control suplementario pod en estaciones hvdc vsc … · limitación de potencia reactiva no...
TRANSCRIPT
CONTROL SUPLEMENTARIO POD EN ESTACIONES HVDC VSC PARA AMORTIGUAMIENTO DE
OSCILACIONES ELECTROMECÁNICAS (LÍNEAS PUNTO A PUNTO Y LÍNEAS EMBEBIDAS)
Juan Sebastián LaverdeDaniel Felipe SantosMario Alberto Ríos
2 Contenido
Tecnología HVDC
Metodología para el diseño de control suplementario
Linealización del sistema
Diseño de Control POD
Resultados
Conclusiones y Trabajos Futuros
HVAC vs HVDC3
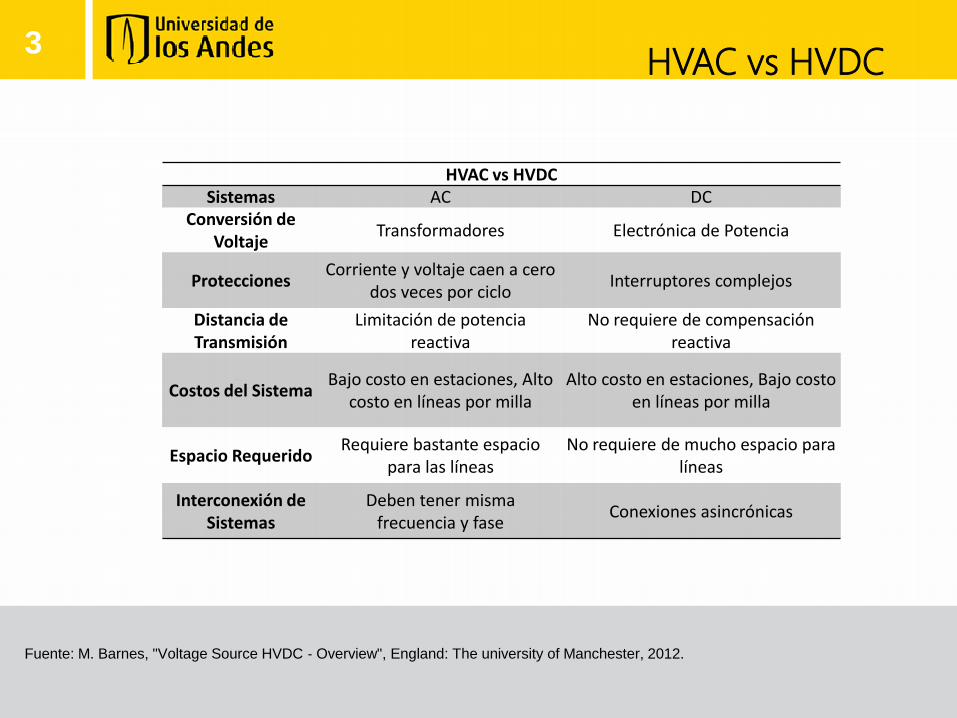
HVAC vs HVDCSistemas AC DC
Conversión de Voltaje
Transformadores Electrónica de Potencia
ProteccionesCorriente y voltaje caen a cero
dos veces por cicloInterruptores complejos
Distancia de Transmisión
Limitación de potencia reactiva
No requiere de compensación reactiva
Costos del SistemaBajo costo en estaciones, Alto
costo en líneas por millaAlto costo en estaciones, Bajo costo
en líneas por milla
Espacio RequeridoRequiere bastante espacio
para las líneasNo requiere de mucho espacio para
líneas
Interconexión de Sistemas
Deben tener misma frecuencia y fase
Conexiones asincrónicas
Fuente: M. Barnes, "Voltage Source HVDC ‐ Overview", England: The university of Manchester, 2012.

Comparación tecnologías VSC-LCC4
Tecnología HVDC-LCC Tecnología HVDC-VSC
Tecnología basada en tiristores Tecnología basada en IGBT
Control basado en ángulo de encendido Estrategias de control PWM o vectorial
Genera distorsión armónica Bajo contenido armónico
Pérdidas en estaciones de conversión de 0,5 % Pérdidas en estaciones de conversión de 1 %
Requiere compensación Reactiva Puede consumir e inyectar potencia reactiva
Menor costo de inversión Costo de equipos elevado
Permite el Control de potencia activa Control de potencia activa y reactiva
Fuente: O. Lennerhag, V. Traff, “ Modelling of VSC-HVDC for Slow Dynamic Studies.” Master’s Thesis, Chalmers University of
Techonology, Gothenburg, Sweden, 2013.
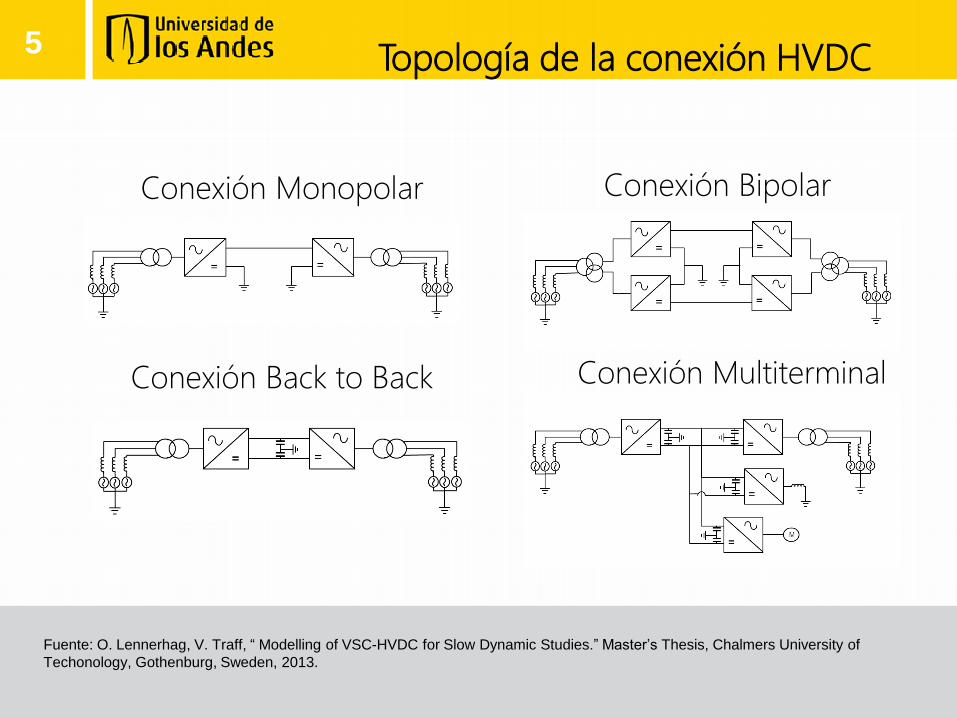
Topología de la conexión HVDC 5
Conexión BipolarConexión Monopolar
Conexión Back to Back Conexión Multiterminal
Fuente: O. Lennerhag, V. Traff, “ Modelling of VSC-HVDC for Slow Dynamic Studies.” Master’s Thesis, Chalmers University of
Techonology, Gothenburg, Sweden, 2013.
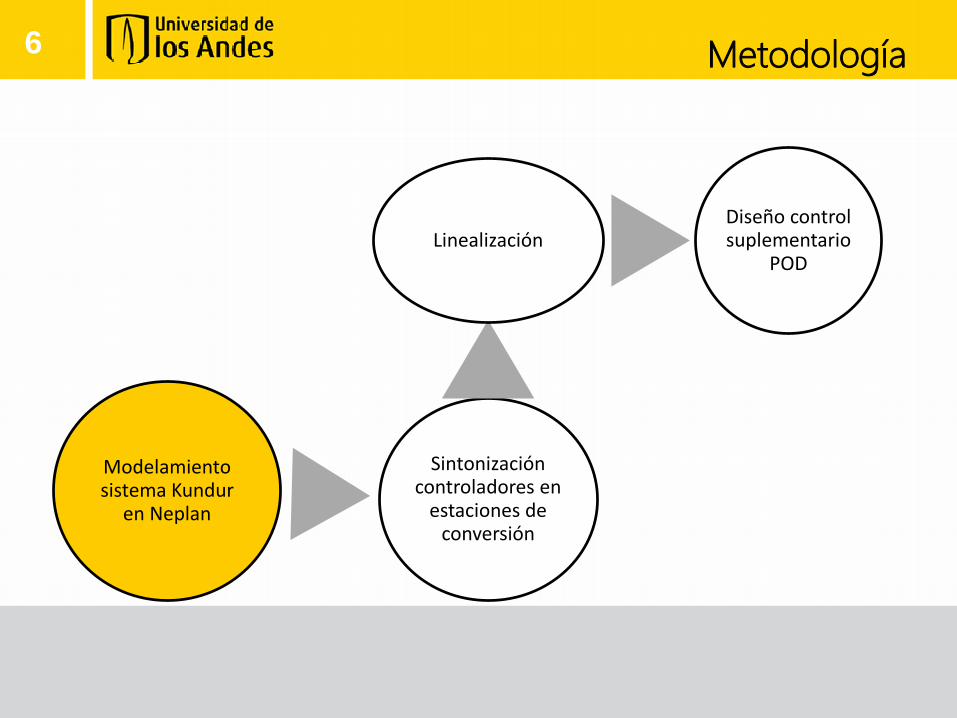
6
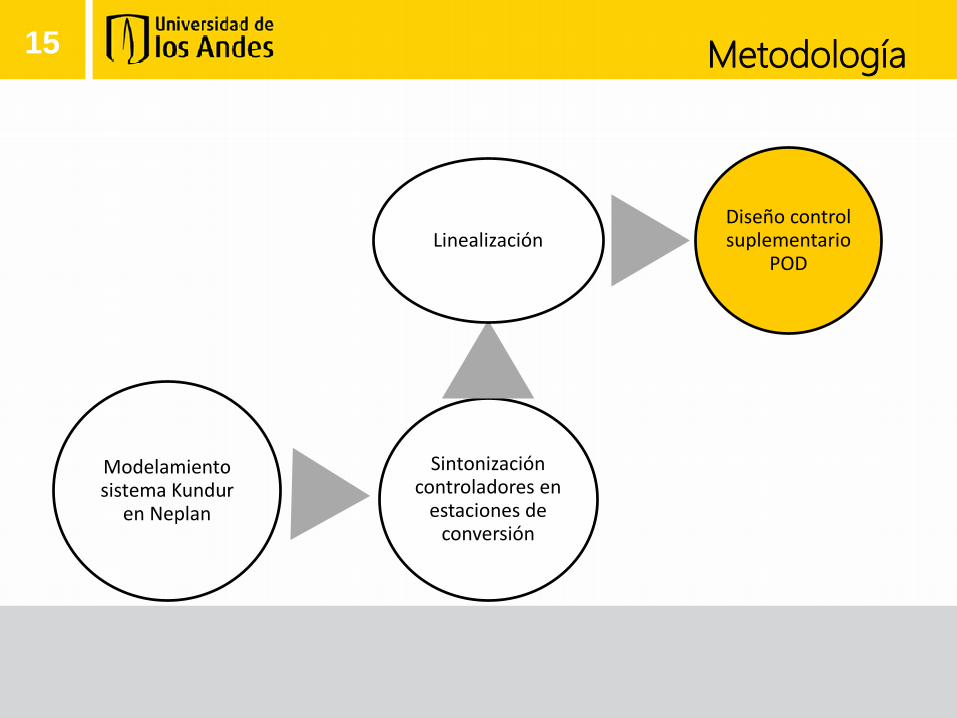
Modelamiento sistema Kundur
en Neplan
Sintonización controladores en
estaciones de conversión
LinealizaciónDiseño control suplementario
POD
Metodología
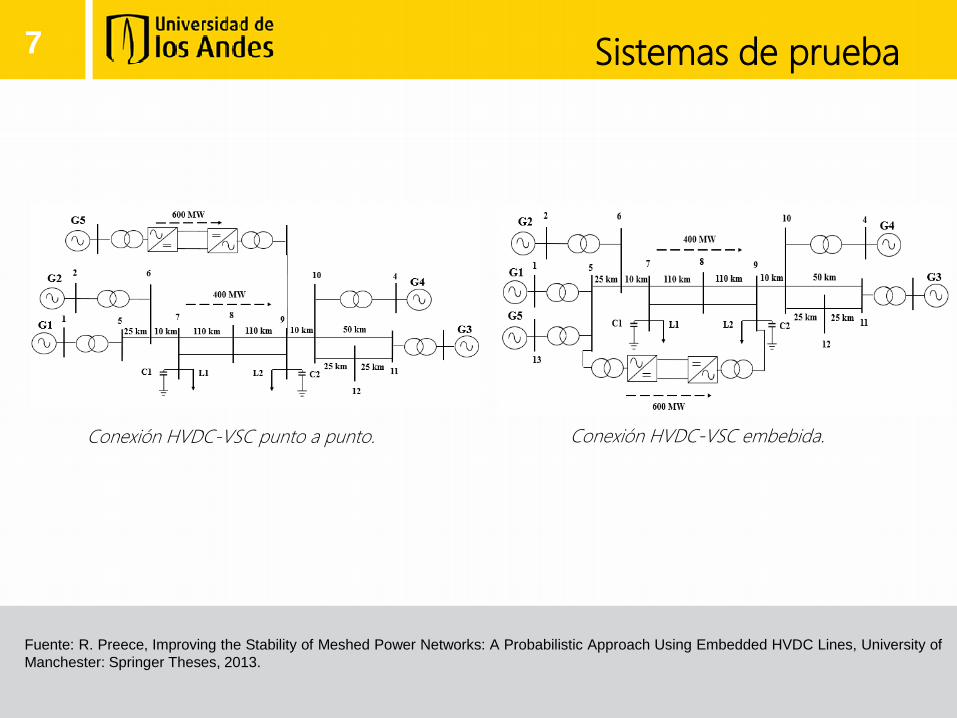
Sistemas de prueba7
Fuente: R. Preece, Improving the Stability of Meshed Power Networks: A Probabilistic Approach Using Embedded HVDC Lines, University of
Manchester: Springer Theses, 2013.
Conexión HVDC-VSC punto a punto. Conexión HVDC-VSC embebida.
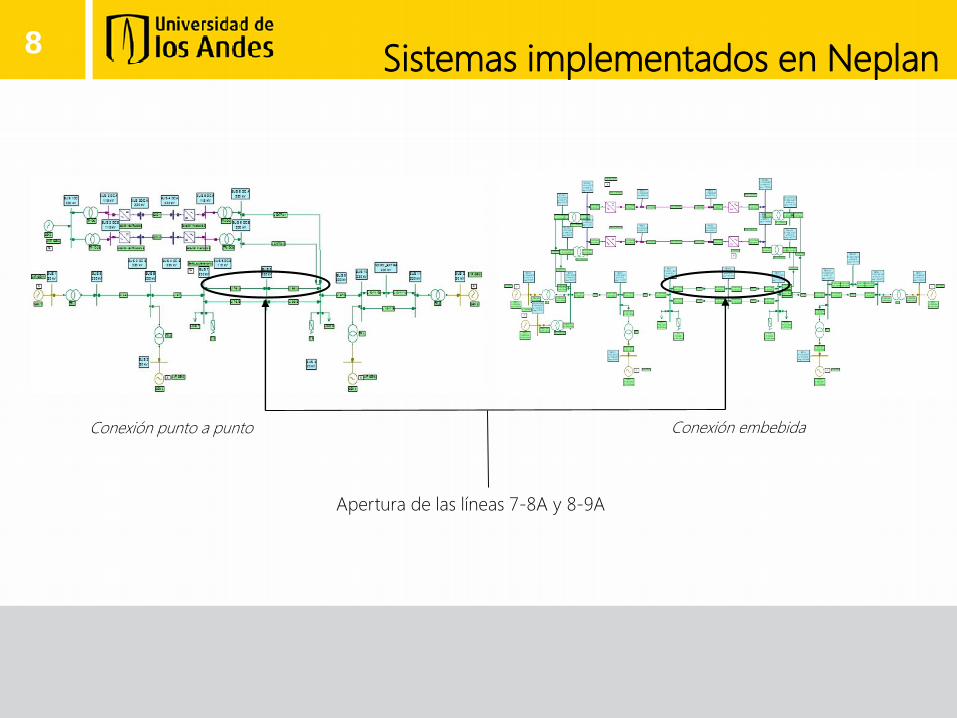
Sistemas implementados en Neplan8
Apertura de las líneas 7-8A y 8-9A
Conexión punto a punto Conexión embebida
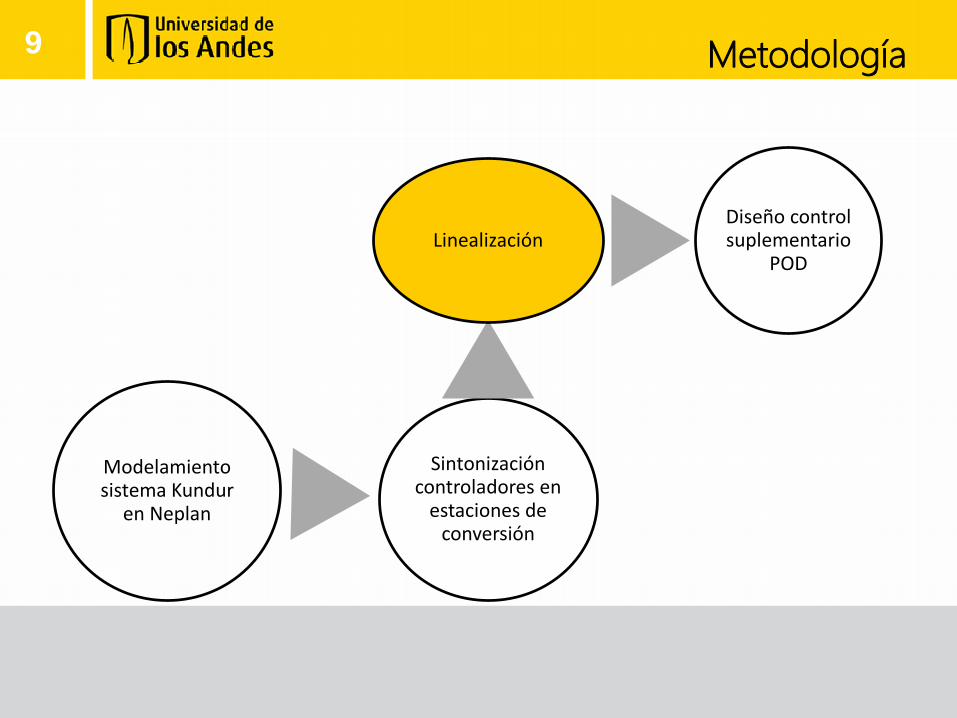
9
Modelamiento sistema Kundur
en Neplan
Sintonización controladores en
estaciones de conversión
LinealizaciónDiseño control suplementario
POD
Metodología
10
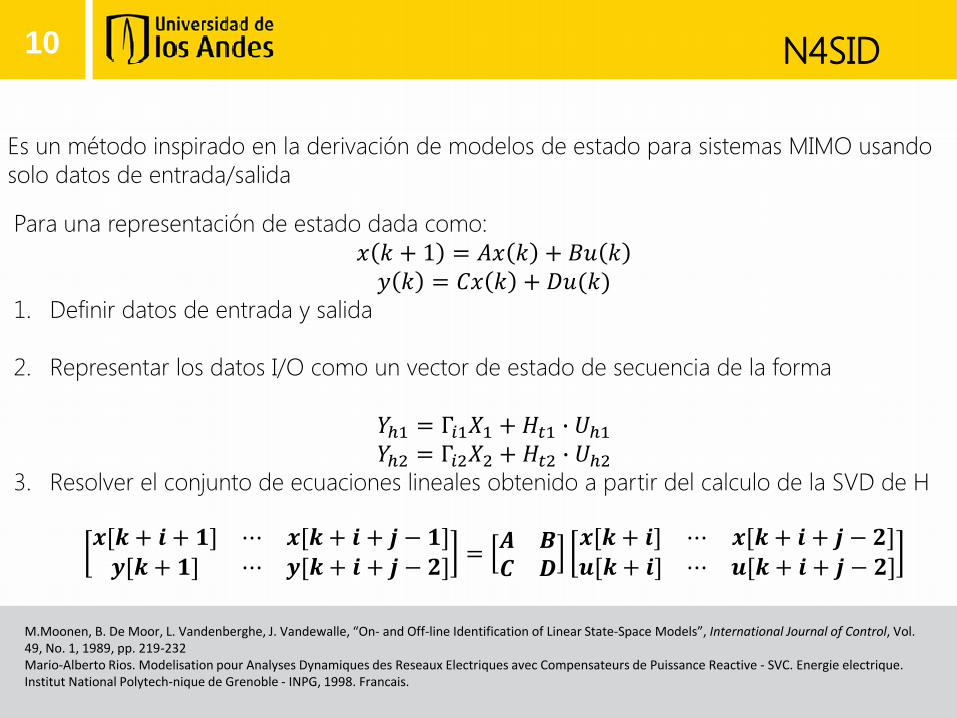
Es un método inspirado en la derivación de modelos de estado para sistemas MIMO usando
solo datos de entrada/salida
N4SID
Para una representación de estado dada como:
𝑥 𝑘 + 1 = 𝐴𝑥 𝑘 + 𝐵𝑢 𝑘𝑦 𝑘 = 𝐶𝑥 𝑘 + 𝐷𝑢(𝑘)
1. Definir datos de entrada y salida
2. Representar los datos I/O como un vector de estado de secuencia de la forma
𝑌ℎ1 = Γ𝑖1𝑋1 +𝐻𝑡1 ∙ 𝑈ℎ1𝑌ℎ2 = Γ𝑖2𝑋2 + 𝐻𝑡2 ∙ 𝑈ℎ2
3. Resolver el conjunto de ecuaciones lineales obtenido a partir del calculo de la SVD de H
𝒙[𝒌 + 𝒊 + 𝟏] ⋯ 𝒙[𝒌 + 𝒊 + 𝒋 − 𝟏]𝒚[𝒌 + 𝟏] ⋯ 𝒚[𝒌 + 𝒊 + 𝒋 − 𝟐]
=𝑨 𝑩𝑪 𝑫
𝒙[𝒌 + 𝒊] ⋯ 𝒙[𝒌 + 𝒊 + 𝒋 − 𝟐]𝒖[𝒌 + 𝒊] ⋯ 𝒖[𝒌 + 𝒊 + 𝒋 − 𝟐]
M.Moonen, B. De Moor, L. Vandenberghe, J. Vandewalle, “On- and Off-line Identification of Linear State-Space Models”, International Journal of Control, Vol. 49, No. 1, 1989, pp. 219-232Mario-Alberto Rios. Modelisation pour Analyses Dynamiques des Reseaux Electriques avec Compensateurs de Puissance Reactive - SVC. Energie electrique. Institut National Polytech-nique de Grenoble - INPG, 1998. Francais.
11
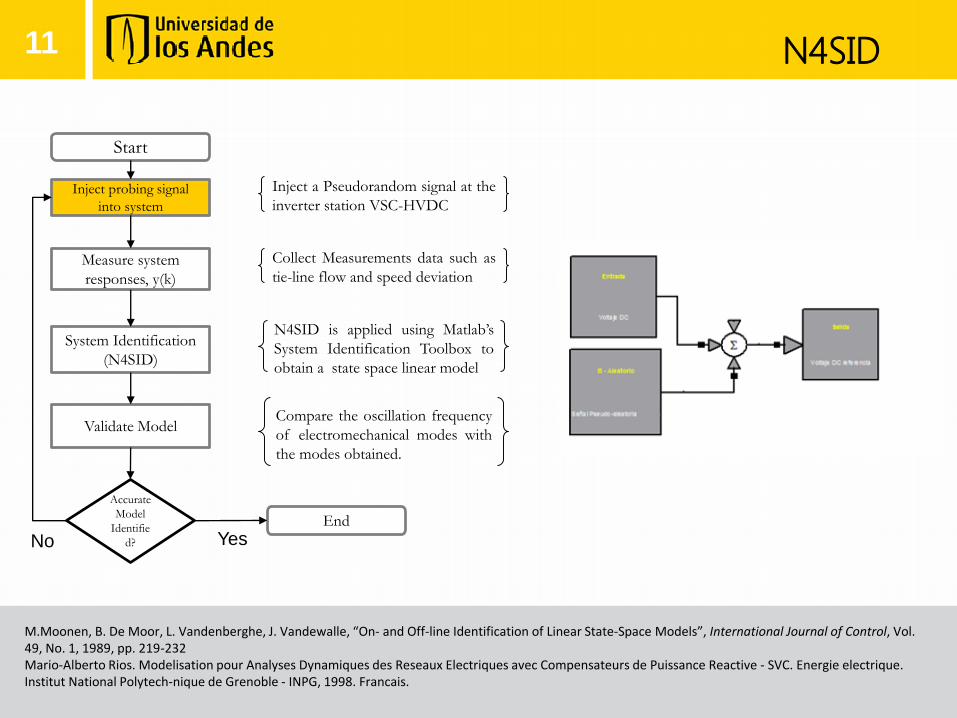
Start
Inject probing signal
into system
Measure system
responses, y(k)
System Identification
(N4SID)
Validate Model
Accurate
Model
Identifie
d?
End
No Yes
Inject a Pseudorandom signal at the
inverter station VSC-HVDC
Collect Measurements data such as
tie-line flow and speed deviation
N4SID is applied using Matlab’s
System Identification Toolbox to
obtain a state space linear model
Compare the oscillation frequency
of electromechanical modes with
the modes obtained.
N4SID
M.Moonen, B. De Moor, L. Vandenberghe, J. Vandewalle, “On- and Off-line Identification of Linear State-Space Models”, International Journal of Control, Vol. 49, No. 1, 1989, pp. 219-232Mario-Alberto Rios. Modelisation pour Analyses Dynamiques des Reseaux Electriques avec Compensateurs de Puissance Reactive - SVC. Energie electrique. Institut National Polytech-nique de Grenoble - INPG, 1998. Francais.

12
Start
Inject probing signal
into system
Measure system
responses, y(k)
System Identification
(N4SID)
Validate Model
Accurate
Model
Identifie
d?
End
No Ye
s
Inject a Pseudorandom signal at the
inverter station VSC-HVDC
Collect Measurements data such as
tie-line flow and speed deviation
N4SID is applied using Matlab’s
System Identification Toolbox to
obtain a state space linear model
Compare the oscillation frequency
of electromechanical modes with
the modes obtained.
Modelos 1 2
Entrada 𝑉𝑑𝑐−𝐴, 𝑉𝑑𝑐−𝐵 𝑉𝑑𝑐−𝐴, 𝑉𝑑𝑐−𝐵
Salidas 𝑃𝑙𝑖𝑛𝑒𝑎 , 𝑊1,𝑊2,𝑊3, 𝑊4 𝑃𝑙𝑖𝑛𝑒𝑎 , 𝑊𝑝𝑟𝑜𝑚𝑒𝑑𝑖𝑜
N4SID
M.Moonen, B. De Moor, L. Vandenberghe, J. Vandewalle, “On- and Off-line Identification of Linear State-Space Models”, International Journal of Control, Vol. 49, No. 1, 1989, pp. 219-232Mario-Alberto Rios. Modelisation pour Analyses Dynamiques des Reseaux Electriques avec Compensateurs de Puissance Reactive - SVC. Energie electrique. Institut National Polytech-nique de Grenoble - INPG, 1998. Francais.
13
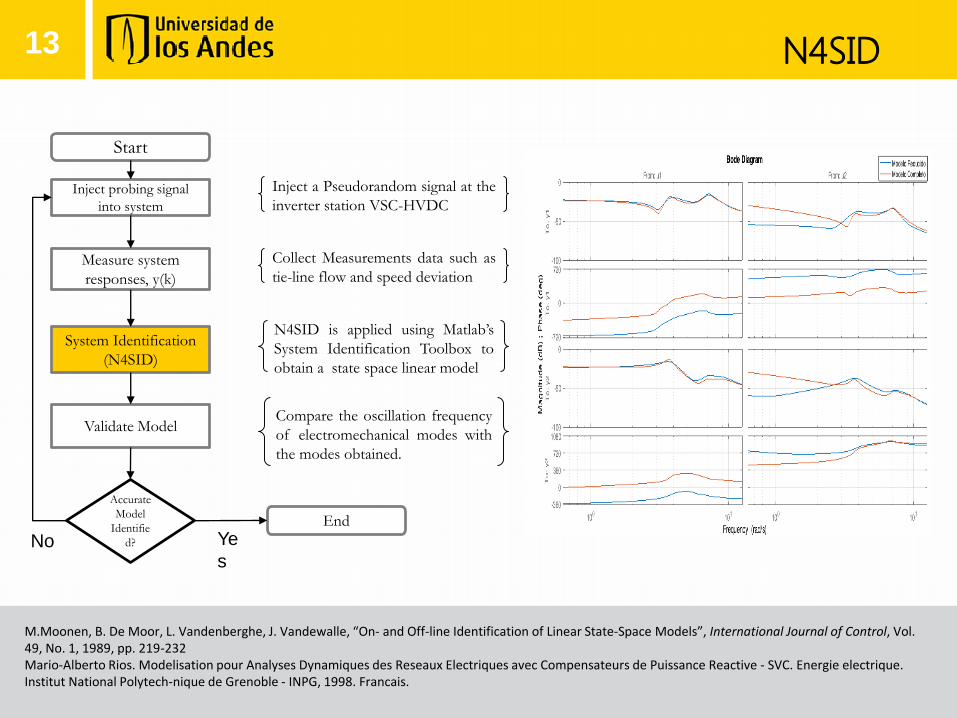
Start
Inject probing signal
into system
Measure system
responses, y(k)
System Identification
(N4SID)
Validate Model
Accurate
Model
Identifie
d?
End
No Ye
s
Inject a Pseudorandom signal at the
inverter station VSC-HVDC
Collect Measurements data such as
tie-line flow and speed deviation
N4SID is applied using Matlab’s
System Identification Toolbox to
obtain a state space linear model
Compare the oscillation frequency
of electromechanical modes with
the modes obtained.
N4SID
M.Moonen, B. De Moor, L. Vandenberghe, J. Vandewalle, “On- and Off-line Identification of Linear State-Space Models”, International Journal of Control, Vol. 49, No. 1, 1989, pp. 219-232Mario-Alberto Rios. Modelisation pour Analyses Dynamiques des Reseaux Electriques avec Compensateurs de Puissance Reactive - SVC. Energie electrique. Institut National Polytech-nique de Grenoble - INPG, 1998. Francais.
14
M.Moonen, B. De Moor, L. Vandenberghe, J. Vandewalle, “On- and Off-line Identification of Linear State-Space Models”, International Journal of Control, Vol. 49, No. 1, 1989, pp. 219-232Mario-Alberto Rios. Modelisation pour Analyses Dynamiques des Reseaux Electriques avec Compensateurs de Puissance Reactive - SVC. Energie electrique. Institut National Polytech-nique de Grenoble - INPG, 1998. Francais.
Start
Inject probing signal
into system
Measure system
responses, y(k)
System Identification
(N4SID)
Validate Model
Accurate
Model
Identifie
d?
End
No Ye
s
Inject a Pseudorandom signal at the
inverter station VSC-HVDC
Collect Measurements data such as
tie-line flow and speed deviation
N4SID is applied using Matlab’s
System Identification Toolbox to
obtain a state space linear model
Compare the oscillation frequency
of electromechanical modes with
the modes obtained.
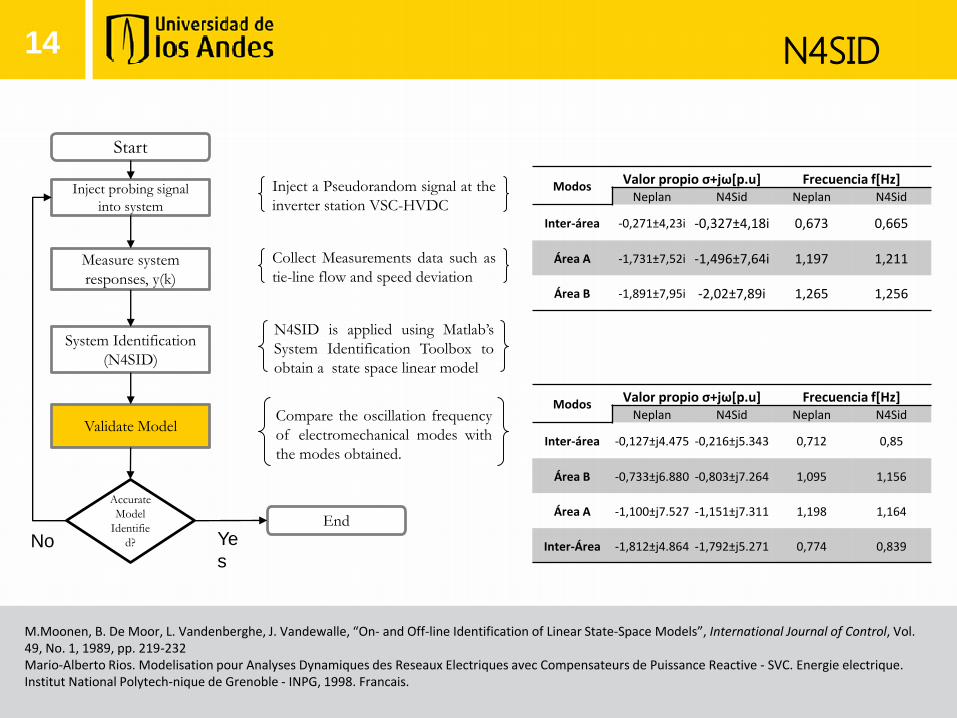
ModosValor propio σ+jω[p.u] Frecuencia f[Hz]
Neplan N4Sid Neplan N4Sid
Inter-área -0,127±j4.475 -0,216±j5.343 0,712 0,85
Área B -0,733±j6.880 -0,803±j7.264 1,095 1,156
Área A -1,100±j7.527 -1,151±j7.311 1,198 1,164
Inter-Área -1,812±j4.864 -1,792±j5.271 0,774 0,839
N4SID
ModosValor propio σ+jω[p.u] Frecuencia f[Hz]
Neplan N4Sid Neplan N4Sid
Inter-área -0,271±4,23i -0,327±4,18i 0,673 0,665
Área A -1,731±7,52i -1,496±7,64i 1,197 1,211
Área B -1,891±7,95i -2,02±7,89i 1,265 1,256
Metodología 15
Modelamiento sistema Kundur
en Neplan
Sintonización controladores en
estaciones de conversión
LinealizaciónDiseño control suplementario
POD
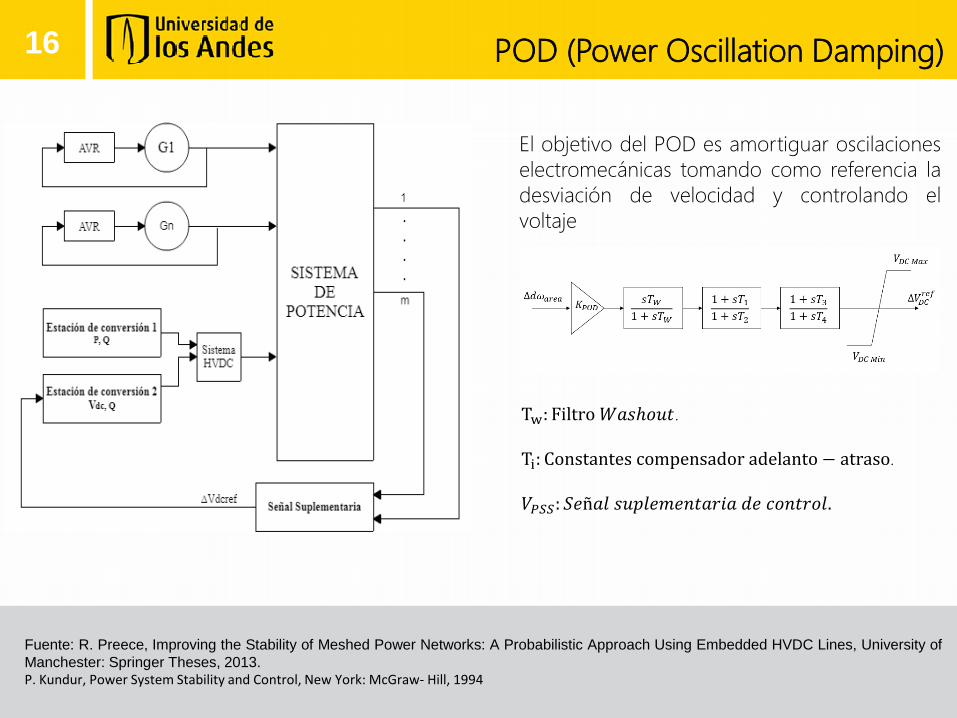
POD (Power Oscillation Damping)16
Tw: Filtro 𝑊𝑎𝑠ℎ𝑜𝑢𝑡.
Ti: Constantes compensador adelanto − atraso.
𝑉𝑃𝑆𝑆: 𝑆𝑒ñ𝑎𝑙 𝑠𝑢𝑝𝑙𝑒𝑚𝑒𝑛𝑡𝑎𝑟𝑖𝑎 𝑑𝑒 𝑐𝑜𝑛𝑡𝑟𝑜𝑙.
El objetivo del POD es amortiguar oscilaciones
electromecánicas tomando como referencia la
desviación de velocidad y controlando el
voltaje
Fuente: R. Preece, Improving the Stability of Meshed Power Networks: A Probabilistic Approach Using Embedded HVDC Lines, University of
Manchester: Springer Theses, 2013.P. Kundur, Power System Stability and Control, New York: McGraw- Hill, 1994
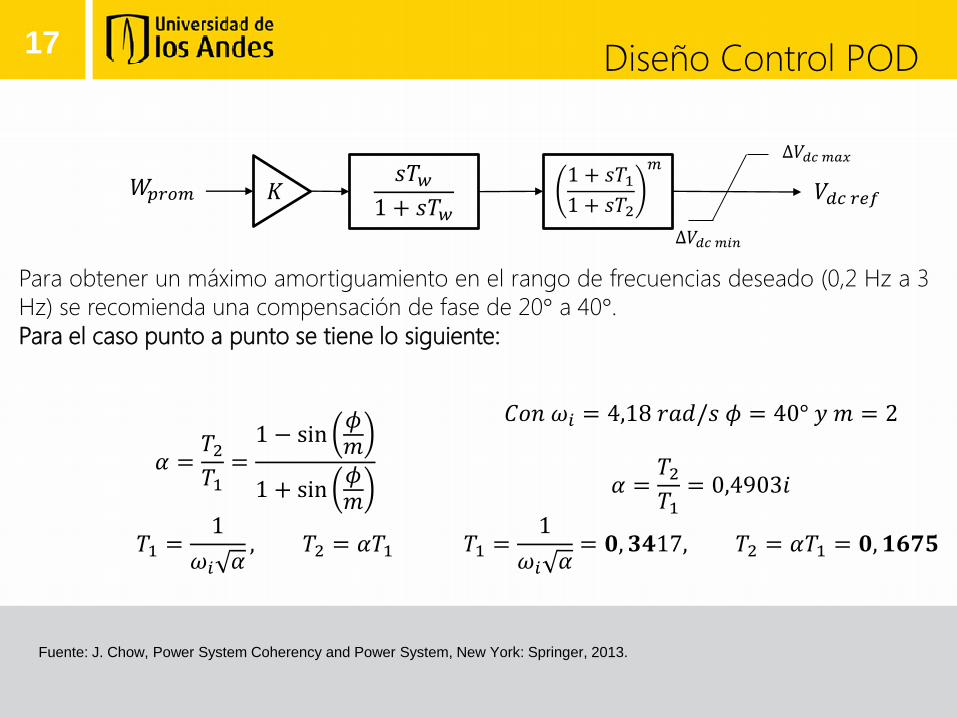
17
Fuente: J. Chow, Power System Coherency and Power System, New York: Springer, 2013.
Diseño Control POD
𝑠𝑇𝑤1 + 𝑠𝑇𝑤
1 + 𝑠𝑇11 + 𝑠𝑇2
𝑚
𝐾
∆𝑉𝑑𝑐 𝑚𝑎𝑥
∆𝑉𝑑𝑐 𝑚𝑖𝑛
𝑊𝑝𝑟𝑜𝑚 𝑉𝑑𝑐 𝑟𝑒𝑓
𝛼 =𝑇2𝑇1
=1 − sin
𝜙𝑚
1 + sin𝜙𝑚
𝑇1 =1
𝜔𝑖 𝛼, 𝑇2 = 𝛼𝑇1
Para obtener un máximo amortiguamiento en el rango de frecuencias deseado (0,2 Hz a 3
Hz) se recomienda una compensación de fase de 20° a 40°.
Para el caso punto a punto se tiene lo siguiente:
𝐶𝑜𝑛 𝜔𝑖 = 4,18 𝑟𝑎𝑑/𝑠 𝜙 = 40° 𝑦 𝑚 = 2
𝛼 =𝑇2𝑇1
= 0,4903𝑖
𝑇1 =1
𝜔𝑖 𝛼= 𝟎, 𝟑𝟒17, 𝑇2 = 𝛼𝑇1 = 𝟎, 𝟏𝟔𝟕𝟓
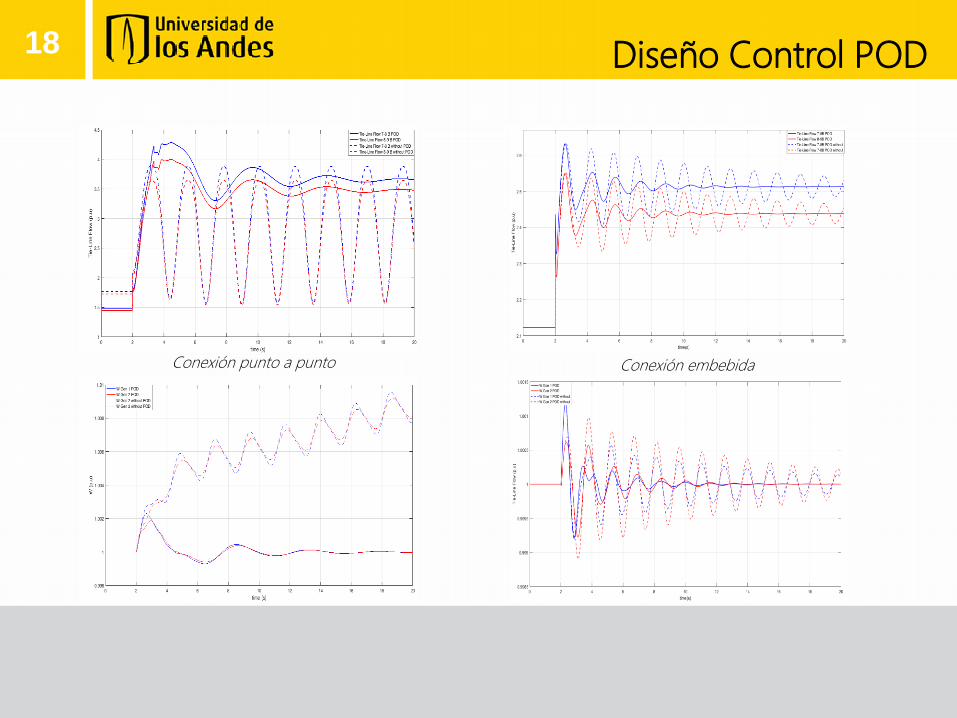
18 Diseño Control POD
Conexión punto a punto Conexión embebida

Conclusiones y trabajo futuro
• La técnica de identificación N4SID proporciona una aproximación adecuada y es
útil al momento de limitaciones en los softwares que carecen de herramientas
para linealizar.
• El control por POD garantiza la estabilidad del sistema únicamente para una
condición de operación fija.
• Para trabajos futuros se puede optar por un POD adaptativo o selectivo que
proporcione mayor estabilidad.
• En trabajos futuros se puede implementar AG para realizar la sintonización de
todos los controles suplementarios.
19
Referencias20
[1] P. Kundur, Power System Stability and Control, New York: McGraw-Hill, 1994.
[2] R. Preece, Improving the Stability of Meshed Power Networks: A Probabilistic Approach Using Embedded HVDC Lines, University of Manchester: Springer Theses, 2013.
[3] O. LENNERHAG, Modelling of VSC-HVDC for Slow Dynamic, Sweden: Chalmers University of Technology, 2013.
[4] L. Harnefors y H.-P. Nee, «Model-Based Current Control of AC Machines Using the Internal Model Control Method,» IEEE TRANSACTIONS ON INDUSTRY APPLICATIONS,, vol. 34, p. 9, 1998.
[5] M.Moonen, B. De Moor, L. Vandenberghe, J. Vandewalle, “On- and Off-line Identification of Linear State-Space Models”, International Journal of Control, Vol. 49, No. 1, 1989, pp. 219-232
[6] M. Rios, Modelisation pour Analyses Dynamiques des Reseaux Electriques avec Compensateurs de Puissance Reactive - SVC, Francais: Institut National Polytech-nique de Grenoble - INPG, 1998.
[7] J. Chow, Power System Coherency and Power System, New York: Springer, 2013.
[8] M. Barnes, "Voltage Source HVDC ‐ Overview", England: The university of Manchester, 2012