computacion paralela 5
TRANSCRIPT

1
Programación y Computación paralela (5)
Operaciones con Matrices Densas
Glen D. Rodríguez R.
Basado en material de J. Demmel

2
Revisión de BLAS
n/22n34n2Mult Matriz-matriz
3
22n2n2Mult. Matriz-vector
2
2/32n13n“Axpy”, prod escalar
1
q # flops# mem refsEx.Nivel BLAS
• Bloques básicos de operaciones de alg. Lineal.•Las librerías paralelas llaman alas funciones seriales en cada CPU: deben ser veloces!
•Recordar la eficiencia del algor. q = # flops / # refs mem• A mayor q, más rápido el algoritmo en computadorasreales con jerarquía de memoria
• “axpy” (ax plus y): y = αααα*x + y, con αααα escalar, x e y vectores

3
Varias particiones de data en prc. paralelos para matrices
0 1 2 3 0 1 2 3 0 1 2 3 3210
0 1 2 3 0 1 2 3
1) Bloques de columnas en 1D2) Columnas cíclicas en 1D
3) Bloques cíclicos de cols. 1D
4) Cambiar columnas por filas en los casos 1,2,3 y salen 3 casos análogos
Generalizar otros
32323232
10101010
32323232
10101010
32323232
10101010
32323232
0 1 0 1 0 1 0 1
6) Bloques cíclicos 2D
0 1 2 3
32
0 1
5) Bloques (sub matrices) en 2D

4
Multiplicación paralela matriz vector
• Computar y = y + A*x, con A matriz densa
• Partición: • Bloques de filas en 1D
• A(i) es el bloque de filas tamaño n por n/p asignado al procesador i,
• x(i) e y(i) son los segmentos de
x,y asignados al proc.“i”
• Algoritmo:• Para todos los procesadores i
• Broadcast x(i)
• Computar y(i) = y(i) + A(i)*x
• Algoritmo use la formula
y(i) = y(i) + A(i)*x = y(i) + Σj A(i,j)*x(j)
x
y
P0
P1
P2
P3
P0 P1 P2 P3

5
Multiplicación matriz vector y = y + A*x
• Una partición por columnas elimina el broadcast de x• Pero implicaría un mpi_reduce para obtener el valor de y
• Una partición de bloques 2D use broadcast y reducción, ambos en un subconjunto de procesadores
• sqrt(p) si tenemos una distribución cuadrada de procesadores (2x2, 3x3, 4x4, 5x5, etc.)
P0 P1 P2 P3
P0 P1 P2 P3
P4 P5 P6 P7
P8 P9 P10 P11
P12 P13 P14 P15

6
Multiplicación de matrices en paralelo
• Computar C=C+A*B
• Usando algoritmo básico: 2*n3 Flops
• Variables:• Partición de la data
• Topología de las máquinas
• Scheduling (calendarización) de la comunicación
• Uso de modelos de performance para diseñar el algoritmo• Tiempo comunicación= “latencia” + #words *tiempo-por-word
= α + n*β
• Eficiencia (en cualquier modelo):• serial time / (p * parallel time) = speedup / p
• speedup perfecto (lineal) es “p” ↔ efficiency = 1 = 100%

7
Algoritmo trivial
• Si hay suficiente espacio de memoria en cada
procesador para guardar todos los elementos de A, B y C; entonces dividir solo el cálculo pero no la data.
A BxC +
Todos guardan la totalidad de A, B, C. Los valores iniciales se comunican con broadcastPara matrices de tamaño nxn, cada procesadordebe usar memoria= tamaño word x 3n2

8
Mejora al trivial
• Se ahorra algo de memoria si se divide la memoria de C
y de A, pero no de B.
• La división es por bloques de filas 1D
• Ver programa ejemplo
Para matrices de tamaño nxn, si hay p procesadores,cada procesador debe usar memoria = tamaño word x (n2 + 2n2/p)
A
Proc. 0Proc. 1Proc. 2Proc. 3…Proc. p-2Proc. p-1

9
Multiplic. matrices con partición columnas 1D
• Asumir matrices de n x n con n divisible por p
• A(i) es el bloque de columnas tamaño n por n/p asignado al proc.”i” (lo mismo para B(i) y C(i))
• B(i,j) es un sub-bloque tamaño n/p por n/p de B(i) • desde la fila j*n/p hasta la fila ((j+1)*n/p)-1
• Algoritmo usa la formula
C(i) = C(i) + A*B(i) = C(i) + Σj A(j)*B(j,i)
p0 p1 p2 p3 p5 p4 p6 p7
Suposición razonable para análisis, no para programar
10
Partición 1D en Bus ó Anillo
• Algoritmo usa la formula
C(i) = C(i) + A*B(i) = C(i) + Σj A(j)*B(j,i)
• Primero, considerar una máquina que usa bus y sin broadcast: solo un par de procesadores pueden
comunicarse a la vez (ej.: ethernet)
• Luego, considerar procesadores en un anillo: todos los
procesadores se pueden comunicar con sus vecinos inmediatos a la vez.

11
MatMul: Partición 1D en Bus sin Broadcast
Algoritmo simplón:
C(myproc) = C(myproc) + A(myproc)*B(myproc,myproc)
for i = 0 to p-1
for j = 0 to p-1 except i
if (myproc == i) send A(i) al procesador j
if (myproc == j)
receive A(i) del procesador i
C(myproc) = C(myproc) + A(i)*B(i,myproc)
barrier
Costo del loop interno :
computación: 2*n*(n/p)2 = 2*n3/p2
comunicación: α + β*n2 /p

12
Continua…
Costo del loop interno:
computación: 2*n*(n/p)2 = 2*n3/p2
comunicación: αααα + ββββ*n2 /p … aprox.
Solo un par de procesadores (i , j) están activos en una iteración,
y de ellos, sólo i esta computando
=> el algoritmo es prácticamente serial
Tiempo de ejecución:
= (p*(p-1) + 1)*computación + p*(p-1)*comunicación
~= 2*n3 + p2*αααα + p*n2*ββββ
Es peor que el tiempo serial y crece con p.
Quién lo usaría si es malo? ���� ojo, no acelera tiempo de ejecución pero por lo menos aumenta la memoria disponible.

13
Matmul en columnas 1D y en un anillo
• Pares de procesadores se pueden comunicar a la vez
Copiae A(myproc) en Tmp
C(myproc) = C(myproc) + Tmp*B(myproc , myproc)
for j = 1 to p-1
Send Tmp al procesador myproc+1 mod p
Receive Tmp del procesador myproc-1 mod p
C(myproc) = C(myproc) + Tmp*B( myproc-j mod p , myproc)
• Misma idea que en el paralelismo de N-body, usar un bufferde variables temporales
• Tiempo del loop interno = 2*(αααα + ββββ*n2/p) + 2*n*(n/p)2
14
Matmul en columnas 1D y en un anillo
• Tiempo del loop interno= 2*(αααα + ββββ*n2/p) + 2*n*(n/p)2
• Tiempo Total = 2*n* (n/p)2 + (p-1) * Tiempo loop interno
• ~ 2*n3/p + 2*p*αααα + 2*ββββ*n2
• Optimo para partición 1D en Ring o Bus, aún con Broadcast:
• Speedup perfecto para aritmética
• A(myproc) debe moverse a los demás procesadores, cuesta por lo menos:
(p-1)*costo de enviar n*(n/p) words
• Eficiencia paralela = 2*n3 / (p * Tiempo Total paralelo)
= 1/(1 + αααα * p2/(2*n3) + ββββ * p/(2*n) )
= 1/ (1 + O(p/n))
• Se acerca a 1 si n/p crece (o si αααα , ββββ se achican)

15
MatMul en particiones 2D
• Considerar procesadores en malla 2D (física o lógica)
• Procs. se pueden comunicar con 4 vecinos inmediatos• Broadcast a lo largo de filas y columnas
• Asumir p procesadores forman una malla de s x s
p(0,0) p(0,1) p(0,2)
p(1,0) p(1,1) p(1,2)
p(2,0) p(2,1) p(2,2)
p(0,0) p(0,1) p(0,2)
p(1,0) p(1,1) p(1,2)
p(2,0) p(2,1) p(2,2)
p(0,0) p(0,1) p(0,2)
p(1,0) p(1,1) p(1,2)
p(2,0) p(2,1) p(2,2)
= *

16
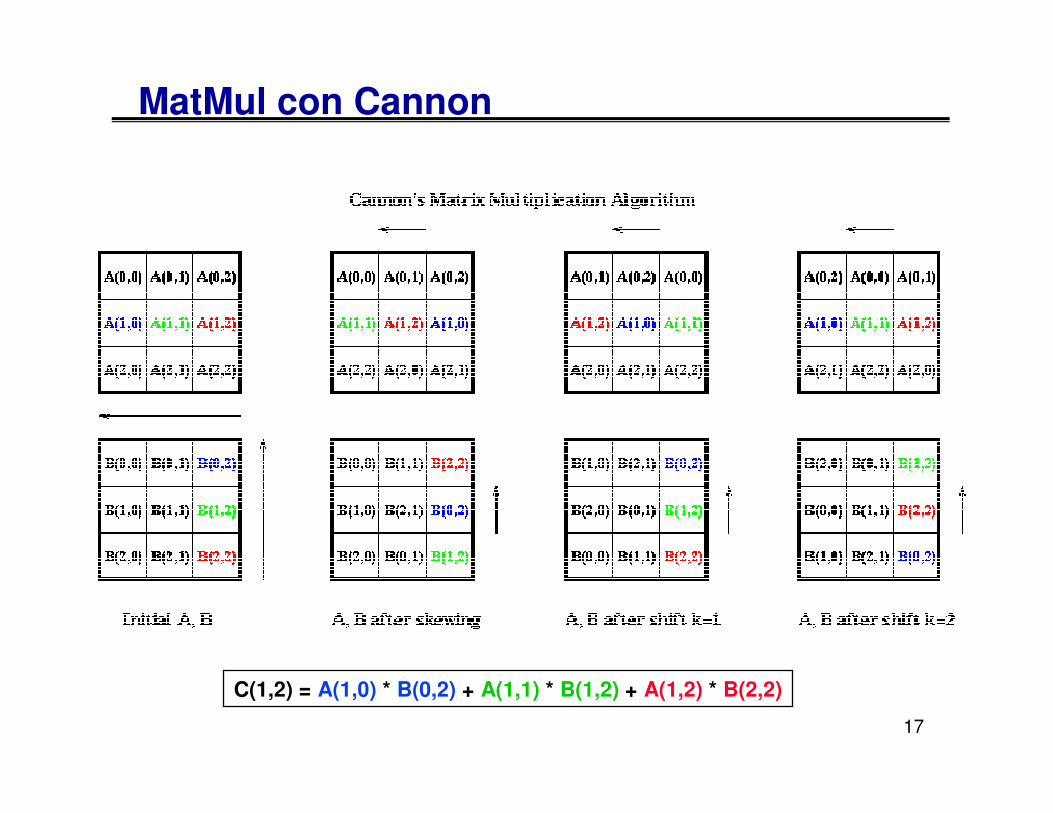
Algoritmo de Cannon
… C(i,j) = C(i,j) + ΣΣΣΣ A(i,k)*B(k,j)
… se asume que s = sqrt(p) es entero
forall i=0 to s-1 … “mover” A
desplaz. circular-izq. de la fila i de A en “i” posiciones
… tal que A(i,j) es sobreescrito por A(i,(j+i)mod s)
forall i=0 to s-1 … “mover” B
desplaz.circular-arriba de columna i de B en “i” pos.
…tal que that B(i,j) es sobreescrito por B((i+j)mod s), j)
for k=0 to s-1 … secuencial
forall i=0 to s-1 and j=0 to s-1 … todos procs. en paralelo
C(i,j) = C(i,j) + A(i,j)*B(i,j)
despl.circular-izq para cada fila de A en 1
despl.circular-arriba para cada columna de B en 1
k
17
C(1,2) = A(1,0) * B(0,2) + A(1,1) * B(1,2) + A(1,2) * B(2,2)
MatMul con Cannon
18
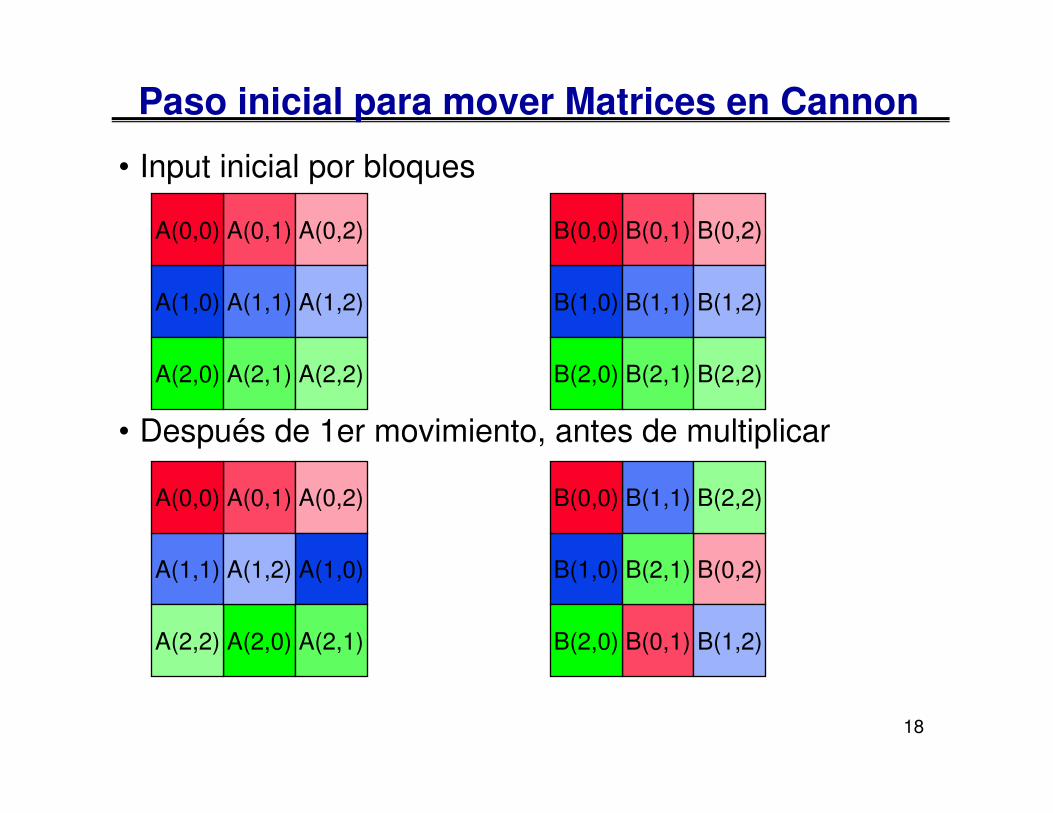
Paso inicial para mover Matrices en Cannon
• Input inicial por bloques
• Después de 1er movimiento, antes de multiplicar
A(0,1) A(0,2)
A(1,0)
A(2,0)
A(1,1) A(1,2)
A(2,1)A(2,2)
A(0,0)
B(0,1) B(0,2)
B(1,0)
B(2,0)
B(1,1) B(1,2)
B(2,1) B(2,2)
B(0,0)A(0,1) A(0,2)
A(1,0)
A(2,0)
A(1,1) A(1,2)
A(2,1) A(2,2)
A(0,0)
B(0,1)
B(0,2)B(1,0)
B(2,0)
B(1,1)
B(1,2)
B(2,1)
B(2,2)B(0,0)

19
Siguientes movimientos en Cannon
• 1er. paso
• 2do. paso
• 3er. paso
A(0,1) A(0,2)
A(1,0)
A(2,0)
A(1,1) A(1,2)
A(2,1)A(2,2)
A(0,0)
B(0,1)
B(0,2)B(1,0)
B(2,0)
B(1,1)
B(1,2)
B(2,1)
B(2,2)B(0,0)
A(0,1) A(0,2)
A(1,0)
A(2,0)
A(1,2)
A(2,1)
B(0,1)
B(0,2)B(1,0)
B(2,0)
B(1,1)
B(1,2)
B(2,1)
B(2,2)B(0,0)
A(0,1)A(0,2)
A(1,0)
A(2,0)
A(1,1) A(1,2)
A(2,1) A(2,2)
A(0,0) B(0,1)
B(0,2)B(1,0)
B(2,0)
B(1,1)
B(1,2)
B(2,1)
B(2,2)B(0,0)
A(1,1)
A(2,2)
A(0,0)

20
Costo del Algoritmo de Cannonforall i=0 to s-1 … recordar que s = sqrt(p)
despl.circ.izq. fila i de A en i … costo = s*(αααα + ββββ*n2/p)
forall i=0 to s-1
desp.circ.arr. columna i de B en i … costo = s*(αααα + ββββ*n2/p)
for k=0 to s-1
forall i=0 to s-1 and j=0 to s-1
C(i,j) = C(i,j) + A(i,j)*B(i,j) … costo = 2*(n/s)3 = 2*n3/p3/2
despl.circ.izq. cada fila de A en 1 … costo = α α α α + ββββ*n2/p
desp.circ.arr. cada columna de B en 1 … costo = αααα + ββββ*n2/p
°Tiempo Total = 2*n3/p + 4* s*αααα + 4*ββββ*n2/s °Eficiencia Paralela = 2*n3 / (p * Tiempo Total paralelo)
= 1/( 1 + αααα * 2*(s/n)3 + ββββ * 2*(s/n) )= 1/(1 + O(sqrt(p)/n))
°Se acerca a 1 si crece n/s = n/sqrt(p) = sqrt(data por procesador)°Mejor que 1D, que tiene eficiencia= 1/(1 + O(p/n))

21
Pros y Contras de Cannon
• Se optimiza la computación local
• Difícil de generalizar para:• Valores de p que no son cuadrados perfectos
• Matrices A y B no son cuadradas
• Dimensiones de A, B que no son divisibles por s=sqrt(p)
• A y B no “alineadas” en la forma en que están guardadas en los procesadores
• Bloques cíclicos
• Consume memoria (copias extra de matrices locales)

22
Algoritmo SUMMA
• SUMMA = Scalable Universal Matrix Multiply
• Un poco menos eficiente, pero es más sencillo y más
fácil de generalizar
• Link: slides de van de Geijn y Watts• www.netlib.org/lapack/lawns/lawn96.ps
• Ideas similares aparecieron en muchas ocasiones
• Usado en PBLAS = Parallel BLAS• www.netlib.org/lapack/lawns/lawn100.ps

23
SUMMA
* =i
j
A(i,k)
k
k
B(k,j)
• i, j representan todas las filas, columnas asignadas a un procesador
• k es una sola fila o columna; o un bloque de b filas o columnas
• C(i,j) = C(i,j) + Σk A(i,k)*B(k,j)
• Asumir una malla de pr por pc procesadores (pr = pc =
4 en el ejemplo de arriba) . El número de procesadores no necesariamente debe ser cuadrado perfecto.
C(i,j)
Proc(1,1)
Proc(2,1)
Proc(pr,pc)

24
SUMMA
For k=0 to n-1 … ó (n/b)-1 donde b es el tamaño de bloque
… b= # columnas en A(i,k) y # filas en B(k,j)
for all i = 1 to pr … en paralelo
dueño de A(i,k) le hace broadcast a todos los procs. de esa fila
for all j = 1 to pc … en paralelo
dueño de B(k,j) le hace broadcast a todos los procs. de esa col.
Receive A(i,k) en Acol
Receive B(k,j) en Brow
C_myproc = C_myproc + Acol * Brow
* =i
j
A(i,k)
k
k
B(k,j)
C(i,j)

25
Performance de SUMMA
For k=0 to n/b-1
for all i = 1 to s … s = sqrt(p)
dueño de A(i,k) le hace bc. a todos los procs. de la fila
… tiempo = log s *( αααα + ββββ * b*n/s), usando árbol
for all j = 1 to s
dueño de B(k,j) le hace bc. a todos los procs. de la col.
… tiempo = log s *( αααα + ββββ * b*n/s), usando árbol
Receive A(i,k) en Acol
Receive B(k,j) en Brow
C_myproc = C_myproc + Acol * Brow
… tiempo= 2*(n/s)2*b
° Tiempo Total = 2*n3/p + αααα * log p * n/b + ββββ * log p * n2 /s
° Solo para simplificar análisis, asumir s = sqrt(p)

26
Performance de SUMMA
• Tiempo total = 2*n3/p + α * log p * n/b + β * log p * n2 /s
• Eficiencia Paralela =
1/(1 + α * log p * p / (2*b*n2) + β * log p * s/(2*n) )
• ~Mismo término β de Cannon, excepto por el factor log p
log p crece lento, así que no es problema
• Término con latencia (α) puede ser mayor, dependiendo de b
Cuando b=1, se tiene α * log p * n
Si b se acerca a n/s, término se achica hacia
α * log p * s (log p veces Cannon)
• Storage temporal crece como 2*b*n/s
• Se puede cambiar b para disminuir latencia a costa de la
necesidad de más memoria

27
Librería paralela ScaLAPACK

28
PDGEMM = rutina PBLASpara multipl. matrices
Observaciones:Para N fijo, si P aumenta,
Mflops aumenta, peromenos que 100% eficiencia
Para P fijo, si N aumenta,Mflops (eficiencia) aumenta
DGEMM = rutina BLASpara multip. matrices
Max. Velocidad para PDGEMM= # Procs * veloc. de DGEMM
Observaciones (mismas arriba):Eficiencia por lo menos 48%Para N fijo, si P aumenta,
eficiencia cae Para P fijo, si N aumenta,
eficiencia aumenta

29
Notación para el algoritmo de Fox
Los índices comienzan en 0 para las sub matrices, pero comienzan en 1 para filas y columnas de procesadores

30
Algoritmo de Fox (Broadcast, Multiply, y Roll)

31
Primer paso -- index n=0 en suma de sub-bloque

32
Segundo paso -- index n=1 en suma de sub-bloque

33
Segundo paso, continuado

34
El algoritmo completo para un elemento

35
MPI: grupos de procesadores y comunicación colectiva
• Necesitamos “broadcasts parciales” a lo largo de las filas en Fox (y de las columnas también en SUMMA)
• Y rolls (desplazamientos en 1) en las columnas en Fox (parecido en Cannon)
• Estas son “comunicaciones colectivas”
• “Broadcasts de filas” son broadcasts es sub-grupos especiales de procesadores
• Rolls se hacen como una variante del MPI_SENDRECV con “condiciones de frontera ciclicas”
• También hay rutinas especiales MPI para definir la malla 2D de procesadores
36
Broadcast en el caso de la Matriz completa
• MatMul usando Fox o Summa con MPI emplea
broadcast como comunicación básica
• Usaremos esta aplicación para discutir 3 enfoques del broadcast• Trivial
• Logarítmico
• Pipe (tubo)
• Que tiene diferente performance dependiendo en el
tamaño del mensaje y la arquitectura del hardware.

37
Implementación Broadcast trivial y del logarítmico

38
Broadcast de pipe o tubo
• En el caso que el tamaño del mensaje es grande, otras implementaciones son posibles o deseables, ya que será necesario hacer broadcast del mensaje previa sub división en una secuencia de mensajes más chicos.
• El broadcast puede establecer un camino (o varios) desde el procesador origen y que visita a los demás procesadores de un grupo.
• El mensaje es enviado desde la fuente a lo largo del camino en un “tubo”, donde cada procesador recibe un bloque del mensaje desdensupredecesor y lo envia luego a su sucesor.
• La performance de este broadcast es por lo tanto el tiempo para enviar el mensaje al procesador al final del camino más la latencia de inicializar y terminar el “tubo”.
• Tiempo = (Tamaño del mensaje + Tamaño de un paquete (√N – 2))tcomm
• Para granos suficientemente gruesos, el pipe es mejor que el log.
• Alta latencia es mala para este enfoque de “tubo”
• MPI usa logarítmico, pero se puede “adoptarel trivial.

39
Esquema de Operación

40
Análisis de performance
41
Resumen de MatMul paralela• 1D
• Bus sin broadcast – más lento que serial
• Comunicación al vecino más próximo en anillo (o bus con broadcast): Eficiencia = 1/(1 + O(p/n))
• 2D• Cannon
• Eficiencia = 1/(1+O(α ∗ ( sqrt(p) /n)3333 +β* sqrt(p) /n))
• Difícil de generalizar para arbitrarios p, n, bloques cíclicos,
alineamientos
• SUMMA
• Eficiencia = 1/(1 + O(α ∗ log p * p / (b*n2) + β∗log p * sqrt(p) /n))
• Más genérico
• b chico => menos memoria, menos eficiencia
• b grande => más memoria, más eficiencia