capitulo ii marco teorico - virtual.urbe.eduvirtual.urbe.edu/tesispub/0094929/cap02.pdf ·...
TRANSCRIPT
10
CAPITULO II
MARCO TEORICO
En este capítulo, se presentan los antecedentes que han servido de soporte
para esta investigación, las bases teóricas, el análisis de las variables que
intervinieron en el estudio y las definiciones de los términos básicos para un mejor
entendimiento de la investigación en cuestión.
2.1. Antecedentes. A continuación se harán referencia de trabajos relacionados con el área de
estudio seleccionada. La realización de esta investigación, ha requerido la
consulta de varios estudios relacionados con el diseño de estrategia de control
que permitan mejorar el proceso. En primer lugar tenemos la investigación de
Martínez (2010), quien realizó la investigación doctoral en la Universidad
Politécnica de Madrid sobre “Comunicación con computador mediante señales
cerebrales. Aplicación a la Tecnología de la Rehabilitación” el cual consiste sobre
el avance reciente en hardware para ordenadores persónales y procesamiento de
señal, ha hecho posible el uso de señale EEG u ondas cerebrales para
comunicación y computadora. Hay paciente que sufren de síndrome bloqueante
disponen ahora una nueva forma de comunicación con el reto del mundo.

11
Los dispositivos existente son diseñados con la idea de flexibilidad de la
mente, dando lugar a que sean lento. El proyecto explora la efectividad de la
técnica de análisis y en tiempo y frecuencia para la clasificación de diferentes
actividades mentales haciendo uso de la electroencefalografía (EEG). La
diferencia de lo métodos basado en representaciones temporales y frecuenciales
han ido considerado para la clasificación entre la tarea mencionada. Lo resultado
indican la utilización del método de hardware para ordenadores para ventana de
un tercio de segundo.
La aplicabilidad de esta información se orienta al diseño electrónico de
amplificación de señal, ya que para lograr el registro de la señales cerebrales que
son muy baja para mover un dispositivo, debe existir un medio de amplificación y
lectura de datos donde le indique al sistema la instrucción deseada, en el trabajo
de Martínez hacen referencia al estudio de la electromiografía que es un equipo
biomédico que se utiliza para leer la señale eléctrica de lo nervio de lo miembro
inferiores y superior del cuerpo humano, este dato no llevo a realizar prueba para
comprobar la viabilidad del este proyecto.
El segundo trabajo es realizado por J. Canová y F. García (2008). “Control e
implementación en tiempo real de un brazo robot antropomórfico en entorno
MATLAB/Simulink”, realizado en la Universidad Politécnica de Cartagena la cual
plantea que ttodo manipulador robótico se inspira en un brazo humano aunque
con alguna diferencia muy notable. El brazo Robótico que se plantea es un
artefacto programable, que se conoce y emplea en nuestros días, no surge como
consecuencia de la tendencia o ficción a crear un robot-humano, sino de la
necesidad de la liberación del hombre en trabajos peligrosos y desagradables.
12
La idea tomada de esta excelente investigación e el procedimiento teórico de
cómo funciona un brazo robótico, aclarando que el brazo biónica e similar pero en
vez de ser movido por un sistema netamente electrónico este e moverá con las
señales cerebrales amplificadas, la diferencia no es muy grande pero el grado de
libertad coordenada, articulaciones y demás característica no ayuda al análisis de
cómo sería u alcance utilizando alguno comando que utilizaron Canora y García
para la simulación del sistema.
El trabajo de R. Leal (2008), el cual fue desarrollado en la Universidad Dr.
Rafael Belloso Chacin de Maracaibo, que muestra un “Control adaptativo basado
en lógica difusa en los lazos pid de los múltiples de gas lift de la unidad de
explotación Lagomar” se baso en desarrollar un sistema de control simulado con
Matlab 7.0 y Simulink aplicando el modelo matemático del proceso en estudio, a
través de métodos para métricos de identificación y posteriormente se diseñó el
sistema de control Adaptativo Basado en Lógica Difusa los resultados e mostraron
según el análisis de señale en Simulink y el desarrollo de controlador PID basado
en lógica difusa mostraron en los niveles esperados.
La herramienta utilizada en este trabajo como lo e simulink para poder
procesar la señale difusa fueron de mucha utilidad ya que por medio de un modelo
matemático realizado al sistema e introduciendo lo dato en maltaba e obtienen
valore que demuestran la versatilidad y fiabilidad del diseño difuso biónico.
13
Seguidamente el trabajo de Lago, N (2006), llevo a cabo “La evaluación
neurobiológica de electrodos regenerativo como interfase entre nervios lesionados
y prótesis biónicas” elaborado en la casa de estudio de la Universidad Autónoma
de Barcelona, donde muestra el análisis neurobiológico y la revisión crítica que
urgen hasta la hora de aplicar una interfase a un nervio periférico lesionado.
La implementación de esta investigación analiza la técnica de utilización de la
señales micro eléctrica cerebrales que es la parte esencial del este trabajo en
cuestión, comprobando que dicha señale producen una excitación muscular
consecuente al movimiento del miembro en donde se aplique tal fuerza previa a la
contracción, la cuales e pueden detectar por electrodo sensible colocado en la
superficie de la piel y con ayuda de un gel conductor se puede obtener la señal
requerida.
La ubicación de la colocación de los electrodos, sugiere Lago, que sea en la
parte de de flexión y otro para los dedos, claro está, lo mencionado es para una
mano, pero es aplicable a un brazo reorganizando lo electrodos teniendo en
cuenta que los electrodos son diferentes para cada parte del miembro o músculo.
Por último tenemos la investigación de J. González (2006) sobre “Controlador
difuso para la planta ty30a/ev-g30a/ev del laboratorio de controles de la
universidad Dr. Rafael Belloso Chacín”. Investigación llevada a cabo en la misma
casa de estudio, plantea un controlador difuso para el controlar el nivel de
producto en la planta TY30A/EV-G30A/EV del Laboratorio de Controles de la
URBE, controlada inicialmente por un controlador convencional PI el cual se
identificó el modelo matemático asociado a la planta, para colocarlo en la
herramienta de simulación en MATLAB.
14
González realizo pruebas a lazo abierto para constatar la presencia o no de la
linealidad; se creó un controlador difuso con conjunto difusos de entrada el valor
deseado del nivel del producto y de salida el valor de nivel logrado, se definieron
las reglas difusas, edita el programa del sistema de inferencia difusa en MATLAB,
se realizaron pruebas con la adición de cada uno de los controladores PI al
proceso, para luego ser comparadas y poder establecer mejor respuesta.
La aplicación del método utilizado en esta investigación sirvió de ejemplo para
aplicar la lógica difusa en la codificación de las señales micro eléctricas leídas con
los electrodos y procesada en el sistema electrónico para poder dar el movimiento
deseado, claro esta que los valores tomados se obtuvieron previamente antes de
llegar a la simulación, este trabajo fue de mucha ayuda para tal fin ya que el
tratamiento de la señal es similar como la que se realizo anteriormente en esta
tesis.
2.2. Bases Teóricas.
A continuación, se emitirán varias definiciones con el propósito de dar una
perspectiva general al lector del objetivo que pretende alcanzar esta investigación,
además de permitirles concebir un concepto acerca de las implicaciones y las
ventajas que presentan la automatización y control del proceso.
15
2.2.1.- Sistema de Control.
Según Ogata (1993 pág. 2) un sistema de control “Es una combinación de
componentes que actúan conjuntamente para medir el valor de la variable
controlada del sistema con las medidas y aplicar al mismo la variable manipulada
para corregir o limitar la desviación del valor medido respecto al valor deseado.”
Según Kuo (1996 Pág.2) “El objetivo de un sistema de control es controlar las
salidas en alguna forma prescrita mediante las entradas a través de los elementos
del sistema de control.” Algunos elementos relacionados con los sistemas de
control se mencionan a continuación:
• Variable Controlada: es aquella condición que se mide y se controla.
Esta variable es la salida del sistema.
• Variable Manipulada: es aquella condición que es controlada por un
elemento llamado controlador.
• Controlador: mide el valor de la variable controlada, altera la variable
manipulada y luego modifica a la variable controlada si hay algún margen
de error en el sistema a partir de un modelo o valor deseado llamado set-
point que generalmente es modificado por el usuario dependiendo del tipo
de condiciones que requiera el sistema.
16
2.2.1.1. Clasificación de sistema de control.
La clasificación de los sistemas de control están definidos según las
características de diseño y parámetros existentes.
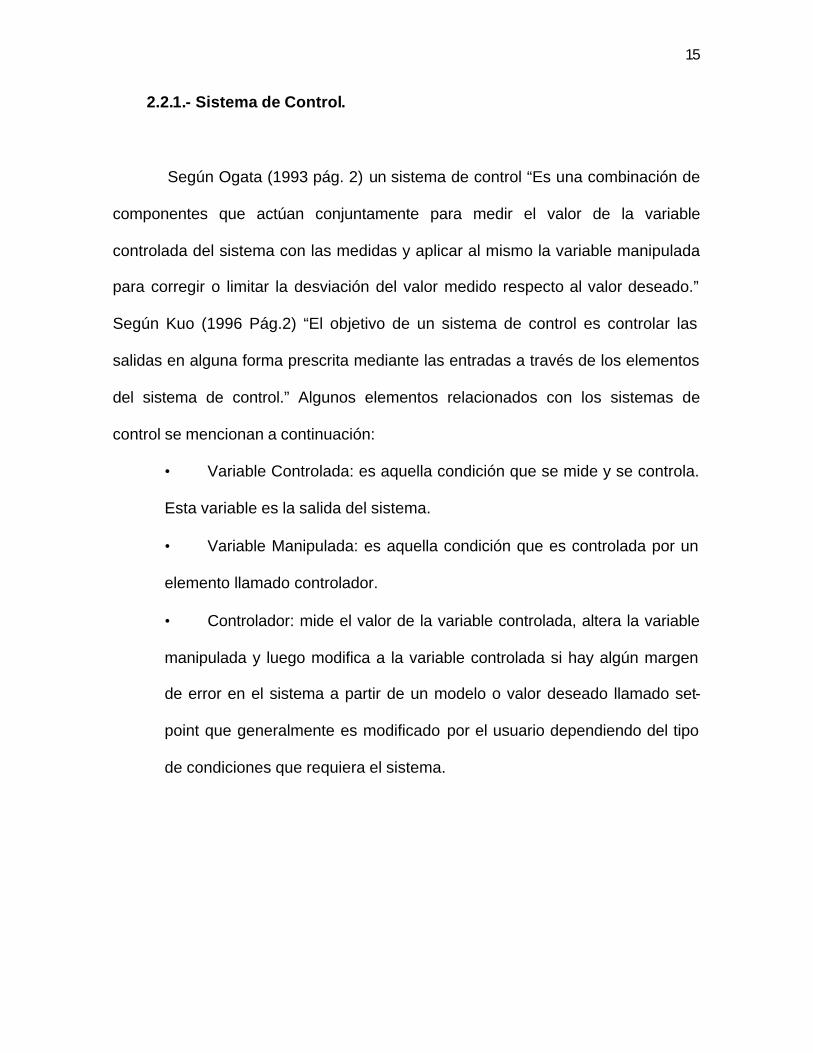
2.2.1.2. Sistemas de Control lazo abierto.
Es aquel sistema en el que los valores de salida no afectan los de la
entrada ya que no existe retroalimentación que los comunique.
Figura 1. Lazo de control abierto. Fuente: http://www.slideshare.net/balzasbravas/control-continuo
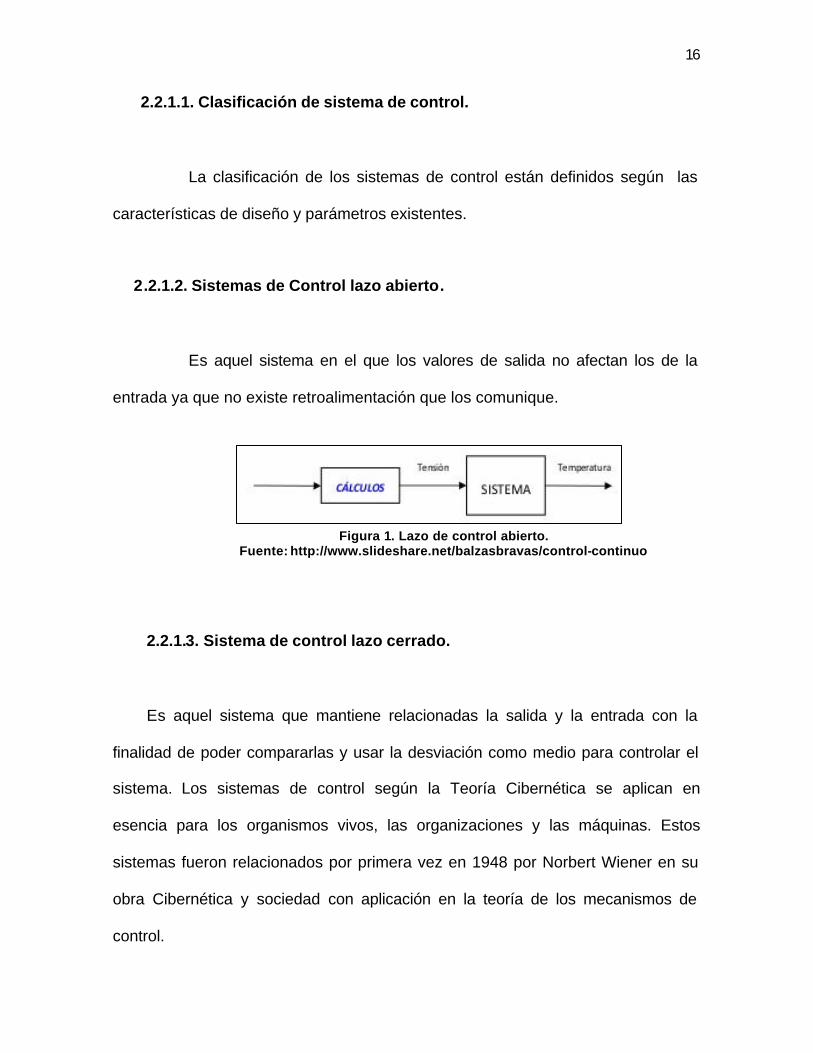
2.2.1.3. Sistema de control lazo cerrado.
Es aquel sistema que mantiene relacionadas la salida y la entrada con la
finalidad de poder compararlas y usar la desviación como medio para controlar el
sistema. Los sistemas de control según la Teoría Cibernética se aplican en
esencia para los organismos vivos, las organizaciones y las máquinas. Estos
sistemas fueron relacionados por primera vez en 1948 por Norbert Wiener en su
obra Cibernética y sociedad con aplicación en la teoría de los mecanismos de
control.
17
Desde tiempos inmemorables el hombre ha tratado de mejorar su estándar de
vida y de que ciertas rutinas se realicen de forma automática, o por lo menos que
se ejecuten sin la necesidad de vigilar su desempeño.
Para el estudio de los sistemas de control se utiliza el método basado en el
uso de los diagramas de bloque, los cuales permiten mostrar la relación funcional
entre las distintas partes que integran el sistema. Así lo establece Navarro (2004,
pág. 6).
Figura 2. Lazo de control cerrado.
Fuente: http://www.slideshare.net/balzasbravas/control-continuo
2.2.1.4. Sistema de control discreto.
Un sistema en tiempo discreto viene caracterizado por magnitudes que
varían solo en instantes específicos de tiempo. Estas magnitudes o señales en
tiempo discreto toman valores como r k( ), r(t1), r(t2)….., r(tn) como se muestra en
la figura 1, también se puede definir como Un sistema de control discreto es aquel
que incluye un computador digital en el bucle de control para realizar un
procesamiento de señal.

18
Figura 3. Magnitud en tiempo discreto. Fuente: http://www.isa.uma.es
2.2.1.5. Transformada Z.
La transformada Z, al igual que otras transformaciones integrales, puede ser
definida como una transformada unilateral o bilateral.
• Transformada Z bilateral: La TZ bilateral de una señal definida en el
dominio del tiempo discreto x[n] es una función X(z) que se define:
Donde n es un entero y z es, en general, un número complejo de la
forma:
Donde A es el módulo de z, y ? es la frecuencia angular en radianes por
segundo (rad/s).
• Transformada Z unilateral: de forma alternativa, en los casos en
que x[n] está definida únicamente para n = 0, la transformada Z
unilateral se define como:
19
En el procesamiento de señales, se usa esta definición cuando la señal
es causal. En este caso, la Transformada Z resulta una serie de Laurent, con ROC
del tipo ; es decir que converge "hacia afuera". Un ejemplo interesante de
la TZ unilateral es la función de generación de probabilidades, donde x[n]es la
probabilidad que toma una variable discreta aleatoria en el instante n, y la
función X(z) suele escribirse como X(s), ya que s = z- 1. Las propiedades de las
transformadas Z son útiles en la teoría de la probabilidad.
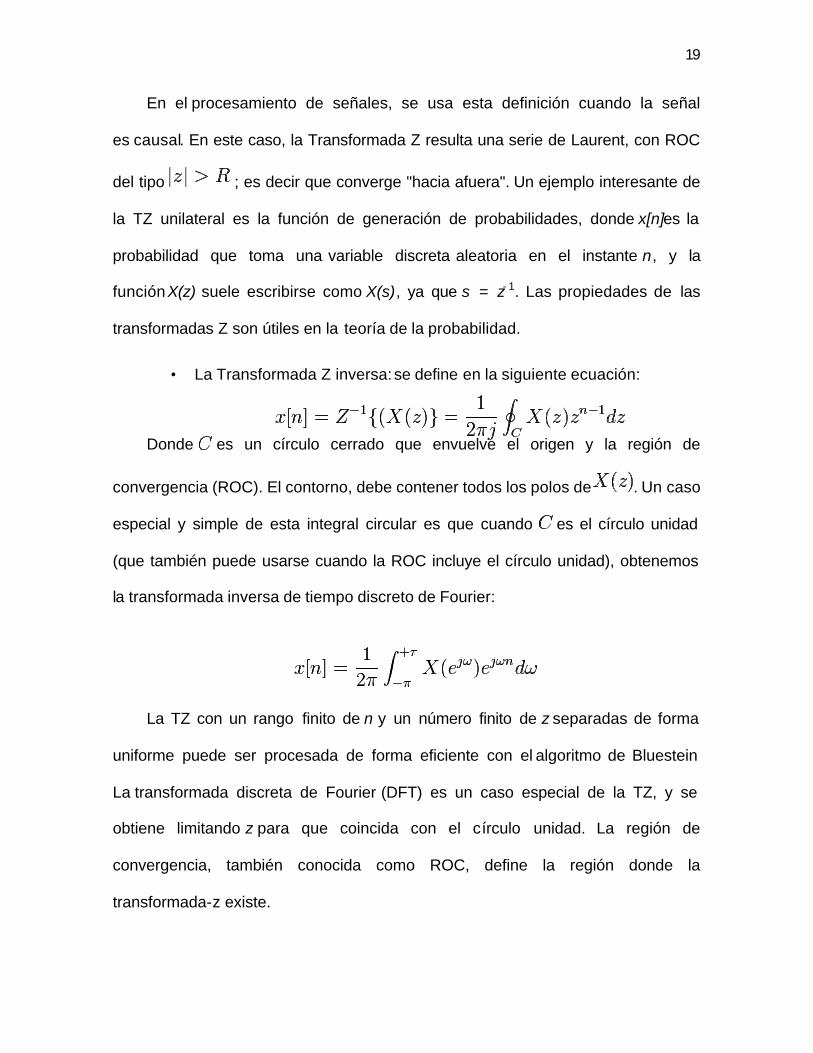
• La Transformada Z inversa: se define en la siguiente ecuación:
Donde es un círculo cerrado que envuelve el origen y la región de
convergencia (ROC). El contorno, debe contener todos los polos de . Un caso
especial y simple de esta integral circular es que cuando es el círculo unidad
(que también puede usarse cuando la ROC incluye el círculo unidad), obtenemos
la transformada inversa de tiempo discreto de Fourier:
La TZ con un rango finito de n y un número finito de z separadas de forma
uniforme puede ser procesada de forma eficiente con el algoritmo de Bluestein
La transformada discreta de Fourier (DFT) es un caso especial de la TZ, y se
obtiene limitando z para que coincida con el círculo unidad. La región de
convergencia, también conocida como ROC, define la región donde la
transformada-z existe.
20
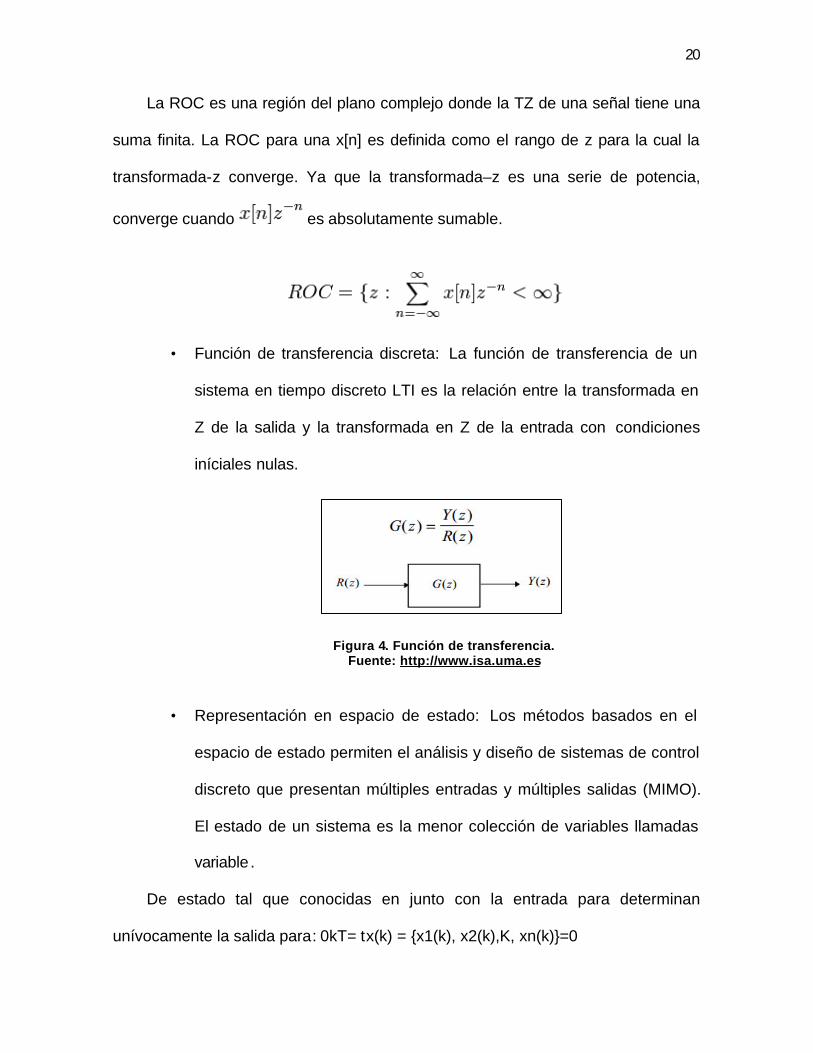
La ROC es una región del plano complejo donde la TZ de una señal tiene una
suma finita. La ROC para una x[n] es definida como el rango de z para la cual la
transformada-z converge. Ya que la transformada–z es una serie de potencia,
converge cuando es absolutamente sumable.
• Función de transferencia discreta: La función de transferencia de un
sistema en tiempo discreto LTI es la relación entre la transformada en
Z de la salida y la transformada en Z de la entrada con condiciones
iníciales nulas.
Figura 4. Función de transferencia. Fuente: http://www.isa.uma.es
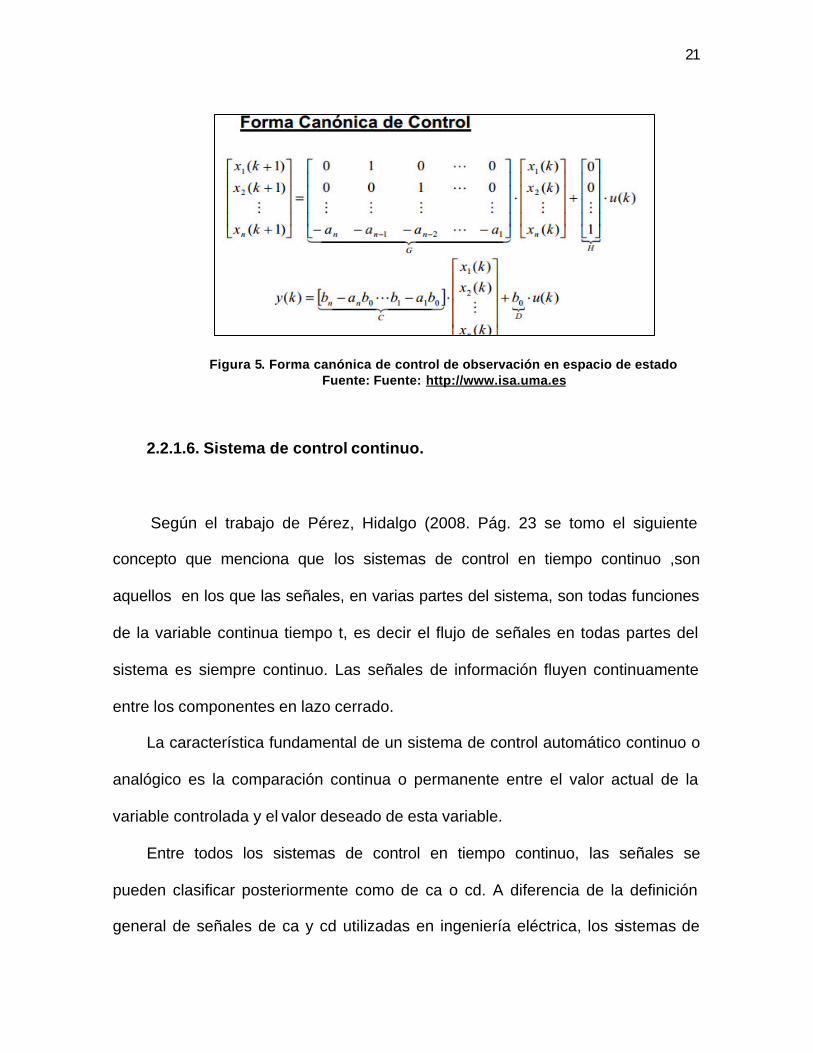
• Representación en espacio de estado: Los métodos basados en el
espacio de estado permiten el análisis y diseño de sistemas de control
discreto que presentan múltiples entradas y múltiples salidas (MIMO).
El estado de un sistema es la menor colección de variables llamadas
variable .
De estado tal que conocidas en junto con la entrada para determinan
unívocamente la salida para: 0kT= tx(k) = {x1(k), x2(k),K, xn(k)}=0
21
Figura 5. Forma canónica de control de observación en espacio de estado Fuente: Fuente: http://www.isa.uma.es
2.2.1.6. Sistema de control continuo.
Según el trabajo de Pérez, Hidalgo (2008. Pág. 23 se tomo el siguiente
concepto que menciona que los sistemas de control en tiempo continuo ,son
aquellos en los que las señales, en varias partes del sistema, son todas funciones
de la variable continua tiempo t, es decir el flujo de señales en todas partes del
sistema es siempre continuo. Las señales de información fluyen continuamente
entre los componentes en lazo cerrado.
La característica fundamental de un sistema de control automático continuo o
analógico es la comparación continua o permanente entre el valor actual de la
variable controlada y el valor deseado de esta variable.
Entre todos los sistemas de control en tiempo continuo, las señales se
pueden clasificar posteriormente como de ca o cd. A diferencia de la definición
general de señales de ca y cd utilizadas en ingeniería eléctrica, los sistemas de
22
control de ca y cd tienen un significado especial en la terminología de sistemas de
control. Cuando se hace referencia a un sistema de control de ca, usualmente
significa que las señales en el sistema están moduladas según algún esquema de
modulación.
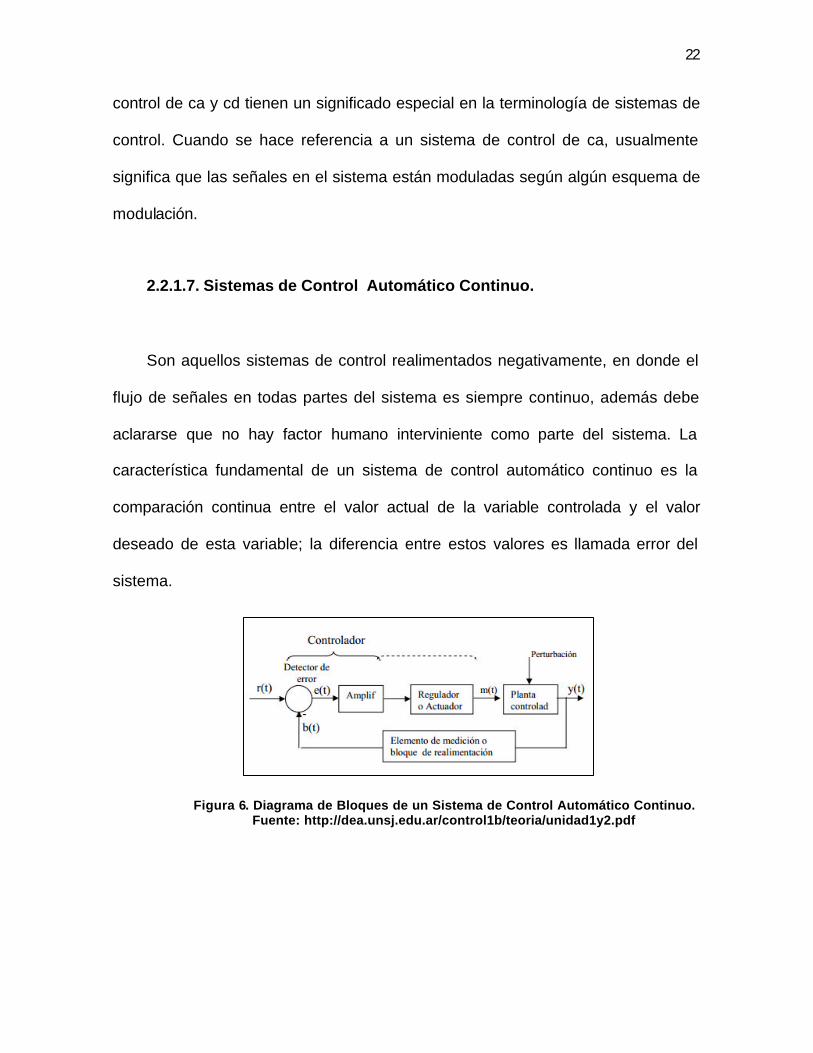
2.2.1.7. Sistemas de Control Automático Continuo.
Son aquellos sistemas de control realimentados negativamente, en donde el
flujo de señales en todas partes del sistema es siempre continuo, además debe
aclararse que no hay factor humano interviniente como parte del sistema. La
característica fundamental de un sistema de control automático continuo es la
comparación continua entre el valor actual de la variable controlada y el valor
deseado de esta variable; la diferencia entre estos valores es llamada error del
sistema.
Figura 6. Diagrama de Bloques de un Sistema de Control Automático Continuo.
Fuente: http://dea.unsj.edu.ar/control1b/teoria/unidad1y2.pdf
23
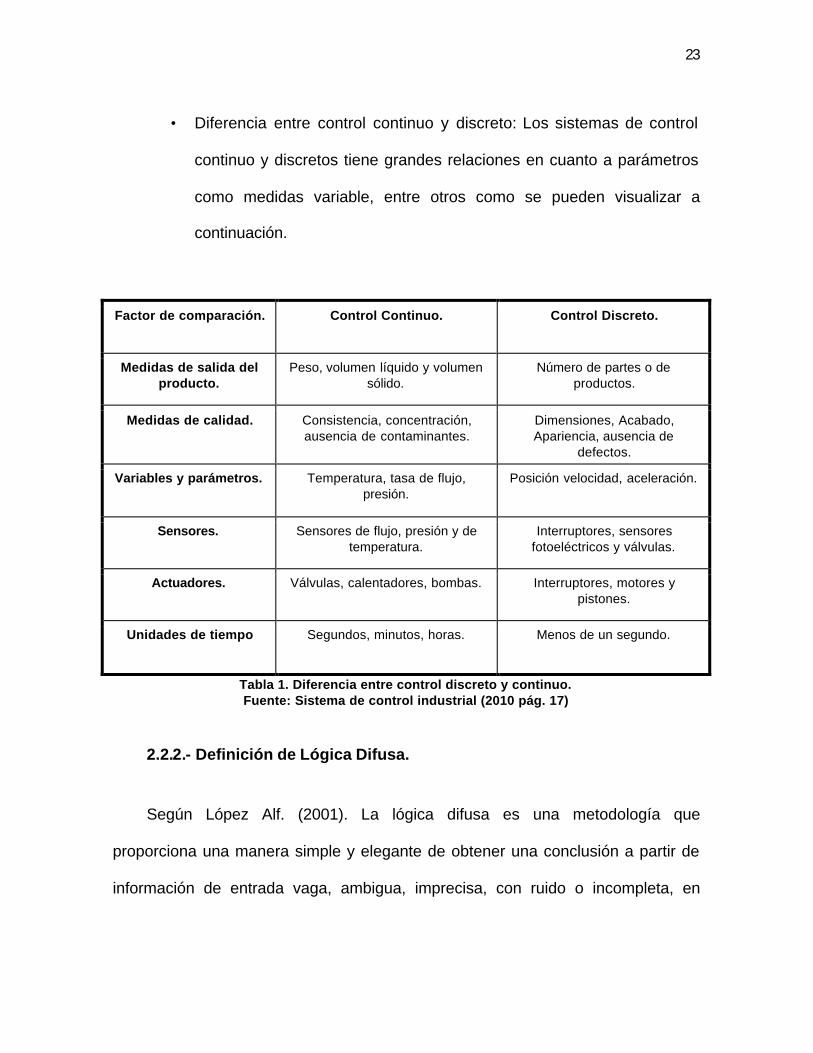
• Diferencia entre control continuo y discreto: Los sistemas de control
continuo y discretos tiene grandes relaciones en cuanto a parámetros
como medidas variable, entre otros como se pueden visualizar a
continuación.
Tabla 1. Diferencia entre control discreto y continuo. Fuente: Sistema de control industrial (2010 pág. 17)
2.2.2.- Definición de Lógica Difusa. Según López Alf. (2001). La lógica difusa es una metodología que
proporciona una manera simple y elegante de obtener una conclusión a partir de
información de entrada vaga, ambigua, imprecisa, con ruido o incompleta, en
Factor de comparación. Control Continuo. Control Discreto.
Medidas de salida del producto.
Peso, volumen líquido y volumen sólido.
Número de partes o de productos.
Medidas de calidad. Consistencia, concentración, ausencia de contaminantes.
Dimensiones, Acabado, Apariencia, ausencia de
defectos.
Variables y parámetros. Temperatura, tasa de flujo, presión.
Posición velocidad, aceleración.
Sensores. Sensores de flujo, presión y de temperatura.
Interruptores, sensores fotoeléctricos y válvulas.
Actuadores. Válvulas, calentadores, bombas. Interruptores, motores y pistones.
Unidades de tiempo Segundos, minutos, horas. Menos de un segundo.
24
general la lógica difusa imita como un persona toma decisiones basada en
información con las características mencionadas.
Una de las ventajas de la lógica difusa es la posibilidad de implementar
sistemas basados en ella tanto en hardware como en software o en combinación
de ambos por otra parte Dicho por el Dr. José Galindo G. (2010). Lógica difusa.
La aplicabilidad hoy en día en industrias Japonesas, ya que ello son lo
pionero en esa especialidad en cambio en Latinoamérica se está empezando a
realizar estudios con esta modalidad con excelentes resultados empleándolos en
los siguientes sistemas:
• Sistemas de control de acondicionadores de aire
• Sistemas de foco automático en cámaras fotográficas
• Electrodomésticos familiares (frigoríficos, lavadoras entre otras)
• Sistemas de reconocimiento de escritura
• Mejora en la eficiencia del uso de combustible en motores
• Sistemas expertos del conocimiento (simular el comportamiento de un
experto humano)
• Tecnología informática
• Bases de datos difusas: Almacenar y consultar información imprecisa. Para
este punto, por ejemplo, existe el lenguaje FSQL.
De la misma página se tomo la defección de Lógica difusa en la inteligencia
artificial: los sistemas basados en lógica difusa imitan la forma en que toman
decisiones los humanos, con la ventaja de ser mucho más rápidos. Estos sistemas
son generalmente robustos y tolerantes a imprecisiones y ruidos en los datos de
entrada.
25
En este paradigma, también tiene un especial valor la variable del tiempo, ya
que los sistemas de control pueden necesitar retroalimentarse en un espacio
concreto de tiempo, pueden necesitarse datos anteriores para hacer una
evaluación media de la situación en un período anterior.
De Alzate A. y Mancera David. (2007). Nos define El Control Difuso: la lógica
difusa proporciona un medio para enfrentar situaciones del mundo real, complejas
y dinámicas, que son más fácilmente caracterizadas por palabras que por modelos
matemáticos. En esencia un controlador difuso contiene un algoritmo capaz de
convertir una estrategia de control lingüística en una de control automático, con lo
que se busca imitar el razonamiento humano.
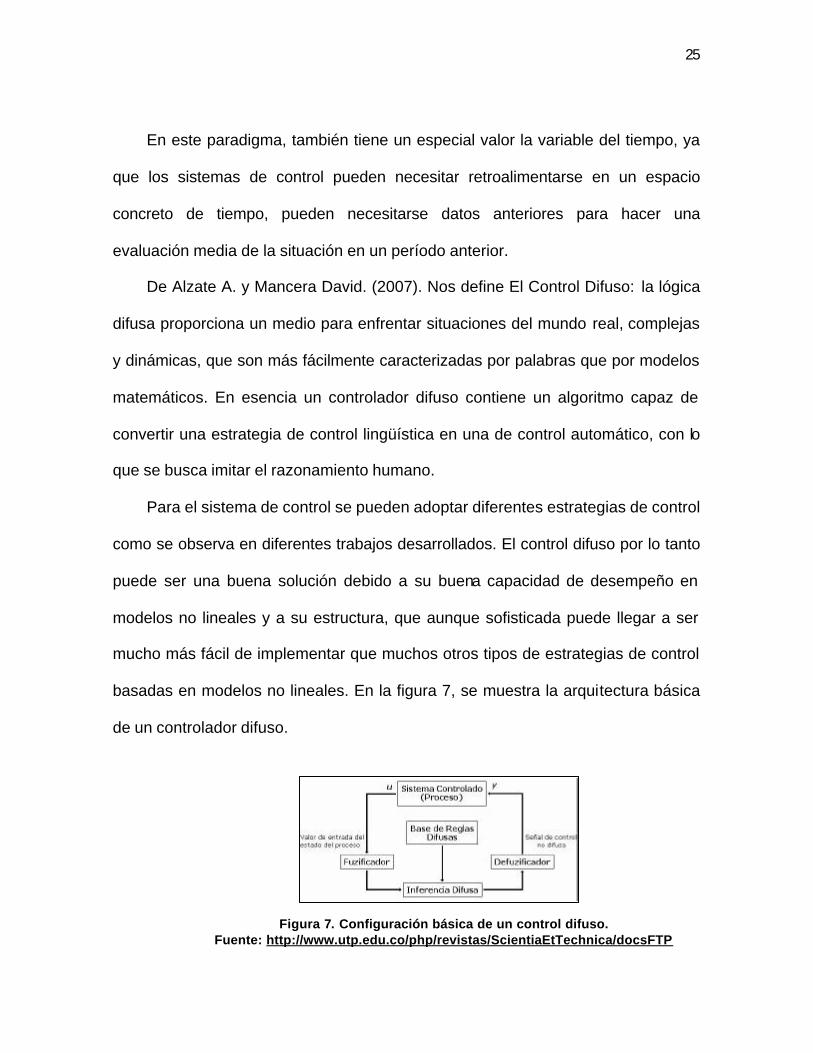
Para el sistema de control se pueden adoptar diferentes estrategias de control
como se observa en diferentes trabajos desarrollados. El control difuso por lo tanto
puede ser una buena solución debido a su buena capacidad de desempeño en
modelos no lineales y a su estructura, que aunque sofisticada puede llegar a ser
mucho más fácil de implementar que muchos otros tipos de estrategias de control
basadas en modelos no lineales. En la figura 7, se muestra la arquitectura básica
de un controlador difuso.
Figura 7. Configuración básica de un control difuso.
Fuente: http://www.utp.edu.co/php/revistas/ScientiaEtTechnica/docsFTP
26
2.2.2.1. Funcionamiento de la lógica difusa.
La lógica difusa ("fuzzy logic" en inglés) se adapta mejor al mundo real en el
que vivimos, e incluso puede comprender y funcionar con nuestras expresiones,
del tipo "hace mucho calor", "no es muy alto", "el ritmo del corazón está un poco
acelerado", entre otros. La clave de esta adaptación al lenguaje, se basa en
comprender los cuantificadores de nuestro lenguaje (en los ejemplos de arriba
"mucho", "muy" y "un poco").
Para cada conjunto difuso, existe asociada una función de pertenencia para
sus elementos, que indican en qué medida el elemento forma parte de ese
conjunto difuso. Las formas de las funciones de pertenencia más típicas son
trapezoidales, lineales y curvas.
Se basa en reglas heurísticas de la forma: SI (antecedente) ENTONCES
(consecuente), donde el antecedente y el consecuente son también conjuntos
difusos, ya sea puros o resultado de operar con ellos. Sirvan como ejemplos de
regla heurística para esta lógica (nótese la importancia de las palabras
"muchísimo", "drásticamente", "un poco" y "levemente" para la lógica difusa):
• SI hace muchísimo calor ENTONCES aumentó drásticamente
la temperatura.
• SI voy a llegar un poco tarde ENTONCES aumento levemente la velocidad.
Los métodos de inferencia para esta base de reglas deben ser simples,
veloces y eficaces. Los resultados de dichos métodos son un área final, fruto de
un conjunto de áreas solapadas entre sí (cada área es resultado de una regla de
27
inferencia). Para escoger una salida concreta a partir de tanta premisa difusa, el
método más usado es el del centroide, en el que la salida final será el centro de
gravedad del área total resultante. Las reglas de las que dispone el motor de
inferencia de un sistema difuso pueden ser formuladas por expertos, o bien
aprendidas por el propio sistema, haciendo uso en este caso de redes neuronales
para fortalecer las futuras tomas de decisiones.
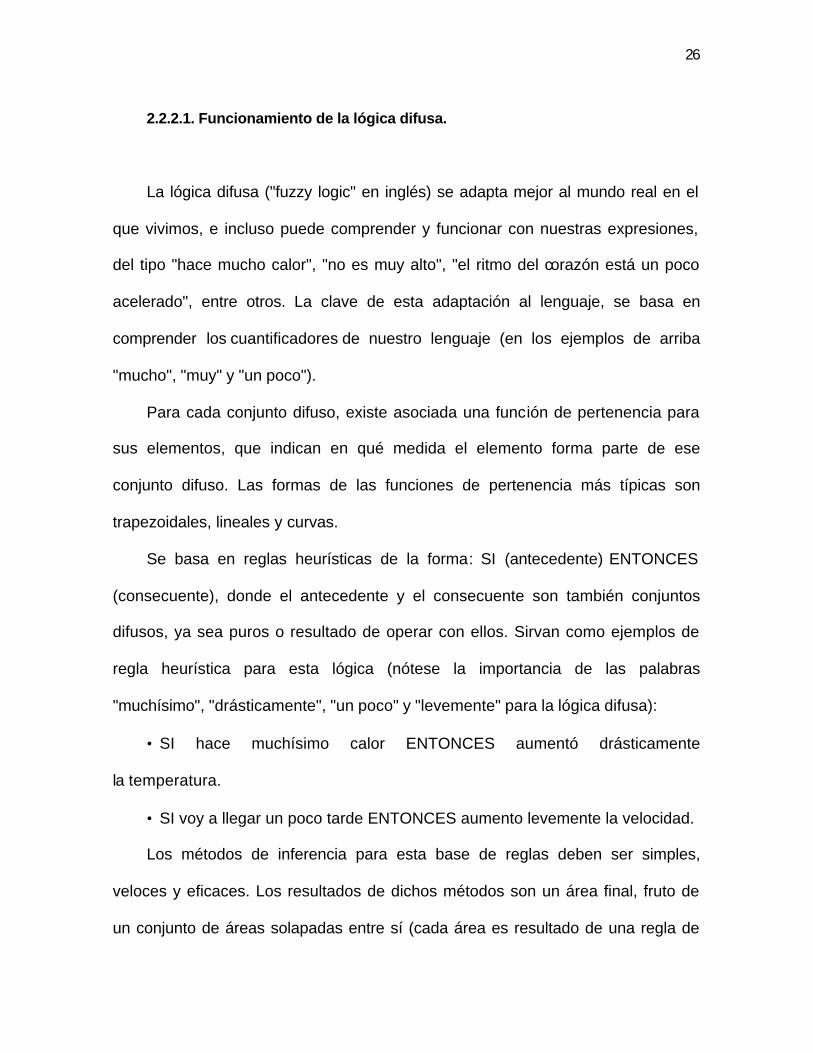
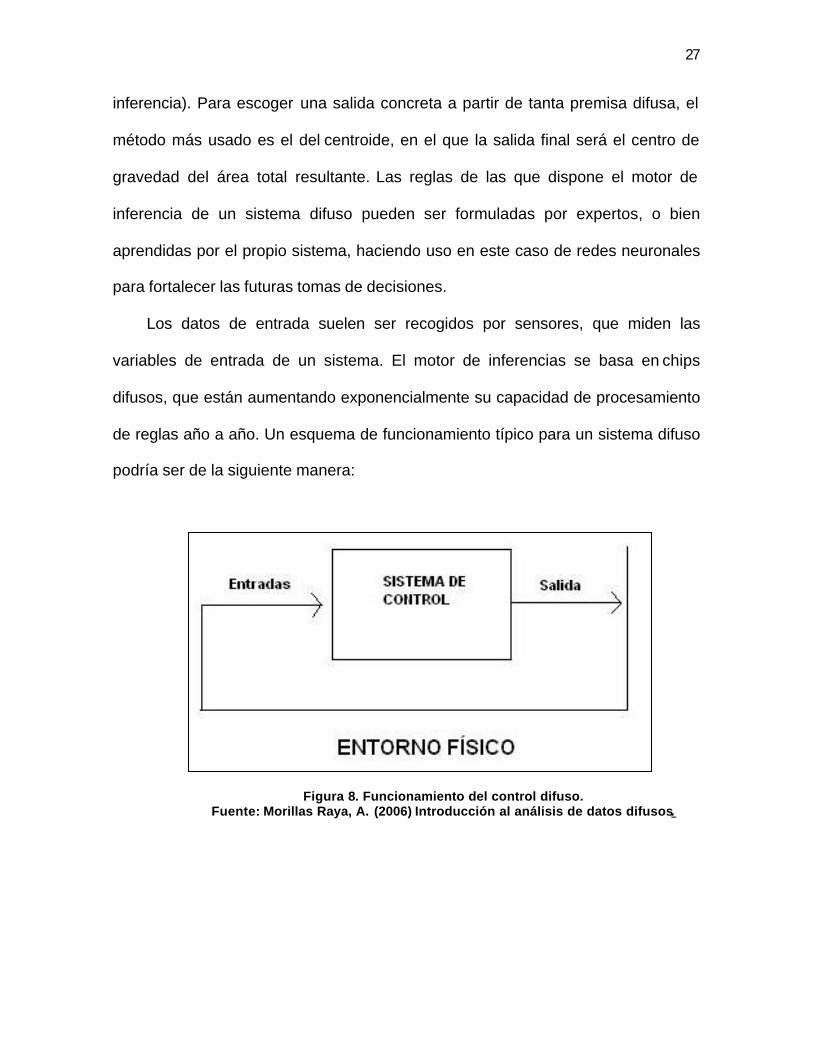
Los datos de entrada suelen ser recogidos por sensores, que miden las
variables de entrada de un sistema. El motor de inferencias se basa en chips
difusos, que están aumentando exponencialmente su capacidad de procesamiento
de reglas año a año. Un esquema de funcionamiento típico para un sistema difuso
podría ser de la siguiente manera:
Figura 8. Funcionamiento del control difuso. Fuente: Morillas Raya, A. (2006) Introducción al análisis de datos difusos.
28
2.2.2.2. Procedimiento de lógica difusa. a. Proceso de fuzzificaciòn: el proceso de fuzzificación consiste en convertir
una variable real en un grado de pertenencia que cuantifica el grado de posesión
hacia su correspondiente variable lingüística. La entrada siempre es un valor
numérico limitado al universo del discurso de la variable de entrada (0-10).
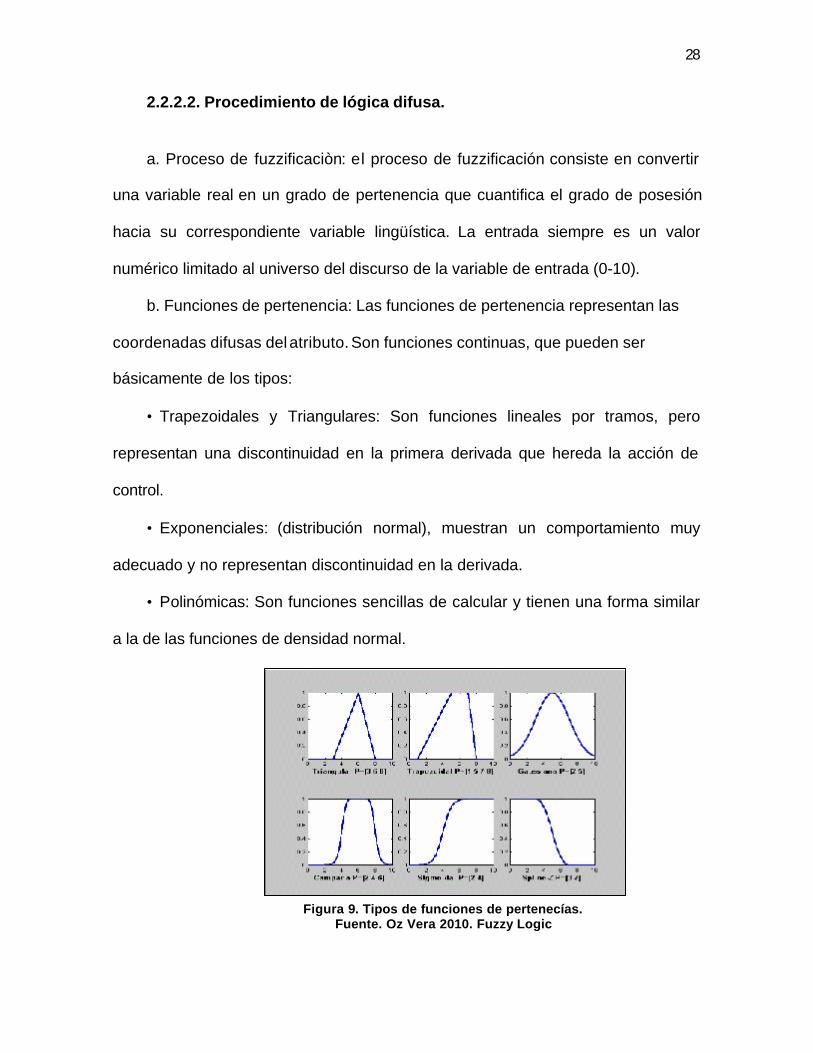
b. Funciones de pertenencia: Las funciones de pertenencia representan las
coordenadas difusas del atributo. Son funciones continuas, que pueden ser
básicamente de los tipos:
• Trapezoidales y Triangulares: Son funciones lineales por tramos, pero
representan una discontinuidad en la primera derivada que hereda la acción de
control.
• Exponenciales: (distribución normal), muestran un comportamiento muy
adecuado y no representan discontinuidad en la derivada.
• Polinómicas: Son funciones sencillas de calcular y tienen una forma similar
a la de las funciones de densidad normal.
Figura 9. Tipos de funciones de pertenecías.
Fuente. Oz Vera 2010. Fuzzy Logic
29
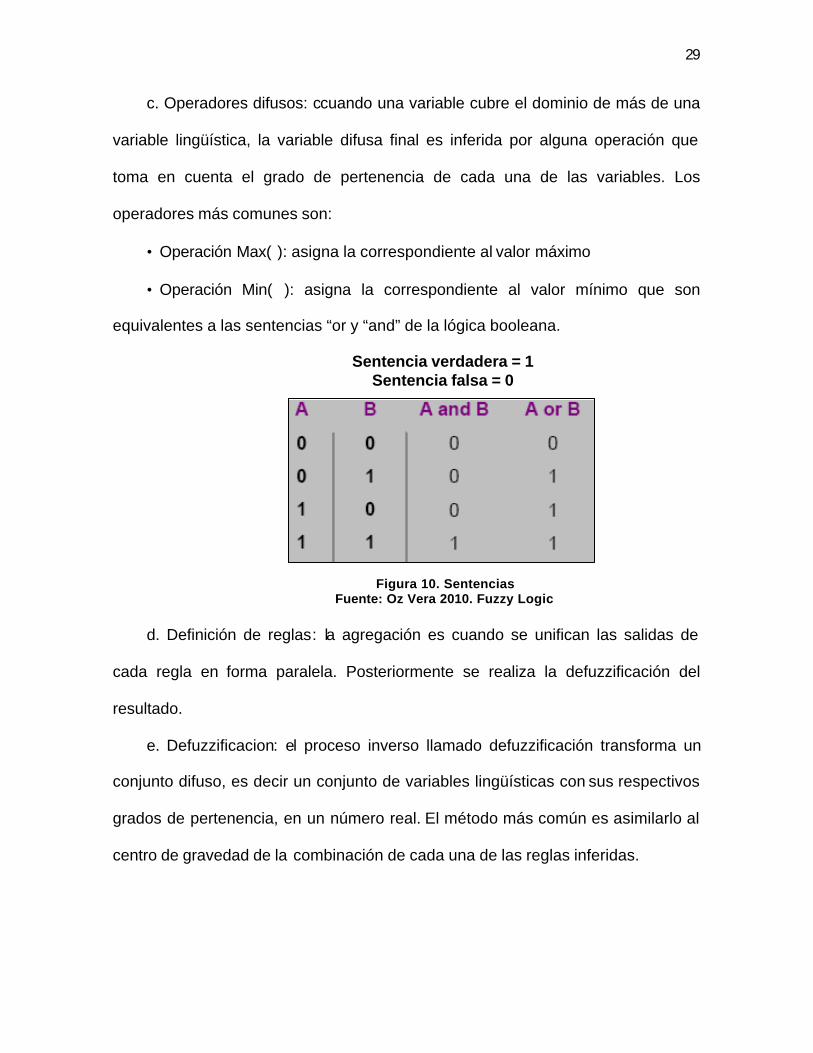
c. Operadores difusos: ccuando una variable cubre el dominio de más de una
variable lingüística, la variable difusa final es inferida por alguna operación que
toma en cuenta el grado de pertenencia de cada una de las variables. Los
operadores más comunes son:
• Operación Max( ): asigna la correspondiente al valor máximo
• Operación Min( ): asigna la correspondiente al valor mínimo que son
equivalentes a las sentencias “or y “and” de la lógica booleana.
Sentencia verdadera = 1 Sentencia falsa = 0
Figura 10. Sentencias Fuente: Oz Vera 2010. Fuzzy Logic
d. Definición de reglas: la agregación es cuando se unifican las salidas de
cada regla en forma paralela. Posteriormente se realiza la defuzzificación del
resultado.
e. Defuzzificacion: el proceso inverso llamado defuzzificación transforma un
conjunto difuso, es decir un conjunto de variables lingüísticas con sus respectivos
grados de pertenencia, en un número real. El método más común es asimilarlo al
centro de gravedad de la combinación de cada una de las reglas inferidas.
30
2.2.2.3. Controlador Difuso.
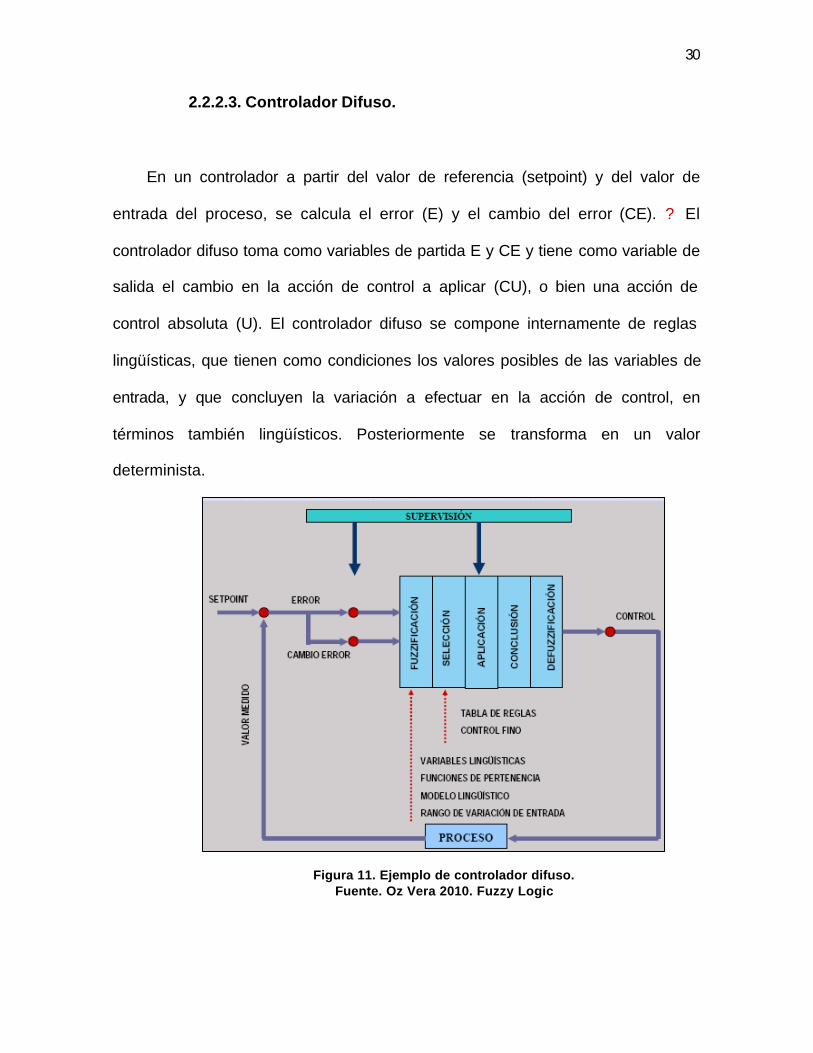
En un controlador a partir del valor de referencia (setpoint) y del valor de
entrada del proceso, se calcula el error (E) y el cambio del error (CE). ? El
controlador difuso toma como variables de partida E y CE y tiene como variable de
salida el cambio en la acción de control a aplicar (CU), o bien una acción de
control absoluta (U). El controlador difuso se compone internamente de reglas
lingüísticas, que tienen como condiciones los valores posibles de las variables de
entrada, y que concluyen la variación a efectuar en la acción de control, en
términos también lingüísticos. Posteriormente se transforma en un valor
determinista.
Figura 11. Ejemplo de controlador difuso. Fuente. Oz Vera 2010. Fuzzy Logic
31
a. Configuración básica de un controlador difuso.
a.1. Fuzzificacion: Es la primera acción en el diseño del controlador difuso, a
partir de los valores deterministas de E y CE, se le adjudica su correspondiente
valor difuso.
a.2. Elaboración de reglas: Después de haber traducido los valores
deterministas de las variables de entrada a valores difusos, se plantean las reglas.
Para ello se construye una tabla de doble entrada ( E y CE ) por cada variable de
entrada al controlador.
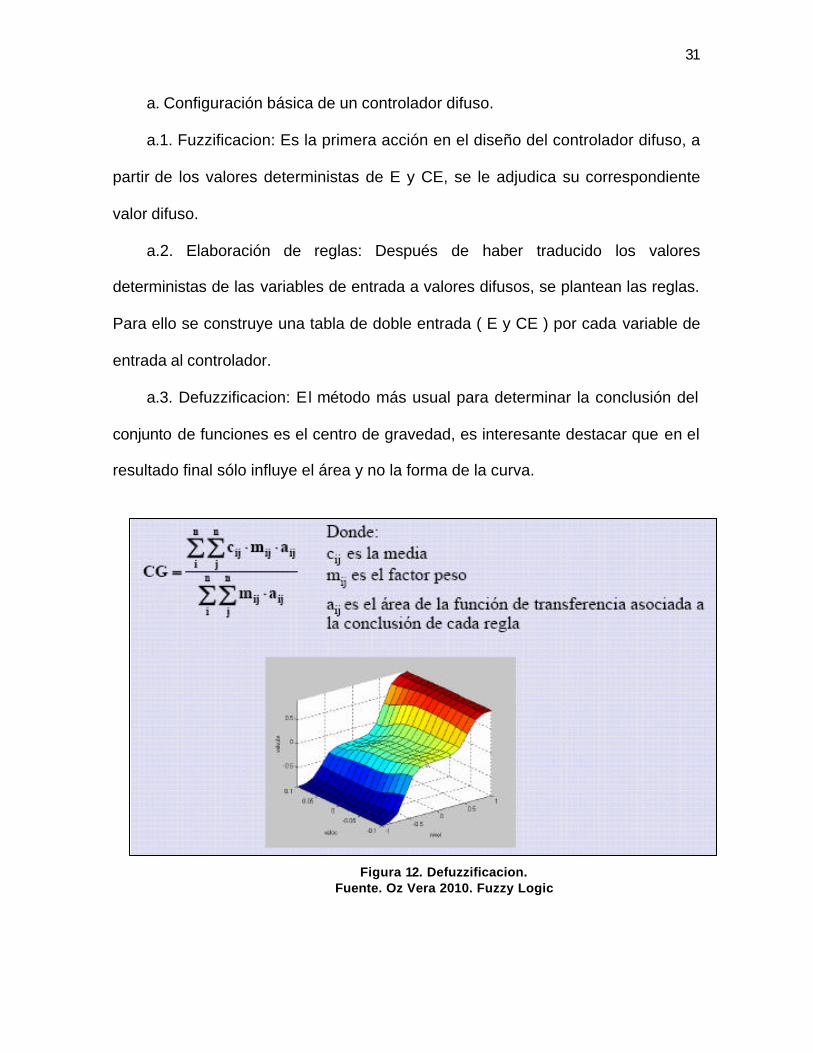
a.3. Defuzzificacion: El método más usual para determinar la conclusión del
conjunto de funciones es el centro de gravedad, es interesante destacar que en el
resultado final sólo influye el área y no la forma de la curva.
Figura 12. Defuzzificacion. Fuente. Oz Vera 2010. Fuzzy Logic
32
a.4. Acción de control: uuna vez obtenido el valor numérico, éste puede ser
multiplicado por un factor de escala para ser aplicado como acción de control. Una
alternativa es utilizar un factor de ganancia Kc, el cual se utiliza en el controlador
como un parámetro de ajuste, así la acción de control está dada por:
CU(k)=CU(k- 1) + K C ·?CU
2.2.3. Señales Bioeléctricas. Según Ing. González (2008). Define lo siguiente “La señal bioeléctricas es
propia de los sistemas biológicos. Su fuente es el potencial transmembrana, el
cual ante ciertas condiciones puede variar para generar una diferencia de
potencial (potencial de acción). El campo eléctrico se propaga a través del medio
biológico, y así el potencial puede adquirirse a distancia desde la superficie del
sistema en estudio, eliminándose la necesidad de invadirlo. La señal bioeléctricas
requiere un transductor relativamente simple para su adquisición.
Se necesita un transductor porque la conducción eléctrica en el medio
biológico se produce a través de iones, mientras que en el sistema de medición la
conducción es mediante electrones”. Igualmente podemos agregar que la
impedancia eléctrica de los tejidos contiene información importante sobre su
composición, volumen y distribución sanguínea, actividad endocrina, actividad
del sistema nervioso autónomo, y más.
33
La señal de bioimpedancia se genera usualmente inyectando en el tejido
bajo prueba corrientes senoidales (frecuencias entre 50 KHz y 1 MHz, y
corrientes de 20 uA a 20 mA). El rango de frecuencia se utiliza para
minimizar los problemas de polarización de los electrodos, lo cual produciría
migración neta de iones de carga opuesta hacia los mismos. Se utilizan bajas
densidades de corriente para evitar daños a los tejidos, principalmente debido a
los efectos de calentamiento.
Las mediciones de bioimpedancia se realizan generalmente con 4
electrodos. Dos de ellos se conectan a una fuente de corriente y sirven para
inyectar la corriente eléctrica en el tejido. Los dos electrodos de medición se
ubican sobre el tejido en investigación y se utilizan para medir la caída de
tensión generada por la corriente y la impedancia del tejido.
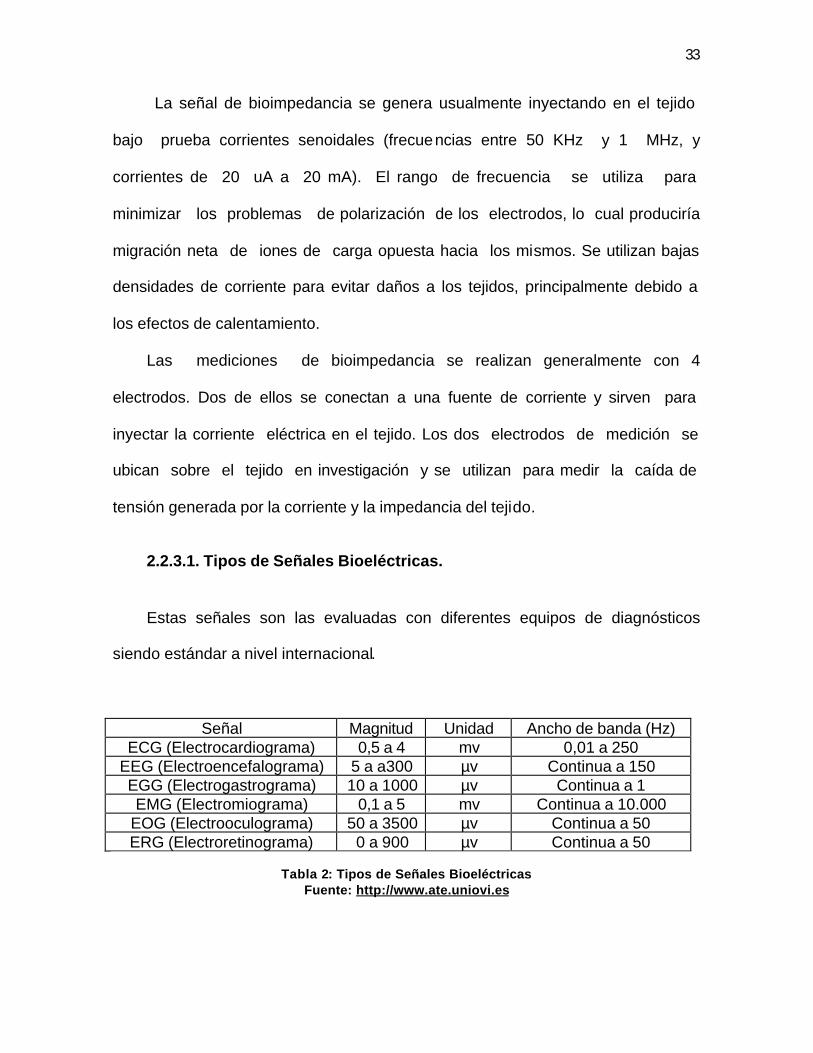
2.2.3.1. Tipos de Señales Bioeléctricas. Estas señales son las evaluadas con diferentes equipos de diagnósticos
siendo estándar a nivel internacional.
Señal Magnitud Unidad Ancho de banda (Hz) ECG (Electrocardiograma) 0,5 a 4 mv 0,01 a 250
EEG (Electroencefalograma) 5 a a300 µv Continua a 150 EGG (Electrogastrograma) 10 a 1000 µv Continua a 1 EMG (Electromiograma) 0,1 a 5 mv Continua a 10.000
EOG (Electrooculograma) 50 a 3500 µv Continua a 50 ERG (Electroretinograma) 0 a 900 µv Continua a 50
Tabla 2: Tipos de Señales Bioeléctricas
Fuente: http://www.ate.uniovi.es
34
2.2.3.2. Puntos Motores Monopolares Nerviosos y Musculares.
La respuesta de contracciones para exploración o tratamiento motor son
diferentes para cada paciente ya que la impedancia o resistencia de los tejidos
responde en distintos lugares de localización.
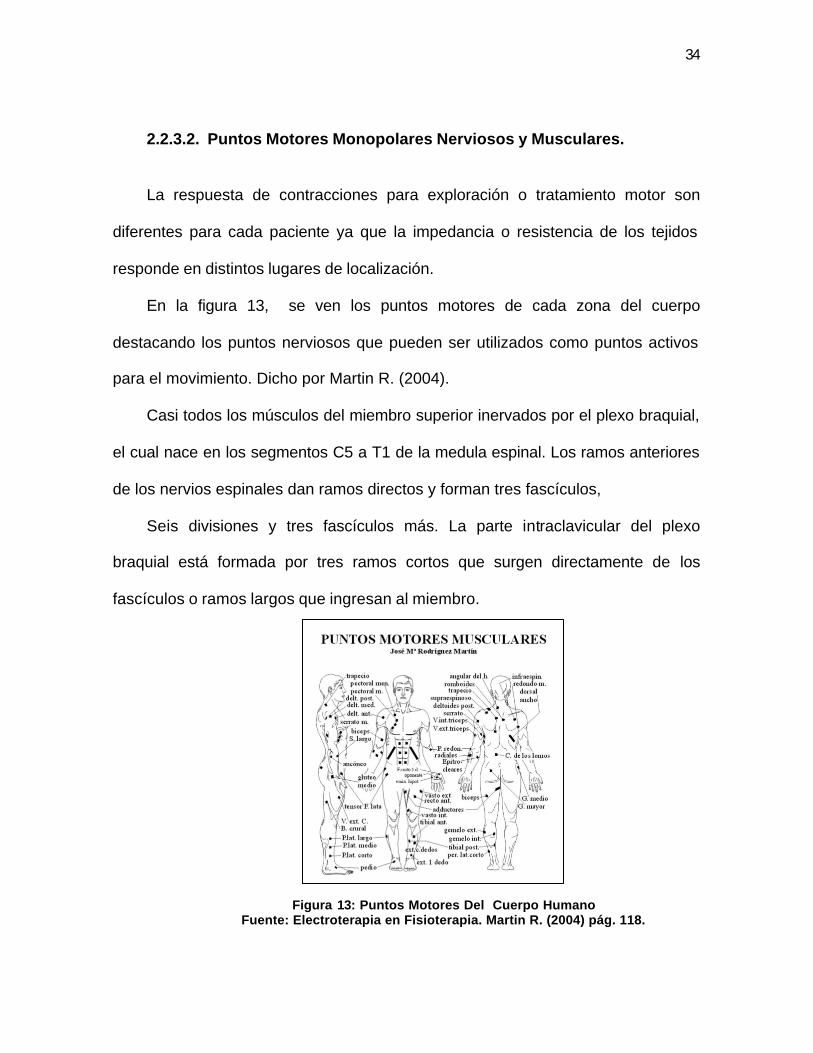
En la figura 13, se ven los puntos motores de cada zona del cuerpo
destacando los puntos nerviosos que pueden ser utilizados como puntos activos
para el movimiento. Dicho por Martin R. (2004).
Casi todos los músculos del miembro superior inervados por el plexo braquial,
el cual nace en los segmentos C5 a T1 de la medula espinal. Los ramos anteriores
de los nervios espinales dan ramos directos y forman tres fascículos,
Seis divisiones y tres fascículos más. La parte intraclavicular del plexo
braquial está formada por tres ramos cortos que surgen directamente de los
fascículos o ramos largos que ingresan al miembro.
Figura 13: Puntos Motores Del Cuerpo Humano Fuente: Electroterapia en Fisioterapia. Martin R. (2004) pág. 118.
35
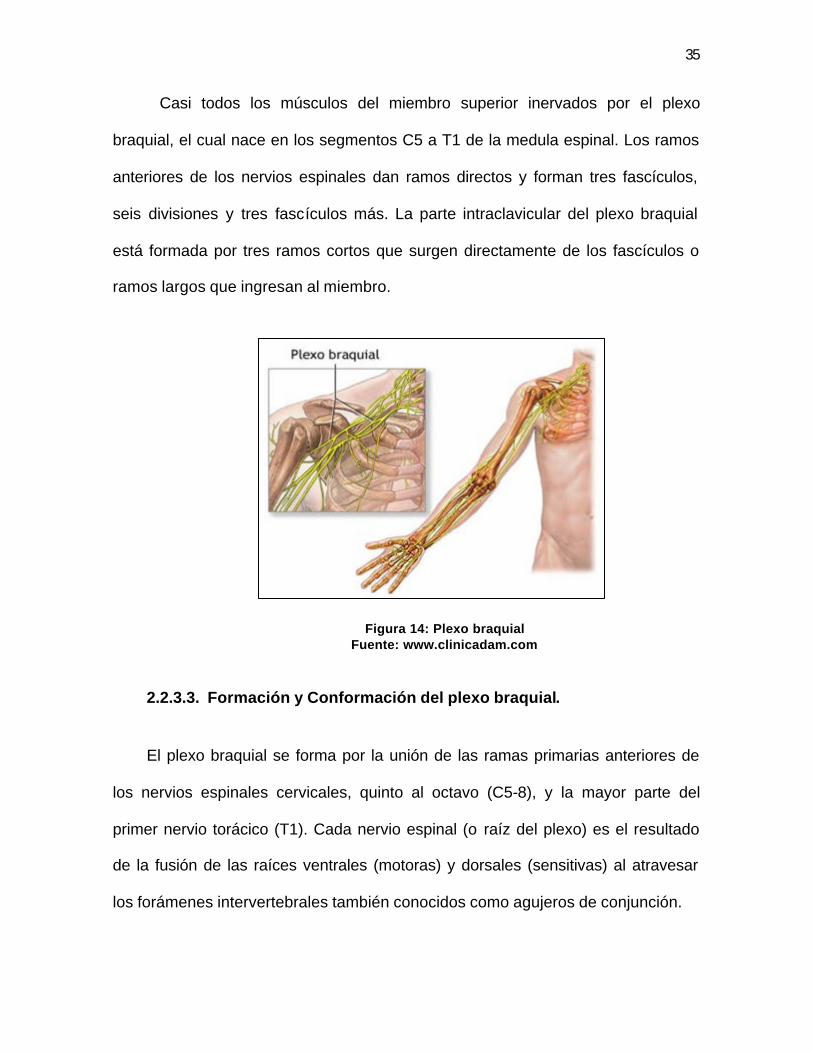
Casi todos los músculos del miembro superior inervados por el plexo
braquial, el cual nace en los segmentos C5 a T1 de la medula espinal. Los ramos
anteriores de los nervios espinales dan ramos directos y forman tres fascículos,
seis divisiones y tres fascículos más. La parte intraclavicular del plexo braquial
está formada por tres ramos cortos que surgen directamente de los fascículos o
ramos largos que ingresan al miembro.
Figura 14: Plexo braquial
Fuente: www.clinicadam.com
2.2.3.3. Formación y Conformación del plexo braquial.
El plexo braquial se forma por la unión de las ramas primarias anteriores de
los nervios espinales cervicales, quinto al octavo (C5-8), y la mayor parte del
primer nervio torácico (T1). Cada nervio espinal (o raíz del plexo) es el resultado
de la fusión de las raíces ventrales (motoras) y dorsales (sensitivas) al atravesar
los forámenes intervertebrales también conocidos como agujeros de conjunción.
36
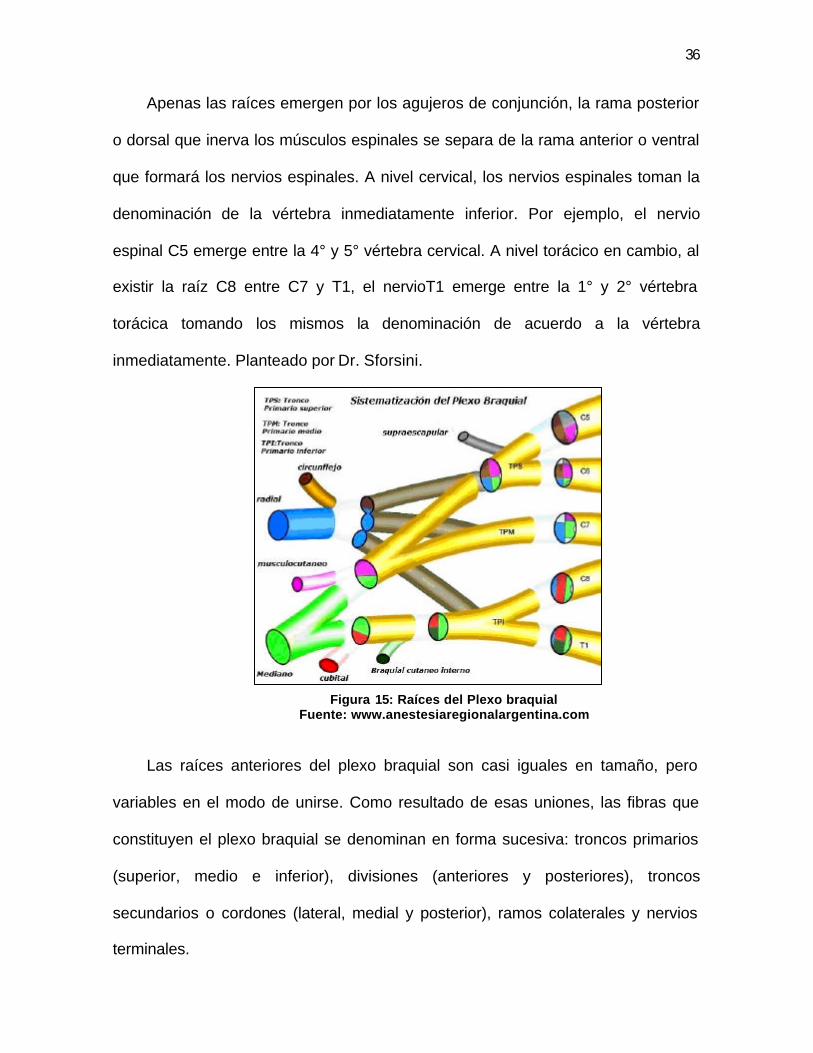
Apenas las raíces emergen por los agujeros de conjunción, la rama posterior
o dorsal que inerva los músculos espinales se separa de la rama anterior o ventral
que formará los nervios espinales. A nivel cervical, los nervios espinales toman la
denominación de la vértebra inmediatamente inferior. Por ejemplo, el nervio
espinal C5 emerge entre la 4° y 5° vértebra cervical. A nivel torácico en cambio, al
existir la raíz C8 entre C7 y T1, el nervioT1 emerge entre la 1° y 2° vértebra
torácica tomando los mismos la denominación de acuerdo a la vértebra
inmediatamente. Planteado por Dr. Sforsini.
Figura 15: Raíces del Plexo braquial Fuente: www.anestesiaregionalargentina.com
Las raíces anteriores del plexo braquial son casi iguales en tamaño, pero
variables en el modo de unirse. Como resultado de esas uniones, las fibras que
constituyen el plexo braquial se denominan en forma sucesiva: troncos primarios
(superior, medio e inferior), divisiones (anteriores y posteriores), troncos
secundarios o cordones (lateral, medial y posterior), ramos colaterales y nervios
terminales.
37
2.2.3.4 Biónica. De Perede M y Marks L. (2008). Plantean que biónica es aquella rama de la
cibernética que trata de simular el comportamiento de los seres vivos haciendo de
esto mejore en casi toda las ramas por medio de instrumentos mecánicos y
electrónicos desenvuelto en la biología. En presente la biónica aporta una gran
ayuda en la medicina, ya que es un campo donde el diseño y construcción de
dispositivos artificiales han reemplazado las deficiencias de implantes.
Las manos artificiales se fabrican ahora con sensores en las yemas de los
dedos para controlar la fuerza de agarre. Otros avances es la investigación sobre
sensores insertados en los forros para encajes, que unen la prótesis a la
extremidad residual y se adaptan automáticamente a la fluctuación del volumen
corporal. Una tecnología de sensores parecida a ésta también podría conseguir
que los pies artificiales se tensaran y relajaran para adaptarse a la variación de la
resistencia y la velocidad, y así hacer posible el uso de una misma prótesis para
realizar varias actividades. Algunas prótesis se puede clasificar como lo siguiente:
2.2.3.5. Prótesis de extremidades inferiores y superiores.
Las prótesis de extremidades devuelven esta sensación sin sentir dificultad al
utilizarlas. Además, son del larga duración y tienen un mecanismo Tecnológico
que ayuda a soportar el peso del individuo haciendo que este se sienta cómodo en
todo momento.
38
Figura 16: Prótesi s de miembro inferior.
Fuente: http://www.consumer.es/web/es/salud/investigacion_medica
Figura 17: Prótesis de miembros superiores Fuente: http://www.gadgetoweb.com/brazos-bionicos-2/
2.2.3.6. Avances en recuperación de la visión.
Uno de los problemas más importantes en este campo es la búsqueda de la
recuperación de la capacidad visual en personas invidentes. La investigación se
centra principalmente en los implantes que han sido probados y sus beneficios
potenciales.
39
El principal método para lograr la recuperación de la visión es el implante de
dispositivos microscópicos que estimulan el nervio óptico o transforman la luz en
potenciales eléctricos.
Aunque se ha reportado numerosos avances, aún no se logra alcanzar
resultados considerables ya que la complejidad de este órgano es muy grande
debido a las conexiones cerebrales y diminutas.
Figura 18: Globo ocular Biónico
Fuente: http://kall-tecmed.blogspot.com
2.2.3.7. Avances en ortopedia.
El avance en ortopedia que incluye materiales utilizados últimamente en
prótesis de cadera.
Figura n 19: Prótesis de Cadera Fuente: http://blogdefarmacia.com/practicar-deporte-con-una-protesis-de-
cadera/
40
2.2.3.8. Desarrollo de prótesis de válvulas cardiacas.
Este artículo trata el avance de las prótesis en el corazón, con el motivo de
corregir quirúrgicamente problemas cardiovasculares que anteriormente eran
difíciles de curar.
Figura nº 9: Prótesis de un corazón Biónica. Fuente: http://bionicoupc.blogspot.com/
2.2.4. Sistemas Protésicos. La fuente de energía de la prótesis puede variar según su tipo y en la función
que aplique como tomar fuerza, mando o acción, a continuación plantean Según
Dorador 2004.
41
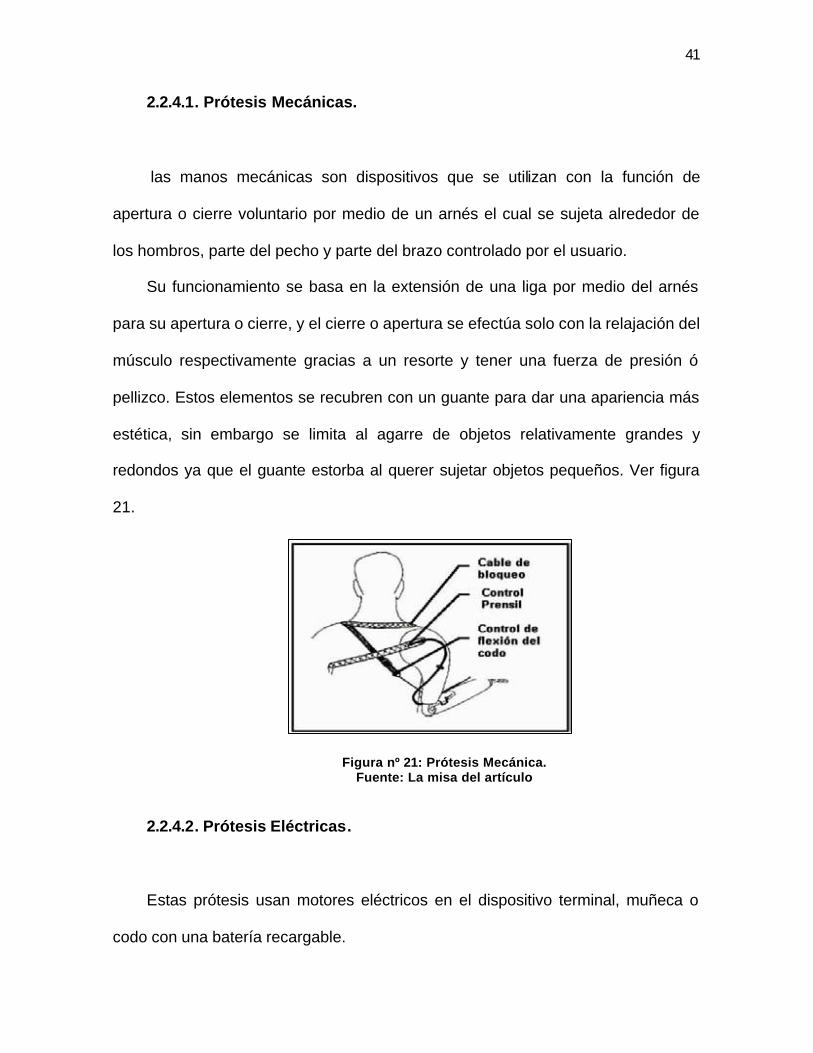
2.2.4.1. Prótesis Mecánicas.
las manos mecánicas son dispositivos que se utilizan con la función de
apertura o cierre voluntario por medio de un arnés el cual se sujeta alrededor de
los hombros, parte del pecho y parte del brazo controlado por el usuario.
Su funcionamiento se basa en la extensión de una liga por medio del arnés
para su apertura o cierre, y el cierre o apertura se efectúa solo con la relajación del
músculo respectivamente gracias a un resorte y tener una fuerza de presión ó
pellizco. Estos elementos se recubren con un guante para dar una apariencia más
estética, sin embargo se limita al agarre de objetos relativamente grandes y
redondos ya que el guante estorba al querer sujetar objetos pequeños. Ver figura
21.
Figura nº 21: Prótesis Mecánica. Fuente: La misa del artículo
2.2.4.2. Prótesis Eléctricas.
Estas prótesis usan motores eléctricos en el dispositivo terminal, muñeca o
codo con una batería recargable.
42
Se controlan de varias formas, ya sea con un servo control, control con botón
pulsador o botón con interruptor de arnés. Se usa un socket que es un dispositivo
intermedio entre la prótesis y el muñón logrando la suspensión de éste por una
succión. Es más costosa su adquisición y reparación, existiendo otras desventajas
evidentes como son el cuidado a la exposición de un medio húmedo y el peso de
la prótesis.
2.2.4.3. Prótesis neumáticas.
Estas prótesis eran accionadas por ácido carbónico comprimido, que
proporcionaba una gran cantidad de energía, aunque también presentaba como
inconveniente la complicación de sus aparatos accesorios y del riesgo del uso del
ácido carbónico. Ver figura 22.
Figura 22: Prótesis Neumática.
Fuente: www.ortoportal.com/ortosedeno/
43
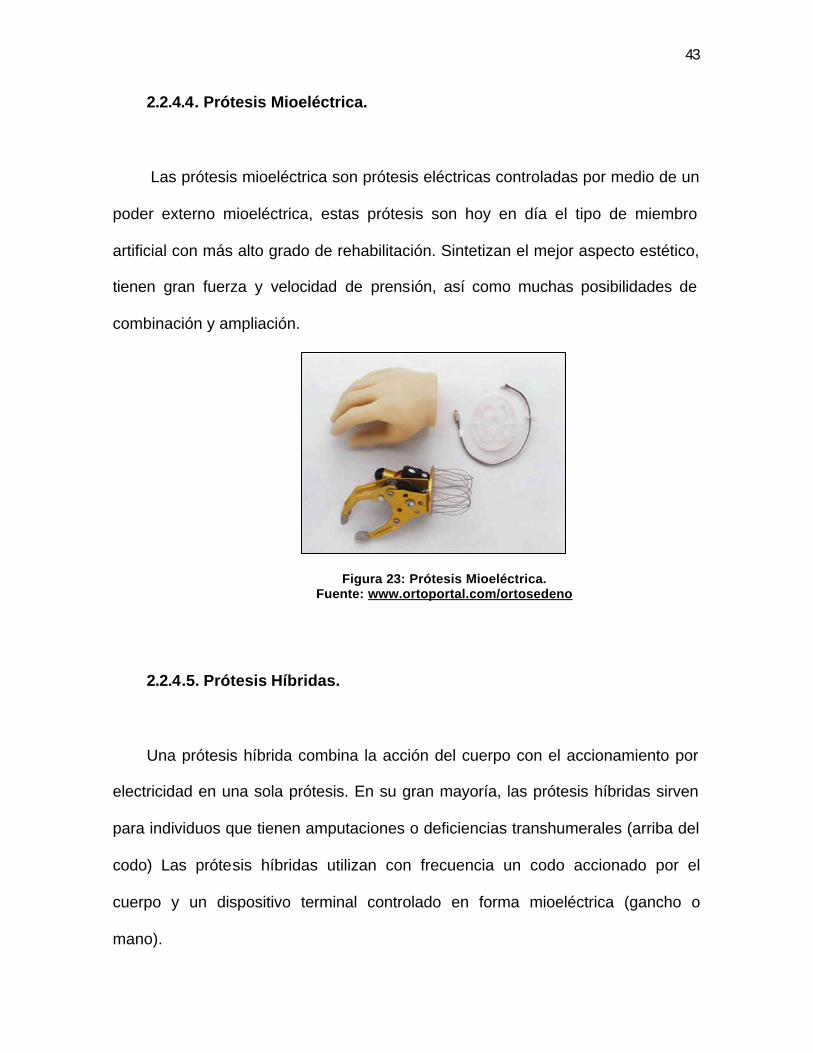
2.2.4.4. Prótesis Mioeléctrica.
Las prótesis mioeléctrica son prótesis eléctricas controladas por medio de un
poder externo mioeléctrica, estas prótesis son hoy en día el tipo de miembro
artificial con más alto grado de rehabilitación. Sintetizan el mejor aspecto estético,
tienen gran fuerza y velocidad de prensión, así como muchas posibilidades de
combinación y ampliación.
Figura 23: Prótesis Mioeléctrica. Fuente: www.ortoportal.com/ortosedeno
2.2.4.5. Prótesis Híbridas.
Una prótesis híbrida combina la acción del cuerpo con el accionamiento por
electricidad en una sola prótesis. En su gran mayoría, las prótesis híbridas sirven
para individuos que tienen amputaciones o deficiencias transhumerales (arriba del
codo) Las prótesis híbridas utilizan con frecuencia un codo accionado por el
cuerpo y un dispositivo terminal controlado en forma mioeléctrica (gancho o
mano).
44
2.2.5. Señales. La definición tomada por Sánchez A. (2006). Plantea el concepto que Señal
es una variación del potencial o de alguna de la característica de una corriente
eléctrica, utilizada para transmitir información.
2.2.5.1. Señales Analógica.
Las señales analógicas se pueden clasificar en simple y compleja, pero por
efecto de nuestra investigación solo necesitamos definir el concepto de señal
Analógica, el cual la tomamos de Forouzan B. (2002). Plantea es forma de onda
continua que cambia suavemente en el tiempo. Puede tener cualquier valor
dentro de un rango. Véase fig. 24.
Figura 24: Señal Analógica Fuente: esacademic.com
45
2.2.5.2. Señale Digitales.
Del mismo autor la señal digital se discreta, solamente puede tener un
numero de valores definidos, a menudo es tan simple como ceros y unos. La
transición entre las señales digítales es instantánea como una luz que se enciende
o se apaga. Ver figura 25.
Figura 25: Señal Digital Fuente: http://www.oocities.org/
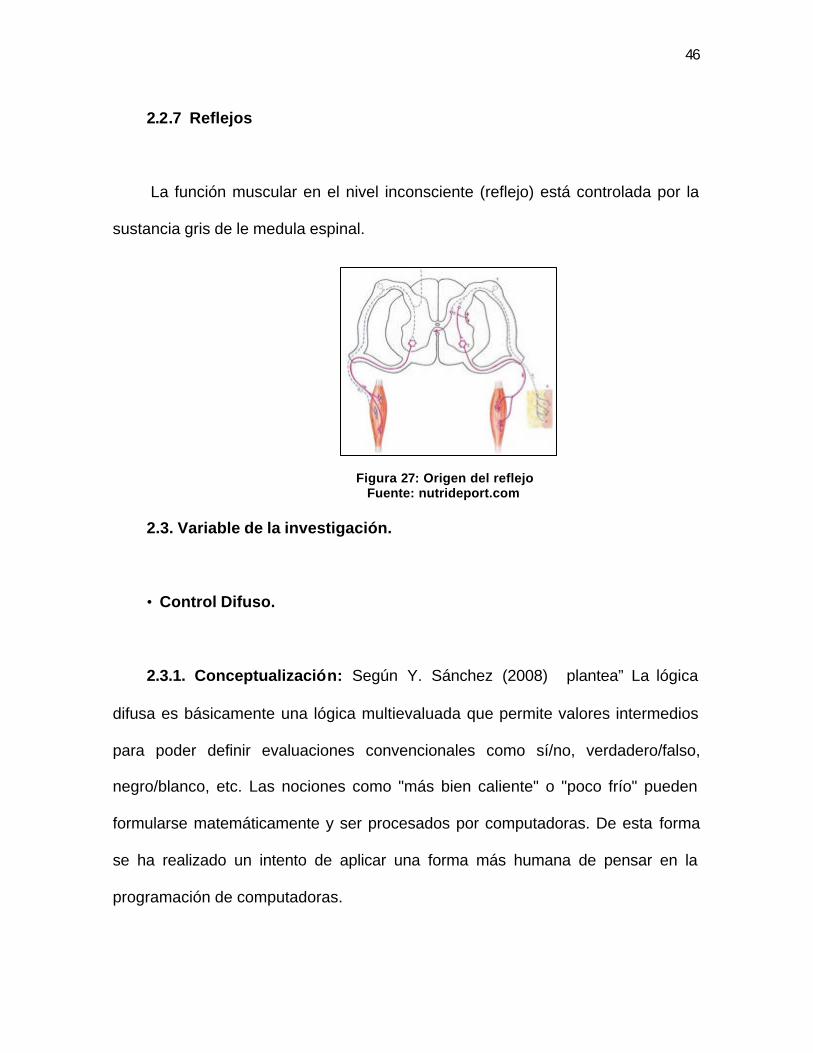
2.2.6. Innervación muscular.
Algunos músculos están inervados por las neuronas motoras de asta anterior
de un segmento de la medula espinal (músculos indicadores de ese segmento). La
mayoría de los músculos reciben inervación de una columna motora (músculos
multisegmentarios), una disposición vertical de núcleos motores distribuidos en
varios segmentos medulares.
Figura 26: Innervación muscular Fuente: kinesioterapiafisica.blogspot.com
46
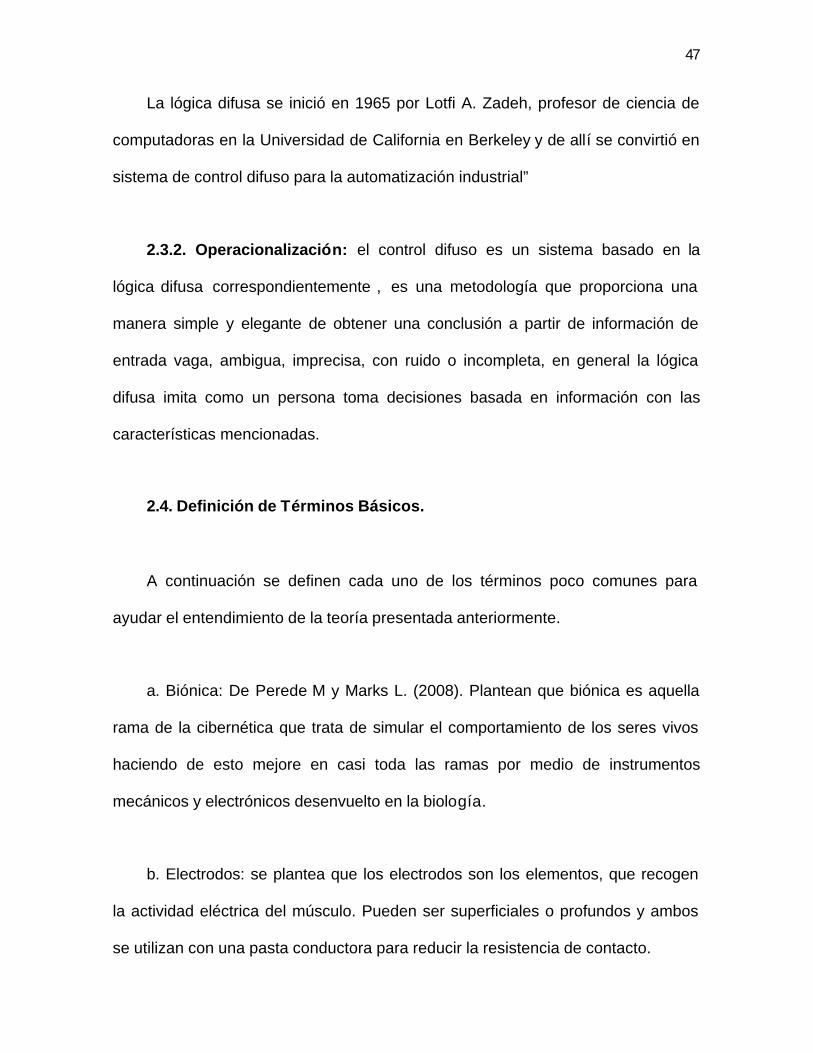
2.2.7 Reflejos
La función muscular en el nivel inconsciente (reflejo) está controlada por la
sustancia gris de le medula espinal.
Figura 27: Origen del reflejo Fuente: nutrideport.com
2.3. Variable de la investigación.
• Control Difuso.
2.3.1. Conceptualización: Según Y. Sánchez (2008) plantea” La lógica
difusa es básicamente una lógica multievaluada que permite valores intermedios
para poder definir evaluaciones convencionales como sí/no, verdadero/falso,
negro/blanco, etc. Las nociones como "más bien caliente" o "poco frío" pueden
formularse matemáticamente y ser procesados por computadoras. De esta forma
se ha realizado un intento de aplicar una forma más humana de pensar en la
programación de computadoras.
47
La lógica difusa se inició en 1965 por Lotfi A. Zadeh, profesor de ciencia de
computadoras en la Universidad de California en Berkeley y de allí se convirtió en
sistema de control difuso para la automatización industrial”
2.3.2. Operacionalización: el control difuso es un sistema basado en la
lógica difusa correspondientemente , es una metodología que proporciona una
manera simple y elegante de obtener una conclusión a partir de información de
entrada vaga, ambigua, imprecisa, con ruido o incompleta, en general la lógica
difusa imita como un persona toma decisiones basada en información con las
características mencionadas.
2.4. Definición de Términos Básicos.
A continuación se definen cada uno de los términos poco comunes para
ayudar el entendimiento de la teoría presentada anteriormente.
a. Biónica: De Perede M y Marks L. (2008). Plantean que biónica es aquella
rama de la cibernética que trata de simular el comportamiento de los seres vivos
haciendo de esto mejore en casi toda las ramas por medio de instrumentos
mecánicos y electrónicos desenvuelto en la biología.
b. Electrodos: se plantea que los electrodos son los elementos, que recogen
la actividad eléctrica del músculo. Pueden ser superficiales o profundos y ambos
se utilizan con una pasta conductora para reducir la resistencia de contacto.

48
c. Electrodos concéntricos de agujas: Se dividen en unipolares y en bipolares
son los más empleados en electromiografía clínica, consisten en una cánula
similar a una aguja hipodérmica, en cuyo interior se cementa un hilo (o dos) de
acero o de platino, aislado excepto en la punta.
d. Impedancia: La impedancia es una magnitud que establece la relación
(cociente) entre la tensión y la intensidad de corriente. Tiene especial importancia
si la corriente varía en el tiempo, en cuyo caso, ésta, la tensión y la propia
impedancia se describen con números complejos o funciones del análisis
armónico.
e. Ingeniería Biomédica: La ingeniería biomédica utiliza los conocimientos en
biología, medicina, física, matemáticas, ciencias de la ingeniería (física y química),
computación y comunicación para resolver problemas médicos y biológicos. Ing.
González (2008).
f. Los electrodos superficiales: son pequeños discos metálicos y se utilizan
para obtener un estudio global del músculo, ya que no pueden detectar
potenciales de baja amplitud o de elevada frecuencia.
g. Mono polares de aguja: Son simples agujas de acero inoxidable aisladas
con barniz excepto en la punta.
49
h. Prótesis: según José A. de la Osa plantea que es un reemplazo de una
parte del cuerpo por un objeto artificial similar. Instrumento diseñado y colocado
para mejorar la función de un órgano (o de una parte) o para sustituirlo.
i. Potenciales eléctricos: El potencial eléctrico en un punto es el trabajo que
debe realizar una fuerza eléctrica para mover una carga positiva q desde la
referencia hasta ese punto, dividido por unidad de carga de prueba.