cap´ıtulo 2 muestreo y reconstrucci´on de...
TRANSCRIPT

Capıtulo 2
Muestreo y Reconstruccion deSenales
2.1. Introduccion
Muchas de las senales de interes practico proceden de fenomenos fısicos que son con-tinuos y por tanto las senales que generan son analogicas. Para procesar de forma digitalestas senales es necesario convertir la senal al dominio digital, realizar el procesado yposiblemente volver a transformar la senal al dominio continuo, como muestra la figura2.1. El primer bloque de la figura es un convertidor de continuo a digital (ADC), el cual
xa(t) y
a (t)
T
ADC DACSistema
digital
T
Figura 2.1: Sistema convertidor a digital, etapa de procesado y conversion de nuevo aldominio continuo.
consta de tres etapas. En primer lugar es necesario convertir la senal analogica en unasenal discreta mediante un convertidor de tiempo continuo a discreto, C/D. Este sistemarealiza un muestreo de la senal y una conversion al dominio discreto obteniendo final-mente una secuencia de muestras de la senal. En segundo lugar es necesario realizar unadiscretizacion o cuantificacion en la amplitud de la senal, de modo que la amplitud de lasenal sea representada por un valor seleccionado a partir de un conjunto finito de posiblesvalores. A este proceso se le llama cuantificacion y debido a la perdida de informacion quese produce es un proceso no invertible. Finalmente la senal cuantificada se codifica usandouna representacion digital con un numero dado de bits, a esta operacion se le denominacodificacion. El sistema que realiza todas estas operaciones se le denomina convertidorAnalogico Digital (ADC) y se muestra en la figura 2.2. Un ejemplo de senal sinusoidalde tiempo continuo que ha sido muestreada y cuantificada se muestra en la figura 2.3.Las lıneas verticales muestran los instantes de muestreo de la senal. Las lıneas vertica-les situadas dentro del rango del cuantificador (±4∆) indican los niveles permitidos decuantificacion de la senal. La senal cuantificada viene dada por los puntos negros xq(nT )
1

2 2. Muestreo y Reconstruccion de Senales
xa(t) x[n]
ADC
muestreador
C/Dcuantificador
xq[n]
codificador
0110...
Figura 2.2: convertidor ADC, bloques basicos.
estos puntos se pueden interpolar por un interpolador de orden cero generando la senalen escalera que viene dada por la senal xq(t). La senal digital finalmente queda como
Figura 2.3: Senal de tiempo continuo muestreada y cuantizada.
una secuencia de numeros que tıpicamente vienen dados por una representacion binaria.Mediante este procedimiento se obtiene la senal digital apta para su procesado por unsistema digital. Una vez finalizado el procesado suele ser necesario una conversion de lasenal digital al dominio analogico mediante un convertidor Digital Analogico (DAC). Eldiagrama de bloques de DAC viene representado en la figura 2.4. Este sistema realizauna conversion de una senal digital a una senal de tiempo continuo (D/C), posterior-mente es necesario realizar una interpolacion de la senal para aproximar el valor esta enlos instantes de tiempo entre muestras consecutivas. Teoricamente existe un proceso deinterpolacion optima –tambien denominada interpolacion ideal– que permite recuperar lasenal analogica original, de la cual proviene la secuencia de entrada al conversor. Esteproceso de recuperacion se produce de forma exacta, siempre que la senal este limitadaen banda y se haya muestreado con una frecuencia de muestreo suficientemente alta. Enla practica este metodo resulta excesivamente complejo y se suelen utilizar otros metodos
2 Problemas de Tratamiento Digital de Senales

2.2. Muestreo y reconstruccion ideal de senales 3
y[n]y(t)^
ConvertidorD/C
Interpolador
DAC
Filtro
Figura 2.4: convertidor DAC, bloques basicos.
de interpolacion: interpolacion de orden cero, lineal, cuadratica, ... Estas tecnicas suelengenerar ciertas distorsiones en la senal y normalmente requieren de una ultima etapa defiltrado. La aproximacion de interpolacion de orden cero (Zero Order Hold) consiste enmantener el valor de la muestra hasta la llegada de la siguiente muestra, de manera quequeda una aproximacion de la senal en escalera. La aproximacion de orden uno consisteen unir las muestras con una lınea recta, y ası sucesivamente.En primer lugar, tanto los procesos ADC y DAC, como los elementos que los componenson considerados ideales. De este modo, es posible establecer las relaciones entrada/salidaen el dominio del tiempo y de la frecuencia de un modo sencillo y elegante. En el casodel ADC se considera la conversion de tiempo continuo a tiempo discreto de forma ideal,tambien se considera que la operacion de cuantificacion tiene precision infinita, por lotanto se pueden despreciar los efectos del cuantificador y del codificador. Con todas estasconsideraciones, el convertidor ADC se considera simplemente como un convertidor C/Dideal. En el convertidor DAC tambien suponemos condiciones ideales, considerando que laconversion se realiza unicamente en la etapa D/C. Se supone que el elemento D/C generala senal analogica definitiva sin necesidad de elementos de interpolacion extra ni de filtrocompensador. Finalmente, se introducen los efectos no ideales y algunos de los problemaspracticos que surgen en la implementacion.
2.2. Muestreo y reconstruccion ideal de senales
Como se ha mencionado anteriormente, el convertidor (C/D) realiza dos procesos,la operacion de muestreo y la conversion a tiempo discreto. El diagrama de bloque delconvertidor C/D viene dado por la figura 2.5. Uno de los metodos de muestreo y conversiona tiempo discreto mas tıpicos consiste en realizar un muestreo periodico o uniforme, elcual se basa en la seleccion de muestras de la senal analogica en un intervalo de tiempouniforme. Matematicamente, el procedimiento consiste en sustituir la variable t = nT ,donde T es el periodo de muestreo, obteniendo una secuencia de muestras:
x[n] = xa(nT ), n ∈ Z (2.1)
donde la frecuencia de muestreo es fs = 1/T y viene dada en muestras por segundo. Tam-bien se puede expresar en radianes por segundo, ωs = 2π/T . La diferencia mas importanteentre la senal analogica y la senal discreta es que la variable independiente de la secuenciaes un ındice entero donde se ha perdido la dimension temporal, es decir, se ha produci-do una normalizacion temporal. Como veremos, esta relacion entre la variable temporalanalogica (t) y discreta (n) se transforma en una relacion analoga entre el dominio de lafrecuencia de tiempo continuo y de tiempo discreto.
3 Problemas de Tratamiento Digital de Senales

4 2. Muestreo y Reconstruccion de Senales
En general, la operacion de muestreo es no invertible porque se produce perdida de infor-
T
C/D
xa(t) x[n] = x
a(nT)
Figura 2.5: Representacion de un convertidor C/D ideal.
macion de la senal, ya que pueden existir varias senales analogicas diferentes que coincidanen los puntos de muestreo, generando la misma senal muestreada. Sin embargo, si impo-nemos alguna limitacion a las senales analogicas, esta ambiguedad puede resolverse y elproceso pasa a ser invertible. Esta limitacion viene dada por el teorema del muestreo. Sepuede demostrar que el sistema de la figura 2.5 es una operacion lineal pero no invarianteen el tiempo.
2.2.1. Muestreo ideal
Para estudiar el proceso de muestreo y conversion a tiempo discreto en el dominio dela frecuencia es interesante dividir el sistema de la figura 2.5 en dos procesos: en primerlugar se realiza un muestreo con un tren de deltas y en segundo lugar se realiza un cambiode dominio de tiempo continuo a tiempo discreto, es decir, se realiza una conversion detren de impulsos a secuencia. Estos dos procedimientos vienen representados en la figura2.6. En esta seccion se trata el fenomeno de la modulacion con un tren de deltas. Para
Convertidor
impulso /
secuencia
xa(t) x[n] = x
a(nT)
x
s(t)
xs(t)
C/D ideal
xa(t)
xs(t)
x[n]
-3T -2T -T 0 T 2T 3T t
-3 -2 -1 0 1 2 3 n
Figura 2.6: Muestreo con un tren de deltas seguido de un convertidor de tren de impulsosen secuencia.
obtener las relaciones entre las senales en el dominio de la frecuencia expresamos el trende deltas:
s (t) =
∞∑
n=−∞
δ (t− nT ) (2.2)
4 Problemas de Tratamiento Digital de Senales

2.2. Muestreo y reconstruccion ideal de senales 5
La transformada de Fourier de la senal queda:
S (ω) =2π
T
∞∑
k=−∞
δ (ω − kωs), (2.3)
donde ωs =2πT. Finalmente, la senal muestreada queda:
xs (t) = xa(t)s(t) =∞∑
n=−∞
xa (t) δ (t− nT ) (2.4)
En el dominio transformado, la senal muestreada viene dada por:
Xs (ω) =1
2πXa (ω) ∗ S (ω) =
1
T
∞∑
k=−∞
Xa (ω − kωs) (2.5)
La transformada de xs(t) consiste en la superposicion una copia de Xa(ω) periodicamenterepetida en los multiplos de la frecuencia de muestreo ωs. El resultado es una senalperiodica en el dominio de la frecuencia con periodo ωs. En la figura 2.7 se observauna senal de banda limitada con ancho de banda ωN que ha sido muestreada con unafrecuencia ωs.
−ωΝ
ωΝ
ω
Xa(ω)
1
S(ω)
−ωs
ωs
ω
Xs(ω)
−ωs
−ωΝ
ωΝ
ωs
ω
ωs−ω
Ν
2π/Τ
1/Τ... ...
... ...
Figura 2.7: Efecto del muestreo ideal en el dominio de la frecuencia, se cumple ωs > 2ωN .
2.2.2. Reconstruccion
Segun el valor de ωs en la figura 2.7 se producen dos situaciones claramente diferencia-das. Si la frecuencia de muestreo es tal que ωs > 2ωN las copias de Xa(ω) no se solapan,es decir, la senal xa(t) puede recuperarse a partir de xs(t) mediante un filtro paso bajoideal, Hr(ω), como puede verse en la 2.8. El filtro recuperador viene dado por:
Hr (ω) =
T ωN < ωc < ωs − ωN
0 resto(2.6)
y la senal de salida del filtro queda:
Xr (ω) = Xs (ω)Hr (ω) = Xa (ω)
5 Problemas de Tratamiento Digital de Senales

6 2. Muestreo y Reconstruccion de Senales
xR(t)x
a(t)
HR(ω)
Xa(ω)
−ωs
−ωΝ
ωΝ
ωs
ωω
s−ω
Ν
1/Τ... ...
−ωc
ωc
ω
ΤH
r(ω)
−ωΝ
ωΝ
ω
Xr(ω)
1
Figura 2.8: Recuperacion exacta de la senal mediante un filtro paso bajo ideal, se cumpleωN < ωc < ωs − ωN .
La segunda situacion se produce cuando ωs < 2ωN , en este caso se produce un solapa-miento entre las copias del espectro desplazadas, tal y como se muestra en la figura 2.9.Alrededor de ωs/2 se genera una distorsion del espectro provocada por el solapamientoentre las frecuencias originales del espectro y las frecuencias denominadas “alias”, produ-ciendo lo que se denomina aliasing.Supongamos una senal xa(t) = cos(ω0 · t). La transformada de Fourier de la senal son dos
−ωΝ
ωΝ
ω
Xa(ω)
1
S(ω)
−2ωs
−ωs
ωs
2ωs
ω
Xs(ω)
−ωs
ωs
ω
ωs/2
2π/Τ
1/Τ... ...
... ...
Figura 2.9: Solapamiento entre las replicas del espectro de la senal original cuando ωs <2ωN
deltas centradas en ±ω0 como se muestra en la figura 2.10 (a). Si la frecuencia de muestreocumple ωs > 2ω0, la transformada de Fourier de la senal muestreada se presenta en lafigura 2.10 (b). Situando un filtro recuperador con una frecuencia de corte de ωc = ωs/2 sepuede obtener una recuperacion perfecta de la senal original. Por el contrario, si la senal semuestrea con una frecuencia ωs < 2ω0, la transformada de Fourier de la senal muestreadase representa en la figura 2.10 (c). Situando un filtro recuperador con una frecuencia decorte de ωc = ωs/2 la senal que se obtendrıa es xr(t) = cos((ωs −ω0)t). Este fenomeno dealiasing ocurre porque las frecuencias ω0 y (ωs−ω0) son diferentes en continuo pero las dosgeneran la misma senal muestreada. Esta caracterıstica se puede entender facilmente ob-teniendo las senales muestreadas: la senal orgininal muestreada es: xa(nT ) = cos(ω0Tn).
6 Problemas de Tratamiento Digital de Senales

2.2. Muestreo y reconstruccion ideal de senales 7
Por otro lado, muestreando la senal xr(t) se obtiene: xr(nT ) = cos((ωs−ω0)nT ) = xa(nT ).
Teorema de Nyquist:
Sea xa(t) una senal limitada en banda, es decir:
Xa(ω) = 0, |ω| > ωN .
La senal esta completamente determinada por sus muestras x[n] = xa(nT ) siempre queωs > 2ωN
Xa(ω)
−ω0
ω0
ω
Xs(ω)
−ωs
ω−ω0
ω0
ωs
ωs/2
Hr(ω)
Xs(ω)
ω−ω
0 ω
0
ωs/2
Hr(ω)
ωs
(a)
(b)
(c)
Figura 2.10: Transformada de Fourier de la senal xa(t) cuando se muestrea con una fre-cuencia ωs > 2ω0 y con una frecuencia ωs < 2ω0.
Problema 2.1Obtener la mınima frecuencia de muestreo de la siguiente senal sin perder informacion.
Xa(ω)
ω1
ω2 ω
Figura 2.11: Transformada de Fourier de una senal que se pretende muestrear.
Problema 2.2Sea una senal x(t) = sen(t), realizar un muestreo a la frecuencia de Nyquist mediante
la senal s (t) =∞∑
n=−∞
δ (t− nT ) y representar las transformadas de Fourier de la senal
original, de la senal muestreada xs (t) = x(t)s(t) y de la senal discreta xd[n] = x(nT ).
7 Problemas de Tratamiento Digital de Senales

8 2. Muestreo y Reconstruccion de Senales
2.3. Convertidor C/D ideal
Un convertidor ADC ideal consta de un C/D ideal y un cuantificador de precisioninfinita. Un cuantificador con precision infinita no realiza ninguna transformacion en lasenal, por lo tanto, puede despreciarse su labor junto con la del codificador. Teniendoen cuenta esta consideracion, se estudiara el funcionamiento del convertidor C/D idealmostrado en la figura 2.12 mediante su relacion entrada/salida. En el dominio del tiempo
Convertidor
tren impulsos/
secuencia
xa(t) x[n] = x
a(nT)
x
s(t)
xs(t)
C/D ideal
Figura 2.12: Convertidor CD.
la relacion entrada/salida es simplemente x[n] = xa(nT ). Esta relacion es muy sencillapero no aporta toda la informacion de la transformacion realizada. Por otro lado, esinteresante observar que la transformacion es lineal pero no es invariante temporalmente,es decir, el sistema completo no es LTI.En el dominio de la frecuencia, la relacion entrada/salida hay que realizarla identificandola transformada de Fourier de la salida x[n] y de xs(t). Recordando la expresion de xs(t):
xs (t) =
∞∑
n=−∞
xa (nT ) δ (t− nT ) (2.7)
Su transformada de Fourier viene dada por dos expresiones:
Xs (ω) =
∞∑
n=−∞
xa (nT ) e−jωTn =
1
T
∞∑
k=−∞
Xa
(
ω − k2π
T
)
(2.8)
La senal discreta de salida tiene como transformada:
X (Ω) =∞∑
n=−∞
x [n] e−jΩn =∞∑
n=−∞
xa (nT ) e−jΩn (2.9)
Teniendo en cuenta el ultimo termino de la ecuacion 2.9 y el segundo termino de laecuacion 2.8, la relacion entre transformadas es:
X (Ω) = Xs (ω)|ω=Ω
T
(2.10)
por ultimo, si se considera el ultimo termino de la ecuacion 2.8, X(Ω) se puede ponercomo funcion de Xa(ω):
X (Ω) = Xs (ω)|ω=Ω
T
=1
T
∞∑
k=−∞
Xa
(
Ω
T− k
2π
T
)
(2.11)
8 Problemas de Tratamiento Digital de Senales

2.3. Convertidor C/D ideal 9
Luego X(Ω) es una version escalada de Xs(ω), como funcion de Ω = ωT , la cual a su vezes una suma de diferentes copias de Xa(ω) escaladas y desplazadas en multiplos de 2π.Si la senal Xs(ω) es una senal periodica con periodo 2π/T , la senal X(Ω) sera periodicacon periodo 2π, como corresponde a la transformada de Fourier de una senal de tiempodiscreto. Dicho de otro modo, el proceso de conversion C/D en el tiempo simplementeselecciona muestras a intervalos regulares y en el dominio de la frecuencia dota a la trans-formada de la periodicidad necesaria para corresponder a una senal de tiempo discreto.Si se introduce la senal de la figura 2.7 en un convertidor C/D, las senales implicadas enel convertidor C/D vienen dadas por la senal representada en la figura 2.13. La normali-zacion en el tiempo ha dado lugar a una normalizacion en la frecuencia, de modo que sien el tiempo se pasa de “segundos” a “muestras”, en el dominio de la frecuencia se pasade “rad/s” a “rad/muestra”.
−ωΝ
ωΝ
ω
Xa(ω)
1
Xs(ω)
−ωs
−ωΝ
ωΝ
ωs
ω
1/Τ... ...
X(Ω)
−2π
−ωΝT
ω
Ν T
2π
Ω
1/Τ... ...
Convertidor
tren impulsos/
secuencia
xa(t) x[n] = x
c(nT)
x
s(t)
xs(t)
C/D ideal
Figura 2.13: Relacion en el dominio de la frecuencia de las senales implicadas en el con-vertidor C/D.
Ejemplo 2.1Sea una senal xa (t) = A cos (ω0t), la cual se muestrea con una frecuencia fs = 1/T :
x [n] = A cos (ω0Tn) = A cos (Ω0n)
Como puede observarse, la relacion entre frecuencias surge de forma natural: Ω0 = ω0T
En el ejemplo anterior se ha puesto de manifiesto la relacion entre frecuencias enel tiempo continuo y en el tiempo discreto. Merece al pena notar que el intervalo devariacion de la frecuencia de tiempo continuo es −∞ < ω < ∞ y todas las frecuenciasde este intervalo son diferentes. Sin embargo, las frecuencias diferentes en tiempo discretotienen un intervalo de variacion de −π < Ω < π, lo cual implica que muestreando la senalde tiempo continuo con un periodo T , la correspondencia entre frecuencias no sera “unoa uno”. Para que la correspondencia sea “uno a uno”, las frecuencias analogicas que sepueden representar sin ambiguedad son: −π/T < ω < π/T . Si existen frecuencias fuerade este rango (en tiempo continuo), estas frecuencias produciran ambiguedad con sus“alias” que pertenecen al intervalo. Este fenomeno esta mostrado en la figura 2.14, en laque se muestra la relacion entre frecuencias analogicas y discretas. En esta figura puedeobservarse que no existe una relacion uno a uno entre frecuencias.
9 Problemas de Tratamiento Digital de Senales

10 2. Muestreo y Reconstruccion de Senales
Ω
ω−3π/Τ −π/Τ π/Τ 2π/Τ
π
−π
Figura 2.14: Relacion entre frecuencias de tiempo continuo y frecuencias de tiempo dis-creto.
Problema 2.3Representar los espectros de todas las senales intermedias en el sistema de la figura 2.12,cuando la frecuencia de muestreo vale los siguientes valores: fs = 2, 3, 5KHz. Considere
que se muestrea con la senal: s (t) =∞∑
n=−∞
δ (t− nT ) y la senal de entrada Xa(ω) es:
Xa(ω)
2πKrad/s
ω
Figura 2.15: Senal de entrada Xa(ω).
2.4. Convertidor D/C ideal
Un DAC ideal es un sistema que interpola la senal digital para obtener una senalanalogica y desde el punto de vista ideal se pueden despreciar todos los procesos excepto laconversion D/C ideal. En esta seccion se estudia la relacion entrada/salida del convertidorde tiempo discreto a tiempo continuo como el mostrado en la figura 2.16. Al igual que
T
D/C
xr(t)x[n]
Figura 2.16: Representacion en diagrama de bloques de un convertidor DC ideal.
el convertidor C/D estudiado en la seccion anterior, este sistema es lineal pero no esinvariante temporal. Si la senal discreta proviene de una senal analogica original, la cualha sido muestreada cumpliendo el criterio de Nyquist, es posible la recuperacion de la senaloriginal mediante un convertidor D/C. Al igual que en el apartado anterior, es convenientedescomponer el convertidor D/C en dos elementos, un convertidor de secuencia a tren deimpulsos y un filtro de reconstruccion ideal, tal y como se muestra en la figura 2.17. El
10 Problemas de Tratamiento Digital de Senales
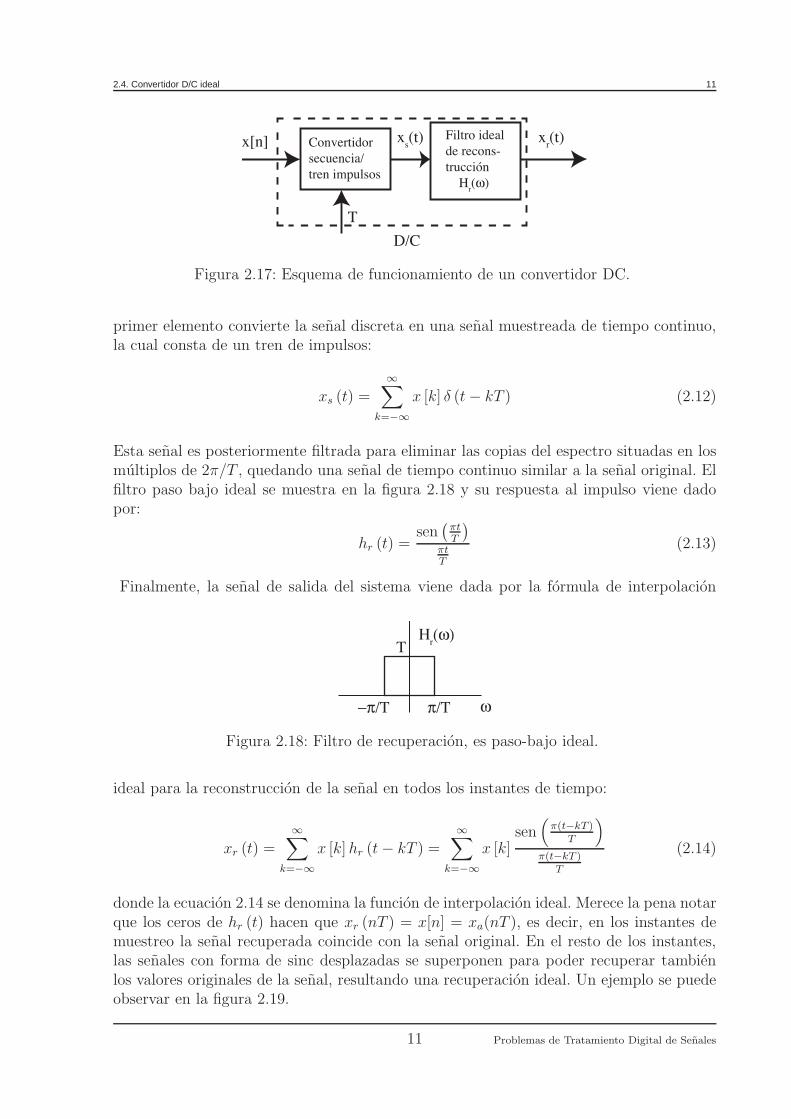
2.4. Convertidor D/C ideal 11
Filtro ideal
de recons-
trucción
Hr(ω)
xr(t)x[n]
T
xs(t)
D/C
Convertidor
secuencia/
tren impulsos
Figura 2.17: Esquema de funcionamiento de un convertidor DC.
primer elemento convierte la senal discreta en una senal muestreada de tiempo continuo,la cual consta de un tren de impulsos:
xs (t) =∞∑
k=−∞
x [k] δ (t− kT ) (2.12)
Esta senal es posteriormente filtrada para eliminar las copias del espectro situadas en losmultiplos de 2π/T , quedando una senal de tiempo continuo similar a la senal original. Elfiltro paso bajo ideal se muestra en la figura 2.18 y su respuesta al impulso viene dadopor:
hr (t) =sen
(
πtT
)
πtT
(2.13)
Finalmente, la senal de salida del sistema viene dada por la formula de interpolacion
ω
Ηr(ω)
π/T−π/T
T
Figura 2.18: Filtro de recuperacion, es paso-bajo ideal.
ideal para la reconstruccion de la senal en todos los instantes de tiempo:
xr (t) =
∞∑
k=−∞
x [k] hr (t− kT ) =
∞∑
k=−∞
x [k]sen
(
π(t−kT )T
)
π(t−kT )T
(2.14)
donde la ecuacion 2.14 se denomina la funcion de interpolacion ideal. Merece la pena notarque los ceros de hr (t) hacen que xr (nT ) = x[n] = xa(nT ), es decir, en los instantes demuestreo la senal recuperada coincide con la senal original. En el resto de los instantes,las senales con forma de sinc desplazadas se superponen para poder recuperar tambienlos valores originales de la senal, resultando una recuperacion ideal. Un ejemplo se puedeobservar en la figura 2.19.
11 Problemas de Tratamiento Digital de Senales

12 2. Muestreo y Reconstruccion de Senales
−0, 4
−0, 2
0
0,2
0,4
0,6
0,8
1
Señal reconstruida
-5T -4T -3T -2T -T 0 T 2T 3T 4T 5T t(s)
Amplitud (u.a.)
Figura 2.19: Proceso de recuperacion de una senal a partir de sus muestras mediante unfiltro ideal.
Para estudiar el sistema en el dominio de la frecuencia recurrimos a la ecuacion 2.11,la cual relaciona la transformada de Fourier de tiempo discreto x[n] con la transformadade Fourier de tiempo continuo xs(t). Recordando la relacion:
Xs (ω) = X (ωT )
A continuacion, la senal pasa por el filtro ideal y la relacion entrada salida del sistemaqueda:
Xr (ω) = Hr (ω)X (ωT ) =
T ·X (ωT ) |ω| < πT
0 resto
Si bien en el tiempo se produce una interpolacion de la senal para recuperar la senalanalogica, en la frecuencia se produce un filtrado que elimina la periodicidad del espectrode la senal discreta para convertirla en senal analogica.
Problema 2.4Dado el convertidor D/C de la figura 2.17 y la senal de entrada de la figura 2.20, repre-sentar la transformada de Fourier de la senal xs(t) y xr(t).
X(Ω)
ΩΩc
−2π 2π
Figura 2.20: Proceso de recuperacion de una senal a partir de sus muestras mediante unfiltro ideal.
12 Problemas de Tratamiento Digital de Senales

2.4. Convertidor D/C ideal 13
A continuacion, se muestran dos casos diferentes de senal original, muestreo y recons-truccion. En el primero de ellos, figura 2.21, se considera una senal limitada en banda quese somete a una conversion C/D con varios periodos de muestreo y que posteriormente sepretende recuperar mediante un filtrado ideal. En la figura 2.21 (a) se puede ver la senal ysu transformada. En la figura 2.21 (b) se puede observar un muestreo de la senal con unafrecuencia que cumple el criterio de Nyquist, por lo tanto no existe solapamiento en lascopias del espectro de la senal original. Segun va disminuyendo la frecuencia de muestreocomienza a producirse solapamiento entre copias 2.21 (c,d). La reconstruccion de la senalen este ultimo caso genera una senal que, debido al solapamiento espectral, cambia suforma respecto de la original. De hecho, aparece un rizado sobre la senal original quecorresponde al alzamiento que se ha producido en las frecuencias altas del espectro. En el
Figura 2.21: Ejemplo de una senal limitada en banda que se somete a una conversion C/Dy D/C.
segundo caso considerado, la senal no esta limitada en banda y por lo tanto, es imposible
13 Problemas de Tratamiento Digital de Senales

14 2. Muestreo y Reconstruccion de Senales
cumplir el criterio de Nyquist. La senal y su transformada son:
xa (t) = e−A|t|
Xa (F ) = 2AA2+(2πF )2
y se muestran en la figura 2.22 (a). Es importante observar que tanto la senal comosu transformada son decrecientes. Cuando la senal se muestrea a una frecuencia sufi-cientemente grande, el solapamiento entre copias es muy pequeno, ya que el espectro esdecreciente y el solapamiento viene dado por las colas de las copias del espectro desplaza-das en los multiplos de la frecuencia de muestreo. En estas condiciones la recuperacion dela senal no es perfecta pero se aproxima mucho a la senal original, figura 2.22 (b). En lafigura 2.22 (c), la frecuencia de muestreo es mas pequena y la senal recuperada comienzaa diferenciarse de la senal original. Es interesante notar que si la senal se hubiera filtradoantes de muestrearse, se hubieran eliminando por completo las colas de la senal y el sola-pamiento entre copias se hubiera evitado. Esta es una forma de mitigar el el solapamientoy hacer la reconstruccion mas precisa.
Figura 2.22: Ejemplo de una senal no limitada en banda que se somete a una conversionC/D y D/C.
14 Problemas de Tratamiento Digital de Senales

2.5. Procesado en tiempo discreto de senales de tiempo continuo 15
2.5. Procesado en tiempo discreto de senales de tiem-
po continuo
En muchas aplicaciones se requiere procesar senales de tiempo continuo mediante pro-cesadores digitales. Para ello, como se ha comentado al principio del capıtulo, se utilizaun sistema como el de la figura 2.23. Los sistemas convertidores C/D y D/C realizan la“interface” entre tiempo continuo y tiempo discreto y el sistema total es equivalente aun sistema de tiempo continuo. Es importante limitar en banda la senal de entrada para
xa(t) x[n] y[n] y
a (t)
T
C/D D/C
Sistema
digital
Hd(Ω)
T
Filtro
antisolapamiento
Figura 2.23: Sistema convertidor a digital, etapa de procesado y conversion de nuevo aldominio continuo.
preservar la maxima frecuencia deseada y limitar los efectos indeseados del aliasing. Paraello se realiza un prefiltrado de la senal de entrada con un filtro denominado filtro anti-aliasing. El uso de este filtro tambien elimina el posible ruido aditivo e interferencias quecontenga la senal fuera del rango de frecuencias de interes, ya que las replicas desplazadasvan a introducir sus colas, que contienen el ruido e interferencias, dentro de la banda defrecuencias de interes, generando aliasing. Por otro lado, es necesario ajustar el periodo demuestreo de los convertidores C/D y D/C, que tiene que ser suficientemente grande parapreservar la maxima frecuencia deseada de la senal, atendiendo al criterio de Nyquist.
2.5.1. Relacion entrada/salida
Para establecer la relacion entrada/salida del sistema equivalente de la figura 2.23,es necesario encadenar las relaciones entrada/salida de cada uno de los sistemas que locomponen. En primer lugar, el sistema C/D ideal es un sistema lineal y no invariante en eltiempo que escala el espectro analogico en un factor 1/T y crea una repeticion periodicaen el espectro con periodo 2π. Las relaciones entrada/salida en el tiempo y en la frecuenciason:
x [n] = xa (nT )
X (Ω) = 1T
∞∑
k=−∞
Xa
(
ΩT− k 2π
T
) (2.15)
El sistema D/C ideal tiene el cometido de escalar el espectro de entrada por un factorT y eliminar la region del espectro cuyas frecuencias cumplan: |ω| > π/T . Las relacionesentrada/salida en el tiempo y en la frecuencia son:
ya (t) =∞∑
k=−∞
y [k] · hr (t− kT )
Ya (ω) = Y (ωT ) ·Hr (ω)(2.16)
Suponemos que el sistema intermedio es un sistema LTI que viene dado por su respuesta enfrecuenciaH(Ω). El sistema realiza el procesado digital y relaciona la salida del convertidor
15 Problemas de Tratamiento Digital de Senales

16 2. Muestreo y Reconstruccion de Senales
C/D con la entrada del convertidor D/C:
Y (Ω) = X (Ω)Hd (Ω) (2.17)
Finalmente, componiendo todas las relaciones, la salida del sistema queda en el dominiotransformado:
Ya (ω) = Hr (ω)H (ωT )1
T
∞∑
k=−∞
Xa
(
ω − k2π
T
)
(2.18)
Si la senal es limitada en banda y se muestrea cumpliendo el criterio de Nyquist, entoncesel filtro recuperador situado en el convertidor D/C filtrara todas las copias del espectro dela senal de entrada que estan desplazadas, dejando pasar el espectro original. La relacionentrada/salida en estas condiciones queda:
Ya (ω) =
Hd (ωT )Xa (ω) |ω| < πT
0 resto(2.19)
Teniendo en cuenta el resultado anterior, es posible definir un sistema LTI analogicoequivalente cuya respuesta en frecuencia queda:
Ha (ω) =
Hd (ωT ) |ω| < πT
0 resto(2.20)
De modo que la relacion entrada/salida en el dominio de la frecuencia queda:
Ya (ω) = Ha (ω)Xa (ω) (2.21)
Merece la pena recordar que para que se cumplan las ecuaciones 2.19, 2.20 y 2.21 esnecesario que el sistema discreto sea LTI, que la senal de entrada sea limitada en banday que se cumpla el criterio de Nyquist en el muestreo, es decir, que no haya solapamientocon las replicas del espectro de la senal.
Ejemplo 2.2Teniendo en cuenta un filtro digital, ideal, paso bajo y de frecuencia de corte Ωc como elde la figura 2.24:
Ω
Ηd
(Ω)
2π2π Ωc
−Ωc
Figura 2.24: Filtro digital ideal paso bajo.
se puede obtener un filtro analogico equivalente usando un sistema como el de la figura2.23, el cual viene dado por:
Ha (ω) =
Hd (ωT ) |ω| < πT
0 resto(2.22)
16 Problemas de Tratamiento Digital de Senales
2.5. Procesado en tiempo discreto de senales de tiempo continuo 17
y su representacion grafica viene dada por la figura 2.25:
ω
Ηa
(ω)
Ωc/T−Ω
c/T
Figura 2.25: Filtro digital ideal paso bajo.
Merece la pena resaltar que el filtro analogico depende de Ωc y T , de modo que con ununico filtro digital podemos conseguir diferentes filtros analogicos modificando el periodode muestreo T .
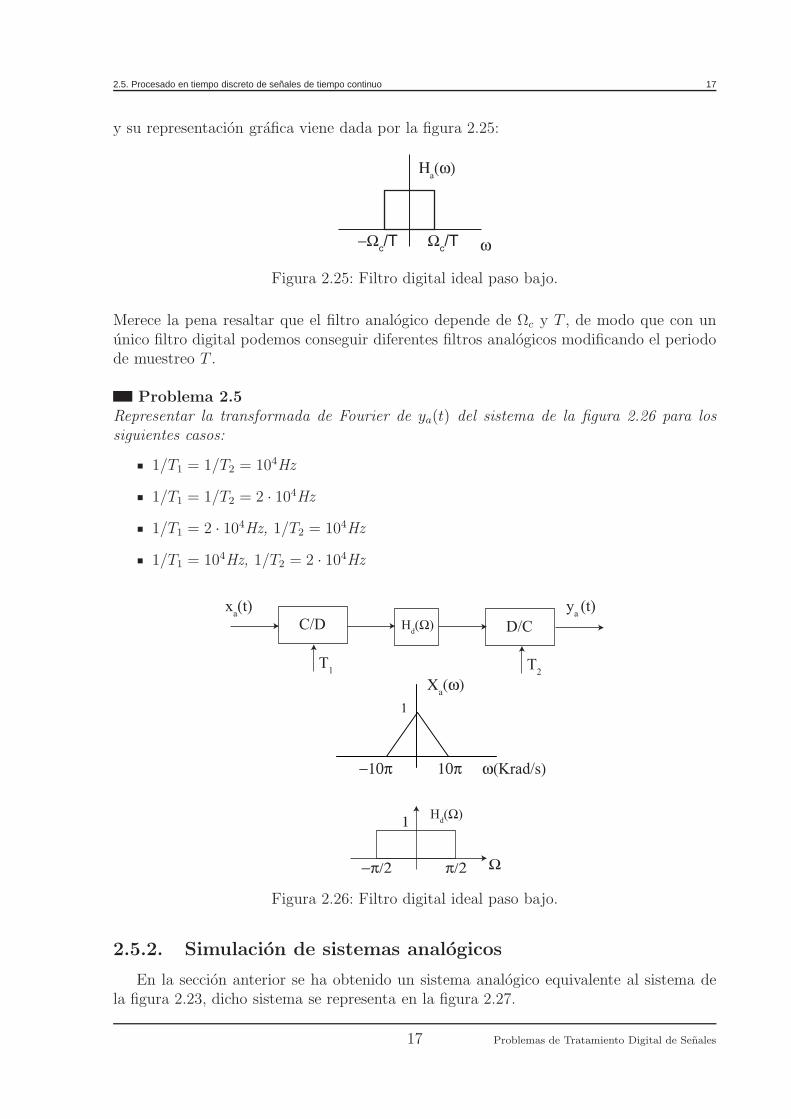
Problema 2.5Representar la transformada de Fourier de ya(t) del sistema de la figura 2.26 para lossiguientes casos:
1/T1 = 1/T2 = 104Hz
1/T1 = 1/T2 = 2 · 104Hz
1/T1 = 2 · 104Hz, 1/T2 = 104Hz
1/T1 = 104Hz, 1/T2 = 2 · 104Hz
xa(t) y
a (t)
T1
C/D D/CHd(Ω)
T2
ω(Krad/s)−10π 10π
π/2−π/2
1
Ω
Hd(Ω)
Xa(ω)
Figura 2.26: Filtro digital ideal paso bajo.
2.5.2. Simulacion de sistemas analogicos
En la seccion anterior se ha obtenido un sistema analogico equivalente al sistema dela figura 2.23, dicho sistema se representa en la figura 2.27.
17 Problemas de Tratamiento Digital de Senales

18 2. Muestreo y Reconstruccion de Senales
xa(t) y
a (t)
Ha(ω)
Figura 2.27: Filtro analogico equivalente.
Un sistema digital funcionando dentro de un sistema como el de la figura 2.23 generauna relacion entrada salida que viene dada por:
Hd (Ω) → Ya (ω) =
Hd (ωT )Xa (ω) |ω| < πT
0 resto(2.23)
Tambien se puede plantear el problema inverso: dado un sistema analogico, encontrar elsistema digital que realiza la misma transformacion. Segun la ecuacion 2.23, para podersimular un sistema analogico es necesario que este limitado en banda en el intervalo|ω| < π/T , es decir:
Ha (ω) , |ω| < πT
→ Hd (Ω) = Ha
(
Ω
T
)
, |Ω| < π (2.24)
Si Ha (ω) no esta limitado en la banda [−π/T, π/T ] pero la senal de entrada si lo esta,entonces solo se utilizan las frecuencias dentro de este rango. En este caso se puede limitaren banda Ha (ω) de forma artificial, considerando solo la region |ω| < π/T .
2.5.3. Respuesta al impulso invariante
Dado un sistema digital situado entre un convertidor C/D y D/C, se ha consideradoel calculo de un sistema analogico equivalente, por otro lado, dado un sistema analogicose ha considerado el sistema digital que lo simula. En todos los calculos y deducciones seha utilizado el dominio de Fourier. En esta seccion se estudian las transformaciones enel dominio del tiempo, para ello se considera un sistema analogico dado por una funcionsistema Ha (ω). Este sistema se simula mediante un sistema digital con la respuesta enfrecuencia:
Hd (Ω) =∞∑
k=−∞
Ha
(
Ω
T− k
2π
T
)
(2.25)
Es decir, es necesario considerar la respuesta en frecuencia analogica como funcion deΩ/T y una coleccion de copias situadas en los multiplos de 2π. Esta transformacion enla frecuencia es equivalente al muestreo en el dominio del tiempo, es decir, si el sistemaanalogico tiene una respuesta al impulso de ha (t), el sistema digital viene definido por elmuestreo de ha (t) multiplicandolo por T :
hd [n] = T · ha (nT ). (2.26)
Es sencillo demostrar que la respuesta en frecuencia de hd [n] viene dada por la ecuacion2.25, ya que es la misma relacion en la frecuencia que la de un convertidor C/D actuandosobre una senal de entrada ha (t). El factor T es necesario para que su transformadacoincida con la del sistema equivalente. Es decir, se puede conseguir un sistema digitalequivalente a uno analogico simplemente muestreando su respuesta al impulso. Merece lapena recordar que el sistema analogico debe estar limitado en banda para que esta tecnicafuncione.
18 Problemas de Tratamiento Digital de Senales

2.6. Procesado de tiempo continuo de senales de tiempo discreto 19
Ejemplo 2.3A continuacion se muestra un ejemplo de la aplicacion de la respuesta al impulso inva-riante. Sea un filtro analogico con una respuesta en frecuencia:
Ha (ω) =
1 |ω| < ωc
0 resto(2.27)
Su funcion de respuesta al impulso es:
ha (t) =sen (ωct)
πt
Teniendo en cuenta la ecuacion 2.25, su equivalente digital es:
Hd (Ω) =
1 |Ω| < ωcT0 ωcT < |Ω| < π
por lo tanto, la respuesta al impulso digital es:
hd [n] =sen (ωcTn)
πn
La cual se corresponde con el muestreo de la analogica.
Problema 2.6
Calcular la respuesta en frecuencia de un sistema digital que simule a un diferen-ciador analogico para procesar senales limitadas en banda con ωM = π/T .
Suponer una senal de entrada xa(t) = cos(ω0t). Obtener la entrada digital y sutransformada de Fourier y la salida digital y su transformada.
Nota: el diferenciador tiene unas relacion entrada/salida:
ya (t) =dxa (t)
dt
2.6. Procesado de tiempo continuo de senales de tiem-
po discreto
En ocasiones suele ser interesante plantearse la situacion inversa a la estudiada, esdecir, la simulacion de un sistema digital mediante un sistema analogico, tal y como semuestra en la figura 2.28. Para calcular el sistema digital efectivo es necesario tener encuenta las relaciones de entrada/salida de cada uno de los elementos. En primer lugar, larelacion entrada/salida del convertidor D/C queda:
xa (t) =∞∑
k=−∞
x [n] · hr (t− nT )
Xa (ω) =
T ·X (ωT ) , |ω| < πT
0 resto
19 Problemas de Tratamiento Digital de Senales

20 2. Muestreo y Reconstruccion de Senales
x[n] xa(t) y
a (t) y[n]
T
D/C C/D
Sistema
analógico
Ha(ω)
T
Hd(Ω)
Figura 2.28: Sistema convertidor a digital, etapa de procesado y conversion de nuevo aldominio continuo.
La relacion entrada salida del convertidor C/D queda:
y [n] = ya (nT )
Y (Ω) = 1TYa
(
ΩT
)
, |Ω| < π
y finalmente se considera uns sitema analogico LTI que viene dado por: Ya (ω) = Xa (ω)Ha (ω).Con todas estas relaciones, encadenando todas las entradas y salidas finalmente queda unsistema digital efectivo:
Hd (Ω) = Ha
(
Ω
T
)
, |Ω| < π
A continuacion se presenta un ejemplo donde es necesario simular un sistema digitalmediante uno analogico.
Ejemplo 2.4En ocasiones es necesario dotar de sentido fısico a algunos sistemas digitales que no lotienen, por ejemplo, un sistema digital que venga dado por su respuesta en frecuencia:
Hd (Ω) = e−jΩ∆, |Ω| < π
Si ∆ es un numero entero el sistema realiza un retardo temporal: y [n] = x [n−∆]
si ∆ no es entero, se puede definir el retardo temporal mediante un sistema deprocesado continuo equivalente como el de la figura 2.28. La senal de entrada setransforma al dominio del tiempo continuo, se desplaza una cantidad ∆ segun larespuesta en frecuencia del sistema analogico equivalente: Ha (ω) = e−jωT∆ y la senalanalogica se desplaza mediante: ya (t) = xa (t−∆T ). Con estas consideraciones, lasenal digital queda: y [n] = ya (nT ).
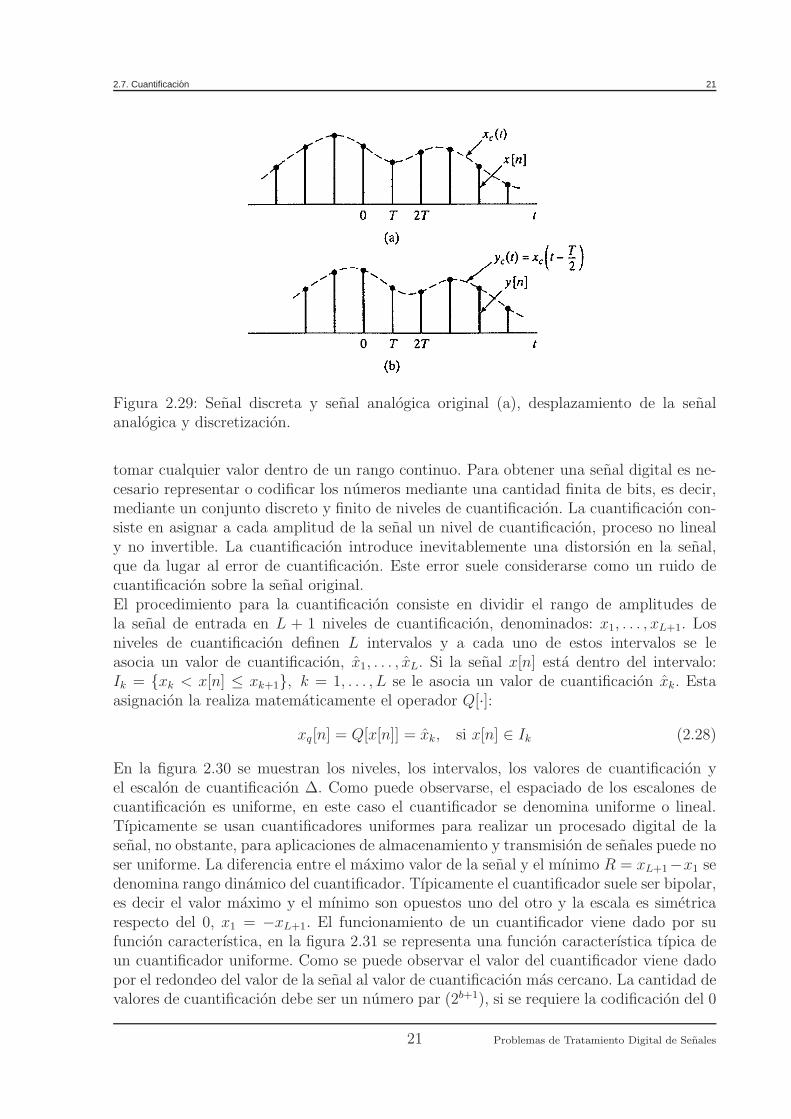
Un ejemplo de este tipo de transformacion se muestra en la figura 2.29.
2.7. Cuantificacion
Hasta ahora se ha considerado que existe una precision infinita en la representaciondigital de los datos, por lo tanto, se han despreciado las etapas de cuantificacion y codi-ficacion. En una aproximacion mas realista, es necesario considerar la precision finita ysu efecto sobre los sistemas. Una senal discreta es una secuencia de numeros que puede
20 Problemas de Tratamiento Digital de Senales
2.7. Cuantificacion 21
Figura 2.29: Senal discreta y senal analogica original (a), desplazamiento de la senalanalogica y discretizacion.
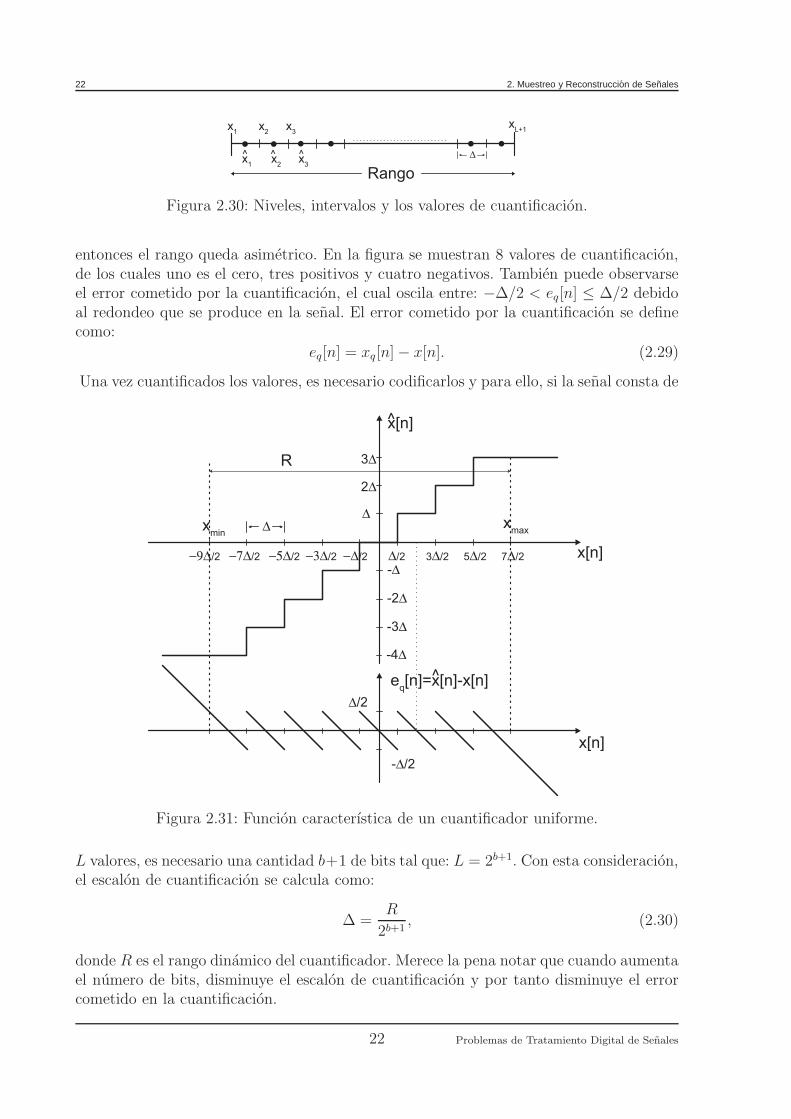
tomar cualquier valor dentro de un rango continuo. Para obtener una senal digital es ne-cesario representar o codificar los numeros mediante una cantidad finita de bits, es decir,mediante un conjunto discreto y finito de niveles de cuantificacion. La cuantificacion con-siste en asignar a cada amplitud de la senal un nivel de cuantificacion, proceso no linealy no invertible. La cuantificacion introduce inevitablemente una distorsion en la senal,que da lugar al error de cuantificacion. Este error suele considerarse como un ruido decuantificacion sobre la senal original.El procedimiento para la cuantificacion consiste en dividir el rango de amplitudes dela senal de entrada en L + 1 niveles de cuantificacion, denominados: x1, . . . , xL+1. Losniveles de cuantificacion definen L intervalos y a cada uno de estos intervalos se leasocia un valor de cuantificacion, x1, . . . , xL. Si la senal x[n] esta dentro del intervalo:Ik = xk < x[n] ≤ xk+1, k = 1, . . . , L se le asocia un valor de cuantificacion xk. Estaasignacion la realiza matematicamente el operador Q[·]:
xq[n] = Q[x[n]] = xk, si x[n] ∈ Ik (2.28)
En la figura 2.30 se muestran los niveles, los intervalos, los valores de cuantificacion yel escalon de cuantificacion ∆. Como puede observarse, el espaciado de los escalones decuantificacion es uniforme, en este caso el cuantificador se denomina uniforme o lineal.Tıpicamente se usan cuantificadores uniformes para realizar un procesado digital de lasenal, no obstante, para aplicaciones de almacenamiento y transmision de senales puede noser uniforme. La diferencia entre el maximo valor de la senal y el mınimo R = xL+1−x1 sedenomina rango dinamico del cuantificador. Tıpicamente el cuantificador suele ser bipolar,es decir el valor maximo y el mınimo son opuestos uno del otro y la escala es simetricarespecto del 0, x1 = −xL+1. El funcionamiento de un cuantificador viene dado por sufuncion caracterıstica, en la figura 2.31 se representa una funcion caracterıstica tıpica deun cuantificador uniforme. Como se puede observar el valor del cuantificador viene dadopor el redondeo del valor de la senal al valor de cuantificacion mas cercano. La cantidad devalores de cuantificacion debe ser un numero par (2b+1), si se requiere la codificacion del 0
21 Problemas de Tratamiento Digital de Senales
22 2. Muestreo y Reconstruccion de Senales
∆
xL+1x
1 x
2 x
3
Rangox
1 x
2 x
3
^ ^ ^
Figura 2.30: Niveles, intervalos y los valores de cuantificacion.
entonces el rango queda asimetrico. En la figura se muestran 8 valores de cuantificacion,de los cuales uno es el cero, tres positivos y cuatro negativos. Tambien puede observarseel error cometido por la cuantificacion, el cual oscila entre: −∆/2 < eq[n] ≤ ∆/2 debidoal redondeo que se produce en la senal. El error cometido por la cuantificacion se definecomo:
eq[n] = xq[n]− x[n]. (2.29)
Una vez cuantificados los valores, es necesario codificarlos y para ello, si la senal consta de
∆∆
−9∆/2 −7∆/2 −5∆/2 −3∆/2 −∆/2 ∆/2 3∆/2 5∆/2 7∆/2
∆/2
-∆/2
^eq[n]=x[n]-x[n]
x[n]
x[n]
x[n]^
-∆
-2∆
-3∆
-4∆
2∆
xmaxx
min
3∆R
Figura 2.31: Funcion caracterıstica de un cuantificador uniforme.
L valores, es necesario una cantidad b+1 de bits tal que: L = 2b+1. Con esta consideracion,el escalon de cuantificacion se calcula como:
∆ =R
2b+1, (2.30)
donde R es el rango dinamico del cuantificador. Merece la pena notar que cuando aumentael numero de bits, disminuye el escalon de cuantificacion y por tanto disminuye el errorcometido en la cuantificacion.
22 Problemas de Tratamiento Digital de Senales

2.7. Cuantificacion 23
En los convertidores ADC reales pueden existir multitud de desviaciones respecto del com-portamiento ideal, pueden existir problemas de offset en las transiciones de los escalones,errores en los factores de escala (o ganancia) de la senal de entrada, no linealidades en laseparacion de escalores de cuantificacion, etc...
2.7.1. Analisis de errores de cuantificacion
Para estimar el error cometido por el ADC debido a la cuantificacion es necesariorealizar un estudio estadıstico, ya que el error depende de las caracterısticas de la senalen cada punto y estas son desconocidas. Por otro lado, el comportamiento del cuantifi-cador es no lineal y por tanto muy complicado de tratar de forma determinista. Desdeel punto de vista estadıstico se asume que el error es de naturaleza aleatoria y se consi-dera como un ruido aditivo a la senal, de este modo el cuantificador se puede modelarmatematicamente como el sistema mostrado en la figura 2.32. Si los valores de la senal
Cuantizador
Q[.]
x[n]^x[n] x[n]=x[n]+e[n]^x[n]+
e[n]
Figura 2.32: Cuantificador y modelo estadıstico.
de entrada estan dentro del rango dinamico del cuantificador, el error de cuantificacionestara acotado: |eq[n]| < ∆/2, este tipo de error se suele denominar ruido granular. Porel contrario, si la senal de entrada esta fuera del rango, se produce un desbordamientoque genera un recorte de la senal y un valor del error que esta descontrolado, este caso nosera considerado.Para caracterizar el modelo estadıstico del error es necesario suponer algunas caracterısti-cas razonables:
El error eq[n] esta uniformemente distribuido en el rango [−∆/2,∆/2].
El error se considera un ruido blanco estacionario, es decir, no esta correlacionadoen el tiempo.
El error no esta correlacionado con la senal de entrada.
La senal de entrada es estacionaria y de media cero.
Estas suposiciones se cumplen razonablemente bien cuando la senal varia de un modocomplicado y los escalones de cuantificacion son suficientemente pequenos, de modo queentre muestras sucesivas de la senal existan varios escalones de cuantificacion. Con estasconsideraciones, la funcion de densidad de probabilidad del ruido de cuantificacion esuniforme y de media cero, como se muestra en la figura 2.33. El efecto del ruido decuantificacion sobre la senal se suele cuantificar mediante la relacion senal a ruido decuantificacion (SQNR), la cual se define como:
SQNR = 10 log10Px
Pe, (2.31)
23 Problemas de Tratamiento Digital de Senales

24 2. Muestreo y Reconstruccion de Senales
1/∆
e
p(e)
∆/2-∆/2
Figura 2.33: Funcion de densidad de probabilidad del ruido de cuantificacion.
donde Px = σ2x = E[x2(n)] es la potencia promedio de la senal y Pe = σ2
e = E[e2q(n)]. Lapotencia del error de cuantificacion queda:
Pe = σ2e =
∆/2∫
−∆/2
e2p (e) de =∆2
2. (2.32)
Sustituyendo la potencia en la ecuacion 2.31 y teniendo en cuenta la relacion 2.30 queda:
SQNR = 10 log10Px
Pe
= 20 log10σx
σe
= 6,02b+ 16,81− 20 log10R
σx
(2.33)
En esta ecuacion se pone de manifiesto que cada bit que se anada al cuantificador au-menta 6dBs aproximadamente la SQNR. Es interesante analizar el ultimo termino de laecuacion, el cual relaciona el rango dinamico del cuantificador con la varianza de la senal.Si la varianza toma un valor demasiado grande la amplitud de la senal supera al rangodinamico y se produce un desbordamiento que implica un recorte de la senal. Si la varian-za es demasiado pequena, la relacion SQNR disminuye. Por lo tanto, es necesario adaptarlo mejor posible el rango de variacion de la senal al rango dinamico del cuantificador. Siconsideramos una senal de entrada con una funcion de distribucion de probabilidad Gaus-siana y extendemos el rango dinamico del cuantificador a R = 6σx, la ecuacion anteriorqueda:
SQNR = 6,02b+ 1,25 (2.34)
Como un ejemplo, en grabacion y reproduccion de musica digital de alta fidelidad se usaun SQNR entre 90 y 96dBs. Esto implica un convertidor DAC con un cuantificador de almenos 16 bits.
2.8. Codificacion
Existen diferentes representaciones para codificar los numeros, cada una de las cualestiene sus ventajas e inconvenientes. En esta seccion se realiza una revision, a modo derecordatorio, de las tecnicas de representacion de numeros mas interesantes. Tıpicamente,esta suele ser la ultima etapa de un convertidor ADC en la cual se realiza la codificacionbinaria de la senal.Todos los numeros se pueden representar mediante una descomposicion polinomica enfuncion de una determinada base, la mas tıpica es la base decimal aunque se puede utilizarcualquier otra. En particular, en sistemas digitales se utiliza una representacion binaria,
24 Problemas de Tratamiento Digital de Senales

2.8. Codificacion 25
es decir, con base 2. Sea un numero con parte entera y parte fraccional dado por:
X =(
x−a . . . x−1 x0 , x1 . . . xb
)
r=
b∑
i=−a
xir−i, 0 ≤ xi ≤ r − 1 (2.35)
donde xi representa los dıgitos o bits, r es la base, a es el numero de dıgitos enteros yb es el numero de dıgitos fraccionales. En el caso binario, los dıgitos unicamente puedentomar valores 0, 1. El dıgito situado mas a la izquierda, x−a se denomina el bit massignificativo (MSB, most significative bit) y el dıgito situado mas a la derecha, xb es el bitmenos significativo (LSB, least significative bit). El punto o coma entre los bits x0 y x1
no existe fısicamente en los computadores, para su gestion se disenan los circuitos logicospara asumir el punto o coma en la posicion que se haya prefijado. Un numero de bitsdisponible para representar un numero hace que solo se puedan representar una cantidadde numeros finita. El proceso de cuantificar convierte las amplitudes de la senal en otrasaproximadas que pueden ser representadas con un numero determinado de bits. Todaslas operaciones implicadas en el procesado digital tambien estan sujetas a los efectosprovocados por el hecho de tener un numero finito de bits (longitud finita de la palabrao efectos de precision finita), cualquier operacion con numeros digitales puede generar unresultado que no se pueda representar con el numero de bits disponible y en ese caso esnecesario volver a realizar una cuantificacion mediante redondeo o truncamiento del valordel numero. Este procedimiento se le denomina aritmetica de precision finita y generaerrores cuyo valor depende del numero de bits utilizado. Estos errores se propagan alo largo de los procedimientos implicados en un algoritmo y pueden generar resultadoserroneos, incluso divergencias e inestabilidades del propio algoritmo.
2.8.1. Representacion de punto fijo
Debido a que la gestion de la posicion del punto decimal de los numeros puede sercomplicada, se suelen considerar numeros que solo tienen parte fraccional. Merece la penanotar que cualquier numero con parte entera y fraccional se puede considerar fraccionalsacando como factor comun ra. Para un numero positivo que sea puramente fraccional larepresentacion de punto fijo consiste en poner el bit mas significativo a 0 y el resto:
X = 0. x1x2 . . . xb =
b∑
i=1
xi2−i (2.36)
de manera que la representacion usa b + 1 bits, por lo tanto tiene una capacidad pararepresentar 2b numeros positivos con una distancia entre numeros consecutivos de 2−b.Para la representacion de los numeros negativos existen varias alternativas:
Signo y magnitud: Se pone el bit mas significativo a 1 quedando X = 1. x1x2 . . . xb.
Complemento a uno: Consiste en obtener la representacion del numero positivo ycambiar todos los bits por sus complementarios a uno, es decir, si el bit vale 1 sucomplementario vale 0 y si el bit vale 0, su complementario vale 1.
X1C = 1. x1x2 . . . xb, (2.37)
25 Problemas de Tratamiento Digital de Senales

26 2. Muestreo y Reconstruccion de Senales
donde xi = 1−xi. Los numeros representados estan distribuidos en un rango [−(1−2−b), 1 − 2−b]. El cero esta representado cos dos numeros diferentes, con todos losbits a cero y con todos los bits a uno.
Complemento a dos: consiste en representar el numero positivo resultante de sumar2 al numero negativo que queremos representar. Una tecnica mas sencilla para ob-tenerlo consiste en obtener el complemento a uno y sumarle un numero que consisteen el bit menos significativo. La suma se realiza en modulo 2 e ignorando en la sumael bit mas significativo:
X2C = 1. x1x2 . . . xb + 00 . . . 01, (2.38)
Con este metodo los numeros representados estan distribuidos en un rango [−1, 1−2−b], por lo tanto es un codigo asimetrico. Por otro lado, el cero esta representa-do con un solo numero. Una caracterıstica muy importante de la aritmetica de lasuma es que si la suma final de un conjunto de sumandos esta dentro del rangode representacion el calculo sera correcto, incluso si las sumas parciales producendesbordamiento ( “overflow”, valores fuera del rango de representacion).
Cada tipo de representacion tiene unas reglas aritmeticas asociadas. Tıpicamente se usala representacion de complemento a 2, ya que es la mas utilizada por los procesadoresdigitales de la etapa de procesado que suele venir a continuacion. Debido a que estarepresentacion permite codificar numeros en el intervalo [−1, 1), normalmente la senal deentrada suele ser escalada para que exista una correspondencia directa.
2.8.2. Representacion de punto flotante
En una representacion de punto fijo que cubra un rango de numeros de xmax − xminla resolucion viene dada por:
∆ =xmax − xmın
m− 1, (2.39)
donde m = 2b es el numero de niveles de cuantizacion y b es numero de bits utilizados. Alrango de valores xmax − xmin que es posible representar se le denomina rango dinamico.Para un rango dinamico dado la resolucion es fija, si aumenta el rango dinamico disminuyela resolucion. En muchas ocasiones es necesario tener una resolucion variable, es decir,que permita obtener mas resolucion para numeros mas pequenos y menos resolucion paranumeros mas grandes. Al mismo tiempo es necesario aumentar el rango dinamico de larepresentacion. Estas caracterısticas se consiguen con la representacion de punto flotante.Un numero flotante binario viene dado por la mantisa M , la cual es la parte fraccionalde un numero que este en el rango 1/2 ≤ M < 1 ( si esta fuera de este rango se sacafactor comun 2), y por un factor exponencial 2E , donde E es un numero entero positivoo negativo. El numero X se representa por:
X = M × 2E (2.40)
Tanto la mantisa como el exponente requieren un bit para el signo. Un ejemplo de repre-sentacion del 5 puede ser:
(0,101000)× 2011
26 Problemas de Tratamiento Digital de Senales
2.9. Consideraciones practicas 27
Debido a la multiplicacion por la exponencial, la resolucion depende del modulo del nume-ro que se representa, ademas se aumenta el rango de valores representados. Con este tipode representacion se aumenta la precision de los calculos a costa de un mayor procesado,ya que el tipo de aritmetica necesaria es mas compleja. Por ejemplo, para sumar dosnumeros requiere que el exponente sea el mismo, por lo tanto es necesario realizar unaadaptacion previa de los numeros. Los detalles de la definicion del formato de punto flo-tante estan descritos en el standard IEEE 754 el cual define varios niveles de precision,media (16 bits), simple (32 bits), doble (64 bits) y cuadruple (128 bits). Por ejemplo, enel caso de doble precision que es la mas utilizada por computadores de uso general (porejemplo, Matlab por defecto) viene dada por:
Un bit para el signo.
11 bits para el exponente E
52 bits para la mantisa.
2.9. Consideraciones practicas
Hasta ahora hemos tratado la conversion ADC y DAC como operaciones ideales, lascuales nos han permitido obtener una descripcion matematica elegante de la simulacionde sistemas analogicos mediante sistemas digitales y viceversa. En la practica no es tansencillo, en primer lugar las senales no estan limitadas en banda y los filtros disponiblesno son ideales, por lo tanto no pueden limitar las senales en banda. Ademas, los conver-tidores CD y DC son dispositivos electronicos que solo pueden ofrecer una aproximacional comportamiento ideal. En las siguientes secciones trataremos una aproximacion masrealista al convertidor ADC y DAC.
2.9.1. Convertidores ADC
El ADC es un dispositivo que convierte una senal de voltaje o corriente en un codigobinario que representa valores discretos de amplitud lo mas cercanos posible a la amplitudde la senal de entrada. En un sistema real, cada T segundos tiene que salir una muestradigital y en ese tiempo tiene que realizarse el muestreo, la cuantificacion y la codificacion.Para que el sistema funcione correctamente, es necesario que el muestreo obtenga unamuestra y mantenga su valor hasta que se hayan completado todas las operaciones. Estetipo de muestreo se denomina muestreo y retencion (Sample and Hold, S/H) sustituyeal convertidor CD ideal y se antepone al procedimiento de cuantificacion y codificacion.El S/H permite que la cuantificacion y codificacion no sea instantanea y dota al sistemadel tiempo suficiente para que realice sus tareas. Si no se realiza la retencion y la senalde entrada cambia en una cantidad superior a la mitad del escalon de cuantificacion,la cuantificacion y codificacion sera erronea. Por esta razon, para sistemas de resolucionmoderada o alta (a partir de unos 12 bits por muestra) con gran ancho de banda es im-prescindible el S/H. El circuito que realiza la operacion S/H esta controlado digitalmentey su funcionamiento es seguir las variaciones de la senal durante el modo muestreo (S) yretener el valor de la senal durante el modo retencion (H). La senal de entrada y salidaal S/H se puede ver en la figura 2.34. El tiempo necesario para realizar la cuantificacion
27 Problemas de Tratamiento Digital de Senales

28 2. Muestreo y Reconstruccion de Senales
y codificacion debe ser inferior al tH y el periodo de muestro total T debe ser mayor quetS + tH . En principio, un S/H ideal no introduce distorsion en el proceso de conversion
S
tS+t
H
S S
S S
H
HH
H
Entrada
Salida S/H
Figura 2.34: Senal de entrada y salida del S/H.
pero en la realidad son dispositivos que estan sujetos a variaciones en la periodicidad delmuestreo, oscilaciones del voltaje debidos a transitorios, etc...
2.9.2. Convertidores DAC
La senal de salida de un convertidor DAC ideal viene dada por:
xr (t) =
∞∑
k=−∞
x [k] hr (t− kT ) =
∞∑
k=−∞
x [k]sen
(
π(t−kT )T
)
π(t−kT )T
(2.41)
como se puede observar el procedimiento es complejo ya que para el calculo de la senalen un t dado se requiere el conocimiento de toda la secuencia x[k] para todos los valoresde k. Esto hace que el procedimiento no sea util desde el punto de vista practico. Enla practica un convertidor DAC real consta de varias etapas: un convertidor de digitala analogico (D/C), una etapa de muestreo y retencion S/H y un filtro paso bajo quesuaviza la senal de salida. Una representacion grafica de las etapas se muestra en la figura2.35 En primer lugar, el convertidor DC acepta como entrada una senal electrica que
y[n] y(t)^
ConvertidorDC
S/H
Filtro
paso-bajo
compensacion
ySH
(t)
Figura 2.35: Etapas implicadas en un DAC real.
corresponde a una palabra digital, su tarea es producir una senal electrica proporcionalal valor de esa palabra digital. Un ejemplo de funcion caracterıstica de este sistema parauna senal digital de 3 bits se muestra en la figura 2.36. Normalmente el convertidor D/Ctarda un tiempo en alcanzar el valor deseado, ya que normalmente la salida consta deun transitorio oscilatorio, sobre todo cuando los saltos de voltaje son altos. Para evitareste caracter oscilatorio la senal de salida se suele pasar a una etapa de muestreo yretencion que mantiene el valor de voltaje constante hasta que la nueva muestra llegue aproducirse. Un ejemplo de senal de entrada y salida del S/H se muestra en la figura 2.37.La salida de este sistema es una aproximacion a la senal analogica original mediante unafuncion escalera. Este tipo de salida se expresa matematicamente mediante la funcion de
28 Problemas de Tratamiento Digital de Senales

2.9. Consideraciones practicas 29
∆
100 101 110 111 000 001 010 011 Entrada
Salida
-∆
-2∆
-3∆
-4∆
2∆
3∆
Figura 2.36: Funcion caracterıstica de un DC.
tT 2T 3T 4T 5T 6T 7T0
Señal de entradaSeñal de salida, y
SH(t)
Figura 2.37: Ejemplo de senal de entrada y salida del S/H.
interpolacion:
hSH (t) =
1 0 ≤ t < T0 resto
(2.42)
y la senal de salida viene dada por:
ySH (t) =∞∑
n=−∞
y [n]hSH (t− nT ) (2.43)
En el dominio de la frecuencia la funcion de interpolacion queda:
HSH (ω) =2sen (ωT/2)
ωe−jωT/2 (2.44)
La representacion grafica de la ecuacion 2.44 superpuesta con la respuesta en frecuencia delinterpolador ideal se presenta en la figura 2.38 (a). Como se puede ver la frecuencia de cortedel filtro interpolador no esta definida y deja pasar sin mucha atenuacion componentesfrecuenciales hasta 2π/T . Como consecuencia de esto, el filtro de reconstruccion deja pasarparte del espectro que es susceptible de contener aliasing. Para compensar este efectoy tener una senal mas aproximada a la senal analogica, se suele situar un filtro pasobajo de compensacion que limita el paso de las frecuencias que estan fuera del intervalo[−π/T, π/T ] y compensa la distorsion generada por la respuesta en frecuencia del filtrointerpolador del S/H, figura 2.38 (b).
29 Problemas de Tratamiento Digital de Senales

30 2. Muestreo y Reconstruccion de Senales
2πT
ω
ω
|Hc(ω)|
|HSH
(ω)|
πT
Hr(ω)
(a)
(b)
Figura 2.38: Respuesta en frecuencia del filtro interpolador ideal y del S/H (a). Filtrocompensador (c) .
2.10. Muestreo y reconstruccion de senales paso-banda
Sea una senal paso-banda de tiempo continuo con ancho de banda definido comoB = ωH − ωL y con un espectro que se extiende en el intervalo: 0 < ωL < |ω| < ωH , tal ycomo se muestra en la figura ??. En esta figura se observa tambien la frecuencia centraldel espectro, ωc = (ωL + ωH)/2. Resulta evidente que usando una frecuencia de muestreode ωs ≥ 2ωh no existe solapamiento pero la ocupacion del espectro no es en absolutoeficiente, es decir, se puede muestrear con frecuencias menores sin solapamiento. Paraello, es necesario tener en cuenta el ancho de banda de la senal y entender la ocupaciondel espectro cuando una senal se muestrea.
Xa(ω)
ωL
ωc
ωH ω
-ωH-ω
c-ω
L
Figura 2.39: Espectro de una senal paso-banda.
2.10.1. Muestreo uniforme
Como se ha mencionado anteriormente, en general el muestreo de una senal cualquieray en particular el muestreo de una senal paso-banda genera una senal cuyo espectro vienedado por:
Xs (ω) =1
T
∞∑
k=−∞
Xa (ω − kωs) (2.45)
donde la posicion de las replicas de la transformada de la senal original estan controladaspor el parametro ωs. En este caso, la eleccion de la frecuencia de muestreo debe ser
30 Problemas de Tratamiento Digital de Senales

2.10. Muestreo y reconstruccion de senales paso-banda 31
cuidadosa para que no exista solapamiento provocado tanto por la banda de frecuenciaspositivas como por la banda de frecuencias negativas. Para evitar el solapamiento sedistinguen dos casos, los cuales se estudian a continuacion.
Posicionamiento entero de la banda
Suponiendo que la maxima frecuencia del espectro cumple: ωH = mB, dondem denotala posicion de la banda, existe espacio en el espectro para alojar un numero entero debandas espectrales. Esto quiere decir que la mınima frecuencia de muestreo que generaun espectro sin solapamiento es ωs = 2B. Esta situacion corresponde a la situacion lımiteen la cual se obtiene un espectro completamente ocupado, pero sin solapamiento. En lafigura 2.40 y 2.41 puede observarse esta situacion cuando m = 3 y m = 4 respectivamente.La reconstruccion de la senal se puede realizar, como se ha estudiado, con un filtro ideal
Xs(ω)
ωL
ωc
ωH ω
-ωH-ω
c-ω
L
Xa(ω)
ωL
ωc
ωH ω
-ωH-ω
c-ω
L
Figura 2.40: Respuesta en frecuencia de una senal paso banda con m = 3 y la senalmuestreada.
Xa(ω)
ωL
ωc
ωH ω
-ωH-ω
c-ω
L
Xs(ω)
ωL
ωc
ωH ω
-ωH-ω
c-ω
L
Figura 2.41: Respuesta en frecuencia de una senal paso banda con m = 4 y la senalmuestreada.
que deje pasar el espectro original y elimine todas las replicas. Este filtro, como se muestraen la figura 2.42, es un filtro ideal paso banda cuya respuesta al impulso es:
ga (t) =sen (πBt)
πBtcos (ωct) . (2.46)
31 Problemas de Tratamiento Digital de Senales

32 2. Muestreo y Reconstruccion de Senales
Con estas condiciones, la senal reconstruida queda:
xa (t) =∞∑
n=−∞
xa (nT ) ga (t− nT ), (2.47)
Resulta interesante notar que, eligiendo la posicion del filtro recuperador, es posible
Hr(ω)
ωL
ωc
ωH ω
-ωH-ω
c-ω
L
Figura 2.42: Respuesta en frecuencia del filtro recuperador ideal.
recuperar la senal original, o bien cualquier replica de esta. En particular, es posiblerecuperar la replica del espectro en banda base (paso bajo), este fenomeno se utilizamucho en comunicaciones, ya que resulta equivalente a realizar una demodulacion de lasenal. En las figuras 2.40 y 2.41 puede observarse que, en general, si la posicion de labanda es par, la replica en banda base esta invertida y si es impar, la replica en bandabase es identica.
Posicionamiento arbitrario de la banda
Esta situacion sucede cuando la posicion de la banda m no es un numero entero deveces el ancho de banda y por tanto la eleccion de la frecuencia de muestreo debe sermas cuidadosa. Es necesario evitar que las replicas de la banda de frecuencias negativassolapen con la banda de frecuencias positivas, y al reves, que las replicas de la bandade frecuencias positivas no solapen con la banda de frecuencias negativas. Esta situacionpuede observarse en la figura 2.43, la condicion que tienen que cumplir las replicas es queentre la replica k y k−1 de la banda de frecuencias negativas haya suficiente espacio paraque quepa la banda de frecuencias positivas. Matematicamente, y teniendo en cuenta lafigura 2.43, las condiciones quedan:
2ωH ≤ kωs
(k − 1)ωs ≤ 2ωL(2.48)
Es decir, para que no haya solapamiento tienen que existir un valor entero k y una fre-cuencia de muestreo que cumplan simultaneamente las ecuaciones 2.48, las cuales formanun sistema de desigualdades con dos incognitas, ωs y k. Resolviendo el sistema se llega ala conclusion que k tiene que ser un entero que cumpla:
1 ≤ k ≤⌊ωH
B
⌋
(2.49)
lo cual quiere decir que el maximo valor de k es la posicion de la banda pero redondeadaal entero inferior. La frecuencia de muestreo tiene que cumplir:
2ωH
k≤ ωs ≤
2ωL
k − 1(2.50)
32 Problemas de Tratamiento Digital de Senales

2.10. Muestreo y reconstruccion de senales paso-banda 33
Xa(ω)
ωL
ωc
ωH ω
-ωH-ω
c-ω
L
Xs(ω)
ωL
ωc
ωH ω
-ωH-ω
c-ω
L
B
(k-1)ωs
kωs
2ωH
2ωL
Réplica kRéplica k-1
Figura 2.43: Situacion en la cual las replicas de la banda negativa del espectro no solapancon la banda positiva.
La frecuencia de muestreo mınima se obtiene como ωs,mın = 2ωH/kmax, donde kmax =⌊
FH
FB
⌋
. Como se puede apreciar la posicion entera de la banda es un caso particular de la
posicion arbitraria, en el cual las desigualdades se convierten en igualdades.
33 Problemas de Tratamiento Digital de Senales

34 2. Muestreo y Reconstruccion de Senales
2.11. Referencias
[1] A. V. Oppenheim, R. Schafer, and J. R. Buck, Discrete-Time Signal Processing, 2/ed.Prentice-Hall, 1999.[2] J. G. Proakis and D. G. Manolakis, Digital Signal Processing. Principles, Algorithmsand Applications, 3/ed. Prentice-Hall, 1996.
34 Problemas de Tratamiento Digital de Senales