calcul infinitesimal` notes de classe - mat … · 2 piskunov n. (2004) ca´lculo diferencial e...
TRANSCRIPT

CALCUL INFINITESIMAL
Notes de Classe
J. M. Aroca
Departament de Matematica Aplicada IV,
Universitat Politecnica de Catalunya
e-mail:[email protected]
http://www-ma4.upc.edu/~aroca
Febrer de 2015
Index
Notacio i bibliografia 7
I Fonaments: conjunts numerics i successions 9
1 Metodes de demostracio 10
1.1 Logica, axiomes i teoremes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
1.2 Demostracio directa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
1.3 Demostracio per contrarecıproc . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
1.4 Demostracio per reduccio a l’absurd . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
1.5 Demostracio per induccio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2 Conjunts 14
2.1 Conjunts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.2 Operacions entre conjunts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.3 Producte cartesia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.4 Relacions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.5 Relacions d’ordre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.6 Funcions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.7 Operacions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
3 Conjunts numerics 18
3.1 Els nombres naturals . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
3.2 Els nombres enters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
3.3 Els nombres racionals . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
4 El cos dels nombres reals 22
4.1 Estructura de cos ordenat . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
4.1.1 Estructura de cos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
4.1.2 Relacio d’ordre total . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
4.2 Propietats d’un cos ordenat . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
4.2.1 Valor absolut . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
1
4.2.2 Intervals . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
4.2.3 Nombres racionals . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
4.3 Fites i extrems . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
4.4 Successions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
4.4.1 Lımit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
4.4.2 Successions de Cauchy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
4.4.3 Proposicio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
4.5 Intervals encaixats . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
4.6 Definicio axiomatica de R . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
4.6.1 Propietat arquimediana . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
4.6.2 Teorema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
4.6.3 Teorema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
4.6.4 Teorema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
4.6.5 Teorema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
4.7 Subsuccessions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
4.7.1 Teorema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
4.7.2 Teorema de Bolzano-Weierstrass . . . . . . . . . . . . . . . . . . . . . . . . . 29
4.8 Representacio decimal dels nombres reals . . . . . . . . . . . . . . . . . . . . . . . . 29
4.9 Numerabilitat . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
5 Calcul de lımits de successions 31
5.1 Propietats del lımit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
5.2 Lımits infinits . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
5.3 Algebra de lımits infinits . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
5.4 Resolucio d’indeterminacions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
5.4.1 Expressions racionals . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
5.4.2 Resta d’arrels . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
5.4.3 Indeterminacio 1∞. El nombre e. . . . . . . . . . . . . . . . . . . . . . . . . . 35
5.4.4 Un lımit trigonometric . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
5.4.5 Criteri d’Stolz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
5.4.6 Mitjanes aritmetiques i geometriques . . . . . . . . . . . . . . . . . . . . . . . 37
5.4.7 Arrel n-esima . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
5.4.8 Successions recurrents . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
6 Nombres complexos 39
6.1 El cos dels nombres complexos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
6.2 Teorema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
6.3 Conjugacio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
6.4 Modul . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
2
6.5 Representacio geometrica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
6.6 Forma polar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
6.7 Potencies i arrels . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
6.8 Formules d’Euler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
6.9 Polinomis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
6.10 Arrels de polinomis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
6.11 Teorema fonamental de l’algebra . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
6.12 Factoritzacio de polinomis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
II Funcions reals. Calcul d’una variable 48
7 Funcions a R 49
7.1 Funcio real de variable real . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
7.2 Domini d’una funcio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
7.3 Funcions injectives, exhaustives i bijectives . . . . . . . . . . . . . . . . . . . . . . . 50
7.4 Funcio inversa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
7.5 Grafica d’una funcio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
7.6 Funcions elementals . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
7.7 Altres funcions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
7.8 Operacions entre funcions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
7.9 Simetries d’una funcio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
8 Lımit i continuıtat de funcions 58
8.1 Definicio de lımit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
8.2 Teorema (lımit per successions) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
8.3 Lımits infinits i en l’infinit. Definicions . . . . . . . . . . . . . . . . . . . . . . . . . . 58
8.4 Propietats del lımit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
8.5 Lımits laterals . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
8.6 Teorema dels lımits laterals . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
8.7 Algebra de lımits infinits . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
8.8 Resolucio d’indeterminacions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
8.8.1 Expressions racionals . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
8.8.2 Resta d’arrels . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
8.8.3 Resta de logaritmes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
8.8.4 Indeterminacio 1∞. El nombre e. . . . . . . . . . . . . . . . . . . . . . . . . . 63
8.9 Continuıtat . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
8.10 Teorema (caracteritzacio de la continuıtat) . . . . . . . . . . . . . . . . . . . . . . . 63
8.11 Tipus de discontinuıtat . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
8.12 Propietats de les funcions contınues . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
3
8.13 Continuıtat de les funcions elementals . . . . . . . . . . . . . . . . . . . . . . . . . . 65
8.14 Fites, maxim i mınim d’una funcio . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
8.15 Teorema del maxim i el mınim (Weierstrass) . . . . . . . . . . . . . . . . . . . . . . . 66
8.16 Teorema de Bolzano . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
8.17 Teorema del valor mitja . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
9 Derivacio 69
9.1 Derivada d’una funcio en un punt . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
9.2 Teorema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
9.3 Calcul d’algunes derivades . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
9.4 Derivades de les funcions elementals . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
9.5 Recta tangent . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
9.6 Propietats de les funcions derivables . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
9.7 Teorema. (Regla de la cadena) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
9.8 Derivada logarıtmica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
9.9 Teorema. (Funcio inversa) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
9.10 Teorema de Rolle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
9.11 Teorema del valor mitja (Cauchy) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
9.12 Teorema del valor mitja (Lagrange) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
9.13 Regla de l’Hopital . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
9.14 Teorema de l’Hopital . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
9.15 Infinitesims . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
9.16 Teorema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
9.17 Calcul de lımits amb infinitesims . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
9.18 Infinits . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
9.19 Ordres d’infinitud . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
9.20 Metode de Newton per a la resolucio numerica d’equacions . . . . . . . . . . . . . . 79
10 Teorema de Taylor 81
10.1 Ordre de contacte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
10.2 Teorema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
10.3 Teorema de Taylor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
10.4 Formula de Taylor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
10.5 Teorema. Forma del residu de Taylor . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
10.6 Polinomi de Taylor de les funcions elementals . . . . . . . . . . . . . . . . . . . . . . 84
10.7 Propietats del polinomi de Taylor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
10.8 Calculs aproximats . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
10.9 Aplicacio al calcul de lımits . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
10.10Estudi local de funcions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
4
10.10.1Creixement i decreixement . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
10.10.2Concavitat i convexitat . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
10.10.3Teorema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
10.10.4Asımptotes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
10.11Obtencio de la grafica d’una funcio . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
11 Calcul de primitives 92
11.1 Primitives d’una funcio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
11.2 Integrals immediates . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
11.3 Integracio per canvi de variable . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
11.4 Integracio per parts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94
11.5 Integracio de funcions racionals . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
11.5.1 Reduccio del grau del numerador . . . . . . . . . . . . . . . . . . . . . . . . . 95
11.5.2 Canvi de variable . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
11.5.3 Casos basics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96
11.5.4 Descomposicio en fraccions simples . . . . . . . . . . . . . . . . . . . . . . . . 96
11.5.5 Arrels complexes multiples . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98
11.5.6 Metode d’Hermite-Ostrogradski . . . . . . . . . . . . . . . . . . . . . . . . . . 99
11.6 Integracio de funcions racionals trigonometriques . . . . . . . . . . . . . . . . . . . . 100
11.6.1 Canvi general . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
11.6.2 Formes particulars . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
11.7 Integrals irracionals . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
12 Integral de Riemann 103
12.1 Sumes de Riemann . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
12.2 Teorema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104
12.3 Integral de Riemann . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104
12.4 Teorema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105
12.5 Teorema (Condicions suficients d’integrabilitat) . . . . . . . . . . . . . . . . . . . . . 105
12.6 Teorema (Integral com lımit de sumes de Riemann) . . . . . . . . . . . . . . . . . . . 106
12.7 Propietats de la integral . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
12.8 Teorema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
12.9 Teorema fonamental del calcul . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
12.10Teorema (Integral de la derivada) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
12.11Teorema (Integracio per parts) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
12.12Teorema (Canvi de variable) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108
12.13Teorema del valor mitja per a integrals . . . . . . . . . . . . . . . . . . . . . . . . . . 108
12.14Aplicacions de la integracio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109
12.14.1Calcul d’arees planes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109
5
12.14.2Calcul de la longitud d’una corba . . . . . . . . . . . . . . . . . . . . . . . . . 110
12.14.3Calcul d’arees i volums de revolucio . . . . . . . . . . . . . . . . . . . . . . . 110
12.15Metodes numerics d’integracio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112
12.15.1Metode dels trapezis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112
12.15.2Metode de Simpson . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112
13 Integracio impropia 113
13.1 Funcions localment integrables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113
13.2 Integrals impropies de primera especie . . . . . . . . . . . . . . . . . . . . . . . . . . 113
13.3 Integrals impropies de segona especie . . . . . . . . . . . . . . . . . . . . . . . . . . . 114
13.4 Teorema (criteris de comparacio) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 115
13.5 Teorema (comparacio amb x−α) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 116
13.6 Integrals absolutament convergents . . . . . . . . . . . . . . . . . . . . . . . . . . . . 116
13.7 Teorema (convergencia absoluta) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 117
14 Series numeriques i de potencies 119
14.1 Series numeriques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 119
14.2 Teorema (condicio necessaria de convergencia) . . . . . . . . . . . . . . . . . . . . . . 119
14.3 Criteri de comparacio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 120
14.4 Comparacio per quocient . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 120
14.5 Criteri de l’arrel (Cauchy) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121
14.6 Criteri del quocient (D’Alembert) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121
14.7 Criteri integral . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122
14.8 Series alternades . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123
14.9 Convergencia absoluta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123
14.10Series de potencies . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 124
14.11Radi de convergencia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 124
14.12Derivacio i integracio de series de potencies . . . . . . . . . . . . . . . . . . . . . . . 125
14.13Series de Taylor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
14.14Exponencial complexa. Formules d’Euler . . . . . . . . . . . . . . . . . . . . . . . . 126
III Transformacio de Laplace 128
15 La transformacio de Laplace 129
15.1 Funcions objecte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 129
15.2 Transformada de Laplace . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 129
15.3 Propietats de la transformacio de Laplace . . . . . . . . . . . . . . . . . . . . . . . . 130
15.4 Funcions definides a trossos. Funcio de Heaviside . . . . . . . . . . . . . . . . . . . . 132
15.5 Inversio de la transformada . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 134
6
15.6 Aplicacio a la resolucio d’equacions diferencials lineals . . . . . . . . . . . . . . . . . 135
15.7 Funcions generalitzades. Delta de Dirac . . . . . . . . . . . . . . . . . . . . . . . . . 137
15.8 Producte de convolucio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 138
15.9 Funcio de resposta impulsional. Funcio de transferencia . . . . . . . . . . . . . . . . 139
15.10Taula de transformades . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 140
15.11Resum de propietats . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 141
IV Apendixs 142
A Binomi de Newton 143
A.1 Variacions i permutacions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 143
A.2 Combinacions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 144
A.3 Demostracio de la formula del binomi de Newton . . . . . . . . . . . . . . . . . . . . 145
B Formules trigonometriques 146
C Fites trigonometriques 148
D Funcions hiperboliques 150
7
Notacio
♦ Final d’exemple.
DEM: Inici de demostracio.
♣ Final de demostracio.
Bibliografia
Llibres de teoria
1 Bartle, R.G., Shebert, D.R. (1996) Introduccion al Analisis Matematico de una variable. 2a
ed. Limusa. ISBN: 978-968-18-5191-0.
2 Piskunov N. (2004) Calculo Diferencial e Integral - Tomo I y II. Limusa. ISBN: 9681839854.
3 Ortega Aramburu, J.M. (2002) Introduccio a l’Analisi Matematica. 2a ed. Manuals de laUniversitat Autonoma de Barcelona.
4 E. Jarauta Bragulat. (2001). Analisi Matematica d’una variable. Fonaments i aplicacions. 1ed. Barcelona: Edicions UPC. ISBN: 84-8301-516-1.
Llibres de problemes
1 Demidovich, B. (1993) Problemas y ejercicios de analisis matematico. 11a ed. Paraninfo.ISBN: 978-84-283-0049-0.
2 Aguilo, F., Barguilla, J., Garriga, E., Miralles, A. (2002) Aprenentatge de calcul. EdicionsUPC. ISBN: 848301629X.
Llibres de formules
Es imprescindible un llibre de formules i taules matematiques, per consultar propietats de funcionscom les trigonometriques, grafiques, taules, primitives, etc.
1 Spiegel, M., Liu, J., Abellanas, L. (2005) Manual de formulas y tablas de Matematica aplicada.
3a ed. Col.leccio Shaum, McGraw-Hill. ISBN: 8448198409.
2 Vodnev, V., Naumovich, A., Naumovich, N. (1995) Formulas matematicas fundamentales.
Rubinos-1860. ISBN: 84-8041-063-9.
8

Part I
Fonaments: conjunts numerics isuccessions
9
Capıtol 1
Metodes de demostracio
1.1 Logica, axiomes i teoremes
La matematica es un llenguatge formal que funciona amb les regles del metode axiomatic. Aixo es,treballem amb uns objectes primitius (que tenen un sentit intuıtiu, que no cal definir) i uns axiomes
que son enunciats o regles referits a aquests objectes. Els axiomes son enunciats que donem per certsi que, per tant, no cal demostrar. A partir d’aquı ens podem plantejar si una proposicio donadaes certa o falsa. Si es certa podem, en principi, demostrar-la fent servir els axiomes establerts i les
regles de la deduccio logica.
Per fixar un marc que ens serveixi d’exemple treballarem amb l’aritmetica dels nombres enters
i dels nombres racionals. La base axiomatica son les propietats de les operacions suma i producteque tots coneixem. En un capıtol posterior es detallaran mes aquestes questions. Ara nomes ens
interessa tenir un material basic per plantejar exemples del proces de demostracio.
Els enunciats amb que treballem son enunciats simples p com per exemple “existeixen infinitsnombres primers” o predicats p(x), es a dir, enunciats que contenen variables. Els enunciats els
anomenem tambe proposicions. Notem que un enunciat simple ha de ser cert o fals pero el valorde veritat d’un predicat depen del que valgui la variable. Per exemple, p(x) =“x es un nombre
primer”. Tenim que p(11) es cert, pero p(9) es fals. Els predicats son importants perque a travesdels quantificadors permeten construir enunciats del primer tipus. El primer quantificador es ∃ i
es llegeix com “existeix”. L’enunciat “∃x|p(x)” es llegeix “existeix algun x tal que p(x) es cert”(la barra vertical es un sımbol que denota “tal que”). Per exemple, l’enunciat “∃x|x es primer” es
cert, ja que veient que x = 5 es primer ho tenim demostrat. El segon quantificador es ∀ i es llegeixcom “per a tot”. L’enunciat “∀x, p(x)” es llegeix “per a tot x es verifica p(x)”. Per exemple, “∀x,
x es primer” es fals ja que hi ha nombres que no son primers. En canvi, “∀x, x2 ≥ 0” es cert.
Sovint, es formen enunciats combinant els dos quantificadors. Per exemple, dins dels nombresenters, “∃x|(∀y, y2 − 2y > x)” es cert, ja que es pot veure que x = −2 ho verifica. L’enunciat
“∀x, (∃y|y > x)” tambe es cert (prenent, per exemple y = x + 1).
Un altre tipus d’enunciats molt corrents son les implicacions. L’enunciat p ⇒ q on p i q son
enunciats es llegeix “p implica q” o “si p llavors q”. Sovint, la implicacio es dona entre predicats:p(x) ⇒ q(x), entenent que es valida ∀x. Per demostrar que la implicacio es certa hem de demostrar
q suposant que p es certa. Ens referim a p com la hipotesi. Per exemple, “x divisible per 6 ⇒ xdivisible per 2” es un enunciat cert. Quan tenim que p ⇒ q i q ⇒ p escrivim p ⇔ q, es a dir, p
si i nomes si q. En aquest cas diem que les proposicions p i q son equivalents, o que p es condicionecessaria (q ⇒ p) i suficient (p ⇒ q) per a q. Per exemple, es fals que “x divisible per 6 ⇔ xdivisible per 2” ja que x divisible per 2 no implica x divisible per 6 (8 es divisible per 2 pero no
10
per 6).
Un enunciat que s’arriba a demostrar dins de certa axiomatica s’anomena proposicio o teorema.
El terme lema sol fer referencia a un enunciat senzill que es demostra per utilitzar-lo despres en lademostracio mes complexa d’un altre enunciat.
No hi ha un procediment establert per demostrar teoremes. Normalment, intuım que cert
enunciat es cert. En aquest cas tenim una conjectura que es convertira en teorema si demostremque es certa (o sera refutada si demostrem que es falsa). El proces de demostracio es mes un art que
una ciencia pero les regles son implacables: nomes podem utilitzar, els axiomes, altres enunciatsque hagin estat demostrats i els procediments de la logica. En el que segueix farem una petita
classificacio de tipus de demostracio centrant-nos en exemples d’interes pel calcul infinitesimal.
1.2 Demostracio directa
Volem demostrar un enunciat del tipus A ⇒ B. Comencem per A i anem fent calculs o passos fins
arribar a B.
Exemple 1.1 Si x i y son nombres enters llavors (x+y)2 = x2 +y2+2xy i x2−y2 = (x+y)(x−y).
DEM: Apliquem les propietats de la suma i producte de nombres enters. Utilitzant les propi-
etats distributiva, associativa i commutativa (veure el capıtol sobre conjunts numerics):
(x + y)2 = (x + y)(x + y) = x(x + y) + y(x + y) = (x2 + xy) + (yx + y2) = x2 + y2 + 2xy.
(x + y)(x− y) = x(x − y) + y(x − y) = (x2 − xy) + (yx− y2) = x2 − y2.♣El resultat es valid tambe quan es tracta de nombres racionals o reals. De fet, val per qualsevolanell commutatiu. ♦
Exemple 1.2 a, b, c son catets i hipotenusa d’un triangle rectangle ⇒ c ≤ a + b.
DEM: Segons la hipotesi, pel teorema de Pitagores, c =√
a2 + b2. Llavors
c2 = a2 + b2 ≤ a2 + b2 + 2ab = (a + b)2 ⇒ c ≤ a + b.♣
(notem que s’ha utilitzat un resultat que es pot demostrar com exercici: per nombres positius,x > y ⇔ x2 > y2.) ♦
Exemple 1.3 x parell ⇒ x2 parell.
DEM: Segons la hipotesi, x es divisible per 2. Aixı, existeix un enter k tal que x = 2k. Araconsiderem x2 = (2k)2 = 4k2 = 2(2k2) amb el que veiem que x2 tambe es multiple de 2 i queda
demostrada la proposicio. ♣♦
1.3 Demostracio per contrarecıproc
Els enunciats A ⇒ B i no B ⇒ no A son equivalents. Aixı, si volem demostrar A ⇒ B tenim
l’opcio de demostrar en el seu lloc no B ⇒ no A.
Exemple 1.4 x2 parell ⇒ x parell.
DEM: Demostrarem la proposicio equivalent: x senar ⇒ x2 senar.
11

Notem que un nombre es parell si es exactament divisible per 2 (llavors x = 2k) i es senar encas contrari. En aquest segon cas el residu de la divisio nomes pot ser 1 i podem escriure x = 2k+1
(dividend igual a divisor per quocient mes residu).
Per hipotesi, existeix un enter k tal que x = 2k+1. Ara tenim que x2 = (2k+1)2 = 4k2+4k+1 =
2(2k2 + 2k) + 1. Efectivament, x2 es senar. ♣♦
1.4 Demostracio per reduccio a l’absurd
Per demostrar la proposicio A suposem que “no A” es certa i arribem a una contradiccio. Es a dir,demostrem no A ⇒ B on B es una proposicio falsa.
Exemple 1.5 No existeix cap nombre racional x tal que x2 = 2.
DEM: Suposem que existeix x racional tal que x2 = 2. Si x es racional, es pot escriure x =p
qon p i q son enters primers entre si (sense factors comuns). Es a dir, triem la fraccio de manera que
ja no es pugui simplificar. Ara tenim:
2 = x2 =
(p
q
)2
=p2
q2⇒ p2 = 2q2 ⇒ p2 parell ⇒ p parell ⇒ p = 2p1
⇒ (2p1)2 = 2q2 ⇒ q2 = 2p2
1 ⇒ q parell ⇒ q = 2q1.
Hem arribat a concloure que p i q son parells en contradiccio amb la hipotesi que no tenıem factors
comuns. Per tant, la proposicio inicial es certa.√
2 no es un nombre racional.♣♦
Exemple 1.6 Si un nombre real x verifica |x| < ε per a tot ε > 0, llavors x = 0.
DEM: Per la definicio de valor absolut sabem que |x| ≥ 0. Suposem |x| > 0. Llavors prenent
ε = |x|2 > 0 hauria de ser |x| < |x|
2 que es impossible. Aixı, la suposicio es falsa i ha de ser |x| = 0,
es a dir x = 0.♣♦
1.5 Demostracio per induccio
Tenim un predicat P (n) que depen d’un ındex natural n i volem demostrar que es cert per a tot
n ≥ n0 (tıpicament n0 val 0 o 1). Es pot comprovar que l’enunciat ∀n ≥ n0, P (n) equival a:
(1) P (n0).
(2) P (n) ⇒ P (n + 1).
Es a dir, hem de veure que el predicat es cert pel primer valor de l’ındex (condicio inicial) i que, si
val per un ındex n (hipotesi d’induccio) llavors val pel seguent, n + 1 (pas d’induccio).
Exemple 1.7 Per a tot n ≥ 1: 1 + 2 + 3 + · · ·+ n =n(n + 1)
2.
DEM:
(1) P (1) es cert ja que 1 =1(1+1)
2 .
(2) Suposem ara que 1 + 2 + · · ·+ n =n(n+1)
2 . llavors
1+2+ · · ·+(n+1) = (1+2+ · · ·+n)+(n+1) =n(n + 1)
2+(n+1) =
(n + 1)((n + 1) + 1)
2.♣
12

♦
Notem que per proposicions de demostracio complicada pot ser necessari combinar diferents
metodes de demostracio. Tambe podem tenir maneres alternatives de fer una demostracio.
Exemple 1.8 La demostracio de l’exemple 1.7, com totes les d’induccio, requereix coneixer elresultat, es a dir, la formula que volem demostrar. Que passa si no coneixem aquest resultat? En
aquest cas hem de trobar un procediment directe per arribar-hi. Veiem que aixo es possible enl’anterior exemple:
DEM: Anomenem S = 1 + 2 + 3 + · · ·+ n. Ara tenim
2S = S + S = (1 + 2 + 3 + · · ·+ n) + (1 + 2 + 3 + · · ·+ n)
= (1 + 2 + 3 + · · ·+ (n − 1) + n) + (n + (n − 1) + · · ·+ 2 + 1)
= (1 + n) + (2 + (n − 1)) + · · · ((n − 1) + 2) + (n + 1)
= (n + 1) + (n + 1) + · · ·+ (n + 1) = n(n + 1)
d’on aıllem S i tenim el resultat.♣♦
13
Capıtol 2
Conjunts
2.1 Conjunts
Les matematiques es formulen en el llenguatge de la teoria de conjunts. Els conceptes de conjunt ielement son primitius. No es defineixen sino que que s’estableixen les regles formals per utilitzar-
los. Aquestes regles responen a la idea: “un conjunt es una col.leccio d’elements”. Aixı, introduımel sımbol de pertinenca ∈ per indicar que un element pertany a un conjunt: x ∈ A, es a dir, xpertany a A o x es un element del conjunt A.
Si A te un nombre finit d’elements podem representar A simbolicament escrivint els seus ele-ments separats per comes i entre claus. Per exemple, A = {1, 2, 3} es el conjunt els unics elements
del qual son els nombres 1, 2 i 3. Podem escriure 1 ∈ A, 2 ∈ A, etc. Quan un element no pertanya un conjunt escrivim x 6∈ A. Per exemple, pel conjunt anterior, 4 6∈ A.
De manera mes general podem descriure un conjunt a traves de les propietats dels seus elements:A = {x|p(x)}, es a dir, A esta format pels x tals que es verifica la propietat p(x) (el sımbol |, barravertical, es llegeix com “tal que”). Sovint, una de les propietats que verifiquen els elements d’un
conjunt A es que tambe son elements d’un altre conjunt ja conegut B. En aquest cas escrivimA = {x ∈ B|p(x)}, es a dir, A esta format pels elements de B que verifiquen la propietat p(x). Per
exemple, si B = {1, 2, 3, 4, 5, 6, 7, 8, 9, 10} i A = {x ∈ B|x es parell} llavors A = {2, 4, 6, 8, 10}.Es convenient, tambe, l’us d’un conjunt “que no te cap element”. L’anomenem conjunt buit i
el representem pel sımbol ∅. Es defineix dient que, per a tot x, x 6∈ ∅.Entre conjunts podem considerar la relacio d’inclusio quan tots els elements d’un primer conjunt
son tambe elements d’un segon conjunt. Escrivim A ⊂ B, A esta inclos en B o A es un subconjuntde B. Per exemple, {1, 2, 3} ⊂ {1, 2, 3, 4, 5, 6, 7, 8, 9, 10}. Diem que dos conjunts son iguals, A = B,si A ⊂ B i B ⊂ A, es a dir, si tenen els mateixos elements.
2.2 Operacions entre conjunts
Hi ha algunes operacions que permeten obtenir un conjunt a partir de dos conjunts donats. Launio:
A ∪ B = {x | x ∈ A o x ∈ B}, (2.1)
la interseccio:A ∩ B = {x | x ∈ A i x ∈ B}, (2.2)
la diferencia:
A − B = {x | x ∈ A i x 6∈ B}. (2.3)
14
Per exemple, si A = {1, 2, 3} i B = {1, 3, 5}, llavors A∪B = {1, 2, 3, 5}, A∩B = {1, 3} i A−B = {2}.
2.3 Producte cartesia
Un parell ordenat es una col.leccio ordenada de dos elements: (x, y). Dos parells ordenats son iguals
si tenen el mateix primer element i el mateix segon element, es a dir, (x1, y1) = (x2, y2) si i nomessi x1 = x2 i y1 = y2. El conjunt de tots els possibles parells ordenats (x, y) on x ∈ A i y ∈ B
l’anomenem producte cartesia dels conjunts A i B, i el denotem A ×B (“A per B”). Per exemple,si A = {1, 2, 3} i B = {1, 2, 3, 4} llavors:
A × B = {(1, 1), (1, 2), (1, 3), (1, 4), (2, 1), (2, 2), (2, 3), (2, 4), (3, 1), (3, 2), (3, 3), (3, 4)}.
2.4 Relacions
El producte cartesia serveix per definir relacions entre els elements d’un mateix conjunt o de dosconjunts diferents. Entenem que el parell (x, y) representa “x esta relacionat amb y” i determinem
un cert tipus de relacio quedant-nos amb nomes els parells d’elements relacionats. Aixı, de formageneral, definim una relacio R entre elements de A i elements de B com un subconjunt R ⊂ A×B.
Exemple 2.1 Per exemple, si A = {1, 2, 3}, una possible relacio entre els seus elements es consid-
erar x1 relacionat amb x2 si x1 ≤ x2. En aquest cas R = {(1, 1), (1, 2), (1, 3), (2, 2), (2, 3), (3, 3)},subconjunt del conjunt A × A. ♦
2.5 Relacions d’ordre
Una relacio d’ordre en un conjunt A es una relacio R ⊂ A ×A (si (x, y) ∈ R escriurem x ≤ y) queverifica les seguents propietats:
(o1) Per a tot x ∈ A, x ≤ x (reflexiva.)
(o2) x ≤ y i y ≥ x ⇒ x = y (antisimetrica.)
(o3) x ≤ y i y ≤ z ⇒ x ≤ z (transitiva.)
(o4) Per a tot x, y ∈ A, x ≤ y o y ≤ x (total.)
La relacio de l’exemple anterior es d’ordre. Una relacio d’ordre diferent al mateix conjunt pot
ser R = {(1, 1), (2, 1), (2, 2), (2, 3), (3, 1), (3, 3)}.
2.6 Funcions
De especial interes es com a traves de les relacions podem definir el que es una funcio. Intuıtivament,
una funcio es una “transformacio”, es a dir, una especificacio que quines operacions hem de fer sobreun element per obtenir-ne un de nou. Per exemple podem trobar-nos havent d’elevar nombres al
quadrat. En aquest cas, considerem la transformacio “elevar al quadrat”. Per posar situacionscom aquesta en el marc de la teoria de conjunts, comencem per fixar quins valors pot prendre la
variable que transformem i anomenem A aquest conjunt. Igualment, considerem un conjunt B tal
15

que tots els possibles resultats de la transformacio hi pertanyin. Ara, si x es transforma en y podemconsiderar aixo com que hi ha un cert tipus de relacio R ⊂ A × B i (x, y) ∈ R.
Per que una relacio R ⊂ A×B representi una funcio cal que per a tot x ∈ A hi hagi un i nomesun y ∈ B tal que (x, y) ∈ R ja que hem de poder transformar tots els elements de A i el resultat
ha de ser unic.
Direm que A es el conjunt de sortida (o conjunt original) i B el conjunt d’arribada (o conjuntfinal). Si (x, y) ∈ R, escriurem y = f(x), on la lletra f representa la nostra funcio. x l’anomenem
element original i y element d’arribada. Escriurem tambe f :A → B per indicar que f es una funcioque transforma elements de A i dona resultats a B.
Per exemple, si A = {1, 2, 3} i B = {1, 2, 3, 4, 5, 6, 7, 8, 9, 10} podem considerar f :A → B ambf(x) = x2. En aquest cas, R = {(1, 1), (2, 4), (3, 9)}. Aixı, 1 = f(1), 4 = f(2), etc.
Diem, tambe, que A es el domini de la funcio (A = Dom(f)) i definim el recorregut o imatge dela funcio Img(f) com el subconjunt de B format pels elements y tals que hi ha algun x ∈ A amby = f(x). En l’exemple anterior Img(f) = {1, 4, 9}.
Podem distingir diferents tipus de funcio:
Diem que f es injectiva si y = f(x1) i y = f(x2) implica x1 = x2. Es a dir no hi ha dos elements
diferents amb la mateixa imatge. L’aplicacio de l’exemple anterior es injectiva.
Diem que f es exhaustiva si per a tot y ∈ B hi ha algun x ∈ A tal que y = f(x). Es a dir,tot element del conjunt d’arribada te algun original al conjunt de sortida. Per tant, en aquest cas
Img(f) = B. L’aplicacio de l’exemple anterior no es exhaustiva ja que, per exemple, 2 ∈ B no esimatge de cap element de A.
Diem que f es bijectiva si per a tot y ∈ B hi ha un unic x ∈ A tal que y = f(x). Es a dir, quanf es injectiva i exhaustiva a la vegada. En aquest cas, la funcio es pot invertir, es a dir, existeix
una funcio f−1 :B → A que anomenem funcio inversa de f , tal que x = f−1(y) si y = f(x).
El terme aplicacio es sinonim de funcio. Normalment, s’utilitza “funcio” quan es tracta de
conjunts numerics, i “aplicacio” en els altres casos.
Exemple 2.2 Amb A = {1, 2, 3} considerem f : A → A definida per f(x) = 7x− 3− 2x2. Es facilveure que esta ben definida ja que f(1) = 2, f(2) = 3 i f(3) = 1. Es bijectiva i la seva inversa es
la funcio definida f−1(1) = 3, f−1(2) = 1 i f−1(3) = 2. ♦
2.7 Operacions
Una operacio interna en un conjunt A consisteix en l’assignacio d’un element de A a cada parell
d’elements de A. Formalment ho descrivim com una aplicacio ? :A × A → A. Si el parell ordenat(x, y) va a parar a z, escrivim z = x ? y.
Amb aixo en fem una abstraccio i generalitzem les operacions tıpiques com la suma o el productede nombres. En el context numeric fer servir sımbols com + o · en lloc del sımbol generic ?.
Escriurem A = (A, ?) per denotar que tenim una estructura A formada pel conjunt A amb
l’operacio ?. L’algebra abstracta s’ocupa de l’estudi i classificacio de les estructures, a partir de lespropietats de les operacions. De forma general, senyalem algunes propietats d’interes que pot tenir
una operacio:
Associativa: (x ? y) ? z = x ? (y ? z), per a tot x, y, z ∈ A.
Commutativa: x ? y = y ? x, per a tot x, y ∈ A.
16

Element neutre: Existeix un element e ∈ A tal que x ? e = e ? x = x, per a tot x ∈ A.
Element invers: Per a tot x ∈ A existeix un element x−1 ∈ A, tal que x ? x−1 = x−1 ? x = e.
Si l’operacio es associativa podem escriure x ? y ? z ja que no importa com posem els parentesi.
En un context numeric l’element neutre se sol simbolitzar 0 o 1.
En ocasions un conjunt te definida mes d’una operacio. En aquest cas poden haver noves
propietats que relacionin les diverses operacions.
17

Capıtol 3
Conjunts numerics
Els nombres son el principal objecte per representar la informacio amb que descrivim la realitat.En matematiques les diferents classes de nombres es formalitzen a traves de la teoria de conjunts.
A mes, les operacions definides en aquests conjunts (les que fem habitualment entre nombres,com la suma o el producte) donen lloc a estructures. Una estructura es un conjunt amb una o
varies operacions definides, verificant-se certes propietats. L’algebra fa una abstraccio d’aquestasituacio i estudia les caracterıstiques de les estructures a partir de les propietats que verifiquen les
operacions. D’aquesta manera podem deduir resultats comuns per tots els conjunts que tinguin lamateixa estructura.
Anomenem conjunts numerics als conjunts N (nombres naturals), Z (nombres enterss),Q (nom-bres racionals), R (nombres reals) i C (nombres complexos). Podem pensar que cadascun es unaextensio que resol alguna limitacio de l’anterior. Aixı tenim:
N ⊂ Z ⊂ Q ⊂ R ⊂ C (3.1)
En la disciplina que ens ocupa, que es el calcul infinitesimal d’una variable real, el conjuntcentral es R. Un tema basic es entendre la necessitat de i la manera com es fa el pas de Q a R.
Aixo sera el contingut del proper capıtol. En aquest revisem les definicions i estructures de N, Z iQ. Els nombres complexos els tractarem en un tema posterior.
En llibres d’algebra basica es poden trobar construccions rigoroses d’aquests conjunts. Aquı
ens acontentarem amb una descripcio informal, ates que ja son coneguts.
3.1 Els nombres naturals
Els nombres naturals son els que serveixen per comptar el nombre d’elements dels conjunts finits.
N = {0, 1, 2, 3, 4, . . .} (3.2)
En ocasions, no s’inclou el 0 en N. En qualsevol cas, podem descriure N dient que te un primerelement i que per cada element hi ha un element seguent.
N es un conjunt ordenat. Te infinits elements. En aquest cas diem que es un infinit numerable
ja que els seus elements poden ser enumerats.
A N tenim dues operacions que son la suma i el producte. Ambdues son associatives i com-
mutatives amb elements neutres donats per 0 i 1 respectivament. L’absencia d’element invers (capnombre natural n verifica 2 + n = 0 o 2 · n = 1) fa que no tinguem cap estructura interessant.
18

3.2 Els nombres enters
A N, l’absencia d’invers per la suma fa que no puguem restar dos naturals qualsevol. Aquesta idea,
pero, te sentit. Ja que, per exemple, el fet de deure una quantitat el podrıem avaluar amb unnombre que sumat a aquesta quantitat dones 0. Aixo ens porta a la construccio dels enters. El que
fem es afegir als naturals l’invers per la suma de cada nombre n 6= 0 representant-lo com −n. Aixı:
Z = {. . . ,−3,−2,−1, 0, 1, 2, 3, . . .}. (3.3)
Les operacions suma (+) i producte (·) s’estenen de forma consistent amb les que tenıem a N.Per exemple, definim n · (−m) = −(n ·m), etc. Amb aixo apareix una estructura bastant rica.
(Z, +) es un grup commutatiu. Es un grup perque:
(a1) (x + y) + z = x + (y + z), per a tot x, y, z ∈ Z (la suma es associativa).
(a2) Existeix 0 ∈ Z tal que x + 0 = 0 + x = x, per a tot x ∈ Z (la suma te element neutre o zero).
(a3) Per a tot x ∈ Z existeix un element −x ∈ Z, tal que x + (−x) = (−x) + x = 0. (la suma teelement invers o simetric).
Es un grup commutatiu perque a mes es verifica:
(a4) x + y = y + x, per a tot x, y ∈ Z (la suma es commutativa).
En general, quan tenim un conjunt amb una operacio que es associativa, te element neutre i elementinvers diem que el conjunt amb l’operacio te estructura de grup. Si, a mes, es compleix a4 diem
que el grup es commutatiu o abelia.
A mes, es verifiquen les seguents propietats:
(a5) (xy)z = x(yz), per a tot x, y, z ∈ Z (el producte es associatiu).
(a6) x(y + z) = xy + xz, (x + y)z = xz + yz, per a tot x, y, z ∈ Z (propietat distributiva).
Diem, llavors, que (Z, +, ·) es un anell. Un anell es un conjunt amb dues operacions internes
que verifiquen les propietats a1 fins a6. En el nostre cas es tracta d’un anell commutatiu i unitarija que:
(a7) ∃1 ∈ Z, tal que x · 1 = 1 · x = x (el producte te element unitat).
(a8) x · y = y · x, per a tot x, y ∈ Z (el producte es commutatiu).
A Z sempre esta definida la resta que entenem com x − y = x + (−y). L’equacio x + a = b
sempre te solucio ja que x+a = b ⇒ (x+a)+(−a) = b+(−a) ⇒ x+(a+(−a)) = b−a ⇒ x = b−a.
Z es un conjunt ordenat. La relacio es defineix dient que x ≤ y si y−x ≥ 0 (entenent que z ≥ 0
equival a z ∈ N). Es una relacio d’ordre total (verifica les propietats de la seccio 2.5).
Es tambe un conjunt infinit numerable, es a dir, podem enumerar tots els seus elements. Aixo
vol dir que es possible donar una successio x1, x2, x3, . . . que recorre tots els valors del conjunt. Perexemple, podem prendre x1 = 0, x2 = 1, x3 = −1, x4 = 2, x5 = −2 . . .. Notem que l’enumeracio
no te per que ser consistent amb l’ordre, nomes dona la mesura de la infinitud del conjunt que, enaquest cas, es equivalent a la de N.
19

3.3 Els nombres racionals
Amb Z hem resolt el problema de la resta pero hi ha un problema addicional que es el de la divisio.
Es a dir, en general no existeix un element invers pel producte. No hi ha cap nombre enter quemultiplicat per 2 doni 1, l’equacio 2x = 1 no te solucio a Z. Aixo fa el conjunt Z insuficient per
mesurar distancies a l’espai. Podem considerar tots els multiples de la unitat de longitud perotambe voldrıem representar numericament les seves fraccions. Mitja unitat de mesura, etc. Aixoens porta a estendre el conjunt i definir els nombres racionals:
Q =
{p
q| p, q ∈ Z, q 6= 0
}
. (3.4)
En aquest conjunt hi tenim una relacio d’equivalencia:
p
q≡ p′
q′si pq′ − qp′ = 0.
Es a dir, entenem que dues fraccions verificant l’anterior relacio representen el mateix nombre. Perexemple, 2
3 i 46 . Podem elegir un representant canonic prenent p, q primers entre si (es a dir, no
tenen factors comuns, o la fraccio no es pot simplificar) i amb q > 0. Notem que Q conte Z ja quepodem identificar p ∈ Z amb el racional p
1 .
A Q hi tenim les operacions + i · consistents amb les de Z, definides:
p
q+
p′
q′=
pq′ + p′qqq′
,p
q· p′
q′=
p · p′q · q′ .
(Q, +, ·) verifica les propietats a1 fins a8. A mes es compleix:
(a9) Si x 6= 0, ∃x−1 ∈ Q, tal que x · x−1 = x−1 · x = 1 (el producte te element invers).
Notem que en un anell el 0 no pot tenir mai invers pel producte ja que 0 · x = 0 per a tot x (en
efecte, per la propietat distributiva, (0 + 0) · x = 0 · x + 0 · x ⇒ 0 · x = 0 · x + 0 · x i, restant 0 · x alsdos costats arribem a 0 = 0 · x). El maxim a que podem aspirar es a que tot element no nul tingui
invers pel producte. En el cas de Q aixo passa ja que qp es l’invers de p
q si p 6= 0.
Quan un conjunt verifica les propietats a1 fins a7 i a9 es diu que te estructura de cos. Si, a mes,es dona a8 diem que es un cos commutatiu.
Q es, a mes, un cos ordenat. Hi ha una relacio d’ordre definida pq ≤ p′
q′ si p′q − pq′ ≥ 0, amb els
representants triats de manera que q, q′ > 0. I aquesta relacio es compatible amb l’estructura de
cos. Aixo vol dir que a mes de les propietats o1 a o4 es verifiquen:
(o5) x ≤ y ⇒ x + z ≤ y + z.
(o6) x ≥ 0, y ≥ 0 ⇒ xy ≥ 0.
Aquesta relacio d’ordre ens permet veure els elements de Q com disposats sobre una recta. En
aquesta recta hi podem mesurar distancies fent servir el valor absolut. Es a dir, mesurem lamagnitud de cada nombre racional amb el valor positiu:
|x| =
{x si x ≥ 0
−x si x < 0
Ara podem considerar com distancia entre dos racionals d(x, y) = |x − y|. Notem que per a tot
parell de racionals r1 < r2 a distancia d el racional s = r1+r22 verifica r1 < s < r2 i queda a distancia
20
d2 de cadascun d’ells. Aixı, repetint aquest procediment, veiem que entre dos racionals diferents hiha sempre infinits racionals i que les distancies entre ells poden ser arbitrariament petites. Aixo
ens porta a visualitzar Q com omplint la recta de manera densa.
La visio anterior te algunes limitacions. Ja els deixebles de Pitagores sabien que algunes
distancies no es podem mesurar amb nombres racionals. En efecte, si considerem la diagonald’un quadrat de costat 1, tenim que la seva longitud verifica d2 = 12 + 12 = 2 pero, com hem vistal primer capıtol (exemple 1.5), no hi ha cap racional que elevat al quadrat doni 2. Pot semblar
paradoxal que en Q puguem “afinar tant com vulguem” i en canvi hi hagi longituds que no espuguin mesurar. Aquest fet te a veure amb el pas al lımit i requereix nous conceptes per poder-lo
analitzar.
Aixo ens situa en el problema de la incompletesa de Q i la necessitat de trobar un conjunt mes
gran que ho resolgui. Aquest conjunt sera el dels nombres reals, que tractarem al proper capıtol.
21
Capıtol 4
El cos dels nombres reals
Al capıtol anterior arribavem al conjunt Q com a representacio de la recta numerica pero veiemque alguns punts d’aquesta recta no eren representables per nombres racionals. En aquest capıtol
tractem la superacio d’aquest problema a traves del conjunt dels nombres reals R. L’estructurabasica que tenim es la de cos ordenat que ja es va descriure al parlar dels nombres racionals. Ara
comencarem recordant aquesta definicio, veurem les propietats basiques que te i explicarem que calafegir-li per tenir completesa. L’estructura abstracta la referim a un cos ordenat generic K. Com
veurem, K ha de contenir els racionals de manera que Q es l’exemple mınim d’aquesta estructura.
4.1 Estructura de cos ordenat
4.1.1 Estructura de cos
Considerem un conjunt K amb dues operacions internes + (suma) i · (producte). Aixo vol dir queper a cada parell d’elements x, y de K hi ha definits en K dos elements que representem com x + y
i x · y. Quan no hi hagi possibilitat de confusio escriurem xy en lloc de x · y. (K, +, ·) es un coscommutatiu totalment ordenat (cos ordenat) si es verifiquen les seguents propietats:
(c1) (x + y) + z = x + (y + z), ∀x, y, z ∈ K (la suma es associativa).
(c2) ∃0 ∈ K, tal que 0 + x = x + 0 = x, ∀x ∈ K (la suma te element neutre).
(c3) ∀x ∈ K, ∃(−x) ∈ K, tal que x + (−x) = (−x) + x = 0 (la suma te element simetric).
(c4) x + y = y + x, ∀x, y ∈ K (la suma es commutativa).
(c5) x(y + z) = xy + xz, (x + y)z = xz + yz, ∀x, y, z ∈ K (distributiva).
(c6) (xy)z = x(yz), ∀x, y, z ∈ K (el producte es associatiu).
(c7) ∃1 ∈ K, tal que x · 1 = 1 · x = x, ∀x ∈ K (el producte te element unitat).
(c8) Si x 6= 0, ∃x−1 ∈ K, tal que x · x−1 = x−1 · x = 1 (el producte te element invers).
(c9) xy = yx, ∀x, y ∈ K (el producte es commutatiu).
Notem que c1 a c3 diem que (K, +) te estructura de grup. Per c4, aquest grup es abelia. c6
a c8 diuem que (K − {0}, ·) te estructura de grup. Per c9, aquest grup es abelia (o commutatiu).La propietat distributiva c5 vincula les dues operacions. Amb totes les propietats tenim un cos. El
cos es commutatiu degut a c9.
22

4.1.2 Relacio d’ordre total
Una relacio en un conjunt es la seleccio d’una famılia de parells ordenats. El fet de triar el parell
(x, y) s’enten com representacio del fet “x esta relacionat amb y”. Aixı, una relacio d’ordre en Kes R ⊂ K × K. Si (x, y) ∈ R escriurem x ≤ y. La relacio ha de verificar:
(o1) x ≤ x (reflexiva).
(o2) x ≤ y i y ≥ x ⇒ x = y (antisimetrica).
(o3) x ≤ y i y ≤ z ⇒ x ≤ z (transitiva).
(o4) x ≤ y o y ≤ x (total).
Compatibilitat amb l’estructura de cos:
(o5) x ≤ y ⇒ x + z ≤ y + z.
(o6) 0 ≤ x, 0 ≤ y ⇒ 0 ≤ xy.
Escriurem x < y per a indicar x ≤ y i x 6= y. Podem dividir el conjunt K en nombres positiusK+ = {x | x > 0}, nombres negatius K− = {x | x < 0} i zero. Es a dir K = K+ ∪ K− ∪ {0}.
4.2 Propietats d’un cos ordenat
A partir dels axiomes anterior es facil veure que tot cos ordenat verifica certes propietats (escriuremx − y ≡ x + (−y)):
1. x · 0 = 0, ∀x ∈ K.
2. x(y − z) = xy − xz, ∀x, y, z ∈ K.
3. x(−y) = (−x)y = −xy, ∀x, y ∈ K.
4. Regla dels signes: (+) · (+) = +, (+) · (−) = (−) · (+) = −, (−) · (−) = +.
5. x ≤ y, 0 ≤ z ⇒ xz ≤ yz.
6. ∀x ∈ K, x2 ≥ 0.
7. 1 > 0.
8. x−1 te el mateix signe que x.
9. Si x, y > 0, x2 < y2 ⇒ x < y.
10. x < y ⇒ x < x+y2 < y.
DEM:
1. x · 0 = x · (0 + 0) = x · 0 + x · 0, restant x · 0 als dos costats queda demostrat.
2. xy = x(y − z + z) = x(y − z) + xz i restem xz als dos costats.
3. x(−y) = x(0− y) = x · 0− xy = −xy, (−x)y = (0 − x)y = 0 · y − xy = −xy.
4. Per o6, x > 0, y > 0 ⇒ xy > 0. x > 0, y < 0 ⇒ yx < 0 · x = 0. x < 0, y < 0 ⇒ −x > 0 ⇒ y(−x) < 0 · (−x) =0 ⇒ −xy < 0 ⇒ xy > 0.
23

5. y − x ≥ 0 d’on, per o6, (y − x)z ≥ 0, es a dir yz − xz ≥ 0.
6. Immediat a partir de la regla dels signes.
7. Ja que 1 = 12.
8. Ja que x · x−1 = 1 > 0.
9. Contrarecıproc: x ≥ y ⇒ x2 ≥ xy i xy ≥ y2 ⇒ x2 ≥ y2.
10. x < y ⇒ x + x < y + x, x + y < y + y i multipliquem els dos costats per 12. ♣
4.2.1 Valor absolut
Donat un cos ordenat K, el valor absolut es una funcio | · | : K → K+ ∪ {0} que verifica:
(a1) |x| = 0 ⇔ x = 0.
(a2) |xy| = |x| · |y|.
(a3) |x + y| ≤ |x| + |y| (desigualtat triangular).
(a4) |x| ≤ y ⇔ −y ≤ x ≤ y.
Podem prendre |x| = max{x,−x}, es a dir: |x| =
{x si x ≥ 0−x si x < 0
4.2.2 Intervals
Donat un cos ordenat, els intervals son els seguents subconjunts de K:
Interval obert: (a, b) = {x ∈ K | a < x < b}.Interval tancat: [a, b] = {x ∈ K | a ≤ x ≤ b}.Intervals mixtes. (a, b] = {x ∈ K | a < x ≤ b}, [a, b) = {x ∈ K | a ≤ x < b}.Tambe definim les semirectes: (a,∞) = {x ∈ K | x > a}, [a,∞) = {x ∈ K | x ≥ a},
(−∞, a) = {x ∈ K | x < a}, (−∞, a] = {x ∈ K | x ≤ a}.L’entorn de centre a i radi ε > 0 es l’interval (a − ε, a + ε). Notem que es pot escriure com el
conjunt {x ∈ K | |x− a| < ε}, es a dir, els punts que estan a distancia de a menor que ε.
4.2.3 Nombres racionals
El conjunt dels nombres racionals Q, definit al capıtol anterior, es un cos ordenat. Es el mınim cos
ordenat en el seguent sentit:
Tot cos ordenat “conte” Q (i, per tant, N i Z). Sigui 1 la unitat del producte en un cos ordenat
K. Com 1 > 0, 1 + 1 > 0, 1 + 1 + 1 > 0, . . .. Definim n1 = 1 + 1 + · · ·+ 1︸ ︷︷ ︸
(n)
i identifiquem aquest
nombre de K amb el natural n. Com n1 > 0, ∃n1−1. Llavors identifiquem el nombre racional mn
amb l’element de K (m1) · (n1)−1.
Ara, sabem que a Q no hi ha cap element tal que x2 = 2 tot i que voldrıem poder representar
numericament la longitud√
2.
L’anterior fet indica la insuficiencia del conjunt Q. Hi ha tres maneres equivalents de manifestarmes formalment la incompletesa de Q:
i) No tot conjunt fitat superiorment te suprem.
24

ii) No tota successio de Cauchy convergeix.
iii) No tota sequencia d’intervals encaixats te un punt comu.
En el que segueix, explicarem aquests nous conceptes i arribarem al cos ordent R.
4.3 Fites i extrems
Si K es un conjunt ordenat i A ⊂ K un subconjunt seu diem que:
• M ∈ K es una fita superior de A si x ≤ M, ∀x ∈ A.
• m ∈ K es una fita inferior de A si x ≥ m, ∀x ∈ A.
• A es fitat superiorment si admet alguna fita superior.
• A es fitat inferiorment si admet alguna fita inferior.
• A es fitat si ho es superiorment i inferiorment.
• M es maxim de A si M es fita superior i M ∈ A.
• m es mınim de A si m es fita inferior i m ∈ A.
• El suprem de A es el mınim (si existeix) del conjunt de les fites superiors de A.
• L’ınfim de A es el maxim (si existeix) del conjunt de les fites inferiors de A.
Els denotarem maxA, minA, supA, inf A. Si existeixen, son unics. Si M = maxA, llavorssup A = M . Si m = minA, llavors inf A = m.
Als seguents exemples K = Q.
Exemple 4.1 A = {x ∈ Q | x ≤ 1}.A es fitat superiorment ja que, per exemple, 2 es una fita superior. maxA = 1 ja que 1 n’es
fita superior i 1 ∈ A. El conjunt de les fites superiors es {x ∈ Q | x ≥ 1}. Aquest conjunt te unelement mınim que es 1. Aixı, sup A = 1. De fet, havent vist que A te maxim ja podıem concloure
que te suprem i aquest coincideix amb el maxim. ♦
Exemple 4.2 A = {x ∈ Q | x < 1}.A es fitat superiorment ja que, per exemple, 2 es una fita superior. El conjunt de les fites
superiors es {x ∈ Q | x ≥ 1}. Aquest conjunt te un element mınim que es 1. Aixı, sup A = 1.Notem que A no te maxim. En efecte, si hagues un maxim M , per ser M ∈ A es verificaria M < 1.
Llavors tenim (propietat 9 de l’apartat 4.2) M < M+12 < 1 amb el que l’element M+1
2 ∈ A i esmajor que M en contradiccio amb la suposicio que M es maxim. ♦
Dels dos exemples anteriors semblaria concloure’s que els conjunts fitats superiorment poden tenirmaxim o no, pero sempre tenen suprem. La idea es que si un conjunt es fitat superiorment, s’ha
d’acabar en algun punt i aquest punt el dona el suprem. El seguent exemple mostra que aixo noes aixı.
25

Exemple 4.3 B = {x ∈ Q | x > 0, x2 < 2}.B es fitat superiorment. Per la propietat 8 de l’apartat 4.2, x2 < 2 ⇒ x2 < 4 ⇒ x < 2. Aixı, 2
es fita superior. Pero B no te suprem:
DEM: El conjunt de les fites superiors es F = {x ∈ Q | x > 0, x2 > 2}. Demostrem que no te mınim
comprovant que si m ∈ F , es possible trobar ε > 0 tal que m − ε ∈ F . Aixı, suposem m2 > 2 i intentem trobar ε tal
que (m − ε)2 > 2. Tenim m2 − 2εm + ε2 > 2 d’on cal que ε < m2−22m−ε
. Nomes hem de prendre 0 < ε < m2−22m
ja quem2−22m
< m2−22m−ε
.♣ ♦
Aquest exemple mostra que a Q hi ha conjunts fitats superiorment que no tenen suprem. Hemarribat a la primera versio de la incompletesa:
A Q no tot conjunt fitat superiorment te suprem.
4.4 Successions
Si K es un conjunt, una successio a K es una aplicacio N → K. A la imatge de n la denotem an
(terme general o n-esim terme de la successio). Podem representar la successio com {an}n∈N o,mes simplement {an}.
Exemple 4.4 A Q, { 1n} es la successio 1, 1
2 , 13 , . . ..
La successio 12 , 1
4 , 18 , . . . te terme general an = 1
2n . ♦
4.4.1 Lımit
Sigui {an} una successio a Q. Diem que te lımit l si
∀ε > 0 ∃n0 ∈ N tal que n > n0 ⇒ |an − l| < ε.
Notem que el conjunt de x tals que |x − l| < ε es l’interval (l − ε, l + ε). Notem tambe que ε ∈ Q.
La definicio de lımit formalitza la idea que els punts de la successio es van acumulant al voltantdel seu lımit. Aixı, per petit que sigui ε hem de trobar un valor de l’ındex n a partir del qual tots
els termes de la successio cauen dins l’interval (l − ε, l + ε).
Escriurem liman = l o an → l i direm que la successio es convergent. Tambe s’escriu limn→∞
an = l.
Exemple 4.5 Demostrem que lim 1n = 0. Donat ε > 0 volem trobar un n0 a partir del qual 1
n < ε.
Es suficient prendre n0 > 1ε . En efecte, si n > n0 llavors n > 1
ε , d’on 1n < ε. ♦
4.4.2 Successions de Cauchy
Una successio {an} es de Cauchy si
∀ε > 0 ∃n0 ∈ N tal que n, m > n0 ⇒ |an − am| < ε.
Successio de Cauchy es aquella on la distancia entre els elements es va reduint. Aixo dona unaidea de convergencia sense fer referencia al lımit de la successio.
26

4.4.3 Proposicio
{an} convergent ⇒ {an} es de Cauchy.
DEM: Suposem liman = l. Llavors, per a tot ε > 0 hi ha un ındex n0 a partir del qual |an − l| < ε2. Ara tenim
que |an − am| = |an − l + l − am| ≤ |an − l| + |am − l| < ε2 + ε
2 = ε, si prenem n, m > n0. ♣
Resulta que a Q el recıproc no es cert. Considerem an igual a l’aproximacio a√
2 amb n
decimals. Es a dir, a1 = 1,4, a2 = 1,41, a3 = 1,414, etc. Es de Cauchy ja que, per n < m,|an−am| < 10−n < ε per n prou gran. No pot tenir lımit ja que hauria de ser (liman)2 = lima2
n = 2,
(ates que |a2n − 2| < 10−(n−1) < ε) fet que cap nombre racional verifica. Hem arribat, doncs, a la
segona versio de la incompletesa de Q:
A Q no tota successio de Cauchy convergeix.
4.5 Intervals encaixats
Si a, b ∈ Q, definim l’interval tancat [a, b] = {x ∈ Q | a ≤ x ≤ b}.Una successio d’intervals encaixats es {In}n∈N, In = [an, bn], bn ≥ an, verificant In+1 ⊂ In i, si
ln = bn − an, llavors lim ln = 0.
Com ln → 0 esperarıem que els intervals tanquin un punt de Q. Per exemple, si In = [− 1n , 1
n ] hiha un element comu a tots que es 0. No sempre es aixı. Si prenem an i bn iguals a les aproximacions
per exces i per defecte a√
2 amb n decimals, tenim que no hi ha cap racional comu a tots ells.Aquesta es la tercera versio de la incompletesa de Q.
A Q no tota sequencia d’intervals encaixats te un punt comu.
4.6 Definicio axiomatica de R
Com s’ha vist anteriorment, un cos ordenat es un conjunt K amb dues operacions + i · que verifiquenc1 a c9, i una relacio d’ordre ≤ que verifica o1 a o6. (Aixo implica l’existencia del valor absolut
verificant a1 a a4.) Tot cos ordenat “conte” Q.
Les definicions donades a Q (successions, etc.) valen per un cos ordenat. Ara els ε pertanyen
al cos.
Definicio: R es un cos ordenat que verifica el seguent axioma de completesa: Totsubconjunt no buit de R fitat superiorment te suprem.
(Es pot donar una definicio constructiva de R, per exemple, a partir de les successions de Cauchydels racionals. En aquest cas, l’axioma de completesa es converteix en una propietat demostrable.)
4.6.1 Propietat arquimediana
Un cos ordenat es arquimedia si N no hi es fitat. Es a dir, ∀a ∈ K, ∃n ∈ N, n > a. Aixo implicaque una successio de nombres racionals convergent ho segueix sent, considerada com successio a K.
DEM: Considerem una successio de nombres racionals tal que lim an = l ∈ Q. Aixo vol dir que per a tot
ε racional positiu podem trobar un ındex n0 a partir del qual |an − l| < ε. Ara volem demostrar que la successio
27

segueix sent convergent considerada dins de K , es a dir, es verifica l’anterior relacio per tot ε ∈ K positiu. Si K es
arquimedia, per a tot ε ∈ K , ε > 0 podem trobar un nombre natural ν > 1ε. Ara, com 1
ν∈ Q podem assegurar que a
partir de cert ındex |an − l| < 1ν < ε. Per tant, la successio tambe es convergent a K .♣
4.6.2 Teorema
R es arquimedia.
DEM: Si no fos arquimedia, N hi seria fitat superiorment i, per tant, existiria el suprem S = sup N. Ara,
com S es la mınima fita superior, S − 1 no pot ser fita superior i hi ha d’haver algun enter n > S − 1 d’on veiem
S < n + 1 ∈ N en contradiccio amb que S sigui el suprem. ♣
Aixı, R es una extensio de Q consistent respecte els lımits de successions. A mes, R es un coscomplet, en el sentit que es superen les propietats de incompletesa de Q. La propietat del suprem
es resol perque l’hem utilitzat com axioma en la definicio de R. Les altres propietats es resolen talcom mostren els seguents teoremes.
4.6.3 Teorema
Tota successio creixent de nombres reals fitada superiorment te lımit.
(Tota successio decreixent de nombres reals fitada inferiorment te lımit.)
DEM: Considerem an creixent i fitada superiorment. El conjunt de nombres {an} te un suprem S. Veiem
que S = liman. Donat ε > 0, S − ε no pot ser fita superior, amb el que hi ha algun element de la successio tal que
S − ε < an0 ≤ S. Ara, com la successio es creixent |an − S| < ε per n > n0. ♣
4.6.4 Teorema
A R tota successio de Cauchy es convergent (R es complet per successions).
DEM: Es pot demostrar directament a partir de l’axioma del suprem, pero hi ha una manera alternativa a
partir del teorema de Bolzano-Weierstrass que veurem mes endavant.♣
4.6.5 Teorema
A R tota successio d’intervals encaixats {In}n∈N te un unic punt comu,⋂
n
In = x0 ∈ R.
DEM: Si In = [an, bn], considerem les successions {an} i {bn}:{an} es creixent i fitada superiorment, ja que an ≤ b1,∀n.
{bn} es decreixent i fitada inferiorment, ja que a1 ≤ bn,∀n.
Aixı, existeixen els lımits a = liman i b = lim bn. Ara, com la longitud dels intervals tendeix a zero: 0 =
lim(bn −an) = lim bn − liman = b−a. Llavors a = b i denotem x0 = a = b aquest lımit comu. Ates que an ≤ x0 ≤ bn,
x0 pertany a tots els intervals In i, per tant, a la seva interseccio. Veiem que es l’unic punt amb aquesta propietat ja
que si an ≤ x ≤ bn, prenent lımits arribem a x = x0. ♣
28

4.7 Subsuccessions
Una subsuccessio de {an} es una de la forma {ani}i∈N on n1 < n2 < · · · Una subsuccessio tambe
s’anomena successio parcial.
Per exemple, la successio bn =1
2nes una subsuccessio de an =
1
n. Correspon a prendre ni = 2i.
4.7.1 Teorema
Si {an} convergeix a l, llavors tota successio parcial seva convergeix a l.
DEM: Sigui bi = ani la successio parcial. Donat ε > 0, per hipotesi, existeix m0 tal que n > m0 ⇒ |an − l| < ε.Ara notem que
i > m0 ⇒ ni > m0 ⇒ |bi − l| = |ani − l| < ε
(la primera implicacio s’obte a partir de ni ≥ i per a tot i.) Hem vist doncs que lim bi = l. ♣
Aquest resultat es pot utilitzar per demostrar que algunes successions no tenen lımit. Aixo es
fa trobant dues successions parcials amb lımit diferent.
Exemple 4.6 La successio an = (−1)n no te lımit. En efecte, considerem les dues subsuccessions
bn = a2n i cn = a2n+1. Com, per tot n, bn = 1 i cn = −1, tenim que lim bn = 1 i lim cn = −1. Aixı,an no te lımit ja que si en tingues totes les seves subsuccessions convergirien a aquest valor comu.
♦
4.7.2 Teorema de Bolzano-Weierstrass
Tota successio fitada de nombres reals te una successio parcial convergent.
DEM: Si es fitada tindrem a ≤ an ≤ b. Anomenem I1 = [a, b] i el dividim en dos subintervals [a, a+b2
] i[ a+b
2, b]. Algun d’ells, diguem-li I2, contindra infinits termes de la successio (es a dir, hi ha infinits valors de n tals
que an ∈ I2). Repetim aquest procediment obtenint una sequencia d’intervals encaixats I1 ⊃ I2 ⊃ I3 ⊃ · · · on lalongitud de In val b−a
2n−1 que te lımit 0.
Ara prenem an1 ∈ I1, an2 ∈ I2, (n2 > n1) etc. Sigui l el punt comu a tots els intervals que ens assegura el
teorema 4.6.5. Llavors la successio parcial bi = ani convergeix a l ja que, ates que tant ani com l pertanyen a Ii,
|ani − l| < b−a2i que podem fer menor que qualsevol ε > 0 prenen i prou gran. ♣
Aquest teorema permet una demostracio alternativa de la completesa dels nombres reals:
Demostracio del teorema 4.6.4
Sigui an de Cauchy.
Veiem primer que es fitada. Prenent ε = 1 tenim que existeix n0 tal que n, m > n0 ⇒ |an − am| < 1. Posemm = n0+1 d’on, per n > n0, |an−an0+1| < 1. Per la desigualtat triangular |an| ≤ |an−an0+1|+|an0+1| < 1+|an0+1|.Llavors, ∀n, |an| < max{|a1|, · · · , |an0 |, 1 + |an0+1|}.
Al ser fitada admet una subsuccessio convergent: ani → l. Per tant, existeix i0 tal que |ani − l| < ε2 per i > i0.
Al ser de Cauchy, tambe existeix n0 tal que |an − am| < ε2
per m, n > n0. Ara, prenent N = max{n0, ni0} tenim
que, per n > N , |an − l| ≤ |an − ani | + |ani − l| < ε2
+ ε2
= ε. ♣
4.8 Representacio decimal dels nombres reals
El irracionals es representen com lımit de successions. Tota successio convergent es pot considerar
com una representacio del seu lımit. Per tenir una representacio mes estandard triem una successio
29

determinada, la que correspon a l’expansio decimal del nombre.
Les expressions b-naries son sequencies de nombres naturals
a0a1 · · ·ak,ak+1ak+2 · · ·
on 0 ≤ ai < b, que representen la successio de Cauchy
An = bk(a0 + a1b−1 + a2b
−2 + · · ·+ anb−n).
(Per nombres negatius afegirem el signe menys a l’anterior expressio.) El nombre x queda repre-sentat per la successio An, x = limAn. Normalment treballem amb b = 10 (base 10). La notacio
es unica si evitem ai = b − 1, ∀i > n0 (per exemple, 0,9=1).
Exemple 4.7 Pel nombre π. k = 0, a0 = 3, a1 = 1, a2 = 4, a3 = 1, etc. A0 = 3, A1 = 3,1,A2 = 3,14, A3 = 3,141, A4 = 3,1415, etc.
π = limAn = 3,1415926535897932385 . . . ♦
Exemple 4.8 Tot i que solem treballar en base 10, cal tenir en compte que els ordinadors operenen base 2 a nivell de hardware. Igualment, la memoria dels ordinadors s’estructura en bytes (1 byte
= 8 bits) de manera que la base 8 (sistema octal) i la base 16 (sistema hexadecimal) son habitualsen contextos de programacio.
L’expressio 1,1 en base 2 seria 1 + 1 · 2−1 = 32 que es 1,5 en base 10.
El nombre decimal 12 es 14 al sistema octal (14 = 1 · 8 + 4).
El sistema hexadecimal requereix sımbols addicionals per representar les xifres entre 0 i 15.
S’utilitza A = 10, B = 114, C = 12, D = 13, E = 14 i F = 15. El nombre hexadecimal 3B es eldecimal 59 (3 · 16 + 11). ♦
4.9 Numerabilitat
Els conjunts Q i R son conjunts infinits. Notem que donats dos racionals diferents r1 < r2, el seu
punt mitja s = r1+r22 es un racional tal que r1 < s < r2. Similarment, t = r1 +
√2
2 (r2 − r1) esun irracional tal que r1 < t < r2. Amb aixo veiem que entre dos racionals hi ha infinits racionals
i irracionals. Tambe, a partir de les aproximacions decimals, podem trobar racionals a distanciaarbitrariament petita de qualsevol nombre real. Aixı deduım que tot interval de R per petit que
sigui conte infinits punts racionals (i infinits punts irracionals), de manera que Q es dens en R.
Tot i ocupar la recta real de manera densa, Q es numerable. En efecte, el nombre de racionalspq amb |p| + |q| = n es finit. Llavors podem enumerar tots els racionals numerant primer aquells
amb n = 1, despres aquells amb n = 2, etc.
El conjunt de nombres reals no es numerable ja que les sequencies decimals no ho son. Si
ho fossin, sigui la k-esima sequencia, rk = (a(k)0 , a
(k)1 , . . .), k = 1, , . . .. Ara podem construir una
successio s = (b0, b2, . . .) on bk 6= a(k)k , ∀k. Resulta que s es diferent de totes les rk en contradiccio
amb el fet que les havıem numerat totes. Una consequencia d’aquest fet es que els reals no soncodificables (no hi ha una representacio simbolica que abasti tots els nombres reals).
30
Capıtol 5
Calcul de lımits de successions
En aquest tema ens concentrarem en els aspectes practics del calcul de lımits. Les propietats sontambe valides quan treballem a Q pero aquı considerem ja que som a R de manera que tenim
assegurat que una successio monotona (creixent o decreixent) fitada te lımit i que una successio deCauchy es convergent.
Recordem que una successio {an} te lımit l si
∀ε > 0 ∃n0 ∈ N tal que n > n0 ⇒ |an − l| < ε. (5.1)
5.1 Propietats del lımit
(1) Si existeix, el lımit es unic.
(2) Diem que una successio esta fitada si el conjunt {an} ho esta. Si {an} te lımit, llavors esta
fitada.
(3) Algebra de lımits.
A partir d’unes successions se’n poden construir d’altres fent certes operacions. Definim elproducte per un escalar (λ ∈ R): λ · {an} = {λan}, la suma de successions: {an} + {bn} =
{an + bn} i el producte de successions: {an} · {bn} = {anbn}. Llavors, si existeixen els lımitsde {an} i {bn}:
a) limλ · {an} = λ lim{an}.b) lim({an} + {bn}) = lim{an} + lim{bn}.c) lim({an} · {bn}) = lim{an} lim{bn}.
d) Si an 6= 0 i liman 6= 0, llavors lim1
an=
1
liman.
(4) Si, per a n > n0, R < an < S i existeix l = liman, llavors R ≤ l ≤ S.
(5) an → a, bn → b i an ≤ bn ∀n > n0 ⇒ a ≤ b.
(6) an ≤ bn ≤ cn ∀n > n0 i existeixen liman = lim cn ⇒ lim bn existeix i val el mateix.
DEM:
(1) Suposem an → l i an → l′. Per tant, ∀ε > 0 existeixen n0, n′0 tals que |an − l| < ε
2per a n > n0 i |an − l′| < ε
2
per a n > n′0. Aixı, si prenem n > max(n0, n
′0) tenim que |l − l′| ≤ |l − an| + |an − l′| < ε
2+ ε
2= ε. Com |l − l′| < ε
per a tot ε > 0, ha de ser l = l′ (veure exemple 1.6).
31

(2) Si an → l, prenent ε = 1 tenim que existeix n0 tal que, per n > n0, |an − l| < 1. Llavors, per n > n0
|an| ≤ |an − l|+ |l| < 1 + |l|. Aixı, M = max{|a1|, |a2|, . . . , |an0 |,1 + |l|} es una fita del conjunt de tots els valors |an|.(3)
a) Si λ = 0 la igualtat es clarament certa. Si λ 6= 0, per a tot ε > 0 existeix n0 tal que, per n > n0, |an − l| < ε|λ| .
Llavors, passant |λ| a l’esquerra, |λan − λl| < ε amb el que veiem que λan tendeix a λl = λ liman.
b) Suposem an → a i bn → b. Per tant, ∀ε > 0 existeixen n0, n′0 tals que |an−a| < ε
2per a n > n0 i |bn−b| < ε
2per
a n > n′0. Si prenem n > max(n0, n
′0) tenim que |(an+bn)−(a+b)| = |(an−a)+(bn−b)| ≤ |an−a|+|bn−b| < ε
2+ ε
2= ε.
Per tant, an + bn tendeix a a + b.
c) an → a i bn → b. Aplicant la propietat (2) trobem una constant M tal que |an| < M per a tot n. Ara,donat ε > 0 podem trobar n0 tal que, per a n > n0, |an − a| < ε
M+|b|i |bn − b| < ε
M+|b|. Finalment, |anbn − ab| =
|anbn − anb + anb − ab| ≤ |an||bn − b| + |b||an − a| < M εM+|b|
+ |b| εM+|b|
= ε. Per tant, anbn tendeix a ab.
d) an → a 6= 0. Prenent ε = |a|2 , per a n prou gran sempre es |an − a| <
|a|2 . Ara apliquem la desigualtat
triangular |a| ≤ |a− an| + |an| i, denotant m = |a|2
, tenim que |an| > m a partir de cert valor de n. Ara triem n0 tal
que per n > n0, |an − a| < ε|a|m. Llavors, | 1an
− 1a| = |an−a|
|an||a|< ε|a|m
m|a|= ε. Aixı, 1
antendeix a 1
a.
(4) an → l. Si fos l > S, prenem ε = l − S i tenim que per n > n0 |an − a| < l − S. Llavors, an = l − (l − an) ≥l − |l − an| > l − (l − S) = S en contradiccio amb la fita inicial. De la mateixa manera es veu l ≥ R.
(5) Apliquem la propietat (4) a la successio an − bn i la fita S = 0.
(6) liman = lim cn = l. Donat ε > 0, a partir de cert valor de n es verifica l − ε < an i cn < l + ε, d’on
l − ε < bn < l + ε amb el que bn → l. ♣
Exemple 5.1 Ja hem vist que lim 1n = 0. Tambe es molt facil demostrar que per una successio
constant (an = c, ∀n), liman = c.
Ara, podem calcular altres lımits com:
lim1
n2= lim
1
n· 1
n= lim
1
n· lim 1
n= 0.
De fet, de manera similar a com demostravem que 1n → 0 podem demostrar que si α > 0 es un
nombre real:
lim1
nα= 0. (5.2)
(Nomes cal prendre n0 > 1/ε1α .) Aixı, per exemple:
lim1√n
= 0. (5.3)
A vegades conve reescriure l’expressio per tal de fer apareixer termes amb lımit conegut:
lim3 + 2n
3n + 5= lim
3n + 2
3 + 5n
=3 lim 1
n + 2
3 + 5 lim 1n
=2
3.
Els lımits coneguts es poden utilitzar per establir fites:
limsin n
n= 0 (5.4)
ja que −1 ≤ sin n ≤ 1, d’on − 1n ≤ sinn
n ≤ 1n i les successions dels extrems tendeixen a 0. ♦
5.2 Lımits infinits
El concepte de lımit s’esten per incloure alguns casos on no hi ha convergencia pero aixo passa
perque la magnitud dels termes de la successio va prenent valors arbitrariament grans. En aquests
32

casos direm que la successio tendeix a +∞ o a −∞. Es tracta de successions que no tenen lımit jaque no estan fitades pero les distingim d’aquelles on la divergencia es deguda a oscil.lacions o altres
comportaments.
Diem que liman = +∞ si
∀K > 0 ∃n0 tal que n > n0 ⇒ an > K. (5.5)
Diem que liman = −∞ si −an → +∞.
Quan no hi hagi possibilitat de confusio escriurem ∞ en lloc de +∞.
Exemple 5.2 limn = ∞ ja que per a tot K ∈ R hi ha algun enter n0 > K. Si prenem n > n0
llavors els termes de la successio son efectivament majors que K.
Similarment es demostra que si α > 0 es un nombre real:
limnα = ∞. ♦
5.3 Algebra de lımits infinits
El sımbol infinit es pot manipular de manera similar a un nombre entenent que aquestes relacions
expressen el resultat de prendre lımits. Per exemple, quan escrivim a + ∞ = ∞ volem dir que siuna successio an tendeix a un nombre a i una successio bn tendeix a +∞ llavors la successio an +bn
tendeix a +∞. Amb la definicio de lımit i de lımit infinit es demostren les seguents propietats:
(1) ∞ + ∞ = ∞.
(2) a + ∞ = ∞, a −∞ = −∞,a
∞ = 0,a
−∞ = 0. (Tambe son valides si en lloc de an → a es te
{an} fitada.)
(3) Si a > 0, a · ∞ = ∞, a(−∞) = −∞.
(4) Si a < 0, a · ∞ = −∞, a(−∞) = ∞.
(5) ∞ ·∞ = ∞, ∞(−∞) = −∞, (−∞)(−∞) = ∞.
(6) 10+ = ∞ on 0+ indica una successio que tendeix a 0, tal que a partir d’algun valor de l’ındexels seus termes son positius.
(7) Si a > 0, ∞a = ∞. Si b > 1, b∞ = ∞.
(8) log∞ = ∞.
Exemple 5.3 Es pot veure que, degut al caracter oscil.lant de la funcio sinus, lim sinn no existeix.Tot i aixo, el sinus es fitat (| sinn| ≤ 1) i podem donar els seguents lımits:
limsinn
n= 0,
lim(sinn + n) = ∞. ♦
33

En ocasions saber que les parts d’una expressio tenen un lımit (finits o infinits) coneguts esinsuficient per determinar el lımit de tota l’expressio. Per exemple, les successions an = n2, bn = n
i cn = n − 1 tendeixen totes a ∞. Ara, an − bn = n(n − 1) → ∞, bn − cn = 1 → 1, de manera queno es pot assignar un valor definit a ∞ − ∞. Si haguessim escrit directament an − bn = n2 − n
no podrıem assignar un resultat ja que estem restant dues successions que tendeixen a ∞. Hacalgut transformar la resta en un producte per trobar el resultat. La majoria de lımits que hemde resoldre a la practica son expressions indeterminades sobre les que s’ha de treballar per poder
determinar-ne el lımit. A aixo ho anomenem resoldre la indeterminacio.
Les principals indeterminacions son:
∞−∞,±∞±∞ , 0 · (±∞),
0
0, 1∞, ∞0, 00, . . .
A continuacio veiem com es resolen algunes indeterminacions tıpiques.
5.4 Resolucio d’indeterminacions
5.4.1 Expressions racionals
Un polinomi en n, es a dir, una expressio del tipus pknk + pk−1nk−1 + · · · + p1n + p0 on pi son
nombres reals tendeix a ±∞ segons el signe del coeficient del terme de grau mes alt pk. Per ferel lımit d’un quocient de polinomis (determinacio ∞
∞) dividim el numerador i denominador per la
potencia mes alta de n present a l’expressio. Aixı queden tot de termes amb lımit constant.
Exemple 5.4
limn2 − 2n + 3
5 − 2n2= lim
n2−2n+3n2
5−2n2
n2
= lim1 − 2
n + 3n2
5n2 − 2
=1 − 0 + 0
0 − 2= −1
2.
limn3 − 4
n − n5= lim
n3−4n5
n−n5
n5
= lim1n2 − 4
n5
1n4 − 1
=0 − 0
0 − 1= 0.
De manera mes general, es facil veure que el lımit
limpknk + pk−1n
k−1 + · · ·+ p1n + p0
qlnl + ql−1nl−1 + · · ·+ q1n + q0(5.6)
val 0 si k < l, val ±∞ si k > l i val pkqk
si k = l. ♦
Exemple 5.5 L’analisi anterior es pot utilitzar en casos on apareixen arrels. Novament es tracta
de detectar la potencia dominant i dividir numerador i denominador.
lim
√n3 + 1 + n
2n + 1= lim
√n3+1+nn3/2
2n+1n3/2
= lim
√
1 + 1n3 + 1
n1/2
2n1/2 + 1
n3/2
= lim1 + 0
0 + 0= ∞.
limn +
√n2 + 1
3√
n + 8n3= lim
n+√
n2+1n
3√n+8n3
n
= lim1 +
√
1 + 1n2
3
√1n2 + 8
= lim1 + 1
3√
8= 1. ♦
34

5.4.2 Resta d’arrels
Algunes indeterminacions del tipus ∞−∞ es resolen racionalitzant les expressions. Notem que
√A −
√B = (
√A −
√B)
√A +
√B√
A +√
B=
√A
2 −√
B2
√A +
√B
=A − B√A +
√B
. (5.7)
Exemple 5.6 L’analisi anterior es pot utilitzar en casos on apareixen arrels. Novament es tractade detectar la potencia dominant i dividir numerador i denominador.
lim(√
n2 + 5n−√
n2 − 3n + 2) = limn2 + 5n − (n2 − 3n + 2)√n2 + 5n +
√n2 − 3n + 2
= lim8n − 2√
n2 + 5n +√
n2 − 3n + 2=
lim8 − 2
n√
1 + 5n +
√
1 − 3n + 2
n2
= 4. ♦
Altres arrels es poden tractar tenint en compte que:
Xk − Y k
X − Y= Xk−1 + Xk−2Y + Xk−3Y 2 + · · ·+ XY k−2 + Y k−1. (5.8)
Aixı, donat α√
A − β√
B, prenem k com el mınim comu multiple de α i β i posem:
α√
A − β√
B =A
kα − B
kβ
Ak−1
α + Ak−2
α B1β + · · ·+ B
k−1β
(5.9)
Exemple 5.7 Prenent α = β = 3 tenim que 3√
A − 3√
B = A−B3√
A2+ 3√A 3√B+3√
B2.
lim(3√
n3 + 2n2 − 3√
n3 + n2) = limn3 + 2n2n − (n3 + n2)
(n3 + 2n2)23 + (n3 + 2n2)
13 (n3 + n2)
13 + (n3 + n2)
23
=
limn2
n2((
1 + 2n
) 23 +
(1 + 2
n
)13(1 + 1
n
) 13 +
(1 + 1
n
) 23
) =1
3. ♦
5.4.3 Indeterminacio 1∞. El nombre e.
Considerem la successio xn =(1 + 1
n
)n. Es una successio creixent, fitada superiorment.
DEM: Notem que, utilitzant el binomi de Newton
xn =
„
1 +1
n
«n
=nX
k=0
n
k
!
1
nk=
nX
k=0
1
k!
n(n − 1) · · · (n − k + 1)
nk= 1 +
nX
k=1
1
k!
„
1− 1
n
«„
1 − 2
n
«
· · ·„
1 − k − 1
n
«
.
Per tant xn ≤ 1+Pn
k=11k!
. Ara utilitzem que, per k ≥ 1, k! ≥ 2k−1 (per induccio: si k = 1, queda 1 ≥ 1; si k! ≥ 2k−1
llavors (k + 1)! = (k + 1)k! ≥ 2k! ≥ 2 · 2k−1 = 2k).
xn ≤ 1 +
nX
k=1
1
2k−1= 1 +
1 − 12n
1− 12
= 3 − 1
2n−1≤ 3.
on s’ha fet servir la suma geometrica (1 + x + x2 + · · · + xn = 1−xn+1
1−x).
Aixı, 3 es fita superior de la successio. Per veure que es creixent cal demostrar que xn+1 − xn ≥ 0:
xn+1 − xn = 1 +n+1X
k=1
1
k!
(n + 1)n(n − 1) · · · (n − k + 2)
(n + 1)k−
1 +nX
k=1
1
k!
n(n − 1) · · · (n − k + 1)
nk
!
35

≥nX
k=1
1
k!
„
(n + 1)n(n − 1) · · · (n − k + 2)
(n + 1)k− n(n − 1) · · · (n − k + 1)
nk
«
=nX
k=1
n(n − 1) · · · (n − k + 2)
k!(n + 1)k−1nk(nk − (n + 1)k−1(n − k + 1)).
Nomes falta veure que el terme de l’ultim parentesi es positiu:
nk − (n + 1)k−1(n − k + 1) = n
k − (n + 1)k + k(n + 1)k−1 = nk −
kX
l=0
k
l
!
nl + k
k−1X
l=0
k − 1
l
!
nl =
k−1X
l=0
k
k − 1
l
!
−
k
l
!!
nl = k!
k−1X
l=0
nl
l!(k − l)!(k − 1 − l) ≥ 0.♣
Per tant, la successio xn te lımit i anomenem e a aquest nombre:
lim
(
1 +1
n
)n
= e (5.10)
on e = 2,718281 . . . es un nombre irracional.
Ara, es facil demostrar que donada una successio tal que liman = ∞:
lim
(
1 +1
an
)an
= e. (5.11)
Es pot demostrar tambe que, per a tot α ∈ R
lim(
1 +α
n
)n= eα. (5.12)
De manera mes general, observant que abnn =
((
1 + 1(an−1)−1
)(an−1)−1)bn(an−1)
, tenim que, si
liman = 1 i lim bn = ∞,limabn
n = elim bn(an−1). (5.13)
Exemple 5.8
lim
(n + 3
n + 5
)n−2
= elim((n−2)(n+3n+5
−1)) = elim(−2 n+2n+5 ) = e−2. ♦
5.4.4 Un lımit trigonometric
Per qualsevol α ∈ R:
limn sinα
n= α. (5.14)
DEM: Degut a la paritat del sinus, es suficient considerar el cas α > 0. Per n prou gran, l’angle θ = αn es
troba entre 0 i π2. Es facil veure que sin θ ≤ θ ≤ tg θ (apendix C). Aixı, tenim dues relacions:
sinα
n≤ α
ntg
α
n≥ α
n
d’on traiem la relacio:α cos
α
n≤ n sin
α
n≤ α.
Com els extrems tendeixen a α, queda demostrat. ♣
36

5.4.5 Criteri d’Stolz
Considerem el calcul de lim anbn
on bn es una successio creixent amb lim bn = ∞.
Si existeix l = liman+1 − an
bn+1 − bn, llavors lim
an
bn= l.
Exemple 5.9 Si a > 1
limn
an= 0. (5.15)
En efecte, an → ∞ i:
lim(n + 1)− n
an+1 − an= lim
1
(a − 1)an= 0. ♦
Exemple 5.10
limlnn
n= 0. (5.16)
En efecte,
limln(n + 1) − ln n
(n + 1) − n= lim ln
n + 1
n= ln 1 = 0. ♦
Exemple 5.11 El criteri d’Stolz s’utilitza especialment quan el numerador consisteix en un suma-
tori. En aquest cas an+1 − an val el terme n + 1 del sumatori.
lim12 + 22 + · · ·+ n2
n3= lim
(12 + 22 + · · ·+ (n + 1)2) − (12 + 22 + · · ·+ n2)
(n + 1)3 − n3=
lim(n + 1)2
3n2 + 3n + 1=
1
3. ♦
Exemple 5.12
lim1 + 1
2 + · · ·+ 1n
ln n= lim
1n+1
ln(n + 1)− lnn= lim
1
ln(
n+1n
)n+1= 1
ja que(
n+1n
)n+1 → e i ln e = 1. ♦
5.4.6 Mitjanes aritmetiques i geometriques
A partir d’una successio an podem construir la successio de les seves mitjanes aritmetiques:
An =a1 + a2 + · · ·+ an
n(5.17)
i, si an > 0, la successio de les seves mitjanes geometriques:
Gn = n√
a1a2 · · ·an. (5.18)
Si an es convergent amb liman = l, aquestes successions son convergents amb limAn = l i limGn =l.
DEM: Pel cas de An apliquem el criteri d’Stolz i el resultat surt immediatament. Pel cas de Gn posen
limGn = lim elnGn = lime
ln a1+ln a2+···+ln ann
i apliquem Stolz a l’exponent. ♣
37

5.4.7 Arrel n-esima
Considerem el calcul de lim n√
an on an es una successio de termes positius.
Si lim anan−1
= l, llavors lim n√
an = l.
DEM: Donada la successio definida b1 = a1 i bn = an
an−1per n ≥ 2, la successio de les seves mitjanes
geometriques val n√
b1b2 · · · bn = n√
an. Ara apliquem l’apartat anterior ♣
Exemple 5.13
lim n√
n = 1 (5.19)
ja que nn−1 → 1. ♦
5.4.8 Successions recurrents
Son aquelles que es defineixen donant el primer terme i una regla per obtenir cada terme a partirde l’anterior:
x1 = a, xn+1 = f(xn), per n ≥ 1. (5.20)
on f es una funcio donada, que suposarem contınua.
Si existeix l = limxn, prenent lımits als dos costats de la relacio recursiva trobem:
l = f(l). (5.21)
Es a dir, el lımit de xn, si existeix, es un punt fix de la funcio f . El procediment es calcular aquestspunts fixos i assegurar-se que la successio es convergent (per exemple, si es creixent i fitada, etc).
Exemple 5.14 Considerem la successio definida per x1 = 1 i xn+1 = 1+xn3 , per n ≥ 1. Si es
convergent, el seu lımit sera solucio de
l =1 + l
3.
Aquesta equacio te nomes la solucio l = 12 . Podem afirmar ara que limxn = 1
2? Sı, ja que lasuccessio es fitada inferiorment i decreixent:
En efecte, xn > 0 per a tot n i
xn+1 − xn =1 + xn
3− 1 + xn−1
3=
xn − xn−1
3
de manera que el signe de les diferencies entre termes consecutius es mante. Com x2−x1 = 23 −1 =
−13 < 0 sera sempre xn+1 − xn < 0. ♦
Exemple 5.15 Per la successio definida per x1 = 2 i xn+1 = 2xn−1, per n ≥ 1, l’equacio del punt
fix es l = 2l − 1 que te la solucio l = 1. Es limxn = 1? No, ja que la successio es divergent:
x1 = 2, x2 = 3, x3 = 5, x4 = 9, x4 = 17, . . . ♦
38
Capıtol 6
Nombres complexos
6.1 El cos dels nombres complexos
Ja hem vist que R es un cos ordenat que verifica l’axioma de completesa. Molts calculs requereixentrobar arrels de polinomis, es a dir, resoldre equacions com, per exemple, x2 + 5x + 4 = 0. Com
sabem, a vegades trobem dues solucions (−1 i −4 en l’exemple anterior) pero a vegades no n’existeixcap (per exemple, x2 + 4 = 0). L’origen del problema esta en l’existencia d’arrels quadrades. Jasabem que si a < 0, no existeix cap nombre real x tal que x2 = a (ja que un quadrat sempre es no
negatiu).
Ens proposem trobar un cos commutatiu que contingui R, on tot element admeti alguna arrel
quadrada. Si es aixı, existira alguna arrel de −1. Es a dir, hi haura un element j tal que j2 = −1.Com hem dit, j 6∈ R. j es el que anomenem unitat imaginaria1.
Si hem d’arribar a un cos que contingui R i l’element j, necessariament tindrem tots els elementsde la forma a + bj on a, b ∈ R. Notem que per aquests elements, assumint les propietats del’estructura de cos, la suma i producte son tancades (no donen lloc a elements de tipus diferent):
i) (a + bj) + (a′ + b′j) = (a + a′) + (b + b′)j,
ii) (a + bj) · (a′ + b′j) = (aa′ − bb′) + (ab′ + ba′)j.
A mes, resulta que tot element no nul te invers. Veiem primer que a + bj = 0 ⇔ a = b = 0. Enefecte, b = 0 ja que si no, j = −a
b ∈ R, i a partir d’aquı, a = 0.
Notem ara que, per un complex no nul, (a + bj)(a− bj) = a2 + b2 es real i diferent de 0. Aixı,podem obtenir:
1
a + bj=
1
a + bj· a − bj
a − bj=
a − bj
a2 + b2=
a
a2 + b2− b
a2 + b2j.
Hem vist que tot element no nul te invers pel producte. Llavors el conjunt d’elements que es-
tem considerant te estructura de cos. Passem a donar una definicio formal del cos dels nombrescomplexos, C.
Definicio: Cos dels nombres complexos
C consisteix en el conjunt R2 amb dues operacions, suma (+) i producte (·) definides:
1Moltes vegades s’anomena i en lloc de j, si be en el context d’enginyeria es prefereix la j ja que els complexoss’utilitzen per representar senyals electrics i i sol designar la intensitat electrica.
39

(1) (a, b) + (a′, b′) = (a + a′, b + b′),
(2) (a, b) · (a′, b′) = (aa′ − bb′, ab′ + ba′).
A partir de les anteriors definicions podem verificar que (C, +) es un grup commutatiu amb ele-
ment neutre (0, 0) (zero) i simetric−(a, b) = (−a,−b). En quant al producte, es associatiu, commu-tatiu, hi ha element unitat, (1, 0) i tot element diferent de zero te invers (a, b)−1 = ( a
a2+b2,− b
a2+b2).
A mes, es verifica la propietat distributiva. Tenim, doncs, un cos commutatiu.
Ates que (a, 0) · (a′, 0) = (aa′, 0) podem identificar els elements de la forma (a, 0) amb els reals,aixı que escriurem a = (a, 0). Notem tambe que (0, 1)2 = (0, 1) · (0, 1) = (−1, 0). Si denotem
j = (0, 1), resulta j2 = −1.
A partir d’aquı fem el seguent canvi de notacio:
(a, b) = (a, 0) + (0, b) = (a, 0) + (b, 0) · (0, 1) = a + bj.
Representem el complex z = (a, b) com z = a + bj i anomenem aquesta expressio la seva forma
binomica. a s’anomena part real de z i b part imaginaria de z. Escrivim a = <(z), b = =(z). Elsnombres de la forma bj s’anomenen imaginaris purs.
Exemple 6.1 Considerem els complexos z1 = 1+ j i z2 = 1− 2j. Com som a un cos commutatiu,
s’ha de verificar (z1 + z2)2 = z2
1 + z22 + 2z1z2. Veiem que es aixı en aquest cas concret:
z1 + z2 = 2 − j. (z1 + z2)2 = (2 − j)2 = (2 − j) · (2 − j) = 3 − 4j.
Per altra banda, z21 = (1 + j) · (1 + j) = 2j, z2
2 = (1 − 2j) · (1 − 2j) = −3 − 4j i z1z2 =(1 + j) · (1 − 2j) = 3 − j. Llavors, z2
1 + z22 + 2z1z2 = 2j + (−3 − 4j) + 2(3 − j) = 3 − 4j. ♦
Exemple 6.2 Pels nombres de l’anterior exemple, calcular z1z2
i z2z1
. Comprovar llavors que el
producte dels dos resultats es 1.
z1
z2=
1 + j
1 − 2j=
1 + j
1 − 2j· 1 + 2j
1 + 2j=
(1 + j)(1 + 2j)
12 + 22=
−1 + 3j
5.
z2
z1=
1− 2j
1 + j=
1− 2j
1 + j· 1− j
1− j=
(1 + 2j)(1− j)
12 + 12=
−1 − 3j
2.
I, efectivament, −1+3j5 · −1−3j
2 = 1. ♦
Ja hem vis que C conte els reals. A mes, es clar que els reals negatius admeten arrels quadrades(√−4 =
√4√−1 = 2j, per exemple). De fet, tot element de C admet alguna arrel quadrada:
6.2 Teorema
Tot nombre complex admet alguna arrel quadrada.
DEM: Donat el complex a+bj, volem trobar z = x+yj tal que z2 = a+bj. Ates que (x+yj)2 = x2−y2+2xyj,s’han de verificar les dues equacions:
x2 − y2 = a
2xy = b
Aıllant, trobem x = ±q√
a2+b2+a
2i y = ± signe(b)
q√a2+b2−a
2(on hem de triar el mateix valor del doble signe per
x i y). ♣
Aquest resultat sembla suggerir que tenim un cos “millor” que R i haurıem d’abandonar elsreals en favor dels complexos. Aixo no es aixı degut a que la completesa algebraica que hem trobat
te un preu. En efecte, els complexos no admeten un ordre compatible amb l’estructura de cos.
40

DEM: Si fos aixı, com un quadrat ha de ser positiu, seria j2 = −1 > 0, es a dir, 0 > 1. Pero 1 = 12 > 0. ♣
6.3 Conjugacio
Donat el complex z = x + yj, definim el seu conjugat z = x − yj. Recordem que la part real dez es <(z) = x i la seva part imaginaria =(z) = y. Llavors, el conjugat de z es el nombre tal que
<(z) = <(z) i =(z) = −=(z). Es facil demostrar les seguents propietats. Si z, z1, z2 ∈ C:
(1) z = z.
(2) z1 + z2 = z1 + z2.
(3) z1 · z2 = z1 · z2.
(4) <(z) =z + z
2, =(z) =
z − z
2.
(5) z es real ⇔ z = z.
(6) z es imaginari pur ⇔ z = −z.
6.4 Modul
Donat el complex z = x + yj, definim el seu modul |z| = +√
x2 + y2. |z| es un nombre real nonegatiu. Verifica les seguents propietats, similars a les del valor absolut dels nombres reals:
(1) |z| = 0 ⇔ z = 0.
(2) |z1 · z2| = |z1| · |z2|.
(3) |z1 + z2| ≤ |z1|+ |z2| (desigualtat triangular).
Tambe tenim les seguents relacions
(4) |z|2 = z · z.
(5) z−1 =z
|z|2 , (z 6= 0).
DEM: (4) zz = (x + yj)(x − yj) = x2 + y2 = |z|2. (5) z−1 = 1z
= zzz
= z|z|2
.
(1) Es immediat veure |0| = 0. Ara, |z| = 0 implica zz = 0 d’on z = 0 (z = 0 es equivalent a z = 0).
(2) |z1 · z2|2 = (z1 · z2) · (z1 · z2) = (z1z1) · (z2z2) = |z1|2 · |z2|2.
(3) |z1 +z2|2 = (z1+z2) · (z1 + z2) = |z1|2+ |z2|2 +z1z2 +z2z1 = |z1|2 + |z2|2+2<(z1z2) ≤ |z1|2 + |z2|2 +2|z1z2| =
|z1|2 + |z2|2 + 2|z1| · |z2| = (|z1| + |z2|)2. (Hem utilitzat z + z = 2<(z) i <(z) ≤ |z|.) ♣
6.5 Representacio geometrica
Els nombres complexos es poden representar sobre un pla, assignant a z = x + yj el punt decoordenades (x, y). De manera analoga a la recta real, parlem del pla complex. Notem que la suma
de complexos es equivalent a la suma a R2 dels vectors corresponents, el modul d’un complex es lanorma euclıdia del seu vector, etc. Les operacions amb complexos es poden interpretar a partir de
transformacions geometriques al pla.
41

Figura 6.1: Pla complex.
6.6 Forma polar
La perspectiva geometrica de l’apartat anterior, on x i y s’interpreten com coordenades cartesianesal pla, ens presenta la possibilitat de representar el nombre complex z = x+yj a partir de les seves
coordenades polars, donades per la distancia del punt (x, y) a l’origen de coordenades: r =√
x2 + y2
i l’angle que forma el radi vector amb en semieix real positiu: θ on tg θ = yx . Notem que r es el
modul de z. θ s’anomena argument de z, arg(z). Sobre la grafica es veu facilment com depenen les
coordenades x, y de r, θ:{
x = r cos θ
y = r sin θ(6.1)
El complex z = 0 te r = 0 i θ no definit. La resta de complexos tenen r > 0 i θ definit excepte perun nombre enter de voltes. Es a dir, els nombres θ + 2kπ, k ∈ Z representen tots el mateix angle.El mes habitual es prendre θ entre −π i π o entre 0 i 2π.
La forma polar de z s’escriu rθ. A partir de (6.1) tenim la relacio entre la forma binomica i lapolar:
z = r(cos θ + j sin θ) (6.2)
Notem que l’anterior relacio ens expressa z = ru on r es un real no negatiu i u = cos θ + j sin θ es
un complex de modul 1 (|u| = 1). Aquesta separacio en una amplitud (r) i una fase (θ) ja suggereixla importancia dels nombres complexos en la descripcio de fenomens oscil.latoris.
La representacio polar es especialment adequada per operacions de tipus multiplicatiu. El motiu
es que:rθ · r′θ′ = (rr′)θ+θ′ (6.3)
rθ
r′θ′=( r
r′
)
θ−θ′(6.4)
DEM: rθ · r′θ′ = r(cos θ+ j sin θ)r′(cos θ′ + j sin θ′) = rr′(cos θ cos θ′ − sin θ sin θ′ + j(sin θ cos θ′ +cos θ sin θ′)) =rr′(cos(θ + θ′) + j sin(θ + θ′)) = (rr′)θ+θ′ .
Pel quocient, es suficient veure que: 1rθ
= 1r(cos θ+j sin θ)
= 1r(cos θ − j sin θ) = ( 1
r)−θ ♣
Exemple 6.3 Expressem els complexos z1 = j i z2 = 1+j en forma polar i calculem el seu productei quocient. Escrivim z1 = (r1)θ1 i z2 = (r2)θ2. Calculem r1 =
√02 + 12 = 1, r2 =
√12 + 12 =
√2,
cos θ1 = 01 = 0, d’on θ1 = π
2 (notem que per obtenir l’argument no es suficient coneixer una de les
42

Figura 6.2: Coordenades polars d’un nombre complex.
seves raons trigonometriques, tambe s’ha de vigilar el signe de l’altra. En aquest cas el sinus es
positiu i aixo ens descarta l’angle −π2 ). Finalment, tg θ2 = 1, θ2 = π
4 (es un complex del primerquadrant, el que exclou l’angle al tercer quadrant 5π
4 ).
Aixı, z1 = 1π2
i z2 =√
2π4. Ara calculem:
z1z2 = 1π2
√2π
4=
√2 3π
4,
z1
z2=
1π2√2π
4
=
(√2
2
)
π4
.
En forma binomica,√
23π4
=√
2(cos 3π4 + j sin 3π
4 ) =√
2(−√
22 + j
√2
2 ) = −1 + j. En efecte,
j(1 + j) = j + j2 = j − 1. Pel quocient, (√
22 )π
4=
√2
2 (cos π4 + j sin π
4 ) =√
22 (
√2
2 + j√
22 ) = 1
2 + j2 . En
efecte, j1+j = j(1−j)
12+12 = j−j2
2 = j+12 . ♦
6.7 Potencies i arrels
Donat el complex z = x + yj = rθ, el calcul de les seves potencies i arrels n-esimes es fa de maneradirecta a traves de la seva forma polar. Si, n ∈ Z:
zn = (rn)nθ (6.5)
DEM: Notem que, per potencies positives, z2 = rθ · rθ = (r · r)θ+θ = (r2)2θ i procedint d’aquesta manera,
zn = rθ · rθ · · · · · rθ = (r · r · · · · · r)θ+θ+···+θ = (rn)nθ. Per n < 0, es demostra a partir del resultat que ja hem vist:
(rθ)−1 = (r−1)−θ . ♣
Utilitzant (6.2), obtenim la formula de De Moivre:
(cos θ + j sin θ)n = cos nθ + j sinnθ (6.6)
Exemple 6.4 Calculem (1−j)7. En forma polar, (√
2−π4)7 = (
√27)− 7π
4= 8
√2π
4. Passant a forma
binomica, el resultat es 8 + 8j. ♦
43

Exemple 6.5 Trobar les relacions de l’angle doble a partir de la formula de De Moivre.
cos 2θ + j sin 2θ = (cos θ + j sin θ)2 = cos2 θ − sin2 θ + j2 sinθ cos θ
Igualant parts reals i imaginaries:
cos 2θ = cos2 θ − sin2 θ, sin 2θ = 2 sin θ cos θ.♦
Pel calcul de l’arrel n-esima de z = rθ, sigui ρα = n√
z. Llavors ha de ser (ρα)n = z, es a dir
(ρn)nα = rθ. Arribem aixı a les condicions ρn = r i nα = θ + 2kπ, k ∈ Z. Notem que ha calgutconsiderar el terme 2kπ ja que al multiplicar per n podem sortir del perıode principal. Encara que
d’entrada k pren infinits valors, nomes hem de considerar aquells que donen lloc a diferents valors(no diferint en multiples de 2π) de α. La solucio s’expressa finalment:
n√
rθ = ( n√
r) θ+2kπn
, k = 0, 1, . . . , n − 1. (6.7)
Hem demostrat doncs que tot complex no nul te n arrels n-esimes diferents. Aquestes es troben enun cercle de radi n
√r separades uniformement per un angle 2π
n .
Exemple 6.6 Calculem 3√
8j. En forma polar, 3
√
8π2.
Les arrels tindran modul 3√
8 = 2 i argumentsπ2 + 2kπ
3, k = 0, 1, 2. Les arrels son:
2π6
=√
3 + j, 2 5π6
= −√
3 + j, 2 3π2
= −2j.♦
6.8 Formules d’Euler
Si denotem u(θ) = cos θ + j sin θ, tenim que u(0) = 1 i u(θ)u(θ′) = u(θ + θ′). Aquestes propietatsson analogues a les de la funcio exponencial eλθ. Observant que la derivada amb respecte a θ esu(θ)′ = − sin θ + j cos θ = ju(θ) i (eλθ)′ = λeλθ arribem a la hipotesi2 u(θ) = ejθ. Ara la utilitzem
per justificar la seguent definicio d’exponencial d’un nombre complex. Si z = x + jy:
ez = ex+jy = ex(cos y + j sin y), (6.8)
Ara podem reescriure la forma polar:rθ = rejθ. (6.9)
L’anterior expressio ens dona la representacio exponencial dels nombres complexos. Les propietats
de l’exponencial son ben conegudes i faciliten recordar les operacions en forma polar.
Considerant r = 1 obtenim les formules d’Euler :
ejθ = cos θ + j sin θ, e−jθ = cos θ − j sin θ. (6.10)
cos θ =ejθ + e−jθ
2, sin θ =
ejθ − e−jθ
2j. (6.11)
L’exponencial complexa difereix del caracter monoton de l’exponencial real. Es periodica, fet
que podem resumir en la propietat e2πj = 1. Notem tambe la relacio remarcable eπj + 1 = 0,relacionant les constants fonamentals 0, 1, e, π i j (identitat d’Euler).
L’expressio del cosinus i el sinus com parts real i imaginaria de l’exponencial complexa converteixels calculs trigonometrics en senzilles operacions amb exponencials.
2En un capıtol posterior donarem una justificacio analıtica d’aquesta igualtat.
44

Exemple 6.7 Desenvolupar cos 5x en potencies de cosx.
cos 5x = <(e5xj) = <((exj)5) = <((cosx + j sin x)5) =
<(cos5 x + 5j cos4 x sinx − 10 cos3 x sin2 x − 10j cos2 x sin3 x + 5 cosx sin4 x + j sin5 x) =
cos5 x − 10 cos3 x sin2 x + 5 cosx sin4 x = cos5 x − 10 cos3 x(1− cos2 x) + 5 cosx(1 − cos2 x)2 =
16 cos5 x − 20 cos3 x + 5 cosx.♦
6.9 Polinomis
Considerem un cos commutatiu K. Un polinomi amb coeficients a K es una expressio del tipus:
p = a0 + a1x + a2x2 + a3x
3 + · · ·+ an−1xn−1 + anxn (6.12)
on n ∈ N i ak ∈ K per k = 0, 1, · · · , n. Diem que tenim un polinomi en una indeterminada (x).
Anomenem K[x] al conjunt dels polinomis amb coeficients al cos K. Els polinomis es podenmultiplicar i sumar tractant x com si fos una variable numerica i tenint en compte xn ·xm = xn+m.
Amb la suma i el producte K[x] adquireix estructura d’anell commutatiu unitari.
El maxim n amb an 6= 0 es el grau del polinomi. Escrivim grau(p) = n. Si n = 0 el polinomi es
redueix a una constant. Si la constant es no nul.la, el polinomi te grau 0. El polinomi 0, pero, note grau definit. Es facil demostrar que si p i q son polinomis no nuls i amb suma no nul.la:
grau(p · q) = grau(p) + grau(q), grau(p + q) ≤ max(grau(p), grau(q)). (6.13)
Un monomi es un polinomi on tots els coeficients son zero excepte un, es a dir, te la forma
p = axk. Un polinomi es monic si el coeficient de la potencia mes alta val 1.
Exemple 6.8 Treballem a R[x]. Donats els polinomis f = 2+3x−x3 i g = 1+x2 el seu producte
val h = f · g = (2 + 3x − x3)(1 + x2) = 2 + 3x + 2x2 + 2x3 − x5. El producte de dos polinomis degrau 2 i 3 respectivament te, en efecte, grau 5.
Quin grau te el polinomi f + xg? f te grau 3 i xg te grau 1 + 2 = 3. Ara, calculem f + xg =
(2+3x−x3)+x(1+x2) = 2+4x. El resultat te grau 1. Com veiem, al sumar pot haver cancel.laciode termes de manera que el grau sigui menor que el maxim dels dos graus.
Notem que el polinomi h es divisible per f i per g. En general, no tenim assegurada la divisioexacta, es a dir, R[x] no te estructura de cos. El teorema de la divisio diu que donats f i g, amb
g 6= 0 existeixen uns unics polinomis q (quocient) i r (residu) tals que f = g · q + r (r = 0 ograu(r) < grau(g)).
En el nostre cas, dividint −x3 + 3x + 2 entre x2 + 1 s’obte q = −x i r = 4x. ♦
6.10 Arrels de polinomis
A partir d’ara tractarem els casos on K es R o C.
Un polinomi, a mes d’un objecte algebraic es una funcio que assigna a cada x ∈ K el resultat
p(x) = a0 + a1x + a2x2 + · · ·+ anxn (funcio polinomica).
Diem que α ∈ K es una arrel del polinomi p si p(α) = 0. Es dona el seguent teorema:
α ∈ K es arrel de p ⇔ p es divisible per x − α.
45

DEM: Dividint p entre x − α obtenim p = (x − α)q + r on r = 0 o grau(r) = 0, es a dir, r es una constant.
Assignant a x el valor α, obtenim p(α) = r d’on surt immediatament el teorema. ♣
Per trobar arrels de polinomis disposem de formules per polinomis fins a grau 4. Per graussuperiors, o per no aplicar les complicades formules dels graus 3 i 4, hi ha metodes numerics
(aproximats).
Les arrels son la base per factoritzar polinomis. Si localitzem una arrel de p, tindrem p = (x−α)q
on grau(q) = grau(p)−1. Ara, podem prosseguir el procediment cercant arrels de q, etc. El seguentteorema diu en quina mesura podem realitzar aquesta factoritzacio. Fa referencia a polinomis a
coeficients complexos pero notem que els polinomis a coeficients reals en son un cas particular.
6.11 Teorema fonamental de l’algebra
Tot polinomi a C[x] te tantes arrels com grau te el polinomi.
Es a dir, donat p ∈ C[x] amb grau(p) = n existeix una constant λ ∈ C i n constantsα1, α2, . . . , αn ∈ C (no necessariament diferents) tals que
p = λ(x − α1)(x− α2) . . . (x− αn). (6.14)
αi, i = 1, . . . , n son les arrels de p, λ es una constant igual al coeficient del terme de maxim grau
λxn.
Si una arrel apareix repetida k vegades, diem que l’arrel te multiplicitat k. Si un polinomi de
grau n te arrels diferents α1, α2, . . . , αr ∈ C amb multiplicitats k1, k2, . . . , kr tenim que
p = λ(x− α1)k1(x − α2)
k2 . . . (x− αr)kr . (6.15)
i k1 + k2 + · · ·+ kr = n.
6.12 Factoritzacio de polinomis
El teorema anterior mostra que tot polinomi a C[x] factoritza completament amb factors de primer
grau. Que passa amb els polinomis a R[x]? Com son un cas particular de polinomis a C[x], admetenla factoritzacio en termes de primer grau, havent de passar potser al cos complex. Si volem una
factoritzacio dins de R[x] podem tenir en compte el seguent resultat:
Si α ∈ C es arrel de p ∈ R[x] llavors α tambe es arrel de p.
DEM: De les propietats de la conjugacio tenim que si p es a coeficients reals, p(α) = p(α) de manera que
p(α) = 0 implica p(α) = 0. ♣
Aixı, per polinomis a coeficients reals, les arrels complexes van per parelles. A mes
(x − α)(x − α) = x2 − 2<(α)x + |α|2 (6.16)
es un polinomi de segon grau a coeficients reals. Llavors:
Tot polinomi a coeficients reals factoritza dins dels reals amb factors de primer o segon grau.
Notem que la manera de trobar els factors de segon grau passa per trobar les arrels complexes
del polinomi.
46

Exemple 6.9 Les arrels d’un polinomi real de segon grau ax2 + bx + c venen donades per laformula:
−b ±√
b2 − 4ac
2a. (6.17)
L’expressio ∆ = b2 − 4ac s’anomena discriminant. Si ∆ > 0 tenim dues arrels reals diferents. Si
∆ = 0 tenim una arrel real doble. Si ∆ < 0 tenim dues arrels complexes conjugades.
Factoritzem a R i a C els seguents polinomis: p1 = 2x2 + 9x − 5, p2 = x2 + 2x + 2.
p1 te dues arrels reals, 12 i −5, aixı que factoritza p1 = 2(x− 1
2)(x + 5). p2 te arrels complexes,−1 ± j. A R es queda com a factor unic de segon grau. A C, p2 = (x + 1 + j)(x + 1 − j).
Considerem ara el polinomi de grau 3, p3 = x3 − 2x2 + 4x − 8. Com les arrels complexes van
per parelles, un polinomi de grau imparell ha de tenir alguna arrel real. En aquest cas per tanteigveiem que te l’arrel 2. Dividint per (x − 2) (per Ruffini, per exemple) queda x2 + 4 que te arrels
complexes ±2j. Aixı, a R, p3 = (x− 2)(x2 + 4) mentre que a C, p3 = (x − 2)(x + 2j)(x− 2j). ♦
Exemple 6.10 Un polinomi monic de grau n, p = xn + an−1xn−1 + . . . + a1x + a0 te n arrels, de
manera que p = (x − α1)(x − α2) . . . (x − αn). Analitzant el producte d’aquests n factors es facil
veure quean−1 = −(α1 + α2 + . . . + αn),
a0 = (−1)nα1 · α2 · . . . · αn.
Con les n arrels n-esimes d’un complex β son les arrels del polinomi zn − β, deduım que la suma
de les n arrels n-esimes de β val sempre zero, i el producte de totes elles val (−1)n−1β.
Per exemple, 4√−1, ates que −1 = 1π, te els valors 1π+2kπ
4, k = 0, 1, 2, 3. Es a dir, α1 = 1π
4,
α2 = 1 3π4
, α3 = 1 5π4
, α4 = 1 7π4
. En forma binomica: α1 =√
22 (1 + j), α2 =
√2
2 (−1 + j), α3 =√
22 (−1 − j), α4 =
√2
2 (1− j).
Es immediat comprovar α1 + α2 + α3 + α4 = 0 i, a partir de que α1α4 = 1 i α2α3 = 1:
α1α2α3α4 = 1, tal com ha de ser ((−1)n−1β = (−1)3(−1) = 1).
Notem que aquests quatre complexos son les arrels del polinomi x4 + 1. Aquest factoritza als
reals com producte de dos polinomis de segon grau. Un es (x−α1)(x−α4) = x2 −√
2x+1 i l’altre(x − α2)(x − α3) = x2 +
√2x + 1 (α1, α4 es una parella conjugada, a l’igual que α2, α3). Aixı,
x4 + 1 = (x2 +√
2x + 1)(x2 −√
2x + 1). ♦
47

Part II
Funcions reals. Calcul d’una variable
48
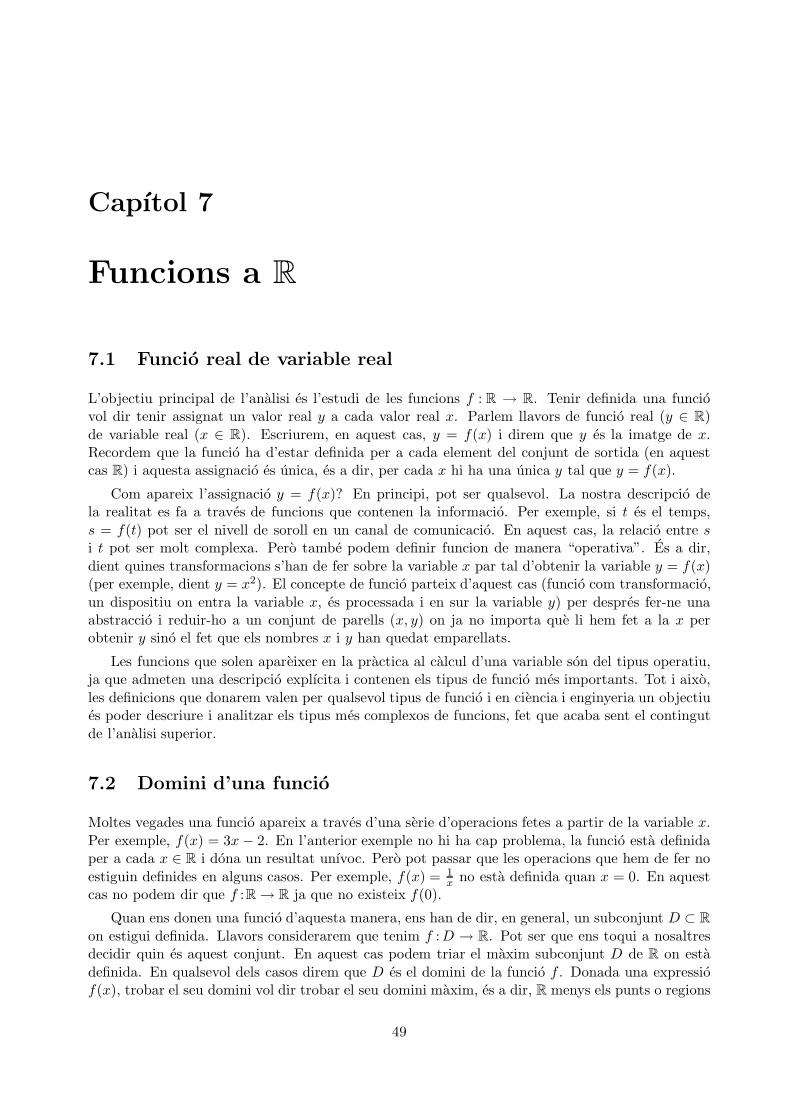
Capıtol 7
Funcions a R
7.1 Funcio real de variable real
L’objectiu principal de l’analisi es l’estudi de les funcions f : R → R. Tenir definida una funciovol dir tenir assignat un valor real y a cada valor real x. Parlem llavors de funcio real (y ∈ R)
de variable real (x ∈ R). Escriurem, en aquest cas, y = f(x) i direm que y es la imatge de x.Recordem que la funcio ha d’estar definida per a cada element del conjunt de sortida (en aquestcas R) i aquesta assignacio es unica, es a dir, per cada x hi ha una unica y tal que y = f(x).
Com apareix l’assignacio y = f(x)? En principi, pot ser qualsevol. La nostra descripcio dela realitat es fa a traves de funcions que contenen la informacio. Per exemple, si t es el temps,
s = f(t) pot ser el nivell de soroll en un canal de comunicacio. En aquest cas, la relacio entre si t pot ser molt complexa. Pero tambe podem definir funcion de manera “operativa”. Es a dir,
dient quines transformacions s’han de fer sobre la variable x par tal d’obtenir la variable y = f(x)(per exemple, dient y = x2). El concepte de funcio parteix d’aquest cas (funcio com transformacio,
un dispositiu on entra la variable x, es processada i en sur la variable y) per despres fer-ne unaabstraccio i reduir-ho a un conjunt de parells (x, y) on ja no importa que li hem fet a la x perobtenir y sino el fet que els nombres x i y han quedat emparellats.
Les funcions que solen apareixer en la practica al calcul d’una variable son del tipus operatiu,ja que admeten una descripcio explıcita i contenen els tipus de funcio mes importants. Tot i aixo,
les definicions que donarem valen per qualsevol tipus de funcio i en ciencia i enginyeria un objectiues poder descriure i analitzar els tipus mes complexos de funcions, fet que acaba sent el contingut
de l’analisi superior.
7.2 Domini d’una funcio
Moltes vegades una funcio apareix a traves d’una serie d’operacions fetes a partir de la variable x.
Per exemple, f(x) = 3x − 2. En l’anterior exemple no hi ha cap problema, la funcio esta definidaper a cada x ∈ R i dona un resultat unıvoc. Pero pot passar que les operacions que hem de fer no
estiguin definides en alguns casos. Per exemple, f(x) = 1x no esta definida quan x = 0. En aquest
cas no podem dir que f :R → R ja que no existeix f(0).
Quan ens donen una funcio d’aquesta manera, ens han de dir, en general, un subconjunt D ⊂ R
on estigui definida. Llavors considerarem que tenim f :D → R. Pot ser que ens toqui a nosaltresdecidir quin es aquest conjunt. En aquest cas podem triar el maxim subconjunt D de R on esta
definida. En qualsevol dels casos direm que D es el domini de la funcio f . Donada una expressiof(x), trobar el seu domini vol dir trobar el seu domini maxim, es a dir, R menys els punts o regions
49
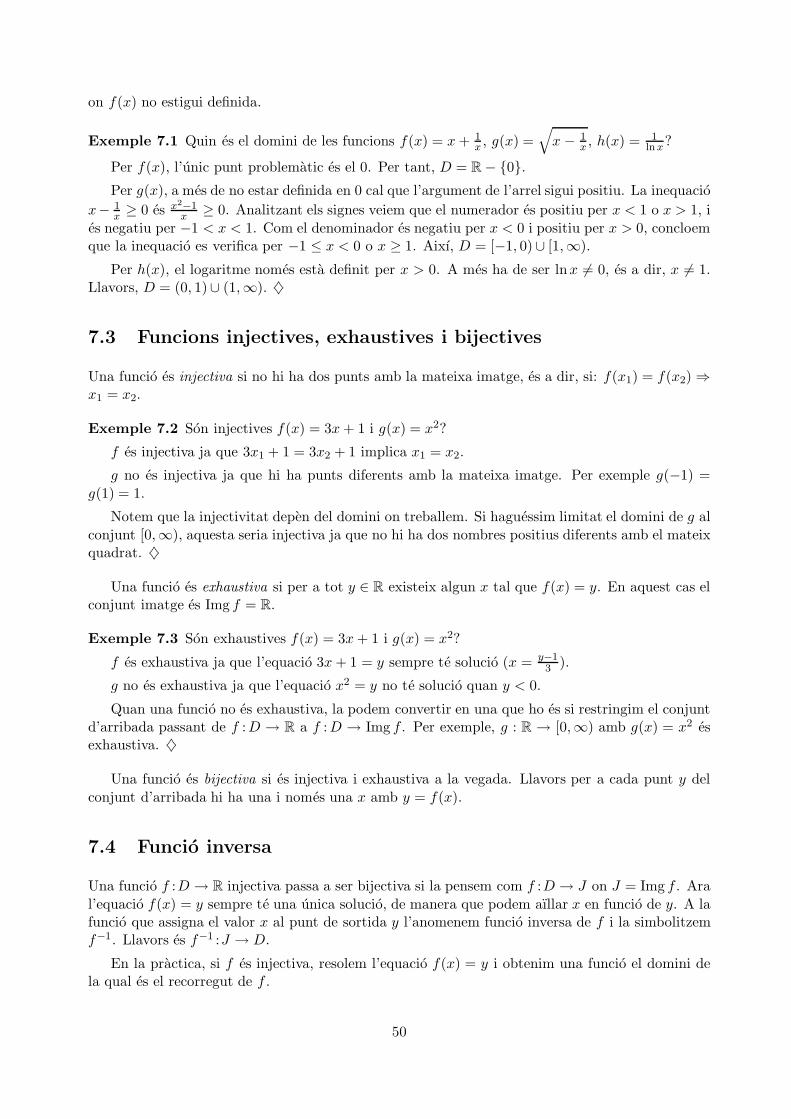
on f(x) no estigui definida.
Exemple 7.1 Quin es el domini de les funcions f(x) = x + 1x , g(x) =
√
x − 1x , h(x) = 1
lnx?
Per f(x), l’unic punt problematic es el 0. Per tant, D = R − {0}.Per g(x), a mes de no estar definida en 0 cal que l’argument de l’arrel sigui positiu. La inequacio
x− 1x ≥ 0 es x2−1
x ≥ 0. Analitzant els signes veiem que el numerador es positiu per x < 1 o x > 1, i
es negatiu per −1 < x < 1. Com el denominador es negatiu per x < 0 i positiu per x > 0, concloemque la inequacio es verifica per −1 ≤ x < 0 o x ≥ 1. Aixı, D = [−1, 0)∪ [1,∞).
Per h(x), el logaritme nomes esta definit per x > 0. A mes ha de ser lnx 6= 0, es a dir, x 6= 1.Llavors, D = (0, 1)∪ (1,∞). ♦
7.3 Funcions injectives, exhaustives i bijectives
Una funcio es injectiva si no hi ha dos punts amb la mateixa imatge, es a dir, si: f(x1) = f(x2) ⇒x1 = x2.
Exemple 7.2 Son injectives f(x) = 3x + 1 i g(x) = x2?
f es injectiva ja que 3x1 + 1 = 3x2 + 1 implica x1 = x2.
g no es injectiva ja que hi ha punts diferents amb la mateixa imatge. Per exemple g(−1) =
g(1) = 1.
Notem que la injectivitat depen del domini on treballem. Si haguessim limitat el domini de g al
conjunt [0,∞), aquesta seria injectiva ja que no hi ha dos nombres positius diferents amb el mateixquadrat. ♦
Una funcio es exhaustiva si per a tot y ∈ R existeix algun x tal que f(x) = y. En aquest cas elconjunt imatge es Img f = R.
Exemple 7.3 Son exhaustives f(x) = 3x + 1 i g(x) = x2?
f es exhaustiva ja que l’equacio 3x + 1 = y sempre te solucio (x = y−13 ).
g no es exhaustiva ja que l’equacio x2 = y no te solucio quan y < 0.
Quan una funcio no es exhaustiva, la podem convertir en una que ho es si restringim el conjuntd’arribada passant de f :D → R a f :D → Img f . Per exemple, g : R → [0,∞) amb g(x) = x2 esexhaustiva. ♦
Una funcio es bijectiva si es injectiva i exhaustiva a la vegada. Llavors per a cada punt y del
conjunt d’arribada hi ha una i nomes una x amb y = f(x).
7.4 Funcio inversa
Una funcio f :D → R injectiva passa a ser bijectiva si la pensem com f :D → J on J = Img f . Ara
l’equacio f(x) = y sempre te una unica solucio, de manera que podem aıllar x en funcio de y. A lafuncio que assigna el valor x al punt de sortida y l’anomenem funcio inversa de f i la simbolitzemf−1. Llavors es f−1 :J → D.
En la practica, si f es injectiva, resolem l’equacio f(x) = y i obtenim una funcio el domini dela qual es el recorregut de f .
50
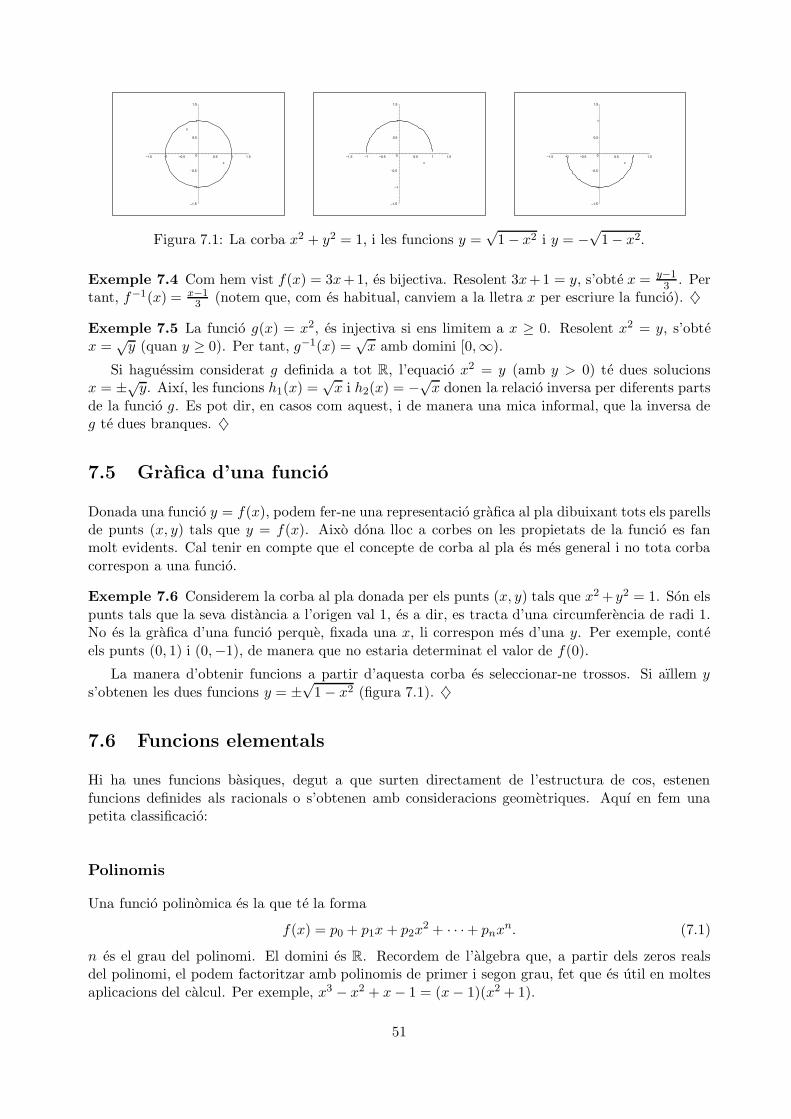
–1.5
–1
–0.5
0
0.5
1
1.5
y
–1.5 –1 –0.5 0.5 1 1.5
x
–1.5
–1
–0.5
0
0.5
1
1.5
–1.5 –1 –0.5 0.5 1 1.5
x
–1.5
–1
–0.5
0
0.5
1
1.5
–1.5 –1 –0.5 0.5 1 1.5
x
Figura 7.1: La corba x2 + y2 = 1, i les funcions y =√
1 − x2 i y = −√
1− x2.
Exemple 7.4 Com hem vist f(x) = 3x+1, es bijectiva. Resolent 3x+1 = y, s’obte x = y−13 . Per
tant, f−1(x) = x−13 (notem que, com es habitual, canviem a la lletra x per escriure la funcio). ♦
Exemple 7.5 La funcio g(x) = x2, es injectiva si ens limitem a x ≥ 0. Resolent x2 = y, s’obtex =
√y (quan y ≥ 0). Per tant, g−1(x) =
√x amb domini [0,∞).
Si haguessim considerat g definida a tot R, l’equacio x2 = y (amb y > 0) te dues solucionsx = ±√
y. Aixı, les funcions h1(x) =√
x i h2(x) = −√x donen la relacio inversa per diferents parts
de la funcio g. Es pot dir, en casos com aquest, i de manera una mica informal, que la inversa deg te dues branques. ♦
7.5 Grafica d’una funcio
Donada una funcio y = f(x), podem fer-ne una representacio grafica al pla dibuixant tots els parellsde punts (x, y) tals que y = f(x). Aixo dona lloc a corbes on les propietats de la funcio es fanmolt evidents. Cal tenir en compte que el concepte de corba al pla es mes general i no tota corba
correspon a una funcio.
Exemple 7.6 Considerem la corba al pla donada per els punts (x, y) tals que x2 +y2 = 1. Son els
punts tals que la seva distancia a l’origen val 1, es a dir, es tracta d’una circumferencia de radi 1.No es la grafica d’una funcio perque, fixada una x, li correspon mes d’una y. Per exemple, conte
els punts (0, 1) i (0,−1), de manera que no estaria determinat el valor de f(0).
La manera d’obtenir funcions a partir d’aquesta corba es seleccionar-ne trossos. Si aıllem y
s’obtenen les dues funcions y = ±√
1 − x2 (figura 7.1). ♦
7.6 Funcions elementals
Hi ha unes funcions basiques, degut a que surten directament de l’estructura de cos, estenen
funcions definides als racionals o s’obtenen amb consideracions geometriques. Aquı en fem unapetita classificacio:
Polinomis
Una funcio polinomica es la que te la forma
f(x) = p0 + p1x + p2x2 + · · ·+ pnxn. (7.1)
n es el grau del polinomi. El domini es R. Recordem de l’algebra que, a partir dels zeros realsdel polinomi, el podem factoritzar amb polinomis de primer i segon grau, fet que es util en moltes
aplicacions del calcul. Per exemple, x3 − x2 + x − 1 = (x − 1)(x2 + 1).
51
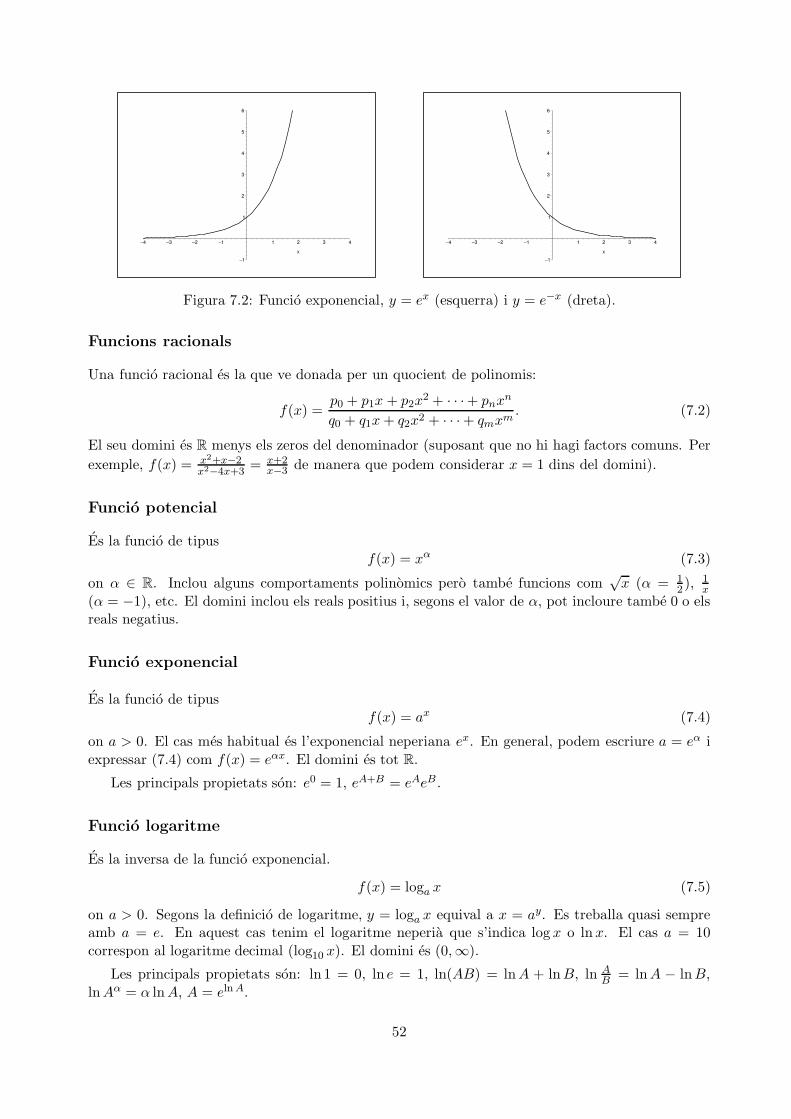
–1
1
2
3
4
5
6
–4 –3 –2 –1 1 2 3 4
x
–1
1
2
3
4
5
6
–4 –3 –2 –1 1 2 3 4
x
Figura 7.2: Funcio exponencial, y = ex (esquerra) i y = e−x (dreta).
Funcions racionals
Una funcio racional es la que ve donada per un quocient de polinomis:
f(x) =p0 + p1x + p2x
2 + · · ·+ pnxn
q0 + q1x + q2x2 + · · ·+ qmxm. (7.2)
El seu domini es R menys els zeros del denominador (suposant que no hi hagi factors comuns. Per
exemple, f(x) = x2+x−2x2−4x+3
= x+2x−3 de manera que podem considerar x = 1 dins del domini).
Funcio potencial
Es la funcio de tipusf(x) = xα (7.3)
on α ∈ R. Inclou alguns comportaments polinomics pero tambe funcions com√
x (α = 12 ), 1
x(α = −1), etc. El domini inclou els reals positius i, segons el valor de α, pot incloure tambe 0 o elsreals negatius.
Funcio exponencial
Es la funcio de tipusf(x) = ax (7.4)
on a > 0. El cas mes habitual es l’exponencial neperiana ex. En general, podem escriure a = eα i
expressar (7.4) com f(x) = eαx. El domini es tot R.
Les principals propietats son: e0 = 1, eA+B = eAeB .
Funcio logaritme
Es la inversa de la funcio exponencial.
f(x) = loga x (7.5)
on a > 0. Segons la definicio de logaritme, y = loga x equival a x = ay. Es treballa quasi sempreamb a = e. En aquest cas tenim el logaritme neperia que s’indica log x o ln x. El cas a = 10
correspon al logaritme decimal (log10 x). El domini es (0,∞).
Les principals propietats son: ln 1 = 0, ln e = 1, ln(AB) = ln A + ln B, ln AB = ln A − ln B,
ln Aα = α ln A, A = eln A.
52
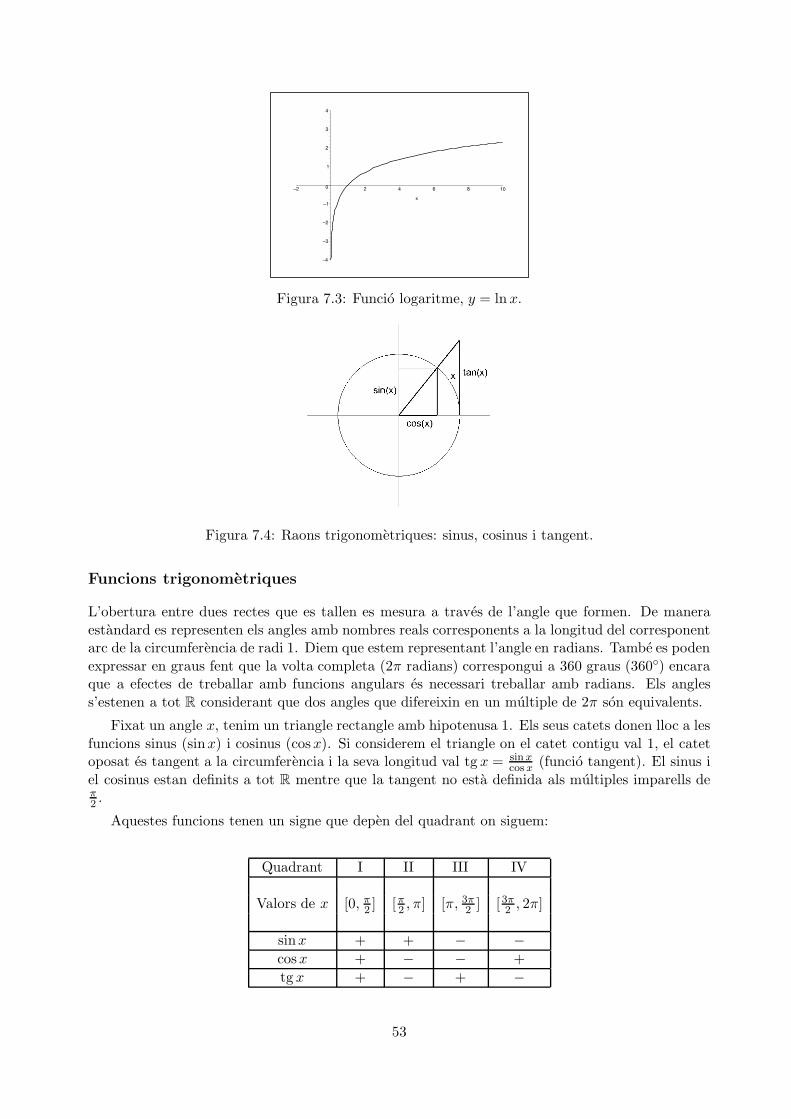
–4
–3
–2
–1
0
1
2
3
4
–2 2 4 6 8 10
x
Figura 7.3: Funcio logaritme, y = ln x.
Figura 7.4: Raons trigonometriques: sinus, cosinus i tangent.
Funcions trigonometriques
L’obertura entre dues rectes que es tallen es mesura a traves de l’angle que formen. De manera
estandard es representen els angles amb nombres reals corresponents a la longitud del corresponentarc de la circumferencia de radi 1. Diem que estem representant l’angle en radians. Tambe es poden
expressar en graus fent que la volta completa (2π radians) correspongui a 360 graus (360◦) encaraque a efectes de treballar amb funcions angulars es necessari treballar amb radians. Els angles
s’estenen a tot R considerant que dos angles que difereixin en un multiple de 2π son equivalents.
Fixat un angle x, tenim un triangle rectangle amb hipotenusa 1. Els seus catets donen lloc a les
funcions sinus (sinx) i cosinus (cosx). Si considerem el triangle on el catet contigu val 1, el catetoposat es tangent a la circumferencia i la seva longitud val tg x = sin x
cos x (funcio tangent). El sinus i
el cosinus estan definits a tot R mentre que la tangent no esta definida als multiples imparells deπ2 .
Aquestes funcions tenen un signe que depen del quadrant on siguem:
Quadrant I II III IV
Valors de x [0, π2 ] [π
2 , π] [π, 3π2 ] [ 3π
2 , 2π]
sinx + + − −cosx + − − +
tg x + − + −
53

–2
–1
0
1
2
–10 –5 5 10
x
–2
–1
0
1
2
–10 –5 5 10
x
–2
–1
0
1
2
–6 –4 –2 2 4 6
x
Figura 7.5: Funcions trigonometriques: y = sinx, y = cos x, y = tg x.
–2
–1
0
1
2
–2 –1 1 2
x
–1
0
1
2
3
4
–2 –1 1 2
x
–2
–1
0
1
2
–10 –8 –6 –4 –2 2 4 6 8 10
x
Figura 7.6: Funcions trigonometriques inverses: y = arcsinx, y = arccos x, y = arctgx.
Notem la important relacio sin2 x + cos2 x = 1. Alguns valors importants d’aquestes funcions
es donen a la taula seguent:
Graus 0 30 45 60 90 180
Radians 0 π/6 π/4 π/3 π/2 π
sinx 0 1/2√
2/2√
3/2 1 0
cos x 1√
3/2√
2/2 1/2 0 −1
tg x 0√
3/3 1√
3 ∞ 0
Funcions trigonometriques inverses
Son les inverses de les funcions anteriors: arcsinx, arccosx i arctgx. Son bijectives si triem lesbranques:
arcsin: [−1, 1] →[
−π
2,π
2
]
arccos : [−1, 1] → [0, π]
arctg: (−∞,∞) →[
−π
2,π
2
]
Notem que arcsinx + arccos x = π2 .
Funcions hiperboliques
Son el sinus hiperbolic (sinh), cosinus hiperbolic (cosh) i tangent hiperbolica (tanh) de x ∈ R:
coshx =ex + e−x
2, sinhx =
ex − e−x
2, tanhx =
sinh x
cosh x=
ex − e−x
ex + e−x. (7.6)
Es tracten amb detall en l’apendix D. Les seves inverses son:
arg coshx = ln(x+√
x2 − 1), arg sinh x = ln(x+√
x2 + 1), arg tanhx =1
2ln
(1 + x
1 − x
)
. (7.7)
54
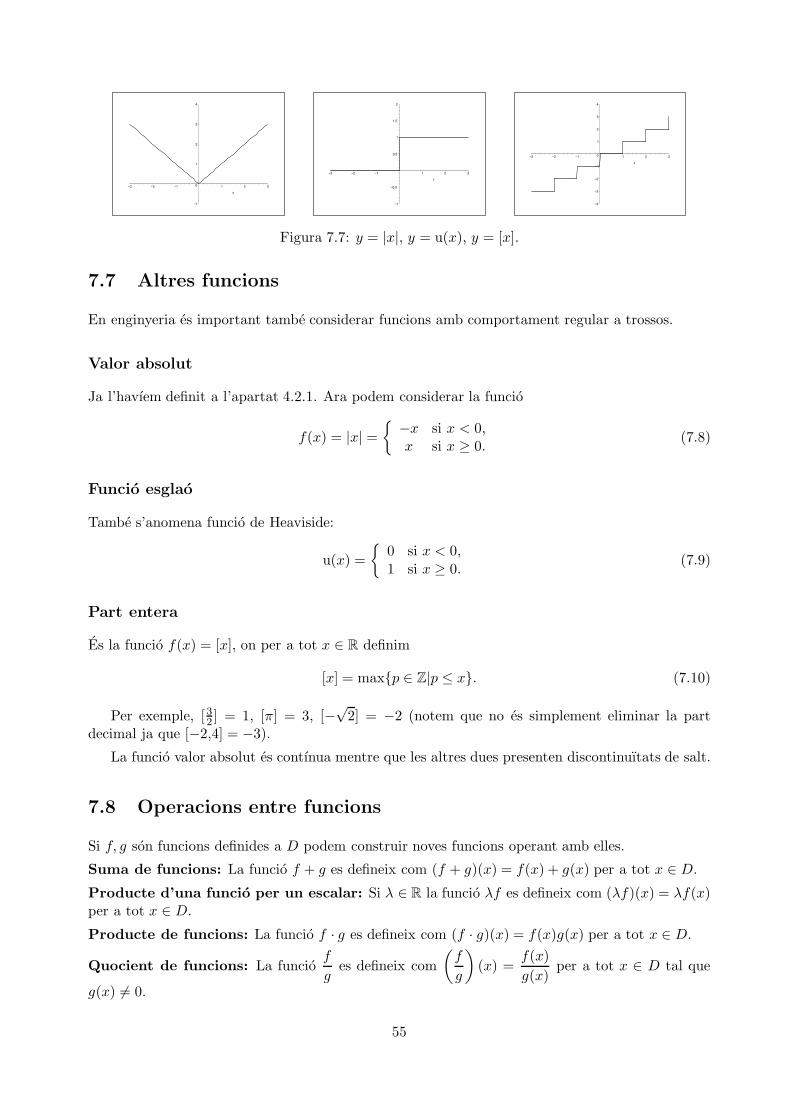
–1
0
1
2
3
4
–3 –2 –1 1 2 3
x
–1
–0.5
0.5
1
1.5
2
–3 –2 –1 1 2 3
x
–4
–3
–2
–1
0
1
2
3
4
–3 –2 –1 1 2 3
x
Figura 7.7: y = |x|, y = u(x), y = [x].
7.7 Altres funcions
En enginyeria es important tambe considerar funcions amb comportament regular a trossos.
Valor absolut
Ja l’havıem definit a l’apartat 4.2.1. Ara podem considerar la funcio
f(x) = |x| =
{−x si x < 0,x si x ≥ 0.
(7.8)
Funcio esglao
Tambe s’anomena funcio de Heaviside:
u(x) =
{0 si x < 0,
1 si x ≥ 0.(7.9)
Part entera
Es la funcio f(x) = [x], on per a tot x ∈ R definim
[x] = max{p ∈ Z|p ≤ x}. (7.10)
Per exemple, [ 32 ] = 1, [π] = 3, [−√
2] = −2 (notem que no es simplement eliminar la partdecimal ja que [−2,4] = −3).
La funcio valor absolut es contınua mentre que les altres dues presenten discontinuıtats de salt.
7.8 Operacions entre funcions
Si f, g son funcions definides a D podem construir noves funcions operant amb elles.
Suma de funcions: La funcio f + g es defineix com (f + g)(x) = f(x) + g(x) per a tot x ∈ D.
Producte d’una funcio per un escalar: Si λ ∈ R la funcio λf es defineix com (λf)(x) = λf(x)per a tot x ∈ D.
Producte de funcions: La funcio f · g es defineix com (f · g)(x) = f(x)g(x) per a tot x ∈ D.
Quocient de funcions: La funciof
ges defineix com
(f
g
)
(x) =f(x)
g(x)per a tot x ∈ D tal que
g(x) 6= 0.
55

Composicio de funcions:
Donades g :D → J i f :J → K, on D, J, K son subconjunts de R, es defineix la funcio composiciof ◦ g :D → K com (f ◦ g)(x) = f(g(x)). Notem que, en general, el que cal es que el recorregut de
g estigui inclos al domini de f
Exemple 7.7 Si f(x) = x2, i g(x) = sinx, llavors (f ◦ g)(x) = sin2 x i (g ◦ f)(x) = sin x2. ♦
La funcio identitat es I(x) = x per a tot x ∈ R. Podem limitar-la a un subconjunt D: ID :D →D. Es evident que sempre es verifica f ◦ I = I ◦ f = f . O, amb mes precisio sobre els dominis, si
f :D → J llavors f ◦ ID = IJ ◦ f = f Tambe, si f :D → J admet funcio inversa f−1 :J → D llavorsf ◦ f−1 = IJ i f−1 ◦ f = ID.
A traves de les funcions elementals i de les anteriors operacions obtenim una extensa classe de
funcions sobre les quals solem treballar en els problemes. Cal tenir en compte, pero, que no totafuncio es pot expressar combinant funcions elementals amb un nombre finit de les operacions ante-
riors. Aquesta limitacio la trobem quan, per exemple, calculem una funcio inversa pero l’equaciono es pot resoldre en forma analıtica tot i que la solucio existeix. Hem d’entendre que una funcio
queda perfectament definida si tenim un procediment per calcular la imatge de qualsevol punt ambla precisio decimal que vulguem.
Exemple 7.8 f(x) = x + x5 es bijectiva a R. Per tant, l’equacio y = x + x5 dona una relacio
x = f−1(y) ben definida encara que no la puguem expressar combinant funcions elementals. Aixono es tant limitador com pot semblar ja que disposem de metodes numerics per, donat un valor
de y, resoldre l’equacio amb tants decimals com calguin. Despres de tot, avaluar una funcio basicacom el sinus en un punt donat (sin 1, per exemple) tambe requereix un tractament numeric. ♦
7.9 Simetries d’una funcio
Un fet que simplifica l’estudi d’una funcio es que aquesta posseeixi alguna simetria. Aixo vol dirque la funcio es invariant sota certa transformacio. Tambe pot donar-se que la funcio no sigui
invariant pero tingui un comportament determinat al fer la transformacio. Les transformacionsque ens interessen son la paritat, que transforma f(x) en f(−x), i les translacions, que transformen
f(x) en f(x − a) on a es un nombre fixat.
Funcions parelles i imparelles
Diem que f es parella si f(−x) = f(x) per a tot x del seu domini (que ha de ser R o un conjunton si hi ha un punt x tambe hi ha −x).
Diem que f es imparella si f(−x) = −f(x) per a tot x del seu domini (que ha de ser R o unconjunt on si hi ha un punt x tambe hi ha −x).
Exemple 7.9 f(x) = x2 + x4 es parella ja que f(−x) = (−x)2 + (−x)4 = x2 + x4.
g(x) = x + x5 es imparella ja que f(−x) = (−x) + (−x)5 = −x − x5 = −(x + x5).
h(x) = x + x4 no es parella ni imparella. En aquest cas diem que no te paritat definida.
Son parelles: Les funcions on nomes apareixen potencies parelles de x (per exemple, sin(1+x2),1
1+x4 ). Les funcions |x|, cos x, etc.
Son imparelles: Els polinomis on nomes apareixen potencies imparelles de x (per exemple,
2x − x3)). Les funcions sin x, tgx, etc. ♦
56
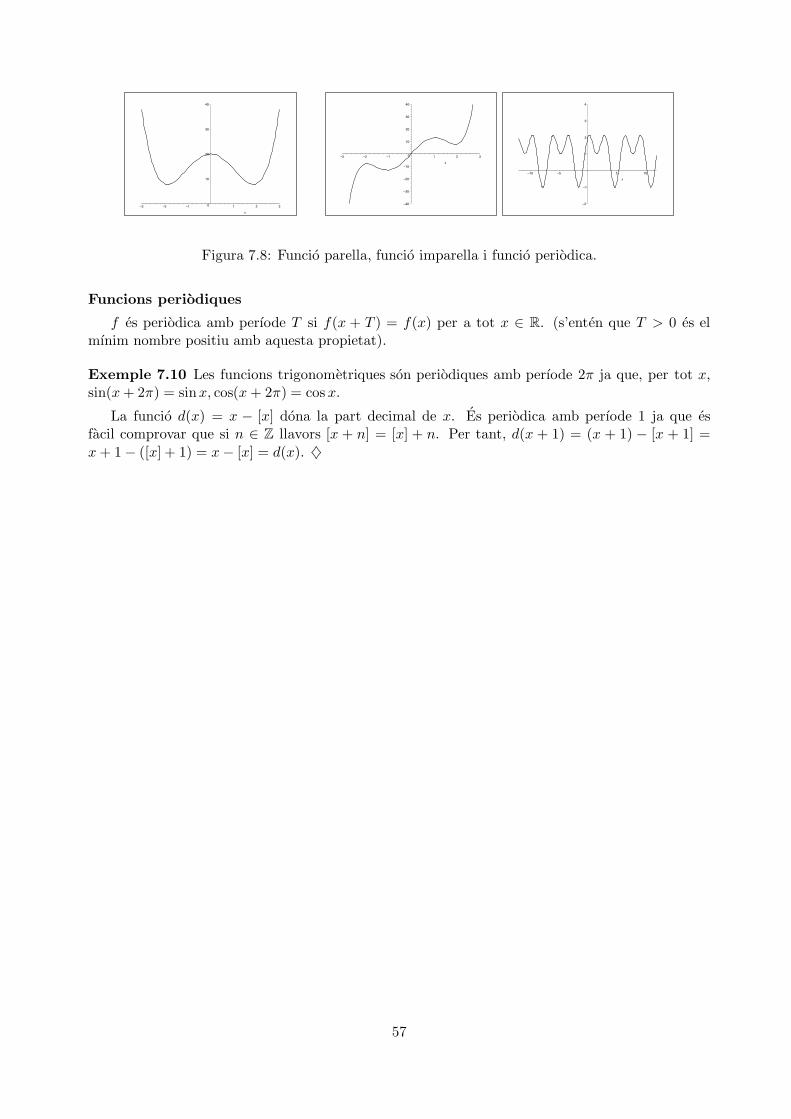
0
10
20
30
40
–3 –2 –1 1 2 3
x
–40
–30
–20
–10
0
10
20
30
40
–3 –2 –1 1 2 3
x
–2
–1
1
2
3
4
–10 –5 5 10
x
Figura 7.8: Funcio parella, funcio imparella i funcio periodica.
Funcions periodiques
f es periodica amb perıode T si f(x + T ) = f(x) per a tot x ∈ R. (s’enten que T > 0 es elmınim nombre positiu amb aquesta propietat).
Exemple 7.10 Les funcions trigonometriques son periodiques amb perıode 2π ja que, per tot x,sin(x + 2π) = sinx, cos(x + 2π) = cos x.
La funcio d(x) = x − [x] dona la part decimal de x. Es periodica amb perıode 1 ja que esfacil comprovar que si n ∈ Z llavors [x + n] = [x] + n. Per tant, d(x + 1) = (x + 1) − [x + 1] =
x + 1 − ([x] + 1) = x − [x] = d(x). ♦
57

Capıtol 8
Lımit i continuıtat de funcions
Considerem f : D → R on D ⊂ R es el domini de la funcio f . Diem que a ∈ R es un puntd’acumulacio de D si tot entorn de a conte infinits punts de D. O, alternativament, si existeix una
successio xn → a amb xn ∈ D, xn 6= a. Notem que no es necessari que a ∈ D. Aixı, per exemple, 0i 1 son punts d’acumulacio de l’interval (0, 1).
8.1 Definicio de lımit
Donada f definida en D i a punt d’acumulacio de D, diem que limx→a
f(x) = l si
∀ε > 0 ∃δ > 0 tal que x ∈ D, 0 < |x − a| < δ ⇒ |f(x)− l| < ε. (8.1)
8.2 Teorema (lımit per successions)
limx→a
f(x) = l ⇐⇒ Tota successio xn → a amb xn ∈ D, xn 6= a es tal que f(xn) → l.
DEM:
⇒)
Donat ε > 0, ∃δ > 0 tal que 0 < |x − a| < δ ⇒ |f(x) − l| < ε. Ara, com xn → a existeix n0 tal que per n > n0
|xn − a| < δ i, per tant, |f(xn) − l| < ε.
⇐)
Si no fos limx→a
f(x) = l tindrıem que ∃ε tal que ∀n existeix xn ∈ D amb 0 < |x − a| < 1n i |f(xn) − l| ≥ ε. Aixı,
hem construıt una successio tal que xn → a pero f(xn) 6→ l. ♣
Exemple 8.1 Considerem la funcio constant f(x) = c per a tot x ∈ R. Donat a ∈ R i xn → a,
tenim que f(xn) = c → c. Per tant, per a tot a, limx→a
c = c.
Ara, sigui la funcio identitat f(x) = x. Donat a ∈ R i xn → a, tenim que f(xn) = xn → a. Pertant, per a tot a, lim
x→ax = a. ♦
8.3 Lımits infinits i en l’infinit. Definicions
(1) limx→a
f(x) = ∞ si ∀K > 0 ∃δ > 0 tal que x ∈ D, 0 < |x − a| < δ ⇒ f(x) > K.
(2) limx→a
f(x) = −∞ si ∀K < 0 ∃δ > 0 tal que x ∈ D, 0 < |x − a| < δ ⇒ f(x) < K.
58

(3) limx→∞
f(x) = l si ∀ε > 0 ∃K tal que x ∈ D, x > K ⇒ |f(x)− l| < ε.
(4) limx→−∞
f(x) = l si ∀ε > 0 ∃K tal que x ∈ D, x < K ⇒ |f(x)− l| < ε.
(5) limx→∞
f(x) = ∞ si ∀M > 0 ∃K tal que x ∈ D, x > K ⇒ f(x) > M.
En els lımits impropis (x → ±∞) suposem que existeixen successions xn amb xn ∈ D tals quexn → ±∞.
Exemple 8.2 limx→∞
sin x no existeix. Les successions xn = 2πn i yn = π2 + 2πn tendeixen a infinit
pero f(xn) = 0 → 0 mentre que f(yn) = 1 → 1. ♦
8.4 Propietats del lımit
Pel teorema 8.2, les propietats dels lımits de successions es traslladen als de funcions. En el que
segueix f, g, h son funcions definides a D i λ ∈ R.
(1) El lımit es unic.
(2) Si limx→a
f(x) = l1 i limx→a
g(x) = l2, llavors:
limx→a
(f + g)(x) = l1 + l2, limx→a
(λf)(x) = λl1, limx→a
(f · g)(x) = l1l2, limx→a
(f
g
)
(x) =l1l2
(si l2 6= 0).
(3) Si f(x) ≤ g(x) llavors l1 ≤ l2. Si per x ∈ D f(x) ≤ g(x) ≤ h(x) i limx→a
f(x) = limx→a
h(x) = l
llavors limx→a
g(x) existeix i val l.
(4) Si limx→a
f(x) = l, existeix un entorn U de a tal que f esta fitada en U ∩ D.
DEM: (1), (2) i (3) s’obtenen facilment de les corresponents propietats per lımits de successions (apartat
5.1). Per provar (4), prenent ε = 1 existeix un entorn U de radi δ tal que, si x ∈ U ∩ D, |f(x) − l| < 1. Llavors,
|f(x)| ≤ |f(x) − l| + |l| < 1 + l. ♣
Exemple 8.3 Partint de l’exemple 8.1 i les propietats anteriors, son immediats els seguents lımits:
limx→1
(x3 − 2x2 + 3) = 12 − 2 · 12 + 3 = 2.
limx→0
1 + 2x2
1 + 3x + x3=
1 + 2 · 02
1 + 3 · 0 + 03= 1. ♦
Exemple 8.4 Notem quelimx→0
|x| = 0. (8.2)
En efecte, si xn → 0 llavors ||xn| − 0| = |xn| → 0 (notem que segons (5.1) es equivalent xn → 0 a
|xn| → 0).
Com hem vist a 5.4.4, sinx ≤ x per 0 ≤ x < π2 . Raonant sobre els signes es facil establir
−|x| ≤ sinx ≤ |x| per −π2 < x < π
2 . D’aquı surt, per l’anterior propietat (3) que
limx→0
sin x = 0.
I, tenint en compte que cos x = 1 − 2 sin2 x2 ,
limx→0
cosx = 1. ♦
59

Exemple 8.5 El seguent lımit es un resultat important:
limx→0
sin x
x= 1. (8.3)
En efecte, tal com veien a l’apartat 5.4.4, sinx ≤ x ≤ tg x per 0 ≤ x < π2 d’on surt l’afitacio
cos x ≤ sin xx ≤ 1 per −π
2 < x < π2 . Veient que els extrems tendeixen a 1, queda demostrat (8.3). ♦
8.5 Lımits laterals
Lımit per la dreta: Donada f definida en D i a punt d’acumulacio de D ∩ (a,∞), diem que
limx→a+
f(x) = l si
∀ε > 0 ∃δ > 0 tal que x ∈ D, x > a, 0 < |x − a| < δ ⇒ |f(x)− l| < ε. (8.4)
De manera analoga es defineix el lımit per l’esquerra limx→a−
f(x) prenent x < a.
8.6 Teorema dels lımits laterals
limx→a
f(x) = l ⇐⇒ limx→a+
f(x), limx→a−
f(x) existeixen i valen l.
DEM: A (8.1) tenim que per a tot ε > 0 podem trobar δ > 0 tal que si a − δ < x < a + δ i x 6= a llavors|f(x) − l| < ε.
Aixı, |f(x) − l| < ε es verifica per a < x < a + δ i per a − δ < x < a que son les condicions que apareixen als
lımits laterals per la dreta i l’esquerra respectivament. ♣
Exemple 8.6 Considerem limx→0
[x]. Notem que, al voltant de 0, [x] val 0 si x ≥ 0 i val −1 si x < 0.
Per tant:lim
x→0+[x] = 0, lim
x→0−[x] = −1. (8.5)
Com els lımits laterals son diferents, limx→0
[x] no existeix. ♦
8.7 Algebra de lımits infinits
Als apartats anteriors s’ha vist com calcular alguns lımits senzills. Les coses son mes complicades
quan intervenen infinits en els lımits. Per alguns casos tenim propietats que ens donen facilmentel resultat. Aixo es veu en aquest apartat. Quan no podem aplicar aquestes propietats parlem
d’indeterminacions. No hi ha un metode general per resoldre-les pero hi ha una serie de casos meshabituals que sabem tractar i es descriuen en el seguent apartat. En capıtols posteriors veurem
altres tecniques per resoldre indeterminacions (l’Hopital, infinitesims, etc).
El sımbol infinit es pot manipular de manera similar a un nombre entenent que aquestes relacionsexpressen el resultat de prendre lımits. Per exemple, quan escrivim l + ∞ = ∞ volem dir que si
una funcio f(x) tendeix a un nombre l i una funcio g(x) tendeix a ∞ llavors la funcio f(x) + g(x)tendeix a ∞. S’enten que els dos lımits s’estan fent alhora per x → a, x → ∞ o x → −∞ Amb la
definicio de lımit i de lımit infinit es demostren les seguents propietats:
(1) ∞ + ∞ = ∞.
60

(2) l +∞ = ∞, l−∞ = −∞,l
∞ = 0,l
−∞ = 0. (Tambe son valides si en lloc de f(x) → l es te
f(x) fitada.)
(3) Si l > 0, l · ∞ = ∞, l(−∞) = −∞.
(4) Si l < 0, l · ∞ = −∞, l(−∞) = ∞.
(5) ∞ ·∞ = ∞, ∞(−∞) = −∞, (−∞)(−∞) = ∞.
(6) 10+ = ∞ on 0+ indica una funcio que tendeix a 0, tal que es positiva en algun entorn de 0.
(7) Si α > 0, ∞α = ∞. Si b > 1, b∞ = ∞.
(8) e∞ = ∞, e−∞ = 0.
(9) ln∞ = ∞, ln 0 = −∞.
Exemple 8.7 Es pot veure que, degut al caracter oscil.lant de la funcio sinus, limx→∞
sinx no existeix.
Tot i aixo, el sinus es fitat (| sinx| ≤ 1) i podem donar els seguents lımits:
limx→∞
sin x
x= 0,
limx→∞
(sinx + x) = ∞. ♦
En ocasions saber que les parts d’una expressio tenen un lımit (finits o infinits) coneguts es
insuficient per determinar el lımit de tota l’expressio. Per exemple, les funcions f(x) = x2, g(x) = xi h(x) = x − 1 tendeixen totes a ∞. Ara, f(x) − g(x) = x(x − 1) → ∞, g(x) − h(x) = 1 → 1,de manera que no es pot assignar un valor definit a ∞ − ∞. Si haguessim escrit directament
f(x) − g(x) = x2 − x no podrıem assignar un resultat ja que estem restant dues successions quetendeixen a ∞. Ha calgut transformar la resta en un producte per trobar el resultat. La majoria
de lımits que hem de resoldre a la practica son expressions indeterminades sobre les que s’ha detreballar per poder determinar-ne el lımit. A aixo ho anomenem resoldre la indeterminacio.
Les principals indeterminacions son:
∞−∞,±∞±∞ , 0 · (±∞),
0
0, 1∞, ∞0, 00, . . .
A continuacio veiem com es resolen algunes indeterminacions tıpiques.
8.8 Resolucio d’indeterminacions
8.8.1 Expressions racionals
Un polinomi en x, es a dir, una expressio del tipus pnxn + pk−1xk−1 + · · · + p1x + p0 on pi son
nombres reals tendeix a ±∞, per x → ∞, segons el signe del coeficient del terme de grau mes alt pn.
Per fer el lımit d’un quocient de polinomis (determinacio ∞∞) dividim el numerador i denominador
per la potencia mes alta de x present a l’expressio. Aixı queden tot de termes amb lımit constant.
Exemple 8.8
limx→∞
x2 − 2x + 3
5 − 2x2= lim
x→∞
x2−2x+3x2
5−2x2
x2
= limx→∞
1 − 2x + 3
x2
5x2 − 2
=1 − 0 + 0
0− 2= −1
2.
61

limx→∞
limx3 − 4
x − x5= lim
x→∞
x3−4x5
x−x5
x5
= limx→∞
1x2 − 4
x5
1x4 − 1
=0 − 0
0 − 1= 0.
De manera mes general, es facil veure que el lımit
limx→∞
pkxk + pk−1x
k−1 + · · ·+ p1x + p0
qlxl + ql−1xl−1 + · · ·+ q1x + q0(8.6)
val 0 si k < l, val ±∞ si k > l i val pkqk
si k = l. ♦
Exemple 8.9 L’analisi anterior es pot utilitzar en casos on apareixen arrels. Novament es tracta
de detectar la potencia dominant i dividir numerador i denominador.
limx→∞
√x3 + 1 + x
2x + 1= lim
x→∞
√x3+1+xx3/2
2x+1x3/2
= limx→∞
√
1 + 1x3 + 1
x1/2
2x1/2 + 1
x3/2
=1 + 0
0 + 0= ∞.
limx→∞
x +√
x2 + 13√
x + 8x3= lim
x→∞
x+√
x2+1x
3√x+8x3
x
= limx→∞
1 +√
1 + 1x2
3
√1x2 + 8
=1 + 1
3√
8= 1. ♦
Els lımits anteriors on x → −∞ es tracten de manera similar, posant especial cura en el signeresultant.
8.8.2 Resta d’arrels
Algunes indeterminacions del tipus ∞−∞ es resolen racionalitzant les expressions. Notem que
√A −
√B = (
√A −
√B)
√A +
√B√
A +√
B=
√A
2 −√
B2
√A +
√B
=A − B√A +
√B
. (8.7)
Exemple 8.10
limx→∞
(√
x2 + 5x −√
x2 − 3x + 2) = limx→∞
x2 + 5x − (x2 − 3x + 2)√x2 + 5x +
√x2 − 3x + 2
=
limx→∞
8x − 2√x2 + 5x +
√x2 − 3x + 2
= limx→∞
8 − 2x
√
1 + 5x +
√
1 − 3x + 2
x2
= 4. ♦
8.8.3 Resta de logaritmes
Si α(x) i β(x) tendeixen a infinit, la funcio lnα(x)− lnβ(x) dona una indeterminacio ∞−∞ que
es resol tenint en compte que
ln A − lnB = lnA
B. (8.8)
Exemple 8.11
limx→∞
(ln(2x2 − 5x)− ln(x2 − 3x + 2)) = limx→∞
ln2x2 − 5x
x2 − 3x + 2=
ln limx→∞
2x2 − 5x
x2 − 3x + 2= ln2. ♦
62

8.8.4 Indeterminacio 1∞. El nombre e.
Considerem la funcio f(x) =(1 + 1
x
)x. Es una funcio creixent, fitada superiorment. Per tant, f(x)
te lımit quan x → ∞ i anomenem e a aquest nombre:
limx→∞
(
1 +1
x
)x
= e (8.9)
on e = 2,718281 . . . es un nombre irracional.
Ara, es facil demostrar que donada una funcio tal que limx→a
f(x) = ∞:
limx→a
(
1 +1
f(x)
)f(x)
= e. (8.10)
Es pot demostrar tambe que, per a tot α ∈ R
limx→∞
(
1 +α
x
)x= eα. (8.11)
De manera mes general, observant que f(x)g(x) =
((
1 + 1(f(x)−1)−1
)(f(x)−1)−1)g(x)(f(x)−1)
, tenim
que, si limx→a
f(x) = 1 i limx→a
g(x) = ∞,
limx→a
f(x)g(x) = elimx→a
g(x)(f(x)− 1). (8.12)
Exemple 8.12
limx→∞
(x + 3
x + 5
)x−2
= elim
x→∞
(
(x − 2)
(x + 3
x + 5− 1
))
= elim
x→∞
(
−2x + 2
x + 5
)
= e−2. ♦
8.9 Continuıtat
Considerem la funcio f definida en D i a∈D punt d’acumulacio de D. f es contınua en a si existeixlimx→a
f(x) i coincideix amb f(a). f es contınua en un conjunt si ho es en tots els seus punts.
8.10 Teorema (caracteritzacio de la continuıtat)
La continuıtat de f en a equival a qualsevol de les seguents condicions.
(1) ∀ε > 0 ∃δ > 0 tal que |x − a| < δ ⇒ |f(x)− f(a)| < ε.
(2) xn → a, xn∈D ⇒ f(xn) → f(a).
DEM: Es simplement escriure la definicio de continuıtat fent explıcita la definicio de lımit.♣
Notem que a la definicio de lımit no s’utilitza per res el valor f(a) que, de fet, no te ni per queexistir. El lımit utilitza nomes el que val la funcio al voltant del punt. Quan parlem de continuıtat,
ha d’estar definida f(a) i no cal indicar x 6= a als anteriors lımits ja que, per x = a, |f(x)−f(a)| = 0que es obviament menor que qualsevol ε > 0.
Quan definim que una funcio es contınua mitjancant (2) es parla de continuıtat per successions.
63

Exemple 8.13 Com s’ha vist a l’exemple 8.1 la funcio constant f(x) = c i la funcio identitatf(x) = x son contınues a tot R.
Alternativament, ho podem veure aplicant (1):
La funcio constant f(x) = c es contınua en R ja que |f(x) − f(a)| = |c − c| = 0 que es < εtrivialment.
La funcio identitat f(x) = x es contınua en R ja que |f(x)−f(a)| = |x−a| < ε si prenem δ = ε.♦
Exemple 8.14 Sigui f(x) =
{1 + x + x2 si x < 1
x3 + 2 si x ≥ 1Es contınua en x = 1? lim
x→1+f(x) =
limx→1
(x3 + 2) = 3. limx→1−
f(x) = limx→1
(1 + x + x2) = 3. Per tant, limx→1
f(x) = 3. Com, a mes,
f(1) = 3 la funcio es contınua en 1. ♦
Exemple 8.15 La funcio de Dirichlet val 1 si x es racional i 0 si x es irracional: f(x) =
{1 si x ∈ Q
0 si x 6∈ Q
Es discontınua a tot R ja que, per qualsevol punt a, tot entorn per petit que sigui conte punts ambf(x) = 1 i amb f(x) = 0 de manera que es impossible assegurar |f(x)−f(a)| < ε si ε es prou petit.♦
8.11 Tipus de discontinuıtat
Si existeix el lımit de f(x) en a pero no coincideix amb f(a) diem que la discontinuıtat es evitable.Es pot arreglar redefinint el valor de f(a).
Si existeixen els lımits laterals pero no coincideixen diem que la discontinuıtat es de salt.
Si algun dels lımits laterals es infinit diem que hi ha una asımptota vertical.
Exemple 8.16 f(x) = [x] + [−x]. Es contınua en 0? En un entorn de 0, si x > 0 f(x) = −1,si x < 0 f(x) = −1. Aixı, els lımits laterals existeixen i valen el mateix, amb el que tenimlimx→0
f(x) = −1. Ara, f(0) = [0]+ [−0] = 0 amb el que f no es contınua en 0. Pero la discontinuıtat
es evitable i desapareix si redefinim f de manera que f(x) = [x] + [−x] per x 6= 0 i f(0) = −1. ♦
Exemple 8.17 Sigui f(x) =
{0 si x = 0|x|x si x 6= 0
Es contınua en x = 0? Per x > 0 |x| = x amb el
que limx→0+
f(x) = limx→0
1 = 1. Per x < 0 |x| = −x amb el que limx→0−
f(x) = limx→0
(−1) = −1. Els lımits
laterals existeixen pero son diferents. Tenim una discontinuıtat de salt. ♦
Exemple 8.18 Es contınua, en x = 0, f(x) =1
x? lim
x→0+
1
x= +∞. lim
x→0−
1
x= −∞. Tenim una
asımptota vertical. ♦
Exemple 8.19 Sigui f(x) =
{0 si x = 0
sin 1x si x 6= 0
Es contınua en x = 0? limx→0+
sin1
xno existeix ja
que, fent t = 1x , equival a lim
t→∞sin t (veure l’exemple 8.2). En aquest cas tenim un comportament
oscil.lant que fa que ja no existeixin els lımits laterals (figura 8.2). ♦
64

–1
0
1
2
3
4
–2 –1 1 2 3 4 5
x
–10
–8
–6
–4
–2
0
2
4
6
8
10
–2 –1 1 2 3 4 5
x
Figura 8.1: Discontinuıtat de salt i asımptota vertical.
–1.5
–1
–0.5
0
0.5
1
1.5
–1 –0.8 –0.6 –0.4 –0.2 0.2 0.4 0.6 0.8 1
x
Figura 8.2: Discontinuıtat per oscil.lacio. y = sin 1x .
8.12 Propietats de les funcions contınues
(1) Si f i g son contınues en el punt a i λ ∈ R, llavors tambe ho son f + g, λf , f · g,f
g(si
g(a) 6= 0).
(2) La composicio de funcions contınues es contınua. Es a dir, donades f definida en D, g definida
en E ⊂ f(D). Si f es contınua en a i g es contınua en f(a), llavors g ◦ f es contınua en a.
DEM: (1) Immediata utilitzant les propietats del lımit.
(2) Prenem qualsevol ε > 0. Com g es contınua en f(a), ∃δ > 0 tal que |y − f(a)| < δ ⇒ |g(y) − g(f(a))| < ε.
Ara, com f es contınua en a, donat aquest δ, ∃δ1 > 0 tal que |x − a| < δ1 ⇒ |f(x) − f(a)| < δ ⇒ |g(f(x)) −g(f(a))| < ε. La ultima desigualtat es |(g ◦ f)(x)− (g ◦ f)(a))| < ε. ♣
8.13 Continuıtat de les funcions elementals
Amb els resultats de l’exemple 8.13 i les anteriors propietats veiem facilment que els polinomis son
continus a tot R.
Una funcio racional, f(x) = p(x)q(x) , es contınua a tot R menys en els zeros de q(x) (considerant
que p i q no tenen factors comuns).
A partir de consideracions similars a les de l’exemple 8.2 es demostra que les funcions sin x,
cos x, ex son contınues a tot R. lnx es continu al seu domini, (0,∞). Les funcions potencials xα
65

son contınues al seu domini.
Exemple 8.20 La funcio f(x) =ecos x
1 + x2es contınua a tot R (composicio i quocient de funcions
contınues, el denominador mai s’anul.la). ♦
Exemple 8.21 La funcio f(x) =sin x
xes clarament contınua a R−{0}. Con es en 0? Ja hem vist
(exemple 8.5) limx→0
f(x) = 1 el que demostra que f es contınua en 0. En aquest exemple caldria dir
que definim f(0) = 1. En la practica, si una funcio es indeterminada en un punt, s’enten que es
defineix igual al lımit, si aquest existeix. ♦
8.14 Fites, maxim i mınim d’una funcio
Una funcio es fitada superiorment en un conjunt D si ∃M ∈ R tal que f(x) ≤ M, ∀x ∈ D.
Una funcio es fitada inferiorment en un conjunt D si ∃m ∈ R tal que f(x) ≥ m, ∀x ∈ D.
Una funcio es fitada en un conjunt D si ho es superior i inferiorment. Es a dir, ∃M ∈ R talque |f(x)| ≤ M, ∀x ∈ D.
Una funcio te un maxim en un conjunt D si ∃a ∈ D tal que f(x) ≤ f(a), ∀x ∈ D. Diem queel valor f(a) es el maxim de la funcio (f(a) = max
Df(x)) i que aquest s’assoleix en x = a.
Una funcio te un mınim en un conjunt D si ∃a ∈ D tal que f(x) ≥ f(a), ∀x ∈ D. Diem que el
valor f(a) es el mınim de la funcio (f(a) = minD
f(x)) i que aquest s’assoleix en x = a.
El maxim i el mınim tambe s’anomenen maxim i mınim absoluts per distingir-los de possibles
maxims o mınims locals. Notem que el maxim o mınim poden no existir, fins i tot si la funcio esfitada. Si existeixen, tambe es possible que s’assoleixin en mes d’un punt.
Exemple 8.22 f(x) = sinx en (0, 2π) te maxim 1 (x = π2 ) i mınim −1 (x = 3π
2 ).
f(x) = 2x en (0, 1) no te maxim ni mınim. Notem que el conjunt de valors que pren es fitat ite suprem 2 i ınfim 0.
f(x) = x2 en [−2, 2] te maxim 4 i mınim 0. Notem que el maxim s’assoleix en x = −2 i enx = 2.
f(x) = 1x en (0, 1] te mınim 1 i no te maxim. Notem que no es fitada superiorment degut a que
per x → 0 f(x) → ∞. ♦
8.15 Teorema del maxim i el mınim (Weierstrass)
Sigui f definida i contınua en [a, b]. Llavors f es fitada i te maxim i mınim.
DEM: Si f no fos fitada podem prendre xn amb |f(xn)| > n. La successio xn es fitada (a ≤ xn ≤ b) demanera que ha de tenir una successio parcial convergent xni → l on a ≤ l ≤ b. Com f es contınua, hauria de serf(xni) → f(l) pero aixo no pot ser ja que la successio f(xni) no es fitada. Hem arribat a una contradiccio, per tantf es fitada.
Com el conjunt {f(x)|x ∈ [a, b]} es fitat, te suprem M i ınfim m. Llavors podem construir successions an i bn
contingudes a [a, b] (per tant, fitades) tals que M − 1n
< f(an) ≤ M i m ≤ f(bn) < m + 1n
amb el que f(an) → M
i f(bn) → m. Al ser fitades, admeten parcials convergents ani → c, bmi → d, i per continuıtat, f(ani) → f(c),
f(bmi ) → f(d). Per tant, f(c) = M es el maxim i f(d) = m es el mınim. ♣
66
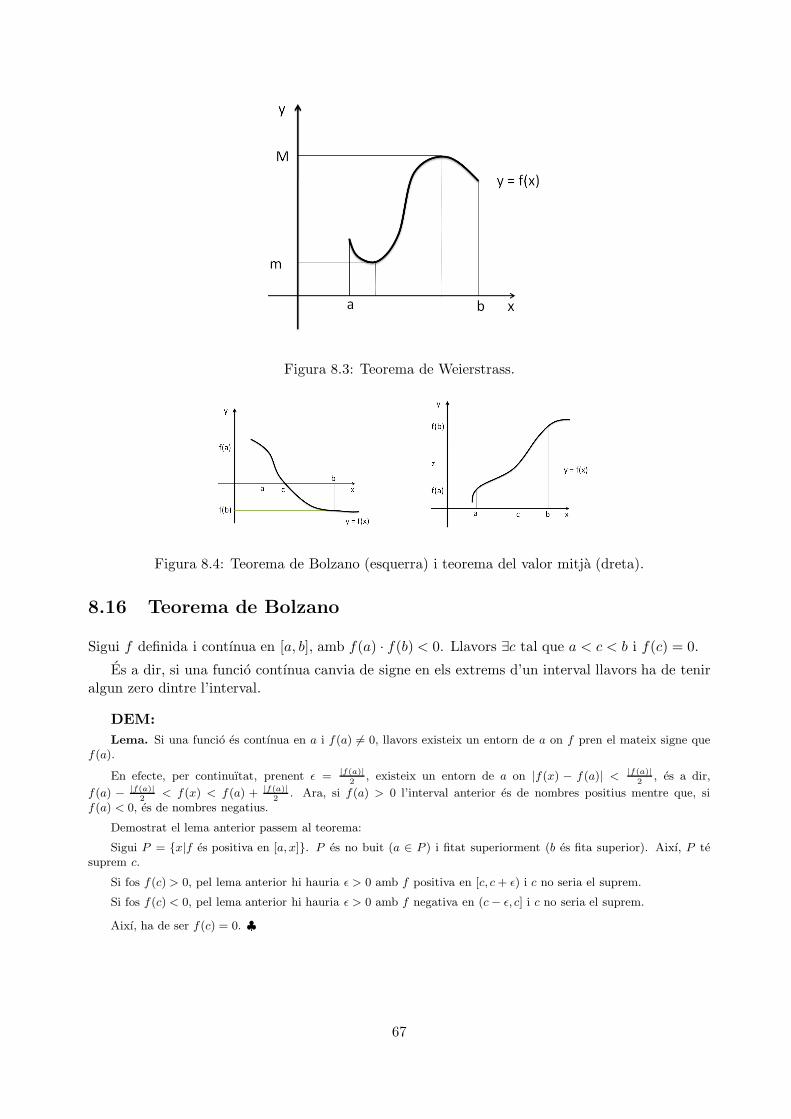
Figura 8.3: Teorema de Weierstrass.
Figura 8.4: Teorema de Bolzano (esquerra) i teorema del valor mitja (dreta).
8.16 Teorema de Bolzano
Sigui f definida i contınua en [a, b], amb f(a) · f(b) < 0. Llavors ∃c tal que a < c < b i f(c) = 0.
Es a dir, si una funcio contınua canvia de signe en els extrems d’un interval llavors ha de tenir
algun zero dintre l’interval.
DEM:
Lema. Si una funcio es contınua en a i f(a) 6= 0, llavors existeix un entorn de a on f pren el mateix signe quef(a).
En efecte, per continuıtat, prenent ε = |f(a)|2
, existeix un entorn de a on |f(x) − f(a)| <|f(a)|
2, es a dir,
f(a) − |f(a)|2
< f(x) < f(a) + |f(a)|2
. Ara, si f(a) > 0 l’interval anterior es de nombres positius mentre que, sif(a) < 0, es de nombres negatius.
Demostrat el lema anterior passem al teorema:
Sigui P = {x|f es positiva en [a, x]}. P es no buit (a ∈ P ) i fitat superiorment (b es fita superior). Aixı, P tesuprem c.
Si fos f(c) > 0, pel lema anterior hi hauria ε > 0 amb f positiva en [c, c + ε) i c no seria el suprem.
Si fos f(c) < 0, pel lema anterior hi hauria ε > 0 amb f negativa en (c − ε, c] i c no seria el suprem.
Aixı, ha de ser f(c) = 0. ♣
67

8.17 Teorema del valor mitja
Si f es contınua en [a, b] i z esta entre f(a) i f(b), llavors ∃c ∈ (a, b) tal que f(c) = z.
DEM: Apliquem el teorema de Bolzano a la funcio g(x) = f(x) − z. g es contınua en [a, b] i canvia de signe
als extrems. Llavors hi ha algun punt c on g(c) = 0, es a dir, f(c) = z. ♣
68

Capıtol 9
Derivacio
Donada una magnitud y que varia amb el temps t ens podem plantejar com avaluar la velocitatamb que es dona aquesta variacio. L’evolucio de la variable y la descriurem amb una funcio
y(t). El canvi entre dos instants t0 i t1 ve donat per y(t1) − y(t0). Naturalment, aquest canvi
depen de l’interval temporal considerat. Es preferible donar el quocient Vm =y(t1)− y(t0)
t1 − t0, o
velocitat mitjana. Aquest concepte es limitat en tant que va associat a intervals mentre queens agradaria parlar de la velocitat en un instant donat. Per aixo, escrivim ∆t = t1 − t0 de
manera que Vm =y(t0 + ∆t) − y(t0)
∆t. Ara, si volem definir la velocitat en l’instant t0 podem
considerar valors cada vegada mes petits de ∆t. Es a dir, definim la velocitat instantania com
V (t0) = lim∆t→0
y(t0 + ∆t) − y(t0)
∆t. Notem que numerador i denominador tendeixen a 0, de manera
que esperem que el lımit doni un valor finit significatiu.
Les anteriors consideracions tenen un significat geometric associat. Si pensem en la grafica de
la funcio y(t), el quocient d’incrementsy(t0 + ∆t) − y(t0)
∆tdona la pendent d’una recta que passa
pels punts (t0, y(t0)) i (t1, y(t1)). En el lımit t1 → t0 (es a dir, ∆t → 0) aquesta recta es converteixen la tangent a la grafica passant pel punt (t0, y(t0)).
Tot aixo motiva la introduccio del concepte de derivada.
9.1 Derivada d’una funcio en un punt
Diem que la funcio f es derivable en un punt a del seu domini si existeix i es finit el lımit:
f ′(a) = limh→0
f(a + h)− f(a)
h. (9.1)
Tambe es pot escriure:
f ′(a) = limx→a
f(x)− f(a)
x − a(9.2)
o
f ′(a) = lim∆x→0
∆f
∆x. (9.3)
Una manera equivalent de definir-ho es dir que f es derivable en a si ∃m ∈ R tal que
f(x) = f(a) + m(x− a) + θ(x)(x − a) (9.4)
69

Figura 9.1: Derivada d’una funcio.
on θ(x) → 0 quan x → a.
DEM: Si es dona (9.4), llavors limx→a
f(x) − f(a)
x − a= lim
x→a(m + θ(x)) = m. Aixı, f es derivable en a i f ′(a) = m.
A la inversa, si es dona (9.2), definim θ(x) =f(x) − f(a)
x − a− f
′(a). Clarament, es verifica (9.4) i limx→a
θ(x) = 0. ♣
f es derivable en un interval real I si ho es en tots els seus punts. En aquest cas podem parlarde la funcio derivada f ′(x). Tambe s’escriu
f ′(x) =df(x)
dx. (9.5)
Una funcio derivable tambe es diu que es diferenciable. Notem, en qualsevol cas que el sımboldx per si sol no te cap significat. Nomes el fem servir en la forma (9.5) per recordar que f ′(x)
s’obte com a lımit d’un quocient d’increments (9.3). Aixı, tendim a pensar en dx com un incrementinfinitesimal, si be aixo es una imatge sense sentit matematic precıs.
9.2 Teorema
f derivable en a ⇒ f contınua en a.
DEM: Utilitzem (9.4): limx→a
f(x) = limx→a
(f(a) + m(x − a) + θ(x)(x − a)) = f(a). ♣
Exemple 9.1 El recıproc no es cert. f(x) = |x| es contınua en 0 pero no es derivable en 0 ja que|x|x
tendeix a 1 o a −1 segons ens acostem per la dreta o per l’esquerra. ♦
Des de la perspectiva de l’analisi, la derivabilitat es la segona condicio de regularitat. La primera
es la continuıtat. Es a dir, dintre de les funcions reals distingim primer les que son contınues i, ara,dins les contınues, les que son “suaus”. Fixem-nos en l’anterior exemple que |x| es contınua en 0
pero te una “punxa” de manera que no hi ha tangent definida en aquest punt.
70

9.3 Calcul d’algunes derivades
• (xn)′ = nxn−1, n = 0, 1, 2, . . .
limh→0
(x + h)n − xn
h= lim
h→0
xn + nxn−1h + h2Polinomi(h)− xn
h
= limh→0
(nxn−1 + hPolinomi(h)) = nxn−1.
• (sinx)′ = cosx.
limh→0
sin(x + h) − sinx
h= lim
h→0
sinx cosh + cosx sinh − sinx
h
= limh→0
(
cos xsinh
h− sinx
1 − cos h
h
)
= limh→0
(
cos xsinh
h− sinx
2 sin2(h/2)
h
)
= cos x.
Tenint en compte (8.3) i que 2 sin2(h/2)h = h
2
(sin(h/2)
h/2
)2→ 0.
De manera semblant es veu (cosx)′ = − sinx.
• (lnx)′ =1
x.
limh→0
ln(x + h) − ln x
h= lim
h→0
1
hln
x + h
x= lim
h→0ln
(
1 +h
x
) 1h
= limh→0
ln
(
1 +1/x
1/h
) 1h
= ln e1/x =1
x.
• (√
x)′ =1
2√
x.
limh→0
√x + h −√
x
h= lim
h→0
1√x + h +
√x
=1
2√
x.
• (ex)′ = ex.
limh→0
ex+h − ex
h= lim
h→0ex eh − 1
h= ex lim
H→0
H
ln(1 + H)= ex.
(S’ha fet H = eh − 1. Notem que en la derivada del logaritme, si posem x = 1 es veu que per
h → 0, ln(1+h)h → 1.)
9.4 Derivades de les funcions elementals
Amb calculs com els de l’apartat anterior i fent servir algunes propietats que es veuran a continuacio,es pot completar la seguent taula amb les derivades de les funcions elementals:
71

(xα)′ = αxα−1, α ∈ R
(1
x
)′= − 1
x2(√
x)′ =1
2√
x
(ax)′ = ln a · ax, a > 0 (ex)′ = ex (lnx)′ =1
x
(sinx)′ = cos x (cosx)′ = − sinx (tgx)′ =1
cos2 x
(arcsinx)′ =1√
1 − x2(arccosx)′ = − 1√
1 − x2(arctgx)′ =
1
1 + x2
(sinhx)′ = cosh x (cosh x)′ = sinhx (tanh x)′ =1
cosh2 x
(arg sinh x)′ =1√
1 + x2(arg cosh x)′ =
1√x2 − 1
(arg tanhx)′ =1
1 − x2
9.5 Recta tangent
Si una funcio f es derivable en un punt a llavors existeix una recta que passa pel punt (a, f(a)) ies tangent a la grafica de f en aquest punt. El pendent d’aquesta recta es f ′(a) i la seva equacio:
ra(x) = f(a) + f ′(a)(x − a). (9.6)
Notem que es (9.4) sense el terme amb θ. El fet que una funcio sigui derivable en un punt correspona que es comporta en un entorn de a (es a dir, localment) com un polinomi de primer grau. Pertant, (9.6) te el significat de donar una relacio geometrica entre corbes al pla pero tambe com el
fet que podem aproximar el valor de la funcio en punts propers a a amb un polinomi de grau 1.
Exemple 9.2 La funcio f(x) =√
x te derivada f ′(x) = 12√
x. Calculem la recta tangent en a = 4:
f(4) = 2 i f ′(4) = 14 . Per tant, la recta es r(x) = 2 + 1
4(x − 4), es a dir, r(x) = 1 + x4 .
Ara notem que, per punts propers a 4, per exemple 4,1, r(4,1) = 2, 025 mentre que√
4,1 =
2,02484. L’error a l’aproximar f(4,1) amb r(4,1) es nomes del 0,007%. ♦
9.6 Propietats de les funcions derivables
Si f, g son derivables en a i λ ∈ R, llavors f + g, λf , f · g,f
g(si g(a) 6= 0) son derivables en a i
(1) (f + g)′(a) = f ′(a) + g′(a).
(2) (λf)′(a) = λf ′(a).
72

Figura 9.2: Recta tangent com a lımit de rectes secants.
(3) (fg)′(a) = f ′(a)g(a) + f(a)g′(a) (Regla de Leibniz).
(4)
(f
g
)′(a) =
f ′(a)g(a)− f(a)g′(a)
g(a)2.
DEM: (1) i (2) son immediates amb la definicio de derivada. Notem que ens diuen que la derivacio es unaoperacio lineal.
(3)
(fg)′(a) = limx→a
f(x)g(x) − f(a)g(a)
x − a= lim
x→a
f(x)g(x) − f(a)g(x) + f(a)g(x) − f(a)g(a)
x − a
= limx→a
„
f(x)− f(a)
x − ag(x) + f(a)
g(x) − g(a)
x − a
«
= f′(a)g(a) + f(a)g′(a).
(4)„
1
g
«′
(a) = limx→a
1g(x) − 1
g(a)
x − a= − lim
x→a
1
g(x)g(a)
g(x) − g(a)
x − a= − g′(a)
g(a)2.
Ara considerem f(x)g(x)
= f(x) 1g(x)
i apliquem la regla de Leibniz. ♣
Exemple 9.3
(tg x)′ =
(sin x
cosx
)′=
(sinx)′ cosx − sinx(cosx)′
cos2 x=
cos2 x + sin2 x
cos2 x=
1
cos2 x. ♦
9.7 Teorema. (Regla de la cadena)
f : I −→ R, g : J −→ R, amb g(J) ⊂ I . Per tant, esta definida la funcio composta (f ◦ g)(x) =f(g(x)).
Suposem g derivable en a i f derivable en g(a). Llavors f ◦ g es derivable en a i
(f ◦ g)′(a) = f ′(g(a))g′(a). (9.7)
DEM:
(f ◦ g)′(a) = limx→a
(f ◦ g)(x) − (f ◦ g)(a)
x − a= lim
x→a
f(g(x)) − f(g(a))
g(x) − g(a)
g(x) − g(a)
x − a= f
′(g(a))g′(a).♣
73

Exemple 9.4
(ln(1 +√
x))′ =1
1 +√
x(1 +
√x)′ =
1
1 +√
x
1
2√
x=
1
2(√
x + x). ♦
Exemple 9.5 Si coneixem la derivada (f(x))′ = f ′(x), la funcio f(ax + b) on a i b son constants
te derivada (f(ax + b))′ = af ′(ax + b).
Per exemple:
(arctg(2x + 1))′ = 2 · 1
1 + (2x + 1)2=
1
1 + 2x + 2x2. ♦
9.8 Derivada logarıtmica
En el cas de funcions construıdes a traves de productes, quocients o potencies, el calcul de la derivadaes simplifica amb el seguent procediment. La derivada logarıtmica d’una funcio es l’expressio
f ′(x)/f(x). Notem que es tracta de (ln f(x))′. Aixı, tenim la relacio:
f ′(x) = f(x)(ln f(x))′. (9.8)
Exemple 9.6 Per derivar una funcio del tipus f(x) = g(x)h(x), l’expressem f(x) = eh(x) ln g(x) i
obtenim f ′(x) = f(x)(h(x) lng(x))′, tal com ens diu (9.8).
Per exemple:
(xx)′ = (ex lnx)′ = ex lnx(x lnx)′ = xx(lnx + 1). ♦
Exemple 9.7 calcular la derivada de f(x) =(x − 1)5
(x2 + 2)3. Es ln f(x) = 5 ln(x − 1) − 3 ln(x2 + 2),
d’on:f ′(x)
f(x)=
5
x − 1− 6x
x2 + 2.
Aixı:
f ′(x) =(x − 1)5
(x2 + 2)3
(5
x − 1− 3
x2 + 2
)
=(x − 1)4
(x2 + 2)4(10 + 6x − x2). ♦
9.9 Teorema. (Funcio inversa)
f : [a, b] −→ R, injectiva, contınua i derivable en x0 ∈ (a, b) amb f ′(x0) 6= 0. Posem y0 = f(x0).Llavors f−1 es derivable en y0 i
(f−1)′(y0) =1
f ′(x0). (9.9)
Exemple 9.8 Per derivar f(x) = arcsinx que es la funcio inversa de x = f−1(y) = sin y:
f ′(x) =1
cos y=
1√
1 − sin2 y=
1√1 − x2
. ♦
Exemple 9.9 Notem com la notacio amb diferencials facilita recordar les anteriors propietats.Considerem les funcions y = sinx i z = sin3 x. Es z(x) = y3 on y depen implıcitament de x.
Llavors la regla de la cadena la podem expressar:
dz
dx=
dz
dy
dy
dx= 3y2 cos x = 3 sin2 x cosx.
74

Figura 9.3: Teorema de Rolle.
Ara, sigui t = 3√
x. Per tant, x = t3 i
dt
dx=
1dxdt
=1
3t2=
1
33√
x2. ♦
9.10 Teorema de Rolle
Considerem f contınua en [a, b], derivable en (a, b), tal que f(a) = f(b). Llavors ∃c ∈ (a, b) tal quef ′(c) = 0.
DEM: Al ser una funcio contınua en un interval tancat, f te maxim M i mınim m.
Si M = m, la funcio es constant i f ′ = 0 en [a, b].
Si M 6= m algun dels dos valors sera diferent de f(a).
Si M 6= f(a), correspon a un maxim local que s’assoleix en algun punt c ∈ (a, b). Llavors, per h > 0, f(c) ≥f(c + h) i f(c) ≥ f(c − h). Per tant, f(c+h)−f(c)
h≤ 0 i f(c−h)−f(c)
−h≥ 0. Fent h → 0, ha de ser f ′(c) ≤ 0 i f ′(c) ≥ 0,
es a dir, f ′(c) = 0.
Si m 6= f(a), m correspon a un maxim local de −f i podem repetir el raonament anterior. ♣
9.11 Teorema del valor mitja (Cauchy)
Considerem f, g contınues en [a, b], derivables en (a, b), amb g(a) 6= g(b) i les derivades de f i de gno s’anul·len simultaniament en cap punt. Llavors ∃c ∈ (a, b) tal que
f(b)− f(a)
g(b)− g(a)=
f ′(c)g′(c)
. (9.10)
DEM: Definim la funcio F en [a, b] com F (x) = (f(b)− f(a))g(x)− (g(b) − g(a))f(x). F es contınua en [a, b] i
derivable en (a, b). Tambe tenim que F (a) = F (b) = f(b)g(a) − f(a)g(b). Pel teorema de Rolle existeix c ∈ (a, b) tal
que F ′(c) = 0, es a dir, (f(b) − f(a))g′(c) − (g(b) − g(a))f ′(c) = 0 d’on surt directament (9.10). ♣
75

Figura 9.4: Teorema del valor mitja. Al punt c la recta tangent te la mateixa pendent que la que
passa pels punts (a, f(a)) i (b, f(b)).
9.12 Teorema del valor mitja (Lagrange)
Considerem f contınua en [a, b] i derivable en (a, b). Llavors ∃c ∈ (a, b) tal que
f(b)− f(a) = f ′(c)(b − a). (9.11)
DEM: Prenem g(x) = x en l’anterior teorema. ♣
9.13 Regla de l’Hopital
Siguin dues funcions f, g definides en un entorn de a tals que f(a) = g(a) = 0 i son derivables ena amb g′(a) 6= 0. Llavors
limx→a
f(x)
g(x)=
f ′(a)
g′(a). (9.12)
DEM: Considerem la igualtatf(x)
g(x)=
f(x)−f(a)x−a
g(x)−g(a)x−a
d’on, prenent lımits, surt (9.12). ♣
Exemple 9.10 La regla de l’Hopital serveix per resoldre indeterminacions del tipus0
0. lim
x→0
sin(2x)
sin(3x)=
0
0. Com el quocient de derivades val
2 cos(2x)
3 cos(3x), el lımit anterior val 2
3 . ♦
Una versio mes general es:
9.14 Teorema de l’Hopital
Siguin dues funcions f, g contınues en [a, b], derivables en (a, b), tals que f(a) = g(a) = 0 i g i g′
no s’anul·len en (a, b). Si
limx→a+
f ′(x)
g′(x)= L
76

amb L ∈ R ∪ {−∞,∞}, llavors
limx→a+
f(x)
g(x)= L.
DEM: Considerem primer el cas L ∈ R. Donat ε > 0 existeix δ > 0 tal que per a < x < a+δ es |f′(x)
g′(x)−L| < ε.
Per cadascuna d’aquestes x el teorema del valor mitja ens assegura que ∃cx amb a < cx < x < a + δ tal quef(x)
g(x)=
f ′(cx)
g′(cx). Llavors |f(x)
g(x)− L| = |f
′(cx)
g′(cx)− L| < ε. Per tant, lim
x→a+
f(x)
g(x)= L.
Pel cas L = ∞: Donat K > 0 existeix δ > 0 tal que per a < x < a + δ esf ′(x)
g′(x)> K . Fent com abans trobem
a < cx < x < a + δ if(x)
g(x)=
f ′(cx)
g′(cx)> K . Per tant, lim
x→a+
f(x)
g(x)= ∞. ♣
L’anterior resultat s’esten als casos a = ±∞ i tambe quan f, g tendeixen a ∞.
Exemple 9.11
limx→0
sin x√x
= limx→0
cos x
1/(2√
x)= lim
x→02√
x cos x = 0. ♦
Exemple 9.12
limx→∞
ln x
x= lim
x→∞1/x
1= 0. ♦
Exemple 9.13 limx→0
x lnx = 0 · (−∞). Podem convertir la indeterminacio en∞∞ posant
limx→0
x lnx = limx→0
lnx
1/x= −∞
∞ = limx→0
1/x
−1/x2= lim
x→0(−x) = 0. ♦
9.15 Infinitesims
Una funcio es un infinitesim per x → a si limx→a
f(x) = 0. Si f i g son infinitesims, diem que f es
d’ordre superior a g si limx→a
f(x)
g(x)= 0. Diem que f i g son equivalents si lim
x→a
f(x)
g(x)= 1 (i escrivim
f ∼ g). Si el lımit anterior val un nombre K 6= 0, 1, diem que son del mateix ordre.
Les anteriors relacions s’expressen amb la notacio ‘o petita’. Si f es d’ordre superior a g, escrivim
f(x) = o(g(x)), x → a. Aixı, f i g son equivalents si i nomes si f(x) = g(x) + o(g(x)), x → a.
9.16 Teorema
f i g son infinitesims equivalents ⇐⇒ f − g es d’ordre superior.
DEM: Per x → a,f(x)
g(x)→ 1 si i nomes si
f(x) − g(x)
g(x)= 1 − f(x)
g(x)→ 0. ♣
Exemple 9.14 Per x → 0, x, x2 i sinx son infinitesims.
x i sinx son equivalents ja que limx→0
sinx
x= 1.
x2 es d’ordre superior a x ja que limx→0
x2
x= 0. ♦
77

Exemple 9.15 Per x → 0:ln(1 + x) ∼ x (9.13)
1 − cosx ∼ x2
2(9.14)
Ja que, aplicant l’Hopital, limx→0
ln(1 + x)
x= lim
x→0
1
1 + x= 1, lim
x→0
1 − cos xx2
2
= limx→0
sinx
x= 1. ♦
La seguent taula recull algunes equivalencies importants, totes per x → 0.
sinx ∼ x 1 − cos x ∼ x2
2tgx ∼ x ex − 1 ∼ x ln(1 + x) ∼ x
Tambe es facil veure que si f(x) ∼ g(x) per x → a i r(x) → a per x → b, llavors f(r(x)) ∼g(r(x)) per x → b. Aixı, per exemple, sinx3 ∼ x3 per x → 0.
9.17 Calcul de lımits amb infinitesims
L’us d’infinitesims agilitza el calcul de lımits on, en principi, s’aplicaria l’Hopital. Si, per x → a,f ∼ f1 i g ∼ g1, es immediat demostrar que
limx→a
f(x)
g(x)= lim
x→a
f1(x)
g1(x). (9.15)
Es a dir, al calcular lımits podem substituir infinitesims per d’altres equivalents si estan multiplicant
o dividint. Per exemple, si f(x) es un infinitesim obtenim el seguent resultat (relacionat amb (8.12))
(1 + f(x))g(x) = eg(x) ln(1+f(x)) ∼ eg(x)f(x). (9.16)
(Notem que realitzem un abus de notacio i escrivim ∼ entre funcions que no necessariament ten-
deixen a 0. Amb aixo indiquem que tenen el mateix comportament lımit. Per exemple, a partir de(9.14) podem escriure cosx ∼ 1 − x2
2 .)
Exemple 9.16
limx→0
sin x ln(1 + x3)
(1− cos x)2= lim
x→0
x · x3
(x2/2)2= 4.
Fer-lo per l’Hopital requereix 4 derivacions. ♦
Exemple 9.17 Considerem el lımit limx→0
sinx − x
x2. No podem substituir sin x per x ja que el sinus
no multiplica tot el numerador. El terme sin x − x es un infinitesim d’ordre superior a x. Podem
cercar-ne un d’equivalent de la forma Axn:
limx→0
sin x − x
Axn= lim
x→0
cosx − 1
Anxn−1= lim
x→0
− sinx
An(n − 1)xn−2= lim
x→0
− cosx
An(n − 1)(n − 2)xn−3.
Per a que el lımit anterior valgui 1, cal que n = 3 i A = −16 . Tenim doncs l’equivalencia:
sinx − x ∼ −1
6x3. (9.17)
Tambe podem escriure sinx = x − 16x3 + o(x3). Ara ja podem calcular
limx→0
sinx − x
x2= lim
x→0
−16x3
x2= 0. ♦
78

9.18 Infinits
Una funcio es un infinit per x → a si limx→a
f(x) = ∞. Si f i g son infinits, diem que f es d’ordre
superior a g si limx→a
f(x)
g(x)= ∞. Diem que f i g son equivalents si lim
x→a
f(x)
g(x)= 1 (i escrivim f ∼ g).
Si el lımit anterior val un nombre K 6= 0, 1, diem que son del mateix ordre.
Notacio ‘O gran’. Donades f i g amb domini comu D, escrivim f = O(g) si existeix C ∈ R talque |f(x)| < C|g(x)| per x ∈ D.
Exemple 9.18 Per x → π2 , tg x i
−1
x − π2
son infinits equivalents.
limx→π
2
tg x−1
x−π2
= limx→π
2
(x − π2 )2
cos2 x=
(
limx→π
2
x − π2
cos x
)2
=
(
limx→π
2
1
sinx
)2
= 1.
Notem, pero, que de fet tg x tendeix a +∞ per l’esquerra i a −∞ per la dreta. El que passa es que−1
x − π2
te el mateix comportament i per tant son equivalents tant per la dreta com per l’esquerra.
♦
9.19 Ordres d’infinitud
Alguns infinits caracterıstics i els seus ordres relatius son (x → ∞, m > 0, a > 1)
ln x < xm < ax < xx. (9.18)
Els infinits xm son mes potents com major es m. Els infinits ax son mes potents com major es a.
Notem tambe que1
infinit= infinitesim.
Exemple 9.19 Ates que sin x ∼ x per x → 0, tenim l’equivalencia d’infinitesims sin(π2 −x) ∼ π
2 −x
per x → π2 . Es a dir, cos x ∼ π
2 − x i, ates que sin π2 = 1, cosx
sinx ∼ π2 − x.
Invertint els dos costats passem a l’equivalencia d’infinits de l’exemple 9.18. ♦
Exemple 9.20
limx→∞
ln x + 2x
x3 + ex= 0
ja que el numerador equival a 2x i el denominador a ex (i ex es mes potent que 2x). ♦
9.20 Metode de Newton per a la resolucio numerica d’equacions
La resolucio aproximada d’equacions del tipus f(x) = 0 es pot fer de de manera bastant rapida si
f es una funcio derivable. El metode de Newton consisteix en construir una sequencia de puntsque tendeix a la solucio del problema. El punt inicial es tria relativament proper a la solucio, i
s’obte un punt a partir de l’anterior tracant la recta tangent i prenent el punt on aquesta talla l’eixd’abscisses. Si ens trobem al punt xn, la recta tangent es
y = f(xn) + f ′(xn)(x − xn).
79
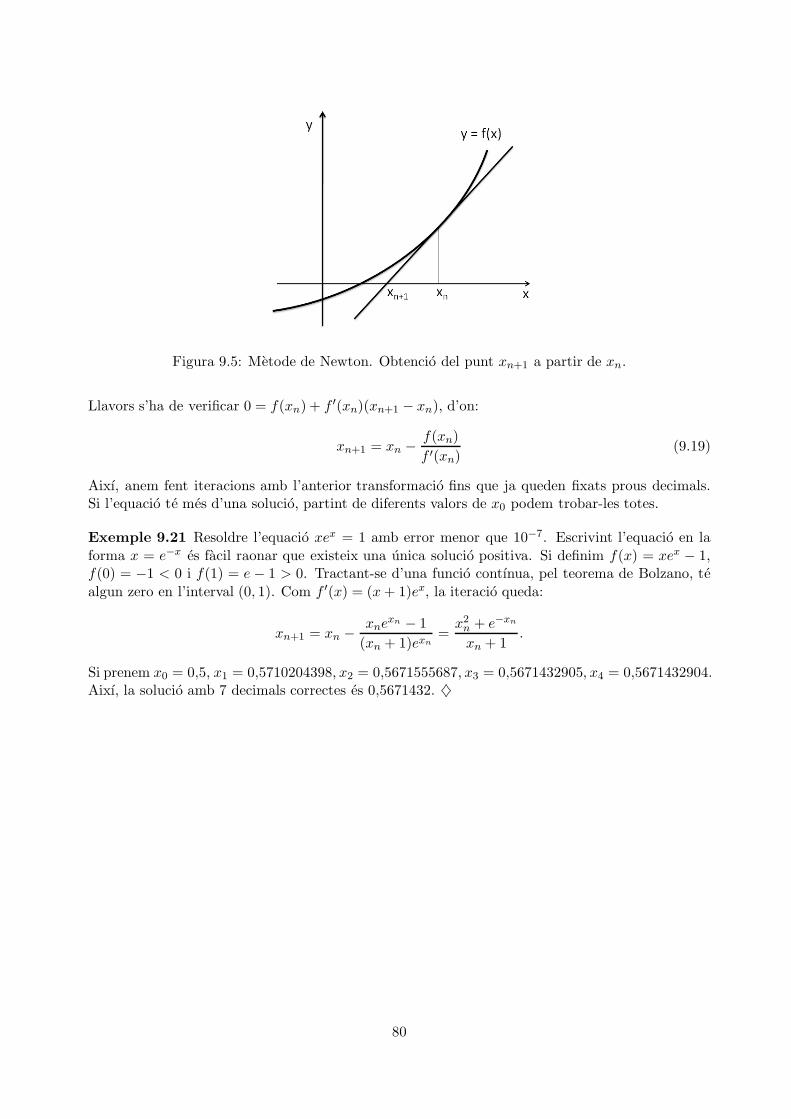
Figura 9.5: Metode de Newton. Obtencio del punt xn+1 a partir de xn.
Llavors s’ha de verificar 0 = f(xn) + f ′(xn)(xn+1 − xn), d’on:
xn+1 = xn − f(xn)
f ′(xn)(9.19)
Aixı, anem fent iteracions amb l’anterior transformacio fins que ja queden fixats prous decimals.Si l’equacio te mes d’una solucio, partint de diferents valors de x0 podem trobar-les totes.
Exemple 9.21 Resoldre l’equacio xex = 1 amb error menor que 10−7. Escrivint l’equacio en la
forma x = e−x es facil raonar que existeix una unica solucio positiva. Si definim f(x) = xex − 1,f(0) = −1 < 0 i f(1) = e − 1 > 0. Tractant-se d’una funcio contınua, pel teorema de Bolzano, te
algun zero en l’interval (0, 1). Com f ′(x) = (x + 1)ex, la iteracio queda:
xn+1 = xn − xnexn − 1
(xn + 1)exn=
x2n + e−xn
xn + 1.
Si prenem x0 = 0,5, x1 = 0,5710204398, x2 = 0,5671555687, x3 = 0,5671432905, x4 = 0,5671432904.Aixı, la solucio amb 7 decimals correctes es 0,5671432. ♦
80
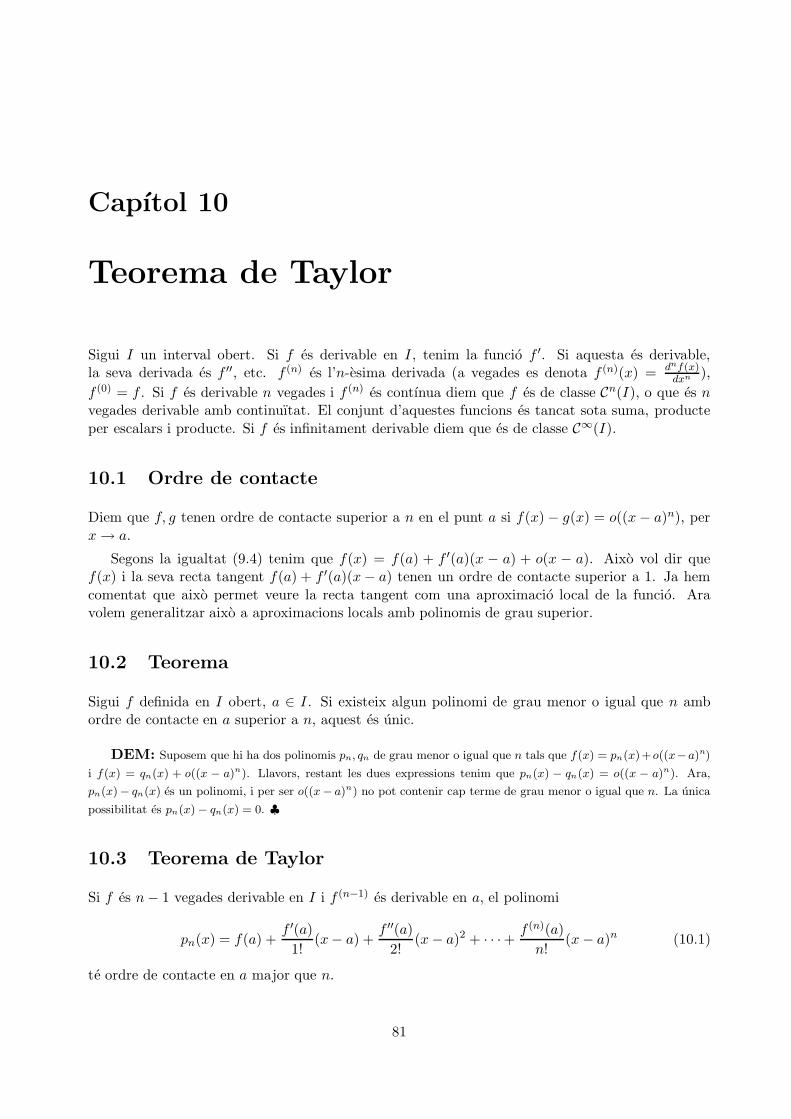
Capıtol 10
Teorema de Taylor
Sigui I un interval obert. Si f es derivable en I , tenim la funcio f ′. Si aquesta es derivable,la seva derivada es f ′′, etc. f (n) es l’n-esima derivada (a vegades es denota f (n)(x) = dnf(x)
dxn ),
f (0) = f . Si f es derivable n vegades i f (n) es contınua diem que f es de classe Cn(I), o que es nvegades derivable amb continuıtat. El conjunt d’aquestes funcions es tancat sota suma, producte
per escalars i producte. Si f es infinitament derivable diem que es de classe C∞(I).
10.1 Ordre de contacte
Diem que f, g tenen ordre de contacte superior a n en el punt a si f(x) − g(x) = o((x − a)n), per
x → a.
Segons la igualtat (9.4) tenim que f(x) = f(a) + f ′(a)(x − a) + o(x − a). Aixo vol dir quef(x) i la seva recta tangent f(a) + f ′(a)(x − a) tenen un ordre de contacte superior a 1. Ja hem
comentat que aixo permet veure la recta tangent com una aproximacio local de la funcio. Aravolem generalitzar aixo a aproximacions locals amb polinomis de grau superior.
10.2 Teorema
Sigui f definida en I obert, a ∈ I . Si existeix algun polinomi de grau menor o igual que n ambordre de contacte en a superior a n, aquest es unic.
DEM: Suposem que hi ha dos polinomis pn, qn de grau menor o igual que n tals que f(x) = pn(x)+o((x−a)n)
i f(x) = qn(x) + o((x − a)n). Llavors, restant les dues expressions tenim que pn(x) − qn(x) = o((x − a)n). Ara,
pn(x)− qn(x) es un polinomi, i per ser o((x− a)n) no pot contenir cap terme de grau menor o igual que n. La unica
possibilitat es pn(x) − qn(x) = 0. ♣
10.3 Teorema de Taylor
Si f es n − 1 vegades derivable en I i f (n−1) es derivable en a, el polinomi
pn(x) = f(a) +f ′(a)
1!(x− a) +
f ′′(a)
2!(x − a)2 + · · ·+ f (n)(a)
n!(x − a)n (10.1)
te ordre de contacte en a major que n.
81

Aquest polinomi s’anomena polinomi de Taylor d’ordre n de f en a. La seva caracterıstica basicaes que les seves n primeres derivades en el punt a coincideixen amb les de f . Se sol anomenar tambe
polinomi de Taylor de grau n, si be pot ser que f (n)(a) = 0 amb el que el polinomi d’ordre n podriatenir grau menor que n.
DEM: Tenim pn(x) =
nX
k=0
f (k)(a)
k!(x − a)k. Si ho derivem l vegades trobem p
(l)n (x) =
n−lX
k=0
f (k+l)(a)
k!(x − a)k .
(nomes cal veure quedl
dxl
(x − a)k
k!=
(x − a)k−l
(k − l)!i fer un canvi d’ındex k → k + l).
Substituint x = a en p(l)n (x) ens queda nomes el terme en k = 0, es a dir, p
(l)n (a) = f (l)(a) per l = 0, 1, . . . n.
Per veure que l’ordre de contacte es superior a n apliquem l’Hopital successivament per anar desfent les indeter-minacions 0
0:
limx→a
f(x) − pn(x)
(x − a)n= lim
x→a
f ′(x) − p′n(x)
n(x − a)n−1= · · · = lim
x→a
f (n−1)(x) − p(n−1)n (x)
n!(x − a)=
f (n)(a) − p(n)n (a)
n!= 0.♣
Exemple 10.1 Cerquem el polinomi de Taylor d’ordre 2 de la funcio f(x) =√
x en a = 4.
f ′(x) = 12√
x, f ′′(x) = − 1
4√
x3. f(4) = 2, f ′(4) = 1
4 , f ′′(4) = − 132 .
p2(x) = f(4) +f ′(4)
1!(x − 4) +
f ′′(4)
2!(x− 4)2 = 2 +
1
4(x − 4)− 1
64(x − 4)2 =
3
4+
3
8x − x2
64.
Veiem com p2 millora numericament l’aproximacio que feiem a l’exemple 9.2. Ara es p2(4,1) =
2,02484375 mentre que√
4,1 = 2,024845673. L’error a l’aproximar f(4,1) amb p2(4,1) es nomes del0,00009%. ♦
Exemple 10.2 Calculem el polinomi de Taylor d’ordre n de la funcio f(x) = ex en a = 0.
Totes les derivades valen el mateix f (n)(x) = ex. Per tant, f (k)(0) = 1 per k = 0, 1, . . . , n i
pn(x) = 1 + x +x2
2!+ · · ·+ xn
n!. ♦
Exemple 10.3 Calculem els polinomis de Taylor en a = 0 de la funcio f(x) = sinx.
f ′(x) = cosx, f ′′(x) = − sinx, f ′′′(x) = − cos x, f (4)(x) = sinx, etc. En x = 0, f(0) = 0,f ′(0) = 1, f ′′(0) = 0, f ′′′(0) = −1, f (4)(0) = 0, etc. Llavors
p2n(x) = x − x3
3!+
x5
5!+ · · ·+ (−1)n+1 x2n−1
(2n− 1)!.
Notem que, degut a que el sinus es una funcio imparella, p2n(x) = p2n−1(x). ♦
10.4 Formula de Taylor
Definim el terme complementari, o residu de Taylor, Rn com la diferencia f(x)− pn(x).
f(x) =
n∑
k=0
f (k)(a)
k!(x− a)k + Rn(x, a). (10.2)
Ja sabem que Rn(x, a) = o((x− a)n), es a dir,
limx→a
Rn(x, a)
(x− a)n= 0 (10.3)
82
–2
–1
0
1
2
–3 –2 –1 1 2 3
x
Figura 10.1: Funcio sinus (lınia gruixuda) junt als seus polinomis de Taylor de grau 1 (recta), 3 i
5 (corba mes coincident amb el sinus).
10.5 Teorema. Forma del residu de Taylor
Sigui f es n + 1 vegades derivable en I . Llavors per x, a ∈ I existeixen punts c i d en l’intervaldeterminat per a i x tals que el residu de Taylor es pot expressar:
Forma de Lagrange:
Rn(x, a) =f (n+1)(c)
(n + 1)!(x − a)n+1. (10.4)
Forma de Cauchy:
Rn(x, a) =f (n+1)(d)
(n + 1)!(x − a)(x − d)n. (10.5)
DEM: Definim F (t) = f(x) −nX
k=0
f (k)(t)
k!(x − t)k. Tenim F (a) = Rn(x, a) i F (x) = f(x) − f(x) = 0. La seva
derivada es
F′(t) = −
nX
k=0
f (k+1)(t)
k!(x − t)k +
nX
k=0
f (k)(t)
(k − 1)!(x − t)k−1 = −f (n+1)(t)
n!(x − t)n
.
Suposem ara que g es una funcio contınua a l’interval tancat d’extrems a i x, derivable a l’interior amb g′ 6= 0 (pertant, g(x) 6= g(a)). Pel teorema del valor mitja, existeix un punt c en aquest interval, on:
F (a) − F (x)
g(a) − g(x)=
− f(n+1)(c)n!
(x − c)n
g′(c)
Aıllant, F (a) = −g(a) − g(x)
g′(c)
f (n+1)(c)
n!(x − c)n.
Si prenem g(t) = (x − t)n+1 obtenim la forma de Lagrange:
F (a) = − (x − a)n+1
−(n + 1)(x − c)n
f (n+1)(c)
n!(x − c)n =
f (n+1)(c)
(n + 1)!(x − a)n+1
.
Si prenem g(t) = (x − t) obtenim la forma de Cauchy:
F (a) = − (x − a)
−1
f (n+1)(c)
n!(x − c)n =
f (n+1)(d)
(n + 1)!(x − a)(x − c)n
.♣
L’expressio
f(x) = f(a) +f ′(a)
1!(x− a) +
f ′′(a)
2!(x− a)2 + · · ·+ f (n)(a)
n!(x− a)n +
f (n+1)(c)
(n + 1)!(x− a)n+1 (10.6)
s’anomena formula de Taylor (o formula de Mc Laurin si a = 0).
83
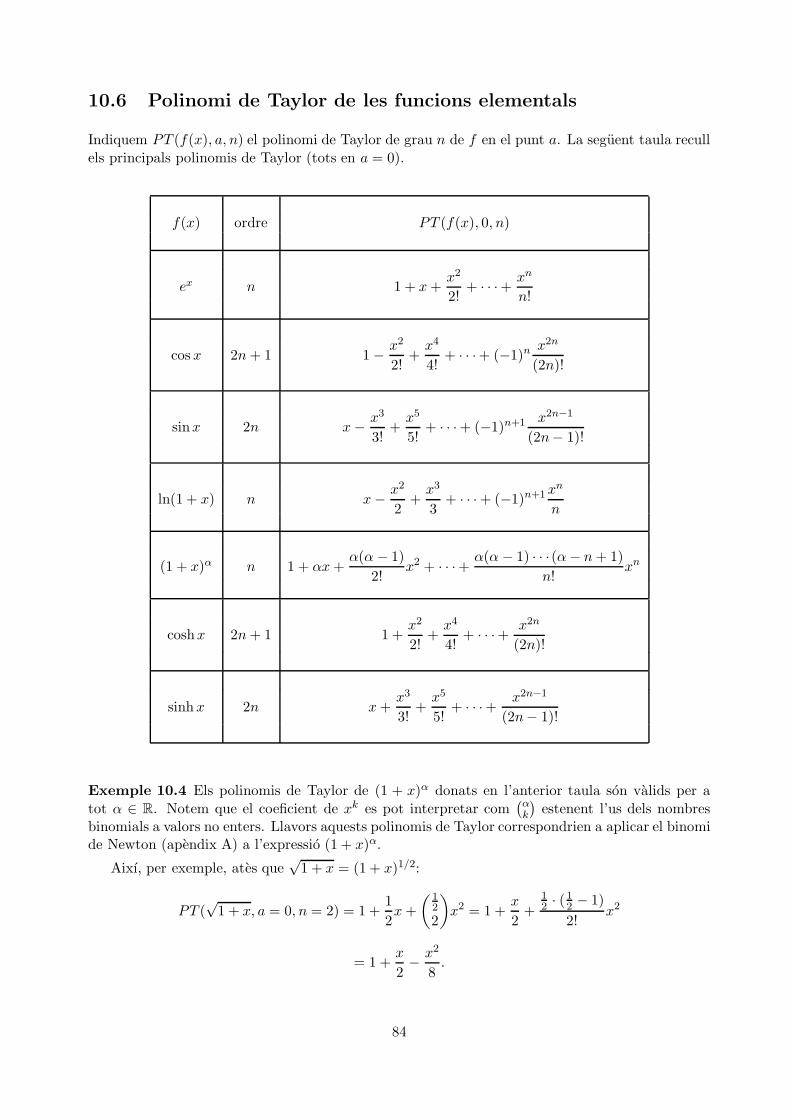
10.6 Polinomi de Taylor de les funcions elementals
Indiquem PT (f(x), a, n) el polinomi de Taylor de grau n de f en el punt a. La seguent taula recull
els principals polinomis de Taylor (tots en a = 0).
f(x) ordre PT (f(x), 0, n)
ex n 1 + x +x2
2!+ · · ·+ xn
n!
cos x 2n + 1 1 − x2
2!+
x4
4!+ · · ·+ (−1)n x2n
(2n)!
sinx 2n x − x3
3!+
x5
5!+ · · ·+ (−1)n+1 x2n−1
(2n− 1)!
ln(1 + x) n x − x2
2+
x3
3+ · · ·+ (−1)n+1 xn
n
(1 + x)α n 1 + αx +α(α − 1)
2!x2 + · · ·+ α(α − 1) · · · (α − n + 1)
n!xn
coshx 2n + 1 1 +x2
2!+
x4
4!+ · · ·+ x2n
(2n)!
sinh x 2n x +x3
3!+
x5
5!+ · · ·+ x2n−1
(2n− 1)!
Exemple 10.4 Els polinomis de Taylor de (1 + x)α donats en l’anterior taula son valids per a
tot α ∈ R. Notem que el coeficient de xk es pot interpretar com(αk
)estenent l’us dels nombres
binomials a valors no enters. Llavors aquests polinomis de Taylor correspondrien a aplicar el binomide Newton (apendix A) a l’expressio (1 + x)α.
Aixı, per exemple, ates que√
1 + x = (1 + x)1/2:
PT (√
1 + x, a = 0, n = 2) = 1 +1
2x +
( 12
2
)
x2 = 1 +x
2+
12 · ( 1
2 − 1)
2!x2
= 1 +x
2− x2
8.
84

De manera similar, podem obtenir el polinomi d’ordre n de1
1 + xTenint en compte que
(−1k
)=
(−1)(−2)···(−k)k! = (−1)k,
PT
(1
1 + x, , 0n
)
= 1 − x + x2 − x3 + · · · (−1)nxn. ♦
10.7 Propietats del polinomi de Taylor
En les seguents propietats, f i g son funcions que admeten polinomi de Taylor d’ordre n, λ ∈ R i
< P >n, on P es un polinomi, indica quedar-se amb els termes de grau menor o igual a n (truncaciofins a grau n).
(1) PT (f(x) + g(x), a, n) = PT (f(x), a, n) + PT (g(x), a, n).
(2) PT (λf(x), a, n) = λPT (f(x), a, n).
(3) PT (f ′(x), a, n) = ddxPT (f(x), a, n + 1).
(4) PT (f(x)g(x), 0, n) =< PT (f(x), 0, n) · PT (g(x), 0, n) >n.
(5) Si g(0) = 0, PT (f(g(x)), 0, n) =< PT (f(x), 0, n) ◦ PT (g(x), 0, n) >n.
DEM: (1), (2) i (3) son immediates a partir de les propietats de la derivada. Per demostrar (4) denotem
P (x) = PT (f(x), 0, n) i Q(x) = PT (g(x), 0, n). Aixı, f(x) = P (x) + o(xn) i g(x) = Q(x) + o(xn). Llavors, per les
propietats dels infinitesims, f(x)g(x) = P (x)Q(x)+o(xn). P (x)Q(x) te ordre de contacte amb f(x)g(x) superior a n,
pero es tracta d’un polinomi de grau superior a n. Passant els termes de grau major que n a l’infinitesim ens queda
f(x)g(x) =< P (x)Q(x) >n +o(xn) i com < P (x)Q(x) >n te grau menor o igual que n, es tracta ja del polinomi de
Taylor d’ordre n. Amb consideracions similars es demostra (5). ♣
Exemple 10.5 Calcular el polinomi de Taylor d’ordre 4 en a = 0 de la funcio f(x) = ex sinx.
PT (ex sin x, 0, 4) =
⟨(
1 + x +x2
2!+
x3
3!+
x4
4!
)
·(
x − x3
3!
)⟩
4
.
Dels 10 termes del producte, els unics amb grau no superior a 4 son:
x − x3
6+ x2 − x4
6+
x3
2+
x4
6
d’on PT (ex sinx, 0, 4) = x + x2 +x3
3. ♦
Exemple 10.6 Calcular el polinomi de Taylor d’ordre 4 en a = 0 de la funcio f(x) = esinx.
Notem que, en efecte, sin 0 = 0 de manera que l’argument de l’exponencial es un infinitesim.
Prenent els termes del sinus fins a grau 4 tindrıem ex−x3
6 i el seu polinomi seria:
⟨
1 +
(
x − x3
6
)
+1
2!
(
x − x3
6
)2
+1
3!
(
x − x3
6
)3
+1
4!
(
x − x3
6
)4⟩
4
=
= 1 + x +x2
2− x4
8. ♦
85

10.8 Calculs aproximats
Si |x − a| es petit, el polinomi de Taylor dona un valor aproximat de f(x). Aquesta es una
aproximacio de tipus local: es mes bona com mes a prop som del punt a.
Exemple 10.7 Sabem que sin 30◦ = 0,5. Que val sin 31◦?
Prenem a = π6 , x = π
6 + π180 . x − a = π
180 = 0,017. Fent servir el polinomi de primer grau
sin 31 ≈ sin 30 + cos 30π
180= 0,5151149.
El valor real es sin 31◦ = 0,515038. ♦
Exemple 10.8 Per calcular nombres irracionals. Podem calcular aproximacions decimals al nom-
bre e considerant f(x) = ex. Llavors e = f(1) i aproximem f(1) a partir del polinomi de Taylor ena = 0, (??):
e = 1 + 1 +1
2!+ · · ·+ 1
n!+ Rn(1, 0)
on Rn(1, 0) = eλ
(n+1)!, 0 < λ < 1. L’expressio del terme complementari permet fitar-lo i determinar
quina n necessitem per tenir un error prou petit. Si volem error< ε, afitem
eλ
(n + 1)!<
3
(n + 1)!< ε.
Si, per exemple, ε = 10−4 (4 decimals correctes) cal que (n + 1)! > 3ε = 30.000. Hem de prendre
n = 7 i e ≈ 2,718254 (es e = 2,7182818 . . .). ♦
Exemple 10.9 Que val la gravetat a 3Km d’alcada si al nivell del mar es g0 = 9,80 m · s−2?
Si G es la constant de gravitacio universal, M la massa de la Terra i RT el radi de la Terra, la
gravetat a alcada x val
g(x) = GM
(RT + x)2≈ G
M
R2T
− GM
R3T
x = g0
(
1 − 2x
RT
)
= 9,80(
1− 2x
6300
)
,
on hem fet l’aproximacio de Taylor de primer grau, ja que 3Km es molt petit comparat ambRT = 6300 Km. Obtenim g(3) = 9,79 m · s−2. ♦
10.9 Aplicacio al calcul de lımits
El polinomi de Taylor es una manera de trobar infinitesims equivalents a una funcio donada. En
els lımits del tipus limx→a
f(x)
g(x)amb indeterminacio
0
0, es pot aproximar per Taylor els dos termes per
resoldre la indeterminacio. Acostuma a ser una manera bastant directa, alternativa a fer-ho perl’Hopital. Hem de vigilar d’agafar el nombre suficient de termes.
Exemple 10.10
limx→0
x − sinx
ex − 1 − x= lim
x→0
x − (x − x3
3! + · · · )(1 + x + x2
2! + · · · ) − 1 − x= lim
x→0
x3
6x2
2
= limx→0
x
3= 0. ♦
Exemple 10.11
limx→0
√1− cosx
sin x= lim
x→0
√
1 − (1− x2
2 )
x= lim
x→0
√x2
2
x=
{1√2
si x → 0+
− 1√2
si x → 0−♦
86

10.10 Estudi local de funcions
Donada una funcio f definida en un interval obert I , estudiem propietats locals en un punt a ∈ I ,
es a dir, com es comporta f al voltant d’aquest punt.
10.10.1 Creixement i decreixement
Una funcio es creixent en un interval I si dins d’aquest interval x1 < x2 implica f(x1) ≤ f(x2).Decreixent si f(x1) ≥ f(x2).
Una funcio es creixent en un punt a si existeix un entorn de a onf(x) − f(a)
x − a≥ 0. (Es
decreixent sif(x)− f(a)
x − a≤ 0.) El comportament es estricte si la desigualtat es estricta.
f te un maxim local en a si existeix un entorn de a on f(x) ≤ f(a). Mınim local sif(x) ≥ f(a). Els maxims i mınims locals tambe s’anomenen extrems locals.
Si f es derivable en a tenim que, si es creixent, llavors f ′(a) ≥ 0. Si es decreixent, f ′(a) ≤ 0. Site un maxim o un mınim locals, llavors f ′(a) = 0.
El contrari no es cert en general: f(x) = x3 verifica f ′(0) = 0 pero no es cap extrem.
Si f es derivable en l’interval obert I , llavors es creixent en I si i nomes si f ′(x) ≥ 0, ∀x ∈ I .
(Si f ′ > 0 la funcio es estrictament creixent. Tambe pot ser f ′ ≥ 0 i ser estrictament creixent,
com per exemple f(x) = x3.)
Si f ′ = 0 en I interval obert, llavors la funcio es constant en I .
DEM: Ja hem vist que si es creixent, la derivada es positiva. Ara, si en tot l’interval es f ′ ≥ 0, pel teoremadel valor mitja, donats x1 < x2, f(x2) − f(x1) = f ′(c)(x2 − x1) amb x1 < c < x2. Llavors f(x2) − f(x1) ≥ 0.
Si f ′ = 0 en I , pel mateix teorema del valor mitja f(x2) − f(x1) = 0. ♣
Exemple 10.12 On es creixent i decreixent f(x) = x3 − 2x2 + x?
Calculem la primera derivada: f ′(x) = 3x2 − 4x + 1. Al ser contınua a tot R, nomes cal trobarels seus zeros per tenir els intervals on el signe es positiu o negatiu. Es un polinomi de segon grau
que s’anul.la en 13 i 1. Veient que f ′(0) = 1 > 0, f ′( 1
2 ) = −14 < 0 i f ′(2) = 5 > 0, concloem que f
es creixent en (−∞, 13), decreixent en ( 1
3 , 1) i creixent en (1,∞).
Que passa als punts amb derivada zero? En x = 13 hi ha un maxim ja que passa de ser creixent
a decreixent. En 1 hi ha un mınim ja que passa de ser decreixent a creixent. ♦
10.10.2 Concavitat i convexitat
Recordem que la recta tangent a f en a es ra(x) = f(a) + f ′(a)(x− a).
Diem que f es concava en a si existeix un entorn U de a on f(x) > ra(x) en U − {a}.Diem que f es convexa en a si existeix un entorn U de a on f(x) < ra(x) en U − {a}.El punt a es d’inflexio si f(x) − ra(x) pren diferent signe a la dreta i l’esquerra de a.
Si f es derivable en un entorn de a i existeix f ′′(a), llavors si f ′′(a) > 0 f es concava mentre
que si f ′′(a) < 0 f es convexa1. Si a es un punt d’inflexio f ′′(a) = 0.
1En ocasions els termes concava i convexa es defineixen al reves. En qualsevol cas, conve recordar: f ′′(a) > 0curvatura ^, f ′′(a) < 0 curvatura _.
87

DEM: Per Taylor,
f(x) − ra(x) =f ′′(a)
2!(x − a)2 + o((x − a)2) =
1
2f′′(a) + θ(x)(x − a)2
on θ(x) → 0 per x → a. Prenent un entorn prou petit de a tenim que f(x) − ra(x) te el mateix signe que f ′′(a) (sif ′′(a) 6= 0).
Si a es un punt d’inflexio, f no es ni concava ni convexa en a, per tant ha de ser f ′′(a) = 0. ♣
Exemple 10.13 On es concava i convexa la funcio de l’exemple 10.12?
Calculem la segona derivada: f ′′(x) = 6x − 4. S’anul.la a x = 23 . Com f ′′(0) = −4 < 0 i
f ′′(1) = 2 > 0, concloem que f es concava en (−∞, 23) i convexa en ( 2
3 ,∞). En x = 23 , f ′′ val zero.
Es un punt d’inflexio? Sı, perque f passa de ser concava a convexa (figura 10.2). ♦
10.10.3 Teorema
Suposem f n − 1 vegades derivable en un entorn de a i f (n−1) derivable en a. Suposem f ′′(a) =
· · · = f (n−1)(a) = 0 i f (n)(a) 6= 0.
Si n es parell i f (n)(a) > 0 f es concava. Si, a mes, f ′(a) = 0, a es mınim.
Si n es parell i f (n)(a) < 0 f es convexa. Si, a mes, f ′(a) = 0, a es maxim.
Si n es imparell a es punt d’inflexio.
DEM: Com abans, l’aproximacio de Taylor dona el comportament local. En aquest cas
f(x) − ra(x) =f (n)(a)
2!(x − a)n + o((x − a)n).
Si n es imparell, el terme (x − a)n pren signe diferent a cada costat.
Si n es parell, es (x − a)n > 0 als dos costats i el signe de f(x) − ra(x) coincideix amb el de f (n)(a). A mes, si
f ′(a) = 0, el terme de l’esquerra es f(x) − f(a) que, al prendre un signe definit, indica un maxim o mınim. ♣
Exemple 10.14 Trobar els extrems locals i els punts d’inflexio de f(x) = x4 − x7.
Calculem algunes derivades: f ′(x) = 4x3 − 7x6, f ′′(x) = 12x2 − 42x5, f ′′′(x) = 24x − 210x4,
f (4)(x) = 24− 840x3.
Els extrems poden ser les solucions de f ′(x) = 4x3 − 7x6 = 0, es a dir, x = 0 o x = 3
√47 . Els
punts d’inflexio poden ser les solucions de f ′′(x) = 12x2 − 42x5 = 0, es a dir, x = 0 o x = 3
√27 .
x = 3
√47 es un maxim local ja que f ′′( 3
√47) = −8,26 < 0 (derivada d’ordre parell negativa).
x = 3
√27 es un punt d’inflexio ja que f ′′′( 3
√27) = 23,7 6= 0 (derivada d’ordre imparell no nul.la).
x = 0 va anul.lant derivades fins que f (4)(0) = 24. Al ser una derivada d’ordre parell positiva,es tracta d’un mınim (figura 10.2). ♦
10.10.4 Asımptotes
x = a es una asımptota vertical si f(x) → ±∞ per x → a. De fet el comportament s’ha d’analitzarper la dreta i l’esquerra del punt a.
A mes del comportament local, podem analitzar el comportament “en l’infinit”. El que estudiem
es si la funcio es comporta com una recta. Si es aixı, diem que ha asımptotes obliques (horitzontals,si son de pendent zero).
88

y = b es una asımptota horitzontal si f(x) → b per x → ∞.
y = mx + b es una asımptota obliqua si existeixen els lımits
m = limx→∞
f(x)
x, b = lim
x→∞(f(x)− mx). (10.7)
Tambe es miren per x → −∞.
Exemple 10.15 Trobar les asımptotes de f(x) =
√1 + 4x3 + x4
x.
Hi ha una asımptota vertical en x = 0, on limx→0+
f(x) = +∞ i limx→0−
f(x) = −∞.
Per trobar si hi ha asımptotes obliques:
m = limx→∞
f(x)
x= lim
x→∞
√1 + 4x3 + x4
x2= 1.
b = limx→∞
(√1 + 4x3 + x4
x− x
)
= limx→∞
√1 + 4x3 + x4 − x2
x= lim
x→∞1 + 4x3
x(√
1 + 4x3 + x4 + x2)= 2.
Aixı, per x → ∞ tenim l’asımptota y = x + 2. Es veu facilment que per x → −∞ hi ha la mateixaasımptota (figura 10.3). ♦
10.11 Obtencio de la grafica d’una funcio
Donada una funcio f(x) ens proposem fer un estudi global, de manera que podem acabar dibuixantla seva grafica. Els punts a tractar son:
• Domini (veure apartat 7.2).
• Simetries (veure apartat 7.9).
• Talls amb els eixos: Per x = 0, y = f(0). Tambe cerquem els punts amb y = 0, es a dir, els
zeros de la funcio: f(x) = 0.
• Intervals de creixement i decreixement.
• Maxims i mınims.
• Intervals de concavitat i convexitat.
• Punts d’inflexio.
• Asımptotes.
Exemple 10.16 Representar graficament f(x) =x3
x2 − 4.
El domini es R − {−2, 2}.f(−x) = (−x)3
(−x)2−4= − x3
x2−4= −f(x). Es una funcio imparella. Aixı, limitem l’estudi a x ≥ 0.
f(0) = 0. L’equacio f(x) = 0 no te mes solucions.
Calculem les derivades: f ′(x) =x2(x2 − 12)
(x2 − 4)2, f ′′(x) =
8x(x2 + 12)
(x2 − 4)3.
89

–1
–0.8
–0.6
–0.4
–0.2
0
0.2
0.4
0.6
0.8
1
–1 –0.5 0.5 1 1.5 2
x
–1
–0.8
–0.6
–0.4
–0.2
0
0.2
0.4
0.6
0.8
1
–2 –1 1 2
x
Figura 10.2: Grafiques de x3 − 2x2 + x i de x4 − x7.
–10
–8
–6
–4
–2
0
2
4
6
8
10
–6 –4 –2 2 4 6
x
Figura 10.3: Grafica de√
1+4x3+x4
x .
f ′ s’anul.la en 0 i en√
12. En (0,√
12), es f ′ < 0 (decreixent). En (√
12,∞), es f ′ > 0 (creixent).
x =√
12 = 2√
3 es un mınim (el punt es (2√
3, 3√
3)). (Notem que en aquesta analisi cal tenir encompte els punts de discontinuıtat, que en aquest cas no fan variar el signe de la primera derivada.)
f ′′ nomes s’anul.la en 0. En (0, 2), es f ′′ < 0 (convexa). En (2,∞), es f ′′ > 0 (concava). x = 0es un punt d’inflexio (es pot veure f ′′′(0) = −3
2 6= 0 o raonar a partir de la paritat de f).
Hi ha una asımptota vertical en x = 2, on limx→2+
f(x) = +∞ i limx→2−
f(x) = −∞.
Per trobar si hi ha asımtotes obliques:
m = limx→∞
f(x)
x= lim
x→∞x2
x2 − 4= 1.
b = limx→∞
(x3
x2 − 4− x
)
= limx→∞
4x
x2 − 4= 0.
Aixı, per x → ∞ tenim l’asımptota y = x.
Amb tota aquesta informacio ja podem tracar la grafica que es mostra en la figura 10.4. ♦
90

–20
–10
0
10
20
–10 –8 –6 –4 –2 2 4 6 8 10
x
Figura 10.4: Grafica de x3
x2−4.
91

Capıtol 11
Calcul de primitives
11.1 Primitives d’una funcio
Diem que la funcio F (x) es una primitiva de la funcio f(x) si F ′(x) = f(x). El calcul de primitiveses l’invers del calcul de derivades.
Com veurem al tema seguent, si una funcio f es contınua en un interval [a, b], la seva integral
val: ∫ b
af(x)dx = F (x)|ba = F (b)− F (a), (11.1)
on F es qualsevol primitiva de f . Si f es fitada i tenim un punt c de discontinuıtat dins de l’interval[a, b] fem
∫ ba f =
∫ ca f +
∫ bc f . El mateix es fa per funcions definides a trossos. Aixı el problema
de la integracio queda reduıt al calcul de primitives. Notem que si F1 i F2 son primitives de f ,(F1 − F2)
′ = 0 amb el que F2 = F1 + C per alguna constant C.
El problema que considerem a partir d’aquı es trobar una primitiva d’una funcio donada f .Les primitives tambe s’anomenen integrals indefinides de f i es denoten
∫f(x)dx, de manera que
∫ ba f(x)dx passa a dir-se integral definida. En el present capıtol utilitzarem el terme “integral” com
sinonim de primitiva.
Hi ha diferents metodes per trobar integrals indefinides, si be hi ha funcions que no admeten
primitives que es puguin expressar com a combinacio de funcions elementals. Per exemple:∫
ex2dx
o∫
sinxx dx. En aquests casos hem de recorrer a metodes numerics per trobar resultats aproximats
a les integrals definides. En alguns casos, depenent de quins siguin els lımits d’integracio, es podencalcular exactament les integrals definides sense utilitzar primitives, amb tecniques de variable
complexa, per exemple.
A continuacio veiem els metodes mes habituals d’integracio. Cal tenir en compte tambe que el
software matematic actual amb la seva capacitat simbolica redueix bastant la necessitat de calcularprimitives “a ma”.
Notem que, per exemple, com la derivada de x val 1, x es una primitiva de 1. Llavors, qualsevol
primitiva de 1 te la forma x + C per algun valor de la constant C. Per tant, escrivim:
∫
1dx = x + C.
Per simplicitat, en el que segueix ometrem la constant C, fet que no te efecte sobre el calculd’integrals definides, ja que al restar en els lımits d’integracio la constant desapareix.
92

11.2 Integrals immediates
A partir de les derivades de les funcions elementals s’obte una taula de primitives basiques:
∫
xαdx =xα+1
α + 1(α 6= −1)
∫dx
x= ln |x|
∫
axdx =1
lnaax
∫
exdx = ex
∫
sin xdx = − cosx
∫
cosxdx = sin x
∫dx
1 + x2= arctg x
∫dx√
1 − x2= arcsinx
Algunes funcions elementals no apareixen a la taula ja que el calcul de la seva primitiva no esimmediat. Per exemple,
∫lnxdx.
Notem que la primitiva de 1x donada per ln x nomes permet treballar amb x > 0. Posant ln |x|
tenim una funcio que es valida tambe treballant a la regio x < 0. Ates que 1x no es contınua en 0,
es incorrecte dir que ln |x| es la primitiva de 1x a R o a R − {0}, pero aixı incloem les dues regions
(x < 0 i x > 0) en una sola formula. Quan l’argument del logaritme sigui positiu per la seva formao per la regio on treballem, podem ometre el valor absolut.
De la linealitat de la derivada, s’obte que la integracio indefinida tambe ho es: si α, β ∈ R,∫
(αf(x) + βg(x))dx = α
∫
f(x)dx + β
∫
g(x)dx. (11.2)
Tambe tenim qued
dxF (ax + b) = aF ′(ax + b) de manera que, si
∫
f(x)dx = F (x) llavors:
∫
f(ax + b)dx =1
aF (ax + b). (11.3)
Exemple 11.1
∫ (
2√
x +1
x2
)
dx = 2
∫ √xdx +
∫dx
x2= 2
x12+1
12 + 1
+x−2+1
−2 + 1=
4
3
√x3 − 1
x. ♦
Exemple 11.2 ∫
(3 cos(2x + 1)− 2e−3x)dx =3
2sin(2x + 1) +
2
3e−3x. ♦
11.3 Integracio per canvi de variable
Per calcular∫
f(x)dx sempre tenim l’opcio de fer un canvi de variable x = φ(t) amb el que
dx = φ′(t)dt i l’integral es converteix en∫
f(φ(t))φ′(t)dt. De forma similar, si hem de calcular
93

una integral de la forma∫
f(φ(x))φ′(x)dx, farem el canvi z = φ(x), amb el que dz = φ′(x)dx i laintegral es redueix a
∫f(z)dz. En aquests casos, una vegada feta la integral en la nova variable
substituirem aquesta per la variable original.
Exemple 11.3 ∫
x sinx2dx =1
2
∫
sin zdz = −1
2cos z = −1
2cosx2.
on hem fet z = x2, dz = 2xdx. ♦
Exemple 11.4 ∫ex
1 + e2xdx =
∫dt
1 + t2= arctg t = arctg ex.
Amb el canvi t = ex, dt = exdx. ♦
Exemple 11.5∫√
a2 − x2dx =
∫ √
a2 − a2 sin2 θa cos θdθ = a2
∫
cos2 θdθ = a2
∫1 + cos 2θ
2dθ
= a2
(θ
2+
1
4sin 2θ
)
=a2
2(θ + sin θ cos θ) =
a2
2arcsin
x
a+
1
2x√
a2 − x2.
Amb el canvi x = a sin θ, dx = a cos θdθ. ♦
11.4 Integracio per parts
Integrant els dos costats de la regla de Leibniz (fg)′ = f ′g + fg′ s’obte:∫
f(x)g′(x)dx = f(x)g(x)−∫
f ′(x)g(x)dx. (11.4)
Quan hem d’integrar un producte, identifiquem un terme amb f i l’altre amb g′. Derivant el primeri integrant el segon passem a l’expressio de la dreta.
Es tıpic aplicar-ho a la integracio de polinomi per exponencial, polinomi per funcio trigonometricai exponencial per funcio trigonometrica.
Exemple 11.6
∫
x2e−2xdx = −x2
2e−2x+
∫
xe−2xdx = −x2
2e−2x− x
2e−2x +
1
2
∫
e−2xdx = −1
2
(
x2 + x +1
2
)
e−2x.
Amb
{
f = x2 −→ f ′ = 2x
g′ = e−2x −→ g = e−2x
−2
i
{
f = x −→ f ′ = 1
g′ = e−2x −→ g = e−2x
−2
♦
Exemple 11.7∫
e−x sin 2xdx = −e−x sin 2x + 2
∫
e−x cos 2xdx = −e−x sin 2x − 2e−x cos 2x − 4
∫
e−x sin 2xdx
Amb
{f = sin2x −→ f ′ = 2 cos2x
g′ = e−x −→ g = −e−x i
{f = cos 2x −→ f ′ = −2 sin 2x
g′ = e−x −→ g = −e−x Ara podem aıllar la inte-
gral que ens interessa:∫
e−x sin 2xdx = −e−x
5(sin 2x + 2 cos 2x). ♦
94

Tambe s’aplica el metode quan tenim un polinomi per un logaritme o per una funcio trigonometricainversa.
Exemple 11.8 ∫
lnxdx = x lnx −∫
dx = x lnx − x.
Amb
{f = ln x −→ f ′ = 1
xg′ = 1 −→ g = x
♦
Exemple 11.9
∫
x arctgxdx =x2
2arctg x − 1
2
∫x2
1 + x2dx =
x2
2arctgx − 1
2
∫ (
1− 1
1 + x2
)
dx
=1 + x2
2arctgx − x
2
Amb
{
f = arctgx −→ f ′ = 11+x2
g′ = x −→ g = x2
2
♦
11.5 Integracio de funcions racionals
Es tracta de calcular
∫p(x)
q(x)dx on p i q son polinomis.
11.5.1 Reduccio del grau del numerador
Si grau(p) ≥ grau(q), dividim p(x) entre q(x) obtenint un quocient a(x) i un residu b(x) (grau(b) <
grau(q)). Ara, la integral es converteix en
∫ (
a(x) +b(x)
q(x)
)
dx. Aixı, podem considerar grau(p) <
grau(q) sense perdre generalitat.
Exemple 11.10
∫x3
x2 + 1dx =
∫ (
x − x
x2 + 1
)
dx =x2
2− 1
2ln(x2 + 1). ♦
11.5.2 Canvi de variable
Algunes integrals racionals es poden fer amb un simple canvi de variable.
Exemple 11.11 ∫x
1 + x4dx =
1
2
∫dt
1 + t2=
1
2arctg t =
1
2arctgx2.
Amb x2 = t, 2xdx = dt. ♦
95

11.5.3 Casos basics
Hi ha dos tipus d’integral racional que considerem basiques ja que totes es redueixen a aquestes.
Son: ∫dx
(x + a)k,
∫Ax + B
(x2 + bx + c)ldx, (11.5)
on el polinomi x2 + bx + c te arrels complexes.
La primera es immediata. Si k = 1:
∫dx
x + a= ln |x + a|. (11.6)
Si k > 1: ∫dx
(x + a)k= − 1
(k − 1)(x + a)k−1. (11.7)
Per la segona, considerem ara nomes el cas l = 1. Notem primer que:
∫dx
x2 + a2=
1
aarctg
x
a,
∫x
x2 + a2dx =
1
2ln(x2 + a2). (11.8)
Llavors:∫
Ax + B
x2 + bx + cdx =
∫Ax + B
(x + b2 )2 + c − b2
4
dx =
∫A(x + b
2) + B − A b2
(x + b2 )2 + c − b2
4
dx
= A
∫x + b
2
(x + b2 )2 + c− b2
4
dx +
(
B − Ab
2
)∫dx
(x + b2 )2 + c − b2
4
=A
2ln(x2 + bx + c) +
B − A b2
√
c− b2
4
arctgx + b
2√
c− b2
4
. (11.9)
Normalment es mes facil reproduir el calcul que recordar les formules:
Exemple 11.12
∫dx
x2 + x + 1=
∫dx
(x + 12 )2 + 3
4
=4
3
∫dx
( 2x+1√3
)2 + 1=
4
3
√3
2
∫dt
t2 + 1=
2√3
arctg t =2√3
arctg2x + 1√
3.
Amb t = 2x+1√3
, dt = 2√3dx. ♦
11.5.4 Descomposicio en fraccions simples
Tornem ara al cas general
∫p(x)
q(x)dx. El procediment consisteix en descompondre la fraccio p(x)
q(x)
en fraccions simples. Per fer-ho, factoritzem
q(x) = λ∏
i
(x − αi)ni∏
j
(x2 + bjx + cj)mj (11.10)
on αi son les arrels reals del polinomi (amb multiplicitat ni), i els polinomis de segon grau tenen
arrels complexes (amb multiplicitat mj). La constant λ apareix si q(x) no es monic.
96

Si q(x) = (x − α)n(x2 + bx + c)m, la descomposicio es:
p(x)
q(x)=
n∑
k=1
Ak
(x− α)k+
m∑
l=1
Blx + Cl
(x2 + bx + c)l(11.11)
Si hi ha mes arrels, afegim termes analegs per a cada arrel.
El seguent pas es sumar les fraccions simples i igualar els numeradors per tal de determinar lesconstants Ak, Bl, Cl. Per fer-ho, podem donar valors concrets a x (per exemple, x = αk) o igualarels coeficients de les diferents potencies de x. Aixo ens condueix a un sistema d’equacions lineals
per les constants que cerquem.
Quan ja tenim les constants, realitzem les integrals, que son dels tipus (11.6), (11.7) i (11.9) (si
no hi ha arrels complexes multiples).
Exemple 11.13 Considerem
∫dx
x2 + x − 1. A diferencia de l’exemple 11.12 el polinomi x2 +x−1
te arrels reals,−1 ±
√5
2. Per tant,
1
x2 + x − 1=
A
x + 1+√
52
+B
x + 1−√
52
d’on 1 = A(x + 1−√
52 ) + B(x + 1+
√5
2 ). Igualant els coeficients de x tenim 0 = A + B, igualant les
constants 1 = A1−√
52 + B 1+
√5
2 = −√
5A. Es A = − 1√5, B = 1√
5. Llavors:
∫dx
x2 + x − 1=
1√5
∫(
1
x + 1−√
52
− 1
x + 1+√
52
)
dx
=1√5
(
ln
∣∣∣∣∣x +
1 −√
5
2
∣∣∣∣∣− ln
∣∣∣∣∣x +
1 +√
5
2
∣∣∣∣∣
)
=1√5
ln
∣∣∣∣∣
2x + 1 −√
5
2x + 1 +√
5
∣∣∣∣∣. ♦
Exemple 11.14∫
3x3 + 2x− 1
x4 + x2dx.
El denominador factoritza x2(x2 + 1). Per tant,
3x3 + 2x − 1
x4 + x2=
A
x+
B
x2+
Cx + D
x2 + 1.
Llavors, 3x3 +2x−1 = Ax(x2 +1)+B(x2 +1)+(Cx+D)x2 . Igualant potencies de x: 3 = A+C,
0 = B + D, 2 = A, −1 = B. Aixı, A = 2, B = −1, C = 1, D = 1.
∫3x3 + 2x − 1
x4 + x2dx =
∫ (2
x− 1
x2+
x + 1
x2 + 1
)
dx = 2 ln |x|+ 1
x+
1
2ln(x2 + 1) + arctgx
=1
x+ ln(x2
√
x2 + 1) + arctgx. ♦
Exemple 11.15 ∫dx
x4 + 1.
97

El denominador te quatre arrels complexes x = 4√−1. treballant en forma polar −1 = 1π, d’on les
arrels son 1π4, 1 3π
4, 1 5π
4i 1 5π
4. En forma binomica:
√2
2 +√
22 j,
√2
2 −√
22 j, −
√2
2 +√
22 j i −
√2
2 −√
22 j.
Ara factoritzem
x4 + 1 =
(
x −√
2
2−
√2
2j
)(
x −√
2
2+
√2
2j
)(
x +
√2
2−
√2
2j
)(
x +
√2
2+
√2
2j
)
=
(
x −√
2
2
)2
+1
2
(
x +
√2
2
)2
+1
2
= (x2 −√
2x + 1)(x2 +√
2x + 1).
Per tant,1
x4 + 1=
Ax + B
x2 −√
2x + 1+
Cx + D
x2 +√
2x + 1.
Llavors, 1 = (Ax+B)(x2+√
2x+1)+(Cx+D)(x2−√
2x+1). Igualant potencies de x: 1 = B+D,
0 = A +√
2B + C −√
2D, 0 =√
2A + B −√
2C + D, 0 = A + C. Aixı, A = − 12√
2, C = 1
2√
2,
B = 12 , D = 1
2 .
∫dx
x4 + 1=
1
2√
2
∫x +
√2
x2 +√
2x + 1dx − 1
2√
2
∫x −
√2
x2 −√
2x + 1dx
=1
4√
2
∫2x +
√2
x2 +√
2x + 1dx +
1
4
∫dx
x2 +√
2x + 1− 1
4√
2
∫2x −
√2
x2 −√
2x + 1dx +
1
4
∫dx
x2 −√
2x + 1
1
4√
2ln(x2 +
√2x + 1) +
1
2
∫dx
(√
2x + 1)2 + 1− 1
4√
2ln(x2 −
√2x + 1) +
1
2
∫dx
(√
2x − 1)2 + 1
=
√2
8ln
(
x2 +√
2x + 1
x2 −√
2x + 1
)
+
√2
4arctg(
√2x + 1) +
√2
4arctg(
√2x − 1). ♦
11.5.5 Arrels complexes multiples
Considerem ara ∫Ax + B
(x2 + bx + c)ndx, (11.12)
on el polinomi x2 + bx + c te arrels complexes i n > 1.
Fent un canvi de variable podem reduir-la al calcul de∫
dt(t2+1)n . Veiem primer com es calcula
aquest tipus d’integral.
In =
∫dx
(x2 + 1)n. (11.13)
Notem que I1 = arctg x. Podem trobar una relacio que expressa In en funcio de In−1, de maneraque podem obtenir-les totes a partir d’aquesta recurrencia:
In =1
2(n − 1)
x
(x2 + 1)n−1+
2n − 3
2(n − 1)In−1. (11.14)
DEM:1
(x2 + 1)n=
1 + x2 − x2
(x2 + 1)n=
1
(x2 + 1)n−1− x2
(x2 + 1)n.
Integrant els dos costats In = In−1 −R
x · x(x2+1)n dx i, integrant ara per parts:
In = In−1 +1
2(n − 1)
x
(x2 + 1)n−1− 1
2(n − 1)In−1 =
1
2(n − 1)
x
(x2 + 1)n−1+
2n − 3
2(n − 1)In−1.♣
98

Exemple 11.16
J =
∫x − 2
(x2 + 3x + 5)2dx =
∫x − 2
((x + 3
2
)2+ 11
4
)2 dx =42
112
∫x − 2
((2x+3√
11
)2+ 1
)2dx =
(Amb t = 2x+3√11
, dt = 2√11
dx, x =√
11t−32 .)
=42
112
√11
2
∫√
112 t − 7
2
(t2 + 1)2dt =
2
11
∫2t
(t2 + 1)2dt − 28
11√
11
∫dt
(t2 + 1)2
= − 2
11
1
t2 + 1− 28
11√
11
∫dt
(t2 + 1)2.
Ara, utilitzant (11.14): ∫dt
(t2 + 1)2=
t
2(t2 + 1)+
1
2arctg t.
Aixı, J = − 2
11
1 + 7√11
t
t2 + 1− 14
11√
11arctg t, i desfent el canvi de variable:
J = − 1
11
7x + 16
x2 + 3x + 5− 14
11√
11arctg
2x + 3√11
. ♦
11.5.6 Metode d’Hermite-Ostrogradski
Aquest metode permet extreure la part racional de la primitiva i es mes directe, especialment enel cas que hi hagi arrels complexes multiples.
∫p(x)
q(x)dx =
p1(x)
q1(x)+
∫p2(x)
q2(x)dx (11.15)
on q(x) =∏
i(x − αi)ni∏
j(x2 + bjx + cj)
mj , q1(x) =∏
i(x − αi)ni−1
∏
j(x2 + bjx + cj)
mj−1,
q2(x) =∏
i(x − αi)∏
j(x2 + bjx + cj), grau(p1) < grau(q1), grau(p2) < grau(q2).
Els polinomis p1, p2 es determinen derivant els dos costats de la igualtat.
Exemple 11.17
I =
∫dx
(x3 − 1)2.
El polinomi al denominador es x3 − 1 = (x − 1)(x2 + x + 1). Aixı, totes les arrels son dobles i
∫dx
(x3 − 1)2=
Ax2 + Bx + C
x3 − 1+
∫Dx2 + Ex + F
x3 − 1dx.
Derivant els dos costats
1
(x3 − 1)2=
(2Ax + B)(x3 − 1)− (Ax2 + Bx + C)3x2
(x3 − 1)2+
Dx2 + Ex + F
x3 − 1,
d’on 1 = (2Ax + B)(x3 − 1) − (Ax2 + Bx + C)3x2 + (Dx2 + Ex + F )(x3 − 1). Igualant potenciesde x: 0 = D, 0 = −A + E, 0 = −2B + F , 0 = −3C −D, 0 = −2A−D, 1 = −B −F . La solucio es
A = C = D = E = 0, B = −13 , F = −2
3 .
99

I = −1
3
x
x3 − 1− 2
3
∫dx
x3 − 1= −1
3
x
x3 − 1− 2
3
∫ (1
3
1
x − 1− 1
3
x + 2
x2 + x + 1
)
dx
= −1
3
x
x3 − 1− 2
9
∫dx
x − 1+
1
9
∫2x + 1
x2 + x + 1dx +
1
3
∫dx
x2 + x + 1
= −1
3
x
x3 − 1+
1
9ln
x2 + x + 1
(x − 1)2+
2
3√
3arctg
2x + 1√3
. ♦
11.6 Integracio de funcions racionals trigonometriques
Es tracta d’integrals de la forma
I =
∫
R(sinx, cosx)dx, (11.16)
on R es una funcio racional.
11.6.1 Canvi general
Podem passar sempre a una integral racional ordinaria amb el canvi: t = tgx
2. Es a dir, x = 2 arctg t
i
dx =2
1 + t2dt, sin x =
2t
1 + t2, cosx =
1 − t2
1 + t2
DEM:
tg2 x
2=
sin2 x2
cos2 x2
=1
cos2 x2
− 1.
Llavors cos x2 = 1√
1+t2i sin x
2 = t√1+t2
. Finalment, fem servir les formules de l’angle doble: sinx = 2 sin x2 cos x
2 ,
cos x = cos2 x2 − sin2 x
2 . ♣
Amb aquest canvi I =∫
R( 2t1+t2 ,
1−t2
1+t2 ) 2dt1+t2 .
Exemple 11.18∫
dx
3 + cosx=
∫1
3 + 1−t2
1+t2
2dt
1 + t2=
∫2dt
3(1 + t2) + 1 − t2=
=
∫dt
t2 + 2=
1√2
arctgt√2
=1√2
arctg
(1√2
tgx
2
)
. ♦
Per algunes formes particulars de la funcio R hi ha metodes mes directes.
11.6.2 Formes particulars
•∫
R(sinx) cosxdx, amb el canvi t = sin x.
∫
R(cosx) sinxdx, amb el canvi t = cos x.
Exemple 11.19∫
cosx
1 + sin xdx =
∫dt
1 + t= ln(1 + t) = ln(1 + sinx). ♦
100

•∫
R(tgx)dx, amb el canvi t = tgx, dx =dt
1 + t2.
Exemple 11.20∫
cos x
cosx + sinxdx =
∫dx
1 + tgx=
∫dt
(1 + t)(t2 + 1)=
1
2
∫ (1
1 + t− t
1 + t2+
1
1 + t2
)
dt =1
2ln |1 + t| − 1
4ln(1 + t2) +
1
2arctg t
1
4ln
(1 + t)2
1 + t2+
1
2arctg t =
1
2ln | cosx + sinx| + x
2.♦
•∫
R(sinx, cosx)dx, on totes les potencies son parelles. Amb el canvi:
t = tg x, dx =dt
1 + t2, cos2 x =
1
1 + t2, sin2 x =
t2
1 + t2.
Exemple 11.21∫
dx
1 + cosx sinx=
∫1
1 + t1+t2
dt
1 + t2=
∫dt
1 + t + t2=
2√3
arctg2t + 1√
3=
2√3
arctg2 tgx + 1√
3.
(S’ha utilitzat el resultat de l’exemple 11.12.) ♦
Els anteriors tipus particulars es poden resumir dient que:
Si R(− sinx,− cosx) = R(sinx, cosx), fem el canvi t = tg x.
Si R(− sinx, cosx) = −R(sinx, cosx) (imparella en el sin x), fem el canvi t = cosx.
Si R(sinx,− cosx) = −R(sinx, cosx) (imparella en el cos x), fem el canvi t = sinx.
Exemple 11.22∫
dxcos x es imparella en el cosx. Fem t = sin x, dt = cos xdx, d’on dx = dt
cosx .∫
dx
cosx=
∫dt
cos2 x=
∫dt
1 − t2=
1
2
∫ (1
1 − t+
1
1 + t
)
dt
=1
2ln
1 + t
1 − t=
1
2ln
1 + sin x
1 − sin x. ♦
El seguent tipus, tot i no ser racional, es important pel seu us en l’analisi de Fourier.
•∫
cosax cos bxdx,
∫
sin ax sin bxdx,
∫
cosax sin bxdx. Amb les formules:
cosA cosB =1
2(cos(A + B) + cos(A − B)), (11.17)
sinA sinB =1
2(cos(A − B) − cos(A + B)), (11.18)
cosA sinB =1
2(sin(A + B) − sin(A − B)). (11.19)
Exemple 11.23∫
cos 7x sin 4xdx =1
2
∫
(sin 11x − sin 3x)dx =1
6cos 3x − 1
22cos 11x. ♦
101

11.7 Integrals irracionals
Quan una integral conte potencies fraccionaries de x podem fer el canvi x = tn on n es el mınim
comu multiple dels radicals que apareixen.
Exemple 11.24
∫dx√
x + 3√
x=
∫6t5dt
t3 + t2= 6
∫t3dt
t + 1= 6
∫ (
t2 − t + 1 − 1
t + 1
)
dt
= 6
(t3
3− t2
2+ t − ln(t + 1)
)
= 2√
x − 3 3√
x + 6 6√
x − 6 ln(1 + 6√
x).
Amb el canvi x = t6. ♦
En aquest apartat tambe s’inclouen les integrals de funcions que depenen de√
ax2 + bx + c.Fent apareixer un quadrat perfecte i amb senzilles manipulacions algebriques arribem a integrals
que contenen una de les seguents expressions:
•√
1 − x2. Fem el canvi x = sin t, d’on dx = cos tdt i√
1− x2 = cos t.
•√
1 + x2. Fem el canvi x = sinh t, d’on dx = cosh tdt i√
1 + x2 = cosh t.
•√
x2 − 1. Fem el canvi x = cosh t, d’on dx = sinh tdt i√
x2 − 1 = sinh t.
Les funcions racionals depenents de sinh t i cosh t es tracten de manera similar a les racionals
trigonometriques, o, alternativament, amb el canvi z = et.
Exemple 11.25∫
dx
1 +√
x2 + 2x + 5=
∫dx
1 +√
(x + 1)2 + 4=
∫dx
1 + 2√
(x+12 )2 + 1
=
(fem y = x+12 , dy = dx
2 ) =
∫2dy
1 + 2√
y2 + 1=
(fem y = sinh t, dy = cosh tdt) =
∫2 cosh tdt
1 + 2 cosh t=
(fem z = et, dz = etdt, dt = dzz , cosh t = z+z−1
2 )
=
∫z + z−1
1 + z + z−1· dz
z=
∫z2 + 1
z(z2 + z + 1)dz =
∫ (1
z− 1
z2 + z + 1
)
dz
= ln z − 2√3
arctg2z + 1√
3= t − 2√
3arctg
2et + 1√3
= arg sinh y − 2√3
arctg2earg sinh y + 1√
3
= ln(y +√
y2 + 1) − 2√3
arctg2y + 1 + 2
√
y2 + 1√3
= ln(x + 1 +√
x2 + 2x + 5)− 2√3
arctgx + 2 +
√x2 + 2x + 5√3
.
(s’omet un 2 dividint l’argument del logaritme, ja que es pot absorbir en la constant d’integracio.)
102

Capıtol 12
Integral de Riemann
Considerem funcions definides en un interval f : [a, b] → R. Volem calcular l’area sota la corba(tancada per les lınies y = 0, x = a, x = b i y = f(x)). Si la funcio es constant f(x) = c, aquesta
area val c(b− a) (base per alcada del rectangle). Si f no es constant, la podem aproximar per una
funcio esglaonada i l’area queda aproximada per A(n) =
n∑
i=1
f(xi)(xi − xi−1) on xi = a + i (b−a)n .
Llavors esperem que l’area exacta sigui A = limn→∞
A(n).
Figura 12.1: Area sota la grafica d’una funcio.
En el que segueix considerarem nomes funcions fitades en [a, b] i donarem una versio rigorosa
de les anteriors idees.
12.1 Sumes de Riemann
Una particio de [a, b] es Π = {x0, x1, · · · , xn} tal que a = x0 < x1 < · · · < xn = b. Els increments
son ∆xi = xi − xi−1, i = 1, 2, · · · , n. Notem que n pot prendre qualsevol valor i que l’espaiat entrepunts no te perque ser regular. Definim tambe, per i = 1, 2, · · · , n,
Mi = supx∈[xi−1,xi]
f(x), mi = infx∈[xi−1,xi]
f(x). (12.1)
Les sumes de Riemann de f segons la particio Π son:
Suma superior: S(f, Π) =
n∑
i=1
Mi∆xi. Suma inferior: s(f, Π) =
n∑
i=1
mi∆xi.
Ates que mi ≤ Mi tenim:
s(f, Π) ≤ S(f, Π). (12.2)
103

Figura 12.2: Sumes inferiors i superiors.
Direm que una particio Π′ es mes fina que Π si Π ⊂ Π′. Llavors resulta que si Π′ es mes finaque Π:
S(f, Π) ≥ S(f, Π′), s(f, Π) ≤ s(f, Π′). (12.3)
DEM: Es suficient veure-ho quant Π′ consisteix en afegir un punt a Π. Aixı, Π = {x0, x1, · · · , xn}, Π′ ={x0, x1, · · · , xi−1, x
′, xi, · · · , xn}.Definim M
(1)i = sup
x∈[xi−1 ,x′ ]
f(x), M(2)i = sup
x∈[x′,xi ]
f(x), m(1)i = inf
x∈[xi−1 ,x′ ]f(x), m
(2)i = inf
x∈[x′,xi ]f(x).
Clarament, M(1)i , M
(2)i ≤ Mi i m
(1)i , m
(2)i ≥ mi. Llavors
S(f, Π) − S(f, Π′) = Mi(xi − xi−1) − M(1)i (x′ − xi−1) − M
(2)i (xi − x
′)
= (Mi − M(1)i )(x′ − xi−1) + (Mi − M
(2)i )(xi − x
′) ≥ 0,
s(f, Π) − s(f, Π′) = mi(xi − xi−1) − m(1)i (x′ − xi−1) − m
(2)i (xi − x
′)
= (mi − m(1)i )(x′ − xi−1) + (mi − m
(2)i )(xi − x
′) ≤ 0.♣
A partir d’aquı traiem el seguent resultat:
12.2 Teorema
Donades dues particions arbitraries Π1, Π2 es verifica que S(f, Π1) ≥ s(f, Π2).
DEM: Considerem Π′ = Π1 ∪ Π2 que es mes fina que Π1 i que Π2. Per tant:
S(f, Π1) ≥ S(f, Π′) ≥ s(f,Π′) ≥ s(f, Π2).♣
12.3 Integral de Riemann
L’anterior teorema implica que les S estan fitades inferiorment i les s superiorment. Llavors definim:
Integral inferior de Riemann:
∫ b
a
f = supΠ
s(f, Π).
Integral superior de Riemann:
∫ b
af = inf
ΠS(f, Π).
Es veu clarament que
∫ b
a
f ≤∫ b
af .
104

Diem que f es integrable Riemann en [a, b] si
∫ b
a
f =
∫ b
af . A aquest valor comu l’anomenem
∫ b
af .
Les integrals superiors i inferiors son el lımit de les sumes superiors i inferiors quan la particio
es fa infinitament fina. Tenim doncs assegurada l’existencia de J+ =∫ b
af i de J− =∫ b
af
Per la definicio de suprem i ınfim, tenim que ∀ε > 0 existeixen particions Π1, Π2 tals que per
tota particio Π′1 mes fina que Π1 i per tota particio Π′
2 mes fina que Π2:
0 ≤ J− − s(f, Π′1) ≤ J− − s(f, Π1) < ε,
0 ≤ S(f, Π′2) − J+ ≤ S(f, Π2)− J+ < ε. (12.4)
12.4 Teorema
f es integrable Riemann ⇐⇒ ∀ε > 0 ∃Π tal que S(f, Π)− s(f, Π) < ε.
DEM: Donat ε > 0, considerem (12.4) amb ε2 i Π′
1 = Π′2 = Π1 ∪ Π2 ≡ Π:
0 ≤ J− − s(f,Π) <ε
2, 0 ≤ S(f, Π) − J+ <
ε
2.
Sumant les desigualtats tenim que ∀ε > 0, ∃Π tal que
0 ≤ S(f, Π) − s(f,Π) − (J+ − J−) < ε,
Ara, si f es integrable Riemann, J+ = J− i deduım S(f, Π) − s(f, Π) < ε.
Inversament, ates que 0 ≤ J+ − J− ≤ S(f, Π)− s(f,Π), si fos S(f, Π)− s(f,Π) < ε per a tot ε > 0, hauria de ser
J+ − J− = 0 i la funcio seria integrable Riemann. ♣
12.5 Teorema (Condicions suficients d’integrabilitat)
• f es contınua en [a, b] ⇒ f es integrable Riemann.
• f es monotona en [a, b] ⇒ f es integrable Riemann.
Exemple 12.1 Per a tota funcio fitada existeixen les integrals superior i inferior, i els resultatsanteriors asseguren la integrabilitat Riemann d’una amplia classe de funcions. Pero hi ha funcions
que no son integrables Riemann. Considerem la funcio (veure exemple 8.15):
f(x) =
{1 si x ∈ Q
0 si x 6∈ Q
Tenim que sempre es Mi = 1 i mi = 0 ja que qualsevol interval conte punts racionals i irracionals.
Llavors, per a tota particio Π de l’interval [a, b]: s(f, Π) = 0, S(f, Π) = (b − a). Aixı,
∫ b
a
f = 0,
∫ b
af = b − a, amb el que f no es integrable Riemann. ♦
105

12.6 Teorema (Integral com lımit de sumes de Riemann)
Donada Π, si triem zi ∈ [xi−1, xi], definim la corresponent suma de Riemann com
SR =
n∑
i=1
f(zi)(xi − xi−1). (12.5)
f definida i fitada en [a, b] es integrable Riemann si i nomes si existeix una constant A tal que
∀ε > 0 ∃Π0 tal que si Π es mes fina que Π0 llavors |A −n∑
i=1
f(zi)(xi − xi−1)| < ε.
DEM: Si f es integrable Riemann, definim A =R b
af . Ates que mi ≤ f(zi) ≤ Mi, SR , a l’igual que A, es
troba entre la suma inferior i la superior. El teorema 12.4 ens dona Π0 tal que S(f, Π0) − s(f,Π0) < ε. Llavors, si Πes mes fina que Π0:
|A − SR| ≤ S(f, Π) − s(f,Π) ≤ S(f, Π0) − s(f, Π0) < ε.
Per demostrar la implicacio contraria, comencem notant que podem triar els zi de manera que SR sigui tan proper a
S(f, Π) com vulguem (el mateix per s(f,Π)). Llavors, |A− S(f, Π)| ≤ |A− SR| + |SR − S(f, Π)| que es pot fer tant
petit com es vulgui. Aixı demostrem que tant S(f, Π) com s(f,Π) tendeixen a A d’on f es integrable Riemann. ♣
En aquest cas A =∫ ba f . Podem considerar doncs la integral com el lımits de les sumes de
Riemann quan les particions es fan infinitament fines. Podem escriure
∫ b
a
f = limΠ
n∑
i=1
f(zi)∆xi. (12.6)
Tambe es fa servir la notacio: ∫ b
af ≡
∫ b
af(x)dx. (12.7)
12.7 Propietats de la integral
(1) Si f, g son integrables Riemann en [a, b] i λ ∈ R llavors f + g i λf son integrables Riemann
en [a, b] i
∫ b
a(f + g) =
∫ b
af +
∫ b
ag,
∫ b
aλf = λ
∫ b
af .
(2) Si f es integrable Riemann en [a, b] i g difereix de f nomes en un nombre finit de punts llavors
g es integrable Riemann en [a, b] i
∫ b
ag =
∫ b
af .
(3) Si f, g son integrables Riemann en [a, b] i f(x) ≤ g(x) ∀x ∈ [a, b] llavors∫ ba f ≤
∫ ba g.
(4) Si f es integrable Riemann en [a, b] llavors tambe ho es |f | i∫ ba |f | ≥ |
∫ ba f |.
(5) Si f es integrable Riemann en [a, b], tambe ho es en tot subinterval. Si f es integrable Riemann
en [a, c] i en [c, b] llavors ho es en [a, b] i∫ ba f =
∫ ca f +
∫ bc f .
(6) Si f es integrable Riemann en [a, b] i f([a, b]) ⊂ [c, d] i g es contınua en [c, d] llavors g ◦ f esintegrable en [a, b].
(7) Si f, g son integrables Riemann en [a, b] llavors tambe ho es el seu producte f · g.
106

La integral
∫ b
af l’hem definit per a < b. En el cas a > b fem
∫ b
af = −
∫ a
bf . Aixı es mante la
propietat d’additivitat. (Notem que
∫ a
af = 0.)
Si f es fitada i integrable en [a, b], tambe ho es en [a, x] per a ≤ x ≤ b. Per tant, podem definirla funcio
F (x) =
∫ x
a
f. (12.8)
12.8 Teorema
F es contınua. Si f es contınua en c, F es derivable en c i F ′(c) = f(c).
Notem que si f es contınua en [a, b], aquest teorema ens diu que
d
dx
∫ x
af = f(x). (12.9)
Es a dir, que la derivada de la integral respecte al lımit superior es la funcio que integrem.
12.9 Teorema fonamental del calcul
Sigui f contınua en [a, b] i F una primitiva de f (F ′ = f). Llavors, ∀x ∈ [a, b]∫ x
af = F (x) − F (a). (12.10)
En particular, tenim la regla de Barrow
∫ b
af = F (b) − F (a) ≡ F |ba. (12.11)
DEM: Si g(x) =R x
af , ja hem vist g′(x) = f(x). Llavors (g(x) − F (x))′ = g′(x)− F ′(x) = 0 en tot [a, b]. Aixı,
ha de ser g(x) − F (x) = K constant. Ates que g(a) = 0, K = −F (a) i g(x) = F (x) − F (a). ♣
Aquests resultats mostren una connexio profunda entre les operacions, conceptualment dife-rents, de derivacio i integracio. En el sentit mostrat anteriorment, aquestes operacions son inversa
una de l’altra.
12.10 Teorema (Integral de la derivada)
g derivable en [a, b] amb derivada g′ integrable. Llavors
∫ b
ag′ = g(b)− g(a).
12.11 Teorema (Integracio per parts)
Si f ′, g′ son integrables∫ b
a
fg′ = fg|ba −∫ b
a
f ′g. (12.12)
107

DEM:R b
afg′ +
R b
af ′g =
R b
a(fg′ + f ′g) =
R b
a(fg)′ = fg|ba. ♣
12.12 Teorema (Canvi de variable)
f contınua en [a, b], φ definida en [c, d] amb valors en [a, b] derivable amb continuıtat i tal queφ(c) = a, φ(d) = b. Llavors
∫ b
af =
∫ d
c(f ◦ φ)φ′. (12.13)
Fent servir la notacio (12.7) el teorema anterior s’escriu
∫ b
af(x)dx =
∫ d
c(f ◦ φ)(t)φ′(t)dt =
∫ d
cf(φ(t))φ′(t)dt =
∫ d
cf(φ(t))dφ(t). (12.14)
DEM: Si F ′ = f , (F ◦ φ)′ = (f ◦ φ)φ′. Llavors
Z b
a
f = F (b) − F (a) = F (φ(d)) − F (φ(c)) =
Z d
c
(f ◦ φ)φ′.♣
L’anterior resultat es correspon amb el procediment de canvi de variable per calcular primitives.En aquest cas, pero, no es necessari desfer el canvi de variable:
Exemple 12.2 A l’exemple 11.3 havıem vist
∫
x sinx2dx = −1
2cos x2, fent el canvi z = x2,
dz = 2xdx.
Si la integral hagues estat definida, el procediment hagues estat
∫ √2π
√π
x sinx2dx =1
2
∫ 2π
πsin zdz = −1
2cos z|2π
π = −1. ♦
12.13 Teorema del valor mitja per a integrals
f contınua en [a, b]. g integrable no negativa. Llavors ∃c ∈ [a, b] tal que
∫ b
af(x)g(x)dx = f(c)
∫ b
ag(x)dx. (12.15)
DEM: Prenem m = inf[a,b]
f , M = sup[a,b]
f . Llavors
m
Z b
a
g ≤Z b
a
fg ≤ M
Z b
a
g
d’on m ≤R b
afg
R b
ag
≤ M i, pel teorema 8.17, existeix c ∈ [a, b] amb f(c) igual a l’anterior quocient. ♣
Notem que, si g = 1, el teorema del valor mitja queda:
∫ b
af = f(c)(b − a). (12.16)
108
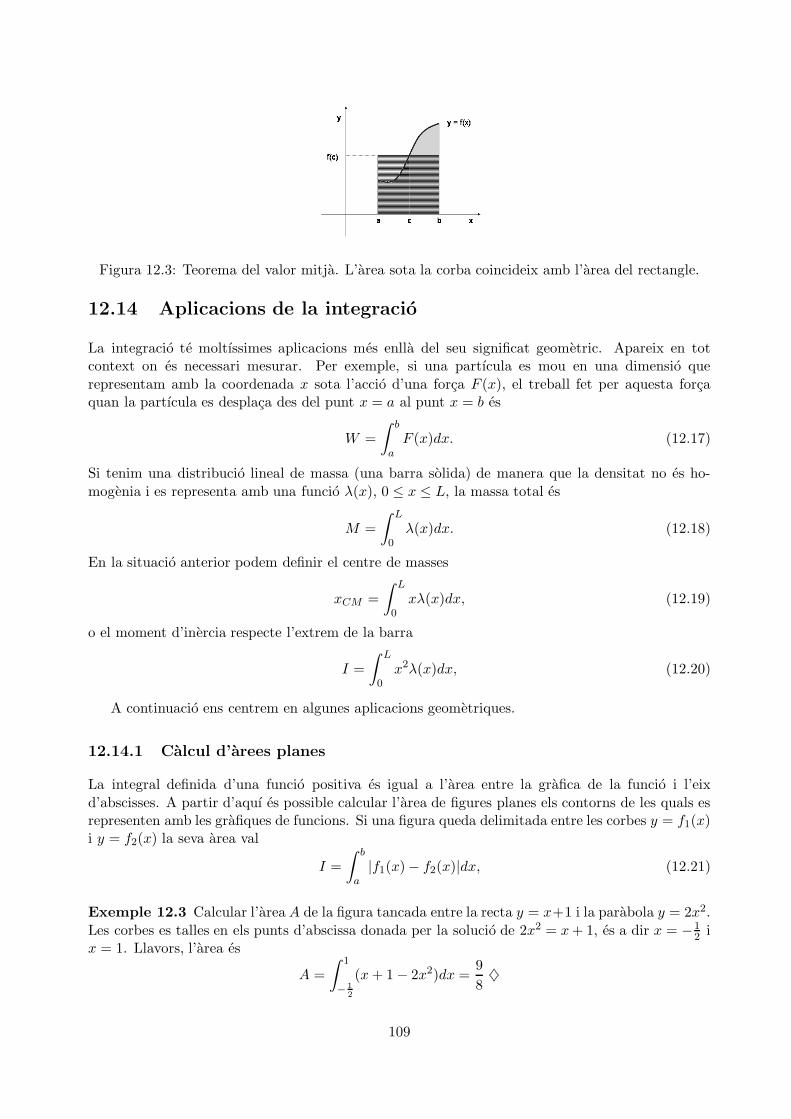
Figura 12.3: Teorema del valor mitja. L’area sota la corba coincideix amb l’area del rectangle.
12.14 Aplicacions de la integracio
La integracio te moltıssimes aplicacions mes enlla del seu significat geometric. Apareix en totcontext on es necessari mesurar. Per exemple, si una partıcula es mou en una dimensio que
representam amb la coordenada x sota l’accio d’una forca F (x), el treball fet per aquesta forcaquan la partıcula es desplaca des del punt x = a al punt x = b es
W =
∫ b
a
F (x)dx. (12.17)
Si tenim una distribucio lineal de massa (una barra solida) de manera que la densitat no es ho-
mogenia i es representa amb una funcio λ(x), 0 ≤ x ≤ L, la massa total es
M =
∫ L
0λ(x)dx. (12.18)
En la situacio anterior podem definir el centre de masses
xCM =
∫ L
0xλ(x)dx, (12.19)
o el moment d’inercia respecte l’extrem de la barra
I =
∫ L
0x2λ(x)dx, (12.20)
A continuacio ens centrem en algunes aplicacions geometriques.
12.14.1 Calcul d’arees planes
La integral definida d’una funcio positiva es igual a l’area entre la grafica de la funcio i l’eix
d’abscisses. A partir d’aquı es possible calcular l’area de figures planes els contorns de les quals esrepresenten amb les grafiques de funcions. Si una figura queda delimitada entre les corbes y = f1(x)i y = f2(x) la seva area val
I =
∫ b
a|f1(x)− f2(x)|dx, (12.21)
Exemple 12.3 Calcular l’area A de la figura tancada entre la recta y = x+1 i la parabola y = 2x2.
Les corbes es talles en els punts d’abscissa donada per la solucio de 2x2 = x + 1, es a dir x = −12 i
x = 1. Llavors, l’area es
A =
∫ 1
− 12
(x + 1 − 2x2)dx =9
8♦
109

0
1
2
3
4
y
–1 1 2
x
Figura 12.4: Recta y = x + 1 i parabola y = 2x2.
Exemple 12.4 Es facil veure que l’area d’un cercle de radi R (l’interior de la corba x2 + y2 = R2)val (veure l’exemple 11.5):
2
∫ R
−R
√
R2 − x2dx = R2 (θ + sin θ cos θ)|π/2−π/2 = πR2. ♦
12.14.2 Calcul de la longitud d’una corba
Considerem el segment de la corba y = f(x) entre els punts amb x = a i x = b. Per calcular laseva longitud partim [a, b] en n subintervals i aproximem la longitud per la suma
L ≈∑
i
√
(∆xi)2 + (∆yi)2.
Quan n es molt gran i els ∆xi es fan molt petits, podem aproximar ∆yi ∼ f ′(xi)∆xi amb el que
L ≈∑
i
√
1 + f ′(xi)2∆xi.
La longitud exacta la obtenim en el lımit n → ∞ on
L =
∫ b
a
√
1 + f ′(x)2dx, (12.22)
Exemple 12.5 La corba y =√
R2 − x2, −R ≤ x ≤ R, descriu mitja circumferencia. Per tant lalongitud P d’una circumferencia de radi R es el doble de la seva longitud:
P = 2
∫ R
−R
√
1 +
(
− x√R2 − x2
)2
dx = 2R
∫ R
−R
dx√R2 − x2
= 2R arcsinx
R
∣∣∣
R
−R= 2πR. ♦
12.14.3 Calcul d’arees i volums de revolucio
Encara que el calcul de volums o arees de figures tridimensionals requereix la integracio multidi-mensional, hi ha figures que es poden tractar amb la integracio unidimensional.
Les figures de revolucio son aquelles que s’obtenen al fer girar una corba plana al voltant d’uneix. Aquı fem girar el segment de la corba y = f(x) entre x = a i x = b al voltant de l’eix
d’abscisses.
110
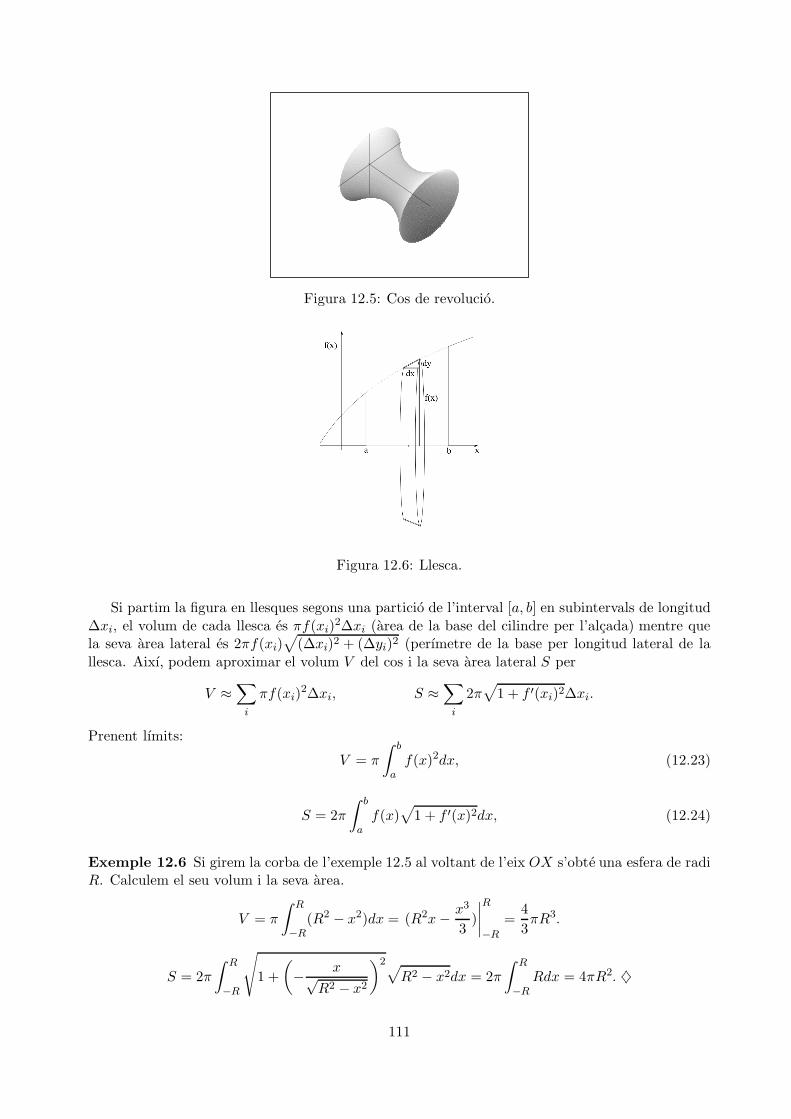
Figura 12.5: Cos de revolucio.
Figura 12.6: Llesca.
Si partim la figura en llesques segons una particio de l’interval [a, b] en subintervals de longitud
∆xi, el volum de cada llesca es πf(xi)2∆xi (area de la base del cilindre per l’alcada) mentre que
la seva area lateral es 2πf(xi)√
(∆xi)2 + (∆yi)2 (perımetre de la base per longitud lateral de la
llesca. Aixı, podem aproximar el volum V del cos i la seva area lateral S per
V ≈∑
i
πf(xi)2∆xi, S ≈
∑
i
2π√
1 + f ′(xi)2∆xi.
Prenent lımits:
V = π
∫ b
af(x)2dx, (12.23)
S = 2π
∫ b
af(x)
√
1 + f ′(x)2dx, (12.24)
Exemple 12.6 Si girem la corba de l’exemple 12.5 al voltant de l’eix OX s’obte una esfera de radiR. Calculem el seu volum i la seva area.
V = π
∫ R
−R(R2 − x2)dx = (R2x − x3
3)
∣∣∣∣
R
−R
=4
3πR3.
S = 2π
∫ R
−R
√
1 +
(
− x√R2 − x2
)2√
R2 − x2dx = 2π
∫ R
−R
Rdx = 4πR2. ♦
111

12.15 Metodes numerics d’integracio
En ocasions, hem de calcular
∫ b
af(x)dx on la primitiva de f no es combinacio de funcions elemen-
tals, o el seu calcul es molt complex. En aquests casos disposem de metodes per trobar el resultat
amb la precisio que dessitjem. La base d’aquests metodes son les sumes de Riemann (12.5). Donema continuacio els dos metodes mes basics amb fites per l’error comes.
En cada cas partim l’interval [a, b] en n subintervals de longitud h = b−an . Els punts de la
particio son xk = a + kh, k = 0, 1, . . . , n. Aixı, x0 = a, x1 = a + h, x2 = a + 2h, . . . , xn = b.Suposarem que f te derivades contınues, almenys fins a ordre 4.
12.15.1 Metode dels trapezis
Equival a aproximar f per la funcio que s’obte unint amb segments de recta els punts (x0, f(x0)),(x1, f(x1)), . . . , (xn, f(xn)). El valor que ens aproxima la integral ve donat per la mitjana de la
suma de Riemann corresponent a prendre el punt inicial de cada subinterval i la suma prenent elpunt final de cada subinterval:
Tn = h
(
f(a)
2+
n−1∑
k=1
f(a + kh) +f(b)
2
)
. (12.25)
L’error comes verifica: ∣∣∣∣Tn −
∫ b
af
∣∣∣∣≤ M2
(b − a)3
12n2(12.26)
on M2 = supx∈[a,b]
|f ′′(x)|.
12.15.2 Metode de Simpson
Aproximem f per segments de parabola, substituint la funcio sobre cada dos intervals consecutiusper la parabola que passa pels tres punts corresponents. Integrant l’aproximacio arribem a (prenem
n parell):
Sn =h
3(f(a)+4f(a+h)+2f(a+2h)+4f(a+3h)+2f(a+4h)+ · · ·+2f(b−h)+4f(b−2h)+f(b)).
(12.27)L’error comes verifica: ∣
∣∣∣Sn −
∫ b
af
∣∣∣∣≤ M4
(b − a)5
180n4(12.28)
on M4 = supx∈[a,b]
|f (4)(x)|.
112
Capıtol 13
Integracio impropia
Fins ara hem considerat la integracio de funcions fitades sobre intervals. Tambe es necessari incloureel cas de funcions no fitades (per exemple, amb asımptotes verticals) i integracio sobre conjunts no
fitats com semirectes o tot R.
13.1 Funcions localment integrables
Diem que una funcio es localment integrable sobre un conjunt D ⊂ R si es integrable en tot interval
[a, b] ⊂ D. Notem que D pot ser un interval obert, una semirecta, etc.
13.2 Integrals impropies de primera especie
Prenent lımits sobre els extrems d’integracio, es poden definir integrals sobre intervals indefinits.
Si f esta definida i es localment integrable en [a,∞), definim
∫ ∞
a
f = limM→∞
∫ M
a
f, (13.1)
en cas que el lımit existeixi. Si el lımit val ±∞ diem que la integral divergeix. Si no existeix, la
integral no existeix en sentit impropi. Similarment, si f es localment integrable en (−∞, a], definim
∫ a
−∞f = lim
M→−∞
∫ a
Mf. (13.2)
Finalment, si f es localment integrable en R definim
∫ ∞
−∞f =
∫ a
−∞f +
∫ ∞
a
f. (13.3)
Exemple 13.1∫ ∞
1
dx
x2= − 1
x
∣∣∣∣
∞
1
=
(
1 − limx→∞
1
x
)
= 1. ♦
Exemple 13.2 ∫ ∞
1
dx√x
= 2√
x|∞1 = limx→∞
2√
x − 2 = ∞. ♦
113

Figura 13.1: Integral d’una funcio entre a i ∞.
Exemple 13.3
∫ ∞
0
(x2 + 1)e−2xdx = − 1
4(2x2 + 2x + 3)e−2x
∣∣∣∣
∞
0
= − limx→∞
1
4(2x2 + 2x + 3)e−2x +
3
4=
3
4. ♦
Exemple 13.4 ∫ ∞
−∞
dx
1 + x2= arctgx|∞−∞ = π. ♦
13.3 Integrals impropies de segona especie
Si f esta definida i es localment integrable en [a, b) definim com integral impropia de f
∫ b
af = lim
x→b−
∫ x
af, (13.4)
en cas que el lımit existeixi. Si el lımit val ±∞ diem que la integral divergeix. Si no existeix, la
integral no existeix en sentit impropi.
De manera similar, podem definir-ho per l’esquerra. f : (a, b] → R.
∫ b
af = lim
x→a+
∫ b
xf. (13.5)
Exemple 13.5
∫ 1
0
dx
x2= lim
ε→0+
∫ 1
ε
dx
x2= lim
ε→0+− 1
x
∣∣∣∣
1
ε
= limε→0+
(
1 − 1
ε
)
= ∞. ♦
Exemple 13.6
∫ 1
0
dx√x
= limε→0+
∫ 1
ε
dx√x
= limε→0+
2√
x|1ε = limε→0+
(2− 2√
ε) = 2. ♦
Exemple 13.7
∫ 1
0
1
x2sin
1
xdx = lim
ε→0+
∫ 1
ε
1
x2sin
1
xdx lim
ε→0+cos
1
x
∣∣∣∣
1
ε
= limε→0+
(
cos 1 − cos1
ε
)
No existeix. ♦
114

Figura 13.2: Integral d’una funcio amb discontinuıtats.
En ocasions el punt problematic c estara en l’interior de l’interval d’integracio [a, b]. En aquestcas hem de separar la integral en suma d’integrals sobre [a, c] i [c, b].
Exemple 13.8
∫ 1
−1
dx3√
x2=
∫ 0
−1
dx3√
x2+
∫ 1
0
dx3√
x2= 3 3
√x|0−1 + 3 3
√x|10 = 3 + 3 = 6. ♦
Exemple 13.9∫ 1
−1
dx
x2=
∫ 0
−1
dx
x2+
∫ 1
0
dx
x2= ∞ + ∞ = ∞.
Notem que en aquest cas un us ingenu de la regla de Barrow ens hagues donat − 1x
∣∣1
−1= −2 en
lloc de la divergencia que realment hi ha. Conve estar alerta sobre aquest possible error.♦
En ocasions, nomes volem saber el caracter convergent o no d’una integral impropia. Es conve-nient tenir, doncs, alguns resultats de referencia. Es facil comprovar que:∫ ∞
1
dx
xαes convergent per α > 1 i divergent per α ≤ 1.
∫ 1
0
dx
xαes convergent per α < 1 i divergent per α ≥ 1.
∫ ∞
1
p(x)e−λxdx on p(x) es un polinomi i λ > 0, sempre es convergent.
13.4 Teorema (criteris de comparacio)
Considerem funcions f, g no negatives, localment integrables en [a, b).
Si existeix una constant K > 0 i un entorn de b tal que f(x) ≤ Kg(x) en aquest entorn, llavors
si g es integrable en [a, b) tambe ho es f . Si∫ ba f divergeix tambe ho fa
∫ ba g.
El mateix passa per b = ∞.
Ara considerem I =∫∞a f(x)dx on, per x → ∞, f(x) → 0 i hi ha una funcio no negativa g tal
que f(x) ∼ g(x) per x → ∞. Llavors, a partir de cert valor de x tenim | f(x)g(x) − 1| < 1
2 d’on, a partir
d’aquesta x, 12g(x) < f(x) < 3
2g(x). Aixı, I te el mateix caracter que∫∞a g(x)dx.
115

Exemple 13.10∫ ∞
1
2 + x3
x5 + 3x + 1dx
es convergent ja que la funcio, per x → ∞, es comporta com 1x2 que te integral convergent.
∫ ∞
2
dx
x + sin xdx
es divergent ja que la funcio, per x → ∞, es comporta com 1x que te integral divergent. ♦
13.5 Teorema (comparacio amb x−α)
Donada una funcio f no negativa, localment integrable en (0, b]: si existeix α tal que limt→0
f(x)xα = l,∫ b0 f es convergent per α < 1 (l finit) i divergent per α ≥ 1 (l finit i no nul).
Exemple 13.11 El teorema anterior surt en aplicar el criteri de comparacio en el cas f(x) ∼ 1xα .
∫ π2
0
dx
sin x
es divergent ja que per x → 0,1
sin xes comporta com
1
xque te integral divergent (α = 1). ♦
Exemple 13.12 La seguent integral es de les anomenades de tercera especie ja que te carac-terıstiques de primera i segona especie.
I =
∫ ∞
0
dx√ex − 1
.
S’ha d’analitzar la convergencia de les dues integrals:
I1 =
∫ 1
0
dx√ex − 1
, I2 =
∫ ∞
1
dx√ex − 1
.
I1 es convergent ja que analitzant per Taylor, per x → 0,1√
ex − 1∼ 1√
xque es integrable en [0, 1].
I2 es convergent ja que, per x → ∞,1√
ex − 1∼ e−
x2 que es integrable en [1,∞]. Per tant, I es
convergent (amb el canvi t =√
ex − 1 es facil veure que val π). ♦
13.6 Integrals absolutament convergents
Donada f localment integrable en [a, b) diem que la integral impropia de f es absolutament con-
vergent si∫ ba |f | es convergent.
Donada f localment integrable en [a,∞) diem que la integral impropia de f es absolutament
convergent si∫∞a |f | es convergent.
116
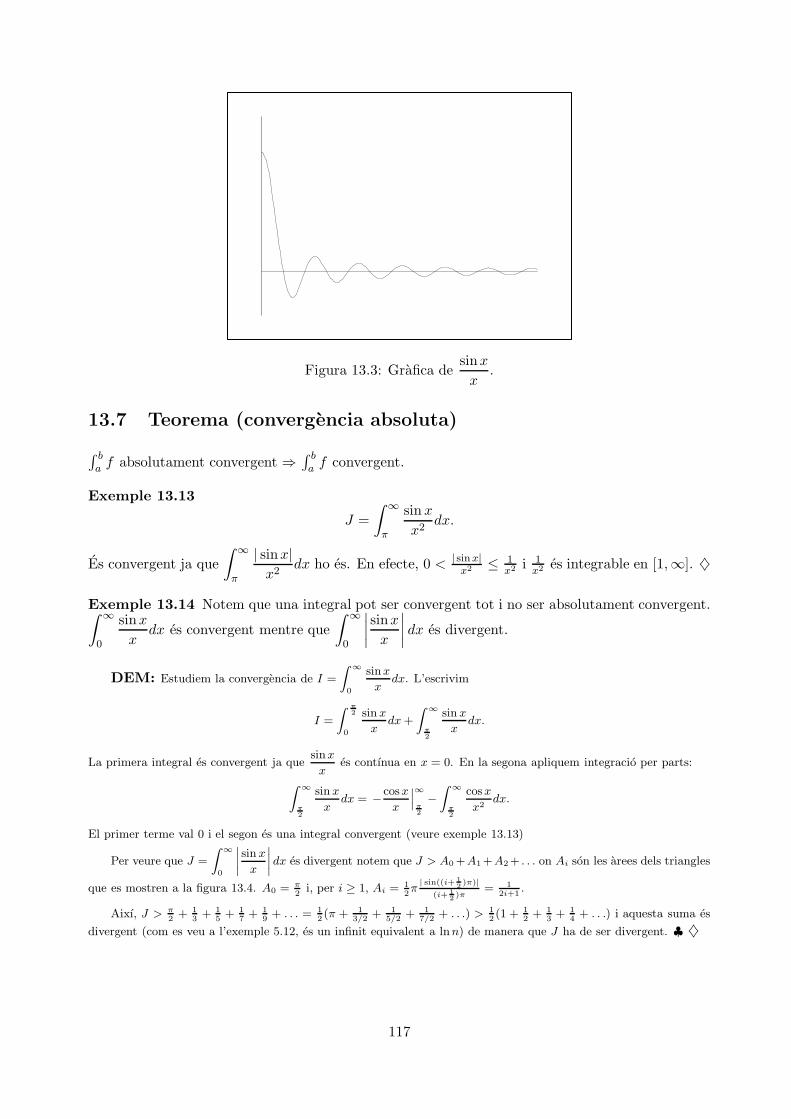
Figura 13.3: Grafica desinx
x.
13.7 Teorema (convergencia absoluta)
∫ ba f absolutament convergent ⇒
∫ ba f convergent.
Exemple 13.13
J =
∫ ∞
π
sin x
x2dx.
Es convergent ja que
∫ ∞
π
| sinx|x2
dx ho es. En efecte, 0 < | sinx|x2 ≤ 1
x2 i 1x2 es integrable en [1,∞]. ♦
Exemple 13.14 Notem que una integral pot ser convergent tot i no ser absolutament convergent.∫ ∞
0
sinx
xdx es convergent mentre que
∫ ∞
0
∣∣∣∣
sinx
x
∣∣∣∣dx es divergent.
DEM: Estudiem la convergencia de I =
Z ∞
0
sinx
xdx. L’escrivim
I =
Z π2
0
sin x
xdx +
Z ∞
π2
sin x
xdx.
La primera integral es convergent ja quesinx
xes contınua en x = 0. En la segona apliquem integracio per parts:
Z ∞
π2
sin x
xdx = − cosx
x
˛
˛
˛
∞
π2
−Z ∞
π2
cosx
x2dx.
El primer terme val 0 i el segon es una integral convergent (veure exemple 13.13)
Per veure que J =
Z ∞
0
˛
˛
˛
˛
sin x
x
˛
˛
˛
˛
dx es divergent notem que J > A0 +A1+A2+ . . . on Ai son les arees dels triangles
que es mostren a la figura 13.4. A0 = π2
i, per i ≥ 1, Ai = 12π
| sin((i+ 12)π)|
(i+ 12 )π
= 12i+1
.
Aixı, J > π2 + 1
3 + 15 + 1
7 + 19 + . . . = 1
2 (π + 13/2 + 1
5/2 + 17/2 + . . .) > 1
2 (1 + 12 + 1
3 + 14 + . . .) i aquesta suma es
divergent (com es veu a l’exemple 5.12, es un infinit equivalent a lnn) de manera que J ha de ser divergent. ♣ ♦
117

Figura 13.4: Fita inferior a la integral de∣∣ sinx
x
∣∣.
118
Capıtol 14
Series numeriques i de potencies
14.1 Series numeriques
Sigui {an} una successio de nombres reals. La seva serie associada es la successio {sn} definida
sn =
n∑
k=1
ak. (14.1)
Es a dir, sn = a1 + a2 + · · ·+ an.
A sn en diem suma parcial de la serie. El valor de l’ındex a partir del qual comenca la sumapot ser un altre, per exemple k = 0.
Diem que la serie es convergent si existeix lim sn. Aquest lımit el representem com∞∑
n=1
an. (14.2)
Exemple 14.1 Un exemple important es la serie geometrica. Es tracta de la serie associada ala successio geometrica de rao r: an = arn (a 6= 0, r 6= 1). Les seves sumes parcials valen
sn = a
n∑
k=0
rk = arn+1 − 1
r − 1. (14.3)
DEM: rsn = r(a + ar + ar2 + · · · + arn) = ar + ar2 + · · · + arn+1 = sn − a + arn+1 . D’aquı aıllem sn. ♣
Ara podem fer el lımit n → ∞. Si |r| < 1, lim sn =a
1 − r. Per a r > 1, lim sn = ∞. Per a
r < −1, no existeix. (Notem que per r = 1, sn = a(n + 1) → ∞ i per r = −1, sn oscil.la entre elsvalors 0 i a i no te lımit.)
Aixı, la serie geometrica es convergent si i nomes si −1 < r < 1 i val∞∑
k=0
ark =a
1 − r. ♦ (14.4)
14.2 Teorema (condicio necessaria de convergencia)
Si la serie
∞∑
n=1
an es convergent, llavors liman = 0.
119

DEM: Sigui S = limsn el valor de la serie. Ates que an = sn − sn−1, liman = lim sn − lim sn−1 = S − S = 0.
♣
Aixı, si an no tendeix a zero, la serie no pot ser convergent. Pero la condicio an → 0 no essuficient.
Exemple 14.2 Es convergent
∞∑
n=1
n
n + 2? No, ja que lim
n
n + 2= 1 6= 0. ♦
Exemple 14.3 Considerem la serie
∞∑
n=1
1
n. Ara, lim 1
n = 0 pero anem a veure que la serie es
divergent.
Notem que els termes de la successio1
nentre
1
2i
1
22son majors que
1
22, els que estan entre
1
22
i1
23son majors que
1
23, etc.
s2n = 1+1
2+
1
3+
1
22+
1
5+
1
6+
1
7+
1
23+ · · ·+ 1
2n> 1+
1
2+
1
22+
1
22+
1
23+
1
23+
1
23+
1
23+ · · ·+ 1
2n
= 1 +1
2+
1
2+ · · ·+ 1
2= 1 +
n
2→ ∞.
Aixı, necessariament sn → ∞. De fet, ja havıem vist a l’exemple 5.12 quesn
lnn→ 1 de manera que
la serie ha de divergir de forma similar a ln n. ♦
Encara que sumar series es un problema difıcil, a vegades nomes volem determinar-ne la con-
vergencia. Hi ha diversos criteris amb aquesta fi.
14.3 Criteri de comparacio
Siguin les series∑
n
an,∑
n
bn de termes no negatius tals que hi ha K > 0 i n0 ∈ N amb an ≤ Kbn,
∀n > n0. Llavors, si∑
n
bn es convergent, tambe ho es∑
n
an. Si∑
n
an es divergent, tambe ho es
∑
n
bn.
14.4 Comparacio per quocient
Sian
bn→ λ 6= 0,
∑
n
an es convergent si i nomes si ho es∑
n
bn. Si λ = 0,∑
n
bn convergent ⇒∑
n
an convergent.
Exemple 14.4 Series harmoniques
Es convenient disposar de series de referencia per a poder fer comparacions. Un cas moltutilitzat es la serie harmonica: ∞∑
n=1
1
np(14.5)
120

on p ∈ R. La serie es convergent si p > 1, i divergent si p ≤ 1.
DEM: Ja hem vist a l’exemple 14.3 que la serie harmonica amb p = 1 es divergent.
Si p ≤ 1, 0 <1
n≤ 1
np, d’on
X 1
npdivergeix.
Si p > 1, la serie queda fitada superiorment per
1 +
„
1
2p+
1
2p
«
+
„
1
4p+
1
4p+
1
4p+
1
4p
«
+
„
1
8p+ · · · + 1
8p
«
+ · · · = 1 +1
2p−1+
1
(2p−1)2+ · · ·
serie geometrica amb rao 12p−1 < 1 i, per tant, convergent. ♣ ♦
El criteri del quocient ens diu que si an i bn son “infinitesims” equivalents (considerats com
funcions de n), les series∑
n
an i∑
n
bn tenen el mateix caracter.
Una manera d’estudiar la convergencia consisteix en trobar-ne una d’equivalent de tipus harmonic
o geometric.
Exemple 14.5 Estudiar la convergencia de la serie
∞∑
n=1
1 +√
n
n.
Per n → ∞,1 +
√n
n∼ 1√
n. La serie
∞∑
n=1
1√n
es harmonica amb p = 12 < 1; per tant, divergent.
Aixı,
∞∑
n=1
1 +√
n
nes divergent. ♦
Exemple 14.6 Estudiar la convergencia de la serie S =
∞∑
n=1
1
an + 1en funcio del parametre a > 0.
Per a ≤ 1, lim1
an + 16= 0 amb el que S no pot ser convergent.
Per a > 1,1
an + 1∼ 1
an. La serie
∑ 1an es geometrica amb rao 0 < 1
a < 1 i, per tant, convergent.
En aquest cas, S es convergent. ♦
14.5 Criteri de l’arrel (Cauchy)
Sigui la serie∑
n
an de termes no negatius. Sigui α = lim n√
an. Si α < 1, es convergent. Si α > 1,
es divergent.
DEM: Si α > 1, existeix n0 tal que per n > n0 es n√
an > 1 (prenent ε = α− 1 en la definicio de lımit). Llavorsno pot ser an → 0 i la serie no pot ser convergent.
Si α < 1, prenem α < r < 1. A partir de cert valor de n, es n√
an < r. Per tant, 0 ≤ an < rn. Com la geometrica
de rao r es convergent,P
an tambe ho es. ♣
14.6 Criteri del quocient (D’Alembert)
Sigui la serie∑
n
an de termes no negatius. Sigui α = liman+1
an. Si α < 1, es convergent. Si α > 1,
es divergent.
121

DEM: Si α > 1, existeix n0 tal que per n > n0 esan+1
an> 1. Llavors an+1 > an i no pot ser an → 0. La serie
no pot ser convergent.
Si α < 1, prenem α < r < 1. Existeix n0 tal que per n > n0,an+1
an< r. Per tant, an+1 =
an+1
an
an
an−1· · · an0+2
an0+1an0+1 <
rn−n0an0+1 = Krn. Com la geometrica de rao r es convergent,P
an tambe ho es. ♣
Exemple 14.7 Estudiar la convergencia de la serie
∞∑
n=1
n2e−n.
Apliquem el criteri del quocient. lim(n+1)2e−(n+1)
n2e−n = e−1 < 1. La serie es convergent. ♦
Si α = 1, els anteriors criteris no decideixen. Si el quocient tendeix a 1 llavors l’arrel tendeix a
1. El seguent criteri pot ser util en aquests casos.
14.7 Criteri integral
Sigui f : [1,∞) → R una funcio contınua, positiva i decreixent. Llavors, la serie S =∑
n
f(n) i la
integral I =
∫ ∞
1f tenen el mateix caracter.
DEM: Del decreixement de f deduım f(n + 1) ≤R n+1
nf ≤ f(n). Sumant sobre n, de la primera desigualtat
deduım que si la integral I es convergent, llavors la serie S es convergent. De la segona desigualtat, si S es convergent,llavors I es convergent. A mes podem obtenir una fita a l’error comes a l’aproximar la serie per la integral.
∞X
n0+1
f(n) ≤Z ∞
n0
f ≤∞X
n0
f(n) = f(n0) +∞X
n0+1
f(n).
D’aquı traiemR∞
n0f − f(n0) ≤
P∞n0+1 f(n) ≤
R∞
n0f . Llavors
S =
n0X
1
f(n) +
Z ∞
n0
f − ε (14.6)
on 0 ≤ ε ≤ f(n0). ♣
Exemple 14.8 Estudiar la convergencia de la serie
∞∑
n=2
1
n lnn.
La comparacio amb les series harmoniques, 1n2 < 1
n lnn < 1n no decideix. El criteri del quocient
tampoc decideix ja que liman+1
an= lim
n lnn
(n + 1) ln(n + 1)= lim
lnn
ln(n + 1)= lim
n + 1
n= 1, (on hem
fet l’Hopital).
Ara,
∫ ∞
2
dx
x lnx= ln(lnx)|∞2 = ∞, aixı que la serie es divergent. ♦
Exemple 14.9 Sumar la serie S =
∞∑
n=1
1
n√
namb error menor que 10−3.
La serie es convergent (harmonica amb p = 32). Per a que l’error sigui menor que ε, hem de
triar n0 en (14.6) de manera que 1n√
n< ε, es a dir, n0 > 1
ε2/3 . En el nostre cas ε = 10−3 i n0 = 101.
S ≈101∑
n=1
1
n√
n+
∫ ∞
101
dx√x3
= 2,61287.
122

El resultat exacte es S = 2,61237. Si nomes prenem la suma dels primers 101 termes el resultat es2,41385. Aixı, l’us de l’aproximacio integral accelera notablement la convergencia numerica. ♦
Fins ara hem tractant amb series de termes positius. Veiem ara alguns resultats per series ambtermes de signe variable.
14.8 Series alternades
Son les que tenen la forma∑
n
an amb signe alternat an = (−1)n+1bn on bn ≥ 0.
Si la successio bn es estrictament decreixent i tendeix a 0, llavors la serie associada a an es
convergent.
DEM: Definim ∆n = bn − bn+1 ≥ 0 ja que bn es decreixent. Les sumes parcials son sn =Pn
k=1(−1)k+1bk .Les parelles valen s2n = ∆1 + ∆3 + · · · + ∆2n−1 de manera que formen una sequencia creixent. Les imparelles valens2n+1 = b1 − ∆2 − ∆4 − · · · − ∆2n de manera que formen una sequencia decreixent.
Ates que s2n+1 − s2n = b2n+1 ≥ 0, la successio de termes parells es fitada superiorment i la de termes imparells
es fitada inferiorment de manera que convergeixen a un valor comu ja que bn → 0. Aquest valor es la suma de la
serie. ♣
14.9 Convergencia absoluta
Diem que la serie∑
n
an es absolutament convergent si∑
n
|an| es convergent.
Resulta que si una serie es absolutament convergent llavors es convergent.
DEM: Apliquem el criteri de Cauchy i tenim en compte que |an + · · · + an+p| ≤ |an| + · · · + |an+p| < ε. ♣
Exemple 14.10 Es convergent la serie
∞∑
n=1
sin n
n2?
Sı, ja que ho es en valor absolut. En efecte,
∞∑
n=1
| sinn|n2
convergeix ja que 0 <| sinn|
n2<
1
n2i
l’harmonica amb p = 2 convergeix. ♦
El recıproc no es cert. Hi ha series que son convergents pero no absolutament convergents.
Exemple 14.11 Es convergent la serie
∞∑
n=1
(−1)n+1
n?
Sı, ja que es una serie alternada amb terme general tendint a 0. Com veurem mes endavant, laseva suma val
1 − 1
2+
1
3− 1
4+ · · · = ln2.
La serie no es convergent, pero, en valor absolut ja que ens queda l’harmonica amb p = 1, divergent.♦
123

14.10 Series de potencies
Son successions de forma generica a0 + a1x + a2x2 + · · · + anxn. Considerem la serie
∞∑
n=0
anxn.
Volem estudiar la convergencia en funcio del parametre x.
En general es poden considerar series centrades en qualsevol punt a:
∞∑
n=0
an(x − a)n. Per
simplicitat, considerarem a = 0.
Exemple 14.12
∞∑
n=0
xn nomes es convergent si |x| < 1 (ja que es tracta d’una serie geometrica de
rao x). ♦
Exemple 14.13
∞∑
n=0
xn
n!es convergent ∀x ∈ R (considerem-la en valor absolut i apliquem el criteri
del quocient: lim xn+1/(n+1)!xn/n!
= lim xn+1 = 0).
Exemple 14.14
∞∑
n=0
n!xn nomes es convergent si x = 0 (considerem-la en valor absolut i apliquem
el criteri del quocient: lim (n+1)!xn+1
n!xn = lim((n + 1)x) que val ±∞ a no ser que x = 0). ♦
14.11 Radi de convergencia
Donada la serie
∞∑
n=0
anxn considerem ρ = lim |an|1/n. El radi de convergencia es R =1
ρ. L’interval
de convergencia es (−R, R). El teorema de Cauchy-Hadamard diu que la serie es convergent si|x| < R i divergent si |x| > R.
Si |x| = R, pot passar qualsevol cosa.
Utilitzant el resultat de l’apartat 5.4.7 notem que tambe podem calcular ρ = lim∣∣∣an+1
an
∣∣∣.
Exemple 14.15
∞∑
n=0
xn.
an = 1 d’on ρ = 1 i R = 1. En x = ±1 es divergent. ♦
Exemple 14.16
∞∑
n=1
xn
n2.
an =1
n2d’on ρ = 1 i R = 1. En x = ±1 es convergent. ♦
Exemple 14.17
∞∑
n=1
xn
n.
an =1
nd’on ρ = 1 i R = 1. En x = −1 es convergent (alternada amb terme de lımit 0) i en
x = 1 es divergent (harmonica amb p = 1). ♦
124

14.12 Derivacio i integracio de series de potencies
f(x) =
∞∑
n=0
anxn defineix una funcio en l’interval (−R, R). Resulta que aquesta funcio es contınua
i es pot derivar i integrar terme a terme.
f ′(x) =
∞∑
n=0
annxn−1,
∫ x
0f =
∞∑
n=0
an
n + 1xn+1. (14.7)
Exemple 14.18 La serie geometrica
∞∑
n=0
xn convergeix en (−1, 1) i la seva suma val1
1 − x(veure
(14.4)). ♦
Exemple 14.19 Sumar la serie
∞∑
n=0
nxn.
Sabem que
∞∑
n=0
xn =1
1 − xen (−1, 1). Derivant, tenim que
1
(1 − x)2=
∞∑
n=0
nxn−1. Multiplicant
per x els dos costats tenim que la serie considerada inicialment es convergent en (−1, 1) i la seva
suma valx
(1 − x)2. ♦
14.13 Series de Taylor
Si la funcio f te derivades d’ordre arbitrari en a ∈ R, podem considerar els seus polinomis de Taylor
de grau successiu. Aixo ens dona una serie de potencies amb an = f (n)(a)n! . Ens plantegem si la serie
∞∑
n=0
f (n)(a)
n!(x − a)n (14.8)
convergeix a f(x). Per a que passi aixo cal que el residu verifiqui limn→∞
Rn(x, a) = 0 en algun entorn
de a. Si aixo es dona, la funcio f(x) queda representada per la seva serie de Taylor (14.8).
Exemple 14.20 Per la funcio ex el residu de Taylor val verifica
limn→∞
Rn(x, 0) = limn→∞
ec xn
n!= 0
per a qualsevol valor de x. Aixı, amb radi de convergencia infinit,
ex =
∞∑
n=0
xn
n!= 1 + x +
x2
2!+
x3
3!+ · · · ♦ (14.9)
De manera similar s’obtenen els casos seguents.
Exemple 14.21 Per a tot x ∈ R,
cos x =∞∑
n=0
(−1)n
(2n)!x2n = 1 − x2
2!+
x4
4!− · · · ♦ (14.10)
125

Exemple 14.22 Per a tot x ∈ R,
sinx =
∞∑
n=0
(−1)n
(2n + 1)!x2n+1 = x − x3
3!+
x5
5!− · · · ♦ (14.11)
En altres casos la serie pot tenir un radi de convergencia finit.
Exemple 14.23
1
1 + x=
∞∑
n=0
(−x)n =∞∑
n=0
(−1)nxn (14.12)
per a x ∈ (−1, 1). (Notem que aquest resultat s’obte dels polinomis de Taylor (exemple 10.4) o,
alternativament, considerant la funcio com serie geometrica de rao −x.)
Integrant els dos costats trobem
ln(1 + x) =
∞∑
n=0
(−1)n xn+1
n + 1= x − x2
2+
x3
3− · · · . (14.13)
Tambe podem obtenir la serie de arctgx fent servir que
(arctgx)′ =1
1 + x2=
∞∑
n=0
(−1)nx2n
i integrant
arctgx =
∞∑
n=0
(−1)n x2n+1
2n + 1. (14.14)
Aquests dos ultims exemples tambe convergeixen en (−1, 1). ♦
Notem que les anteriors igualtats, per exemple (14.9), es poden prendre com definicions de lesfuncions corresponents. D’aquesta manera les funcions elementals queden definides a traves de lesoperacions basiques, associades a l’estructura de cos dels nombres reals, i de l’operacio de pas al
lımit.
14.14 Exponencial complexa. Formules d’Euler
L’expressio de funcions com series de Taylor permet considerar valors complexes de la variable. Lessumes parcials d’una serie son polinomis amb el que no hi ha cap problema per prendre x ∈ C.
Entendrem que aquestes sumes convergeixen a un nombre complex a + bj si la seva part realconvergeix a a i la seva part imaginaria convergeix a b.
El cas que ens interessa especialment es el de la funcio exponencial. Ates que
ex = 1 + x +x2
2!+
x3
3!+ · · · , cosx = 1− x2
2!+
x4
4!− · · · , sin x = x − x3
3!+
x5
5!− · · · ,
fent x = jθ on θ ∈ R,
ejθ = 1 + jθ +(jθ)2
2!+
(jθ)3
3!+ · · · = 1 + jθ − θ2
2!− j
θ3
3!+
θ4
4!+ · · ·
= 1 − θ2
2!+
θ4
4!+ · · ·+ j
(
θ − θ3
3!+ · · ·
)
= cos θ + j sin θ.
126

Hem arribat a la relacio entre l’exponencial imaginaria i les funcions trigonometriques (veure l’a-partat 6.8):
ejθ = cos θ + j sin θ. (14.15)
Es a dir, cos θ = <(ejθ) i sin θ = =(ejθ) De la mateixa manera e−jθ = cos θ − j sin θ. Combinant
les dues arribem a les formules d’Euler:
cos θ =ejθ + e−jθ
2, sin θ =
ejθ − e−jθ
2j. (14.16)
Aquestes relacions permeten reduir els calculs trigonometrics als calculs basats en exponencials.
Exemple 14.24 Ates que ejnθ = cos(nθ) + j sin(nθ), tenim la formula de de Moivre per fer
potencies de complexos en forma polar:
(cos θ + j sin θ)n = cos(nθ) + j sin(nθ). (14.17)
Per n = 2 obtenim les formules de l’angle doble: cos(2θ) + j sin(2θ)) = (cos θ + j sin θ)2 = cos2 θ −sin2 θ + j2 sinθ cos θ. ♦
Exemple 14.25 Ates que ej(α+β) = ejαejβ ,
cos(α + β) + j sin(α + β) = (cosα + j sinα)(cosβ + j sinβ)
= cos α cosβ − sinα sinβ + j(sinα cos β + cos α sin β).
Igualant parts reals i imaginaries arribem a les formules pel sinus i el cosinus de la suma:
cos(α + β) = cosα cosβ − sin α sin β, sin(α + β) = sinα cosβ + cos α sin β. ♦
Exemple 14.26
∫
e3x cos 2xdx es pot calcular integrant per parts, pero tambe:
∫
e3x cos 2xdx =
∫
e3x<ej2xdx = <∫
e(3+2j)xdx = <e(3+2j)x
3 + 2j
= <e3x(cos 2x + j sin 2x)
32 − (2j)2(3− 2j) =
e3x
13(3 cos2x + 2 sin2x). ♦
127
Part III
Transformacio de Laplace
128
Capıtol 15
La transformacio de Laplace
15.1 Funcions objecte
Treballarem amb funcions que representen una magnitud que varia amb el temps, f(t). Aquestesestaran definides per t ≥ 0. Tenim aixı f : [0,∞) → R. Per algunes questions es mes comode
considerar que aquestes funcions estan definides a tot R i f(t) = 0 per t < 0. Direm que aquestesson funcions objecte si verifiquen les seguents condicions:
(1) f i les seves derivades tenen un nombre finit de discontinuıtats en cada interval finit.
(2) f te, com a molt, creixement exponencial. Es a dir, existeixen constants M, γ ∈ R tals que:
|f(t)| ≤ Meγt, ∀t ∈ [0,∞).
Notem que entre les funcions objecte s’hi troben les funcions sinωt i cosωt, els polinomis, lesexponencials, i els productes d’aquests tres tipus. Aixo inclou les solucions d’equacions diferencials
a coeficients constants com les que regeixen molts tipus de circuits.
15.2 Transformada de Laplace
Si f(t) es una funcio objecte (amb constants M , γ), la seva transformada de Laplace es la funcio
F (s) definida:
F (s) =
∫ ∞
0f(t)e−stdt. (15.1)
Tambe denotarem aquesta transformada com L[f ]. La transformada esta definida per a tot s > γ.
DEM: f es localment integrable i la integral es absolutament convergent:˛
˛
˛
˛
Z ∞
0
f(t)e−stdt
˛
˛
˛
˛
≤Z ∞
0
|f(t)|e−stdt ≤ M
Z ∞
0
e−(s−γ)t
dt =M
s − γ,
d’on la integral es convergent si s > γ. ♣
Exemple 15.1
L[1] =
∫ ∞
0e−stdt =
e−st
−s
∣∣∣∣
∞
0
=1
s.
L[eat] =
∫ ∞
0eate−stdt =
e−(s−a)t
−(s − a)
∣∣∣∣∣
∞
0
=1
s − a.
129

L[cos bt] =
∫ ∞
0cos bte−stdt =
−s cos bt + b sinbt
s2 + b2e−st
∣∣∣∣
∞
0
=s
s2 + b2.
La primera i la tercera estan definides per s > 0, la segona per s > a. ♦
15.3 Propietats de la transformacio de Laplace
En el que segueix f(t), g(t), etc son funcions objecte amb transformada L[f ] = F (s), etc. α, β, a, b,etc son constants reals.
(1) Unicitat.
La transformacio L es injectiva. Es a dir, si L[f(t)] = F (s) i L[g(t)] = G(s) amb F (s) =G(s), ∀s, llavors f(t) = g(t) en tots els punts de continuıtat.
La demostracio d’aquest fet, basada en una expressio general per la inversio de la transforma-da, requereix l’us de la transformacio de Fourier i queda, per tant, fora de l’abast d’aquestes
notes.
(2) Linealitat.
L[αf(t) + βg(t)] = αF (s) + βG(s). (15.2)
DEM:
L[αf(t) + βg(t)] =
Z ∞
0
(αf(t) + βg(t))e−stdt = α
Z ∞
0
f(t)e−stdt + β
Z ∞
0
g(t)e−stdt = αF (s) + βG(s). ♣
(3) Derivacio.L[f ′(t)] = sF (s) − f(0+) (15.3)
on f(0+) = limt→0+
f(t). Per la derivada n-esima:
L[f (n)(t)] = snF (s) − sn−1f(0+) − sn−2f ′(0+) − · · · − sf (n−2)(0+)− f (n−1)(0+). (15.4)
DEM: Integrem per parts:
L[f ′(t)] =
Z ∞
0
f′(t)e−st
dt = f(t)e−st˛
˛
∞
0−Z ∞
0
f(t)(−s)e−stdt = −f(0+) + sF (s).
Considerant que f ′′(t) es la derivada de f ′(t):
L[f ′′(t)] = sL[f ′(t)] − f′(0+) = s(sF (s) − f(0+)) − f
′(0+) = s2F (s) − sf(0+) − f
′(0+).
Repetint aquest procediment arribem a (15.4).♣
(4) Integracio.
L[∫ t
0f(u)du
]
=F (s)
s(15.5)
DEM: Denotem g(t) =R t
0f(u)du. Tenim que g(0+) = 0 i g′(t) = f(t). Aplicant (15.3) a aquesta ultima
relacio: F (s) = L[f(t)] = L[g′(t)] = sL[g(t)] − g(0+), d’on aıllem L[g(t)].♣
130

(5) Multiplicacio per t.
L[tf(t)] = −dF (s)
ds. (15.6)
DEM: La derivada respecte a s es pot entrar dins la integral ja que es pot demostrar que aquesta es
uniformement convergent: dF (s)ds
= dds
R∞
0f(t)e−stdt =
R∞
0f(t)(−t)e−stdt = −L[tf(t)]. ♣
(6) Divisio per t. Si existeix limx→0+
f(t)
t:
L[f(t)
t
]
=
∫ ∞
sF (u)du. (15.7)
DEM: Denotem G(s) =R∞
sF (u)du. La transformada de tg(t) val − dG(s)
ds= F (s) d’on tg(t) = f(t).♣
(7) Multiplicacio per eat.
L[eatf(t)] = F (s − a). (15.8)
DEM:R∞
0eatf(t)e−stdt =
R∞
0f(t)e−(s−a)tdt = F (s − a). ♣
(8) Translacio. Definim la translacio d’una funcio objecte f(t) com la funcio Taf(t) (on a ≥ 0)
definida:
Taf(t) =
{f(t − a) si t ≥ a
0 si t < a(15.9)
La seva transformada val:L[Taf(t)] = e−asF (s). (15.10)
DEM: Amb el canvi u = t − a:R∞
0Taf(t)e−stdt =
R∞
af(t − a)e−stdt =
R∞
0f(u)e−s(u+a)du = e−as
R∞
0f(u)e−sudu = e−asF (s). ♣
(9) Canvi d’escala. Donat a > 0
L[f(at)] =1
aF(s
a
)
. (15.11)
DEM: Amb el canvi u = at:R∞
0f(at)e−stdt =
R∞
0f(u)e−s u
adua
= 1a
R∞
0f(u)e−
sa
udu = 1aF ( s
a). ♣
(10) Funcions periodiques. Si f es periodica de perıode T (f(t + T ) = f(t)):
L[f(t)] =
∫ T0 f(t)e−stdt
1 − e−sT(15.12)
DEM:R∞
0f(t)e−stdt =
R T
0f(t)e−stdt +
R∞
Tf(t)e−stdt
(canvi u = t − T )
=R T
0f(t)e−stdt+
R∞
0f(u+T )e−s(u+T )du =
R T
0f(t)e−stdt+e−sT
R∞
0f(u)e−sudu, d’on aıllem la transformada.♣
(11) Valors lımit.
lims→∞
F (s) = 0, f(0+) = lims→∞
sF (s), limt→∞
f(t) = lims→0
sF (s). (15.13)
(en el cas que existeixin f(0+) i f(∞).)
131

DEM: El primer lımit surt de la desigualtat |F (s)| ≤ Ms−γ .
Si prenem el lımit s → ∞ a L[f ′(t)] = sF (s)− f(0+) obtenim 0 = lims→∞
sF (s)− f(0+) d’on surt el segon lımit.
Sobre la mateixa relacio, el lımit s → 0 dona lims→0
sF (s) − f(0+) = lims→0
Z ∞
0
f′(t)e−st
dt =
Z ∞
0
f′(t)dt =
f(∞) − f(0+), d’on surt el tercer lımit.♣
Figura 15.1: Transformacio de Laplace.
15.4 Funcions definides a trossos. Funcio de Heaviside
En aplicacions a l’enginyeria es habitual tractar funcions definides a trossos. Es poden tractarseparant la integral en suma d’integrals, pero donades les propietats de la transformada en ocasionshi ha metodes mes directes. La manera de tractar aquestes situacions es basa en l’us de la funcio
de Heaviside, definida (veure apartat 7.7):
u(t) =
{0 si t < 0,1 si t ≥ 0.
(15.14)
Tambe s’utilitza la seva desplacada ua(t) = u(t − a), es a dir:
ua(t) =
{0 si t < a,1 si t ≥ a.
(15.15)
Donada qualsevol funcio objecte f(t) podem incorporar-li el fet que val 0 per t < 0 escrivint-la comu(t)f(t) ja que
u(t)f(t) =
{0 si t < 0,
f(t) si t ≥ 0.(15.16)
D’aquesta manera la translacio Taf (15.9) es pot escriure Taf(t) = u(t−a)f(t−a) sense necessitatd’escriure la definicio a trossos. A partir dels resultats que ja tenıem:
L[u(t)] =1
s. (15.17)
132

Figura 15.2: f(t), g(t), h(t).
L[u(t − a)] =e−as
s. (15.18)
L[u(t − a)f(t − a)] = e−asF (s). (15.19)
De manera mes general, donat un subconjunt A ⊂ R, definim la seva funcio caracterıstica 1A(t):
1A(t) =
{1 si t ∈ A,
0 si t 6∈ A.(15.20)
El cas principal es quan A es un interval [a, b). Es facil comprovar que 1[a,b)(t) = ua(t)−ub(t). Si una
funcio esta definida a trossos, podem expressar-la de forma compacta utilitzant aquestes funcions.A efectes d’us de la transformada de Laplace poden utilitzar u(t) i 1 de manera intercanviable.
Per semirectes tenim 1[a,∞)(t) = ua(t).
Exemple 15.2 Considerem les funcions f(t) = t, g(t) = t − 2, h(t) = u(t − 2)f(t − 2). En elcontext de la transformacio de Laplace, traslladar dues unitats a la dreta la funcio f dona com a
resultat la funcio h en lloc de la funcio g ja que el desplacament mou part de la component nul.lade la funcio (quan t < 0) a la regio t > 0 (veure figura 15.2).
Les seves transformades son F (s) =1
s2, G(s) =
1
s2− 2
si H(s) =
e−2s
s2. ♦
Exemple 15.3 Considerem la funcio
f(t) =
t si 0 ≤ t < 2,2 si 2 ≤ t < 4,
2 cosπt si t ≥ 4.
f(t) = t · 1[0,2)(t) + 2 · 1[2,4)(t) + 2 cosπt · 1[4,∞)(t). En termes de u(t):
f(t) = (u(t) − u(t − 2))t + 2(u(t − 2) − u(t − 4)) + 2u(t− 4) cosπt. Finalment queda:
f(t) = t − u(t − 2)(t− 2) + 2(cosπt − 1)u(t − 4).
Notem que hem posat u(t)t = t. Ara, sabent que L[t] =1
s2, L[cosπt] =
s
s2 + π2i escrivint
u(t − 4) cosπt = u(t − 4) cos(π(t− 4) + 4π) = u(t − 4) cos(π(t − 4)):
L[f(t)] =1
s2− e−2s
s2+ 2
(s
s2 + π2− 1
s
)
e−4s =1 − e−2s
s2− 2π2 e−4s
s(s2 + π2). ♦
133
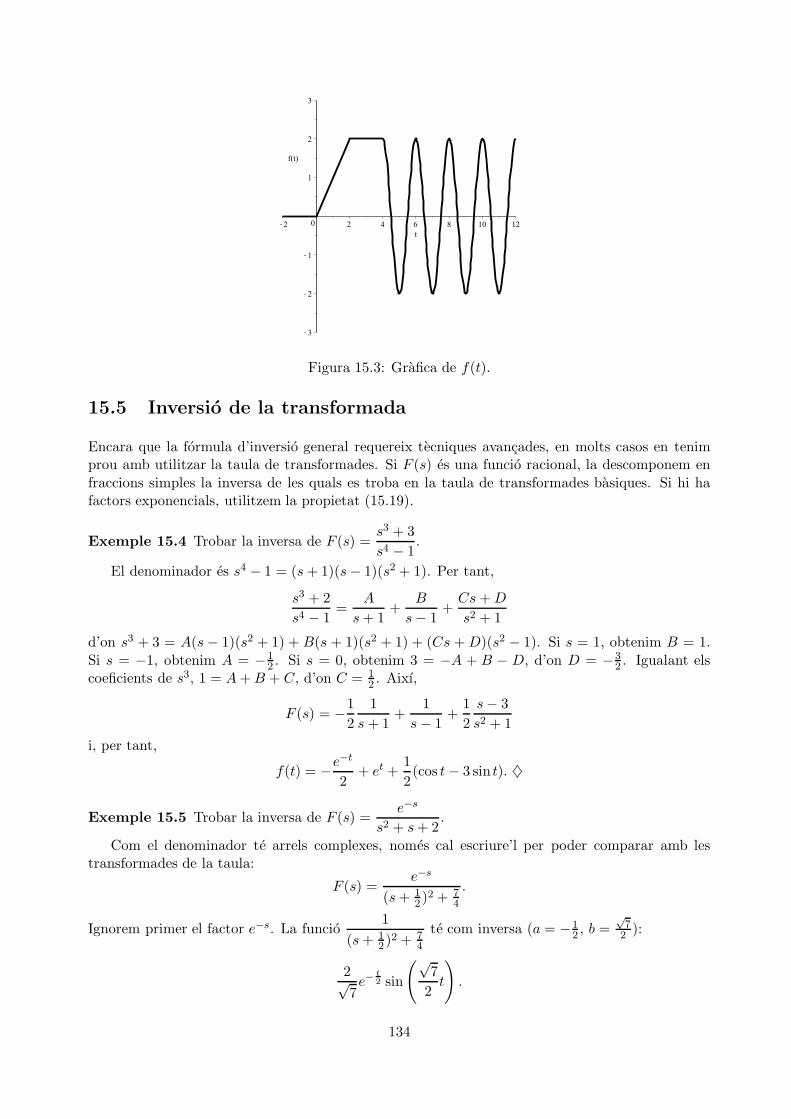
Figura 15.3: Grafica de f(t).
15.5 Inversio de la transformada
Encara que la formula d’inversio general requereix tecniques avancades, en molts casos en tenimprou amb utilitzar la taula de transformades. Si F (s) es una funcio racional, la descomponem en
fraccions simples la inversa de les quals es troba en la taula de transformades basiques. Si hi hafactors exponencials, utilitzem la propietat (15.19).
Exemple 15.4 Trobar la inversa de F (s) =s3 + 3
s4 − 1.
El denominador es s4 − 1 = (s + 1)(s − 1)(s2 + 1). Per tant,
s3 + 2
s4 − 1=
A
s + 1+
B
s − 1+
Cs + D
s2 + 1
d’on s3 + 3 = A(s − 1)(s2 + 1) + B(s + 1)(s2 + 1) + (Cs + D)(s2 − 1). Si s = 1, obtenim B = 1.
Si s = −1, obtenim A = −12 . Si s = 0, obtenim 3 = −A + B − D, d’on D = −3
2 . Igualant elscoeficients de s3, 1 = A + B + C, d’on C = 1
2 . Aixı,
F (s) = −1
2
1
s + 1+
1
s − 1+
1
2
s − 3
s2 + 1
i, per tant,
f(t) = −e−t
2+ et +
1
2(cos t − 3 sin t). ♦
Exemple 15.5 Trobar la inversa de F (s) =e−s
s2 + s + 2.
Com el denominador te arrels complexes, nomes cal escriure’l per poder comparar amb lestransformades de la taula:
F (s) =e−s
(s + 12 )2 + 7
4
.
Ignorem primer el factor e−s. La funcio1
(s + 12 )2 + 7
4
te com inversa (a = −12 , b =
√7
2 ):
2√7e−
t2 sin
(√7
2t
)
.
134

Tenint en compte el factor e−s, la inversa es:
f(t) =2√7u(t − 1)e−
t−12 sin
(√7
2(t − 1)
)
. ♦
15.6 Aplicacio a la resolucio d’equacions diferencials lineals
Degut al comportament de la transformacio de Laplace sota la derivacio de la funcio objecte (equa-cions (15.3) i (15.4)) les equacions diferencials a coeficients constants es poden convertir en equa-
cions algebriques en passar al domini transformat (figura 15.1). A mes (15.3) i (15.4) permetenincorporar d’entrada les condicions inicials de l’equacio diferencial. El procediment s’aplica igual a
equacions diferencials d’ordre n i a sistemes d’equacions diferencials. Degut a les altres propietatsde la transformacio, tambe podem utilitzar el metode en algunes equacions integro-diferencials i en
algunes equacions amb coeficients no constants.
Exemple 15.6 Resoldre l’equacio diferencial x′ + 2x = t amb condicions inicials x(0) = 1.
La transformada de x′(t) es sX(s)−x(0) = sX(s)−1. Transformant els dos costats de l’equacio:
sX(s)− 1 + 2X(s) =1
s2.
Es a dir,
(s + 2)X(s) =s2 + 1
s2.
Llavors arribem a la solucio en l’espai transformat: X(s) =s2 + 1
s2(s + 2).
Descomponent en fraccions simples:
X(s) =A
s+
B
s2+
C
s + 2
trobem A = −14 , B = 1
2 , C = 54 . Invertint la transformada arribem a la solucio buscada:
x(t) = −1
4+
t
2+
5
4e−2t. ♦
Exemple 15.7 Resoldre l’equacio diferencial x′′′ + 4x′ = et amb condicions inicials x(0) = 1,
x′(0) = 0, x′′(0) = 1.
La transformada de x′′′(t) es s3X(s) − s2x(0)− sx′(0) − x′′(0) = s3X(s) − s2 − 1. La de x′(t)es sX(s)− x(0) = sX(s)− 1. Transformant els dos costats de l’equacio:
s3X(s)− s2 − 1 + 4(sX(s)− 1) =1
s − 1.
Es a dir,
(s3 + 4s)X(s) =1
s − 1+ s2 + 5 =
s3 − s2 + 5s − 4
s − 1.
Llavors arribem a la solucio en l’espai transformat: X(s) =s3 − s2 + 5s − 4
s(s − 1)(s2 + 4).
Descomponent en fraccions simples:
X(s) =A
s+
B
s − 1+
Cs + D
s2 + 4
135

trobem A = 1, B = 15 , C = D = −1
5 . Invertint la transformada arribem a la solucio buscada:
x(t) = 1 +et
5− 1
5cos 2t − 1
10sin 2t. ♦
Exemple 15.8 Resoldre el sistema d’equacion diferencials
{
x′ = x + y
y′ = 2x− yamb condicions inicials
x(0) = 1, y(0) = 0.
Transformant les equacions del sistema:
{
sX − 1 = X + Y
sY = 2X − Y
Es a dir,
{
(s − 1)X − Y = 1
−2X + (s + 1)Y = 0que te solucio X(s) =
s + 1
s2 − 3, Y (s) =
2
s2 − 3.
Fent servir la taula de transformades arrribem a la solucio final:
x(t) = cosh√
3t + 1√3sinh
√3t,
y(t) = 2√3
sinh√
3t.
Alternativament, podem descompondre X(s) i Y (s) segon les arrels reals simples ±√
3 i arribar
a la solucio en termes d’exponencials:
x(t) = 3+√
36 e
√3t + 3−
√3
6 e−√
3t,
y(t) = 1√3(e
√3t − e−
√3t).
♦
Exemple 15.9 Un cos de massa m esta subjecte a un ressort amb forca recuperadora de constant
k. El cos es mou sense friccio en una dimensio horitzontal, sent x el desplacament de la posiciod’equilibri. Trobar la posicio del cos en funcio del temps, x(t), si en t = 0 es troba en x0 amb
velocitat v0.
L’equacio del moviment es md2xdt2
= F on F es la forca a que esta sotmes el cos. En el nostre
cas F = −kx, aixı que l’equacio es:
mx′′(t) = −kx(t), x(0) = x0, x′(0) = v0.
Transformant els dos costats de l’equacio per Laplace, si X(s) es la transformada de Laplace de
x(t):m(s2X(s)− sx(0) − x′(0)) = −kX(s)
Es a dir, (s2 + km)X(s) = x0s + v0, d’on tenim la solucio en el domini transformat:
X(s) =x0s + v0
s2 + km
.
Per trobar, x(t) hem d’invertir la transformacio (definim ω =√
km ):
x(t) = x0 cosωt +v0
ωsin ωt.
On es veu que ω es la frequencia natural del ressort.♦
136

15.7 Funcions generalitzades. Delta de Dirac
Donat un instant a ≥ 0, considerem funcions fε(t) que verifiquin les seguents propietats:
(1) fε(t) = 0 sempre que t 6∈ [a, a + ε).
(2)
∫ ∞
0fε(t)dt = 1.
Si ε es petit, aquestes funcions representen una magnitud concentrada en un petit interval al voltantdel punt a. Per exemple,
fε(t) =
0 si t < a,1ε si a ≤ t < a + ε,
0 si t ≥ a + ε.
Com exemple fısic pensem en una pilota de golf de massa 1 en repos. Aquesta rep un cop intens
i molt breu (entre t = 0 i t = ε) i passa a moure’s amb velocitat 1. Com la forca aplicada esf(t) = dv
dt tenim que∫ ε
0f(t)dt = ∆v = 1
Per moltes questions la forma concreta de la forca no te importancia. Podem considerar que aquesta
esta concentrada en t = 0 i provoca un canvi de velocitat igual a 1.
−0.4 −0.2 0.2 0.4 0.6 0.8 1 1.2 1.4
−0.2
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
t
v(t)
−0.5 0.5 1 1.5 2 2.5 3
−0.5
0.5
1
1.5
2
2.5
3
3.5
t
F(t)
Figura 15.4: Canvi rapid en la velocitat i forca impulsiva que el provoca.
Aixo ens condueix a considerar el lımit ε → 0 pero matematicament arribem a una funcio queval 0 a tot arreu excepte en el punt a:
limε→0
fε(t) =
{0 si t 6= a,
∞ si t = a.
Ara be, la integral de Riemann d’una funcio que es 0 llevat d’un sol punt necessariament ha devaler 0. la solucio a aquest problema es ampliar el concepte de funcio a un nou objecte definit,
no pels seus valors en funcio de t sino pel seu comportament al ser integrats. Aquests objectess’anomenen distribucions o funcions generalitzades. La mes important es la de l’exemple anterior
i s’anomena delta de Dirac, δa(t) = δ(t − a). Un intent de definir-la com a funcio ens portaria a:
δ(t − a) =
{0 si t 6= a,∞ si t = a.
(15.21)
137

Pero aquesta no es cap definicio rigorosa i la definirem a partir de la seguent propietat formal. Pera tota funcio g(t) contınua:
∫ β
αδ(t − a)g(t)dt =
{g(a) si α ≤ a < β.0 en cas contrari.
(15.22)
A partir de la delta centrada en 0, δ(t), resulta que δa(t) = δ(t − a) es δ(t) traslladada. Les seves
transformades es poden calcular aplicant (15.22).
L[δ(t)] = 1. (15.23)
L[δ(t− a)] = e−as. (15.24)
Notem que la transformada de δ(t) es la constant 1, de manera que per s → ∞ la transformada
no tendeix a 0 tal com hauria de ser segons (15.13). El motiu es que estem tractant, no amb unafuncio objecte sino amb una funcio generalitzada.
En l’exemple de la pilota de golf, hem arribat a que la forca aplicada en la situacio ideal ε → 0es f(t) = δ(t). Notem que en aquest lımit la velocitat es v(t) = u(t). Tenim aixı la relacio:
d
dtu(t) = δ(t), (15.25)
i, per tant,d
dtu(t − a) = δ(t − a). (15.26)
Degut a la peculiaritat del punt t = 0 en la transformada de Laplace, s’ha de tractar amb compte
la delta centrada en 0, δ(t). Si a > 0, podem deduir (15.26) transformant per Laplace:
L[
d
dtu(t − a)
]
= sL[u(t − a)]− u(0+ − a) = se−as
s− 0 = e−as,
que es precisament L[δ(t − a)]. La relacio (15.25) l’obtenim fent a → 0+ (aplicar la regla de laderivada directament a u′(t) hagues donat s1
s − u(0+) = 0 ja que estarıem tractant u(t) com lafuncio constant 1).
15.8 Producte de convolucio
El producte de convolucio de dues funcions objecte f(t) i g(t) es una nova funcio objecte (f ? g)(t)definida:
(f ? g)(t) =
∫ t
0f(τ)g(t− τ)dτ. (15.27)
Verifica les seguents propietats:
(1) f ? g = g ? f .
(2) f ? (g + h) = f ? g + f ? h.
(3) f ? (g ? h) = (f ? g) ? h.
(4) δ ? f = f .
Especialment important es el seguent resultat:
138

Teorema de convolucio
Si L[f ] = F (s) i L[g] = G(s) llavors:
L[(f ? g)(t)] = F (s)G(s). (15.28)
Es a dir, la transformada del producte de convolucio es el producte ordinari de les transformades.
15.9 Funcio de resposta impulsional. Funcio de transferencia
Si p es un polinomi, considerem l’equacio diferencial lineal a coeficients constants:
p(D)x(t) = f(t), (15.29)
on D =d
dtes l’operador derivada. Per exemple, si l’equacio es x′′ + 2x′ − x = sin t, llavors
p(D) = D2 + 2D − 1 i f(t) = sin t.
L’equacio (15.29) s’interpreta com la d’un sistema al qual s’aplica el terme f(t). Llavors, elpolinomi p reflecteix les caracterıstiques del sistema (components d’un circuit, per exemple) mentre
que f(t) es un input extern (voltatge aplicat al circuit). La solucio x(t) es veu com la resposta delsistema a l’entrada f(t).
S’anomena funcio de resposta impulsional, h(t), del sistema a la resposta quan l’entrada es un
impuls instantani, es a dir, quan f(t) = δ(t), i quan les condicions inicials son homogenies, es a dir,x(0) = x′(0) = · · · = x(n−1)(0) = 0 si l’equacio es d’ordre n.
Aixı, p(D)h(t) = δ(t)p(D)h(t) = δ(t), (15.30)
amb h(0) = h′(0) = · · · = h(n−1)(0) = 0.
S’anomena funcio de transferencia, H(s), del sistema a la transformada de Laplace de la funcio
de resposta impulsional:H(s) = L[f(t)]. (15.31)
Transformant l’equacio (15.30) s’obte
H(s) =1
p(s). (15.32)
Quan al sistema li apliquem una funcio qualsevol f(t) i cerquem la solucio amb condicionsinicials homogenies: p(D)x(t) = f(t). Transformant els dos costats: p(s)X(s) = F (s), d’on X(s) =
1p(s)
F (s) = H(s)F (s). Tenint en compte el teorema de convolucio:
x(t) = (h ? f)(t). (15.33)
Exemple 15.10 Considerem el sistema amb p(D) = D+2, La seva funcio de resposta impulsionales la solucio de h′ + 2h = δ(t) amb h(0) = 0. La seva funcio de transferencia es H(s) = 1
s+2 , d’on
h(t) = e−2t.
La solucio de l’equacio x′ + 2x = sin t amb x(0) = 0 es:
x(t) = e−2t ? sin t = sin t ? e−2t =
∫ t
0sin τe−2(t−τ )dτ =
1
5(e−2t − cos t + 2 sin t).
Quina seria la solucio en el cas x′ + 2x = 4 amb x(0) = 0?
x(t) = e−2t ? 4 =
∫ t
0
e−2τ4dτ = 2 − 2e−2t.
139
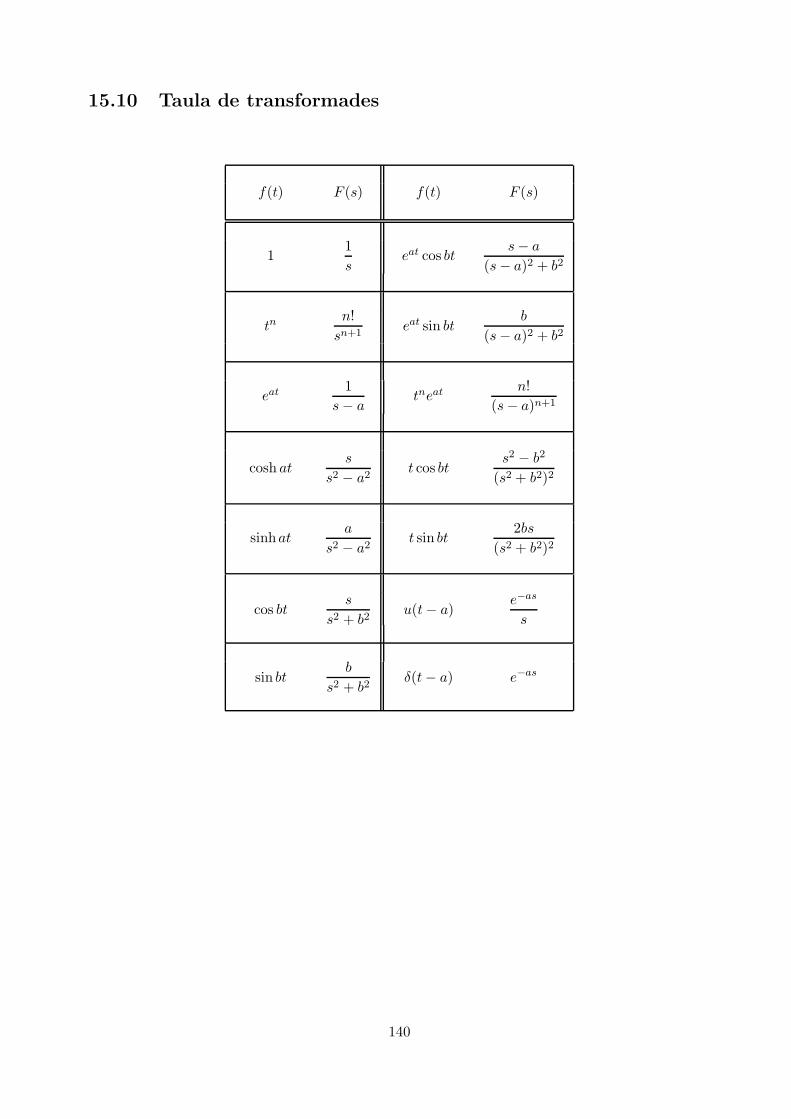
15.10 Taula de transformades
f(t) F (s) f(t) F (s)
11
seat cos bt
s − a
(s − a)2 + b2
tnn!
sn+1eat sin bt
b
(s − a)2 + b2
eat 1
s − atneat n!
(s − a)n+1
cosh ats
s2 − a2t cos bt
s2 − b2
(s2 + b2)2
sinhata
s2 − a2t sin bt
2bs
(s2 + b2)2
cos bts
s2 + b2u(t − a)
e−as
s
sin btb
s2 + b2δ(t − a) e−as
140
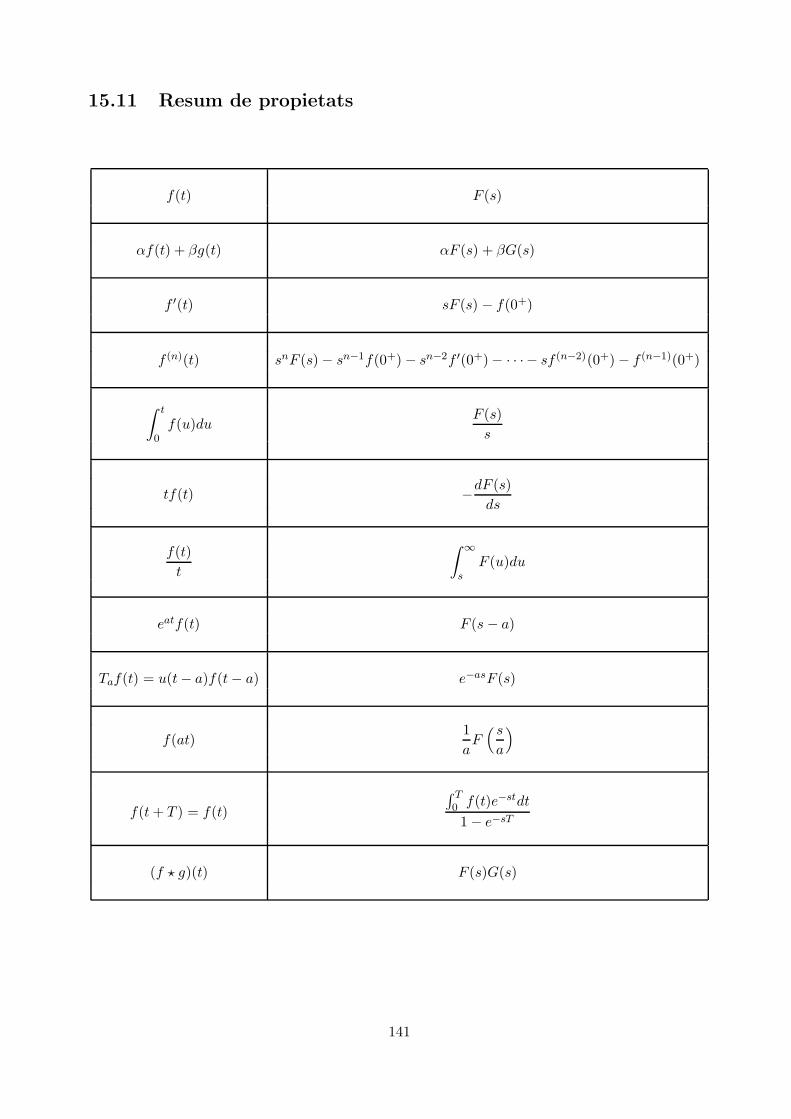
15.11 Resum de propietats
f(t) F (s)
αf(t) + βg(t) αF (s) + βG(s)
f ′(t) sF (s) − f(0+)
f (n)(t) snF (s) − sn−1f(0+) − sn−2f ′(0+)− · · · − sf (n−2)(0+) − f (n−1)(0+)
∫ t
0f(u)du
F (s)
s
tf(t) −dF (s)
ds
f(t)
t
∫ ∞
sF (u)du
eatf(t) F (s − a)
Taf(t) = u(t − a)f(t − a) e−asF (s)
f(at)1
aF( s
a
)
f(t + T ) = f(t)
∫ T0 f(t)e−stdt
1 − e−sT
(f ? g)(t) F (s)G(s)
141
Part IV
Apendixs
142
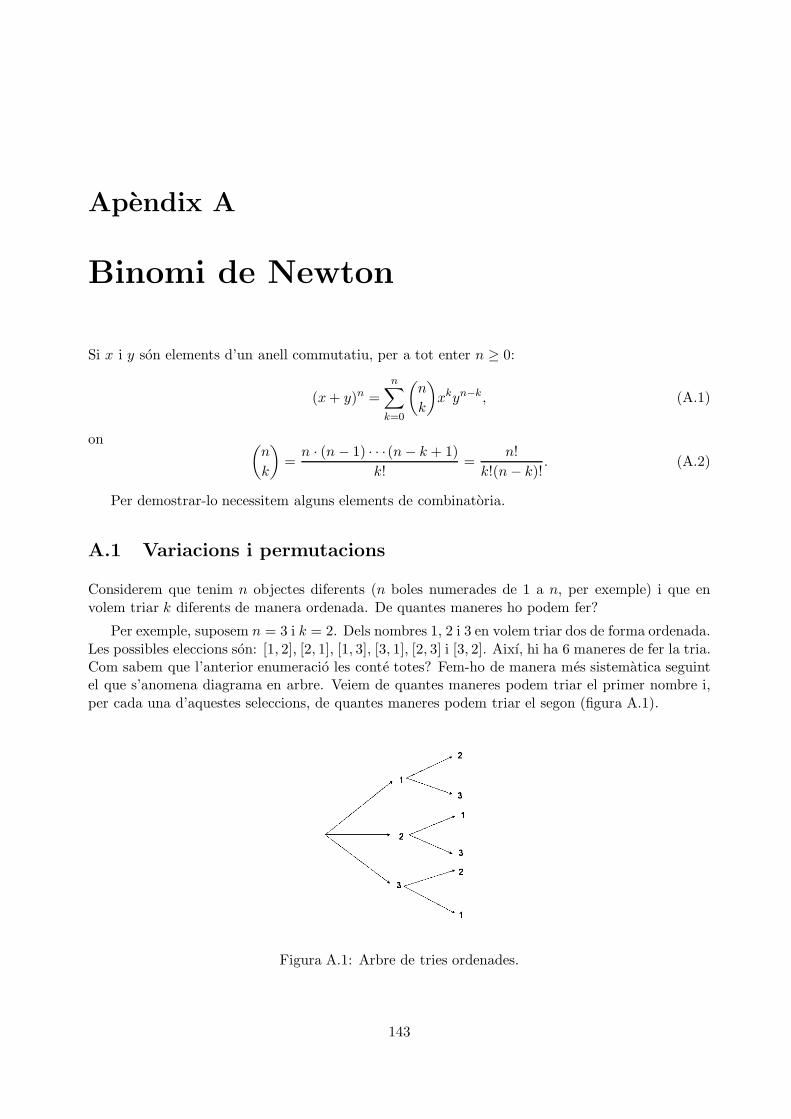
Apendix A
Binomi de Newton
Si x i y son elements d’un anell commutatiu, per a tot enter n ≥ 0:
(x + y)n =
n∑
k=0
(n
k
)
xkyn−k, (A.1)
on (n
k
)
=n · (n − 1) · · · (n − k + 1)
k!=
n!
k!(n − k)!. (A.2)
Per demostrar-lo necessitem alguns elements de combinatoria.
A.1 Variacions i permutacions
Considerem que tenim n objectes diferents (n boles numerades de 1 a n, per exemple) i que en
volem triar k diferents de manera ordenada. De quantes maneres ho podem fer?
Per exemple, suposem n = 3 i k = 2. Dels nombres 1, 2 i 3 en volem triar dos de forma ordenada.
Les possibles eleccions son: [1, 2], [2, 1], [1, 3], [3, 1], [2, 3] i [3, 2]. Aixı, hi ha 6 maneres de fer la tria.Com sabem que l’anterior enumeracio les conte totes? Fem-ho de manera mes sistematica seguintel que s’anomena diagrama en arbre. Veiem de quantes maneres podem triar el primer nombre i,
per cada una d’aquestes seleccions, de quantes maneres podem triar el segon (figura A.1).
Figura A.1: Arbre de tries ordenades.
143

Amb aquest esquema de raonament veiem que el nombre de maneres de triar k objectes ordenatsd’un total de n (variacions de n objectes agafats de k en k) val:
V kn = n · (n − 1) · · · (n − k + 1). (A.3)
Notem que si k = n estem contant el nombre de maneres d’ordenar n objectes. El resultat esV n
n = n! on per tot enter no negatiu n definim el seu factorial n! de la seguent manera:
0! = 1, n! = 1 · 2 · 3 · · · (n − 1) · n. (A.4)
Amb el factorial podem expressar
V kn =
n!
(n − k)!. (A.5)
A.2 Combinacions
Suposem que ara, dels n objectes en volem triar k pero fem la seleccio sense que importi l’ordre.
Per exemple, volem fer un combinat de dos licors, disposant-ne de tres (A, B, C) per triar-los.
En aquest cas hi ha tres eleccions possibles: A i B, A i C, B i C. Ens ha donat la mitat que en elcas de les variacions ja que de les 6 seleccions ordenades [AB], [BA], [AC], [CA], [BC], [CB] les
dues primeres son equivalents, les dues seguents tambe, etc.
Anomenem Ckn al nombre de maneres de triar k objectes no ordenats d’un total de n (com-
binacions de n objectes agafats de k en k). Com veiem a l’exemple anterior, les podem comptar
comptant les tries ordenades i dividint pel nombre de maneres d’ordenar una seleccio donada de kobjectes (k!):
Ckn =
V kn
k!=
n!
k!(n − k)!. (A.6)
Generalment, en lloc de Ckn s’escriu
(nk
)= n!
k!(n−k)!i s’anomena a aquests valors nombres combina-
toris o binomials. La seguent propietat es immediata:(
n
k
)
=
(n
n − k
)
. (A.7)
Una altra propietat facil de demostrar per calcul directe (tenint en compte que n! = n · (n−1)!) es:(
n
k
)
=
(n − 1
k
)
+
(n − 1
k − 1
)
. (A.8)
Si representem els combinatoris en la seguent disposicio (triangle de Tartaglia):(
0
0
)
(1
0
) (1
1
)
(2
0
) (2
1
) (2
2
)
(3
0
) (3
1
) (3
2
) (3
3
)
etc.
la propietat (A.8) indica que la suma de dos elements de costat dona el de la fila seguent:
144

1
1 1
1 2 1
1 3 3 1
1 4 6 4 1
etc.
La simetria del triangle respecte de l’eix central es deu a la propietat (A.7).
Exemple A.1 En una loteria, l’aposta es fa marcant 6 creus en un caseller que conte els nombres
de l’1 al 49. De quantes maneres es pot fer l’aposta?
Tenim 49 objectes diferents i en volem triar 6. Hi ha ordre en l’eleccio? no, perque es el mateixmarcar 1 i 2 que marcar 2 i 1. Aixı, la resposta es:
(49
6
)
=V 6
49
6!=
49 · 48 · 47 · 46 · 45 · 44
6 · 5 · 4 · 3 · 2 · 1 = 13.983.816
(Notem que per avaluar valors numerics es mes directe utilitzar(nk
)= V k
nk! que
(nk
)= n!
k!(n−k)! .) ♦
A.3 Demostracio de la formula del binomi de Newton
Observem els primers casos:(x + y)1 = x + y.
(x + y)2 = (x + y)(x + y) = x(x + y) + y(x + y)
= xx + xy + yx + yy = x2 + 2xy + y2.
(x + y)3 = (x + y)(x + y)2 = x(xx + xy + yx + yy) + y(xx + xy + yx + yy) =
xxx + xxy + xyx + xyy + yxx + yxy + yyx + yyy = x3 + 3x2y + 3xy2 + y3.
A l’aplicar la propietat distributiva sobre el producte (x + y)n surt la suma de tots els possibles
termes on multipliquem n factors cadascun dels quals val x o y. Per la propietat commutativa cadaterme te la forma xkyn−k. Al resultat final, el terme xkyn−k te un coeficient que es el nombre de
vegades que apareix en la suma. Aixo equival al nombre de paraules de n lletres que podem feramb k x’s i n − k y’s. Per contar-ho, notem que equival a dir de quantes maneres podem col.locar
les x’s en la sequencia de n lletres. Es tracta de triar k elements, sense ordre, d’un total de n. Aixı,hi ha
(nk
)maneres de fer-ho i arribem a la formula (A.1).
Notem que els coeficients que necessitem per calcular (x + y)n es troben a la fila n-esima del
triangle de Tartaglia. Per exemple, per calcular (x + y)5 necessitarıem la fila seguent al trianglerepresentat anteriorment. Facilment veiem que es 1, 5, 10, 10, 5, 1, aixı que
(x + y)5 = x5 + 5x4y + 10x3y2 + 10x2y3 + 5xy4 + y5.
145
Apendix B
Formules trigonometriques
cos2 A + sin2 A = 1, tg A =sinA
cos A.
sin 2A = 2 sinA cosA, cos 2A = cos2 A − sin2 A, tg 2A =2 tgA
1 − tg2 A.
A 0π
6
π
4
π
3
π
2π
cosA 1
√3
2
√2
2
1
20 −1
sin A 01
2
√2
2
√3
21 0
tgA 0
√3
31
√3 ∞ 0
cos(A + B) = cos A cosB − sin A sinB, cos(A − B) = cosA cosB + sinA sinB.
sin(A + B) = sin A cosB + cos A sinB, sin(A − B) = sinA cosB − cosA sinB.
tg(A + B) =tgA + tgB
1 − tgA tg B, tg(A − B) =
tg A − tg B
1 + tg A tgB.
146

cos A cosB =1
2(cos(A + B) + cos(A − B)).
sin A sinB =1
2(cos(A − B) − cos(A + B)).
cosA sinB =1
2(sin(A + B) − sin(A − B)).
sinA cosB =1
2(sin(A + B) + sin(A − B)).
1 + tg2 A =1
cos2 A.
cos2 A =1 + cos 2A
2, sin2 A =
1 − cos 2A
2.
cosA
2=
√
1 + cos A
2, sin
A
2=
√
1− cosA
2.
147

Apendix C
Fites trigonometriques
Alguns calculs referents a lımits i continuıtat de les funcions trigonometriques es poden fer a partirde les seguents fites. Considerem un angle x al primer quadrant 0 < x < π
2 . Segons la figura C.1,
x es la longitud de l’arc BC i:
OC = OB = 1, OA = cosx, AC = sinx, BD = tg x.
Ara es facil adonar-se de les seguents relacions:
AC < BC < x.
D’on arribem a les dues desigualtats: AC < x i BC < x. La primera ens mostra que:
sinx < x, per 0 < x < π2 . (C.1)
Com BC2
= AC2
+ AB2
= sin2 x + (1 − cosx)2 = 2(1 − cosx), la segona desigualtat implica
2(1 − cosx) < x2. Es a dir:
1 − cosx <x2
2, per 0 < x < π
2 . (C.2)
Analitzant el que passa per x = 0, x < 0 i angles mes enlla de π2 arribem a la conclusio:
−|x| ≤ sin x ≤ |x|, per x ∈ R. (C.3)
0 ≤ 1 − cosx ≤ x2
2, per x ∈ R. (C.4)
Figura C.1: Relacions trigonometriques.
148
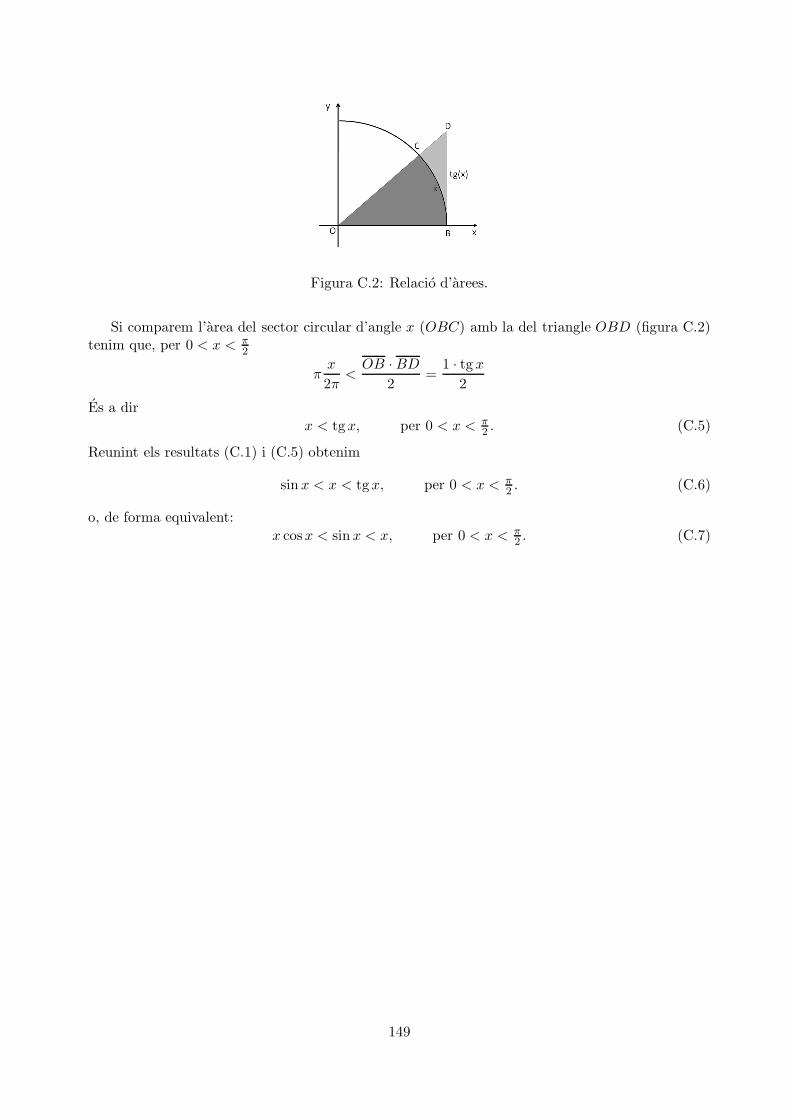
Figura C.2: Relacio d’arees.
Si comparem l’area del sector circular d’angle x (OBC) amb la del triangle OBD (figura C.2)tenim que, per 0 < x < π
2
πx
2π<
OB · BD
2=
1 · tg x
2
Es a dir
x < tgx, per 0 < x < π2 . (C.5)
Reunint els resultats (C.1) i (C.5) obtenim
sin x < x < tgx, per 0 < x < π2 . (C.6)
o, de forma equivalent:
x cosx < sin x < x, per 0 < x < π2 . (C.7)
149

Apendix D
Funcions hiperboliques
Per analogia amb les formules de Euler (14.16), definim les funcions sinus hiperbolic (sinh) i cosinushiperbolic (cosh) de x ∈ R:
cosh x =ex + e−x
2, sinh x =
ex − e−x
2. (D.1)
0
2
4
6
8
10
–3 –2 –1 1 2 3
x
–4
–2
0
2
4
–3 –2 –1 1 2 3
x
Figura D.1: Grafiques del cosh x i del sinh x. Les lınies puntejades representen 12e±x.
Tambe definim la tangent hiperbolica (tanh)
tanh x =sinhx
cosh x=
ex − e−x
ex + e−x. (D.2)
Notem que el cosh es una funcio parella cosh(−x) = cosh x mentre que el sinh es una funcioimparella sinh(−x) = − sinh x.
Les dues funcions verifiquen la seguent relacio fonamental:
cosh2 x − sinh2 x = 1. (D.3)
DEM: cosh2 x − sinh2 x =“
ex+e−x
2
”2
−“
ex−e−x
2
”2
= e2x+e−2x+24
− e2x+e−2x−24
= 1.♣
Parametritzacio de la hiperbola
De manera similar a com les funcions trigonometriques permeten parametritzar la circumferenciax2 + y2 = 1, prenent x = cos t i y = sin t, les funcions hiperboliques parametritzen la hiperbola
x2 − y2 = 1 corresponent a les funcions y = ±√
x2 − 1. En aquest cas es x = cosh t i y = sinh t.
150

–1.5
–1
–0.5
0
0.5
1
1.5
–3 –2 –1 1 2 3
x
Figura D.2: Grafica de tanhx.
Figura D.3: cosh t i sinh t sobre la hiperbola.
Series de Taylor
A partir de la serie de Taylor de l’exponencial s’obte facilment:
cosh x =
∞∑
n=0
x2n
(2n)!= 1 +
x2
2!+
x4
4!+ · · · (D.4)
sinh x =
∞∑
n=0
x2n+1
(2n + 1)!= x +
x3
3!+
x5
5!+ · · · (D.5)
Relacio amb les funcions trigonometriques
Com s’ha vist abans, les series de Taylor del cosh i del sinh son les del cos i del sin sense signesalternats. D’aquı, o de les formules de de Moivre, s’obte:
cosh jx = cosx, sinh jx = j sinx. (D.6)
En el cas hiperbolic tenim una formula analoga a la de de Moivre. Ates que ex = coshx + sinh x,
enx = cosh nx + sinh nx,(coshx + sinhx)n = cosh nx + sinhnx (D.7)
Separant les parts parelles i imparelles surten formules pels valors multiples de la variable.
151

Per exemple, si n = 2, (coshx + sinh x)2 = cosh2x + sinh 2x. Aixı, cosh 2x + sinh2x =cosh2 x + sinh2 x + 2 sinhx coshx d’on
cosh 2x = cosh2 x + sinh2 x, sinh2x = 2 sinhx coshx. (D.8)
Funcions hiperboliques inverses
Les funcions inverses del cosh, sinh i tanh s’anomenen arg cosh, arg sinh i arg tanh respectivament.Valen
arg cosh x = ln(x +√
x2 − 1), x > 1. (D.9)
arg sinhx = ln(x +√
x2 + 1), −∞ < x < ∞. (D.10)
arg tanh x =1
2ln
(1 + x
1− x
)
, −1 < x < 1. (D.11)
DEM: Volem aıllar y de l’equacio x = cosh y. Posem z = ey, de manera que es x = 12(z + z−1), es a dir,
z2 − 2xz + 1 = 0 que te solucio z = x +√
x2 − 1. Per tant, y = ln(x +√
x2 − 1). (Notem que l’altra solucio,z = x −
√x2 − 1 = (x +
√x2 − 1)−1, dona la mateixa y amb signe negatiu.)
Les altres funcions inverses s’obtenen de manera similar. ♣
Derivades
De les definicions inicials (D.1), (D.2) i de (D.9), (D.10), (D.11) s’obte:
(coshx)′ = sinhx, (sinhx)′ = cosh x, (tanhx)′ =1
cosh2 x. (D.12)
(arg cosh x)′ =1√
x2 − 1, (arg sinh x)′ =
1√x2 + 1
, (arg tanh x)′ =1
1− x2. (D.13)
Aplicacio al calcul d’integrals
Les integrals que depenen de l’expressio√
x2 − 1 es poden tractar amb el canvi x = cosh t. Simi-
larment, si l’expressio es√
x2 + 1 fem x = sinh t
Exemple D.1 I =∫ √
x2 − 1dx. Fem x = cosh t, dx = sinh tdt i es
I =
∫ √
cosh2 t − 1 sinh tdt =
∫
sinh2 tdt =1
2
∫
(cosh2t − 1)dt =
1
4sinh 2t − t
2=
1
2sinh t cosh t − t
2=
1
2x√
x2 − 1 − 1
2ln(x +
√
x2 − 1). ♦
152