bvisiw cencias basicas e inwnieria148.206.53.84/tesiuami/uam7883.pdf · dos instrumentos detectores...
TRANSCRIPT

.
UNIVERSIDAD AUTONOMA METROPOLITANA . <
MIDAD IZTAPALAPA
BVISIW oe: CENCIAS BASICAS E INWNIERIA
&TO. IN. ELECTRONICA
/' SEBC-UAMI Si-grafo Electrbnico de Bajo Costo /
Asesor :
hg . Alejandro k r t i nez
Fecha :
Abril 21 de 1983.
hg . Alejandro Mart i ne2

d . e . . . . e . . . . . . . . . 0 . . . . e . e . . . . . e . . e . . . . . . b . e e .
o . e . . . e b . . . . e e . . e . . . . . . . e e e e . . e . . . . . . . . e .
d . . . . . e . . . e . e e 0 . . . . . . . . . . . e . . . . . . . e . . . . e . . . . . .
(D e e . . . e . . . e b . e . e . . e . e e . e . . . e e e e . e . e e . e
W . . . . b
e
e . . e e e . e e . . . . e e e . . 3 i VI
o . . . e e . . b . e e . b . . . . . . e . . . e e e . e e e e . . . e
P vi
rl .-( . .
e . . e e . e . e . . . . . . . e
e . . e e . . . e e . e . e
N r7 .
e . e . . e . e . . . e e e . . . . . . . . . e . . . . . . . . . e .
m Fi . . . .
e . . . 0 . . . . . . . . . . e . e . e e . . e . . . . e .
4 (O a .d
d d . .
e . e . . . . . . e . e
tn Fi . . . .
e . . . . . b . . e . e e b . . . e e . . e e e e e
tn d . .
e . . e . . e . . . e . . e e . . . . e . e . . e . e . e . . d 9 ** U u
al a L
4
rl rl
rl .
d
(o 4
e . . . . . e e . e e . e . . . . . . e
* . . . . e . . e e . e . . . e . e
(o rl .
e . e . . . e . . . . . . e . . . . . . . e . . e . . . e . .
ID Q) d
e . e . e e . . e . .
d . . e . e . . e e . e . . . e . 6 3
E
d .rl N .
6 i a, L
ai c
a al
O u
*i O 0
ki 3
Is 3 : Q
4
cu al -a
a h h
a a m .a rc f
3 9 C
e O d
9 8 O O c, C a,
6( (O t
C O
ui
Is L U
2 a,
3
2 4 4 k- W
r; O
-4 b
d (u . d
6
o c a u h 0
3 c H
h . r7
d
5! . : P B O
rl
rl e
d H L v1
m . M
rri
(D . r7
d
co . M
ui
rl
ti (3 k i d I-
rfi B m rl
d
d (3

5.3 SisRlogra ma .......................................... 20 5.3.1 I)efi.~i6n ................................... 20 5.3.2 Interpretacibn ............................... 20
6 . SISMOGRAFOS .BC.U. ..................................... 22 6.1 DBscripci~n ......................................... 22 6.2 S i s d g r a f o SEBC-UAMI de Componente Vertical ......... 23
6.2.1 Parte mecanica ............................... 23 6.2.1.1 Base .................................. 24
6.2.1.2 Masa .................................. 25
6.2.1.3 Soporte para e l e j e d e l a masa ........ 25 6.2.1.4 Eje d e l a masa ........................ 26
6.2.1 . 5 Tirante del pkndulo ................... 27 6.2.1.6 AIllOrtiguador .......................... 29
6.2.2 Parte electrc5nica ............................ 30
6.2.2.1 DiagrallLa .............................. 35
6.2.3 Interface .................................... 37
6.2.4 .lidas ...................................... 40
6.3 Sism6grafo SEBC-UAMI de Componente Horizontal ....... 4 3
6.3.1 Parte .caf.l.ica ............................... 44
6.3.1.1 base..................................^
6.3.1.2 Masa .................................. 44
6.3.1.3 Soporte para e l e j e de la masa ........ 44
6.3.1.4 Eje de l a IMsa ........................ 44
6.3.1.5 AIIY3rtiguador .......................... 45
6.3 .2 Parte electr..ca ............................. 6.3.3 interface....................................^
6.3.4 Salidas ...................................... 50
7. .SI;LILT. ................................................ 51

9. COTIWCION ............................................. 00.58
9.1 Cotizacidn del SEBC-UAMI de Componente Vertical ..... 58
9.1.1 Parte mecdnica ............................... 558
9.1.2 Parte electrb.ca ............................ Sg
9.2 Cotizacidn del SEBC-UAMI de Componente Horizontal ... 60
9.2.1 Parte mecdnica ............................... 60 ' . 9.2.2 Parte electrbnica ............................ 60

2. OBJETIVOS .
2.1 OBJETIVO GENERAL.
El objetivo general a mediano plazo del presente proyecto es el
de poder crear una red completa de sism6grafos ubicados en lugares
estrategicos, cubriendo un area determinada de terreno y comunicados
entre sf , con el objeto de poder registrar cualquier movimiento
sfsmico antes de que llegue a las ciudades y poder tomar precauciones
antes de que se presente el siniestro en las mismas.
2.2 OBJETIVO PARTICULAR.
El objetivo particular del presente proyecto es el de desarrollar
dos instrumentos detectores de sismos de bajo costo, sencilkr en el
diseKo y alta confiabilidad, capaces de detectar las componentes
horizontal y vertical respectivamente de los movimientos sismicos, con
objeto da producirlos a gran escala y a un bajo precio.
2

3. DURACION Y ETAPAS.
El proyecto se dividid en dos etapas con duracidn de un trimestre
cada una., Durante la primera etapa se procedi6 a revisar la bibliografía correspondiente a los reportes de construcci6n de algunos
siswgrafos, con el objeto de formarnos algunas ideas a este respecto.
Una vez hecho esto, se comenzd a trabajar en el diseffo de nuestros
propios sistemas, basados en los mismos principios fundamentales, pero
con algunas diferencias significativas, Io cual le da un sello propio,
Dentro de asta etapa se construyt, el primero de los dos
sismtSgrafos, el de componente vertical, terminando esta etapa con la varificacidn del correcto funcionamiento dol mismo.
Durante la segunda etapa del proyecto se procedi6 a la
cons~rucci6n del segundo instrumento, el de componente horizontal,
verificandose igualmente su correcto funcionamiento. Una vez
terminados ambos instrumentos, se pas6 a la etapa de dapuracidn,
pruebas y caractarizacidn de los mismos, para lo cual se COnfd con la
opinidn de un experto en la materia. Esta segunda etapa termini5 con
los primeros registros permanentes de los movimientos detectados por
el sism6grafo de componente vertical. Cabe seflalar aquf que por falta de tiempo no se pudieron realizar todas las pruebas deseadas a ambos
instrumentos, dejando abierta la posibilidad de realizarlas en alguna
etapa posterior, ya sea por nosotros mismos o por algún otro grupo que
retome el proyecto.
3
4. INTRODUCCION.
Un terremoto es un temblor de una parte de la corteza terrestre
provocado por diversas causas subterraneas naturales, ssgdn sus tipos,
aunque ahora se conviene generalmente en que la mayor parte de ellos
se producen a consecuencia de tensiones de la corteza terrestre, las
cuales pueden ser relajadas por al deslizamiento de una superficie
rocosa sobre otra.
Cuando por una causa cualquiera un espacio del suelo sufre una
sacudida violenta, Bsta se transmite en virtud de la elasticidad de
los materiales p&treos, formandose una onda si smica que adquiere
sucesivamente mayor amplitud, del mismo modo que la adquieren las
ondas producidas por el choque de un cuerpo sdido en el agua. No
tiene, sin embargo, aquella la regularidad ¿e &stas, la onda sismica
encuentra numerosos obstaculos que la hacen variar de direccibn; por
esta causa es irregular.
La duracicin de un sismo depende de la magn
distancia epicentral. a mayor magnitud, mayor
intensa del movimiento; igualmente la duracid
distancia epicentral a medida que las ondas
cuando se alejan del foco.
itud del evento y de la
duracibn de la fase
)n incrementa con la
sf smicas se dispersan
Existen aparatos que se utilizan para detectar las ondas
sismicas, tanto su direccian como su intensidad. A este tipo de
aparatos se les da el nombre do sism-rafos.
Aunque existen muchos tipos de sismdgrafoe, todos se basan en
unos cuantos principios fundamentales. Se necesita un elemento masivo
suspendido de tal forma que pueda permanecer quieto mientras su
apoyo se mueve. El pendulo simple es un sism6graf0, aunque no eficaz.
4

Es facil predecir en cierta regibn quo tanta probabilidad existe
de que ocurra un terremoto por la sencilla razdn de que esta es alta
en aquellas zonas en que ya se han producido anteriormente.
Los estudios posteriores en cuanto a las causas de los sismos
$eran muy provechosos, pero a la fecha los sismdogos aitn estan lejos
de poder predecir la hora y el lugar de un terremoto destructivo. Por
lo tanto, lo mas que puede hacerse en este momento, es ubicar los
terremotos en el momento en que s t producen, con ayuda de sismbgrafos
cada vez mbs precisos y con el avance en el Area de las
comunicaciones, transmitir rapidamente esta informaci6n a los lugares
d6nde los efectos del movimiento pueden ser mas daastrosos.

5. ANTECEDENTES TEORICOS
5.1 TERREMOTOS.
5. l. 1 DEFINICION-
Temblor de una parte de la corteza terrestre provocado por causas
subterrineas naturales. Las trepidaciones de un terremoto pueden ser
tan dbbiles que salo las registran los instrumentos mds sensibles, o
tan fuertes que producen el derrumbamiento de edificios, la apertura
de grietas en terrenos aluviales, el desprendimiento de tierras e
incluso la destruccibn de ciudades. Las sacudidas mfis fuertes se
producen en el centro del terremoto y van extinguimdose gradualmente
a medida que aumenta la distancia al mismo.
Los terremotos se han atribuido a muchas causas, según sus tipos,
pero ahora se conviene generalmente en que la mayor parte de ellos se
producen a consecuencia de tensiones de la corteza terrestre.
Semejante tensibn puede ser relajada por el deslizamiento de una
superficie rocosa sobre otra. Los terremotos de esta clase son
tect6nicos o debidos a fracturas de rocas. Los sismos de caracter muy
violento pero locales pueden tener origen volcanico y estar
relacionados con volcanes activos. Se creyd en un principio que los
terremotos pudieran obedecer a grandes corrimientos de tierra o a
hundimiento de las rocas de las cavernas, pero ahora se considera que
estas causas tienen una importancia minima.
El resultado de litoclasas y desplazamientos rocosos se conoce
por los g d o g o s como Fallas. En algunos casos los corrimientos fueron
de cientos da metros o incluso kildmetros y debieron realizarse en
muchas etapas, cada una de ellas aeompaKada de un gran terremoto. El deslizamiento puede ser vertical, horizontal o transversal.
La teoria m6s acorde con la dispocici6n observada es la de que,
en los terremotos tectbnicos, se producen deformaciones elasticas quo

finalmente llegan a superar la resistencia de la roca. Cuando @e
alcanza este punto, ambos lados de la fractura saltan en direcciones
opuestas. Los cambios rdpidos en la velocidad de la roca en movimiento
originan vibraciones que se pueden propagar a gran didancia. Esto se
conoce con el nombre de teoria del rebote ekstico. Los movimientos
principales se extienden lateralmente a s d o pocos kilamotros de la
fractura.
A pesar de que no ha habido despues muchas ocasiones de realizar
observaciones similares, excepto quirds en lugares donde el movimiento
de las fallas es complicado y parcialmente desconocido, esta teori a
se considera generalmente como una explicacidn valida de la causa
inmediata de los terremotos. En anos recientes se ha comprobado que en
ciertas partes de la Tierra se producen terremotos a profundidades de
hada 290 km y, en otras, de hasta 675. A pesar de las condiciones de
temperatura y presi6n a tales profundidades, se admite generalmente
que estos terremotos son de naturaleza tect6nica, aunque no se ha
encontrado una teoria satisfactoria que explique el desarrollo de
astas tensiones.
Los grandes terremotos nunca se limitan a una solo racudida.
Generalmente se produce una gran sacudida que dura de medio minuto a
un minuto (aunque se han registrado sacudidas de cuatro a cinco
minutos da duracian), seguida de una serie de sacudidas posteriores
que continúan durante meses e inclusa afios. Estas son al principio muy
frecuentes, mas luego, da forma gradual e irregular, van perdiendo
intensidad y frecuencia hasta que finalmente se extinguen, aunque a
menudo se repitan eslporadicamente con bastante violencia. A r a í z del gran terremoto de Mino-Owari (Japbn), en 1891, se registraron durante
dos aKos en el observatorio de Gifu 3364 sacudidas secundarias. Estas
sacudidas posteriores prueban que las tensiones de la corteza se
relajan del todo, y no desaparecen, sino qua subsisten tensiones
menores que originan fracturas menos importantes durante un periodo de
tiempo considerable. Los temblores que a veces preceden a un terremoto
no pueden reconocerse todavia como sitmos precursores. Podrian ser
7

ocasionados por la pres& de los gases acumulados en las bolsadas do magma emigrado del centro de la Tierra.
5.1 2 REG1 ONES =GAS CAS-
La regi6n sobre la que se siente un terremoto con violencia se
llama ragi& megasismica. Los fenhenos observados se pueden dividir
en dos clases: primarios y secundarios. Entre los primarios se
encuentran los movimientos lentos de la corteza, el sabito rebote
elastico de los bordes; la formacibn de escalones de falla o la elevaci6n o deprssibn de la linea de pleamar.
En muchos casos la fractura no asciende a la superficie y los
fen6menos primarios no se producen o son indiscernibles.
Los fem6menos secundarios obedecen a las vibraciones resultantes.
Segan su violencia, el terremoto puede provocar meramente un temblor
ligero o despedir los objetos de su sitios, mover muebles, romper o
derribar chimeneas, agrietar paradas o derruir casas. En arenas
anegadas y en terrenos de aluvi6n se abriran tal vez grieta*,
e~pecialmente junto a las escarpaduras de los ríos, y el agua ser&
sometida a tal presibn que se abra camino hacia la superficie en forma
de pequeplos crateres. Puede haber rotura de CaKerías, retorcimiento de
los rieles de ferrocarril, trituracidn del pavimento de las calles. En
las regiones montafiosas se producen numerosos corrimientos de tierra y
si el suelo est& anegado puede deslizarse valle abajo. Es a veces
dificil determinar si un fenbmeno es primario o secundario; sin
embargo, esta distincicjn es importante para realizar una
interpretaci6n correcta.
La amplitud de las vibraciones de un terremoto do intensidad
moderada es del orden de 1 cm, excepto cerca del foco inicial, donde
puede llegar a 40 cm. El caracter de estar vibraciones es muy
complejo, como claramente se deduce de sus exfraKos resultados.
Algunas veces se rompen la8 chimeneas y su parte superior ha girado
varios grttdos sin llegar a caer. La mayoria de los monumentos que se
8

derrumban en los cementerios pueden hacerlo en una direccibn, mientras
que el resto puede hacerlo en otra, incluso en dngulo recto con
respecto a la direcci6n de la mayoría. Un monumento aparece tal vez
volcado sobre su basa sin caer y aun pueden moverse parte del mismo en
diferentes angulos. En algunos terremotos se producen vibraciones
verticales lo bastante violentas para lanzar piedras a lo alto.
El movimiento de objetos en la superficie de la tierra puede
muchas veces ser tan grande como el de la roca subyacente, tal como
una moneda colocada sobre una mesa puede saltar a varios csntimetros
de altura si se golpea con violencia la parte inferior de &fa, aun
cuando 'la :r superficie se mueva solamente una pequeHa fraccibn de
centimetro.
Las vibraciones de la zona megasismica presentan frocuancias
diferentes con periodos que varían de una paqueKa fracci6n de segundo
a varios segundos. Si las frecuoncias son lo suficientemente altas,
las vibraciones pueden originar sonidos graves que parecen proceder de
todas direcciones. A distancias mayores, en que el terremoto se
siente, las vibracione rApidas se extinguon y sdlo persisten las
lentas. Estas vibraciones lentas causan confrecuencia nfiuseas en las personas que viven en la zona afectada.
5.1 3 MICROSISMOS.
Algunas veces los sismdgrafos registran durante horas e incluso
d ías enteros pequeKas vibraciones del terremo con periodos do 5 a 9
segundos y amplitudes de unas pocas mil&simas de milimetro. Estas
vibraciones han sido atribuidas a las olas marinas que baten la
costa, al viento, a la presibn atrnbsferica, etc., pero su causa
verdadera no ha sido a m determinada, aunque se ha dedicado
considerable estudio a su metodo de propagaci6n.
5. 1 4 PROPAGACION DE LAS ONDAS SISMI CAS.
Cuando por una causa cualquiera un espacio del suelo sufre una
sacudida violenta, &eta se transmite en virtud de la elasticidad de
los materiales petreos, formdndose una onda sismica que adquiere
sucesivamente mayor amplitud, del mismo modo que la adquieren las
ondas producidas por el choque de un cuerpo d i d o en el agua. NO tiene, sin embargo, aqu&lla la regularidad da &stas, la onda rismica
encuentra numerosos obstaculos que la hacen variar de direccibn; por
esta causa es irregular. Hay terremotos en que la onda no se produce
por sacudidas en sentido vertical, sino que son IOS movimientos
ondulatorios desde su origen, se extienden a grandes espacios y no
tienen las fatales consecuencias que suelen tener los primeros; cuando
varias ondulaciones sufren una reflaxidm y en el movimiento chocan
contra la* directas, puede producirse un movimiento de torbellino;
estos terremotos son los qua m ~ s terribles accidentes acasionan.
Todavía la transmisi6n de la onda puede verificarse de dos formas: se
transmite en todas las direcciones, en cuyo caso el terremoto es
central, o se transmite en una sola direccicln, en cuyo caso es lineal.
Generalmente las ondas llegan on tres series separadas: los
primeros temblores preliminares u ondas precursorat, conocidas como
ondas P; los segundos temblores preliminares, llamados ondas S; y las
ondas principales, denominadas ondas L. En el caso da terremotos
distantes puede haber reflexiones de las ondas P y S desde la
superficie de la Tierra a 1/3 y 2/3 de la distancia cubierta.
Las ondas P son de compresidn u ondas longitudinales, como las
sonoras; las oscilaciones se producen en uno y en otro sentido a lo largo de la linea de propagaci6n de la onda. Tienen una amplitud
minima, generalmente inferior a 1 mrin; su velocidad cerca de la
superficie es de 7 a 8 krn/seg y el periodo, o t iampo de oscilacidn,
varia de 5 a 7 segundos. Las ondas S son transversales, es decir, las
vibraciones son perpendiculares a la direcci6n en que se mueve la
onda. Su velocidad cerca de la superficie es aproximadamente de 4.5
km/seg y su periodo de 5 a 7 segundos. Tanto las ondas P como las S siguen a traves de la Tierra una trayectoria mas profunda que la seKalada por la linea recta que une el centro del terremoto al
sismc5grafo. Ademas de ser reflejadas en la superficie de la Tierra,
1 0
estas ondas pueden ser tambien reflejas o refractadas en superficies
descontinuas dentro del globo terraqueo. La superficie mds notable de
esta clase es la presentada por el nfrcleo central de la Tierra, a una
profundidad de unos 2900 kildmetros.
Las ondas principales u ondas L (L abreviatura de largas)
circulan alrededor de la superficie el ida de la Tierra y ondulan en
el fondo de oceano. Son ondas longitudinalas complejas con velocidades
de 3 a 4 kmlseg y periodos de hasta 60 segundos. La mayor parte de la energía de los terremotos de profundidad media es transmitida por
estas ondas L, las cuales puedan ser identificadas en los grandes
terremotos despu6s de dar una vuelta completa alrededor de la Tierra.
En tanto que ai localizar terremotos solamente se utilizan las ondas P y S, Las ondas L se estudian por la informacidn que puedan
proporcionar respecto al perfil del fondo del ocdano.
S. l. 5 CONTENIDO DE FRECUENCIAS Y DURACION DEL MOVIMIENTO.
El contenido de frecuencias es una funcibn del mecanismo en la
fuente y de la propagacidn de las ondas. El periodo predominante de
las ondas estA asociado a la magnitud del evento y a la distancia
epicentral. As¡. las ondas P y S causan cerca del epicentro
vibraciones de mayor amplitud y de alta frecuencia, del orden de 5 a
20 hertz (periodos predominantes muy cortos. O 2 a 0.05 segundos), por
lo tanto, muchas de ellas caen dentro del ambit0 audible y pueden ser
precibidas como un ruido sordo que acompaRa el terremoto. Cerca del epicentro la componente vertical es significativa y los terremotos son
percibidos por las personas como una vibraci6n violenta, trepidante,
de alta frecuencia.
Las frecuencias altas de las ondas sismicaa son filtradas cuando
se propogan por el medio salido de la Tierra y a medida que &stas se
alejan de la fuente, predominando a grandes distancias los periodos de
onda largos. A distancias epicentralas grandes las ondas P y S pueden
tener periodos Predominantes de 2 a 3 segundos; la onda de superficie
L, en cambio, es de frecuencia muy baja, o sea el preriodo de onda son
11

mayores, en el orden de 20 segundos. Los sismos lejanos son percibidos
por las personas como un movimiento ondulatorio da periodo largo, que
causa sensaci6n de mareo; on este caso la componente vertical es
pequofTa an relaci6n con la horizontal del movimiento.
La duraci6n de un sismo depende de la magnitud del evento y de la
distancia epicentral. a mayor magnitud, mayor duraci6n do la fase
intensa del movimiento; igualmente la duracidn incrementa con la
distancia epicentral a medida que las ondas sismicas se dispersan
cuando se alejan del foco. Cerca del epicentro el. movimiento del terreno puede durar pocos segundos y en sismos de magnitud baja estar
representado en el registro por una o pocas oscilaciones. A distancias
epicentrales grandes (200 a 400 km) el movimiento puede durar varios
minutos si es causado por un sismo de gran magnitud. La duracih del
sismo influye en el comportamiento de la estructuras, de ahi la
necesidad de tomar en cuenta la duracidn del movimiento. A mayor
duraci6n de la sacudida, mayor la cuantfa de los daKos ocasionados.
5- 1 6 MAGNITUD.
La magnitud es una medida cuantitativa e instrumental del tamaKo
del evento, relacionada con la energia sismica liberada durante el
proceso de ruptura en la falla. La magnitud es una constante única que
se asigna a un sismo dado y es independiente del sitio de observaclan.
La magnitud se determina midiendo la maxima amplitud de las ondas
registradas en el sismograma correspondiente al evento.
En la practica existen varias escalas de magnitud, segdn el tipo
da onda en que se basa la medici6n ¿a la amplitud. La escala de
magnitud original es la desarrollada por Charles Richter en 1935 para
sismos en California. La escala Richter est& expresada en escala
logaritmica, y es designada con la letra M. La magnitud Richter se
daf ¡ne como
M log A - log Ao
1 2

donde: A es la maxima amplitud del trazo registrado por un sismbgrafo
a cierta distancia del foco, y Ao es el trazo miximo para un evento
tomado como patrbn, sea un evento normalizado.
Richter defini6 la magnitud de sismos locales como: el logaritmo
en baa0 10 de fa maxima amplitud de la onda sismica, expresada
mil&simas de milimetro (micronas), registrada en un sism6metro
estindar a una distancia de 100 km del epicentro del evento. El instrumento tomado como estandar para la determinaci6n de la magnitud
es un s i s m t r o de torsidn del tipo Wood-Anderson. Debido a que los
instrumentos que registran un evento sismico pueden estar a distancia
mayor que !a que se toma para la dafinici6n de magnitud. Richter tam6
en considsraci6n la atenuacidn de las ondas sfsmicas con la distancia
epicentral, pero no espacificb el tipo de onda en que se debla basar
la medici6n de amplitud.
5- 1 7 INTENSIDAD.
Es una medida de la fuerza del movimiento del terreno causado por
un evento sismico y del grado en que la vibracibn es sentida y
registrada en una determinada localidad, no es un valor Qnico que se
pueda asignar a un sismo. La intensidad es una variable que depende
del sitio de obaervaci6n; generalmente es mayor en el Area epicentral
y disminuye en funcidn de la distancia a la fuente sismica. Existen
dos formas para descrir y medir la intensidad.
La acderaci6n expresada en porcentaje de la gravedad terrestre,
ha sido hasta la fecha la medida instrumental mfis generalizada y un
pardmetro para evaluar las fuerzas sismicas inducidas en las
estructuras. La aceieracidn maxima dewl terreno es un valor que
representa la maxima sacudida de &te y, por lo tanto, es tambien un
pardmetro útil para evaluar la intensidad registrada en determinado
sit io.
1 3

" .
5.1 8 LOCALIZACION DE LOS TERREXOT0S.
Los gadlogos han reunido muchos sismogramas exactos de estaciones sismograficas situadas a diferentes distancias de los
terremotos. Por medio de estos datos y con la ayuda de teorias
apropiadas sobre la estructura de la Tierra han creado curvas de
tiempo de propagaci6n y tablas que permiten determinar, por medio de
un solo sismograma, la distancia existente entre la estacibn y un
terremoto determinado. La situacibn del terremoto puede determinarse
por medio da gran gran globo terraqueo en el que se marcan las
posiciones de las estaciones sismograficas. Utilizando la posici6n de
cada estacibn como centro y la distancia de cada una de ellas al
terremoto como radio, se trazan arcos en la superf icie del globo. La
interseccibn de estos arcos da la situacibn del terremoto. La
exactitud de la situacidn puede comprobarse anotando la proximidad de
interseccian de los arcos en un punto y la coincidencia de las horas
de origen dadas por las diferentes estaciones.
1
Aunque la fractura o deslizamiento que produce el terremoto puede
extenderse a lo largo de una zona considerable, hay pruebas
sismograficas de que al estallido principal de energia que produce las
ondas m;as importantes del terremoto se circunscribe a una zona
relativamente prquena. Esta zona se llama centro. El area de la
superficie terrestre que se encuentra directamente sobre el centro s t
llama epicentro. Generalmente se localizan estas zonas mediante el
cotejo de los informes obtenidos por multitud de observadores sobre la
intensidad del temblor. Los informes se redactan regGn un modelo
especial que indica la clase de informacidm deseada. Se evalcja cada
informe en cuanto a la intensidad con arreglo a la escala numerica
adoptada y su valor queda sefialado en un mapa.
S. l. 9 FRECUENCIA.
Segun un analisis dectuado por Gutenberg y Richter, be producen
anualmente alrededor de un mill6n de terremotos lo bastante fuertes
para ser registrados por los sism6grafos cercanos. De &*tos, por
termino medio, hay 10 terremotos de importancia, 100 que son
14

potencialmente destructivos y 1000 que son perjudiciales hasta cierto
grado.
5. l. 10 PERIODICIDAD.
Se ha realizado un inmenso trabajo con objeto de saber si la frecuencia y tiempo de incidencia de los terremotos resultan afectados
por las posiciones del Sol y la Luna, por las estaciones, por la
alteracic5n. del d ia y la noche, por variaciones de la pres¡&
atmosferica, por cambios en la posicidn de los polos de la Tierra,
etc. Los resultados han sido infructuosos. Las conclusiones obtenidas
son frecuentemente contradictorias y no muestran gran diversidad de
frecuencia entre el maxim0 y mínimo del periodo en discusian.
5.1 1 1 PREDI CCI ON. Es facil predecir en que regiones se produciran fuertes
terremotos por la sencilla raz6n de que es probable que se repitan las
sacudidas en aquellas zonas en que ya se han producido anteriormente.
Si se pudieran determinar las tensiones de las rocas y la proporcichr
en que aumentan estas tensiones. cabría predecir con aproximaci6n el tiempo de la sacudida. Los estudios posteriores en este sentido pueden
ser provechosos, paro los sismdogos aan estan lejos de poder predecir
la hora y el lugar de un terremoto destructivo.
Por medio de mediciones geodesicas reiteradas existe tal vez la
posibilidad de localizar tensiones crecientes como las reveladas por
movimientos crustales de la superficie, pero no se ha realizado este
trabajo lo bastante consienzudamente para deducir resultados
concluyentes. Trabajos de este tipo se han efectuado principalmente en
el Jap6n y en California. Partiendo de la suposici6n de que las capas
terrestres se ladean ligeramente en las cercanías de una falla activa
antes de que se produzca la fractura autentica o de que ocurra
el deslizamiento, los gedogos han ideado ún medidor de inclinación
que ha permitido la acurnulacicm de datos importantes. En el Japan se
han dado casos de fuerte incIinaci6n pocas horas antes de acaecer
ciertos terremotos.
1 5
5.2 SISMOGRAFOS.
8.2.1 DEFINICION.
hstrumento que sefiala, durante un terremoto, la diroccidn de las
oecilaciones y sacudirnientos de la Tierra.
Los primeros ensayos rudimentarios de aparatos destinados a
acuear los terremotos parece ser fueron realizados por el chino
Chio-Chio durante el siglo I; el aparato construido fue un
sismoscopio. AI abate de Hautefeuille se atribuye la gloria de haber
sido el constructor del primer aparato cientificamente concebido.
Hacia al aKo 1600, el franc& Calígnon de Perains di6 el principio de
un sismagrafo pendular, y en 1731 Nicolas Cirillo realizt,
observaciones con el aparato ideado por el primero; pero la invencitm
del sism6grafo se debe al italiano Bina.
S. 2.2 PRINCIPIOS DE FUNCIONAMIENTO.
Hay muchos tipos de sism6grafos, aunque todos se basan en unos
pocos principios fundamentales. Han de poseer una masa, o parte
principal, suspendida de tal forma que pueda permanecer quieta
mientras su apoyo se mueve. El pendulo simple es un sismhgrafo, aunque
no eficaz. Se ha usado el p6ndulo invertido, con su masa equilibrada
en un punto y mantenida en posicidn por medio de muelles horizontales.
El mecanismo mas usado es el pendulo horizontal. El funcionamiento de
este mecanismo es similar al de una puerta de cierre automatico sujeta
por dos goznes, de forma que el superior no se encuentra exactamente
perpendicular al inferior; al abrirse la puerta, se eleva ligeramente
y , al soltarse, se cierra con movimiento de balanceo. Si se sustituye
el gozne inferior por un punz6n que sa apoya contra el soporte y al gozne superior por una ligadura de alambre, se elimina casi totalmente
la fricci6n. Colocando en linea casi vertical los puntos de apoyo, se
puede facilmante alargar a 20 segundos el periodo natural de
oscilacidn.
1 6

Hay un tipo reciente de sism6grafo que se utiliza especialmente I
para registrar terremotos cercanos, el pendulo de torsion, en el que
se fija excentricamente una masa pequeKa a lo largo de un alambre j
sometido a tension. Otra forma, llamada sismdqrafo electromagnetico,
emplea una bobina de alambre como masa. El movimiento de esta bobina
con respecto a un campo magnetic0 induce una corriente electrica, cuya
intenaidad es registrada por un galvan6metro. q
Los instrumentos descritos regidran solamente los componentes
horizontales del movimiento de la Tierra y estan generalmente
dispuestos por pares, que registran, uno de ellos, la componente
norte-sur y el otro la componente este-oeste. Para registrar la
componente.' vertical se sitira una masa en equilibrio sobre un muelle y
el movimiento se registra dpticamente o por mktodos electromagn6ticos.
Sa aumenta considerablemente la exactitud registradora del sismógrafo
mediante el amortiguamiento, es decir, la introduccion de fuerzas que
resiatan al movimiento del phdu lo y que son proporcionalels a la
velocidad de tal movimiento. El amortiguamiento reduce la oscilacian
natural del pendulo, capaz do falsificar el registro, sobre todo
cuando el periodo natural del p&ndulo coincide con el de las ondas que
se registran. El amortiguamionto reduce tambien la variací6n de la
potencia amplificadora en las ondas de diferentes periodos. Estos dos
efectos tienden a hacer del sismograma reaultante una representacibn
mas autentica de los movimientos reales del suelo. El amortiguamiento
pueda ser moc&nico, o bien magn6tico o electromagnetico.
El poder amplificador de los sismdgrafos es de 25 a 100 veces,
pero puede alcanzar hasta 1000 veces. Los movimientos registrados son
a menudo tan pequeRios que la unidad utilizada para expresarloa es lAOOO de mili metro. El registro se hace en una hoja de papel
enrollado sobre un tambor qua gira a velocidad constante. Otra tlcnica
involucra el uso da papel ahumado sobre el que presiona ligeramente un
estilo, movido por un sistema adecuado de palancas. Es posible
tambien, remplarar al estilo un rayo de luz y el registro se traza
sobra un papel fotosensible.
17

Los sism6grafos ordinarios no sirven para registrar fuertes
movimientos terraqueos en la inmediata proximidad do un terremoto;
para este fin se han ideado instrumentos especiales. Las tres
componentes norte-sur, este-oeste y la vertical, debidamente
amortiguadas, son registradas una al lado de la otra en la' misma hoja
de papel. El principal fin conseguido con este sism6grafo de
movimientos violentos es lograr un registro de los movimientos
terraqueos que sea dtil a los ingenieros para diseflar estructuras
capaces de resistir los dafioa oca8ionados por los terremotos.
Los mejores sismagrafos de movimientos violentos registran
solamente las aceleraciones pero a partir de estos registros se pueden
calcular los otros elementos del movimiento. Los movimientos reales de
un terremoto pueden ser reproducidos en una plataforma vibradora,
sobre la que se monta un modelo funcionante de una estructura, de
forma que se puedan analizar los efectos de un terremoto sobre olla
sin esperar a que se produzca el terremoto verdadero.
5.2.3 SISMOGRAF'O DEL DOCTOR MILWE.
El sismgrafo del doctor Milne consta de un pilar de hierro
perpendicular a una plataforma triangular solidaria. sostenida por
medio de tres tornillos de nivel. El pendulo os una varilla ligera de
aluminio de 1 m de longitud, la cual termina en al extremo opuesto a
la masa por un espig6n de dgata, por donde se apoya sobre una punta de * acero que sirve de pivote, atornillada en el pilar de hierro. La masa
(alrededor de 1 kg.) soportada por medio de un alambre de acero, cuyo
otro extremo va a la parte superior del pilar. La masa no esta
rígidamente unida al pendulo, por lo quo se puede reducir el momento
de inercia del mismo.
El ajuste consiste en hacer que el pendulo ocupe una posicibn
horizontal y a lo largo de un linea previamente indicada. Uno de los
tornillos de nivel tiene un paso de Ob mm y esta provisto de un
indica que se desplaza sobre una graduacibn, con lo que es posible dar
al aparato una inclinacibn dada. El registro tiene lugar de la manera
18

siguiente: et1 brazo del pendulo lleva una plancha de aluminio colocada
transversalmante al pendulo, y en el que hay una rendija horizontal;
delante de &Sta hay otra rendija vertical practicada en la caja del
aparato. Un rayo de luz enviado desde la parte superior, despu&s de
pasar a atrav&s de las dos rendijas, seta interceptado por el papel
sensible colocado sobre el cilindro.
5.2.4 SSMffiRAFO APERIODIC0 DE GALITZIN.
El Sism6grafo aperiadico de Galitzin, componente Horizontal. con
registro electromagn&ico. Consiste en una armadura metalica,
sustentada por tres tornillos de nivel; lateralmente hay sistemas de
imanes, de los cuales unos son los destinados alamortiguamiento y los
otros al registro galvano-ttico. La masa de 7 kg. va unida
rigidamate al phdulo ; los tensores son alambres de acero y platino
iridiado. El p&ndulo lleva en un extremo una placa de cobre que se
desplaza entre los imanes de amortiguamiento y unas bobinas planas que
se desplazan antre los imanes de registro galvanometrico; estas
bobinas estan conectadas al equipo m6vil de un galvan6metro
Dspret-Ar8onval. Los movimientos u oscilaciones del espejito del
galvandmetro son registrados fotogrdficamente sobre un cilindro de papel sensible, colocado a la distancia da 1 m., mediante un haz de
rayos reflejado por el espejo. Como se precisan dos componentes, se
deben colocar, uno al lado del otro y perpendiculares, dos aparatos, y
si puede ser, con registros independienterr.
En el Sism6grafo Vertical Aperiadico da Galitrin con Registro
Electromagn&tico. El phdulo es remplazado por una armadura que
sostiene la masa; esta armadura puede girar alrededor de un eje
horizontal que, a fin de reducir al rozamiento esta constituido por
dos pares de laminas de acero, colocadas perpendicularmente. La armadura, con la masa, esta sostenida por un muelle en espiral, cuyos
puntos de enlace superior e inferior se pueden variar por medio da
tornillos, que facilitan la colocaci6n de la parte m6vil en la
posici6n conveniente.
19
La disposici6n de los imanes, tanto de los destinados al
amortiguamiento como al registro galvanom&trico, es aniloga. El extremo del phdulo lleva la misma placa de cobre y armadura o bobina
plana que los pendulos horizontales.
5.3 SISMOGRAMAS.
50 3.1 DEFI NI CI ON.
Diagrama regiutrado por los aparatos sismogrdficos o sismr5grafoo
por la acci6n de los movimientos del suelo.
50 30 2 INTERPRETACION.
El aspecto mas general de un sismograma corresponde a un temblor,
en el caso de no venir el registro perturbado por los microsismos, os
el siguiente: en primer lugar aparecen, las ondas da Ir primera fase,
u ondas P, ondas longitudinalas, iniciadas por un marcado impulso
(impetus) y entonces la fase se designa iP, o por una desviaci6n
gradual (ernersio), o . sea eP; despues de este comienzo siguen
oscilaciones o movimientos que se caracterizan por su irregularidad y
su corto periodo. A determinados intervalos aparecen despuks las ondas
reflejadas PRI y PR2, etc.
Despudt de la primera fase, cuya duracidn depende de la distancia
que separa la esfaci6n del epicentro, aparece la segunda fase,
designada por la letra S, ondas transversales; SU iniciacian se puede
ver en el sismograma por el cambio de aspecto del registro, aunque,
debido a ser menos pronunciadas, es a veces dudo80 este comienzo. Las
oscilaciones que siguen a la aparici6n de las S son, y algunas se
distiguen por las letras RS y PS, muy irregulares. Despues del
transcurso de un tiempo, que depende de la distancia, aumenta el
periodo de las ondas y &stas adquieren un aspecto sinusoidal; son las
20

ondas L, ondas superficiales, las cuales gradualmente van aumentando
de amplitud, decreciendo despues; asi, aparece una sucesidn de
mbximot, antes de iniciarse la última parte del temblor o Coda.
Esto en el caso de un temblor cuyo epicentro este a una distancia
tal de la esfacidn que permita aparezcan bien distintas las diferentes
f a-m.
En el sismograma la altura del trazo de la oscilacidn sobre la posicion o linea cero se denomina la amplitud de onda, A, y el tiempo
que dura un ticlo de oscilacion se denomina el periodo de onda,T. Este
se determina directamente del sismograma midiendo la distancia entre
dos pic0.s adyacentes. La frecuencia, f , es el numero de vibraciones
por segundo, se mide en hertz o ciclos/s, y es equivalente al inverso
del periodo de onda: f = 1/T. La frecuencia caracteristica del sismo
se puede determinar tambien midiendo el nrfmero de veces por segundo
que el trazo del sismograma cruza la linem cero. La amplitud de la
onda registrada en el sismograma no representa la amplitud real del
desplazamiento del terreno, pues los sisrndgrafos contienen sistemas de
amplificacidn que magnifican el movimiento del terreno en un factor
determinado: decenas a miles de veces, segan el tipo de sismdgrafo. La
amplitud real del movimiento del terreno estA dado por la amplitud del trazo del sismograma dividida por el factor de amplificaci6n del
instrumento.
21

6 . SISMOGRAFOS SEBC -UAMI.
6.1 DESCRIPCION.
Durante el desarrollo da1 proyecto SEBC-UAM (Sismcjgrafo
Electr6nico de Bajo Costo) se diseKaron y construyewon dos
instrumentos sism6grafos, uno capdz de detectar la componente
horizontal del movimiento y otro que detecta la componente vertical
del mismo. Se pretende que cada estacibn cuente con tras instrumentos:
dos de componente horizontal, el primero orientado norte-sur y el segundo en orientaci6n este-oeste; y un tercero da componente
vertical. Ambos sism6grafos de componente horizontal serin exactamente
iguales.
El disefío de ambos tipos de sismbgrafos estan basados en el
principio del pdndulo simple, es decir, poseen una masa suspendida de manera que pueda permanecer inm6vil durante el suceso, mientras su
base se mueve. Para lograr que se moviera d o la base del instrumento
mientras la masa se mantiene quieta, fue necesario colocar masas
grandes, bajo la premisa de que mientras mis grande sea la masa mayor
es la fuerza de gravedad que actúa sobre ella y sentir& menos el
efecto del movimiento. Cabe destacar que la inmovilidad de la masa no
s6lo depende de su peso, sino tambien de la forma de fijacibn a la
base del instrumento.
Por otra parte, no basta con que la masa sea muy grande y se
pueda mover libremente, sino trmbien disetrar el sistema de manera que
sea lo mAs sensible posible a las vibraciones del terreno,
independientemente de que se cuenta con un amplificador electranico el
cual se encargara de amplificar la seKal recibida.
Las partes principales que componen cada uno de los instrumentos
las hemos enumerado como sigue :
22

- Parte mecAnica.
- Parte elcctronica.
- interface.
- Salidas.
”“_ ..
6.2 SISMOGRAFO SEBC-UAMI DE COMPONENTE VERTICAL.
6.2.1 PARTE MECANICA.
La parte mecanica del sismc:grafo de componente vertical csta
formada por los siguientes elementos :
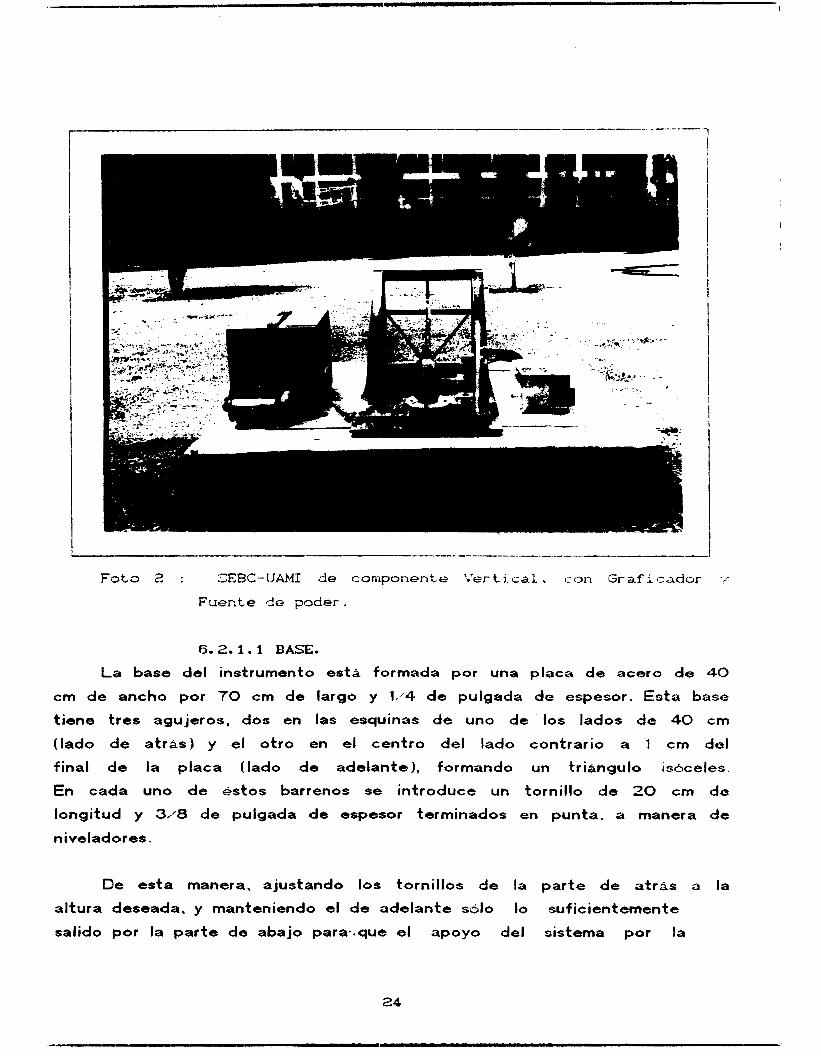
6.2. l . 1 BASE.
La base del instrumento esta formada por una placa de acero de 40
cm de ancho por 70 c m de largo y 1,.'4 de pulgada de espesor. Esta base
tiene tres agujeros, dos en las esquinas de uno de los lados de 40 cm
(lado de atrds) y el otro en el centro del lado contrario a 1 cm del
final de la placa (lado de adelante), formando un triingulo isficeles.
En cada uno de estos barrenos se introduce un tornillo de 20 cm de
longitud y 318 de pulgada de espesor terminados en punta. a manera de
niveladores.
De esta manera, ajustando los tornillos de la parte de atrás a la
altura deseada. y manteniendo el de adelante s d o lo suficientemente
salido por la parte de abajo para..que el apoyo del sistema por la
24

parte de adelante este cargado totalmente en la pu’nta del tornillo, se
puede variar el periodo del pendulo, cambiando el angulo del sistema
con respecto al suelo.
6.2. 1 2 MASA-
La mara es un cilindro torneado de acero de 8 cm de diametro y
con un paso aproximado de 5 kilogramos. AI centro de una de las caras
tiene un orificio con cuerda de 1 4 pulgada de espesor y 4 cm de
profundidad. En este orificio se atornillara la barra que la unira al
resto del sistema. Se practic6 un segundo orificio de 114 da pulgada
de espesor tambien con cuerda, en el cuerpo de la masa, a la mitad do
la misma. El objeto de este segundo orificio es atornillar aqui la
barra que mantendra firmemente unida la pieza de ferrita a la masa.
6.2. l. 3 SOPORTE PARA EL EJE DE LA MASA.
El soporte del eje de la masa es una estructura rectangular
construida con dngulo de acero de 1 1 4 pulgadas y 1.46 de pulgada do
espesor, can dos lados de 35 cm de altura y un fravesaKo de 38 cm de
largo. Esta soldada firmemente a la base perpendicularmente a la
misma, y paralela al lado de atrds. Cuenta ademas con un puntal a cada
lado, construidos del mismo material y soldados al soporte en su parte
mas alta y a la base en dngulo de 45 grados. La funcibn de tos
puntales es evitar que el soporte se mueva con respecto a la base, es
decir, le da fuerza a la soldadura del soporte evitando que el peso de
la masa lo venza hacia adelante.
Ademas de los puntales, el soporte cuenta con dos baleros,
fijos uno a cada lado del mismo por la parte de adentro, cuyo eje es
paralelo a la placa y a una altura de 20 cm con respecto a la misma,
con un di;slmetro interno de 1/2 pulgada. Es en Bstos baleros
perfectamente engrasados dande ira montada firmemente la barra del eje
de la masa, buscando reducir al maxim0 la friccion provocada por el
rozamiento, tratando de que la masa pueda moverse libremente hacia
arriba y abajo.

Foto 3 : Vi rta f rontal SEBC--AMI de componente Vertdl.tal.
6.2. l. 4 EJE DE L A MASA.
Esta formado por una barra circular de acero de 1-/2 pulgada de
espesor de 37 cm de largo, la cual entra a presibn en los baleros del
soporte. Exactamente a la mitad de esta barra y on forma perpendicular
estA soldada una barra con cuerda sin fin de 1/'2 pulgada de espesor y
49.5 cm de longitud. En el extremo contrario se atornilla la masa,
fijimdola así al resto del sistema.
En la parte final y a unos 2 cm de la masa. la barra tiene una
perforacian de lado a lado, la cual servira para fijar el amortiguador
como se explicarA mas adelante.
La ratbn para tener una barra con cuerda sin fin, es la de poder
colocar 3 tuercas en esta, la del centro con una pequefia placa de
acero soldada con un orificio. En este orificio se enganchar6. un cable
26

de acero conectado a un resorte a manera de tirante, cuya función s t
explicarA mtrs adelante. Las tuercas de los lados servirtrn para fijar
la central en cierta posicidn de la barra, atornilldndolas una contra
otra. El cable no se fij6 a la barra de la masa por que dependiendo de
la longitud del mismo se puede manipular el angulo del pendulo con I
respecto al piso.
f
Con objeto de evitar que la barra atornillada a la masa pudiera
ladearse, perdiendo su angulo recto con respecto a la primera barra se
soldaron un par de varillas de 3/8 de pulgada de espesor a manera de
puntales, en 6ngulo aproximado de 60 grados con respecto a la barra
montada en los baleros.
6.2. l. 5 TIRANTE DEL PENDULO.
Para permitir que el pendulo oscile y a manera de muelle, el
instrumento cuenta con un cable de acero fijado a un tensor que cuenta
con un par de armellas con cuerda encontrada en los extremos opuestos
del cuerpo del tensor, da manera que si se gira este en el sentido de
las manecillas del reloj, las armellas se alejan; en cambio si se gira
en sentido contrario, las armellas se acercan. Su fhncibn es la de
poder variar la longitud del tirante con $610 girarlo a la izquierda o
a la derecha.
El otro extremo de estc dispositivo esta unido a un resorte y
Bste a su vez se engancha a un pequeKo agujero en el centro del travesa~o del soporte. El otro extremo del cable de acero se sujeta
a la tuerca central en la barra de la masa como se describib antes. El 6ngulo del pendulo puede variarse entonces de 3 formas distintas,
subiendo o bajando los niveladores de la base, alejando o acercando
las tuercas a la masa o alargando y acortando la longitud del tirante.
El tirante es entonces el encargado de mantener suspendido el
elemento masivo. La funcibn del resorte es permitir que la masa
oscile, por esta razdn es importante conseguir un resorte con una
27

7
I i
constante de daformacibn adecuada, ya que si su
paquaffa, el peso que ejercen la masa y la barra st
I
constante
1 jetadora p
es muy
lueda ser
mayor que la constante y de esta manera el resorte se mantendra
siempre alargado al maxim0 y no permitir& que el sistema oscile con
libertad. Por otra parto, si la constante de deformacibn del resorte
es muy grande, entonces este sera tan rígido que no permitira a la
masa moverse cuando se presente algún evento.
20

6. 2. 1 6 AMORTIGUADOR.
La funci6n del amortiguador es de suma importancia, ya que se
aumenta considerablemente la exactitud del sismbgrafo, o soa, mediante
la introducci6n da fuerzas qua resistan al movimiento del pendulo y
que son proporcionales a la velocidad de tal movimiento. El amortiguamiento reduce la oscilacian natural del p&ndulo, capaz de
falsificar el registro, sobre todo cuando el periodo natural del
pendulo coincide con el de las ondas que se registran. El amortiguamiento reduce tambien la variacian de la potencia
amplificadora en las ondas de diferentes periodos. Estos dos efectos
tienden a ,hacer del sismograma rem~ltante una representacir5n mis
autdntica. da" los movimientos reales del suelo.
El sistema de amortiguamiento est6. formado por un recipiente
cilindrico construido de tubo PVC de 2 1 4 pulgadas de diametro y 7 cm
de alto y base de nylamid, atornillado sobre la placa
perpendicularmente a la misma. La tapa del cilindro tambien es de nylrmid y tiene un orificio al centro un poco mayor a 5/16 de pulgada
de diametro. Por dentro de este orificio puede correr libremente una
barra de acero de 5/16 de pulgada de espesor en uno de cuyos extremos
tiene atornillada una pieza circular de nylamid de 1/4 de pulgada de
espesor y diametro ligeramente menor que el diametro interno del
cilindro de PVC. Esta pieza sirve de kmbolo al amortiguador.
El extremo contrario de la barrita del embolo, tiene un orificio.
en el cual sa introduce uno de los extremos de una grapa de alambre
galvanizado y cuyo otro extremo se introduce en el orificio de la
barra de la masa cercana a la misma, descrito anteriormente. Es
entonces, por medio de esta grapa como el amortiguador se comunica a
la masa del sistema. Ndtese que la barra del embolo no puede ser
fijada rígidamente a la barra de la maea, ya que al tener &fa un
movimiento circular, la barra del embolo cambia su posicidn relativa
con respecto a esta, para poder moverse siempre a lo largo del
cilindro, el cual si est& fijo con respecto a la base del sistema.
2s

El cilindro del amortiguador se Iten6 con diversos fluidos de
diferente viscosidad, desde aire y agua, hasta aceite de alta
densidad, tratando de determinar cual fluido seria el iddneo para el
sistema de amortiguamiento de nuestro sismbgrafo. Al final se opt6 por
fluido refrigerante de baja viscosidad y volatilidad, el cual permito
moverse libremente a la masa cuando se presenta alguna vibracian, y la detiene una vez que ha terminado el evento, evitando de esta forma
tener registros errbneos producidos por la libre oscilacian del
pendulo.
6- 2 - 2 PARTE ELECTRONICA.
El dispositivo mAs importante del sensor del sism6grafo es el
circuito integrado NE 5521, que es un circuito condicionador de sefial,
asta integrado contiene un oscilador de onda cuadrada, cuya frecuencia
se puede determinar con los valores del capacitor y al resistor
conectados a las patas 17 y 11 respectivamente. Con los valores 4.7 nf
y 8 2 KO sa tiene una frecuencia aproximadamente de 19.5 KHz.
Esta frecuencia que hemos elegido, es aquella que, en relaci6n
con las características de las cuatro bobinas (LlA, LlB, L2A, L2B) nos permite alcanzar la sensibilidad maxima.
Esta onda cuadrada, por medio de una segunda etapa, se transforma
en una onda senusoidal; tras esta etapa se encuentran dos
amplificadoros operacionales cuyas salidas (patas 14, 15 y 13) van
conectadas a dos bobinas, a las quo llamaremos bobinas de sxcitaci6n
(L2A y L28).
Si a junto a estas bobinas aplicamos otras dos, a las que
llamaremos detectoras (L1B y LZB), en oposicidn de fase, y luego
acoplamos estas cuatro bobinas introduciendo en su interior un nircleo
de ferrita, podemos conseguir una de esta tres situaciones:
30

,
1 4 5 8 6 7
1. Si el nucleo est& totalmente centrado cn el interior de las
cuatro bobinas (situacidn de equilibrio 1, en la salida conseguiremos
un voltaje nulo, ya que la sefial captada por las dos bobinas
detectoras, al ser de la misma intensidad pero en oposicicjn de fase.
se anula.
2. Si el nuclao se desplaza hacia la derecha, obtenemos una
sinusoide en fase, cuya amplitud es proporcional al desplazamiento del
núcleo.
3 . Si el núcleo se desplaza hacia la izquierda, obtenemos una
sinusoide desfasada, cuya amplitud es proporcional al desplazamiento
del núcleo.
31

Para obtener el voltaje en estas tres situaciones tenemos que
demodular la seKal, es decir tomar la seKa1 generada por el oscilador
y la existente en la salida de las dos bobinas detectoras y aplicarla
a la etapa del damodulador síncrono, incluida tambien en dicho
integrado (patas 4 y 6).
5) recogemos una semionda positiva; si la sinusoida est& desfasada, la
semionda es negativa. ,
En la salida del demodulador (pata 5) nos encontramos con
sirniondas positivas o negativas, que tenemos que convertir en un
voltaje continuo.
Aplicando este voltaje pulsante en la pata de entrada 2, por
medio de un filtro pasa-bajas formado por los resistores de 1 Ka (entre pata 5 y punto A ) y 5.6 KO (entre pata 2 y punto A), y los
capacitores de 470 nF (entra punto A y punto B) y 1 pF (entra pata 2 y
tierra), en la salida del operacional (pata 1) nos encontramos con un voltaje continuo. El potencibmetro de 220 Kn se utiliza para variar la
sensibilidad del sismhgrafo.
El filtro pasa-bajas nos permite conseguir que s d o pase la gama
de frecuencias subshicas, de O a 20 HZ. Por consiguiente, cualquier
frecuencia superior a 20 Hz no puede pasar a traves de dicho filtro, eliminando tambibn el ruido de 5 0 a 60 Hz da la red el&ctrica.
' Una vez equilibrado el circuito, es decir con el núcleo de
ferrita perfectamente centrado en el interior de las cuatro bobinas,
en la pata de salida 1 obtenemos un voltaje continuo de 6 voltios.
32

"""- r 1
Foto €3 ;
Vista Detallada
Amortiguador e I n t e r f
S E B C - U N
Componente Vertical
Si el n6cleo de ferrita se desplaza a la derecha, en la salida se
presenta un voltaje de 9 voltios, si se desplaza a la izquierda, el voltaje es da 3 voltios.
Por consiguiente, en presencia de una onda sismica. el nücleo de
ferrita, afectado por estas vibraciones. al moverse en el interior de
33

las cuatro bobinas aunque st510 sea unos cuantos milimetros, provoca en
la salida un voltaje que refleja fielmente la frecuencia de la onda
sismica. Cuanto mas intensas sean las vibraciones sismicas, mas amplias serAn las variaciones de voltaje.
El circuito integrado TLO81 que es un amplificador operacional,
tiene conectada la pata no inversora a la pata 12 del NE 5521 donde se
obtiene 6 voltios, y la pata inversora a la salida del TL081. Este
circuito sirve para conseguir un voltaje de referencia de 6 voltios
con impedancia de salida reducida, a la salida del TL081 (pata S) .
Este voltaje es aplicado a la pata 1 del NE 5521 por medio de los resistores de 22 Kn (entre pata 6 del TL081 y pata 3 del NE 5521) y
de 5.6 Kn (entre pata 1 y 3 del NE 5521). Entre la pata 6 del TLO81 y
pata 3 del NE 5521 esta conectada un resistor de 22 kn, el cual
alimenta la salida del TL08l a la entrada del NE 5521.
La funci6n dol potenciomatro de 22 Kn (pata 2 del TL084A y
tierra), es la de ajustar el voltaje de salida del divisor a 25 voltios.
El capacitor de 1 0 pF (entre pata 2 del TL084A y tierra) y el de
4.7 pF (entre pata 3 del TL08l y tierra) se utilizan para eliminar
seKales de ruido en el lugar donde estan conectados.
El circuito formado por los tres ampJificadores operacionales
(TLO84A, TL0848 y TL084D) forman un amplificador de instrumentacian,
el cual ha sido disenado para tener una alta impedancia de entrada,
una elevada Ratan de Rechazo de Modo ComGn (RRMC) y entre otras
propiedades. Este tipo de amplificadores es uno de los mas til les,
precisos y versatiles disponible an la actualidad.
Las seKales de entrada excitan circuitos seguidores de voltaje,
en los cuales la se8al de entrada se aplica a la entrada positiva. La
entrada negativa se conecta a la salida. El voltaje de salida iguala
al voltaje da entrada tanto en magnitud como en signo. Por lo tanto,
34

6.2.2.1 DIAGRAMA ELECTRICO.

el voltaje da salida eigue al voltaje de entrada. L a ganancia de
voltaje es 1 (la unidad). El seguidor de voltaje tiene una resistencia
de entrada alta (muchos megaohms) y una resistencia de salida muy
baja.
Estos seguidores de voltaje alimentan a su vez a un amplificador
diferencial. Cuatro resistores, dos de 1Kn (uno entre la pata 1 del
TL084A y 13 del TL084D y entre la pata 7 del TL0848 y 1 2 del TLO84D),
otro de 4.7 Kfl (entre pata 1 2 del TL0840 y tierra) y un potenci6metro
de 4.7 Kn (entre patas 13 y 14 del TL084D) que sirve para ajustar la
ganancia del amplificador. El amplificador de instrumentaci6n se
utiliza para amplificar la sefial proveniente del integrado NE 5521, que se aplica a la entrada positiva. En la otra entrada del amplificador se ap I ica la salida del divisor de voltaje, para
obtener a la salida de dicho amplificador un nivel de referencia de
2.5 voltios corriente directa.
El resistor de 68 Kn (entre la pata 14 del TL084 y la salida) y
al capacitor de 0.1 pF forman un filtro pasa-bajas impidiendo el paso
de ruido de altas frecuencias.
El circuito integrado LM 3914 es un indicador de niveles de
voltaje, los cuales son mostrados utilizando leds. El indicador puede
funcionar en uno de dos modos, barra o punto. Para nuestro circuito en
particular se acfiv6 al modo indicador punto, con una diferencia de 18
milivolts entre cada led punto.
La funcibn principal de este indicador es la de ilurrtrar el
punto de equilibrio del sistema, es decir, e1 lugar en el que la
ferrita sa halla dentro de las bobinas de manera tal que la
diferencia de fase en lar bobinas producen una salida de voltaje nula.
El voltaje alterno producido por las ondas sismicas es aplicado a
la pata 5 proveniente da la salida del NE 5521 (pata 1). Se enciende
un led cada vez que la entrada se incrementa o disminuye 18
36
milivoltios aproximadamente. Cuando el sistema se encuentra en
equilibrio, la salida as igual a 6 volts aprox., o sea, la mitad del
voltaje de polaritaci6n. Este voltaje esta indicado al encenderse el
led 5.
El divisor de voltaje formado por los resistores de 1 KO (entre
la pata 4 del LM 3914 y +12 voltios) y 0825 Kn (entre pata 4 del LM 3914 y tierra) se utiliza para cambiar el voltaje de referencia a 6
voltios. El segundo divisor de voltaje formado por los resistoras da
0.906 Kn (entre patas 7 y 8 del LM 3914) y de 3.00 Kn (entre pata 8
del LM 3914 y tierra), tiene la funcibn de variar la sensibilidad del
indicador. En particular estos valores de las resistencias, fijan la
variaci6n de voltaje de 18 milivolts entre cada led.
6.2.3 INTERFACE.
Corno s t mencion6 durante la descripci6n de la parte electrdnica,
el principio de operacibn de esta se basa en la mcdici6n del cambio de fase que provoca el desplazamiento de una barra de ferrita dentro de 4 bobinas debidamente acopladas. El problema principal entonces, para
entrelazar las partes mecAnica y elsctrica era construir un juego da
bobinas y ferrita que respondiera satisfactoriamente a esta situaci6n.
Una vez hecho esto, habi a que buscar la forma de fijar la barra do ferrita a la masa, mientras las bobinas debi an permanecer fijas a la
base del sistema.
La primera situaci6n que se busc6 resolver era la consfrucci6n
de las bobinas. Dado que no habia un precedente que nos pudiera dar
una idea de la cons~ruccidn de los embobinados, s t procedi6 a realizar
un gran nomero de pruebas tanto de materiales c6mo de disposici6n de
las bobinas. Es así, como se probcl con alambre magneto de diferentes
diametros, desde muy delgado hasta relativamente grueso y nacleos de
diferentes materiales, desde plastic0 y cart6n hasta papel de baja
permeabilidad magnetita y madera.
37

a
Vista F r o n t s 1
SERC-IJAMI
Componente Yet- ti cal
Ademas se realizaron pruebas con diferentes números de vueltas en
los devanados, se prob6 como respondian las bobinas con pocas vueltas,
con muchas vueltas, con un número de vueltas en las bobinas exitadoras
y otro diferente en las detectoras, etc. Por otra parte, se comprobt,
tambien las diferencias en la respuesta disponiendo las bobinas en
forma diferente, es decir, con 4 bobinas enrrolladas
independientemente, colocadas en diferentes posiciones. y con pares de
bobinas enrrolladas en un $610 núcleo.
38

Con base en los resultados obtenidos con todas estas pruebas, se
demostr6 que la mejor respuesta era entregada por pares de bobinas
detectora-excitadora enrrolladas en un mismo carrete de pkstico, de 2
cm de diametro interno y 2.5 cm de largo, utilizando alambre magneto
delgado y con 50 vueltas en cada devanado.
La barra de ferrita utilizada es del mismo tipo de las que se
emplean en las antenas de sintonizadoros de AM. Con un diametro aprox.
de 1/4 de pulgada y 138 cm de largo.
Una vez construido el conjunto bobinas ferrita que mejor
respondía a nuestras necesidades, se empez6 a idear la forma de fijar
la barra de ferrita a la masa y unir las bobinas a la base del
sistema, de manera que la ferrita se desplazara libremente dentro de las bobinas, sin que hubiera rozamiento.
Para fijar la ferrita, se construyb una pieza cilindrica de
nilamyd de 3/8 de pulgada de diametro, con cuerda en un extremo y una
perforacidn de lado a lado, con un diamstro similar al de la barra de
ferrita (1/4 de pulgada 1 en el otro. El extremo con cuerda se
atornilla en el orificio lateral de la masa construido para ese
propdsito y en el agujero del otro extremo se introduce a presi6n la barra de ferrita aprisionada adamas con un pequefio tornillo
introducido desde la cara plana del mismo extremo de la pieza de
nilamyd, quedando la barra de ferrita centrada y perpendicular con
respecto a la pieza.
Para colocar las bobinas, primero habi a que mantenerlas fijas una
con respecto a la otra una cierta distancia, de manera que la ferrita
centrada dentro de ellas produjera un voltaje nulo a la salida del
circuito. Para consoguir esto, se utiliz6 una placa de circuito
impreso de 18 cm de largo por 6 de ancho, la cual tenfa un doble
propdsito : por una parte fijar las bobinas con una separaci6n de 9 cm
aprox. una de la otra, lo cual se iogr6 utilizando pegamento
instantaneo ademas de sujetarlas firmemente con cuerda para caKa de
pescar.
3s

Por otro lado, la placa de impreso nos servia para soldar en ella
las terminales de las bobinas a los alambres del circuito electranico,
evitando hacerlo directamente unos con otros y pudiendo provocar una
facil ruptura debido al diamttro tan pequePio del alambre magneto.
Una vez fijadas las bobinas a la tablilla, esta se monta sobre
una escuadra construida de acrilico de 1 4 pulgadas de espesor y cuya
cara vertical tiene 9.5 cm de ancho por 26 cm de alto, utilizando para
su montaje cinta adhesiva de polittileno. La parte horizontal de la
escuadra se atornilla a la placa de la base, de manera tal que ya
montada la pieza de ferrita sobre la masa y perpendicular a la base,
la ferrita pudiera moverse libremente dentro de las bobinas sin
rozar los carretes de las mismas. Es asi como se lograron comunicar
los movimientos detectados por la parte mecanica del instrumento con
el circuito alectr6nico.
6.2.4 SALIDAS.
Como se explica en la descripcidn de la parte elactr6nica. el
instrumento tiene dos salidas, la primera da ellas se conecta
directamente a una barra indicadora de voltajes construida a base de
leds, y cuya funcibn principal consiste en indicar la posicibn de equilibrio del sistema.
La segunda salida es Iza mas importante, ya que es esta la que se
tomara para interpretar los movimientos detectados por el sismagrafo.
Durante la fase experimental, y con objeto de evaluar la
sensibilidad del indrumento, la calibraci6n del mismo, la etapa
amplificadora, la eliminacidn del ruido y en general la respuesta dol
sistema, la salida principal era graficada en un osciloscopio. Tan
pronto se logra conjuntar la parte meCAn¡Ca con la parto electr6nica
del sistema, y una vez conseguida una buena respuesta del instrumento,
se procedi6 a probar con dispositivoic graficadores permanentes.
40

Como se mencionb anteriormente, la salida principal del
instrumanto fue fijada sobre un nivel de offsat da 26 volts, esto se
hizo con la finalidad de conectar un convertidor anrbgico / digital a
esta salida, obteniendo entonces la sefial digitalirada detectada por
el instrumento. El objetivo de digitalizar la seffal es al de poder
manipular via electrbnica digital la salida del instrumento, es decir,
la seKal digital ya puede ser manipulada por un microprocesador
(microcomputadora) con objeto de poder guardar lo5 registros arrojados
por el sismbgrafo en alglfn medio de almacenamiento temporal o
definitivo, c6mo memoria RAM o disco flexible.
La ventaja de almacenar estos registros, es que si se guarda en
disco o en cinta, se puede tener una gran cantidad de inforrnaci6n
perfectamente ordenanda y clasificada a un bajo costo tanto an espacio
como en dinero, creando así un registro detallado de la actividad
detectada por el instrumento. Esta informacibn puede ser accasada y
graficada en la pantalla de la microcomputadora cuantas veces se
desee. Es importante hacer notar que no necesariamente cada estacibn
debe tenor su propia microcomputadora, sino basta con conectar la
salida a un transmisor de radio y enviar la seKal hacia una
computadora central que controle varias estaciones a la vez.
Otra raz6n para digitalirar la seKal es que si s t desea
transmitir esta informacibn via modem por ejemplo, necesariamente debe
digitalitarse, cargarse en la memoria de la microcomputadora y
enviarse mediante algun sistema de transmisi6n hacia el modem
conectado a la linea.
Por otra parte, tambikn es posible conectar la salida principal
del instrumento a un graficador en hojas de papel continuo enrrollado
en un tambor y que gira a una velocidad constante. El principio de funcionamiento de estos grrficadores es simple, reciben como entrada
una seKa1 analdqica y por medio de sistemas electromagn6ticos
convierten las variaciones de voltaje de la sefial en un movimiento
proporcional aplicado a una plumilla que est& en contacto con el
papel.
41
Existen graficadores termicos, que imprimen sobre papel encerado
especial, calentando la plumilla. De esta forma, la plumilla vfi
quemando el papel por dande pasa, obteni&ndo$t asi al registro.
Otros graficadores utilizan dispositivos que bombean tinta hacia
la punta de la plumilla, la cual va trazando su movimiento sobre el
papel.
La principal ventaja de este sistema con respecto al
almacenamiento en disco, es qua se tiene al instante el sismograma,
conforme va transcurriendo el evento. Su desventaja principal es el
hecho de Cpre el papel gastado no puede ser reutilizado, sino que es
necesario alimentar constantemente papel nuevo a la impresora, lo cual
resulta muy costoso. En todo caso, se pueden utilizar ambas tecnicas
para el regietro de los eventos.
En nuestro caso particuar, para la etapa de calibraci6n y prueba
del instrumento, se utili26 un graficador de tinta para hacer los
primeros registros. Los resultados se reportan mas adelante. Cabe
seHaJar que por falta de tiempo no se conectb el convertidor
anal6gico / digital a la salida dol sistema, para obtener asf registros digitales. Esperamos que en una segunda fase del proyecto,
&te sea uno de los puntos mas importantes a desarrollar, ya sea por
nosotros mismos o por algon otro grupo que retome este proyecto.
42

6.3 SISMOGRAFO SEBC-UAMI DE COMPONENTE HORIZONTAL.
La construccidn y el funcionamiento del sismdgrafo de componente
horizontal es muy similar al de componente vertical, con algunas
diferencias muy significativas, y sobre todo tomando en cuenta los
errores y problemas que se tuvieron durante el diseFio y la
consfrucci6n del instrumento ¿e componente verticai, creemos que se
mejor6 bastante en algunas cosas este segundo sismdgrafo.
”_ ” - I - ””_ “ ”
8 : SEBC-UAMI de componente Horizontal, con Graf‘icaJor :J
F u e n t e de poder.

60 3. 1 PARTE MECANICA0
6-30 1 1 B A S .
La base se construyd con los mismos materiales y dimensiones que
el sismbgrafo anterior. La única diferencia principal entre ambos, es
que en este instrumento se utilizaron tornillos niveladores mis
gruesos (142 de pulgada) que soportan mejor la carga del sistema.
6-30 1 2 MASA.
En al sismbgrafo de componente horizontal, se utiliz6 ahora un
cilindro de acero de 10 kg de peso aproximadamente, es decir, el doble
de la masa del sistema de componente vertical. Su diamatro es de 10
cm. AI igual que en el otro sistema, la masa tiene un barreno con
cuerda de 1 4 pulgada de diametro en una de las caras cuya finalidad
es la de atornillar ahf la barra que sirve como eje de la masa, y un
segundo barreno de 114 de pulgada sobre el cuerpo de la masa y
perpendicular a la misma, ddnde se fijara la barra da soporte de la
ferrita.
60 30 l o 3 SOPORTE PARA EL EJE DE LA MASA.
El soporte para el eje de la masa es exactamente igual al del
sismdgrafo anterior, con la única diferencia de que al ser el
nuevo instrumento de pendulo horizontal, ahora los baleros no se
colocaron a los lados de la estructura, sino uno a la mitad del
fravesaKo en su parte interior, y el otro sobra la base, exactamente a
la mitad de la placa. Ambos alineados entre sf.
6.3.1 . 4 EJE DE LA MASA.
Asimismo, el eje de la masa es igual al del instrumento de
componente vertical, con un par de diferencias, la primera es que la
barra central en ddnde se atornilla la masa ahora es una barra de
acero de 1/2 pulgada de espesor y sdlo con cuerda en el extremo que se
une a la masa, a diferencia de la barra con cuerda sin fin del
sism6grafo anterior, pues aqui ya no hay necesidad de mater tuercas.
44

L a segunda diferencia es el barreno practicado terca de la masa
para fijar e¡ dispositivo amortiguador. A diferencia del anterior
sismhgrafo on el cual el eje de la masa tiene un pequeÍ50 or if icio
paralelo a la base, en este se le hizo un agujero de lado a lado y
perpendicular a la base de 1/14 de pulgada de dibmetro. con cuerda,
dande s t atornillara la paleta del amortiguador como se explicara rn&s
adelant e.
la
6.3. I. 5 AMORTIGUADOR.
La funcibn del amortiguador sigue siendo la misma. o sea. reducir
oscilacian natural del pendulo obteniendo así un sisrnograma mis
real. Sin embargo. el sistema de amortiguamiento es totalmente
diferente.
45

El sistema de amortiguamiento esta formado por una caja de
acri lico de 3 mm de espesor, de 21 cm de largo por 8 cm de ancho y 8
cm de profundidad. La funcibn de esta caja es contener un fluido,
dentro del cual estard sumergida la paleta del amortiguador. La tapa
de la caja tiene un corte semicircular de 1.5 cm de ancho, iniciando y
terminando a 2 cm del principio y final de la tapa, y cuya curvatura
46

corresponde al movimiento circular descrito por el eje de la masa a la
altura del barreno para la paleta del amortiguador.
El objetivo de este corte, es el de permitir moverse a lo largo
de el a una barra de aluminio de 3,,'8 pulgada de diametro. que en un
extremo VI atornillada al eje de la masa en el barreno practicado para
ese propbsito, y en el otro va atornillado a una pieza semicircular de
nilamyd de 5 cm de diametro, la cual queda dentro de la caja de
acri tico, especialmente fabricada para servir de paleta de
amortiguamiento.
r
a
**,
-
I
!
I
I
Foto 11 : V i s t a Lateral SEBC-UAMI componente Horizontal.
De esta forma, la paleta del amortiguador unida a la barra de la
masa, al estar sumergida dentro del fluido contenido en la caja, no
47

permite moverse libremente al pendulo del sistema, sino q u e reducir3
la oscilaci6n n a t u r a l del mismo.
6.3 .2 PARTE ELECTRONICA-
El circuito utilizado en este sismbgrafo es exactamente igual a l
utilizado e n el sismdgrafo anterior.
_1
Foto 1 2 : V i s t a detallada, AmorLiguador e Interface d e l SEBC-UAMI
componente Horizontal.
48

6- 3- 3 INTERFACE-
La construccidn de las bobinas para &ate segundo sismbgrafo fue
muy similar a la de las bobinas del instrumento anterior, presentando
algunas diferencias tendientes a mejorar la respuesta del sistema. Se utiliz6 ahora un carrete de tubo de PVC de 2.5 cm de diametro y 3 cm
de largo.
El alambre utilizado ahora fue ligeramente mds grueso y se
aumentd e1 nrfmero de vueltas a 75 por cada devanado. El didmetro
de la ferrita utilizada es 3 mm mas grande que el de la anterior y su
longitud es 2 cm mayor.
Tambien el sistema do fijacidn tanto de la ferrita a la masa como
de laa bobinas a la base del sistema fue muy similar. Para fijar la
ferita, se construyb una pieza de nilamyd con las mismas
características quo la utilizada anteriormente, es decir, atornillada
por un lado a la masa en el barreno correspondiente y en el otro un
agujero de diametro similar al de la ferrita, en la cual se introduce
esta a presibn y se sujeta ademas con un tornillo introducido desde la
cara plana de la pieza de nilamyd.
Las bobinas a su vez se fijaron en una placa de circuito impreso
de las mismas dimensiones que el anterior, utilizando cuerda para caKa
de pescar, a 9 cm de distancia una de la otra, buscando obtener un
voltaje nulo mientras la ferrita asta centrada dentro de ellas. Para
fijar la tablilla de impreso al sistema, se construyh ahora una
especie de base o mesita de acrílico de 3 cm de alto aprox. por 7 cm
de ancho y 20 de largo, en la cual se month la tablilla utilizando
cinta adhesiva de polistileno.
La mesita se atornil16 a la placa do la base, de manera que la ferrita quedara centrada dentro de las bobinas en el estado de
equilibrio del sistema, y pudiera moverse libremente sin rozar las
paredes de los carretes cuando Ir masa comenzara a oscilar.
49
6- 30 4 SALIDAS.
Puesto que el circuito electrdnico es el mismo en ambos
instrumentos, igualmente lo son el nirmero de salidas y la manipulacian
que puede hacerse de ellas, como se explicb anteriormente en la parte
correspondiente al sismdgrafo de componente vertical.
Cabe sefialar aqui, que tambidn por falta de tiempo no se logrd
realizar ninguna prueba con al graficador para este sismdgrafo,
dejandose igualmente abierta la posibilidad de hacerlo en una segunda
etapa del proyecto.
SO

7 . RESULTADOS
En esta secci6n se reportan los resultados arrojados por el
Sismbgrafo SERC-UAM de componente vertical. El objetivo de las
pruebas que se le aplicaron era principalmente determinar el rango de
su periodo de oscilacibn y comprobar que tan sensible es en la
practica.
Para lograr la caracterizaci6n del sism6grafo, se ida6 la
siguiente prueba : se coloc6 un cierto elemento masivo con un alambre
sobre la masa del sistema, la cual cambia su estado de equilibrio con
respecto al:- resto del instrumanto cuando tiene sobre si el peso del
elemento de prueba. Una vez que el pendulo queda an reposo, dando un
tir6n al alambre se retira el elemento de prueba y se toma el registro, graficando la salida principal del instrumento.
La prueba se raalizt, un buen número de veces, varidndo el dngulo
del pbndulo con respecto al piso, desde 4 hasta 46 grados aprox. y
repitiendo 2 o 3 veces cada registro (las medidas de los 6ngulos del
pendulo con respecto al piso no son exlctas, ya que el angulo entre la
placa y el piso puede determinarse mas o menos exactamente calculando
senos y cosenos, sin embargo, el angulo entre el pendulo y la base se
midi6 utilizando un transportador. El Angulo total entre la masa y el
suelo es entonces la suma de ambos angulos), utilizando el mismo
elemento de prueba, de esta forma podiamos medir el periodo del
pendulo a diferentes inclinaciones y actuando sobre el la misma
fuerza.
Para determinar al periodo lo mas exactamente posible, se midi6
en la grafica el tiempo que le toma al pendulo completar 5 ciclos.
Para determinar el periodo del pendulo es suficiente con dividir este
tiempo entre 5.
En la siguiente tabla se muestran los resultados obtenidos del
analitis de los registros para diferentes dngulos entre el periodo y
el suelo.

ANGULO ENTRE EL PENDULO Y EL SUELO
PERtODO (milisegundos)
736
784
792
793
800
808
824
832
A continuacibn se presentan las graficas originales obtenidas. En
la parte de abajo de cada grafica, se observa una serie de marcas,
dande la distancia entre cada cuadro representa 1 segundo en tiempo
real.
Angulo = 469 Periodo 3: 736 mseg.

A n g u l o P 38- Periodo = 784 mseg.
Angulo 300; Periodo = 793 mseg.
92313.9253 PRINTED IN U.S.A. - . -
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . " -
. . , . " : " : - : : : : : : : : : : : : : : : . . . . . . . . . . . . . . . . . . . -
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . ~ " -
. . . : . . . . . . . . ,
. . . . . . . . . - . . . .
. . . . . c . . . . . . . . . . . , . . . . . . . . . . . . . . . . . . . . . .
" ._ ~- ~ "- .
. . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ~ . . . . , . . . . . . . .
. . . . . . . _" . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . ~ ~ . " . - . ~ . "
. . . . . . , . . . ._ ~. . . . . - . , . . . "" . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . & " * - - -~ ~.~ i -
- _- ~ * " , ~-~
1 A t
53

Angulo 288 Periodo = 800 mseg.
. . .
~ ___ " . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . , . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .~ _" . . " " . ." . .
. . . . . . . ____c_ _ _ _ ~ ~ .-__~ . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ". - "" ~
N n n
Angulo m 21- Periodo = 808 =ego
ETT.?ACKARD ~ " _ _ _ ~ "" _"_^__ . . . . . . . . . . : _ . . , : . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
_ ~ _ _ . - . . __________ -~ ""
. . . . . . .
~ ~ ." . . . . , . . . . . . ""-
: : : : : : ; : ! : : : : : : : : ' . ~- ""
. . . . . . . . . . . . . . . . . . . "" -___
- ~- ; : ; . . . . . . a . . : . . . . . . . . . . .
. . . ! . " . " " ' . . . . . . . : , ; ; : : : : " . . . . . , . . , i < . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . * - . . . . . . . . . . . . . f ~
. . . . . . . . . . . .
. . . . . . . . . , . . . . . . . . . . . . . . , . . "-~- . _ _ _ . . . . . . . . - . . . . . . . . . . . . . . . . . . . . . . . . . . . - + , : t t : . : : : : : : ; . : . . . . . . . . .__ - "
. , . " , , - I m I -

. , .-
Angulo P 133 Periodo = 824 mseg.
Angulo = 405 Periodo = 832 =ego
: HEWLETT.?SCKARD
. . . . . . . . . . . . I : . . . . . . . . . . . . . . . . . . . d . " L.", - . e ".. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . _ , . . . "" . . . . L - : : : : : : : . . . . . . . . . . .
8. CONCLUSIONES.
AI inicio del proyecto se propuso disefiar y construir un par de
instrumentos detectores de movimiento, que serían utilizados como
8i~m6grafOS. Se pretendia ademas que estos instrumentos tuvieran las
siguientes características :
- Sencilkz en el diseflo y funcionamiento.
- Bajo costo de fabricacian.
- Alta confiabilidad y efectividad en su operaci6n.
Los diseKos de tales sismbgrafos estan basados en una idea
genhral propuesta por nuestro asesor: partiendo da esta idea se
pro4edi6 a detallar los planos de construccidn. Durante el desarrollo
del I proyecto se tuvieron algunos problemas, de los cuales, algunos de
los / mis importantes fueron : la fijacibn de la masa a la base del
sistbma reduciendo al mi nimo la friccian entre el eje de la masa y al
sopbrte del mismo; los sistemas de amortiguamiento; la construccibn de
las ~ bobinas: la etapa amplificadora de la sefial; la supresien de
ruidb; etc. Las soluciones a estos problemas se explican en detalle en
la darte 6 del presente reporte.
~
Una vez resueltas estas situaciones y verificado el correcto
funkionamiento de los sismbgrafos, ya es posible realizar algunas
codparaciones para determinar en qu8 medida se cumplid el objetivo
probuesto :
~ DisaHo y construcci6n. Durante la fase de diseKo se estudiaron
div+rsos tipos de sism6grafos en operacibn, con una alta sensibilidad
y konfiabilidad, sin embargo, el común denominador de todos estos era
un4 gran complejidad en sus diseKos, los cuales involucran en la
maioría de los casos desde elementos de alta presicibn hasta
di*ositivos 6pticos en algunos de ellos. Todo esto contrasta con la
senkill&z de nuestro disefio al cual no involucra complicados sistemas

o elementos altamente calibrados, sino basado totalmente en principios
mecanices bastante simples.
Costo de fabricaci6n. Los disenos complejos necesariamente se
traducen en altos costos de fabricacibn. El nuestro, al estar
construido con materiales muy comunes, y sin necesitar una mano de
obra experta en complicadas cuestiones tkcnicas, es mucho mas barato.
Confiabilidad. Desgraciadamente, no se tenia ningirn otro sistema
contra el cual comparar el funcionamiento de nuestros sismdgrafos: sin
embargo, en basa a las pruebas realizadas, se demostrb que estos son
instrumentos lo Suficientemente sensibles como para funcionar
eficientemente.
Basados en todo lo anterior, creemos que se cumplid en gran
medida al objetivo particular que se propuso, lamantandose el hecho de
no se contb con el tiempo suficiente para realizar todas las pruebas
que se tenían previstas.

9. COTIZACION.
En esta secci6n se presenta una cotizacibn aproximada de los
costos de fabricaci6n de cada sism6grafo. Se cotiza a d o el material y
no la mano de obra. En algunos casos, no se presenta al costo de cada
elemento separadamente sino el costo total por elemento completo, es
decir, en el caso del angulo de acero por ejemplo, se tomb en
consideraci6n el peso de todo este material utilizado y el precio que
se presenta por Kg. es al precio al qua se venda un tramo completo da
6 mts. y no un tramo del tamaKo empleado.
9.1 COTIZACION DEL SISMOGRAFO SEBC-UAMI DE COMPONENTE VERTICAL.
PIEZAS UNIDAD
1 14.5 Kg
1 4.13 Kg
1 1.05 Kg
1 0.605 Kg
1 5 Kg
1 r h 4 t
2
DESCRI PC1 Off
Placa Acero 6.4 mm 4 0 c m X 7 0 c m
Angulo Acero 3mm X 3.8 cm
Barra Acero 19 mm
Barra Acero 6.4 mm
Barra Acero 8 cm
Barra Acero 13 mm Cuerda Corrida
Baleros
PRECI o IMPORTE UNITARIO C N$>
C NS3
2.7 39.15
2.7 11 -15
35 3.70
35 2.18
3 .S 17 .S
10. o 10 .o
19 .o 38 .O

PIE- UNIDAD DESCRI PC1 ON PRECIO IMPORTE UNITARIO C N$>
C N$>
1 Tensor 5 .O 5 .O
1 Resorte
9.1 2 PARTE ELECTRONICA.
DESCRI PC1 ON PI E W S
1
20
3
1
1
1
10
1
1
1
1
1
1
1
2
NE5521
Reektoras 1/4 W
Preset
TL081
TL084
LM3914
Leds
0.1 pF
10 pF
4.7 pF
470 nF
22 pF
4.7 nF
Barra de Ferrita
Bobinas
3 .O 3 .O
TOTAL = N$ 129.68
PRECIO UNITARIO
C NS3
48 .O
O .15
1.5
2 .o 4 .O
12.8
O .4
O .6
O .4
O .4
1 .o O .4
O .8
5 .O
25
TOTAL
IMPORTE C N$>
48 .O
3 .O
4.5
2 .o
4 .O
12.8
4 .O
O .6
O .4
O .4
1 .o O .4
O .8
5 .O
5 .O
= N$ 91.90
Precio Total del SEE-UAM componente vertical = N$ 221.58
59

9.2 COTIZACION DEL SISMOGRAFO SEBC-UAMI DE COMPONENTE HORIZONTAL.
9-20 1 PARTE MECANICA-
PIEZAS UNIDAD
1 14.5 Kg
1 4.13 Kg
1 1.05 Kg
1 0805 Kg
1 10 KG
1 0.7 Kg
2
DESCRI PC1 ON
Placa Acero 6.4 mm 40cmX70cm
Angulo Acero 3mm X 3.8 cm
Barra Acero 19 mm
Barra Acera 6.4 mm
Barra Acero 10 cm
Barra Acero 13 mm
Baleros
9-20 2 PARTE ELECTRONICA.
P I EZAS DESCRI PC1 ON
1 NE5521
20 Resistores 1/4 W
3 Preset
1 TL08l
1 TL084
1 LM3914
PRECIO I P O R T E UNITARIO C N$)
C NS3
2.7 39.15
2.7 11.15
3.5 3.70
3.5 2.18
3.5 35 .o 3.5 2.45
1s .o 38 .O
TOTAL = N$ 131.68
PRECI o UNITARIO
C NS3
48 .O
O .15
15
2 .o 4.0
12.8
IMPORTE C Ns3
443 .o 3 .O
4.5
2 .o 4 .O
12.8
60

PI EZAS DESCRI PC1 ON
10
1
1
1
1
1
1
1
2
Leds
0.1 pF
10 pF
4.7 rF
470 nF
22 FF
4.7 nF
Barra de Ferrita
Bobinas
PRECI o UNITARIO
C N$>
O .4
O .6
O .4
O -4
1 .o O .4
O .8
5 .O
25
IMPORTE c NS3
4.0
O .6
O .4
O .4
1 .o O .4
o .a
5 .O
5 .O
TOTAL = N$ 91.90
Precio Total del SEBC-UAM componente horizontal = N3 223.58
61

10. BIBLIOGRAFIA
1. *‘Fundamentos da hgeniaria I” I n t r o d u c i d n a l a Sismologia
Fr a n z S a u t e r
T e c n o l 6 g i c a d e C o s t a Rica
2. “Gran Enciclopedia del Mundo7*
Tomo Nrfmero 1 8 Durvan, S R d e E d i c i o n e s B i 1 bao
3. “Elementary Seismology”
R i c h t e r , Charles F.
W . H. Freeman And Company
4. “Enciclopedia Universal Ilustrada”
Eur o p e a - h e r i c a n a
Tomos Nrfmeros 56 y 60
Espasa- Cal pe, S. A. Madrid
5. “Registtierung Und Auswertung”
S e i s m i c h e r E r e i g n i s s e
Von Peter Borman
Akademie V e r l a g , B e r l i n 1966
6. “Signatics Linear Products”
Handbook
7. “Special Purpose Linear Devices Handbook”
National Semiconductor
8. “Linear Aplication Handbook”
N a t i o n a l Semi conductor
es2

9. “Electr6nica PrActica”
Tomo 1 Compi 1 ado por el equi PO edi tori al de McGraw-Hi 11
10. **Circuitos htsgrados Lineales Y Amplificadores
Operacionales”
Robert F. Coughlin; Frederick F. Driscoll Pr enti ce-Hal 1 Hispanoamericana, S. A.
11. “Principios De Electr6nica”
A l b e r t Paul Malvino
McGraw-HI 11
12. “Nueva Elsctr6nica”
AKo VI I NQmero 79 Mayo 1990
Madrid EspaKa
13. “Bulletin Of The Seismological Society Of America”
Vol. 79 No. 2 Oct. 1989
14. “Bulletin Of The Seismological Society Of America’’
Vol. 79 No. 6 Dec. 1989
15. “Bulletin Of The Seismological Society Of America”
Vol. 82 No. 1 Feb. 1992
63