budi.blog.undip.ac.idbudi.blog.undip.ac.id/files/2009/06/kelompok-d.doc · web viewmekanisme ini...
TRANSCRIPT

TUGAS RESUME MAKALAH
MEKATRONIKA
” Mekatronik Postural Asisten Bedah Laparoskopi Solo (PMASS)”
Arturo Minor Martínez and Daniel Lorias Espinoza
Kelompok D :
Andhika Dwipradipta L2F008105
Arif Widagdo L2F008106
Catur Ardy Bayu P L2F008109
Satria Nur Cahya L2F008148
TEKNIK ELEKTROFAKULTAS TEKNIK UNIVERSITAS DIPONEGORO
2011

Tugas Resume Jurnal MekatronikaPostural Mechatronic Assistant for Laparoscopic Solo Surgery (PMASS)
( Mekatronik Postural Asisten Bedah Laparoskopi Solo)
1. Latar Belakang Penelitian
Laparoscopes digunakan dalam operasi laparoskopi dimanipulasi dengan cara
manusia, sistem pasif atau sistem robot. Pekerjaan ini mengusulkan sebuah sistem
navigasi baru yang mandiri menangani laparoskop, dengan maksud untuk mengurangi
latency, dan yang memungkinkan real-time penyesuaian perspektif visual. Metode.
Sistem yang dirancang adalah sistem mekatronika intuitif dengan tiga derajat kebebasan
dan artikulasi aktif tunggal. Sistem ini menggunakan titik penyisipan sebagai titik
invarian untuk navigasi dan memiliki ruang kerja yang erat menyerupai kerucut terbalik.
Operasi laparoskopi, yang berada di garda depan teknologi, telah mencakup
berbagai bidang teknologi. Mengingat karakteristik, jenis operasi ini menuntut bahwa
dokter yang khusus memperoleh kemampuan baru dan cepat beradaptasi dengan
teknologi baru. Kemajuan teknologi dalam bantuan dengan memegang dan penanganan
laparoskop selama fokus operasi pada operasi solo, di mana ahli bedah disediakan dengan
sarana teknologi untuk melakukan operasi saja.
Ruang kerja dari semua sistem ini merupakan kerucut terbalik. Namun,
tergantung pada aplikasi atau subspesialisasi, ruang kerja nyata terbatas untuk setengah
atau kurang dari setengah dari kerucut terbalik, yang biasanya terletak di depan ahli
bedah. Sebuah alat seperti asisten robot sangat menguntungkan jika dapat digunakan
dalam semua spesialisasi laparoskopi. Namun, mengingat transportasi, instalasi dan biaya
pemeliharaan, alat ini menjadi sangat mahal jika penggunaannya terbatas pada beberapa
spesialisasi. Selain itu, downtime karena manual atau suara diaktifkan reposisi laparoskop
adalah kumulatif dan umumnya tidak diperhitungkan selama proses evaluasi. Namun
demikian, downtime dapat dikurangi jika laparoskop ditangani secara intuitif dan,
sebaiknya, secara real time. Oleh karena itu kami mengusulkan alat dioptimalkan,
berdasarkan Postural Mechatronic Assistant for Laparoscopic Training (PMAT) (Minor
et al., 2005), yang dapat diterapkan secara selektif untuk operasi solo, mudah diinstal dan
diangkut, dan digunakan untuk memberikan bantuan fungsional selama operasi.
2. Material dan Metode
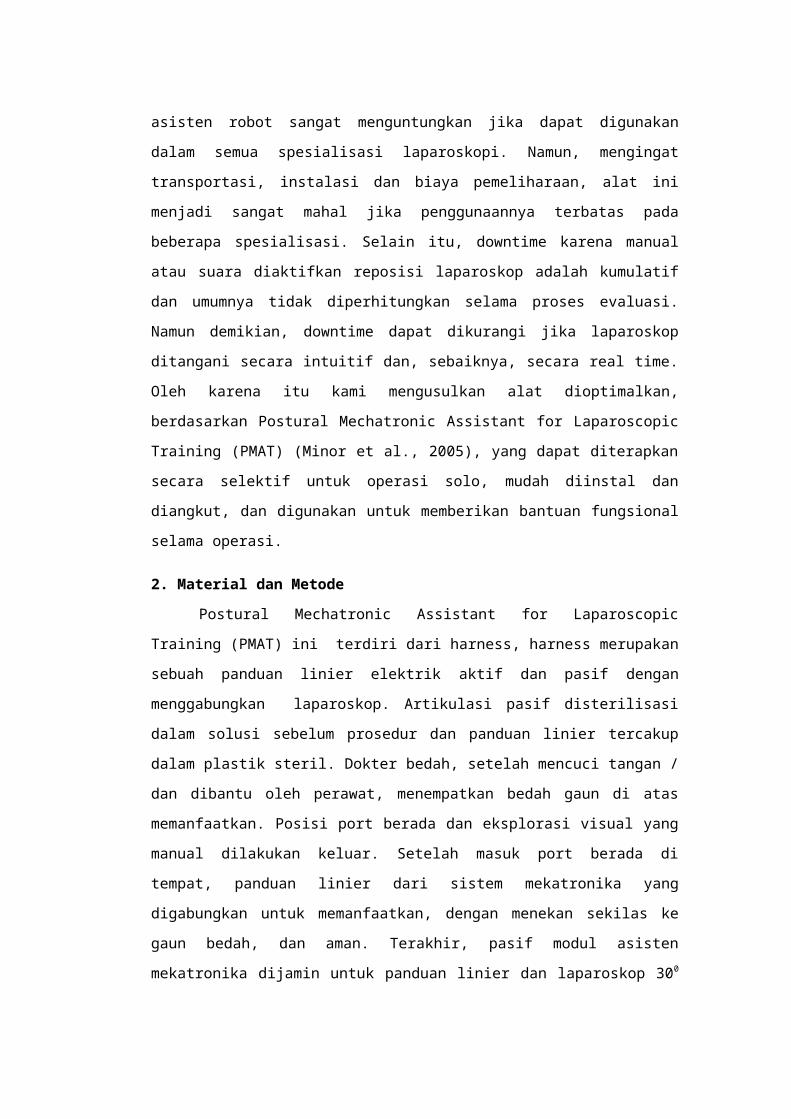
Postural Mechatronic Assistant for Laparoscopic Training (PMAT) ini terdiri
dari harness, harness merupakan sebuah panduan linier elektrik aktif dan pasif dengan
menggabungkan laparoskop. Artikulasi pasif disterilisasi dalam solusi sebelum prosedur

dan panduan linier tercakup dalam plastik steril. Dokter bedah, setelah mencuci tangan /
dan dibantu oleh perawat, menempatkan bedah gaun di atas memanfaatkan. Posisi port
berada dan eksplorasi visual yang manual dilakukan keluar. Setelah masuk port berada di
tempat, panduan linier dari sistem mekatronika yang digabungkan untuk memanfaatkan,
dengan menekan sekilas ke gaun bedah, dan aman. Terakhir, pasif modul asisten
mekatronika dijamin untuk panduan linier dan laparoskop 300 adalah terpasang. Setelah
sistem optik digabungkan dengan sistem mekatronika, itu diperkenalkan kerongga untuk
melakukan eksplorasi dan memulai prosedur.
Gambar 1. Model konseptual laparoskopi
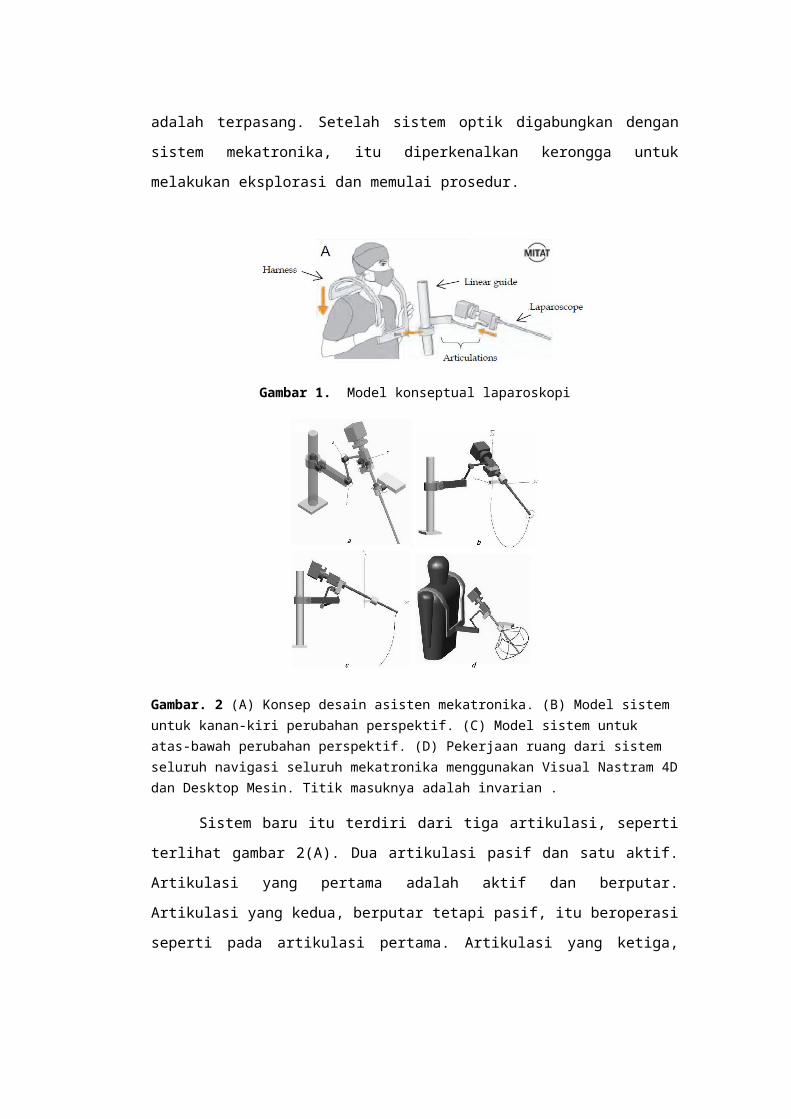
Gambar. 2 (A) Konsep desain asisten mekatronika. (B) Model sistem untuk kanan-kiri perubahan perspektif. (C) Model sistem untuk atas-bawah perubahan perspektif. (D) Pekerjaan ruang dari sistem seluruh navigasi seluruh mekatronika menggunakan Visual Nastram 4D dan Desktop Mesin. Titik masuknya adalah invarian .
Sistem baru itu terdiri dari tiga artikulasi, seperti terlihat gambar 2(A). Dua
artikulasi pasif dan satu aktif. Artikulasi yang pertama adalah aktif dan berputar.
Artikulasi yang kedua, berputar tetapi pasif, itu beroperasi seperti pada artikulasi pertama.
Artikulasi yang ketiga, adalah pasif dan berputar, itu beroperasi di bidang tegak lurus
tehadap artikulasi sebelumnya.
Sistem memakai entri poin yang tetap dan invarian point untuk eksprolasi dan
navigasi. Navigasi laparoskopi dengan 0 derajat optik membutuhkan enam dasar
perpindahan : kanan,kiri,atas,masuk, masuk, dan keluar. Untuk merhorinzontalkan semua
kekanan,kiri dokter bedah memutar tubuh pasien kanan atau kiri. Artikulasi ketiga dan
inti dari pergerakan yang komplit (gambar 2B). Untuk memantapkan sudut entry yang
berkorespondensi dengan pergantian orientasi optikal atas dan bawah laparoskopi, sistem
memakai artikulasi pertama yaitu yang aktif dan berputar bersama-sama dengan artikulasi
kedua yaitu yang pasif. Mekanisme ini hampir mendekati pergantian linear seperti yang
ditunjukan gambar 2.C. Dokter bedah meaktifasi artikulasi ini dengan arti dua perubahan
proksimal.
Untuk memindahkan laparoskopi masuk atau keluar, dokter bedah
menggerakkan badannya untik menuju atau menjauhi pasien. Trejectori hampir linier,
maka tidak ada penglihatan yang hilang ketika menggerakkan masuk atau keluar dari
jaringan dan organ selama prosedur (gambar 2.D).
Simulasi juga menentukan posisi dalam semua momen ujung laparoskop dan
besarnya perpindahan di dalam rongga perut untuk gerakan kanan-kiri dan hasilnya
seperti gambar 3.
Setelah sistem mekatronika telah dimodelkan, sebuah kelompok multidisiplin
bertemu untuk menetapkan kriteria sebagai berikut:
Sistem tersebut harus mountable dalam modul, sehingga setup di ruang operasi
sterilisasi cepat dan trans-operatory dipertahankan.
Sistem harus memungkinkan pemutusan cepat laparoskop, sehingga ahli bedah
dapat melakukan eksplorasi tak terduga ruang anatomi dan manufer selama setiap
operasi standar.
Sistem tersebut harus dibuat dari bahan yang dapat disterilkan.
Berat sistem harus disimpan ke minimum.
Gambar 3. Ruang lokasi ujung laparoskopi selama berlayar (A) kanan-kiri perubahan perspektif. (B) di atas-bawah perspektif perubahan

3. Pengujian
Pendekatan dokter bedah adalah frontal pasien dan ergonomis. Evaluasi berikutnya terdiri dari PMASS dievaluasi oleh dokter yang berpengalaman, yang pertama dibedah, dipotong, dan dijahit bagian ayam menggunakan optik 0o dan manuver dilakukan untuk mengubah perspektif optik dan menjelajahi daerah sekitarnya (Gambar 4 a, b). Operasi dipilih sehingga tiga ovariohysterectomies pada anjing, menggunakan 0 ° optik (Gambar 4 c, d). Evaluasi akhir terdiri dari dua operasi pediatrik untuk mana prosedur yang dipilih adalah Nissen fundoplication untuk memperbaiki penyakit gastroesophageal reflux, tidak dikoreksi oleh pengobatan farmakologis dan dengan esofagitis gigih dan perdarahan saluran pencernaan.
Gambar 4. (a) Dari konsep untuk desain. (b) Adaptasi menjahit bagian ayam. (c) Coupling dari PMASS sebelum ke ovariohysterectomy laparoskopi. (d) Solo bedah laparoskopi ovariohysterectomy pada anjing
4. Hasil
Sistem mekatronika itu dipasang ke ahli bedah dalam waktu rata-rata 1 menit.
Para ahli bedah diperlukan rata-rata dari 5 menit untuk adaptasi untuk membentuk
tangan-mata umpan balik dengan sistem. Ahli bedah yang digunakan gerakan postural
dan umpan balik visual yang diperlukan untuk mencapaiposisi sambil menjaga kedua
tangan bebas untuk melakukan prosedur mereka. Optik menunjukkan tidak ada
tandatremor, dan eksplorasi, sambil bergerak masuk dan keluar, adalah intuitif dan terjadi

secara real waktu. Hal itu juga mengamati bahwa sistem tersebut bekerja sama dengan
baik apakah ahli bedah berdiri atau duduk, dan bahwa perubahan postural tidak
membatasi persepsi visual. Simulasi menggunakan prototipe menunjukkan bahwa dalam
gerakan keluar dan tidak benar-benar linier. Namun, ketika di operasikan dengan umpan
balik visual, sistem mekatronika tidak memiliki keterbatasan ini.
5. Diskusi
Penggunaan teknologi baru dalam operasi ini memungkinkan ahli bedah untuk
beroperasi solo dalam beberapa prosedur. Keuntungan adalah ruang kerja yang memadai
di meja operasi dan manufer. Namun, meskipun sistem aktif dan pasif menawarkan
keunggulan ini, waktu yang dibutuhkan untuk pindah dan membersihkan laparoskopi
antara operasi belum berkurang.
. Sistem mekatronika baru menunjukkan bahwa adalah mungkin untuk menjalani
operasi solo di mana ahli bedah otomatis memanipulasi laparoskop untuk mendapatkan
perspektif optik terbaik dan memiliki kedua tangan bebas untuk melakukan prosedur.
Salah satu manufer yang menyebabkan keterlambatan paling selama operasi pembersihan
laparoskop,apakah laparoskop kotor atau dikukus sampai. Penundaan tersebut, yang
bersifat kumulatif, yang lebih besar untuk sistem robot daripada untuk asisten manusia,
mengingat set perintah verbal yang harus diberikan kepada robot dan waktu yang
diperlukan untuk pasangan dan uncouple mekanis yang laparoskop. Desain baru
mengurangi waktu pembersihan tanpa mempengaruhi kualitas bedah.

6. Referensi