bastÓn guÍa ultrasÓnico con indicador sonoro para …
TRANSCRIPT

BASTÓN GUÍA ULTRASÓNICO CON INDICADOR SONORO PARA PERSONAS CON
LIMITACIÓN VISUAL
JONATAN YAHÍR GALÁN ACUÑA
TRABAJO DE GRADO PARA OPTAR POR EL TÍTULO DE
INGENIERÍA ELECTRÓNICA
DIRECTOR
ING. JORGE LUIS SÁNCHEZ TÉLLEZ, M.Sc.
PONTIFICIA UNIVERSIDAD JAVERIANA
FACULTAD DE INGENIERÍA
CARRERA DE INGENIERÍA ELECTRÓNICA
2013

PONTIFICIA UNIVERSIDAD JAVERIANA
FACULTAD DE INGENIERÍA
CARRERA DE INGENIERÍA ELECTRÓNICA
RECTOR MAGNÍFICO P. JOAQUÍNEMILIO SÁNCHEZ GARCÍA, S.J.
DECANO ACADÉMICO ING. JORGE LUIS SÁNCHEZ TÉLLEZ, M.Sc.
DECANO DEL MEDIO P. ANTONIO JOSÉ SARMIENTO NOVA, S.J.
DIRECTOR DE CARRERA ING. JAIRO ALBERTO HURTADO LONDOÑO, Ph.D.
DIRECTOR DE PROYECTO ING. JORGE LUIS SÁNCHEZ TÉLLEZ, M.Sc.

NOTA DE ADVERTENCIA
“La universidad no se hace responsable de los conceptos emitidos por sus alumnos en los proyectos de
grado. Solo velará porque no se publique nada contrario al dogma y la moral católica y porque los
trabajos no contengan ataques o polémicas puramente personales. Antes bien, que se vea en ellos el
anhelo de buscar la verdad y la justicia.”
Artículo 23 de la Resolución No. 13, del 6 julio de 1946,
por la cual se reglamenta lo concerniente a Tesis y
Exámenes de Grado en la Pontificia Universidad
Javeriana.

Contenido
INTRODUCCIÓN ................................................................................................................................. 5
1. MARCO CONCEPTUAL ............................................................................................................ 6
2. ESPECIFICACIONES ................................................................................................................. 9
3. DESARROLLO ........................................................................................................................... 13
3.1. UNIDAD DE CONTROL ................................................................................................... 13
3.2. INDICADOR SONORO ..................................................................................................... 13
3.3. SENSOR DE ULTRASONIDO .......................................................................................... 14
3.4. AMPLIFICADOR DE AUDIO .......................................................................................... 15
4. DESARROLLO TEÓRICO ....................................................................................................... 15
4.1. REGULACIÓN DE LA FUENTE DE ALIMENTACIÓN. ............................................ 15
4.2. MICROCONTROLADOR ................................................................................................. 19
4.2.1. POLARIZACIÓN ....................................................................................................... 20
4.2.2. POTENCIA DISIPADA ............................................................................................. 20
4.2.3. OSCILADOR ............................................................................................................... 20
4.2.4. PROTOCOLO DE COMUNICACIÓN .................................................................... 22
4.3. INDICADOR SONORO ..................................................................................................... 23
4.3.1. DESCRIPCIÓN DEL CHIP DE VOZ ISD4002 ....................................................... 24
4.3.2. SECUENCIA DE INICIO DEL ISD4002 ................................................................. 26
4.3.3. POLARIZACIÓN ....................................................................................................... 26
4.4. AMPLIFICADOR DE AUDIO .......................................................................................... 27
4.4.1. POLARIZACIÓN ....................................................................................................... 27
4.4.2. POTENCIA DISIPADA .............................................................................................. 28
4.4.3. GANANCIA ................................................................................................................. 28
4.5. FUENTE DE ALIMENTACIÓN ........................................................................................ 29
5. ANÁLISIS DE RESULTADOS. ................................................................................................ 30
5.1. PRUEBA DE ALCANCE. .................................................................................................. 30
5.2. PRUEBA DE FUNCIONAMIENTO. ................................................................................ 31
5.3. RESULTADO DE LA CARCASA DEL PROTOTIPO. ................................................. 33
5.4. COSTO ................................................................................................................................. 34
6. SUGERENCIAS DE IMPLEMENTACIÓN ............................................................................ 35
7. CONCLUSIONES ....................................................................................................................... 35
BIBLIOGRAFÍA ................................................................................................................................. 36

5
INTRODUCCIÓN
Con el fin de realizar un trabajo de grado que impacte positivamente a una población vulnerable en
Colombia, se pensó en la implementación de un dispositivo electrónico que ayude a personas con
limitación visual, en el desarrollo de su vida cotidiana.
Al investigar sobre las limitaciones que poseen las personas con deficiencia visual para la ejecución de
actividades en su vida normal, se identificó que la movilidad es una de las actividades más
importantes; por ello, el enfoque del trabajo de grado se dirigió hacia la implementación de un
dispositivo electrónico que apoye a las personas con limitación visual en la movilidad.
La característica principal que se pretendía lograr con este dispositivo es que por medio de audio le
indicara al usuario la distancia a la que se encuentra de algún obstáculo, sin necesidad que el usuario
choque con este para saber de su presencia. Otra de sus características es que se use un dispositivo
similar al “bastón blanco” para detectar anomalías en el terreno y obstáculos muy bajos, lo cual nunca
desprotege al usuario.
Para la implementación del dispositivo fue necesario investigar sobre los principales peligros con los
que las personas con discapacidad visual corren cuando desean movilizarse; de igual forma, conocer
los dispositivos existentes que le brindan un poco de seguridad a la hora de movilizarse con el fin de
tener en cuenta puntos de referencia para el dispositivo planteado. Con ello y para cumplir con el
propósito social que tiene este proyecto, se analizó el impacto que este tendría en esta comunidad, que
como se observará más adelante es una problemática que parece una gran población colombiana,
donde las personas con menos recursos económicos son considerables.
El principal interés en la realización de este dispositivo es brindar un poco de seguridad a las personas
con discapacidad visual, al movilizarse, darles mayor independencia para realizar sus actividades
cotidianas y, de igual forma, ayudarlas a que se incluyan en la sociedad, compartiendo muchas
actividades que por su inseguridad al movilizarse no realizan. Por otro lado, el interés académico es
aplicar los conocimientos adquiridos durante la carrera de ingeniería electrónica al desarrollo de un
proyecto con aplicación en la sociedad.
Para entender las necesidades de las personas con discapacidad visual se iniciará con el marco teórico,
en el que se observarán los problemas que viven las personas con limitación visual y la solución a la
movilidad. Luego se presentan las especificaciones del sistema, en donde se analizarán los
requerimientos que deben ser satisfechos por el dispositivo. Seguidamente, se presenta la descripción
y el diagrama en bloques del dispositivo, en donde se observarán los dispositivos con los que se
implementó el bastón guía. Se continúa con el análisis del desarrollo teórico del sistema propuesto y,
finalmente, de analizarán los resultados obtenidos, donde se observará la funcionalidad del dispositivo.
6
1. MARCO CONCEPTUAL
El objetivo de esta sección es obtener suficiente información para analizar la problemática de la
limitación visual en Colombia y evidenciar grupos sociales y económicos donde la discapacidad visual
incide con mayor frecuencia y, a su vez, intuir la calidad de vida que tienen estas personas por su
condición tanto física como económica. De igual forma se tendrá información acerca de la movilidad
en personas con limitación visual, para evidenciar la problemática a la hora movilizarse. Con esta
información, se analizará la importancia del dispositivo guía ultrasónico con el fin de darle seguridad
a las personas con discapacidad visual a la hora de movilizarse y a su vez, se preverá el impacto
positivo que tendría el dispositivo al llegar a las personas con menos recursos económicos del país.
Para realizar esta consulta se han tomado tres documentos diferentes: “Realidad y contexto situacional
de la población con limitación visual en Colombia1, Educación inclusiva: Discapacidad visual y
Apoyo a la movilidad para discapacitados visuales graves2.
Para iniciar el entendimiento de la discapacidad visual cabe plantarse la siguiente pregunta:
¿Quiénes son las personas con discapacidad visual en Colombia?
En el documentó “Realidad y contexto situacional de la población con limitación visual en
Colombia”, se menciona que “no es correcto afirmar que toda persona con limitación visual está en
condiciones de discapacidad”; esto se debe a la definición de este término dado por la Organización
Mundial de la Salud (OMS) la cual es “[…] un término general que abarca las deficiencias, las
limitaciones de la actividad y las restricciones […] es un fenómeno complejo que refleja una
interacción entre las características del organismo humano y las características en las que vive”. Con
base en este concepto se puede concluir que las personas con discapacidad son aquellas que tengan
deficiencia física, mental, sensorial o intelectual a largo plazo y que por estas condiciones poseen
impedimentos en una participación plena y efectiva en la sociedad en la que se desenvuelven.
Los datos que se presentarán a continuación son extraídos del documento “Realidad y contexto
situacional de la población con limitación visual en Colombia. Una aproximación desde la justicia y
el desarrollo humano.”, los cuales son tomados de censos de población y vivienda de 1993 y censos
de población y vivienda de 2005.
La población colombiana con limitación visual es el 2,49% de la población total, los cuales
representan el 43,2% de las personas con algún tipo de discapacidad. Pero lo peor es que el 80% de las
personas con discapacidad visual viven en condiciones de pobreza y carecen de los recursos necesarios
para acceder a bienes y servicios.
1 (Moreno Angarita & Rubio Vizcaya, 2011)
2 (Martín Andrade)

7
Cabe resaltar que es una cifra bastante grande para un país como Colombia, donde habitan
aproximadamente 47 millones de personas; sin duda alguna, uno de los países más ricos del mundo
en el que es casi impensable que una cifra como el 80% de las personas con limitación visual, viva en
estas condiciones de vulnerabilidad social que afecta su calidad de vida.
En el censo de 2005 el enfoque con el que se enmarcó el censo fue con limitaciones permanentes en
las actividades cotidianas, las cuales son las personas con condición de limitación mayor a un año,
donde se obtuvo un resultado de 2.624.898 personas.
En este nuevo censo se obtiene nuevamente que la limitación visual es la mayor limitación que afecta
a los colombianos con una cifra de 1.134.085 personas en condición de discapacidad visual el 42,3%.
Con estos datos podemos ver el gran número de personas que poseen limitación visual, una cifra
bastante grande donde el dispositivo sería de gran apoyo. De igual forma podemos observar el
aumento significativo del censo del 1993 al 2005.
Se podría plantear una relación directa entre la edad y la deficiencia visual, debido al desgaste por el
uso de los ojos, exposición a radiación y otros parámetros. Con las cifras obtenidas en el censo del
2005 se obtiene un número de personas con limitación visual según la edad, lo que se puede observar
en la Tabla 1.
Tabla 1. Datos del censo 2005, limitación visual y la edad3
El censo muestra cifras de 30.224 menores entre 0 y 17 años de edad, denominada como infancia; el
11,8% posee limitación visual y cabe resaltar que estos menores de edad son los registrados en el
3 (Moreno Angarita & Rubio Vizcaya, 2011)
8
Instituto del Bienestar Familiar, quienes adicional a su limitación visual, viven en condiciones de
vulnerabilidad debido a la pobreza y la violencia.
Analizando la tabla, ciertamente podemos observar que inevitablemente al aumentar los años vividos
el riesgo de padecer una limitación visual es mayor, lo que indica un crecimiento en esta población,
debido a la mayor exposición de la vista a radiaciones en día.
Adicionalmente, para el desarrollo pleno de una persona, es necesario realizar ciertas actividades que
le aporten estructuras mentales, fiscas y sociales, entre las que se tienen actividades como caminar,
correr, saltar, hablar, comunicarse, entre otras, las cuales son fundamentales para cualquier ser
humano. Según el censo del DANE de 2005 , las personas con discapacidades se ven privadas de
realizar algunas de estas actividades, donde tenemos un 48,1% de personas que le dan mayor
importancia a la movilidad (caminar, correr, saltar); el 35,6% también le ven gran importancia a
actividades relacionadas con el aprendizaje (estudiar); adicionalmente, el 33,1% ven necesario poder
desplazarse debido a problemas respiratorios o del corazón; el 18,2% toman oír como la actividad más
importante y finalmente el 11,4% le dan mayor importancia a hablar y comunicarse.
Por otro lado, actividades cotidianas como bañarse, peinarse, vestirse, comer son prácticamente
personales pero el 37,7% de las personas con discapacidad requieren de ayuda permanente de otras
personas para desarrollarlas, y el 36% de las personas con limitación visual requieren de ayuda.
Sin duda alguna el movilizarse es la actividad más importante para un mayor número de personas con
limitación visual lo que impulsa más el desarrollo del dispositivo guía ultrasónico; de igual forma,
este dispositivo ayudará a independizar al 36% de las personas con limitación visual en algunas de
las actividades cotidianas.
Por todo lo anterior, la movilidad es un aspecto importante para las personas invidentes, el cual se ha
venido trabajando poco a poco y se han visto avances en la creación de dispositivos o herramientas
que les ayuden a movilizarse, ya sea en áreas pequeñas como sus casas o zonas urbanas como parques,
centro comerciales, etc. Algunas de las técnicas que utilizan las personas invidentes para este
propósito son:

9
El uso de auxiliares de movilidad: técnica basada en el uso de alguna ayuda o herramienta que
les sirve como guía a la hora de desplazarse; algunas de estas técnicas son:
o Guía vidente: Se trata del uso de una persona que puede ver, con el fin que los ayude a
guiarse.
o Bastón Blanco: Se trata del uso de un bastón que es de color blanco (reconocido
internacionalmente como herramienta de un invidente), con el cual captan la presencia
de obstáculo.
o Perro guía: Es la ayuda de un canino el cual ha sido entrenado para reconocer peligros
que se encuentren cerca al invidente y para guiarlos en espacios urbanos.
Sin auxiliar de movilidad:
o Uso de pistas: Se trata de unas rutas previamente diseñadas para que las personas
invidentes puedan ir de un lugar a otro con el más mínimo peligro posible.
o Puntos de referencia: Son unas marcas que pueden identificar los invidentes, con los
cuales pueden conocer su posición actual.
o Rastreo: Esta técnica se realiza por medio del tacto del invidente, en donde este va
tocando todo lo que está a su alrededor para guiarse en el espacio donde se encuentre.
Estas técnicas son las que va aprendiendo, poco a poco, una persona invidente y son las
fundamentales para que tomen confianza para sus desplazamientos. La idea de este trabajo es
enfocarnos en la técnica del uso de auxiliares de movilidad.
Ahora bien, al buscar en Internet información acerca de herramientas de movilidad para personas con
limitación visual, se encuentra con mayor frecuencia el bastón blanco, herramienta muy práctica y
económica con las que las personas invidente pueden llegar casi a cualquier parte con algunas ayudas
extras como puntos de referencias y pistas. Así, aunque el bastón es la herramienta más práctica que
puede poseer estas personas, posee algunos inconvenientes como:
Identifican únicamente obstáculos de la cintura para abajo, la parte superior queda expuesta a
cualquier peligro.
Es necesario que el bastón golpee el obstáculo para ser identificado, lo cual podría ser un
peligro tanto para el obstáculo como para el invidente.
Por la longitud limitada del bastón, los objetos a localizar son aquellos ubicados en un rango
muy pequeño, lo cual hace que el invidente vaya más despacio, debido a la posible cercanía
del obstáculo.
2. ESPECIFICACIONES
El dispositivo desarrollado busca ayudar a las personas con discapacidad visual a movilizarse; esto se
logra indicándole al usuario la presencia de un obstáculo y la distancia a la que se encuentra. Para ello
se diseñó un dispositivo electrónico que emite ondas ultrasónicas para detectar los obstáculos.

10
El proceso para determinar la distancia que hay entre el obstáculo y el usuario, se basa en el tiempo
el cual corresponde al tiempo que demora en ir y volver la onda ultrasónica, previamente enviada por
el dispositivo, la cual viajará por el aire hasta rebotar en el obstáculo y ser captada por el sistema. Este
tiempo se dividirá entre 2 y se multiplicará por la velocidad de propagación de la onda en el aire, como
se observa en la ecuación (1).
, donde ⁄
Una vez conocida la distancia, se le indicará al usuario por medio de audio previamente grabado, en
un integrado, la distancia del obstáculo detectado.
En la Figura 1 se presenta el diagrama en bloques del bastón guía ultrasónico, como se puede observar
el dispositivo emite un señal la cual rebota con el obstáculo y captada nuevamente por el dispositivo.
Para esa función se utilizó un módulo de ultrasonido.
Figura 1.Diagrama en bloques del bastón guía
En la Figura 3 se presenta el diagrama de flujo que controla el dispositivo. Para este prototipo se
utilizó 2 sensores uno que capta obstáculos en la parte frontal y baja del usuario y el otro en la parte
superior. Como se evidencia en diagrama, el microcontrolador inicia colocando en estado alto la
terminal Trigger1 por con el cual se le indica al primer módulo de ultrasonido que inicie con el
envío de la señal de . Al ser enviada la señal se espera que la señal Echo1 se ponga en nivel

11
alto y se inicia el conteo por medio del Timer1, al detectar que esta señal se pone en bajo se detiene el
conteo del Timer1. Este tiempo es multiplicado por la velocidad del sonido obteniendo así la distancia
detectada por el sensor1 y es almacenada. El mismo proceso ocurre para el sensor2 donde se almacena
la distancia detectada por este segundo sensor, es por esto que se tiene 2 señales de los sensores. La
primera etapa del código corresponde a la detección y medición de la distancia del obstáculo, la cual
se presenta en el diagrama de tiempos de la Figura 2.
Figura 2. Diagrama de tiempos del HC SR-04
Al obtener las distancias detectadas por cada uno de los sensores, se evalúa la distancia del sensor que
detecta los obstáculos en la parte superior, si se encuentra en un rango de 0 cm y 95 cm inicia la
reproducción de la alerta correspondiente a la detección del obstáculo en la parte superior, de lo
contrario se emite la alerta correspondiente a la distancia detectada en la parte inferior.

12
Figura 3. Diagrama de flujo del bastón guía

13
3. DESARROLLO
En esta sección se encuentran las especificaciones del sistema y las características principales del
dispositivo.
3.1. UNIDAD DE CONTROL
Como se puede observar en el diagrama de bloques (Figura 1), el dispositivo está gobernado por
una unidad de control. Para este bloque se utilizó un microcontrolador; luego de revisar varías
alternativas existentes en el mercado y con base en las necesidades y requerimientos del sistema,
se seleccionó el PIC18F252 por sus características, desempeño y costo. En la Figura 4 se presenta
el componente.
Figura 4. Esquemático del PIC18F252 con el nombre de los terminales (Izquierda) y fotografía del componente
(Derecha)
Es de 10 bits.
Posee tecnología RISC.
Posee 4 temporizadores
o Timer0 (8 bit o 16 bit)
o Timer1 (16 bit)
o Timer2 (8 bit)
o Timer3 (16 bit)
Posee comunicación serial I2C y SPI.
Su rango de operación es de 2,0 a 5,5 voltios.
Memoria FLASH 32 Kbyte.
El microcontrolador PIC18F252 posee las características necesarias (mencionadas anteriormente)
para la implementación del bastón guía, además de ser un dispositivo muy económico, de bajo
consumo, eficiente y de fácil de conseguir en el mercado.
3.2. INDICADOR SONORO

14
El bloque “Indicador Sonoro” que se presenta en la Figura 1, es el encargado de entregar la
información al usuario. Para seleccionar este dispositivo se tuvo en cuenta; su economía,
funcionalidad y la compatibilidad con los demás dispositivos. En la Figura 5 se observa el
componente.
Figura 5. Esquemático del circuito integrado ISD4002 con el nombre de los terminales (Izquierda) y fotografía del
componente (Derecha)
Se decidió, entonces, utilizar una grabadora de voz, debido a que la información que el dispositivo
debe brindar es una cantidad limitada de palabras que se encuentran grabadas para luego ser
reproducidas por él mismo. El dispositivo seleccionado es el integrado ISD4002, el cual es un
dispositivo que graba y reproduce mensajes de audio con una capacidad de almacenamiento de 2
minutos; además posee comunicación SPI compatible con la unidad de control seleccionada.
3.3. SENSOR DE ULTRASONIDO
Para la medición de la distancia se empleó el sensor de ultrasonido HC SR-04, el cual posee
características que ayudan en la implementación del bastón guía. Se presenta el módulo de
ultrasonido en la Figura 6.
Figura 6. Imagen del sensor HC SR-04(Izquierda)
Voltaje de funcionamiento: 5 V (DC)
Corriente estática: <2 mA
Corriente en funcionamiento: 15 mA
Frecuencia de trabajo: 40 kHz

15
Señal de salida: frecuencia de la señal eléctrica, 5 V de alto nivel, bajo nivel de 0 V
Ángulo Eficaz: <15º
Distancia de detección: 2 cm - 450 cm
Resolución: 0,3 cm
3.4. AMPLIFICADOR DE AUDIO
Para la amplificación del audio se escogió el integrado LM386, el cual es un circuito integrado que
consiste en un amplificador de potencia de audio que requiere bajo voltaje, tanto en la entrada de
audio como en la alimentación. Se puede obtener 1 W de potencia y tan solo 0,2 % de distorsión.
En la Figura 7 se presenta el componente.
Figura 7. Esquemático del circuito integrado LM386 con el nombre de los terminales (Izquierda) y fotografía del
componente (Derecha)
4. DESARROLLO TEÓRICO
4.1. REGULACIÓN DE LA FUENTE DE ALIMENTACIÓN.
El bastón guía es alimentado por una pila de 9 V, por lo que se usó un regulador de Tensión de 5 V
y 3,3 V para alimentar los diversos bloques que conforman el circuito. Los reguladores que se
eligieron son; el integrado MIC5205 que proporciona una tensión regulada de 5 V y el LM1117DT
que proporciona una tensión regulada de 3,3 V. Observando las hojas de especificaciones de los
componentes se tiene la información que se muestra en las Tabla 2 (LM1117DT) y Tabla 3
(MIC5205).
Parámetros del componente
Tensión de entrada máxima (VIN) 20 V
Temperatura de la juntura -40°C a +125°C
Temperatura del empaque 260°C, 10 s
Condición de corriente de salida
Condición de corriente de
Temperatura ambiente
Impedancia térmica para el empaque SOT-233

16
Tabla 2. Información eléctrica y térmica del integrado LM1117DT
Para calcular la máxima disipación de potencia del regulador LM1117DT se utilizó la ecuación (2)
( )
Con esta máxima disipación se calcula la corriente máxima de salida con una alimentación de 9 V,
mediante la ecuación (3)
Con una alimentación de 9 V se tiene una corriente máxima de salida de 125 mA y una tensión de
salida de 3.3 V.
La hoja de especificaciones propone la conexión que se presenta en la Figura 8.
Figura 8. Esquemático de la conexión típica del regulador LM1117DT
En la Gráfica 1 se presenta la gráfica de rechazo de rizado contra la corriente. Como la máxima
corriente entregada por el integrado es de 125 mA se tiene un rechazo de rizado de 69 dB
aproximadamente.

17
Gráfica 1. Rechazo de rizado contra la corriente
En la Gráfica 2 se presenta la gráfica de rechazo de rizado contra la frecuencia. Con un rizado de 69
dB se tiene una frecuencia de aproximadamente 20 Hz.
Gráfica 2. Rechazo de rizado contra la frecuencia
La impedancia de la carga a la salida del regulador se obtuvo mediante la ecuación (4), donde la
corriente de salida es la consumida por el integrado ISD4002, es decir, 15 mA.

18
La capacitancia se calculó mediante la ecuación (5).
Comercialmente se encontró condensadores de .
Parámetros del componente
Tensión de entrada (VIN) -20 V a +20 V
Tensión de entrada del habilitador (VEN) -20 V a +20V
Temperatura de la juntura -40°C a +125°C
Temperatura del empaque -65°C a +150°C
Corriente del terminal GND Condición de corriente de salida
Precisión de Tensión a la salida ±1 %
Temperatura ambiente
Impedancia térmica para el empaque SOT-23-5(M5)
Habilitador
Tensión máximo para nivel lógico bajo 0.4 V
Tensión mínimo para nivel lógico alto 2.0 V
Tabla 3. Información eléctrica y térmica del integrado MIC5205
Para calcular la máxima disipación de potencia del regulador MIC5205 se utilizó la ecuación (2)
Con esta máxima disipación se calcula la corriente máxima de salida con una alimentación de 9 V,
mediante la ecuación (3)
Con una alimentación de 9 V se tiene una corriente máxima de salida de 108 mA y una tensión de
salida de 5 V.
La hoja de especificaciones propone la conexión que se presenta en la Figura 9.

19
Figura 9. Esquemático de la conexión típica del regulador MIC5205
En la Gráfica 3 se presenta la gráfica de la relación de rechazo de la fuente de alimentación. Como se
evidencia, para aplicaciones de bajo ruido esta se comporta estable con una condensador de .
Gráfica 3. Relación de rechazo de la fuente de alimentación
4.2. MICROCONTROLADOR
El microcontrolador que se selecciono es él PIC18F252 como se había mencionado. Observando la
hoja de especificaciones del componente se ha obtenido la información de la Tabla 4.
Parámetros del componente
Temperatura ambiente -55 °C a 125 °C
Tensión en todos los terminales (excepto VDD, MCLR y RA4) con respecto a VSS -0,3 V a (VDD+0,3) V
Tensión de VDD con respecto a VSS +2,0 V a +5,5 V
Máxima corriente de salida del terminal VSS 300 mar
Máxima corriente en el terminale VDD 250 mar
Máxima corriente de salida de los terminales I/O 25 mar
Tabla 4. Información eléctrica del integrado PIC18F252

20
4.2.1. POLARIZACIÓN
La fuente de alimentación VDD para este integrado corresponde a la suministrada por el regulador
MIC5205, es decir 5 V.
Para seleccionar los capacitores de desacople se eligió el criterio de por amperio.
Con la Gráfica 1 se obtiene la corriente máxima consumida por el integrado.
.
Comercialmente se encontró condensadores de .
4.2.2. POTENCIA DISIPADA
Como se observa en la Gráfica 4 la corriente máxima consumida por el integrado, a una
frecuencia de 4 MHz, y una tensión de polarización de 5 V, .
La potencia máxima disipada por el integrado está dada por
Gráfica 4. Gráficas de la tendencia de la IDD VS FOSC dependiendo de su polarización
4.2.3. OSCILADOR
Este microcontrolador no posee reloj interno, por lo que se utilizó un cristal de cuarzo de 4 MHz,
la hoja de especificaciones muestra la forma como debe ser conectado el cristal.

21
Figura 10. Conexión del cristal de 4,0 MHz al PIC18F252
En la Tabla 5 se presentan los cortes comunes del cristal de cuarzo y en la Figura 11 se presenta
el circuito equivalente de un cristal piezoeléctrico.
0.032 40000 4800 4.91 2.85 25000
0.525 1400 12.7 7.24 3.44 30000
2.0 82 0.52 12.2 4.27 80000
10.0 5 0.012 14.5 4.35 150000 Tabla 5. Cortes comunes del cristal de cuarzo
Figura 11. Circuito equivalente de un cristal piezoeléctrico
El circuito equivalente para un cristal de 2 MHz se presenta en la Figura 12, donde

22
Figura 12. Circuito equivalente para un cristal de 2 MHz
Como el factor de calidad del cristal es muy alto Q=80000 se puede despreciar . Entonces la
capacitancia equivalente está dada por la ecuación (6) y
La capacitancia efectiva esta dada por;
( )
(
)
√
⁄
Lo recomendado por el fabricante es utilizar condensadores de 15 pF a 68 pF para cristales de 4
MHz y 2 MHz, se utilizó 15 pF.
4.2.4. PROTOCOLO DE COMUNICACIÓN
El protocolo de comunicación entre el PIC18F252 y el integrado ISD4002 es el SPI (Serial
Peripherical Interface), el cual es un protocolo de comunicación serial entre periféricos (Maestro y
esclavo). Posee la característica de poder transmitir y recibir al mismo tiempo (full duplex). Se
conforma por un bus de datos de 3 líneas MOSI, MISO, SCKL, y una línea de selección ( ̅̅ ̅).

23
MOSI (Master Out Slave In) transmite los datos del maestro hacia el esclavo.
MISO (Master In Slave Out) transmite los datos del esclavo hacia el maestro.
SCLK (Línea de reloj) es generada por el maestro y sincroniza la transferencia de datos.
SS (Slave Select) selecciona al periférico esclavo con el que se establecerá la
comunicación, es una señal lógica activa en bajo.
En la Figura 13 se observa la configuración del microcontrolador en donde los terminales 14
(SCKL), 15 (MISO), 16 (MOSI) y 17 ( ̅̅ ̅) son los terminales del puerto de comunicación serial
SPI, el cual va ser usado con el integrado ISD4002 como se mencionó anteriormente.
Figura 13. Esquemático de los terminales del SPI del PIC18f252
4.3. INDICADOR SONORO
El dispositivo utilizado, es el integrado ISD4002, sus características eléctricas se muestran en la
Tabla 6.
Parámetros del componente
Tensión de alimentación Vss - 0,3V) a (Vcc + 0,3V)
Tensión de entrada de nivel bajo (VSS -0,3)
Tensión de entrada nivel alto (VDD *0,7) a VDD
Tensión de salida de nivel bajo (VSS -0,3) a 0,3*VDD
Tensión de salida nivel alto (VDD *0,7) a VDD
Corriente de operación
Tabla 6. Información eléctrica del integrado ISD4002
La conexión del ISD4002 se presenta en la Figura 14, esta es la recomendada por la hoja de
especificaciones para el uso del protocolo de comunicación SPI.

24
Figura 14. Esquemático de conexión de integrado ISD4002
4.3.1. DESCRIPCIÓN DEL CHIP DE VOZ ISD4002
Este integrado pertenece a la familia de circuitos de voz ISD con interfaz de control serial, con
protocolo de comunicación SPI.
La serie ISD4002, es una alternativa para aplicaciones electrónicas que requieran trabajar con
voz; estos circuitos son útiles tanto para grabar como para reproducir sonidos. La familia de
circuitos ISD4002 se expone en la Tabla 7.
Nombre del
Dispositivo
Duración en
Segundos
Frecuencia de
muestreo (kHz)
Filtro pasa
banda(kHz)
ISD4002-120 120 8.0 3.4
ISD4002-150 150 6.4 2.7
ISD4002-180 180 5.3 2.3
ISD4002-240 240 4.0 1.7
Tabla 7. Familia del ISD4002
Como se había mencionado, este dispositivo utiliza una interfaz SPI para sus funciones de
direccionamiento, y está diseñado para trabajar como un circuito esclavo. Solo cuatro líneas son
necesarias para controlar el funcionamiento del dispositivo (MOSI, MISO, SCLK, SS ).
El puerto SPI está conformado por dos registros de desplazamiento, uno es el MISO (master in
slave out), el cual entrega información al circuito de control (maestro), en primer lugar entrega el
bit de desborde de memoria, seguido del bit de fin de mensaje y luego entrega la dirección a la
cual quedó apuntando el puntero interno de direcciones del ISD (P0-P10). El segundo registro el

25
MOSI (master out slave in) salida del maestro y entrada al esclavo, es el utilizado para entregar al
ISD la dirección desde la cual debe comenzar a trabajar (A0-A9), A10 es independiente de su
valor (X), y los bit de control (C0-C4). La trama de bit se realiza con el bit menos significativo.
En la Tabla 8 se presenta la trama de bits para controlar el ISD.
Tabla 8. Bits de control del ISD4002
C0 = Salto de mensaje (message cueing)
C1 = Ignorar bits de direcciones (Ignore address bits)
C2 = Control de encendido o apagado (Master power control)
C3 = Selección de grabado o reproducción (Record or play operation)
C4 = habilitar o deshabilitar una operación
En la Figura 15 se presenta el diagrama de tiempos del protocolo SPI para el integrado ISD4002.
Figura 15. Diagrama de tiempos del ISD4002
Bits de dirección
<A0-A15>Bits de control
POWERUP <XXXXX…..XXXXX> X X X 0 0 1 0 0
SETPLAY <A0-A15> X X X 0 0 1 1 1
PLAY <XXXXX…..XXXXX> X X X 0 1 1 1 1
SETREC <A0-A15> X X X 0 0 1 0 1
REC <XXXXX…..XXXXX> X X X 0 1 1 0 1
SETMC <A0-A15> X X X 1 0 1 1 1
MC <XXXXX…..XXXXX> X X X 1 1 1 1 1
STOP <XXXXX…..XXXXX> X X X 0 1 1 X 0
STOPPWRDN <XXXXX…..XXXXX> X X X X 1 0 X 0
RINT <XXXXX…..XXXXX> X X X 0 1 1 X 0
Descripción
Inicia la grabación desde la dirección <A0-A15>.
Inicia la grabación hasta EOM o cuando se envié el
Inicia un salto de mensaje desde <A0-A15>.Inicia un salta de mensaje desde la dirección actual
hasta el final de otro mensaje, o entra en estado OVF si
no encuentra mas mensajes.
Detiene la operación en curso.
Detiene la operación en curso y entra en un estado de
reposo.
Lee el estado de los bits INT, OVF o EOM.
Instrucción
Código de operación
El dispositivo esta listo para aceptar otra operación
después de TPUD.
Inicia la reproducción desde la dirección <A0-A15>.
Inicia la reproducción hasta EOM o OVF.

26
4.3.2. SECUENCIA DE INICIO DEL ISD4002
El ISD4002 estará listo para funcionar después que se le envíe la secuencia de inicio. Se
recomienda utilizar la siguiente secuencia para optimizar las operaciones de grabado y
reproducción.
Modo de grabación.
1. Enviar el comando POWERUP.
2. Esperar el tiempo Tpud.
3. Enviar el comando POWERUP.
4. Esperar 2x Tpud.
5.
a.) Enviar el comando SETREC con la dirección deseada
b.) Enviar el comando REC
6. Enviar el comando STOP para detener la grabación.
7. Esperar el tiempo Tstop/pause
Para 5.a.) El dispositivo comenzará a grabar desde la dirección deseada y generará una
interrupción cuando encuentre el final de la memoria, si no se envía un comando STOP antes de
ese evento el dispositivo se detendrá automáticamente.
Modo de reproducción
1. Enviar el comando POWERUP.
2. Esperar el tiempo Tpud.
3.
a.) Enviar el comando SETPLAY con la dirección deseada, o
b.) Enviar el comando PLAY (reproducción desde la dirección actual)
4.
a.) Enviar el comando STOP
b.) Esperar que la reproducción finalice al encontrar una marca de fin de mensaje o
un fin Esperar Tstop/pause
Para 3.a.) El dispositivo comenzará a reproducir en la dirección deseada y generará una
interrupción al encontrar un EOM o un OVF.
4.3.3. POLARIZACIÓN
La fuente de alimentación VCC para este integrado corresponde a la suministrada por el regulador
LM1117, es decir 3.3 V.

27
Para seleccionar los capacitores de desacople se eligió el criterio de por amperio. La
corriente máxima consumida por el integrado al reproducir el audio es de .
Comercialmente se encontró condensadores de .
4.3.4. POTENCIA DISIPADA
En standby
En reproducción.
4.4. AMPLIFICADOR DE AUDIO
El circuito de amplificación del audio está dado por el integrado LM386; sus características
eléctricas y térmicas se presentan en la Tabla 9.
Tensión de alimentación VCC 15 V
Corriente de alimentación típica ICC 4 Ma
Voltaje de entrada ±´0.4 V
Temperatura de operación 0 °C a 70 °C
Temperatura del empaque -65 °C a 150 °C
Temperatura de la juntura 150 °C
Tabla 9. Información eléctrica y térmica del integrado LM386
4.4.1. POLARIZACIÓN
La fuente de alimentación VDD para este integrado corresponde a la suministrada por el regulador
MIC5205, es decir 5 V.
Para seleccionar los capacitores de desacople se eligió el criterio de por amperio. La
corriente máxima consumida por el integrado al amplificar el audio es de .

28
Comercialmente se encontró condensadores de .
4.4.2. POTENCIA DISIPADA
La potencia máxima disipa por el integrado está dada por
4.4.3. GANANCIA
Por su diseño interno el integrado LM386 proporciona una ganancia 20 (26 dB) debido a la
resistencia de que se encuentra en paralelo entre las terminales 1 y 8 como se observa en
la figura 16. Para aumentar su ganancia a 200 (46 dB) se puso en paralelo a las terminales 1 y 8
un condensador de e como lo recomienda la hoja de especificaciones del componente
como se presenta en la Figura 17.
Figura 16. Circuito interno del LM386

29
Figura 17. Configuración del LM386 para una ganancia de 200
4.5. FUENTE DE ALIMENTACIÓN
El dispositivo cuenta una batería de níquel-hidruro metálico (Ni-MH) de 9 V. En la Gráfica 5 se
presenta la tendencia de descarga de la batería.
Gráfica 5. Tendencia de descarga de la batería
El consumo total de corriente del dispositivo es de 42 mA y la capacidad típica de la batería es de
400 mAh. Para el cálculo del tiempo de descarga dela batería se realizó mediante la ecuación (7).

30
La autonomía del dispositivo es aproximadamente 9 horas y media.
5. ANÁLISIS DE RESULTADOS.
Para verificar el funcionamiento del dispositivo, se realizó la siguiente prueba, con la que se
obtuvieron los siguientes resultados.
5.1. PRUEBA DE ALCANCE.
La prueba realizada para verificar el alcance que tiene al bastón guía ultrasónico, se realizó
mediante ubicación de un obstáculo en diferentes posiciones, para la prueba se utilizó una caja
de cartón de 30 cm de alto, 40 cm de ancho y 40 cm de largo. Para la variación de las
posiciones se cambió la distancia del objeto al sensor como se muestra en la Figura 18, la
altura con respecto al sensor como se presenta en la Figura 19 y el ángulo con respecto al
sensor como se observa en la figura 20.
Figura 18. Modo de variación de la distancia
Figura 19. Modo de variación de la altura

31
Figura 20. Modo de variación del ángulo
Estas variaciones arrojaron los resultados que se presentan en la Tabla 10.
Tabla 10. Resultados de la prueba
5.2. PRUEBA DE FUNCIONAMIENTO.
Para esta prueba se contó con la colaboración del señor Henry Sanchez, quien es una persona
invidente de 54 años. Se le pidió al señor Henry que caminara por un área abierta donde se
tenían obstáculos estáticos y móviles, haciendo uso del bastón guía ultrasónico. Al terminar la
prueba se le realizó las siguientes preguntas.
Prueba Distancia (cm) Altura (cm) Angulo (º) Cumple Observación
1 40 0 0 Si
2 40 0 10 Si
3 40 0 18 No EL obstáculo se encuentra en
ángulo mayor al ángulo de
apertura del sensor.
4 40 -50 0 Si
5 100 0 0 Si
6 100 -50 0 Si
7 100 -50 15 Si
8 40 20 0 Si
9 40 80 0 No Se encuentra fuera del
alcance del sesor superior
10 50 70 0 Si
11 200 -10 12 Si
12 300 0 0 Si
13 310 0 0 No El bastón esta configurado
para captar obstáculos a
menos de 300 cm.
Prueba de Alcance
32
1. ¿Qué opina usted sobre los dispositivos electrónicos para la ayuda de la movilidad de
las personas con limitación visual?
“En la movilidad de las personas con limitación visual no se ha avanzado mucho,
conocí un bastón similar a este el cual emitía un pito cuando encontraba el
obstáculo. Lo interesante de este es que habla, lo cual es una ventaja ya que así se
tiene un mayor detalle del entorno.”
2. ¿Cuál es su opinión acerca del bastón guía ultrasónico en cuanto a su peso, tamaño,
portabilidad y comodidad al sujetarlo?
“En cuanto al peso está muy bien, es casi similar al peso del bastón con el que
camino normalmente.
El tamaño es factor que depende mucho de la persona, lo ideal es que el bastón
llegue al inicio del esternón, en mi caso este bastón me serviría.
En cuanto a la portabilidad sería mejor que esté se pudiera plegar, ya que no
siempre uno se encuentra de pie, y plegarlo nos permitirá ponerlo en las piernas
para realizar las actividades que no requieren del uso del bastón.
El diseño del manubrio está muy bien, pero sería más cómodo si este tuviera una
pequeña curvatura con el fin de no tener la muñeca recta todo el tiempo.”
3. ¿Cuál fue su experiencia al usar el bastón?
“Al comenzar a caminar me sentía muy seguro porque podía sentir por medio del
tacto al igual que lo hago con mi bastón. Cuando escuche que algo estaba a 2
metros, mi primera reacción fue de detenerme para analizar lo que estaba pasando y
tenía un poco de desconfianza, al dar el siguiente paso ya decía que estaba a un
metro y medio y decidí girar para tomar una nueva ruta.
Poco a poco fui tomando confianza y ya me acercaba al obstáculo hasta que el
bastón me decía que estaba a menos de un metro, y decidía cambiar la dirección
porque sé que a un metro se encuentra muy cerca el obstáculo.
La experiencia fue chévere y la información de la distancia fue muy útil porque sentí
que podía avanzar más rápido de lo normal”
4. ¿Qué recomendación daría para una nueva versión del dispositivo?
33
“En cuanto al diseño, sería bueno la curvatura del manubrio, cambiar el caucho de
apoyo del bastón por un rodachin, y que este permita ser plegado para poder
ponerlo en las piernas.
Y en cuanto a las utilidades, sería bueno que nos avisara la presencia de charcos, ya
que la única forma que se tiene para detectarlo es metiendo el pie”.
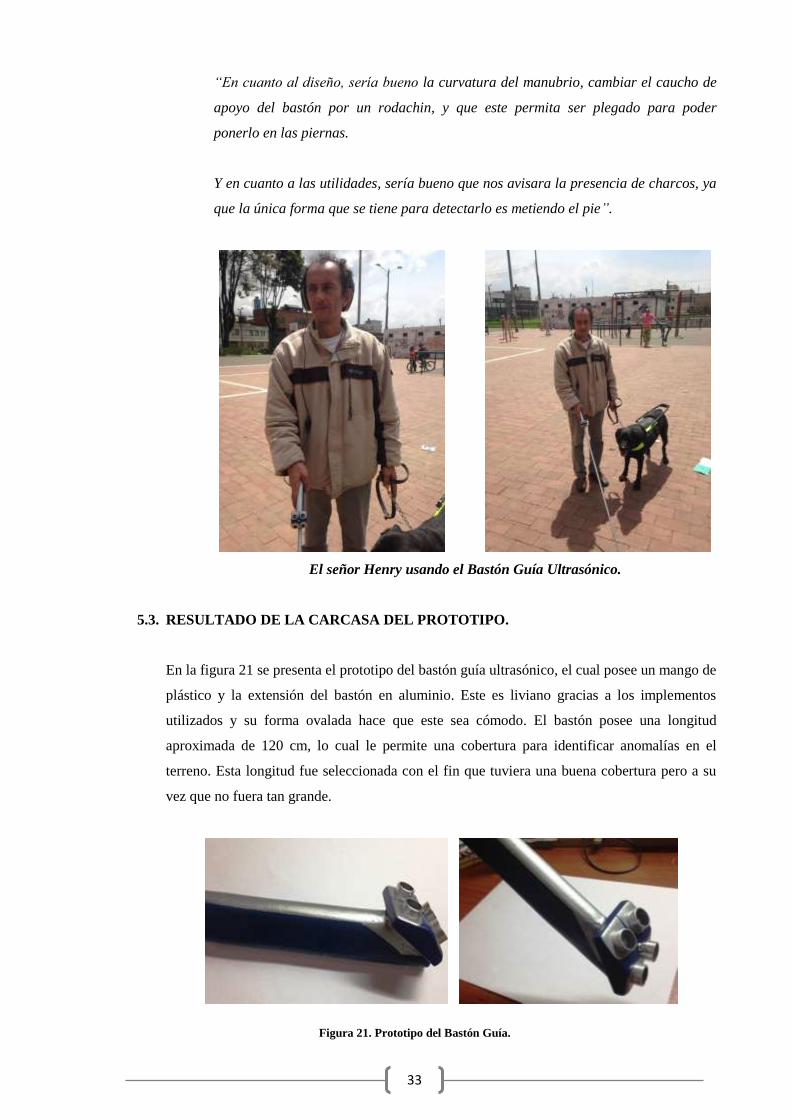
El señor Henry usando el Bastón Guía Ultrasónico.
5.3. RESULTADO DE LA CARCASA DEL PROTOTIPO.
En la figura 21 se presenta el prototipo del bastón guía ultrasónico, el cual posee un mango de
plástico y la extensión del bastón en aluminio. Este es liviano gracias a los implementos
utilizados y su forma ovalada hace que este sea cómodo. El bastón posee una longitud
aproximada de 120 cm, lo cual le permite una cobertura para identificar anomalías en el
terreno. Esta longitud fue seleccionada con el fin que tuviera una buena cobertura pero a su
vez que no fuera tan grande.
Figura 21. Prototipo del Bastón Guía.
34
5.4. COSTO
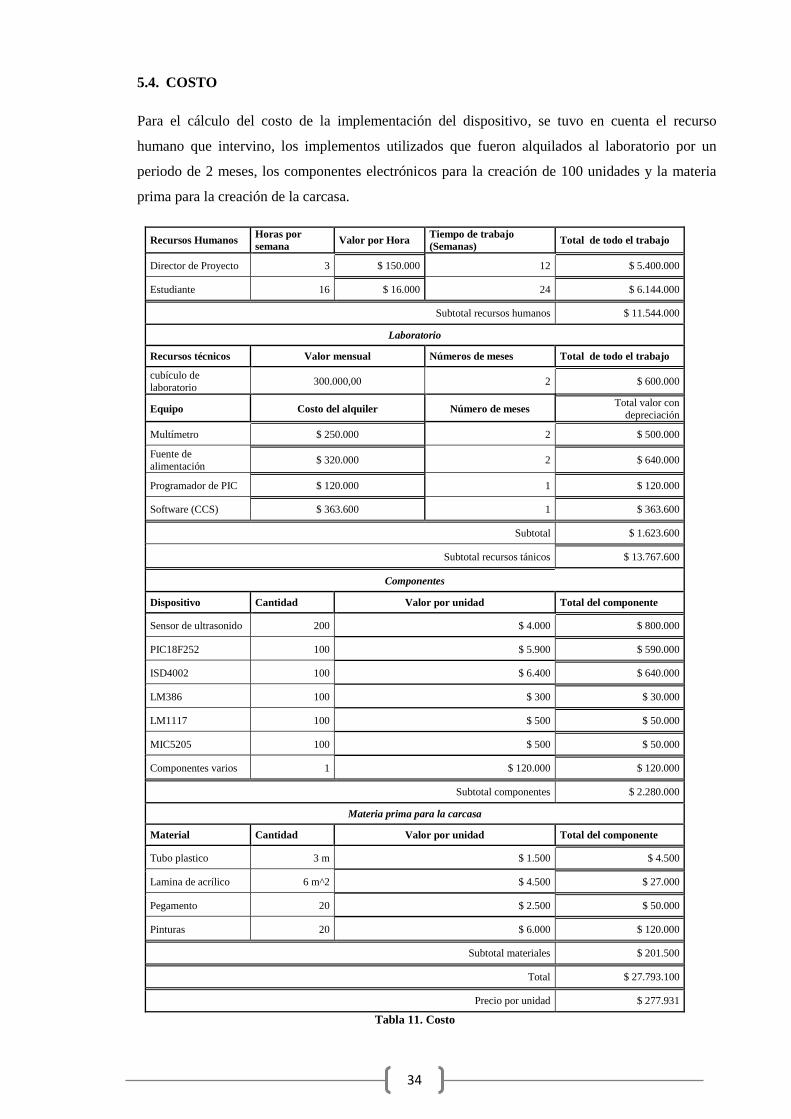
Para el cálculo del costo de la implementación del dispositivo, se tuvo en cuenta el recurso
humano que intervino, los implementos utilizados que fueron alquilados al laboratorio por un
periodo de 2 meses, los componentes electrónicos para la creación de 100 unidades y la materia
prima para la creación de la carcasa.
Recursos Humanos Horas por
semana Valor por Hora
Tiempo de trabajo
(Semanas) Total de todo el trabajo
Director de Proyecto 3 $ 150.000 12 $ 5.400.000
Estudiante 16 $ 16.000 24 $ 6.144.000
Subtotal recursos humanos $ 11.544.000
Laboratorio
Recursos técnicos Valor mensual Números de meses Total de todo el trabajo
cubículo de
laboratorio 300.000,00 2 $ 600.000
Equipo Costo del alquiler Número de meses Total valor con
depreciación
Multímetro $ 250.000 2 $ 500.000
Fuente de
alimentación $ 320.000 2 $ 640.000
Programador de PIC $ 120.000 1 $ 120.000
Software (CCS) $ 363.600 1 $ 363.600
Subtotal $ 1.623.600
Subtotal recursos tánicos $ 13.767.600
Componentes
Dispositivo Cantidad Valor por unidad Total del componente
Sensor de ultrasonido 200 $ 4.000 $ 800.000
PIC18F252 100 $ 5.900 $ 590.000
ISD4002 100 $ 6.400 $ 640.000
LM386 100 $ 300 $ 30.000
LM1117 100 $ 500 $ 50.000
MIC5205 100 $ 500 $ 50.000
Componentes varios 1 $ 120.000 $ 120.000
Subtotal componentes $ 2.280.000
Materia prima para la carcasa
Material Cantidad Valor por unidad Total del componente
Tubo plastico 3 m $ 1.500 $ 4.500
Lamina de acrílico 6 m^2 $ 4.500 $ 27.000
Pegamento 20 $ 2.500 $ 50.000
Pinturas 20 $ 6.000 $ 120.000
Subtotal materiales $ 201.500
Total $ 27.793.100
Precio por unidad $ 277.931
Tabla 11. Costo

35
Como se evidencia en la Tabla 11 el precio por unidad del dispositivo es de $ 277.931.
Buscando en internet dispositivos similares se encontró el UltraCane, el cual es un bastón que
detecta obstáculos por ultrasonido y le indica la distancia al usuario por medio de vibraciones. El
costo de este dispositivo es de £ 635 aproximadamente $ 1´961.337, por ende se podría decir que
nuestro bastón guía ultrasónico es económico.
6. SUGERENCIAS DE IMPLEMENTACIÓN
En el desarrollo de la implementación y pruebas del bastón guía ultrasónico, salieron ideas las cuales
vale la pena documentar para futuras versiones del bastón:
Mayor ergonomía del manubrio, con el fin, que el usuario no someta la muñeca a malas
posiciones.
El uso de una rueda para bastón en la parte baja, para facilitar el desplazamiento del
mismo.
La posibilidad que el bastón sea plegable para una mejor portabilidad.
La adecuación de sensores de humedad para que este pueda alertar al usuario sobre la
presencia de agua en el camino.
El uso de comunicación bluetooth entre el dispositivo y auriculares bluetooth.
La indicación de la hora.
7. CONCLUSIONES
El prototipo desarrollado permitirá el desplazamiento con mayor seguridad e independencia de las
personas con limitación visual. Esto gracias a que el dispositivo aumenta la información acerca de los
obstáculos que se encuentran en el camino y, por consiguiente, se le ayuda con la toma de decisiones
acerca de las posibles rutas que pueda tomar hacia su destino. Este prototipo además de indicar la
distancia del obstáculo sirve como sustituto de los bastones comúnmente usados, ya que este también
posee una extensión con la cual el usuario podrá sentir los obstáculos que no se detectan con el
ultrasonido.
Una característica del circuito desarrollado es que permite actualizaciones del código fuente y del
audio, gracias a que este posee programación In-circuit serial programming (ICSP), lo que lo hace
ideal para realizar mejoras en el desempeño del bastón.
El Bastón Guía Ultrasónico es cómodo, portátil, tiene un bajo consumo de energía y es económico, lo
que indica que dispositivo es ideal para el uso de las personas con limitación visual en Colombia, lo
cual es el objetivo principal de este proyecto.

36
BIBLIOGRAFÍA DANE. (2013). Departamento Administrativo Nacional de Estadística DANE . Obtenido de
Departamento Administrativo Nacional de Estadística DANE : http://www.dane.gov.co/
INCI. (2013). Instituto NacionalPara Ciegos-INCI. Obtenido de Instituto NacionalPara Ciegos-INCI:
http://www.inci.gov.co/
Martín Andrade, P. (s.f.). Web de educación de la ONCE. Obtenido de Web de educación de la ONCE:
http://educacion.once.es/appdocumentos/educa/prod/Necesidades%20y%20respuesta%20
educativa.pdf
Moreno Angarita, M., & Rubio Vizcaya, S. X. (2011). Instituto Nacional Para Ciegos-INCI. Recuperado
el 2013, de Instituto Nacional Para Ciegos-INCI: http://www.inci.gov.co/observatorio-
social/informes-estadisticos/otros-estudios-e-investigaciones

37
FIGURA 1.DIAGRAMA EN BLOQUES DEL BASTÓN GUÍA ........................................................................................... 10
FIGURA 2. DIAGRAMA DE TIEMPOS DEL HC SR-04 ................................................................................................ 11
FIGURA 3. DIAGRAMA DE FLUJO DEL BASTÓN GUÍA ............................................................................................... 12 FIGURA 4. ESQUEMÁTICO DEL PIC18F252 CON EL NOMBRE DE LOS TERMINALES (IZQUIERDA) Y FOTOGRAFÍA DEL
COMPONENTE (DERECHA) ............................................................................................................................. 13 FIGURA 5. ESQUEMÁTICO DEL CIRCUITO INTEGRADO ISD4002 CON EL NOMBRE DE LOS TERMINALES (IZQUIERDA)
Y FOTOGRAFÍA DEL COMPONENTE (DERECHA) .............................................................................................. 14
FIGURA 6. IMAGEN DEL SENSOR HC SR-04(IZQUIERDA) ........................................................................................ 14 FIGURA 7. ESQUEMÁTICO DEL CIRCUITO INTEGRADO LM386 CON EL NOMBRE DE LOS TERMINALES (IZQUIERDA) Y
FOTOGRAFÍA DEL COMPONENTE (DERECHA) ................................................................................................. 15
FIGURA 8. ESQUEMÁTICO DE LA CONEXIÓN TÍPICA DEL REGULADOR LM1117DT ................................................. 16
FIGURA 9. ESQUEMÁTICO DE LA CONEXIÓN TÍPICA DEL REGULADOR MIC5205 ..................................................... 19
FIGURA 10. CONEXIÓN DEL CRISTAL DE 4,0 MHZ AL PIC18F252 .......................................................................... 21
FIGURA 11. CIRCUITO EQUIVALENTE DE UN CRISTAL PIEZOELÉCTRICO .................................................................. 21
FIGURA 12. CIRCUITO EQUIVALENTE PARA UN CRISTAL DE 2 MHZ ........................................................................ 22
FIGURA 13. ESQUEMÁTICO DE LOS TERMINALES DEL SPI DEL PIC18F252 ............................................................. 23
FIGURA 14. ESQUEMÁTICO DE CONEXIÓN DE INTEGRADO ISD4002 ....................................................................... 24
FIGURA 15. DIAGRAMA DE TIEMPOS DEL ISD4002 ................................................................................................ 25
FIGURA 16. CIRCUITO INTERNO DEL LM386 .......................................................................................................... 28
FIGURA 17. CONFIGURACIÓN DEL LM386 PARA UNA GANANCIA DE 200 ............................................................... 29
FIGURA 18. MODO DE VARIACIÓN DE LA DISTANCIA .............................................................................................. 30
FIGURA 19. MODO DE VARIACIÓN DE LA ALTURA .................................................................................................. 30
FIGURA 20. MODO DE VARIACIÓN DEL ÁNGULO ..................................................................................................... 31
FIGURA 21. PROTOTIPO DEL BASTÓN GUÍA. ........................................................................................................... 33
TABLA 1. DATOS DEL CENSO 2005, LIMITACIÓN VISUAL Y LA EDAD ........................................................................ 7
TABLA 2. INFORMACIÓN ELÉCTRICA Y TÉRMICA DEL INTEGRADO LM1117DT ...................................................... 16
TABLA 3. INFORMACIÓN ELÉCTRICA Y TÉRMICA DEL INTEGRADO MIC5205.......................................................... 18
TABLA 4. INFORMACIÓN ELÉCTRICA DEL INTEGRADO PIC18F252 ......................................................................... 19
TABLA 5. CORTES COMUNES DEL CRISTAL DE CUARZO .......................................................................................... 21
TABLA 6. INFORMACIÓN ELÉCTRICA DEL INTEGRADO ISD4002 ............................................................................. 23
TABLA 7. FAMILIA DEL ISD4002 ........................................................................................................................... 24
TABLA 8. BITS DE CONTROL DEL ISD4002 ............................................................................................................. 25
TABLA 9. INFORMACIÓN ELÉCTRICA Y TÉRMICA DEL INTEGRADO LM386 ............................................................. 27
TABLA 10. RESULTADOS DE LA PRUEBA ................................................................................................................. 31
TABLA 11. COSTO .................................................................................................................................................. 34
GRÁFICA 1. RECHAZO DE RIZADO CONTRA LA CORRIENTE ..................................................................................... 17
GRÁFICA 2. RECHAZO DE RIZADO CONTRA LA FRECUENCIA ................................................................................... 17
GRÁFICA 3. RELACIÓN DE RECHAZO DE LA FUENTE DE ALIMENTACIÓN ................................................................. 19
GRÁFICA 4. GRÁFICAS DE LA TENDENCIA DE LA IDD VS FOSC DEPENDIENDO DE SU POLARIZACIÓN .................. 20
GRÁFICA 5. TENDENCIA DE DESCARGA DE LA BATERÍA.......................................................................................... 29
ANEXO 1. CÓDIGO DEL BASTÓN GUÍA ULTRASÓNICO