automatizacion (control numerico.robotica)
TRANSCRIPT

GARCIA, MARIA JOSEHERNÁNDEZ, MARIA F.
MARQUEZ, GLORIAMUNOZ, NATALIA
NAMMOUR, NORMAURBINA, DIHELEN
VARELA, CARLOS A. VILLALOBOS, RICARDO
Dispositivo capaz de dirigir posicionamientos de un órgano mecánico móvil
elaboradas en forma totalmente automática
a partir de informaciones numéricas
manual programa
TornosRectificadoras
Electroerosiadoras Maquinas de Coser
CNC Años cincuentas
instituto tecnología de Massachusetts (MIT)
Se automatizó una fresadora
El uso se ha extendido

Informaciones numéricas (tiempo real)
Movimiento herramienta de corte
Ordenes de forma automática
SISTEMA DE COORDENADAS

EjEs PrinciPalEs sistEmas dE transmisión
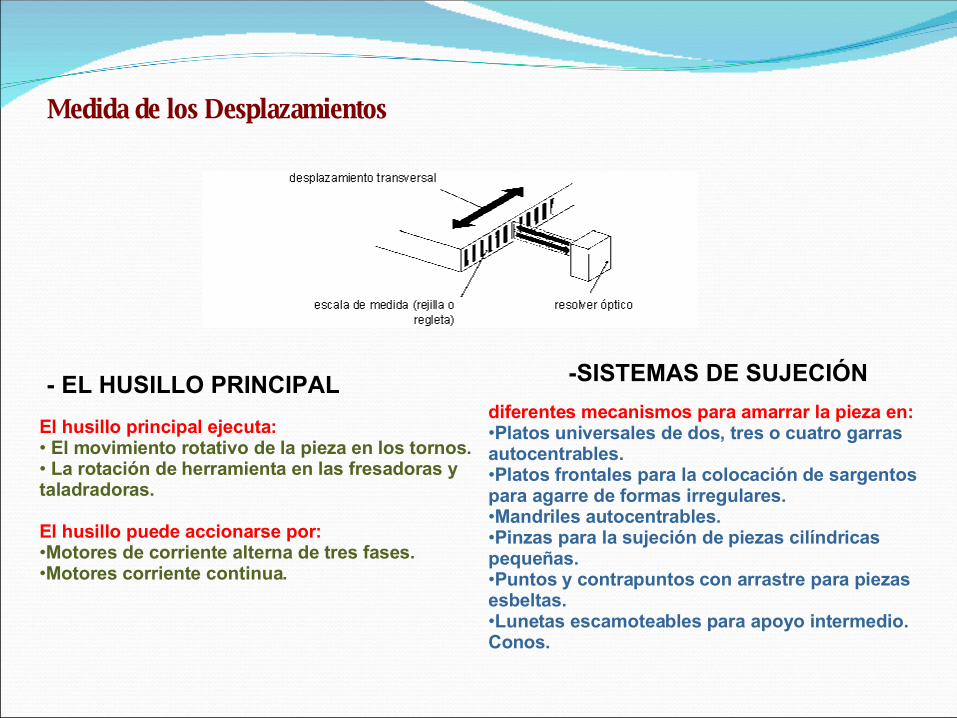
Medida de los Desplazamientos
- EL HUSILLO PRINCIPAL
El husillo principal ejecuta: • El movimiento rotativo de la pieza en los tornos. • La rotación de herramienta en las fresadoras y taladradoras.
El husillo puede accionarse por: •Motores de corriente alterna de tres fases. •Motores corriente continua.
-SISTEMAS DE SUJECIÓN
diferentes mecanismos para amarrar la pieza en:•Platos universales de dos, tres o cuatro garras autocentrables. •Platos frontales para la colocación de sargentos para agarre de formas irregulares. •Mandriles autocentrables. •Pinzas para la sujeción de piezas cilíndricas pequeñas. •Puntos y contrapuntos con arrastre para piezas esbeltas. •Lunetas escamoteables para apoyo intermedio. Conos.
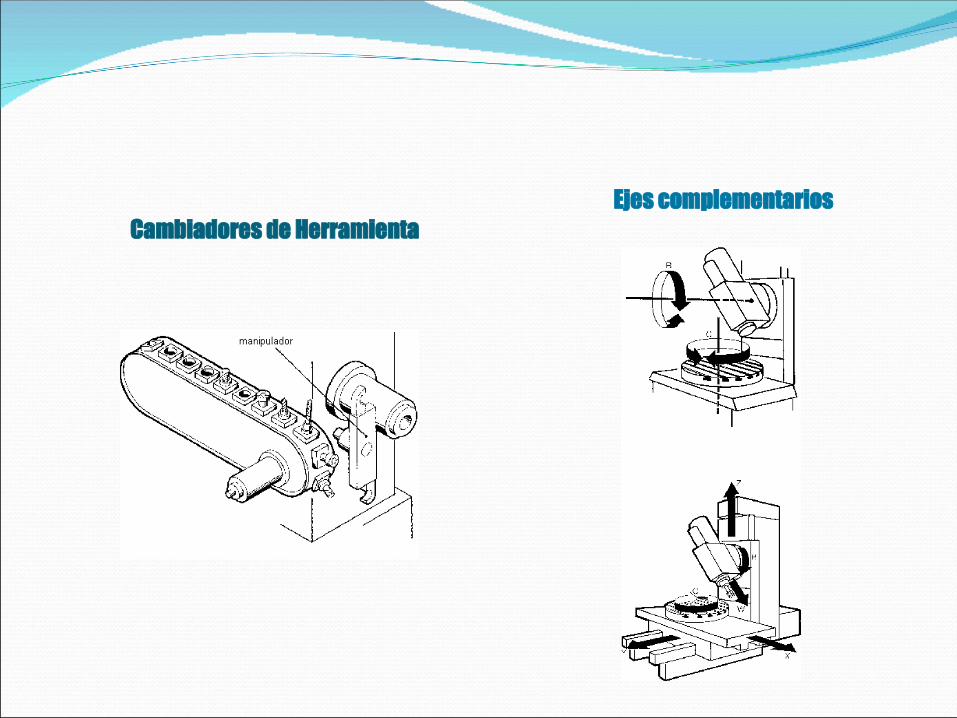
Cambiadores de Herramienta Ejes complementarios
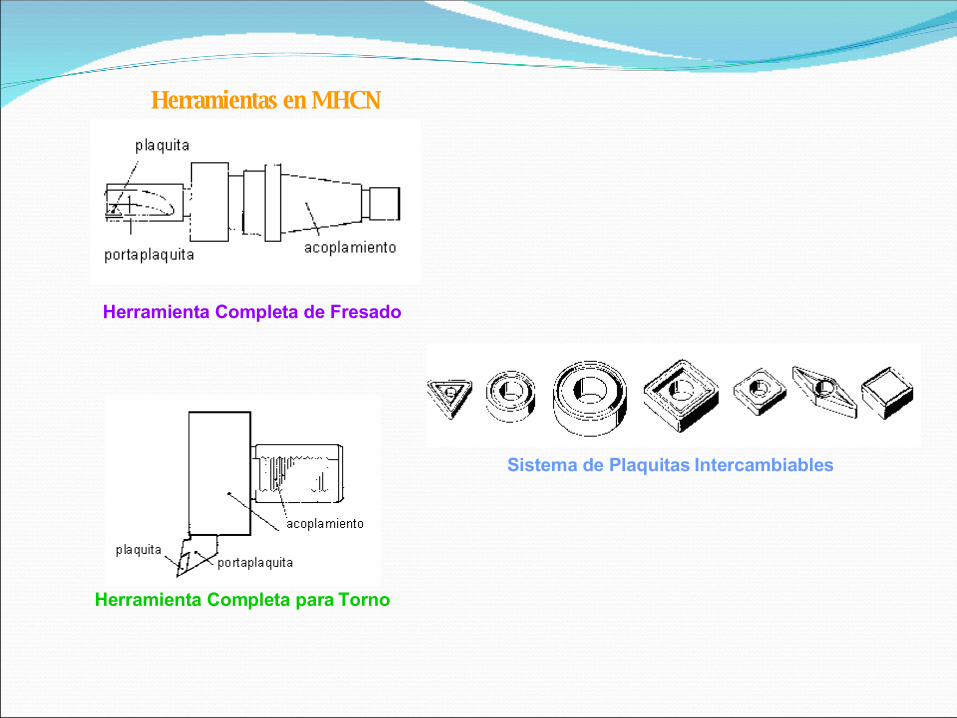
Herramientas en MHCN
Herramienta Completa de Fresado
Herramienta Completa para Torno
Sistema de Plaquitas Intercambiables
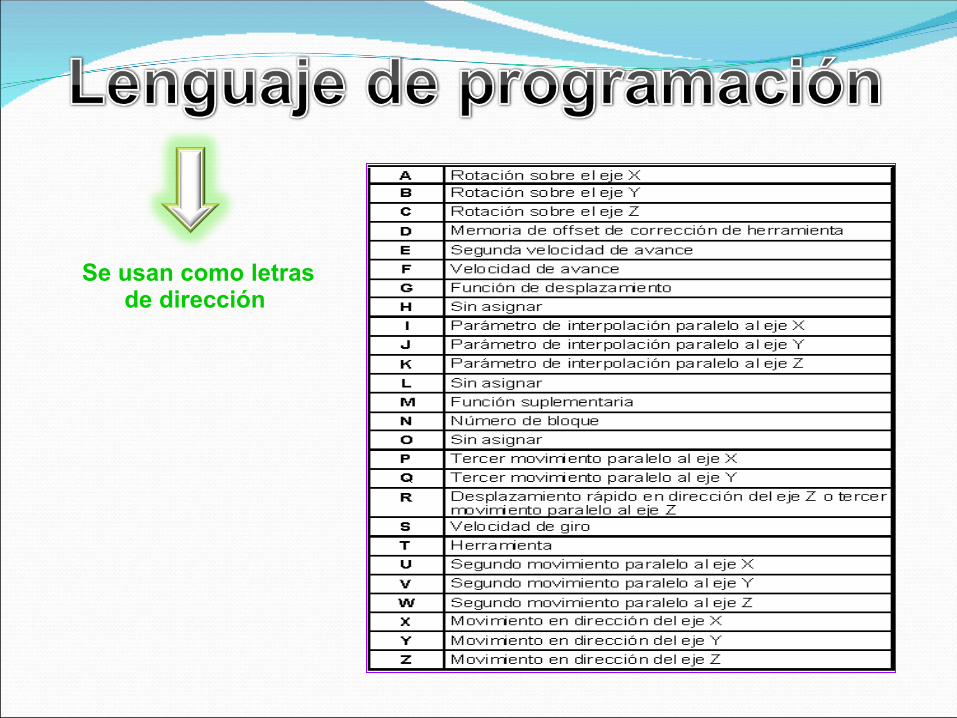
Se usan como letras de dirección
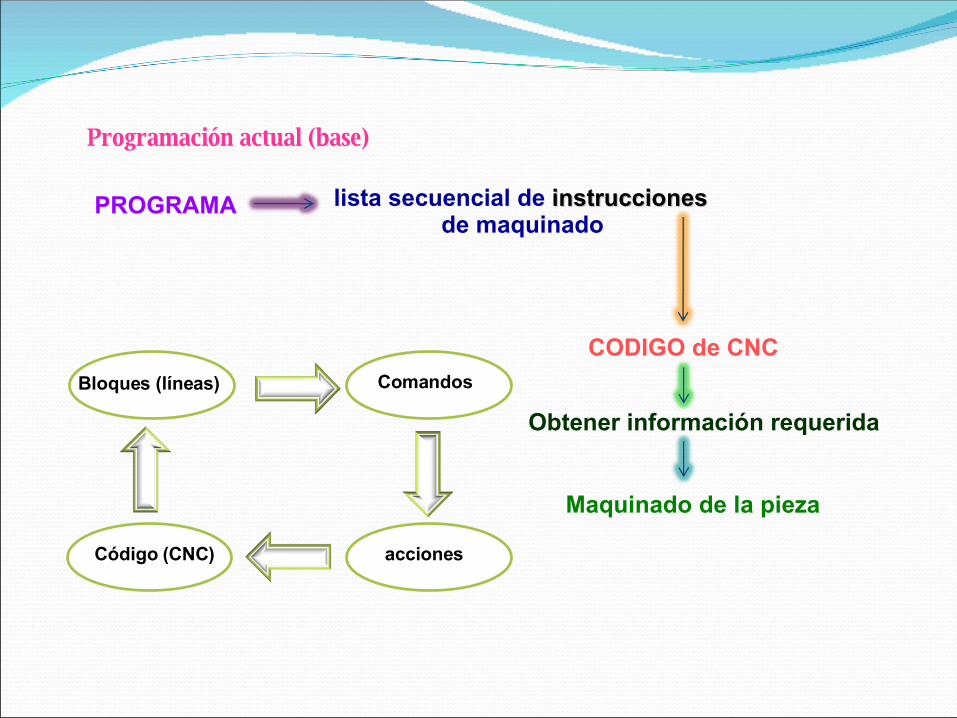
Programación actual (base)
PROGRAMA lista secuencial de instruccionesinstruccionesde maquinado
CODIGO de CNC
Obtener información requerida
Maquinado de la pieza
Bloques (líneas) Comandos
accionesCódigo (CNC)
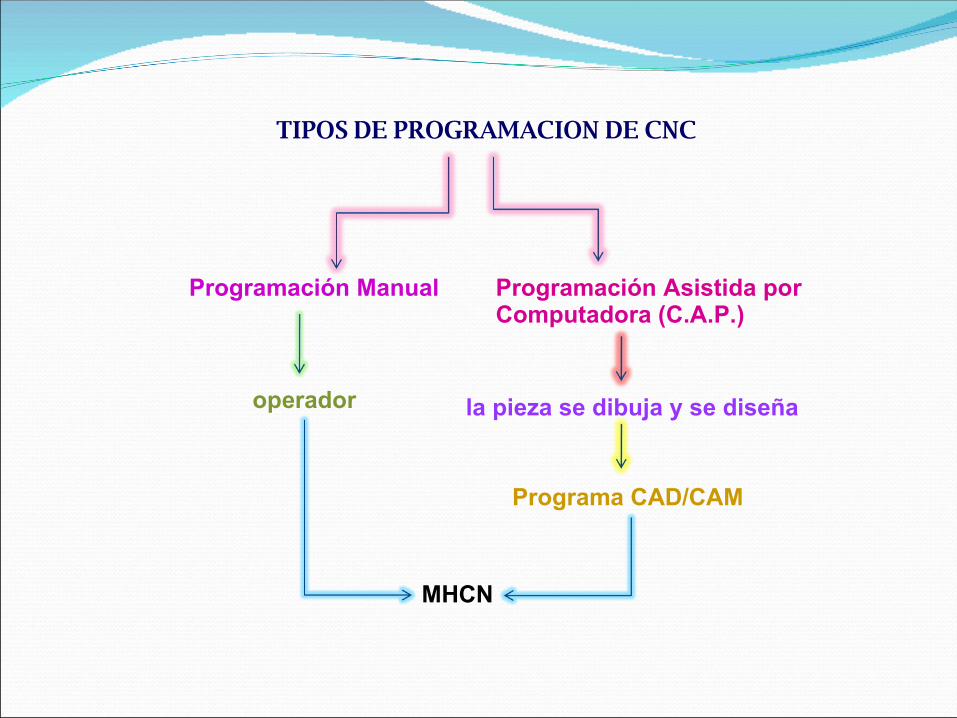
TIPOS DE PROGRAMACION DE CNC
Programación Manual Programación Asistida por Computadora (C.A.P.)
operador la pieza se dibuja y se diseña
Programa CAD/CAM
MHCN
Punto a punto Paraxial
ContinuoPunto a punto
Permite el posicionado de la herramienta
SOLDADURA PUNTO A PUNTO
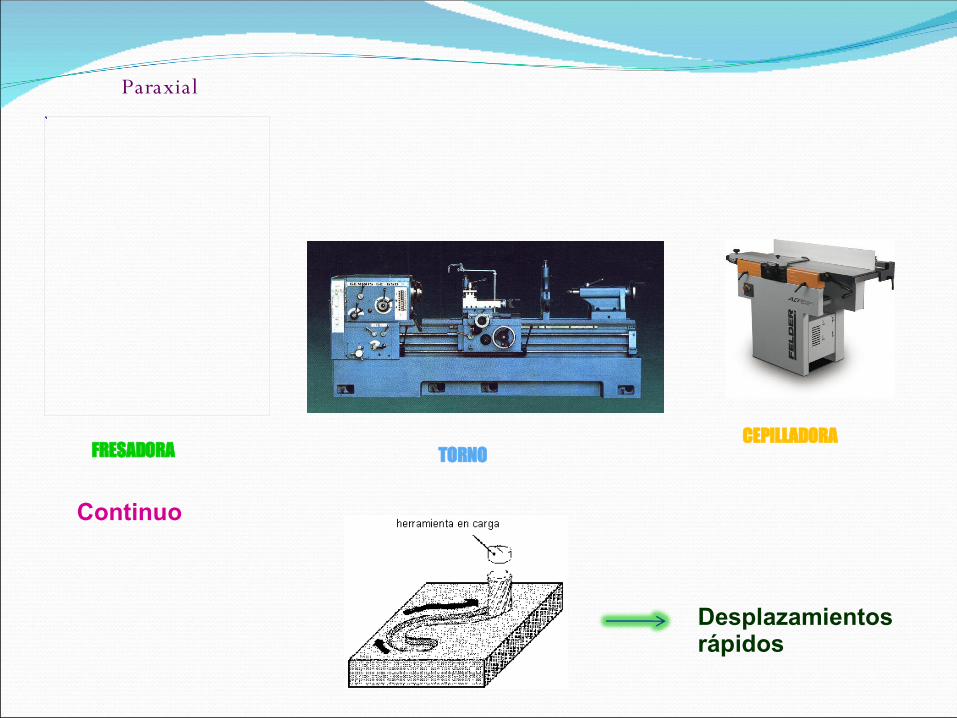
Paraxial
FRESADORA TORNOCEPILLADORA
Continuo
Desplazamientos rápidos
VEntajas dEsVEntajas
• Mejor calidad de productos•Mayor precisión de productos•Operar la maquina varias veces•Fácil procesamiento de productos•Flexibilidad para el cambio del producto en un tiempo corto
• Alto costo de la maquinaria•Necesario la programación de forma correcta•Falta de opciones en caso de una falla
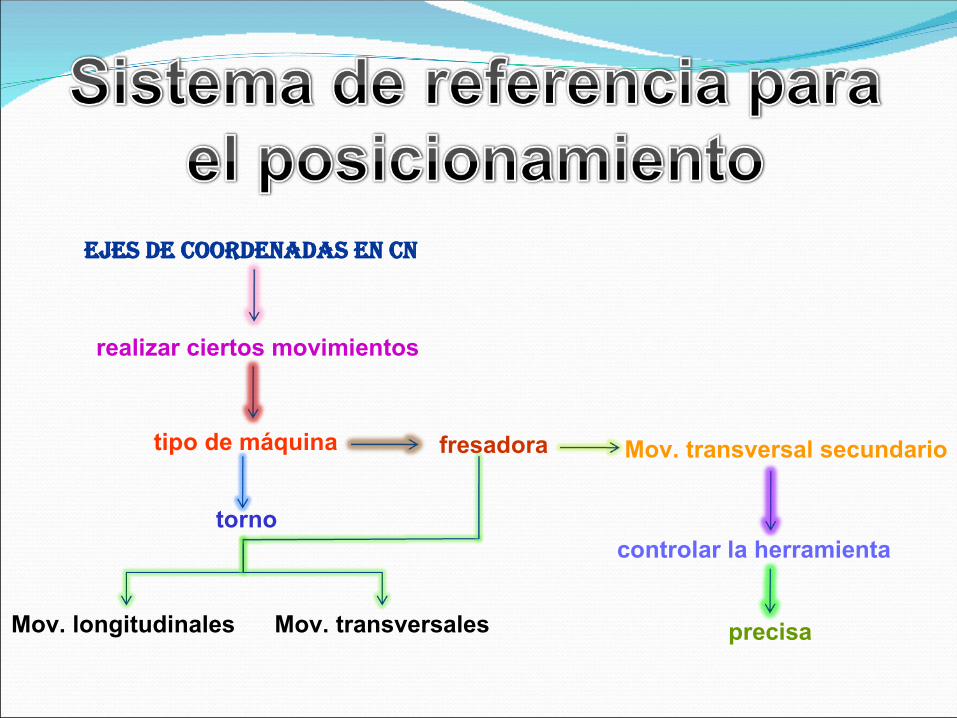
EjEs dE cOOrdEnadas En cn
realizar ciertos movimientos
tipo de máquina
torno
Mov. longitudinales Mov. transversales
fresadora Mov. transversal secundario
controlar la herramienta
precisa
S IS TE M A S D E C O O R D E N A D A S D E LA M Á Q U IN A
sistema de control de la máquina-herramienta
convierte los valores de coordenadas
movimientos
herramienta pieza
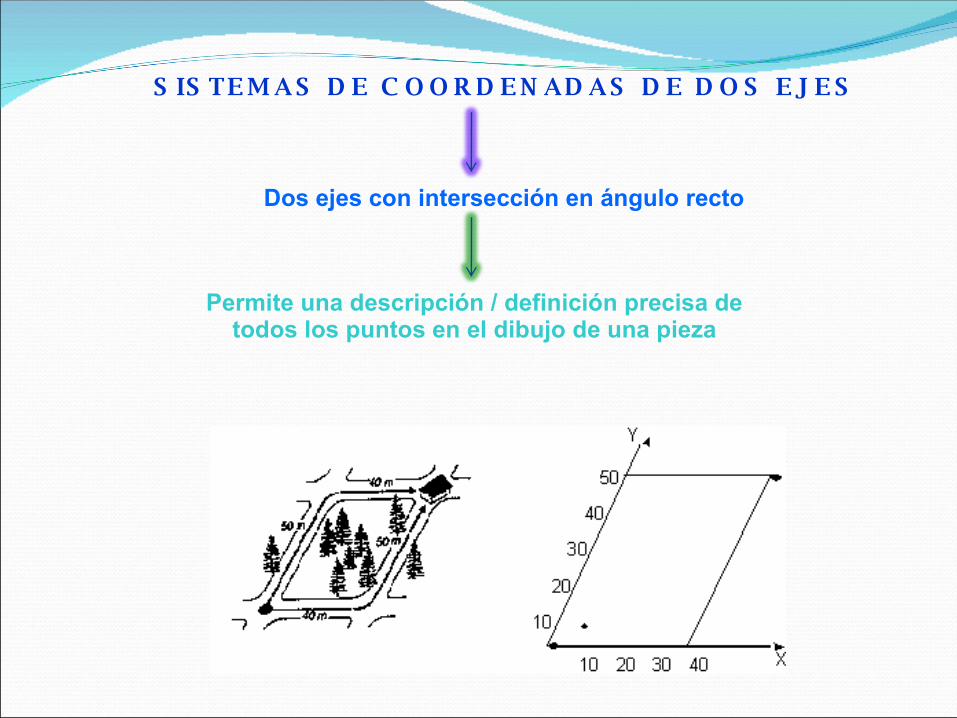
S IS TE M A S D E C O O R D E N A D A S D E D O S E J E S
Dos ejes con intersección en ángulo recto
Permite una descripción / definición precisa de todos los puntos en el dibujo de una pieza
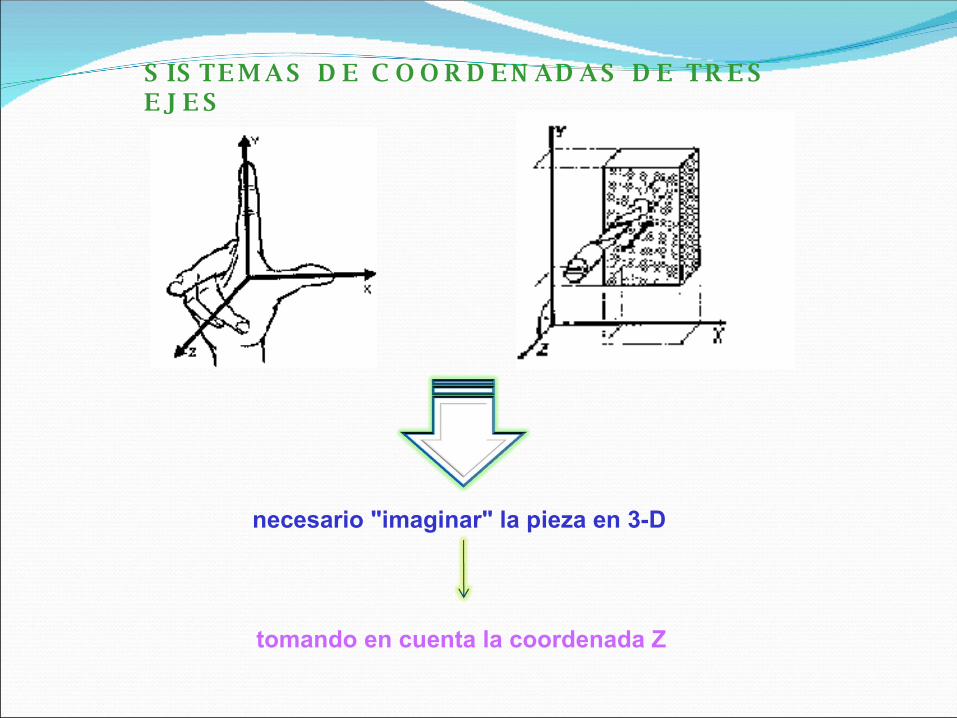
S IS TE M A S D E C O O R D E N A D A S D E TR E S E J E S
necesario "imaginar" la pieza en 3-D
tomando en cuenta la coordenada Z
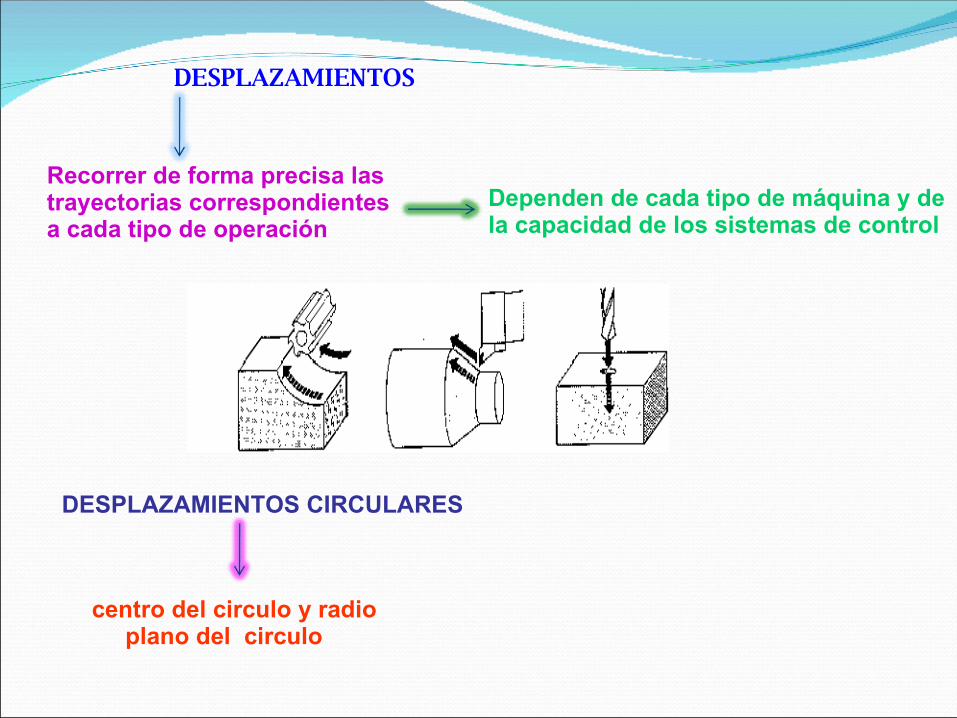
DESPLAZAMIENTOS
Recorrer de forma precisa las trayectorias correspondientes a cada tipo de operación
Dependen de cada tipo de máquina y de la capacidad de los sistemas de control
DESPLAZAMIENTOS CIRCULARES
centro del circulo y radio plano del circulo
Tres reglas principales de la robótica
1.-Ningún robot puede hacer daño a un ser humano, o permitir que se le haga daño por no actuar.
2.-Un robot debe obedecer las órdenes dadas por un ser humano, excepto si estas órdenes entran en conflicto con la primera ley.
3.-Un robot debe proteger su propia existencia en la medida en que está protección no sea incompatible con las leyes anteriores.
Versatilidad Auto adaptabilidad al entorno
Ejecutar diversas tareas Alcanzar su objetivo a pesar del entorno en el que se encuentre
Los sistemas de control
emiten los comandos de movimientos del robot
Sistemas de control Eléctrico
Sistemas Neumáticos
Realizar movimientos
Grados de libertad
BRAZO MECANICO
Controlador
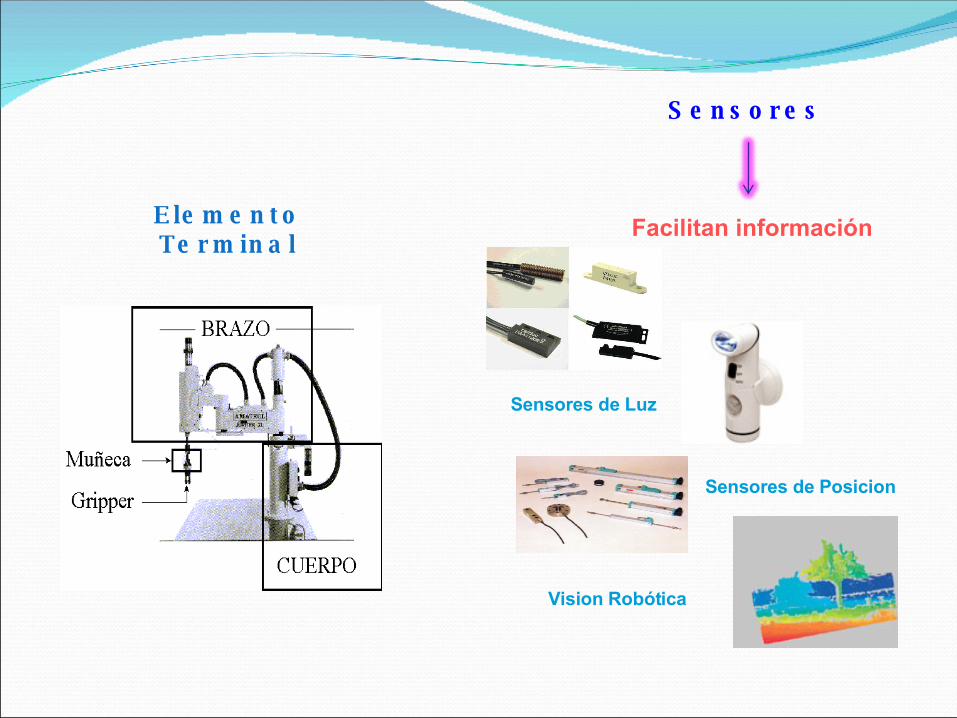
Facilitan información
S e n s o r e s
E le m e n t o Te r m in a l
Sensores de Luz
Sensores de Posicion
Vision Robótica

rObOt sErPEntina
Mas Versátiles
Utilizado en: Medios Subterráneos Y
Espacios Reducidos
Los robots diversidad de aplicaciones
robots tortugas robots soldadores
brazos tele operados en el trasbordador espacial.
Cada robot lleva consigo su problemática propia y sus soluciones afines; no obstante que mucha gente considera que la automatización de procesos a través de robots está en sus inicios, es un hecho innegable que la introducción de la tecnología robótica en la industria, ya ha causado un gran impacto.
Los robots son utilizados por una diversidad de procesos industriales como lo son: la
soldadura de punto y soldadura de arco, pinturas de spray, transportación de
materiales, molienda de materiales, moldeado en la
industria plástica, máquinas-herramientas, y otras más.

Son operaciones en las cuales el objetivo primario es mover una pieza de una posición a otra. Se suelen
considerar entre las operaciones más sencillas o directas de realizar por
los robots.
* Carga/Descarga de Máquinas.
* Carga de máquinas.
* Descarga de máquinas.
Además de las aplicaciones de manejo de piezas, existe
una gran clase de aplicaciones en las cuales el
robot realmente efectúa trabajos sobre piezas.
* Soldadura por puntos.
* Soldadura por arco continúa.
* Recubrimiento con spray.
Llevan acabo con efectividad tareas repetitivas como la
colocación de tubos de pruebas dentro de los
instrumentos de medición. Un sistema de preparación de muestras consiste de un robot y una estación de
laboratorio, la cual contiene balanzas, dispensarios,
centrifugados, racks de tubos de pruebas, etc.
La tecnología robótica encontró su primer
aplicación en la industria nuclear con el desarrollo de tele
operadores para manejar material
radiactivo. Los robots más recientes han sido utilizados para soldar
a control remoto.
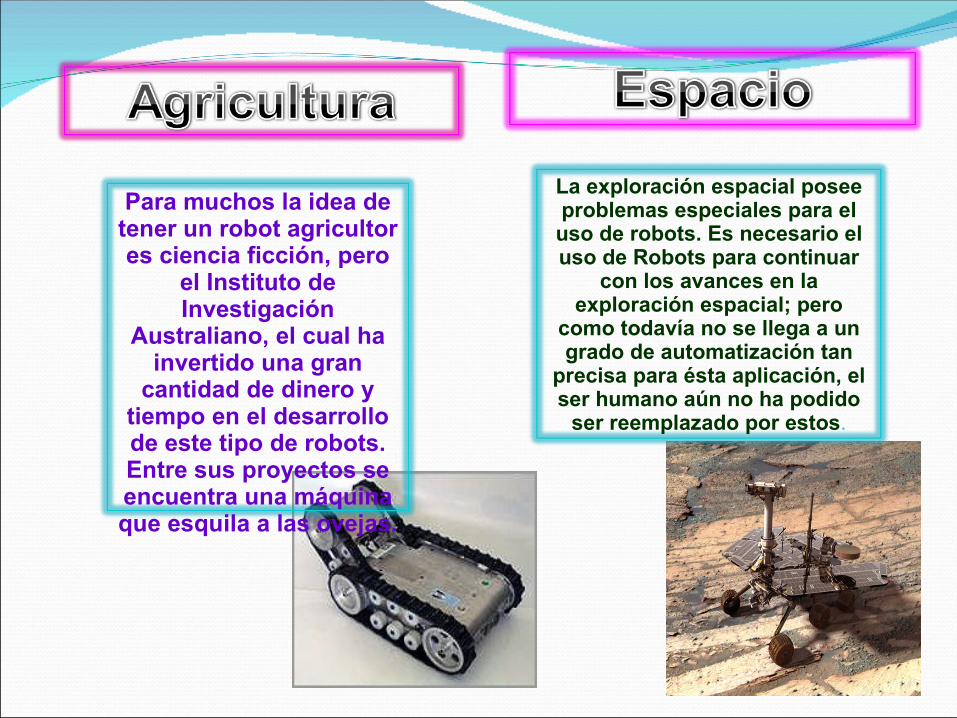
Para muchos la idea de tener un robot agricultor es ciencia ficción, pero
el Instituto de Investigación
Australiano, el cual ha invertido una gran
cantidad de dinero y tiempo en el desarrollo de este tipo de robots. Entre sus proyectos se encuentra una máquina que esquila a las ovejas.
La exploración espacial posee problemas especiales para el uso de robots. Es necesario el uso de Robots para continuar
con los avances en la exploración espacial; pero
como todavía no se llega a un grado de automatización tan
precisa para ésta aplicación, el ser humano aún no ha podido
ser reemplazado por estos.
Dos eventos durante el verano de 1985 provocaron el incremento por el interés de los vehículos submarinos. En el primero - Un avión de la Air Indian se estrelló en el Océano Atlántico cerca de
las costas de Irlanda - un vehículo submarino guiado remotamente,
normalmente utilizado para el tendido de cable, fue utilizado
para encontrar y recobrar la caja negra del avión. El segundo fue el descubrimiento del Titanic en el fondo de un cañón, donde había
permanecido después del choque con un iceberg en 1912, cuatro
kilómetros abajo de la superficie.
Los robots están apareciendo en los salones de clases de tres
distintas formas. Primero, los programas educacionales
utilizan la simulación de control de robots como un medio de
enseñanza. El segundo y de uso más común es el uso del robot tortuga en conjunción con el lenguaje LOGO para enseñar ciencias computacionales. En tercer lugar está el uso de los
robots en los salones de clases. Una serie de manipuladores de bajo costo, robots móviles, y sistemas completos han sido
desarrollados para su utilización en los laboratorios
educacionales.

GARCIA, MARIA JOSEHERNÁNDEZ, MARIA F.
MARQUEZ, GLORIAMUNOZ, NATALIA
NAMMOUR, NORMAURBINA, DIHELEN
VARELA, CARLOS A. VILLALOBOS, RICARDO