apuntes anÁlisis de sistemas dinÁmicos - …marcoselgueta/analisis_sist_dinamicos/psaavedr... ·...
TRANSCRIPT
Departamento de Ingeniería Mecánica
APUNTES
ANÁLISIS DE SISTEMAS DINÁMICOS
PROFESOR
PEDRO SAAVEDRA G.
EDICIÓN CRISTÓBAL SCHEEL L.
ILUSTRACIONES JUAN PARRA O.
CRISTÓBAL SCHEEL L.
Análisis de Sistemas Dinámicos
Capítulo 1
Sistemas de un grado de libertad Sistema lineal: Ecuación diferencial que rige su movimiento es lineal. Ejemplo: )(tfkxxcxm =++
&&&
Propiedades:
1.- Principio de superposición: Si e B1B(t)→sB1B(t) e B2B(t)→sB2B(t)
... .. . entonces e B1B(t)+ e B2B(t)+... → sB1B(t)+ sB2B(t)+... La presencia de una excitación, no afecta la respuesta del sistema a otras excitaciones. 2.- En el estado permanente: La respuesta de un sistema lineal a una excitación armónica Ω, es a la misma frecuencia Ω. Si )()()(
00φ−Ω=→Ω= tsenXtxtsenFtf
Linealización de los sistemas para pequeñas oscilaciones respecto a su posición de equilibrio.
0,,
1
2 →
→→
etc
cos
sen
θθθθ
θθ
&&&&
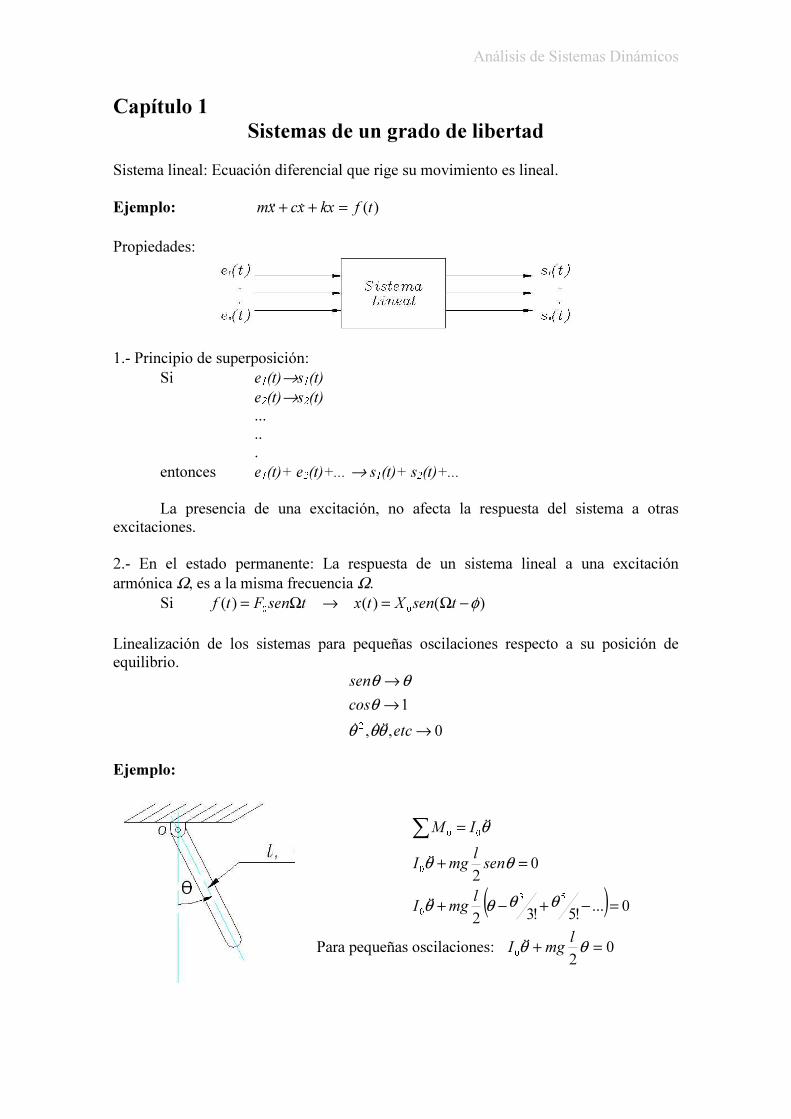
Ejemplo:
(2
2
0
0
00
−+
+
=
) 0...!5!3
0
53
=−+
=
∑
θθ
θ
θθ
θ
θ
lmgI
senl
mgI
IM
&&
&&
&&
Para pequeñas oscilaciones: 02
0=+ θθ l
mgI &&
Análisis de Sistemas Dinámicos
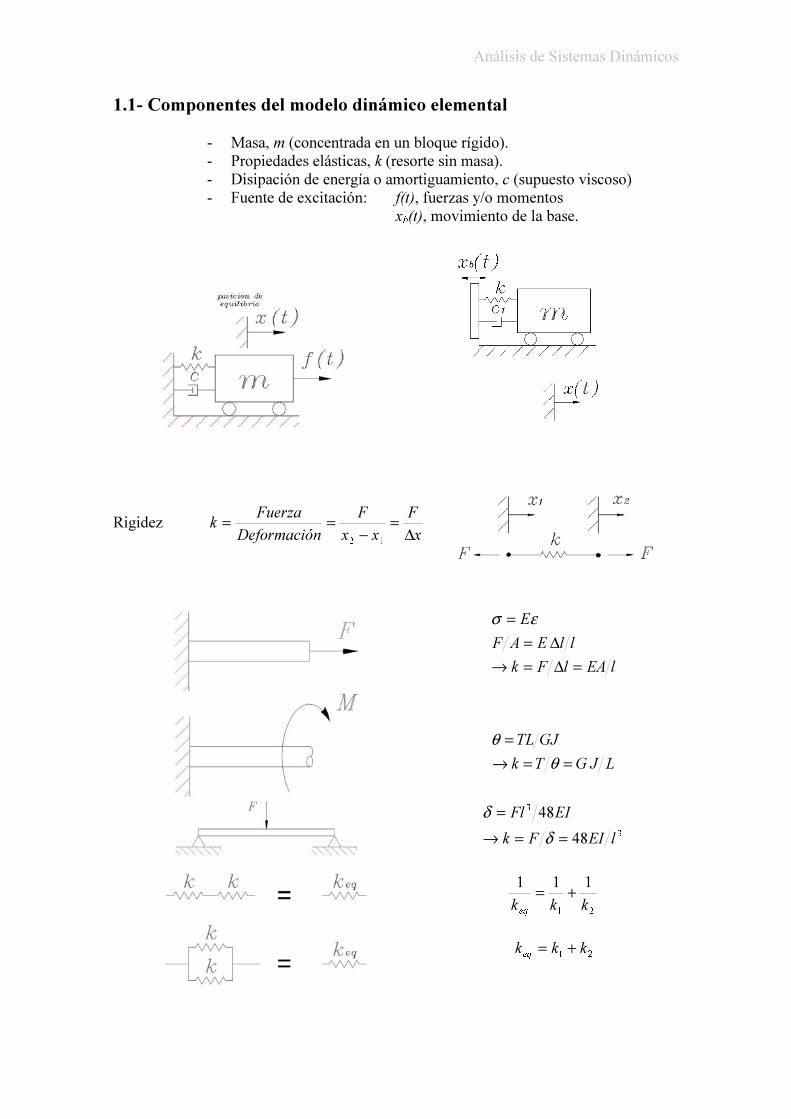
1.1- Componentes del modelo dinámico elemental
- Masa, m (concentrada en un bloque rígido). - Propiedades elásticas, k (resorte sin masa). - Disipación de energía o amortiguamiento, c (supuesto viscoso) - Fuente de excitación: f(t), fuerzas y/o momentos
x BbB(t), movimiento de la base.
Rigidez x
F
xx
F
nDeformació
Fuerzak
∆=
−==
12
lEAlFk
llEAF
E
=∆=→∆=
= εσ
LJGTk
GJTL
==→=
θθ
3
3
48
48
lEIFk
EIFl
==→=
δδ
21
111
kkkeq
+=
21kkk
eq+=
Análisis de Sistemas Dinámicos
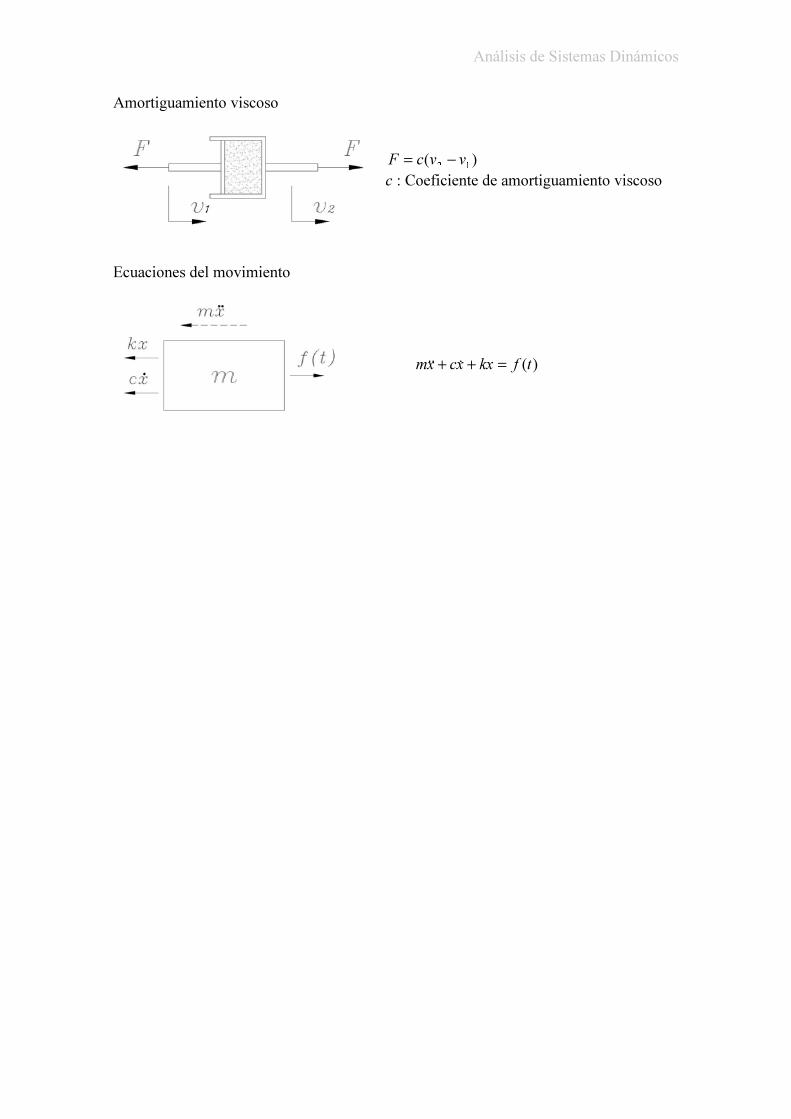
Amortiguamiento viscoso
)(
12vvcF −=
c : Coeficiente de amortiguamiento viscoso
Ecuaciones del movimiento
)(tfkxxcxm =++&&&

Análisis de Sistemas Dinámicos
1.2.- Vibraciones libres ( f(t)=0 )
1.2.1.- Vibraciones libres y no amortiguadas ( f(t)=0 y c=0 )
Determinar el movimiento del sistema ideal cuando se le dá un desplazamiento y velocidad inicial (x B0B y B0B). x
&
Resolver:
P.V.I. 00
)0(;)0(;0 xxxxkxxm&&&&
===+ Solución: trtr
eCeCtx 21
21)( +=
Ecuación característica: m
kjrkmr ±=→=+ 0
2
tm
ksenBt
m
kcosAtx +=)( ;movimiento armónico simple
A y B se obtienen de las condiciones iniciales:
mktsenx
tcosxtxnn
n
n=+= ωω
ωω ;)( 0
0
&
(1-1)
( )00
2
0
2
00
0
tg
)()(
xx
xxX
tsenXtx
n
n
n
&
&
ωϕω
ϕω
=+=
+=
(1-2)
X B0B = Amplitud del desplazamiento, valor pico (m) T = Período del movimiento (s) f = 1/T = Frecuencia del movimiento (Hz) ωBnB = 2π fBnB = Frecuencia (circular) natural de vibrar (rad/s) ϕ = Ángulo de fase (rad) v = = Velocidad (m/s) x
&
a = = Aceleración (mP
2P/s) x
&&
v(t) = (t) = X B0BωBnBcos(ωBnBt + ϕ) = V B0Bsen(ωBnBt + ϕ + x&
2π )
a(t) = (t) = - XB0BωBnPB
2Psen(ωBnBt + ϕ) = A B0Bsen(ωBnBt + ϕ + x
&&π )

Análisis de Sistemas Dinámicos
V B0B = Amplitud de la velocidad A B0B = Amplitud de la aceleración La velocidad y aceleración están adelantados respecto al desplazamiento en 90°
y 180° respectivamente.
ωBnB = m
k
- Solo depende de las características del sistema (k y m) - Si disminuye la rigidez del sistema, disminuye ωBnB
- Si aumenta la masa del sistema disminuye ωBn
1.2.2.- Vibraciones libres amortiguadas
Resolver:
P.V.I. : , , 0=++ kxxcxm&&& 0
)0( xx =0
)0( xx&&
= Ecuación característica : 02 =++ kcrmr
m
k
m
c
m
crr −⎟
⎠
⎞⎜⎝
⎛±−=2
21
22,
Para que el sistema vibre, rBiB deben ser imaginarios ⎟⎟
⎠
⎞
⎜⎜
⎝
⎛⎟⎠
⎞⎜⎝
⎛>2
2m
c
m
k
Definición = El máximo valor de c para que el sistema vibre se llama amortiguamiento crítico c BcB y vale:
2
2⎟⎠
⎞⎜⎝
⎛=m
c
m
k
ncmkmc ω22 == (1-3)
Es más cómodo expresar en función de 2 parámetros fáciles de medir:
ny ωξ
ξ = Factor de amortiguamiento = cc
c
(1-4)
1,2
21−±−= ξωξω
nnrr
Caso I: Amortiguamiento sub-crítico ( 1<ξ ) ⇒ Raíces complejas conjugadas ⇒ Existe vibración
( )tcosBtsenAetxdd
tn ωωξω += −
)(
A y B determinados de las condiciones iniciales x B0B y B0B x&
Luego:
⎟⎟⎠
⎞⎜⎜⎝
⎛++= −
tcosxtsenxx
etxdd
d
ntn ωω
ωξωξω
0
00)(&
(1-5)
Análisis de Sistemas Dinámicos
21 ξωω −=
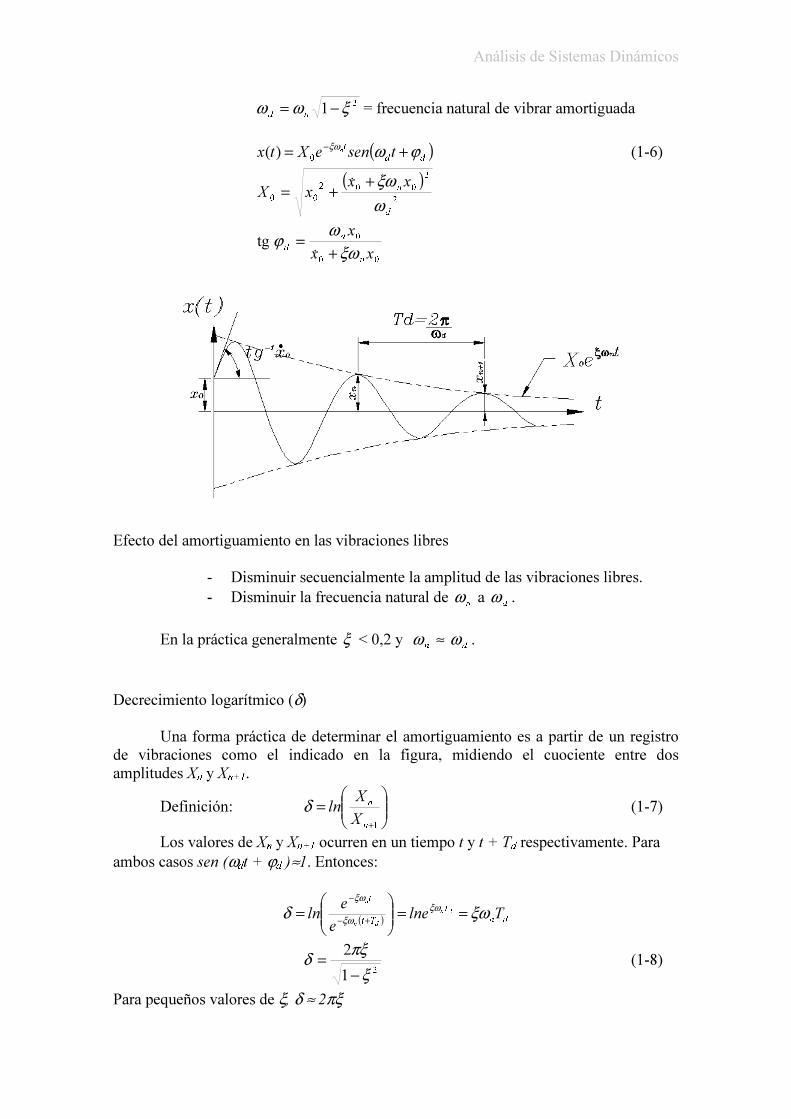
nd= frecuencia natural de vibrar amortiguada
(
dd
ttseneXtx n ϕωξω += −
0)( ) (1-6)
( )2
2
002
00
d
nxx
xX
ωξω+
+= &
00
0tg
xx
x
n
d
d ξωωϕ+
=&
Efecto del amortiguamiento en las vibraciones libres
- Disminuir secuencialmente la amplitud de las vibraciones libres. - Disminuir la frecuencia natural de a .
nω
dω
En la práctica generalmente ξ < 0,2 y ≈ .
nω
dω
Decrecimiento logarítmico (δ) Una forma práctica de determinar el amortiguamiento es a partir de un registro de vibraciones como el indicado en la figura, midiendo el cuociente entre dos amplitudes X BnB y X Bn+1B.
Definición: ⎟⎟⎠
⎞⎜⎜⎝
⎛=
+1n
n
X
Xlnδ (1-7)
Los valores de X BnB y X Bn+1B ocurren en un tiempo t y t + TBdB respectivamente. Para ambos casos sen (ωBdBt + ϕBdB )≈1. Entonces:
( ) dn
T
Tt
t
Telne
eln dn
dn
n
ξωδ ξωξω
ξω
==⎟⎟⎠
⎞⎜⎜⎝
⎛= +−
−
21
2
ξπξδ−
= (1-8)
Para pequeños valores de ξ, δ ≈ 2πξ
Análisis de Sistemas Dinámicos
Caso II: Amortiguamiento crítico (ξ = 1) ⇒ raíces reales e iguales ⇒ no existe vibración
nrr ξω−==21
( ) tnetAAtx
ξω−+=21
)(
introduciendo las condiciones iniciales: (1-9) ( )[ t
n
n
extxtxξωω −++=
001)(
&]
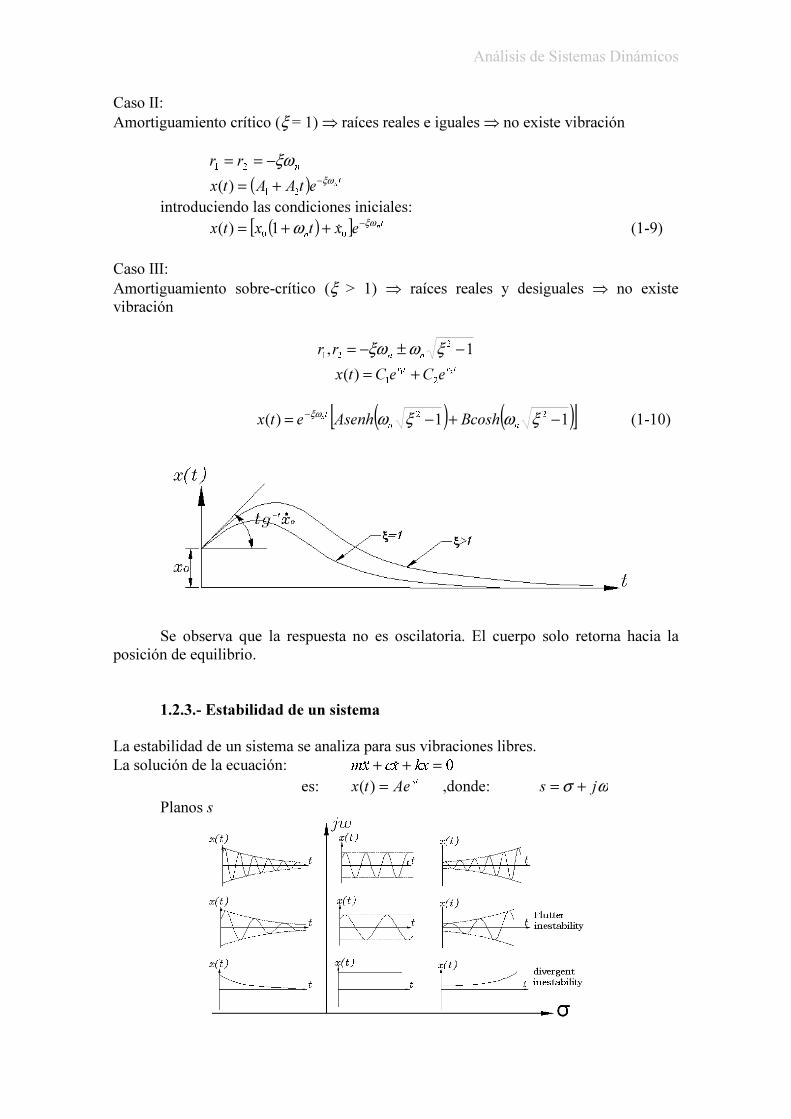
Caso III: Amortiguamiento sobre-crítico (ξ > 1) ⇒ raíces reales y desiguales ⇒ no existe vibración
1,2
21−±−= ξωξω
nnrr
trtr
eCeCtx 21
21)( +=
( ) ( )[ ]11)( 22 −+−= − ξωξωξωnn
t
coshBsenhAetx n (1-10)
Se observa que la respuesta no es oscilatoria. El cuerpo solo retorna hacia la posición de equilibrio.
1.2.3.- Estabilidad de un sistema
La estabilidad de un sistema se analiza para sus vibraciones libres. La solución de la ecuación: 0=++ kxxcxm
&&&
es: ,donde: st
Aetx =)( ωσ js += Planos s

Análisis de Sistemas Dinámicos
Criterios de estabilidad
Una condición necesaria y suficiente para que un sistema sea estable, es que todas las raíces de la ecuación característica tengan partes reales negativas.
Analizando m
k
m
c
m
cr −⎟
⎠
⎞⎜⎝
⎛±−=2
22
Esto sucederá cuando k y/o c sean negativos, es decir, no se oponen al movimiento, sino que lo ayudan. Ejemplo: Analice la estabilidad del péndulo invertido de la figura:
( )
ml
mgkl
m
kr
tmgkltml
mglkl
ml
mlmglll
k
IM
km
2
2
0)(2)(2
02
sencos2
sen2
2
2
2
2
00
−=−=
=−+
=−+
=+−
=
∗
∗
∗∗
∑
θθ
θθθ
θθθθ
θ
43421&&
&&
&&
&&
Si la rigidez efectiva k P
*
P es negativa, es decir si kl - 2mg < 0, el movimiento del péndulo será inestable por divergencia.
Análisis de Sistemas Dinámicos
1.3.- Relaciones entre fuerzas y excitaciones
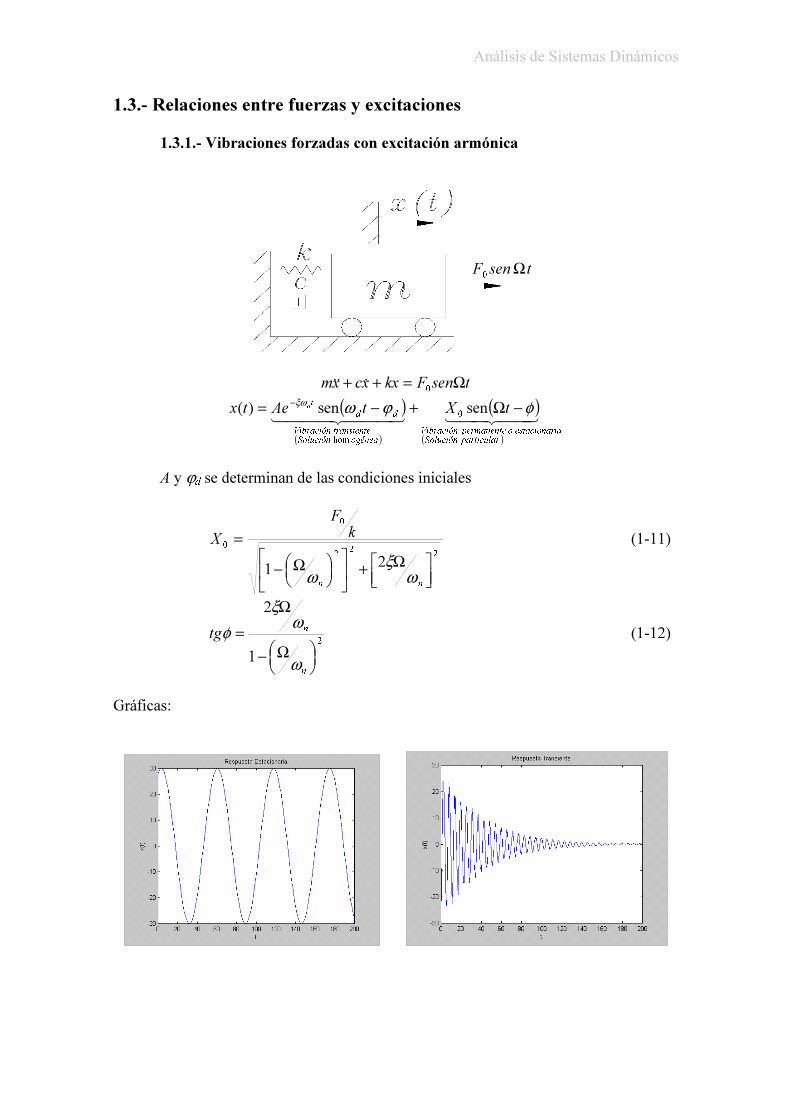
1.3.1.- Vibraciones forzadas con excitación armónica
tsenF Ω0
tsenFkxxcxm Ω=++
0&&&
( )( )
( )( )
44 344 21444 3444 21
particularSolucióniaestacionaropermanenteVibración
ogéneaSolucióntransienteVibración
dd
ttXtAetx n φϕωξω −Ω+−= −
sensen)(0
hom
A y ϕBdB se determinan de las condiciones iniciales
22
2
0
0
21
⎥⎦⎤
⎢⎣⎡ Ω+⎥
⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛Ω−
=
nn
k
F
X
ωξ
ω
(1-11)
2
1
2
⎟⎠⎞
⎜⎝⎛Ω−
Ω
=
n
n
tg
ω
ωξ
φ (1-12)
Gráficas:
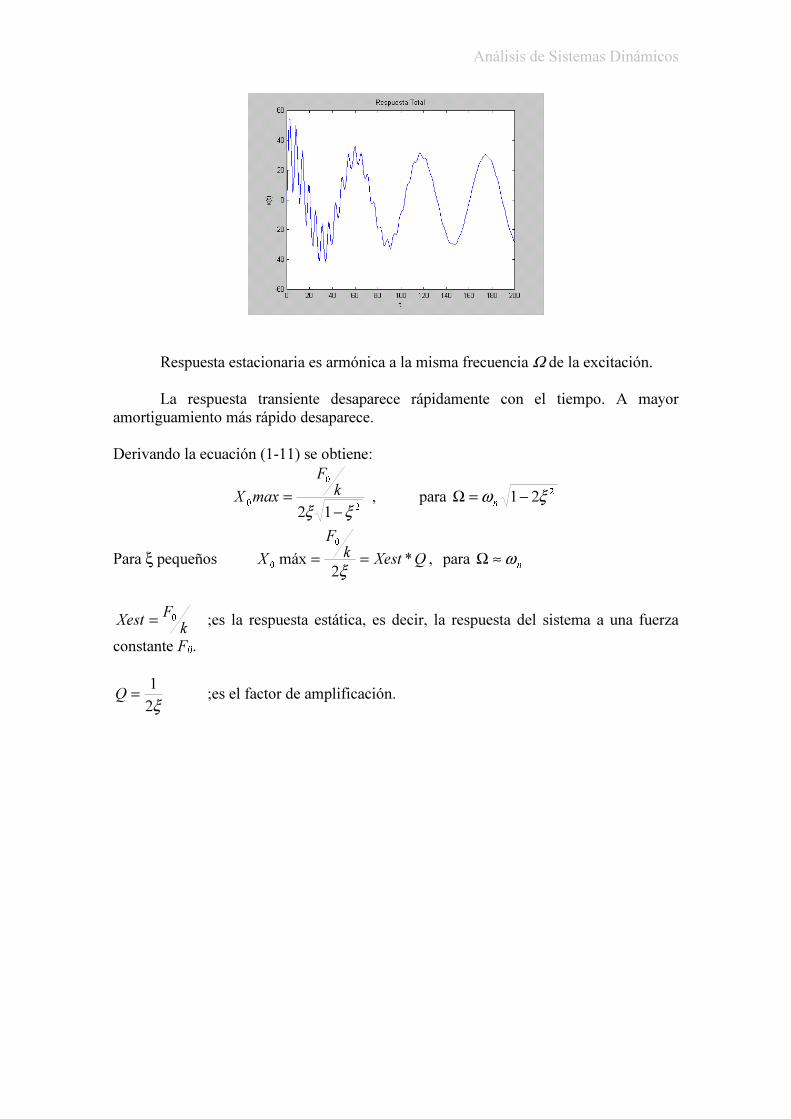
Análisis de Sistemas Dinámicos
Respuesta estacionaria es armónica a la misma frecuencia Ω de la excitación.
La respuesta transiente desaparece rápidamente con el tiempo. A mayor
amortiguamiento más rápido desaparece. Derivando la ecuación (1-11) se obtiene:
2
0
0
12 ξξ −= k
F
maxX , para 221 ξω −=Ω
n
Para ξ pequeños QXestkF
X *2
máx
0
0==
ξ, para
nω≈Ω
k
FXest 0= ;es la respuesta estática, es decir, la respuesta del sistema a una fuerza
constante F B0B.
ξ21=Q ;es el factor de amplificación.

Análisis de Sistemas Dinámicos
1.3.2.- Método del álgebra compleja
El uso del álgebra compleja generalmente simplifica el proceso de solución de la
ecuación diferencial.
La función puede ser representada como la proyección de
un vector X B0B que gira con velocidad angular Ω.
( φω += tsenXtx0
)( )
El vector rotatorio X B0B expresado en función de los ejes R, I es:
( ) ( ) ( ) tjjtjeeXeXtsenjXtcosXX
ωφφωφωφω00000
==+++= +r
tj
XeXω=
0
r
φj
eXX0
= = amplitud compleja
Por lo tanto puede ser expresado como: ( φω += tsenXtx
0)( )
( )tjXeImtx
ω=)( tj
Xetxω=)( (En la práctica generalmente se obvia escribir Im)
Aplicación en determinar la respuesta estacionaria si tjFetf Ω=)(
Por ser sistema lineal, la respuesta es a la misma frecuencia que la excitación: tj
XetxΩ=)( ; ; tjXejtx ΩΩ=)(
&
tjXetx
ΩΩ−= 2)(&&
Reemplazando en las ecuaciones del movimiento, se obtiene:
( ) tjtj FeXekcjm ΩΩ =+Ω+Ω− 2
kcjm
eFeXx
Fj
xj
+Ω+Ω−==
2
0
0
φφ
por lo tanto el módulo (igual a ecuación (1-11)):
( ) 22
2
0
2222
0
0
21
⎥⎦⎤
⎢⎣⎡ Ω+⎥
⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛Ω−
=Ω+Ω−
=
nn
kF
cmk
FX
ωξ
ω
Análisis de Sistemas Dinámicos
y las fases (igual a ecuación (1-12)):
22
1
2
)(
⎟⎠⎞
⎜⎝⎛Ω−
Ω
−=Ω−Ω−=−
n
n
FX
mk
ctg
ω
ωξ
φφ
si y , se tiene: 0=
Fφ φφ −=
X
2
1
2
⎟⎠⎞
⎜⎝⎛Ω−
Ω
=
n
n
tg
ω
ωξ
φ
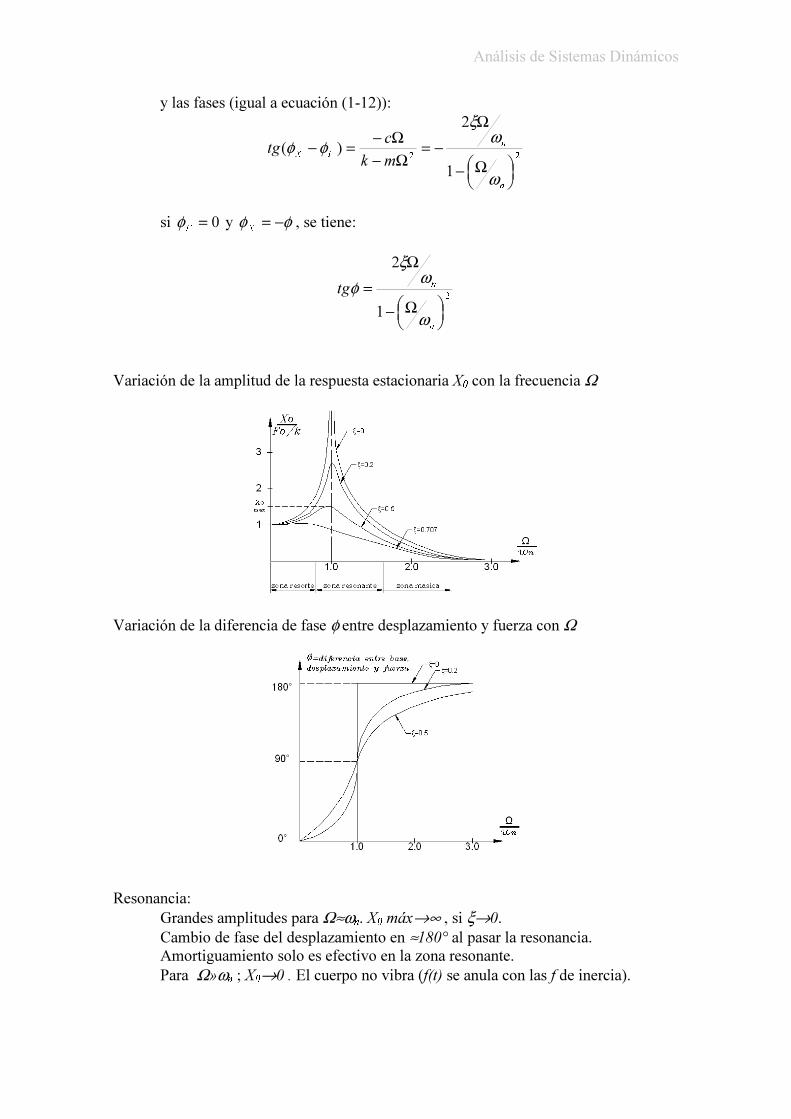
Variación de la amplitud de la respuesta estacionaria X B0B con la frecuencia Ω
Variación de la diferencia de fase φ entre desplazamiento y fuerza con Ω
Resonancia:
Grandes amplitudes para Ω≈ωBnB. X B0B máx→∞ , si ξ→0. Cambio de fase del desplazamiento en ≈180° al pasar la resonancia. Amortiguamiento solo es efectivo en la zona resonante. Para Ω»ωBnB ; X B0B→0 . El cuerpo no vibra (f(t) se anula con las f de inercia).
Análisis de Sistemas Dinámicos
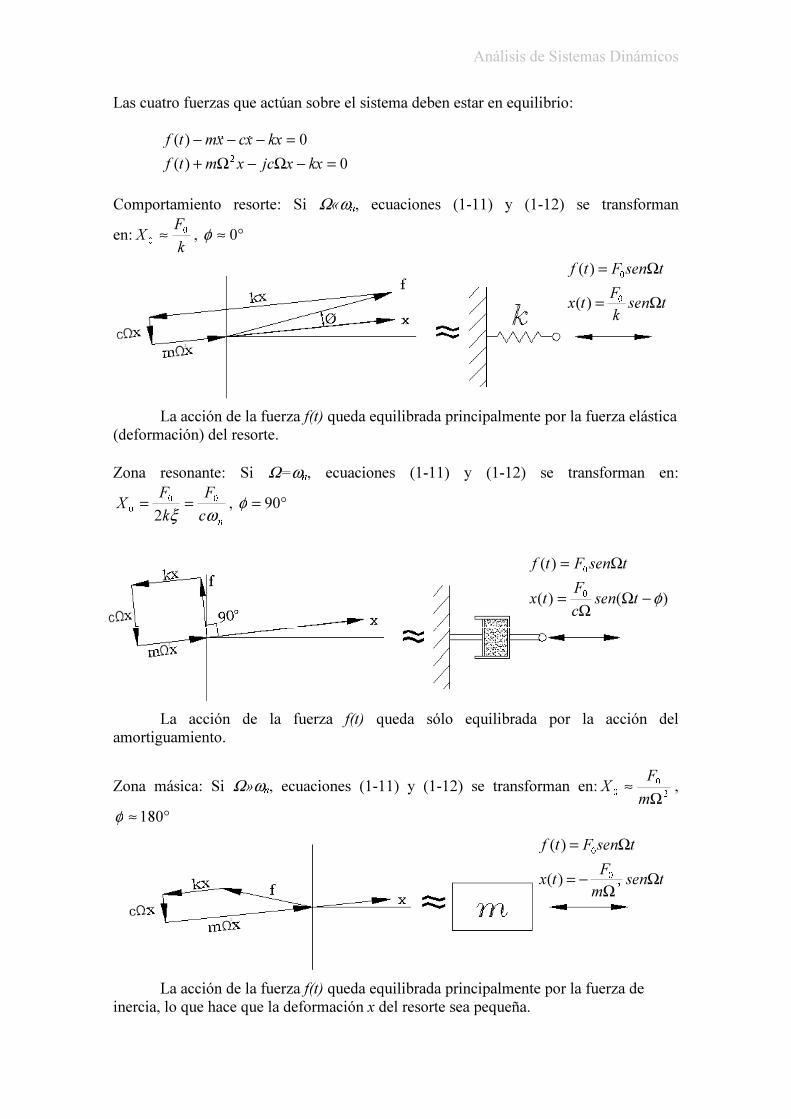
Las cuatro fuerzas que actúan sobre el sistema deben estar en equilibrio:
0)( =−−− kxxcxmtf&&&
0)( 2 =−Ω−Ω+ kxxjcxmtf
Comportamiento resorte: Si Ω«ωBnB, ecuaciones (1-11) y (1-12) se transforman
en:k
FX
0
0≈ , °≈ 0φ
tsenk
Ftx
tsenFtf
Ω=
Ω=
0
0
)(
)(
La acción de la fuerza f(t) queda equilibrada principalmente por la fuerza elástica (deformación) del resorte. Zona resonante: Si Ω=ωBnB, ecuaciones (1-11) y (1-12) se transforman en:
nc
F
k
FX
ωξ00
0
2== , °= 90φ
)()(
)(
0
0
φ−ΩΩ
=
Ω=
tsenc
Ftx
tsenFtf
La acción de la fuerza f(t) queda sólo equilibrada por la acción del amortiguamiento.
Zona másica: Si Ω»ωBnB, ecuaciones (1-11) y (1-12) se transforman en:2
0
0 Ω≈m
FX ,
°≈ 180φ
tsenm
Ftx
tsenFtf
ΩΩ
−=
Ω=
2
0
0
)(
)(
La acción de la fuerza f(t) queda equilibrada principalmente por la fuerza de inercia, lo que hace que la deformación x del resorte sea pequeña.
Análisis de Sistemas Dinámicos
1.3.3.- La función de transferencia y la función respuesta (en frecuencias)
La función de transferencia de un sistema lineal se define como la relación de la transformada de Laplace de la variable de entrada, suponiendo que todas las condiciones iniciales se hacen igual a cero. Para el sistema ideal de 1 grado de libertad:
)(tfkxxcxm =++&&&
( ) ( ) )()()0()()0()0()(2 tfskXxssXcxsxsXsm =+−+−− ++&
si: 0)0()0( == xx
&
222
2
11
)(
)()(
nnss
m
kcsmssF
sXsH
ωξω ++=
++==
Formas alternativas de la función de transferencia Diferentes funciones de transferencia son utilizadas en el análisis de vibraciones, dependiendo de si se usa el desplazamiento, velocidad o aceleración. Función de Transferencia
Compliancia dinámica
Receptancia =F
X
Flexibilidad dinámica
Movilidad = F
V
Acelerancia = F
A
Función de Transf. inversa Rigidez dinámica =
X
F Impedancia =
V
F Masa efectiva =
A
F
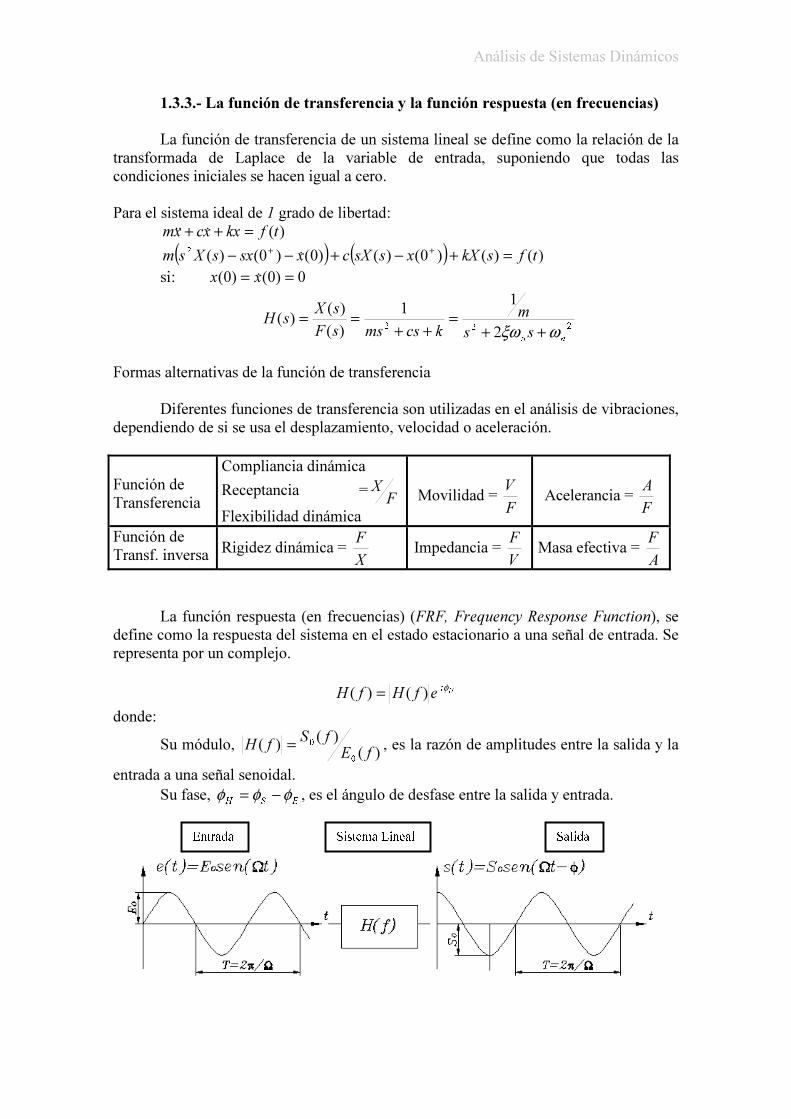
La función respuesta (en frecuencias) (FRF, Frequency Response Function), se define como la respuesta del sistema en el estado estacionario a una señal de entrada. Se representa por un complejo.
HjefHfH
φ)()( =
donde:
Su módulo, )(
)()(
0
0
fEfS
fH = , es la razón de amplitudes entre la salida y la
entrada a una señal senoidal. Su fase, , es el ángulo de desfase entre la salida y entrada.
ESHφφφ −=
Salida Sistema Lineal Entrada

Análisis de Sistemas Dinámicos
Puesto que las transformadas de Fourier y Laplace están estrechamente relacionadas, especialmente cuando la función f(t) se define solo para t=0, como frecuentemente es el caso ¿ Por qué usar ambas transformadas?
∫∞ −=0
)()( dtetfsF st
∫∞
∞−= dtetfF tjωω )()(
La transformada de Laplace nos permite investigar la ubicación en el plano s de los polos y ceros, y por lo tanto su estabilidad. La función respuesta en frecuencia es la facilidad para determinarla experimentalmente. Formas de representación de las funciones respuestas 1.- Diagrama de Bodé: Módulo y fase v/s la frecuencia. 2.- Diagrama de Nyquist o polar: Parte real v/s parte imaginaria. 3.- Parte real e imaginaria v/s la frecuencia. EJEMPLO: Función Respuesta del sistema ideal
200= kgm
Par
:
01,02
503
1
207,125
3160
2
==
=
=−=
===
=
n
nnd
n
m
c
mNsc
Hzs
rad
mk
mkNk
ωξ
ωξωω
ω
a :0≈ΩkF
XfH
1)(
0
0 ==
Análisis de Sistemas Dinámicos
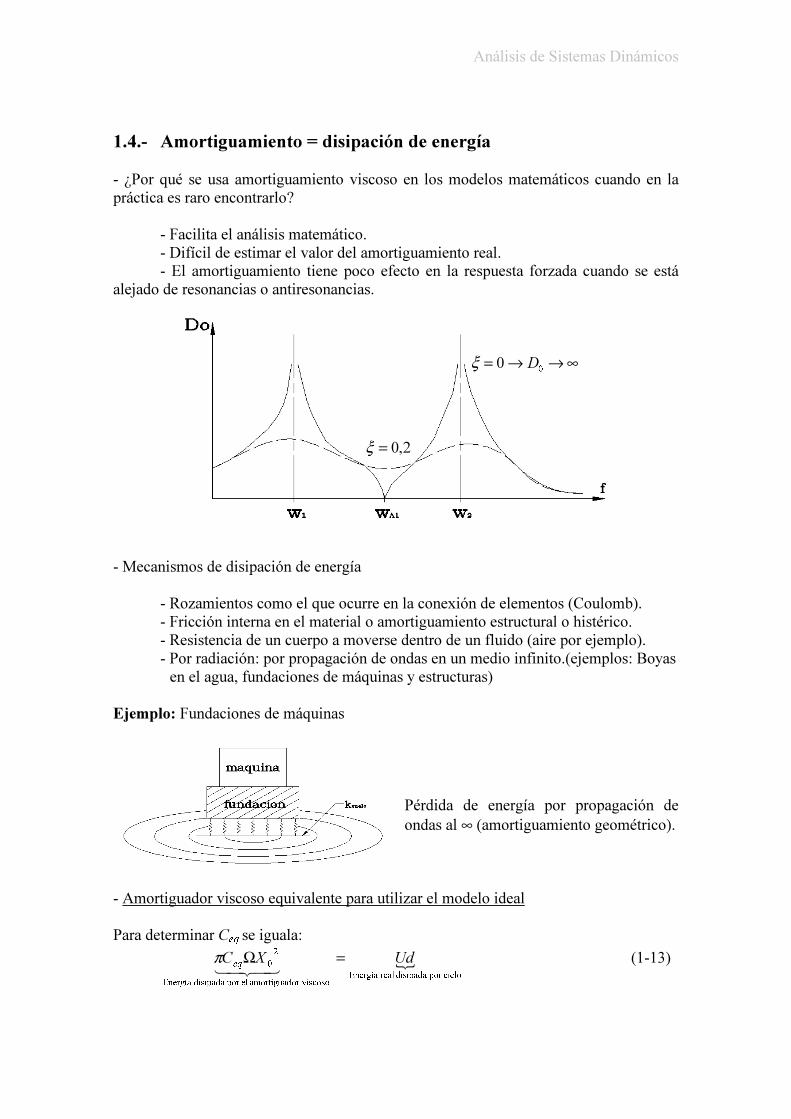
1.4.- Amortiguamiento = disipación de energía - ¿Por qué se usa amortiguamiento viscoso en los modelos matemáticos cuando en la práctica es raro encontrarlo? - Facilita el análisis matemático. - Difícil de estimar el valor del amortiguamiento real. - El amortiguamiento tiene poco efecto en la respuesta forzada cuando se está alejado de resonancias o antiresonancias.
∞→→=0
0 Dξ
2,0=ξ
- Mecanismos de disipación de energía
- Rozamientos como el que ocurre en la conexión de elementos (Coulomb). - Fricción interna en el material o amortiguamiento estructural o histérico. - Resistencia de un cuerpo a moverse dentro de un fluido (aire por ejemplo). - Por radiación: por propagación de ondas en un medio infinito.(ejemplos: Boyas
en el agua, fundaciones de máquinas y estructuras)
Ejemplo: Fundaciones de máquinas
Pérdida de energía por propagación de ondas al ∞ (amortiguamiento geométrico).
- UAmortiguador viscoso equivalente para utilizar el modelo idealU
Para determinar C Beq
Bse iguala:
ciclopor disipada real Energía or viscosoamortiguad elpor disipada Energía
2
0 UdXCeq
=Ω43421
π (1-13)
Análisis de Sistemas Dinámicos
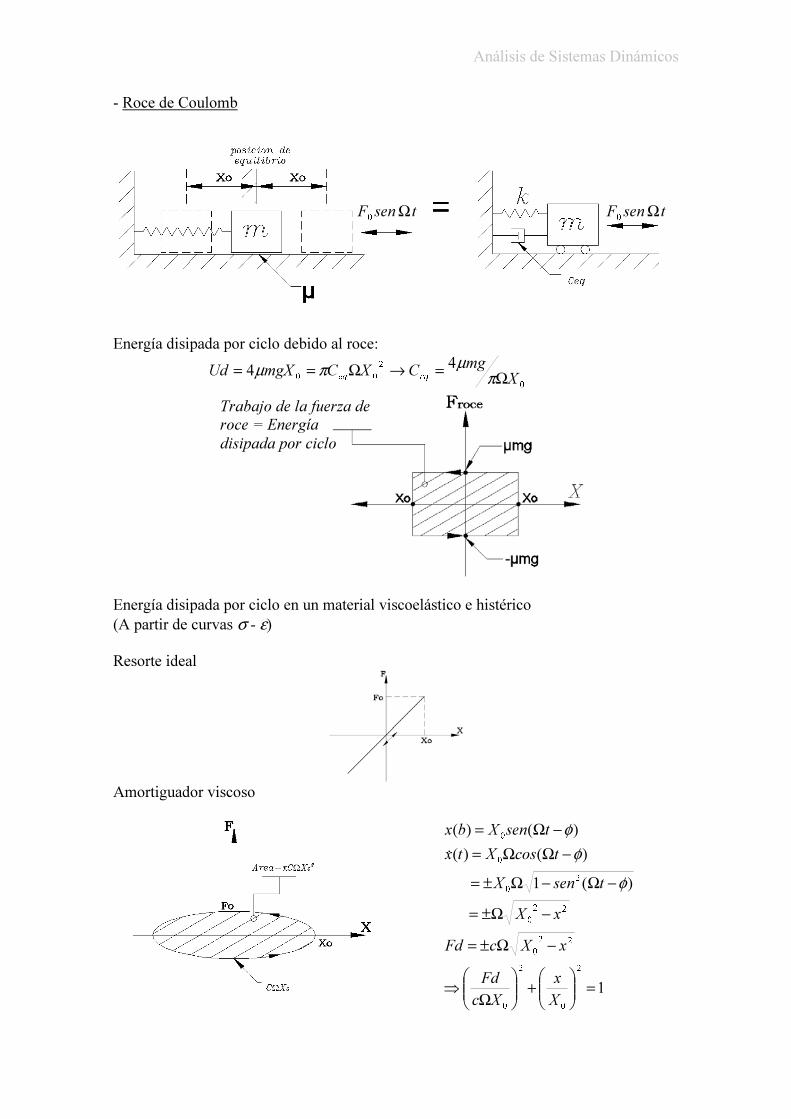
- URoce de Coulomb U
←→ tsenF Ω0
tsenF Ω0
Energía disipada por ciclo debido al roce:
0
2
00
44
Xmg
CXCmgXUdeqeq Ω=→Ω== π
µπµ
Trabajo de la fuerza de
roce = Energía
disipada por ciclo
Energía disipada por ciclo en un material viscoelástico e histérico (A partir de curvas σ - ε) Resorte ideal
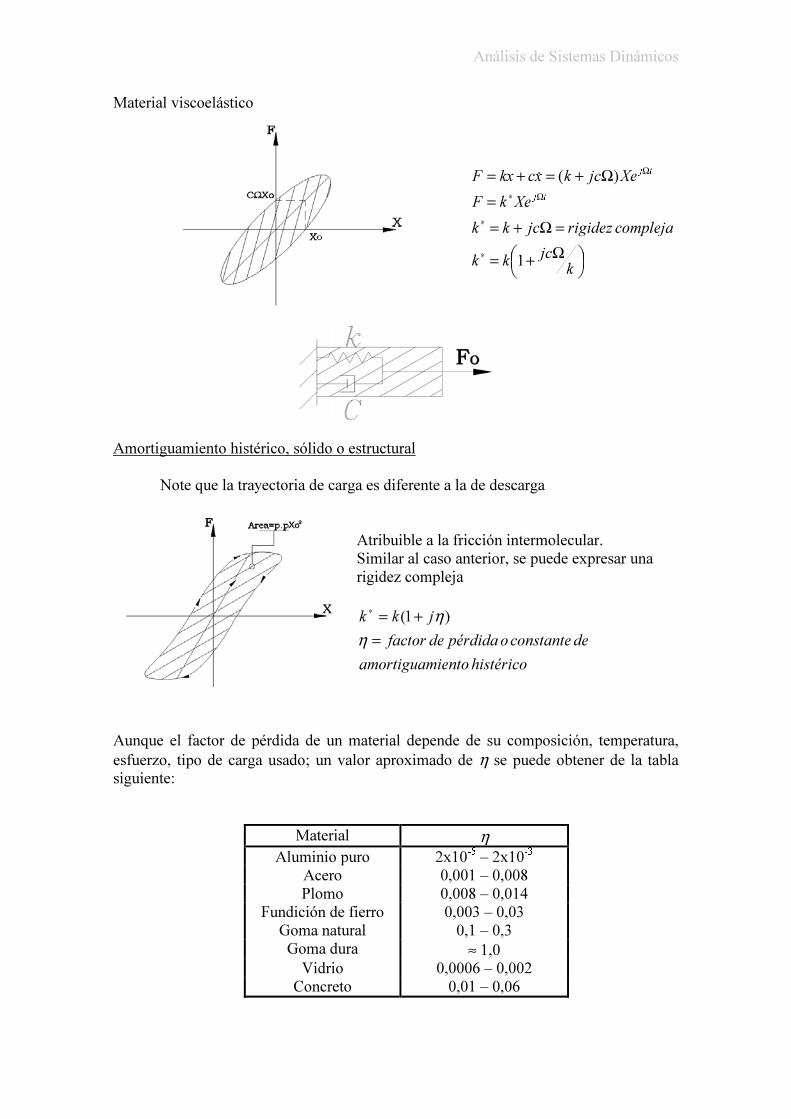
Amortiguador viscoso
1
)(1
)()(
)()(
2
0
2
0
22
0
22
0
2
0
0
0
=⎟⎟⎠
⎞⎜⎜⎝
⎛+⎟⎟
⎠
⎞⎜⎜⎝
⎛
Ω⇒
−Ω±=
−Ω±=
−Ω−Ω±=
−ΩΩ=−Ω=
X
x
Xc
Fd
xXcFd
xX
tsenX
tcosXtx
tsenXbx
φ
φφ
&
Análisis de Sistemas Dinámicos
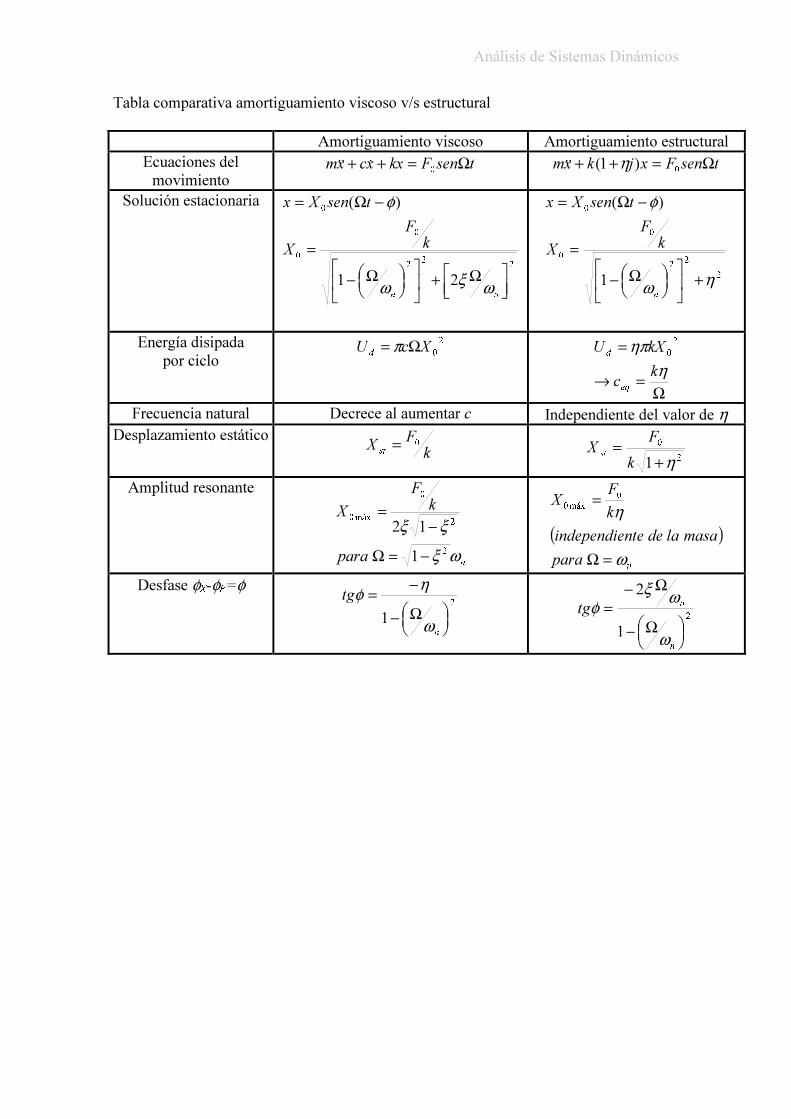
Material viscoelástico
⎟⎠⎞⎜
⎝⎛ Ω+=
=Ω+=
=Ω+=+=
∗
∗
Ω∗
Ω
kjc
kk
complejarigidezjckk
XekF
XejckxckxF
tj
tj
1
)(&
UAmortiguamiento histérico, sólido o estructural
Note que la trayectoria de carga es diferente a la de descarga
Atribuible a la fricción intermolecular. Similar al caso anterior, se puede expresar una rigidez compleja
histéricoientoamortiguam
deconstanteopérdidadefactor
jkk
=+=∗
ηη)1(
Aunque el factor de pérdida de un material depende de su composición, temperatura, esfuerzo, tipo de carga usado; un valor aproximado de η se puede obtener de la tabla siguiente:
Material η Aluminio puro 2x10P
-5P – 2x10P
-3P
Acero 0,001 – 0,008 Plomo 0,008 – 0,014
Fundición de fierro 0,003 – 0,03 Goma natural 0,1 – 0,3 Goma dura ≈ 1,0
Vidrio 0,0006 – 0,002 Concreto 0,01 – 0,06
Análisis de Sistemas Dinámicos
Tabla comparativa amortiguamiento viscoso v/s estructural
Amortiguamiento viscoso Amortiguamiento estructural Ecuaciones del
movimiento tsenFkxxcxm Ω=++
0&&& tsenFxjkxm Ω=++
0)1( η
&&
Solución estacionaria
22
2
0
0
0
21
)(
⎥⎦⎤
⎢⎣⎡ Ω+⎥
⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛Ω−
=
−Ω=
nn
k
F
X
tsenXx
ωξω
φ
2
22
0
0
0
1
)(
ηω
φ
+⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛Ω−
=
−Ω=
n
k
F
X
tsenXx
Energía disipada por ciclo
2
0XcU
dΩ= π
Ω=→
=η
ηπk
c
kXU
eq
d
2
0
Frecuencia natural Decrece al aumentar c Independiente del valor de η Desplazamiento estático
k
FX
st
0=
2
0
1 η+=k
FX
st
Amplitud resonante
npara
kF
X
ωξ
ξξ2
2
0
máx0
1
12
−=Ω
−=
( )n
para
masaladenteindependie
k
FX
ω
η
=Ω
= 0
máx0
Desfase φBXB-φBFB=φ 2
1 ⎟⎠⎞
⎜⎝⎛Ω−
−=
n
tg
ω
ηφ
2
1
2
⎟⎠⎞
⎜⎝⎛Ω−
Ω−=
n
n
tg
ω
ωξφ
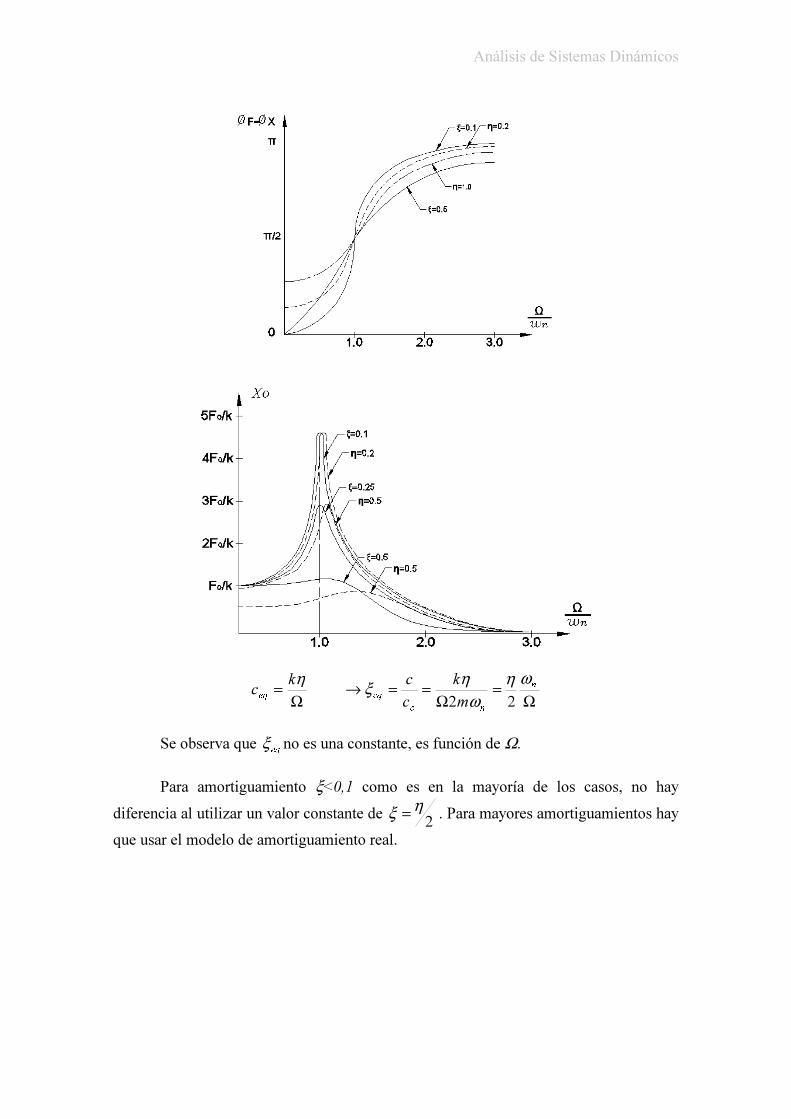
Análisis de Sistemas Dinámicos
Ω= ηk
ceq
Ω
=Ω
==→ n
nc
eq
m
k
c
c ωηωηξ
22
Se observa que no es una constante, es función de Ω.
eqξ
Para amortiguamiento ξ<0,1 como es en la mayoría de los casos, no hay
diferencia al utilizar un valor constante de 2
ηξ = . Para mayores amortiguamientos hay
que usar el modelo de amortiguamiento real.

Análisis de Sistemas Dinámicos
1.5.- Ejemplo de sistemas que pueden modelarse como el sistema ideal
de un grado de libertad
1.5.1- Conjunto de cuerpos rígidos donde las deformaciones del sistema se
generan en unos elementos resortes
Ejemplo: Determinar la amplitud de las vibraciones estacionarias del punto A de la placa de la figura.
A
tsenF Ω0
Se miden los z(t) a partir de su posición de equilibrio (no se considera por lo
tanto el efecto del peso). Se supone que la placa se comporta como rígida respecto al resorte.
fuerzaaFF
rigideza
kbk
dageneralizamasaba
bmcon
tsenFzkzm
tsenaFza
kbz
bab
zba
batsenFza
kb
atz
IatsenFbkb
IM
:
:
:3
:
3
3
)(
00
2
22
0
0
222
22
0
2
00
00
⋅=
=
+⋅⋅=
Ω=+
Ω⋅=+⋅+⋅⋅
⋅+⋅⋅=⋅Ω+−
⋅==⋅Ω+⋅−
=
∗
∗
∗
∗∗∗
∑
γ
γ
γ
θθθ
θ
&&
&&
&&
&&
&&
Análisis de Sistemas Dinámicos
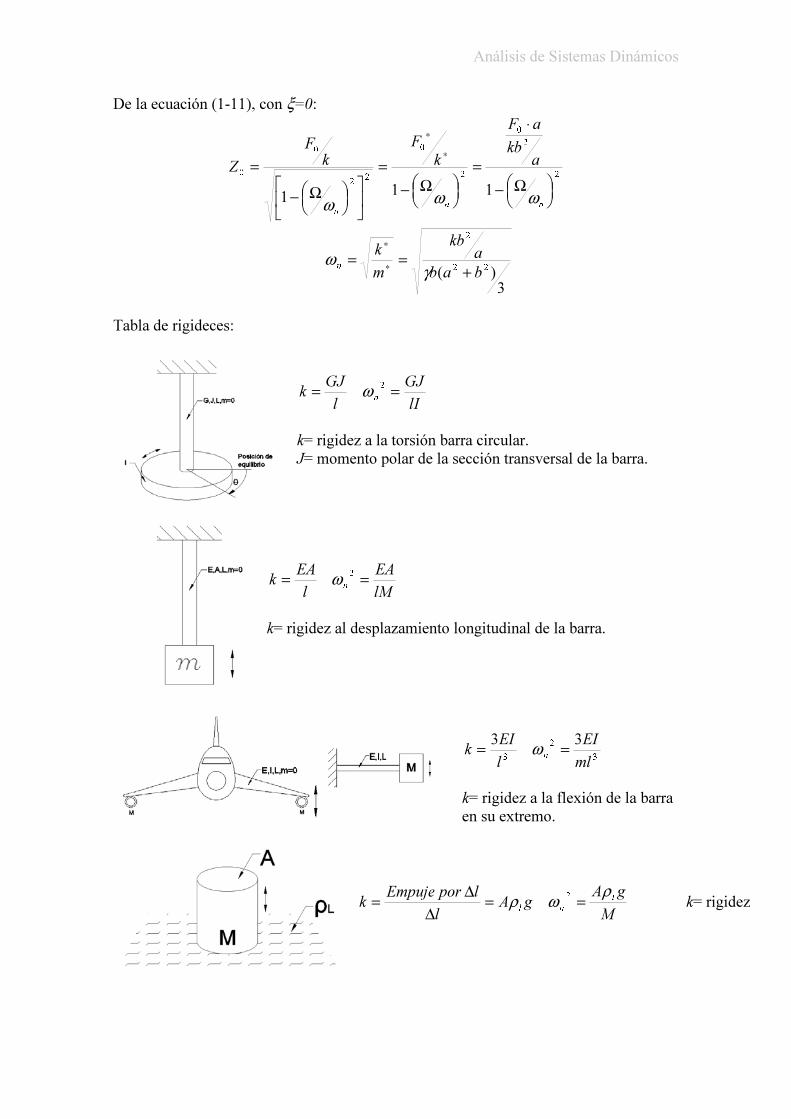
De la ecuación (1-11), con ξ=0:
2
2
0
2
0
22
0
0
111 ⎟
⎠⎞
⎜⎝⎛Ω−
⋅
=⎟⎠⎞
⎜⎝⎛Ω−
=
⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛Ω−
=∗
∗
nn
n
akb
aF
k
F
k
F
Z
ωωω
3)(
22
2
bab
akb
m
kn +
== ∗
∗
γω
Tabla de rigideces:
lI
GJ
l
GJk
n== 2ω
k= rigidez a la torsión barra circular. J= momento polar de la sección transversal de la barra.
lM
EA
l
EAk
n== 2ω
k= rigidez al desplazamiento longitudinal de la barra.
3
2
3
33
ml
EI
l
EIk
n== ω
k= rigidez a la flexión de la barra en su extremo.
M
gAgA
l
lporEmpujek l
nl
ρωρ ==∆
∆= 2 k= rigidez
Análisis de Sistemas Dinámicos
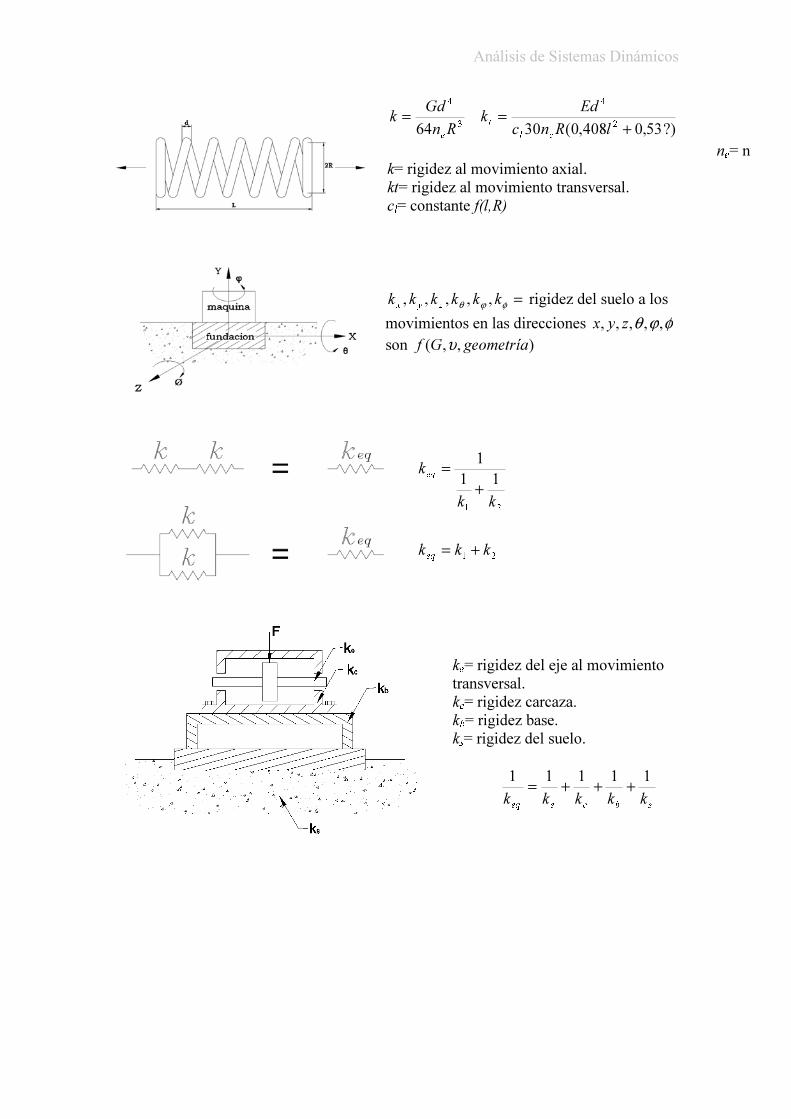
?)53,0408,0(30642
4
3
4
+==
lRnc
Edk
Rn
Gdk
el
t
e
nBeB= núk= rigidez al movimiento axial. kt= rigidez al movimiento transversal. c BlB= constante f(l,R)
=φϕθ kkkkkk
zyx,,,,, rigidez del suelo a los
movimientos en las direcciones φϕθ ,,,,, zyx
),,( geometríaGf
son υ
21
21
11
1
kkk
kk
k
eq
eq
+=
+=
k BeB= rigidez del eje al movimiento transversal. k BcB= rigidez carcaza. k BbB= rigidez base. k BsB= rigidez del suelo.
sbce kkkk
1111 +++eqk
1 =
Análisis de Sistemas Dinámicos
1.5.2- Sistemas con características elásticas repartidas donde se puede
suponer una forma de deformación
Para establecer un modelo de un grado de libertad de un sistema continuo
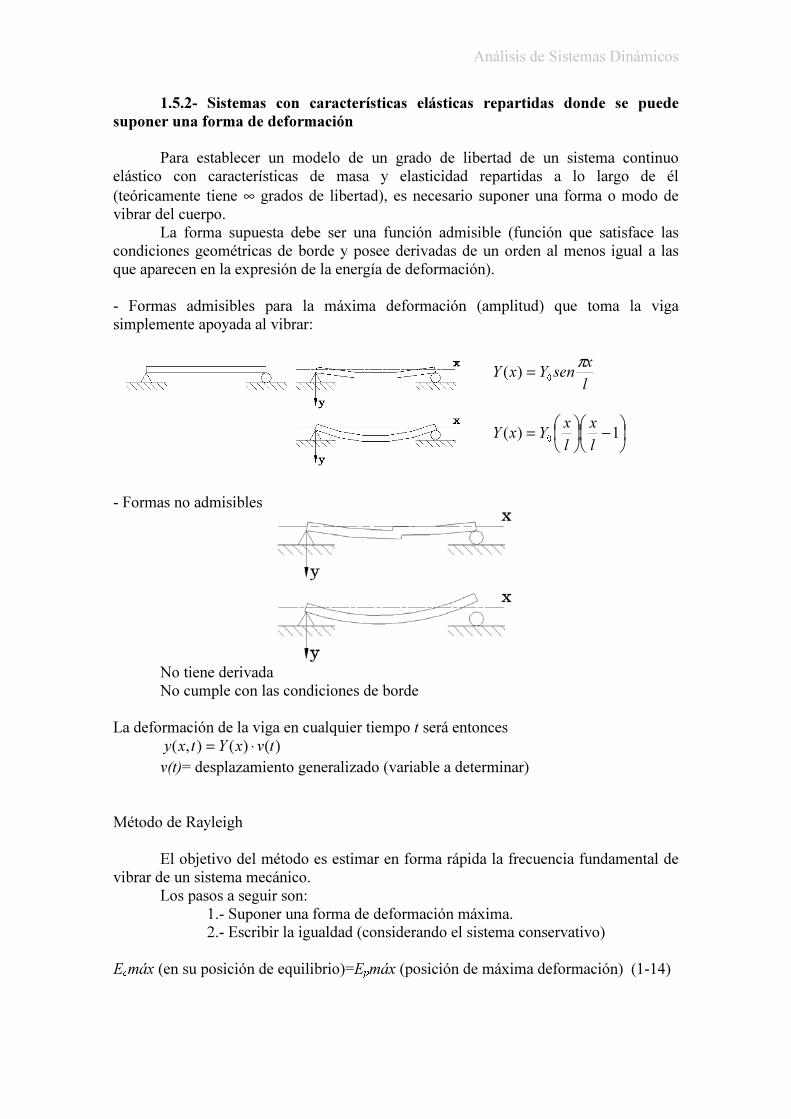
elástico con características de masa y elasticidad repartidas a lo largo de él (teóricamente tiene ∞ grados de libertad), es necesario suponer una forma o modo de vibrar del cuerpo. La forma supuesta debe ser una función admisible (función que satisface las condiciones geométricas de borde y posee derivadas de un orden al menos igual a las que aparecen en la expresión de la energía de deformación). - Formas admisibles para la máxima deformación (amplitud) que toma la viga simplemente apoyada al vibrar:
l
xsenYxY
π0
)( =
⎟⎠
⎞⎜⎝
⎛ −⎟⎠
⎞⎜⎝
⎛= 1)(0
l
x
l
xYxY
- Formas no admisibles
No tiene derivada
No cumple con las condiciones de borde La deformación de la viga en cualquier tiempo t será entonces
)()(),( tvxYtxy ⋅= v(t)= desplazamiento generalizado (variable a determinar)
Método de Rayleigh
El objetivo del método es estimar en forma rápida la frecuencia fundamental de vibrar de un sistema mecánico. Los pasos a seguir son:
1.- Suponer una forma de deformación máxima. 2.- Escribir la igualdad (considerando el sistema conservativo)
E BcBmáx (en su posición de equilibrio)=E BpBmáx (posición de máxima deformación) (1-14)

Análisis de Sistemas Dinámicos
Ejemplo: Determinar la frecuencia fundamental ωB1B de la viga uniforme de la figura:
xπ
m
k
kYYm
máxEmáxE
kYmáxE
Ym
máxymmáxE
tcosYy
tsenYty
n
n
pc
p
n
c
nn
n
=
=
=
=
=
=
==
2
2
0
2
0
2
2
0
2
0
2
2
0
0
2
1
2
2
1
2
)(2
1
)(
ω
ω
ω
ωωω
&
&
Notas: 1.- Si se hubiese asumido como forma
sl
x
l
xYtxy0
1),( ⎟⎠
⎞⎜⎝
⎛ −⎟⎠
⎞⎜⎝
⎛=
se obtiene:
3
2
1
120
ml
EI=ω (2
Cuando se usa la verdadera
frecuencia correcta. Para otra curva lala correcta. Esto se explica por el hecrequiere restricciones externas adicionun efecto rigidizante que aumenta ωBiB.
33
4
0
2
0
2
2
2
2
1
0
2
2
2
0
2
2
1
11
1
0
4,97
)(
2
1
)(2
2
1
)(
,)(),(
,)(
ml
EI
ml
EI
dxl
mxY
dxdx
ydEI
máxEmáxE
dxdx
ydEImáxE
dxl
mxY
dmmáxymáxE
tcosxYy
t cualquier en nDeformaciótsenxYtxy
máximanDeformaciól
senYxY
l
l
pc
l
p
l
c
==⎟⎟⎠
⎞⎜⎜⎝
⎛
=
=
⎟⎟⎠
⎞⎜⎜⎝
⎛=
=
=
==
=
∫
∫
∫
∫
∫
πω
ω
ωωω
&
&
de deformación una parábola:
ten1
ω
0% mayor que el valor anterior)
curva de deformación máxima se obtiene la frecuencia determinada será siempre mayor que
ho que cualquier desviación de la verdadera curva ales actuando sobre el sistema. Esto se traduce en

Análisis de Sistemas Dinámicos
2.- Comparando este resultado con un método de discretización, que se verá posteriormente, consistente en considerar concentradas las masas en los extremos de barras, se obtiene:
3
2 96
ml
EIn=ω
3.- Masas concentradas: El método de Rayleigh puede utilizarse para determinar la frecuencia fundamental de una viga o eje con masas concentradas, utilizando la curva de deformación estática debido a fuerzas iguales a los pesos de las masas concentradas.
)(2
1
)(2
1
332211
2
33
2
22
2
11
2
1
yMyMyMgmáxE
yMyMyMmáxE
p
c
++=
++= ω
∑
∑=2
2
1
ii
ii
yM
yMgω (1-15)
Resolución del ejemplo utilizando las ecuaciones de Lagrange:
3
4
2
0
3
2
0
4
2
3
2
0
42
0
0 0
3
2
0
242
04
242
2
2
2
0
2
0
2
0
2
0
22
0
2
2
022
422
1
4
)(
2
)()()(
2
1
:)()()()(),(
ml
EI
mY
l
YEI
ql
YEIq
mY
E
q
E
dt
d
l
YqEIdx
l
xsenY
l
qEIdx
x
yEIE
mYtqdx
l
xsenY
l
mtqdx
l
mtqxYE
dageneralizavariableoincógnitatqtql
xsenYtqxYtxy
q
pc
l l
p
ll
c
ππ
ω
π
πππ
π
π
==→
=+
=∂∂
+⎟⎟⎠
⎞⎜⎜⎝
⎛
∂∂
=⎟⎠
⎞⎜⎝
⎛=⎟⎟⎠
⎞⎜⎜⎝
⎛
∂∂=
=⎟⎠
⎞⎜⎝
⎛==
==
∫ ∫
∫∫
&&
&
&&
&

Análisis de Sistemas Dinámicos
1.6.- Vibraciones forzadas por movimiento de la base Las vibraciones pueden ser generadas no solo por fuerzas variables en el tiempo, sino que también por movimiento de sus puntos de apoyo (sismos, transmisiones de una máquina a otra, etc.). Supongamos que la base del resorte y amortiguador se mueven con x BbB(t). Ecuaciones del movimiento: 1.- En función del desplazamiento absoluto x(t)
)(
0)()(
tfkxxckxxcxm
xxkxxcxm
bb
bb
∗=+=++
=−+−+
&&&&
&&&&
( ) ( )ffbbb
bbbb
tsenFtsenkcXtsenkXtcosXctf
tcosXxtsenXxsi
φφ +Ω=+Ω+Ω=Ω+ΩΩ=→
ΩΩ=Ω=∗∗
0
222)(
;:&
De la ecuación (1-11):
22
2
2
22
2
222
0
21
21
21 ⎥⎦
⎤⎢⎣⎡ Ω+⎥
⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛Ω−
⎟⎠⎞
⎜⎝⎛ Ω+
=
⎥⎦⎤
⎢⎣⎡ Ω+⎥
⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛Ω−
+Ω=
nn
n
b
nn
b
Xk
kcX
X
ωξ
ω
ωξ
ωξ
ω
(1-17)
2.- En función del desplazamiento relativo x BrB(t) Reemplazando )()()( txtxtx
rb+=
Se obtiene )(tpxmkxxcxm effbrrr =−=++
&&&&&
:)(tpeff representa la carga efectiva debido a la excitación de los apoyos.
Nota: Para la determinación de esfuerzos en los elementos elásticos es más útil expresar las ecuaciones del movimiento en función de los desplazamientos relativos a la base.
Análisis de Sistemas Dinámicos
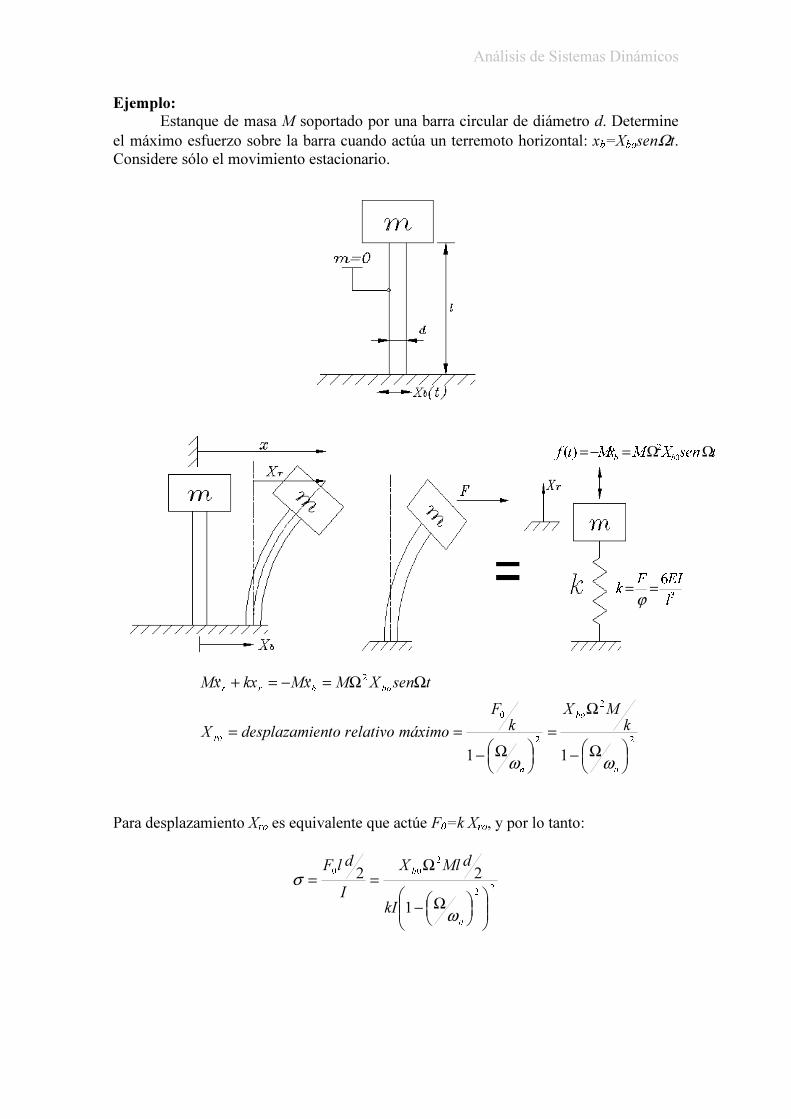
Ejemplo:
Estanque de masa M soportado por una barra circular de diámetro d. Determine el máximo esfuerzo sobre la barra cuando actúa un terremoto horizontal: x BbB=X BboBsenΩt. Considere sólo el movimiento estacionario.
tsenXMxMtf
bbΩΩ=−=
0
2)(
&&
3
6
l
EIFk ==
ϕ
2
2
2
0
2
11 ⎟⎠⎞
⎜⎝⎛Ω−
Ω=
⎟⎠⎞
⎜⎝⎛Ω−
==
ΩΩ=−=+
n
bo
n
ro
bobrr
kMX
kF
máximorelativoentodesplazamiX
tsenXMxMkxxM
ωω
&&&&
Para desplazamiento X BroB es equivalente que actúe F B0B=k X BroB, y por lo tanto:
22
2
00
1
22
⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎠⎞
⎜⎝⎛Ω−
Ω==
n
b
kI
dMlX
I
dlF
ω
σ
Análisis de Sistemas Dinámicos
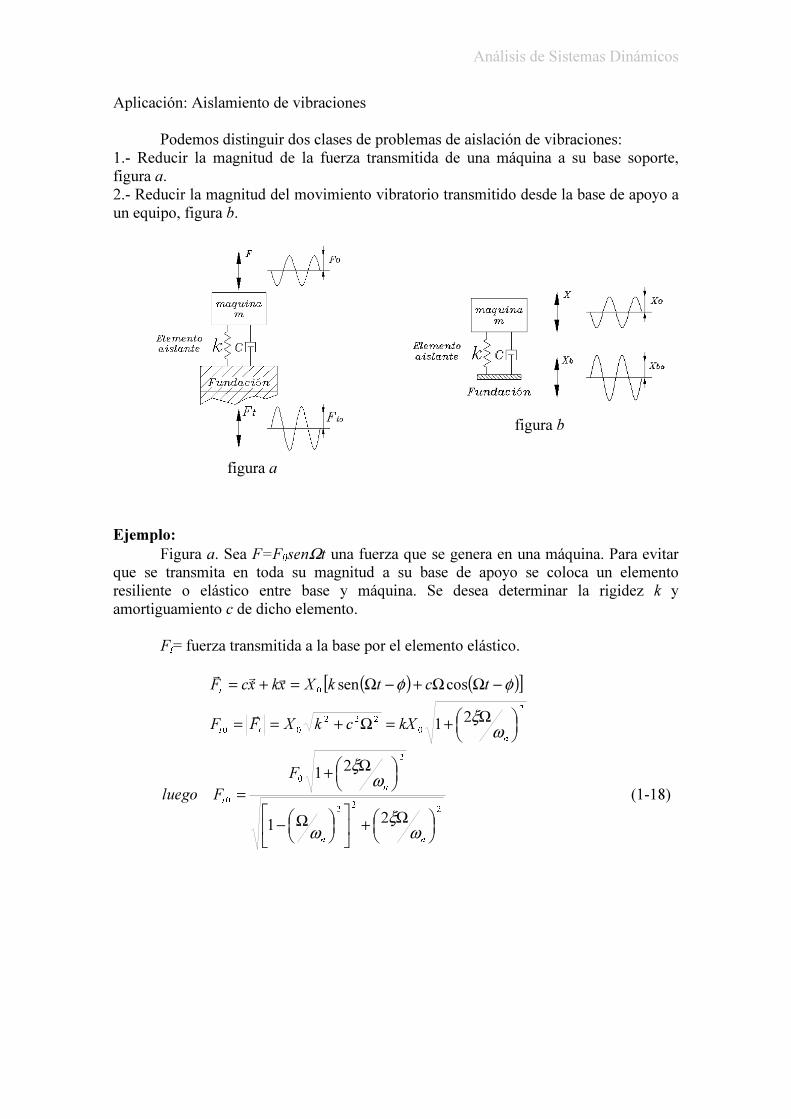
Aplicación: Aislamiento de vibraciones Podemos distinguir dos clases de problemas de aislación de vibraciones: 1.- Reducir la magnitud de la fuerza transmitida de una máquina a su base soporte, figura a. 2.- Reducir la magnitud del movimiento vibratorio transmitido desde la base de apoyo a un equipo, figura b.
figura a
figura b
Ejemplo:
Figura a. Sea F=F B0BsenΩt una fuerza que se genera en una máquina. Para evitar que se transmita en toda su magnitud a su base de apoyo se coloca un elemento resiliente o elástico entre base y máquina. Se desea determinar la rigidez k y amortiguamiento c de dicho elemento. F BtB= fuerza transmitida a la base por el elemento elástico.
( ) ([ ])2
0
222
00
0
21
cossen
⎟⎠⎞
⎜⎝⎛ Ω+=Ω+==
−ΩΩ+−Ω=+=
n
tt
t
kXckXFF
tctkXxkxcF
ωξ
φφ
r
rr&
r
22
2
2
0
0
21
21
⎟⎠⎞
⎜⎝⎛ Ω+⎥
⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛Ω−
⎟⎠⎞
⎜⎝⎛ Ω+
=
nn
n
t
F
Fluego
ωξ
ω
ωξ
(1-18)
Análisis de Sistemas Dinámicos
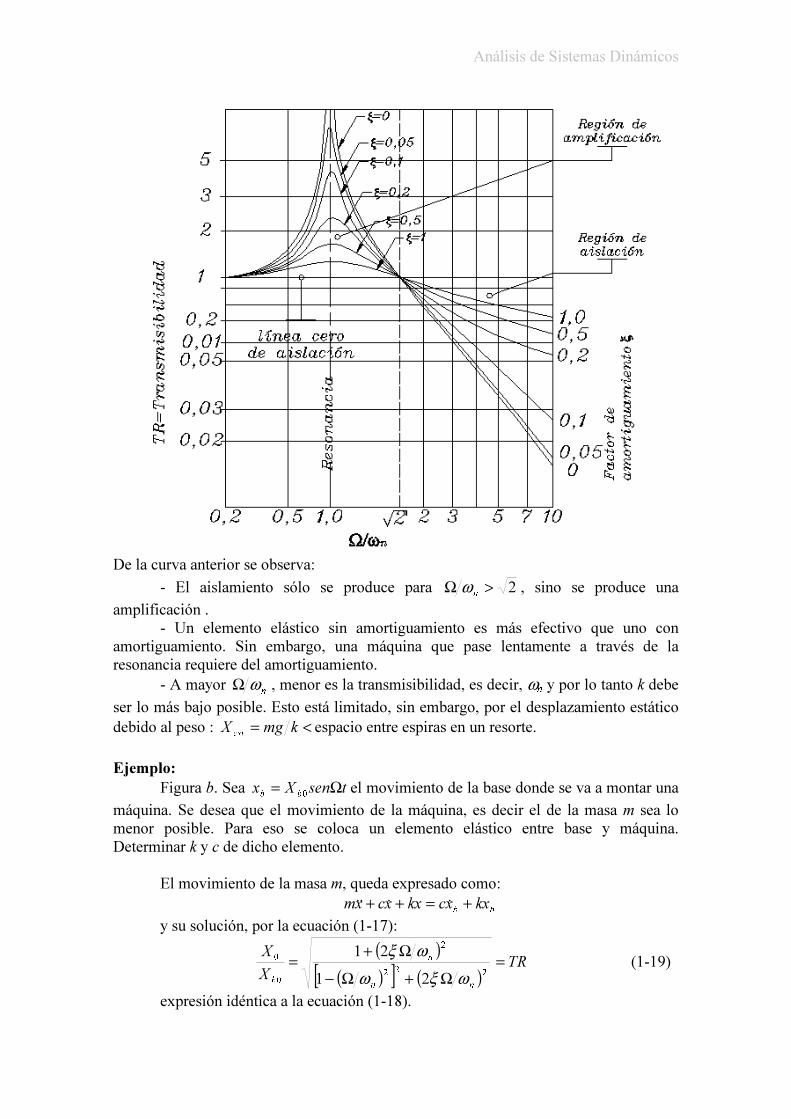
De la curva anterior se observa:
- El aislamiento sólo se produce para 2>Ωn
ω , sino se produce una
amplificación . - Un elemento elástico sin amortiguamiento es más efectivo que uno con amortiguamiento. Sin embargo, una máquina que pase lentamente a través de la resonancia requiere del amortiguamiento. - A mayor
nωΩ , menor es la transmisibilidad, es decir, ωBnB y por lo tanto k debe
ser lo más bajo posible. Esto está limitado, sin embargo, por el desplazamiento estático debido al peso : <= kmgX
estespacio entre espiras en un resorte.
Ejemplo:
Figura b. Sea el movimiento de la base donde se va a montar una
máquina. Se desea que el movimiento de la máquina, es decir el de la masa m sea lo menor posible. Para eso se coloca un elemento elástico entre base y máquina. Determinar k y c de dicho elemento.
tsenXxbb
Ω=0
El movimiento de la masa m, queda expresado como:
bbkxxckxxcxm +=++
&&&&
y su solución, por la ecuación (1-17):
( )( )[ ] ( )
TRX
X
nn
n
b
=Ω+Ω−
Ω+=
222
2
0
0
21
21
ωξω
ωξ (1-19)
expresión idéntica a la ecuación (1-18).

Análisis de Sistemas Dinámicos
1.7.- Vibraciones forzadas con fuerza periódica cualquiera Vamos a ver que es posible utilizar las mismas ecuaciones anteriores para determinar la respuesta del sistema a una excitación periódica cualquiera. Para ello: 1.- Expresar la excitación en una serie de Fourier. 2.- Si el sistema es lineal, utilizar el principio de superposición: la respuesta total del sistema será la suma de las respuestas debido a cada término de la serie. Una función periódica x(t), de período TB0B y frecuencia
001 Tf = , se expresa mediante
una serie de Fourier:
( )
"":
"":
2)(2
2)(2
:)(1
222)(
22
0
0
0
0
0
0
00
0
1
00
1
0
1
00
0
0
0
narmónicaladeFaseb
atgarc
narmónicaladeAmplitudbaX
dttfnsentxT
b
dttfncostxT
a
medioValordttxT
a
tfnsenXatfnsenbtfncosaatx
n
n
n
nnn
T
n
T
n
T
n
nn
n
n
n
n
⎟⎠⎞
⎜⎝⎛=
+=
=
=
=
++=++=
∫
∫
∫
∑∑∑∞
=
∞
=
∞
=
ϕ
π
π
ϕπππ
(1-20)
)2()(000
ϕπ ++= tfsenXxtx
Análisis de Sistemas Dinámicos
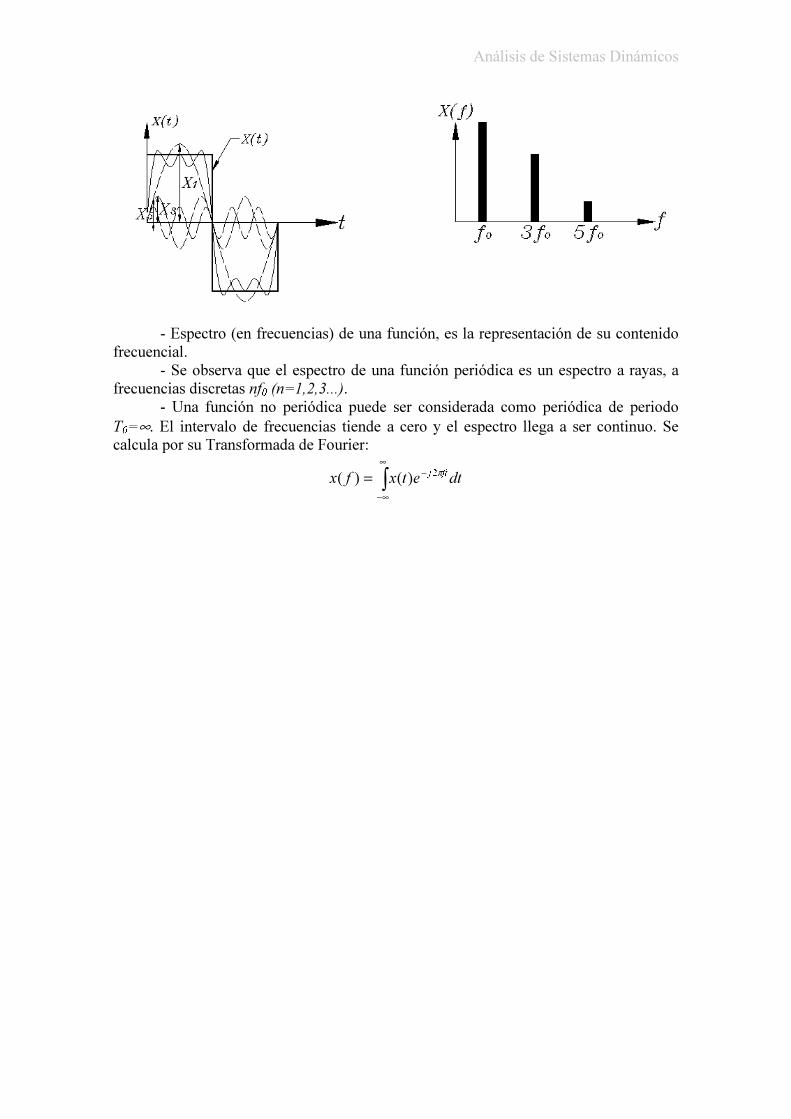
- Espectro (en frecuencias) de una función, es la representación de su contenido
frecuencial. - Se observa que el espectro de una función periódica es un espectro a rayas, a frecuencias discretas nfB0B (n=1,2,3...). - Una función no periódica puede ser considerada como periódica de periodo TB0B=∞. El intervalo de frecuencias tiende a cero y el espectro llega a ser continuo. Se calcula por su Transformada de Fourier:
∫∞
∞−
−= dtetxfx ftj π2)()(

Análisis de Sistemas Dinámicos
1.8.- Respuesta a una excitación dinámica cualquiera
La respuesta del sistema ideal a una fuerza excitadora cualquiera puede determinarse siguiendo los pasos siguientes: 1.- Considerar la fuerza arbitraria como una serie de impulsos (como el achurado para t=η) y determinar la respuesta a cada impulso.
2.- Utilizar el principio de superposición (sistema lineal) para sumar la contribución de cada impulso.
1.8.1.- Respuesta a una impulso ( ) Iˆ
Una fuerza impulsiva es una fuerza de gran magnitud que actúa durante un tiempo muy pequeño. El impulso es: Iˆ
∫= dttfI )(ˆ
Cuando 0→ε e , se denomina el impulso unitario o la función delta δ.
1ˆ =I
La acción de un impulso es comunicarle al sistema una velocidad inicial mIx ˆ)0( =
& y por lo tanto la respuesta del sistema ideal será (ecuación (1-5)):
tsenem
Itsene
xtx
d
t
d
d
t
d
nn ωω
ωω
ξωξω −− ==ˆ)0(
)(&
1.8.2.- Respuesta impulsional h(t)
Se define como la respuesta del sistema a un impulso unitario. Por lo tanto, para el sistema ideal:
tsenm
eth
d
d
tn
ωω
ξω−
=)( (1-21)
Análisis de Sistemas Dinámicos
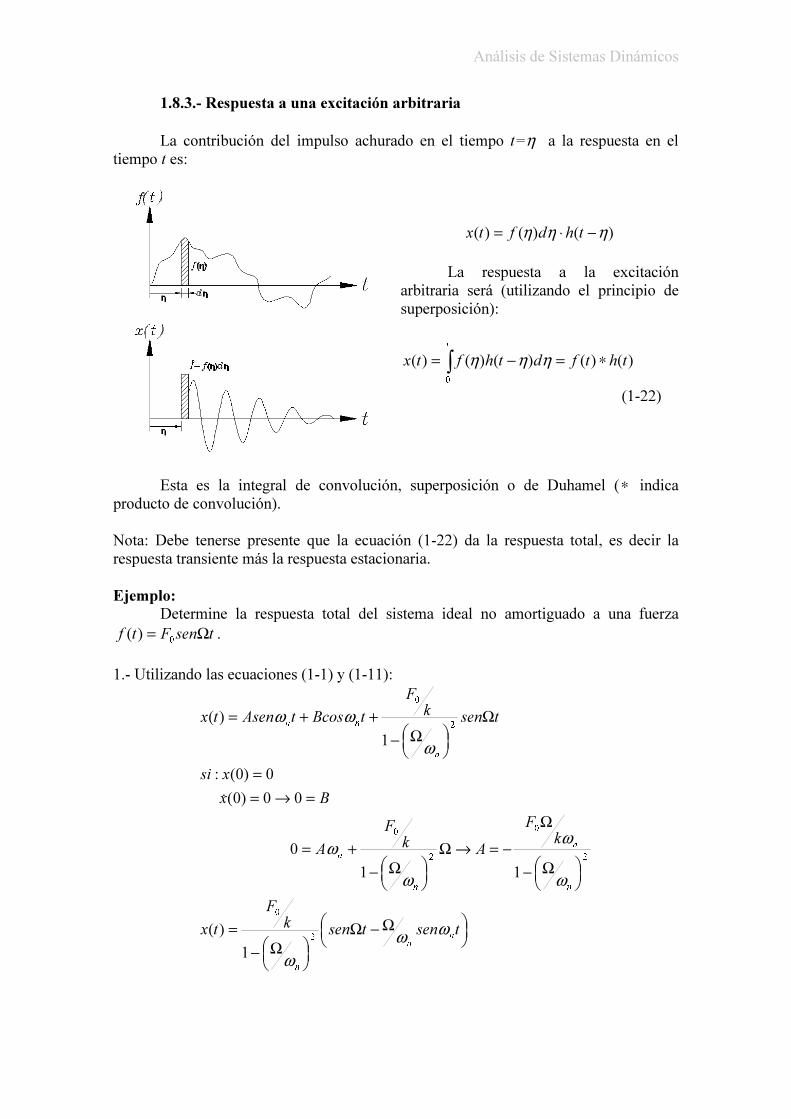
1.8.3.- Respuesta a una excitación arbitraria
La contribución del impulso achurado en el tiempo t=η a la respuesta en el tiempo t es:
)()()( ηηη −⋅= thdftx
La respuesta a la excitación arbitraria será (utilizando el principio de superposición):
∫ ∗=−=t
thtfdthftx0
)()()()()( ηηη
(1-22)
Esta es la integral de convolución, superposición o de Duhamel (∗ indica
producto de convolución). Nota: Debe tenerse presente que la ecuación (1-22) da la respuesta total, es decir la respuesta transiente más la respuesta estacionaria. Ejemplo:
Determine la respuesta total del sistema ideal no amortiguado a una fuerza . tsenFtf Ω=
0)(
1.- Utilizando las ecuaciones (1-1) y (1-11):
⎟⎠⎞
⎜⎝⎛ Ω−Ω
⎟⎠⎞
⎜⎝⎛Ω−
=
⎟⎠⎞
⎜⎝⎛Ω−
Ω
−=→Ω⎟⎠⎞
⎜⎝⎛Ω−
+=
=→==
Ω⎟⎠⎞
⎜⎝⎛Ω−
++=
tsentsenk
F
tx
k
F
Ak
F
A
Bx
xsi
tsenk
F
tscoBtsenAtx
n
n
n
n
n
n
n
n
nn
ωωω
ω
ω
ω
ω
ω
ωω
2
0
2
0
2
0
2
0
1
)(
11
0
00)0(
0)0(:
1
)(
&
Análisis de Sistemas Dinámicos
2.- Utilizando la integral de Duhamel:
[ ]
[ ] [ ]
⎟⎠⎞
⎜⎝⎛ Ω−Ω
⎟⎠⎞
⎜⎝⎛Ω−
=
−−Ω+−+Ω=
−−+=⋅
−Ω=−=
∫∫
∫∫
tsentsenkF
tx
dtcosdtcosm
Ftx
BAcosBAcosBsenAsenutilizando
dm
tsensenFdthftx
n
n
n
t
n
t
n
n
t
n
n
t
ωωω
ηηωηηηωηω
ηω
ηωηηηη
2
0
00
0
0
0
0
1
)(
)()(2
)(
)()(2
1:
)()()()(
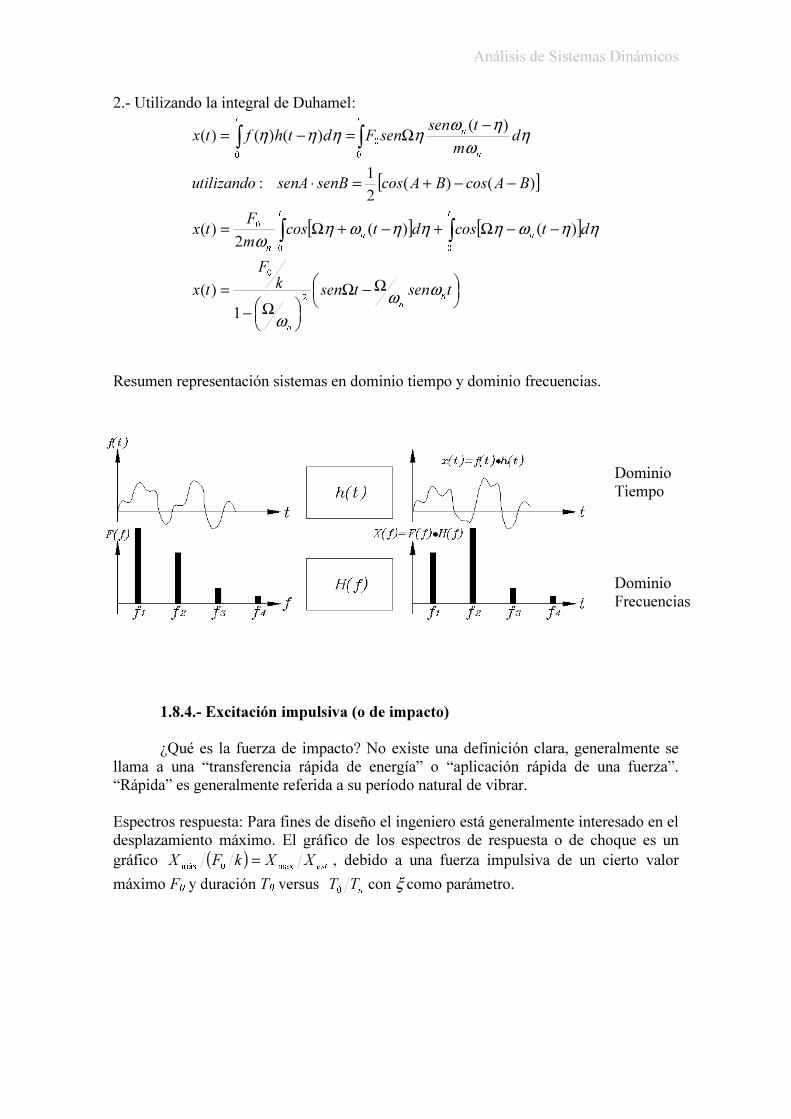
Resumen representación sistemas en dominio tiempo y dominio frecuencias.
Dominio Tiempo Dominio Frecuencias
1.8.4.- Excitación impulsiva (o de impacto)
¿Qué es la fuerza de impacto? No existe una definición clara, generalmente se
llama a una “transferencia rápida de energía” o “aplicación rápida de una fuerza”. “Rápida” es generalmente referida a su período natural de vibrar. Espectros respuesta: Para fines de diseño el ingeniero está generalmente interesado en el desplazamiento máximo. El gráfico de los espectros de respuesta o de choque es un gráfico ( )
estXXkFX
máx0máx= , debido a una fuerza impulsiva de un cierto valor
máximo F B0B y duración TB0B versus n
TT0
con ξ como parámetro.
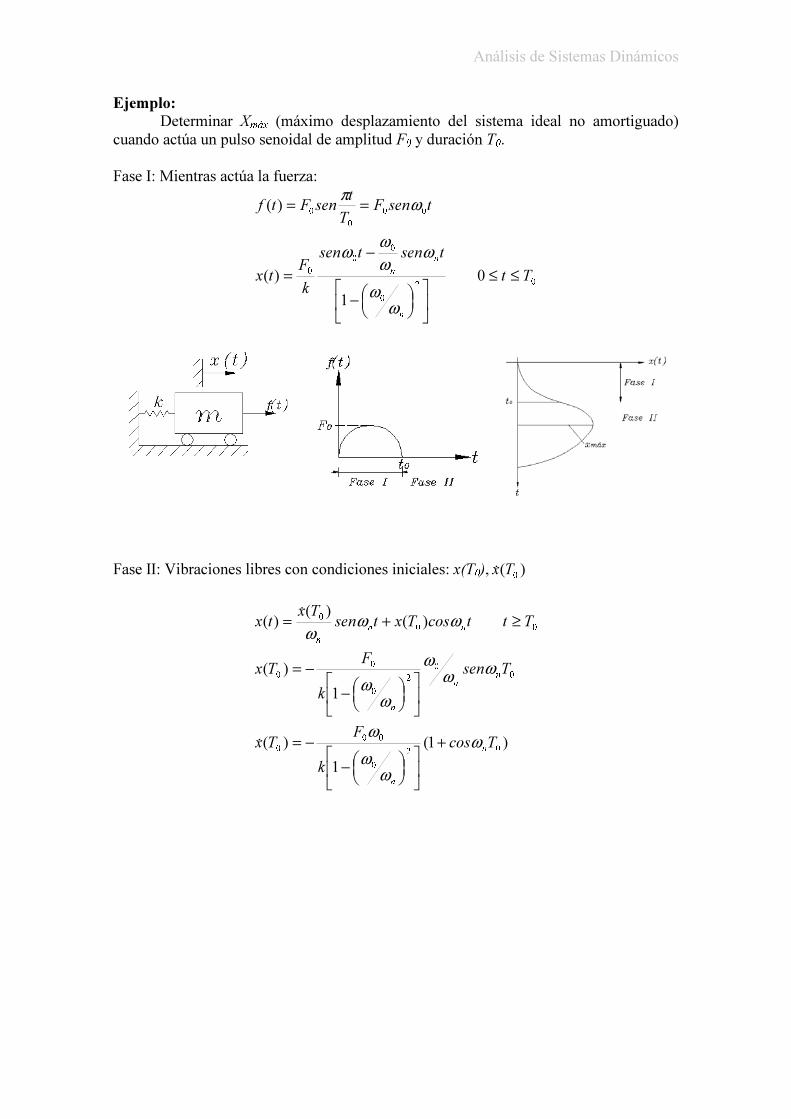
Análisis de Sistemas Dinámicos
Ejemplo: Determinar X BmáxB (máximo desplazamiento del sistema ideal no amortiguado)
cuando actúa un pulso senoidal de amplitud F B0B y duración TB0B. Fase I: Mientras actúa la fuerza:
02
0
0
0
0
00
0
0
0
1
)(
)(
Tt
tsentsen
k
Ftx
tsenFT
tsenFtf
n
n
n ≤≤
⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛−
−=
==
ωω
ωωωω
ωπ
Fase II: Vibraciones libres con condiciones iniciales: x(TB0B), )(
0Tx
&
)1(
1
)(
1
)(
)()(
)(
02
0
00
0
0
0
2
0
0
0
00
0
Tcos
k
FTx
Tsen
k
FTx
TttcosTxtsenTx
tx
n
n
n
n
n
nn
n
ω
ωωω
ωωω
ωω
ωωω
+
⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛−
−=
⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛−
−=
≥+=
&
&
Análisis de Sistemas Dinámicos
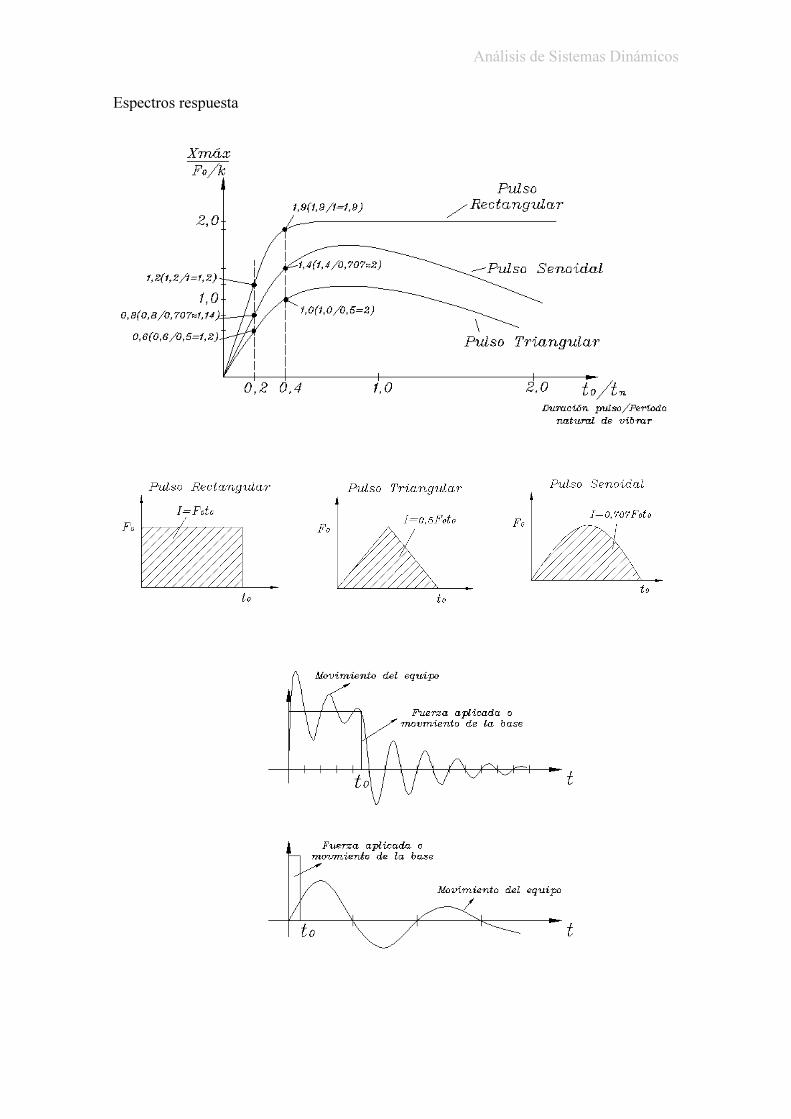
Espectros respuesta

Análisis de Sistemas Dinámicos
Es aparente que para cortas duraciones del impulso, digamos 20 n
TT < , lo
importante es el valor del impulso y la forma del impulso tiene menor efecto. Esto trae como consecuencia que en la práctica impulsos con 2
0 nTT < sean considerados como
velocidad inicial dado al sistema:
∫ ∫==0 0
0 0
)(1)(
T T
idttf
mdt
m
tIv , para el caso de una fuerza impulso.
, para un movimiento de la base aBbB(t). ∫=0
0
)(
T
bidttav
El factor de impacto raramente es mayor que 2.
Terremoto de El Centro, California, 18 de Mayo de 1940. (″Shock Vibration Handbook″, Cyril M. Harris, 3° ed., pag. 24-5, 24-7)
(A) Aceleración del terreno. (B) Variación de la velocidad del terreno, obtenida por integración de (A). (C) Variación del desplazamiento del terreno, obtenido por integración de (B).
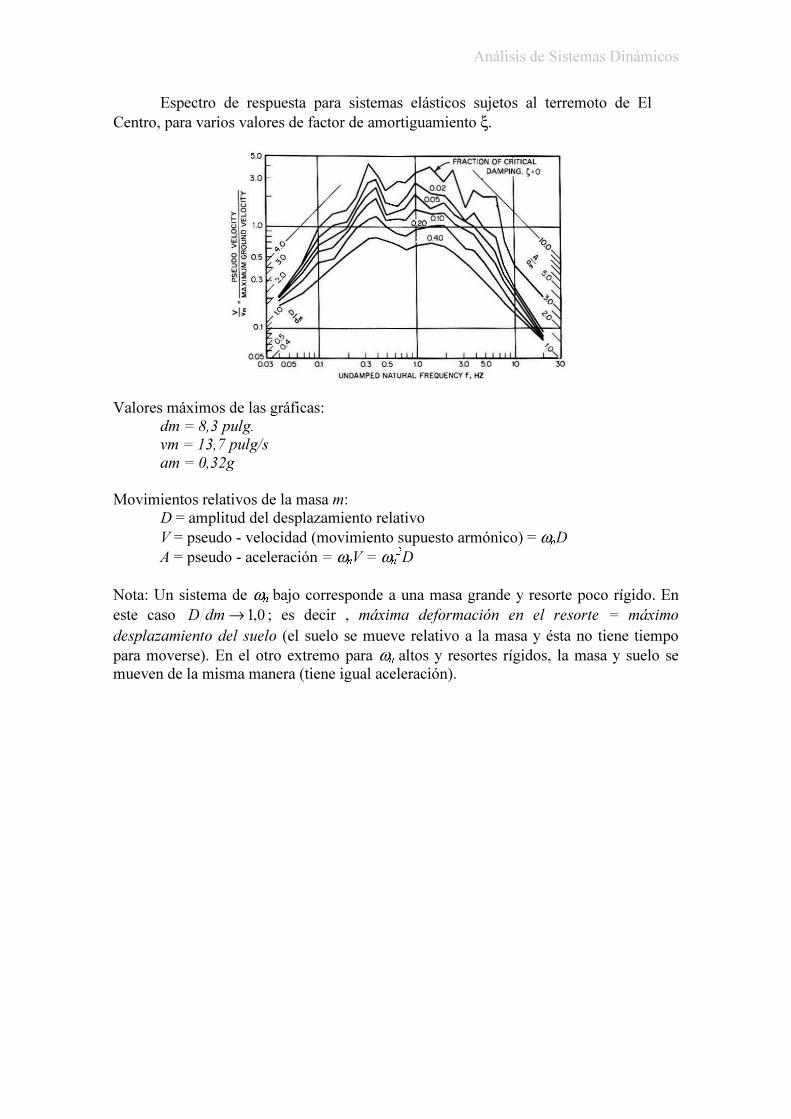
Análisis de Sistemas Dinámicos
Espectro de respuesta para sistemas elásticos sujetos al terremoto de El Centro, para varios valores de factor de amortiguamiento ξ.
Valores máximos de las gráficas: dm = 8,3 pulg.
vm = 13,7 pulg/s
am = 0,32g
Movimientos relativos de la masa m: D = amplitud del desplazamiento relativo V = pseudo - velocidad (movimiento supuesto armónico) = ωBnBD A = pseudo - aceleración = ωBnBV = ωBnPB
2PD
Nota: Un sistema de ωBn
Bbajo corresponde a una masa grande y resorte poco rígido. En este caso 0,1→dmD ; es decir , máxima deformación en el resorte = máximo
desplazamiento del suelo (el suelo se mueve relativo a la masa y ésta no tiene tiempo para moverse). En el otro extremo para ωBn
Baltos y resortes rígidos, la masa y suelo se mueven de la misma manera (tiene igual aceleración).
Análisis de Sistemas Dinámicos
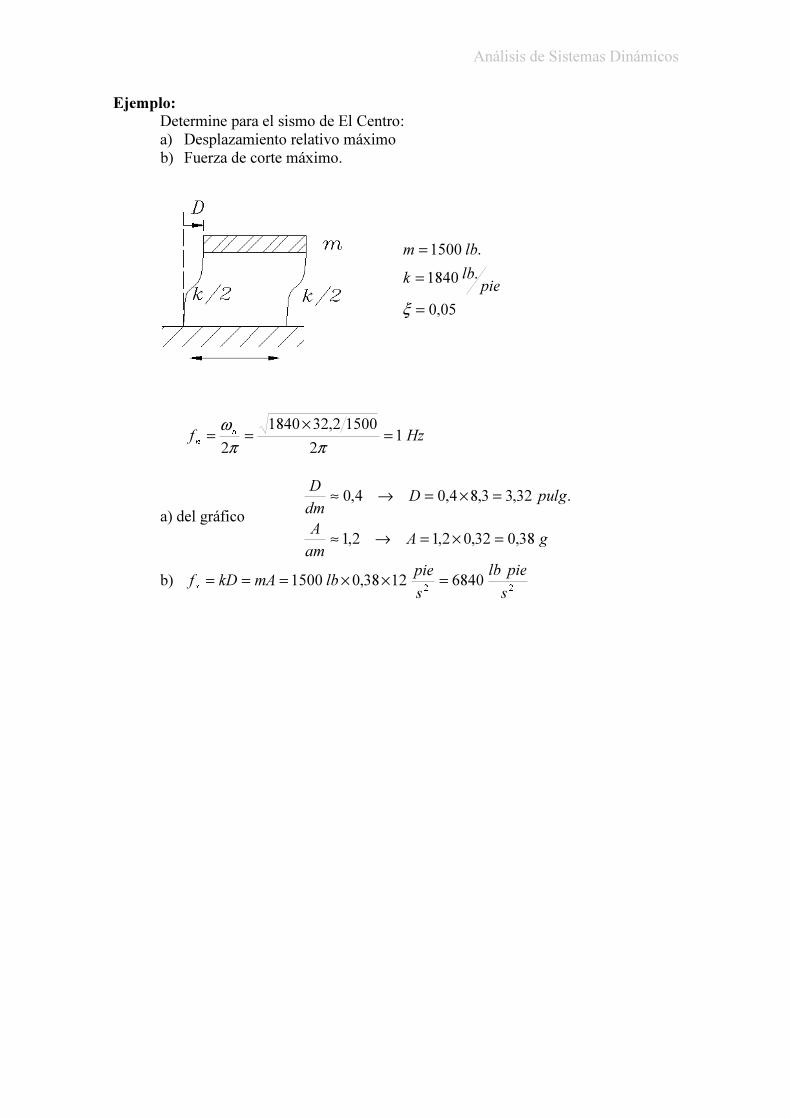
Ejemplo: Determine para el sismo de El Centro: a) Desplazamiento relativo máximo b) Fuerza de corte máximo.
05,0
.1840
.1500
=
=
=
ξpie
lbk
lbm
Hzf n
n1
2
15002,321840
2=
×==
ππω
a) del gráfico
gAam
A
lgpuDdm
D
38,032,02,12,1
.32,33,84,04,0
=×=→≈
=×=→≈
b) 22
68401238,01500s
pielb
s
pielbmAkDf
s=××===

Análisis de Sistemas Dinámicos
Capítulo 2
Sistemas de N grados de libertad
2.1.- Ecuaciones del movimiento
Los sistemas de N grados de libertad pueden escribirse en forma matricial.
[ ] [ ] [ ]
[ ][ ][ ][ ] entodesplazamiVectorx
externasfuerzasVectorf
rigidezdeMatrizK
ovisientoamortiguamdeMatrizC
masasdeMatrizM
FxKxCxM
:
:
:
cos:
:
=++&&&
Ejemplo:
( )
( )tfkxkxxcxcxm
tfkxkxxcxccxm
22112222
1212212112
=+−−+=−+−++
&&&&
&&&&( )
⎭⎬⎫
⎩⎨⎧
=⎭⎬⎫
⎩⎨⎧⎥⎦
⎤⎢⎣
⎡
−−
+⎭⎬⎫
⎩⎨⎧⎥⎦
⎤⎢⎣
⎡
−−+
+⎭⎬⎫
⎩⎨⎧⎥⎦
⎤⎢⎣
⎡
)(
)(2
0
0
2
1
2
1
2
1
22
221
2
1
tf
tf
x
x
kk
kk
x
x
cc
ccc
x
x
m
m
&
&
&&
&&

Análisis de Sistemas Dinámicos
2.2.- Vibraciones libres no amortiguadas
[ ] [ ] 0=+ xKxM
&&
Las soluciones son de la forma:
( ) rt
iieXtx = (2-1)
( ) rtrt
nn
eXtxe
X
X
X
tx
tx
tx
=⇒
⎪⎪
⎭
⎪⎪
⎬
⎫
⎪⎪
⎩
⎪⎪
⎨
⎧
=
⎪⎪
⎭
⎪⎪
⎬
⎫
⎪⎪
⎩
⎪⎪
⎨
⎧
...
)(
...
)(
)(
2
1
2
1
(2-2)
Ecuación (2-2) en (2-1):
[ ] 02 =+ XKMr (2-3)
La solución no trivial de este sistema de ecuaciones se obtiene para los valores de r que satisfagan la ecuación característica:
[ ] 0det2 =+ KMr (2-4)
Ejemplo:
02
det2
2
=+−
−+kmrk
kkmr
( )( )
03
02
2
2
24
2222
=++
=−++
m
kr
m
kr
kkmrkmr
jjm
kr
mkr
jjm
kr
mkr
22
2
2
11
2
1
618,1618,2
618,0382,0
ω
ω
±=±=→−=
±=±=→−=
21, rr = valores propios, eingenvalores
21,ωω = frecuencias naturales de vibrar

Análisis de Sistemas Dinámicos
2.2.1.- Modos de vibrar o vectores propios
Son los vectores determinados por la ecuación (2-3) que corresponden a cada
valor propio. Ejemplo:
1221
21
2
1
618,10618,0
0618,1
:382,0
xxxkx
kxkx
m
krpara
=⇒=+−=−
−=
1221
21
2
2
618.00618,1
0618,0
:618,2
xxkxkx
kxkx
m
krpara
−=⇒=−−=−−
−=
Normalización de los modos: Los valores x BiB obtenidos no son independientes. Si hay x BiB valores, existen i-1 ecuaciones independientes. Para determinar un valor hay que agregar una nueva ecuación, lo que se llama normalización. 1.- Hacer una de las componentes igual a 1.
⎭⎬⎫
⎩⎨⎧
−=
⎭⎬⎫
⎩⎨⎧
=⇒
⎭⎬⎫
⎩⎨⎧
=⎭⎬⎫
⎩⎨⎧
=⇒=
618,0
1
618,1
11
2
2
2
12
1
2
1
11
1
X
XX
X
XXxSi
:j
iX Amplitud de masa i cuando vibra con el modo j.
2.- Hacer su longitud igual a uno.
( )
( ) ⎭⎬⎫
⎩⎨⎧
−=→=−+→
⎭⎬⎫
⎩⎨⎧
=→=+→=+
=→=++=
526,0
851,01618,0
851,0
526,01618,11
0,10,1...
222
1
2
1
121
1
1
1
2
2
2
1
22
2
2
1
XXX
XXXXX
XXXXXXT
n

Análisis de Sistemas Dinámicos
3.- Hacer el producto X P
TPMX =1,0.
0,122
2
2
2
1
2
1
21=+=
⎭⎬⎫
⎩⎨⎧⎥⎦
⎤⎢⎣
⎡mxmx
x
x
m
m
xx
( )
21
2
21
11
2
22
1
2
1
465,0
753,0
648,0
40,0160,00,1618,12
−
−
⎭⎬⎫
⎩⎨⎧
−=
⎭⎬⎫
⎩⎨⎧
=→=→=+
mX
mXm
xxmmx
2.2.2.- Ecuaciones del movimiento
Si el sistema vibrara sólo con el modo entonces de ecuación (2-
2):
( ,ss
rr ωω == )
( ) ( ) s
sssssXtcosBtsenAtx ωω += (2-5)
En el caso general: El sistema vibra con una combinación lineal de los modos:
( ) ( ) ( ) ∑∑==
+==N
s
s
ssss
N
s
sXtcosBtsenAtxtx
11
ωω
La solución para el caso i, será:
( ) ( )∑=
+=N
s
s
issssiXtcosBtsenAtx
1
ωω (2-6)
para sistemas amortiguados:
( ) ( )∑=
− +=N
s
s
idssdss
t
iXtcosBtsenAetx ss
1
ωωωξ (2-7)
Ejemplo: Determinar x B1B(t) y x B2B(t) Si: ( )( ) ( ) ( ) 0000
0
212
101
====
xxx
xx
&&
Se había determinado : ⎭⎬⎫
⎩⎨⎧
−=
⎭⎬⎫
⎩⎨⎧
=⎭⎬⎫
⎩⎨⎧
=⎭⎬⎫
⎩⎨⎧
=618,0
1;
618,1
1
2
2
1
22
2
1
1
11
X
XX
X
XX
Aplicando ecuación (2-6):
( ) ( ) ( )( ) ( ) ( ) 2
22222
1
211112
2
12222
1
111111
XtcosBtsenAXtcosBtsenAtx
XtcosBtsenAXtcosBtsenAtx
ωωωω
ωωωω
+++=
+++=
Análisis de Sistemas Dinámicos
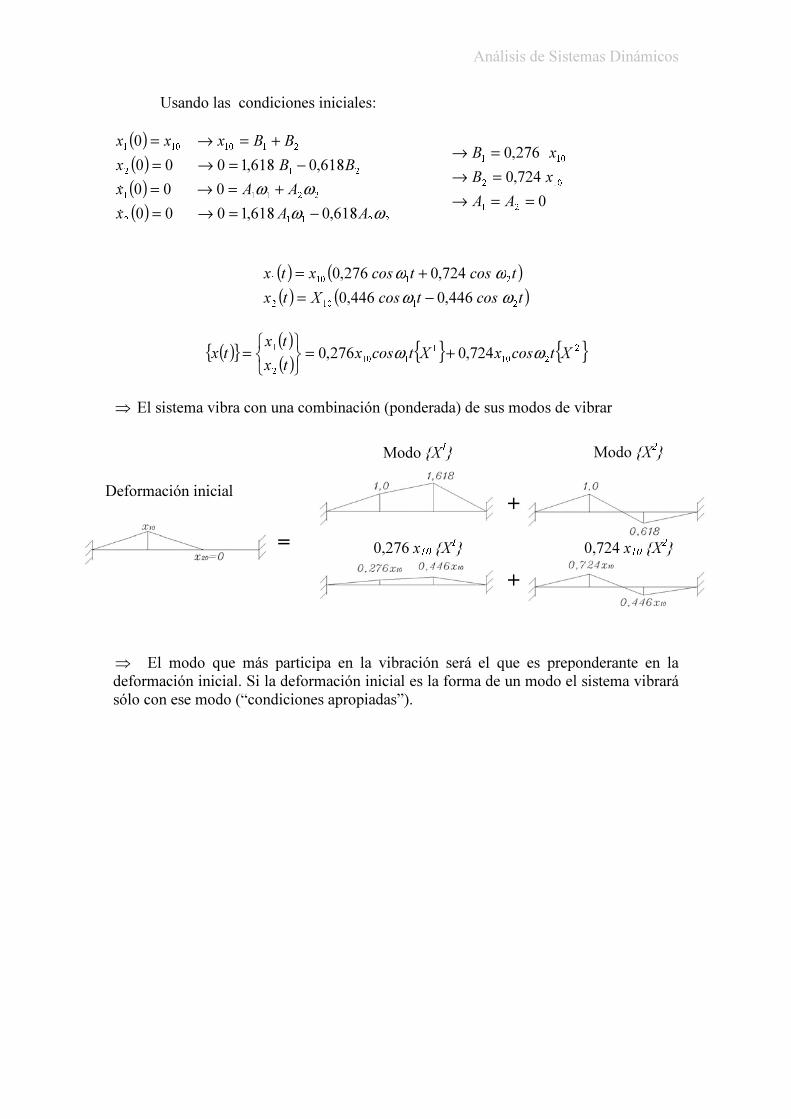
Usando las condiciones iniciales: ( )( )( )( )
22112
22111
212
2110101
618,0618,1000
000
618,0618,1000
0
ωωωω
AAx
AAx
BBx
BBxxx
−=→=+=→=
−=→=+=→=
&
&
0
724,0
276,0
21
102
101
==→=→=→
AA
xB
xB
( ) ( )( ) ( )tcostcosXtx
tcostcosxtx
21102
21101
446,0446,0
724,0276,0
ωωωω
−=+=
( ) ( )( ) 2
210
1
110
2
1724,0276,0 XtcosxXtcosx
tx
txtx ωω +=
⎭⎬⎫
⎩⎨⎧
= ⇒ El sistema vibra con una combinación (ponderada) de sus modos de vibrar Modo X P
1P
Deformación inicial
⇒ El modo que más participa en ldeformación inicial. Si la deformación sólo con ese modo (“condiciones apropi
0,276 x B10B X P
1P
a vibración será el que es preponinicial es la forma de un modo el sadas”).
Modo X P
2P
0,724 x B10B X P
2P
=+
+
derante en la istema vibrará

Análisis de Sistemas Dinámicos
2.3.- Vibraciones forzadas sin amortiguamiento
2.3.1.- Método directo
Para excitaciones armónicas, la respuesta estacionaria puede ser determinada
usando el álgebra compleja. Para esto hay que reemplazar en las ecuaciones del movimiento:
( )
( )( )
( )tj
ii
tj
ii
tj
ii
tj
ii
eXtx
ejXtx
eXtx
eFtf
Ω
Ω
Ω
Ω
Ω−=
Ω=
=
=
2
&&
&
y resolver el sistema de ecuaciones resultantes. Ejemplo: Determinar x B1B(t) y x B2B (t) estacionarios
tsenFtF Ω=01
)(
mk
mk
618,1
618,0
2
1
=
=
ω
ω
0
2
212
0211
=+−Ω=−+
kxkxxm
tsenFkxkxxm
&&
&&
Reemplazando:
( )( ) tj
ii
tj
ii
tj
eXtx
eXtx
eFtsenF
Ω
Ω
Ω
Ω−=
=
=Ω
2
00
&&
( )
( ) 0
2
2
2
1
02
2
1
=Ω−+−
=−+Ω−
XmkKX
FkXkmX
( )
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
−Ω⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
−Ω
Ω−=
∆Ω−
−
=⇒
4342143421
2
2
2
1
618,2382,0
0
222
2
0
2
0
1
ωω
mk
mkm
mkFmk
kF
X
Análisis de Sistemas Dinámicos
( )( )22
22
1
22
0
0
2
2
0
2
ωω −Ω−Ω−
=∆
−Ω−
=m
kFk
Fmk
X
( )( )
( )( )m
km
km
m
k
m
km
kmkmkmkk
kmk
618,2382,0
3
22
222
2
2
242
222
2
2
−Ω−Ω=
⎟⎟⎠
⎞⎜⎜⎝
⎛+Ω−Ω=
−Ω−Ω−=Ω−−
−Ω−=∆
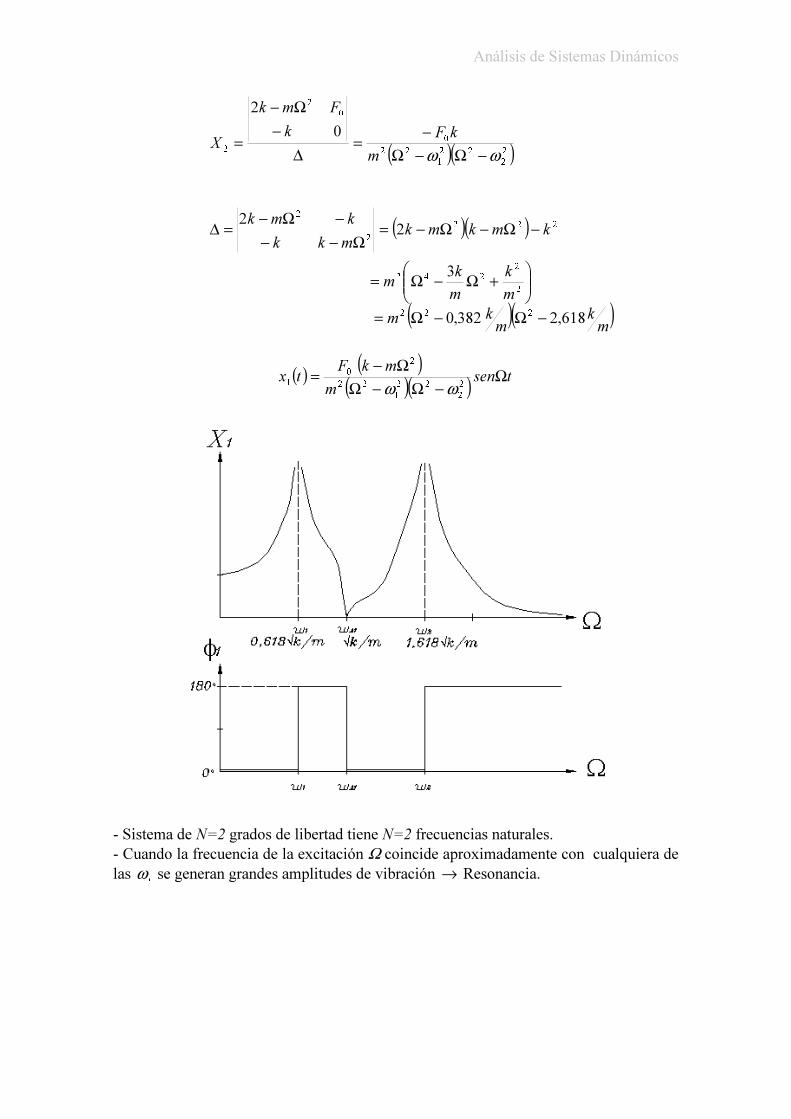
( ) ( )( )( ) tsen
m
mkFtx Ω
−Ω−ΩΩ−
=2
2
22
1
22
2
0
1 ωω
- Sistema de N=2 grados de libertad tiene N=2 frecuencias naturales. - Cuando la frecuencia de la excitación Ω coincide aproximadamente con cualquiera de las se generan grandes amplitudes de vibración → Resonancia.
iω

Análisis de Sistemas Dinámicos
2.3.2- Método modal
Las coordenadas x B1B, x B2B elegidas para definir el movimiento del sistema están
acopladas, en el sentido en que ambas coordenadas aparecen en cada ecuación y por lo tanto si varía x B1B, varía también x B2B.
0
02
212
211
=+−=−+
kxkxxm
kxkxxm
&&
&&
Sin embargo, siempre es posible en un sistema no - amortiguado encontrar un
sistema de coordenadas, qBiB, sin ningún tipo de acoplamiento o desacopladas, llamadas coordenadas principales. Propiedades de ortogonalidad de los vectores propios:
Consideremos dos modos cualesquiera i y j. De ecuación (2-3)
[ ] [ ] XXK2Ω−= ; 22
iir−=ω
(2-a) [ ] [ ] i
i
iXMXK
2ω=
(2-b) [ ] [ ] jj
jXMXK
2ω=
(2-c) Premultiplicando ec.(2-a) por [ ] [ ] iTj
i
iTjXMXXKX
2ω=
TjX
(2-d) Transpuesta de ecuación (2-b) [ ] [ ]MXKXTj
i
Tj 2ω=
(2-e) Postmulplicando ec.(2-d) por [ ] [ ] iTj
i
iTjXMXXKX
2ω= iX
( ) [ ] 022 =−⇒
iTj
ji XMXωω Ecuación (2-c) - (2-e)
- Para i j, si : ≠
jiωω ≠
[ ] 0=iT
iXMX Relaciones de Ortogonalidad (2-8)
[ ] 0=iTj
XKX i, j = 1,2,...N
es decir, los vectores propios son ortogonales respecto a las matrices [ ] [ ]KyM

Análisis de Sistemas Dinámicos
- Para i = j:
[ ] [ ]
ii
iT
i
ii
iT
i
XKX
XMX
γ
µ
=
= (2-9)
=
iiµ Masa modal correspondiente al modo i.
iiγ = Rigidez modal correspondiente al modo i.
Nota: son constantes que dependen de cómo fue normalizado el vector
propio .
iiiiγµ ,
iX
Para eficiencia operacional se define la matriz modal , como la matriz cuyas columnas son los vectores propios de los diferentes modos, o sea como:
[ ]X
[ ] [ ]N
XXXX −−−= 21 (2-10)
Se puede demostrar que [ son matrices diagonales. Como ejemplo consideremos un sistema con dos grados de libertad:
] [ ][ ] [ ] [ ][ ]XKXyXMXTT
[ ] [ ][ ] [ ] [ ] [ ] [ ]
[ ] [ ] ⎥⎥⎦⎤
⎢⎢⎣
⎡=
⎥⎥⎦
⎤
⎢⎢⎣
⎡=
2212
2111
21
2
1
XMXXMX
XMXXMXXXM
X
XXMX
TT
TT
T
T
T
[ ] [ ][ ] ⎥⎦
⎤⎢⎣
⎡=
22
11
µοοµ
XMXT
Ecuaciones del movimiento en coordenadas principales. Introduciendo la siguiente transformación lineal de coordenadas:
( ) [ ] ( ) tqXtX = (2-11)
en las ecuaciones del movimiento y premultiplicando por , se obtiene: [ ]TX
[ ] [ ][ ] [ ] [ ][ ] [ ] [ ] [ ] Pqq
fXqXKXqXMXTTT
=+=+
→←
→← γµ
&&
&&
(2-12)
Las coordenadas qBiB (t), se llaman coordenadas principales y generalmente no tienen significado físico. Es una herramienta de cálculo para desacoplar las ecuaciones del movimiento. El sistema de ecuación (2-12) son N ecuaciones desacopladas:
)(tPqqiiiiiii
=+ γµ&& (2-13)

Análisis de Sistemas Dinámicos
[ ] fXtPT
i=)( (2-14)
Cuando los modos son normalizados respecto a la matriz de masa, a veces se
llaman modos normales : y las matrices de (2-12) se transforman en : i
NX
[ ] [ ][ ] [ ][ ] [ ][ ] [ ]→
←
→←
=
=2
1
iN
T
N
N
T
N
XKX
XMX
ω (2-15)
Ejemplo: Resolver por el método modal ( ) ( )txtx21
,
( ) ( ) ( ) ( ) 0000;0212101
==== xxxxxsi&&
02
2
1
2
1 =⎭⎬⎫
⎩⎨⎧⎥⎦
⎤⎢⎣
⎡
−−
+⎭⎬⎫
⎩⎨⎧⎥⎦
⎤⎢⎣
⎡
x
x
kk
kk
x
x
m
m
&&
&&
m
km
kXX 382,0;618,2;618,0
1;
618,1
12
2
2
1
21 ==⎭⎬⎫
⎩⎨⎧
−=
⎭⎬⎫
⎩⎨⎧
= ωω
- Desacoplando las ecuaciones del movimiento:
[ ] mm
mXMX
T
618,3618,1
1618,11
11
11=
⎭⎬⎫
⎩⎨⎧⎥⎦
⎤⎢⎣
⎡==µ
m
m
m
382,1618,0
1618,01
22=
⎭⎬⎫
⎩⎨⎧
−⎥⎦
⎤⎢⎣
⎡−=µ
kkk
kk
kkk
kk
618,3618,0
12618,01
382,1618,1
12618,11
22
11
=⎭⎬⎫
⎩⎨⎧
−⎥⎦
⎤⎢⎣
⎡
−−
−=
=⎭⎬⎫
⎩⎨⎧⎥⎦
⎤⎢⎣
⎡
−−
=
γ
γ
Comprobación de relaciones de ortogonalidad (verificar si fueron bien
calculados los ): iX
0;0618,0
1618,11
1212==−=
⎭⎬⎫
⎩⎨⎧
−⎥⎦
⎤⎢⎣
⎡= γµ idemmm
m
m

Análisis de Sistemas Dinámicos
Verificación de las frecuencias naturales (las frecuencias naturales son independientes del sistema de coordenadas elegido):
3,618 m 0382,111=+ qkq
&&
1,382 m 0618,322=+ qkq
&&
Ecuación del movimiento en coordenadas principales (ecuaciones del movimiento desacopladas):
m
k
m
k382,0
618,3
382,1
11
112
1===
µγω ;
m
k
m
k618,2
382,1
618,3
22
222
2===
µγω
Solución de cada ecuación:
( ) ( ) tsenq
tcosqtqi
i
i
iiiωωω )0(
0 &+=
Cálculo de las condiciones iniciales en coordenadas , usando
ecuación (2-11):
( ) ( )( )0,0iii
qqq &
( ) [ ] ( ) tqXtx =
( )( )
( )( )⎭⎬⎫
⎩⎨⎧⎥⎦
⎤⎢⎣
⎡
−=
⎭⎬⎫
⎩⎨⎧
tq
tq
tx
tx
2
1
2
1
618,0618,1
11
( ) ( ) ( )101211
276,00447,0)(276,0 xqtxtxtq =⇒+=⇒
( ) ( ) ( )102212
724,00447.0)(724,0 xqtxtxtq =−=
Luego
( )( ) tcosxtq
tcosxtq
2102
1101
724,0
276,0
ωω
==
Solución en coordenadas qBi B(t).
La solución en coordenadas x BiB (t):
tcosxtcosxtx
tcosxtcosxtx
2101102
2101101
447,0447,0)(
724,0276,0)(
ωωωω
+=+=
Verificación para t = 0 :
( )( ) 0447,0447,00
724,0276,00
10102
1010101
=−==+=
xxx
xxxx

Análisis de Sistemas Dinámicos
Ejemplo: Determine las respuestas estacionarias x B1B (t), x B2B (t) usando método modal.
De ecuación (2-14): ( ) [ ] fXtPT
i=
tsenF Ω0
⎭⎬⎫
⎩⎨⎧
ΩΩ
=⎭⎬⎫
⎩⎨⎧ Ω⎥⎦
⎤⎢⎣
⎡
−=
tsenF
tsenFtsenFtP
i
0
00
0618,01
618,11)(
Por lo tanto las ecuaciones desacopladas del movimiento de acuerdo a ecuación (2-13) son:
tsenFqkqm
tsenFqkqm
Ω=+Ω=+
022
011
618,3382,1
382,1618,3
&&
&&
Cuyas soluciones para el movimiento estacionario son:
( )( ) ( )
( ) ( )( ) ( ) tsen
m
Ftq
tsenm
Ftq
tsenF
tsenF
tqiiii
ii
i
ΩΩ−
=
ΩΩ−
=
ΩΩ−
=ΩΩ−
=
22
2
0
2
22
1
0
1
22
0
2
0
382,1
618,3
/1
/
ω
ω
ωµωγ
Luego:
( ) ( ) ( ) ( ) ( )⎥⎦⎤
⎢⎣
⎡
Ω−+
Ω−Ω=+=
22
2
22
1
0
211
382,1
1
618,3
1
ωω mmtsen
m
Ftqtqtx
( ) ( )( )( ) tsenXtsen
m
mkFtx Ω=Ω
Ω−Ω−Ω−
=122
2
21
1
2
2
0
1 ωω
( ) ( ) ( )
( ) ( )( ) tsenXtsenm
kFtx
tqtqtx
Ω=ΩΩ−Ω−
−=
−=
222
2
22
1
2
0
2
212618,0618,1
ωω
Análisis de Sistemas Dinámicos
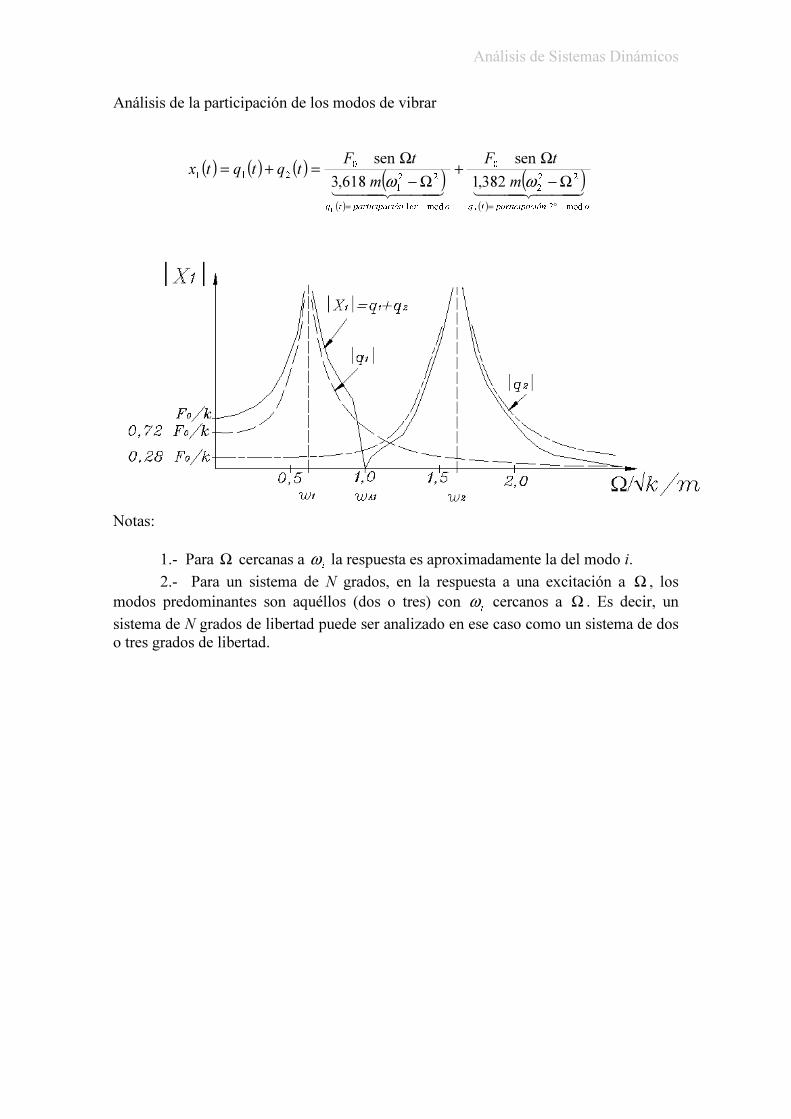
Análisis de la participación de los modos de vibrar
( ) ( ) ( ) ( )( )
( )( )
444 3444 21444 3444 21
oiónparticipactqoeriónparticipactq
m
tF
m
tFtqtqtx
mod2
22
2
0
mod1
22
1
0
211
21
382,1
sen
618,3
sen
°==
Ω−Ω
+Ω−
Ω=+=
ωω
Notas:
1.- Para cercanas a la respuesta es aproximadamente la del modo i. Ωi
ω2.- Para un sistema de N grados, en la respuesta a una excitación a Ω , los
modos predominantes son aquéllos (dos o tres) con cercanos a . Es decir, un
sistema de N grados de libertad puede ser analizado en ese caso como un sistema de dos o tres grados de libertad.
iω Ω
Análisis de Sistemas Dinámicos
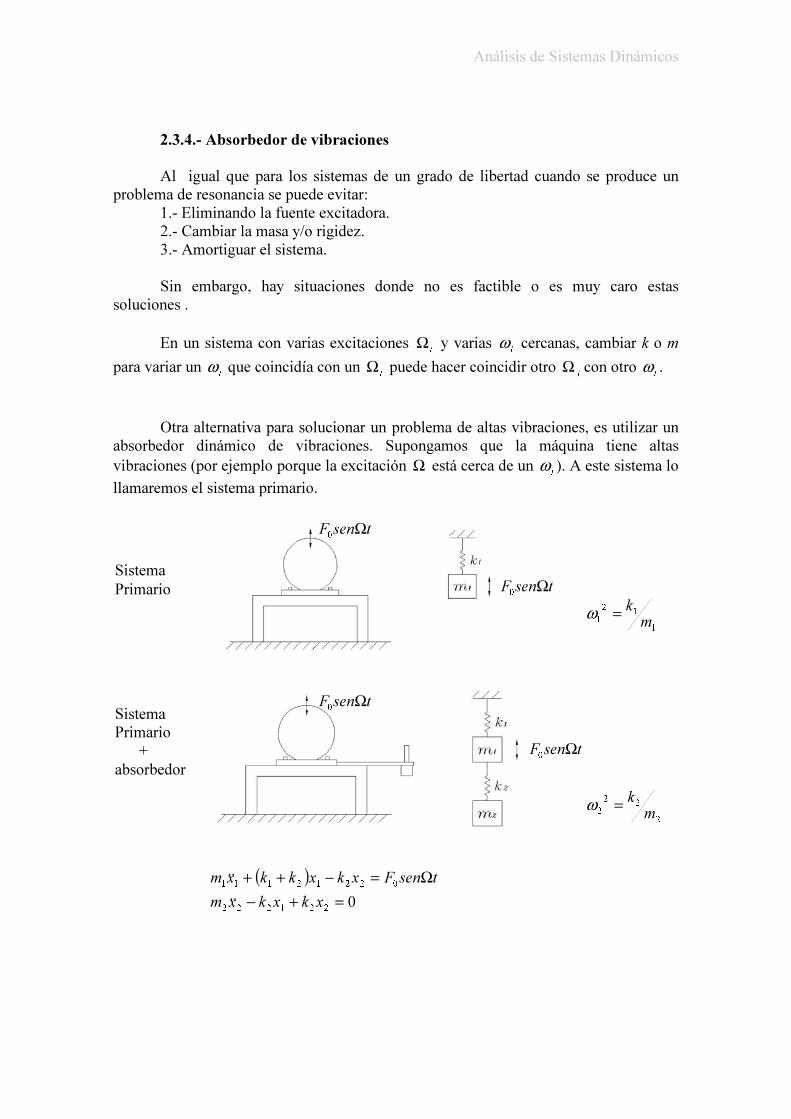
2.3.4.- Absorbedor de vibraciones
Al igual que para los sistemas de un grado de libertad cuando se produce un problema de resonancia se puede evitar:
1.- Eliminando la fuente excitadora. 2.- Cambiar la masa y/o rigidez. 3.- Amortiguar el sistema.
Sin embargo, hay situaciones donde no es factible o es muy caro estas
soluciones .
En un sistema con varias excitaciones y varias cercanas, cambiar k o m
para variar un que coincidía con un puede hacer coincidir otro con otro . i
Ωi
ω
iω
iΩ
jΩ
iω
Otra alternativa para solucionar un problema de altas vibraciones, es utilizar un absorbedor dinámico de vibraciones. Supongamos que la máquina tiene altas vibraciones (por ejemplo porque la excitación Ω está cerca de un ). A este sistema lo
llamaremos el sistema primario. i
ω
tsenF Ω0
Sistema Primario
tsenF Ω0
1
12
1 m
k=ω
tsenF Ω0Sistema
Primario + absorbedor
tsenF Ω0
2
22
2 m
k=ω
( )0
221222
02212111
=+−Ω=−++
xkxkxm
tsenFxkxkkxm
&&
&&

Análisis de Sistemas Dinámicos
tj
tj
tj
eFtsenF
eXtsenXx
eXtsenXx
Ω
Ω
Ω
=Ω
=Ω=
=Ω=
00
222
111
( )( ) 0
2
2
2212
022121
2
1
=Ω−+−
=−++Ω−
XmkXk
FkXXkkm
( )( )( )
1
22
2
2
2
1
2
1
2
2
2
2
1
0
2
2
2
22
2
121
2
220
1
11
1
k
k
wk
k
wk
F
kmkmkk
mkFX
−⎟⎠
⎞⎜⎝
⎛ Ω−⎟⎠
⎞⎜⎝
⎛ Ω−+
⎟⎠
⎞⎜⎝
⎛ Ω−=
−Ω−Ω−+Ω−
=
ω
(2-*)
( )( )1
22
2
2
2
1
2
1
2
1
0
2
2
2
22
2
121
2.0
2
11k
k
wk
k
k
F
kmkmkk
kFX
−⎟⎠
⎞⎜⎝
⎛ Ω−⎟⎠
⎞⎜⎝
⎛ Ω−+=
−Ω−Ω−+=
ω
(2-**) De la ecuación (2-*), si Es decir, el sistema primario
(máquina) queda detenido (no vibra) si se hace que la frecuencia natural del sistema absorbedor .
;012=⇒=Ω Xω
Ω=Un caso importante de altas vibraciones es debido a la resonancia: Para este caso .
1ω=Ω
El adsorbedor a agregar para eliminar las vibraciones debe tener según la
ecuación (2-*): Ω=
2ω
1
2
1
2
1
1
2
2
12:seao
k
k
m
m
m
k
m
k==⇒=⇒==Ω µωω
De ecuación (2-**): ( ) ( )º180
2
0
2
0
2
2
0
2+Ω=Ω−=⇒−= tsen
k
Ftsen
k
Ftx
k
FX
es decir, el absorbedor vibra en contrafase con . tsenF Ω0
Análisis de Sistemas Dinámicos
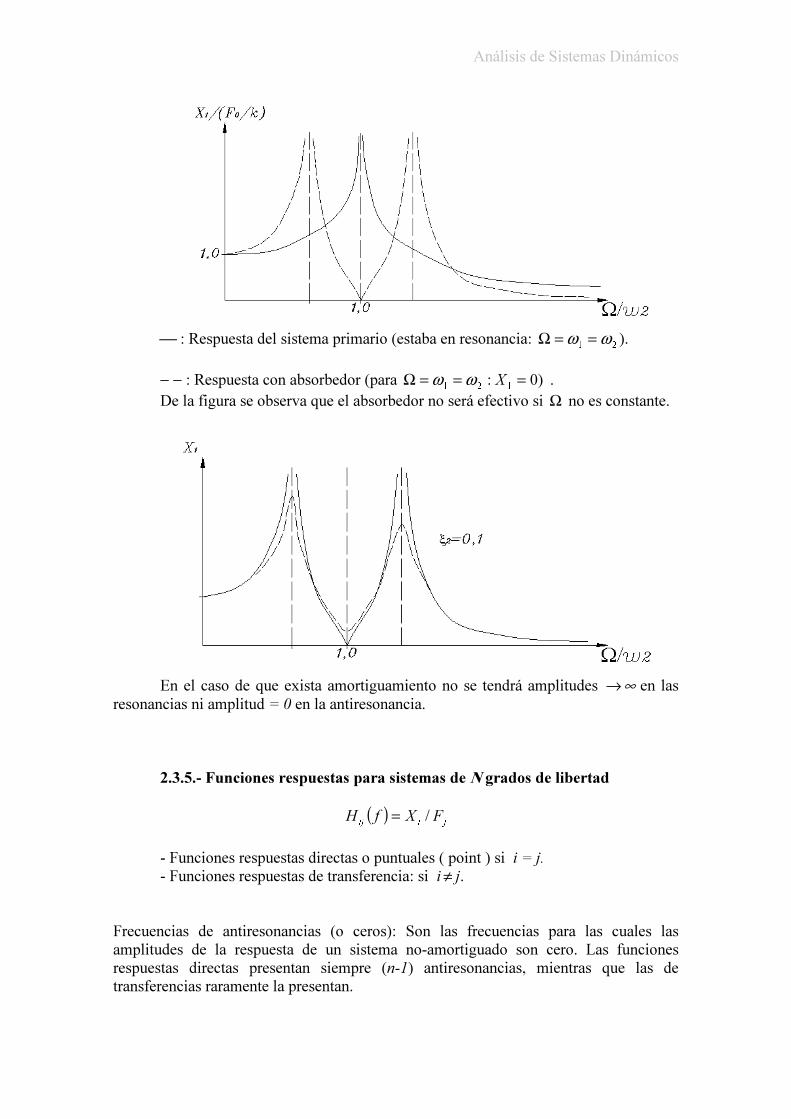
⎯ : Respuesta del sistema primario (estaba en resonancia: ).
21ωω ==Ω
− − : Respuesta con absorbedor (para . )0:
121===Ω Xωω
De la figura se observa que el absorbedor no será efectivo si no es constante. Ω
En el caso de que exista amortiguamiento no se tendrá amplitudes ∞ en las
resonancias ni amplitud = 0 en la antiresonancia. →
2.3.5.- Funciones respuestas para sistemas de N grados de libertad
( )
jiijFXfH /=
- Funciones respuestas directas o puntuales ( point ) si i = j. - Funciones respuestas de transferencia: si i j. ≠
Frecuencias de antiresonancias (o ceros): Son las frecuencias para las cuales las amplitudes de la respuesta de un sistema no-amortiguado son cero. Las funciones respuestas directas presentan siempre (n-1) antiresonancias, mientras que las de transferencias raramente la presentan.
Análisis de Sistemas Dinámicos
2.3.6.- Movimientos de cuerpo Rígido
Los sistemas no restringidos a moverse, presentan movimientos de cuerpo rígido
(el sistema se mueve sin deformarse). Ellos están caracterizados por . 0=i
ω

Análisis de Sistemas Dinámicos
Ejemplo: Determinar las frecuencias naturales y modos de vibrar del sistema.
0
0
122
211
=−+=−+
kxkxxm
kxkxxm
&&
&&
020242
2
2
=+==+−
−+kmrrm
kmrk
kkmr
m
kr
r
2
0
2
2
2
1
−=
=⇒
Para ( ) :0;0
1
2
1== ωr
0
2
1
2
2
=⎭⎬⎫
⎩⎨⎧
+−−+
x
x
kmrk
kkmr .
⎭⎬⎫
⎩⎨⎧
==⇒1
11
21XXX
Es decir, si la masa 1 se desplaza 1, la masa 2 también se desplaza 1, o sea el
sistema se mueve sin deformarse, o sea como cuerpo rígido.
Para :2;22
2
2 ⎟⎠⎞⎜
⎝⎛ =−=
mk
mkr ω
02
2
2
1 =⎭⎬⎫
⎩⎨⎧
+−−
−+−
x
x
kmm
kk
kkmm
k
⎭⎬⎫
⎩⎨⎧
−=−=⇒
1
12
21XXX
2.3.7.- Matrices de flexibilidad y rigidez
Los sistemas matriciales son una aproximación sistemática para lograr claridad y
simplicidad en el cálculo de sistemas con muchos grados de libertad. Coeficiente de influencia o flexibilidad,
ijf
Se define como el desplazamiento en i debido a una fuerza unitaria aplicada en j.
j
i
jiF
xf =
Coeficientes de rigidez, ijk
Se define como la fuerza sostenedora en i para un desplazamiento unitario en j (siendo nulos los otros desplazamientos).
j
i
jix
Fk =

Análisis de Sistemas Dinámicos
Ejemplo: Determinar a) fBij By b) k BijB para el sistema de la figura
a)
( )( ) 0
1
12
121
=−=−−
xxk
xxkkx
( )( ) 1
0
12
112
=−=−−
xxk
kxxxk
kfx
kfxxx
/1
/1
212
111
12 ====
⇒=⇒ kfx
kfxxx
/2
/12
222
121
12 ====
⇒=⇒
Matriz de flexibilidad o de coeficientes de influencia
[ ] [ ] [ ] ⎥⎦
⎤⎢⎣
⎡
−−
==⇒⎥⎦
⎤⎢⎣
⎡= −
kk
kkfk
kk
kkf
2
/2/1
/1/11
b)
21
111
Fkx
Fkxkx
=−=+
22
12
Fkx
Fkx
==−
kkF
kkF
−====
⇒212
1112
kkF
kkF
==−==
⇒
222
121
[ ] ⎥⎦
⎤⎢⎣
⎡
−−
=⇒kk
kkk
2
Nota: Para este ejemplo, determinar las matrices de rigidez o flexibilidad no presenta ventaja operativa para determinar las ecuaciones del movimiento. Sin embargo, en el próximo problema si que será de gran utilidad.
Análisis de Sistemas Dinámicos
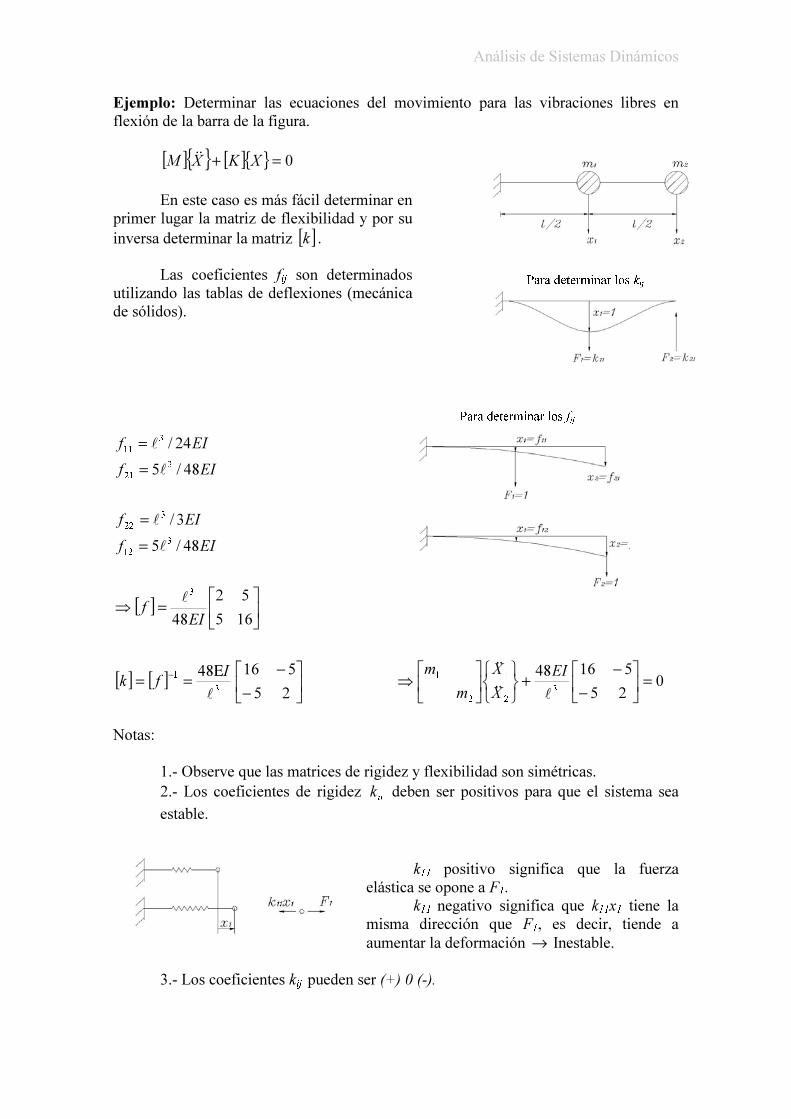
Ejemplo: Determinar las ecuaciones del movimiento para las vibraciones libres en flexión de la barra de la figura.
[ ] [ ] 0=+ XKXM &&
En este caso es más fácil determinar en
primer lugar la matriz de flexibilidad y por su inversa determinar la matriz . [ ]k
Las coeficientes fBijB son determinados utilizando las tablas de deflexiones (mecánica de sólidos).
Pa
[ ] ⎥⎦
⎤⎢⎣
⎡=⇒
=
=
=
=
165
52
48
48/5
3/
48/5
24/
3
3
12
3
22
3
21
3
11
EIf
ΕΙf
ΕΙf
ΕΙf
ΕΙf
l
l
l
l
l
[ ] [ ] ⎥⎦
⎤⎢⎣
⎡
−−Ε== −
25
51648
3
1
l
Ifk
2
1
⎢⎣
⎡⇒
m
m
Notas:
1.- Observe que las matrices de rigidez y flexibil2.- Los coeficientes de rigidez deben ser po
estable. iik
k B11
Bposielástica se opone
k B11
Bnegatmisma direccióaumentar la defo
3.- Los coeficientes k Bij Bpueden ser (+) 0 (-).
Para determinar los k BijB
ra
⎥⎦
⎤
ids
tiv aivn rm
determinar los f BijB
025
51648
3
2
1 =⎥⎦
⎤⎢⎣
⎡
−−
+⎭⎬⎫
⎩⎨⎧
l&&
&& ΕΙ
X
X
ad son simétricas. itivos para que el sistema sea
o significa que la fuerza F B1B. o significa que k B11Bx B1B tiene la que F B1B, es decir, tiende a ación → Inestable.

Análisis de Sistemas Dinámicos
2.4.- Vibraciones amortiguadas
Generalmente el amortiguamiento se puede ignorar en las zonas alejadas de las resonancias o antiresonancias, pero no así en estas zonas (es de importancia fundamental).
2.4.1.- Vibraciones libres
La solución del movimiento en vibraciones libres:
[ ] [ ] [ ] 0=++ xKxCxM
&&& (2-16)
Son de la forma: (2-17) t
eXxΩ=
(2-17) en (2-16): [ ] 0
2 =++ XKCrMr (2-18)
para que exista solución [ ] 0det2 =++ KCrMr (2-19)
Para que exista vibración los valores propios (r) deben ser complejos
conjugados, es decir
21
iiidi
iii
iiijr
ξωωβ
ωξαβα
−==
=±−=
(2-20)
Nota: debe ser negativo para que el sistema sea estable.
iα
Reemplazando (2-20) en (2-18) se obtienen los modos de vibrar. Estos vectores propios serán complejos. Físicamente significa que las diferentes masas no llegan a sus posiciones extremas al mismo tiempo, sino que desfasadas (por lo tanto ya no se puede hablar de la deformada o forma de vibrar).
2.4.2.- Amortiguamiento proporcional
Se llama al amortiguamiento que es proporcional a la matriz de masa y/o matriz
de rigidez, es decir:
[ ] [ ] [ ]KbMaC += a, b = constantes (2-21)
Cuando el amortiguamiento es proporcional:
1.- Los modos de vibrar son reales, iguales al sistema conservativo asociado.

Análisis de Sistemas Dinámicos
2.- Se pueden desacoplar las ecuaciones del movimiento. En efecto:
[ ] [ ] [ ] FxKxCxM =++&&&
(2-22)
Con la transformación: y premulplicando por : [ ] qXx = [ ]TX
[ ] [ ][ ] [ ] [ ][ ] [ ] [ ][ ] [ ] qXqXKXqXCXqXMXTTTT =++
&&& (2-23)
si [ ] [ ] [ ]KbMaC +=
[ ] [ ][ ] [ ] [ ][ ] [ ] [ ][ ] DiagonalXKXbXMXaXCX
Diagonal
T
Diagonal
TT⇒+=
4847648476
y la ecuación (2-12) queda desacoplada:
[ ] [ ][ ] [ ] Pqqqi
=++ →←
→←
→← γϕµ
&&& (2-24)
Donde:
[ ] iT
i
iiXCX=ϕ (2-25)
Ejemplo:
a) Con amortiguamiento proporcional
kmcc 2,021==
02
2,02,0
2,04,0
2
1
2
1
2
1 =⎭⎬⎫
⎩⎨⎧⎥⎦
⎤⎢⎣
⎡
−−
+⎭⎬⎫
⎩⎨⎧⎥⎦
⎤⎢⎣
⎡
−−
+⎭⎬⎫
⎩⎨⎧⎥⎦
⎤⎢⎣
⎡
x
x
kk
kk
x
x
kmkm
kmkm
x
x
m
m
&
&
&&
&&
Observe: [ proporcional a ]C [ ]K

Análisis de Sistemas Dinámicos
[ ]
041,004,36,0
02,02,0
2,024,0
0
2
2
234
2
2
2
=++++
=⎥⎦
⎤⎢⎣
⎡
++−−−−++
=++
m
k
m
k
m
k
m
krkmrr
krkmmrkkm
kkmkrkmmrdet
KCrMrdet
222
111
)5967,12618,0(
)6168,003819,0(
βα
βα
jm
kjr
jm
kjr
±=±−=
±=±−=⇒
Usando ecuación (2-20):
1618,0;618,1;5967,1
0618,0;618,0;6168,0
22
11
2
1
===
===
ξωω
ξωω
mk
mk
mk
mk
d
d
Usando ecuación (2-18):
[ ] 02 =++ XKCrMr
para ( )211
2
1βα jr ±=
⎭⎬⎫
⎩⎨⎧
=618,1
0,11
X
para ( )222
2
2βα jr ±=
⎭⎬⎫
⎩⎨⎧
−=
618,0
0,12
X
Nota: Se observa que los modos de vibrar son reales e idénticos a los modos sin amortiguamiento. b) Con amortiguamiento no – proporcional
kmc
kmc
2,0
4,0
2
1
=
=
02
2,02,0
2,06,0
2
1
2
1
2
1 =⎭⎬⎫
⎩⎨⎧⎥⎦
⎤⎢⎣
⎡
−−
+⎭⎬⎫
⎩⎨⎧⎥⎦
⎤⎢⎣
⎡
−−
+⎭⎬⎫
⎩⎨⎧⎥⎦
⎤⎢⎣
⎡
x
x
kk
kk
x
x
kmkm
kmkm
x
x
m
m
&
&
&&
&&

Análisis de Sistemas Dinámicos
det [ ] 02 =++ KCrMr
jr
jr
58,13341,0
6156,00659,0
2
1
±−=±−=⇒
Usando ecuación (2-20):
1064,0;619,0;6156,0111=== ξωω
d
207,0;615,1;58,1212=== ξωω
d
Usando ecuación (2-18): [ ] 0
2 =++ XKCrMr
para :111
βα jr ±= ⎭⎬⎫
⎩⎨⎧
=⎭⎬⎫
⎩⎨⎧
±= ± º2,3
1
621,1
1
09017,0618,1
1
ejX
para :222
βα jr ±=⎭⎬⎫
⎩⎨⎧
−=
⎭⎬⎫
⎩⎨⎧
±= ± º3.8
2
6045,0
1
08714,05982,0
1
ejX
2.4.3.- Método pseudo modal
1.- Si el sistema tiene N grados de libertad se usa un sistema sólo de n grados de libertad de modo que:
máxΩ < ni)(ω
(máxima frecuencia de excitación)< (frecuencia natural del modo n).
Para lo cual es necesario determinar
n
n
XXX ...,
...,
21
21ωωω
2.- Se resuelve el sistema:
[ ] [ ]⎪⎪
⎭
⎪⎪
⎬
⎫
⎪⎪
⎩
⎪⎪
⎨
⎧
=
⎪⎪
⎭
⎪⎪
⎬
⎫
⎪⎪
⎩
⎪⎪
⎨
⎧
++ →←
→←
)(
:
)(
)(
:
3
2
1
2
1
tP
tP
tP
q
q
q
qCXXq
n
T γµ&&&
Si el amortiguamiento es no-proporcional y pequeño, se puede aproximar la
solución no considerando los términos diagonales de matriz (Hipótesis de Basile) y desacoplando el sistema de ecuaciones.
CXXT

Análisis de Sistemas Dinámicos
2.4.4- Método de resolución de valores y vectores propios
Cuando el amortiguamiento [C] no es proporcional, es inapropiado usar un método de resolución de valores propios estándar en las ecuaciones:
[ ] [ ] [ ] 0=++ xKxCxM&&&
(2-16)
Para transformar (2-16) a un problema estándar, se le suma la ecuación (2-26):
[ ] [ ] 0=− xKxK&&
(2-26)
obteniendo después de ordenar
000
0=
⎭⎬⎫
⎩⎨⎧⎥⎦
⎤⎢⎣
⎡+
⎭⎬⎫
⎩⎨⎧⎥⎦
⎤⎢⎣
⎡
− x
x
K
KC
x
x
K
M&
&
&&
(2-27)
llamando
[ ] [ ] ⎭⎬⎫
⎩⎨⎧
=⎥⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡
−=
x
xy
K
KCB
K
MA
&
;0
;0
0 (2-28)
se obtiene
[ ] [ ] 0)()( =+ tyBtyA&
(2-29) las soluciones son de la forma: (2-30) teYty Ω=)(
[ ] [ ] [ ] YYA
YrYBA
λ=−=−
`
1
Forma estándar (2-31)
Ejemplo:
Resolver por Matlab los ωBiB y X BiB.
a.- Si kmckmc 2,0,4,021==
011
12
2,02,0
2,06,0
10
01
2
1
2
1
2
1 =⎭⎬⎫
⎩⎨⎧⎥⎦
⎤⎢⎣
⎡
−−
+⎭⎬⎫
⎩⎨⎧⎥⎦
⎤⎢⎣
⎡
−−
+⎭⎬⎫
⎩⎨⎧⎥⎦
⎤⎢⎣
⎡
x
x
x
x
x
x
&
&
&&
&&
[ ] alproporcionnoientoAmortiguamC :⇒

Análisis de Sistemas Dinámicos
Programa Matlab para resolver el ejemplo
» A
A =
1 0 0 0
0 1 0 0
0 0 -2 1
0 0 1 -1
» B
B =
0.6000 -0.2000 2.0000 -1.0000
-0.2000 0.2000 -1.0000 1.0000
2.0000 -1.0000 0 0
-1.0000 1.0000 0 0
» [E,EE]=eig(inv(A)*B)
E =
-0.3774 - 0.6221i -0.3774 + 0.6221i 0.2433 + 0.1313i 0.2433 - 0.1313i
0.1715 + 0.4050i 0.1715 - 0.4050i 0.4055 + 0.1905i 0.4055 - 0.1905i
0.4252 - 0.1489i 0.4252 + 0.1489i -0.2527 + 0.3681i -0.2527 - 0.3681i
-0.2673 + 0.0520i -0.2673 - 0.0520i -0.3757 + 0.6184i -0.3757 - 0.6184i
EE =
0.3341 + 1.5802i 0 0 0
0 0.3341 - 1.5802i 0 0
0 0 0.0659 + 0.6156i 0
0 0 0 0.0659 - 0.6156i
Matriz E = Matriz Modal del vector
⎪⎪
⎭
⎪⎪
⎬
⎫
⎪⎪
⎩
⎪⎪
⎨
⎧
4
3
2
1
x
x
x
x
&
&
&
&
Matriz EE = Matriz de valores propios λ Bi
Observe que rBi B= -λ Bi
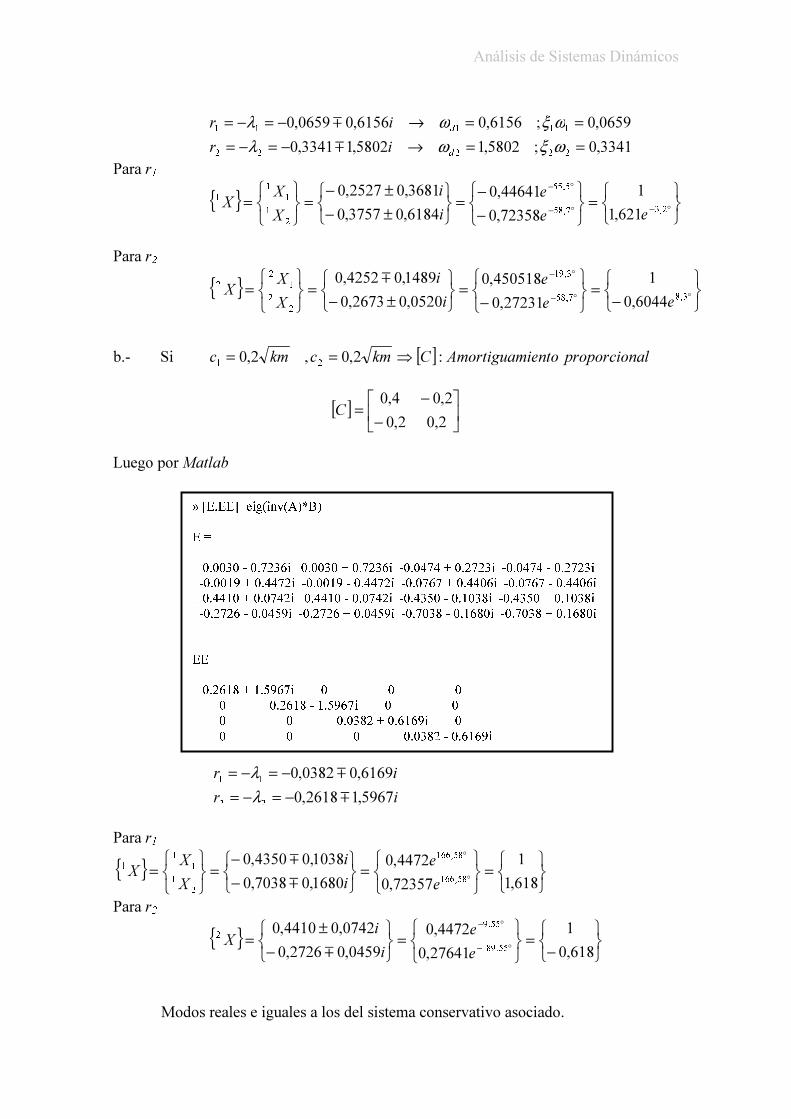
Análisis de Sistemas Dinámicos
3341,0;5802,15802,13341,0
0659,0;6156,06156,00659,0
22222
11111
==→−=−===→−=−=
ωξωλωξωλ
d
d
ir
ir
m
m
Para rB1B
⎭⎬⎫
⎩⎨⎧
=⎭⎬⎫
⎩⎨⎧
−−
=⎭⎬⎫
⎩⎨⎧
±−±−
=⎭⎬⎫
⎩⎨⎧
= °−°−
°−
2,37,58
5,55
2
1
1
1
1
621,1
1
72358,0
44641,0
6184,03757,0
3681,02527,0
ee
e
i
i
X
XX
Para rB2B
⎭⎬⎫
⎩⎨⎧
−=
⎭⎬⎫
⎩⎨⎧
−=
⎭⎬⎫
⎩⎨⎧
±−=
⎭⎬⎫
⎩⎨⎧
= °°−
°−
3,87,58
3,19
2
2
1
2
2
6044,0
1
27231,0
450518,0
0520,02673,0
1489,04252,0
ee
e
i
i
X
XX
m
b.- Si kmckmc 2,0,2,021== [ ] alproporcionientoAmortiguamC :⇒
[ ] ⎥⎦
⎤⎢⎣
⎡
−−
=2,02,0
2,04,0C
Luego por Matlab
» [E,EE]=eig(inv(A)*B)
E =
0.0030 - 0.7236i 0.0030 + 0.7236i -0.0474 + 0.2723i -0.0474 - 0.2723i
-0.0019 + 0.4472i -0.0019 - 0.4472i -0.0767 + 0.4406i -0.0767 - 0.4406i
0.4410 + 0.0742i 0.4410 - 0.0742i -0.4350 - 0.1038i -0.4350 + 0.1038i
-0.2726 - 0.0459i -0.2726 + 0.0459i -0.7038 - 0.1680i -0.7038 + 0.1680i
EE =
0.2618 + 1.5967i 0 0 0
0 0.2618 - 1.5967i 0 0
0 0 0.0382 + 0.6169i 0
0 0 0 0.0382 - 0.6169i
ir
ir
5967,12618,0
6169,00382,0
22
11
m
m
−=−=−=−=
λλ
Para rB1B
⎭⎬⎫
⎩⎨⎧
=⎭⎬⎫
⎩⎨⎧
=⎭⎬⎫
⎩⎨⎧
−−
=⎭⎬⎫
⎩⎨⎧
= °
°
618,1
1
72357,0
4472,0
1680,07038,0
1038,04350,0
58,166
58,166
2
1
1
1
1
e
e
i
i
X
XX
m
m
Para rB2B
⎭⎬⎫
⎩⎨⎧
−=
⎭⎬⎫
⎩⎨⎧
=⎭⎬⎫
⎩⎨⎧
−±
= °−
°−
618,0
1
27641,0
4472,0
0459,02726,0
0742,04410,0
55,189
55,9
2
e
e
i
iX
m
Modos reales e iguales a los del sistema conservativo asociado.

Análisis de Sistemas Dinámicos
2.5.- Vibraciones de sistemas continuos
Hasta ahora hemos visto sistemas discretos, donde la masa, rigidez y amortiguamiento estaban concentrados en algunos elementos. Ahora consideremos el caso donde estas propiedades están distribuidas continuamente a lo largo del sistema.
2.5.1.- Vibraciones longitudinales libres en una barra. Cuerda vibrando
transversalmente
i.- Supongamos una barra fija longitudinalmente en ambos extremos, a la cual se le da una perturbación axial inicial. Se quiere determinar la ecuación del movimiento de la barra en vibraciones libres axiales. Consideremos que la barra es homogénea, isotrópica y que sigue la Ley de Hooke.
( ) =txu , Desplazamiento axial de la
sección transversal en x.Suponemos que la sección transversal permanece plana (propagación de ondas planas). Esto es efectivo si las dimensiones de la sección transversal son pequeñas respecto a su largo.
( )2
2,
t
txuAdxNdx
x
NN
xmFx
∂∂=−
∂∂+
=∑
ρ
&&
(2-32)
2
2),(
),(
x
txuEA
x
N
x
txuEANE
∂∂=
∂∂
∂∂=⇒= εσ
(2-33)
(2-33) en (2-32):
( )2
2
2
2,1),(
t
txu
cx
txu
∂∂=
∂∂
Ecuación de la onda en una dirección. (2-34)
c = ρ/Ε = Velocidad de propagación de la onda longitudinal o del sonido en el
material.
ii.- Supongamos una cuerda fija en sus extremos, a la que se le dá una perturbación inicial. Describir su movimiento.

Análisis de Sistemas Dinámicos
Si la deflexión transversal de la
cuerda es pequeña, el cambio de la tracción de la cuerda con la deflexión puede ignorarse.ymF
y=∑
&&
c
L
d f
o ps
2
2
t
ydxTdx
xT
∂∂=−⎟
⎠
⎞⎜⎝
⎛
∂∂+ ρθθθ
2
2
t
y
Tx ∂∂=
∂∂ ρθ
Como x
y
∂∂=θ
2
2
22
21
t
y
cx
y
∂∂=
∂∂
⇒ (2-35)
ρ/t= = Velocidad de propagación de las ondas a lo largo de la cuerda.
a solución general de la ecuación (2-34) o (2-35) es de la forma:
( ) )()(,21
ctxfctxftxu ++−= (2-36)
Donde fB1B(x) y fB2B(x) son funciones arbitrarias (verificar que satisfacen la ecuación iferencial) cuyas formas deben satisfacer las condiciones iniciales y de borde.
Físicamente el primer término de la ecución (2-36) representa una onda de forma B1B(x) viajando en la dirección positiva de x con velocidad c y el segundo término una nda de forma fB2B(x) viajando en la dirección negativa de x con velocidad c. B
B
Aunque la solución (2-36) es útil para estudiar el movimiento transiente (onda rogresiva), cuando se forma la onda estacionaria es más práctico utilizar el método de eparación de variables para resolver las ecuaciones (2-34) o (2-35).
La solución de la ecuación (2-35) se puede expresar:
)()(),( tfxYtxy ⋅= (2-37)
Reemplazando en (2-35):
( ) )(1
2
2
22
2
xYdt
fd
ctf
dxYd ⋅=⋅

Análisis de Sistemas Dinámicos
2
2
2
2
22)(
)(
1)(
)(ω−=== cte
dt
tfd
tfdx
xYd
xY
c
tdefunciónSóloxdefunciónSólo
44344214434421
(2-38)
( )
( ) tcosCtsenCtffdt
fd
xc
cosCxc
senCxYcdx
yd
ωωω
ωωω
43
2
2
2
212
2
2
2
0
0
+=→=+
+=→=+
(2-39)
( ) )cossen()cossen(,
)(
43
)(
214444 34444 21
4444 34444 21tf
xY
tCtCxc
Cxc
Ctxy ωωωω ++=→ (2-40)
1.- Las constantes C B1B y C B2B y las frecuencias naturales ω son determinadas de las condiciones de borde:
Si ⎩⎨⎧
==0),(
0),0(
tLy
ty
00
0
1
2
=→=→
=→
c
Lsen
c
LsenC
C
ωω
c
xsenCxY
L
ci
i
ii
i
ω
πω
=
=
)(
i =1,2,3 ...∞ (2-41)
La solución general de una ecuación diferencial es la suma de todas sus soluciones independientes:
(∑∞
=
+=1
43),(
i
ii
i
itcosCtsenC
cx
senCtxy ωωω ) (2-42)
2.- Las constantes C B3B y C B4B son determinadas de las condiciones iniciales.
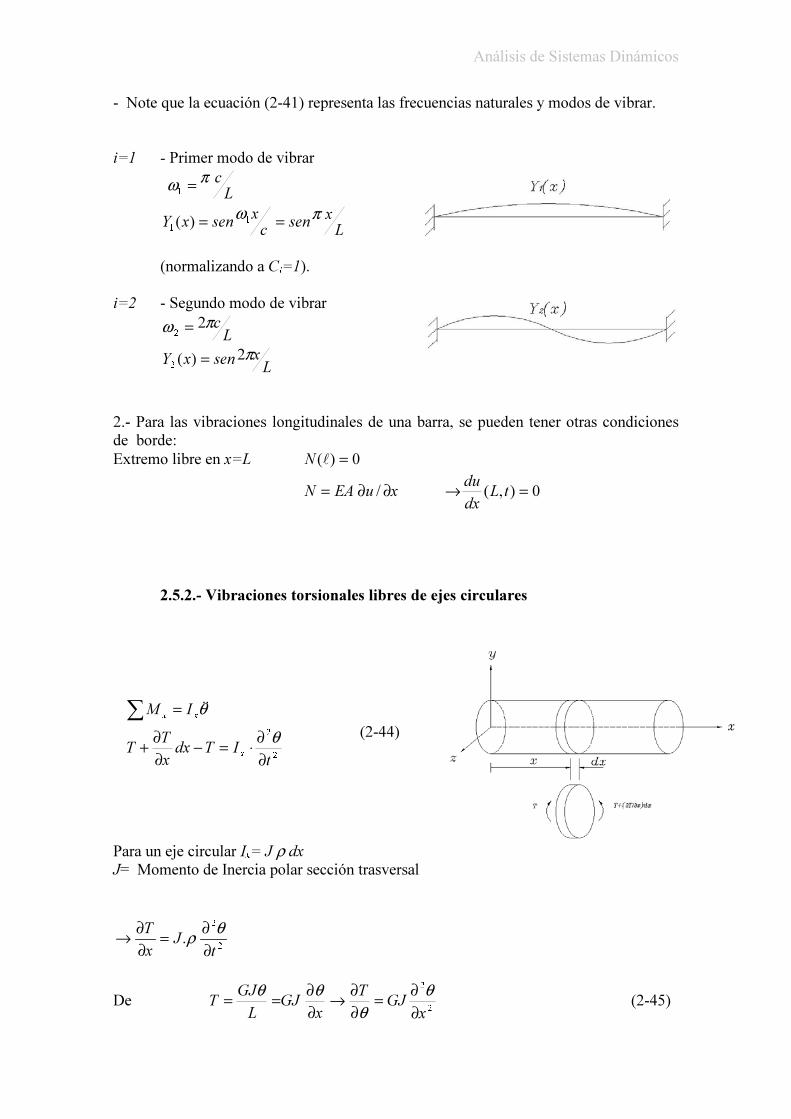
Análisis de Sistemas Dinámicos
- Note que la ecuación (2-41) representa las frecuencias naturales y modos de vibrar. i=1 - Primer modo de vibrar
L
xsen
c
xsenxY
L
c
πω
πω
==
=
11
1
)(
(normalizando a C BiB=1).
i=2 - Segundo modo de vibrar
Lcπω 2
2=
LxsenxY π2)(
2=
2.- Para las vibraciones longitudinales de unde borde: Extremo libre en x=L 0)( =lN
xuEAN ∂∂= /
2.5.2.- Vibraciones torsionales libres
2
2
tITdx
x
TT
IM
x
xx
∂∂⋅=−
∂∂+
=∑θ
θ&& (2-44)
Para un eje circular IBxB= J ρ dx J= Momento de Inercia polar sección trasvers
2
2
.
tJ
x
T
∂∂=
∂∂→ θρ
De GJT
xGJ
L
GJT =
∂∂→
∂∂==
θθθ
a barra, se pueden tener otras condiciones
0),( =→ tLdx
du
de ejes circulares
al
2
2
x∂∂ θ
(2-45)
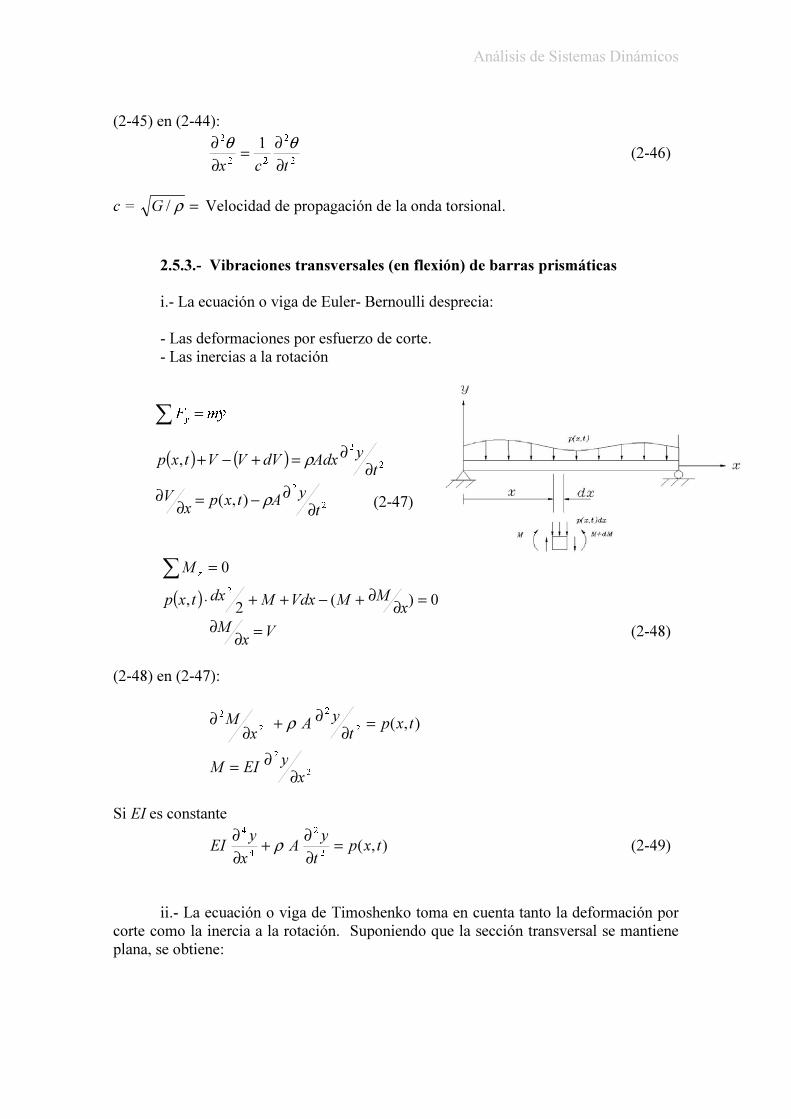
Análisis de Sistemas Dinámicos
(2-45) en (2-44):
2
2
22
21
tcx ∂∂=
∂∂ θθ
(2-46)
c = =ρ/G Velocidad de propagación de la onda torsional.
2.5.3.- Vibraciones transversales (en flexión) de barras prismáticas
i.- La ecuación o viga de Euler- Bernoulli desprecia:
- Las deformaciones por esfuerzo de corte. - Las inercias a la rotación
( ) ( )
2
2
2
2
),(
,
ty
Atxpx
V
ty
AdxdVVVtxp
∂∂−=∂
∂∂
∂=+−+
ρ
ρ
(2-47)
∑ = ymFy &&
( ) 0)(2
,
0
2
=∂∂+−++⋅
=∑
xMMVdxMdxtxp
Mz
Vx
M =∂∂ (2-48)
(2-48) en (2-47):
2
2
2
2
2
2
),(
xy
EIM
txpt
yA
xM
∂∂=
=∂∂+∂
∂ ρ
Si EI es constante
),(2
2
4
4
txpt
yA
x
yEI =
∂∂+
∂∂ ρ (2-49)
ii.- La ecuación o viga de Timoshenko toma en cuenta tanto la deformación por
corte como la inercia a la rotación. Suponiendo que la sección transversal se mantiene plana, se obtiene:

Análisis de Sistemas Dinámicos
),(4
4
2
2
2
2
22
4
22
4
2
2
4
4
txpt
y
kAG
J
t
p
kAG
J
x
p
kAG
EI
tx
y
kAG
EI
tx
yJ
t
yA
x
yEI
rotaciónlaainerciaecortedelcombinadoEfecto
m
corteporangularnDeformació
m
rotaciónlaaInerciaEulervigaSolución
=∂∂+
∂∂−
∂∂+
∂∂∂−
∂∂∂−
∂∂+
∂∂
444 3444 214444 34444 2143421444 3444 21
ρ
2.5.3.1.- Vibraciones libres de vigas de Euler
La solución de (2-49) utilizando separación de variables es:
( ) ( ) (tfxYtxy =, )
2
2
2
4
4 )(
)(
1)(
)(
1 ωρ
==−= ctedt
tfd
tfdx
xYd
xYA
EI (2-50)
0
0
2
4
4
2
2
2
=−
=+
YEI
A
dx
Yd
fdt
fd
ωρ
ω
EIASi
tcosBtsenAtf
/
)(
24 ωρβωω
=→
+=→ (2-51)
La ecuación auxiliar será:
044 =− βr
βββ
β
jr
jr
r
r
−==−=
=
4
3
2
1
P
P
xjxjxx
eCeCeCeCxYββββ −− ′+′+′+′=→
4321)(
xcoshCxsenhCxcosCxsenCxY ββββ4321
)( +++=
))(()()(),(
4321tcosBtsenAxcoshCxsenhCxcosCxsenCtfxYtxy ωωββββ ++++==
(2-52) Las constantes C B1B, C B2B, C B3, BC B4B y los son determinadas de las condiciones de borde
iω
( ) 0,0
0),(033
22
=∂∂→==∂∂→=
⎭⎬⎫
= xtLyV
xtLyM
Lxen
libreExtremo
( ) 0,0
0),(0 22
=→==∂∂→=
⎭⎬⎫
= tLyy
xtLyM
Lxen
apoyadoExtremo
( ) 0,
0),(0
=∂∂=→=
⎭⎬⎫
= xtLy
tLyy
Lxen
empotradoExtremo
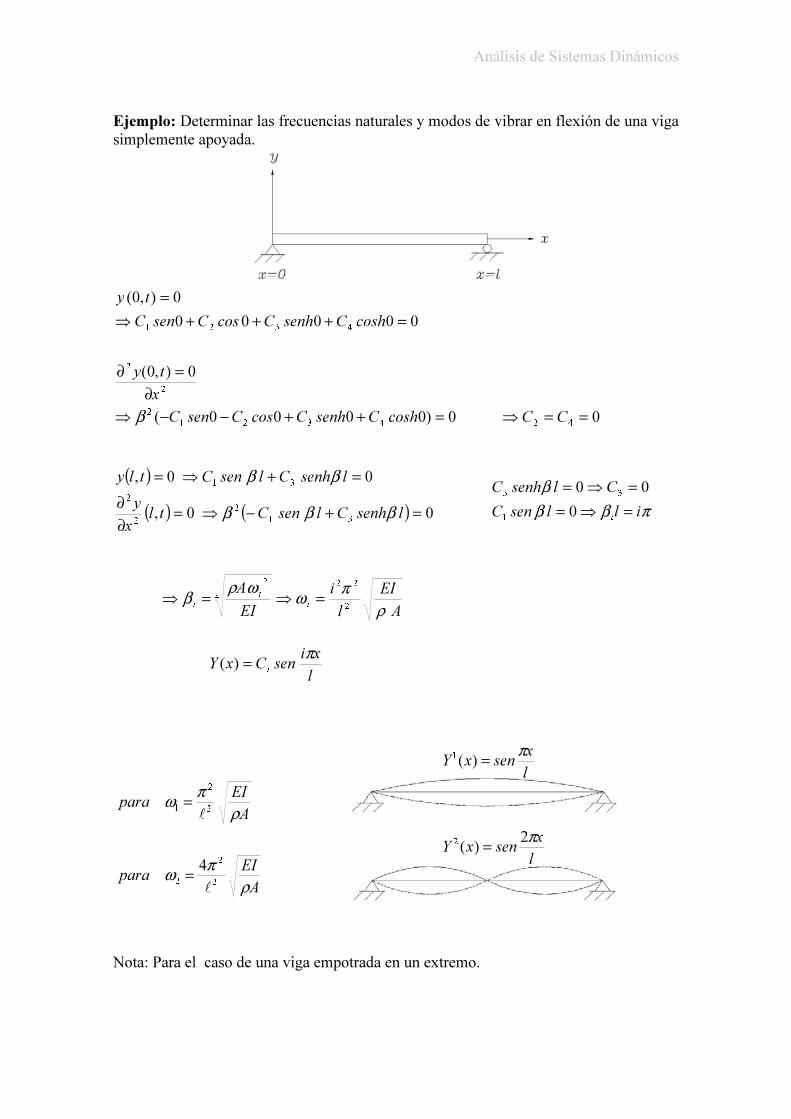
Análisis de Sistemas Dinámicos
Ejemplo: Determinar las frecuencias naturales y modos de vibrar en flexión de una viga simplemente apoyada.
00)0000(
0),0(
00000
0),0(
424321
2
2
2
4321
==⇒=++−−⇒
∂=∂
=+++⇒
=
CCcoshCsenhCcosCsenC
x
ty
coshCsenhCcosCsenC
ty
β
( )
( ) ( ) 00,
00,
31
2
2
2
31
=+−⇒=∂∂
=+⇒=
lsenhClsenCtlx
y
lsenhClsenCtly
βββ
ββ
πβββ
illsenC
ClsenhC
i=⇒==⇒=
0
00
1
33
A
EI
l
i
EI
A
i
i
i ρπωωρβ2
22
4
2
=⇒=⇒
l
xisenCxY
i
π=)(
l
xsenxY
π=)(1
A
EIpara
A
EIpara
ρπω
ρπω
2
2
2
2
2
1
4
l
l
=
=
l
xsenxY
π2)(
2 =
Nota: Para el caso de una viga empotrada en un extremo.

Análisis de Sistemas Dinámicos
0)(0),0(
00),0(
31
42
=+⇒=∂
∂
=+⇒=
CCx
ty
CCty
β
00),(
00),(
43213
3
43212
2
=++−−⇒=∂
∂
=++−−⇒=∂
∂
lllll
lllll
ββββ
ββββ
senhCcoshCsenCcosCx
ty
coshCsenhCcosCsenCx
ty
Sistema de ecuación homogénea cuya solución es el determinante de los
coeficientes = 0
01 =+⇒ ll ββ coshcos
Cuyas soluciones β i son :
l
l
l
/8543,7
/6936,4
/8751,1
3
2
1
===
βββ
A
EIi
i ρβω
4
2 =⇒
Con C B1B=1 se puede determinar para cada β BiB ( ) el modo de vibrar del sistema
de ecuaciones.
iω
Nota: Al igual que para las vibraciones longitudinales de las barras, las constantes A y
B son determinadas de las condiciones iniciales.

Análisis de Sistemas Dinámicos
2.6.- Métodos aproximados de cálculo
2.6.1- Método de los elementos finitos
Rigidez de una viga en flexión
La estructura se modela por un sistema de elementos separados que son unidos
por un número finito de nodos.
Los desplazamientos de estos modos son las coordenadas generalizadas.
4321
,,, yyyyqT =
Para determinar la rigidez de la barra debemos darnos una forma de deformación
cualquiera que satisfaga las condiciones de continuidad interna y nodal. Si se utilizan
las verdaderas funciones de forma o interpolación se obtienen las rigideces
verdaderas.
)(xi
ϕ
Si las cargas en la viga son fuerzas y momentos.
iiiMxFxM
dx
ydEI +== )(
2
2
La elástica es una cúbica (obtenida al integrar).
La presencia de estos términos asegura:
3
3
2
2
32)(
dx
ydEIVde
iaConvergenc
dx
ydEIMde
iaConvergenc
dxdy
de
iaConvergencyde
iaConvergenc
dxcxbxaxy
==
+++=
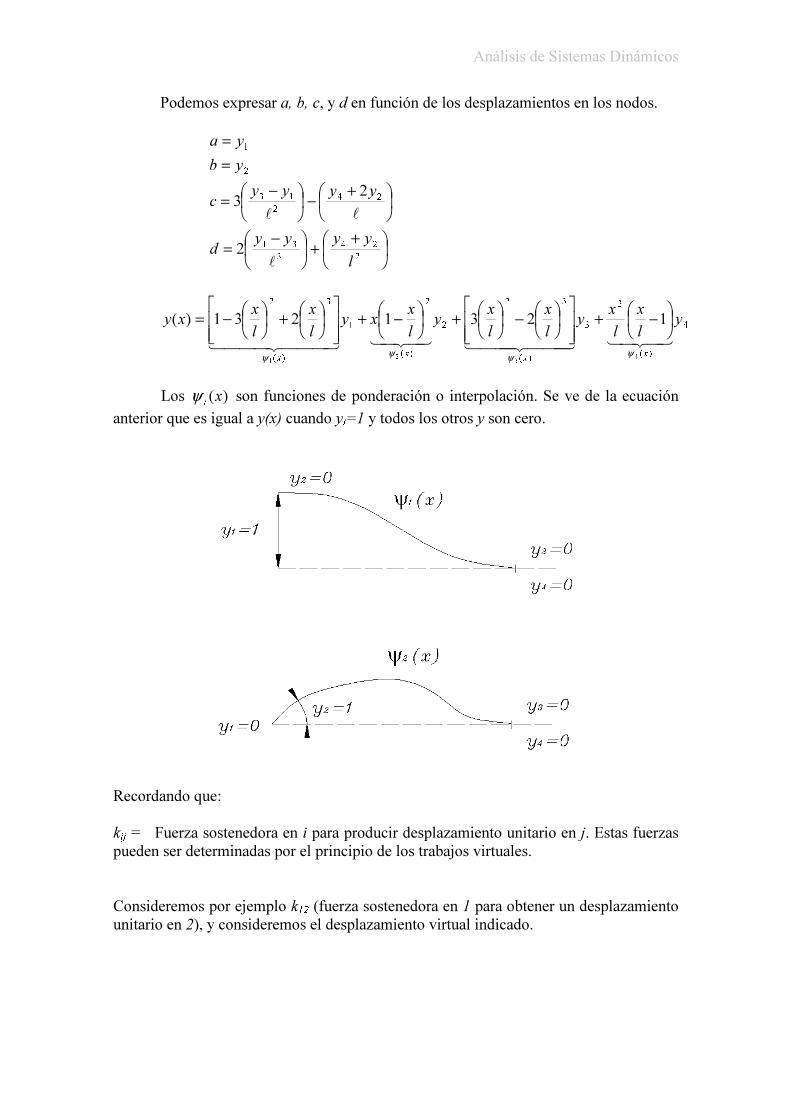
Análisis de Sistemas Dinámicos
Podemos expresar a, b, c, y d en función de los desplazamientos en los nodos.
⎟⎠
⎞⎜⎝
⎛ +−⎟⎠
⎞⎜⎝
⎛ −=
==
ll
24
2
13
2
1
23
yyyyc
yb
ya
⎟⎠
⎞⎜⎝
⎛ ++⎟
⎠
⎞⎜⎝
⎛ −=
2
24
3
312l
yyyyd
l
4
)(
2
3
)(
32
2
)(
2
1
)(
32
43
21
1231231)( yl
x
l
xy
l
x
l
xy
l
xxy
l
x
l
xxy
xx
xx
43421444 3444 21
43421444 3444 21
ψψψψ
⎟⎠
⎞⎜⎝
⎛ −+⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎠
⎞⎜⎝
⎛−⎟⎠
⎞⎜⎝
⎛+⎟⎠
⎞⎜⎝
⎛ −+⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎠
⎞⎜⎝
⎛+⎟⎠
⎞⎜⎝
⎛−=
Los son funciones de ponderación o interpolación. Se ve de la ecuación
anterior que es igual a y(x) cuando y BiB=1 y todos los otros y son cero.
)(xi
ψ
Recordando que:
k BijB = Fuerza sostenedora en i para producir desplazamiento unitario en j. Estas fuerzas
pueden ser determinadas por el principio de los trabajos virtuales.
Consideremos por ejemplo k B12B (fuerza sostenedora en 1 para obtener un desplazamiento
unitario en 2), y consideremos el desplazamiento virtual indicado.

Análisis de Sistemas Dinámicos
112. ykW
Eδ=
WBI B= Trabajo de los momentos interiores asociados a y B2B=1, actuando sobre las
curvaturas virtuales.
( ) ⎟⎟⎠
⎞⎜⎜⎝
⎛== ∫∫
LL
dxdxydxMdxdxydEIU0
22
0
222 /)(2
1/
2
1
[ ] ∫∫ ⋅=∂∂=
L
i
L
IdxyxxxEIdxxy
xxMW
0
12
0
2
2
)(")(")()()( δψψδ
WBE B= WBI
ji
L
jiij
L
kdxxxxEIk
dxxxxEIk
==
=
∫
∫
0
0
2112
)(")(")(
)(")(")(
ψψ
ψψ
De esta forma se puede determinar la matriz de rigidez en flexión para un elemento
de eje en flexión, como:
[ ]K
⎪⎪
⎭
⎪⎪
⎬
⎫
⎪⎪
⎩
⎪⎪
⎨
⎧
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−−−−
−−
=
⎪⎪
⎭
⎪⎪
⎬
⎫
⎪⎪
⎩
⎪⎪
⎨
⎧
4
3
2
1
22
22
3
4
3
2
1
4626
612612
2646
612612
y
y
y
y
lll
l
lEI
F
F
F
F
l
l
lll
ll
l
Procedimiento de ensamble
Cuando se tienen varios elementos, la matriz global de rigidez del sistema se
determina con el procedimiento de ensamble siguiente ilustrado para 2 elementos:
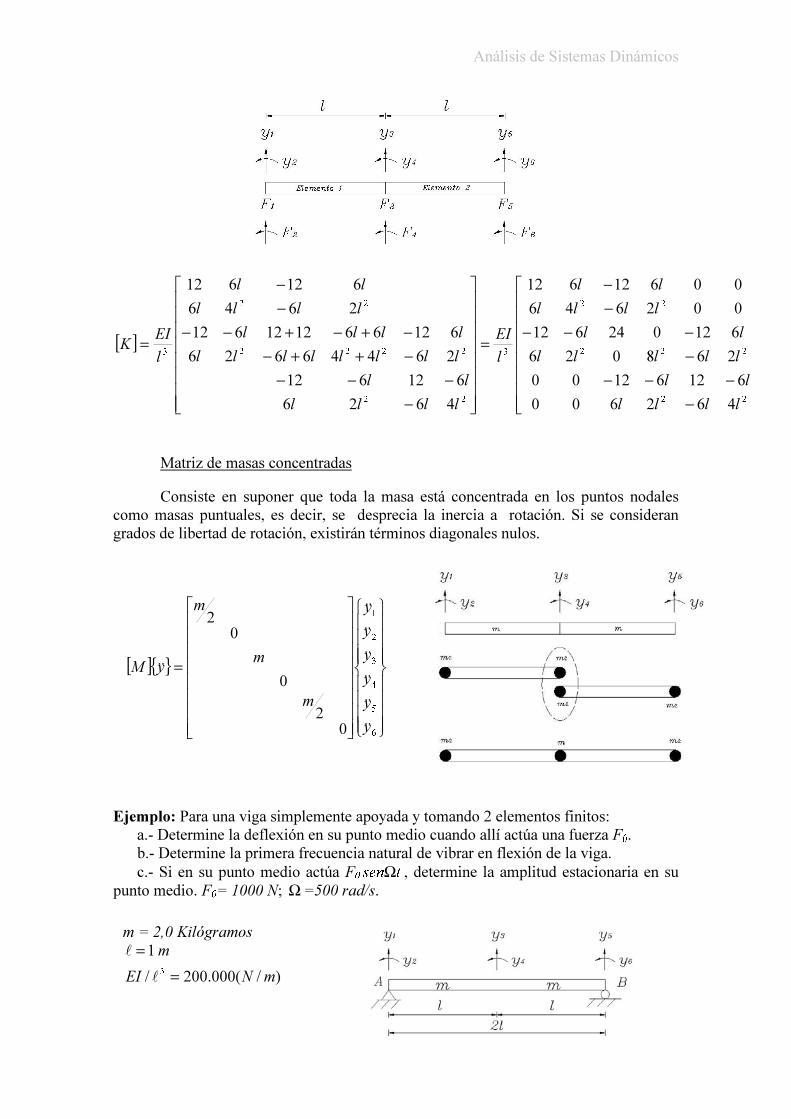
Análisis de Sistemas Dinámicos
[ ]
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−−−−
−−−−
−−
=
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−−−−
−++−−+−+−−
−−
=
22
222
22
3
22
2222
22
3
462600
61261200
268026
612024612
002646
00612612
4626
612612
26446626
612661212612
2646
612612
llll
ll
lllll
ll
llll
ll
l
EI
llll
ll
llllllll
llll
llll
ll
l
EIK
Matriz de masas concentradas
Consiste en suponer que toda la masa está concentrada en los puntos nodales
como masas puntuales, es decir, se desprecia la inercia a rotación. Si se consideran
grados de libertad de rotación, existirán términos diagonales nulos.
[ ]
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
=
6
5
4
3
2
1
0
2
0
0
2
y
y
y
y
y
y
m
m
m
yM
&&
&&
&&
&&
&&
&&
&&
Ejemplo: Para una viga simplemente apoyada y tomando 2 elementos finitos:
a.- Determine la deflexión en su punto medio cuando allí actúa una fuerza F B0B.
b.- Determine la primera frecuencia natural de vibrar en flexión de la viga.
c.- Si en su punto medio actúa F B0B , determine la amplitud estacionaria en su
punto medio. F B0B= 1000 N; Ω=500 rad/s.
tsenΩ
m = 2,0 Kilógramos
)/(000.200/
1
3mNEI
m
=
=
l
l
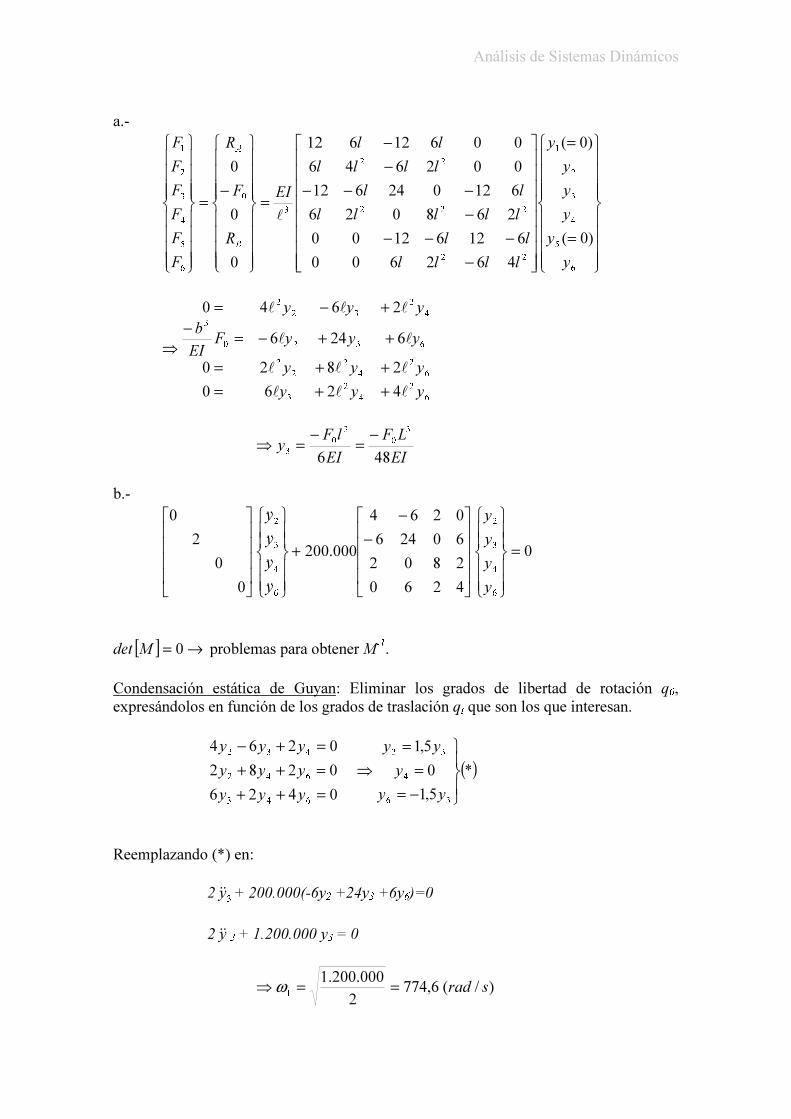
Análisis de Sistemas Dinámicos
a.-
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
=
=
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−−−−
−−−−
−−
=
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
−=
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
6
5
4
3
2
1
22
222
22
3
0
6
5
4
3
2
1
)0(
)0(
462600
61261200
268026
612024612
002646
00612612
0
0
0
y
y
y
y
y
y
llll
ll
lllll
ll
llll
ll
EI
R
F
R
F
F
F
F
F
F
B
A
l
6
2
4
2
3
6
2
4
2
2
2
6320
3
4
2
32
2
4260
2820
6246
2640
yyy
yyy
yyyFEI
b
yyy
lll
lll
ll
lll
++=++=
++−=−+−=
⇒
EI
LF
EI
lFy
486
3
0
3
0
3
−=
−=⇒
b.-
0
4260
2802
60246
0264
000.200
0
0
2
0
6
4
3
2
6
4
3
2
=
⎪⎪
⎭
⎪⎪
⎬
⎫
⎪⎪
⎩
⎪⎪
⎨
⎧
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−−
+
⎪⎪
⎭
⎪⎪
⎬
⎫
⎪⎪
⎩
⎪⎪
⎨
⎧
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
y
y
y
y
y
y
y
y
&&
&&
&&
&&
det problemas para obtener MP
-1P. [ ] →= 0M
Condensación estática de Guyan: Eliminar los grados de libertad de rotación qB0B,
expresándolos en función de los grados de traslación qBtB que son los que interesan.
0426
0282
0264
643
642
432
=++=++=+−
yyy
yyy
yyy
B
B ( )*5,1
0
5,1
36
4
32
⎪⎭
⎪⎬
⎫
−==
=⇒
yy
y
yy
Reemplazando (*) en:
2 + 200.000(-6yB2B +24y B3B +6y B6B)=0 3y&&
2 B3 B+ 1.200.000 yB3 B= 0 y&&
)/(6,7742
000.200.11
srad==⇒ω

Análisis de Sistemas Dinámicos
De(*), si y B2B=1,0
y B3B=0,666
y B4B=0
y B6B=-1,0
Comparando el valor de B
Bobtenido, con el valor exacto obtenido anteriormente: 1
ω
⎟⎠
⎞⎜⎝
⎛===s
rad
A
EI
L2,780
2/4
000.200
22
2
2
2
1
πρ
πω
⇒ Error cometido = 0,7 %
El procedimiento anterior se puede generalizar utilizando matrices.
qBt B= grados de traslación
qBθ B= grados de rotación a eliminar.
⎭⎬⎫
⎩⎨⎧
==
⎭⎬⎫
⎩⎨⎧⎥⎦
⎤⎢⎣
⎡
0θθθθθ
θ
F
F
q
q
kk
kktt
t
ttt
(Inercia a la rotación = 0 )
⎪⎪
⎭
⎪⎪
⎬
⎫
⎪⎪
⎩
⎪⎪
⎨
⎧
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
=
⎪⎪
⎭
⎪⎪
⎬
⎫
⎪⎪
⎩
⎪⎪
⎨
⎧
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−−
θθθθ
θ
q
q
kk
kk
y
y
y
yt
t
ttt
6
4
2
3
4206
2820
0246
60624
0=+=+
θθθθ
θθ
qkqk
Fqkqk
tt
ttttt
tt
qkkq θθθθ1−−=→
[ ] [ ]
ttt
tttttt
Fqk
Fqkkkk
==−⇒
−θθθθ
1
c.-
tsenyy 500000.1000.200.1233=+
&&
)(43,1)6,774/500(1
000.200.1/000.123
mmy =−
=

Análisis de Sistemas Dinámicos
Rigidez de una viga en movimiento axial
Elemento con dos nodos
( )
( ) l
l
/
/
1212
211
uuEAFF
uuEAF
−=−=−=
[ ] ⎥⎦
⎤⎢⎣
⎡
−−
=⇒⎭⎬⎫
⎩⎨⎧
⎥⎦
⎤⎢⎣
⎡
−−
=⎭⎬⎫
⎩⎨⎧
11
11
11
11
2
1
2
1
ll
EAK
u
uEA
F
F
Rigidez de un eje circular en torsión
Elementos con dos nodos
( )
( ) l
l
/
/
1212
211
θθθθ
−=−=−=GJTT
GJT
[ ] ⎥⎦
⎤⎢⎣
⎡
−−
=⇒⎭⎬⎫
⎩⎨⎧⎥⎦
⎤⎢⎣
⎡
−−
⎭⎬⎫
⎩⎨⎧
11
11
11
11
2
1
2
1
ll
GJK
GJ
T
T
θθ
2.6.2.- Método de Rayleigh- Ritz
Es uno de los métodos más cómodos para calcular algunos de los primeros
modos de una estructura.
La hipótesis en que se basa el método es que el desplazamiento puede expresarse
por medio de una serie de curvas de deformación supuestas, multiplicadas por
coordenadas generalizadas qBiB (t) a determinar.
iψ
∑=
=n
i
itqxtxy
1
1)()(),( ψ
Para obtener buenos resultados con un número restringido de coordenadas se
deben elegir adecuadamente los :)(xi
ψ- Como aproximación al vector modal verdadero . )(x
iφ
- Debe satisfacer las condiciones cinemáticas en los apoyos.

Análisis de Sistemas Dinámicos
Ejemplo: Determine las 2 primeras y sus modos correspondientes de la viga de la
figura, en vibraciones longitudinales.
iω
i.- Usando 2 funciones de desplazamiento.
ii.- Usando 4 funciones de desplazamiento.
iii.- Determine la respuesta estacionaria si en el extremo actúa una fuerza senoidal axial
. tsenF Ω0
i.- Elijamos funciones parabólicas que satisfagan las condiciones cinemáticas del
empotramiento.
( ) ( )tqL
Xtq
L
xtxu
2
2
1)(, ⎟
⎠
⎞⎜⎝
⎛+=
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛++=
⎟⎟⎠
⎞⎜⎜⎝
⎛++=
⎟⎟⎠
⎞⎜⎜⎝
⎛++=
⎟⎟⎠
⎞⎜⎜⎝
⎛+=
∫∫∫
∫
5232
5232
2
2
2
1
2
221
2
1
2
24
5
213
4
2
12
3
0
2
24
4
0
213
3
0
2
12
2
0
2
2
2
2
1
LqLqqLqAEc
qL
xqq
L
xq
L
xAEc
dxqL
xdxqq
L
xdxq
L
xAEc
dxqL
xq
L
xAEc
LLL
L
&&&&
&&&&
&&&&
&&
ρ
ρ
ρ
ρ
22
12
qL
x
L
q
x
u +=∂∂
∫
∫
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛++=
⎟⎠
⎞⎜⎝
⎛ +=
L
L
dxqL
xqq
L
x
L
qEAEp
dxqL
x
L
qEAEp
0
2
24
2
2132
2
1
0
2
22
1
44
2
2
2
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛++=
L
qqq
LL
qEAEp
2
2
21
2
1
3
42
2

Análisis de Sistemas Dinámicos
( )
03
82
254
022243
0
21
2
1
21
21
=⎟⎠
⎞⎜⎝
⎛ ++⎟⎠
⎞⎜⎝
⎛ +
=++⎟⎠
⎞⎜⎝
⎛ +
=∂∂+⎟⎟
⎠
⎞⎜⎜⎝
⎛
∂∂
qqL
EALqq
LA
qqL
EALqLqA
q
Ep
q
EC
dt
d
ii
&&
&&
&&&&
&
ρ
ρ
0
3
41
11
5
1
4
1
4
1
3
1
2
1
2
1 =⎭⎬⎫
⎩⎨⎧
⎥⎥
⎦
⎤
⎢⎢
⎣
⎡+
⎭⎬⎫
⎩⎨⎧
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
q
q
L
EA
q
qAL
&&
&&ρ
20
L
Eksi
ρ=
0
2
0
2
0
2
0
2
3
4
5
1
4
1
4
1
3
1
det
krkr
krkr
++
++
2
0
2
0
4
2
0
2
0
4
2
0
242
0
2
0
2
0
4
2
0
2042
0
22
0
204
807,34
2401043
07203604596032014448
0216
1
3
4
9
4
515
1
krkr
krkr
krrkrkrkr
krk
rkrkrk
r
++=
++=
=−−−+++=
=−−−+++=
85,1433,1744,22033,172 ±−=±−=r
ρω
ρω E
L
E
Lkr
575,1;
48,248,2
12
2
10
2
1==⇒−=
ρω
ρω E
L
E
Lkr
67,5;
18,3218,32
22
2
20
2
2==⇒−=
Para 048,24
148,2
3
148,2
2001000
2
1=⎟
⎠
⎞⎜⎝
⎛ +−⋅+⎟⎠
⎞⎜⎝
⎛ +−⋅⇒−= qkkqkkkr
455,0
1
038,0173,0
2
1
21
−=⇒
=⇒
=+
q
q

Análisis de Sistemas Dinámicos
2
1455,0)( ⎟
⎠
⎞⎜⎝
⎛−=⇒L
x
L
xxφ
1ω es prácticamente la exacta
ρω
ρω E
L
E
Lexactoexacto
712,4;
570,121
==⇒
Nota: - Los modos son bien aproximados.
ii.- Mejores resultados se obtiene con 4 funciones de desplazamiento.
( )4
4
3
3
2
2
1, q
L
xq
L
xq
L
xq
L
xtxu ⎟
⎠
⎞⎜⎝
⎛+⎟⎠
⎞⎜⎝
⎛+⎟⎠
⎞⎜⎝
⎛+=
Para este caso las ecuaciones del movimiento son:
0
7
162
5
81
25
9
2
31
5
8
2
3
3
41
1111
9
1
8
1
7
1
6
1
8
1
7
1
6
1
5
1
7
1
6
1
5
1
4
1
6
1
5
1
4
1
3
1
4
3
2
1
4
3
2
1
=
⎪⎪
⎭
⎪⎪
⎬
⎫
⎪⎪
⎩
⎪⎪
⎨
⎧
⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
+
⎪⎪
⎭
⎪⎪
⎬
⎫
⎪⎪
⎩
⎪⎪
⎨
⎧
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
q
q
q
q
L
EA
q
q
q
q
AL
&&
&&
&&
&&
ρ (*)
432
22
432
11
056,2561,26898,0;724,4
1106,05,002782,0;571,1
⎟⎠
⎞⎜⎝
⎛+⎟⎠
⎞⎜⎝
⎛−⎟⎠
⎞⎜⎝
⎛+==
⎟⎠
⎞⎜⎝
⎛+⎟⎠
⎞⎜⎝
⎛−⎟⎠
⎞⎜⎝
⎛+==
L
x
L
x
L
x
L
xE
L
L
x
L
x
L
x
L
xE
L
φρ
ω
φρ
ω
Con una exactitud mayor a un 0,2%.
iii.- Para esto hay que resolver la ecuación (*) con el término derecho de fuerzas
generalizadas.
tsenFQ
qqqqtLu
qL
xq
L
xq
L
xq
L
xtxu
tLutsenFqQ
i
ii
Ω=⇒
+++=
⎟⎠
⎞⎜⎝
⎛+⎟⎠
⎞⎜⎝
⎛+⎟⎠
⎞⎜⎝
⎛+=
⋅Ω=∑
0
4321
4
4
3
3
2
2
1
0
),(
),(
),(
δδδδδ
δδδδδ
δδ

Análisis de Sistemas Dinámicos
Capítulo 3
Analogías eléctricas
Dos sistemas mecánicos de distinta naturaleza son análogos si las ecuaciones del
movimiento de ambos son semejantes.
Ejemplo:
∫ =++
=++=++
)(
)(
)(
thzdtCBzdt
dzA
tgyyBy
tfcxxbxa
γα&&&
&&&
Estas ecuaciones son análogas ya que las tres son de segundo orden, coeficientes
constantes y lineales.
Elementos eléctricos discretos
Resistencia Inductancia Capacidad
Representación
Simbólica
Relación general
isvv
Riv =
dt
diLv = ∫= idt
Cv
1
Para Corriente
Continua
RIV =
0=V 0=I
Impedancia
i
vZ =
0jRZ +=
LjXZ
LjZ
+=+=
0
0 ω
CjXZ
CZ
+=
−=
0
10
ω
R = Resistencia X BLB= Reactancia
inductiva
B B LXL
ω=
X BC B= Reactancia
capacitiva
CXC ω
1−=

Análisis de Sistemas Dinámicos
ωω
ω
ω
jij
iidt
ijdt
di
Iei tj
−==
=
=
∫
Elementos mecánicos discretos
Amortiguador Masa Resorte
Representación
Relación general vcf ⋅=
dt
dvmf = ∫= vdtkf
Impedancia
v
fZ =
0jcZ +=
mjZ ω+= 0 ωk
jZ −= 0
Ejemplos de circuitos
Generador de corriente
Ley de Kirchhoff de corrientes: La suma algebraica de las corrientes que llegan a
cada nodo es cero.
corrientede
Generador
ti )(ci↓
Ri↓
Li↓
C R L
(3-1)
)(1
0)(
tivdtLR
v
dt
dvC
iiitiLRC
=++
=−−−
∫
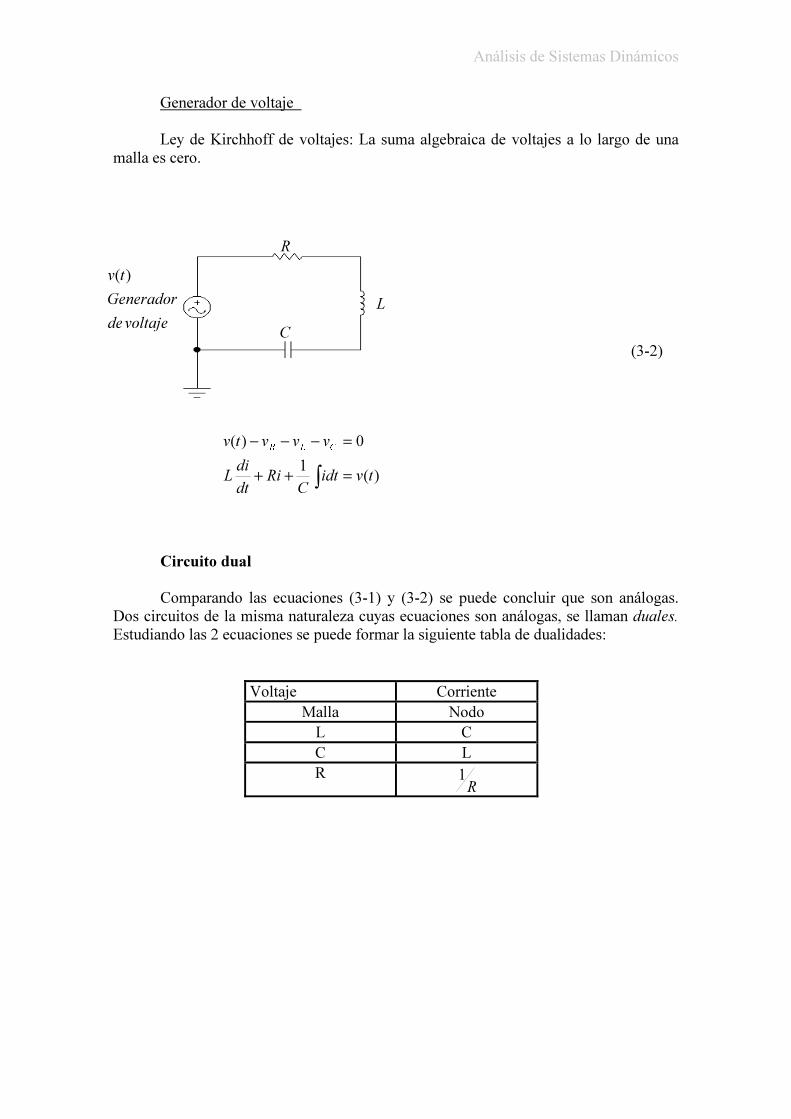
Análisis de Sistemas Dinámicos
Generador de voltaje
Ley de Kirchhoff de voltajes: La suma algebraica de voltajes a lo largo de una
malla es cero.
(3-2)
voltaje
R
C
L
de
Generador
tv )(
)(1
0)(
tvidtC
Ridt
diL
vvvtvCLR
=++
=−−−
∫
Circuito dual
Comparando las ecuaciones (3-1) y (3-2) se puede concluir que son análogas.
Dos circuitos de la misma naturaleza cuyas ecuaciones son análogas, se llaman duales.
Estudiando las 2 ecuaciones se puede formar la siguiente tabla de dualidades:
Voltaje Corriente
Malla Nodo
L C
C L
R R
1
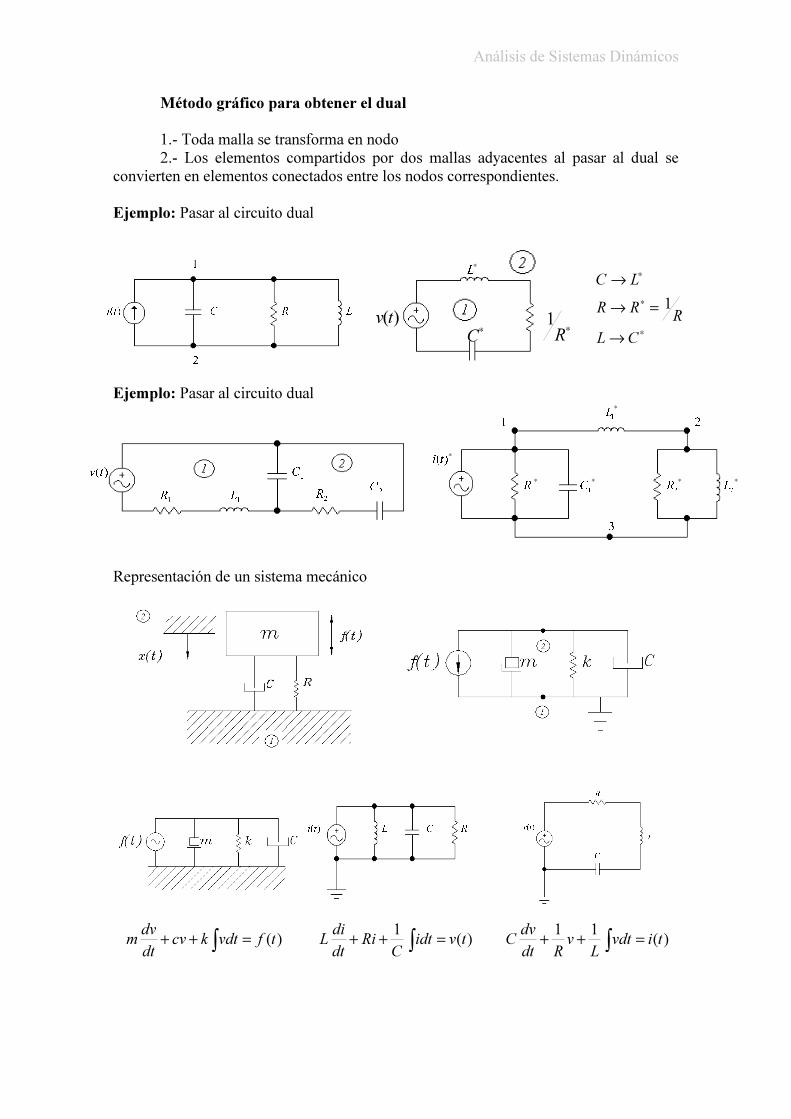
Análisis de Sistemas Dinámicos
Método gráfico para obtener el dual
1.- Toda malla se transforma en nodo
2.- Los elementos compartidos por dos mallas adyacentes al pasar al dual se
convierten en elementos conectados entre los nodos correspondientes.
Ejemplo: Pasar al circuito dual
Ejemplo: Pasar al circuito dual
C R L)(ti
1
2
∗L
∗C
∗R
1)(tv∗
∗
∗
→
=→
→
CL
RRR
LC
1
)(tv
1R
1L 2
R2
C
1C
∗)(ti
∗1R
∗1C
∗2R
∗2L
∗1L
3
21
Representación de un sistema mecánico
)(tfvdtkcvdt
dvm =++ ∫ )(
1tvidt
CRi
dt
diL =++ ∫ )(
11tivdt
Lv
Rdt
dvC =++ ∫
L)(ti C R
R
C
L
)(tv
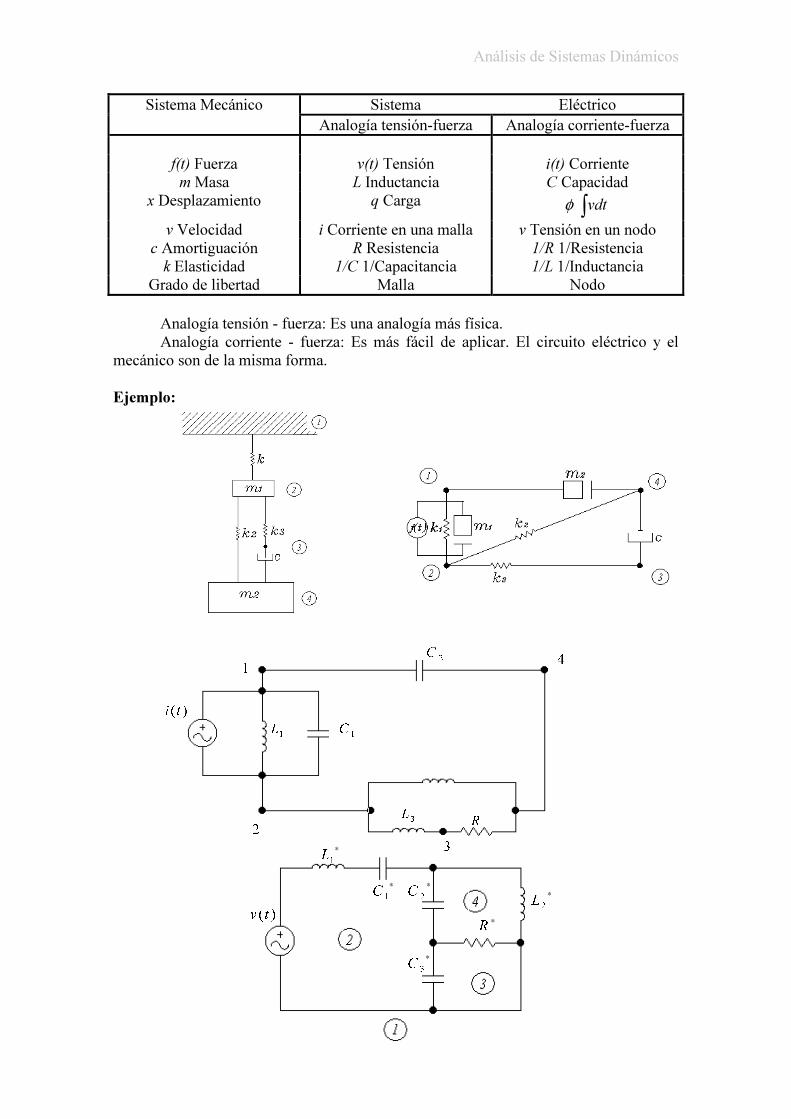
Análisis de Sistemas Dinámicos
Sistema Mecánico Sistema Eléctrico
Analogía tensión-fuerza Analogía corriente-fuerza
f(t) Fuerza v(t) Tensión i(t) Corriente
m Masa L Inductancia C Capacidad
x Desplazamiento q Carga φ ∫ vdtv Velocidad i Corriente en una malla v Tensión en un nodo
c Amortiguación R Resistencia 1/R 1/Resistencia
k Elasticidad 1/C 1/Capacitancia 1/L 1/Inductancia
Grado de libertad Malla Nodo
Analogía tensión - fuerza: Es una analogía más física.
Analogía corriente - fuerza: Es más fácil de aplicar. El circuito eléctrico y el
mecánico son de la misma forma.
Ejemplo:
1
2
3
4
)(ti
3L
1C
2C
R
1L
∗1
L
∗2
L
∗R
∗1
C∗
2C
∗3
C
)(tv

Análisis de Sistemas Dinámicos
Ejemplo:
a.- Construir el análogo eléctrico.
b.- Determinar . n
ωc.- Determinar estacionario. )(ti
a.-
)(tfvdtkcvdt
dvm =++ ∫ )(
11tivdt
Lv
Rdt
dvc =++ ∫ )(
1tvidt
CRi
dt
diL =++ ∫
)(ti
LRC )(tv
L
R
C
b.- Para el circuito voltaje. Si:
( )( )
( )( )OhmR
Volt
CoulombFaradioC
Amperio
segundoVoltHenrioL
Volttsentv
2,0
1,01,0
1,01,0
510)(
=
==
==
=
( )( )
( )1,0
2
2,0
110
1,01,0
11
1101
1,0
==
==
⎟⎠
⎞⎜⎝
⎛=⋅
===
==
==
∗
∗
∗
∗
∗
n
n
m
c
OhmRc
sCLm
k
FaradioCk
HenrioLm
ωξ
ω
c.
( )2
22
0
21
)()()(
⎥⎦
⎤⎢⎣
⎡ Ω+⎥⎥
⎦
⎤
⎢⎢
⎣
⎡
⎟⎟⎠
⎞⎜⎜⎝
⎛ Ω−
−Ω=⋅Ω==
nn
tsenk
F
txtvti
ωξ
ω
φ

Análisis de Sistemas Dinámicos