analisis numerico libro zapateiro
TRANSCRIPT

Analisis NumericoNotas de clase
———————————

Analisis Numerico
Notas de clase———————————
Jorge Velasquez ZapateiroVirgilio Obeso Fernandez
Ediciones UninorteBarranquilla-Colombia
2007
Jorge Velasquez ZapateiroAnalisis Numerico, Notas de claseJorge Velasquez Zapateiro, Virgilio ObesoFernandez.Barranquilla:Ediciones Uninorte,2007195pISBN:
c©Ediciones Uninorte,2007
c©Jorge Velasquez Zapateiro y Virgilio Obeso Fernandez, 2007
Cordinacion editorial
Zoila Sotomayor O.
Editor
Jorge Velasquez Zapateiro.
Correccion de textos
xxxxxxxxxxxxxxxx.
Diseno de portada
yyyyyyyyyyyyyy.
Impreso y hecho en ColombiaCargraphics Worl Bogota


Indice general
1. Numeros en la Computadora 31.1. Sistemas Decimal y Binario . . . . . . . . . . . . . . . . . . . 31.2. Del Sistemas Decimal al Sistema Binario . . . . . . . . . . . . 41.3. Numeros en Punto Flotante . . . . . . . . . . . . . . . . . . . 71.4. Notacion Cientıfica Normalizada . . . . . . . . . . . . . . . . . 91.5. Errores y Notacion fl(x) . . . . . . . . . . . . . . . . . . . . . 11
1.5.1. Norma Vector . . . . . . . . . . . . . . . . . . . . . . . 111.5.2. Error Absoluto y Relativo . . . . . . . . . . . . . . . . 12
1.6. Analisis de Error . . . . . . . . . . . . . . . . . . . . . . . . . 151.7. Epsilon de la Maquina . . . . . . . . . . . . . . . . . . . . . . 151.8. Notacion O de Landau . . . . . . . . . . . . . . . . . . . . . . 161.9. Perdida de Dıgitos Significativos . . . . . . . . . . . . . . . . . 19
2. Solucion de Ecuaciones no lineales 252.1. Ratas de Convergencia . . . . . . . . . . . . . . . . . . . . . . 262.2. Punto Fijo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 272.3. Analisis Grafico del Metodo de Punto Fijo . . . . . . . . . . . 362.4. Metodos de Localizacion de Raıces . . . . . . . . . . . . . . . 37
2.4.1. Metodo de Biseccion o Busqueda Binaria . . . . . . . . 372.5. Metodo de Falsa Posicion o Regula Falsi . . . . . . . . . . . . 432.6. Metodo de Newton . . . . . . . . . . . . . . . . . . . . . . . . 45
2.6.1. Convergencia del Metodo de Newton . . . . . . . . . . 492.7. Metodo Modificado de Newton . . . . . . . . . . . . . . . . . 522.8. Metodo de la Secante . . . . . . . . . . . . . . . . . . . . . . . 562.9. Metodo ∆2 de Aitken . . . . . . . . . . . . . . . . . . . . . . . 59
3. Solucion de Sistema de Ecuaciones 673.1. Vectores y Matrices . . . . . . . . . . . . . . . . . . . . . . . . 683.2. Matrices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 703.3. Determinantes . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
v

vi J Velasquez Zapateiro/ V. Obeso Fernandez
3.3.1. Norma Matriz . . . . . . . . . . . . . . . . . . . . . . . 743.4. Sistema de Ecuaciones Lineales . . . . . . . . . . . . . . . . . 76
3.4.1. Sistemas Triangulares Superior . . . . . . . . . . . . . 773.5. Eliminacion de Gauss y Pivoteo . . . . . . . . . . . . . . . . . 80
3.5.1. Transformaciones Elementales . . . . . . . . . . . . . . 803.5.2. Operaciones Elementales en los Renglones . . . . . . . 80
3.6. Estrategias de Pivoteo . . . . . . . . . . . . . . . . . . . . . . 833.6.1. Pivoteo Trivial . . . . . . . . . . . . . . . . . . . . . . 833.6.2. Pivoteo Parcial . . . . . . . . . . . . . . . . . . . . . . 833.6.3. Pivoteo Parcial Escalado . . . . . . . . . . . . . . . . . 84
3.7. Factorizacion LU . . . . . . . . . . . . . . . . . . . . . . . . . 853.8. Metodo de Jacobi . . . . . . . . . . . . . . . . . . . . . . . . . 883.9. Metodo de Gauss- Saidel . . . . . . . . . . . . . . . . . . . . . 913.10. Sistema de Ecuaciones no Lineales . . . . . . . . . . . . . . . . 93
3.10.1. Metodo de Newton . . . . . . . . . . . . . . . . . . . . 933.10.2. Ventajas y Desventajas de Metodo de Newton . . . . . 973.10.3. Metodo de Punto Fijo . . . . . . . . . . . . . . . . . . 97
4. Interpolacion Polinomial 1054.1. Interpolacion de Lagrange . . . . . . . . . . . . . . . . . . . . 1074.2. Cotas de Error . . . . . . . . . . . . . . . . . . . . . . . . . . 1114.3. Polinomio Interpolador de Newton . . . . . . . . . . . . . . . 1144.4. Polinomios de Hermite . . . . . . . . . . . . . . . . . . . . . . 1194.5. Aproximacion de Pade . . . . . . . . . . . . . . . . . . . . . . 1254.6. Interpolacion a Trozos . . . . . . . . . . . . . . . . . . . . . . 129
4.6.1. Interpolacion Lineal a Trozos . . . . . . . . . . . . . . 1304.6.2. Interpolacion Cubica o Cercha Cubica . . . . . . . . . 131
4.7. Aproximacion con Polinomios Trigonometricos . . . . . . . . . 150
5. Derivacion e Integracion Numerica 1615.1. Derivacion Numerica . . . . . . . . . . . . . . . . . . . . . . . 161
5.1.1. Analisis de Error . . . . . . . . . . . . . . . . . . . . . 1745.2. Extrapolacion de Richardson . . . . . . . . . . . . . . . . . . . 1755.3. Integracion Numerica . . . . . . . . . . . . . . . . . . . . . . . 1805.4. Integracion Compuesta . . . . . . . . . . . . . . . . . . . . . . 193
5.4.1. Regla Compuesta del Trapecio . . . . . . . . . . . . . . 1935.4.2. Regla Compuesta de Simpson . . . . . . . . . . . . . . 1965.4.3. Regla Compuesta de los 3
8Simpson . . . . . . . . . . . 199
5.4.4. Cotas de Error para las Reglas Compuestas . . . . . . 2015.5. Metodo de Integracion de Romberg . . . . . . . . . . . . . . . 2065.6. Cuadratura Adaptativa . . . . . . . . . . . . . . . . . . . . . . 211
INDICE GENERAL

Analisis Numerico. Notas de clase vii
5.7. Integracion Gauss-Legendre . . . . . . . . . . . . . . . . . . . 2165.8. Integrales Impropias . . . . . . . . . . . . . . . . . . . . . . . 2215.9. Integracion Doble . . . . . . . . . . . . . . . . . . . . . . . . . 226
6. Ecuaciones Diferenciales Ordinarias con Condiciones Ini-ciales 2396.1. Ecuaciones Diferenciales de Primer Orden con Condiciones
Iniciales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2406.2. Metodos de Euler y de Taylor . . . . . . . . . . . . . . . . . . 243
6.2.1. Metodo de Euler . . . . . . . . . . . . . . . . . . . . . 2456.2.2. Cotas de Error . . . . . . . . . . . . . . . . . . . . . . 2466.2.3. Metodo de Taylor . . . . . . . . . . . . . . . . . . . . . 248
6.3. Metodos de Runge-Kuta . . . . . . . . . . . . . . . . . . . . . 2526.4. Metodos Explıcitos de Adams- Bashforth . . . . . . . . . . . . 257
6.4.1. Metodo de Adams- Bashforth de dos pasos . . . . . . . 2576.4.2. Metodo de Adams- Bashforth de tres pasos . . . . . . . 2576.4.3. Metodo de Adams- Bashforth de cuatro pasos . . . . . 258
6.5. Metodos de Adams-Moulton . . . . . . . . . . . . . . . . . . . 2606.5.1. Metodo se Adams-Moulton de dos pasos . . . . . . . . 2606.5.2. Metodo se Adams-Moulton de tres pasos . . . . . . . . 261
6.6. Metodos Predictor-Corrector . . . . . . . . . . . . . . . . . . . 2646.6.1. Metodo de Milne-Simpson . . . . . . . . . . . . . . . . 266
6.7. Sistema de Ecuaciones Diferenciales . . . . . . . . . . . . . . . 2696.7.1. Aproximacion Numerica . . . . . . . . . . . . . . . . . 270
6.8. Ecuaciones Diferenciales de Orden Superior . . . . . . . . . . 272
Bibliografıa......................................................................... 279
INDICE GENERAL

viii J Velasquez Zapateiro/ V. Obeso Fernandez
INDICE GENERAL
Analisis Numerico. Notas de clase 1
0pt0.4pt
INDICE GENERAL

2 J Velasquez Zapateiro/ V. Obeso Fernandez
INDICE GENERAL
Capıtulo 1
Numeros en la Computadora
La aparicion de los computadores ha hecho posible la solucion de problemas,que por su tamano antes eran excluidos. Desafortunadamente los resultadosson afectados por el uso de la Aritmetica de Precision Finita, en la cualpara cada numero se puede almacenar tantos dıgitos como lo permita eldiseno del computador.
Ası por ejemplo, de nuestra experiencia esperamos tener siempre expresionesverdaderas como 2 + 2 = 4, 32 = 9, (
√5)2 = 5, pero en la aritmetica de
precision finita√
5 no tiene un solo numero fijo y finito, que lo representa.
Como√
5 no tiene una representacion de dıgitos finitos, en el interior delcomputador se le da un valor aproximado cuyo cuadrado no es exactamente5, aunque con toda probabilidad estara lo bastante cerca a el para que seaaceptable.
1.1. Sistemas Decimal y Binario
El sistema numerico de uso frecuente es el sistema decimal. La base del sis-tema decimal sabemos es 10. Ahora bien la mayorıa de las computadoras nousan el sistema decimal en los calculos ni en la memoria, sino que usan el sis-tema binario que tiene base 2, y su memoria consiste de registros magneticos,en los que cada elemento solo tiene los estados encendido o apagado.
La base de un sistema numerico recibe el nombre de raız. Para el sistemadecimal como se dijo es 10 y para el binario es 2.La base de un numero se denota por un subındice ası que (3.224)10 es 3.224en base 10, (1001.11)2 es 1001.11 en base 2.
3

4 J Velasquez Zapateiro/ V. Obeso Fernandez
El valor de un numero base r es (abcdefg.hijk)r y se calcula como
a×r6+b×r5+c×r4+d×r3+e×r2+f×r1+g×r0+h×r−1+i×r−2+j×r−3+k×r−4
1.2. Del Sistemas Decimal al Sistema Binario
Consideremos el numero 17 en base 10 (de aquı en adelante se omite la basesi esta es 10) este se puede escribir en base 2 de la siguiente forma
(17)10 = (10001)2
en efecto
1× 24 + 0× 23 + 0× 22 + 0× 21 + 1× 20 = 16 + 1 = 17,
o tambien427.325 ≈ (110101011.0101001)2
Ahora (1001.11101)2 = 1 × 23 + 0 × 22 + 0 × 21 + 1 × 20 + 1 × 2−1 + 1 ×2−2 + 1× 2−3 + 0× 2−4 + 1× 2−5 = 9.90625.
En general si N es un numero natural entonces existen cifras a0, a1, a2, a3, . . . ,aK ∈ 0, 1 tales que
N = aK × 2K + aK−1 × 2K−1 + aK−2 × 2K−2 + · · ·+ a1 × 21 + a0 × 20.
Un algoritmo para encontrar la representacion binaria de un numero naturalN , se puede establecer si dividimos la expresion anterior entre dos teniendoentonces que
N
2= aK × 2K−1 + aK−1 × 2K−2 + aK−2 × 2K−3 + · · ·+ a1 × 20 +
a0
2,
si llamamos
P0 = aK × 2K−1 + aK−1 × 2K−2 + aK−2 × 2K−3 + · · ·+ a1 × 20,
entoncesN
2= P0 +
a0
2,
luego a0 es el resto que resulta de dividir a N entre dos, dividiendo ahora aP0 entre dos se tiene que
P0
2= aK × 2K−2 + aK−1× 2K−3 + aK−2× 2K−4 + · · ·+ a3× 21 + a2× 20 +
a1
2,
CAPITULO 1. NUMEROS EN LA COMPUTADORA

Analisis Numerico. Notas de clase 5
con lo queP0
2= P1 +
a1
2,
donde
P1 = aK × 2K−2 + aK−1 × 2K−3 + aK−2 × 2K−4 + · · ·+ a3 × 21 + a2 × 20
o sea que a1 es el resto de dividir a P0 entre dos, y se continua este procedi-miento hasta que se encuentre un numero K, tal que PK = 0, de lo anteriorse tiene el siguiente algoritmo
N = 2P0 + a0
P0 = 2P1 + a1
.
.
.
PK−2 = 2PK−1 + aK−1
PK−1 = 2PK + aK PK = 0
Ejemplo 1.2.1. Utilizar el algoritmo anterior para escribir a 1357 en no-tacion binaria.
Solucion
1357 = 678× 2 + 1, a0 = 1
678 = 339× 2 + 0, a1 = 0
339 = 169× 2 + 1, a2 = 1
169 = 84× 2 + 1, a3 = 1
84 = 42× 2 + 0, a4 = 0
42 = 21× 2 + 0, a5 = 0
21 = 10× 2 + 1, a6 = 1
10 = 5× 2 + 0, a7 = 0
5 = 2× 2 + 1, a8 = 1
2 = 1× 2 + 0, a9 = 0
1 = 0× 2 + 1, a10 = 1
1.2. DEL SISTEMAS DECIMAL AL SISTEMA BINARIO

6 J Velasquez Zapateiro/ V. Obeso Fernandez
luego1357 = a10a9a8a7a6a5a4a3a2a1a0 = (10101001101)2
¥
Supongamos ahora se tiene Q ∈ R con 0 < Q < 1, entonces existen,b1, b2, b3, b4 · · · ∈ 0, 1, tal que
Q = 0.b1b2b3b4b5 . . . ,
y por tanto
Q = b1 × 2−1 + b2 × 2−2 + b3 × 2−3 + · · ·+ bk × 2−k + . . .
si multiplicamos a Q por dos se tiene que
2Q = b1 + b2 × 2−1 + b3 × 2−2 + · · ·+ bk × 2−k+1 + . . .
si F1 = frac(2Q), donde frac(x) es la parte fraccionaria de x, y b1 = [|2Q|],donde [|x|], es la parte entera de x, entonces
F1 = b2 × 2−1 + b3 × 2−2 + · · ·+ bk × 2−k+1 + . . . ,
multiplicando ahora a F1 por dos se tiene que
2F1 = b2 + b3 × 2−1 + · · ·+ bk × 2−k+2 + · · · = b2 + F2,
donde F2 = frac(2F1), y b2 = [|2F1|], continuando este proceso formamosdos sucesiones bk y Fk, dadas por bk = [|2Fk−1|] y Fk = frac(2Fk−1), conb1 = [|2Q|] y F1 = frac(2Q) se tiene entonces que la representacion binariade Q es
Q =∞∑i=1
bi2−i
Ejemplo 1.2.2. Utilizar el algoritmo anterior para escribir a 0.234 en no-tacion binaria.
SolucionSea Q = 0.234, entonces
2Q = 0.468, b1 = [|0.468|] = 0 F1 = frac(0.468) = 0.468
2F1 = 0.936, b2 = [|0.936|] = 0 F2 = frac(0.936) = 0.936
2F2 = 1.872, b3 = [|1.872|] = 1 F3 = frac(1.872) = 0.872
CAPITULO 1. NUMEROS EN LA COMPUTADORA

Analisis Numerico. Notas de clase 7
2F3 = 1.744, b3 = [|1.744|] = 1 F4 = frac(1.744) = 0.744
2F4 = 1.488, b5 = [|1.488|] = 1 F5 = frac(1.488) = 0.488
2F5 = 0.976, b6 = [|0.976|] = 0 F6 = frac(0.976) = 0.976
2F6 = 1.952, b7 = [|1.952|] = 1 F7 = frac(1.952) = 0.952
.
.
de lo anterior se tiene que
Q = 0.234 = (0.0011101 . . . )2
¥
1.3. Numeros en Punto Flotante
Definicion 1.3.1. Los numeros en punto flotante son numeros reales de laforma
±α× βe
donde α tiene un numero de dıgitos limitados, β es la base y e es el exponenteque hace cambiar de posicion al punto decimal.
Definicion 1.3.2. Un numero real x tiene una representacion punto flotantenormalizada si
x = ±α× βe
con 1β
< |α| < 1
En el caso que x tenga representacion punto flotante normalizada entonces
x = ±0, d1d2...dk × βe
donde si x 6= 0, d1 6= 0, 0 ≤ di < β, i = 1, 2, 3, ....k y L ≤ e ≤ U .
Definicion 1.3.3. El conjunto de los numeros en punto flotante se le llama,conjunto de numeros de maquina.
El conjunto de numero de maquina es finito, ya que si x =±0.d1d2d3d4 · · · dt × βe, con d1 6= 0, 0 ≤ di ≤ β − 1, L ≤ e ≤ U ,entonces para asignarle valor a d1, hay β − 1 posibles valores y paradi, i = 2, 3, 4, . . . t hay β posibles asignaciones, luego, entonces existiran
1.3. NUMEROS EN PUNTO FLOTANTE

8 J Velasquez Zapateiro/ V. Obeso Fernandez
(β − 1) ββ · · · β︸ ︷︷ ︸t−1 factores
= (β − 1)βt−1, fracciones positivas.
Pero, como el numero de exponentes es U − L + 1 en total habran(β − 1)βt−1(U − L + 1) numeros de maquina positivos y tomandolos numeros maquina negativos, el total de numeros de maquina es2(β − 1)βt−1(U − L + 1) + 1, teniendo en cuenta que el cero es tambien unnumero de maquina.
Esto significa que cualquier numero real debe ser representado poruno de los 2(β − 1)βt−1(U − L + 1) + 1 numero de maquina.
Ejemplo 1.3.1. Como ejemplo, tomemos β = 2, t = 3, L = −2 y U = 2,en este caso, las mantisas serıan (0.100)2, (0.101)2, (0.110)2 y (0.111)2 los
cuales son la representacion en base dos de los numeros reales1
2,
5
8,
3
4y
7
8respectivamente, el total de numeros es maquina aparecen en la siguiente
tabla
-2 -1 0 1 2
(0.100)2 × 2−2 (0.100)2 × 2−1 (0.100)2 × 20 (0.100)2 × 21 (0.100)2 × 22
(0.101)2 × 2−2 (0.101)2 × 2−1 (0.101)2 × 20 (0.101)2 × 21 (0.101)2 × 22
(0.110)2 × 2−2 (0.110)2 × 2−1 (0.110)2 × 20 (0.110)2 × 21 (0.110)2 × 22
(0.111)2 × 2−2 (0.111)2 × 2−1 (0.111)2 × 20 (0.111)2 × 21 (0.111)2 × 22
TABLA 1
que corresponden respectivamente a los numeros reales de la siguiente tabla
4
32
8
32
16
32
32
32
64
32
5
32
10
32
20
32
40
32
80
32
6
32
12
32
24
32
48
32
96
32
7
32
14
32
28
32
56
32
112
32
CAPITULO 1. NUMEROS EN LA COMPUTADORA

Analisis Numerico. Notas de clase 9
TABLA 2
El total de numeros de maquina es 2(2 − 1) × 22(2 + 2 + 1) + 1 = 41 loscuales son
0, ± 4
32, ± 5
32, ± 6
32, ± 7
32, ± 8
32, ±10
32, ±12
32, ±14
32, ±16
32, ±20
32, ±24
32
±28
32, ±32
32, ±40
32, ±48
32, ±56
32, ±64
32, ±80
32, ±96
32, ±112
32
1.4. Notacion Cientıfica Normalizada
En la seccion anterior, hablamos de representacion punto flotante y puntoflotante normalizado, de acuerdo a eso si x ∈ R esta en base 10 este se puedenormalizar tomando
x = ±r × 10n
con 0.1 ≤ r < 10 y n un entero. Obviamente si x = 0 entonces r = 0
Ejemplo 1.4.1. 1) 732.5051 se puede representar como punto flotante nor-malizado escribiendo 732.5051 = 0.7325051× 103.2) De la misma manera −0.005612 = −0.5612× 10−2
Por otro lado si x esta en el sistema binario, se puede representar en puntoflotante normalizado si se escribe de la forma
x = ±q × 2m,
donde 0.5 ≤ q < 1 y m es un entero.
Ejemplo 1.4.2. 1) (101.01)2 = 0.10101× 23
2) (0.0010111)2 = 0.10111× 2−2
Nota: (0.1)2 = 1× 2−1 = 0.5.
En una computadora los numeros se representan de la manera anteriormentecomentada, pero con ciertas restricciones sobre q y m impuestas por la lon-gitud de la palabra. Si suponemos se tiene una computadora hipotetica, lacual llamaremos NORM-32, y si ademas suponemos que tiene una longitudde palabra de 32 bits (1bit = 1Binary digital), estos se distribuyen de lamanera siguiente:
1.4. NOTACION CIENTIFICA NORMALIZADA

10 J Velasquez Zapateiro/ V. Obeso Fernandez
donde los dos primeros espacios son reservado para los signos, asignandolecero si el signo es positivo y uno si es negativo, los siguientes siete espaciospara el exponente y los restantes para la mantisa.
Dado que un numero real distinto de cero x = ±q × 2m, siemprepuede normalizarse de tal manera que 1
2≤ q < 1, podemos suponer que el
primer bit en q es 1, y por lo tanto no requiere almacenamiento esto es, sise quiere almacenar en NORM-32 el numero 0.828125 el cual es equivalentea (0.110101)2 × 20 esto se hace de la forma indicada.
0 0 0 0 0 0 0 0 0 1 0 1 0 1 . . . . . . 0
Ejemplo 1.4.3. Representar y almacenar en punto flotante normalizado-0.125
SolucionSe tiene que
0.125× 2 = 0.25 | 0
0.25× 2 = 0.5 | 0
0.5× 2 = 1 | 1,
entonces−0.125 = (−0.001)2 = (−0.1)2 × 2−2.
Ademas2 = (10)2,
ası que su representacion es
1 1 0 0 0 0 0 1 0 0 0 0 0 0 0 . . . . 0
¥Ejemplo 1.4.4. Representar y almacenar en punto flotante normalizado117.125
SolucionSabemos que
117 = (1110101)2
y que0.125 = (0.001)2,
luego117.125 = (1110101.001)2 = (0.1110101001)2 × 27
y 7 = (111)2 luego para almacenarlo se hace de la siguiente forma
CAPITULO 1. NUMEROS EN LA COMPUTADORA
Analisis Numerico. Notas de clase 11
0 0 0 0 0 0 1 1 1 1 1 0 1 0 1 . . . . 0
¥
Ahora, hemos dicho que |m| no requiere mas de 7 bits lo cual signifi-ca que |m| ≤ (1111111)2 = 27 − 1 = 127 de modo que el exponente de 7dıgitos binarios proporciona un intervalo de 0 a 127, pero el uso exclusivode enteros positivos para el exponente no permite una representacionadecuada para numeros pequenos, para que esto pueda ser posible se tomael exponente en el intervalo [−63, 64]
Tambien hemos dicho que q requiere no mas de 24 bits, por lo tantolos numeros de nuestra maquina hipotetica tienen una precision limitada quecorresponde a entre 7 y 8 dıgitos decimales ya que el bit menos significativoen la mantisa representa unidades del orden 2−24 ≈ 10−7. Esto quiere decirque numeros expresados mediante mas de siete dıgitos decimales seranobjeto de una aproximacion cuando se dan como datos de entrada o comoresultados de operaciones.
1.5. Errores y Notacion fl(x)
1.5.1. Norma Vector
Definicion 1.5.1. Sea V un espacio vectorial. Una funcion g : V −→ R esuna norma vector si ∀x, y ∈ V y α un escalar, se cumple que
1. g(x) ≥ 0 y g(x) = 0 si y solo si x = 0.
2. g(αx) = |α|g(x).
3. g(x + y) ≤ g(x) + g(y).
Entre las clases de norma estan las denominadas p-normas las cuales se definecomo
Definicion 1.5.2. Para 1 ≤ p < ∞ se definen ası
||x||p =[ n∑
i=1
|xi|p] 1
p.
Otra norma muy usada en analisis numerico es la norma del maximo cuyadefinicion presentamos ahora
1.5. ERRORES Y NOTACION FL(X)

12 J Velasquez Zapateiro/ V. Obeso Fernandez
Definicion 1.5.3. Sea x ∈ Rn, definimos la norma del maximo como
||x||∞ = max1≤i≤n
|xi|.
Nota: Si p = 1, se tiene que ||x||1 =[ n∑
i=1
|xi|]
y si p = 2, se tiene que
||x||2 =[ n∑
i=1
|xi|2] 1
2
1.5.2. Error Absoluto y Relativo
Definicion 1.5.4. Si x ∈ Rn y x? ∈ Rn, es una aproximacion a x, definimosel error absoluto como
E = ‖x− x?‖.
Definicion 1.5.5. Si x ∈ Rn y x? ∈ Rn, es una aproximacion a x, definimosel error relativo como
Er =‖x− x?‖‖x‖ x 6= 0.
NOTA: Si n = 1 entonces E = |x− x?| y Er =|x− x?||x| x 6= 0.
Definicion 1.5.6. Si x ∈ R y x? ∈ R es su aproximacion, se dice que x?
tiene por lo menos p - β cifras significativas exactas si E ≤ 12β−p.
Definicion 1.5.7. Si x ∈ R y x? ∈ R es su aproximacion, se dice que x?
tiene por lo menos p - β dıgitos significativos exactos si Er ≤ 12β−p+1.
Como hemos dicho los numeros pueden sufrir aproximaciones cuandose dan como datos de entrada o como resultados de operaciones, estas aprox-imaciones se pueden hacer de dos formas:
Truncamiento: En este proceso el numero se representa por mediodel mayor numero de la maquina menor que el numero dado.
Redondeo: En este proceso el numero se representa por el numero demaquina mas cercano al numero dado.
CAPITULO 1. NUMEROS EN LA COMPUTADORA

Analisis Numerico. Notas de clase 13
Los errores de redondeo pueden ser sutiles, cuando se realizan calculos indi-viduales pero estos pueden perjudicar la precision computacional si existendos situaciones las cuales son
1. Cuando se suman una sucesion de numeros, especialmente si estos de-crecen en valor absoluto.
2. Cuando se hace la diferencia entre dos numeros casi identicos, ya quese cancelan los dıgitos principales.
Por lo anterior, si deseamos estimar el error cometido al aproximar un numeropositivo x = ±0.d1d2...dtdt+1...×βm, di 6= 0 mediante un numero de maquina,notado fl(x), esto se hace de la siguiente forma
Con redondeo
1. fl(x) = ±0.d1d2...dt × βm si 0 ≤ dt+1 < β2.
2. fl(x) = ±(0.d1d2...dt + β−t)× βm si β2≤ dt+1 < β
Con truncamientofl(x) = ±0.d1d2...dt × βm
Se puede probar que si hay redondeo los errores absoluto y relativo sonE ≤ 1
2βm−t y Er ≤ 1
2β1−t si hay truncamiento son E ≤ βm−t y Er ≤ β1−t.
En nuestra computadora hipotetica NORM-32, si x =(0.d1d2d3...d24d25d26...) × 2m, el numero x
′= (0.d1d2d3...d24) × 2m obtenido
por truncamiento se encuentra a la izquierda de x en la recta real y elnumero x
′′= (0.d1d2d3...d24 + 2−24) × 2m obtenido por redondeo se localiza
a la derecha de x (ver figura 1.1). El mas cercano a x entre x′
y x′′
se
x′ x x′′
Figura 1.1
selecciona para representar a x en la computadora. Observese que si x′
representa mejor a x. entonces
|x− x′| ≤ 1
2|x′ − x
′′| ≤ 1
2× 2−24 × 2m = 2m−25,
1.5. ERRORES Y NOTACION FL(X)
14 J Velasquez Zapateiro/ V. Obeso Fernandez
luego el error relativo es
Er =|x− x
′||x| ≤ 2m−25
q × 2m=
2−25
q≤ 2−25
12
= 2−24,
y si x esta mas cercano a x′′, entonces
|x− x′′ | ≤ 1
2|x′′ − x
′| = 2m−25,
luego entonces el error relativo es
Er =|x− x
′′||x| ≤ 2−24.
Es posible que durante el transcurso del calculo, se genere un numero±q×2m,donde m quede por fuera del rango permitido por la computadora. Si m esdemasiado grande se dice que se produce un sobreflujo o desbordamientopor exceso (OVERFLOW) y se interrumpen los calculos, si m es por elcontrario muy pequeno se dice que ocurre un subflujo o desbordamiento pordefecto (UNDERFLOW) y suele darsele el valor cero; en NORM-32 estoocurre para m > 127 o m < −127 respectivamente.
Definicion 1.5.8. Sean x y y puntos flotantes, definimos ⊕, ª, ⊗ y ®,llamadas operaciones de punto flotante, de la siguiente forma,
x⊕ y = fl(fl(x) + fl(y))
xª y = fl(fl(x)− fl(y))
x⊗ y = fl(fl(x)× fl(y))
x® y = fl(fl(x)/fl(y))
donde +,−,×, / son las operaciones usuales
Para ilustrar estas operaciones sean x, y ∈ R, tales que fl(x) =24
32y fl(y) =
7
32, son numeros punto flotantes, dados en el ejemplo 1.3.1, entonces,
x⊕ y = fl(24
32+
7
32
)= fl
(31
32
)=
32
32= 1
xª y = fl(24
32− 7
32
)= fl
(17
32
)=
16
32
CAPITULO 1. NUMEROS EN LA COMPUTADORA
Analisis Numerico. Notas de clase 15
x⊗ y = fl(24
32× 7
32
)= fl
( 21
128
)=
20
128=
5
32
x® y = fl(24
32
/ 7
32
)= fl
(24
32× 32
7
)= fl
(24
7
)= fl
(768
224
)=
784
224=
112
7
Observemos que si fl(x) = 9632
y fl(y) = 432
, entonces
x® y = fl(96
32
/ 4
32
)= fl
(96
4
)=
112
32
(fenomeno OVERFLOW) ya que 964
> 11232
En resumen si fl(x) es el numero de maquina mas cercano a x y tomamos
δ =fl(x)− x
x, entonces, fl(x) = x(1 + δ) y |δ| ≤ 1
2β1−t = ε o |δ| ≤ β1−t = ε
usando aritmetica de redondeo o truncamiento respectivamente. El numeroε se conoce como error de redondeo unitario o unidad de redondeo. EnNORM-32 la unidad de redondeo es 2−24.
1.6. Analisis de Error
Sea ⊗ un operador con el cual representamos una cualquiera de las opera-ciones basicas +, - ×, ÷ y sean x, y dos numeros cualesquiera y si x ⊗ ydebe calcularse y almacenarse, entonces, la variacion computada de x⊗ y esfl(x⊗ y), entonces cabe preguntarse que tan preciso es fl(x⊗ y)? Por lo an-terior fl(x⊗y) = (x⊗y)(1+δ) con |δ| ≤ ε, si x, y son numeros de la maquina.
Si x, y no son numeros de la maquina, entonces fl[fl(x) ⊗ fl(y)] =(x + (1 + δ1)⊗ (y + (1 + δ2))(1 + δ3) con δi ≤ ε.
1.7. Epsilon de la Maquina
Ya se ha comentado que si una maquina funciona con una base β y utiliza tposiciones en la mantisa de sus numeros de punto flotante entonces
fl(x) = x(1 + δ), |δ| ≤ ε
donde ε = 12β1−t en caso de redondeo y ε = β1−t en caso de truncamiento. El
numero ε (error de redondeo unitario) es una caracterıstica de la maquina,de su sistema operativo y de la manera en que efectua los calculos. El epsilonde la maquina es importante porque caracteriza la precision de la maquina
1.6. ANALISIS DE ERROR

16 J Velasquez Zapateiro/ V. Obeso Fernandez
en tal forma que los programas computacionales sean razonablemente inde-pendientes de la maquina en donde se ejecuta, sirve ademas como criterio deparada de los algoritmos.
Definicion 1.7.1. Se define ε de la maquina, abreviadamente “macheps”,como el numero positivo mas pequeno τ tal que sumado con 1 da como re-sultado, un numero mayor que 1, esto es ε = τ : τ + 1.Este numero es posible hallarlo con el siguiente algoritmo
ALGORITMO
Inicioeps ← 1.0Mq 1.0 + eps > 1.0
epsilon ← epseps ← 0.5× eps
FMqEscriba epsilon
Fin
En el caso de nuestra maquina hipotetica “macheps”= 2−24
1.8. Notacion O de Landau
Con el proposito de determinar que tan rapido crece o decrece una funcion,Edmund Landau introdujo la notacion de ordenes de magnitud que lleva sunombre. Por ejemplo, el desarrollo de Taylor de la funcion exponencial sepuede escribir como
ex = 1 + x +x2
2!+ O(x3), x → 0,
donde el ultimo termino significa que el termino de error del teorema deTaylor es menor, en valor absoluto, que una constante que multiplica a x3,cuando x esta cerca de 0.
De manera formal se tiene la siguiente definicion
Definicion 1.8.1. Dos funciones f(x) y g(x) de variable real son del mismoorden de magnitud, escrito f(x) = O(g(x)), mas propiamente,
f(x) = O(g(x)), x →∞,
si y solo si, existen constantes N y C tales que
|f(x)| ≤ C|g(x)|, ∀x > N.
CAPITULO 1. NUMEROS EN LA COMPUTADORA

Analisis Numerico. Notas de clase 17
Lo que intuitivamente significa que f(x) no crece mas rapido que g(x)
En general, si a ∈ R, escribiremos
f(x) = O(g(x)), x → a,
si y solo si, existen constantes α, β tales que
|f(x)| ≤ β|g(x)|, |x− a| < α.
Normalmente, el contexto determina el valor de a o si esta es ∞.
Se denomina de orden constante a una funcion O(1), logarıtmico si esO(log(n)), lineal si O(n), cuadratico para O(n2), polinomico para O(nk) conk ∈ N, y exponencial para O(cn) con 0 < c ∈ R. Es facil comprobar queO(log(n)) = O(log(nc)).
Ademas de la notacion O grande, Landau tambien introdujo la no-tacion o pequena. Informalmente f(x) = o(g(x)) significa que f crece muchomas lentamente que g y se hace cada vez mas insignificante respecto a ellaconforme x crece.
Formalmente, se tiene
Definicion 1.8.2. f(x) = o(g(x)), para x → ∞ si y solo si ∀γ > 0, existeuna constante N , tal que
|f(x)| ≤ γ|g(x)|, ∀x > N.
En general, se tiene que
Definicion 1.8.3. f(x) = o(g(x), x → a, si y solo si, ∀γ > 0, existe unaconstante η tal que
|f(x)| ≤ γ|g(x)|, ∀|x− a| < η.
Cuando a es cero o infinito, y queda claro su valor por el contexto, se omite.
Es facil observar que los sımbolos O y o son equivalentes a ≤ y <.
El sımbolo O tiene propiedades las cuales mostramos en el siguienteteorema
Teorema 1.8.1. 1. Si f(x) = O(g(x)) y h(x) = O(g(x)), entonces,λf(x) + νh(x) = O(g(x))
1.8. NOTACION O DE LANDAU
18 J Velasquez Zapateiro/ V. Obeso Fernandez
2. Si f(x) = O(g(x)), h(x) = O(k(x)), entonces, f(x)h(x) =O(g(x)k(x)).
3. Si f(x) = O(g(x)), g(x) = O(h(x)), entonces,f(x) = O(h(x))
Demostracion. 1.- Como f(x) = O(g(x)) y h(x) = O(g(x)), entonces, existenconstantes N1 y N2, tales que,
|f(x)| ≤ N1|g(x)| y |h(x)| ≤ N2|g(x)|,luego
|λf(x) + νg(x)| ≤ |λ||f(x)|+ |ν||g(x)|,de modo que,
|λf(x) + νg(x)| ≤ |λ|N1|g(x)|+ |ν|N2|g(x)| = (|λ|N1 + |ν|N2)|g(x)|,por tanto existe una constante N = |λ|N1 + |ν|N2, tal que
|λf(x) + νg(x)| ≤ N |g(x)|,de modo que
λf(x) + νh(x) = O(g(x))
2.- Si f(x) = O(g(x)), h(x) = O(k(x)), entonces existen constantes N1 y N2,tales que
|f(x)| ≤ N1|g(x)| y |h(x)| ≤ N2|k(x)|,luego
|f(x)h(x)| = |f(x)||h(x)| ≤ N1|g(x)|N2|k(x)| = (N1N2)|g(x)k(x)|,ası que existe una constante N = N1N2, tal que
|f(x)h(x)| ≤ N |g(x)k(x)|,y por lo tanto,
f(x)h(x) = O(g(x)k(x)),
3.- Si f(x) = O(g(x)), g(x) = O(h(x)), existen constantes N1 y N2, tales que
f(x)| ≤ N1|g(x)| y |g(x)| ≤ N2|h(x)|,por lo tanto
|f(x)| ≤ N1|g(x)| ≤ N1(N2|h(x)|) = N |h(x)|,con N = N1N2, de modo que existe N = N1N2, tal que
|f(x)| ≤ N |h(x)|,y por lo tanto f(x) = Oh(x)
CAPITULO 1. NUMEROS EN LA COMPUTADORA

Analisis Numerico. Notas de clase 19
La notacion O, por supuesto tambien permite comparar sucesiones, an,bn de forma an ≤ bn de acuerdo a la siguiente definicion
Definicion 1.8.4. Sean an y bn dos sucesiones, con bn > 0 ∀n, siexiste una constante C tal que
|an| ≤ Cbn,
con n ≥ N , para algun numero natural N , entonces se dice que
an = O(bn)
La definicion anterior es equivalente a decir que lımn→∞
|an|bn
= L 6= ∞
Ejemplo 1.8.1. 1. Como1
n2≤ 2
n(n + 1), entonces
1
n2= O
( 1
n(n + 1)
)
2. Se sabe que | cos n| ≤ 1, luego cos n = O(1).
3. senx
n= O
( 1
n
), ya que
∣∣∣ senx
n
∣∣∣ ≤ x
n= |x| 1
n
4. Como lımn→∞
√n + 1−√n
1/√
n= lım
n→∞
√n√
n + 1 +√
n=
1
2, entonces
√n + 1−√n = O
( 1√n
)
Hay 3 sımbolos mas, pero solo presentaremos uno de ellos, el equivalente a=: se dice que f(x) = θ(g(x)) si y solo si f(x) = O(g(x)) y g(x) = O(f(x)).Note la diferencia entre escribir f(x) = O(g(x)) y f(x) = θ(g(x)).
En el presente texto nos limitaremos al uso de la notacion O grande,sobre todo para simplificar la escritura del termino de error. No utilizaremosninguno de los otros sımbolos de Landau.
1.9. Perdida de Dıgitos Significativos
Toda operacion de punto flotante en un proceso computacional puede darlugar a un error, que puede aumentar o disminuir, una de las maneras mascomunes de aumentar la importancia de un error se conoce como perdidade dıgitos significativos. La perdida de dıgitos significativos se puede generarpor la longitud de la palabra que almacena los numeros y en este caso es
1.9. PERDIDA DE DIGITOS SIGNIFICATIVOS

20 J Velasquez Zapateiro/ V. Obeso Fernandez
inevitable, pero tambien se puede tener por la programacion, en este caso esevitable. Estos ultimos aparecen por ejemplo al restar numeros muy cercanos,supongamos que vamos a calcular z = x − y y que tenemos aproximacionesx? y y? para x y y respectivamente cada una de las cuales es buena hasta rdıgitos. Entonces z? = x? − y? es una aproximacion para z que tambien esbuena hasta r dıgitos significativos a menos que, x? y y? coincidan en uno omas dıgitos. En este ultimo caso habra cancelacion durante la sustraccion ypor lo tanto z? sera exacto hasta menos de r dıgitos.
Por ejemplo, si x = 0.3721478693 y y = 0.3720230572, entonces x − y =0.0001248121 = 0.1248121×10−3, si los calculos se llevan en una computadoradecimal con mantisa de cinco dıgitos, entonces fl(x) = x? = 0.37215 yfl(y) = y? = 0.37202 luego, z? = fl(x)− fl(y) = x? − y? = 0.00013, el errorrelativo es
Er =∣∣∣(x− y)− (x? − y?)
x− y
∣∣∣ ≈ 4 %.
que es un error relativo muy grande.
La perdida de dıgitos significativo se puede evitar, (cuando sea posi-ble) reescribiendo las ecuaciones bien sea utilizando artificios algebraicos,trigonometricos o series de Taylor.Por ejemplo, calcular y =
√x + 1− 1 esta implicando una perdida de dıgitos
significativos para valores cercanos a 0 ya que en este caso√
x + 1 ≈ 1, luegose podrıa evitar esta perdida reescribiendo la ecuacion de la forma
y = (√
x + 1− 1)
√x + 1 + 1√x + 1 + 1
=x√
x + 1 + 1.
Otro ejemplo serıa evaluar la funcion f(x) = 1 − cos x, al igual que antes1 ≈ cos x para valores cercanos a cero, y se presentara perdida de dıgitossignificativos, entonces la funcion puede reescribirse como
f(x) = 1− cos x =(1− cos x)(1 + cos x)
1 + cos x=
sen2 x
1 + cos x
la cual puede calcularse con mucha mas exactitud para valores cercanos acero, o tambien a partir de la formula de Taylor alrededor de 0 esto es
cos x = 1− x2
2!+
x4
4!− x6
6!+ ...,
luego
f(x) = 1− cos x = 1− (1− x2
2!+
x4
4!− x6
6!+ ...) =
x2
2!− x4
4!+
x6
6!+ ...
CAPITULO 1. NUMEROS EN LA COMPUTADORA

Analisis Numerico. Notas de clase 21
y si x esta cercano de cero, podemos usar una serie truncada tal como
f(x) =x2
2− x4
24+
x6
720+ O(x7),
luego si x → 0, entonces,
f(x) ≈ x2
2− x4
24+
x6
720=
x2
2
(1− x2
12+
x4
360
)=
x2
2
(1− x2
12
(1− x2
30
)).
Ejercicios
1. Escribir el numero decimal correspondiente a los siguientes numeros
a)(1101110)2 b)(1101110.01)2 c)(100111.101)2 d)(101101.001)2
2. Escribir en base dos los siguientes numeros dados en base 10
a)2324.6 b)3475.52 c)45632 d)1234.83
3. Haga una aproximacion usando aritmetica de redondeo a cuatro cifras
a)0.3258132 b)1.425138 c)0.4263289d)3.2514326
4. Calcule en forma exacta y luego usando aritmetica de redondeo acuatro cifras, las siguientes operaciones
a)2
5+
5
3b)
5
7× 2
3c)
(1
3+
2
5
)× 4
7d)
(2
5− 1
7
)+
5
8
5. Sea f(x) =(x− π
2) sen x + cos x
(x− π2) + cos x
a) Calcule lımx→π
2
f(x),
b) Use aritmetica de redondeo a cinco cifras para evaluar f(0.1)
6. Establezca un algoritmo que permita resolver la ecuacion cuadraticaax2 + bx + c = 0
7. Use el algoritmo del ejercicio anterior para resolver
a)8x2 − 738x + 24 = 0 a)8x2 + 738x − 24 = 0 a)1002x2 −11010x + 12.65 = 0 a)1002x2 + 11010x− 12.65 = 0
1.9. PERDIDA DE DIGITOS SIGNIFICATIVOS
22 J Velasquez Zapateiro/ V. Obeso Fernandez
8. Si x = 0.43257143 y y = 0.43257824
a) Use aritmetica de redondeo a cinco cifras para calcular fl(x)y fl(y).
b) Calcule los errores relativos y absoluto
c) Resolver x⊕ y, xª y, x⊗ y y x® y.
d) Calcule los errores relativos para las operaciones realizadas enel inciso c).e) Cuantos dıgitos significativos se pierden al resolver cada una de lasoperaciones realizadas en el inciso c).
9. Para los siguientes numeros x y fl(x), ¿con cuantas cifras significativasaproxima fl(x) a x?
a) x = 524.023, f l(x) = 524.023 b)x = −0.045246, f l(x) =
− 0.04523 c)x = 34.5245, f l(x) = 34.6426
10. Dado el sistema35.584x + 13.25y = 54.01
14.12x + 5.581y = 21.02.
Multiplique la primera ecuacion por 14, 12 y la segunda por −35.584y sumelas para obtener el valor de y, despues obtenga el valor de x.
a) Use aritmetica de redondeo a cuatro cifras al realizar las op-eraciones para obtener la solucion del sistema.
b) Encuentre el error relativo.
11. Sea x = ±0, d1d2d3 . . . dtdt+1 · · · × 10p y fl(x) la aproximacion a x poraritmetica de redondeo con t dıgitos.
Demuestre que Er < 5× 10−t.
12. Sea x = ±0, d1d2d3 . . . dtdt+1 · · · × 10p y fl(x) la aproximacion a x poraritmetica de redondeo con t dıgitos pruebe que.
CAPITULO 1. NUMEROS EN LA COMPUTADORA

Analisis Numerico. Notas de clase 23
a)Er < 10−(t−1)
b)E < 10p−t.
1.9. PERDIDA DE DIGITOS SIGNIFICATIVOS

24 J Velasquez Zapateiro/ V. Obeso Fernandez
CAPITULO 1. NUMEROS EN LA COMPUTADORA
Capıtulo 2
Solucion de Ecuaciones nolineales
En una colision de un proton con un atomo de helio en su estado base, laenergıa potencial de interaccion se puede representar mediante un potencialde Morse definido por la ecuacion
V (r) = ε[e2c(1− r
rm) − 2ec(1− r
rm)]
(2.1)
donde r es la distancia internuclear, ε = 2.040eV , rm = 0.7743A, c = 2.1931si r ≤ rm, y c = 2.1341 si r > rm.
La ecuacion que permite determinar los puntos de retorno, esto es, lospuntos donde r es maxima o mınima, esta dada por
1− b
r2− V (r)
E= 0. (2.2)
En 2.2, b es el parametro de impacto, el cual puede tomar en principio,cualquier valor positivo, pero se sugiere asignarle valores entre 0 y 4.0A.La cantidad E es la energıa total del sistema y puede suponerse que tomacualquier valor entre 0 y 2.0eV.
Como puede verse, determinar los puntos de retorno en este proble-ma, supone tomar un valor para b y otro para E, reemplazar 2.1 en 2.2 yresolver la ecuacion resultante para r, lo cual debe hacerse por metodosnumericos.
Con el proposito de resolver problemas como el planteado antes, nosproponemos estudiar metodos que permitan encontrar la solucion de dichasecuaciones que con frecuencia aparecen en ciencias e ingenierıa.
25

26 J Velasquez Zapateiro/ V. Obeso Fernandez
Como hemos dicho en este capitulo trataremos el problema de encon-trar un cero de una funcion de variable real con valores en los reales es decirencontrar un x? ∈ R, tal que f(x?) = 0.
Definamos formalmente el concepto de ceros de una funcion
Definicion 2.0.1. Sea f : R −→ R una funcion, r ∈ R es un cero de f demultiplicidad p ∈ Z+, si
f(x) = (x− r)pq(x),
con q(r) 6= 0
NOTA: Decimos que r es un cero simple si p = 1.
Para lograr nuestro proposito, estudiaremos metodos iterativos, estoes, metodos que partiendo de un punto inicial, generan una sucesion depuntos que deben converger al cero de la funcion, por ello es importante,establecer las condiciones de convergencia y la rapidez de dicha convergencia.
2.1. Ratas de Convergencia
Es muy importante caracterizar las ratas de convergencia de los diferentesalgoritmos, ya que la rata de convergencia de un metodo es una propiedaddecisiva en la escogencia del mismo; ası por ejemplo, si la convergencia esmuy lenta, tardaremos mucho en obtener la aproximacion deseada. Por lotanto, en esta seccion, definiremos algunas clases de convergencias.
Supongamos que un metodo iterativo produce una sucesion de puntos x1, x2,x3 . . . a partir de un punto inicial x0. Se quiere conocer si converge a lasolucion x? y cual es la rapidez con que lo hace.
Definicion 2.1.1. La sucesion xk ⊂ Rn converge a x? ∈ Rn si
lımk 7→+∞
‖ xk − x? ‖= 0.
Definicion 2.1.2. Sea xk una sucesion que converge a x?. Si existe unaconstante α ∈ (0, 1) y un entero k1 ≥ 0 tal que, para todo k ≥ k1
‖ xk+1 − x? ‖≤ α ‖ xk − x? ‖,
se dice que xk es por lo menos q-linealmente convergente a x?.
CAPITULO 2. SOLUCION DE ECUACIONES NO LINEALES

Analisis Numerico. Notas de clase 27
Esto garantiza que eventualmente, el error decrecera por un factor α < 1
La definicion anterior es equivalente a decir que la sucesion xk con-verge q-linealmente a x?, si y solo si,
lımk→∞
||xk+1 − x?||||xk − x?|| = L
con 0 < L < 1.
Definicion 2.1.3. Sea xk una sucesion que converge a x?, xk convergepor lo menos q-superlinealmente a x? si,
‖ xk+1 − x? ‖≤ αk ‖ xk − x? ‖para alguna sucesion αk, la cual converge a cero.
Definicion 2.1.4. Sea xk una sucesion que converge a x?. Si existen cons-tantes p > 1, α ≥ 0, k1 ≥ 0, tal que para todo k ≥ k1
‖ xk+1 − x? ‖≤ α‖ xk − x? ‖p,
entonces, decimos que xk converge a x? con q-orden al menos p.
Si p = 2 o p = 3, decimos que la convergencia es al menos cuadratica ocubica, respectivamente.
Ademas de la convergencia q-orden, tenemos la convergencia r-orden, la cuales una alternativa, aunque mas debil, para medir la rapidez de convergencia.
Definicion 2.1.5. Sea xk una sucesion que converge a x?. Decimos quexk converge con r-orden al menos p si existe una sucesion αn que con-verge a cero con q-orden al menos p tal que
‖xn − x?‖ ≤ αn. n = 0, 1, 2, ...
2.2. Punto Fijo
El primer metodo que estudiaremos es el de punto fijo, antes de definir elconcepto de punto fijo y mostrar los teoremas que permitan su estudio,demostraremos primero algunos resultados de calculo que nos seran utilespara este proposito.
2.2. PUNTO FIJO

28 J Velasquez Zapateiro/ V. Obeso Fernandez
Teorema 2.2.1. TEOREMA DE FERMAT
Si f(c) es un punto extremo de f en un intervalo I, c esta en el interior deI y f
′(c) existe, entonces f
′(c) = 0.
Demostracion. Supongamos f(c) es el mınimo de f en I. Si c+h ∈ I entoncesde la definicion de mınimo
f(c + h) ≥ f(c),
luego
f(c + h)− f(c) ≥ 0.
Si h > 0 entoncesf(c + h)− f(c)
h≥ 0 (2.3)
y si h < 0 entoncesf(c + h)− f(c)
h≤ 0, (2.4)
como f′(c) existe, se tiene que f
′(c) > 0, f
′(c) < 0 o f
′(c) = 0. Si f
′(c) > 0,
entones de la definicion de derivadaf(c + h)− f(c)
h> 0, para h 6= 0
suficientemente cerca a 0, lo cual es una contradiccion con 2.4 de modo que
f′(c) < 0 o f
′(c) = 0. Si f
′(c) < 0, de la misma manera
f(c + h)− f(c)
h< 0,
para h 6= 0 suficientemente cerca a 0, lo cual es una contradiccion con 2.3 demodo que la unica posibilidad es f
′(c) = 0.
De igual forma se prueba que f′(c) = 0, cuando f(c) es un maximo.
Teorema 2.2.2. Si f es continua en un intervalo cerrado [a, b]; entoncesexiste un punto x0 ∈ [a, b] para el cual
f(x0) ≥ f(x) ∀x ∈ [a, b]
Demostracion. La prueba se deja como ejercicio al lector
Teorema 2.2.3. Si f es continua en un intervalo cerrado [a, b]; entoncesexiste un punto x
′0 ∈ [a, b] para el cual
f(x′0) ≤ f(x) ∀x ∈ [a, b]
Demostracion. La prueba se deja como ejercicio al lector
CAPITULO 2. SOLUCION DE ECUACIONES NO LINEALES

Analisis Numerico. Notas de clase 29
Teorema 2.2.4. TEOREMA DE ROLLE
Si f continua en el intervalo cerrado [a, b], diferenciable en el interva-lo abierto (a, b) y f(a) = f(b), entonces existe un numero c ∈ (a, b), tal quef′(c) = 0
Demostracion. Por los teoremas 2.2.2 y 2.2.3, f alcanza tanto un maximocomo un mınimo en [a, b]. Sea M = max f(x) y m = mın f(x). Si M = m,entonces f es constante y f
′(x) = 0 para toda x en (a, b). Si M 6= m, entonces
uno de ellos es diferente de a. Supongamos que es M (para m es semejante).Entonces M > f(a), de manera que el maximo no puede obtenerse en x = ao bien x = b. De aquı que existe un punto c en (a, b) en el cual f(x) es unmaximo. Por el teorema de Fermat, entonces f
′(c) = 0
El teorema de Rolle significa geometricamente que si la curva C dada pory = f(x) tiene una tangente en todo punto de (a, b) entonces entre dos puntossobre C que se encuentren a un mismo nivel, existe (por lo menos) un puntoentre ellos en el cual la linea tangente es horizontal
Teorema 2.2.5. TEOREMA DEL VALOR MEDIO
Si f es continua en el intervalo cerrado [a, b] y diferenciable en el intervaloabierto (a, b) existe un numero c ∈ (a, b), tal que
f(b)− f(a) = f′(c)(b− a)
Demostracion. Consideremos la funcion
φ(x) = f(x)− f(a)− f(b)− f(a)
b− a(x− a),
como f es continua en [a, b] y diferenciable en (a, b) entonces
φ′(x) = f
′(x)− f(b)− f(a)
b− a,
pero φ(a) = 0 y φ(b) = 0 de modo que la funcion φ satisface las condicionesdel teorema de Rolle en [a, b].
Luego por dicho teorema existe c ∈ (a, b) tal que
φ′(c) = f
′(c)− f(b)− f(a)
b− a= 0
por lo tanto,
f′(c) =
f(b)− f(a)
b− a
2.2. PUNTO FIJO

30 J Velasquez Zapateiro/ V. Obeso Fernandez
Teorema 2.2.6. TEOREMA DEL VALOR INTERMEDIO
Si f es continua en el intervalo cerrado [a, b], f(a) 6= f(b) y k un numerocualquiera entre f(a) y f(b), entonces existe un numero c ∈ (a, b), tal quef(c) = k
Demostracion. Sea G(x) =∫ x
af(t)dt, luego, G
′(x) = f(x) si x ∈ [a, b],
tomemos F (x) = G(x)− kx, la cual es continua en [a, b], puesto que G(x) loes, por lo tanto, F (x) tiene un maximo y un mınimo en [a, b]. Supongamosque
f(a) < k < f(b),
comoF′(x) = G
′(x)− k = f(x)− k ∀x ∈ [a, b],
entonces, por este hecho y por el supuesto, tenemos que,
F′(a) = f(a)− k < 0
yF′(b) = f(b)− k > 0,
de modo que existe c ∈ (a, b), tal que
0 = F′(c) = f(c)− k,
ya que F es diferenciable y F′(a) y F
′(b), son de signos opuestos, de modo
quef(c) = k.
Definamos ahora si el concepto de punto fijo y mostremos resultados que nospermitan decidir cuando este existe y si la iteracion de punto fijo converge ono.
Definicion 2.2.1. Sean P ∈ R, y g(x) una funcion. P es un punto fijo deg(x), si y solo si, P = g(P).
Definicion 2.2.2. Decimos que P es un punto fijo de orden m de g si g(x)esta dada por
g(x) = P + (x−P)mq(x)
con q(P) 6= 0 .
Observese que si x = P, la definicion coincide con la anterior.
CAPITULO 2. SOLUCION DE ECUACIONES NO LINEALES

Analisis Numerico. Notas de clase 31
Definicion 2.2.3. La iteracion pn+1 = g(pn), n = 0, 1, 2, 3, . . . se definecomo la iteracion de punto fijo.
Teorema 2.2.7. Sea g(x) una funcion continua, pn∞n=0 la sucesion gener-ada por la iteracion de punto fijo. Si
lımn→∞
pn = P,
entonces, P es un punto fijo de g.
Demostracion. Comolım
n→∞pn = P,
entonceslım
n→∞pn+1 = P,
luego
g(P ) = g(
lımn→∞
pn
)= lım
n→∞g(pn) = lım
n→∞pn+1 = P,
ası que P es un punto fijo de g
Teorema 2.2.8. Supongamos g ∈ C[a; b].
1. Si la imagen de y = g(x), es tal que y ∈ [a; b], ∀x ∈ [a; b], entonces gtiene un punto fijo.
2. Si g′(x), esta definida en [a; b] y |g′(x)| < 1, ∀x ∈ (a; b), entonces el
punto fijo es unico en [a; b].
Demostracion. Probemos 1). Si g(a) = a o g(b) = b, entonces, a o b sonpuntos fijos de g y se cumple (1). Sea entonces g(a) ∈ (a; b] y g(b) ∈ [a; b),luego a < g(a) y b > g(b), por tanto a− g(a) < 0 y b− g(b) > 0. Definamosla funcion f(x) = x− g(x), luego f(a) = a− g(a) < 0 y f(b) = b− g(b) > 0entonces por el teorema del valor intermedio existe P ∈ (a; b), tal quef(P) = 0, luego 0 = P− g(P) y por tanto, g(P) = P siendo P un punto fijode g.
Probemos 2) Supongamos que |g′(x)| < 1 ∀x ∈ (a; b) y que P1 y P2
son puntos fijos distintos de g, entonces por el teorema del valor medio∃d ∈ (a; b) tal que g(P1) − g(P2) = g
′(d)(P1 − P2), pero como g(P1) = P1
y g(P2) = P2, entonces P2 −P1 = g′(d)(P2 −P1) y por lo tanto,
g′(d) =P2 −P1
P2 −P1
,
ası que ∃d ∈ (a; b) tal que g′(d) = 1 y ademas por hipotesis, ∀x ∈ (a; b),
−1 < g′(x) < 1, lo cual es una contradiccion, por tanto P2 = P1
2.2. PUNTO FIJO

32 J Velasquez Zapateiro/ V. Obeso Fernandez
Teorema 2.2.9. TEOREMA DEL PUNTO FIJO
Supongamos i) g, g′ ∈ C[a; b], ii) K > 0 una constante, iii) p0 ∈ (a; b),
iv) g(x) ∈ [a; b], ∀x ∈ [a; b]. Entonces hay un punto fijo P de g en [a; b];ademas
1. Si |g′(x)| ≤ K < 1, ∀x ∈ [a; b], entonces Pes el unico punto fijo de gen [a; b] y la iteracion de punto fijo converge a dicho punto.
2. Si |g′(x)| > 1 y po 6= P, la iteracion de punto fijo no converge a P.
Demostracion. Por i), iv) y el teorema anterior existe un punto fijo P de g.Demostremos 1) Por el teorema anterior y las hipotesis i)-iv), se prueba que elpunto fijo es unico, por otro lado, por el teorema del valor medio ∃c0 ∈ (a; b),tal que |g(P)− g(p0)| = |g′(c0)(P− p0)|, pero g(P) = P y g(p0) = p1, luegoentonces, ∃c0 ∈ (a; b), tal que |P−p1| = |g′(c0)||P−p0| ≤ K|P−p0| < |P−p0|,de modo que, p1, esta mas cerca de P que p0. Pero tambien ∃c1 ∈ (a; b), talque |g(P) − g(p1)| = |g′(c1)(P − p1)|, pero g(P) = P y g(p1) = p2, luegoentonces, ∃c1 ∈ (a; b), tal que |P−p2| = |g′(c1)||P−p1| ≤ K|P−p1| < |P−p1|,ası que, |P− p2| < |P− p1| < |P− p0|, y p2 esta mas cerca de P que p1, engeneral,
|P− pn| < |P− pn−1| < . . . < |P− p1| < |P− p0|,podemos probar ahora que
lımn→∞
|P− pn| = 0.
En efecto probemos primero por induccion sobre que n que|P− pn| ≤ Kn|P− p0|.
Para n=1 se probo que |P− p1| ≤ K|P− p0|.Supongamos que |P− pn| ≤ Kn|P− p0|, luego
|P− pn+1| = |g(P)− g(pn)| = |g′(cn)(P− pn)| = |g′(cn)||P− pn|,pero como |g′(cn)| ≤ K, entonces
|P− pn+1| ≤ K|P− pn| ≤ KKn|P− p0|,luego
|P− pn+1| ≤ Kn+1|P− p0|.Pero entonces, como 0 < K < 1, tenemos que,
lımn→∞
Kn = 0,
CAPITULO 2. SOLUCION DE ECUACIONES NO LINEALES

Analisis Numerico. Notas de clase 33
luegolım
n→∞|P− pn+1| ≤ |P− p0| lım
n→∞Kn = 0,
ası que0 ≤ lım
n→∞|P− pn+1| ≤ 0,
de modo quelım
n→∞|P− pn| = 0
y por tantolım
n→∞pn = P.
La prueba de (2) se deja de ejercicio al lector.
Corolario 2.2.1. Supongamos g satisface, las hipotesis (1) del teorema ante-rior. Entonces las cotas del error que se comete al usar la iteracion de puntofijo para aproximar a P son
|P− pn| ≤ Kn|P− p0| ∀n ≥ 1
y
|P− pn| ≤ Kn|p1 − p0|1−K
∀n ≥ 1
Demostracion. La primera cota ya fue probada en el teorema anterior.
Demostremos que se cumple la otra cota.Para n ≥ 1, se tiene que
|pn+1 − pn| = |g(pn)− g(pn−1)| = |g′(cn−1)||pn − pn−1| ≤ K|pn − pn−1| ≤
· · · ≤ Kn|p1 − p0|,luego
|pn+1 − pn| ≤ Kn|p1 − p0|.Ası que, para m > n ≥ 1,
|pm − pn| = |pm − pm−1 + pm−1 − pm−2 + pm−2 − · · · − pn+1 + pn+1 − pn|,
entonces,
|pm − pn| ≤ |pm − pm−1|+ |pm−1 − pm−2|+ · · ·+ |pn+1 − pn|
≤ Km−1|p1 − p0|+ Km−2|p1 − p0|+ · · ·+ Kn|p1 − p0|= Kn|p1 − p0|(Km−n−1 + Km−n−2 + . . . K2 + K + 1),
2.2. PUNTO FIJO

34 J Velasquez Zapateiro/ V. Obeso Fernandez
pero comolım
m→∞pm = P,
tenemos que,
|P−pn| = lımm→∞
|pm−pn| ≤ lımm→∞
Kn|p1−p0|m−n−1∑
i=0
K i ≤ Kn|p1−p0| lımm→∞
m−n−1∑i=0
K i,
perom−n−1∑
i=0
Ki es una serie geometrica de razon K con 0 < K < 1, luego la
sucesion converge a1
1−K, y entonces,
|P− pn| ≤ Kn|p1 − p0| 1
1−K=
Kn|p1 − p0|1−K
Teorema 2.2.10. Si g es diferenciable en [a; b] y P es un punto fijo de g deorden m > 1, entonces, la iteracion de punto fijo tiene orden de convergenciam > 1 y si |g′(x)| < 1, ∀x ∈ [a; b], entonces el metodo converge linealmente.
Demostracion. Supongamos g(x) = P +(x−P )mq(x), entonces, g(k)(P ) = 0,para k = 1, 2, 3, . . . , m−1 y g(m)(P ) 6= 0, por el desarrollo de Taylor de g(xn)alrededor de P , tenemos que,
g(xn) = P +m−1∑
k=1
(xn − P )k
k!g(k)(P ) +
(xn − P )m
m!g(m)(P ) + O[(xn − P )m+1],
de modo que,
g(xn) = P +(xn − P )m
m!g(m)(P ) + O[(xn − P )m+1],
luego,
xn+1 = P +(xn − P )m
m!g(m)(P ) + O[(xn − P )m+1],
o sea que
xn+1 − P =(xn − P )m
m!g(m)(P ) + O[(xn − P )m+1],
por lo tanto,
lımn→∞
xn+1 − P
(xn − P )m=
g(m)(P )
m!,
CAPITULO 2. SOLUCION DE ECUACIONES NO LINEALES

Analisis Numerico. Notas de clase 35
luego, el metodo tiene convergencia de orden m > 1 si P , es un punto fijo deorden m.En particular si m = 1,
lımn→∞
xn+1 − P
(xn − P )= g
′(P ) < 1
y la convergencia es lineal.
Ejemplo 2.2.1. Usa la iteracion de punto fijo para calcular un cero def(x) = ex − x2 + 3x− 2
Solucion
Como f(x) = ex − x2 + 3x − 2 entonces calcular un cero de f(x)
equivale a obtener un punto fijo de x = g(x) =2− ex + x2
3, los resultados
de la iteracion de punto fijo se tiene en la tabla siguiente
k xk g(x) =2− ex + x2
3|f(xk)|
0 x0 0.3333333333 0.31013611 x1 0.23849956201 0.0720402052 x2 0.26251296367 0.018819164 x3 0.25623991092 0.00487648855 x4 0.25786540708 0.001266286 x5 0.25744331555 0.000328637 x6 0.25755285996 0.0000853018 x7 0.25752442613 0.000022149 x8 0.25753180627 0.000005747
TABLA 3
Como puede observarse |f(x8)| ≈ 0 ¥
2.2. PUNTO FIJO
36 J Velasquez Zapateiro/ V. Obeso Fernandez
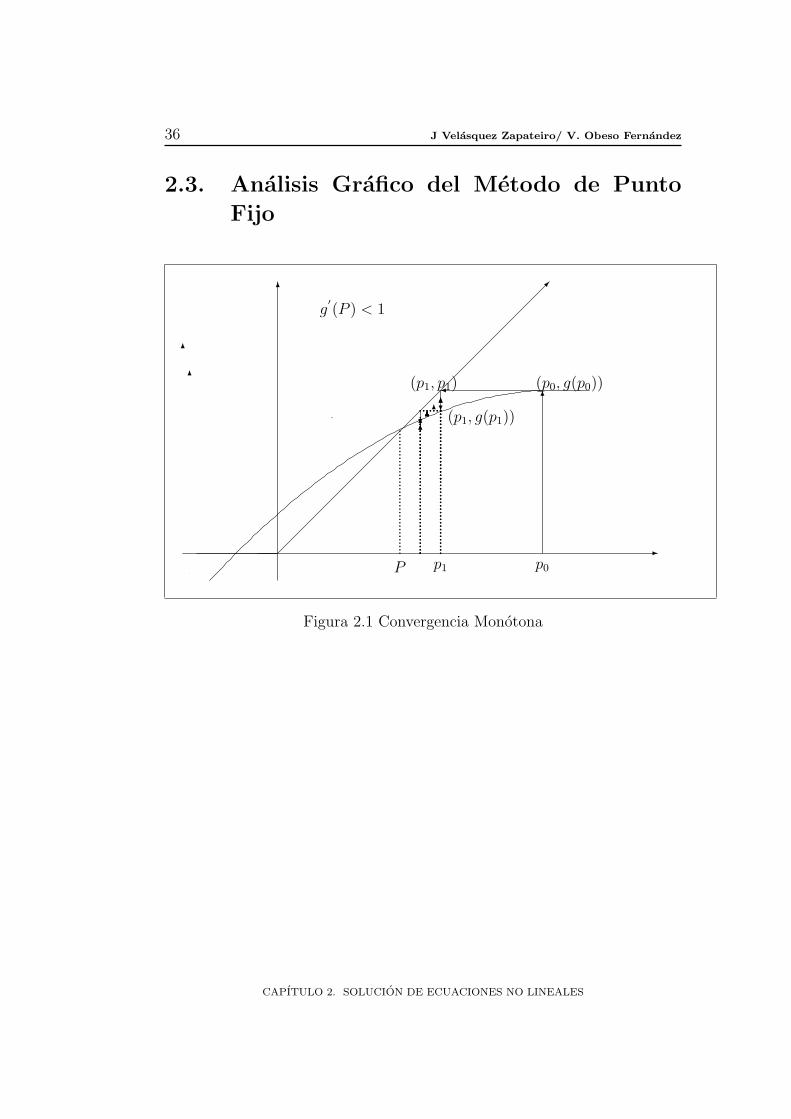
2.3. Analisis Grafico del Metodo de Punto
Fijo
-
6 µ
.....................................
6¾
?666
6
...........................................
..
6
...
...
...
...
...
...
..............................................
....... 6......... 666666?666
P
.....
(p0, g(p0))
(p1, g(p1))
...
....
...
...
...............................................
...
...
...
...
...
...
...
....
...
...
...
...
(p1, p1)
g′(P ) < 1
p0p1
Figura 2.1 Convergencia Monotona
CAPITULO 2. SOLUCION DE ECUACIONES NO LINEALES
Analisis Numerico. Notas de clase 37
.................
6-
666-
.....................................
6.........................................................
P
6
p0
66
6
6
p1 p2
(p1, p1)
(p2, p2)
(p0, g(p0))
(p1, g(p1))
g′(P ) > 1
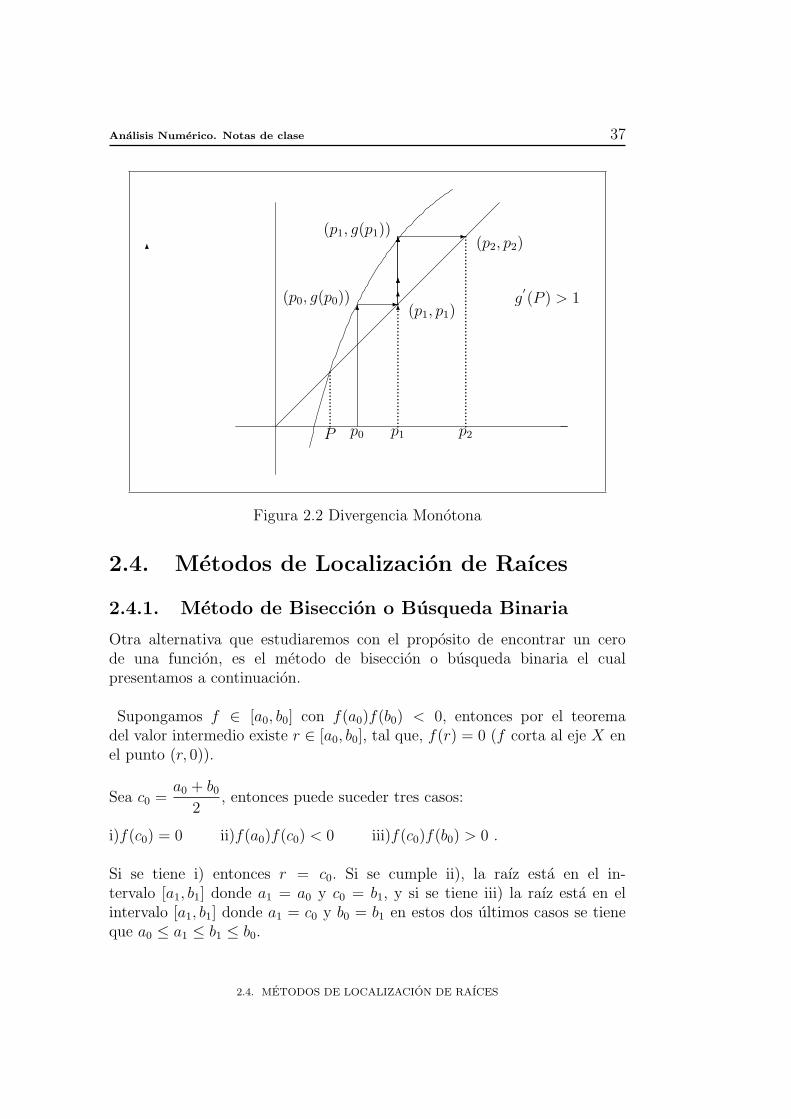
Figura 2.2 Divergencia Monotona
2.4. Metodos de Localizacion de Raıces
2.4.1. Metodo de Biseccion o Busqueda Binaria
Otra alternativa que estudiaremos con el proposito de encontrar un cerode una funcion, es el metodo de biseccion o busqueda binaria el cualpresentamos a continuacion.
Supongamos f ∈ [a0, b0] con f(a0)f(b0) < 0, entonces por el teoremadel valor intermedio existe r ∈ [a0, b0], tal que, f(r) = 0 (f corta al eje X enel punto (r, 0)).
Sea c0 =a0 + b0
2, entonces puede suceder tres casos:
i)f(c0) = 0 ii)f(a0)f(c0) < 0 iii)f(c0)f(b0) > 0 .
Si se tiene i) entonces r = c0. Si se cumple ii), la raız esta en el in-tervalo [a1, b1] donde a1 = a0 y c0 = b1, y si se tiene iii) la raız esta en elintervalo [a1, b1] donde a1 = c0 y b0 = b1 en estos dos ultimos casos se tieneque a0 ≤ a1 ≤ b1 ≤ b0.
2.4. METODOS DE LOCALIZACION DE RAICES

38 J Velasquez Zapateiro/ V. Obeso Fernandez
[...................................
].......................(b, f(b))
(a, f(a))
a
b(r, 0) [ ]
(a, f(a))
b
a
(b, f(b))
...
...
...
...
...
...
...
...
...
...
...
.......................
(r, 0)
Figura 2.3 Metodo de Biseccion
Sea ahora c1 =a1 + b1
2, entonces igual que antes se puede tener:
i)f(c1) = 0 ii)f(a1)f(c1) < 0 iii)f(c1)f(b1) > 0 .Si se tiene i) entonces r = c1. Si se cumple ii), la raız esta en el intervalo[a2, b2] donde a2 = a1 y c1 = b2, y si se tiene iii) la raız esta en el intervalo[a2, b2] donde a2 = c1 y b1 = b2 en estos dos ultimos casos se tiene quea0 ≤ a1 ≤ a2 ≤ b2 ≤ b1 ≤ b0.
Continuando con este proceso se toma cn =an + bn
2generando una
sucesion de intervalos [a0, b0], [a1, b1], . . . , [an, bn], con a0 ≤ a1 ≤ a2 ≤ · · · ≤an ≤ · · · ≤ bn ≤ · · · ≤ b2 ≤ b1 ≤ b0.
Con el proposito de probar el teorema de convergencia del metodo debusqueda binaria presentamos las siguientes definiciones y resultados.
Definicion 2.4.1. Una sucesion an es creciente, si
a1 ≤ a2 ≤ a3 ≤ . . . an ≤ an+1 ≤ . . .
Definicion 2.4.2. Una sucesion an es decreciente, si
a1 ≥ a2 ≥ a3 ≥ . . . an ≥ an+1 ≥ . . .
CAPITULO 2. SOLUCION DE ECUACIONES NO LINEALES

Analisis Numerico. Notas de clase 39
Definicion 2.4.3. Una sucesion an es acotada superiormente, si existeuna constante M tal que
an ≤ M ∀nDefinicion 2.4.4. Una sucesion an es acotada inferiormente, si existe unaconstante M tal que
an ≥ M ∀nDefinicion 2.4.5. Una sucesion an es convergente si tiende a un limitefinito.
Definicion 2.4.6. Una sucesion an es divergente si no tiene limite finito.
Teorema 2.4.1. TEOREMA DE WEIERSTRASS Una sucesion cre-ciente y acotada superiormente tiende a un limite, y una sucesion decrecientey acotada inferiormente tiende a un limite.
Teorema 2.4.2. TEOREMA DE CONVERGENCIA Supongamosf ∈ C[a, b] y f(a)f(b) < 0. Sea cn∞n=0 la sucesion de puntos medios gener-ada por el metodo de busqueda binaria. Existe r ∈ [a, b], tal que f(r) = 0 yademas
|r − cn| ≤ b− a
2n+1,
en particular cn∞n=0 converge a r
Demostracion. Observemos que a0 ≤ a1 ≤ a2 ≤ · · · ≤ an ≤ · · · ≤ b0 yque b0 ≥ b1 ≥ b2 ≥ · · · ≥ a0, por tanto la sucesion an es creciente yesta acotada luego por el teorema de Weierstrass es converge y bn esdecreciente y acotada ası que nuevamente por el teorema de Weierstrassconverge.
Pero b1 − a1 =b0 − a0
2, b2 − a2 =
b1 − a1
2=
b0 − a0
22, en general
bn − an =b0 − a0
2n, luego
lımn→∞
(bn − an) = (b0 − a0) lımn→∞
1
2n,
pero lımn→∞
1
2n= 0, por tanto
lımn→∞
(bn − an) = 0,
ası quer = lım
n→∞bn = lım
n→∞an,
2.4. METODOS DE LOCALIZACION DE RAICES

40 J Velasquez Zapateiro/ V. Obeso Fernandez
como f(an)f(bn) ≤ 0, entonces, por la continuidad de f se tiene que,
f(
lımn→∞
an
)f(
lımn→∞
bn
)≤ 0,
por tanto
f(r)f(r) ≤ 0,
de modo que
0 ≤ [f(r)]2 ≤ 0,
y ası
f(r) = 0.
Pero
|r − cn| ≤ bn − an
2,∀n,
ya que la distancia entre r y cn no puede ser mayor que la mitad de anchode [an, bn], figura 2.4 ademas
[ ]cnan bnr
Figura 2.4
bn − an =b0 − a0
2n,
entonces,
|r − cn| ≤ b0 − a0
2n+1,
ası que
0 ≤ lımn→∞
|r − cn| ≤ (b0 − a0) lımn→∞
1
2n+1= 0,
luego
lımn→∞
cn = r.
Se puede probar que el numero de iteraciones necesarias que nos garanti-zarıa que el punto medio cN generado por el metodo de biseccion converge,
CAPITULO 2. SOLUCION DE ECUACIONES NO LINEALES

Analisis Numerico. Notas de clase 41
esta dado por N =[∣∣∣ ln(b− a)− ln δ
ln 2
∣∣∣], donde como sabemos [|x|] es la parte
entera de x, para un delta previamente escogido. En efecto sea
|b− a|2n+1
< δ,
entonces tomando logaritmo a ambos lados se tiene que
ln|b− a|2n+1
< ln δ,
luego
ln |b− a| − ln 2n+1 < ln δ,
o sea que
ln |b− a| − (n + 1) ln 2 < ln δ,
pero entonces
n + 1 >( ln |b− a| − ln δ
ln 2
),
pero como el numero de iteraciones tiene que ser un numero entero, se tieneque necesariamente
N =[∣∣∣ ln(b− a)− ln δ
ln 2
∣∣∣].
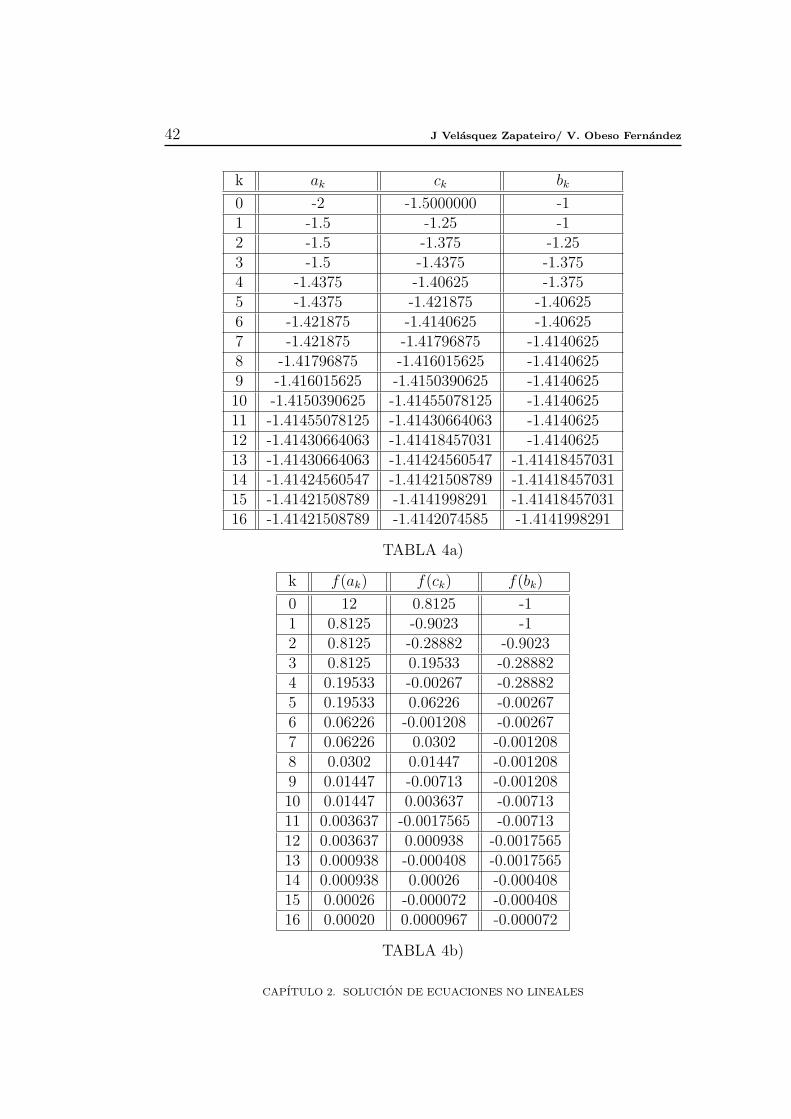
Ejemplo 2.4.1. Aplicar el metodo de biseccion para encontrar un cero def(x) = x4 − 2x3 − 4x2 + 4x + 4, en el intervalo [−2,−1]
Solucion
Los resultados obtenidos al aplicar el metodo de biseccion se muestran enlas tablas 4a) y 4b)
2.4. METODOS DE LOCALIZACION DE RAICES
42 J Velasquez Zapateiro/ V. Obeso Fernandez
k ak ck bk
0 -2 -1.5000000 -11 -1.5 -1.25 -12 -1.5 -1.375 -1.253 -1.5 -1.4375 -1.3754 -1.4375 -1.40625 -1.3755 -1.4375 -1.421875 -1.406256 -1.421875 -1.4140625 -1.406257 -1.421875 -1.41796875 -1.41406258 -1.41796875 -1.416015625 -1.41406259 -1.416015625 -1.4150390625 -1.414062510 -1.4150390625 -1.41455078125 -1.414062511 -1.41455078125 -1.41430664063 -1.414062512 -1.41430664063 -1.41418457031 -1.414062513 -1.41430664063 -1.41424560547 -1.4141845703114 -1.41424560547 -1.41421508789 -1.4141845703115 -1.41421508789 -1.4141998291 -1.4141845703116 -1.41421508789 -1.4142074585 -1.4141998291
TABLA 4a)
k f(ak) f(ck) f(bk)
0 12 0.8125 -11 0.8125 -0.9023 -12 0.8125 -0.28882 -0.90233 0.8125 0.19533 -0.288824 0.19533 -0.00267 -0.288825 0.19533 0.06226 -0.002676 0.06226 -0.001208 -0.002677 0.06226 0.0302 -0.0012088 0.0302 0.01447 -0.0012089 0.01447 -0.00713 -0.00120810 0.01447 0.003637 -0.0071311 0.003637 -0.0017565 -0.0071312 0.003637 0.000938 -0.001756513 0.000938 -0.000408 -0.001756514 0.000938 0.00026 -0.00040815 0.00026 -0.000072 -0.00040816 0.00020 0.0000967 -0.000072
TABLA 4b)
CAPITULO 2. SOLUCION DE ECUACIONES NO LINEALES
Analisis Numerico. Notas de clase 43
En la iteracion 16 observamos que para x16 = −1.4142074585, se tiene|f(x16)| = 0.0000488 ≈ 0 ¥
2.5. Metodo de Falsa Posicion o Regula Falsi
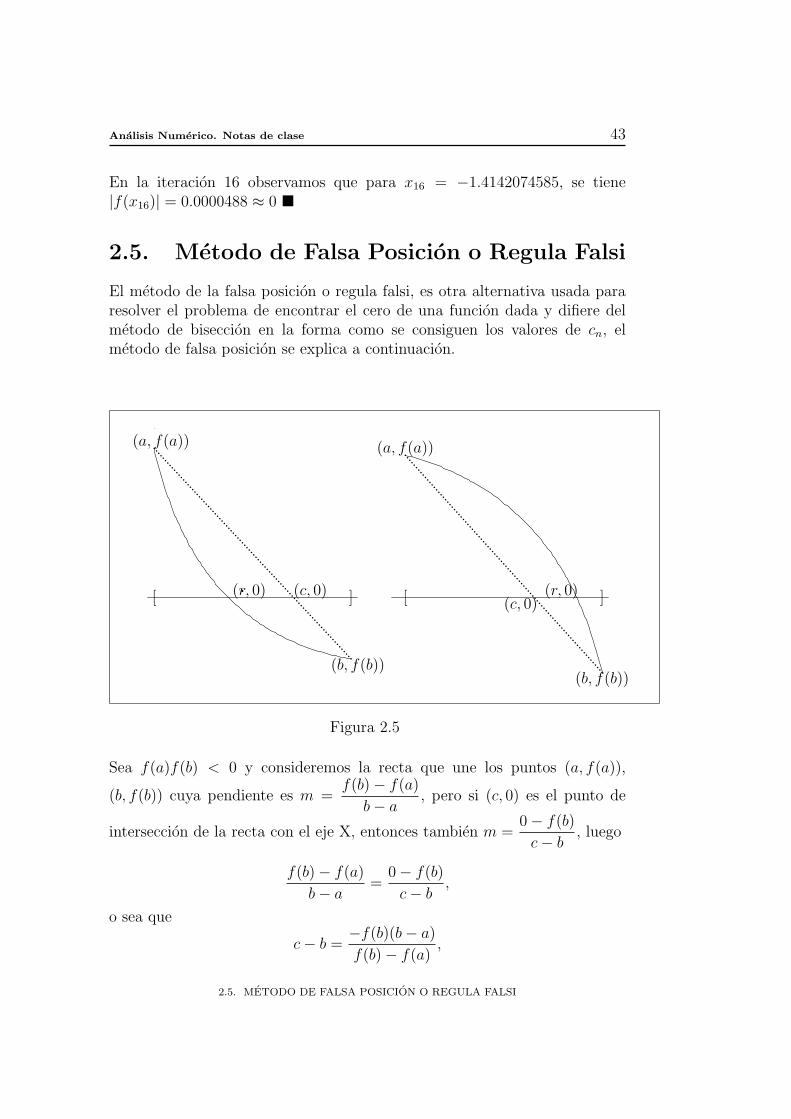
El metodo de la falsa posicion o regula falsi, es otra alternativa usada pararesolver el problema de encontrar el cero de una funcion dada y difiere delmetodo de biseccion en la forma como se consiguen los valores de cn, elmetodo de falsa posicion se explica a continuacion.
[ ] ][(r, 0) (r, 0)
(a, f(a)) (a, f(a))
(b, f(b))(b, f(b))
........................................................................................
.........................................................................................
.... (c, 0)(c, 0)
Figura 2.5
Sea f(a)f(b) < 0 y consideremos la recta que une los puntos (a, f(a)),
(b, f(b)) cuya pendiente es m =f(b)− f(a)
b− a, pero si (c, 0) es el punto de
interseccion de la recta con el eje X, entonces tambien m =0− f(b)
c− b, luego
f(b)− f(a)
b− a=
0− f(b)
c− b,
o sea que
c− b =−f(b)(b− a)
f(b)− f(a),
2.5. METODO DE FALSA POSICION O REGULA FALSI

44 J Velasquez Zapateiro/ V. Obeso Fernandez
luego
c = b− f(b)(b− a)
f(b)− f(a),
de modo que
c =bf(b)− bf(a)− bf(b) + af(b)
f(b)− f(a),
o tambien
c =af(b)− bf(a)
f(b)− f(a).
Al igual que para el metodo de biseccion se tienen tres posibilidades:i) f(c) = 0 ii) f(a)f(c) < 0 iii) f(c)f(b) < 0.Si f(c) = 0, entonces c es un cero de f .Si f(a)f(c) < 0, entonces hay un cero de f en [a; c].Si f(c)f(b) < 0, entonces hay un cero de f en [c; b].Lo anterior sugiere un proceso iterativo que se concreta tomando
cn =anf(bn)− bnf(an)
f(bn)− f(an).
n = 0, 1, 2, 3, . . .
Ejemplo 2.5.1. Aplicar el metodo de falsa posicion para encontrar un cerode f(x) = x4 − 2x3 − 4x2 + 4x + 4, en el intervalo [−2,−1]
Solucion
Los resultados obtenidos al aplicar el metodo de falsa posicion son
CAPITULO 2. SOLUCION DE ECUACIONES NO LINEALES

Analisis Numerico. Notas de clase 45
k ck
0 -1.076923076921 -1.154674874952 -1.225371351883 -1.283477846024 -1.327258692595 -1.358069655066 -1.378703556837 -1.392059701958 -1.400513610359 -1.4057884838410 -1.4090502822611 -1.4110560195912 -1.41228513822313 -1.4130367516314 -1.4134957727215 -1.41377588468716 -1.4139467302717 -1.4140509063218 -1.4141144169219 -1.4141531317120 -1.414176729921 -1.4141911133322 -1.41419988002
TABLA 5
En la iteracion 23 se tiene que |f(x23)| = 0.000109 ≈ 0 ¥
2.6. Metodo de Newton
En la busqueda de los ceros de una funcion uno de los metodo mas atractivosdebido a su rapida convergencia, ya que en general es q-cuadratico, es el deNewton, el cual presentamos a continuacion.
Sea f ∈ Cn+1[a, b], una funcion diferenciable en [a; b] y sea x0 ∈ [a; b],entonces para todo x ∈ (a, b), sabemos por el Teorema de Taylor que f sepuede escribir de la forma
f(x) = f(x0) + f′(x0)(x− x0) +
f′′(x0)(x− x0)
2
2!+
f′′′(x0)(x− x0)
3
3!+ . . .
2.6. METODO DE NEWTON

46 J Velasquez Zapateiro/ V. Obeso Fernandez
si r es el cero de la funcion y x0 ≈ r, entonces podemos tomar la aproximacionlineal dada por M(x) = f(x0) + f
′(x0)(x − x0), el metodo desea encontrar
punto x+, tal que M(x+) = 0, lo cual se consigue si
0 = f(x0) + f′(x0)(x+ − x0),
por tanto
x+ = x0 − f(x0)
f ′(x0),
o sea
s+ = x+ − x0 = − f(x0)
f ′(x0),
Lo anterior sugiere el siguiente algoritmo.
ALGORITMO DE NEWTON
Dado f : R 7−→ R continuamente diferenciable y x0 ∈ RPara k = 0, 1, 2, . . . , “hasta converger”
Resuelva sk =−f(xk)
f ′(xk)Haga xk+1 = xk + sk.
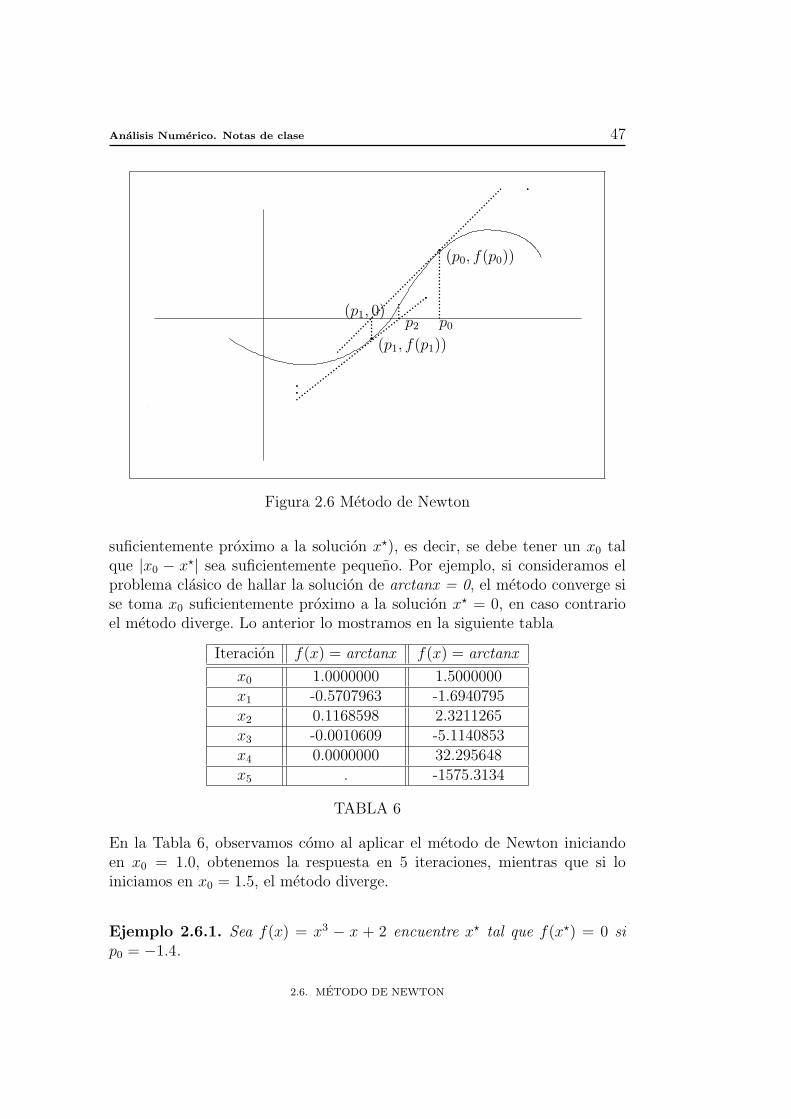
El metodo de Newton tambien se puede establecer observando en lafig 2.6 que la recta que pasa por los puntos (p0, f(p0)) y (p1, 0) tienependiente f
′(p0), luego se tiene que
f′(p0) =
0− f(p0)
p1 − p0
=−f(p0)
p1 − p0
,
por tanto
p1 − p0 =−f(p0)
f ′(p0),
o sea nuevamente
s1 = p1 − p0 =−f(p0)
f ′(p0)
como antes.
Una de las desventajas de este metodo es que en cada iteracion sedebe evaluar f(x) y f
′(x), lo cual para algun tipo de funciones es muy
costo computacionalmente. Otra de las desventajas es que la convergenciase garantiza solo si se inicia el proceso desde un punto x0 aceptable (
CAPITULO 2. SOLUCION DE ECUACIONES NO LINEALES
Analisis Numerico. Notas de clase 47
.........................................................................
...
...
...
...
...
...
...
.........
............
........
........
........
........
........
....
...
..
p0
(p1, 0)p2
(p0, f(p0))
(p1, f(p1))
Figura 2.6 Metodo de Newton
suficientemente proximo a la solucion x?), es decir, se debe tener un x0 talque |x0 − x?| sea suficientemente pequeno. Por ejemplo, si consideramos elproblema clasico de hallar la solucion de arctanx = 0, el metodo converge sise toma x0 suficientemente proximo a la solucion x? = 0, en caso contrarioel metodo diverge. Lo anterior lo mostramos en la siguiente tabla
Iteracion f(x) = arctanx f(x) = arctanx
x0 1.0000000 1.5000000x1 -0.5707963 -1.6940795x2 0.1168598 2.3211265x3 -0.0010609 -5.1140853x4 0.0000000 32.295648x5 . -1575.3134
TABLA 6
En la Tabla 6, observamos como al aplicar el metodo de Newton iniciandoen x0 = 1.0, obtenemos la respuesta en 5 iteraciones, mientras que si loiniciamos en x0 = 1.5, el metodo diverge.
Ejemplo 2.6.1. Sea f(x) = x3 − x + 2 encuentre x? tal que f(x?) = 0 sip0 = −1.4.
2.6. METODO DE NEWTON
48 J Velasquez Zapateiro/ V. Obeso Fernandez
Solucion
Como f(x) = x3 − x + 2, entonces f′(x) = 3x2 − 1 pero la iteracion
de Newton como hemos visto es
xk+1 = xk − f(xk)
f ′(xk),
entonces al aplicar dicha iteracion, se obtienen los resultados dados en lasiguiente tabla.
k xk f(x) = x3 − x + 2 |f(xk)|0 x0 -1.4 0.6561 x1 -1.53442622951 0.078324864212 x2 -1.52150857169 0.000766021443 x3 -1.52139827287 0.000110354344 x4 -1.52137970707 0.000000001575 x5 -1.52137970681 0.00000000003
TABLA 7
Como puede observarse |f(x5)| = 0.00000000003, de modo que x5 ≈ x?
¥
Ejemplo 2.6.2. Aplicar el metodo de Newton para obtener la solucion de
f(x) = x3 + 3x2 − 1
Solucion
Partiendo de x0 = −3 se tiene la siguiente tabla
k xk f(x) = x3 + 3x2 − 1 |f(xk)|0 x0 -2.88888888889 -0.07227023321 x1 -2.87945156695 -0.00050385012 x2 -2.87938524484 -0.0000002483 x3 -2.87938524157 0.0000000000
TABLA 8
La solucion x3 = −2.87938524157 se tiene en cuatro iteraciones. ¥
CAPITULO 2. SOLUCION DE ECUACIONES NO LINEALES

Analisis Numerico. Notas de clase 49
2.6.1. Convergencia del Metodo de Newton
En esta seccion probaremos un resultado que muestra que el metodo deNewton converge q-cuadraticamente, pero para esto necesitamos establecerunos resultados previos.
Teorema 2.6.1. Teorema Generalizado del Valor Medio Si se cumpleque
1. f y g continuas en un intervalo [a,b]
2. f y g diferenciables en el intervalo [a,b]
3. g′(x) 6= 0, ∀x ∈ (a, b),
entonces existe c ∈ (a, b), tal que
f(b)− f(a)
g(b)− g(a)=
f′(c)
g′(c)
Demostracion. Se tiene que g(a) 6= g(b), ya que si g(a) = g(b), entonces, porel teorema del valor medio existe c ∈ (a, b), tal que
g′(c) =
g(b)− g(a)
b− a= 0,
y por hipotesis g′(x) 6= 0, ∀x ∈ (a, b) lo que es una contradiccion.
Sea φ(x) = f(x)−f(a)− f(b)− f(a)
g(b)− g(a)[g(x)−g(a)], entonces φ(x) es continua
en [a, b] y diferenciable en (a, b), ademas, φ(a) = 0 y φ(b) = 0 ya que
φ(a) = f(a)− f(a)− f(b)− f(a)
g(b)− g(a)[g(a)− g(a)] = 0
y
φ(b) = f(b)−f(a)− f(b)− f(a)
g(b)− g(a)[g(b)−g(a)] = f(b)−f(a)−f(b)+f(a) = 0,
luego aplicando el teorema de Rolle a φ(x), se tiene que existe c ∈ (a, b) talque φ
′(c) = 0, pero como
φ′(x) = f
′(x)− f(b)− f(a)
g(b)− g(a)g′(x),
entonces
f′(c)− f(b)− f(a)
g(b)− g(a)g′(c) = 0,
2.6. METODO DE NEWTON

50 J Velasquez Zapateiro/ V. Obeso Fernandez
luegof′(c)[g(b)− g(a)] = g
′(c)[f(b)− f(a)],
por lo tantof′(c)
g′(c)=
f(b)− f(a)
g(b)− g(a).
Teorema 2.6.2. Si f cumple las siguientes condiciones
1. f y f′son continuas en un intervalo cerrado I = [c, c + h]
2. f′′(x) existe si x ∈ (c, c + h)
3. E = f(c + h)− [f(c) + f ′(c)h]
4. Existe M tal que |f ′′(x)| ≤ M , ∀x ∈ (c, c + h)
entonces, |E| ≤ 12Mh2
Demostracion. Sea F (x) = f(x) + f′(x)(c + h − x), G(x) = (c + h − x)2,
entonces F y G satisfacen las hipotesis del teorema anterior y por lo tanto,existe m ∈ (c, c + h) tal que
F′(m)
G′(m)=
F (c + h)− F (c)
G(c + h)−G(c), (2.5)
pero
F (c+h)−F (c) = [f(c+h)+f′(c+h)×0]−[f(c)+f
′(c)h] = f(c+h)−f(c)−f
′(c)h
yG(c + h)−G(c) = (c + h− c− h)2 − (c + h− c)2 = −h2,
luegoF (c + h)− F (c)
G(c + h)−G(c)=
f(c + h)− f(c)− f′(c)h
−h2,
y como
F′(x) = f
′(x)− f
′(x) + f
′′(x)(c + h− x) = f
′′(x)(c + h− x)
yG′(x) = −2(c + h− x),
entonces tomando x = m se tiene que
F′(m) = f
′′(m)(c + h−m)
CAPITULO 2. SOLUCION DE ECUACIONES NO LINEALES

Analisis Numerico. Notas de clase 51
y
G′(m) = −2(c + h−m),
ası que de 2.5 tenemos que
f(c + h)− f(c)− f′(c)h
−h2=
f′′(m)(c + h−m)
−2(c + h−m)=
f′′(m)
−2
por el inciso 3 de la hipotesis
E
−h2=
f′′(m)
−2,
o sea que
E =h2
2f′′(m),
luego
|E| =∣∣∣h
2
2f′′(m)
∣∣∣ = |f ′′(m)|h2
2≤ M
h2
2,
luego en efecto
|E| ≤ Mh2
2.
Teorema 2.6.3. Si se cumple que
1. f tiene primera y segunda derivada en un intervalo abierto I que con-tiene un numero x? con f(x?) = 0
2. ∃m > 0, tal que |f ′(x)| ≥ m, ∀x ∈ I
3. ∃M > 0, tal que |f ′′(x)| ≤ M , ∀x ∈ I
4. xn, xn+1 ∈ I, son aproximaciones sucesivas de x? producidas por elmetodo de Newton.
entonces
|xn+1 − x?| ≤ M
2m|xn − x?|2, n = 1, 2, 3, . . .
Demostracion. Sea E el error que resulta de usar f(xn) como una aproxi-macion para f(x?) = 0, entonces,
E = f(x?)− [f(xn) + f′(xn)(x? − xn)] = −[f(xn) + f
′(xn)(x? − xn)],
2.6. METODO DE NEWTON

52 J Velasquez Zapateiro/ V. Obeso Fernandez
pero por el teorema anterior
|E| ≤ 1
2M(xn − x?)2.
Como xn+1 = xn − f(xn)
f ′(xn), n = 1, 2, 3, . . . , entonces
xn+1 − x? = xn − f(xn)
f ′(xn)− x? =
−[f(xn) + f′(xn)(x? − xn)]
f ′(xn),
luego
xn+1 − x? =E
f ′(xn),
por tanto
|xn+1 − x?| = |E||f ′(xn)| ≤
M(xn − x?)2
2|f ′(xn)| ,
pero1
|f ′(xn)| ≤1
m, luego
|xn+1 − x?| ≤ M
2m|xn − x?|2.
Como podemos observar el teorema anterior muestra que el metodo de New-ton en general converge q-cuadraticamente.
2.7. Metodo Modificado de Newton
Hemos dicho que en general el metodo se Newton converge cuadraticamentesin embargo cuando la raız no es simple solo se garantiza la convergencialineal, como lo muestra el siguiente teorema.
Teorema 2.7.1. Sea una funcion diferenciable en un intervalo [a; b] quecontiene a r y supongamos r es un cero de multiplicidad p > 1, entonces elmetodo de Newton converge q-linealmente.
Demostracion. Como r es un cero de multiplicidad p > 1, entonces, f(x) =(x− r)pq(x), con q(r) 6= 0. Sea
g(x) = x− f(x)
f ′(x),
CAPITULO 2. SOLUCION DE ECUACIONES NO LINEALES

Analisis Numerico. Notas de clase 53
como la iteracion de Newton es
xn+1 = xn − f(xn)
f ′(xn),
esta se puede considerar una iteracion de punto fijo para g(x).
Luego
g(x) = x− (x− r)pq(x)
p(x− r)p−1q(x) + (x− r)pq′(x)= x− (x− r)q(x)
pq(x) + (x− r)q′(x),
ası que
g′(r) = 1− p[q(r)]2
p2[q(r)]2= 1− 1
p,
pero como p > 1, entonces 1 − 1
p< 1, de modo que 0 6= g
′(r) < 1, ası que
por el teorema 2.2.10, el metodo de Newton converge q-linealmente.
Ejemplo 2.7.1. Aplicar el metodo de Newton a la funcion f(x) = x3−4x2+4x, partiendo de x0 = 1.5.
Solucion
Observemos que f(x) tiene en r = 2 un cero de multiplicidad 2, ypartiendo de x0 = 1.5 obtenemos los siguientes resultados.
2.7. METODO MODIFICADO DE NEWTON

54 J Velasquez Zapateiro/ V. Obeso Fernandez
i xi |xi − x?| |xi+1−x?||xi−x?|
0 1.5 0.5 0.41 1.8 0.2 0.472 1.905882359 0.0941 0.493 1.954132539 0.04587 0.4944 1.9773386164 0.02266 0.4975 1.988734610 0.011266 0.4986 1.994383304 0.0056167 0.4997 1.997195612 0.0028044 0.4998 1.998598791 0.00140121 0.4999 1.999299641 0.00070036 0.499910 1.999649882 0.00035012 0.499911 1.999824956 0.00017504 0.499912 1.999912482 0.00008752 0.513 1.999956242 0.0000438 0.514 1.999978121 0.000021879 0.49915 1.999989061 0.000010939 0.499916 1.999994530 0.00000547 0.517 1.999997265 0.000002735 0.5
TABLA 9
Como podemos observar, el metodo de Newton en en este caso tiene uncomportamiento lineal.¥
Con el proposito de mejorar la convergencia del metodo, este se puedemodificar, cuando como en este caso el cero buscado sea de multiplicidadm > 1.
Supongamos que r es un cero de multiplicidad m > 1, entonces,
f(x) = (x− r)mq(x),
con q(r) 6= 0, definamos
g(x) =f(x)
f ′(x)=
(x− r)q(x)
mq(x) + (x− r)q′(x).
Observemos primero que r es tambien un cero de g(x) ya que
g(r) =(r − r)q(r)
mq(r) + (r − r)q′(r)=
0
mq(r)= 0,
CAPITULO 2. SOLUCION DE ECUACIONES NO LINEALES

Analisis Numerico. Notas de clase 55
ademas r es un cero simple de g(x) puesto que esta funcion se puede escribirde la forma
g(x) = (x− r)[ q(x)
mq(x) + (x− r)q′(x)
]= (x− r)s(x),
donde
s(x) =q(x)
mq(x) + (x− r)q′(x),
con
s(r) =q(r)
mq(r) + (r − r)q′(r)=
q(r)
mq(r)=
1
m6= 0.
Consideremos la funcion de iteracion
h(x) = x− g(x)
g′(x)= x−
f(x)
f ′(x)
[f′(x)]2 − f(x)f
′′(x)
[f ′(x)]2
,
la cual nos da un metodo de Newton por lo menos q-cuadratico luego,
h(x) = x− f(x)f′(x)
[f ′(x)]2 − f(x)f ′′(x),
lo anterior sugiere un proceso iterativo, el cual se concreta al escribir
xn+1 = xn − f(xn)f′(xn)
[f ′(xn)]2 − f(xn)f ′′(xn),
n = 0, 1, 2, 3, . . . ,.
Ejemplo 2.7.2. Usar el metodo de modificado Newton para encontrar uncero de f(x) = x3 − 4x2 + 4x, partiendo de x0 = 1.5
Solucion
Al aplicar el metodo modificado de Newton partiendo de x0 = 1.5,con una tolerancia de 10−10 los resultados que se obtienen son:
k xk f(x) = x3 − 4x2 + 4x |f(xk)|0 x0 1.51 x1 1.89473684210526 0.020994314032 x2 1.99691833590139 0.000018964063 x3 1.99999761850615 0.0000000000014 x4 1.9999999999256 0.000000000001
2.7. METODO MODIFICADO DE NEWTON
56 J Velasquez Zapateiro/ V. Obeso Fernandez
TABLA 10
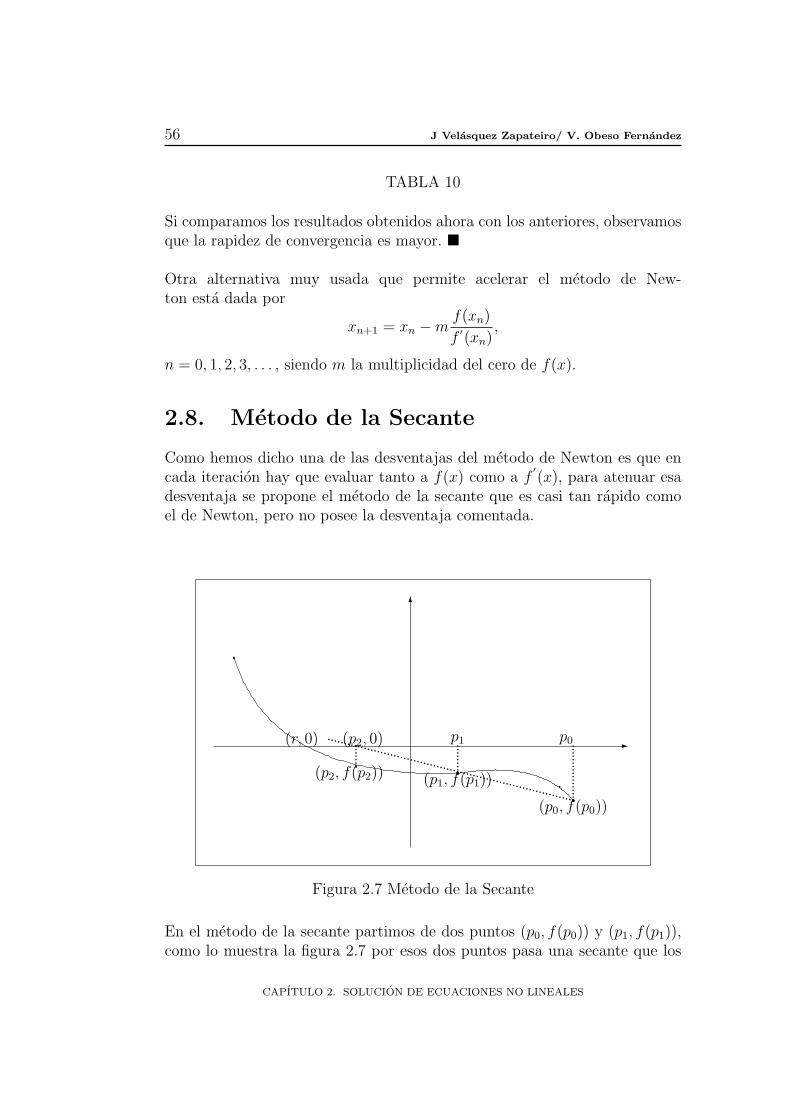
Si comparamos los resultados obtenidos ahora con los anteriores, observamosque la rapidez de convergencia es mayor. ¥
Otra alternativa muy usada que permite acelerar el metodo de New-ton esta dada por
xn+1 = xn −mf(xn)
f ′(xn),
n = 0, 1, 2, 3, . . . , siendo m la multiplicidad del cero de f(x).
2.8. Metodo de la Secante
Como hemos dicho una de las desventajas del metodo de Newton es que encada iteracion hay que evaluar tanto a f(x) como a f
′(x), para atenuar esa
desventaja se propone el metodo de la secante que es casi tan rapido comoel de Newton, pero no posee la desventaja comentada.
....... ..
....................
....................
....................
...............
(p2, f(p2))
(r, 0) -
6
p0p1
(p0, f(p0))
(p1, f(p1))
..
.........
...................
(p2, 0)
Figura 2.7 Metodo de la Secante
En el metodo de la secante partimos de dos puntos (p0, f(p0)) y (p1, f(p1)),como lo muestra la figura 2.7 por esos dos puntos pasa una secante que los
CAPITULO 2. SOLUCION DE ECUACIONES NO LINEALES

Analisis Numerico. Notas de clase 57
une y cuya pendiente es
m =f(p1)− f(p0)
p1 − p0
,
pero puesto que esta recta secante corta al eje X en el punto (p2, 0), entoncestambien se tiene que
m =0− f(p1)
p2 − p1
,
luego entoncesf(p1)− f(p0)
p1 − p0
=0− f(p1)
p2 − p1
,
por tanto
p2 = p1 − f(p1)(p1 − p0)
f(p1)− f(p0),
este proceso genera la formula de iteracion dada por
pk+1 = pk − f(pk)(pk − pk−1)
f(pk)− f(pk−1).
Como hemos dicho el metodo de secante se propone para mejorar alguna delas desventaja que presenta el metodo de Newton, sin quitar mucho de surapidez de convergencia, con el teorema siguiente se prueba que el metodo de
la secante converge con una rapidez de convergencia dada por p =1
2(1+
√5)
Teorema 2.8.1. Sea x? un cero de f(x) y supongamos que f′′(x?) 6= 0,
entonces el orden de convergencia del metodo de la secante es p =1
2(1+
√5).
Demostracion. Sea ek = pk − x?, k = 0, 1, 2, . . . , como
pk+1 =pk−1f(pk)− pkf(pk−1)
f(pk)− f(pk−1),
tenemos que
pn+1 − x? =pn−1f(pn)− pnf(pn−1)
f(pn)− f(pn−1)− x?(f(pn)− f(pn−1))
f(pn)− f(pn−1)
=(pn−1 − x?)f(pn)− (pn − x?)f(pn−1)
f(pn)− f(pn−1),
de modo que
en+1 =en−1f(x? + en)− enf(en−1 + x?)
f(x? + en)− f(en−1 + x?),
2.8. METODO DE LA SECANTE

58 J Velasquez Zapateiro/ V. Obeso Fernandez
pero por el desarrollo de Taylor de f(x? + en) y f(x? + en−1) alrededor de x?
tenemos que
f(x? + en) = f(x?) + f′(x?)en +
1
2f′′(x?)e2
n + . . .
y
f(x? + en−1) = f(x?) + f′(x?)en−1 +
1
2f′′(x?)e2
n−1 + . . . ,
pero como f(x?) = 0 entonces,
en−1f(x? + en) = f′(x?)enen−1 +
1
2f′′(x?)e2
nen−1 + . . .
y
enf(x? + en−1) = f′(x?)en−1en +
1
2f′′(x?)e2
n−1en + . . . ,
ademas
f(x? + en)− f(x? + en−1) = f′(x?)(en − en−1) +
1
2f′′(x?)(e2
n − e2n−1) + . . .
de modo que
en+1 =12f′′(x?)enen−1(en − en−1) + . . .
f ′(x?)(en − en−1) + . . .,
para |en−1| y |en| suficientemente pequenos tenemos que
en+1 ≈ f′′(x?)enen−1
2f ′(x?),
ası que|en+1| ≈ M |enen−1| = M |en||en−1|,
siendo M =f′′(x?)
2f ′(x?), pero queremos obtener el valor de p, para el cual se
cumpla que|x? − xn| = α|x? − xn−1|p,
o sea que|en| = α|en−1|p,
con α > 0, p ≥ 1, pero tambien
|en+1| = α|en|p = α(α|en−1|p)p,
de modo queαp+1|en−1|p2
= M(α|en−1|p)|en−1|,
CAPITULO 2. SOLUCION DE ECUACIONES NO LINEALES

Analisis Numerico. Notas de clase 59
de modo queαp+1|en−1|p2
= αM(|en−1|p+1),
la cual es valida si αp = M y p2 = p + 1, de modo que
p =1
2(1 +
√5)
Ejemplo 2.8.1. Aplique el metodo de la Secante para obtener la solucion de
f(x) = x3 + 3x2 − 1,
en el intervalo [−3,−2]
Solucion
k xk f(x) = x3 + 3x2 − 1 |f(xk)|0 x0 -2.75000000000 0.8906251 x1 -3.06666666667 1.6269629632 x2 -2.86202438769 0.13018357223 x3 -2.87718593646 0.01667924734 x4 -2.87941389757 0.000217685 x5 -2.87938519474 0.00000035586 x6 -2.87938524157 0.000000000
TABLA 11
Lo anterior nos muestra que la raız de f(x) es x6 = −2.87938524157, la cualse tiene en 7 iteraciones, y que el metodo si bien es suficientemente rapido, elmetodo de Newton sigue siendo mas eficiente lo cual era de esperarse puestoque como hemos probado Newton es q-cuadratico en tanto que el orden deconvergencia de el metodo de la Secante es p ≈ 1.618. ¥
2.9. Metodo ∆2 de Aitken
Es posible aumentar la rapidez de convergencia de una sucesion, cuando estaconverge linealmente, esto se hace usando una tecnica llamada metodo ∆2 deAitken, antes de exhibir el metodo ∆2 de Aitken estableceremos la siguientedefinicion
2.9. METODO ∆2 DE AITKEN

60 J Velasquez Zapateiro/ V. Obeso Fernandez
Definicion 2.9.1. Supongamos pn∞n=0 una sucesion, definimos la diferen-cia progresiva ∆pn como
∆pn = pn+1 − pn n ≥ 0
Para k ≥ 2 se define recursivamente ∆kpn = ∆(∆k−1pn)
Lo que deseamos es, construir una sucesion qn∞n=0 que converja a pmas rapidamente que pn∞n=0, para ello supongamos que pn∞n=0, con-verge a p, que pn − p, pn+1 − p, pn+2 − p, tienen el mismo signo y quepn+1 − p
pn − p≈ pn+2 − p
pn+1 − p, luego
(pn+1 − p)2 ≈ (pn+2 − p)(pn − p),
ası quep2
n+1 − 2pn+1p + p2 ≈ pnpn+2 − ppn+2 − ppn + p2,
pero entoncesppn+2 + ppn − 2ppn+1 ≈ pnpn+2 − p2
n+1,
o sea que(pn+2 + pn − 2pn+1)p ≈ pnpn+2 − p2
n+1,
entonces
p ≈ pnpn+2 − p2n+1
pn+2 + pn − 2pn+1
=p2
n + pnpn+2 − 2pnpn+1 + 2pnpn+1 − p2n+1 − p2
n
pn+2 + pn − 2pn+1
,
de modo que
p ≈ pn(pn + pn+2 − 2pn+1)− (p2n − 2pnpn+1 + p2
n+1)
pn+2 + pn − 2pn+1
,
luego
p ≈ pn − (pn+1 − pn)2
pn+2 − 2pn+1 + pn
,
pero ∆pn = pn+1 − pn y ∆2pn = ∆(∆pn) = ∆(pn+1 − pn) = ∆pn+1 −∆pn =pn+2 − pn+1 − pn+1 + pn = pn+2 − 2pn+1 + pn, de modo que
p ≈ pn − (∆pn)2
∆2pn
,
definamos la sucesion qn∞n=0 por
qn = pn − (∆pn)2
∆2pn
(2.6)
Mostremos ahora que la sucesion qn∞n=0 converge a p mas rapidamente quepn∞n=0
CAPITULO 2. SOLUCION DE ECUACIONES NO LINEALES

Analisis Numerico. Notas de clase 61
Teorema 2.9.1. Supongamos pn∞n=0 converge a p linealmente y suponga-mos que (pn − p)(pn+1 − p) > 0, para n suficientemente grande. Entonces lasucesion qn∞n=0 dada por 2.6 converge a p mas rapidamente que la sucesionpn∞n=0 en el sentido que
lımn→∞
∣∣∣qn − p
pn − p
∣∣∣ = 0
Demostracion. Como pn∞n=0 converge linealmente a p, entonces existe λ ∈(0, 1), tal que
lımn→∞
∣∣∣pn+1 − p
pn − p
∣∣∣ = λ,
luego, entonces existe λ ∈ (0, 1), tal que
lımn→∞
∣∣∣pn+1 − p
pn − p− λ
∣∣∣ = 0,
de modo que si δn =pn+1 − p
pn − p− λ se tiene que
lımn→∞
δn = 0,
pero como En = pn−p y En+1 = pn+1−p, entonces δn =En+1
En
−λ, de modo
que En+1 = Enδn + λEn, o sea que
En+1 = (δn + λ)En,
ası queEn+2 = (δn+1 + λ)En+1 = (δn+1 + λ)(δn + λ)En,
pero∆pn = pn+1 − pn = (pn+1 − p) + (p− pn) = En+1 − En,
de modo que
∆pn = Enδn + λEn − En = (δn + λ− 1)En,
ası que,
∆2pn = ∆(∆pn) = ∆(pn+1 − pn) = ∆pn+1 −∆pn = pn+2 − pn+1 − pn+1 + pn
luego
∆2pn = pn+2−2pn+1+pn = (pn+2−p)−2(pn+1−p)+(pn−p) = En+2−2En+1+En
2.9. METODO ∆2 DE AITKEN

62 J Velasquez Zapateiro/ V. Obeso Fernandez
o sea que
∆2pn = (δn+1 + λ)(δn + λ)En − 2(δn + λ)En + En
= λ2En + (δn+1 + δn)λEn + δnδn+1En − 2δnEn − 2λEn + En,
luego
∆2pn = (λ2 − 2λ + 1)En + (λδn+1 + λδn + δnδn−1 − 2δn)En
= (λ2 − 2λ + 1)En + δ′nEn,
donde δ′n = λδn+1 + λδn + δnδn−1 − 2δn de modo que
∆2pn = (λ− 1)2En + δ′nEn = [(λ− 1)2 + δ
′n]En,
pero como δn∞n=0 converge a cero entonces
lımn→∞
δ′n = lım
n→∞(λδn+1 + λδn + δnδn−1 − 2δn) = 0,
por tanto,
qn = pn − (∆pn)2
∆2pn
= pn − (pn+1 − p)2
[(λ− 1)2 + δ′n]En
= pn − (δn + λ− 1)2E2n
[(λ− 1)2 + δ′n]En
ası que
qn = En + p− (δn + λ− 1)2E2n
[(λ− 1)2 + δ′n]En
,
de modo que
qn − p =[(λ− 1)2 + δ
′n]E2
n − (δn + λ− 1)2E2n
[(λ− 1)2 + δ′n]En
,
o sea queqn − p
En
=(λ− 1)2 + δ
′n − (δn + λ− 1)2
(λ− 1)2 + δ′n,
por consiguiente
qn − p
pn − p=
λ2 − 2λ + 1 + δ′n − (δ2
n + λ2 + 1 + 2λδn − 2δn − 2λ)
(λ− 1)2 + δ′n,
pero entoncesqn − p
pn − p=
δ′n − 2δn(λ− 1)− δ2
n
(λ− 1)2 + δ′n,
luego
lımn→∞
qn − p
pn − p= lım
n→∞δ′n − 2δn(λ− 1)− δ2
n
(λ− 1)2 + δ′n=
0
(λ− 1)2= 0
CAPITULO 2. SOLUCION DE ECUACIONES NO LINEALES

Analisis Numerico. Notas de clase 63
Ejercicios
En los ejercicios del 1-10 encuentre el cero real de las siguientes funciones,
encuentre el intervalo [a, b] en el que se encuentra dicha raız y usea + b
2como
punto de inicio para el metodo de Newton. Use biseccion, regula falsi, secantey Newton en las funciones
1. f(x) = x2 − 7
2. f(x) = x3 − 6
3. f(x) = x4 − 0.65
4. f(x) = x3 − 7
5. f(x) = x3 − 3
6. f(x) = x3 − 7x2 + 14x− 7
7. f(x) = x3 − x2 − 4x− 3
8. f(x) = x3 − x2 − 24x− 32
9. f(x) = 0.4x2 − x + 0.2
10. f(x) = 9x3 − 10x + 1
11. Demuestre que el punto fijo de x = g(x) = 0.4x2 + 0.2 existe, y use laiteracion de punto fijo para encontrarlo.
12. Use la iteracion de punto fijo para encontrar el punto fijo de x = g(x) =0.9x3 + 0.1
13. Determine las raıces de f(x) = −2+6x−4x2+0.5x3, usando el metod0de Newton usando valores iniciales de a)4.2 y b) 4.43.
14. Localice la primera raız positiva de sen x + cos(x2 + 1)− 1. Use cuatroiteraciones con el metodo de Newton con valores iniciales de a) 1.0 yb) 1.5
15. La funcion f(x) = x3 + 2x2− 5x + 3 tiene una raız doble en x = 1. Usea) el metodo normal de Newton, b) el metodo modificado de Newtonpara resolver para la raız x = 1. Compare y analice la convergenciapara x0 = 0.2
2.9. METODO ∆2 DE AITKEN

64 J Velasquez Zapateiro/ V. Obeso Fernandez
16. Use el metodo de punto fijo para encontrar la raız de f(x) = sen√
x−x.Use el valor inicial p0 = 0.5 e iteracion hasta que δ ≤ 0.01 %
17. Para cada una se las siguientes funciones, use el metodo de Newtonpara encontrar un cero, en caso que el metodo falle explique porque.
a) f(x) = −5x4 + 11x2 − 2, x0 = 1
b) f(x) = x4 − 4x + 1, x0 = 0
c) f(x) = 5x4 − 11x2 + 2, x0 =1
2, x0 = 0
18. Encuentre los ceros de los siguientes polinomios de Legendre.
a) P2(x) =1
2(3x2 − 1)
b) P3(x) =1
2(5x3 − 3x)
c) P4(x) =1
8(35x4 − 30x2 + 3)
d) P5(x) =1
8(65x5 − 70x3 + 15x)
19. Encuentre la interseccion de y = ex y y = x3
20. Encuentre la interseccion de y = 2x y y = x2
21. Encuentre la interseccion de y = −a + ex y y = b + lnx, si
a) a = 5 y b = 1
CAPITULO 2. SOLUCION DE ECUACIONES NO LINEALES

Analisis Numerico. Notas de clase 65
b) a = 3 y b = 2
c) a = 1 y b = 5
22. Use el metodo se Newton y el de la secante para encontrar un cero def(x) = −0.01 + 1
1+x2
2.9. METODO ∆2 DE AITKEN

66 J Velasquez Zapateiro/ V. Obeso Fernandez
CAPITULO 2. SOLUCION DE ECUACIONES NO LINEALES
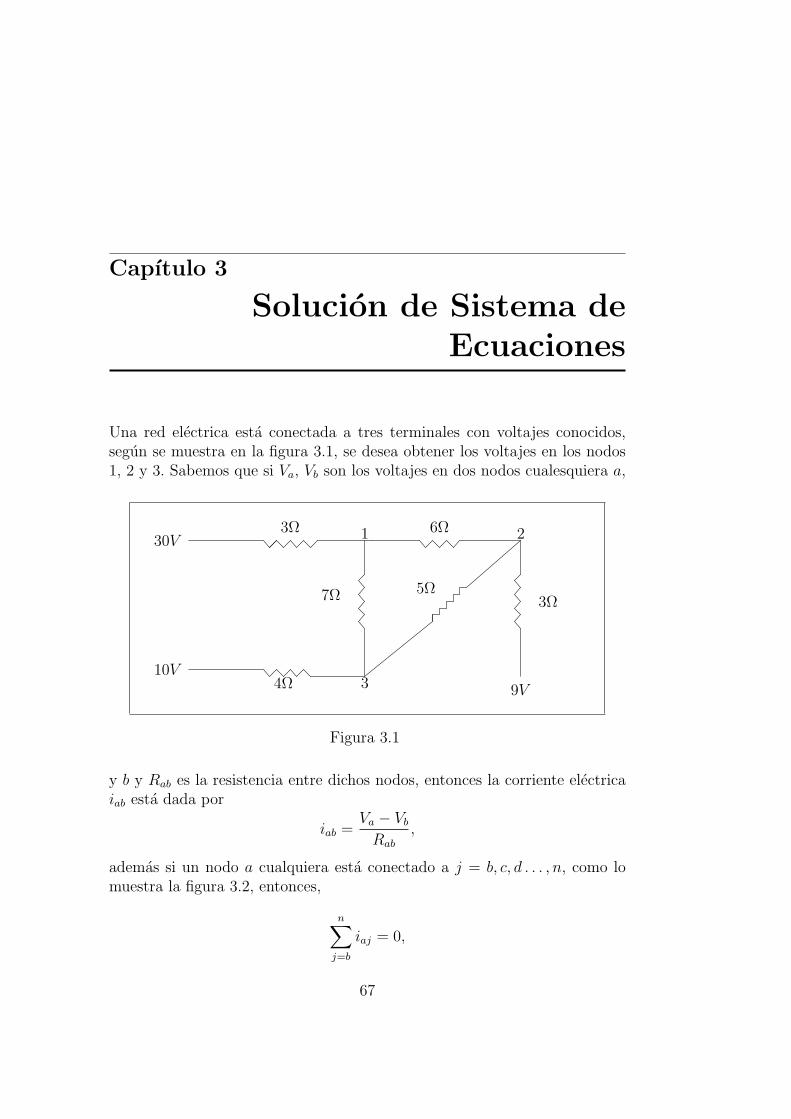
Capıtulo 3
Solucion de Sistema deEcuaciones
Una red electrica esta conectada a tres terminales con voltajes conocidos,segun se muestra en la figura 3.1, se desea obtener los voltajes en los nodos1, 2 y 3. Sabemos que si Va, Vb son los voltajes en dos nodos cualesquiera a,
30V
10V
3Ω
7Ω
6Ω
4Ω
5Ω3Ω
1 2
3 9V
Figura 3.1
y b y Rab es la resistencia entre dichos nodos, entonces la corriente electricaiab esta dada por
iab =Va − Vb
Rab
,
ademas si un nodo a cualquiera esta conectado a j = b, c, d . . . , n, como lomuestra la figura 3.2, entonces,
n∑
j=b
iaj = 0,
67
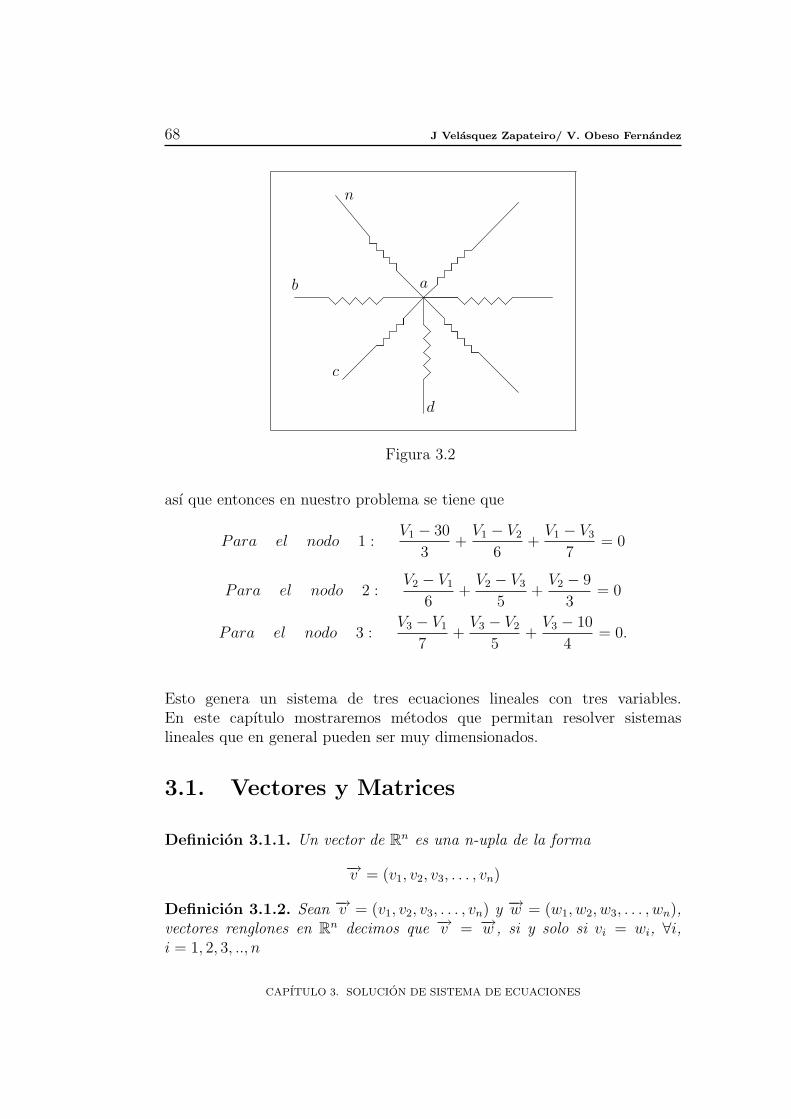
68 J Velasquez Zapateiro/ V. Obeso Fernandez
ab
c
d
n
Figura 3.2
ası que entonces en nuestro problema se tiene que
Para el nodo 1 :V1 − 30
3+
V1 − V2
6+
V1 − V3
7= 0
Para el nodo 2 :V2 − V1
6+
V2 − V3
5+
V2 − 9
3= 0
Para el nodo 3 :V3 − V1
7+
V3 − V2
5+
V3 − 10
4= 0.
Esto genera un sistema de tres ecuaciones lineales con tres variables.En este capıtulo mostraremos metodos que permitan resolver sistemaslineales que en general pueden ser muy dimensionados.
3.1. Vectores y Matrices
Definicion 3.1.1. Un vector de Rn es una n-upla de la forma
−→v = (v1, v2, v3, . . . , vn)
Definicion 3.1.2. Sean −→v = (v1, v2, v3, . . . , vn) y −→w = (w1, w2, w3, . . . , wn),vectores renglones en Rn decimos que −→v = −→w , si y solo si vi = wi, ∀i,i = 1, 2, 3, .., n
CAPITULO 3. SOLUCION DE SISTEMA DE ECUACIONES

Analisis Numerico. Notas de clase 69
Definicion 3.1.3. Sean −→v = (v1, v2, v3, . . . , vn) y −→w = (w1, w2, w3, . . . , wn),vectores renglones en Rn definimos
−→v +−→w = (v1 + w1, v2 + w2, ...., vn + wn)
Definicion 3.1.4. Sea −→v = (v1, v2, v3, . . . , vn) vector de Rn, α ∈ R definimos
α−→v = (αv1, αv2, αv3, ..., αvn)
Definicion 3.1.5. Sean −→v = (v1, v2, v3, . . . , vn) y −→w = (w1, w2, w3, . . . , wn)vectores en Rn, definimos
−→v • −→w = v1 · w1 + v2 · w2 + v3 · w3 + ... + vn · wn =n∑
i=1
vi · wi,
como el producto escalar de −→v y −→w .
Definicion 3.1.6. Sea −→v = (v1, v2, v3, . . . , vn) vector de Rn, definimos lanorma de −→v , notada ||−→v || como
||−→v || =√
v12 + v2
2 + v32 + ... + vn
2 =( n∑
i=1
vi2) 1
2.
Teorema 3.1.1. Sean −→v , −→w y −→u vectores en Rn, entonces, se tiene:
1. −→v +−→w = −→w +−→v
2. (−→v +−→w ) +−→u = −→v + (−→w +−→u )
3. ∃−→0 ∈ Rn, tal que −→v +−→0 = −→v
4. ∀−→v ∈ Rn, ∃−→z ∈ Rn, tal que −→v +−→z =−→0
5. ∀α, β ∈ R, (α + β)−→v = α−→v + β−→v
6. ∀α ∈ R, α(−→v +−→w ) = α−→v + α−→w
7. ∀α, β ∈ R, α(β−→v ) = β(α−→v ) = (αβ)−→v
Demostracion. La prueba se deja como Ejercicio al lector
3.1. VECTORES Y MATRICES

70 J Velasquez Zapateiro/ V. Obeso Fernandez
3.2. Matrices
Definicion 3.2.1. Una matriz es un arreglo rectangular de mn numeros dela forma
a11 a12 a13 . . . a1n
a21 a22 a23 . . . a2n...
......
. . ....
am1 am2 am3 . . . amn
la cual tiene m filas y n columnas
Notacion Si los elementos de una matriz A son numeros reales y dichamatriz tiene m filas y n columnas diremos que A ∈ Rm×n, y que su tamanoes m× n
Es comun usar la notacion A = [aij], i = 1, 2, 3, . . . ,m, j = 1, 2, 3, . . . , npara referirnos a la matriz A ∈ Rm×n
Definicion 3.2.2. Sean A = [aij] y B = [bij] dos matrices tamano m × n,entonces, A = B si y solo si aij = bij, ∀i, j
Definicion 3.2.3. Una matriz A es cuadrada si tiene el mismo numero defilas y de columnas y en este caso se escribe A ∈ Rn×n.
Definicion 3.2.4. Sea A ∈ Rn×n, una matriz cuadrada si aij = 1, i = j yaij = 0, i 6= j, se dice que A es la matriz identica y se nota In
Definicion 3.2.5. La matriz O = [aij] ∈ Rm×n, tal que aij = 0, ∀i, j es lamatriz nula.
Definicion 3.2.6. Sean A = [aij] y B = [bij] dos matrices tamano m × n,definimos A + B como la matriz m× n dada por A + B = [aij + bij]
Definicion 3.2.7. Sea A = [aij] una matriz tamano m× n, y c un numerodefinimos cA como la matriz m× n dada por cA = [caij]
Definicion 3.2.8. Sea A = [aij] una matriz tamano m× n definimos −A =[−aij]
Definicion 3.2.9. Sea A = [aij] ∈ Rm×n y B = [bij] ∈ Rn×r definimos elproducto A × B como la matriz C = [cij] ∈ Rm×r, donde cij =
∑nk=1 aikbkj,
i = 1, 2, 3, . . . ,m, j = 1, 2, 3, . . . , r
CAPITULO 3. SOLUCION DE SISTEMA DE ECUACIONES

Analisis Numerico. Notas de clase 71
Presentamos a continuacion algunos teoremas sin demostracion las cuales sedejan como ejercicios para el lector
Teorema 3.2.1. Sean A ∈ Rm×n, B ∈ Rm×n y C ∈ Rm×n, entonces
1. A + B = B + A
2. A + (B + C) = (A + B) + C
3. A + O = A
4. A + (−A) = O
5. Si α ∈ R, β ∈ R entonces, (α + β)A = αA + βA
6. Si α ∈ R entonces, α(A + B) = αA + αB
7. Si α ∈ R, β ∈ R entonces, (αβ)A = α(βA) = β(αA)
Teorema 3.2.2. Sean A ∈ Rm×n, B ∈ Rm×n, D ∈ Rn×r entonces, (A +B)D = AD + BD.
Teorema 3.2.3. Sean D ∈ Rm×r, A ∈ Rr×n, B ∈ Rr×n entonces, D(A +B) = DA + DB.
Teorema 3.2.4. Sean A ∈ Rm×n, B ∈ Rn×r, C ∈ Rr×s entonces, A(BC) =(AB)C.
Definicion 3.2.10. Una matriz A = [aij] ∈ Rn×n es triangular superior siaij = 0 para i > j
De la definicion anterior la siguiente matriz es triangular superior
a11 a12 a13 . . . a1n
0 a22 a23 . . . a2n
0 0 a33 . . . a3n...
......
. . ....
0 0 0 . . . ann
Definicion 3.2.11. Una matriz A = [aij] ∈ Rn×n es triangular inferior siaij = 0 para i < j
La matriz siguiente es triangular inferior
a11 0 0 . . . 0a21 a22 0 . . . 0a31 a32 a33 . . . 0...
......
. . ....
an1 an2 an3 . . . ann
3.2. MATRICES
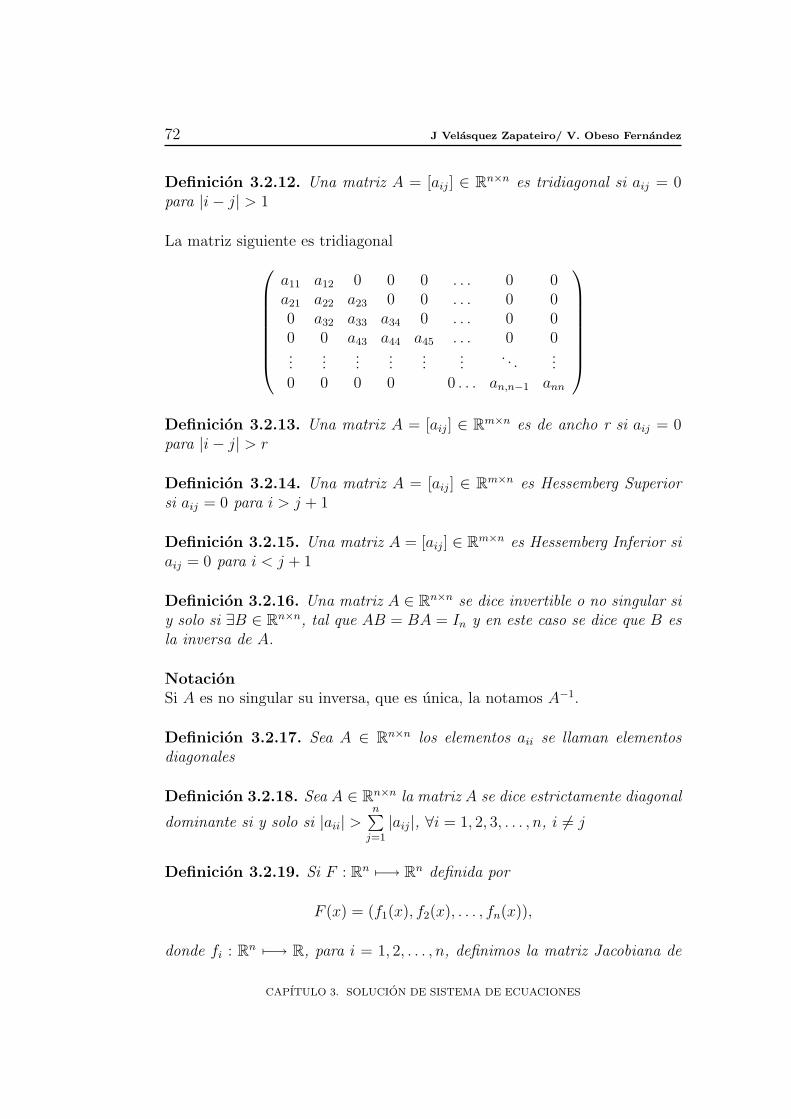
72 J Velasquez Zapateiro/ V. Obeso Fernandez
Definicion 3.2.12. Una matriz A = [aij] ∈ Rn×n es tridiagonal si aij = 0para |i− j| > 1
La matriz siguiente es tridiagonal
a11 a12 0 0 0 . . . 0 0a21 a22 a23 0 0 . . . 0 00 a32 a33 a34 0 . . . 0 00 0 a43 a44 a45 . . . 0 0...
......
......
.... . .
...0 0 0 0 0 . . . an,n−1 ann
Definicion 3.2.13. Una matriz A = [aij] ∈ Rm×n es de ancho r si aij = 0para |i− j| > r
Definicion 3.2.14. Una matriz A = [aij] ∈ Rm×n es Hessemberg Superiorsi aij = 0 para i > j + 1
Definicion 3.2.15. Una matriz A = [aij] ∈ Rm×n es Hessemberg Inferior siaij = 0 para i < j + 1
Definicion 3.2.16. Una matriz A ∈ Rn×n se dice invertible o no singular siy solo si ∃B ∈ Rn×n, tal que AB = BA = In y en este caso se dice que B esla inversa de A.
NotacionSi A es no singular su inversa, que es unica, la notamos A−1.
Definicion 3.2.17. Sea A ∈ Rn×n los elementos aii se llaman elementosdiagonales
Definicion 3.2.18. Sea A ∈ Rn×n la matriz A se dice estrictamente diagonal
dominante si y solo si |aii| >n∑
j=1
|aij|, ∀i = 1, 2, 3, . . . , n, i 6= j
Definicion 3.2.19. Si F : Rn 7−→ Rn definida por
F (x) = (f1(x), f2(x), . . . , fn(x)),
donde fi : Rn 7−→ R, para i = 1, 2, . . . , n, definimos la matriz Jacobiana de
CAPITULO 3. SOLUCION DE SISTEMA DE ECUACIONES

Analisis Numerico. Notas de clase 73
F , notada J(x), donde x = (x1, x2, . . . , xn), como
J(x) =
∂f1
∂x1
∂f1
∂x2
∂f1
∂x3
. . .∂f1
∂xn
∂f2
∂x1
∂f2
∂x2
∂f2
∂x3
. . .∂f2
∂xn...
......
. . ....
∂fn
∂x1
∂fn
∂x2
∂fn
∂x3
. . .∂fn
∂xn
Definicion 3.2.20. Sea A = [aij] ∈ Rm×n la matriz transpuesta de A es unamatriz B = [bij] ∈ Rn×m, tal que bij = aji, y en ese caso se nota B = AT
Ejemplo 3.2.1. Si
A =
3 2 14 2 56 0 4
,
entonces
AT =
3 4 62 2 01 5 4
Definicion 3.2.21. Sea A ∈ Rn×n se dice que A es simetrica, si y solo si,A = AT
Definicion 3.2.22. Sea A ∈ Rn×n una matriz simetrica, A es definida pos-itiva, si y solo si, XT AX > 0, para todo vector columna X 6= O
3.3. Determinantes
Definicion 3.3.1. Sea
A =
(a11 a12
a21 a22
),
definimos el determinante de A, como |A| =∣∣∣∣
a11 a12
a21 a22
∣∣∣∣ = a11a22 − a12a21
Definicion 3.3.2. Sea A ∈ Rn×n definimos el menor ij notado Mij comoel determinate de la submatriz que se obtiene de A eliminando la fila i y lacolumna j
3.3. DETERMINANTES

74 J Velasquez Zapateiro/ V. Obeso Fernandez
Definicion 3.3.3. Sea A ∈ Rn×n definimos el cofactor ij notado Aij como
Aij = (−1)i+jMij
Definicion 3.3.4. Sea A ∈ Rn×n definimos el determinate de A notado |A|como
|A| =n∑
j=1
aijAij
i = 1, 2, 3, . . . , n
Nota : Si A es una matriz triangular superior o inferior tamano n × nentonces, |A| = a11 · a22 · a33 · .... · ann =
∏ni=1 aii
3.3.1. Norma Matriz
Definicion 3.3.5. Sea A ∈ Rm×n, la norma de A esta definida, como
||A|| = max ||Ax||||x||
/||x|| 6= 0
Como la norma matricial se expresa es terminos de un vector, se dice que lanorma es inducida por la correspondiente norma vector.
La definicion anterior es equivalente a
||A|| = max||Ay||/||y|| = 1,
ya que si y =x
||x|| , entonces,
||Ay|| =∣∣∣∣∣∣A 1
||x||x∣∣∣∣∣∣ =
||Ax||||x|| .
Como ||A||, es el maximo cociente||Ax||||x|| , entonces,
||A|| ≥ ||Ax||||x|| ,
x 6= 0, por lo tanto||Ax|| ≤ ||A||||x||.
Las normas matriciales mas usadas en analisis numerico son relacionadas acontinuacion
CAPITULO 3. SOLUCION DE SISTEMA DE ECUACIONES

Analisis Numerico. Notas de clase 75
1. La norma 1 dada por
||A||1 = maxj=1,··· ,n
m∑i=1
|aij|
2. La norma infinito dada por
||A||∞ = maxi=1,··· ,m
n∑j=1
|aij|
3. La norma de Frobenius dada por
||A||F =[ m∑
i=1
n∑j=1
a2ij
]1/2
Definicion 3.3.6. Sea A una matriz no singular definimos el numero decondicion de la matriz A notado κ(A), como
κ(A) = ||A|| · ||A−1||Nota: El numero condicion puede ser calculado con cualquiera de las ante-riores normas. Distinguimos las diferentes normas usadas con un subındiceescribiendo entonces κ1, κ∞ o κF respectivamente.
Definicion 3.3.7. Sea A una matriz no singular decimos que la matriz Aesta bien condicionada si K(A) es un numero muy cercano a 1, si K(A) essignificativamente mayor que 1 la matriz se dice mal condicionada.
Ejemplo 3.3.1. Supongamos se tiene el sistema
x− 2y = 1
x− (2 + δ)y = 1 + δ
el cual como puede comprobarse tiene solucion x = −1, y = −1, ademas lamatriz de coeficiente del sistema es
A =
(1 −21 −(2 + δ)
),
la cual es no singular y su inversa esta dada por
A−1 = −1
δ
( −(2 + δ) 2−1 1
)=
(2 + δ)
δ
−2
δ
1
δ
−1
δ
,
3.3. DETERMINANTES

76 J Velasquez Zapateiro/ V. Obeso Fernandez
de modo que ||A||∞ = max|1|+ | − 2|, | − (2 + δ)|+ |1| = 3 + δ y
||A−1||∞ =4 + δ
δ,
de modo que
κ∞(A) = ||A||∞||A−1||∞ =(3 + δ)(4 + δ)
δ.
Si δ = 10−6, entonces κ∞(A) =12 + 7× 10−6 + 10−12
10−6= 12×106+7+10−6 ≈
12× 106 de modo que A es mal condicionada lo cual trae como consecuenciaque pequenos cambios en b alteren la solucion de modo considerable, en efectosi el sistema es ahora
x− 2y = 1
x− (2 + δ) = 1 + 2δ,
la solucion ahora es x = 3, y = −2, que esta muy alejada de la solucionanterior
3.4. Sistema de Ecuaciones Lineales
En esta seccion estudiaremos metodos iterativos que nos permitan solucionarsistemas de ecuaciones lineales cuadrados es decir, sistemas con n ecuacioneslineales y n variables.
Definicion 3.4.1. Sea A ∈ Rn×n una matriz cuadrada, X ∈ Rn×1 y b ∈ Rn×1
vectores columnas, entonces AX = b es un sistema de n ecuaciones linealescon n variables.
De la definicion anterior si
A =
a11 a12 a13 . . . a1n
a21 a22 a23 . . . a2n...
......
. . ....
an1 an2 an3 . . . ann
, X =
x1
x2
x3
.
.
.xn
y b =
b1
b2
b3
.
.
.bn
,
CAPITULO 3. SOLUCION DE SISTEMA DE ECUACIONES
Analisis Numerico. Notas de clase 77
entonces el sistema de la definicion anterior es
a11 a12 a13 . . . a1n
a21 a22 a23 . . . a2n...
......
. . ....
an1 an2 an3 . . . ann
x1
x2
x3
.
.
.xn
=
b1
b2
b3
.
.
.bn
y por lo tanto se tiene
a11x1 + a12x2 + a13x3 + · · ·+ a1nxn = b1
a21x1 + a22x2 + a23x3 + · · ·+ a2nxn = b2
a31x1 + a32x2 + a33x3 + · · ·+ a3nxn = b3
.
.
an1x1 + an2x2 + an3x3 + · · ·+ annxn = bn.
Definicion 3.4.2. La matriz A del sistema lineal anterior se define como lamatriz de coeficientes del sistema
Definicion 3.4.3. A la matriz [A|b] ∈ Rn×(n+1) que resulta al agregarle ala matriz de coeficiente el vector columna b se le define como la matriz decoeficientes ampliada del sistema
3.4.1. Sistemas Triangulares Superior
Un sistema de ecuaciones lineales triangular superior tiene la forma
a11x1 + a12x2 + a13x3 + a14x4 + · · ·+ a1n−1xn−1 + a1nxn = b1
a22x2 + a23x3 + a24x4 + · · ·+ a2n−1xn−1 + a2nxn = b2
a33x3 + a34x4 + · · ·+ a3n−1xn−1 + a3nxn = b3
. .
. .
an−1n−1xn−1 + an−1nxn = bn−1
annxn = bn.
3.4. SISTEMA DE ECUACIONES LINEALES

78 J Velasquez Zapateiro/ V. Obeso Fernandez
Teorema 3.4.1. Teorema de Sustitucion Regresiva Si AX = b esun sistema triangular superior de ecuaciones lineales y akk 6= 0, ∀k =1, 2, 3, . . . , n, entonces el sistema tiene solucion unica.
Demostracion. La demostracion se hace de manera recursiva. Como ann 6= 0por hipotesis, de la ultima ecuacion se tiene que
xn =bn
ann
,
ademas el valor de xn se unico.Pero ahora, conocido xn se puede encontrar el valor de xn−1 ya que comosabemos an−1n−1 6= 0, luego de la penultima ecuacion se tiene que
xn−1 =bn−1 − an−1nxn
an−1n−1
la unicidad de xn−1, esta garantizada por la unicidad de xn.Como an−2n−2 6= 0 y puesto que conocemos los valores de xn y xn−1, entoncesse tiene que
xn−2 =bn−2 − an−2n−1xn−1 − an−2nxn
an−2n−2
.
Si suponemos que se conocen los valores de xn, xn−1, xn−2, . . . , xk+1, y comoakk 6= 0, entonces se tiene que
xk =bk − akk+1xk+1 − akk+2xk+2 − · · · − akn−1xn−1 − aknxn
akk
,
o tambien
xk =
bk −n∑
i=k+1
akixi
akk
,
k = 1, 2, 3, . . . , n− 2, n− 1.Ademas la unicidad de la solucion se garantiza por induccion sobre n.
Teorema 3.4.2. Teorema de Sustitucion Progresiva Si AX = b esun sistema triangular inferior de ecuaciones lineales y akk 6= 0, ∀k =1, 2, 3, . . . , n, entonces el sistema tiene solucion unica.
Demostracion. Como a11 6= 0, entonces
x1 =b1
a11
,
CAPITULO 3. SOLUCION DE SISTEMA DE ECUACIONES

Analisis Numerico. Notas de clase 79
pero como tambien a22 6= 0, entonces
x2 =b2 − a21x1
a22
,
conocido los valores de x1 y x2, tenemos que
x3 =b3 − a31x1 − a32x2
a33
.
En general si se han calculado los valores de x1, x2, . . . , xk−1, y como akk 6= 0,entonces
xk =bk − ak1x1 − ak2x2 − ak3x3 − · · · − akk−1xk−1
akk
=
bk −k−1∑j=1
akjxj
akk
,
k = 1, 2, 3 . . . , n.
La unicidad de la solucion se tiene porque en la primera ecuacionb1
a11
, es el
unico valor posible de x1 y, por induccion finita, los valores de x2, x3, ...., xn
son unicos.
Ejemplo 3.4.1. Consideremos el sistema
2x1 + x2 − 3x3 = 4
5x2 + 4x3 = 2
3x3 = 6
resolver el sistema utilizando sustitucion regresiva.
Solucion
De la ultima ecuacion se tiene que
x3 =6
3= 2,
pero entonces reemplazando este valor en la ecuacion anterior obtenemos que
x2 =2− 4x3
5=
2− 4× 2
5=−6
5
conocido los valores de x3 y x2 se reemplazan en la primera ecuacion paraobtener
x1 =4− x2 + 3x3
2=
28
5.
¥
3.4. SISTEMA DE ECUACIONES LINEALES

80 J Velasquez Zapateiro/ V. Obeso Fernandez
3.5. Eliminacion de Gauss y Pivoteo
Definicion 3.5.1. Dos sistemas de ecuaciones lineales son equivalentes si ysolo si tienen el mismo conjunto de soluciones.
3.5.1. Transformaciones Elementales
1. Dado un sistema de ecuaciones lineales, si a una cualquiera de sus ecua-ciones se multiplica por un escalar c 6= 0, resulta un sistema equivalenteal sistema dado.
2. Dado un sistema de ecuaciones lineales, si dos cualesquiera de sus ecua-ciones se intercambian, resulta un sistema equivalente al sistema dado.
3. Dado un sistema de ecuaciones lineales, si a una cualquiera de susecuaciones se le suma un multiplo de otra ecuacion cualquiera, resultaun sistema equivalente al sistema dado.
3.5.2. Operaciones Elementales en los Renglones
Existen tres operaciones elementales sobre los renglones de una matriz A, lascuales enumeramos a continuacion.
1. Multiplicar un renglon cualquiera de una matriz por un escalar c 6= 0.
2. Sumarle a un renglon de una matriz un multiplo de otro renglon.
3. Intercambiar dos renglones cualesquiera de la matriz.
Definicion 3.5.2. El elemento aqq 6= 0, usado para eliminar los elementosarq, para r = q + 1, q + 2, . . . , n se define como el elemento pivote y la fila qse define como la fila pivote.
Definicion 3.5.3. Los numeros mrq =arq
aqq
, por el cual se multiplica la fila
pivote para luego restarsela a la fila r con r = q + 1, q + 2, . . . , n se llamanmultiplicadores.
Las operaciones elementales junto con los elementos pivotes y los multi-plicadores nos permiten, cuando esto sea posible, transformar la matrizampliada de un sistema de ecuaciones, en una matriz bien sea triangularsuperior o inferior y resolver el sistema equivalente, por sustitucion regresivao progresiva respectivamente.
CAPITULO 3. SOLUCION DE SISTEMA DE ECUACIONES

Analisis Numerico. Notas de clase 81
Ejemplo 3.5.1. Resolver el sistema
2x1 + 3x2 + 2x3 + 4x4 = 4
4x1 + 10x2 − 4x3 = −8
−3x1 − 2x2 − 5x3 − 2x4 = −4
−2x1 + 4x2 + 4x3 − 7x4 = −1
usando sustitucion regresiva.
Solucion
La matriz ampliada del sistema es
2 3 2 4 | 44 10 −4 0 | −8−3 −2 −5 −2 | −4−2 4 4 −7 | −1
.
El elemento pivote en la primera fila es a11 = 2 y los multiplicadores son
m21 =a21
a11
=4
2= 2, m31 =
a31
a11
= −3
2, m41 =
a41
a11
= −2
2= −1, tomando
la primera fila para eliminar los elementos de la primera columna ubicadosdebajo de la diagonal se tiene que
2 3 2 4 | 40 4 −8 −8 | −16
|0 5
2−2 4 | 2
|0 7 6 −3 | 3
.
Para la segunda fila ahora el elemento pivote es a22 = 4 luego los multipli-
cadores ahora son m32 =a32
a22
=5
8, m42 =
a42
a22
=7
4, luego entonces se tiene
que
2 3 2 4 | 40 4 −8 −8 | −160 0 3 9 | 12
|0 0 20 11 | 31
.
3.5. ELIMINACION DE GAUSS Y PIVOTEO

82 J Velasquez Zapateiro/ V. Obeso Fernandez
Pero ahora para la tercera fila el elemento pivote es a33 = 3 y el multiplicador
es m43 =a43
a33
=20
3, luego entonces tenemos que
2 3 2 4 | 40 4 −8 −8 | −160 0 3 9 | 120 0 0 −49 | −49
.
La matriz ampliada anterior corresponde al sistema triangular superior dadopor
2x1 + 3x2 + 2x3 + 4x4 = 4
4x2 − 8x3 − 8x4 = −16
3x3 + 9x4 = 12
−49x4 = −49
que es equivalente al original.
Aplicando la sustitucion regresiva se tiene de la ultima ecuacion delsistema que x4 = 1, pero en la tercera ecuacion se tiene que
3x3 = 12− 9x4 = 12− 9 = 3,
por lo tanto x3 = 1.De la ecuacion dos tenemos que
4x2 = −16 + 8x3 + 8x4 = −16 + 8 + 8 = 0,
luego x2 = 0.Finalmente de la primera ecuacion
2x1 = 4− 3x2 − 2x3 − 4x4 = −2,
ası que x1 = −1. ¥
El proceso que acabamos de utilizar para obtener la solucion del ejemploanterior se conoce como la Eliminacion Gaussiana con SustitucionRegresiva.
CAPITULO 3. SOLUCION DE SISTEMA DE ECUACIONES
Analisis Numerico. Notas de clase 83
3.6. Estrategias de Pivoteo
3.6.1. Pivoteo Trivial
Puede suceder que en algun paso del proceso de eliminacion Gaussiana consustitucion regresiva, se tenga aqq = 0, esto naturalmente implica que esteelemento (aqq), no se puede tomar como elemento pivote, en este caso seusa la estrategia del Pivoteo Trivial, que consiste en escoger de una fila k,k = q + 1, q + 2, . . . , n en la que akq 6= 0, esta fila se intercambia con la filaq-esima, con lo cual se obtiene un pivote no nulo.
3.6.2. Pivoteo Parcial
Es posible que al utilizar el pivoteo trivial se produzcan errores debido aque como es sabido la computadora utiliza aritmetica de precision finita, loanterior lo ilustramos con un ejemplo.
Ejemplo 3.6.1. Supongamos se desea resolver el sistema
1.133x1 + 5.281x2 = 6.414
24.14x1 − 1.21x2 = 22.93
haciendo operaciones con una precision de cuatro cifras significativas.
Solucion
Observemos primero que la solucion del sistema es exactamente x1 = 1y x2 = 1. El elemento pivote es a11 = 1.133 y el multiplicador esm21 = 24.14
1.133= 21.31, de modo que se tiene entonces que
1.133x1 + 5.281x2 = 6.414
−113.7x2 = 113.8
por tanto x2 = 1.001 y ası x1 = 0.9956. ¥
El error que se comete se debe a que el valor del multiplicador m21 = 21.31es muy grande.Miremos ahora como podrıamos resolver el sistema anterior para evitar elerror cometido.
3.6. ESTRATEGIAS DE PIVOTEO

84 J Velasquez Zapateiro/ V. Obeso Fernandez
Si se intercambian las ecuaciones se obtiene el sistema
24.14x1 − 1.21x2 = 22.93
1.133x1 + 5.281x2 = 6.414
que es equivalente al original; pero ahora el elemento pivote es a11 = 24.14 y elmultiplicador es m21 = 1.133
24.14= 0.04593, con esto resulta el sistema triangular
superior24.14x1 − 1.21x2 = 22.93
5.338x2 = 5.338,
de modo que se tiene la solucion exacta x1 = 1 y x2 = 1.
La estrategia anterior se conoce como pivoteo parcial la cual con-siste en tomar como pivote el coeficiente de mayor magnitud, y una vezubicado intercambiar filas a fin de colocarlo en la diagonal, esto es, secomparan todos los coeficientes en la columna q, desde el que esta en ladiagonal hasta el que esta en la ultima fila. Una vez hecho esto se toma elelemento de mayor valor absoluto y esa fila se intercambia con la q- esima,es decir, si
|akq| = max|aqq|, |aq+1q|, . . . , |anq|,entonces se intercambian las filas q-esima y k-esima, con esto todos los mul-tiplicadores seran todos menores que 1 en valor absoluto.
3.6.3. Pivoteo Parcial Escalado
Si bien el pivoteo parcial evita errores que se pueden cometer con el pivoteotrivial, con el pivoteo parcial escalado se pretende reducir aun mas la propa-gacion de errores, resultando una tecnica mucho mas eficiente.En el pivoteo parcial escalado, se toma en cada columna desde la q -esimahacia abajo el que tenga el mayor valor relativo con respecto a los elementosde su fila. Es decir se busca primero en cada fila, a partir de la fila q, hastala n-esima el elemento de mayor tamano, esto es, si ese elemento lo notamosur, entonces
ur = max|arq|, |arq+1|, |arq+2|, . . . , |arn|,r = q, q + 1, . . . , n, la fila pivote es entonces la fila k para la cual
|akq|uk
= max |aqq|
uq
,|aq+1q|uq+1
,|aq+2q|uq+2
, . . . ,|anq|un
.
Una vez hecho esto se intercambian la fila k y la fila q a menos que q = k.
CAPITULO 3. SOLUCION DE SISTEMA DE ECUACIONES

Analisis Numerico. Notas de clase 85
3.7. Factorizacion LU
Definicion 3.7.1. Sea A una matriz no singular se dice que A tiene facto-rizacion LU si y solo si, se puede expresar de la forma A = LU , donde L esuna matriz triangular inferior con elementos diagonales iguales a 1 y U esuna matriz triangular superior.
Ejemplo 3.7.1. La matriz
A =
2 3 2 44 10 −4 0−3 −2 −5 −2−2 4 4 −7
,
tiene factorizacion LU ya que si
L =
1 0 0 0
2 1 0 0
−32
58
1 0
−1 74
203
1
y
U =
2 3 2 40 4 −8 −80 0 3 90 0 0 −49
,
entonces
A =
2 3 2 44 10 −4 0−3 −2 −5 −2−2 4 4 −7
=
1 0 0 0
2 1 0 0
−32
58
1 0
−1 74
203
1
2 3 2 40 4 −8 −80 0 3 90 0 0 −49
= LU.
Si la matriz A tiene factorizacion LU dicha factorizacion se puede obten-
3.7. FACTORIZACION LU

86 J Velasquez Zapateiro/ V. Obeso Fernandez
er de la manera siguiente
A =
a11 a12 a13 . . . a1n
a21 a22 a23 . . . a2n
a31 a32 a33 . . . a3n...
......
. . ....
an1 an2 an3 . . . ann
y
L =
1 0 0 . . . 0m21 1 0 . . . 0m31 m32 1 . . . 0...
......
. . ....
mn1 mn2 mn3 . . . 1
, U =
u11 u12 u13 . . . u1n
0 u22 u23 . . . u2n
0 0 u33 . . . u3n...
......
. . ....
0 0 0 . . . unn
,
donde mkq son los multiplicadores.Ahora si se tiene un sistema lineal dado por la forma AX = b, donde A tienefactorizacion LU , entonces el sistema se puede escribir como
LUX = b,
pero si hacemosUX = Y,
entonces, se puede resolver primero el sistema
LY = b
usando la sustitucion regresiva, para luego resolver el sistema
UX = Y
aprovechando el hecho de que U es una matriz triangular superior.
Ejemplo 3.7.2. Resolver el sistema del ejemplo anterior usando factor-izacion LU
Solucion
La matriz de coeficientes del sistema es
2 3 2 44 10 −4 0−3 −2 −5 −2−2 4 4 −7
,
CAPITULO 3. SOLUCION DE SISTEMA DE ECUACIONES

Analisis Numerico. Notas de clase 87
luego entonces la matriz L, es
L =
1 0 0 02 1 0 0
−32
58
1 0
−1 74
203
1
,
y la matriz U es
U =
2 3 2 40 4 −8 −80 0 3 90 0 0 −49
,
sea
Y =
y1
y2
y3
y4
,
entonces LY = b es el sistema dado por
1 0 0 02 1 0 0
−32
58
1 0
−1 74
203
1
y1
y2
y3
y4
=
4−8−4−1
.
Que corresponde al sistema
y1 = 4
2y1 + y2 = −8
−3
2y1 +
5
8y2 + y3 = −4
−y1 +7
4y2 +
20
3y3 + y4 = −1,
de la primera ecuacion y1 = 4 luego de la segunda ecuacion se tiene quey2 = −8−2y1 = −16 ası que de la tercera ecuacion y3 = −4+ 3
2y1− 5
8y2 = 12,
3.7. FACTORIZACION LU

88 J Velasquez Zapateiro/ V. Obeso Fernandez
y de la cuarta ecuacion se tiene que y4 = −1 + y1 − 74y2 − 20
3y3 = −49 de
modo que el sistema UX = Y a resolver es
2 3 2 40 4 −8 −80 0 3 90 0 0 −49
x1
x2
x3
x4
=
4−1612−49
.
o sea
2x1 + 3x2 + 2x3 + 4x4 = 4
4x2 − 8x3 − 8x4 = −16
3x3 + 9x4 = 12
−49x4 = −49
sistema cuya solucion como se ha visto antes es
X =
−1011
.
¥
3.8. Metodo de Jacobi
Miremos un ejemplo que nos permita comprender el metodo de Jacobi,el cual es usado, para encontrar la solucion de un sistema cuadrado deecuaciones lineales.
Ejemplo 3.8.1. Resolver el sistema lineal
5x− y + z = 10
2x + 8y − z = 11
−x + y + 4z = 3
usando el metodo iterativo de Jacobi a partir del punto inicial (0, 0, 0).
CAPITULO 3. SOLUCION DE SISTEMA DE ECUACIONES

Analisis Numerico. Notas de clase 89
Solucion
De la primera ecuacion tenemos que
x =10 + y − z
5,
de la segunda
y =11− 2x + z
8
y de la tercera
z =3 + x− y
4.
La iteracion de Jacobi para este caso es
xk+1 =10 + yk − zk
5
yk+1 =11− 2xk + zk
8
zk+1 =3 + xk − yk
4
y los resultados del proceso iterativo se muestran en la tabla 12
Iteracion xk yk zk
0 0 0 01 2 1.375 0.752 2.125 0.96875 0.906253 2.0125 0.95703 1.0390634 1.983593 1.001758 1.0138685 1.997578 1.0058353 0.9924316 2.002681 0.999659 1.0012877 1.9996744 0.999491 1.0007568 1.999747 1.0001759 1.00004599 2.000026 1.00006899 0.99989310 2.000035 0.99998 0.99998911 1.9999982 0.9999899 1.00001312 1.9999954 1.000002 1.00000213 2.00000 1.00000 1.00000
TABLA 12
¥
3.8. METODO DE JACOBI

90 J Velasquez Zapateiro/ V. Obeso Fernandez
Ejemplo 3.8.2. Resolver el sistema lineal
2x + 8y − z = 11
−x + y + 4z = 3
5x− y + z = 10
usando el metodo iterativo de Jacobi a partir del punto inicial (0, 0, 0).
Solucion
La iteracion de Jacobi para este caso es
xk+1 =11− 8yk + zk
2
yk+1 = 3 + xk − 4zk
zk+1 = 10− 5xk + yk
los resultados de la iteracion de Jacobi se muestran en la tabla 13
Iteracion xk yk zk
0 0 0 01 5.5 3 102 -1.5 -31.5 -14.53 124.5 59.5 -144 -239.5 183.5 -6725 -1064.5 2415.5 1024
TABLA 13
¥
Observamos como a pesar de ser sistemas equivalentes el metodo deJacobi en el primer caso converge a la solucion (2, 1, 1), en tanto que para elotro sistema el metodo de Jacobi diverge.
La razon de lo anterior es que en el primer caso la matriz de coefi-cientes del sistema es una matriz estrictamente diagonal dominante, ya que|5| > | − 1| + |1|, |8| > |2| + | − 1| y |4| > | − 1| + |1|, en tanto que para elotro caso esto no se cumple.
Lo anterior significa que, para que el metodo de Jacobi converja la
CAPITULO 3. SOLUCION DE SISTEMA DE ECUACIONES

Analisis Numerico. Notas de clase 91
matriz de coeficiente del sistema a resolver debe ser estrictamente diago-nal dominanteEn general dado el sistema lineal
a11x1 + a12x2 + · · ·+ a1nxn = b1
a21x1 + a22x2 + · · ·+ a2nxn = b2
. . .
. . .
. . .
an1x1 + an2x2 + · · ·+ annxn = bn,
con la matriz de coeficientes diagonal estrictamente dominante y punto inicialP0 = (x0
1, x02, . . . , x
0n) y si en la iteracion k se ha obtenido el punto Pk =
(xk1, x
k2, . . . , x
kn) entonces las coordenadas del punto Pk+1 estan dadas por
xk+1i =
bi − ai1xk1 − ai2x
k2 − · · · − aii−1x
ki−1 − aii+1x
ki+1 − · · · − ainx
kn
aii
3.9. Metodo de Gauss- Saidel
Una variacion del metodo de Jacobi es el metodo de Gauss-Saidel, que es maseficiente que el primero, la diferencia esta en que en el de Jacobi para generarel nuevo punto del proceso iterativo se utilizan las coordenadas del puntoanterior, mientras que en el de Gauss-Saidel se van usando las coordenadasen la medida en que se van generando, esto es, si se supone que ya hemosobtenido xk+1
1 , xk+12 , . . . , xk+1
i−1 , entonces la coordenada xk+1i , se obtiene de la
siguiente forma:
xk+1i =
bi − ai1xk+11 − ai2x
k+12 − · · · − aii−1x
k+1i−1 − aii+1x
ki+1 − · · · − ainx
kn
aii
Ejemplo 3.9.1. Resolver el sistema lineal
5x− y + z = 10
2x + 8y − z = 11
−x + y + 4z = 3
usando el metodo iterativo de Gauss-Saidel a partir del punto inicial (0, 0, 0).
3.9. METODO DE GAUSS- SAIDEL

92 J Velasquez Zapateiro/ V. Obeso Fernandez
Solucion
Primero observemos que se trata del mismo sistema resuelto con anterioridadpor el metodo de Jacobi y comparemos resultado. Al igual que para elmetodo de Jacobi se tiene que:
xk+1 =10 + yk − zk
5
yk+1 =11− 2xk+1 + zk
8
zk+1 =3 + xk+1 − yk+1
4,
la diferencia estara en que siempre utilizaremos las variables que se vangenerando para encontrar la o las variables restantes, los resultados del pro-ceso iterativo se muestran en la tabla 14
Iteracion xk yk zk
0 0 0 01 2 0.875 1.0312 1.9688 1.011675 0.989283 2.004479 0.99754 1.00173484 1.99808 1.000697 o.99934585 2.00027024 0.9998567 1.00010346 1.999951 1.0000252 0.99998157 2.000009 0.9999544 1.00000348 1.99999841 1.0000008 0.99999949 2.000000 1.000000 1.000000
TABLA 14
¥
Como podemos notar el metodo de Gauss-Saidel nos da la respuestaen 9 iteraciones en tanto que con Jacobi se obtuvo en 13, lo cual dice de larapidez de convergencia del uno comparado con el otro.
Ejemplo 3.9.2. Resolver el sistema lineal
2x + 8y − z = 11
−x + y + 4z = 3
5x− y + z = 10
usando el metodo iterativo de Gauss-Saidel a partir del punto inicial (0, 0, 0).
CAPITULO 3. SOLUCION DE SISTEMA DE ECUACIONES

Analisis Numerico. Notas de clase 93
Solucion
La iteracion de Gauss-Saidel es entonces
xk+1 =11− 8yk + zk
2
yk+1 = 3 + xk+1 − 4zk
zk+1 = 10− 5xk+1 + yk+1
los resultados de la iteracion de Gauss-Saidel se muestran en la tabla 15
Iteracion xk yk zk
0 0 0 01 5.5 8.5 7.52 -49.5 -76.5 1813 -776.75 -1477.75 2316
TABLA 15
¥
Al igual que para el de Jacobi el metodo de Gauss-Saidel, no converge a lasolucion del sistema a pesar de que son sistemas equivalentes, la razon deello es que, el metodo de Gauss-Saidel como el de Jacobi solo converge a lasolucion si la matriz de coeficientes del sistema es estrictamente diagonaldominante.
3.10. Sistema de Ecuaciones no Lineales
3.10.1. Metodo de Newton
En el problema de encontrar x? ∈ Rn tal que F (x?) = 0 donde F : Rn 7−→ Rn,es una funcion continuamente diferenciable dada, es posible utilizar metodoscomputacionales, cuya utilizacion depende de las condiciones del problemaespecıfico que se desea resolver.
Uno de los metodos mas usados en la solucion de este problema es elmetodo de Newton, el cual requiere de J(x), el jacobiano de la funcion F . Lomejor del metodo es que converge cuadraticamente, pero, a su vez, su mayordesventaja es que resolver el sistema J(x)s = −F (x), en cada iteracion escostoso.
3.10. SISTEMA DE ECUACIONES NO LINEALES

94 J Velasquez Zapateiro/ V. Obeso Fernandez
Para el caso n > 1, en analogıa con el caso n = 1, como F ∈ Rn
entonces aproximamos F (x) por el modelo lineal
Mc(x) = F (xc) + J(xc)(x− xc),
donde J(xc) es la matriz jacobiana de F en xc. El metodo de Newton tratade encontrar x+ tal que Mc(x+) = 0, esto es
F (xc) + J(xc)(x+ − xc) = 0,
luegox+ = xc − J(xc)
−1F (xc),
el cual determina un nuevo punto del proceso iterativo. Lo anterior permiteestablecer el algoritmo siguiente.
ALGORITMO DE NEWTON
Dado F : Rn 7−→ Rn continuamente diferenciable y x0 ∈ Rn
Para k = 0, 1, 2, . . . , “hasta converger”Resuelva J(xk)sk = −F (xk)Haga xk+1 = xk + sk.
Ejemplo 3.10.1. Obtenga tres iteraciones del metodo de Newton para elsistema no lineal dado por
x2 − y = 0.2
y2 − x = 0.3
Solucion
Sea
F (x, y) = F (X) =
[x2 − y − 0.2y2 − x− 0.3
]
y
J(x, y) = J(X) =
[2x −1−1 2y
].
Sea
X0 =
[1.41.4
]
el punto de inicio.
CAPITULO 3. SOLUCION DE SISTEMA DE ECUACIONES

Analisis Numerico. Notas de clase 95
Primera Iteracion
J(X0) =
[2.8 −1−1 2.8
],
F (X0) =
[0.360.26
],
luego si
s(1) =
[s(1)1
s(1)2
],
se debe entonces resolver el sistema
[2.8 −1−1 2.8
] [s(1)1
s(1)2
]=
[ −0.36−0.26
],
o sea2.8s
(1)1 − s
(1)2 = −0.36
−s(1)1 + 2.8s
(1)2 = −0.26,
cuya solucion es s(1)1 = −0.185380116959 y s
(1)2 = −0.159064327485, luego
s(1) =
[ −0.185380116959−0.159064327485
],
de modo que
X1 = X0 + s(1) =
[1.41.4
]+
[ −0.185380116959−0.159064327485
]=
[1.214619883041.24064327485
],
y
F (X1) =
[0.034365787760.02530146029
]
Segunda Iteracion
J(X1) =
[2.429239766608 −1
−1 2.48187134504
],
y
s(2) =
[s(2)1
s(2)2
],
3.10. SISTEMA DE ECUACIONES NO LINEALES
96 J Velasquez Zapateiro/ V. Obeso Fernandez
de modo que se resuelve el sistema
[2.429239766608 −1
−1 2.48187134504
] [s(2)1
s(2)2
]=
[ −0.03436578776−0.02530146029
]
esto es2.429239766608s
(2)1 − s
(2)2 = −0.03436578776
−s(2)1 + 2.48187134504s
(2)2 = −0.02530146029
que tiene como solucion s(2)1 = −0.0219907863685 y s
(2)2 = −0.0190551049745
ası que
X2 = X1 + s(2) =
[1.219471201931.22188056755
]
y
F (X2) =
[0.065229444796−0.02647908057
]
Tercera Iteracion
J(X2) =
[2.43894240380 −1
−1 2.4437611351
],
y
s(3) =
[s(3)1
s(3)2
],
por tanto se resuelve el sistema
[2.43894240380 −1
−1 2.4437611351
] [s(3)1
s(3)2
]=
[ −0.0652294447960.02647908057
]
esto es2.43894240380s
(3)1 − s
(3)2 = −0.06522944479
−s(3)1 + 2.4437611351s
(3)2 = 0.02647908057
cuya solucion es s(3)1 = −0.0267985763175 y s
(3)2 = −0.0001307393522 de
modo que
X3 = X2 + s(3) =
[1.192672625611.2217498282
]
y
F (X3) =
[0.000718163680.00000000171
].
CAPITULO 3. SOLUCION DE SISTEMA DE ECUACIONES
Analisis Numerico. Notas de clase 97
Observese que
||F (X3)|| =√
0.000718163682 + 0.000000001712 = 0.00071816380203,
que es una buena aproximacion a la solucion que como sabemos debe ser talque
||F (X?)|| ≈ 0,
naturalmente si queremos una mejor solucion debemos efectuar mas itera-ciones ¥
3.10.2. Ventajas y Desventajas de Metodo de Newton
VENTAJAS
1. Suponiendo que J(xk) es no singular, converge q-cuadraticamente si secomienza de un punto suficientemente cercano a la solucion.
2. Para una funcion lineal F, da la solucion exacta en una iteracion (o unpaso).
DESVENTAJAS
1. No es globalmente convergente para muchos problemas.
2. Requiere el calculo J(xk) en cada iteracion.
3. Cada iteracion requiere la solucion de un sistema de ecuaciones linealesque puede ser singular o mal condicionado.
3.10.3. Metodo de Punto Fijo
A menudo es conveniente resolver un sistema de ecuaciones no lineal por unproceso iterativo que no requiera evaluar las derivadas parciales como es elcaso del metodo de Newton. Una opcion adecuada es usar la iteracion depunto fijo, la cual es una extension de la idea en la seccion 2.2.
En efecto, si x ∈ D ⊂ Rn y si suponemos ademas que f(x), esta definidaen un rectangulo n-dimensional R = (x1, x2, . . . , xn)/ai ≤ xi ≤ bi paraalgunas constantes a1, a2, . . . , an, b1, b2, . . . , bn. Supongamos ademas quelas componentes de la matriz jacobiana son continuas en D, si f(x) ∈ D,∀x ∈ D, entonces existe un punto fijo P ∈ D.
3.10. SISTEMA DE ECUACIONES NO LINEALES

98 J Velasquez Zapateiro/ V. Obeso Fernandez
Ahora si F (P ), es la matriz jacobiana de f en P y si ||F (P )||∞ < 1,la sucesion generada por la iteracion de punto fijo definida por xk+1 = f(xk)converge, mientras que el punto de inicio este suficientemente cerca al puntofijo P .
Ademas si K < 1 es tal que para todo x ∈ D,∣∣∣∂fi(x)
∂xj
∣∣∣ ≤ K
n, para
cada i = 1, 2, 3, . . . , n, j = 1, 2, 3, . . . , n, entonces para cualquier puntoinicial, la iteracion de punto fijo converge.
Una cota del error en el n-esimo paso esta dado por
||xn − P ||∞ ≤ Kn
1−K||x1 − x0||∞.
Como una ilustracion del uso de la iteracion de punto fijo, busquemos lasolucion del siguiente sistema.
f1(x, y, z) = x3 − 10x + y − z + 3 = 0
f2(x, y, z) = y3 + 10y − 2x− 5 = 0
f3(x, y, z) = x + y − 10z + 2Senz + 5 = 0.
estas ecuaciones se pueden escribir de la forma F (X) = 0, F : R3 → R3.
Hay muchas posibilidades para convertir este sistema como una it-eracion de punto fijo, pero su convergencia depende de que la magnitud dela derivada parcial de F sea suficientemente pequena, para esto reescribimosel sistema de la siguiente forma
xk+1 = 0.1x3k + 0.1yk − 0.1zk + 0.3
yk+1 = −0.1y3k + 0.2xk + 0.5
zk+1 = 0.1xk + 0.1yk + 0.2Senzk + 0.5
Si tomamos X0 = (1, 1, 1) se tiene el siguiente resultado (tabla 16)
CAPITULO 3. SOLUCION DE SISTEMA DE ECUACIONES

Analisis Numerico. Notas de clase 99
Iteracion xi yi zi
0 1 1 11 0.4 0.6 0.8682942 0.279571 0.5584 0.7526463 0.282761 0.538503 0.7205124 0.28406 0.540936 0.71408035 0.284734 0.540984 0.7134846 0.285058 0.541114 0.7134667 0.285081 0.541168 0.7136098 0.285083 0.541167 0.7135239 0.285081 0.541167 0.713525
TABLA 16
la cual es una buena aproximacion ya que ||F (X)||2 = 0.00004 ≈ 0
Ejercicios
En los ejercicios del 1-5 aproxime la solucion del sistema AX = b, partiendode x0 = [0; 0; 0], usando primero el metodo de Jacobi y luego el de Gauss-Saidel,
1.
A =
10 −2 1−2 10 −2−2 −5 10
, b =
91218
2.
A =
4 1 01 3 −11 0 2
, b =
3−45
3.
A =
5 −1 0−1 3 −10 −1 5
, b =
94−6
4.
A =
8 1 −1−1 7 −22 1 9
, b =
8412
3.10. SISTEMA DE ECUACIONES NO LINEALES

100 J Velasquez Zapateiro/ V. Obeso Fernandez
5.
A =
4 1 01 3 −10 −1 4
, b =
345
Use la eliminacion gaussiana y la aritmetica de truncamiento a cua-tro dıgitos para resolver los siguientes sistemas. Compare luego con lasolucion real
6.
a) 0.03x1 + 58.9x2 = 59.2 b) 58.9x1 + 0.03x2 = 59.2
5031x1 − 6.1x2 = 47 − 6.1x1 + 5.31x2 = 47
Solucion real (10; 1)T Solucion real (1; 10)T
c) 3.03x1 − 12.1x2 + 14x3 = −119
−3.03x1 + 12.1x2 − 7x3 = 120
6.11x1 − 14.2x2 + 21x3 = −139
Solucion real (0; 10;1
7)T
d) πx1 − ex2 +√
2x3 −√
3x4 =√
11
π2x1 + ex2 − e2x3 +3
7x4 = 0
√5x1 −
√6x2 + x3 −
√2x4 = π
π3x1 + e2x2 −√
7x3 +1
9x4 =
√2
Solucion real (0.78839378; 0.01269269;−0.02065405;−1.18260870)T
7. Repita el ejercicio 6 usando pivoteo parcial.
8. Repita el ejercicio 6 usando pivoteo parcial escalado.
En los ejercicios 9-13 use a) el metodo de Newton, b) la iteracion depunto fijo para resolver los siguientes sistemas no lineales
9.f(x, y, z) = x3 − 10x + y − z + 3 = 0
g(x, y, z) = y3 + 10y − 2x− 2z − 5 = 0
h(x, y, z) = x + y − 10z + 2 sen z + 5 = 0
CAPITULO 3. SOLUCION DE SISTEMA DE ECUACIONES

Analisis Numerico. Notas de clase 101
10.f(x, y, z) = x2 + 20x + y2 + z2 − 20 = 0
g(x, y, z) = x2 + 20y + z2 − 20 = 0
h(x, y, z) = x2 + y2 − 40z = 0
11.f(x, y, z) = x2 + y2 + z2 + 10x− 4 = 0
g(x, y, z) = x2 − y2 + z2 + 10y − 5 = 0
h(x, y, z) = x2 + y2 − z2 + 10z − 6 = 0
12.f(x, y, z) = 10x− x2 − y − z2 − 4 = 0
g(x, y, z) = 10y − x2 − y2 − z2 − 5 = 0
h(x, y, z) = 10z − x− y2 − z2 − 6 = 0
13.f(x, y, z) = 10x− x3 + y2 − z − 5 = 0
g(x, y, z) = 10y + 0.5x2 − y2 − z − 3 = 0
h(x, y, z) = 10z − x− y2 − z3 − 6 = 0
14. Resuelva el siguiente sistema no lineal usando el metodo de Newton Si
1
2= a1 y
3
2= a2,
resuelva el sistema0 = a1x1 + a2x2
2
3= a1x
21 + a2x
22
0 = a1x31 + a2x
32
15. El estado estacionario de concentracion de dos especies quımicas enun sistema quımico oscilatorio descrito por el modelo de Brusselatoresta dado por el sistema no lineal
0 = A + x2y − (B + 1)x
0 = Bx− x2y,
encuentre la solucion si
3.10. SISTEMA DE ECUACIONES NO LINEALES
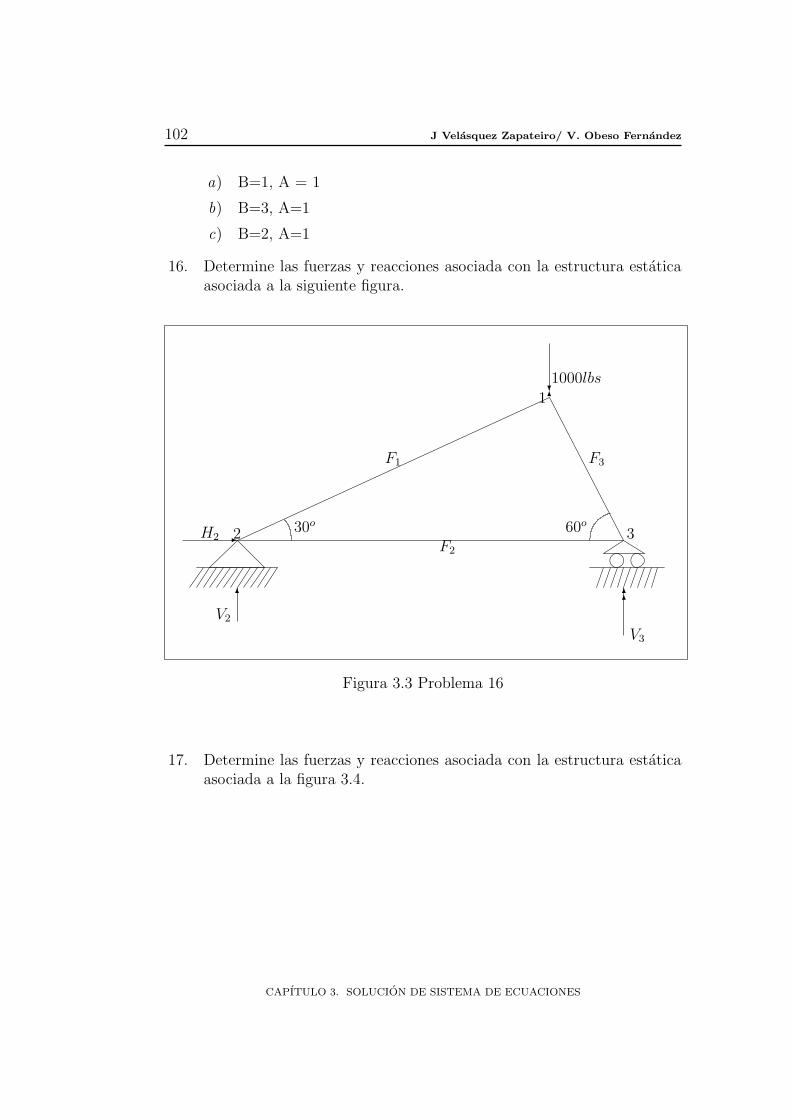
102 J Velasquez Zapateiro/ V. Obeso Fernandez
a) B=1, A = 1
b) B=3, A=1
c) B=2, A=1
16. Determine las fuerzas y reacciones asociada con la estructura estaticaasociada a la siguiente figura.
F1 F3
F2
30o 60o
V3
6 6
?6
1000lbs
6
-H2
V2
1
2 3
Figura 3.3 Problema 16
17. Determine las fuerzas y reacciones asociada con la estructura estaticaasociada a la figura 3.4.
CAPITULO 3. SOLUCION DE SISTEMA DE ECUACIONES
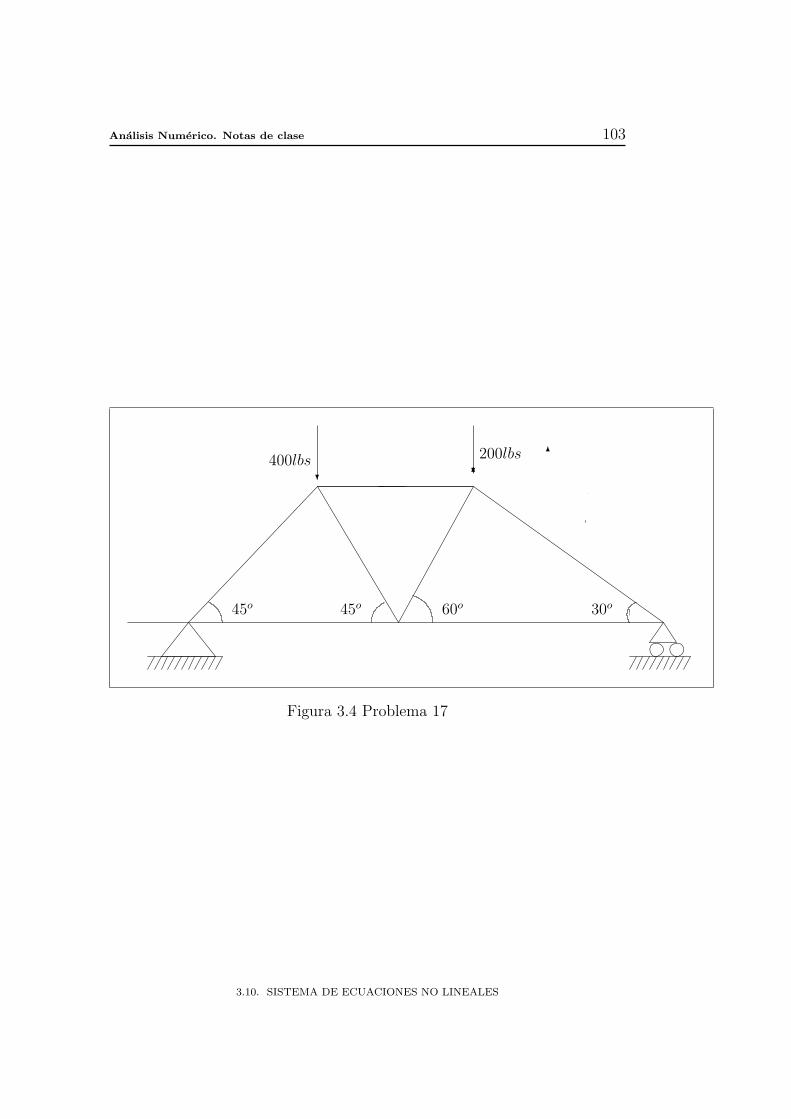
Analisis Numerico. Notas de clase 103
400lbs? ?
200lbs
45o 45o
6
6
60o 30o
Figura 3.4 Problema 17
3.10. SISTEMA DE ECUACIONES NO LINEALES

104 J Velasquez Zapateiro/ V. Obeso Fernandez
CAPITULO 3. SOLUCION DE SISTEMA DE ECUACIONES

Capıtulo 4
Interpolacion Polinomial
Por el termino interpolar se entiende estimar el valor desconocido deuna funcion en un punto, tomando una medida ponderada de sus valoresconocidos en puntos cercanos al punto dado.
El primer polinomio de aproximacion que estudiaremos es el polinomio deTaylor. Para ello supongamos que el polinomio
Pn(x) =n∑
i=0
ci(x− x0)i,
es tal que Pn(x0) = f(x0) y P(k)n (x0) = f (k)(x0) para k = 1, 2, 3, . . . , n,
deseamos encontrar un polinomio que aproxime a f(x) alrededor de x = x0.
Pero
P (k)n (x) =
n−k∑i=0
(i + 1)(i + 2) . . . (i + k)ci+k(x− x0)i,
luego
P (k)n (x) = 1 · 2 · 3 . . . kck +
n−k∑i=1
(i + 1)(i + 2) . . . (i + k)ci+k(x− x0)i,
ası queP (k)
n (x0) = k!ck,
pero como P(k)n (x0) = f (k)(x0), entonces
ck =f (k)(x0)
k!,
ası que el polinomio de Taylor que aproxima a f(x) alrededor de x = x0 es
Pn(x) =n∑
i=0
f (i)(x0)
i!(x− x0)
i
105

106 J Velasquez Zapateiro/ V. Obeso Fernandez
Definicion 4.0.1. Supongamos f tiene derivada de orden n y Pn(x) es elpolinomio de aproximacion de f(x), definimos
En(x) = f(x)− Pn(x)
Teorema 4.0.1. Supongamos x0 es cualquier numero con x0 6= x, si ftiene n derivadas continuas en un intervalo cerrado I = [x0, x] y f (n+1)(x)esta definida en (x0, x), entonces existe un numero c ∈ (x0, x), tal que
En =f (n+1)(c)
(n + 1)!(x− x0)
n+1
Demostracion. Sea t ∈ I, y definamos F (t) y G(t) como
F (t) = f(x)−f(t)−f′(t)(x−t)− f
′′(t)(x− t)2
2!−· · ·− f (n)(t)(x− t)n
n!−En(x),
yG(t) = (x− t)n+1,
entonces, F (x) = −En(x), G(x) = 0, F (x0) = f(x) − Pn(x) − En(x) = 0 yG(x0) = (x− x0)
n+1, ademas
F′(t) = −f
′(t)+f
′(t)−f
′′(t)(x−t)+f
′′(t)(x−t)−f
′′′(t)(x− t)2
2!+
f′′′(t)(x− t)2
2!
−f (4)(t)(x− t)3
3!+ · · · − f (n)(t)(x− t)(n−1)
(n− 1)!+
f (n−1)(t)(x− t)(n−2)
(n− 2)!−
f (n+1)(t)(x− t)n
n!+
f (n)(t)(x− t)(n−1)
(n− 1)!
luego
F′(t) = −f (n+1)(t)(x− t)n
n!y
G′(t) = −(n + 1)(x− t)n.
Aplicando el teorema del valor medio generalizado a F y G se tiene
F (x)− F (x0)
G(x)−G(x0)=
F′(c)
G′(c),
luego entonces
−En(x)
−(x− x0)n+1=−f (n+1)(c)(x− c)n
n!−(n + 1)(x− c)n
,
CAPITULO 4. INTERPOLACION POLINOMIAL

Analisis Numerico. Notas de clase 107
luegoEn(x)
(x− x0)n+1=
f (n+1)(c)
(n + 1)!,
y por tanto
En(x) =f (n+1)(c)
(n + 1)!(x− x0)
n+1
4.1. Interpolacion de Lagrange
Para la interpolacion lineal utilizamos un segmento de recta que pasa por dospuntos conocidos, sean P (x0, y0) y P (x1, y1) dichos puntos, luego la pendientedel segmento es
m =y1 − y0
x1 − x0
,
y por tanto la ecuacion de la recta que contiene a ese segmento es
y = P (x) = y0 +y1 − y0
x1 − x0
(x− x0)
o sea que
y = P (x) =y1 − y0
x1 − x0
x +y0(x1 − x0)− x0(y1 − y0)
x1 − x0
,
de modo que
y = P (x) =y1 − y0
x1 − x0
x +y0x1 − x0y1
x1 − x0
,
que es un polinomio de grado menor o igual que 1, que satisface queP (x0) = y0 y P (x1) = y1.
Lagrange propuso otro procedimiento para encontrar este polinomio.Como
y = P1(x) = y0 +y1 − y0
x1 − x0
(x− x0),
entonces
y = P1(x) = y0 + (y1 − y0)x− x0
x1 − x0
= y1x− x0
x1 − x0
+ y0 − y0x− x0
x1 − x0
,
luego
y = P1(x) = y1x− x0
x1 − x0
+ y0
(1− x− x0
x1 − x0
),
4.1. INTERPOLACION DE LAGRANGE

108 J Velasquez Zapateiro/ V. Obeso Fernandez
o sea que
y = P1(x) = y1x− x0
x1 − x0
+ y0x− x1
x0 − x1
.
Sea
L1,0(x) =x− x1
x0 − x1
y
L1,1(x) =x− x0
x1 − x0
,
los cuales son lineales, ası que
P1(x) = y0L1,0(x) + y1L1,1(x),
pero como L1,0(x0) = 1, L1,0(x1) = 0, L1,1(x0) = 0, L1,1(x1) = 1, entonces
P1(x0) = y0L1,0(x0) + y1L1,1(x0) = y0
y
P1(x1) = y0L1,0(x1) + y1L1,1(x1) = y1,
por tanto P1(x) pasa por los puntos (x0, y0) y (x1, y1).
Definicion 4.1.1. Los terminos
L1,0(x) =x− x1
x0 − x1
y
L1,1(x) =x− x0
x1 − x0
se definen como polinomios coeficientes de Lagrange
De la definicion anterior se tiene que
P1(x) =1∑
k=0
ykL1k(x).
Cuando yk = f(xk), el proceso de utilizar P1(x) para aproximar a f(x) en[x0, x1] se conoce como interpolacion lineal, x0 y x1 se les llama nodos.
Si x < x0 entonces al proceso se le llama extrapolacion.
CAPITULO 4. INTERPOLACION POLINOMIAL
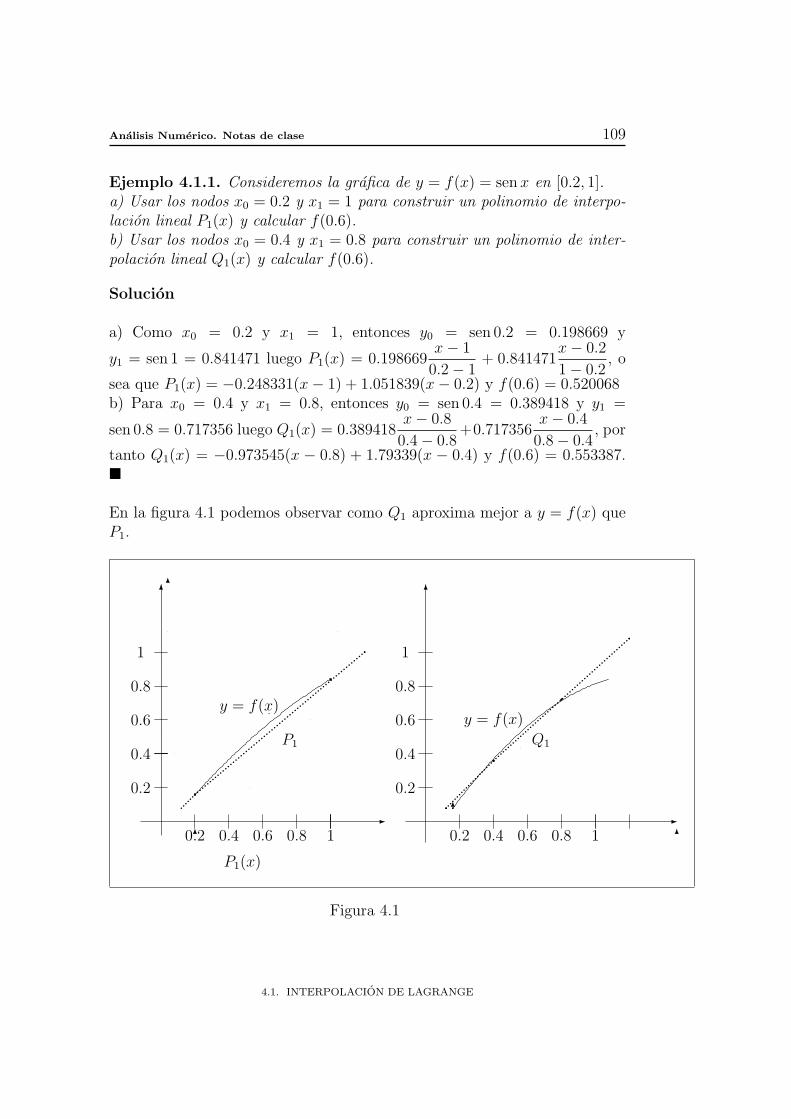
Analisis Numerico. Notas de clase 109
Ejemplo 4.1.1. Consideremos la grafica de y = f(x) = sen x en [0.2, 1].a) Usar los nodos x0 = 0.2 y x1 = 1 para construir un polinomio de interpo-lacion lineal P1(x) y calcular f(0.6).b) Usar los nodos x0 = 0.4 y x1 = 0.8 para construir un polinomio de inter-polacion lineal Q1(x) y calcular f(0.6).
Solucion
a) Como x0 = 0.2 y x1 = 1, entonces y0 = sen 0.2 = 0.198669 y
y1 = sen 1 = 0.841471 luego P1(x) = 0.198669x− 1
0.2− 1+ 0.841471
x− 0.2
1− 0.2, o
sea que P1(x) = −0.248331(x− 1) + 1.051839(x− 0.2) y f(0.6) = 0.520068b) Para x0 = 0.4 y x1 = 0.8, entonces y0 = sen 0.4 = 0.389418 y y1 =
sen 0.8 = 0.717356 luego Q1(x) = 0.389418x− 0.8
0.4− 0.8+0.717356
x− 0.4
0.8− 0.4, por
tanto Q1(x) = −0.973545(x − 0.8) + 1.79339(x − 0.4) y f(0.6) = 0.553387.¥
En la figura 4.1 podemos observar como Q1 aproxima mejor a y = f(x) queP1.
66
-0.2 0.4 0.6 0.8
1
0.2
0.4
0.6
0.8
1
.....................................................................
.......
P1(x)
-
6
6
6 0.2
0.2
0.4
0.4
0.6
0.6
0.8
0.8
1
1
..6
..........................................................
........................
y = f(x)y = f(x)
P1 Q1
Figura 4.1
4.1. INTERPOLACION DE LAGRANGE

110 J Velasquez Zapateiro/ V. Obeso Fernandez
En general si se tiene los n + 1 puntos x0, x1, . . . , xn, y si f(xk) = P (xk)para k = 0, 1, 2, 3 . . . , n el polinomio que pasa por esos n + 1 puntos es
Pn(x) =n∑
k=0
ykLn,k,
donde
Ln,k =(x− x0)(x− x1) . . . (x− xk−1)(x− xk+1) . . . (x− xn)
(xk − x0)(xk − x1) . . . (xk − xk−1)(xk − xk+1) . . . (xk − xn),
o usando una notacion mas compacta
Ln,k =
n∏j=0
(x− xj)
n∏j=0
(xk − xj), k 6= j
Ejemplo 4.1.2. Consideremos y = f(x) = sen x en el intervalo [0.2, 1]a) Usando los nodos x0 = 0.2, x1 = 0.5, x2 = 1, construir el polinomiointerpolador P2(x).b) Usando los nodos x0 = 0.2, x1 = 0.4, x2 = 0.8, x3 = 1, construir elpolinomio interpolador P3(x) y calcular f(0.6).
Solucion
a)
P2(x) = y0(x− x1)(x− x2)
(x0 − x1)(x0 − x2)+y1
(x− x0)(x− x2)
(x1 − x0)(x1 − x2)+y2
(x− x0)(x− x1)
(x2 − x0)(x2 − x1),
pero y0 = sen x0 = 0.198669, y1 = sen x1 = 0.479426, y2 = sen x2 = 0.841471,luego
P2(x) = 0.198669(x− 0.5)(x− 1)
(0.2− 0.5)(0.2− 1)+ 0.479426
(x− 0.2)(x− 1)
(0.5− 0.2)(0.5− 1)
+0.841471(x− 0.2)(x− 0.5)
(1− 0.2)(1− 0.5),
luego
P2(x) = 0.198669(x− 0.5)(x− 1)
0.24+ 0.479426
(x− 0.2)(x− 1)
−0.15
CAPITULO 4. INTERPOLACION POLINOMIAL
Analisis Numerico. Notas de clase 111
+0.841471(x− 0.2)(x− 0.5)
0.4,
por tanto
P2(x) = 0.8277675(x−0.5)(x−1)−3.196173(x−0.2)(x−1)+2.103678(x−0.2)(x−0.5),
b)
P3(x) = y0(x− x1)(x− x2)(x− x3)
(x0 − x1)(x0 − x2)(x0 − x3)+ y1
(x− x0)(x− x2)(x− x3)
(x1 − x0)(x1 − x2)(x1 − x3)
+y2(x− x0)(x− x1)(x− x3)
(x2 − x0)(x2 − x1)(x2 − x3)+ y3
(x− x0)(x− x1)(x− x2)
(x3 − x0)(x3 − x1)(x3 − x2),
pero y0 = sen x0 = 0.198669, y1 = sen x1 = 0.389418, y2 = sen x2 = 0.717356y y3 = sen x3 = 0.8411471, luego
P3(x) = 0.198669(x− 0.4)(x− 0.8)(x− 1)
(0.2− 0.4)(0.2− 0.8)(0.2− 1)+0.389418
(x− 0.2)(x− 0.8)(x− 1)
(0.4− 0.2)(0.4− 0.8)(0.4− 1)
+0.717356(x− 0.2)(x− 0.4)(x− 1)
(0.8− 0.2)(0.8− 0.4)(0.8− 1)+0.841471
(x− 0.2)(x− 0.4)(x− 0.8)
(1− 0.2)(1− 0.4)(1− 0.8),
por tanto
P3(x) = −2.069469(x−0.4)(x−0.8)(x−1)+8.112875(x−0.2)(x−0.8)(x−1)
−14.9449(x− 0.2)(x− 0.4)(x− 1) + 8.765323(x− 0.2)(x− 0.4)(x− 0.8)
con este polinomio el valor de f(0.6) = 0.56449 ¥
4.2. Cotas de Error
Teorema 4.2.1. Polinomio Interpolador de Lagrange Supongamosque f ∈ Cn+1[a, b] y x0, x1, . . . , xn son los nodos de interpolacion, entonces,∀x ∈ [a, b]
f(x) = Pn(x) + En(x),
donde
En(x) =(x− x0)(x− x1) . . . (x− xn)f (n+1)(c)
(n + 1)!c ∈ [a, b]
4.2. COTAS DE ERROR

112 J Velasquez Zapateiro/ V. Obeso Fernandez
Demostracion. Miremos primero el caso n = 1, para esto sea
g(t) = f(t)− P1(t)− E1(x)(t− x0)(t− x1)
(x− x0)(x− x1),
luego
g(x) = f(x)− P1(x)− E1(x)(x− x0)(x− x1)
(x− x0)(x− x1)= f(x)− P1(x)− E1(x) = 0,
g(x0) = f(x0)− P1(x0)− E1(x)(x0 − x0)(x0 − x1)
(x− x0)(x− x1)= 0
y
g(x1) = f(x1)− P1(x1)− E1(x)(x1 − x0)(x1 − x1)
(x− x0)(x− x1)= 0.
Supongamos sin perder generalidad que x ∈ (x0, x1), luego por el teoremade Rolle aplicado a g(t) en [x0, x] se tiene que existe d0 ∈ (x0, x) tal queg′(d0) = 0 y aplicando el mismo teorema a g en el intervalo [x, x1] existe
d1 ∈ (x, x1) tal que g′(d1) = 0, luego la funcion g
′(t) = 0 si t = d0 o
t = d1, aplicando nuevamente el teorema de Rolle pero a la funcion g′(t) en
el intervalo [d0, d1] existe c ∈ (d0, d1) tal que g′′(c) = 0, pero
g′(t) = f
′(t)− P
′1(t)− E1(x)
[(t− x1) + (t− x0)]
(x− x0)(x− x1)
y
g′′(t) = f
′′(t)− P
′′1 (t)− E1(x)
2
(x− x0)(x− x1),
pero como P1(x) es de grado 1, entonces P′′1 (t) = 0, ∀t luego
g′′(t) = f
′′(t)− E1(x)
2
(x− x0)(x− x1),
ası que
0 = f′′(c)− E1(x)
2
(x− x0)(x− x1),
de modo que
E1(x) =f′′(c)
2(x− x0)(x− x1).
Para el caso general observemos que si x = xk, k = 0, 1, 2, . . . , n, entoncesEn(xk) = 0, ası que f(xk) = Pn(xk), y en este caso c puede tomar un valorarbitrario en (a, b), supongamos, x 6= xk k = 0, 1, 2, . . . , n y sea
g(t) = f(t)− Pn(t)− En(x)(t− x0)(t− x1) . . . (t− xn)
(x− x0)(x− x1) . . . (x− xn)
CAPITULO 4. INTERPOLACION POLINOMIAL

Analisis Numerico. Notas de clase 113
= f(t)− Pn(t)− En(x)n∏
i=0
(t− xi)
x− xi
,
cuando t = xk, se tiene que,
g(xk) = f(xk)−Pn(xk)−En(x)n∏
i=0
(xk − xi)
x− xi
= 0−En(x)·0 = 0 k = 0, 1, 2, . . . , n,
ademas
g(x) = f(x)− Pn(x)− En(x)n∏
i=0
(x− xi)
x− xi
= f(x)− Pn(x)− En(x) = 0,
luego g se anula en los n+2 puntos x, x0, x1, . . . , xn, por tanto por el teoremade Rolle existe c ∈ (a, b) tal que gn+1(c) = 0, pero
g(n+1)(t) = f (n+1)(t)− P (n+1)n (t)− En(x)
dn+1
dtn+1
n∏i=0
(t− xi)
(x− xi),
pero como Pn(x) es un polinomio de grado n , entonces P(n+1)n (t) = 0, ademas
n∏i=0
(t− xi)
x− xi
=1∏n
i=0(x− xi)tn+1+terminos de grado menor que n
y
dn+1
dtn+1
n∏i=0
(t− xi)
(x− xi)=
(n + 1)!∏ni=0(x− xi)
ya que
dn+1
dtn+1tn+1 = (n + 1)n(n− 1) . . . 2.1 = (n + 1)!,
luego
0 = f (n+1)(c)− 0− En(x)(n + 1)!∏ni=0(x− xi)
,
ası que
En(x) =f (n+1)(c)
(n + 1)!
n∏i=0
(x− xi)
4.2. COTAS DE ERROR
114 J Velasquez Zapateiro/ V. Obeso Fernandez
4.3. Polinomio Interpolador de Newton
Cuando queremos aproximar funciones por polinomios es deseable disponerde varios polinomios y escoger el que mas se adecue a las necesidades delproblema. En los polinomios de Lagrange, estos se construyen individual-mente, y no tienen relacion alguna entre si, esto, junto con el hecho de quepara su construccion se necesita un alto numero de operaciones, lo cualimplica un alto costo computacional, constituyen una desventaja.
Presentamos ahora los polinomios interpolantes de Newton, los cualesse construyen recursivamente. Sean
P1(x) = a0 + a1(x− x0)
P2(x) = a0 + a1(x− x0) + a2(x− x0)(x− x1)
P3(x) = a0 + a1(x− x0) + a2(x− x0)(x− x1) + a3(x− x0)(x− x1)(x− x2)
.
.
Pn(x) = a0 + a1(x− x1) + a2(x− x1)(x− x2) + a3(x− x0)(x− x1)(x− x2)
+ · · ·+ an(x− x0)(x− x1)(x− x2) . . . (x− xn−1).
Observemos que
P2(x) = P1(x) + a2(x− x0)(x− x1)
P3(x) = P2(x) + a3(x− x0)(x− x1)(x− x2)
.
.
Pn(x) = Pn−1(x) + an(x− x0)(x− x1)(x− x2) . . . (x− xn−1).
Definicion 4.3.1. Al polinomio
Pn(x) = Pn−1(x) + an(x− x0)(x− x1)(x− x2) . . . (x− xn−1)
de le define como el polinomio de Newton con n centros x0, x1, . . . , xn−1
Ejemplo 4.3.1. Dados los centros x0 = 2, x1 = 4, x2 = 5, x3 = 6, cona0 = 4, a1 = 3, a2 = −5, a3 = −4, a5 = 0.5, calcular P1(x), P2(x), P3(x),P4(x) y evaluar P3(2.6).
CAPITULO 4. INTERPOLACION POLINOMIAL

Analisis Numerico. Notas de clase 115
Solucion
a)
P1(x) = 4 + 3(x− 2)
P2(x) = 4 + 3(x− 2)− 5(x− 2)(x− 4)
P3(x) = 4 + 3(x− 2)− 5(x− 2)(x− 4)− 4(x− 2)(x− 4)(x− 5)
P4(x) = 4 + 3(x− 2)− 5(x− 2)(x− 4)− 4(x− 2)(x− 4)(x− 5)
+0.5(x− 2)(x− 4)(x− 5)(x− 6)
b)
P3(2.6) = 4 + 1.8 + 4.2− 8.064 = 1.936
¥
La forma de evaluar a P3(2.6) se puede hacer de manera mas facil dela siguiente forma
P3(x) = (((a3(x− x2) + a2)(x− x1) + a1)(x− x0) + a0),
si tomamos S3 = a3 = −4, S2 = S3(x − x2) + a2, S1 = S2(x − x1) + a1,S0 = S1(x − x0) + a0, entonces, S3 = −4, S2 = −4 × −2.4 − 5 = 4.6,S1 = 4.6(2.6 − 4) + 3 = −3.44, S0 = −3.44(2.6 − 2) + 4 = 1.936, el procesoanterior se conoce con el nombre de multiplicaciones encajadas.
Supongamos ahora se quieren encontrar los coeficientes ak de los poli-nomios de Newton que aproximan a la funcion f(x), entonces para P1(x) setiene que P1(x0) = f(x0) y P1(x1) = f(x1), luego P1(x0) = a0 = f(x0) yP1(x1) = f(x1) = a0 + a1(x1 − x0), de modo que,
a1 =f(x1)− f(x0)
x1 − x0
.
Para P2(x), se tiene que f(x2) = P2(x2) = f(x0) + a1(x2 − x0) + a2(x2 −x0)(x2 − x1), luego
f(x2)− f(x0)− a1(x2 − x0)
(x2 − x0)(x2 − x1)= a2,
o sea que
a2 =f(x2)− f(x0)
(x2 − x0)(x2 − x1)−
f(x1)−f(x0)x1−x0
(x2 − x0)
(x2 − x0)(x2 − x1)
4.3. POLINOMIO INTERPOLADOR DE NEWTON

116 J Velasquez Zapateiro/ V. Obeso Fernandez
=( f(x2)− f(x0)
(x2 − x0)(x2 − x1)− f(x1)− f(x0)
(x1 − x0)(x2 − x1)
),
por lo tanto
a2 =(f(x2)− f(x0))(x1 − x0)− (f(x1)− f(x0))(x2 − x0)
(x1 − x0)(x2 − x0)(x2 − x1),
o tambien
a2 =x1f(x2)− x1f(x0)− x0f(x2) + x0f(x0)− x2f(x1) + x0f(x1) + x2f(x0)− x0f(x0)
(x1 − x0)(x2 − x0)(x2 − x1),
de modo que
a2 =f(x2)(x1 − x0)− f(x1)(x1 − x0)− f(x1)(x2 − x1) + f(x0)(x2 − x1)
(x1 − x0)(x2 − x0)(x2 − x1),
=((x1 − x0)(f(x2)− f(x1))
(x1 − x0)(x2 − x1)− (x2 − x1)(f(x1)− f(x0))
(x1 − x0)(x2 − x1)
) 1
x2 − x0
,
y por tanto
a2 =(f(x2)− f(x1)
x2 − x1
− f(x1)− f(x0)
x1 − x0
) 1
x2 − x0
.
El numerador es una diferencia de cocientes de diferencias, a cada uno deestos cocientes, se les llama diferencias divididas, definamos este concepto.
Definicion 4.3.2. Sea f(x) una funcion se define las diferencias divididasde f(x) como
f [xk] = f(xk)
f [xk−1, xk] =f [xk]− f [xk−1]
xk − xk−1
f [xk−2, xk−1, xk] =f [xk−1, xk]− f [xk−2, xk−1]
xk − xk−2
f [xk−3, xk−2, xk−1, xk] =f [xk−2, xk−1, xk]− f [xk−3, xk−2, xk−1]
xk − xk−3
,
en general
f [xk−j, xk−j+1 . . . , xk] =f [xk−j+1, xk−j+2 . . . , xk]− f [xk−j, xk−j+1, . . . , xk−1]
xk − xk−j
,
CAPITULO 4. INTERPOLACION POLINOMIAL

Analisis Numerico. Notas de clase 117
Las diferencias divididas nos permitiran calcular los coeficientes ak de lospolinomios de Newton, ya que estos se calculan mediante la expresion
ak = f [a0, a1, a2 . . . , ak] k = 0, 1, 2, 3, . . . , n
.
La siguiente tabla ilustra las diferencias divididas para k = 0, 1, 2, 3, 4
k f [xk] f [, ] f [, , ] f [, , , ] f [, , , , ]
0 f [x0]1 f [x1] f [x0, x1]2 f [x2] f [x1, x2] f [x0, x1, x2]3 f [x3] f [x2, x3] f [x1, x2, x3] f [x0, x1, x2, x3]4 f [x4] f [x3, x4] f [x2, x3, x4] f [x1, x2, x3, x4] f [x0, x1, x2, x3, x4]
TABLA 17
Ejemplo 4.3.2. Si f(x) = cos x, construir la tabla de diferencias divididaspara los nodos x0 = 0.2, x1 = 0.4, x2 = 0.8, x3 = 1.0, x4 = 1.2.
Solucion
Las diferencias divididas en este caso se muestran en la tabla 18
k xk f [xk] f [, ] f [, , ] f [, , , ] f [, , , , ]
0 0,2 0,98006661 0,4 0,92106099 -0,29562812 0,8 0,6967067 -0,5608857 -0,4420963 1,0 0,540302 -0,782022 -0,3685605 0,09191944 1,2 0,3623578 -0,8897225 -0,26925125 0,1241366 0,0322172
TABLA 18
¥
Ejemplo 4.3.3. Calcular los coeficientes ak y los cuatro polinomios inter-polantes de Newton si f(x) = sen x para los puntos x0 = 0, x1 = 1, x2 = 2,x3 = 3, x4 = 4.
Solucion
Las diferencias divididas en este caso se muestran en la tabla 19.
4.3. POLINOMIO INTERPOLADOR DE NEWTON
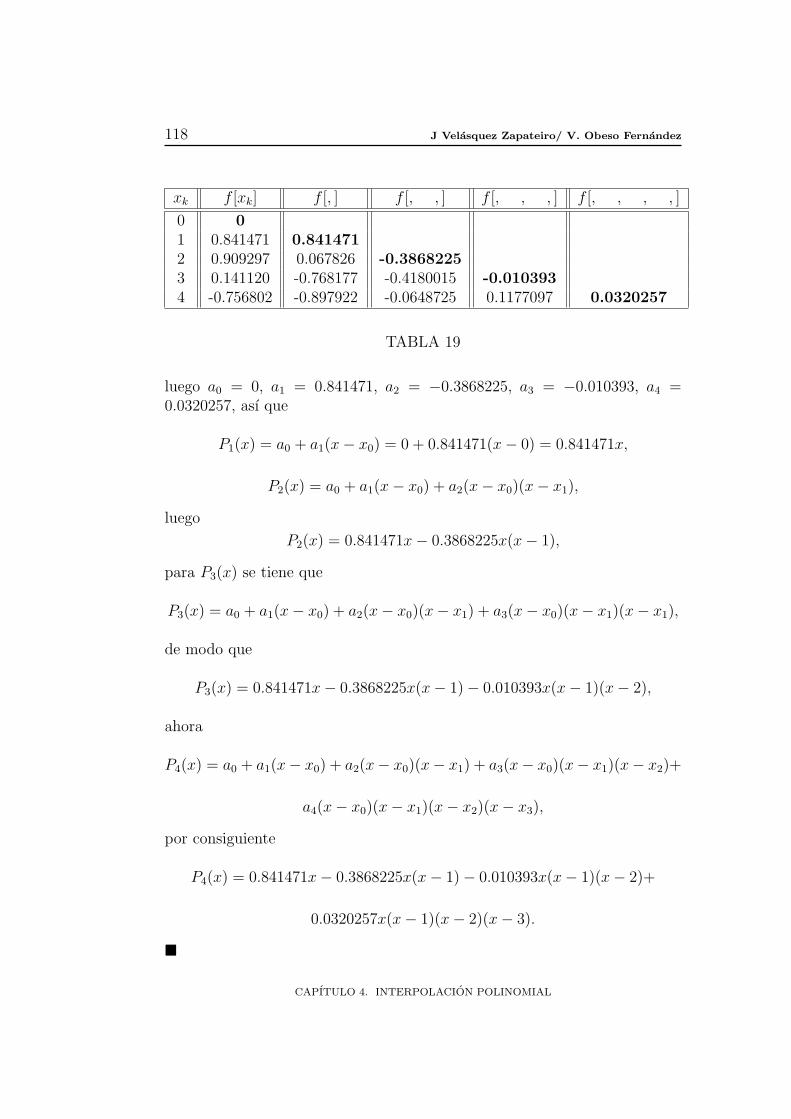
118 J Velasquez Zapateiro/ V. Obeso Fernandez
xk f [xk] f [, ] f [, , ] f [, , , ] f [, , , , ]
0 01 0.841471 0.8414712 0.909297 0.067826 -0.38682253 0.141120 -0.768177 -0.4180015 -0.0103934 -0.756802 -0.897922 -0.0648725 0.1177097 0.0320257
TABLA 19
luego a0 = 0, a1 = 0.841471, a2 = −0.3868225, a3 = −0.010393, a4 =0.0320257, ası que
P1(x) = a0 + a1(x− x0) = 0 + 0.841471(x− 0) = 0.841471x,
P2(x) = a0 + a1(x− x0) + a2(x− x0)(x− x1),
luego
P2(x) = 0.841471x− 0.3868225x(x− 1),
para P3(x) se tiene que
P3(x) = a0 + a1(x− x0) + a2(x− x0)(x− x1) + a3(x− x0)(x− x1)(x− x1),
de modo que
P3(x) = 0.841471x− 0.3868225x(x− 1)− 0.010393x(x− 1)(x− 2),
ahora
P4(x) = a0 + a1(x− x0) + a2(x− x0)(x− x1) + a3(x− x0)(x− x1)(x− x2)+
a4(x− x0)(x− x1)(x− x2)(x− x3),
por consiguiente
P4(x) = 0.841471x− 0.3868225x(x− 1)− 0.010393x(x− 1)(x− 2)+
0.0320257x(x− 1)(x− 2)(x− 3).
¥
CAPITULO 4. INTERPOLACION POLINOMIAL

Analisis Numerico. Notas de clase 119
4.4. Polinomios de Hermite
Definicion 4.4.1. Sean x0, x1, . . . , xn ∈ [a, b], mi un entero no negativo, aso-ciado a cada xi, con i = 0, 1, 2, 3 . . . , n, f ∈ Cm[a, b] con m = max0≤i≤n mi,definimos el Polinomio Osculante que aproxima a f como el polinomiode menor grado tal que
d(k)P (xi)
dxk=
d(k)f(xi)
dxk,
∀k = 0, 1, 2, 3, . . . , mi
Observemos que si i = 0, entonces k = 0, 1, 2, . . . , m0, luego P (0)(x0) =f (0)(x0), P
′(x0) = f
′(x0), P
′′(x0) = f
′′(x0),. . . , P (m0)(x0) = f (m0)(x0),
o sea que en este caso el polinomio osculante es que aproxima a f es elm0-esimo polinomio de Taylor, pero si mi = 0 para i = 1, 2, 3, . . . , n ,entonces, P (x0) = f(x0), P (x1) = f(x1), P (x2) = f(x2), . . . , P (xn) = f(xn),es decir que P (xk) = f(xk) para k = 1, 2, 3, . . . , n y en este caso el polinomioosculante es el n-esimo polinomio de Lagrange.
Ahora si mi = 1 para i = 0, 1, 2, . . . , n, el polinomio osculante queaproxima a f son los llamados Polinomios de Hermite, observese que eneste caso P (xk) = f(xk) y P
′(xk) = f
′(xk), k = 0, 1, 2, 3, . . . , n.
Teorema 4.4.1. Sea f ∈ C[a, b], x0, x1, x2, . . . , xn ∈ [a, b] con xi 6= xj,i, j = 0, 1, 2, . . . , n, el polinomio unico de menor grado que coincide con f yf′en x0, x1, x2, . . . , xn es el polinomio de Hermite de grado 2n + 1 dado por
H2n+1(x) =n∑
i=0
f(xi)Hn,i(x) +n∑
i=0
f′(xi)Hn,i(x)
donde
Hn,i(x) = [1− 2(x− xi)L′n,i(xi)]L
2n,i(x)
y
Hn,i(x) = (x− xi)L2n,i(x)
Demostracion. Como
Ln,i(x) =n∏
j=0,j 6=i
(x− xj)
(xi − xj),
4.4. POLINOMIOS DE HERMITE

120 J Velasquez Zapateiro/ V. Obeso Fernandez
entonces Ln,i(xj) = 0 si j 6= i y Ln,i(xj) = 1 si j = i, por lo tanto, si i = j
Hn,i(xj) = [1−2(xj−xi)L′n,i(xi)]L
2n,i(xj) = 1 y Hn,i(xj) = (xj−xj)L
2n,i(xj) =
0, y si j 6= i Hn,i(xj) = 0 y Hn,i(xj) = 0 , pero como
H2n+1(x) =n∑
i=0,j 6=i
f(xi)Hn,i(x) + f(xj)Hn,i(x) +n∑
i=0
f′(xi)Hn,i(x),
entonces
H2n+1(xj) =n∑
i=0,j 6=i
f(xi)Hn,i(xj) + f(xj)Hn,i(xj) +n∑
i=0
f′(xi)Hn,i(xj),
ası que
H2n+1(xj) =n∑
i=0,j 6=i
f(xi) · 0 + f(xj) · 1 +n∑
i=0
f′(xi) · 0 = f(xj),
por tanto H2n+1(xj) = f(xj) para j = 0, 1, 2, . . . , n.
Ahora
H′n,i(x) = −2L
′n,i(xi)L
2n,i(x) + 2Ln,i(x)L
′n,i(x)[1− 2(x− xi)L
′n,i(xi)],
ası que si j 6= i,
H′n,i(xj) = −2L
′n,i(xj)L
2n,i(xj) + 2Ln,i(xj)L
′n,i(xj)[1− 2(xj − xi)L
′n,i(xi)]
= −2L′n,i(xi) · 0 + 2 · 0L′
n,i(xj)[1− 2(xj − xj)L′n,i(xi)] = 0,
y si i = j
H′n,j(xj) = −2L
′n,j(xj)L
2n,j(xj) + 2Ln,j(xj)L
′n,j(xj)[1− 2(xj − xj)L
′n,j(xj)],
= −2L′n,j(xj) + 2L
′n,j(xj) = 0
por tanto H′n,i(xj) = 0 ∀j, i.
TambienH
′n,i(x) = L2
n,i(x) + 2(x− xi)Ln,i(x)L′n,i(x),
ası queH
′n,i(xj) = L2
n,i(xj) + 2(x− xi)Ln,i(xj)L′n,i(xj)
= Ln,i(xj)[Ln,i(xj) + 2(xj − xi)L′n,j(xj)],
CAPITULO 4. INTERPOLACION POLINOMIAL

Analisis Numerico. Notas de clase 121
luego, si j 6= i Ln,i(xj) = 0 y por tanto
H′n,i(xj) = 0
y si i = jH
′n,i(xi) = Ln,i(xi)[Ln,i(xi) + 2(xi − xi)L
′n,i(xi)]
= 1[1 + 2(xi − xi)L′n,i(xi)] = 1,
de modo que como
H′2n+1(x) =
n∑i=0
f(xi)H′n,i(x) +
n∑i=0
f′(xi)H
′n,i(x)
=n∑
i=0
f(xi)H′n,i(x) +
n∑
i=0,i6=j
f′(xi)H
′n,i(x) + f
′(xj)H
′n,i(x),
entonces
H′2n+1(xj) =
n∑i=0
f(xi)H′n,i(xj)+
n∑
i=0,i6=j
f′(xi)H
′n,i(xj)+f
′(xj)H
′n,i(xj) = f
′(xj).
Por lo anterior se tiene que H2n+1(xj) = f(xj) y H′2n+1(xj) = f
′(xj), para
j = 0, 1, 2, . . . , n
Ejemplo 4.4.1. Sea f(x) = sen x, construir un polinomio interpolante deHermite que aproxime a f(x) en x = 0.4
Solucion
Sea x0 = 0.3, x1 = 0.32, x2 = 0.35, se tiene entonces que f(x0) = 0.29552,f(x1) = 0.31457, f(x2) = 0.3429, ademas f
′(x) = cos x, luego
f′(x0) = 0.95534, f
′(x1) = 0.94924, f
′(x2) = 0.93937, como k = 0, 1, 2,
entonces n = 2, ası que el polinomio de Hermite es H2n+1(x) = H5(x) dadopor
H5(x) =2∑
i=0
f(xi)H2,i(x) +2∑
i=0
f′(xi)H2,i(x),
= f(x0)H2,0(x) + f(x1)H2,1(x) + f(x2)H2,2(x)
+f′(x0)H2,0(x) + f
′(x1)H2,1(x) + f
′(x2)H2,2(x),
pero sabemos que
H2,i(x) = [1− 2(x− xi)L′2,i(x)]L2
2,i(x)
4.4. POLINOMIOS DE HERMITE

122 J Velasquez Zapateiro/ V. Obeso Fernandez
yH2,i(x) = (x− xi)L
22,i(x),
i = 0, 1, 2 por lo tanto debemos calcular H2,0(x), H2,1(x), H2,2(x)
ası como,H2,0(x), H2,1(x), H2,2(x).
Para esto
L2,0(x) =(x− x1)(x− x2)
(x0 − x1)(x0 − x2)=
(x− 0.32)(x− 0.35)
(0.3− 0.32)(0.3− 0.35)=
(x− 825
)(x− 720
)1
1000
,
o sea que
L2,0(x) = 1000(x− 8
25
)(x− 7
20
)= 1000x2 − 670x + 112,
L2,1(x) =(x− x0)(x− x2)
(x1 − x0)(x1 − x2)=
(x− 0.3)(x− 0.35)
(0.32− 0.3)(0.32− 0.35)=
(x− 310
)(x− 720
)
− 35000
,
luego
L2,1(x) = −5000
3
(x− 3
10
)(x− 7
20
)= −5000
3x2 +
3250
3x− 175
y
L2,2(x) =(x− x0)(x− x1)
(x2 − x0)(x2 − x1)=
(x− 0.3)(x− 0.32)
(0.35− 0.3)(0.35− 0.32)=
(x− 310
)(x− 825
)3
2000
,
luego
L2,2(x) =2000
3
(x− 3
10
)(x− 8
25
)=
2000
3x2 − 1240
3x + 64,
de lo anterior se tiene que
L′2,0(x) = 2000x−670, L
′2,1(x) = −10000
3x+
3250
3, L
′2,2(x) =
4000
3x−1240
3,
por tanto,
L′2,0(x0) = −70, L
′2,1(x1) =
50
3L′2,2(x2) =
160
3
luego
H2,0(x) =[1−2
(x− 3
10
)·(−70)
](1000x2−670x+112)2 = (140x−41)(1000x2−670x+112)2,
CAPITULO 4. INTERPOLACION POLINOMIAL
Analisis Numerico. Notas de clase 123
H2,1(x) =[1− 2
(x− 8
25
)· 50
3
](− 5000
3x2 +
3250
3x− 175
)2
=(− 100
3x +
35
3
)(− 5000
3x2 +
3250
3x− 175
)2
,
y
H2,2(x) =[1− 2
(x− 7
20
)· 160
3
](2000
3x2 − 1240
3x + 64
)2
=(− 320
3x +
115
3
)(2000
3x2 − 1240
3x + 64
)2
.
Ahora
H2,0(x) =(x− 3
10
)(1000x2 − 670x + 112
)2
,
H2,1(x) =(x− 8
25
)(− 5000
3x2 +
3250
3x− 175
)2
,
y
H2,2(x) =(x− 7
20
)(2000
3x2 − 1240
3x + 64
)2
,
luego
H5(x) = 0.29552H2,0(x) + 0.31457H2,1(x) + 0.3429H2,2(x)
+0.95534H2,0(x) + 0.94924H2,1(x) + 0.93937H2,2(x).
Pero H2,0(0.34) =33
125, H2,1(0.34) =
4
27, H2,2(0.34) =
19845
3375, H2,0(0.34) =
1
625, H2,1(0.34) =
2
225y H2,2(0.34) = − 16
5625, entonces
H5(0.34) = 0.29552 ·( 33
125
)+ 0.31457 ·
( 4
27
)+ 0.3429 ·
(1984
3375
)
+0.95534 ·( 1
625
)+ 0.94924 ·
( 2
225
)− 0.93937 ·
( 16
5625
)
de modo que
H5(0.34) = 0.333489.
¥
Como se observa en el ejemplo anterior el calculo de los polinomiosde Hermite aun en el caso en que se tengan pocos puntos, es muy costosocomputacionalmente. Otro metodo para generar los polinomios de Hermite,
4.4. POLINOMIOS DE HERMITE

124 J Velasquez Zapateiro/ V. Obeso Fernandez
es utilizando las diferencia divididas interpolantes de Newton, usadas paraobtener dichos polinomios, que como hemos comentado estan dados por
Pn = f [x0] +n∑
i=1
f [x0, x1, ..., xi](x− x0)(x− x1)...(x− xi).
Supongamos se tiene x0, x1, . . . , xn, xi 6= xj, f(xi) y f′(xi), i = 0, 1, 2, . . . , n,
sea z2i = z2i+1 = xi, ∀i = 0, 1, 2, . . . , n, con estos nuevos puntos se construyela tabla de diferencias divididas. Pero como z2i = z2i+1, no se puede tenerf [z2i, z2i+1] en este caso se toma f [z2i, z2i+1] = f
′(xi), para i = 0, 1, 2, . . . , n,
el polinomio de Hermite es entonces
H2n+1(x) = f [x0] +2n+1∑i=1
f [z0, z1, ..., zn](x− z0)(x− z1)...(x− zi−1).
Ejemplo 4.4.2. Sea f(x) = sen x, construir un polinomio interpolante deHermite que aproxime a f(x) en x = 0.34
Solucion
Como antes sea x0 = 0.3, x1 = 0.32, x2 = 0.35, se tiene entonces quef(x0) = 0.29552, f(x1) = 0.31457, f(x2) = 0.3429, ademas f
′(x) = cos x,
luego f′(x0) = 0.95534, f
′(x1) = 0.94924, f
′(x2) = 0.93937, como k = 0, 1, 2,
la tabla de diferencia divididas es entonces
z0 0.3 0.29552z1 0.3 0.29552 0.95534z2 0.32 0.31457 0.9525 -0.142z3 0.32 0.31457 0.94924 -0.163 -1.05z4 0.35 0.3429 0.94433 -0.16367 -0.0134 20.732z5 0.35 0.3429 0.93937 -0.16533 -0.05533 -0.7986 398.668
TABLA 20
Ası que,
H2n+1(x) = 0.29552+0.95534(x− 3
10
)−0.142
(x− 3
10
)2
−1.05(x− 3
10
)2(x− 8
25
)
+20.732(x− 3
10
)2(x− 8
25
)2
+ 398.668(x− 3
10
)2(x− 8
25
)2(x− 7
20
),
CAPITULO 4. INTERPOLACION POLINOMIAL

Analisis Numerico. Notas de clase 125
luego
H2n+1
(17
50
)= H2n+1(0.34) = 0.29552+0.95534
(17
50− 3
10
)−0.142
(17
50− 3
10
)2
−1.05(17
50− 3
10
)2(17
50− 8
25
)+ 20.732
(17
50− 3
10
)2(17
50− 8
25
)2
+398.668(17
50− 3
10
)2(17
50− 8
25
)2(17
50− 7
20
)= 0.333489,
que coincide con la aproximacion obtenida con anterioridad. ¥
4.5. Aproximacion de Pade
Es posible aproximar una funcion f(x) por un polinomio racional, esto es, sise tiene
Pn(x) = p0 + p1x + p2x2 + p3x
3 + · · ·+ pnxn
yRm(x) = 1 + q1x + q2x
2 + q3x3 + · · ·+ qmxm
se desea encontrar un polinomio cociente
Qn,m(x) =Pn(x)
Rm(x),
que aproxime a la funcion f(x).
Observese que el primer sumando de Rm(x) lo hemos tomado igual auno, lo cual es posible ya que como q0 debe ser distinto de cero, siemprees posible dividir numerador y denominador por q0 teniendo siempre a unocomo primer sumando de Rm(x).
El polinomio Qn,m(x), se toma de tal forma que f y sus derivadashasta de orden n + m coincidan en x = 0.
Supongamos f(x) es analıtica en x = 0 y que tiene como serie deMacLaurin
f(x) = a0 + a1x + a2x2 + a3x
3 + · · ·+ akxk + . . .
y seaRm(x)f(x)− Pn(x) = C(x),
4.5. APROXIMACION DE PADE

126 J Velasquez Zapateiro/ V. Obeso Fernandez
o sea
( ∞∑j=0
ajxj)( m∑
j=0
qjxj)−
n∑j=0
pjxj =
( ∞∑j=n+m+1
cjxj), q0 = 1.
Al igualar a cero los coeficientes de la potencias iguales xk,k = 1, 2, 3, . . . , n + m se obtienen n + m + 1 ecuaciones lineales convariables pi, i = 0, 1, 2, 3, . . . , n y qj, j = 1, 2, 3, . . . , m.
El proceso anterior se conoce como el metodo de aproximacion dePade, el cual como hemos visto requiere que f(x) y sus derivadas seancontinuas en x = 0.
Ejemplo 4.5.1. Determine la aproximacion de Pade Q3,2 de f(x) = ln(1 +x).
Solucion
Como el desarrollo de MacLaurin de f(x) = ln(1 + x) es
f(x) = x− x2
2+
x3
3− x4
4+
x5
5− . . .
el cual se puede escribir como
f(x) = x(1− x
2+
x2
3− x3
4+
x4
5− . . . ),
entonces se determina primero la aproximacion de Pade R2,2(x) para g(x) =f(x)
x, para esto sea
(1−x
2+
x2
3−x3
4+
x4
5−. . .
)(1+q1x+q2x
2)−p0−p1x−p2x2 = 0+0x+0x2+0x3
+0x4 + c5x5 + . . . ,
o sea que
(1− p0) +(q1 − 1
2− p1
)x +
(q2 − q1
2+
1
3− p2
)x2 +
(1
3q1 − 1
2q2 − 1
4
)x3
+(− 1
4q1 +
1
3q2 +
1
5
)x4 + · · · = 0 + 0x + 0x2 + 0x3 + 0x4 + c5x
5 + . . . ,
CAPITULO 4. INTERPOLACION POLINOMIAL

Analisis Numerico. Notas de clase 127
entonces se tiene que
1− p0 = 0,
q1 − 1
2− p1 = 0
q2 − q1
2+
1
3− p2 = 0
1
3q1 − 1
2q2 − 1
4= 0
−1
4q1 +
1
3q2 +
1
5= 0,
luego al resolver las dos ultimas ecuaciones se tiene que q1 =6
5y q2 =
3
10,
al reemplazar estos valores en las ecuaciones 2 y 3 anteriores se tiene que
p1 =7
10y p2 =
1
30, ademas p0 = 1 de la primera ecuacion, ası que
g(x) ≈1 +
7
10x +
1
30x2
1 +6
5x +
3
10x2
=
30 + 21x + x2
3010 + 12x + 3x2
10
=30 + 21x + x2
30 + 36x + 9x2,
de modo que
f(x) = ln(1 + x) ≈ Q3,2(x) =30x + 21x2 + x3
30 + 36x + 9x2
¥
Ejemplo 4.5.2. Determine la aproximacion de Pade Q5,4(x) de f(x) = sen xy evaluar sen 0.34 a partir de dicha aproximacion.
Solucion
Sabemos que la serie de MacLaurin para sen x es
sen x = x− x3
3!+
x5
5!− x7
7!+
x9
9!− . . . ,
4.5. APROXIMACION DE PADE

128 J Velasquez Zapateiro/ V. Obeso Fernandez
como x es un factor, entonces podrıamos obtener primero la aproximacion
de Pade de g(x) =sen x
x, o sea
g(x) = 1− x2
3!+
x4
5!− x6
7!+
x8
9!− . . . ,
pero observemos que la funcion g(x) solo contiene potencia pares de x, locual permite encontrar la aproximacion de Pade para
h(x) = g(x12 ) = 1− x
3!+
x2
5!− x3
7!+
x4
9!− . . .
y luego reemplazar a x por x2. Sea entonces
(1− x
6+
x2
120− x3
5040+
x4
362880− . . .
)(1 + q1x + q2x
2)− p0 − p1x− p2x2
= 0 + 0x + 0x2 + 0x3 + 0x4 + c5x5 + . . . ,
luego se tiene que1− p0 = 0,
q1 − 1
6− p1 = 0
1
120− q1
6+ q2 − p2 = 0
− 1
5040+
1
120q1 − 1
6q2 = 0
1
362880+
1
120q2 − 1
5040q1 = 0,
resolviendo las dos ultimas ecuaciones se tiene que q1 =91
2772y q2 =
5
11088,
luego entonces se tiene que p1 = − 371
2772y p2 =
551
166320ahora como p0 = 1
se tiene que el polinomio de aproximacion de Pade de h(x) es
S2,2(x) =1− 371
2772x +
551
166320x2
1 +91
2772x +
5
11088x2
=
166320− 22260x + 551x2
16632011088 + 364x + 5x2
11088
,
o sea que
S2,2(x) =166320− 22260x + 551x2
15(11088 + 364x + 5x2),
CAPITULO 4. INTERPOLACION POLINOMIAL

Analisis Numerico. Notas de clase 129
luego si reemplazamos a x por x2 se tiene que
sen x
x≈ 166320− 22260x2 + 551x4
15(11088 + 364x2 + 5x4),
de modo que
sen x ≈ Q5,4(x) =166320x− 22260x3 + 551x5
15(11088 + 364x2 + 5x4).
Observamos que
sen 0.34 ≈ Q5,4(0.34) =166320× 0.34− 22260× (0.34)3 + 551× (0.34)5
15(11088 + 364× (0.34)2 + 5× (0.34)4)
=55676.39645
166952.1783= 0.333487
que coincide con la aproximacion obtenida usando los polinomios de Hermite.¥
4.6. Interpolacion a Trozos
En un polinomio interpolador de grado n es posible tener n−1 extremos rela-tivos, lo cual trae como consecuencia que tenga muchas oscilaciones o fluc-tuaciones al pasar por los puntos dados, una alternativa para evitar dichasfluctuaciones es generar polinomios Sk(x) que solo interpolen dos nodos con-secutivos y luego unirlos en sus extremos, el conjunto Sk(x) forman unacurva polinomial a trozos o spline que notaremos S(x)
(x0, y0)
(x1, y1)
(x2, y2)
(x3, y3)(xk, yk)
(xk+1, yk+1)
(xn−1, yn−1)
(xn, yn)
x0 x1 x3x2 xk xk+1 xn
Figura 4.2
4.6. INTERPOLACION A TROZOS

130 J Velasquez Zapateiro/ V. Obeso Fernandez
(x0, y0)
(x1, y1)
(x2, y2)
(x3, y3)(xk, yk)
(xk+1, yk+1)
(xn−1, yn−1)
(xn, yn)
x0 x1 x3x2 xk xk+1 xn
Figura 4.3
4.6.1. Interpolacion Lineal a Trozos
Sean (x0, y0), (x1, y1), (x2, y2),. . . ,(xk, yk), (xk+1, yk+1), . . . ,(xn, yn), lospuntos por los cuales debe pasar el polinomio interpolador, el polinomio massimple que se puede construir es el polinomio de grado uno, el cual produceuna linea poligonal.Fig(4.3)
Por los polinomios interpoladores de Lagrange podemos determinarcada uno de los segmentos que forman esta linea poligonal, si Sk(x) es elq-esimo segmento que une los puntos (xk, yk), (xk+1, yk+1) se tiene entoncesque
Sk(x) = ykx− xk+1
xk − xk+1
+ yk+1x− xk
xk − xk+1
,
o tambien
Sk(x) = yk + dk(x− xk), dk =yk+1 − yk
xk+1 − xk
CAPITULO 4. INTERPOLACION POLINOMIAL

Analisis Numerico. Notas de clase 131
que es la ecuacion de la recta que pasa por los puntos dados, luego entonces,
S(x) =
y0 + d0(x− x0), x ∈ [x0, x1]y1 + d1(x− x1), x ∈ [x1, x2]
.
.
.yk + dk(x− xk), x ∈ [xk, xk+1]
.
.
.yn−1 + dn−1(x− xn−1), x ∈ [xn−1, xn]
4.6.2. Interpolacion Cubica o Cercha Cubica
Es posible construir una funcion cubica Sk(x) en cada intervalo [xk, xk+1],tal que la curva a trozos y = S(x) sea dos veces diferenciable y S
′′(x) sea
continua en [x0, xn] , lo primero implica que y = f(x) no tiene esquinas y losegundo que S(x) tiene un radio de curvatura definido.
Definicion 4.6.1. Sea P = x0, x1, x2, . . . , xn−1, xn una particion de elintervalo [x0, xn], S(x) es un interpolador cubico o cercha cubica de f(x) siexisten n polinomios cubicos Sk(x) tales que
1. S(x) = ak + bk(x− xk) + ck(x− xk)2 + dk(x− xk)
3
2. S(xk) = f(xk) k = 0, 1, 2, . . . , n
3. Sk(xk+1) = Sk+1(xk+1) k = 0, 1, 2, . . . , n− 2
4. S′k(xk+1) = S
′k+1(xk+1) k = 0, 1, 2, . . . , n− 2
5. S′′k (xk+1) = S
′′k+1(xk+1) k = 0, 1, 2, . . . , n− 2
Las condiciones dadas en la definicion anterior se pueden utilizar para cons-truir cerchas cubicas, en efecto como
Sk(x) = ak + bk(x− xk) + ck(x− xk)2 + dk(x− xk)
3
y yk = f(xk) = Sk(xk) = ak, entonces, Sk+1(xk+1) = ak+1 = yk+1 y por lacondicion 3 de la definicion Sk+1(xk+1) = Sk(xk+1), entonces
yk+1 = ak + bk(xk+1 − xk) + ck(xk+1 − xk)2 + dk(xk+1 − xk)
3,
4.6. INTERPOLACION A TROZOS

132 J Velasquez Zapateiro/ V. Obeso Fernandez
sea hk = xk+1 − xk, entonces,
yk+1 = ak + bkhk + ckh2k + dkh
3k (4.1)
para determinar bk sea bn = S′(xn), pero
S′k(x) = bk + 2ck(x− xk) + 3dk(x− xk)
2,
entonces S′k(xk) = bk, k = 0, 1, 2, . . . , n− 1, luego por la condicion 4
bk+1 = S′k+1(xk+1) = S
′k(xk+1) = bk + 2ckhk + 3dkh
2k (4.2)
y S′′k (x) = 2ck + 6dk(x− xk), luego si tomamos λk = S
′′k (xk) = 2ck, por 5 de
la definicion se tiene que,
2ck+1 = S′′k+1(xk+1) = S
′′k (xk+1) = 2ck + 6dkhk.
Pero entonces dk =ck+1 − ck
3hk
y al reemplazar en 4.1y 4.2 tenemos que
yk+1 = yk + bkhk + ckh2k +
ck+1 − ck
3hk
h3k = yk + bkhk +
(2ck + ck+1)
3h2
k (4.3)
y
bk+1 = bk + 2ckhk +3h2
k(ck+1 − ck)
3hk
= bk + hk(ck + ck+1). (4.4)
De 4.3 se tiene que
bk =yk+1 − yk
hk
− hk
3(2ck + ck+1) (4.5)
reduciendo el ındice en una unidad se tiene que
bk−1 =yk − yk−1
hk−1
− hk−1
3(2ck−1 + ck) (4.6)
y comobk = bk−1 + hk−1(ck−1 + ck) (4.7)
la cual es obtenida al reducir el orden en 4.4, reemplazando 4.5 y 4.6 en 4.7tenemos que
yk+1 − yk
hk
− hk
3(2ck + ck+1) =
yk − yk−1
hk−1
− hk−1
3(2ck−1 + ck)+hk−1(ck−1 + ck),
luego
3yk+1 − yk
hk
−2hkck−hkck+1 = 3yk − yk−1
hk−1
−2hk−1ck−1−hk−1ck+3hk−1(ck−1+ck),
CAPITULO 4. INTERPOLACION POLINOMIAL

Analisis Numerico. Notas de clase 133
de modo que
3yk+1 − yk
hk
−3yk − yk−1
hk−1
= 2hkck+hkck+1−2hk−1ck−1−hk−1ck+3hk−1ck−1+3hk−1ck,
o sea que
3yk+1 − yk
hk
− 3yk − yk−1
hk−1
= hk−1ck−1 + 2hk−1ck + 2hkck + hkck+1,
sea βk =yk+1 − yk
hk
, entonces
3βk − 3βk−1 = hk−1ck−1 + 2(hk−1 + hk)ck + hkck+1,
pero como λk = 2ck, entonces ck =λk
2, ası que
3(βk − βk−1) = hk−1λk−1
2+ 2(hk−1 + hk)
λk
2+ hk
λk+1
2,
de modo que,
6(βk − βk−1) = hk−1λk−1 + 2(hk−1 + hk)λk + hkλk+1,
si hacemos vk = 6(βk − βk−1) se tiene que
hk−1λk−1 + 2(hk−1 + hk)λk + hkλk+1 = vk (4.8)
k = 1, 2, 3, . . . , n − 1 que representa un sistema de n− 1 ecuaciones linealescon n + 1 variables λ0, λ1, λ2, . . . , λn, observemos que la primera ecuacion es
λ0h0 + 2(h0 + h1)λ1 + λ2h1 = v1
y la ultima es
hn−2λn−2 + 2(hn−2 + hn−1)λn−1 + λnhn−1 = vn−1
ahora si fijamos valores para λ0 y para λn se tiene entonces que la primera yultima ecuacion se transforman en
2(h0 + h1)λ1 + λ2h1 = v1 − λ0h0
yhn−2λn−2 + 2(hn−2 + hn−1)λn−1 = vn−1 − λnhn−1
las cuales junto con el sistema
λk−1hk−1 + 2(hk−1 + hk)λk + λk+1hk = vk, k = 2, 3, . . . n− 2
forman un sistema de n− 1 ecuaciones lineales con n− 1 variables.
4.6. INTERPOLACION A TROZOS
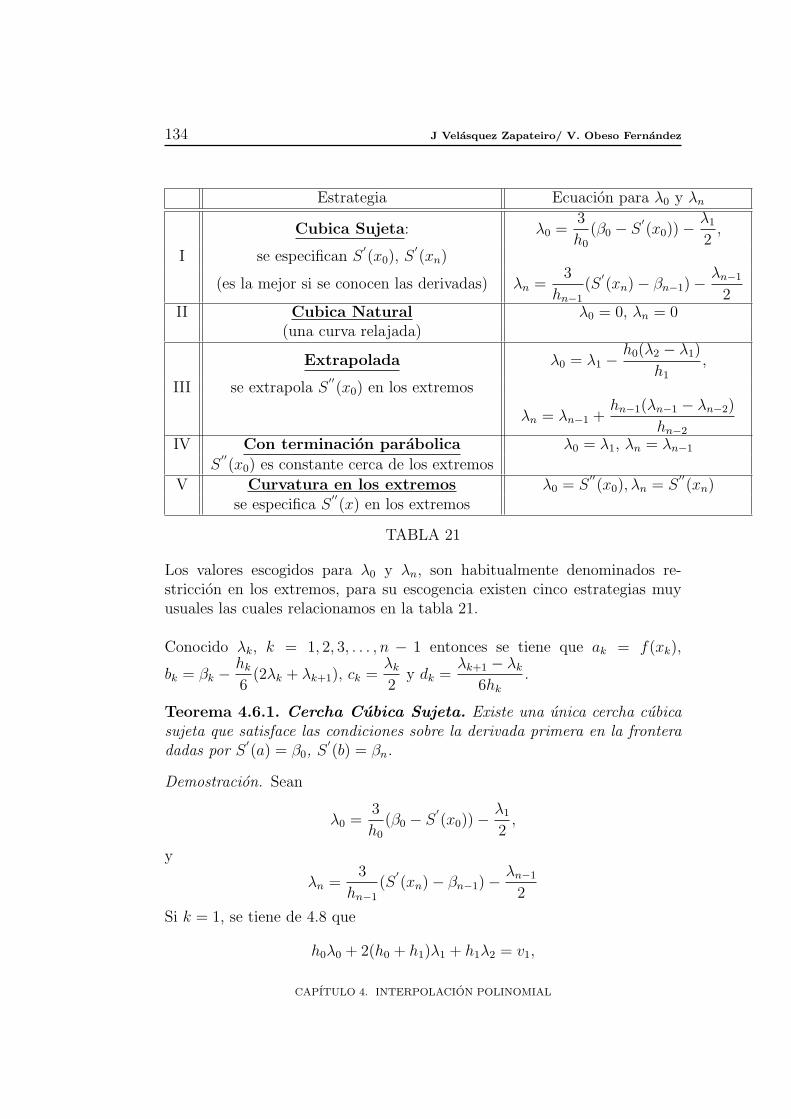
134 J Velasquez Zapateiro/ V. Obeso Fernandez
Estrategia Ecuacion para λ0 y λn
Cubica Sujeta: λ0 =3
h0
(β0 − S′(x0))− λ1
2,
I se especifican S′(x0), S
′(xn)
(es la mejor si se conocen las derivadas) λn =3
hn−1
(S′(xn)− βn−1)− λn−1
2II Cubica Natural λ0 = 0, λn = 0
(una curva relajada)
Extrapolada λ0 = λ1 − h0(λ2 − λ1)
h1
,
III se extrapola S′′(x0) en los extremos
λn = λn−1 +hn−1(λn−1 − λn−2)
hn−2
IV Con terminacion parabolica λ0 = λ1, λn = λn−1
S′′(x0) es constante cerca de los extremos
V Curvatura en los extremos λ0 = S′′(x0), λn = S
′′(xn)
se especifica S′′(x) en los extremos
TABLA 21
Los valores escogidos para λ0 y λn, son habitualmente denominados re-striccion en los extremos, para su escogencia existen cinco estrategias muyusuales las cuales relacionamos en la tabla 21.
Conocido λk, k = 1, 2, 3, . . . , n − 1 entonces se tiene que ak = f(xk),
bk = βk − hk
6(2λk + λk+1), ck =
λk
2y dk =
λk+1 − λk
6hk
.
Teorema 4.6.1. Cercha Cubica Sujeta. Existe una unica cercha cubicasujeta que satisface las condiciones sobre la derivada primera en la fronteradadas por S
′(a) = β0, S
′(b) = βn.
Demostracion. Sean
λ0 =3
h0
(β0 − S′(x0))− λ1
2,
y
λn =3
hn−1
(S′(xn)− βn−1)− λn−1
2
Si k = 1, se tiene de 4.8 que
h0λ0 + 2(h0 + h1)λ1 + h1λ2 = v1,
CAPITULO 4. INTERPOLACION POLINOMIAL

Analisis Numerico. Notas de clase 135
es decir
h0
[ 3
h0
(β0 − S′(x0))− λ1
2
]+ 2(h0 + h1)λ1 + h1λ2 = v1,
luego
2(h0 + h1)λ1 + h1λ2 = v1 − h0
[ 3
h0
(β0 − S′(x0))− λ1
2
],
o sea que
2(h0 + h1)λ1 + h1λ2 = v1 − 3(β0 − S′(x0)) +
h0λ1
2,
luego
λ1
(2h0 + 2h1 − h0
2
)+ h1λ2 = v1 − 3(β0 − S
′(x0))
y por tanto(3
2h0 + 2h1
)λ1 + h1λ2 = v1 − 3(β0 − S
′(x0))
que es la primera ecuacion del sistema, pero si k = n− 1, entonces
hn−2λn−2 + 2(hn−2 + hn−1)λn−1 + hn−1λn = vn−1,
luego
hn−2λn−2 + 2(hn−2 + hn−1)λn−1 = vn−1−hn−1
[ 3
hn−1
(S′(xn)−βn−1)− λn−1
2
],
ası que
hn−2λn−2 + 2(hn−2 + hn−1)λn−1 = vn−1 − 3(S′(xn)− βn−1) +
hn−1λn−1
2,
luego
hn−2λn−2 +(2hn−2 +
3
2hn−1
)λn−1 = vn−1 − 3(S
′(xn)− βn−1),
que es la ultima ecuacion del sistema, las dos ecuaciones anteriores junto con
hk−1λk−1 + 2(hk−1 + hk)λk + hhλk+1 = vk k = 2, 3, 4, . . . , n− 2,
forman un sistema lineal de n− 1 ecuaciones con n− 1 variables de la formaAX = b cuya matriz de coeficientes es
A =
32h0 + 2h1 h1 0 0 . . . 0 0
h1 2(h1 + h2) h2 0 . . . 0 00 h2 2(h2 + h3) h3 . . . 0 0...
......
. . ....
...0 0 0 . . . hn−2 2hn−2 + 3
2hn−1
,
4.6. INTERPOLACION A TROZOS

136 J Velasquez Zapateiro/ V. Obeso Fernandez
X =
λ1
λ2
λ3
.
.λn−1
b =
v1 − 3(β0 − S′(x0))
v2
v3
.
.vn−1 − 3(S
′(xn)− βn−1)
.
En el sistema anterior podemos observar que la matriz A es tridiagonal es-trictamente diagonal dominante lo cual implica que el sistema tiene solucionunica y el teorema queda probado.
Ejemplo 4.6.1. Determinar la cercha cubica sujeta que pasa por los pun-tos (−3, 2), (−2, 0), (1, 3), (4, 1) y verifica las condiciones sobre la primeraderivada en los extremos dados por S
′(−3) = −1, S
′(4) = 1.
Solucion
Sabemos que ak = f(xk), bk = βk − hk
6(2λk + λk+1), ck =
λk
2y
dk =λk+1 − λk
6hk
, k = 0, 1, 2, 3, como es cercha cubica sujeta se toma
λ0 =3
h0
(β0 − S′(x0))− λ1
2y λ3 =
3
h2
(S′(x3)− β2)− λ2
2, faltarıa determinar
λ1 y λ2 para esto se resuelve el sistema
(3
2h0 + 2h1
)λ1 + h1λ2 = v1 − 3(β0 − S
′(x0))
h1λ1 + (2h1 +3
2h2)λ2 = v2 − 3(S
′(x3)− β2),
recordemos que hk = xk+1 − xk, βk = yk+1−yk
hk, vk = 6(βk − βk−1), ası que
h0 = x1 − x0 = 1, h1 = x2 − x1 = 3, h2 = x2 − x1 = 3,
β0 =y1 − y0
h0
= −2, β1 =y2 − y1
h1
= 1, β2 =y3 − y2
h2
=−2
3,
v1 = 6(β1 − β0) = 18, v2 = 6(β2 − β1) = −10.
El sistema a resolver es entonces
15
2λ1 + 3λ2 = 21
3λ1 +21
2λ2 = −15
CAPITULO 4. INTERPOLACION POLINOMIAL
Analisis Numerico. Notas de clase 137
cuya solucion es λ1 =118
31y λ2 = −78
31, ademas λ0 = 3
1(−2+1)− 118
31
2= −152
31
y λ3 = 33(1 + 2
3) +
7831
2= 272
93, luego
a0 = f(x0) = 2,
b0 = β0 − h0
6(2λ0 + λ1) = −93
93= −1,
c0 =λ0
2= −76
31y
d0 =λ1 − λ0
6h0
=45
31,
luego
S0(x) = 2− (x + 3)− 76
31(x + 3)2 +
45
31(x + 3)3 − 3 ≤ x ≤ −2.
Ademas se tiene tambien que
a1 = f(x1) = 0,
b1 = β1 − h1
6(2λ1 + λ2) = −48
31,
c1 =λ1
2=
59
31y
d1 =λ2 − λ1
6h1
= − 98
279,
luego
S1(x) = −48
31(x + 2) +
59
31(x + 2)2 − 98
279(x + 2)3 − 2 ≤ x ≤ 1
pero tambiena2 = f(x2) = 3,
b2 = β2 − h2
6(2λ2 + λ3) =
12
31,
c2 =λ2
2= −39
31y
d2 =λ3 − λ2
6h2
=253
837,
4.6. INTERPOLACION A TROZOS

138 J Velasquez Zapateiro/ V. Obeso Fernandez
luego
S2(x) = 3 +12
31(x− 1)− 39
31(x− 1)2 +
253
837(x− 1)3 1 ≤ x ≤ 4,
de modo que la cercha cubica sujeta es en este ejemplo
S(x) =
S0(x) = 2− (x + 3)− 76
31(x + 3)2 +
45
31(x + 3)3 − 3 ≤ x ≤ −2
S1(x) = −48
31(x + 2) +
59
31(x + 2)2 − 98
279(x + 2)3 − 2 ≤ x ≤ 1
S2(x) = 3 +12
31(x− 1)− 39
31(x− 1)2 +
253
837(x− 1)3 1 ≤ x ≤ 4
¥
Teorema 4.6.2. Cercha Cubica Natural. Existe una unica cercha cubicanatural que satisface las condiciones sobre la derivada primera en la fronteradadas por S
′(x0) = 0, S
′(xn) = 0.
Demostracion. Si λ0 = 0 y λn = 0, la primera y la ultima ecuacion estandadas por
2(h0 + h1)λ1 + h1λ2 = v1
yhn−2λn−2 + 2(hn−2 + hn−1)λn−1 = vn−1,
el sistema a resolver es entonces
2(h0 + h1)λ1 + h1λ2 = v1
hk−1λk−1 + 2(hk−1 + hk)λk + hhλk+1 = vk k = 2, 3, 4, . . . , n− 2,
hn−2λn−2 + 2(hn−2 + hn−1)λn−1 = vn−1,
que es de la forma AX = b con A como matriz de coeficientes dada por
A =
2(h0 + h1) h1 0 0 . . . 0 0h1 2(h1 + h2) h2 0 . . . 0 00 h2 2(h2 + h3) h3 . . . 0 0...
......
. . ....
...0 0 0 . . . hn−2 2(hn−2 + hn−1)
,
CAPITULO 4. INTERPOLACION POLINOMIAL

Analisis Numerico. Notas de clase 139
X =
λ1
λ2
λ3
.
.λn−1
b =
v1
v2
v3
.
.vn−1
.
La matriz A puede observarse es tridiagonal con diagonal estrictamente domi-nante, por tanto el sistema tiene solucion unica y el teorema queda probado.
Ejemplo 4.6.2. Determinar la cercha cubica natural que pasa por los pun-tos (−3, 2), (−2, 0), (1, 3), (4, 1) y verifica las condiciones sobre la primeraderivada en los extremos dados por S
′(−3) = 0, S
′(4) = 0.
Solucion
Igual que para el ejemplo anterior, sabemos que ak = f(xk),
bk = βk − hk
6(2λk + λk+1), ck =
λk
2y dk =
λk+1 − λk
6hk
, k = 0, 1, 2, 3,
como es cercha natural se toma λ0 = 0 y λ3 = 0, falta entonces determinarλ1 y λ2 para esto se resuelve el sistema
2(h0 + h1)λ1 + h1λ1 = v1
h1λ1 + 2(h1 + h2)λ2 = v2,
recordemos que hk = xk+1 − xk, βk = yk+1−yk
hk, vk = 6(βk − βk−1), ası que
h0 = x1 − x0 = 1, h1 = x2 − x1 = 3, h2 = x2 − x1 = 3,
β0 =y1 − y0
h0
= −2, β1 =y2 − y1
h1
= 1,
β2 =y3 − y2
h2
=−2
3,
v1 = 6(β1 − β0) = 18, v2 = 6(β2 − β1) = −10.
El sistema a resolver es entonces
8λ1 + 3λ2 = 18
3λ1 + 12λ2 = −10
cuya solucion es λ1 =82
29y λ2 = −134
87, se tiene entonces que λ0 = 0,
λ1 =82
29, λ2 = −134
87, λ3 = 0.
4.6. INTERPOLACION A TROZOS

140 J Velasquez Zapateiro/ V. Obeso Fernandez
Se tiene entonces quea0 = f(x0) = 2,
b0 = β0 − h0
6(2λ0 + λ1) = −215
87,
c0 =λ0
2= 0
y
d0 =λ1 − λ0
6h0
=41
87,
luego
S0(x) = 2− 215
87(x + 3) +
41
87(x + 3)2 +
41
87(x + 3)3 − 3 ≤ x ≤ −2.
Ahoraa1 = f(x1) = 0,
b1 = β1 − h1
6(2λ1 + λ2) = −92
87,
c1 =λ1
2=
41
29y
d1 =λ2 − λ1
6h1
= −190
783,
luego
S1(x) = −92
87(x + 2) +
41
29(x + 2)2 − 190
783(x + 2)3 − 2 ≤ x ≤ 1
ya2 = f(x2) = 3,
b2 = β2 − h2
6(2λ2 + λ3) =
76
87,
c2 =λ2
2= −67
87y
d2 =λ3 − λ2
6h2
=67
783,
luego
S2(x) = 3 +76
87(x− 1)− 67
87(x− 1)2 +
67
783(x− 1)3 1 ≤ x ≤ 4,
CAPITULO 4. INTERPOLACION POLINOMIAL

Analisis Numerico. Notas de clase 141
de modo que la cercha cubica natural es
S(x) =
S0(x) = 2− 215
87(x + 3) +
41
87(x + 3)2 +
41
87(x + 3)3 − 3 ≤ x ≤ −2
S1(x) = −92
87(x + 2) +
41
29(x + 2)2 − 190
783(x + 2)3 − 2 ≤ x ≤ 1
S2(x) = 3 +76
87(x− 1)− 67
87(x− 1)2 +
67
783(x− 1)3 1 ≤ x ≤ 4
¥
Teorema 4.6.3. Cercha Cubica Extrapolada. Existe una unica cerchacubica que usa extrapolacion desde los nodos x1 y x2 y tambien extrapolaciondesde los nodos xn−1 y xn−2 con el fin de determinar S
′′(xn).
Demostracion. Como en este caso se tiene que
λ0 = λ1 − h0(λ2 − λ1)
h1
y
λn = λn−1 +hn−1(λn−1 − λn−2)
hn−2
,
la primera esta dada por
h0λ0 + 2(h0 + h1)λ1 + h1λ2 = v1
o sea
h0
[λ1 − h0(λ2 − λ1)
h1
]+ 2(h0 + h1)λ1 + h1λ2 = v1,
por tanto,
h0
(λ1 − h0
h1
λ2 +h0
h1
λ1
)+ 2(h0 + h1)λ1 + h1λ2 = v1,
de modo que
h0λ1 +h2
0
h1
λ1 + 2(h0 + h1)λ1 − h20
h1
λ2 + h1λ2 = v1,
ası que (3h0 + 2h1 +
h20
h1
)λ1 + (h1 − h2
0
h1
)λ2 = v1,
4.6. INTERPOLACION A TROZOS

142 J Velasquez Zapateiro/ V. Obeso Fernandez
ahora la ultima ecuacion es
hn−2λn−2 +2(hn−2 +hn−1)λn−1 +hn−1
(λn−1 +
hn−1
hn−2
λn−1− hn−1
hn−2
λn−2
)= vn−1,
o sea que
(hn−2 −
h2n−1
hn−2
)λn−2 +
(2hn−2 + 2hn−1 + hn−1 +
h2n−1
hn−2
)λn−1 = vn−1,
luego
(hn−2 −
h2n−1
hn−2
)λn−2 +
(2hn−2 + 3hn−1 +
h2n−1
hn−2
)λn−1 = vn−1.
El sistema a resolver es entonces(3h0 + 2h1 +
h20
h1
)λ1 +
(h1 − h2
0
h1
)λ2 = v1,
hk−1λk−1 + 2(hk−1 + hk)λk + hhλk+1 = vk k = 2, 3, 4, . . . , n− 2,(hn−2 −
h2n−1
hn−2
)λn−2 +
(2hn−2 + 3hn−1 +
h2n−1
hn−2
)λn−1 = vn−1.
que es de la forma AX = b con A como matriz de coeficientes dada por
A =
3h0 + 2h1 +h2
0
h1
h1 − h20
h1
. . . 0 0
h1 2(h1 + h2) . . . 0 00 h2 . . . 0 0...
. . ....
...
0 0 . . . hn−2 − h2n−1
hn−22hn−2 + 3hn−1 +
h2n−1
hn−2
,
X =
λ1
λ2
λ3
.
.λn−1
b =
v1
v2
v3
.
.vn−1
.
La matriz A puede observarse es tridiagonal con diagonal estrictamente domi-
nante, ya que h1 +h2
0
h1
> h1− h20
h1
, luego 3h0 + 2h1 +h2
0
h1
> h1− h20
h1
y 2hn−2 +
h2n−1
hn−2
> hn−2 −h2
n−1
hn−2
, luego, 2hn−2 + 3hn−1 +h2
n−1
hn−2> hn−2 − h2
n−1
hn−2ademas
2(hk−1 + hk) > hk−1 + hk, por tanto el sistema tiene solucion unica y elteorema queda probado.
CAPITULO 4. INTERPOLACION POLINOMIAL

Analisis Numerico. Notas de clase 143
Ejemplo 4.6.3. Determinar la cercha cubica extrapolada que pasa por lospuntos (−3, 2), (−2, 0), (1, 3) y (4, 1).
SolucionDe los ejemplos anteriores tenemos que
h0 = 1, h1 = 3, h2 = 3,
β0 = −2, β1 = 1,
β2 =−2
3,
v1 = 18, v2 = −10.
como es cercha cubica extrapolada el sistema es
(3h0 + 2h1 +h2
0
h1
)λ1 + (h1 − h20
h1
)λ2 = v1,
(h1 − h2
2
h1
)λ1 +
(2h1 + 3h2 +
h22
h1
)λ2 = v2,
o sea28
3λ1 +
8
5λ2 = 18
18λ2 = −10,
cuya solucion es λ1 =263
126y λ2 = −5
9, pero λ0 = λ1 − h0(λ2 − λ1)
h1
=187
63y
λ3 = λ2 +h2(λ2 − λ1)
h1
= −1069
126.
Se tiene entonces que
a0 = f(x0) = 2, b0 = −841
252,
c0 =187
126d0 = −37
52,
luego
S0(x) = 2− 841
252(x + 3) +
187
126(x + 3)2 − 37
252(x + 3)3 − 3 ≤ x ≤ −2.
Ahora
a1 = f(x1) = 0, b1 = −17
21,
4.6. INTERPOLACION A TROZOS

144 J Velasquez Zapateiro/ V. Obeso Fernandez
c1 =263
252d1 = − 37
252,
luego
S1(x) = −17
21(x + 2) +
263
252(x + 2)2 − 37
252(x + 2)3 − 2 ≤ x ≤ 1
y
a2 = f(x2) = 3, b2 =347
84,
c2 = − 5
18d2 = −37
84,
luego
S2(x) = 3 +347
84(x− 1)− 5
18(x− 1)2 − 37
84(x− 1)3 1 ≤ x ≤ 4,
de modo que la cercha extrapolada es
S(x) =
S0(x) = 2− 841252
(x + 3) + 187126
(x + 3)2 − 37252
(x + 3)3 − 3 ≤ x ≤ −2
S1(x) = −1721
(x + 2) + 263252
(x + 2)2 − 37252
(x + 2)3 − 2 ≤ x ≤ 1
S2(x) = 3 + 34784
(x− 1)− 518
(x− 1)2 − 3784
(x− 1)3 1 ≤ x ≤ 4
¥
Teorema 4.6.4. Cercha con Terminacion Parabolica. Existe unaunica cercha cubica con S
′′′(x) ≡ 0, en [a, b] y S
′′′(x) ≡ 0, en [xn−1, xn].
Demostracion. Como en este caso se tiene que
λ0 = λ1
yλn = λn−1,
como la primera ecuacion es
h0λ0 + 2(h0 + h1)λ1 + h1λ2 = v1
entoncesh0λ1 + 2(h0 + h1)λ1 + h1λ2 = v1,
CAPITULO 4. INTERPOLACION POLINOMIAL

Analisis Numerico. Notas de clase 145
por tanto,
(3h0 + 2h1)λ1 + h1λ2 = v1,
ahora la ultima ecuacion es
hn−2λn−2 + 2(hn−2 + hn−1)λn−1 + hn−1λn = vn−1,
pero entonces se tiene que
hn−2λn−2 + 2(hn−2 + hn−1)λn−1 + hn−1λn−1 = vn−1
o sea que
hn−2λn−2 + (2hn−2 + 3hn−1)λn−1 = vn−1
El sistema a resolver es entonces
(3h0 + 2h1)λ1 + h1λ2 = v1,
hk−1λk−1 + 2(hk−1 + hk)λk + hhλk+1 = vk k = 2, 3, 4, . . . , n− 2,
hn−2λn−2 + (2hn−2 + 3hn−1)λn−1 = vn−1.
que es de la forma AX = b con A como matriz de coeficientes dada por
A =
(3h0 + 2h1) h1 0 0 . . . 0 0h1 2(h1 + h2) h2 0 . . . 0 00 h2 2(h2 + h3) h3 . . . 0 0...
......
. . ....
...0 0 0 . . . hn−2 2hn−2 + 3hn−1
,
X =
λ1
λ2
λ3
.
.λn−1
b =
v1
v2
v3
.
.vn−1
.
La matriz A puede observarse es tridiagonal con diagonal estrictamente dom-inante, por tanto el sistema tiene solucion unica y el teorema queda proba-do.
Ejemplo 4.6.4. Determinar la cercha con terminacion parabolica dada enlos extremos que pasa por los puntos (−3, 2), (−2, 0), (1, 3) y (4, 1), quesatisface las condiciones S
′′(−3) = −1 y S
′′(4) = −2.
4.6. INTERPOLACION A TROZOS

146 J Velasquez Zapateiro/ V. Obeso Fernandez
Solucion
De los ejemplos anteriores tenemos que
h0 = 1, h1 = 3, h2 = 3,
β0 = −2, β1 = 1,
β2 =−2
3,
v1 = 18, v2 = −10.
como es cercha con terminacion parabolica λ0 = λ1 y λ2 = λ3, luego entoncesel sistema es
(3h0 + 2h1)λ1 + h1λ2 = v1 = 18,
h1λ1 + (2h1 + 3h2)λ2 = v2 = −10
o sea
9λ1 + 3λ2 = 18
3λ1 + 15λ2 = −10,
que tiene como solucion λ1 =50
21y λ2 = −8
7luego, λ0 = λ1 =
50
21y
λ2 = λ3 = −8
7, ademas recordemos que ak = f(xk), bk = βk− hk
6(2λk+λk+1),
ck =λk
2y dk =
λk+1 − λk
6hk
, k = 0, 1, 2, 3
Se tiene entonces que
a0 = f(x0) = 2, b0 = −67
21,
c0 =25
21d0 = 0,
luego
S0(x) = 2− 67
21(x + 3) +
25
21(x + 3)2 − 3 ≤ x ≤ −2
Ahora
a1 = f(x1) = 0, b1 = −17
21,
c1 =25
21d1 = − 37
189,
CAPITULO 4. INTERPOLACION POLINOMIAL

Analisis Numerico. Notas de clase 147
luego
S1(x) = −17
21(x + 2) +
25
21(x + 2)2 − 37
189(x + 2)3 − 2 ≤ x ≤ 1
y
a2 = f(x2) = 3, b2 =22
21,
c2 = −4
7d2 = 0,
luego
S2(x) = 3 +22
21(x− 1)− 4
7(x− 1)2 1 ≤ x ≤ 4,
de modo que la cercha con terminacion parabolica es
S(x) =
S0(x) = 2− 6721
(x + 3) + 2521
(x + 3)2 − 3 ≤ x ≤ −2
S1(x) = −1721
(x + 2) + 2521
(x + 2)2 − 37189
(x + 2)3 − 2 ≤ x ≤ 1
S2(x) = 3 + 2221
(x− 1)− 4
7(x− 1)2 1 ≤ x ≤ 4
¥
Teorema 4.6.5. Cercha con curvatura en los extremos. Existe unaunica cercha cubica que satisface las condiciones sobre la derivada segundaen los extremos con valores dados S
′′(a), y S
′′(b).
Demostracion. Como en este caso se tiene que
λ0 = S′′(x0)
yλn = S
′′(xn),
como la primera ecuacion es
h0λ0 + 2(h0 + h1)λ1 + h1λ2 = v1
entoncesh0S
′′(x0) + 2(h0 + h1)λ1 + h1λ2 = v1,
por tanto,2(h0 + h1)λ1 + h1λ2 = v1 − h0S
′′(x0),
4.6. INTERPOLACION A TROZOS

148 J Velasquez Zapateiro/ V. Obeso Fernandez
ahora la ultima ecuacion es
hn−2λn−2 + 2(hn−2 + hn−1)λn−1 + hn−1λn = vn−1,
o sea que
hn−2λn−2 + 2(hn−2 + hn−1)λn−1 = vn−1 − hn−1S′′(xn).
El sistema a resolver es entonces
2(h0 + h1)λ1 + h1λ2 = v1 − h0S′′(x0),
hk−1λk−1 + 2(hk−1 + hk)λk + hhλk+1 = vk k = 2, 3, 4, . . . , n− 2,
hn−2λn−2 + 2(hn−2 + hn−1)λn−1 = vn−1 − hn−1S′′(xn).
que tiene forma AX = b con A como matriz de coeficientes dada por
A =
2(h0 + h1) h1 0 0 . . . 0 0h1 2(h1 + h2) h2 0 . . . 0 00 h2 2(h2 + h3) h3 . . . 0 0...
......
. . ....
...0 0 0 . . . hn−2 2(hn−2 + hn−1)
,
X =
λ1
λ2
λ3
.
.λn−1
b =
v1
v2
v3
.
.vn−1
.
La matriz A puede observarse es tridiagonal con diagonal estrictamente domi-nante, por tanto el sistema tiene solucion unica y el teorema queda probado.
Ejemplo 4.6.5. Determinar la cercha con curvatura dada en los extremosque pasa por los puntos (−3, 2), (−2, 0), (1, 3) y (4, 1) que satisface las condi-ciones S
′′(−3) = −1 y S
′′(4) = 2.
Solucion
De los ejemplos anteriores tenemos que
h0 = 1, h1 = 3, h2 = 3,
CAPITULO 4. INTERPOLACION POLINOMIAL

Analisis Numerico. Notas de clase 149
β0 = −2, β1 = 1,
β2 =−2
3,
v1 = 18, v2 = −10.
como es cercha cubica con curvatura en los extremos el sistema es
2(h0 + h1)λ1 + h1λ2 = v1 − h0S′′(x0) = 18 + 1,
h1λ1 + 2(h1 + h2)λ2 = v2 − h2S′′(x3) = −10− 6
o sea8λ1 + 3λ2 = 19
3λ1 + 12λ2 = −16,
que tiene como solucion λ1 =92
29y λ2 = −185
87pero, λ0 = S
′′(−3) = −1 y
λ3 = S′′(1) = 2, ademas recordemos que ak = f(xk), bk = βk−hk
6(2λk+λk+1),
ck =λk
2y dk =
λk+1 − λk
6hk
, k = 0, 1, 2, 3
Se tiene entonces que
a0 = f(x0) = 2, b0 = −191
87,
c0 = −1
2d0 =
121
174,
luego
S0(x) = 2− 191
87(x + 3)− 1
2(x + 3)2 +
121
174(x + 3)3 − 3 ≤ x ≤ −2
Ahora
a1 = f(x1) = 0, b1 = −193
174,
c1 =46
29d1 = − 461
1566,
luego
S1(x) = −193
174(x + 2) +
46
29(x + 2)2 − 461
1566(x + 2)3 − 2 ≤ x ≤ 1
y
a2 = f(x2) = 3, b2 =40
87,
4.6. INTERPOLACION A TROZOS

150 J Velasquez Zapateiro/ V. Obeso Fernandez
c2 = −185
174d2 =
359
1566,
luego
S2(x) = 3 +40
87(x− 1)− 185
174(x− 1)2 − 359
1566(x− 1)3 1 ≤ x ≤ 4,
de modo que la cercha con curvatura en los extremos es
S(x) =
S0(x) = 2− 19187
(x + 3)− 12(x + 3)2 + 121
174(x + 3)3 − 3 ≤ x ≤ −2
S1(x) = −193
174(x + 2) +
46
29(x + 2)2 − 461
1566(x + 2)3 − 2 ≤ x ≤ 1
S2(x) = 3 +40
87(x− 1)− 185
174(x− 1)2 − 359
1566(x− 1)3 1 ≤ x ≤ 4
¥
4.7. Aproximacion con Polinomios
Trigonometricos
Definicion 4.7.1. Sea an una sucesion de numeros, entonces, la suma
a0 + a1 + a2 + · · ·+ an + · · · =∞∑i=0
ai
se llama serie infinita .
Definicion 4.7.2. Sea∞∑i=0
ai, una serie infinita, los numeros Sn =n∑
i=0
ai, se
definen como sumas parciales.
Definicion 4.7.3. Sea∞∑i=0
ai, una serie infinita, se dice que la serie converge,
si lımn→∞
Sn = S existe y en este caso S =∞∑i=0
ai
Nota: Si lımn→∞
Sn no existe se dice que la serie no converge.
Ejemplo
CAPITULO 4. INTERPOLACION POLINOMIAL

Analisis Numerico. Notas de clase 151
Probar que∞∑i=0
xi converge yn∑
i=0
xi =1
1− x, con |x| < 1.
Solucion
Se tiene queSn = 1 + x + x2 + x3 + x4 + · · ·+ xn,
luego,xSn = x + x2 + x3 + x4 + · · ·+ xn+1,
de modo queSn − xSn = 1− xn+1,
ası queSn(1− x) = 1− xn+1,
por tanto
Sn =1− xn+1
1− x=
1
1− x
(1− xn+1
)=
1
1− x− xn+1
1− x.
Pero si −1 < x < 1, entonces, xn+1 → 0, cuando, n →∞, de modo que
lımn→∞
xn+1
1− x= 0
y
lımn→∞
Sn =1
1− xEjemplo
Probar que∞∑i=1
1
n(n + 1)converge y encontrar la suma.
Solucion
Observemos que1
n(n + 1)=
1
n− 1
n + 1,
luego,
Sn =n∑
k=1
(1
k− 1
k + 1
)= 1− 1
n + 1,
por lo tantolım
n→∞Sn = 1 = S.
4.7. APROXIMACION CON POLINOMIOS TRIGONOMETRICOS
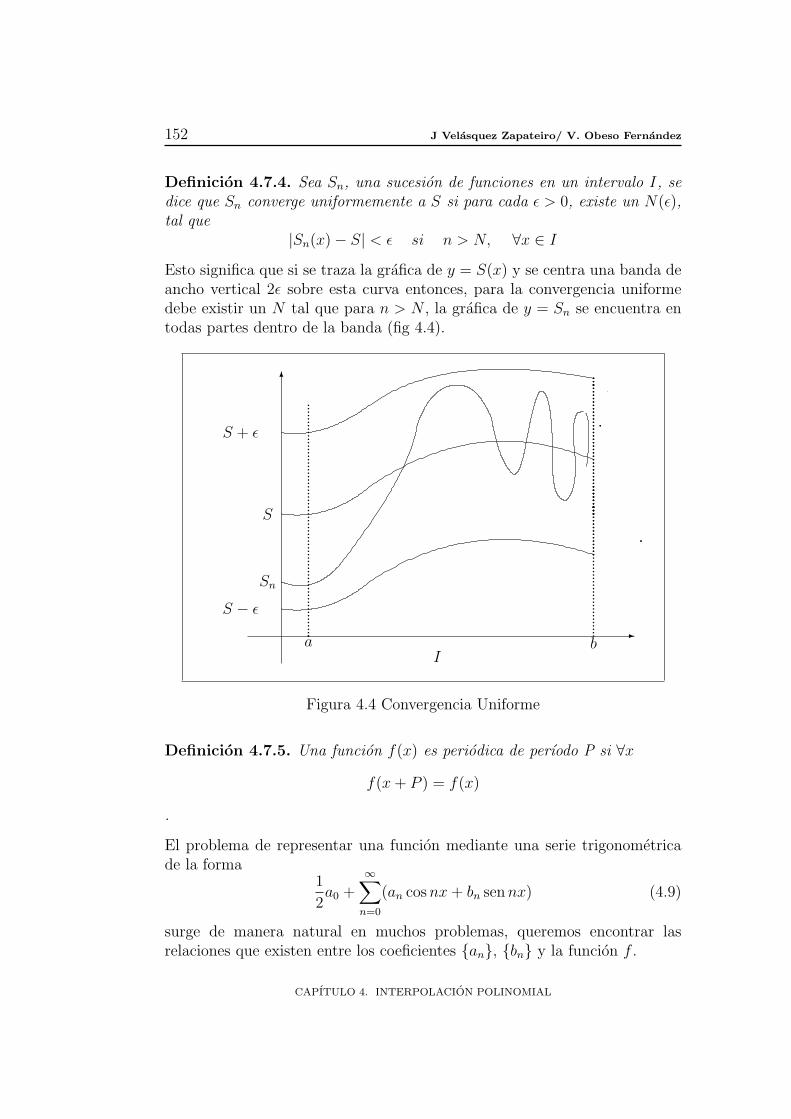
152 J Velasquez Zapateiro/ V. Obeso Fernandez
Definicion 4.7.4. Sea Sn, una sucesion de funciones en un intervalo I, sedice que Sn converge uniformemente a S si para cada ε > 0, existe un N(ε),tal que
|Sn(x)− S| < ε si n > N, ∀x ∈ I
Esto significa que si se traza la grafica de y = S(x) y se centra una banda deancho vertical 2ε sobre esta curva entonces, para la convergencia uniformedebe existir un N tal que para n > N , la grafica de y = Sn se encuentra entodas partes dentro de la banda (fig 4.4).
-
6 .......................................................
..............................................................................
S + ε
S − ε
S
Sn
.......................................................................
...............
a
....
...........
..
....
bI
Figura 4.4 Convergencia Uniforme
Definicion 4.7.5. Una funcion f(x) es periodica de perıodo P si ∀xf(x + P ) = f(x)
.
El problema de representar una funcion mediante una serie trigonometricade la forma
1
2a0 +
∞∑n=0
(an cos nx + bn sen nx) (4.9)
surge de manera natural en muchos problemas, queremos encontrar lasrelaciones que existen entre los coeficientes an, bn y la funcion f .
CAPITULO 4. INTERPOLACION POLINOMIAL

Analisis Numerico. Notas de clase 153
Para ello recordemos primero las siguientes formulas trigonometricasde gran utilidad
sen α cos β =sen(α + β)− sen(α− β)
2
sen α sen β =cos(α− β)− cos(α + β)
2
cos α cos β =cos(α + β) + cos(α− β)
2
teniendo en cuenta las relaciones anteriores se tiene que∫ π
−π
sen mx cos nxdx =1
2
∫ π
−π
sen(m + n)xdx− 1
2
∫ π
−π
sen(m− n)xdx,
luego∫ π
−π
sen mx cos nxdx = − 1
2(m + n)
(cos(m + n)π − cos(m + n)(−π)
)
+1
2(m− n)
(cos(m− n)π − cos(m− n)(−π)
)= 0 m 6= n.
Si m = n,∫ π
−π
sen nx cos nxdx =1
2
∫ π
−π
sen 2nxdx = − 1
4n(cos 2nπ − cos 2n(−π)) = 0,
luego, ∫ π
−π
sen nx cos mxdx = 0
para todo m, n.
Ahora si n 6= m∫ π
−π
cos nx cos mxdx =1
2
∫ π
−π
cos(m + n)xdx +1
2
∫ π
−π
cos(m− n)xdx,
luego∫ π
−π
cos nx cos mxdx =1
2(m + n)
(sen(m + n)π + sen(m + n)π
)
+1
2(m− n)
(sen(m− n)π + sen(m− n)π
)= 0,
4.7. APROXIMACION CON POLINOMIOS TRIGONOMETRICOS
154 J Velasquez Zapateiro/ V. Obeso Fernandez
pero si m = n > 0, entonces,∫ π
−π
cos nx cos mxdx =
∫ π
−π
cos2 nx =1
2n(2nπ) = π,
si m = n = 0, entonces,∫ π
−π
cos nx cos mxdx =
∫ π
−π
dx = π + π = 2π.
De la misma manera, si m 6= n∫ π
−π
sen mx sen nxdx =1
2
∫ π
−π
cos(m− n)xdx− 1
2
∫ π
−π
cos(m + n)xdx,
luego∫ π
−π
sen mx sen nxdx =1
2(m− n)
(sen(m− n)π − sen(m− n)(−π)
)
− 1
2(m + n)
(sen(m + n)π − sen(m + n)(−π)
)= 0,
pero si m = n,∫ π
−π
sen mx sen nxdx =
∫ π
−π
sen2 nxdx =1
2(2π) = π,
por lo anterior se tiene que∫ π
−π
sen nx cos mxdx = 0 ∀m,n (4.10)
∫ π
−π
cos nx cos mxdx =
0 si m 6= n
π si m = n > o
2π si m = n = o
(4.11)
∫ π
−π
sen mx sen nxdx =
0 si m 6= n
π si m = n > 0(4.12)
Las ecuaciones 4.10, 4.11 y 4.12 se llaman formulas de ortogonalidad.
Supongamos ahora se tiene una serie trigonometrica dada por
1
2a0 +
∞∑n=0
(an cos nx + bn sen nx), (4.13)
CAPITULO 4. INTERPOLACION POLINOMIAL
Analisis Numerico. Notas de clase 155
si la convergencia de la serie permite integrar termino a termino (por ejemploque tenga convergencia uniforme), entonces
∫ π
−π
f(x)dx =1
2
∫ π
−π
a0 +∞∑
n=0
(an
∫ π
−π
cos nxdx + bn
∫ π
−π
sen nxdx),
pero∫ π
−πcos nxdx = 0 y
∫ π
−πsen nxdx = 0, luego
∫ π
−πf(x)dx = a0π de modo
que
a0 =1
π
∫ π
−π
f(x)dx (4.14)
Si k ≥ 1 entonces∫ π
−π
f(x) cos kxdx =1
2
∫ π
−π
a0 cos kxdx
+∞∑
n=0
(an
∫ π
−π
cos nx cos kxdx + bn
∫ π
−π
sen nx cos kxdx),
o sea que
∫ π
−π
f(x) cos kxdx =1
2
∫ π
−π
a0 cos kxdx +∞∑
n=0
an
∫ π
−π
cos nx cos kxdx,
ya que∫ π
−πsen nx cos kxdx = 0 por 4.10, pero por 4.12 solo se tiene el termino
distinto de cero si n = k, luego∫ π
−π
f(x) cos kxdx = akπ,
ası que
ak =1
π
∫ π
−π
f(x) cos kxdx (4.15)
Pero tambien si k ≥ 1, se tiene que∫ π
−π
f(x) sen kxdx =1
2
∫ π
−π
a0 sen kxdx
+∞∑
n=0
(an
∫ π
−π
cos nx sen kxdx + bn
∫ π
−π
sen nx sen kxdx),
luego
∫ π
−π
f(x) sen kxdx =1
2
∫ π
−π
a0 sen xdx +∞∑
n=0
an
∫ π
−π
cos nx sen kxdx,
4.7. APROXIMACION CON POLINOMIOS TRIGONOMETRICOS

156 J Velasquez Zapateiro/ V. Obeso Fernandez
ya que∫ π
−πsen nx cos kxdx = 0 por 4.10, pero por 4.12 solo se tiene el termino
distinto de cero si n = k, luego
∫ π
−π
f(x) sen kxdx = bkπ,
ası que
bk =1
π
∫ π
−π
f(x) sen kxdx (4.16)
.
De lo anterior se tiene que, si f(x) es integrable en x ∈ (−π, π), loscoeficientes an y bn pueden calcularse mediante las formulas 4.15 y 4.16.En este caso la serie 4.13 se llama serie de Fourier de f .
Ejemplo 4.7.1. Calcular la serie de Fourier de f(x) = x
Solucion
Como f(x) = x se tiene que
an =1
π
∫ π
−π
x cos nxdx = 0
puesto que x cos nx es una funcion impar.Ahora,
bn =1
π
∫ π
−π
x sen nxdx,
como la funcion x sen nx es par ya que x, y sen nx son impares y el productode funciones impares es una funcion par, se tiene entonces que
bn =1
nπ
∫ π
−π
x sen xdx =2
nπ
∫ π
0
x sen xdx = − 2
nπx cos nx
∣∣∣π
0+
1
nπ
∫ π
0
cos nxdx,
de modo que
bn = − 2
ncos nπ = (−1)n+1 2
n
luego
x ∼∞∑
n=1
(−1)n+1 2
n.
El sımbolo ∼ se lee genera. ¥
CAPITULO 4. INTERPOLACION POLINOMIAL

Analisis Numerico. Notas de clase 157
Ejemplo 4.7.2. Calcular la serie de Fourier de
f(x) =
0 si x ∈ [−π, 0]
1 si x ∈ [0, π]
Solucion
a0 =1
π
∫ π
−π
f(x)dx =1
π
∫ π
0
dx = 1.
Para n ≥ 1
an =1
π
∫ π
0
cos nxdx =1
nπsen nx
∣∣∣π
0= 0
y
bn =1
π
∫ π
0
sen nxdx = − 1
nπcos nx
∣∣∣π
0= − 1
nπ[cos nπ−cos 0] = − 1
nπ[(−1)n−1],
luego
bn =
0 si n es par
2nπ
si n es impar
Por tanto
f(x) ∼1
2+
1
π
∞∑
k=0
sen(2k + 1)x
2k + 1
¥
Ejercicios
Para los ejercicios 1-10 encuentrea) La forma interpolante de Lagrangeb) La forma interpolante de Newton
1.x 1 2 3y 1 4 8
2.x 1 4 9y 1 2 3
4.7. APROXIMACION CON POLINOMIOS TRIGONOMETRICOS

158 J Velasquez Zapateiro/ V. Obeso Fernandez
3.x 4 9 16y 2 3 4
4.x -1 0 1y -2 3 2
5.x 0 1 2y 1 2 4
6.x 0 1 2 4y 1 1 2 5
7.x -1 0 1 2y 1/3 1 3 9
8.x 0 1 2 3y 1 2 4 8
9.x 0 1 2 3y 0 1 0 -1
10.x 0 1 2 3y 1 1 2 4
Para los ejercicios 11-15 encuentrea) La forma interpolante de Lagrangeb) La forma interpolante de Newtonc) Las funciones cubicas interpolantes o spline cubicos
x 0 2/3 1 2y 4 -4 -2 -1/2
11.x 0 2/3 1 2y 4 -4 -7/2 -1/2
12.x 0 2/3 1 2y 2 -2 -1 -1/2
13.x 1 2 3 4y 2 4 8 6
14.x 0 1/2 1 3/2y 1 2 1 0
CAPITULO 4. INTERPOLACION POLINOMIAL
Analisis Numerico. Notas de clase 159
15.x 0 1 2 3y 1 1 2 4
Para los ejercicios 16-20 encuentrea) La forma interpolante de Lagrangeb) la interpolacion polinomial (cualquier forma)c) Las funciones cubicas interpolantes o spline cubicos
x 0 1 8 27y 0 1 2 3
Compare los valores interpolados en x = 5.5, 3.5 y x = 18 conlos correspondientes valores de f(x) = 3
√x
16.x 0 1 4 9y 0 -41 2 3
Compare los valores interpolados en x = 0.5, 2.5 y x = 6.5 conlos correspondientes valores de f(x) =
√x
17.x -1 -0.75 -0.25 0.25 0.75 1y 0 -0.7 -0.7 0.7 0.7 0
Compare los valores interpolados en x = −0.5, 0 y x = 0.5 conlos correspondientes valores de f(x) = sen πx
18.x 0 1 2 3 4 5 6y -0.33 -0.20 -0.08 0.00 0.04 0.06 0.07
Compare los valores interpolados con los correspondientes valores dez = x−3
9+x2
19.x 0 1 2 3 4 5 6 7 8 9y 0 0.5 0.5 0.375 0.25 0.1562 0.0938 0.0547 0.0312 0.01764
Compare los valores interpolados con los correspondientes valores dez = x2−x
20.x 0 1 2 3 4 5 6 7 8 9 10y 2.0 0 0.6667 0 0.40 0 0.2587 0 0.2222 0 0.1818
Compare los valores interpolados con los correspondientes valores dez = 1+cos(πx)
1+x
21. Usando los siguientes datos para la capacidad calorıfica Cp (kJ/kgKo)del metilciclohexalona C7H14 como una funcion de la temperatura
4.7. APROXIMACION CON POLINOMIOS TRIGONOMETRICOS

160 J Velasquez Zapateiro/ V. Obeso Fernandez
(Ko), interpole para estimar la capacidad calorıfica a 175, 225, y 275 Ko
T 150 200 250 300Cp 1.43 1.54 1.70 1.89
22. La viscosidad µ de un fluido depende de la temperatura T del fluidode acuerdo a la relacion representada en la siguiente tabla
T (Co) 5 20 30 50 55µ(N − seg/m2) 0.08 0.015 0.09 0.006 0.0055
Use la interpolacion para encontrar un estimativo para la viscosidad aT = 25 y T = 40.
CAPITULO 4. INTERPOLACION POLINOMIAL

Capıtulo 5
Derivacion e IntegracionNumerica
5.1. Derivacion Numerica
Sabemos que la definicion de la derivada de una funcion f(x) esta dada por
f′(x) = lım
h→0
f(x + h)− f(x)
h,
esto indica que para calcular la aproximacion numerica de la derivada enun punto, debemos tomar una sucesion hk, tal que hk → 0 y calculamosentonces el cociente
Dk =f(x + hk)− f(x)
hk
=fk − f
hk
, (5.1)
generamos entonces una sucesion D1, D2, D3, . . . , Dn y tomamos a Dn como laaproximacion deseada, el problema esta en conocer cual valor de hk garantizauna buena aproximacion, ya que si se toma un valor muy grande de hk laaproximacion no es aceptable y se toma un valor muy pequeno la diferenciaf(x + hk)− f(x) ≈ 0 ya que hay perdida de dıgitos significativos, lo anteriorse muestra en tabla 22, en la que se observan los cocientes Dk para aproximarla derivada de f(x) = sen x en x = 2 cuyo valor con nueve cifras significativas
161

162 J Velasquez Zapateiro/ V. Obeso Fernandez
hk fk fk − f fk−fhk
10−1 0.863209367 -0.04608806 -0.460880610−2 0.905090563 -0.04206864 -0.420686410−3 0.98880825 -0.000416602 -0.41660210−4 0.909255808 -0.000041619 -0.4161910−5 0.909293265 -0.00000416514 -0.41651410−6 0.909297017 -0.000000416148 -0.41614810−7 0.909297385 -0.000000041615 -0.4161510−8 0.909297423 -0.000000004162 -0.416210−9 0.909297426 -0.00000000416 -0.41610−10 0.909297427 -0.00000000 0.0000000
TABLA 22
es f′(2) = −0.416146837.
Como podemos observar h = 10−6, proporciona el mejor valor paraf′(2) en tanto que valores mas pequenos van desmejorando la aproximacion.
Lo anterior es una justificacion para desarrollar una teorıa que permitainvestigar la exactitud de los metodos para la derivacion numerica.
Teorema 5.1.1. Supongamos f ∈ C3[a, b], x− h, x + h ∈ [a, b], entonces,
f′(x) ≈ f(x + h)− f(x− h)
2h.
Ademas existe α = α(x) ∈ [a, b], tal que
f′(x) =
f(x + h)− f(x− h)
2h+ Et(f, h),
siendo Et(f, h) = −h2f (3)(α)
6= O(h2)
Demostracion. Las series de Taylor de orden 2 de f(x+h) y f(x−h) alrededorde x son
f(x+h) = f(x)+ f′(x)(x+h−x)+
f′′(x)
2!(x+h−x)2 +
f′′′(α1)
3!(x+h−x)3
o sea que
f(x + h) = f(x) + f′(x)h +
f′′(x)
2!h2 +
f′′′(α1)
3!h3 (5.2)
CAPITULO 5. DERIVACION E INTEGRACION NUMERICA

Analisis Numerico. Notas de clase 163
y
f(x−h) = f(x)+ f′(x)(x−h−x)+
f′′(x)
2!(x−h−x)2 +
f′′′(α2)
3!(x−h−x)3
de modo que
f(x− h) = f(x)− f′(x)h +
f′′(x)
2!h2 − f
′′′(α2)
3!h3 (5.3)
luego
f(x + h)− f(x− h) = 2hf′(x) +
f′′′(α1)
3!h3 +
f′′′(α2)
3!h3.
Como f ∈ C3[a, b], entonces por el teorema del valor intermedio existe α ∈[a, b] tal que,
f′′′(α) =
f′′′(α1) + f
′′′(α2)
2,
ası que 2f′′′(α) = f
′′′(α1) + f
′′′(α2), luego
f(x + h)− f(x− h) = 2hf′(x) +
2f′′′(α)
3!h3
por tanto
f′(x) =
f(x + h)− f(x− h)
2h− f
′′′(α)
6h2.
A la expresionf(x + h)− f(x− h)
2h, se le llama formula de la diferencia
centrada de orden O(h2), ya que x + h y x − h se situan a izquierda y aderecha de x.
Teorema 5.1.2. Supongamos f ∈ C5[a, b], x−2h, x−h, x+h, x+2h ∈ [a, b],entonces,
f′(x) ≈ −f(x + 2h) + 8f(x + h)− 8f(x− h) + f(x− 2h)
12h.
Ademas existe α = α(x) ∈ [a, b], tal que
f′(x) =
−f(x + 2h) + 8f(x + h)− 8f(x− h) + f(x− 2h)
12h+ Et(f, h),
siendo Et(f, h) =h4f (5)(α)
30= O(h4)
5.1. DERIVACION NUMERICA

164 J Velasquez Zapateiro/ V. Obeso Fernandez
Demostracion. Las series de Taylor de orden 4 de f(x+h) y f(x−h) alrededorde x son
f(x + h) = f(x) + f′(x)(x + h− x) +
f′′(x)
2!(x + h− x)2 +
f′′′(x)
3!(x + h− x)3
+f (4)(x)
4!(x + h− x)4 +
f (5)(α1)
5!(x + h− x)5
luego
f(x + h) = f(x) + f′(x)h +
f′′(x)
2!h2 +
f′′′(x)
3!h3 +
f (4)(x)
4!h4
+f (5)(α1)
5!h5 (5.4)
y
f(x− h) = f(x) + f′(x)(x− h− x) +
f′′(x)
2!(x− h− x)2 +
f′′′(x)
3!(x− h− x)3
+f (4)(x)
4!(x− h− x)4 +
f (5)(α2)
5!(x− h− x)5
o sea que
f(x− h) = f(x)− f′(x)h +
f′′(x)
2!h2 − f
′′′(x)
3!h3 +
f (4)(x)
4!h4
−f (5)(α2)
5!h5 (5.5)
ası que
f(x + h)− f(x− h) = 2hf′(x) +
2f′′′(x)
3!h3 +
2f (5)(c1)
5!h5, (5.6)
siendo 2f (5)(c1) = f (5)(α1) + f (5)(α2), si reemplazamos a h por 2h se tieneque
f(x + 2h)− f(x− 2h) = 4hf′(x) + 16
f′′′(x)
3!h3 + 64
f (5)(c1)
5!h5, (5.7)
ademas si multiplicamos 5.6 por 8 se tiene que
8[f(x + h)− f(x− h)] = 16hf′(x) +
16f′′′(x)
3!h3 +
16f (5)(c1)
5!h5. (5.8)
CAPITULO 5. DERIVACION E INTEGRACION NUMERICA

Analisis Numerico. Notas de clase 165
Restandole a 5.8 la ecuacion 5.7 se tiene que
8[f(x+h)−f(x−h)]−[f(x+2h)−f(x−2h)] = 12hf′(x)+
16f (5)(c1)− 64f (5)(c2)
5!h5.
Si f (5)(x) tiene signo constante y cambia muy poco cerca de x se puede tomarc ∈ [x− 2h, x + 2h] tal que c = c1 = c2 y por tanto 16f (5)(c1)− 64f (5)(c2) =−48f (5)(c) y entonces
8f(x + h)− 8f(x− h)− f(x + 2h) + f(x− 2h) = 12hf′(x)− 48f (5)(c)h5
120,
luego
f′(x) =
−f(x + 2h) + 8f(x + h)− 8f(x− h) + f(x− 2h)
12h+ O(h4) (5.9)
La ecuacion 5.9 se conoce como la formula de la diferencia centrada de ordenO(h4).
Ejemplo 5.1.1. Si f(x) = sen x, calcular la aproximacion de f′(2), usando
las formulas de las diferencias centradas con h = 0.1
Solucion
Con las diferencias centradas de orden O(h2), se tiene que
f′(2) =
1
2× 0.1[sen(2.1)− sen(1.9)] =
1
0.2[0.863209366649−0.946300087687]
=−0.083090721038
0.2= −0.41545360519.
Con la formula de las diferencias centradas de orden O(h4) tenemos que
f′(2) =
1
1.2[−0.80849640382+6.9905674933−7.570400702+0.973847630878]
= −0.416145451042,
la respuesta exacta como hemos visto es −0.416146836547.¥
Otra alternativa para calcular la aproximacion numerica de la deriva-da, es por medio de las llamadas formulas de los tres puntos y las formulas
5.1. DERIVACION NUMERICA

166 J Velasquez Zapateiro/ V. Obeso Fernandez
de los cinco puntos, las cuales se obtienen usando los polinomios de Lagrange,para esto se tiene por el teorema 4.2 que,
f(x) =n∑
i=0
f(xi)Ln,i(x) +(x− x0)(x− x1)(x− x2) . . . (x− xn)
(n + 1)!f (n+1)(c),
para algun c = c(x) ∈ [a, b] y Ln,i(x) es el i-esimo polinomio de Lagrangepara f en x0, x1,...,xn, luego
f′(x) =
n∑i=1
f(xi)L′n,i(x) +
d[(x− x0)(x− x1)(x− x2) . . . (x− xn)]
dx
f (n+1)(c)
(n + 1)!
+(x− x0)(x− x1)(x− x2) . . . (x− xn)
(n + 1)!f (n+2)(c),
de modo que
f′(x) =
n∑i=0
f(xi)L′n,i(x) +
f (n+1)(c)
(n + 1)!
[(x− x1)(x− x2)(x− x3) . . . (x− xn)+
+(x−x0)(x−x2)(x−x3) . . . (x−xn)+(x−x0)(x−x1)(x−x3) . . . (x−xn)+. . .
+(x− x0)(x− x1)(x− x2) . . . (x− xn−1)]
+
∏nj=0,j 6=k(xj − xk)
(n + 1)!f (n+2)(c).
Si x = xj, j = 0, 1, 2, . . . , n, entonces se tiene que
f′(xj) =
n∑i=0
f(xi)L′n,i(xj) +
f (n+2)(c)
(n + 1)!
n∏
j=0,j 6=k
(xj − xk) (5.10)
La formula 5.10 es llamada la formula de los n + 1 puntos, naturalmente setiene una mejor aproximacion a la derivada si se toma una mayor cantidadde puntos, pero esto a su vez implica un alto costo computacional debido ala gran cantidad de evaluaciones que deben realizarse por esto es suficientetomar 3 o 5 puntos.
Para los puntos x0, x1, x2, se tiene que
L2,0(x) =(x− x1)(x− x2)
(x0 − x1)(x0 − x2),
L2,1(x) =(x− x0)(x− x2)
(x1 − x0)(x1 − x2)
CAPITULO 5. DERIVACION E INTEGRACION NUMERICA

Analisis Numerico. Notas de clase 167
y
L2,2(x) =(x− x0)(x− x1)
(x2 − x0)(x2 − x1),
ası que,
L′2,0(x) =
x− x2 + x− x1
(x0 − x1)(x0 − x2)=
2x− x1 − x2
(x0 − x1)(x0 − x2),
L′2,1(x) =
x− x0 + x− x2
(x1 − x0)(x1 − x2)=
2x− x0 − x2
(x1 − x0)(x1 − x2),
y
L′2,2(x) =
x− x1 + x− x0
(x2 − x0)(x2 − x1)=
2x− x0 − x1
(x2 − x0)(x2 − x1),
luego para j = 0, 1, 2 se tiene que
f′(xj) = f(x0)
2xj − x1 − x2
(x0 − x1)(x0 − x2)+ f(x1)
2xj − x0 − x2
(x1 − x0)(x1 − x2)
+f(x2)2xj − x0 − x1
(x2 − x0)(x2 − x1)+
f (3)(c)
3!
2∏
k=0,k 6=j
(xj − xk).
Ahora si xi, i = 0, 1, 2 estan igualmente espaciado, esto es, si x1 − x0 = h yx2 − x1 = h, entonces x1 = x0 + h y x2 = x0 + 2h, luego entonces se tieneque si j = 0,
f′(x0) = f(x0)
2x0 − x0 − h− x0 − 2h
(x0 − x0 − h)(x0 − x0 − 2h)+f(x1)
2x0 − x0 − x0 − 2h
(x0 + h− x0)(x0 + h− x0 − 2h)
+f(x2)2x0 − x0 − x0 − h
(x0 + 2h− x0)(x0 + 2h− x0 − h)+
f (3)[c(x0)]
3!(x0−x0−h)(x0−x0−2h),
luego
f′(x0) =
−3hf(x0)
2h2+−2hf(x1)
−h2+−hf(x2)
2h2+
f (3)[c(x0)]
3h2,
de modo que
f′(x0) =
1
h
[− 3
2f(x0) + 2f(x1)− 1
2f(x2)
]+
f (3)[c(x0)]
3h2 (5.11)
Ahora
f′(x1) = f
′(x0 + h) = f(x0)
2x0 + 2h− x0 − h− x0 − 2h
2h2+
5.1. DERIVACION NUMERICA

168 J Velasquez Zapateiro/ V. Obeso Fernandez
f(x1)2x0 + 2h− x0 − x0 − 2h
−h2+ f(x2)
2x0 + 2h− x0 − x0 − h
2h2+
f (3)[c(x1)]
3!(x0 + h− x0)(x0 + h− x0 − 2h),
luego
f′(x0 + h) =
1
h
[− f(x0)
2+
f(x2)
2
]+
f (3)[c(x1)]
3!h2. (5.12)
Pero tambien
f′(x2) = f
′(x0 + 2h) = f(x0)
2x0 + 4h− x0 − h− x0 − 2h
2h2+
f(x1)2x0 + 4h− x0 − x0 − 2h
−h2+ f(x2)
2x0 + 4h− x0 − x0 − h
2h2+
f (3)[c(x2)]
3!(x0 + 2h− x0)(x0 + 2h− x0 − h),
por tanto
f′(x0 + 2h) =
1
h
[f(x0)
2− 2f(x1) +
3f(x2)
2
]+
f (3)[c(x2)]
3h2 (5.13)
De 5.11 y puesto que x1 = x0 + h y x2 = x0 + 2h tenemos que
f′(x0) =
1
2h
[− 3f(x0) + 4f(x0 + h)− f(x0 + 2h)
]+
f (3)(c0)
3h2 (5.14)
Por motivos practicos sustituimos en 5.12 a x0 +h por x0 y en 5.13 a x0 +2hpor x0, se obtiene entonces que
f′(x0) =
1
2h
[− f(x0 − h) + f(x0 + h)
]− f (3)(c1)
3!h2 (5.15)
f′(x0) =
1
2h
[f(x0 − 2h)− 4f(x0 − h) + 3f(x0)
]+
f (3)(c2)
3h2. (5.16)
Observese que las ecuaciones 5.14 y 5.16 son equivalentes ya que si en 5.16reemplazamos a h por −h se tiene que
f′(x0) = − 1
2h
[f(x0 + 2h)− 4f(x0 + h) + 3f(x0)
]+
f (3)(c2)
3h2,
o sea que
f′(x0) =
1
2h
[− 3f(x0) + 4f(x0 + h)− f(x0 + 2h)
]+
f (3)(c2)
3h2,
CAPITULO 5. DERIVACION E INTEGRACION NUMERICA

Analisis Numerico. Notas de clase 169
que es la ecuacion 5.14. Lo anterior implica que solo se tienen dos ecuacionesque son
f′(x0) = 1
2h
[− 3f(x0) + 4f(x0 + h)− f(x0 + 2h)
]+ f (3)(c0)
3h2
c0 ∈ [x0, x0 + 2h]
f′(x0) = 1
2h
[− f(x0 − h) + f(x0 + h)
]+ f (3)(c1)
3!h2
c1 ∈ [x0 − h, x0 + h]
(5.17)
las ecuaciones 5.17 son las llamadas formulas de los tres puntos
Ejemplo 5.1.2. Usar las formulas 5.17 para aproximar f′(2) si f(x) = sen x.
Solucion
Si h = 0.1 se tiene que
f′(2) ≈ 1
0.2[−3f(2) + 4f(2.1)− f(2.2)]
=1
0.2(−3× 0.909297427 + 4× 0.863209367− 0.808496404) = −0.417756085.
Si h = −0.1, obtenemos
f′(2) ≈ − 1
0.2[−3f(2) + 4f(1.9)− f(1.8)]
=1
0.2(−3× 0.909297427 + 4× 0.946300088− 0.9733847631) = −0.4173022,
el error en la primera respuesta es E = 1.61 × 10−2 y en la segunda esE = 1.155× 10−2 ¥
Para deducir la formula de los cinco puntos consideremos
L4,0(x) =(x− x1)(x− x2)(x− x3)(x− x4)
(x0 − x1)(x0 − x2)(x0 − x3)(x0 − x4),
L4,1(x) =(x− x0)(x− x2)(x− x3)(x− x4)
(x1 − x0)(x1 − x2)(x1 − x3)(x1 − x4),
L4,2(x) =(x− x0)(x− x1)(x− x3)(x− x4)
(x2 − x0)(x2 − x1)(x2 − x3)(x2 − x4),
5.1. DERIVACION NUMERICA

170 J Velasquez Zapateiro/ V. Obeso Fernandez
L4,3(x) =(x− x0)(x− x1)(x− x2)(x− x4)
(x3 − x0)(x3 − x1)(x3 − x2)(x3 − x4),
L4,4(x) =(x− x0)(x− x1)(x− x2)(x− x3)
(x4 − x0)(x4 − x1)(x4 − x2)(x4 − x3),
con x1 = x0 + h, x2 = x0 + 2h, x3 = x0 + 3h, x4 = x0 + 4h, es decir x0, x1,x2, x3 y x4 igualmente espaciados, luego entonces, se tiene que
L′4,0(x) =
1
(x0 − x1)(x0 − x2)(x0 − x3)(x0 − x4)[(x− x2)(x− x3)(x− x4)
+(x−x1)(x−x3)(x−x4)+(x−x1)(x−x2)(x−x4)+(x−x1)(x−x2)(x−x3)],
L′4,1(x) =
1
(x1 − x0)(x1 − x2)(x1 − x3)(x1 − x4)[(x− x2)(x− x3)(x− x4)
+(x−x0)(x−x3)(x−x4)+(x−x0)(x−x2)(x−x4)+(x−x0)(x−x2)(x−x3)],
L′4,2(x) =
1
(x2 − x0)(x2 − x1)(x2 − x3)(x2 − x4)[(x− x1)(x− x3)(x− x4)
+(x−x0)(x−x3)(x−x4)+(x−x0)(x−x1)(x−x4)+(x−x0)(x−x1)(x−x3)],
L′4,3(x) =
1
(x3 − x0)(x3 − x1)(x3 − x2)(x3 − x4)[(x− x1)(x− x2)(x− x4)
+(x−x0)(x−x2)(x−x4)+(x−x0)(x−x1)(x−x4)+(x−x0)(x−x1)(x−x2)]
y
L′4,4(x) =
1
(x4 − x0)(x4 − x1)(x4 − x2)(x4 − x3)[(x− x1)(x− x2)(x− x3)
+(x−x0)(x−x2)(x−x3)+(x−x0)(x−x1)(x−x3)+(x−x0)(x−x1)(x−x2)],
de modo que
L′4,0(x0) = − 25
12hL′4,1(x0) =
4
hL′4,2(x0) = −3
h
L′4,3(x0) =
4
3hy L
′4,4(x0) = − 1
4h,
ası que
f′(x0) = − 25
12hf(x0) +
4
hf(x1)− 3
hf(x2) +
4
3hf(x3)− 1
4hf(x4) +
f (5)(c0)h4
5,
es decir que
f′(x0) =
1
12h[−25f(x0) + 48f(x0 + h)− 36f(x0 + 2h)+
CAPITULO 5. DERIVACION E INTEGRACION NUMERICA

Analisis Numerico. Notas de clase 171
16f(x0 + 3h)− 3f(x0 + 4h)] +f (5)(c0)h
4
5(5.18)
pero tambien
L′4,0(x1) = − 1
4hL′4,1(x1) = − 5
6hL′4,2(x1) =
3
2h
L′4,3(x1) = − 1
2hy L
′4,4(x1) =
1
12h
luego
f′(x0 + h) = − 1
4hf(x0)− 5
6hf(x0 + h) +
3
2hf(x0 + 2h)− 1
2hf(x0 + 3h)
+1
12hf(x0 + 4h)− f (5)(c1)h
4
20,
por lo tanto,
f′(x0 + h) =
1
12h[−3f(x0)− 10f(x0 + h) + 18f(x0 + 2h)− 6f(x0 + 3h)
+f(x0 + 4h)]− f (5)(c1)h4
20(5.19)
ahora
L′4,0(x2) =
1
12hL′4,1(x2) = − 2
3hL′4,2(x2) = 0
L′4,3(x2) =
2
3hy L
′4,4(x2) = − 1
12h,
ası que
f′(x0+2h) =
1
12hf(x0)− 2
3hf(x0+h)+
2
3hf(x0+3h)− 1
12hf(x0+4h)+
f (5)(c2)h4
30
y por tanto
f′(x0 + 2h) =
1
12h[f(x0)− 8f(x0 + h) + 8f(x0 + 3h)
−f(x0 + 4h)] +f (5)(c2)h
4
30, (5.20)
pero
L′4,0(x3) =
1
3hL′4,1(x3) =
1
2hL′4,2(x3) = − 2
3h
L′4,3(x3) =
17
6hy L
′4,4(x3) =
1
4h,
5.1. DERIVACION NUMERICA

172 J Velasquez Zapateiro/ V. Obeso Fernandez
por consiguiente
f′(x0 + 3h) =
1
3hf(x0) +
1
2hf(x0 + h)− 2
3hf(x0 + 2h) +
17
6hf(x0 + 3h)
+1
4hf(x0 + 4h)− f (5)(c3)h
4
20
y
f′(x0 + 3h) =
1
12h[4f(x0) + 6f(x0 + h)− 8f(x0 + 3h) + 34f(x0 + 3h)
+3f(x0 + 4h)]− f ′(c3)h4
20(5.21)
L′0(x4) =
1
4hL′1(x4) = − 4
3hL′2(x4) =
3
h
L′3(x4) = −4
hy L
′4(x4) =
25
12h,
luego,
f′(x0 + 4h) =
1
4hf(x0)− 4
hf(x0 + h) +
3
hf(x0 + 2h)− 4
hf(x0 + 3h)
− 25
12hf(x0 + 4h) +
f (5)(c4)h4
5
ası que
f′(x0 + 4h) =
1
12h[f(x0)− 3f(x0 + h) + 4f(x0 + 2h)− 36f(x0 + 3h)
+25f(x0 + 4h)] +f (5)(c4)h
4
5. (5.22)
CAPITULO 5. DERIVACION E INTEGRACION NUMERICA

Analisis Numerico. Notas de clase 173
Pero si en 5.19 se reemplaza a x0 + h por x0, en 5.20 a x0 + 2h por x0, en5.21 a x0 + 3h por x0 y en 5.22 a x0 + 4h por x0, se tiene que
f′(x0) = 1
12h[−25f(x0) + 48f(x0 + h)− 36f(x0 + 2h) + 16f(x0 + 3h)
−3f(x0 + 4h)] + f (5)(c0)h4
5
f′(x0) = 1
12h[−3f(x0 − h)− 10f(x0) + 18f(x0 + h)
−6f(x0 + 2h) + f(x0 + 3h)]− f (5)(c1)h4
5
f′(x0) = 1
12h[f(x0 − 2h)− 8f(x0 − h) + 8f(x0 + h)
−f(x0 + 2h)] + f (5)(c2)h4
30
f′(x0) = 1
12h[4f(x0 − 3h) + 6f(x0 + 2h)− 8f(x0 − h)
+34f(x0) + 3f(x0 + h)]− f (5)(c3)h4
30
f′(x0) = 1
12h[f(x0 − 4h)− 3f(x0 − 3h) + 4f(x0 − 2h)
−36f(x0 − h) + 25f(x0)] + f (5)(c4)h4
5
(5.23)Las ecuaciones de 5.23 son las formulas de los cinco puntos.
De las formulas anteriores, las mas utiles son
f′(x0) =
1
12h[−25f(x0) + 48f(x0 + h)− 36f(x0 + 2h) + 16f(x0 + 3h)
−3f(x0 + 4h)] +f (5)(c0)h
4
5y
f′(x0) =
1
12h[f(x0 − 2h)− 8f(x0 − h) + 8f(x0 + h)− f(x0 + 2h)]
+f (5)(c2)h
4
30.
Podemos establecer formulas que permitan calcular derivadas se orden supe-rior, en efecto, sea
f(x) = f(x0)+f′(x0)(x−x0)+
f′′(x0)
2!(x−x0)
2+f′′′(x0)
3!(x−x0)
3+f (4)(α1)
4!(x−x0)
4,
de modo
f(x0 + h) = f(x0) + f′(x0)h +
f′′(x0)
2!h2 +
f′′′(x0)
3!h3 +
f (4)(α1)
4!h4,
5.1. DERIVACION NUMERICA

174 J Velasquez Zapateiro/ V. Obeso Fernandez
y
f(x0 − h) = f(x0)− f′(x0)h +
f′′(x0)
2!h2 − f
′′′(x0)
3!h3 +
f (4)(α2)
4!h4,
por lo tanto si f (4)(α1) ≈ f (4)(α2) se tiene que
f(x0 + h) + f(x0 − h) = 2f(x0) + f′′(x0)h
2 + 2f (4)(α)
24h4
ası que
f′′(x0) =
1
h2
[f(x0 + h) + f(x0 − h)− 2f(x0)
]− f (4)(α)
12h2
5.1.1. Analisis de Error
Si ek es el error de redondeo cometido al evaluar a f(x + kh), entonces paralas formulas de los cinco puntos sugerida, tenemos que
Et(h) =−25e0 + 48e1 − 36e2 + 16e3 − 3e4
12h− h4f (5)(c0)
5,
y se ademas se supone que ∀k, |ek| < ε y que |f (5)(x)| ≤ M , ∀x ∈ [x0, x0+4h],entonces
|Et(h)| ≤ 1
12h[25|e0|+ 48|e1|+ 36|e2|+ 16|e3|+ 3|e4|] +
h4|f (5)(c0)|5
,
o sea que
|Et(h)| ≤ 128ε
12h+
h4M
5=
32ε
3h+
h4M
5.
Si hacemos
H(h) =32ε
3h+
h4M
5,
entonces el incremento optimo se tiene en el valor de h que minimice H(h).Pero como
H′(h) = −32ε
3h2+
4Mh3
5,
luego si
−32ε
3h2+
4Mh3
5= 0,
entonces8ε
3h2=
Mh3
5,
CAPITULO 5. DERIVACION E INTEGRACION NUMERICA

Analisis Numerico. Notas de clase 175
luego
h5 =40ε
3M,
o sea que
h =( 40ε
3M
) 15.
De la misma manera si usamos
f′(x0) =
1
12h[f(x0 − 2h)− 8f(x0 − h) + 8f(x0 + h)− f(x0 + 2h)]
+f (5)(c2)h
4
30,
se tiene que
Et(h) =e−2 − 8e−1 + 8e1 + e2
12h+
h4f (5)(c2)
30,
si |ek| < ε, ∀k y |f (5)(x)| ≤ M , ∀x ∈ [x0 − 2h, x0 + 2h], entonces
|Et(h)| ≤ 18ε
12h+
h4M
30=
3ε
2h+
h4M
30,
con lo que obtenemos que
h =( 45ε
4M
) 15.
5.2. Extrapolacion de Richardson
Supongamos G(h) es una expresion que aproxima a una cantidad G, luegoentonces se tiene que G−G(h) = ET , donde ET es el error de truncamientoque se comete al aproximar a G por G(h).
SupongamosET = c1h + c2h
2 + c3h3 + c4h
4 + . . . ,
luegoG = G(h) + c1h + c2h
2 + c3h3 + c4h
4 + . . . h > 0, (5.24)
si tomamos h =h
2, entonces
G = G(h
2
)+ c1
h
2+ c2
h2
4+ c3
h3
8+ c4
h4
16+ . . . h > 0, (5.25)
5.2. EXTRAPOLACION DE RICHARDSON

176 J Velasquez Zapateiro/ V. Obeso Fernandez
si a dos veces la ecuacion 5.25 le restamos la ecuacion 5.24 se tiene que
2G−G = 2G(h
2
)+c1h+c2
h2
2+c3
h3
4+c4
h4
8+· · ·−G(h)−c1h−c2h
2−c3h3−c4h
4−. . .
o sea que
G = 2G(h
2
)−G(h)− c2
h2
2− 3
4c3h
3 − 7
8c4h
4 − . . . ,
luego
G =[G
(h
2
)+
(G
(h
2
)−G(h)
)]− c2
h2
2− 3
4c3h
3 − 7
8c4h
4 − . . . ,
para simplificar los calculos tomemos G(h) ≡ G1(h), la expresion para O(h2),es entonces
G = G2(h)− c2h2
2− 3
4c3h
3 − 7
8c4h
4 − . . . , (5.26)
donde G2(h) = G1
(h
2
)+
(G1
(h
2
)−G1(h)
), si igual que antes reemplazamos
h porh
2en 5.26, se tiene que,
G = G2
(h
2
)− c2
h2
8− 3
32c3h
3 − 7
128c4h
4 − . . . . (5.27)
Pero si a cuatro veces la ecuacion 5.27 le restamos la ecuacion 5.26 se tieneque
4G−G = 4G2
(h
2
)−G2(h)− c2
h2
2− 3
8c3h
3 − 7
32c4h
4 − . . .
+c2h2
2+
3
4c3h
3 +7
8c4h
4 + . . . ,
o sea que
3G = 4G2
(h
2
)−G2(h) +
3
8c3h
3 +21
32c4h
4 + . . .
luego
G =[G2
(h
2
)+
G2
(h
2
)−G2(h)
3
]+
1
8c3h
3 +7
32c4h
4 + . . . ,
si tomamos
G3(h) = G2
(h
2
)+
G2
(h
2
)−G2(h)
3,
CAPITULO 5. DERIVACION E INTEGRACION NUMERICA
Analisis Numerico. Notas de clase 177
se tiene la expresion para O(h3)dada por
G = G3(h) +1
8c3h
3 +7
32c4h
4 + . . . (5.28)
reemplacemos nuevamente a h porh
2, entonces se tiene que
G = G3
(h
2
)+
1
64c3h
3 +7
512c4h
4 + . . . (5.29)
ahora si a ocho veces la ecuacion 5.29 le restamos la ecuacion 5.28 se tieneque
7G = 8G3
(h
2
)−G3(h)− 7
64c4h
4 + . . .
o sea que
7G = 7G3
(h
2
)+ G3
(h
2
)−G3(h)− 7
64c4h
4 + . . .
luego
G =[G3
(h
2
)+
G3
(h
2
)−G3(h)
7
]− 1
64c4h
4 + . . . ,
ası que si
G4(h) = G3
(h
2
)+
G3
(h
2
)−G3(h)
7,
se tiene la aproximacion O(h4) dada por
G = G4(h)− 1
64c4h
4 + . . . ,
continuando con este proceso, la aproximacion O(hn) es
G =[Gn−1
(h
2
)+
Gn−1
(h
2
)−Gn−1(h)
2n−1 − 1
]+
m−1∑j=1
cjhj + O(hm) (5.30)
o sea
G = Gn(h) +m−1∑j=1
cjhj + O(hm),
donde
Gn(h) =[Gn−1
(h
2
)+
Gn−1
(h
2
)−Gn−1(h)
2n−1 − 1
](5.31)
5.2. EXTRAPOLACION DE RICHARDSON
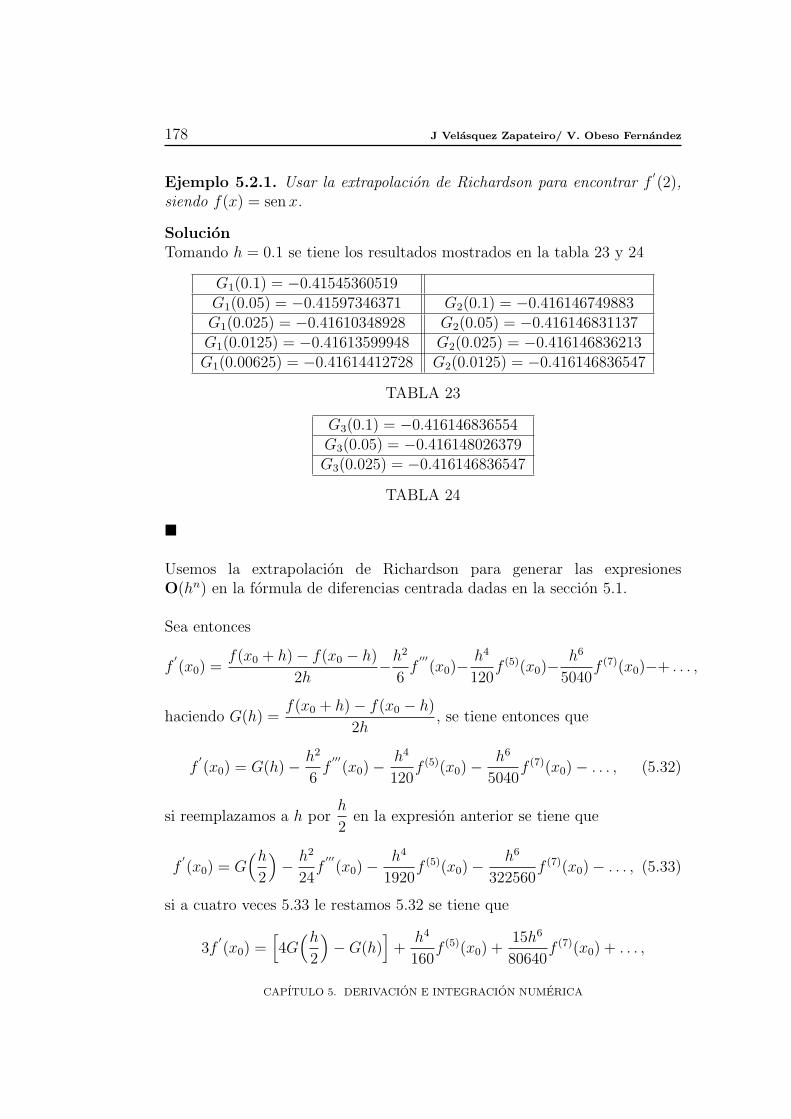
178 J Velasquez Zapateiro/ V. Obeso Fernandez
Ejemplo 5.2.1. Usar la extrapolacion de Richardson para encontrar f′(2),
siendo f(x) = sen x.
SolucionTomando h = 0.1 se tiene los resultados mostrados en la tabla 23 y 24
G1(0.1) = −0.41545360519G1(0.05) = −0.41597346371 G2(0.1) = −0.416146749883G1(0.025) = −0.41610348928 G2(0.05) = −0.416146831137G1(0.0125) = −0.41613599948 G2(0.025) = −0.416146836213G1(0.00625) = −0.41614412728 G2(0.0125) = −0.416146836547
TABLA 23
G3(0.1) = −0.416146836554G3(0.05) = −0.416148026379G3(0.025) = −0.416146836547
TABLA 24
¥
Usemos la extrapolacion de Richardson para generar las expresionesO(hn) en la formula de diferencias centrada dadas en la seccion 5.1.
Sea entonces
f′(x0) =
f(x0 + h)− f(x0 − h)
2h−h2
6f′′′(x0)− h4
120f (5)(x0)− h6
5040f (7)(x0)−+ . . . ,
haciendo G(h) =f(x0 + h)− f(x0 − h)
2h, se tiene entonces que
f′(x0) = G(h)− h2
6f′′′(x0)− h4
120f (5)(x0)− h6
5040f (7)(x0)− . . . , (5.32)
si reemplazamos a h porh
2en la expresion anterior se tiene que
f′(x0) = G
(h
2
)− h2
24f′′′(x0)− h4
1920f (5)(x0)− h6
322560f (7)(x0)− . . . , (5.33)
si a cuatro veces 5.33 le restamos 5.32 se tiene que
3f′(x0) =
[4G
(h
2
)−G(h)
]+
h4
160f (5)(x0) +
15h6
80640f (7)(x0) + . . . ,
CAPITULO 5. DERIVACION E INTEGRACION NUMERICA

Analisis Numerico. Notas de clase 179
o sea que
f′(x0) =
[G
(h
2
)+
G(h
2
)−G(h)
3
]+
h4
480f (5)(x0) +
h6
16128f 7(x0) + . . . ,
y por tanto la aproximacion para O(h2) esta dada por
f′(x0) = G2(h) +
h4
480f (5)(x0) +
h6
16128f (7)(x0) + . . . , (5.34)
siendo G2(h) = G(h
2
)+
G(h
2
)−G(h)
3si en 5.34 reemplazamos nuevamente
a h porh
2, obtenemos que
f′(x0) = G2
(h
2
)+
h4
7680f (5)(x0) +
h6
1032192f (7)(x0) + . . . , (5.35)
ahora restandole a dieciseis veces la ecuacion 5.35, la ecuacion 5.34 se tieneque
15f′(x0) = 16G2
(h
2
)−G2(h) +
h6
64512f (7)(x0)− h6
16128f (7)(x0) . . . ,
o sea que
15f′(x0) = 15G2
(h
2
)+ G2
(h
2
)−G2(h)− 3h6
64512f (7)(x0) + . . . ,
o sea que la aproximacion para O(h4) es
f′(x0) = G2
(h
2
)+
[G2
(h
2
)−G2(h)
15
]− h6
322560f (7)(x0) + . . . , (5.36)
la cual podemos escribir como
f′(x0) = G3(h)− h4
480f (5)(x0)− h6
322560f (7)(x0) + . . . , (5.37)
siendo G3(h) = G2
(h
2
)+
G2
(h
2
)−G2(h)
15, continuando con este proceso se
tiene la aproximacion O(h2j), j = 2, 3, 4, . . . dada por
Gj(h) = Gj−1
(h
2
)+
Gj−1
(h
2
)−Gj−1(h)
4j−1 − 1(5.38)
5.2. EXTRAPOLACION DE RICHARDSON

180 J Velasquez Zapateiro/ V. Obeso Fernandez
5.3. Integracion Numerica
Si deseamos calcular la integral dada por
b∫
a
xe−x2
dx
podemos usar el metodo de sustitucion y tomar entonces a u = x2 de modo
que du = 2xdx, ası que xdx =du
2, por lo tanto la integral resulta ser
b∫
a
xe−x2
dx =1
2
b2∫
a2
e−udu = −1
2e−u
∣∣∣b2
a2=
1
2
(e−a2 − e−b2
).
Pero si deseamos calcular la integral
b∫
a
e−x2
dx,
es claro que al no ser posible calcularla por ninguno de los metodos conocidosdel calculo integral, la via entonces es, buscar un valor aproximado de laintegral en cuestion.
En esta seccion obtendremos metodos que permitan calcular el valoraproximado de una integral dada.
Un metodo para aproximar la integral dada porb∫
a
f(x)dx se basa en los
polinomios de Lagrange, en efecto sea
Pn(x) =n∑
i=0
f(xi)Ln,i(x)
el polinomio de aproximacion de Lagrange que aproxima a la funcion f(x),pero como
f(x) = Pn(x) + ET (x) =n∑
i=0
f(xi)Ln,i(x) +n∏
i=0
(x− xi)f (n+1)[c(x)]
(n + 1)!,
al integrar termino a termino se tiene que
b∫
a
f(x)dx =
b∫
a
n∑i=0
f(xi)Ln,i(x)dx +
b∫
a
n∏i=0
(x− xi)f (n+1)[c(x)]
(n + 1)!dx,
CAPITULO 5. DERIVACION E INTEGRACION NUMERICA

Analisis Numerico. Notas de clase 181
de modo que
b∫
a
f(x)dx =n∑
i=0
f(xi)
b∫
a
Ln,i(x)dx +1
(n + 1)!
b∫
a
n∏i=0
(x− xi)f(n+1)[c(x)]dx,
con c(x) ∈ [a, b], luego entonces ,
b∫
a
f(x)dx ≈n∑
i=0
f(xi)
b∫
a
Ln,i(x)dx =n∑
i=0
wifi(x),
siendo wi =b∫
a
Ln,i(x)dx.
Miremos el caso para L1,0(x) y L1,1(x), en este caso P (x) =
f(x0)x− x1
x0 − x1
+ f(x1)x− x0
x1 − x0
, luego
b∫
a
f(x)dx =
x1∫
x0
f(x0)x− x1
x0 − x1
dx +
x1∫
x0
f(x1)x− x0
x1 − x0
dx
+1
2!
x1∫
x0
f′′[c(x)](x− x0)(x− x1)dx,
por el teorema del valor medio generalizado para las integrales, existe c ∈[a, b], tal que
x1∫
x0
f′′[c(x)](x− x0)(x− x1)dx = f
′′(c)
x1∫
x0
(x− x0)(x− x1)dx,
pero,
f′′(c)
x1∫
x0
(x− x0)(x− x1)dx = f′′(c)
x1∫
x0
(x2 − (x1 + x0)x + x0x1)dx
de modo que
f′′(c)
x1∫
x0
(x− x0)(x− x1)dx = f′′(c)
[x3
3
∣∣∣x1
x0
− (x0 + x1)x2
2
∣∣∣x1
x0
+ x0x1x∣∣∣x1
x0
],
5.3. INTEGRACION NUMERICA

182 J Velasquez Zapateiro/ V. Obeso Fernandez
o sea que
f′′(c)
x1∫
x0
(x−x0)(x−x1)dx = f′′(c)
[x31 − x3
0
3−(x0+x1)
x21 − x2
0
2+x0x1(x1−x0)
],
ası que
f′′(c)
x1∫
x0
(x−x0)(x−x1)dx = f′′(c)(x1−x0)
[x21 + x1x0 + x2
0
3−(x0 + x1)
2
2+x0x1
],
de modo que si h = x1 − x0, entonces
f′′(c)
x1∫
x0
(x−x0)(x−x1)dx =hf
′′(c)
6(−x2
1 +2x1x0−x20) = −hf
′′(c)
6(x1−x0)
2
luego
1
2!
x1∫
x0
f′′[c(x)](x− x0)(x− x1)dx = −h3f
′′(c)
12,
por lo anterior se tiene que
x1∫
x0
f(x)dx = −f(x0)
2
(x0 − x1)2
(x0 − x1)+
f(x1)
2
(x1 − x0)2
(x1 − x0)− h3f
′′(c)
12,
de modo que
x1∫
x0
f(x)dx =f(x0)
2(x1 − x0) +
f(x1)
2(x1 − x0)− h3f
′′(c)
12
=(x1 − x0)
2[f(x0) + f(x1)]− h3f
′′(c)
12
por lo tanto,x1∫
x0
f(x)dx =h
2[f(x0) + f(x1)]− h3f
′′(c)
12, (5.39)
la ecuacion 5.39 es llamada la regla del trapecio
Deduzcamos ahora la regla de Simpson utilizando una via diferente a
CAPITULO 5. DERIVACION E INTEGRACION NUMERICA

Analisis Numerico. Notas de clase 183
la utilizada para calcular la regla del trapecio, para ello utilizamos elpolinomio de Taylor de f(x) de cuarto orden alrededor de x1, la cual comosabemos esta dado por
f(x) = f(x1) + f′(x1)(x− x1) + f
′′(x1)
(x− x1)2
2!+ f
′′′(x1)
(x− x1)3
3!
+f (4)[c(x)](x− x1)
4
4!,
luego
x2∫
x0
f(x)dx = f(x1)
x2∫
x0
dx + f′(x1)
x2∫
x0
(x− x1)dx +f′′(x1)
2!
x2∫
x0
(x− x1)2dx
+f′′′(x1)
3!
x2∫
x0
(x− x1)3dx +
1
4!
x2∫
x0
f (4)[c(x)](x− x1)4dx,
pero por el teorema del valor medio ponderado existe c ∈ [x0, x2] , con a = x0
y b = x2, tal que
1
4!
x2∫
x0
f (4)[c(x)](x− x1)4dx =
f (4)(c)
4!
x2∫
x0
(x− x1)4dx,
perox2∫
x0
(x− x1)4dx =
(x− x1)5
5
∣∣∣x2
x0
,
ahora si x1 − x0 = h, x2 − x1 = h, entonces
f (4)(c)
4!
x2∫
x0
(x− x1)4dx =
h5f (4)(c)
60.
Se tiene entonces que
x2∫
x0
f(x)dx = f(x1)x∣∣∣x2
x0
+f′(x1)
2(x− x1)
2∣∣∣x2
x0
+f′′(x1)
6(x− x1)
3∣∣∣x2
x0
+f′′′(x1)
24(x− x1)
4∣∣∣x2
x0
+h5f (4)(c)
60,
5.3. INTEGRACION NUMERICA

184 J Velasquez Zapateiro/ V. Obeso Fernandez
luego
x2∫
x0
f(x)dx = f(x1)[(x2 − x1)− (x0 − x1)] +f′(x1)
2[(x2 − x1)
2 − (x0 − x1)2]
+f′′(x1)
6[(x2−x1)
3− (x0−x1)3]+
f′′′(x1)
24[(x2−x1)
4− (x0−x1)4]+
h5f (4)(c)
60,
entonces,
x2∫
x0
f(x)dx = f(x1)[(x2 − x1) + (x1 − x0)] +f′(x1)
2[(x2 − x1)
2 − (x1 − x0)2]
+f′′(x1)
6[(x2−x1)
3 +(x1−x0)3]+
f′′′(x1)
24[(x2−x1)
4− (x1−x0)4]+
h5f (4)(c)
60,
pero como hemos dicho x1 − x0 = x2 − x1 = h, luego
x2∫
x0
f(x)dx = f(x1)[(x2−x1)+(x1−x0)]+f′′(x1)
6[(x2−x1)
3+(x1−x0)3]+
h5f (4)(c)
60,
se puede escribir como
x2∫
x0
f(x)dx = 2hf(x1) + h3f′′(x1)
3+
h5f (4)(c)
60,
pero
f′′(x1) =
1
h2[f(x1 − h)− 2f(x1) + f(x1 + h)]− h2
12f (4)(c1),
luego entonces
x2∫
x0
f(x)dx = 2hf(x1)+h3
3h2[f(x1−h)−2f(x1)+f(x1+h)]−h5f (4)(c1)
36+
h5f (4)(c)
60,
de modo que
x2∫
x0
f(x)dx = 2hf(x1) +h
3[f(x0)− 2f(x1) + f(x2)]− h5
12
[f (4)(c1)
3− f (4)(c)
5
],
CAPITULO 5. DERIVACION E INTEGRACION NUMERICA

Analisis Numerico. Notas de clase 185
se puede probar que existe α, tal que,
h5
12
[f (4)(c1)
3− f (4)(c)
5
]=
h5f (4)(α)
90
por consiguiente tenemos que
x2∫
x0
f(x)dx =h
3[6f(x1) + f(x0)− 2f(x1) + f(x2)]− h5f (4)(α)
90,
y por tanto
x2∫
x0
f(x)dx =h
3[f(x0) + 4f(x1) + f(x2)]− h5f (4)(α)
90, (5.40)
la ecuacion 5.40 es la regla de Simpson
Otra regla para aproximar numericamente la integral es, la regla3
8de
Simpson la cual discutiremos a continuacion.Sea
f(x) ≈ f(x0)(x− x1)(x− x2)(x− x3)
(x0 − x1)(x0 − x2)(x0 − x3)+f(x1)
(x− x0)(x− x2)(x− x3)
(x1 − x0)(x1 − x2)(x1 − x3)
+f(x2)(x− x0)(x− x1)(x− x3)
(x2 − x0)(x2 − x1)(x2 − x3)+ f(x3)
(x− x0)(x− x1)(x− x2)
(x3 − x0)(x3 − x1)(x3 − x2),
luego entonces se tiene que
x3∫
x0
f(x)dx ≈ f(x0)
(x0 − x1)(x0 − x2)(x0 − x3)
x3∫
x0
(x− x1)(x− x2)(x− x3)dx
+f(x1)
(x1 − x0)(x1 − x2)(x1 − x3)
x3∫
x0
(x− x0)(x− x2)(x− x3)dx
+f(x2)
(x2 − x0)(x2 − x1)(x2 − x3)
x3∫
x0
(x− x0)(x− x1)(x− x3)dx
+f(x3)
(x3 − x0)(x3 − x1)(x3 − x2)
x3∫
x0
(x− x0)(x− x1)(x− x2)dx,
5.3. INTEGRACION NUMERICA

186 J Velasquez Zapateiro/ V. Obeso Fernandez
si tomamos la sustitucion x = x0 + uh y como xi = x0 + ih, i = 1, 2, 3,entonces x3 = x0 + 3h, luego si x = x0, se tiene que u = 0 y si x = x3,entonces x3 = x0 + uh, o sea que x0 + 3h = x0 + uh, de modo que u = 3,ademas dx = hdu, x − x1 = x − x0 − h = uh − h = h(u − 1), x − x2 =x−x0−2h = uh−2h = h(u−2) y x−x3 = x−x0−3h = uh−3h = h(u−3),y xk − xj = (k − j)h, de modo que
x3∫
x0
f(x)dx ≈ f(x0)
(−h)(−2h)(−3h)
3∫
0
h(u− 1)h(u− 2)h(u− 3)hdu
+f(x1)
(h)(−h)(−2h)
3∫
0
uhh(u−2)h(u−3)hdu+f(x2)
(2h)(h)(−h)
3∫
0
uhh(u−1)h(u−3)hdu
+f(x3)
(3h)(2h)(h)
3∫
0
uhh(u− 1)h(u− 2)hdu,
luego
x3∫
x0
f(x)dx ≈ −h4f(x0)
6h3
3∫
0
(u3−6u2+11u−6)du+h4f(x1)
2h3
3∫
0
(u3−5u2+6u)du
+−h4f(x2)
2h3
3∫
0
(u3 − 4u2 + 3u)du +h4f(x3)
6h3
3∫
0
(u3 − 3u2 + 2u)du,
de modo que
x3∫
x0
f(x)dx ≈ −hf(x0)
6
−9
4+
hf(x1)
2
9
4− hf(x2)
2
−9
4+
hf(x3)
6
9
4,
luegox3∫
x0
f(x)dx ≈ 3hf(x0)
8+
9hf(x1)
8+
9hf(x2)
8+
3hf(x3)
8,
ası quex3∫
x0
f(x)dx ≈ 3h
8[f(x0) + 3f(x1) + 3f(x2) + f(x3)], (5.41)
CAPITULO 5. DERIVACION E INTEGRACION NUMERICA

Analisis Numerico. Notas de clase 187
la ecuacion 5.41 es la llamada regla de los3
8de Simpson.
La regla del trapecio, la de Simpson, y la de los3
8de Simpson con
sus respectivos errores estan entonces dadas por
x1∫
x0
f(x)dx =h
2[f(x0) + f(x1)]− h3
12f′′(c) c ∈ [x0, x1] (5.42)
x2∫
x0
f(x)dx =h
3[f(x0) + 4f(x1) + f(x2)]− h5
90f (4)(c) c ∈ [x0, x2] (5.43)
x3∫
x0
f(x)dx =3h
8[f(x0) + 3f(x1) + 3f(x2) + f(x3)]− 3h5
80f (4)(c) c ∈ [x0, x3]
(5.44)las reglas anteriores se conocen como las formulas cerradas de Newton-Cotes.
Definicion 5.3.1. El grado de Exactitud de una formula de integracionnumerica o formula de cuadratura es el numero natural n tal que para todopolinomio Pi(x) de grado i ≤ n, el error E[Pi(x)] es cero y existe Pn+1(x) degrado n + 1 con E[Pn+1(x)] 6= 0.
Mas concretamente, el grado de Exactitud o de precision es el entero posi-tivo i, tal que la formula de integracion es exacta para xi, i = 0, 1, 2, 3, . . . , n
Ası que la regla del trapecio tiene un grado de exactitud uno, en tan-to que la de Simpson y la de los tres octavo de Simpson tiene un grado deexactitud tres.
Ya hemos dicho que las reglas anteriormente expuestas se llaman formulascerradas de Newton, esto porque la integracion se hace en el intervalocerrado [a, b], si la integracion se hace en el intervalo abierto (a, b) setiene entonces, las formulas abiertas de Newton - Cotes, en este caso six0, x1, x2, . . . , xn ∈ (a, b) son los nodos, es claro que a y b no son parte deellos, por tanto tomamos x−1 = a y xn+1 = b. Algunas formulas abiertas deNewton - Cotes, estan dadas por
n= 0
x1∫
x−1
f(x)dx = 2hf(x0) +h3
3f′′(c) (Regla del punto medio)
(5.45)
5.3. INTEGRACION NUMERICA

188 J Velasquez Zapateiro/ V. Obeso Fernandez
n= 1
x2∫
x−1
f(x)dx =3h
2[f(x0) + f(x1)] +
3h3
4f′′(c) (5.46)
n= 2
x3∫
x−1
f(x)dx =4h
3[2f(x0)− f(x1) + 2f(x2)] +
14h5
45f (4)(c) (5.47)
n= 3
x4∫
x−1
f(x)dx =5h
24[11f(x0) + f(x1) + f(x2) + 11f(x3)] +
95h5
144f (4)(c)
(5.48)Los dos teoremas que damos a continuacion sin demostracion permiten,obtener las formulas cerradas y abiertas de Newton - Cotes respectivamente.
Para las cerradas se tiene que
Teorema 5.3.1. Supongamos quen∑
i=0
aif(xi), es la formula cerradas de New-
ton - Cotes con x0 = a y xn = b, h =b− a
n, entonces existe c ∈ (a, b), tal
que
b∫
a
f(x)dx =n∑
i=0
aif(xi) +hn+3f (n+2)(c)
(n + 2)!
n∫
0
t2(t− 1)(t− 2)(t− n)dt,
si n es par, f ∈ Cn+2[a, b] y
b∫
a
f(x)dx =n∑
i=0
aif(xi) +hn+2f (n+1)(c)
(n + 1)!
n∫
0
t(t− 1)(t− 2)(t− n)dt
si n es impar, f ∈ Cn+1[a, b], ai =b∫
a
Li(x)dx
Observemos que si n = 4 la formula cerrada de Newton - Cotes es
b∫
a
f(x)dx =2h
45[7f(x0)+ 32f(x1)+ 12f(x2)+ 32f(x3)+ 7f(x4)]− 8h7
945f (6)(c)
(5.49)llamada la regla de Boole
Para la formulas abiertas el teorema es
CAPITULO 5. DERIVACION E INTEGRACION NUMERICA

Analisis Numerico. Notas de clase 189
Teorema 5.3.2. Supongamos quen∑
i=0
aif(xi), es la formula abierta de New-
ton - Cotes con x−1 = a y xn+1 = b, h =b− a
n + 2, entonces existe c ∈ (a, b),
tal que
b∫
a
f(x)dx =n∑
i=0
aif(xi) +hn+3f (n+2)(c)
(n + 2)!
n+1∫
−1
t2(t− 1)(t− 2)(t− n)dt
si n es par y si f ∈ Cn+2[a, b], y
b∫
a
f(x)dx =a∑
i=0
aif(xi) +hn+2f (n+1)(c)
(n + 1)!
n+1∫
−1
t(t + 1)(t− 2) . . . (t− n)dt
si n es impar y si f ∈ Cn+1[a, b]
Ejemplo 5.3.1. Utilizar las formulas cerradas de Newton - Cotes para
aproximar la integral1.5∫1
x2 ln xdx
Solucion
Primero observemos que
1.5∫
1
x2 ln xdx =x3
9(3 ln x− 1)
∣∣∣1.5
1,
y por tanto el valor exacto de la integral con doce cifras significativas es
1.5∫
1
x2 ln xdx = 0.192259357733.
Usemos primero el metodo del trapecio, en el h = 1.5− 1 = 0.5, luego
1.5∫
1
x2 ln xdx ≈ 0.5
2[f(1) + f(1.5)] =
1
4[1 ln 1 + (1.5)2 ln 1.5],
o sea que1.5∫
1
x2 ln xdx ≈ 0.2280741233,
5.3. INTEGRACION NUMERICA

190 J Velasquez Zapateiro/ V. Obeso Fernandez
resultado que presenta un error absoluto de E = 0.0358147655674 ≈ 3.58 %,que como vemos es un error muy alto.
Con la regla de Simpson se tiene que h =b− a
n=
b− a
2=
1
4, luego
x0 = 1, x1 = x0 + h = 1.25 y x2 = 1.5, por tanto
1.5∫
1
x2 ln xdx ≈ h
3[f(x0) + 4f(x1) + f(x2)],
luego1.5∫
1
x2 ln xdx ≈ 1
12[f(1) + 4f(1.25) + f(1.5)],
de modo que
1.5∫
1
x2 ln xdx ≈ 1
12[1 ln 1 + 4(1.25)2 ln 1.25 + (1.5)2 ln 1.5]
=1
12[1.39464719571 + 0.912296493243],
ası que1.5∫
1
x2 ln xdx ≈ 0.192245307412,
teniendose un error absoluto de E = 0.000014050321.
Apliquemos ahora la regla tres octavos de Simpson, aquı h =b− a
3=
1
6,
ademas x0 = 1, x1 = 1 +1
6, x1 = 1 +
1
3y x3 = 1.5, luego
1.5∫
1
x2 ln xdx ≈ 1
16[f(x0) + 3f(x1) + 3f(x2) + f(x3)],
luego
1.5∫
1
x2 ln xdx ≈ 1
16[0 + 0.62944860931 + 1.53430438639 + 0.912296493243],
CAPITULO 5. DERIVACION E INTEGRACION NUMERICA

Analisis Numerico. Notas de clase 191
por tanto1.5∫
1
x2 ln xdx ≈ 0.192253093059,
con un error absoluto de E = 0.000006264674
Finalmente usando la regla de Boole h =b− a
4=
0.5
4=
1
8= 0.125,
luego
1.5∫
1
x2 ln xdx ≈ 2h
45[7f(x0) + 32f(x1) + 12f(x2) + 32f(x3) + 7f(x4)],
pero x0 = 1, x1 = 1 + 0.125 = 1.125, x2 = 1 + 0.25 = 1.25, x3 = 1 + 0.375 =1.375 y x4 = 1.5, de modo que
1.5∫
1
x2 ln xdx ≈ 1
180[0 + 4.77021294406 + 4.18394158714
+19.2664507327 + 6.3860754527],
luego1.5∫
1
x2 ln xdx ≈ 0.192259337314,
teniendo ahora un valor absoluto E = 0.000000020419.
Como podemos observar la regla de Boole es la que proporciona unmenor error. ¥
Ejemplo 5.3.2. Utilizar las formulas abiertas de Newton - Cotes para
aproximar la integral1.5∫1
x2 ln xdx
Solucion
Si aplicamos la regla del punto medio podemos observar que
1.5∫
1
x2 ln xdx ≈ 0
5.3. INTEGRACION NUMERICA

192 J Velasquez Zapateiro/ V. Obeso Fernandez
ya que1.5∫
1
x2 ln xdx ≈ 2hf(x0) = 2× 12 ln 1 = 0,
lo cual significa que el error es del 100 %.
Con n = 1 se tiene que h =b− a
n + 2=
0.5
3=
1
6, luego x0 = a + h = 1 +
1
6y
x1 = a + 2h = 1 +1
3, de modo que
1.5∫
1
x2 ln xdx ≈31
62
[f(x0) + f(x1)],
luego
1.5∫
1
x2 ln xdx ≈ 1
4[0.209816203103 + 0.511434795463] = 0.180312749642,
la cual proporciona un error absoluto de E = 0.011946608091.
Si tomamos n = 2, h =b− a
n + 2=
0.5
4=
1
8= 0.125, ası que
x0 = a + h = 1 + 0.125 = 1.125, x1 = x0 + h = 1.125 + 0.125 = 1.25, yx2 = x1 + h = 1.25 + 0.125 = 1.375, luego,
1.5∫
1
x2 ln xdx ≈ 4h
3[2f(x0)− f(x1) + 2f(x2)],
o sea que,
1.5∫
1
x2 ln xdx ≈ 1
6[0.298138309004− 0.348661798928 + 1.20415317079],
de modo que
1.5∫
1
x2 ln xdx ≈ 1
6(1.19100821798) = 0.198501369663,
CAPITULO 5. DERIVACION E INTEGRACION NUMERICA

Analisis Numerico. Notas de clase 193
aproximacion que presenta un error de E = 0.00624201193.
Veamos la aproximacion cuando n = 3, en este caso h = 0.1 ya que h =b− a
n + 2=
0.5
5=
1
10, pero entonces, x0 = a + h = 1 + 0.1 = 1.1, x1 = x0 + h =
1.1 + 0.1 = 1.2, x2 = x1 + h = 1.2 + 0.1 = 1.3 x3 = x2 + h = 1.3 + 0.1 = 1.4,ası que
1.5∫
1
x2 ln xdx ≈ 5× 0.1
24[11f(x0) + f(x1) + f(x2) + 11f(x3)]
=1
48[11f(1.1) + f(1.2) + f(1.3) + 11f(1.4)],
por lo tanto
1.5∫
1
x2 ln xdx ≈ 1
48[1.2685784932+0.262543041783+0.443395606949+7.25434142155],
y de ese modo
1.5∫
1
x2 ln xdx ≈ 1
48× 9.22885856348 = 0.192267886739,
que proporciona un error absoluto de E = 0.000008529006. ¥
5.4. Integracion Compuesta
Ahora bien una mejor aproximacion numerica a la integral la proporcionala llamada integracion numerica compuesta, la cual estudiaremos en estaseccion, mirando primero la integracion numerica compuesta para la regladel trapecio, luego para la regla de Simpson y por ultimo para la regla 3
8de
Simpson.
5.4.1. Regla Compuesta del Trapecio
Sea P = x0, x1, x2, . . . , xn, una particion de un intervalo cerrado [a, b],
tal que xk = x0 + hk, h =b− a
n, k = 0, 1, 2, . . . , n, entonces aplicamos a
5.4. INTEGRACION COMPUESTA

194 J Velasquez Zapateiro/ V. Obeso Fernandez
cada subintervalo [xk−1, xk] la regla del trapecio, esto es en cada subintervalo[xk−1, xk] se tiene que
xk∫
xk−1
f(x)dx ≈ h
2[f(xk−1) + f(xk)],
luego
b∫
a
f(x)dx ≈n∑
k=1
h
2[f(xk−1) + f(xk)] =
h
2
n∑
k=1
[f(xk−1) + f(xk)],
o sea que
b∫
a
f(x)dx ≈ h
2[f(x0)+f(x1)+f(x1)+f(x2)+f(x2)+· · ·+f(xn−1)+f(xn−1)+f(xn)],
de modo que
b∫
a
f(x)dx ≈ h
2f(x0) + 2[f(x1) + f(x2) + · · ·+ f(xn−1)] + f(xn),
por lo tanto
b∫
a
f(x)dx ≈ h
2
[f(x0) + f(xn) + 2
n−1∑
k=1
f(xk)],
pero como x0 = a y xn = b, entonces
b∫
a
f(x)dx ≈ h
2
[f(a) + f(b) + 2
n−1∑
k=1
f(xk)], (5.50)
la ecuacion 5.50 se conoce como la regla compuesta del trapecio.
Ejemplo 5.4.1. Aplicar la regla compuesta del trapecio con n = 4 y n = 6
para aproximar la integral1.5∫1
x2 ln xdx
CAPITULO 5. DERIVACION E INTEGRACION NUMERICA
Analisis Numerico. Notas de clase 195
Solucion
Como h =b− a
n, entonces h =
1
8= 0.125, luego,
1.5∫
1
x2 ln xdx ≈ h
2
[f(x0) + f(x4) + 2
3∑
k=1
f(xk)],
por tanto,
1.5∫
1
x2 ln xdx ≈ 1
16
[f(x0) + f(x4) + 2[f(x1) + f(x2) + f(x3)]
],
pero x0 = 1, x1 = x0 + h = 1 + 0.125 = 1.125, x2 = x1 + h = 1.125 + 0.125 =1.25, x3 = x2 + h = 1.25 + 0.125 = 1.375 y x4 = 1.5, luego,
1.5∫
1
x2 ln xdx ≈ 1
16
[f(1) + f(1.5) + 2[f(1.125) + f(1.25) + f(1.375)]
],
o sea que
1.5∫
1
x2 ln xdx ≈ 1
16
[0 + 0.912296493243 + 2[0.149069154502
+0.348661798928 + 0.602076585397]],
de modo que
1.5∫
1
x2 ln xdx ≈ 1
16[0.912296493243 + 2.19961507766],
ası que,1.5∫
1
x2 ln xdx ≈ 1
16× 3.119115709 = 0.194494473181.
Para n = 6 se tiene que h =b− a
n, luego h =
0.5
6=
1
12, de modo que
x0 = 1, x1 = x0 + h = 1 +1
12, x2 = x0 + 2h = 1 +
1
6, x3 = x0 + 3h = 1 +
1
4,
5.4. INTEGRACION COMPUESTA

196 J Velasquez Zapateiro/ V. Obeso Fernandez
x4 = x0 + 4h = 1 +1
3, x5 = x0 + 5h = 1 +
5
12, x6 = 1, de modo que,
1.5∫
1
x2 ln xdx ≈ h
2
[f(x0) + f(x6) + 2
5∑
k=1
f(xk)],
de modo que
1.5∫
1
x2 ln xdx ≈ 1
24
[f(x0) + f(x6) + 2[f(x1) + f(x2) + f(x3) + f(x4) + f(x5)]
],
o sea que
1.5∫
1
x2 ln xdx ≈ 1
24[0.912296493243 + 3.72576798698],
y de ese modo1.5∫
1
x2 ln xdx ≈ 0.193252686676.
¥
Podemos observar que si bien la aproximacion obtenida no es muy buenaporque mantiene un error muy grande, si es mejor a la obtenida con la regladel trapecio, naturalmente entre mas grande sea el valor de n usado en laregla compuesta del trapecio, se obtendra una mejor aproximacion.
5.4.2. Regla Compuesta de Simpson
Consideremos sub-intervalos de la forma [x2k−2, x2k], k = 1, 2, . . . , n, yapliquemos la regla de Simpson a cada uno de esos sub-intervalos, entoncesse tiene que
x2k∫
x2k−2
f(x)dx ≈ h
3
[f(x2k−2) + 4f(x2k−1) + f(x2k)
],
luegob∫
a
f(x)dx ≈n∑
k=1
x2k∫
x2k−2
f(x)dx,
CAPITULO 5. DERIVACION E INTEGRACION NUMERICA

Analisis Numerico. Notas de clase 197
por tanto
b∫
a
f(x)dx ≈n∑
k=1
h
3
[f(x2k−2) + 4f(x2k−1) + f(x2k)
],
o sea que
b∫
a
f(x)dx ≈ h
3[f(x0)+4f(x1)+f(x2)+f(x2)+4f(x3)+f(x4)+f(x4)+4f(x5)
+ · · ·+ f(x2n−4) + 4f(x2n−3) + f(x2n−2) + f(x2n−2) + 4f(x2n−1) + f(x2n)],
pero entonces,
b∫
a
f(x)dx ≈ h
3
[f(x0) + f(x2n)+ 2f(x2) + f(x4) + · · ·+ f(x2n−2)
]
+4f(x1) + f(x3) + · · ·+ f(x2n−1)],
pero x0 = a y x2n = b, entonces,
b∫
a
f(x)dx ≈ h
3[f(a) + f(b)] +
2h
3
n−1∑
k=1
f(x2k) +4h
3
n∑
k=1
f(x2k−1) (5.51)
la formula 5.51 es la regla compuesta de Simpson.
Ejemplo 5.4.2. Usar la regla compuesta de Simpson con 11 nodos para
aproximar la integral5∫2
x2 ln xdx.
Solucion Como se va aplicar la regla compuesta de Simpson con 11 nodos
entonces n = 5, luego h =b− a
2n=
3
10, entonces
5∫
2
x2 ln xdx ≈ h
3[f(2) + f(5)] +
2h
3
4∑
k=1
f(x2k) +4h
3
5∑
k=1
f(x2k−1),
pero como xk = x0 + kh, entonces x0 = 2, x1 = x0 + 2 = 2 +3
10=
23
10,
x2 =26
10=
13
5x3 =
29
10x4 =
32
10=
16
5, x5 =
35
10=
7
2, x6 =
38
10=
19
5,
5.4. INTEGRACION COMPUESTA
198 J Velasquez Zapateiro/ V. Obeso Fernandez
x7 =41
10, x8 =
44
10=
22
5, x9 =
47
10y x10 =
50
10= 5, luego
5∫
2
x2 ln xdx ≈ 1
10[f(2) + f(5)] +
1
5[f(x2) + f(x4) + f(x6) + f(x8)]
+2
5[f(x1) + f(x3) + f(x5) + f(x7) + f(x9)],
o sea que
5∫
2
x2 ln xdx ≈ 1
10[f(2) + f(5)] +
1
5[f(2.6) + f(3.2) + f(3.8) + f(4.4)]
+2
5[f(2.3) + f(2.9) + f(3.5) + f(4.1) + f(4.7)],
de modo que
5∫
2
x2 ln xdx ≈ 1
10[2.77258872224 + 40.2359478108]
+1
5[6.45925736838 + 11.9106642925 + 19.2774154036 + 28.6838639122]
+2
5[4.40608926033 + 8.95421729809 + 15.3463463641
+23.7186910281 + 34.1856558176],
por lo tanto
5∫
2
x2 ln xdx ≈ 1
10[43.008536533] +
1
5[66.3312009767] +
2
5[86.6109997682]
= 4.3008536533 + 13.2662401953 + 34.6443999072,
de modo que5∫
2
x2 ln xdx ≈ 52.2114937558.
Hacemos notar que, el valor exacto de la integral con doce cifras significativases
5∫
2
x2 ln xdx =1
9x3(3 ln x− 1)
∣∣∣5
2= 52.2115205364,
de modo que el error de aproximacion es E = |52.2115205364 −52.2114937558| = 0.0000276806 ¥
CAPITULO 5. DERIVACION E INTEGRACION NUMERICA

Analisis Numerico. Notas de clase 199
5.4.3. Regla Compuesta de los 38 Simpson
Consideremos nuevamente la particion P = x0, x1, x2, . . . , xn, del intervalo
cerrado [a, b], con xk = x0 + hk, h =b− a
3n, k = 0, 1, 2, . . . , n, entonces
aplicamos a cada subintervalo [x3k−3, x3k] la regla 38
de Simpson, luego encada subintervalo [x3k−3, x3k] de tiene que
x3k∫
x3k−3
f(x)dx ≈ 3h
8[f(x3k−3) + 3f(x3k−2) + 3f(x3k−1) + f(x3k)],
luego entonces tenemos que
b∫
a
f(x)dx ≈n∑
k=1
3h
8
[f(x3k−3) + 3f(x3k−2) + 3f(x3k−1) + f(x3k)
],
de modo que
b∫
a
f(x)dx ≈ 3h
8
[ n∑
k=1
f(x3k−3)+3n∑
k=1
f(x3k−2)+3n∑
k=1
f(x3k−1)+n∑
k=1
f(x3k)],
luego
b∫
a
f(x)dx ≈ 3h
8[f(x0)+f(x3)+f(x6)+· · ·+f(x3n−3)+3f(x1)+3f(x4)+3f(x7)
· · ·+ 3f(x3n−2) + 3f(x2) + 3f(x5) + 3f(x8) + · · ·+ 3f(x3n−1) + f(x3) + f(x6)
+f(x9) + · · ·+ f(x3n)],
ası que
b∫
a
f(x)dx ≈ 3h
8[f(x0) + f(x3n)] +
6h
8[f(x3) + f(x6) + f(x9) + · · · f(x3n−3)]
+9h
8[f(x1)+f(x4)+f(x7)+· · · f(x3n−2)]+
9h
8[f(x2)+f(x5)+f(x8)+· · · f(x3n−1)],
de modo que
b∫
a
f(x)dx ≈ 3h
8[f(a)+f(b)]+
3h
4
n−1∑
k=1
f(x3k)+9h
8
n∑
k=1
f(x3k−2)+9h
8
n∑
k=1
f(x3k−1)
(5.52)la formula 5.52 es la regla compuesta de los 3
8de Simpson.
5.4. INTEGRACION COMPUESTA

200 J Velasquez Zapateiro/ V. Obeso Fernandez
Ejemplo 5.4.3. Usar la regla compuesta de los 38
de Simpson con 13 nodos
para aproximar la integral1.5∫1
x2 ln xdx.
Solucion Como se va aplicar la regla compuesta de los 38
de Simpson con 13
nodos entonces n = 4, luego h =b− a
3n=
1
24, entonces
5∫
2
x2 ln xdx ≈ 3h
8[f(1)+f(1.5)]+
3h
4
3∑
k=1
f(x3k)+9h
8
4∑
k=1
f(x3k−2)+9h
8
4∑
k=1
f(x3k−1),
pero como xk = x0 + kh, entonces x0 = 1, x1 = 1 +1
24=
25
24, x2 =
26
24
x3 =27
24x4 = x3 =
28
24, x5 =
29
24, x6 =
30
24, x7 =
31
24, x8 =
32
24, x9 =
33
24,
x10 =34
24, x11 =
35
24y x12 =
36
24= 1.5 luego
1.5∫
1
x2 ln xdx ≈ 1
64[f(1) + f(1.5)] +
1
32[f(x3) + f(x6) + f(x9)]
+3
64[f(x1) + f(x4) + f(x7) + f(x10)] + +
3
64[f(x2) + f(x5) + f(x8) + f(x11)],
o sea que
1.5∫
1
x2 ln xdx ≈ 1
64[0+0.91229649]+
1
32[0.14906915+0.3486618+0.60207659]
+3
64[0.044294698+0.209816203+0.4269999+0.69903219+0.093939+0.2763065
+0.5114348 + 0.80240537],
por lo tanto
1.5∫
1
x2 ln xdx ≈ 0.014254632 + 0.034368985 + 0.143635718,
CAPITULO 5. DERIVACION E INTEGRACION NUMERICA
Analisis Numerico. Notas de clase 201
de modo que5∫
2
x2 ln xdx ≈ 0.192259335.
Es bueno observar que, el valor exacto de la integral con nueve cifras signi-ficativas es
1.5∫
1
x2 ln xdx =1
9x3(3 ln x− 1)
∣∣∣1.5
1= 0.192259357,
de modo que el error de aproximacion es E = |0.192259357−0.192259335| =2.2732× 10−8 ¥
5.4.4. Cotas de Error para las Reglas Compuestas
Miremos primero el error para la regla compuesta del trapecio y luego loharemos para las reglas compuestas de Simpson.
Sabemos que en el intervalo [xk−1, xk] la funcion f(x), esta dada porf(x) = Pk(x) + Ek(x), siendo, Pk(x) el k-esimo polinomio de Lagrange y
Ek(x) =(x− xk−1)(x− xk)
2!f′′[c(x)], luego entonces,
xk∫
xk−1
f(x)dx =
xk∫
xk−1
Pk(x)dx +1
2!
xk∫
xk−1
(x− xk−1)(x− xk)f′′[c(x)]dx,
pero por el teorema del valor medio para integrales existe ck ∈ (xk−1, xk), talque
xk∫
xk−1
f(x)dx =
xk∫
xk−1
Pk(x)dx +f′′(ck)
2!
xk∫
xk−1
(x− xk−1)(x− xk)dx,
sea x = xk−1 +hv, xk = xk−1 +h, entonces x−xk = x−xk−1−h = hv−h =h(v − 1) y dx = hdv, ademas si x = xk−1, entonces hv = 0 y de ese modov = 0, y si x = xk, se tiene que 0 = h(v − 1) y entonces v = 1, de lo anteriorse tiene que
xk∫
xk−1
(x− xk−1)(x− xh)dx =
1∫
0
hvh(v − 1)hdv = h3
1∫
0
(v2 − v)dv,
5.4. INTEGRACION COMPUESTA

202 J Velasquez Zapateiro/ V. Obeso Fernandez
por lo tantoxk∫
xk−1
(x− xk−1)(x− xh)dx = −h3
6,
luego, el error en el intervalo [xk−1, xk] es
Ek = −f′′(ck)h
3
12.
De lo anterior se tiene que
b∫
a
f(x)dx =n∑
k=1
xk∫
xk−1
f(xk)dx−n∑
k=1
f′′(ck)h
3
12=
h
2
n∑
k=1
[f(xk−1) + f(xk)]
−h3
12
n∑
k=1
f′′(ck),
pero h =b− a
n, luego
b∫
a
f(x)dx =h
2
n∑
k=1
[f(xk−1) + f(xk)]− b− a
12nh2
n∑
k=1
f′′(ck),
o sea que
b∫
a
f(x)dx =h
2
n∑
k=1
[f(xk−1) + f(xk)]− (b− a)h2
12
n∑k=1
f′′(ck)
n,
peron∑
k=1
f′′(ck)
n=
f′′(c1) + f
′′(c2) + f
′′(c3) + · · ·+ f
′′(cn)
n,
es la media aritmetica de la funcion continua f′′, por tanto esta se puede
reemplazar por f′′(c) para algun c ∈ (a, b), de modo que
b∫
a
f(x)dx =
b∫
a
f(x)dx =h
2
n∑
k=1
[f(xk−1) + f(xk)]− (b− a)h2
12f′′(c) (5.53)
CAPITULO 5. DERIVACION E INTEGRACION NUMERICA

Analisis Numerico. Notas de clase 203
Para la regla compuesta de Simpson consideremos el intervalo cerrado [a, b],y supongamos se divide en sub-intervalos de la forma [x2k−2, x2k], luego por5.43 aplicada a ese intervalo se tiene que
x2k∫
x2k−2
f(x)dx =h
3[f(x2k−2) + 4f(x2k−1) + f(x2k)]− h5f (4)[ck(x)]
90,
luego entonces,
b∫
a
f(x)dx =n∑
k=1
[h
3[f(x2k−2) + 4f(x2k−1) + f(x2k)]− h5f (4)[ck(x)]
90
],
con h =b− a
2n, x2k−2 ≤ ck(x) ≤ x2k, pero hemos visto que
n∑
k=1
[h
3[f(x2k−2) + 4f(x2k−1) + f(x2k)] =
h
3[f(a) + f(b)] +
2h
3
n−1∑
k=1
f(x2k)
+4h
3
n∑
k=1
f(x2k−1),
siendo a = x0 y b = x2n, por lo tanto
b∫
a
f(x)dx =h
3[f(a) + f(b)] +
2h
3
n−1∑
k=1
f(x2k) +4h
3
n∑
k=1
f(x2k−1)
−h5
90
n∑
k=1
f (4)[ck(x)],
ası que el error es
ET (x) = −h5
90
n∑
k=1
f (4)[ck(x)].
Como f ∈ C4[a, b], tiene valores extremos, luego
mına≤x≤b
f (4)(x) ≤ f (4)[ck(x)] ≤ maxa≤x≤b
f (4)(x),
luego entonces
n mına≤x≤b
f (4)(x) ≤n∑
k=1
f (4)[ck(x)] ≤ n maxa≤x≤b
f (4)(x),
5.4. INTEGRACION COMPUESTA

204 J Velasquez Zapateiro/ V. Obeso Fernandez
ası que
mına≤x≤b
f (4)(x) ≤ 1
n
n∑
k=1
f (4)[ck(x)] ≤ maxa≤x≤b
f (4)(x),
luego por el teorema del valor intermedio existe c ∈ (a, b) tal que
f (4)(c) =1
n
n∑
k=1
f (4)[ck(x)]
luego
ET (x) = −h5
90
n∑
k=1
f (4)[ck(x)] = −h5nf (4)(c)
90,
pero como h =b− a
2n, entonces
ET = −h4 (b− a)
2n
nf (4)(c)
90= −b− a
180h4f (4)(c),
ası que la regla de Simpson con error es
b∫
a
f(x)dx =h
3[f(a)+f(b)]+
2h
3
n−1∑
k=1
f(x2k)+4h
3
n∑
k=1
f(x2k−1)− b− a
180h4f (4)(c)
(5.54)Con respecto a la regla compuesta de los 3
8Simpson consideremos el in-
tervalo cerrado [a, b], y supongamos se divide en sub-intervalos de la forma[x3k−3, x3k], luego entonces al aplicar 5.44 en este intervalo se tiene que
x3k∫
x3k−3
f(x)dx =3h
8[f(x3k−3)+3f(x3k−2)+3f(x3k−2)+f(x3k)]− 3h5f (4)[ck(x)]
80,
luego entonces,
b∫
a
f(x)dx =n∑
k=1
[3h
8[f(x3k−3)+3f(x3k−2)+3f(x3k−2)+f(x3k)]−3h5f (4)[ck(x)]
80
],
con h =b− a
3n, x3k−3 ≤ ck(x) ≤ x3k, pero
n∑
k=1
[3h
8[f(x3k−3) + 3f(x3k−2) + 3f(x3k−2) + f(x3k)] =
3h
8[f(x0) + f(xn)]
CAPITULO 5. DERIVACION E INTEGRACION NUMERICA

Analisis Numerico. Notas de clase 205
+9h
8
n∑
k=1
f(x3k−2) +9h
8
n∑
k=1
f(x3k−1) +h
4
n∑
k=1
f(x3k−3)],
con a = x0 y b = x3n, por lo tanto
b∫
a
f(x)dx =n∑
k=1
[3h
8[f(x3k−3) + 3f(x3k−2) + 3f(x3k−2) + f(x3k)]
−3h5
80
n∑
k=1
f (4)[ck(x)],
ası que el error es
ET (x) = −3h5
80
n∑
k=1
f (4)[ck(x)].
Pero f ∈ C4[a, b], tiene valores extremos, de modo que
mına≤x≤b
f (4)(x) ≤ f (4)[ck(x)] ≤ maxa≤x≤b
f (4)(x),
por lo tanto
n mına≤x≤b
f (4)(x) ≤n∑
k=1
f (4)[ck(x)] ≤ n maxa≤x≤b
f (4)(x),
luego
mına≤x≤b
f (4)(x) ≤ 1
n
n∑
k=1
f (4)[ck(x)] ≤ maxa≤x≤b
f (4)(x),
pero por el teorema del valor intermedio existe c ∈ (a, b) tal que
f (4)(c) =1
n
n∑
k=1
f (4)[ck(x)]
luego
ET (x) = −3h5
80
n∑
k=1
f (4)[ck(x)] = −3h5nf (4)(c)
80,
como h =b− a
3n, entonces
ET = −h4 (b− a)
3n
nf (4)(c)
80= −b− a
80h4f (4)(c),
5.4. INTEGRACION COMPUESTA

206 J Velasquez Zapateiro/ V. Obeso Fernandez
de modo que la regla de los 38
de Simpson con error es
b∫
a
f(x)dx =3h
8[f(a) + f(b)] +
9h
8
n−1∑
k=1
f(x3k−2) +9h
8
n∑
k=1
f(x3k−1)+
h
4
n∑
k=1
f(x3k−3)− b− a
80h4f (4)(c) (5.55)
5.5. Metodo de Integracion de Romberg
Como hemos visto la regla del trapecio nos proporciona la aproximacionde una integral con un error considerablemente grande con el proposito demejorar el procedimiento y hacerlo mas eficiente estudiaremos a continuacionel metodo de Romberg.
Consideremos la regla compuesta con nodos n1 = 1, n2 = 2, n3 =4, · · · , ni = 2i−1, la cual esta dada por
b∫
a
f(x)dx =hi
2
[f(a) + f(b) + 2
2i−1−1∑
k=1
f(xk)]− b− a
12h2
i f(c),
con hi =b− a
2i−1y xk = a + khi, sea
R(i, 1) =hi
2
[f(a) + f(b) + 2
2i−1−1∑
k=1
f(a + khi)],
entonces
R(1, 1) =h1
2[f(a) + f(b)],
pero h1 = b− a, luego
R(1, 1) =b− a
2[f(a) + f(b)], (5.56)
ahora
R(2, 1) =h2
2[f(a)+f(b)+2f(a+h2)] =
b− a
4[f(a)+f(b)]+2
b− a
4f(a+h2),
CAPITULO 5. DERIVACION E INTEGRACION NUMERICA

Analisis Numerico. Notas de clase 207
ya que h2 =b− a
2luego
R(2, 1) =b− a
4[f(a) + f(b)] +
b− a
2f(a + h2)
=1
2
[b− a
2f(a) + f(b)+ (b− a)f(a + h2)
],
pero por 5.56, se tiene que,
R(2, 1) =1
2
[R(1, 1) + h1f(a + h2)
]. (5.57)
Pero
R(3, 1) =h3
2
[f(a) + f(b) + 2
3∑
k=1
f(a + kh3)],
luego
R(3, 1) =h3
2[f(a) + f(b) + 2f(a + h3) + f(a + 2h3) + f(a + 3h3)],
como h3 =b− a
22, entonces
R(3, 1) =h3
2[f(a) + f(b) + 2f
(a + 2
b− a
22
)+ 2f(a + h3) + f(a + 3h3)]
=h3
2[f(a) + f(b) + 2f
(a +
b− a
2
)+ 2f(a + h3) + f(a + 3h3)]
=b− a
8[f(a) + f(b) + 2f(a + h2) + 2f(a + h3) + f(a + 3h3)],
de modo que
R(3, 1) =1
2
[b− a
4
[f(a)+f(b)
]+
b− a
2f(a+h2)+
b− a
2f(a+h3)+f(a+3h3)
],
pero de 5.57 se tiene que
R(3, 1) =1
2
[R(2, 1) + h2f(a + h3) + f(a + 3h3)
].
Continuando con este proceso se tiene que
R(k, 1) =1
2
[R(k − 1, 1) + hk−1
2k−2∑i=1
f(a + (2i− 1)hk)]
(5.58)
5.5. METODO DE INTEGRACION DE ROMBERG

208 J Velasquez Zapateiro/ V. Obeso Fernandez
Ejemplo 5.5.1. Usar el metodo de Romberg para aproximar
π2∫
−π2
cos xdx,
con h = 5
Solucion
Al resolver la integral propuesta usando el calculo integral se tieneque
3π2∫
−π2
cos xdx = 2.
Ahora
R(1, 1) =π2
+ π2
2
[cos
3π
2+ cos
π
2
]= 0,
luego
R(2, 1) =1
2[R(1, 1) + πf(a + h2)]
=1
2
[0 + π cos
(− π
2+
π
2
)]=
1
2π = 1.570879633.
R(3, 1) =1
2
[R(2, 1) + h2
cos
π
4+ cos
π
4
]=
1
2[1.57079633 +
π
2
√2]
= 1.89611890524.
Pero entonces
R(4, 1) =1
2
[R(2, 1) + h3
cos
3π
8+ cos
π
8+ cos
π
8+ cos
3π
8
]
=1
2
[1.89611890534 + h3
2 cos
3π
8+ 2 cos
π
8
]
=1
2[1.89611890534 + 2.05234431668] = 1.97423161101.
Y finalmente
R(5, 1) =1
2
[R(4, 1) + h4
f(a + h5) + f(a + 3h5) + f(a + 5h5) + f(a + 7h5)
+f(a + 9h5) + f(a + 11h5) + f(a + 13h5) + f(a + 15h5)]
,
CAPITULO 5. DERIVACION E INTEGRACION NUMERICA

Analisis Numerico. Notas de clase 209
luego,
R(5, 1) =1
2
[R(4, 1) +
π
8
2Cos
7π
16+ 2 cos
5π
16+ 2 cos
3π
16+ 2 cos
π
16
],
por lo tanto
R(5, 1) =1
2
[R(4, 1) +
π
4
cos
7π
16+ cos
5π
16+ cos
3π
16+ cos
π
16
],
de modo que
R(5, 1) =1
2[1.97423161101 + 2.01290909611] = 1.99357035356.
el error es entonces E = |2 − 1.99357035356| = 0.00642964644 ≈ 0, 6 %¥
Con el fin de acelerar el metodo de Romberg, es comun usar el proce-so de extrapolacion de Richardson que ya fue presentado en una seccionanterior.
Sea f ∈ C∞[a, b], se puede probar que la regla compuesta del trapecio sepuede escribir (omitimos la demostracion) como
b∫
a
f(x)dx−R(k, 1) = a1h2 + a2h
4 + a3h6 + . . . (5.59)
ası que si reemplazamos a k por k + 1 y h porh
2en 5.59 se tiene que
b∫
a
f(x)dx−R(k + 1, 1) = a1h2
4+ a2
h4
16+ a3
h6
64+ . . . (5.60)
si a cuatro veces la ecuacion 5.60 le restamos la ecuacion 5.59 se tiene que
3
b∫
a
f(x)dx−4R(k+1, 1)+R(k, 1) = a2
(h4
4−h4
)+a3
(h6
16−h6
)+. . . (5.61)
luego
b∫
a
f(x)dx−[R(k+1, 1)+
R(k + 1, 1)−R(k, 1)
3
]=
a2
3
(h4
4−h4
)+
a3
3
(h6
16−h6
)+. . . ,
5.5. METODO DE INTEGRACION DE ROMBERG
210 J Velasquez Zapateiro/ V. Obeso Fernandez
de modo que,
b∫
a
f(x)dx = R(k, 2)− a2h4
4− 5a3h
6
16+ . . . , (5.62)
donde
R(k, 2) = R(k + 1, 1) +R(k + 1, 1)−R(k, 1)
3=
4R(k + 1, 1)−R(k, 1)
4− 1,
que al reescribirlo se tiene que
R(k, 2) = R(k, 1) +R(k, 1)−R(k − 1, 1)
3=
4R(k, 1)−R(k − 1, 1)
4− 1,
pero si en 5.62 reemplazamos nuevamente a k por k + 1 y h porh
2, tenemos
queb∫
a
f(x)dx = R(k + 1, 2)− a2h4
64− a3
5h6
1024+ . . . , (5.63)
restandole a 16 veces la ecuacion 5.63 la ecuacion 5.62 se tiene que
15
b∫
a
f(x)dx = 16R(k + 1, 2)−R(k, 2) + . . . ,
por tanto,
b∫
a
f(x)dx = R(k + 1, 2) +R(k + 1, 2)−R(k, 2)
15+
por tantob∫
a
f(x)dx = R(k, 3) + . . .
donde
R(k, 3) = R(k + 1, 2) +R(k + 1, 2)−R(k, 2)
15=
42R(k + 1, 2)−R(k, 2)
42 − 1
que al reescribirla se tiene que
R(k, 3) = R(k, 2) +R(k, 2)−R(k − 1, 2)
15=
42R(k, 2)−R(k − 1, 2)
42 − 1
CAPITULO 5. DERIVACION E INTEGRACION NUMERICA
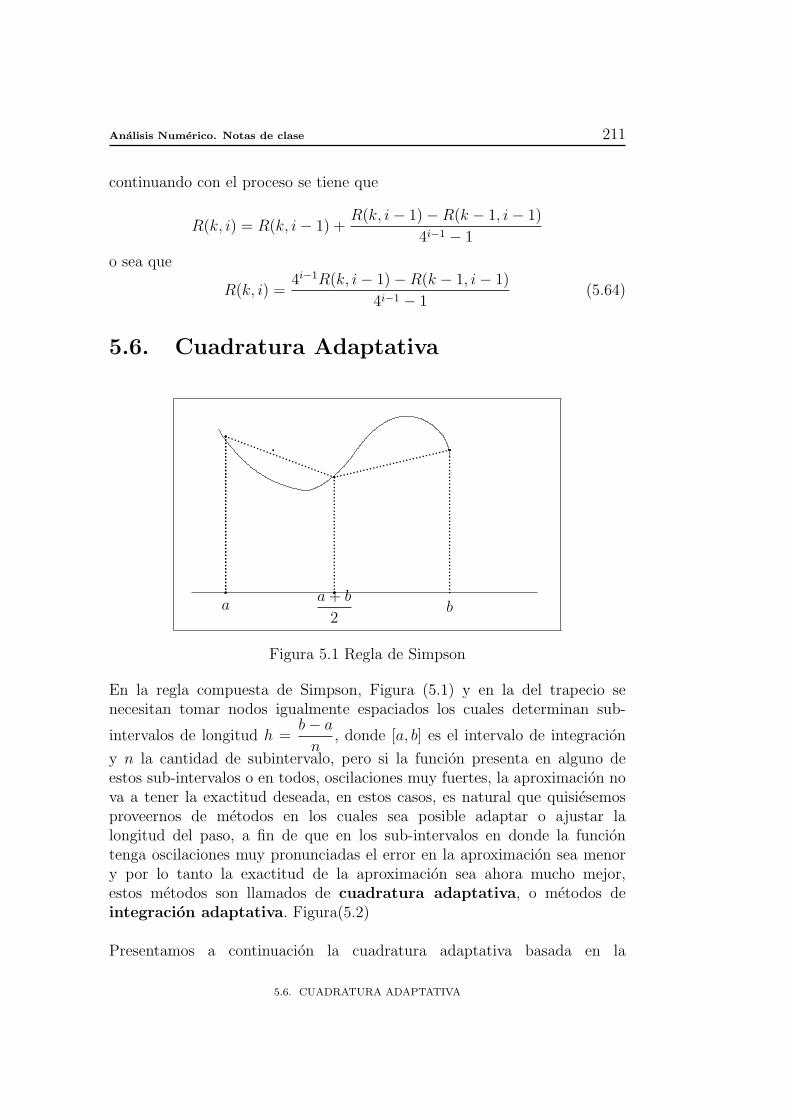
Analisis Numerico. Notas de clase 211
continuando con el proceso se tiene que
R(k, i) = R(k, i− 1) +R(k, i− 1)−R(k − 1, i− 1)
4i−1 − 1
o sea que
R(k, i) =4i−1R(k, i− 1)−R(k − 1, i− 1)
4i−1 − 1(5.64)
5.6. Cuadratura Adaptativa
............................................................................
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
....
.....................................
.............
.........................................................
..............
aa + b
2b
Figura 5.1 Regla de Simpson
En la regla compuesta de Simpson, Figura (5.1) y en la del trapecio senecesitan tomar nodos igualmente espaciados los cuales determinan sub-
intervalos de longitud h =b− a
n, donde [a, b] es el intervalo de integracion
y n la cantidad de subintervalo, pero si la funcion presenta en alguno deestos sub-intervalos o en todos, oscilaciones muy fuertes, la aproximacion nova a tener la exactitud deseada, en estos casos, es natural que quisiesemosproveernos de metodos en los cuales sea posible adaptar o ajustar lalongitud del paso, a fin de que en los sub-intervalos en donde la funciontenga oscilaciones muy pronunciadas el error en la aproximacion sea menory por lo tanto la exactitud de la aproximacion sea ahora mucho mejor,estos metodos son llamados de cuadratura adaptativa, o metodos deintegracion adaptativa. Figura(5.2)
Presentamos a continuacion la cuadratura adaptativa basada en la
5.6. CUADRATURA ADAPTATIVA

212 J Velasquez Zapateiro/ V. Obeso Fernandez
............................................................................
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
....
.......................
............. ...................
a b
......................................................................................
.....................................................
x1 x2 x3
Figura 5.2 Cuadratura Adaptativa
regla compuesta de Simpson.Consideremos el intervalo [ak, bk] al aplicar la regla de Simpson en estaintervalo se tiene que
bk∫
ak
f(x)dx =h
3
[f(ak) + 4f(ck) + f(bk)
]− h5f (4)(α1)
90,
donde h =bk − ak
2y ck =
ak + bk
2, observese que ck =
ak + bk
2=
2ak + bk − ak
2= ak +
bk − ak
2= ak + h, luego,
bk∫
ak
f(x)dx =h
3
[f(ak) + 4f(ak + h) + f(bk)
]− h5f (4)(α1)
90,
tomemos
S(ak, bk) =h
3
[f(ak) + 4f(ak + h) + f(bk)
],
entoncesbk∫
ak
f(x)dx = S(ak, bk)− h5f (4)(α1)
90.
Sea ahora ak1 y bk1 puntos medios de los sub-intervalos [ak, ck] y [ck, bk]respectivamente, aplicando nuevamente regla compuesta de Simpson con los
CAPITULO 5. DERIVACION E INTEGRACION NUMERICA

Analisis Numerico. Notas de clase 213
nodos ak, ak1, ck, bk1, bk, con h1 =bk − ak
4=
h
2, se tiene que
bk∫
ak
f(x)dx =h1
3
[f(ak) + 4f(ak1) + 2f(ck) + 4f(bk1) + f(bk)
]− h5
16
f (4)(α2)
90,
=h
6
[f(ak) + 4f(ak1) + f(ck) + f(ck) + f(bk1) + 4f(bk)
]− h5
16
f (4)(α2)
90
=h
6
[f(ak) + 4f(ak1) + f(ck)
]+
h
6
[f(ck) + f(bk1) + 4f(bk)
]− 1
16
h5f (4)(α2)
90,
sea
S(ak, ck) =h
6
[f(ak) + 4f(ak1) + f(ck)
]
y
S(ck, bk) =h
6
[f(ck) + 4f(bk1) + f(bk)
],
entoncesbk∫
ak
f(x)dx = S(ak, ck) + S(ck, bk)− 1
16
h5f (4)(α2)
90,
luego
bk∫
ak
f(x)dx = S(ak,
ak + bk
2
)+ S
(ak + bk
2, bk
)− 1
16
h5f (4)(α2)
90(5.65)
Nota: Observese que ak1 = ak + h1 = ak +h
2, bk1 = ck + h1 =
ak + bk
2+
h
2=
ak + bk
2+
bk − ak
4=
2ak + 2bk + bk − ak
4=
ak + 3bk
4=
4ak + 3bk − 3ak
4= ak +
3(bk − ak)
4= ak +
3
2h.
Si suponemos que α1 ≈ α2, entonces, f (4)(α1) ≈ f (4)(α2) lo cual permiteestimar el error,de modo que el metodo es exitoso dependiendo del gradode exactitud del supuesto. En particular si f (4)(α1) = f (4)(α2) = f (4)(α),entonces
S(ak,
ak + bk
2
)+ S
(ak + bk
2, bk
)− 1
16
h5f (4)(α2)
90≈ S(ak, bk)− h5f (4)(α1)
90,
luego
15
16
h5f (4)(α)
90≈ S(ak, bk)− S
(ak,
ak + bk
2
)− S
(ak + bk
2, bk
),
5.6. CUADRATURA ADAPTATIVA

214 J Velasquez Zapateiro/ V. Obeso Fernandez
o sea que
1
15
[S(ak, bk)− S
(ak,
ak + bk
2
)− S
(ak + bk
2, bk
)]≈ 1
16
h5f (4)(α)
90,
pero por 5.65
1
16
h5f (4)(α)
90≈
bk∫
ak
f(x)dx− S(ak,
ak + bk
2
)− S
(ak + bk
2, bk
),
luego1
15
∣∣∣S(ak, bk)− S(ak,
ak + bk
2
)− S
(ak + bk
2, bk
)∣∣∣ ≈
∣∣∣bk∫
ak
f(x)dx− S(ak,
ak + bk
2
)− S
(ak + bk
2, bk
)∣∣∣,
ası que si
M =∣∣∣S(ak, bk)− S
(ak,
ak + bk
2
)− S
(ak + bk
2, bk
)∣∣∣ < 15ε, (5.66)
para una tolerancia ε predeterminada, entonces
∣∣∣bk∫
ak
f(x)dx−S(ak,
ak + bk
2
)−S
(ak + bk
2, bk
)∣∣∣ ≈ 1
15M <
1
1515ε = ε, (5.67)
luego S(ak,
ak+bk
2
)+ S
(ak+bk
2, bk
)aproxima 15 veces mejor a
bk∫ak
f(x)dx que
S(ak, bk) y por tanto es una aproximacion suficientemente exacta.
Ejemplo 5.6.1. Mostrar la exactitud de la estimacion del error que se da
en 5.66 para1.5∫1
x2 ln xdx.
Solucion
Se tiene que
S(1; 1, 5) =0.25
3[f(1)+4f(1.25)+F (1.5)] =
1
12[0+1.39464719571+0912296493243],
por lo tantoS(1; 1, 5) = 0.192245307412.
CAPITULO 5. DERIVACION E INTEGRACION NUMERICA
Analisis Numerico. Notas de clase 215
Ahora
S(0; 1, 25)+S(1.25; 1, 5) =1
24[f(0)+4f(1.25)+2f(1.25)+4f(1.375)+f(1.5)]
=1
24[0+0.59627668008+0.697323597856+2.40830634159+0.912296493243]
= 0.192258460446.
de modo que
1
15
∣∣∣S(1; 1, 5)−S(0; 1, 25)−S(1.25; 1, 5)∣∣∣ =
1
15×0.000013153034 = 0.0000008769.
Esto es una buena aproximacion al error real dado por
∣∣∣1.5∫
1
x2 ln xdx− 0.192258460446∣∣∣ = 0.000000897.
¥
El metodo de cuadratura adaptativa se concreta de la siguiente for-ma: Sea el intervalo [a, b], que reescribimos [a0, b0] tomamos el punto medioc0, y dividimos el intervalo en dos sub-intervalos y aplicamos el criterio deexactitud 5.66 con una tolerancia predeterminada ε0 si se satisface aplicamos5.65 y terminamos el proceso, si no se cumple el criterio de exactitudentonces se toman los dos sub-intervalos [a1, b1], [a2, b2] con a1 = a0,b1 = c0 = a2 y b2 = b.
Ahora el intervalo [a1, b1], se divide en dos sub-intervalos tomando elpunto medio c1, se tiene entonces los sub-intervalos [a1, c1], [c1, b1], se mira
si se cumple el criterio de exactitud con una tolerancia ε1 =ε0
2, si se cumple
el criterio entonces se aplica 5.65 y el proceso termina. Pero en este segundopaso tambien el subintervalo [a2, b2] se divide en dos sub-intervalos [a2, c2],
[c2, b2], con c2, punto medio y se aplica el criterio de exactitud con ε2 =ε1
2,
si se cumple el criterio se aplica entonces 5.65 si no se cumple el criterio en[a1, b1] ni en [a2, b2], entonces cada uno de los sub-intervalos [a1, c1], [c1, b1],[a2, c2], [c2, b2] se dividen en sub-intervalos tomando sus puntos medios yse verifica el criterio de exactitud con una tolerancia igual a la mitad de laanterior y se continua el proceso.
Con estos refinamientos el proceso termina en un numero finito de
pasos debido a que el error se va reduciendo en un factor1
16.
5.6. CUADRATURA ADAPTATIVA

216 J Velasquez Zapateiro/ V. Obeso Fernandez
5.7. Integracion Gauss-Legendre
Tanto en las formulas cerradas de Newton-Cotes como en las abiertas, losnodos que utilizamos estan igualmente espaciados, este procedimiento puedecomprometer la exactitud de la aproximacion, la cual puede ser mejoradatomando las reglas compuestas, pero para una mejor aproximacion podemosoptimizar la escogencia de los nodos a fin de que nuestro proposito se cumpla.
Sea P = x0, x1, x2, . . . , xn una particion de [a, b] y supongamos que
b∫
a
f(x)dx ≈n∑
i=1
wif(xi), (5.68)
donde w1, w2, w3, . . . , wn son los pesos que tienen valores indeterminados, laseleccion de los pesos wi y los nodos xi, i = 1, 2, 3, . . . , n se debe hacer detal forma que la aproximacion sea lo mas exacta posible.
Encontrar pues los pesos y los nodos es equivalente a encontrar 2nparametros, lo cual puede hacerse, si consideramos como parametros loscoeficientes de los polinomios de grado 2n − 1, los cuales son los queproporcionan una mayor exactitud.
Para mostrar el procedimiento supongamos que
1∫
−1
f(x)dx ≈ w1f(x1) + w2f(x2) (5.69)
donde w1, w2, x1, x2 son los parametros a determinar de lo comentadoanteriormente el resultado es exacto para polinomios de grado 2n− 1 = 3 yaque el numero de parametros es cuatro.
Es suficiente exigir que 5.69 sea exacta para f(x) = 1, f(x) = x,f(x) = x2, f(x) = x3, ası que las cuatro condiciones serıan
1. f(x) = 1,1∫−1
dx = w1f(x1) + w2f(x2) = w1 + w2, luego
w1 + w2 = 2
2. f(x) = x,1∫−1
xdx = w1f(x1) + w2f(x2) = w1x1 + w2x2, luego
w1x1 + w2x2 = 0
CAPITULO 5. DERIVACION E INTEGRACION NUMERICA

Analisis Numerico. Notas de clase 217
3. f(x) = x2,1∫−1
x2dx = w1f(x1) + w2f(x2) = w1x21 + w2x
22, luego
w1x21 + w2x
22 =
2
3
4. f(x) = x3,1∫−1
x3dx = w1f(x1) + w2f(x2) = w1x31 + w2x
32, luego
w1x31 + w2x
32 = 0
por lo tanto se tiene que
w1 + w2 = 2 (5.70)
w1x1 + w2x2 = 0 (5.71)
w1x21 + w2x
22 =
2
3(5.72)
w1x31 + w2x
32 = 0 (5.73)
de 5.71, se tiene que w1x1 = −w2x2 y de 5.73 w1x31 = −w2x
32, luego entonces
w1x1
w1x31
=w2x2
w2x32
,
por lo tanto x21 = x2
2, ası que x1 = −x2 ya que x1 6= x2, puesto que son cuatronodos distintos, pero entonces se tiene que por 5.71 w1x1 − w2x1 = 0 o seaque w1 = w2 y de 5.70 w1 = 1 y w2 = 1 por lo tanto al reemplazar en 5.72
se tiene que x21 =
1
3luego x2
1 = x22 =
1
3, de modo que x1 =
1√3
y x2 = − 1√3
por lo tanto1∫
−1
f(x)dx ≈ f( 1√
3
)+ f
(− 1√
3
),
esta ultima expresion es conocida como la regla de Gauss-Legendre de dosnodos
Ejemplo 5.7.1. Aproximar la integral1∫−1
13(x2 − x)e−3x2 dx usando la inte-
gracion Gauss-Legendre.
5.7. INTEGRACION GAUSS-LEGENDRE

218 J Velasquez Zapateiro/ V. Obeso Fernandez
Solucion
Como f(x) = 13(x2 − x)e−3x2 , entonces f
( 1√3
)= −1.33429932893
y
f(− 1√
3
)= 28.1462747836 ası que
1∫
−1
13(x2 − x)e−3x2 dx ≈ f
( 1√3
)+ f
(− 1√
3
)= 26.8119754547.
¥
Otra alternativa diferente para encontrar los pesos y los nodos es us-ando los polinomios de Legendre que a continuacion definimos
Definicion 5.7.1. El n-esimo polinomio de Legendre se define como
Pn(x) =
[|n2|]∑
k=0
(−1)k(2n− 2k)!
2nk!(n− k)!(n− 2k)!xn−2k
donde [|n2|] es la parte entera de
n
2
De la definicion anterior se tiene que los cinco primeros polinomio de Legendreson:
• P0(x) = 1
• P1(x) = x
• P2(x) =1
2(3x2 − 1)
• P3(x) =1
2(5x3 − 3x)
• P4(x) =1
8(35x4 − 30x2 + 3)
• P5(x) =1
8(63x5 − 70x3 + 15x)
Los polinomios de Legendre cumplen propiedades importantes entre lascuales podemos destacar las siguientes
CAPITULO 5. DERIVACION E INTEGRACION NUMERICA

Analisis Numerico. Notas de clase 219
? Pn(x) es un polinomio de grado n
? Si Q(x) es un polinomio de grado menor que n,1∫−1
Q(x)Pn(x)dx = 0
Las raıces de los polinomios de Legendre son los nodos que nos proporcionanresultados exactos para cualquier polinomio de grado menor que 2n, lo cualse prueba con el siguiente teorema
Teorema 5.7.1. Sean x1, x2, x3, . . . , xn las n raıces del polinomio de Legen-dre de grado n y ademas sea
wi =
1∫
−1
n∏
j=1,j 6=i
x− xj
xi − xj
dx. (5.74)
Si P (x) es cualquier polinomio de grado menor que 2n, entonces
1∫
−1
P (x)dx =n∑
i=1
wiP (xi).
Demostracion. Primero probemos el teorema para un polinomio de gradomenor n, en efecto sea P (x) un polinomio cualquiera de grado menor n,entonces, P (x) se puede escribir como un polinomio de Lagrange de gradon− 1, esto es
P (x) =n∑
i=1
n∏
i=1,k 6=i
x− xi
xk − xi
P (xi) +f (n)[ε(x)]
n!(x− x0)(x− x1) . . . (x− xn),
con xi i = 1, 2, 3 . . . , n raıces del polinomio de grado n de Legendre, perocomo P (x) tiene grado n, entonces
f (n)[ε(x)]
n!(x− x0)(x− x1) . . . (x− xn) = 0,
luego1∫
−1
P (x)dx =
1∫
−1
n∑i=1
n∏
i=1,k 6=i
x− xi
xk − xi
P (xi)dx,
o sea que
1∫
−1
P (x)dx =n∑
i=1
( 1∫
−1
n∏
i=1,k 6=i
x− xi
xk − xi
P (xi)dx)
=n∑
i=1
wiP (xi).
5.7. INTEGRACION GAUSS-LEGENDRE

220 J Velasquez Zapateiro/ V. Obeso Fernandez
Sea ahora P (x) un polinomio de grado menor que 2n, y Pn(x) el poli-nomio de Legendre de grado n, entonces por el algoritmo de la division
P (x)
Pn(x)= Q(x) +
R(x)
Pn(x),
con Q(x) y R(x) polinomios de grado menor que n, ası que,
P (x) = Q(x)Pn(x) + R(x),
de modo que,1∫
−1
P (x)dx =
1∫
−1
R(x)dx,
ademas como xi es raız de Pn(x), entonces Pn(xi) = 0 por lo tanto,
P (xi) = Q(xi)Pn(xi) + R(xi) = R(xi).
Ahora como R(x) es de grado menor que n, por la primera parte del teoremase tiene que
1∫
−1
P (x)dx =n∑
i=1
wiR(xi),
luego entonces se obtiene que
1∫
−1
P (x)dx =n∑
i=1
wiR(xi) =n∑
i=1
wiP (xi)
Como el polinomio de Legendre de grado 2 esta dado por P2(x) =1
2(3x2−1)
sus raıces son x1 =1√3
y x2 = − 1√3, y al aplicar la expresion 5.74 se
puede facilmente determinar que w1 = w2 = 1 que coinciden con los valoresobtenidos anteriormente en el metodo de de Gauss-Legendre de dos nodos.
Para el polinomio de Legendre de grado 3 que viene dado por
P3(x) =1
2(5x3 − 3x) =
1
2x(5x2 − 3),
CAPITULO 5. DERIVACION E INTEGRACION NUMERICA

Analisis Numerico. Notas de clase 221
las raıces son x1 = −√
3
5, x2 = 0, x3 =
√3
5y entonces w1 = 0.5555555556,
w2 = 0.88888888888 y w3 = 0.5555555556
Pero no siempre los limites de integracion son −1 y 1, entonces si se
quiere aproximarb∫
a
f(x)dx usando la integracion Gauss-Legendre, se puede
usar la sustitucion x =a + b
2+
b− a
2u de modo que dx =
b− a
2du, por lo
tanto se tiene que,
b∫
a
f(x)dx =
1∫
−1
f(a + b
2+
b− a
2u)b− a
2du
5.8. Integrales Impropias
En esta seccion miraremos la forma de aproximar integrales de la formab∫
a
g(x)
(x− a)pdx,
b∫a
g(x)
(x− b)pdx,
∞∫−∞
f(x)dx, que como podemos observar son
integrales impropias ya que presentan problemas en los limites de integracion.
Supongamos g ∈ C5[a, b], y sea P4(x) el polinomio de Taylor de cuar-to orden de g(x) alrededor de x = a, luego
P4(x) = g(a) + g′(a)(x− a) +
g′′(a)
2!(x− a)2 +
g′′′(a)
3!(x− a)3 +
g4(a)
4!(x− a)4,
por lo tanto,
P4(x)
(x− a)p= g(a)(x− a)−p + g
′(a)(x− a)1−p +
g′′(a)
2!(x− a)2−p
+g′′′(a)
3!(x− a)3−p +
g4(a)
4!(x− a)4−p,
pero entonces,
b∫
a
P4(x)
(x− a)pdx = g(a) lım
c→a+
b∫
c
1
(x− a)pdx + g
′(a) lım
c→a+
b∫
c
1
(x− a)p−1dx
+g′′(a)
2!lım
c→a+
b∫
c
1
(x− a)p−2dx +
g′′′(a)
3!lım
c→a+
b∫
c
1
(x− a)p−3dx
5.8. INTEGRALES IMPROPIAS

222 J Velasquez Zapateiro/ V. Obeso Fernandez
+g4(a)
4!lım
c→a+
bn∫
c
1
(x− a)p−4dx,
pero 0 < p < 1, entonces
b∫
a
P4(x)
(x− a)pdx =
g(a)
1− plım
c→a+
[ 1
(x− a)p−1
∣∣∣b
c
]+
g′(a)
2− plım
c→a+
[ 1
(x− a)p−2
∣∣∣b
c
]
+g′′(a)
2!(3− p)lım
c→a+
[ 1
(x− a)p−3
∣∣∣b
c
]+
g′′′(a)
3!(4− p)lım
c→a+
[ 1
(x− a)p−4
∣∣∣b
c
]
+g4(a)
4!(5− p)lım
c→a+
[ 1
(x− a)p−5
∣∣∣b
c
],
de modo que
b∫
a
P4(x)
(x− a)pdx =
g(a)
1− p
1
(b− a)p−1+
g′(a)
2− p
1
(b− a)p−2+
g′′(a)
2!(3− p)
1
(b− a)p−3
+g′′′(a)
3!(4− p)
1
(b− a)p−4+
g(4)(a)
4!(5− p)
1
(b− a)p−5,
ası queb∫
a
P4(x)
(x− a)pdx =
4∑
k=0
gk(a)
k!(k + 1− p)(b− a)k+1−p (5.75)
por tanto
b∫
a
g(x)
(x− a)pdx =
b∫
a
g(x)− P4(x)
(x− a)pdx +
b∫
a
P4(x)
(x− a)pdx.
Sea
G(x) =
g(x)−P4(x)(x−a)p si a < x ≤ b
si x = a
aplicamos ahora la regla compuesta de Simpson a G(x) y agregamos aesta aproximacion el valor obtenido en 5.75 para obtener finalmente el valorde la integral deseada.
CAPITULO 5. DERIVACION E INTEGRACION NUMERICA

Analisis Numerico. Notas de clase 223
Para calcular el valor deb∫
a
g(x)(x−b)p con 0 < p < 1, al igual que antes
tomamos el polinomio de Taylor de cuarto orden de g(x) alrededor de x = b,o sea
P4(x) =4∑
k=0
gk(b)
k!(x− b)k−p,
luego,b∫
a
P4(x)
(x− b)p= −
4∑
k=0
gk(b)
k!(a− b)k+1−p, (5.76)
ya que
b∫
a
P4(x)
(x− b)pdx =
4∑
k=0
b∫
a
gk(b)
k!(x− b)k−pdx =
4∑
k=0
lımc→b−
c∫
a
gk(b)
k!(x− b)k−pdx,
o sea,
b∫
a
P4(x)
(x− b)pdx =
4∑
k=0
gk(b)
k!lım
c→b−
c∫
a
(x−b)k−pdx =4∑
k=0
gk(b)
k!lım
c→b−
[(x− b)k+1−p
k + 1− p
∣∣∣c
a
],
y ası,
b∫
a
P4(x)
(x− b)pdx =
4∑
k=0
gk(b)
k!(k + 1− p)
[lım
c→b−
( 1
(c− b)p−k−1− 1
(a− b)p−k−1
)]
= −4∑
k=0
(a− b)k+1−p
k!(k + 1− p)g(k)(b)
sea ahora
G(x) =
0 si b = x
g(x)−P4(x)(x−b)p si a ≤ x < b
entonces aplicamos la regla de Simpson a G(x) y a este valor le agregamosel valor de 5.76 teniendo la aproximacion de la integral comentada.
5.8. INTEGRALES IMPROPIAS

224 J Velasquez Zapateiro/ V. Obeso Fernandez
Otras integrales impropias son como hemos dicho∞∫−∞
f(x)dx,b∫
−∞f(x)dx y
∞∫a
f(x)dx, pero como
∞∫
−∞
f(x)dx =
0∫
−∞
f(x)dx +
∞∫
0
f(x)dx,
solo analizaremos los casosb∫
−∞f(x)dx y
∞∫a
f(x)dx.
Para estos casos sea x =1
u, entonces dx = −du
u2, ası que si x = a,
entonces u =1
ay si x = ∞, se tiene que u = 0 luego
∞∫
a
f(x)dx = −0∫
1a
1
u2f(1
u
)du,
de la misma manera
b∫
−∞
f(x)dx = −1b∫
0
1
u2f(1
u
)du,
las cuales se pueden resolver por medio del procedimiento analizado anterior-mente.
Ejemplo 5.8.1. Aproximar la integral
1∫
0
e−x
√1− x
dx
usando la regla compuesta de Simpson con 13 nodos.
Solucion
El polinomio de cuarto orden para e−x alrededor de x = 1 es
P4(x) =1
e
[1− (x− 1) +
(x− 1)2
2!− (x− 1)3
3!+
(x− 1)4
4!
]
CAPITULO 5. DERIVACION E INTEGRACION NUMERICA

Analisis Numerico. Notas de clase 225
=1
e
[1 + (1− x) +
(1− x)2
2!+
(1− x)3
3!+
(1− x)4
4!
]
ası que
P4(x)√1− x
=1
e
[(1− x)−
12 + (1− x)
12 +
(1− x)32
2!+
(1− x)52
3!+
(1− x)72
4!
]
luego
1∫
0
P4(x)√1− x
dx =1
e
1∫
0
[(1−x)−
12 +(1−x)
12 +
(1− x)32
2+
(1− x)52
6+
(1− x)72
24
]dx
= −1
elım
c→1−
[2(1−x)
12 +
2
3(1−x)
32 +
1
5(1−x)
52 +
1
21(1−x)
72 +
1
108(1−x)
92
]∣∣∣c
0
= 2 +2
3+
1
5+
1
21+
1
108≈ 2.92354497355.
Ahora como son 13 nodos entonces n = 6, por lo tanto h =b− a
2n=
1
12, sea
G(x) =
0 si 1 = x
e−x − P4(x)√1− x
si 0 ≤ x < 1
aplicando la regla compuesta de Simpson tenemos que
1∫
0
G(x)dx =
1
123
[G(a) + G(b)
]+ 2
1
123
n−1∑
k=1
G(x2k) + 4
1
123
n−1∑
k=1
G(x2k−1)
=1
36
[G(0)+G(1)
]+
1
18
(G(x2)+G(x4)+G(x6)+G(x8)+G(x10)
)+
1
9
(G(x1)
+G(x3) + G(x5) + G(x7) + G(x9) + G(x11))
pero x0 = 0, x1 =1
12, x2 =
1
6, x3 =
1
4, x4 =
1
3, x5 =
5
12, x6 =
1
2, x7 =
7
12,
x8 =2
3, x9 =
3
4, x10 =
5
6, x11 =
11
12, x12 = 1. Los resultados aparecen en la
siguiente tabla
5.8. INTEGRALES IMPROPIAS
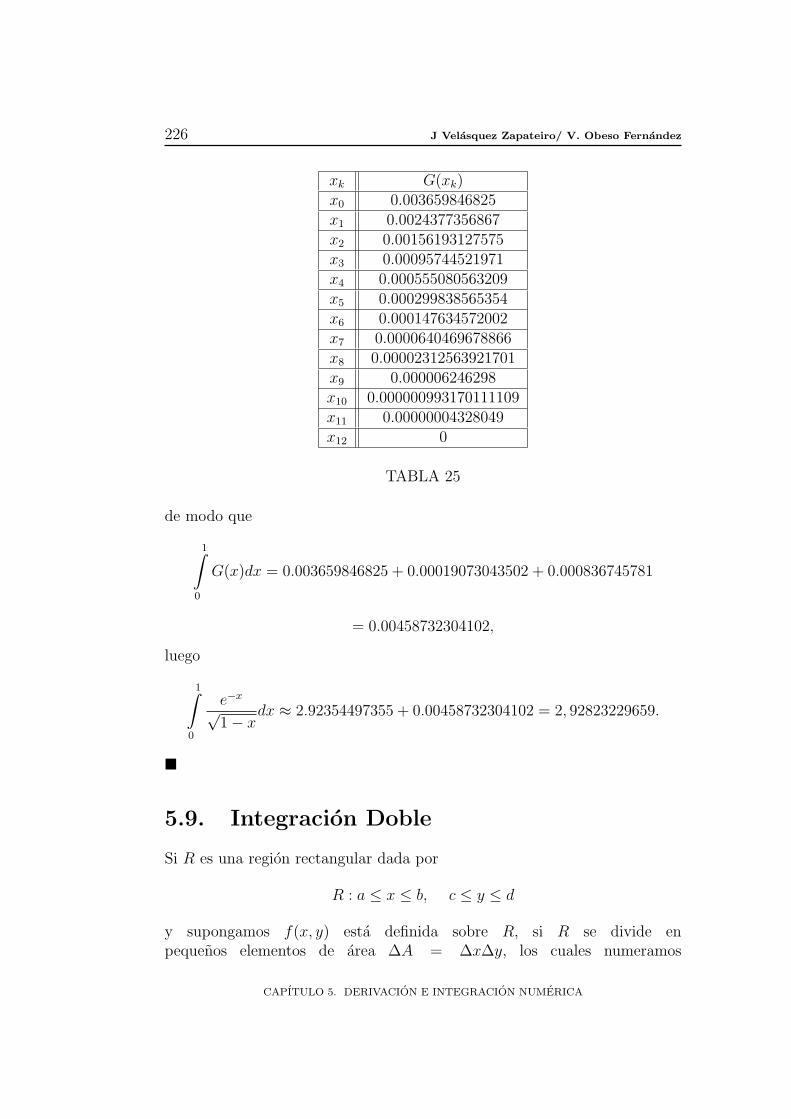
226 J Velasquez Zapateiro/ V. Obeso Fernandez
xk G(xk)x0 0.003659846825x1 0.0024377356867x2 0.00156193127575x3 0.00095744521971x4 0.000555080563209x5 0.000299838565354x6 0.000147634572002x7 0.0000640469678866x8 0.00002312563921701x9 0.000006246298x10 0.000000993170111109x11 0.00000004328049x12 0
TABLA 25
de modo que
1∫
0
G(x)dx = 0.003659846825 + 0.00019073043502 + 0.000836745781
= 0.00458732304102,
luego
1∫
0
e−x
√1− x
dx ≈ 2.92354497355 + 0.00458732304102 = 2, 92823229659.
¥
5.9. Integracion Doble
Si R es una region rectangular dada por
R : a ≤ x ≤ b, c ≤ y ≤ d
y supongamos f(x, y) esta definida sobre R, si R se divide enpequenos elementos de area ∆A = ∆x∆y, los cuales numeramos
CAPITULO 5. DERIVACION E INTEGRACION NUMERICA

Analisis Numerico. Notas de clase 227
∆A1, ∆A2, ∆A3 . . . , ∆An, y escogemos un punto (xi, yi) en cada elemento∆Ai, formamos la suma
Sn =n∑
i=1
f(xi, yi)∆Ai,
entonces ∫ ∫
A
f(x, y)∆A = lım∆A→0
n∑i=1
f(xi, yi)∆Ai.
El siguiente teorema, que presentamos sin demostracion, nos permite calcularuna integral sobre una region
Teorema 5.9.1. Si f(x, y) es continua sobre la region R, dada por R : a ≤x ≤ b, c ≤ y ≤ d, entonces,
∫ ∫
R
f(x, y)∆A =
b∫
a
d∫
c
f(x, y)dydx =
d∫
c
b∫
a
f(x, y)dxdy
Para aproximar una integral doble consideremos las particiones P1 = a =x0, x1, x2, x3, . . . , xn = b y P2 = c = y0, y1, y2, y3, . . . , ym = d de los in-tervalos [a, b] y [c, d] respectivamente con xi = x0 + ih, yj = y0 + jk siendo
h =b− a
2ny k =
d− c
2m, luego en el intervalo [x2i−1, x2i] y para un y fijo se
tiene, por la regla compuesta de Simpson que,
b∫
a
f(x, y)dx ≈ h
3
[f(x0, y) + 2
n−1∑i=1
f(x2i, y) + 4n∑
i=1
f(x2i−1, y) + f(x2n, y)],
luego entonces,
d∫
c
[ b∫
a
f(x, y)dx]dy ≈
d∫
c
h
3
[f(x0, y) + 2
n−1∑i=1
f(x2i, y)
+4n∑
i=1
f(x2i−1, y) + f(x2n, y)]dy
de modo que
d∫
c
[ b∫
a
f(x, y)dx]dy ≈ h
3
[ d∫
c
f(x0, y)dy + 2n−1∑i=1
d∫
c
f(x2i, y)dy
5.9. INTEGRACION DOBLE

228 J Velasquez Zapateiro/ V. Obeso Fernandez
+4n∑
i=1
d∫
c
f(x2i−1, y)dy +
d∫
c
f(x2n, y)dy],
pero, nuevamente por la regla compuesta de Simpson en el intervalo[y2j−1,y2j],
d∫
c
f(x0, y)dy ≈ k
3
[f(x0, y0)+2
m−1∑j=1
f(x0, y2j)+4m∑
j=1
f(x0, y2j−1)+f(x0, y2m)],
ademas,
d∫
c
f(x2i, y)dy ≈ k
3
[f(x2i, y0)+2
m−1∑j=1
f(x2i, y2j)+4m∑
j=1
f(x2i, y2j−1)+f(x2i, y2m)],
d∫
c
f(x2i−1, y)dy ≈ k
3
[f(x2i−1, y0) + 2
m−1∑j=1
f(x2i−1, y2j) + 4m∑
j=1
f(x2i−1, y2j−1)
+f(x2i−1, y2m)],
y
d∫
c
f(x2n, y)dy ≈ k
3
[f(x2n, y0)+2
m−1∑j=1
f(x2n, y2j)+4m∑
j=1
f(x2n, y2j−1)+f(x2n, y2m)],
ası que
b∫
a
d∫
c
f(x, y)dxdy ≈ hk
9
[f(x0, y0)+2
m−1∑j=1
f(x0, y2j)+4m∑
j=1
f(x0, y2j−1)+f(x0, y2m)
+2n−1∑i=1
(f(x2i, y0) + 2
m−1∑j=1
f(x2i, y2j) + 4m∑
j=1
f(x2i, y2j−1) + f(x2i, y2m))
+4n∑
i=1
(f(x2i−1, y0)+2
m−1∑j=1
f(x2i−1, y2j)+4m∑
j=1
f(x2i−1, y2j−1)+f(x2i−1, y2m))
+(f(x2n, y0) + 2
m−1∑j=1
f(x2n, y2j) + 4m∑
j=1
f(x2n, y2j−1) + f(x2n, y2m))]
,
CAPITULO 5. DERIVACION E INTEGRACION NUMERICA

Analisis Numerico. Notas de clase 229
luego
b∫
a
d∫
c
f(x, y)dxdy ≈ hk
9
[f(a, c) + 2
m−1∑j=1
f(a, y2j) + 4m∑
j=1
f(a, y2j−1) + f(a, d)
+2n−1∑i=1
f(x2i, c) +n−1∑i=1
m−1∑j=1
f(x2i, y2j) + 8n−1∑i=1
m−1∑j=1
f(x2i, y2j−1) + 2n−1∑i=1
f(x2i, d)
+4n∑
i=1
f(x2i−1, c) + 8n∑
i=1
m−1∑j=1
f(x2i−1, y2j) + 16n∑
i=1
m∑j=1
f(x2i−1, y2j−1)
+4n∑
i=1
f(x2i−1, d) + 2m−1∑j=1
f(b, y2j) + 4m∑
j=1
f(b, y2j−1) + f(b, c) + f(b, d)]
Ejemplo 5.9.1. Utilice la Regla de Simpson para aproximar la integral
4∫
2
4+ex2∫
ln2x
Cos(x + y)dydx
.
Solucion
Dado que en el eje X el intervalo es [2;4], entonces hx =4− 2
2= 1,
luego los nodos en dicho eje son x2 = 1, x2 = 3, x3 = 4. Para la integraldada por
I =
4∫
2
4+ex2∫
ln2x
Cos(x + y)dydx,
al aplicar la regla de Simpson obtenemos que
I =hx
3[H(x1) + 4H(x2) + H(x3)],
donde H(xi) =4+e
xi2∫
ln2xi
Cos(xi + y)dy, por lo tanto
I ≈ hx
3
[ 4+e12∫
ln2
Cos(2 + y)dy + 4
4+e∫
ln4
Cos(4 + y)dy +
4+e32∫
ln6
Cos(6 + y)dy].
5.9. INTEGRACION DOBLE

230 J Velasquez Zapateiro/ V. Obeso Fernandez
Por lo tanto
I ≈ hx
3
[ 5.6487∫
0.6931
Cos(2 + y)dy + 4
6.7183∫
1.3863
Cos(4 + y)dy +
8.4817∫
1.7918
Cos(6 + y)dy].
Sean I1 =5.6487∫0.6931
Cos(2 + y)dy, I2 =6.7183∫1.3863
Cos(4 + y)dy y I3 =
8.4817∫1.7918
Cos(6 + y)dy.
Para I1, h1y =5.6487− 0.6931
2= 2.4778, luego entonces
I1 =2.4778
3[Cos(2 + 0.6931) + 4Cos(2 + 3.1709) + Cos(2 + 5.6487)],
de modo que
I1 = 0.82593(−0.90110 + 1.77045 + 0.20384) = 0.888637.
Para I2, h2y =6.7183− 1.3863
2= 2.666, por lo tanto
I2 =2.666
3[Cos(3 + 1.3863) + 4Cos(3 + 4.0523) + Cos(3 + 6.7183)],
ası que,
I2 = 0.8887(−0.32034 + 2.8741− 0.9572) = 1.418863.
y para I3, h3y =8.4817− 1.7918
2= 3.34495, por consiguiente,
I3 =3.34495
3[Cos(4 + 1.7918) + 4Cos(4 + 5.13675) + Cos(4 + 8.4817)],
ası que,
I3 = 1.114983(0.88168− 3.835224 + 0.99642) = −2.182156.
De modo que
4∫
2
4+ex2∫
ln2x
Cos(x + y)dydx ≈ 1
3[I1 + 4I2 + I3],
CAPITULO 5. DERIVACION E INTEGRACION NUMERICA

Analisis Numerico. Notas de clase 231
luego entonces
4∫
2
4+ex2∫
ln2x
Cos(x + y)dydx ≈ 1
3(0.888637 + 4× 1.418863− 2.1821556),
y por lo tanto4∫
2
4+ex2∫
ln2x
Cos(x + y)dydx ≈ 1.460644
Ejercicios
1. La formula 5.1 es llamada de diferencias progresiva, si h > 0, y dediferencias regresiva si h < 0. Use esta formula para determinar lasaproximaciones que completan las siguientes tablas
a)
x f(x) f′(x)
0.5 0.87760.6 0.82530.7 0.76480.8 0.6967
b)
x f(x) f′(x)
0.1 4.39520.3 5.15990.5 5.89880.7 6.6238
2. Los datos del ejercicio 1 se tomaron de las siguientes funciones. Calculelos errores reales del ejercicio 1 y obtenga las cotas por medio de lasformulas de errora)f(x) = cos x b)f(x) = ex + 3x− x2 + 3
3. Use la formula de los tres puntos mas conveniente para determinar lasaproximaciones con que se completarıan las siguientes tablas
a)
x f(x) f′(x)
1.1 0.11801.2 0.09071.3 0.074271.4 0.06081
5.9. INTEGRACION DOBLE

232 J Velasquez Zapateiro/ V. Obeso Fernandez
b)
x f(x) f′(x)
2.9 -7.47193 -8.4866
3.1 -9.47283.2 -10.4093
c)
x f(x) f′(x)
8.0 133.0848.1 137.2478.2 141.4828.3 145.789
d)
x f(x) f′(x)
2.0 012862.1 0.14632.2 0.19072.3 0.2630
4. Los datos del ejercicio 3 se tomaron de las siguientes funciones. Calculelos errores reales del ejercicio 1 y obtenga las cotas por medio de lasformulas de errora)f(x) = e−2x b)f(x) = x sen x + x2 cos x c)x2 ln xd) x(ln x)2 + 2 cos x
5. Use la formula mas precisa posible para determinar las aproximacionescon que se completaran las siguientes tablas
a)
x f(x) f′(x)
2.1 0.74512.2 0.65372.3 0.55612.4 0.45632.5 0.35822.6 0.2657
CAPITULO 5. DERIVACION E INTEGRACION NUMERICA

Analisis Numerico. Notas de clase 233
b)
x f(x) f′(x)
-3.0 -2.7769-2.8 -2.5534-2.6 -2.3275-2.4 -2.0988-2.2 -1.8671-2.0 -1.6321
6. Los datos del ejercicio 5 se tomaron de las siguientes funciones. Calculelos errores reales del ejercicio 5 y obtenga las cotas por medio de lasformulas de errora)f(x) = sen2 x b)f(x) = e
x2 + x
7. Usando la expansion de Taylor demuestra que
f′′′(x0) ≈ 1
2h3[f(x0 + 2h)− 2f(x0 + h) + 2f(x0 − h)− f(x0 − 2h)]
8. Usando la expansion de Taylor demuestra que
f′′′′
(x0) ≈ 1
h4[f(x0+2h)−4f(x0+h)+6f(x0)−4f(x0−h)+f(x0−2h)]
9. Estime el valor optimo de h para las formulas de tres puntos.
10. Estime el valor optimo de h para las formulas que permiten aproximarf′′(x0) y f
′′′(x0).
11. En un circuito electrico con un voltaje impreso ε(t) y una inductanciaL, la primera ley de Kirchhoff nos da la siguiente relacion
Ldi
dt+ Ri = ε(t),
donde R es la resistencia del circuito e i es la corriente. Suponga quemedimos la corriente con varios valores de t y obtenemos
t 1.00 1.01 1.02 1.03 1.04i 3.10 3.12 3.14 3.18 3.24
donde t se mide en segundos, i se da en amperes, la inductancia Les una constante de 0.098 henries y la resistencia es de 0.142 ohms.Aproxime el voltaje ε(t) en los valores t = 1.00, 1.01, 1.02, 1.03y1.04
5.9. INTEGRACION DOBLE

234 J Velasquez Zapateiro/ V. Obeso Fernandez
12. La funcion error esta definida como
Erf(x) =2√π
x∫
0
e−t2dt.
Encuentre Erf(2)
13. Si
Si(x) =
x∫
0
sen t
tdt.
Encuentre Si(2)
14. Si
Ci(x) =
x∫
0
cos t
tdt.
Encuentre Ci(2)
15. Las integrales de Fresnel estan definidas como
C(x) =
x∫
0
cos(πt2
2
)dt
y
S(x) =
x∫
0
sen(πt2
2
)dt.
Encontrar C(2) y S(2)
16. Existen muchas formas de integrales elıpticas
a) La integral elıptica completa de primera clase esta definida como
K(m) =
π2∫
0
1√1−m sen2 t
dt.
Encuentre K(1) y K(4)
CAPITULO 5. DERIVACION E INTEGRACION NUMERICA
Analisis Numerico. Notas de clase 235
b) La integral elıptica completa de segunda clase esta definida como
E(m) =
π2∫
0
√1−m sen2 tdt.
Encuentre E(1) y E(4)
c) La integral elıptica de primera clase esta definida como
K(k, x) =
x∫
0
1√1−m sen2 t
dt.
Encuentre K(1, 1) y K(2, 1)
d) La integral elıptica de segunda clase esta definida como
E(k, x) =
x∫
0
√1−m sen2 tdt.
Encuentre E(1, 1) y E(2, 1)
17. Encuentre la longitud de arco de la curva descrita por la funcion y =x−1, 1 < x < 2; la longitud esta dada por
2∫
1
√1 + x−4dx
18. Encuentre la longitud de arco de la curva descrita por la funcion y =Senx, 0 < x < π; la longitud esta dada por
2∫
1
√1 + cos2dx
19. Encuentre la longitud de arco de la curva descrita por la funcion y =ln(x), 1 < x < 2; la longitud esta dada por
2∫
1
√1 + x−2dx
5.9. INTEGRACION DOBLE

236 J Velasquez Zapateiro/ V. Obeso Fernandez
20. Aplique la regla del trapecio con los valores indicados de n para aproxi-mar la integrales siguientes
a)2∫1
x2 ln xdx, n = 4 b)2∫−2
x2exdx, n = 4
c)2∫0
3x2+9
dx, n = 6 d)π∫0
x2 sen xdx, n = 4
e)5∫3
1√x2 − 4
dx, n = 8 f)
3π8∫0
tan xdx, n = 8
21. Aplique la regla compuesta de Simpson para aproximar las integralesdel ejercicio 16.
22. Aplique la regla3
8de Simpson para aproximar las integrales del
ejercicio 16.
En los problemas 19-25 aproxime las integrales dadas
a) Usando el metodo compuesto del trapecio con 10 subintervalo
b) Usando la regla de Simpson con dos subintervalos
c) Usando el metodo compuesta de Simpson con 10 subintervalo
d) Usando cuadratura Gaussiana con n = 2.
e) Usando integracion de Romberg.
23.1∫0
x sen(πx)dx.
24.1∫−1
dx1+x2 .
25.2∫0
exdx.
26.2∫1
√x3 − 1dx.
27.π∫0
x2 sen(2x)dx.
CAPITULO 5. DERIVACION E INTEGRACION NUMERICA
Analisis Numerico. Notas de clase 237
28.π∫0
x3 sen(x2)dx.
29.2∫0
ln(x2 + 1)dx
30. Use la regla de Simpson para calcular las siguientes integrales
a)π/4∫
0
∫
sen x
cos x(2y sen x + cos2 x)dydx
b)2∫
1
x2∫
x
(y2 + x3)dydx
c)2.2∫
2
2+x2∫
x
(x2 + y3)dydx
.
31. Use la regla de los3
8de Simpson para calcular las integrales del ejercicio
anterior.
5.9. INTEGRACION DOBLE

238 J Velasquez Zapateiro/ V. Obeso Fernandez
CAPITULO 5. DERIVACION E INTEGRACION NUMERICA

Capıtulo 6
Ecuaciones DiferencialesOrdinarias con Condiciones
Iniciales
Un paracaidista de masa m salta desde un avion en t = 0, supongamos quela velocidad vertical inicial del paracaidista es cero en t = 0 y que la caıda esvertical. Si el arrastre aerodinamico esta dado por faire = cv2, con c constantey v la velocidad vertical, entonces por la segunda ley de Newton el equilibriode fuerzas satisface
ma = mg − faire,
luego
mdv(t)
dt= mg − cv2, v(0) = 0
o sea quedv(t)
dt= g − c
mv2, v(0) = 0
o lo que es lo mismo
v′(t) = f(v, t), v(0) = 0,
con f(v, t) = g − cm
v2.
Observamos que la ecuacion diferencial tambien se puede escribir co-mo
d2y
dt2= g − c
m(y
′)2, y(0) = 0, y
′(0) = 0,
que es una ecuacion diferencial de segundo orden con condiciones iniciales.
En este capitulo, desarrollaremos metodos que aproximen la solucionde problemas como el anteriormente expuesto.
239

240 J Velasquez Zapateiro/ V. Obeso Fernandez
6.1. Ecuaciones Diferenciales de Primer Or-
den con Condiciones Iniciales
Estudiemos primero la ecuacion diferencial dada por
tdy
dt= 2y (6.1)
la cual al separar variable toma la forma
dy
y=
2dt
t
al integrar miembro a miembro se tiene que
ln y = 2 ln t + c1 = 2 ln t + ln c,
o sea queln y = ln ct2,
de modo que la solucion de 6.1 esta dada por
y(t) = ct2 (6.2)
ecuacion que se satisface para cualquier constante c la cual puede escogersearbitrariamente, en la figura 6.1 se muestra la grafica de 6.2 para algunosvalores de c.En la practica, estas formulas explıcitas, al traducirlas como un modelomatematico, resulta una ecuacion diferencial que involucra la razon decambio de una funcion desconocida.
Si suponemos P (t) es el numero de individuos de una poblacion, conindices de natalidad y mortalidad β y α respectivamente, entonces la razonde cambio de la poblacion esta relacionada con la cantidad de nacimientosy muerte que se tengan en la poblacion dada, teniendo entonces que
dP (t)
dt= (β − α)P (t) = kP (t)
.
Si conocemos el numero de individuos en un instante t = 0, siendoP (0) = P0, entonces el problema a resolver es
dP (t)
dt= kP (t), P (0) = P0
CAPITULO 6. ECUACIONES DIFERENCIALES ORDINARIAS CON CONDICIONES INICIALES
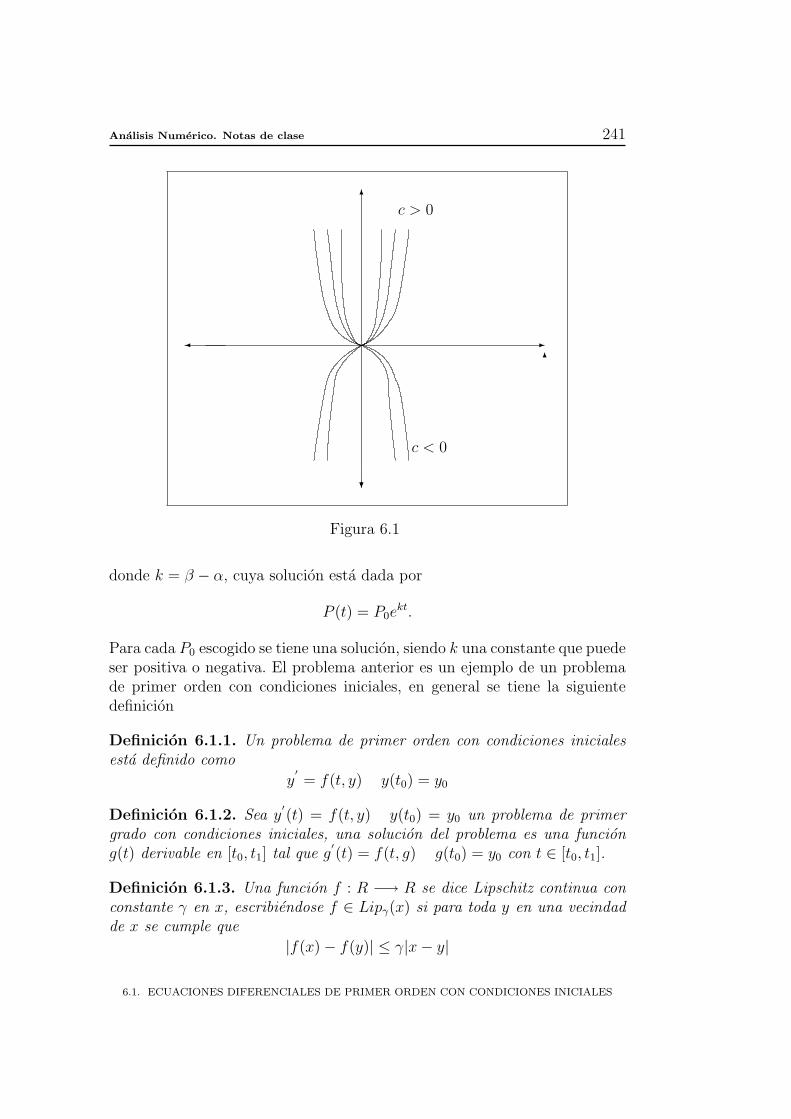
Analisis Numerico. Notas de clase 241
-
6
6
¾
??
c > 0
c < 0
Figura 6.1
donde k = β − α, cuya solucion esta dada por
P (t) = P0ekt.
Para cada P0 escogido se tiene una solucion, siendo k una constante que puedeser positiva o negativa. El problema anterior es un ejemplo de un problemade primer orden con condiciones iniciales, en general se tiene la siguientedefinicion
Definicion 6.1.1. Un problema de primer orden con condiciones inicialesesta definido como
y′= f(t, y) y(t0) = y0
Definicion 6.1.2. Sea y′(t) = f(t, y) y(t0) = y0 un problema de primer
grado con condiciones iniciales, una solucion del problema es una funciong(t) derivable en [t0, t1] tal que g
′(t) = f(t, g) g(t0) = y0 con t ∈ [t0, t1].
Definicion 6.1.3. Una funcion f : R −→ R se dice Lipschitz continua conconstante γ en x, escribiendose f ∈ Lipγ(x) si para toda y en una vecindadde x se cumple que
|f(x)− f(y)| ≤ γ|x− y|
6.1. ECUACIONES DIFERENCIALES DE PRIMER ORDEN CON CONDICIONES INICIALES

242 J Velasquez Zapateiro/ V. Obeso Fernandez
Definicion 6.1.4. Sea f : R2 −→ R2, una funcion, D = (t, y)/a ≤ t ≤b, c ≤ y ≤ d se dice f es Lipschitz continua con constante γ en y ∈ D, si secumple que
|f(t, y)− f(t, y1)| ≤ γ|y − y1|El siguiente resultado muestra cuando una ecuacion diferencial de primerorden con condiciones iniciales tiene solucion unica.
Teorema 6.1.1. Supongamos que f(t, y) es continua en R = (t, y)/t0 ≤ t ≤t1, c ≤ y ≤ d), si f es Lipschitz de constante γ con respecto a R y (t0, y0) ∈ R,entonces, el problema con condicion inicial y
′(t) = f(t, y) y(t0) = y0, tiene
solucion unica y = y(t) en algun subintervalo t0 ≤ t ≤ t0 + δ
Demostracion. Sean y1(t) y y2(t) soluciones de el problema de primer ordencon condiciones iniciales, sea φ(t) = [y1(t)−y2(t)]
2 la cual satisface φ(t0) = 0ya que y1(t0) = y0 y y2(t0) = y0, probemos que φ(t) = 0. Consideremost > t0, entonces
φ′(t) = 2[y1(t)− y2(t)][y
′1(t)− y
′2(t)],
luego,|φ′(t)| = 2|y1(t)− y2(t)||y′1(t)− y
′2(t)|,
o sea que,|φ′(t)| = 2|y1(t)− y2(t)||f(t, y1)− f(t, y2)|,
pero como f es Lipschitz, entonces
|f(t, y1)− f(t, y2)| ≤ γ|y1(t)− y2(t)|,por tanto,
φ′(t) ≤ 2γ|y1(t)− y2(t)|2 = 2γφ(t). (6.3)
Pero entonces tenemos que,
φ′(t)− 2γφ(t) ≤ 0,
de modo quee−2γtφ
′(t)− 2e−2γtγφ(t) ≤ 0,
ası que,(e−2γtφ(t))
′ ≤ 0,
luego por el teorema del valor medio se tiene que
φ(t)e−2γt − φ(t0)e−2γt0
t− t0≤ 0,
CAPITULO 6. ECUACIONES DIFERENCIALES ORDINARIAS CON CONDICIONES INICIALES

Analisis Numerico. Notas de clase 243
por tanto,φ(t)e−2γt − φ(t0)e
−2γt0 ≤ 0,
o sea que,φ(t)− φ(t0)e
−2γt0+2γt ≤ 0,
de modo que,φ(t) ≤ φ(t0)e
2γ(t−t0),
ası que,0 ≤ [y1(t)− y2(t)]
2 ≤ [y1(t0)− y2(t0)]2e2γ(t−t0),
por consiguiente,
[y1(t)− y2(t)] ≤ [y1(t0)− y2(t0)]eγ(t−t0),
pero como y1(t0)−y2(t0) = 0, entonces y1(t) = y2(t), de modo que la soluciones unica.
6.2. Metodos de Euler y de Taylor
Para calcular la aproximacion de la solucion de una ecuacion diferencialde primer orden con condiciones iniciales, en esta seccion presentaremosprimero el metodo de Euler y luego el de Taylor. Miraremos que el metodode Euler es poco eficiente ya que acumula errores muy altos en el desarrollodel proceso iterativo, sin embargo su estudio y analisis resultan importantesporque nos sirve para el estudio de metodos mas avanzados.
Primero estableceremos algunos resultados cuyo proposito es el anali-sis del error producido por el metodo de Euler.
Lema 6.2.1. Si x ≥ −1 y n ≥ 0, entonces 0 ≤ (1 + x)n ≤ enx
Demostracion. Por el teorema de Taylor para ex, alrededor de x = 0, conn = 1 tenemos que
ex = 1 + x +f′′(c)
2!x2,
pero f′′(c) = ec, luego, ex = 1 + x + x2
2!ec.
Ademas
0 ≤ 1 + x ≤ 1 + x +x2
2!ec,
de modo que0 ≤ 1 + x ≤ ex,
6.2. METODOS DE EULER Y DE TAYLOR

244 J Velasquez Zapateiro/ V. Obeso Fernandez
pero como n ≥ 0 entonces
0 ≤ (1 + x)n ≤ enx.
Lema 6.2.2. Sean u, v ∈ R+, aiki=0 una sucesion tal que a0 ≥ − v
uy ademas
supongamos que
ai+1 ≤ (1 + u)ai + v i = 0, 1, 2, 3, . . . , k,
entoncesai+1 ≤ e(i+1)u
(a0 +
v
u
)− v
u
Demostracion. Como por hipotesis se tiene que para un i fijo
ai+1 ≤ (1 + u)ai + v
ai ≤ (1 + u)ai−1 + v
ai−1 ≤ (1 + u)ai−2 + v,
.
.
.
a1 ≤ (1 + u)a0 + v,
entonces,
ai+1 ≤ (1 + u)[(1 + u)ai−1 + v] + v = (1 + u)2ai−1 + [1 + (1 + u)]v
de modo que
ai+1 ≤ (1+u)2[(1+u)ai−2+v]+[1+(1+u)]v = (1+u)3ai−2+[1+(1+u)+(1+u)2]v.
En general se tiene que
ai+1 ≤ (1 + u)i+1a0 + [1 + (1 + u) + (1 + u)2 + · · ·+ (1 + u)i]v,
pero 1 + (1 + u) + (1 + u)2 + · · ·+ (1 + u)i es una serie geometrica de razon1 + u de modo que
1 + (1 + u) + (1 + u)2 + · · ·+ (1 + u)i =1− (1 + u)i+1
1− (1 + u)=
1− (1 + u)i+1
−u,
CAPITULO 6. ECUACIONES DIFERENCIALES ORDINARIAS CON CONDICIONES INICIALES

Analisis Numerico. Notas de clase 245
por tanto
1 + (1 + u) + (1 + u)2 + · · ·+ (1 + u)i =1
u[(1 + u)i+1 − 1],
luego
ai+1 ≤ (1 + u)i+1a0 +v
u[(1 + u)i+1 − 1] = (1 + u)i+1a0 +
v
u(1 + u)i+1 − v
u,
pero por el lema anterior (1 + u)i+1 ≤ e(i+1)u, luego
ai+1 ≤ e(i+1)u(a0 +
v
u
)− v
u.
6.2.1. Metodo de Euler
Consideremos el intervalo cerrado [a, b] y P = a = t0, t1, t2, . . . , tn = buna particion del intervalo con ti = t0 + ih, siendo h =
b− a
nel tamano del
paso, y consideremos ademas la ecuacion diferencial y′(t) = f(t, y), y(0) = y0
en [a, b], si y(t), y′(t) y y
′′(t), son continuas, al aplicar el teorema de Taylor
alrededor de ti en el intervalo [ti, ti+1] se tiene que
y(ti+1) = y(ti) + y′(ti)(ti+1 − ti) +
y′′(ci)
2!(ti+1 − ti)
2,
pero como y′(ti) = f(ti, y(ti)), y h = ti+1 − ti entonces,
y(ti+1) = y(ti) + f(ti, y(ti))h +y′′(ci)
2!h2,
pero si ti+1 − ti ≈ 0, entonces
y(ti+1) ≈ y(ti) + f(ti, y(ti))h,
para i = 0, 1, 2, 3, . . . , n. Si ui ≈ y(ti), entonces se tiene que
ui+1 ≈ ui + hf(ti, ui), u0 = y0 i = 0, 1, 2, 3, . . . , n (6.4)
que constituye el metodo de Euler.
Ejemplo 6.2.1. Aplicar el metodo de Euler para aproximar la ecuaciony′(t) = y + 3t2 + 2, y(0) = 1 en el intervalo [0, 2] con h = 0.2
6.2. METODOS DE EULER Y DE TAYLOR

246 J Velasquez Zapateiro/ V. Obeso Fernandez
Solucion
Como y′(t) = y + 3t2 + 2, ti = 0 + hi, y h = 0.2 entonces,
ui+1 = ui+0.2(ui+3(0.2i)2+2) = ui+0.2ui+0.024i2+0.4 = 1.2ui+0.024i2+0.4,
se tiene entonces la siguiente tabla
i ti ui y(ti) Ei = |y(ti)− ui|0 0 1 1 01 0.2 1.6 1.6726248234 0.7262482342 0.4 2.344 2.5464222788 0.20242223 0.6 3.3088 3.7190692035 0.41026924 0.8 4.58656 5.3098683564 0.725308365 1 6.28787200000000 7.4645364561 1.1766644566 1.2 8.54544640000000 10.3610523047 1.81560597 1.4 11.51853568000000 14.2167997016 2.698264028 1.6 15.39824281600000 19.2972918196 3.8990499 1.8 20.41389137920000 25.9268271797 5.5129357810 2.0 26.84066965504000 34.5015048904 7.66048083
TABLA 26
¥
6.2.2. Cotas de Error
Una cota de error para el metodo de Euler se tiene mediante el siguienteteorema.
Teorema 6.2.1. Sea f una funcion Lipschitz continua de constante γ, ysupongamos y
′′(t) esta acotada. Si y(t) es la solucion del problema con
condicion inicial dado por y′(t) = f(t, y), a ≤ t ≤ b, y(t0) = y0 y sean
u0, u1, u2, . . . , un, la sucesion generada por el metodo de Euler, entonces,
|y(ti)− ui| ≤ hK
2γ[eγ(ti−y0) − 1],
siendo K ≥ |y′′(t)|.Demostracion. Sabemos que ∀i = 0, 1, 2, 3, . . . , n
y(ti) = y(ti−1) + f(ti−1, y(ti−1))h + y′′(ci−1)
h2
2,
CAPITULO 6. ECUACIONES DIFERENCIALES ORDINARIAS CON CONDICIONES INICIALES

Analisis Numerico. Notas de clase 247
como la aproximacion de Euler esta dada por
ui = ui−1 + hf(ti−1, ui−1),
entonces
|y(ti)−ui| = |y(ti−1)−ui−1 +f(ti−1, y(ti−1))h−hf(ti−1, ui−1)+y′′(ci−1)
h ¿2|
≤ |y(ti−1)− ui−1|+ |f(ti−1, y(ti−1))h− hf(ti−1, ui−1)|+ |y′′(ci−1)h2
2|
= |y(ti−1)− ui−1|+ h|f(ti−1, y(ti−1))− f(ti−1, ui−1)|+ |y′′(ci−1)h2
2|
luego
|y(ti)− ui| ≤ |y(ti−1)− ui−1|+ hγ|y(ti−1)− ui−1|+ h2K
2,
ya que |f(ti−1, y(ti−1))− f(ti−1, ui−1)| ≤ γ|y(ti−1)− ui−1| por ser f Lipschitzcontinua de constante γ y K ≥ |y′′(t)| ∀t, entonces,
|y(ti)− ui| ≤ (1 + hγ)|y(ti−1)− ui−1|+ h2K
2,
pero por el lema 6.2.2
|y(ti)−ui| ≤ e(1+i)hγ(|y(t0)−u0|+
h2K2
hγ
)−
h2K2
hγ= e(1+i)hγ
(|y(t0)−u0|+Kh
2γ
)−Kh
2γ,
pero como y0 = u0 y ti+1 = a + (i + 1)h, entonces, |y(t0) − u0| = 0 y(i + 1)h = ti+1 − a, luego,
|y(ti)− ui| ≤ e(ti+1−t0)γ Kh
2γ− Kh
2γ,
ası que
|y(ti)− ui| ≤ Kh
2γ[e(ti+1−t0)γ − 1]
Definicion 6.2.1. Sea y′(t) = Φ(t, y), y(t0) = y0 un problema con condi-
ciones iniciales, el metodo de aproximacion
u0 = y0, ui+1 = ui + hΦ(ti, ui)
se define como el metodo de diferencias
6.2. METODOS DE EULER Y DE TAYLOR

248 J Velasquez Zapateiro/ V. Obeso Fernandez
Definicion 6.2.2. El metodo de diferencias tiene un error de discretizacionlocal ei(h) definido como
ei(h) =yi − yi−1
h− Φ(ti−1, yi−1),
y un error de discretizacion global ei(h) dado por
ei(h) = y(ti)− ui
Observemos que el metodo de Euler es un metodo de diferencias y por lotanto su error de discretizacion local es
ei(h) =yi − yi−1
h− f(ti−1, yi−1),
donde yi = y(ti) pero como
y(ti) = y(ti−1) + hf(ti−1, y(ti−1)) + y′′(ci−1)
h2
2
o sea que
yi = yi−1 + hf(ti−1, yi−1) + y′′(ci−1)
h2
2,
por tanto
yi − yi−1 − hf(ti−1, yi−1) = y′′(ci−1)
h2
2,
entonces
|ei(h)| = |y′′(ci−1)h
2|,
pero como |y′′(ci−1)| ≤ K, se tiene que
|ei(h)| ≤ Kh
2,
o sea que el error de discretizacion local del metodo de Euler es O(h).
6.2.3. Metodo de Taylor
Consideremos el problema
y′(t) = f(t, y) y(t0) = y0
y la serie de Taylor dada por
y(ti+1) = y(ti) + y′(ti)(ti+1 − ti) +
y′′(ti)
2!(ti+1 − ti)
2 +y′′′(ti)
3!(ti+1 − ti)
3
CAPITULO 6. ECUACIONES DIFERENCIALES ORDINARIAS CON CONDICIONES INICIALES

Analisis Numerico. Notas de clase 249
+ · · ·+ y(n−1)(ti)
(n− 1)!(ti+1− ti)
n−1 +y(n)(ti)
n!(ti+1− ti)
n +y(n+1)(cn+1)
(n + 1)!(ti+1− ti)
n+1
o sea que
y(ti+1) = y(ti) + y′(ti)h +
y′′(ti)
2!h2 +
y′′′(ti)
3!h3 + · · ·+ y(n−1)(ti)
(n− 1)!hn−1
+y(n)(ti)
n!hn +
y(n+1)(cn+1)
(n + 1)!hn+1, (6.5)
pero como y′(t) = f(t, y), entonces y(k)(t) = f (k−1)(t, y), luego
y(ti+1) = y(ti) + h
n∑
k=1
f (k−1)(ti, y(ti))
k!hk−1 +
y(n+1)(cn+1)
(n + 1)!hn+1,
si u0 = y(t0) = y0 y ui ≈ yi = y(ti), entonces al suprimir el ultimo sumando,se tiene el metodo de Taylor de orden n, el cual se concreta si tomamos
u0 = y0
ui+1 = ui + hT n(ti, ui),
con
T n(ti, ui) =n∑
k=1
f (k−1)(ti, ui)
k!hk−1.
En particular el metodo de Taylor de orden dos esta dado por
u0 = y0
ui+1 = ui + hT 2(ti, ui),
con
T 2(ti, ui) = f(ti, ui) +h
2f′(ti, ui).
y el de orden 4 comou0 = y0
ui+1 = ui + hT 4(ti, ui),
con
T 4(ti, ui) = f(ti, ui) +h
2f′(ti, ui) +
h2
6f′′(ti, ui) +
h3
24f′′′(ti, ui).
6.2. METODOS DE EULER Y DE TAYLOR

250 J Velasquez Zapateiro/ V. Obeso Fernandez
Ejemplo 6.2.2. Aplicar el metodo de Taylor de orden dos y orden cuatropara aproximar la ecuacion y
′(t) = y + 3t2 + 2, y(0) = 1 en el intervalo [0, 1]
con h = 0.2
Solucion
a) Como f(t, y) = y + 3t2 + 2, entonces f′(t, y) = y
′+ 6t = y + 3t2 + 2 + 6t y
f′′(t, y) = y
′+ 6t + 6 = y + 3t2 + 2 + 6t + 6 = y + 3t2 + 6t + 8, de modo que
T 2(ti, ui) = ui + 3t2i + 2 +h
2(ui + 3t2i + 6ti + 2) =
(1 +
h
2
)ui +
(1 +
h
2
)3t2i
+h
26ti + 2
(1 +
h
2
),
pero como h = 0.2, y ti = 0.2i entonces
T 2(ti, ui) = 1.1(ui + 0.12i2 + 2) + 0.12i
de modo que se tiene
u0 = 1
ui+1 = ui +0.2[1.1(ui +0.12i2 +2)+0.12i] = 1.22ui +0.0264i2 +0.024i+0.44
los resultados se muestran a continuacion
i ti ui y(ti) Ei = |y(ti)− ui|0 0 1 1 01 0.2 1.66 1.6726248234 0.01262 0.4 2.51560000 2.5464222788 0.006761643 0.6 3.662632 3.7190692035 0.02704610714 0.8 5.21801104 5.3098683564 0.055954726015 1 7.3243734688 7.4645364561 0.096306328136 1.2 10.15573563193600 10.3607737863 0.205038157 1.4 13.92439747096192 14.2167997016 0.292402238 1.6 18.88936491457355 19.2979918196 0.40862699 1.8 25.36662519577973 25.9268271797 0.5602019810 2.0 33.74168273885127 34.5015048904 0.75982216
TABLA 27
b) Para el metodo de Taylor de cuarto orden se tiene que f(t, y) = y+3t2+2,entonces f
′(t, y) = y
′+ 6t = y + 3t2 + 2 + 6t y f
′′(t, y) = y
′′+ 6t + 6 =
CAPITULO 6. ECUACIONES DIFERENCIALES ORDINARIAS CON CONDICIONES INICIALES

Analisis Numerico. Notas de clase 251
y + 3t2 + 2 + 6t + 6 = y + 3t2 + 6t + 8, f′′′(t, y) = y + 3t2 + 6t + 8, de modo
que
T 4(ti, ui) = ui+3t2i +2+h
2[ui+3t2i +6ti+2]+
h2
6[ui+3t2i +6ti+8]+
h3
24[ui+3t2i +6ti+8],
de modo que tenemosu0 = 1
ui+1 = ui + 0.2[1.107ui + 3.321t2i + 0.642ti + 2.256]
i ti ui y(ti) Ei = |y(ti)− ui|0 0 1 1 01 0.2 1.67260000 1.6726248234 0.00002482342 0.4 2.54636164 2.5464222788 0.00006063883 0.6 3.7189581071 3.7190692035 0.00011109644 0.8 5.309687443201 5.3098683564 0.00018092325 1 7.46426022945 7.4645364561 0.00027622665
TABLA 28
¥
Como podemos observar los resultados obtenidos al aplicar los meto-dos de Taylor de orden dos y cuatro dan mejores resultados que el metodode Euler, ademas observamos tambien, que el de orden cuatro arroja unerror menor que el de orden dos.
Si observamos la ecuacion 6.5 se tiene que
yi+1 − yi − f(ti, yi)h− h2
2!f′(ti, yi)− h3
3!f′′(ti, yi)− · · · − hn−1
(n− 1)!f (n−2)(ti, yi)
−hn
n!f (n−1)(ti, yi) =
hn+1
(n + 1)!f (n)(ti, ci+1),
o sea que
yi+1 − yi − hT n(ti, yi) =hn+1
(n + 1)!f (n+1)(ti, ci+1),
por tantoyi+1 − yi
h− T n(ti, yi) =
hn
(n + 1)!f (n+1)(ti, ci+1)
de modo que el error de discretizacion local es ei = O(hn) para cada i =1, 2, 3, . . . , n.
6.2. METODOS DE EULER Y DE TAYLOR

252 J Velasquez Zapateiro/ V. Obeso Fernandez
6.3. Metodos de Runge-Kuta
Derivemos primero los metodos de Runge-Kuta de orden dos, para esto seay′(t) = f(t, y), luego entonces
y′′(t, y) =
∂f(t, y)
∂t+
∂f(t, y)
∂yy′(t) =
∂f(t, y)
∂t+
∂f(t, y)
∂yf(t, y),
pero por el desarrollo de Taylor de y(t + h) alrededor de t se tiene que
y(t + h) = y(t) + (t + h− t)y′(t) +
(t + h− t)2
2!y′′(t) +
(y + h− t)3
3!K + . . . ,
donde K incluye a y′′′(t), o sea que
y(t + h) = y(t) + hy′(t) +
h2
2!
[∂f(t, y)
∂t+
∂f(t, y)
∂yf(t, y)
]+ K
h3
6+ . . .
de modo que
y(t + h) = y(t) + h[f(t, y) +
h
2!
[∂f(t, y)
∂t+
∂f(t, y)
∂yf(t, y)
]]+ K
h3
6+ . . . ,
en los metodos de Runge-Kuta de orden dos se desea encontrar una funcion
Af(t, y) + Bf(t + ah, y + bhf(t, y))
de tal forma que
Af(t, y)+Bf(t+ah, y + bhf(t, y)) = f(t, y)+h
2!
∂f(t, y)
δt+
h
2!
∂f(t, y)
∂yf(t, y),
pero por el desarrollo de Taylor para dos variables se tiene que
f(t+ah, y+bhf(t, y)) = f(t, y)+(t+ah−t)∂f(t, y)
∂t+(t+bhf(t, y)−t)
∂f(t, y)
∂y+Hh3,
donde H incluye las derivadas parciales segundas de f(t, y), luego
f(t + ah, y + bhf(t, y)) = f(t, y) + ah∂f(t, y)
∂t+ bhf(t, y)
∂f(t, y)
∂y+ Hh3,
luego entonces
f(t, y)+h
2!
∂f(t, y)
∂t+
h
2!
∂f(t, y)
∂yf(t, y) = Af(t, y)+Bf(t, y)+aBh
∂f(t, y)
∂t+
CAPITULO 6. ECUACIONES DIFERENCIALES ORDINARIAS CON CONDICIONES INICIALES

Analisis Numerico. Notas de clase 253
bBhf(t, y)∂f(t, y)
∂y+ HBh3,
ası queA + B = 1,
aB =1
2,
bB =1
2,
pero como se tiene un sistema de tres ecuaciones con cuatro incognitas, parasu solucion se le debe asignar un valor a una de las variables. Si escogemos
B =1
2, entonces A =
1
2de modo que a = 1 y b = 1, luego entonces
y(t + h) = y(t) + h[1
2f(t, y) +
1
2f(t + h, y + hf(t, y))
]
= y(t) +h
2[f(t, y) + f(t + h, y + hf(t, y))].
Con los valores escogidos anteriormente se genera la sucesion (ti, ui), dadapor
u0 = y0
ui+1 = ui +h
2[f(ti, ui) + f(ti+1, ui + hf(ti, ui))], (6.6)
donde ui = y(ti), ui+1 = y(ti + h) = y(ti+1), la expresion 6.6 se conoce comoel metodo de Heun.
Ahora si tomamos A = 0, entonces, B = 1, a =1
2y b =
1
2, se tiene
entoncesu0 = y0
ui+1 = ui + hf(ti +
h
2,h
2f(ti, ui)
), (6.7)
la expresion 6.7 es el metodo modificado de Euler.
Ejemplo 6.3.1. Aplicar el metodo modificado de Euler y metodo de Heunpara aproximar la ecuacion y
′(t) = y + 3t2 + 2, y(0) = 1 en el intervalo [0, 1]
Solucion
Al aplicar 6.6 y 6.7 con u0 = 1, se tienen los resultados mostrado enla tabla 29
6.3. METODOS DE RUNGE-KUTA

254 J Velasquez Zapateiro/ V. Obeso Fernandez
i ti y(ti) Heun Modificado de Euler0 0 1.00000000000000 1.0000000000000 1.000000000000001 0.2 1.66000000000000 1.66800000000000 1.67200000000002 0.4 2.51560000000000 2.53336000000000 2.542240000000003 0.6 3.66263200000000 3.69229920000000 3.707132800000004 0.8 5.21801104000000 5.26220502400000 5.284302016000005 1 7.32437346880000 7.38629012928000 7.417248459520006 1.2 10.3607737863 10.23927395772160 10.281043120614407 1.4 14.2164952815 14.03431422842035 14.0899272607149598 1.6 19.296964184 19.03146335867283 19.102512580722489 1.8 25.9264811644 25.54798529758085 25.6386653484814210 2.0 34.5011483923 33.97094206304864 34.08557172514733
TABLA 29
¥
Pero el mas exitoso de los metodos de Runge-Kuta es el de cuartoorden y consiste en aproximar a T 4(f, t) mediante la expresion
Af(t, y(t)) + Bf(t + hα1, y + β1f(t, y(t)))
+Cf(t + hα2, y + β2f(t, y(t)) + β3f(t + hα1, y + β1f(t, y(t))))
+Df(t + α3, y + β4f(t, y(t)) + β5f(t + hα1, y + β1f(t, y(t)))
+β6f(t + hα3, y + β2f(t, y(t)) + β3f(t + hα1, y + β1f(y, y(t))))
que como podemos observar tiene tiene 13 incognitas, Runge y Kuta lograronobtener 11 ecuaciones, lo cual obliga a asignar condiciones adicionales para
poder resolver el sistema. La eleccion mas util es α1 =1
2, β2 = 0 y con
esta eleccion se tiene que α2 =1
2, α3 = 1, β1 =
1
2, β3 =
1
2, β4 = 0, β5 = 0,
β6 = 1, A =1
6, B =
1
3, C =
1
3y D =
1
6.
Con estos valores se tiene entonces el metodo de Runge-Kuta decuarto orden dado por
u0 = y0
ui+1 = ui +1
6
[hf(ti, ui) + 2hf(ti +
h
2, ui +
h
2f(ti, ui))
+2hf(ti +h
2, ui +
h
2f(ti +
h
2, ui +
h
2f(ti, ui))
CAPITULO 6. ECUACIONES DIFERENCIALES ORDINARIAS CON CONDICIONES INICIALES

Analisis Numerico. Notas de clase 255
+hf(ti + h, ui + hf(ti +h
2, ui +
h
2f(ti +
h
2, ui +
h
2f(ti, ui))))
].
Ahora si tomamos
RK1 = hf(ti, ui),
RK2 = hf(ti +h
2, ui +
h
2f(ti, ui)),
RK3 = hf(ti +h
2, ui +
h
2f(ti +
h
2, ui +
h
2f(ti, ui))
y
RK3 = hf(ti + h, ui + hf(ti +h
2, ui +
h
2f(ti +
h
2, ui +
h
2f(ti, ui)))),
entonces, se tiene que
RK2 = f(ti +h
2, ui +
1
2RK1),
RK4 = f(ti +h
2, ui +
1
2RK2),
y
RK4 = f(ti+1, ui + RK3),
de modo que el metodo de Runge- Kuta de cuarto orden se puedeescribir ahora como
u0 = y0
ui+1 = ui +1
6(RK1 + 2RK2 + 2RK3 + RK4) (6.8)
Ejemplo 6.3.2. Aplicar el metodo de Runge-Kuta de cuarto orden para apro-ximar la ecuacion y
′(t) = y + 3t2 + 2, y(0) = 1 en el intervalo [0, 2]
Solucion
Aplicando la expresion 6.8 con u0 = 1 se tienen los resultados mostrados enla tabla 30
6.3. METODOS DE RUNGE-KUTA

256 J Velasquez Zapateiro/ V. Obeso Fernandez
i ti y(ti) Runge-Kuta0 0 1.00000000000000 1.00000000000001 0.2 1.66000000000000 1.672620000000002 0.4 2.51560000000000 2.546406068000003 0.6 3.66263200000000 3.719032371455204 0.8 5.21801104000000 5.309798138495385 1 7.32437346880000 7.464415446358286 1.2 10.3607737863 10.360857026181987 1.4 14.2164952815 14.216498771778678 1.6 19.296964184 19.296843599850479 1.8 25.9264811644 25.9261767728573610 2.0 34.5011483923 34.5008031036799
TABLA 30
¥
Los metodos de Euler, Taylor y de Runge-Kuta, son llamados meto-dos de un paso ya que para obtener la aproximacion (i + 1)-esima se usa lai-esima informacion, pero es posible desarrollar metodos mas precisos paraencontrar una aproximacion i-esima cualquiera usando las aproximacionesprecedentes calculadas en los puntos t0, t1, t2, , . . . , ti−1, estos son los llamadosmetodos multipasos.
Definicion 6.3.1. Sea y′(t) = f(t, y), a ≤ t ≤ b, y(t0) = α0, un metodo
multipaso es aquel cuya aproximacion ui+1 puede representarse de la forma
ui+1 = αm−1ui + αm−2ui−1 + · · ·+ α0ui+1−m
+h[βmf(ti+1, ui+1) + βm−1f(ti, ui) + · · ·+ β0f(ti+1−n, ui+1−n)],
m > 1, i = m − 1,m, . . . , n − 1, h =b− a
n, α0, αi, . . . , αm−1, β0, β1, . . . , βm
valores constantes y ui = αi, i = 0, 1, 2, 3, . . . , m− 1 las condiciones inicialesdadas
Definicion 6.3.2. Si en la definicion anterior βm = 0 se dice que el metodoes explıcito y si βm 6= 0 el metodo multipaso es implıcito.
CAPITULO 6. ECUACIONES DIFERENCIALES ORDINARIAS CON CONDICIONES INICIALES

Analisis Numerico. Notas de clase 257
6.4. Metodos Explıcitos de Adams- Bash-
forth
6.4.1. Metodo de Adams- Bashforth de dos pasos
Encontremos primero el metodo de Adams-Bashforth de dos pasos para estotomamos el polinomio de Lagrange de f(t, y(t)) que pasa por los puntos(tk−1, fk−1), (tk, fk) donde fk−1 = f(tk−1, uk−1) , fk = f(tk, uk) y ui ≈ y(ti),luego se tiene que
f(t, y(t)) = fk−1(t− tk)
(tk−1 − tk)+ fk
(t− tk−1)
(tk − tk−1),
ası que,∫ tk+1
tk
f(t, y(t))dt = fk−1
∫ tk+1
tk
(t− tk)
(tk−1 − tk)dt + fk
∫ tk+1
tk
(t− tk−1)
(tk − tk−1)dt
pero como ti = t0 + ih y tj = t0 + jh, entonces ti − tj = (i − j)h , seat = tk + hu, entonces dt = hdu, tk−1 − tk = −h, y tk − tk−1 = h, ademast− tk−1 = t− tk + h = uh + h = h(u + 1), ya que tk−1 = tk − h, de modo que
∫ tk+1
tk
f(t, y(t))dt = fk−1
∫ 1
0
huh
−hdu + fk
∫ 1
0
h(u + 1)h
hdu
= −hfk−1
∫ 1
0
udu + hfk
∫ 1
0
(u + 1)du
por lo tanto ∫ tk+1
tk
f(t, y(t))dt = −1
2hfk−1 +
3
2hfk
de lo anterior se tiene que el metodo de Adams-Bashforth de dos pasos es
u0 = α0, u1 = α1
ui+1 = ui +h
2[3f(ti, ui)− f(ti−1, ui−1)].
6.4.2. Metodo de Adams- Bashforth de tres pasos
En este metodo al igual que antes se toma el polinomio de Lagrange paraf(t, y(t)) que pasa por los puntos (tk−2, fk−2), (tk−1, fk−1) y (tk, fk), dondefi = f(ti, ui), i = k, k − 1, k − 2, luego,
∫ tk+1
tk
f(t, y(t))dt = fk−2
∫ tk+1
tk
(t− tk−1)(t− tk)
(tk−2 − tk−1)(tk−2 − tk)dt
6.4. METODOS EXPLICITOS DE ADAMS- BASHFORTH

258 J Velasquez Zapateiro/ V. Obeso Fernandez
+fk−1
∫ tk+1
tk
(t− tk−2)(t− tk)
(tk−1 − tk−2)(tk−1 − tk)dt + fk
∫ tk+1
tk
(t− tk−2)(t− tk−1)
(tk − tk−2)(tk − tk−2)dt,
si t = tk + uh, entonces,
∫ tk+1
tk
f(t, y(t))dt = fk−2
∫ 1
0
huh(u + 1)
−h(−2h)hdu + fk−1
∫ 1
0
huh(u + 2)
h(−h)hdu
+fk
∫ 1
0
h(u + 2)h(u + 1)
h2hhdu,
de modo que
∫ tk+1
tk
f(t, y(t))dt =hfk−2
2
∫ 1
0
(u2 + u)du− hfk−1
∫ 1
0
(u2 + 2u)du
+hfk
2
∫ 1
0
(u2 + 3u + 2)du
ası que
∫ tk+1
tk
f(t, y(t))dt =hfk−2
2
(1
3+
1
2
)− hfk−1
(1
3+ 1
)+
hfk
2
(1
3+
3
2+ 2
)
=5hfk−2
12− 4hfk−1
3+
23hfk
12
por lo tanto se tiene que
∫ tk+1
tk
f(t, y(t))dt =h
12[5fk−2 − 16fk−1 + 23fk]
de modo que el metodo de Adams-Bashforth de tres pasos es entonces
u0 = α0 u1 = α1 u2 = α2
ui+1 = ui +h
12[5f(ti−2, ui−2)− 16f(ti−1, ui−1) + 23f(ti, ui)]
6.4.3. Metodo de Adams- Bashforth de cuatro pasos
Consideremos el polinomio de Lagrange para f(t, y(t)) que pasa por lospuntos (tk−3, fk−3), (tk−2, fk−2), (tk−1, fk−1) y (tk, fk), donde fi = f(ti, ui),i = k, k − 1, k − 2, k − 3, entonces se tiene que
∫ tk+1
tk
f(t, y(t))dt = fk−3
∫ tk+1
tk
(t− tk−2)(t− tk−1)(t− tk)
(tk−3 − tk−2)(tk−3 − tk−1)(tk−3 − tk)dt
CAPITULO 6. ECUACIONES DIFERENCIALES ORDINARIAS CON CONDICIONES INICIALES

Analisis Numerico. Notas de clase 259
+fk−2
∫ tk+1
tk
(t− tk−3)(t− tk−1)(t− tk)
(tk−2 − tk−3)(tk−2 − tk−1)(tk−2 − tk)dt
+fk−1
∫ tk+1
tk
(t− tk−3)(t− tk−2)(t− tk)
(tk−1 − tk−3)(tk−1 − tk−2)(tk−1 − tk)dt
+fk
∫ tk+1
tk
(t− tk−3)(t− tk−2)(t− tk−1)
(tk − tk−3)(tk − tk−2)(tk − tk−2)dt,
sea t = tk + hu, luego dt = hdu ademas como ti − tj = (i− j)h y t− tk−3 =h(u + 3), t− tk−2 = h(u + 2), t− tk−1 = h(u + 1) y t− tk = hu, entonces setiene que∫ tk+1
tk
f(t, y(t))dt = fk−3
∫ 1
0
h(u + 2)h(u + 1)hu
−h(−2h)(−3h)hdu+fk−2
∫ 1
0
h(u + 3)h(u + 1)hu
−h(h)(−2h)hdu
+fk−1
∫ 1
0
h(u + 3)h(u + 2)hu
h2h(−h)hdu + fk
∫ 1
0
h(u + 3)h(u + 2)h(u + 1)
3h(2h)hhdu,
de modo que∫ tk+1
tk
f(t, y(t))dt = −hfk−3
6
∫ 1
0
(u3+3u2+2u)du+hfk−2
2
∫ 1
0
(u3+4u2+3u)du
−hfk−1
2
∫ 1
0
(u3 + 5u2 + 6u)du +hfk
6
∫ 1
0
(u3 + 6u2 + 11u + 6)du
ası que∫ tk+1
tk
f(t, y(t))dt = −hfk−3
6
(1
4+ 1 + 1
)+
hfk−2
2
(1
4+
4
3+
3
2
)
−hfk−1
2
(1
4+
5
3+ 3
)+
hfk
6
(1
4+ 2 +
11
2+ 6
)
o sea que∫ tk+1
tk
f(t, y(t))dt = −hfk−3
6
9
4+
hfk−2
2
37
12− hfk−1
2
59
12+
hfk
6
55
4
=h
24[−9fk−3 + 37fk−2 − 59fk−1 + 55fk]
entonces el metodo de Adams-Bashforth de cuatro pasos esta dado por
u0 = α0 u1 = α1 u2 = α2 u3 = α3
ui+1 = ui +h
24[−9f(ti−3, ui−3)+37f(ti−2, ui−2)−59f(ti−1, ui−1)+55f(ti, ui)]
6.4. METODOS EXPLICITOS DE ADAMS- BASHFORTH

260 J Velasquez Zapateiro/ V. Obeso Fernandez
6.5. Metodos de Adams-Moulton
Los metodos de Adams-Moulton son metodos implıcitos y al igual que paralos explıcitos se pueden deducir por medio de los polinomios de Lagrangededuciremos primero el de Adams-Moulton de dos pasos y luego el de trespasos.
6.5.1. Metodo se Adams-Moulton de dos pasos
Consideremos el polinomio de Lagrange que pasa por los puntos (tk−1, fk−1),(tk, fk), (tk+1, fk+1), luego
f(y, y(t)) = fk−1(t− tk)(t− tk+1)
(tk−1 − tk)(tk−1 − tk+1)+ fk
(t− tk−1)(t− tk+1)
(tk − tk−1)(tk − tk+1)
+fk+1(t− tk)(t− tk−1)
(tk+1 − tk)(tk+1 − tk−1),
luego ∫ tk+1
tk
f(t, y(t))dt = fk−1
∫ tk+1
tk
(t− tk)(t− tk+1)
(tk−1 − tk)(tk−1 − tk+1)dt
+fk
∫ tk+1
tk
(t− tk−1)(t− tk+1)
(tk − tk−1)(tk − tk+1)dt + fk+1
∫ tk+1
tk
(t− tk)(t− tk−1)
(tk+1 − tk)(tk+1 − tk−1)dt
tomando la sustitucion t = tk+hu entonces dt = hdu y como ti−tj = (i−j)h,t− tk = h, t− tk−1 = h(u + 1), t− tk+1 = h(u− 1), entonces
∫ tk+1
tk
f(t, y(t))dt = fk−1
∫ 1
0
huh(u− 1)
−h(−2h)hdu + fk
∫ 1
0
h(u + 1)h(u− 1)
−hhhdu
+fk+1
∫ 1
0
h(u + 1)hu
h(2h)hdu,
de modo que
∫ tk+1
tk
f(t, y(t))dt =hfk−1
2
∫ 1
0
(u2−u)du−hfk
∫ 1
0
(u2−1)du+hfk+1
2
∫ 1
0
(u2+u)du,
por lo tanto
∫ tk+1
tk
f(t, y(t))dt =hfk−1
2
(1
3− 1
2
)− hfk
(1
3− 1
)+
hfk+1
2
(1
3+
1
2
)
CAPITULO 6. ECUACIONES DIFERENCIALES ORDINARIAS CON CONDICIONES INICIALES

Analisis Numerico. Notas de clase 261
ası que
∫ tk+1
tk
f(t, y(t))dt = −hfk−1
12+
2hfk
3+
5hfk+1
12=
h
12[5fk+1 + 8fk − fk−1].
El metodo de Adams-Moulton de dos pasos es entonces
u0 = α0 u1 = α1
ui+1 = ui +h
12[5f(ti+1, ui+1) + 8f(ti, ui)− f(ti−1, ui−1)]
6.5.2. Metodo se Adams-Moulton de tres pasos
Tomemos ahora como antes el polinomio de Lagrange que pasa por los puntos(tk−2, fk−2), (tk−1, fk−1), (tk, fk), (tk+1, fk+1), luego
f(y, y(t)) = fk−2(t− tk−1)(t− tk)(t− tk+1)
(tk−2 − tk−1)(tk−2 − tk)(tk−2 − tk+1)
+fk−1(t− tk−2)(t− tk)(t− tk+1)
(tk−1 − tk−2)(tk−1 − tk)(tk−1 − tk+1)+fk
(t− tk−2)(t− tk−1)(t− tk+1)
(tk − tk−2)(tk − tk−1)(tk − tk+1)
+fk+1(t− tk−2)(t− tk)(t− tk−1)
(tk+1 − tk−2)(tk+1 − tk−1)(tk+1 − tk),
por consiguiente
∫ tk+1
tk
f(t, y(t))dt = fk−2
∫ tk+1
tk
(t− tk−1)(t− tk)(t− tk+1)
(tk−2 − tk−1)(tk−2 − tk)(tk−2 − tk+1)dt
+fk−1
∫ tk+1
tk
(t− tk−2)(t− tk−1)(t− tk+1)
(tk − tk−2)(tk − tk−1)(tk − tk+1)dt
+fk
∫ tk+1
tk
(t− tk−2)(t− tk−1)(t− tk+1)
(tk − tk−2)(tk − tk−1)(tk − tk+1)
+fk+1
∫ tk+1
(tk
t− tk−2)(t− tk)(t− tk−1)
(tk+1 − tk−2)(tk+1 − tk−1)(tk+1 − tk)dt
si sustituimos t = tk + hu entonces dt = hdu y como ti − tj = (i − j)h,t − tk−2 = h(u + 2), t − tk−1 = h(u + 1), t − tk = h, t − tk+1 = h(u − 1),entonces
∫ tk+1
tk
f(t, y(t))dt = fk−2
∫ 1
0
h(u + 1)huh(u− 1)
−h(−2h)(−3h)hdu
6.5. METODOS DE ADAMS-MOULTON

262 J Velasquez Zapateiro/ V. Obeso Fernandez
+fk−1
∫ 1
0
h(u + 2)huh(u− 1)
h(−h)(−2h)hdu + fk
∫ 1
0
h(u + 2)h(u + 1)h(u− 1)
2h(−h)hhdu
+fk+1
∫ 1
0
h(u + 2)h(u + 1)hu
h(2h)(−h)hdu,
por lo tanto
∫ tk+1
tk
f(t, y(t))dt = −hfk−2
6
∫ 1
0
(u3 − u)du +hfk−1
2
∫ 1
0
(u3 + u2
−2u)du− hfk
2
∫ 1
0
(u3 + 2u2 − u− 2)du +hfk+1
6
∫ 1
0
(u3 + 3u2 + 2u)du,
de modo que
∫ tk+1
tk
f(t, y(t))dt = −hfk−2
6
(1
4− 1
2
)+
hfk−1
2
(1
4+
1
3− 1
)
−hfk
2
(1
4+
2
3− 1
2− 2
)+
hfk+1
2
(1
4+ 1 + 1
)
o sea que
∫ tk+1
tk
f(t, y(t))dt =hfk−2
24− 5hfk−1
24+
19hfk
24+
9hfk+1
24
=h
24[fk−2 − 5fk−1 + 19fk + 9fk+1].
El metodo de Adams-Moulton de tres pasos es entonces
u0 = α0 u1 = α1 u2 = α2
ui+1 = ui +h
24[f(ti−2, ui−2)− 5f(ti−1, ui−1) + 19f(ti, ui) + 9f(ti+1, ui+1)]
Ejemplo 6.5.1. Considerar el problema con condiciones iniciales y′(t) =
y + 3t2 + 2, y(0) = 1, 0 ≤ t ≤ 2, usar el metodo de Adams-Bashforth decuatro pasos y el de Adams-Moulton de tres pasos con h = 0.2
Solucion
Para el metodo de Adams-Bashforth de cuatro pasos se tiene que
ui+1 = ui +h
24[55(ui + 3t2i + 2)− 59(ui−1 + 3t2i−1 + 2) + 37(ui−2 + 3t2i−2 + 2)
CAPITULO 6. ECUACIONES DIFERENCIALES ORDINARIAS CON CONDICIONES INICIALES

Analisis Numerico. Notas de clase 263
−9(ui−3 + 3t2i−3 + 2)]
pero tk = t0 + hk = hk, entonces se tiene que,
ui+1 = ui+h
24[55ui+6.6i2+110−59ui−1−7.08i2+14.16i−7.08−118+37ui−2+4.44i2
−17.76i + 17.76 + 74− 9ui−3 − 1.08i2 + 6.48i− 9.73− 18]
o tambien
ui+1 = ui +h
24[55ui − 59ui−1 + 37ui−2 − 9ui−3 + 2.88i2 + 2.88i + 48.96]
pero como h = 0.2, entonces
ui+1 =1
24[35ui − 11.8ui−1 + 7.4ui−2 − 1.8ui−3 + 0.576i2 + 0.576i + 9.792].
Para el metodo de Adams-Moulton de tres pasos se tiene que
ui+1 = ui +h
24[9f(ti+1, ui+1) + 19f(ti, ui)− 5f(ti−1, ui−1) + f(ti−2, ui−2)],
de modo que
ui+1 = ui+h
24[9(ui+1+3t2i+1+2)+19(ui+3t2i +2)−5(ui−1+3t2i−1+2)+ui−2+3t2i−2+2],
pero entonces
ui+1 = ui +h
24[9(ui+1 + 0.12i2 + 0.24i + 2.12)19(ui + 0.12i2 + 2)
−5(ui−1 + 0.12i2 − 0.24i + 2.12) + ui−2 + 0.12i2 − 0.48i + 2.48]
o sea que
ui+1 = ui +h
24[9ui+1 + 19ui − 5ui−1 + ui−2 + 2.88i2 + 2.88i + 48.96]
= ui +1
24[1.8ui+1 + 3.8ui − ui−1 + 0.2ui−2 + 0.576i2 + 0.576i + 9.792]
de modo que
ui+1 − 1.8ui+1
24=
1
24[27.8ui − ui−1 + 0.2ui−2 + 0.576i2 + 0.576i + 9.792]
luego
ui+1 =1
22.2[27.8ui − ui−1 + 0.2ui−2 + 0.576i2 + 0.576i + 9.792].
Los resultados aparecen en la tabla siguiente
6.5. METODOS DE ADAMS-MOULTON

264 J Velasquez Zapateiro/ V. Obeso Fernandez
i ti ui yi Adams-Bashforth Adams-Moulton0 0 u0 11 0.2 u1 1.67262482342 0.4 u2 2.54642227883 0.6 u3 3.7190692035 3.719185339064 0.8 u4 5.3098683564 5.30837762188 5.310155635685 1 u5 7.4645364561 7.46054168108 7.465064224736 1.2 u6 10.3610523047 10.353735621 10.36191292257 1.4 u7 14.2167997016 14.20499176972 14.21811469148 1.6 u8 19.2972918196 19.279123658 19.29922019569 1.8 u9 25.9268271797 25.9001289049 25.92957609610 2 u10 34.5015048904 34.4634611452 34.5053431627
TABLA 31
¥
En la tabla anterior podemos observar como el metodo implıcito deAdams-Moulton de tres pasos produce una mejor aproximacion que elmetodo explıcito de Adams-Bashforth de cuatro pasos.
6.6. Metodos Predictor-Corrector
A menudo los metodos de Adams-Bashforth se conocen como predictores,en el sentido en que estos predicen una aproximacion y los metodosexplıcitos de Adams-Moulton se conocen como correctores ya que corrigenla aproximacion dada por los predictores, si se combinan ambos metodos,establecemos los llamados metodos predictor-corrector, en estos si pi+1 es laaproximacion dada por el metodo predictor, este valor se usa para calcularla aproximacion ui+1 en el corrector.
Para ilustrar esto sea pi+1 la aproximacion producida por el metodopredictor de Adams-Bashforth en el ejemplo anterior, luego
pi+1 = ui +h
24[55(ui + 3t2i + 2)− 59(ui−1 + 3t2i−1 + 2) + 37(ui−2 + 3t2i−2 + 2)
−9(ui−3 + 3t2i−3 + 2)],
CAPITULO 6. ECUACIONES DIFERENCIALES ORDINARIAS CON CONDICIONES INICIALES

Analisis Numerico. Notas de clase 265
como hemos dicho esta aproximacion se usa para calcular la aproximacionen el metodo corrector, en este caso el de Adams-Moulton de tres pasos,entonces se tiene que
ui+1 = ui +h
24[9f(ti+1, pi+1) + 19f(ti, ui)− 5f(ti−1, ui−1) + f(ti−2, ui−2)].
Hacemos notar que al resolver el ejemplo hemos usado los primeros valoresexactos del problema con condicion inicial, estos naturalmente no siempreestan disponibles puesto que en muchos casos la solucion exacta del pro-blema no se tiene de manera explıcita, bastarıa entonces con calcular estosvalores usando uno cualquiera de los metodos de aproximacion estudiadoscon anterioridad.
Ejemplo 6.6.1. Considerar el problema con condiciones iniciales y′(t) =
y + 3t2 + 2, y(0) = 1, 0 ≤ t ≤ 2, usar el metodo predictor- corrector conh = 0.2
Solucion
Para encontrar las primeras cuatro aproximaciones, hemos usado elmetodo de Runge-Kuta de orden cuatro, los resultados estan dados en lasiguiente tabla
i ti ui y(ti) Ei
0 0 1 1 01 0.2 1.67262 1.6726248234 0.00000482242 0.4 2.54640473467 2.5464222788 0.0000017544133 0.6 3.71902540959 3.7190692035 0.000043793914 0.8 5.30964596925 5.3098683564 0.000222387155 1 7.46428114957 7.4645364561 0.000255306436 1.2 10.3607737863 10.3610523047 0.00027851847 1.4 14.2164952815 14.2167997016 0.000304422018 1.6 19.296964184 19.2972918196 0.00032763569 1.8 25.9264811644 25.9268271797 0.000346015310 2 34.5011483923 34.5015048904 0.0003564981
TABLA 32
¥
6.6. METODOS PREDICTOR-CORRECTOR
266 J Velasquez Zapateiro/ V. Obeso Fernandez
6.6.1. Metodo de Milne-Simpson
Otro metodo predictor-corrector es el de Milne-Simpson, y para deducirloconsideremos nuevamente el problema y
′(t) = f(t, y), y(t0) = y0, a ≤ t ≤ b,
por el teorema fundamental del calculo en el intervalo [tk−3, tk+1], tenemosque ∫ tk+1
tk−3
y′(t)dt =
∫ tk+1
tk−3
f(t, y(t))dt,
luego entonces
y(tk+1)− y(tk−3) =
∫ tk+1
tk−3
f(t, y(t))dt,
o sea que
y(tk+1) = y(tk−3) +
∫ tk+1
tk−3
f(t, y(t))dt,
debemos por tanto evaluar la integral, para hacerlo consideremos el polinomiode Lagrange de f(t, y(t)) que pasa por los puntos (tk−3, fk−3), (tk−2, fk−2),(tk−1, fk−1), (tk, fk), luego
f(y, y(t)) = fk−3(t− tk−2)(t− tk−1)(t− tk)
(tk−3 − tk−2)(tk−3 − tk−1)(tk−3 − tk)
+fk−2(t− tk−3)(t− tk−1)(t− tk)
(tk−2 − tk−3)(tk−2 − tk−1)(tk−2 − tk)
+fk−1(t− tk−3)(t− tk−2)(t− tk)
(tk−1 − tk−3)(tk−1 − tk−2)(tk−1 − tk)
+fk(t− tk−3)(t− tk−2)(t− tk−1)
(tk − tk−3)(tk − tk−2)(tk − tk−1),
luego entonces
∫ tk+1
tk−3
f(t, y(t))dt = fk−3
∫ tk+1
tk−3
(t− tk−2)(t− tk−1)(t− tk)
(tk−3 − tk−2)(tk−3 − tk−1)(tk−3 − tk)dt
+fk−2
∫ tk+1
tk−3
(t− tk−3)(t− tk−1)(t− tk)
(tk−2 − tk−3)(tk−2 − tk−1)(tk−2 − tk)dt
+fk−1
∫ tk+1
tk−3
(t− tk−3)(t− tk−2)(t− tk)
(tk−1 − tk−3)(tk−1 − tk−2)(tk−1 − tk)dt
+fk
∫ tk+1
tk−3
(t− tk−3)(t− tk−2)(t− tk−1)
(tk − tk−3)(tk − tk−2)(tk − tk−1)dt,
CAPITULO 6. ECUACIONES DIFERENCIALES ORDINARIAS CON CONDICIONES INICIALES

Analisis Numerico. Notas de clase 267
sea t = tk +vh, luego dt = hdv, pero t− tk−3 = t− tk−3 = vh−3 = h(v−3)y t− tk+1 = t− tk−h = vh−h = h(v− 1) luego si t = tk−3, entonces v = −3y si t = tk, entonces v = 1 ademas ti − tj = (i − j)h y t − tk−1 = h(v + 1),t− tk−2 = h(v + 2), t− tk−3 = h(v + 3) ası que
∫ tk+1
tk−3
f(t, y(t))dt = fk−3
∫ 1
−3
h(v + 2)h(v + 1)hv
−h(−2h)(−3h)hdv+fk−2
∫ 1
−3
h(v + 3)h(v + 1)hv
h(−h)(−2h)hdv
+fk−1
∫ 1
−3
h(v + 3)h(v + 2)vh
2h(h)(−h)hdv + fk
∫ 1
−3
h(v + 3)h(v + 2)h(v + 1)
h(2h)(3h)hdv,
de modo que
∫ tk+1
tk−3
f(t, y(t))dt = −hfk−3
6
∫ 1
−3
(v3+3v2+2v)dv+hfk−2
2
∫ 1
−3
(v3+4v2+3v)dv
−hfk−1
2
∫ 1
−3
(v3 + 5v2 + 6v)dv +hfk
6
∫ 1
−3
(v3 + 6v2 + 11v + 6)dv,
por lo tanto
∫ tk+1
tk−3
f(t, y(t))dt =8hfk−2
3− 4hfk−1
3+
8hfk
3,
ya que∫ 1
−3(v3 + 3v2 + 2v)dv = 0 luego
∫ tk+1
tk−3
f(t, y(t))dt =4h
3[2fk−2 − fk−1 + 2fk],
si ui ≈ y(ti), entonces
u?i+1 = ui−3 +
4h
3[2f(ti−2, ui−2)− f(ti−1, ui−1) + 2f(ti, ui)]
que es el valor predictor.
Para calcular el corrector, tomamos ahora el polinomio de Lagrangede f(t, y(y)) que pasa por los puntos (tk−1, fk−1), (tk, fk), (tk+1, f
?k+1), donde
f ?k+1 = f(tk+1, u
?k+1) e integramos en el intervalo [tk−1, tk+1].
Luego entonces se tiene que
∫ tk+1
tk−1
f(t, y(t))dt = fk−1
∫ tk+1
tk−1
(t− tk)(t− tk+1)
(tk−1 − tk)(tk−1 − tk+1)dt
6.6. METODOS PREDICTOR-CORRECTOR

268 J Velasquez Zapateiro/ V. Obeso Fernandez
+fk
∫ tk+1
tk−1
(t− tk−1)(t− tk+1)
(tk − tk−1)(tk − tk+1))dt + f ?
k+1
∫ tk+1
tk−1
(t− tk−1)(t− tk)
(tk+1 − tk−1)(tk+1 − tk)dt
de modo que si tomamos t = tk + vh se tiene que∫ tk+1
tk−1
f(t, y(t))dt = fk−1
∫ 1
−1
vh(v + 1)h
h(2h)hdv
+fk
∫ 1
−1
h(v + 1)h(v − 1)
h(−h)hdv + f ?
k+1
∫ 1
−1
hvh(v + 1)
h(2h)hdv
o sea que∫ tk+1
tk−1
f(t, y(t))dt =hfk−1
2
∫ 1
−1
(v2−v)dv−hfk
∫ 1
−1
(v2−1)dv+hf ?
k+1
2
∫ 1
−1
(v2+v)dv,
de ese modo tenemos que∫ tk+1
tk−1
f(t, y(t))dt =hfk−1
3+
4hfk
3+
hf ?k+1
3,
luego entonces el valor del corrector es
ui+1 = ui +h
3[f(ti−1, ui−1) + 4f(ti, ui) + f(ti+1, u
?i+1)]
Ejemplo 6.6.2. Usar el metodo predictor-corrector de Milne-Simpson paraaproximar el problema con condiciones iniciales y
′(t) = y+3t2 +2, y(0) = 1,
0 ≤ t ≤ 2 con h = 0.2
Solucion
El valor del predictor de Milne-Simpson esta dado por
u?i+1 = ui−3 +
4h
3[2f(ti−2, ui−2)− f(ti−1, ui−1) + 2f(ti, ui)]
y el valor del corrector es
ui+1 = ui +h
3[f(ti−1, ui−1) + 4f(ti, ui) + f(ti+1, u
?i+1)],
luego para el predictor se tiene que
u?i+1 =
1
3[1.6ui − 0.8ui−1 + 1.6ui−2 + 3ui−3 + 0.288i2 − 0.576i + 5.472]
y para el corrector
ui+1 =1
3[0.2u?
i+1 + 0.8ui + 3.2ui−1 + 0.144i2 + 2.448]
los resultados aparecen en la tabla siguiente
CAPITULO 6. ECUACIONES DIFERENCIALES ORDINARIAS CON CONDICIONES INICIALES
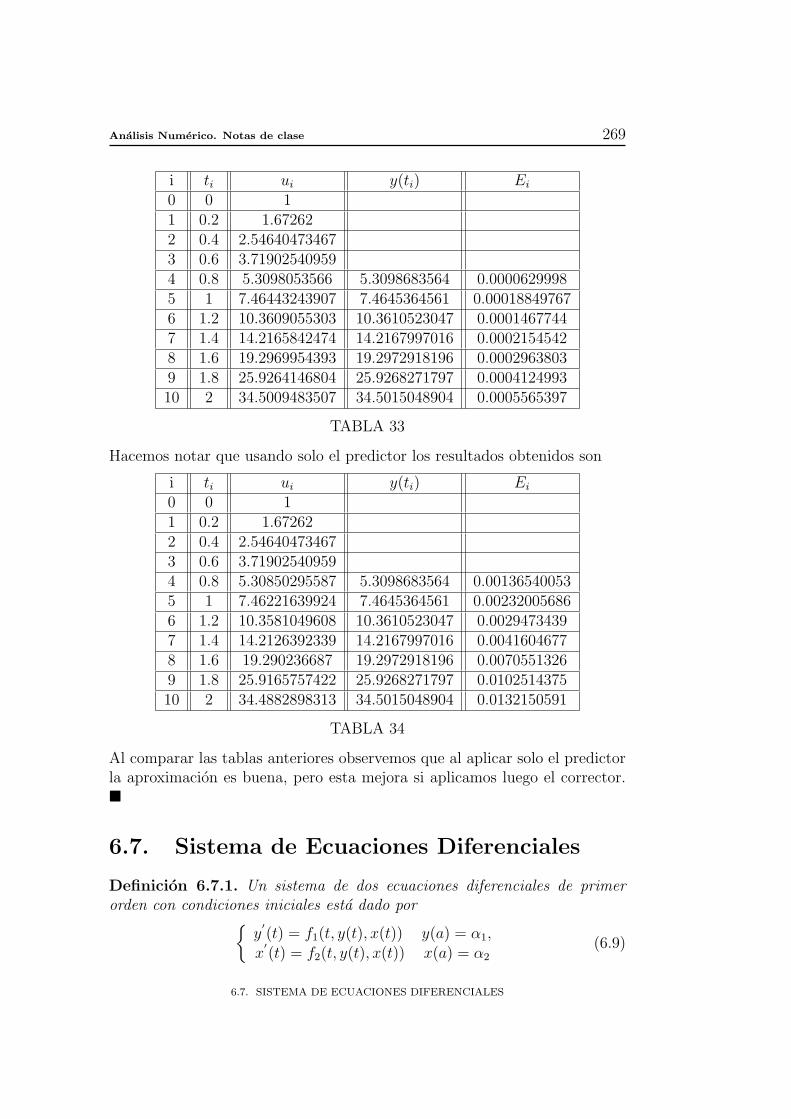
Analisis Numerico. Notas de clase 269
i ti ui y(ti) Ei
0 0 11 0.2 1.672622 0.4 2.546404734673 0.6 3.719025409594 0.8 5.3098053566 5.3098683564 0.00006299985 1 7.46443243907 7.4645364561 0.000188497676 1.2 10.3609055303 10.3610523047 0.00014677447 1.4 14.2165842474 14.2167997016 0.00021545428 1.6 19.2969954393 19.2972918196 0.00029638039 1.8 25.9264146804 25.9268271797 0.000412499310 2 34.5009483507 34.5015048904 0.0005565397
TABLA 33
Hacemos notar que usando solo el predictor los resultados obtenidos son
i ti ui y(ti) Ei
0 0 11 0.2 1.672622 0.4 2.546404734673 0.6 3.719025409594 0.8 5.30850295587 5.3098683564 0.001365400535 1 7.46221639924 7.4645364561 0.002320056866 1.2 10.3581049608 10.3610523047 0.00294734397 1.4 14.2126392339 14.2167997016 0.00416046778 1.6 19.290236687 19.2972918196 0.00705513269 1.8 25.9165757422 25.9268271797 0.010251437510 2 34.4882898313 34.5015048904 0.0132150591
TABLA 34
Al comparar las tablas anteriores observemos que al aplicar solo el predictorla aproximacion es buena, pero esta mejora si aplicamos luego el corrector.¥
6.7. Sistema de Ecuaciones Diferenciales
Definicion 6.7.1. Un sistema de dos ecuaciones diferenciales de primerorden con condiciones iniciales esta dado por
y′(t) = f1(t, y(t), x(t)) y(a) = α1,
x′(t) = f2(t, y(t), x(t)) x(a) = α2
(6.9)
6.7. SISTEMA DE ECUACIONES DIFERENCIALES

270 J Velasquez Zapateiro/ V. Obeso Fernandez
con a ≤ t ≤ b
Definicion 6.7.2. Las funciones y1(t) y x1(t) son soluciones del sistema 6.9si y1(t) y x1(t) son derivables y ademas se cumple que
y′1(t) = f1(t, y1(t), x1(t)) y1(a) = α1,
x′1(t) = f2(t, y1(t), x1(t)) x1(a) = α2
(6.10)
6.7.1. Aproximacion Numerica
Una primera aproximacion numerica del problema 6.9 se tiene si consi-deramos dy = yk+1 − yk, dx = xk+1 − xk, dt = tk+1 − tk , de modo queel problema
dy
dt= f1(tk, y(tk), x(tk)) y1(a) = α1,
dx
dt= f2(tk, y(tk), x(tk)) x1(a) = α2
se puede aproximar escribiendo
yk+1 − yk = f1(tk, y(tk), x(tk))h
xk+1 − xk = f2(tk, y(tk), x(tk))h
donde h = tk+1 − tk por tanto se tiene que
ui+1 = ui + f1(ti, y(ti), x(ti))h
vi+1 = vi + f2(ti, y(ti), x(ti))h
donde vi ≈ x(ti) y ui ≈ y(ti), esta es la aproximacion de Euler.
Una mejor aproximacion para resolver 6.9 se tiene cuando usamos elmetodo de Runge-Kuta de cuarto orden que como sabemos esta dado por
ui+1 = ui +h
3(F1 + 2F2 + 2F3 + F4)
vi+1 = vi +h
3(G1 + 2G2 + 2G3 + G4)
donde
F1 = f1(ti, y(ti), x(ti)) G1 = f2(ti, y(ti), x(ti))
F2 = f1(ti +h
2, ui +
h
2F1, vi +
h
2G1) G2 = f2(ti +
h
2, ui +
h
2F1, vi +
h
2G1)
CAPITULO 6. ECUACIONES DIFERENCIALES ORDINARIAS CON CONDICIONES INICIALES

Analisis Numerico. Notas de clase 271
F3 = f1(ti +h
2, ui +
h
2F2, vi +
h
2G2) G3 = f2(ti +
h
2, ui +
h
2F2, vi +
h
2G2)
y
F4 = f1(ti +h
2, ui + hF3, vi + hG3) G4 = f2(ti +
h
2, ui + hF3, vi + hG3)
En general si se tiene el sistema de n ecuaciones diferenciales linealesdado por
dy1
dt= f1(t, y1, y2, y3, · · · , yn)
dy2
dt= f2(t, y1, y2, y3, · · · , yn)
dy3
dt= f3(t, y1, y2, y3, · · · , yn)
.
.
.dyn
dt= fn(t, y1, y2, y3, · · · , yn)
con y1(a) = α1, y2(a) = α2, y3(a) = α3, · · · , yn(a) = αn entonces, sisuponemos que hemos calculado las aproximaciones u1,j, u2,j, u3,j, · · · , un,j,para calcular las aproximaciones u1,j+1, u2,j+1, u3,j+1, · · · , un,j+1 por el meto-do de Runge-Kuta de cuarto orden se calcula inicialmente los valores de
RK1,j = hfj(tj, u1,j, u2,j, u3,j, · · · , un,j)
∀j = 1, 2, 3, · · ·n
RK2,j = hfj(tj+h
2, u1,j+
1
2RK1,1, u2,j+
1
2RK1,2, u3,j+
1
2RK1,3, · · · , un,j+
1
2RK1,n)
∀j = 1, 2, 3, · · ·n
RK3,j = hfj(tj+h
2, u1,j+
1
2RK2,1, u2,j+
1
2RK2,2, u3,j+
1
2RK2,3, · · · , un,j+
1
2RK2,n)
∀j = 1, 2, 3, · · ·ny por ultimo
RK4,j = hfj(tj+1, u1,j + RK3,1, u2,j + RK3,2, u3,j + RK3,3, · · · , un,j + RK3,n)
6.7. SISTEMA DE ECUACIONES DIFERENCIALES

272 J Velasquez Zapateiro/ V. Obeso Fernandez
∀j = 1, 2, 3, · · ·n de modo que se tiene
u1,j+1 = u1,j +(RK1,j + 2RK2,j + 2RK3,j + RK4,j)
6
∀j = 1, 2, 3, · · ·n
Ejemplo 6.7.1. Resolver el sistema de ecuaciones diferenciales dado por
u′1 = u2 0 ≤ t ≤ 2 u1(0) = 1
u′2 = −u1 − 2et + 1 0 ≤ t ≤ 2 u2(0) = 0
u′3 = −u1 − et + 1 0 ≤ t ≤ 2 u3(0) = 1
Solucion
Utilizando el metodo de Runge-Kutta de cuarto orden, para sistemade ecuaciones con h = 0.2 los resultados se muestran en la siguiente tabla
i ti u1 u2 u3
0 0 1 0 11 0.2 0.9573287755 -0.4399988675 0.78140401352 0.4 0.8186474956 -0.9601667038 0.53165826683 0.6 0.5678513505 -1.561399861 0.26071939594 0.8 0.1885153676 -2.246152634 -0.020611025165 1 -0.3365112519 -3.019399866 -0.30111708376 1.2 -1.025716648 -3.889733852 -0.56961564217 1.4 -1.899771276 -4.870603803 -0.81540214048 1.6 -2.982636139 -5.981711933 -1.0286773159 1.8 -4.302967654 -7.250588086 -1.20093781910 2 -5.895857864 -8.714374822 -1.325315178
TABLA 35
6.8. Ecuaciones Diferenciales de Orden Su-
perior
Una ecuacion diferencial de orden superior, es una ecuacion diferencial quecontiene derivadas de orden superior x
′′(t), x
′′′(t), · · · xn(t)
CAPITULO 6. ECUACIONES DIFERENCIALES ORDINARIAS CON CONDICIONES INICIALES

Analisis Numerico. Notas de clase 273
Consideremos primero una ecuacion diferencial de orden dos con condicionesiniciales, esto es, una ecuacion de la forma
ax′′(t) + bx
′(t) + cx(t) = f(t)
con x(a0) = α y x′(a0) = β
resolver una ecuacion como la planteada antes es equivalente a resolver unsistema de ecuaciones diferenciales de primer orden, lo cual es posible sitomamos
v(t) = x′(t),
luego entonces
v′(t) = x
′′(t),
de modo que se tiene el sistema
x′(t) = v(t)
v′(t) = g(t, v(t))
con x(a) = x0, x′(a) = v0.
En general si se tiene una ecuacion de orden n dada por
xn(t) = f(t, x(t), x′(t), x
′′(t), · · · , xn−1(t)) a ≤ t ≤ b
con x(t0) = a1, x′(t0) = a2, x
′′(t0) = a3, · · · , xn−1(t0) = an, entonces si se
toma v1(t) = x(t), v2(t) = x′(t), v3(t) = x
′′(t), · · · , vn(t) = xn−1(t) se tiene el
sistema
v′1(t) = v2(t)
v′2(t) = v3(t)
v′3(t) = v4(t)
.
.
.
v′n(t) = f(t, vi(t)), v2(t), · · · , vn(t)
con v1(a) = a1, v2(a) = a2, v3(a) = a3 · · · , vn(a) = an, sistema que se puederesolver ahora por ejemplo usando el metodo de Runge-Kuta de cuarto ordenmostrado en la seccion anterior.
6.8. ECUACIONES DIFERENCIALES DE ORDEN SUPERIOR

274 J Velasquez Zapateiro/ V. Obeso Fernandez
Ejemplo 6.8.1. Aproxime la ecuacion diferencial con valores iniciales dadapor
y′′ − 2y
′+ y = tet − t, 0 ≤ t ≤ 1 y(0) = y
′(0) = 0
Solucion
Sea u1(t) = y(t), y u2(t) = y′(t), entonces la ecuacion diferencial de
segundo orden se transforma en el sistema de ecuaciones lineales
u′1(t) = u2(t),
u′2(t) = tet − t + 2u2(t)− u1(t),
sistema que al aplicarle el metodo de Runge- Kutta se obtienen como resul-tado los mostrado en la tabla 36
i ti u1 u2
0 0 0 01 0.2 0.000008972441866 0.00036391977222 0.4 0.0001535194529 0.0031788221563 0.6 0.0008342683499 0.011719085354 0.8 0.002832054801 0.030353253375 1 0.007429677753 0.064798388166 1.2 0.01656148953 0.12242374487 1.4 0.03299617073 0.21261233018 1.6 0.06055896274 0.34719028129 1.8 0.104400702 0.540935589210 2 0.1713222417 0.81217952
TABLA 36
Ejercicios
Para los problemas 1-5, resuelva el problema con valor inicial y compare susresultados con la solucion exacta que se da.a) Usando el metodo de Euler con h = 0.5, y h = 0.1.b) Usando el metodo de Taylor de segundo orden con h = 0.5, y h = 0.1.c) Usando el metodo de Runge-Kuta con h = 0.5, y h = 0.1.d) Usando el metodo de punto medio con h = 0.5, y h = 0.1.
1. y′= xy + x, y(0) = 0, en [0; 1]. La solucion exacta es y(x) = 1
x+1
CAPITULO 6. ECUACIONES DIFERENCIALES ORDINARIAS CON CONDICIONES INICIALES

Analisis Numerico. Notas de clase 275
2. y′= −y2, y(0) = 1, en [0; 1]. La solucion exacta es y(x) = −1 + e
x2
2 .
3. y′= y + x, y(0) = 2, en [0; 1]. La solucion exacta es y(x) = ex − x− 1.
4. y′
= x + 4yx−1, y(1) = 12, en [1; 2]. La solucion exacta es y(x) =
−12x2 + x4.
5. y′= y cos x, y(0) = 1, en [0; 1]. La solucion exacta es y(x) = esen x
Para los problemas 6-13, resuelva el problema con valor inicial ycompare sus resultados con la solucion exacta que se da. Investigue elefecto que se causa usando diferentes tamanos de pasoa) Usando el metodo de Euler .b) Usando el metodo de Runge-Kutac) Usando el metodo de punto medio .d) Usando el metodo de Adams-Bashforth-Moulton .
6. y′= −y + sen x, y(0) = 0, en [0; π]. (Compare los resultados usando
n = 12, 20, 40) La solucion exacta es y(x) = 1.5e−x+0.5 sen x−0.5 cos x
7. y′
= y tan x + x, y(0) = 3, en [0; π/4]. La solucion exacta es y(x) =x tan x + 2 sec x6 + 1.
8. y′= x2+y2
2xy, y(1) = 2, en [1; 2]. La solucion exacta es y(x) = x(x + 3).
9. y′
= −y tan x + sec x, y(0) = 2, en [0; π/4]. La solucion exacta esy(x) = sen x + 2 cos x.
10. y′= y cos x, y(0) = 1, en [0; 1]. La solucion exacta es y(x) = esen x
11. y′
= (y + x)2, y(0) = −1, en [0; π/2]. La solucion exacta es y(x) =−x + tan(x− π/4).
12. y′= 3x
y−xy, y(0) = 2, en [0; 2]. La solucion exacta es y(x) =
√3 + e−x2 .
13. y′
= xy−1 − xy, y(0) = 2, en [0; 2]. La solucion exacta es y(x) =√1 + 3e−x2 .
14. Resolver y′= xy + y2 + x2, y(0) = 1, en [0; 0.5]
15. Resolver y′= −1
xy − y2 + 1
x2 , y(1) = 13, en [0.1; 1].
16. Resolver y′= 1
xy + 1
xy2 + −2
x, y(2) = −3, en [2; 3]
17. Resolver y′= 1
xy + 1
xy2 + −2
x, y(0.1) = 1, en [0.1; 1]
6.8. ECUACIONES DIFERENCIALES DE ORDEN SUPERIOR

Indice alfabetico
algoritmode Newton para
ecuaciones no lineales , 46de Newton para sistemas no li-
neales, 92analisis de error, 15aproximacion
de Pade, 121por redondeo, 12por truncamiento, 12
cerchacubica con curvatura en los ex-
tremos, 143cubica con terminacion
parabolica, 140cubica extrapolada, 137cubica natural, 134cubica sujeta, 130
ceros de una funcion, 26convergencia
q-cuadratica, 27q-cubica, 27q-lineal, 26q-orden al menos p, 27q-superlineal, 27r-orden al menos p, 27uniforme, 148
cuadratura adaptativa, 204
diferencia centradade orden O(h2), 159de orden O(h4), 161
diferencias divididas, 112
ecuaciones diferenciales de ordensuperior, 260
elemento pivote, 78elementos diagonales, 70eliminacion gaussiana, 80epsilon de la maquina, 15error
absoluto, 12de discretizacion global, 236de discretizacion local, 236relativo, 12
extrapolacion de Richardson, 171,202
factorizacionLU, 83
fila pivote, 78funcion Lipschitz, 229funcion periodica, 148formula
de los cinco puntos , 169de los tres puntos , 165
formulasabiertas de Newton - Cotes,
182cerradas de Newton-Cotes, 182
grado de exactitud, 182
integracionadaptativa, 204
276

Analisis Numerico. Notas de clase 277
Gauss-Legendre, 208interpolacion
cubica, 127lineal a trozos, 126lineal de Lagrange, 103polinomial a trozos o spline,
125iteracion de punto fijo, 31
matrizampliada del sistema, 75bien condicionada, 73cuadrada, 68de ancho r, 70de coeficientes, 75definida positiva, 71estrictamente diagonal domi-
nante, 70Hessemberg Inferior, 70Hessemberg Superior, 70identica, 68invertible, 70jacobiana, 70nula, 68numero condicion de una, 73simetrica, 71transpuesta, 71triangular inferior, 69triangular superior, 69tridiagonal, 70
multiplicadores, 78metodo
∆2 de Aitken, 59de biseccion, 38de integracion de Romberg,
199de Adams-Bashforth de cuatro
pasos, 247de Adams-Bashforth de dos pa-
sos , 245
de Adams-Bashforth de trespasos, 246
de Adams-Moulton de dos pa-sos, 249
de Adams-Moulton de tres pa-sos, 250
de diferencias, 235de Euler, 233de Gauss- Saidel, 89de Heun, 241de Jacobi, 86de la Secante, 55de Milne-Simpson, 254de Newton, 45, 91de punto fijo, 27, 95de Runge-Kuta de cuarto or-
den, 242de Runge-Kuta de orden dos,
240de Taylor, 236de Taylor de Orden 2, 237de Taylor de Orden 4, 237modificado de Euler, 241modificado de Newton, 52predictor-corrector, 252regula falsi, 43
metodosmultipasos, 244multipasos explıcitos, 244multipasos implıcitos, 244
normade una matriz, 72vector, 11
notacioncientıfica normalizada, 9fl(x), 11O de Landau, 16
numerode maquina, 7punto flotantes, 7
INDICE ALFABETICO
278 J Velasquez Zapateiro/ V. Obeso Fernandez
operaciones elementales, 78
pivoteoparcial, 81parcial escalado, 82trivial, 81
polinomiode Hermite, 115de Taylor, 101interpolador de Lagrange, 106interpolador de Newton, 110osculante, 115
punto fijo, 30punto flotante, 7
normalizado, 7
regla3
8de Simpson, 182
compuesta de los 38
de Simp-son, 193
compuesta de Simpson, 191compuesta del trapecio, 188de Gauss-Legendre de dos no-
dos, 210de Boole, 183de Simpson, 180del punto medio, 182del trapecio, 178
serie, 146de Fourier, 152
sistemade ecuaciones lineales, 74triangular superior de ecua-
ciones lineales, 75de ecuaciones diferenciales ,
257de ecuaciones no lineales, 91
sucesionacotada inferiormente, 39acotada superiormente, 39
convergente, 39creciente, 38decreciente, 38divergente, 39
Teoremade Fermat, 28de Rolle, 29de Weierstrass, 39del punto fijo, 32del valor intermedio, 30del valor medio, 29generalizado del valor medio,
49sustitucion progresiva, 76sustitucion regresiva, 76
transformaciones elementales, 78
INDICE ALFABETICO
Bibliografıa
[1] Richard L. Burden., J.Douglas Faires. Analisis Numerico. Thom-son Learning
[2] Jhon H. Mathews., Kurtis D. Fink. Metodos Numericos con MAT-LAB 3.a Edicion. Prentice Hall
[3] Jorge Nocedal., Stephen J. Wright, Numerical Optimization.Springer
[4] Ignacio Mantilla, Analisis Numerico. Universidad Nacional de Colom-bia.
[5] Steven C. Chapra., Raymond P. Canale, Metodos Numericos paraIngenieros. Editorial McGraw-Hill .
[6] D. Kincaid., W. Chenney Analisis Numerico. Editorial Addison Wes-ley Iberoamericana.
[7] Shoichiro Nakamura, Analisis Numerico y Visualizacion Grafica. Edi-torial Prentice Hall.
[8] Shoichiro Nakamura, Metodos Numericos Aplicados con Software.Editorial Prentice Hall.
[9] Philips Clarke Jr., Calculus and Analytic Geometry. D.C. Heath andCompany.
[10] Laurene V. Faussett., Applied Numerical Analysis using MATLAB.Editorial Prentice Hall.
[11] Introduction to Numerical Linear Algebra and Optimisation. CambridgeTexts in Applied Mathematics.
[12] J.D.Hoffman., Numerical Methods for enginers and scientists. Edito-rial McGraw-Hill.
279

280 J Velasquez Zapateiro/ V. Obeso Fernandez
[13] Yu Takeuchi., Sucesiones y Series. Universidad Nacional de Colombia.
[14] E. Kreyszig., Matematicas Avanzadas para Ingenieros. EditorialLimusa, Mexico.
BIBLIOGRAFIA