aceleración variable: el oscilador armónicojacobi.fis.ucm.es/rtandres/iescmg/b2/oscilador.pdf ·...
TRANSCRIPT
Movimientos en la recta(iii)Aceleración variable: el oscilador armónico
Resumen
Primera parte
Comenzar por el principio es bien
I ¿Qué es lo que ya sabes?I ¿Qué es lo que no sabes?
Dinámica del oscilador armónico
I Hooke revisitedI Análisis de fuerzas sobre el osciladorI Ecuación de movimiento del oscilador: ecuaciones diferencialesI ¿Qué podemos saber sin resolver nada?
I Aspectos cualitativos de ecuaciones diferencialesI Puntos de equilibrio y estabilidad
Resumen
Primera parte
Comenzar por el principio es bien
I ¿Qué es lo que ya sabes?I ¿Qué es lo que no sabes?
Dinámica del oscilador armónico
I Hooke revisitedI Análisis de fuerzas sobre el osciladorI Ecuación de movimiento del oscilador: ecuaciones diferencialesI ¿Qué podemos saber sin resolver nada?
I Aspectos cualitativos de ecuaciones diferencialesI Puntos de equilibrio y estabilidad
Segunda parte
La solución del oscilador armónico
I Solución general y condiciones inicialesI Parámetros: A, ω y φI Análisis cinemático
I Posición máxima y mínimaI Aceleración máxima y mínima
¿Y todo esto para qué?
I Perturbación de sistemas en equilibrio estableI Osciladores acopladosI Sistemas biológicos oscilantes
I De lobos y ovejas: modelo de Volterra-LotkaI Ritmo circadiano y circanualI Luciérnagas
Segunda parte
La solución del oscilador armónico
I Solución general y condiciones inicialesI Parámetros: A, ω y φI Análisis cinemático
I Posición máxima y mínimaI Aceleración máxima y mínima
¿Y todo esto para qué?
I Perturbación de sistemas en equilibrio estableI Osciladores acopladosI Sistemas biológicos oscilantes
I De lobos y ovejas: modelo de Volterra-LotkaI Ritmo circadiano y circanualI Luciérnagas
Movimientos con aceleración variable
I Puedes imaginar millones de movimientos con aceleraciónvariable.Por ejemplo movimientos con
I a(t) = t2
I a(t) = t5 + t + cos(t)I . . .
I Sin embargo no tienen mucho interés físico porque no todosaparecen en la naturaleza...
Pero hay uno que aparece de forma ubicua
El oscilador armónicoI Característico de sistemas elásticos (ley de Hooke)I Su posición/velocidad/aceleración es oscilanteI Lo tenemos estudiado a fondo
Movimientos con aceleración variable
I Puedes imaginar millones de movimientos con aceleraciónvariable.Por ejemplo movimientos con
I a(t) = t2
I a(t) = t5 + t + cos(t)I . . .
I Sin embargo no tienen mucho interés físico porque no todosaparecen en la naturaleza...
Pero hay uno que aparece de forma ubicua
El oscilador armónicoI Característico de sistemas elásticos (ley de Hooke)I Su posición/velocidad/aceleración es oscilanteI Lo tenemos estudiado a fondo
¿Qué es lo que ya sabes?
I Sabes lo que es la ley de Hooke:ut tensio sic vis
La fuerza que tiende arecuperar un medioelástico es proporcionalal alargamiento y designo contrario
FH = −k∆l
I Sabes hacer cálculos en equilibrioI Sin movimiento...
I Sabes experimentalmente que hayoscilaciones

¿Qué es lo que no sabes?
I No sabes de dónde vienen las oscilacionesI (Quizá) no sabes por qué diablos es importante...
¿Qué es lo que no sabes?
I No sabes de dónde vienen las oscilacionesI (Quizá) no sabes por qué diablos es importante...

¿Qué es lo que no sabes?
I No sabes de dónde vienen las oscilacionesI (Quizá) no sabes por qué diablos es importante...
¿Qué es lo que no sabes?
I No sabes de dónde vienen las oscilacionesI (Quizá) no sabes por qué diablos es importante...
¿Qué es lo que no sabes?
I No sabes de dónde vienen las oscilacionesI (Quizá) no sabes por qué diablos es importante...
¿Qué es lo que no sabes?
I No sabes de dónde vienen las oscilacionesI (Quizá) no sabes por qué diablos es importante...
¿Qué es lo que no sabes?
I No sabes de dónde vienen las oscilacionesI (Quizá) no sabes por qué diablos es importante...

Diagrama de fuerzas (i)
Ya no vamos a suponer equilibrio... sino desequilibrioI Es un movimiento en una dimensiónI Colocamos el origen del SRI en el extremo del
muelle.I Actúan sólo Fspring y P, y van a estar
desequilibradasI ¡Importante! Ya no somos libres de fijar todos
los sentidos de las fuerzas arbitrariamente...I Fspring depende de la posición, y siempre es
contraria a ella
Fspring = −ky
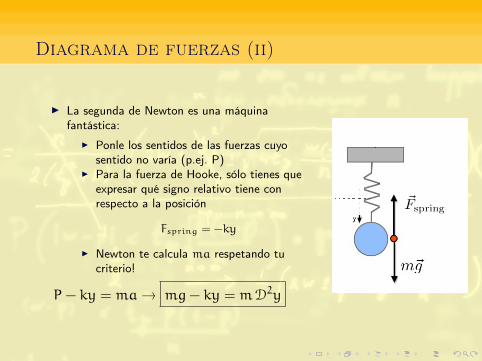
Diagrama de fuerzas (ii)
I La segunda de Newton es una máquinafantástica:
I Ponle los sentidos de las fuerzas cuyosentido no varía (p.ej. P)
I Para la fuerza de Hooke, sólo tienes queexpresar qué signo relativo tiene conrespecto a la posición
Fspring = −ky
I Newton te calcula ma respetando tucriterio!
P − ky = ma→ mg− ky = mD2y
Con la iglesia hemos dado, Sancho...
mg− ky = mD2y −→ D2y+k
my− g = 0
Ecuación de movimiento deloscilador
D2y+k
my− g = 0
I Aparece tanto la posición y, como suderivada segunda, D2y
I Ecuaciones así se llaman ecuacionesdiferenciales
I Encontrar soluciones es un arte... (noentra en el examen)
Con la iglesia hemos dado, Sancho...
mg− ky = mD2y −→ D2y+k
my− g = 0
Ecuación de movimiento deloscilador
D2y+k
my− g = 0
I Aparece tanto la posición y, como suderivada segunda, D2y
I Ecuaciones así se llaman ecuacionesdiferenciales
I Encontrar soluciones es un arte... (noentra en el examen)

Generalidades sobre ecuacionesdiferenciales (i)
¿Qué son?I Relacionan una función con
sus derivadas (primera,segunda, etc.)
I Necesitan condiciones inicialespara resolverse¡por eso salen en mecánica!
I Tienen infinitas soluciones, engeneral. ¡Pero no cualquiercosa vale!
I Hay métodos para encontrarsoluciones en algunos casosimportantes
No siempre...
¿Y qué hago?I Probar funciones a ver si
cuela...I Estudiar ec. diferenciales...I Ver si echando un ojo
podemos saber algo
Generalidades sobre ecuacionesdiferenciales (i)
¿Qué son?I Relacionan una función con
sus derivadas (primera,segunda, etc.)
I Necesitan condiciones inicialespara resolverse¡por eso salen en mecánica!
I Tienen infinitas soluciones, engeneral. ¡Pero no cualquiercosa vale!
I Hay métodos para encontrarsoluciones en algunos casosimportantes
No siempre...
¿Y qué hago?I Probar funciones a ver si
cuela...I Estudiar ec. diferenciales...I Ver si echando un ojo
podemos saber algo

Ecuaciones diferenciales (ii)
Puntos de equilibrioSon soluciones constantes de una ecuación diferencial
Ejemplo: puntos de equilibrio de nuestro oscilador
D2 y+ kmy− g = 0
I Busquemos soluciones y∗ constantesI Está claro que D2y∗ = 0 (son constantes!!!)I Sólo hay una solución
k
my∗ − g = 0 −→ y∗ =
mg
k
¡Que es precisamente el punto de equilibrio del objeto colgando delmuelle si se compensaran exactamente el peso y la fuerza de Hooke!
Ecuaciones diferenciales (ii)
Puntos de equilibrioSon soluciones constantes de una ecuación diferencial
Ejemplo: puntos de equilibrio de nuestro oscilador
D2 y+ kmy− g = 0
I Busquemos soluciones y∗ constantesI Está claro que D2y∗ = 0 (son constantes!!!)I Sólo hay una solución
k
my∗ − g = 0 −→ y∗ =
mg
k
¡Que es precisamente el punto de equilibrio del objeto colgando delmuelle si se compensaran exactamente el peso y la fuerza de Hooke!
Ec.dif (III): puntos de equilibrio
Consecuencia 1Si un sistema regido por una cierta ecuación diferencial está enreposo en un punto de equilibrio, entonces se queda así para losrestos.
Consecuencia 2 (no inmediata...)
Cualquier perturbación de un sistema que estuviera en un punto deequilibrio estable le hace volver a tender hacia él (p.ej: oscilando)
¡Ya sabemos de dónde vienen las oscilaciones del muelle y en tornoa qué punto serán!
Ec.dif (III): puntos de equilibrio
Consecuencia 1Si un sistema regido por una cierta ecuación diferencial está enreposo en un punto de equilibrio, entonces se queda así para losrestos.
Consecuencia 2 (no inmediata...)
Cualquier perturbación de un sistema que estuviera en un punto deequilibrio estable le hace volver a tender hacia él (p.ej: oscilando)
¡Ya sabemos de dónde vienen las oscilaciones del muelle y en tornoa qué punto serán!
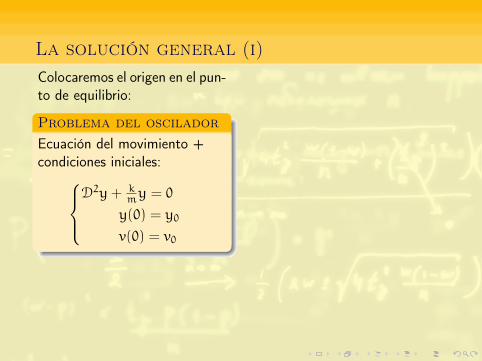
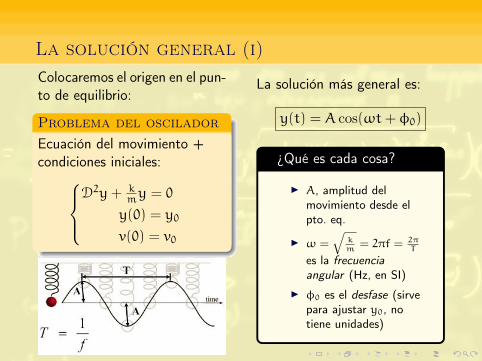
La solución general (i)Colocaremos el origen en el pun-to de equilibrio:
Problema del osciladorEcuación del movimiento +condiciones iniciales:
D2y+ kmy = 0
y(0) = y0
v(0) = v0
La solución más general es:
y(t) = A cos(ωt+ φ0)
¿Qué es cada cosa?
I A, amplitud delmovimiento desde elpto. eq.
I ω =√
km
= 2πf = 2πT
es la frecuenciaangular (Hz, en SI)
I φ0 es el desfase (sirvepara ajustar y0, notiene unidades)
La solución general (i)Colocaremos el origen en el pun-to de equilibrio:
Problema del osciladorEcuación del movimiento +condiciones iniciales:
D2y+ kmy = 0
y(0) = y0
v(0) = v0
La solución más general es:
y(t) = A cos(ωt+ φ0)
¿Qué es cada cosa?
I A, amplitud delmovimiento desde elpto. eq.
I ω =√
km
= 2πf = 2πT
es la frecuenciaangular (Hz, en SI)
I φ0 es el desfase (sirvepara ajustar y0, notiene unidades)
Ejemplo 1
Ejemplo 1
A un oscilador armónico de rigidez k = 2 N/m colgado deltecho se le cuelga despacio a su vez una masa de 500 g.Cuando el sistema ha alcanzado el equilibrio, y para hacerleoscilar, se le estira 0,4 m de su posición de equilibrio y sesuelta. Calcula
I La amplitud del movimiento respecto del punto de equilibrioI La frecuencia de las oscilacionesI Las ecuaciones cinemáticas
Ejemplo 1
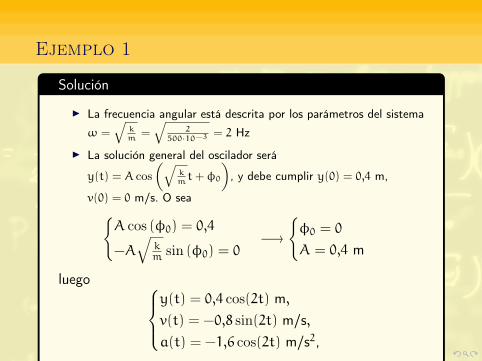
Solución
I La frecuencia angular está descrita por los parámetros del sistema
ω =√
km
=√
2500·10−3 = 2 Hz
I La solución general del oscilador será
y(t) = A cos(√
kmt + φ0
), y debe cumplir y(0) = 0,4 m,
v(0) = 0 m/s. O sea{A cos (φ0) = 0,4
−A√
km sin (φ0) = 0
−→ {φ0 = 0A = 0,4 m
luego y(t) = 0,4 cos(2t) m,v(t) = −0,8 sin(2t) m/s,a(t) = −1,6 cos(2t) m/s2,
Ejemplo 2
Ejemplo 2
Desde la posición de equilibrio de un muelle (k = 45 N/m)horizontal con una masa de 5 kg conectada, se estira hasta laposición x(t) = 1 m y se le empuja de modo que parta conuna velocidad inicial v0 = 2 m/s. Calcula
I La frecuencia angular de las oscilacionesI La amplitud del movimientoI Las ecuaciones cinemáticasI La velocidad máxima y mínima
Ejemplo 2
Solución
I La frecuencia angular es independiente de amplitudes yvelocidades iniciales. Sólo depende de la masa conectada almuelle y de la rigidez del mismo
ω =
√k
m=
√45
5= 3 Hz
I La solución del oscilador desde la posición de equilibrio puedeescribirse siempre como A cos (ωt + φ0), sea en la dirección quesea.Las condiciones iniciales son x(0) = 0 m, v(0) = 2 m/s; es decir{A cos (φ0) = 0−3A sin (φ0) = 2
−→ {φ0 = (2k + 1)π2k, k ∈ Z
−3A(−1)k = 2→ A = 32m ' 1,5 m
Solución (continúa)
I Las ecuaciones cinemáticas sony(t) = 1,5 cos
(3t+ π
2
)m,
v(t) = −4,5 sin(3t+ π
2
)m/s,
a(t) = −13,5 cos(3t+ π
2
)m/s2,
I Como la velocidad es algo multiplicado por un seno, y el seno tomavalores máximos en 1 y -1, resulta
vmax = 4,5 m/s, vmin = −4,5 m/s.
Si piensas en un muelle, esta velocidad se consigue en el mismo puntocuando el oscilador está avanzando en un sentido o en otro.