3. análisis mareal y modelos - bibing.us.esbibing.us.es/proyectos/abreproy/5392/fichero/7.pdf ·...
TRANSCRIPT

CAPÍTULO 3 Análisis mareal y modelos
30
3. Análisis mareal y modelos
3.1. Ecuaciones de movimiento y conservación
La propagación de la marea en estuarios puede ser descrita a través de muchos
modelos matemáticos o hidráulicos. Sin embargo, tales modelos no
proporcionan una comprensión exacta de los mecanismos básicos o la
sensibilidad de los parámetros controladores.
El principio de conservación de cantidad de movimiento, o segunda ley de
Newton, aplicada a un volumen fluido expresa que la variación con el tiempo
de su cantidad de movimiento es igual a la resultante de todas las fuerzas, de
superficie y másicas, que actúan sobre él (Barrero Ripoll et al. 2005).
La segunda ley de Newton exige, por tanto, el cumplimiento en cada instante y
en cada punto fijo del dominio fluido de la ecuación
𝜌𝐷𝐯
𝐷𝑡= 𝜌
𝜕𝐯
𝜕𝑡+ 𝜌𝐯 ∙ ∇𝐯 = −∇𝑝 + ∇ ∙ 𝜏 ′ + 𝜌𝐟𝐦 (3.1)
Donde 𝜏 ′ es el tensor de esfuerzos, 𝐯 la velocidad en un punto cualquiera de la
superficie fluida, ρ es la densidad y 𝐟𝐦 es el vector de fuerzas másicas. La
ecuación (3.1) dividida por ρ expresa que la aceleración de la unidad de masa es
igual a la resultante de fuerzas, de superficie (presión y viscosidad) y másicas
que actúan sobre ella. Separando ya la velocidad por componentes horizontales
X e Y, nos queda.
Eje X:
𝜕𝑈
𝜕𝑡+ 𝑈
𝜕𝑈
𝜕𝑋+ 𝑉
𝜕𝑈
𝜕𝑌= 𝑓𝑢𝑒𝑟𝑧𝑎𝑠 𝑑𝑒 𝑝𝑟𝑒𝑠𝑖ó𝑛 𝑦 𝑣𝑖𝑠𝑐𝑜𝑠𝑖𝑑𝑎𝑑 𝑒𝑛 𝑒𝑙 𝑒𝑗𝑒 𝑋 (3.2)
Eje Y:
𝜕𝑉
𝜕𝑡+ 𝑈
𝜕𝑉
𝜕𝑋+ 𝑉
𝜕𝑉
𝜕𝑌= 𝑓𝑢𝑒𝑟𝑧𝑎𝑠 𝑑𝑒 𝑝𝑟𝑒𝑠𝑖ó𝑛 𝑦 𝑣𝑖𝑠𝑐𝑜𝑠𝑖𝑑𝑎𝑑 𝑒𝑛 𝑒𝑙 𝑒𝑗𝑒 𝑌 (3.3)
Las ecuaciones de movimiento a lo largo de ejes ortogonales horizontales, X e Y,
pueden ser escritas según Prandle 2009, como siguen.
Aceleración en la dirección X:
𝜕𝑈
𝜕𝑡+ 𝑈
𝜕𝑈
𝜕𝑋+ 𝑉
𝜕𝑈
𝜕𝑌+ 𝑔
𝜕𝜍
𝜕𝑋− Ω𝑉 =
𝜕
𝜕𝑍𝐸
𝜕𝑈
𝜕𝑍 (3.4)
Aceleración en la dirección Y:
𝜕𝑉
𝜕𝑡+ 𝑈
𝜕𝑉
𝜕𝑋+ 𝑉
𝜕𝑉
𝜕𝑌+ 𝑔
𝜕𝜍
𝜕𝑌+ Ω𝑈 =
𝜕
𝜕𝑍𝐸
𝜕𝑉
𝜕𝑍 (3.5)
CAPÍTULO 3 Análisis mareal y modelos
31
La ecuación de continuidad o ecuación de conservación de la masa en forma
diferencial es la que sigue.
𝐷𝜌
𝐷𝑡+ 𝜌∇ ∙ 𝐯 = 0 (3.6)
Siendo el primer término la variación con el tiempo de la masa y el segundo
representa el flujo que por convección abandona un volumen de control.
Desarrollando los términos como antes.
𝜕(𝜌∙𝑈)
𝜕𝑋𝑑𝑋 ∙ 𝑑𝑌 ∙ 𝑑𝑍 ∙ 𝑑𝑡 +
𝜕𝜌
𝜕𝑡𝑑𝑡 ∙ 𝑑𝑋 ∙ 𝑑𝑌 ∙ 𝑑𝑍 = 0 (3.7)
𝜕(𝜌∙𝑈)
𝜕𝑋𝑑𝑋 ∙ 𝑑𝑌 ∙ 𝑑𝑍 ∙ 𝑑𝑡 +
𝜕𝜌
𝜕𝑡𝑑𝑡 ∙ 𝑑𝑋 ∙ 𝑑𝑌 ∙ 𝑑𝑍 = 0 (3.8)
𝜕(𝜌∙𝑈)
𝜕𝑋𝑑𝑋 ∙ 𝑑𝑌 ∙ 𝑑𝑍 ∙ 𝑑𝑡 +
𝜕𝜌
𝜕𝑡𝑑𝑡 ∙ 𝑑𝑋 ∙ 𝑑𝑌 ∙ 𝑑𝑍 = 0 (3.9)
Reagrupado términos y considerando el fluido como incompresible tenemos la
ecuación (3.10).
Continuidad:
𝜕𝑈
𝜕𝑋+
𝜕𝑉
𝜕𝑌+
𝜕𝑊
𝜕𝑍= 0 (3.10)
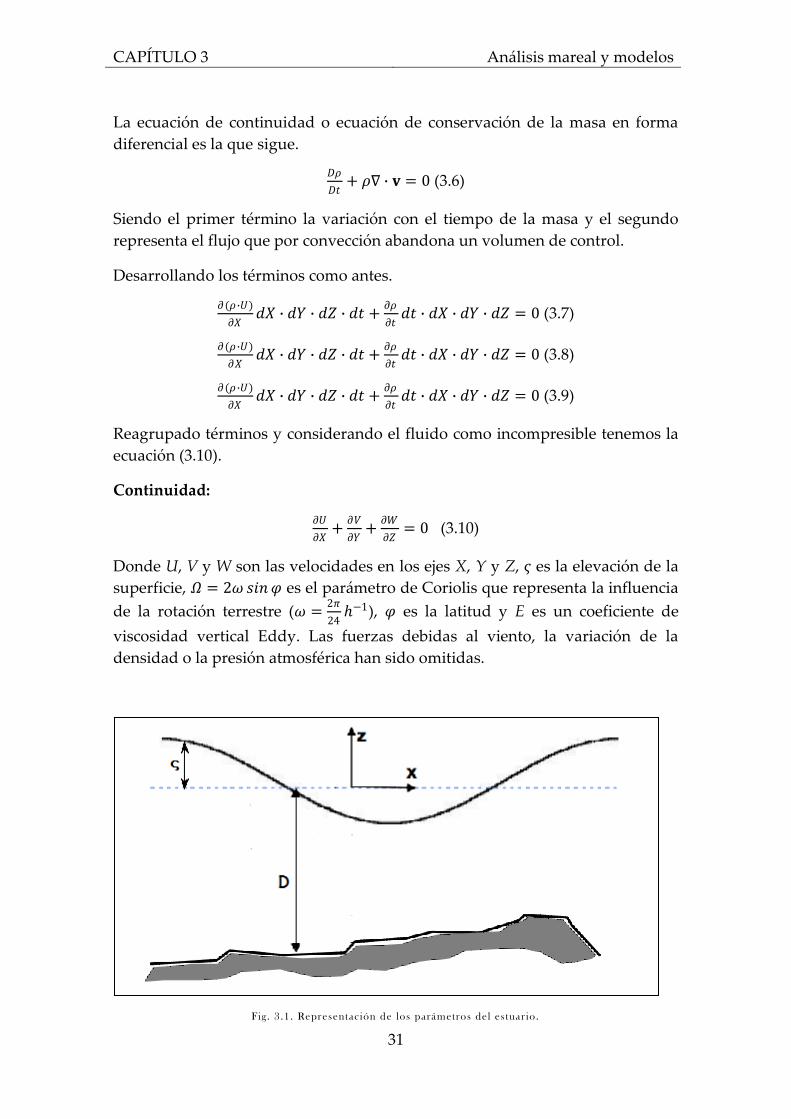
Donde U, V y W son las velocidades en los ejes X, Y y Z, 𝜍 es la elevación de la
superficie, 𝛺 = 2𝜔 𝑠𝑖𝑛𝜑 es el parámetro de Coriolis que representa la influencia
de la rotación terrestre (𝜔 =2𝜋
24−1), 𝜑 es la latitud y E es un coeficiente de
viscosidad vertical Eddy. Las fuerzas debidas al viento, la variación de la
densidad o la presión atmosférica han sido omitidas.
Fig. 3 .1. Representación de los parámetros del es tuar io.

CAPÍTULO 3 Análisis mareal y modelos
32
Para muchas aplicaciones, es conveniente integrar entre la superficie y el lecho.
Las ecuaciones de profundidad promediadas tienen la misma forma excepto:
(1) los términos convectivos no lineales 𝑈𝜕𝑈
𝜕𝑋+ 𝑉
𝜕𝑈
𝜕𝑌 en (3.4) y 𝑈
𝜕𝑉
𝜕𝑋+ 𝑉
𝜕𝑉
𝜕𝑌 en (3.5)
están multiplicados por coeficientes que dependen de la estructura vertical de U
y V; estos coeficientes se suponen a menudo iguales a 1 por simplicidad.
(2) con cero tensiones superficiales, los términos de viscosidad verticales se
sustituyen por los términos de estrés del lecho 𝜏𝑥/𝜌𝐷 y 𝜏𝑦/𝜌𝐷, que se suponen
que son proporcionales a los componentes respectivos de velocidad del lecho al
cuadrado, donde D es la profundiadad del estuario en este caso.
𝜏𝑥 = −𝜌𝑓𝑈(𝑈2 + 𝑉2)1/2, 𝜏𝑦 = −𝜌𝑓𝑉(𝑈2 + 𝑉2)1/2 (3.11)
Donde 𝜌 es la densidad del agua y 𝑓 es el coeficiente de tensión del lecho
(≈ 0.0025) (Prandle 2009).
(3) la condición de contorno cinemática en la superficie y el lecho es (Prandle
2009):
𝑊𝑠 =𝜕𝜍
𝜕𝑡+ 𝑈
𝜕𝜍
𝜕𝑋+ 𝑉
𝜕𝜍
𝜕𝑌
Y (3.12)
𝑊0 = −𝑈𝜕𝐷
𝜕𝑋− 𝑉
𝜕𝐷
𝜕𝑌
Éstos producen una ecuación de continuidad integrada en profundidad:
𝐷 + 𝜍 𝜕𝜍
𝜕𝑡+
𝜕
𝜕𝑋𝑈 𝐷 + 𝜍 +
𝜕
𝜕𝑌𝑉 𝐷 + 𝜍 = 0 (3.13)
Ianniello (1977) indica que las velocidades transversales se pueden despreciar si
el número de Kelvin Ω𝐵 (𝑔𝐷)1/2 ≪ 1 y la relación de aspecto horizontal
𝐵2𝜔2 (𝑔𝐷) ≪ 1 (B amplitud, ω = 2π/P, P periodo de marea). De ahí la adopción
de X axialmente, mediante la integración a través de amplitud y profundidad,
(3.4) puede ser reescrita en forma transversal en promedio parámetros como
𝜕𝑈
𝜕𝑡+ 𝑈
𝜕𝑈
𝜕𝑋+ 𝑔
𝜕𝜍
𝜕𝑋+ 𝑓
𝑈 𝑈
𝐷+𝜍 = 0 (3.14)
Y la nueva ecuación de continuidad:
𝐵 𝐷 + 𝜍 𝜕𝜍
𝜕𝑡+
𝜕
𝜕𝑋𝐵𝑈𝐴 = 0 (3.15)
Donde A es el área de la sección transversal.
Aunque las velocidades laterales pueden estar restringidas en los estuarios, el
término transversal de Coriolis Ω𝑈, en (3.12), debe ser equilibrado, por lo

CAPÍTULO 3 Análisis mareal y modelos
33
general por un gradiente de la superficie lateral. Este gradiente produce un
avance de fase de elevación en el lado derecho (mirando tierra adentro en el
hemisferio norte) de orden de Ω𝐵 (2(𝑔𝐷)1/2) radianes.
Siendo el número de Froude (FR) un número adimensional que relaciona el
efecto de las fuerzas de inercia y la fuerzas de gravedad que actúan sobre un
fluido. Así, la relación de las magnitudes de la expresión convectiva y el
término de aceleración temporal es igual al número de Froude para el flujo. Ésta
es generalmente pequeña, y por lo tanto, para el primer orden de simulación de
las mareas, los términos convectivos se pueden despreciar. La magnitud
relativa del término de fricción con el término de la aceleración temporal para la
frecuencia semi-diurna y f = 0,0025 es aproximadamente 20𝑈∗ 𝐷𝑠−1 , es decir,
predominante en el flujo rápido de estuarios poco profundos. En tales estuarios,
la fuerza de fricción es muy superior al término de aceleración (inercial)
durante la mayor parte del ciclo de la marea.
𝐹𝑅 =𝑣
𝑔𝐷𝐻 (3.16)
Donde v es la velocidad, DH (igual al cociente del área transversal del flujo y el
ancho de lámina libre) es la profundidad hidráulica y g es la aceleración de la
gravedad.
3.2. Estudio de las ondas que se producen en el Estuario
En general, se considera que la onda de marea en estuarios recibe su energía
directamente del océano exterior, siendo de menor importancia el efecto
generador de marea que ejerce el Sol y la Luna en aguas interiores, al considerar
el menor volumen de agua estuarina con relación al del océano. A su vez, la
onda de marea se propaga con una velocidad directamente proporcional a la
profundidad sobre la cual se desplaza, relación que experimenta ligeras
modificaciones en ambientes someros, donde la amplitud de la onda es
comparable a dicha profundidad.
𝐶 = 𝑔𝐷 (3.17)
Donde C es la celeridad de la onda de marea, g la aceleración de la gravedad y
D la profundidad del estuario.
Asimismo, las cuencas interiores tienen su propio modo natural de oscilación
que depende de sus dimensiones. Este aspecto es de particular importancia en
estuarios que se caracterizan por una gran variabilidad en su geometría. En este
contexto, los límites del estuario impiden que la onda de marea se propague
indefinidamente como una onda progresiva, experimentando una reflexión

CAPÍTULO 3 Análisis mareal y modelos
34
frente a cambios repentinos en la profundidad y en los bordes del estuario,
donde las ondas incidente y reflejada se combinan para generar la onda total.
En un canal cerrado en su extremo, como es el caso de numerosos fiordos
australes, la onda reflejada sin pérdida de amplitud produce un patrón de
ondas estacionarias, donde los nodos y antinodos tienen relación directa con la
intensidad de la corriente generada (Pugh 1987). Sin embargo, muchos estuarios
experimentan disipación de la energía de marea, antes y después de la
reflexión, obteniéndose una onda estacionaria con una contribución progresiva
de magnitud variable (Dyer 1997).
Nuestra onda de marea, en su propagación, pasa de forma continua de un
movimiento oscilatorio progresivo en la plataforma a estacionario en el último
tramo, cerca de la presa. La transformación del carácter oscilatorio de la onda
de marea en el estuario está asociada a la reflexión en la presa de Alcalá y tiene
consecuencias notables en la magnitud y distribución de las corrientes
residuales que, a su vez, conjuntamente con las descargas fluviales, regulan la
distribución espacio-temporal, entre otros, la salinidad, los sólidos en
suspensión, oxígeno disuelto y la toxicidad de las aguas.
Dado que en el estuario del Guadalquivir se da la convivencia de ondas
progresivas y estacionarias haremos una descripción de las mismas. Las ondas
progresivas corresponden a la onda de marea que penetra desde mar abierto en
el estuario; mientras que las ondas estacionarias son producidas por la reflexión
en la presa. En el Estuario las ondas existentes poseen parcialmente
características de ambas.
Las ondas estacionarias son aquellas ondas en las cuales, ciertos puntos de la
onda llamados nodos, permanecen inmóviles. Una onda estacionaria se forma
por la interferencia de dos ondas de la misma naturaleza con
igual amplitud, longitud de onda (o frecuencia) que avanzan en sentido opuesto
a través de un medio. Este tipo de ondas no implican un movimiento de avance
de la perturbación.
Este tipo de ondas están asociadas a reflexiones en los límites de separación de
medios de propiedades diferentes. Dichos límites pueden ser básicamente de
dos tipos, libres y fijos. Se comprueba experimentalmente que en un límite
libre la onda reflejada tiene las mismas características que la onda incidente, tan
sólo difieren en el sentido de avance de la perturbación. Por el contrario, en
un límite fijo la onda reflejada posee las mismas características que la incidente,
pero está desfasada π radianes respecto a la onda incidente.
La amplitud de la oscilación para cada punto depende de su posición, la
frecuencia es la misma para todos, y coincide con la de las ondas que
interfieren. Tiene puntos que no vibran (nodos), que permanecen inmóviles,

CAPÍTULO 3 Análisis mareal y modelos
35
estacionarios, mientras que otros (vientres o antinodos) lo hacen con una
amplitud de vibración máxima, igual al doble de la de las ondas que interfieren,
y con una energía máxima. El nombre de onda estacionaria proviene de la
aparente inmovilidad de los nodos. La distancia que separa dos nodos o dos
antinodos consecutivos es media longitud de onda.
Una onda estacionaria se puede formar por la suma de una onda y su onda
reflejada sobre un mismo eje (x o y).
Se pueden obtener por la suma de dos ondas atendiendo a la fórmula:
𝑦1 = 𝐴 𝑠𝑖𝑛 𝑘𝑥 + 𝜔𝑡 (3.18)
𝑦2 = 𝐴 𝑠𝑖𝑛 −𝑘𝑥 + 𝜔𝑡 (3.19)
𝑦 = 𝑦1 + 𝑦2 = 𝐴 𝑠𝑖𝑛 𝑘𝑥 + 𝜔𝑡 + 𝑠𝑖𝑛 −𝑘𝑥 + 𝜔𝑡 (3.20)
En este caso las ecuaciones han sido consideradas para x=0 y t=0, ya que para
otro caso se debe añadir su correspondiente ángulo de desfase.
Estas ecuaciones nos dan como resultado:
𝑦 𝑥, 𝑡 = 2𝐴𝑐𝑜𝑠(𝑘𝑥) ∙ sin(𝜔𝑡) (3.21)
Siendo k = 2π/λ y ω = 2πf = 2π/T.
En relación a la terminología empleada:
Se produce un vientre cuando sin 𝑘𝑥 = +1 − 1, siendo 𝑘𝑥 =
𝜋
2,
3𝜋
2,… . ,
(2𝑛+1)𝜋
2 𝑝𝑎𝑟𝑎 ∀𝑛 ∈ 𝑍.
- Si 𝑘 =2𝜋
𝜆, entonces 𝑥 = 𝑛 +
1
2 ∙
𝜆
2𝑝𝑎𝑟𝑎 ∀𝑛 ∈ 𝑍. (3.22)
Se produce un nodo cuando sin 𝑘𝑥 = 0, siendo 𝑘𝑥 = 0, 𝜋,… . ,𝑛𝜋 𝑝𝑎𝑟𝑎 ∀𝑛 ∈ 𝑍
- Si 𝑘 =2𝜋
𝜆, entonces 𝑥 = 𝑛 ∙
𝜆
2𝑝𝑎𝑟𝑎 ∀𝑛 ∈ 𝑍. (3.23)
Una imagen que ejemplifica un fenómeno en el que aparecen ondas
estacionarias es la Fig. 3.2.

CAPÍTULO 3 Análisis mareal y modelos
36
Fig. 3 .2 . Imagen que e jempl if ica la aparición de los nodos y los fenómenos asociados a las ondas
estacionarias .
El movimiento oscilatorio de la marea en el estuario del Guadalquivir es
parcialmente estacionario, y es el resultado de la superposición de un tren
incidente y otro reflejado. Si el tren de ondas se propaga en un medio sin
fricción, la velocidad horizontal y el nivel están en fase, φ=0, si es progresivo, y
φ=π/2 si es estacionario; en este caso las máximas velocidades horizontales
coinciden con el nodo y aquellas son nulas cuando el nivel es máximo o
mínimo, es decir en los antinodos.
Por otra parte, en un medio con fricción (como el estuario) la velocidad y el
nivel se desfasan; si la onda es progresiva este desfase es del orden de π/4.
Además, el instante de velocidad nula (estoas de pleamar o bajamar) se
adelanta con respecto al instante de nivel máximo (pleamar) o mínimo
(bajamar); y la velocidad máxima se adelanta con respecto al nivel medio.
Llamando ε al desfase entre los instantes de nivel máximo o mínimo y la
velocidad nula, se debe cumplir que φ + ε = π/2.
En la Fig. 3.2. se representa el desfase entre el instante de la estoa y el de nivel
máximo o mínimo. Se observa que en la desembocadura el desfase ε es superior
a π/4 mientras que ya en Sevilla el desfase es, prácticamente, cero, lo cual es
indicativo de que en el tramo T6 la dinámica es fundamentalmente estacionaria.

CAPÍTULO 3 Análisis mareal y modelos
37
Fig. 3 .3. Desfase entre la p leamar y la estoa l lenante en el es tuario . Este valor es indicat ivo de cómo varía la
onda de progresiva a estacionar ia . Losada et a l . (2001)
Debido a lo alejado del punto principal de reflexión (presa de Alcalá), la onda
de marea se puede modelar como una onda progresiva con un decrecimiento
débilmente exponencial o casi lineal tal y como los datos observados,
𝜂~𝑎 exp −𝑘1𝑥 cos(𝑘𝑅𝑥 − 𝜔𝑡 + 𝜀) (3.24)
𝑈~𝑎
exp −𝑘1𝑥 cos(𝑘𝑅𝑥 − 𝜔𝑡) (3.25)
A esta velocidad hay que añadirle la del caudal del río (promediado en el ciclo
mareal). En el apartado 3.3 que sigue haremos un análisis más detallado de la
primera expresión.
3.3. Análisis lineal de la reflexión de la marea en la presa de Alcalá del Río
Como menciona Fierro (2001), la onda de la marea se refleja en todos aquellos
tramos del estuario en los que cambia su celeridad por cambio brusco de
profundidad, anchura, o por alcanzar un contorno cerrado tal y como es la
presa de Alcalá. En este punto (P.K. 109.8 km) la onda de la marea se refleja
totalmente, el coeficiente de refelxión del obstáculo es igual a la unidad y la
velocidad normal nula. El tren reflejado se propaga aguas abajo

CAPÍTULO 3 Análisis mareal y modelos
38
experimentando un asomeramiento inverso, es decir, reducción de su amplitud
por la divergencia del cauce y disipación por efecto de la fricción. La
superposición lineal de ambos trenes, incidente y reflejado, da lugar a un
régimen estacionario de onda de marea y produce un incremento de la
amplitud de la marea tanto más acusado cuanto más cerca de la presa.
El carácter estacionario de la marea en el tramo alto del estuario tiene
consecuencias importantes en la magnitud y distribución de las corrientes
residuales que, a su vez, conjuntamente con las descargas fluviales, regulan la
distribución espacio-temporal, entre otros, de la salinidad, oxígeno disuelto, la
toxicidad de las aguas y los sólidos en suspensión.
A partir de los tres mareógrafos instalados en el último tramo del estuario,
repartidos en los últimos 15 km del estuario, es posible cuantificar el coeficiente
de reflexión.
Podemos concluir que en el tramo T6 domina la reflexión y el incremento de la
amplitud sugiere que el efecto de la fricción en la propagación de la onda de la
marea se reduce con respecto al resto de tramos. No obstante, debido a la
fricción, el tiempo de propagación depende del cuadrado de la distancia hasta
la presa.
El método empleado para calcular los coeficiente de refexión se basa en el
empleado por Baquerizo (1995). El método asume: (1) que el tren de onda incide
normalmente en el elemento reflectante (esto permite que el problema se
estudie en dos dimensiones); y (2) que el canal es uniforme y sin fricción (lo que
significa que la amplitud de la marea, longitud de onda y fase no son
modificados por las variaciones topográficas). A pesar de la considerable
simplificación, la ubicación del conjunto de medidores mareales situados a una
distancia de menos de 15 km de la presa están más cercanos a lo ideal. Los
últimos 15 km del canal se pueden considerar con geometría aproximadamente
uniforme.
Hay un sistema de coordenadas (x,z) en el que el nivel de agua estancado con el
eje z apuntando hacia arriba y el eje x positivo en la dirección opuesta a la
propagación del incidente tren de ondas. La teoría de onda lineal se puede
aplicar para obtener la superficie libre en la posición del mareógrafo n, xn, como
sigue:
𝜂𝑛 = 𝑍𝑖𝑒−𝑖𝑘𝑥𝑛 + 𝑍𝑟𝑒
𝑖𝑘𝑥𝑛 𝑒−𝑖𝜔𝑡 (3.26)
donde ω es la frecuencia angular del armónoco mareal considerado; k es el
número de onda obtenido como una solución de la ecuación de dispersión, ω2 =
gk tanh (kh); Zi y Zr son los amplitudes complejas de los trenes de onda incidente
y reflejado, respectivamente, t es el tiempo, y i es la unidad imaginaria.

CAPÍTULO 3 Análisis mareal y modelos
39
εn se define como el valor absoluto de la diferencia entre la ecuación (3.26) y el
valor armónico complejo medido en xn, Cn = Aneiϕn, donde An es el complejo de la
amplitud y ϕn es la fase. Zi y Zr se obtienen buscando aquellos valores para los
que se logra el mínimo absoluto del error cuadrático medio:
𝐸 𝑍𝑖 ,𝑍𝑟 = 𝑒𝑛2 = 𝑍𝑖𝑒
−𝑖𝑘𝑥𝑛 + 𝑍𝑟𝑒𝑖𝑘𝑥𝑛 − 𝐶𝑛
23𝑛=1
3𝑛=1 (3.27)
Baquerizo (1995) muestra que el mínimo de esta función compleja es la solución
de el sistema que se obtiene después de igualar a cero las derivadas parciales de
E respecto a Zi y Zr.
𝑍𝑖 =3∙𝐵2−𝐵1∙𝑆2
9−𝑆2∙𝑆1
(3.28)
𝑍𝑟 =3∙𝐵1−𝐵2∙𝑆1
9−𝑆2∙𝑆1
Donde
𝐵1 = 𝐶𝑛 ∙ 𝑒𝑖𝑘𝑥𝑛3
𝑛=1
𝐵2 = 𝐶𝑛 ∙ 𝑒−𝑖𝑘𝑥𝑛3
𝑛=1
(3.29)
𝑆1 = 𝑒2𝑖𝑘𝑥𝑛3𝑛=1
𝑆2 = 𝑒−2𝑖𝑘𝑥𝑛3𝑛=1
Por ejemplo, para la cosntituyente M2, el coeficiente de reflexión resultante es,
aproximadamente, 0.4 y para la componente M4 es 0.65. Se trata de un valor
representativo de todo el tramo de 15 km, que tiene en cuenta, además de lo
que ocurre en la presa, las reflexiones en las márgenes, cambios de sección y
profundidad, fricción, lo que explica que el valor sea menor que 1. Por otra
parte, el valor del coeficiente de reflexión depende del estado de la marea, ya
que en pleamar la relación entre la energía reflejada en la presa y a lo largo del
tramo es superior que en bajamar, donde la reflexión en los bajos es mayor.

CAPÍTULO 3 Análisis mareal y modelos
40
Fig. 3 .4. Coefic iente de ref lex ión dependiente de la frecuencia y fase del coef iciente de ref lexión. RS para
M2 y RQ para M4. Díez-Minguito et a l . (2011)
Las características resonantes del canal condicionan el comportamiento del
armónico de la constituyente M2, que depende de dos factores, la longitud y la
profundidad del estuario. Los cuales han sido modificados artificialmente, la
longitud por la posición de la esclusa, que dista 89 km de mar abierto; y la
profundidad del canal, generada por los periódicos dragados que se efectúan
para mantener el calado suficiente para permitir el paso de grandes buques.
Tal y como se recoge en Díez-Minguito y Baquerizo (2011), la reflexión de la
marea puede generar corrientes residuales que pueden tener consecuencias en
la morfología del lecho. El reflejo de la constituyente M4 favorece la
sedimentación en el área cerca de la presa.
3.4. Modelos
Existen una serie de modelos que nos permiten simplificar las ecuaciones que
hemos mostrado hasta el momento, así como caracterizar el comportamiento

CAPÍTULO 3 Análisis mareal y modelos
41
del estuario en unas determinadas condiciones, en algunos casos demasiado
ideales, como para representar fielmente lo que sucede en la realidad.
3.4.1. Modelo sin fricción
Despreciando el término convectivo y linealizando el término de fricción en
(3.7) nos queda:
𝜕𝑈
𝜕𝑡+ 𝑔
𝜕𝜍
𝜕𝑋+ 𝐹𝑈 = 0 (3.30)
Es fácilmente demostrable que en un canal prismático de longitud infinita y
fricción nula, (3.14) y (3.15) indican una velocidad de onda, 𝑐 = (𝑔𝐷)1/2 y
𝑈∗ = 𝜍(𝑔
𝐷)1/2 (Lamb, 1932). La amplitud máxima ocurre entonces para una
resonancia de un cuarto de onda para la 𝐿 = 0.25𝜆 = 0.25𝑃(𝑔𝐷)1/2 (Prandle
2009). Siendo U* la amplitud de la corriente de marea.
Introduciendo el gradiente de superficie para un constituyente predominante
de la forma
𝜕𝜍
𝜕𝑋= 𝜍∗ cos𝜔𝑡 (3.31)
Con ϛ* la elevación de la amplitud de marea. De (3.30), obtenemos
𝑈∗ =−𝑔𝜍∗
𝐹2+𝜔2 (𝐹 cos𝜔𝑡 + 𝜔 sin𝜔𝑡) (3.32)
Así, para un sistema con parámetro dominante la fricción F>>ω, siendo 𝜍𝑥∗ la
elevación de la amplitud de marea en la dirección x.
𝑈∗ =−𝑔𝜍𝑥
∗
𝐹 cos 𝜔𝑡 (3.33)
Mientras que para un sistema sin fricción dominante F<<ω,
𝑈∗ =−𝑔𝜍𝑥
∗
𝜔 sin 𝜔𝑡 (3.34)

CAPÍTULO 3 Análisis mareal y modelos
42
Fig. 3 .5 . Ampli tud de corr iente para M2 c omo una función del gradiente de superf ic ie.
La figura indica la solución de (3.32) prescrito para valores del gradiente de
superficie hasta 0.00025g y profundidades de 4, 16 y 64 m. Para el caso más
profundo, la solución aproximada es (3.34) mientras que para el más superficial
es (3.33).
3.4.2. Solución para estuarios síncronos
Un ‚estuario síncrono‛ es uno donde el gradiente de superficie asociado con las
variaciones de la amplitud axial en ϛ* son significativamente menores que las
asociadas con las correspondientes variaciones de la fase. En soluciones
obtenidas de (3.8) y (3.11), una aproximación similar suponemos que se aplican
variaciones axiales en U*. Para la batimetría síncrona derivada, esta suposición
para ambos U* y ϛ* han sido demostrados válidos, excepto en las condiciones
más superficiales en el límite de marea (Prandle 2003). La introducción de la
solución aquí permite una fácil comparación con otras soluciones y proporciona
expresiones para U* en términos de ϛ* y D.
Centrándonos en la propagación de la componente predominante de la marea,
M2, las soluciones para U y ϛ en una localización puede ser expresada como
𝜍 = 𝜍∗ cos 𝐾1𝑋 − 𝜔𝑡 y 𝑈 = 𝑈∗ cos(𝐾2𝑋 − 𝜔𝑡 + 𝜃) (3.35)

CAPÍTULO 3 Análisis mareal y modelos
43
Donde K1 y K2 son números relacionados con la onda, ω es la frecuencia de la
marea y θ es la fase de latencia de U relativa a ϛ.
Suponiendo una sección transversal triangular con la pendiente lateral
constante, (3.15) se reduce a
𝜕𝜍
𝜕𝑡+ 𝑈
𝜕𝜍
𝜕𝑋+
𝜕𝐷
𝜕𝑋 +
1
2
𝜕𝑈
𝜕𝑋(𝜍 + 𝐷) = 0 (3.36)
Friedrichs and Aubrey (1994) indican que 𝑈(𝜕𝐴/𝜕𝑋) ≫ 𝐴(𝜕𝑈/𝜕𝑋) en canales
convergentes. Igualmente, asumiendo 𝜕𝐷
𝜕𝑋≫ 𝜕𝜍∗/𝜕𝑋, adoptamos la siguiente
forma de la ecuación de continuidad:
𝜕𝜍
𝜕𝑡+ 𝑈
𝜕𝐷
𝜕𝑋 +
𝐷
2
𝜕𝑈
𝜕𝑋= 0 (3.37)
Sustituyendo la solución (3.35) en las ecuaciones (3.30) y (3.37), cuatro
ecuaciones representando componente de cos ωt y sin ωt son obtenidas.
Especificando la condición de estuario síncrono, por la cual el gradiente
espacial de la amplitud mareal es cero, la condición K1=K2=k deriva de ahí.
tan 𝜃 = −𝐹
𝜔=
𝑆𝐿
0.5𝐷𝑘, 𝑈∗ = 𝜍∗𝑔
𝑘
(𝜔2+𝐹2)1/2, 𝑘 =
𝜔
(𝐷𝑔
2)1/2
(3.38)
3.4.3. Soluciones en el caso de que la anchura y la profundidad varíen
exponencialmente
Asumiendo que la anchura y la profundidad varían:
𝐵 𝑋 = 𝐵0 exp 𝑛𝑋
𝐻 𝑋 = 𝐻0 exp 𝑚𝑋 (3.39)
Donde B0 y H0 son los respectivos valores en la cabeza X=0. Convirtiendo en
términos adimensionales basados en el periodo P como la unidad de tiempo. H0
como la dimensión vertical y λ como la horizontal
𝜆 = 𝑔𝐻0 1
2𝑃 (3.40)
Tenemos, entonces, las variables adimensionales:
𝑥 = 𝑋/𝜆, 𝑡 = 𝑇/𝑃, 𝑧 = 𝑍/𝐻0, 𝑏 = 𝐵/𝜆, = 𝐻/𝐻0, 𝑢 = 𝑈(𝑃
𝜆), 𝑠 = 𝐹𝑃 y
𝑏 𝑥 = 𝑏0e(𝛼𝑥 ) (3.41)
𝑥 = e(𝛽𝑥 ) (3.42)
donde α=nλ y β=mλ.

CAPÍTULO 3 Análisis mareal y modelos
44
Sustituyendo (3.41) y (3.42) en (3.15) y (3.30), las ecuaciones pueden ser escritas
de forma separada para cada ϛ o u. Las derivadas temporales en estas
expresiones pueden ser eliminadas considerando amplitudes pertenecientes a
un sólo periodo P, entonces
𝜍 = 𝜍∗exp(𝑖2𝜋𝑡) y 𝑢 = 𝑢∗exp(𝑖2𝜋𝑡) (3.43)
Las expresiones para las amplitudes de marea ϛ y u son pues las que siguen:
𝜕2
𝜕𝑥2 𝜍∗ + 𝛼 + 𝛽
𝜕𝜍∗
𝜕𝑥+ 4𝜋2 − 2𝜋𝑖𝑠
𝜍∗
exp 𝛽𝑥 = 0 (3.44)
𝜕2𝑢∗
𝜕𝑥2+ 𝛼 + 2𝛽
𝜕𝑢∗
𝜕𝑥+ 𝛽(𝛼 + 𝛽) +
4𝜋2−2𝜋𝑖𝑠
exp 𝛽𝑥 𝑢∗ = 0 (3.45)
Con la introducción de las transformaciones apropiadas, los términos centrales
(los que implican la derivada en x en (3.43) y (3.45) pueden ser eliminados. Las
ecuaciones resultantes pueden ser solucionadas analíticamente. Dichas
soluciones han sido examinadas por Xiu (1983).
Considerando las soluciones para ciertos casos especiales para ilustrar la
naturaleza de la repuesta.
(1) Soluciones para profundidad constante β=0:
𝜍 = 𝜍0∗ exp
−𝛼𝑥
2 (cosh𝜔𝑥 +
𝛼
2𝜔sinh𝜔𝑥) (3.46)
𝑢 = −𝜍0∗ exp
−𝛼𝑥
2
2𝜋𝑖
𝛼sinh𝜔𝑥 (3.47)
Donde 𝜔 = 𝜔1 + 𝑖𝜔2, 𝜔12 − 𝜔2
2 =𝛼2
4− 4𝜋2, 𝜔1 ∙ 𝜔2 = 𝜋𝑠 y 𝜍0
∗es la elevación de la
amplitud en la cabeza x=0.
(2) Soluciones para una profundidad constante, β=0 y sin fricción: Para este caso
(3.44) y (3.45) describen la vibración libre de un oscilador armónico simple
amortiguado. Usando esta analogía, para α<4π el sistema es subamortiguado,
α=4π representa amortiguamientos críticos, mientras α>4π es
sobreamortiguado.
Para α>4π, las soluciones conservan la forma mostrada en (3.46) y (3.47) con
𝜔12 =
𝛼2
4− 4𝜋2, 𝜔2 = 0.
Para α<4π, la solución se simplifica a
𝜍 = 𝜍0∗ exp
−𝛼𝑥
2 (cos𝜔2𝑥 +
𝛼
2𝜔sin𝜔2𝑥) (3.48)
𝑢 = −𝜍0∗ exp
−𝛼𝑥
2
2𝜋𝑖
𝜔2sinh𝜔2𝑥 (3.49)

CAPÍTULO 3 Análisis mareal y modelos
45
Con 𝜔22 =
−𝛼2
4+ 4𝜋2.
Para α=4π, son aplicadas las siguientes soluciones específicas
𝜍 = 𝜍0∗ exp −2𝜋𝑥 (1 + 2𝜋𝑥) (3.50)
𝑢 = −𝜍0∗ exp −2𝜋𝑥 2𝜋𝑖𝑥 (3.51)
(3) Soluciones numéricas para cada profundidad y anchura variando
exponencialmente y con fricción. En este apartado podríamos hacer otra
separación de soluciones, (a) profundidad constante con anchura variable, (b)
anchura y profundidade variables y (c) anchura constante con profundidad
variable. El primero de los casos ya ha sido resuelto en (3.46).
(b) Respuesta para anchura y profundidad variables: α=0-20, β=0-20, s=0.2π,
2.0π
Mediante diferencias finitas obtenemos soluciones para (3.44) con la siguiente
condición de contorno en la cabeza X=0
𝜍 = 𝜍0 y 𝜕𝜍
𝜕𝑥= 0 (3.52)
La respuesta fue calcula para el rango del parámetro adimensional x=0-1 y para
el resto de rango de los parámetros mencionados.
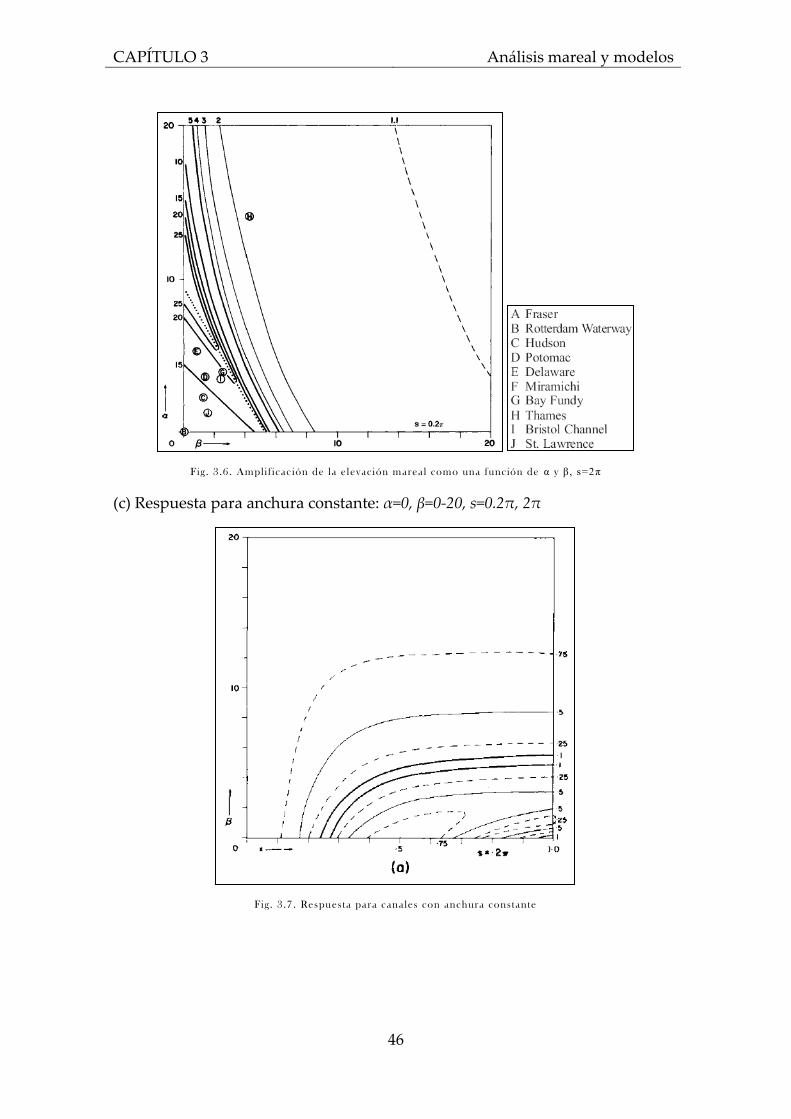
La figura muestra como la amplificación es máxima para valores de α y β por
debajo de la línea 𝛼 + 2𝛽 ≅ 10, y en la región 𝛼 + 2𝛽 < 10, es más sensible al
valor del parámetro de fricción s.
CAPÍTULO 3 Análisis mareal y modelos
46
Fig. 3 .6 . Amplif icac ión de la elevación mareal como una función de α y β, s=2π
(c) Respuesta para anchura constante: α=0, β=0-20, s=0.2π, 2π
Fig . 3 .7 . Respuesta para canales con anchura constante
CAPÍTULO 3 Análisis mareal y modelos
47
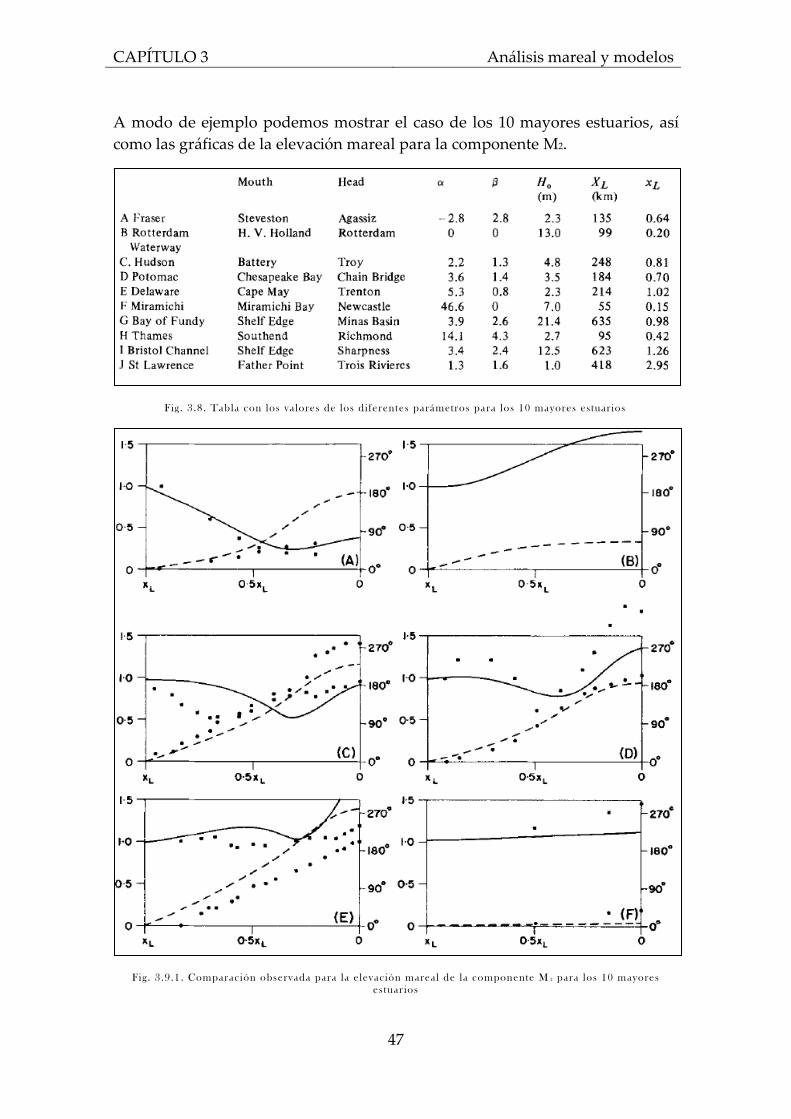
A modo de ejemplo podemos mostrar el caso de los 10 mayores estuarios, así
como las gráficas de la elevación mareal para la componente M2.
Fig. 3 .8 . Tabla con los valores de los diferentes parámetros para los 10 mayores estuarios
Fig . 3 .9.1 . Comparación observada para la elevación mareal de la componente M 2 para los 10 mayores
estuar ios

CAPÍTULO 3 Análisis mareal y modelos
48
Fig. 3 .9.2 . Comparación observada para la ele vación mareal de la componente M 2 para los 10 mayores
estuar ios
Para nuestro caso de estudio, el Estuario del Guadalquivir. La anchura y la
profundidad decrecen estuario arriba según una ley exponencial,
𝐴 𝑋 = 𝐴0 exp −𝑥/𝑎0
𝐵 𝑋 = 𝐵0 exp −𝑥/𝑏0
(3.53)
Siendo A0=5839.4 m2, B0=795.15 m, a0=60.26 km y b0=65.5 km, donde los dos
últimos son parámetros de convergencia del estuario. Ambos son del mismo
orden de magnitud dado que la profundidad apenas varía en todo el estuario
interior. Una medida e convergencia del cauce es, 𝑑𝐵 𝑑𝑥 = 𝐵(𝑥) 𝑏0 , que
decrece hacia aguas arriba del estuario.

CAPÍTULO 3 Análisis mareal y modelos
49
En los tramos definidos en la tabla 3.1, se ha ajustado una curva exponencial
decreciente similar a (3.53), esto es, se ha supuesto que ambas magnitudes, área
y anchura, decrecen según leyes exponenciales,
𝐴 𝑋 = 𝐴𝑖 ,1exp−(𝑥 − 𝑥𝑖)/𝑎𝑖
𝐵 𝑋 = 𝐵𝑖 ,1 exp −( 𝑥 − 𝑥𝑖)/𝑏𝑖
Donde k={1,2,3,4,5,6} y xk es el kilómetro inicial del tramo, Ak,1 y Bk,1 son el área y
la anchura a la salida de cada tramo y ak y bk son los respectivos parámetros de
convergencia. Los resultados se encuentran en la tabla 3.1 y los tramos son los
referentes a la tabla 2.1.
Tabla 3.1. Áreas y anchos de sal ida y parámetros de convergencia para cada tramo. Valor medio de h, A y B
en cada tramo. La tabla se completa con los parámetros del es tuario g lobal , por comparación, los datos con
* no incluyen e l t ramo de la Broa (T1).
3.4.4. Anchura y profundidad variando como una potencia de la distancia X
Asumimos que la profundidad y la anchura varían como
𝐵 𝑋 = 𝐵𝐿(𝑋
𝜆)𝑛 (3.54)
𝐻 𝑋 = 𝐻𝐿(𝑋
𝜆)𝑚 (3.55)
Con la coordenada X tomada desde la cabeza del estuario. Para pasar a un
formato adimensional, adoptamos λ como una unida de dimensión horizontal,
HL como una unidad de dimensión vertical y P, el periodo mareal, como una
unidad de tiempo, con
𝜆 = 𝑔𝐻0 1
2𝑃 (3.56)
Correspondiente a la longitud de onda mareal para HL constante. Los
parámetros adimensionales introducidos son los siguientes:

CAPÍTULO 3 Análisis mareal y modelos
50
𝑥 = 𝑋/𝜆, 𝑡 = 𝑇/𝑃, = 𝐻/𝐻𝐿, 𝑏 = 𝐵/𝜆, , 𝑢 = 𝑈(𝑃
𝜆), 𝑠 = 𝐹𝑃 (3.57)
Prandle y Rahman (1980) muestran que la sustitución de (3.54) y (3.55) en (3.15)
y (3.30) dan la siguiente solución para la elevación mareal ϛ en una localización
x, en un tiempo t, para el periodo mareal P:
𝜍 = 𝜍∗ 𝑘𝑦
𝑘𝑦𝑀
1−𝜈 𝐽𝜈−1(𝑘𝑦 )
𝐽𝜈−1(𝑘𝑦𝑀 )𝑒𝑖2𝜋𝑡 (3.58)
Donde ϛ*ei2πt es la elevación mareal en la boca xM y
𝜈 =𝑛+1
2−𝑚 𝑘 =
1−𝑖𝑠
2𝜋
1/2
𝑦 =4𝜋
2−𝑚𝑥2−𝑚/2 (3.59)
Y Jv-1, es la función de Bessel de primer tipo y de orden v-1.
La siguiente figura muestra la solución
Fig. 3 .10. Respuesta de la frecuencia para la elevación mareal en la Bahía de Fundy, con s=0.2π y 2π .
Prandle y Rahman (1980)