03_daq
DESCRIPTION
NIdaqTRANSCRIPT

CURSO DE INSTRUMENTACIÓN INDUSTRIAL Y ELECTRÓNICA
SESIÓN 3BDAQ Y CONTROL DIGITAL
Ismael Minchala Avila
MOTIVACIÓN(1)
• Los controladores digitales son los que se implementan en la práctica, mas no los analógicos.
• Un manejo adecuado de ésta teoría permitirá a través de la implementación de controladores digitales alcanzar el desempeño óptimo en automatización de procesos.
• Los sistemas en tiempo continuo se pueden describir mediante ecuaciones diferenciales. Los sistemas en tiempo discreto también se pueden describir mediante ecuaciones en diferencias después de la apropiada discretización de las señales en tiempo continuo.
2

MOTIVACIÓN(2)
3

MOTIVACIÓN(3)
• Diversas teorías se desprenden del control digital.
• Tipos de Controladores:– PID– “Inteligente” (Difuso, Neuronal, Bayesiano)– Ubicación de polos (Realimentación de estados)– Polinomiales (Un paso, Kalman, Dahlin, RST)– Óptimo– MPC– No-Lineal (Lyapunov, Modo Deslizante)– Adaptativo– Tolerante a Fallas
4

SINTONIZACIÓN DE UN LAZO DE CONTROL(1)
5

SINTONIZACIÓN DE UN LAZO DE CONTROL(2)
6

TIPOS DE SEÑALES
7
AnálogasDigitales

SISTEMAS DE CONTROL DIGITAL
Actuador
+-
SHy
ConvertidorA/D
ComputadorDigital
ConvertidorD/A
Circuito deRetención
Planta o Proceso
Transductor
0001
0010
1000
0101
1010
1011

MyR EN INSTRUMENTACIÓN

PROCESO DE MyR(1)
Señal muestreada V(t)
Seguimiento del V(t)* dispositivo de muestreo y retención
Control de interruptor p(t)
cerrado
abierto

PROCESO DE MyR(2)

DISPOSITIVOS BÁSICOS DE MyR

CONVERTIDORES D/A(1)
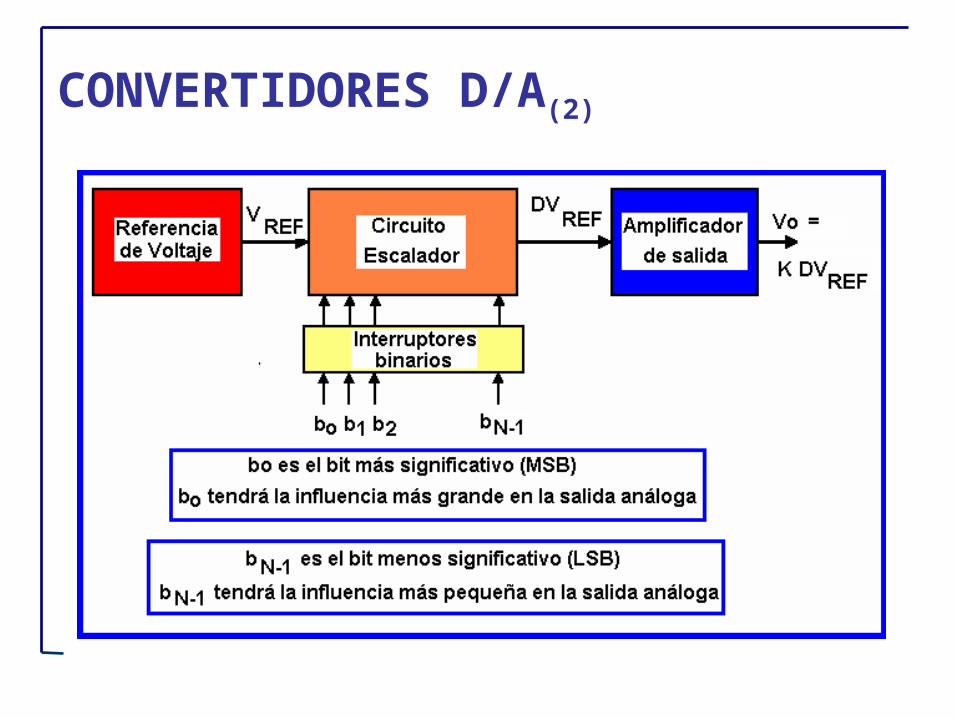
CONVERTIDORES D/A(2)

Definiciones… Conversión D-A

Más definiciones… Conversión D-A

Más Definiciones… Conversión D-A

RELACIÓN E/S CONVERSIÓN D/A

CLASIFICACIÓN CONVERTIDORES D/A

Convertidores D/A por ponderación de corrientes

Convertidor D/A por ponderación binaria de resistencias

Convertidor D/A por ponderación binaria usando escalera R-2R

Convertidores D-A por escalamiento de voltajes

D-A de 3 bits por escalamiento de voltajes

D-A por escalamiento de voltajes, otra realización

Diagrama del proceso de conversión análogo digital A-D

Frecuencia de Nyquist y de muestreo en conversión A-D

• Los convetidores A-D se clasifican de acuerdo a:– Relación de fB a 0.5 fS (frecuencias de banda base a muestreo)
– Rapidez de conversión.• Basado en esto podemos clasificarlos como:
– Convertidores A-D Nyquist: la frecuencia fB se acerca lo más que se pueda a 0.5 fS (frecuencia de Nyquist).
– Convertidores de Sobremuestreo: fB será mucho menor a 0.5 fS.
Clasificación de sistemas de conversión A-D

Características estáticas para conversión A-D

Definiciones, conversión A-D

Conversión A-D serial, esquema rampa sencilla

Conversión A-D serial, comparador-contador

Conversión A-D media velocidad, aproximaciones sucesivas

Árbol de cuantificación, aproximaciones sucesivas de 3 bits

Diagrama general para aproximaciones sucesivas

Diagrama específico para aproximaciones sucesivas

A-D de 5 bits por aproximaciones sucesivas

46
• Muestras individuales se representan en la forma: x[i] = x(it), para i = 0, 1, 2, …
• Si N muestras se obtiene de una señal x(t): X = {x[0], x[1], x[2], …x[N-1])
• La secuencia X = {x[i]} está indexada en i y no contiene información de la velocidad de muestreo
Muestreo de Señales

Consideraciones al muestrear• La señal analógica original es
continua respecto al tiempo.
• La señal muestreada es una serie de muestras discretas adquiridas a una velocidad de muestreo específica.
• A mayor velocidad de muestreo, más se parecerá la señal muestreada a la original.
• Si no se muestrea de manera correcta, un fenómeno llamado aliasing se puede presentar en la señal
Señal Original
Señal Muestreada

Aliasing
48
Efectos del aliasing en una señal muestreada incorrectamente
Con muestreo adecuado
Con aliasing, debido a un submuestreo
• Velocidad de muestreo – cada cuándo ocurre una conversión en el ADC.• Alias – representación incorrecta de una señal• Posibles causas – Ruido, armónicas

Ejemplo de Aliasing
49
Señales después de la Adquisición
Señales antes de la
Adquisición
Frecuencia de Alias = |(múltiplo entero de la frecuencia de muestreo más próximo a la frecuencia de la señal - frecuencia de la señal)|

Prevención del Aliasing
50
• Sobremuestreo+ Incrementa la frecuencia de
Nyquist- El ADC puede no lograr esa
velocidad• Filtro pasobajo
+ Elimina la mayoría de las frecuencias arriba de la frecuencia de corte
- La región transitoria aún permite que algunas frecuencias sea leídas
• Mejor solución+ Realizar un sobremuestreo y
tener un filtro pasobajo
Nyquist0.0
1.0
Vout
Vin
Frecuencia
Filtro Ideal
0.0
1.0
Vout
Vin
FrecuenciaCorte
Banda depaso
Región Transitoria
Frecuencias atenuadas, pero leídas
Filtro real

Teorema de Nyquist
• Se debe de muestrear mínimo al doble de la frecuencia máxima presente en la señal, para obtener una representación acertada de la FRECUENCIA de la misma.
• NOTA: Es necesario muestrear 5 o 10 más rápido que la máxima frecuencia presente en la señal, para obtener una representación acertada de la FORMA de la misma.
51

Ejemplo de Nyquist
52
Aliased Signal
Muestreo adecuado para frecuencia(Mismo # de ciclos)
Muestreo adecuado para Frecuencia y Forma
Onda Senoidal 100Hz
Onda Senoidal 100 Hz
Muestreada a 100Hz
Muestreada a 200Hz
Muestreada a 1kHzOnda Senoidal 100 Hz