validación de modelos mecanísticos · le dedico esta tesis a mi esposa teo y a mis hijos ricardo...
TRANSCRIPT

COLEGIO DE POSTGRADUADOS
INSTITUCIÓN DE ENSEÑANZA E INVESTIGACIÓN EN CIENCIAS AGRÍCOLAS
CAMPUS MONTECILLO
SOCIOECONOMÍA, ESTADÍSTICA E INFORMÁTICA
ESTADÍSTICA
VALIDACIÓN DE MODELOS MECANÍSTICOS BASADA EN LA PRUEBA JI-CUADRADA DE FREESE,
SU MODIFICACIÓN Y EXTENSIÓN
SALVADOR MEDINA PERALTA
T E S I S
PRESENTADA COMO REQUISITO PARCIAL PARA OBTENER EL GRADO DE:
M A E S T R O E N C I E N C I A S
MONTECILLO, TEXCOCO, EDO. DE MÉXICO 2006

AGRADECIMIENTOS
Le dedico esta tesis a mi esposa Teo y a mis hijos Ricardo y Daniela.
Al Colegio de Postgraduados, en especial al personal docente y administrativo
del Programa en Estadística.
A la Universidad Autónoma de Yucatán (UADY) por permitirme continuar con mi
formación académica.
Al Programa de Mejoramiento del Profesorado (PROMEP) por el apoyo
económico otorgado durante la estancia de mis estudios de Maestría.
A mi consejo particular:
Dr. Enrique Arjona Suárez, Dr. Jorge Navarro Alberto, Dr. Luís Vargas Villamil y Dr.
Germán Mendoza Martínez, por su disposición y aportaciones realizadas en el
desarrollo de este trabajo.
A Luís y Jorge por su amistad, entusiasmo, apoyo, disciplina, capacidad,
ejemplo... Gracias por su apoyo académico y personal en todos los proyectos
realizados.
I

ÍNDICE Página
ÍNDICE……………………………...……………………………………….………………. II
LISTA DE CUADROS……………………………………………………………………... V
LISTA DE FIGURAS……………………….………………………………………………. VII
RESUMEN…………………………………………………………………………………... IX
SUMMARY…………………………………………………..…………….………………... X
1. INTRODUCCIÓN……………...………………………………………………………… 1
2. OBJETIVOS……………………………………………………………………………… 3
2.1. Objetivo general……………………………………………………………….. 3
2.2. Objetivos específicos…………………………………………………………. 3
3. REVISIÓN DE LITERATURA………………………………………………………….. 5
3.1. Sistema y variable de estado………………………………………………… 5
3.2. Modelo matemático…………………………………………………………… 5
3.3. Modelación empírica y mecanística………………………………………… 7
3.4. Validación de modelos: conceptos y métodos…………………………….. 8
3.4.1. Conceptos…………………………………………………………… 8
3.4.2. Métodos para la validación de modelos………………………….. 12
3.5. Pruebas para el supuesto de normalidad…………………………………... 17
3.6. Transformaciones de datos………………………………………………….. 18
4. MATERIALES Y MÉTODOS…………………………………………………………… 20
4.1. Descripción del modelo mecanístico Wakax POS………………………… 20
4.2. Descripción de los datos experimentales empleados en la
validación…………………………..………………………………………….. 21
4.3. Procedimientos estadísticos para la validación de modelos basados en
el planteamiento de Freese…………………………………………………. 22
4.3.1. Conceptos básicos………………………………………………….. 23
4.3.2. Validación de modelos basada en el valor absoluto del error en
ausencia de sesgo…………………………………………………. 25
4.3.2.1. Pruebas estadísticas para la exactitud requerida…… 27
4.3.2.2. Prueba UMP(α’) para ……………………………….'0H 29
II

4.3.3. Validación de modelos basada en el porcentaje del error en
ausencia de sesgo…………………………………………………. 32
4.3.4. Validación por intervalo de confianza empleando el error crítico
en ausencia de sesgo……………………………………………… 34
4.3.5. Planteamiento para validar un modelo en predicción de varias
variables…………………………………………………................. 46
4.3.6. Planteamiento para la comparación de dos o más modelos en
predicción……………………………………………………........... 48
4.3.7. Validación de modelos basada en el valor absoluto del error en
presencia de sesgo constante……………………………………. 50
4.3.7.1. Pruebas estadísticas para la exactitud requerida…… 52
4.3.8. Validación por intervalo de confianza empleando el error crítico
en presencia de sesgo constante………………………………… 56
4.3.9. Validación de modelos basada en el valor absoluto del error en
presencia de sesgo proporcional….……………..………............ 61
4.3.9.1. Pruebas estadísticas para la exactitud requerida…… 63
4.3.10. Validación por intervalo de confianza empleando el error
crítico en presencia de sesgo proporcional….………………… 65
4.3.11. Análisis exploratorio e identificación del sesgo………………… 68
5. RESULTADOS Y DISCUSIÓN………………………………………………………… 70
5.1. Procedimientos estadísticos para la validación de modelos basados en
el planteamiento de Freese.………...………………………………………. 70
5.2. Validación de modelos basada en el valor absoluto del error en
ausencia de sesgo………………………………………………………….... 71
5.2.1. Pruebas estadísticas para la exactitud requerida……………….. 71
5.3. Validación de modelos basada en el porcentaje del error en ausencia
de sesgo…..…………………………………………………………………... 72
5.4. Validación por intervalo de confianza empleando el error crítico en
ausencia de sesgo…………………………………………………………… 73
5.5. Planteamiento para validar un modelo en predicción de varias
variables……………………………………………………………………….. 75
III
5.6. Planteamiento para la comparación de dos o más modelos en
predicción……………………………………………………………………… 76
5.7. Validación de modelos basada en el valor absoluto del error en
presencia de sesgo constante………………………………………………. 77
5.7.1. Pruebas estadísticas para la exactitud requerida……………….. 78
5.8. Validación por intervalo de confianza empleando el error crítico en
presencia de sesgo constante…….………………………………………… 79
5.9. Validación de modelos basada en el valor absoluto del error en
presencia de sesgo proporcional.………..…………………………………. 81
5.9.1. Pruebas estadísticas para la exactitud requerida……………….. 81
5.10. Validación por intervalo de confianza empleando el error crítico en
presencia de sesgo proporcional…………………………………………… 82
5.11. Planteamiento para validar un modelo en predicción de varias
variables y para la comparación de dos o mas modelos en predicción
cuando el modelo presenta sesgo………………………………………….. 83
5.12. Sesgo y supuestos………………………………………………………...... 84
5.13. Validación del modelo dinámico mecanístico Wakax POS en
predicción de la ganancia de peso……………………...………………….. 86
5.14. Validación del modelo dinámico mecanístico Wakax POS en
predicción de la materia seca, ácidos grasos volátiles, acetato,
propionato y butirato en el Rumen y Ciego……..…………………………. 95
6. CONCLUSIONES……………………………………………………………………….. 106
7. BIBLIOGRAFÍA………………………………………………………………………….. 108
ANEXO I…………………………………………………………………………………….. 116
ANEXO II…………………………………………………………...……………………….. 136
IV

LISTA DE CUADROS Página
Cuadro 1. Promedios observados de ganancia de peso (kg) de 34 experimentos
y sus correspondientes simulados con el modelo Wakax POS……..…. 86
Cuadro 2. Diferencia entre los valores observados y predichos, y la corrección
por sesgo constante……….………………………………………………... 90
Cuadro 3. Valores de DM, AGVs, Ac, Pr y Bu observados y predichos con el
modelo Wakax POS en el Rumen y Ciego……………...……………….. 96
Cuadro 4. Medidas descriptivas de las diferencias entre los valores observados
y predichos para las DM, Ac, Pr, Bu y AGVs en el Rumen y Ciego…… 99
Cuadro 5. Valores de las estadísticas MEF y CD para las variables DM, AGVs,
Ac, Pr y Bu en el Rumen y Ciego………………………………………….. 105
Anexo I Cuadro I.1. Símbolos usados en el diagrama del modelo Turix….………………... 116
Cuadro I.2. Notación y abreviaciones empleadas en el modelo Wakax POS con
excepción del submodelo de Crecimiento animal…………………..…. 117
Cuadro I.3. Notación y abreviaciones empleadas en el submodelo de
Crecimiento animal……………………………………………….……….. 119
Cuadro I.4. Submodelo Concentrado (Co).…………...…………………………..…. 126
Cuadro I.5. Submodelo Pasto (Pa).…..……….………………….………………..…. 128
Cuadro I.6. Submodelo Caña de azúcar (CZ).……………………………..……..…. 130
Cuadro I.7. Submodelo Melaza.………………………………………….……………. 132
Cuadro I.8. Ecuaciones descriptivas.………………………………….…………..….. 133
Cuadro I.9. Submodelo Crecimiento animal.…………………………………………. 133
Anexo II Cuadro II.1. Fuentes de los datos experimentales utilizados en la validación del
modelo Wakax POS en predicción de la GPP por día………………... 136
Cuadro II.2. Datos de los animales, cantidades de los alimentos suministrados y
la GPP por día observada y modelada con el modelo Wakax POS… 137
V

Cuadro II.3. Fuentes e información de los datos experimentales utilizados en la
validación del modelo Wakax POS en predicción en el Rumen y
Ciego de DM(%), AGVs(mM), Ac(%), Pr(%) y Bu(%)…………………. 139
VI

LISTA DE FIGURAS Página
Figura 1. Esquematización de la exactitud contra la precisión…………………….. 9
Figura 2. Comparación de las medidas de exactitud y precisión. La línea
punteada representa a la recta y=x……………………………………….. 10
Figura 3. Valores hipotéticos del error crítico (j=1,2,3) para cada variable…....*je 47
Figura 4. Valores hipotéticos de V(Dj) o εj (j=1,2,3) para cada variable…………... 48
Figura 5. Valores hipotéticos del error crítico (j=1,2) para la variable Y por
medio de los modelos 1 y 2 (M1 y M2)……………………………………
**je
49
Figura 6. Relación entre el sesgo (di) y los valores simulados (zi) para la GPP.
233.0d = kg es la media de las diferencias (di)…………………………. 88
Figura 7. Dispersión de los puntos (zi, yi) para la GPP. y=z es la recta que
representa la exactitud ideal.…………………………...………………….. 89
Figura 8. Relación entre los valores predichos (zi) y los observados (yi) para la
GPP. y=0.2798+0.6475z es la recta de regresión ajustada. y=z es la
recta de exactitud ideal…….....……………………………………………. 93
Figura 9. Dispersión de los puntos (zi, yi) para DM, Ac, Pr y Bu en el Rumen.
y=z es la recta que representa la exactitud ideal……………….……... 97
Figura 10. Dispersión de los puntos (zi, yi) para AGVs(mM) en el Rumen. y=z es
la recta que representa la exactitud ideal………………………………… 98
Figura 11. Relación entre el sesgo (di=yi-zi) y los valores simulados o predichos
(zi) para DM, Ac, Pr y Bu en el Rumen…………………………………… 98
Figura 12. Relación entre el sesgo (di=yi-zi) y los valores simulados o predichos
(zi) para AGVs(mM) en el Rumen…………………………………………. 99
Figura 13. Dispersión de los puntos (zi, yi) para DM, Ac, Pr y Bu en el Ciego. y=z
es la recta que representa la exactitud ideal……………………………... 100
Figura 14. Dispersión de los puntos (zi, yi) para AGVs(mM) en el Ciego. y=z es
la recta que representa la exactitud ideal………………………………… 101
Figura 15. Relación entre el sesgo (di=yi-zi) y los valores simulados o predichos
(zi) para DM, Ac, Pr y Bu en el Ciego……………………………………... 101
VII

Figura 16. Relación entre el sesgo (di=yi-zi) y los valores simulados o predichos
(zi) para AGVs(mM) en el Ciego…………………………………………… 102
Anexo I Figura I.1. Representación esquemática del modelo Turix….……………………… 116
VIII

RESUMEN
Una etapa fundamental en la construcción de un modelo es su validación, la cual presenta dificultades tanto conceptuales como prácticas. En este trabajo se presentó, modificó y extendió el procedimiento de validación de modelos desarrollado por Freese (1960). El método es una alternativa inferencial para determinar si las salidas del modelo están suficientemente próximas a los valores observados del sistema real. Permite analizar datos provenientes de modelos que presenten o no sesgo en sus pronósticos sin modificar la estructura del modelo. Se establecieron los supuestos, la estadística de prueba y el error crítico para el planteamiento original y alternativo del procedimiento de Freese cuando el modelo presenta o no sesgo. Para el caso de sesgo proporcional se presenta una modificación al método. Se expone un procedimiento alternativo al de Reynolds (1984) para determinar el intervalo de confianza bilateral (ICB) para el cuantil 1-α de la distribución de |D|. Se determinaron en términos del error crítico los ICB para el cuantil 1-α de la distribución de DD − y Rε , cuando el modelo presenta sesgo constante y proporcional respectivamente. Con base al error crítico se propone un método para validar un modelo en predicción de varias variables y otro para comparar dos o más modelos en predicción del mismo sistema. Para ilustrar la metodología basada en el planteamiento de Freese, se validó el modelo dinámico mecanístico Wakax POS en predicción de la ganancia de peso promedio por día de bovinos alimentados con caña de azúcar, maíz quebrado y/o melaza en una zona tropical de México. Adicionalmente se utilizaron métodos gráficos y medidas estadísticas para la validación en predicción de la materia seca (DM), ácidos grasos volátiles (AGVs), acetato (Ac), propionato (Pr) y butirato (Bu) en el Rumen y Ciego. El modelo Wakax POS puede usarse para predecir la ganancia de peso promedio por día, aunque requerirá un ajuste con base a la presencia de sesgo constante para incrementar su exactitud. El sesgo de las predicciones en el Rumen presenta mayor amplitud para los AGVs, seguido por Ac, Pr, Bu y DM. En el Ciego el sesgo tiene mayor amplitud para los AGVs, seguido por DM, Ac, Bu y Pr. A diferencia del coeficiente de determinación del modelo, la eficiencia de modelado proporciona resultados consistentes con los obtenidos de las técnicas visuales de validación. Palabras clave: Validación, modelo mecanístico, prueba ji-cuadrada de Freese, error crítico, corrección por sesgo.
IX

SUMMARY
A fundamental stage in the construction of a model is its validation, which presents difficulties both conceptual and practical. In this work a procedure of model validation developed by Freese (1960) is presented, and subsequently the procedure is modified and extended. The method is an inferential alternative used to determine whether the outputs of the model are sufficiently close to the observed values of the real system. It allows to analyze data coming from models with or without bias, and without modifying the structure of the model. The assumptions, the test statistic and the critical error were established for the original and the alternative settings of Freese's procedure for models possessing or not possessing bias. For the case of proportional bias a modification to the method is presented. An alternative procedure to that given in Reynolds (1984) is exposed in order to construct a two-sided confidence interval (TCI) for the 1-α quantile of the distribution of |D|. TCI's were established in terms of the critical error for the 1-α quantile of the distribution of DD − and Rε , when the model has constant and proportional bias, respectively. On the basis of the critical error, one method of model-validation that predicts several variables and another one for the comparison of two or more predictive models of the same system are proposed. To illustrate the methodology based on Freese's approach, the mechanistic dynamic model Wakax POS was validated for the prediction of the average weight gain per day of bovines fed with sugar cane, broken corn and/or molasses in a tropical area of Mexico. Additionally, graphical methods and statistical measures were used for the validation in prediction of dry matter (DM), volatile fatty acids (VFAs), acetate (Ac), propionate (Pr) and butirate (Bu) in Rumen and Cecum. The model Wakax POS can be used to predict the average weight gain per day, but it will require an adjustment taking into account the presence of constant bias in order to increase its accuracy. The bias of the predictions in the Rumen presents larger amplitude for the VFAs, followed by Ac, Pr, Bu and DM. In the Cecum the largest bias was attained for the VFAs, followed by DM, Ac, Bu and Pr. Contrary to the coefficient of model determination, the modeling efficiency provides consistent results with those obtained by the visual techniques of validation. Keywords: Validation, mechanistic model, Freese chi-squared test, critical error, bias correction.
X
1. INTRODUCCIÓN
En la construcción de un modelo se necesita tener conocimiento tanto de las
partes que conforman el sistema como de las interacciones existentes entre ellas,
aproximándose más el modelo a la realidad cuanto más detallado sea dicho
conocimiento. En el procedimiento de ajuste de modelos mecanísticos, se asumen
relaciones particulares entre las variables, llevando al modelador a aceptar alguna
desviación entre los datos y el modelo para obtener un modelo que explique
satisfactoriamente la situación bajo investigación (Giordano et al., 1997a).
En el proceso de modelación, los modeladores generalmente admiten que una
etapa fundamental es la validación de los modelos, sobre todo de aquellos que serán
utilizados para propósitos de predicción. La validación se define como la comparación
de las predicciones del modelo con los valores observados del sistema real para
determinar si el modelo es adecuado para el propósito establecido (Mayer y Buttler,
1993; Mitchell, 1997; Oberkampf y Trucano, 2002; Montgomery et al., 2002a; Halachmi
et al., 2004). Por su parte Reynolds (1984), señala que un método para determinar cuán
bien se comporta un modelo es comparar las predicciones del modelo con un modelo
existente o con valores observados del sistema real. Para Mayer y Buttler (1993), las
técnicas de validación se pueden agrupar en cuatro principales categorías: la
evaluación subjetiva, las técnicas visuales, las medidas de desviación y las pruebas
estadísticas.
En un buen modelo la realidad se simplifica lo suficiente para permitir los cálculos
matemáticos, pero incluso así debe ser bastante exacto para permitir conclusiones
valiosas respecto a la comprensión del fenómeno estudiado y a la predicción de su
comportamiento en el futuro. En consecuencia, si el modelo ajusta a los datos
observados, entonces dos de sus finalidades, quizás las más importantes, son
comprender el fenómeno y la predicción de su comportamiento. Por lo que en el
proceso de modelación matemática, la etapa de validación con datos observados
diferentes a los empleados en la obtención de los parámetros del modelo, juega un
papel fundamental para modelos que serán aplicados; donde las predicciones serán
1

empleadas en lugar de las mediciones del sistema real, las cuales pueden ser
demasiado costosas o difíciles de obtener.
Nuevos modelos son desarrollados y reportados en diferentes áreas del
conocimiento para usarse en predicción y estimación. Frecuentemente, el usuario del
modelo es una persona distinta de quien lo desarrolló y antes de que el modelo pase al
usuario debe hacerse una evaluación de su validez. En muchos casos los nuevos
modelos de simulación han sido presentados sin una adecuada validación (Reynolds,
1984; Barrales et al., 2004), o evaluación de las magnitudes de los errores que pueden
resultar de su uso (Reynolds, 1984). Las posibles razones son que: (a) en la literatura
científica ha habido relativamente poca discusión sobre la filosofía y procedimientos
para este tipo de investigación (Reynolds, 1984), (b) para efectuar una validación los
modeladores recurran a procedimientos simples, a su alcance, aparentemente
adecuados, incluyendo gráficos de dispersión de predicciones y observaciones, algunas
veces utilizando regresión, la cual es pensada como un método objetivo y cuantitativo
para medir cuán bueno es un modelo (Mitchell, 1997), (c) se utilizan diferentes términos
para referirse a la comparación de los valores predichos con los observados, y d) se
tienen una gran variedad de técnicas para validar modelos en las diferentes áreas del
conocimiento, en consecuencia no se cuenta con un sólo método o con un conjunto
único de técnicas aceptadas por la comunidad científica.
En el desarrollo de un modelo intervienen experimentadores, analistas de los
datos y modeladores; y un modelo es útil cuando captura los elementos adecuados de
la realidad con un grado aceptable de exactitud. En consecuencia, es importante hacer
cierta evaluación de su validez que permita contar con una medida de protección, tanto
para el modelador como para el usuario del modelo, cuando el modelo sea utilizado en
predicción del comportamiento del sistema. En este trabajo se presentó, modificó y
extendió el procedimiento estadístico inferencial de validación de modelos con o sin
sesgo desarrollado por Freese (1960), y se validó el modelo dinámico mecanístico de
“animal completo” Wakax POS en predicción de la ganancia de peso promedio por día,
materia seca, ácidos grasos volátiles, acetato, propionato y butirato de bovinos en
pastoreo suplementado con caña de azúcar, maíz quebrado y/o melaza en una zona
tropical de México.
2

2. OBJETIVOS
2.1. Objetivo general
Establecer la validación de modelos mecanísticos con base en la prueba ji-
cuadrada de Freese (1960), y validar el modelo Wakax POS en predicción de la
ganancia de peso promedio por día, materia seca, ácidos grasos volátiles, acetato,
propionato y butirato de bovinos en pastoreo suplementado con caña de azúcar, maíz
quebrado y/o melaza en una zona tropical de México.
2.2. Objetivos específicos
1. Desarrollar el método de validación para modelos mecanísticos de simulación de
sistemas basado en el procedimiento de Fresse (1960).
a) Establecer los supuestos, la estadística de prueba y el error crítico para la
versión original y alternativa del procedimiento de Freese cuando el
modelo presente o no sesgo en sus predicciones.
b) Proponer un procedimiento alternativo al de Reynolds (1984), para
obtener el intervalo de confianza bilateral para el cuantil 1-α de la
distribución de |D|.
c) Obtener en términos del error crítico, los intervalos de confianza bilateral
para el cuantil 1-α de la distribución correspondiente, cuando el modelo
presente sesgo constante o proporcional.
d) Plantear un método para validar un modelo en predicción de varias
variables.
e) Plantear un procedimiento para comparar dos o más modelos de
predicción del mismo sistema.
2. Aplicar el método de validación al modelo dinámico mecanístico Wakax POS en
predicción de la ganancia de peso promedio por día.
3

3. Validar el modelo Wakax POS en predicción de la materia seca, ácidos grasos
volátiles, acetato, propionato y butirato en el Rumen y Ciego.
4

3. REVISIÓN DE LITERATURA
3.1. Sistema y variable de estado
Un sistema es un conjunto de objetos o componentes relacionados entre si de
una manera regulada para formar un todo organizado (Harrington y Tumay, 2000). Se
tiene un sistema dinámico cuando se consideran los flujos como variables en función
del tiempo. Según Zill (2002), un sistema dinámico lo forma un conjunto de variables
dependientes del tiempo, que se llaman variables de estado, más una regla que permite
determinar el estado del sistema en términos de un estado especificado en cierto
momento t0. El estado del sistema en un tiempo t es el valor de las variables de estado
en ese instante; el estado especificado del sistema en el instante t0 es sólo el conjunto
de condiciones iniciales que acompañan al modelo matemático.
El valor de una variable de estado determina el estado del sistema en un punto
dado en el tiempo (France y Thornley, 1984a).
El modelador generalmente está interesado en entender como funciona un
sistema dinámico particular, que causa los cambios en sus variables de estado y en
predecir su comportamiento.
3.2. Modelo matemático
Un modelo matemático es una ecuación o un conjunto de ecuaciones que
representan el comportamiento de un sistema (France y Thornley, 1984b), o una
construcción matemática diseñada para estudiar un sistema del mundo real o fenómeno
(Giordano et al., 1997b). Los elementos estructurales básicos de un modelo son las
variables, los parámetros, las constantes y las funciones o relaciones funcionales de las
variables entre sí y de éstas con los parámetros.
En la construcción de un modelo se necesita tener conocimiento tanto de las
partes que forman el sistema como de las interacciones existentes entre ellas,
aproximándose más el modelo a la realidad cuanto más detallado sea dicho
conocimiento. Según Richter y Söndgerath (1990), la estimación de parámetros de un
5

modelo es un sinónimo de los procedimientos estadísticos y numéricos utilizados para
obtener valores numéricos razonables de los parámetros en los modelos (valores
basados en los datos observados). También según estos autores, la estimación de
parámetros proporciona la conexión entre los datos y el modelo, entre estadística y
simulación.
Csáki (1985) señala que en la construcción de modelos matemáticos se tienen
tres pasos: construcción del modelo, determinación de los parámetros (especificación
del modelo) y validación del modelo.
Fub et al. (2005) describen tres etapas en el proceso de modelación:
Etapa de diseño del modelo. Se define y formula el modelo matemático a partir de un
proceso biológico, sistema o problema bajo investigación. Esta etapa involucra
decisiones en las que se debe entender el sistema, sus requerimientos y componentes,
para determinar que tipo de interacciones se deberán incluir en la formulación del
modelo.
Etapa de análisis y aplicación del modelo. La implementación computacional del modelo
es utilizada para simular y estudiar el desarrollo dinámico del modelo bajo diferentes
condiciones en relación al estudio biológico del sistema o proceso.
Etapa de validación del modelo. El comportamiento y los datos generados por la
simulación computacional del modelo son comparados contra datos obtenidos de
experimentos similares en un sistema biológico real, o valorados epistemológicamente
sobre la base del conocimiento existente.
Si el modelo ajusta a los datos observados entonces dos de sus finalidades,
quizás las más importantes, son comprender el fenómeno y la predicción de su
comportamiento. Así, en un buen modelo la realidad se simplifica lo suficiente para
permitir los cálculos matemáticos, pero incluso así es bastante exacto para permitir
conclusiones valiosas respecto a la comprensión del fenómeno estudiado y a la
predicción de su comportamiento en el futuro.
6

3.3. Modelación empírica y mecanística
A los modelos que estudian las relaciones biológicas o los mecanismos
relacionados con el comportamiento del sistema, como por ejemplo el comportamiento
animal, se les denominan modelos mecanísticos, estos modelos son diferentes de los
modelos empíricos que describen las relaciones matemáticas entre los datos, es decir,
se basan por completo en los datos experimentales que se reúnen (France y Thornley,
1984b; Box et al., 1999a; Box et al., 1999b). En los modelos mecanísticos se describe
el sistema integrando las variables determinantes o causales de la dinámica del mismo
y contrastan con los modelos empíricos donde lo que se realiza es una descripción
matemática (con base biológica o no) de datos observados (Chilibroste, 2002).
En el procedimiento de ajuste de modelos mecanísticos, se asumen relaciones
particulares entre las variables, llevando al modelador a aceptar alguna desviación
entre los datos y el modelo para obtener un modelo que explique satisfactoriamente la
situación bajo investigación (Giordano et al., 1997a).
Box et al. (1999a) señalan que un modelo empírico puede ser útil,
particularmente si sólo se desea una respuesta aproximada en una región de interés en
que las variables tienen rangos de valores limitados.
Al enfoque general para ajustar modelos empíricos se le llama análisis de
regresión. En general, suponga que se tiene una sola variable dependiente o de
respuesta (y) que depende de k variables independientes, por ejemplo x1, x2,…,xk. La
relación que existe entre estas variables se caracteriza por un modelo matemático
llamado modelo de regresión (modelo empírico) y dicho modelo se ajusta a un conjunto
de datos muestreados. Montgomery (2004a) indica que en ocasiones el experimentador
conoce la forma exacta de la verdadera relación funcional entre y y x1, x2,…,xk, por
ejemplo y=φ(x1, x2,…,xk), sin embargo, en la mayoría de los casos no se conoce la
verdadera relación funcional, y el experimentador elige una función apropiada para
aproximar φ.
Para Box et al. (1999b), un modelo mecanístico resulta justificado siempre que
para progresar sea esencial el conocimiento básico del sistema o cuando los
conocimientos previos son suficientes para construir fácilmente un modelo mecanístico
7

útil. Estos autores también opinan que los modelos mecanísticos pueden proporcionar
más comprensión científica del sistema, una mejor base para la extrapolación, y
frecuentemente, una representación con menos parámetros.
Una ecuación polinómica, aunque puede representar adecuadamente lo que
pasa en la región de estudio, no proporciona una base sólida para extrapolar. En un
modelo mecanístico lo que se extrapola es el mecanismo y no una mera curva empírica,
así, incluso un modelo mecanístico debe ser preferentemente utilizado para sugerir
regiones donde puede ser beneficioso desarrollar nuevas investigaciones (Box et al.,
1999b).
Si no contamos con la teoría física o mecanística que nos ayude a expresar un
modelo, construimos un modelo empírico, el cual se basa por completo en los datos
que se reúnen, generalmente usando metodología estadística, y lo que se busca es una
curva que se ajuste a los datos, en el sentido que capture la tendencia básica de las
observaciones muestreadas, es decir, mediante una ecuación derivada de los datos
que exprese la relación entre la respuesta y los factores importantes del diseño.
3.4. Validación de modelos: conceptos y métodos
3.4.1. Conceptos
Barrales et al. (2004) señalan que en la modelación de sistemas, una etapa
esencial y que presenta dificultades tanto conceptuales como prácticas, es la validación
de los modelos.
Según Freese (1960), si la diferencia (observados-predichos) es una constante o
alguna función matemática de los valores observados, el modelo es sesgado, la falta de
precisión ocurre cuando el modelo es no sesgado y proporciona valores que fluctúan
ampliamente alrededor de los valores reales u observados; y la inexactitud puede
deberse al sesgo, a la falta de precisión o a una combinación de éstos.
La exactitud se refiere a que tan cerca están los valores predichos por el modelo
de los valores reales (Loague y Green, 1991; Ramakrishnan y Mountain, 2004;
Tedeschi, 2006). La precisión se refiere a que tan cerca están entre ellos los valores
8

predichos por el modelo (Ramakrishnan y Mountain, 2004; Tedeschi, 2006). La
precisión es el grado en que los valores predichos por el modelo se aproximan a una
función lineal de los valores observados (Loague y Green, 1991). En otras palabras, la
exactitud es la capacidad del modelo para predecir correctamente los valores y
precisión es la capacidad del modelo para predecir valores similares consistentemente
(Tedeschi, 2006). En la Figura 1 se ilustra la diferencia entre la exactitud y precisión de
un modelo de simulación. El caso 1 es inexacto e impreciso, el caso 2 es inexacto y
preciso, el caso 3 es exacto e impreciso y el caso 4 es exacto y preciso. En un modelo
de predicción lo ideal es que cumpla que sea exacto y preciso (caso 4).
Fuente: Tedeschi (2006)
Figura 1. Esquematización de la exactitud contra la precisión.
Tedeschi (2006), indica que en el análisis de regresión lineal simple de los
valores observados (eje Y) sobre los valores predichos (eje X), el coeficiente de
determinación (r2) es buen indicador de precisión (un valor alto de r2 precisión alta), y
que los parámetros estimados del intercepto y la pendiente son buenos indicadores de
exactitud, así, cuando son simultáneamente cercanos a cero y a uno respectivamente,
9

la exactitud es más alta. En la Figura 2 se comparan las medidas de precisión y
exactitud de un modelo a través del coeficiente de determinación y de los parámetros
estimados del modelo de regresión. El caso 1 es inexacto e impreciso, el caso 2 es
inexacto y preciso, el caso 3 es exacto e impreciso, y el caso 4 es exacto y preciso. En
un modelo de predicción lo ideal es que cumpla el caso 4.
Fuente: Tedeschi (2006)
Figura 2. Comparación de las medidas de exactitud y precisión. La línea punteada
representa a la recta y=x.
Oberkampf y Trucano (2002) diferencian verificación y validación: (i) la
verificación es la valoración de la exactitud de la solución de un modelo computacional
por comparación con soluciones conocidas, su estrategia fundamental es la
identificación y cuantificación del error en el modelo computacional y su solución; es
principalmente una cuestión matemática, y (ii) la validación es la valoración de la
exactitud de la simulación computacional por comparación con datos experimentales,
su estrategia fundamental es calcular la exactitud de los resultados computacionales al
10

ser comparados con datos experimentales y estimar el error generado por ambos; es
principalmente una cuestión física.
Oreskes et al. (1994) discuten la confusión de los conceptos de verificación,
validación, confirmación y calibración de modelos. Indican que los conceptos de
validación o verificación son criticados porque es filosóficamente imposible probar que
todos los componentes del modelo del sistema real son verídicos o correctos.
Determinar si el comportamiento de un modelo iguala suficientemente bien el
comportamiento del sistema, siempre ha sido un asunto de gran interés y señalado en
muchos documentos durante muchos años (Beck, 2002). La frase contemporánea
empleada para resolver esta cuestión es “evaluación” (Oreskes, 1998). Según Beck
(2002), las preguntas fundamentales a contestar en la evaluación de un modelo son: (1)
¿El modelo ha sido construido de materiales aprobados, es decir, las hipótesis que lo
constituyen son aprobados (en términos científicos)?, (2) ¿Su comportamiento se
aproxima bien a lo observado en el sistema real?, y (3) ¿Funciona, es decir, cumple con
su tarea indicada, o sirve a su propósito establecido?. Por su parte Tedeschi (2006),
señala que la evaluación del modelo consiste en determinar si el modelo es una
representación adecuada del proceso para el que fue diseñado antes que el
establecimiento en cualquier sentido de la verdad del modelo, y que un modelo
matemático no puede ser probado si es válido, solamente si éste es apropiado para su
propósito establecido con las condiciones dadas.
Para Mayer y Buttler (1993) la validación es un paso necesario para la
aceptación de un modelo, y se define como la comparación de las predicciones del
modelo con los valores observados del mundo real para determinar si el modelo es
adecuado para el propósito establecido.
Según Mitchell (1997), la validación de modelos consiste en comprobar la
estructura del modelo o si sus salidas están suficientemente próximas a los valores
observados del sistema real; el énfasis sobre la estructura del modelo o de las salidas
depende si el modelo es principalmente para explorar el mecanismo o funcionamiento
del sistema e incrementar su comprensión, o si las predicciones obtenidas remplazarán
las observaciones del sistema real, las cuales pueden ser demasiado costosas o
difíciles de obtener. Para este autor, la comparación de las predicciones del modelo con
11

observaciones del mundo real, junto con una evaluación del comportamiento del
modelo, es la validación empírica.
En el contexto de los modelos empíricos, Montgomery et al. (2002a) señalan que
la comprobación de la adecuación del modelo incluye análisis internos que investigan el
ajuste de un modelo de regresión a los datos disponibles y que la validación del modelo
se concentra en la determinación de si el modelo funcionará bien en su ambiente
pretendido de operación, por ejemplo, si el modelo se empleará para pronosticar
nuevas observaciones, la validación se debe concentrar en la determinación de la
exactitud del modelo. Mitchell (1997), coincide en que la validación debe demostrarle al
usuario del modelo, que el modelo es adecuado para el propósito de su desarrollo.
Para Halachmi et al. (2004), la validación determina si el modelo matemático es
una representación exacta del sistema real, y una forma de validación es comparando
los datos reales con los predichos del sistema.
Hamilton (1991) recopiló una extensa lista de publicaciones (316) con respecto a
la validación de modelos con énfasis en artículos de potencial interés para estadísticos,
e incluye para cada una un breve comentario acerca de que tratan y sus palabras clave.
Menciona que la validación es la valoración del alcance para la cual un modelo es
fundamentado o racional y de que cumple el propósito para el cual fue construido. Esta
comprende tres tareas: 1) la verificación, la cual incluye el diseño, programación y la
revisión de los procesos en el programa de cómputo, 2) el análisis de sensibilidad, que
es la determinación del comportamiento del modelo por cambios en sus parámetros
(comportamiento de cada componente del modelo), y 3) la evaluación, que consiste en
la comparación de las salidas del modelo con datos reales.
3.4.2. Métodos para la validación de modelos
Para Mayer y Buttler (1993), las técnicas de validación se pueden agrupar en
cuatro principales categorías: la evaluación subjetiva (involucra a un número de
expertos en el campo de interés), las técnicas visuales (gráficas comparativas), las
medidas de desviación (basadas en las diferencias entre valores observados y
12
simulados) y las pruebas estadísticas. Proponen la eficiencia de modelado (EF) como la
mejor medida de concordancia entre los valores observados y los simulados.
Freese (1960) presenta un método de tres pasos para comparar los valores
pronosticados y observados: i) establecer la exactitud requerida por el modelador o
usuario del modelo, ii) cuantificar la exactitud alcanzada por el modelo, y iii) aplicar una
prueba estadística para decidir si el modelo cumple con la exactitud requerida. Dicho
método se explicará en detalle en el capítulo de materiales y métodos.
Reynolds (1984) señala que un método para determinar cuán bien se comporta
un modelo es comparar las predicciones del modelo con un modelo existente o con
valores observados del sistema real. También, señala que la información acerca de la
capacidad predictiva del modelo puede obtenerse por comparación de los valores
observados y predichos en diferentes ensayos del modelo.
Para cuantificar la concordancia entre las observaciones y las predicciones,
Reckhow et al. (1990) utiliza y discute la prueba t, la prueba de Wilcoxon, el análisis de
regresión y la prueba de Kolmogorov-Smirnov para dos muestras.
Mitchell (1997) señala que muchos libros sobre modelación dan una pequeña
guía sobre la validación empírica, y que no es sorprendente que para efectuar la
validación, los modeladores recurran a procedimientos simples a su alcance,
aparentemente adecuados, incluyendo gráficos de dispersión de predicciones y
observaciones, algunas veces utilizando regresión, la cual es pensada como un método
objetivo y cuantitativo para medir cuán bueno es un modelo. Propuso un método que no
requiere de los supuestos necesarios de los métodos estadísticos, en donde se grafica
en el eje de las abscisas los valores predichos y en el eje de las ordenadas las
desviaciones (predicho menos observado) y el porcentaje de puntos que caen dentro de
un rango o precisión aceptable con centro en cero, es usado como un criterio de
adecuación del modelo. El rango de aceptación lo establece el modelador de acuerdo a
su criterio y propósitos.
Analla (1998) propone el cuadrado medio del error (CME) de la regresión de los
valores observados (Y) sobre los predichos (Z) para efectuar una validación, así como
para comparar dos o más modelos en predicción del sistema. Por su parte Kobayashi y
13

Salam (2000) proponen la media de las desviaciones al cuadrado (MSD) y sus
componentes para validar modelos y para comparar dos o más modelos.
Chilibroste (2002) utiliza la raíz del cuadrado medio del error (MSPE) para
evaluar modelos (comparación entre valores observados y predichos). Considera que
un valor aceptable de la MSPE es que se encuentre en torno al 10% de la media
observada.
Según Hayirli et al. (2003) la validación de modelos se efectúa en tres fases: la
primera es la significancia de los coeficientes de regresión de los modelos ajustados, la
segunda es la regresión entre los valores predichos y los actuales, y la tercera son
pruebas t para determinar si el sesgo (B; predichos-actuales) es diferente de cero, si el
intercepto es diferente de cero y si la pendiente es diferente de uno. También usan el
coeficiente de correlación entre los valores predichos y actuales para determinar la
exactitud de la predicción e indicar la cercanía de dichos valores; y para medir exactitud
y precisión emplean el error de predicción relativa (RPE) y la media del cuadrado de los
errores de predicción (MSPE).
Halachmi et al. (2004) indican que el modelo será valido si y solo si los valores
reales y predichos tienen: (i) medias iguales, (ii) varianzas iguales, y (iii) correlación
positiva entre los valores reales y las respuestas del modelo.
Collao-Saenz et al. (2005) utilizan la media del cuadrado de los errores de
predicción (MSPE) para evaluar los resultados predichos (comparación entre valores
observados y predichos).
Tedeschi (2006) discute y compara varias técnicas para evaluar modelos
matemáticos diseñados para propósitos predictivos. En su revisión expone las
siguientes técnicas: análisis de regresión lineal, análisis de los errores ajustados,
coeficiente de correlación de concordancia, diversas medidas para evaluación, el error
cuadrado medio de predicción, análisis no paramétricos y la comparación de la
distribución de los datos.
En la práctica es común que para validar modelos en predicción del sistema se
utilice la regresión lineal (RL) entre la variable dependiente Y (observados) y la variable
independiente Z (predichos) (Reckhow et al., 1990; Flavelle, 1992; Mayer y Butler,
1993; Mayer et al., 1994; Analla, 1998; Yang et al., 2000; Hayirli et al., 2003; Tedeschi,
14
2006), así como diferentes medidas estadísticas para comparar a Y y Z (Loague y
Green, 1991; Mayer y Butler, 1993; Analla, 1998; Kobayashi y Salam, 2000; Yang et al.,
2000; Chilibroste, 2002; Collao-Saenz et al., 2005; Tedeschi, 2006). Los resultados de
la RL que en general se incluyen son: (i) el gráfico de dispersión de los valores
predichos (zi) vs. los observados (yi), junto con la recta de regresión estimada y la recta
y=z, la cual permite visualizar que tan alejados están los puntos de la recta y=z que
representa la exactitud ideal, (ii) el coeficiente de determinación como indicador de
precisión, y (iii) los parámetros estimados del intercepto y la pendiente como
indicadores de exactitud y las pruebas estadísticas acerca de si son simultáneamente
cercanos a cero y a uno respectivamente.
Frecuentemente la validación de modelos en predicción del sistema es realizado
mediante la prueba F simultánea de intercepto cero y pendiente uno. En cuanto a la
discusión acerca de si es apropiada para efectuar validación, Harrison (1990) señala
que sesgo en los parámetros estimados puede conducir al rechazo de modelos
“válidos” y concluye que no es apropiada. Posteriormente Mayer et al. (1994), concluye
que es apropiada excepto cuando los errores están autocorrelacionados. Por su parte
Analla (1998), concluye que no es apropiada ya que la significancia de esta prueba es
inversamente proporcional a la bondad del ajuste del modelo evaluado. En su lugar
propone el cuadrado medio del error (CME) de la regresión del modelo o modelos a
validar.
Otra prueba estadística que ha sido cuestionada para efectuar validación es la
prueba de t para muestras dependientes u observaciones pareadas entre los valores
observados y los predichos (Freese, 1960; Reynolds et al., 1981; Harrison, 1990;
Mitchell, 1997). Por su parte Mayer et al. (1994), señalan que la prueba de t y la prueba
de Wilcoxon no pueden ser recomendadas para propósitos de validación.
Respecto a las técnicas o medidas estadísticas basadas en la RL para efectuar
validación, Mitchell (1997) señala que es pensada como un método objetivo y
cuantitativo para medir cuán bueno es un modelo. Lo anterior puede atribuirse a que la
RL es relativamente sencilla de aplicar y prácticamente todos los paquetes estadísticos
comerciales lo incluyen entre sus opciones. Algunas desventajas en la aplicación de la
RL y que se presentan frecuentemente en la práctica son: (i) que sea aplicable, es
15

decir, que los puntos (zi, yi) tengan cierta tendencia lineal, (ii) garantizar el cumplimiento
de que los errores son independientes y provengan de una distribución normal con
media cero y varianza constante, y (iii) su aplicación cuando el tamaño de muestra es
muy pequeño o cuando los datos se encuentran concentrados en una pequeña región,
la cual no permitiría visualizar si tienen una tendencia lineal. En consecuencia es
pertinente tener un rango amplio y creciente de los valores observados yi para poder
visualizar si los puntos (zi, yi) efectivamente siguen una tendencia lineal. Reckhow et al.
(1990) discute el cumplimiento de los supuestos de la regresión. Para Harrison (1990),
la regresión no debe usarse para validación por las dificultades para satisfacer los
supuestos y la ambigüedad cuando no se rechaza la hipótesis nula. Flavelle (1992)
discute las ventajas y limitaciones del uso de la regresión para validación. Por su parte
Mitchell (1997), da cinco argumentos en contra de la regresión y la considera
inapropiada para efectuar validación. Kobayashi y Salam (2000) indican que no es
garantía el supuesto de que Y se relacione linealmente con Z y que es innecesario para
comparar a Y y Z. Montgomery et al. (2002c) señalan varios abusos comunes en la
aplicación de la regresión.
Para Mayer y Butler (1993) la complejidad de los modelos y del tipo de datos,
origina que no haya un conjunto combinado de técnicas de validación aplicable en
todas las situaciones de modelación, y señalan que en la mayoría de los casos, un
número de medidas de validación son necesarias para apreciar “la foto completa”. Por
su parte Tedeschi (2006), indica que la valoración de la adecuación de un modelo
solamente es posible por medio de una combinación de varios análisis estadísticos y
propios al propósito para la cual el modelo matemático fue inicialmente conceptualizado
y desarrollado. Para Barrales et al. (2004), los índices o medidas para efectuar
validación no presentan el carácter objetivo que se demanda de las pruebas o métodos
estadísticos en el sentido que para un mismo conjunto de datos, todos los modeladores,
usando el mismo procedimiento, lleguen a las mismas conclusiones.
16

3.5. Pruebas para el supuesto de normalidad
Una gran variedad de métodos estadísticos suponen normalidad para poder
utilizarlos, por lo que existen variados métodos gráficos e inferenciales para verificarlo.
Estos métodos (pruebas de bondad de ajuste), comprueban si los datos que se
observan concuerdan en efecto con el modelo probabilístico de la distribución normal
que se ha supuesto para esos datos.
El problema de bondad de ajuste es como sigue: dada una muestra aleatoria
d1,d2,…,dn de la variable aleatoria D se quiere probar H0: D tiene función de distribución
, o bien, la muestra proviene de una población con función de distribución .
La H1 es que no es la función de distribución verdadera de D. La prueba clásica
es la prueba ji-cuadrada de bondad de ajuste.
)d(FD )d(FD
)d(FD
En las pruebas de bondad de ajuste para el supuesto D~ , se presentan
las siguientes situaciones para la función de distribución normal : (i) y son
completamente especificados y (ii)
),(N 2DD σµ
)d(FD Dµ2Dσ
Dµ y/o deben ser estimados. 2Dσ
Stephens (1974), analizó cinco de las principales estadísticas de pruebas de
bondad de ajuste basadas en la función de distribución empírica [KS (Kolmogorov-
Smirnov), W2 (Cramér-von Mises), V (Kuiper), U2 (Watson) y A2 (Anderson-Darling)] y
tres situaciones importantes: la distribución hipotetizada es completamente
especificada y la representa la distribución normal o exponencial con uno o más
parámetros que son estimados de los datos. Indica que las pruebas de Cramér-von
Mises y de Anderson-Darling son: (a) más potentes que la prueba de Kolmogorov-
Smirnov cuando es la distribución normal con
)d(FD
)d(FD
)d(FD Dµ y estimados por 2Dσ d y
respectivamente, y (b) en general son consideradas como dos de las mejores pruebas
de bondad de ajuste, esto también es señalado por Reynolds (1984). En Stephens
(1974) se dan los valores críticos para las cinco pruebas bajo las tres situaciones
mencionadas anteriormente.
21ns −
Conover (1980) señala que la prueba para normalidad de Shapiro-Wilk ( Dµ y
estimados) es más potente que muchas pruebas para la hipótesis compuesta de
2Dσ
17

normalidad, incluyendo la prueba de Lilliefors ( Dµ y estimados) y la prueba ji-
cuadrada.
2Dσ
Una prueba de bondad de ajuste para normalidad basada en el gráfico de
probabilidad normal (gráfico Q-Q) se presenta en Johnson y Wichern (2002), y es
llamada la prueba de normalidad del coeficiente de correlación del gráfico Q-Q. Indican
al igual que Filliben (1975) que tiene buena propiedad de potencia. Dicha prueba es
para el caso en donde la media y la varianza de la distribución normal hipotetizada son
estimados.
3.6. Transformaciones de datos
Cuando la variable de estudio no se distribuye normal, generalmente se emplea
algún tipo de transformación para aproximar los datos a la distribución normal y el
método estadístico se aplica a la variable transformada.
Montgomery (2004c) señala que las transformaciones se usan para tres
propósitos: estabilizar la varianza de la respuesta, hacer que la distribución de la
variable de respuesta esté más cerca de la distribución normal y mejorar el ajuste del
modelo a los datos.
Las transformaciones más comunes para lograr la normalidad y/o la
homogeneidad de varianzas son la raíz cuadrada, la logarítmica y la angular o
transformación arco seno (Steel y Torrie, 1988; Zar, 1999; Sokal y Rohlf, 2000;
Montgomery, 2004b). En las tres primeras referencias citadas, se discute en detalle bajo
que condiciones se recomienda utilizar cada una de las transformaciones mencionadas.
Una clase útil de transformaciones es la de la transformación de potencia yλ
(método de Box-Cox) para corregir la no normalidad y/o la varianza no constante en
modelos de regresión y análisis de varianza (Montgomery, et al., 2002b; Montgomery,
2004c). Johnson y Wichern (2002), indican que cuando la elección de la transformación
que aproxime a la distribución normal no es obvia, es conveniente que los datos
sugieran una transformación, y esto puede lograrse con la familia de transformaciones
de potencia (yλ). También, presentan un método analítico relativamente práctico para
elegir la transformación de potencia.
18

Una transformación es simplemente una reexpresión de los datos en diferente
unidad de medida. Cuando no hay una transformación obvia, generalmente se realiza
una búsqueda empírica de una transformación que aproxime a la distribución normal a
través de observar el efecto de cada una de las transformaciones, por ejemplo, en el
gráfico de probabilidad normal.
19

4. MATERIALES Y MÉTODOS
4.1. Descripción del modelo mecanístico Wakax POS
El modelo dinámico mecanístico de “animal completo” Wakax POS (inédito), fue
desarrollado por el Dr. Luís Vargas Villamil del Colegio de Postgraduados campus
Tabasco en una estancia posdoctoral en el Departamento de Ciencia Animal de la
Universidad de California, Davis (UCD).
En la construcción del modelo Wakax POS la representación del sistema es en
términos de variables de estado y de tasas de cambio las cuales se especifican por
medio de ecuaciones diferenciales de primer orden. Las ventajas en su desarrollo son:
el sistema completo se separa en sus partes fundamentales, se representan los flujos
de entradas y salidas entre sus partes, y sobre todo se establecen las relaciones dentro
y entre sus partes por los mecanismos o teoría física que las gobiernan.
El modelo Wakax POS fue desarrollado para describir las relaciones biológicas
(digestión, crecimiento bacteriano, fermentación y absorción) durante la nutrición de
bovinos alimentados con caña de azúcar (CZ) y para predecir la ganancia de peso
promedio (GPP) por día de bovinos en pastoreo suplementado con CZ, maíz quebrado
y/o melaza en una zona tropical de México. El modelo esta compuesto por 119
variables de estado que describen el sistema compuesto por cinco submodelos:
Concentrado, Pasto, Caña de azúcar, Melaza y Crecimiento animal (Anexos I.B y I.C).
Los tres primeros están divididos en tres secciones: Rumen, Intestino y Digestión en
Ciego. Cada sección fue derivada de un modelo de crecimiento bacteriano, previamente
publicado, llamado Turix (Vargas-Villamil et al., 2004) y cuya descripción puede
consultarse en el Anexo I.A. El submodelo de Melaza describe la ración o entrada de
melaza. Finalmente el submodelo de Crecimiento animal proporciona la ganancia de
peso. Las variables de entrada del modelo Wakax POS son: a) peso vivo; b) consumo
de materia seca de maíz, melaza y pasto; c) fracción soluble de pasto y CZ; d) fracción
degradable de pasto y CZ; y e) razón de degradación de pasto y CZ.
El submodelo Concentrado describe el sistema de nutrimento de materia seca de
maíz y es descrito por 34 variables de estado. El submodelo Pasto describe el sistema
20

de nutrimento de materia seca de pasto y es descrito por 40 variables de estado. El
submodelo Caña de azúcar describe el sistema de nutrimento de materia seca de CZ y
melaza, y es descrito por 40 variables de estado. El submodelo Melaza describe la
entrada de melaza y el flujo dentro del submodelo de Caña de azúcar y es descrito por
una variable de estado. El submodelo Crecimiento animal proporciona la salida de GPP
por día y es descrito por cuatro variables de estado. Las constantes y parámetros
involucrados en los submodelos (Anexo I.C) son valores tomados, calculados, ajustados
o aproximados de la literatura científica. Las secciones de los submodelos describen los
procesos de digestión, crecimiento bacteriano, fermentación, absorción, y los flujos en
el Rumen-Reticulo (Sección Rumen, R) y en el Ciego (Sección Ciego, C); así como la
digestión, absorción y flujo en el omaso, abomaso e intestino delgado (Sección
Intestino, D).
4.2. Descripción de los datos experimentales empleados en la validación
El método de validación basado en el planteamiento de Freese se aplicó a la
diferencia entre los datos experimentales de la GPP por día y los simulados con el
modelo Wakax POS. Los valores de la GPP corresponden a las medias de los
experimentos obtenidos de la literatura (Anexo II, Cuadros: II.1 y II.2) con bovinos en
pastoreo suplementado con caña de azúcar, maíz quebrado y/o melaza en una zona
tropical de México.
En el Cuadro II.3 del Anexo II se indican las fuentes e información de los datos
experimentales utilizados en la validación del modelo Wakax POS en predicción en el
Rumen y Ciego de la materia seca (DM), ácidos grasos volátiles (AGVs), acetato (Ac),
propionato (Pr) y butirato (Bu). En el Cuadro 3 se muestran los valores observados y
predichos para cada una de dichas variables en el Rumen y Ciego. En este caso la
validación se efectúo por medio de métodos gráficos y medidas estadísticas para
comparar a los valores observados y predichos.
Los datos experimentales utilizados en la validación del modelo Wakax POS en
predicción de la GPP, DM, AGVs, Ac, Pr y Bu fueron distintos a los empleados en el
ajuste de sus parámetros.
21

4.3. Procedimientos estadísticos para la validación de modelos basados en el planteamiento de Freese
En este trabajo se considera:
(i) La validación de un modelo en predicción del sistema, como la comparación
por medio de algún método de las predicciones del modelo con
observaciones del sistema real para determinar su capacidad predictiva, es
decir, la validación se concentra en la determinación de la exactitud del
modelo.
(ii) La evaluación de un modelo, como un procedimiento más general y que
incluye la validación del modelo en predicción del sistema. La evaluación de
un modelo comprende: el estudio de su estructura, el proceso de ajuste de
sus parámetros, el análisis de sensibilidad de sus componentes, la
comparación de las salidas del modelo con observaciones del sistema real y
si funciona para su propósito en diferentes escenarios.
En esta sección se presentan procedimientos estadísticos basados en el
planteamiento de Freese (1960) para determinar si la exactitud de un modelo o técnica
de estimación es adecuada para cumplir los requerimientos del modelador o usuario del
modelo. Básicamente el planteamiento de Freese para comparar los valores
pronosticados y observados consiste de tres pasos: establecer la exactitud requerida
por el modelador o usuario del modelo, cuantificar la exactitud alcanzada por el modelo,
y finalmente aplicar una prueba estadística para decidir si el modelo cumple con la
exactitud requerida.
En los procedimientos presentados se detallan desarrollos omitidos por Freese
(1960), Rennie y Wiant (1978), Reynolds (1984) y Barrales et al. (2004), y se incorporan
modificaciones y extensiones a sus planteamientos. En el capítulo de resultados y
discusión, donde se resumirán los métodos de validación se indicarán cuales son las
modificaciones y extensiones incorporadas.
22

4.3.1. Conceptos básicos
Dos de los objetivos, quizás los más importantes en la construcción de un
modelo, son la comprensión y predicción del sistema usando la información contenida
en los valores de las variables de entrada al modelo. Frecuentemente en modelos
dinámicos mecanísticos conformados por muchas variables de estado, el interés se
centra en alguna de ellas sin descuidar el comportamiento de las restantes ya que
juntas proporcionan información del sistema.
Sea el caso de predecir el valor de alguna variable de estado. Siguiendo la
notación de Reynolds (1984), sea Y el valor actual u observado de la variable a
predecir, sea el vector correspondiente a las p variables de entrada al
modelo y sea Z=Z( ) el valor predicho por el modelo basado en . Suponga que se
tienen n pares para comparar (Yi, Zi) i=1,2,…,n donde para el i-ésimo par, Yi es el valor
observado, Zi el valor predicho y
)X,...,X,X(X p21=−
−X
−X
)X,...,X,X(X ip2i1ii =−
los valores de las variables de
entrada.
A menos que el modelo matemático sea considerado estocástico (o
probabilístico) los valores predichos o simulados Zi son fijos (determinísticos). Así, los
valores observados de alguna variable de estado fueron considerados aleatorios ya que
contienen una variabilidad natural, y los valores predichos fueron considerados
determinísticos.
Freese (1960), plantea para la comparación de Yi y Zi que el valor observado Yi o
µi en su notación, es una constante y que Zi o Xi en su notación se distribuye normal
con media µi.
Las inferencias para determinar cuán bien el modelo predice el sistema real
fueron basadas en las n diferencias Di=Yi–Zi para i=1, 2,…,n.
Si Y1, Y2,…,Yn es una muestra aleatoria de N(Zi, σ2), es decir, si las n variables
aleatorias Yi son independientes normalmente distribuidas con media Zi y varianza σ2
[Yi~NI(Zi, σ2) i=1,2,…,n] entonces Di=(Yi–Zi)~NI(0,σ2), ya que
)Zd(F)ZdY(P)dZY(P)dD(P)d(F iiYiiiiiiiiiD ii+=+≤=≤−=≤=
23
[ ] [ ] ( ) )Zd(fZddd)Zd(f)Zd(F
dd)d(F
dd)d(f iiYii
iiiYiiY
iiD
iiD iiiii
+=++=+==
)d(Ie2
1e2
1)d(f i),(
)d(2
1)ZZd(2
1
iD
2i2
2iii2
i ∞−∞σ
−−+σ
−
πσ=
πσ=
por lo que
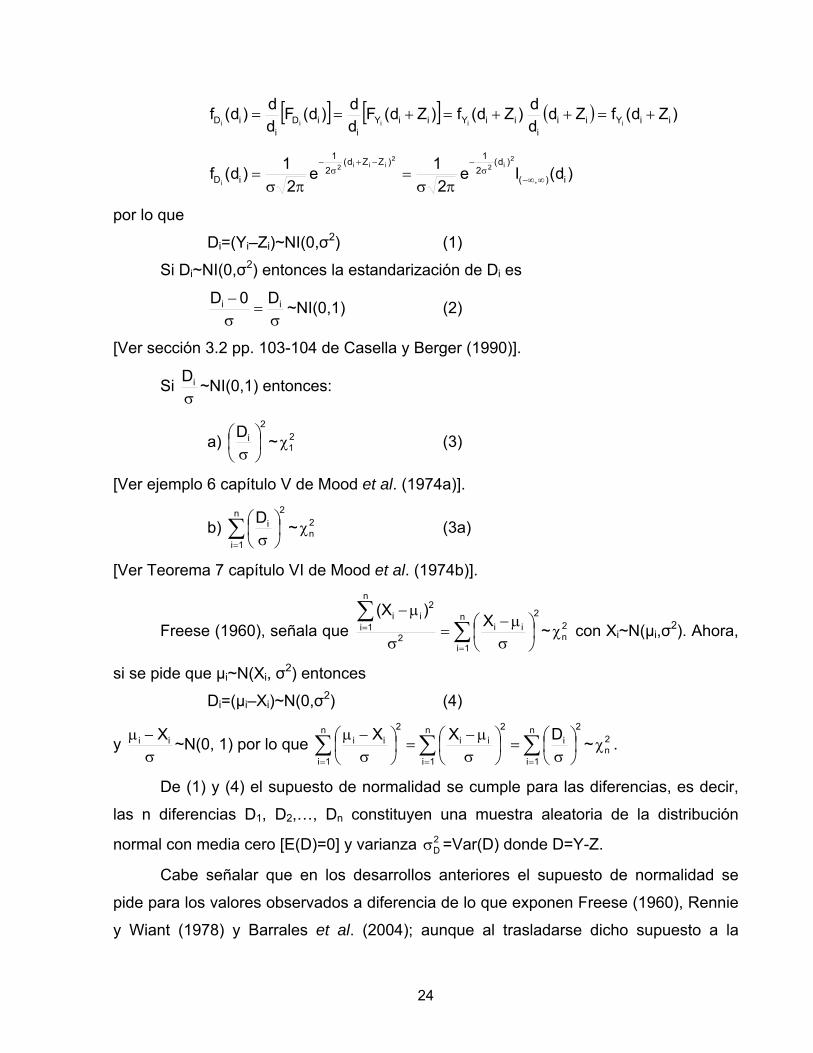
Di=(Yi–Zi)~NI(0,σ2) (1)
Si Di~NI(0,σ2) entonces la estandarización de Di es
σ=
σ− ii D0D ~NI(0,1) (2)
[Ver sección 3.2 pp. 103-104 de Casella y Berger (1990)].
Si σ
iD ~NI(0,1) entonces:
a) 2
iD⎟⎠⎞
⎜⎝⎛σ
~ (3) 21χ
[Ver ejemplo 6 capítulo V de Mood et al. (1974a)].
b) ∑=
⎟⎠⎞
⎜⎝⎛σ
n
1i
2iD ~ (3a) 2
nχ
[Ver Teorema 7 capítulo VI de Mood et al. (1974b)].
Freese (1960), señala que 2n
1i
ii2
2ii
n
1i X)X(
∑∑
=
= ⎟⎠⎞
⎜⎝⎛
σµ−
=σ
µ−~ con Xi~N(µi,σ2). Ahora,
si se pide que µi~N(Xi, σ2) entonces
2nχ
Di=(µi–Xi)~N(0,σ2) (4)
y σ−µ ii X ~N(0, 1) por lo que
2n
1i
i2n
1i
ii2n
1i
ii DXX ∑∑∑===
⎟⎠⎞
⎜⎝⎛σ
=⎟⎠⎞
⎜⎝⎛
σµ−
=⎟⎠⎞
⎜⎝⎛
σ−µ ~ . 2
nχ
De (1) y (4) el supuesto de normalidad se cumple para las diferencias, es decir,
las n diferencias D1, D2,…, Dn constituyen una muestra aleatoria de la distribución
normal con media cero [E(D)=0] y varianza =Var(D) donde D=Y-Z. 2Dσ
Cabe señalar que en los desarrollos anteriores el supuesto de normalidad se
pide para los valores observados a diferencia de lo que exponen Freese (1960), Rennie
y Wiant (1978) y Barrales et al. (2004); aunque al trasladarse dicho supuesto a la
24

población de las diferencias entre los valores observados y predichos, los resultados
son básicamente los mismos.
4.3.2. Validación de modelos basada en el valor absoluto del error en ausencia de sesgo
En el planteamiento de Freese (1960), para la determinación de la exactitud
requerida se necesita que los valores e y α especificados por el modelador o usuario del
modelo satisfagan
( ) α−≥≤ 1eDP (5)
( ) α≤>⇔ eDP
para que la exactitud del modelo sea aceptable. Así, un modelo es considerado
suficientemente confiable para predicción si la probabilidad (exactitud) establecida en
(5) se cumple, donde D es la diferencia (error) entre las observaciones y predicciones
de la variable de respuesta del modelo a validar, e es el máximo error admitido y 1-α
represente el nivel de exactitud requerida. Si α es pequeño entonces la diferencia entre
el valor observado y el predicho sería menor que e con alta probabilidad. Barrales et al.
(2004), señalan que el valor e (E en su notación) es la discrepancia aceptada entre la
predicción zi y el valor real yi, es decir, el valor máximo admisible de las desviaciones
|yi–zi|=|di|.
Los siguientes resultados ayudaran al planteamiento de pruebas de hipótesis e
intervalos de confianza, con la finalidad de decidir si el modelo cumple con la exactitud
requerida por el modelador o usuario del modelo.
Si D~N(0, ) por (2) 2Dσ 2
DD
DDσ
=σ
~N(0,1) y por (3) 2D
22
D
DDσ
=⎟⎟⎠
⎞⎜⎜⎝
⎛σ
~ . Por lo que el
cuantil 1-α de la distribución ji-cuadrada con 1 grado de libertad (g.l.), , es tal que
21χ
21,1 α−χ
α−=⎟⎟⎠
⎞⎜⎜⎝
⎛χ≤
σ α− 1DP 21,12
D
2
(6)
De (5) se tiene que
( ) α−≥≤ 1eDP
25

( ) α−≥≤ 1eDP 22
( ) α−≥≤ 1eDP 22
α−≥⎟⎟⎠
⎞⎜⎜⎝
⎛σ
≤σ
1eDP 2D
2
2D
2
(7)
Por lo tanto de (6) y (7) se tiene que
21,12
D
2eα−χ≥
σ (8)
La igualdad en (8) se tiene cuando la probabilidad asociada en (7) es igual a 1-α.
Ahora se probará que 2
21
21,1 z α
−α− =χ donde
21
z α−
es el cuantil 2
1 α− de la
distribución normal estándar, es decir, la 2
1zZP2
1
α−=⎟⎟
⎠
⎞⎜⎜⎝
⎛≤ α
−. Para ello note que
( ) ( ) α−=χ≤=χ≤χ α−α− 1ZPP 21,1
221,1
21 , así
( ) ( )21,1
221,1
21 ZPP α−α− χ≤=χ≤χ
( )21,1
2ZP α−χ≤=
( )21,1ZP α−χ≤=
( ) α−=χ≤≤χ−= α−α− 1ZP 21,1
21,1
entonces ( )2
1ZP 21,1
α−=χ≤ α− y por
21zZP
21
α−=⎟⎟
⎠
⎞⎜⎜⎝
⎛≤ α
− se sigue que
21
21,1 z α
−α− =χ , es
decir, 2
21
21,1 z α
−α− =χ (9)
Así, el resultado (8) puede escribirse también como 2
212
D
2
zeα
−≥
σ, o bien,
2
21
2
2D
z1
e α−
≤σ
26

21,1
2
2
21
22D
eze
α−α−
χ=≤σ (10)
la cual corresponde a la forma dada por Freese en su notación Var(D)=σ2 y 22
21
z τ=α−
.
Por lo tanto, si D~N(0, ) donde 2Dσ 0D =µ significa predicción insesgada y denota la
varianza de los errores de predicción (precisión), entonces la técnica o modelo será
aceptable o suficientemente confiable para predicción cuando se cumpla (10). Así, los
valores e y α especificados por el modelador o usuario del modelo son tales que
satisfacen la exactitud requerida
2Dσ
( ) α−≥≤ 1eDP que se traduce en 21,1
22D
eα−χ
≤σ , o sea,
la varianza de las diferencias tendrá como cota superior a 21,1
2eα−χ
cuando la exactitud
requerida se satisfaga.
4.3.2.1. Pruebas estadísticas para la exactitud requerida
Hasta ahora se ha determinado que si D~N(0, ) y 2Dσ ( ) α−≥≤ 1eDP entonces la
Var(D)= debe satisfacer 2Dσ 2
1,1
22D
eα−χ
≤σ para que el modelo sea considerado aceptable o
suficientemente confiable para predicción. El siguiente paso es probar la hipótesis:
H0: 21,1
22D
eα−χ
≤σ vs. H1: 21,1
22D
eα−χ
>σ (11)
Reynolds (1984), señala que bajo los supuestos D~N(0, ) con 2Dσ 2
1,1
22D
e0
α−χ=σ entonces
la estadística de prueba es ∑∑== σ
=⎟⎟⎠
⎞⎜⎜⎝
⎛
σ
n
1i2D
2i
n
1i
2
D
i
00
DD ~ y que la H0 será rechazada con un
nivel de significación α’ si la estadística de prueba (12) excede a . La distribución
de
2nχ
2'1,n α−χ
∑= σ
n
1i2D
2iD se determinó en páginas anteriores y puede consultarse en el resultado (3a).
27

Bajo los supuestos anteriormente señalados la estadística de prueba puede escribirse
como
∑χ
=
χ
=σ
==
α−
=
α−
=∑∑
n
1i
2i2
21,1
n
1i2
1,1
2
2i
n
1i2D
2i D
eeDDV
0
~ (12) 2nχ
y la H0 se rechazará con un nivel de significación α’ si donde Vc es el valor
de la estadística de prueba V que se obtendría al usar la información contenida en la
muestra d1,d2,…,dn y los valores e y α especificados por el modelador o usuario del
modelo. En la sección 4.2 pp. 431-432 del capítulo IX de Mood et al. (1974c) se puede
consultar la obtención de la prueba uniformemente más potente de tamaño α [UMP(α)]
de H0: vs. H1: cuando se tiene una muestra aleatoria de tamaño n de
una distribución normal con media µ conocida y varianza σ2. Cuando µ es desconocida
se trata de una prueba de razón de verosimilitudes generalizada de tamaño α. La
prueba ( ) especificada para las hipótesis en (11) corresponde a la prueba
UMP(α’) ya que D~N(0, ), es decir, E(D)=µD=0 es conocida (supuesta).
2'1,ncV α−χ>
20
2 σ≤σ 20
2 σ>σ
2'1,ncV α−χ>
2Dσ
Freese (1960), señala que el valor de (exactitud requerida) lo establece
previamente el usuario y que la hipótesis H0, que no expuso explícitamente, puede
rechazarse cuando el valor esperado de Xi no es µi, es decir, E(D)≠0 (sesgo) o cuando
la varianza no es como se hipotetizó o por una combinación de ambas razones.
Reynolds (1984), coincide con Freese al indicar que esta prueba tenderá a rechazar H0
si es grande o si |E(D)| es grande, o si ambas son grandes de modo que es sensible
a éstas dos cantidades que afectan la exactitud. Así, si H0 no se rechaza entonces se
asume que el modelo es adecuado bajo los valores e, α y α’ especificados por el
modelador o usuario del modelo, es decir, el modelo proporciona la exactitud requerida
y se estaría tentado a concluir con un nivel de significación α’ que H0:
2Dσ
2Dσ
2Dσ
21,1
22D
eα−χ
≤σ se
cumple, o bien, que ( ) α−≥≤ 1eDP . Aunque cabe la posibilidad de que H0 sea falsa
(error tipo II) y se tendría que calcular la potencia de la prueba [η(.)] para un valor de H1
de importancia particular que sea considerado de significado práctico, digamos tal 21Dσ
28

que 21,1
22
1De
α−χ>σ y determinar η( )=1-P(Error tipo II)=1-β para decidir si H0 es
verdadera cuando realmente es . Es decir, la probabilidad β de un error de tipo II
tendría que calcularse para este valor alternativo. Si β es suficientemente “pequeño”
[η( ) grande] se aceptaría H0 y se haría conociendo exactamente el riesgo de una
decisión errónea. Así, si H0 no se rechaza lo que se puede concluir es que los datos no
proporcionan suficiente evidencia para rechazarla, que los datos no apoyan
suficientemente a H1 y no que se acepte la declaración establecida en H0.
21Dσ
21Dσ
21Dσ
La H0 en (11) indica que el beneficio de la duda es dado al modelo en el sentido
de que el modelo es juzgado en ser adecuado a menos que haya suficiente evidencia
de lo contrario. Desde el punto de vista práctico y de que la hipótesis de investigación
se plantea en la H1, las hipótesis en (11) fueron intercambiadas quedando
21,1
22D
'0
e:Hα−χ
>σ vs. 21,1
22D
'1
e:Hα−χ
≤σ (13)
de modo que si es rechazada, se sabe de antemano con que probabilidad (α’) se le
estaría rechazando cuando es verdadera. Las hipótesis en (13) coinciden prácticamente
con el planteamiento alternativo de Reynolds (1984), ya que para él la hipótesis nula es
'0H
21,1
22D
'0
e:Hα−χ
≥σ . Por lo tanto, si la en (13) es rechazada con un nivel de significación
α’ entonces se asume que el modelo es adecuado bajo los valores e y α especificados
por el modelador o usuario del modelo.
'0H
4.3.2.2. Prueba UMP(α’) para '0H
Para la determinación de la prueba UMP(α’) para las hipótesis en (13), se
utilizaron los siguientes resultados:
(R1) Sea la familia exponencial donde λ(θ) es monótona y θ )x(T)(e)x(r)(h);x(f θλθ=θ ∈
(a, b) con -∞≤a<b≤∞, (i) si λ(θ) es creciente en θ entonces la familia tiene razón de
verosimilitudes monótona en T(x) y (ii) si λ(θ) es decreciente en θ entonces la familia
tiene razón de verosimilitudes monótona en -T(x).
29

(R2) Sea con densidad −X ( )θ
−−
;xfX , θ ∈ Ω ⊂ ℜ la cual conforma una familia con razón
de verosimilitudes monótona en ( )−xT . Para probar H0: θ>θ0 vs. H1: θ≤θ0 con θ0
conocida, existe la prueba UMP(α) la cual es dada por:
( ) 1x =φ−
si ( ) kxT <−
(se rechaza H0)
( ) cx =φ−
si ( ) kxT =−
(c una constante)
( ) 0x =φ−
si ( ) kxT >−
con k tal que satisface ( )( )−θ φ=α XE
0.
[Los resultados (R1), (R2) y variantes (con otra notación), pueden consultarse en las pp.
422-425 capítulo IX de Mood et al. (1974c)].
El supuesto para las hipótesis en (13) es que D1, D2,…, Dn son una muestra
aleatoria de la distribución N(0, ). Se tiene que la función de densidad conjunta de
es:
2Dσ −
D
( ) ( ) )d(Ie2
1;df;df i),(
)d(2
1
2D
n
1i
2Di
n
1i
2DD
2i2
D∞−∞
σ−
==− πσΠ=σΠ=σ
−
( )
∑⎥⎦⎤
⎢⎣⎡Π
σπ= =
⎟⎟⎠
⎞⎜⎜⎝
⎛
σ−
∞−∞=
n
1i
2i2
D)d(
21
i),(
n
1i2n
2D
e)d(I2
1
donde ( )
( ) ( ) ∑=σ
−=σλΠ=σπ
=σ=−∞−∞=−
n
1i
2i2
D
2Di),(
n
1i2n
2D
2D )d(dTy
21)(,)d(Idr,
2
1)(h . Por lo
que la familia ( ) +−
ℜ∈σσ−
2D
2DD ,;df pertenece a la clase exponencial indicada en (R1)
para y como −D 2
D
2D 2
1)(σ
−=σλ es monótona creciente en entonces por (i) de (R1) la
familia tiene razón de verosimilitudes monótona en
2Dσ
( ) ∑ µ−∑ ====−
n
1i
2Di
n
1i
2i )d()d(dT . Por lo
tanto, por (R2) la prueba UMP(α’) es dada por:
( ) 1d =φ−
si k)d(n
1i
2i ≤∑
=
( ) 0d =φ−
si k)d(n
1i
2i >∑
=
30

Note que c=0 y que la igualdad en k puede establecerse en cualquiera de las dos
condiciones ya que es una variable aleatoria continua. La constante k es tal que
satisface
−D
( )( )−σ
φ=α DE 20D
' donde 21,1
22D
e0
α−χ=σ , por lo que
⎟⎟⎠
⎞⎜⎜⎝
⎛σ=σ≤=α ∑
=
2D
n
1i
2D
2i
'0
|kDP
⎟⎟⎠
⎞⎜⎜⎝
⎛σ=σ
σ≤
σ= ∑
=
2D
n
1i
2D2
D2D
2i
0|kDP
⎟⎟⎠
⎞⎜⎜⎝
⎛
σ≤
σ= ∑
=
n
1i2D
2D
2i
00
kDP
⎟⎟⎠
⎞⎜⎜⎝
⎛
σ≤χ= 2
D
2n
0
kP [por el resultado (3a): ∑= σ
n
1i2D
2iD ~ ] 2
nχ
la cual implica que 2',n2
D0
kαχ=
σ donde es el cuantil α’ de la distribución ji-cuadrada
con n g.l., es decir,
2',n αχ
( )2',n
2n
' P αχ≤χ=α , así, 21,1
2',n
22
',n2D
ek
0α−
αα χ
χ=χσ= . Por lo tanto, la prueba
UMP(α’) es:
( ) 1d =φ−
si 2',n2
21,1
n
1i
2i
21,1
2',n
2n
1i
2i e
)d(e)d( α
α−=
α−
α
=χ≤
χ∑⇔
χχ
≤∑ (14)
( ) 0d =φ−
si 2',n2
21,1
n
1i
2i
e
)d(α
α−= χ>
χ∑
Con D~N(0, ) y por (14), la estadística de prueba bajo verdadera puede escribirse
como
2Dσ
'0H
∑χ
=χ∑
==
α−α−
=n
1i
2i2
21,1
2
21,1
n
1i
2i
' Dee
DV ~ (15) 2
nχ
y se rechazará con un nivel de significación α’, si donde es el valor de
la estadística de prueba que se obtendría al usar la información contenida en la
muestra d1,d2,…,dn y los valores e y α especificados por el modelador o usuario del
'0H 2
',n'cV αχ≤ '
cV
'V
31
modelo. Así, si se rechaza con un nivel de significación α’ entonces el modelo será
considerado aceptable.
'0H
Las estadísticas de prueba V y correspondientes a las hipótesis en (11) y
(13), son iguales.
'V
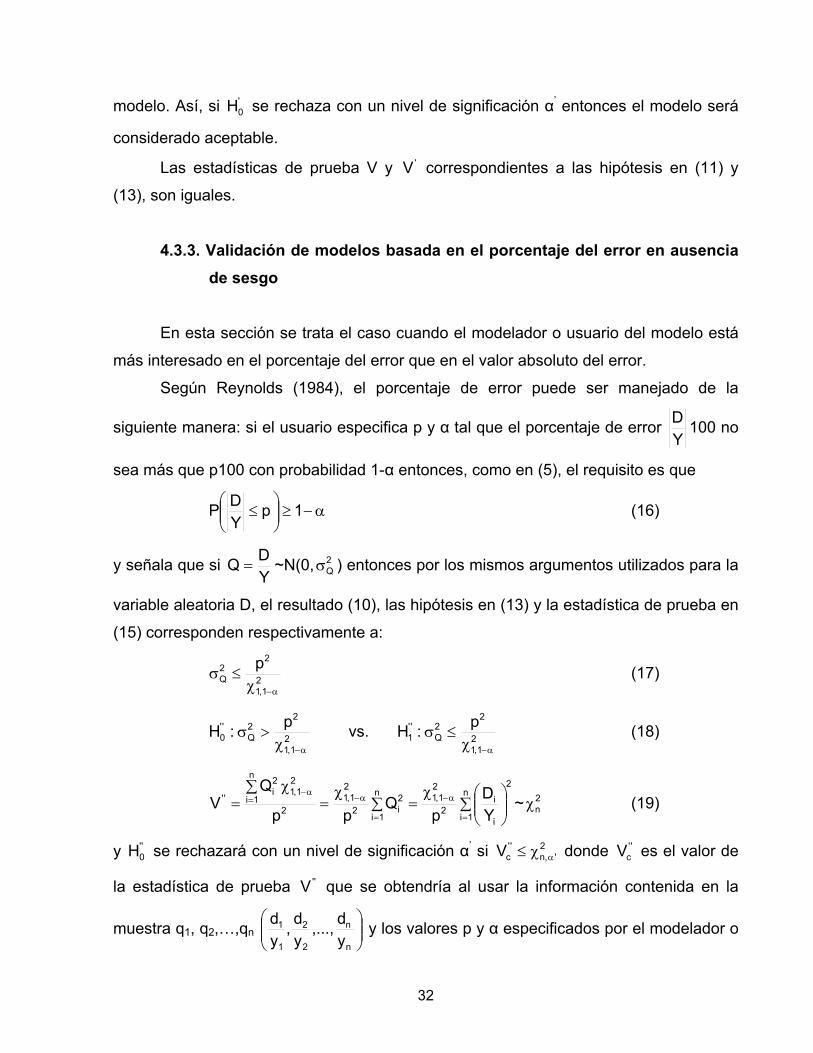
4.3.3. Validación de modelos basada en el porcentaje del error en ausencia de sesgo
En esta sección se trata el caso cuando el modelador o usuario del modelo está
más interesado en el porcentaje del error que en el valor absoluto del error.
Según Reynolds (1984), el porcentaje de error puede ser manejado de la
siguiente manera: si el usuario especifica p y α tal que el porcentaje de error YD 100 no
sea más que p100 con probabilidad 1-α entonces, como en (5), el requisito es que
α−≥⎟⎟⎠
⎞⎜⎜⎝
⎛≤ 1p
YDP (16)
y señala que si YDQ = ~N(0, ) entonces por los mismos argumentos utilizados para la
variable aleatoria D, el resultado (10), las hipótesis en (13) y la estadística de prueba en
(15) corresponden respectivamente a:
2Qσ
21,1
22Q
pα−χ
≤σ (17)
21,1
22Q
''0
p:Hα−χ
>σ vs. 21,1
22Q
''1
p:Hα−χ
≤σ (18)
2
n
1i i
i2
21,1n
1i
2i2
21,1
2
21,1
n
1i
2i
''
YD
pQ
pp
QV ∑ ⎟⎟
⎠
⎞⎜⎜⎝
⎛χ=∑
χ=
χ∑=
=
α−
=
α−α−
= ~ (19) 2nχ
y se rechazará con un nivel de significación α’ si donde es el valor de
la estadística de prueba que se obtendría al usar la información contenida en la
muestra q1, q2,…,qn
''0H 2
',n''
cV αχ≤ ''cV
''V
⎟⎟⎠
⎞⎜⎜⎝
⎛
n
n
2
2
1
1
yd,...,
yd,
yd y los valores p y α especificados por el modelador o
32

usuario del modelo. Por lo tanto, el modelo será considerado aceptable si se rechaza
. ''0H
Al usar el error absoluto o el porcentaje de error, es necesario probar normalidad
para la apropiada variable aleatoria D o YD respectivamente. Si Y~N(Z, ) entonces
D~N(0, ) donde . Para la determinación de la distribución de
2Yσ
2Dσ
2D
2Y σ=σ
YDQ = es
necesario pedir que , de lo contrario Q=1. La función de distribución de 0ZY ≠=µ
⎟⎠⎞
⎜⎝⎛−=
−==
Y1Z1
YZY
YDQ es
⎟⎟⎠
⎞⎜⎜⎝
⎛−≥⎟
⎠⎞
⎜⎝⎛=⎟⎟
⎠
⎞⎜⎜⎝
⎛−≤⎟
⎠⎞
⎜⎝⎛−=⎟⎟
⎠
⎞⎜⎜⎝
⎛≤⎟
⎠⎞
⎜⎝⎛−=≤= q1
Y1ZP1q
Y1ZPq
Y1Z1P)qQ(P)q(FQ
⎟⎟⎠
⎞⎜⎜⎝
⎛−
=⎟⎟⎠
⎞⎜⎜⎝
⎛−
≤=⎟⎠⎞
⎜⎝⎛ −
≥=q1
ZFq1
ZYPZ
q1Y1P Y
así, la función de densidad de YDQ = está dada por
( ) [ ] ⎟⎟⎠
⎞⎜⎜⎝
⎛−−
=−−−⎟⎟⎠
⎞⎜⎜⎝
⎛−
=−⎟⎟⎠
⎞⎜⎜⎝
⎛−
= −−
q1Zf
)q1(Z)1()q1(Z
q1Zf)q1(Z
dqd
q1Zf)q(f Y2
2Y
1YQ
⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛−
−σ−
σπ−=
2
2YY
2 Zq1
Z2
1exp2
1)q1(
Z
⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛−σ
−σπ−
=2
2DD
2 q1Zq
21exp
21
)q1(Z
)q(Iq1
q2Zexp
)q1(1
2Z
1
2
2D
2
22D
−ℜ⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛−σ
−−πσ
=
La forma de la función de densidad de probabilidad (fdp) depende de los
parámetros Z y de la distribución de Y~N(Z, ). Cuando Z= la fdp de Q es
)q(fQ2D
2Y σ=σ 2
Yσ Dσ
)q(Iq1
q21exp
)q1(1
21)q(f 1
2
2Q −ℜ⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛−
−−π
=
y por lo tanto no depende de dichos parámetros.
33

Bajo los supuestos establecidos la distribución de YD tiene soporte 1−ℜ ,
i
i
yd no
es estrictamente un porcentaje y YD no tiene distribución normal. Así, el porcentaje de
error bajo los supuestos Y~N(Z, ) entonces D~N(0, ), es un enfoque confuso para
medir exactitud en predicción comparado con el error absoluto.
2Yσ
2Dσ
Freese (1960), señala que si Xi~N(µi,σ2) entonces 2n
1i
ii2
2ii
n
1i X)X(
∑∑
=
= ⎟⎠⎞
⎜⎝⎛
σµ−
=σ
µ−~
donde Xi es el valor estimado por la nueva técnica para la i-ésima unidad experimental,
µi es el valor “verdadero o correcto” medido con la técnica estándar para la i-ésima
unidad experimental, n es el número de unidades experimentales y σ2 es la exactitud
requerida, es decir,
2nχ
21,1
22 e
α−χ≤σ o 2
1,1
22 p
α−χ≤σ para el caso del error absoluto o del
porcentaje del valor verdadero o correcto respectivamente. Por lo tanto, la expresión del
error como un porcentaje del valor verdadero o correcto i
ii
i
i XDµµ−
=µ
~⎟⎟
⎠
⎞
⎜⎜
⎝
⎛⎥⎦
⎤⎢⎣
⎡µσ
2
i
,0N , tiene
una interpretación práctica como la exactitud requerida expresada en términos relativos
del valor real en vez de unidades absolutas del valor real, y los resultados (16), (17),
(18), (19) se cumplen con Di=Xi-µi y Yi=µi.
De aquí en adelante los resultados obtenidos sólo se relacionan a cuando la
exactitud requerida es expresada en unidades absolutas del valor real u observado (Yi),
es decir, con el valor absoluto del error ( )[ ]α−≥≤ 1eDP .
4.3.4. Validación por intervalo de confianza empleando el error crítico en ausencia de sesgo
En esta sección se estudia el enfoque de intervalos de confianza, esto es
motivado debido a que en el planteamiento de Freese, diferentes usuarios del modelo
34

pueden tener distintas necesidades de exactitud, la cual conduce a diferentes valores
de e. Autores como Rennie y Wiant (1978) y Ek y Monserud (1979), han tratado este
problema calculando un error máximo anticipado o error crítico (e*) la cual es el valor
más pequeño de e que conducirá al no rechazo de H0 en (11). Reynolds (1984), señala
que si el usuario del modelo especifica un valor de e tal que e>e* entonces el modelo es
adecuado y si e<e* entonces el modelo no es adecuado. El error crítico e* puede
determinarse de la región de rechazo de H0 en (11):
2'1,ncV α−χ>
2'1,n2
n
1i
2i
21,1
e
dα−
=α−
χ>χ ∑
2'1,n
n
1i
2i
21,1
2 1
d
eα−
=α−
χ<
χ ∑
2'1,n
n
1i
2i
21,1
2d
eα−
=α−
χ
χ<
∑
21
2'1,n
n
1i
2i
21,1 d
e⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
χ
χ<
α−
=α− ∑
(20)
En páginas anteriores se indicó, con base en el planteamiento de Freese, que si
la H0 en (11) no se rechaza entonces el modelo es considerado aceptable o adecuado
bajo los valores e, α y α’ especificados por el modelador o usuario del modelo, así, de
(20)
21
2'1,n
n
1i
2i
21,1 d
*e⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
χ
χ=
α−
=α− ∑
Por lo tanto, H0 se rechazará si e<e* y no se rechazará si e≥e*, es decir, si el modelador
o usuario del modelo especifica un valor de e tal que e≥e* entonces el modelo es
considerado aceptable y si e<e* el modelo no es aceptable. Cabe señalar que Rennie y
35

Wiant (1978) y Reynolds (1984), no indicaron cual es la decisión cuando e=e*, aunque
al señalar que H0 se rechaza cuando entonces la región de no rechazo es
por lo que si e=e* la decisión será que el modelo es aceptable.
2'1,ncV α−χ>
2'1,ncV α−χ≤
El error crítico
21
2'1,n
n
1i
2i
21,1 D
*E⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
χ
χ=
α−
=α− ∑
es una estadística que Ek y Monserud (1979) usaron como un índice para comparar
dos modelos, de modo que el modelo con el menor error crítico es el mejor modelo.
El error crítico también puede determinarse de la región de rechazo de en
(13), es decir,
'0H
2',n
'cV αχ≤
2',n2
n
1i
2i
21,1
e
dα
=α−
χ≤χ ∑
2',n
n
1i
2i
21,1
2 1
d
eα
=α−
χ≥
χ ∑
2',n
n
1i
2i
21,1
2d
eα
=α−
χ
χ≥
∑
21
2',n
n
1i
2i
21,1 d
e⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
χ
χ≥
α
=α− ∑
(21)
Por lo tanto, de (21) sea
21
2',n
n
1i
2i
21,1 d
**e⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
χ
χ=
α
=α− ∑
36

Así, se rechazará si el modelador o usuario del modelo especifica un valor de e tal
que e≥e**, es decir, el modelo será aceptable y si e<e** el modelo no será aceptable.
Análogamente al uso como un índice que Ek y Monserud (1979) le dieron a E*, el error
crítico
'0H
21
2',n
n
1i
2i
21,1 D
**E⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
χ
χ=
α
=α− ∑
también es una estadística para comparar dos modelos, de tal manera que el modelo
con el menor error crítico es el mejor modelo.
Los errores críticos e* y e** son similares, su diferencia se debe sólo a sus
denominadores y respectivamente. Si 2'1,n α−χ 2
',n αχ21' =α entonces y e*=e**.
Si
2',n
2'1,n αα− χ=χ
21' <α entonces
2',n
2'1,n αα− χ>χ
2',n
2'1,n
11αα− χ
<χ
2',n
n
1i
2i
21,1
2'1,n
n
1i
2i
21,1 dd
α
=α−
α−
=α−
χ
χ<
χ
χ ∑∑
(e*)2 < (e**)2
e* < e** (22)
Si para un valor 21' <α , e y α especificados por el modelador o usuario del modelo se
tiene que e*< e <e** entonces el modelo es aceptable empleando la estadística E* y no
lo es con la estadística E**. Esto indica que las hipótesis en (13)
21,1
22D
'0
e:Hα−χ
>σ vs. 21,1
22D
'1
e:Hα−χ
≤σ
representan un planteamiento alternativo para decidir si un modelo cumple con la
exactitud requerida que el planteamiento original de Freese (1960), además de la
37

implicación práctica para la mayoría de los usuarios al tener la hipótesis de
investigación en la hipótesis alternativa.
A continuación se determina y expone la interpretación del error crítico que hizo
Reynolds (1984), a través de un intervalo de confianza (IC) bilateral.
Con el supuesto D~N(0, ), considere el parámetro 2Dσ ε definido como
( )21
21,1
2D α−χσ=ε
el cual corresponde al cuantil 1-α de la distribución de |D| o equivalentemente es el
cuantil 1-α de la distribución de D2, ya que por el resultado (6) se tiene que
2ε
⎟⎟⎠
⎞⎜⎜⎝
⎛χ≤
σ=α− α−
21,12
D
2DP1
( )21,1
2D
2DP α−χσ≤=
( )22DP ε≤=
( )22DP ε≤=
( )ε≤= DP
La variable aleatoria pivote para el parámetro ε es ∑= σ
n
1i2D
2iD ~ , la estadística de
prueba empleada en las pruebas de hipótesis establecidas en (11) y (13). Por lo tanto,
2nχ
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
χ≤σ
=α− α−=∑
2'1,n2
D
n
1i
2i
'D
P1
despejando de ε se tiene que 2Dσ 2
1,1
22D
α−χε
=σ y por consiguiente
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
χ≤
χε
=α− α−
α−
=∑
2'1,n
21,1
2
n
1i
2i
'D
P1
38

⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
χ≤ε
χ= α−
=α− ∑
2'1,n2
n
1i
2i
21,1 D
P
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
ε≤χ
χ=
α−
=α− ∑
22
'1,n
n
1i
2i
21,1 D
P
( )22*)E(P ε≤=
( )ε≤= *EP
Por lo que (E*, ∞) es un IC unilateral del (1-α’)100% para ( )21
21,1
2D α−χσ=ε . En el IC
estimado (e*, ∞), e* es el límite inferior de confianza del cuantil 1-α de la distribución de
|D|.
El error crítico E** también puede interpretarse en términos de un IC para el
parámetro ε, ya que
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
χ≤σ
=α α=∑
2',n2
D
n
1i
2i
'D
P
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
χ≥σ
−=α α=∑
2',n2
D
n
1i
2i
'D
P1
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
χ≥σ
=α− α=∑
2',n2
D
n
1i
2i
'D
P1
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
χ≥
χε
= α
α−
=∑
2',n
21,1
2
n
1i
2iD
P
39

⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
χ≥ε
χ= α
=α− ∑
2',n2
n
1i
2i
21,1 D
P
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
ε≥χ
χ=
α
=α− ∑
22
',n
n
1i
2i
21,1 D
P
( )22*)*E(P ε≥=
( )ε≥= **EP
Por lo que (0, E**) es un IC unilateral del (1-α’)100% para ( )21
21,1
2D α−χσ=ε . En el IC
estimado (0, e**), e** es el límite superior de confianza del cuantil 1-α de la distribución
de |D|.
Reynolds (1984) combinó los dos IC unilaterales para formar ( ), un
intervalo de confianza bilateral (ICB) del (1-2α’)100% para ε. Si se reemplaza α’ por
∗IE , ∗∗
IE
2
'α
en las expresiones para E* y E** se obtiene un ICB del (1-α’)100% para ε. Así, en el ICB
estimado ( ∗Ie , ∗∗
Ie )
21
2
2'1,n
n
1i
2i
21,1
I
de
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
χ
χ=
α−
=α−
∗∑
y
21
2
2',n
n
1i
2i
21,1
I
de
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
χ
χ=
α
=α−
∗∗∑
(23)
son los límites de confianza inferior y superior respectivamente del (1-α’)100% para el
cuantil 1-α de la distribución de |D| bajo el supuesto de que D~N(0, ). El intervalo de
confianza estimado significa que se tiene confianza en un (1-α’)100% que el punto de la
distribución |D| que tiene debajo el (1-α)100% de los errores absolutos está localizado
en alguna parte en el intervalo
2Dσ
( )**I
*I e,e . Del resultado (22) se tiene que si
21' <α
entonces e*<e**.
La función de distribución de T=|D| con D~N(0, ) es 2Dσ
40
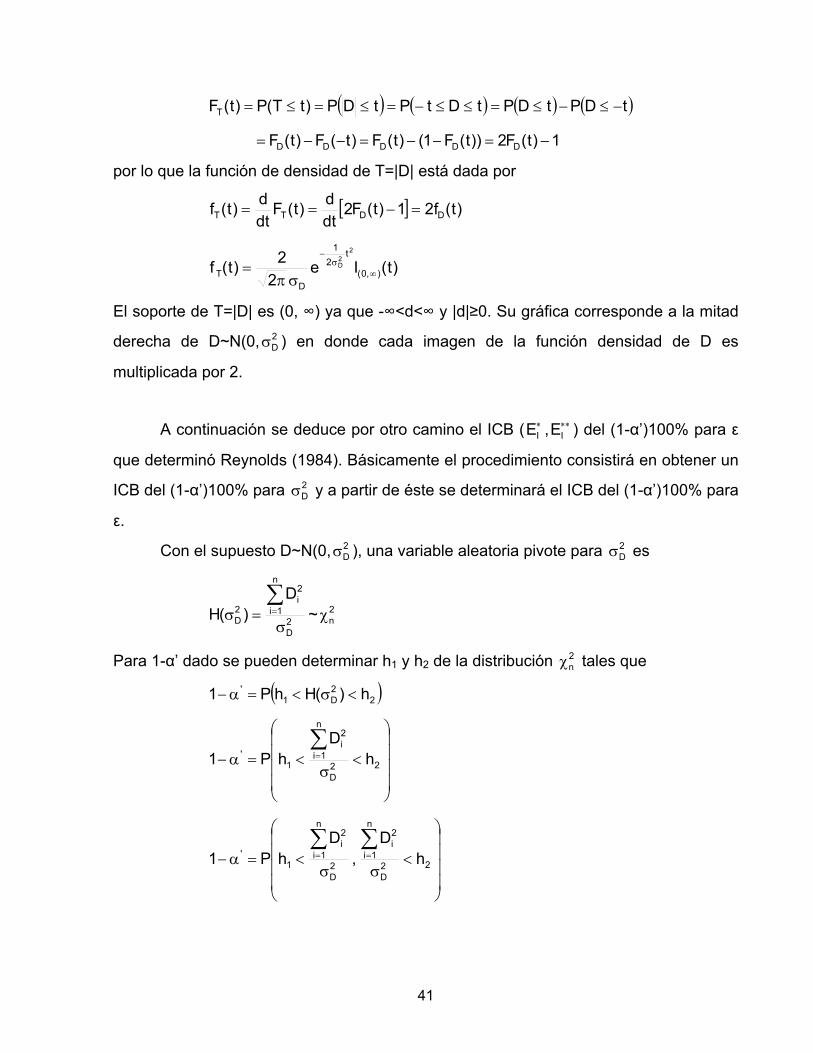
( ) ( ) ( ) ( tDPtDPtDtPtDP)tT(P)t(FT −≤−≤=≤≤−=≤=≤= )
1)t(F2))t(F1()t(F)t(F)t(F DDDDD −=−−=−−=
por lo que la función de densidad de T=|D| está dada por
[ ] )t(f21)t(F2dtd)t(F
dtd)t(f DDTT =−==
)t(Ie2
2)t(f ),0(
t2
1
DT
22D
∞σ
−
σπ=
El soporte de T=|D| es (0, ∞) ya que -∞<d<∞ y |d|≥0. Su gráfica corresponde a la mitad
derecha de D~N(0, ) en donde cada imagen de la función densidad de D es
multiplicada por 2.
2Dσ
A continuación se deduce por otro camino el ICB ( ) del (1-α’)100% para ε
que determinó Reynolds (1984). Básicamente el procedimiento consistirá en obtener un
ICB del (1-α’)100% para y a partir de éste se determinará el ICB del (1-α’)100% para
ε.
∗IE , ∗∗
IE
2Dσ
Con el supuesto D~N(0, ), una variable aleatoria pivote para es 2Dσ
2Dσ
2D
n
1i
2i
2D
D)(H
σ=σ∑= ~ 2
nχ
Para 1-α’ dado se pueden determinar h1 y h2 de la distribución tales que 2nχ
( )22D1
' h)(HhP1 <σ<=α−
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
<σ
<=α−∑=
22D
n
1i
2i
1' h
DhP1
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
<σσ
<=α−∑∑==
22D
n
1i
2i
2D
n
1i
2i
1' h
D,
DhP1
41

⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
σ<<σ=α−∑∑== 2
D2
n
1i
2i
1
n
1i
2i
2D
'
h
D,
h
DP1
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
<σ<=α−∑∑==
1
n
1i
2i
2D
2
n
1i
2i
'
h
D
h
DP1
Por lo tanto
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛ ∑∑==
1
n
1i
2i
2
n
1i
2i
h
D,
h
D
es un ICB del (1-α’)100% para . Una manera de obtener h1 y h2 es tal que se tenga
igual probabilidad en las colas de la distribución , es decir,
2Dσ
2nχ
2h
DPh
DP
'
22D
n
1i
2i
12D
n
1i
2i α
=
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
>σ
=
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
<σ
∑∑==
por lo que 2
2',n1h αχ= y 2
2'1,n2h α
−χ= . Así, el ICB del (1-α’)100% para es 2
Dσ
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
χχ α
=
α−
=∑∑
2
2',n
n
1i
2i
2
2'1,n
n
1i
2i D
,D
(24)
y es referido a veces como el IC de colas iguales para la varianza.
Otra manera de determinar h1 y h2 es tal que minimicen la amplitud esperada del
intervalo, E(A), sujeta a la restricción ( )22D1
' h)(HhP1 <σ<=α− . Se tiene que
)h(F)h(F1 1H2H' −=α− (25)
y
42

⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎟⎠
⎞⎜⎜⎝
⎛−=
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
−= ∑∑∑
=
==n
1i
2i
212
n
1i
2i
1
n
1i
2i
DEh1
h1
h
D
h
DE)A(E
∑=
⎟⎟⎠
⎞⎜⎜⎝
⎛−=
n
1i
2i
21
)D(Eh1
h1 (26)
Derivando (25) y (26) respecto a h1 se tiene que
[ ])h(F)h(Fdhd)1(
dhd
1H2H1
'
1
−=α−
)h(fdhdh)h(f0 1H
1
22H −=
1
22H1H dh
dh)h(f)h(f =
)h(f)h(f
dhdh
2H
1H
1
2 = (27)
0h1
h1
dhd)D(E
dh)A(dE
211
n
1i
2i
1
=⎟⎟⎠
⎞⎜⎜⎝
⎛−= ∑
=
0dhdh
h1
h1
1
222
21
=+−
211
222 h
1dhdh
h1
=
21
22
1
2
hh
dhdh
= (28)
Igualando (27) y (28) se obtiene
21
22
2H
1H
hh
)h(f)h(f=
)h(fh)h(fh 2H221H
21 = (29)
Por lo tanto, h1 y h2 se seleccionan de modo que cumplan (29) y sujetos a la restricción
( ) '2
2D1 1h)(HhP α−=<σ< .
43

Ahora se determinará un ICB del (1-α’)100% para ( )21
21,1
2D α−χσ=ε , el cuantil 1-α de
la distribución de |D|, a partir del ICB del (1-α’)100% para obtenido en (24). Para
esto se utilizó el siguiente resultado que puede ser consultado en el capítulo VIII página
378 de Mood et al. (1974d): Si
2Dσ
(.)τ es una función monótona creciente y (T1=t1(X1,
X2,…,Xn), T2=t2(X1, X2,…,Xn)) es un IC del %100γ para θ entonces ( es un IC
del
))T(),T( 21 ττ
%100γ para ya que )(θτ
( ) ( ) γ=<θ<=τ<θτ<τ θθ 2121 TTP)T()()T(P
Del IC del (1-α’)100% para obtenido en (24) y de que la función 2Dσ
( ) ( ) ε=χσ=στ α−21
21,1
2D
2D es monótona creciente, entonces por el resultado antes
mencionado
( )⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
χτ<στ<
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
χτ
α
=
α−
=∑∑
2
2',n
n
1i
2i
2D2
2'1,n
n
1i
2i DD
21
2
2',n
21,1
n
1i
2i
21
2
2'1,n
n
1i
21,1
2i DD
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
χ
χ<ε<
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
χ
χ
α
α−=
α−
=α− ∑∑
∗∗∗ <ε< II EE
Así, ( ) es un ICB del (1-α’)100% para ε, el cual coincide con el obtenido por
Reynolds (1984), empleando un procedimiento diferente. Cabe señalar que del análisis
efectuado para la obtención del resultado e*<e**, es necesario especificar un valor
∗IE , ∗∗
IE
21' <α .
Probablemente para la mayoría de los usuarios de un modelo, sea relativamente
más práctico y sencillo trabajar con el IC para que para el IC del cuantil 1-α de la
distribución de |D|. Por lo que se expone, respecto a la adecuación del modelo, un
posible uso del ICB del (1-α’)100% para .
2Dσ
2Dσ
44

Para e y α especificados por el modelador o usuario del modelo considere las
hipótesis
21,1
22D0
e:Hα−χ
=σ vs. 21,1
22D1
e:Hα−χ
≠σ
las cuales constituyen el planteamiento de una prueba de hipótesis de dos colas con
nivel de significación, digamos α’. También, considere el ICB del (1-α’)100% para 2Dσ
2
2',n
n
1i
2i
2D2
2'1,n
n
1i
2i DD
α
=
α−
=
χ<σ<
χ
∑∑
Con un nivel de significación α’, no se rechazará 21,1
22D0
e:Hα−χ
=σ a favor de
21,1
22D1
e:Hα−χ
≠σ si el valor 21,1
2eα−χ
está en el IC del (1-α’)100% para . Se rechazará H0
si
2Dσ
21,1
2eα−χ
está fuera del intervalo. El ICB del (1-α’)100% se puede interpretar como el
conjunto de valores de 21,1
2eα−χ
para los cuales 21,1
22D0
e:Hα−χ
=σ es “aceptable” en el nivel
de significación α’. No hay un valor aceptable para el parámetro sino un número
infinito de valores dentro del intervalo, es por esto que, por lo general, “no se acepta” la
H0 de que tome un valor particular
2Dσ
2Dσ 2
1,1
2eα−χ
, aun si el valor 21,1
2eα−χ
está dentro del IC.
Como diversos valores de son aceptables, se evita aceptar un solo valor de
como el valor real.
2Dσ
2Dσ
Una posible utilidad del ICB del (1-α’)100% para es que proporciona una idea
de los valores de e y α para los cuales el modelo será considerado aceptable
2Dσ
⎥⎥⎦
⎤
⎢⎢⎣
⎡
χ≤σ
α−2
1,1
22D
eenigualdadlacaso , y éstos serán los que hagan que 21,1
2eα−χ
se encuentre
en dicho IC. Esto es debido a que un modelo es aceptable si se cumple que 21,1
22D
eα−χ
≤σ .
45

Otra utilidad más práctica es que proporciona información acerca de la amplitud de los
valores de . 2Dσ
4.3.5. Planteamiento para validar un modelo en predicción de varias variables
Con base a los resultados obtenidos, se plantea un procedimiento gráfico para
visualizar cuando un modelo satisface la exactitud requerida para varias variables que
sean salidas de un modelo o submodelo.
Sea el caso de validar un modelo en predicción para tres variables de estado
observadas Y1, Y2, Y3 con Z1, Z2, Z3 sus correspondientes valores predichos por el
modelo, así, se tienen tres pares de conjuntos (Yjk, Zjk) con j=1,2,3; k=1,2,…,nj, los
mismos valores de exactitud e y α especificados por el modelador o usuario del modelo
y la misma α’ empleada en las inferencias para la determinación de o con j=1,2,3.
Se tendrá que el modelo satisface la exactitud requerida
*je **
je
21,1
22D
eα−χ
≤σ para la variable Yj
con un nivel de significación α’ si o . Un gráfico de líneas o barras con los
letreros Y1, Y2 y Y3 en el eje de las abscisas y los valores o en el eje de las
ordenadas, permitiría visualizar para cuales variables el modelo es adecuado o
aceptable en predicción. Por ejemplo, si entonces el modelo sólo es
aceptable en predicción de la variable Y2. Aunque también se tendría que el modelo es
más adecuado en predicción para Y2, luego para Y1 y finalmente para Y3 (Figura 3).
*jee ≥ **
jee ≥
*je **
je
*3
*1
*2 eeee <<≤
46

0
12
3
45
6
7
89
10
Y1 Y2 Y3
e*
Figura 3. Valores hipotéticos del error crítico (j=1, 2, 3) para cada variable. *
je
Otros gráficos que contribuirían a completar la percepción de la adecuación de
un modelo analizando varias variables, sería un gráfico de los ICB del (1-α’)100% para
la j=1,2,3 y un gráfico de los ICB del (1-α’)100% para 2Dj j
)D(V σ= ( )2121,1
2Dj j α−χσ=ε , el
cuantil 1-α de la distribución de |Dj| j=1,2,3. El primero indicaría la amplitud de los
valores para cada , un intervalo angosto implicaría que la distribución de Dj es
menos variable. El segundo, con los IC
2Dj
σ
( )**Ij
*Ij e,e graficados, significaría que se tiene
confianza en un (1-α’)100% que el punto de la distribución |Dj| que tiene debajo el (1-
α)100% de los errores absolutos está localizado en alguna parte en el intervalo ( )**Ij
*Ij e,e .
Un intervalo con menor límite superior de confianza para ( )2121,1
2Dj j α−χσ=ε implicaría que
para la variable Yj el modelo es más adecuado ya que contiene el cuantil 1-α de los
valores |djk| antes que las otras variables, y si el IC es angosto mucho mejor. Ambos
gráficos serían como la Figura 4, con la diferencia de los valores en el eje de las
ordenadas, es decir, para el ICB de la varianza y 2Dj j
)D(V σ= ( )2121,1
2Dj j α−χσ=ε para los
valores del cuantil 1-α de la distribución de |Dj|.
47

V(Dj)
Y1 Y2 Y36
7
8
9
10
11
Figura 4. Valores hipotéticos de V(Dj) o εj (j=1, 2, 3) para cada variable.
Se requiere que las variables sean medidas en las mismas unidades para que
las comparaciones sean justas. En caso contrario se tendría que establecer diferentes
valores de e, una para cada variable Yj y mantener los mismos valores de α y α’ en las
inferencias. También para evitar trabajar con parejas de datos que tienen unidades de
medida diferentes, se puede estandarizar cada columna de datos, de modo que cada
columna transformada tendrá media cero y desviación estándar uno, además de que no
tendrán unidades de medida.
4.3.6. Planteamiento para la comparación de dos o más modelos en predicción
Un problema frecuentemente dado en la construcción de un nuevo modelo M2,
para un sistema particular cuando ya se tiene un modelo M1 de dicho sistema, es
decidir cuál modelo es mejor en cuanto a la exactitud en predicción de los valores del
sistema real (Y). En páginas anteriores se trató este problema cuando se determinaron
los errores críticos E* y E**. Ahora, se plantea analíticamente la situación y una solución
por medio del error crítico E**. Análogamente la comparación puede hacerse utilizando
E*.
Sea (Yi, Zij) i=1,2,…,n y j=1,2 donde para el i-ésimo par y modelo j (Mj), Yi es el
valor observado de la variable de interés y Zij el correspondiente valor predicho
mediante el modelo j. Usando los conjuntos (Yi, Zi1) y (Yi, Zi2) para i=1,2,…,n se pueden
48

obtener y que son respectivamente los errores críticos basados en el
planteamiento alternativo para los modelos M1 y M2. Si el modelador o usuario del
modelo especifica un valor de e tal que para alguna (j=1,2) donde es un
valor de la estadística
**1e **
2e
**jee ≥ **
je
21
2',n
n
1i
2ij
21,1
**j
DE
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
χ
χ=
α
=α− ∑
para el modelo j entonces dicho modelo es aceptable. Así, en la comparación de dos
modelos, el modelo con el menor error crítico será el mejor modelo. Por ejemplo, si
entonces el mejor modelo es M1 (Figura 5). Por supuesto que en la
determinación de se emplean los mismos valores de α y α’. Este procedimiento
permite comparar m modelos (j=1,2,…,m) bajo las mismas consideraciones planteadas
para el caso de dos modelos.
**2
**1 eee <≤
**je
0
12
3
45
6
7
89
10
M1 M2
e**
Figura 5. Valores hipotéticos del error crítico (j=1, 2) para la variable Y por medio de
los modelos 1 y 2 (M1 y M2).
**je
49
4.3.7. Validación de modelos basada en el valor absoluto del error en presencia de sesgo constante
En la obtención de todos los resultados del procedimiento para determinar si un
modelo satisface los requerimientos de exactitud, el supuesto fue D~N(0, ), es decir,
que no hay sesgo en el modelo. El objetivo en esta sección es obtener un
procedimiento cuando el modelo presente sesgo en sus pronósticos Zi para el
correspondiente valor observado Yi.
2Dσ
Del supuesto D~N(0, ) se tiene que µD=E(D)=E(Y-Z)=E(Y)-Z=0, es decir,
E(Y)=Z la cual indica que la esperanza de la variable aleatoria de los datos observados
(Y) es igual al correspondiente valor predicho por el modelo (Z), y es en este sentido de
que se dice que el modelo no presenta sesgo.
2Dσ
Aunque en sus planteamientos Freese (1960), no indica explícitamente la
traducción de la exactitud requerida ( ) α−≥≤ 1eDP en 21,1
22D
eα−χ
≤σ , asume como indica
también Reynolds (1984) que D~N(0, ), es decir, que el modelo no presenta sesgo
[E(D)=0]. Reynolds (1984) no presentó un planteamiento basado en el procedimiento de
Freese cuando el modelo presenta sesgo.
2Dσ
Si el modelo presenta sesgo constante (SC) B, Freese (1960) aunque señala que
si el sesgo B es el mismo para todos los valores Yi (µi en su notación), y que su
magnitud puede estimarse por la media de las diferencias entre los valores observados
y los predichos
ZYn
)ZY(
n
DDB
n
1iii
n
1ii
−=−
===∑∑==
∧
no indica explícitamente las razones de utilizar DB =∧
y de la traducción de la exactitud
requerida en . 2Dσ
El uso de DB =∧
se debe a las siguientes razones: Si D1, D2,…,Dn es una
muestra aleatoria de D~ , es decir, Di~ ) i=1,2,…,n entonces ),(N 2DD σµ ,(NI 2
DD σµ
50
)Y(SZ)Y(SZZ)Y(E)ZY(E)D(E iiiiiiiii =−+=−=−=
B)Y(S)D(E iDi ==µ=
donde denota el sesgo de Yi. Por lo tanto, un estimador insesgado de )Y(S i BD =µ es
DBD ==µ∧∧
, y
)D(E)D(E)DD(E)BD(E iii −=−=−∧
0DDDD =µ−µ=µ−µ= (30)
ya que si D~ entonces ),(N 2DD σµ D ~ ⎟⎟
⎠
⎞⎜⎜⎝
⎛ σµ
n,N
2D
D [ver teorema 6 página 241 del capítulo VI
de Mood et al. (1974b)]. Por (30) DDBD ii −=−∧
es la corrección por SC o fijo B, el
mismo para todos los valores Yi.
Sea DDW ii −= entonces
( )n1ii1i1ii D...DDD...Dn1DDD ++++++−=− +−
n1ii1i1 Dn1...D
n1D
n11D
n1...D
n1
⎟⎠⎞
⎜⎝⎛−++⎟
⎠⎞
⎜⎝⎛−+⎟
⎠⎞
⎜⎝⎛ −+⎟
⎠⎞
⎜⎝⎛−++⎟
⎠⎞
⎜⎝⎛−= +−
es una combinación lineal de variables aleatorias independientes con distribución
y por el teorema 6.3 pp. 305-306 capítulo 6 de Wackerly (2002) [Sean Y1,
Y2,…,Yn variables aleatorias independientes que tienen distribución normal con E(Yi)=µi
y var(Yi)= i=1,2,…,n y a1,a2,…,an constantes. Si entonces
U~ ], Wi se distribuye normal con media
),(N 2DD σµ
2iσ ∑
=
=n
1iiiYaU
⎟⎟⎠
⎞⎜⎜⎝
⎛σµ ∑∑
==
n
1i
2i
2i
n
1iii a,aN 0)DD(E)W(E ii =−= [ver
resultado (30)] y varianza
)DD(Var)W(Var ii −=
⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛−++⎟
⎠⎞
⎜⎝⎛−+⎟
⎠⎞
⎜⎝⎛ −+⎟
⎠⎞
⎜⎝⎛−++⎟
⎠⎞
⎜⎝⎛−= +− n1ii1i1 D
n1...D
n1D
n11D
n1...D
n1Var
2D2
2D2
2D
22D2
2D2 n
1...n1
n11
n1...
n1
σ++σ+σ⎟⎠⎞
⎜⎝⎛ −+σ++σ=
51

)1n1(n
1nn
1nn
1n 2D2
2D
22D2 −+σ⎟
⎠⎞
⎜⎝⎛ −
=σ⎟⎠⎞
⎜⎝⎛ −
+σ⎟⎠⎞
⎜⎝⎛ −
=
2Dn
1nσ⎟⎠⎞
⎜⎝⎛ −
= n≥2
Por lo que, )DD(W ii −= ~ ⎟⎟⎠
⎞⎜⎜⎝
⎛σ⎟⎠⎞
⎜⎝⎛ − 2
Dn1n,0N . Así, para D~ se sigue que ),(N 2
DD σµ
)DD(W −= ~ ⎟⎟⎠
⎞⎜⎜⎝
⎛σ⎟⎠⎞
⎜⎝⎛ − 2
Dn1n,0N .
4.3.7.1. Pruebas estadísticas para la exactitud requerida
Sea W1,W2,…,Wn una muestra aleatoria de la distribución ⎟⎟⎠
⎞⎜⎜⎝
⎛σ⎟⎠⎞
⎜⎝⎛ −
=σ 2D
2W n
1n,0N
entonces por los mismos argumentos utilizados para la variable aleatoria D cuando
D~ , la exactitud requerida traducida en la varianza indicada en (10), las
hipótesis con el planteamiento original en (11), alternativo en (13) y la estadística de
prueba en (15) corresponden respectivamente a (31), (32), (32a) y (33):
),0(N 2Dσ
21,1
22W
eα−χ
≤σ (31)
donde los valores e y α especificados por el usuario del modelo satisfacen la exactitud
requerida ( ) α−≥≤ 1eDP que se traduce en 21,1
22D
eα−χ
≤σ una vez que es removido el SC
mediante la corrección DDi − .
21,1
22W
SCW0
e:Hα−χ
≤σ vs. 21,1
22W
SCW1
e:Hα−χ
>σ (32)
21,1
22W
'SCW0
e:Hα−χ
>σ vs. 21,1
22W
'SCW1
e:Hα−χ
≤σ (32a)
∑χ
=
χ
=σ
==
α−
=
α−
=∑∑
n
1i
2i2
21,1
n
1i2
1,1
2
2i
n
1i2W
2iSCW W
eeWWV
0
52

( ) ( ) ⎥⎦
⎤⎢⎣
⎡∑ −
χ=∑ −
χ=
=
α−
=
α−2n
1i
2i2
21,1
2n
1ii2
21,1 DnD
eDD
e~ (33) 2
1n−χ
La hipótesis nula para SC , se rechazará con un nivel de
significación α’ si o las cuales son pruebas de razón de
verosimilitudes generalizada de tamaño α’ [ver pp. 431-432 capítulo IX de Mood et al.
(1974c)]. es el valor de la estadística de prueba que se obtendría al usar la
información contenida en la muestra w1,w2,…,wn (
SCW0H o 'SCW
0H
2'1,1n
SCWcV α−−χ> 2
',1nSCWcV α−χ≤
SCWcV SCWV
ddw ii −= ) y los valores e y α
especificados por el modelador o usuario del modelo como se indicó arriba. Por lo tanto,
si no se rechaza o se rechaza con un nivel de significación α’ entonces el
modelo será considerado aceptable bajo los valores e, α.
SCW0H 'SCW
0H
Los resultados (31), (32), (32a) y (33) pueden formularse en (34), (35), (35a) y
(36) respectivamente cuando se considera D~ y el modelo presenta SC. Esto
se debe a que:
),(N 2DD σµ
21,1
22W
eα−χ
≤σ
21,1
22D
en
1nα−χ
≤σ⎟⎠⎞
⎜⎝⎛ −
21,1
22D
e1n
nα−χ
⎟⎠⎞
⎜⎝⎛
−≤σ (34)
donde e y α satisfacen ( ) α−≥≤− 1eDDP . El resultado (34), también puede obtenerse
con el mismo procedimiento empleado en la determinación del resultado (10). Así, si
D~ entonces ),(N 2DD σµ
)DD(W −= ~ ⎟⎟⎠
⎞⎜⎜⎝
⎛σ⎟⎠⎞
⎜⎝⎛ − 2
Dn1n,0N (a)
2Dn
1nDD
σ⎟⎠⎞
⎜⎝⎛ −
− ~N(0,1) (b)
53

( )2D
2
2D
2
2
2D n
1nW
n1nDD
n1nDD
σ⎟⎠⎞
⎜⎝⎛ −
=σ⎟⎠⎞
⎜⎝⎛ −
−=
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
σ⎟⎠⎞
⎜⎝⎛ −
− ~ (c) 21χ
( ) α−=χ≤χ=⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
χ≤σ⎟⎠⎞
⎜⎝⎛ − α−α− 1P
n1n
WP 21,1
21
21,1
2D
2
(d)
De ( ) α−≥≤ 1eWP se tiene que
( ) α−≥≤ 1eWP 22
( ) α−≥≤ 1eWP 22
α−≥⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
σ⎟⎠⎞
⎜⎝⎛ −
≤σ⎟⎠⎞
⎜⎝⎛ −
1
n1n
e
n1n
WP2D
2
2D
2
α−≥⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
σ⎟⎠⎞
⎜⎝⎛ −
≤χ 1
n1n
eP2D
221 (e)
Por lo tanto, de (d) y (e) se obtiene el resultado (34)
21,1
2D
2
n1n
eα−χ≥
σ⎟⎠⎞
⎜⎝⎛ −
21,1
2
2D 1
en
1n
α−χ≤
σ⎟⎠⎞
⎜⎝⎛ −
21,1
22D
e1n
nα−χ
⎟⎠⎞
⎜⎝⎛
−≤σ
El siguiente paso es probar la hipótesis con el planteamiento original o alternativo:
21,1
22D
SCD0
e1n
n:Hα−χ
⎟⎠⎞
⎜⎝⎛
−≤σ vs. 2
1,1
22D
SCD1
e1n
n:Hα−χ
⎟⎠⎞
⎜⎝⎛
−>σ (35)
54

21,1
22D
'SCD0
e1n
n:Hα−χ
⎟⎠⎞
⎜⎝⎛
−>σ vs. 2
1,1
22D
'SCD1
e1n
n:Hα−χ
⎟⎠⎞
⎜⎝⎛
−≤σ (35a)
Con D~ , el modelo presenta SC, e y α tales que satisfacen la exactitud
requerida
),(N 2DD σµ
( ) ( ) α−≥≤−=≤ 1eDDPeWP que se traduce en 21,1
22D
e1n
nα−χ
⎟⎠⎞
⎜⎝⎛
−≤σ , implican
que la estadística de prueba bajo ) verdadera es: SCD0H ( 'SCD
0H
( )∑= σ
−=
n
1i2D
2iSCD
0
DDV ~ 21n−χ donde 2
1,1
22D
e1n
n0
α−χ⎟⎠⎞
⎜⎝⎛
−=σ .
( ) ( )∑ −χ
⎟⎠⎞
⎜⎝⎛ −
=
χ⎟⎠⎞
⎜⎝⎛
−
−=
=
α−
=
α−
∑n
1i
2i2
21,1
n
1i2
1,1
2
2i DD
en1n
e1n
nDD
( ) ⎥⎦
⎤⎢⎣
⎡∑ −
χ⎟⎠⎞
⎜⎝⎛ −
==
α−2n
1i
2i2
21,1 DnD
en1n ~ (36) 2
1n−χ
SCD0H o se rechazará con un nivel de significación α’ si 'SCD
0H
( ) 2'1,1n
2n
1i
2i2
21,1SCD
c dnden
1nV α−−=
α− χ>⎥⎦
⎤⎢⎣
⎡∑ −
χ⎟⎠⎞
⎜⎝⎛ −
= o las cuales son pruebas de
razón de verosimilitudes generalizada de tamaño α’ [ver pp. 431-432 capítulo IX de
Mood et al. (1974c)]. Por lo tanto, si no se rechaza o se rechaza con un nivel
de significación α’ entonces el modelo será considerado aceptable bajo los valores e y
α.
2',1n
SCDcV α−χ≤
SCD0H 'SCD
0H
La distribución de puede obtenerse del teorema 8 pp. 243-245 capítulo VI
de Mood et al. (1974b) [Si X1, X2,…,Xn es una muestra aleatoria de la distribución
normal con media µ y varianza entonces
SCDV
2σ( )∑
= σ−n
1i2
2i XX ~ ]. Como Di~
entonces
21n−χ ),(NI 2
DD σµ
( )∑= σ
−n
1i2D
2i DD ~ . También Montgomery (2004d), señala que 2
1n−χ ( )∑=
−=n
1i
2i DDSS
es la suma de cuadrados corregida de las observaciones Di y si Di~ ) entonces ,(NI 2σµ
( )∑= σ
−=
σ
n
1i2
2i
2DDSS ~ . 2
1n−χ
55

Cuando el modelo presenta SC y D~ , coincidiendo con Freese (1960),
los valores e y α son tales que satisfacen la exactitud requerida
),(N 2DD σµ
( ) α−≥≤ 1eDP que se
traduce en 21,1
22D
eα−χ
≤σ una vez que es removido el sesgo, y bajo verdadera la
estadística de prueba se distribuye ji-cuadrada con n-1 g.l. Ahora, si el modelo
presenta SC, D~ , e y α son tales que satisfacen la exactitud requerida
SCW0H
SCWV
),(N 2DD σµ
( ) ( ) α−≥≤−=≤ 1eDDPeWP que se traduce en 21,1
22D
e1n
nα−χ
⎟⎠⎞
⎜⎝⎛
−≤σ , implica que bajo
verdadera la estadística de prueba a utilizar sería , la cual también se
distribuye ji-cuadrada con n-1 g.l.
SCD0H SCDV
4.3.8. Validación por intervalo de confianza empleando el error crítico en presencia de sesgo constante
Freese (1960), Rennie y Wiant (1978), Reynolds (1984) y Barrales et al. (2004)
no presentaron el error crítico cuando el modelo tiene SC o proporcional.
Con D~ y el modelo presenta SC, se tiene que ),(N 2DD σµ
)DD(W −= ~ ⎟⎟⎠
⎞⎜⎜⎝
⎛σ⎟⎠⎞
⎜⎝⎛ − 2
Dn1n,0N . Por los mismos argumentos empleados en la obtención
de los errores críticos E* y E** cuando el modelo no presenta sesgo [D~ ], los
errores críticos para el planteamiento original y alternativo después de remover el SC
corresponden respectivamente a:
),0(N 2Dσ
( ) ( )21
2'1,1n
2n
1i
2i
21,1
21
2'1,1n
n
1i
2i
21,1
21
2'1,1n
n
1i
2i
21,1
SCW
DnDDDWE
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
χ
⎥⎦
⎤⎢⎣
⎡∑ −χ
=
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
χ
−χ=
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
χ
χ=
α−−
=α−
α−−
=α−
α−−
=α−
∗∑∑
56

( ) ( )21
2',1n
2n
1i
2i
21,1
21
2',1n
n
1i
2i
21,1
21
2',1n
n
1i
2i
21,1
SCW
DnDDDWE
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
χ
⎥⎦
⎤⎢⎣
⎡∑ −χ
=
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
χ
−χ=
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
χ
χ=
α−
=α−
α−
=α−
α−
=α−
∗∗∑∑
Si el usuario del modelo especifica un valor de e tal que entonces
el modelo es considerado aceptable. Los valores e y α son tales que satisfacen la
exactitud requerida
∗≥ SCWee o ∗∗≥ SCWee
( ) α−≥≤ 1eDP que se traduce en 21,1
22D
eα−χ
≤σ una vez que es
removido el SC.
Si D~ , el modelo presenta SC, e y α tales que satisfacen la exactitud
requerida
),(N 2DD σµ
( ) ( ) α−≥≤−=≤ 1eDDPeWP que se traduce en 21,1
22D
e1n
nα−χ
⎟⎠⎞
⎜⎝⎛
−≤σ , entonces
el error crítico para el planteamiento alternativo puede obtenerse de la región de
rechazo de , es decir, 'SCD0H
2',1n
SCDcV α−χ≤
( ) 2',1n
n
1i
2i2
21,1 dd
en1n
α−=
α− χ≤∑ −χ
⎟⎠⎞
⎜⎝⎛ −
( ) 2',1n
n
1i
2i
21,1
2 1
dd
11n
neα−
=α− χ
≥∑ −
⎟⎠⎞
⎜⎝⎛
−χ
( )2
',1n
n
1i
2i
21,1
2dd
n1ne
α−
=α−
χ
∑ −χ⎟⎠⎞
⎜⎝⎛ −
≥
( ) 21
2',1n
n
1i
2i
21,1 dd
n1ne
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
χ
∑ −χ⎟⎠⎞
⎜⎝⎛ −
≥α−
=α−
(37)
Por lo tanto, de (37) el error crítico corresponde a
( ) 21
2',1n
n
1i
2i
21,1
SCD
DD
n1nE
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
χ
∑ −χ⎟⎠⎞
⎜⎝⎛ −
=α−
=α−
∗∗
57

Análogamente de puede determinarse 2'1,1n
SCDcV α−−χ>
( ) 21
2'1,1n
n
1i
2i
21,1
SCD
DD
n1nE
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
χ
∑ −χ⎟⎠⎞
⎜⎝⎛ −
=α−−
=α−
∗
Si el modelador o usuario del modelo especifica un valor de e tal que
entonces el modelo es considerado aceptable.
∗≥ SCDee o
∗∗≥ SCDee
El ICB del (1-α’)100% para con D~ y variable aleatoria pivote 2Dσ ),(N 2
DD σµ
( )2D
n
1i
2i
2D
DD)(H
σ
−=σ∑= ~ es 2
1n−χ
( ) ( )
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
χ
−
χ
−
α−
=
α−−
=∑∑
2
2',1n
n
1i
2i
2
2'1,1n
n
1i
2i DD
,DD
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
χ−
χ−
α−
α−−
2
2',1n
2D
2
2'1,1n
2D S)1n(,S)1n( (38)
y puede obtenerse de la misma manera como se determinó en páginas anteriores el
ICB del (1-α’)100% para con D~ . De (38) se tiene que 2Dσ ),0(N 2
Dσ
( ) ( )
'1DDDD
P 2
2',1n
n
1i
2i
2D2
2'1,1n
n
1i
2i
α−=
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
χ
−<σ<
χ
−
α−
=
α−−
=∑∑
( ) ( )'1
DD
n1n
n1n
DD
n1nP 2
2',1n
n
1i
2i
2D2
2'1,1n
n
1i
2i
α−=
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
χ
−⎟⎠⎞
⎜⎝⎛ −
<σ⎟⎠⎞
⎜⎝⎛ −
<χ
−⎟⎠⎞
⎜⎝⎛ −
α−
=
α−−
=∑∑
( ) ( )'1
DD
n1n
DD
n1nP 2
2',1n
n
1i
2i
2W2
2'1,1n
n
1i
2i
α−=
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
χ
−⎟⎠⎞
⎜⎝⎛ −
<σ<χ
−⎟⎠⎞
⎜⎝⎛ −
α−
=
α−−
=∑∑
58

Por lo que el ICB del (1-α’)100% para es: 2Wσ
( ) ( )
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
χ
−⎟⎠⎞
⎜⎝⎛ −
χ
−⎟⎠⎞
⎜⎝⎛ −
α−
=
α−−
=∑∑
2
2',1n
n
1i
2i
2
2'1,1n
n
1i
2i DD
n1n,
DD
n1n
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
χ−
⎟⎠⎞
⎜⎝⎛ −
χ−
⎟⎠⎞
⎜⎝⎛ −
α−
α−−
2
2',1n
2D
2
2'1,1n
2D S)1n(
n1n,S)1n(
n1n (39)
Considere el parámetro definido por SCε
( ) 21
21,1
2D
21
21,1
2WSC n
1n⎟⎟⎠
⎞⎜⎜⎝
⎛χσ⎟
⎠⎞
⎜⎝⎛ −
=χσ=ε α−α−
el cual es el cuantil 1-α de la distribución de DDW −= o equivalentemente ( )2SCε es el
cuantil 1-α de la distribución de ( )22 DDW −= ya que
⎟⎟⎠
⎞⎜⎜⎝
⎛χ≤
σ=α− α−
21,12
W
2WP1
[Si )DD(W −= ~ ⎟⎟⎠
⎞⎜⎜⎝
⎛σ⎟⎠⎞
⎜⎝⎛ − 2
Dn1n,0N entonces ( )
2D
2
2D
2
n1nDD
n1n
W
σ⎟⎠⎞
⎜⎝⎛ −
−=
σ⎟⎠⎞
⎜⎝⎛ −
~ ] 21χ
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
χ≤σ⎟⎠⎞
⎜⎝⎛ −
=α− α−2
1,12D
2
n1n
WP1
⎟⎟⎠
⎞⎜⎜⎝
⎛χσ⎟
⎠⎞
⎜⎝⎛ −
≤= α−2
1,12D
2
n1nWP
( )2SC
2 )(WP ε≤=
( )2SC
2 )(WP ε≤=
( ) ( )SCSC DDPWP ε≤−=ε≤=
59

Note que ( ) ( ) ε⎟⎠⎞
⎜⎝⎛ −
=χσ⎟⎠⎞
⎜⎝⎛ −
=⎟⎟⎠
⎞⎜⎜⎝
⎛χσ⎟
⎠⎞
⎜⎝⎛ −
=στ=ε α−α−
21
21
21,1
2D
21
21
21,1
2D
2DSC n
1nn
1nn
1n . Un ICB del (1-
α’)100% para a partir del ICB del (1-α’)100% para [resultado (38)] y con SCε 2Dσ
( ) SC2D ε=στ función monótona creciente, está dado por
( )
( )( )
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
χ
−τ<στ<
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
χ
−τ
α−
=
α−−
=∑∑
2
2',1n
n
1i
2i
2D2
2'1,1n
n
1i
2i DDDD
( ) ( ) 2
1
2
2',1n
21,1
n
1i
2i
SC
21
2
2'1,1n
21,1
n
1i
2i DD
n1n
DD
n1n
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
χ
χ−⎟⎠⎞
⎜⎝⎛ −
<ε<
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
χ
χ−⎟⎠⎞
⎜⎝⎛ −
α−
α−=
α−−
α−=
∑∑
∗∗∗ <ε< ISCSCISC EE
Por lo tanto, ( , ) es un ICB del (1-α’)100% para ∗ISCE ∗∗
ISCE21
21,1
2DSC n
1n⎟⎟⎠
⎞⎜⎜⎝
⎛χσ⎟
⎠⎞
⎜⎝⎛ −
=ε α− , el
cuantil 1-α de la distribución de DD − . son los límites de confianza inferior y
superior del intervalo para cuando el modelo presenta SC, y corresponden a los
errores críticos que se obtienen de las regiones de rechazo para las hipótesis nulas
∗ISCE y ∗∗
ISCE
SCε
21,1
22D
e1n
nα−χ
⎟⎠⎞
⎜⎝⎛
−≤σ y 2
1,1
22D
e1n
nα−χ
⎟⎠⎞
⎜⎝⎛
−>σ respectivamente, con la diferencia de que α’
corresponde a 2
'α en sus expresiones.
Pueden emplearse, con el error crítico correspondiente, el mismo tipo de gráficas
propuestas para visualizar la validación de un modelo en predicción de varias variables.
En la comparación de dos o más modelos en predicción del mismo sistema, se
emplearía el error crítico correspondiente según el modelo presente SC o no tenga
sesgo.
60
4.3.9. Validación de modelos basada en el valor absoluto del error en presencia de sesgo proporcional
Sea el caso cuando el modelo presenta sesgo en sus pronósticos zi para los
correspondientes valores observados yi y el sesgo es proporcional (SP), es decir, la
magnitud del sesgo (di=yi-zi) crece o decrece directamente con los valores predichos zi.
También para este caso Freese (1960), no indica explícitamente la traducción de la
exactitud requerida en la y las razones de emplear los residuos de una
regresión lineal de los valores yi sobre los valores zi (en su notación xi sobre µi) para la
corrección por SP.
2D)D(Var σ=
Sea Yi~ ) i=1,2,…,n donde S(Yi) denota el sesgo de Yi y es
proporcional como se indico. Así,
),Y(SZ(NI 2ii σ+
)Y(SZ)Y(E iii +=
)Y(SZ)Y(E iii =−
)Y(S)ZY(E iii =−
R)Y(S)D(E iDi i==µ=
Para el caso en que el sesgo (di=yi-zi) crece o decrece directamente con los valores
predichos (zi), un estimador de R)Y(S iDi==µ es . Esto se debe a
que para el conjunto (Di, Zi) i=1,2,…,n relacionados por y Var(Di)=σ2
con Di~ ) , es decir,
i10D ZRi
∧∧∧∧
β+β==µ
i10i Z)D(E β+β=
,Z(NI 2i10 σβ+β Rii10i ZD ε+β+β= donde 0)(E Ri =ε y
, se sigue que 2R
2Ri )(Var σ=σ=ε [ ])D(ED)Z(D iii10iRi −=β+β−=ε ~ . Si y
son los estimadores por mínimos cuadrados de los parámetros β0 y β1, entonces
. Por lo tanto, es la corrección por
SP (di crece o decrece directamente con zi). La esperanza de s
),0(NI 2Rσ
∧
β0
∧
β1
i10iD ZDRi
∧∧∧∧∧
β+β===µ )Z(DDDRD i10iiii
∧∧∧∧
β+β−=−=−
∧
− ii DD e
⎟⎠⎞
⎜⎝⎛ β+β−β+β=⎟
⎠⎞
⎜⎝⎛−=⎟
⎠⎞
⎜⎝⎛ −
∧∧∧∧
i10i10iiii ZEZDE)D(EDDE
61

i10i10 ZEEZ ⎟⎠⎞
⎜⎝⎛β−⎟
⎠⎞
⎜⎝⎛β−β+β=
∧∧
0ZZ i10i10 =β−β−β+β=
[Los estimadores por mínimos cuadrados y son estimadores insesgados de los
parámetros β0 y β1 del modelo. Ver pp. 19-20 de Montgomery et al. (2002c)].
∧
β0
∧
β1
Para el caso de que el modelo presente SP se requiere que los residuales
que son los estimaciones de los errores del modelo y que se obtienen de
, provengan de una distribución normal con media cero y varianza de los
errores constante, es decir, ~ ) . Cada valor di es corregido al restársele
, es decir, los residuales representan la corrección cuando el sesgo (di)
crece o decrece directamente con los valores zi.
∧
−= iiRi dde∧∧
−=ε iiRi DD∧
εRi ,0(NI 2R
2 σ=σ
∧
id∧
−= iiRi dde
Si ~ entonces Rε ),0(N 2R
2 σ=σ
2R
R
σ
ε ~N(0,1) [a]
2R
2R
2
2R
R
σε
=⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
σ
ε ~ [b] 21χ
( ) α−=χ≤χ=⎟⎟⎠
⎞⎜⎜⎝
⎛χ≤
σε
α−α− 1PP 21,1
21
21,12
R
2R [c]
Para e y α tales que satisfacen ( ) α−≥≤ε 1eP R se tiene que
( ) α−≥≤ε 1eP 22R
( )( ) α−≥≤ε 1eP 22R
α−≥⎟⎟⎠
⎞⎜⎜⎝
⎛σ
≤σε 1eP 2
R
2
2R
2R
α−≥⎟⎟⎠
⎞⎜⎜⎝
⎛σ
≤χ 1eP 2R
221 [d]
Por lo tanto, por [c] y [d] se tiene que
62
21,12
R
2eα−χ≥
σ
21,1
2
2R 1
e α−χ≤
σ
21,1
22R
eα−χ
≤σ
4.3.9.1. Pruebas estadísticas para la exactitud requerida
El siguiente paso es probar la hipótesis con el planteamiento original o alternativo:
21,1
22R
SP0
e:Hα−χ
≤σ vs. 21,1
22R
SP1
e:Hα−χ
>σ
21,1
22R
'SP0
e:Hα−χ
>σ vs. 21,1
22R
'SP1
e:Hα−χ
≤σ (40)
Note que con ~ ) , e y α tales que satisfacen la exactitud requerida Riε ,0(NI 2R
2 σ=σ
( ) α−≥≤ε 1eP R que se traduce en 21,1
22R
eα−χ
≤σ , coincide con los supuestos:
~ ) , e y α tales que satisfacen la exactitud requerida Riε ,0(NI 2R
2 σ=σ ( ) α−≥≤ 1eDP que
se traduce en 21,1
22D
eα−χ
≤σ una vez que es removido el SP mediante la corrección
. Así, con los últimos supuestos y bajo ) verdadera,
la estadística de prueba es:
)Z(DDD i10iiiRi
∧∧∧∧
β+β−=−=ε SP0H ( 'SP
0H
( )20
n
1i
2
ii
20
2SP
DD)2n(
1)2n()2n(V
σ
⎟⎠⎞
⎜⎝⎛ −
−−
=σ
σ−=
∑=
∧∧
~ donde 22n−χ
21,1
220
e
α−χ=σ
( )
21,1
2D
20
n
1i
2
Ri
20
n
1i
2
ii
eSCE
DD
α−
=
∧
=
∧
χ
=σ
⎟⎠⎞
⎜⎝⎛ε
=σ
⎟⎠⎞
⎜⎝⎛ −
=∑∑
63

( ) ( )D2
21,1
D2
21,1 CME)2n(
eSCE
e−
χ=
χ= α−α− ~ (41) 2
2n−χ
donde (SCE)D y 2n)SCE()CME( D
D −= corresponden respectivamente a la suma de
cuadrados del error y al cuadrado medio del error cuando la variable dependiente es D
con variable regresora Z, es decir, del modelo Rii10i ZD ε+β+β= con ~ .
La distribución de
Riε ),0(NI 2R
2 σ=σ
( )2R
2)2n(σ
σ−∧
puede consultarse en el Apéndice C (C.3.2) pp. 537-538
de Montgomery et al. (2002d), en las pp. 487-494 del capítulo X de Mood et al. (1974e)
o en las pp. 204-205 del capítulo 6 de Graybill (1976). SP0H o se rechazará con un nivel de significación α’ si o
, donde es el valor de la estadística de prueba que se obtendría al usar
la información de la muestra (Di, Zi) i=1,2,…,n. Por lo tanto, si no se rechaza o
se rechaza con un nivel de significación α’ entonces el modelo será considerado
aceptable bajo los valores e y α.
'SP0H 2
'1,2nSPcV α−−χ>
2',2n
SPcV α−χ≤ SP
cV
SP0H
'SP0H
Si el modelo presenta SP, Freese (1960) en la determinación de la estadística de
prueba ( ), utilizó SPV 21,1
22 e
α−χ≤σ para la exactitud requerida ( ) α−≥≤ 1eDP que se
traduce precisamente en 21,1
22 e
α−χ≤σ una vez que es removido el sesgo, la cual coincide
con los supuestos ~ ) , e y α tales que satisfacen Riε ,0(NI 2R
2 σ=σ ( ) α−≥≤ε 1eP R .
Note que para este caso (SCE)D es la suma de cuadrados del error del modelo
estimado . Freese (1960) señala que si el modelo presenta SP, es decir, la
magnitud del sesgo (en su notación di=xi-µi) crece o decrece directamente con los
valores reales (en su notación µi), la estadística de prueba con Xi~ es
i10i ZD∧∧∧
β+β=
),(N 2i σµ
2SCEσ
~ donde la SCE se obtiene del modelo estimado . Por los 22n−χ i10iX µβ+β=
∧∧∧
64

resultados obtenidos en esta sección, la SCE corresponde a la obtenida del modelo
estimado (en su notación). Si se emplea la SCE del modelo estimado
debe tomarse en cuenta lo siguiente:
i1101iD µβ+β=∧∧∧
i10iX µβ+β=∧∧∧
ii1101iii XD ε+µβ+β=µ−=
iii1101iX ε+µ+µβ+β=
ii1101i )1(X ε+µ+β+β=
Por lo que , 010 β=β 1111 +β=β y la SCE al emplear como variable dependiente Xi con
variable regresora µi corresponde al modelo estimado . i110i 1X µ⎟⎠⎞
⎜⎝⎛ +β+β=
∧∧∧
4.3.10. Validación por intervalo de confianza empleando el error crítico en presencia de sesgo proporcional
Freese (1960), Rennie y Wiant (1978), Reynolds (1984) y Barrales et al. (2004)
no presentaron el error crítico cuando el modelo tiene SC o SP.
Si la magnitud del sesgo (di=yi-zi) crece o decrece directamente con los valores
predichos (zi) y se cumple el supuesto Riε ~ ) entonces por los mismos
argumentos empleados en la obtención de los errores críticos E* y E** cuando el
modelo no presenta sesgo [D~ ], los errores críticos después de remover el SP
corresponden respectivamente a:
,0(NI 2R
2 σ=σ
),0(N 2Dσ
( ) ( ) 21
2'1,2n
D2
1,121
2'1,2n
D2
1,1
21
2'1,2n
n
1i
2
ii2
1,1
SP
CME)2n(SCEDDE ⎟
⎟⎠
⎞⎜⎜⎝
⎛
χ−χ
=⎟⎟⎠
⎞⎜⎜⎝
⎛
χχ
=
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
χ
⎟⎠⎞
⎜⎝⎛ −χ
=α−−
α−
α−−
α−
α−−
=
∧
α−∗
∑
( ) ( ) 21
2',2n
D2
1,121
2',2n
D2
1,1
21
2',2n
n
1i
2
ii2
1,1
SP
CME)2n(SCEDDE ⎟
⎟⎠
⎞⎜⎜⎝
⎛
χ−χ
=⎟⎟⎠
⎞⎜⎜⎝
⎛
χχ
=
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
χ
⎟⎠⎞
⎜⎝⎛ −χ
=α−
α−
α−
α−
α−
=
∧
α−∗∗
∑
65

donde .y denotan los errores críticos basados en el planteamiento original y
alternativo respectivamente cuando el modelo presenta SP. Si el usuario del modelo
especifica un valor de e tal que entonces el modelo es considerado
aceptable. Los valores e y α son tales que satisfacen la exactitud requerida
∗SPE ∗∗
SPE
∗≥ SPee o ∗∗≥ SPee
( ) α−≥≤ 1eDP que se traduce en 21,1
22D
eα−χ
≤σ una vez que es removido el SP mediante
la corrección . )Z(DDD i10iiiRi
∧∧∧∧
β+β−=−=ε
El ICB del (1-α’)100% para con 2Rσ Riε ~ ) y variable aleatoria pivote ,0(NI 2
R2 σ=σ
( )2R
D2R
n
1i
2
ii
2R
22D
)SCE(DD
)2n()(Hσ
=σ
⎟⎠⎞
⎜⎝⎛ −
=σ
σ−=σ
∑=
∧∧
~ es 22n−χ
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
χχ α−
α−−
2
2',2n
D2
2'1,2n
D )SCE(,)SCE(
2
2',2n
D2R2
2'1,2n
D )SCE()SCE(α
−α
−−χ
<σ<χ
(42)
y puede obtenerse de la misma manera como se determinó el resultado (24), el ICB del
(1-α’)100% para con D~ . 2Dσ ),0(N 2
Dσ
Considere el parámetro SPε definido por
( )21
21,1
2RSP α−χσ=ε
el cual corresponde al cuantil 1-α de la distribución de Rε o equivalentemente ( )2SPε es
el cuantil 1-α de la distribución de ya que 2Rε
⎟⎟⎠
⎞⎜⎜⎝
⎛χ≤
σε
=α− α−2
1,12R
2RP1
[Si ~ entonces Rε ),0(N 2R
2 σ=σ2R
R
σ
ε ~N(0,1) y 2R
2R
2
2R
R
σε
=⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
σ
ε ~ ] 21χ
( )21,1
2R
2RP1 α−χσ≤ε=α−
66

( )2SP
2RP ε≤ε=
( )2SP
2R ||P ε≤ε=
( )SPR ||P ε≤ε=
Un ICB del (1-α’)100% para SPε a partir del ICB del (1-α’)100% para con 2Rσ
( ) ( ) SP21
21,1
2R
2R ε=χσ=στ α− función monótona creciente, está dado por
( )⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
χτ<στ<
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
χτ
α−
α−−
2
2',2n
D2R2
2'1,2n
D )SCE()SCE(
2
2',2n
D2
1,1SP2
2'1,2n
D2
1,1 )SCE()SCE(
α−
α−
α−−
α−
χχ
<ε<χ
χ
∗∗∗ <ε< ISPSPISP EE
Por lo tanto, ( ) es un ICB del (1-α’)100% para ∗ISPE , ∗∗
ISPE ( )21
21,1
2RSP α−χσ=ε , el cuantil 1-α
de la distribución de Rε . son los límites de confianza inferior y superior del
intervalo para cuando el modelo presenta SP y corresponden a los errores críticos
que se obtienen de las regiones de rechazo para las hipótesis nulas
∗ISPE y ∗∗
ISPE
SPε
21,1
22D
eα−χ
≤σ y
21,1
22D
eα−χ
>σ respectivamente, con la diferencia de que α’ corresponde a 2
'α en sus
expresiones. Para distinguirlos se utilizó la notación , de modo que
denota al error crítico obtenido de la región de rechazo de la prueba estadística y l
error crítico empleado en el ICB. La diferencia entre es que en el
denominador se tienen respectivamente y
∗∗SPE y ∗∗
ISPE ∗∗SPE
∗∗ISPE e
∗SPE y ∗
ISPE
2'1,2n α−−χ 2
2'1,2n α
−−χ . Para la diferencia
se debe a que en el denominador tienen respectivamente y
∗∗SPE y ∗∗
ISPE
2',2n α−χ 2
2',2n α
−χ .
67
Pueden utilizarse, con el error crítico correspondiente, el mismo tipo de gráficas
propuestas para visualizar la validación de un modelo en predicción de varias variables.
En la comparación de dos o más modelos en predicción del mismo sistema, se
emplearía el error crítico correspondiente según el modelo presente sesgo proporcional,
constante o no tenga sesgo.
4.3.11. Análisis exploratorio e identificación del sesgo
Un análisis gráfico exploratorio de los valores predichos contra los observados y
de los predichos contra el sesgo, resulta fundamental para visualizar la exactitud,
precisión e identificación del tipo de sesgo.
Similarmente al procedimiento empleado por Barrales et al. (2004) para
identificar la presencia de sesgo, éste puede identificarse por la magnitud de DB =∧
y
por la forma en que se distribuyen los puntos provenientes de graficar en un plano de
coordenadas los puntos (zi, di) i=1,2,…,n. El SC es reconocido por un valor de DB =∧
muy diferente de cero y al graficar los puntos (zi, di) se forme una banda horizontal
centrada alrededor de D , con una distribución sistemática a ser positivos o negativos
(puntos arriba y debajo de la recta dd = ). El SP es reconocido cuando los puntos del
gráfico formen una banda con una tendencia lineal positiva o negativa.
Adicionalmente para verificar que D es “muy diferente de cero”, con D distribuida
aproximadamente normal, puede calcularse un ICB del (1-α)100% para la E(D):
n
StD)D(En
StD D
21,1n
D
21,1n ⎟⎟
⎠
⎞⎜⎜⎝
⎛+<<⎟⎟
⎠
⎞⎜⎜⎝
⎛− α
−−α
−−
donde n
DD
n
1ii∑
== , ( )
1n
DDS
n
1i
2i
2D −
−=∑= y
21,1n
t α−−
es el cuantil 2
1 α− de la distribución t con n-
1 g.l. ⎥⎥⎦
⎤
⎢⎢⎣
⎡ α−=⎟⎟
⎠
⎞⎜⎜⎝
⎛≤ α
−−− 2
1ttP2
1,1n1n .
Un análisis de regresión lineal simple del sesgo sobre los simulados
( ), contribuiría a determinar SP de una manera más objetiva en cuanto Rii10i ZD ε+β+β=
68

a la percepción de que los puntos (zi, di) del gráfico de dispersión formen una banda
con una tendencia lineal positiva o negativa.
69

5. RESULTADOS Y DISCUSIÓN
Una vez expuestos y justificados los desarrollos estadísticos para la validación
de modelos en el capítulo anterior, es este capítulo se presenta y discute la
metodología para aplicar el procedimiento de Freese con sus modificaciones y
extensiones, así como un ejemplo de su aplicación a la validación del modelo Wakax
POS en predicción de la ganancia de peso promedio por día. Adicionalmente se
presenta la validación para la predicción de la materia seca, ácidos grasos volátiles,
acetato, propionato y butirato en el Rumen y Ciego. Esta validación se hizo por medio
de métodos gráficos y de medidas basadas en la comparación entre los valores
observados y los predichos.
5.1. Procedimientos estadísticos para la validación de modelos basados en el planteamiento de Freese
La validación de modelos mecanísticos basada en: (i) el procedimiento original
de Freese (1960), (ii) los planteamientos de Rennie y Wiant (1978), Reynolds (1984), y
(iii) las modificaciones y extensiones presentadas en este trabajo, constituyen un
método estadístico formado por pruebas de hipótesis e intervalos de confianza, las
cuales representan una alternativa inferencial para determinar si las salidas del modelo
están suficientemente próximas a los valores observados del sistema real, es decir,
cuán bien el modelo se comporta en predicción del sistema. Coincidiendo con Barrales
et al. (2004), estos procedimientos inferenciales permiten determinar cuán bien un
modelo se comporta en predecir los valores observados del sistema real, así mismo,
permiten estudiar datos provenientes de modelos que presenten o no sesgo en sus
pronósticos, y donde el máximo error admisible es expresado en las mismas unidades
del valor real.
La validación de modelos mediante el planteamiento de Freese (1960) y las
extensiones presentadas en este trabajo no requieren el supuesto de que Y se
relacione linealmente con Z, además de que no es necesario para la comparación entre
Y y Z. Adicionalmente, no se ha reportado con regresión una prueba estadística para la
70

exactitud requerida ( )( α−≥≤ 1eDP ) por el modelador o usuario del modelo en
presencia o no de SC o SP.
5.2. Validación de modelos basada en el valor absoluto del error en ausencia de sesgo
Freese (1960), no indicó explícitamente la traducción de la exactitud requerida
( ) α−≥≤ 1eDP en 21,1
22D
eα−χ
≤σ , aunque asume como señala también Reynolds (1984)
que D~N(0, ). Es decir, el modelo presenta predicción insesgada 2Dσ ( 0D )=µ y la
precisión de los errores de predicción ( )2Dσ debe cumplir 2
1,1
22D
eα−χ
≤σ para que la
exactitud requerida se satisfaga y el modelo sea considerado aceptable o
suficientemente confiable para predicción.
5.2.1. Pruebas estadísticas para la exactitud requerida
El siguiente paso es probar las hipótesis con el planteamiento original 2
1,122
D0 e:H α−χ≤σ (Freese, 1960) o alternativo 21,1
22D
'0 e:H α−χ>σ (Reynolds, 1984). Si
D~N(0, ) la estadística de prueba bajo o verdadera es 2Dσ 0H '
0H ∑χ
==
α− n
1i
2i2
21,1 D
eV ~ . La
o se rechazará con un nivel de significación α’ si
2nχ
0H '0H 2
'1,n
n
1i
2i2
21,1
c de
V α−=
α− χ>∑χ
= o
, la cual corresponde a la prueba uniformemente más potente de tamaño α’.
Por lo tanto, si no se rechaza o se rechaza entonces el modelo es considerado
aceptable para predicción.
2',ncV αχ≤
0H '0H
Como el denominador de la estadística de prueba (V) es e2 y cuando
, se sigue que al incrementar los valores de e la estadística de prueba
disminuye conduciendo al rechazo de , por lo que el planteamiento alternativo es
2',n
2'1,n αα− χ>χ
5.0' <α'0H
71
más conservador en el sentido que permite un valor más grande de e para rechazar .
Reynolds (1984), señala que la prueba estadística de es más conservadora y
probablemente preferible al planteamiento original por más modeladores quienes
necesitan estar razonablemente seguros que el modelo cumplirá con sus
requerimientos de exactitud. El inconveniente de aplicar el planteamiento original es la
ambigüedad que se presenta al no rechazar a H0, ya que lo que se puede inferir es que
los datos no proporcionan suficiente evidencia para rechazarla, que los datos no
apoyan suficientemente a H1 y no que se acepte la declaración establecida en H0. Una
opción es presentar los resultados de la prueba a través del valor P para tener el nivel
de significación alcanzado en la prueba.
'0H
'0H
5.3. Validación de modelos basada en el porcentaje del error en ausencia de sesgo
El porcentaje de error 100YD que señala Reynolds (1984), no es estrictamente
un porcentaje y puede observarse en los valores posibles de i
i
yd . También bajo los
supuestos Y~N(Z, ) entonces D~N(0, ), la distribución de 2Yσ
2D
2Y σ=σ
YD tiene soporte
y no se distribuye normal. Por lo que, el “porcentaje de error” bajo los supuestos
señalados, es un enfoque no apropiado para medir exactitud en comparación con el
error absoluto |D|. En el caso del planteamiento original de Freese, si tiene sentido
hablar del “porcentaje de error”. Freese (1960) señala que si Xi~N(µi,σ2) entonces
1−ℜ
2n
1i
ii2
2ii
n
1i X)X(
∑∑
=
= ⎟⎠⎞
⎜⎝⎛
σµ−
=σ
µ−~ , donde Xi es el valor estimado por la nueva técnica para
la i-ésima unidad experimental, µi es el valor “verdadero o correcto” medido con la
técnica estándar para la i-ésima unidad experimental y σ2 es la exactitud requerida, es
decir,
2nχ
21,1
22 e
α−χ≤σ o 2
1,1
22 p
α−χ≤σ para el caso del error absoluto o del “porcentaje del valor
verdadero o correcto” respectivamente. Por lo tanto, la expresión del error como un
72

porcentaje del valor verdadero o correcto i
ii
i
i XDµµ−
=µ
~⎟⎟
⎠
⎞
⎜⎜
⎝
⎛⎥⎦
⎤⎢⎣
⎡µσ
2
i
,0N , tiene una
interpretación práctica como la exactitud requerida expresada en términos relativos del
valor real en vez de unidades absolutas del valor real.
De aquí en adelante la discusión de los resultados obtenidos sólo se relaciona a
cuando la exactitud requerida es expresada en unidades absolutas del valor real u
observado (Yi), es decir, con el valor absoluto del error ( )[ ]α−≥≤ 1eDP .
5.4. Validación por intervalo de confianza empleando el error crítico en ausencia de sesgo
En el planteamiento de Freese diferentes usuarios del modelo pueden tener
distintas necesidades de exactitud, la cual conduce a diferentes valores de e. Rennie y
Wiant (1978) y Ek y Monserud (1979), han tratado este problema calculando un error
máximo anticipado o error crítico (e*) el cual es el valor más pequeño de e que
conducirá al no rechazo de H0. Reynolds (1984), planteó un enfoque conservador y
determinó otro error crítico (e**) el cual es el valor más pequeño de e que conducirá al
rechazo de , y dio una interpretación del error crítico en términos de un ICB. '0H
Los errores críticos e* y e** se determinaron de la región de rechazo para H0 y
respectivamente, '0H
212
'1,n
n
1i
2i
21,1 d*ee ⎟⎟
⎠
⎞⎜⎜⎝
⎛χχ=< α−
=α− ∑ y
212
',n
n
1i
2i
21,1 d**ee ⎟⎟
⎠
⎞⎜⎜⎝
⎛χχ=≥ α
=α− ∑ . Por
lo tanto, si el modelador o usuario del modelo especifica un valor de e tal que e≥e* o
e≥e** entonces el modelo es considerado adecuado.
Rennie y Wiant (1978) y Reynolds (1984), no indicaron cual es la decisión
cuando e=e*, aunque al señalar que H0 se rechaza cuando entonces la
región de no rechazo es por lo que si e=e* la decisión será que el modelo es
adecuado.
2'1,ncV α−χ>
2'1,ncV α−χ≤
73

Análogamente al uso como un índice que le dieron al error crítico (E*) Ek y
Monserud (1979), el error crítico 21
2',n
n
1i
2i
21,1 D**E ⎟⎟
⎠
⎞⎜⎜⎝
⎛χχ= α
=α− ∑ también es una estadística
para comparar dos modelos, de tal manera que el modelo con el menor error crítico
(e**) es el mejor modelo.
Cuando los errores críticos e* o e** se utilizan para determinar si un modelo
satisface la exactitud requerida o para comparar dos o más modelos, la validación se
reduce a calcular el error máximo anticipado o error crítico, en donde el modelador
decide si el modelo es aceptable en predicción del sistema o que un modelo es mejor
que otro, al comparar el error crítico con la exactitud requerida (e) bajo los valores α y α’
especificados con anticipación. Lo anterior implica una buena comprensión del sistema
por parte del modelador o usuario del modelo para establecer la exactitud requerida.
Barrales et al. (2004), señalan que conceptualmente el error límite (e) y el error crítico
(e*) representan lo mismo, pero con la diferencia de que e se establece a priori por el
modelador, mientras que e* se calcula a posteriori.
Los errores críticos e* y e** son similares con excepción de sus denominadores
y respectivamente. Si 2'1,n α−χ 2
',n αχ 21' =α entonces y e*=e**. Si 2',n
2'1,n αα− χ=χ 21' <α
entonces e*<e**. Así, para un valor 21' <α y e tal que e*<e<e** se sigue que el modelo
es adecuado empleando la estadística E* y no lo es con la estadística E**. Esto indica
que la prueba estadística para y por consiguiente E** representan un planteamiento
más conservador que el planteamiento original de Freese (1960), en el sentido que
permite un valor más grande de e para inferir que el modelo es aceptable, la cual desde
el punto de vista de los modeladores o usuarios del modelo no es muy práctico, ya que
lo que se quiere es tener un valor de e suficientemente pequeño tal que cumpla
'0H
( ) α−≥≤ 1eDP con una probabilidad alta.
Reynolds (1984) determinó en términos de los errores críticos un ICB (E*, E**)
del (1-2α’)100% para el parámetro ( ) 2121,1
2D α−χσ=ε , el cuantil 1-α de la distribución de |D|
o equivalentemente ε2 corresponde al cuantil 1-α de la distribución de D2. Para ello
combinó dos intervalos de confianza unilaterales para ε. Si se reemplaza α’ por α’/2 en
74

las expresiones para E* y E** se obtiene ( , ) un ICB del (1-α’)100% para ε. El ICB
estimado
∗IE ∗∗
IE
( )**I
*I e,e significa que se tiene confianza en un (1-α’)100% que el punto de la
distribución |D| que tiene debajo el (1-α)100% de los errores absolutos está localizado
en alguna parte de dicho intervalo.
En este trabajo se presentó un procedimiento alternativo al Reynolds (1984) para
obtener el ICB ( ) del (1-α’)100% para ε. Con el supuesto D~N(0, ), ∗IE , ∗∗
IE 2Dσ
⎟⎟⎠
⎞⎜⎜⎝
⎛χχ α
=α
−=∑∑ 2
2',n
n
1i
2i
2
2'1,n
n
1i
2i D,D es un ICB del (1-α’)100% para . Del ICB del (1-α’)100%
para y de que la función
2Dσ
2Dσ ( ) ( ) ε=χσ=στ α−
21
21,1
2D
2D es monótona creciente, se sigue que:
( ) ⎟⎟⎠
⎞⎜⎜⎝
⎛χτ<στ<⎟⎟
⎠
⎞⎜⎜⎝
⎛χτ α
=α
−=∑∑ 2
2',n
n
1i
2i
2D
2
2'1,n
n
1i
2i DD
212
2',n
21,1
n
1i
2i
212
2'1,n
n
1i
21,1
2i DD ⎟⎟
⎠
⎞⎜⎜⎝
⎛χχ<ε<⎟⎟
⎠
⎞⎜⎜⎝
⎛χχ αα−
=α
−=α− ∑∑ o ∗∗∗ <ε< II EE
es el ICB del (1-α’)100% para ( ) ε=στ 2D (Mood et al., 1974d). Del análisis efectuado en
la obtención del resultado e*<e**, es necesario especificar un valor . 5.0' <α
Aunque para la mayoría de los usuarios de un modelo sea relativamente más
práctico y sencillo trabajar con un IC de que para un IC del cuantil 1-α de la
distribución de |D|, el ICB del (1-α’)100% de sólo indica la amplitud de los valores de
(un intervalo angosto implicaría que la distribución de D es menos variable), por lo
que para determinar si un modelo satisface la exactitud requerida, no es práctico y no
aporta suficiente información para dicho fin que el que proporciona los errores críticos o
el ICB ( ) del (1-α’)100% para ε, el cuantil 1-α de la distribución de |D|.
2Dσ
2Dσ
2Dσ
∗IE , ∗∗
IE
5.5. Planteamiento para validar un modelo en predicción de varias variables
Para el caso de tres variables de salida del modelo y en consecuencia tres pares
de conjuntos (Yjk, Zjk) j=1,2,3; k=1,2,…,nj, los mismos valores de exactitud (e y α), y la
misma α’ empleada en las inferencias para la determinación de o , un gráfico de *je **
je
75

líneas o barras con los letreros Y1, Y2 y Y3 en el eje de las abscisas y los valores o
en el eje de las ordenadas, permitiría visualizar para cuales variables el modelo es
más adecuado en predicción. Por ejemplo, si entonces el modelo sólo
es adecuado en predicción de la variable Y2. También se tendrá que el modelo es más
adecuado en predicción para Y2, luego para Y1 y finalmente para Y3. Del gráfico de los
ICB
*je
**je
*3
*1
*2 eeee <<≤
( )**Ij
*Ij e,e del (1-α’)100% para εj el cuantil 1-α de la distribución de |Dj|, el intervalo
con el menor valor implicaría que para la variable Yj el modelo es más adecuado ya
que contiene el cuantil 1-α de los valores |djk| antes que las otras variables, además de
que primero se cumpliría que para las restantes variables. En caso de tener
unidades de medida diferentes entre las variables, éstas pueden estandarizarse. El
procedimiento puede emplearse para validar un submodelo en predicción de varias
variables que serán consideradas entradas de otro submodelo.
**Ije
**Ijee ≥
5.6. Planteamiento para la comparación de dos o más modelos en predicción
Un problema frecuentemente dado en la construcción de un nuevo modelo M2,
para un sistema particular cuando ya se tiene un modelo M1, es decidir cuál modelo es
mejor en cuanto a la exactitud en predicción de los valores del sistema real (Y). Usando
los conjuntos (Yi, Zi1) y (Yi, Zi2) i=1,2,…,n y los mismos valores de α y α’, se pueden
obtener y que son respectivamente los errores críticos basados en el
planteamiento alternativo para los modelos M1 y M2. Análogamente al uso como un
índice para comparar dos modelos que le dieron al error crítico (E*) Ek y Monserud
(1979), el error crítico E** también puede emplearse para el mismo fin, de tal manera
que el modelo con el menor error crítico ( ) será considerado el mejor modelo. Si el
usuario del modelo especifica un valor de e tal que para alguna j (j=1,2)
entonces el modelo j es adecuado. Un gráfico de barras con los letreros M1 y M2 en el
eje de las abscisas y los valores en el eje de las ordenadas, visualizaría cual es el
mejor modelo en predicción del sistema real (Y). Este procedimiento permite comparar
**1e **
2e
**je
**jee ≥
**je
76

dos o más modelos bajo las mismas consideraciones planteadas para el caso de dos
modelos.
De la sección 5.4 se tiene que la comparación por medio del error crítico basado
en el planteamiento original (e*), exige menor error máximo admisible (e) de las
desviaciones |yi–zi|=|di|.
Mayer y Butler (1993) señalan que medidas de desviación como la media de los
errores absolutos (MAE), la media porcentual de los errores (MA%E) y la raíz cuadrada
de la media del cuadrado de los errores (RMSE), han sido utilizadas para comparar
diferentes modelos o técnicas. Analla (1998), propone el cuadrado medio del error
(CME) de la regresión de Y sobre Z para efectuar una validación y para la comparación
de dos o más modelos en predicción del sistema. Por su parte Kobayashi y Salam
(2000), proponen la media de las desviaciones al cuadrado (MSD) y sus componentes
para validar modelos y para comparar dos o más modelos. Para Tedeschi (2006), el uso
de solamente algunas técnicas puede ser engañoso en la elección de un modelo
apropiado para un escenario determinado. Por su parte Chilibroste (2002), indica que
es importante que al evaluar o comparar modelos, la consideración de los objetivos con
que han sido construidos sea especialmente considerada, a los efectos de poder
extraer conclusiones valederas.
5.7. Validación de modelos basada en el valor absoluto del error en presencia de sesgo constante
Reynolds (1984) no presentó un planteamiento basado en el procedimiento de
Freese cuando hay sesgo en el modelo, sino que propuso utilizar un ICB del (1-α’)100%
para la E(D) la cual sólo da una idea de la discrepancia entre el parámetro µD=E(D) y su
estimador D . También, propuso utilizar un intervalo de predicción cuando el usuario
está interesado en una predicción futura y un intervalo de tolerancia cuando el usuario
está interesado con la población de errores de un número grande de predicciones.
Menciona que estos dos intervalos no son muy robustos al supuesto de normalidad y
que pueden usarse en presencia o no de sesgo en el modelo.
77
Freese (1960) aunque señala que si el sesgo B es el mismo para todos los
valores Yi (µi en su notación), y que su magnitud puede estimarse por la media de las
diferencias entre los valores observados y los predichos ⎟⎠⎞
⎜⎝⎛ −==∧
ZYDB , no indicó
explícitamente las razones. Si Di~ ) entonces ,(NI 2DD σµ
B)Y(SZ)Y(SZZ)Y(E)D(E iiiiiii ==−+=−= , donde denota el sesgo de Yi. Como )Y(S i
DBD ==µ∧∧
y se sigue que 0)BD(E i =−∧
iii WDDBD =−=−∧
es la corrección por SC B.
Cuando D~ y el modelo presenta SC, coincidiendo con Freese (1960),
los valores e y α especificados por el usuario del modelo son tales que satisfacen la
exactitud requerida
),(N 2DD σµ
( ) α−≥≤ 1eDP que se traduce en 21,1
22D e α−χ≤σ , una vez que es
removido el SC mediante la corrección DDi − .
5.7.1. Pruebas estadísticas para la exactitud requerida
El siguiente paso es probar las hipótesis con el planteamiento original 2
1,122
WSCW0 e:H α−χ≤σ (Freese, 1960) o alternativo 2
1,122
W'SCW
0 e:H α−χ>σ . Si D~
entonces
),(N 2DD σµ
)DD(W −= ~ ( )( )2Dn]1n[,0N σ− , y la estadística de prueba bajo
verdadera es
SCW0H o 'SCW
0H
( ) ⎥⎦
⎤⎢⎣
⎡∑ −
χ=
=
α−2n
1i
2i2
21,1SCW DnD
eV ~ . La se rechazará con un
nivel de significación α’ si
21n−χ SCW
0H o 'SCW0H
( ) 2'1,1n
2n
1i
2i2
21,1SCW
c dnde
V α−−=
α− χ>⎥⎦
⎤⎢⎣
⎡∑ −
χ= o , las cuales
corresponden a pruebas de razón de verosimilitudes generalizada de tamaño α’ (Mood
et al., 1974c). Por lo tanto, si no se rechaza o se rechaza entonces el
modelo es considerado aceptable para predicción.
2',1n
SCWcV α−χ≤
SCW0H 'SCW
0H
Si el modelo presenta SC, D~ , e y α son tales que satisfacen la
exactitud requerida
),(N 2DD σµ
( ) ( ) α−≥≤−=≤ 1eDDPeWP que se traduce en 21,1
22D
e1n
nα−χ
⎟⎠⎞
⎜⎝⎛
−≤σ ,
entonces: (i) las hipótesis con el planteamiento original y alternativo son
78
21,1
22D
SCD0
e1n
n:Hα−χ
⎟⎠⎞
⎜⎝⎛
−≤σ y 2
1,1
22D
'SCD0
e1n
n:Hα−χ
⎟⎠⎞
⎜⎝⎛
−>σ , y (ii) la estadística de prueba bajo
) verdadera es SCD0H ( 'SCD
0H ( ) ⎥⎦
⎤⎢⎣
⎡∑ −
χ⎟⎠⎞
⎜⎝⎛ −
==
α−2n
1i
2i2
21,1SCD DnD
en1nV ~ . La e
rechazará con un nivel de significación α’ si
21n−χ SCD
0H o 'SCD0H s
( ) 2'1,1n
2n
1i
2i2
21,1SCD
c dnden
1nV α−−=
α− χ>⎥⎦
⎤⎢⎣
⎡∑ −
χ⎟⎠⎞
⎜⎝⎛ −
= o
[pruebas de razón de verosimilitudes generalizada de tamaño α’, Mood et
al. (1974c)]. Por lo tanto, si no se rechaza o se rechaza entonces el modelo
es considerado aceptable para predicción.
2',1n
SCDcV α−χ≤
SCD0H 'SCD
0H
Establecer e como el valor máximo admisible de las desviaciones |yi–zi|=|di|, es
quizás más práctico que como el valor máximo admisible de las desviaciones ddi − .
5.8. Validación por intervalo de confianza empleando el error crítico en presencia de sesgo constante
Freese (1960), Rennie y Wiant (1978), Reynolds (1984) y Barrales et al. (2004)
no presentaron el error crítico cuando el modelo tiene SC o SP en sus predicciones.
Cuando el modelo presenta SC y D~ , los errores críticos
correspondientes al planteamiento original y alternativo son:
),(N 2DD σµ
( )21
2'1,1n
2n
1i
2i
21,1
SCW
DnDE
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
χ
⎥⎦
⎤⎢⎣
⎡∑ −χ
=α−−
=α−
∗ y ( )
21
2',1n
2n
1i
2i
21,1
SCW
DnDE
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
χ
⎥⎦
⎤⎢⎣
⎡∑ −χ
=α−
=α−
∗∗
Si el modelador o usuario del modelo especifica un valor de e tal que o
entonces el modelo es considerado aceptable. Los valores e y α son tales que
satisfacen la exactitud requerida
∗≥ SCWee
∗∗≥ SCWee
( ) α−≥≤ 1eDP que se traduce en 21,1
22D
eα−χ
≤σ una vez
que es removido el SC mediante la corrección DDi − .
79

Si el modelo presenta SC, D~ , e y α son tales que satisfacen la
exactitud requerida
),(N 2DD σµ
( ) ( ) α−≥≤−=≤ 1eDDPeWP que se traduce en 21,1
22D
e1n
nα−χ
⎟⎠⎞
⎜⎝⎛
−≤σ ,
entonces los errores críticos con base al planteamiento original y alternativo son
( ) 21
2'1,1n
n
1i
2i
21,1
SCD
DD
n1nE
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
χ
∑ −χ⎟⎠⎞
⎜⎝⎛ −
=α−−
=α−
∗ y ( ) 2
1
2',1n
n
1i
2i
21,1
SCD
DD
n1nE
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
χ
∑ −χ⎟⎠⎞
⎜⎝⎛ −
=α−
=α−
∗∗ . Si el modelador o
usuario del modelo especifica un valor de e tal que o entonces el
modelo es considerado aceptable.
∗≥ SCDee ∗∗≥ SCDee
Reynolds (1984) y Barrales et al. (2004) no presentaron un ICB para
( ) ε⎟⎠⎞
⎜⎝⎛ −
=⎟⎟⎠
⎞⎜⎜⎝
⎛χσ⎟
⎠⎞
⎜⎝⎛ −
=χσ=ε α−α−
21
21
21,1
2D
21
21,1
2WSC n
1nn
1n , el cuantil 1-α de la distribución de
DDW −= o equivalentemente el cuantil 1-α de la distribución de D corregido por el
factor 21
n1n⎟⎠⎞
⎜⎝⎛ − . Un ICB del (1-α’)100% para SCε a partir del ICB del (1-α’)100% para
y con
2Dσ
( )2DSC στ=ε función monótona creciente es:
( ) ( ) 21
2
2',1n
21,1
n
1i
2i
SC
21
2
2'1,1n
21,1
n
1i
2i DD
n1n
DD
n1n
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
χ
χ−⎟⎠⎞
⎜⎝⎛ −
<ε<
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
χ
χ−⎟⎠⎞
⎜⎝⎛ −
α−
α−=
α−−
α−=
∑∑ o ∗∗∗ <ε< ISCSCISC EE
∗ISCE y corresponden a los errores críticos que se obtienen de las regiones de
rechazo para , con la diferencia de que α’ corresponde a
∗∗ISCE
SCD0H y 'SCD
0H 2'α en sus
expresiones. El intervalo de confianza estimado significa que se tiene confianza en un
(1-α’)100% que el punto de la distribución DDW −= que tiene debajo el (1-α)100% de
los errores absolutos está localizado en alguna parte en el intervalo ( )**ISC
*ISC e,e .
80

5.9. Validación de modelos basada en el valor absoluto del error en presencia de sesgo proporcional
También para este caso Reynolds (1984), no presentó un planteamiento basado
en el procedimiento de Freese cuando el modelo presenta SP en sus predicciones.
Freese (1960) no indicó explícitamente la traducción de la exactitud requerida
( ) α−≥≤ 1eDP en 21,1
22D e α−χ≤σ , así como las razones de emplear los residuos de una
regresión lineal de los valores yi sobre los valores zi (en su notación xi sobre µi) para la
corrección por SP. Con Yi~ ) i=1,2,…n se tiene que ),Y(SZ(NI 2ii σ+ R)Y(S)D(E ii == y si
el sesgo (di=yi-zi) crece o decrece directamente con los valores predichos (zi), un
estimador de R es . Esto se debe a que para el conjunto (Di, Zi)
i=1,2,…,n relacionados por
i10D ZRi
∧∧∧∧
β+β==µ
Rii10i ZD ε+β+β= donde Riε ~ ) , y los
estimadores por mínimos cuadrados de los parámetros β0 y β1 se sigue que
y . Por lo tanto, es la
corrección por SP.
,0(NI 2R
2 σ=σ∧
β0
∧
β1
i10iD ZDRi
∧∧∧∧∧
β+β===µ 0DDE ii =⎟⎠⎞
⎜⎝⎛ −
∧
)Z(DDD i10iiiRi
∧∧∧∧
β+β−=−=ε
Si el modelo presenta SP, Freese (1960) en la determinación de la estadística de
prueba utilizó, sin indicarlo explícitamente, 21,1
22 e α−χ≤σ para la exactitud requerida
( ) α−≥≤ 1eDP que se traduce precisamente en 21,1
22R e α−χ≤σ una vez que es
removido el SP mediante la corrección indicada antes, la cual coincide con los
supuestos ~ ) , e y α tales que satisfacen Riε ,0(NI 2Rσ ( ) α−≥≤ε 1eP R .
5.9.1. Pruebas estadísticas para la exactitud requerida
El siguiente paso es probar las hipótesis con el planteamiento original 2
1,122
RSP0 e:H α−χ≤σ (Freese, 1960) o alternativo 2
1,122
R'SP
0 e:H α−χ>σ . La estadística de
prueba con ~ ) y bajo o verdadera es Riε ,0(NI 2R
2 σ=σ SP0H 'SP
0H
( ) ( )D221,1
SP CME)2n(eV −χ= α− ~ . La se rechazará con un nivel de 22n−χ SP
0H o 'SP0H
81
significación α’ si ( ) ( ) 2'1,2nD
221,1
SPc CME)2n(eV α−−α− χ>−χ= o donde (CME)D
corresponde al cuadrado medio del error del modelo estimado . Por lo
tanto, si no se rechaza o se rechaza entonces el modelo es considerado
aceptable.
2',2n
SPcV α−χ≤
i10i ZD∧∧∧
β+β=
SP0H 'SP
0H
Freese (1960) señala que si el modelo presenta SP, es decir, la magnitud del
sesgo (en su notación di=xi-µi) crece o decrece directamente con los valores reales (en
su notación µi), la estadística de prueba con Xi~ es ),(N 2i σµ 2
SCEσ
~ donde la SCE
se obtiene del modelo estimado . Sin embargo, por los resultados
obtenidos la SCE corresponde al modelo estimado (en su notación),
donde el supuesto a verificar es que los residuales estimados on
independientes y provienen de una distribución normal con media cero y varianza
constante. Si se utiliza como variable dependiente Xi con variable regresora µi, la SCE
corresponde al modelo estimado .
22n−χ
i10iX µβ+β=∧∧∧
i1101iD µβ+β=∧∧∧
∧
−= iiRi dde s
i110i 1X µ⎟⎠⎞
⎜⎝⎛ +β+β=
∧∧∧
5.10. Validación por intervalo de confianza empleando el error crítico en presencia de sesgo proporcional
También para este caso Freese (1960), Rennie y Wiant (1978), Reynolds (1984)
y Barrales et al. (2004) no presentaron el error crítico cuando el modelo tiene SP en sus
pronósticos.
Si la magnitud del sesgo (di=yi-zi) crece o decrece directamente con los valores
predichos (zi) y se cumple el supuesto Riε ~ ) para el modelo estimado
, los errores críticos correspondientes al planteamiento original y
alternativo son
,0(NI 2R
2 σ=σ
i10i ZD∧∧∧
β+β=
( ) 21
2'1,2n
D2
1,1SP
CME)2n(E ⎟
⎟⎠
⎞⎜⎜⎝
⎛
χ−χ
=α−−
α−∗ y ( ) 2
1
2',2n
D2
1,1SP
CME)2n(E ⎟
⎟⎠
⎞⎜⎜⎝
⎛
χ−χ
=α−
α−∗∗ . Si el usuario
82

del modelo especifica un valor de e tal que o entonces el modelo es
considerado aceptable. Los valores e y α son tales que satisfacen la exactitud requerida
∗≥ SPee ∗∗≥ SPee
( ) α−≥≤ 1eDP que se traduce en 21,1
22D
eα−χ
≤σ una vez que es removido el SP mediante
la corrección . )Z(DDD i10iiiRi
∧∧∧∧
β+β−=−=ε
Reynolds (1984) y Barrales et al. (2004), no presentaron un ICB para
( )21
21,1
2RSP α−χσ=ε , el cuantil 1-α de la distribución de Rε . Un ICB del (1-α’)100% para SPε
a partir del ICB del (1-α’)100% para con 2Rσ ( ) ( ) SP
21
21,1
2R
2R ε=χσ=στ α− función monótona
creciente, está dado por 2
2',2n
D2
1,1SP2
2'1,2n
D2
1,1 )SCE()SCE(
α−
α−
α−−
α−
χχ
<ε<χ
χ, es decir, .
corresponden a los errores críticos con la diferencia de que α’ se
sustituye por α’/2. El intervalo de confianza estimado significa que se tiene confianza en
un (1-α’)100% que el punto de la distribución
∗∗∗ <ε< ISPSPISP EE
∗ISPE y ∗∗
ISPE ∗SPE y ∗∗
SPE
Rε que tiene debajo el (1-α)100% de los
errores absolutos está localizado en alguna parte en el intervalo ( )**ISP
*ISP e,e .
5.11. Planteamiento para validar un modelo en predicción de varias variables y para la comparación de dos o más modelos en predicción cuando el modelo presenta sesgo
Con los errores críticos para SC o SP, pueden emplearse el mismo tipo de
gráficas propuestas para visualizar la validación de un modelo en predicción de varias
variables cuando el modelo no presenta sesgo. En la comparación de dos o más
modelos en predicción del mismo sistema, se emplearía el error crítico correspondiente
según el modelo no presente sesgo, tenga sesgo constante o proporcional. El modelo
con el menor error crítico es el mejor modelo.
83

5.12. Sesgo y supuestos
En los procedimientos tratados se supone básicamente que D~ para el
caso en el que el modelo no presenta sesgo, y D~ cuando el modelo presenta
SC o SP, aunque para este último, el supuesto se traduce en ~ ) para el
modelo . En el procedimiento de validación cuando el modelo no
presenta sesgo, la suposición D~N(0, ) significa que el modelo presenta predicción
insesgada
),0(N 2Dσ
),(N 2DD σµ
Riε ,0(NI 2Rσ
Rii10i ZD ε+β+β=
2Dσ
( 0D = )µ y la precisión de los errores de predicción ( )2Dσ debe cumplir
21,1
22D
eα−χ
≤σ para que la exactitud requerida se satisfaga y modelo sea considerado
aceptable o suficientemente confiable para predicción.
Un análisis gráfico exploratorio de los valores predichos contra los observados y
de los predichos contra el sesgo, es básico para visualizar la exactitud, precisión e
identificación del tipo de sesgo y así, utilizar el procedimiento apropiado para determinar
si el modelo cumple con la exactitud requerida; por lo que en la aplicación de los
procedimientos, ya sea una prueba de hipótesis, un intervalo de confianza o el error
crítico, es necesario y fundamental establecer la exactitud requerida la cual implica una
comprensión del sistema por parte del modelador o usuario del modelo. Por su parte
Barrales et al. (2004), señalan que se requiere de un compromiso por parte del usuario,
que es decidir el nivel de exactitud asignado al modelo para su aceptación y
adicionalmente, un estudio de la información generada por el modelo, que le permita
seleccionar de las metodologías propuestas, aquella más adecuada a las
características de los datos.
Los procedimientos para validar modelos en presencia de SC o SP se aplican sin
que el modelo sea modificado en su estructura, sino que se remueve el tipo de sesgo a
los datos disponibles (zi, yi) a través de los valores del sesgo (di), es decir, DDi − es la
corrección por SC y es la corrección por SP. )Z(D i10i
∧∧
β+β−
Identificar el tipo de sesgo permitiría corregir al modelo en su estructura y
evaluación a través de cuestionar: (a) las hipótesis que se emplearon en la construcción
84

del modelo, (b) los datos experimentales utilizados en el ajuste de los parámetros, (c)
los métodos para el ajuste de los parámetros, (d) los parámetros tomados de la
literatura, (e) los datos experimentales empleados en la validación del modelo, (f) el
comportamiento en predicción del modelo para diferentes escenarios, y (g) el tipo de
corrección a utilizar en el modelo y en que etapa del diseño del modelo debe realizarse.
Bendell (1986), indica que sólo la validación no es suficiente y que hay que insistir para
un cambio de énfasis en la práctica de la modelación hacia el conocimiento de los datos
y al análisis exploratorio en la etapa de formulación del modelo. Para Barrales et al.
(2004), detectar en el modelo la presencia de un sesgo, ya sea constante o
proporcional, en función de los valores del sistema real, le permitiría al usuario
identificar en su modelo, la o las causas que lo producen, corregir deficiencias en el
comportamiento predictivo, que llevaría a disminuir las discrepancias entre lo estimado
por el modelo y los valores proporcionados por el escenario real, permitiendo que las
conclusiones que se obtengan acerca de la confiabilidad del modelo cumplan con los
objetivos establecidos.
La validación de modelos mediante el planteamiento de Freese (1960) y las
extensiones presentadas en este trabajo no requieren el supuesto de que Y se
relacione linealmente con Z, además de que no es necesario para la comparación entre
Y y Z. Por su parte Kobayashi y Salam (2000) indican que no es garantía el supuesto
de que Y se relacione linealmente con Z y que es innecesario para compararlos.
Reynolds (1984), señala que las predicciones de un simulador estocástico son
por lo general basadas sobre el promedio de varias corridas de simulación, y aplica el
procedimiento de validación para un ejemplo en donde el modelo no presenta sesgo en
sus pronósticos y es un simulador estocástico. Por lo que los procedimientos tratados
en este trabajo pueden utilizarse para modelos o simuladores estocásticos, de modo
que cada predicción sea generada como la media aritmética de varias corridas de
simulación. Así, la varianza de las predicciones promedio es menor que la varianza de
las observaciones usadas para generarlas, ya que si X1,X2,…,Xn es una muestra
aleatoria de una función de densidad de probabilidad f(.) la cual tiene media µ y
varianza finita σ2 entonces µ=)X(E y n)X(V 2σ= .
85
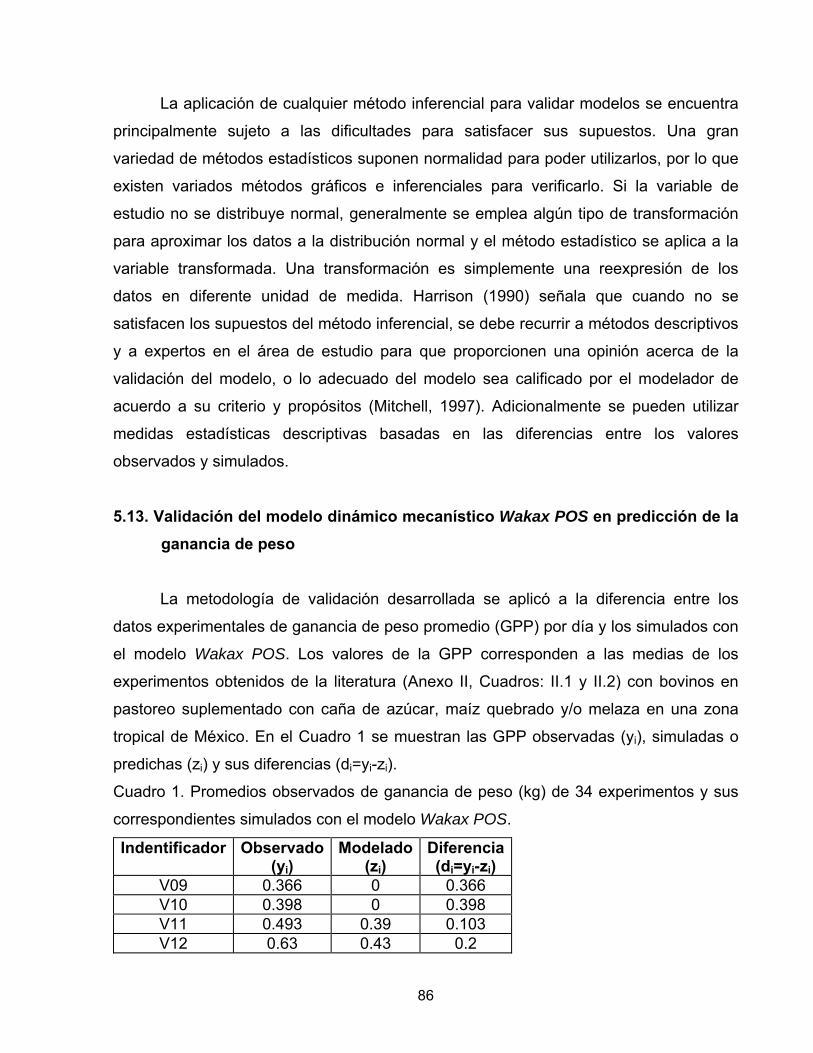
La aplicación de cualquier método inferencial para validar modelos se encuentra
principalmente sujeto a las dificultades para satisfacer sus supuestos. Una gran
variedad de métodos estadísticos suponen normalidad para poder utilizarlos, por lo que
existen variados métodos gráficos e inferenciales para verificarlo. Si la variable de
estudio no se distribuye normal, generalmente se emplea algún tipo de transformación
para aproximar los datos a la distribución normal y el método estadístico se aplica a la
variable transformada. Una transformación es simplemente una reexpresión de los
datos en diferente unidad de medida. Harrison (1990) señala que cuando no se
satisfacen los supuestos del método inferencial, se debe recurrir a métodos descriptivos
y a expertos en el área de estudio para que proporcionen una opinión acerca de la
validación del modelo, o lo adecuado del modelo sea calificado por el modelador de
acuerdo a su criterio y propósitos (Mitchell, 1997). Adicionalmente se pueden utilizar
medidas estadísticas descriptivas basadas en las diferencias entre los valores
observados y simulados.
5.13. Validación del modelo dinámico mecanístico Wakax POS en predicción de la ganancia de peso
La metodología de validación desarrollada se aplicó a la diferencia entre los
datos experimentales de ganancia de peso promedio (GPP) por día y los simulados con
el modelo Wakax POS. Los valores de la GPP corresponden a las medias de los
experimentos obtenidos de la literatura (Anexo II, Cuadros: II.1 y II.2) con bovinos en
pastoreo suplementado con caña de azúcar, maíz quebrado y/o melaza en una zona
tropical de México. En el Cuadro 1 se muestran las GPP observadas (yi), simuladas o
predichas (zi) y sus diferencias (di=yi-zi).
Cuadro 1. Promedios observados de ganancia de peso (kg) de 34 experimentos y sus
correspondientes simulados con el modelo Wakax POS.
Indentificador Observado (yi)
Modelado (zi)
Diferencia (di=yi-zi)
V09 0.366 0 0.366 V10 0.398 0 0.398 V11 0.493 0.39 0.103 V12 0.63 0.43 0.2
86

V16 0.43 0.13 0.3 V17 0.4 0.28 0.12 V18 0.49 0.23 0.26 V19 0.6 0.29 0.31 V20 0 0.28 -0.28 V21 0.43 0.09 0.34 V22 0.7 0.32 0.38 V23 0.69 0.33 0.36 V24 0.5 0.02 0.48 V25 0.68 0 0.68 V26 0.62 0 0.62 V27 0.52 0.26 0.26 V28 0.64 0 0.64 V29 0.45 0 0.45 V30 0.43 0.33 0.1 V31 0.76 0.39 0.37 V32 0.036 0 0.036 V33 0.019 0 0.019 V35 0.412 0 0.412 V36 0.052 0 0.052 V37 0.414 0 0.414 V38 0.05 0 0.05 V39 0.292 0.35 -0.058 V40 0.054 0 0.054 V41 0.308 0.39 -0.082 V42 0.054 0 0.054 V48 0.037 0 0.037 V49 0.051 0 0.051 V50 0.062 0 0.062 V51 0.364 0 0.364
La media y desviación estándar de las n=34 diferencias del Cuadro 1 son
kg233.0d = y . De observar las diferencias y el valor de la media se
espera que estadísticamente, es decir, el modelo presente algún tipo de
sesgo.
kg223.0SD =
0)D(E D ≠µ=
Para probar el supuesto D~ con varianza no especificada, se utilizaron
las pruebas de bondad de ajuste de Cramér-von Mises (W2=2.172, P<0.003) y
Anderson-Darling (A2=10.733, P<0.003). Ambas pruebas con nivel de significación del
5% (α=0.05) rechazan la hipótesis D~ . El siguiente paso es probar si
),0(N 2Dσ
),0(N 2Dσ
87

D~ con media y varianza no especificadas e identificar el tipo de sesgo
presente en el modelo. Los valores de las estadísticas de prueba de Cramér-von Mises,
Anderson-Darling, Shapiro-Wilks, Kolmogorov-Smirnov y sus correspondientes P-
valores son: W2=0.118, P=0.065; A2=0.655, P=0.084; W=0.961, P=0.254; KS=0.135,
P=0.115. Con éstas cuatro pruebas la hipótesis D~ no puede ser rechazada
con α=0.05 (P>0.05). La distribución normal ajustada tiene media y desviación estándar
estimadas
),(N 2DD σµ
),(N 2DD σµ
kg233.0d = y [D~kg223.0SD = [ ]( )2kg223.0,kg233.0N ].
La prueba t para la hipótesis 0)D(E D =µ= determinó que 0D ≠µ (P<0.05)
[t=6.092, g.l.=33, P=7.361 x 10-7], la cual sugiere que el modelo presenta algún tipo de
sesgo. Para determinar la presencia de SC o SP se obtuvo un gráfico de dispersión de
los valores pronosticados (zi) vs. el sesgo correspondiente (di), con la media de las
diferencias indicada (Figura 6). El gráfico de dispersión de los valores predichos (zi) vs.
los observados (yi) (Figura 7), permite visualizar que tan alejados están los puntos de la
recta y=z, y de posibles tendencias de los puntos respecto a dicha recta.
-0.46
-0.23
0
0.23
0.46
0.69
0.92
0 0.1 0.2 0.3 0.4 0.5
Zi
di
d
Figura 6. Relación entre el sesgo (di) y los valores simulados (zi) para la GPP.
233.0d = kg es la media de las diferencias (di).
88

0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8
Zi
Yi
y=z
Figura 7. Dispersión de los puntos (zi, yi) para la GPP. y=z es la recta que representa la
exactitud ideal.
La distribución de los puntos en la Figura 6 muestra un SC, ya que: (i) la
estimación de DB =∧
es muy diferente de cero, la cual fue verificado con la prueba t
( ), y (ii) los puntos (zi, di) forman prácticamente una banda horizontal centrada
alrededor de
0D ≠µ
d , con una distribución sistemática a ser positivos o negativos, es decir,
los puntos se localizan arriba y debajo de la recta dd = .
La distribución de los puntos en la Figura 7 muestra que éstos se encuentran
“alejados” de la exactitud ideal (y=z), aunque si se trasladan una cierta cantidad
perpendicularmente al eje de las abscisas, la exactitud mejorará. Lo anterior refuerza la
percepción de que el modelo presenta SC en sus pronósticos.
Debido a que el modelo presenta SC se procedió a aplicar los procedimientos de
validación correspondientes a este tipo de sesgo. En el Cuadro 2 se presentan los
valores de la corrección por SC ( )233.0dddw iii −=−= .
89

Cuadro 2. Diferencia entre los valores observados y predichos, y la corrección por
sesgo constante.
Indentificador Diferencia (di=yi-zi)
Corrección por SC ( )233.0dddw iii −=−=
V09 0.366 0.133 V10 0.398 0.165 V11 0.103 -0.13 V12 0.2 -0.033 V16 0.3 0.067 V17 0.12 -0.113 V18 0.26 0.027 V19 0.31 0.077 V20 -0.28 -0.513 V21 0.34 0.107 V22 0.38 0.147 V23 0.36 0.127 V24 0.48 0.247 V25 0.68 0.447 V26 0.62 0.387 V27 0.26 0.027 V28 0.64 0.407 V29 0.45 0.217 V30 0.1 -0.133 V31 0.37 0.137 V32 0.036 -0.197 V33 0.019 -0.214 V35 0.412 0.179 V36 0.052 -0.181 V37 0.414 0.181 V38 0.05 -0.183 V39 -0.058 -0.291 V40 0.054 -0.179 V41 -0.082 -0.315 V42 0.054 -0.179 V48 0.037 -0.196 V49 0.051 -0.182 V50 0.062 -0.171 V51 0.364 0.131
La media y desviación estándar de las n=34 correcciones por SC (wi) del Cuadro
2 son kg0w = y e indican que en promedio las desviaciones (di=yi-
zi) de cero son 0.223 (0 ± 0.223).
kg223.0SS WD ==
90
Para probar el supuesto ( )DDW −= ~ ) con varianza no especificada, se
utilizaron las pruebas de bondad de ajuste de Cramér-von Mises (W2=0.122, P>0.25) y
Anderson-Darling (A2=0.675, P>0.25). Ambas pruebas con α=0.05 no rechazan la
hipótesis W~ .
,0(N 2Wσ
),0(N 2Wσ
En este ejemplo se aplicó el método de calcular los errores máximos anticipados
o errores críticos del planteamiento original ( ) y alternativo ( ) del
procedimiento de Freese. Con este enfoque el modelador o usuario del modelo, decide
si el modelo es aceptable en predicción del sistema al comparar el error crítico con la
exactitud requerida (e) bajo los valores α y α’ especificados con anticipación.
Adicionalmente se calculó el ICB del (1-α’)100% para
∗SCWe ∗∗
SCWe
( ) 21
21,1
2D
21
21,1
2WSC n
1n⎟⎟⎠
⎞⎜⎜⎝
⎛χσ⎟
⎠⎞
⎜⎝⎛ −
=χσ=ε α−α− , el cuantil 1-α de la distribución de DDW −= .
Con α=α’=0.05 los errores críticos son:
( ) ( )kg365.0
)kg(641274.1dde
21
295.0,33
2295.0,1
21
2'1,1n
n
1i
2i
21,1
SCW =⎟⎟⎠
⎞⎜⎜⎝
⎛
χχ
=
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
χ
−χ=
α−−
=α−
∗∑
( ) ( )kg550.0
)kg(641274.1dde
21
205.0,33
2295.0,1
21
2',1n
n
1i
2i
21,1
SCW =⎟⎟⎠
⎞⎜⎜⎝
⎛
χχ
=
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
χ
−χ=
α−
=α−
∗∗∑
Por lo tanto, si el modelador o usuario del modelo especifica una exactitud e
( )( )95.0eDP ≥≤ tal que o entonces el modelo
será considerado suficientemente confiable en predicción del sistema con base en el
planteamiento original y alternativo respectivamente. Lo anterior implica una buena
comprensión del sistema por parte del modelador o usuario del modelo para establecer
la exactitud requerida (e).
kg365.0ee SCW =≥ ∗ kg550.0ee SCW =≥ ∗∗
El ICB del 1-α’=95% para SCε esta dado por:
91

( ) ( ) 21
2
2',1n
21,1
n
1i
2i
SC
21
2
2'1,1n
21,1
n
1i
2i DD
n1n
DD
n1n
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
χ
χ−⎟⎠⎞
⎜⎝⎛ −
<ε<
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
χ
χ−⎟⎠⎞
⎜⎝⎛ −
α−
α−=
α−−
α−=
∑∑
( ) ( ) 21
2025.0,33
295.0,1
2
SC
21
2975.0,33
295.0,1
2 )kg(641274.13433)kg(641274.1
3433
⎟⎟⎠
⎞⎜⎜⎝
⎛
χχ
⎟⎠⎞
⎜⎝⎛<ε<⎟
⎟⎠
⎞⎜⎜⎝
⎛
χχ
⎟⎠⎞
⎜⎝⎛
kg567.0kg347.0 SC <ε<
Por lo tanto, se tiene confianza en un 1-α’=95% de que el punto de la distribución
DDW −= que tiene debajo el 1-α=95% de los errores absolutos ( )dd − está
localizado en alguna parte en el intervalo (0.347 kg, 0.567 kg), es decir, con
probabilidad del 95% la magnitud del error ( )dd− no es más de 0.567 kg.
A pesar de las objeciones señaladas a la regresión para validar modelos (sección
3.4.2.), se procedió a efectuar esta metodología entre la variable dependiente Y y la
variable independiente Z, con la finalidad de establecer alguna similitud con los
resultados previamente obtenidos de la metodología de validación de modelos
mecanísticos basada en el procedimiento de Freese (1960).
El gráfico de dispersión de los valores predichos (zi) vs. observados (yi), junto
con la recta de regresión estimada y la recta y=z (Figura 8), permite visualizar que tan
alejados están los puntos de la recta y=z, de posibles tendencias de los puntos respecto
a dicha recta y de una percepción acerca de la precisión y exactitud basadas según
Tedeschi (2006) en el coeficiente de determinación (r2) como buen indicador de
precisión (un valor alto de r2 precisión alta), y en que los parámetros estimados del
intercepto y la pendiente son buenos indicadores de exactitud; simultáneamente
cercanos a cero y a uno respectivamente, la exactitud es más alta.
Del ajuste por mínimos cuadrados al modelo lineal Rii10i ZY ε+β+β= i=1,2,…,34
para describir la relación entre Y y Z, se obtuvo la ecuación del modelo ajustado o
estimado y=0.280+0.648z. Antes de dar una interpretación a dicho modelo se procedió
a verificar los supuestos básicos del método. Las pruebas de bondad de ajuste de
Cramér-von Mises (W2=0.190, P>0.25) y de Anderson-Darling (A2=1.109, P=0.24),
92

indican con α=0.05 que los errores estimados provienen de una distribución normal con
media cero y varianza constante. De los resultados del ANOVA (F1,32=7.64, P=0.009)
existe relación estadísticamente significativa (P<0.05) entre Y y Z. En la Figura 8 se
muestra la recta de regresión ajustada, el coeficiente de determinación y la recta de
exactitud ideal y=z.
y=0.2798+0.6475z R2=0.1927
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8
Zi
Yi
y=z
Figura 8. Relación entre los valores predichos (zi) y los observados (yi) para la GPP.
y=0.2798+0.6475z es la recta de regresión ajustada. y=z es la recta de exactitud ideal.
La distribución de los puntos en la Figura 7 y 8 muestran que éstos se
encuentran “alejados” de la exactitud ideal (y=z), aunque si se trasladan una cierta
cantidad perpendicularmente al eje de las abscisas, la exactitud mejorará. En la Figura
8 se observa que la recta de regresión estimada y=0.280+0.648z es “casi paralela” a la
recta y=z que representa la exactitud ideal. Las dos observaciones anteriores refuerzan
la percepción de que el modelo presenta SC en sus pronósticos. Esto concuerda con el
análisis exploratorio realizado en la Figura 6 la cual corresponde al gráfico
recomendado para identificar SC o SP.
Los IC estimados del 95% para los parámetros 0β (ordenada en el origen o
intercepto) y 1β (pendiente) son 379.0180.0 0 <β< y 125.1170.0 1 <β< . Estos indican
que con una probabilidad del 95% el intercepto es estadísticamente diferente de cero y
la pendiente es estadísticamente uno. El enfoque de intervalos de confianza para
93

determinar si el intercepto es cero y la pendiente uno es más informativo que las
pruebas t para el mismo propósito, ya que proporcionan la amplitud de los posibles
valores de dichos parámetros y no son tan categóricos como las pruebas de hipótesis.
De nuevo, con base en los IC estimados para los parámetros del modelo
, se refuerza la percepción de que el modelo presenta SC ya que el
intercepto es estadísticamente diferente de cero y la pendiente es estadísticamente
uno, es decir, la recta de regresión ajustada es “casi paralela” a la recta determinística
y=z que representa la exactitud ideal. Por su parte Gauch et al. (2003), señalan que
cuando estadísticamente la pendiente es igual a uno y el intercepto es diferente de
cero, se dice que la falta de exactitud es conocida como discrepancia por traslación; en
cambio Tedeschi (2006) le llama un caso inexacto y preciso. Para Flavelle (1992), si se
rechaza la hipótesis de pendiente igual a uno entonces hay algún sesgo en el modelo, y
si no se rechazan las hipótesis de pendiente uno e intercepto cero no significa que el
modelo esta libre de sesgo, únicamente que el análisis de regresión fracasa en
identificarlo. Mayer y Butler (1993), presentaron un ejemplo en donde no resultaron
significativas las pruebas t para las hipótesis de pendiente uno e intercepto cero y sin
embargo, la prueba F simultánea de pendiente uno e intercepto cero sí resultó
significativa. Por su parte Tedeschi (2006), presentó un ejemplo en donde las pruebas t
para pendiente uno e intercepto cero resultaron no significativa y significativa
respectivamente, la cual concordó con la significancia de la prueba F simultánea de
pendiente uno e intercepto cero.
Rii10i ZY ε+β+β=
En cuanto al coeficiente de determinación (r2=19.27%), llamado con frecuencia la
proporción de la variación explicada por el regresor (z); indica que el 19.27% de la
variabilidad de los valores observados (y) es explicada por el modelo de regresión
ajustado. Montgomery et al. (2002c), señalan respecto al coeficiente de determinación
en una regresión rectilínea que: (a) un valor grande de r2 puede ser tan sólo el resultado
de que z se haya variado en forma no realista dentro de un intervalo grande. La r2
puede ser pequeña porque el intervalo de las z sea demasiado pequeño como para
permitir detectar su relación con la variable dependiente (y), y (b) un valor grande de r2
no implica que la pendiente sea grande, además, r2 no mide la adecuación del modelo
lineal, porque con frecuencia r2 es grande aunque z y (y) no tengan relación lineal. Una
94

r2 grande no necesariamente implica que el modelo de regresión sea un predictor
exacto.
De los análisis estadísticos realizados se tiene que el modelo Wakax POS puede
usarse para predecir la GPP diaria de bovinos alimentados con caña de azúcar, maíz
quebrado y/o melaza en una zona tropical de México, aunque requerirá un ajuste con
base a la presencia de SC para incrementar la exactitud en sus pronósticos. Desde la
perspectiva de la regresión el modelo presenta discrepancia por traslación, es decir, es
un caso inexacto y preciso.
Determinar comportamientos extraños entre los pronósticos de un modelo y los
valores observados del sistema real, como por ejemplo el tipo de sesgo, es fundamental
para el mejoramiento del modelo a través de cuestionar desde su estructura hasta los
datos y métodos empleados en todos los procesos. Según McCarthy et al. (2001),
probar un modelo ayuda a identificar sus debilidades para que sea mejorado su
desempeño predictivo por medio de un proceso iterativo de desarrollo del modelo,
probarlo, modificarlo y probarlo nuevamente. Para Tedeschi (2006), la identificación y
aceptación de inexactitudes de un modelo es un paso hacia la evolución de un modelo
más exacto y de más confianza.
5.14. Validación del modelo dinámico mecanístico Wakax POS en predicción de la materia seca, ácidos grasos volátiles, acetato, propionato y butirato en el Rumen y Ciego
A continuación se validará el modelo Wakax POS en predicción de la materia
seca (DM), ácidos grasos volátiles (AGVs), acetato (Ac), propionato (Pr) y butirato (Bu)
en el Rumen y Ciego.
En el Cuadro II.3 del Anexo II se indican las fuentes e información de los datos
experimentales utilizados en la validación. En el Cuadro 3 se muestran los valores
observados (yi) y predichos (zi) para cada una de dichas variables en el Rumen y Ciego.
Debido al tamaño de muestra pequeño (Cuadro 3) [Rumen: n=3 DM, n=5 AGVs, y n=8
Ac, Pr, Bu; Ciego: n=3 DM, AGVs, Ac, Pr, Bu], se utilizaran métodos gráficos o visuales
de validación como los gráficos de dispersión de Z vs. Y junto con la recta y=z y el
95

gráfico propuesto por Mitchell (1997), en donde se grafica en el eje de las abscisas los
valores predichos, en el eje de las ordenadas las desviaciones (predicho menos
observado) y el porcentaje de puntos que caen dentro de un rango o precisión
aceptable con centro en cero, es usado como un criterio de adecuación del modelo. El
rango de aceptación lo establece el modelador de acuerdo a su criterio y propósitos.
Este gráfico es similar al que se emplea para la determinación de sesgo (zi vs. di), con
la diferencia de que en el eje de las ordenadas se gráfica el sesgo o desviaciones di=yi-
zi (observado menos predicho), la cual no causa ningún problema técnico en cuanto a
visualizar las desviaciones al comparar los observados con los predichos. Aquí se
utilizará la gráfica empleada para determinar sesgo. Adicionalmente se emplearán dos
medidas para efectuar validación que se basan en la comparación entre los valores
observados y los predichos. Estas serán la eficiencia de modelado (MEF) (Loague y
Green, 1991; Mayer y Butler, 1993; Tedeschi, 2006) y el coeficiente de determinación
del modelo (CD) (Tedeschi, 2006).
Cuadro 3. Valores de DM, AGVs, Ac, Pr y Bu observados y predichos con el modelo
Wakax POS en el Rumen y Ciego. Rumen
Ind DM(%) DM(%)P AGVs(mM) AGVs(mM)P Ac(%) Ac(%)P Pr(%) Pr(%)P Bu(%) Bu(%)P V32 59.9 60 21.9 35 17.9 5 V42 64 60 23 35 13 5 V43 14.3 6 149 40.960 58 60 28 35 14 5 V44 15.3 9 176 67.074 54 60 26 33 20 8 V45 17.3 11 161 94.341 56 60 27 31 17 9 V46 116.667 63.428 73.333 60 18.333 35 7.667 5 V47 157.333 61.440 76.667 60 17 35 6.333 5 V51 76.9 60 17.6 35 5.1 5
Ciego
Ind DM(%) DM(%)P AGVs(mM) AGVs(mM)P Ac(%) Ac(%)P Pr(%) Pr(%)P Bu(%) Bu(%)P V43 14 55 63 99.377 73 79 21 16 6 5 V44 10.5 74 82 137.103 71 78 22 16 7 6 V45 10 89 88 167.709 73 78 22 16 5 6 Ind denota Identificador. Una P al final de cada variable denota sus correspondientes predichos con el modelo Wakax POS.
En las Figuras 9 y 10 se describe la exactitud de las predicciones de Wakax POS
en el Rumen para DM, Ac, Pr, Bu y AGVs respecto a la recta y=z. Las Figuras 11 y 12
describen la relación entre el sesgo (di=yi-zi) y los valores simulados (zi) para dichas
96

variables en el Rumen. De proyectar los puntos de las Figuras 9 y 10 en cada uno de
los ejes y de observar la magnitud del sesgo para cada predicción en las Figuras 11 y
12, se tiene en términos generales que las predicciones para: (a) DM fueron menores a
los observados, (b) Ac fue única (60%) para valores de entre 54% y 76.9%, siendo
mejor para valores intermedios a dichos extremos, (c) Pr fueron mayores a los
observados, (d) Bu fueron mayores a los observados, siendo mejor para valores
observados bajos, y (e) AGVs fueron menores a los observados, quedando
prácticamente cada predicción a la mitad de cada observación del sistema real.
0
10
20
30
40
50
60
70
80
0 10 20 30 40 50 60 70 80
Zi
Yi
DM(%)
Ac(%)
Pr(%)
Bu(%)
y=z
Figura 9. Dispersión de los puntos (zi, yi) para DM, Ac, Pr y Bu en el Rumen. y=z es la
recta que representa la exactitud ideal.
97

0
20
4060
80
100
120
140160
180
200
0 20 40 60 80 100 120 140 160 180 200
Zi
Yi
y=z
Figura 10. Dispersión de los puntos (zi, yi) para AGVs(mM) en el Rumen. y=z es la recta
que representa la exactitud ideal.
-20
-15
-10
-5
0
5
10
15
20
0 10 20 30 40 50 60 70
Zi
DM(%)PAc(%)PPr(%)PBu(%)P
di
Figura 11. Relación entre el sesgo (di=yi-zi) y los valores simulados o predichos (zi) para
DM, Ac, Pr y Bu en el Rumen.
98

0
20
40
60
80
100
120
0 10 20 30 40 50 60 70 80 90 100
Zi
di
Figura 12. Relación entre el sesgo (di=yi-zi) y los valores simulados o predichos (zi) para
AGVs(mM) en el Rumen.
Del rango de las diferencias (di) para DM, Ac, Pr, Bu y AGVs en el Rumen, se
tiene que el sesgo (di=yi-zi) presenta mayor amplitud para los AGVs, seguido por Ac, Pr,
Bu y DM (Cuadro 4). Esto también puede observarse en las Figuras 11 y 12.
Cuadro 4. Medidas descriptivas de las diferencias entre los valores observados y
predichos para las DM, Ac, Pr, Bu y AGVs en el Rumen y Ciego.
Rumen Medidas descriptivas
DDM(%) DAc(%) DPr(%) DBu(%) DAGVs(mM)
n 3 8 8 8 5 Media ( d ) 6.967 4.85 -11.896 6.75 86.551 Desviación estándar ( dS )
1.155 9.449 5.373 4.837 25.274
Rango (máx-mín)
2 22.9 14 12.8 55.687
Ciego
Medidas descriptivas
DDM(%) DAc(%) DPr(%) DBu(%) DAGVs(mM)
n 3 3 3 3 3 Media ( d ) -61.167 -6 5.667 0.333 -57.063
99

Desviación estándar ( dS )
19.107 1 0.577 1.155 21.732
Rango (máx-mín)
38 2 1 2 43.332
Una D al inicio de cada variable denota sus diferencias (di=yi-zi).
En las Figuras 13 y 14 se describe la exactitud de las predicciones de Wakax
POS en el Ciego para DM, Ac, Pr, Bu y AGVs respecto a la recta y=z. Las Figuras 15 y
16 describen la relación entre el sesgo (di=yi-zi) y los valores simulados (zi) para dichas
variables en el Ciego. De proyectar los puntos de las Figuras 13 y 14 en cada uno de
los ejes y de observar la magnitud del sesgo para cada predicción en las Figuras 15 y
16, se tiene en términos generales que las predicciones para: (a) DM fueron bastante
mayores a los observados y decrecen conforme crecen los observados, (b) Ac y Pr
fueron relativamente exactos, siendo mayores para Ac y menores para Pr, (d) Bu fueron
bastante exactos a los observados, y (e) AGVs fueron mayores a los observados y
decrecen conforme decrecen los observados. En las Figuras 15 y 16 se observa sesgo
proporcional para DM y AGVs.
010
2030
405060
7080
90100
0 10 20 30 40 50 60 70 80 90 100
Zi
Yi
DM(%)Ac(%)Pr(%)Bu(%)
y=z
Figura 13. Dispersión de los puntos (zi, yi) para DM, Ac, Pr y Bu en el Ciego. y=z es la
recta que representa la exactitud ideal.
100

0
20
40
60
80
100
120
140
160
180
0 20 40 60 80 100 120 140 160 180
Zi
Yi
y=z
Figura 14. Dispersión de los puntos (zi, yi) para AGVs(mM) en el Ciego. y=z es la recta
que representa la exactitud ideal.
-90
-80
-70
-60
-50
-40
-30
-20
-10
0
10
20
0 10 20 30 40 50 60 70 80 90 100
Zi
di
DM(%)PAc(%)PPr(%)PBu(%)P
Figura 15. Relación entre el sesgo (di=yi-zi) y los valores simulados o predichos (zi) para
DM, Ac, Pr y Bu en el Ciego.
101
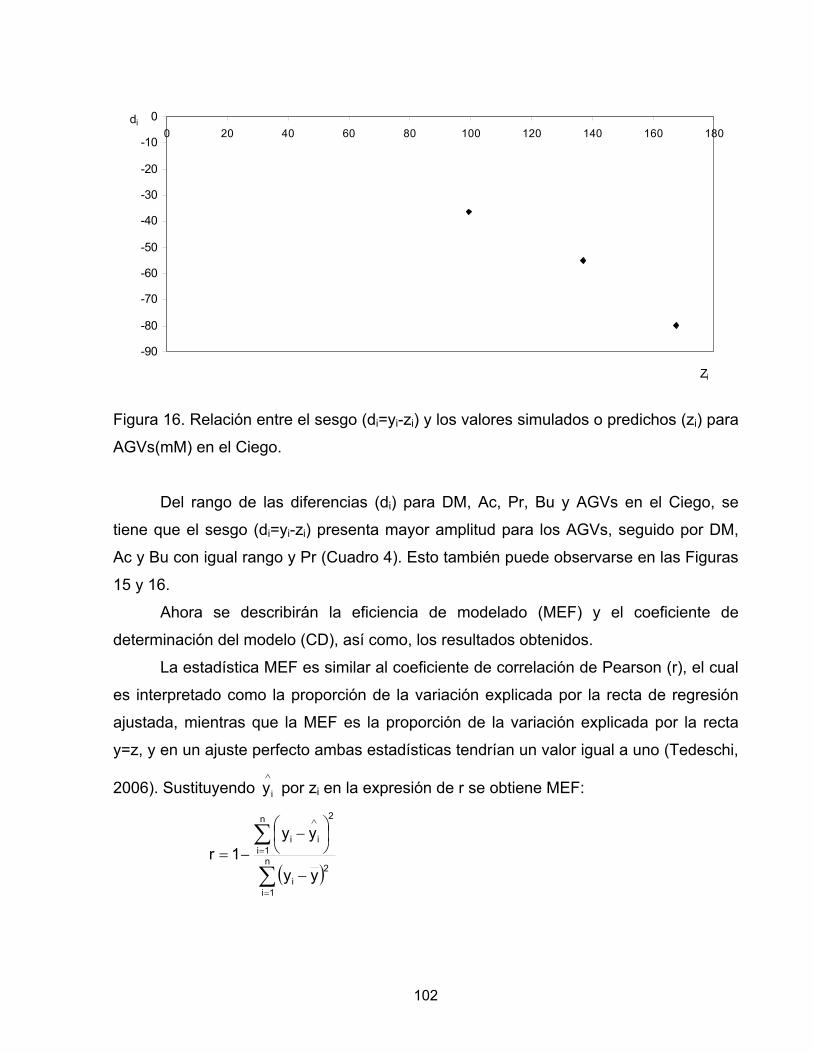
-90
-80
-70
-60
-50
-40
-30
-20
-10
00 20 40 60 80 100 120 140 160 180
Zi
di
Figura 16. Relación entre el sesgo (di=yi-zi) y los valores simulados o predichos (zi) para
AGVs(mM) en el Ciego.
Del rango de las diferencias (di) para DM, Ac, Pr, Bu y AGVs en el Ciego, se
tiene que el sesgo (di=yi-zi) presenta mayor amplitud para los AGVs, seguido por DM,
Ac y Bu con igual rango y Pr (Cuadro 4). Esto también puede observarse en las Figuras
15 y 16.
Ahora se describirán la eficiencia de modelado (MEF) y el coeficiente de
determinación del modelo (CD), así como, los resultados obtenidos.
La estadística MEF es similar al coeficiente de correlación de Pearson (r), el cual
es interpretado como la proporción de la variación explicada por la recta de regresión
ajustada, mientras que la MEF es la proporción de la variación explicada por la recta
y=z, y en un ajuste perfecto ambas estadísticas tendrían un valor igual a uno (Tedeschi,
2006). Sustituyendo por zi en la expresión de r se obtiene MEF: ∧
iy
( )∑
∑
=
=
∧
−
⎟⎠⎞
⎜⎝⎛ −
−= n
1i
2i
n
1i
2
ii
yy
yy1r
102

( )
( )
( )
( )∑
∑
∑
∑
=
=
=
=
−−=
−
−−= n
1i
2i
n
1i
2i
n
1i
2i
n
1i
2ii
yy
d1
yy
zy1MEF
donde yi es el i-ésimo valor observado, es el i-ésimo valor predicho por la recta de
regresión ajustada,
∧
iy
y es la media aritmética de los valores observados y zi es el i-ésimo
valor simulado o predicho por el modelo a validar. La cota superior de MEF es uno
(Loague y Green, 1991; Tedeschi, 2006), pero puede ser negativo (Loague y Green,
1991) y su cota inferior (teórica) es menos infinito (Tedeschi, 2006). Si MEF<0 los
valores predichos por el modelo son peor que sencillamente usar la media observada y
(Loague y Green, 1991). La MEF puede usarse como un buen indicador de la bondad
del ajuste entre los valores observados y simulados (Mayer y Butler, 1993).
El coeficiente de determinación del modelo (CD) es el cociente de la variación
total de los datos observados entre el total de las diferencias al cuadrado de los valores
simulados respecto a la media de los datos observados.
( )
( )∑
∑
=
=
−
−= n
1i
2i
n
1i
2i
yz
yyCD
En un ajuste perfecto CD valdría uno. La estadística CD indica la proporción de la
variación total de los datos observados explicada por los datos simulados (Loague y
Green, 1991). Un valor de CD cercano a uno indica una mejora en las predicciones del
modelo, CD>1 es un indicador de baja predicción y si CD<1 de sobrepredicción
(Tedeschi, 2006).
Debido a que todos los valores de MEF resultaron menores que cero (Cuadro 5),
se tiene que sería mejor usar la media de los valores observados para cada variable
que las predicciones por el modelo, ya sea en el Rumen o en el Ciego. Los dos valores
más grandes de MEF para las variables consideradas en el Rumen corresponden a Ac
(-0.301) y a Bu (-1.357), los cuales indican una mejor exactitud respecto a la recta y=z
para dichas variables (Figura 9). Para el Ciego, el valor más grande de MEF
103
corresponde a Bu (-0.5), la cual indica una mejor exactitud respecto a la recta y=z para
dicha variable (Figura 13).
Según Tedeschi (2006) un valor de CD cercano a uno indica una mejora en las
predicciones del modelo, CD>1 es un indicador de baja predicción y si CD<1 de
sobrepredicción. Por lo tanto de los valores de CD para las variables consideradas en el
Rumen se tiene que el modelo: (a) predice mejor para Bu (0.585), (b) sobrepredice las
variables DM (0.029), AGVs (0.05), Pr (0.117) y Bu (0.585), y (c) proporciona baja
predicción para Ac (3.321) (Cuadro 5). Aunque de las Figuras 9-12 se observó que las
predicciones para: (a) DM fueron menores a los observados, la cual es contrario a lo
indicado con el CD, (c) Pr fueron mayores a los observados, (d) Bu fueron mayores a
los observados, siendo mejor para valores observados bajos, y (e) AGVs fueron
menores a los observados, siendo contrario a lo señalado con el CD. Así, algunas
veces con el CD se obtienen resultados contrarios a lo observado en las técnicas
gráficas de validación y en otras ocasiones resultados coincidentes. Esto se debe a que
con el CD se comparan las distancias al cuadrado de los valores observados y
predichos respecto a la media de los valores observados ( y ), y por consiguiente
depende de que tan lejos se encuentran dichos valores de y . Respecto a los valores de
CD para las variables consideradas en el Ciego se tiene que el modelo: (a)
sobrepredice las variables DM (0.001), AGVs (0.028), Ac (0.025) y Pr (0.007), y (b)
proporciona baja predicción para Bu (2) (Cuadro 5). Aunque de las Figuras 13-16 se
observó que las predicciones para: (a) DM fueron bastante mayores a los observados
(coincide con CD) y decrecen conforme crecen los observados, (b) Ac y Pr fueron
relativamente exactos, siendo mayores para Ac (coincide con CD) y menores para Pr
(contrario a CD), (d) Bu fueron bastante exactos a los observados, y (e) AGVs fueron
mayores a los observados (coincide con CD) y decrecen conforme decrecen los
observados.
104

Cuadro 5. Valores de las estadísticas MEF y CD para las variables DM, AGVs, Ac, Pr y
Bu en el Rumen y Ciego.
Rumen Estadística DM
n=3 AGVs n=5
Ac n=8
Pr n=8
Bu n=8
MEF -30.772 -19.593 -0.301 -8.896 -1.357 CD 0.029 0.050 3.321 0.117 0.585 y 15.633% 152mM 64.85% 22.354% 12.625%
Ciego (n=3) MEF -1257.342 -30.448 -40.25 -144.5 -0.5 CD 0.001 0.028 0.025 0.007 2 y 11.5% 77.667mM 72.333% 21.667% 6% y denota la media aritmética de los valores observados
De los resultados obtenidos por medio de la eficiencia de modelado (MEF) y del
coeficiente de determinación del modelo (CD), se sigue que la MEF proporciona
resultados consistentes con los obtenidos de las técnicas visuales de validación que el
CD.
105

6. CONCLUSIONES
La validación de modelos mecanísticos basada en: (i) el procedimiento original
de Freese (1960), (ii) los planteamientos de Rennie y Wiant (1978), Reynolds (1984), y
(iii) las modificaciones y extensiones presentadas en este trabajo, constituyen un
método estadístico formado por pruebas de hipótesis e intervalos de confianza, las
cuales representan una alternativa inferencial para determinar si las salidas del modelo
están suficientemente próximas a los valores observados del sistema real. El método
permite analizar datos provenientes de modelos que presenten o no sesgo en sus
pronósticos sin modificar la estructura del modelo, y donde el máximo error admisible es
expresado en las mismas unidades del valor real.
Se establecieron los supuestos, la estadística de prueba y el error crítico para el
planteamiento original y alternativo del procedimiento de Freese cuando el modelo
presenta o no sesgo en sus predicciones.
El establecimiento de la exactitud requerida con D~ y en presencia de
SC puede formularse de dos maneras para e y α especificadas: (i)
),(N 2DD σµ
( ) α−≥≤ 1eDP se
traduce en 21,1
22D
eα−χ
≤σ , y (ii) ( ) ( ) α−≥≤−=≤ 1eDDPeWP se traduce en
21,1
22D
e1n
nα−χ
⎟⎠⎞
⎜⎝⎛
−≤σ . Siendo (i) el más práctico de establecer.
En los procedimientos para el caso en que el modelo presenta SP, se supone
D~ que se traduce en ),(N 2DD σµ Riε ~ ) para el modelo ,0(NI 2
Rσ Rii10i ZD ε+β+β= . La SCE
en el numerador de la estadística de prueba corresponde a la del modelo estimado
y no a como presentó Freese (1960). i10i ZD∧∧∧
β+β= i1101i ZY∧∧∧
β+β=
106

Se presentó un procedimiento alternativo al de Reynolds (1984) para determinar
el ICB para ε, el cuantil 1-α de la distribución de |D|. Se obtuvo a partir de un ICB del (1-
α’)100% para y de que la función 2Dσ ( ) ( ) ε=χσ=στ α−
21
21,1
2D
2D es monótona creciente.
Se determinaron en términos del error crítico para el planteamiento original y
alternativo, los ICB para el cuantil 1-α de la distribución de DD − y Rε , cuando el
modelo presenta SC o SP respectivamente.
Las pruebas estadísticas y errores críticos para el planteamiento alternativo
representan un enfoque más conservador que el original en el sentido que permite un
valor más grande del máximo error admisible (e) para inferir que el modelo es aceptable
en predicción del sistema.
El error crítico a partir del planteamiento original o alternativo, puede emplearse
para comparar dos o más modelos y para validar un modelo en predicción de varias
variables.
El modelo Wakax POS puede usarse para predecir la GPP por día de bovinos
alimentados con caña de azúcar, maíz quebrado y/o melaza en una zona tropical de
México, aunque requerirá un ajuste con base a la presencia de SC para incrementar la
exactitud en sus pronósticos. Desde la perspectiva de la regresión el modelo presenta
discrepancia por traslación, es un caso inexacto y preciso.
El sesgo de las predicciones en el Rumen presenta mayor amplitud para los
AGVs, seguido por Ac, Pr, Bu y DM. En el Ciego el sesgo tiene mayor amplitud para los
AGVs, seguido por DM, Ac y Bu con igual rango y Pr.
A diferencia del coeficiente de determinación del modelo (CD), la eficiencia de
modelado (MEF) proporciona resultados consistentes con los obtenidos de las técnicas
visuales de validación.
107

7. BIBLIOGRAFÍA
Analla, M. (1998). Model validation through the linear regression fit to actual versus
predicted values. Agric. Syst. 57:115-119.
Barrales, V.L.; Peña, R.I.; Fernández, R.B. (2004). Model validation: an applied
approach. Agric. Téc. 64(1):66-73.
Beck, B. (2002). Model evaluation and performance. Encyclopedia of Environmetrics.
John Wiley & Sons Chichester. 3:1275-1279.
Bendell, T. (1986). Minimising misconceived models. The Statistician. 35(3):303-309.
Box, G.E.P.; Hunter, W.G.; Hunter, J.S. (1999a). Modelado empírico. En: Estadística
para investigadores. Introducción al diseño de experimentos, análisis de datos y
construcción de modelos. Editorial Reverté. Barcelona, España. pp. 301-315.
Box, G.E.P.; Hunter, W.G.; Hunter, J.S. (1999b). Construcción mecanicista de modelos.
En: Estadística para investigadores. Introducción al diseño de experimentos, análisis de
datos y construcción de modelos. Editorial Reverté. Barcelona, España. pp. 555-570.
Casella, G.; Berger, R.L. (1990). Common Families of Distributions. En: Statistical
inference. Wadsworth & Brooks/Cole. California, USA. pp. 85-127.
Chilibroste, P. (2002). Evaluación de modelos detallados de rumen para predecir
disponibilidad de nutrientes en sistemas intensivos de producción de leche bajo
pastoreo. Arch. Latinoam. Prod. Anim. 10(3):232-240.
Collao-Saenz, E.A.; Dijkstra, J.; Aguiar, P.P.C.; Bannink, A.; Arcuri, P.B.; Teixeira, J.C.;
Olalquiaga, P.J.R.; David, F.M. (2005). Simulation model for particle dynamics in rumen
of cattle fed sugarcane diet. Sci. Agric. (Piracicaba, Braz.). 62(2):102-110.
108
Conover, W.J. (1980). Statistics of the Kolmogorov-Smirnov type. En: Practical
nonparametric statistics. 2a Ed. John Wiley & Sons. New York, USA. pp. 344-393.
Csáki, C. (1985). Constructing the Mathematical Model. En: Simulation and systems
analysis in agriculture. Elsevier. Amsterdam. pp. 43-48.
Ek, A.R.; Monserud, R.A. (1979). Performance and comparison of stand growth models
based on individual tree and diameter-class growth. Canada Journal Forest Research.
9:231-244.
Filliben, J.J. (1975). The probability plot correlation coefficient test for normality.
Technometrics. 17(1):111-117.
Flavelle, P. (1992). A quantitative measure of model validation and its potential use for
regulatory purpose. Advances in Water Resources. 15:5-13.
France, J.; Thornley, J.H.M. (1984a). Techniques: dynamic deterministic modellig. En:
Mathematical Models in Agriculture. Butterworth & Co (Publishers) Ltd. London. pp. 15-
36.
France, J.; Thornley, J.H.M. (1984b). Role of mathematical models in agriculture and
agricultural research. En: Mathematical Models in Agriculture. Butterworth & Co
(Publishers) Ltd. London. pp. 1-14.
Freese, F. (1960). Testing accuracy. Forest Sci. 6(2):139-145.
Fub, H.; Dubitzky, W.; Downes, C.S.; Kurth, M.J. (2005). Mathematical models of cell
cycle regulations. Briefings In Bioinformatics. 6(2):163-177.
109
Giordano, F.R.; Weir, M.D.; Fox, W.P. (1997a). Model fitting. En: A First Course in
Mathematical Modeling. 2a Ed. Brooks/Cole Publishing Company, Pacific Grove. USA.
pp. 134-165.
Giordano, F.R.; Weir, M.D.; Fox, W.P. (1997b). The modeling process. En: A First
Course in Mathematical Modeling. Brooks/Cole Publishing Company, Pacific Grove.
USA. pp. 31-50.
Graybill, F.A. (1976). General Linear Model. En: Theory and application of the linear
model. Duxbury Press. USA. pp. 171-228.
Gauch, H.G.; Hwang, J.T.G.; Fick, G.W. (2003). Model evaluation by comparison of
model-based predictions and measured values. Agronomy Journal. 95:1442-1446.
Hamilton, M.A. (1991). Model validation: an annotated bibliography. Communications in
Statistics: Theory & Methods. 20:2207-2266.
Harrington, H.J.; Tumay, K. (2000). Introduction to process simulation. En: Simulation
Modeling Methods. The McGraw-Hill Companies, Inc. pp. 1-32.
Harrison, S.R. (1990). Regression of a model on real-system output: an invalid test of
model validity. Agric. Syst. 34:183-190.
Halachmi, I.; Edan, Y.; Moallem, U.; Maltz, E. (2004). Predicting feed intake of the
individual dairy cow. Journal of Dairy Science. 87:2254-2267.
Hayirli, A.; Grummer, R.R.; Nordheim, E.V.; Crump, P.M. (2003). Models for predicting
dry matter intake of Holsteins during the prefresh transition period. Journal of Dairy
Science. 86:1771-1779.
110

Johnson, R.A.; Wichern, D.W. (2002). The multivariate normal distribution. En: Applied
multivariate statistical analysis. 5a Ed. Prentice Hall. New Jersey, USA. pp. 149-209.
Kobayashi, K.; Salam, M.U. (2000). Comparing simulated and measured values using
mean squared deviation and its components. Agronomy Journal. 92:345-352.
Loague, K.; Green, R.E. (1991). Statistical and graphical methods for evaluating solute
transport models: Overview and applications. Journal of Contaminant Hydrology. 7:51-
73.
McCarthy, M.A.; Possingham, H.P.; Day, J.R.; Tyre, A.J. (2001). Testing the accuracy of
population viability analysis. Conservation Biology. 15(4):1030-1038.
Mayer, D.G.; Butler, D.G. (1993). Statistical validation. Ecological Modelling. 68:21-32.
Mayer, D.G.; Stuart, M.A.; Swain, A.J. (1994). Regression of real world data on model
output: an appropriate overall test of validity. Agric. Syst. 45:93-104.
Mitchell, P.L. (1997). Misuse of regression for empirical validation of models. Agric. Syst.
54(3):313-326.
Montgomery, D.C. (2004a). Ajuste de modelos de regresión. En: Diseño y análisis de
experimentos. 2ª Ed. Limusa Wiley, México, D.F. pp. 392-426.
Montgomery, D.C. (2004b). Experimentos con un sólo factor: el análisis de varianza. En:
Diseño y análisis de experimentos. 2ª Ed. Limusa Wiley, México, D.F. pp. 60-125.
Montgomery, D.C. (2004c). Otros tópicos de diseño y análisis. En: Diseño y análisis de
experimentos. 2ª Ed. Limusa Wiley, México, D.F. pp. 590-629.
111

Montgomery, D.C. (2004d). Experimentos comparativos simples. En: Diseño y análisis
de experimentos. 2ª Ed. Limusa Wiley, México, D.F. pp. 21-59.
Montgomery, D.C.; Peck, E.A.; Vining, G.G. (2002a). Validación de los modelos de
regresión. En: Introducción al análisis de regresión lineal. 3ª Ed. CECSA. México, D.F.
pp. 477-494.
Montgomery, D.C.; Peck, E.A.; Vining, G.G. (2002b). Transformaciones y ponderación
para corregir inadecuaciones del modelo. En: Introducción al análisis de regresión
lineal. 3ª Ed. CECSA. México, D.F. pp. 155-184.
Montgomery, D.C.; Peck, E.A.; Vining, G.G. (2002c). Regresión lineal simple. En:
Introducción al análisis de regresión lineal. 3ª Ed. CECSA. México, D.F. pp. 13-60.
Montgomery, D.C.; Peck, E.A.; Vining, G.G. (2002d). Apéndice C. Material
suplementario. En: Introducción al análisis de regresión lineal. 3ª Ed. CECSA. México,
D.F. pp. 529-566.
Mood, A.M.; Graybill, F.A.; Boes, D.C. (1974a). Distributions of Functions of Random
Variables. En: Introduction to the Theory of Statistics. 3a. Ed. McGraw-Hill. New York,
USA. pp. 175-218.
Mood, A.M.; Graybill, F.A.; Boes, D.C. (1974b). Sampling and Sampling Distributions.
En: Introduction to the Theory of Statistics. 3a. Ed. McGraw-Hill. New York, USA. pp.
219-270.
Mood, A.M.; Graybill, F.A.; Boes, D.C. (1974c). Tests of Hypotheses. En: Introduction to
the Theory of Statistics. 3a. Ed. McGraw-Hill. New York, USA. pp. 401-481.
112

Mood, A.M.; Graybill, F.A.; Boes, D.C. (1974d). Parametric Interval Estimation. En:
Introduction to the Theory of Statistics. 3a. Ed. McGraw-Hill. New York, USA. pp. 372-
400.
Mood, A.M.; Graybill, F.A.; Boes, D.C. (1974e). Linear Models. En: Introduction to the
Theory of Statistics. 3a. Ed. McGraw-Hill. New York, USA. pp. 482-503.
Oberkampf, W.L.; Trucano, T.G. (2002). Verification y validation in computacional fluid
dynamics. Progress in Aerospace Sciences. 38:209-272.
Oreskes, N.; Shrader-Frechette, K.; Belitz, K. (1994). Verification, validation, and
confirmation of numerical models in the earth sciences. Science. 263:641-646.
Oreskes, N. (1998). Evaluation (not validation) of quantitative models for assessing the
effects of environmental lead exposure. Environmental Health Perspectives. 106:1453-
1460.
Ramakrishnan, U.; Mountain, J.L. (2004). Precision and accuracy of divergence time
estimates from STR and SNPSTR variation. Molecular Biology and Evolution. 21:1960-
1971.
Reckhow, K.H.; Clements, J.T.; Dodd, R.C. (1990). Statistical evaluation of mechanistic
water-quality models. Journal Environmental Engineering. 116(2):250-268.
Rennie, J.C.; Wiant, H.V.Jr. (1978). Modification of Freese’s chi-square test of accuracy.
USDI Bureau of Land Management, Denver Colorado. Resource Inventory Notes. Note
BLM 14:1-3.
Reynolds, M.R.Jr.; Burkhart, H.E.; Daniels, R.F. (1981). Procedures for statistical
validation of stochastic simulations models. Forest Sci. 27(2):349-364.
113
Reynolds, M.R.Jr. (1984). Estimating the error in model predictions. Forest Sci.
30(2):454-469.
Richter, O.; Söndgerath, D. (1990). Introducción. En: Parameter Estimation in Ecology.
VCH Verlagsgesellschaft mbH. Germany. pp. 1-9.
Stephens, M.A. (1974). EDF statistics for goodness of fit and some comparisons.
Journal of the American Statistical Association. 69(347):730-737.
Sokal, R.R.; Rohlf, F.J. (2000). Assumptions of analysis of variance. En: Biometry, the
principles and practice of statistics in biological research. 3a Ed. W.H. Freeman and
Company. New York, USA. pp 392-450.
Steel, R.G.D.; Torrie, J.H. (1988). Análisis de la varianza II: clasificaciones múltiples. En:
Bioestadística: principios y procedimientos. 2ª Ed. McGraw-Hill/Interamericana. México,
D.F. pp 188-230.
Tedeschi, L.O. (2006). Assessment of the adequacy of mathematical models. Agric.
Syst. 89:225–247.
Vargas-Villamil, L.M. (2003). Desarrollo de un modelo dinámico mecanístico para la
estimación de parámetros de crecimiento bacteriano ruminal mediante una técnica de
doble ajuste. Tesis de Doctorado. Universidad Autónoma de Yucatán. México. 275 pp.
Vargas-Villamil, L.M.; Ku-Vera, J.; Vargas-Villamil, F.; Medina-Peralta, S. (2004).
Modelo para la estimación de tres parámetros ruminales biológico. Interciencia.
29(6):296-302.
Vargas-Villamil, L.M.; Ku-Vera, J.; Vargas-Villamil, F.; Medina-Peralta, S. (2005).
Evaluación de un sistema ruminal basado en caña de azúcar mediante un modelo
dinámico mecanístico. Interciencia. 30(7):424-430.
114

Wackerly, D.D.; Mendenhall, W.; Scheaffer, R.L. (2002). Funciones de variables
aleatorias. En: Estadística matemática con aplicaciones. 6a Ed. Thomson Learning.
México, D.F. pp. 279-329.
Yang, J.; Greenwood, D.J.; Rowell, D.L.; Wadsworth, G.A.; Burns, I.G. (2000). Statistical
methods for evaluating a crop nitrogen simulation model, N_ABLE. Agric. Syst. 64:37–
53.
Zar, J.H. (1999). Data transformations. En: Biostatistical analysis. 4a Ed. Prentice Hall.
New Jersey, USA. pp 273-281.
Zill, D.G. (2002). Introducción a las ecuaciones diferenciales. En: Ecuaciones
diferenciales con aplicaciones de modelado. 7ª ed. Thomson Learning. México, D.F. pp.
1-38.
115

ANEXO I
I.A. Descripción del modelo mecanístico del sistema crecimiento bacteriano, Turix
El modelo dinámico mecanístico Turix fue desarrollado para la estimación de dos
parámetros cinéticos y uno de rendimiento de ácidos grasos volátiles en un sistema
cerrado de crecimiento bacteriano ruminal. El modelo esta compuesto por 11 variables
de estado que describen el sistema (degradación del alimento, crecimiento y
fermentación bacteriana) (Vargas-Villamil et al., 2004). En la Figura I.1 y Cuadro I.1 se
presentan respectivamente un diagrama del modelo Turix y los símbolos usados. Su
desarrollo, descripción, evaluación matemática y evaluación de un sistema ruminal
basado en caña de azúcar por medio de Turix, se presenta con más detalle en Vargas-
Villamil (2003), Vargas-Villamil et al. (2004) y Vargas-Villamil et al. (2005).
Fuente: Vargas-Villamil et al. (2004)
Figura I.1. Representación esquemática del modelo Turix.
Cuadro I.1. Símbolos usados en el diagrama del modelo Turix.
ND Fracción o fase lentamente degradable del alimento NS Fracción o fase rápidamente degradable del alimento SC Fracción o fase inmediatamente degradable del alimento Sm Sustrato microbiano L Sustrato intermedio M Biomasa bacteriana AGV Ácidos grasos volátiles AGV + CO2 Productos de la fermentación Vargas-Villamil et al. (2004)
116

I.B. Notación empleada en el modelo Wakax POS Cuadro I.2. Notación y abreviaciones empleadas en el modelo Wakax POS con excepción del submodelo de Crecimiento animal.
General ( )Sup
SubCbD C Compartimiento o submodelo b Proceso D Descripción Sup Sección Sub Sustrato o tamaño de partícula
Entrada (CD) C Co, Pa, ZC, Z, O D In, We (mg/h o g)
Parámetro ajustado ( )SupSubCbD
C Co, Pa, ZC, O b c, y, f (ml/h*mg o g/g) D C Sup R, C Sub Sm, AGV, Ac, Pr, Bu, Va
Parámetro ( )SupSubCbD
C Co, Pa, ZC, Z, O b i, b, d, p, a (g/g o 1/h) D C Sup R, C, D Sub Sm, p, g, l, MS
Constante (D) D InVoRu, InVoCi, SiBa, DiPa, DiZC (ml/g o 1/h)
Variable de estado ( )SupSubCD
C Co, Pa, ZC D C, Q (mg o mg/ml, ) Sup R, C, D Sub Sm, L, M, Ac, Pr, Bu, Va, CO2, MS, U, W, V, Fi
Flujo ( )SupCD C Co, Pa, ZC, Z, O D Descripción del proceso de la variable de estado x a y, Ex, In, D (mg/ml*h) Sup R, C, D, A
117

Variable auxiliar (D) D Descripción de la variable Compartimiento o submodelo Proceso Co Concentrado c Substrato de salida Pa Pasto y Rendimiento de AGV ZC Caña de azúcar f Coeficiente de fermentación Z Melaza i Entrada de substrato en fracción de MS O No relacionado a un d Tasa de degradación compartimiento o p Tasa de pasaje submodelo específico a Tasa de absorción b Digestibilidad
Descripción¥ In Ingreso al sistema Ex Salida del sistema D Substrato degradado We Peso del animal C Concentración del substrato x ( ) Sup
xCbCQ Cantidad del substrato x ( ) Sup
xCbQSiBa Síntesis microbial InVon Índice de volumen en n. Dii Tasa de reducción de la partícula de i Von Volumen en n in Entrada en n de substrato en proporción de volumen en n relacionado con i ipCnm Tasa de pasaje en n de la partícula media relacionado a i ismCn Concentración en n de MS relacionado con i iFluCSmMpn Flujo de la concentración de Sm y M a través de n relacionado con i iFluQSmMpn Flujo de la cantidad de Sm y M a través de n relacionado con i Uni Fracción no degradable de i iCnj Concentration de j dentro de n relacionado con i ijFlu Fracción de j en el flujo a Ciego relacionado con i Sección R Rumen D Intestino C Ciego Substrato p Partícula pequeña g Partícula grande l líquido Sm Substrato microbial AGV Ácidos grasos volátiles Ac Acetato M Biomasa MS Materia seca V Partícula reducida L Metabolito intermedio U Fracción no degradable Bu Butirato CO2 Dióxido de carbono Va Valerato Fi Fibra W Biomasa ruminal dentro del Ciego Pr Propionato ¥ i = Co (Concentrado), Pa (Pasto), ZC (Caña de azúcar), Z (Melaza)
118

n = Ru (Rumen), D (Intestino), Ci (Ciego), O (Compartimiento o submodelo no definido) j = M (Biomasa), Ac (Acetato), Pr (Propionato), Butirato (Bu), Sm (Substrato microbial), MS (Materia seca). Cuadro I.3. Notación y abreviaciones empleadas en el submodelo de Crecimiento animal.
General ( )SupSubCD
C Compartimiento o submodelo D Descripción Sup Sección Sub Sustrato
Entrada (CD) C O D We (g)
Constante (D) D Descripción de la constante
Variable de estado ( )SupSubCD
C O D Q (molo o g) Sup A Sub aa, ACA, Pal, Fa
Flujo ( )SupCD C O D Descripción del proceso de la variable de estado x a y, Ex, In, D (mol o g/h) Sup A
Variable auxiliar (D) D Descripción de la variable Compartimiento o submodelo O No relacionado a un compartimiento o submodelo específico
Descripción de constantes Ex Salida del sistema In Ingreso al sistema We Peso del animal Q Cantidad del substrato x ( ) Sup
xCbQIndxy Índice de conversión de y a x xy Proporción de x dentro de y PMx Peso molecular de x Retx Eficiencia de retención de x
119

Reqxsy Requerimiento de x durante la síntesis de y Forxoy Formación de x durante la oxidación de y IndMan Energía para “mantenimiento” en relación a su peso metabólico (kg^.75)
Descripción de variables auxiliares MxA Moles de x absorbidos xi Cantidad de x dentro del compartimiento i xsy Gasto de x por mol de y sintetizada xdy x formada por mol de y degradada xty x equivalente en mol de y Indxy Índice de conversión de y a x xMan Moles (o equivalente) de x utilizado para “mantenimiento” Retx Eficiencia de retención de x xDa Incremento promedio diario de x Sección Substrato A Animal aa aminoácido ACA Acetil Coenzima A Pal Palmitato x o y: Glu = Glucosa, Pro = Proteína, M = Biomasa, MS = Materia Seca, aa = aminoácido, ATP = Trifosfato de Adenosina, ACA = Acetil Coenzima A, Ac = Acetato, Pr = Propionato, Bu = Butirato, Pal = Palmitato, Fa = Grasa, Ga = Ganancia de peso i: A = Animal
120

I.C. Descripción del modelo Wakax POS
A continuación se definen cinco “funciones” llamadas Turix (T), fSup, fD,
que serán referidas en los submodelos.
R1f y
C2f
Sea la “función” Turix definida por:
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
Glu,VaGlu,Bu
GluPr,Glu,AcSF,PAGVLMSmL,MCOLVaBuPrAcMSm
c,c
,c,c,Y,k,k;dtCd
,dtCd,
dtCd,
dtCd,
dtCd,
dtCd,
dtCd,
dtCd
T2
donde las ocho expresiones diferenciales corresponden a las variables de estado del
modelo Turix (Vargas-Villamil et al., 2004). Las siete constantes y parámetros
localizados después del punto y coma, se reescriben en notación según el submodelo y
sección correspondiente del modelo Wakax POS. En general para el submodelo C (Co,
Pa, CZ) sección Sup (R, C): SupSmSmL,M cCk C= , , , , ,
, .
siBakLM = SupAGVSF,PAGV yCY C= Sup
AcGlu,Ac fCc C= SupPrGluPr, fCc C=
SupBuGlu,Bu fCc C= Sup
VaGlu,Va fCc C=
Sea la “función” definida por: Supf
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
SupSupVa
SupBu
SupPr
SupAc
SupM
SupVa
SupBu
SupPr
SupAc
SupM
Sup
)CP(;)VA(,)VA(
,)VA(,)VA(,)VA(;dtCd,
dtCd,
dtCd,
dtCd,
dtCd
fCCC
CCCCCCCC
donde las cinco expresiones diferenciales corresponden a las variables de estado M,
Ac, Pr, Bu y Va para el submodelo C (Co, Pa, CZ) sección Sup (R, C). con
Sub=M, Ac, Pr, Bu, Va, denota la(s) variable(s) auxiliar(es) para la variable de estado
Sub y sección Sup en el submodelo C. denota las constantes y parámetros en
el submodelo C sección Sup.
SupSub)VA(C
Sup)CP(C
Ecuaciones diferenciales para las variables de estado M, Ac, Pr, Bu y Va en el
submodelo C sección Rumen (Sup=R):
RRM MM
dtCd CC
−=
RRRAc AcABAcAc
dtCd CCC
−−=
121

RRRPr GluPrPrPr
dtCd CCC
−−=
RRRBu BuABBuBu
dtCd CCC
−−=
RRRVa VaExVaVa
dtCd CCC
−−=
Variables auxiliares para las variables de estado M, Ac, Pr, Bu y Va en el submodelo C
sección Rumen (Sup=R): RMm
RRM C*pCRMM:)VA( CCCC =
RAc
RAc
RRAc
Rl
RRAc C*aCAcAB;C*pCAcAc:)VA( CCCCCCC ==
RPr
RPr
RRPr
Rl
RRPr C*aCGluPr;C*pCPrPr:)VA( CCCCCCC ==
RBu
RBu
RRBu
Rl
RRBu C*aCBuAB;C*pCBuBu:)VA( CCCCCCC ==
RVa
RVa
RRVa
Rl
RRVa C*aCVaEx;C*pCVaVa:)VA( CCCCCCC ==
R)CP(C se especifican al final de la descripción de cada submodelo C sección Rumen
(Sup=R).
Ecuaciones diferenciales para las variables de estado M, Ac, Pr, Bu y Va en el
submodelo C sección Ciego (Sup=C):
CCM MEx
dtCd CC
−=
CCCAc AcABAcAc
dtCd CCC
−−=
CCCPr GluPrPrPr
dtCd CCC
−−=
CCCBu BuABBuBu
dtCd CCC
−−=
CCCVa VaExVaVa
dtCd CCC
−−=
Variables auxiliares para las variables de estado M, Ac, Pr, Bu y Va en el submodelo C
sección Ciego (Sup=C): CMm
CCM C*pCRMEx:)VA( CCCC =
122

CAc
CAc
CCAc
Cl
CCAc C*OaCAcAB;C*OpCAcAc:)VA( CCCCC ==
CPr
CPr
CCPr
Cl
CCPr C*OaCGluPr;C*OpCPrPr:)VA( CCCCC ==
CBu
CBu
CCBu
Cl
CCBu C*OaCBuAB;C*OpCBuBu:)VA( CCCCC ==
CVa
CVa
CCVa
Cl
CCVa C*OaCVaEx;C*OpCVaVa:)VA( CCCCC ==
C)CP(C se especifican al final de la descripción de cada submodelo C sección Ciego
(Sup=C).
Sea la “función” definida por: Df
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
DDVa
DBu
DPr
DAc
DM
DMS
DSm
DVa
DBu
DPr
DAc
DM
DMS
DSm
D
)CP();RMTP(,)VA(,)VA(,)VA(,)VA(,)VA(
)VA(,)VA(;dtCd,
dtCd,
dtCd,
dtCd,
dtCd,
dtCd,
dtCd
fCCCCCCC
CCCCCCCCC
donde las siete expresiones diferenciales corresponden a las variables de estado Sm,
MS, M, Ac, Pr, Bu y Va para el submodelo C (Co, Pa, CZ) sección Intestino (Sup=D).
CRMTP denota la razón media del tamaño de la partícula en el submodelo C.
con Sub=Sm, MS, M, Ac, Pr, Bu, Va, denota la(s) variable(s) auxiliar(es) para la variable
de estado Sub y sección D en el submodelo C. denota las constantes y
parámetros para el submodelo C sección D.
DSub)VA(C
D)CP(C
Ecuaciones diferenciales para las variables de estado Sm, MS, M, Ac, Pr, Bu y Va en el
submodelo C sección Intestino (Sup=D):
DCDDDSm SmSmSmGluSmSm
dtCd CCCC
−−=
DCDDDMS MSMSMSGluMSMS
dtCd CCCC
−−=
DCDDDM MSmMaaMM
dtCd CCCC
−−=
DCDDDAc AcAcAcABAcAc
dtCd CCCC
−−=
DCDDDPr PrPrGluPrPrPr
dtCd CCCC
−−=
DCDDDBu BuBuBuABBuBu
dtCd CCCC
−−=
123

DCDDDVa VaVaVaExVaVa
dtCd CCCC
−−=
Variables auxiliares para las variables de estado Sm, MS, M, Ac, Pr, Bu y Va en el
submodelo C sección Intestino (Sup=D):
;bC*pC*CSmGlu;SmSmSmSm:)VA( DSm
Dl
DSm
DRDDSm CCCCCCC ==
)bC1(*pC*CSmSm DSm
Dl
DSm
DC CCCC −=
;C*bC*pCMSGlu;VMSMSMSUMSMSMS:)VA( DMS
DM
Dm
DRRRDDMS CCCCCCCCC =++=
)bC1(*pC*CMSMS DMS
Dm
DMS
DC CCCC −=
;bC*pC*CMaa;MMMM:)VA( DM
Dm
DM
DRDDM CCCCCCC ==
)bC1(*pC*CMSm DM
Dm
DM
DC CCCC −= DAc
Dl
DCDAc
DAc
DRDDAc C*pCAcAc;C*aCAcAB;AcAcAcAc:)VA( CCCCCCCCC ===
DPr
Dl
DCDPr
DPr
DRDDPr C*pCPrPr;C*aCGluPr;PrPrPrPr:)VA( CCCCCCCCC ===
DBu
Dl
DCDBu
DBu
DRDDBu C*pCBuBu;C*aCBuAB;BuBuBuBu:)VA( CCCCCCCCC ===
DVa
Dl
DCDVa
DVa
DRDDVa C*pCVaVa;C*aCVaEx;VaVaVaVa:)VA( CCCCCCCCC ===
( ) 2/pCpCpCDm:RMTP Dg
Dp CCCC +=
D)CP(C se especifican al final de la descripción de cada submodelo C sección Intestino
(Sup=D).
Sea la “función” definida por: R1f
⎟⎟⎠
⎞⎜⎜⎝
⎛ R1
RU
RV
RMS
RU
RV
RMSR
1 )CP(;)VA(,)VA(,)VA(;dtCd,
dtCd,
dtCdf CCCCCCC
donde las tres expresiones diferenciales corresponden a las variables de estado MS, V
y U para el submodelo C (Pa, CZ) sección Rumen (Sup=R). con Sub=MS, V,
U denota la(s) variable(s) auxiliar(es) para la variable de estado Sub y sección R en el
submodelo C. denota las constantes y parámetros en el submodelo C sección
R.
RSub)VA(C
R1)CP(C
Ecuaciones diferenciales para las variables de estado MS, V y U en el submodelo C
sección Rumen (Sup=R):
124

RRRRRMS MSMSMSVMSSmInMS
dtCd CCCCC
−−−=
RRRRV VMSmVSmMSV
dtCd CCCC
−−=
RRRU UMSInU
dtCd CCC
−=
Variables auxiliares para las variables de estado MS, V y U en el submodelo C sección
Rumen (Sup=R):
;C*dCMSSm;24/)VoRu/In(Ru;iC*RuInMS:)VA( RMS
RMS
RRMS
RRMS CCCCCCCCC ===
RMS
Rg
RRMS
R C*pCMSMS;C*DiMSV CCCCCC ==
RV
Rp
RRV
RMS
RRV C*pCVMS;C*dCVSm:)VA( CCCCCCC ==
RU
Rg
RRSm
RMS
RRU C*pCUMS;iCiC1Un;Un*RuInU:)VA( CCCCCCCCCC =−−==
2/)pCpC(pCRm Rp
Rg CCC +=
R1)CP(C se especifican al final de la descripción de cada submodelo C sección Rumen
(Sup=R).
Sea la “función” definida por: C2f
⎟⎟⎠
⎞⎜⎜⎝
⎛ C2
CW
CMS
CW
CMSC
2 )CP(;)VA(,)VA(;dtCd,
dtCdf CCCCC
donde las dos expresiones diferenciales corresponden a las variables de estado MS y
W para el submodelo C (Pa, CZ) sección Ciego (Sup=C). con Sub=MS, W
denota la(s) variable(s) auxiliar(es) para la variable de estado Sub y sección C en el
submodelo C. denota las constantes y parámetros en el submodelo C sección
C.
CSub)VA(C
C2)CP(C
Ecuaciones diferenciales para las variables de estado MS y W en el submodelo C
sección Ciego (Sup=C).
CCCCMS MSExMSSmMSMS
dtCd CCCC
−−=
DCCCCW WExWSmMWC
dtCd CCCC
−−=
125

Variables auxiliares para las variables de estado MS y W en el submodelo C sección
Ciego (Sup=C):
;VoCi/FluQSmMpCCi;MSFlu*CiMSMS:)VA( CCMS CCCCCC ==
;VoRu*FluCSmMpCFluQSmMpC;FluCSmMpC/MSMSMSFlu DC CCCCC ==
;SmSmMSMSMSmFluCSmMpC;InVoCi*WeVoCi DCDCDC CCCC ++== CMS
Cp
CCMS
CMS
C C*pCMSEx;C*dCMSSm CCCCCC ==
;FluCSmMpC/MSmMFlu;MFlu*CiMWC:)VA( DCCCW CCCCCCC ==
2/)OpCpC(pCCm;C*pCWEx;C*dCWSm Cl
Cp
CW
Cp
CCW
CW
C +=== CCCCCCCC
C2)CP(C se especifican al final de la descripción de cada submodelo C sección Ciego
(Sup=C).
En los siguientes cuadros se describe cada submodelo con sus secciones.
Cuadro I.4. Submodelo Concentrado (Co). Sección Rumen
Variable de estado Sm: RRR
RSm CoSmGluCoSmSmSmlnCo
dtdCoC
−−=
Variables auxiliares: RSm
R CoiC*CoRuSmlnCo = CoRu = (CoIn/VoRu)/24 VoRu = InVoRu*We
2/)CopCCopC(CopCRm Rp
Rg +=
RSm
Rl
R CoC*CopCCoSmSm = RSm
RSm
R CoC*CoaCCoSmGlu = Las ecuaciones diferenciales y variables auxiliares para las variables de estado M, Ac, Pr, Bu y Va del submodelo Concentrado sección Rumen se obtienen de las “funciones” Turix y fSup:
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
Glu,VaGlu,Bu
GluPr,Glu,AcSF,PAGVLMSmL,MCOLVaBuPrAcMSm
c,c
,c,c,Y,k,k;dtCd
,dtCd,
dtCd,
dtCd,
dtCd,
dtCd,
dtCd,
dtCd
T2
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
SupSupVa
SupBu
SupPr
SupAc
SupM
SupVa
SupBu
SupPr
SupAc
SupM
Sup
)CP(;)VA(,)VA(
,)VA(,)VA(,)VA(;dtCd,
dtCd,
dtCd,
dtCd,
dtCd
fCCC
CCCCCCCC
al sustituir C=Co y Sup=R.
126

Constantes y parámetros : R)CP(CRVa
RBu
RPr
RAc
RSm
Rl
Rp
Rg
RSm CoaC,CoaC,CoaC,CoaC,CoaC,CopC,CopC,CopC,CoiC,InVoRu
Entradas: Modelo: CoIn, We.
Sección Ciego Variable de estado Sm:
CCCSm CoSmExCoSrSm
dtdCoC
−=
Variable auxiliar: CoCiCoSrSmC =
CoCi = CoFluQSmMpC/VoCi CoFluQSmMpC = CoFluCSmMpC*VoRu
DCDC CoSmSmCoMSmCCoFluCSmMp += VoCi = We*InVoCi
2/)CopCCopC(CopCRm Cl
Cp +=
CSm
Cl
C CoC*OpCCoSmEx = Las ecuaciones diferenciales y variables auxiliares para las variables de estado M, Ac, Pr, Bu y Va del submodelo Concentrado sección Ciego se obtienen de las “funciones” Turix y fSup:
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
Glu,VaGlu,Bu
GluPr,Glu,AcSF,PAGVLMSmL,MCOLVaBuPrAcMSm
c,c
,c,c,Y,k,k;dtCd
,dtCd,
dtCd,
dtCd,
dtCd,
dtCd,
dtCd,
dtCd
T2
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
SupSupVa
SupBu
SupPr
SupAc
SupM
SupVa
SupBu
SupPr
SupAc
SupM
Sup
)CP(;)VA(,)VA(
,)VA(,)VA(,)VA(;dtCd,
dtCd,
dtCd,
dtCd,
dtCd
fCCC
CCCCCCCC
al sustituir C=Co y Sup=C: Constantes y parámetros : C)CP(C C
VaCBu
CPr
CAc
Cl
Cp OaC,OaC,OaC,OaC,OpC,CopC,InVoCi
Entradas: Otro submodelo o sección: , VoRu DCDC CoSmSm,CoMSm
Sección Intestino Las ecuaciones diferenciales y variables auxiliares para las variables de estado Sm, M, Ac, Pr, Bu y Va del submodelo Concentrado sección Intestino se obtienen de la “función” fD:
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
DDVa
DBu
DPr
DAc
DM
DSm
DVa
DBu
DPr
DAc
DM
DSm
D
)CP();RMTP(,)VA(,)VA(,)VA(
,)VA(,)VA(,)VA(;dtCd,
dtCd,
dtCd,
dtCd,
dtCd,
dtCd
fCCCCC
CCCCCCCCC
127

al sustituir C=Co, Sup=D y de no tomar en cuenta las que corresponden a MS. Constantes y parámetros : D)CP(C
DVa
DBu
DPr
DAc
DM
DSm
Dl
Dp CoaC,CoaC,CoaC,CoaC,CobC,CobC,CopC,CopC
Entradas: Otro submodelo o sección:
RRRRRR CoBuBu,PrPrCo,CoVaVa,CoAcAc,CoMM,CoSmSm Cuadro I.5. Submodelo Pasto (Pa).
Sección Rumen Variable de estado Sm:
RRRRRRSm PaSmGluPaSmSmPaVSmSmlnPaPaMSSm
dtdPaC
−−++=
Variable auxiliar: RSm
R PaiC*PaRuSmlnPa = RSm
Rl
R PaC*PapCPaSmSm = RSm
RSm
R PaC*PaaCPaSmGlu = 2/)PapCPapC(PapCRm R
pRg +=
Las ecuaciones diferenciales y variables auxiliares para las variables de estado M, Ac, Pr, Bu y Va del submodelo Pasto sección Rumen se obtienen de las “funciones” Turix y fSup:
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
Glu,VaGlu,Bu
GluPr,Glu,AcSF,PAGVLMSmL,MCOLVaBuPrAcMSm
c,c
,c,c,Y,k,k;dtCd
,dtCd,
dtCd,
dtCd,
dtCd,
dtCd,
dtCd,
dtCd
T2
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
SupSupVa
SupBu
SupPr
SupAc
SupM
SupVa
SupBu
SupPr
SupAc
SupM
Sup
)CP(;)VA(,)VA(
,)VA(,)VA(,)VA(;dtCd,
dtCd,
dtCd,
dtCd,
dtCd
fCCC
CCCCCCCC
al sustituir C=Pa y Sup=R. Constantes y parámetros : R)CP(C
RVa
RBu
RPr
RAc
RSm
RSm
Rl
Rp
Rg PaaC,PaaC,PaaC,PaaC,PaiC,PaaC,PapC,PapC,PapC
Entradas: Otro submodelo o sección: , PaRu RPaMSSm Las ecuaciones diferenciales y variables auxiliares para las variables de estado MS, V y U del submodelo Pasto sección Rumen se obtienen de la “función” R
1f :
⎟⎟⎠
⎞⎜⎜⎝
⎛ R1
RU
RV
RMS
RU
RV
RMSR
1 )CP(;)VA(,)VA(,)VA(;dtCd,
dtCd,
dtCdf CCCCCCC
128

al sustituir C=Pa y Sup=R. Donde a la primera variable auxiliar en se le suma CoInMSR.
RMS)VA(C
Constantes y parámetros : R
1)CP(C Rp
Rg
RFi PapC,PapC,Dipa,CoiC
Entradas: Modelo: PaIn, R
SmRMS PaiC,PaiC
Otro submodelo o sección: CoRu, , CoInMSR, VoRu RMS
R PadC,CoInMS
Sección Ciego Variable de estado Sm:
CCCCCSm PaSmExPaSmSmPaWSSmPaMSSm
dtdPaC
−++=
Variable auxiliar: PaSmFluPaSmSmC =
CSm
Cl
C PaC*OpCPaSmEx = 2/)PapCPapC(PapCRm C
lCp +=
Las ecuaciones diferenciales y variables auxiliares para las variables de estado M, Ac, Pr, Bu y Va del submodelo Pasto sección Ciego se obtienen de las “funciones” Turix y fSup:
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
Glu,VaGlu,Bu
GluPr,Glu,AcSF,PAGVLMSmL,MCOLVaBuPrAcMSm
c,c
,c,c,Y,k,k;dtCd
,dtCd,
dtCd,
dtCd,
dtCd,
dtCd,
dtCd,
dtCd
T2
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
SupSupVa
SupBu
SupPr
SupAc
SupM
SupVa
SupBu
SupPr
SupAc
SupM
Sup
)CP(;)VA(,)VA(
,)VA(,)VA(,)VA(;dtCd,
dtCd,
dtCd,
dtCd,
dtCd
fCCC
CCCCCCCC
al sustituir C=Pa y Sup=C. Constantes y parámetros : C)CP(C C
VaCBu
CPr
CAc
Cl
Cp OaC,OaC,OaC,OaC,OpC,PapC
Entradas: Otro submodelo o sección : PaSmFlu Las ecuaciones diferenciales y variables auxiliares para las variables de estado MS y W del submodelo Pasto sección Ciego se obtienen de la “función” C
2f :
⎟⎟⎠
⎞⎜⎜⎝
⎛ C2
CW
CMS
CW
CMSC
2 )CP(;)VA(,)VA(;dtCd,
dtCdf CCCCC
al sustituir C=Pa y Sup=C. Constantes y parámetros : C
2)CP(C CW
Cl
Cp
CMS PadC,OpC,PapC,PadC
129

Entradas: Modelo: We Otro submodelo o sección: InVoCi, VoRu, , PaFluCSmMpC
DCDCDC PaMSMS,PaSmSm,PaMSSm
Sección Intestino
Las ecuaciones diferenciales y variables auxiliares para las variables de estado Sm, MS, M, Ac, Pr, Bu y Va del submodelo Pasto sección Intestino se obtienen de la “función” fD:
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
DDVa
DBu
DPr
DAc
DM
DMS
DSm
DVa
DBu
DPr
DAc
DM
DMS
DSm
D
)CP();RMTP(,)VA(,)VA(,)VA(,)VA(,)VA(
)VA(,)VA(;dtCd,
dtCd,
dtCd,
dtCd,
dtCd,
dtCd,
dtCd
fCCCCCCC
CCCCCCCCC
al sustituir C=Pa y Sup=D. Constantes y parámetros : D)CP(C
DVa
DBu
DPr
DAc
Dl
Dp
Dg
DMS
DSm
DM PaaC,PaaC,PaaC,PaaC,PapC,PapC,PapC,PabC,PabC,PabC
Entradas: Otro submodelo o sección:
RDBu
DVa
RRRRR PaBuBu,PaaC,PaaC,PaVaVa,PaSmSm,PaMM,PaAcAc,PrPrPa Cuadro I.6. Submodelo Caña de azúcar (CZ).
Sección Rumen Variable de estado Sm:
RRRRRRSm CZSmGluCZSmSmCZVSmCZInSmCZMSSm
dtdCZC
−−++=
Variable auxiliar: RSm
R CZiC*CZRuCZInSm = RSm
Rl
R CZCCZpCCZSmSm += RSm
RSm
R CZC*CZaCCZSmGlu = 2/)CZpCCZpC(CZpCRm R
pRg +=
Las ecuaciones diferenciales y variables auxiliares para las variables de estado M, Ac, Pr, Bu y Va del submodelo Caña de azúcar sección Rumen se obtienen de las “funciones” Turix y fSup:
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
Glu,VaGlu,Bu
GluPr,Glu,AcSF,PAGVLMSmL,MCOLVaBuPrAcMSm
c,c
,c,c,Y,k,k;dtCd
,dtCd,
dtCd,
dtCd,
dtCd,
dtCd,
dtCd,
dtCd
T2
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
SupSupVa
SupBu
SupPr
SupAc
SupM
SupVa
SupBu
SupPr
SupAc
SupM
Sup
)CP(;)VA(,)VA(
,)VA(,)VA(,)VA(;dtCd,
dtCd,
dtCd,
dtCd,
dtCd
fCCC
CCCCCCCC
130

al sustituir C=CZ y Sup=R. Constantes y parámetros : R)CP(C
RVa
RBu
RPr
RAc
RSm
RSm
Rl
Rp
Rg CZaC,CZaC,CZaC,CZaC,CZiC,CZaC,CZpC,CZpC,CZpC
Entradas: Otro submodelo o sección: CZMSSmR, ZCRu Las ecuaciones diferenciales y variables auxiliares para las variables de estado MS, V y U del submodelo Caña de azúcar sección Rumen se obtienen de la “función” R
1f :
⎟⎟⎠
⎞⎜⎜⎝
⎛ R1
RU
RV
RMS
RU
RV
RMSR
1 )CP(;)VA(,)VA(,)VA(;dtCd,
dtCd,
dtCdf CCCCCCC
al sustituir C=CZ y Sup=R. Constantes y parámetros : DiZC, R
1)CP(C Rp
Rg CZpC,CZpC
Entradas: Modelo: R
SmRMS
RMS CZiC,CZiC,CZIn,CZdC
Otro submodelo o sección: VoRu
Sección Ciego Variable de estado Sm:
CCCCCSm CZSmExCZSmSmCZWSmCZMSSm
dtdCZC
−++=
Variable auxiliar: CZSmFlu*CZCiCZSmSmC =
CSm
Cl
C CZC*OpCCZSmEx = 2/)CZpCCZpC(CZpCRm C
lCp +=
Las ecuaciones diferenciales y variables auxiliares para las variables de estado M, Ac, Pr, Bu y Va del submodelo Caña de azúcar sección Ciego se obtienen de las “funciones” Turix y fSup:
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
Glu,VaGlu,Bu
GluPr,Glu,AcSF,PAGVLMSmL,MCOLVaBuPrAcMSm
c,c
,c,c,Y,k,k;dtCd
,dtCd,
dtCd,
dtCd,
dtCd,
dtCd,
dtCd,
dtCd
T2
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
SupSupVa
SupBu
SupPr
SupAc
SupM
SupVa
SupBu
SupPr
SupAc
SupM
Sup
)CP(;)VA(,)VA(
,)VA(,)VA(,)VA(;dtCd,
dtCd,
dtCd,
dtCd,
dtCd
fCCC
CCCCCCCC
al sustituir C=CZ y Sup=C. Constantes y parámetros : C)CP(C C
VaCBu
CPr
CAc
Cl
Cp OaC,OaC,OaC,OaC,OpC,CZpC
131

Entradas: Otro submodelo o sección: CZSmFlu, CZCi, CZSmFlu Las ecuaciones diferenciales y variables auxiliares para las variables de estado MS y W del submodelo Caña de azúcar sección Ciego se obtienen de la “función” C
2f :
⎟⎟⎠
⎞⎜⎜⎝
⎛ C2
CW
CMS
CW
CMSC
2 )CP(;)VA(,)VA(;dtCd,
dtCdf CCCCC
al sustituir C=CZ y Sup=C. Constantes y parámetros : C
2)CP(C Cl
Cp
CW
CMS OpC,CZpC,CZdC,CZdC
Entradas: Modelo: We Otro submodelo o sección: , InVoCi, VoRu, PaFluCSmMpC
DCDCDC PaSmSm,PaMSm,CZMSMS
Sección Intestino
Las ecuaciones diferenciales y variables auxiliares para las variables de estado Sm, MS, M, Ac, Pr, Bu y Va del submodelo Caña de azúcar sección Intestino se obtienen de la “función” fD:
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
DDVa
DBu
DPr
DAc
DM
DMS
DSm
DVa
DBu
DPr
DAc
DM
DMS
DSm
D
)CP();RMTP(,)VA(,)VA(,)VA(,)VA(,)VA(
)VA(,)VA(;dtCd,
dtCd,
dtCd,
dtCd,
dtCd,
dtCd,
dtCd
fCCCCCCC
CCCCCCCCC
al sustituir C=CZ y Sup=D. Constantes y parámetros : D)CP(C
Dl
Dp
Dg
DVa
DBu
DPr
DAc
DM
DMS
DSm CZpC,CZpC,CZpC,CZaC,CZaC,CZaC,CZaC,CZbC,CZbC,CZbC
Entradas: Otro submodelo o sección:
RRRRRR CZSmSm,CZMM,CZAcAc,PrPrCZ,CZBuBu,CZVaVa Cuadro I.7. Submodelo Melaza. Variable de estado Sm:
RDSm ZInSm
dtdZC
=
Variable auxiliar: ZRu*ZiCZInSm R
SmR =
ZRu = (ZIn / VoRu) / 24 Constantes y parámetros: R
SmZiC Entradas: Modelo: ZIn Otro submodelo o sección: VoRu
132

Cuadro I.8. Ecuaciones descriptivas. OsmCR = CosmCR + PasmCR + ZCsmCR OsmCC = CosmCC + PasmCC + ZCsmCC OCRM = CoCRM + PaCRM + ZCCRM OCRAc = CoCRAc + PaCRAc + ZCCRAc OCRPr = CoCRPr + PaCRPr + ZCCRPr OCRBu = CoCRBu + PaCRBu + ZCCRBu OCRVa = CoCRVa + PaCRVa + ZCCRVa OCCM = CoCCM + PaCCM + ZCCCM OCCAc = CoCCAc + PaCCAc + ZCCCAc OCCPr = CoCCPr + PaCCPr + ZCCCPr OCCBu = CoCCBu + PaCCBu + ZCCCBu OCCVa = CoCCVa + PaCCVa + ZCCCVa
RVa
RBu
RPr
RAc
RSm
RM CoCCoCCoCCoCCoCCoCCosmCR +++++=
CVa
CBu
CPr
CAc
CSm
CM CoCCoCCoCCoCCoCCoCCosmCC +++++=
RVa
RBu
RPr
RAc
RM
RSm
RV
RMS
RU PaCPaCPaCPaCPaCPaCPaCPaCPaCPasmCR ++++++++=
CVa
CBu
CPr
CAc
CM
CSm
CMS PaCPaCPaCPaCPaCPaCPaCPasmCC ++++++=
RVa
RBu
RPr
RAc
RM
RSm
RV
RMS
RU CZCCZCCZCCZCCZCCZCCZCCZCCZCCZsmCR ++++++++=
CVa
CBu
CPr
CAc
CM
CSm
CMS CZCCZCCZCCZCCZCCZCCZCCZsmCC ++++++=
RFi
R CoiC*CoRuCoInMS = Cuadro I.9. Submodelo Crecimiento animal.
Proteína ProA = (((CoMaaD+PaMaaD+ZCMaaD)*VoRu)*ProM)+(MSA*ProMS)
Ácidos grasos volátiles AcA = AcR+AcD+AcC AcR = (CoAcABR+PaAcABR+ZCAcABR)*VoRu AcD = (CoAcABD+PaAcABD+ZCAcABD)*VoRu AcC = (CoAcABC+PaAcABC+ZCAcABC)*VoCi PrA = PrC+PrD+PrR PrR = (CoPrGluR+PaPrGluR+ZCPrGluR)*VoRu PrD = (CoPrGluD+PaPrGluD+ZCPrGluD)*VoRu PrC = (CoPrGluC+PaPrGluC+ZCPrGluC)*VoCi PrBu = BuR+BuD+BuC BuR = (CoBuABR+PaBuABR+ZCBuABR)*VoRu BuD = (CoBuABD+PaBuABD+ZCBuABD)*VoRu BuC = (CoBuABC+PaBuABC+ZCBuABC)*VoCi VaA = VaR+VaD+VaC VaR = (CoVaExR+PaVaExR+ZCVaExR)*VoRu VaD = (CoVaExD+PaVaExD+ZCVaExD)*VoRu VaC = (CoVaExCa+PaVaExCa+ZCVaExCa)*VoCi
133

Entrada: Del modelo Ruminal: CoMaaD, PaMaaD, ZCMaaD, VoRu, ProM, MSA, ProMS, CoAcABR, PaAcABR, ZCAcABR, CoAcABD, PaAcABD, ZCAcABD, CoAcABC, PaAcABC, ZCAcABC, CoPrGluR, PaPrGluR, ZCPrGluR, CoPrGluD, PaPrGluD, ZCPrGluD, CoPrGluC, PaPrGluC, ZCPrGluC, CoBuABR, PaBuABR, ZCBuABR, CoBuABD, PaBuABD, ZCBuABD, CoBuABC, PaBuABC, ZCBuABC, CoVaExD, PaVaExD, ZCVaExD, CoVaExCa, PaVaExCa, ZCVaExCa Variable de estado aa:
AAAAaa OaaExoPrOaaOMaa
dtdOQ
−−=
Variable auxiliar: aaAOMaaA =
tPCRe*OMaaoPrOaa AA = aaA = ((ProA*aaPC)/1000)/PMaa
AAA oPrOaaOMaaOaaEx −= Entrada: Otro submodelo o sección: ProA Constantes y parámetros: aaPC, PMaa, RetPC Variable de estado ACA:
AAAAAACA OACAExOACAManOACAACAOInACA
dtdOQ
−−−=
Variable auxiliar: OInACAA = ACAtAcBu+ACAtGlu+ACAtPr+ACAtaa ACAtAcBu = (((AcA/1000)/PMAc)*IndACAAc)+ (((BuA/1000)/PMBu)*IndACABu) ACAtGlu = ((SmA/1000)/PMGlu)*IndACAGlu ACAtPr = IndACAPr * mPrA IndACAPr = ForATPoPr/ForATPoACA mPrA = (PrA/1000)/PMPr ACAtaa = ATPdeaa/ForATPoACA ATPdeaa = ATPdaa-ATPsPro ATPdaa = OaaExA * ForATPoaa ATPsPro = ReqATPsaa*OaaProA
tPalRe*)OACAManOInACA(OACAACA AAA −= RetPal = 1-(ACAsPal/(ACAsPal+ReqACAsPal)) ACAsPal = ReqATPsPal/ForATPoACA OACAManA = ACAMan ACAMan = ATPMan/ForATPoACA ATPMan = (((IndMan*(OWe/1000)^.75)/IndCalATP)/24)*cC
)tPalRe1(*)OACAManOInACA(OACAEx AAA −−= Entrada: Otro submodelo o sección: AcA, BuA, SmA, para, cC Constantes y parámetros: PMAc, IndACAAc, PMBu, IndACABu, PMGlu, IndACAGlu,
134

ForATPoPr, ForATPoACA, PMPr, ForATPoaa, ReqATPsaa, ForATPoACA, ReqATPsPal, ForATPoACA, ReqACAsPal, OWe, IndMan, IndCalATP Variable de estado Pal:
AAAAPal OPalExOPalPalOACAPal
dtdOQ
−−=
qACAsPalRe/OACAACAOACAPal AA = OPalPalA = OACAPalA - OPalExA OPalExA = PalNo PalNo = ACAsFa/ReqACAsPal ACAsFa = ATPsFa/ForATPoACA ATPsFa = OACAPalA * ReqATPsFa Entrada: Otro submodelo o sección: OACAACAA Constantes y parámetros: ReqATPsFa Variable de estado Fa:
AAAFa OGliFaOPalFa
dtdOQ
+=
OPalFaA = RetFa * OPalPalA * PMPal RetFa = 1-(PalsFa/(PalsFa+ReqPalsFa)) PalsFa = GlusFa/ReqACAsPal GlusFa = ReqGlusFa/ForATPoACA OGliFaA = (OPalPalA * RetFa/3)*PMGli Entrada: Otro submodelo o sección: OPalPalA, PMGli Constantes y parámetros: ReqGlusFa, ForATPoACA, ReqACAsPal, ReqPalsFa, PMPal
Ganancia de peso GaDa = ProDa + FaDa ProDa = ((OaaProACorregido*PMaa)/.2201)*24 OaaProACorregido = OaaProA Difaa = DifATP/ForATPoaa DifATP = DifACA * ForATPoACA DifACA = ACAMan-OInACAA FaDa = O3Pal1GliFaA * 24 O3Pal1GliFaA = OPalFaA + OGliFaA Entrada: Otro submodelo o sección: OaaProA, ACAMan, OInACAA, OPalFaA, OGliFaA Constantes y parámetros: PMaa, ForATPoACA, ForATPoaa
135

136
ANEXO II Cuadro II.1. Fuentes de los datos experimentales utilizados en la validación del modelo Wakax POS en predicción de la GPP por día. Indentificador Bibliografía
V09-V12 M Ferreira and T R Preston (1976) Effect of different concentrations of urea in final molasses given as a supplement to chopped sugarcane for fattening cattle. Trop Anim Prod. 1(2)66-71.
V16-V31 R Silvestre, NA MacLeod and TR Preston (1976) Supplementation of sugar cane/urea for growing cattle: levels of maize grain and a protein concentrate. Trop Anim Prod. 1:206-214.
V32 FJ Alvarez, A Priego and TR Preston (1977) Comportamiento animal en caña de azúcar ensilada. Prod Anim Trop. 2:27-33.
V33 y V35 HM Ferreiro, TR Preston and TM Sutherland (1977) Limitaciones dietéticas de raciones basadas en caña de azúcar. Prod Anim Trop. 2:58-63.
V36-V41 R Silvestre, NA MacLeod and TR Preston (1977) Suplementación de caña de azúcar con urea para engorde de ganado: efecto del maíz y diferentes niveles y fuentes de proteínas. Prod Anim Trop. 2:84-92.
V42 R Silvestre, NA MacLeod and TR Preston (1977) Effect of meal, dried cassava root and groundnut oil in diets based on sugar cane/urea, or molasses/urea. Trop Anim Prod. 2:151-157.
V48 y V49 HM Ferreiro, TM Sutherland, A Wilson and TR Preston (1977) Engorde de ganado con caña de azúcar: comparación de diferentes suplementos. Prod Anim Trop. 2:319-324.
V50 R Silvestre and FD DeB Hovell (1978) Growth of fattening cattle given chopped sugar cane supplement with different levels of wheat bran. Trop Anim Prod. 3:148-151.
V51 A Fernandez, JB Rowe ant TR Preston (1980) Effect of a methane inhibitor on growth performance and rumen VFA of steers fed sugar cane and molasses. Trop Anim Prod. 5:172-176.
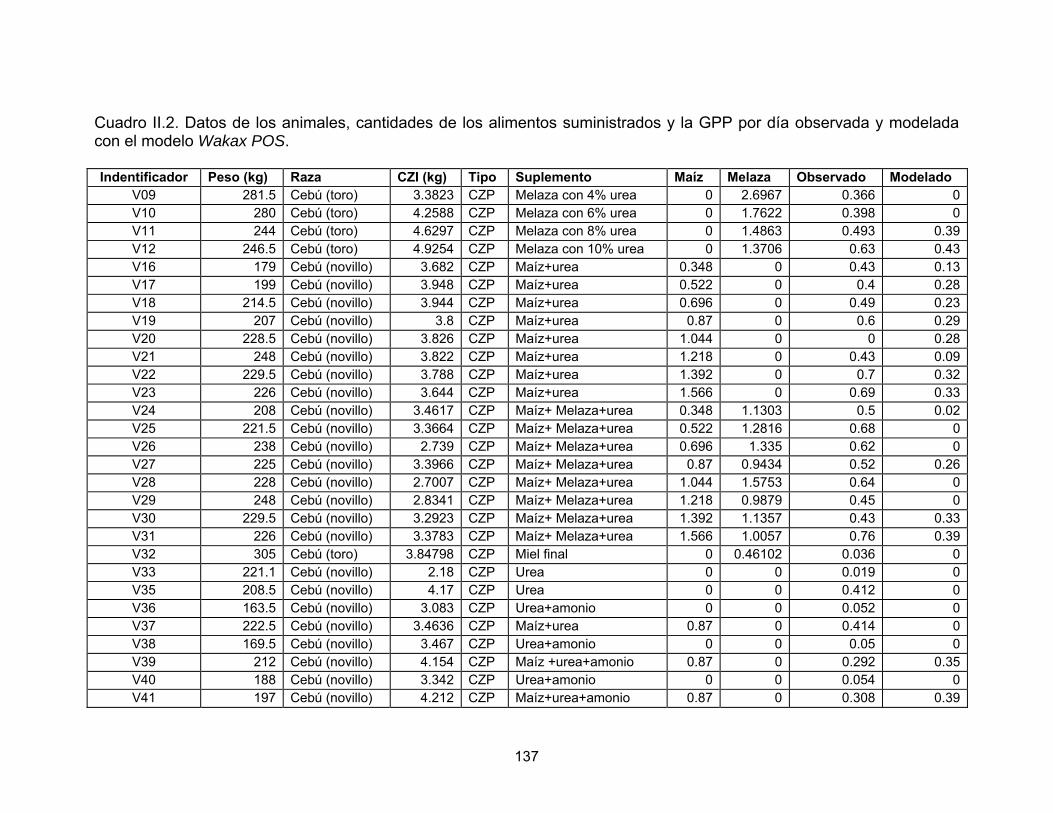
Cuadro II.2. Datos de los animales, cantidades de los alimentos suministrados y la GPP por día observada y modelada con el modelo Wakax POS. Indentificador Peso (kg) Raza CZI (kg) Tipo Suplemento Maíz Melaza Observado Modelado
V09 281.5 Cebú (toro) 3.3823 CZP Melaza con 4% urea 0 2.6967 0.366 0V10 280 Cebú (toro) 4.2588 CZP Melaza con 6% urea 0 1.7622 0.398 0V11 244 Cebú (toro) 4.6297 CZP Melaza con 8% urea 0 1.4863 0.493 0.39V12 246.5 Cebú (toro) 4.9254 CZP Melaza con 10% urea 0 1.3706 0.63 0.43V16 179 Cebú (novillo) 3.682 CZP Maíz+urea 0.348 0 0.43 0.13V17 199 Cebú (novillo) 3.948 CZP Maíz+urea 0.522 0 0.4 0.28V18 214.5 Cebú (novillo) 3.944 CZP Maíz+urea 0.696 0 0.49 0.23V19 207 Cebú (novillo) 3.8 CZP Maíz+urea 0.87 0 0.6 0.29V20 228.5 Cebú (novillo) 3.826 CZP Maíz+urea 1.044 0 0 0.28V21 248 Cebú (novillo) 3.822 CZP Maíz+urea 1.218 0 0.43 0.09V22 229.5 Cebú (novillo) 3.788 CZP Maíz+urea 1.392 0 0.7 0.32V23 226 Cebú (novillo) 3.644 CZP Maíz+urea 1.566 0 0.69 0.33V24 208 Cebú (novillo) 3.4617 CZP Maíz+ Melaza+urea 0.348 1.1303 0.5 0.02V25 221.5 Cebú (novillo) 3.3664 CZP Maíz+ Melaza+urea 0.522 1.2816 0.68 0V26 238 Cebú (novillo) 2.739 CZP Maíz+ Melaza+urea 0.696 1.335 0.62 0V27 225 Cebú (novillo) 3.3966 CZP Maíz+ Melaza+urea 0.87 0.9434 0.52 0.26V28 228 Cebú (novillo) 2.7007 CZP Maíz+ Melaza+urea 1.044 1.5753 0.64 0V29 248 Cebú (novillo) 2.8341 CZP Maíz+ Melaza+urea 1.218 0.9879 0.45 0V30 229.5 Cebú (novillo) 3.2923 CZP Maíz+ Melaza+urea 1.392 1.1357 0.43 0.33V31 226 Cebú (novillo) 3.3783 CZP Maíz+ Melaza+urea 1.566 1.0057 0.76 0.39V32 305 Cebú (toro) 3.84798 CZP Miel final 0 0.46102 0.036 0V33 221.1 Cebú (novillo) 2.18 CZP Urea 0 0 0.019 0V35 208.5 Cebú (novillo) 4.17 CZP Urea 0 0 0.412 0V36 163.5 Cebú (novillo) 3.083 CZP Urea+amonio 0 0 0.052 0V37 222.5 Cebú (novillo) 3.4636 CZP Maíz+urea 0.87 0 0.414 0V38 169.5 Cebú (novillo) 3.467 CZP Urea+amonio 0 0 0.05 0V39 212 Cebú (novillo) 4.154 CZP Maíz +urea+amonio 0.87 0 0.292 0.35V40 188 Cebú (novillo) 3.342 CZP Urea+amonio 0 0 0.054 0V41 197 Cebú (novillo) 4.212 CZP Maíz+urea+amonio 0.87 0 0.308 0.39
137

V42 243 Cebú (novillo) 3.502 CZP Urea+amonio 0 0 0.054 0V48 214 Cebú (toro) 3.1009 CZP Miel+urea 0 1.0591 0.037 0V49 276.5 Cebú (toro) 3.149 CZP Maíz+urea 0.435 0 0.051 0V50 227.5 Cebú (toro) 3.39 CZP 0 0 0.062 0V51 225 Cebú (toro) 1.5394 CZP Melaza+urea 0 3.1836 0.364 0
CZI=Caña de azúcar sin raíz, CZP=Caña de azúcar picada
138

Cuadro II.3. Fuentes e información de los datos experimentales utilizados en la validación del modelo Wakax POS en predicción en el Rumen y Ciego de DM(%), AGVs(mM), Ac(%), Pr(%) y Bu(%). Indentificador Bibliografía Peso (kg) Raza CZI (kg) Tipo Suplemento
V32 FJ Alvarez, A Priego and TR Preston (1977) Comportamiento animal en caña de azúcar ensilada. Prod Anim Trop. 2:27-33.
305 Cebú (toro) 3.84798 CZP Miel final
V42 R Silvestre, NA MacLeod and TR Preston (1977) Effect of meal, dried cassava root and groundnut oil in diets based on sugar cane/urea, or molasses/urea. Trop Anim Prod. 2:151-157.
243 Cebú (novillo) 3.502 CZP Urea+amonio
V43-V45
S Minor, NA MacLeod, TR Preston and RA Leng (1977) Studies on digestion in different sections of the intestinal tract of bulls fed sugar cane/urea with different supplements. Trop Anim Prod. 2(2):163-174.
325 Cebú (toro) 3.315 CZP Urea
V44 396 Cebú (toro) 5.4264 CZP Maíz+ureaV45 346 Cebú (toro) 5.699 CZP Maíz+urea
V46 y V47 A Priego, A Wilson and TM Sutherland (1977) Efecto de la caña de azúcar picada y suplementada con pulidura de arroz o harina de yuca sobre los parámetros de fermentación ruminal y tasa de líquido ruminal en toros cebu. Prod Anim Trop. 2:301-308.
300 Cebú (toro) 4.74 CZP Urea
V47 300 Cebú (toro) 4.59 CZP UreaV51 A Fernandez, JB Rowe ant TR Preston (1980)
Effect of a methane inhibitor on growth performance and rumen VFA of steers fed sugar cane and molasses. Trop Anim Pro. 5:172-176.
225 Cebú (toro) 1.5394 CZP Melaza+urea
CZI=Caña de azúcar sin raíz, CZP=Caña de azúcar picada
139