universidad nacional del callao - biblioteca...
TRANSCRIPT

UNIVERSIDAD NACIONAL DEL CALLAO
FACULTAD DE CIENCIAS NATURALES Y • MATEMÁTICA
®
INSTITUTO DE INVESTIGACIÓfU.-1,...._-----• R UNIVERSIDAD NACIONAL DEL CALLAO E VICE·P~~TI')rl.I':·C 1)~ !~NESTIGACIÓN e ,/.\}'0 ! 15 ABR 201\ ~ 1 HOf<A:/6"4 ..................... ~ .. - ·
. ~ () .. t~."lt .......................... ~ ......... _
INFORME FINAL DEL PROYECTO DE INVESTIGACIÓN
1 1 1
"TEXTO: TOPICOS DE MECANICA CLASICA -Parte II. Teoría y Problemas con Programas
Computacionales"
AUTOR
Mg. PABLO GODOFREDO ARELLANO UBILLUZ
(Período de ejecución: 01/03/12 al 28/02/14) (Resolución NO 195-2012-R del 12 de marzo de 2012)
ÍNDICE
Contenido Pág.
Resumen 03
Introducción 04
Parte teórica OS
l'!'ateriales y métodos 06
Resultados 07
Capítulo 1. Ecuaciones de movimiento de Hamilton OS 1.1 La función hamiltoniana
1.2 Teorema general de conservación
1.3 Coordenadas de traslación y de rotación
1.4 Propiedades de simetría
1.5 Coordenadas cíclicas y fuerzas generalizadas
1.6 Conservación del hamiltoniano
1. 7 Conservación de la energía
1.8 Ecuaciones canónicas de Hamilton
1.9 Teoremas de conservación hamiltoniana
Problemas desarrollados
Capítulo 2. Transformaciones canónicas 2.1. Espacio de las fases
2.2. Transformación canónica de variables
2.3. Corchetes de Poisson
2.4. Ecuaciones del movimiento y teoremas de conservación
2.5. Ecuaciones de movimiento usando corchetes de Poisson.
Problemas desarrollados
Capítulo 3. Teorema de Hamilton - lacobi 3.1 Teoría de Hamilton-Jacobi
3.2 Ecuación de Hamilton-Jacobi
3.3 Función principal de Hamilton
34
52
3.4 El problema del oscilador armónico
3.5 Ecuación de Hamilton-Jacobi para la función característica
de Hamilton
3.6 Ejemplos de separación de variables en la ecuación de
Hamilton-Jacobi
3. 7 Variables acción-ángulo para sistemas con un grado de libertad
Problemas desarrollados
Capítulo 4. Teoría canónica de la perturbación 4.1. Introducción
4.2. El método de transformaciones canónicas
4.3. El péndulo simple
4.4. El oscilador anharmónico
4.5. Invariantes Adiabáticos
Problemas desarrollados
83
Capítulo S. Formulaciones de Lagrange y Hamilton 104 5.1 Introducción
5.2 Transición a sistemas continuos
5.3 Oscilaciones longitudinales 5.4 Oscilaciones transversales
5.5 Formulación Lagrangiana y Principio de Hamilton para sistemas continuos Problemas desarrollados
Discusión
Referenciales
Apéndice
Anexo
122
123
124
125
2

RESUMEN
En el presente trabajo de investigación se ha elaborado un texto
intitulado "TÓPICOS DE MECÁNICA CLÁSICA - Parte II. Teoría y
Problemas con Programas Computacionales", en donde se ha
desarrollado la segunda parte del curso de Mecánica Clásica, con un
tratamiento computacional, a fin de que los estudiantes se familiaricen
con el uso de la simulación en la resolución de problemas en el campo
de la física.
' Los capítulos tratados en este trabajo son los siguientes: Ecuaciones de
movimiento de Hamilton, Transformaciones canónicas, Teorema de
Hamilton - Jacobi, Teoría canónica de la perturbación y Formulaciones
de Lagrange y Hamilton. Al final de cada capítulo se presentan la
solución de algunos problemas resueltos, a fin de afianzar los
conocimientos que se imparten en los mismos.
Finalmente se han seleccionado algunos problemas para su desarrollo
computacional usando lenguaje de computadoras, y que fueron
desarrollados en un ordenador personal.
, INTRODUCCION
El desarrollo de este trabajo es la continuación del trabajo intitulado
"Texto: Tópicos de Mecánica Clásica - Parte I. Teoría y Problemas con
Programas Computacionales", en donde se desarrolló la primera parte
del curso de Mecánica Clásica con un nuevo enfoque, el cual contempla
el uso de la computadora como un instrumento de ayuda en la
simulación y comprensión de los tópicos de esta asignatura.
Los estudiantes de física y de otras especialidades de ingeniería, tienen
dentro de su currículo la asignatura de mecánica clásica, sin embargo,
de la bibliografía existente relacionado con dicho curso, no se adapta
necesariamente a los requerimientos que se solicitan. Tampoco se
dispone de bibliografía que solucione problemas de mecánica clásica,
con el uso del ordenador. Esto motivó la elaboración de este texto,
resultado de una investigación bibliográfica, a fin de ser usado por los
estudiantes de nuestra universidad.
Con el presente trabajo se espera cubrir en cierta manera esta
deficiencia bibliográfica que presentan los estudiantes que llevan esta
asignatura.

PARTE TEÓRICA
Las teorías que sirvieron como fundamento para el desarrollo del
presente trabajo de investigación son aquellas que se encuentran en la
bibliografía existente, esto es, el presente trabajo ha sido desarrollado
usando una bibliografía actualizada, a fin de cubrir los temas
comprendidos de la segunda parte de la asignatura de mecánica clásica,
correspondiente a la aplicación de las ecuaciones de movimiento de
Hamilton, Transformaciones canónicas (Marion, 1995), Teorema de
Hamilton - Jacobi, Teoría canónica de la perturbación y las
Formulaciones de Lagrange y Hamilton (Goldstein, 1998), siendo por lo
tanto este trabajo, básicamente, una investigación bibliográfica.
Con respecto a la solución de problemas con programas
computacionales, se consideró lenguaje de computadoras en Fortran,
así como trabajos de autores (Valadez et al, 2006), que usan la
programación en la física.

, MATERIALES Y METODOS
Materiales
Para desarrollar este trabajo se ha usado información bibliográfica,
separatas y apuntes de clase relacionados con la asignatura.
Esta información ha sido procesada, obteniéndose el presente trabajo
incluyendo los temas de soluciones numéricas mediante un ordenador.
Métodos
Por ser una investigación bibliográfica relacionada con la enseñanza a
nivel superior, se ha usado el método inductivo y deductivo para
mostrar el desarrollo del formulismo que describen los conceptos físicos
descritos, así como también, en el análisis de solución en los problemas
resueltos.
RESULTADOS

CAPÍTULO I
ECUACIONES DE MOVIMIENTO DE HAMIL TON
1.1 LA FUNCIÓN HAMILTONIANA
Se define como Hamiltoniana de un sistema de partículas de
Lagrangiana L, a la función siguiente:
(1.1)
donde las Pi son las correspondientes componentes de momento
lineal.
En un sistema sometido a un campo exterior de potencial V,
sabemos que la Lagrangiana es de la forma:
r 1 2 1 ¿N · 2 .~..-=-mv -V=-m ·- q· -V 2 2 J-1 } (1.2)
por tanto, se tiene:
N N N
= L mi¡] -~m L q] + V = ~m L q] + V = ~ mv2 + V j=l j=l j=l
Por lo tanto:
JC= L+V (1.3)

Es decir, la Hamiltoniana de un sistema sometido a un campo
exterior constante, no dependiente del tiempo ni de la velocidad,
es la energía total del sistema, esto es, la suma de la energía
cinética más la energía potencial.
1.2 TEOREMA GENERAL DE CONSERVACIÓN
Si el Lagrangiano de un sistema no considera una coordenada
generalizada qj (aunque pueda tener su derivada temporal i¡j), se
dice que esa coordenada es cíclica o ingnorable.
El teorema de Woother señala que el momento canónico o
conjugado Pi = :~i de una coordenada cíclica qj se conserva.
Teorema que se demuestra tomando la ecuación de Lagrange para
qj donde se tiene que:
0 = ~ (aL)_ aL = dpj _ 0 (lA) dt aqj aqj dt
Por lo que Pi es constante.
1.3 COORDENADAS DE TRASLACIÓN Y DE ROTACIÓN
Supongamos que qj es tal que oqj representa una traslación del
sistema en su conjunto en una dirección ñ arbitraria (por ejemplo
las coordenadas cartesianas del centro de masa del sistema). Por
lo que:
(1.5)

Si qi es una coordenada de traslación, es decir oqi representa sólo
una traslación del sistema en su conjunto en una dirección ñ
arbitraria, en este caso:
Por lo que Pi viene a ser el impulso total del sistema en la
dirección ñ : N
' • ---+ p ---+ Pi = L miri · n = · n i=l
Si qi es tal que oqi representa una rotación alrededor del eje ñ ,
entonces se obtiene que:
se tiene que Pi es la
componente del impulso angular total en la dirección ñ:
(1.6)
Con estos últimos resultados concluimos que:
a) Si una coordenada de traslación es cíclica, entonces se
conserva la componente del impulso total según la dirección de
traslación.
b) Si una coordenada de rotación es cíclica, se conserva la
componente del momento angular según la dirección de
rotación.

1.4 PROPIEDADES DE SIMETRÍA
Para conocer si una coordenada es cíclica o no, no es necesario
calcular el Lagrangiano, sino sólo se debe conocer las propiedades
de simetría del sistema.
Para el caso de un sistema invariante respecto a una traslación en
una determinada dirección, entonces esa coordenada de traslación
figurará en el Lagrangiano. Entonces esta coordenada de
traslación es cíclica y se conserva el impulso total correspondiente.
En forma análoga, si un sistema es invariante respecto a una
determinada rotación, se conserva el momento angular
correspondiente.
Un caso particular, es el de un sistema con simetría esférica,
donde se conservan todas las componentes del impulso angular.
1.5 COORDENADAS CÍCLICAS Y FUERZAS GENERALIZADAS
Consideremos la ecuación de Lagrange:
(1.7)
Si una coordenada q¡ es tal que oq¡ representa un desplazamiento
(traslación o rotación) del sistema en su conjunto, no aparece en
la expresión de la energía cinética, porque las velocidades no se
alteran al desplazar el sistema en su conjunto. Por lo que:
Pj = Rj

La conservación del momento conjugado de una coordenada
cíclica implica que se anula la fuerza generalizada
correspondiente.
De la definición de fuerza generalizada, tenemos: N ~ ar-
Ri = ¿ Fi · aq~ i=l ]
donde Ri es la componente en la dirección ñ de la fuerza total
aplicada sobre el sistema para una coordenada de traslación en
dicha dirección:
Ri = F ·ñ
e igual a la componente en la dirección ñ del momento de fuerza
total para una coordenada de rotación alrededor de dicha
dirección:
Ri = M·ñ
Por lo tanto, se tiene que Pi= P · ñ en una traslación y Pi= L · ñ
para una rotación, y como ñ e~ una dirección arbitraria, se tiene
que:
Í'=F y i=M (1.8)
Por tanto, la expresión Pi = Ri es una generalización de la
segunda ley de Newton, tanto para partículas individuales como
para sistemas complejos.
1.6 CONSERVACIÓN DEL HAMIL TONIANO
Según vemos, existe una generalización de los teoremas de
conservación del impulso y del momento angular. Asimismo se
puede encontrar una generalización similar del teorema d~
conservación de la energía.
A partir del Lagrangiano, tenemos:

3N-k 3N-k dL ~ aL ~ aL aL dt = ~ aq
1· qj + ~ aq
1· qj +-at
j=l J=l
= 3rk (:t (::.)- Qj) i¡j + 3r :~ qj + ~~ j=l ] j=l ]
3N-k 3N-k
= I (p j - Qj) qj + I p j qj + ~~ j=l j=l
3N-k 3N-k ~ ~ d aL
=- L -Qi izi + L dt (Piizi) + at j=l j=l
Esta ecuación nos permite definir el Hamiltoniano de un sistema
mediante la ecuación:
por lo que:
qr ~3N-k · r JL = L..j=l qjpj - .lw (1.9)
Para un sistema conservativo, las fuerzas se deducen de un
potencial, por tanto:
ax at
aL
at (1.10)
Este es el teorema de conservación del Hamiltoniano, que se
enuncia como: "Si el tiempo es una coordenada cíclica, entonces
el Hamiltoniano se conserva".
1.7 CONSERVACIÓN DE LA ENERGÍA
La energía cinética en función de las velocidades generalizadas qi
se representa mediante la ecuación:
13
~

(1.11)
3N-k 3N-k3N-k
= b + ¿ bilj + ¿ ¿ bjt([/lt j=l j=l f=l
donde los valores de b, bi ybie están dados por las ecuaciones:
1 f (ar·)2
b = z¿ mí att ' í=l
N
b. = ~ . arí arí J ¿ mt aq· at '
í=l 1
Si las ligaduras no contienen el tiempo, es decir, si son
esclerónomas, entonces ~i = o , entonces la energía cinética
·tendrá una forma cuadrática homogénea respecto a las
velocidades generalizadas:
3N-k 3N-k
T = L L bje4ile (1.12) j=l f=l
Entonces:
(1.13)
Por lo tanto:
El valor constante del Hamiltoniano para vínculos esclerónomos
(independientes del tiempo) implica que la energía mecánica total
se conserva.
Es necesario tener en consideración que Jf y la energía E son
diferentes, porque el tiempo puede existir en las ecuaciones de

transformación ri = ri(q, t) y no en Jf, y en este caso Jf es una
constante del movimiento, pero no es la energía total.
1.8 ECUACIONES CANÓNICAS DE HAMILTON
Las ecuaciones diferenciales acopladas de segundo orden
obtenidas de las ecuaciones de Lagrange para un sistema de 3N-k
grados de libertad, se pueden reducir duplicando su número. Por
ejemplo para el caso de un problema unidimensional general, . 2
donde el Lagrangiano es: L = mq - V(q), de la ecuación de 2
Lagrange se obtiene que mq = -av ¡aq, que es una ecuación
diferencial de segundo grado para la función q(t). Como el
momento es p = !~ = mi¡, entonces de la ecuación de Newton se
obtienen dos ecuaciones acopladas de primer orden para las
funciones q(t) y p(t).
av p=-aq y
. p q=
m
Estas expresiones pueden ser escritas en función del Hamiltoniano 2
Jf = é¡p- L = L + V(q) por las ecuaciones: 2m
. aJf . aJf p=-a;¡ Y q=·ap (1.14)
Donde se observa que se ha reducido el orden de las ecuaciones
diferenciales pero duplicando su número.
Este resultado se · puede generalizar en vez de tener 3N-k
ecuaciones diferenciales acopladas _de segundo orden para q1(t),
. q3N-k(t), se usen 2(3N-k) ecuaciones de primer orden para q1(t),
.' q3N-k(t) y Pl(t), . P3N-k(t).
'

El H "1 . t1f ~3N-k . L am1 ton1ano JL = L.,j=l qjpj - como función ya no
depende de llt (t), . q3N-k(t) sino de
P1(t), ·P3N-k(t) Y t.
Además,
De igual manera:
(
3N-k ) 3N-k 3N-k a1f a ~ . . ~ aq1 ~ aL aq1 ap. = ap. L q¡p¡ - L = qj + L ap. Pt - L aq
1 ap.
} } f=l f=l } f=l }
3N-k . ~ ( aL) aq1 . = qj + L Pt - -¡¡- ~ = qj + o
t=l q¡ p1
Ecuaciones que corresponden al caso unidimensional, con un
término adicional Qj que corresponde a las fuerzas no
conservativas. Así tenemos:
iJ:J[ = Q· - p· iJq¡ J J
(1.15)
En estos casos se debe encontrar el Hamiltoniano del sistema
como función de los momentos conjugados Pj y no de las
velocidades generalizadas qj . Se debe encontrar una expresión
16
~
que relacione ambos conjuntos de variables. De la expresión de
energía cinética:
3N-k 3N-k3N-k
T = b + I bjl¡j + I I bHiJ/lt (1.16) j=l j=l f=l
Se observa que los potenciales independientes de la velocidad, las
velocidades generalizadas y. los momentos conjugados están
relacionado mediante una trasformación lineal:
(1.17)
Donde b¡ y b¡.e son funciones de las coordenadas generalizadas y
de tiempo dadas por:
Usando esta ecuación y la ecuación para el Hamiltoniano:
3N-k
1f = ¿ qipi -L (1.18)
j=l
Se obtiene finalmente el Hamiltoniano JC como función de las
coordenadas generalizadas, los momentos conjugados y el tiempo.
1.9 TEOREMAS DE CONSERVACIÓN HAMILTONIANA
Considerando la definición del Hamiltoniano, se obtiene que:
at at (1.19)
17

Además se encontró que:
(1.20)
Lo que significa que si el Hamiltoniano no considera el tiempo,
entonces t es cíclico, porque tampoco aparece en el Lagrangiano y
viceversa; o, si el Hamiltoniano no considera a una coordenada qj,
entonces qi es cíclica y viceversa.
Así de las ecuaciones:
dJf aH
dt at '
donde los teoremas de conservación en la formulación
Hamiltoniana, son más inmediatos, se tiene que:
- Si el tiempo es una coordenada cíclica, entonces el
Hamiltoniano se conserva.
- El momento conjugado Pj de una coordenada cíclica se
conserva, en ausencia de fuerzas no conservativas.
PROBLEMAS DESARROLLADOS
PROBLEMA 1.-
Sean los tres sistemas mecánicos de las correspondientes figuras. En
todos ellos el campo g es paralelo al eje Z, como habitualmente se
describe, y paralelamente al eje X, y en su sentido positivo, se dispone
18
un campo E. Ambas masas son también cargas, siendo idénticas para
estos dos campos.
1) ¿cuántas ligaduras y cuánt9s grados de libertad tiene cada uno de
ellos?·
2) ¿cuántas ecuaciones de Hamilton son nec;:esarias en cada caso?
Solución
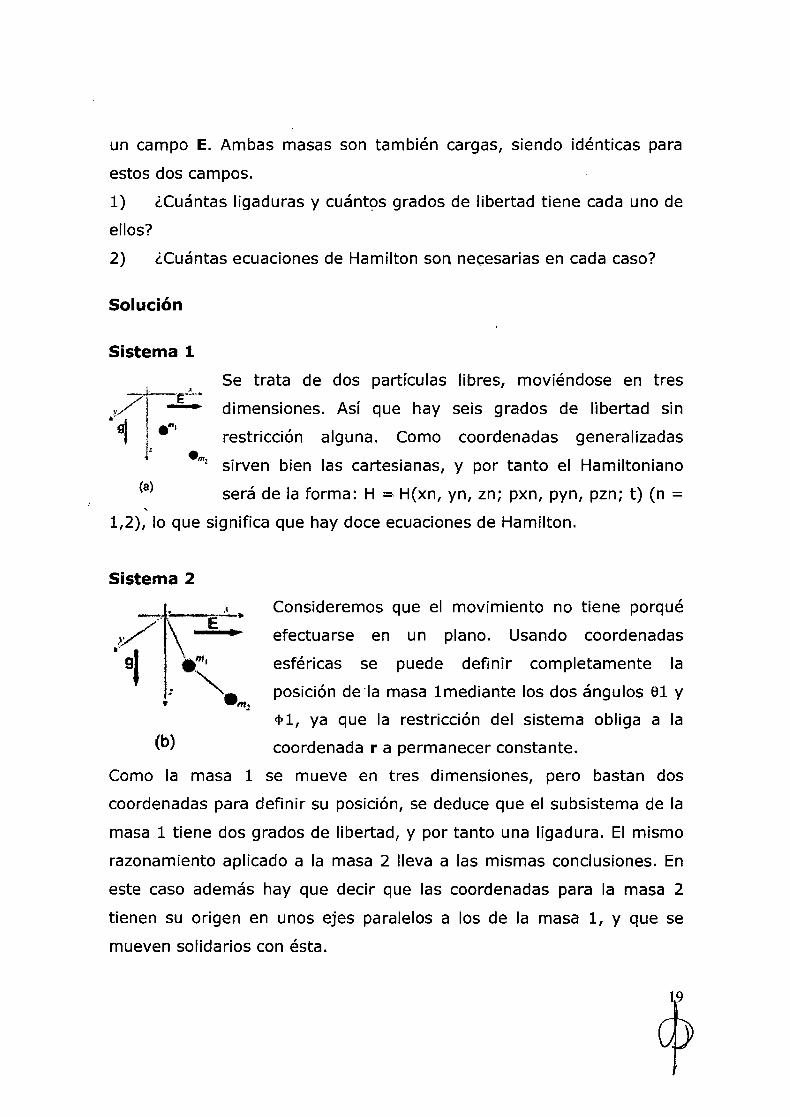
Sistema 1
(a)
'
Se trata de dos partículas libres, moviéndose en tres
dimensiones. Así que hay seis grados de libertad sin
restricción alguna. Como coordenadas generalizadas
sirven bien las cartesianas, y por tanto el Hamiltoniano
será de la forma: H =, H(xn, yn, zn; pxn, pyn, pzn; t) (n =
1,2), lo que significa que hay doce ecuaciones de Hamilton.
Sistema 2
:: .,
(b)
E .. Consideremos que el movimiento no tiene porqué
efectuarse en un plano. Usando coordenadas
esféricas se puede definir completamente la
posición de·la masa !mediante los dos ángulos 61 y
<1> 1, ya que la restricción del sistema obliga a la
coordenada r a permanecer constante.
Como la masa 1 se mueve en tres dimensiones, pero bastan dos
coordenadas para definir su posición, se deduce que el subsistema de la
masa 1 tiene dos grados de libertad, y por tanto una ligadura. El mismo
razonamiento aplicado a la masa 2 lleva a las mismas conclusiones. En
este caso además hay que decir que las coordenadas para la masa 2
tienen su origen en unos ejes paralelos a los de la masa 1, y que se
mueven solidarios con ésta.
Como en total son dos partículas que se mueven en tres dimensiones,
pero bastan cuatro coordenadas generalizadas, se deduce que el
sistema tiene cuatro grados de libertad, y por tanto dos ligaduras. El
hamiltoniano tendrá la forma H = H(Bn, <J.n; pBn,p<J.n; t), lo que significa
que hay ocho ecuaciones de Hamilton.
Como en total son dos partículas que se mueven en tres dimensiones,
pero bastan cuatro coordenadas generalizadas, se deduce que el
sistema tiene cuatro grados de libertad, y por tanto dos ligaduras. El
hamiltoniano tendrá la forma H = H(Bl, B2; pBl,pB2; t), lo que significa
que hay ocho ecuaciones de Hamilton.
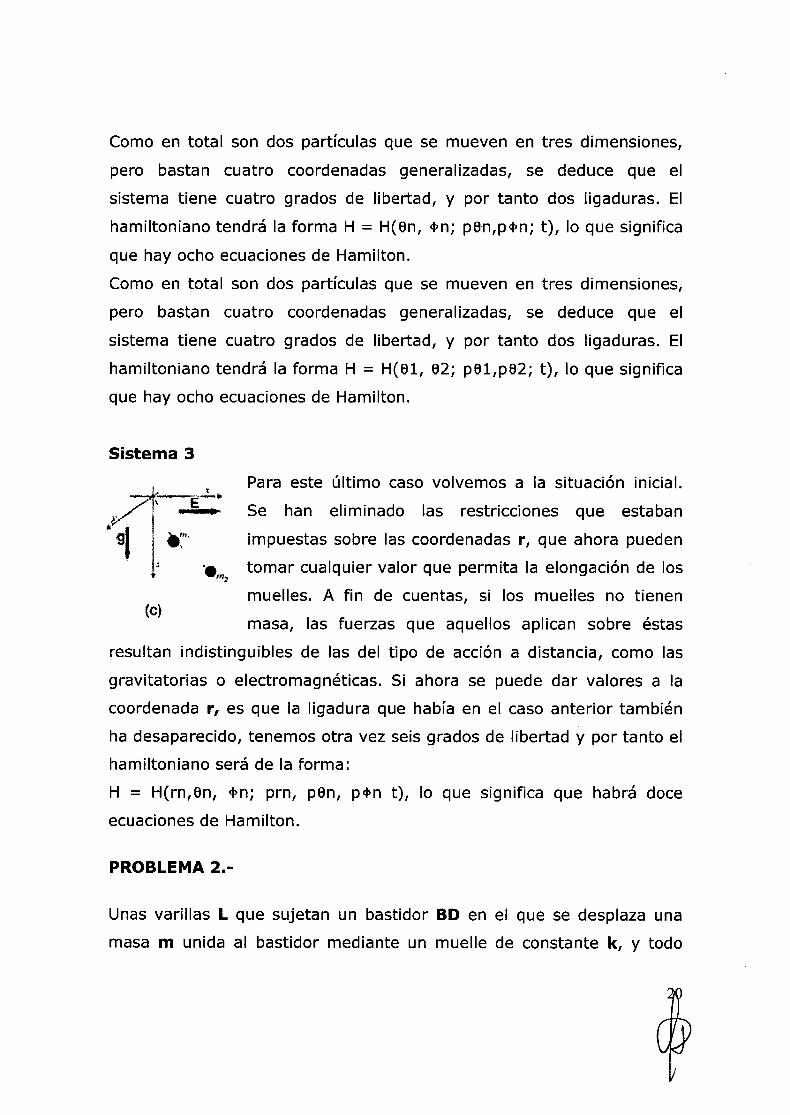
Sistema 3
(C)
Para este último caso volvemos a la situación inicial.
Se han eliminado las restricciones que estaban
impuestas sobre las coordenadas r, que ahora pueden
tomar cualquier valor que permita la elongación de los
muelles. A fin de cuentas, si los muelles no tienen
masa, las fuerzas que aquellos aplican sobre éstas
resultan indistinguibles de las del tipo de acción a distancia, como las
gravitatorias o electromagnéticas. Si ahora se puede dar valores a la
coordenada r, es que la ligadura que había en el caso anterior también
ha desaparecido, tenemos otra vez seis grados de libertad y por tanto el
hamiltoniano será de la forma:
H = H(rn,Bn, <J.n; prn, pBn, plf>n t), lo que significa que habrá doce
ecuaciones de Hamilton.
PROBLEMA 2.-
Unas varillas L que sujetan un bastidor BD en el que se desplaza una
masa m unida al bastidor mediante un muelle de constante k, y todo

ello, colgado de un techo. Para ir introduciendo suavemente nuevos
términos, comencemos sin masa en las varillas ni el bastidor, y dejemos
también para un poco más adelante el término con las fuerzas
disipativas que surge del rozamiento de m con el bastidor:
Solución
Supongamos que el movimiento se efectúa en un plano.
Las coordenadas generalizadas serán el
ángulo aque forma el péndulo con la
vertical, con el cero de potencial en el
plano XV (el techo), y la coordenada
"x", con su cero correspondiente en el
p..x...x....ll.-l-X....L.X ____ __,, D extremo del muelle en equilibrio (su
,\' longitud natural). Para encontrar el
Hamiltoniano, realizamos los pasos siguientes:
Paso 1.- Escribir la Lagrangiana
V= +Yíkx2 - mg(L- Lcos6)
T:> = T- v = Y.!rn[e 2L2 + x 2 + 2e x Leos e- ~x2 + 2gL(l-cos6)), .....
Paso 2.- Procedamos ahora a utilizar las ecuaciones de Hamilton para
encontrar los momentos p asociados:
aL • Pe=-.-= m(L26 +X Leos a) ca aL • Pv = -.- = m(x +6 Lcos6)
~ ax Resolviendo este sistema de dos ecuaciones mediante el método de
Cramer para x y é:
x = - 1 -(&- Pe cosa) sen2a m ml
a• l ( l>e Px a) = ---cos Lsen:za ml m
Paso 3-. Ahora la función energía h=h(e,x,é,x) es:
h(6,x;6 ,X)= e m(L2S +X Leos e') +X m(x +S lcos6)- b.
= 3<Smxz + Y.!mL2á 2 -+ mlcosex á + ~kx2 -mgl(l- cos9) . Paso 4.- Sustituyendo ahora xy 6, obtenemos finalmente el
Hamiltoniano:
li=Yltr~_!_(f)., -l!.tcos6P)+Y,;nl1l 1 <~-P, cos6)']+ sen49 m mt Llser1'e ml m
.fmlcos8f_!_(~- .!J..cos9)][_2_(.Et_- B:.cos9)) • Yikxl-mgl(l- cosS) setiS m mL LseriS ml m
Tras agrupar términos, la hamiltoniana presenta este aspecto más
manejable:
H = m 1. ((&)2 + (~)l- (~)(J!JL)cosSsenlS) + Y?kxl -mgl(l- cosS) 2sen e •n rnl m mL
PROBLEMA 3.-
El potencial de un oscilador armónico está dado por:
1 V(q) = -mw2 q2
2
Utilizando coordenadas rectilíneas, encontrar el lagrangiano, los
momentos conjugados y el hamiltoniano del sistema.
Solución
El lagrangiano de un sistema mecánico se escribe de la forma
L(q, q) = T(q, q)- V(q)
En coordenadas rectilíneas, la energía cinética está dada por:
1 T(q) = -mq2
2

Por lo que:
Los momentos conjugados se definen como la derivada respecto de q
del lagrangiano,
Obteniendo que:
Jp =mq,l
Por lo que, el momento conjugado viene a ser la cantidad de
movimiento, o momento lineal del sistema.
De otro lado, el hamiltoniano se define de la forma
H(q,p,t) = p · q- L(q,q),
Operando se obtiene que el hamiltoniano expresado en función del
momento lineal, es:
PROBLEMA 4.-
Usando las ecuaciones de Hamilton, determinar las ecuaciones del
movimiento de un péndulo ideal de masa m y longitud r.
y R.
... ___
X

Solución
Consideremos el eje X como el nivel de referencia de las energías
potenciales. De la gráfica se obtiene que:
x = r sene ~ X. = r é cose
y= r cose ~ y= -r é sen e
La energía cinética está dada por:
T = ~m(x2 + y2 ) = ~m(r2 é2 cos2 e + r2 é2 sen2 e) = ~mr2 é2
2 2 2
La energía potencial está dada por:
V = - mgy = - mgr cose
El hamiltoniano de este sistema es:
H = T + V = ~ mr2 é2 - mgr cose 2
Si usamos e como posición generalizada, el momento generalizado será:
aT 2
. p = -. = mr e a e
que representa el momento de la cantidad de movimiento, entonces:
p2 H = -
2 2- mgrcose
mr
Las ecuaciones de Hamilton quedarán:
Por lo tanto:
ap at
a e at
aH a e
aH ap
ae P . ~ -=-=e at mr2
~ ;t (mr2 é) = -mgr sene
.. g e= --sene
r

e o ·o ·¡¡; o
Cl..
PROBLEMAS DESARROLLADOS CON PROGRAMAS
COMPUTACIONALES
PROBLEMA N° 1
Un péndulo simple es uno tal, que se puede considerar como una masa
puntual, suspendida de una cuerda o varilla de masa despreciable. Es un
sistema resonante con una frecuencia de resonancia simple.
0.08
0.06
0.04
0.02
o
-0.02
-0.04
-0.06
-0.08
d2() 9 -=--sen() dt 2 l
Posicion vs tiempo para el pendulo simple
Tiempo
6 o

o ... e
Trayectoria en el espacio de fase del pendulo simple
e----~----------~~----------~~---~.1
PROGRAMA COMPUTACIONAL
PROGRAM PENDULO
INTEGER NSTEP,NVAR
PARAMETER(NVAR=2)
INTEGER i,j
Posicion
REAL x(100000),xl,x2,y(S0,100000),vstart(NVAR),h
COMMON /path/ x,y
EXTERNAL derivs
OPEN(S,FILE='archiv.dat') ! archivo donde se depositan phi y t
0.1
OPEN(lO,FILE='archivl.dat') ! archivo donde se depositan dphidt y t
OPEN(lS,FILE='trayectoria.dat') ! archivo donde se depositan dphidt e phi
xl=l. ! Tiempo inicial
vstart{l)=O.OOS ! phi inicial
vstart(2)=0.3 ! dphidt inicial
h=O.Ol ! paso de integración
x2=55.0 ! tiempo final
NSTEP=(x2-x1)/h !Numero de pasos o numero de pares de valores
call rkdumb(vstart,NVAR,x1,x2,NSTEP,derivs)
write(5,'(/1x,t9,a,t17,a,t31,a/)') 't','Theta','Omega'
do i=1,NSTEP
j=i
end do
END
write(5,'(1x,f10.4,2x,2f12.6)') x(j),y(1,j) !escribe t y phi
write(10,'(1x,f10.4,2x,2f12.6}') x(j),y(2,j) !escribe t y dphidt
write(15,'(1x,f10.4,2x,f12.6)')y(1,j),y(2,j) !phi y dphidt
1------------------------------------------------------------SUBROUTINE derivs(x,y,dydx)
REAL x, y( *),dydx( *),1
X=X
1=0.53
dydx(1)=y(2)
dydx(2)=-(9.8/l)*sin(y(1))
return
END
1-------------------------------------------------------------SUBROUTINE rkdumb(vstart,nvar,x1,x2,nstep,derivs)
INTEGER nstep,nvar,NMAX,NSTPMX
PARAMETER (NMAX=SO,NSTPMX=100000)
REAL x1,x2,vstart(nvar),xx(NSTPMX),y(NMAX,NSTPMX)
EXTERNAL derivs
COMMON /path/ xx,y
USES rk4
INTEGER i,k
REAL h,x,dv(NMAX),v(NMAX)
do 11 i=1,nvar
v(i )=vsta rt(i)
y(i,1)=v(i)
11 continue
xx(1)=x1
x=x1
h=(x2-x1)/nstep ' do 13 k=1,nstep

call derivs(x,v,dv)
call rk4(v,dv,nvar,x,h,v,derivs)
if(x+h.eq.x)pause 'stepsize not significant in rkdumb'
x=x+h
xx(k+1)=x
do 12 i=1,nvar
y(i,k+1)=v(i)
12 continue
13 continue
return
END
r k 4. f o r -------------------------------------------------
SUBROUTINE rk4(y,dydx,n,x,h,yout,derivs)
INTEGER n,NMAX
REAL h,x,dydx(n),y(n),yout(n)
EXTERNAL derivs
PARAMETER (NMAX=SO)
INTEGER i
REAL hG,hh,xh,dym(N MAX),dyt(N MAX), yt(NMAX)
hh=h*O.S
hG=h/6.
xh=x+hh
do 11 i=1,n
yt(i)=y(i)+hh*dydx(i)
11 continue
call derivs(xh, yt,dyt)
do 12 i=1,n
yt(i)=y(i)+hh *dyt(i)
12 continue
call derivs(xh,yt,dym)
do 13 i=1,ri
yt(i)=y(i)+h*dym(i)
dym(i)=dyt(i)+dym(i)
13 continue
call derivs(x+h,yt,dyt)
do 14 i=1,n
yout(i)=y(i)+h6 *( dydx(i)+dyt(i)+2. *dym(i))
14 continue
8

return
END
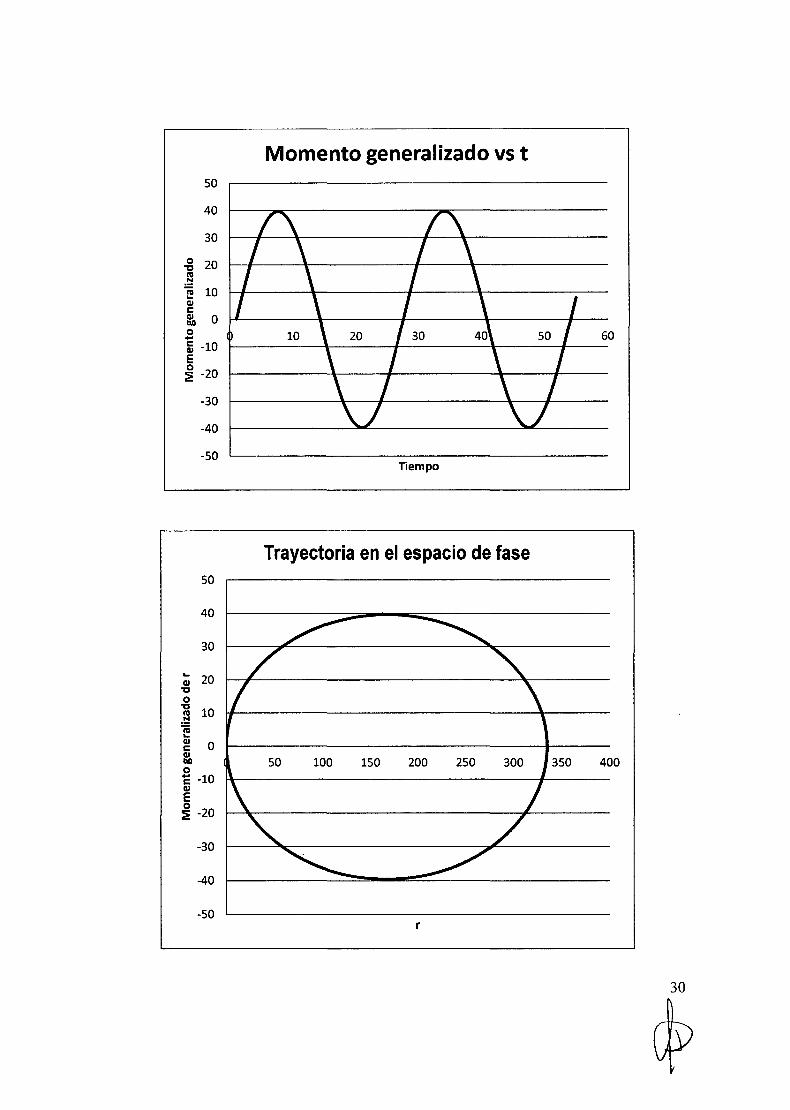
PROBLEMA N° 2
Una partícula de masa m está vinculada suavemente a un tubo liso el
cual se hace rotar en torno de la vertical con velocidad angular Q
constante, de modo que el ángulo de inclinación del tubo con la vertical
es constante a . Para la coordenada generalizada r, la distancia de la
partícula al punto fijo del tubo se pide
.. 0 2 . 2 r == r ..... s1n ü- g cosa.
RESULTADOS
r vs t 400
3SO
300
2SO ... r::: o
·¡:¡ 200 ·¡¡¡ o a.
1SO
100
so
o o 10 20 30 40 so 60
Tiempo
9
so
40
30
o 20 "D
"' .!:::! ¡¡ 10 ... QJ e QJ o ti.O o ... ~ -10 E o ~ -20
-30
-40
-50
so
40
30
~ 20 "D o -g 10 .!:::! "E ~ o QJ ti.O o 1: -10 QJ
E o ~ -20
-30
-40
-50
Momento generalizado vs t
60
Tiempo
Trayectoria en el espacio de fase
150 350 400
r
30
qv

PROGRAMA COMPUTACIONAL
PROGRAM BARRAROT INTEGER NSTEP,NVAR PARAMETER(NVAR=2) INTEGER i,j REAL x(lOOOOO),xl,x2,y(SO,lOOOOO),vstart(NVAR),h COMMON /path/ x,y EXTERNAL derivs
OPEN(S,FILE='archiv.dat') ! archivo donde se depositan r y t OPEN(lO,FILE='archivl.dat') ! archivo donde se depositan drdt y t OPEN(lS,FILE='trayectoria.dat') ! archivo donde se depositan drdt e r
xl=l. ! Tiempo inicial vstart(l)=O.Ol ! r inicial vstart(2)=0.2 ! drdt inicial
h=O.Ol ! paso de integración x2=55.0 ! tiempo final NSTEP=(x2-xl)/h !Numero de pasos o numero de pares de valores
call rkdumb(vstart,NVAR,xl,x2,NSTEP,derivs)
do i=l,NSTEP j=i
write(S,'(lx,f10.4,2x,2f12.6)') x(j),y(l,j) !escribe t y r write(lO,'(lx,f10.4,2x,2f12.6}') x(j),y(2,j) !escribe t y drdt write(15,'(1x,fl0.4,2x,fl2.6)')y(l,j),y(2,j) !r y drdt
end do END
1------------------------------------------------------------SUBROUTINE derivs(x,y,dydx) REAL x,y(*),dydx(*),g,ohmio,alfa
X=X .
g=9.8 ohmio=0.8 alfa=0.3
dydx(l)=y(2) dydx(2)=-y( 1) *ohmio* *2 * (sin(alfa)) * * 2+g*cos( alfa)
return END
!-------------------------------------------------------------
SUBROUTINE rkdumb(vstart,nvar,x1,x2,nstep,derivs) INTEGER nstep,nvar,NMAX,NSTPMX PARAMETER (N MAX=SO,NSTPMX=100000) REAL x1,x2,vstart(nvar),xx(NSTPMX),y(NMAX,NSTPMX) EXTERNAL derivs COMMON /path/ xx,y USES rk4 INTEGER i,k REAL h,x,dv(NMAX),v(NMAX) do 11 i=1,nvar v(i)=vstart(i) y(i,1)=v(i)
11 continue xx(1)=x1
x=x1 h=(x2-x1)/nstep do 13 k=1,nstep
call derivs(x,v,dv) call rk4(v,dv,nvar,x,h,v,derivs) if(x+h.eq.x)pause 'stepsize not significant in rkdumb' x=x+h xx(k+1)=x do 12 i=1,nvar y(i,k+1)=v(i)
12 continue 13 continue
return END r k 4. f o r -------------------------------------------------
SUBROUTINE rk4(y,dydx,n,x,h,yout,derivs) INTEGER n,NMAX REAL h,x,dydx(n),y(n),yout(n) EXTERNAL derivs PARAMETER (NMAX=SO) INTEGER i REAL hG,hh,xh,dym(NMAX),dyt(NMAX),yt(NMAX) hh=h*O.S hG=h/6. xh=x+hh do 11 i=1,n
yt(i)=y(i)+hh*dydx(i) 11 continue
call derivs(xh,yt,dyt) do 12 i=1,n

yt(i)=y(i)+hh *dyt(i) 12 continue
call derivs(xh,yt,dym) do 13 i=1,n
yt(i)=y(i)+h*dym(i) dym(i)=dyt(i)+dym(i)
13 continue call derivs(x+h,yt,dyt) do 14 i=1,n
yout(i)=y(i)+h6 *( dydx(i)+dyt(i)+2. *dym(i)) 14 continue
return END
33
~

CAPÍTULO 11
TRANSFORMACIONES CANÓNICAS
2.1. ESPACIO DE LAS FASES
El espacio de las fases de un sistema de partículas es el espacio cuyos
puntos son las 2n componentes qv q2 , .•. , qn, Pv p2, ... , Pn 1 es decir, las
coordenadas generalizadas y las correspondientes componentes de
momento lineal.
En el espacio de fases del sistema, se dice, para cada valor de k, que
qk y Pk son variables conjugadas entre sí.
Se define el Corchete de Poisson para dos funciones f1 y f2 , en las
variables del espacio de las fases, y se representa por [fv f2], a la suma
de derivaciones parciales siguiente:
(2.2)
Si una coordenada no es considerada, y como su componente de
momento lineal es constante, el espacio fásico tendría dos componentes
menos.
En el caso de que hubiera m coordenadas ignoradas, las dimensiones
del espacio de las fases sería, entonces, 2(n-m).

2.2. TRANSFORMACIÓN CANÓNICA DE VARIABLES
La condición necesaria y suficiente para que una transformación de
variables de la forma (qi, pJ ~ (Qi, PJ mantenga la invariancia de las
ecuaciones de Hamilton
. oH Pi=- oq¡
. oH q¡ = op¡ i = 1, 2, 3, ... , n (2.3)
es que exista una función de las coordenadas generalizadas y del
tiempo, f = f( q¡, Qi' t), tal que
of p¡ = oq¡
of H=--
• oQ¡ H' = H + of
ot (2.4)
siendo H' la función hamiltoniana del sistema con respecto a las nuevas
coordenadas. Este tipo de transformación se dice Transformación
canónica de variables.
En efecto, es necesaria esa condición si se cumplen las ecuaciones de
Hamilton en las nuevas coordenadas y cantidades de movimiento
generalizados.
Sea L' y H' las funciones de Lagrange y Hamilton respecto de las nuevas
coordenadas. Entonces se debe cumplir, para toda función de las
coordenadas y del tiempo f(q¡, Qi' t) que:
L = L' + :: ~ Lf=1 p¡dq¡- Hdt = Lf=1 P¡dQ¡- H'dt + df (2.5)
Entonces:
(2.6)

el diferencial de la función f está dado por:
d ""n ar d ""n af dQ af d f = L..i=1 -a q¡ + L..i=1-a i +-a t q¡ Q¡ t
Comparando las ecuaciones se obtiene que:
ar -a = p¡,
q¡
ar -=-P aQ¡ JI
ar = H'- H at
que es la condición necesaria para su cumplimiento.
(2.7)
(2.8)
Esta condición es suficiente para que se deduzcan las ecuaciones de
Hamilton en las nuevas coordenadas y cantidades de movimiento
genera 1 izados:
Si se cumplen las ecuaciones (2-8), se tendrá entonces que:
df = ""!1_ p· dq¡ - H- ""!1_ P dQ¡ + H' = L- L' (2.10) dt L..1- 1 1 dt L.. 1- 1 1 dt
Finalmente se tiene que:
L = L' + df dt
(2.11)
Donde se tiene que las funciones L' y H' son respectivamente
lagrangiana y hamiltoniana del sistema en las nuevas variables,
cumpliéndose por tanto las ecuaciones de Hamilton:
. aH P=--
1 aQ¡
. aH Q¡ = aP¡ i = 1,2,3, ... ,n (2.12)

2.3. CORCHETES DE POISSON
La variación temporal de una función f = f(q¡(t), p¡(t), t), de las
coordenadas y cantidades de movimiento generalizadas, está dada por:
df = of + [H f] dt at ' (2.13)
Donde H es la función hamiltoniana del sistema, y [H, f] es el corchete
de Poisson de las funciones H y f.
En efecto:
Los corchetes de Poisson es otra manera, más compacta y genérica, de
establecer las leyes de conservación y las ecuaciones del movimiento de
un sistema. Abre el paso a la formulación más rigurosa de la mecánica
cuántica, donde las distintas magnitudes físicas están representadas por
operadores matriciales, según la visión de Heisenberg de dicha
mecánica, así que el corchete de Poisson obedece ese tipo particular de
álgebra no asociativa que se llama álgebra de Lie.
El corchete de Poisson de dos funciones, que ahora llamaremos "f" y
"H", respecto de las variables canónicas p y q se define como:
(2.15)
Sean ahora f(q,p), H(q,p), entonces los corchetes cumplen las
siguientes propiedades:
Donde ó es la delta de Kronecker.
De una manera general, las propiedades que cumplen son:
a) [f,f]=[H,H]=O
b) [f, H] = -[H, f] (antisimetría)
e) [af1 + bf2, H] = a[f11 f2] + b[f2, H] (linealidad)
d) [f1 f2, H] = f1 [f2, H] + [f11 H]f2
e) [f11 [f2, HJ] + [H, [f11 f2J] + [f2, [H, f1]] = O (identidad de Jacobi)
La identidad de Jacobi quiere decir que "la suma de las permutaciones
cíclicas de los corchetes de Poisson dobles de tres funciones es cero", y
que se cumplirá siempre que tales funciones posean derivada segunda
continua. Esta es una propiedad importante, necesaria para deducir las
ecuaciones del movimiento. La ventaja que ofrece esta formulación de la
mecánica es que los corchetes de Poisson son invariantes ante cualquier
transformación canónica, con lo que se constituye entonces en una
herramienta poderosa que se ha de considerar cuando se efectúen
dichas transformaciones.
2.4. ECUACIONES DEL MOVIMIENTO Y TEOREMAS DE
CONSERVACIÓN
Sea una función u(q,p,t). Entonces su derivada total:
(2.16)
38
$

Usando las ecuaciones de Hamilton:
du ou dH ou dH ou -=----·-+-dt aq, dp, op1 dql or (2.17)
pero sabemos que:
du [ H.] au -=u +-dt ' ot (2.18)
de manera que cuando la función u(q,p,t) es una constante del
movimiento, entonces:
du = 0 dt (2.19)
"El corchete de Poisson de H con cualquier constante del movimiento es
igual a la derivada explícita de esa constante respecto del tiempo".
Si la función u no depende del tiempo, se tiene que:
[H,u] =o
Cuando la función u es una de las variables canónicas q o p:
dq dt = q = [ q, H] + O = [ q, H]
dp =P =[p,H]+O=[p,H) dt
(2.20)
(2.21)
2.5. ECUACIONES DE MOVIMIENTO USANDO CORCHETES DE
POISSON
La ecuación diferencial (2-18) tiene como solución el desarrollo de
Taylor en torno a las condiciones iniciales t=t0 :

Entonces:
du ( H) ou -=U +-dt ' at
du t2 d2u U(t) = Uo + t(-1 )o +-(d l)o + .... e t 2! t (2.22)
Como la derivada respecto a t de una función, es el corchete de esa
función con la hamiltoniana, entonces:
. tl u(t) = U0 + t[u,H]0 + 2[[u,H),H]0 + ...
(2.23)
Esta serie concluye a partir del término que resulte ya constante.
Apliquemos este caso a una partícula de masa "m" que se mueve con
aceleración constante "a" en una dimensión, con coordenadas
generalizadas "p" y "x", y que por tanto su hamiltoniana es:
J pl H = T + V = T + -Fdx =--rnax
2m
Lá ecuación del movimiento que buscamos es de la forma x(t):
f2 x(t) = xo + t[x,H]o + 2 [(x.H].H]o + ....
Los corchetes de Poisson están dados por:
, dx p [x,H]= -·=
dt m d 1 dp F [[x,H),H] = -[x,H) =--=-=a dt m dt m
(2.24)
(2.25)
(2.26)
Como "a" es constante, las derivadas de orden superior son todas nulas
y termina la serie. Sustituimos ahora los valores obtenidos en el
desarrollo de Taylor, obteniendo finalmente que:

X(t) =X + E._(t- t ) - 2-a(t- t )2 o m o 2 o (2.27)
que corresponde a la ecuación de un movimiento uniformemente
acelerado.
Teorema de Poisson
Es ahora cuando la identidad de Jacobi empieza a adquirir importancia.
Apoyándose en ésta, se enuncia el teorema de Poisson:
[H, [u, v]] = O (2.28)
"El corchete de Poisson de dos constantes del movimiento es también
una constante del movimiento".
PROBLEMAS DESARROLLADOS
PROBLEMA 1.-
Obtener la Hamiltoniana y las ecuaciones canónicas correspondientes a
una partícula libre, sometida a un potencial V (x; y; z).
z
•m
V(x,y,z)
r-----------------~ y
Figura 2.1. Partícula libre sometida a un campo conservativo de fuerzas
1

Solución
En coordenadas cartesianas la energía cinética es:
1 T = -m(x 2 + y2 + i 2
) 2
y los momentos generalizados:
ar ar pX = ax = mi; pY = ay = my;
ar pz = az =mi
Expresando el cambio de variables, se obtiene el primer grupo de
ecuaciones canónicas:
. pX x=-· 1 m
La Hamiltoniana es:
. pY y=
m
. pz z=
m
H = px .X + pY y + pz i - (T - V)
1 = px.x + pYy + pzi- 2m(x2 + y2 + i 2) + V(x,y,z)
Remplazando las velocidades en función de los momentos
generalizados, se obtiene finalmente que:
1 H =2m [(px)z + (pY)2 + (pz)Z] + V(x,y,z)
Derivando H para obtener las ecuaciones canónicas 8
8H = -
8
8L = -pi (i =
. q¡ q¡
1,2,3, .... , n), se obtiene:
av ax = -px;
av ay= -pY;
av -= -pz az
Derivando H respecto de los momentos generalizados se obtienen las
mismas expresiones de x, y y i, deducidas por el cambio de variables,
del primer grupo de ecuaciones canónicas qi íJH
íJpi U = 1, 2, .... , n).

PROBLEMA 2.-
Encontrar las ecuaciones canónicas para el caso del movimiento de una
partícula de masa m en un campo central, definido por un potencial
V(r).
Solución
Al conservarse el momento cinético, el movimiento es plano, por lo que
utilizaremos coordenadas polares (r;<p):
x = r cos qJ
y = r sen qJ
entonces tenemos que:
La Lagrangiana es
L = T- V = liz m(r2 + r 2 <j)2)- V (r)
y los momentos generalizados:
Comprobamos la condición de regularidad
H = piq¡- (T- V) = piq¡- [1/z a¡¡(¡¡q¡ + a¡q¡ + 1/ 2 ao] +V
haciendo el cambio de variables de q¡ a pi:
La Hamiltoniana la podemos obtener aplicando H = 1j2 p¡q1 + V, tenemos
que:

Siendo las ecuaciones canónicas:
. aH pr . aH p<fJ r = apr = m ; <p = ap<p = mr2
. aH (p<fJ) 2 av Pr- - p' <p = O - - ar - mr3 - ar
Comprobamos que q> es cíclica, por lo que p<fJ = l (cte), siendo l el módulo
del momento cinético.
También, al ser H independiente del tiempo
dH aH dt = at = O entonces H = T + V = cte
PROBLEMA 3.-
Un oscilador armónico simple de masa m y constante lineal del resorte
k, tiene una elongación q medida desde la posición de equilibrio, y p el
momento generalizado correspondiente. Realizar una transformación
canónica a coordenadas cíclicas (P,Q).
q
fVL. m
Figura 2.2: Oscilador armónico simple.

Solución
La hamiltoniana está dada por:
mq2 kqz pz mw2q2 H = -2- + T = 2m + 2
donde p = mq es el momento generalizado, y w = jkfm
Veamos una transformación canónica que convierta a la coordenada q
en otra coordenada Q que es cíclica. Para ello consideramos la función
generadora
0(q, Q) = liz mwq2cot Q
que es del tipo M= 0(qi, Qi, t).
Aplicando las relaciones pi = ~; -Pi = ~ · K= H + 80
ap¡ oQ¡' at
a0 p = aq = mwq cotQ
a0 1 q2
P=--=-mw--aQ 2 sen2 Q
eliminando p y q entre estas igualdades resulta
p = v'2mwP cosQ
Sustituyendo en la hamiltoniana se tiene que:
comprobando que se verifica que:
a K aQ =o
Por lo tanto: Q es cíclica
Al tratarse de una coordenada cíclica, las ecuaciones canónicas resultan
triviales de plantear y de integrar, en función de dos parámetros (a,~)
que se obtendrán con las condiciones iniciales
Por lo que
Por lo que
. aK p =--=o
aQ
P =a (cte)
. aK Q=-=w aP
Q = wt + ~
Una vez realizada esta integración, y de las ecuaciones de p y q, se
obtiene para q:
q(t) = ~sen(wt+ ~) que es la solución general, conocida ya, de oscilaciones armónicas en
vibraciones libres, en función de dos constantes de integración a y~' que
se determinarán a partir de las ecuaciones iniciales.
PROBLEMAS DESARROLLADOS CON PROGRAMAS
COMPUTACIONALES
PÉNDULO AMORTIGUADO
Se considera un péndulo con masa puntual, como se muestra en la
figura adjunta. Las fuerzas que actúan sobre este objeto son el peso y la
fuerza de disipación por parte del aire. Aplicando la segunda ley de
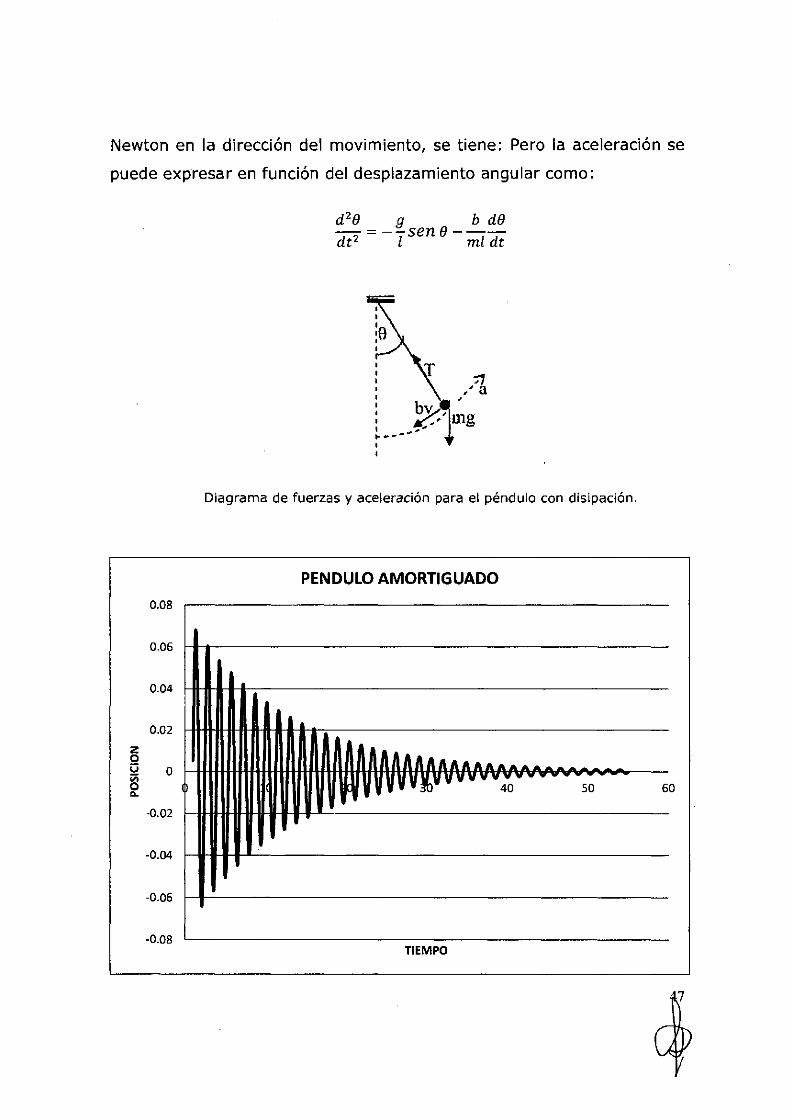
Newton en la dirección del movimiento, se tiene: Pero la aceleración se
puede expresar en función del desplazamiento angular como:
0.08
0.06
0.04
0.02
z o u o ¡;:¡ o Cl..
-0.02
-0.04
-0.06
-0.08
d 28 g b de -=--sene--dt2 l ml dt
Diagrama de fuerzas y aceleración para el péndulo con disipación.
PENDULO AMORTIGUADO
ftAAAAAAAAAAAAaaaA ~V V Jo V V V y V V 4~ ........ - so
TIEMPO
6 o

Trayectoria en el espacio de fase del pendulo amortiguado
PROGRAMA COMPUTACIONAL
PROGRAM PENAMOR
INTEGER NSTEP,NVAR
PARAMETER(NVAR=2)
INTEGER i,j
Posicion
REAL x(lOOOOO),xl,x2,y(SO,lOOOOO),vstart(NVAR),h
COMMON /path/ x,y
EXTERNAL derivs
OPEN(S,FILE='archiv.dat') ! archivo donde se depositan phi y t
OPEN(lO,FILE='archivl.dat') ! archivo donde se depositan dphidt y t
OPEN(lS,FILE='trayectoria.dat') ! archivo donde se depositan dphidt e phi
xl=l. ! Tiempo inicial
vstart(l)=O.OOS ! phi inicial
vstart(2)=0.3 ! dphidt inicial
h=O.Ol ! paso de integración
x2=55.0 ! tiempo final
NSTEP=(x2-xl)/h !Numero de pasos o numero de pares de valores
8

call rkdumb(vstart,NVAR,x1,x2,NSTEP,derivs)
write(5,'(/1x, t9,a, t17,a, t31,a/)') 't', 'Theta','Omega'
do i=1,NSTEP
j=i
end do
END
write(5,'(1x,f10.4,2x,2f12.6)') x(j),y(1,j) !escribe t y phi
write(10,'(1x,f10.4,2x,2f12.6)') x(j),y(2,j) !escribe t y dphidt
write(15,'(1x,f10.4,2x,f12.6)')y(1,j),y(2,j) !phi y dphidt
1------------------------------------------------------------SUBROUTINE derivs(x,y,dydx)
REAL x,y(*),dydx(*),m,l,b
X=X
m=0.150
1=0.53
b= 0.013
dydx(1)=y(2)
dydx(2 )=-b *y(2)/( m* 1)-(9.8/1) *sin(y( 1))
return
END
1-------------------------------------------------------------SUBROUTINE rkdumb(vstart,nvar,x1,x2,nstep,derivs)
INTEGER nstep,nvar,NMAX,NSTPMX
PARAMETER (NMAX=50,NSTPMX=100000)
REAL x1,x2,vstart(nvar),xx(NSTPMX),y(NMAX,NSTPMX)
EXTERNAL derivs
COMMON /path/ xx,y
USES rk4
INTEGER i,k
REAL h,x,dv(NMAX),v(NMAX)
do 11 i=1,nvar
v(i)=vstart(i)
y(i,1)=v(i)

11 continue
xx(1)=x1
x=x1
h=(x2-x1)/nstep
do 13 k=1,nstep
call derivs(x,v,dv)
call rk4(v,dv,nvar,x,h,v,derivs)
if(x+h.eq.x)pause 'stepsize not significant in rkdumb'
x=x+h
xx(k+1)=x
do 12 i=1,nvar
y(i,k+1)=v(i)
12 continue
13 continue
return
END
rk 4. f o r -------------------------------------------------
SUBROUTINE rk4{y,dydx,n,x,h,yout,derivs)
INTEGER n,NMAX
REAL h,x,dydx(n),y(n),yout(n)
EXTERNAL derivs
PARAMETER (NMAX=SO)
INTEGER i
REAL h6,hh,xh,dym(N MAX),dyt(N MAX), yt(N MAX)
hh=h*O.S
h6=h/6.
xh=x+hh
do 11 i=1,n
yt(i)=y(i)+hh*dydx(i)
11 continue
call derivs(xh, yt,dyt)
do 12 i=1,n
yt(i)=y(i)+hh*dyt(i)
12 continue
call derivs(xh,yt,dym)
do 13 i=1,n
yt(i)=y(i)+h*dym(i)
dym(i)=dyt(i)+dym(i)
13 continue
call derivs(x+h,yt,dyt)
do 14 i=1,n
yout(i)=y(i)+hG*( dydx(i)+dyt(i)+2. *dym(i))
14 continue
return
END

CAPÍTULO 111
TEOREMA DE HAMIL TON - JACOBI
3.1. TEORÍA DE HAMILTON-JACOBI
Las transformaciones canónicas son de gran utilidad, por lo que es
necesario estudiar algunas de ellas que por su definición se convierten
en soluciones de problemas concretos. En el caso en que se conserve la
hamiltoniana H, se puede realizar una transformación a unas nuevas
coordenadas cíclicas, y el problema se reduce entonces a simples
cuadraturas. Otra transformación interesante es aquella donde las
coordenadas que se transforman lo hacen en unas cantidades
constantes. Si estas constantes son la posición inicial q0 y la cantidad de
movimiento inicial p0 , la inversa de la transformación será de la forma:
q = q (qo,po,t)
p = p (qo,po,t),
que, evidentemente, es la solución del problema.
(3.1)
Esta segunda transformación es más general que la anterior porque no
se exige que se conserve la hamiltoniana
3.2. ECUACIÓN DE HAMIL TON-JACOBI
Las ecuaciones de Lagrange para un sistema descripto por n
coordenadas generalizadas son n ecuaciones de segundo orden de
derivación en el tiempo. El mismo sistema puede ser estudiado de

acuerdo a Hamilton con 2n ecuaciones de primer orden. Existe una
notable alternativa, la descripción de Hamilton y Jacobi, que se reduce a
una única ecuación en derivadas parciales.
La condición que han de satisfacer las nuevas coordenadas q0i y Poil que
desde ahora llamaremos Q y P, resaltando que esta es una
transformación canónica, para que sean constantes, es que la
hamiltoniana transformada K cumpla que:
8K • -=P. =0 OQ. 1
1 (3.2)
Podemos asegurar esto si K es idénticamente nula. Recordando ahora
cómo estaban relacionadas H y K:
aF K(Q, P, t) = H(q, p, t) + at
Entonces si K=O se obtiene que:
(3.3)
(3.4)
y por tanto, tenemos la denominada: Ecuación de Hamilton-Jacobi.
La ecuación de Hamilton-Jacobi también se representa por la ecuación
diferencial para la función generatriz S(q11 •• ,qn, Q11 ••• ,Qn, t), que es
función de los qk y del tiempo t y con Qk = ak como constantes de
integración, esto es:
( as as ) as
H qv .. , qn, aql, ... , aqn + at = O (3.5)
Para la solución de problemas se realiza el siguiente procedimiento:
3

1. Se encuentra una solución completa de la ecuación (3.5); esto es,
una solución que contenga n constantes de integración ak:
2. Usando las ecuaciones Qk = ak = cte, Pk = flk = cte y as;aQk = -Pk = -pk, derivamos parcialmente la solución encontrada respecto de las
constantes ak y las igualamos a las constantes pk:
(3.6)
3. Resolvemos las n ecuaciones (3.6) para hallar las qk en términos de
las constantes ak, ~k y del tiempo t:
(3.7)
Con lo que se obtiene la solución dinámica completa del problema ya
que se encuentran las n coordenadas generalizadas como funciones
explícitas del tiempo y de 2n constantes de integración que permiten
ajustar condiciones iniciales genéricas.
No existen métodos generales para obtener soluciones completas de la
ecuación de Hamilton-Jacobi; sin embargo, existen casos importantes en
los que es posible obtener una solución completa de ésta por el método
de separación de variables. Si consideramos hamiltonianos que no
dependen explícitamente del tiempo, sabemos que H = E, por lo que se
propone:
donde hemos defnido la acción reducida S0 , que simpli.ca la ecuación de
Hamilton-Jacobi a:
( as as ) H q¡, .. ,qn,-a , ... ,- =E q¡ aqn
(3.8)

Análogamente, si H no depende de alguna coordenada (coordenada
cíclica), digamos q1 , entonces se puede plantear:
de donde:
( as' as' ) as'
H qz, .. , qn, av aqz, ... , aqn + at = O
habiéndose simplificado una variable.
Para coordenadas no cíclicas la idea es proponer que la acción reducida
es de la forma:
(3.9)
y reemplazar en (3.8). La ecuación resultante se debe separar en
grupos que dependan de sólo una coordenada cada uno. Como la suma
de estos grupos (o en general una combinación más complicada de
éstos) es igual a la constante E para cualquier combinación de las
variables qk, esto es posible sólo si cada grupo es constante. Así,
igualamos el grupo que depende de cada qk a la constante cxk, para
escribir, por ejemplo, E = a 1 + a2 + ··· + an (éste es el caso más sencillo;
en general se obtiene una forma más complicada).
Por otro lado, cada grupo igualado al cxk, correspondiente nos provee de
una ecuación diferencial ordinaria de primer orden, que puede entonces
resolverse por cuadraturas. Nótese que las constantes de integración
(las cxk) provienen de la separación de variables y no de constantes de
integración de estas cuadraturas, que no son esenciales ya que suman a
una constante aditiva a S.

3.3. FUNCIÓN PRINCIPAL DE HAMILTON
A la solución "S" de la ecuación de Hamilton-Jacobi se le llama Función
principal de Hamilton:
(3.10)
donde cada ai = Pu de manera que las ecuaciones de la transformación
quedan:
oS(q,<X, t) P= =Ot ' aq .
= aS(q,<X, t> = Q
q ocx. IJ; 1
Invirtiendo ahora estas ecuaciones:
p¡ = p¡(()(,~,t)
Q1 = q¡(CX,{3,t),
que constituye una solución completa del problema.
(3.11)
(3.12)
Por lo visto hasta ahora, podría parecer que la introducción de la función
S es un tanto artificiosa. Sin embargo, posee una propiedad importante:
ya que S queda definida únicamente en función de las coordenadas qi y
del tiempo, su derivada total:
y por tanto:
dS as • as dt = aq qi + at
= P/11 -H = L
S= J ldt +Cte. (3.13)
56

3.4. EL PROBLEMA DEL OSCILADOR ARMÓNICO
Un oscilador armónico es un sistema conservativo, lo que implica que se
conserve H, y por tanto que los dos métodos de resolución sean
aplicables. Nominemos a este primer método como el "método de la
función S".
Método de la función S
Lo que estamos buscando es una transformación canónica que nos dé
las expresiones de a y {3 en función de q y p, con lo que se resuelve el
problema. Una vez logrado esto, se encuentra la expresión de la función
principal de Hamilton "S", es decir, la función generatriz de esa
transformación. Para que quede claro, lo que se hace es trabajar con la
función S sin tener que calcularla sino a posteriori, y si acaso nos la
piden. Se aprovecha por tanto la invariancia formal que tienen las
ecuaciones de las transformaciones canónicas para definir las nuevas
coordenadas y momentos. Una vez resuelto el problema, se podrá
comprobar que S satisface las ecuaciones de la transformación:
oS< oc, (3, t) --... a;..:...;.....;..= OC¡
o...,¡
oS< oc, (3, t) = (3. oOC· 1
1
Paso 1-. Condiciones para la función principal de Hamilton S
Sabemos que la solución S tiene que cumplir que:
os H+-=0
at
(3.14)

La hamiltoniana para un oscilador armónico en una dimensión es:
es la frecuencia natural del oscilador.
Paso 2-. La función S hace las veces del hamiltoniano. Sustitución de p.
Sustituyendo ahora P = (l>S/oq):
1 as as -[(-)2 + (mwq)2] +-=O 2m oq at
de forma que la condición exigible a S queda:
1 as -[(-)2 + (mwq)2J = oc 2m oq
Ya que de momento S = S( q,t), la teoría de derivadas en ecuaciones
parciales nos dice que cuando cada sumando es función únicamente de
cada una de las variables, entonces son idénticamente iguales a una
constante. Aprovechamos esto para definir lX:
Paso 3. Separación de variables. Identificación del hamiltoniano con la
energía H = E y aparición de W(q,a)
De esta forma,
as -=-OC 8t
_t_[(os)2 + (mwq)2] = (){ 2m cq
lX=H=E
58
$

De la primera de estas igualdades se obtiene:
S = -O<t + W(q,O<).
Sustituyendo esto en la segunda:
1 aw -[{-)2 + (mwq)2] =oc 2m aq
que se puede integrar inmediatamente:
W = n1wJ dq ( 2m oc)- q2, y por tanto: mlw2
Lo que nos interesa ahora es utilizar la segunda ecuación de Hamilton
en las nuevas variables, es decir, 1>= dS/dLX.
Paso 4. Solución por el método de Hamilton-Jacobi. Usando la segunda
ecuación de Hamilton para obtener las coordenadas qi.
Finalmente, al despejar q((l( ,l>,t):
.J2moc . q(<X,J3,t) = --smw(f3+t) ({3' = wl))
mw
.J2moc . ( n ') = Slll Wt + v rnw
que es la conocida solución del oscilador armónico.
9

Paso S. Obtención de la cantidad de movimiento p. Para encontrar
la cantidad de movimiento, usamos la relación:
as aw p¡(<X,[$, t) = - = -~aq, oq,
Y ahora sustituimos la q obtenida más arriba:
y se comprueba fácilmente que:
p = m(dq/dt)
Paso 6. Determinar las constantes tx y ~ a partir de las condiciones
iniciales es hallar la energía E y el ángulo de fase B.
Sólo queda entonces encontrar la relación entre a y ~ con las
condiciones iniciales Po y q0 • La forma que tienen p y q sugieren elevar al
cuadrado y comparar:
p2 = 2m <X e os 2(wt + 13 ') 2mO< .
q2 = --sm2(wt + ~'), entonces (mw)2
p2 + (mwq)2 = 2mO<(cos2(wt + ~') + sin2(wt+ ~')
o bien, teniendo en cuenta que en las condiciones iniciales t=O;
Para hallar la ~' volvemos a tener en cuenta que las condiciones
iniciales son para un tiempo t = 0:
o

_rn_w__;q~o = tgj3 '• Po
R.' -1 mwqo , .. = tg Po
Así que la función principal de Hamilton S, no es más que una función
generatriz de una transformación, que en este caso transforma las
coordenadas q y p a las coordenadas LX y 13', energía total y ángulo de
fase inicial, respectivamente.
Paso 7. Obtención final de la función principal de Hamilton S a partir de
la lagrangiana
Una vez determinados q(oc,~,t) Y p(oc~~,t) se puede escribir la lagrangiana,
y desde ésta, mediante una integración temporal, se encuentra la
función principal de Hamilton S:
y finalmente:
1 L = T -V = -(p2 + (mwq)2)
2m
S= JLdt=()(Jcos2(wt+~')dt
= 2: sin2(wt+f3'). (3.15)
3.5. ECUACIÓN DE HAMIL TON-JACOBI PARA LA FUNCIÓN
CARACTERÍSTICA DE HAMIL TON
En el apartado anterior nos encontrábamos con una función W que
surgía como necesidad en una integración de una derivada parcial, y
que por tanto era una función de todas las demás variables que no
estaban afectadas por el proceso de integración. En ese caso veíamos
que:
as J H + Ot = O ~ Hdt = -S+ W(q.)
En el proceso posterior aplicamos la condición de separabilidad que la
función S debe cumplir. Ahora se ve claramente que la separación entre
las coordenadas espaciales qi y el tiempo que se practicó a la ecuación:
1 as . as -[(-)2 + (mwq)2] +-=O 2m aqi at
siempre será posible si la hamiltoniana no depende explícitamente del
tiempo, de forma que tendremos:
os as H(q,-)+-=0
'aq, at
es decir, un sumando es función únicamente de las coordenadas qi y el
otro es función únicamente del tiempo.
Una vez separada la ecuación encontrábamos que S era de la forma:
S(qt,OC,t) = W(qt,<X) - oct. (3.16)
A la función W se le llama "Ecuación característica de Hamilton".
Después, se sustituía esta S en la condición de las coordenadas, es
decir, la que debe cumplir la hamiltoniana, resultando que:
62
es decir, H es constante.
as H(q,-) =Ot , aq , (3.17)
Hasta aquí nos han valido las cuentas que echamos con el oscilador
armónico. Al principio de ese apartado se hacía notar que era un
ejemplo resoluble con los dos métodos. Utilizaremos el hecho de que la
hamiltoniana es constante para explicar el segundo método, que exige
que la hamiltoniana se conserve. Nominaremos a este segundo método
el "método de la función W".
Método de la función W
La transformación que se persigue ahora es aquella en la cual todas las
nuevas cantidades de movimiento ~ i sean constantes, pues así la
resolución de las ecuaciones de la transformación es trivial. Si hacemos
que la función generatriz (en este caso W) sea de la forma W(q, P)
tendremos que:
de manera que cuando se toma como valor particular ~ 1 = H, según se
indicaba más arriba, la hamiltoniana será:
(jW H = H(Q,-) =oc,
. oq, (3.18)
A esta ecuación también se le llama de Hamilton-Jacobi, ya que se
deduce de aquella como consecuencia de la forma de W.
Ahora bien, W no contiene al tiempo, luego:

aw -=0 Ot
y si recordamos como están relacionadas las hamiltonianas H y K:
aw K = H +- <::::> K = H = (,)(1
at
o lo que es lo mismo, las nuevas cantidades de movimiento P í = C<í
conjugadas a las nuevas coordenadas cíclicas Qít son todas constantes:
oP¡ __ _ oK = O n -=- r, = ()(. at oQ1 • •
De la otra mitad de las ecuaciones canónicas se deduce que:
aQ, cK aK {1. si i = 1 Ot = oP, = oC<¡ = 0, Si í ;: l.
Evidentemente, tienen como solución:
J aw} Q =t+~ =-1 1 ~IV o"',
l ow Q =~=-¡ , aoc
i
Relacionando oc y f3 con los valores iniciales de p íY qí, usando las
mismas ecuaciones que en ejemplo de más arriba, evaluadas sabiendo
que en las condiciones iniciales t=O.
Finalmente, como W no depende del tiempo tenemos que:
dW oWdq • dt = aqi dt=P;Q¡'
W = f P/J, dt = f P1dQ1 (3.19)

Estas ecuaciones se pueden aplicar al sistema de una partícula en un
campo de fuerzas central.
3.6. EJEMPLOS DE SEPARACIÓN DE VARIABLES EN LA
ECUACIÓN DE HAMIL TON-JACOBI
Se dice que la ecuación de Hamilton-Jacobi es separable, si todas las
coordenadas del sistema son separables. Entonces una solución S para
la función principal de Hamilton será de la forma:
" S= L Sl(q¡;<X¡;t)
l•l
as H,(Q,:<X.,<Xz•"' oq .... ,<X,:t) =<X.
• (3.20)
A las constantes cx.i se les llama ahora constantes de separación.
Cada una de estas ecuaciones es una ecuación diferencial de primer
orden y por tanto su resolución será posible mediante cuadraturas, lo
que resuelve el problema.
Hay que decir que la separabilidad de un sistema, además de la
naturaleza propia del mismo, depende de la elección de las coordenadas
generalizadas.
Por ejemplo, en un problema con fuerzas centrales, el sistema será
separable en coordenadas polares cuando V = V(r), pero no en
coordenadas cartesianas. Hay otros problemas, como el de los tres
cuerpos, que no son separables en ningún sistema de coordenadas.
Este es el motivo principal por el que se usan distintos sistemas de
coordenadas en la Física: hacer más fácil la resolución de problemas.
Veamos finalmente un ejemplo en el que el potencial es de una forma
particularmente sencilla: un campo de fuerzas central. Como ya se ha
dicho antes, un sistema así es separable en coordenadas polares planas,
ya que la órbita del movimiento se realiza en un plano.
Por tanto, el sistema tiene dos grados de libertad, y la hamiltoniana es
de la forma:
Paso 1. Determinación del Hamiltoniano
1 pz H = -(p2 +J..)+ V(r)
2m ' r2
Como no aparece la coordenada <P, entonces es cíclica, y por tanto su
momento cinético conjugado p4> es constante. Sea LX 4> = p4>, de manera
que la función característica de Hamilton W, una vez separada, va a ser
de la forma:
Paso 2. Formación de la ecuación característica de Hamilton W y
su uso en la ecuación de Hamilton-Jacobi
w = W1(r) + oc.,\1)
Sustituyendo esta W en la ecuación de Hamilton-Jacobi
aw H = H(q,. ~q ) = <X1
() '

aw <X2
(-1)2 +--± + 2mV(r) =2m <X,
ar r 2
Se puede ya resolver esto para W, y queda:
Ahora ya tenemos W en función de las nuevas variables. Entonces al
usar las ecuaciones de la transformación para Qi obtenemos las
ecuaciones del movimiento:
Paso 3. Obtención de las nuevas coordenadas oc1 y oc0 usando la
función característica de Hamilton W como si fuera el
Hamiltoniano.
dW = f3 = <t> _ f <XQ doc z r2 -r=====oc~z
4> 2m( oc -V)-___..!. 1 .-z
dr
Si identificamos oc1 =E, oc<t>= 1, y recordamos también que Pi = Qu la
primera de estas ecuaciones es la solución encontrada para el problema
de los dos cuerpos:
Ir dr t[r0 ,r] =
2 F '• -(E-V--) m 2mr1
Cuando disponemos que <t> = 8, {32 = 80 , y hacemos el cambio de 1
variable u=ru la segunda de estas ecuaciones nos da la ecuación de la
órbita:

J du 8(U0,U) = 80 - -;=======
2mE 2mV 2 -~2-- -~2-- u
Para que quede aún más claro el proceso de separación de variables,
ana/icemos este mismo ejemplo sin dar por sentado que el movimiento
se va a efectuar en un plano. Usaremos entonces coordenadas esféricas
para reflejar el hecho de que el movimiento nos es, en principio,
desconocido. En este sistema de coordenadas la hamiltoniana H y la
función característica de Hamilton W tienen la forma:
W = W,(r) + W9 (8} + W.¡.(cp)
Según se puede ver, en la hamiltoniana no aparece la coordenada .P,
por tanto esta coordenada es cíclica, y esto implica que p ct> = a ct> = cte, y
entonces el sumando correspondiente a dicha componente es Wcp(</>) =
act><P·
Así que la ecuación de Hamilton-Jacobi, sabiendo que
nos queda:
aw H=H(q,-)=<X =E , aq 1
Como cada sumando es función únicamente de una variable, cada uno
de ellos es igual a una constante. Por conveniencia, definimos
como a~ dicha constante. Esto es:
y finalmente:
""W oe (.~-~Y + - 0 = 2m(E - V(r)) 8r r 2 (3.21)
Estas ecuaciones se pueden resolver para W, obteniéndose Wr(r) y W<P(6)
respectivamente, mediante cuadraturas, para posteriormente encontrar
las ecuaciones del movimiento utilizando las ecuaciones de
transformación.
Cada una de las tres constantes de integración necesarias tiene su
significado físico claro como consecuencia de los diversos teoremas o
leyes de conservación:
<X1 = H = E
como ya se había mencionado antes. Obsérvese que la última ecuación
es entonces una forma de enunciar el teorema de conservación de la
energía.
aw oc =P =--~
4> 4> e<l>
es el momento cinético alrededor del eje polar, es decir, la tercera
componente del momento angular Lz es constante.
es el cuadrado del módulo del momento angular, que también es
constante.

Cuando se sustituyen los valores de Prp y de Pe en la hamiltoniana se
descubre que el movimiento se produce en un plano. Efectivamente:
(3.22)
Es decir, el movimiento se describe únicamente con dos coordenadas.
Comparando esta hamiltoniana con la anterior, obtenida en el caso del
uso de coordenadas polares planas, se puede identificar a a9 = Pl/J = l, el módulo del momento angular.
3.7. VARIABLES ACCIÓN-ÁNGULO PARA SISTEMAS CON UN
GRADO DE LIBERTAD
Por la importancia que tiene en diversas ramas de la mecánica, veamos
finalmente una transformación especial: es aquella en la que las
coordenadas generalizadas van a ser, como el título del apartado indica,
la acción J y el ángulo de fase <1». Como todo sistema de referencia en
que una de las coordenadas es un ángulo, el uso de esta pareja de
variables será especialmente útil en el caso de sistemas que lleven
asociados ejes de simetría.
Se podría mencionar que para conseguir esta ventaja ya disponemos de
sistemas de referencia más conocidos, pero un vistazo al aspecto que
presentaban las hamiltonianas de los ejemplos del capítulo 3 son
suficientes, para convencer al más conservador, de las bondades de
estas nuevas variables, como al final del apartado se podrá comprobar.

Al igual que sucede en el resto de los capítulos, el entramado elemental
necesario para poder atacar esta sección reside en aquella otra donde
una vez domadas las transformaciones canónicas, encontrábamos
algunas que parecían ayudar en la resolución de sistemas didácticos.
Retomemos la senda abierta en la sección 5.2., e intentemos describir el
comportamiento de un oscilador armónico bajo estas nuevas variables.
Sin duda, parte del trabajo realizado allí será de utilidad ahora.
Necesitaremos saber cómo es el hamiltoniano de un oscilador en una
dimensión, así como las coordenadas tal y como quedaron en forma de
esféricas, o de polares planas, si así se prefirió. También será necesario
recordar la definición de la acción J, y de la del nuevo ángulo, e~>*
símbolo.
Usando las expresiones de p, de q y de IX= H = E obtenidas tenemos: -
(3.23)
y de la definición de la variable acción J cuando el hamiltoniano se
conserva, se deduce que:
J = ,h pdq = ,h J2mH e os a .J2rñH e os 9d9 'f ':t' rnw
2H12'" 2n =- e os 29d9 :::: -H = J(H)
wo w
Por tanto el Hamiltoniano será:
wJ . • d<P oH w H(J) = -, y la frecuencia v = <1> =- = - =-2n dt ~ 2n (3.24)
Como vemos, el hamiltoniano es independiente de la coordenada ~, es
decir, esta es una coordenada cíclica. Su momento asociado es entonces
constante. La otra ecuación de Hamilton queda:
(3.25)
Es decir, para un sistema holónomo (conservativo), la acción se
conserva en el tiempo.
Para encontrar las ecuaciones que transforman q y p en l y ~ tenemos
en cuenta que el ángulo ~ se puede escribir como 4> = vT+W = (WT/2n)+~'
donde T= 1/T y w· es el ángulo inicial. Sustituyendo esto y el valor de l
encontrado, nos queda:
~2m 00J q(J, <f>) = 2n sin2nvT = 4 J sin2n(<f> + 6 ')
mw mwn
p(J, el>)= ~2m~,! COS2TTVT = Jn':j COS 2n(<f> + 6') (3.26)
PROBLEMAS DESARROLLADOS
PROBLEMA 1
Utilizando la ecuación de Hamilton-Jacobi, resolver el movimiento de un
oscilador armónico de masa m y frecuencia w, en una dimensión.
Solución
El hamiltoniano del oscilador armónico es:
H( ) p2 1 ') 2
qdJ = - + -mw-q • 2m 2 (1)

La ecuación de Hamilton-Jacobi se escribe de la forma:
OS(q.(l!:t) H( DS(q:n,t)) =O D + q. D .
t . q (2)
En este caso, la ecuación de Hamilton-Jacobi toma la forma,
8S(q,a,t) + 2_ (8S(q,a,t))2 + !mu..·2q2 =O ..
8t 2m oq 2 (3)
Dado que el oscilador armónico es conservativo, podemos proponer la
siguiente solución
S(q. n~ t) = -Et + n:(lJ: o), (4)
donde la energía, E, representa la constante del movimiento ex. En estas
condiciones la ecuación (3) se escribe de la forma
2~n (Hl'(q: o:))2 + ~mw2q2 =B.
(5)
donde la prima representa derivación respecto de 11. A partir de la
ecuación (5) podemos aislar la derivada de la función característica en
función de las constantes del movimiento y de q:
1V'(q,a') = /2mE- (mu.:q)2, (6)
de donde obtenemos:
lF(q: (l!) = Jdqyl2mB- (mwq)2. (7)
La integral anterior se puede resolver fácilmente, aunque las ecuaciones
del movimiento se encuentran mediante las relaciones:
OS(q, n·, t) OlF(q: a) 1'(t) = . = , Dq fJq (8)
ro~= OS(q, n, t) = OS(q: a, t) IJ Oo: OE . (9)
De la ecuación (8) tenemos:
Olt!( q. o) {) ¡ / . . ? p(t.) = · =- dq\ 2m.E- (mwq)-
Dq Dq
= yl2mB- (mwq)2. (lO)
De la ecuación (9) obtenemos

= -t + dq---¡::==:::¡;¡::= m ¡ l J2mE · mw2
2 l- 2E q
m ¡gE (fg-mw2 ) =-t+ ~ --2 arc~in . --, q .
2mE mw 2H
y la coordenada en función del tiempo es:
q(t) = 2E --? sinw(t + ¡3)~ 1nw-
(11)
(12)
de donde vemos que un oscilador armónico realiza oscilaciones
sinusoidales con pulsación w y una amplitud proporcional a la raíz
cuadrada de la energía total, con una fase inicial dada por {1. Usando la
ecuación (10), podemos encontrar el momento conjugado en función del
tiempo, o sea:
jp(t) = ~cosw(t+ {:J).I
PROBLEMA 2
Determine las variables de acción angular para el caso particular del
oscilador armónico, con hamiltoniano H = p2 /2m+ kq 2 /2 = a.
Solución
Tenemos que:
] = f pdq = f ±.J2ma-mkq2 dq
Como los puntos de retorno (p = O) son q1,2 = ±../2a/k, la integral puede
reducirse a:

1 = 4 Lq1
.Jzma- mkq2 dq
que al calcularse resulta:
a 1 = 2n
w
por lo que se obtiene que:
con
1w H=-
2n siendo entonces
PROBLEMA 3
w= ffi 1 2rr
T = H'U) = -z;-
Determine la posición de una partícula en caída libre dentro de un
campo gravitacional dirigido en el eje Z, con un Hamiltoniano de la
forma:
Solución
- 1 ( 2 2 2) H -- Px +py +pz +mgz. 2m
Aplicando separación de variables, la ecuación de Hamilton-Jacobi se
expresa como:
Observando que E es constante, por lo que cada término de esta
expresión es también constante por ser cada uno independientes, esto
es:
Teniendo como soluciones:

Las constantes a11 a 2 , a3 definen los nuevos momentos en una
transformación canónica generada por: S= S(x,y,z, a 11 a2 , a 3 ). La otra
parte de las nuevas coordenadas generalizadas definen las ecuaciones:
/31 = - = ± - X - t as ~ aa1 2a1 f3z = - = ± - x - t as ~ aa2 2a2
De estas ecuaciones tenemos finalmente que:
~ X= ± ~---;;-- ({31 + t)
r;-: Y = ± ~---;;-- (f3z + t)
PROBLEMA 4
Usando el método de Hamilton-Jacobi,
resolver el problema del potencial lineal
dado en la siguiente figura.
Solución
El Hamiltoniano está dado por:
p2 H = Zm +klxl
Con el valor de:
Por lo tanto: X o
a Xo = +--k
a3 g z z = --- ({33 + t)
mg 2
xn
1 = ~ J .Jzm(a- kx) dx o
Entonces se tiene que:
(9 )1/3
a= 8mk 2n 2 J2 2 (9m )113 w =- --k 2n 2
3 8 1

PROBLEMA 5
Una partícula se mueve con movimiento periódico en una dimensión
bajo la influencia de un potencial V(x) = Flxl, donde F es una constante.
Utilizando variables acción-ángulo, hallar el periodo del movimiento en
función de la energía de la partícula.
Solución
De acuerdo con el potencial dado, tenemos en este caso que el
hamiltoniano está dado por:
p2 H =E=-+ Flxl
2m
De donde obtenemos p como función de x, esto es:
p = .fiñi)E- Flxl
A partir de esta ecuación obtenemos la variable acción, siendo: E/F
f f J 8..J2iñ E3/2
] = pdx = .JZiñ)E- Flxl dx = 4.J2m )E- Flxl dx = 3
F o
Esta integral ha sido calculada considerando que la función recorre
cuatro veces el camino desde o hasta x = EJF (que es el punto de
retorno) sobre el contorno cerrado de integración, además se hizo el
cambio de variable y= E- Flxl.
De esta última ecuación se obtiene que E= H como función de]:
(3F])2/3
H= Vm 4V2
Considerando que la frecuencia está dada v =oH y T =.!. = 81 por ~ v oH
entonces, se tiene finalmente que:
4.J2mE T=--F-
7

PROBLEMAS DESARROLLADOS CON PROGRAMAS COMPUTACIONALES
PÉNDULO ELÁSTICO
Consideremos el péndulo elástico representado en la figura que se
encuentra moviendo en el plano XY. Calcular los espacios de fase con
respecto a r y e.
o "ti
0.8
0.6
0.4
.g¡ 0.2 "! Cll e :0 o .S o e Cll E -O 2 o . ~
-0.4
-0.6
-0.8
y X
Posicion generalizada

Espacio de fase respecto a 11theta ..
o "a
-~----~~------------------~r-----------------~~~-----E Cll e ~--~~--------------------~+----------------------------~.6 0.6 Cll
E----~~------------------~+-----------------~~~-----0 :!!!
PROGRAMA COMPUTACIONAL
PROGRAM PENDELAS
INTEGER NSTEP,NVAR
PARAMETER(NVAR=4)
INTEGER i,j
Poscion generalizada
REAL x(lOOO),xl,x2,y(SO,lOOO),vstart(NVAR)
REAL xx(lOOO),yy(lOOO),E(lOOO),m,ro,g,h,k
COMMON /path/ x,y
EXTERNAL derivs
OPEN(S,FILE='archiv.dat') ! archivo donde se depositan r y w
OPEN(lO,FILE='archivl.dat') ! archivo donde se depositan theta y z
OPEN{lS,FILE='trayectoria.dat') ! archivo donde se depositan x e y
OPEN(20,FILE='Energía.dat') ! archivo donde se depositan la energía
xl=O.O ! Tiempo inicial
vstart(l)=O.S ! r inicial
vstart(2)=0.5 ! w inicial
vstart(3)=0.5 ! Theta inicial
vstart(4)=0.5 ! z inicial

h=0.01 ! paso de integración
x2=5.0 ! tiempo final
NSTEP=(x2-x1)/h !Numero de pasos o numero de pares de valores
call rkdumb(vstart,NVAR,x1,x2,NSTEP,derivs)
write(S,'(/1x,t9,a,tl7,a,t31,a/)') 't','Theta','Omega'
m=O.OS ! masa del péndulo
ro=O.S ! longitud natural del péndulo
k=20. ! constante elastica
g=9.8 ! gravedad
do i=1,NSTEP
j=i
EÜ)=O.S *m* (y(2,j) * * 2+y( 1,j) * *2 *y( 4,j) * *2)-
m*g*y(1,j)*cos(y(3,J))+O.S*k*(y(1,j)-ro)**2 !Calcula la energía
XX(J)=y(1,j)*sin(y(3,j))! calcula la coordenada x
YY(J)=-y(1,j)*cos(y(3,j)) ! calcula la coordenada y
write(S, '(1x,f10.4,2x,2f12.6)') x(j),y(1,j),y(2,j) !escribe r y w
write(10,'(1x,f10.4,2x,2f12.6)') x(j),y(3,j),y(4,j) !escribe theta y z
write(15,'(1x,f10.4,2x,f12.6)')xx(j),yyÜ) !escribe la coordenada x e y
write(20,'(1x,f10.4,2x,f12.6)')x(j),EÜ) !escribe la energía
end do
END
1------------------------------------------------------------SUBROUTINE derivs(x,y,dydx)
REAL x,y(*),dydx(*),g,ro,k,m
x=x ! variable tiempo
g=9.8 ! gravedad
ro=O.S ! longitud natural del resorte
k=20. ! constante elastica del resorte
m=O.OS ! masa del pendulo
dydx(1)=y(2)
dydx(2)=y( 1) *y( 4) * * 2+g*cos(y( 3) )-k* (y( 1)-ro )/m
dydx(3)=y(4)
dydx( 4)=-2. *y(2) *y( 4 )/y( 1)-g*si n(y(3) )/y( 1)
return
END
!-------------------------------------------------------------
SUBROUTINE rkdumb(vstart,nvar,x1,x2,nstep,derivs)
INTEGER nstep,nvar,NMAX,NSTPMX
PARAMETER (NMAX=SO,NSTPMX=1000)
REAL x1,x2,vstart(nvar),xx(NSTPMX),y(NMAX,NSTPMX)
EXTERNAL derivs
COMMON /path/ xx,y
USES rk4
INTEGER i,k
REAL h,x,dv(NMAX),v(NMAX)
do 11 i=1,nvar
v(i)=vstart(i)
y(i,1)=v(i)
11 continue
xx(1)=x1
x=x1
h=(x2-x1)/nstep
do 13 k=1,nstep
call derivs(x,v,dv)
call rk4(v,dv,nvar,x,h,v,derivs)
if(x+h.eq.x)pause 'stepsize not significant in rkdumb'
x=x+h
xx(k+1)=x
do 12 i=1,nvar
y(i,k+1)=v(i)
12 continue
13 continue
return
END
r k 4. f o r -------------------------------------------------
SUBROUTINE rk4(y,dydx,n,x,h,yout,derivs)
INTEGER n,NMAX
REAL h,x,dydx(n),y(n),yout(n)
EXTERNAL derivs
PARAMETER (NMAX=SO)
INTEGER i
REAL h6,hh,xh,dym(N MAX),dyt(N MAX), yt(N MAX)
hh=h*O.S
h6=h/6.

xh=x+hh
do 11 i=1,n
yt(i)=y(i)+hh*dydx(i)
11 continue
call derivs(xh,yt,dyt)
do 12 i=1,n
yt(i)=y(i)+hh*dyt(i)
12 continue
call derivs(xh,yt,dym)
do 13 i=1,n
yt(i)=y(i)+h*dym(i)
dym(i)=dyt(i)+dym(i)
13 continue
call derivs(x+h,yt,dyt)
do 14 i=1,n
yout(i )=y(i)+h6 * ( dydx(i)+dyt(i)+2. * dym(i))
14 continue
return
END
8
CAPÍTULO IV , , ,
TEORIA CANONICA DE LA PERTURBACION
4.1. INTRODUCCIÓN
Se demuestra que en el caso del problema de los dos cuerpos,
cada uno describe una elipse o una cónica en relación a su centro
de masa o en torno al otro. Con la presencia de un tercer cuerpo,
ninguno de ellos describe una cónica, y la ecuación de la cónica no
es la solución de sus ecuaciones de movimiento.
Con la teoría canónica de la perturbación se obtienen soluciones
aproximadas a partir de soluciones conocidas de problemas
resolubles correspondientes a hamiltonianos no perturbados. Este
procedimiento se puede aplicar a hamiltonianos que se pueden
considerar próximos a los no perturbados, tal que la diferencia
entre el hamiltoniano perturbado y el no perturbado se puede
considerar pequeña de modo que la perturbación es proporcional a
un parámetro pequeño adimensional A«l. La solución aproximada
se da entonces como una serie en potencias de dicho parámetro.
La teoría de perturbaciones se aplica en el desarrollo de la
mecánica celeste, así como en el estudio y predicción de órbitas
para vehículos espaciales ayudado por el incremento en la
capacidad de cálculo con las modernas computadoras.
Considerando la mecánica cuántica, se tiene la teoría de
perturbaciones dependiente e independiente del tiempo. También
se tiene la teoría de perturbaciones directa que no hace uso del
formalismo de transformaciones canónicas.
4.2. EL MÉTODO DE TRANSFORMACIONES CANÓNICAS
Un problema dinámico con hamiltoniano H0 es resuelto usando la
función principal S0 , donde los nuevos momentos a y coordenadas
p son constantes. Cuando el hamiltoniano tiene un término
adicional, llamada perturbación, entonces tenemos que encontrar
la nueva solución. La transformación generada por S0 sigue siendo
canónica, aunque el hamiltoniano haya variado, pero los valores
de a y p no serán constantes. La variación en el tiempo de estos
valores estarán relacionadas con la perturbación llH.
La función principal S0 produce la transformación S0 : (p, q) ~ (a,p)
donde los momentos y coordenadas a y p serán variables, y el
nuevo hamiltoniano es:
H = Ho + llH +aso at
Pero la suma H0 +a;;= o, por lo que:
H = llH(a,p, t)
(4.1)
(4.2)
de esta ecuación se deduce que las ecuaciones dinámicas que
satisfacen a, p son:
da· iJllH _t- ---dt
(4.3)
Es de observar que si en este sistema de 2n ecuaciones se
obtienen ai,pi en función del tiempo, entonces las ecuaciones de
transformación entre (p, q) y (a,p) darán los valores de Pj y qj en
función del tiempo, o sea, el problema se resuelve. En general, la
solución exacta de las ecuaciones (4.3) no son fáciles de obtener,
por lo que en la técnica de la perturbación se usa el hecho de ser
!1H pequeño, y las cantidades a,p aun no siendo constantes, no
varían rápidamente.
Las variables (a,fl) dependen del tiempo y la transformación
canónica S0 : (p, q) ~(a, {1) se determina resolviendo la ecuación de
Hamilton-Jacobi para el problema no perturbado, entonces las
variables (a,fl) en un tiempo t, determinan la configuración y
movimiento (velocidades) instantáneo del sistema de la misma
forma que en el caso no perturbado.
Por ejemplo, si se trata el caso de una órbita elíptica planetaria,
las constante (a,fl) deben estar relacionadas con las características
de la elipse y el estado del sistema debe estar dado de la misma
manera que en el caso no perturbado, pero en este caso los
parámetros (excentricidad, semiejes, etc.) eran constantes, y
ahora son variables dependientes del tiempo t. Si la perturbación
es pequeña, la variación de los parámetros es lenta en
comparación con el movimiento orbital no perturbado.
4.3. EL PÉNDULO SIMPLE
El péndulo simple tiene como hamiltoniano a la siguiente
ecuación:
2
H = ~ + mgl(l- cos<p) 2ml
(4.3)
a. En el caso sin perturbación:
Como:
. p qJ = mF
y la energía total del sistema es:

E = ~ml2 ifJ2 + mg l (1 - COS({J)
con puntos de retorno que satisfacen la ecuación:
E 1 - COS(/)1 = -l
mg
por lo que el periodo está dado por:
(/)1 (/)1
T = 4 f d~ = 4 f dqJ ({J j 2E 2g o o mZZ- -z (1- COS((J)
que puede ser reducida a una función elíptica completa K(k),
rr/2
T = 4 f dqJ
o j1- _E_sen2 qJ 2mgl
como la función elíptica K(k) tiene la expansión para k 2 < 1
siguiente:
T=4 IT ~ (1+-1 __ E_~+ 1x3 (-E-)2~+···) (4.4) ~g 2 2x1! 2mgl 2 22x2! 2mgl 4
b. En el caso con perturbación:
El hamiltoniano del péndulo simple se puede expandir, para
oscilaciones no muy grandes, de la siguiente manera:
p2 1 l 2 1 l 4 H =-+-mg m --mg m + ··· 2ntl2 2 ~ 4! ~
(4.5)
Ecuación semejante a un oscilador armónico más una
perturbación:
1 11H = - -mglqJ 4
4!

Si consideramos la función principal asociada a H0 tal que el
nuevo momento es la variable de acción 1 y sea I = ml2,
w0 = l/g, tenemos que:
wo1 S=W--t
2n
~ = J 11
sen(w0 t + 2n{3) n w0
/Ji:: p = ~--;---cos(w0 t + 2n{3)
donde el momento o acción 1 y la coordenada {3 no son
necesariamente constantes. Así tenemos que 11H es:
1 4 1 12 4 11H = --mgl<p =-----sen (w0 t + 2n{3)
4! 24n2 mF
Obteniéndose que las ecuaciones de Hamilton para 1 y {3 están
dadas por:
df3 _ a11H _ 1 1 4 dt ---¡¡¡--- 12n2 mF sen (wot + 2n{3)
d1 a11H 1 12
dt = - ap = 3nml2 sen3 (wot + 2n{3)cos(wot + 2n{3)
La teoría de la perturbación coloca en el lado derecho los
valores no perturbados: 1 >o, {3 = o, por simplicidad. Así
entonces se tiene:
d11- 1 1~ 3 dt - 3n mF sen w0 t cosw0 t
87

que corresponden a derivadas periódicas de primer orden,
donde sus valores promedios en un periodo perturbado,
asociado a w0 son:
Si hacemos una mayor aproximación, tenemos que:
h =Jo
se obtiene como solución a este orden para el valor de lfJ:
~ ( ( 1 Jot)) qJ = ~~sen w0 t + 2n - 32rr2 mP
de donde se obtiene que el cambio en la frecuencia respecto al
péndulo no perturbado es:
w-w0 E =---
w0 8mgl
donde se observa que esta expresión corresponde a la misma
corrección encontrada en primer orden usando funciones
elípticas.
T = 4 fi ?!. (1 + _E ) ...Jg 2 8mgl (4.6)
4.4. EL OSCILADOR ANHARMÓNICO
En el caso no perturbado el período no depende de la amplitud
mientras que en el caso perturbado el período sí depende de la
amplitud.
Consideremos el hamiltoniano de un péndulo simple de
longitud 1:

En el límite de pequeñas oscilaciones, para el caso no
perturbado, se tiene:
pz mgl8z Ho = 2mZZ + 2
Asimismo se tiene que la energía no perturbada está dada por:
mgl8~áx Eo =--2--
porque cuando é = O, el valor de () = ()máx·
Si consideraremos que nuestro parámetro pequeño es
proporcional a ()11 entonces tenemos que:
Sea el valor de A.:
2 2E () =-
1 mgl
ef Eo A.=-=--
6 3mgl
Así el Hamiltoniano se puede reescribir como:
Nótese que ¡e;e1 1 puede hacerse 1, ya que ()1 es el valor
máximo de e en el caso no perturbado. El parámetro pequeño
es A. oc ()1 •
Para el caso del oscilador armónico se tiene:
S = -Qt + l.j2mQ J d()
con w 2 = gfl y Q la energía ,
89

donde 1 = ml 2 (momento de inercia).
Por otra parte, a partir de la ecuación de S es directo obtener
que:
l~Q fJ =- -- sen(wt- wP) l mw 2
p = l.j2mQ cos(wt- wP)
Recordemos que Q representa la nueva coordenada y P el
nuevo momento. La variación temporal de Q y P viene dada
por:
a K a K P=-- ~
wP =- a(Qfw) aQ
a K Q a K Q = aP ~ =
w a(wP)
Haciendo cambio de variables para las nuevas coordenadas y
momentos:
Q'= Q w
P'= wP
En estas nuevas variables reescribimos e y p como:
l~Q' fJ =- - sen(wt- P') l mw
p = l.j2mwQ'cos(wt- P')
Considerando la primera corrección a H0 se tiene que:
mglfJ4
mgl (2Q') 2
K= flH =- = --- -- sen4 (wt- P') 24 2414 mw .
90
~

Q'2 K= !:J.H = ---sen4 (wt- P')
6mL2
Para la evolución temporal de Q' y P' en primer orden resulta:
. aK 2Qb2
Q' = aP' = 3
mL2 sen3(wt- P¿) cos(wt- P¿)
., - aK- Qb 4 , P -- aQ'- 3mL2 sen (wt- P0 )
Calculando el promedio de p/ sobre un período:
2rr
. ' - ow w 4 ' - o Q' ¡- Q' (P)- 6nmL2
0 dt sen (wt- P0 ) - BmL2
De este modo P/ tiene un comportamiento secular. De modo
que la fase P/ en e y p oscila alrededor del valor:
(P) = (P(t)}t + P¿ = 8~bl 2 t + P¿
Este resultado introducido en e y p da un cambio promedio en
la frecuencia angular:
w' = w - _o_ = w - o = w 1 - ....!. Q' E ( ez) 8ml2 8mwl2 16
(4.7)
y efectivamente la frecuencia angular pasa a depender de la
amplitud. Por contra:
. 2Qb2 (Q') = -
3ml 2 (sen 3(wt- P¿) cos(wt- P¿)) = O
Por lo tanto, Q'(t) es periódica a primer orden (con período
igual a nfw, es decir, 1/2 del período del movimiento sin
perturbar). y se tiene un comportamiento oscilatorio. Así, en
91
promedio, y a primer orden, el valor de la energía no
perturbada no cambia. También podemos decir, a partir de la
ecuación para 8máx y 811 que en promedio y a primer orden la
oscilación máxima del movimiento no cambia respecto del caso
sin perturbar.
4.5. INVARIANTES ADIABÁTICOS
Si en el Hamiltoniano H(q, p, .A), .A no es una constante sino que
varía lentamente con el tiempo en un determinado intervalo, las
variables acción siguen siendo útiles ya que se mantienen
constantes de forma muy aproximada.
Si .A cambia en ll.A en un intervalo de tiempo T, el cambio en J es
proporcional a ll.A/T. Esto implica que, independientemente de lo
grande que sea el cambio en ll.A, el cambio en J se puede hacer
arbitrariamente pequeño haciendo que suceda en un intervalo de
tiempo T suficientemente grande.
Si .A=cte., las variables acción-ángulo, son:
h (Q,íl.) = ~pidqi (4.8)
De la primera de ellas, invirtiéndola, se obtiene:
Qi U,íl.) y w (q,J,íl.) = w (q,QU,íl.) ,íl.)
Asimismo:
Pi
donde w = w (q,J,íl.) es una función generatriz y aunque .A varíe
con el tiempo sigue dando lugar a transformaciones canónicas dadas
por las ecuaciones anteriores.

El nuevo Hamiltoniano viene dado por:
H no depende de w ya que, para 'A constante, tenemos variables
usuales de acción-ángulo donde H no depende de w y la relación
funcional entre (q, p) y U, w) no cambia independientemente del
valor de 'A. Por otra parte, una vez evaluada aw ¡aA. la expresamos
como una función de (w,J) en lugar de (q,J) y la llamamos
W.1 (w,j,A.):
K(w,],A.) = HU, A.) + WJc(w,],A.) ,l
Hallemos las ecuaciones de movimiento:
. aK aH awA ; U ,) + aw.1 ; wi =-a =-a + -a-/1. = vi , /1. a /1. li li li li
(4.10)
A las funciones víU,A.) se las llama frecuencias locales (si 'A fuese
constante serían las frecuencias del sistema). Además,
que no son constantes de movimiento (sólo lo son si ,l =O).
Calculemos a continuación el cambio de W.1 en un ciclo de qí:
(4.11)
ya que en W se toma la derivada parcial respecto de 'A
manteniendo (q,J) constantes. Así, W.1 es una función periódica en
las wí, que siguen cumpliendo que varían en una unidad cuando qí
hace un ciclo y cero en cualquier otro ciclo. Recuérdese que estos
ciclos se toman en el espacio de fase (qi,pi), dado que el sistema
se supone separable, y que no involucran cambios en el resto de
variables ni en el tiempo. De este modo, W.1 admite el desarrollo

de Fourier que ya hemos visto con anterioridad en las variables wu
y, por lo tanto, aW;Jawi carece de términos con mi = O, para todo
i, así que:
f.wi+l aw.A. d , _ 0 - W·-
Wí aw[ l (4.12)
Supongamos que A. es una función que varía lentamente con el
tiempo tal que:
1 i 1 <E (4.13)
con e arbitrariamente pequeño. Sea t = o el tiempo inicial,
tomemos wa(O) = o por conveniencia.
Entonces:
(4.14)
donde hemos supuesto que de wi(t) se puede despejar t = t(wa.
De la ecuación wu se obtiene que:
1
~ 1:i 1 = 1:i1 + B(E)
Introduciendo este resultado en lllr hl se tiene:
En virtud de ( 4.12) la integral ( 4.14) está acotada:
ya que:
B lllr Id <E
vi
(4.15)
no depende de T (4.16)
y viene dada por el remanente del último ciclo que todavía no se
ha completado tras el tiempo T. Haciendo e arbitrariamente
pequeño en ( 4.13) así resulta el correspondiente cambio en fu
puesto que el resto de factores a la derecha de ( 4.13) son finitos y
no crecen con T.
A lo largo del desarrollo hemos supuesto que wi era
suficientemente pequeño, siendo este el "punto débil" del
razonamiento. Es decir, hemos supuesto que vi tuviese inversa
para todo A. y que en el intervalo o~ T no se hace arbitrariamente
pequeña al variar A. de modo que ( 4.16) quede justificada.
Ahora consideremos un sistema periódico con un grado de libertad
descrito por las variables de acción angular J y e. Además que el
hamiltoniano dependa de un parámetro a que sea dependiente del
tiempo, con una variación muy pequeña durante cada periodo no
perturbado, correspondiente a una variación adiabática del
parámetro.
Entonces:
H = HU,a) (4.17)
La transformación W0 : (p, q) ~ u, e) generada por W sigue siendo
canónica aunque el parámetro a sea función del tiempo. Si la
transformación contiene el parámetro, el nuevo hamiltoniano será
distinto y posiblemente] y e variarán de otra forma. Por razones
de periodicidad en e, conviene usar como función generadora de la
transformación a la función:
W*(q,e,a) = W(q,],a)- e¡
De modo que el nuevo hamiltoniano es:
95

- aw• da aw• H = HU,a) +a¡= HU, a)+ dt aa (4.18)
Y las correspondientes ecuaciones de Hamilton son:
d] aH da a aw· = =-----dt ae dt ae aa
de _ aR _ aH + da a aw· ----- ---dt a¡ a¡ dt a¡ aa
(4.19)
Que son exactas. Como W = f pdq, se tiene que su variación en un
periodo no perturbado es justamente J. El cambio de la variable
angular en el periodo lo podemos tomar el valor de 1, de manera
que W* no cambia en el periodo. Se concluye entonces que w· es
una función periódica para cambios enteros de 8, así también lo
serán sus derivadas, por lo cual podemos expandir:
00
aw•(], a, 8) _ ~A (] ) zírcne aa -L., n ,a e
n=O
00
a aw·u,a,e) ¿ z· e - = 2innA (] a)e mn ae aa n 1
n=O
De manera que los valores promedios en un periodo no
perturbado serán:
(4.20)
Lo que define a] como un invariante adiabático.
PROBLEMAS DESARROLLADOS
PROBLEMA 1

Consideremos un oscilador armónico donde w es variable en forma
adiabática. Calcular los valores de j y é.
Solución
El hamiltoniano del oscilador armónico es:
p2 1 ?
Ii(q~p) = 2- + -2mw-q2. m
p2 1 = 2m+ -zkqz,
k wz =
m
Las ecuaciones que satisfacen J y e son:
PROBLEMA 2
. w ] = --] cos( 4n6) w
. w w () = -
2 + -
4- sen(4n6)
n nw
Calcular la variación de energía de un péndulo simple cuya longitud
varia lentamente (Péndulo de Ehrenfest).
Solución
Consideremos el hamiltoniano dado por la ecuación:
En t:::;; o se tiene:

La variable acción es:
h = f pdq = f (AiAi sen (Ait)) 2 dt = AT Af ~ = AiAT n
Después de iniciarse la dependencia temporal A. cambia con el tiempo,
tal que tras un tiempo T la elongación final es A¡ . La nueva variable
acción viene dada por:
]¡ = nA¡A}
con A¡ el valor de A(t) característico para un ciclo alrededor de t = t1
dado que A varía lentamente.
Entonces, igualando los valores de la variable acción para los tiempos
inicial y final:
A¡=~ Ai ~;:;:
que da la relación entre las elongaciones. Para la energía, teniendo en
cuenta que,
Realizando el cociente:
luego:
Sustituyendo
tenemos:
LlA LlE =-E
A
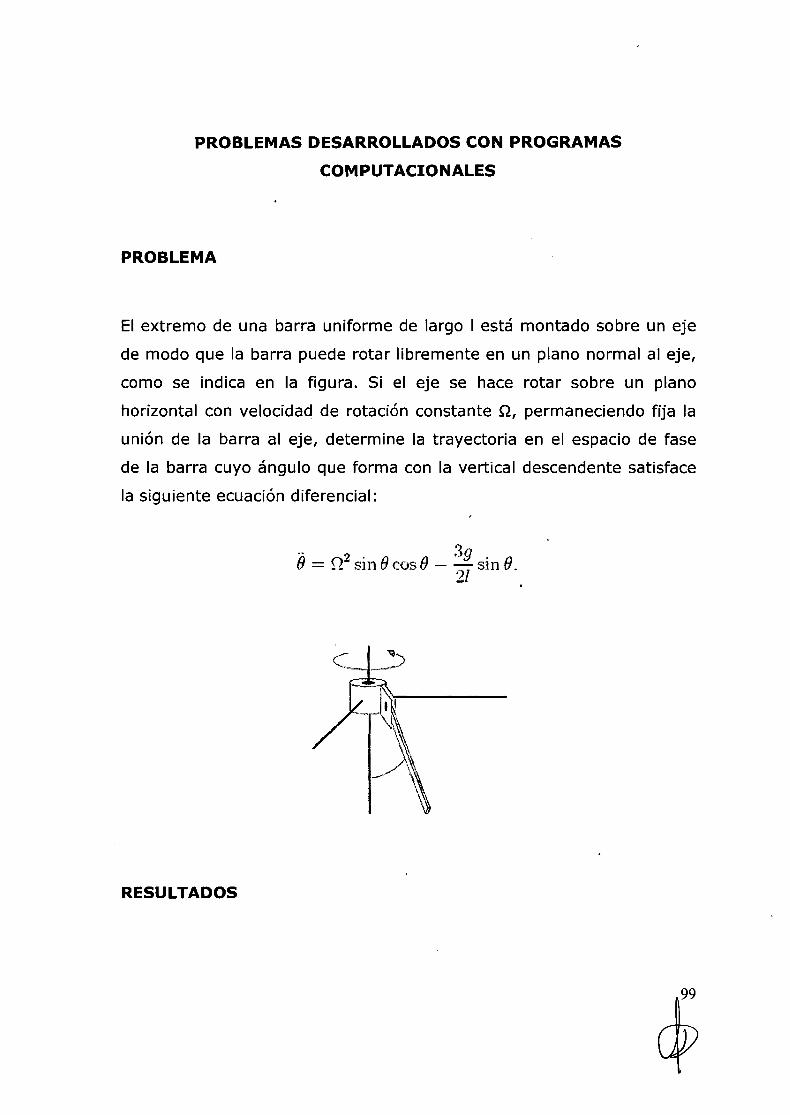
PROBLEMAS DESARROLLADOS CON PROGRAMAS
COMPUTACIONALES
PROBLEMA
El extremo de una barra uniforme de largo 1 está montado sobre un eje
de modo que la barra puede rotar libremente en un plano normal al eje,
como se indica en la figura. Si el eje se hace rotar sobre un plano
horizontal con velocidad de rotación constante Q, permaneciendo fija la
unión de la barra al eje, determine la trayectoria en el espacio de fase
de la barra cuyo ángulo que forma con la vertical descendente satisface
la siguiente ecuación diferencial:
.. 2 . :3g . () = n sm () cos () - 2l sm ().
RESULTADOS

Theta vs tiempo 0.1
0.08
0.06
0.04
0.02
IQ ... o Cll .S::. 1- ~( 60
-0.02
-0.04
-0.06
-0.08
-0.1 Tiempo
Momento generalizado vs tiempo 0.25
0.2
0.15
o 0.1 -e IQ
.!::! 0.05 ¡¡¡ ... Cll e Cll o tiO o S 60 ... e ~ -0.05 o ~
-0.1
-0.15
-0.2
-0.25 Tiempo
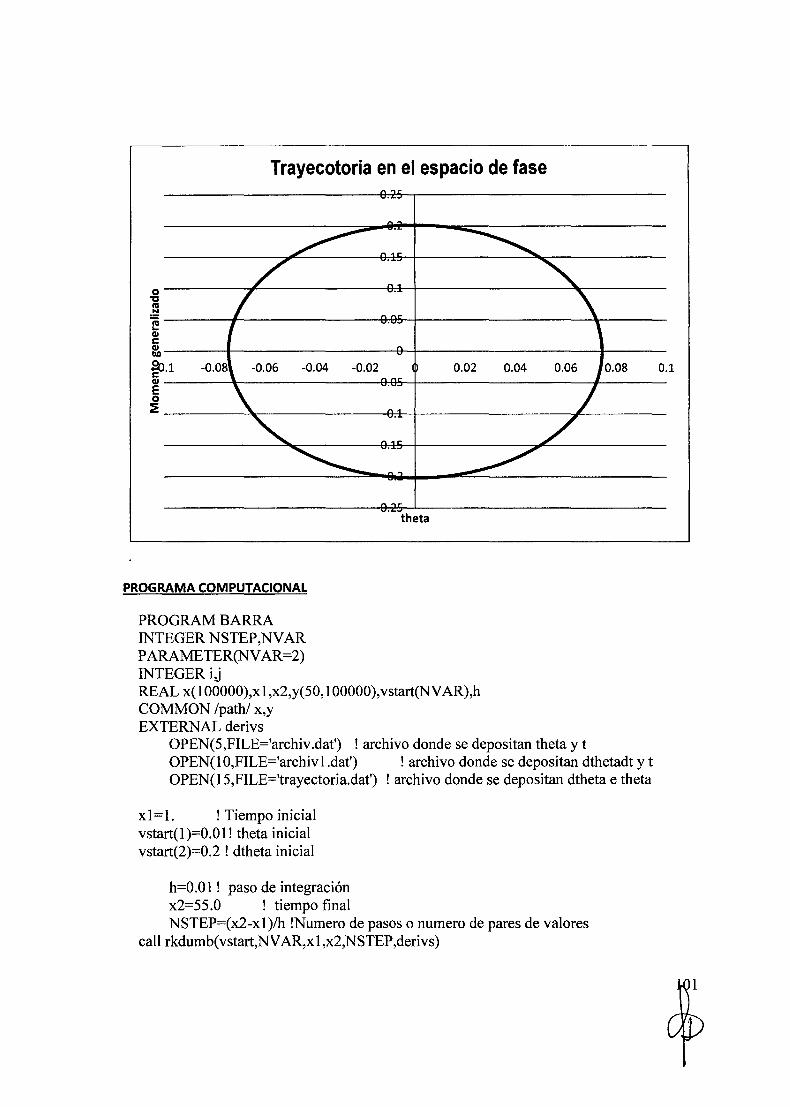
Trayecotoria en el espacio de fase
0--------~------------~~~--------------~--------"CC 111
.!::! e-------+--------------~~r-----------------~-------01 e ~------~----------------~~----------------~-------~.1 0.08 0.1 01------~--------------~b-~----------------~------E o ~--------~------------~~~--------------~---------
PROGRAMA COMPUTACIONAL
PROGRAM BARRA INTEGER NSTEP,NVAR PARAMETER(NV AR=2) INTEGERi,j
theta
REAL x( 1 OOOOO),x 1 ,x2,y( 50, 1 00000), vstart(NV AR ),h COMMON /path/ x,y EXTERNAL derivs
OPEN(5,FILE='archiv.dat') ! archivo donde se depositan theta y t OPEN(lO,FILE='archiv1.dat') ! archivo donde se depositan dthetadt y t OPEN(l5,FILE='trayectoria.dat') ! archivo donde se depositan dtheta e theta
x1=1. ! Tiempo inicial vstart(l)=0.01! theta inicial vstart(2)=0.2 ! dtheta inicial
h=O.O 1 ! paso de integración x2=55.0 ! tiempo final NSTEP=(x2-x1)/h !Numero de pasos o numero de pares de valores
call rkdumb( vstart,NV AR,x 1 ,x2,NS TEP ,derivs)

do i=1,NSTEP j=l
enddo END
write(5,'(1x,f10.4,2x,2f12.6)') xG),y(l j) !escribe t y theta write(10,'(1x,f10.4,2x,2f12.6)') xG),y(2,j) !escribe t y dtheta write(15,'(1 x,fl 0.4,2x,f12.6)')y(l ,j),y(2,j) !theta y dthetadt
!------------------------------------------------------------SUBROUTINE derivs(x,y,dydx) REAL x,y(*),dydx(*),g,ohmio,l
X=X g=9.8 ohmio=0.1 1=0.5
dydx(1)=y(2) dydx(2)=-ohmio* *2*sin(y( 1) )*cos(y( 1) )-(3 *g/2 *l)*sin(y( 1))
retum END
!-------------------------------------------------------------SUBROUTINE rkdumb(vstart,nvar,x 1 ,x2,nstep,derivs) INTEGER nstep,nvar,NMAX,NSTPMX PARAMETER (NMAX=50,NSTPMX=100000) REAL x 1 ,x2,vstart(nvar),xx(NSTPMX),y(NMAX,NSTPMX) EXTERNAL derivs COMMON /path/ xx,y USES rk4 INTEGER i,k REAL h,x,dv(NMAX),v(NMAX) do 11 i=1,nvar v(i)=vstart(i) y(i,1)=v(i)
11 continue xx(l)=x1
x=x1 h=(x2-x1)/nstep do 13 k= 1 ,nstep
call derivs(x,v,dv) call rk4(v,dv,nvar,x,h,v,derivs) if(x+h.eq.x)pause 'stepsize not significant in rkdumb' x=x+h xx(k+ 1)=x do 12 i=1,nvar
y(i,k+ 1 )=v(i) 12 continue 13 continue
102
cf

retum END rk 4. for-------------------------------------------------
SUBROUTINE rk4(y ,dydx,n,x,h,yout,derivs) INTEGER n,NMAX REAL h,x,dydx(n),y(n),yout(n) EXTERNAL derivs PARAMETER (NMAX=50) INTEGER i REAL h6,hh,xh,dym(NMAX),dyt(NMAX),yt(NMAX) hh=h*0.5 h6=h/6. xh=x+hh do 11 i=1,n
yt(i)=y(i)+hh*dydx(i) 11 continue
cáll derivs(xh,yt,dyt) do 12 i=1,n
yt(i)=y(i)+hh *dyt(i) 12 continue
call derivs(xh,yt,dym) do 13 i=1,n
yt(i)=y(i)+h*dym(i) dym(i)=dyt(i)+dym(i)
13 continue call derivs(x+h,yt,dyt) do 14 i=1,n
yout(i)=y(i)+h6*( dydx(i)+dyt(i)+ 2. *dym(i)) 14 continue
re tu m END

CAPÍTULO V
FORMULACIONES DE LAGRANGE Y HAMIL TON
5.1 INTRODUCCIÓN
El estudio de la mecánica realizado hasta ahora, es con sistemas que
tengan un número de grados de libertad finito y el formalismo utilizado
es con sistemas discretos. Sin embargo, En la mecánica clásica existen
casos que poseen sistemas continuos, por lo tanto, estos formalismos
usados pueden ser extendidos a sistemas continuos con infinitos grados
de libertad, como el problema de un sólido elástico vibrante, en donde
cada punto del sólido continuo actúa en las oscilaciones, y el
movimiento total puede ser descrito por el desplazamiento de la cuerda
especificando las coordenadas de posición de todos los puntos, es decir
una función campo que dependa de r y t.
5.2 TRANSICIÓN A SISTEMAS CONTINUOS
No resulta difícil modificar las formulaciones anteriores de la mecánica
para poder tratar dichos problemas. El método más directo consiste en
aproximar el sistema continuo a uno que contenga partículas discretas y
luego examinar cómo cambian las ecuaciones que describen el
movimiento, cuando nos aproximamos al límite continuo. Con las
formulaciones de la mecánica clásica se pueden resolver estos
problemas.
Cuando el número de grados de libertad es grande, el tratamiento de las
ecuaciones de valores propios se hace complejo, pero si hay ciertas
simetrías, el problema se puede resolver para un número arbitrario de
04

grados de libertad. Se pueden estudiar los casos particulares de simples
soluciones y luego se generalizan los resultados a sistemas con infinitos
grados de libertad, esto es, los sistemas continuos.
Para observar el paso de un sistema discreto a uno continuo,
estudiaremos los casos de las oscilaciones o vibraciones longitudinales y
transversales de una cuerda o una varilla infinitamente larga.
5.3 OSCILACIONES LONGITUDINALES
Para el caso de una varilla infinitamente larga, consideremos sus
vibraciones longitudinales de forma aproximada al correspondiente a un
sistema discreto de infinitas partículas de masa m separadas una
distancia a y unidas por resortes de constante k. Si solamente posee
desplazamientos longitudinales, sea r¡¡(t) el desplazamiento longitudinal
de la partícula i de este sistema.
La energía cinética total de este sistema es:
T 1"' ·2 = 2 L..i mr¡i (5.1)
y la energía potencial es la suma de las energías potenciales del
conjunto de todos los resortes, esto es:
(5.2)
En estos casos, el lagrangiano de este sistema discreto está dado por:
(5.3)
A efectos de llevar al límite esta expresión para pasar de un sistema
discreto a uno continuo, multiplicamos y dividimos por la distancia entre
las masas a. Esto es:
L =~a¿. [mr¡·?- ka(rJiH-rJi)2
] _ a"'·L· 2 t a t a .L..t t (5.4)
105

Las ecuaciones que se derivan de este lagrangiano son:
m ··? + ka (rli - 'YJi-1) _ ka (r¡i+1 - 'YJi) a r¡t az az
El cambio de este sistema discreto al continuo se realiza llevando al
límite a algunas cantidades. Estas son:
Siendo ít = densidad lineal de masa de la varilla.
La varilla obedece a la ley de Hooke, esto es, el alargamiento de la
varilla por unidad de longitud es proporcional a la tensión.
F = Yt:
donde Y es el módulo de Young y t: es el alargamiento por unidad de
longitud.
Entonces la fuerza necesaria para estirar el resorte es:
('YJi+1 - 'Yli)
F = k(r¡i+1 - r¡a = ka a
Donde ka~ Y y el índice i que corresponde a cada una de las masas en
el sistema discreto, al pasar al sistema continuo representará la
posición x: rJi ~ r¡(x), esto es, llevando al límite se tiene que:
'YJi+1 - 'Yli r¡(x +a) - r¡(x) ---~....:..___ ___ ....:..___~
a a
l. 7](X+a)-7](X) _ a11 Ima~o --a a x
(5.5)
Concordante con la ecuación (5.5), en el lagrangiano de la ecuación
(5.4), la sumatoria se transforma en una integral en x al pasar del
sistema discreto al sistema continuo en el límite.
(5.6)
Finalmente la ecuación de movimiento viene a estar dadá.por:
. a2r¡ azr¡ A.--Y-=0 at2 ax2
o por la ecuación:
(5.7)
Expresión conocida como la ecuación de onda de una varilla que se
propaga lOngitudinalmente con una velocidad de propagación v, dada
por:
v=J% (5.8)
De las ecuaciones (5.4) y (5.6) se define la densidad lagrangiana por la
ecuación:
(5.9)
Siendo: L = f L dx
5.4 OSCILACIONES TRANSVERSALES
Veamos el caso de un sistema de N partículas de igual masa m
separadas una distancia a y unidas por resortes sin masa de la misma
longitud natural y constante elástica k ubicadas en línea recta, y los
resortes sometidos a una tensión igual r. Si las partículas se desplazan
lateralmente, estarán sometidos a fuerzas de modo que por la segunda
ley de Newton se tiene que:

(5.10)
si no hay desplazamientos longitudinales en x y los transversales en y
son pequeños, entonces se tiene que:
(5.11)
O sea:
(Yi+l - Yi Yi - Yi-1)
~T -----a a
Por consiguiente, tenemos que la ecuación aproximada del movimiento
es:
(5.12)
a. Límite continuo
Cuando N ~ oo y a ~ O, así también las masas tiendan a cero, y
considerando m~ A. (densidad lineal de masa), entonces la ecuación a
(5.3) se convierte en una variable continua de la posición, esto es:
Yi --+ y(x, t)
donde:
- ay(x, t) 1 a 2y(x, t) 2 Yi+l --+ y(x +a, t) - y(x, t) + ax a+ z axz a

- ay(x, t) 1 a2 y(x, t) 2 Yi-1--+ y(x- a,t)- y(x,t)- ax a+ 2 axz a
Además tenemos que:
a2y(X, t) = T a2y(X, t) aZ
at2 ma ax2
Obteniendo finalmente que:
a2 y(x,t) -:!.. a2 y(x,t) = o at 2 (]' ax 2 (5.13)
que viene a ser la ecuación de onda para una cuerda elástica.
b. Lagrangiano para la cuerda continua
Cuando tenemos un sistema de N partículas, el lagrangiano de este
sistema es:
2 L = ! ~.(V m . ?- _ ar ~.(V (Yi+l -Yi)
2 L..t=l Yt 2 L..t=l a
el cual cumple con las ecuaciones de movimiento (5.3), estas son:
donde:
T Y· =-(y-+1 + Y·-1- 2y·) t ma t t t
aL -a· =myi
Yi
(5.14)

Pasando del sistema discreto al continuo, tenemos que:
a --7 O
Yi (t) --7 y(x, t)
Yi+t - Yi ay(x, t) a ax
ay(x, t) Yi --7 --
at
De la ecuación (5.5) tenemos que el lagrangiano está dado por:
N N lLm .2 TL (Yi+l - Yi)2
L=- -y. a-- a 2 a t 2 a
i=l i=l
L = ~ f (ay(x,t))2 dx - :_ f (ay(x,t))2 dx 2 at 2 ax (5.15)
Para esta cuerda continua, la densidad lagrangiana (la lagrangiana por
unidad de longitud), se expresa por:
L = 3:. (ay(x,t))2
_ ~ (ay(x,t))2
2 at 2 ax (5.16)
5.5 FORMULACIÓN LAGRANGIANA Y PRINCIPIO DE HAMILTON
PARA SISTEMAS CONTINUOS
Consideremos la existencia de densidades lagrangianas de la forma:

( ay ay) L = L y, ax' at
Por lo que la acción S es:
y considerando el principio de Hamilton que señala que la variación a
extremos fijos es nula, se tiene:
Usa11do el formalismo de las variaciones 8, se tiene que:
como:
y
Por lo que:
La segunda integral puede ser integrada parcialmente respecto a x, la
tercera parcialmente respecto a t, la parte integrada se anula por la
condición de extremos fiJos
8y = O en t = t 1 y t = t 2
obteniéndose que:
111

ft2 J (aL a aL a aL ) oS= t
1 dt ay- axa(ayjax)- ata(ayjat) oydx =O
De donde encontramos que:
.!..._ aL + ~ aL _ aL = 0 ax a(ay/ax) at a(ay/at) ay (5.17)
que corresponden a la ecuación de Lagrange para un sistema continuo.
Para el caso de la cuerda:
De acuerdo con la ecuación (5. 7) la densidad lagrangiana de una cuerda
continua está dada por:
L = ~ (ay(x, t)) 2 _ ::_ (ay(x, t))2
2 at 2 ax
Remplazando esta ecuación en la ecuación de Lagrange dada por la
ecuación (5.8) obtenemos:
_ !__ r (ay(x, t)) +~u (ay(x, t)) = 0 ax ax at at
que corresponde a la ecuación de onda la cual se puede reescribir
mediante la siguiente ecuación:
a2 y(x,t) - v2 a2 y(x,t) = o at2 ax2
(5.18)
donde:

v=jh
PROBLEMAS DESARROLLADOS
PROBLEMA 1
Encontrar la ecuación de movimiento de una partícula de masa m que
está sometida a un potencial V= -Fq cuya posición en cualquier
instante es q, velocidad v y con condiciones iniciales q1 y t 1 •
Solución
En este caso la acción está dada por:
PROBLEMA 2
Determinar el hamiltoniano y las ecuaciones canónicas para un sistema
cuyo lagrangiano es:
Solución
13

Como:
Entonces se tiene que:
aL Pl = aq_l
En forma semejante tenemos que:
Por lo que:
Siendo:
aL P2 =-a. = 4qlq2q2
qz
. P2 y q2 = 4qlq2
H = éJ.1P1 + éJ.2P2 - L = éJ.1P1 + éJ.2P2 - (q¡ + q2)4i - 2q¡ q2q~ + 4qi + 3q~ - Sq1 q2
Remplazando,
_ P1 P2 [ P1 ]2
[ P2 ]2
2 H- 2(q¡ + q2) Pl + 4qlq2 P2- (q¡ + q2) 2(q¡ + q2) - 2qlq2 4q¡q2 + 4q¡
+ 3q~- 5q1q 2
Obteniendo finalmente que el hamiltoniano está dado por:
Utilizando este valor del hamiltoniano, podemos obtener nuevamente los
valores de q1 y q2 , a saber:
. aH P2 y q2=-=--
ap2 4q¡qz
1 4
y que corresponden a los mismos valores hallados usando el
lagrangiano. /
De igual manera obtenemos que:
PROBLEMA 3
Consideremos dos partículas que se encuentran unidas con un resorte
de longitud f 0 y coeficiente de elasticidad k que caen a lo X
largo de un tubo, como se muestra en la figura. Calcular:
a) La energía cinética, la energía potencial y el
lagrangiano,
b) El hamiltoniano, y
e) Las ecuaciones canónicas del sistema
Solución o
Las energías cinética y potencial están dadas por: • 2 • 2
mlxl m2x2 T=-2-+-2-'
El lagrangiano es:
El hamiltoniano está dado por:

m1xi m2x~ k(x1 - x2 - f 0 ) 2
H =T+Y=-2-+-
2-+
2 +m1gx1 +m2gx2
pero las coordenadas p1 y p2 están relacionadas con las velocidades x1 y
x2 por las ecuaciones:
Pt = m1x1 y Pz = IDzXz
o Pt Pz
:Xt=- y Xz=-ml mz
Entonces se tiene que:
Pi P~ k(xl - Xz - f 0)2
H = T + V = -2
- + -2
- + 2
+ m1gx1 + m2gx2 ml mz
Las ecuaciones canónicas están dadas por:
aH P1 = -- = -k(xl- Xz- fo)- m1g
axl
aH Pz = -- = k(xl - Xz - f o) - mzg
axz
PROBLEMAS DESARROLLADOS CON PROGRAMAS
COMPUTACIONALES
PEONZA SIMÉTRICA
Cuando lanzamos una peonza observamos una serie de movimientos
aparentemente independientes unos de otros. Por una parte tenemos la
rotación de la peonza sobre su eje de simetría, tal vez sea el
menos llamativo de todos los movimientos que puede realizar. Cuando
la peonza empieza a inclinarse, su eje de simetría describe un
movimiento en torno a la vertical (como describiendo un cono), que
se conoce con el nombre de precesión. Finalmente, es posible lograr un
tercer movimiento, llamado nutación, consistente en un acercamiento

de la peonza a la vertical; coloquialmente, lo que se conoce como
"bamboleo".
z'
y•
yl
Recta de nodos
Gráficos del momento generalizado vs la posición generalizada para cada uno de los ángulos de Euler de la peonza simétrica.
3
2
o -g 1 .!:!
~ Cll e g¡, o 2 e Cll
6 -1 :E
-2
-3
Espacio de fase respecto a theta
2 2.5 3
Posicion generalizada
3.5
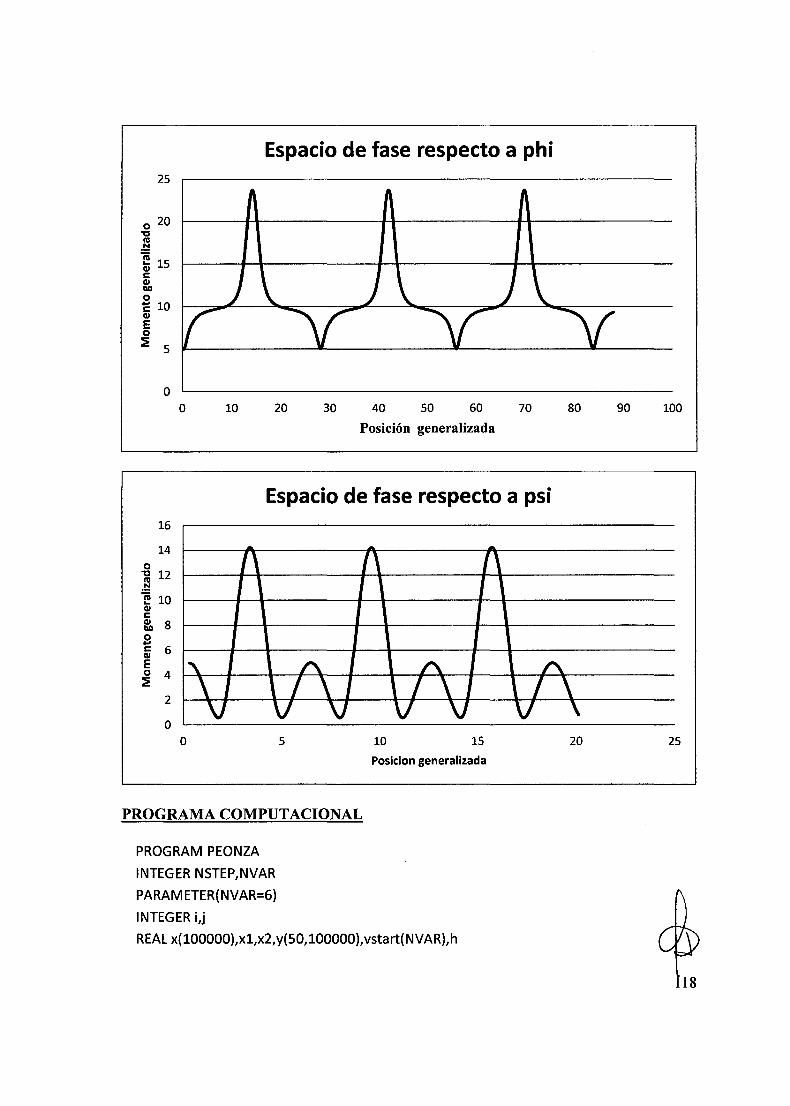
25
o 20 "C
111 .!::!
7!! 15 Cll e 2'o o ~10 Cll E o :E 5
o
16
14 o
"C 12 .~ 7!!10 Cll e 2'o 8 B ; 6 E
o 10
-/'
"\
Espacio de fase respecto a phi
20 30 40 50 60 70 80
Posición generalizada
Espacio de fase respecto a psi
- -1' 1'
/\. /\. /\. ~ 4
2 \ J ' 1 \ J \ 1 \ J \ 1 \ V V V o
o 5
PROGRAMA COMPUTACIONAL
PROGRAM PEONZA
INTEGER NSTEP,NVAR
PARA M ETER(NVAR=G)
INTEGER i,j
V V 10 15
Posicion generalizada
REAL x(lOOOOO),xl,x2,y(SO,lOOOOO),vstart(NVAR),h
V \ 20
90 100
25
18

COMMON /path/ x,y
EXTERNAL derivs
OPEN(S,FILE='archiv.dat') ! archivo donde se depositan phi y t
OPEN(lO,FILE='archivl.dat') ! archivo donde se depositan dphidt y t
OPEN(lS,FILE='trayectoria.dat') ! archivo donde se depositan dphidt e phi
xl=l. ! Tiempo inicial
vstart(l)=0.3 ! theta inicial
vstart(2)=0.0 ! dthetadt inicial
vstart(3)=0.3 ! phi inicial
vstart(4)=5.0 ! dphidt inicial
vstart(S)=0.3 ! psi inicial
vstart(G)=S.O ! dpsidt inicial
h=O.Ol ! paso de integración
x2=10.0 ! tiempo final
NSTEP=(x2-xl)/h !Numero de pasos o numero de pares de valores
call rkdumb(vstart,NVAR,xl,x2,NSTEP,derivs)
! write(S,'(/lx,t9,a,t17,a,t3l,a/)') 't','Theta','Omega'
do i=l,NSTEP
j=i
end do
END
write(S,'(lx,f10.4,2x,2fl2.6)') x(j),y(l,j) !escribe t y phi
write(lO,'(lx,f10.4,2x,2fl2.6)') x(j),y(3,j) !escribe t y dphidt
write(1S,'(lx,f10.4,2x,f12.6)')x(j),y(S,j) !phi y dphidt
1------------------------------------------------------------SUBROUTINE derivs(x,y,dydx)
REAL x,y(*),dydx(*),lx,ly,lz,m,g,r
x=x
lx=0.036
ly=lx
lz=2.604e-4
m=0.0875
g=9.8
r=0.07
119

dydx(1)=y(2)
dydx(2)=y( 6) * *2 *sin(y( 1)) *cos(y( 1) )-lz*y( 4) *y( 6)*sin(y( 1) )/lx-
lz*y( 6) * *2 *si n(y( 1) )*cos( y( 1) )/lx+m * g*r*si n(y( 1) )/lx
dydx(3)=y(4)
deno=lx*sin(y( 1) )* *2+1z* ( cos(y( 1) )+cos(y( 1)) * *2)
dydx( 4 )=-lz *y(2)*sin(y( 1) )*cos(y( 1)) *y( 4 )/deno+y( 6) *y(2) *sin(y( 1) )-2 *(lz
lx) *y( 6) *y(2)* sin(y( 1) )*cos(y( 1)) * *2/ den o
dydx(S)=Y(6)
dydx( 6)=(2 *( lz-lx) *y( 6)*y(2) *sin(y( 1)) *cos(y( 1) )+lz*y( 4) *y(2)*sin(y( 1)) )/den o
return
END
1-------------------------------------------------------------SUBROUTINE rkdumb(vstart,nvar,x1,x2,nstep,derivs)
INTEGER nstep,nvar,NMAX,NSTPMX
PARAMETER (NMAX=SO,NSTPMX=100000)
REAL x1,x2,vstart(nvar),xx(NSTPMX),y(NMAX,NSTPMX)
EXTERNAL derivs
COMMON /path/ xx,y
USES rk4
INTEGER i,k
REAL h,x,dv(NMAX),v(NMAX)
do 11 i=1,nvar
v(i)=vstart(i)
y(i,1)=v(i)
11 continue
xx(1)=x1
x=x1
h=(x2-x1)/nstep
do 13 k=1,nstep
call derivs(x,v,dv)
call rk4(v,dv,nvar,x,h,v,derivs)
if(x+h.eq.x)pause 'stepsize not significant in rkdumb'
x=x+h
xx(k+1)=x
120

do 12 i=1,nvar
y(i,k+1)=v(i)
12 continue
13 continue
return
END
rk~.for-------------------------------------------------
SUBROUTINE rk~(y,dydx,n,x,h,yout,derivs)
INTEGER n,NMAX
REAL h,x,dydx(n)N(n)NOUt(n)
EXTERNAL derivs
PARAMETER (NMAX=SO)
INTEGER i
REAL h6,hh,xh,dym(NMAX),dyt(NMAX),yt(NMAX)
hh=h*O.S
hG=h/6.
xh=x+hh
do 11 i=1,n
yt(i)=y(i)+hh*dydx(i)
11 continue
call derivs(xh, yt,dyt)
do 12 i=1,n
yt(i)=y(i)+hh *dyt(i)
12 continue
call derivs(xhNt,dym)
do 13 i=1,n
yt(i)=y(i)+h*dym(i)
dym(i)=dyt(i)+dym(i)
13 continue
call derivs(x+hNt,dyt)
do 1~ i=1,n
yout(i)=y(i)+h6 * ( dydx(i)+dyt(i)+2. *dym(i))
14 continue
return
END
121
" DISCUSION
De acuerdo a los resultados obtenidos se observa que
comparados con otros textos similares, el presente
trabajo se ajusta más al contenido de los sílabos y
sumillas requeridas por las escuelas profesionales
mencionadas, por lo que consideramos que será más
utilizado con respecto a los otros textos existentes.
122

REFERENCIALES ·
1 GOLDSTEIN, HERBERT. Mecánica Clásica, Barcelona: Editorial Reverté, Primera Edición, 1998.
2 HAUSER, WALTER. Introducción a los Principios de Mecánica, México: Editorial UTEHA, Primera Edición, 1969.
3 KIBBLE, T.W.B. Mecánica Clásica, Madrid: Fondo Editorial Mixto, Primera Edición. 1974.
4 MARION, JERRY B. Dinámica clásica de las partículas y sistemas, Barcelona: Editorial Reverte, Segunda Edición, 1995.
5 OLLER, JOSÉ A., Mecánica Teórica, Murcia: Universidad de Murcia, www.um.es/oller/docencia/versionmteor.pdf, 2013
6 RODRÍGUEZ VALENCIA, LUIS. Mecánica Clásica, Santiago de Chile: Universidad de Santiago de Chile, http://fisica.usach.cl/rv lhrodrig/libromecanica.pdf, 2000.
7 SOLDOVIERI, TERENZIO. Introducción a la Mecánica de Lagrange y Hamilton, Maracaibo: Universidad de Zulia, www.cmc.org.ve/ tsweb/documentos/ApuntesMecii.pdf, 2013.
8 SPIEGEL, MURRAY R. Teoría y Problemas de Mecánica Teórica, Madrid: Editorial McGraw-Hill, Colección Schaum, Segunda Edición, 1989.
9 VALADEZ, SERGIO; ATENCIO, ANA MARÍA; LEÓN, JAVIER. Análisis de Fenómenos de la Mecánica Clásica a través de Programas de Simulación, México: Editorial CFIE- IPN, Primera Edición, 2006.
123
, APENDICE
Concordante con el trabajo desarrollado (el cual es la
elaboración de un texto universitario), y por la
naturaleza de ser una investigación bibliográfica, los
aportes del autor vienen a ser los programas
computacionales para la solución de problemas en
cada temática, los cuales se encuentran insertos al
finalizar cada capítulo, a fin de que los lectores
puedan tener una mejor comprensión del tema en
estudio.
124

ANEXO
En este informe no se consideran Anexos porque los
gráficos están incluidos dentro del mismo texto.
125