universidad de valladolid - alojamientos.uva.es · los pulsos dados por el sistema señales de...
TRANSCRIPT

Morfología del robot:Morfología del robot:SensoresSensores
J.C. FraileJ.C. Fraile - ETSII - Universidad de Valladolid - ETSII - Universidad de Valladolid
Universidad de ValladolidUniversidad de ValladolidE.T.S. de Ingenieros IndustrialesE.T.S. de Ingenieros Industriales
Control y Programación de RobotsControl y Programación de Robots
Sensores en los robotsSensores internos:Sensores internos:• Sensores de presencia:
– Inductivos, capacitivos, ópticos, ultrasonido, contacto• Sensores de posición:
– Analógicos: potenciometro, resolver– Digitales: encoder (absoluto, incremental)
• Sensores de velocidad:– Tacómetros
Sensores externos:Sensores externos:• Sensores de presencia• Sensores de distancia• Sensores avanzados: imagen, esfuerzo
J.C. FraileJ.C. Fraile - ETSII - Universidad de Valladolid - ETSII - Universidad de Valladolid
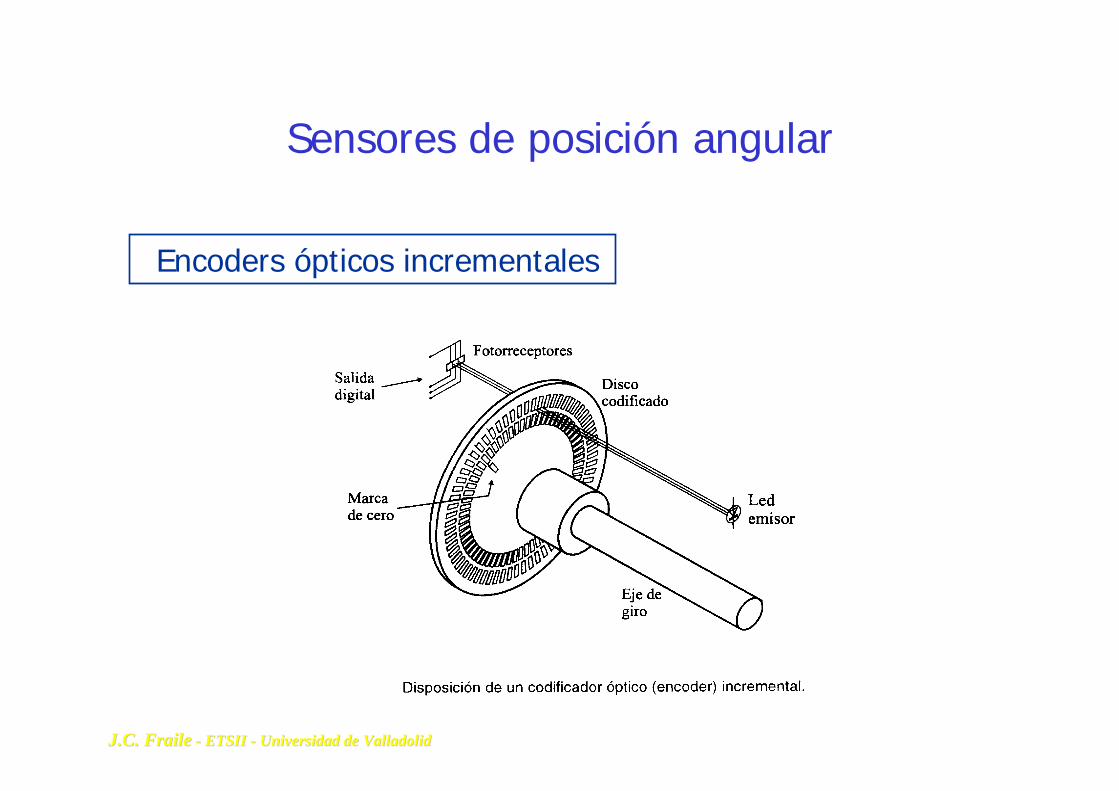
Sensores de posición angular
Encoders ópticos incrementales
J.C. FraileJ.C. Fraile - ETSII - Universidad de Valladolid - ETSII - Universidad de Valladolid
Encoders ópticos incrementales
J.C. FraileJ.C. Fraile - ETSII - Universidad de Valladolid - ETSII - Universidad de Valladolid
• Disco transparente con marcas opacas colocadas radialmente yequidistantes entre sí.
• Sistema de iluminación con un diodo led emisor
• Un elemento fotorreceptor
• El eje cuya posición se quiere medir va acoplado al discotransparente.
Encoders ópticos incrementales
J.C. FraileJ.C. Fraile - ETSII - Universidad de Valladolid - ETSII - Universidad de Valladolid

• Cuando el eje gira, se generan pulsos en el elementofotorreceptor cada vez que la luz atraviesa cada marca, contandoestos pulsos se puede conocer la posición del eje.
• Es necesario disponer de una marca de referencia sobre el discoque indique que se ha dado una vuelta completa.
•La resolución de este tipo de sensores depende del número demarcas que se pueden poner físicamente en el disco.
Encoders ópticos incrementales
J.C. FraileJ.C. Fraile - ETSII - Universidad de Valladolid - ETSII - Universidad de Valladolid

Encoders ópticos incrementales
J.C. FraileJ.C. Fraile - ETSII - Universidad de Valladolid - ETSII - Universidad de Valladolid
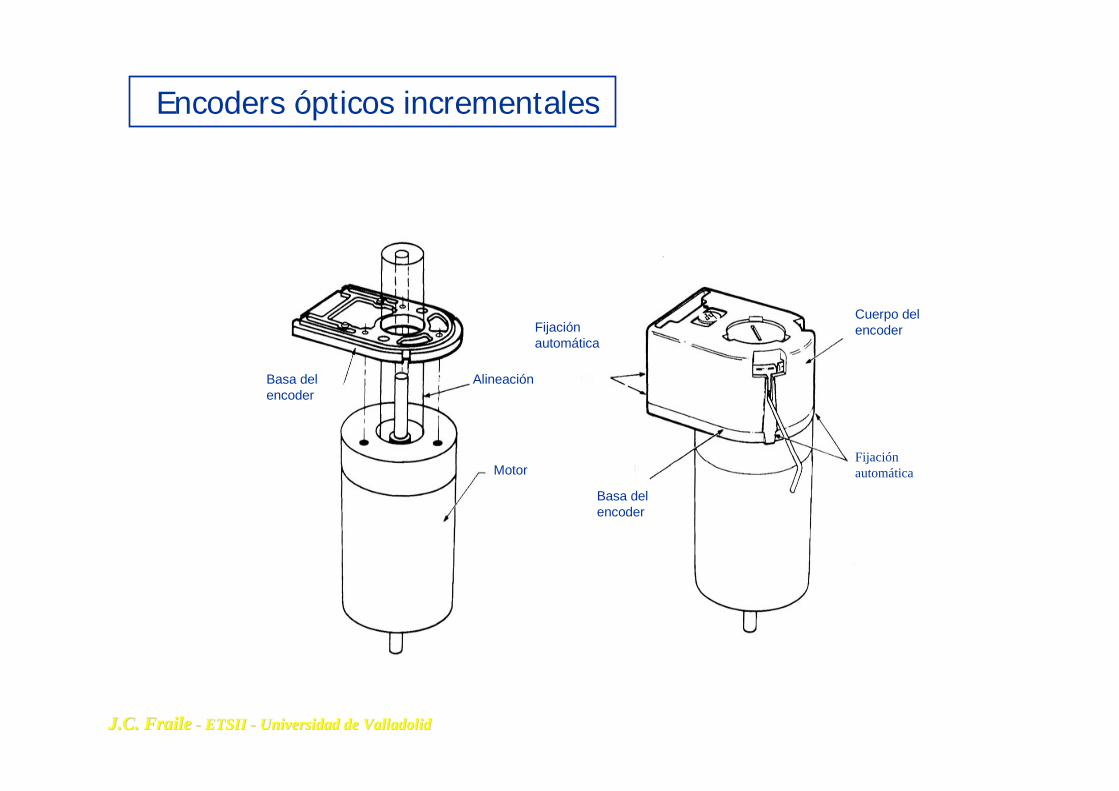
Motor
Cuerpo delencoder
Fijaciónautomática
Basa delencoder
Fijaciónautomática
Basa delencoder
Alineación
Encoders ópticos incrementales
J.C. FraileJ.C. Fraile - ETSII - Universidad de Valladolid - ETSII - Universidad de Valladolid

Encoders ópticos incrementales
J.C. FraileJ.C. Fraile - ETSII - Universidad de Valladolid - ETSII - Universidad de Valladolid

Encoders ópticos incrementales en el robot Scorbot
Los encoders incrementales disponen de una banda de marcastransparentes y opacas repartidas a lo largo del disco y separadas por un
paso que llamaremos “p”
Banda de marcas transparenteso opacas (512 ranuras)
Disco del encoder delSCORBOT ER-IX
Pulso de índice
Detalle de los captadores ópticos
J.C. FraileJ.C. Fraile - ETSII - Universidad de Valladolid - ETSII - Universidad de Valladolid
• En el estator existen dos pares de emisor-receptor ópticoseparados un número entero de pasos.
• El encoder utilizado por el SCORBOT ER-IX contiene undiodo (LED) que sólo sirve de fuente de luz. La luz esdespués convertida en un rayo unidireccional mediante unlente de polycarbonato situada directamente sobre el LED.
• Enfrente, hay un circuito integrado detector de luz. Estecircuito integrado se compone de varios juegos defotodetectores y del circuito que genera la señal digital desalida
Encoders ópticos incrementales en el robot Scorbot
J.C. FraileJ.C. Fraile - ETSII - Universidad de Valladolid - ETSII - Universidad de Valladolid
• El disco metálico dentado que gira con el eje se sitúa entreel circuito integrado emisor y el detector. Al girar el rotor, eldisco gira también entre el emisor y el detector. El rayo deluz está interrumpido por la pista del disco, transparente uopaca, lo que crea una serie de pulsos recibidos por losdetectores.
• El disco tiene 512 ranuras.
• Cada detector óptico genera una señal cuadrada. Estosdetectores son espaciados de manera que un período de luzsobre un par de detectores corresponda a un período desombra sobre el par adyacente de detectores.
Encoders ópticos incrementales en el robot Scorbot
J.C. FraileJ.C. Fraile - ETSII - Universidad de Valladolid - ETSII - Universidad de Valladolid

• La salida del fotodiodo está después tratada por el circuitode tratamiento de señal lo que da como resultado:
nota :Q es la suma de todoslos pulsos dados porel sistema
Señales de salida
• la salida digital del canal Aestá en cuadratura de fase conla del canal B (90º de desfase).
Encoders ópticos incrementales en el robot Scorbot
J.C. FraileJ.C. Fraile - ETSII - Universidad de Valladolid - ETSII - Universidad de Valladolid

• El desfase de ¼ de división de los captadores genera:- las señales de salida tengan entre sí un desfase de ¼ de período cuando el rotor gira en un sentido,- ¾ de período cuando gira en sentido contrario, lo cual se utiliza para discriminar el sentido de giro.
• Cuando, el eje gira en sentido contrario a las agujas del reloj, elcanal A está delante del canal B. En la dirección de las agujas delreloj, el canal B está delante del canal A.
A
B
A
B
Encoders ópticos incrementales en el robot Scorbot
J.C. FraileJ.C. Fraile - ETSII - Universidad de Valladolid - ETSII - Universidad de Valladolid

Resolución del encoderLa resolución es el menor incremento que el sistema de control puedeidentificar y teóricamente controlar.
SE = 360º / N
SE : Resolución del encoder.N: Número de pulsos en un giro de encoder.
El encoder del Scorbot tiene un disco con 512 pares transparentes yopacos. Como el sistema detecta 4 pulsos por cada par, el encoder genera2048 pulsos por cada giro completo del motor, por tanto la resolución delos encoders del SCORBOT ER-IX es:
SE = 360º / 2048 = 0.176º
Encoders ópticos incrementales en el robot Scorbot
J.C. FraileJ.C. Fraile - ETSII - Universidad de Valladolid - ETSII - Universidad de Valladolid

Resolución del movimiento de giro
El encoder está montado sobre el eje. Teniendo en cuenta el rendimiento de losengranajes de cada eje del robot, podemos obtener la resolución del movimiento de giro (Sjoint)con la formula siguiente:
Sjoint = SE / Naxis
“Naxis” es el rendimiento del eje.
Numero del eje SE Naxis Sjoint1 0.176 214.13 0.000821º2 0.176 243.8 0.000721º3 0.176 213.33 0.000825º4 0.176 180 0.000977º5 0.176 100 0.00176º
Encoders ópticos incrementales en el robot Scorbot
J.C. FraileJ.C. Fraile - ETSII - Universidad de Valladolid - ETSII - Universidad de Valladolid
Encoders ópticos absolutos
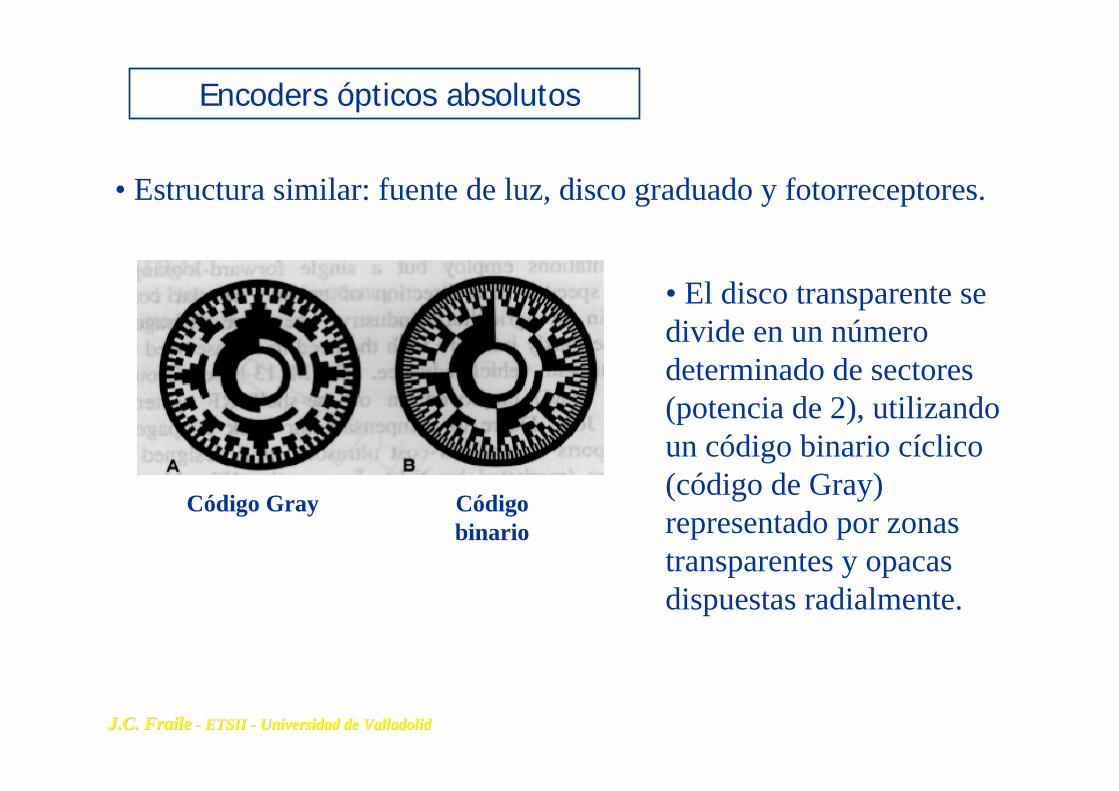
• Estructura similar: fuente de luz, disco graduado y fotorreceptores.
• El disco transparente sedivide en un númerodeterminado de sectores(potencia de 2), utilizandoun código binario cíclico(código de Gray)representado por zonastransparentes y opacasdispuestas radialmente.
Código Gray Códigobinario
J.C. FraileJ.C. Fraile - ETSII - Universidad de Valladolid - ETSII - Universidad de Valladolid
• NO es necesario detectar el sentido de giro pues cada detector escodificado de forma absoluta.
• La resolución viene determinada por el número de anillos queposee el disco graduado (valores típicos de 28 a 219 bits).
Encoders ópticos absolutos
J.C. FraileJ.C. Fraile - ETSII - Universidad de Valladolid - ETSII - Universidad de Valladolid

Encoders ópticos absolutos
J.C. FraileJ.C. Fraile - ETSII - Universidad de Valladolid - ETSII - Universidad de Valladolid

Problemas con los encoders
• Problemas mecánicos debido a la gran precisión que se debe teneren su fabricación.
• La contaminación ambiental puede ser una fuente de interferenciasen la transmisión óptica.
• Son dispositivos muy sensibles a golpes y vibraciones.
J.C. FraileJ.C. Fraile - ETSII - Universidad de Valladolid - ETSII - Universidad de Valladolid

Sensores de posición angular: resolvers
• Son captadores analógicos de resolución “teóricamente” infinita.
• Utiliza una bobina, solidaria al eje, excitada por una portadora, ydos bobinas fijas situadas a su alrededor, desfasadas 90º.
J.C. FraileJ.C. Fraile - ETSII - Universidad de Valladolid - ETSII - Universidad de Valladolid

• El giro de la bobina móvil hace que el acoplamiento con lasbobinas fijas varíe, con lo que la señal de tensión en éstas dependedel seno del ángulo de giro.
• La bobina móvil excitada con tensión V•sen(ωt) y girada unángulo θ, induce en las bobinas fijas situadas en cuadratura, lassiguientes tensiones:
V1 = V • sen(ωt) • sen(θ)
V2 = V • sen(ωt) • cos(θ)
que permite determinar el ángulo “θ”
Sensores de posición angular: resolvers
J.C. FraileJ.C. Fraile - ETSII - Universidad de Valladolid - ETSII - Universidad de Valladolid

Sensores de posición lineal: inductosyn
J.C. FraileJ.C. Fraile - ETSII - Universidad de Valladolid - ETSII - Universidad de Valladolid
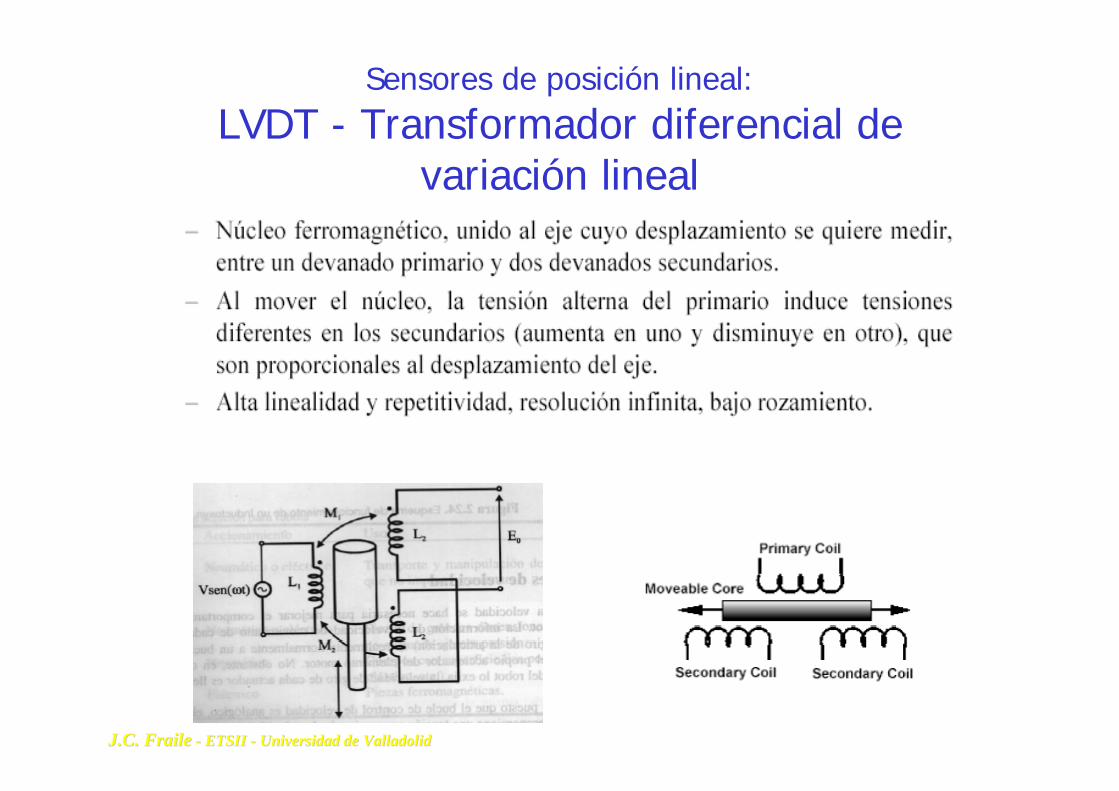
Sensores de posición lineal:LVDT - Transformador diferencial de
variación lineal
J.C. FraileJ.C. Fraile - ETSII - Universidad de Valladolid - ETSII - Universidad de Valladolid

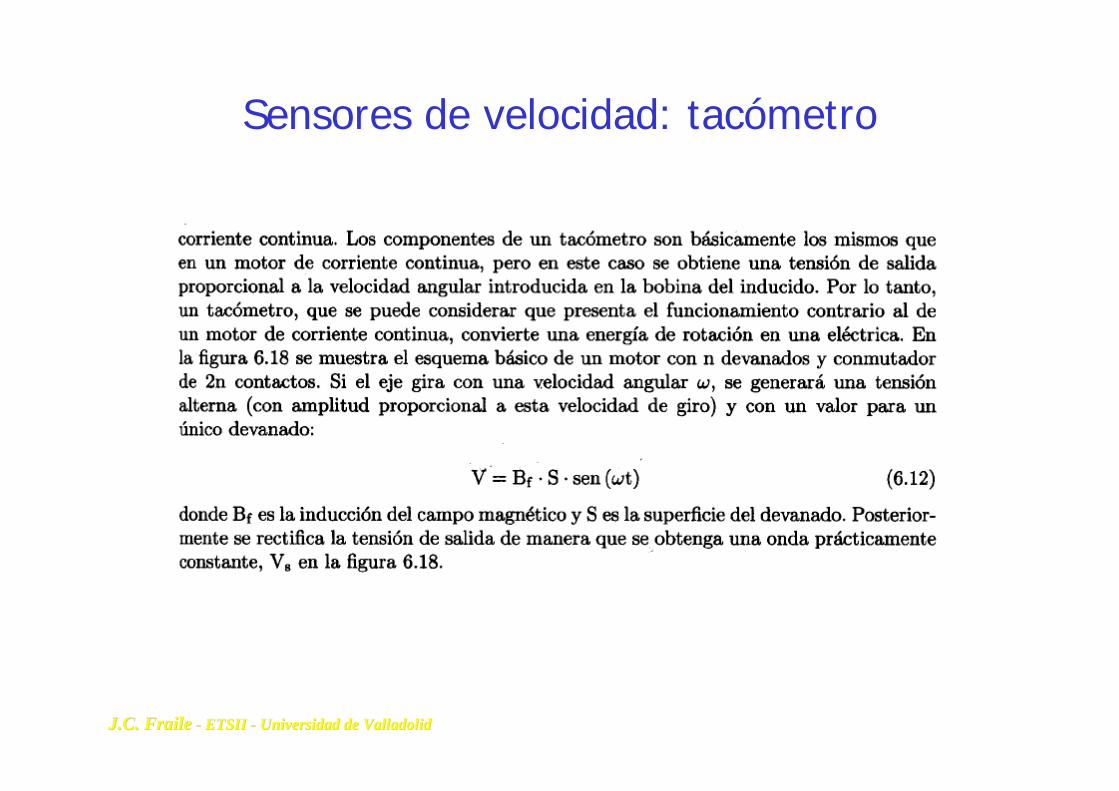
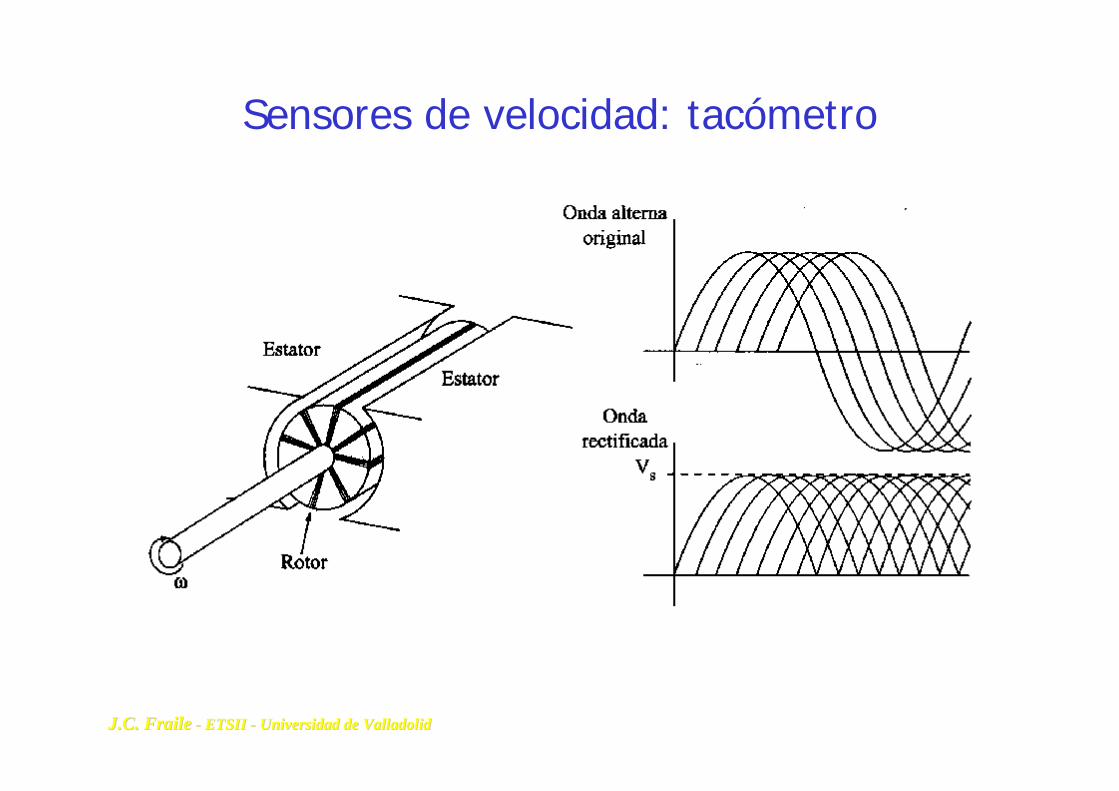
Sensores de velocidad: tacómetro
• Permiten determinar la velocidad de los actuadores del robot.
• Necesario para mejorar el comportamiento dinámico del robot.
• La velocidad del movimiento de cada actuador se realimenta aun bucle de control analógico.
• El captador proporciona una tensión proporcional a la velocidadde giro del eje (10 milivoltios por revolución).
J.C. FraileJ.C. Fraile - ETSII - Universidad de Valladolid - ETSII - Universidad de Valladolid
Sensores de velocidad: tacómetro
J.C. FraileJ.C. Fraile - ETSII - Universidad de Valladolid - ETSII - Universidad de Valladolid
Sensores de velocidad: tacómetro
J.C. FraileJ.C. Fraile - ETSII - Universidad de Valladolid - ETSII - Universidad de Valladolid
Sensores de presencia y proximidad
• Sensores capaces de detectar la presencia de un objetodentro de un intervalo de distancia determinado.Esta detección puede hacerse con o sin contacto con el objeto.En el caso de detección con contacto, se trata de uninterruptor mecánico, como pueden ser los finales de carrera.
• Los detectores de presencia se utilizan en robóticaprincipalmente como auxiliares de los detectores de posición,para indicar los límites de movimiento de las articulaciones ypermitir localizar la posición de referencia de cero de éstos, enel caso de que sean incrementales.
J.C. FraileJ.C. Fraile - ETSII - Universidad de Valladolid - ETSII - Universidad de Valladolid

Sensores de presencia y proximidad
• Sensores inductivos:Sensores inductivos:
Para detectar la presencia de un objeto sin contacto, se utilizansensores inductivos, los cuáles constan básicamente de unabobina y un imán. Cuando un objeto ferromágnetico penetra oabandona el campo del imán el cambio que se produce endicho campo induce una corriente en la bobina. Sufuncionamiento es sencillo: si se detecta una corriente en labobina, algún objeto ha entrado en el campo del imán.Presentan el inconveniente de distinto comportamiento segúndel tipo de metal del que se trate.
J.C. FraileJ.C. Fraile - ETSII - Universidad de Valladolid - ETSII - Universidad de Valladolid
Sensores de presencia y proximidad
• Sensores de efecto HALL:Sensores de efecto HALL:
Los sensores basados en el efecto Hall detectan la presencia deobjetos ferromagnéticos por la deformación que estos provocansobre un campo magnético. El efecto Hall relaciona la tensiónentre dos puntos de un material conductor o semiconductor conun campo magnético a través del material. Este tipo desensores suelen constar de ese elemento conductor osemiconductor y de un imán. Cuando un objeto(ferromagnético) se aproxima al sensor, el campo provocadopor el imán en el elemento se debilita, pudiéndose determinarasí la proximidad de un objeto.
J.C. FraileJ.C. Fraile - ETSII - Universidad de Valladolid - ETSII - Universidad de Valladolid
Sensores de presencia y proximidad
• Sensores capacitivos:Sensores capacitivos:
Los sensores capacitivos, permiten detectar cambios decapacidad inducidos por superficies cercanas, sin necesidad deque los objetos a detectar sean metálicos. Constan de doselementos principales: el elemento cuya capacidad se altera(que suele ser un condensador formado por electrodos) y eldispositivo que detecta el cambio de capacidad (un circuitoelectrónico conectado al condensador). Este tipo de sensorestiene la ventaja de que detectan la proximidad de objetos decualquier naturaleza, sin embargo, la sensibilidad disminuyebastante cuando la distancia es superior a algunos milímetros.Presentan el problema de trabajo en condiciones húmedas ycon puestas a tierra defectuosas.
J.C. FraileJ.C. Fraile - ETSII - Universidad de Valladolid - ETSII - Universidad de Valladolid
Sensores de presencia y proximidad
• Sensores ópticos de barrera:Sensores ópticos de barrera:
Los sensores ópticos tipo barrera, se caracterizan por que elobjeto intercepta la línea entre el emisor y el receptor. Elprincipio de funcionamiento se basa en el empleo de diodosemisores de luz y fotodetectores (fotorresistores, fotodiodos ofototransistores).También existen sensores ópticos que pueden detectar lareflexión de la luz procedente del emisor sobre el objeto.
J.C. FraileJ.C. Fraile - ETSII - Universidad de Valladolid - ETSII - Universidad de Valladolid

Sensores de presencia y proximidad
• Sensores de infrarrojo:Sensores de infrarrojo:
Son sensores sensibles a longitudes de onda, tales como880nm, inmediatamente inferiores a la visible. Éstos no aportanninguna medida de distancia, sino solo una señal binariaindicando si existe o no un objeto próximo en un rango dedistancia característico del sensor.
••Sensores de ultrasonido:Sensores de ultrasonido:
Utiliza un transductor electroacústico que emite unas ondasultrasónicas; a continuación pasa a modo de espera, hasta querecibe las ondas reflejadas en algún objeto. Si las ondas llegan,quiere decir que hay algún objeto en las proximidades.Dependiendo del tiempo de conmutación del transductor(tiempo que está esperando) de detecta un grado deproximidad u otro.
J.C. FraileJ.C. Fraile - ETSII - Universidad de Valladolid - ETSII - Universidad de Valladolid

Sensores de presencia y proximidad
••Sensores láser:Sensores láser:Son sensores ópticos de distancia que se basan en ladeterminación del tiempo entre los pulsos emitidos y los que sereciben después de ser reflejado en el objeto.
J.C. FraileJ.C. Fraile - ETSII - Universidad de Valladolid - ETSII - Universidad de Valladolid
Sensores para medir esfuerzos y pares
• Se trata de transductores pasivos, empleados para medirtensiones mecánicas. La tensión a medir provoca deformaciónde la pieza de estudio, la cual se transmite a la galga,modificando ésta su resistencia en función de la deformación, apartir de la cual se puede determinar la tensión sobre la pieza.
•Mediante estos transductores de tipo resistivo o piezorresistivoes posible medir las deformaciones axiales, radiales otangenciales, estáticas y dinámicas, que tiene lugar en lasuperficie de un cuerpo como consecuencia de las solicitacionesmecánicas a las que está sometido.
J.C. FraileJ.C. Fraile - ETSII - Universidad de Valladolid - ETSII - Universidad de Valladolid

Sensores para medir esfuerzos y pares
El principio de las galgas extensiométricas es el siguiente:
Si a un hilo conductor se le somete a un esfuerzo de tracción,se alarga, aumentando su longitud en ∂L, y no se rebasa ellímite elástico del material, el cambio de longitud esproporcional a la carga, y el hilo recupera su longitud originalcuando se le retira la carga aplicada. Simultáneamente, coneste aumento de longitud hay una ligera reducción de lasección transversal del hilo, y dado que la resistencia de unconductor es:
R = ρL / A ρ = resistividad del material L = longitud A = área de la sección transversal
J.C. FraileJ.C. Fraile - ETSII - Universidad de Valladolid - ETSII - Universidad de Valladolid
Sensores para medir esfuerzos y pares
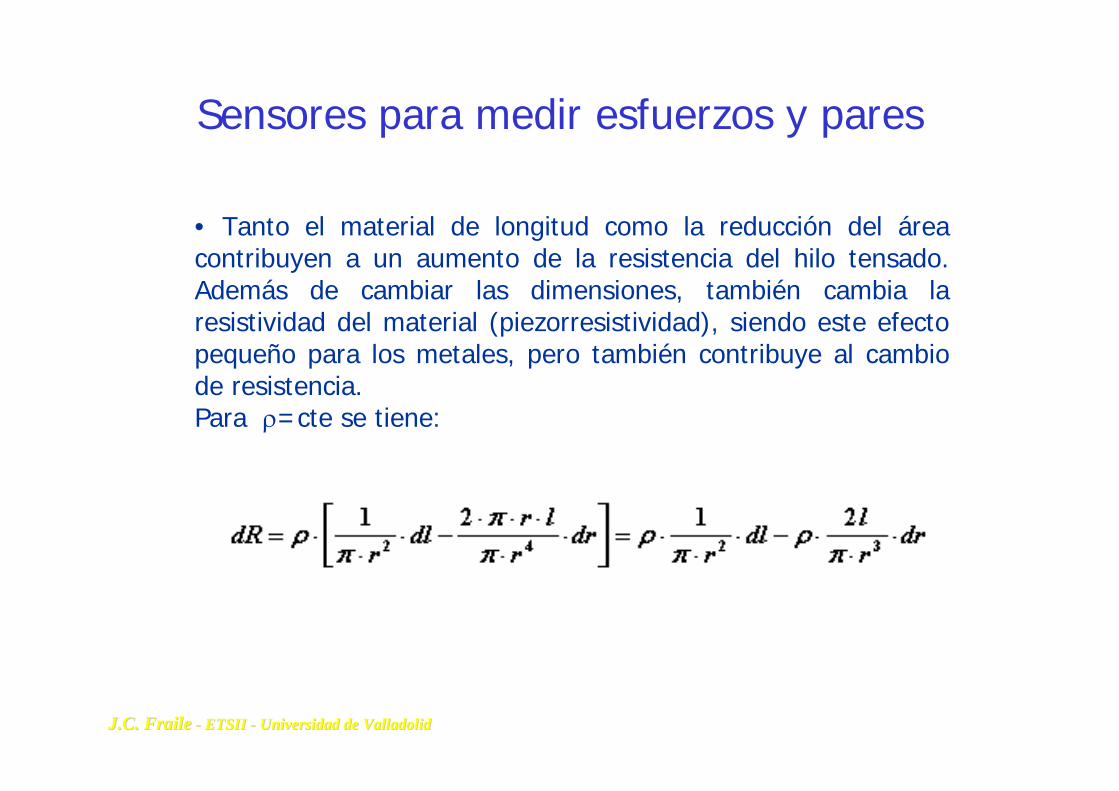
• Tanto el material de longitud como la reducción del áreacontribuyen a un aumento de la resistencia del hilo tensado.Además de cambiar las dimensiones, también cambia laresistividad del material (piezorresistividad), siendo este efectopequeño para los metales, pero también contribuye al cambiode resistencia.Para ρ=cte se tiene:
J.C. FraileJ.C. Fraile - ETSII - Universidad de Valladolid - ETSII - Universidad de Valladolid
Sensores para medir esfuerzos y pares
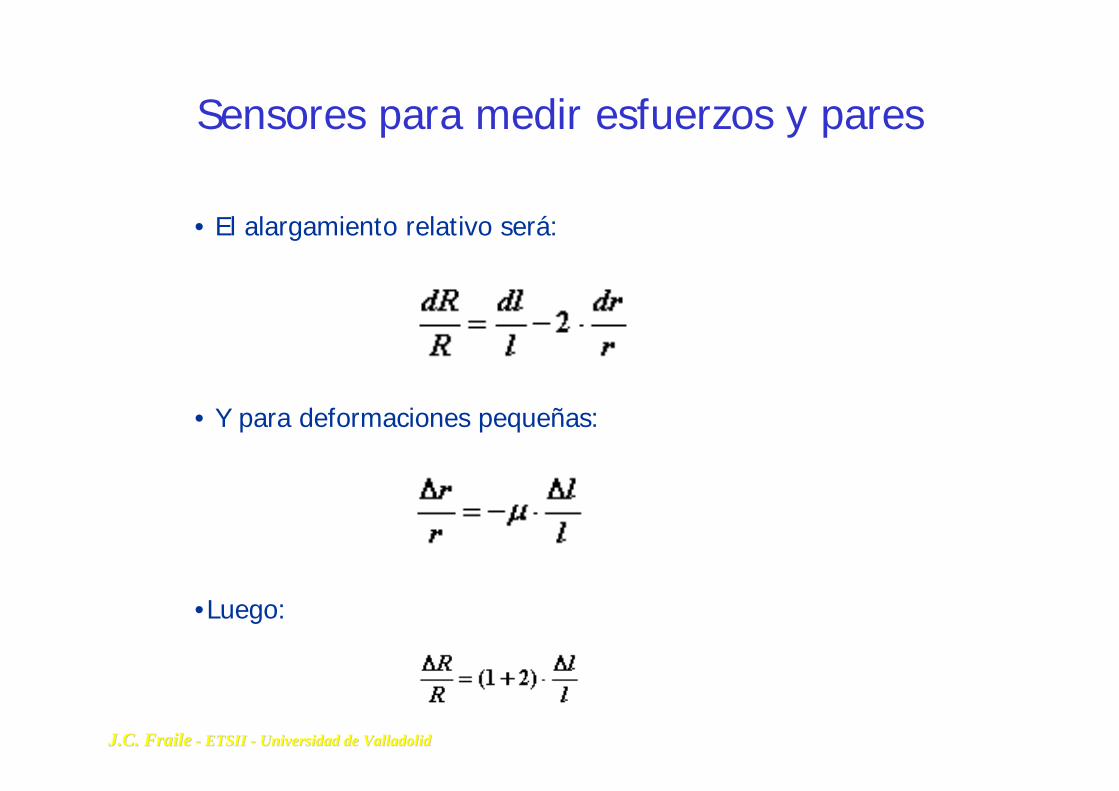
• El alargamiento relativo será:
• Y para deformaciones pequeñas:
•Luego:
J.C. FraileJ.C. Fraile - ETSII - Universidad de Valladolid - ETSII - Universidad de Valladolid
Sensores para medir esfuerzos y pares
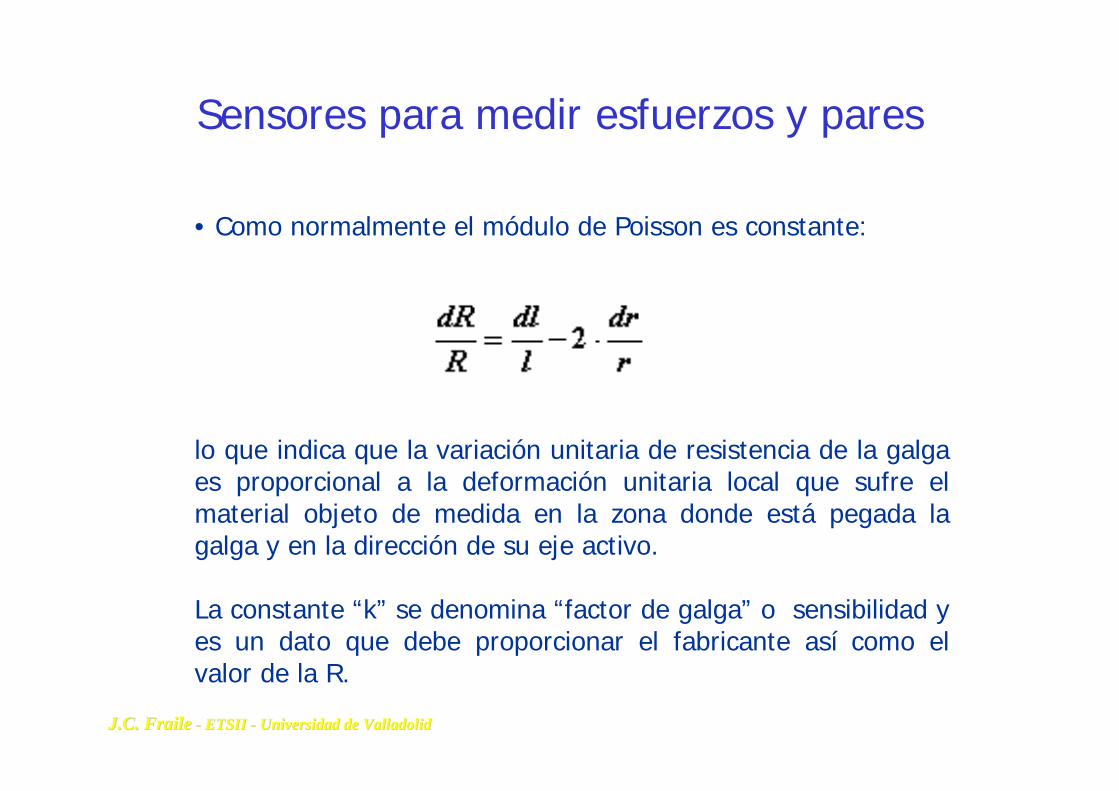
• Como normalmente el módulo de Poisson es constante:
lo que indica que la variación unitaria de resistencia de la galgaes proporcional a la deformación unitaria local que sufre elmaterial objeto de medida en la zona donde está pegada lagalga y en la dirección de su eje activo.
La constante “k” se denomina “factor de galga” o sensibilidad yes un dato que debe proporcionar el fabricante así como elvalor de la R.
J.C. FraileJ.C. Fraile - ETSII - Universidad de Valladolid - ETSII - Universidad de Valladolid
Sensores para medir esfuerzos y pares
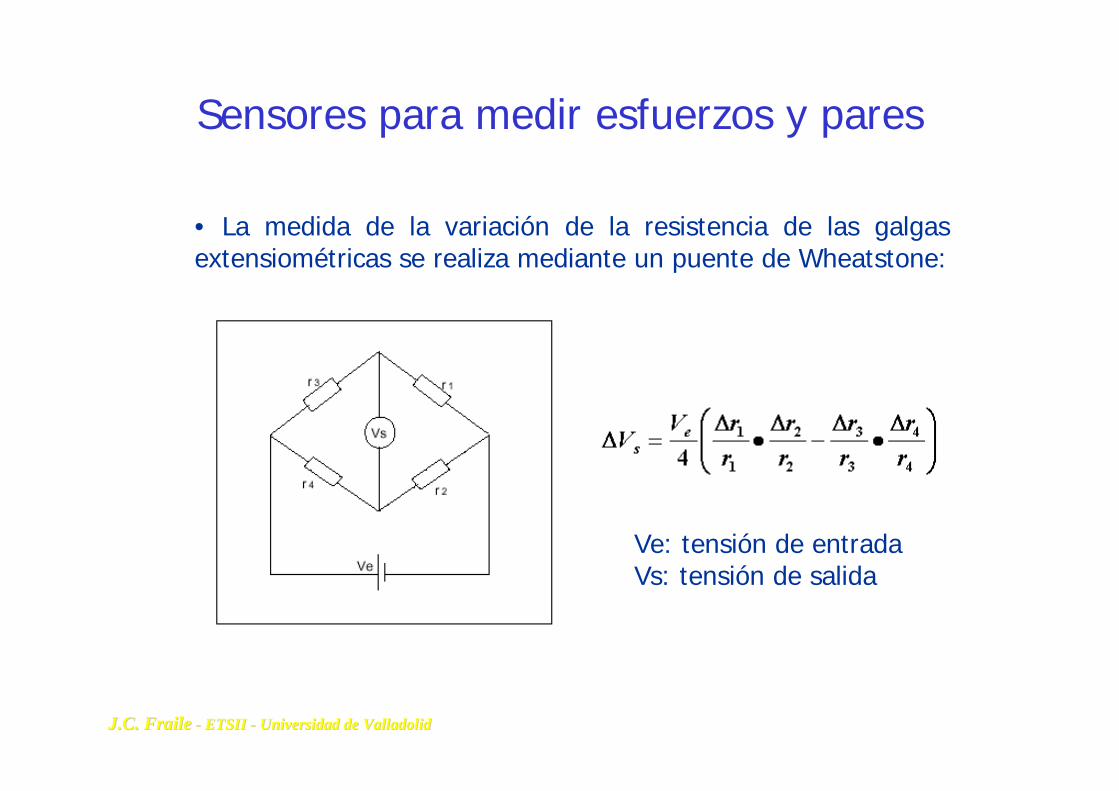
• La medida de la variación de la resistencia de las galgasextensiométricas se realiza mediante un puente de Wheatstone:
Ve: tensión de entrada Vs: tensión de salida
J.C. FraileJ.C. Fraile - ETSII - Universidad de Valladolid - ETSII - Universidad de Valladolid

Sensores de esfuerzos para manipuladores(multi-axis force/torque sensor)
Sensores ATISensores ATI(www.ati-ia.com)(www.ati-ia.com)
J.C. FraileJ.C. Fraile - ETSII - Universidad de Valladolid - ETSII - Universidad de Valladolid
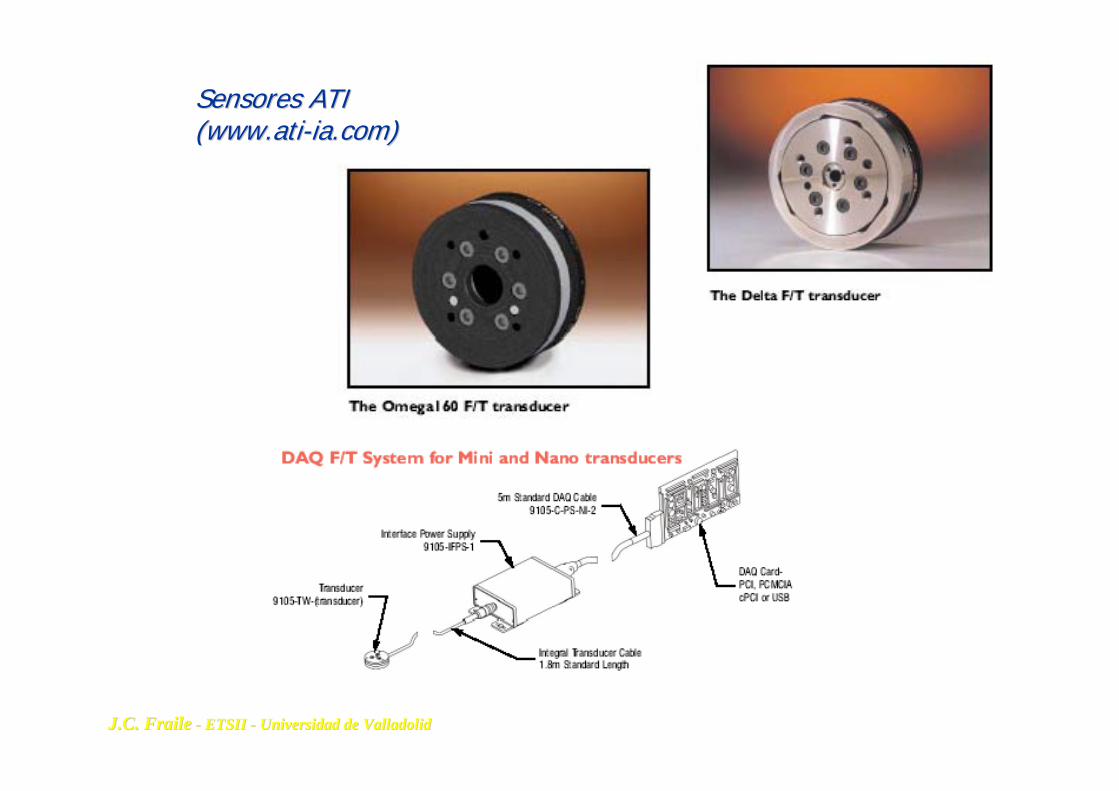
Sensores ATISensores ATI(www.ati-ia.com)(www.ati-ia.com)
J.C. FraileJ.C. Fraile - ETSII - Universidad de Valladolid - ETSII - Universidad de Valladolid

Sensores ATISensores ATI(www.ati-ia.com)(www.ati-ia.com)
¿ Como determinar qué¿ Como determinar quésensor es el mássensor es el más
adecuado ??adecuado ??
J.C. FraileJ.C. Fraile - ETSII - Universidad de Valladolid - ETSII - Universidad de Valladolid

Sensores ATISensores ATI(www.ati-ia.com)(www.ati-ia.com)
¿ Como determinar qué¿ Como determinar quésensor es el mássensor es el más
adecuado ??adecuado ??
J.C. FraileJ.C. Fraile - ETSII - Universidad de Valladolid - ETSII - Universidad de Valladolid

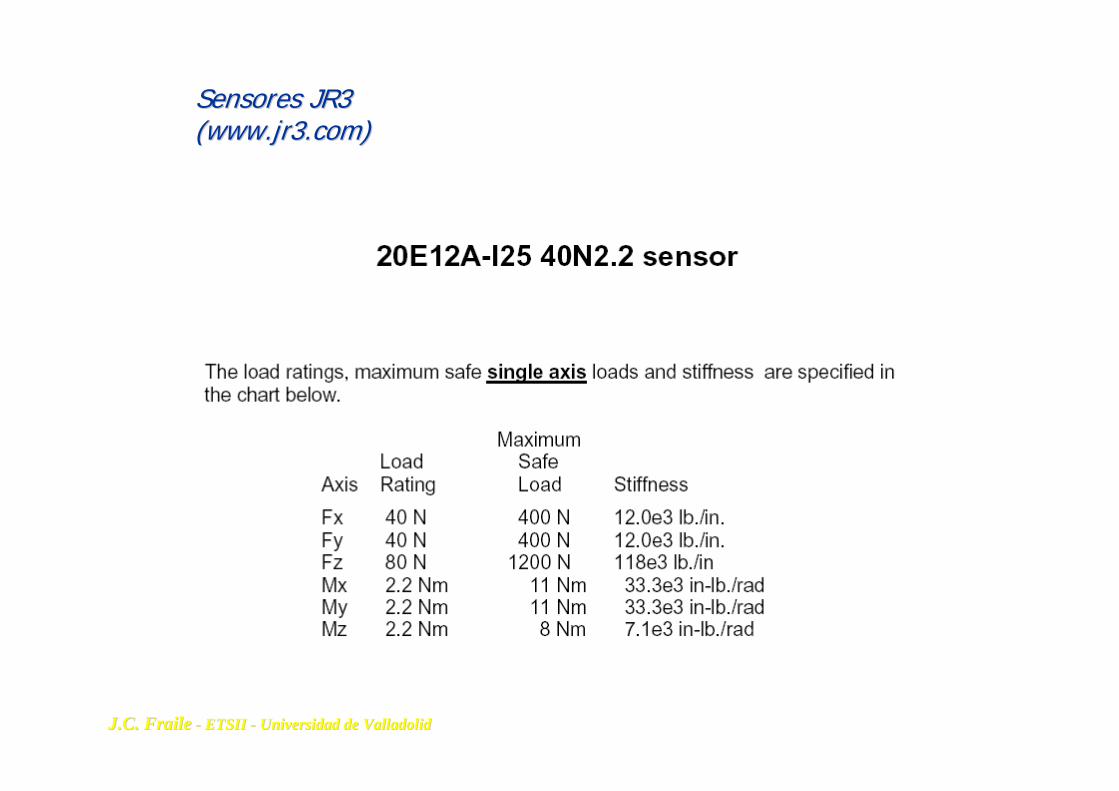
Sensores de esfuerzos para manipuladores(multi-axis force/torque sensor)
Sensores JR3Sensores JR3(www.jr3.com)(www.jr3.com)
• Soporta esfuerzos de un 125% delesfuerzo nominal, aplicadas a todoslos ejes simultáneamente.
• Si el esfuerzo es sólo sobre uneje, soporta cargas mucho mayores.
J.C. FraileJ.C. Fraile - ETSII - Universidad de Valladolid - ETSII - Universidad de Valladolid
Sensores JR3Sensores JR3(www.jr3.com)(www.jr3.com)
J.C. FraileJ.C. Fraile - ETSII - Universidad de Valladolid - ETSII - Universidad de Valladolid

Sensores JR3Sensores JR3(www.jr3.com)(www.jr3.com)
Robot ABB IRB 4400 + sensorde esfuerzos JR3
Conexión del sensor deesfuerzos en un robot tipo
Scara con bus VME
J.C. FraileJ.C. Fraile - ETSII - Universidad de Valladolid - ETSII - Universidad de Valladolid

Sensores JR3Sensores JR3(www.jr3.com)(www.jr3.com)
Robot ABB IRB 4400 + sensorde esfuerzos JR3 + pinza
neumática
J.C. FraileJ.C. Fraile - ETSII - Universidad de Valladolid - ETSII - Universidad de Valladolid

Sensor JR3 para el robot Staubli RX 90 BSensor JR3 para el robot Staubli RX 90 B(www.jr3.com)(www.jr3.com)
Robot Staubli RX 90B
Sensor JR3 67M25ASensor JR3 67M25AJ.C. FraileJ.C. Fraile - ETSII - Universidad de Valladolid - ETSII - Universidad de Valladolid

Sensor JR3 para el robot Staubli RX 90 BSensor JR3 para el robot Staubli RX 90 B(www.jr3.com)(www.jr3.com)
Robot Staubli RX 90B
Instrucciones del lenguaje V+ en el robot Instrucciones del lenguaje V+ en el robot StaubliStaubli,,para la gestión del sensor de esfuerzos JR3para la gestión del sensor de esfuerzos JR3
J.C. FraileJ.C. Fraile - ETSII - Universidad de Valladolid - ETSII - Universidad de Valladolid

Bibliografía:Bibliografía:• Barrientos, A., L.F. Peñín, C. Balaguer y R. Aracil. "Fundamentos de robótica". Editorial McGraw-Hill. 1997
• Ollero A. "Robótica, manipuladores y robots móviles". Editorial Marcombo. 2001.
• Fu K.S., R.C. GonzÁlez y C.S.G., Lee. "Robótica: control, detección visióne inteligencia". McGraw-Hill. 1988
• Roque J. Saltaren y otros. Prácticas de robótica utilizando MATLAB. Univ. "Miguel Hernández" - Elche. 2000
• Iñigo R., Vidal E. “Robots industriales manipuladores”. Ediciones UPC. 2002
• Romeo A.. Robótica industrial. Universidad de Zaragoza
• Garcia M. Universidad de Vigo.