unificación de los métodos de regularización de máxima ...³n de los métodos de regularización...
TRANSCRIPT

Unificación de los Métodos de Regularización de Máxima Entropía y de Análisis Variacional para
Reconstrucción de Imágenes de Percepción Remota L. J. Morales-Mendoza, R. F. Vázquez-Bautista y Y. V. Shkvarko, Senior Member, IEEE
Resumen-- En este trabajo, se propone una nueva aproximación
para la reconstrucción de imágenes de percepción remota
degradada por ruido y limitadas por la resolución sensorial del
sistema. El método propuesto utiliza la idea de la fusión de
estrategias de regularización con diferentes paradigmas
computacionales. En primer lugar, proponemos aplicar el método
de regularización probabilística de la máxima entropía (ME) para
la reconstrucción de imagen, y además, se escoge el método de la
regularización descriptiva del análisis variacional (AV) para la
localización precisa de las zonas homogéneas con el realce de los
bordes dentro de la imagen. Combinando las ventajas de estas dos
metodologías para la reconstrucción de imagen y eliminación del
ruido se realiza su fusión para la obtención de una nueva
estrategia de post-procesamiento computacional reconstructivo
para imágenes de percepción remota. Se propone implementar
computacionalmente el método propuesto VAME (por sus siglas
en inglés, Variation-Analysis – Maximum Entropy) mediante la
combinación de la estructura efectiva de la red neuronal del tipo
Hopfield modificada junto con una estructura iterativa
numérica.1La eficiencia del método propuesto VAME se ilustra
por medio de simulaciones computacionales.
I. INTRODUCCIÓN
os diferentes paradigmas computacionales modernos para el post-procesamiento reconstructivo de imágenes de
percepción remota son tradicionalmente basados en las estrategias de regularización estadística. En este trabajo vamos a considerar una de las estrategias más modernas y robustas, la cual es el método basado en la máxima entropía regularizada (ME) [1], [2], [3]. En imágenes de percepción remota la nitidez de la imagen algunas veces es insuficiente para analizar y caracterizar dicha imagen. A pesar de eso, la estrategia del ME obtiene una reconstrucción favorable en el sentido del IOSNR (por sus siglas en inglés, Improvement in the Output Signal-to-Noise Ratio, [3], [6]) aunque, realiza un suavizado sobre toda la imagen perdiendo de esta manera las características especiales tales como las formas de los bordes en zonas homogéneas con detección precisa de la relación señal a ruido, etc. Por otra parte, el paradigma computacional del método de análisis variacional (AV) [4], [5] realza los bordes entre las zonas homogéneas dentro de la imagen, pero no realiza una
1
Los atores están en el CINVESTAV-IPN, Unidad Guadalajara, México.
óptima reconstrucción de la imagen en el sentido del IOSNR (modelo libre) [20]. Por esta razón, en este trabajo proponemos realizar la fusión de las estrategias ME y AV, combinando las ventajas de la reconstrucción mejorada de la imagen (lograda usando la estrategia ME) y el realce de los bordes entre las zonas homogéneas (lograda usando la estrategia AV). En la segunda sección de este trabajo, se comienza con el planteamiento del problema para la reconstrucción de imágenes de percepción remota. Seguimos con la presentación de las bases de los métodos de la máxima entropía (ME) y el análisis variacional (AV) como estrategias de regularización del procesamiento reconstructivo de datos en percepción remota. En la tercera sección, se definen las estrategias de reconstrucción determinística regularizada, tales como, el CLS “Constrained Least Squares”, la estrategia de reconstrucción estocástica MAP “Maximum A-Posteriori Probability” y el método de la máxima entropía regularizada a través del método CLS (ME-NN). Además, proporcionamos los conceptos básicos sobre la herramienta de la red neuronal (NN) del tipo Hopfield modificada y concluimos esta sección con el método variacional aplicando la estadística robusta propuesta inicialmente por Sapiro y Black [14], [15], [17]. En la cuarta sección, se muestra el desarrollo del nuevo método fusionado VAME para la reconstrucción de imágenes en percepción remota con localización precisa de zonas homogéneas y el realce de bordes. En la quinta sección, se realizan las simulaciones del nuevo método utilizando imágenes sintetizadas de percepción remota y se efectúan comparaciones cuantitativas entre el algoritmo propuesto VAME y los algoritmos antecesores ME-NN y AV (p.e. Perona-Malik [4]). Finalmente, en la sexta sección, se dan las conclusiones de este trabajo y las futuras aplicaciones de la nueva metodología para post-procesamiento reconstructivo de imágenes de percepción remota.
II. MODELADO DEL PROBLEMA
A. Formulación del Problema El modelo matemático tradicional para la formación de imágenes de percepción remota degradadas por ruido y limitada por la resolución sensorial del sistema de formación está formulada a través de la siguiente ecuación de observación [9], [21]
xxxxxx ndvAu ''', (1)
L
362 IEEE LATIN AMERICA TRANSACTIONS, VOL. 3, NO. 4, OCTOBER 2005

donde, la variable x = (x, y) representa el mapeo de imágenes en 2D, v( 'x ) es la imagen del objeto, u(x) es el dato de medición (imagen degradada obtenida por el sistema), n(x) es el ruido de observación y 'xx,A representa la función
suavizadora o de perturbación llamada PSF (por sus siglas en inglés, Point Spread Function), conocida la cual depende solamente del sistema de formación de imagen, [9], [21] . La ecuación de observación (1) en su forma vectorial se puede determinar como [10]
nAvu . (2)
Aquí, Kv es un vector positivo de la imagen original
discreta ordenada de forma lexicográfica [12] (usualmente representando las intensidades de los píxeles en una escala
aceptada en tonalidades de grises); Ku representa el
vector de la imagen degradada en la misma ordenación
lexicográfica; n es el ruido de observación y KKA
representa la forma matricial del operador PSF definida por la orientación lexicográfica de la misma imagen [12]. El problema de reconstrucción de la imagen implica (matemáticamente) la solución de (2) con respecto de la imagen v tomando algunas restricciones no triviales del modelo de v impuestos a la solución v̂ . Los modelos más interesantes y con suficientes grados de libertad (el término fue tomado de la teoría de regularización [6], [9], [33]) en la reconstrucción de imágenes están basados en el modelo de regularización estadística de la máxima entropía (ME) [1], [2] y por otro lado, el modelo descriptivo de la difusión anisotrópica [4], [5] conocida también como modelo del método de análisis variacional (AV). La siguiente sección presenta una breve descripción de estos modelos.
B. Modelo ME de la Imagen La imagen inicial es ordenada lexicográficamente (vector v), formada con un número dado de píxeles {vk; k = 1,..., K}.Cada uno de estos píxeles representa una porción de la distribución de potencia en el dominio de la observación [21]. Esto es, la restricción no lineal sobre la no negatividad (debido a que la potencia no es una función negativa) es impuesta por la siguiente condición
{ 0kv ; k = 1,..., K}. (3)
La condición sobre el límite de la energía global (la potencia total) de la imagen de percepción remota deseada es posible suponerla a través de la condición de calibración [3]
K
kk Bv
1
. (4)
donde, B representa una constante de calibración. Estas dos condiciones, (3) y (4), permiten la introducción de la interpretación probabilística [13] de los valores discretos { Kkpk ,...,1; } en el modelo de píxeles a través de la imagen
normalizada
KkBvp k
k ,...,1; ; K
kkp
1
1. (5)
El paradigma del método ME [1], [2], puede ser expresado como el modelo presentado por (3)-(5) que está asociado con una distribución de probabilidad para la realización de los eventos discretos { ;kp Kk ,...,1 }, el cual, corresponde a los
valores discretos de { ;kv Kk ,...,1 } y es caracterizado por la
conocida entropía de ShannonK
kkk vvH
1
lnv . (6)
La condición ME
K
kkk vvH
1
lnv
maxv , (7)
está enfocada hacia la solución de (2), restringe el modelo ME de la imagen introduciendo la menor información a priori de su configuración. De esta manera, puede ser vista como una condición que restringe el conocimiento subjetivo introducido en la solución del problema (2) de reconstrucción de imagen [1]. Nótese que la restricción de la solución positiva impuesta por (3) es automáticamente involucrada a través de (7), y debido a esto, la entropía (6) no es definida para valores negativos.
C. Modelo AV de la Imagen Actualmente, en el ámbito de procesamiento y mejoramiento de imágenes se han desarrollo diferentes técnicas variacionales a través de la ecuación de difusión (comúnmente conocida como ecuación de calor) [4], [5], [27], que tiene la forma
vdivct
tyxv ,, , (8)
donde, c es la constante de difusión de calor con un valor igual a uno. Koenderink en [26] mostró la formulación para la ecuación de difusión basada principalmente en dos criterios: el de causalidad y el de homogeneidad. El criterio de causalidad implica que las escalas ordinarias puedan ser solamente resultado causales de las escalas finas. El criterio de homogeneidad implica que el borrado es invariante en todo el espacio de la imagen. El borrado puede ser considerado como la difusión de la intensidad sobre el tiempo [28], donde el tiempo es tomado ahora como nuestra escala t.Cuando el coeficiente de difusión es igual en todas las direcciones, el proceso es conocido como homogéneo. Cuando la difusión es igual para cada punto en la imagen, el proceso es conocido como isotrópico. Perona y Malik en [4] propusieron un método que realiza la localización inmediata de los bordes con las propiedades importantes del suavizado en las regiones planas. Esta innovadora idea considera la introducción de un coeficiente de difusión g(.) para controlar la difusión donde sea requerida, debido a esto, la ecuación de difusión asume la siguiente forma
MORALES-MENDOZA et al.: UNIFYING THE MAXIMUM 363

vvgdivt
tyxv ,, , (9)
donde, los coeficiente de difusión g(|| v||) propuestos por Perona y Malik en [4] están definidos como
1
2
2
1v
vg y2
2
expv
vg , (10)
donde, a su vez, la constante es conocida como umbral de difusión. Si g(.) es una constante, entonces obtenemos la ecuación lineal (8). Pero si sustituimos la constante c por una función g(.), obtendríamos dos efectos básicos [27]: el primero es aumentar el suavizado dentro de una región especifica y el segundo es reducir el suavizado en la frontera de dicha región. Esto puede ser cumplido por una escalar difusiva g(.) definida como función de la norma del gradiente v (es decir, || v||)[29]. Perona y Malik nombraron este modelo como anisotrópico. La opción de realizar diferentes cambios de la función g(.) afecta considerablemente el desempeño del método, por eso, buscamos la selección adecuada que preserve las discontinuidades brillantes en la imagen [4]. Para ello, Tannenbaum en [32], Hamza en [20] y Sarah en [27] generalizaron esta función a través de la siguiente integral
V
dVvgvE , (11)
donde, E(v) es la función de suavizado propuesta y V es el espacio de la imagen. Black y Sapiro en [14], [15] realizaron diferentes estudios sobre la estimación robusta en la formulación variacional hecha por Perona y Malik [4], obteniendo así la nueva función de difusión conocida como la norma de error de la función de difusión (norma estadística). Por lo anterior, usamos la norma de Lorentz definida como
2
2
2
11log
vvg , (12)
para aplicar sus propiedades de realce de bordes en este método. Donde, es una constante de escala relacionada con el
umbral de difusión en (10) y es expresada como 22 2 .
En este trabajo, nos encaminaremos a utilizar principalmente la difusión anisotrópica robusta propuesta por Black y Sapiro [14] motivados por la combinación destacada de la difusión anisotrópica de Perona con la norma de error estadística. Además, siguiendo el esquema discreto de la ecuación de Perona – Malik [4] y considerando las funciones de energía definidas en (10), la expresión discreta de (9) presentada es
sppkpk
k
tk
tk vvgvv ,,
1 , (13)
donde, tkv es una muestra discreta de la imagen, k denota la
posición del píxel en una cuadrícula de dos dimensiones (2D), y t ahora denota el paso del tiempo discreto (iteraciones). La constante es un escalar que determina la tasa de difusión, k
representa la vecindad espacial del píxel k y k es el número
de vecinos (usualmente 4, excepto en los bordes y las esquinas de la imagen). Perona estableció una aproximación para la linealidad del gradiente en una dirección particular
tkppk vvv , kp , (14)
donde, pkv , es el gradiente de la imagen y p denota el
vecindario del píxel k. Cualitativamente, el efecto de la difusión anisotrópica obtenida a través de la solución de (13) es suavizar la imagen original dentro de las zonas cuasi-homogéneas mientras preserva las discontinuidades brillantes (píxeles) de los bordes [4].
III. ESTRATEGIAS BÁSICAS DE RECONSTRUCCIÓN
A. Método Determinístico CLS La estrategia del método CLS para la reconstrucción de imágenes es formulada por el siguiente problema de optimización regularizada [7], [11]
vvvv
22
11
22minargˆ JJCLS , (15)
donde, 1 y 2 son los parámetros de control que intercambia la fidelidad entre J1(.) y J2(.). La función J1(.) define la mínima discrepancia (error de fidelidad) y está definida como
2
1 1
21
K
j
K
kkjkj vAuJ Avuv , (16)
la cual, representa la distancia cuadrada entre la medición actual del vector de datos u y su componente de señal Av en el espacio vectorial l2. La función J2(.) impone la condición de regularización mediante el valor mínimo de la norma ponderada de la solución deseada
K
k
K
iikki
T vvCJ1 1
22 Cvvvv
C , (17)
también conocida como el estabilizador de Tikhonov [11], [21], donde la matriz de ponderación C es el operador numérico de Laplace [1], el cual permite introducir la estructura métrica en el espacio de imagen [21]. Sustituyendo (16) y (17) en (15) se busca una solución regularizada de (2).
B. Método Estocástico MAP La reconstrucción de imágenes en percepción remota a través del modelo estocástico utiliza la aproximación Bayesiana [10], [13], debido a que posee una forma flexible y conveniente para modelar el conocimiento sobre la función de densidad de probabilidad a priori de la imagen deseada. El método de
364 IEEE LATIN AMERICA TRANSACTIONS, VOL. 3, NO. 4, OCTOBER 2005

estimación Bayesiana es usado cuando la función de densidad de probabilidad (PDF, por sus siglas en inglés, Probability Density Function) a posteriori de la imagen deseada puede ser establecida [10], [13]. El aspecto sumamente relevante de la estrategia de Bayes se observa al combinar en forma estadística el riesgo mínimo [10] de la información a priori con la información contenida en los datos actualmente observados para obtener la distribución aposteriori, de tal modo que
upvpvupuvp |
| . (18)
En (18), la p(v) representa la PDF a priori, la p(u) es la probabilidad de los datos que asegura la normalización de la distribución a posteriori y la vup | representa la función de
likelihood, la cual, expresa la probabilidad de los datos ucondicionados a la imagen deseada v. La estrategia de Bayes permite aliviar el mal planteamiento del problema inverso de reconstrucción de la imagen deseada en forma estadística, distinguiendo a esta de la de la estrategia de regularización determinística descriptiva presentada en la sección previa. La aproximación de regularización estadística resuelve el problema inverso confiando en el uso de modelos probabilísticos para una señal desconocida v y los datos de observación u, donde el rol clave lo proporciona el método llamado Riesgo Mínimo de Bayes (BMR, por sus siglas en inglés, Bayes Minimum Risk) [10], [20]. Para realizar la optimización estadística BMR se introduce la función objetivo (loss function) conocida como el Riesgo de Bayes
vudpAv,uLvAr || . (19)
El estimador MAP [19] representa una opción adecuada para minimizar el riesgo (19) usando la información estadística a priori de v maximizando la PDF uvp | posterior (que es
equivalente a la minimización del riesgo (19)) con respecto a los datos mediante la siguiente estrategia BMR
vAruvpvvv
|minarg|maxargˆ . (20)
Aplicando el logaritmo en la PDF posterior y retomando el teorema de Bayes, el problema de optimización MAP puede ser expresado como [10]
uvpvv
|lnmaxargˆ (21)
cuya expresión, factoriza la función log-likelihood con el logaritmo de la PDF a priori, esto es
vpvupvv
ln|lnmaxargˆ . (22)
Desde que la maximización del MAP en (22) incluye una condición previa (conocimiento previo representado por ln p(v), esencialmente, este modelo provee estimaciones regularizadas en modo estadístico que garantiza su efectividad
en el sentido del riesgo mínimo obtenido mediante la estrategia (20).
Es importante remarcar que la estrategia BMR coincide con la estrategia descriptiva del CLS solamente para un caso particular [10], esto es, el caso cuando la función objetivo está definida como la distancia cuadrática Euclidiana desde los datos observados y su aproximación con su parte proyectada sobre el espacio de la señal, es decir,
2, AvuuAvL . (23)
Notamos que la definición (23) es directamente correspondiente para los modelos Gaussianos de datos e imágenes que son más frecuentemente usados en la mayoría de los métodos existentes de reconstrucción de señales e imágenes. Las referencias [7], [10], [13], [18], [20] son solo algunos ejemplos indicativos. Adoptando el comúnmente usado modelo Gaussiano al método (22), este es transformado como
vvvv
22
11
22minargˆ JJMAP , (24)
con calibración uniforme de los parámetros de pesos, 1 = 2 = 1 y con la definición de dos funciones objetivo J1(v) y J2(v), como sigue,
21 AvuvJ , (25)
CvvvvC
TJ 22 con el modelo trivial, C = I. (26)
Está claro que la estrategia Bayesiana es completamente distinta a (24) cuando aplicamos otros modelos a priori (no gaussianos) de la imagen deseada. Por ejemplo, el modelo de la máxima entropía es representado por el modelo a priori de Gibbs dado por [3], que produce la siguiente PDF
p(v| ) = exp {– ln ( ) – ||v||2} ; v Vc , (27)
donde, es la constante de normalización. Además
( ) =
CV
exp( – ||v||2 ) dv , (28)
define la suma estadística de Boltzmann [3] y Vc define el subespacio de vectores deseados de la imagen reconstruida con valores no negativos. Esta última restricción está físicamente justificada debido a que la potencia en ningún caso contiene elementos negativos. Las ventajas destacadas que presentan los paradigmas estudiados en esta sección (Bayes de BMR) y el anterior (CLS), los cuales son paradigmas clásicos en el estudio de procesamiento reconstructivo de señales e imágenes, establecen un amplio conocimiento a priori especifico sobre estructuras de procesamiento y dan la guía en este análisis para encontrar la similitud estrecha entre ellos para la solución
MORALES-MENDOZA et al.: UNIFYING THE MAXIMUM 365

óptima en ambos sentidos (BMR-CLS). Lo antes mencionado permite concretar la dualidad existente entre estos dos paradigmas descriptivos y estadísticos expuestos anterior-mente.
C. Método ME (CLS Regularizado por el Modelo ME) Las técnicas de optimización no lineal que empleamos aquí, son similares en formalismo matemático y notaciones a las previamente desarrolladas por los autores en los estudios previos [1], [24], [25], y algunos de los elementos cruciales se repiten para conveniencia del lector. La fusión del modelo de regularización de ME con el método CLS puede realizarse a través de la combinación de la función objetivo (15) usando la condición mínima del valor negativo del ME (6) (porque la maximización de la entropía es equivalente a la minimización de su valor negativo). Tal método propuesto CLS regularizado por ME (que por simplicidad nombramos el método ME) adiciona las ventajas de la simplicidad del CLS con la regularización del ME estableciendo la minimización de la siguiente función objetivo
vvvv min
2
1
2
1ln)|( 2211
1
JJvvEK
kkk , (29)
donde, = ( 1 2)T son los parámetros de regularización.
En las imágenes de percepción remota, es una práctica común [9], [12], [21] ajustar el parámetro 2 que impone un peso al estabilizador de Tikhonov, J2(v), dentro del intervalo de (10-1 …10) aproximado al inverso de la razón de señal a ruido
( 1 ), donde se cumple SNR = N0 /E0 (por las siglas en
inglés, Signal-to-Noise Ratio), esto es, 2 (10-1…10) 1 . En
el SNR , E0 representa la potencia promedio del píxel de la imagen adquirida actualmente (niveles promedio de grises en la
imagen) calculado como, E0 = (1/K) 0
21
1
2 NuK
k k ,
donde, a su vez, N0 define la intensidad promedio del píxel de ruido en (2) especificada por la calibración del sistema particular de adquisición de imagen [1], [19]. El parámetro de regularización 1 impone el balance entre la métrica ME de información a priori (el primer término en (29)) y la tolerancia de los datos medidos (el segundo término en (29)). Existe una amplia variedad de métodos prácticos para el ajuste de estos factores de balance, siendo [1], [3], [9], [11], [12], [19], [21] referencias indicativas. Todos estos pueden ser probados empíricamente, lo que se encuentra fuera del objetivo del trabajo presente. En este estudio aplicamos la aproximación propuesta en [1] que delimita el intervalo de búsqueda (ajuste)
1 (1…102) 1 . Diferentes combinaciones admisibles de los
parámetros de regularización en (29) fueron probados empíricamente y las simulaciones ejecutadas se resumen en la Sección V, también con algunas combinaciones preferentes resumidas en la Tabla 1. Arreglando (29) en su forma explícita, obtenemos
K
k
K
iik
K
jkijijk vvCAAE
1 1 1212
1|v
E
K
k
K
jjjkkk CuAvv
1 11ln , (30)
donde, EC es un término constante e independiente de v que
puede ser despreciado, por lo que no afecta al problema de optimización (30). Ahora, la solución regularizada del problema de reconstrucción ME para la imagen es reducida al problema de minimización óptimo, es decir
|vvv
Eminargˆ (31)
donde, el vector contienen los parámetros de regularización que ofrece el control sobre el método.
D. La Red Neuronal Dinámica Modificada Con relación a la Sección III-C notamos lo siguiente. El algoritmo y la estructura computacional de la red neuronal (NN) que se emplea y modifica aquí para implementar el método propuesto VAME es similar en formalismo y notaciones al anteriormente desarrollado por los autores de este artículo en sus estudios previos [1], [2], [24], [25], algunos de cuyos elementos cruciales son repetidos para conveniencia del lector. El método ME es rigurosamente no lineal y por consecuencia requiere una ejecución computacional extremadamente compleja [24], [25]. En este trabajo, proponemos aplicar para la ejecución computacional eficiente del método propuesto la NN de tipo Hopfield desarrollada previamente en [1] y [2], apropiadamente modificada. La NN es una interconexión masiva de neuronas formales como unidades de procesamiento básico, tal y como está especificado en la Figura 1. Los estados {vk; k = 1,…, K} para cada k-ésimoneurón de la NN multiestado puede tomar valores en un rango desde cero (nivel negro) hasta algún valor máximo preasignado (nivel blanco). Estos valores se usan para representar los niveles de gris de la imagen en el proceso de reconstrucción. El
estado inicial del neurón k es denotado por 0kv , que asocia a la
imagen original con {v0k = uk; k = 1,…, K}.
Cada una de las K neuronas es visitada secuencialmente en tiempo discreto t. El lazo de retroalimentación involucra el uso de ramificaciones particulares compuestas de elementos de unidades de retardo (en la Figura 1b estas son denotadas por ).Para cada visita en particular, un neurón k recibe en su i-ésimonodo de entrada la señal de entrada vi que es justamente el estado actual del i-ésimo neurón, i = 1,…, K y la entrada polarizada k que sirve como umbral del bloque hard limiter(el bloque designado como sgn( ) en la Figura 1a). De esta manera, cada neurón recibe las señales de todos los otros neurones incluyendo la de él mismo. Las salidas de todas las k-ésimas neuronas están definidas como en [7] y [8] por
366 IEEE LATIN AMERICA TRANSACTIONS, VOL. 3, NO. 4, OCTOBER 2005

K
ikikik vWz
1
sgn . (32)
El vector de salida de la red Hopfield está formalizado a través de z = sgn(Wv + ), donde W es una matriz K K de la fuerte interconexión (matriz de pesos “sinápticos” [7]) de la NN y es el vector K 1 de polarización. El vector de salida zes usado para actualizar el vector de estado v = (v1 v2…vK)T de
la red [30], [31]: vvv''' donde, v = z representa
un cambio del vector de estado v que se calcula aplicando la regla particular z de actualización de estado definida
posteriormente por (38) y los superíndices ´ y ´´ corresponden a los valores de estado antes y después de la actualización del estado en la red, respectivamente. La función de energía de la NN se define como
K
k
K
i
K
kkkikki
TT vvvWE1 1 1
2
1
2
1)( vWvvv .(33)
Si la regla de actualización del estado z es designada
apropiadamente como fue desarrollada en [1] (esta regla está definida posteriormente por (38)), entonces el decremento de la función de energía en (33) es garantizada para cada etapa de actualización ''' EE , hasta que finalmente la función de energía E converge a su valor mínimo estable Emin, que es conocido como el punto estacionario de la red. De esta manera, la característica operacional de la NN multiestado depende de: 1) los valores asignados en la matriz W de la fuerte interconexión y el vector de polarización y 2) el empleo de la regla de actualización de estado z .
Esto es, si la función de energía de la NN representa la función del problema de minimización matemática sobre un espacio de parámetros, entonces el estado de la NN representa los parámetros y el punto estacionario de la red, produciendo la solución óptima del problema de minimización original.
Por consiguiente, utilizando el concepto de la red Hopfield modificada desarrollada en [1], es posible trasladar nuestro problema de reconstrucción de imagen basado en ME (31) en un problema relevante de minimización de la función de energía (33) de la NN del tipo Hopfield modificada a través de la especificación correspondiente de sus parámetros W y .Considerando ahora la función de costo dado por (30) como una función de energía de la NN multiestado y por comparación de (30) y (33), definimos estos parámetros para garantizar que la red (NN) resuelva el problema de optimización (31), (es decir, ejecutar el algoritmo ME-NN) tenemos que especificar a W y como sigue
ki
K
jjijkki CAAW 2
11 ; (34)
K
jjjkkk uAv
11ln ; k, i = 1, 2, … K . (35)
Después de obtener los parámetros de la NN, podemos aplicar el método descendente de minimización de la función de energía como en [30] y [31]. Considérese solo un paso de actualización en una neurona particular k. Tenemos que vkdefine el cambio de estado de la neurona k, es decir, podemos expresar el estado de la neurona k después de la actualización
como kkk vvv ''' . La función de energía E toma el cambio ''' EEE debido a la actualización de la neurona k.
Usando la definición (33), este cambio de energía puede ser expresado como [1]
2
1
''
2
11 kkkk
K
ikiki vWvvWE , (36)
lo que permite redefinir la salida de la neurona k descrita en (32) como se muestra a continuación
K
ikikik vWz
1
'' 1sgn k = 1,…, K . (37)
Para garantizar que los valores no sean positivos en (36), se aplica la siguiente regla de actualización
0si
0si
0si
kk
kk
kk
kk
zzzzzz
zv , (38)
donde, el parámetro es preasignado como tamaño de paso. Comúnmente este parámetro es = 1. Estas condiciones permiten la unificación del método ME-NN con el método AV, la cual, es detallada por el esquema iterativo presentado en la Sección IV. Al implementar el algoritmo ME-NN, los valores de los parámetros de regularización 1 y 2 son seleccionados en forma empírica [6] o controlados aplicando los esquemas de agregación desarrollados detalladamente en [1] y [3]. Así, unificando el método de agregación con la NN construida por el esquema de la Figura 1(a) y 1(b), se deduce el esquema particular desarrollado en [1] para el ajuste adaptativo de los parámetros de regularización q; q = 1, 2, en (30)
qq ˆˆˆ 1 ; rqq ˆ10)10...1(ˆ ; q = 1, 2, (39)
donde, ˆ representa la estimación actual de la SNR, r =trace{(A)-2} es el factor de resolución correspondiente del sistema y ˆ es determinada como la solución para la ecuación de balance (ecuación (38) de [1]).
E. Método Descriptivo AV Siguiendo el método de estadística robusta desarrollado previamente en [14], [15], [17] presentamos la interpretación estadística de la solución de (12) que puede ser formalizada en términos de regularización más adecuados para el problema de reconstrucción de la imagen. El método original AV propone encontrar la imagen reconstruida v que satisfaga la siguiente condición de optimización de AV
MORALES-MENDOZA et al.: UNIFYING THE MAXIMUM 367

a) Estructura del k-ésimo neurón.
b) Estructura de la red neuronal.
Fig. 1. Red dinámica neuronal (tipo Hopfield modificada).
Vk pkpv
k
vv ,min , (40)
donde, k V denota los píxeles dentro de la apertura de V en la imagen 2-D (la escena) y
2
2
11log|
xx , (41)
define la función (norma) de error de Lorentz robusta con el parámetro de la escala . Para minimizar (40), la intensidad de cada píxel vk puede ser “cercana” a la de sus vecinos {vp}.Como se puede ver, un cambio apropiado de la función nos permitiría minimizar el efecto de los perfiles en los límites entre las regiones de una imagen suavizada. La solución de
(40) obtenida en [14], [15], [17] a través del método de gradiente descendente, es dada por
kp
tkp
k
tk
tk vvvv ,1 ; k V , (42)
donde, y k son parámetros previamente definidos y
222
2|
xxx , (43)
define la primera derivada de la norma robusta (x| ), p.e.(x| ) = )|(x . La actualización es llevada acabo
simultáneamente para cada píxel k utilizando la imagen degradada u como iteración inicial v0 = u. Las gráficas de la función de Lorentz y su primera derivada ( ) para diferentes valores de son mostradas en la Figura 2. Como se puede observar en la Figura 2b, el borde es “parado” por la primera derivada de esta función que está controlada por la selección del parámetro . La estructura numérica propuesta por Sapiro [14], [15], [17] para solucionar (42) emplea la norma de Lorentz en la forma siguiente
kppk
tpk
k
tk
tk vlvv ,
1,
31 ; k V (44)
donde, 3 representa el parámetro de regularización que controla la convergencia del esquema (43) y
pknm
tnm
k
mp
tmp
k
tpk
vll
l
kk
,2
,
,
2
,
,
12
21
,
21
12
12
12
2(45)
representa el factor de actualización. En (44), 1k y 2
k son
dos indicadores de conmutación entre los bordes V y el interior VV \ de la escena V:
1k =
VVkVk
\para0
para1; 2
k = Vk
VVkpara0
\para1. (46)
Siguiendo [18], los grupos de píxeles 1k y 2
k usados en las
sumatorias en (41) son de dos tipos: 1k con tres píxeles y es
arreglado como se muestra en la Figura 3a para los píxeles localizados en los bordes V V (verticales u horizontales) de la escena V (columna izquierda y renglón derecho en la Figura
3a, respectivamente) y 2k con cuatro píxeles para procesar
los píxeles contenidos en el interior de la escena VV \ (p.e. excluyendo sus bordes V) se muestra en la Figura 3b. Además, note que la ecuación (41) es equivalente a la difusión propuesta por Perona en [4] particularmente si la función g(.)
introducida en (13) coincide con 1,
tpkl en (39) como g(.) 1
,t
pkl .
368 IEEE LATIN AMERICA TRANSACTIONS, VOL. 3, NO. 4, OCTOBER 2005

a) b)
Fig. 2. a) Norma de error de Lorentz con diferentes ; b) Primera derivada de la función de Lorentz.
a) b)
Fig. 3. Grupos de píxeles { k} utilizados.
IV. MÉTODO VAME
A. Estrategia de Fusión Considerando ahora el problema de unificación (agrega-ción) de los métodos ME-NN y AV, primero se aprecia que no es posible unificarlos en un solo esquema matemático del problema de optimización porque el método ME-NN utiliza la forma lexicográfica (vectorial) para la representación y reconstrucción de la imagen y, por otro lado, el método AV ejecuta todas las reconstrucciones en el formato 2-D, particularmente M M. De esta manera, para considerar la relevancia de los métodos previos, las dimensiones pueden ser ajustadas como M2 = K. Además, la estrategia de fusión de los métodos de procesamiento no lineal implica agregación (no compilación trivial) de los esquemas iterativos de cada método, acoplando un esquema iterativo dentro del otro [1]. En nuestro caso de fusión de los ME-NN y AV parece lógico colocar el esquema ME-NN (que contiene más carga computacional) dentro del AV (que requiere menos carga). Por consiguiente, la estrategia computacional unificada del método fusionado VAME propone la agregación de dos métodos iterativos ME-NN y AV acoplando el ME-NN dentro del AV, lo que implica la posibilidad de controlar los grados de libertad (parámetros de regularización) respectivos.
B. Algoritmo del VAME En la Fig. 5 y la Fig. 6, se representa el mecanismo iterativo (diagrama de flujo) para la fusión de los métodos AV Y ME-NN en el método fusionado VAME. Nótese que en este trabajo se siguen los esquemas desarrollados en [1] y en [14] para ajustar los parámetros de regularización 1, 2, 3 y . Pero es importante enfatizar que estos parámetros conforman los grados de libertad (terminología tomada de la teoría de regularización [33]) del método fusionado propuesto VAME. Esto significa que, con el ajuste apropiado, es posible controlar el balance de impacto de las características de desempeño adquiridas en los métodos AV y ME ajustando el VAME con diferentes grados de libertad particulares. Además, también se han establecido las condiciones iniciales del algoritmo (por ejemplo, el parámetro de tolerancia, ) para el buen desempeño, el cual, es detallado en la siguiente
sección.
V. EJECUCIÓN COMPUTACIONAL, SIMULACIONES Y DISCUCIÓN
A. Ejecución Computacional En esta sección, hemos implementado computacionalmente el método desarrollado unificado VAME para la reconstrucción de imágenes de percepción remota con reducción del ruido y preservación de bordes en las zonas homogéneas. En la Fig. 4, se presenta la imagen original ideal v(x,y) (no observada) que fue utilizada para las simulaciones con un formato de 256 256píxeles. La imagen real u(x,y) registrada por el sistema de percepción remota perturbada y contaminada con ruido se muestra en la Fig. 7. El nivel del ruido utilizado durante las pruebas de los algoritmos es de 10 dB usando la función de punto disperso (PSF) del sistema de formación de imagen. Esta es del tipo exponencial y aproximada numéricamente en [3] (Fig. 8), aplicándola tanto en azimut x como en rango y, es decir
22exp yxaPSF , (47)
donde, el parámetro a fue ajustado para obtener el ancho de la PSF igual a 5 píxeles a un nivel de 0.5 de su valor máximo.
Fig. 4. Imagen original de alta resolución (no observada) empleada para todas las simulaciones de sistemas de resolución limitada.
= 3
= 0.5
= 1
= 2
= 3
= 0.5
= 1
= 2
MORALES-MENDOZA et al.: UNIFYING THE MAXIMUM 369
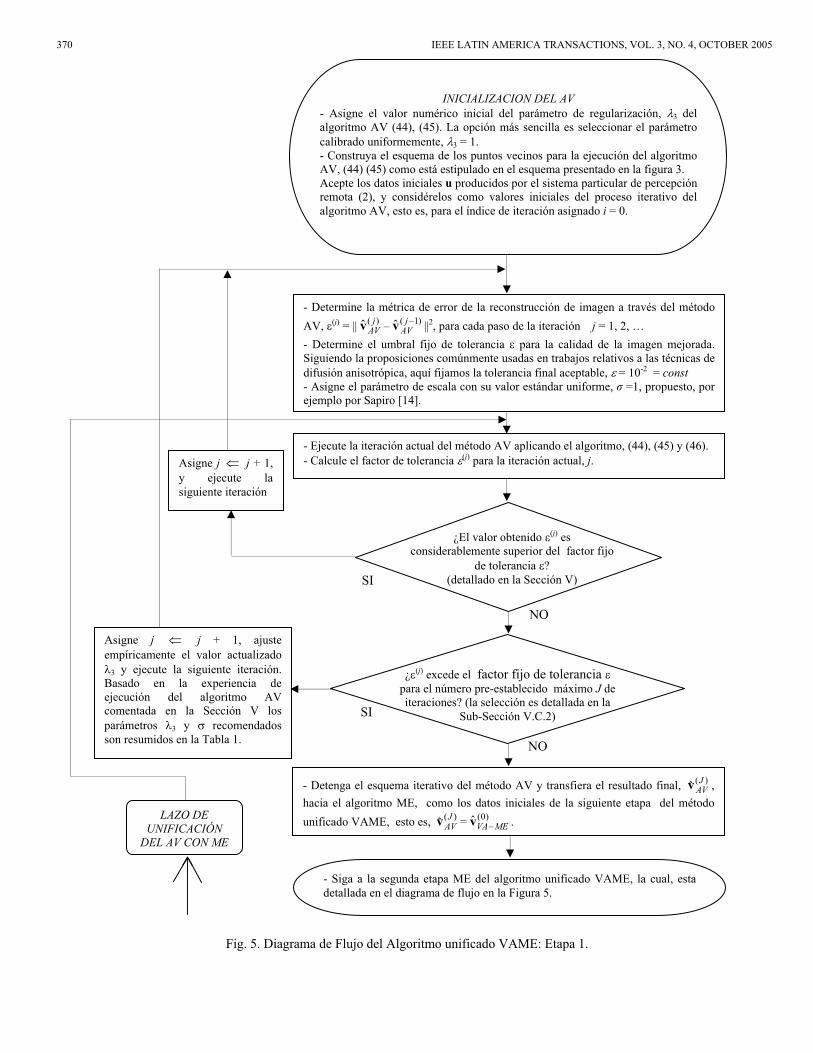
Fig. 5. Diagrama de Flujo del Algoritmo unificado VAME: Etapa 1.
Asigne j j + 1, y ejecute la siguiente iteración
- Determine la métrica de error de la reconstrucción de imagen a través del método
AV, (j) = || )(ˆ jAVv – )1(ˆ j
AVv ||2, para cada paso de la iteración j = 1, 2, …
- Determine el umbral fijo de tolerancia para la calidad de la imagen mejorada. Siguiendo la proposiciones comúnmente usadas en trabajos relativos a las técnicas de difusión anisotrópica, aquí fijamos la tolerancia final aceptable, = 10-2 = const- Asigne el parámetro de escala con su valor estándar uniforme, =1, propuesto, por ejemplo por Sapiro [14].
- Ejecute la iteración actual del método AV aplicando el algoritmo, (44), (45) y (46). - Calcule el factor de tolerancia (j) para la iteración actual, j.
- Detenga el esquema iterativo del método AV y transfiera el resultado final, )(ˆ JAVv ,
hacia el algoritmo ME, como los datos iniciales de la siguiente etapa del método
unificado VAME, esto es, )(ˆ JAVv = )0(ˆ MEVAv .
NO
SI
¿El valor obtenido (j) es considerablemente superior del factor fijo
de tolerancia ?(detallado en la Sección V)
- Siga a la segunda etapa ME del algoritmo unificado VAME, la cual, esta detallada en el diagrama de flujo en la Figura 5.
INICIALIZACION DEL AV - Asigne el valor numérico inicial del parámetro de regularización, 3 del algoritmo AV (44), (45). La opción más sencilla es seleccionar el parámetro calibrado uniformemente, 3 = 1. - Construya el esquema de los puntos vecinos para la ejecución del algoritmo AV, (44) (45) como está estipulado en el esquema presentado en la figura 3. Acepte los datos iniciales u producidos por el sistema particular de percepción remota (2), y considérelos como valores iniciales del proceso iterativo del algoritmo AV, esto es, para el índice de iteración asignado i = 0.
¿ (j) excede el factor fijo de tolerancia para el número pre-establecido máximo J de iteraciones? (la selección es detallada en la
Sub-Sección V.C.2)SI
NO
Asigne j j + 1, ajuste empíricamente el valor actualizado
3 y ejecute la siguiente iteración. Basado en la experiencia de ejecución del algoritmo AV comentada en la Sección V los parámetros 3 y recomendados son resumidos en la Tabla 1.
LAZO DE UNIFICACIÓN
DEL AV CON ME
370 IEEE LATIN AMERICA TRANSACTIONS, VOL. 3, NO. 4, OCTOBER 2005
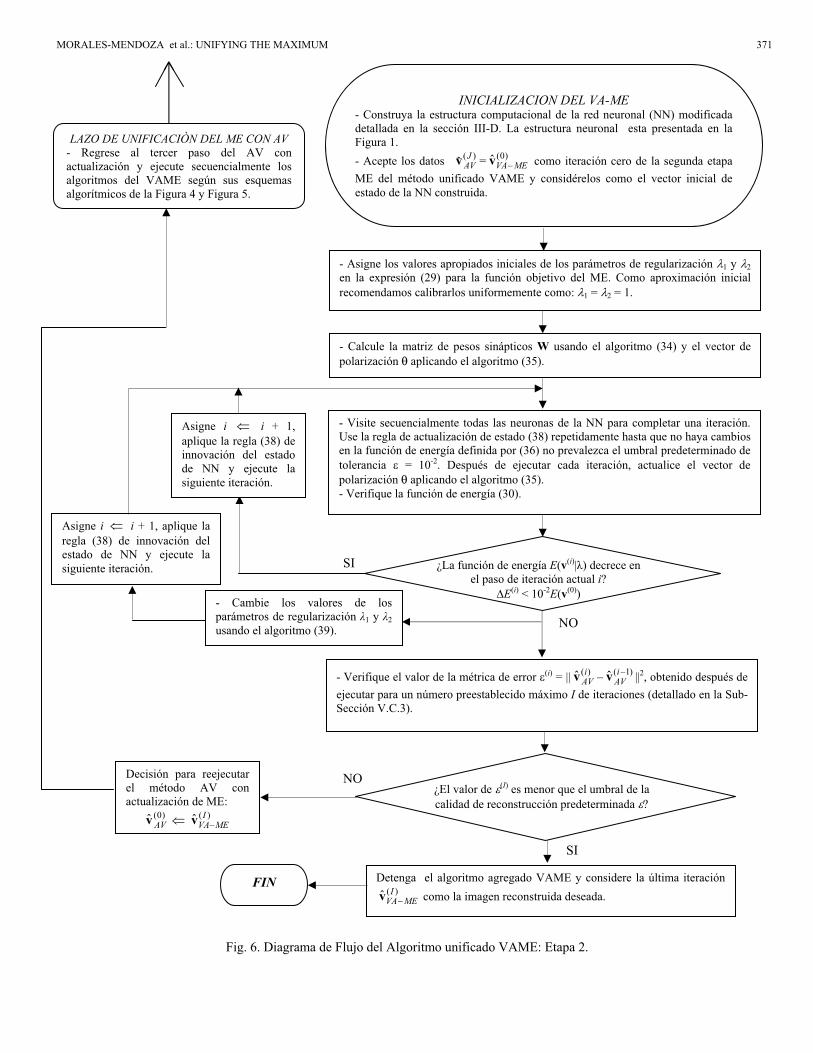
Fig. 6. Diagrama de Flujo del Algoritmo unificado VAME: Etapa 2.
- Calcule la matriz de pesos sinápticos W usando el algoritmo (34) y el vector de polarización aplicando el algoritmo (35).
- Visite secuencialmente todas las neuronas de la NN para completar una iteración. Use la regla de actualización de estado (38) repetidamente hasta que no haya cambios en la función de energía definida por (36) no prevalezca el umbral predeterminado de tolerancia = 10-2. Después de ejecutar cada iteración, actualice el vector de polarización aplicando el algoritmo (35). - Verifique la función de energía (30).
SI
Detenga el algoritmo agregado VAME y considere la última iteración )(ˆ I
MEVAv como la imagen reconstruida deseada. FIN
INICIALIZACION DEL VA-ME - Construya la estructura computacional de la red neuronal (NN) modificada detallada en la sección III-D. La estructura neuronal esta presentada en la Figura 1.
- Acepte los datos )(ˆ JAVv = )0(ˆ MEVAv como iteración cero de la segunda etapa
ME del método unificado VAME y considérelos como el vector inicial de estado de la NN construida.
Asigne i i + 1, aplique la regla (38) de innovación del estado de NN y ejecute la siguiente iteración.
- Asigne los valores apropiados iniciales de los parámetros de regularización 1 y 2
en la expresión (29) para la función objetivo del ME. Como aproximación inicial recomendamos calibrarlos uniformemente como: 1 = 2 = 1.
¿El valor de (I) es menor que el umbral de la calidad de reconstrucción predeterminada ?
¿La función de energía E(v(i)| ) decrece en el paso de iteración actual i?
E(i) < 10-2E(v(0))
SI
NO
NO
- Cambie los valores de los parámetros de regularización 1 y 2
usando el algoritmo (39).
Asigne i i + 1, aplique la regla (38) de innovación del estado de NN y ejecute la siguiente iteración.
- Verifique el valor de la métrica de error (i) = || )(ˆ iAVv – )1(ˆ i
AVv ||2, obtenido después de
ejecutar para un número preestablecido máximo I de iteraciones (detallado en la Sub-Sección V.C.3).
LAZO DE UNIFICACIÒN DEL ME CON AV - Regrese al tercer paso del AV con actualización y ejecute secuencialmente los algoritmos del VAME según sus esquemas algorítmicos de la Figura 4 y Figura 5.
Decisión para reejecutar el método AV con actualización de ME:
)0(ˆ AVv)(ˆ I
MEVAv
MORALES-MENDOZA et al.: UNIFYING THE MAXIMUM 371
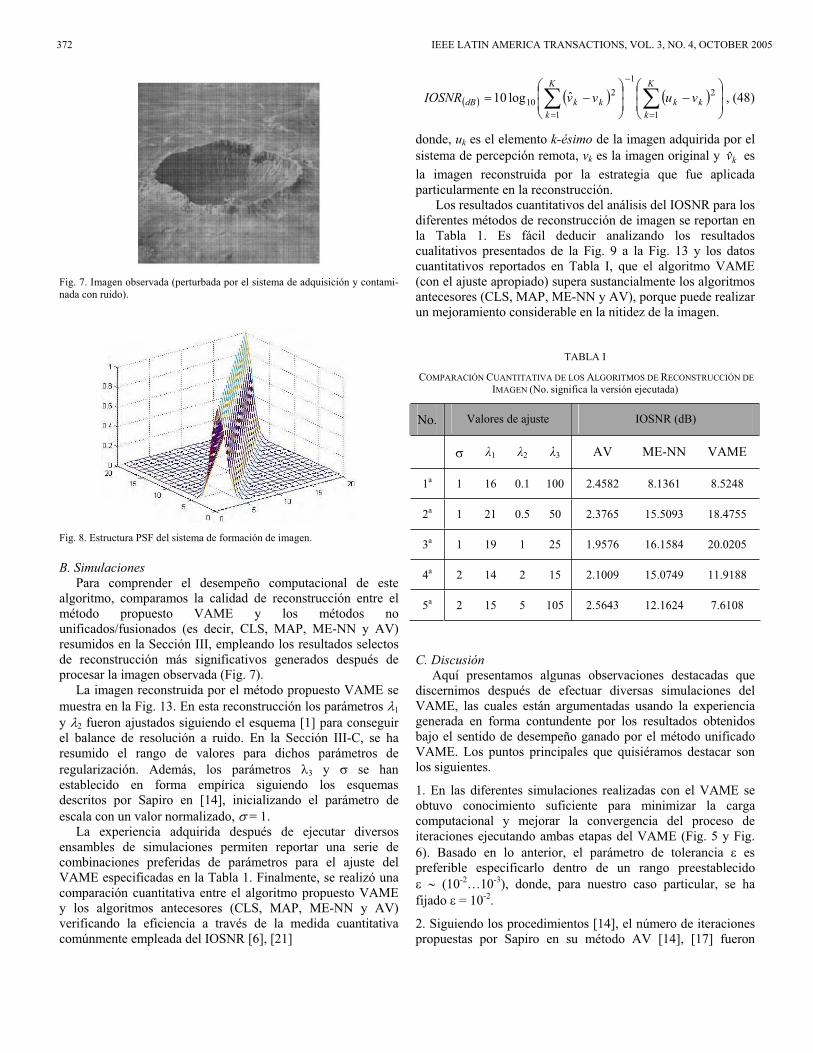
Fig. 7. Imagen observada (perturbada por el sistema de adquisición y contami-nada con ruido).
Fig. 8. Estructura PSF del sistema de formación de imagen.
B. Simulaciones Para comprender el desempeño computacional de este algoritmo, comparamos la calidad de reconstrucción entre el método propuesto VAME y los métodos no unificados/fusionados (es decir, CLS, MAP, ME-NN y AV) resumidos en la Sección III, empleando los resultados selectos de reconstrucción más significativos generados después de procesar la imagen observada (Fig. 7). La imagen reconstruida por el método propuesto VAME se muestra en la Fig. 13. En esta reconstrucción los parámetros 1
y 2 fueron ajustados siguiendo el esquema [1] para conseguir el balance de resolución a ruido. En la Sección III-C, se ha resumido el rango de valores para dichos parámetros de regularización. Además, los parámetros 3 y se han establecido en forma empírica siguiendo los esquemas descritos por Sapiro en [14], inicializando el parámetro de escala con un valor normalizado, = 1. La experiencia adquirida después de ejecutar diversos ensambles de simulaciones permiten reportar una serie de combinaciones preferidas de parámetros para el ajuste del VAME especificadas en la Tabla 1. Finalmente, se realizó una comparación cuantitativa entre el algoritmo propuesto VAME y los algoritmos antecesores (CLS, MAP, ME-NN y AV) verificando la eficiencia a través de la medida cuantitativa comúnmente empleada del IOSNR [6], [21]
K
kkk
K
kkkdB vuvvIOSNR
1
2
1
1
210 ˆlog10 , (48)
donde, uk es el elemento k-ésimo de la imagen adquirida por el sistema de percepción remota, vk es la imagen original y kv̂ es
la imagen reconstruida por la estrategia que fue aplicada particularmente en la reconstrucción. Los resultados cuantitativos del análisis del IOSNR para los diferentes métodos de reconstrucción de imagen se reportan en la Tabla 1. Es fácil deducir analizando los resultados cualitativos presentados de la Fig. 9 a la Fig. 13 y los datos cuantitativos reportados en Tabla I, que el algoritmo VAME (con el ajuste apropiado) supera sustancialmente los algoritmos antecesores (CLS, MAP, ME-NN y AV), porque puede realizar un mejoramiento considerable en la nitidez de la imagen.
TABLA I
COMPARACIÓN CUANTITATIVA DE LOS ALGORITMOS DE RECONSTRUCCIÓN DE
IMAGEN (No. significa la versión ejecutada)
No. Valores de ajuste IOSNR (dB)
1 2 3 AV ME-NN VAME
1a 1 16 0.1 100 2.4582 8.1361 8.5248
2a 1 21 0.5 50 2.3765 15.5093 18.4755
3a 1 19 1 25 1.9576 16.1584 20.0205
4a 2 14 2 15 2.1009 15.0749 11.9188
5a 2 15 5 105 2.5643 12.1624 7.6108
C. Discusión Aquí presentamos algunas observaciones destacadas que discernimos después de efectuar diversas simulaciones del VAME, las cuales están argumentadas usando la experiencia generada en forma contundente por los resultados obtenidos bajo el sentido de desempeño ganado por el método unificado VAME. Los puntos principales que quisiéramos destacar son los siguientes.
1. En las diferentes simulaciones realizadas con el VAME se obtuvo conocimiento suficiente para minimizar la carga computacional y mejorar la convergencia del proceso de iteraciones ejecutando ambas etapas del VAME (Fig. 5 y Fig. 6). Basado en lo anterior, el parámetro de tolerancia es preferible especificarlo dentro de un rango preestablecido
(10-2…10-3), donde, para nuestro caso particular, se ha fijado = 10-2.
2. Siguiendo los procedimientos [14], el número de iteraciones propuestas por Sapiro en su método AV [14], [17] fueron
372 IEEE LATIN AMERICA TRANSACTIONS, VOL. 3, NO. 4, OCTOBER 2005

establecidas en J 100. Sin embargo, nuestra experiencia con la ejecución del VAME verificó la posibilidad de especificar J= 10, debido a la eficiencia suficiente ganada para la detección de los bordes en la imagen mejorada realizando solo 10 iteraciones del algoritmo AV dentro del método unificado VAME.
3. Ejecutando la etapa del algoritmo ME (Figura 5) basado en la NN, hemos observado que la convergencia de la NN a su estado cuasi-estacionario (con tolerancia preestablecida = 10-2) usualmente ( 95% de las ejecuciones) requiere ejecutar no más de 50 iteraciones. Debido a lo anterior, y con base en las múltiples referencias de otros estudios [6], [19], [30], [31], en el método propuesto unificado VAME se ha especificado I (40…50). Todos los resultados de las simulaciones de este trabajo son reportados para la especificación, I = 40.
4. La carga computacional de las diferentes simulaciones selectivas presentadas en esta Sección se resumen en la Tabla II. Si la imagen de percepción remota seleccionada para el proceso tiene un formato de K K píxeles y L niveles de escala de grises, entonces se necesita construir computacionalmente K2L neuronas con ½(K4L2) interconexiones y ejecutar K4L2
operaciones de sumas y multiplicaciones por cada iteración. Pero, debido a que el número de iteraciones para el VAME está establecido con la limitación I = 40, entonces, los requeri-mientos computacionales totales del VAME pueden determinarse como K4L2 neuronas de la NN y K4L2Ioperaciones de sumas y productos.
5. Finalmente, comentamos que el equipo de cómputo utilizado en este estudio para llevar acabo las simulaciones del VAME en el tiempo casi real es el siguiente: Computadora Pentium IV® con 2.8 GHz de velocidad y 512 MB de memoria RAM (por sus siglas en inglés, Random Access Memory). El tiempo promedio de ejecución del VAME con el equipo de cómputo descrito anteriormente fue de 1.47 minutos. En la Tabla 2 resumimos el tiempo de carga computacional de varias ejecuciones relacionadas a la Tabla 1. Es obvio que, utilizar un equipo de cómputo con características inferiores requeriría mayor tiempo considerable de ejecución.
TABLA II
ANÁLISIS COMPARATIVO DE LA COMPLEJIDAD COMPUTACIONAL DE
DIFERENTES VERSIONES DEL VAME.
No. de versión reportada en Tabla 1
1ª 2ª 3ª 4ª 5ª
No. de Iteraciones requeridas
21 25 26 35 38
Tiempo de procesamiento total
(en segundos) 64 76 80 106 115
Fig. 9. Imagen reconstruida aplicando el algoritmo CLS ( 1 = 20).
Fig. 10. Imagen reconstruida aplicando el algoritmo MAP ( 1 = 2 = 1).
Fig. 11. Imagen reconstruida aplicando el algoritmo ME-NN ( 1 = 0.5, 2 = 10 y {Cij} = L (es la aproximación numérica del operador Laplaciano [1])).
VI. CONCLUSIONES
En este trabajo se ha dirigido una perspectiva novedosa hacia la reconstrucción mejorada de imagen en percepción remota, tal como la situación del problema inverso mal planteado con el modelo de incertidumbres. Se ha extendido la experiencia previa referida en [1-33] para desarrollar el método unificado VAME sujeto a los paradigmas AV y ME agregados.
MORALES-MENDOZA et al.: UNIFYING THE MAXIMUM 373

Fig. 12. Imagen reconstruida aplicando el algoritmo AV (Difusión anisotrópica de Perona-Malik con = 20 y coeficiente de difusión g(.) definido en (10a)).
Fig. 13. Imagen reconstruida aplicando el algoritmo VAME ( 1 = 19, 2 = 1, 3
= 25, = 1 y {Cij} = L (es la aproximación numérica del operador Laplaciano [1])).
Así mismo, se ha desarrollado la modificación de la NN multiestado del tipo Hopfield dinámica antes propuesta en [1], [2] para reconstrucción y/o mejoramiento de imagen con control adaptativo de grados de libertad. La unificación VAME óptima se ha llevado a cabo para desarrollar el procesamiento agregado iterativo de los datos proporcionados por los sistemas de formación de imagen. La reconstrucción de imagen fue implementada acoplando el esquema iterativo del ME-NN dentro del AV. El aspecto innovador de la estrategia propuesta de la fusión resulta distinguida al realizar el acoplamiento del ME-NN y AV. El método fusionado VAME admite ajuste controlado de los grados de libertad disponibles (parámetros de regularización) incorporando control sobre las métricas, calibración del sistema e información a priori sobre el modelo particular VAME de la imagen. También se ha establecido el algoritmo computacional basado en NN para la implementación eficiente del método de mejoramiento de imagen desarrollado. Además se incluyen algunos ejemplos de simulación para ilustrar la mejoría general del desempeño de la imagen alcanzada con el uso del método VAME. Finalmente, el estudio presentado establece un nuevo fundamento para ayudar a entender los aspectos teóricos básicos de la optimización fusionada multietapa (AV y regularización ME) de las técnicas de post-procesamiento de la señal requerido para mejorar las imágenes de percepción
remota. Los desarrollos de perspectiva planteada en este estudio relaciona las aplicaciones del método VAME propuesto con las áreas de aplicación alternativa, tales como: fusión inteligente de sensor industrial; discriminación dinámica de imagen para el control no destructivo de procesos tecnológicos; manejo de recursos; mejoramiento de imágenes biomédicas, etc.
VII. AGRADECIMIENTOS
Los autores agradecen al Consejo Nacional de Ciencia y Tecnología (CONACyT) por el apoyo de este trabajo a través del proyecto de investigación SEP-2003-CO2-43290/A-1.
VIII. REFERENCIAS
[1] Y. V. Shkvarko, Y.V. Shmaliy, R. Jaime-Rivas, and M. Torres-Cisneros, “System fusion in passive sensing using a modified hopfield network”, Journal of the Franklin Institute, vol. 338, pp. 405-427, 2001.
[2] H. D. Li, M. Kellergí, W. Quian, V. K. Jain and L. P. Clarke, “Neural network with maximum entropy constraint for nuclear medicine image restoration”, Op. Eng., vol. 34, pp 1431-1440, May 1995.
[3] Y. Shkvarko, “Estimation of wavefield power distribution in the remotely sensed environment: bayesian maximum entropy approach”, IEEE Trans. on Signal Processing, vol. 50, September 2002.
[4] P. Perona and J. Malik, “Scale-space and edge detection using anisotropic diffusion”, IEEE Trans. on Pattern Analysis and Machine Intelligent, vol. 12, July 1990.
[5] Y. You, W. Xu, A. Tonnenbaum and M. Kaveh, “Behavioral analysis of anisotropic diffusion in images processing”, IEEE Trans. on Image Processing, vol. 5, November 1996.
[6] A. Katsaggelos, “Iterative image restoration algorithms”, Op. Eng., Vol. 28, pp.735-748, July 1989.
[7] S. Haykin, Neural Networks: A Comprehensive Foundation, Macmillan, New York, 1994.
[8] M. H. Hassoun., Fundamentals of Artificial Neural Networks,Cambridge, Mass.: MIT Press, 1995.
[9] M. Bertero and O. Boccacci, Introduction to Inverse Problems in Imaging, British Library Cataloging-in-Publications Data, 1998.
[10] G. Demoment, “Image reconstruction and restoration: overview of common estimation structures and problems”, IEEE Trans. on Acoustic Speech Signal Processing, vol. 37, Dec. 1989.
[11] A. Tikhonov and V. Arsenin, Solutions of I11-posed Problems, John Wiley & Sons, 1977.
[12] A. K. Jail, Fundamentals of Digital Images Processing, Prentice Hall, 1989.
[13] S. Geman and D. Geman, “Stochastic relaxation, gibbs distribution and the bayesian restoration in images”, IEEE Trans. on Pattern Analysis and Machine Intelligent, vol. 6, November 1984.
[14] M. J. Black, G. Sapiro, D. H. Marimont and D. Heeger, “Robust anisotropic diffusion”, IEEE Trans. on Signal Processing, vol. 7, March 1998.
[15] M .J. Black, Robust Incremental Optical Flow, Ph.D. Thesis, September 1992.
[16] C. Chiu, C. Maa and M. A. Shanblatt, “Energy function analysis of dynamic programming neural networks”, IEEE Trans. on Neural Networks, vol. 2, July 1991.
[17] M. Black and A. Rangarajan, “On the unification of line processes, outlier rejection, and robust statistics whit application in early vision”, International Journal of Computer Vision, vol. 19, 1996.
[18] D. Geman and G. Reynolds, “Constrained restoration and the recovery of discontinuities”, IEEE Trans. on Pattern Analysis and Machine Intelligence, vol. 14, March1992.
[19] S. C. Park, M. K. Park and M. G. Kang, “Super-resolution image reconstruction: a technical overview”, IEEE Signal Processing Magazine, May 2003.
374 IEEE LATIN AMERICA TRANSACTIONS, VOL. 3, NO. 4, OCTOBER 2005

[20] A. B. Hamza, H. Krim and G. B. Unal, “Unifying probabilistic and variational estimation”, IEEE Signal Processing Magazine, pp. 37-47, September 2002, [21] M. R. Banham and A. K. Katsaggelos, “Digital image restoration”,
IEEE Signal Processing Magazine, pp. 24-41, March 1997. [22] D. Tschumperlé and R. Deriche, “Diffusion PDEs on vector-valued
images”, IEEE Signal Processing Magazine, pp. 16-25, September 2002. [23] I. Pollak, “Segmentation and restoration via nonlinear multiscale
filtering”, IEEE Signal Processing Magazine, pp. 26-36, September 2002.
[24] L. J. Morales-Mendoza, Y. V. Shkvarko, R. F. Vazquez-Bautista and J. L. Ponce-Dávalos, “Aggregated maximum entropy variational analysis methods for magnetic resonance imagery”, Information Resources Management Association 2004, (IRMA04).
[25] L. J. Morales-Mendoza, Yu. Shkvarko J. L. Leyva-Montiel and R. F. Vazquez-Bautista, “Antenna-based processing of the radar data for zone detection in remote sensing imagery”, Proc. 2003 IEEE International Conference on Antenna Theory and Techniques (ICATT03), September 2003.
[26] J. Koenderink, “The structure images”, Biol. Cybern., vol. 50, pp. 363-370, 1984.
[27] S. John and M. A. Vorontsov, “Multiframe selective information fusion from robust error estimation theory” IEEE Trans. on Image Processing,vol. 14, May 2005.
[28] D. Marr and E. Hildreth, “Theory of edge detection”, Proc. R. Soc. Lond.B 207, pp. 187-217, 1980.
[29] F. Vosi, S. Eiho, N. Sugimoto and H. Sekiguchi, “Estimating the gradient threshold in the perona-malik equation”, IEEE Signal Processing Magazine, May 2004.
[30] Y. Zhou, R. Chellappa, A. Vaid and K. Jenkis, “Image restoration using a neural network”, IEEE Trans. on Acoustic, Speech, and Signal Processing, July 1988.
[31] J. K. Paik and A. Katsaggelos, “Image restoration using a modified hopfield networks”, IEEE Trans. on Image Processing, Vol. 1, January 1992.
[32] Y. You, W. Xu, A. Tannenbaum and M. Kaveh, “Behavioral analysis of anisotropic diffusion in image processing”, IEEE Trans. on Image Processing, vol. 5, November 1996.
[33] R. G. Lorenz, S. P. Boyd, “Robust minimal variance beanforming”, IEEE Trans. on Signal Processing, vol. 53, pp. 1684-1696, May 2005.
Luis J. Morales-Mendoza
En Julio del 2001 obtuvo su grado de Ingeniero en Electrónica y Comunicaciones en la Facultad de Ingeniería de la Universidad Veracruzana; en Julio del 2002 obtuvo su grado de Maestro en Ingeniería Eléctrica en la Facultad de Ingeniería Mecánica, Eléctrica y Electrónica de la Universidad de Guanajuato (graduado con Honores). Actualmente está en el Programa Doctoral de Ingeniería Eléctrica
en el Departamento de Telecomunicaciones del Centro de Investigaciones Avanzadas del IPN (CINVESTAV-IPN) Unidad Guadalajara. E-mail: [email protected].
René F. Vázquez-Bautista
(S’04) recibió el grado de Ingeniero en Electrónica y Comunicaciones en la Facultad de Ingeniería Electrónica y Comunicaciones de la Universidad Veracruzana y el grado de Maestro en Ingeniería Eléctrica en la Facultad de Ingeniería Mecánica, Eléctrica y Electrónica en la Universidad de Guanajuato, ambas en México, en el año 2000 y 2002, respectivamente. Actualmente es estudiante del Programa Doctoral en el CINVESTAV-IPN, Unidad
Guadalajara, en el área de Telecomunicaciones, desde del año 2002. E-mail: [email protected].
Yuriy V. Shkvarko
(M’95-SM’04), Ph.D. (1980), D.Sc. (1990), Profesor titular (1994), Senior Member IEEE(2004), miembro del Sistema Nacional de Investigadores (SNI-II, 2002), miembro regular de la Academia Mexicana de Ciencias (2003). Actualmente es Profesor Titular en el CINVESTAV-IPN, Unidad Guadalajara, México. Sus áreas de investigación incluyen las aplicaciones
de procesamiento de señales en la percepción remota, imágenes de radar y navegación, particularmente en problemas inversos; estimación estocástica; análisis espacial adoptivo; arreglos de sensores estadísticos y procesamiento multicanal; fusión de sistemas y de métodos aplicando cálculo de redes neuronales. Posee 12 patentes en la ex-URSS, tiene publicado dos libros y 110 artículos en revistas internacionales y memorias de conferencias sobre estos tópicos. E-mail: [email protected].
MORALES-MENDOZA et al.: UNIFYING THE MAXIMUM 375