un modelo de predicción de tráfico en la ciudad de...
TRANSCRIPT

MASKANA, I+D+ingeniería 2014
TIC.EC 55
Un modelo de predicción de tráfico en la ciudad de Ambato
Marcelo Pilamunga P.1, David Ríos Insua
2
1 Facultad de Diseño, Arquitectura y Artes, Universidad Técnica de Ambato, Av. Los Chasquis y Rio
Payamino, Ambato, Ecuador, 1801334. 2 ICMAT-CSIC, C/Nicolás Cabrera 13-15 Campus de Cantoblanco, UAM, Madrid, España, 28049.
Autores para correspondencia: [email protected], [email protected]
Fecha de recepción: 21 de septiembre de 2014 - Fecha de aceptación: 17 de octubre de 2014
RESUMEN
Este artículo contiene el estudio inicial de un modelo de predicción de tráfico, que intenta mostrar
cómo puede complementarse la toma de decisiones que afecten a la ciudad a través de una buena
planificación vial. Esto permitirá dar alternativas posibles de solución mediante la predicción de flujos
de tráfico y determinando las intersecciones de mayor influencia dentro de la red vial, lo que por
consecuencia reduciría costes en tiempo, combustible, contaminación, etc., obteniendo así una
herramienta de ayuda en la toma de decisiones respecto del tráfico. Específicamente, se utiliza
modelos dinámicos lineales para predecir el tráfico en distintos puntos de una ciudad y, en
consecuencia, pronosticar su eventual saturación. Se puede así predecir puntos de la ciudad en la que
es necesario actuar para aliviar los problemas de tráfico antes de que éstos lleguen a manifestarse.
Palabras clave: Tráfico, predicción, planificación vial, modelos dinámicos lineales, saturación,
Ambato.
ABSTRACT
This paper reports the results of an initial study about a traffic prediction model, which attempts to
complement city decisions by providing a good road planning. The prediction of traffic flows and the
identification of intersections with major problems within the road network might enable identifying
timely solutions. A support tool in decision-making regarding traffic will reduce costs in time, fuel,
pollution, etc. The study uses linear dynamic models to forecast the traffic flow in the city and points
where traffic saturation is likely to occur, so that timely actions can be taken to reduce traffic pressure
before jams occur.
Keywords: Traffic, forecast, road planning, dynamic linear models, traffic saturation, Ambato.
1. INTRODUCCIÓN
La inversión en la gestión de actividades integradas para un mejor desarrollo comunitario determina el
progreso de una ciudad. Así, generar acciones encaminadas al cambio y evolución debe y puede
promover mayor satisfacción entre sus habitantes.
Una de esas actividades es la concerniente al tránsito, que es uno de los factores más
trascendentales en la calidad de vida de una ciudad moderna. Así, una buena planificación vial es de
vital importancia para el desarrollo de las mismas. Para ello, se deben realizar estudios que nos
permitan tener un diagnóstico de la realidad y así tomar decisiones que ayuden a minimizar o evitar
problemas que se están presentando o que pudieran aparecer en el futuro. Sin embargo, realizar un
estudio de este tipo cada vez que se requiera es costoso en términos de tiempo y recursos.
MASKANA, I+D+ingeniería 2014
TIC.EC 56
La elaboración de modelos que ayuden a predecir y simular el tráfico y determinar posibles
alternativas de solución a los problemas que se presentan en el flujo vehicular en una ciudad resulta de
gran utilidad para ayudarnos en la toma de decisiones pertinentes. Puede verse una introducción a
estos problemas y sus soluciones en Stathopoulos & Karlaftis (2003). Este trabajo propone un modelo
que permita realizar predicciones a corto plazo de los flujos de tráfico en distintas secciones relevantes
de una ciudad y, en consecuencia, predecir cuestiones como la saturación de tráfico en las mismas,
determinando así las posibles soluciones a la congestión vial que se pueda presentar en un momento
dado. Ilustramos el modelo con datos pertenecientes a la ciudad de Ambato.
2. PLANTEAMIENTO DEL PROBLEMA
2.1. Marco teórico
El flujo de vehículos en una red urbana presenta aspectos relevantes que justifican un tratamiento más
elaborado que la coordinación de un conjunto de arterias viales. Seguidamente, se realiza una breve
revisión de algunas técnicas y modelos relevantes en el problema que nos ocupa.
En primer lugar es necesario exponer algunas definiciones y principios básicos en redes. Una red
vial es un conjunto de calles y avenidas que se cruzan en intersecciones, que puedan ocurrir a nivel o
desnivel. Los conceptos de camino, trayectoria y circuito que se registran en una red urbana son bien
conocidos. En general los tramos de calles o avenidas tienen un cierto sentido de circulación y, por
tanto, se designan como dirigidos. El modelo básico empleará grafos. Un grafo es un conjunto, no
vacío, de objetos llamados vértices (o nodos) y una selección de pares de vértices, llamado aristas, que
pueden ser orientados o no (Taha, 2004).
Los estudios de movilidad basados en el análisis y optimización de una red de tráfico mediante la
caracterización de la infraestructura y su capacidad incluyen minuciosas investigaciones de campo
necesarias para conocer las relaciones origen/destino y sus principales características (motivo de viaje,
aparcamiento en origen-destino (O-D), ocupación de los vehículos, tiempo de viaje, etc.). Esto permite
ajustar en gran detalle las características funcionales de los diferentes elementos del sistema,
incluyendo un análisis pormenorizado de las intersecciones y sus diferentes métodos de regulación,
véase Fernandez & Valenzuela (2004).
A continuación se indican algunos modelos de tráfico vehicular existentes que ayudan a
comprender de mejor manera las ventajas del modelo propuesto. Cada usuario define cómo llegar a un
destino, eligiendo la que considere mejor ruta, considerando factores como coste, tiempo, seguridad y
comodidad. Los flujos estimados pueden servir tanto para describir el tráfico como para predecir o
recomendar un patrón de flujo vehicular en una red. Para ello, por ejemplo, pueden emplearse los
modelos de Castillo et al. (2002) o Tebaldi & West (1998), que representan el comportamiento
macroscópico del tráfico en grandes zonas urbanas o ciudades enteras. Mediante estos modelos es
posible estimar los flujos vehiculares en una red donde existe cierta demanda de viajes y los efectos de
la congestión hacen que los tiempos de viaje en los arcos dependan de los flujos.
Los impactos urbanos y ambientales asociados al tráfico van, en gran medida, directamente
asociados al grado de saturación (x) de cualquier dispositivo vial (vía, intersección, paradero, red). El
grado de saturación se define como la razón entre el flujo que usa el dispositivo (q) y su capacidad
(Q), es decir, x = q/Q. Se debe diferenciar el grado de saturación, de la denominada congestión. La
segunda es consecuencia del primero y suele manifestarse en:
Demoras adicionales a las personas, más allá de las requeridas para hacer un viaje a una
velocidad segura y constante.
Colas de vehículos o personas, que se generan en tramos de vía, cruces o terminales de
transporte público o privado (paradas, estacionamientos).
Detenciones involuntarias de vehículos o usuarios, que ocurren en los mismos lugares
anteriores, producto del avance y estancamiento de una cola.
MASKANA, I+D+ingeniería 2014
TIC.EC 57
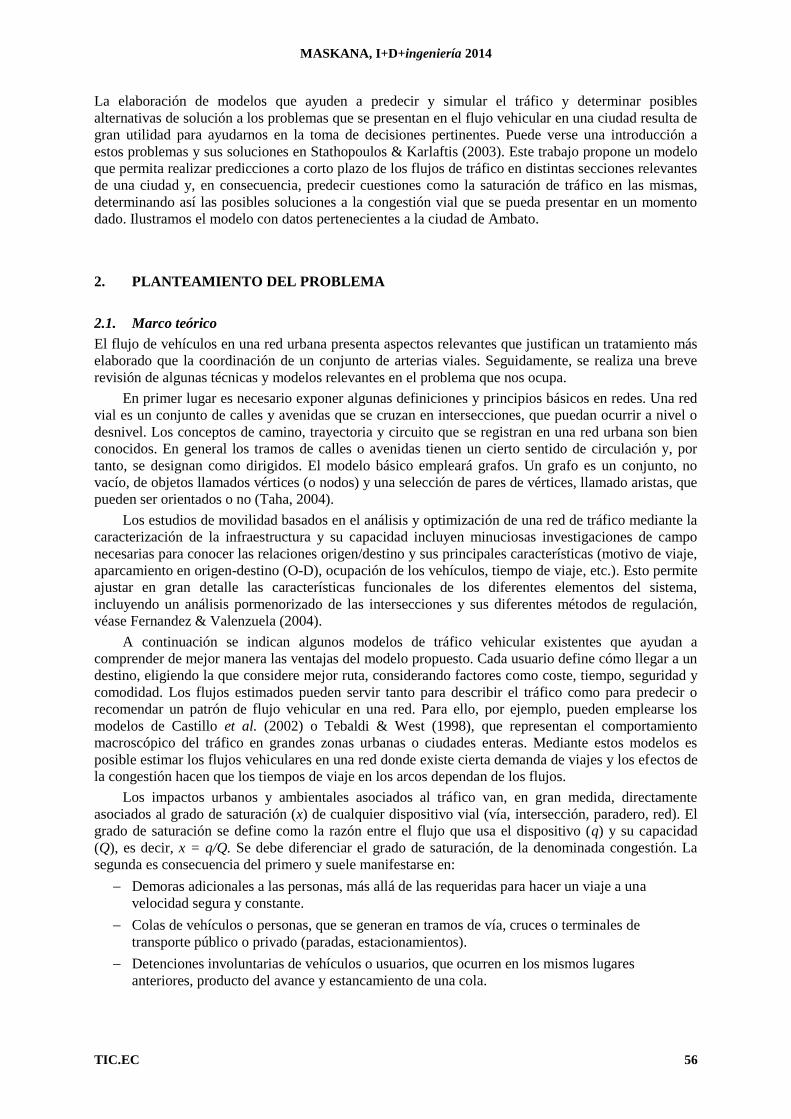
Varios estudios, véase por ejemplo Akcelik (1981), IHT (1997), indican que las manifestaciones
de la congestión comienzan a producirse para valores de x superiores a 0,7 ó 0,8. Lo anterior se ilustra
en la 0, en el que se muestra la evolución de uno de los índices de congestión: la demora por usuario
en un cruce.
Figura 1. Variación de la demora con el grado de saturación en un cruce (Revista Eure, XXIX(89),
pp. 100).
Durante las últimas décadas, se han propuesto modelos de predicción de flujo de tráfico con
distinto grado de complejidad. Los más simples son los de combinación de recorridos aleatorios, pero
sólo funcionan bien en situaciones específicas (Williams & Hoel, 1999). Una aproximación más
compleja (Head, 1995), se basa en modelos de series temporales ARIMA, ARIMA estacionales
(Williams & Hoel, 1999; Lee & Fambro, 1999), filtros de Kalman (Okutani & Stephanedes, 1984)
simulación (Banks, 1998; Barceló, 2010), modelos de regresión locales (Willumsen, 1978),
combinación de mapas de Kohonen y modelos ARIMA (Voort et al., 1996) y cadenas de Markov
véase Yu et al. (2003). Aquí emplearemos, como variación, modelos dinámicos lineales. Pueden verse
introducciones a estos modelos en West & Harrison (2005) y Petris et al. (2009), que incluyen
numerosas aplicaciones en la economía y el mundo de los negocios. Sin embargo, se sabe que ésta es
la primera aplicación en problemas de tráfico. En comparación con la propuesta antes mencionada, la
muestra se aproxima a la de Okutani & Stephanedes (1984), pero tiene la ventaja de permitir
incorporar información a priori. Comparadas con las restantes, tiene la ventaja de ser una metodología
dinámica, permitiendo predicciones en tiempo real.
2.2. El tráfico en Ambato
El problema del tránsito en las grandes ciudades se ha acentuado en las últimas décadas, por el
desarrollo de dos fenómenos simultáneos:
El incremento en la necesidad de movilizarse de un punto a otro ha potenciado el uso del
automóvil privado en detrimento del transporte público, debido a que resulta insuficiente para
cubrir todos los sectores de la ciudad.
La generalización del modelo de ciudad difusa (Nel-lo, 1998), que ha alcanzado su desarrollo
actual tras un proceso descentralizador.
MASKANA, I+D+ingeniería 2014
TIC.EC 58
Ambos problemas se dan en la ciudad de Ambato. Además, la geografía de la urbe y la creciente
presencia de autos, sumado a la concentración de entidades públicas y privadas en ciertas zonas de la
ciudad, la buena actividad comercial de los mercados e industrias, la gran concentración de estudiantes
alrededor de los centros educativos, etc., complican aún más el tránsito en esta ciudad.
En estudios previos (Acevedo, 2011), se determinaron problemas de congestión, y flujo vehicular
alrededor de los terminales y paradas de autobús existentes, por lo que en la actualidad, se ha
remodelado la estructura física del terminal de Ingahurco para mejorar el flujo y brindar un mejor
servicio al usuario.
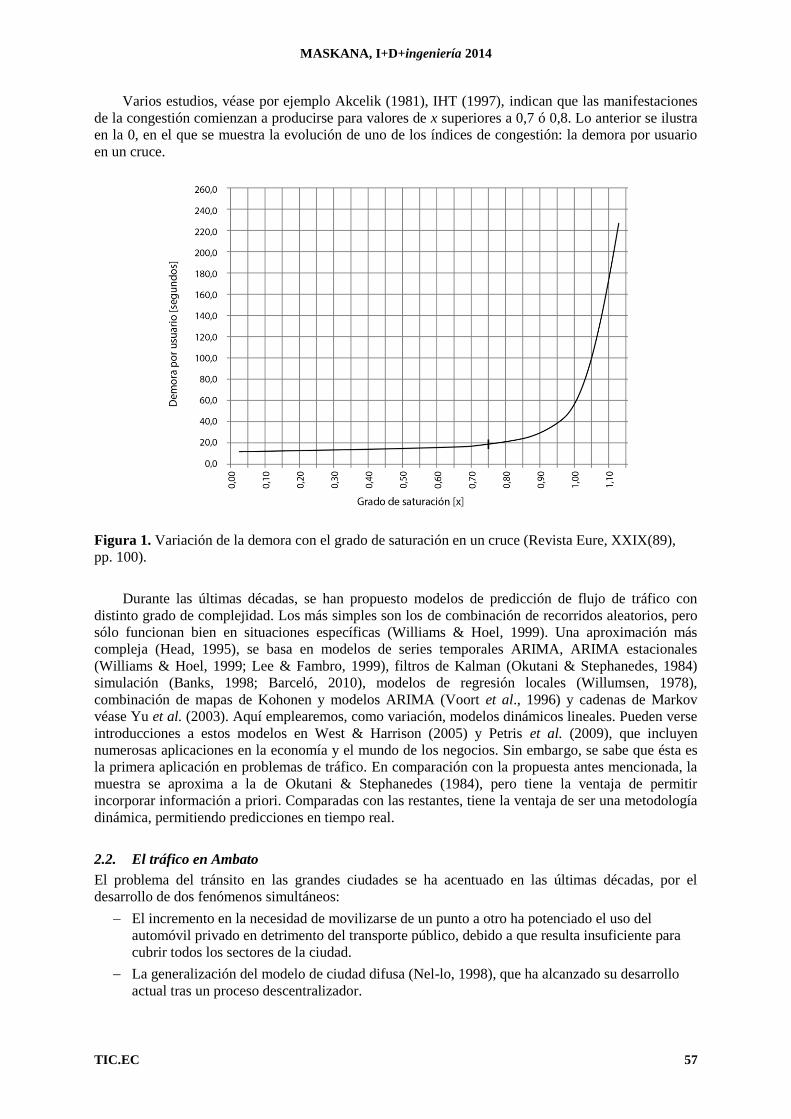
2.3. Análisis del tráfico en la ciudad de Ambato
A continuación se presentan varios problemas de tráfico que han surgido como consecuencia del
crecimiento poblacional y la expansión de la ciudad de Ambato.
Figura 2. Mapa de localización de puntos de conflicto de tráfico en Ambato.
MASKANA, I+D+ingeniería 2014
TIC.EC 59
No existe infraestructura adecuada en lugares de concentración masiva.
El parque automotor creció descontroladamente.
El diseño vial hace que en las intersecciones no exista espacio suficiente para ubicar señalética. La entidad reguladora dio prioridad al tránsito de peatones aumentando el ancho de las aceras.
Como ciudad eminentemente comercial, existen muchos locales que usan la calzada como área
de carga y descarga de productos.
Los sentidos de las vías se suelen decidir sin realizar un estudio que sustente técnicamente las
decisiones.
El desorden del tráfico suelen retrasar las frecuencias establecidas para el servicio de autobuses
públicos.
Todas las instituciones de servicio público se ubican en el centro urbano de la ciudad.
En la 0 se puede observar el mapa de Ambato con los puntos de mayor conflicto de tráfico. La
zona marcada en color amarillo representa parte del casco central urbano de la ciudad, en la que existe
congestión prácticamente en todas sus intersecciones.
Tras haber analizado y planteado los problemas de tráfico existentes, cabe pensar que al predecir
el flujo vehicular en la red vial ayudaría a optimizarlo, con lo que se resolverían algunos de los
problemas que hemos mencionado anteriormente. Con la ayuda de herramientas tecnológicas como los
sistemas de predicción se podrían realizar estudios que permitan determinar una mejor planificación
vial de manera técnica, reduciendo costes en función de las distancias y la pérdida de tiempo, el gasto
de combustible y la degradación ambiental.
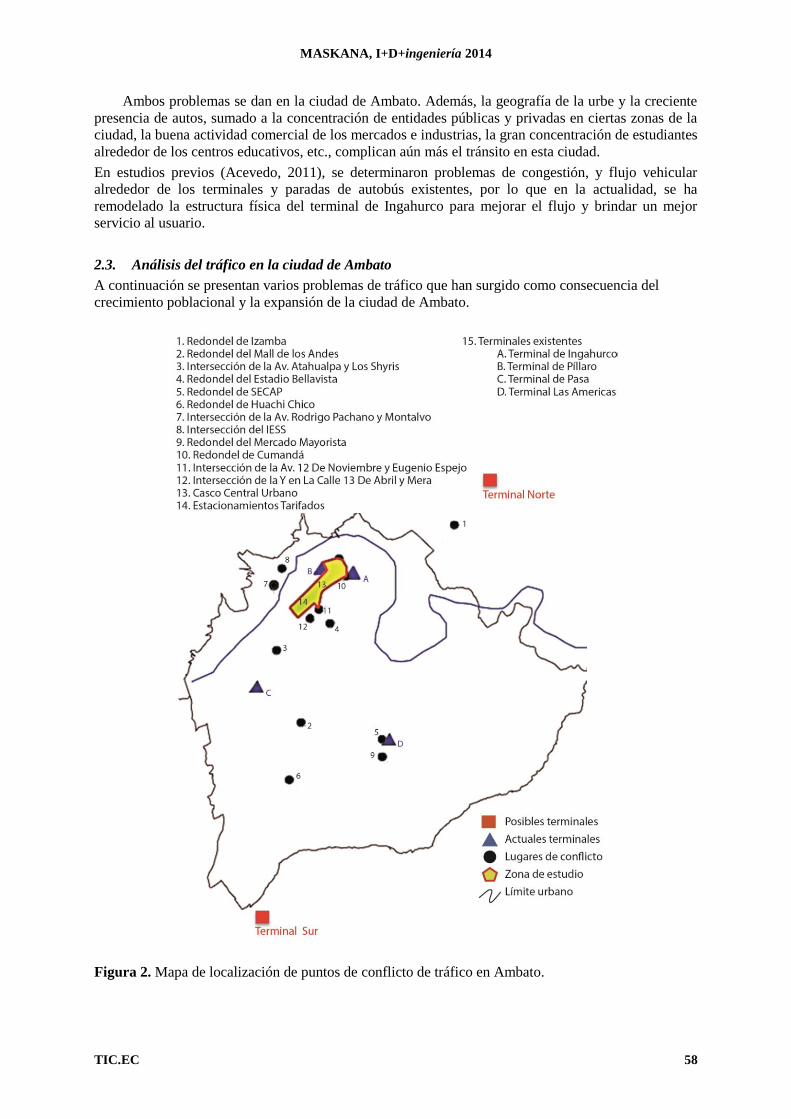
3. METODOLOGÍA
Se ha tomado como ejemplo parte de la red vial de Ambato debido a sus características, ya que en este
sector se presentan la mayoría de problemas de tráfico que existen en el resto de la ciudad, por esta
razón se han realizado conteo de vehículos en sus intersecciones o nodos, y están marcados con color
amarillo, los arcos de color rojo contienen la información a utilizarse para aplicar la propuesta, como
muestra la 0. Con ella, se ilustran los métodos empleados en el problema.
Figura 3. Sección de red tomada de la red vial de la ciudad.
3.1. Análisis de componentes principales en la red ejemplo
El Análisis de Componentes Principales (ACP) (Hair et al., 1987) es una técnica de análisis
exploratorio de datos, cuyo objetivo es la síntesis de la información, o reducción del número de
variables. Una componente principal es una combinación lineal de las variables originales. Con el fin
MASKANA, I+D+ingeniería 2014
TIC.EC 60
de determinar los nodos de mayor influencia dentro de la red ejemplo, se ha realizado un ACP sobre
datos disponibles de la misma. De esta manera, se pueden establecer los nodos de mayor influencia en
esta sección de red y establecerlos como nodos (componentes) principales.
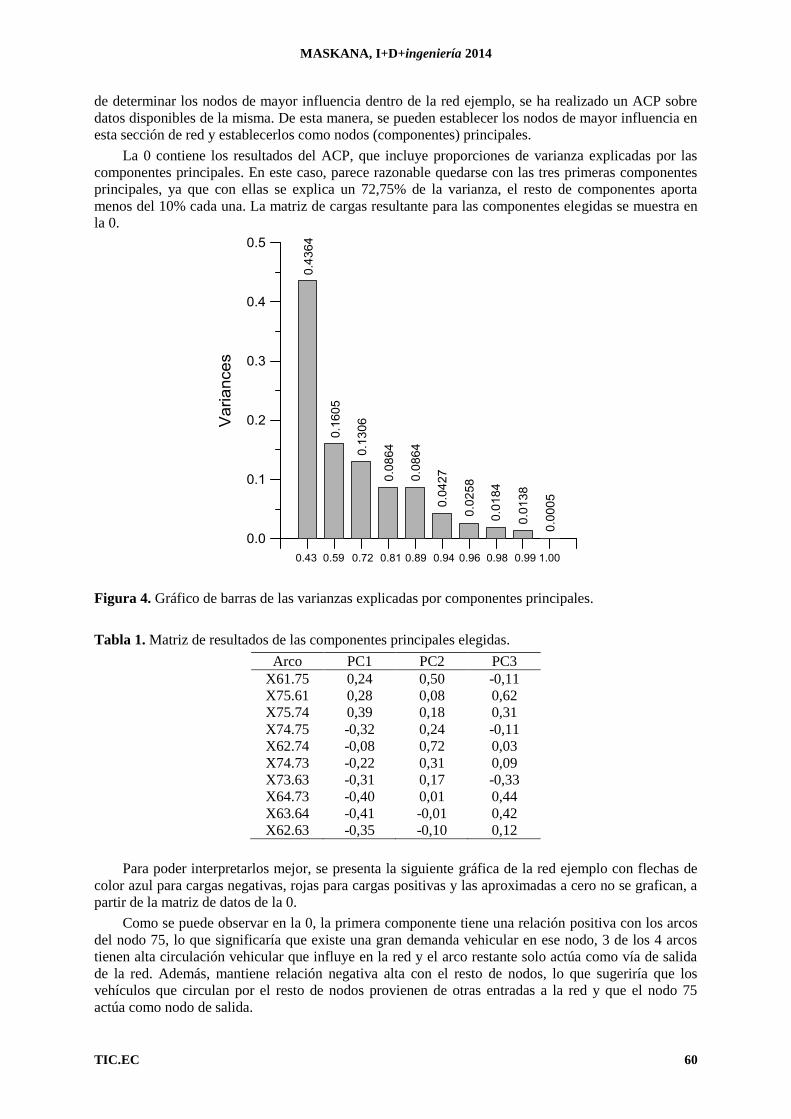
La 0 contiene los resultados del ACP, que incluye proporciones de varianza explicadas por las
componentes principales. En este caso, parece razonable quedarse con las tres primeras componentes
principales, ya que con ellas se explica un 72,75% de la varianza, el resto de componentes aporta
menos del 10% cada una. La matriz de cargas resultante para las componentes elegidas se muestra en
la 0.
Figura 4. Gráfico de barras de las varianzas explicadas por componentes principales.
Tabla 1. Matriz de resultados de las componentes principales elegidas.
Arco PC1 PC2 PC3
X61.75 0,24 0,50 -0,11
X75.61 0,28 0,08 0,62
X75.74 0,39 0,18 0,31
X74.75 -0,32 0,24 -0,11
X62.74 -0,08 0,72 0,03
X74.73 -0,22 0,31 0,09
X73.63 -0,31 0,17 -0,33
X64.73 -0,40 0,01 0,44
X63.64 -0,41 -0,01 0,42
X62.63 -0,35 -0,10 0,12
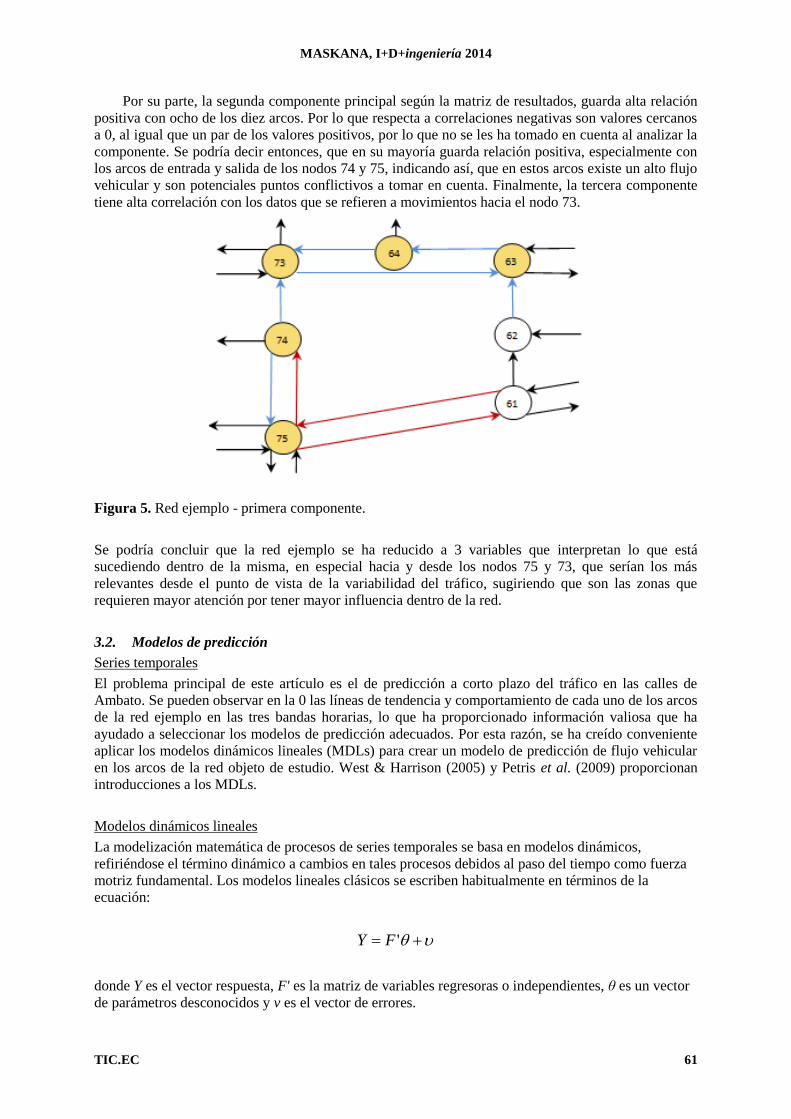
Para poder interpretarlos mejor, se presenta la siguiente gráfica de la red ejemplo con flechas de
color azul para cargas negativas, rojas para cargas positivas y las aproximadas a cero no se grafican, a
partir de la matriz de datos de la 0.
Como se puede observar en la 0, la primera componente tiene una relación positiva con los arcos
del nodo 75, lo que significaría que existe una gran demanda vehicular en ese nodo, 3 de los 4 arcos
tienen alta circulación vehicular que influye en la red y el arco restante solo actúa como vía de salida
de la red. Además, mantiene relación negativa alta con el resto de nodos, lo que sugeriría que los
vehículos que circulan por el resto de nodos provienen de otras entradas a la red y que el nodo 75
actúa como nodo de salida.
MASKANA, I+D+ingeniería 2014
TIC.EC 61
Por su parte, la segunda componente principal según la matriz de resultados, guarda alta relación
positiva con ocho de los diez arcos. Por lo que respecta a correlaciones negativas son valores cercanos
a 0, al igual que un par de los valores positivos, por lo que no se les ha tomado en cuenta al analizar la
componente. Se podría decir entonces, que en su mayoría guarda relación positiva, especialmente con
los arcos de entrada y salida de los nodos 74 y 75, indicando así, que en estos arcos existe un alto flujo
vehicular y son potenciales puntos conflictivos a tomar en cuenta. Finalmente, la tercera componente
tiene alta correlación con los datos que se refieren a movimientos hacia el nodo 73.
Figura 5. Red ejemplo - primera componente.
Se podría concluir que la red ejemplo se ha reducido a 3 variables que interpretan lo que está
sucediendo dentro de la misma, en especial hacia y desde los nodos 75 y 73, que serían los más
relevantes desde el punto de vista de la variabilidad del tráfico, sugiriendo que son las zonas que
requieren mayor atención por tener mayor influencia dentro de la red.
3.2. Modelos de predicción
Series temporales
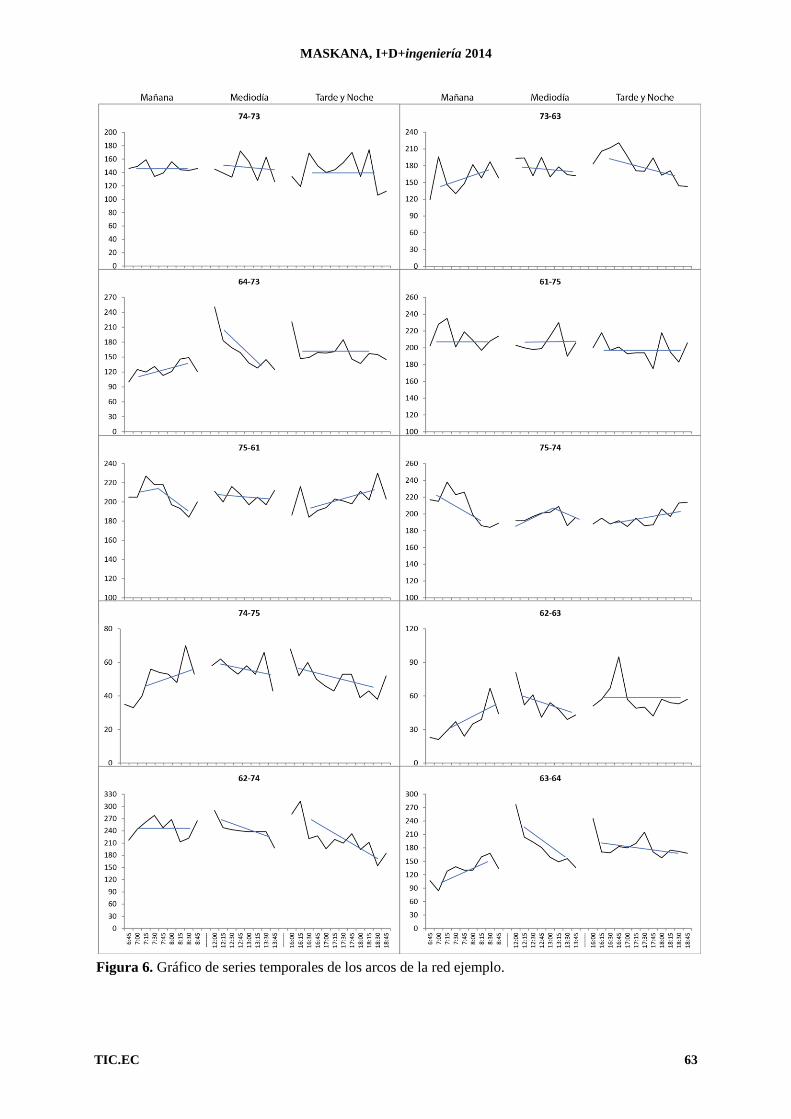
El problema principal de este artículo es el de predicción a corto plazo del tráfico en las calles de
Ambato. Se pueden observar en la 0 las líneas de tendencia y comportamiento de cada uno de los arcos
de la red ejemplo en las tres bandas horarias, lo que ha proporcionado información valiosa que ha
ayudado a seleccionar los modelos de predicción adecuados. Por esta razón, se ha creído conveniente
aplicar los modelos dinámicos lineales (MDLs) para crear un modelo de predicción de flujo vehicular
en los arcos de la red objeto de estudio. West & Harrison (2005) y Petris et al. (2009) proporcionan
introducciones a los MDLs.
Modelos dinámicos lineales
La modelización matemática de procesos de series temporales se basa en modelos dinámicos,
refiriéndose el término dinámico a cambios en tales procesos debidos al paso del tiempo como fuerza
motriz fundamental. Los modelos lineales clásicos se escriben habitualmente en términos de la
ecuación:
'FY
donde Y es el vector respuesta, F' es la matriz de variables regresoras o independientes, θ es un vector
de parámetros desconocidos y v es el vector de errores.

MASKANA, I+D+ingeniería 2014
TIC.EC 62
Si se quiere dar un sentido dinámico o evolutivo al sistema anterior, se han de poder variar los
elementos del modelo con el paso del tiempo t y permitir que el conjunto de parámetros θ evolucione,
a su vez, con el tiempo. La evolución toma la forma de un proceso de primer orden de Markov. De
este modo, se podría escribir un modelo lineal dinámico (MDL) normal general según:
tttt
tttt
wG
FY
1
tpt
tmt
WNw
VNv
,0
,0
000 ,CmN p
que vendrá caracterizado por: {Ft, Gt , Wt , Vt }, donde, para cada instante de tiempo t, Ft es un
vector conocido de dimensión n x 1, Gt es una matriz conocida n x n, Vt es una varianza
conocida y Wt es una matriz de varianzas conocida n x n.
El modelo específico a utilizar es un MDL de crecimiento lineal, que es un modelo de espacio de
estados con:
2,1
1,11
ttt
tttt
ttt
w
w
Y
2
2,
2
1,
,0
,0
,0
Nw
Nw
VN
t
t
t
Cuando β es igual o está muy concentrado en 0, el modelo lineal polinómico es de orden 1 (como
en el arco 74-73, por la mañana). Caso contrario, es de orden 2 (como en el arco 75-61, horario en la
tarde). En los MDLs permiten modelizar rasgos típicos en series temporales como tendencias
(polinómicas), regresión y efectos estacionales, véase Petris et al. (2009).
Aplicación de los MDLs a la red ejemplo
En la 0 se puede visualizar las líneas de tendencia, marcadas con color azul, las mismas que sugieren
si el nivel del polinomio es de primer o segundo orden. Esto nos ayuda a determinar uno de los
principales parámetros para obtener valores mediante la aplicación del modelo dinámico lineal (MDL)
de predicción.
Se toma como ejemplo los datos del arco 75-61 representados en la 0, ya que según sus líneas de
tendencia en el horario de la mañana es de segundo orden, mientras que en los horarios del mediodía y
tarde y noche son de primer orden. Los valores para W y V utilizados en el MDL se han determinado
por máxima verosimilitud; el valor inicial de m0 es igual a la media del vector de datos de la banda
horaria correspondiente y la C0 inicial, la varianza de los mismos. Se ha aplicado el MDL mencionado
en R, y se han obtenido los siguientes modelos y gráficos:
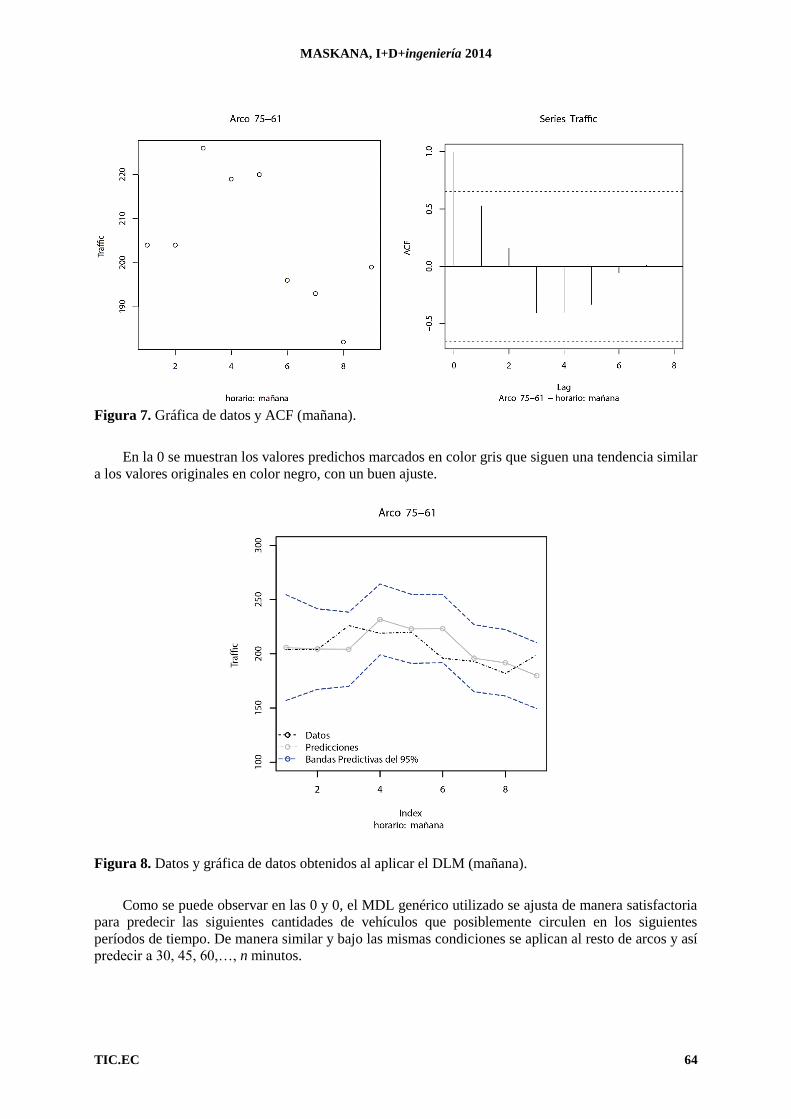
Horario de la mañana (6:45 - 7:00 - 7:15 - 7:30 - 7:45 - 8:00 - 8:15 - 8:30 - 8:45)
Se puede observar en la 0, en el primer cuadro la gráfica de dispersión de los datos de la mañana. El
segundo muestra la función de autocorrelación que sugiere la línea de tendencia de orden 2 indicada
en la 0 para el arco 75-61 en el horario de la mañana.
MASKANA, I+D+ingeniería 2014
TIC.EC 63
Figura 6. Gráfico de series temporales de los arcos de la red ejemplo.
MASKANA, I+D+ingeniería 2014
TIC.EC 64
Figura 7. Gráfica de datos y ACF (mañana).
En la 0 se muestran los valores predichos marcados en color gris que siguen una tendencia similar
a los valores originales en color negro, con un buen ajuste.
Figura 8. Datos y gráfica de datos obtenidos al aplicar el DLM (mañana).
Como se puede observar en las 0 y 0, el MDL genérico utilizado se ajusta de manera satisfactoria
para predecir las siguientes cantidades de vehículos que posiblemente circulen en los siguientes
períodos de tiempo. De manera similar y bajo las mismas condiciones se aplican al resto de arcos y así
predecir a 30, 45, 60,…, n minutos.

MASKANA, I+D+ingeniería 2014
TIC.EC 65
Predicción de la saturación
Uno de los usos más relevantes del MDL anterior es el de la predicción de la saturación en las
correspondientes vías de la red. Se define como capacidad de una vía a la máxima intensidad horaria
de personas o vehículos al atravesar un tramo uniforme de un carril o calzada durante un período
definido de tiempo bajo las condiciones prevalecientes viales, el tráfico y los sistemas de regulación
(National Academy of Science, 2000).
Para hacer el cálculo de flujo máximo en cada arco, considerando que la capacidad de un carril es
el máximo número de vehículos que puede pasar por él, suponiendo una velocidad uniforme.
Generalmente, se expresa en vehículos/hora. Entonces la capacidad en vehículos por hora sería:
1000s
C
donde C: capacidad máxima de un carril, v: velocidad en km/h, s: separación media mínima en metros
entre las partes frontales o traseras de dos vehículos sucesivos, para determinar la velocidad. El valor
de s está en función de la longitud de los vehículos, del tiempo de reacción de los conductores y de la
distancia de frenado, pudiendo expresarse en función de v mediante una fórmula del tipo:
2 cbas
El término independiente (a) corresponde a la longitud de los vehículos, el término (bv) al tiempo
de reacción de los conductores y (cv2) a la distancia de frenado. En un estudio realizado en Inglaterra
por Smeed & Bennet (1949), encontró la siguiente fórmula para la separación más frecuente en
función de la velocidad:
2003.02.08 s
Reemplazando s en la fórmula de la capacidad C, tendríamos:
2003.02.08
C
Cuando la velocidad en marcha de vehículo se encuentra por debajo de 25km/h se vuelve
intolerable para el conductor, por lo que hemos considerado ocupar el mínimo tolerable para conducir.
Por lo tanto, v = 25 km h-1 y C = 1681vehículos/hora. Así, obtendríamos que para cada 15 min para
arcos con un carril, el flujo máximo es de 420, y el 70% de su capacidad sería 294, información
necesaria ya que al sobrepasar ese porcentaje empieza a existir problemas de saturación. Las
probabilidades de saturación se calculan mediante:
fZ 7.0Pr
donde Z es la distribución predictiva del MDL correspondiente.
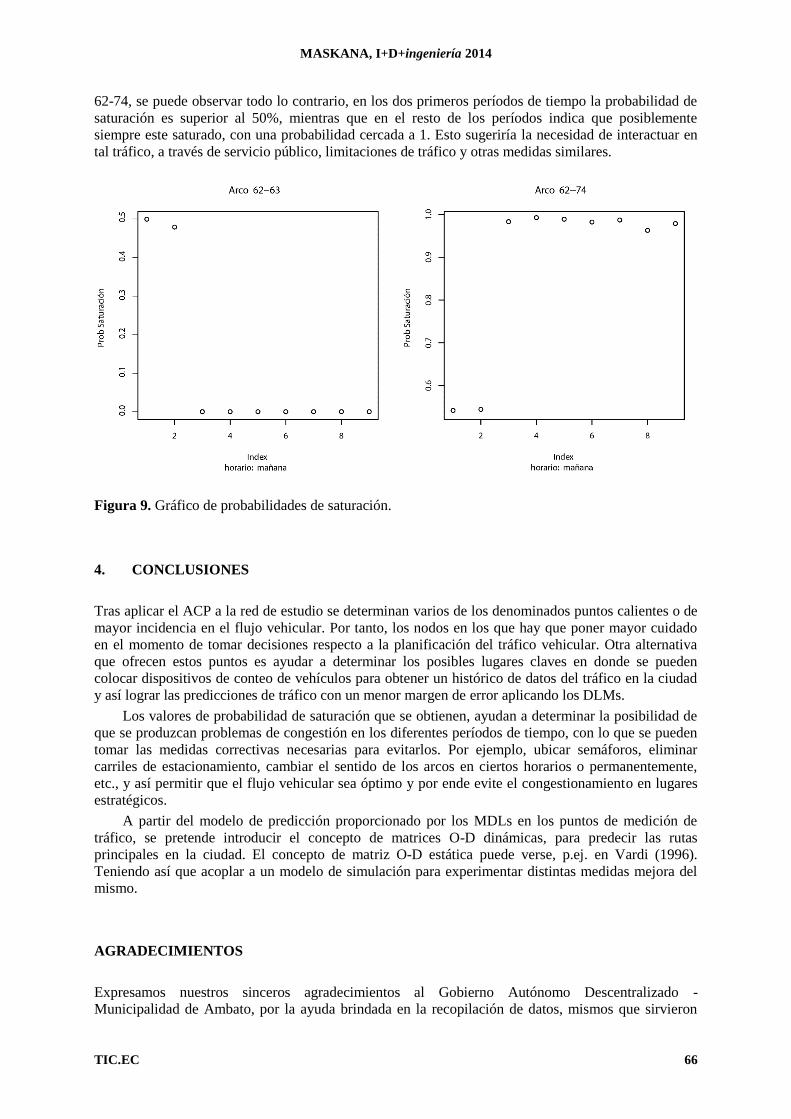
Luego de determinar los valores de probabilidad para cada arco, se observa en la 0, en el primer
cuadro indica que en el arco 62-63 se tiene una probabilidad muy baja de saturación, pues el valor
máximo que alcanza es de 0,5 en los dos primeros cuartos de hora del horario de la mañana y en el
resto de períodos de medición de flujos vehiculares la probabilidad es cercana a 0. Respecto al arco
MASKANA, I+D+ingeniería 2014
TIC.EC 66
62-74, se puede observar todo lo contrario, en los dos primeros períodos de tiempo la probabilidad de
saturación es superior al 50%, mientras que en el resto de los períodos indica que posiblemente
siempre este saturado, con una probabilidad cercada a 1. Esto sugeriría la necesidad de interactuar en
tal tráfico, a través de servicio público, limitaciones de tráfico y otras medidas similares.
Figura 9. Gráfico de probabilidades de saturación.
4. CONCLUSIONES
Tras aplicar el ACP a la red de estudio se determinan varios de los denominados puntos calientes o de
mayor incidencia en el flujo vehicular. Por tanto, los nodos en los que hay que poner mayor cuidado
en el momento de tomar decisiones respecto a la planificación del tráfico vehicular. Otra alternativa
que ofrecen estos puntos es ayudar a determinar los posibles lugares claves en donde se pueden
colocar dispositivos de conteo de vehículos para obtener un histórico de datos del tráfico en la ciudad
y así lograr las predicciones de tráfico con un menor margen de error aplicando los DLMs.
Los valores de probabilidad de saturación que se obtienen, ayudan a determinar la posibilidad de
que se produzcan problemas de congestión en los diferentes períodos de tiempo, con lo que se pueden
tomar las medidas correctivas necesarias para evitarlos. Por ejemplo, ubicar semáforos, eliminar
carriles de estacionamiento, cambiar el sentido de los arcos en ciertos horarios o permanentemente,
etc., y así permitir que el flujo vehicular sea óptimo y por ende evite el congestionamiento en lugares
estratégicos.
A partir del modelo de predicción proporcionado por los MDLs en los puntos de medición de
tráfico, se pretende introducir el concepto de matrices O-D dinámicas, para predecir las rutas
principales en la ciudad. El concepto de matriz O-D estática puede verse, p.ej. en Vardi (1996).
Teniendo así que acoplar a un modelo de simulación para experimentar distintas medidas mejora del
mismo.
AGRADECIMIENTOS
Expresamos nuestros sinceros agradecimientos al Gobierno Autónomo Descentralizado -
Municipalidad de Ambato, por la ayuda brindada en la recopilación de datos, mismos que sirvieron
MASKANA, I+D+ingeniería 2014
TIC.EC 67
para la realización de este estudio. De la misma manera, extendemos nuestros agradecimientos a la
Universidad Técnica de Ambato por el apoyo brindado en la parte técnica-científica.
REFERENCIAS
Acevedo, J., 2011. Estudio de Ingeniería de Tránsito para la semaforización centralizada en el casco
urbano de la Ciudad de Ambato. Ilustre Municipio de Ambato, UMTA, Ambato.
Akcelik, R., 1981. Analysis traffic signals: Capacity and timing. Australian Road Research Board,
ARRB Group Limited, Vermont South, Victoria 3133, Australia.
Banks, J., 1998. Handbook of simulation: Principles, methodology, advances, applications and
practice. EMP Books, Atlanta, Georgia, USA.
Barceló, J., 2010. Fundamentals of traffic simulation. Springer Verlag, California, USA.
Castillo, E., A.J. Conejo, P. Pedegral, R. García, N. Alguacil, 2002. Formulación y resolución de
modelos de programación matemática en ingeniería y ciencia. Alfaomega Grupo Editor, México
DF, 574 pp.
Fernandez, R., E. Valenzuela, 2004. Gestión ambiental de tránsito: Cómo la ingeniería de transporte.
Eure, 29(89), 97-107.
Hair, J., R. Anderson, R. Tatham, 1987. Multivariate data analysis. Macmillan Publish. Company,
New York, USA.
Head, K.L., 1995. Event-based short-term traffic flow prediction model. Transportation Research
Record: Journal of the Transportation Research Board, pp. 46-52.
IHT, 1997. Transport in the urban environment..The Institution of Highway and Transportation,
London, UK.
Lee, S., D.B. Fambro, 1999. Application of subset autoregressive integrated moving average model for
short-term freeway traffic volume forecasting. Transportation Research Record: Journal of the
Transportation Research Board, pp. 179-188.
National Academy of Sciencies, 2000. Highway capacity manual (HCM2000). Transportation
Research Board, National Research Council, Washington DC, 1207 pp.
Nel-lo, O., 1998. Los confines de la ciudad sin confines. Estructura urbana y límites administrativos en
la ciudad difusa. En: J. Monclús (Ed.). La ciudad dispersa. Suburbanización y nuevas periferias.
Centro de Cultura Contemporánea de Barcelona, pp. 35-57.
Okutani, I., Y.J. Stephanedes, 1984. Dynamic prediction of traffic volume through Kalman filtering
theory. Transportation Research Part B: Methodological, pp. 1-11.
Petris, G., S. Petrone, P. Campagnoli, 2009. Dynamic linear models with R. Springer Verlag, New
York, 186 pp.
Smeed, R., G. Bennett, 1949. Research on road safety and traffic flow. ICE Engineering Division
Papers, 7(3), 1-38.
Stathopoulos, A., M.G. Karlaftis, 2003. A multivariate state space approach for urban traffic flow
modeling and prediction. Transportation Research Part C: Emerging Technologies, 121-135.
Taha, H.A., 2004. Investigación de operaciones. Pearson Educación, México.
Tebaldi, C., M. West, 1998. Bayesian inference on network traffic using link count data. Journal of the
American Statistical Association, 93(442), 557-573.
Vardi, Y., 1996. Network tomography: Estimating source-destination traffic intensities from link data.
Journal of the American Statistical Association, 91(433), 365-377.
Voort, M.V.D., M. Dougherty, S. Watson,1996. Combining kohonen maps with arima time series
models to forecast traffic flow. Transportation Research Part C: Emerging Technologies, 4, 307-
318.