transmisiÓn digital bandabase.docx
TRANSCRIPT

TRANSMISIÓN DIGITAL BANDABASE
La transmisión digital, o transmisión en banda base, consiste en utilizar una
señal que sólo puede tomar unos pocos valores de tensión dentro de un rango.
Este tipo de transmisión es más rápido pero necesita un medio que permita un
mayor ancho de banda.
Existen muchos métodos de codificación en banda base:
Códigos NRZ (no retorno a 0): Representan cada dígito por un único nivel físico y
el voltaje no vuelve a cero entre bits.
En el receptor y el transmisor se debe efectuar un muestreo de igual frecuencia.
Este código no es autosincronizante, y su principal ventaja es que al emplear
pulsos de larga duración requiere menor ancho de banda que otros sistemas de
codificación que emplean pulsos más cortos.
Códigos RZ (retorno a 0): En este caso se tiene tensión positiva en una parte de la
duración de un 1 lógico, y cero tensión durante el resto del tiempo. Para un 0
lógico se tiene tensión negativa parte del tiempo y el resto del tiempo del pulso la
tensión es 0.
Este código si es autosincronizante debido a que en reloj (clock) del receptor
queda sincronizado por la cadencia de los pulsos que llegan del transmisor puesto
que todos los bits tienen una transición, esto permite identificar a cada bit en una
larga cadena de unos o ceros.
Requiere mayor ancho de banda, pues los pulsos son de menor duración que en
otros códigos, por ejemplo NRZ, lo cual es una gran desventaja.
Codificación Manchester: cada período de un bit se divide en dos intervalos

iguales. Un dígito de valor 1 se transmite con valor de tensión alto en el primer
intervalo y un valor bajo en el segundo. Un dígito 0 se envía al contrario, es decir,
una tensión baja seguida de un nivel de tensión alto. Este esquema asegura que
todos los bits presentan una transición en la parte media, proporcionando así un
excelente sincronismo entre el receptor y el transmisor. Una desventaja de este
tipo de transmisión es que se necesita el doble del ancho de banda para la misma
información que el método convencional.
1.1 SEÑALES Y SISTEMAS DIGITALES: SEÑALES PAM DIGITALES
Señales Y Sistemas Digitales:
Primero que nada mencionaremos lo que es un sistema digital para hacernos una
idea del tema. Un sistema digital no es más que es un conjunto de dispositivos
destinados a la generación, transmisión, procesamiento o almacenamiento de
señales digitales. También un sistema digital es una combinación de dispositivos
diseñados para manipular cantidades físicas o información que estén
representadas en forma digital; es decir, que sólo puedan tomar valores discretos.
Un mensaje digital es una secuencia ordenada de símbolos producida por una
fuente de información discreta. La fuente extrae principalmente de los alfabeto de
144 símbolos diferentes 2, y produce símbolos de salida en algún medio tasa r. Al
utilizar lo más rápido que puedas, te conviertes en una información discreta fuente
de producción de un mensaje digital a una velocidad de unos r = 5 símbolos por
segundos. El mismo equipo trabaja con M = 2 sólo símbolos internos,
representada por el LOW y HIGH estados eléctricos. Solemos asociar estos dos
símbolos con los dígitos binarios 0 y 1, conocidos como bits, para abreviar. Datos
tasas de transferencia dentro de una computadora podrá ser superior a r = LoS.
La tarea de un sistema de comunicación digital es la transferencia de un mensaje
digital a partir de la fuente al destino. Pero el ancho de banda de transmisión finita

establece un límite superior a la velocidad de símbolo, y el ruido provoca errores
que aparezcan en el mensaje de salida. Por lo tanto, velocidad de señalización y
funciones que desempeñan probabilidad de error en la comunicación digital similar
a las de ancho de banda y la relación señal-ruido en la comunicación analógica.
Como preparación para el análisis de velocidad de señalización y probabilidad de
error, lo primero que debe desarrollar la descripción y propiedades de las señales
digitales.
Señales PAM Digitales:
La modulación por amplitud de pulsos (Pulse Amplitude-Modulation) es la más
sencilla de las modulaciones digitales. Consiste en cambiar la amplitud de una
señal, de frecuencia fija, en función del símbolo a transmitir. Esto puede
conseguirse con un amplificador de ganancia variable o seleccionando la señal de
un banco de osciladores
Dichas amplitudes pueden ser reales o complejas. Si representamos las
amplitudes en el plano complejo tenemos lo que se llaman constelaciones de
señal (incluir dibujo). En función del número de símbolos o amplitudes posibles se
llama a la modulación N-PAM. Así podemos tener 2PAM, 4PAM, 260PAM. De la
correcta elección de los puntos de la constelación (amplitudes) depende la
inmunidad a ruido (distancia entre puntos) o la energía por bit (distancia al origen).
1.2 CÓDIGOS DE LÍNEA, LIMITACIONES DE TRANSMISIÓN: SISTEMA DE
TRANSMISIÓN BANDABASE, REGENERADORES, INTERFERENCIA
INTERSIMBÓLICA, PATRÓN DE OJO, JITTER. ESPECTRO DE POTENCIA DE
SEÑALES PAM DIGITALES

Códigos De Línea:
La forma física concreta de la señal de información (señal eléctrica que soporta la
información) recibe el nombre de código de línea. El código de línea no está
modulado cuando se trata de una señal discreta formada por impulsos
rectangulares que siguen un determinado patrón de codificación o conjunto de
reglas de asignación de impulsos de tensión a los bits "0" y "1" de la información, o
a conjuntos de estos. En este caso se trata de un código de línea en banda base
Es un código utilizado en un sistema de comunicación para propósitos de transmisión.
Los códigos en línea son frecuentemente usados para el transporte digital de datos. Estos
códigos consisten en representar la señal digital transportada respecto a su amplitud
respecto al tiempo. La señal está perfectamente sincronizada gracias a las propiedades
específicas de la capa física. La representación de la onda se suele realizar mediante un
número determinados impulsos. Estos impulsos representan los 1s y los 0s digitales. Los
tipos más comunes de codificación en línea son el unipolar, polar, bipolar y Manchester.
Limitaciones De Transmisión:
En 1927, Nyquist determinó que el número de pulsos independientes que podían pasar a
través de un canal de telégrafo, por unidad de tiempo, estaba limitado a dos veces el
ancho de banda del canal.
donde fp es la frecuencia del pulso (en pulsos por segundo) y B es el ancho de banda (en
hercios). La cantidad 2B se llamó, más adelante, tasa de Nyquist, y transmitiendo a esta
tasa de pulsos límite de 2B pulsos por segundo se le denominó señalización a la tasa de
Nyquist.
Nyquist publicó sus resultados en 1928 como parte de su artículo "Certain topics in
Telegraph Transmission Theory".
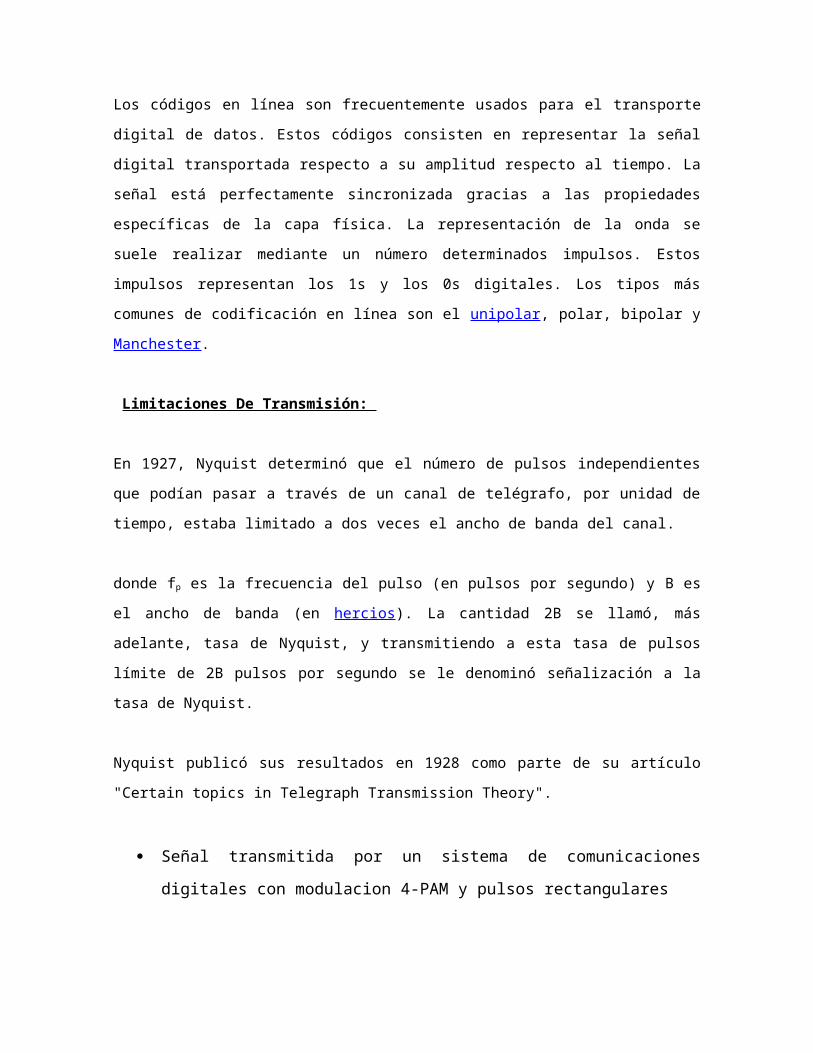
Señal transmitida por un sistema de comunicaciones digitales con
modulacion 4-PAM y pulsos rectangulares

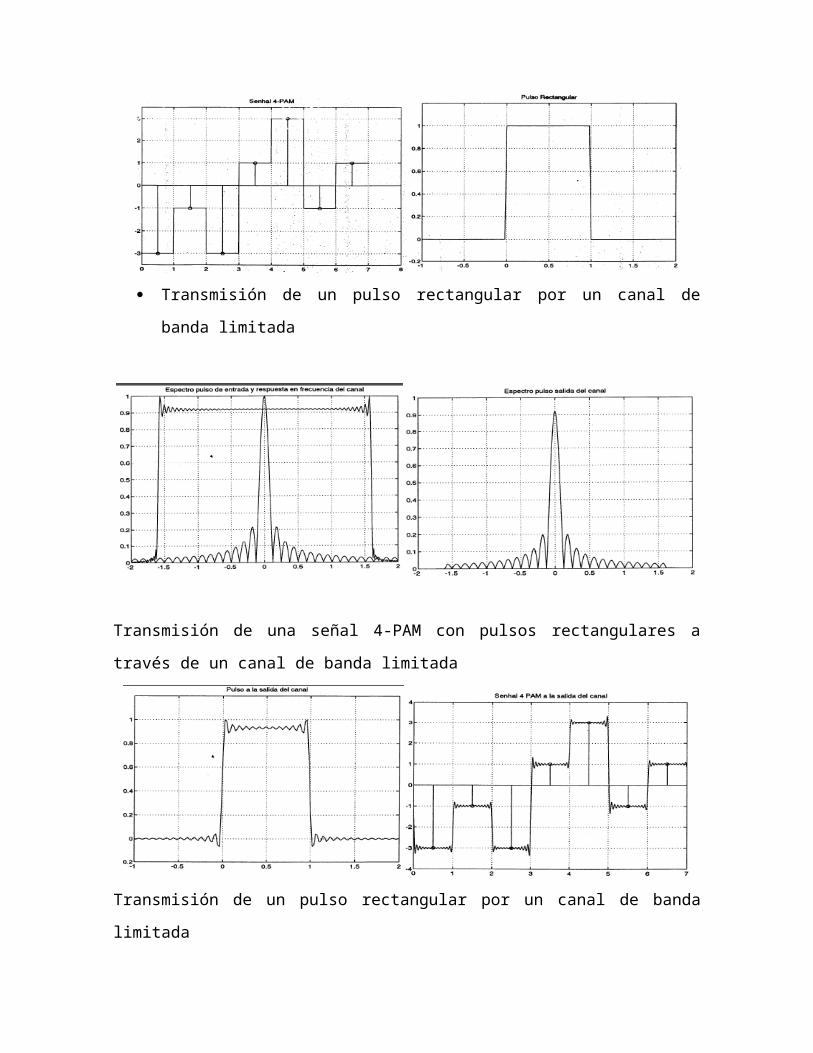
Transmisión de un pulso rectangular por un canal de banda limitada
Transmisión de una señal 4-PAM con pulsos rectangulares a través de un canal
de banda limitada
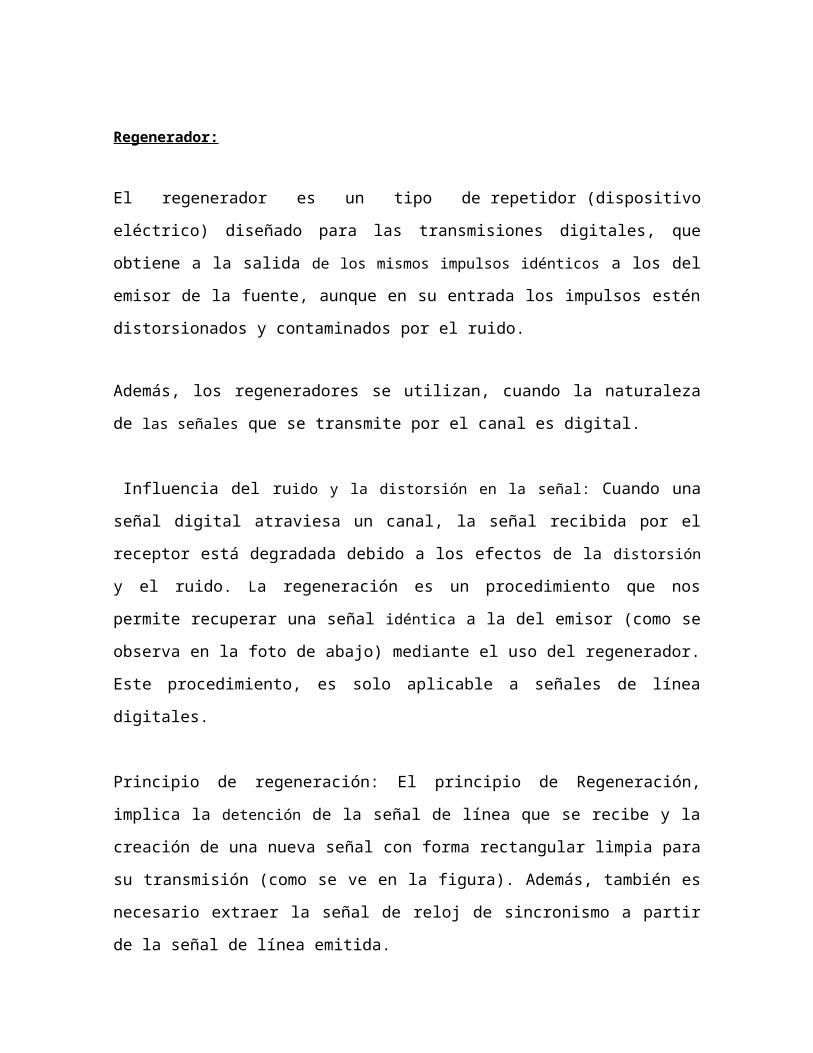
Transmisión de un pulso rectangular por un canal de banda limitada
Sistema De Transmisión Bandabase :
El primer paso esencial en procesamiento digital de señales, formateo, hace a la
señal origen o fuente compatible con el procesamiento digital. En el transmisor, el
formateo es una transformación uno a uno de información fuente a símbolos
digitales (en el receptor el formateo es una transformación inversa). La
codificación fuente es un caso especial de formateo cuando existe reducción de
redundancia en los datos (compresión). Con formateo y transmisión banda base y
posteriormente, , con el caso especial de una descripción eficiente de la
información fuente (codificación fuente). Una señal cuyo espectro se extiende a
partir de cero (o cercano a cero) hasta un valor finito, usualmente menor que
algunos megahertz, es llamada señal banda base o paso bajas. Tal denominación
será tácita siempre que nos refiramos a la “información”, “mensaje” o “datos”, ya
que las señales de la naturaleza son esencialmente banda base (voz, audio,
video, datos, señales de transductores). Para la transmisión de señales en banda
base en un sistema digital de comunicaciones, la información es formateada de
manera que ésta sea representada por símbolos digitales. Después, se asignan
formas de onda compatibles con el canal de comunicaciones que representan los
símbolos. Entonces las formas de onda pueden transmitirse través de canales de
comunicaciones banda base (par trenzado, cable coaxial o fibra óptica).
El modelo de sistema de comunicación en banda base continua siendo el
genérico que tenemos propuesto, pero con la particularidad de emplear ETCDs de
banda base, tal como se indica en la figura El ETD-1 actúa como fuente de la señal
de información digital x e1 (t), que es un tren de impulsos rectangulares, y el
ETCD- 1 proporciona las funciones típicas de un. Entre estas funciones se incluyen
los cambios en la señal que la transforman en otra x e2 (t) que resulta más
adecuada para su correcta propagación por el medio y que, en este caso, también
es digital; es decir, el ETCD-1 no realiza ningún proceso de
modulación/desmodulación en transmisiones banda base.
MODELO DE SISTEMA DE TRANSMISIÓN EN BANDA BASE.
Regenerador:
El regenerador es un tipo de repetidor (dispositivo eléctrico) diseñado para las
transmisiones digitales, que obtiene a la salida de los mismos impulsos idénticos a
los del emisor de la fuente, aunque en su entrada los impulsos estén
distorsionados y contaminados por el ruido.
Además, los regeneradores se utilizan, cuando la naturaleza de las señales que se
transmite por el canal es digital.
Influencia del ruido y la distorsión en la señal: Cuando una señal digital atraviesa un
canal, la señal recibida por el receptor está degradada debido a los efectos de la
distorsión y el ruido. La regeneración es un procedimiento que nos permite
recuperar una señal idéntica a la del emisor (como se observa en la foto de abajo)
mediante el uso del regenerador. Este procedimiento, es solo aplicable a señales
de línea digitales.

Principio de regeneración: El principio de Regeneración, implica la detención de la
señal de línea que se recibe y la creación de una nueva señal con forma
rectangular limpia para su transmisión (como se ve en la figura). Además, también
es necesario extraer la señal de reloj de sincronismo a partir de la señal de línea
emitida.
La regeneración de las señales digitales, es todo lo que se necesita para restaurar
la señal a su forma original, es decir, no es necesario amplificar, ecualizar, ni
procesar en alguna otra forma. El hecho de que la señal se pueda regenerar
perfectamente mediante este procedimiento, es la razón por la cual la transmisión
digital produce señales de alta calidad.
Interferencia Intersimbólica (ISI):
Para transmitir una señal digital, no importa que código de línea usemos, se necesita un
canal de ancho de banda infinito. Sin embargo, sabemos que esto no es posible, el canal
práctico tiene ancho de banda finito, por lo tanto los pulsos se "gotearan" y hará que estos
entorpezcan la decisión sobre los bits vecinos.
Observe la siguiente gráfica de tres bits seguidos que se han dispersado debidos a que el
canal no tiene ancho de banda infinito. Podría ocurrir, por ejemplo que el tercer bit
(combinación de los voltajes presentes y pasados) al llegar al receptor sea visto como un
cero.
La señal codificada, que llamamos y(t), la expresamos como la convolución de una serie
de impulsos aleatorios x(t) con un pulso determinístico p(t); por lo tanto para variar y(t)
podemos variar x(t) o p(t). Además ahora vemos que la forma del pulso p(t) puede ser
determinante para evitar la ISI. Nyquist desarrollo 3 procedimientos para seleccionar los
pulsos de manera de controlar la ISI.
Patrón De Ojo:

En telecomunicación, patrón de ojo, también conocido como diagrama del
ojo es osciloscopio exhibición en la cual adatos digitales señal de un receptor repetidor se
muestrea y se aplica a la vertical entrada, mientras que la tarifa de datos se utiliza para
accionar el barrido horizontal. Es supuesto porque, para varios tipos de codificación, el
patrón parece una serie de ojos entre un par de carriles.
Varios sistema las medidas de funcionamiento pueden ser derivadas analizando la
exhibición. Si las señales son demasiado largas, demasiado corto, sincronizado mal con
el reloj del sistema, demasiado alto, demasiado bajo, también ruidoso, retárdese también
al cambio, o tenga demasiado aterrizaje corto o llegue más allá, esto puede ser observado
del diagrama del ojo. Un patrón de ojo abierto corresponde a la señal mínima distorsión.
Distorsión de la señal forma de onda debido a interferencia de
intersímbolo y ruido aparece como encierro del patrón de ojo.
Resumiendo:
característica del Ojo-diagrama Qué mide
Abertura del ojo (altura, pico al pico) Añadido ruido en la señal
El ojo llega más allá/aterrizaje corto Pico distorsión
Anchura del ojo Sincronización que mide el tiempo y inquietud efectos
Jitter:
El Jitter es la variación en el retardo, en términos simples la diferencia entre el tiempo en
que llega un paquete y el tiempo que se cree que llegara el paquete.
Entrando más en el funcionamiento de TCP/IP sabemos que los paquetes no llegan a su
destino en orden y mucho menos a una velocidad constante, pero el audio tiene que tener
una velocidad constante. Para esto existen los jitter buffer, estos buffer puede manejar
unos 300 mili segundos y controlar esta variación para que el audio se escuche a
velocidad constante. si la llegada de paquetes es demasiado desigual el buffer no la
alcanza a controlar y perderá paquetes, deteriorando la calidad de la voz. Y si esta
pérdida es superior al 5% la perdida afectara al usuario.
Espectro De Potencia De Señales PAM Digitales:
El espectro de potencia pulso P(f)=F[p(t)] proporciona algunas ideas sobre el
espectro de potencia de una señal PAM digital x (t ) . If p (t )=sin c rt , por ejemplo,
entonces P(f) en la ecuación P ( f )=F [ p(t) ]¿r−∏ ( fr ) implica que G x ( f )=0 para |
f| > r/2. no obstante, un conocimiento detallado deG x ( f ) proporciona información
adicional valiosa relacionada con la transmisión digital.
Esta expresión se cumple para cualquier señal PAM digital con espectro de
pulsos P(f) cuando las ak no están correlacionadas y tienen un valor medio cero.
Si una señal PAM digital x(t) tiene el espectro de pulsos P(f) y auto correlación de
amplitudes Ra (n) , su espectro de potencia es
1.3 RUIDO Y ERRORES: PROBABILIDADES DE ERROR BINARIO,
REPETIDORES REGENERATIVOS, FILTRO ACOPLADO Y PROBABILIDADES
DE ERROR M-ARIO
Ruido Y Errores:
Se denomina ruido en la comunicación a toda señal no deseada que se mezcla
con la señal útil que queremos transmitir. Es el resultado de diversos tipos de
perturbación que tiende a enmascarar la información cuando se presenta en
la banda de frecuencias del espectro de la señal, es decir, dentro de su ancho de
banda.
El ruido se debe a múltiples causas: a los componentes electrónicos
(amplificadores), al ruido térmico de las resistencias, a las interferencias de
señales externas, etc. Es imposible eliminar totalmente el ruido, ya que los

componentes electrónicos no son perfectos. Sin embargo, es posible limitar su
valor de manera que la calidad de la comunicación resulte aceptable.
Para medir la influencia del ruido sobre la señal se utiliza la relación señal/ruido,
que generalmente se maneja en decibelios (dB). Como potencia de la señal se
adopta generalmente la potencia de un tono de pruebas que se inyecta en
el canal. La potencia del ruido suele medirse a la entrada del receptor, cuando por
él no se emite dicho tono. Cuando se transmiten señales digitales por un canal, el
efecto del ruido se pone de manifiesto en el número de errores que comete
el receptor. Se deduce inmediatamente que dicho número es tanto mayor cuanto
más grande sea la probabilidad de error.
La probabilidad de error depende del valor de la relación señal/ruido. Cuanto
mayor sea esta relación, más destaca la señal sobre el ruido y, por tanto, menor
es la probabilidad de error. Cuando el ruido se añade a una señal con distorsión,
la probabilidad de error crece rápidamente.
La distorsión que produce el ruido en una determinada comunicación depende de
su potencia, de su distribución espectral respecto al ancho de banda de la señal, y
de la propia naturaleza de la señal y de la información que transporta. El ruido
afecta de diferente manera a la información que transportan las señales
analógicas que a la codificada mediante señales digitales. Esta es la causa por la
que se ha establecido una tipificación básica de los canales: los canales
analógicos (con amplificación) y los canales digitales (con regeneración).
Los tipos de ruidos se pueden clasificar en los siguientes grupos:
Ruido Blanco O Gaussiano: Este tipo de ruido se da por la agitación de los
electrones en la línea de transmisión o por la inducción de líneas eléctricas
adyacentes, este tipo de ruido es inevitables pero por lo general no es un
problema siempre y cuando su nivel no sea muy alto un ejemplo de este tipo de
ruido lo tenemos en el ceceo de fondo o estática conocido en radios y teléfonos.
Ruido De Impulsos O Agujas: Es el principal causante de errores en la
comunicación de datos. Es identificado como un "click" durante las
comunicaciones de voz. Este ruido provoca un error de ráfaga en donde
dependiendo de la tasa de transferencia de información y la duración del impulso
puede cambiar desde 1 o 2 bits, hasta decenas o centenas de estos. Las
principales fuentes de estos ruidos son cambios de voltajes en líneas adyacentes,
falsos contactos y arcos eléctricos en los interruptores o relevadores en las
oficinas telefónicas antiguas.
Ruido De Intermodulación: Se produce cuando las señales de dos líneas
independientes se intermodulan y forman un producto que cae dentro de una
banda de frecuencias que difiere de ambas entradas, pero que puede caer dentro
de una banda de una tercera señal. Un modem mal ajustado puede transmitir un
tono de frecuencia intenso cuando no está transmitiendo datos, produciendo así
este tipo de ruido.
Ruido De Amplitud: Este ruido comprende un cambio repentino en el nivel de
potencia, y es causado por amplificadores defectuosos, contactos sucios con
resistencias variables, cargas agregadas repentinas porque se conmuten nuevos
circuitos durante el día y por labores de mantenimiento.
El ruido de amplitud no afecta las técnicas de modulación de frecuencia debido a
que el equipo transmisor y receptor interpreta la información de frecuencia e
ignoran la información de amplitud.
Probabilidad De Error Binario:
Un canal binario simétrico con probabilidad p de fallo es un canal con una entrada
binaria y una salida (también binaria), definida con una probabilidad de error p.

Esto viene a significar, que si una variable aleatoria X se transmite, y se recibe la
variable aleatoria Y, entonces el canal viene determinado por la siguiente
probabilidad condicionada
Pr( Y = 0 | X = 0) = 1-p
Pr( Y = 0 | X = 1) = p
Pr( Y = 1 | X = 0 ) = p
Pr( Y = 1 | X = 1 ) = 1-p
Donde 0 ≤ p ≤ 1/2. Si p>1/2 entonces el receptor obtendría los bits contrarios
(interpretar un 1 cuando se recibe un 0, y viceversa), obteniéndose un canal
equivalente con probabilidad de fallo 1-p ≤ 1/2.
Repetidores Regenerativos:
Una repetidora es un sistema colocado en un punto intermedio del sistema de
transmisión que permitirá mejorar la relación señal a ruido y por ende la
probabilidad de error. Existen repetidoras regenerativas y no regenerativas; en las
regenerativas cuando les llega la señal sucia no solo la filtran y amplifican,
además se realiza comparación con el umbral y se restablecen los niveles lógicos.
Para tener un patrón de comparación plantearemos el sistema básico constituido
por transmisor-canal-receptor.
Se asume que el trayecto produce una pérdida igual a α, además en el canal se
agrega ruido blanco gaussiano; finalmente el receptor está constituido por un filtro
pasa bajo ideal con ganancia G que compensa la pérdida del trayecto. Por lo tanto
en cuanto a la señal la potencia a la salida es igual a la potencia a la entrada; el

ruido tiene a la salida una DEP constante con valor 0.5ηG entre –B y B. Por lo
tanto podemos llegar al cálculo de la relación señal a ruido de la siguiente forma
Con este valor de referencia, veamos primero el caso sencillo: repetidoras no
regenerativas, las cuales constan de un amplificador y un filtro pasa bajo de ancho
de banda APROPIADO (dependerá del código usado).
Supondremos que se tienen R repetidoras equiespaciadas (el receptor será
considerado la última repetidora), que el ruido tiene las mismas características en
todos los tramos y que cada repetidora compensará la pérdida de señal que sufrió
en el trayecto. Observe el siguiente esquema:
Las ganancias y pérdidas siguientes se compensarán, por lo tanto la potencia de
ruido a la salida debido al ruido de la primera etapa será η1G1B= η1α1B. Si se

hace el análisis para los ruidos que ingresan al sistema en todas las etapas el
resultado es el mismo. Como se asumió que las repetidoras estaban
equiespaciadas, las ganancias y pérdidas son todas iguales. La potencia de ruido
total a la salida será R veces la de cada etapa. Finalmente:
El subíndice entre paréntesis significa Con Repetidoras Sin Regeneración. Para
comparar este resultado con el obtenido sin repetidoras hay que relacionar la
pérdida total del trayecto con la pérdida de cada etapa.
La relación señal a ruido es mayor cuando se usan repetidoras.
Ejemplo:
Se tiene un sistema de 14 repetidoras en un trayecto que produce 140 db de
pérdidas totales. Compare la relación señal a ruido con la obtenida en el caso sin
repetidoras.
Claramente el caso CRSR produce una mayor relación señal a ruido que el caso
sin repetidoras.
Filtro Acoplado:
Un filtro acoplado es un filtro lineal diseñado para proporcionar la máxima relación
señal a ruido a su salida para una forma de onda transmitida en el filtro acoplado
se deslizan dos funciones, pasando una sobre otra y se calcula una secuencia de
correlaciones ecuación que representa la forma general de una señal lineal (una
para cada paso en el deslizamiento).
En efecto, un filtro acoplado para el pulso emitido reconocerá los elementos de la
señal distintiva y la retrasa sucesivamente para comprimir en un pulso corto con la
intensidad proporcional al eco recibido. Aunque un filtro acoplado puede parecer
ser la solución perfecta, también hay que considerar las necesidades en la
capacidad de resolución del sistema, la cual es determinada por la estrechez del
lóbulo principal, pero: otro factor importante es la amplitud de los lóbulos lateral en
la respuesta del filtro acoplado.
Probabilidades De Error M-ario:
La señalización Binaria proporciona la mayor inmunidad al ruido para una S / N, ya
que sólo tiene dos niveles de amplitud, y no se puede enviar información con
menos de dos los niveles.
La señalización M-ario de multiniveles requiere más potencia de la señal, pero
menos ancho de banda de transmisión porque la tasa de señalización será menor
que la tasa de bits de una señal binaria equivalente. En consecuencia, la
señalización M-ario se adapta a usos tales como transmisión digital a través de
canales de voz, donde el ancho de banda disponible es limitado y la razon señal-
ruido es relativamente grande.
A continuación se calcula las probabilidades de error M-ario es ruido gaussiano de

media cero. Se tomara el caso más común de señalización polar con un número
par de niveles equiespaciados en ak=± A2, ±3 A
2,…, ± (M−1) A
2.
1.4 SISTEMAS DIGITALES PAM DE BANDA LIMITADA: FORMA DE PULSOS
NYQUIST, FILTROS TERMINALES ÓPTIMOS, ECUALIZACIÓN
Sistemas Digitales PAM De Banda Limitada:
El ancho de banda de transmisión disponible no es grande en comparación con la
tasa de señalizaciones deseadas y por consiguiente, los usos de señalización de
angulares se distorsiona la gravemente. Por el contrario se debe al uso de banda
ilimitado formados especialmente para evital ISI.
En telecomunicaciones, el término interferencia entre símbolos (en inglés
intersymbol interference, ISI) tiene los siguientes significados:
1. En un sistema de transmisión digital, la distorsión de la señal recibida se
manifiesta mediante ensanchamientos temporales, y el consecuente
solapamiento, de pulsos individuales hasta el punto de que el receptor puede no
distinguir correctamente entre cambios de estado, por ejemplo entre elementos
individuales de la señal.
A partir de un cierto umbral, la ISI puede comprometer la integridad de los datos
recibidos.
La ISI puede ser medida mediante el diagrama de ojos.
2. Energía procedente de la señal en uno o más intervalos de modulación que
interfieren con la recepción de la señal en otro intervalo de modulación.
3. La distorsión causada por la energía de la señal en uno o más intervalos, que
interfiere con la recepción de la señal en otro intervalo de modulación.

Existen varias técnicas en telecomunicaciones y almacenamiento de datos que
intentan solucionar el problema de la interferencia entre símbolos.
Forma De Pulsos Nyquist:
La formación de pulsos de Nyquist se expresara en términos generales de la
señalización M-aria con M 2 e intervalos de símbolos D = 1/r. Con el fin de
enfocarse en problemas potenciales de ISI en el receptor, se considerará que p (t)
es la forma de pulso en la salida del filtro receptor. Nuevamente, asumiendo que la
ganancia del transistor compensa la pérdida de transmisión, la forma de onda de
salida en ausencia de ruido es
El teorema de simetría residual de Nyquist establece que la ecuación (1)
se satisface si p (t) tiene la forma
Formación de pulsos de Nyquist
a) Espectros.
b) Formas de onda

Filtros Terminales Óptimos:
Estas condiciones que mencionan vienen a ser un problema relativamente sencillo
por las siguientes razones:
El formato de la señal es polar y las amplitudes ak no se correlacionen y son
igualmente probables.
El canal de transmisión es lineal, aunque no necesariamente sin distorsión.
El pulso de salida filtrado p(t) tendrá la forma de Nyquist.
El ruido es aditivo y tiene una distribución gaussiana con media cero; sin
embargo, puede tener un espectro de potencia no blanco.
A fin de permitir una posible distorsión del canal o del ruido no blanco, la
optimización debe incluir filtros tanto en el transmisor como en el receptor. Como
algo adicional a la forma de onda de la fuente x(t) puede tener una forma de pulso
más o menos arbitrario px(t).
Ecualización:
Independientemente de la forma de lo pulsos que se hayan elegido, cierta
cantidad de ISI residual permanece inevitablemente en la señal de salida como
resultado del diseño imperfecto de los filtros, la falta de conocimiento de las
características del canal, entre otros.

Por ello, suele insertarse un filtro compensador ajustable entre el filtro receptor y
regenerador. En general, esto compensadores de “limpieza” tiene la estructura de
un filtro transversal.
1.5 TÉCNICAS DE SINCRONIZACIÓN: SINCRONIZACIÓN DE BIT,
“SCRAMBLER” Y GENERACIÓN DE SECUENCIAS DE PSEUDORUIDO (PN),
SINCRONIZACIÓN DE TRAMA
Técnicas De Sincronización:
La sincronización es el arte de hacer que los relojes coincidan al mismo tiempo.
Los relojes en un sistema de comunicación digital están tanto en el transmisor
como en el receptor y es necesario permitir un retardo en el tiempo de transmisión
para ellos.
Sincronización De Bit:
Se vuelve casi trivial cuando y(t) tiene un formato unipolar de RZ de manera que
su espectro de potencia incluye ,La misma técnica se trabaja
con un formato polar si y (t) se procesa primero mediante un dispositivo de ley
cuadrática, como se esquematiza en
La forma de onda resultante unipolar que se muestra en

Tiene ahora el componente deseado senoidal en muchas otras
operaciones no lineales de polar a unipolar en y (t) logran resultados similares en
sincronizadores de bits de lazo abierto. Sin embargo, una configuración de lazo
cerrado que incorpora el reloj en un lazo de realimentación proporciona la
sincronización más confiable.
Generación De Secuencias De Pseudoruido ( PN ):
Una secuencia pseudo aleatoria o de ruido (pseudoruido -PN) se define como un
conjunto de señales binarias, periódicas y de cierta longitud de tal forma que,
dentro de cada período, la señal puede aproximarse a una señal aleatoria. Se
hace esto para tener la certeza de que la misma secuencia puede generarse tanto
en el transmisor como en el receptor. Si fuese totalmente aleatoria esto no sería
posible.
Dentro de estas secuencias PN se define un chip como la duración de cada
elemento dentro de la misma. Se le llamará Tc. Este tiempo será mucho menor
que la duración de 1 bit en la secuencia que se quiere codificar. Las secuencias
periódicas pseudos aleatorias deben satisfacer las siguientes propiedades:
1.-Balance: El número de 1’s, en un período de la secuencia, difiere en uno del
número de 0’s.
2.-Balance en Cadenas: Dentro de un período de la secuencia se definen cadenas
de 1’s y cadenas de 0’s. El número de cadenas de cada uno deben ser iguales. En
cada periodo la mitad de las cadenas del mismo signo tiene longitud 1, un cuarto
tienen longitud 2, un octavo tiene longitud 3 y así sucesivamente.
Autocorrelación: La función de autocorrelación de estas secuencias es periódica y
con dos valores.

Sincronización De Trama:
Hay dos tipos:
1. Marcadores o bit(s) de trama →pocos bits (1 a 4 bits) elegidos sin inteligencia.
2. Código de trama → Una palabra código (varios bits) diseñado con inteligencia
Marcador De Trama: La ventaja principal es la alta eficiencia de transmisión:
Lmarc/Ltram = n/N.
-Se debe de detectar el marcador en varias tramas sucesivas (evitar falsas
alarmas)
-La adquisición de sincronismo de trama es lenta → Idónea para transmisión
continua y no para transmisión en paquetes
Código De Trama: Se utiliza una palabra código de n bits, Xk = (1 0 1 …) de
característica blanca: correlación C(k) tipo delta:
- La búsqueda se realiza correlando la señal recibida con la palabra código. (Filtro
adaptado)
-La ventaja es una adquisición rápida ya que es suficiente detectar únicamente
una cabecera, gracias a las propiedades de correlación
La desventaja, una peor eficiencia de transmisión: n/N por ser n más larga.