trabajo fin de gradobibing.us.es/proyectos/abreproy/90051/fichero/tfg+delia+velasco.pdf · esquema...
TRANSCRIPT
1
Trabajo Fin de Grado Grado en Ingeniería de Tecnologías de Telecomunicación
Intensificación Sonido e Imagen
Segmentación de la excavación en imágenes de
fondo de ojo basada en la curvatura de los vasos
sanguíneos
Autora: Delia Velasco Montero
Tutora: Irene Fondón García
Dep. Teoría de la Señal y Comunicaciones
Escuela Técnica Superior de Ingeniería
Universidad de Sevilla
Sevilla, 2014

2
3
Trabajo Fin de Grado
Grado en Ingeniería de Tecnologías de Telecomunicación
Intensificación Sonido e Imagen
Segmentación de la excavación en imágenes de
fondo de ojo basada en la curvatura de los
vasos sanguíneos
Autora:
Delia Velasco Montero
Tutora:
Irene Fondón García
Profesora Contratada Doctora
Dep. de Teoría de la Señal y Comunicaciones
Escuela Técnica Superior de Ingeniería
Universidad de Sevilla
Sevilla, 2014
4
Trabajo Fin de Grado: Segmentación de la excavación en imágenes de fondo de ojo basada
en la curvatura de los vasos sanguíneos
Autora: Delia Velasco Montero Tutora: Irene Fondón García
El tribunal nombrado para juzgar el Proyecto arriba indicado, compuesto por los siguientes miembros:
Presidente:
Vocales:
Secretario:
Acuerdan otorgarle la calificación de:
Sevilla, 2014
El Secretario del Tribunal
5
ÍNDICE
1. INTRODUCCIÓN 7
1.1. OBJETIVO DEL PROYECTO Y MOTIVACIÓN 7
1.2. GLAUCOMA 7
LA ANATOMÍA EN LA IMAGEN FONDO DE OJO 8
2. TÉCNICAS DE COLOR Y ESTADO DEL ARTE 9
3. MÉTODO DE DETECCIÓN DE LA EXCAVACIÓN 11
3.1. DESCRIPCIÓN GENERAL DEL MÉTODO 11
3.2. EXTRACCIÓN DE LOS VASOS SANGUÍNEOS 12
3.3. DETECCIÓN DE LOS PUNTOS DE MAYOR CURVATURA DE LOS VASOS SANGUÍNEOS DETECTADOS 13
DELIMITACIÓN DE SEGMENTOS DE VASO 13
PERFIL DE CURVATURA DEL SEGMENTO 13
CURVAS RELEVANTES Y ÁNGULO ASOCIADO 14
3.4. SELECCIÓN MULTIETAPA DE LAS CURVAS RELEVANTES 15
PRIMERA ETAPA 15
SEGUNDA ETAPA 16
3.5. INTERPOLACIÓN DEL CONTORNO DE LA EXCAVACIÓN 16
4. RESULTADOS 18
5. CONCLUSIONES Y LÍNEAS FUTURAS 40
6. REFERENCIAS 41
6
ÍNDICE DE FIGURAS
Ilustración 1. Esquema de un Sistema CAD para el diagnóstico de glaucoma 7
Ilustración 2. Perfil del nervio óptico 8
Ilustración 3. Identificación de disco óptico y excavación 8
Ilustración 4. Cupping, aumento del cup-disk ratio 9
Ilustración 5. Espacio HSL 10
Ilustración 6. Esquema resumen del método 11
Ilustración 7. Plano tangente 12
Ilustración 8. Detección de unión entre vasos 13 Ilustración 9. Código de Freeman 13
Ilustración 10. Ángulo de la curva 14
Ilustración 11. Puntos de mayor curvatura detectados 14
Ilustración 12. Primera etapa de selección 15
Ilustración 13. Sectores en torno al círculo y nuevo sistema de coordenadas 16
Ilustración 14. Segunda etapa. Las curvas en rojo han sido descartadas por orientación. Las curvas
cyan rodeadas son las curvas relevantes finales 16
Ilustración 15. Suavizado. La curva verde es el resultado de interpolar directamente; la azul, tras
suavizar 17
Ilustración 16. Segmentación final 17

7
1. INTRODUCCIÓN
1.1. OBJETIVO DEL PROYECTO Y MOTIVACIÓN
Con el desarrollo de los sistemas de análisis, tratamiento y procesado de imágenes han
surgido líneas de trabajo enfocadas a la aplicación de estas técnicas a diversos campos de
la medicina. Es el caso de los Sistemas de Ayuda al Diagnóstico más conocidos por sus
siglas en Inglés CAD (Computer-Aided Diagnosis), que basados usualmente en imágenes de
pacientes tratan de extraer información relevante para el diagnóstico. Este análisis elimina
subjetividad y muestra datos que a veces no son perceptibles por simple inspección visual.
Esto reduce el tiempo de diagnóstico y facilita la tarea del especialista. La procedencia de
las imágenes usadas y, por tanto, la enfermedad a diagnosticar es muy variada.
En el caso particular de patologías oculares, las denominadas imágenes de fondo
de ojo (Colour Fundus Images) constituyen una modalidad de imagen no invasiva,
actualmente usada en el diagnóstico de, entre otras, la retinopatía diabética y el glaucoma.
El trabajo que se presenta consiste en la implementación en Matlab de un algoritmo de
segmentación válido para ser incluido en cualquier sistema de ayuda al diagnóstico. En
concreto el algoritmo trata de segmentar (delimitación del contorno) una zona del ojo
denominada Excavación (Optic Cup), a partir de imágenes de fondo de ojo.
Como en todo sistema CAD, la segmentación constituye la fase principal, a partir de la
cual derivan el resto de pasos a seguir. Una correcta segmentación tanto del disco óptico
ocular como de la excavación posibilita la determinación de determinados parámetros que
permiten valorar el estado de la enfermedad. Frecuentemente es calculada la relación
entre ambos diámetros o cup-disk ratio (CDR), en general usando el diámetro vertical, y la
relación entre áreas o areas ratio.
1.2. GLAUCOMA
El glaucoma es una enfermedad en la que el aumento de la presión intraocular provoca
la degeneración progresiva de las fibras del nervio óptico dando lugar a una pérdida de
visión irreversible. En la actualidad, más de 60 millones de personas ven disminuida su
Segmentación
Disco Óptico
Segmentación
Excavación
Extracción de
parámetros Análisis y Diagnóstico
ILUSTRACIÓN 1. ESQUEMA DE UN SISTEMA CAD PARA EL DIAGNÓSTICO DE
GLAUCOMA
8
capacidad visual debido a esta enfermedad, siendo además la segunda causa de ceguera
según la Organización Mundial de la Salud. Un obstáculo en la lucha contra esta
enfermedad es que los síntomas son difíciles de detectar pues no aparece dolor en sus
primeras fases, únicamente una ligera pérdida de visión en la parte periférica del campo
visual que resulta indetectable hasta que el desarrollo de la enfermedad es mayor. Es, por
tanto, de gran importancia la evaluación de imágenes de fondo de ojo para la detección
precoz del glaucoma y su tratamiento de manera inmediata o, incluso, para realizar un
seguimiento de la enfermedad (1).
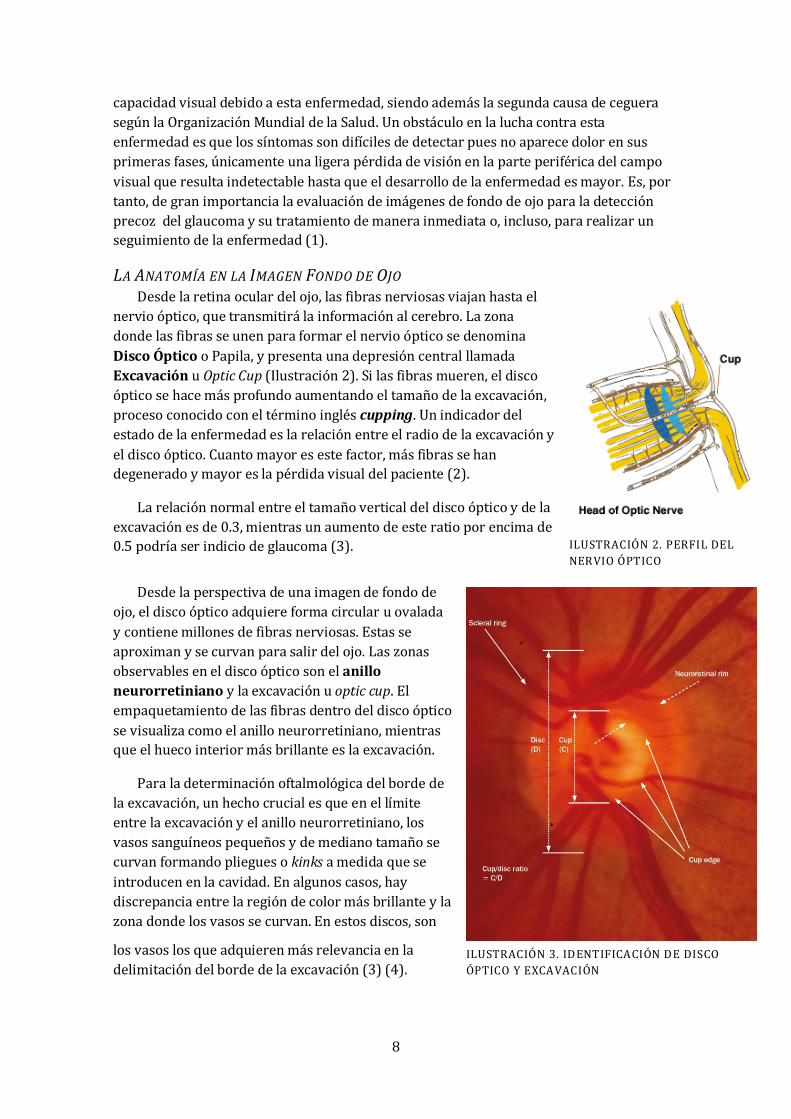
LA ANATOMÍA EN LA IMAGEN FONDO DE OJO Desde la retina ocular del ojo, las fibras nerviosas viajan hasta el
nervio óptico, que transmitirá la información al cerebro. La zona
donde las fibras se unen para formar el nervio óptico se denomina
Disco Óptico o Papila, y presenta una depresión central llamada
Excavación u Optic Cup (Ilustración 2). Si las fibras mueren, el disco
óptico se hace más profundo aumentando el tamaño de la excavación,
proceso conocido con el término inglés cupping. Un indicador del
estado de la enfermedad es la relación entre el radio de la excavación y
el disco óptico. Cuanto mayor es este factor, más fibras se han
degenerado y mayor es la pérdida visual del paciente (2).
La relación normal entre el tamaño vertical del disco óptico y de la
excavación es de 0.3, mientras un aumento de este ratio por encima de
0.5 podría ser indicio de glaucoma (3).
Desde la perspectiva de una imagen de fondo de
ojo, el disco óptico adquiere forma circular u ovalada
y contiene millones de fibras nerviosas. Estas se
aproximan y se curvan para salir del ojo. Las zonas
observables en el disco óptico son el anillo
neurorretiniano y la excavación u optic cup. El
empaquetamiento de las fibras dentro del disco óptico
se visualiza como el anillo neurorretiniano, mientras
que el hueco interior más brillante es la excavación.
Para la determinación oftalmológica del borde de
la excavación, un hecho crucial es que en el límite
entre la excavación y el anillo neurorretiniano, los
vasos sanguíneos pequeños y de mediano tamaño se
curvan formando pliegues o kinks a medida que se
introducen en la cavidad. En algunos casos, hay
discrepancia entre la región de color más brillante y la
zona donde los vasos se curvan. En estos discos, son
los vasos los que adquieren más relevancia en la
delimitación del borde de la excavación (3) (4).
ILUSTRACIÓN 2. PERFIL DEL
NERVIO ÓPTICO
ILUSTRACIÓN 3. IDENTIFICACIÓN DE DISCO
ÓPTICO Y EXCAVACIÓN
9
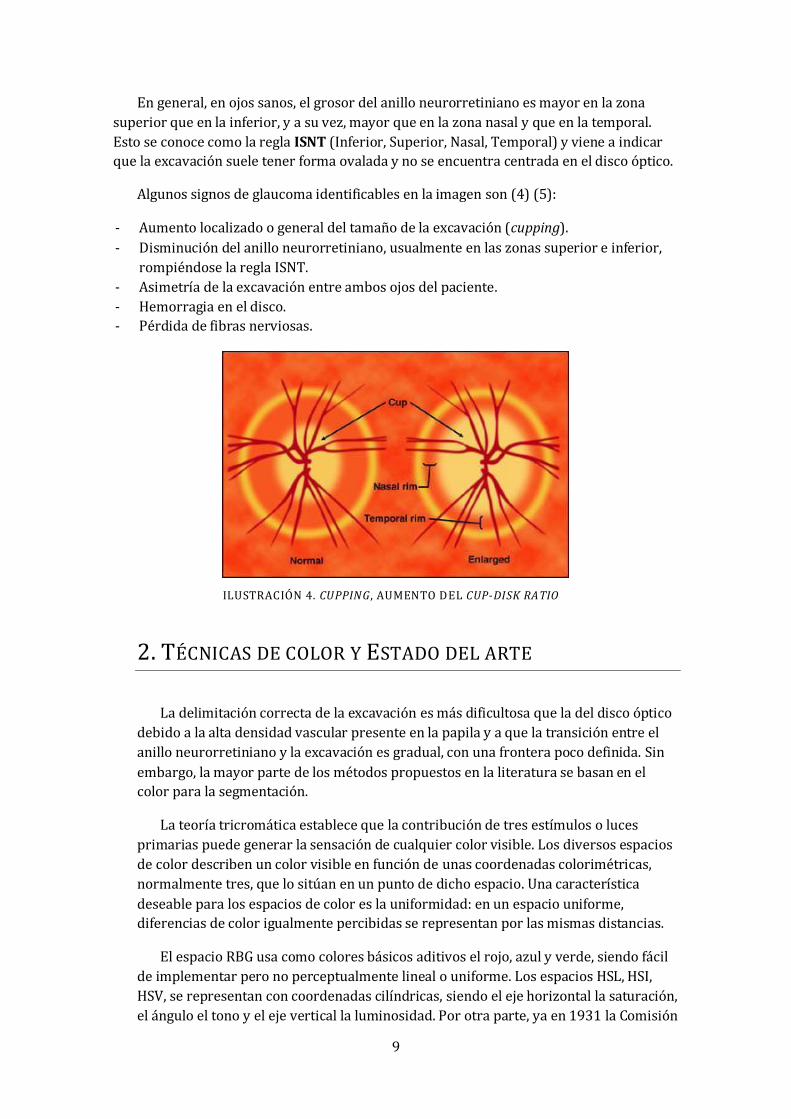
En general, en ojos sanos, el grosor del anillo neurorretiniano es mayor en la zona
superior que en la inferior, y a su vez, mayor que en la zona nasal y que en la temporal.
Esto se conoce como la regla ISNT (Inferior, Superior, Nasal, Temporal) y viene a indicar
que la excavación suele tener forma ovalada y no se encuentra centrada en el disco óptico.
Algunos signos de glaucoma identificables en la imagen son (4) (5):
- Aumento localizado o general del tamaño de la excavación (cupping).
- Disminución del anillo neurorretiniano, usualmente en las zonas superior e inferior,
rompiéndose la regla ISNT.
- Asimetría de la excavación entre ambos ojos del paciente.
- Hemorragia en el disco.
- Pérdida de fibras nerviosas.
2. TÉCNICAS DE COLOR Y ESTADO DEL ARTE
La delimitación correcta de la excavación es más dificultosa que la del disco óptico
debido a la alta densidad vascular presente en la papila y a que la transición entre el
anillo neurorretiniano y la excavación es gradual, con una frontera poco definida. Sin
embargo, la mayor parte de los métodos propuestos en la literatura se basan en el
color para la segmentación.
La teoría tricromática establece que la contribución de tres estímulos o luces
primarias puede generar la sensación de cualquier color visible. Los diversos espacios
de color describen un color visible en función de unas coordenadas colorimétricas,
normalmente tres, que lo sitúan en un punto de dicho espacio. Una característica
deseable para los espacios de color es la uniformidad: en un espacio uniforme,
diferencias de color igualmente percibidas se representan por las mismas distancias.
El espacio RBG usa como colores básicos aditivos el rojo, azul y verde, siendo fácil
de implementar pero no perceptualmente lineal o uniforme. Los espacios HSL, HSI,
HSV, se representan con coordenadas cilíndricas, siendo el eje horizontal la saturación,
el ángulo el tono y el eje vertical la luminosidad. Por otra parte, ya en 1931 la Comisión
ILUSTRACIÓN 4. CUPPING , AUMENTO DEL CUP-DISK RATIO

10
Internacional del Color, CIE, estandarizó el sistema CIE XYZ, que
elige colores no visibles como primarios para representar
cualquier color con unas coordenadas positivas. Los esfuerzos
por conseguir un espacio uniforme acabaron en el desarrollo de
dos espacios con más uniformidad: CIE L*a*b* (1976) y CIE
L*u*v*, cuyas magnitudes derivan matemáticamente de los
triestímulos XYZ. La luminosidad viene representada por L*
mientras la cromaticidad por el conjunto (a*,b*): a* para la
escala rojo/verde y b* para la amarillo/azul (6) (7) (8).
Numerosos métodos basados en color han sido probados para segmentar el disco
óptico. En el caso de la excavación el número se reduce, aunque existen diversas
técnicas de análisis de imagen encaminadas a ello (9):
Partiendo de que la excavación es una depresión dentro del disco óptico, una
técnica consiste en generar un modelo tridimensional a partir de la imagen 2D de
fondo de ojo, para posteriormente extraer la frontera de la excavación minimizando
una función de energía con respecto a la intensidad, forma y suavidad (10).
El método de las curvas de nivel o level-sets también figura en la literatura, con
autores que plantean el trabajo como un problema de minimización de una función de
energía, con un término de energía interna y otro de energía externa. Liu et al. (11)
inicializan el algoritmo umbralizando el canal verde del espacio RGB, que optimiza la
visibilidad de la excavación, y ajustan el resultado final a una elipse para eliminar
irregularidades. Wong et al. (12) incluyen, además, una función de distancia que se
acercará al level-set al minimizar la energía externa.
Optando por técnicas en escala de gris y umbralización, Joshi et al. (13), tras
comparar los distintos espacios de color, seleccionan el canal a* del espacio L*a*b*, en
el que la región correspondiente a la excavación aparece oscura y con gran contraste
respecto al resto del disco óptico. La umbralización es seguida de una reflexión de la
parte temporal para obtener la nasal, normalmente oculta tras vasos sanguíneos. Otros
autores fijan la búsqueda de los píxeles más brillantes en el plano verde del espacio
RGB (11) o hacen uso de un conjunto de operaciones morfológicas en dicho plano de
color (14).
Recurriendo al método de segmentación k-means, otros algoritmos basan la
segmentación de la excavación en la información real de color tal como es percibida
por el sistema visual humano, usando el espacio de color L*a*b y la distancia CIE94
para el algoritmo de agrupamiento o clustering (15).
El problema de usar algoritmos basados únicamente en la información de color, ya
sea mediante el contraste entre la excavación y los alrededores o mediante level-sets,
radica en que la excavación presenta un cambio gradual de color en el borde. Además,
las diferentes condiciones de adquisición de la imagen dan lugar a variaciones en el
color, lo cual presenta un inconveniente para estos algoritmos. Los pliegues de los
ILUSTRACIÓN 5. ESPACIO HSL
11
vasos sanguíneos a su paso por el borde de la excavación aportan información
adicional. Esta es tenida en cuenta en algunos estudios más recientes (16) (17).
3. MÉTODO DE DETECCIÓN DE LA EXCAVACIÓN
Como hemos podido comprobar, la gran mayoría de los algoritmos diseñados para
la segmentación de la excavación ocular se basan sólo en el brillo (en un plano de
color) que diferencia la excavación u optic cup dentro del disco óptico. Sin embargo, el
método seguido en este trabajo, en la línea de Wong et al. (16) (17), recupera también
información de la curvatura de los vasos sanguíneos dentro de la papila, una evidencia
clave usada por expertos oftalmólogos a la hora de evaluar la imagen fondo de ojo.
3.1. DESCRIPCIÓN GENERAL DEL MÉTODO
El algoritmo desarrollado sigue el método propuesto por Joshi et al. en (18) y (19).
De manera simplificada, se basa en encontrar los puntos de curvatura de los vasos
sanguíneos debidas al límite de la excavación y calcular el contorno completo
mediante un spline de interpolación. Esta última fase del método supone una clara
mejora respecto al trabajo de Wong et al. (16), pues el ajuste a una elipse da como
resultado una segmentación menos sutil.
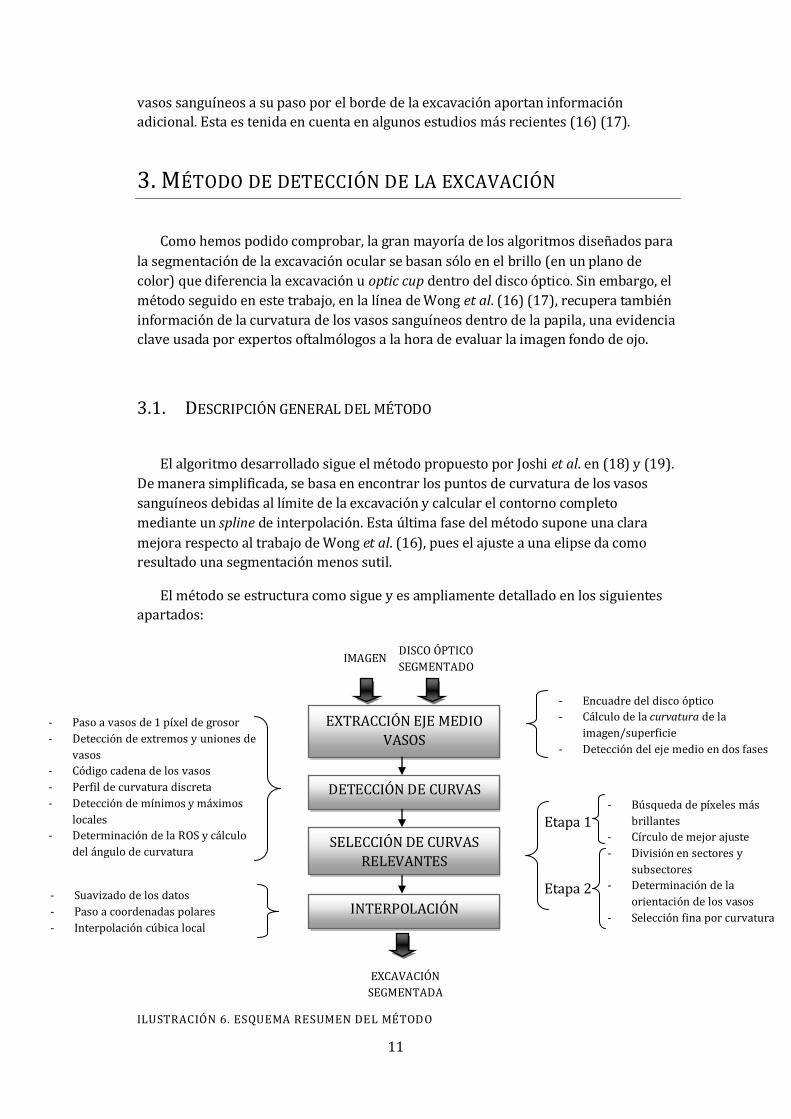
El método se estructura como sigue y es ampliamente detallado en los siguientes
apartados:
EXTRACCIÓN EJE MEDIO
VASOS
DETECCIÓN DE CURVAS
SELECCIÓN DE CURVAS
RELEVANTES
INTERPOLACIÓN
IMAGEN DISCO ÓPTICO
SEGMENTADO
EXCAVACIÓN
SEGMENTADA
- Encuadre del disco óptico
- Cálculo de la curvatura de la
imagen/superficie
- Detección del eje medio en dos fases
- Paso a vasos de 1 píxel de grosor
- Detección de extremos y uniones de
vasos
- Código cadena de los vasos
- Perfil de curvatura discreta
- Detección de mínimos y máximos
locales
- Determinación de la ROS y cálculo
del ángulo de curvatura
- Búsqueda de píxeles más
brillantes
- Círculo de mejor ajuste
- División en sectores y
subsectores
- Determinación de la
orientación de los vasos
- Selección fina por curvatura
Etapa 1
Etapa 2 - Suavizado de los datos
- Paso a coordenadas polares
- Interpolación cúbica local
ILUSTRACIÓN 6. ESQUEMA RESUMEN DEL MÉTODO

12
Como la excavación se encuentra en el interior del disco óptico, para optimizar la
eficiencia del algoritmo, inicialmente se realiza un encuadre de la imagen. Es decir,
durante todo el proceso se trabajará con la mínima fracción de la imagen que contiene
el disco óptico completo. Aunque la detección del disco óptico no es objetivo del
proyecto, existen numerosos métodos y se puede aplicar cualquiera de ellos.
3.2. EXTRACCIÓN DE LOS VASOS SANGUÍNEOS
Este primer paso consiste en detectar los vasos sanguíneos dentro del disco óptico.
Para posibilitar la posterior detección de los puntos de curvatura en los mismos
(siguiente fase del método), lo que se extraerá será el eje medio de los vasos.
El método seguido (20) interpreta el canal verde de la imagen como
superficie 3D, función de dos variables, en la que los vasos son “zanjas”. Se
extiende la definición de curvatura extrínseca de una función 1D a la imagen
2D. Si para una función la curvatura se define como la derivada del ángulo de
la recta tangente respecto a la curva, para una superficie es la derivada del
plano tangente respecto al plano imagen (STD, Surface Tangent Derivative).
El eje medio de los vasos presenta una curvatura alta, en la dirección
perpendicular al vaso.
Se demuestra que la curvatura de una función unidimensional y=f(x)
será máxima cuando su numerador (x) lo sea.
Se escoge, por tanto, (x) como parámetro que representa la STD. En cada píxel de
la imagen f(i,j) se evalúa la STD en cuatro direcciones x, y se extrae la máxima de ellas:
donde las derivadas direccionales se obtienen con las máscaras de Sobel 3x3
correspondientes a las cuatro direcciones especificadas.
Se detecta el eje medio de un vaso cuando la STD máxima de un píxel es mayor que
un umbral t y además mayor que la STD de los vecinos situados en esa dirección. Por
ejemplo, si , el píxel f(i,j) será considerado vaso sanguíneo si
.
Para una mejor detección de vasos de diferentes grosores y eliminación de ruido,
el algoritmo se desarrolla en dos fases:
ILUSTRACIÓN 7. PLANO
TANGENTE
13
- Primero se detecta el mapa de vasos con un umbral alto t1, se seleccionan únicamente
los píxeles pertenecientes al disco óptico y se eliminan los puntos aislados del mapa
obtenido.
- Posteriormente se realiza el mismo proceso con un segundo umbral t2 < t1, obteniendo
un segundo mapa de vasos.
- El mapa completo se inicializa como el primer mapa de vasos, y se va incrementando
añadiendo los píxeles 8-conectados del segundo mapa al mapa completo. Tras varias
iteraciones, se finaliza cuando no haya cambios en el resultado.
3.3. DETECCIÓN DE LOS PUNTOS DE MAYOR CURVATURA DE LOS VASOS
SANGUÍNEOS DETECTADOS
Una vez extraídos los vasos sanguíneos se procede a buscar los puntos de mayor
curvatura, a los que llamaremos conjunto {b} (bends, o puntos-curva).
DELIMITACIÓN DE SEGMENTOS DE VASO Primero se debe extraer cada segmento de vaso, limitado por una unión a otro
vaso o por una terminación.
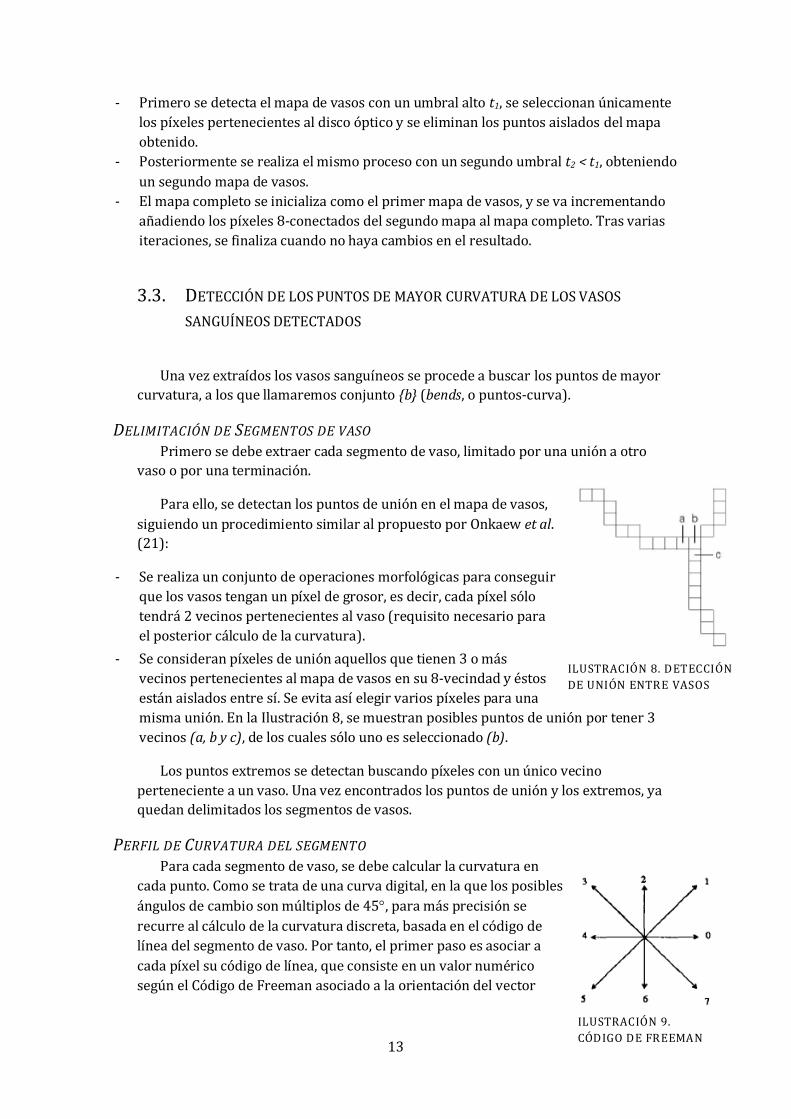
Para ello, se detectan los puntos de unión en el mapa de vasos,
siguiendo un procedimiento similar al propuesto por Onkaew et al.
(21):
- Se realiza un conjunto de operaciones morfológicas para conseguir
que los vasos tengan un píxel de grosor, es decir, cada píxel sólo
tendrá 2 vecinos pertenecientes al vaso (requisito necesario para
el posterior cálculo de la curvatura).
- Se consideran píxeles de unión aquellos que tienen 3 o más
vecinos pertenecientes al mapa de vasos en su 8-vecindad y éstos
están aislados entre sí. Se evita así elegir varios píxeles para una
misma unión. En la Ilustración 8, se muestran posibles puntos de unión por tener 3
vecinos (a, b y c), de los cuales sólo uno es seleccionado (b).
Los puntos extremos se detectan buscando píxeles con un único vecino
perteneciente a un vaso. Una vez encontrados los puntos de unión y los extremos, ya
quedan delimitados los segmentos de vasos.
PERFIL DE CURVATURA DEL SEGMENTO Para cada segmento de vaso, se debe calcular la curvatura en
cada punto. Como se trata de una curva digital, en la que los posibles
ángulos de cambio son múltiplos de 45, para más precisión se
recurre al cálculo de la curvatura discreta, basada en el código de
línea del segmento de vaso. Por tanto, el primer paso es asociar a
cada píxel su código de línea, que consiste en un valor numérico
según el Código de Freeman asociado a la orientación del vector
ILUSTRACIÓN 8. DETECCIÓN
DE UNIÓN ENTRE VASOS
ILUSTRACIÓN 9.
CÓDIGO DE FREEMAN
14
, siendo el píxel en cuestión y el píxel predecesor (22).
Comparando los diversos métodos de cálculo de curvatura basados en el código
de línea, Pal et al. (23) proponen una técnica avanzada que obtiene mejores resultados
que las anteriormente usadas (22):
donde
siendo el código cadena del j-ésimo píxel posterior al píxel i. La base de este
cálculo consiste en agrupar en k parejas los píxeles cercanos al píxel y calcular la
diferencia de códigos de línea de cada pareja.
Como la curvatura es un parámetro que depende de un conjunto de píxeles (mayor
cuanto más elevada sea k), al calcular la curvatura son automáticamente rechazados
los segmentos de vaso de tamaño reducido, la mayoría de ellos procedentes de ruido
en la fase de detección del mapa de vasos.
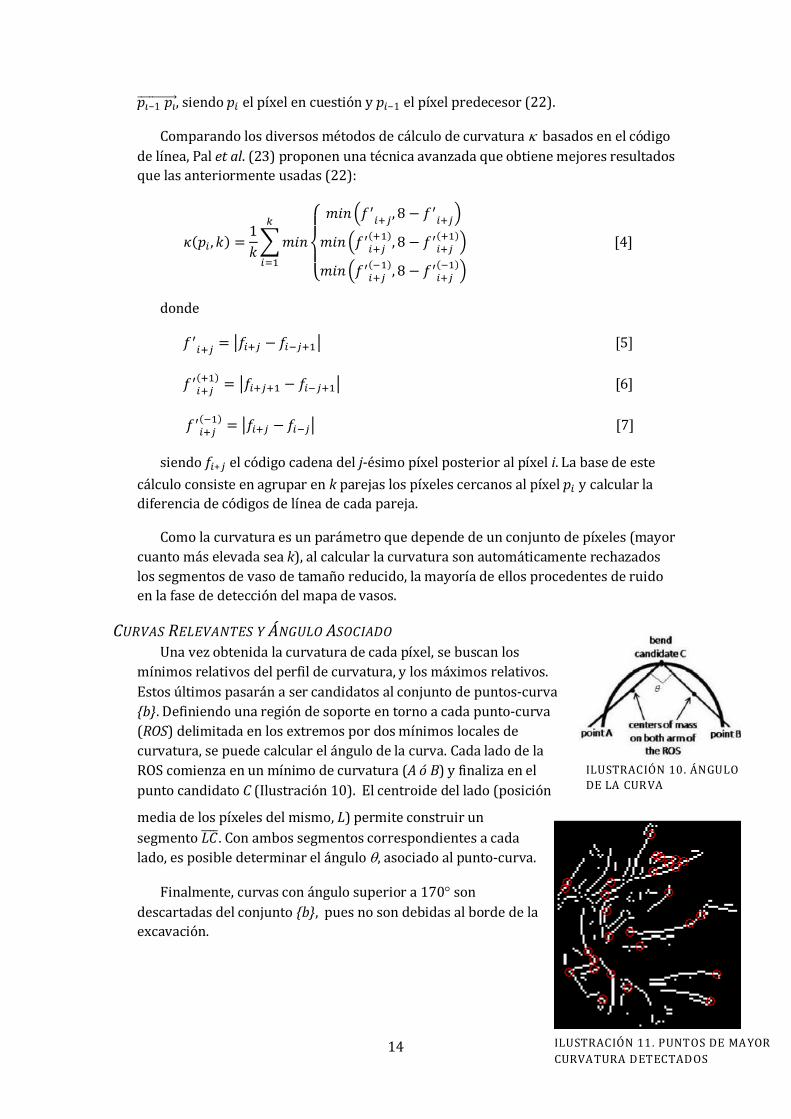
CURVAS RELEVANTES Y ÁNGULO ASOCIADO Una vez obtenida la curvatura de cada píxel, se buscan los
mínimos relativos del perfil de curvatura, y los máximos relativos.
Estos últimos pasarán a ser candidatos al conjunto de puntos-curva
{b}. Definiendo una región de soporte en torno a cada punto-curva
(ROS) delimitada en los extremos por dos mínimos locales de
curvatura, se puede calcular el ángulo de la curva. Cada lado de la
ROS comienza en un mínimo de curvatura (A ó B) y finaliza en el
punto candidato C (Ilustración 10). El centroide del lado (posición
media de los píxeles del mismo, L) permite construir un
segmento . Con ambos segmentos correspondientes a cada
lado, es posible determinar el ángulo , asociado al punto-curva.
Finalmente, curvas con ángulo superior a 170 son
descartadas del conjunto {b}, pues no son debidas al borde de la
excavación.
ILUSTRACIÓN 10. ÁNGULO
DE LA CURVA
ILUSTRACIÓN 11. PUNTOS DE MAYOR
CURVATURA DETECTADOS
15
3.4. SELECCIÓN MULTIETAPA DE LAS CURVAS RELEVANTES
El siguiente paso trata de identificar, del conjunto {b}, sólo las curvas relevantes
para delimitar la excavación. Para ello, se tiene en cuenta tanto la información de color
presente en la imagen, como la estructura anatómica de la imagen fondo de ojo.
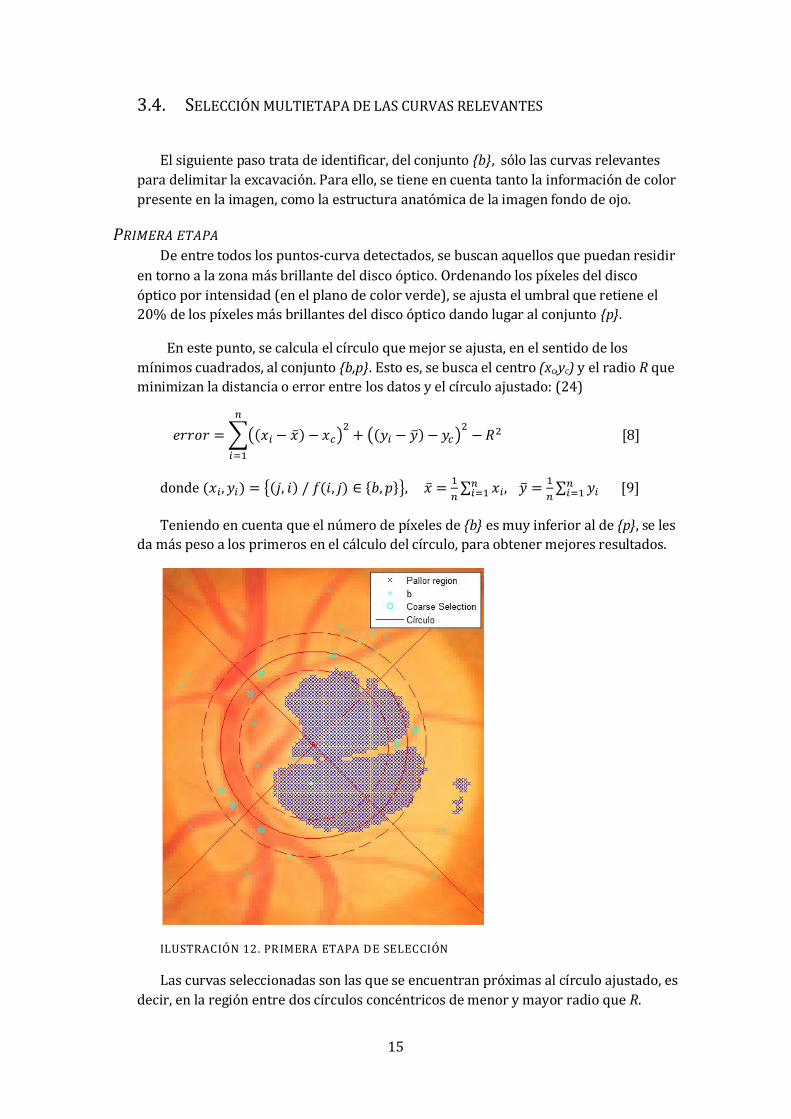
PRIMERA ETAPA De entre todos los puntos-curva detectados, se buscan aquellos que puedan residir
en torno a la zona más brillante del disco óptico. Ordenando los píxeles del disco
óptico por intensidad (en el plano de color verde), se ajusta el umbral que retiene el
20% de los píxeles más brillantes del disco óptico dando lugar al conjunto {p}.
En este punto, se calcula el círculo que mejor se ajusta, en el sentido de los
mínimos cuadrados, al conjunto {b,p}. Esto es, se busca el centro (xc,yc) y el radio R que
minimizan la distancia o error entre los datos y el círculo ajustado: (24)
donde
Teniendo en cuenta que el número de píxeles de {b} es muy inferior al de {p}, se les
da más peso a los primeros en el cálculo del círculo, para obtener mejores resultados.
ILUSTRACIÓN 12. PRIMERA ETAPA DE SELECCIÓN
Las curvas seleccionadas son las que se encuentran próximas al círculo ajustado, es
decir, en la región entre dos círculos concéntricos de menor y mayor radio que R.
16
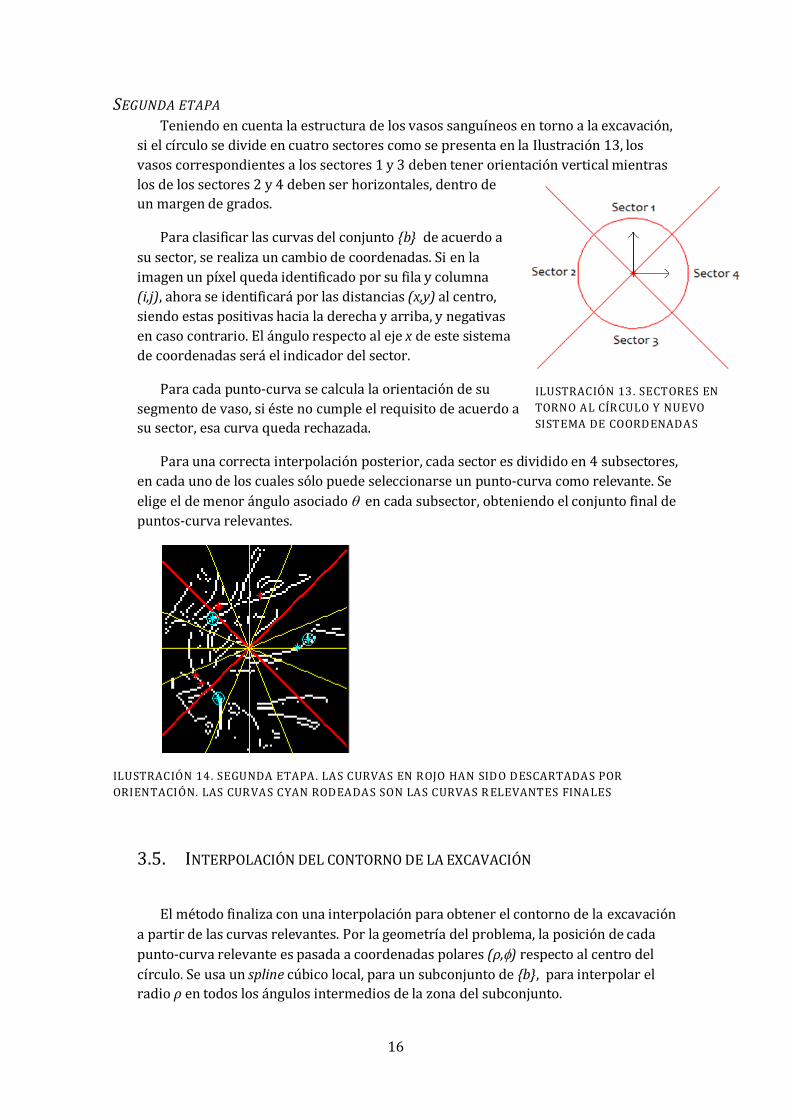
SEGUNDA ETAPA Teniendo en cuenta la estructura de los vasos sanguíneos en torno a la excavación,
si el círculo se divide en cuatro sectores como se presenta en la Ilustración 13, los
vasos correspondientes a los sectores 1 y 3 deben tener orientación vertical mientras
los de los sectores 2 y 4 deben ser horizontales, dentro de
un margen de grados.
Para clasificar las curvas del conjunto {b} de acuerdo a
su sector, se realiza un cambio de coordenadas. Si en la
imagen un píxel queda identificado por su fila y columna
(i,j), ahora se identificará por las distancias (x,y) al centro,
siendo estas positivas hacia la derecha y arriba, y negativas
en caso contrario. El ángulo respecto al eje x de este sistema
de coordenadas será el indicador del sector.
Para cada punto-curva se calcula la orientación de su
segmento de vaso, si éste no cumple el requisito de acuerdo a
su sector, esa curva queda rechazada.
Para una correcta interpolación posterior, cada sector es dividido en 4 subsectores,
en cada uno de los cuales sólo puede seleccionarse un punto-curva como relevante. Se
elige el de menor ángulo asociado en cada subsector, obteniendo el conjunto final de
puntos-curva relevantes.
ILUSTRACIÓN 14. SEGUNDA ETAPA. LAS CURVAS EN ROJO HAN SIDO DESCARTADAS POR
ORIENTACIÓN. LAS CURVAS CYAN RODEADAS SON LAS CURVAS R ELEVANTES FINALES
3.5. INTERPOLACIÓN DEL CONTORNO DE LA EXCAVACIÓN
El método finaliza con una interpolación para obtener el contorno de la excavación
a partir de las curvas relevantes. Por la geometría del problema, la posición de cada
punto-curva relevante es pasada a coordenadas polares (ρ,) respecto al centro del
círculo. Se usa un spline cúbico local, para un subconjunto de {b}, para interpolar el
radio ρ en todos los ángulos intermedios de la zona del subconjunto.
ILUSTRACIÓN 13. SECTORES EN
TORNO AL CÍRCULO Y NUEVO
SISTEMA DE COORDENADAS
17
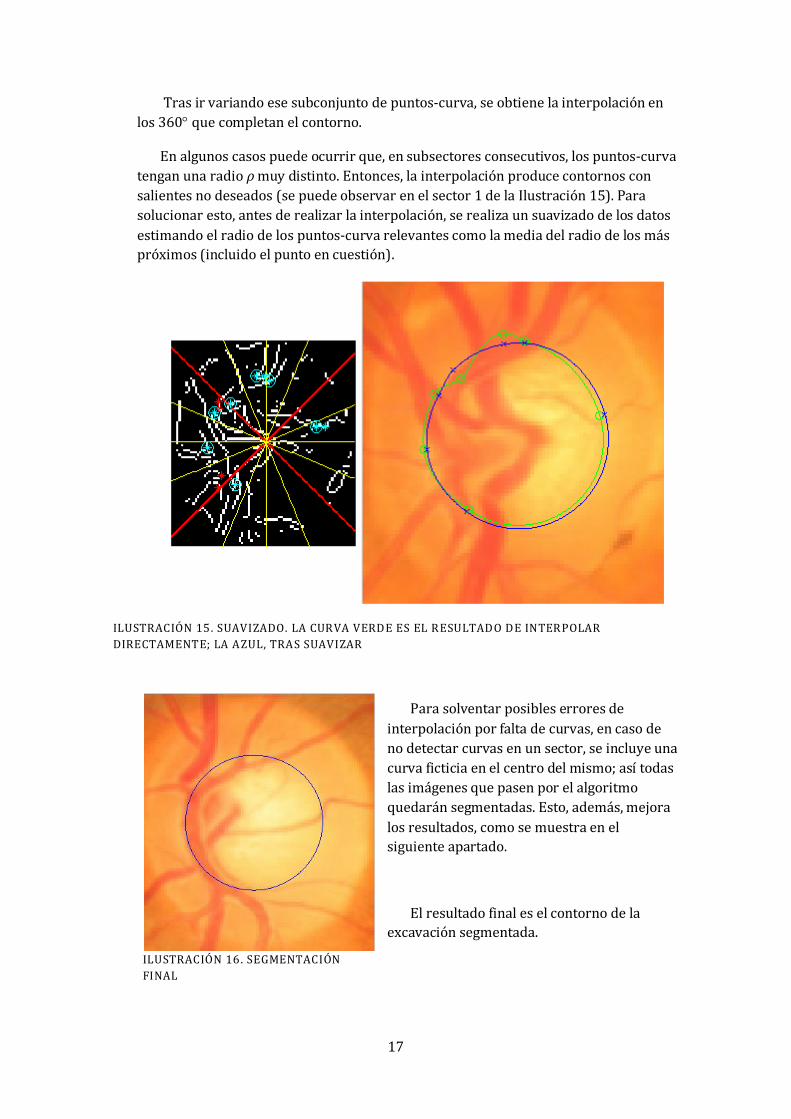
Tras ir variando ese subconjunto de puntos-curva, se obtiene la interpolación en
los 360 que completan el contorno.
En algunos casos puede ocurrir que, en subsectores consecutivos, los puntos-curva
tengan una radio ρ muy distinto. Entonces, la interpolación produce contornos con
salientes no deseados (se puede observar en el sector 1 de la Ilustración 15). Para
solucionar esto, antes de realizar la interpolación, se realiza un suavizado de los datos
estimando el radio de los puntos-curva relevantes como la media del radio de los más
próximos (incluido el punto en cuestión).
ILUSTRACIÓN 15. SUAVIZADO. LA CURVA VERDE ES EL RESULTADO DE INTERPOLAR
DIRECTAMENTE; LA AZUL, TRAS SUAVIZAR
Para solventar posibles errores de
interpolación por falta de curvas, en caso de
no detectar curvas en un sector, se incluye una
curva ficticia en el centro del mismo; así todas
las imágenes que pasen por el algoritmo
quedarán segmentadas. Esto, además, mejora
los resultados, como se muestra en el
siguiente apartado.
El resultado final es el contorno de la
excavación segmentada.
ILUSTRACIÓN 16. SEGMENTACIÓN
FINAL
18
4. RESULTADOS
El método implementado se ha ejecutado sobre un conjunto de 50 imágenes de fondo
de ojo. Además, se ha partido de la segmentación del disco óptico realizada por dos
expertos.
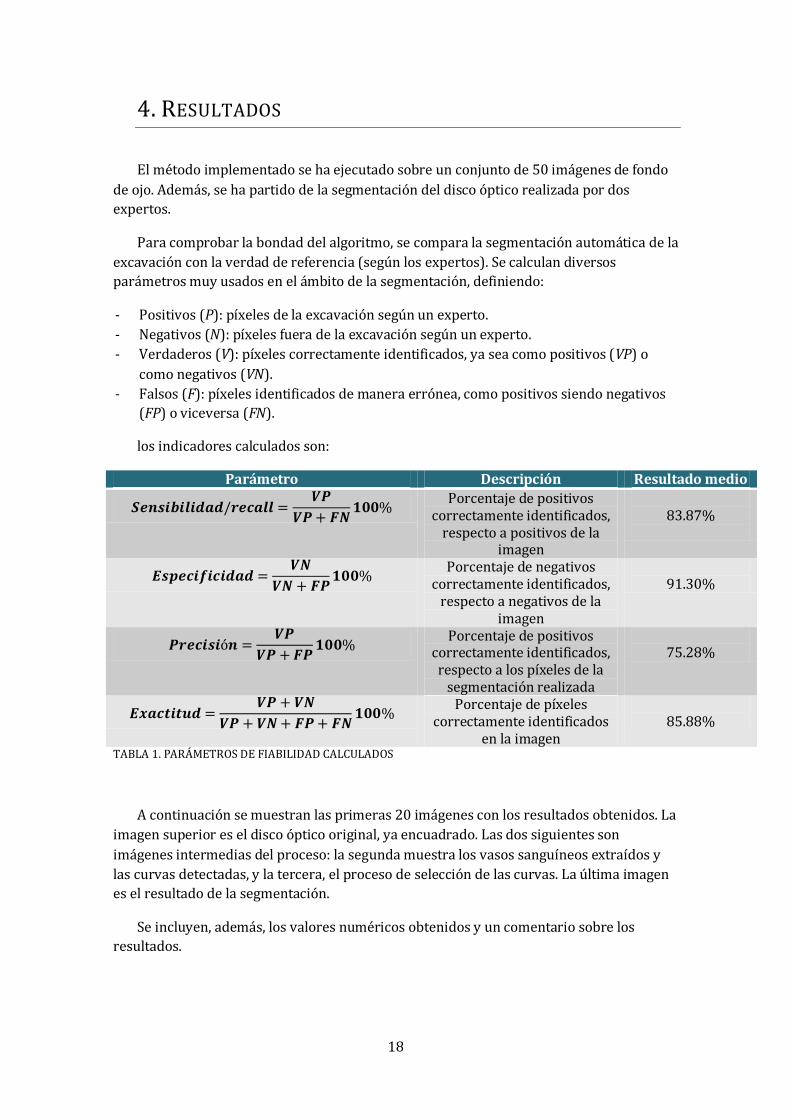
Para comprobar la bondad del algoritmo, se compara la segmentación automática de la
excavación con la verdad de referencia (según los expertos). Se calculan diversos
parámetros muy usados en el ámbito de la segmentación, definiendo:
- Positivos (P): píxeles de la excavación según un experto.
- Negativos (N): píxeles fuera de la excavación según un experto.
- Verdaderos (V): píxeles correctamente identificados, ya sea como positivos (VP) o
como negativos (VN).
- Falsos (F): píxeles identificados de manera errónea, como positivos siendo negativos
(FP) o viceversa (FN).
los indicadores calculados son:
Parámetro Descripción Resultado medio
Porcentaje de positivos correctamente identificados,
respecto a positivos de la imagen
83.87%
Porcentaje de negativos correctamente identificados,
respecto a negativos de la imagen
91.30%
Porcentaje de positivos correctamente identificados, respecto a los píxeles de la
segmentación realizada
75.28%
Porcentaje de píxeles correctamente identificados
en la imagen
85.88%
TABLA 1. PARÁMETROS DE FIABILIDAD CALCULADOS
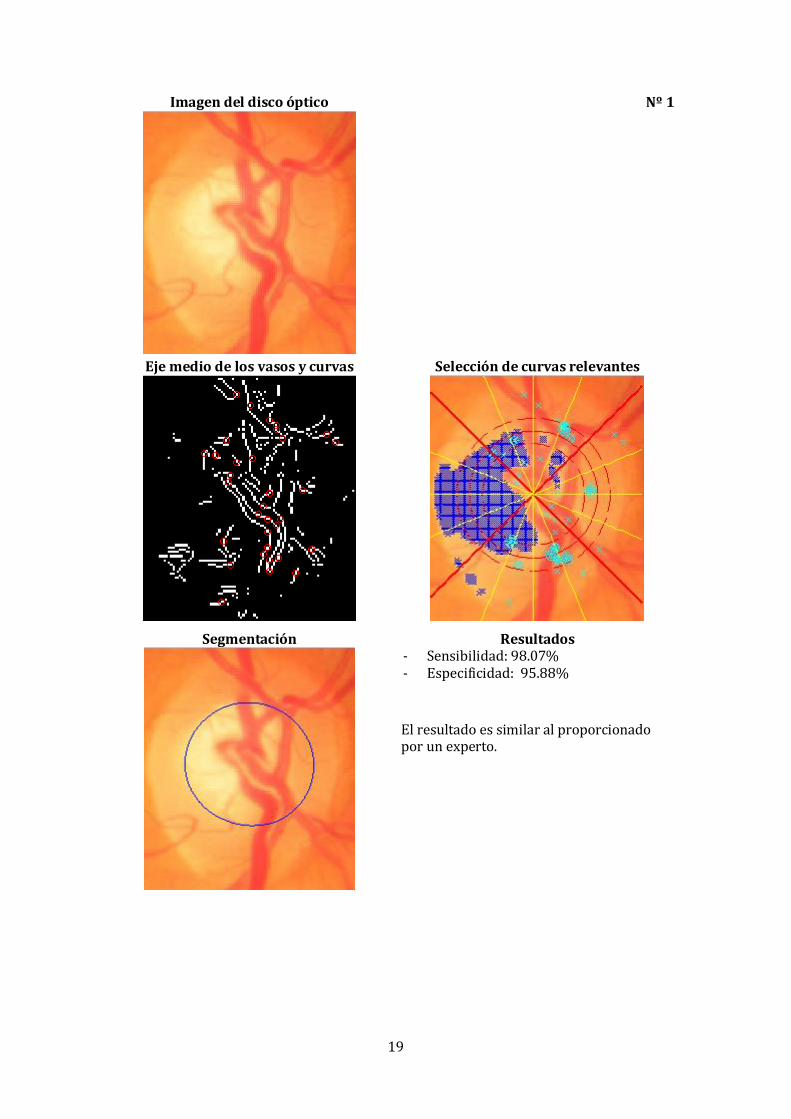
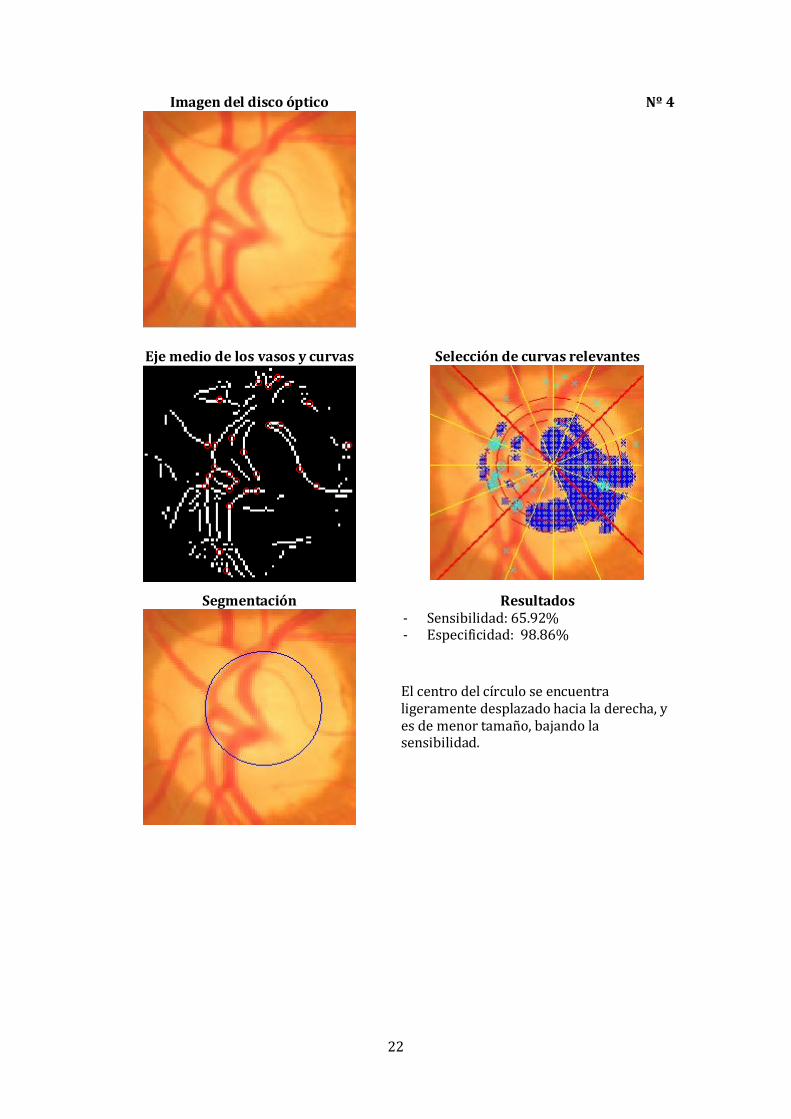
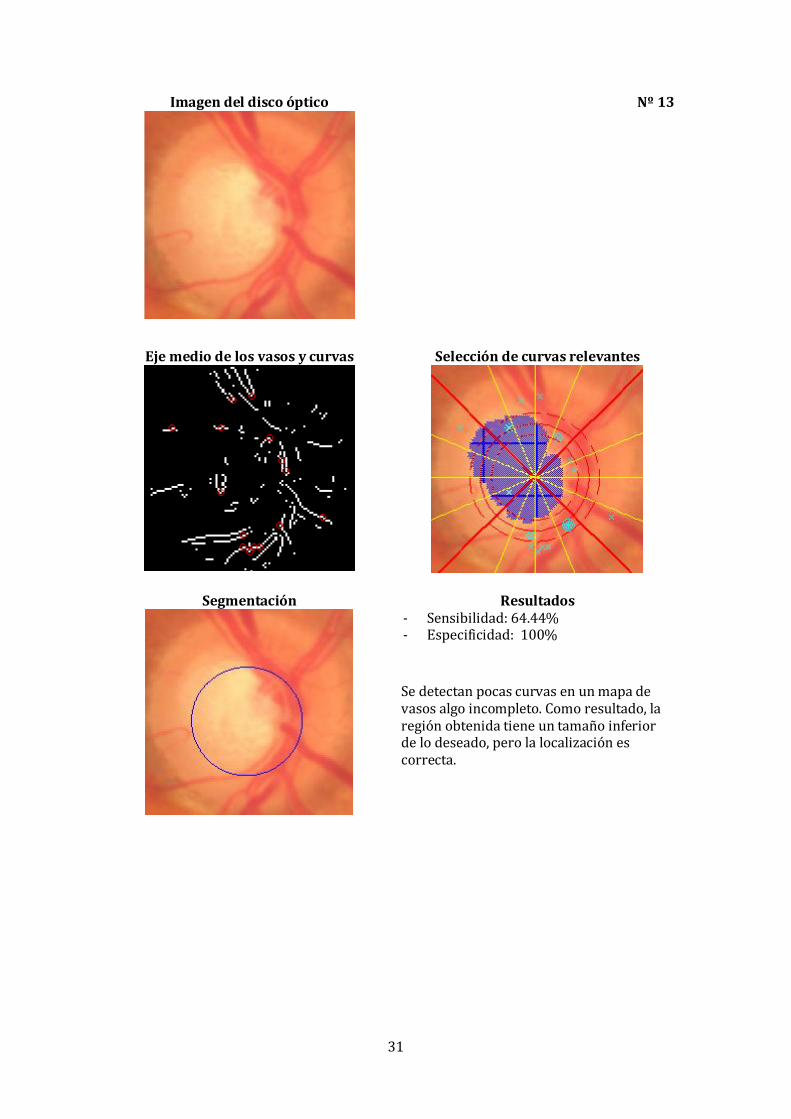
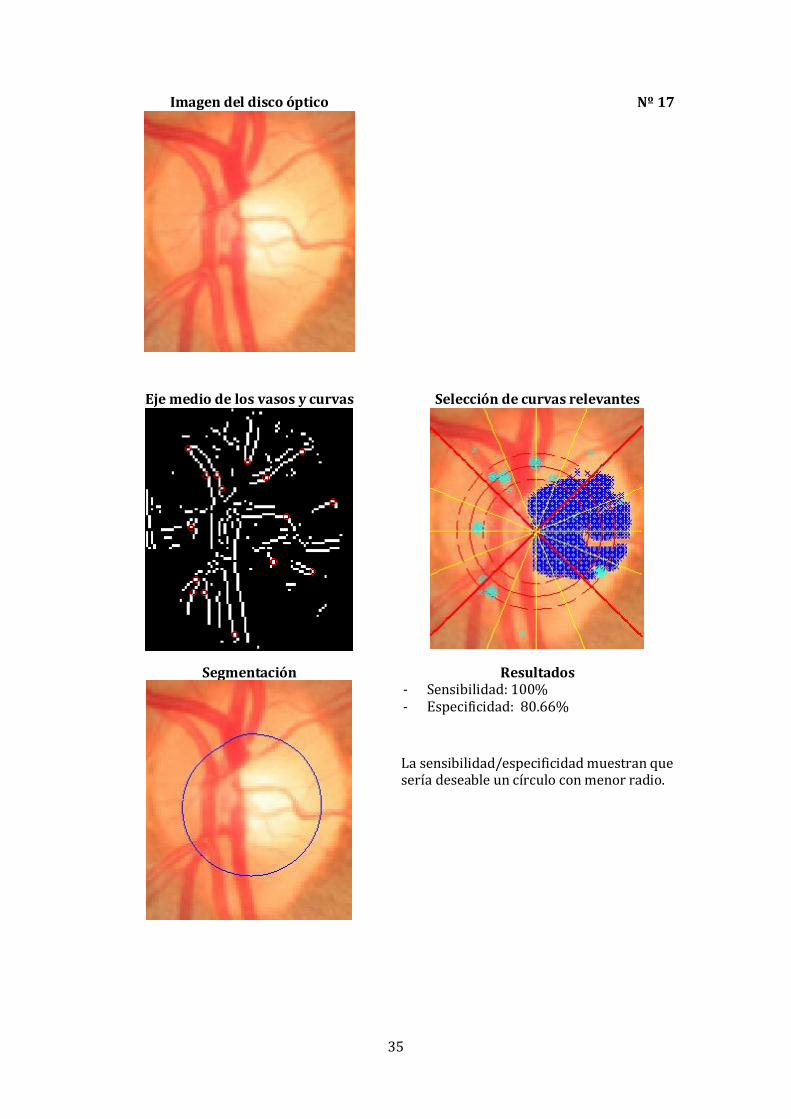
A continuación se muestran las primeras 20 imágenes con los resultados obtenidos. La
imagen superior es el disco óptico original, ya encuadrado. Las dos siguientes son
imágenes intermedias del proceso: la segunda muestra los vasos sanguíneos extraídos y
las curvas detectadas, y la tercera, el proceso de selección de las curvas. La última imagen
es el resultado de la segmentación.
Se incluyen, además, los valores numéricos obtenidos y un comentario sobre los
resultados.
19
Imagen del disco óptico
Nº 1
Eje medio de los vasos y curvas
Selección de curvas relevantes
Segmentación
Resultados - Sensibilidad: 98.07% - Especificidad: 95.88%
El resultado es similar al proporcionado por un experto.

20
Imagen del disco óptico
Nº 2
Eje medio de los vasos y curvas
Selección de curvas relevantes
Segmentación
Resultados - Sensibilidad: 89.71% - Especificidad: 89.64%
El resultado es bueno, aunque sería mejor si se hubiera detectado alguna curva en el sector 4.
21
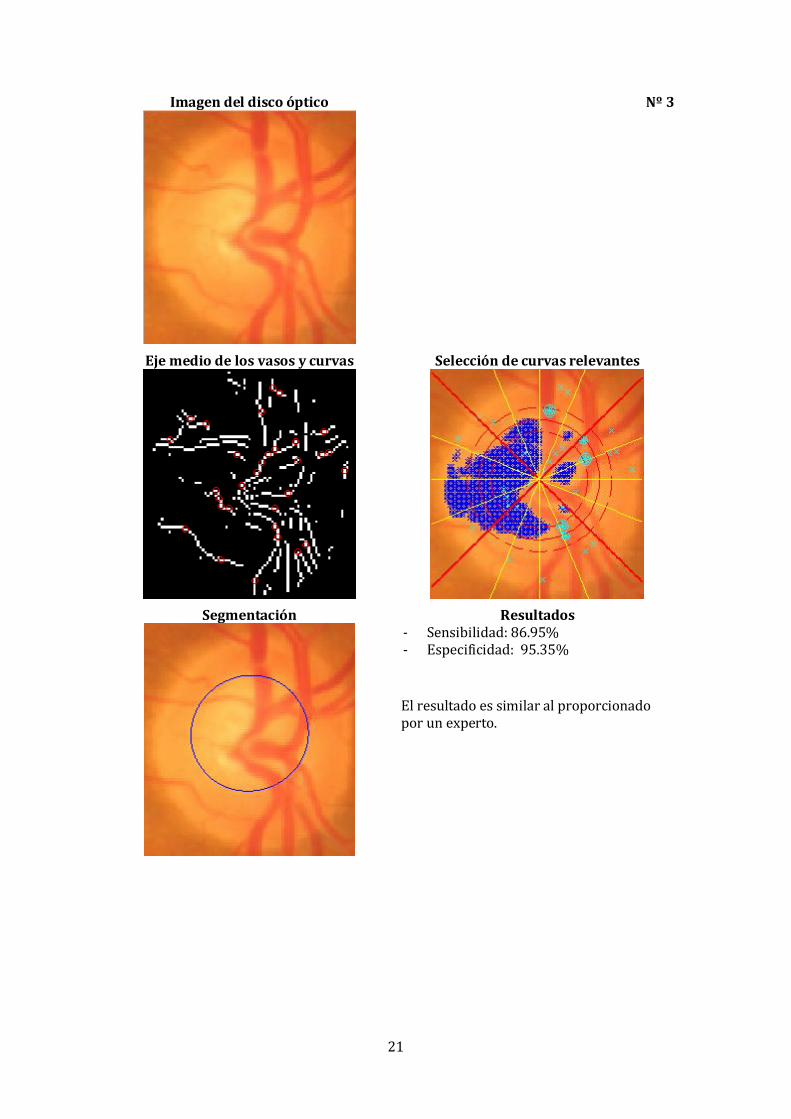
Imagen del disco óptico
Nº 3
Eje medio de los vasos y curvas
Selección de curvas relevantes
Segmentación
Resultados - Sensibilidad: 86.95% - Especificidad: 95.35%
El resultado es similar al proporcionado por un experto.
22
Imagen del disco óptico
Nº 4
Eje medio de los vasos y curvas
Selección de curvas relevantes
Segmentación
Resultados - Sensibilidad: 65.92% - Especificidad: 98.86%
El centro del círculo se encuentra ligeramente desplazado hacia la derecha, y es de menor tamaño, bajando la sensibilidad.
23
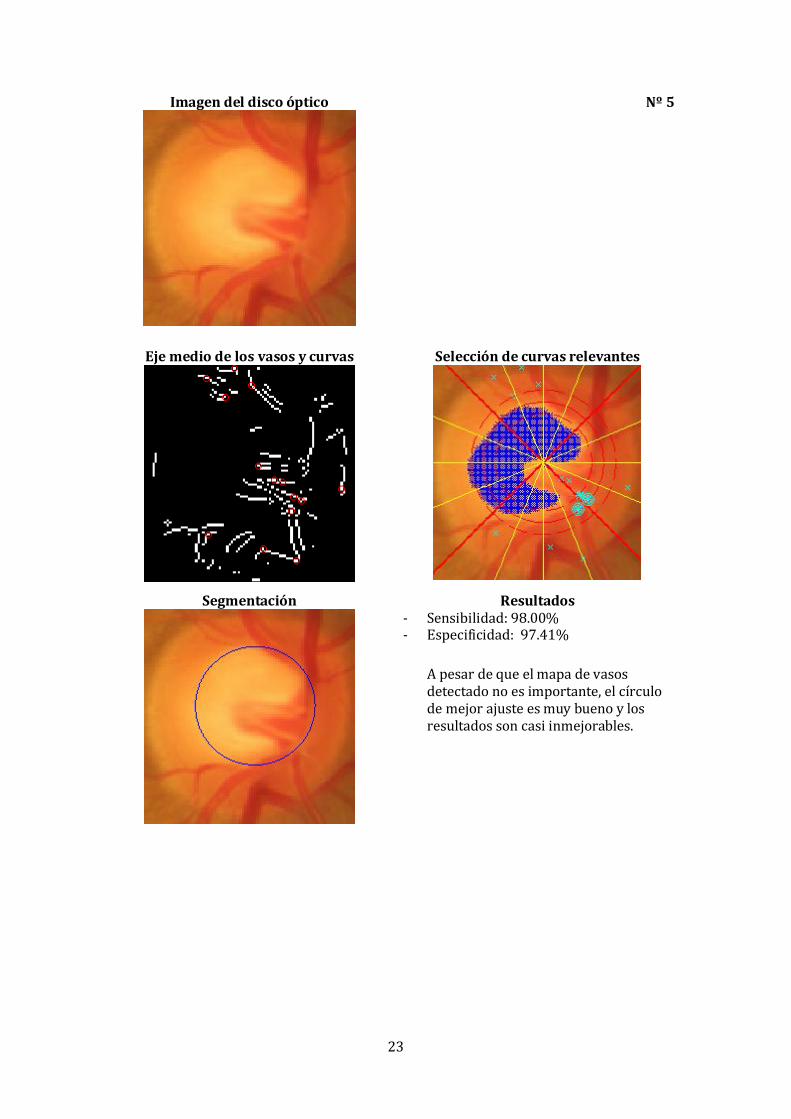
Imagen del disco óptico
Nº 5
Eje medio de los vasos y curvas
Selección de curvas relevantes
Segmentación
Resultados - Sensibilidad: 98.00% - Especificidad: 97.41%
A pesar de que el mapa de vasos detectado no es importante, el círculo de mejor ajuste es muy bueno y los resultados son casi inmejorables.
24
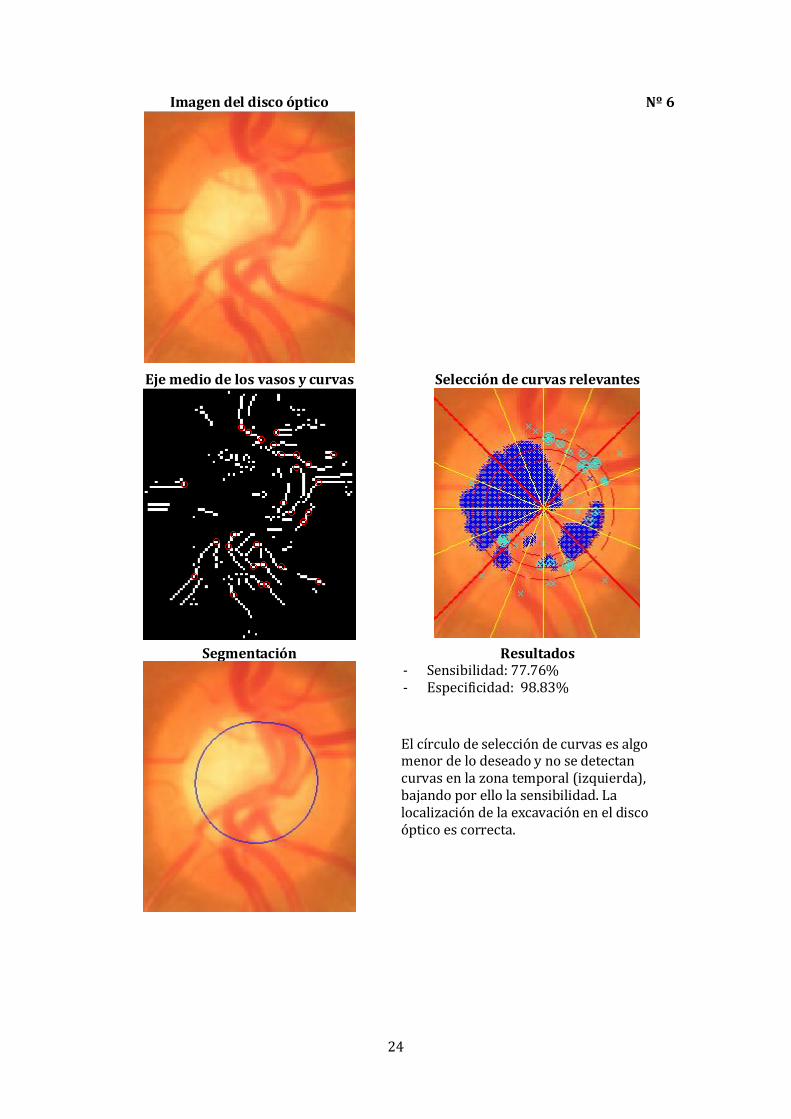
Imagen del disco óptico
Nº 6
Eje medio de los vasos y curvas
Selección de curvas relevantes
Segmentación
Resultados - Sensibilidad: 77.76% - Especificidad: 98.83%
El círculo de selección de curvas es algo menor de lo deseado y no se detectan curvas en la zona temporal (izquierda), bajando por ello la sensibilidad. La localización de la excavación en el disco óptico es correcta.
25
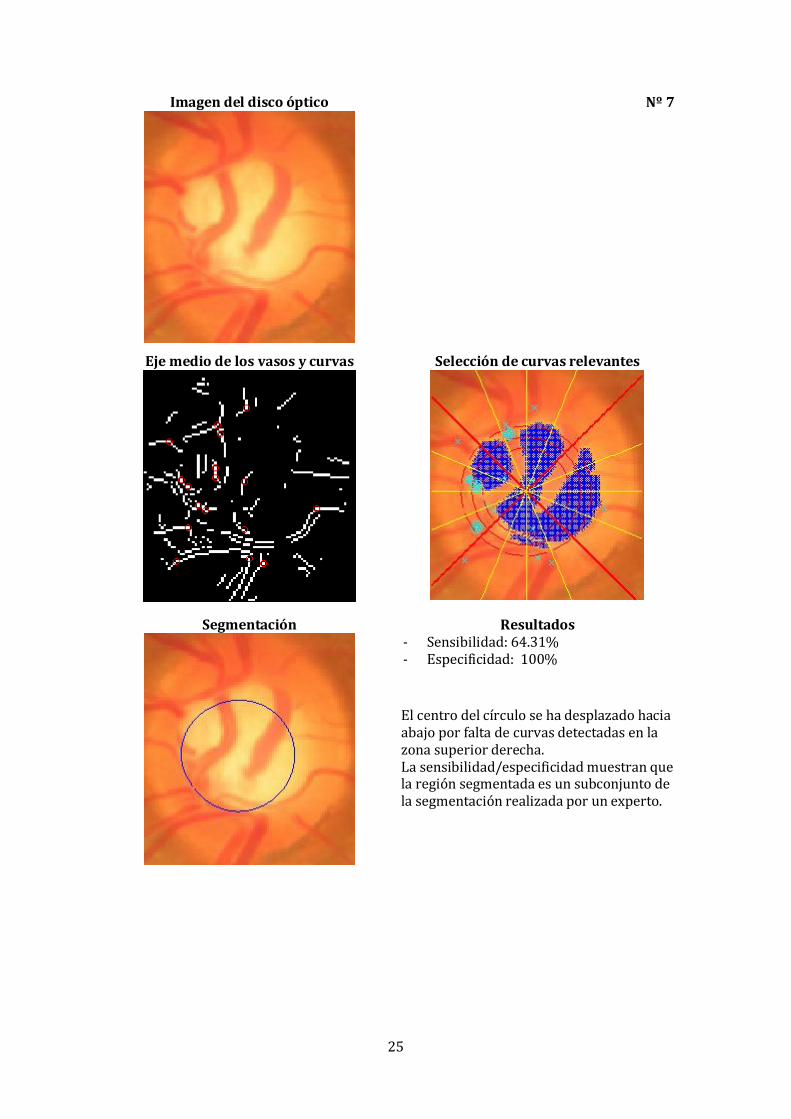
Imagen del disco óptico
Nº 7
Eje medio de los vasos y curvas
Selección de curvas relevantes
Segmentación
Resultados - Sensibilidad: 64.31% - Especificidad: 100%
El centro del círculo se ha desplazado hacia abajo por falta de curvas detectadas en la zona superior derecha. La sensibilidad/especificidad muestran que la región segmentada es un subconjunto de la segmentación realizada por un experto.
26
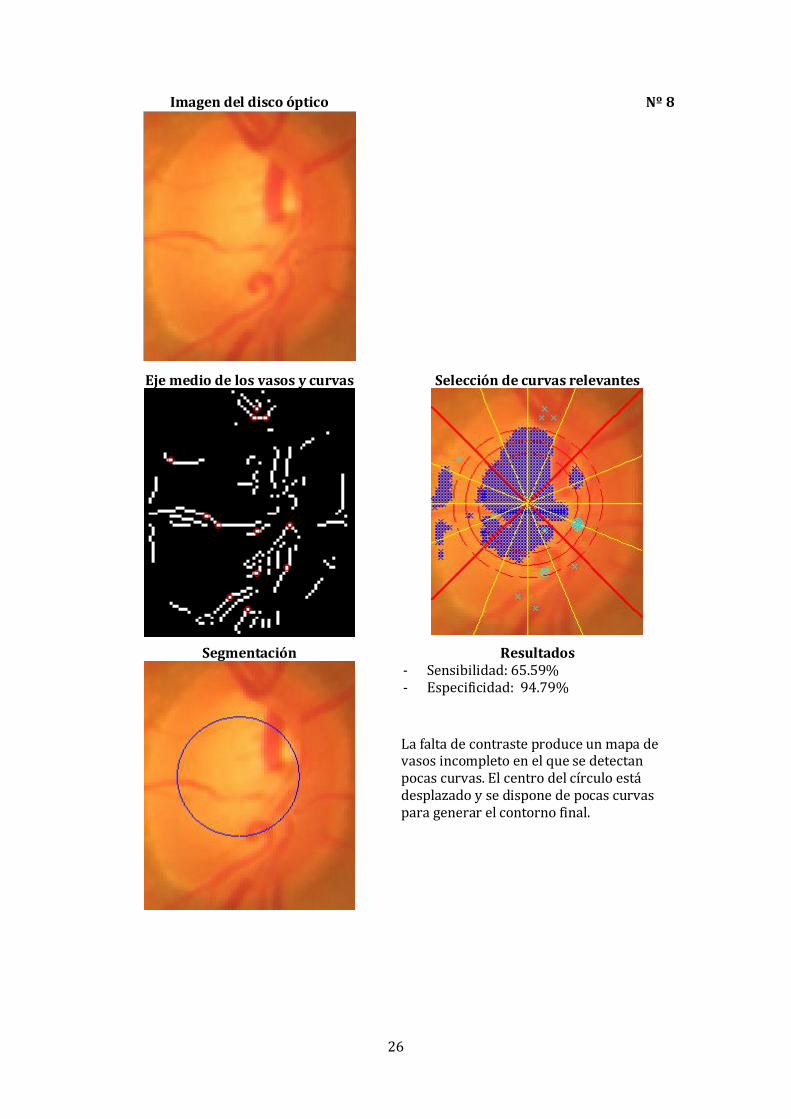
Imagen del disco óptico
Nº 8
Eje medio de los vasos y curvas
Selección de curvas relevantes
Segmentación
Resultados - Sensibilidad: 65.59% - Especificidad: 94.79%
La falta de contraste produce un mapa de vasos incompleto en el que se detectan pocas curvas. El centro del círculo está desplazado y se dispone de pocas curvas para generar el contorno final.
27
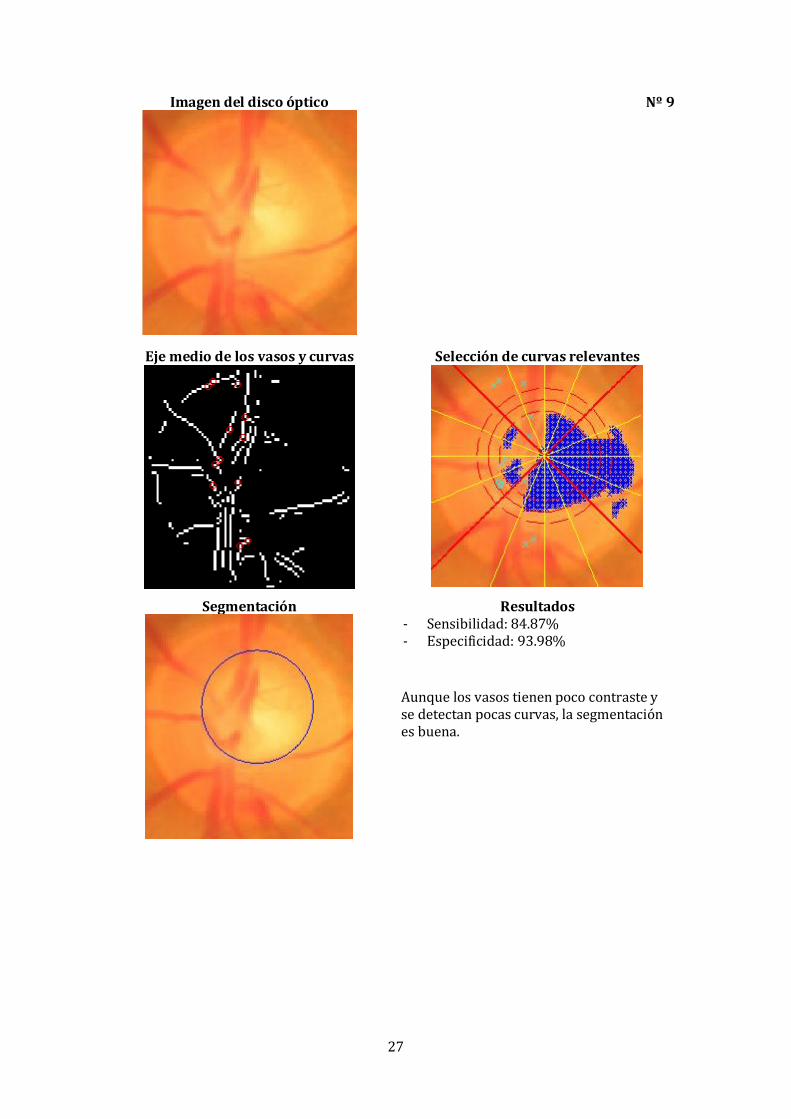
Imagen del disco óptico
Nº 9
Eje medio de los vasos y curvas
Selección de curvas relevantes
Segmentación
Resultados - Sensibilidad: 84.87% - Especificidad: 93.98%
Aunque los vasos tienen poco contraste y se detectan pocas curvas, la segmentación es buena.

28
Imagen del disco óptico
Nº 10
Eje medio de los vasos y curvas
Selección de curvas relevantes
Segmentación
Resultados - Sensibilidad: 92.57% - Especificidad: 88.86%
La ausencia de curvas detectadas en la zona temporal desplaza el círculo un poco hacia la derecha, pero el contorno obtenido es muy acertado, pasando por puntos de pliegues de vasos.
29
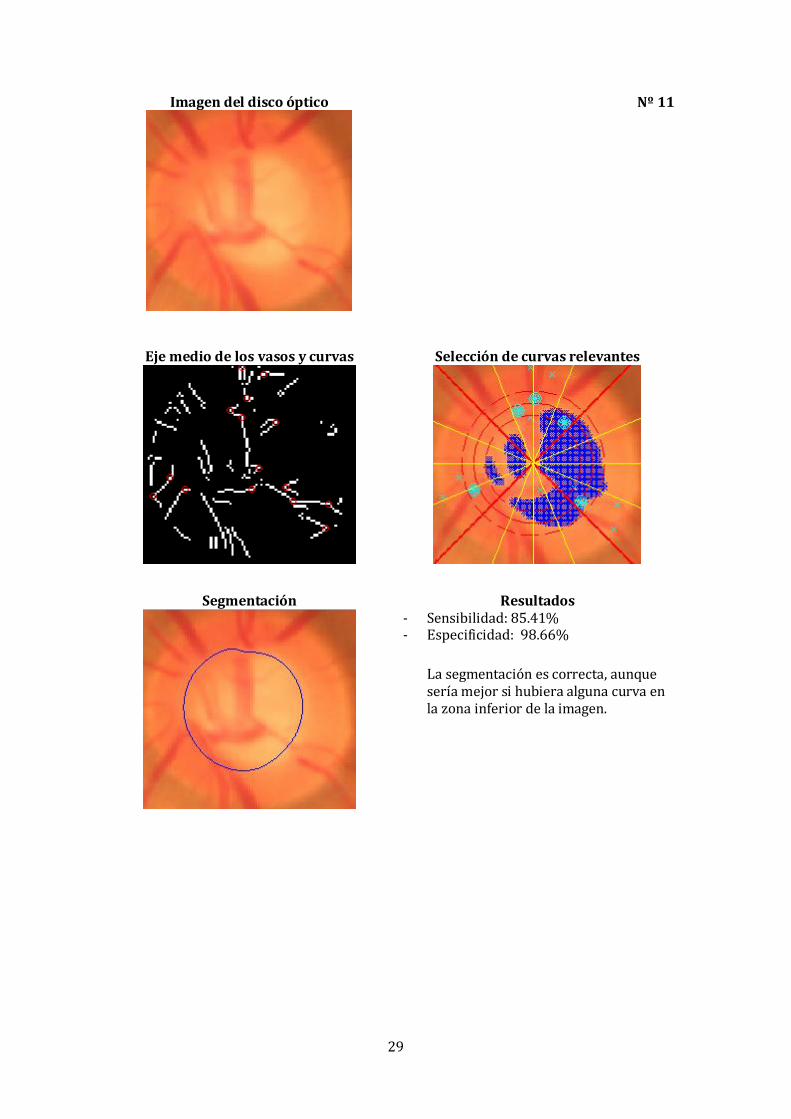
Imagen del disco óptico
Nº 11
Eje medio de los vasos y curvas
Selección de curvas relevantes
Segmentación
Resultados - Sensibilidad: 85.41% - Especificidad: 98.66%
La segmentación es correcta, aunque sería mejor si hubiera alguna curva en la zona inferior de la imagen.
30
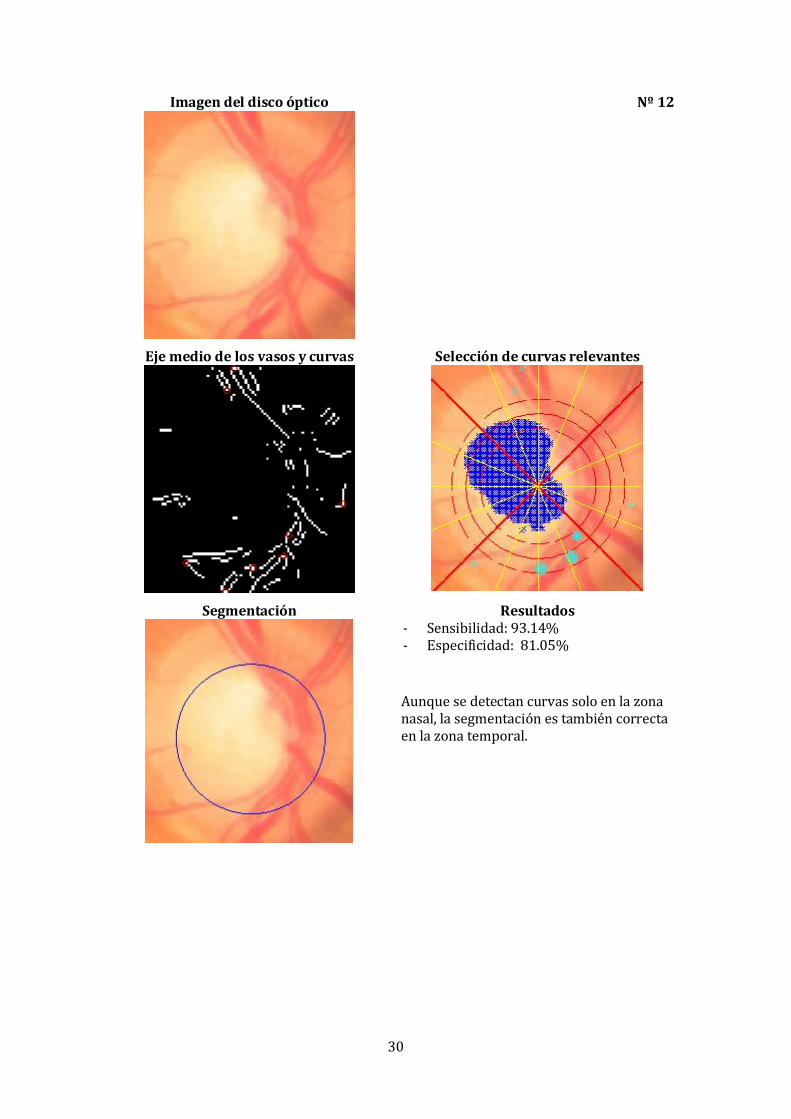
Imagen del disco óptico
Nº 12
Eje medio de los vasos y curvas
Selección de curvas relevantes
Segmentación
Resultados - Sensibilidad: 93.14% - Especificidad: 81.05%
Aunque se detectan curvas solo en la zona nasal, la segmentación es también correcta en la zona temporal.
31
Imagen del disco óptico
Nº 13
Eje medio de los vasos y curvas
Selección de curvas relevantes
Segmentación
Resultados - Sensibilidad: 64.44% - Especificidad: 100%
Se detectan pocas curvas en un mapa de vasos algo incompleto. Como resultado, la región obtenida tiene un tamaño inferior de lo deseado, pero la localización es correcta.
32
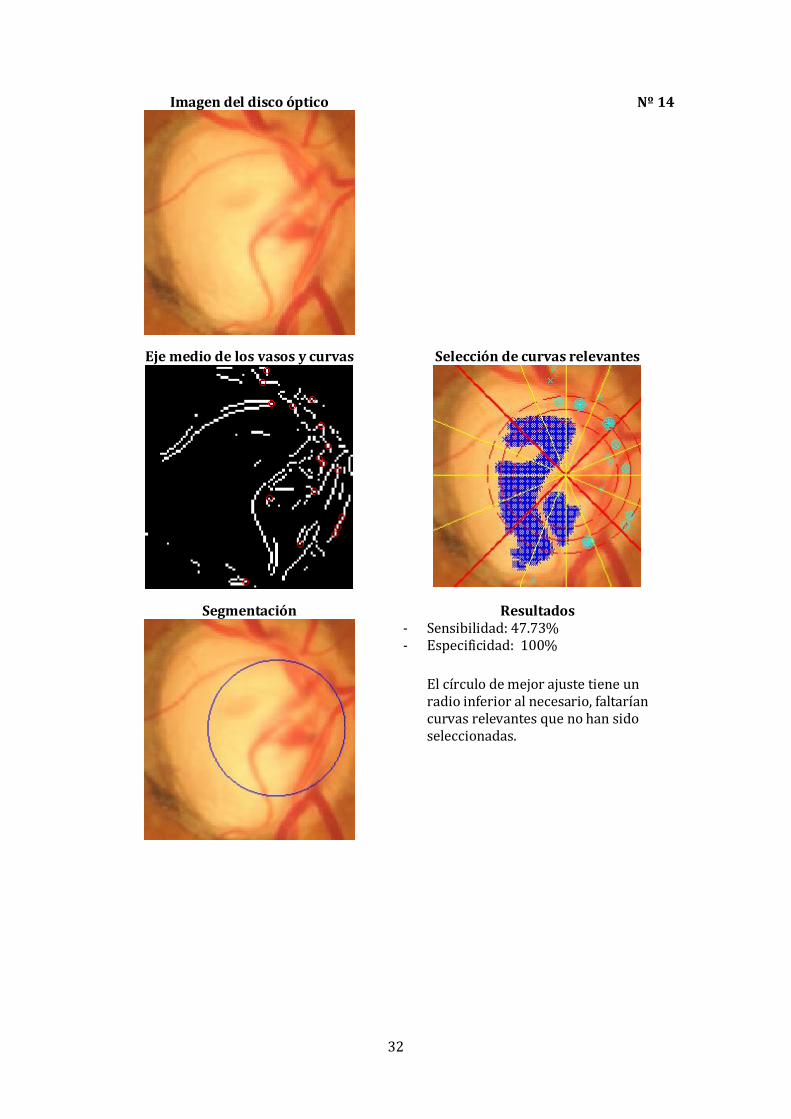
Imagen del disco óptico
Nº 14
Eje medio de los vasos y curvas
Selección de curvas relevantes
Segmentación
Resultados - Sensibilidad: 47.73% - Especificidad: 100%
El círculo de mejor ajuste tiene un radio inferior al necesario, faltarían curvas relevantes que no han sido seleccionadas.
33
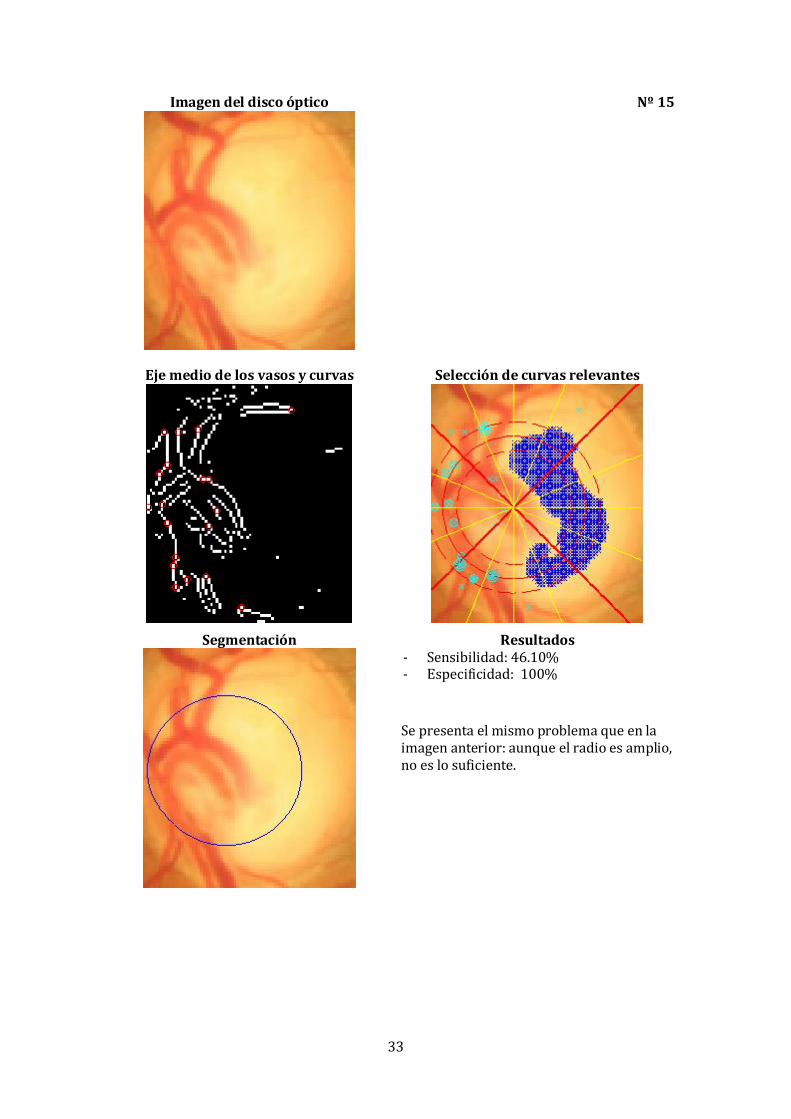
Imagen del disco óptico
Nº 15
Eje medio de los vasos y curvas
Selección de curvas relevantes
Segmentación
Resultados - Sensibilidad: 46.10% - Especificidad: 100%
Se presenta el mismo problema que en la imagen anterior: aunque el radio es amplio, no es lo suficiente.
34
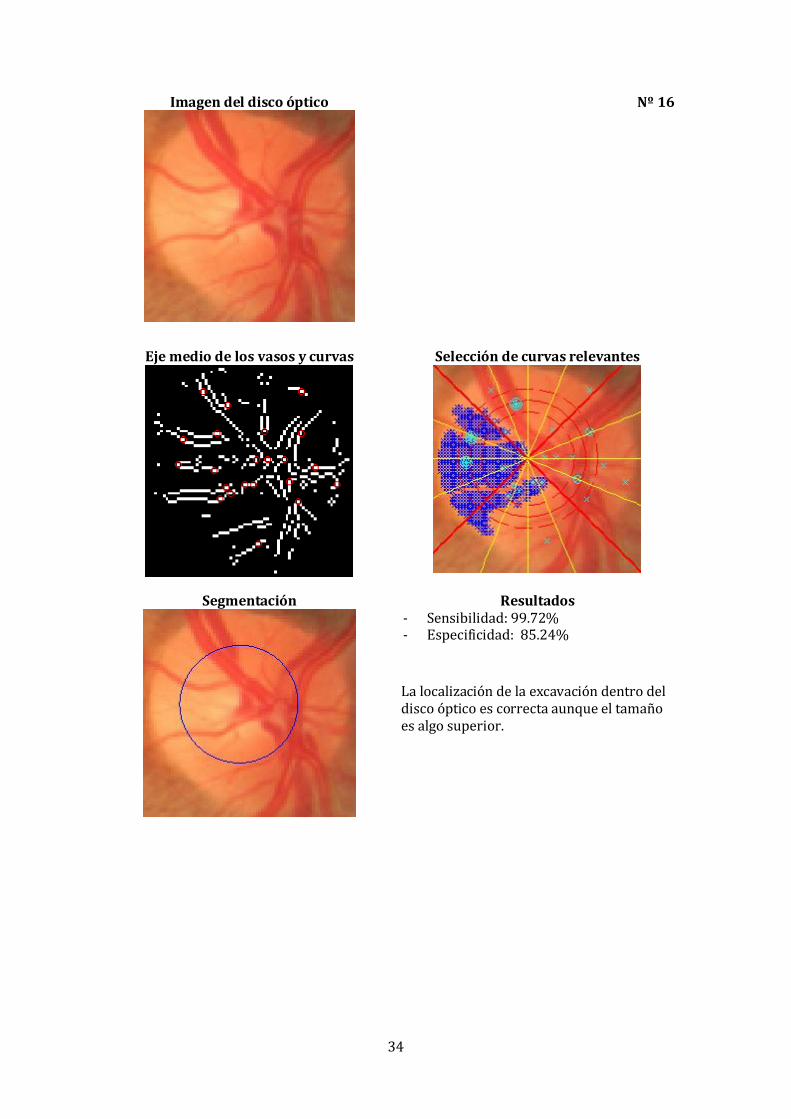
Imagen del disco óptico
Nº 16
Eje medio de los vasos y curvas
Selección de curvas relevantes
Segmentación
Resultados - Sensibilidad: 99.72% - Especificidad: 85.24%
La localización de la excavación dentro del disco óptico es correcta aunque el tamaño es algo superior.
35
Imagen del disco óptico
Nº 17
Eje medio de los vasos y curvas
Selección de curvas relevantes
Segmentación
Resultados - Sensibilidad: 100% - Especificidad: 80.66%
La sensibilidad/especificidad muestran que sería deseable un círculo con menor radio.
36
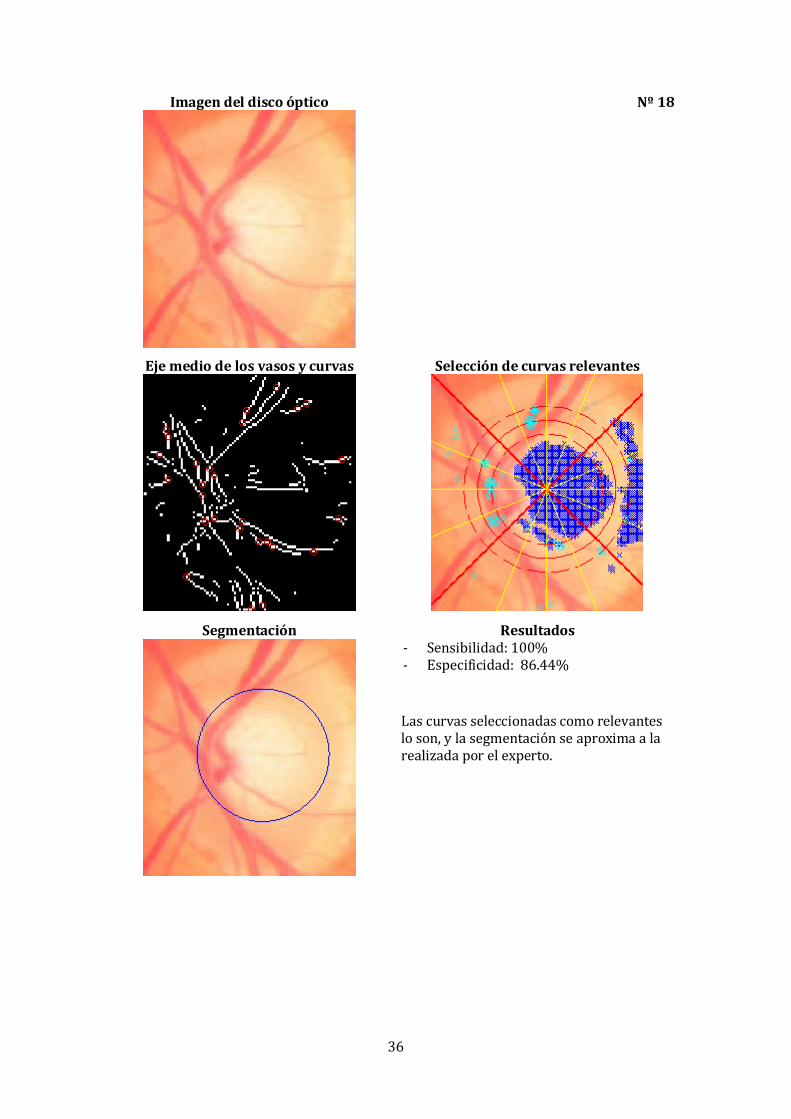
Imagen del disco óptico
Nº 18
Eje medio de los vasos y curvas
Selección de curvas relevantes
Segmentación
Resultados - Sensibilidad: 100% - Especificidad: 86.44%
Las curvas seleccionadas como relevantes lo son, y la segmentación se aproxima a la realizada por el experto.
37
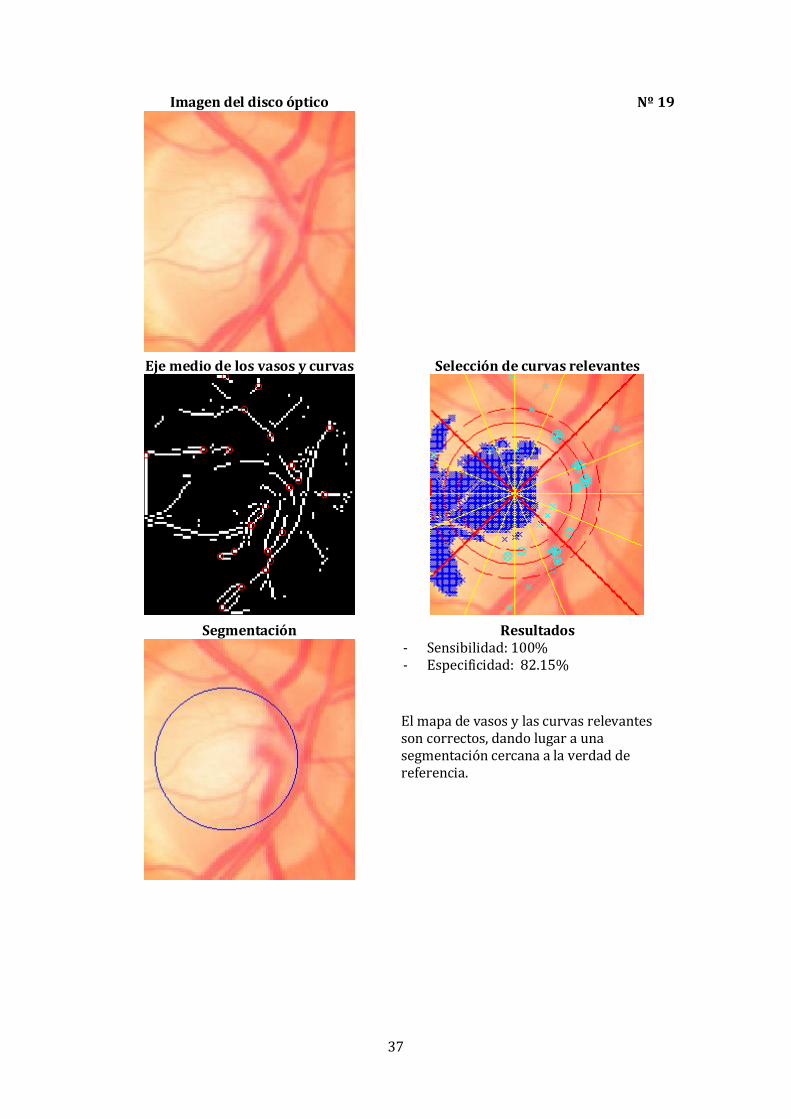
Imagen del disco óptico
Nº 19
Eje medio de los vasos y curvas
Selección de curvas relevantes
Segmentación
Resultados - Sensibilidad: 100% - Especificidad: 82.15%
El mapa de vasos y las curvas relevantes son correctos, dando lugar a una segmentación cercana a la verdad de referencia.
38
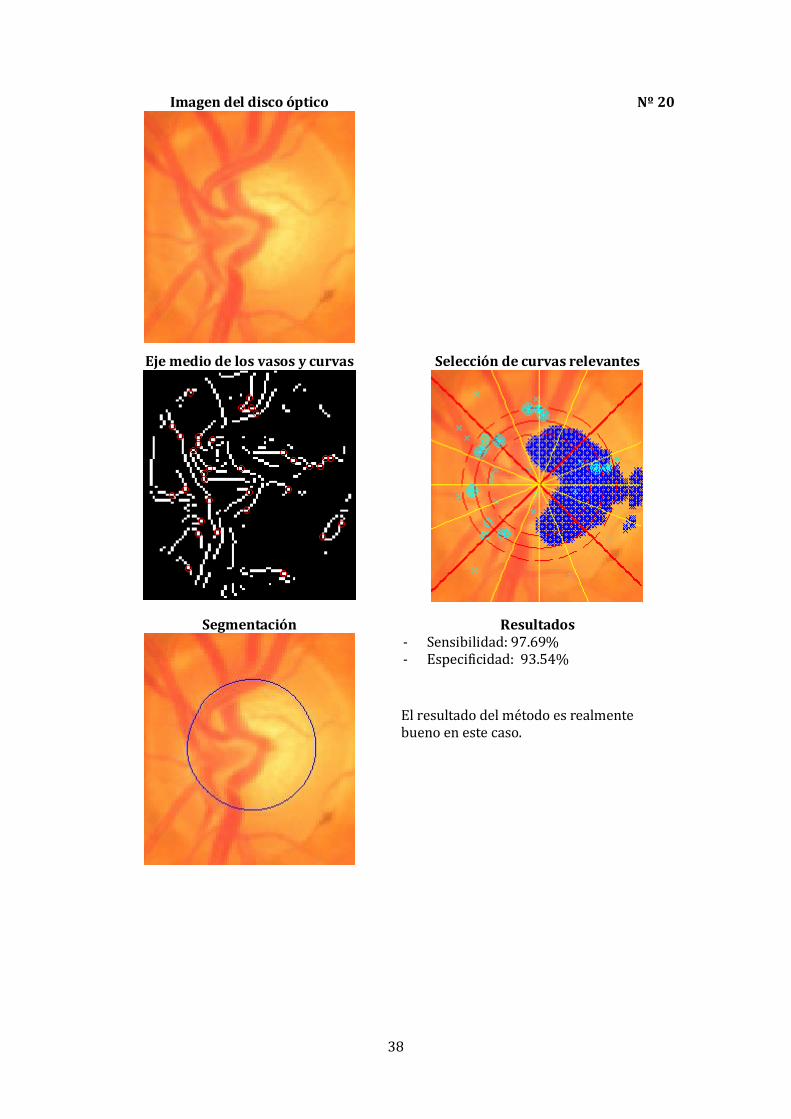
Imagen del disco óptico
Nº 20
Eje medio de los vasos y curvas
Selección de curvas relevantes
Segmentación
Resultados - Sensibilidad: 97.69% - Especificidad: 93.54%
El resultado del método es realmente bueno en este caso.
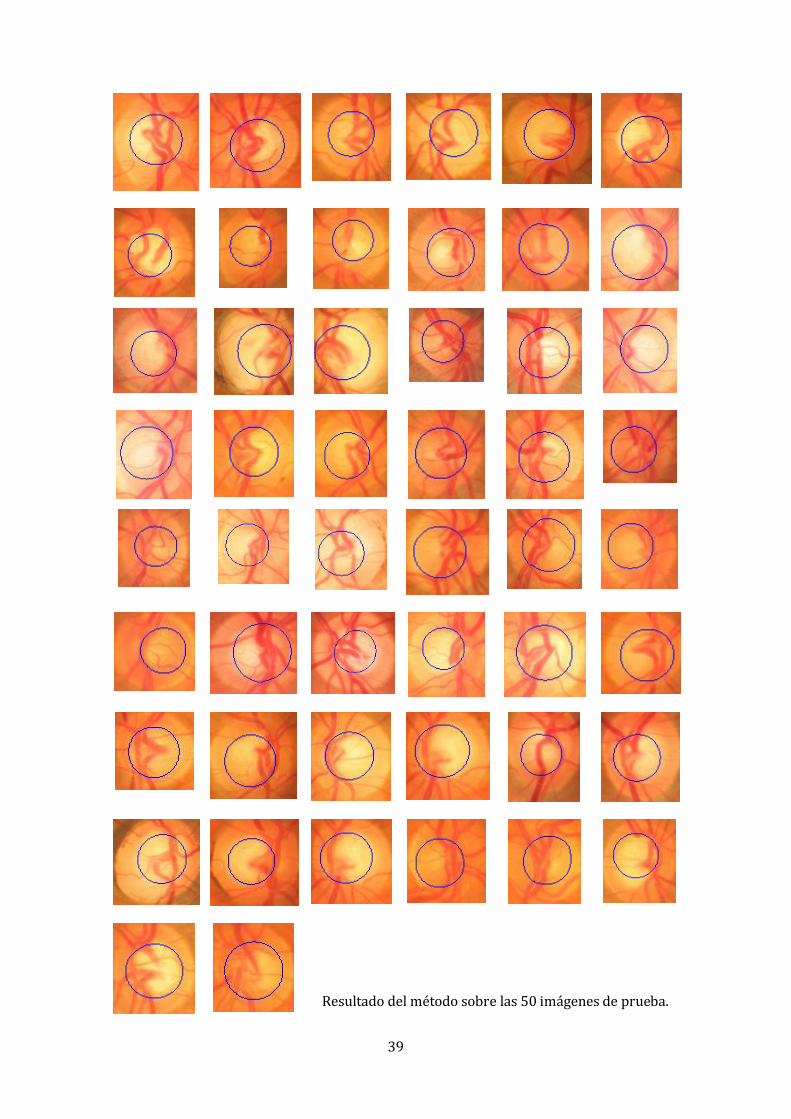
39
Resultado del método sobre las 50 imágenes de prueba.
40
5. CONCLUSIONES Y LÍNEAS FUTURAS
Los resultados obtenidos demuestran que el método llevado a cabo logra una
segmentación de la excavación, como se proponía. Esta segmentación se realiza de manera
completamente automática y para cualquier imagen de entrada. La ventaja de este método
respecto a otros es que tiene en cuenta la información de los vasos sanguíneos, una
evidencia que los expertos usan para el diagnóstico, pero algo novedoso en sistemas CAD
de este campo.
A priori, era evidente la complejidad que supone determinar la excavación en una
imagen fondo de ojo. Se dan, incluso, grandes diferencias entre segmentaciones manuales
realizadas por varios expertos diferentes (19).
Sin embargo, los parámetros de precisión muestran unos resultados realmente
buenos. Además, las segmentaciones realizadas cumplen con el objetivo marcado en un
principio: delimitan la zona más brillante del disco óptico, pasando por curvas
importantes en los vasos sanguíneos.
Una limitación de este método es el proceso de selección de curvas relevantes; pues, al
calcular el mejor círculo en mínimos cuadrados para un número fijo de puntos (el 20%
más brillantes), el radio se aleja del deseado para excavaciones muy pequeñas o muy
grandes. En cuanto a líneas futuras, se puede plantear un mejor proceso de selección de
curvas relevantes, basado en información de color. Esto se puede realizar usando métodos
de level-sets o umbralización, para conseguir una primera segmentación basada en el color
característico de la excavación. Posteriormente, la segmentación se refinaría para que
atraviese los vasos sanguíneos por puntos máximos de curvatura.
41
6. REFERENCIAS
(1) Glaucoma Research Foundation. Learn about Glaucoma. [En línea] 2014.
http://www.glaucoma.org/glaucoma/.
(2) Asociación Oftalmológica de Costa Rica. Glaucoma. [En línea]
http://www.oftalmologiacostarica.com/glaucoma.php.
(3) Marjanovic, Ivan. The Optic Nerve in Glaucoma. The mistery of Glaucoma. Belgrado :
Dr. Tomas Kubena, 2011.
(4) The optic nerve head in glaucoma. Bourne, Rupert RA. 79-80, 2012, Community Eye
Health Journal, Vol. 25, págs. 55-57.
(5) Goñi, Dr. Francisco Javier y Guarro, Dra. Merce. Diagnóstico a tiempo del glaucoma:
Evaluación del nervio óptico. [En línea] Thea Innovación.
http://www.laboratoriosthea.com/archivos/publicaciones/00066.pdf.
(6) Gilabert, Eduardo J. Medida del Color. s.l. : Universidad Politécnica de Valencia, 1992.
(7) Ford, Adrian y Roberts, Alan. Colour Space Conversions. [En línea] 1998.
http://www.poynton.com/PDFs/coloureq.pdf.
(8) Xrite Photo. The Color Guide and Glossary. [En línea] 2004.
https://xritephoto.com/documents/literature/en/L11-029_color_guide_EN.pdf.
(9) Automatic extraction of retinal features from colour retinal images for glaucoma
diagnosis: A review. Salman Haleema, Muhammad, y otros. 7-8, 2013, Computerized
Medical Imaging and Graphics, Vol. 37, págs. 581-596.
(10) Optic disk feature extraction via modified deformable model technique. Xu, Juan, y
otros. 7, 2007, Pattern Recongnition, Vol. 40, págs. 2063–2076.
(11) ARGALI- an Automatic cup-to-disc Ratio measurement system for Glaucoma detection
and analysis framework. Lui, J., y otros. 2009, Proc. SPIE Med. Imag., págs. 72-603.
(12) Level-Set based automatic cup-to-disk ratio determination using retinal fundus images
in ARGALI. Wong, D. W. K., y otros. [ed.] Engineering in Medicine and Biology Society.
Vancouver : s.n., 2008. 30th Annual International IEEE EMBS Conference. págs. 2266-
2269.
(13) Optic disk and cup boundary detection using regional information. Joshi, Gopal Datt, y
otros. 2010, Proc. IEEE Int. Symp. Biomed. Imag, págs. 948–951.
(14) Automated Diagnosis of Glaucoma Using Digital Fundus Images. Nayak, Jagadish, y
otros. 5, 2009, Journal of Medical Systems, Vol. 23, págs. 337-346.
(15) Automatic Cup-to-Disc Ratio Estimation Using Active Contours and Color Clustering in
Fundus Images for Glaucoma Diagnosis. Fondón, Irene, y otros. s.l. : A. Campilho and M.
Kamel, 2012, Image Analysis and Recognition, Vol. 7325, págs. 390-399.
42
(16) Automated detection of kinks from blood vessels for optic cup segmentation in retinal
images. Wong, D.W.K., y otros. Singapore : s.n., 2009, Proceedings on the SPIE Medical
Imaging, Vol. 7260.
(17) Automatic Detection of the Optic Cup Vessel Kinking in Digital Retinal Fundus Images.
Wong, W.K.D., y otros. Singapur : IEEE, 2012. 9th IEEE International Symposium on
Biomedical Imaging (ISBI) . págs. 1647-1650.
(18) Optic Disk and Cup Segmentation From Monocular Color Retinal Images for Glaucoma
Assessment. Joshi, Gopal Datt, Sivaswamy, Jayanthi y Krishnadas, S.R. 6, 2011, IEEE
Transactions on Medical Imaging, Vol. 30, págs. 1192-1205.
(19) Vessel bend-based cup segmentation in retinal images. Joshi, Gopal Datt, y otros.
Estambul : s.n., 2010. 2010 International Conference on Pattern Recognition. págs. 2536-
2539. ISSN: 1051-4651.
(20) Unsupervised curvature-based retinal vessel segmentation. Garg, Saurabh,
Sivaswamy, Jayanthi y Chandra, Siva. 2007. 4th IEEE International Symposium on
Biomedical Imaging. págs. 344-347.
(21) Automatic retinal vessel tortuosity measurement using curvature of improved chain
code. Onkaew, D., y otros. Malasia : s.n., 2011. International Conference on Electrical,
Control and Computer Engineering. págs. 183-186.
(22) On the Detection of Dominant Points on Digital Curves. Teh, C.H. y Chin, R.T. 8, 1989,
IEEE Transactions on Pattern Analysis and Machine Intelligence, Vol. II, págs. 859-872.
(23) Estimation of discrete curvature based on chain-code pairing and digital straightness.
Pal, S. y Bhowmick, P. El Cairo : s.n., 2009. 16th IEEE International Conference on Image
Processing (ICIP). págs. 1097-1100.
(24) Bullock, R. Least-Squares Circle Fit. [En línea] 24 de Octubre de 2006.
http://www.dtcenter.org/met/users/docs/write_ups/circle_fit.pdf.
(25) Making the diagnosis of Glaucoma. [En línea] http://www.e-
sunbear.com/glauc_diag.html.
(26) Pascual, Dr. Rubén. Ocularis. ¿Qué es el glaucoma? [En línea]
http://ocularis.es/blog/?p=44.
(27) Plano tangente. [En línea] http://www.tec-
digital.itcr.ac.cr/revistamatematica/cursos-linea/SUPERIOR/t6-
PlanoTangente/index.html.