tesis que presenta - inicio | cinvestav gdl · 2007-06-11 · transferencia de potencia a través...
TRANSCRIPT
DISEÑO E IMPLEMENTACIÓN EN LABORATORIODE UN DISPOSITIVO TCSC
Tesis que presenta
PÁVEL ZÚÑIGA HARO
Para obtener el grado deMaestro en Ciencias
En la especialidad deIngeniería Eléctrica
Guadalajara, Jalisco, Noviembre de 2001
DISEÑO E IMPLEMENTACIÓN EN LABORATORIO DEUN DISPOSITIVO TCSC
Tesis de Maestría en CienciasIngeniería Eléctrica
Por
Pável Zúñiga Haro
Ingeniero ElectrónicoInstituto Tecnológico de Querétaro, 1994-1999
Becario de CONACyT, expediente No. 143878
Director de Tesis
Dr. Juan Manuel Ramírez Arredondo
CINVESTAV del IPN Unidad Guadalajara, Noviembre de 2001
I
DEDICATORIA
Dedico éste trabajo de tesis a mi familia, ya que sin suapoyo y paciencia llegar al punto en el que ahora me
encuentro hubiese sido imposible.
II
AGRADECIMIENTOS
Agradezco a mis padres por haberme proporcionado los medios necesarios para llevar acabo mis estudios.
Agradezco también a mis compañeros por haberme brindado su amistad; así como a misprofesores por los conocimientos adquiridos.
Agradezco a mi asesor el apoyo en la realización de éste trabajo.
Agradezco al Consejo Nacional de Ciencia y Tecnología por el apoyo económico prestado.
En general agradezco a cada persona que de cualquier manera contribuyo en éste trabajo.
III
RESUMEN
En éste trabajo se presenta el análisis de uno de los dispositivos FACTS que más impactoha tenido desde su introducción, el TCSC. Éste dispositivo permite controlar latransferencia de potencia a través de una línea de transmisión, además de ayudar en elamortiguamiento de oscilaciones y la estabilidad transitoria, entre otros problemas.
Se presenta un análisis en simulación de aspectos relacionados con la implementación realdel dispositivo, como son la inclusión de la resistencia asociada al reactor del dispositivo, lainserción de una red snubber para limitar el crecimiento del voltaje a través de los tiristoresy el estudio del dispositivo separado en módulos.
Se muestra el proceso de identificación de parámetros de los elementos que conforman alTCSC, así como una descripción del diseño del circuito de disparo.
Se analizan las señales obtenidas del TCSC en laboratorio, haciendo énfasis en lassimilitudes que éstas presentan con respecto a los resultados mostrados en la literatura y ensimulación.
Por último se lleva a cabo la aplicación de una red snubber al TCSC, puntualizando elefecto que ésta tiene sobre las señales del dispositivo.
IV
ÍNDICE GENERAL
Resumen III
Índice de figuras VII
Introducción X
Capítulo I. FACTS: Descripción general 1
1.1. Introducción................................................................................................. 11.2. Problemática ................................................................................................ 11.3. Importancia de los parámetros del sistema.................................................. 31.4. Flujo de potencia en rutas paralelas............................................................. 31.5. Flujo de potencia en un sistema mallado..................................................... 41.6. Tipos básicos de controladores FACTS ...................................................... 71.7. La importancia de los diferentes tipos de controladores ............................. 81.8. Breve descripción y definición de los controladores FACTS ..................... 9
1.8.1. Controladores en derivación........................................................... 111.8.2. Controladores serie......................................................................... 141.8.3. Controladores combinados serie-derivación .................................. 16
1.9. Consideraciones adicionales........................................................................ 181.10. Resumen ...................................................................................................... 191.11. Bibliografía .................................................................................................. 20
Capítulo II. Elementos de electrónica de potencia 21
2.1. Introducción................................................................................................. 212.2. Tiristor ......................................................................................................... 21
2.2.1. Rectificador controlado de silicio ................................................... 222.2.1.1. Características del SCR ........................................................................ 232.2.1.2. Encendido y apagado del SCR ............................................................. 25
2.2.2. Tiristor de apagado por compuerta ................................................ 272.2.2.1. Características del GTO ....................................................................... 272.2.2.2. Encendido y apagado del GTO............................................................. 282.2.2.3. Aspectos generales del GTO ................................................................ 29
2.3. Modulación de ancho de pulso .................................................................... 302.3.1. Características del PWM ................................................................ 302.3.2. Modulación senoidal ....................................................................... 302.3.3. Modulación senoidal con muestreo natural .................................... 312.3.4. Sobremodulación en esquemas de PWM senoidal .......................... 332.3.5. Modulación senoidal con muestreo regular.................................... 35
ÍNDICE GENERAL
V
2.4. Resumen ...................................................................................................... 372.5. Bibliografía .................................................................................................. 37
Capítulo III. TCSC: Aspectos prácticos de operación 39
3.1. Introducción................................................................................................. 393.2. Resistencia del reactor ................................................................................. 403.3. Efecto de la razón de cambio del voltaje en los tiristores con respecto al
tiempo .......................................................................................................... 513.4. Cálculo de los componentes de la red snubber............................................ 54
3.4.1. Aplicación........................................................................................ 583.5. Módulos del TCSC ...................................................................................... 613.6. Resumen ...................................................................................................... 653.7. Bibliografía .................................................................................................. 66
Capítulo IV. Implementación 67
4.1. Introducción................................................................................................. 674.2. Identificación de parámetros........................................................................ 67
4.2.1. Selección de señales de entrada...................................................... 704.2.2. Selección del tiempo de muestreo ................................................... 714.2.3. Identificación en y fuera de línea .................................................... 714.2.4. Comparación de métodos de estimación de parámetros................. 714.2.5. Tipos de señales............................................................................... 724.2.6. Método de los mínimos cuadrados.................................................. 734.2.7. Respuesta a la frecuencia................................................................ 74
4.3. Parámetros de los dispositivos que componen al TCSC ............................. 754.3.1. Prueba de respuesta a la frecuencia del reactor ............................ 754.3.2. Prueba de respuesta a la frecuencia del capacitor ......................... 79
4.4. Circuito de disparo....................................................................................... 824.4.1. Acondicionamiento de señal............................................................ 824.4.2. Microcontrolador ............................................................................ 834.4.3. Actuador .......................................................................................... 84
4.5. Adquisición de datos ................................................................................... 854.6. Circuito de prueba........................................................................................ 854.7. Resumen ...................................................................................................... 874.8. Bibliografía .................................................................................................. 88
Capítulo V. Análisis de las señales medidas 89
5.1. Introducción................................................................................................. 895.2. Señales en estado transitorio........................................................................ 895.3. Señales en estado estable ............................................................................. 935.4. Respuesta ante cambios escalón en el ángulo de disparo ............................ 955.5. Contenido armónico de las señales del dispositivo ante diferentes ángulos
de disparo..................................................................................................... 97
ÍNDICE GENERAL
VI
5.6. Efectos de la inclusión de la resistencia asociada al reactor deldispositivo.................................................................................................... 1035.6.1. Amortiguamiento de las señales...................................................... 1035.6.2. Contenido armónico de las señales del sistema ante cambios en
la resistencia asociada al reactor del dispositivo ........................... 1045.6.3. Deformación de las señales del sistema al incluir la resistencia
asociada al reactor del dispositivo ................................................. 1085.7. Inclusión de la red snubber al TCSC ........................................................... 1135.8. Resumen ...................................................................................................... 1155.9. Bibliografía .................................................................................................. 116
Conclusiones y contribuciones 117
Trabajos futuros 119
Publicaciones 120
VII
ÍNDICE DE FIGURAS
1.1. Red con transmisión en rutas paralelas ................................................................. 31.2. Controladores FACTS en serie con la línea.......................................................... 41.3. Red de transmisión mallada .................................................................................. 51.4. Dispositivos FACTS utilizados en una red mallada ............................................. 61.5. Diagrama esquemático del controlador serie y derivación ................................... 71.6. Diagrama esquemático del controlador serie-serie y serie-derivación ................. 81.7. Diagrama esquemático del STATCOM basado en convertidores de voltaje y
corriente................................................................................................................. 101.8. Diagrama esquemático de la unidad BESS, el SSG y el SMES ........................... 121.9. Diagrama esquemático del SVC ........................................................................... 131.10. Diagrama esquemático del TSC, el TCR y el TSR............................................... 141.11. Diagrama esquemático del TCBR......................................................................... 141.12. Diagrama esquemático del SSSC, el TCSC y el TSSC ........................................ 151.13. Diagrama esquemático del TCSR y el TSSR........................................................ 161.14. Diagrama esquemático del UPFC y el TCPST ..................................................... 17
2.1. Símbolo esquemático del SCR.............................................................................. 222.2. Estructura y modelo de dos transistores del SCR ................................................. 222.3. Curva característica IV − .................................................................................... 242.4. Tiempo de apagado de conmutación..................................................................... 262.5. Diagrama esquemático de un SCR con compuerta amplificadora........................ 272.6. Símbolo esquemático del GTO ............................................................................. 272.7. Estructura y modelo de dos transistores del GTO................................................. 292.8. GTO con red snubber ............................................................................................ 292.9. Principio de la modulación senoidal con onda portadora triangular..................... 312.10. Forma de onda PWM que se obtiene utilizando SPWM con muestreo natural,
12=p , 75.0=M ................................................................................................. 322.11. Formas de onda de voltaje para un inversor trifásico SPWM............................... 332.12. Valor RMS del voltaje fundamental de línea relativo a cdV contra la relación de
modulación para SPWM ....................................................................................... 342.13. Sobremodulación en SPWM................................................................................. 342.14. Saltos de voltaje debidos a la sobremodulación.................................................... 352.15. Esquema SPWM de muestreo regular simétrico................................................... 362.16. Esquema SPWM de muestreo regular asimétrico................................................. 36
3.1. Diagrama esquemático del TCSC (equivalente y módulos) ................................. 393.2. Reactancia fundamental del TCSC ....................................................................... 403.3. Diagrama esquemático del TCSC utilizado en simulación................................... 413.4. Comparación entre ecuación y simulación ........................................................... 42
ÍNDICE DE FIGURAS
VIII
3.5. Impedancia equivalente con diferentes valores de tR .......................................... 42
3.6. Módulo insertado en una línea .............................................................................. 433.7. Corriente de línea con diferentes α ...................................................................... 443.8. Comportamiento del sistema con diferentes α ..................................................... 463.9. Tiempo de estabilización del sistema ante cambios en α .................................... 473.10. Corriente de línea con º58=α y diferentes valores de tR ................................... 48
3.11. Comportamiento del sistema con º58=α y diferentes valores de tR ................. 50
3.12. Reactancia equivalente con [ ]º59,º57∈α con diferentes valores de tR ............. 51
3.13. Circuito resistivo ................................................................................................... 523.14. Circuito inductivo y característica dtdv ............................................................. 523.15. Circuito inductivo con tiristores y snubber ........................................................... 533.16. Capacitancia interna del SCR................................................................................ 533.17. Diagrama esquemático con red snubber utilizado para el análisis........................ 543.18. Voltaje en los tiristores (ángulo de disparo de 56º) .............................................. 593.19. Conmutación de tV (ángulo de disparo de 56º) .................................................... 60
3.20. Voltaje en los tiristores.......................................................................................... 603.21. Reactancia equivalente de un sistema multimódulos............................................ 613.22. Corriente de línea con º56=α y º57=α ............................................................ 633.23. Corriente de línea con módulos a diferente valor de α ........................................ 64
4.1. Generación de señales de entrada, medición de señales de salida yalmacenamiento de datos ...................................................................................... 69
4.2. Procedimiento general del proceso de identificación............................................ 704.3. Construcción general del proceso y modelo ......................................................... 724.4. Señales de prueba.................................................................................................. 734.5. Ajuste de una línea recta a través de un conjunto de puntos................................. 734.6. Diagrama esquemático del reactor ........................................................................ 764.7. Circuito equivalente del reactor y su componente resistiva.................................. 774.8. Circuito de prueba del reactor ............................................................................... 784.9. Impedancia del reactor medida y calculada contra la frecuencia.......................... 794.10. Diagrama esquemático del capacitor .................................................................... 794.11. Circuito de prueba del capacitor ........................................................................... 804.12. Impedancia del capacitor medida y calculada contra la frecuencia ...................... 814.13. Diagrama esquemático del circuito de disparo ..................................................... 824.14. Etapa de acondicionamiento de señal ................................................................... 834.15. Etapa del actuador ................................................................................................. 844.16. Diagrama esquemático del circuito de prueba ...................................................... 864.17. Diagrama esquemático del TCSC de laboratorio usado en simulación ................ 864.18. Impedancia equivalente a frecuencia fundamental del circuito de prueba ........... 87
5.1. Período transitorio del TCSC con º42=α ........................................................... 905.2. Principales variables del TCSC con º42=α ........................................................ 905.3. Período transitorio del TCSC con º50=α ........................................................... 915.4. Principales variables del TCSC con º50=α ........................................................ 915.5. Período transitorio del TCSC con º69=α ........................................................... 92
ÍNDICE DE FIGURAS
IX
5.6. Principales variables del TCSC con º69=α ........................................................ 925.7. Corriente de línea con º69=α ............................................................................. 935.8. Corriente en los tiristores con º69=α ................................................................. 945.9. Voltaje en el capacitor con º69=α ...................................................................... 945.10. Corriente de línea ante cambios escalón en el ángulo de disparo ......................... 955.11. Corriente en tiristores ante cambios escalón en el ángulo de disparo................... 965.12. Voltaje en el capacitor ante cambios escalón en el ángulo de disparo.................. 965.13. Principales variables del TCSC ante cambios escalón en α ................................ 975.14. Contenido armónico de lI con º42=α ............................................................... 98
5.15. Contenido armónico de lI con º50=α ............................................................... 99
5.16. Contenido armónico de lI con º69=α ............................................................... 99
5.17. Contenido armónico de tI con º42=α ............................................................... 100
5.18. Contenido armónico de tI con º50=α ............................................................... 100
5.19. Contenido armónico de tI con º69=α ............................................................... 101
5.20. Contenido armónico de cV con º42=α .............................................................. 101
5.21. Contenido armónico de cV con º50=α .............................................................. 102
5.22. Contenido armónico de cV con º69=α .............................................................. 102
5.23. Principales variables del TCSC cuando Ω= 1.0mR ............................................. 103
5.24. Principales variables del TCSC cuando Ω=1mR ................................................ 104
5.25. Contenido armónico de lI cuando Ω= 1.0mR ..................................................... 105
5.26. Contenido armónico de lI cuando Ω=1mR ........................................................ 105
5.27. Contenido armónico de tI cuando Ω= 1.0mR ..................................................... 106
5.28. Contenido armónico de tI cuando Ω=1mR ........................................................ 106
5.29. Contenido armónico de cV cuando Ω= 1.0mR .................................................... 107
5.30. Contenido armónico de cV cuando Ω=1mR ....................................................... 107
5.31. Señales del TCSC con º31=α ............................................................................. 1095.32. Señales del TCSC con º24=α ............................................................................. 1095.33. Señales del TCSC con º16=α ............................................................................. 1105.34. Señales del TCSC con º50=α ............................................................................. 1105.35. Señales del TCSC con º60=α ............................................................................. 1115.36. Contenido armónico de lI con º31=α ............................................................... 111
5.37. Contenido armónico de lI con º24=α ............................................................... 112
5.38. Contenido armónico de lI con º16=α ............................................................... 112
5.39. Circuito usado en laboratorio con la inclusión de una red snubber ...................... 1135.40. Voltaje en los tiristores al momento de la conmutación ....................................... 1145.41. Voltaje y corriente en los tiristores con º42=α .................................................. 115
X
INTRODUCCIÓN
Con el advenimiento de la electrónica de potencia se han desarrollado dispositivos, hoyconocidos como FACTS, que aprovechan las bondades de los elementos semiconductoresde potencia con el fin de mejorar el desempeño de la red eléctrica. Actualmente lossistemas eléctricos de potencia son redes de gran tamaño y complejidad no solo enextensión territorial sino también en la cantidad y diversidad de los elementos que losconforman, debido a esto presentan un gran número de problemas operativos y de control,que se traducen en pérdidas económicas para las compañías suministradoras de servicioeléctrico, así como para los usuarios.
Los dispositivos FACTS se han consolidado como una alternativa de solución a muchos delos problemas que actualmente enfrenta el sector eléctrico, puesto que éstos permitencontrolar los parámetros que rigen la transferencia de potencia. Además presentan una seriede beneficios como la utilización de líneas de transmisión muy cerca de sus límitestérmicos, incremento de los márgenes de estabilidad, control del flujo de potencia a travésde rutas preestablecidas, entre otros. Esto tiene como consecuencia un mejoraprovechamiento de los recursos disponibles permitiendo así ahorros en el aspectoeconómico. Si bien los dispositivos FACTS se instalan para operar en estado estacionario,son bien conocidas las virtudes que éstos tienen en estado transitorio, además de ayudar alamortiguamiento de oscilaciones, estabilidad de voltaje, estabilidad dinámica,compensación de reactivos, limitación de corrientes de falla y en problemas de resonanciasubsícrona.
Uno de los FACTS que más importancia ha tomado desde su advenimiento es el capacitorserie controlado por tiristores (TCSC): Este dispositivo se inserta en serie con la línea detransmisión y consta de un reactor controlado por tiristores (TCR) conectado en paralelocon un capacitor fijo, permitiendo así un control efectivo de la corriente de línea y porconsiguiente de la potencia transmitida, también contribuye de manera positiva en elamortiguamiento de oscilaciones de potencia, estabilidad transitoria y dinámica yestabilidad de voltaje, entre otros; debido a esto es que se lleva a cabo éste trabajo deinvestigación enfocado a su análisis e implementación en laboratorio.
La principal motivación de éste trabajo es el contar con un dispositivo físico que permitaverificar modelos matemáticos y simuladores; por otro lado también puede utilizarse paracorroborar el desempeño de estrategias de control. Esto permite a la comunidad educativamaterializar el trabajo teórico desarrollado, así como ganar experiencia en el uso y diseñode dispositivos FACTS con miras al diseño, construcción y aplicación de éstos en redeseléctricas de gran tamaño.
Así, el objetivo de éste trabajo de investigación es construir a nivel laboratorio undispositivo FACTS, específicamente el TCSC, con el propósito de verificar los resultados
INTRODUCCIÓN
XI
teóricos presentados en la literatura y profundizar en el estudio de aspectos no tratadosanteriormente.
El trabajo está estructurado en cinco capítulos, de los cuales los dos primeros representanuna investigación bibliográfica, y los tres siguientes muestran el cuerpo del trabajo deinvestigación conformado de una parte desarrollada en simulación y finalmente losaspectos relativos a la implementación real y pruebas de desempeño del dispositivo.
En el capítulo I se hace una revisión de dispositivos FACTS, puntualizando suscaracterísticas de operación, de desempeño, así como su conexión en el sistema depotencia.
En el capítulo II se presenta una revisión de dos de los dispositivos de electrónica depotencia más importantes en la tecnología FACTS, explicando sus principalescaracterísticas así como sus ventajas y desventajas, además se revisan aspectos referentes ala modulación de ancho de pulso y a una de las técnicas mas utilizadas que es lamodulación senoidal.
El capítulo III muestra una serie de resultados en simulación acerca de aspectos que sepresentan en la operación real del TCSC, como son la consideración de la resistenciaasociada al reactor del dispositivo.
Se presenta una metodología para el cálculo de redes de amortiguamiento, necesarias parala operación segura de sistemas con tiristores que contienen cargas inductivas.
Por último se analizan las características del dispositivo considerando varios módulos, éstecapítulo es un preámbulo a la implementación física del TCSC.
En el capítulo IV se muestra la identificación de parámetros de los elementos quecomponen al TCSC, empleando una prueba de respuesta a la frecuencia; se presentatambién la descripción referente a la construcción del circuito de disparo utilizado,haciendo énfasis en las etapas que lo conforman. Asimismo se explica lo que concierne a laadquisición de las señales usando una tarjeta de adquisición de datos y lo que respecta alcircuito de prueba.
En el capítulo V se presentan los resultados obtenidos en laboratorio al realizar pruebas dedesempeño al TCSC que comprenden el análisis de las principales señales en estadotransitorio y estable, éstas últimas comparadas con simulaciones. También se llevan a cabopruebas para analizar la respuesta al cambio escalón en el ángulo de disparo, además seanaliza el contenido armónico de las señales.
Se estudian los efectos que trae consigo la inclusión de la resistencia asociada al reactor deldispositivo, tales como amortiguamiento, deformación y contenido armónico de las señalesdel TCSC.
INTRODUCCIÓN
XII
Finalmente se ilustran los resultados obtenidos al insertar una red snubber al TCSC,puntualizando el efecto que tiene ésta sobre la razón de cambio del voltaje a través de lostiristores.
Se hace hincapié en el hecho de que los resultados obtenidos arrojan conclusionescomparables a las presentadas en la literatura, así como de las obtenidas en simulación.
1
CAPÍTULO I
FACTS: Descripción general
1.1. Introducción
En éste capítulo se revisa la problemática de los sistemas eléctricos de potencia, haciendoénfasis en el uso de los dispositivos conocidos como FACTS para la solución de problemasde estado estacionario y dinámico, debido al gran número de ventajas que éstos presentansobre los dispositivos de conmutación mecánica.
Se revisa también la clasificación de FACTS en función de la forma de conexión que estosdispositivos tienen en la red. Así como una descripción de los principales dispositivos,clarificando las diferencias entre ellos y mencionando sus principales características.
1.2. Problemática
Actualmente los sistemas eléctricos de potencia constan de una gran cantidad deinterconexiones, no sólo entre compañías prestadoras de servicio eléctrico pertenecientes aun país, sino también entre sistemas de diferentes países [1]; esto obedece principalmente acuestiones de carácter económico y de seguridad en la operación del sistema.
Las interconexiones en los sistemas de potencia tienen el propósito de compartir plantasgeneradoras, así como cargas; de esta manera se minimizan los costos de generación,debido a que si la carga puede alimentarse utilizando cualquier planta generadora se puedenutilizar las más económicas.
El costo de líneas de transmisión, así como las dificultades que se presentan para suconstrucción, su localización, derecho de vía, etc., a menudo limitan la capacidad detransmisión, trayendo como consecuencia que se presenten casos en los que no se puededisponer de la energía de menor costo.
A medida que un sistema de potencia crece en términos de transferencia de energía yextensión territorial se hace más complejo y difícil de controlar. Esto puede traer comoconsecuencia grandes flujos de potencia en líneas sin un control adecuado, así como
DISEÑO E IMPLEMENTACIÓN EN LABORATORIO DE UN DISPOSITIVO TCSC
2
oscilaciones dinámicas en el sistema, evitando la utilización plena del potencial detransmisión.
En los últimos años la demanda en los sistemas de potencia ha aumentado y seguiráincrementándose, lo que conlleva a una serie de problemas como sobrecarga y/osubutilización del potencial de transmisión.
En la actualidad los sistemas eléctricos de potencia están básicamente controlados pordispositivos mecánicos. En los esquemas de protección y control se utilizan una granvariedad de dispositivos electrónicos, sistemas de cómputo y telecomunicaciones. Sinembargo, cuando se toma la acción de control y las señales llegan a los circuitos depotencia, los dispositivos de conmutación son mecánicos y presentan una velocidad derespuesta baja, así como una tendencia a desgastarse rápidamente comparados con losdispositivos estáticos, esto presenta una limitante en la velocidad de operación. Así, eldesempeño de estos dispositivos representa desde el punto de vista de operación en estadoestable y dinámico un problema de controlabilidad del sistema. Este tipo de limitaciones sehan venido solucionando de tal manera que el sistema de potencia opere de manera efectivay segura, con la ventaja, por ejemplo, de tener mejores márgenes de operación.
Los dispositivos FACTS son una tecnología basada en elementos de electrónica de potenciade alta velocidad [4], y pueden solucionar problemas que se presentan en los sistemas depotencia, como obtener el mayor provecho de los sistemas de transmisión y ayudar a laestabilidad del sistema [2].
Mediante el uso de la tecnología FACTS se puede controlar el flujo de potencia y mejorarla capacidad útil de las líneas de transmisión. Estos dispositivos permiten controlar lacorriente en una línea a un costo relativamente bajo comparado con lo que representa suconstrucción, esto abre nuevas expectativas para incrementar la capacidad de las líneas yaexistentes y/o controlar el flujo de potencia a través de ellas. La posibilidad en las mejorasestriba en que los controladores FACTS poseen la cualidad de controlar todas lascaracterísticas fundamentales de los sistemas de potencia; perfil de voltaje, flujos en líneas,impedancia serie y derivación y la topología de la red [3]. Mediante la modificación dedichos parámetros estos dispositivos pueden forzar el flujo de potencia en una línea cercade su límite térmico. Los FACTS son un conjunto de controladores que pueden serutilizados de manera individual o coordinados para controlar uno o varios de los parámetrosmencionados [1]. Un dispositivo FACTS bien seleccionado y bien ubicado puede disminuirlas limitaciones específicas de una línea.
Los dispositivos de conmutación mecánica pueden sustituirse por dispositivos electrónicosde potencia de respuesta rápida, aunque debe tenerse en cuenta que los dispositivos FACTSno son un substituto para los conmutadores mecánicos.
Previo a la introducción del concepto de FACTS hecha por Narain G. Hingorani, ya sehabían utilizado controladores basados en electrónica de potencia que ahora entran en elconcepto. Uno de estos dispositivos es el compensador estático de reactivos (SVC). El cualfue utilizado por primera vez en el control de un sistema de transmisión de CA en 1978 enun proyecto conjunto del EPRI y la Minnesota Power and Light [5]. Este dispositivo se
CAPÍTULO I FACTS: DESCRIPCIÓN GENERAL
3
conecta en derivación para control de voltaje. Aún antes que los SVCs hubo dos versionesde reactores estáticos saturables que se utilizaban para la limitación de sobrevoltajes.
1.3. Importancia de los parámetros del sistema
Mediante el uso de los dispositivos FACTS es posible controlar parámetros de las líneas,afectando así el flujo de potencia a través de éstas como se muestra a continuación [6].
El control de la impedancia de línea permite un control efectivo de la corriente.
Si la diferencia angular no es grande, que por lo general es lo deseado, el control dela impedancia de línea o del ángulo permite el control de la potencia activa.
La inyección de un voltaje en serie con la línea a cualquier ángulo de fase conrespecto al voltaje en la línea permite el control de la magnitud y la fase de lacorriente de línea. Esto significa que la inyección de un fasor de voltaje con ángulode fase variable puede controlar con precisión el flujo de potencia activa y reactiva.
La inyección de un voltaje en serie, y ortogonal al flujo de corriente proporciona laposibilidad de incrementar o decrementar la magnitud de dicha corriente; como elflujo de corriente está retrasado 90° del voltaje de línea, la inyección de potenciareactiva en serie permite el control de la corriente de línea y por consiguiente lapotencia activa si la diferencia angular no es grande.
1.4. Flujo de potencia en rutas paralelas
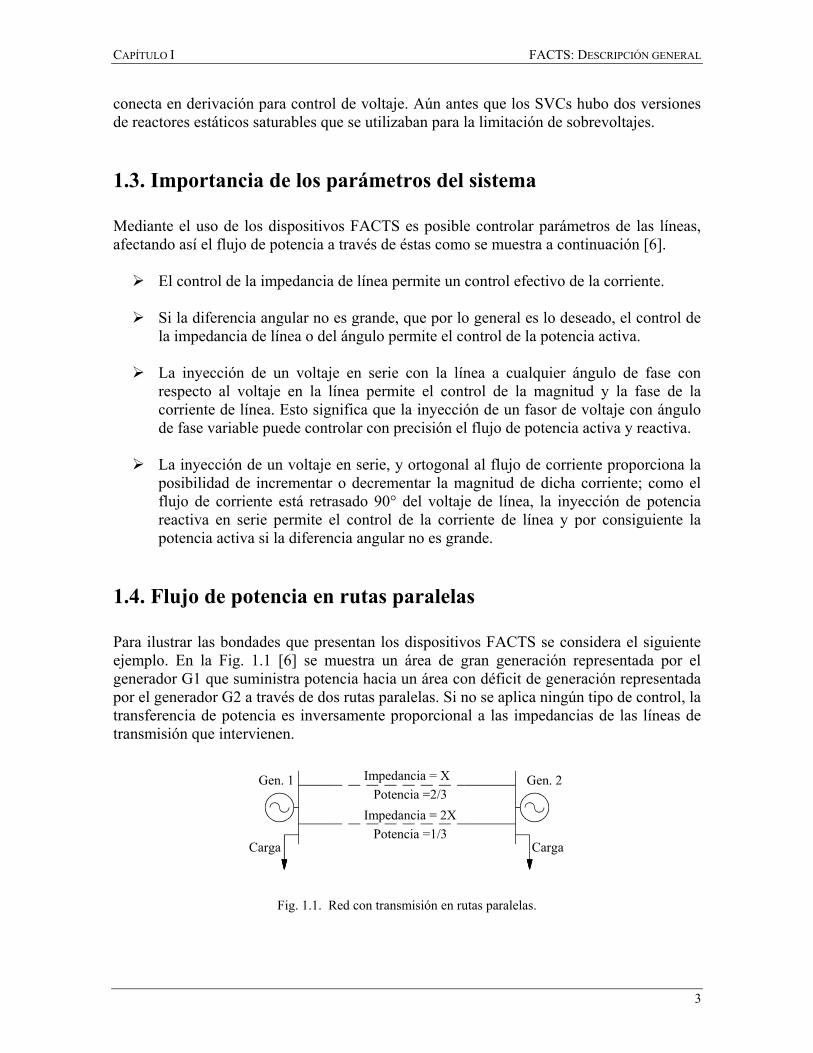
Para ilustrar las bondades que presentan los dispositivos FACTS se considera el siguienteejemplo. En la Fig. 1.1 [6] se muestra un área de gran generación representada por elgenerador G1 que suministra potencia hacia un área con déficit de generación representadapor el generador G2 a través de dos rutas paralelas. Si no se aplica ningún tipo de control, latransferencia de potencia es inversamente proporcional a las impedancias de las líneas detransmisión que intervienen.
Fig. 1.1. Red con transmisión en rutas paralelas.
Gen. 1 Gen. 2
Carga
Impedancia = X
Impedancia = 2X
Potencia =2/3
Potencia =1/3Carga
DISEÑO E IMPLEMENTACIÓN EN LABORATORIO DE UN DISPOSITIVO TCSC
4
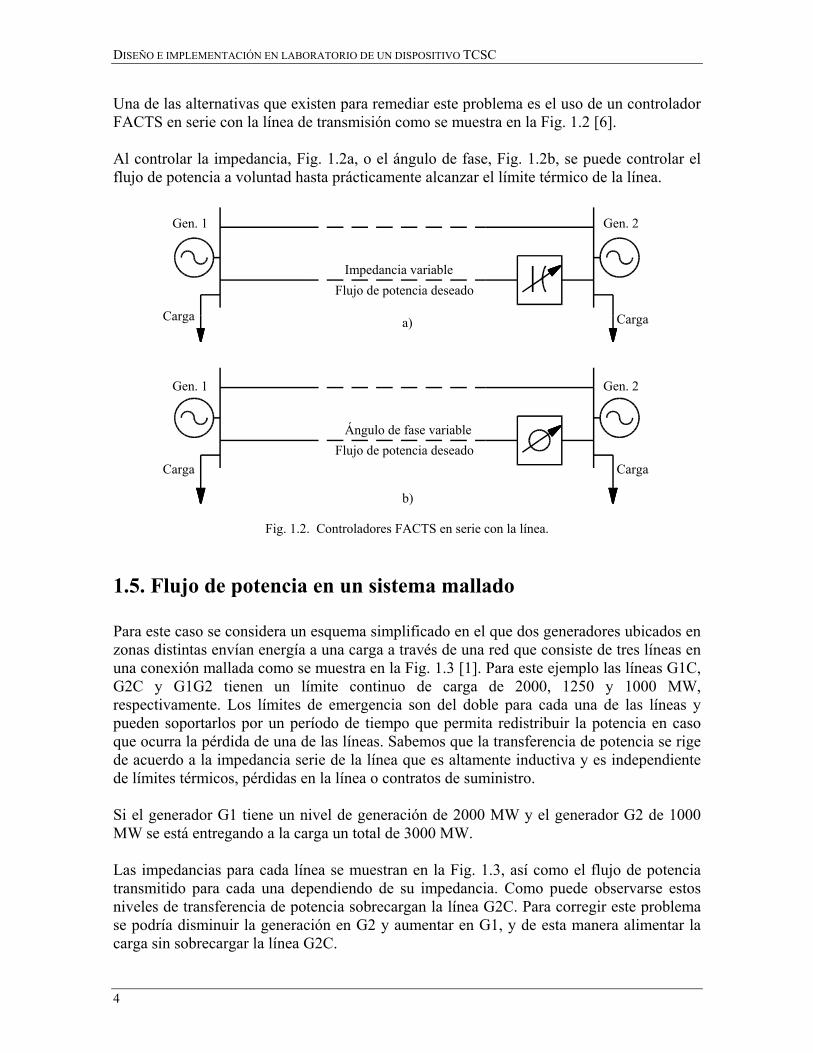
Una de las alternativas que existen para remediar este problema es el uso de un controladorFACTS en serie con la línea de transmisión como se muestra en la Fig. 1.2 [6].
Al controlar la impedancia, Fig. 1.2a, o el ángulo de fase, Fig. 1.2b, se puede controlar elflujo de potencia a voluntad hasta prácticamente alcanzar el límite térmico de la línea.
Fig. 1.2. Controladores FACTS en serie con la línea.
1.5. Flujo de potencia en un sistema mallado
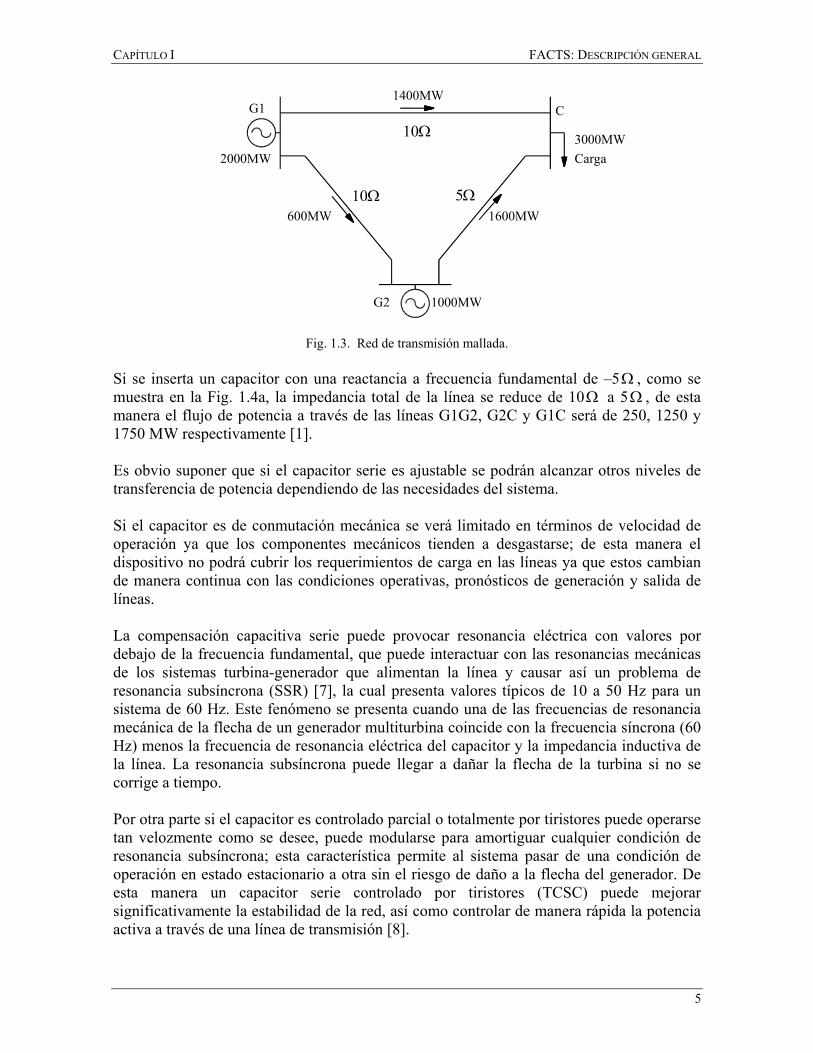
Para este caso se considera un esquema simplificado en el que dos generadores ubicados enzonas distintas envían energía a una carga a través de una red que consiste de tres líneas enuna conexión mallada como se muestra en la Fig. 1.3 [1]. Para este ejemplo las líneas G1C,G2C y G1G2 tienen un límite continuo de carga de 2000, 1250 y 1000 MW,respectivamente. Los límites de emergencia son del doble para cada una de las líneas ypueden soportarlos por un período de tiempo que permita redistribuir la potencia en casoque ocurra la pérdida de una de las líneas. Sabemos que la transferencia de potencia se rigede acuerdo a la impedancia serie de la línea que es altamente inductiva y es independientede límites térmicos, pérdidas en la línea o contratos de suministro.
Si el generador G1 tiene un nivel de generación de 2000 MW y el generador G2 de 1000MW se está entregando a la carga un total de 3000 MW.
Las impedancias para cada línea se muestran en la Fig. 1.3, así como el flujo de potenciatransmitido para cada una dependiendo de su impedancia. Como puede observarse estosniveles de transferencia de potencia sobrecargan la línea G2C. Para corregir este problemase podría disminuir la generación en G2 y aumentar en G1, y de esta manera alimentar lacarga sin sobrecargar la línea G2C.
Carga
Carga
Carga
Impedancia variable
Flujo de potencia deseado
Flujo de potencia deseado
Ángulo de fase variable
a)
b)
Gen. 1 Gen. 2
Gen. 1 Gen. 2
Carga
CAPÍTULO I FACTS: DESCRIPCIÓN GENERAL
Fig. 1.3. Red de
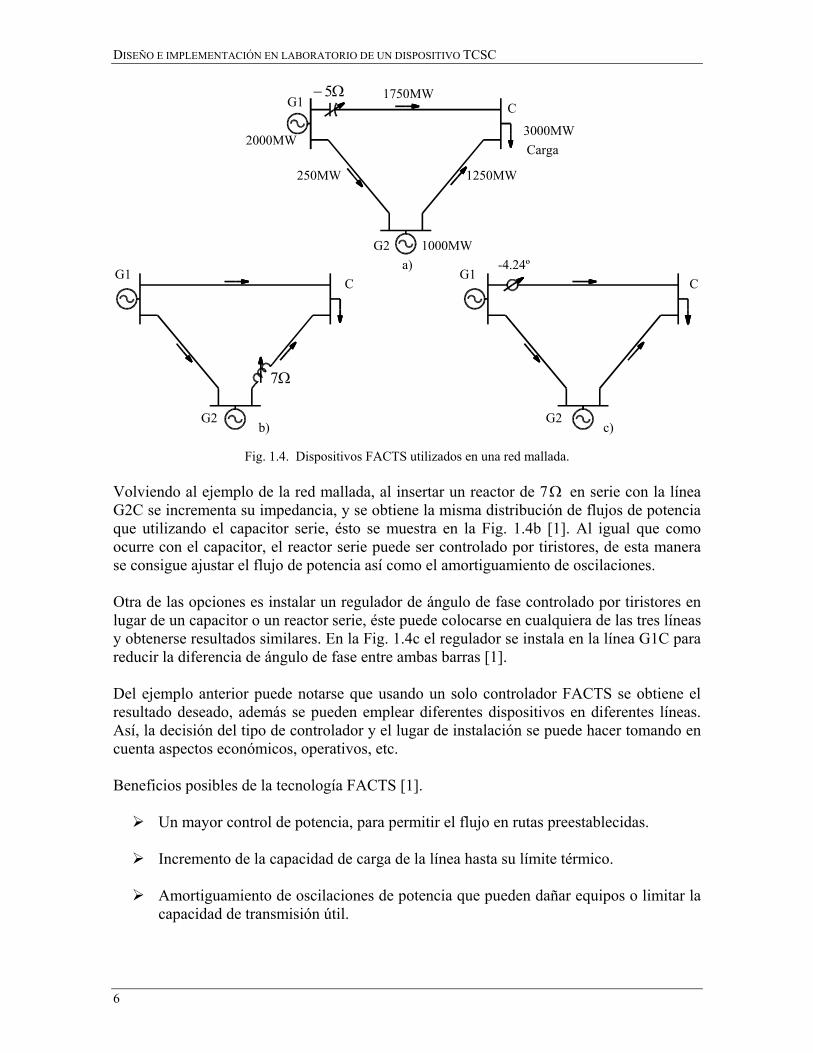
Si se inserta un capacitor con una reactancmuestra en la Fig. 1.4a, la impedancia totamanera el flujo de potencia a través de las 1750 MW respectivamente [1].
Es obvio suponer que si el capacitor serie etransferencia de potencia dependiendo de las
Si el capacitor es de conmutación mecánicaoperación ya que los componentes mecándispositivo no podrá cubrir los requerimiende manera continua con las condiciones oplíneas.
La compensación capacitiva serie puede pdebajo de la frecuencia fundamental, que pde los sistemas turbina-generador que alimresonancia subsíncrona (SSR) [7], la cual psistema de 60 Hz. Este fenómeno se presenmecánica de la flecha de un generador multHz) menos la frecuencia de resonancia elécla línea. La resonancia subsíncrona puede corrige a tiempo.
Por otra parte si el capacitor es controlado ptan velozmente como se desee, puede modresonancia subsíncrona; esta característica operación en estado estacionario a otra sin esta manera un capacitor serie controsignificativamente la estabilidad de la red, aactiva a través de una línea de transmisión [8
G1
G2
C1400MW
2000MW
600MW
Ω0
Ω10
1
3000MWCarga
Ω5
transmisi
ia a frecl de la llíneas G
s ajusta necesid
se veráicos tientos de caerativas,
rovocaruede int
entan resenta ta cuanditurbina trica delllegar a
arcial o ularse ppermiteel riesgolado posí como].
100
5
ón mallada.
uencia fundamental de –5Ω , como seínea se reduce de 10Ω a 5Ω , de esta1G2, G2C y G1C será de 250, 1250 y
ble se podrán alcanzar otros niveles deades del sistema.
limitado en términos de velocidad deden a desgastarse; de esta manera elrga en las líneas ya que estos cambian pronósticos de generación y salida de
resonancia eléctrica con valores poreractuar con las resonancias mecánicasla línea y causar así un problema devalores típicos de 10 a 50 Hz para uno una de las frecuencias de resonanciacoincide con la frecuencia síncrona (60 capacitor y la impedancia inductiva de dañar la flecha de la turbina si no se
totalmente por tiristores puede operarseara amortiguar cualquier condición de al sistema pasar de una condición de de daño a la flecha del generador. Der tiristores (TCSC) puede mejorar controlar de manera rápida la potencia
0MW
1600MW
DISEÑO E IMPLEMENTACIÓN EN LABORATORIO DE UN DISPOSITIVO TCSC
6
Fig. 1.4. D
Volviendo al ejemplo de la reG2C se incrementa su impedaque utilizando el capacitor seocurre con el capacitor, el rease consigue ajustar el flujo de
Otra de las opciones es installugar de un capacitor o un reay obtenerse resultados similarreducir la diferencia de ángulo
Del ejemplo anterior puede nresultado deseado, además seAsí, la decisión del tipo de cocuenta aspectos económicos, o
Beneficios posibles de la tecn
Un mayor control de p
Incremento de la capac
Amortiguamiento de ocapacidad de transmisi
G1
G1
G2
1750MW
2000MW
2
Ω−5
Ω7
b)
G1
G2
3000MW
C
Carga
1000MW
1250MW50MW
C C
-4.24ºa)
ispositivos FACTS utilizados en una red mallada.
d mallada, al insertar un reactor de 7Ω en serie con la líneancia, y se obtiene la misma distribución de flujos de potenciarie, ésto se muestra en la Fig. 1.4b [1]. Al igual que comoctor serie puede ser controlado por tiristores, de esta manera
potencia así como el amortiguamiento de oscilaciones.
ar un regulador de ángulo de fase controlado por tiristores enctor serie, éste puede colocarse en cualquiera de las tres líneases. En la Fig. 1.4c el regulador se instala en la línea G1C para de fase entre ambas barras [1].
otarse que usando un solo controlador FACTS se obtiene el pueden emplear diferentes dispositivos en diferentes líneas.ntrolador y el lugar de instalación se puede hacer tomando enperativos, etc.
ología FACTS [1].
otencia, para permitir el flujo en rutas preestablecidas.
idad de carga de la línea hasta su límite térmico.
scilaciones de potencia que pueden dañar equipos o limitar laón útil.
G2c)
CAPÍTULO I FACTS: DESCRIPCIÓN GENERAL
Una mayor habilidad para la transferencia de potencia entre áreas controladas parapoder reducir el margen de reserva de generación.
Incremento del uso de fuentes de generación de costo más bajo.
Limitar los efectos de fallas en el sistema y fallas en equipos previniendo salidas encascada.
1.6. Tipos básicos de controladores FACTS
De manera general los controladores FACTS pueden dividirse en cuatro categorías [6].
Controladores serie. Controladores en derivación. Controladores serie-serie. Controladores serie-derivación.
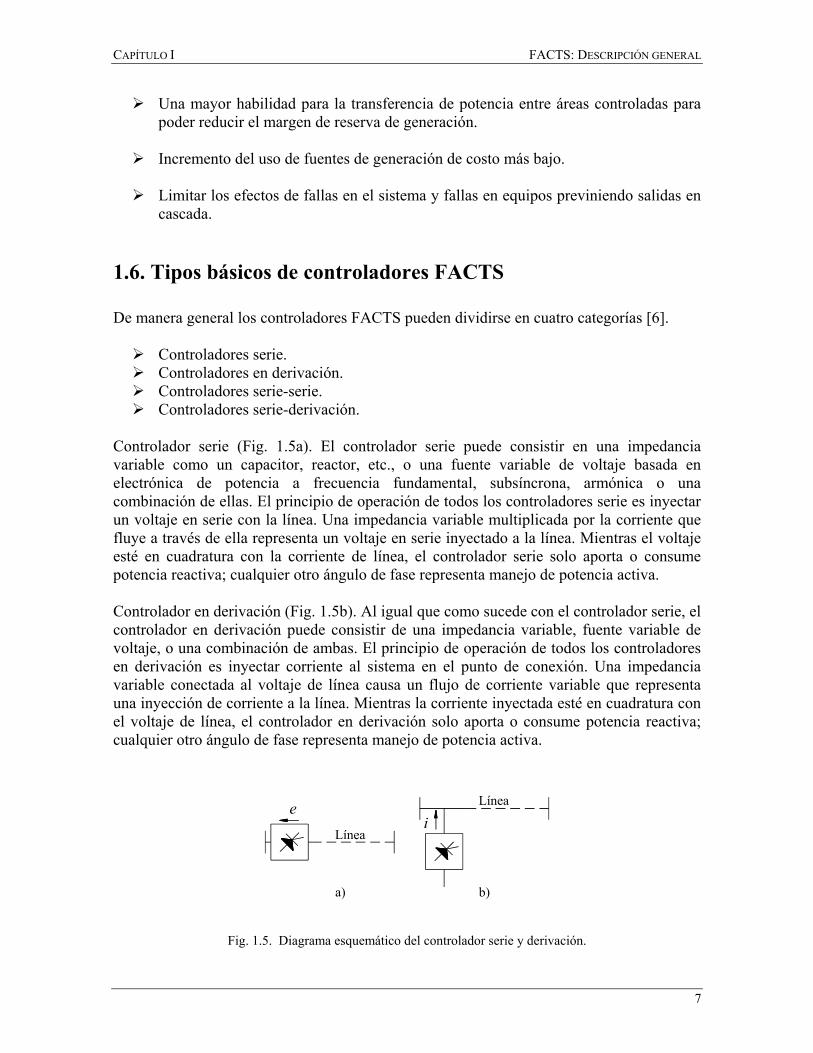
Controlador serie (Fig. 1.5a). El controlador serie puede consistir en una impedanciavariable como un capacitor, reactor, etc., o una fuente variable de voltaje basada enelectrónica de potencia a frecuencia fundamental, subsíncrona, armónica o unacombinación de ellas. El principio de operación de todos los controladores serie es inyectarun voltaje en serie con la línea. Una impedancia variable multiplicada por la corriente quefluye a través de ella representa un voltaje en serie inyectado a la línea. Mientras el voltajeesté en cuadratura con la corriente de línea, el controlador serie solo aporta o consumepotencia reactiva; cualquier otro ángulo de fase representa manejo de potencia activa.
Controlador en derivación (Fig. 1.5b). Al igual que como sucede con el controlador serie, elcontrolador en derivación puede consistir de una impedancia variable, fuente variable devoltaje, o una combinación de ambas. El principio de operación de todos los controladoresen derivación es inyectar corriente al sistema en el punto de conexión. Una impedanciavariable conectada al voltaje de línea causa un flujo de corriente variable que representauna inyección de corriente a la línea. Mientras la corriente inyectada esté en cuadratura conel voltaje de línea, el controlador en derivación solo aporta o consume potencia reactiva;cualquier otro ángulo de fase representa manejo de potencia activa.
Fig. 1.5. D
eLínea
iagrama esquemático de
iLínea
a)
7
l controlador serie y derivación.
b)
DISEÑO E IMPLEMENTACIÓN EN LABORATORIO DE UN DISPOSITIVO TCSC
8
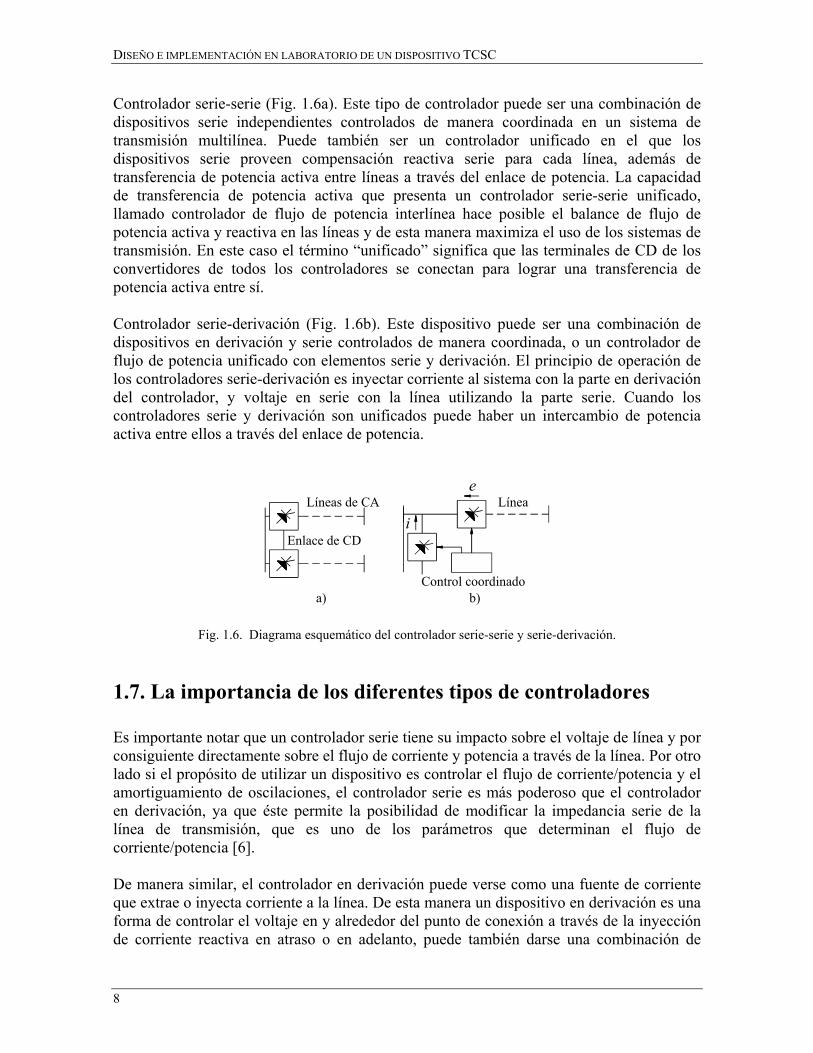
Controlador serie-serie (Fig. 1.6a). Este tipo de controlador puede ser una combinación dedispositivos serie independientes controlados de manera coordinada en un sistema detransmisión multilínea. Puede también ser un controlador unificado en el que losdispositivos serie proveen compensación reactiva serie para cada línea, además detransferencia de potencia activa entre líneas a través del enlace de potencia. La capacidadde transferencia de potencia activa que presenta un controlador serie-serie unificado,llamado controlador de flujo de potencia interlínea hace posible el balance de flujo depotencia activa y reactiva en las líneas y de esta manera maximiza el uso de los sistemas detransmisión. En este caso el término “unificado” significa que las terminales de CD de losconvertidores de todos los controladores se conectan para lograr una transferencia depotencia activa entre sí.
Controlador serie-derivación (Fig. 1.6b). Este dispositivo puede ser una combinación dedispositivos en derivación y serie controlados de manera coordinada, o un controlador deflujo de potencia unificado con elementos serie y derivación. El principio de operación delos controladores serie-derivación es inyectar corriente al sistema con la parte en derivacióndel controlador, y voltaje en serie con la línea utilizando la parte serie. Cuando loscontroladores serie y derivación son unificados puede haber un intercambio de potenciaactiva entre ellos a través del enlace de potencia.
Fig. 1.6. Diagrama esquemático del controlador
1.7. La importancia de los diferentes ti
Es importante notar que un controlador serie tiene su iconsiguiente directamente sobre el flujo de corriente ylado si el propósito de utilizar un dispositivo es controamortiguamiento de oscilaciones, el controlador serieen derivación, ya que éste permite la posibilidad delínea de transmisión, que es uno de los parámcorriente/potencia [6].
De manera similar, el controlador en derivación puedque extrae o inyecta corriente a la línea. De esta manerforma de controlar el voltaje en y alrededor del puntode corriente reactiva en atraso o en adelanto, puede
Enlace de CD
Líneas de CA
Control
e
i
a)
Línea
serie-serie y serie-derivación.
pos de controladores
mpacto sobre el voltaje de línea y por potencia a través de la línea. Por otrolar el flujo de corriente/potencia y el es más poderoso que el controlador modificar la impedancia serie de laetros que determinan el flujo de
e verse como una fuente de corrientea un dispositivo en derivación es una de conexión a través de la inyección también darse una combinación de
coordinadob)
CAPÍTULO I FACTS: DESCRIPCIÓN GENERAL
9
corriente activa y reactiva para un control más efectivo de voltaje y amortiguamiento deoscilaciones de voltaje.
Lo anterior no significa que no se pueda utilizar un controlador serie para mantener elvoltaje de línea dentro de un rango especificado. Después de todo, las fluctuaciones devoltaje son en gran medida una consecuencia de la caída del voltaje en la impedancia seriede las líneas, transformadores y generadores. Así, si se utiliza un controlador FACTS enserie se puede mejorar el perfil de voltaje, pero a un costo muy elevado. Un controlador enderivación es mucho más efectivo para mantener el perfil de voltaje requerido en unasubestación. Una de las ventajas del controlador en derivación es que abastece al nodoindependientemente de las líneas conectadas a él.
Si la solución de un problema involucra controladores serie se podría requerir, aunque nonecesariamente, un controlador para cada una de las líneas conectadas a la subestación; noobstante, esto no implica una razón decisiva para elegir un controlador en derivación, yaque el nivel de potencia requerido en un controlador serie es pequeño comparado con el deun controlador en derivación. De cualquier manera el dispositivo en derivación no puedecontrolar el flujo de potencia sobre las líneas.
Por otro lado, se sugiere diseñar los controladores serie para operar durante contingencias,sobrecargas dinámicas y corrientes de corto circuito. Estos dispositivos se pueden protegermediante supresores de picos, o a través de dispositivos de estado sólido que inhiben suoperación cuando la corriente de falla es demasiado grande.
De lo expuesto anteriormente se puede prever que la combinación de controladores serie yderivación puede ofrecer las ventajas de cada uno de ellos, como lo son control de flujo decorriente/potencia de línea y el control de voltaje nodal.
1.8. Breve descripción y definición de los controladores FACTS
En ésta sección se describen y se definen brevemente controladores en derivación, serie yserie-derivación; los párrafos en letra cursiva corresponden a definiciones del grupo detrabajo de FACTS de IEEE [9].
Debe mencionarse que los controladores basados en convertidores pueden usarconvertidores de voltaje ó de corriente, ambos en base a tiristores de apagado porcompuerta.
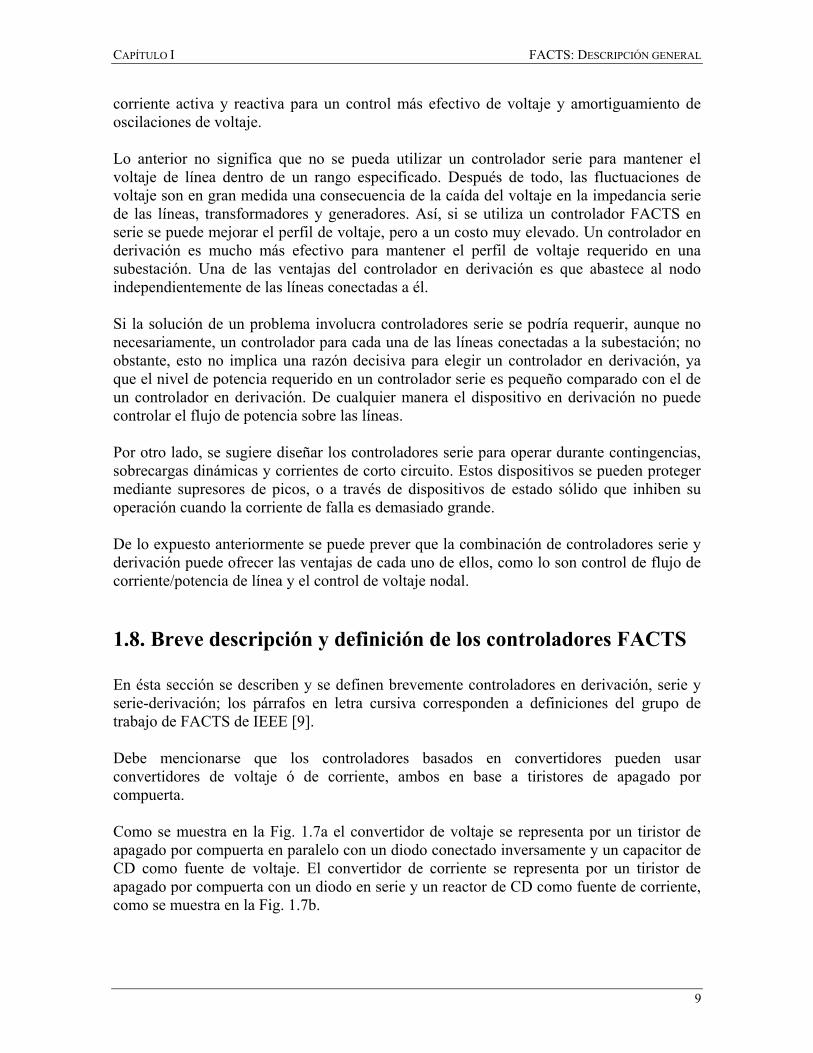
Como se muestra en la Fig. 1.7a el convertidor de voltaje se representa por un tiristor deapagado por compuerta en paralelo con un diodo conectado inversamente y un capacitor deCD como fuente de voltaje. El convertidor de corriente se representa por un tiristor deapagado por compuerta con un diodo en serie y un reactor de CD como fuente de corriente,como se muestra en la Fig. 1.7b.
DISEÑO E IMPLEMENTACIÓN EN LABORATORIO DE UN DISPOSITIVO TCSC
10
Para el convertidor de voltaje, el voltaje de CD del capacitor se presenta, en el lado de CA,como un voltaje de CA a través de la conmutación de los tiristores en forma secuencial. Através de una configuración adecuada del convertidor es posible controlar la salida devoltaje de CA en magnitud y fase con relación al voltaje de CA del sistema.
Fig. 1.7. Diagrama esquemático del STATCOM basado en convertidores de voltaje y corriente.
Cuando la capacidad de almacenamiento del capacitor de CD es pequeña y no hay otrafuente de poder conectada, éste no puede proporcionar o absorber potencia activa más deun ciclo. El voltaje de CA de salida se mantiene a 90° con respecto a la corriente de CA, enadelanto o en atraso, en este caso el convertidor se usa para absorber o suministrarúnicamente potencia reactiva.
Para el convertidor de corriente, la corriente de CD se representa en el lado de CA a travésde la conmutación de tiristores en forma secuencial como una corriente de CA variable enamplitud y fase con relación al voltaje de CA del sistema.
Desde un punto de vista de costo se prefieren los convertidores de voltaje sobre los decorriente.
El grupo de trabajo de FACTS de IEEE sugiere términos y definiciones para dispositivosFACTS y para controladores FACTS [9]. Se presentan ahora las definiciones de lostérminos más comunes en la literatura.
Flexibilidad de transmisión de potencia eléctrica. La habilidad de hacer cambios enel sistema eléctrico de transmisión o condiciones de operación mientras semantienen márgenes suficientes de estado estable y transitorio.
Sistemas de transmisión flexibles de CA (FACTS). Sistemas de transmisión decorriente alterna que incorporan electrónica de potencia y otros controladoresestáticos, para incrementar la controlabilidad y la capacidad de transferencia depotencia.
Línea Línea
a) b)
CAPÍTULO I FACTS: DESCRIPCIÓN GENERAL
11
En la definición anterior debe hacerse notar que las palabras “otros controladores estáticos”implican que puede haber otros controladores estáticos que no estén basados en electrónicade potencia.
Controlador FACTS. Sistema basado en electrónica de potencia y otros equiposestáticos que proporcionan control sobre uno o más de los parámetros de lossistemas de transmisión de CA.
1.8.1. Controladores en derivación
Compensador estático síncrono (STATCOM). Compensador estático síncronooperado como compensador estático de reactivos en derivación, en el que es posiblecontrolar la corriente de salida capacitiva o inductiva de manera independiente delvoltaje de CA del sistema.
El STATCOM es uno de los controladores FACTS más importantes. Puede estar basado enconvertidores de corriente o de voltaje. La Fig. 1.7 muestra un diagrama simple de unalínea con un STATCOM basado en un convertidor de voltaje y en un convertidor decorriente.
Generador estático síncrono (SSG). Convertidor estático de potenciaautoconmutado alimentado de una fuente de energía eléctrica apropiada y operadopara producir un conjunto de voltajes de salida multifase ajustables, que puede seracoplado a un sistema de potencia de CA con el propósito de intercambiarindependientemente y de manera controlada potencia activa y reactiva.
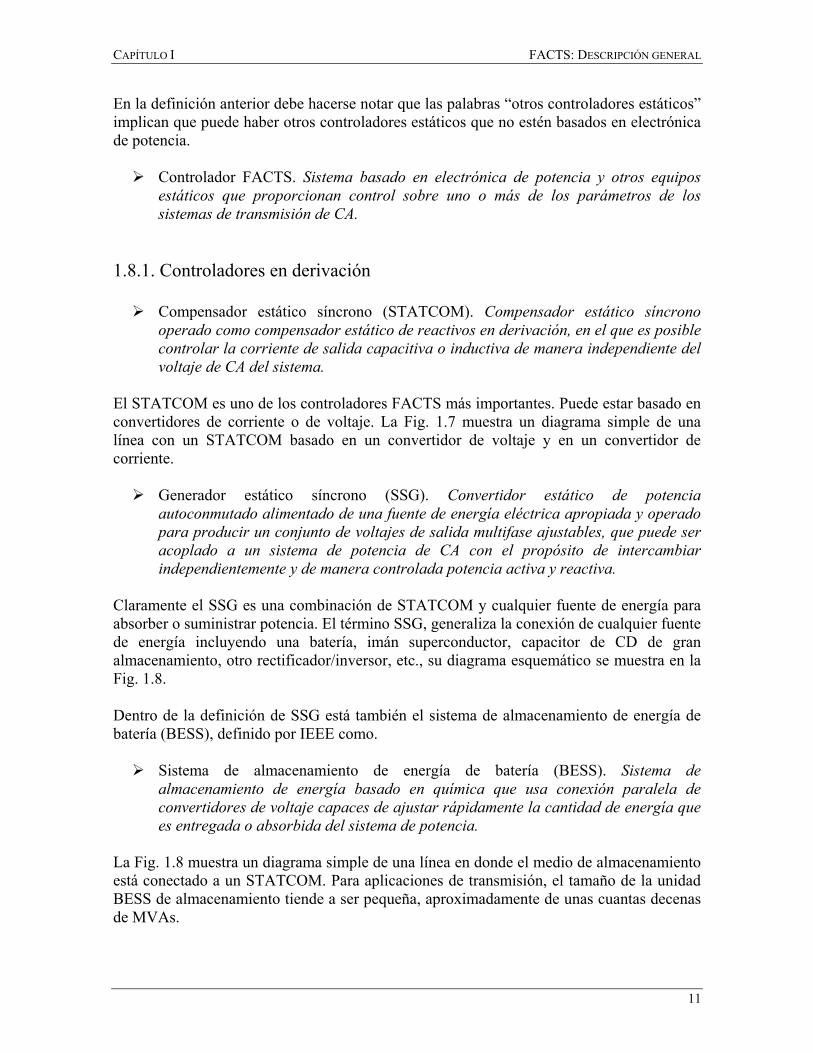
Claramente el SSG es una combinación de STATCOM y cualquier fuente de energía paraabsorber o suministrar potencia. El término SSG, generaliza la conexión de cualquier fuentede energía incluyendo una batería, imán superconductor, capacitor de CD de granalmacenamiento, otro rectificador/inversor, etc., su diagrama esquemático se muestra en laFig. 1.8.
Dentro de la definición de SSG está también el sistema de almacenamiento de energía debatería (BESS), definido por IEEE como.
Sistema de almacenamiento de energía de batería (BESS). Sistema dealmacenamiento de energía basado en química que usa conexión paralela deconvertidores de voltaje capaces de ajustar rápidamente la cantidad de energía quees entregada o absorbida del sistema de potencia.
La Fig. 1.8 muestra un diagrama simple de una línea en donde el medio de almacenamientoestá conectado a un STATCOM. Para aplicaciones de transmisión, el tamaño de la unidadBESS de almacenamiento tiende a ser pequeña, aproximadamente de unas cuantas decenasde MVAs.
DISEÑO E IMPLEMENTACIÓN EN LABORATORIO DE UN DISPOSITIVO TCSC
12
Otro subconjunto del SSG, adecuado para aplicaciones de transmisión, es el imánsuperconductor de almacenamiento de energía (SMES), a continuación se presenta ladefinición dada por IEEE.
Fig. 1.8. Diagrama esquemático de la unidad BESS, el SSG y el SMES.
Imán superconductor de almacenamiento de energía (SMES). Dispositivoelectromagnético superconductor de almacenamiento de energía que contieneconvertidores electrónicos que rápidamente inyectan y/o absorben potencia activay/o reactiva o controlan en forma dinámica el flujo de potencia en un sistema deCA.
Ya que la corriente de CD en el imán no puede cambiar rápidamente, la entrada o salida depotencia en el imán se ajusta controlando el voltaje a través de él utilizando una interfazelectrónica apropiada para la conexión con un STATCOM, en la Fig. 1.8 se muestra sudiagrama esquemático.
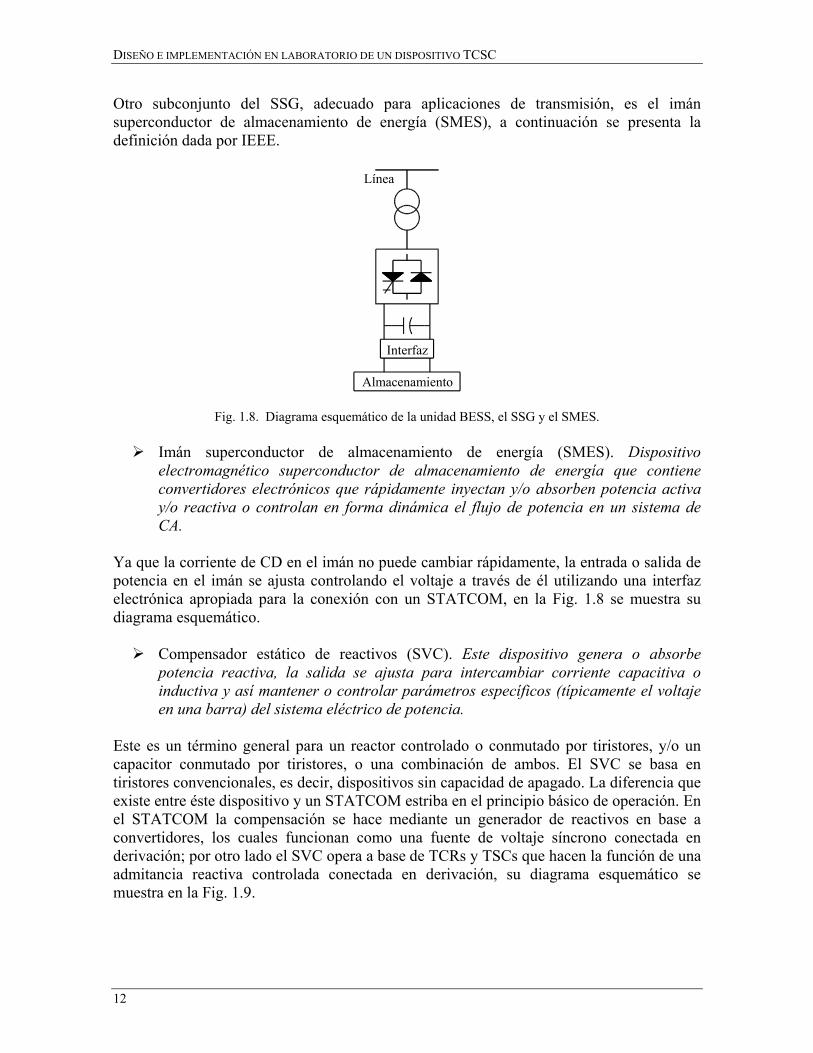
Compensador estático de reactivos (SVC). Este dispositivo genera o absorbepotencia reactiva, la salida se ajusta para intercambiar corriente capacitiva oinductiva y así mantener o controlar parámetros específicos (típicamente el voltajeen una barra) del sistema eléctrico de potencia.
Este es un término general para un reactor controlado o conmutado por tiristores, y/o uncapacitor conmutado por tiristores, o una combinación de ambos. El SVC se basa entiristores convencionales, es decir, dispositivos sin capacidad de apagado. La diferencia queexiste entre éste dispositivo y un STATCOM estriba en el principio básico de operación. Enel STATCOM la compensación se hace mediante un generador de reactivos en base aconvertidores, los cuales funcionan como una fuente de voltaje síncrono conectada enderivación; por otro lado el SVC opera a base de TCRs y TSCs que hacen la función de unaadmitancia reactiva controlada conectada en derivación, su diagrama esquemático semuestra en la Fig. 1.9.
Línea
Interfaz
Almacenamiento
CAPÍTULO I FACTS: DESCRIPCIÓN GENERAL
13
Fig. 1.9. Diagrama esquemático del SVC.
Reactor controlado por tiristores (TCR). Reactor controlado por tiristores que varíasu reactancia efectiva de manera continua mediante control parcial de conducciónde los tiristores.
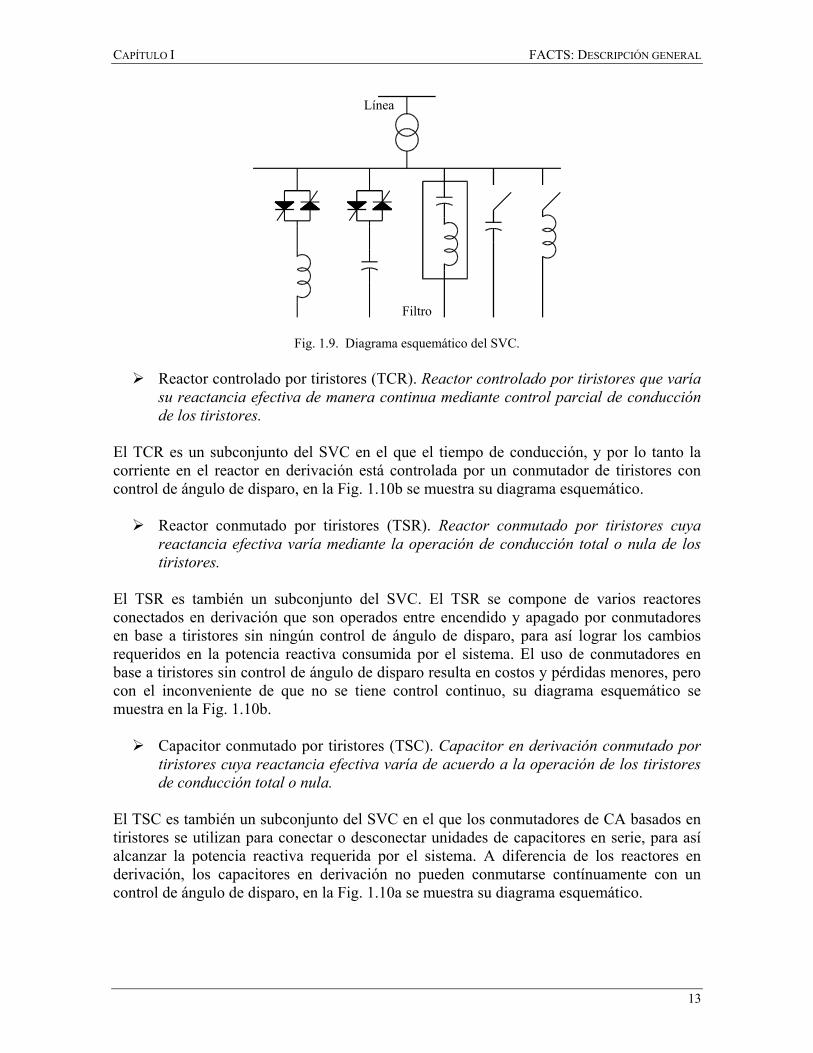
El TCR es un subconjunto del SVC en el que el tiempo de conducción, y por lo tanto lacorriente en el reactor en derivación está controlada por un conmutador de tiristores concontrol de ángulo de disparo, en la Fig. 1.10b se muestra su diagrama esquemático.
Reactor conmutado por tiristores (TSR). Reactor conmutado por tiristores cuyareactancia efectiva varía mediante la operación de conducción total o nula de lostiristores.
El TSR es también un subconjunto del SVC. El TSR se compone de varios reactoresconectados en derivación que son operados entre encendido y apagado por conmutadoresen base a tiristores sin ningún control de ángulo de disparo, para así lograr los cambiosrequeridos en la potencia reactiva consumida por el sistema. El uso de conmutadores enbase a tiristores sin control de ángulo de disparo resulta en costos y pérdidas menores, perocon el inconveniente de que no se tiene control continuo, su diagrama esquemático semuestra en la Fig. 1.10b.
Capacitor conmutado por tiristores (TSC). Capacitor en derivación conmutado portiristores cuya reactancia efectiva varía de acuerdo a la operación de los tiristoresde conducción total o nula.
El TSC es también un subconjunto del SVC en el que los conmutadores de CA basados entiristores se utilizan para conectar o desconectar unidades de capacitores en serie, para asíalcanzar la potencia reactiva requerida por el sistema. A diferencia de los reactores enderivación, los capacitores en derivación no pueden conmutarse contínuamente con uncontrol de ángulo de disparo, en la Fig. 1.10a se muestra su diagrama esquemático.
Línea
Filtro
DISEÑO E IMPLEMENTACIÓN EN LABORATORIO DE UN DISPOSITIVO TCSC
14
Fig. 1.10. Diagrama esquemático del TSC, el TCR y el TSR.
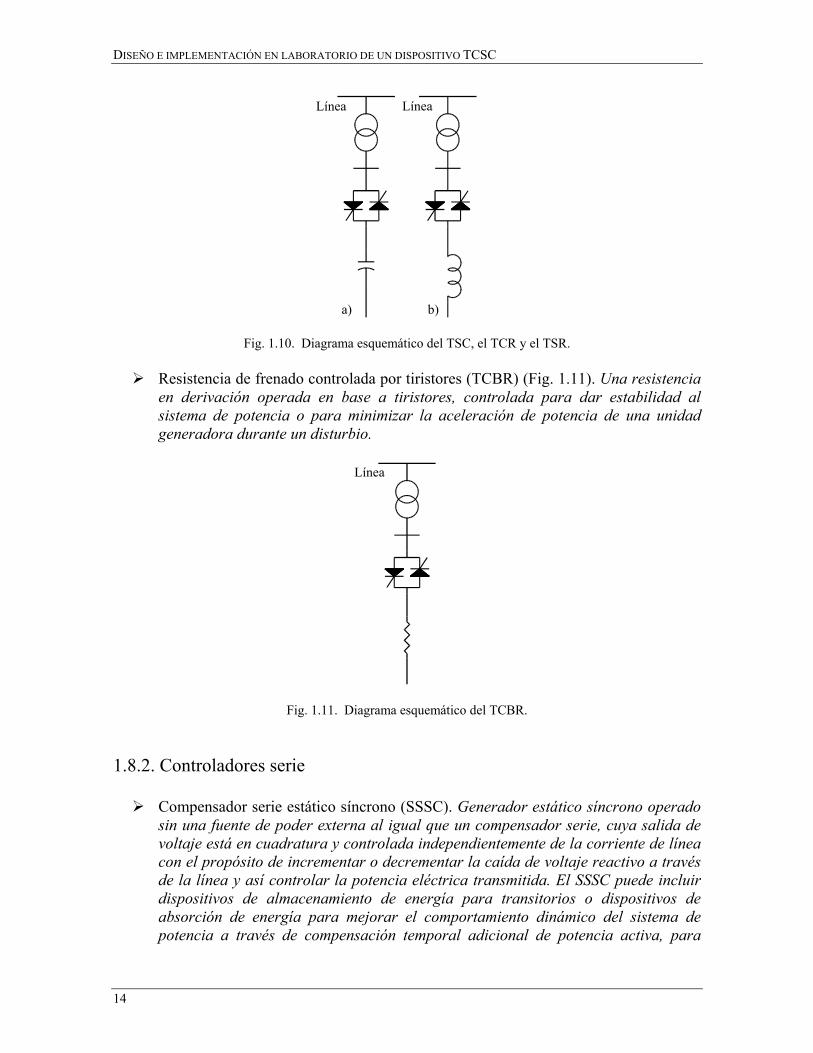
Resistencia de frenado controlada por tiristores (TCBR) (Fig. 1.11). Una resistenciaen derivación operada en base a tiristores, controlada para dar estabilidad alsistema de potencia o para minimizar la aceleración de potencia de una unidadgeneradora durante un disturbio.
Fig. 1.11. Diagrama esquemático del TCBR.
1.8.2. Controladores serie
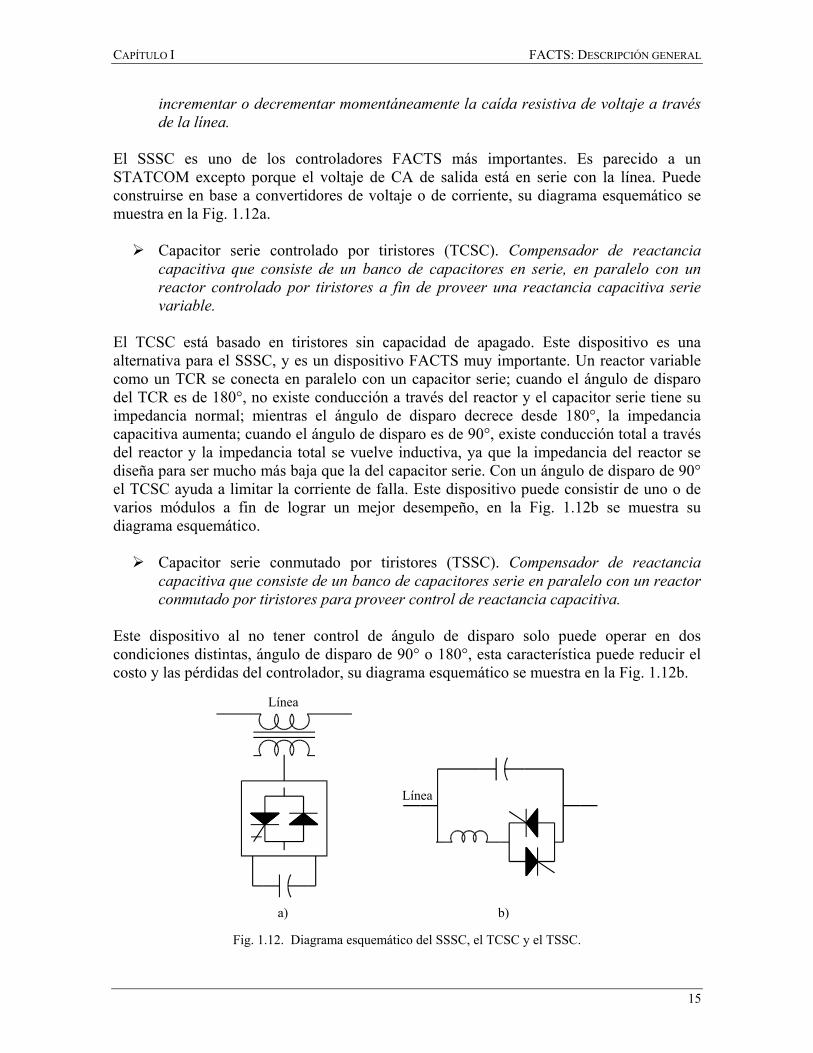
Compensador serie estático síncrono (SSSC). Generador estático síncrono operadosin una fuente de poder externa al igual que un compensador serie, cuya salida devoltaje está en cuadratura y controlada independientemente de la corriente de líneacon el propósito de incrementar o decrementar la caída de voltaje reactivo a travésde la línea y así controlar la potencia eléctrica transmitida. El SSSC puede incluirdispositivos de almacenamiento de energía para transitorios o dispositivos deabsorción de energía para mejorar el comportamiento dinámico del sistema depotencia a través de compensación temporal adicional de potencia activa, para
Línea Línea
a)
Línea
b)
CAPÍTULO I FACTS: DESCRIPCIÓN GENERAL
15
incrementar o decrementar momentáneamente la caída resistiva de voltaje a travésde la línea.
El SSSC es uno de los controladores FACTS más importantes. Es parecido a unSTATCOM excepto porque el voltaje de CA de salida está en serie con la línea. Puedeconstruirse en base a convertidores de voltaje o de corriente, su diagrama esquemático semuestra en la Fig. 1.12a.
Capacitor serie controlado por tiristores (TCSC). Compensador de reactanciacapacitiva que consiste de un banco de capacitores en serie, en paralelo con unreactor controlado por tiristores a fin de proveer una reactancia capacitiva serievariable.
El TCSC está basado en tiristores sin capacidad de apagado. Este dispositivo es unaalternativa para el SSSC, y es un dispositivo FACTS muy importante. Un reactor variablecomo un TCR se conecta en paralelo con un capacitor serie; cuando el ángulo de disparodel TCR es de 180°, no existe conducción a través del reactor y el capacitor serie tiene suimpedancia normal; mientras el ángulo de disparo decrece desde 180°, la impedanciacapacitiva aumenta; cuando el ángulo de disparo es de 90°, existe conducción total a travésdel reactor y la impedancia total se vuelve inductiva, ya que la impedancia del reactor sediseña para ser mucho más baja que la del capacitor serie. Con un ángulo de disparo de 90°el TCSC ayuda a limitar la corriente de falla. Este dispositivo puede consistir de uno o devarios módulos a fin de lograr un mejor desempeño, en la Fig. 1.12b se muestra sudiagrama esquemático.
Capacitor serie conmutado por tiristores (TSSC). Compensador de reactanciacapacitiva que consiste de un banco de capacitores serie en paralelo con un reactorconmutado por tiristores para proveer control de reactancia capacitiva.
Este dispositivo al no tener control de ángulo de disparo solo puede operar en doscondiciones distintas, ángulo de disparo de 90° o 180°, esta característica puede reducir elcosto y las pérdidas del controlador, su diagrama esquemático se muestra en la Fig. 1.12b.
Fig. 1.12. Diagrama esquemático del SSSC, el TCSC y el TSSC.
Línea
Línea
a) b)
DISEÑO E IMPLEMENTACIÓN EN LABORATORIO DE UN DISPOSITIVO TCSC
16
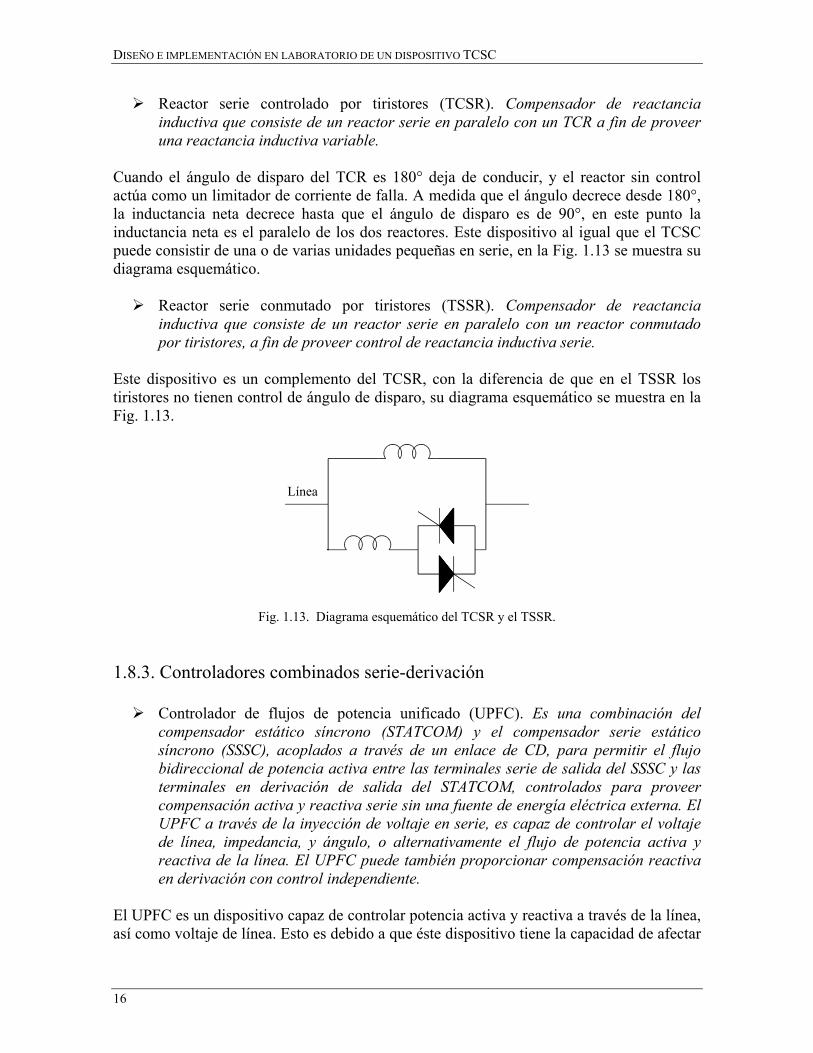
Reactor serie controlado por tiristores (TCSR). Compensador de reactanciainductiva que consiste de un reactor serie en paralelo con un TCR a fin de proveeruna reactancia inductiva variable.
Cuando el ángulo de disparo del TCR es 180° deja de conducir, y el reactor sin controlactúa como un limitador de corriente de falla. A medida que el ángulo decrece desde 180°,la inductancia neta decrece hasta que el ángulo de disparo es de 90°, en este punto lainductancia neta es el paralelo de los dos reactores. Este dispositivo al igual que el TCSCpuede consistir de una o de varias unidades pequeñas en serie, en la Fig. 1.13 se muestra sudiagrama esquemático.
Reactor serie conmutado por tiristores (TSSR). Compensador de reactanciainductiva que consiste de un reactor serie en paralelo con un reactor conmutadopor tiristores, a fin de proveer control de reactancia inductiva serie.
Este dispositivo es un complemento del TCSR, con la diferencia de que en el TSSR lostiristores no tienen control de ángulo de disparo, su diagrama esquemático se muestra en laFig. 1.13.
Fig. 1.13. Diagrama esquemático del TCSR y el TSSR.
1.8.3. Controladores combinados serie-derivación
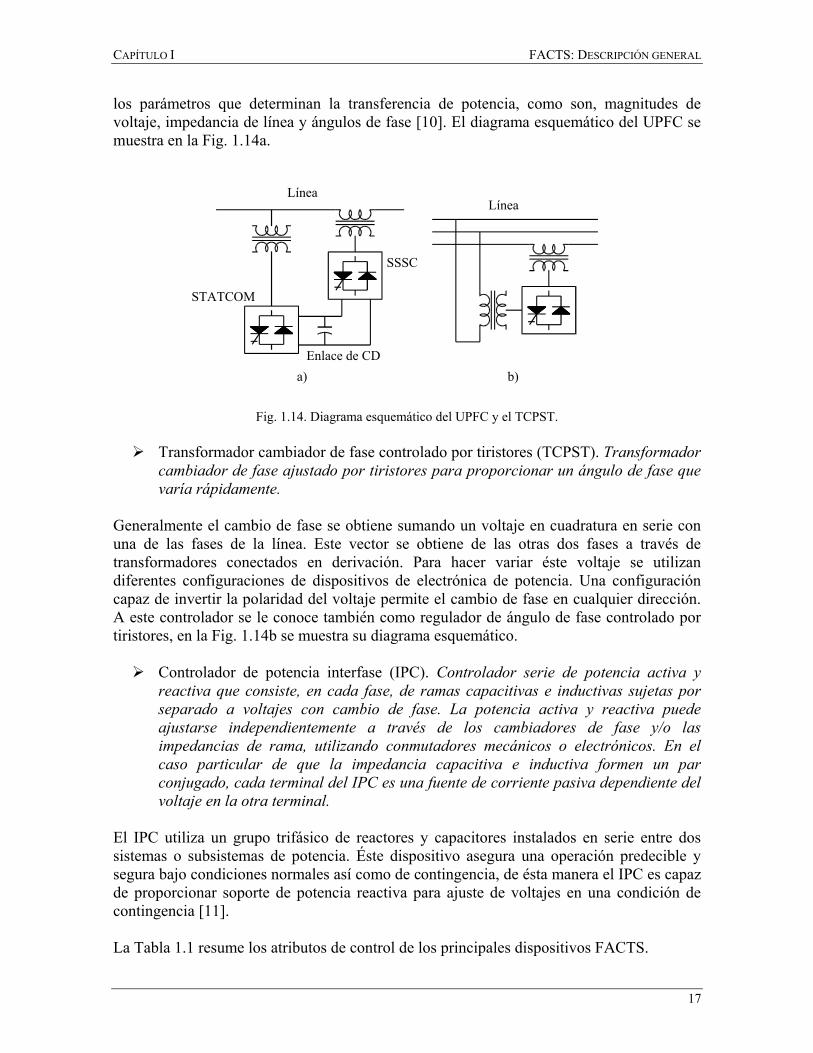
Controlador de flujos de potencia unificado (UPFC). Es una combinación delcompensador estático síncrono (STATCOM) y el compensador serie estáticosíncrono (SSSC), acoplados a través de un enlace de CD, para permitir el flujobidireccional de potencia activa entre las terminales serie de salida del SSSC y lasterminales en derivación de salida del STATCOM, controlados para proveercompensación activa y reactiva serie sin una fuente de energía eléctrica externa. ElUPFC a través de la inyección de voltaje en serie, es capaz de controlar el voltajede línea, impedancia, y ángulo, o alternativamente el flujo de potencia activa yreactiva de la línea. El UPFC puede también proporcionar compensación reactivaen derivación con control independiente.
El UPFC es un dispositivo capaz de controlar potencia activa y reactiva a través de la línea,así como voltaje de línea. Esto es debido a que éste dispositivo tiene la capacidad de afectar
Línea
CAPÍTULO I FACTS: DESCRIPCIÓN GENERAL
17
los parámetros que determinan la transferencia de potencia, como son, magnitudes devoltaje, impedancia de línea y ángulos de fase [10]. El diagrama esquemático del UPFC semuestra en la Fig. 1.14a.
Fig. 1.14. Diagrama esquemático del UPFC y el TCPST.
Transformador cambiador de fase controlado por tiristores (TCPST). Transformadorcambiador de fase ajustado por tiristores para proporcionar un ángulo de fase quevaría rápidamente.
Generalmente el cambio de fase se obtiene sumando un voltaje en cuadratura en serie conuna de las fases de la línea. Este vector se obtiene de las otras dos fases a través detransformadores conectados en derivación. Para hacer variar éste voltaje se utilizandiferentes configuraciones de dispositivos de electrónica de potencia. Una configuracióncapaz de invertir la polaridad del voltaje permite el cambio de fase en cualquier dirección.A este controlador se le conoce también como regulador de ángulo de fase controlado portiristores, en la Fig. 1.14b se muestra su diagrama esquemático.
Controlador de potencia interfase (IPC). Controlador serie de potencia activa yreactiva que consiste, en cada fase, de ramas capacitivas e inductivas sujetas porseparado a voltajes con cambio de fase. La potencia activa y reactiva puedeajustarse independientemente a través de los cambiadores de fase y/o lasimpedancias de rama, utilizando conmutadores mecánicos o electrónicos. En elcaso particular de que la impedancia capacitiva e inductiva formen un parconjugado, cada terminal del IPC es una fuente de corriente pasiva dependiente delvoltaje en la otra terminal.
El IPC utiliza un grupo trifásico de reactores y capacitores instalados en serie entre dossistemas o subsistemas de potencia. Éste dispositivo asegura una operación predecible ysegura bajo condiciones normales así como de contingencia, de ésta manera el IPC es capazde proporcionar soporte de potencia reactiva para ajuste de voltajes en una condición decontingencia [11].
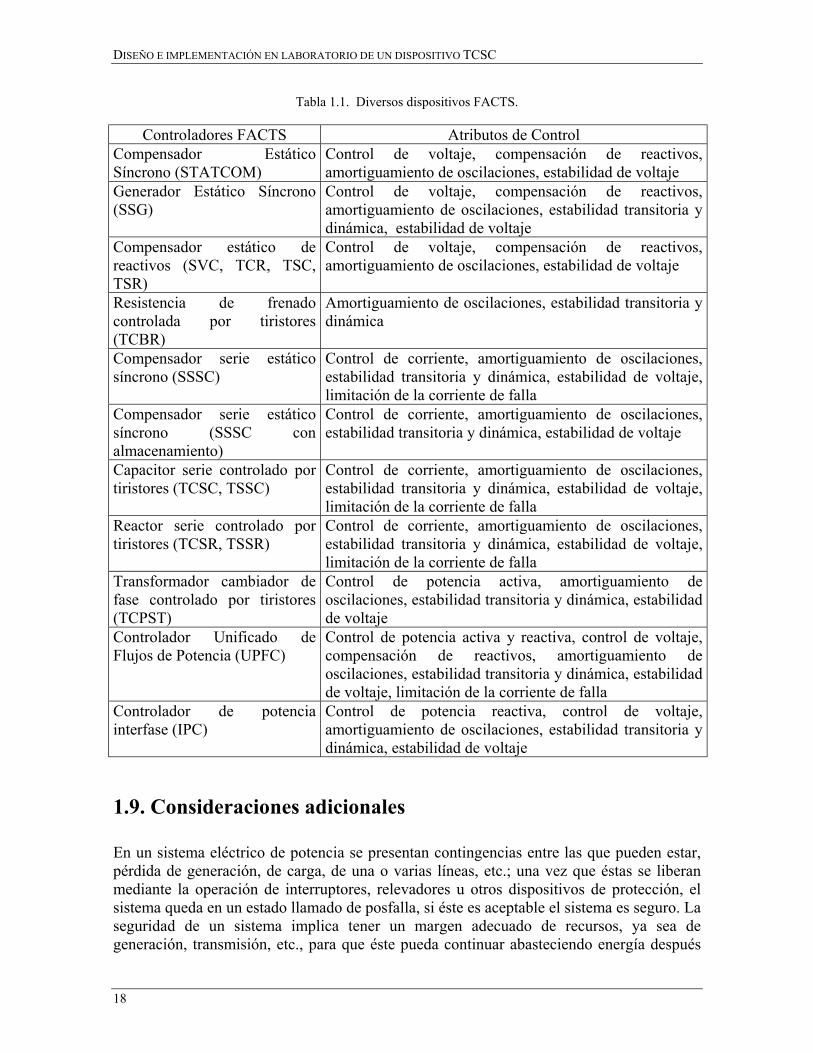
La Tabla 1.1 resume los atributos de control de los principales dispositivos FACTS.
LíneaLínea
SSSC
STATCOM
Enlace de CD
a) b)
DISEÑO E IMPLEMENTACIÓN EN LABORATORIO DE UN DISPOSITIVO TCSC
18
Tabla 1.1. Diversos dispositivos FACTS.
Controladores FACTS Atributos de ControlCompensador EstáticoSíncrono (STATCOM)
Control de voltaje, compensación de reactivos,amortiguamiento de oscilaciones, estabilidad de voltaje
Generador Estático Síncrono(SSG)
Control de voltaje, compensación de reactivos,amortiguamiento de oscilaciones, estabilidad transitoria ydinámica, estabilidad de voltaje
Compensador estático dereactivos (SVC, TCR, TSC,TSR)
Control de voltaje, compensación de reactivos,amortiguamiento de oscilaciones, estabilidad de voltaje
Resistencia de frenadocontrolada por tiristores(TCBR)
Amortiguamiento de oscilaciones, estabilidad transitoria ydinámica
Compensador serie estáticosíncrono (SSSC)
Control de corriente, amortiguamiento de oscilaciones,estabilidad transitoria y dinámica, estabilidad de voltaje,limitación de la corriente de falla
Compensador serie estáticosíncrono (SSSC conalmacenamiento)
Control de corriente, amortiguamiento de oscilaciones,estabilidad transitoria y dinámica, estabilidad de voltaje
Capacitor serie controlado portiristores (TCSC, TSSC)
Control de corriente, amortiguamiento de oscilaciones,estabilidad transitoria y dinámica, estabilidad de voltaje,limitación de la corriente de falla
Reactor serie controlado portiristores (TCSR, TSSR)
Control de corriente, amortiguamiento de oscilaciones,estabilidad transitoria y dinámica, estabilidad de voltaje,limitación de la corriente de falla
Transformador cambiador defase controlado por tiristores(TCPST)
Control de potencia activa, amortiguamiento deoscilaciones, estabilidad transitoria y dinámica, estabilidadde voltaje
Controlador Unificado deFlujos de Potencia (UPFC)
Control de potencia activa y reactiva, control de voltaje,compensación de reactivos, amortiguamiento deoscilaciones, estabilidad transitoria y dinámica, estabilidadde voltaje, limitación de la corriente de falla
Controlador de potenciainterfase (IPC)
Control de potencia reactiva, control de voltaje,amortiguamiento de oscilaciones, estabilidad transitoria ydinámica, estabilidad de voltaje
1.9. Consideraciones adicionales
En un sistema eléctrico de potencia se presentan contingencias entre las que pueden estar,pérdida de generación, de carga, de una o varias líneas, etc.; una vez que éstas se liberanmediante la operación de interruptores, relevadores u otros dispositivos de protección, elsistema queda en un estado llamado de posfalla, si éste es aceptable el sistema es seguro. Laseguridad de un sistema implica tener un margen adecuado de recursos, ya sea degeneración, transmisión, etc., para que éste pueda continuar abasteciendo energía después
CAPÍTULO I FACTS: DESCRIPCIÓN GENERAL
19
de que ocurre una contingencia, además de que el personal de operación pueda controlarelementos ajustables del sistema para garantizar una operación segura ante posibles fallas;para lograr esto se deben establecer límites de operación en el estado de prefalla y amenudo en el estado de posfalla. Así, un sistema que satisface estos límites es seguro parahacer una transición a un estado aceptable una vez que se ha liberado la falla; la presenciade límites en el estado de posfalla limitan la operación del sistema en estado normal, amenudo a expensas de los aspectos económicos.
Una característica que hace que los dispositivos FACTS sean aún más atractivos es que sonefectivos en los tres estados de operación de un sistema: prefalla, transitorio y posfalla [3].La habilidad que presentan estos dispositivos de controlar transitorios y de afectar rápida ysignificativamente el estado siguiente inmediato a una falla, con frecuencia significa que elimpacto que tienen las restricciones impuestas a éste en las operaciones del sistema enestado normal se pueden minimizar, dejando así una región de operación de prefalla mayorpara optimizar aspectos económicos. Así, un sistema que se diseña adecuadamente con unmargen de operación suficiente, hace posible satisfacer seguridad y economía durante suoperación. Por otro lado, un dispositivo FACTS puede lograr que una línea opere muycercana a sus límites térmicos, esto afecta favorablemente el aspecto económico, ya que seevita la construcción de nuevas líneas de transmisión, además de que la energía se puedehacer fluir a través de rutas establecidas [1], permitiendo así el intercambio de potenciaentre diferentes compañías prestadoras de servicio eléctrico, así como entre diferentespaíses. Una de las consecuencias que trae el incremento en la transferencia de potencia através de una o más líneas del sistema es que puede conducir a sobrecalentamientos; de estamanera, con el uso extensivo de estos dispositivos se hará necesario el monitoreo térmicode la red. Otro de los aspectos que también deben tomarse en cuenta es que los FACTS, asícomo cualquier otro componente en el sistema introduce modos a las ecuaciones que rigensu comportamiento, tornándose éste más complejo; esto puede conducir a interacciones nodeseadas entre equipos, debido a esto, debe preverse la coordinación de todos loscontroladores del sistema incluyendo aquellos de los dispositivos FACTS, haciendo cadavez más complejo el control del sistema de potencia. Así pues, la inclusión de éste tipo deelementos al sistema de potencia ofrece una serie de ventajas en diferentes aspectos comoel económico, entre otros; pero también trae consigo desventajas que deben tomarse encuenta para la operación segura del sistema.
1.10. Resumen
Se ha presentado un resumen general del concepto de dispositivos FACTS, suscaracterísticas, sus bondades y su clasificación. Se enfatiza que ésta tecnología hará, en unfuturo próximo, que los sistemas eléctricos de potencia operen de una forma más segura yconfiable. La tendencia de los FACTS se dirige hacia su construcción en base a fuentesconmutadas de voltaje, y muchos de éstos dispositivos aún se encuentran en etapa dedesarrollo y prueba. La mayoría de ellos tiene su aplicación en el mejoramiento de laoperación en estado estacionario aunque secundariamente ayuda a mejorar el estadotransitorio.
DISEÑO E IMPLEMENTACIÓN EN LABORATORIO DE UN DISPOSITIVO TCSC
20
1.11. Bibliografía
[1] Narain G. Hingorani, “Flexible ac transmission”, IEEE Spectrum, pp. 40-45, Abril1993.
[2] F. D. Galiana, K. Almeida, M. Toussaint, J. Griffin, D. Atanackovic, B. T. Ooi, D.T. McGillis, “Assessment and control of the impact of FACTS devices on powersystem performance”, IEEE Transactions on Power Systems, vol. 11, no. 4, pp.1931-1936, Noviembre 1996.
[3] B. Avramovic, L. H. Fink, “Energy management systems and control of FACTS”,Electrical Power and Energy Systems, vol. 17, no. 3, pp. 195-198, 1995.
[4] A. Edris, “FACTS technology development: An update”, IEEE Power EngineeringReview, pp. 4-9, Marzo 2000.
[5] S. L. Nilsson, "Security aspects of flexible AC transmission system controllerapplications", Electrical Power & Energy Systems, vol. 17, no. 3, pp. 173-179,1995.
[6] Narain G. Hingorani, Laszlo Gyugyi, Understanding FACTS Concepts andTechnology of Flexible AC Transmission Systems, primera edición, IEEE Press,1999.
[7] Yong Hua Song, Allan T. Johns, Flexible ac transmission systems (FACTS),primera edición, IEE Power and energy series, 1999.
[8] M. Noroozian, L. Ängquist, M. Ghandhari, G. Andersson, “Improving powersystem dynamics by series connected FACTS devices”, IEEE Transactions onPower Delivery, vol. 12, no. 4, pp. 1635-1641, Octubre 1997.
[9] R. Adapa, M. H. Baker, L. Bohmann, K. Clark, K. Habashi, L. Gyugui, J. Lemay,A. S. Mehraban, A. K. Myers, J. Reeve, F. Sener, D.R. Torgerson and R. R. Wood,"Proposed Terms and Definitions for Flexible AC Transmission System (FACTS)",IEEE Transactions on Power Delivery, vol. 12, no. 4, pp. 1848-1853, Octubre 1997.
[10] A. Edris, A. S. Mehraban, M. Rahman, L. Gyugyi, S. Arabi, T. Reitman,“Controlling the flow of real and reactive power”, IEEE Computer Applications inPower, pp. 20-25, Enero 1998.
[11] Jacques Brochu, Pierre Pelletier, Francois Beauregard, Gaston Morin, “Theinterphase power controller a new concept for managing power flow within ACnetworks”, IEEE Transactions on Power Delivery, vol. 9, no. 2, pp. 833-841, Abril1994.
21
CAPÍTULO II
Elementos de electrónica de potencia
2.1. Introducción
En éste capítulo se presentan dos de los dispositivos de electrónica de potencia másimportantes en la tecnología FACTS, se describe su principio de funcionamiento, así comosus principales características. Se explican también las condiciones necesarias que debenpresentarse para un encendido y apagado correcto de los dispositivos.
Además se revisan técnicas de modulación de ancho de pulso, útiles para el control deinversores, que incorporan elementos de electrónica de potencia.
2.2. Tiristor
El nombre tiristor es genérico para dispositivos compuestos de cuatro capas de silicio(pnpn), que presentan un mecanismo interno regenerativo que engancha al dispositivo en elestado de encendido [1]. Estos dispositivos conducen mientras la corriente de carga externasea más grande que la corriente de mantenimiento del dispositivo [2].
En circuitos de potencia se utilizan como conmutadores cuatro miembros de este género dedispositivos.
El rectificador controlado de silicio (SCR). El conmutador de triodo de corriente alterna (TRIAC). El tiristor de apagado por compuerta (GTO). El tiristor controlado por MOS (MCT).
El SCR es un dispositivo semicontrolado que puede encenderse en un tiempo específico,pero debe apagarse mediante la acción del circuito en el que se encuentra conectado. ElGTO y el MCT tienen la capacidad de encendido y apagado utilizando su terminal decontrol llamada compuerta. Estos dispositivos solo pueden bloquear voltaje en polarizacióndirecta. El TRIAC es similar al SCR, pero permite conducir y bloquear voltaje en cualquierdirección. A continuación se describen los dispositivos SCR y GTO.
DISEÑO E IMPLEMENTACIÓN EN LABORATORIO DE UN DISPOSITIVO TCSC
22
2.2.1. Rectificador controlado de silicio
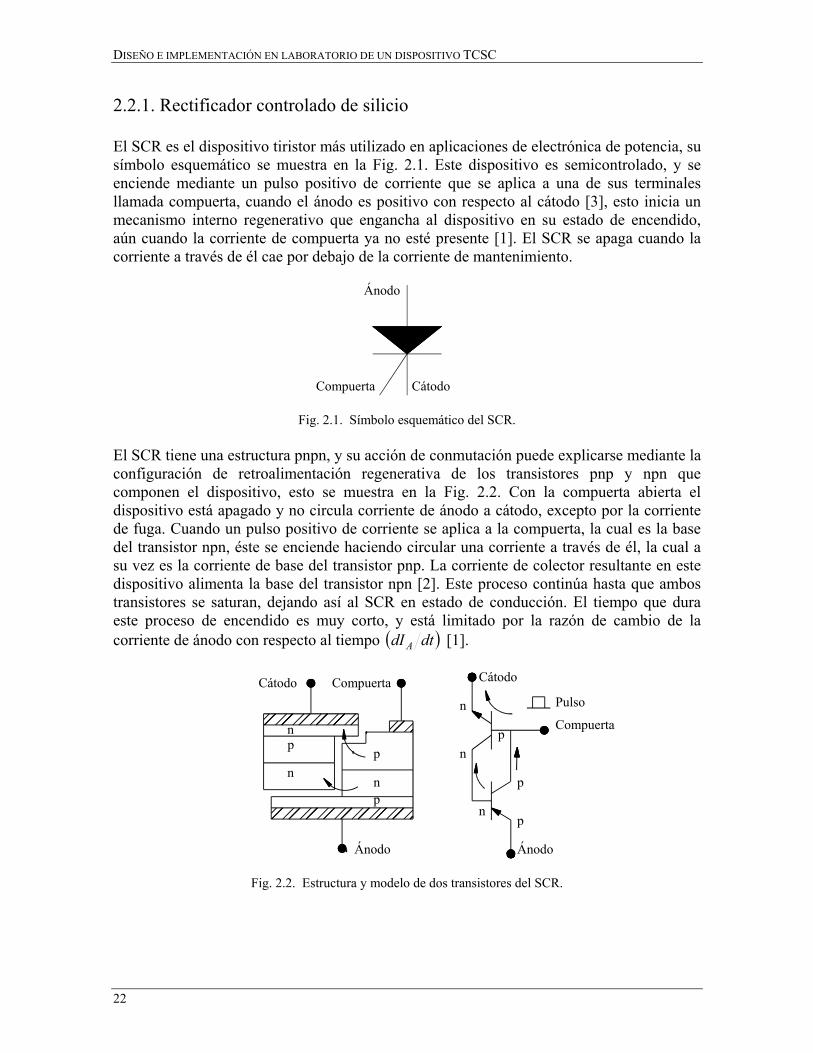
El SCR es el dispositivo tiristor más utilizado en aplicaciones de electrónica de potencia, susímbolo esquemático se muestra en la Fig. 2.1. Este dispositivo es semicontrolado, y seenciende mediante un pulso positivo de corriente que se aplica a una de sus terminalesllamada compuerta, cuando el ánodo es positivo con respecto al cátodo [3], esto inicia unmecanismo interno regenerativo que engancha al dispositivo en su estado de encendido,aún cuando la corriente de compuerta ya no esté presente [1]. El SCR se apaga cuando lacorriente a través de él cae por debajo de la corriente de mantenimiento.
Fig. 2.1. Símbolo esquemático del SCR.
El SCR tiene una estructura pnpn, y su acción de conmutación puede explicarse mediante laconfiguración de retroalimentación regenerativa de los transistores pnp y npn quecomponen el dispositivo, esto se muestra en la Fig. 2.2. Con la compuerta abierta eldispositivo está apagado y no circula corriente de ánodo a cátodo, excepto por la corrientede fuga. Cuando un pulso positivo de corriente se aplica a la compuerta, la cual es la basedel transistor npn, éste se enciende haciendo circular una corriente a través de él, la cual asu vez es la corriente de base del transistor pnp. La corriente de colector resultante en estedispositivo alimenta la base del transistor npn [2]. Este proceso continúa hasta que ambostransistores se saturan, dejando así al SCR en estado de conducción. El tiempo que duraeste proceso de encendido es muy corto, y está limitado por la razón de cambio de lacorriente de ánodo con respecto al tiempo ( )dtdI A [1].
Fig. 2.2. Estructura y modelo de dos transistores del SCR.
Ánodo
CátodoCompuerta
Ánodo
Cátodo Compuerta Cátodo
Ánodo
Compuerta
Pulso
n
nn
n
n
n
pp
p
p
p
p
CAPÍTULO II ELEMENTOS DE ELECTRÓNICA DE POTENCIA
23
2.2.1.1. Características del SCR
Este dispositivo presenta características importantes entre las cuales están.
Corriente de estado inactivo DI . Cuando el voltaje de ánodo se hace positivo con
respecto al cátodo, y si no se ha aplicado señal a la compuerta sólo fluye unapequeña corriente de fuga a través del dispositivo, y éste se encuentra en estado debloqueo directo o desactivado. Se le llama corriente de estado inactivo, DI , a la
corriente de fuga.
Voltaje de ruptura directo BOV . Cuando el dispositivo se sujeta a un voltaje de
ánodo a cátodo positivo mayor que un valor conocido como voltaje de rupturadirecto, BOV , la corriente de fuga del dispositivo es suficiente para hacer entrar en
conducción al SCR en ausencia de corriente de compuerta, a esto se le conoce comoruptura por avalancha.
Corriente de enganche LI . Si la corriente de ánodo es menor que un valor conocido
como corriente de enganche, LI , al reducirse el voltaje de ánodo a cátodo el
dispositivo regresará a la condición de bloqueo. La corriente de enganche es lacorriente de ánodo mínima que se requiere para mantener al dispositivo en estado deconducción inmediatamente después de que ha sido activado y se ha retirado la señalde compuerta.
Corriente de mantenimiento HI . Si la corriente directa de ánodo decae de un nivel
conocido como corriente de mantenimiento, HI , el dispositivo entrará en estado de
bloqueo. Este parámetro representa la corriente mínima para mantener al SCR enestado de régimen permanente.
Corriente inversa RI . Si el voltaje de cátodo es positivo con respecto al ánodo, el
dispositivo se encontrará en estado de bloqueo inverso, y una corriente de fugainversa conocida como corriente inversa, RI , fluirá a través de él.
Característica dtdI A . Un SCR requiere de un tiempo mínimo para dispersar la
conducción de la corriente en forma uniforme a través de sus uniones. Este procesode conducción se caracteriza por una velocidad de dispersión, su , que se considera
constante durante todo el proceso [4]. Si la velocidad de elevación de la corriente deánodo es muy grande en comparación con la velocidad de dispersión del proceso deactivación, se produce un aumento de temperatura debido a una alta densidad decorriente, que es proporcional al voltaje de ánodo a cátodo antes del encendido, asícomo a la razón de cambio de AI [4]; esto puede provocar un fallo del dispositivo
debido a un exceso de temperatura. A esta característica de la corriente de ánodo sele conoce como la razón de cambio de la corriente de ánodo, dtdI A . Una razón de
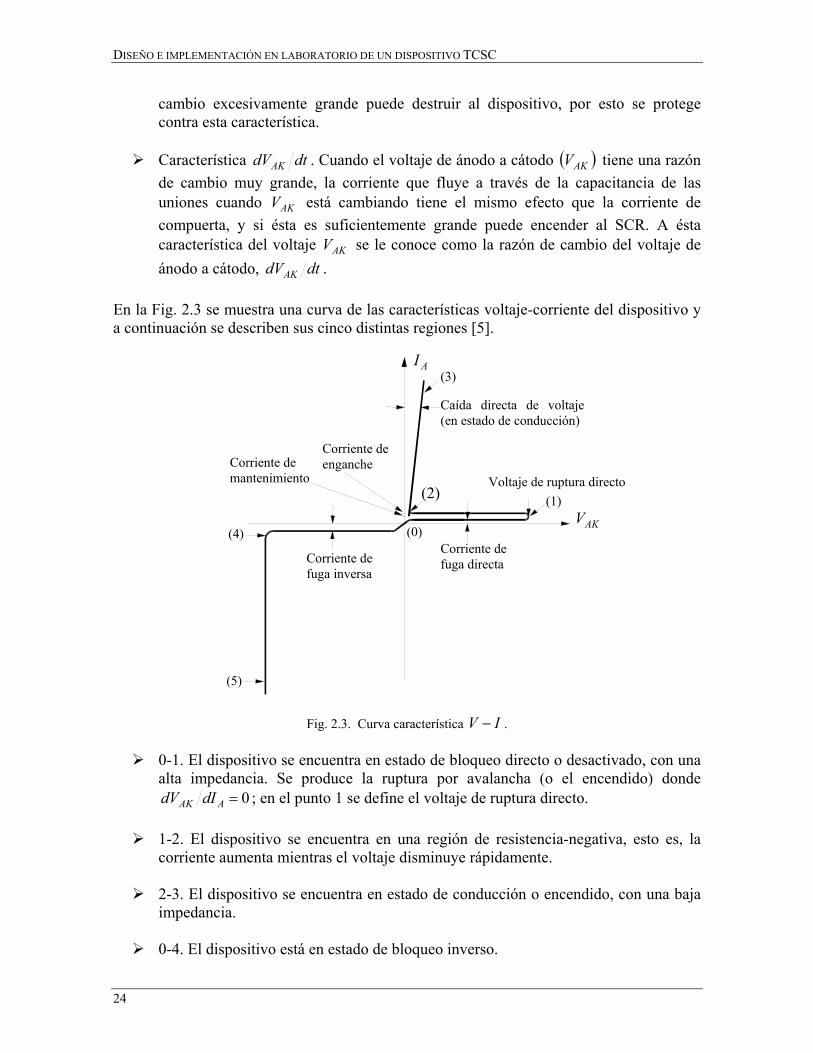
DISEÑO E IMPLEMENTACIÓN EN LABORATORIO DE UN DISPOSITIVO TCSC
24
cambio excesivamente grande puede destruir al dispositivo, por esto se protegecontra esta característica.
Característica dtdVAK . Cuando el voltaje de ánodo a cátodo ( )AKV tiene una razón
de cambio muy grande, la corriente que fluye a través de la capacitancia de lasuniones cuando AKV está cambiando tiene el mismo efecto que la corriente de
compuerta, y si ésta es suficientemente grande puede encender al SCR. A éstacaracterística del voltaje AKV se le conoce como la razón de cambio del voltaje de
ánodo a cátodo, dtdVAK .
En la Fig. 2.3 se muestra una curva de las características voltaje-corriente del dispositivo ya continuación se describen sus cinco distintas regiones [5].
Fig. 2.3. Curva ca
0-1. El dispositivo se encuentra en estaalta impedancia. Se produce la rup
0=AAK dIdV ; en el punto 1 se define
1-2. El dispositivo se encuentra en ucorriente aumenta mientras el voltaje d
2-3. El dispositivo se encuentra en estimpedancia.
0-4. El dispositivo está en estado de bl
I
(4)
(5)
Corriente demantenimiento
Corriente deenganche
Corriente defuga inversa
racterística IV − .
do de bloqueo directo o tura por avalancha (o e el voltaje de ruptura direc
na región de resistencia-isminuye rápidamente.
ado de conducción o enc
oqueo inverso.
A
AKV(1)(2)
(3)
Caída directa de voltaje(en estado de conducción)
Voltaje de ruptura directo
Corriente defuga directa
(0)
desactivado, con unal encendido) dondeto.
negativa, esto es, la
endido, con una baja
CAPÍTULO II ELEMENTOS DE ELECTRÓNICA DE POTENCIA
25
4-5. El dispositivo está en la región de ruptura inversa.
2.2.1.2. Encendido y apagado del SCR
El tiristor se activa cuando se incrementa su corriente de ánodo, esto puede darse pordistintas causas entre las cuales están las siguientes [6]:
Térmica. Cuando la temperatura del tiristor aumenta, también lo hace la corriente defuga, pudiendo tener como consecuencia la activación del dispositivo.
Luz. La incidencia de luz en las uniones del tiristor puede también activar aldispositivo, esto se logra al permitir que la luz llegue a los discos de silicio.
Alto voltaje. Si el dispositivo se sujeta a un voltaje directo de ánodo a cátodo mayorque el voltaje de ruptura directo BOV , la corriente de fuga resultante será suficiente
para iniciar el proceso regenerativo. Este tipo de activación puede resultardestructiva, por lo que debe evitarse.
dtdVAK . Si la razón de cambio del voltaje de ánodo a cátodo es grande, la corriente
de carga de las uniones capacitivas puede ser suficiente para activar al tiristor. Unvalor grande de corriente de carga puede dañar al dispositivo, por lo que eldispositivo se protege contra una relación dtdVAK grande.
Corriente de compuerta. Si el SCR está polarizado directamente, al aplicar unvoltaje positivo entre la compuerta y el cátodo se inyecta una corriente que activa aldispositivo.
Cuando el dispositivo se dispara se produce una corriente directa de ánodo; se diceentonces que el dispositivo está en estado de conducción o activado. En este estado la caídade voltaje se debe a la caída óhmica en las cuatro capas del SCR, y es pequeña.
El SCR se apaga cuando la corriente a través de él cae por debajo de HI . El apagado del
dispositivo puede darse mediante la línea de CA, esto es, en el semiciclo negativo delvoltaje de alimentación el dispositivo está en polarización inversa y se apagará, o puedeemplearse un circuito auxiliar [3]. Cuando el SCR está apagado tiene la capacidad debloquear el voltaje de ánodo a cátodo ya sea en polarización directa o inversa.
Cuando el SCR se apaga, muestra el mismo fenómeno de recuperación inversa que undiodo, hay un período durante el proceso de apagado en el que la corriente de ánodo esmenor que cero ( )0<AI . Aún después de que 0=AI , el SCR es incapaz de bloquear el
voltaje directo hasta que la carga que queda en el dispositivo decae por debajo de un valorcrítico. Al tiempo requerido para éste proceso se le llama el tiempo de apagado deconmutación del circuito, qt . Si se aplica un voltaje directo antes de que haya transcurrido
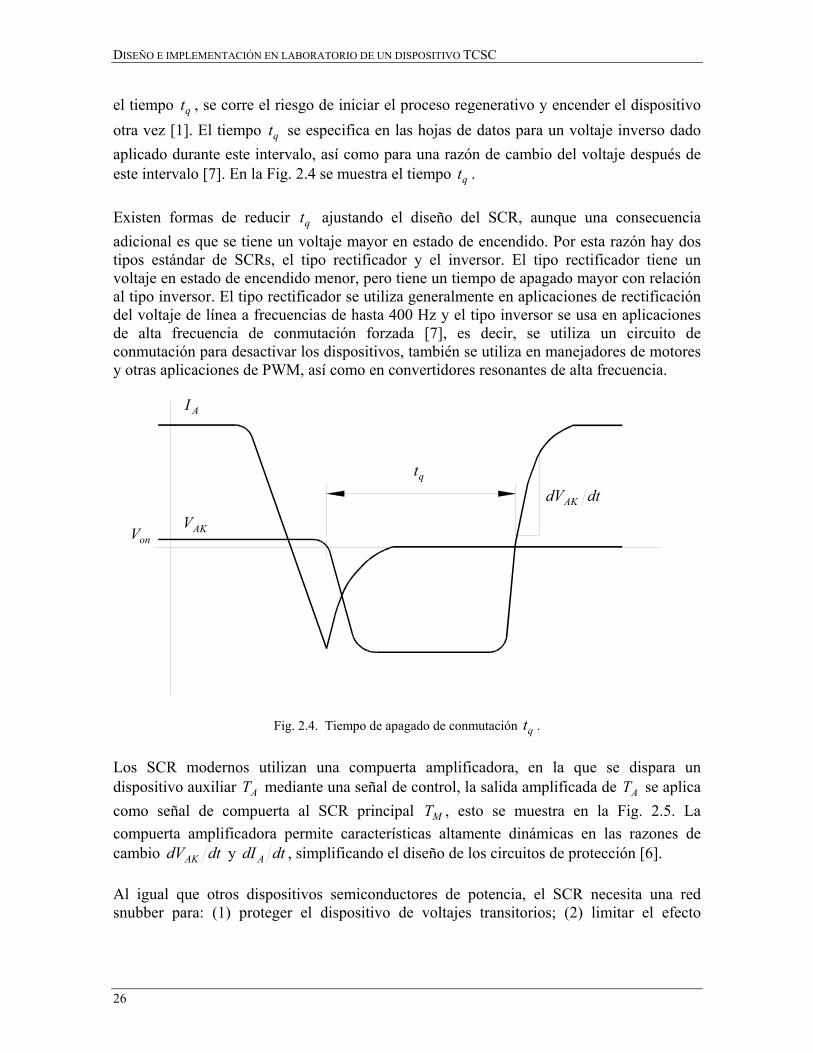
DISEÑO E IMPLEMENTACIÓN EN LABORATORIO DE UN DISPOSITIVO TCSC
26
el tiempo qt , se corre el riesgo de iniciar el proceso regenerativo y encender el dispositivo
otra vez [1]. El tiempo qt se especifica en las hojas de datos para un voltaje inverso dado
aplicado durante este intervalo, así como para una razón de cambio del voltaje después deeste intervalo [7]. En la Fig. 2.4 se muestra el tiempo qt .
Existen formas de reducir qt ajustando el diseño del SCR, aunque una consecuencia
adicional es que se tiene un voltaje mayor en estado de encendido. Por esta razón hay dostipos estándar de SCRs, el tipo rectificador y el inversor. El tipo rectificador tiene unvoltaje en estado de encendido menor, pero tiene un tiempo de apagado mayor con relaciónal tipo inversor. El tipo rectificador se utiliza generalmente en aplicaciones de rectificacióndel voltaje de línea a frecuencias de hasta 400 Hz y el tipo inversor se usa en aplicacionesde alta frecuencia de conmutación forzada [7], es decir, se utiliza un circuito deconmutación para desactivar los dispositivos, también se utiliza en manejadores de motoresy otras aplicaciones de PWM, así como en convertidores resonantes de alta frecuencia.
Los SCRdispositiv
como señ
compuertacambio d
Al igual snubber p
AI
on
qt
dtdVAK
V
AK VFig. 2.4. Tiempo de apa
modernos utilizan una compuero auxiliar AT mediante una señal de
al de compuerta al SCR principa
amplificadora permite característdtVAK y dtdI A , simplificando el
que otros dispositivos semiconducara: (1) proteger el dispositivo d
gado de conmutación qt
ta amplificadora, e control, la salida am
l MT , esto se mue
icas altamente dinádiseño de los circuito
tores de potencia, ee voltajes transitori
.
n la que se dispara unplificada de AT se aplica
stra en la Fig. 2.5. La
micas en las razones des de protección [6].
l SCR necesita una redos; (2) limitar el efecto
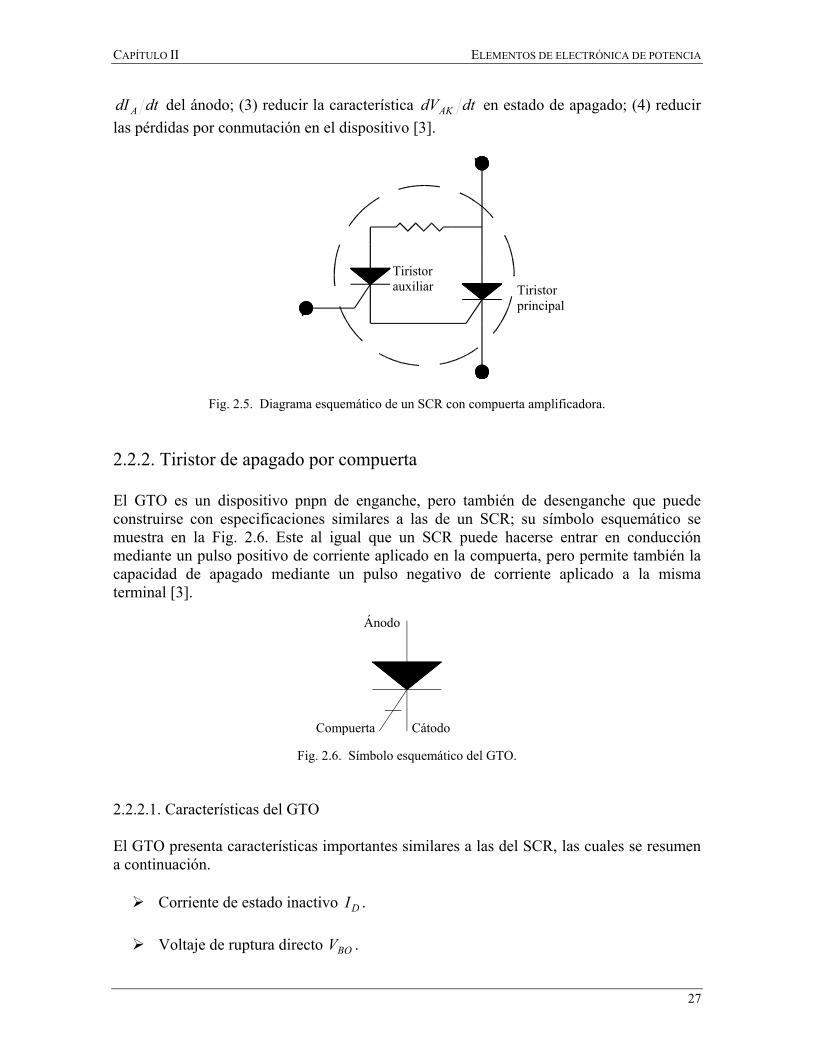
CAPÍTULO II ELEMENTOS DE ELECTRÓNICA DE POTENCIA
dtdI A del ánodo; (3) reducir la característica dtdVAK en estado de apagado; (4) reducir
las pérdidas por conmutación en el dispositivo [3].
Fig. 2.5. Diagrama esquemático
2.2.2. Tiristor de apagado por compu
El GTO es un dispositivo pnpn de engaconstruirse con especificaciones similaresmuestra en la Fig. 2.6. Este al igual qumediante un pulso positivo de corriente apcapacidad de apagado mediante un pulsterminal [3].
Fig. 2.6. Símbol
2.2.2.1. Características del GTO
El GTO presenta características importanta continuación.
Corriente de estado inactivo DI .
Voltaje de ruptura directo BOV .
Tiristor
Áno
Compuerta
Tiristorauxiliar
27
de un SCR con compuerta amplificadora.
erta
nche, pero también de desenganche que puede a las de un SCR; su símbolo esquemático se
e un SCR puede hacerse entrar en conducciónlicado en la compuerta, pero permite también lao negativo de corriente aplicado a la misma
o esquemático del GTO.
es similares a las del SCR, las cuales se resumen
principal
do
Cátodo
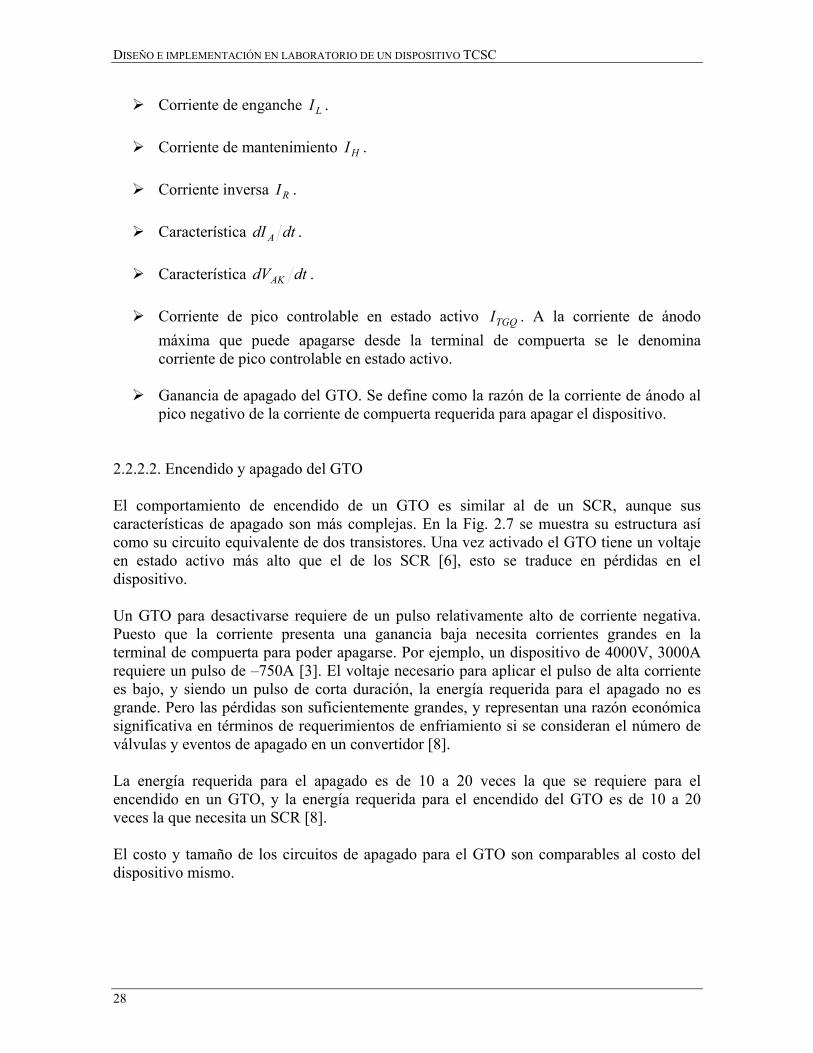
DISEÑO E IMPLEMENTACIÓN EN LABORATORIO DE UN DISPOSITIVO TCSC
28
Corriente de enganche LI .
Corriente de mantenimiento HI .
Corriente inversa RI .
Característica dtdI A .
Característica dtdVAK .
Corriente de pico controlable en estado activo TGQI . A la corriente de ánodo
máxima que puede apagarse desde la terminal de compuerta se le denominacorriente de pico controlable en estado activo.
Ganancia de apagado del GTO. Se define como la razón de la corriente de ánodo alpico negativo de la corriente de compuerta requerida para apagar el dispositivo.
2.2.2.2. Encendido y apagado del GTO
El comportamiento de encendido de un GTO es similar al de un SCR, aunque suscaracterísticas de apagado son más complejas. En la Fig. 2.7 se muestra su estructura asícomo su circuito equivalente de dos transistores. Una vez activado el GTO tiene un voltajeen estado activo más alto que el de los SCR [6], esto se traduce en pérdidas en eldispositivo.
Un GTO para desactivarse requiere de un pulso relativamente alto de corriente negativa.Puesto que la corriente presenta una ganancia baja necesita corrientes grandes en laterminal de compuerta para poder apagarse. Por ejemplo, un dispositivo de 4000V, 3000Arequiere un pulso de –750A [3]. El voltaje necesario para aplicar el pulso de alta corrientees bajo, y siendo un pulso de corta duración, la energía requerida para el apagado no esgrande. Pero las pérdidas son suficientemente grandes, y representan una razón económicasignificativa en términos de requerimientos de enfriamiento si se consideran el número deválvulas y eventos de apagado en un convertidor [8].
La energía requerida para el apagado es de 10 a 20 veces la que se requiere para elencendido en un GTO, y la energía requerida para el encendido del GTO es de 10 a 20veces la que necesita un SCR [8].
El costo y tamaño de los circuitos de apagado para el GTO son comparables al costo deldispositivo mismo.
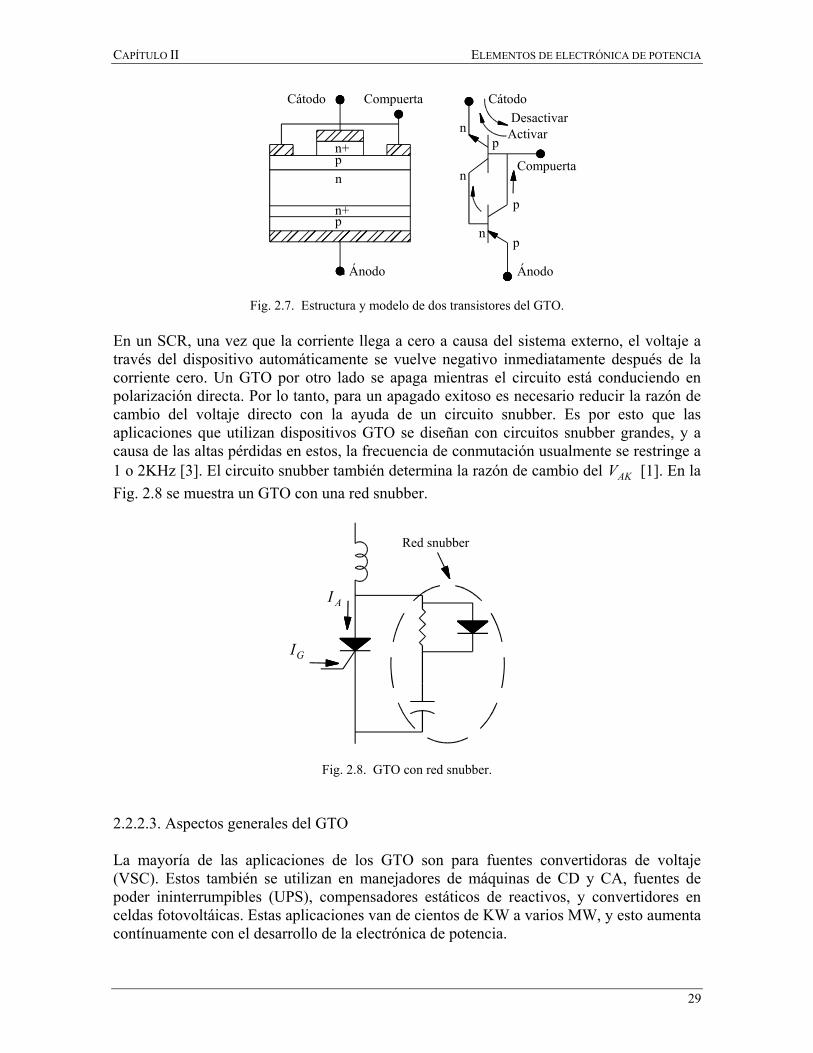
CAPÍTULO II ELEMENTOS DE ELECTRÓNICA DE POTENCIA
Fig. 2.7. Estructura y modelo de dos transistores del GTO.
En un SCR, una vez que la corriente llega a cero a causa del sistema externo, el voltaje através del dispositivo automáticamente se vuelve negativo inmediatamente después de lacorriente cero. Un GTO por otro lado se apaga mientras el circuito está conduciendo enpolarización directa. Por lo tanto, para un apagado exitoso es necesario reducir la razón decambio del voltaje directo con la ayuda de un circuito snubber. Es por esto que lasaplicaciones que utilizan dispositivos GTO se diseñan con circuitos snubber grandes, y acausa de las altas pérdidas en estos, la frecuencia de conmutación usualmente se restringe a1 o 2KHz [3]. El circuito snubber también determina la razón de cambio del AKV [1]. En la
Fig. 2.8 se muestra un GTO con una red snubber.
2.2.2.3. Aspectos generales del G
La mayoría de las aplicacione(VSC). Estos también se utilizpoder ininterrumpibles (UPS), celdas fotovoltáicas. Estas aplicacontínuamente con el desarrollo
Ánodo
Cátodo Compuerta
n+
n+
p
n
p
Cátodo
Compuerta
Ánodo
p
p
p
n
n
n
DesactivarActivar
Red snubber
AI
GI
29
Fig. 2.8. GTO con red snubber.
TO
s de los GTO son para fuentes convertidoras de voltajean en manejadores de máquinas de CD y CA, fuentes decompensadores estáticos de reactivos, y convertidores enciones van de cientos de KW a varios MW, y esto aumenta
de la electrónica de potencia.
DISEÑO E IMPLEMENTACIÓN EN LABORATORIO DE UN DISPOSITIVO TCSC
30
Los GTO tienen varias ventajas sobre los SCR: (1) la eliminación de los componentesauxiliares en la conmutación forzada que da como resultado una reducción en costo, peso yvolumen; (2) la reducción del ruido acústico y electromagnético debido a la eliminación debobinas de inducción en la conmutación; (3) una desactivación más rápida que permitefrecuencias de conmutación más altas; (4) una eficiencia mejorada de los convertidores [6].
2.3. Modulación de ancho de pulso
Los controladores FACTS son dispositivos que incorporan elementos de electrónica depotencia.
En el caso de los controladores FACTS basados en convertidores, la técnica de modulaciónde ancho de pulso (PWM) se utiliza para el control en fuentes convertidoras de voltaje ycorriente, para proporcionar las señales de disparo a los dispositivos de electrónica depotencia [9].
Las técnicas PWM son de gran utilidad en aplicaciones de alta potencia, y dependiendo derequerimientos específicos como control instantáneo de la salida de un convertidor,minimización de componentes armónicas o control de la amplitud de salida de unconvertidor, se puede seleccionar el patrón de generación PWM necesario para laaplicación [9].
2.3.1. Características del PWM
El valor promedio (CD) de cualquier onda está determinado por el área existente entre laonda y la referencia. En una forma de onda rectangular, si se cambia el ancho del pulsomanteniendo el período constante se tiene la posibilidad de controlar el valor promedio dela señal ( )cdV [10].
De esta manera el objetivo de la modulación de ancho de pulso es generar una onda en laque utilizando una estrategia de control se pueda variar el ancho de los pulsos. Losesquemas PWM son ampliamente utilizados en aplicaciones de electrónica de potenciatales como inversores [6].
2.3.2. Modulación senoidal
El método PWM senoidal, llamado también SPWM es muy popular en aplicacionesindustriales y se menciona extensivamente en la literatura [6]. En este tipo de modulación,en lugar de mantener constante el ancho de todos los pulsos, como sucede en otrosesquemas PWM, el ancho de cada pulso varía en proporción con la amplitud de una ondasenoidal modulante que se compara con una onda portadora triangular [6] como se muestra
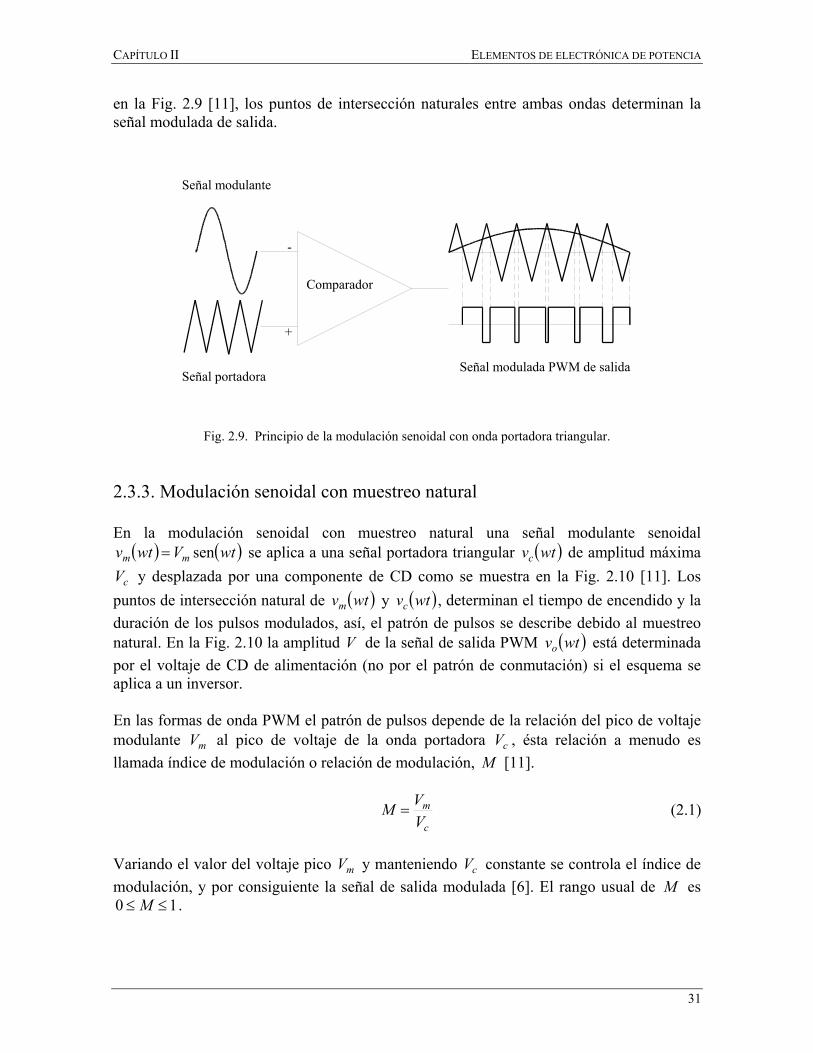
CAPÍTULO II ELEMENTOS DE ELECTRÓNICA DE POTENCIA
31
en la Fig. 2.9 [11], los puntos de intersección naturales entre ambas ondas determinan laseñal modulada de salida.
Fig. 2.9. Principio de la modulación senoidal con onda portadora triangular.
2.3.3. Modulación senoidal con muestreo natural
En la modulación senoidal con muestreo natural una señal modulante senoidal( ) ( )wtVwtv mm sen= se aplica a una señal portadora triangular ( )wtvc de amplitud máxima
cV y desplazada por una componente de CD como se muestra en la Fig. 2.10 [11]. Los
puntos de intersección natural de ( )wtvm y ( )wtvc , determinan el tiempo de encendido y la
duración de los pulsos modulados, así, el patrón de pulsos se describe debido al muestreonatural. En la Fig. 2.10 la amplitud V de la señal de salida PWM ( )wtvo está determinada
por el voltaje de CD de alimentación (no por el patrón de conmutación) si el esquema seaplica a un inversor.
En las formas de onda PWM el patrón de pulsos depende de la relación del pico de voltajemodulante mV al pico de voltaje de la onda portadora cV , ésta relación a menudo es
llamada índice de modulación o relación de modulación, M [11].
c
m
V
VM = (2.1)
Variando el valor del voltaje pico mV y manteniendo cV constante se controla el índice de
modulación, y por consiguiente la señal de salida modulada [6]. El rango usual de M es10 ≤≤ M .
Señal modulante
Señal portadora
Comparador
+
-
Señal modulada PWM de salida
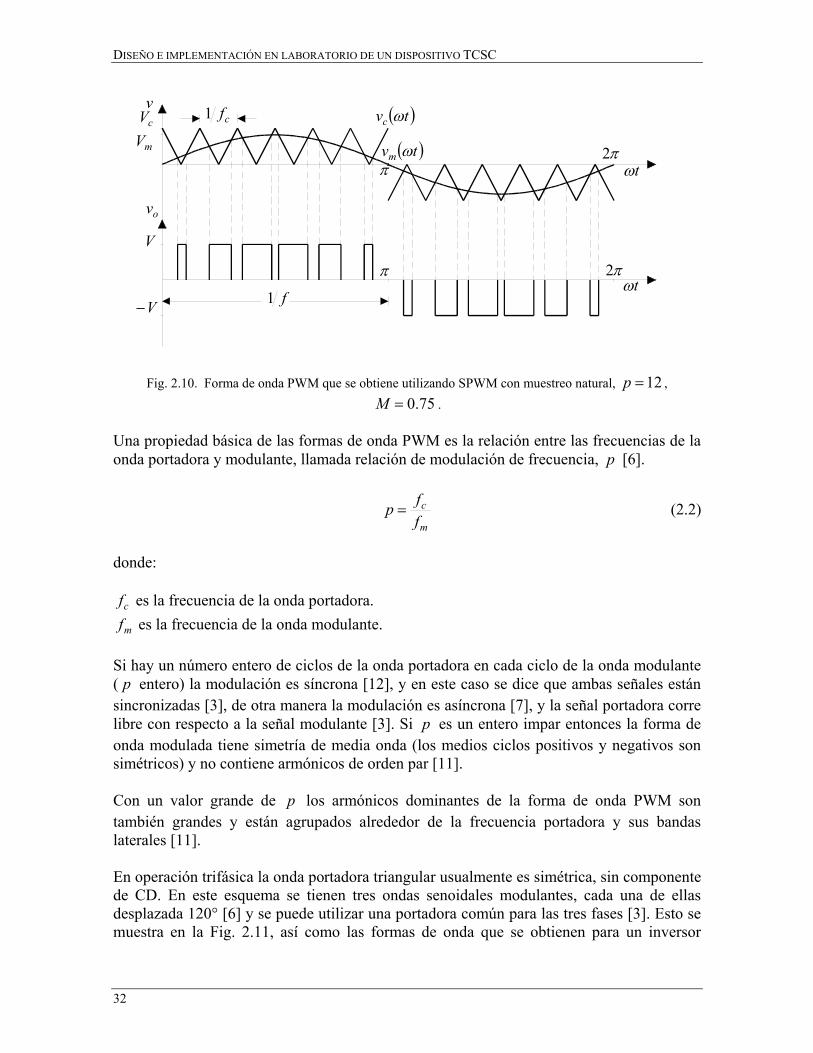
DISEÑO E IMPLEMENTACIÓN EN LABORATORIO DE UN DISPOSITIVO TCSC
32
Unaond
don
cf
mf
Si h( p sinclibreondsim
Contamlate
En ode Cdespmue
v
cf ( )tvc ω V cV
mv
π( )tvm ω π2
t
o
V
V− f
π π2tω
Fig. 2.10.
propiedaa portado
de:
es la frecu
es la frec
ay un númentero) laronizadas con resp
a modulaétricos) y
un valobién granrales [11]
peraciónD. En elazada 1stra en l
1
Forma de o
d básica dra y modu
encia de
uencia de
ero ente modulac [3], de oecto a la
da tiene s no contie
r grande des y es.
trifásica lste esque20° [6] y sa Fig. 2.1
1
nda PWM que se ob
e las formas de olante, llamada rel
la onda portadora
la onda modulant
ro de ciclos de la ión es síncrona [1tra manera la modseñal modulante imetría de mediane armónicos de o
de p los armóntán agrupados al
a onda portadora ma se tienen trese puede utilizar u1, así como las
tiene utilizando SPWM con muestreo nat
75.0=M .
nda PWM es la relación entre las ación de modulación de frecuencia
m
c
f
fp =
.
e.
onda portadora en cada ciclo de la2], y en este caso se dice que amulación es asíncrona [7], y la seña[3]. Si p es un entero impar ento onda (los medios ciclos positivosrden par [11].
icos dominantes de la forma de rededor de la frecuencia portado
triangular usualmente es simétrica ondas senoidales modulantes, cna portadora común para las tres
formas de onda que se obtienen
u
f
bln
r
,afp
ral,
rec, p
ondas pocey n
onda y
sinda aseara
ω
12=p ,
uencias de la [6].
(2.2)
a modulanteseñales estánrtadora corres la forma deegativos son
a PWM son sus bandas
componenteuna de ellass [3]. Esto se un inversor
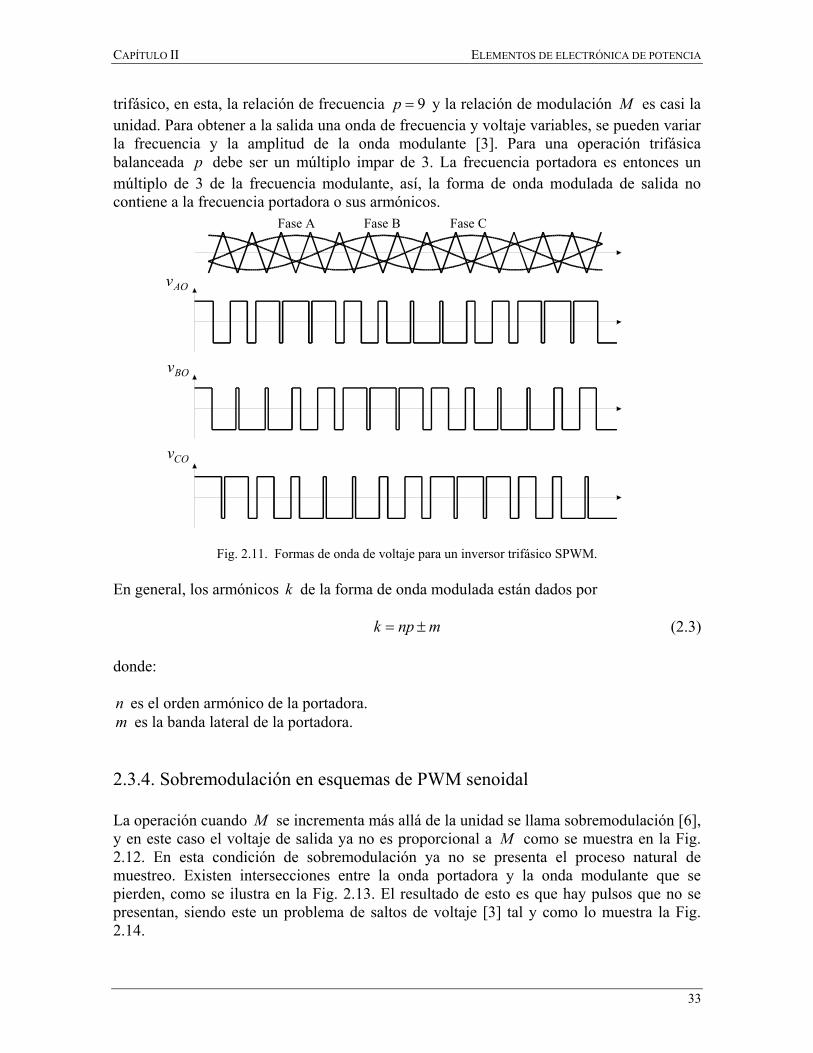
CAPÍTULO II ELEMENTOS DE ELECTRÓNICA DE POTENCIA
trifásico, en esta, la relación de frecuencia 9=p y la relación de modulación M es casi launidad. Para obtener a la salida una onda de frecuencia y voltaje variables, se pueden variarla frecuencia y la amplitud de la onda modulante [3]. Para una operación trifásicabalanceada p debe ser un múltiplo impar de 3. La frecuencia portadora es entonces unmúltiplo de 3 de la frecuencia modulante, así, la forma de onda modulada de salida nocontiene a la frecuencia portadora o sus armónicos.
En gen
donde:
n es elm es l
2.3.4.
La opey en es2.12. Emuestrpierdenpresent2.14.
Fase A Fase B Fase C
v
a
e
AO
v
BOCOv
33
Fig. 2.11. Formas de onda de voltaje para un inversor trifásico SPWM.
eral, los armónicos k de la forma de onda modulada están dados por
mnpk ±= (2.3)
orden armónico de la portadora. banda lateral de la portadora.
Sobremodulación en esquemas de PWM senoidal
ración cuando M se incrementa más allá de la unidad se llama sobremodulación [6],te caso el voltaje de salida ya no es proporcional a M como se muestra en la Fig.n esta condición de sobremodulación ya no se presenta el proceso natural deo. Existen intersecciones entre la onda portadora y la onda modulante que se, como se ilustra en la Fig. 2.13. El resultado de esto es que hay pulsos que no sean, siendo este un problema de saltos de voltaje [3] tal y como lo muestra la Fig.
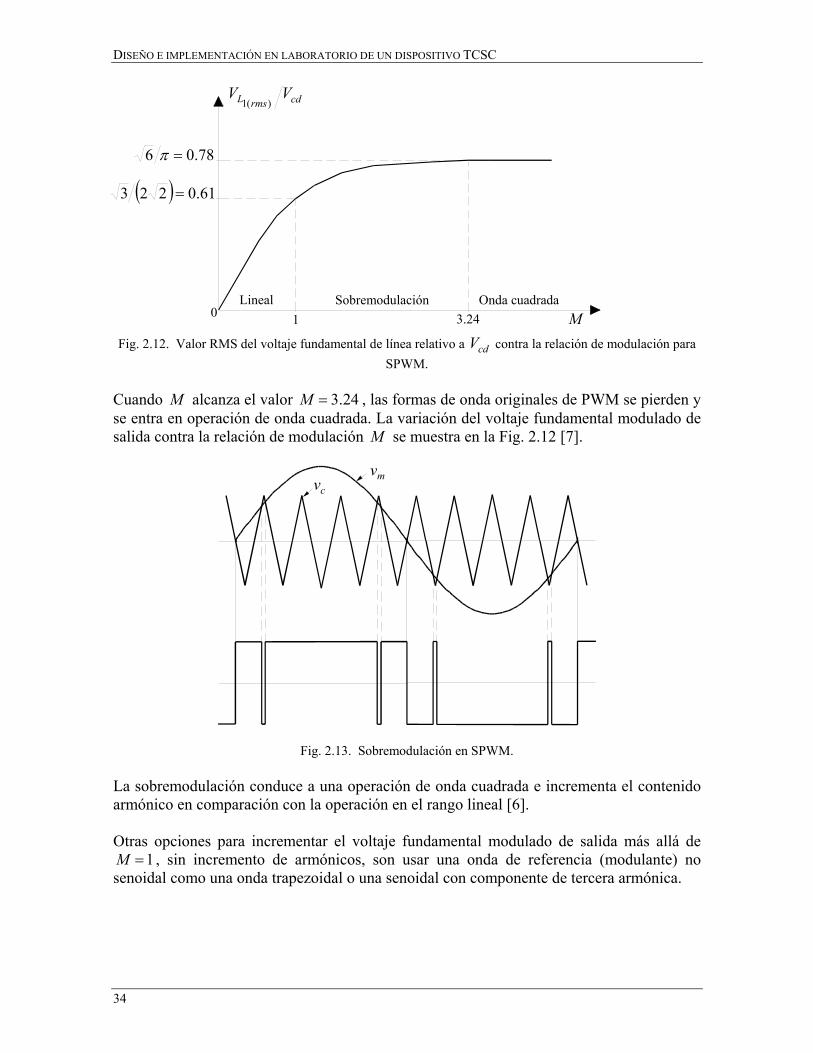
DISEÑO E IMPLEMENTACIÓN EN LABORATORIO DE UN DISPOSITIVO TCSC
34
Fig. 2.12. Valor R
Cuando M alcanse entra en operasalida contra la r
La sobremodulacarmónico en com
Otras opciones p1=M , sin incre
senoidal como un
VV
78.06 =π
( ) 61.0223 =
0
cdrmsL )(1
MS del voltaje fundamental de línea relativo a cdV contra la rel
SPWM.
za el valor 24.3=M , las formas de onda originalesción de onda cuadrada. La variación del voltaje fundelación de modulación M se muestra en la Fig. 2.12
Fig. 2.13. Sobremodulación en SPWM.
ión conduce a una operación de onda cuadrada e inparación con la operación en el rango lineal [6].
ara incrementar el voltaje fundamental modulado mento de armónicos, son usar una onda de refera onda trapezoidal o una senoidal con componente d
M1 3.24
Lineal Sobremodulación Onda cuadrada
mvcv
ación de modulación para
de PWM se pierden yamental modulado de[7].
crementa el contenido
de salida más allá deencia (modulante) noe tercera armónica.
CAPÍTULO II ELEMENTOS DE ELECTRÓNICA DE POTENCIA
35
Fig. 2.14. Saltos de voltaje debidos a la sobremodulación.
2.3.5. Modulación senoidal con muestreo regular
Como alternativa al muestreo natural la onda de referencia senoidal puede muestrearse aintervalos de tiempo regulares. Si el muestreo ocurre en instantes que corresponden a lospicos positivos o a los picos positivos y negativos de la onda portadora triangular, como semuestra en la Fig. 2.15 y Fig. 2.16, el proceso se conoce como muestreo regular o uniforme[11]. Un valor de muestreo de la onda senoidal de referencia se mantiene constante hasta elpróximo instante de muestreo cuando ocurre una transición escalón. La versión escalonadade la onda de referencia se vuelve la onda modulante. La onda modulada de salidaresultante está definida por las intersecciones entre la onda portadora y la onda escalonadamodulante.
Cuando el muestreo ocurre a la frecuencia de la portadora y coincide con los picospositivos de la onda portadora, como se muestra en la Fig. 2.15, las intersecciones de loslados adyacentes de la portadora con la onda escalonada son equidistantes con respecto alos picos no muestreados (negativos). Para cualquier valor de M el ancho de los pulsos dela onda modulada son simétricos con respecto a los picos inferiores (no muestreados) de laportadora, a este proceso se le llama muestreo regular simétrico [11]. El ancho de los pulsoses proporcional a la altura del escalón respectivo y el centro de los pulsos ocurre a tiemposde muestreo uniformemente espaciados.
Cuando el muestreo coincide con ambos, el pico positivo y negativo de la onda portadora,Fig. 2.16, el proceso se conoce como muestreo regular asimétrico [11]. Los ladosadyacentes de la onda portadora triangular intersectan la onda modulante escalonada aniveles diferentes de escalón, así, la onda modulada resultante tiene pulsos que sonasimétricos con respecto al punto de muestreo.
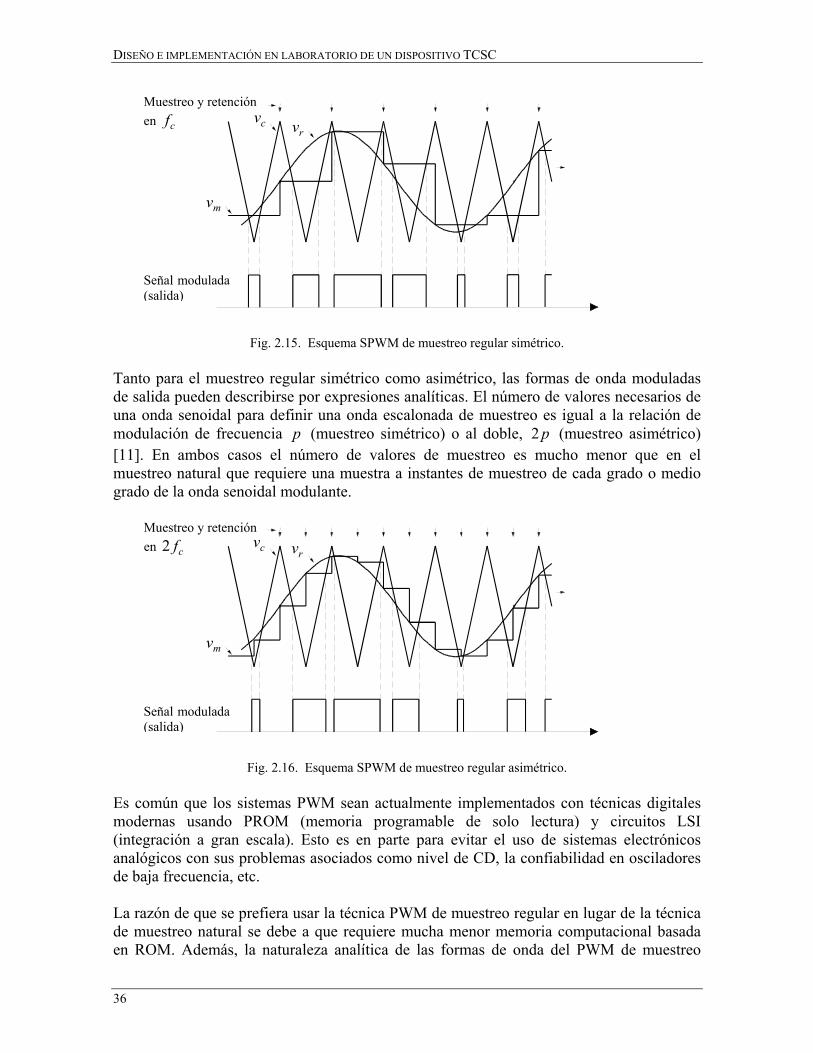
DISEÑO E IMPLEMENTACIÓN EN LABORATORIO DE UN DISPOSITIVO TCSC
36
Tande sunamod[11]muegrad
Es cmod(inteanalde b
La rde men R
c
Muestreo y retención
en f v
cmv
rv
Señal modulada(salida)
Fig. 2.15. Esquema SPWM de muestreo regular simétrico.
to para el muestreo regular simétrico como asimétrico, las formas de onda moduladasalida pueden describirse por expresiones analíticas. El número de valores necesarios de onda senoidal para definir una onda escalonada de muestreo es igual a la relación deulación de frecuencia p (muestreo simétrico) o al doble, p2 (muestreo asimétrico). En ambos casos el número de valores de muestreo es mucho menor que en elstreo natural que requiere una muestra a instantes de muestreo de cada grado o medioo de la onda senoidal modulante.
c v
Muestreo y retenciónen f2 v
cmv
r
Señal modulada(salida)
omún que los siernas usando gración a gran ógicos con sus paja frecuencia, e
azón de que se puestreo natural OM. Además,
Fig. 2.1
stemaPROMescalaroblemtc.
refierase debla natu
6. Esquema SPWM de muestreo regular asimétrico.
s PWM sean actualmente implementados con técnicas digitales (memoria programable de solo lectura) y circuitos LSI). Esto es en parte para evitar el uso de sistemas electrónicosas asociados como nivel de CD, la confiabilidad en osciladores
usar la técnica PWM de muestreo regular en lugar de la técnicae a que requiere mucha menor memoria computacional basadaraleza analítica de las formas de onda del PWM de muestreo
CAPÍTULO II ELEMENTOS DE ELECTRÓNICA DE POTENCIA
37
regular hace esta aproximación factible para su implementación usando técnicas basadas enmicroprocesador ya que el ancho de los pulsos es fácil de calcular.
2.4. Resumen
Se muestran las características de operación del SCR y el GTO, las condiciones para elencendido y apagado de los mismos explicando sus ventajas y desventajas, de esto puedededucirse porqué son dos de los dispositivos de electrónica de potencia más utilizados en latecnología FACTS.
Se explican técnicas de modulación de ancho de pulso, las cuales son útiles para el controlde dispositivos FACTS que incorporan elementos de electrónica de potencia, tales comofuentes convertidoras de voltaje y corriente.
2.5. Bibliografía
[1] John G. Kassakian, Martin F. Schlecht, George C. Verghese, Principles of PowerElectronics, primera edición, Addison-Wesley Publishing Company, 1991.
[2] Ralph E. Tarter, Principles of Solid State Power Conversion, primera edición,Howard W. Sams & Co. Inc., 1985.
[3] Bimal K. Bose, Modern Power Electronics evolution, technology, and applications,primera edición, IEEE Press, 1992.
[4] Sorab K. Ghandhi, Semiconductor Power Devices, primera edición, John Wiley &Sons, Inc., 1977.
[5] S. M. Sze, Semiconductor Devices, physics and technology, primera edición, JohnWiley & Sons, Inc., 1985.
[6] Muhammad H. Rashid, Electrónica de Potencia circuitos, dispositivos yaplicaciones, segunda edición, Prentice Hall, 1995.
[7] Ned Mohan, Tore M. Undeland, William P. Robbins, Power Electronics,converters, applications, and design, segunda edición, John Wiley & Sons, Inc.,1989.
[8] Narain G. Hingorani, Laszlo Gyugyi, Understanding FACTS Concepts andTechnology of Flexible AC Transmission Systems, primera edición, IEEE Press,1999.
DISEÑO E IMPLEMENTACIÓN EN LABORATORIO DE UN DISPOSITIVO TCSC
38
[9] Yong Hua Song, Allan T. Johns, Flexible ac transmission systems (FACTS),primera edición, IEE Power and energy series, 1999.
[10] J. Michael Jacob, Industrial Control Electronics applications and design, primeraedición, Prentice Hall, 1988.
[11] W. Shepherd, L. N. Hulley, D. T. W. Liang, Power Electronics and Motor Control,segunda edición, Cambridge University Press, 1995.
[12] Bimal K. Bose, Power Electronics and Variable Frequency Drives, primera edición,IEEE Press, 1997.
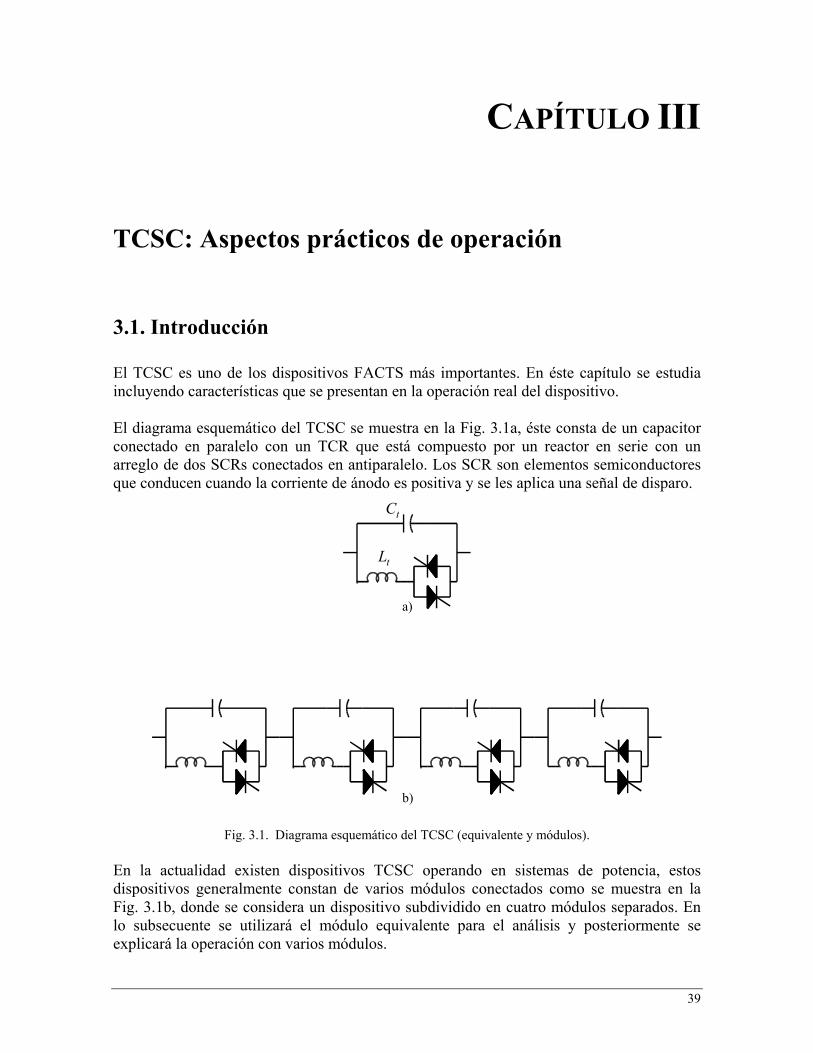
CAPÍTULO III
TCSC: Aspectos prácticos de operación
3.1. Introducción
El TCSC es uno de los dispositivos FACTS más importantes. En éste capítulo se estudiaincluyendo características que se presentan en la operación real del dispositivo.
El diagrama esquemático del TCSC se muestra en la Fig. 3.1a, éste consta de un capacitorconectado en paralelo con un TCR que está compuesto por un reactor en serie con unarreglo de dos SCRs conectados en antiparalelo. Los SCR son elementos semiconductoresque conducen cuando la corriente de ánodo es positiva y se les aplica una señal de disparo.
Fig. 3.1. Diagrama esquemá
En la actualidad existen dispositivos Tdispositivos generalmente constan de vaFig. 3.1b, donde se considera un disposilo subsecuente se utilizará el módulo explicará la operación con varios módulo
C
tL
39
tico del TCSC (equivalente y módulos).
CSC operando en sistemas de potencia, estosrios módulos conectados como se muestra en la
tivo subdividido en cuatro módulos separados. Enequivalente para el análisis y posteriormente ses.
t
a)
b)
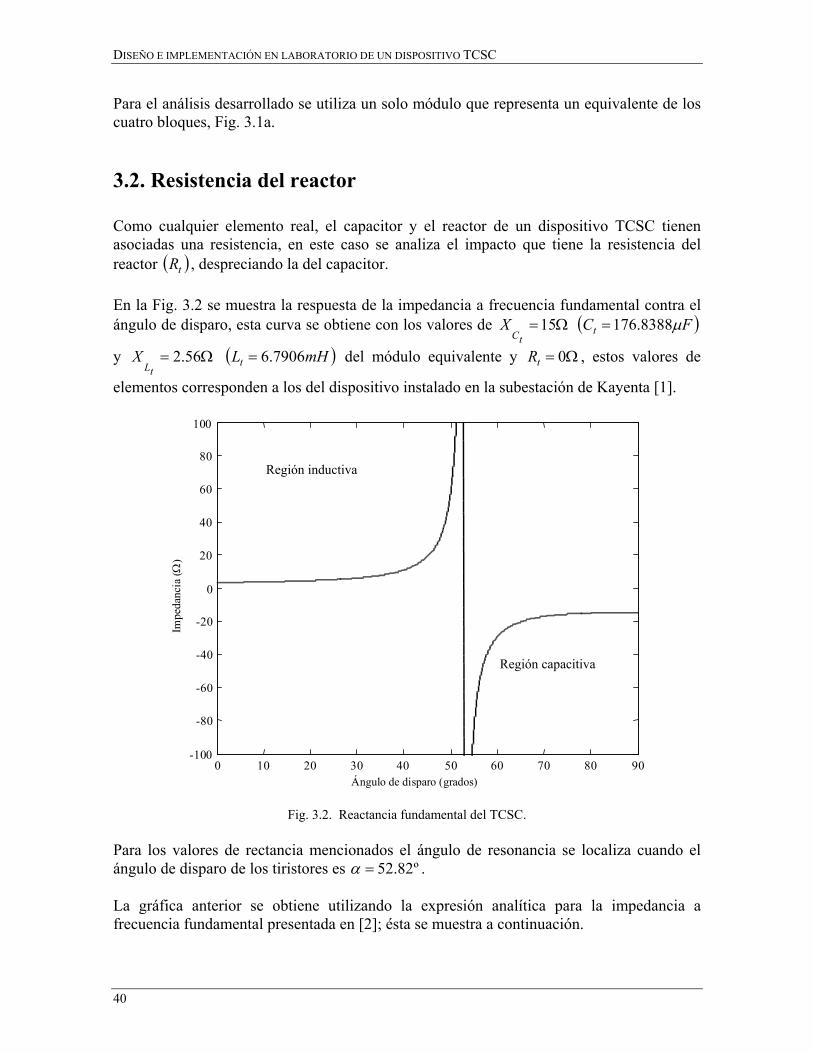
DISEÑO E IMPLEMENTACIÓN EN LABORATORIO DE UN DISPOSITIVO TCSC
40
Para el análisis desarrollado se utiliza un solo módulo que representa un equivalente de loscuatro bloques, Fig. 3.1a.
3.2. Resistencia del reactor
Como cualquier elemento real, el capacitor y el reactor de un dispositivo TCSC tienenasociadas una resistencia, en este caso se analiza el impacto que tiene la resistencia delreactor ( )tR , despreciando la del capacitor.
En la Fig. 3.2 se muestra la respuesta de la impedancia a frecuencia fundamental contra elángulo de disparo, esta curva se obtiene con los valores de Ω=15
tCX ( )FCt µ8388.176=
y Ω= 56.2tL
X ( )mHLt 7906.6= del módulo equivalente y Ω= 0tR , estos valores de
elementos corresponden a los del dispositivo instalado en la subestación de Kayenta [1].
0 10 20 30 40 50 60 70 80 90-100
-80
-60
-40
-20
0
20
40
60
80
100
Ángulo de disparo (grados)
Impe
danc
ia (Ω
)
Fig. 3.2. Reactancia fundamental del TCSC.
Para los valores de rectancia mencionados el ángulo de resonancia se localiza cuando elángulo de disparo de los tiristores es º82.52=α .
La gráfica anterior se obtiene utilizando la expresión analítica para la impedancia afrecuencia fundamental presentada en [2]; ésta se muestra a continuación.
Región inductiva
Región capacitiva

CAPÍTULO III TCSC: ASPECTOS PRÁCTICOS DE OPERACIÓN
+
−
+=
παπ 20
mCCTCSC I
AXjjXX
( )( ) ( ) ( )
++
−
− π
ααπα 2sen1sen2
4
1
22
2
kkktan
kI
AjX
mC (3.1)
donde:
α es el ángulo de disparo.
mI es la corriente aplicada al TCSC.
CXC ω1= , LC10 =ω , ωω0=k , mIA 220
20
ωωω−
= .
También, se obtuvo mediante simulación la parte de la gráfica correspondiente a la regióncapacitiva; se considera únicamente ésta puesto que es en la que opera normalmente eldispositivo.
La simulación para obtener la impedancia fundamental se realiza utilizando el circuito de laFig. 3.3, en el cual la fuente de corriente es ( )tI ωsen= .
Fig. 3.3. Di
Puede observarse en la Fimpedancia al utilizar la exp
Para mostrar el efecto que
impedancia del dispositivo,
Se puede observar en la Figcurva a medida que el ángul
I tC
agrama es
ig. 3.4 resión an
la resiste
se llevan
. 3.5 queo de disp
quemático del TC
que resultan alítica y med
ncia del reac
a cabo simula
la inclusión daro decrece d
L
41
SC utilizado en simulación.
prácticamente los mismos valores deiante simulación.
tor tR tiene en el comportamiento de la
ciones con Ω= 05.0tR y Ω= 1.0tR .
e la resistencia suaviza la pendiente de laesde 90°.
t
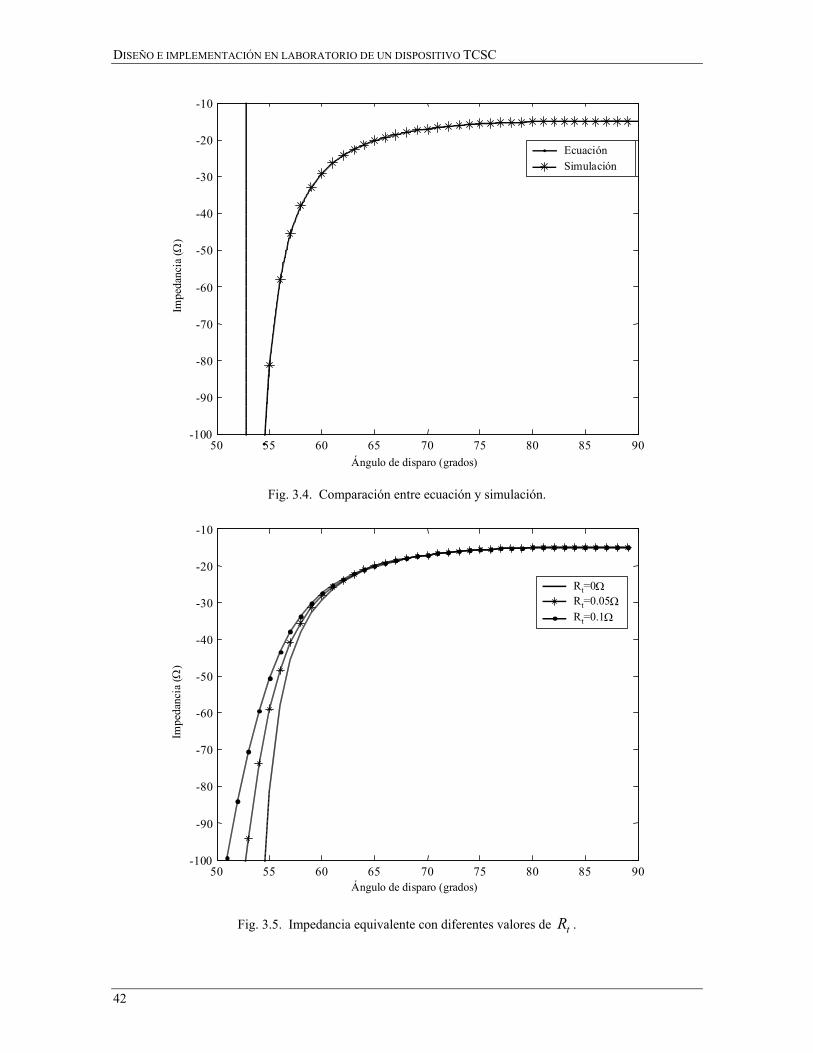
DISEÑO E IMPLEMENTACIÓN EN LABORATORIO DE UN DISPOSITIVO TCSC
42
50 55 60 65 70 75 80 85 90-100
-90
-80
-70
-60
-50
-40
-30
-20
-10
Ángulo de disparo (grados)
Impe
danc
ia (Ω
)
Ecuación
Simulación
Fig. 3.4. Comparación entre ecuación y simulación.
50 55 60 65 70 75 80 85 90-100
-90
-80
-70
-60
-50
-40
-30
-20
-10
Ángulo de disparo (grados)
Impe
danc
ia (Ω
)
Rt=0ΩRt=0.05ΩRt=0.1Ω
Fig. 3.5. Impedancia equivalente con diferentes valores de tR .
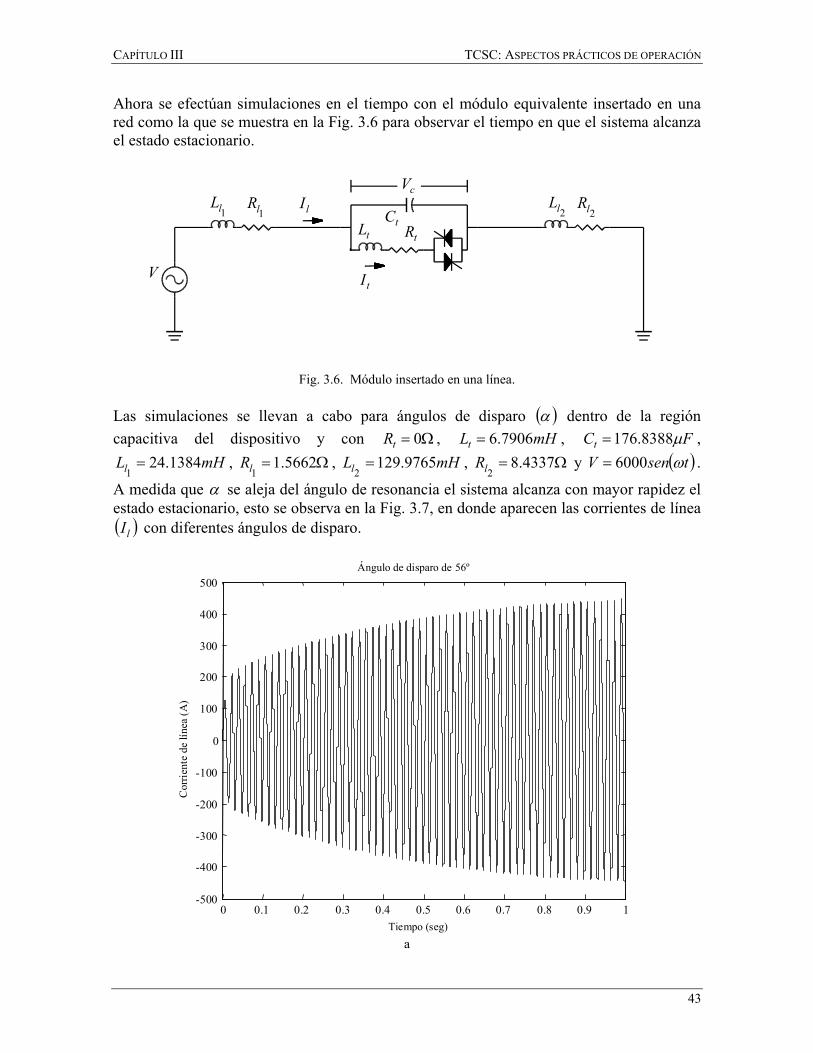
CAPÍTULO III TCSC: ASPECTOS PRÁCTICOS DE OPERACIÓN
Ahora se efectúan simulaciones en el tiempo con el módulo equivalente insertado en unared como la que se muestra en la Fig. 3.6 para observar el tiempo en que el sistema alcanzael estado estacionario.
Fig. 3.6. Módulo
Las simulaciones se llevan a cabo para
capacitiva del dispositivo y con R
mHLl 1384.241= , Ω= 5662.1
1lR , Ll 12
2=
A medida que α se aleja del ángulo de resoestado estacionario, esto se observa en la Fi( )lI con diferentes ángulos de disparo.
0 0.1 0.2 0.3 0.4-500
-400
-300
-200
-100
0
100
200
300
400
500Ángulo
T
Cor
rien
te d
e lí
nea
(A)
V
lI
tI
CtL
1lL
1lR
c
t
tR2l
L2l
R
V
insertado en una línea.
ángulos de disparo (Ω= 0t , mLt 7906.6=
mH9765.9 , = 43.82l
R
nancia el sistema alcag. 3.7, en donde aparec
0.5 0.6 0.7 0
de disparo de 56º
iempo (seg)
a
43
)α dentro de la región
H , FCt µ8388.176= ,
Ω37 y ( )tsenV ω6000= .
nza con mayor rapidez elen las corrientes de línea
.8 0.9 1
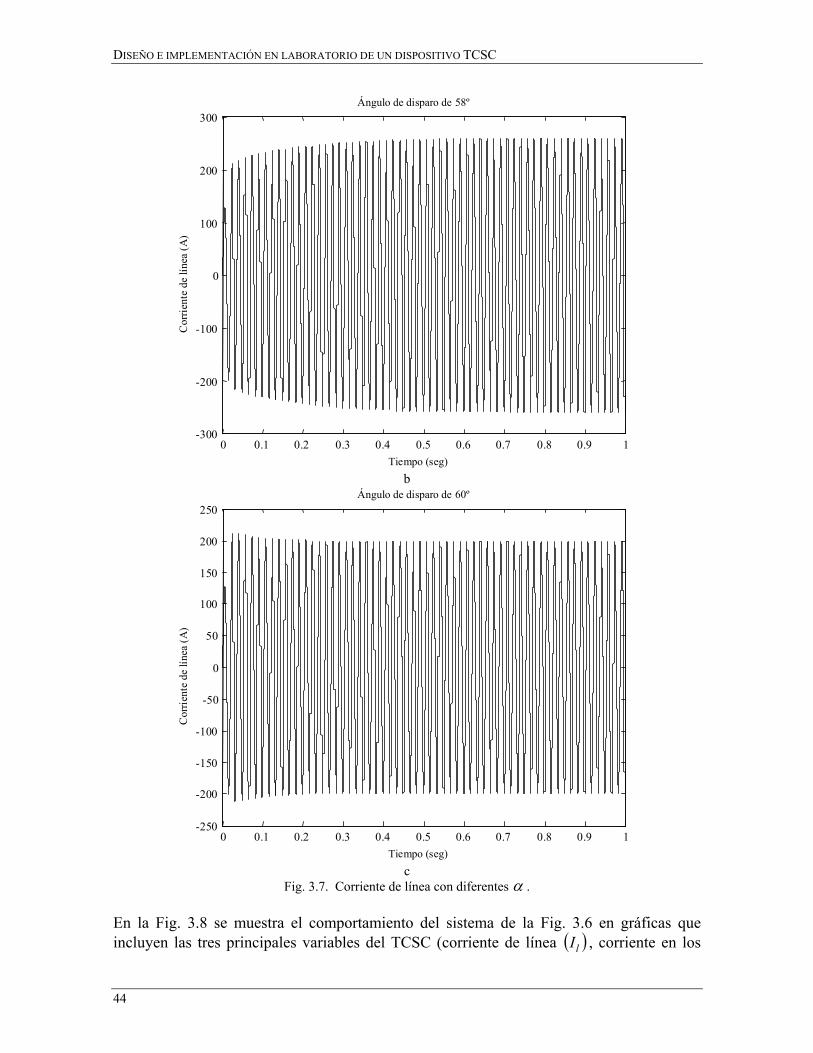
DISEÑO E IMPLEMENTACIÓN EN LABORATORIO DE UN DISPOSITIVO TCSC
44
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-300
-200
-100
0
100
200
300Ángulo de disparo de 58º
Tiempo (seg)
Cor
rien
te d
e lí
nea
(A)
b
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-250
-200
-150
-100
-50
0
50
100
150
200
250Ángulo de disparo de 60º
Tiempo (seg)
Cor
rien
te d
e lí
nea
(A)
cFig. 3.7. Corriente de línea con diferentes α .
En la Fig. 3.8 se muestra el comportamiento del sistema de la Fig. 3.6 en gráficas queincluyen las tres principales variables del TCSC (corriente de línea ( )lI , corriente en los
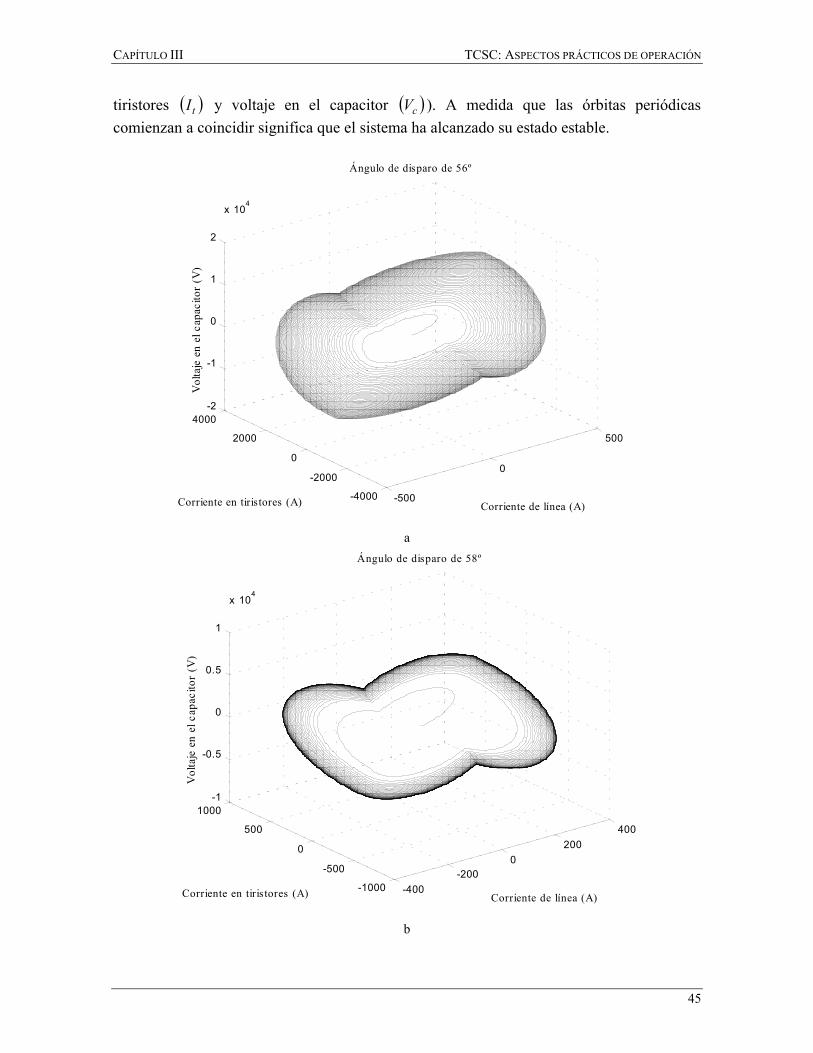
CAPÍTULO III TCSC: ASPECTOS PRÁCTICOS DE OPERACIÓN
45
tiristores ( )tI y voltaje en el capacitor ( )cV ). A medida que las órbitas periódicas
comienzan a coincidir significa que el sistema ha alcanzado su estado estable.
-500
0
500
-4000
-2000
0
2000
4000-2
-1
0
1
2
x 104
Corriente de línea (A)
Ángulo de disparo de 56º
Corriente en tiristores (A)
Vol
taje
en
el c
apac
itor
(V)
a
-400
-200
0
200
400
-1000
-500
0
500
1000-1
-0.5
0
0.5
1
x 104
Corriente de línea (A)
Ángulo de disparo de 58º
Corriente en tiristores (A)
Vol
taje
en
el c
apac
itor
(V)
b
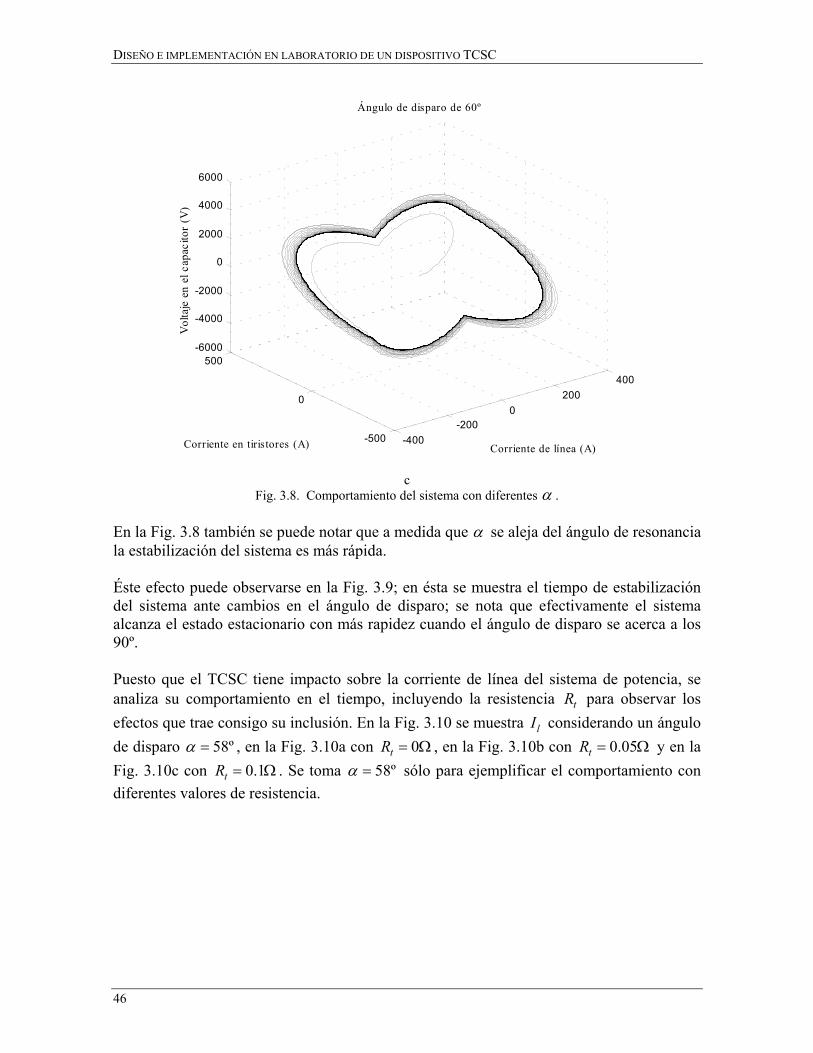
DISEÑO E IMPLEMENTACIÓN EN LABORATORIO DE UN DISPOSITIVO TCSC
46
-400
-2000
200
400
-500
0
500-6000
-4000
-2000
0
2000
4000
6000
Corriente de línea (A)
Ángulo de disparo de 60º
Corriente en tiristores (A)
Vol
taje
en
el c
apac
itor
(V)
cFig. 3.8. Comportamiento del sistema con diferentes α .
En la Fig. 3.8 también se puede notar que a medida que α se aleja del ángulo de resonanciala estabilización del sistema es más rápida.
Éste efecto puede observarse en la Fig. 3.9; en ésta se muestra el tiempo de estabilizacióndel sistema ante cambios en el ángulo de disparo; se nota que efectivamente el sistemaalcanza el estado estacionario con más rapidez cuando el ángulo de disparo se acerca a los90º.
Puesto que el TCSC tiene impacto sobre la corriente de línea del sistema de potencia, seanaliza su comportamiento en el tiempo, incluyendo la resistencia tR para observar los
efectos que trae consigo su inclusión. En la Fig. 3.10 se muestra lI considerando un ángulo
de disparo º58=α , en la Fig. 3.10a con Ω= 0tR , en la Fig. 3.10b con Ω= 05.0tR y en la
Fig. 3.10c con Ω= 1.0tR . Se toma º58=α sólo para ejemplificar el comportamiento con
diferentes valores de resistencia.
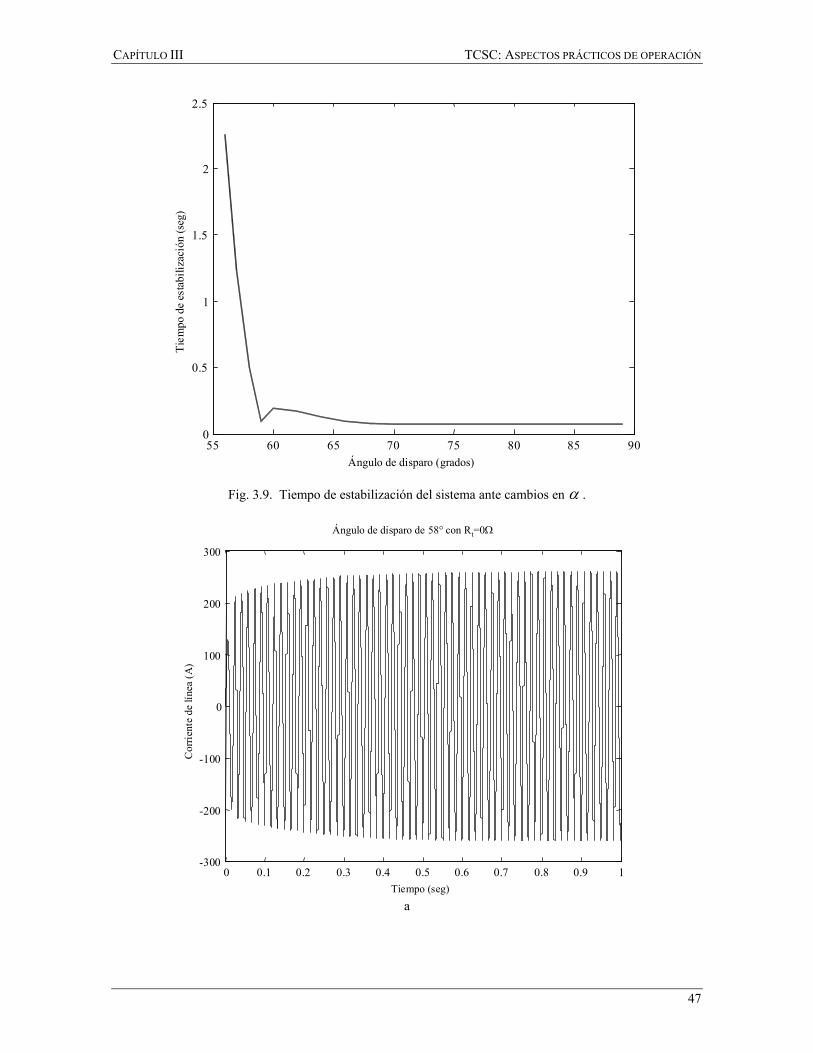
CAPÍTULO III TCSC: ASPECTOS PRÁCTICOS DE OPERACIÓN
47
55 60 65 70 75 80 85 900
0.5
1
1.5
2
2.5
Ángulo de disparo (grados)
Tie
mpo
de
esta
bili
zaci
ón (
seg)
Fig. 3.9. Tiempo de estabilización del sistema ante cambios en α .
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-300
-200
-100
0
100
200
300
Ángulo de disparo de 58° con Rt=0Ω
Tiempo (seg)
Cor
rien
te d
e lí
nea
(A)
a
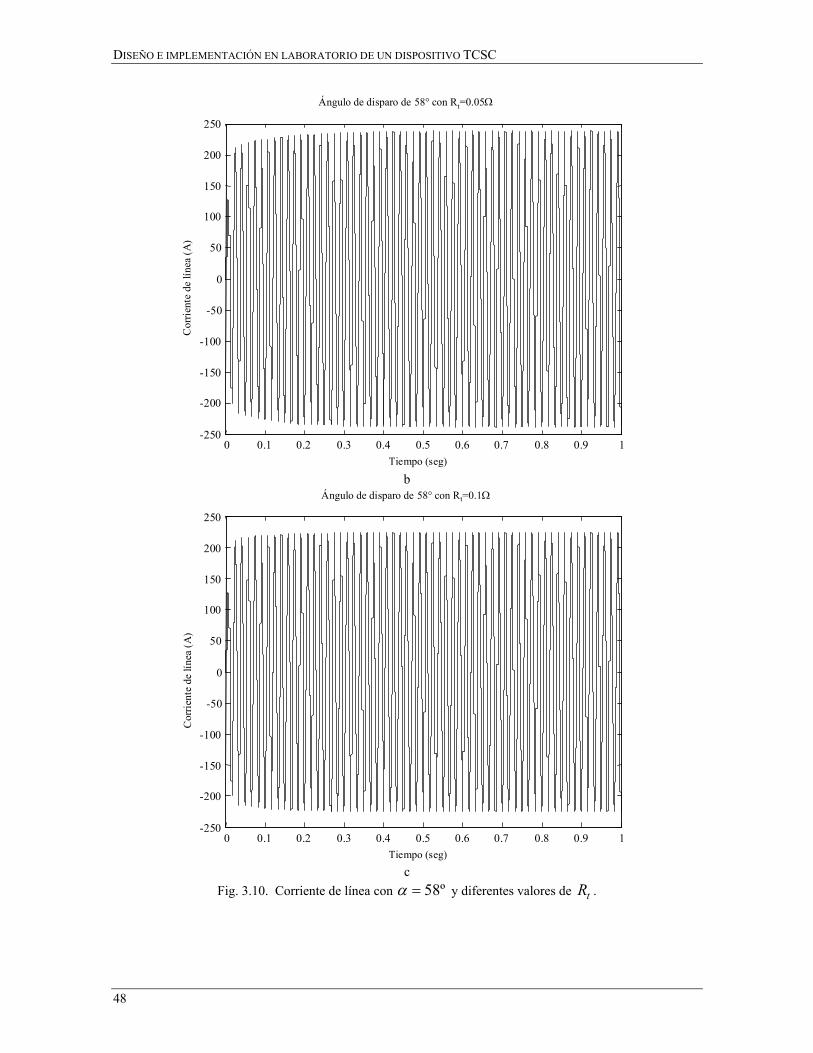
DISEÑO E IMPLEMENTACIÓN EN LABORATORIO DE UN DISPOSITIVO TCSC
48
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-250
-200
-150
-100
-50
0
50
100
150
200
250
Ángulo de disparo de 58° con Rt=0.05Ω
Tiempo (seg)
Cor
rien
te d
e lí
nea
(A)
b
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-250
-200
-150
-100
-50
0
50
100
150
200
250
Ángulo de disparo de 58° con Rt=0.1Ω
Tiempo (seg)
Cor
rien
te d
e lí
nea
(A)
c
Fig. 3.10. Corriente de línea con º58=α y diferentes valores de tR .
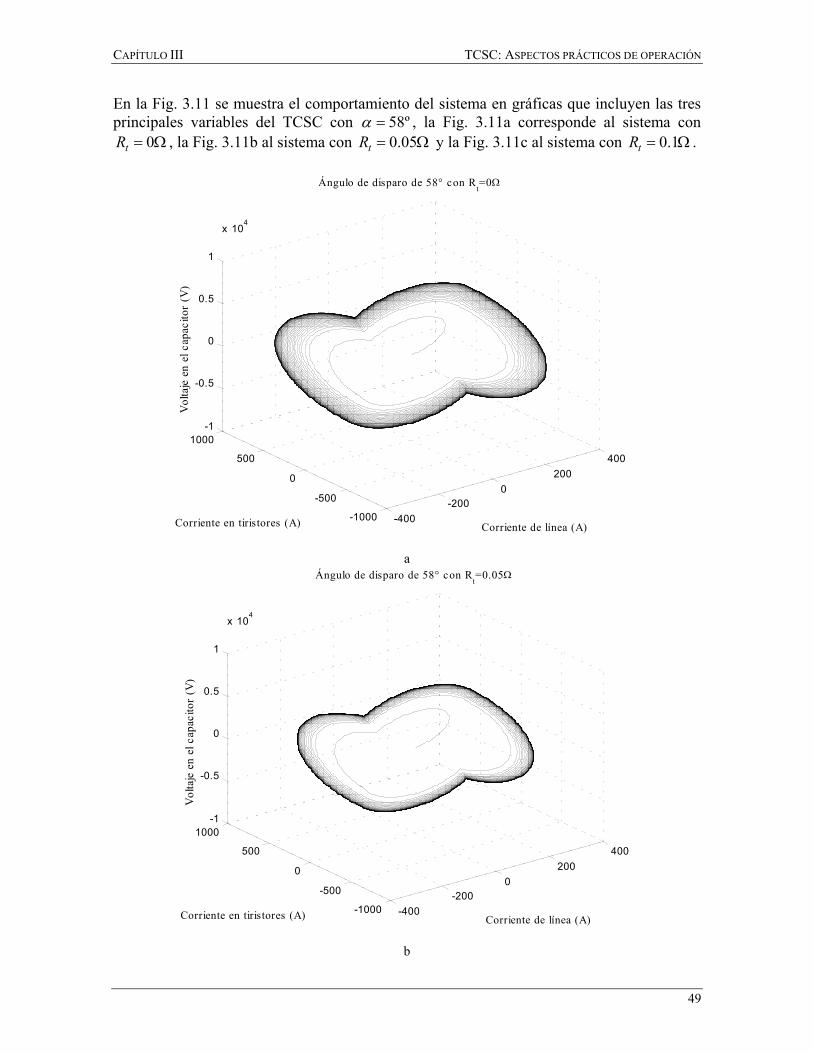
CAPÍTULO III TCSC: ASPECTOS PRÁCTICOS DE OPERACIÓN
49
En la Fig. 3.11 se muestra el comportamiento del sistema en gráficas que incluyen las tresprincipales variables del TCSC con º58=α , la Fig. 3.11a corresponde al sistema con
Ω= 0tR , la Fig. 3.11b al sistema con Ω= 05.0tR y la Fig. 3.11c al sistema con Ω= 1.0tR .
-400
-200
0
200
400
-1000
-500
0
500
1000-1
-0.5
0
0.5
1
x 104
Corriente de línea (A)
Ángulo de disparo de 58° con Rt=0Ω
Corriente en tiristores (A)
Vol
taje
en
el c
apac
itor
(V)
a
-400
-200
0
200
400
-1000
-500
0
500
1000-1
-0.5
0
0.5
1
x 104
Corriente de línea (A)
Ángulo de disparo de 58° con Rt=0.05Ω
Corriente en tiristores (A)
Vol
taje
en
el c
apac
itor
(V)
b
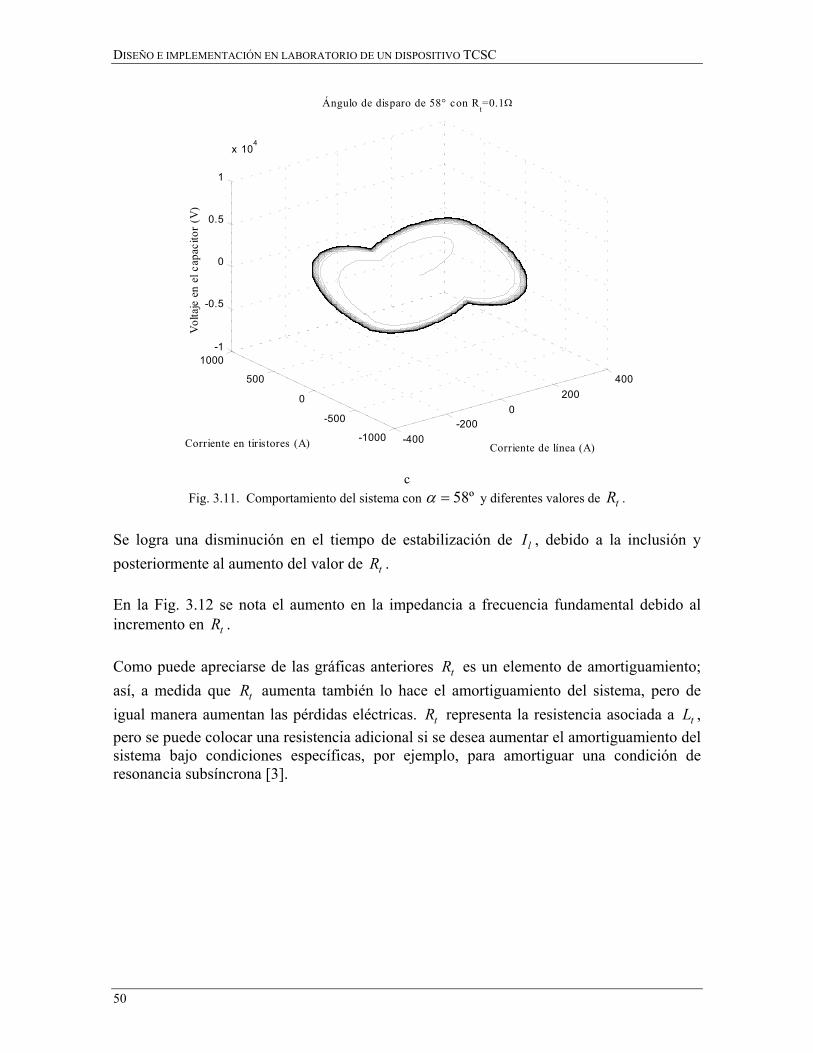
DISEÑO E IMPLEMENTACIÓN EN LABORATORIO DE UN DISPOSITIVO TCSC
50
-400
-200
0
200
400
-1000
-500
0
500
1000-1
-0.5
0
0.5
1
x 104
Corriente de línea (A)
Ángulo de disparo de 58° con Rt=0.1Ω
Corriente en tiristores (A)
Vol
taje
en
el c
apac
itor
(V)
c
Fig. 3.11. Comportamiento del sistema con º58=α y diferentes valores de tR .
Se logra una disminución en el tiempo de estabilización de lI , debido a la inclusión y
posteriormente al aumento del valor de tR .
En la Fig. 3.12 se nota el aumento en la impedancia a frecuencia fundamental debido alincremento en tR .
Como puede apreciarse de las gráficas anteriores tR es un elemento de amortiguamiento;
así, a medida que tR aumenta también lo hace el amortiguamiento del sistema, pero de
igual manera aumentan las pérdidas eléctricas. tR representa la resistencia asociada a tL ,
pero se puede colocar una resistencia adicional si se desea aumentar el amortiguamiento delsistema bajo condiciones específicas, por ejemplo, para amortiguar una condición deresonancia subsíncrona [3].
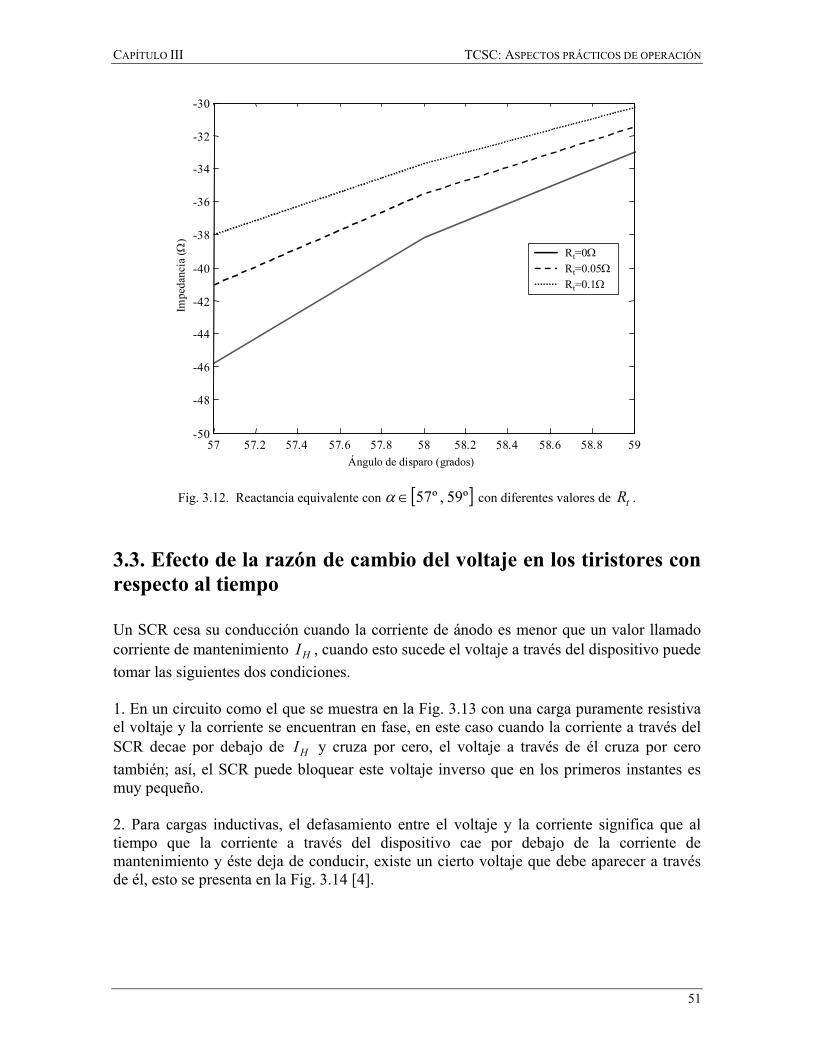
CAPÍTULO III TCSC: ASPECTOS PRÁCTICOS DE OPERACIÓN
51
57 57.2 57.4 57.6 57.8 58 58.2 58.4 58.6 58.8 59-50
-48
-46
-44
-42
-40
-38
-36
-34
-32
-30
Ángulo de disparo (grados)
Impe
danc
ia (Ω
)
Rt=0ΩRt=0.05ΩRt=0.1Ω
Fig. 3.12. Reactancia equivalente con [ ]º59,º57∈α con diferentes valores de tR .
3.3. Efecto de la razón de cambio del voltaje en los tiristores conrespecto al tiempo
Un SCR cesa su conducción cuando la corriente de ánodo es menor que un valor llamadocorriente de mantenimiento HI , cuando esto sucede el voltaje a través del dispositivo puede
tomar las siguientes dos condiciones.
1. En un circuito como el que se muestra en la Fig. 3.13 con una carga puramente resistivael voltaje y la corriente se encuentran en fase, en este caso cuando la corriente a través delSCR decae por debajo de HI y cruza por cero, el voltaje a través de él cruza por cero
también; así, el SCR puede bloquear este voltaje inverso que en los primeros instantes esmuy pequeño.
2. Para cargas inductivas, el defasamiento entre el voltaje y la corriente significa que altiempo que la corriente a través del dispositivo cae por debajo de la corriente demantenimiento y éste deja de conducir, existe un cierto voltaje que debe aparecer a travésde él, esto se presenta en la Fig. 3.14 [4].
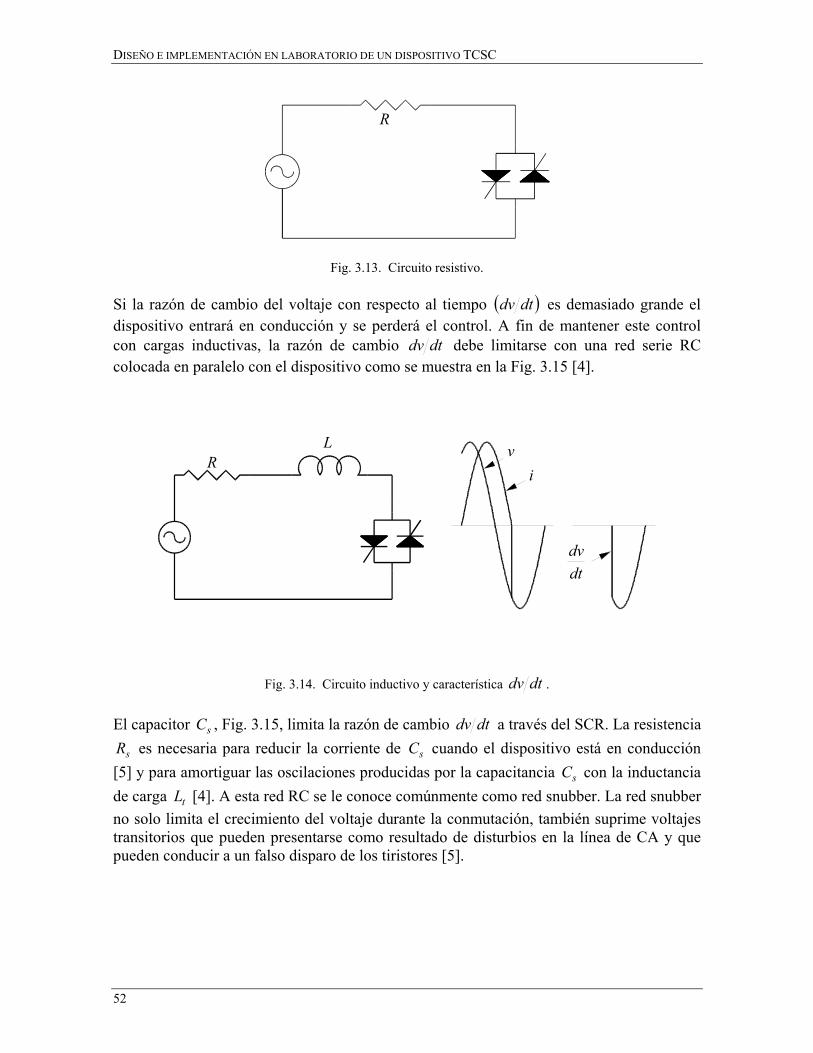
DISEÑO E IMPLEMENTACIÓN EN LABORATORIO DE UN DISPOSITIVO TCSC
52
Fig. 3.1
Si la razón de cambio del voltaje con rdispositivo entrará en conducción y se con cargas inductivas, la razón de camcolocada en paralelo con el dispositivo c
Fig. 3.14. Circuito i
El capacitor sC , Fig. 3.15, limita la razó
sR es necesaria para reducir la corrient
[5] y para amortiguar las oscilaciones pr
de carga tL [4]. A esta red RC se le cono
no solo limita el crecimiento del voltajetransitorios que pueden presentarse compueden conducir a un falso disparo de lo
R
RL
3. Circuito resistivo.
especto al tiempo ( )dtdv es demasiado grande elperderá el control. A fin de mantener este controlbio dtdv debe limitarse con una red serie RC
omo se muestra en la Fig. 3.15 [4].
v
nductivo y característic
n de cambio dtdv
e de sC cuando el
oducidas por la cap
ce comúnmente co
durante la conmutao resultado de dists tiristores [5].
a dv
a tra
dis
acit
mo
cióurbi
i
dt .
vés d
positiv
ancia
red sn
n, tamos en
dv
el SCR. La resistencia
o está en conducción
sC con la inductancia
ubber. La red snubber
bién suprime voltajesla línea de CA y que
dt
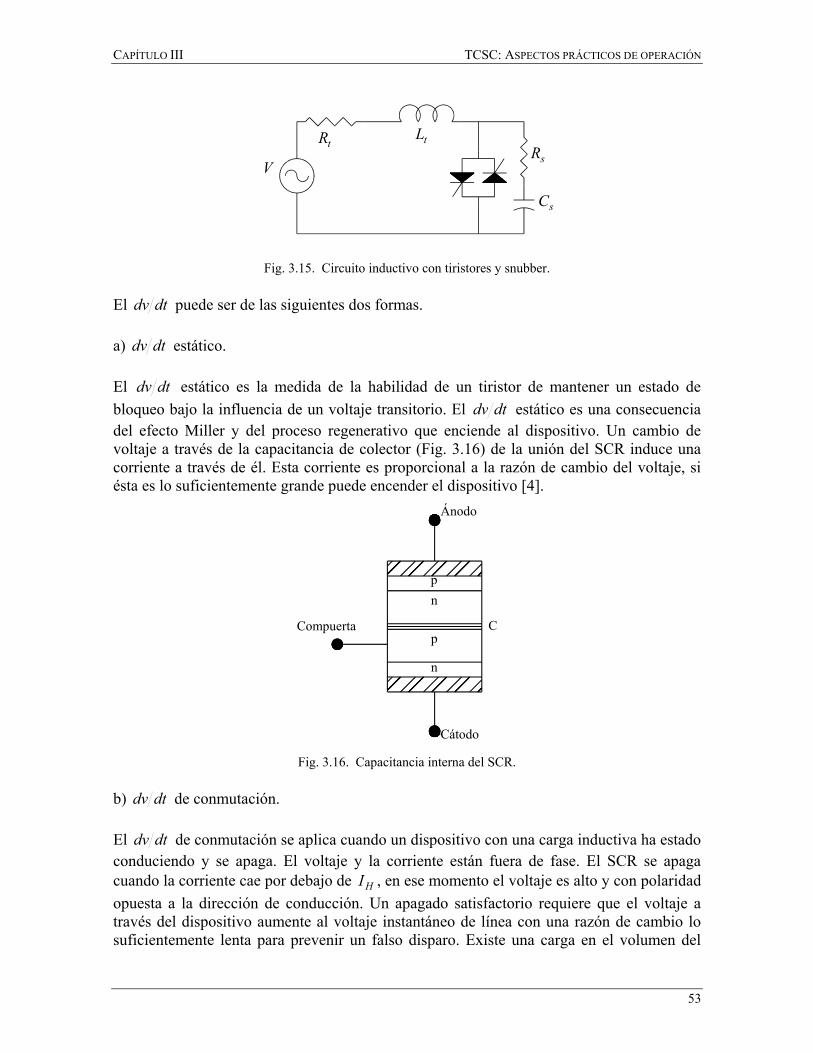
CAPÍTULO III TCSC: ASPECTOS PRÁCTICOS DE OPERACIÓN
El dtdv puede ser de
a) dtdv estático.
El dtdv estático es
bloqueo bajo la influedel efecto Miller y devoltaje a través de la corriente a través de éésta es lo suficienteme
b) dtdv de conmutac
El dtdv de conmutacconduciendo y se apacuando la corriente cae
opuesta a la direccióntravés del dispositivo suficientemente lenta
tR tL
sR
V53
Fig. 3.15. Circuito inductivo con tiristores y snubber.
las siguientes dos formas.
la medida de la habilidad de un tiristor de mantener un estado de
ncia de un voltaje transitorio. El dtdv estático es una consecuencial proceso regenerativo que enciende al dispositivo. Un cambio de
capacitancia de colector (Fig. 3.16) de la unión del SCR induce unal. Esta corriente es proporcional a la razón de cambio del voltaje, sinte grande puede encender el dispositivo [4].
Fig. 3.16. Capacitancia interna del SCR.
ión.
ión se aplica cuando un dispositivo con una carga inductiva ha estadoga. El voltaje y la corriente están fuera de fase. El SCR se apaga por debajo de HI , en ese momento el voltaje es alto y con polaridad
de conducción. Un apagado satisfactorio requiere que el voltaje aaumente al voltaje instantáneo de línea con una razón de cambio lopara prevenir un falso disparo. Existe una carga en el volumen del
sC
Ánodo
Cátodo
Compuerta
p
p
n
n
C
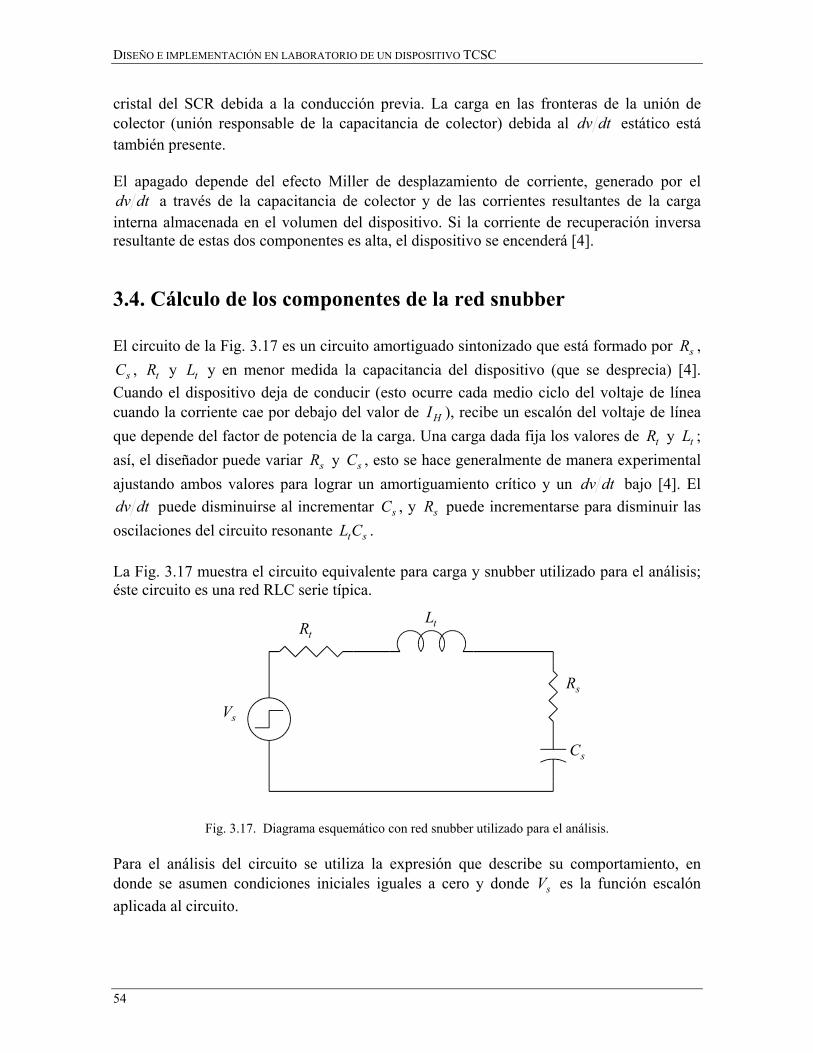
DISEÑO E IMPLEMENTACIÓN EN LABORATORIO DE UN DISPOSITIVO TCSC
54
cristal del SCR debida a la conducción previa. La carga en las fronteras de la unión decolector (unión responsable de la capacitancia de colector) debida al dtdv estático estátambién presente.
El apagado depende del efecto Miller de desplazamiento de corriente, generado por eldtdv a través de la capacitancia de colector y de las corrientes resultantes de la carga
interna almacenada en el volumen del dispositivo. Si la corriente de recuperación inversaresultante de estas dos componentes es alta, el dispositivo se encenderá [4].
3.4. Cálculo de los componentes de la red snubber
El circuito de la Fig. 3.17 es un circuito amortiguado sintonizado que está formado por sR ,
sC , tR y tL y en menor medida la capacitancia del dispositivo (que se desprecia) [4].
Cuando el dispositivo deja de conducir (esto ocurre cada medio ciclo del voltaje de líneacuando la corriente cae por debajo del valor de HI ), recibe un escalón del voltaje de línea
que depende del factor de potencia de la carga. Una carga dada fija los valores de tR y tL ;
así, el diseñador puede variar sR y sC , esto se hace generalmente de manera experimental
ajustando ambos valores para lograr un amortiguamiento crítico y un dtdv bajo [4]. El
dtdv puede disminuirse al incrementar sC , y sR puede incrementarse para disminuir las
oscilaciones del circuito resonante stCL .
La Fig. 3.17 muestra el circuito equivalente para carga y snubber utilizado para el análisis;éste circuito es una red RLC serie típica.
Fig. 3.17. Diagrama esquemático con red snubber utilizado para e
Para el análisis del circuito se utiliza la expresión que describe sdonde se asumen condiciones iniciales iguales a cero y donde sV
aplicada al circuito.
sV
tR tL
sR
l análisis.
u comportamiento, enes la función escalón
sC
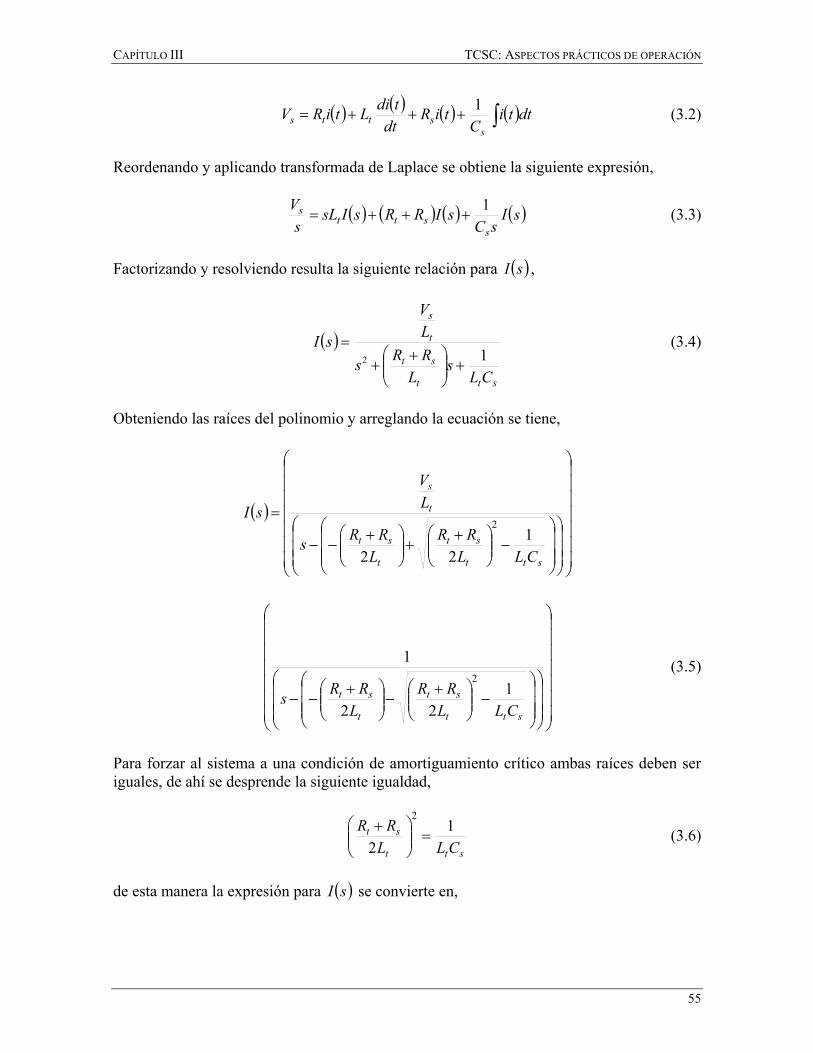
CAPÍTULO III TCSC: ASPECTOS PRÁCTICOS DE OPERACIÓN
55
( ) ( ) ( ) ( )∫+++= dttiC
tiRdt
tdiLtiRV
sstts
1(3.2)
Reordenando y aplicando transformada de Laplace se obtiene la siguiente expresión,
( ) ( ) ( ) ( )sIsC
sIRRsIsLs
V
sstt
s 1+++= (3.3)
Factorizando y resolviendo resulta la siguiente relación para ( )sI ,
( )
stt
st
t
s
CLs
L
RRs
L
V
sI12 +
++
= (3.4)
Obteniendo las raíces del polinomio y arreglando la ecuación se tiene,
( )
−
++
+−−
=
stt
st
t
st
t
s
CLL
RR
L
RRs
L
V
sI
1
22
2
−
+−
+−−
stt
st
t
st
CLL
RR
L
RRs
1
22
12
(3.5)
Para forzar al sistema a una condición de amortiguamiento crítico ambas raíces deben seriguales, de ahí se desprende la siguiente igualdad,
stt
st
CLL
RR 1
2
2
=
+(3.6)
de esta manera la expresión para ( )sI se convierte en,

DISEÑO E IMPLEMENTACIÓN EN LABORATORIO DE UN DISPOSITIVO TCSC
56
( ) 2
2
+−−
=
t
st
t
s
L
RRs
L
V
sI (3.7)
Aplicando transformada inversa de Laplace finalmente se obtiene la expresión en eldominio del tiempo para la corriente,
( )
+−
= tLsRtR
t
t
s teL
Vti
2(3.8)
Una vez obtenida ( )ti se determina la ecuación para obtener el voltaje en la red snubber (elvoltaje en la red snubber será el de los tiristores cuando estén bloqueados) la cual está dadapor,
( ) ( ) ( )tiRdt
tdiLVtV ttst −−= (3.9)
sustituyendo ( )ti en la expresión anterior se obtiene,
( )
−
−=
+−
+−
tLsRtR
t
t
st
tLsRtR
t
t
stst te
L
VRte
L
V
dt
dLVtV
22(3.10)
derivando y reordenando los términos finalmente resulta,
( )
+−
+−
+−
−−
++= tL
sRtRt
t
st
tLsRtR
t
stL
sRtRt
t
stsst te
L
VReVte
L
RRVVtV
222
2(3.11)
la relación anterior representa el voltaje en los tiristores cuando están bloqueados.
Se desea determinar el valor y el tiempo de ocurrencia del voltaje pico pV , para ello se
deriva la expresión y se iguala a cero,
( )+
+−
+=
+−
tLsRtR
t
t
st
t
sts
t eL
RRt
L
RRV
dt
tdV 2
22

CAPÍTULO III TCSC: ASPECTOS PRÁCTICOS DE OPERACIÓN
57
+
+−+
+
+−
+−
tLsRtR
t
t
sts
tLsRtR
t
t
sts e
L
RRVe
L
RRV
22
22
+−
+−
+
+− tL
sRtRt
t
st
tLsRtR
t
t
st
t
st e
L
VRe
L
RRt
L
VR
22
2(3.12)
haciendo ( )
0=dt
tdVt y resolviendo para t se obtiene,
2
22
22
+−
+
+−
=
t
sts
t
st
t
st
t
sts
t
st
p
L
RRV
L
RR
L
VR
L
RRV
L
VR
t (3.13)
donde pt es el tiempo en el que ocurre el voltaje pico.
Sustituyendo pt en la expresión para ( )tVt se obtiene el valor del voltaje pico que resulta,
( )
−
+−
+
+−
++=
−+
+−
+
+−
2
22
22
22
22
22
2
t
sts
t
st
t
st
t
sts
t
st
t
sts
tLsRtR
tLsRtR
sVtL
sRtR
tLsV
tR
tLsRtR
sVtLsV
tR
sp
L
RRV
L
RR
L
VR
L
RRV
L
VR
L
RRVeVtV
+−
+
+−
− 2
22
22
t
sts
t
st
t
st
t
sts
t
st
t
sts
L
RRV
L
RR
L
VR
L
RRV
L
VR
L
VRV (3.14)
Habiendo determinado la magnitud y tiempo en que ocurre el voltaje pico es posiblecalcular los valores y tiempos de ocurrencia de los voltajes en 10% y 63% del valor pico.Esto es necesario a fin de determinar el dtdv aproximado por la siguiente ecuación [4].
1063
1063
tt
VV
dt
dv
−−
= (3.15)
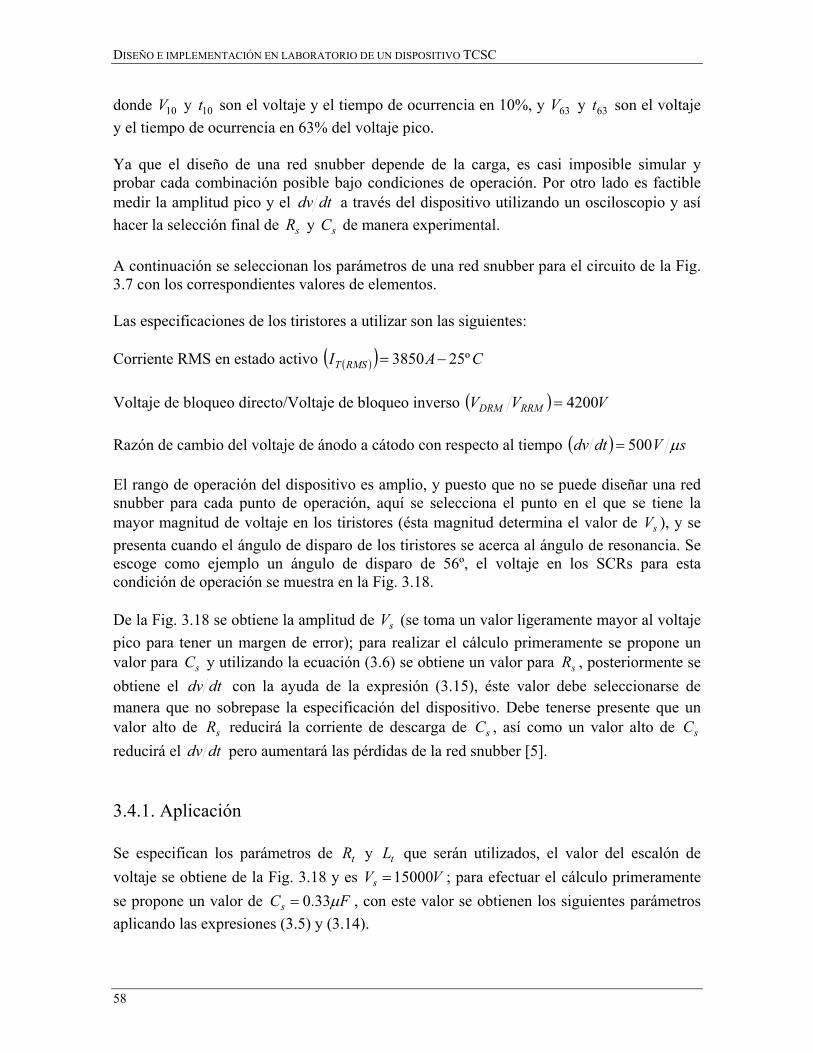
DISEÑO E IMPLEMENTACIÓN EN LABORATORIO DE UN DISPOSITIVO TCSC
58
donde 10V y 10t son el voltaje y el tiempo de ocurrencia en 10%, y 63V y 63t son el voltaje
y el tiempo de ocurrencia en 63% del voltaje pico.
Ya que el diseño de una red snubber depende de la carga, es casi imposible simular yprobar cada combinación posible bajo condiciones de operación. Por otro lado es factiblemedir la amplitud pico y el dtdv a través del dispositivo utilizando un osciloscopio y así
hacer la selección final de sR y sC de manera experimental.
A continuación se seleccionan los parámetros de una red snubber para el circuito de la Fig.3.7 con los correspondientes valores de elementos.
Las especificaciones de los tiristores a utilizar son las siguientes:
Corriente RMS en estado activo ( )( ) CAI RMST º253850 −=
Voltaje de bloqueo directo/Voltaje de bloqueo inverso ( ) VVV RRMDRM 4200=
Razón de cambio del voltaje de ánodo a cátodo con respecto al tiempo ( ) sVdtdv µ500=
El rango de operación del dispositivo es amplio, y puesto que no se puede diseñar una redsnubber para cada punto de operación, aquí se selecciona el punto en el que se tiene lamayor magnitud de voltaje en los tiristores (ésta magnitud determina el valor de sV ), y se
presenta cuando el ángulo de disparo de los tiristores se acerca al ángulo de resonancia. Seescoge como ejemplo un ángulo de disparo de 56º, el voltaje en los SCRs para estacondición de operación se muestra en la Fig. 3.18.
De la Fig. 3.18 se obtiene la amplitud de sV (se toma un valor ligeramente mayor al voltaje
pico para tener un margen de error); para realizar el cálculo primeramente se propone unvalor para sC y utilizando la ecuación (3.6) se obtiene un valor para sR , posteriormente se
obtiene el dtdv con la ayuda de la expresión (3.15), éste valor debe seleccionarse demanera que no sobrepase la especificación del dispositivo. Debe tenerse presente que unvalor alto de sR reducirá la corriente de descarga de sC , así como un valor alto de sC
reducirá el dtdv pero aumentará las pérdidas de la red snubber [5].
3.4.1. Aplicación
Se especifican los parámetros de tR y tL que serán utilizados, el valor del escalón de
voltaje se obtiene de la Fig. 3.18 y es VVs 15000= ; para efectuar el cálculo primeramente
se propone un valor de FCs µ33.0= , con este valor se obtienen los siguientes parámetros
aplicando las expresiones (3.5) y (3.14).
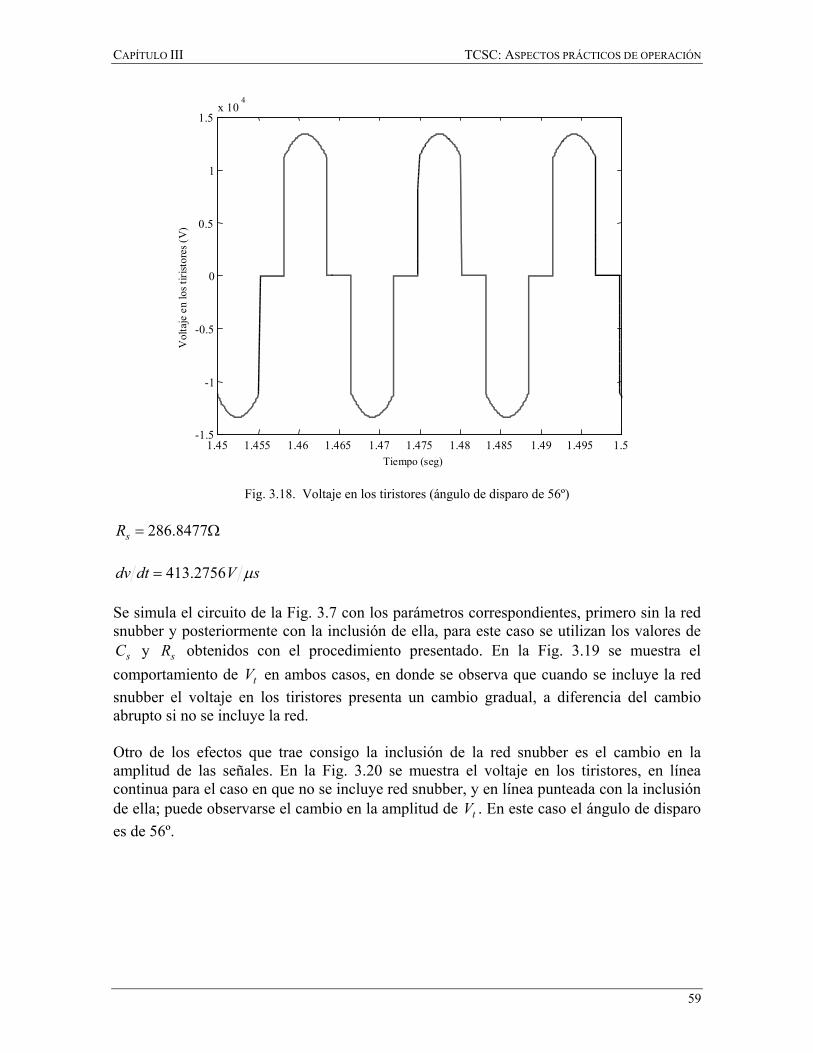
CAPÍTULO III TCSC: ASPECTOS PRÁCTICOS DE OPERACIÓN
59
1.45 1.455 1.46 1.465 1.47 1.475 1.48 1.485 1.49 1.495 1.5-1.5
-1
-0.5
0
0.5
1
1.5x 10
4
Tiempo (seg)
Vol
taje
en
los
tiri
stor
es (
V)
Fig. 3.18. Voltaje en los tiristores (ángulo de disparo de 56º)
Ω= 8477.286sR
sVdtdv µ2756.413=
Se simula el circuito de la Fig. 3.7 con los parámetros correspondientes, primero sin la redsnubber y posteriormente con la inclusión de ella, para este caso se utilizan los valores de
sC y sR obtenidos con el procedimiento presentado. En la Fig. 3.19 se muestra el
comportamiento de tV en ambos casos, en donde se observa que cuando se incluye la red
snubber el voltaje en los tiristores presenta un cambio gradual, a diferencia del cambioabrupto si no se incluye la red.
Otro de los efectos que trae consigo la inclusión de la red snubber es el cambio en laamplitud de las señales. En la Fig. 3.20 se muestra el voltaje en los tiristores, en líneacontinua para el caso en que no se incluye red snubber, y en línea punteada con la inclusiónde ella; puede observarse el cambio en la amplitud de tV . En este caso el ángulo de disparo
es de 56º.
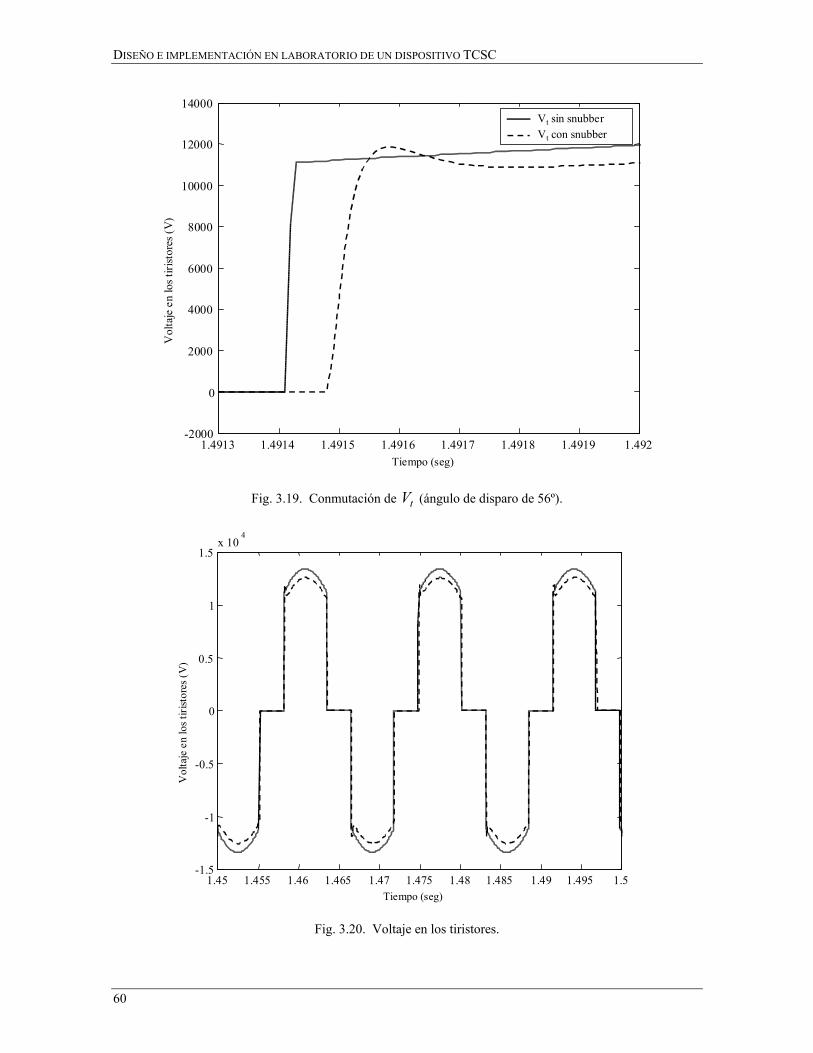
DISEÑO E IMPLEMENTACIÓN EN LABORATORIO DE UN DISPOSITIVO TCSC
60
1.4913 1.4914 1.4915 1.4916 1.4917 1.4918 1.4919 1.492-2000
0
2000
4000
6000
8000
10000
12000
14000
Tiempo (seg)
Vol
taje
en
los
tiri
stor
es (
V)
Vt sin snubber
Vt con snubber
Fig. 3.19. Conmutación de tV (ángulo de disparo de 56º).
1.45 1.455 1.46 1.465 1.47 1.475 1.48 1.485 1.49 1.495 1.5-1.5
-1
-0.5
0
0.5
1
1.5x 10
4
Tiempo (seg)
Vol
taje
en
los
tiri
stor
es (
V)
Fig. 3.20. Voltaje en los tiristores.
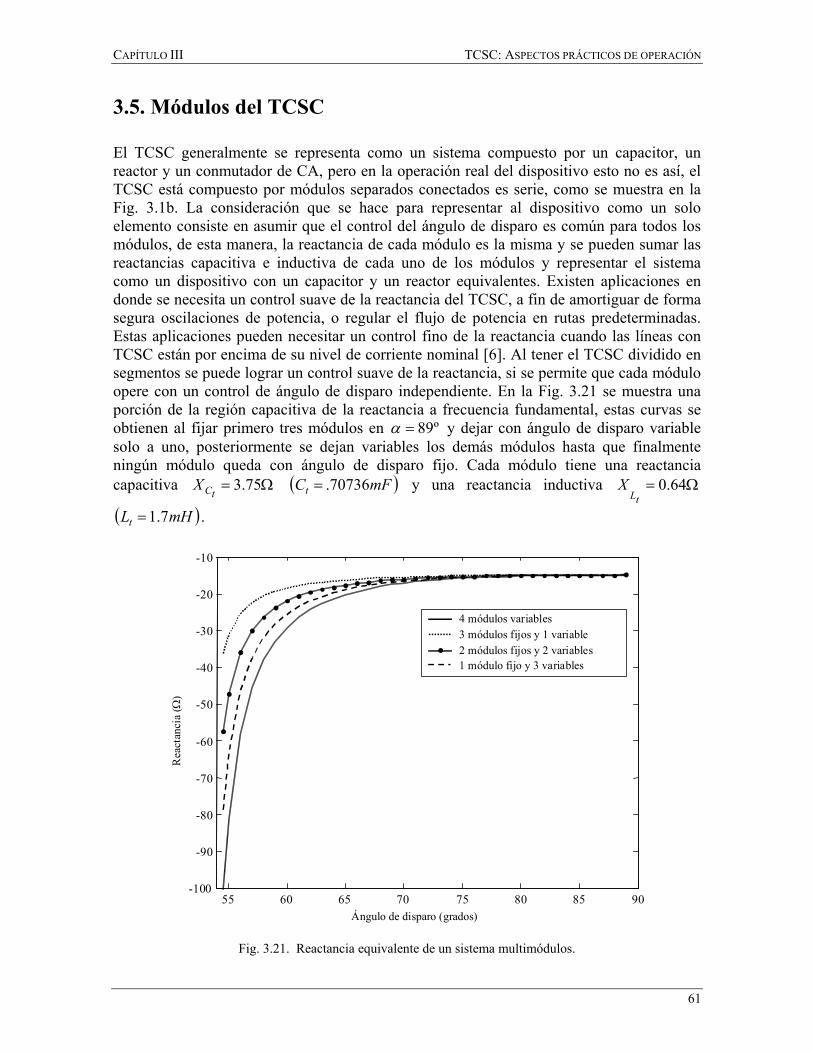
CAPÍTULO III TCSC: ASPECTOS PRÁCTICOS DE OPERACIÓN
61
3.5. Módulos del TCSC
El TCSC generalmente se representa como un sistema compuesto por un capacitor, unreactor y un conmutador de CA, pero en la operación real del dispositivo esto no es así, elTCSC está compuesto por módulos separados conectados es serie, como se muestra en laFig. 3.1b. La consideración que se hace para representar al dispositivo como un soloelemento consiste en asumir que el control del ángulo de disparo es común para todos losmódulos, de esta manera, la reactancia de cada módulo es la misma y se pueden sumar lasreactancias capacitiva e inductiva de cada uno de los módulos y representar el sistemacomo un dispositivo con un capacitor y un reactor equivalentes. Existen aplicaciones endonde se necesita un control suave de la reactancia del TCSC, a fin de amortiguar de formasegura oscilaciones de potencia, o regular el flujo de potencia en rutas predeterminadas.Estas aplicaciones pueden necesitar un control fino de la reactancia cuando las líneas conTCSC están por encima de su nivel de corriente nominal [6]. Al tener el TCSC dividido ensegmentos se puede lograr un control suave de la reactancia, si se permite que cada móduloopere con un control de ángulo de disparo independiente. En la Fig. 3.21 se muestra unaporción de la región capacitiva de la reactancia a frecuencia fundamental, estas curvas seobtienen al fijar primero tres módulos en º89=α y dejar con ángulo de disparo variablesolo a uno, posteriormente se dejan variables los demás módulos hasta que finalmenteningún módulo queda con ángulo de disparo fijo. Cada módulo tiene una reactanciacapacitiva Ω= 75.3
tCX ( )mFCt 70736.= y una reactancia inductiva Ω= 64.0tL
X
( )mHLt 7.1= .
55 60 65 70 75 80 85 90-100
-90
-80
-70
-60
-50
-40
-30
-20
-10
Ángulo de disparo (grados)
Rea
ctan
cia
(Ω)
4 módulos variables
3 módulos fijos y 1 variable
2 módulos fijos y 2 variables1 módulo fijo y 3 variables
Fig. 3.21. Reactancia equivalente de un sistema multimódulos.
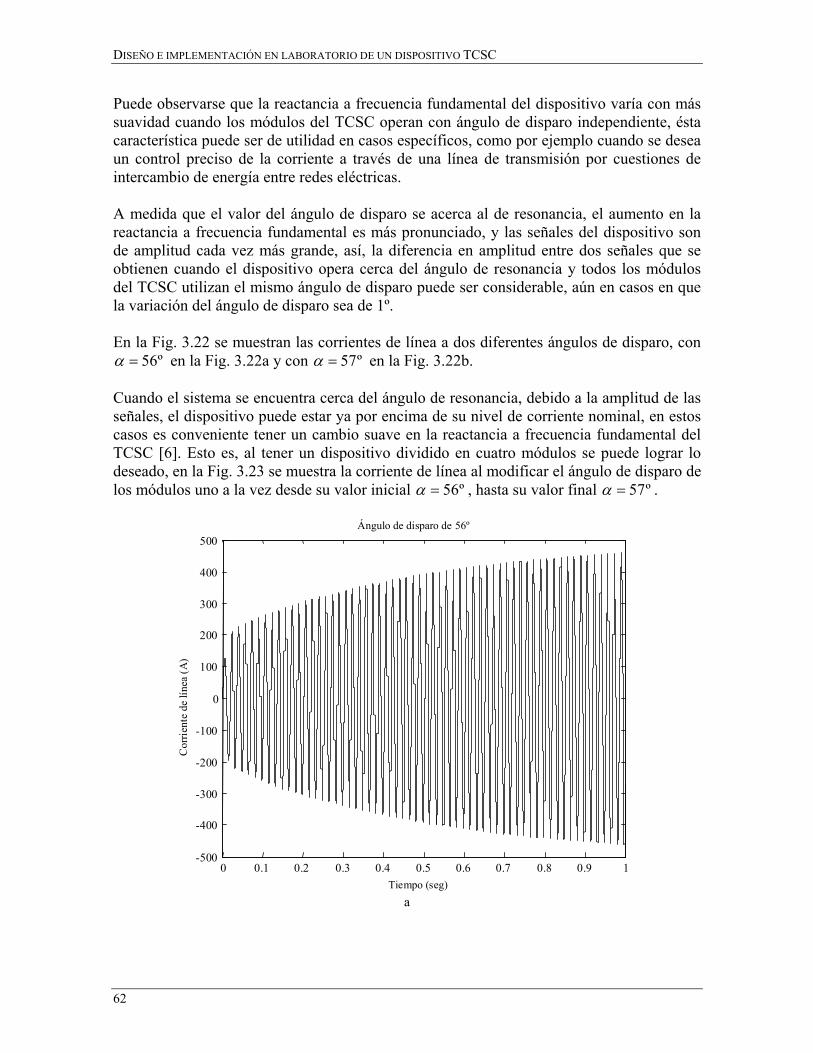
DISEÑO E IMPLEMENTACIÓN EN LABORATORIO DE UN DISPOSITIVO TCSC
62
Puede observarse que la reactancia a frecuencia fundamental del dispositivo varía con mássuavidad cuando los módulos del TCSC operan con ángulo de disparo independiente, éstacaracterística puede ser de utilidad en casos específicos, como por ejemplo cuando se deseaun control preciso de la corriente a través de una línea de transmisión por cuestiones deintercambio de energía entre redes eléctricas.
A medida que el valor del ángulo de disparo se acerca al de resonancia, el aumento en lareactancia a frecuencia fundamental es más pronunciado, y las señales del dispositivo sonde amplitud cada vez más grande, así, la diferencia en amplitud entre dos señales que seobtienen cuando el dispositivo opera cerca del ángulo de resonancia y todos los módulosdel TCSC utilizan el mismo ángulo de disparo puede ser considerable, aún en casos en quela variación del ángulo de disparo sea de 1º.
En la Fig. 3.22 se muestran las corrientes de línea a dos diferentes ángulos de disparo, conº56=α en la Fig. 3.22a y con º57=α en la Fig. 3.22b.
Cuando el sistema se encuentra cerca del ángulo de resonancia, debido a la amplitud de lasseñales, el dispositivo puede estar ya por encima de su nivel de corriente nominal, en estoscasos es conveniente tener un cambio suave en la reactancia a frecuencia fundamental delTCSC [6]. Esto es, al tener un dispositivo dividido en cuatro módulos se puede lograr lodeseado, en la Fig. 3.23 se muestra la corriente de línea al modificar el ángulo de disparo delos módulos uno a la vez desde su valor inicial º56=α , hasta su valor final º57=α .
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-500
-400
-300
-200
-100
0
100
200
300
400
500Ángulo de disparo de 56º
Tiempo (seg)
Cor
rien
te d
e lí
nea
(A)
a
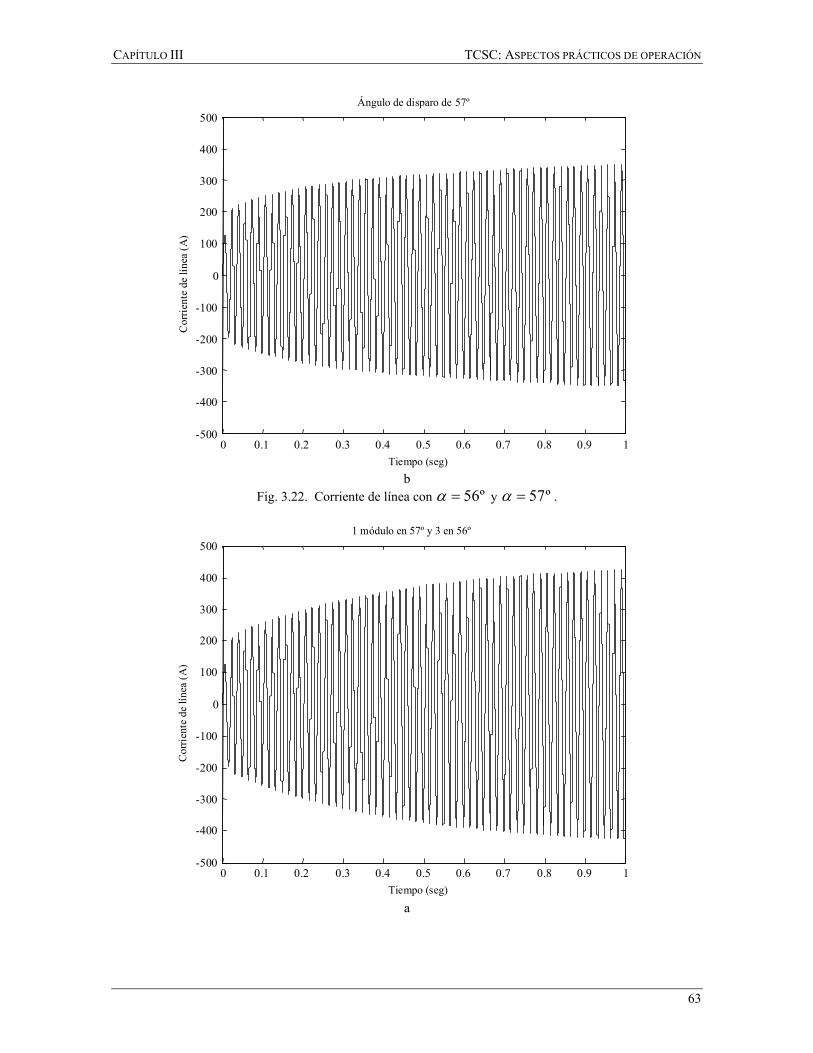
CAPÍTULO III TCSC: ASPECTOS PRÁCTICOS DE OPERACIÓN
63
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-500
-400
-300
-200
-100
0
100
200
300
400
500
Tiempo (seg)
Cor
rien
te d
e lí
nea
(A)
Ángulo de disparo de 57º
bFig. 3.22. Corriente de línea con º56=α y º57=α .
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-500
-400
-300
-200
-100
0
100
200
300
400
5001 módulo en 57º y 3 en 56º
Tiempo (seg)
Cor
rien
te d
e lí
nea
(A)
a
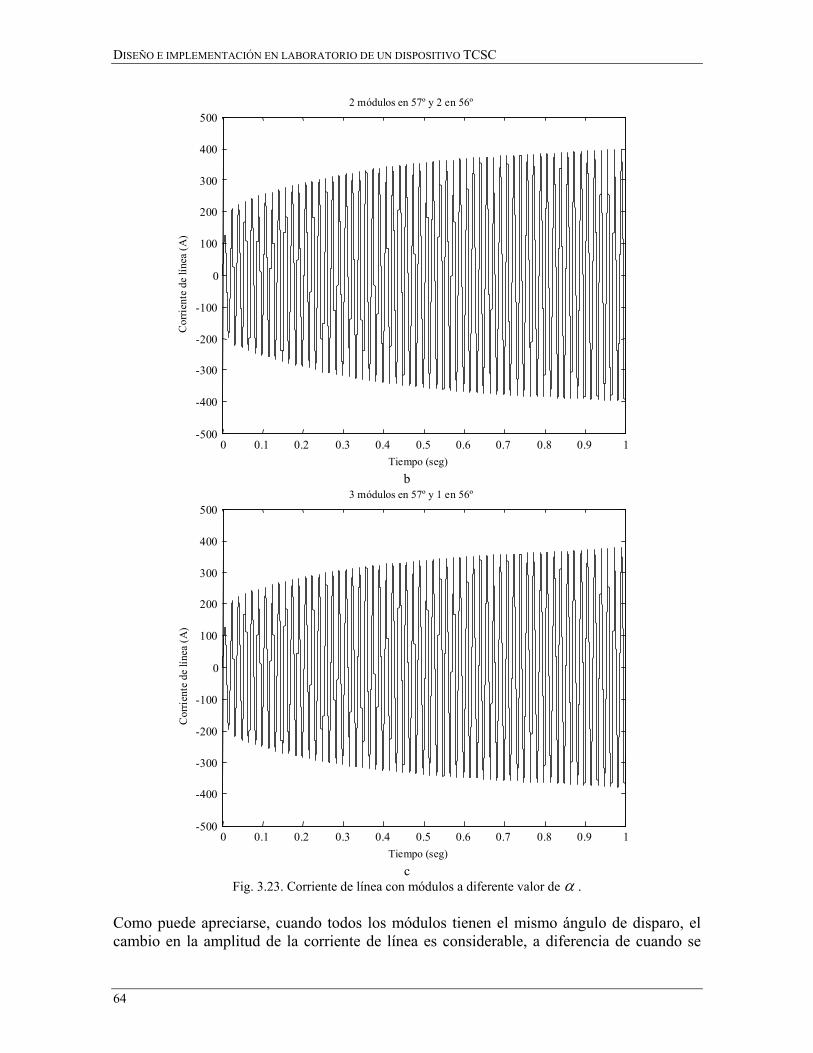
DISEÑO E IMPLEMENTACIÓN EN LABORATORIO DE UN DISPOSITIVO TCSC
64
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-500
-400
-300
-200
-100
0
100
200
300
400
5002 módulos en 57º y 2 en 56º
Tiempo (seg)
Cor
rien
te d
e lí
nea
(A)
b
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-500
-400
-300
-200
-100
0
100
200
300
400
5003 módulos en 57º y 1 en 56º
Tiempo (seg)
Cor
rien
te d
e lí
nea
(A)
cFig. 3.23. Corriente de línea con módulos a diferente valor de α .
Como puede apreciarse, cuando todos los módulos tienen el mismo ángulo de disparo, elcambio en la amplitud de la corriente de línea es considerable, a diferencia de cuando se
CAPÍTULO III TCSC: ASPECTOS PRÁCTICOS DE OPERACIÓN
65
opera cada segmento del dispositivo con un α distinto. En la Fig. 3.23 se muestran tresseñales intermedias entre el cambio de ángulo de disparo de 56º a 57º, pero en el caso deque el dispositivo estuviera compuesto de un mayor número de módulos el cambio seríaaún más suave.
3.6. Resumen
El dispositivo TCSC consta de tres elementos esenciales: un capacitor, un reactor y unconmutador bidireccional que está compuesto por un par de SCRs conectados enantiparalelo. Si se consideran componentes ideales, la respuesta del sistema también seráideal. Puesto que un dispositivo real tiene elementos adicionales, la respuesta del sistemareal y el ideal no será la misma. En éste capítulo se estudian los efectos que trae comoconsecuencia la inclusión de la resistencia asociada al reactor del dispositivo, y la inclusiónde la red snubber, necesaria para el control eficaz del sistema, así como las diferenciasexistentes al utilizar un dispositivo separado en módulos.
Al incluir la resistencia del reactor se observa que existe un amortiguamiento adicional alpresentado originalmente por el sistema. Esto se entiende cuando se observa el cambio quetiene la impedancia a frecuencia fundamental incluyendo la resistencia, Fig. 3.5. Elamortiguamiento puede observarse también al analizar las Fig. 3.10 y Fig. 3.11, éstaresistencia es la asociada a la inductancia del sistema, esto es, no se puede elegir su valor,pero puede variar si se modifica el diseño del reactor; así, es importante conocer los efectosque trae como consecuencia la inclusión de éste parámetro.
La inclusión de la red snubber tiene como resultado cambios en las señales del sistema, seobserva una disminución de la pendiente del voltaje en las terminales de los tiristores almomento del apagado. Esto es importante puesto que debido a ello se puede evitar el falsodisparo de los tiristores y así mantener el control del sistema. Otra de las consecuencias esla modificación de la fase, teniendo como consecuencia un cambio en el tiempo de disparode los tiristores, como se muestra en la Fig. 3.19, ya que el disparo está sincronizado con
lI . Asimismo cambia la amplitud de las señales del sistema debido a que la red snubber
produce pérdidas eléctricas.
Cuando se analiza el TCSC dividido en módulos, se observa que se puede tener un controlmás fino de la reactancia a frecuencia fundamental del dispositivo, esto es importante endeterminadas situaciones, por ejemplo, cuando se necesita regular con precisión el flujo depotencia a través de una ruta predeterminada. A medida que se aumenta el número demódulos el cambio de la reactancia a frecuencia fundamental puede hacerse cada vez máspreciso.
DISEÑO E IMPLEMENTACIÓN EN LABORATORIO DE UN DISPOSITIVO TCSC
66
3.7. Bibliografía
[1] Sasan G. Jalali, Ron A. Hedin, Marcos Pereira, Kadry Sadek, “A stability model forthe advanced series compensator (ASC)”, IEEE Transactions on Power Delivery,vol. 11, no. 2, pp. 1128-1137, Abril 1996.
[2] Ricardo J. Dávalos, Juan M. Ramírez, “A Review of a Quasi-Static and a DynamicTCSC Model”, IEEE Power Engineering Review, vol. 20, no. 11, pp. 63-65,Noviembre 2000.
[3] Narain G. Hingorani, Laszlo Gyugyi, Understanding FACTS Concepts andTechnology of Flexible AC Transmission Systems, primera edición, IEEE Press,1999.
[4] Thyristor Device Data TRIACs & SCRs, Motorola, 1995.
[5] Muhammad H. Rashid, Electrónica de potencia Circuitos, dispositivos yaplicaciones, segunda edición, Prentice Hall, 1995.
[6] E. V. Larsen, K. Clark, S. A. Miske Jr., J. Urbanek, “Characteristics and ratingconsiderations of thyristor controlled series compensation”, IEEE Transactions onPower Delivery, vol. 9, no. 2, pp. 992-1000, Abril 1994.
67
CAPÍTULO IV
Implementación
4.1. Introducción
En éste capítulo se revisan los aspectos que conciernen a la implementación en laboratoriodel dispositivo TCSC.
Debido a la necesidad de determinar los valores de los elementos que componen eldispositivo se llevan a cabo pruebas de respuesta a la frecuencia para estimar losparámetros de inductancia y capacitancia.
Se revisa el diseño del circuito de disparo, necesario para el control de encendido de lostiristores, así como el aspecto relativo a la obtención de información.
Además, se estudia la característica impedancia-frecuencia fundamental del circuito deprueba, esto para identificar las regiones de operación del dispositivo al modificar el ángulode disparo de los tiristores.
4.2. Identificación de parámetros
El objetivo de mencionar aspectos generales del proceso de identificación, radica en tenerun acercamiento con los métodos y consideraciones empleadas en la realización de éstaparte del trabajo.
Es importante la aplicación del modelo en estudio, ya que esto determina losrequerimientos de precisión y el método de identificación. El conocimiento previo delproceso, está basado en el entendimiento de las leyes físicas, lo que proporciona una ideasobre si es lineal o no lineal, invariante en el tiempo o variante en el tiempo, si tiene uncomportamiento proporcional o integral, su tiempo de retardo y características de ruido.Debido a estas características y a las condiciones del proceso de operación, el diseño deexperimentos y la selección del método de identificación están íntimamente relacionados.El diseño de experimentos incluye la selección y determinación de los siguientes aspectos:
Señales de entrada (amplitudes, espectro).
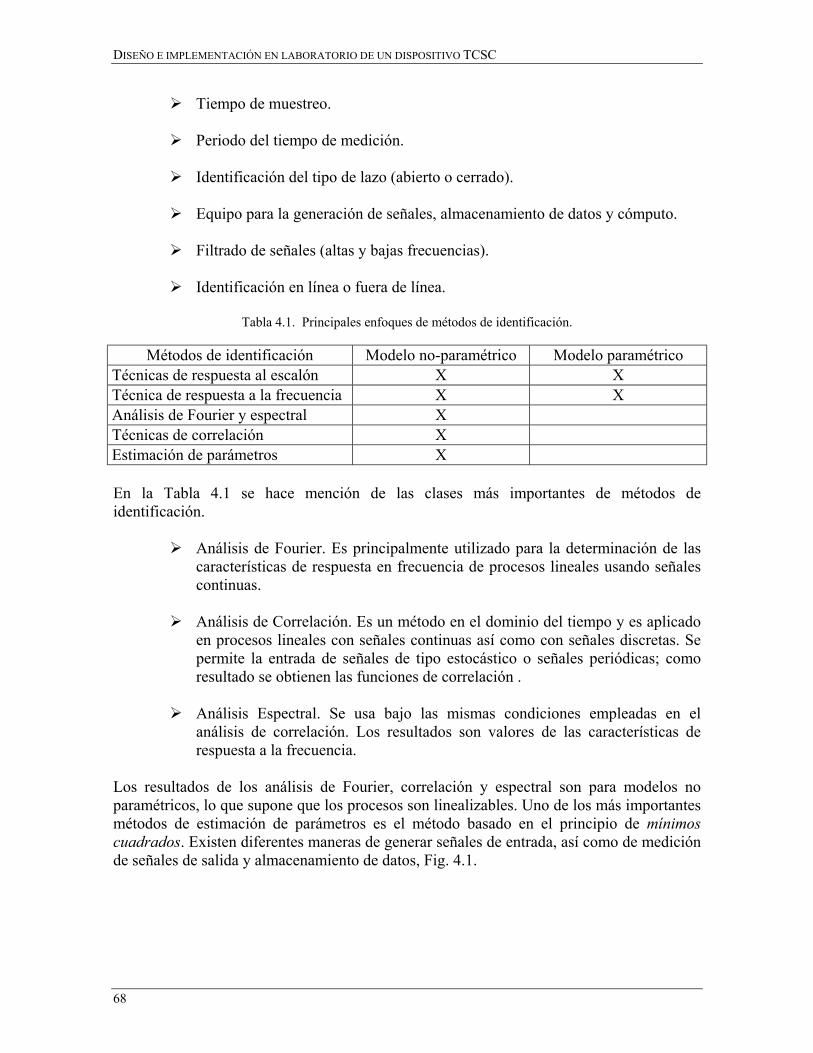
DISEÑO E IMPLEMENTACIÓN EN LABORATORIO DE UN DISPOSITIVO TCSC
68
Tiempo de muestreo.
Periodo del tiempo de medición.
Identificación del tipo de lazo (abierto o cerrado).
Equipo para la generación de señales, almacenamiento de datos y cómputo.
Filtrado de señales (altas y bajas frecuencias).
Identificación en línea o fuera de línea.
Tabla 4.1. Principales enfoques de métodos de identificación.
Métodos de identificación Modelo no-paramétrico Modelo paramétricoTécnicas de respuesta al escalón X XTécnica de respuesta a la frecuencia X XAnálisis de Fourier y espectral XTécnicas de correlación XEstimación de parámetros X
En la Tabla 4.1 se hace mención de las clases más importantes de métodos deidentificación.
Análisis de Fourier. Es principalmente utilizado para la determinación de lascaracterísticas de respuesta en frecuencia de procesos lineales usando señalescontinuas.
Análisis de Correlación. Es un método en el dominio del tiempo y es aplicadoen procesos lineales con señales continuas así como con señales discretas. Sepermite la entrada de señales de tipo estocástico o señales periódicas; comoresultado se obtienen las funciones de correlación .
Análisis Espectral. Se usa bajo las mismas condiciones empleadas en elanálisis de correlación. Los resultados son valores de las características derespuesta a la frecuencia.
Los resultados de los análisis de Fourier, correlación y espectral son para modelos noparamétricos, lo que supone que los procesos son linealizables. Uno de los más importantesmétodos de estimación de parámetros es el método basado en el principio de mínimoscuadrados. Existen diferentes maneras de generar señales de entrada, así como de mediciónde señales de salida y almacenamiento de datos, Fig. 4.1.
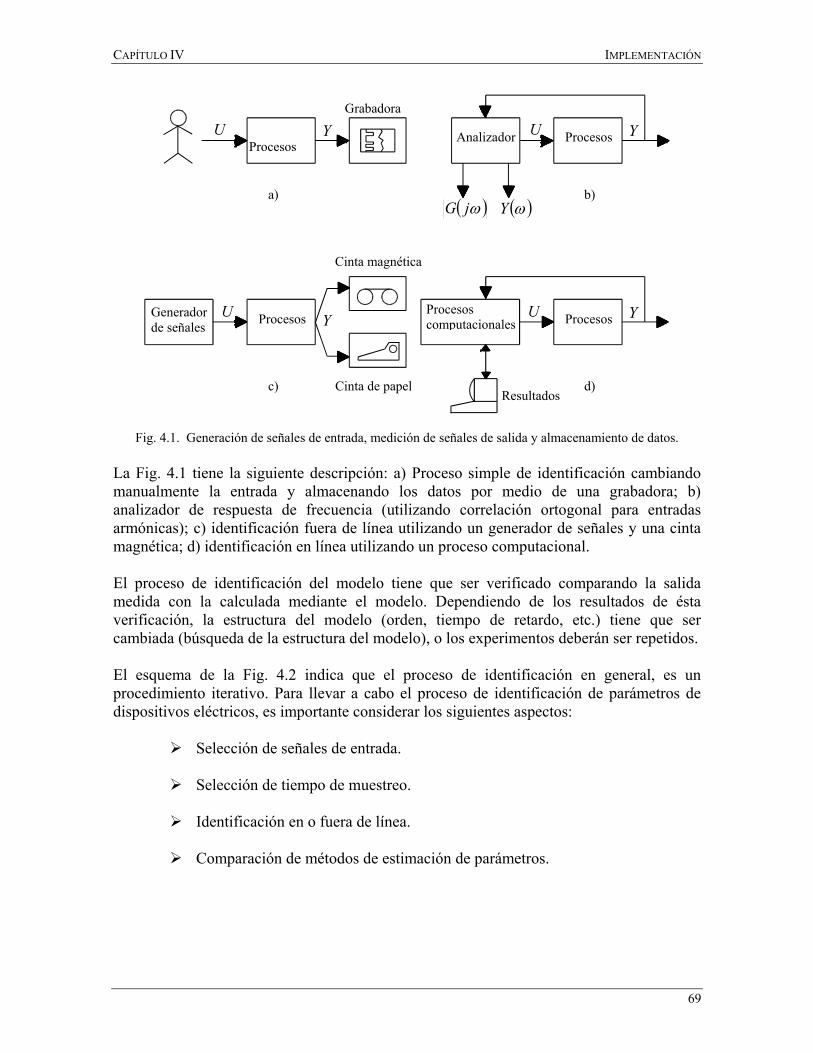
CAPÍTULO IV IMPLEMENTACIÓN
F
La Fmanuanaliarmómagn
El pmediverifcamb
El eprocedispo
Procesos
Grabadora
Analizador Procesos
Procesos Procesos
Cinta magnética
a)
Y U Y
UY Y
b)( )ωjG ( )ωY
Generadorde señales
ig. 4.1. Generación de señales de entrada, medición
ig. 4.1 tiene la siguiente descripción: a) Palmente la entrada y almacenando los
zador de respuesta de frecuencia (utiliznicas); c) identificación fuera de línea utilética; d) identificación en línea utilizando
roceso de identificación del modelo tieneda con la calculada mediante el modeloicación, la estructura del modelo (ordeniada (búsqueda de la estructura del modelo
squema de la Fig. 4.2 indica que el prodimiento iterativo. Para llevar a cabo el psitivos eléctricos, es importante considerar
Selección de señales de entrada.
Selección de tiempo de muestreo.
Identificación en o fuera de línea.
Comparación de métodos de estima
Cinta de papelc)
Procesoscomputacionales
U
de señales de salid
roceso simple d datos por meando correlacióizando un generun proceso comp
que ser verifi. Dependiendo, tiempo de re), o los experim
ceso de identiroceso de iden
los siguientes a
ción de paráme
Res
a y almacenamient
e identificacióndio de una grn ortogonal pador de señalesutacional.
cado comparan de los resultatardo, etc.) ti
entos deberán s
ficación en getificación de paspectos:
tros.
ultadosd)
U
69
o de datos.
cambiandoabadora; b)ara entradas y una cinta
do la salidados de éstaene que serer repetidos.
neral, es unrámetros de
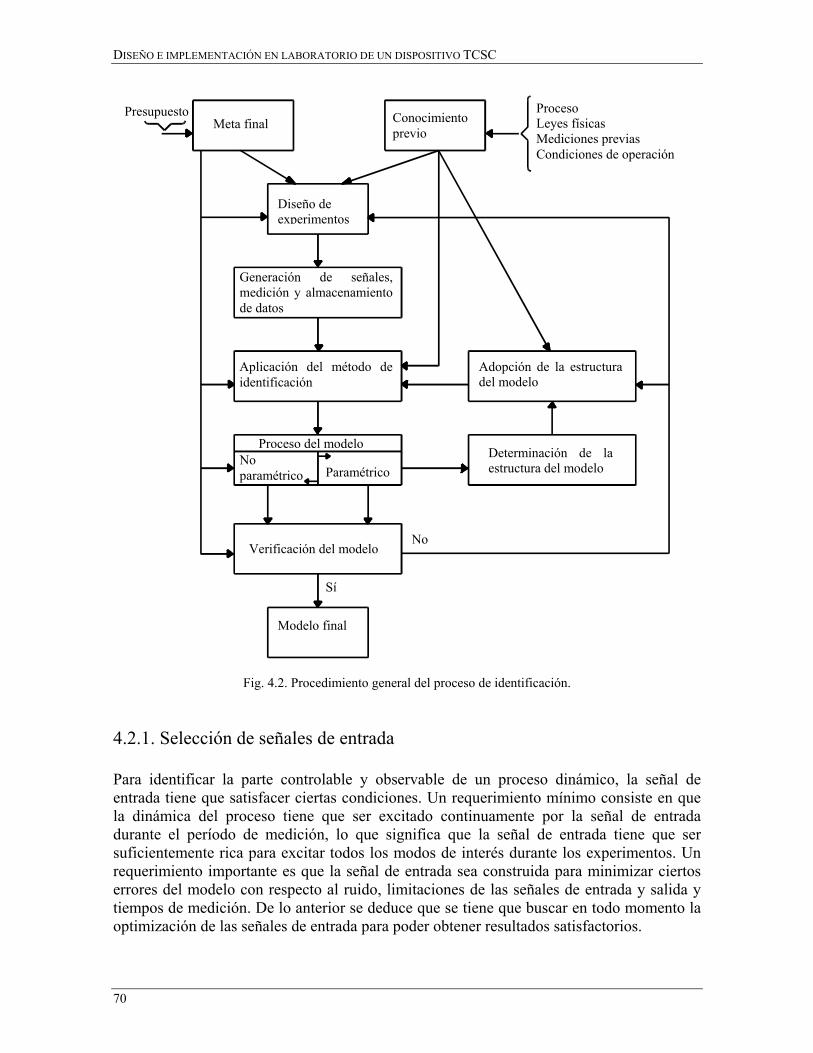
DISEÑO E IMPLEMENTACIÓN EN LABORATORIO DE UN DISPOSITIVO TCSC
70
Fig. 4
4.2.1. Selección de se
Para identificar la parteentrada tiene que satisfala dinámica del procesodurante el período de msuficientemente rica pararequerimiento importanterrores del modelo con rtiempos de medición. Deoptimización de las señal
PresupuestoMeta final Conocimiento
previo
ProcesoLeyes físicasMediciones previasCondiciones de operación
Aplicaidentif
Genermedicde dat
Veri
PrNoparam
Diseño deexperimentos
.2. Procedimiento general del proceso
ñales de entrada
controlable y observable de cer ciertas condiciones. Un req tiene que ser excitado contiedición, lo que significa que excitar todos los modos de in
e es que la señal de entrada seaespecto al ruido, limitaciones d lo anterior se deduce que se ties de entrada para poder obtene
ción del método deicación
ación de señales,ión y almacenamientoos
Modelo final
ficación del modelo
oceso del modelo
étrico Paramétrico
No
Sí
Adopción de la estructuradel modelo
d
uuen lte e
enr
Determinación de laestructura del modelo
e identificación.
n proceso dinámico, la señal derimiento mínimo consiste en que
uamente por la señal de entradaa señal de entrada tiene que serrés durante los experimentos. Unconstruida para minimizar ciertos las señales de entrada y salida ye que buscar en todo momento la
resultados satisfactorios.
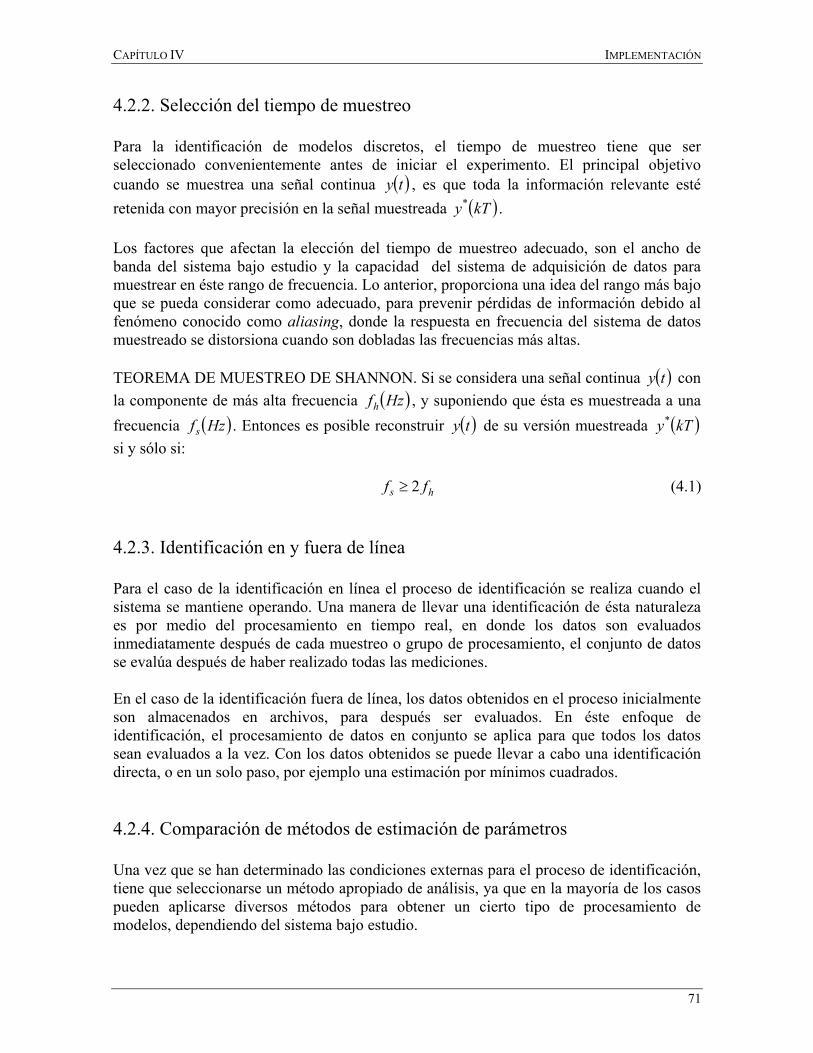
CAPÍTULO IV IMPLEMENTACIÓN
71
4.2.2. Selección del tiempo de muestreo
Para la identificación de modelos discretos, el tiempo de muestreo tiene que serseleccionado convenientemente antes de iniciar el experimento. El principal objetivocuando se muestrea una señal continua ( )ty , es que toda la información relevante esté
retenida con mayor precisión en la señal muestreada ( )kTy* .
Los factores que afectan la elección del tiempo de muestreo adecuado, son el ancho debanda del sistema bajo estudio y la capacidad del sistema de adquisición de datos paramuestrear en éste rango de frecuencia. Lo anterior, proporciona una idea del rango más bajoque se pueda considerar como adecuado, para prevenir pérdidas de información debido alfenómeno conocido como aliasing, donde la respuesta en frecuencia del sistema de datosmuestreado se distorsiona cuando son dobladas las frecuencias más altas.
TEOREMA DE MUESTREO DE SHANNON. Si se considera una señal continua ( )ty con
la componente de más alta frecuencia ( )Hzfh , y suponiendo que ésta es muestreada a una
frecuencia ( )Hzfs . Entonces es posible reconstruir ( )ty de su versión muestreada ( )kTy*
si y sólo si:
hs ff 2≥ (4.1)
4.2.3. Identificación en y fuera de línea
Para el caso de la identificación en línea el proceso de identificación se realiza cuando elsistema se mantiene operando. Una manera de llevar una identificación de ésta naturalezaes por medio del procesamiento en tiempo real, en donde los datos son evaluadosinmediatamente después de cada muestreo o grupo de procesamiento, el conjunto de datosse evalúa después de haber realizado todas las mediciones.
En el caso de la identificación fuera de línea, los datos obtenidos en el proceso inicialmenteson almacenados en archivos, para después ser evaluados. En éste enfoque deidentificación, el procesamiento de datos en conjunto se aplica para que todos los datossean evaluados a la vez. Con los datos obtenidos se puede llevar a cabo una identificacióndirecta, o en un solo paso, por ejemplo una estimación por mínimos cuadrados.
4.2.4. Comparación de métodos de estimación de parámetros
Una vez que se han determinado las condiciones externas para el proceso de identificación,tiene que seleccionarse un método apropiado de análisis, ya que en la mayoría de los casospueden aplicarse diversos métodos para obtener un cierto tipo de procesamiento demodelos, dependiendo del sistema bajo estudio.
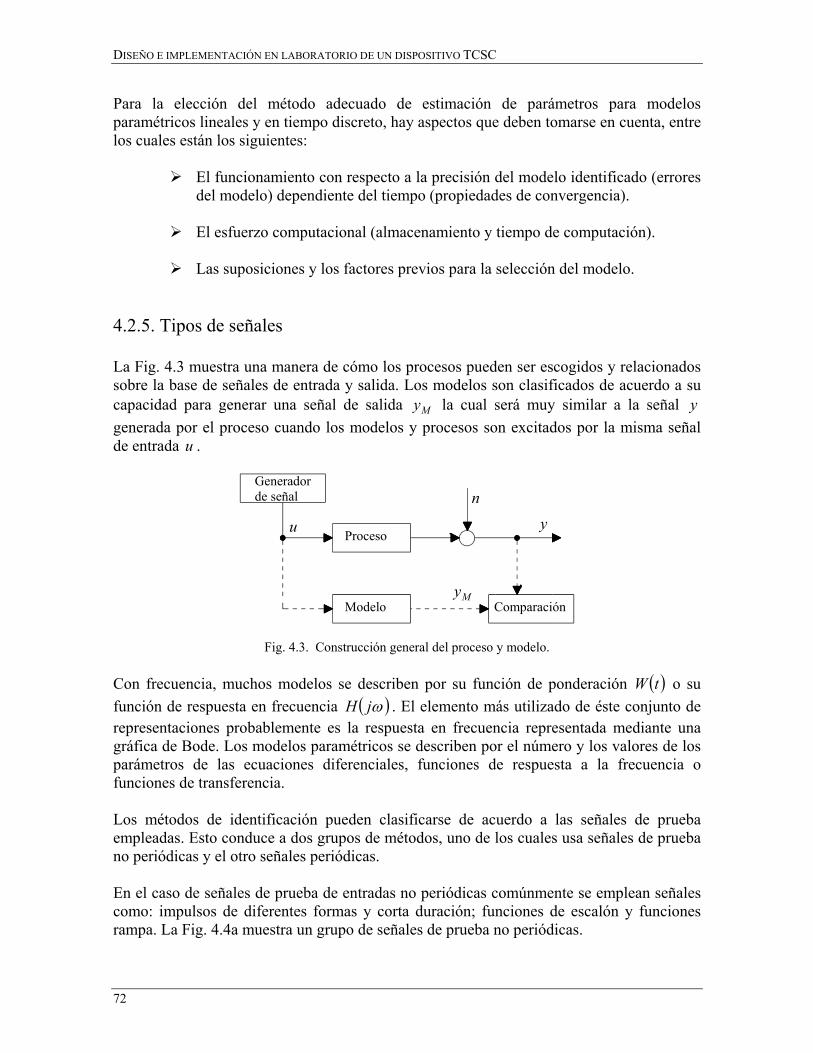
DISEÑO E IMPLEMENTACIÓN EN LABORATORIO DE UN DISPOSITIVO TCSC
72
Para la elección del método adecuado de estimación de parámetros para modelosparamétricos lineales y en tiempo discreto, hay aspectos que deben tomarse en cuenta, entrelos cuales están los siguientes:
El funcionamiento con respecto a la precisión del modelo identificado (erroresdel modelo) dependiente del tiempo (propiedades de convergencia).
El esfuerzo computacional (almacenamiento y tiempo de computación).
Las suposiciones y los factores previos para la selección del modelo.
4.2.5. Tipos de señales
La Fig. 4.3 muestra una manera de cómo los procesos pueden ser escogidos y relacionadossobre la base de señales de entrada y salida. Los modelos son clasificados de acuerdo a sucapacidad para generar una señal de salida My la cual será muy similar a la señal y
generada por el proceso cuando los modelos y procesos son excitados por la misma señalde entrada u .
Con frecuencia, muc
función de respuestarepresentaciones prográfica de Bode. Losparámetros de las efunciones de transfer
Los métodos de ideempleadas. Esto condno periódicas y el otr
En el caso de señalescomo: impulsos de drampa. La Fig. 4.4a m
n
Generadorde señalFig. 4.3. Construcción general del proceso y mod
hos modelos se describen por su función d
en frecuencia ( )ωjH . El elemento más utibablemente es la respuesta en frecuencia r modelos paramétricos se describen por el ncuaciones diferenciales, funciones de resencia.
ntificación pueden clasificarse de acuerdouce a dos grupos de métodos, uno de los cu
o señales periódicas.
de prueba de entradas no periódicas comúniferentes formas y corta duración; funcionuestra un grupo de señales de prueba no pe
y
CompaModelo
Procesou
My
elo.
e ponderación ( )tW o su
lizado de éste conjunto deepresentada mediante unaúmero y los valores de lospuesta a la frecuencia o
a las señales de pruebaales usa señales de prueba
mente se emplean señaleses de escalón y funcionesriódicas.
ración
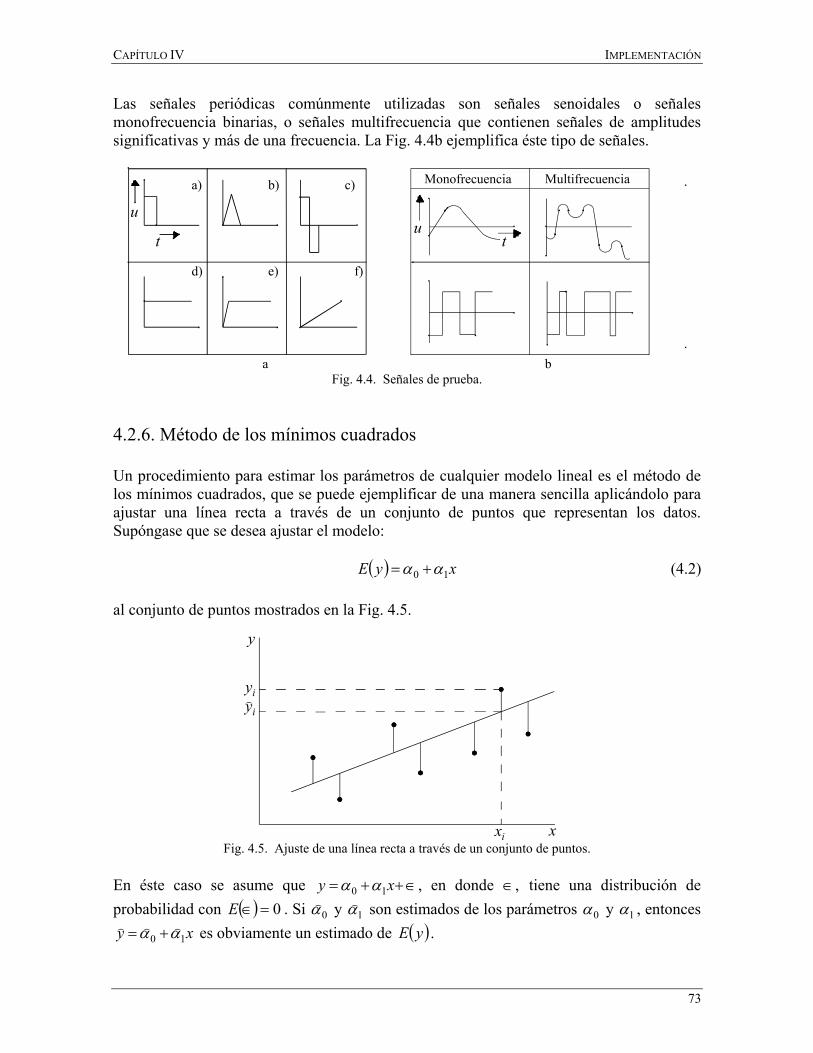
CAPÍTULO IV IMPLEMENTACIÓN
Las señales periódicas comúnmente utilizadas son señales senoidales o señalesmonofrecuencia binarias, o señales multifrecuencia que contienen señales de amplitudessignificativas y más de una frecuencia. La Fig. 4.4b ejemplifica éste tipo de señales.
a bFig. 4.4. Señales de prueba.
4.2.6. Método de los mínimos cuadrados
Un procedimiento para estimar los parámetros de cualquier modelo lineal es el método delos mínimos cuadrados, que se puede ejemplificar de una manera sencilla aplicándolo paraajustar una línea recta a través de un conjunto de puntos que representan los datos.Supóngase que se desea ajustar el modelo:
( ) xyE 10 αα += (4.2)
al conjunto de puntos mostrados en la Fig. 4.5.
Fig
En éste caso se a
probabilidad con E
xy 10 αα ))) += es obv
a) b) c)
d) e) f)
Monofrecuencia Multifrecuencia
y
uu
t t
. 4.5. Ajuste de una línea recta a través de un conjunto d
sume que ∈++= xy 10 αα , en donde ∈, ti
( ) 0=∈ . Si 0α) y 1α
) son estimados de los parám
iamente un estimado de ( )yE .
x
iy
iy)
ix
73
e puntos.
ene una distribución de
etros 0α y 1α , entonces

DISEÑO E IMPLEMENTACIÓN EN LABORATORIO DE UN DISPOSITIVO TCSC
74
El procedimiento de los mínimos cuadrados para ajustar una recta a través de un conjuntode n puntos es similar al método que se puede utilizar para ajustar una recta a simple vista;es decir, se pretende que las desviaciones sean "pequeñas" en cierto sentido. Una maneraconveniente para lograr esto, y que nos aporta estimadores con propiedades adecuadas, esminimizar la suma de los cuadrados de las desviaciones verticales de la recta ajustada(notar las desviaciones en la Fig. 4.5). Por lo tanto si:
ii xy 10 αα ))) += (4.3)
es el valor que se predice del i-ésimo valor de y (cuando ixx = ), entonces la desviación
del valor observado de y a partir de la recta y) (llamada a veces el error) es:
ii yy )− (4.4)
y la suma de los cuadrados de las desviaciones que deben minimizarse es:
( ) ( )[ ]21 10
2
1 ∑∑ ==+−=−=
n
i iin
i ii xyyySCE αα ))) (4.5)
la cantidad SCE se llama también suma de los cuadrados de los errores.
4.2.7. Respuesta a la frecuencia
En éste trabajo para la determinación de los parámetros de la bobina y capacitor del TCSCse utiliza la técnica de respuesta a la frecuencia. La cual se entiende como la respuesta enestado de régimen permanente de un sistema ante una entrada senoidal. El método derespuesta en frecuencia consiste en variar la frecuencia de la señal de entrada a un circuitodeterminado en un rango de interés, estudiándose la respuesta en frecuencia resultante.
Una ventaja del método es la fácil disponibilidad de señales de prueba senoidales paradiversos rangos de frecuencia y amplitudes. Una segunda ventaja consiste en obtener lafunción de transferencia que describe el comportamiento senoidal en el estado estacionariode un sistema, reemplazando en la función del sistema ( )sT a s por ωj . La función detransferencia que representa el comportamiento senoidal en el estado estacionario de unsistema es entonces una función de la variable compleja ωj y de su propia función
compleja ( )ωjT que tiene una magnitud y un ángulo de fase, que se representan porgráficas que proporcionan un medio significativo para el análisis y diseño de sistemas.
El análisis de gráficas puede llevarse a cabo mediante la aplicación del criterio de Nyquist,así como el análisis de los diagramas de Bode, siendo éste último el que se empleará en estetrabajo.
El concepto de función de transferencia se aplica únicamente a sistemas lineales invariantesen el tiempo. Frecuentemente las funciones de transferencia se utilizan para caracterizar las
CAPÍTULO IV IMPLEMENTACIÓN
75
relaciones de salida/entrada en los sistemas. El manejo de la función de transferencia paraentradas senoidales está dada por la siguiente expresión:
( ) ( )( )sX
sYsG = (4.6)
donde ( )sY es la señal senoidal de salida y ( )sX , es la señal senoidal de entrada. En el casode un circuito RL puede escribirse:
( ) ( ) ( )ωωω jXjRsGjs
+== (4.7)
La función de transferencia puede representarse por una magnitud ( )ωjG y una fase
( )ωφ j . Es posible representar una función de transferencia senoidal por dos diagramasdistintos; uno que da la amplitud en función de la frecuencia y el otro que proporciona elángulo de fase en función de la frecuencia.
El diagrama logarítmico o diagrama de Bode consta de dos gráficos: el primero es undiagrama del logaritmo del módulo de una función de transferencia senoidal, mientras queel segundo es un diagrama del ángulo de fase; ambos son representados en función de lafrecuencia con escala logarítmica. La escala logarítmica se utiliza para las frecuencias, y laescala lineal tanto para la amplitud (en decibelios) como para el ángulo de fase (grados).La representación logarítmica es útil, porque presenta las características de alta y bajafrecuencia de la función de transferencia en un solo diagrama, haciendo más fácil laexpansión en el rango de bajas frecuencias utilizando una escala logarítmica en vez de unaescala lineal, ya que a frecuencias bajas se presentan características importantes endeterminados sistemas.
4.3. Parámetros de los dispositivos que componen al TCSC
Para la implementación en laboratorio del dispositivo TCSC es necesario conocer con ciertaprecisión los valores de los elementos a utilizar, en este caso son el valor del reactor y elcapacitor que componen el dispositivo; para estimar estos valores se propone llevar a cabopruebas de respuesta a la frecuencia a ambos elementos.
4.3.1. Prueba de respuesta a la frecuencia del reactor
Se realiza la prueba de respuesta a la frecuencia al reactor para estimar los valores deinductancia y resistencia asociados. El reactor empleado es de alambre magneto calibre #18con 460 vueltas, y núcleo de aire.
La prueba está basada en la representación matemática del elemento cuyo diagramaesquemático se presenta en la Fig. 4.6.
DISEÑO E IMPLEMENTACIÓN EN LABORATORIO DE UN DISPOSITIVO TCSC
76
Fig. 4.6. Diagram
El flujo en el sistema es lΦ , y representa
reactor y que enlaza sus devanados. La ecu
v =
donde:
r es la resistencia del reactor.λ es el enlace de flujo del reactor.i es la corriente a través del reactor.
Se agrega la componente resistiva, puesasociada una resistencia.
Se asume que lΦ enlaza la totalidad de l
flujo pueden escribirse como sigue,
λ
donde N es el número de vueltas del react
Asumiendo que el sistema magnético es lmagnéticos resulta,
Φ
donde lR es la reluctancia.
Sustituyendo (4.10) en (4.9) resulta la sigui
λ
lΦ
N
i+
-
v
a esquemático del reactor.
el flujo producido por la corriente a través del
ación de voltaje del sistema es la siguiente,
dt
dri
λ+ (4.8)
to que cualquier elemento inductivo real tiene
as vueltas del reactor, por lo que los enlaces de
lNΦ= (4.9)
or.
ineal, y aplicando la ley de Ohm para circuitos
ll R
Ni= (4.10)
ente expresión,
lR
iN 2
= (4.11)

CAPÍTULO IV IMPLEMENTACIÓN
Cuando el sistema magnético es lineal generalmente se representa en términos deinductancias, ésta se define de la siguiente manera,
ll R
NL
2
= (4.12)
De esta forma sustituyendo (4.12) en (4.11) obtenemos el enlace de flujo del reactor enfunción de la inductancia,
iLl=λ (4.13)
Finalmente sustituyendo (4.13) en (4.8) resulta la siguiente expresión, que representa elvoltaje en función de la corriente y los elementos del sistema,
dt
idLriv l+= (4.14)
De la ecuación (4.8) se desprende el circuito equivalente mostrado en la Fig. 4.7.
Fig. 4.7. Circu
Utilizando la representación fa
Factorizando y despejando res
Utilizando la ecuación (4.16) simpedancia, dadas por las sigu
+
v
r i
L
ito equi
sorial
ulta la
e pueientes
-
valente
de la e
rV =
imped
I
VZ =
den ob relaci
Z =
= aφ
77
del reactor y su componente resistiva.
xpresión (4.14) obtenemos,
( )ILjI lω+ (4.15)
ancia del elemento,
lLjr ω+= (4.16)
tener expresiones para la magnitud y la fase de laones,
( )22lLr ω+ (4.17)
r
Lrctan lω
(4.18)
l
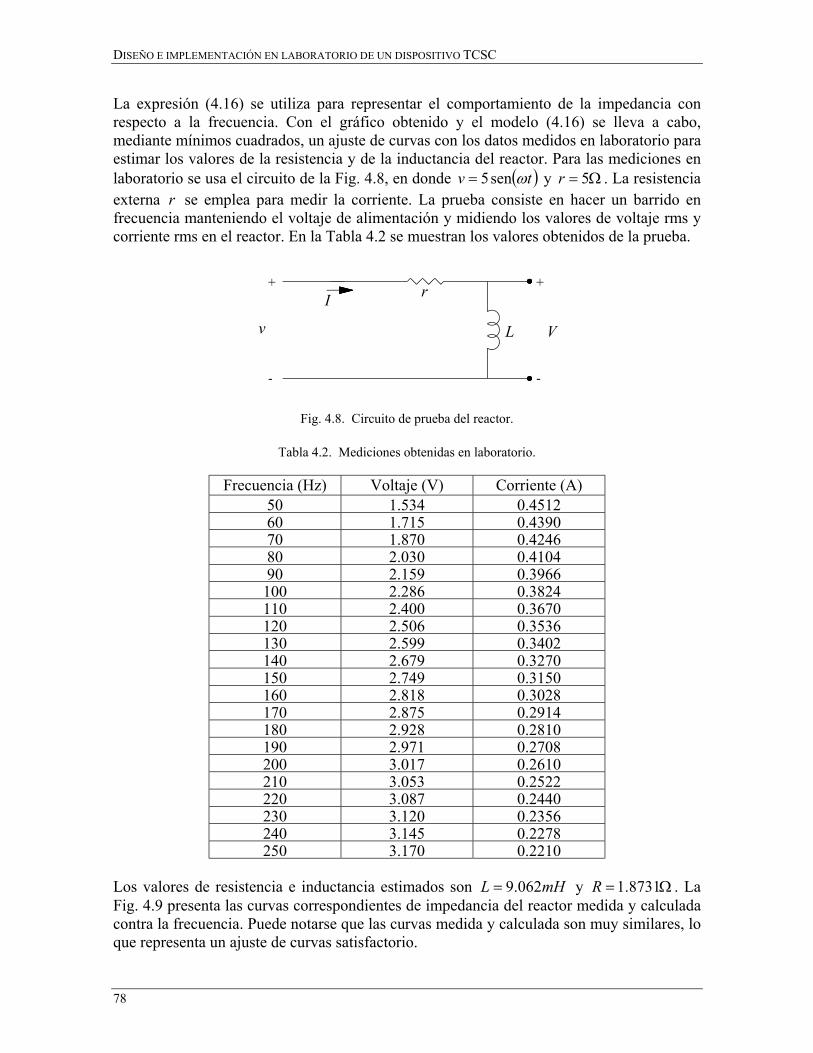
DISEÑO E IMPLEMENTACIÓN EN LABORATORIO DE UN DISPOSITIVO TCSC
78
La expresión (4.16) se utiliza para representar el comportamiento de la impedancia conrespecto a la frecuencia. Con el gráfico obtenido y el modelo (4.16) se lleva a cabo,mediante mínimos cuadrados, un ajuste de curvas con los datos medidos en laboratorio paraestimar los valores de la resistencia y de la inductancia del reactor. Para las mediciones enlaboratorio se usa el circuito de la Fig. 4.8, en donde ( )tv ωsen5= y Ω= 5r . La resistenciaexterna r se emplea para medir la corriente. La prueba consiste en hacer un barrido enfrecuencia manteniendo el voltaje de alimentación y midiendo los valores de voltaje rms ycorriente rms en el reactor. En la Tabla 4.2 se muestran los valores obtenidos de la prueba.
Fig
Tabla 4
Frecuencia (H5060708090100110120130140150160170180190200210220230240250
Los valores de resistencia e inFig. 4.9 presenta las curvas corcontra la frecuencia. Puede notaque representa un ajuste de curv
+
-
Ir
v
+
. 4.8. Circuito de
.2. Mediciones ob
z) Voltaje1.531.711.872.032.152.282.402.502.592.672.742.812.872.922.973.013.053.083.123.143.17
ductancia estimrespondientes drse que las curvas satisfactorio
L V
prueba del reac
tenidas en labo
(V)450096069998581737050
ados son Le impedanciaas medida y
.
tor.
ratorio.
Corrien0.450.430.420.410.390.380.360.350.340.320.310.300.290.280.270.260.250.240.230.220.22
062.9= del re
calcul
-
te (A)129046046624703602705028141008102240567810
mH y Ω= 8731.1R . Laactor medida y calculadaada son muy similares, lo
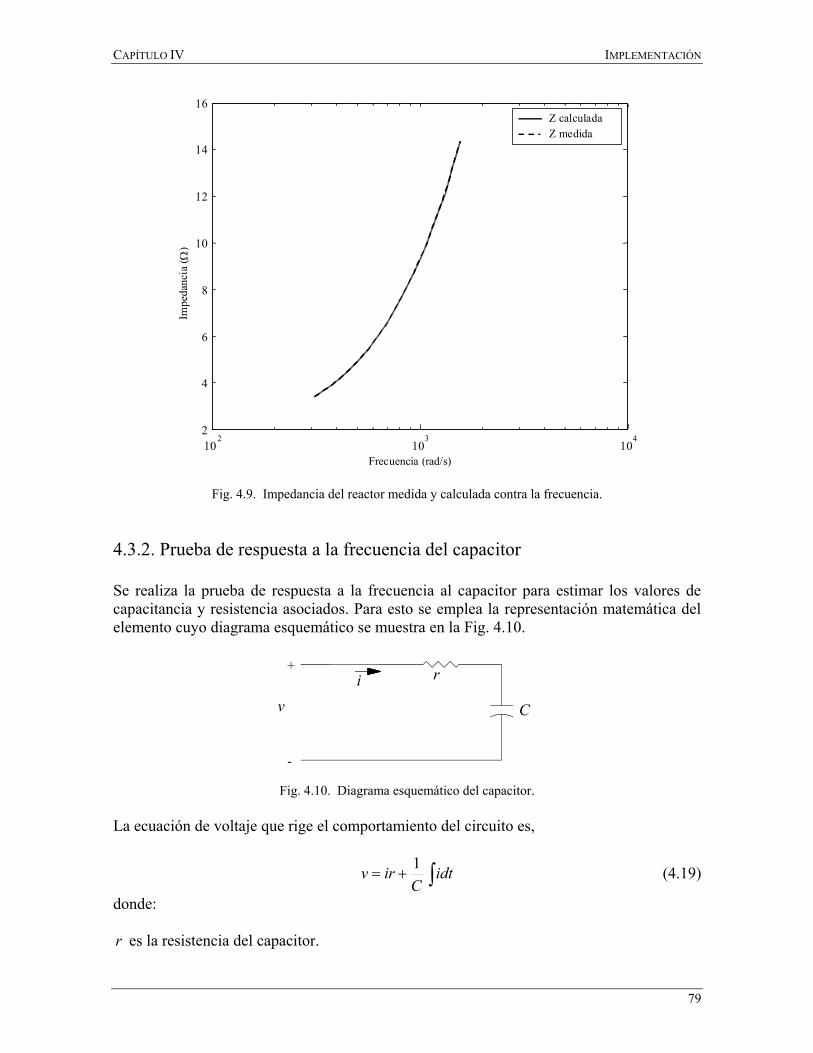
CAPÍTULO IV IMPLEMENTACIÓN
102
103
104
2
4
6
8
10
12
14
16
Frecuencia (rad/s)
Impe
danc
ia (Ω
)
Z calculada
Z medida
Fig. 4.9. Impedancia del reactor medida y calculada contra la frecuencia.
4.3.2. Prueba de respuesta a la frecuencia del capacitor
Se realiza la prueba de respuesta a la frecuencia al capacitor para estimar los valores decapacitancia y resistencia asociados. Para esto se emplea la representación matemática delelemento cuyo diagrama esquemático se muestra en la Fig. 4.10.
La ecuación de voltaje q
donde:
r es la resistencia del ca
+
v
i r
C
Fig. 4.10. D
ue rige el co
pacitor.
-
iagrama esque
mportamien
+=C
irv1
mático del capac
to del circuito
∫ idt
79
itor.
es,
(4.19)
DISEÑO E IMPLEMENTACIÓN EN LABORATORIO DE UN DISPOSITIVO TCSC
80
C es la capacitancia.i es la corriente que circula por el capacitor.
Calculando la representación fasorial de la ecuación (4.19) se tiene,
ωCj
IIrV += (4.20)
Factorizando y despejando resulta la impedancia del circuito descrita por,
ωCjr
I
VZ
1+== (4.21)
Utilizando la ecuación (4.21) se pueden obtener expresiones para la magnitud y la fase de laimpedancia, dadas por las siguientes relaciones,
( )22 1 ωCrZ −+= (4.22)
−=
r
Carctan
ωφ 1(4.23)
La expresión (4.21) es la utilizada para calcular la impedancia del capacitor y así llevar acabo un ajuste de curvas con los datos medidos en laboratorio para estimar los valores deresistencia y capacitancia dados. Nuevamente, la resistencia externa r se emplea paramedir la corriente circulante. Para las mediciones en laboratorio se utiliza el circuito de laFig. 4.11, en donde ( )tv ωsen5= y Ω= 5r . La prueba consiste en efectuar un barrido enfrecuencia manteniendo el voltaje de alimentación y midiendo los valores de voltaje rms ycorriente rms del capacitor; en la Tabla 4.3 se muestran los valores obtenidos de la prueba.
Los valores de resistenΩ= 003885.0R . La F
capacitor medida y caprácticamente se traslap
+
v
Ir
+
C
Fig.
cia y capig. 4.12lculada an, con
-
4.11. Circuito de
acitancia que r muestra las ccontra la frec
siderándose con
prueba del capacitor.
esultan de la prueburvas correspondi
uencia, en ésta se esto un ajuste sati
V
a son FC µ7504.172= yentes de impedancia del observa que las curvassfactorio de curvas.
-
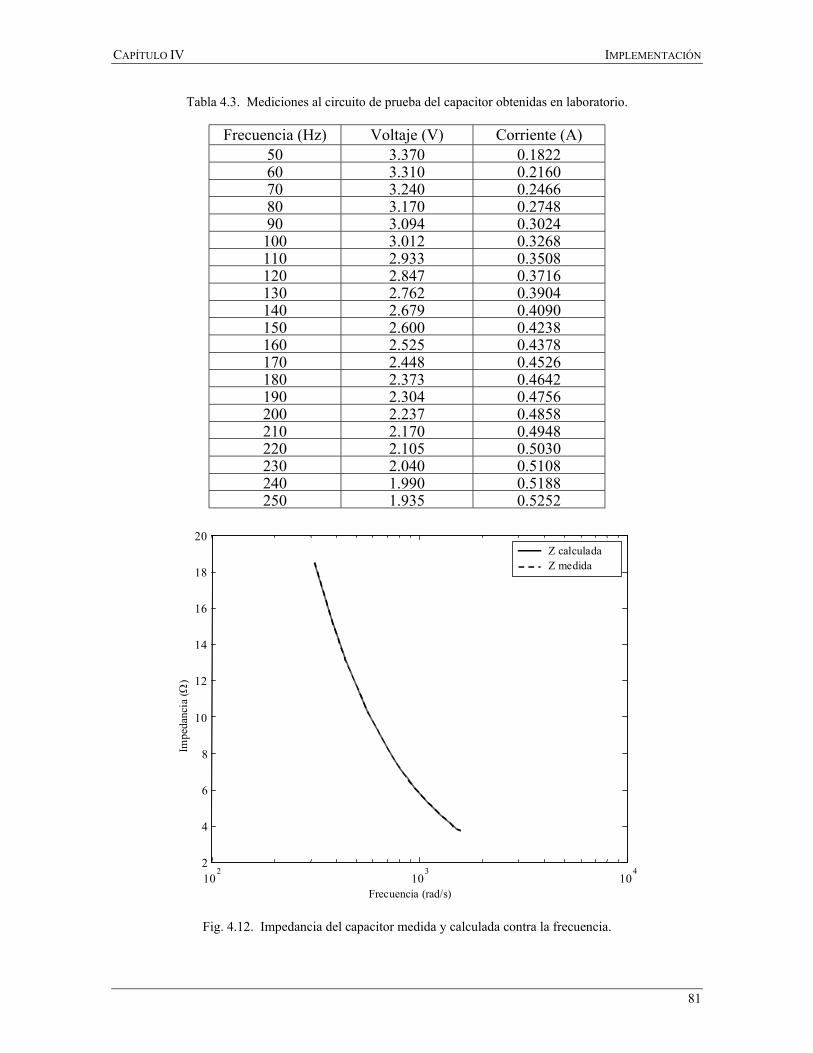
CAPÍTULO IV IMPLEMENTACIÓN
81
Tabla 4.3. Mediciones al circuito de prueba del capacitor obtenidas en laboratorio.
Frecuencia (Hz) Voltaje (V) Corriente (A)50 3.370 0.182260 3.310 0.216070 3.240 0.246680 3.170 0.274890 3.094 0.3024100 3.012 0.3268110 2.933 0.3508120 2.847 0.3716130 2.762 0.3904140 2.679 0.4090150 2.600 0.4238160 2.525 0.4378170 2.448 0.4526180 2.373 0.4642190 2.304 0.4756200 2.237 0.4858210 2.170 0.4948220 2.105 0.5030230 2.040 0.5108240 1.990 0.5188250 1.935 0.5252
102
103
104
2
4
6
8
10
12
14
16
18
20
Frecuencia (rad/s)
Impe
danc
ia (Ω
)
Z calculadaZ medida
Fig. 4.12. Impedancia del capacitor medida y calculada contra la frecuencia.

DISEÑO E IMPLEMENTACIÓN EN LABORATORIO DE UN DISPOSITIVO TCSC
82
4.4. Circuito de disparo
Para controlar el ángulo de disparo se requiere de un circuito que proporcione una señal alos dispositivos semiconductores de potencia. Ésta señal se aplica con un retardoproporcional al ángulo de disparo al que se desea que operen los tiristores. Para elencendido de los tiristores se emplea un circuito cuyo elemento principal es unmicrocontrolador.
En la Fig. 4.13 se muestra el diagrama esquemático del circuito de disparo integrado alTCSC. Éste consta de tres partes principales que se describen enseguida:
Acondicionamiento de señal Microcontrolador Actuador
Fig
4.4.1. Acondicionami
Esta etapa consta de dosdisparo de los tiristores sésta es una práctica comúreferencia a utilizar es la
Para sincronizar el dispautiliza una señal de volt
resistencia de línea lR .
dispositivos electrónicosHall, la salida de éste es
aísla eléctricamente el cpudiera presentarse en la
lI
Detector decruce por cero
lR
Microcontrolador
Señal dereferencia
. 4.13. Diagrama esquemático del circuito de disparo.
ento de señal
partes, señal de referencia y detector de cruce por cero. Para ele toma como referencia el cruce por cero de la corriente de línea;n ya que minimiza la generación de armónicas [1]. Así, la señal decorriente de línea.
ro de los tiristores con el cruce por cero de la corriente de línea seaje,
lRV , proporcional a la corriente de línea, esta se toma de la
Para tener la señal de voltaje en niveles apropiados para los
del circuito de encendido se utiliza un sensor de voltaje de efecto una señal atenuada, '
lRV , de la señal medida. Además el sensor
ircuito de disparo, protegiéndolo ante cualquier contingencia que etapa de potencia.
Acondicionamiento de señalActuador
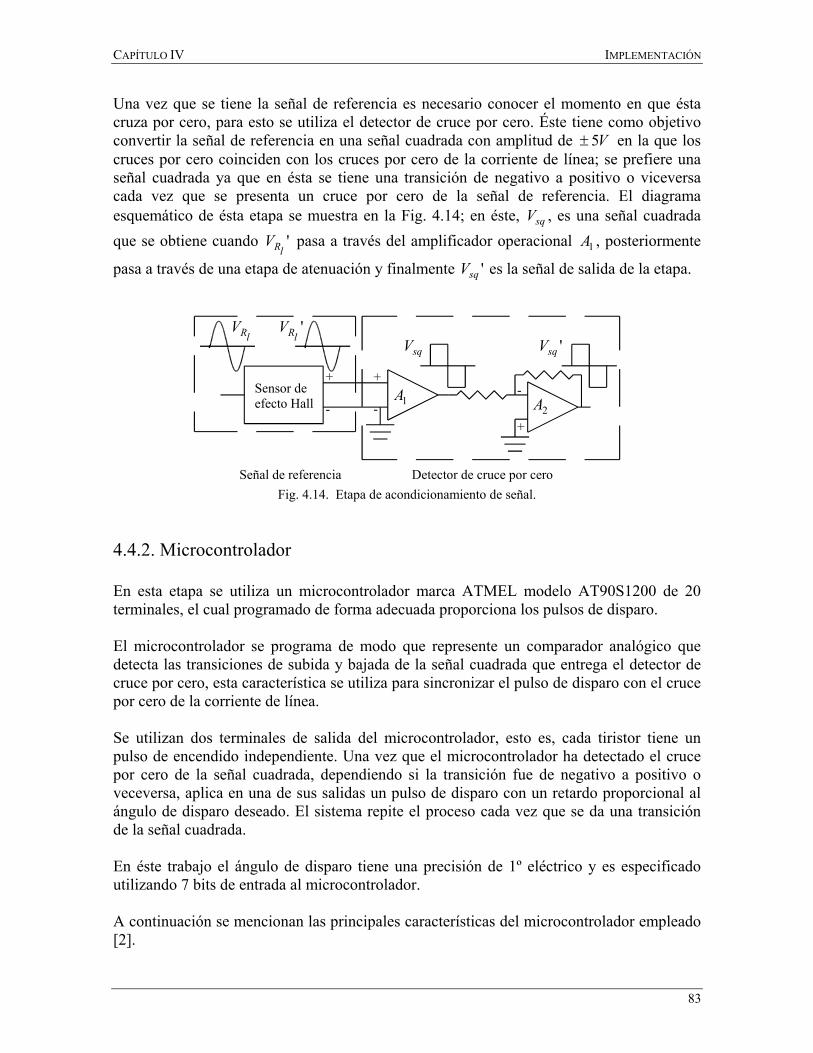
CAPÍTULO IV IMPLEMENTACIÓN
Una vez que se tiene la señal de referencia es necesario conocer el momento en que éstacruza por cero, para esto se utiliza el detector de cruce por cero. Éste tiene como objetivoconvertir la señal de referencia en una señal cuadrada con amplitud de V5± en la que loscruces por cero coinciden con los cruces por cero de la corriente de línea; se prefiere unaseñal cuadrada ya que en ésta se tiene una transición de negativo a positivo o viceversacada vez que se presenta un cruce por cero de la señal de referencia. El diagramaesquemático de ésta etapa se muestra en la Fig. 4.14; en éste, sqV , es una señal cuadrada
que se obtiene cuando 'lRV pasa a través del amplificador operacional 1A , posteriormente
pasa a través de una etapa de atenuación y finalmente 'sqV es la señal de salida de la etapa.
4.4.2. Microcontro
En esta etapa se utiterminales, el cual pr
El microcontrolador detecta las transicioncruce por cero, esta cpor cero de la corrien
Se utilizan dos termpulso de encendido ipor cero de la señalveceversa, aplica en ángulo de disparo dede la señal cuadrada.
En éste trabajo el ánutilizando 7 bits de e
A continuación se m[2].
lRV 'lRV
sqV 'sqV
1A+
2A-
+
-
-
S
Sensor deefecto Hall
83
Fig. 4.14. Etapa de acondicionamiento de señal.
lador
liza un microcontrolador marca ATMEL modelo AT90S1200 de 20ogramado de forma adecuada proporciona los pulsos de disparo.
se programa de modo que represente un comparador analógico quees de subida y bajada de la señal cuadrada que entrega el detector dearacterística se utiliza para sincronizar el pulso de disparo con el crucete de línea.
inales de salida del microcontrolador, esto es, cada tiristor tiene unndependiente. Una vez que el microcontrolador ha detectado el cruce cuadrada, dependiendo si la transición fue de negativo a positivo ouna de sus salidas un pulso de disparo con un retardo proporcional alseado. El sistema repite el proceso cada vez que se da una transición
gulo de disparo tiene una precisión de 1º eléctrico y es especificadontrada al microcontrolador.
encionan las principales características del microcontrolador empleado
+
eñal de referencia Detector de cruce por cero
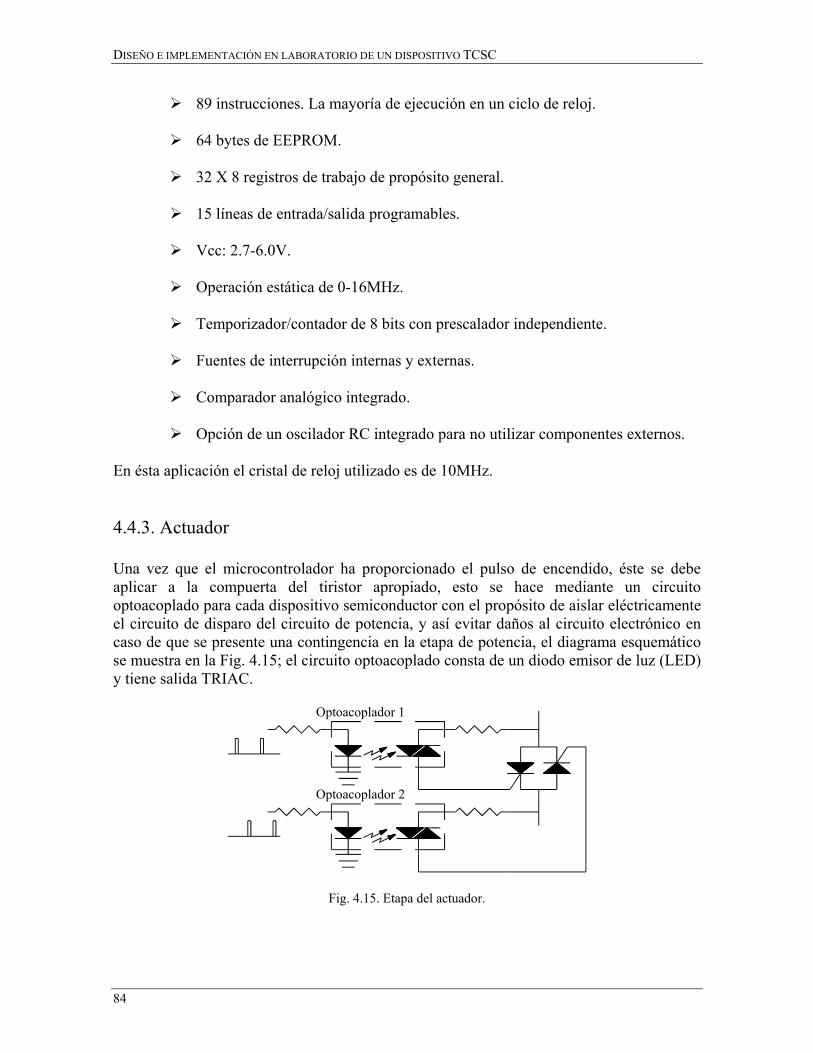
DISEÑO E IMPLEMENTACIÓN EN LABORATORIO DE UN DISPOSITIVO TCSC
84
89 instrucciones. La mayoría de ejecución en un ciclo de reloj.
64 bytes de EEPROM.
32 X 8 registros de trabajo de propósito general.
15 líneas de entrada/salida programables.
Vcc: 2.7-6.0V.
Operación estática de 0-16MHz.
Temporizador/contador de 8 bits con prescalador independiente.
Fuentes de interrupción internas y externas.
Comparador analógico integrado.
Opción de un oscilador RC integrado para no utilizar componentes externos.
En ésta aplicación el cristal de reloj utilizado es de 10MHz.
4.4.3. Actuador
Una vez que el microcontrolador ha proporcionado el pulso de encendido, éste se debeaplicar a la compuerta del tiristor apropiado, esto se hace mediante un circuitooptoacoplado para cada dispositivo semiconductor con el propósito de aislar eléctricamenteel circuito de disparo del circuito de potencia, y así evitar daños al circuito electrónico encaso de que se presente una contingencia en la etapa de potencia, el diagrama esquemáticose muestra en la Fig. 4.15; el circuito optoacoplado consta de un diodo emisor de luz (LED)y tiene salida TRIAC.
Fig. 4.15. Etapa del actuador.
Optoacoplador 1
Optoacoplador 2
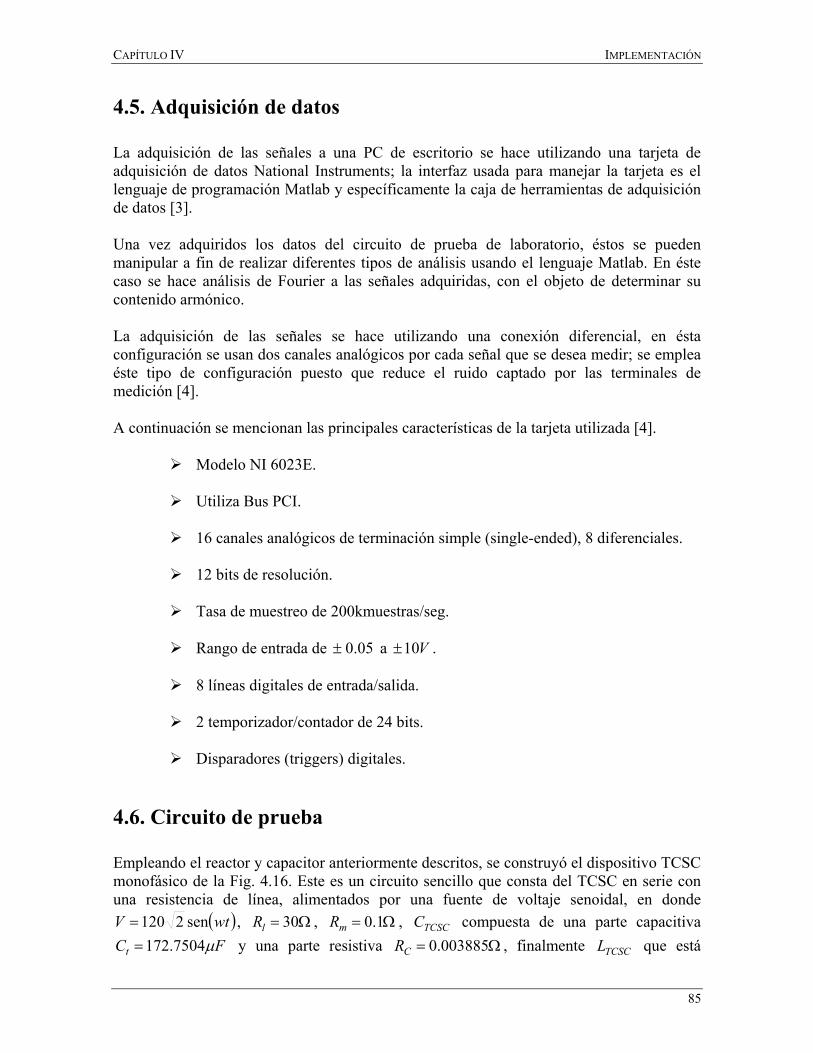
CAPÍTULO IV IMPLEMENTACIÓN
85
4.5. Adquisición de datos
La adquisición de las señales a una PC de escritorio se hace utilizando una tarjeta deadquisición de datos National Instruments; la interfaz usada para manejar la tarjeta es ellenguaje de programación Matlab y específicamente la caja de herramientas de adquisiciónde datos [3].
Una vez adquiridos los datos del circuito de prueba de laboratorio, éstos se puedenmanipular a fin de realizar diferentes tipos de análisis usando el lenguaje Matlab. En éstecaso se hace análisis de Fourier a las señales adquiridas, con el objeto de determinar sucontenido armónico.
La adquisición de las señales se hace utilizando una conexión diferencial, en éstaconfiguración se usan dos canales analógicos por cada señal que se desea medir; se empleaéste tipo de configuración puesto que reduce el ruido captado por las terminales demedición [4].
A continuación se mencionan las principales características de la tarjeta utilizada [4].
Modelo NI 6023E.
Utiliza Bus PCI.
16 canales analógicos de terminación simple (single-ended), 8 diferenciales.
12 bits de resolución.
Tasa de muestreo de 200kmuestras/seg.
Rango de entrada de 05.0± a V10± .
8 líneas digitales de entrada/salida.
2 temporizador/contador de 24 bits.
Disparadores (triggers) digitales.
4.6. Circuito de prueba
Empleando el reactor y capacitor anteriormente descritos, se construyó el dispositivo TCSCmonofásico de la Fig. 4.16. Este es un circuito sencillo que consta del TCSC en serie conuna resistencia de línea, alimentados por una fuente de voltaje senoidal, en donde
( )wtV sen2120= , Ω= 30lR , Ω= 1.0mR , TCSCC compuesta de una parte capacitiva
FCt µ7504.172= y una parte resistiva Ω= 003885.0CR , finalmente TCSCL que está
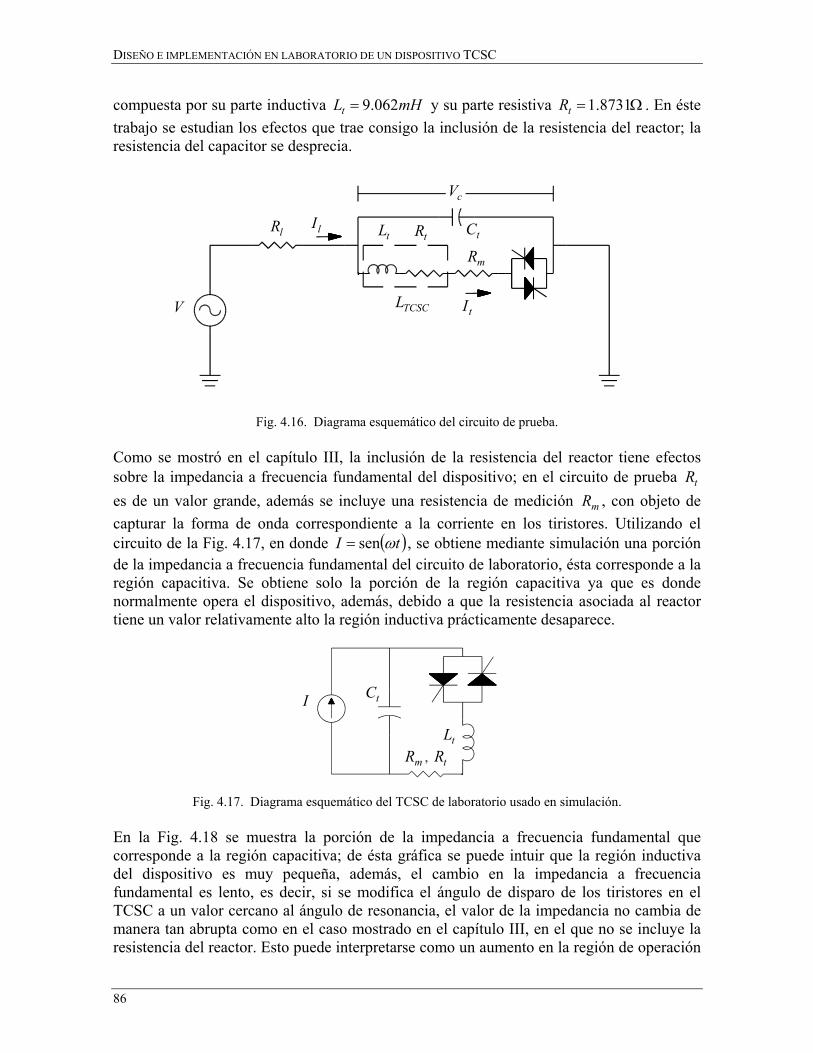
DISEÑO E IMPLEMENTACIÓN EN LABORATORIO DE UN DISPOSITIVO TCSC
86
compuesta por su parte inductiva mHLt 062.9= y su parte resistiva Ω= 8731.1tR . En éste
trabajo se estudian los efectos que trae consigo la inclusión de la resistencia del reactor; laresistencia del capacitor se desprecia.
Como ssobre la
es de un
capturarcircuito de la imregión cnormalmtiene un
En la Fcorrespodel dispfundameTCSC amanera resistenc
cV
lI
tI
mR
V
lRtC
TCSCL
tL tR
Fig. 4.16. Diagrama esq
e mostró en el capítulo III, la inc impedancia a frecuencia fundame
valor grande, además se incluye
la forma de onda correspondiende la Fig. 4.17, en donde (I sen=pedancia a frecuencia fundamentalapacitiva. Se obtiene solo la poente opera el dispositivo, además
valor relativamente alto la región i
Fig. 4.17. Diagrama esquemático de
ig. 4.18 se muestra la porción dnde a la región capacitiva; de éstositivo es muy pequeña, ademántal es lento, es decir, si se mod un valor cercano al ángulo de restan abrupta como en el caso mostria del reactor. Esto puede interpre
I tC
uem
lusnta
un
te )tω
derció, dnd
l T
e la gs,
ificonaadtars
ático del circuito de prueba.
ión de la resistencia del reactor tiene efectosl del dispositivo; en el circuito de prueba tR
a resistencia de medición mR , con objeto de
a la corriente en los tiristores. Utilizando el, se obtiene mediante simulación una porciónl circuito de laboratorio, ésta corresponde a lan de la región capacitiva ya que es dondeebido a que la resistencia asociada al reactoructiva prácticamente desaparece.
CSC de laboratorio usado en simulación.
a impedancia a frecuencia fundamental queráfica se puede intuir que la región inductivael cambio en la impedancia a frecuencia
a el ángulo de disparo de los tiristores en elncia, el valor de la impedancia no cambia de
o en el capítulo III, en el que no se incluye lae como un aumento en la región de operación
tL
mR , tR
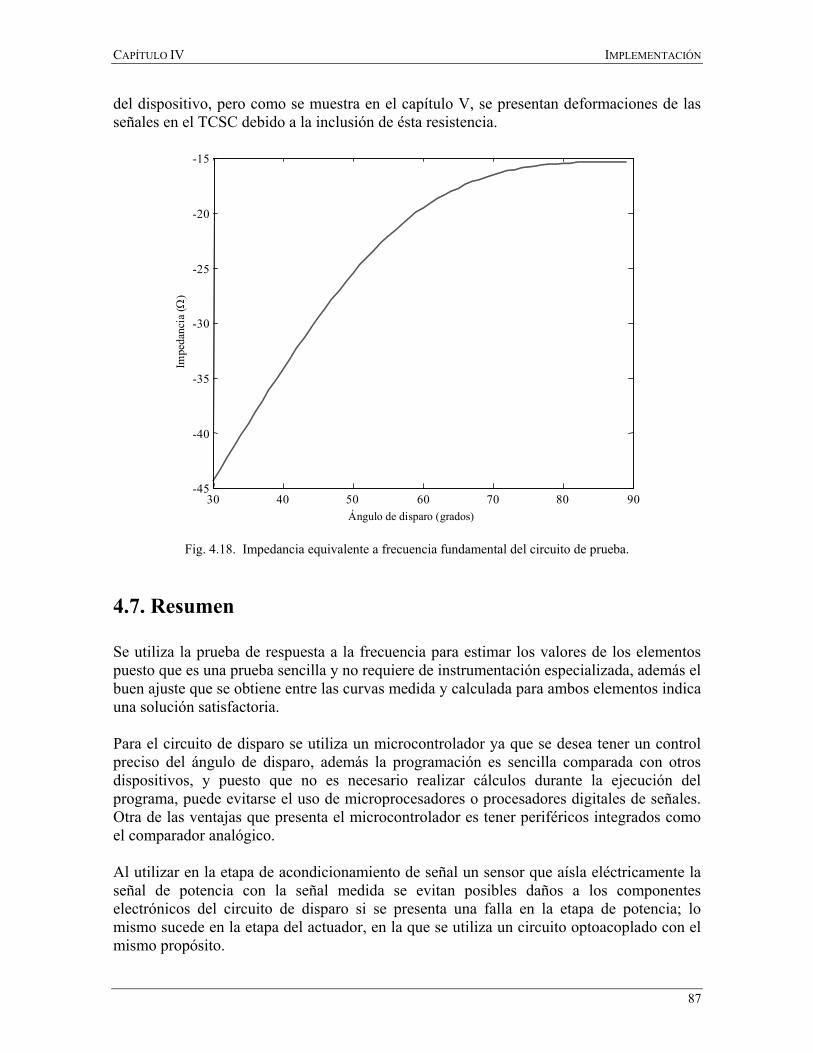
CAPÍTULO IV IMPLEMENTACIÓN
87
del dispositivo, pero como se muestra en el capítulo V, se presentan deformaciones de lasseñales en el TCSC debido a la inclusión de ésta resistencia.
30 40 50 60 70 80 90-45
-40
-35
-30
-25
-20
-15
Ángulo de disparo (grados)
Impe
danc
ia (Ω
)
Fig. 4.18. Impedancia equivalente a frecuencia fundamental del circuito de prueba.
4.7. Resumen
Se utiliza la prueba de respuesta a la frecuencia para estimar los valores de los elementospuesto que es una prueba sencilla y no requiere de instrumentación especializada, además elbuen ajuste que se obtiene entre las curvas medida y calculada para ambos elementos indicauna solución satisfactoria.
Para el circuito de disparo se utiliza un microcontrolador ya que se desea tener un controlpreciso del ángulo de disparo, además la programación es sencilla comparada con otrosdispositivos, y puesto que no es necesario realizar cálculos durante la ejecución delprograma, puede evitarse el uso de microprocesadores o procesadores digitales de señales.Otra de las ventajas que presenta el microcontrolador es tener periféricos integrados comoel comparador analógico.
Al utilizar en la etapa de acondicionamiento de señal un sensor que aísla eléctricamente laseñal de potencia con la señal medida se evitan posibles daños a los componenteselectrónicos del circuito de disparo si se presenta una falla en la etapa de potencia; lomismo sucede en la etapa del actuador, en la que se utiliza un circuito optoacoplado con elmismo propósito.
DISEÑO E IMPLEMENTACIÓN EN LABORATORIO DE UN DISPOSITIVO TCSC
88
Se utiliza una tarjeta de adquisición de datos ya que se desea tener disponible lainformación de las señales medidas, esto con el propósito de poder realizar análisis deFourier para determinar el contenido armónico de éstas. Al usar el lenguaje deprogramación Matlab, y la caja de herramientas de adquisición de datos, el análisis de lasseñales se torna amigable.
En el circuito de prueba el hecho de que el reactor construido tenga una componenteresistiva de valor alto, trae consigo efectos en la característica de impedancia a frecuenciafundamental, aumentando la región capacitiva del dispositivo, esto podría interpretarsecomo una ventaja, pero debe tomarse en consideración que la inclusión de la resistenciaaumenta las pérdidas eléctricas.
El enfoque, los dispositivos y las herramientas utilizadas en éste trabajo se eligen tomandoen cuenta aspectos económicos y de desempeño, cabe también mencionar que no son laúnica alternativa de solución.
4.8. Bibliografía
[1] Scott G. Helbing, G. G. Karady, "Investigations of an advanced form of seriescompensation", IEEE Trans. Power Delivery, vol. 9, no. 2, pp. 939-945, Abril 1994.
[2] AVR Enhanced RISC Microcontroller Data Book, ATMEL, 1997.
[3] Data Acquisition Toolbox User’s Guide, Copyright 1999-2000 by The MathWorks,Inc.
[4] DAQ 6023E/6024E/6025E User Manual, Copyright 1999 National InstrumentsCorporation.
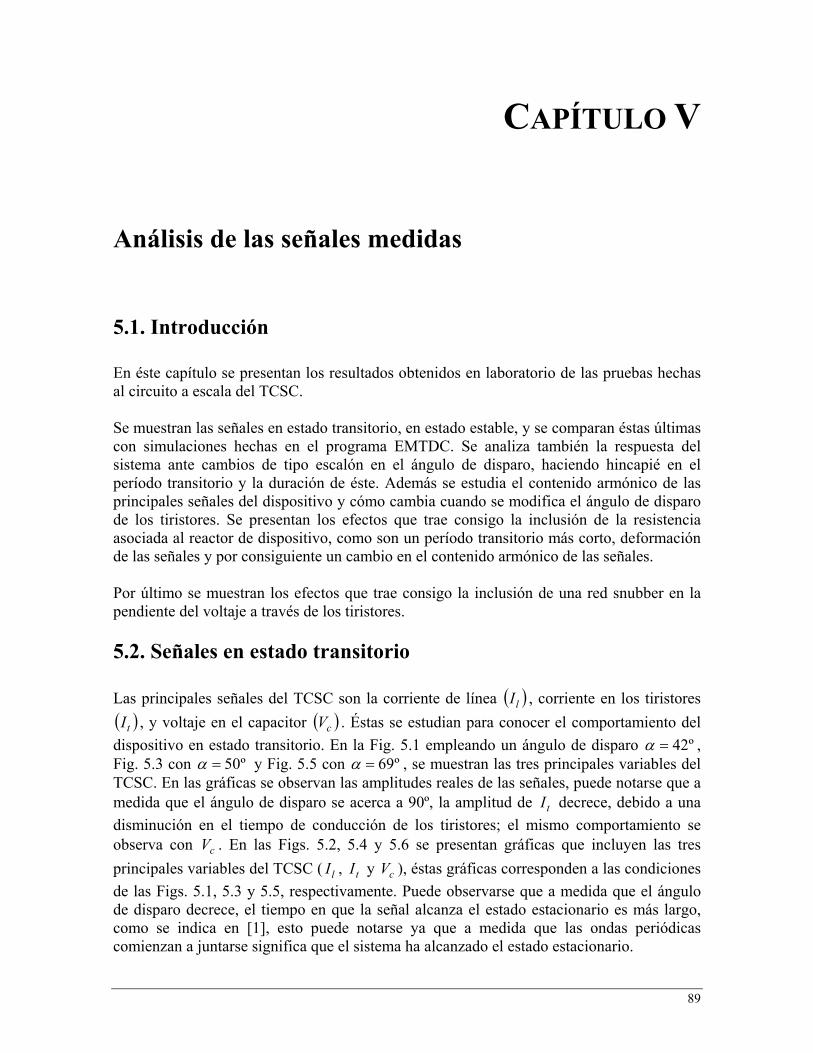
89
CAPÍTULO V
Análisis de las señales medidas
5.1. Introducción
En éste capítulo se presentan los resultados obtenidos en laboratorio de las pruebas hechasal circuito a escala del TCSC.
Se muestran las señales en estado transitorio, en estado estable, y se comparan éstas últimascon simulaciones hechas en el programa EMTDC. Se analiza también la respuesta delsistema ante cambios de tipo escalón en el ángulo de disparo, haciendo hincapié en elperíodo transitorio y la duración de éste. Además se estudia el contenido armónico de lasprincipales señales del dispositivo y cómo cambia cuando se modifica el ángulo de disparode los tiristores. Se presentan los efectos que trae consigo la inclusión de la resistenciaasociada al reactor de dispositivo, como son un período transitorio más corto, deformaciónde las señales y por consiguiente un cambio en el contenido armónico de las señales.
Por último se muestran los efectos que trae consigo la inclusión de una red snubber en lapendiente del voltaje a través de los tiristores.
5.2. Señales en estado transitorio
Las principales señales del TCSC son la corriente de línea ( )lI , corriente en los tiristores
( )tI , y voltaje en el capacitor ( )cV . Éstas se estudian para conocer el comportamiento del
dispositivo en estado transitorio. En la Fig. 5.1 empleando un ángulo de disparo º42=α ,Fig. 5.3 con º50=α y Fig. 5.5 con º69=α , se muestran las tres principales variables delTCSC. En las gráficas se observan las amplitudes reales de las señales, puede notarse que amedida que el ángulo de disparo se acerca a 90º, la amplitud de tI decrece, debido a una
disminución en el tiempo de conducción de los tiristores; el mismo comportamiento seobserva con cV . En las Figs. 5.2, 5.4 y 5.6 se presentan gráficas que incluyen las tres
principales variables del TCSC ( lI , tI y cV ), éstas gráficas corresponden a las condiciones
de las Figs. 5.1, 5.3 y 5.5, respectivamente. Puede observarse que a medida que el ángulode disparo decrece, el tiempo en que la señal alcanza el estado estacionario es más largo,como se indica en [1], esto puede notarse ya que a medida que las ondas periódicascomienzan a juntarse significa que el sistema ha alcanzado el estado estacionario.
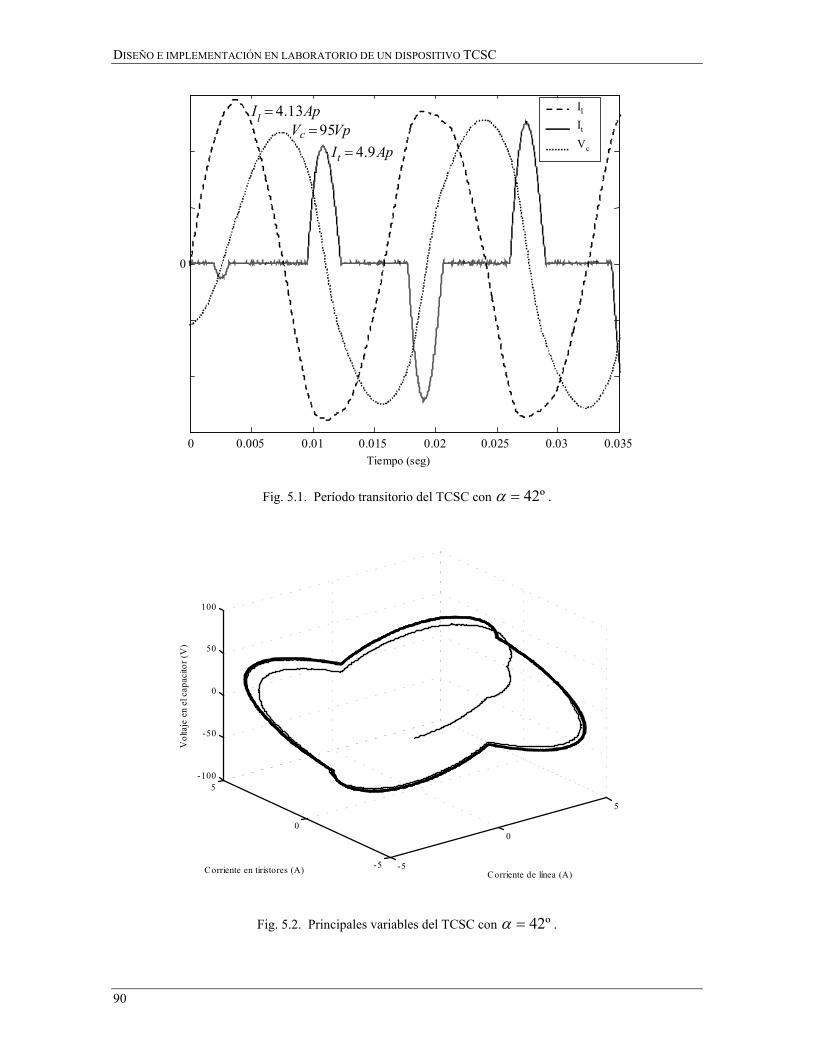
DISEÑO E IMPLEMENTACIÓN EN LABORATORIO DE UN DISPOSITIVO TCSC
90
0 0.005 0.01 0.015 0.02 0.025 0.03 0.035
0
Tiempo (seg)
Il
It
Vc
ApIl 13.4=VpVc 95=
ApIt 9.4=
Fig. 5.1. Período transitorio del TCSC con º42=α .
-5
0
5
-5
0
5-100
-50
0
50
100
Corriente de línea (A)Corriente en tiristores (A)
Vol
taje
en
el c
apac
itor
(V)
Fig. 5.2. Principales variables del TCSC con º42=α .
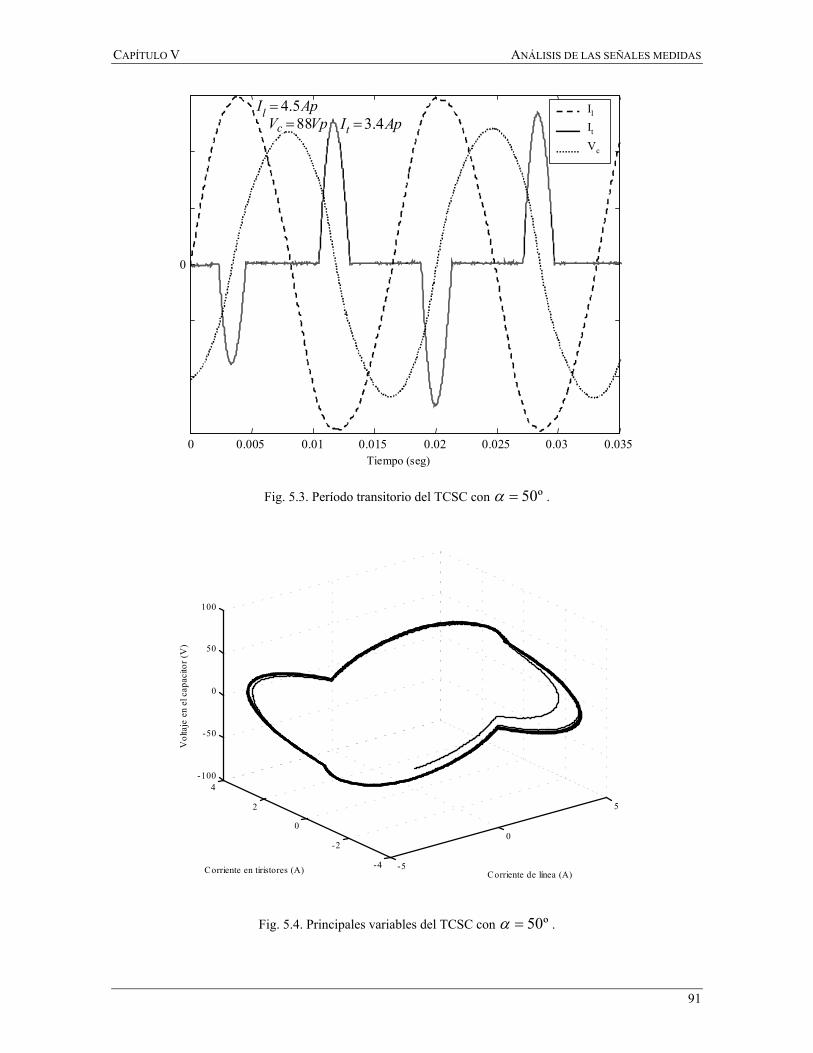
CAPÍTULO V ANÁLISIS DE LAS SEÑALES MEDIDAS
91
0 0.005 0.01 0.015 0.02 0.025 0.03 0.035
0
Tiempo (seg)
Il
It
Vc
ApIl 5.4=ApIt 4.3=VpVc 88=
Fig. 5.3. Período transitorio del TCSC con º50=α .
-5
0
5
-4
-2
0
2
4-100
-50
0
50
100
Corriente de línea (A)Corriente en tiristores (A)
Vol
taje
en
el c
apac
itor
(V)
Fig. 5.4. Principales variables del TCSC con º50=α .
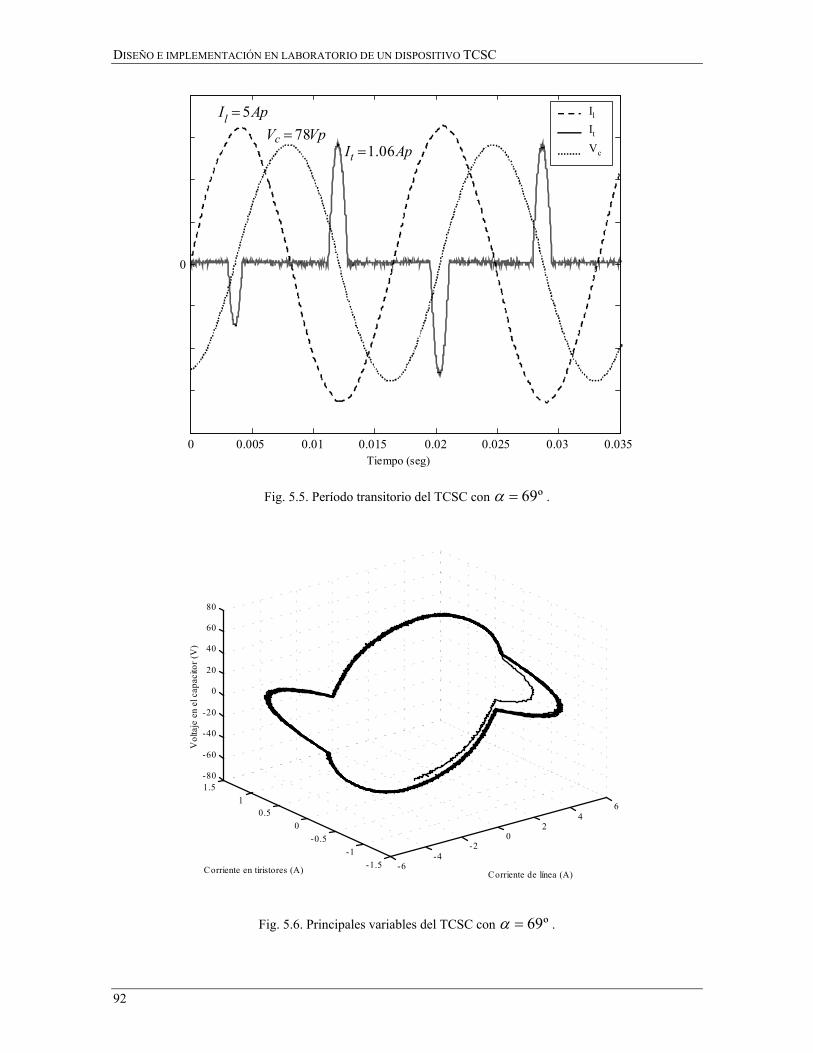
DISEÑO E IMPLEMENTACIÓN EN LABORATORIO DE UN DISPOSITIVO TCSC
92
0 0.005 0.01 0.015 0.02 0.025 0.03 0.035
0
Tiempo (seg)
Il
It
Vc
ApIl 5=VpVc 78=
ApIt 06.1=
Fig. 5.5. Período transitorio del TCSC con º69=α .
-6-4
-20
24
6
-1.5
-1
-0.5
0
0.51
1.5-80
-60
-40
-20
0
20
40
60
80
Corriente de línea (A)Corriente en tiristores (A)
Vol
taje
en
el c
apac
itor
(V)
Fig. 5.6. Principales variables del TCSC con º69=α .
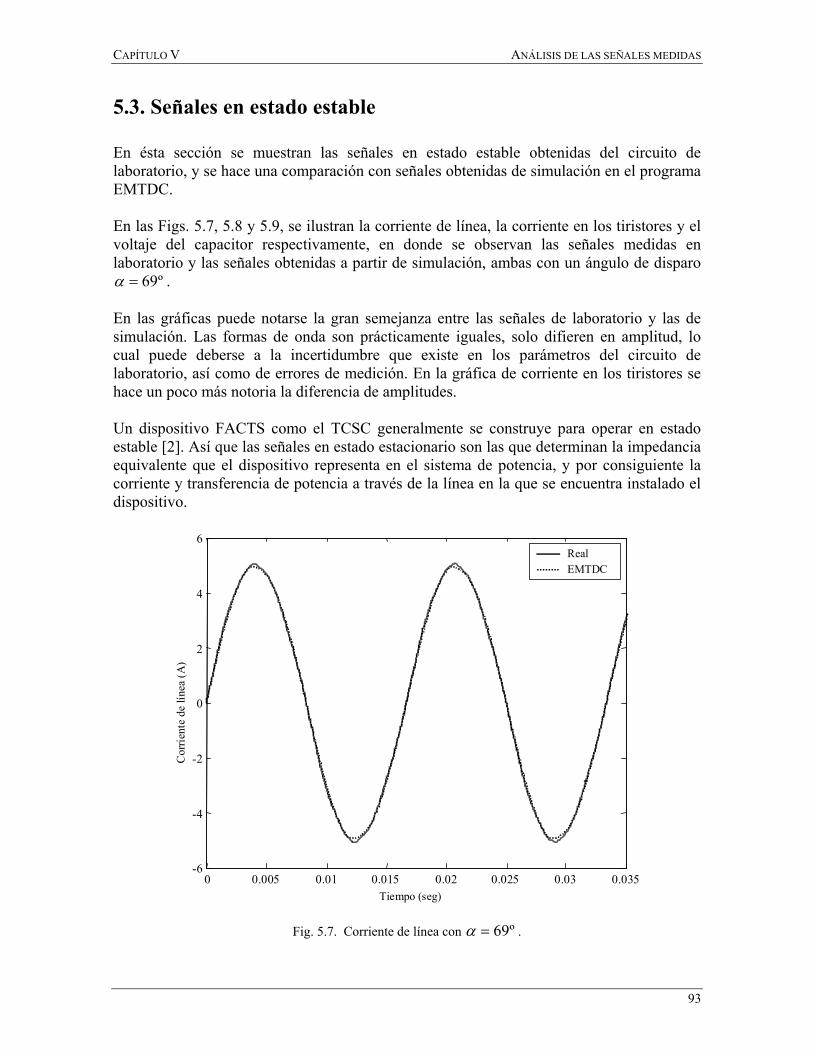
CAPÍTULO V ANÁLISIS DE LAS SEÑALES MEDIDAS
93
5.3. Señales en estado estable
En ésta sección se muestran las señales en estado estable obtenidas del circuito delaboratorio, y se hace una comparación con señales obtenidas de simulación en el programaEMTDC.
En las Figs. 5.7, 5.8 y 5.9, se ilustran la corriente de línea, la corriente en los tiristores y elvoltaje del capacitor respectivamente, en donde se observan las señales medidas enlaboratorio y las señales obtenidas a partir de simulación, ambas con un ángulo de disparo
º69=α .
En las gráficas puede notarse la gran semejanza entre las señales de laboratorio y las desimulación. Las formas de onda son prácticamente iguales, solo difieren en amplitud, locual puede deberse a la incertidumbre que existe en los parámetros del circuito delaboratorio, así como de errores de medición. En la gráfica de corriente en los tiristores sehace un poco más notoria la diferencia de amplitudes.
Un dispositivo FACTS como el TCSC generalmente se construye para operar en estadoestable [2]. Así que las señales en estado estacionario son las que determinan la impedanciaequivalente que el dispositivo representa en el sistema de potencia, y por consiguiente lacorriente y transferencia de potencia a través de la línea en la que se encuentra instalado eldispositivo.
0 0.005 0.01 0.015 0.02 0.025 0.03 0.035-6
-4
-2
0
2
4
6
Tiempo (seg)
Cor
rien
te d
e lí
nea
(A)
Real
EMTDC
Fig. 5.7. Corriente de línea con º69=α .
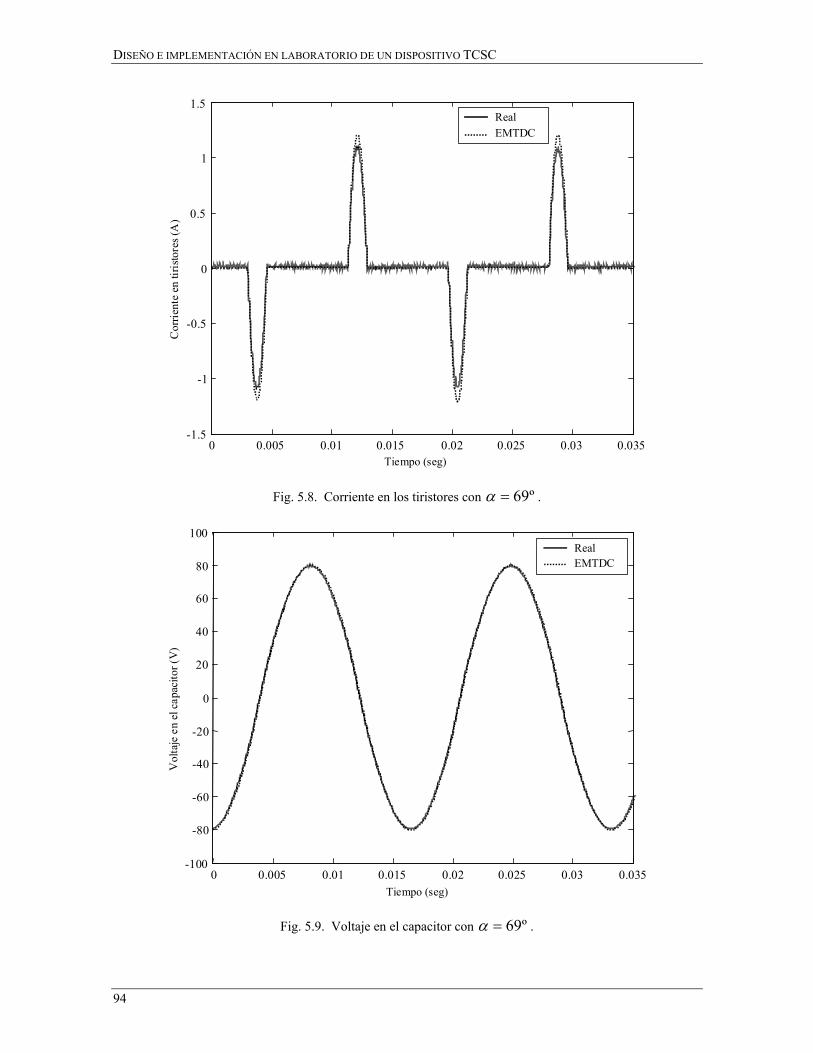
DISEÑO E IMPLEMENTACIÓN EN LABORATORIO DE UN DISPOSITIVO TCSC
94
0 0.005 0.01 0.015 0.02 0.025 0.03 0.035-1.5
-1
-0.5
0
0.5
1
1.5
Tiempo (seg)
Cor
rien
te e
n ti
rist
ores
(A
)
Real
EMTDC
Fig. 5.8. Corriente en los tiristores con º69=α .
0 0.005 0.01 0.015 0.02 0.025 0.03 0.035-100
-80
-60
-40
-20
0
20
40
60
80
100
Tiempo (seg)
Vol
taje
en
el c
apac
itor
(V
)
RealEMTDC
Fig. 5.9. Voltaje en el capacitor con º69=α .
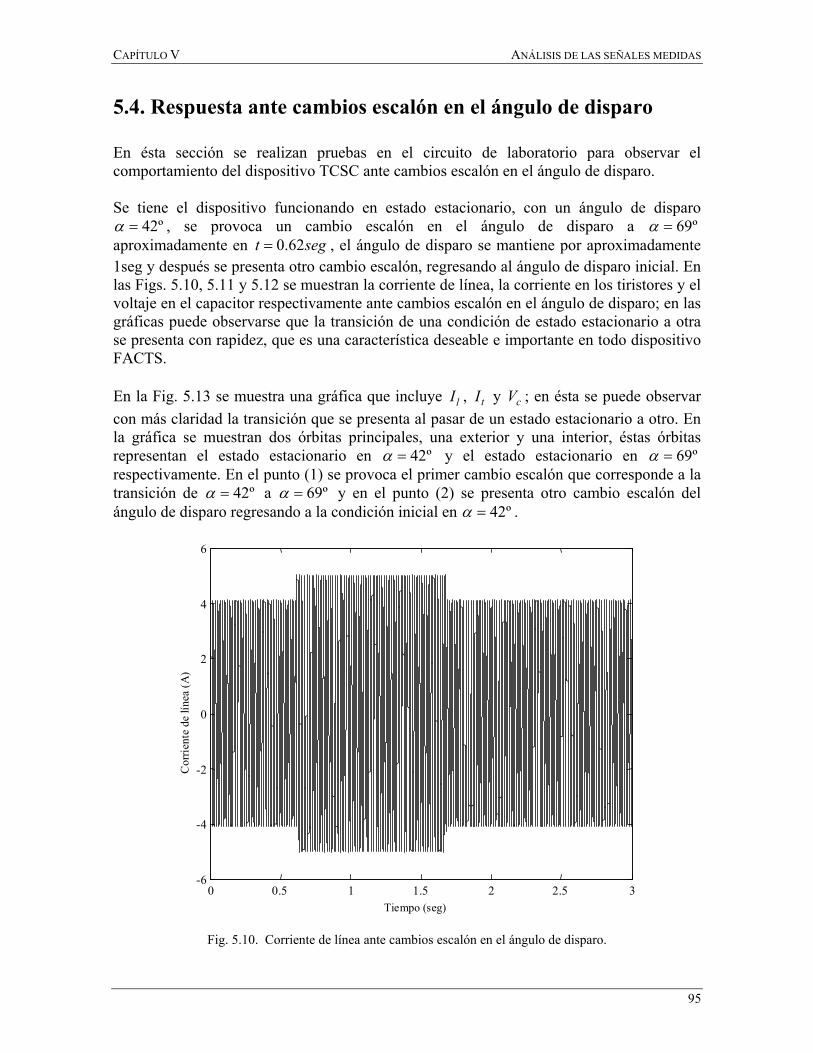
CAPÍTULO V ANÁLISIS DE LAS SEÑALES MEDIDAS
95
5.4. Respuesta ante cambios escalón en el ángulo de disparo
En ésta sección se realizan pruebas en el circuito de laboratorio para observar elcomportamiento del dispositivo TCSC ante cambios escalón en el ángulo de disparo.
Se tiene el dispositivo funcionando en estado estacionario, con un ángulo de disparoº42=α , se provoca un cambio escalón en el ángulo de disparo a º69=α
aproximadamente en segt 62.0= , el ángulo de disparo se mantiene por aproximadamente1seg y después se presenta otro cambio escalón, regresando al ángulo de disparo inicial. Enlas Figs. 5.10, 5.11 y 5.12 se muestran la corriente de línea, la corriente en los tiristores y elvoltaje en el capacitor respectivamente ante cambios escalón en el ángulo de disparo; en lasgráficas puede observarse que la transición de una condición de estado estacionario a otrase presenta con rapidez, que es una característica deseable e importante en todo dispositivoFACTS.
En la Fig. 5.13 se muestra una gráfica que incluye lI , tI y cV ; en ésta se puede observar
con más claridad la transición que se presenta al pasar de un estado estacionario a otro. Enla gráfica se muestran dos órbitas principales, una exterior y una interior, éstas órbitasrepresentan el estado estacionario en º42=α y el estado estacionario en º69=αrespectivamente. En el punto (1) se provoca el primer cambio escalón que corresponde a latransición de º42=α a º69=α y en el punto (2) se presenta otro cambio escalón delángulo de disparo regresando a la condición inicial en º42=α .
0 0.5 1 1.5 2 2.5 3-6
-4
-2
0
2
4
6
Tiempo (seg)
Cor
rien
te d
e lí
nea
(A)
Fig. 5.10. Corriente de línea ante cambios escalón en el ángulo de disparo.
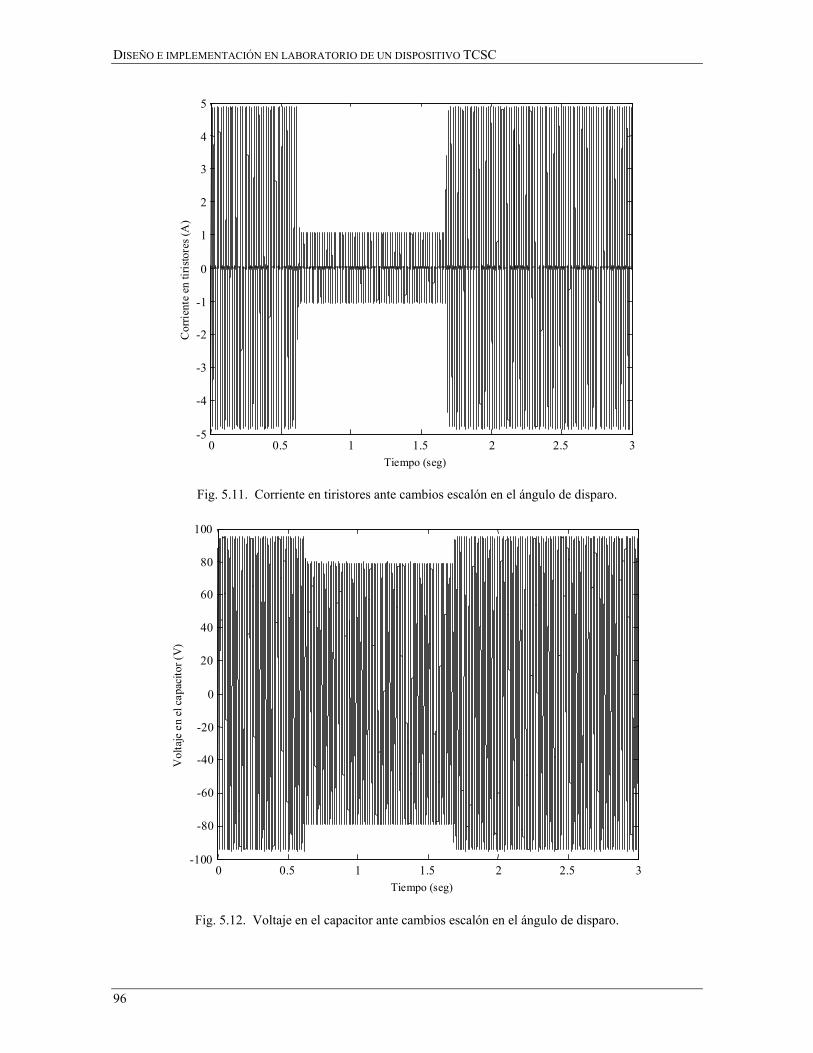
DISEÑO E IMPLEMENTACIÓN EN LABORATORIO DE UN DISPOSITIVO TCSC
96
0 0.5 1 1.5 2 2.5 3-5
-4
-3
-2
-1
0
1
2
3
4
5
Tiempo (seg)
Cor
rien
te e
n ti
rist
ores
(A
)
Fig. 5.11. Corriente en tiristores ante cambios escalón en el ángulo de disparo.
0 0.5 1 1.5 2 2.5 3-100
-80
-60
-40
-20
0
20
40
60
80
100
Tiempo (seg)
Vol
taje
en
el c
apac
itor
(V
)
Fig. 5.12. Voltaje en el capacitor ante cambios escalón en el ángulo de disparo.
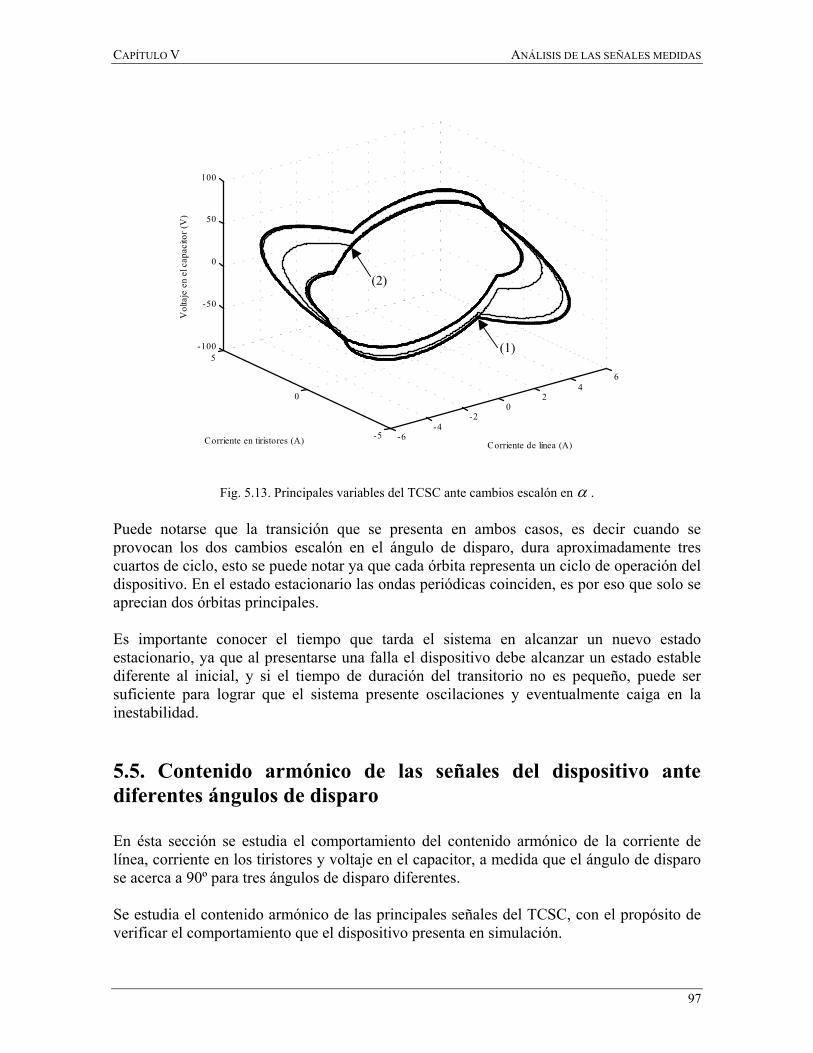
CAPÍTULO V ANÁLISIS DE LAS SEÑALES MEDIDAS
97
-6-4
-20
24
6
-5
0
5-100
-50
0
50
100
Corriente de línea (A)Corriente en tiristores (A)
Vol
taje
en
el c
apac
itor
(V)
Fig. 5.13. Principales variables del TCSC ante cambios escalón en α .
Puede notarse que la transición que se presenta en ambos casos, es decir cuando seprovocan los dos cambios escalón en el ángulo de disparo, dura aproximadamente trescuartos de ciclo, esto se puede notar ya que cada órbita representa un ciclo de operación deldispositivo. En el estado estacionario las ondas periódicas coinciden, es por eso que solo seaprecian dos órbitas principales.
Es importante conocer el tiempo que tarda el sistema en alcanzar un nuevo estadoestacionario, ya que al presentarse una falla el dispositivo debe alcanzar un estado establediferente al inicial, y si el tiempo de duración del transitorio no es pequeño, puede sersuficiente para lograr que el sistema presente oscilaciones y eventualmente caiga en lainestabilidad.
5.5. Contenido armónico de las señales del dispositivo antediferentes ángulos de disparo
En ésta sección se estudia el comportamiento del contenido armónico de la corriente delínea, corriente en los tiristores y voltaje en el capacitor, a medida que el ángulo de disparose acerca a 90º para tres ángulos de disparo diferentes.
Se estudia el contenido armónico de las principales señales del TCSC, con el propósito deverificar el comportamiento que el dispositivo presenta en simulación.
(1)
(2)
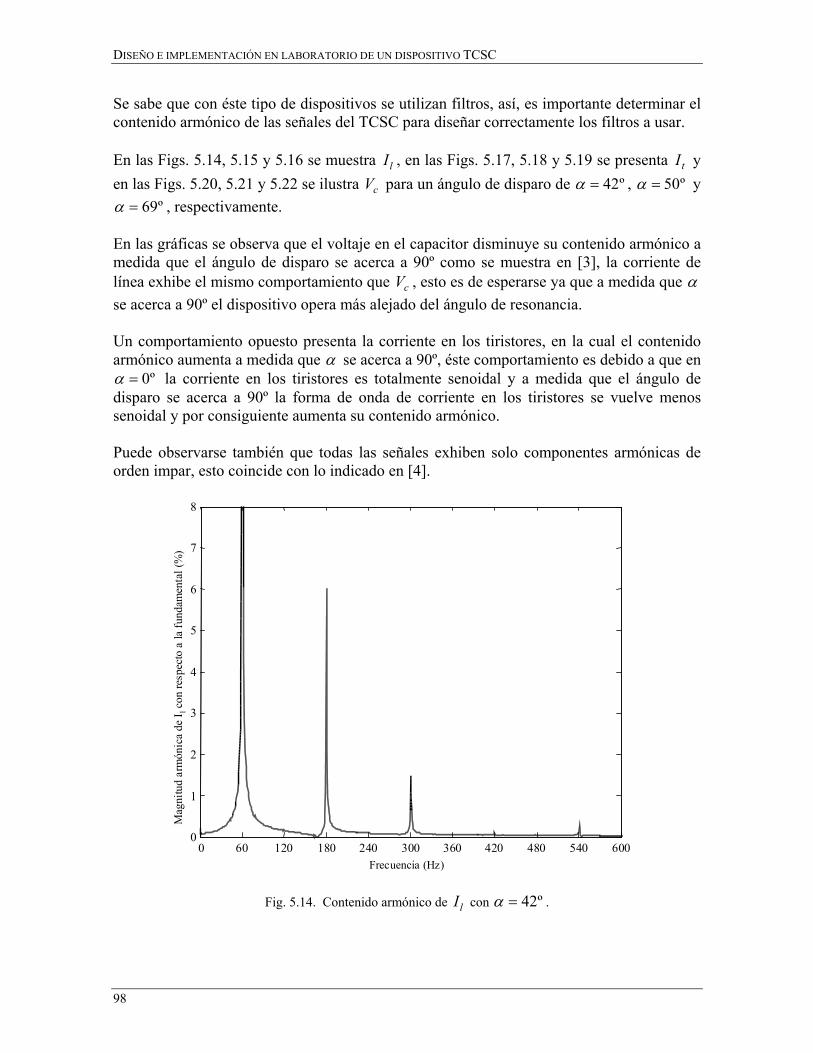
DISEÑO E IMPLEMENTACIÓN EN LABORATORIO DE UN DISPOSITIVO TCSC
98
Se sabe que con éste tipo de dispositivos se utilizan filtros, así, es importante determinar elcontenido armónico de las señales del TCSC para diseñar correctamente los filtros a usar.
En las Figs. 5.14, 5.15 y 5.16 se muestra lI , en las Figs. 5.17, 5.18 y 5.19 se presenta tI y
en las Figs. 5.20, 5.21 y 5.22 se ilustra cV para un ángulo de disparo de º42=α , º50=α y
º69=α , respectivamente.
En las gráficas se observa que el voltaje en el capacitor disminuye su contenido armónico amedida que el ángulo de disparo se acerca a 90º como se muestra en [3], la corriente delínea exhibe el mismo comportamiento que cV , esto es de esperarse ya que a medida que αse acerca a 90º el dispositivo opera más alejado del ángulo de resonancia.
Un comportamiento opuesto presenta la corriente en los tiristores, en la cual el contenidoarmónico aumenta a medida que α se acerca a 90º, éste comportamiento es debido a que en
º0=α la corriente en los tiristores es totalmente senoidal y a medida que el ángulo dedisparo se acerca a 90º la forma de onda de corriente en los tiristores se vuelve menossenoidal y por consiguiente aumenta su contenido armónico.
Puede observarse también que todas las señales exhiben solo componentes armónicas deorden impar, esto coincide con lo indicado en [4].
0 60 120 180 240 300 360 420 480 540 6000
1
2
3
4
5
6
7
8
Frecuencia (Hz)
Mag
nitu
d ar
món
ica
de I
l con
res
pect
o a
la f
unda
men
tal
(%)
Fig. 5.14. Contenido armónico de lI con º42=α .
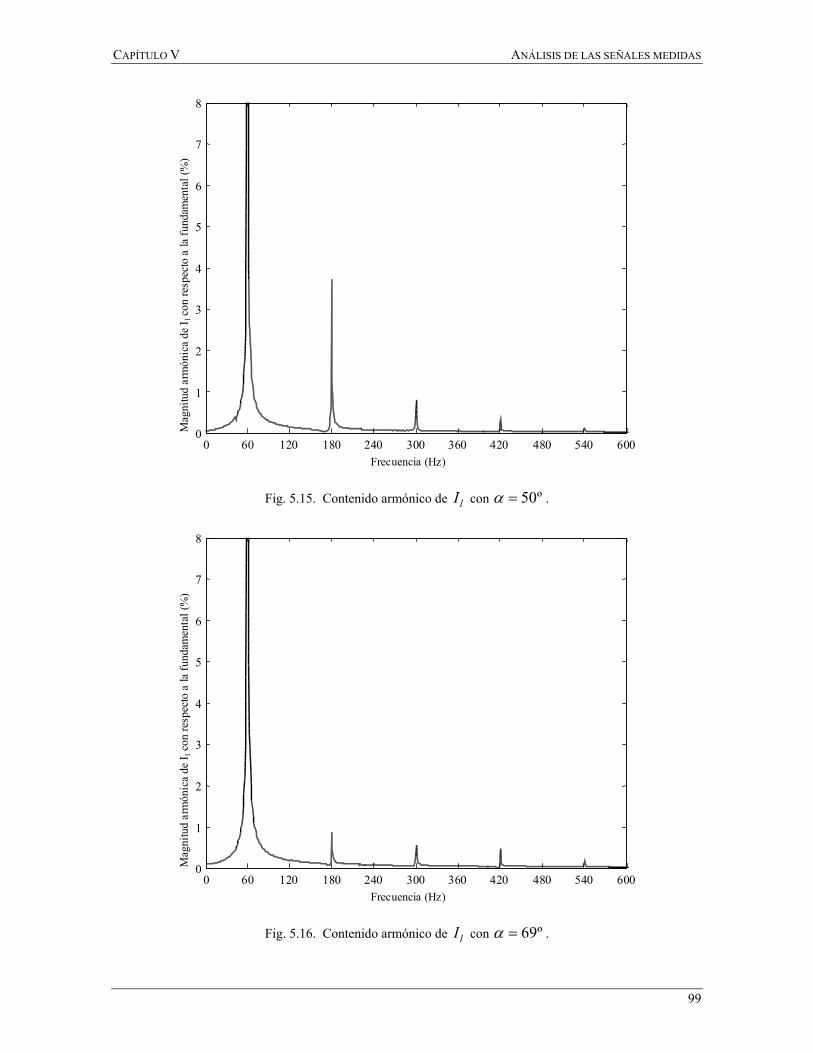
CAPÍTULO V ANÁLISIS DE LAS SEÑALES MEDIDAS
99
0 60 120 180 240 300 360 420 480 540 6000
1
2
3
4
5
6
7
8
Frecuencia (Hz)
Mag
nitu
d ar
món
ica
de I
l con
res
pect
o a
la f
unda
men
tal
(%)
Fig. 5.15. Contenido armónico de lI con º50=α .
0 60 120 180 240 300 360 420 480 540 6000
1
2
3
4
5
6
7
8
Frecuencia (Hz)
Mag
nitu
d ar
món
ica
de I
l con
res
pect
o a
la f
unda
men
tal
(%)
Fig. 5.16. Contenido armónico de lI con º69=α .
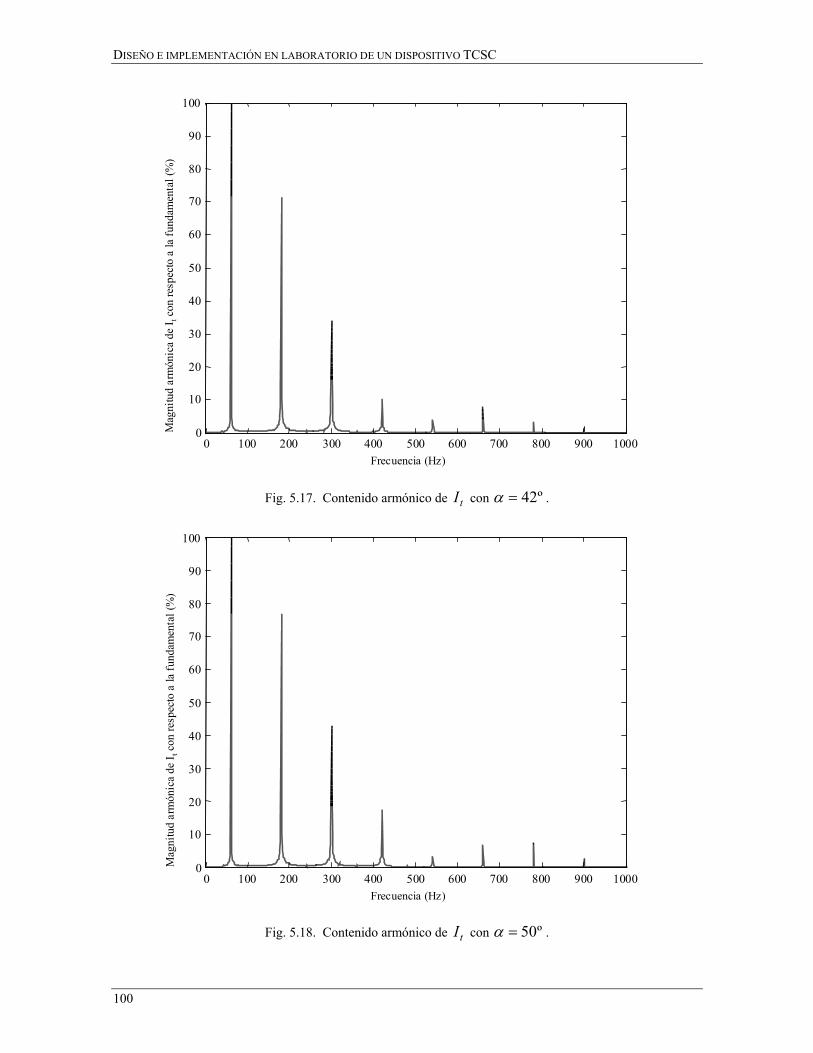
DISEÑO E IMPLEMENTACIÓN EN LABORATORIO DE UN DISPOSITIVO TCSC
100
0 100 200 300 400 500 600 700 800 900 10000
10
20
30
40
50
60
70
80
90
100
Frecuencia (Hz)
Mag
nitu
d ar
món
ica
de I
t con
res
pect
o a
la f
unda
men
tal
(%)
Fig. 5.17. Contenido armónico de tI con º42=α .
0 100 200 300 400 500 600 700 800 900 10000
10
20
30
40
50
60
70
80
90
100
Frecuencia (Hz)
Mag
nitu
d ar
món
ica
de I
t con
res
pect
o a
la f
unda
men
tal
(%)
Fig. 5.18. Contenido armónico de tI con º50=α .
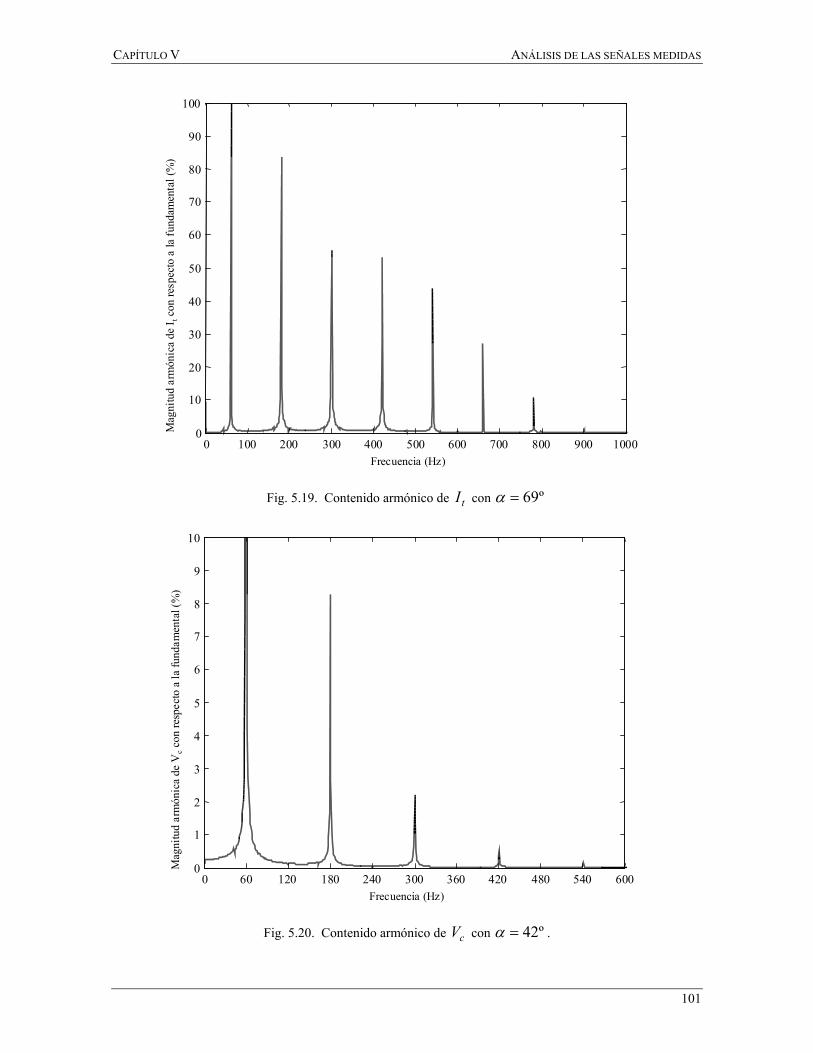
CAPÍTULO V ANÁLISIS DE LAS SEÑALES MEDIDAS
101
0 100 200 300 400 500 600 700 800 900 10000
10
20
30
40
50
60
70
80
90
100
Frecuencia (Hz)
Mag
nitu
d ar
món
ica
de I
t con
res
pect
o a
la f
unda
men
tal
(%)
Fig. 5.19. Contenido armónico de tI con º69=α
0 60 120 180 240 300 360 420 480 540 6000
1
2
3
4
5
6
7
8
9
10
Frecuencia (Hz)
Mag
nitu
d ar
món
ica
de V
c co
n re
spec
to a
la
fund
amen
tal (
%)
Fig. 5.20. Contenido armónico de cV con º42=α .
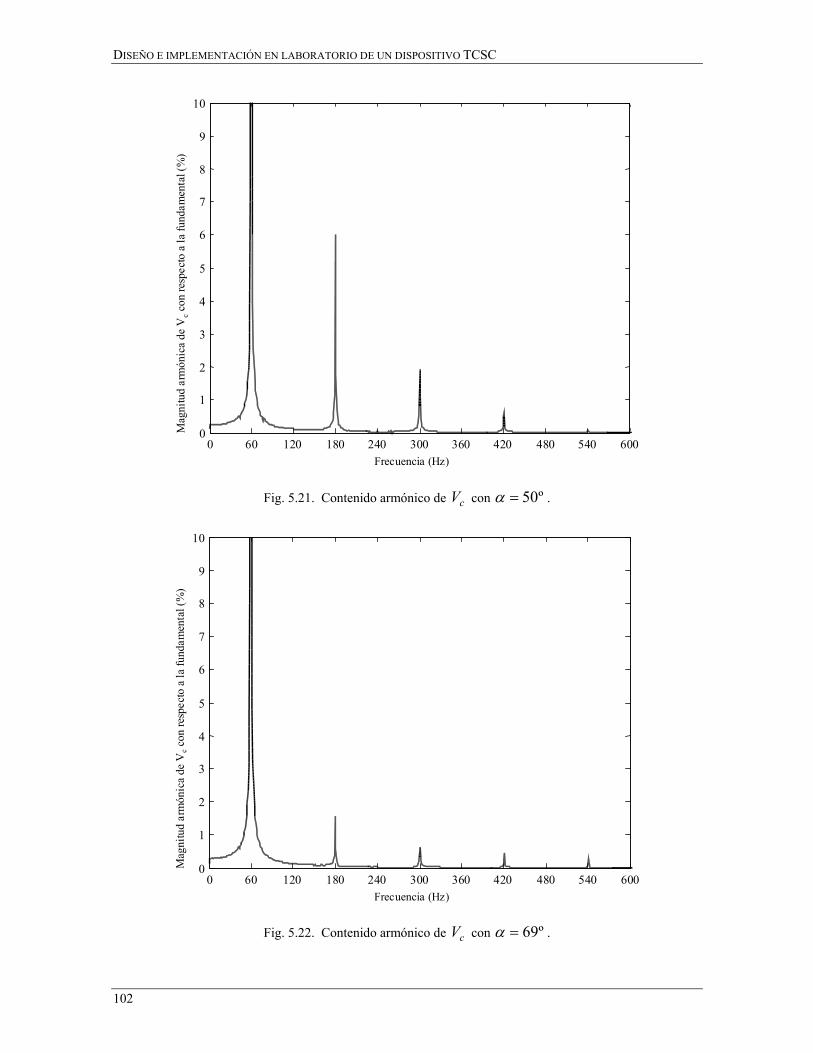
DISEÑO E IMPLEMENTACIÓN EN LABORATORIO DE UN DISPOSITIVO TCSC
102
0 60 120 180 240 300 360 420 480 540 6000
1
2
3
4
5
6
7
8
9
10
Frecuencia (Hz)
Mag
nitu
d ar
món
ica
de V
c co
n re
spec
to a
la
fund
amen
tal (
%)
Fig. 5.21. Contenido armónico de cV con º50=α .
0 60 120 180 240 300 360 420 480 540 6000
1
2
3
4
5
6
7
8
9
10
Frecuencia (Hz)
Mag
nitu
d ar
món
ica
de V
c co
n re
spec
to a
la
fund
amen
tal (
%)
Fig. 5.22. Contenido armónico de cV con º69=α .
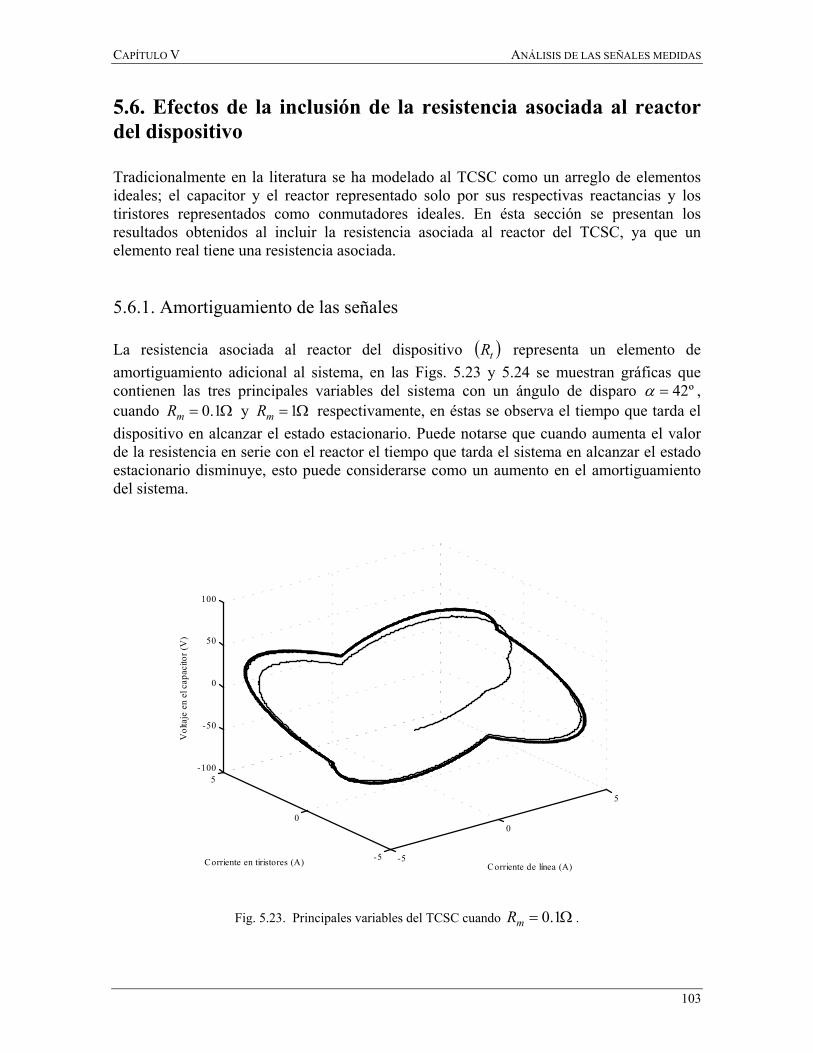
CAPÍTULO V ANÁLISIS DE LAS SEÑALES MEDIDAS
103
5.6. Efectos de la inclusión de la resistencia asociada al reactordel dispositivo
Tradicionalmente en la literatura se ha modelado al TCSC como un arreglo de elementosideales; el capacitor y el reactor representado solo por sus respectivas reactancias y lostiristores representados como conmutadores ideales. En ésta sección se presentan losresultados obtenidos al incluir la resistencia asociada al reactor del TCSC, ya que unelemento real tiene una resistencia asociada.
5.6.1. Amortiguamiento de las señales
La resistencia asociada al reactor del dispositivo ( )tR representa un elemento de
amortiguamiento adicional al sistema, en las Figs. 5.23 y 5.24 se muestran gráficas quecontienen las tres principales variables del sistema con un ángulo de disparo º42=α ,cuando Ω= 1.0mR y Ω=1mR respectivamente, en éstas se observa el tiempo que tarda el
dispositivo en alcanzar el estado estacionario. Puede notarse que cuando aumenta el valorde la resistencia en serie con el reactor el tiempo que tarda el sistema en alcanzar el estadoestacionario disminuye, esto puede considerarse como un aumento en el amortiguamientodel sistema.
-5
0
5
-5
0
5-100
-50
0
50
100
Corriente de línea (A)Corriente en tiristores (A)
Vol
taje
en
el c
apac
itor
(V)
Fig. 5.23. Principales variables del TCSC cuando Ω= 1.0mR .
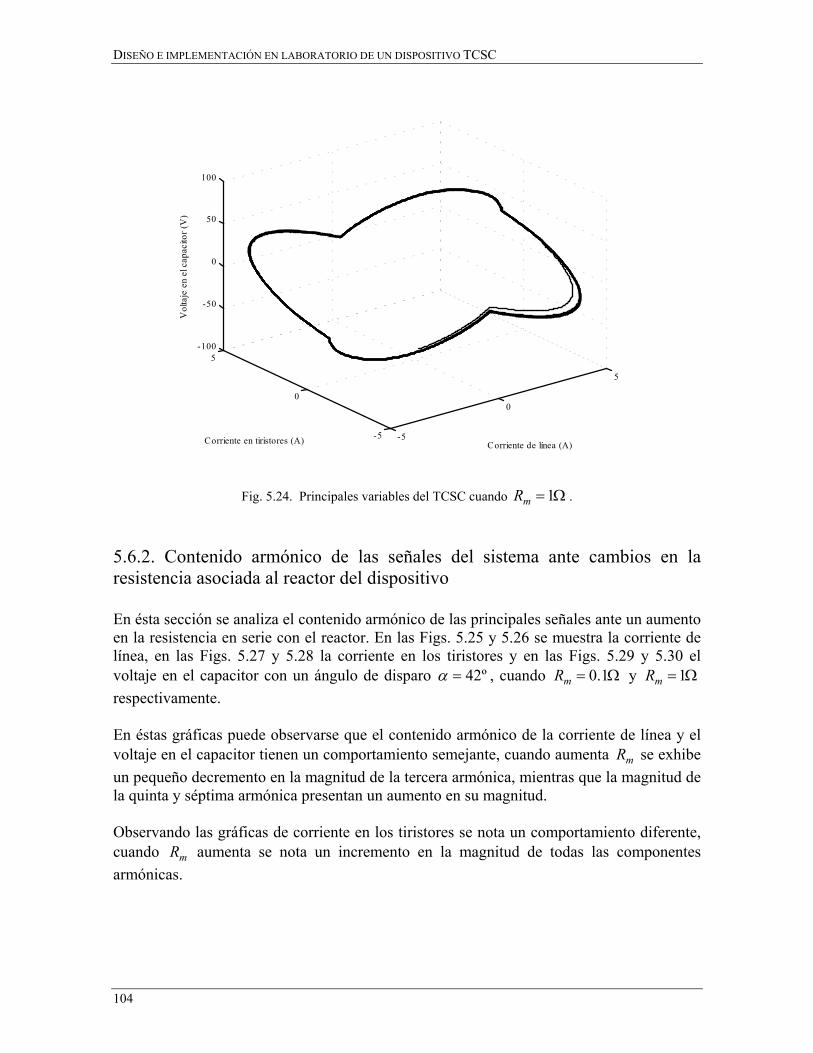
DISEÑO E IMPLEMENTACIÓN EN LABORATORIO DE UN DISPOSITIVO TCSC
104
-5
0
5
-5
0
5-100
-50
0
50
100
Corriente de línea (A)Corriente en tiristores (A)
Vol
taje
en
el c
apac
itor
(V)
Fig. 5.24. Principales variables del TCSC cuando Ω=1mR .
5.6.2. Contenido armónico de las señales del sistema ante cambios en laresistencia asociada al reactor del dispositivo
En ésta sección se analiza el contenido armónico de las principales señales ante un aumentoen la resistencia en serie con el reactor. En las Figs. 5.25 y 5.26 se muestra la corriente delínea, en las Figs. 5.27 y 5.28 la corriente en los tiristores y en las Figs. 5.29 y 5.30 elvoltaje en el capacitor con un ángulo de disparo º42=α , cuando Ω= 1.0mR y Ω=1mR
respectivamente.
En éstas gráficas puede observarse que el contenido armónico de la corriente de línea y elvoltaje en el capacitor tienen un comportamiento semejante, cuando aumenta mR se exhibe
un pequeño decremento en la magnitud de la tercera armónica, mientras que la magnitud dela quinta y séptima armónica presentan un aumento en su magnitud.
Observando las gráficas de corriente en los tiristores se nota un comportamiento diferente,cuando mR aumenta se nota un incremento en la magnitud de todas las componentes
armónicas.
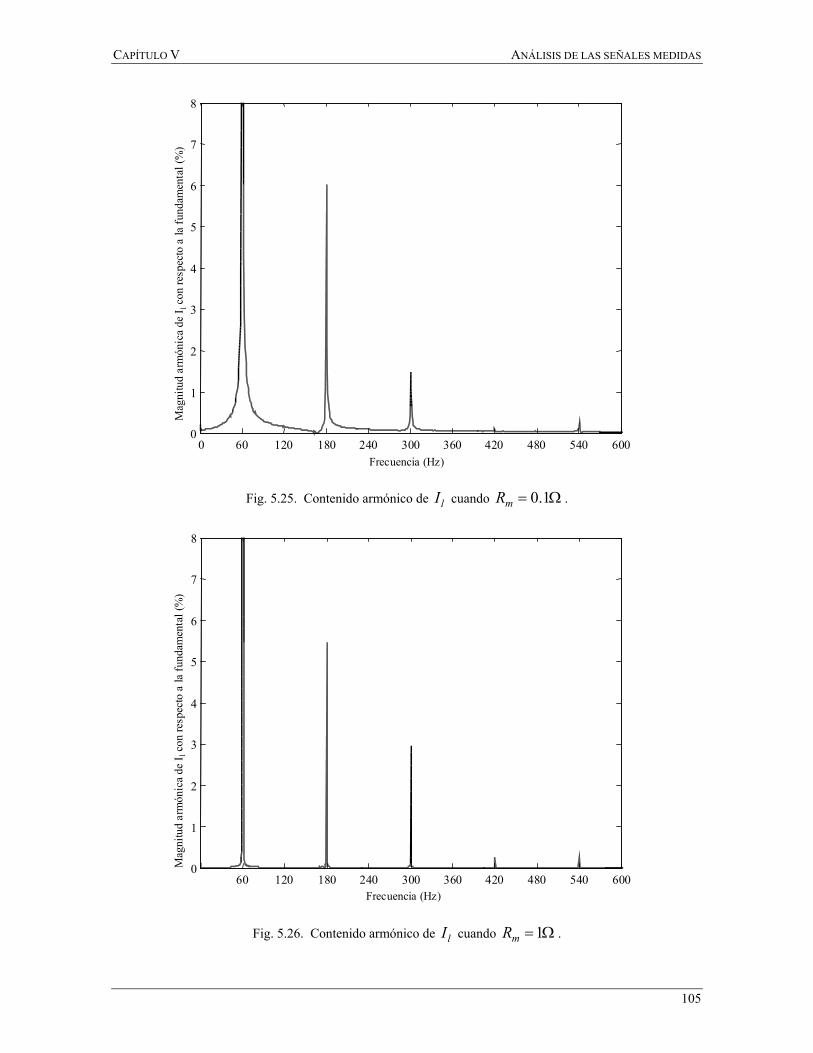
CAPÍTULO V ANÁLISIS DE LAS SEÑALES MEDIDAS
105
0 60 120 180 240 300 360 420 480 540 6000
1
2
3
4
5
6
7
8
Frecuencia (Hz)
Mag
nitu
d ar
món
ica
de I
l con
res
pect
o a
la f
unda
men
tal
(%)
Fig. 5.25. Contenido armónico de lI cuando Ω= 1.0mR .
60 120 180 240 300 360 420 480 540 6000
1
2
3
4
5
6
7
8
Frecuencia (Hz)
Mag
nitu
d ar
món
ica
de I
l con
res
pect
o a
la f
unda
men
tal
(%)
Fig. 5.26. Contenido armónico de lI cuando Ω=1mR .
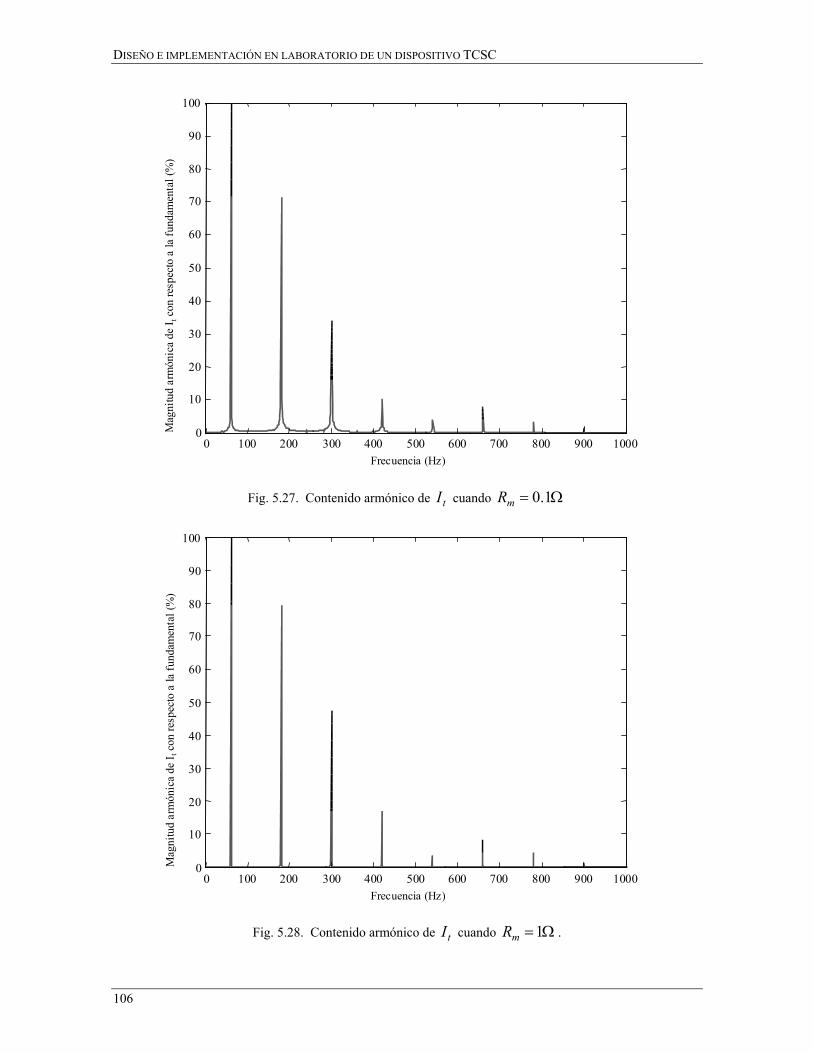
DISEÑO E IMPLEMENTACIÓN EN LABORATORIO DE UN DISPOSITIVO TCSC
106
0 100 200 300 400 500 600 700 800 900 10000
10
20
30
40
50
60
70
80
90
100
Frecuencia (Hz)
Mag
nitu
d ar
món
ica
de I
t con
res
pect
o a
la f
unda
men
tal
(%)
Fig. 5.27. Contenido armónico de tI cuando Ω= 1.0mR
0 100 200 300 400 500 600 700 800 900 10000
10
20
30
40
50
60
70
80
90
100
Frecuencia (Hz)
Mag
nitu
d ar
món
ica
de I
t con
res
pect
o a
la f
unda
men
tal
(%)
Fig. 5.28. Contenido armónico de tI cuando Ω=1mR .
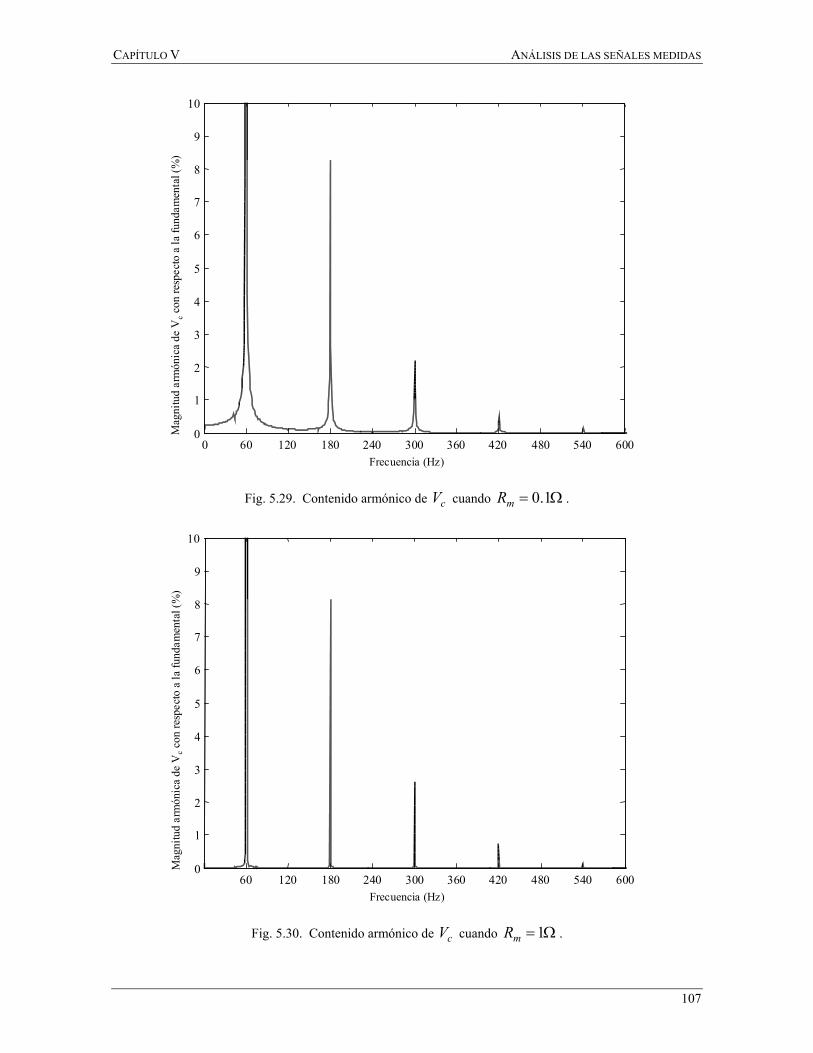
CAPÍTULO V ANÁLISIS DE LAS SEÑALES MEDIDAS
107
0 60 120 180 240 300 360 420 480 540 6000
1
2
3
4
5
6
7
8
9
10
Frecuencia (Hz)
Mag
nitu
d ar
món
ica
de V
c co
n re
spec
to a
la
fund
amen
tal (
%)
Fig. 5.29. Contenido armónico de cV cuando Ω= 1.0mR .
60 120 180 240 300 360 420 480 540 6000
1
2
3
4
5
6
7
8
9
10
Frecuencia (Hz)
Mag
nitu
d ar
món
ica
de V
c co
n re
spec
to a
la
fund
amen
tal (
%)
Fig. 5.30. Contenido armónico de cV cuando Ω=1mR .
DISEÑO E IMPLEMENTACIÓN EN LABORATORIO DE UN DISPOSITIVO TCSC
108
5.6.3. Deformación de las señales del sistema al incluir la resistencia asociadaal reactor del dispositivo
Otro de los efectos que trae consigo la inclusión de la resistencia asociada al reactor deldispositivo es la deformación de las señales. En las Figs. 5.31, 5.32 y 5.33 se ilustran lacorriente de línea, corriente en tiristores y voltaje en el capacitor, para un ángulo de disparode º31=α , º24=α y º16=α respectivamente.
En éstas gráficas puede observarse que la resistencia asociada al reactor del dispositivo y lainclusión de Ω= 1.0mR producen deformaciones en las señales del TCSC, esto se hace más
notorio en las señales de corriente de línea y voltaje en el capacitor.
Puede notarse también, que a medida que el ángulo de disparo disminuye, la deformaciónde las señales es cada vez mayor, esto deriva en un aumento en el contenido armónico delsistema.
En las Figs. 5.34 y 5.35 se muestran la corriente de línea, corriente en tiristores y voltaje enel capacitor para un ángulo de disparo º50=α y º60=α respectivamente, éstas gráficas seobtienen mediante simulación utilizando el circuito mostrado en el capítulo IV; en éstecircuito se alimenta al TCSC con una fuente de corriente.
Las simulaciones se llevan a cabo utilizando los valores de inductancia y capacitancia delcircuito de laboratorio y despreciando tR y mR . Los ángulos de disparo de las señales
reales y de las señales de simulación son diferentes puesto que cuando no se incluyen tR y
mR el ángulo de resonancia para el circuito usado en simulación se presenta en
aproximadamente º47=α . Éste diagrama es el que se muestra comúnmente en la literaturapara modelado del TCSC.
Puede observarse que las señales obtenidas de simulación no se deforman al cambiar elángulo de disparo del dispositivo, aún cuando éste opera cerca del ángulo de resonancia, adiferencia de lo observado en las Figs. 5.31, 5.32 y 5.33 en donde se incluye la resistenciaasociada al reactor del dispositivo. Así, es importante tomar en cuenta éste cambio en lasseñales del dispositivo y prever sus efectos.
En las Figs. 5.36, 5.37 y 5.38 se presentan las magnitudes de las componentes armónicas dela corriente de línea que corresponden a las Figs. 5.31, 5.32 y 5.33 respectivamente.
Puede notarse que el contenido armónico aumenta a medida que el ángulo de disparo esmás pequeño; ésta tendencia coincide con el incremento en la deformación de las señalescuando el ángulo de disparo decrece.
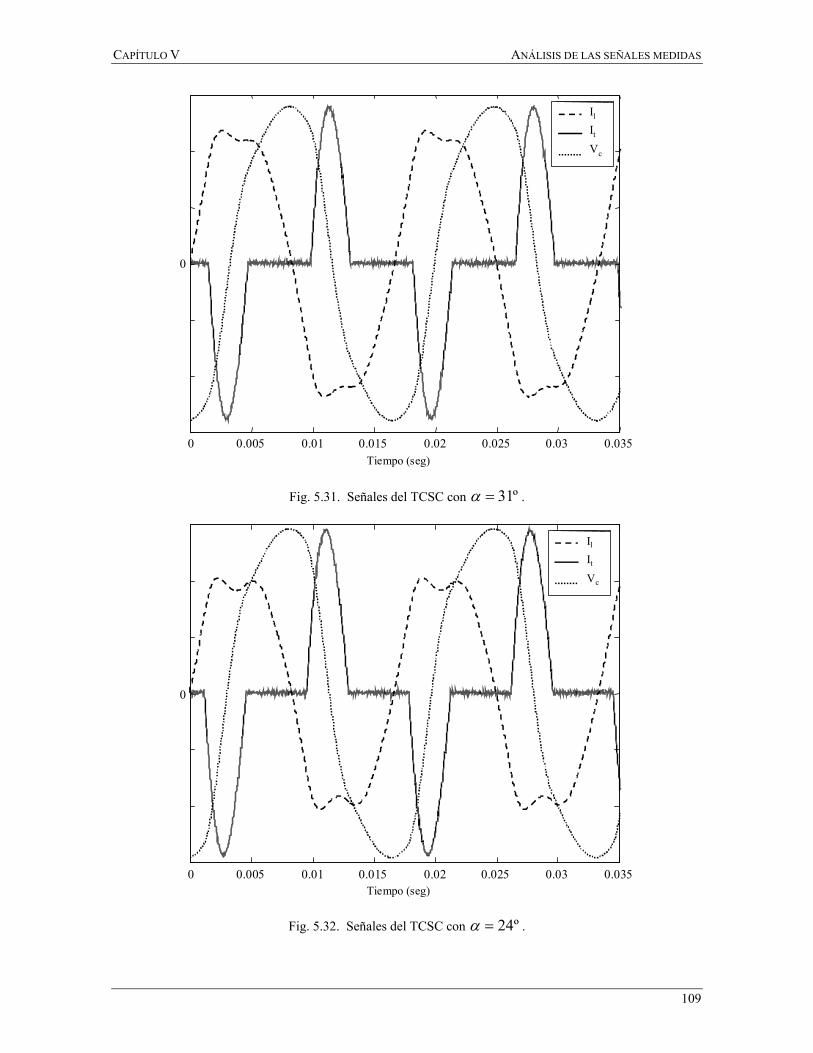
CAPÍTULO V ANÁLISIS DE LAS SEÑALES MEDIDAS
109
0 0.005 0.01 0.015 0.02 0.025 0.03 0.035
0
Tiempo (seg)
Il
It
Vc
Fig. 5.31. Señales del TCSC con º31=α .
0 0.005 0.01 0.015 0.02 0.025 0.03 0.035
0
Tiempo (seg)
Il
It
Vc
Fig. 5.32. Señales del TCSC con º24=α .
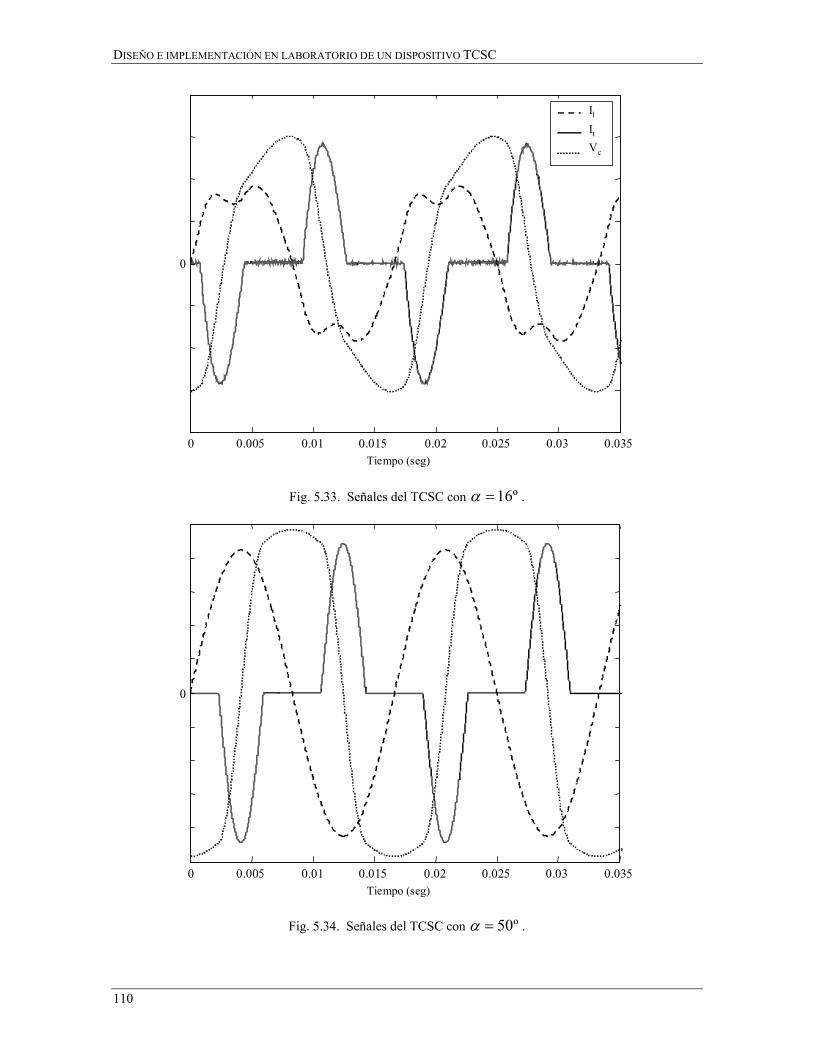
DISEÑO E IMPLEMENTACIÓN EN LABORATORIO DE UN DISPOSITIVO TCSC
110
0 0.005 0.01 0.015 0.02 0.025 0.03 0.035
0
Tiempo (seg)
Il
It
Vc
Fig. 5.33. Señales del TCSC con º16=α .
0 0.005 0.01 0.015 0.02 0.025 0.03 0.035
0
Tiempo (seg)
Fig. 5.34. Señales del TCSC con º50=α .
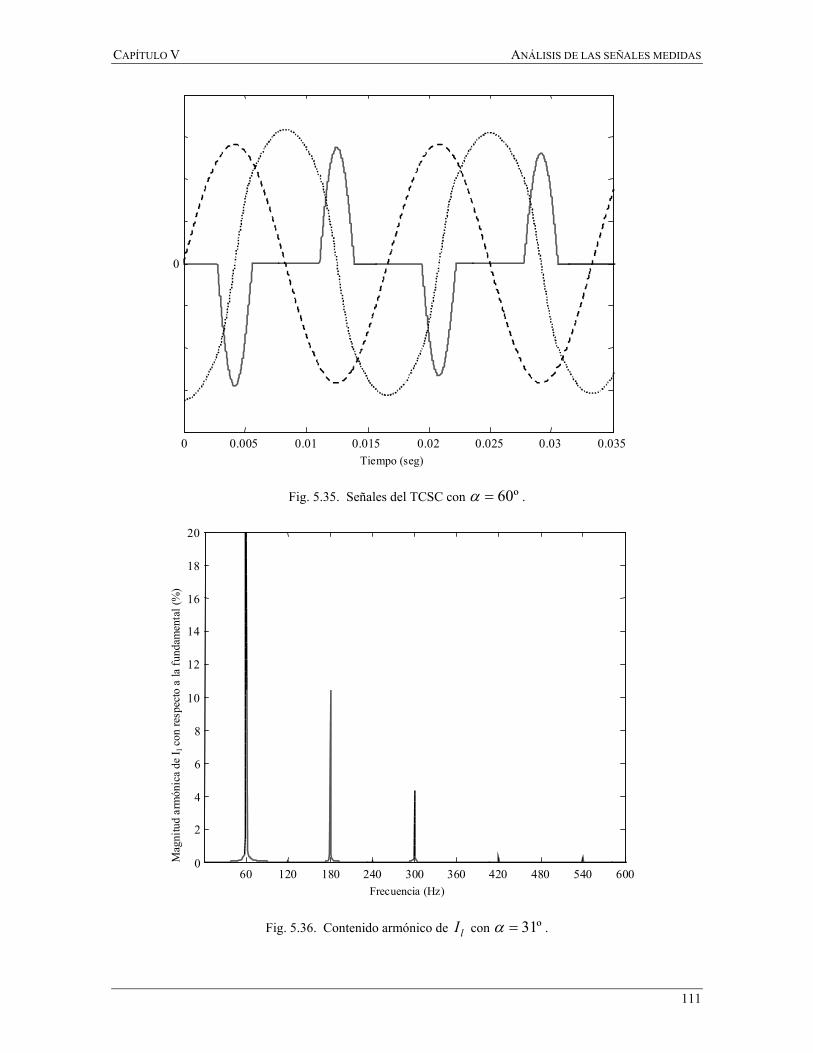
CAPÍTULO V ANÁLISIS DE LAS SEÑALES MEDIDAS
111
0 0.005 0.01 0.015 0.02 0.025 0.03 0.035
0
Tiempo (seg)
Fig. 5.35. Señales del TCSC con º60=α .
60 120 180 240 300 360 420 480 540 6000
2
4
6
8
10
12
14
16
18
20
Frecuencia (Hz)
Mag
nitu
d ar
món
ica
de I
l con
res
pect
o a
la f
unda
men
tal
(%)
Fig. 5.36. Contenido armónico de lI con º31=α .
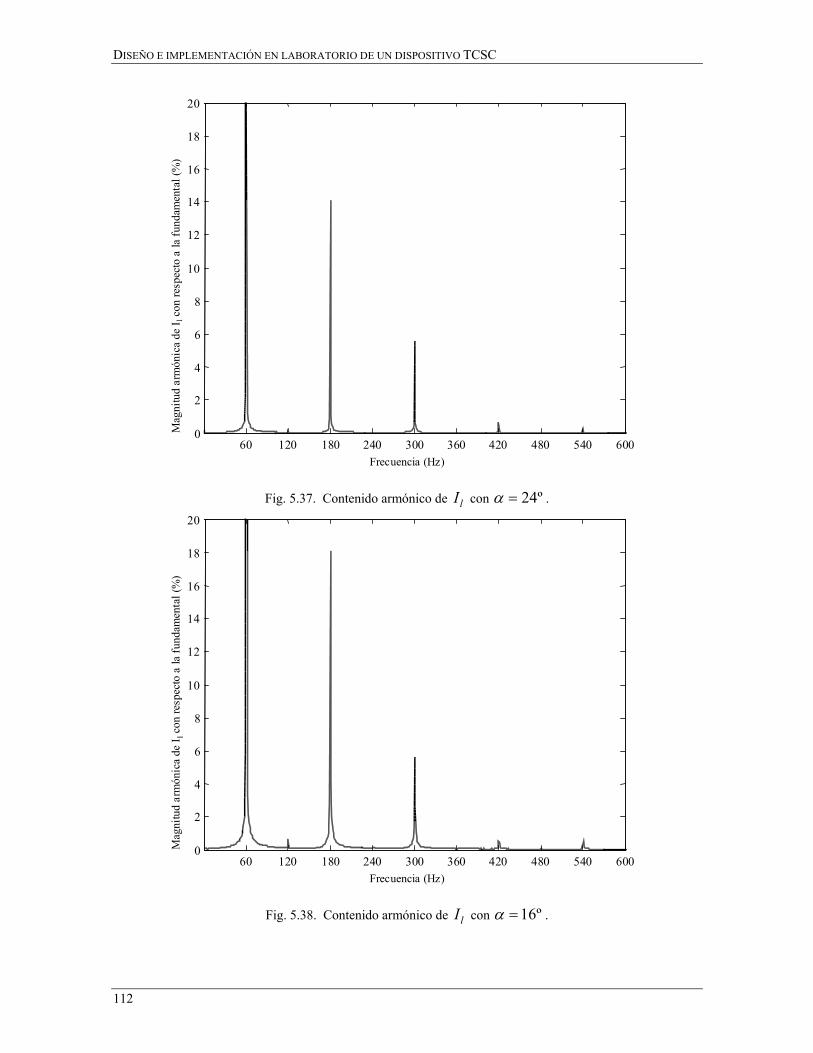
DISEÑO E IMPLEMENTACIÓN EN LABORATORIO DE UN DISPOSITIVO TCSC
112
60 120 180 240 300 360 420 480 540 6000
2
4
6
8
10
12
14
16
18
20
Frecuencia (Hz)
Mag
nitu
d ar
món
ica
de I
l con
res
pect
o a
la f
unda
men
tal
(%)
Fig. 5.37. Contenido armónico de lI con º24=α .
60 120 180 240 300 360 420 480 540 6000
2
4
6
8
10
12
14
16
18
20
Frecuencia (Hz)
Mag
nitu
d ar
món
ica
de I
l con
res
pect
o a
la f
unda
men
tal
(%)
Fig. 5.38. Contenido armónico de lI con º16=α .
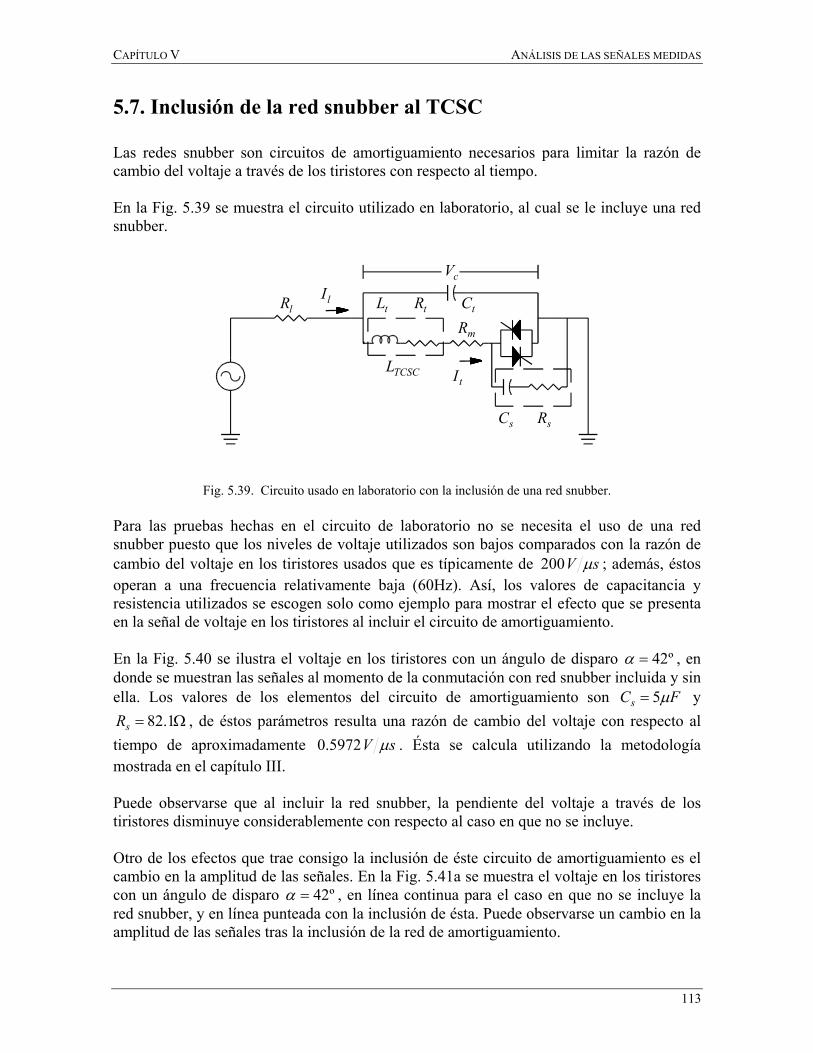
CAPÍTULO V ANÁLISIS DE LAS SEÑALES MEDIDAS
113
5.7. Inclusión de la red snubber al TCSC
Las redes snubber son circuitos de amortiguamiento necesarios para limitar la razón decambio del voltaje a través de los tiristores con respecto al tiempo.
En la Fig. 5.39 se muestra el circuito utilizado en laboratorio, al cual se le incluye una redsnubber.
Fig. 5.39. Circuito usado en laboratorio con la inclusión de una red snubber.
Para las pruebas hechas en el circuito de laboratorio no se necesita el uso de una redsnubber puesto que los niveles de voltaje utilizados son bajos comparados con la razón decambio del voltaje en los tiristores usados que es típicamente de sV µ200 ; además, éstosoperan a una frecuencia relativamente baja (60Hz). Así, los valores de capacitancia yresistencia utilizados se escogen solo como ejemplo para mostrar el efecto que se presentaen la señal de voltaje en los tiristores al incluir el circuito de amortiguamiento.
En la Fig. 5.40 se ilustra el voltaje en los tiristores con un ángulo de disparo º42=α , endonde se muestran las señales al momento de la conmutación con red snubber incluida y sinella. Los valores de los elementos del circuito de amortiguamiento son FCs µ5= y
Ω= 1.82sR , de éstos parámetros resulta una razón de cambio del voltaje con respecto al
tiempo de aproximadamente sV µ5972.0 . Ésta se calcula utilizando la metodologíamostrada en el capítulo III.
Puede observarse que al incluir la red snubber, la pendiente del voltaje a través de lostiristores disminuye considerablemente con respecto al caso en que no se incluye.
Otro de los efectos que trae consigo la inclusión de éste circuito de amortiguamiento es elcambio en la amplitud de las señales. En la Fig. 5.41a se muestra el voltaje en los tiristorescon un ángulo de disparo º42=α , en línea continua para el caso en que no se incluye lared snubber, y en línea punteada con la inclusión de ésta. Puede observarse un cambio en laamplitud de las señales tras la inclusión de la red de amortiguamiento.
lR lIcV
tL tR tC
mR
tI
sC sR
TCSCL
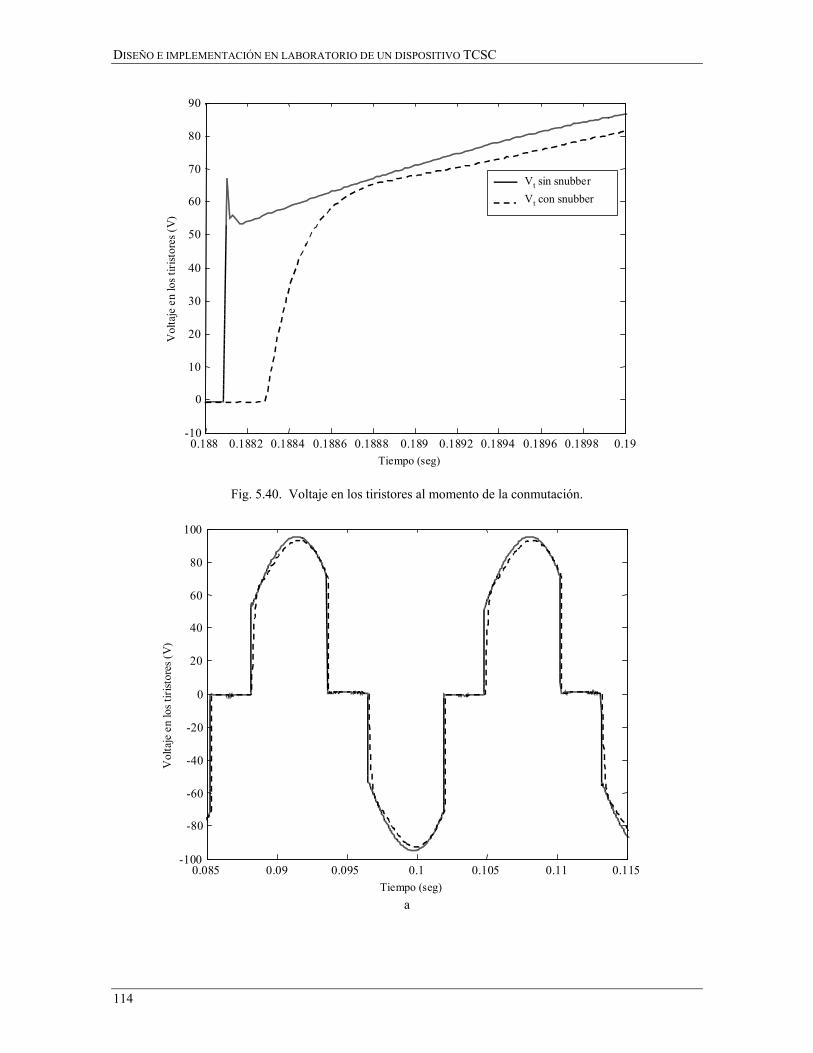
DISEÑO E IMPLEMENTACIÓN EN LABORATORIO DE UN DISPOSITIVO TCSC
114
0.188 0.1882 0.1884 0.1886 0.1888 0.189 0.1892 0.1894 0.1896 0.1898 0.19-10
0
10
20
30
40
50
60
70
80
90
Tiempo (seg)
Vol
taje
en
los
tiri
stor
es (
V)
Vt sin snubber
Vt con snubber
Fig. 5.40. Voltaje en los tiristores al momento de la conmutación.
0.085 0.09 0.095 0.1 0.105 0.11 0.115-100
-80
-60
-40
-20
0
20
40
60
80
100
Tiempo (seg)
Vol
taje
en
los
tiri
stor
es (
V)
a
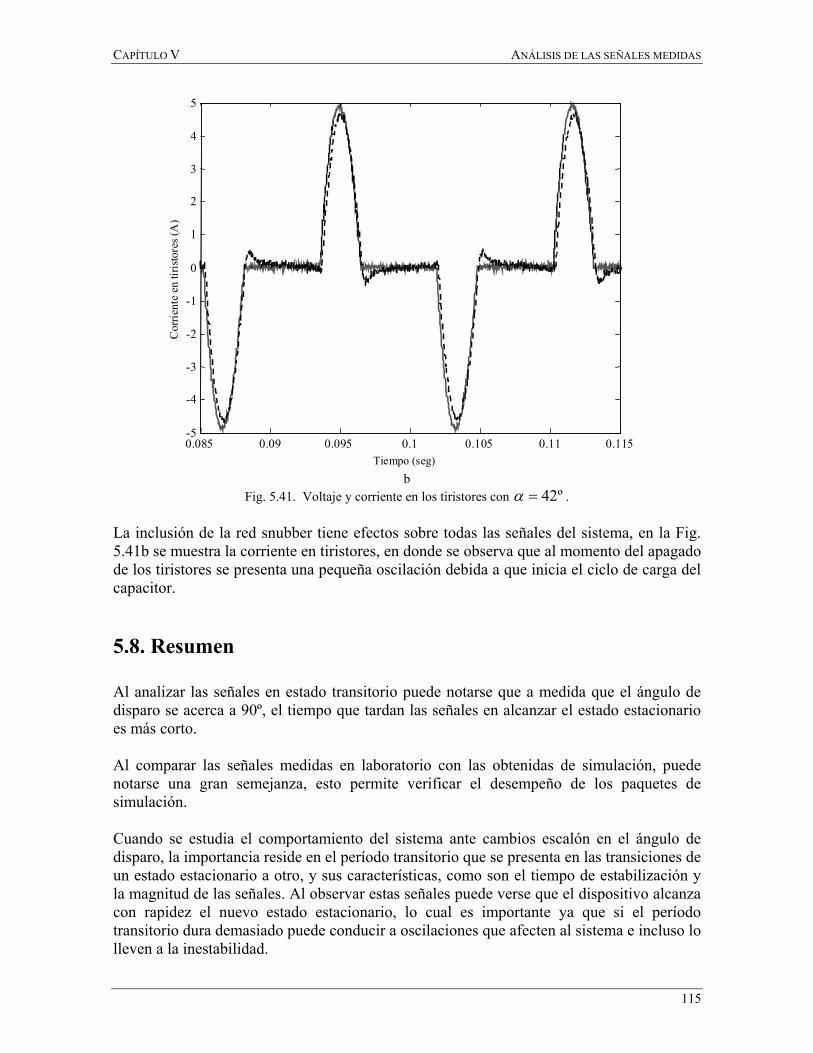
CAPÍTULO V ANÁLISIS DE LAS SEÑALES MEDIDAS
115
0.085 0.09 0.095 0.1 0.105 0.11 0.115-5
-4
-3
-2
-1
0
1
2
3
4
5
Tiempo (seg)
Cor
rien
te e
n ti
rist
ores
(A
)
bFig. 5.41. Voltaje y corriente en los tiristores con º42=α .
La inclusión de la red snubber tiene efectos sobre todas las señales del sistema, en la Fig.5.41b se muestra la corriente en tiristores, en donde se observa que al momento del apagadode los tiristores se presenta una pequeña oscilación debida a que inicia el ciclo de carga delcapacitor.
5.8. Resumen
Al analizar las señales en estado transitorio puede notarse que a medida que el ángulo dedisparo se acerca a 90º, el tiempo que tardan las señales en alcanzar el estado estacionarioes más corto.
Al comparar las señales medidas en laboratorio con las obtenidas de simulación, puedenotarse una gran semejanza, esto permite verificar el desempeño de los paquetes desimulación.
Cuando se estudia el comportamiento del sistema ante cambios escalón en el ángulo dedisparo, la importancia reside en el período transitorio que se presenta en las transiciones deun estado estacionario a otro, y sus características, como son el tiempo de estabilización yla magnitud de las señales. Al observar estas señales puede verse que el dispositivo alcanzacon rapidez el nuevo estado estacionario, lo cual es importante ya que si el períodotransitorio dura demasiado puede conducir a oscilaciones que afecten al sistema e incluso lolleven a la inestabilidad.
DISEÑO E IMPLEMENTACIÓN EN LABORATORIO DE UN DISPOSITIVO TCSC
116
El estudio del contenido armónico de las señales del dispositivo exhibe resultados quecoinciden con los presentados en la literatura, esto es importante ya que así se corrobora elbuen funcionamiento de los modelos matemáticos.
Al analizar los efectos que trae consigo la inclusión de la resistencia asociada al reactor deldispositivo, puede notarse que con un aumento en el valor de ésta resistencia disminuye eltiempo que tarda el sistema en alcanzar el estado estacionario, también puede observarseque se presenta una deformación en las señales del TCSC y por consiguiente un cambio enel contenido armónico, a diferencia de cuando no se incluye la resistencia..
Cuando se analizan las señales del TCSC al incluir la red snubber se observa unadisminución en el tiempo de crecimiento del voltaje en los tiristores, esto es necesario paramantener el control del circuito.
5.9. Bibliografía
[1] Scott G. Helbing, G. G. Karady, “Investigations of an advanced form of seriescompensation”, IEEE Transactions on Power Delivery, vol. 9, no. 2, pp. 939-945,Abril 1994.
[2] Narain G. Hingorani, Laszlo Gyugyi, Understanding FACTS Concepts andTechnology of Flexible AC Transmission Systems, primera edición, IEEE Press,1999.
[3] Ricardo J. Dávalos, Modelado y análisis dinámico del TCSC y su aplicación paramejorar el comportamiento electromecánico en redes eléctricas, CINVESTAV delIPN Unidad Guadalajara, 2000.
[4] E. V. Larsen, K. Clark, S. A. Miske, Jr., J. Urbanek, “Characteristics and ratingconsiderations of thyristor controlled series compensation”, IEEE Transactions onPower Delivery, vol. 9, no. 2, pp. 992-1000, Abril 1994.
117
CONCLUSIONES Y CONTRIBUCIONES
La finalidad de éste trabajo es presentar el diseño y construcción de un TCSC a nivellaboratorio.
Para llevar a cabo la implementación del TCSC y de cualquier otro dispositivo debentomarse en cuenta aspectos que se presentan en la operación real y que suelen despreciarseen modelos matemáticos.
Como primer paso en éste trabajo se hacen simulaciones como preámbulo a laimplementación real.
Cuando se incluye la resistencia asociada al reactor del dispositivo se observa que ésteelemento aumenta el amortiguamiento del sistema, ya que recorre el valor en el que sepresenta el ángulo de resonancia, aumentando así la región capacitiva del dispositivo, estopuede interpretarse como una ventaja, pero no hay que perder de vista el hecho de quetambién aumentan las pérdidas eléctricas.
Al insertar una red snubber que tiene como resultado cambios en las señales del sistema, sepresenta una disminución de la pendiente del voltaje en los tiristores al momento delapagado. Esto es importante puesto que debido a ello se puede evitar el falso disparo de loselementos semiconductores de potencia y así mantener el control del sistema.
Al analizar el TCSC dividido en módulos puede observarse un control más fino de lareactancia a frecuencia fundamental del dispositivo, esto es relevante en situaciones en lasque necesita regularse con precisión el flujo de potencia a través de una línea detransmisión. A medida que aumenta el número de módulos el cambio en la reactancia afrecuencia fundamental se vuelve más preciso.
Uno de los pasos necesarios para llevar a cabo la implementación es conocer los parámetrosde los elementos a utilizar, así como el diseño y construcción del circuito de disparo.
Se utiliza la prueba de respuesta a la frecuencia como medio para determinar parámetrospuesto que es una prueba sencilla y no requiere de instrumentación especializada, además elbuen ajuste que presentan las curvas medida y calculada indica una solución satisfactoria.
Como elemento principal en el circuito de disparo se utiliza un microcontrolador ya que sedesea tener un control preciso del ángulo de disparo; la programación es sencillacomparada con otros dispositivos como microprocesadores o procesadores digitales deseñales. Además, una ventaja que presenta el microcontrolador en tener periféricosintegrados como el comparador analógico.
CONCLUSIONES Y CONTRIBUCIONES
118
En la etapa de acondicionamiento de señal se usa un sensor de voltaje de efecto Hall quetiene la ventaja de aislar los circuitos de potencia y electrónicos para evitar posibles dañossi se presenta una contingencia en la etapa de potencia; lo mismo sucede con la etapa delactuador, en la que se utiliza un circuito optoacoplado con el mismo propósito.
Se implementa el dispositivo TCSC y se llevan a cabo una serie de pruebas para verificar sudesempeño.
Al analizar las señales en estado transitorio puede notarse que a medida que el ángulo dedisparo se acerca a 90º, el tiempo en que las señales alcanzan el estado estacionariodisminuye.
Cuando se comparan las señales medidas en laboratorio con las obtenidas de simulación,puede verse una gran semejanza, esto permite verificar el desempeño de los paquetes desimulación.
Cuando se estudia el comportamiento del sistema ante cambios escalón en el ángulo dedisparo es importante notar las transiciones de un estado estacionario a otro, así como suscaracterísticas, como son el tiempo de estabilización y la magnitud de las señales.
El estudio del contenido armónico de las señales del dispositivo exhibe resultadoscomparables a los presentados en la literatura, esto es de gran importancia ya que ayuda averificar modelos matemáticos.
Cuando se analizan los efectos que trae consigo la inclusión de la resistencia asociada alreactor del dispositivo, puede observarse que un incremento en el valor de éste parámetrodisminuye el tiempo que tarda el sistema en alcanzar el estado estacionario, también puedenotarse una deformación en las señales del TCSC y por consiguiente un cambio en elcontenido armónico.
Finalmente se lleva a cabo la aplicación de una red snubber al TCSC en donde puede versela disminución de la razón de cambio del voltaje en los tiristores con respecto al tiempo, asípueden evitarse falsos disparos y conservar el control del circuito.
A manera de conclusión general del trabajo, mediante las pruebas realizadas al TCSC secorroboraron los resultados presentados en la literatura, así como los obtenidos ensimulación.
119
TRABAJOS FUTUROS
Como trabajos futuros se proponen las siguientes opciones:
Implementación trifásica del TCSC, así como su inserción en una pequeña red depotencia para analizar su operación.
Aplicación de estrategias de control a fin de verificar el desempeño de las mismas encondiciones de operación reales.
Extensión a la compensación serie mediante el uso de fuentes convertidoras devoltaje.
Implementación de otros dispositivos FACTS.
120
PUBLICACIONES
Desde el inicio de éste trabajo de investigación a la fecha se han aceptado, presentado encongreso o revista y sujeto a revisión los siguientes artículos:
[1] R. J. Dávalos, J. M. Ramírez, P. Zúñiga H., “Estudio del TSCS mediante un modeloen espacio de estado”, Congreso Nacional de Instrumentación SOMI XV, ELE-12-2, Octubre 2000.
[2] R. J. Dávalos, J. M. Ramírez, P. Zúñiga H., “Análisis dinámico del TCSC”,Congreso Nacional de Instrumentación SOMI XV, ELE-12-3, Octubre 2000.
[3] J. M. Ramírez, I. Coronado, P. Zúñiga H., R. J. Dávalos, A. Valenzuela, I. Castillo,“Control de una red eléctrica de potencia”, Avance y Perspectiva, vol. 19, pp. 347-357, Noviembre-Diciembre de 2000.
[4] P. Zúñiga H., R. J. Dávalos, J. M. Ramírez, I. Coronado, “Análisis de corrientes yvoltajes en los dispositivos SVC y TCSC”, Congreso Bienal CIGRE México,CIGRE/2001_14-07, Junio de 2001.
[5] I. Coronado, J. M. Ramírez, P. Zúñiga H., “Comparación de metodologías para lainclusión del UPFC en estudios de estado estacionario”, Congreso Bienal CIGREMéxico, CIGRE/2001_14-04, Junio de 2001.
[6] P. Zúñiga H., J. M. Ramírez, I. Coronado, “Análisis armónico del TCR incluyendola resistencia asociada al reactor del dispositivo”, Decimocuarta Reunión de Veranode Potencia y Aplicaciones Industriales/2001, RVP-AI/2001-EDU-21, Julio de2001.
[7] P. Zúñiga H., J. M. Ramírez, I. Coronado, “Metodología para el cálculo de redessnubber en tiristores y su aplicación al TCSC”, Decimocuarta Reunión de Verano dePotencia y Aplicaciones Industriales/2001, RVP-AI/2001-EDU-22, Julio de 2001.
[8] I. Coronado, J. M. Ramírez, P. Zúñiga H., “Impacto del UPFC en los modos deoscilación electromecánicos en un SMBI”, Decimocuarta Reunión de Verano dePotencia y Aplicaciones Industriales/2001, RVP-AI/2001-SIS-12, Julio de 2001.
[9] I. Coronado, J. M. Ramírez, P. Zúñiga H., “Localización de un UPFC en un SEPpara amortiguar oscilaciones electromecánicas”, Decimocuarta Reunión de Veranode Potencia y Aplicaciones Industriales/2001, RVP-AI/2001-SIS-13, Julio de 2001.
PUBLICACIONES
121
[10] I. Coronado, P. Zúñiga H., J. M. Ramírez, “FACTS: soluciones modernas para laindustria eléctrica”, Avance y perspectiva, vol. 20, pp. 235-244, Julio-Agosto de2001.
[11] P. Zúñiga H., Juan M. Ramírez, “Design and implementation of a single-phaseTCSC”, Sometido a International Journal of Electrical Power and Energy Systems.
[12] P. Zúñiga H., Juan M. Ramírez, “Laboratory tests of a single-phase TCSC:Development and performance”, Sometido a IEEE Power Engineering Review.