tesis fileresumen en este trabajo, se realiza la implementación de un sistema de protección de una...
TRANSCRIPT

Diseño y experimentación de un sistemade protección para una turbina el�?ica
Title Diseño y experimentación de un sistema de protección para unaturbina el�?ica
Issue Date 2010-05-01
Publisher Instituto Tecnológico y de Estudios Superiores de Monterrey
Item Type Tesis de maestría
Downloaded 16/10/2018 08:12:39
Link to Item http://hdl.handle.net/11285/571012

INSTITUTO TECNOLÓGICO Y DE ESTUDIOS SUPERIORES DE MONTERREY
CAMPUS MONTERREY DIVISIÓN DE INGENIERÍA
PROGRAMA DE GRADUADOS EN INGENIERÍA
DISEÑO Y EXPERIMENTACIÓN DE U N SISTEMA DE PROTECCIÓN P A R A U N A TURBINA EÓLICA
P R E S E N T A D A C O M O REQUISITO PARCIAL PARA O B T E N E R EL GRADO ACADÉMICO DE : M A E S T R O EN CIENCIAS CON ESPECIALIDAD
E N INGENIERÍA ENERGÉTICA
POR: FRANCISCO SALOMÓN CASTRO C O T A
M O N T E R R E Y , N . L. M A Y O D E 2012
T E S I S

INSTITUTO TECNOLÓGICO Y DE ESTUDIOS SUPERIORES DE
MONTERREY
CAMPUS MONTERREY
D I V I S I Ó N DE INGENIERÍA
PROGRAMA DE GRADUADOS EN INGENIERÍA
DISEÑO Y EXPERIMENTACIÓN DE UN SISTEMA DE
PROTECCIÓN PARA UNA TURBINA EÓLICA
PRESENTADA COMO REQUISITO PARCIAL PARA OBTENER EL GRADO
MAESTRO EN CIENCIAS CON ESPECIALIDAD EN INGENIERÍA
TECNOLÓGICO DE MONTERREY
TESIS
ACADÉMICO DE
ENERGÉTICA
POR:
FRANCISCO SALOMÓN CASTRO COTA
MONTERREY NL. MAYO 2012

INSTITUTO TECNOLÓGICO Y DE ESTUDIOS SUPERIORES DE
MONTERREY
CAMPUS MONTERREY
DIVISIÓN DE INGENIERÍA
PROGRAMA DE GRADUADOS EN INGENIERÍA
Los miembros del comité de tesis recomendamos que el presente proyecto de tesis presentado por el
Ing. FRANCISCO SALOMÓN CASTRO COTA sea aceptado como requisito parcial para obtener el grado
académico de:
MAESTRO EN CIENCIAS CON ESPECIALIDAD EN
INGENIERÍA ENERGÉTICA
M A Y O 2012

Agradecimientos
Se agradece por el apoyo recibido durante la realización de este proyecto a:
A la cátedra de energía eólica, a su director el Dr. Oliver Probst por brindarme la oportunidad de
integrarme a su equipo de trabajo, sus integrantes: Francisco Herbert, Alejandro Romo, Arturo
Delgado, Roberto Chávez, Herbé Gómez y Oswaldo Monroy.
A la empresa Aeroluz, Jaime Martínez y Jorge Elizondo como propietarios y Arturo Delgado como
colaborador, por compartir su tiempo y dedicación para que este proyecto se hiciera posible.
Al Dr. Manuel Macías por sus comentarios acertados en la revisión de la tesis.
i

Resumen
En este trabajo, se realiza la implementación de un sistema de protección de una turbina eólica
pequeña a base de la variación de la carga mediante la colocación de una resistencia de disipación
conectada en paralelo variando su valor mediante la conmutación de un IGBT utilizando modulación
por ancho de pulso (PWM) a la carga principal, se utiliza como estrategia de control para la
variación del ancho de pulso, la lógica difusa.
Se describe a detalle el hardware propuesto para el sistema, los sistemas de protección debido a
las inductancias del generador y la resistencia de disipación. Se realiza el diseño de la programación
de la lógica difusa utilizando parámetros de control: proporcional, derivativo e integral.
Se prueba el prototipo diseñado en un módulo de emulación de viento empleando un generador de
3kW controlado mediante un interfaz utilizando en el paquete computacional Labview.
ii

Contenido
Agradecimientos i
Resumen ii
Listado de figuras vi
Capítulo I. Introducción 1
1.1 Antecedentes 1
1.2 Definición del problema 4
1.3 Justificación 4
1.4 Objetivos 5
1.5 Hipótesis 5
1.6 Método 5
1.7 Marco teórico 6
Capítulo II. Topología 22
2.1 Rectificador 23
2.2 IGBT 24
2.3 PWM 24
2.3:1 Generación de PWM 24
2.3.2 Implementación de la generación de la señal PWM 25
2.3.3 Módulo ADC 26
2.3.4 Módulo PWM 27
2.4 Driver lR2110 28
2.5 Instrumentación 29
2.5.1 Corriente eléctrica 29
2.5.2 Velocidad rotacional 31
2.5.3 Voltaje 35
2.5.4 Potencia 35
2.5.5 Velocidad típica (X) 36
2.5.6 Densidad del aire 36
2.6 Resistencia de disipación 37
2.7 Dispositivos de protección 41
2.7.1 Snubber 41
2.7.2 Capacitor de protección en ausencia de carga 47
2.8 Análisis de la carga 49
iii

Capítulo III. Sistema de control 52
3.1 Estrategia de regulación 52
3.1.1 Curva de operación 52
3.1.2 Zonas de operación 53
3.1.3 Consideraciones del regulador 57
3.2 Estrategia de control 58
3.2.1 Lógica difusa 58
3.2.2 Diseño del lazo de control 59
3.2.3 Funciones de membresía 59
3.2.4 Cálculo del error 60
3.2.5 Reglas base 61
3.2.6 Procedimiento difuso 62
Capítulo IV. Módulo de pruebas 67
4.1 Descripción 67
4.2 Sensores y transductores 70
4.2.1 Voltaje 71
4.2.2 Corriente 72
4.2.3 Torque electromecánico 72
4.3 Interfaz con el usuario 78
4.4 Emulación de viento 83
4.5 Modelo simplificado para generador eléctrico 88
4.6 Modelo con rectificador 91
Capítulo V Pruebas y resultados 99
5.1 Módulo de pruebas 99
5.1.1 Comprobación de las variables eléctricas 99
5.1.2 Pruebas en estado estable con aerodinámica 101
5.1.3 Evaluación de transitorios 103
5.1.4 Velocidades de viento variables 104
5.2 Sistema de protección 107
5.2.1 Sintonización 109
5.2.2 Velocidad de respuesta 114
5.2.3 Distribución triángulos de salida 116
5.3 Series de viento 119
Capítulo VI. Conclusiones y trabajos futuros 124
6.1 Conclusiones generales 124
6.2 Problemas presentados durante el desarrollo del proyecto 125
6.3 Aportaciones 126
iv

6.4 Trabajos futuros 126
Bibliografía 128
Anexo A 131
Anexo B 133
Anexo C 134
Anexo D 136
Anexo E 137
v

Listado de figuras. > Figura 1.1. Efectos de la fuerza "Lift" al aplicar regulación por "stall activo" y "pitch". > Figura 1.2. Sistema de plegado de la turbina eólica (Furling), horizontal y vertical. > Figura 1.3. Señales de voltaje y corriente de rectificación. > Figura 1.4 Símbolo del transistor IGBT, compuerta G, colector C y emisor E. > Figura 1.5 Sección transversal de la estructura de silicio de un IGBT. > Figura 1.6. Señal modulación por ancho de pulso (PWM). > Figura 1.7. Trayectorias de operación en la zona segura (SOA) del IGBT. > Figura 1.8. Zona de operación segura (SOA) del IGBT. > Figura 1.9. Evaluación costo-precisión para un sistema de control. > Figura 1.10. Comparación de control clásico PID y control por lógica difusa. > Figura 1.11.Tubo de corriente del campo fluido viento incidente > Figura 1.12. Modelo físico para calcular la potencia teórica del viento que se extrae con un
aerogenerador. > Figura 1.13. Mapeo de la turbina de 3kW representando las diferentes zonas de operación. > Figura 1.14. Curvas de potencia aerodinámica y potencia mecánica estableciendo los puntos
óptimos. > Figura 1.15. Curva simplificada óptima para la regulación de la turbina de 3kW. > Figura 2.1. Esquemático general de regulación. > Figura 2.2. Circuito equivalente para un 0% de ciclo de trabajo. > Figura 2.3. Circuito equivalente para un 100% de ciclo de trabajo. > Figura 2.4. Esquemático para la generación de PWM. > Figura 2.5. Diagrama de conexión IR2110. > Figura 2.6. Dispositivo físico y diagrama de conexión para medir corriente. > Figura 2.7. Calibración del sensor de corriente. > Figura 2.8. Diagrama de conexión del detector de cruces por cero. > Figura 2.9. Señales de detector de cruces por cero. > Figura 2.10. Diagrama de conexión convertidor frecuencia-voltaje. > Figura 2.11. Calibración del sensor de velocidad rotacional. > Figura 2.12. Circuito equivalente con resistencia de disipación en lado de CA. > Figura 2.13. Circuito equivalente con resistencia de disipación en lado de CD. > Figura 2.14. Comparación de señales de corriente de línea. > Figura 2.15. Comparación de la amplitud de la fundamental de la corriente de línea. > Figura 2.16. Circuito snubber de apagado > Figura 2.17. Señal resultante después de la implementación del snubber. > Figura 2.18. Señal de voltaje en la resistencia de disipación. > Figura 2.19. Resistencias de disipación utilizadas para la regulación. > Figura 2.20. Circuito equivalente considerando inductancia parásita. > Figura 2.21. Circuito equivalente y señal de voltaje de colector-emisor del IGBT afectada por la
inductancia parásita. > Figura 2.22. Señal de voltaje colector-emisor del IGBT con diodo de protección. > Figura 2.23. Señal de voltaje de corriente directa en ausencia de carga. > Figura 2.24. Señal de voltaje de corriente directa en ausencia de carga con capacitor de protección. > Figura 2.25. Circuito equivalente con el regulador y los sistemas de protección. > Figura 2.26. Curva de potencia programada en el inversor. > Figura 3.1. Curva óptima de operación de velocidad rotacional vs. Corriente de línea. > Figura 3.2. Zonas de operación de la curva óptima de operación. > Figura 3.3. Diagrama a bloques del sistema de control utilizando lógica difusa. > Figura 3.4. Distribución de las funciones de membresía. > Figura 3.5. Triángulos de membresía, distribución del error y derivada del error. > Figura 3.6. Representación de los grados de pertenencia de los triángulos de entrada.
vi

> Figura 3.7. Ejemplo para la obtención la comparación de los triángulos de salida mediante el mínimo.
> Figura 3.8. Representación de la inferencia de los triángulos de salida para obtener una conclusión. > Figura 3.9. Representación de la combinación de la inferencia para obtener una conclusión final. > Figura 3.10. Defusificación de los triángulos de salida para obtener una conclusión exacta. > Figura 4.1. Partes que integran el módulo de pruebas. > Figura 4.2. Imagen del motor utilizado para la emulación de viento. > Figura 4.3. Imagen del variador de frecuencia utilizado con su respectivo centro de carga. > Figura 4.4. Imagen del generador eléctrico fabricado en el CITE. > Figura 4.5. Partes que integran la instrumentación del módulo de pruebas. > Figura 4.6. Módulo de pruebas y palanca fija para la medición del torque electromecánico. > Figura 4.7. Colocación de galgas en el eje del estator para medir torsión. > Figura 4.8. Diagrama de conexión de un puente de Wheatstone. > Figura 4.9. Implementación del circuito amplificador para la señal de torque electromecánico. > Figura 4.10. Diagrama de conexión del amplificador de señal de torque electromecánico. > Figura 4.11. Caracterización del taquímetro para su calibración. > Figura 4.12. Tarjeta de adquisición de datos DAQ NI USB-6009. > Figura 4.13. Creación de canales virtuales para la obtención de datos mediante la DAQ. > Figura 4.14. Interfaz con el usuario de las diferentes señales de las variables medidas. > Figura 4.15. Control de velocidad rotacional del generador. > Figura 4.16. Control de la emulación de viento del módulo de pruebas. > Figura 4.17. Interfaz de la etapa aerodinámica, velocidad rotacional con velocidad de viento. > Figura 4.18. Comparación de torques (aerodinámico con electromecánico) > Figura 4.19. Curva característica Cp vs. Lambda. > Figura 4.20. Curva característica de Kp vs. 1/Lambda. > Figura 4.21. Coeficientes de los polinomios de la curva Kp vs. 1/lambda. > Figura 4.22. Relación entre el torque electromecánico y la corriente de línea. > Figura 4.23. Relación del torque electromecánico con la velocidad rotacional en vacío. > Figura 4.24. Modelo del rectificador trifásico conectado al generador. > Figura 4.25. Señales de voltaje trifásico en CA y señal rectificada en CD. > Figura 4.26. Corriente a través del diodo en función del voltaje que consume. > Figura 4.27. Señales de corriente alterna y corriente directa. > Figura 4.28. Datos medidos de voltaje del diodo (VD) contra corriente de línea (la). > Figura 4.29. Voltaje en el diodo V D contra velocidad rotacional a diferentes cargas. > Figura 4.30. Relación de corriente de línea l a con corriente rectificada l C D
> Figura 4.31. Relación de voltaje de línea a neutro V L N y voltaje rectificado V C D
> Figura 5.1. Comparación del torque electromecánico medido con el modelo simplificado. > Figura 5.2. Comparación de la corriente de línea medida con el modelo simplificado. > Figura 5.3. Comparación del voltaje de línea neutro medido con el modelo simplificado. > Figura 5.4. Comparación de las variables: velocidad rotacional, torque electromecánico y corriente
de línea medido con el modelo simplificado agregando el algoritmo aerodinámico. > Figura 5.5. Comparación de las variables: velocidad rotacional, torque electromecánico y corriente
de línea medido con el modelo simplificado agregando el algoritmo aerodinámico en transitorios. > Figura 5.6. Comparación de las variables: velocidad de viento, velocidad rotacional, torque
electromecánico y corriente de línea medido con el modelo simplificado agregando el algoritmo aerodinámico en viento variable (sinusoidal 90Hz.).
> Figura 5.7. Comparación de las variables: velocidad de viento, velocidad rotacional, torque electromecánico y corriente de línea medido con el modelo simplificado agregando el algoritmo aerodinámico en viento variable (sinusoidal 45Hz.).
> Figura 5.8.Curvas de operación de la turbina de 3kW en diferentes cargas resistivas en la correlación velocidad rotacional contra corriente de línea.
> Figura 5.9.Comportamiento del sistema utilizando solamente una entrada proporcional.
vii

> Figura 5.10.Comportamiento del sistema utilizando una entrada proporcional y una entrada derivativa.
> Figura 5.11. Comportamiento del sistema utilizando solamente una entrada proporcional, derivativa e integral.
> Figura 5.12. Configuración de los triángulos de membresía de las entradas: error y derivada del error.
> Figura 5.13. Estados de operación en las curvas Kp y Cp y correlación de energía cinética contra Cp. > Figura 5.14. Respuesta al escalón de una variación de velocidad de viento de 6m/s a 12m/s a una
frecuencia de muestreo de 5Hz. > Figura 5.15. Respuesta al escalón de una variación de velocidad de viento de 6m/s a 12m/s a una
frecuencia de muestreo de 300Hz. > Figura 5.16. Variación de la ganancia para la distribución de los triángulos de salida, incremento de
ciclo de trabajo. > Figura 5.17. Comparación de la operación de la turbina al cambio de frecuencia de muestreo y el
aumento de ganancia a los triángulos de salida. > Figura 5.18. Respuesta a la variación de velocidad de viento en escalones de lm/s. > Figura 5.19. Respuesta del sistema a la introducción de una serie de viento de 7m/s. > Figura 5.20. Respuesta del sistema a la introducción de una serie de viento de 9m/s. > Figura 5.21. Respuesta del sistema a la introducción de una serie de viento de 19m/s. > Figura 5.22. Respuesta del sistema a la introducción de una ráfaga de viento a 15m/s. > Figura 5.23. Respuesta del sistema a la introducción de una ráfaga de viento a 20m/s. > Figura 5.24. Respuesta del sistema a la introducción de una ráfaga invertida de viento a 6m/s.
Listado de tablas > Tabla 2.1. Configuración del módulo ADC. > Tabla 2.2. Calibración sensor de corriente > Tabla 2.3. Características del IGBT. > Tabla 3.1. Reglas base que representan a los conjuntos difusos. > Tabla 4.1. Características del motorreductor. > Tabla 4.2. Características del variador de frecuencia. > Tabla 4.3. Características del generador eléctrico. > Tabla 4.4. Transductores utilizados para la instrumentación del módulo de pruebas. > Tabla 4.5. Caracterización del sensor de torque electromecánico. > Tabla 5.1. Efectos de los parámetros de control, ganancia proporcional (kp), ganancia integral (k¡)
ganancia derivativa (kd). > Tabla 5.2. Valores de cada una de las variables de los estados de operación.
viii

Capítulo I. Introducción
1.1 Antecedentes
En los últimos 20 años, los recursos de energía renovable han llamando la atención
considerablemente, esto es debido al impacto ambiental de los combustibles fósiles. Con el paso
del tiempo, los avances tecnológicos, la reducción de costos y los incentivos gubernamentales los
han hecho más competitivos en el mercado.
Una gran variedad de tecnología de energía eólica se desarrollado en las pasadas dos décadas, en
las cuales se ha trabajado en la eficiencia y en la reducción de costos en la producción de energía
eléctrica. La industria eólica a pequeña escala ha crecido considerablemente. Este tipo de turbinas
se encuentran por debajo de los 300kW pueden ser instaladas en casas, granjas, rancherías y
lugares donde la distribución de la energía eléctrica no alcanza. [1]
El diseño aerodinámico de las aspas de una turbina eólica se realiza tomando en cuenta la
velocidad de viento promedio del lugar en el cual se instala, alrededor de unos 15m/s, resultaría
poco económico diseñarlas para velocidades de viento improbables. Esto genera una trayectoria
óptima de operación en donde la potencia generada será la máxima. Los sistemas de control de las
turbinas eólicas cuentan con la función de mantener a la turbina en su máxima extracción de
potencia debido a la velocidad de viento que llega a las aspas en ese momento, esto ayuda a que
la turbina no trabaje en zonas peligrosas de operación.
El diseño aerodinámico de las aspas de una turbina eólica tiene una influencia significativa sobre el
monto de energía capturada a partir del viento. Este diseño debe considerar el medio para limitar
la potencia y la velocidad rotacional del rotor de la turbina para velocidades de viento por encima
del valor promedio para mantener los esfuerzos de los componentes mecánicos (aspas,
generador, eje, etc.) y la potencia de salida del generador bajo un margen seguro.
Los sistemas de control calificados hasta el día de hoy para regular la velocidad rotacional de una
turbina eólica se encuentran ligados directamente en el diseño aerodinámico de perfiles de aspas
mediante un fenómeno denominado "stalí". [2]
Regulación por "Stall" pasivo.
En caso normal, el aspa gira debido al viento porque el aire fluye a lo largo de la superficie que no
encara al viento y se mueve más rápido que en la superficie que se encuentra contra el viento.
Esto crea una fuerza de "Lift" que empuja el aspa para rotar. El ángulo de ataque del aspa juega un
1

papel importante para determinar la cantidad de fuerza y torque generado por la turbina. Esto es
un medio efectivo de controlar la cantidad de potencia capturada. Cuando la velocidad de viento
se encuentra por debajo del valor de diseño, el aspa de la turbina con el ángulo de ataque
diseñado puede capturar la máxima potencia posible del viento. Cuando la velocidad de viento
supera este valor, los vientos elevados pueden causar turbulencia en la superficie del lado
posterior del aspa. Como resultado, la fuerza que se produce se reduce y eventualmente
desaparece a pesar del incremento de la velocidad del viento, frenando la velocidad rotacional de
la turbina. Para realizar esto, son necesarios diseños aerodinámicos muy complejos, lo cual hace
necesario un control con mayor robustez y de fácil implementación.
La estrategia mencionada en el párrafo anterior se le llama control por "stall pasivo", ya que no
cuenta con un actuador para obtener el funcionamiento deseado.
Regulación por "Stall activo".
Por otro lado, para realizar un control que pueda mantener a la turbina en zonas de operación
deseadas se utiliza el control por "stall activo". En este tipo de control, el fenómeno de "stall" se
provoca no sólo a velocidades de viento altas, sino también incrementando el ángulo de ataque
del aspa, esto se logra mediante aspas ajustables por medio de mecanismos especializados.
Cuando la velocidad de viento excede el límite, las aspas son controladas para girar en contra del
viento, reduciendo así la captura de potencia. De tal manera que la velocidad de la turbina se
mantiene a un valor establecido para su protección ajustando el ángulo de ataque del aspa.
Figura 1.1. Efectos de la fuerza "Lift" al aplicar regulación por "stall activo" y "pitch".
2

Cuando el aspa gira completamente en contra del viento (como se muestra en el tercer perfil) de
la figura 1.1, el aspa pierde toda interacción con el viento, esto causa que el rotor se frene. Esta
operación se utiliza para evitar daños a la turbina de velocidades de viento fuertes. Este tipo de
control se encuentra actualmente disponible comercialmente.
Regulación por freno aerodinámico "pitch".
De una manera similar al control por "stall activo", existe el control por "pitch", la diferencia de
éste último reduce el ángulo de ataque en lugar de aumentarlo, esto se muestra en el primer
perfil de la figura 1.1. Cuando el viento se encuentra por encima del límite establecido el ángulo
de ataque del aspa se reduce, causando una reducción en la fuerza de "Lift" hasta alinearlo con el
viento, lo cual no produce fuerza de "Lift". La turbina de viento entonces se frena.
Regulación por orientación de rotor (Furling).
Es un sistema pasivo en el cual la turbina gira hacia el lado contrario de la dirección del viento
cuando su velocidad supera los límites permitidos por la turbina.
En las turbinas de aspas fijas existen procedimientos que consiguen la regulación del giro del rotor,
haciendo que el plano del mismo gire de manera que la superficie que ofrece al viento disminuya;
esto se consigue con una conexión que articula el eje del rotor con el eje de transmisión o
colocando una excéntrica que haga que la fuerza de empuje del viento produzca un par que
desoriente el plano del rotor. En estas situaciones la hélice deja de estar en posición frontal a la
dirección del viento.
Este tipo de regulación puede ser el plegado de una manera horizontal o vertical, como se muestra
en la figura 1.2.
Figura 1.2. Sistema de plegado de la turbina eólica (Furling), horizontal y vertical.
3

Control electrónico de la potencia.
Se puede variar la velocidad del rotor, en un pequeño margen, mediante resistencias rotóricas
variables, controladas por un microprocesador y accionadas por interruptores estáticos; de esta
forma se consigue variar el deslizamiento del generador, y con ello la velocidad del rotor.
Se ve entonces la necesidad de trazar un límite máximo de la velocidad a la que gira la turbina
debido a que las aspas pueden dañarse o destruirse a muy altas velocidades por los esfuerzos
mecánicos que se generan en estos puntos de operación. De la misma manera, el generador
eléctrico puede sufrir daños térmicos es por ello la importancia de la protección de la turbina.
1.2 Definición del problema
La empresa Aeroluz dedicada al diseño de turbinas eólicas a pequeña escala cuenta con la
necesidad de crear un sistema de protección que disminuya complejidad, costo y mantenimiento,
además, que sea genérico para el escalamiento de potencia de las turbinas que manejan.
En la actualidad existen diferentes sistemas de protección de las turbinas contra velocidades de
viento elevadas, cada una con sus ventajas y desventajas.
La propuesta para el presente proyecto es realizar una experimentación de un sistema electrónico
de protección de una turbina eólica pequeña para evitar que trabaje en zonas de operación
inseguras y que opere en potencia constante después de una velocidad de viento de diseño.
1.3 Justificación
Esto contribuye a la protección de las turbinas de 3kW y WkW que se fabrican en la empresa
Aeroluz. Se utiliza en conjunto con otras protecciones las cuales deben operar de una manera
sincronizada agregando inteligencia al sistema en casos de emergencia como lo son: velocidades
de viento extremosos, desconexión accidental de la carga generando desbocamiento de la turbina,
efectos transitorios no considerados en el diseño aerodinámico, o más en general, incertidumbres
del sistema Eolo-eléctrico, entre otras.
4

1.4 Objetivos
Principal.
Desarrollar un sistema de protección electrónico que proteja a la turbina de zonas de operación
inseguras, que cuente con la inteligencia de funcionar en armonía con otros sistemas de
protección, además de que sea funcional para cualquier tipo de carga.
Específicos.
Realizar pruebas del prototipo en laboratorio utilizando un módulo de pruebas para el sistema de
regulación propuesto para ver su funcionalidad.
Evitar que la turbina se salga de las zonas de operación deseadas, independientemente del control
que ejerza la carga eléctrica sobre la operación de la turbina como lo hacen los inversores.
Realizar la simulación y la implementación del sistema propuesto para realizar el control de la
turbina primeramente para un módulo de pruebas con emulación de viento para generadores y
posteriormente el mismo proceso para pruebas de campo de un aerogenerador de 3kW y WkW.
Realizar pruebas de regulación de la velocidad de la turbina a vientos relativamente altos donde
existen potencialmente riesgos de daño tanto mecánicos como térmicos de la misma.
1.5 Hipótesis
La implementación de un regulador de velocidad rotacional de una turbina eólica de manera
electrónica, genera una buena protección en conjunto con otros sistemas de protección en casos
de emergencia de una manera simple, de bajo costo y mucho menor mantenimiento que cualquier
otro sistema de protección, brindando inteligencia a la protección general de la turbina.
1.6 Método
La implementación del prototipo de regulación se realiza en el laboratorio del Centro de
Investigación de Tecnología Eólica (CITE), el trabajo se realiza en conjunto con la empresa Aeroluz
en el diseño de turbinas eólicas.
5

La metodología para la realización del presente proyecto es la siguiente:
• Se instala un módulo de pruebas para generadores eléctricos.
• Se realiza la instrumentación requerida para el monitoreo de las diferentes variables de la
turbina eólica en el módulo de pruebas.
• Se crea un sistema de emulación de viento en el módulo de pruebas con su respectivo
interfaz con el usuario mediante el programa computacional Labview, de tal manera que
se puedan introducir series de viento reales al generador y observar su comportamiento.
• Simulación del sistema de regulación de la velocidad rotacional mediante un modelo
utilizando el programa computacional Matlab.
• Implementación de la etapa de electrónica de potencia para corroborar los resultados
obtenidos de la simulación.
• Establecer la estrategia de control para diseñar un algoritmo que cumpla con los objetivos
del sistema.
• Implementación del algoritmo mediante sistemas embebidos de electrónica digital.
1.7 Marco teórico
Generadores eléctricos
El generador es el elemento que se encarga de convertir la energía mecánica de la flecha en
energía eléctrica. En general existen en el mercado una gran variedad de generadores para
diversas aplicaciones, lo que nos podría hacer pensar que en el diseño de un aerogenerador este
debería ser una de las partes en las que menos deberíamos preocuparnos, sin embargo es difícil
adaptar un generador común a la aplicación eólica porque se presentan algunas peculiaridades
como baja velocidad rotacional en la flecha y además variable debido a que el viento se comporta
estocásticamente, el acceso para mantenimiento es difícil y resulta costoso, el peso del generador
también es muy importante para dimensionar las estructuras y mecanismos.
Los generadores se clasifican como síncronos, asincronos o de inducción y corriente continua,
están compuestos por un rotor y un estator, comúnmente el rotor se encuentra en la parte
interna pero no necesariamente debe ser siempre así. El rotor y el estator interactúan
magnéticamente y la o las fuentes magnéticas pueden ser inducidas a través de imanes
permanentes o electroimanes.
Generadores síncronos
Los generadores síncronos se caracterizan por su composición, la parte que induce, formada de
imanes permanentes o electroimanes y la parte inducida formada por un acomodo de bobinas. El
6

movimiento relativo entre estas dos partes se conoce como campo magnético rotatorio que es
quien induce una corriente en las bobinas.
Es conveniente mencionar que los generadores síncronos con excitación separada requieren de
escobillas y anillos deslizantes para los electroimanes mientras que los de imanes permanentes no.
El acceso a los generadores ya instalados es difícil, por eso los generadores con imanes
permanentes ganan terreno ya que no hay que estar reemplazando piezas continuamente. Los
generadores síncronos de IP con acoplamiento directo los clasificamos en tres, flujo axial, radial y
transversal, aunque entre ellos también se pueden clasificar por tener o no núcleo o dentado el
estator.
Conversión AC/DC
El rectificador convierte la señal de CA trifásica proveniente del generador a una señal
unidireccional. En un rectificador trifásico se obtienen rizos de seis pulsos a la salida, cada uno de
los diodos conduce 120°. La secuencia de conducción para los diodos es D1-D2, D3-D2, D3-D4, D5-
D6 y D1-D6. El par de diodos conectados entre el par de líneas de alimentación que tienen el
mayor voltaje instantáneo de línea a línea es el que conduce.
Si V m es el valor pico del voltaje de fase, los voltajes instantáneos de fase se pueden describir
como:
Ya que el voltaje de línea a línea está 30° adelantado al voltaje de fase, los voltajes instantáneos de
línea a línea se pueden describir como:
[1.1]
[1.2]
El voltaje promedio de salida se determina como:
[1.3]
7

El voltaje rms de salida es:
Comportamiento de dispositivos semiconductores
Los componentes básicos para el funcionamiento de un convertidor electrónico son los
interruptores electrónicos de estado sólido. Son similares a los dispositivos empleados en la
electrónica analógica y la digital, sin embargo estos componentes están diseñados para manejar
8
Si la carga es puramente resistiva, la corriente pico a través de un diodo es
valor rms de la corriente en cada diodo es
Para realizar la implementación del rectificador se utilizaron diodos de potencia, que soporten más
de 300 V, 10 A debido a las características del generador. [3]

grandes corrientes, altos voltajes, operar con bajas pérdidas de juntura y adicionalmente toleran
grandes cambios de voltaje y corriente (dv/dt y di/dt).
Por lo general se emplean frecuencias de conmutación entre 10kHz y 20kHz. Para reducir el nivel
de ruido percibido por la acción de conmutación. El oído humano es capaz de percibir sonidos con
frecuencias de entre 20 y 20kHz.
La mayoría de los componentes electrónicos de estado sólido son empleados en forma tal que su
comportamiento sea similar al de un interruptor mecánico. Idealmente cuando está abierto un
interruptor mecánico, no conduce corriente y puede tolerar un voltaje infinito entre sus
terminales, cuando está cerrado no tiene caídas de voltaje entre sus terminales y la corriente que
puede conducir es función de la carga que tiene conectada. No disipa potencia cuando está
cerrado o abierto.
Para el caso de los componentes de estado sólido, se tiene que considerar que en la realidad
operan con pérdidas de conducción por caída de voltaje y tienen un límite máximo de corriente
que pueden tolerar estando "cerrados". Cuando están "abiertos" no pueden tolerar un voltaje
infinito entre sus terminales y tienen pequeñas corrientes de fuga. Adicionalmente son muy
sensibles al tipo de carga que alimentan y por lo general deben ser operados en conjunto con
circuitos snubber.
Elementos de conmutación
El elemento más importante en la constitución del puente inversor es el interruptor, el cual, como
ya se mencionó anteriormente realizan la conmutación para obtener la señal de salida específica.
Estos interruptores son en general transistores de potencia, los cuales tienen características
controladas de encendido y apagado, los cuales operan en las regiones de corte y saturación.
Dentro de los transistores utilizados para la construcción de inversores se encuentran:
• BJT
• MOSFET
• IGBT
• GTO
• SCR
El transistor utilizado en el proyecto es el IGBT (transistores bipolares de compuerta aislada), en la
figura 2.7 se muestra el símbolo del IGBT, sus terminales son compuerta, colector y emisor. En un
IGBT se combinan las ventajas de los BJT y de los MOSFET. Un IGBT tiene alta impedancia de
entrada,' como los MOSFET, y pocas pérdidas por conducción en estado activo, como los BJT. Sin
embargo, no tiene problema de segunda avalancha, como los BJT. Por diseño y la estructura de
microcircuito, se controla la resistencia equivalente de drenaje a fuente, RDS, para que se
comporte como la de un BJT.
9

Figura 1.4 Símbolo del transistor IGBT, compuerta G, colector C y emisor E.
El IGBT se encuentra en el rango medio de potencia y frecuencia de conmutación, en comparación
con los tres tipos más comunes utilizados para el control de motores de inducción (Tiristores,
MOSFET y GTO), lo que provee un sistema flexible y robusto al mismo tiempo, ya que pueden
realizarse modificaciones en cuanto a frecuencia de conmutación y potencia de trabajo.
La sección transversal de la estructura de silicio de un IGBT es idéntica a la de un MOSFET, a
excepción del substrato P+. Sin embargo el rendimiento de un IGBT se parece más al de un BJT que
al de un MOSFET, figura 2.8. Un IGBT se hace con cuatro capas alternas PNPN; es un dispositivo
controlado por voltaje, es decir, se enciende solamente aplicándole un voltaje positivo a la
compuerta, formando un canal de portadores n, y se apaga eliminando el voltaje en la compuerta,
desapareciendo el canal. Tiene menores pérdidas de conmutación y de conducción, y al mismo
tiempo comparte muchas de las propiedades adecuadas de los MOSFET de potencia, como la
facilidad de excitación de compuerta, corriente pico, buenas características y robustez. Un IGBT es
más rápido que un BJT. Sin embargo, la velocidad de conmutación de los IGBT es menor que la de
los MOSFET.
La especificación de corriente de un IGBT puede llegar hasta 1200V y 400A, y la frecuencia de
conmutación puede ser hasta de 20kHz.
Figura 1.5 Sección transversal de la estructura de silicio de un IGBT.
10

Los IGBT están encontrando aplicaciones crecientes en potencias intermedias, a medida que los
límites superiores de las especificaciones del IGBT aumentan, están encontrando aplicaciones
donde se usan los BJT y MOSFET convencionales funcionando como interruptores principalmente
y los están sustituyendo.
Generación de PWM
La modulación por ancho de pulsos (también conocida como PWM, siglas en inglés de pulse-width
modulation) de una señal o fuente de energía es una técnica en la que se modifica el ciclo de
trabajo de una señal periódica. El ciclo de trabajo de una señal periódica es el ancho relativo de su
parte positiva en relación con el período.
[1.6]
D es el ciclo de trabajo
T es el tiempo en que la función es positiva (ancho del pulso)
Tes el período de la función
Figura 1.6. Señal modulación por ancho de pulso (PWM).
El tiempo donde el valor de la amplitud de voltaje es cero, se le denomina t o f f , de lo contrario, al
tiempo en el cual el valor de la amplitud de voltaje es 15V se le llama t o n .
Microcontrolador
Microcontroladores como los PIC (Peripherial Interphase Controllers) del fabricante Microchip, son
apropiados para uso en pequeños convertidores electrónicos, pero son rápidamente sobrepasados
por las necesidades de cálculo y memoria de los algoritmos de control y modulación, sin embargo
los PIC son prácticos para ser usados en la interfaz de comunicación y de control con el usuario.
11

Circuitos Amortiguadores (Snubbers)
La función de un circuito snubber es reducir los esfuerzos eléctricos que se aplican a un dispositivo
durante la conmutación por un convertidor de potencia a niveles dentro de las especificaciones
eléctricas del dispositivo. Básicamente podemos considerarlos como un conjunto de componentes
(pasivos y/o activos) que se incorporan al circuito de potencia para reducir en el dispositivo
semiconductor el estrés eléctrico durante las conmutaciones y asegurar un régimen de trabajo
seguro.
La función del snubber es absorber la energía que se genera durante el proceso de conmutación
controlando parámetros tales como la evolución de la tensión o corriente en el interruptor, o bien
limitando los valores máximos de tensión que ha de soportar. Se incrementa de esta forma la
fiabilidad de los semiconductores al reducirse la degradación que sufren debido a los aumentos de
potencia disipada y de la temperatura de la unión.
Necesidad de snubber en transistores.
Los circuitos snubber sirven para proteger a los transistores mediante la mejora de su trayectoria
de conmutación. Existen tres tipos básicos de snubber:
1. Snubberde apagado
2. Snubber de encendido
3. Snubber de sobretensión
Los semiconductores tienen una zona de operación segura (Safe Operation Area o SOA) que se
especifica en la hoja de datos. Esta zona de operación segura limita la corriente y voltaje
instantáneos que pueden existir en el dispositivo al mismo tiempo. Durante los transitorios de
encendido y apagado es posible que el dispositivo salga de la zona de operación segura si no se
utiliza una protección adecuada.
Figura 1.7. Trayectorias de operación en la zona segura (SOA) del IGBT.
12

El SOA para el IGBT utilizado es la siguiente:
Figura 1.8. Zona de operación segura (SOA) del IGBT.
Lógica difusa
Después de ser vista como una tecnología controversial por dos décadas, finalmente la lógica
difusa ha sido aceptada como una tecnología emergente a finales de los 80. Esto se debe
principalmente a una amplia gama de aplicaciones de éxito que van desde productos de consumo,
control de procesos industriales hasta aplicaciones automotrices.
En un sentido estricto, la lógica difusa se refiere a un sistema de lógica que generaliza para un
clásico: dos valores lógicos para el razonamiento bajo incertidumbre, en un sentido burdo, es una
tecnología que utiliza conjuntos difusos, que son las clases con enfoques delimitados.
La representación del concepto se asemeja a la interpretación humana para establecer una
transición gradual entre un set y otro. Una membresía debe tener un comportamiento de manera
gradual esta es la esencia de la lógica.
La lógica difusa se utiliza en distintas ramas como control difuso, probabilidad difusa, análisis de
decisiones difusas, redes neuronales, topología difusa, etc., en todas estas ramas el concepto del
convencional blanco-negro, es generalizado por medio de "cuestión de grado". Realizando esto se
cumplen dos reglas: 1. Se describe el conocimiento humano para utilizar conceptos vagos, 2.
Habilidad para desarrollar soluciones efectivas a problemas del mundo real.
La lógica difusa se motivó mediante dos objetivos. El primero, tiene como objetivo aliviar
dificultades en desarrollo y analizar sistemas complejos encontrados por herramientas
matemáticas convencionales. El segundo es motivado mediante la observación del razonamiento
13

humano, puede utilizar conceptos y conocimientos que no son perfectamente definidos
(conceptos vagos). [4]
3.4.2 ¿Por qué usar lógica difusa para control?
Una respuesta común para esta pregunta es que la lógica difusa puede utilizarse para controlar un
proceso (una planta) que es demasiado no lineal o muy poco entendida para utilizar diseños de
control convencional. Además la lógica difusa provee a los ingenieros de control a implementar
fácilmente estrategias de control utilizadas por operadores humanos. Lo cual cumple con los dos
objetivos de los sistemas de lógica difusa que son resolver sistemas muy complejos y establecer el
conocimiento humano para la toma de decisiones.
Generalmente es necesario pagar un costo muy elevado para obtener alta precisión en un sistema
de control, esto quiere decir, que el costo de un modelo altamente preciso conlleva a un análisis
de un sistema demasiado complejo, de tal manera que se puede realizar una compensación o un
balance entre el costo y la utilidad para lograr controlarlo. En la gráfica siguiente se puede
observar que el costo se eleva conforme el sistema se hace más preciso, sin embargo, al trabajar
en la zona sombreada se puede obtener un sistema medianamente costoso cobrando un poco de
precisión y como resultado obtener la misma utilidad para que el sistema funcione.
Figura 1.9. Evaluación costo-precisión para un sistema de control.
En la variable del costo se involucra el tiempo dedicado para la implementación del controlador,
este es una representación muy burda pero a final de cuentas cierta para tomarla en cuenta en el
diseño del controlador.
Para un controlador convencional, como es el caso de un controlador proporcional-integral-
derivativo (PID), resulta ser una buena alternativa para controlar sistemas dinámicos; ya que
proporcionan tiempos de respuesta rápidos, sin embargo entre mayor es la precisión requerida en
el sistema el ajuste de este tipo de control es más difícil ya que son bastante sensibles a las señales
de ruido y en ocasiones introducen oscilaciones cuando se presentan retardos en el sistema.
Cuando la dinámica de los sistemas o procesos a controlar es no lineal, el control tiene que tener
la capacidad de compensar esta no-linealidad y aunque el control PID asume relaciones lineales,
este no tiene la capacidad para responder a esto. Esta no-linealidad difícilmente puede ser
14

caracterizada por una ecuación por lo que en la mayoría de los casos es tratada de manera
subjetiva por el operador del proceso. Es necesario conocer la respuesta del modelo de la planta,
así como también su comportamiento ante perturbaciones o movimientos externos desconocidos.
El diseño de este tipo de controladores, requiere la especificación de tres parámetros: ganancia
proporcional, constante de tiempo integral y constante de tiempo derivativa, así que, un gran
esfuerzo tiene que ser dedicado a la optimización de la elección de los parámetros del
controlador, para esto, dichos parámetros se fijan durante el control después de que han sido
sintonizados de una manera óptima. La fórmula de sintonización Ziegler-Nichols es quizá el mejor
método de sintonización conocido. Sin embargo, los controladores PID de esta categoría son
simples, pero no pueden siempre controlar los sistemas efectivamente, y pueden necesitar por lo
tanto una frecuente sintonización.
Mientras el modelo PID puede parecer el más simple y por lo tanto, la representación más
económica, lo contrario es frecuentemente más cierto. Los controles difusos son en realidad más
fáciles de implementar, más simples para describir y verificar, y pueden ser mantenidos y
extendidos con mayor exactitud y en menos tiempo. [5],
Figura 1.10. Comparación de control clásico PID y control por lógica difusa.
En un sistema difuso típico, la entrada es leída de una fuente externa y fusificada antes de ser
procesada por la lógica difusa. La salida del proceso lógico es defusificada antes de ser mandada al
dispositivo físico bajo control. Un sistema de control convencional (derecha) tiene una estructura
muy similar, pero sin los elementos difusos.
Energía producida por un aerogenerador
La potencia de entrada de un aerogenerador proviene de la conversión de la energía cinética del
viento. La cantidad de energía transferida al rotor depende de la densidad del aire, del área de
barrido por el rotor y de la velocidad del viento. Según el diseño constructivo del rotor una
cantidad de esta potencia puede ser teóricamente convertida en potencia mecánica extrayendo
15

energía cinética del viento a través del rotor de la turbina y disminuyendo en consecuencia la
velocidad del viento en la parte posterior al rotor.
Figura l.ll.Tubo de corriente del campo fluido viento incidente
5.2.1. Potencia extraíble del viento con un aerogenerador
La teoría más comúnmente utilizada para calcular la potencia teórica que se extrae del viento con
un aerogenerador es la teoría de la cantidad de movimiento y el modelo físico utilizado es el que
se describe en la figura 1.12.
Figura 1.12. Modelo físico para calcular la potencia teórica del viento que se extrae con un aerogenerador.
El disco del rotor está situado frontalmente a la dirección de incidencia del viento. El aire que se
desplaza por el interior del tubo de corriente es el que atraviesa el rotor cediéndole parte de su
energía. El caudal a través del tubo de corriente es constante y en consecuencia, la velocidad
equivalente en cada sección debe disminuir a medida que el tubo se va ensanchando.
La presión estática equivalente en cada sección, también varía su valor a lo largo del tubo de
corriente, de tal manera que en la sección de incidencia su valor es el de la presión ambiente, a
16

medida que se aproxima al rotor se va incrementando hasta un valor P+ en la proximidad de la
cara anterior del disco y través del disco hay un salto descendiente de esta presión estática hasta
un valor P-, inferior a la atmosférica.
La potencia absorbida por el rotor es el producto de la fuerza F ejercida por el fluido sobre el disco
del rotor por la velocidad del fluido V en ej mismo, substituyendo los resultados obtenidos, se
obtiene la potencia que se extrae del viento a partir del disco del rotor:
En la expresión anterior el primer término es el gasto másico a través del rotor y el segundo es la
pérdida de energía cinética por unidad de masa que experimenta el aire entre las dos secciones,
por tanto esta expresión nos dice que la potencia que se obtiene del viento es, por una parte,
proporcional al gasto másico que pasa a través del disco y, por otra, proporcional también a la
diferencia de energía cinética de la corriente entre las secciones A l y A2. Por tanto, aumentando
la cantidad de masa de aire por unidad de tiempo a través del rotor o bien aumentando la
diferencia de energía entre las secciones, aumenta la potencia y en consecuencia la energía
capturada por el aeromotor.
5.2.2. Potencia máxima extraíble para una velocidad dada
Se demuestra que para una velocidad de viento incidente VI dada y fija, si V2 decrece, la
diferencia de energías cinéticas crece en valor pero al mismo tiempo disminuye el gasto másico.
Viceversa si V2 decrece, siendo pues la potencia capturada proporcional al producto de los dos
términos. Interesa conocer si hay algún valor de V2 que haga máximo este producto (gasto másico
a través del djsco por pérdida de energía cinética a lo largo de la estela, se obtiene la potencia
máxima extraíble por un rotor ideal de área A, con una densidad de aire p y para una velocidad de
viento incidente VI
Coeficiente de potencia Cp y límite de Betz
El rotor de la máquina nunca es capaz de captar toda esa potencia asociada a la masa de aire que
lo atraviesa, será como se verá a continuación significativamente menor.
El coeficiente de potencia, C p, de un aerogenerador es el rendimiento con el cual funciona el
mismo y expresa qué cantidad de la potencia total del viento incidente es realmente capturada
17
[1.7]
[1.8]

por el rotor. Se define como la relación adimensional entre la potencia realmente captada por el
rotor (real rotor P) y la potencia del viento incidente (viento P).
[1.9]
El coeficiente de potencia de un aerogenerador no es constante, depende de la velocidad del
viento incidente, de las condiciones atmosféricas (p) y de los parámetros constructivos de la
máquina y de las condiciones de funcionamiento de la misma.
El límite de Betz es el máximo coeficiente de potencia, pmax C, con el que puede funcionar un aerogenerador ideal.
Traducido al lenguaje de potencia, indica que la máxima potencia que se puede obtener en teoría, de una corriente de aire, con un aerogenerador ideal, nunca podrá superar al 59,25% de la potencia del viento incidente. [6]
Mapeo de la turbina
A partir del diseño del generador eléctrico y de la aerodinámica del las aspas, la turbina establece
diferentes zonas operativas las cuales son representadas mediante un "mapa", en el cual se
representa el comportamiento del aerogenerador para diferentes velocidades de viento. Dichos
mapas se realizan a grandes rasgos como sigue: Se parte por fijar una velocidad de viento y se le
pide al programa que evalúe los diferentes parámetros deseados para un determinado rango de
valores de velocidad en la flecha. Una vez evaluados los parámetros para esta velocidad de viento,
se hace lo mismo con otra y así sucesivamente hasta tener un rango amplio de operación del
generador para diferentes velocidades. [7]
Con la información recopilada se elaboran los mapas de operación, velocidad del viento contra
velocidad en la flecha, para cada uno de los parámetros que se evaluaron en la tabla, por ejemplo
el mapa de carga R u que se muestra en la figura 1.13. Estas tablas nos permiten encontrar
cualquier valor posible del binomio generador-aspas.
[1.10]
18

Figura 1.13, Mapeo de la turbina de 3kW representando las diferentes zonas de operación.
En el mapa presentado se clasifican en colores los puntos de operación, los puntos amarillos
formando una trayectoria significan los puntos más eficientes en determinada velocidad de viento
(lambda = 6.7 aproximadamente).
La operación debe estar limitada por la temperatura en el estator para evitar daños, se encuentra
representada en colores naranja y rojo. Para el caso de vientos mayores al estimado
nominalmente la trayectoria se pinta de color verde y azul para una operación conocida como
"active stall".
La figura 1.14 muestra el comportamiento del generador diseñado para realizar la regulación
mediante active stall. Las curvas representan la oferta de potencia mecánica generada por las
aspas, es la potencia aerodinámica disponible debido al viento, cada velocidad de viento traza una
curva.
La demanda de potencia mecánica se representa por las curvas punteadas las cuales pasan por
puntos de las curvas de la potencia disponible, los círculos representan los puntos óptimos de cada
curva de potencia disponible, de tal manera que el active stall realiza una variación a la carga de
manera activa para obtener un punto deseado a determinada velocidad de viento, ya sea en la
mayoría de los casos el óptimo, o bien, un valor nominal para evitar el riesgo de la turbina a
velocidades de viento altas.
19

Figura 1.14. Curvas de potencia aerodinámica y potencia mecánica estableciendo los puntos óptimos.
Así como el mapa de ejemplo señalado en la figura 1.13, se obtienen mapas para cada una de las
variables de la turbina. Para facilitar el diseño del controlador mediante una curva de referencia
que represente todas las zonas de operación definidas (deseadas e ¡ndeseadas) mediante una
curva corriente contra RPM.
Para definirla se parte del mapa de diseño, por ejemplo un viento de 7m/s se obtiene la mayor
potencia en lambda = 6.9 y un radio de 2m.
Al realizar la conversión a revoluciones queda 230.61rpm. Se busca en el mapa de la corriente el
valor de ésta en 7m/s y 230rpm y se observa un valor de 3.1 A. Se puede obtener cada punto de la
curva para completarla realizando el procedimiento descrito. La figura 1.15 muestra la curva
óptima para la regulación.
20
[1.11]

Figura 1.15. Curva simplificada óptima para la regulación de la turbina de 3kW.

Capítulo II. Topología
En el presente capítulo, se proporcionan las bases teóricas para la definición del proyecto, se
describe cada uno de los componentes del sistema de regulación así como el funcionamiento en
su conjunto. Se define también la instrumentación utilizada para la regulación de una turbina
eólica, la implementación y la calibración de éstos.
En el presente proyecto se realiza una propuesta de un sistema de protección de una turbina
eólica pequeña utilizando un regulador por medio de electrónica de potencia.
Se puede definir al regulador como un circuito electrónico que tiene la función de restringir a la
turbina eólica para que opere en una zona segura. Las turbinas eólicas tienen zonas de operación
inseguras, por lo que es indispensable una protección adecuada que evite operar en tales zonas.
La turbina eólica tendrá una carga principal ya sea en el lado AC o en el lado DC, según sea el caso.
Sin embargo, en este caso la regulación se realiza en el lado DC.
Junto con el viento, la carga principal dicta el punto de operación de la turbina en la zona de
operación segura. Pero en las zonas de operación inseguras se requiere ejercer una regulación
adicional que la carga principal no suele brindar, éste es el motivo por el cual se coloca el
regulador.
La protección consiste en conectar una resistencia variable paralela a la carga principal. El
regulador decide consumir la cantidad de corriente proveniente del generador eléctrico. Ya que la
corriente se encuentra directamente proporcional al torque mecánico de la turbina eólica, entre
mayor sea la corriente que consume el regulador, mayor es el torque de oposición de la turbina
eólica. Si la exigencia de torque es alta, y las aspas de la turbina ya no pueden proporcionar más
torque para una velocidad rotacional determinada, entonces la turbina tiende a desacelerarse.
Esta es la manera en cómo funciona el regulador, el cual, tiene el objetivo de mantener a la
turbina eólica en una zona de operación deseada.
La resistencia que se conecta en paralelo debe ser tal que si se conectara permanentemente, frena
a la turbina, es decir, la carga debe ser "pesada" o de pocos ohm y debe contar con una alta
potencia, de tal manera que si la turbina eólica por alguna razón se queda sin carga principal, la
resistencia del regulador disipe toda la potencia generada por la turbina hasta frenarla
completamente.
En la figura 2.1 se muestra el esquemático general del arreglo en el cual se inserta el regulador. En
la figura se representa el generador eléctrico como una fuente trifásica de corriente alterna donde
cada rama de la fuente cuenta con una resistencia y una inductancia equivalente al embobinado
del generador con sus valores reales, las tres ramas cuentan con un desfasamiento de 120°entre
22

ellas. Se encuentra representada también la carga principal, ya sea en el lado de alterna (carga
AC) o en el lado de directa (carga DC) dependiendo cual sea el caso. El rectificador trifásico se hace
cargo de dicha conversión.
La resistencia de disipación (Rdis) que se encuentra en paralelo a la carga principal, cuenta con un
valor pequeño de resistencia con el objetivo de desacelerar a la turbina como se mencionó
anteriormente, solamente si el componente de conmutación, en este caso el IGBT, se encuentra
en saturación, esto cuenta con un comportamiento de un switch en circuito cerrado. Esto
solamente sucederá cuando la turbina eólica se quede sin carga principal.
Cuando la turbina se encuentre entrando a una zona de operación no deseada el componente de
conmutación IGBT se abre y se cierra de manera intermitente a frecuencia de 20kHz de tal manera
que conecte y desconecte la resistencia de disipación en paralelo con la carga principal, esto se
traduce como una resistencia variable que disminuye su valor conforme más alejado se encuentre
la turbina de una zona deseada.
Figura 2.1. Esquemático eléctrico general del sistema de protección.
La estrategia para conmutar el circuito es mediante modulación por ancho de pulso (PWM por sus
siglas en inglés).
23

2.1 Rectificador
Para el presente proyecto se utiliza un rectificador trifásico para convertir la señal proveniente del
generador (corriente alterna trifásica) a una señal de corriente directa. En la implementación del
rectificador trifásico se utilizaron diodos de potencia los cuales deben tener la característica de
soportar más de 300 V, 10 A ya que son valores nominales del generador eléctrico instalado en el
módulo de pruebas (3kW). Estas características aumentan para el diseño de una turbina de mayor
capacidad (lOkW).
El diodo utilizado para la implementación del rectificador trifásico para el proyecto es el 75DQ60B
de APT el cual cuenta con las características eléctricas de 600V, 75 A, soporta las características de
ambas turbinas eólicas.
2.2 IGBT
Para implementar la topología de potencia propuesta en este capítulo, es necesario contar con un
semiconductor de potencia que sea capaz de trabajar con tensiones de 400 V y con corrientes de
más de 20 A. Además se deben considerar las posibles sobretensiones producidas durante las
conmutaciones para agregar un margen de seguridad a los valores mencionados.
Se seleccionó el IGBT modelo FGA20S120M de Fairchild, el cual está diseñado para conducir una
corriente de hasta 40 A y soportar una tensión de hasta 1200 V entre colector y emisor. Es
importante hacer notar que es necesario sobredimensionar la corriente debido a los valores de
punta que ésta toma, que pueden llegar a varias veces la corriente media. Además este IGBT
presenta otras ventajas como son el hecho de que su circuito de disparo requiere de sólo 15 V.
2.3 PWM
2.3.1 Generac ión de PWM
La generación de PWM produce una regulación de la velocidad rotacional de la turbina eólica, la
señal modulada se encuentra conectada a la compuerta del IGBT, es por ello que cuenta con una
amplitud de 15V. La señal PWM es la actuación del sistema de protección, al variar el ancho de
pulso de la señal P W M , varía la corriente que consume la resistencia de disipación de manera
proporcional, es decir, se modifica la resistencia equivalente de la carga ya que la resistencia de
disipación se encuentra conectada en paralelo con la carga principal.
24

La señal PWM conecta la resistencia de disipación cuando el pulso es positivo, la duración a la que
se conecta esta resistencia a la carga depende del ciclo de trabajo (D). cada vez que sucede esto, la
resistencia de disipación demanda corriente eléctrica al generador, esta corriente es extra a la que
la carga principal necesita, por lo tanto, el aumento de corriente provoca un aumento de torque
mecánico en el generador, esto a su vez frena a la turbina eólica si no hay suficiente torque
aerodinámico que soporte dicha carga. La decisión del valor del ancho de pulso de la señal PWM
se toma en la etapa de control.
En el momento preciso donde el IGBT se encuentra abierto debido a la ausencia de voltaje en su
compuerta es 0 V, debido al t o f f de la señal PWM, el circuito queda de la siguiente manera:
Figura 2.2. Circuito equivalente para un 0% de ciclo de trabajo.
En cambio, el circuito que se muestra a continuación, se genera en el momento donde el IGBT se
cierra, esto sucede cuando se presentan 15 V en su compuerta. En la señal PWM esto ocurre en el
tipmno t.„.
Figura 2.3. Circuito equivalente para un 100% de ciclo de trabajo.
En la cual la corriente de entrada l a queda:
¡a = k + ¡R
2.3.2 I m p l e m e n t a c i ó n de la g e n e r a c i ó n de la s e ñ a l PWM.
La etapa de control consta de un sistema mínimo para la generación de la señal P W M , esta señal
se envía al dispositivo de conmutación, en nuestro caso es un IGBT, hacia la etapa de potencia. El
sistema mínimo consta de los siguientes componentes:
• micro controlador PIC18F4550
• Driver entre el micro controlador y el dispositivo de conmutación
Figura 2.4. Esquemático para la generación de PWM.
25

El micro controlador PIC18F4550, contiene el software del sistema, es la parte donde se toman
todas las decisiones, desde la lectura de datos de la etapa de medición para saber el estado actual,
calcular que es lo que falta para estar en un estado deseado, traducir este error a una señal que
activa al actuador de la etapa de potencia. Para efectuar esto se ha realizado una configuración
básica al micro controlador para crear una interconexión entre la programación interna de éste
con el exterior, es decir, la configuración del micro controlador para las señales de entrada
(entradas análogas provenientes de los sensores) y la señal de salida (generación de PWM):
2.3.3 Módulo ADC.
El micro controlador PIC18F4550 cuenta un módulo de convertidor análogo digital con 13
entradas, como su nombre lo indica convierte una señal analógica proveniente de los sensores a
una señal digital de 10 bits.
El módulo convertidor Análogo/Digital es usado para leer e interpretar las señales de los sensores
conectados al mismo. En este caso se cuentan con 4 sensores que son: corriente RMS, velocidad
rotacional (RPM), presión atmosférica y temperatura ambiente por lo cual son necesarias 4
entradas análogas. El funcionamiento del convertidor es controlado con 3 registros configurables:
• ADCON0: A/D Registro de control 0, controla la operación del módulo.
• ADCON1: A/D Registro de control 1, configura la función de los pines del módulo.
• ADCON2: A/D Registro de control 2, configura el tiempo de adquisición y justificación y la fuente de reloj A/D.
Existen además 2 registros dentro de los cuales se escribe el resultado de la conversión A/D, cabe
señalar que el resultado de la conversión AD sólo se guarda en 10 bits por lo que 6bits de ADRESH:
ADRESL quedan sin utilizarse marcando únicamente el valor de 0. Estos bits pueden ser los 6 más
significativos del ADRESH o los 6 menos significativos del ADRESL dependiendo si el registro
ADCON2 lo justifica a la derecha o a la izquierda.
• ADRESH: A/D Result High Register
• ADRESL: A/D Result Low Register
Todos estos son registros de 8 bits la explicación de cada uno se puede ver en la hoja de datos del
micro controlador.
Cabe mencionar que sólo se puede realizar una conversión a la vez, si se requiere leer de una
entrada análoga diferente, antes de empezar la nueva conversión se debe especificar la nueva
entrada análoga con el registro ADCON0. Así mismo los pines de los puertos que corresponden a
pines análogos se deben configurar como entradas o salidas dependiendo si el pin análogo es
entrada o salida respectivamente.
26

En el anexo 1 se muestra el código establecido para realizar la configuración del módulo ADC en el
micro controlador para la lectura de 4 sensores.
2.3.4 Módulo PWM
El micro controlador 18Í4550 cuenta con dos módulos de PWM, sólo se utiliza el primero. Este
módulo genera la señal de control para la activación del IGBT en la etapa de potencia. El ciclo de
trabajo de dicha señal se define mediante el algoritmo de control programado en el micro
controlador según la decisión que éste ha tomado.
Existen 4 registros que permiten controlar la señal PWM:
1. CCP1CON
Controla el modo de operación del módulo (Captura, Comparador o PWM) y además contiene los
2 bits menos significativos del ciclo de trabajo de la señal PWM.
2. CCPR1L En este registro se escriben los 8 bits más significativos del ciclo de trabajo de la señal PWM.
3. PR2 Registro del Timer 2 el cual sirve para establecer el periodo deseado para la señal PWM, esto se
hace mediante la siguiente fórmula:
4. T2CON Registro del Timer 2 del micro controlador, el cual usa como oscilador el cristal conectado al micro
controlador, nos servirá para activar al Timer 2 y para establecer el valor del "TMR2 Preescalador"
= 1.
Los pasos para utilizar el módulo PWM son los siguientes:
• Activar el Timer 2 y establecer el valor del "TMR2 Prescale Value"con el registro T2CON. • Establecer el periodo de la señal PWM con ayuda del registro PR2 y la fórmula descrita
anteriormente. • Especificar el ciclo de trabajo de la señal PWM escribiendo en los registros
CCPR1L:CCP1C0N<5:4>. • Activar el TRIS correspondiente para que el pin CCP1 del micro controlador sea de salida,
éste pin ya está por default como el pin 17 (RC2) del micro controlador. [8]
27
En el anexo 2 se muestra el código utilizado para configurar el módulo PWM en el PIC18Í4550.
De esta manera se obtiene la señal de PWM para activar la siguiente etapa (potencia) en la
compuerta del IGBT (dispositivo de conmutación), sin embargo la hoja de datos de este dispositivo
recomienda una señal de disparo en su compuerta con un voltaje de 12V a 15V con el objetivo de
realizar el cambio de corte a saturación del transistor de una manera correcta, el micro
controlador cuenta con salida tipo TTL, lo cual significa que su voltaje es de OV a 5V, de tal manera
que es necesario aumentar dicho voltaje manteniendo la señal modulada proveniente del PIC, por
lo tanto es necesario colocar entre estos dispositivos un driver.
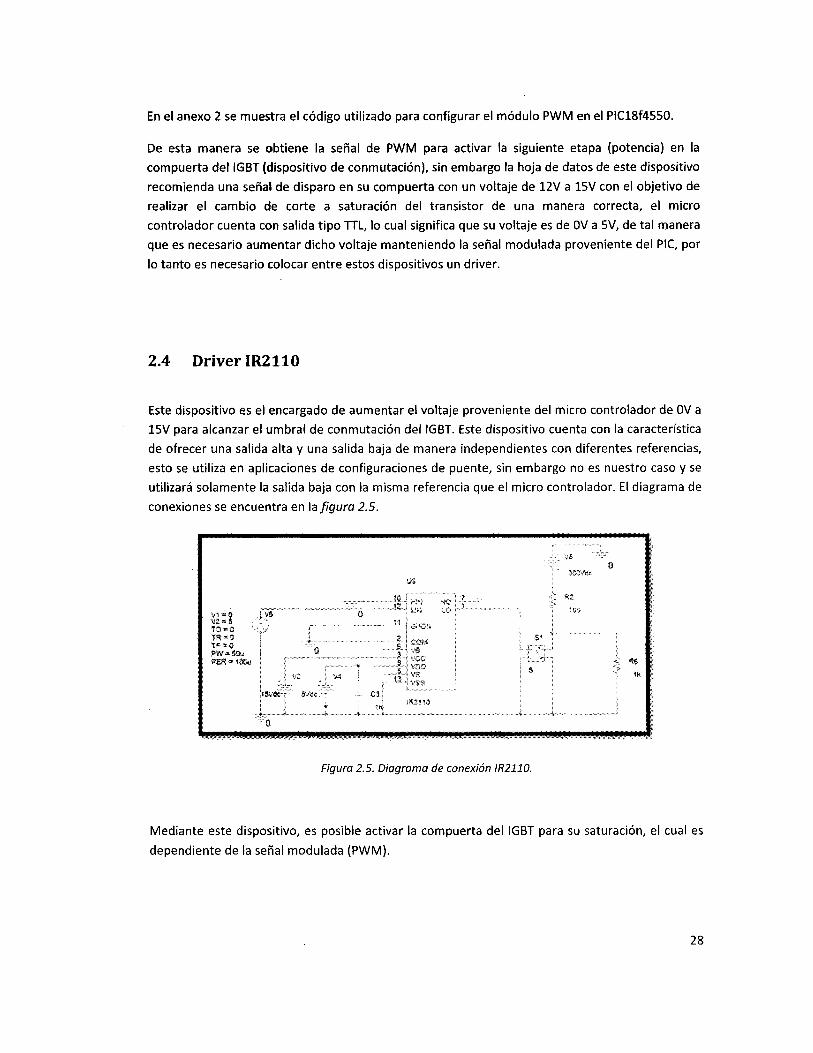
2.4 Driver IR2110
Este dispositivo es el encargado de aumentar el voltaje proveniente del micro controlador de OV a
15V para alcanzar el umbral de conmutación del IGBT. Este dispositivo cuenta con la característica
de ofrecer una salida alta y una salida baja de manera independientes con diferentes referencias,
esto se utiliza en aplicaciones de configuraciones de puente, sin embargo no es nuestro caso y se
utilizará solamente la salida baja con la misma referencia que el micro controlador. El diagrama de
conexiones se encuentra en la figura 2.5.
Figura 2.5. Diagrama de conexión IR2110.
Mediante este dispositivo, es posible activar la compuerta del IGBT para su saturación, el cual es
dependiente de la señal modulada (PWM).
28

2.5 Instrumentación.
En el presente apartado se explican a detalle los diferentes sistemas de medición a las variables
físicas del aerogenerador las cuales son indispensables para el funcionamiento de la protección del
aerogenerador.
Las variables a medir son:
• Corriente eléctrica (Amperes). • Velocidad rotacional (RPM). • Voltaje (Volts). • Potencia eléctrica (Watts). • Velocidad típica (\).
Dichas variables son de importancia para el monitoreo de la turbina de viento, además de ser
indispensables para la regulación de la misma, éstas deben ser medidas mediante la
implementación de un sensor electrónico para cada una de ellas, el cual mide el parámetro y lo
transforma a voltaje adecuado para introducir los datos al micro controlador para su
procesamiento. Las variables medidas son: Corriente, voltaje y velocidad rotacional, la potencia y
la velocidad típica se calculan mediante las variables medidas.
2.5.1 Corriente eléctr ica
Esta variable es necesaria para el regulador ya que se utiliza para la identificación del punto de
operación de la turbina, es decir, nos dirá si se encuentra trabajando en una zona deseada o
indeseada.
La corriente necesaria para determinar el punto de operación en la que se encuentra la turbina
tiene que ser corriente alterna rms, esto se obtiene en una de las terminales del generador ya que
se espera que sea la misma en las tres terminales porque la carga es trifásica balanceada.
El sensor a utilizar para esta variable es el ACS758, las características generales de este dispositivo
son las siguientes: pueden medir corriente en CA y CD, esto quiere decir que es bidireccional,
cuenta con distintas aplicaciones industriales, este dispositivo consiste en un circuito de precisión
mediante la utilización de efecto Hall, contiene un conductor de cobre por el cual se hace pasar la
corriente y genera un campo magnético que el integrado lo convierte a un voltaje proporcional.
29

Figura 2.6. Dispositivo físico y diagrama de conexión para medir corriente.
El componente y la configuración del circuito del sensor se muestran en la figura 2.6. Se observa
que para obtener una mejor calidad de señal se han agregado componentes pasivos externos que
forman un filtro contra radio frecuencias.
Como se menciona anteriormente, este sensor genera un voltaje proporcional a la corriente que
entra al mismo, el cual tiene un rango de 2.5V a 5V, de tal manera que es necesario adecuar dicha
señal para obtener un voltaje adecuado, además de que se tiene que calcular la corriente rms a
partir de dicha señal ya sea mediante un programa computacional o en un dispositivo digital.
Implementación.
Se utiliza el Fluke 123 como instrumento de referencia para la correcta calibración del sensor.
Antes de realizar la calibración es necesario realizar la calibración de fabricante mediante la
siguiente ecuación:
Tabla 2.2. Calibración sensor de corriente.
30
[2.2]
Donde V es el voltaje obtenido del sensor de corriente, esto nos acerca hacia el valor real de la
corriente y ayuda a obtener una mejor resolución para la calibración. El siguiente paso es medir el
voltaje del sensor de corriente después de integrarlo a la ecuación anterior estableciendo
diferentes velocidades del generador, obteniendo lo siguiente:

Se obtiene la función de calibración del voltaje obtenido mediante el sensor y el instrumento de
referencia (Fluke 123).
Figura 2.7. Calibración del sensor de corriente.
De tal manera que la ecuación que define la corriente de línea (la) del sensor se obtiene de la
siguiente manera:
31
[2.3]
Donde V es el voltaje obtenido del sensor de corriente.
2.5.2 Velocidad rotacional
Otra variable importante para el sistema de control, es la velocidad rotacional del generador, ya
que de igual manera que la corriente, nos indicará el punto de operación a la que se encuentra la
turbina trabajando y con esta variable se podrá obtener una comparativa de la curva rpm vs
corriente deseada con la medida, es por ello la importancia de estas dos variables.
Esta variable es más sencilla de calcular mediante la frecuencia eléctrica medida de la corriente
utilizando un programa de computación que realice dicho cálculo, sin embargo, para el prototipo
final no se contará con este programa, por lo tanto es necesario utilizar un sensor electrónico que
realice la medición de la velocidad rotacional en revoluciones por minuto.
Para lo mencionado anteriormente se utiliza un circuito de "generador de pulsos", el cual utiliza
un circuito a base de transistores que trabajan en saturación y corte al comparar la señal
sinusoidal proveniente del generador contra una referencia, en este caso OV, y de esta manera
cuando la señal sinusoidal se encuentra en el lado positivo, el transistor se satura y se obtiene un
uno lógico a la salida, de lo contrario, cuando la señal se encuentra por debajo de la referencia
cero, en el transistor pasa a la zona de corte y con esto se obtiene un cero lógico a la salida, de tal
manera que el objetivo de este circuito es generar una señal digital mediante tren de pulsos en
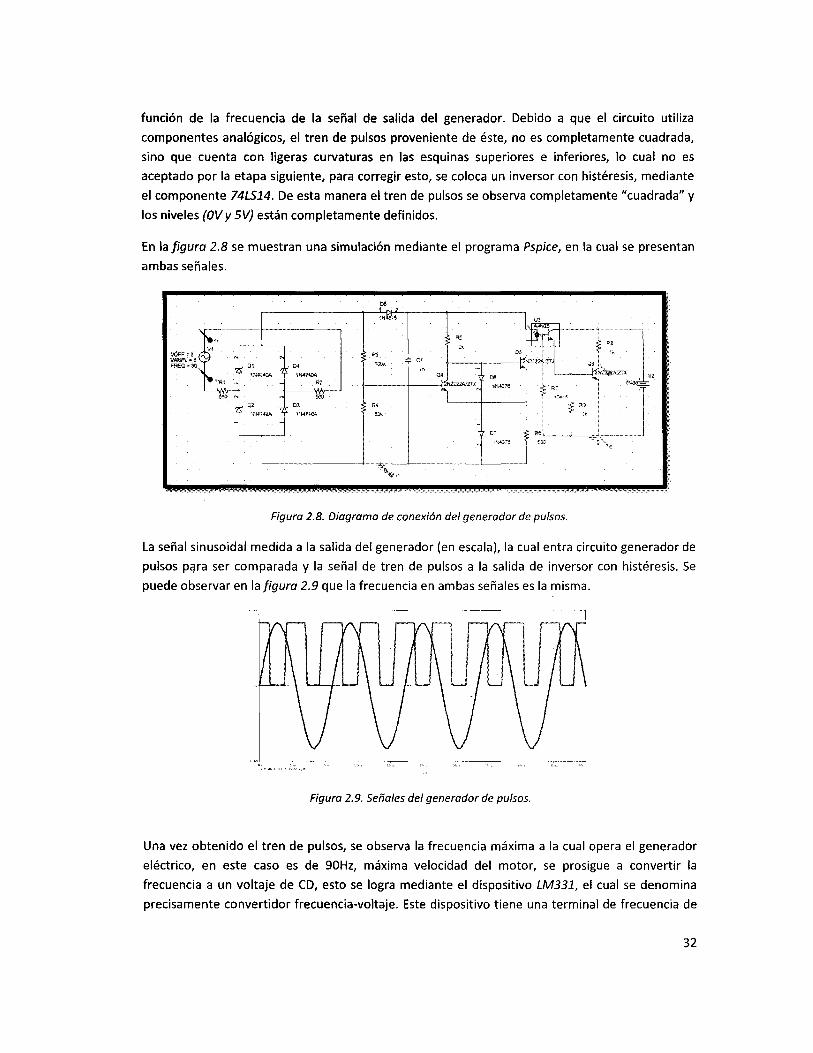
función de la frecuencia de la señal de salida del generador. Debido a que el circuito utiliza
componentes analógicos, el tren de pulsos proveniente de éste, no es completamente cuadrada,
sino que cuenta con ligeras curvaturas en las esquinas superiores e inferiores, lo cual no es
aceptado por la etapa siguiente, para corregir esto, se coloca un inversor con histéresis, mediante
el componente 74LS14. De esta manera el tren de pulsos se observa completamente "cuadrada" y
los niveles (0Vy5V) están completamente definidos.
En la figura 2.8 se muestran una simulación mediante el programa Pspice, en la cual se presentan
ambas señales.
Figura 2.8. Diagrama de conexión del generador de pulsos.
La señal sinusoidal medida a la salida del generador (en escala), la cual entra circuito generador de
pulsos para ser comparada y la señal de tren de pulsos a la salida de inversor con histéresis. Se
puede observar en la figura 2.9 que la frecuencia en ambas señales es la misma.
Figura 2.9. Señales del generador de pulsos.
Una vez obtenido el tren de pulsos, se observa la frecuencia máxima a la cual opera el generador
eléctrico, en este caso es de 90Hz, máxima velocidad del motor, se prosigue a convertir la
frecuencia a un voltaje de CD, esto se logra mediante el dispositivo LM331, el cual se denomina
precisamente convertidor frecuencia-voltaje. Este dispositivo tiene una terminal de frecuencia de
32

entrada F e n t y entrega un voltaje máximo de 10V pero se calibra para obtener un voltaje deseado,
en este caso es V 0 = 5V, debido a que se utilizará para la entrada del ADC del micro controlador.
Esto se realiza con la siguiente fórmula:
Donde RL, R S , R, y C, se pueden observar en la figura 2.10.
[2.4]
El arreglo de la terminal 5 proporciona el tiempo de conmutación de una fuente de corriente que
se encuentra internamente en el dispositivo, que a su vez suministra el voltaje en la terminal 1,
que crece conforme la frecuencia aumenta. Para el proyecto se proponen los valores de Q =
90.1nF yRt = 56.2kO. (valores reales).
Al despejar Rs de la ecuación anterior, que es la resistencia de la corriente de referencia que se
puede variar para su calibración, queda de la siguiente manera:
[2.5]
Sustituyendo los valores utilizados;
Rs = 18.96kQ, (20kü valor comercial)
Este valor de resistencia se coloca en la terminal 5 pudiéndolo variar para su calibración y obtener
el valor exacto deseado de voltaje de salida.
Figura 2.10. Diagrama de conexión convertidor frecuencia-voltaje.
33

La señal de salida del convertidor entra al micro controlador con un voltaje de OV a 5V variable, el
cual será dependiente de la frecuencia del generador, de tal manera que se obtiene la relación del
voltaje de salida mediante la siguiente ecuación:
[2.6]
Para obtener las unidades a revoluciones por minuto (RPM) se realiza mediante la siguiente ecuación:
/ es la frecuencia en Hz. p es el número de polos del generador.
Implementación.
Para el buen funcionamiento del sensor de velocidad rotacional, se realiza la caracterización de
esta variable, utilizando la frecuencia eléctrica obtenida de un motor eléctrico controlado por un
variador de frecuencia, definiéndolo como referencia para la calibración del sensor de velocidad
descrito.
Entonces se realiza la calibración del voltaje obtenido del sensor de velocidad rotacional fabricado
en función de la variación de la velocidad rotacional medida mediante el variador de frecuencia
para obtener la recta resultante para la calibración del sensor.
[2.7]
Donde:
Figura 2.11. Calibración del sensor de velocidad rotacional.
34

De tal manera que la ecuación que define las RPM del sensor se obtiene de la siguiente manera:
2.5.3 Voltaje.
El voltaje no es utilizado para la protección de la turbina eólica ya que cuenta con variaciones
frecuentes y un poco abruptas, además, el voltaje es un poco sensible a la densidad de aire. Sin
embargo, hay zonas donde es de mucho interés el voltaje:
• Desbocamiento de la turbina: es una zona indeseada de operación en la cual por algún
motivo la carga principal es desconectada y la velocidad rotacional sube
considerablemente. El voltaje es importante al inicio de ésta zona de operación ya que
éste subirá ágilmente, lo cual indica tal emergencia.
• Estancamiento: es una zona indeseada de operación, en la cual la turbina se encuentra
accidentalmente en "stall" y el voltaje en este punto es bajo.
• Frenado: el freno se aplica como protección adicional y en este caso el voltaje es bajo.
La variable del voltaje es utilizada como monitoreo del estado de la turbina, el objetivo de su
medición es obtener una coordinación de los diferentes sistemas de protección de la turbina
(mecanismo de pitch y freno de vacío). No es necesario tanto detalle para la obtención del valor
del voltaje, éste debe ser medido en el lado de CA para monitoreo, esto implica obtener el valor
RMS de la señal de voltaje, probablemente cuente con distorsión armónica por lo que se debe
contemplar tal situación al medirlo mediante "true RMS".
2.5.4 Potencia.
La potencia no es una variable tan relevante para la regulación, se calcula con la corriente y el
voltaje instantáneos, luego hay que promediar para obtener la potencia activa. La potencia
reactiva y aparente no se ven tan relevantes en este momento.
La potencia puede ser relevante para un módulo informativo que muestre al usuario de la turbina
la potencia en tiempo real, o el acumulado de energía.
35
[2.8]
Donde V es el voltaje obtenido del sensor de velocidad rotacional.

2.5.5 Velocidad t íp ica (X).
Lambda es una variable derivada a partir de la velocidad rotacional y la velocidad del viento.
Si el control depende de lambda entonces requiere calcularse con cierta precisión, lo que indica
que la velocidad del viento debe medirse con precisión y eso agrega costo significativo en
hardware. De tal manera que la velocidad del viento no se mide mediante sensor, por lo tanto es
necesario derivar esta variable a partir de la corriente eléctrica.
Para relacionar lambda con la corriente eléctrica debe aplicarse una corrección por densidad del
aire. Considerando la complejidad de relacionar lambda con la corriente, puede resultar
conveniente no utilizar lambda para el control y dejar como variables principales sólo las
primarias: velocidad rotacional y corriente eléctrica. Esto implica buscar una relación funcional
entre tales variables primarias y aplicar una corrección por densidad del aire.
2.5.6 Densidad del aire.
La densidad del aire se calcula a partir de la temperatura del ambiente y la presión atmosférica, la
medición de éstas no requiere mayor precisión puesto que se esperan valores típicos de cualquier
ambiente natural.
^ _ (0.287)7 [2-10] Donde: p es la densidad del aire P es la presión atmosférica T es la temperatura ambiente
La corriente tiene que corregirse por densidad del aire, pues la densidad afecta la potencia que
puede entregar la turbina para una velocidad de viento dada. Al bajar la densidad del aire, la
turbina tiene que recibir más velocidad de viento para producir la misma potencia que producía
antes.
Lambda óptima se mantiene constante, pero la relación óptima entre corriente y RPM es distinta.
Para obtener lambda a partir de la corriente, se debe multiplicar la corriente por la relación de
densidades.
Corrección de corriente por densidad:
36

[2.11]
Las RPM medidas se siguen utilizando tal cual para determinar si se activan las protecciones, es
decir, no se modifica el límite de RPM que se recomienda para operar la turbina. Esto es debido a
que el voltaje en terminales y la fuerza centrífuga no se modifican con la densidad del aire.
Efectos de no utilizar la densidad del aire.
Al no modificarse lambda óptima con la densidad, las RPM límite representan la velocidad máxima
tangencial de la punta del aspa y por ende el ruido generado. Si se le permite al generador rotar
más rápido, se genera mucho más ruido acústico, se impone más carga centrífuga en las aspas y se
produce un voltaje más elevado en terminales.
Si se utilizara la corriente medida, al ser menor la corriente en una velocidad rotacional dada
debido a una densidad baja, el voltaje aumenta y la potencia se modifica. Resultan puntos
operativos que tienen una potencia generada mayor. Ese es un problema porque entonces tendría
que calcularse con precisión la potencia trifásica en AC para poder regular en tales casos.
Usar la corriente corregida por densidad para la protección también permite mejorar el aspecto
térmico. En lugares cálidos la densidad el aire es menor y por la mayor temperatura ambiente la
capacidad del generador debe reducirse para evitar sobrecalentamiento. En lugares elevados
sobre el nivel del mar, aunque sean templados, la menor densidad del aire disminuye la capacidad
del aire para disipar calor por convección.
2.6 Resistencia de disipación.
Para elegir la resistencia de regulación/frenado en paralelo se piensa lo siguiente. Se busca poner
la resistencia más alta pero que garantice el frenado, si se coloca una resistencia demasiado baja,
al frenar súbitamente causa un pico de corriente, el pico de corriente provoca un pico de torque y
puede dañar al generador, pero si la resistencia es demasiado alta se corre el riesgo de no frenar la
turbina.
El frenado con resistencia sólo se realiza en viento menor a 20m/s, en viento mayor a ese valor se
activa otra protección, como el pitch, para frenar con resistencia en viento muy alto se tendría que
imponer un corto circuito eso es muy nocivo y hasta contraproducente; es mejor que se active el
pitch en tal caso.
Se espera que la carga principal tenga un algoritmo basado en voltaje, como los inversores
interconectados disponibles comercialmente. Esos inversores demandan más potencia si hay más
37

voltaje disponible. Entonces si el inversor es suficientemente grande debe ser capaz de frenar a la
turbina.
El inversor aplica rápidamente su demanda de potencia por lo que no debe dar oportunidad a la
turbina de acelerarse. Pero no se puede depender de que la carga siempre sea un inversor
interconectado. Incluso con ese inversor CFE en ocasiones se sale de parámetros incluso en
ocasiones hay apagones, con lo cual el inversor se desconecta de la red y deja de demandar
potencia por algunos minutos. En tal caso el regulador tiene que encargarse de absorber toda la
potencia eléctrica disponible y mantener una operación dentro del rango deseado.
Si después de un cierto tiempo el inversor sigue sin reconectarse, el regulador podría tomar la
decisión de frenar por completo a la turbina aplicando la máxima conmutación. Por tal motivo la
resistencia de disipación debe ser tal que la turbina sea capaz de demandar más torque que el
disponible en cualquier RPM para cada viento menor que 20m/s. Se pone como límite 20m/s,
porque más allá de ese valor tiene poco sentido seguir operando la turbina pues las cargas
mecánicas se vuelven peligrosas y ponen en riesgo al sistema.
Se corre la modelación con temperatura constante para tener más valores de RPM's en 20m/s,
resulta que la resistencia menor en 20m/s ocurre en 536RPM y es de 6.25 O. (por fase) significa
que si ponemos una resistencia mayor a ese valor hay riesgo de no frenar la turbina por ende se
tiene que elegir un valor menor, para que ése no sea un punto operativo estable. Para el presente
caso la resistencia que se propone para el regulador es 5 Ohm por fase si se colocan las
resistencias en AC. Si las resistencias se colocan en DC, entonces es necesario buscar un valor
equivalente de resistencia que produzca la misma corriente eléctrica AC. Esa corriente equivalente
AC debe ser la fundamental (que tiene la misma frecuencia que el voltaje), no es la corriente AC
total con armónicas.
Conversión de resistencia de disipación de corriente alterna a corriente directa.
Debido a que la resistencia de disipación se encuentra en el lado de directa del sistema, es
necesario convertirla de tal manera que se consuma la misma corriente eléctrica que la de un
valor de 5ohms en el lado de alterna. Esto causa que se obtenga el mismo torque de oposición y
de esta manera poder frenar a la turbina.
Para obtener un valor de resistencia de disipación equivalente se utiliza el paquete computacional
Pspice para monitorear la corriente de línea en el circuito sin rectificador y con rectificador.
38

Figura 2.12. Circuito equivalente con resistencia de disipación en lado de CA.
En la figura 2.12 se muestran los circuitos equivalentes del generador sin rectificador, como se comenta en el apartado anterior, el valor de la resistencia de disipación para realizar la regulación es de 5ohms, que se colocan 3 resistencias, cada una en paralelo con la carga trifásica conectada en estrella.
En la figura 2.13 se muestra el circuito equivalente del generador con un rectificador para utilizar
cargas en DC, en este caso solamente hay una resistencia de disipación conectada a la carga que
cuenta con el valor equivalente del circuito en AC.
Figura 2.13. Circuito equivalente con resistencia de disipación en lado de CD.
39

Al simular la corriente de línea en ambos circuitos, se observa que la rectificación produce
armónicas en la señal de alterna. Las armónicas no generan torque en el estator del generador, es
por ello que es necesario comparar la corriente fundamental de ambos circuitos variando el valor
de la resistencia de disipación para que ambas sean iguales.
Figura 2.14. Comparación de señales de corriente de línea.
El paquete computacional Pspice cuenta con la opción de obtener el espectro de frecuencias de
las señales simuladas de ambos circuitos (con y sin rectificador). En la figura 2.15 se puede
observar como la amplitud de la fundamental de ambas señales son iguales, además, la amplitud
de la primera armónica en 240Hz aproximadamente de la señal rectificada.
Figura 2.15. Comparación de la amplitud de la fundamental de la corriente de línea.
El valor equivalente de la resistencia de disipación en el lado de directa es de 8.3ohms para una
resistencia con un valor de 5ohms en el lado de alterna.
40

2.7 Dispositivos de protección.
Debido a la no idealidad de los dispositivos, surgen detalles debido principalmente al manejo de
inductancias, tanto en el generador, como las que se generan debido a la naturaleza de los
componentes del circuito de potencia.
Estos problemas se amplifican debido a la conmutación periódica de la resistencia de disipación
conectada a la carga principal. Ésta se realiza mediante el dispositivo de conmutación (IGBT), el
cual cuenta con dos modos de operación: estado de encendido y estado de apagado. Esto quiere
decir que se trabaja solamente en la zona de saturación y corte respectivamente. Debido a que se
opera a altas potencias, es necesario evitar la zona de amplificación del IGBT cuando cambia de
una zona de corte a una de saturación y viceversa, ya que se genera un aumento al valor de la
resistencia interna del dispositivo y se genera calor debido a la potencia disipada en el mismo.
El cambio que se realiza de un estado a otro, no se realiza de manera instantánea, esto quiere
decir, que existe un determinado tiempo tanto de subida como de bajada cuyos valores los
especifica el fabricante en la hoja de datos del componente, en este caso el IGBT utilizado
(FGA20S120M) cuenta con las siguientes especificaciones:
Como se observa en la tabla, el tiempo de apagado es mucho mayor al tiempo de encendido, es
por ello que se toma especial atención a este primer cambio ya que el encendido es despreciable.
Para obtener un mejor funcionamiento y menor desgaste en el dispositivo de conmutación se da
pie al diseño de un circuito de protección llamado snubber.
2.7.1 Snubber.
Los snubber's son los circuitos que previenen que se opere fuera del SOA en los transitorios de
encendido y apagado. En el presente caso, el transitorio de apagado del IGBT es el problema ya
que implica una disminución en la corriente lo que se traduce en picos de voltaje por la
inductancia del generador eléctrico.
El snubber de apagado debe evitar que la corriente Isw que pasa por el switch cuando está
encendido se mantenga constante durante el transitorio. Para ello, se agrega un capacitor en
paralelo que cuando el IGBT comienza a apagarse, aumenta el voltaje en forma paulatina y para
ello desvía la corriente del semiconductor. Evidentemente en cada ciclo de este proceso el
capacitor debe de comenzar descargado o de lo contrario simplemente se mantendrá en el voltaje
41

de circuito abierto del switch sin cumplir ninguna función. Por ello, cuando el switch está
encendido, el capacitor se descarga a través de una resistencia. El arreglo típico del snubber de
apagado es entonces:
Figura 2.16. Circuito snubber de apagado
Durante el estado Q = ON el capacitor se descarga a través de Rs. Cuando el transistor se apaga, el
diodo desvía la corriente hacia el capacitor iniciando un aumento paulatino del voltaje. Cuando el
capacitor llega a voltaje nominal, el transistor está completamente apagado. Cuando se vuelve a
encender, se recomienza el ciclo con la descarga del capacitor.
El dimensionamiento del capacitor Cs es crítico en la operación del snubber. Si es muy pequeño, se cargará demasiado rápido y alcanzará voltaje nominal aún cuando el transistor no está completamente apagado por lo que estará fuera del SOA. Si es muy grande entonces acumula mucha energía y se pierde mucha potencia en la resistencia Rs.
Se debe seleccionar entonces un valor de Cs que garantice que el voltaje nominal solo se alcanzará
después del tiempo T o f f del transistor, pero que no sea mucho más grande que este valor. El
tiempo T o f f generalmente se especifica en la hoja de datos, de donde se calcula una cota mínima
para el capacitor:
42
[2.12]
Seleccionando el capacitor, se puede calcular el tiempo que tardará en descargase. La descarga
debe de ocurrir en el tiempo de encendido del transistor aún en el ciclo de trabajo más pequeño.
Suponiendo que se deben de tener al menos dos constantes de tiempo del circuito RC para tener
una buena descarga, entonces la resistencia tiene una cota máxima en su valor de:
[2.13]
Donde T = periodo del switcheo, D m l n = Mínimo ciclo de trabajo en el que se desea operar.
Otra característica importante de la resistencia es la potencia que deberá disipar. Esto se calcula
como la energía acumulada en el capacitor dividida entre el periodo del switcheo:

[2.14]
Diseño de snubber
Se tienen las siguientes características T o f f = 310 ns, l n 0 m = 10 A, V n o m = 300 V. Entonces Cs = 10 nF.
Si T = 50 u,s y D m i n = 1% entonces Rs = 9.38 Q y P - 9.6 W
Implementación de snubber.
De acuerdo al diseño propuesto, se implementan los componentes en el circuito de potencia, para
probarlo, se mide el voltaje VCE del IGBT para observar su comportamiento. En la figura 2.17 se
observa la señal de conmutación del IGBT. A pesar del circuito de protección propuesto en el
apagado existe una sobretensión que el snubber no es capaz de consumir.
Figura 2.17. Señal resultante después de la implementación del snubber.
Esto quiere decir que en el circuito utilizado existe una gran inductancia parásita que provoca
dicho pico de sobretensión. Se procede entonces a medir el voltaje en la resistencia de disipación
Rdis. En la figura 2.18 se muestra el resultado de ésta. Se observa que el voltaje cuenta con ciclos
negativos, esto quiere decir que se encuentra almacenando energía similar a una inductancia.
43

F/gura 2. JÍS. Seño/ de voltaje en la resistencia de disipación.
El hecho de que se comporte como inductancia es común en resistencias de alta potencia, sin
embargo, la inductancia parásita que se genera es por este tipo de resistencia, es la culpable de los
picos de voltaje generados durante el apagado del IGBT.
Figura 2.19. Resistencias de disipación utilizadas para la regulación.
Cálculo de inductancia parásita.
Un cálculo aproximado de la inductancia presentada por la resistencia de disipación, la cual afecta
directamente a la conmutación del IGBT mediante picos de voltaje en el apagado del mismo, lo
cual genera un riesgo de estrés del dispositivo ya que en el momento en que sucede el pico de
voltaje, la corriente de colector se encuentra aumentando, lo cual genera una potencia que tendrá
44

que disipar el IGBT por medio de calor, eventualmente el IGBT se daña debido al esfuerzo que esto
genera.
En la figura 2.20 se representa la inductancia de la resistencia de disipación conectada en serie con
el IGBT justo en el momento del apagado, el capacitor del snubber queda en paralelo con el IGBT,
no hay resistencia que consuma la energía almacenada en el inductor.
Figura 2.20. Circuito equivalente considerando inductancia parásita.
El capacitor del snubber es pequeño comparado con la inductancia parásita, el valor de la
inductancia en este instante se realiza mediante la siguiente ecuación:
Para obtener el período T, se mide el tiempo que tarda el pico de voltaje en llegar a su máximo:
Por lo tanto T = 4u.s, si el capacitor con el que cuenta el snubber es de un valor de lOnF. La
inductancia parásita tiene un valor de:
El circuito de potencia utilizado para la protección, se simula utilizando el paquete computacional
Pspice colocando este valor de inductancia como se menciona en párrafos anteriores. En la figura
45
[2.15]

2.21 se muestra el voltaje colector emisor del IGBT donde se observa el pico de voltaje provocado
por dicha inductancia.
Figura 2.21. Circuito equivalente y señal de voltaje de colector-emisor del IGBT afectada por la inductancia
parásita.
Para solucionar este problema primeramente se propuso aumentar el valor de la capacitancia del
snubber para que se consumiera la energía almacenada en dicha inductancia en la resistencia del
snubber, sin embargo, se encontró que la mejor opción es re-direccionar dicha energía a la misma
resistencia de disipación colocando un diodo de libre circulación en anti-paralelo con la resistencia
de disipación. Como se muestra en la figura 2.22.
46

Figura 2.22. Señal de voltaje colector-emisor del IGBT con diodo de protección.
2.7.2 Capacitor de protección en ausencia de carga.
El objetivo de la regulación es proteger a la turbina contra velocidad rotacional alta (fuera de zona
de operación deseada). Si se conecta un inversor en la terminales de la turbina cuenta con un
controlador que cuenta con la capacidad de mantener a la turbina en dicha zona de operación
segura, sin embargo, el inversor cuenta con su propia protección en caso de alguna falla con la red,
es decir, si hay un apagón en la red eléctrica, el inversor se apaga para protegerse, en este caso la
turbina queda vulnerable al viento, el regulador debe operar en este tipo de casos, sin embargo, al
realizar conmutación, las bobinas del generador provocan picos de voltaje demasiado altos, lo cual
puede ser mortal para los componentes electrónicos, de tal manera que es necesario colocar un
capacitor en el lado de directa en paralelo con el rectificador para suprimir dichos picos de voltaje.
El cálculo del capacitor se realiza a partir de la energía entregada por la bobina del generador, el
cual cuenta con un valor de 4.8mH. La energía entregada por el inductor debe ser igual a la energía
que almacena el capacitor propuesto:
[2.16]
El valor de la capacitancia se calcula de la siguiente manera:
47

Al simular el circuito de potencia sin carga, se mide el voltaje de corriente directa, (en
rectificador) y se observan los picos de voltaje a 1.36kV como se muestra en la figura 2.23:
Figura 2.23. Señal de voltaje de corriente directa en ausencia de carga.
Al colocar el este capacitor la simulación arroja la siguiente señal de voltaje en el rectificador. El
voltaje se mantiene en 250V.
Figura 2.24. Señal de voltaje de corriente directa en ausencia de carga con capacitor de protección.
Los circuitos de protección propuestos anteriormente quedan integrados al circuito de la siguiente
manera:
48

Figura 2.25. Circuito equivalente con el regulador y los sistemas de protección.
2.8 Análisis de la carga.
El concepto del regulador es trabajar como un limitador de velocidad rotacional. La carga en este
caso puede ser entre otras, las siguientes:
1) Inversor eólico con curva de potencia contra voltaje (o potencia contra velocidad
rotacional) programable.
2) Bomba de agua trifásica.
3) Banco de baterías.
En cualquiera de los casos, existe una carga en las terminales del generador que provoca una curva
de potencia particular.
La carga debe de pedir una potencia eléctrica adecuada al nivel de potencia generada en cada
velocidad de viento. Si la potencia pedida es muy alta entonces las aspas no podrán suministrarla
(i.e. la potencia del generador será mayor a la mecánica) y se frenará. Si la potencia pedida es muy
baja entonces la mecánica es mayor y la turbina se acelerará.
Inversor eólico
Para comenzar el análisis se estudia el caso de utilizar un inversor eólico ya que es la carga que
podemos programar. Se han considerado diferentes opciones de inversores eólicos los cuales son
escogidos para la turbina de 3kW utilizada para este proyecto y además para utilizarlo en la
turbina de lOkW en el escalamiento del prototipo. Se analizan las opciones siguientes:
49

1) Aurora 10 kW
2) 3 Aurora de 3.6 kW
3) 3 S M A W ¡ n d y B o y d e 3 . 8 k W
Se había sugerido que la carga fuera ligeramente baja para que la turbina tendiera a acelerarse,
mientras que el IGBT conectaba una carga adicional que reducen la velocidad rotacional. Como la
carga del inversor es programable, siempre es posible lograr una carga óptima para la turbina.
Del mapeo, observamos que hay una relación funcional entre el voltaje en DC y la potencia
producida (la que debe pedir el inversor). Se considera que el valor de Vdc es alrededor de 1.35
veces el voltaje RMS entre líneas. La relación funcional para operar en el punto de máxima
potencia eléctrica a velocidades bajas y medias, y posteriormente mantener en lOkW puede
seguir varias trayectorias:
Figura 2.26. Curva de potencia programada en el inversor.
De las anteriores se recomienda la que tiene menor pendiente para facilitar el control que hace el
inversor (línea roja). Esta no es la curva de mayor potencia entre 8 m/s y 10.5 m/s sino que se
pierden 200 Watts respecto a la óptima (línea verde), pero la de máxima potencia no es
programable ya que a un mismo voltaje debe de operar en dos potencias diferentes. Esto se
podría resolver programando usando la corriente también, pero esto no es posible con los
inversores considerados.
Bomba de agua
Una bomba de agua trifásica pude conectarse a las terminales de la turbina antes de rectificar. En
ese caso, la rectificación solamente es necesaria para la regulación y el freno.
50

El motor en una bomba de agua también implica una relación funcional entre la potencia y el
voltaje en terminales. Evidentemente esta relación dependerá de la carga conectada a la flecha del
motor y del tipo de bomba que se utilice.
Banco de baterías (voltaje aproximadamente constante)
Si se conecta un banco de baterías a las terminales después del rectificador, en el mapeo se
observa que la turbina opera prácticamente sin carga hasta que alcanza una velocidad rotacional
cerca de la nominal. Por ejemplo, si se eligen baterías para que tengan un voltaje de 285 V (voltaje
nominal en CD), entonces cuando el viento es menor a 5 m/s la turbina no producirá potencia y
operará como si estuviera en vacío. Posteriormente a una velocidad rotacional de 225 RPM
comienza a producir potencia. Conforme el viento aumenta la turbina se. A partir de ahí, mayores
vientos provocan un aumento de corriente pero el voltaje se mantiene fijo. El sistema de
protección realiza la regulación en todo momento.
Resistencia (carga para pruebas)
Para pruebas de laboratorio puede ser necesario utilizar resistencias como carga para el
generador. En ese caso, la relación entre potencia y voltaje es cuadrática:
[2.17]
Una curva de este tipo no permitirá arrancar a la turbina eólica (si R es chica) o la hará operar en
muy altas RPM (si R es grande), lo cual es bueno para dar oportunidad a que opere el regulador
limitando la velocidad en una resistencia alta.
Una vez ¡mplementada la etapa de potencia del sistema de protección, se realiza el diseño del
sistema de control para la protección de la turbina eólica, en el siguiente capítulo se describen
cada una de sus partes.
51

Capítulo III. Sistema de control
En el presente capítulo se describe a detalle la manera en la que se controla el sistema de
protección de una turbina eólica. Se establece la estrategia de regulación utilizando una curva
óptima de RPM - corriente de línea, así como la estrategia de control por medio de la utilización
de lógica difusa explicando cada una de las partes del método y la manera en la que se diseña el
lazo de control.
3.1 Estrategia de regulación.
A lo largo del estudio del proyecto se ha recomendado reducir las distintas variables para obtener
un control adecuado sobre la turbina eólica, esto da lugar a la obtención de una relación funcional
entre la corriente eléctrica y la velocidad rotacional para definir las zonas de operación deseadas e
indeseadas de la turbina eólica.
3.1.1 Curva de operación.
La siguiente imagen muestra la relación de las variables simplificadas para la obtención de las
zonas de operación. Se encuentra compuesta por una curva cuadrática y una recta.
Figura 3.1. Curva óptima de operación de velocidad rotacional vs. Corriente de línea.
52

En el caso de la curva simplificada el objetivo del regulador se vuelve simple: la turbina debe operar únicamente en el área bajo la curva. Cualquier intento de la turbina por salirse de la curva, el regulador conmuta la carga paralela para reducir la velocidad rotacional. La intensidad, rapidez y período de aplicación de la conmutación dependerá de la zona de operación identificada por el controlador.
3.1.2 Zonas de operación.
En la figura 3.2 se muestra ía curva simplificada de operación de la turbina eólica, en la cual se puede apreciar tres zonas importantes: zona de arranque, zona óptima de operación y zona de operación nominal.
Figura 3.2. Zonas de operación de la curva óptima de operación.
Arranque
Esta zona es representada como una línea vertical en la curva simplificada y coincide con el eje
"y", es decir en I = 0. En este momento el control hace nada porque la operación está dentro del
área bajo la curva simplificada.
Se espera que la carga eléctrica principal empiece a operar tras haberse alcanzado las RPM de
arranque (70RPM) o incluso antes, por lo que es posible que I > 0 por debajo del umbral de RPM
que dicta el comienzo de la conmutación por parte del regulador.
La carga puede ser una bomba de agua, una resistencia de calefacción, un banco de baterías o un
inversor interconectado a la red nacional.
Si la carga no ha demandado potencia antes de las RPM de arranque es porque el voltaje no ha
alcanzado el umbral para activarse la carga eléctrica principal.
53

El valor de arranque de la conmutación es muy bajo para tratar de iniciar la regulación en forma
suave y aumentará gradualmente si no se logra mantener el punto operativo dentro del área
permitida bajo la curva óptima de RPM versus corriente.
Cabe señalar que las RPM de arranque, no requieren ajuste por densidad del aire. Eso se debe a
que si la velocidad rotacional ya llegó a un valor, es porque el viento puede solventar todas las
deficiencias. El cambio de densidad lo que provoca es que se retrase la velocidad de viento para la
cual ocurren las RPM de arranque.
Zona óptima de operación.
La protección de la turbina es sólo un limitador, no un seguidor de potencia óptima (MPPT:
máximum power point tracker). La carga principal, sea un inversor, un cargador de baterías, una
bomba de agua o una resistencia de calefacción, puede que tenga MPPT, pero el regulador es un
limitador y por ende no tiene MPPT.
Mientras la carga principal mantenga a la turbina operando en la zona óptima, el regulador no
tiene necesidad de actuar y puede permanecer con el duty cycle en cero o el mínimo, para no
alterar el desempeño. El regulador ejerce control cuando la carga principal no es capaz de
mantener a la turbina operando dentro del área definida por la curva RPM vs II.
Si las RPM medidas están un poco arriba, la conmutación del regulador es ligera; conforme las
RPM medidas estén más arriba de la curva, más intenso se debe hacer el PWM. Esta imposición
de una carga adicional o paralela es la que demanda más torque.
En esa zona óptima de operación la turbina ya no tiene más torque aerodinámico que ofrecer si se
sale de la curva RPM vs II.
Una vez que las RPM medidas empatan en la curva, la conmutación debe cesar y la carga paralela
del regulador ya no consume más potencia.
Zona de operación nominal
La zona de operación nominal en la gráfica RPM vs II está dada por la línea horizontal que significa
RPM constante. Esa zona se compone de varias subzonas que se identifican como: máximo,
nominal, mantenimiento, oscilatorio.
En esta zona el generador acerca sus variables electromecánicas a los valores nominales o
máximos permitidos. En distintos puntos se alcanza la máxima: eficiencia, potencia, velocidad,
voltaje, corriente, temperatura, torque. Es por eso que en esta zona la seguridad es prioridad, para
no dañar al generador, turbina o carga eléctrica.
54

El control es similar a la propuesta en la zona óptima de operación. La intensidad de la
conmutación aumenta si se detecta que para una corriente medida las RPM medidas están por
encima de lo previsto en la curva RPM vs II.
Si las RPM medidas están un poco arriba, el PWM es ligero; conforme las RPM medidas estén más
arriba de la curva, más intenso se debe hacer el PWM. Una vez que las RPM medidas empatan en
la curva, el PWM debe cesar. Si las RPM medidas están dentro del área permitida no se requiere
PWM.
Subzona de operación oscilatoria.
En la zona de operación nominal hay una subzona que presenta inestabilidad, pues lambda baja de
aproximadamente un valor de 5.5. Aparecen puntos metaestables en los que a pesar de subir la
conmutación existe riesgo de que la turbina se acelere y no es por aumento del viento sino porque
el torque aerodinámico disponible es mayor que la demanda de torque.
Se puede observar tal situación para vientos alrededor de 9m/s, para cada velocidad de viento el
torque aumenta por encima del valor nominal conforme se aumentan las RPM por encima de las
RPM nominales. Esto significa que hay más torque aerodinámico disponible por encima de la recta
horizontal descrita en la curva RPM vs II; es decir, hay más torque afuera del área de operación
deseada.
La conmutación debe ser ágil porque en esta zona entrará en una oscilación al acelerar y
desacelerar la turbina. La conmutación eléctrica es más rápido que la respuesta en RPM's, por lo
que no debe haber problema con la oscilación si se calibran bien los parámetros de control.
Entonces la turbina puede que quiera acelerarse, pero entonces se repite la conmutación. La
corriente puede tener aumentos repentinos al tratar de frenar la turbina durante las oscilaciones.
Entonces el sistema de protección debe tomar en cuenta que son normales los intervalos cortos
de corriente alta, pero se convierten en Anormales cuando el intervalo se extiende más allá de un
límite de tiempo.
Frenado en viento alto.
En el presente caso se buscará que la turbina sea frenada por el mecanismo de pitch por encima
de 20m/s. El mecanismo de pitch es una protección que atenúa las cargas mecánicas en la turbina
debidas al viento. Es un mecanismo de tipo pasivo, que entre más viento recibe, más fuerza que
destituye a las aspas llevándolas hasta un estado de menor eficiencia aerodinámica. Sin embargo,
hay una posible preocupación: en el trayecto de plegado de las aspas (pitch to feather) hay una
zona de operación de las aspas de mayor eficiencia aerodinámica. Esa mayor eficiencia implica una
potencia disponible muy alta pero para que esa potencia alta se lleve a la práctica, la turbina tiene
55

que acelerarse, en tal caso se incentiva la acción de otra parte del mecanismo de piten, la que
actúa por fuerza centrífuga. Entonces, entre más quiera acelerarse la turbina, más fuerza
centrífuga y por ende más fuerza de plegado de las aspas. Este mecanismo es también conocido
como "gobernador" pues evita el desbocamiento de la turbina.
El mecanismo de pitch tiene una histéresis muy amplia, es decir, una vez activado se deben dar
condiciones de muy bajo viento y bajas RPM para que éste se desactive y las aspas regresen a su
posición original. El mecanismo es más lento que la electrónica, pero aún así debe ser capaz de
proteger a la turbina en forma rápida.
El regulador electrónico no debe interferir con el mecanismo de pitch, cuando el mecanismo de
pitch actúa es debido a las fuerzas mecánicas por lo tanto el regulador no debe tratar de frenar a
la turbina en tal caso.
Como se mencionó anteriormente, durante el proceso de frenado es probable que haya una
potencia disponible mayor y la turbina trate de acelerarse, para esto el regulador puede tratar de
frenara la turbina imponiendo una carga eléctrica mayor.
El regulador es más rápido que el pitch porque no tiene inercia mecánica, pero aunque el
regulador intentara frenar a la turbina, no sería posible durante el pico de potencia disponible que
ocurre durante el proceso de frenado.
Para evitar que el generador eléctrico se dañe, el regulador debe darse cuenta de que no está
logrando frenar a la turbina y entonces debe desistir, esto es, si la corriente medida es muy alta y
se mantiene alta durante un rato corto a pesar del intento de frenado por parte del regulador,
entonces significa que el pitch está actuando y que no es viable frenar a la turbina con el regulador
por lo que el regulador debe dejar de conmutar.
Si el pitch se daña en forma peligrosa por alguna extraña razón (debe estar diseñado para fallar en
forma segura), entonces la protección que actúa no es el regulador, sino el freno de vacío.
El freno de vacío es un SCR conectado a la misma resistencia de carga paralela, es decir, la carga
del regulador establecida, el SCR se activa por voltaje mediante un arreglo zener o algún circuito
equivalente, pero que sea muy confiable.
Frenado por vacío
Hay que evitar el desbocamiento del generador y voltajes peligrosos que puedan ocurrir en sus
terminales. Por ello cuando el voltaje RMS o promedio en terminales del generador se vuelve
elevado, debe tratar de frenarse la turbina.
El freno por vacío consiste en un SCR que sirve como latch o candado que mantendrá a la turbina
frenada por falta de carga en caso de emergencia. A este freno de emergencia se le puede dejar la
tarea de actuar cuando el regulador no logra regular como debe.
56

Por eso el SCR no debe controlarse por el regulador, sino que debe buscarse que la mayor parte de
su circuitería sea independiente, de forma que sea una protección redundante, y no se neutralice
por falla de algún componente del regulador.
El voltaje alto en el cual se activa el freno por vacío es fijado de forma que no interfiera con la
protección centrífuga del pitch ya que no se deben activar al mismo tiempo pitch y freno
electrónico.
Para elegir la protección correcta debe hacerse un análisis de coordinación de protecciones según
transitorios y retardos en activación. A simple vista se sugiere una protección lenta y una rápida:
La protección lenta ideal es de aproximadamente 10A porque es una protección térmica que evita
quemar el generador que es de 7.5A nominal. La protección rápida ideal es de aproximadamente
50A porque es una protección eléctrica que evita un corto circuito que pueda causar daño
electromecánico.
El torque pico de frenado, proporcional a la corriente, se espera sea 580Nm. Ese valor supera a
cualquier torque aerodinámico de las aspas si el viento es 20m/s o menos, por lo que se asegura el
frenado. El torque de frenado máximo para el cual se diseña esta turbina es 2190Nm, 3.8 veces el
freno por vacío en el peor caso.
Pero eso no quita que el torque de frenado sea severo y puede deteriorar la estructura si es un
freno repetitivo (puede inducir falla por fatiga de los componentes mecánicos). Esto justifica la
recomendación de que primero se active el pitch centrífugo. El freno de vacío se activaría sólo si
falla el pitch centrífugo.
3.1.3 Consideraciones del regulador
Con el fin de establecer un método de regulación basado en reglas simples, se estipulan estas
reglas mencionadas a lo largo del texto anterior. Primero se mide la corriente eléctrica y se corrige
por densidad. También se miden las RPM. Acorde con la corriente se calculan las RPM máximas
teóricas según las ecuaciones que aparecen en la curva simplificada de RPM vs II.
Ese cálculo de RPM sirve para determinar un "error de velocidad", que es una variable de entrada
importante para el regulador porque indica qué tan lejos se encuentra del punto de operación
deseado. Para el presente regulador sólo es de interés un error de velocidad positivo, es decir,
cuando la velocidad rotacional medida es mayor que la velocidad calculada a partir de la corriente.
Si se obtienen valores negativos, pueden anularse o considerarse como cero pues no implican una
acción por parte del regulador.
57

El default de la conmutación es nulo, es decir, la resistencia paralela desconectada. Siempre que
no se requiera regular (disminuir) la velocidad de la turbina, el regulador hace sus cálculos pero no
enciende la resistencia paralela.
La conmutación del regulador no sube de golpe, sino sube como una rampa para evitar frenados
súbitos que dañen a la turbina. La conmutación sí puede bajar de golpe, incluso conviene así para
dejar a la turbina acelerar rápido.
La conmutación máxima es el duty cycle que garantice a la turbina frenarse, que puede llegar a ser
100%. Sin embargo, debe observarse de cerca la corriente RMS para que si se pasa del límite
nominal, entonces el regulador desconecte a la carga paralela. Por ende también puede definirse
un error con respecto de la corriente nominal, que en este caso es 7.5A.
Si la corriente es ligeramente mayor que 7.5A es probable que algo no esté funcionando
correctamente con la carga eléctrica, la turbina o la medición, entonces se procede a regular la
operación para tratar de bajar la corriente. Regular implica conmutar para tratar de bajar la
corriente RMS promediada en varios ciclos AC, aunque al conmutar hay pulsos de corriente altos
dentro de los ciclos AC.
La conmutación debe ser rápida inmediatamente se detecte que la corriente se sale de rango.
Pero conforme la corriente siga subiendo y no se logra la regulación, entonces la conmutación
debe bajar para no quemar al generador y esperar que otra protección actúe.
3.2 Estrategia de control
La etapa de control es la encargada de la toma de decisiones del sistema de protección, en esta
etapa se consideran las variables descritas con anterioridad para el monitoreo de la turbina eólica,
mediante estas variables, el control sabe en qué punto de operación se encuentra y toma medidas
respecto a éste. La etapa de control entrega información al actuador, en este caso es el IGBT, del
momento y la intensidad con la que se debe regular a la turbina.
El control se realiza mediante un algoritmo programado dentro del micro controlador donde se
utiliza la lógica difusa como estrategia de control y de esta manera realizar la regulación.
3.2.1 Lógica difusa
En el presente proyecto se utiliza una planta (aerogenerador) que se requiere controlar o
mantenerla trabajando en una zona de operación deseada, esto requiere de manejo de variables
no lineales y de un sistema cuyo modelo es un tanto complejo. Lo cual requiere un control
robusto como lo es la lógica difusa.
58

3.2.2 Diseño del lazo de control
Para el diseño del lazo de control es conveniente utilizar como variables de entrada al controlador
el error existente en el proceso (e — T — y), el cambio del error (de/dt) y la acumulación del
error (J e(i)dt). Luego cada una debe ser fusificada, es decir, se deben definir una cantidad de
funciones de pertenencia que representan los diferentes estados (lingüísticos) que pueden tomar
estas variables (por ejemplo. Alto, Bajo, Nulo).
Posteriormente se deben definir las reglas base, cuya función es establecer una vinculación lógica
entre los grados de pertenencia de las distintas variables de entrada, por ejemplo, si el error es
grande y crece entonces se debe aplicar actuación correctiva grande, de esta manera se definen
todas las sentencias lógicas posibles, asignándoles a cada una su actuación correspondiente.
Un sistema de control no funciona con conclusiones difusas, sino que requiere de un número
exacto, para esto, las conclusiones de las actuaciones deben ser defusificadas para ser convertidas
a número, esto se logra mediante diversos métodos, siendo el más utilizado el del centroide.
En la figura 3.3 se muestra la forma esquemática del controlador fuzzy, en la cual las entradas de
error y la diferencia del error se definen mediante funciones de pertenencia, la entrada integral se
agrega después de la lógica difusa mediante una sumatoria. Se realiza esto debido a que entre
mayor cantidad de entradas a la fusificación, aumenta la cantidad de reglas base, lo que dificulta
enormemente el diseño del control. Se obtiene entonces un controlador híbrido de dos entradas
difusas y una determinística. [9] [10].
Figura 3.3. Diagrama a bloques del sistema de control utilizando lógica difusa.
3.2.3 Funciones de membresía
El procedimiento para definir estas funciones es el siguiente:
• Se elige un número de funciones, de tal modo que representen los estados de la variable.
• Se diseña un ancho mínimo suficiente que permita obviar el ruido de medición.
59

• Se desea un cierto grado de cruzamiento entre las distintas funciones, para no incurrir en
estados pobremente definidos, inicialmente se recomiendo un entrecruzamiento del 50%
de tal modo que cada elemento quede representado en por lo menos dos funciones.
Para realizar este punto se dispone de una gran variedad de funciones, tales como, gaussianas,
triangulares, trapecios, etc. Para el presente proyecto se ha elegido las de tipo triangular. Se
utilizan 5 triángulos de membresía (error muy negativo, poco negativo, nulo, poco positivo y muy
positivo) definidos de la siguiente manera:
Figura 3.4. Distribución de las funciones de membresía.
3.2.4 Cálculo del error
El error de la velocidad rotacional se calcula mediante la diferencia entre la velocidad rotacional
medida menos la velocidad rotacional óptima.
[3.1]
En donde Afl es el umbral de velocidad rotacional a la cual el regulador no debe pasar, este se
define en el límite al cual está permitido regular. Para este caso dicho límite es 300rpm, ya que
arriba de esta velocidad entra otro sistema de protección "pitch". De tal manera que si se llega a
ese límite el ciclo de trabajo es 100% para frenar completamente.
La velocidad rotacional óptima se obtiene en función de la corriente de línea, la ecuación que la
define, se obtiene de la curva óptima RPM-Ia descrita con anterioridad.
La diferencia de cambio del error se calcula mediante su derivada, se realiza la resta entre el valor
del error actual menos el error anterior.
[3.2]
Por otro lado la acumulación del error definida como la integral, realiza la sumatoria del error.
60

[3.3]
Es necesario realizar una correcta sintonización de las ganancias de cada una de las entradas para
obtener una respuesta adecuada de los transitorios del sistema. La estrategia de control mediante
lógica difusa adquiere una gran ventaja sobre un controlador PID clásico, debido a que este paso
reduce su dificultad. [11]
3.2.5 Reglas base
Las reglas utilizadas para los sets o conjuntos difusos en la lógica difusa son basadas en la regla if-
then, esta regla es bastante utilizada en control. Conceptualmente las reglas difusas sirven para
realizar inferencias respecto a un problema, éstas utilizan como base decisiones de un experto en
donde utiliza varias reglas if-then, cada regla realiza una aproximación hacia la inferencia del
problema y llegar a un grado de solución a éste.
Una regla difusa es la unidad básica para obtener un conocimiento. La regla difusa se compone de
dos partes: la parte ¡f, definida como el antecedente y la parte then, definida como la
consecuencia. El antecedente describe una condición, y la consecuencia describe una conclusión
que ocurre cuando se mantiene la condición.
Ya definidos los 5 conjuntos difusos como error muy negativo, poco negativo, nulo, poco positivo,
muy positivo, se procede a definir cada una de las reglas que representan a estos conjuntos
asignando una actuación. La actuación del sistema es única y físicamente se realiza modificando el
ciclo de trabajo de la señal PWM para frenar o soltar a la turbina aumentando o disminuyendo el
ciclo de trabajo respectivamente. Para realizar la regulación mediante un frenado suave evitando
movimientos bruscos que pueda afectar mecánicamente a la turbina, se utiliza una especie de
rampeo configurando una pendiente de la rampa mediante incrementos de porcentaje de ciclo de
trabajo como la salida del sistema.
Las reglas utilizadas son las siguientes:
• Si el error de velocidad rotacional es muy negativo y su derivada es muy negativa
entonces la pendiente es muy negativa
• Si el error de velocidad rotacional es muy negativo y su derivada es poco negativa
entonces la pendiente es muy negativa
• Si el error de velocidad rotacional es muy negativo y su derivada es nulo entonces la
pendiente es muy negativa
• Si el error de velocidad rotacional es muy negativo y su derivada es poco positiva
entonces la pendiente es muy negativa
61

• Si el error de velocidad rotacional es muy negativo y su derivada es muy positiva entonces
la pendiente es nula
Se prosigue de la misma manera hasta completar las 25 reglas que definen cada combinación,
para obtener un grado de pertenencia a cada una de las opciones de las variables de entrada se
realiza una tabla para definirlas:
3.2.6 Procedimiento difuso
El algoritmo de lógica difusa consiste en cuatro pasos básicos:
1. Igualación difusa: Consiste en calcular el grado en el cual el dato de entrada se iguala a la
condición de la regla difusa.
2. Inferencia: Calcula la conclusión de la regla basado en la igualación difusa.
3. Combinación: Combina la conclusión inferida por todas las reglas difusas en una
conclusión final.
4. Defusificación: Convierte una conclusión difusa en una conclusión exacta bajo cierta clase
de degradación. [4]
Igualación difusa
La igualación difusa consiste en generar los sets difusos que definen el grado de pertenencia en
base a las reglas descritas con anterioridad. Se genera un grado de pertenencia en los triángulos
de membresía, los triángulos se ponen uno sobre otro para formar una degradación combinada en
ambas entradas (error y derivada del error) como se muestra a continuación:
62

Figura 3.5. Triángulos de membresía, distribución del error y derivada del error.
El siguiente paso es obtener el grado de pertenencia de cada uno de los triángulos dependiendo
del error obtenido de las dos variables, esto se define por medio de las alturas como se muestra a
continuación:
Figura 3.6. Representación de los grados de pertenencia de los triángulos de entrada.
A la altura marcada en los triángulos partícipes se le llama grado de igualación, debido a que cabe
la posibilidad de que en ambas variables exista un error, es necesario conjuntar dichos errores
63

para obtener una salida. Esto se realiza comparando cada uno de los triángulos conforme las 25
reglas base.
Comparación de triángulos de salida.
El grado de igualación que existe en cada uno de los triángulos define una altura para éstos, las
cuales en ocasiones serán diferentes. En este proyecto se obtiene el mínimo de todas las alturas
participantes debido a las reglas utilizadas, es posible que un triángulo de salida intervenga en dos
reglas, debido a esto, se puede obtener dos o más alturas, en este caso se define el mínimo de
ambas alturas para obtener la altura resultante a la salida. Como ejemplo se muestra la figura 3.7.
Figura 3.7. Ejemplo para la obtención la comparación de los triángulos de salida mediante el mínimo.
En la figura 3.7 se puede apreciar, en las dos primeras series de triángulos, la fusificación del error
y la derivada del error, el cual toma dos valores distintos para cada uno, esto se traduce a un grado
64

de igualación que se muestra en la tercera serie de triángulos que pertenecen a la salida del
sistema para generar un incremento o un decremento, se puede observar que la altura tomada en
ambas entradas se colocan en la salida, sin embargo, se puede observar que el triángulo nulos (0)
toma dos alturas, en la cual se elige la mínima en este caso para obtener así una conclusión final.
Inferencia.
La inferencia es la conclusión de la comparación de ambas entradas como en la figura 3.8
realizando el corte de los triángulos a la altura obtenida del grado de igualación. Utilizando el
mismo ejemplo se obtiene:
Figura 3.8. Representación de la inferencia de los triángulos de salida para obtener una conclusión.
Combinación
Se combinan los cortes de triángulos para obtener una conclusión a partir de las inferencias. Ya
que estos son los triángulos de salida de la misma manera en cómo se catalogan las
variables de entrada, se obtienen sets de la salida, en este caso, el eje x se define como la
rampa positiva del ciclo de trabajo. La figura 3.9 muestra que la rampa la define un
triángulo en rampa lenta y un triángulo rampa media.
Figura 3.9. Representación de la combinación de la inferencia para obtener una conclusión final.
65

De esta manera se obtiene la conclusión final del sistema de protección de una manera difusa,
para saber el valor exacto del incremento o decremento del ciclo de trabajo, es necesario
defusificar esta conclusión.
Defusificación.
La defusificación obtiene una conclusión exacta de la cantidad de rampeo del ciclo de trabajo, esto
se realiza calculando el centro de área (centroide) de la figura 3.10 compuesta por los triángulos
de conclusión, en el ejemplo se obtiene el siguiente:
Figura 3.10. Defusificación de los triángulos de salida para obtener una conclusión exacta.
Como conclusión, para una entrada de error de entre nulo y poco positivo y una derivada del error
de entre poco negativo y nulo, se obtiene un decremento de ciclo de trabajo entre poco y nulo
(0.15 según centroide). Esto es debido a que el punto de operación se encuentra ligeramente por
encima de la curva óptima pero lleva una tendencia negativa acercándose a la curva, por lo tanto
se va decrementando muy despacio para que las condiciones lo lleven a un error cero y nulificar el
error.
66

Capítulo IV. Módulo de pruebas
4.1 Descripción.
El presente apartado describe de manera detallada la implementación de un módulo de pruebas
para turbinas eólicas, se explican cada una de sus partes para el funcionamiento del mismo.
En el laboratorio del centro de investigación de tecnología eólica CITE, que se encuentra en el
ITESM campus Monterrey, se ha fabricado con la ayuda de la empresa AEROLUZ un módulo de
pruebas electromecánicas, térmicas, funcionalidad y periféricos, para aerogeneradores,
actualmente se encuentra instalado un generador toroidal de 3kW fabricado por compañeros
colaboradores del centro. [7]
El objetivo del módulo de pruebas es monitorear los parámetro o variables de un generador para
observar su comportamiento siguiendo un determinado plan de pruebas, en el presente proyecto,
se utiliza éste como banco de pruebas para la regulación del generador instalado, para esto es
indispensable generar una interfaz con el usuario para su control y el despliegue de las diferentes
variables tanto calculadas como medidas mediante la instrumentación, en esta sección se
describen a detalle cada una de sus partes.
El módulo de pruebas consta de las siguientes partes: motorreductor, variador de frecuencia,
generador eléctrico, sensores y transductores, Monitoreo.
Figura 4.1. Partes que integran el módulo de pruebas.
67

El motorreductor elegido para este fin es un motor común, de inducción, trifásico y con cuatro
polos magnéticos; sus características se resumen en la siguiente tabla:
Tabla 4.1. Características del motorreductor.
El reductor de la misma marca, serie 4000, es de tipo planetario con una relación de reducción de
6:1. Con este motorreductor se puede operar hasta 300 rpm con un torque de 356 Nm, cuando el
torque máximo esperado en las pruebas es menor a 300 Nm, por lo que tenemos un factor de
seguridad de más del 18%, con un factor de servicio de 1 en el motor.
Figura 4.2. Imagen del motor utilizado para la emulación de viento.
El variador de frecuencia que se eligió para controlar la velocidad del motor cuenta con las
siguientes características:
Tabla 4.2. Características del variador de frecuencia.
68

Este variador de frecuencia nos permite obtener la información necesaria del generador en un
rango de velocidad en la flecha de 1 a 300 rpm a partir de la frecuencia que se fija. La velocidad en
la flecha se calcula de acuerdo a la ecuación característica de los motores de inducción.
[4.1]
Donde f es al frecuencia [Hz] alimentada por el variador, p es el número de polos del motor y por
el reductor se aumenta el término R que es el factor de reducción de velocidad debida a la caja de
engranes.
Figura 4.3. Imagen del variador de frecuencia utilizado con su respectivo centro de carga.
El generador eléctrico. En primera instancia se presenta la tabla que resume las características
generales del generador y datos principales de operación nominal.
Tabla 4.3. Características del generador eléctrico.
69

Figura 4.4. Imagen del generador eléctrico fabricado en el CITE.
4.2 Sensores y transductores.
En este apartado se describe cada uno de los sensores y transductores que se instalaron o
fabricaron para la medición de todas las variables físicas necesarias para realizar las pruebas del
regulador, algunas de éstas son medidas directamente y otras son calculadas a partir de variables
medidas. A continuación se describen los sensores y transductores que se implementaron en el
módulo de pruebas de algunas de estas variables, el resto de ellas se explican cómo se calculan en
el siguiente apartado.
Voltaje de fase AC
Voltaje DC
Corriente AC
Corriente DC
Torque
Temperatura interna del estator
70

Figura 4.5. Partes que integran la instrumentación del módulo de pruebas.
Los transductores utilizados para la instrumentación del módulo de pruebas son los siguientes:
Tabla 4.4. Transductores utilizados para la instrumentación del módulo de pruebas.
4.2 .1 Vol ta je
El voltaje instantáneo de CA que nos entrega el transductor VTU-010X5, nos sirve para monitoreo
de la calidad de la señal en las terminales del generador para observar el contenido armónico,
THD, factor de potencia, etc. Se realiza un acondicionamiento de la señal para su calibración.
En el análisis de la señal de voltaje se podrá observar el efecto que realiza la utilización de la
modulación por ancho de pulso (PWM) en el regulador, por tal motivo también la importancia de
medirlo.
El voltaje en CD el cual se mide mediante el transductor VTU-010X5, se obtiene para visualizar el
rizado de la señal en el lado de directa y obtener mediante ésta la potencia en la carga después de
la rectificación ya que es un punto de interés para obtener la eficiencia del sistema.
71

4.2.2 Corriente
La corriente instantánea se mide mediante el transductor CTA-201HX5, el cual utiliza una "dona"
modelo CTL-101(TS)/75, para medir la corriente mediante el efecto hall, de esta manera se
obtiene la señal de corriente, el cual es necesaria su respectiva adecuación para su calibración.
Con este transductor se mide en CA y en CD.
La importancia de medir estas variables en el módulo de pruebas es para su monitoreo, ya que se
puede observar cómo se transforma la señal al colocarse un rectificador, además de que con estas
variables se calcula la potencia, tanto en CA como en CD y así obtener la eficiencia del sistema.
4.2.3 Torque e lect romecánico
El torque en flecha del generador se mide también solamente para pruebas, es de gran
importancia en pruebas aerodinámicas del generador ya que en el módulo de pruebas se realiza la
comparación del torque aerodinámico de las aspas con el torque electromecánico ejercido en la
flecha del generador, de tal manera que para medirlo se utiliza un torquímetro digital.
Se realiza la implementación de un torquímetro en el módulo de pruebas utilizando un eje fijo en
el estator con la estructura, de tal manera que cuando el generador gira en su funcionamiento,
éste ejerce una torsión en el eje fijo, esta torsión se mide mediante la deformación de la flecha
utilizando galgas extensiométricas en configuración puente de Wheatstone.
Figura 4.6. Módulo de pruebas y palanca fija para la medición del torque electromecánico.
72

Galgas extensiométricas
Para obtener el valor del torque eléctrico del generador se utilizan galgas extensiométricas en
configuración de torsión (se verá en la siguiente sección). Estas cuentan con el número de serie
CEA-13-125UN-350 de la marca Vishay. Algunas de las características principales de dichas galgas
de propósito general es que cuentan con una resistencia de 350 ohms con 0.3% de tolerancia y un
rango de temperatura de -75°C a 175°C. Se utilizan generalmente en sistemas de medición lineal,
en este caso se emplean como una configuración especial para medir el torque eléctrico del
generador.
Puente de Wheatstone
En el eje del estator se coloca una extensión del mismo unido a la estructura para que se
encuentre totalmente fijo, en este caso el rotor ejercerá una fuerza o torsión hacia el estator,
dicha fuerza es la que se medirá como torque eléctrico del generador, es decir, la tensión del eje
debido a la fuerza de torsión, para este fin se utilizan galgas extensiométricas en un arreglo de
torsión como se muestra en la figura 4.7.
De tal manera que el diagrama de conexión del puente de Wheatstone se muestra en la siguiente
figura 4.8:
Figura 4.7. Colocación de galgas en el eje del estator para medir torsión.
73

• Figura 4.8. Diagrama de conexión de un puente de Wheatstone.
El funcionamiento básico del puente de Wheatstone es colocar dos ramas como divisor de voltaje,
en la primer rama (galgas 1 y 2) el voltaje de entrada Vi se divide en las resistencias de ambas
galgas de una manera equitativa, ya que ambas cuentan con un valor de 350Q. De la misma forma
se divide el voltaje Vi en la segunda rama (galgas 3 y 4) de tal manera que si mido el voltaje en la
mitad de ambas ramas, es decir, el voltaje en Vo, debido a la igualdad del valor de resistencia de
las 4 galgas, se obtiene un voltaje de OV. Las galgas utilizadas para el presente proyecto cuentan
con una tolerancia del 0.3%, lo cual indica que son bastante precisas como para obtener un valor
diferente a los 350Q. Cuando se establece el movimiento torsional, el eje donde se encuentran
pegadas las galgas se deforma, de la misma manera lo hacen las galgas y éstas cambian su valor de
resistencia, generando un valor de voltaje Vo diferente de cero en proporción a la deformación de
la flecha, cuanto mayor sea la velocidad rotacional del generador o bien, mayor sea la carga
eléctrica conectada al generador, mayor será la torsión de la flecha y a su vez mayor es el torque
electromecánico.
Es necesario que las galgas que se encuentran en el mismo lado del eje sean los que conforman
una rama del puente de Wheatstone con el objetivo de proveer mayor sensibilidad al movimiento
torsional (galgas 1, 2 por un lado y 3, 4 por el otro). En la figura 4.8 se observa que las galgas se
encuentran a 45° con respecto al eje, esto es necesario para medir el movimiento de torsión y
tiene que estar exactamente opuesto a la galga del otro lado, en ambas figuras se han enumerado
cada una de las galgas para identificarlas tanto en el sistema como en la conexión del circuito.
Amplificador de señal
Una vez colocadas las galgas en el eje del estator y realizando las conexiones pertinentes del
diagrama de la figura 4.9, se prosigue a realizar una tarjeta impresa para amplificar dicha señal
que se encuentra en el orden de los micro-volts, tan pequeña que no es posible observar mediante
74

un instrumento de medición la variación de voltaje al momento de ejercer torque al eje del
generador, es por ello la importancia de dicho amplificador.
En la figura 4.9 se muestra el circuito de amplificación implementado, en el cual se secciona en
dos partes, la etiqueta con la letra A, es el conjunto de fuentes de alimentación, tanto para
alimentar el puente de galgas, así como también el circuito de amplificación, el cual aparece con la
etiqueta con la letra B.
Figura 4.9. Implementación del circuito amplificador para la señal de torque electromecánico.
Se muestra el diagrama de conexiones del circuito completo en la figura 4.10. Se puede observar
que se alimenta por medio de la red utilizando un transformador de 10:1 para obtener un voltaje
de 12V, de esta manera se regulan los voltajes necesarios para alimentar el circuito amplificador y
el puente de galgas con -+ 15V y 9V respectivamente),
La etapa de amplificación se produce a la salida del puente de Wheatstone, mediante un
amplificador de instrumentación AD620 el cual cuenta con un alto CMRR, su voltaje de
alimentación es de +- 2.3V a +-18V, en esta ocasión se propuso un voltaje de alimentación de 8V
para ajustarse al transformador, tiene la capacidad de obtener una ganancia de 1 a 1000, en este
caso se utiliza una ganancia de 500 para obtener un voltaje apreciable de las variaciones de
torque en el generador.
75
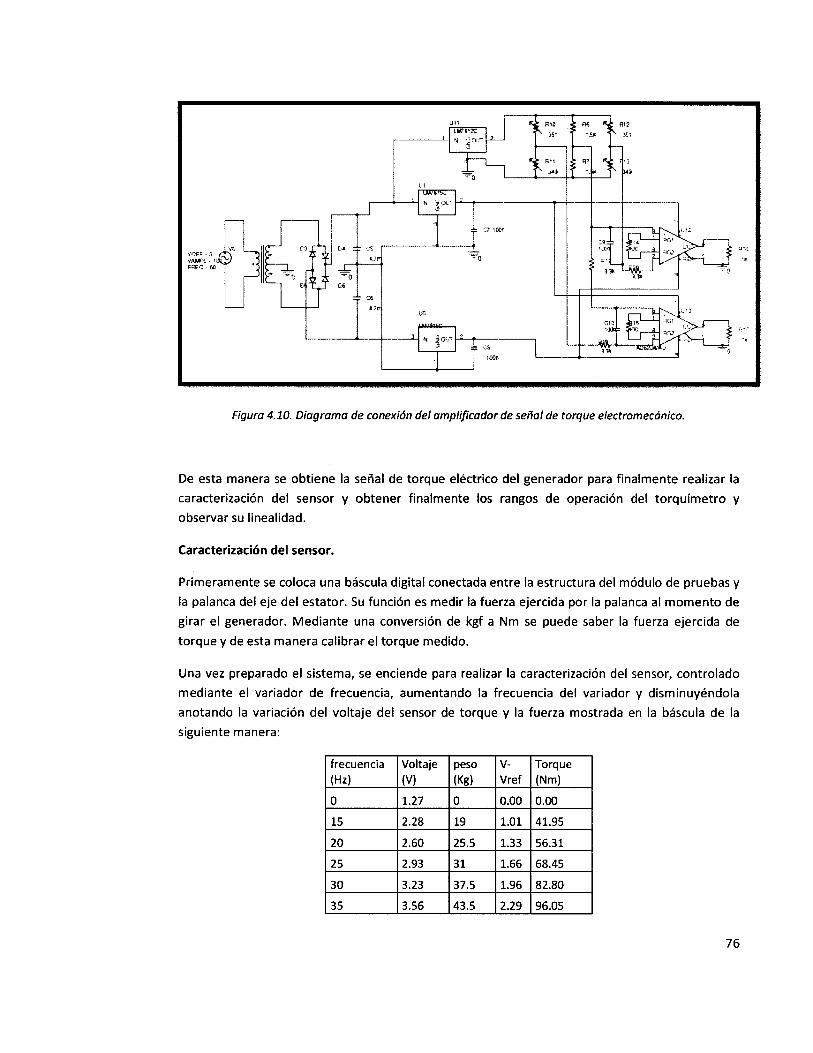
Figura 4.10. Diagrama de conexión del amplificador de señal de torque electromecánico.
De esta manera se obtiene la señal de torque eléctrico del generador para finalmente realizar la
caracterización del sensor y obtener finalmente los rangos de operación del torquímetro y
observar su linealidad.
Caracterización del sensor.
Primeramente se coloca una báscula digital conectada entre la estructura del módulo de pruebas y
la palanca del eje del estator. Su función es medir la fuerza ejercida por la palanca al momento de
girar el generador. Mediante una conversión de kgf a Nm se puede saber la fuerza ejercida de
torque y de esta manera calibrar el torque medido.
Una vez preparado el sistema, se enciende para realizar la caracterización del sensor, controlado
mediante el variador de frecuencia, aumentando la frecuencia del variador y disminuyéndola
anotando la variación del voltaje del sensor de torque y la fuerza mostrada en la báscula de la
siguiente manera:
76
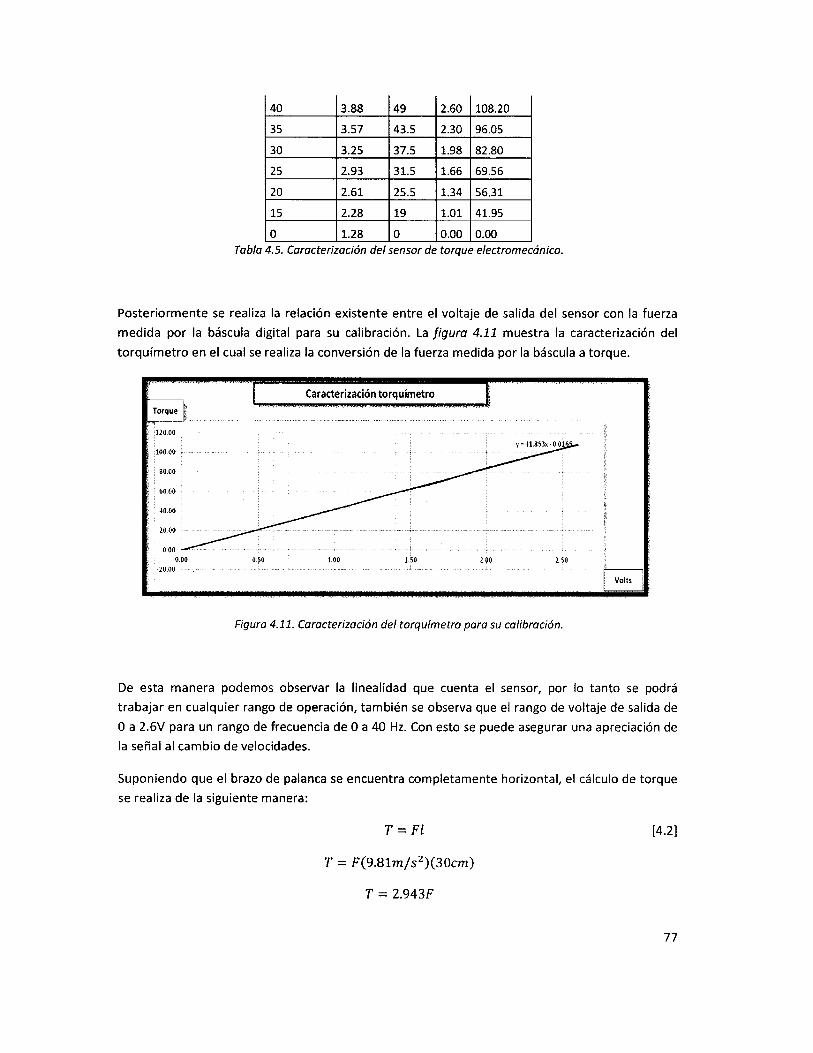
Tabla 4.5. Caracterización del sensor de torque electromecánico.
Posteriormente se realiza la relación existente entre el voltaje de salida del sensor con la fuerza
medida por la báscula digital para su calibración. La figura 4.11 muestra la caracterización del
torquímetro en el cual se realiza la conversión de la fuerza medida por la báscula a torque.
Figura 4.11. Caracterización del torquímetro para su calibración.
De esta manera podemos observar la linealidad que cuenta el sensor, por lo tanto se podrá
trabajar en cualquier rango de operación, también se observa que el rango de voltaje de salida de
0 a 2.6V para un rango de frecuencia de 0 a 40 Hz. Con esto se puede asegurar una apreciación de
la señal al cambio de velocidades.
Suponiendo que el brazo de palanca se encuentra completamente horizontal, el cálculo de torque
se realiza de la siguiente manera:
77
[4.2]

Esta es la ecuación utilizada finalmente para obtener el torque en Nm, en función de la fuerza medida por la báscula.
4.3 Interfaz con el usuario
En esta etapa se describe el procesamiento de datos provenientes de cada uno de los
transductores y sensores del módulo de pruebas, además de la descripción de la información que
se muestra para que el usuario pueda observar el comportamiento de las variables físicas del
generador eléctrico que se encuentra instalado en el módulo. Todo se realiza utilizando el
programa Labview.
Labview es es una herramienta gráfica para pruebas, control y diseño mediante la programación.
El lenguaje que usa se llama lenguaje G, donde la G simboliza que es lenguaje Gráfico. Este
programa fue creado por National Instruments. Los programas desarrollados con LabVIEW se
llaman Instrumentos Virtuales, o Vis. Este programa facilita el desarrollo de mediciones, pruebas y
sistemas de control mediante dichos instrumentos virtuales.
El transductor es capaz de convertir cualquier tipo de energía a voltaje en la mayoría de los casos,
análogo, dicho voltaje cambia en función de la señal de entrada. Cada transductor proporciona un
rango de voltaje análogo que debe tener un procesamiento para obtener el valor real de la
variable física medida.
Al obtener la señal de las variables provenientes de los transductores y los sensores, se utiliza una
tarjeta de adquisición de datos (DAQ), en este caso se utiliza la DAQ NI USB-6009 de National
Instrument, cuenta con compatibilidad con el programa Labview, tiene una resolución de 14bits y
48KS/s en sus 8 entradas análogas, en cambio, las salidas análogas cuenta con una resolución de
12bits y 150S/s.
Figura 4.12. Tarjeta de adquisición de datos DAQ NI USB-6009.
78

La DAQ utiliza las entradas análogas para recibir los datos de los transductores, la función de la
DAQ es enviar dichos datos por un puerto USB de la computadora de manera serial y a su vez, el
programa Labview utiliza un instrumento virtual exclusivo para obtener datos del puerto USB de la
computadora mediante los siguientes comandos gráficos:
Figura 4.13. Creación de canales virtuales para la obtención de datos mediante la DAQ.
En este caso es necesario instalar un instrumento virtual (VI) llamado DAQ.mx, el cual tiene el
objetivo de realizar una comunicación de Labview con la DAQ para crear canales virtuales para
medir el voltaje de entrada de los instrumentos, solo es necesario configurarle el tipo de entrada
(análoga, digital, etc.). En la figura 4.13 se muestran un conjunto de bloques que configuran los
canales virtuales hacia la DAQ, de tal manera que se proporcionan tanto el número de muestras a
leer en determinado tiempo, así como el tiempo de muestreo. El resultado de este conjunto es
obtener todos los datos en una matriz de salida.
La siguiente etapa es realizar el procesamiento de datos de la siguiente manera:
• La señal del transductor de voltaje se multiplica por 120 y así se obtiene la amplitud de la
sinusoidal del voltaje del generador, el voltaje en este momento es instantáneo por lo que
es necesario convertirlo a voltaje RMS, para esto se utiliza un módulo de LAbview que
realiza esta operación. Como el voltaje se mide de línea a neutro, se obtiene también el
voltaje entre líneas mediante la siguiente ecuación: VLL = V3 * VLN
• La corriente en alterna se multiplica por un factor de 15 para obtener la corriente de línea
del generador a partir del transductor de corriente CTA-201HX5.
79

• Utilizando el mismo transductor CTA-201HX5 se mide la corriente de directa, después del
rectificador, en esta variable, los datos se multiplican por 12.5 para su calibración y
obtener la corriente real.
• El torque electromecánico tiene una serie de operaciones para su calibración,
primeramente se agrega un offset a la señal de 1.6V para empezar con una referencia de
cero, posteriormente se realiza una multiplicación de 41.85 y de esta manera obtener el
torque en Nm.
Se verifica cada una de estas comparándolas con instrumentos calificados, para el valor de los
voltajes, tanto de CA como de CD, se utiliza un Fluke 123; para obtener el valor real de la corriente
de CA y la corriente de CD se compara la medición de ambas utilizando un amperímetro de gancho
DC-lOOOkHz y finalmente el torque se utiliza una báscula digital utilizando la calibración descrita
anteriormente.
Consecutivamente se grafican los datos obtenidos de la DAQ utilizando Vl's para obtener los
últimos 1000 datos sincronizándose con el muestreo de la adquisición, posteriormente realizar un
"barrido" de estos en una gráfica de formas de onda realizándolo en tiempo real y así observar la
señal de cada uno de los transductores.
Figura 4.14. Interfaz con el usuario de las diferentes señales de las variables medidas.
La interfaz de las señales provenientes de los transductores se muestra en la figura 4.14,
observando las gráficas de formas de onda a la izquierda de la imagen y a la derecha la
representación del valor puntual en número mediante un despliegue digital. En esta parte de la
80

interfaz se muestran las variables eléctricas del generador, como ya se mencionó anteriormente,
por consiguiente se obtienen la potencia real, potencia reactiva y potencia aparente del
generador, también se obtiene el factor de potencia, incluso el contenido armónico de las señales
tanto de voltaje como de corriente, es información que puede ser útil en un momento dado.
Los datos obtenidos a su vez se guardan en archivos ya sea en .txt o en excell para su posterior
manipulación en caso de ser necesario. En algunos casos es probable que se requiera guardar el
historial de datos obtenidos en determinada prueba, en cambio en otros casos solamente se
requiere obtener los últimos 1000 datos en una sola ventana para ver la calidad de señal o bien su
forma de onda.
Existe en el interfaz opciones de cómo elegir operar el generador o el banco de pruebas, la
primera condición es un selector que el usuario determina entre operar el generador
manualmente, manipulando la variable velocidad rotacional en RPM mediante una perilla, o bien,
realizar una emulación de viento mediante un algoritmo que realiza dicha función.
En la figura 4.15 se muestra la perilla que determina la velocidad rotacional a la que se quiere
trabajar, esta opción es útil para realizar pruebas puntuales con el generador funcionando a
diferentes velocidades, el máximo de velocidad a la que puede llegar esta perilla es de 300rpm,
este valor en frecuencia eléctrica es de 60Hz que entrega el variador de frecuencia para que opere
el motor.
Figura 4.15. Control de velocidad rotacional del generador.
La manera en cómo el Labview hace girar el motor mediante la perilla es a través del variador de
frecuencia, se coloca un grupo de Vl's para configurar las salidas análogas de la DAQ, de la misma
manera es necesario configurar el variador de frecuencia para recibir una señal análoga en uno de
sus puertos de control, en este caso se utiliza un voltaje de corriente directa de OV a 5V para
comunicar ambos, de tal manera que cuando se mueve la perilla para cambiar la velocidad del
81

generador, la DAQ varía su voltaje de salida en ese rango de voltaje para proveerla al variador, el
variador cambia su frecuencia en función de dicho rango de voltaje, por eso cuando se coloca la
perilla en 300rpm, la DAQ entrega 5V y el variador entrega 60Hz al motor y el motor transduce tal
velocidad en la flecha hacia el generador con una relación de 1:1 debido al reductor instalado en el
motor. De esta manera el generador gira a 300rpm.
En caso de seleccionar la opción de emulación de viento al sistema, se tiene de la misma manera
un selector, el cual permite elegir entre emulación de viento constante o emulación de una serie
de viento.
Figura 4.16. Control de la emulación de viento del módulo de pruebas.
La emulación de viento constante permite realizar pruebas del generador manipulando la
velocidad de viento que entra al aerogenerador, por lo tanto se debe considerar el diseño
aerodinámico de las aspas y la carga eléctrica conectada al generador, esto se logra mediante la
utilización de un subprograma que contiene un algoritmo de emulación de viento, éste se explica a
detalle en la siguiente sección. Para seleccionar el viento al que se quiere trabajar se utiliza un VI
de control.
Figura 4.17. Interfaz de la etapa aerodinámica, velocidad rotacional con velocidad de viento.
En esta pestaña de la interfaz se puede observar la interacción entre el viento que entra al
algoritmo de emulación de viento y la velocidad rotacional a la que trabaja el generador obtenida
también del mismo algoritmo.
82

En cambio, al seleccionar la opción de emulación introduciendo una serie de viento, la interfaz lee
un archivo de texto con información de series de viento ya sea real medido a través de un
anemómetro, o bien, creado mediante aleatoriedad de programas computacionales. De esta
manera se puede observar el comportamiento el aerogenerador expuestas a tales condiciones de
viento.
En esta parte de la interfaz se puede observar también una comparación gráfica del cambio entre
el torque aerodinámico que producen las aspas en función de viento, contra el torque
electromecánico (torque opuesto) medido en la flecha del generador que se encuentra en función
de la carga eléctrica.
Figura 4.18. Comparación de torques (aerodinámico con electromecánico)
De esta manera se ha descrito cada una de las partes de la interfaz con el usuario para el
monitoreo de cada una de las variables del generador tanto eléctricas como aerodinámicas
simulando que el generador cuenta con aspas instaladas. En la siguiente sección se explica la
manera en la que se introduce la parte aerodinámica de la turbina instalada en el módulo de
pruebas.
4.4 Emulación de viento.
El módulo de pruebas que se encuentra en el laboratorio de pequeñas turbinas de la cátedra de
eólica, cuenta con el objetivo de monitorear los parámetros de un generador eléctrico para
observar su comportamiento siguiendo un determinado plan de pruebas, sin embargo, se ha
agregado un algoritmo el cual integra las características aerodinámicas y mecánicas de las aspas
con el generador. De esta manera se puede emular una serie de viento medida en campo para
observar el comportamiento de la turbina eólica. Para lograr esto se ha creado un interfaz con el
usuario mediante el programa Labview que cuenta con su etapa de control (algoritmo antes
mencionado) y el despliegue de las diferentes variables tanto calculadas como medidas mediante
la instrumentación del módulo.
83

Se realiza entonces una propuesta de algoritmo para incorporar la aerodinámica de las aspas al
módulo de pruebas.
• Algoritmo: Se utiliza el método de Euler para realizar el algoritmo de control, las condiciones iniciales son:
1. Diámetro del área que cubren las aspas 2. Inercia de las aspas 3. Densidad del aire 4. Velocidad rotacional inicial diferente de cero 5. Serie de viento
Para lograr el control se toma como base la curva aerodinámica realizada durante el diseño de las aspas para la turbina de Aeroluz Pro de 3.5kW.
En un principio se había estado trabajando con la curva CP-\ la cual es utilizada por los diseñadores
de turbinas de viento para examinar el desempeño de la potencia ofrecida por la turbina
utilizando distintos parámetros de diseño, el objetivo del proyecto es regular la turbina eólica para
evitar que salga de una zona de operación segura. El modo más común de operación de una
turbina eólica es a una velocidad rotacional constante, ya sea para conectarse a la red, a un banco
de baterías o bien a una bomba de agua, una alternativa de curva de desempeño para una turbina
controlada a velocidad rotacional constante es la curva KP- [1]. Esta curva es la que se
propone para trabajar con el algoritmo para emular el viento en el módulo de pruebas.
1. Como se muestra en la figura 4.19 la zona de operación en stall activo que se encuentra
señalada en la parte izquierda de la curva, reduce el C P a bajos valores de la velocidad
típica A, lo cual al fijar la velocidad rotacional y realizar un barrido en la velocidad de
viento, la curva (Cp - Lambda) se recorrerá con cambios demasiado pequeños en la zona
de stall. Esto provoca los siguientes problemas:
a. Pérdida de información. Es bastante información representada en un rango tan
pequeño de lambda en la curva de Cp.
b. Información errónea. Cualquier pequeño cambio en esta curva puede ocasionar
que se genere información incorrecta.
c. Al fijar la velocidad rotacional, lambda cambiará inversamente proporcional con la
velocidad de viento.
84

Figura 4.19. Curva característica Cp vs. Lambda.
2. De lo contrario, la curva KP contra lambda, figura 4.20, tiene la característica de que en la
zona de stall no cuenta con cambios tan pequeños comparada con la curva de Cp, sino al
contrario, esta es la zona de la curva donde cuenta con mayores segmentos, lo cual facilita
la representación de la información contenida en dicha curva.
Figura 4.20. Curva característica de Kp vs. 1/Lambda.
85
[4.3]

Debido a que se está trabajando con valores de torque, se trabaja con el coeficiente de torque, C Q -
A . El coeficiente de torque es útil en la evaluación del acoplamiento mecánico del rotor con la
flecha del generador eléctrico, como se tiene en el módulo de pruebas. [12, pp. 173-179]
Para efectos del algoritmo propuesto inicialmente manejando la comparación de los torques,
aerodinámico y electromecánico, se realiza KP en función del torque.
De tal manera que la ecuación del torque que contiene el algoritmo es el siguiente:
Realizando un poco de álgebra finalmente queda de la siguiente manera:
El algoritmo de la aerodinámica de la turbina, utilizando el método de Euler queda finalmente de
la siguiente manera:
86
[4.4]
Sin embargo, la curva de coeficiente de potencia en función de la velocidad típica (Cp-X) es una
representación adimensional de la curva de potencia contra velocidad rotacional del rotor P-Q.
Cuando se tiene velocidad rotacional constante es conveniente una representación adimensional
de la curva de potencia contra velocidad de viento libre P-U«. La forma adimensional de dicha
curva es KP - 1/ X, en la cual KP se conoce como el coeficiente de velocidad-potencia. [13]
[4.5]
[4.6]
Por lo tanto.
[4.7]

La curva Kp - X se obtiene de la aerodinámica de las aspas, el diseñador de aspas genera las curvas
de potencia y de torque de acuerdo al perfil utilizado para la fabricación de las aspas. Los valores
de la curva se muestran en la gráfica, en la cual se observa que se divide en dos polinomios para
realizar un ajuste mejor. Esta curva se introduce al algoritmo programado en Labview en el cual se
utiliza un comando llamado "spline" que realiza la interpolación de los valores según el valor de
lambda obtenido y de esta manera se obtiene el valor de Kp con mucha mayor resolución.
87

V = 2.8 67832670E-07x' - 2.710489778E-06x s * 6551279O50E-O6x" 1 2 - 0 9 5 8 6 1 0 8 5 E - 0 6 » í • 5.688829266E-04X1 - 5.914217898E-
0 1 2 3 4 5 6
Figura 4.21. Coeficientes de los polinomios de la curva Kp vs. 1/lambda.
Implementación en Labview.
El algoritmo antes mencionado se ha implementado en el programa Labview para realizar la
emulación de viento en el módulo de pruebas del laboratorio del CITE. Este algoritmo se coloca
como subprograma del interfaz con el usuario que controla el módulo de pruebas de tal manera
que se siguen los pasos anteriormente descritos utilizando el entorno Labview.
El algoritmo se programa en lenguaje C utilizando el módulo "Formula Node" de Labview, la
programación se encuentra en el anexo E.
4.5 Modelo simplificado para generador eléctrico
Para realizar una simulación de emulación de viento para el generador que se encuentra en el
módulo de pruebas con el objetivo de comprobar su funcionamiento es necesario obtener el
modelo del aerogenerador para integrarlo al algoritmo de emulación de viento.
La variable de interés de dicho modelo es el torque mecánico, esta variable es medida mediante el
torquímetro implementado en el módulo de pruebas, el valor de éste se compara contra el torque
aerodinámico proveniente del algoritmo de emulación de viento, para realizar la simulación en
Matlab el torque medido tiene que ser validado mediante el modelo.
88

A partir de la modelación se obtiene el torque mecánico en función de la corriente eléctrica, es un
modelo que originalmente se ha validado mediante la tesis de Oswaldo Monroy.
Figura 4.22. Relación entre el torque electromecánico y la corriente de línea.
Para obtener esta función se tomaron en cuenta ciertas consideraciones para su simplificación:
• Se omiten las pérdidas de potencia que no dependen de la corriente de línea fundamental.
Sólo se consideran las pérdidas de joule.
• Se fija la temperatura de cobre a 70°C, para que el modelo se aplique solamente a
transitorios de corto plazo.
• La carga es puramente resistiva.
De tal manera que la ecuación de torque mecánico es proporcional a la corriente eléctrica.
[4.8]
De la misma manera se evalúa el generador sin carga (en vacío) y sin corriente eléctrica, para
obtener el torque mecánico en esta condición. Con esto, se omiten también las pérdidas de joule
ya que no hay corriente eléctrica. La figura 4.23 muestra la relación del torque mecánico contra la
velocidad rotacional en vacío.
89

Figura 4.23. Relación del torque electromecánico con la velocidad rotacional en vacío.
Se puede observar de la gráfica que el torque mecánico es una línea recta desplazada hacia arriba,
esto se puede evaluar como torque por fricción estática. La función del torque por fricción se
obtiene mediante la ecuación:
El modelo simplificado fija la resistencia eléctrica de cada fase del generador ya que presupone
temperatura constante del cobre a 70°C. Con esto las constantes que se utilizan en el modelo son
las siguientes:
La resistencia equivalente debido a la carga y la ¡mpedancia del generador eléctrico queda de la
siguiente manera:
90
[4.9]
Constante EMF de línea a neutro, volts generados por cada RPM
Resistencia eléctrica del embobinado de cada fase para temperatura de
Es el valor de la inductancia del embobinado del generador eléctrico.
[4.10]
Con estas condiciones la ecuación del torque electromecánico se obtiene mediante la siguiente
expresión:

Agregando el torque por fricción se obtiene finalmente el torque mecánico en función de la
velocidad rotacional y la resistencia de carga.
Debido a que el voltaje inducido EMF línea-neutro de un arreglo en estrella trifásica es:
El voltaje de líneas queda entonces:
[4.14]
En el anexo C se muestra ei código Matlab del modelo simplificado para el cálculo del torque
electromecánico. Mediante este código se realiza la comparación del torque mecánico con el
torque aerodinámico disponible obteniendo de esta manera el modelo del módulo de pruebas. En
el apartado de pruebas y resultados, se muestran los resultados obtenidos de este modelo con los
resultados obtenidos del módulo de pruebas.
4.6 Modelo con rectificador
Para ampliar el modelo descrito en la sección anterior, se agrega una etapa importante que
requiere de estudio, el rectificador trifásico que va conectado a la salida del generador es un
modelo no lineal que se requiere obtener mediante modelos prácticos de los diodos.
En la figura 4.24 se representa mediante un circuito equivalente la conexión de la fuente trifásica
con el rectificador de 6 pulsos y a su vez una carga de corriente directa para el análisis del modelo.
91
[4.11]
[4.12]
El cálculo de la corriente de línea se obtiene de la siguiente manera:
[4.13]

Figura 4.24. Modelo del rectificador trifásico conectado al generador.
Realizando la simulación mediante el paquete computacional Pspice se obtienen las señales de la
figura 4.25, realizando la comparación del voltaje en corriente alterna y la señal de voltaje
rectificado. Se puede observar que se forma un cierto rizado en el voltaje rectificado.
Figura 4.25. Señales de voltaje trifásico en CA y señal rectificada en CD.
Para el cálculo del voltaje en CD se aplica el promedio al pulso de los ángulos rt/3 < wt < 2rc/3, este
rango de frecuencias tiene un período de rt/3 como se demuestra en la ecuación.
92
[4.15]
VLN: es el voltaje de línea a neutro de la fuente.
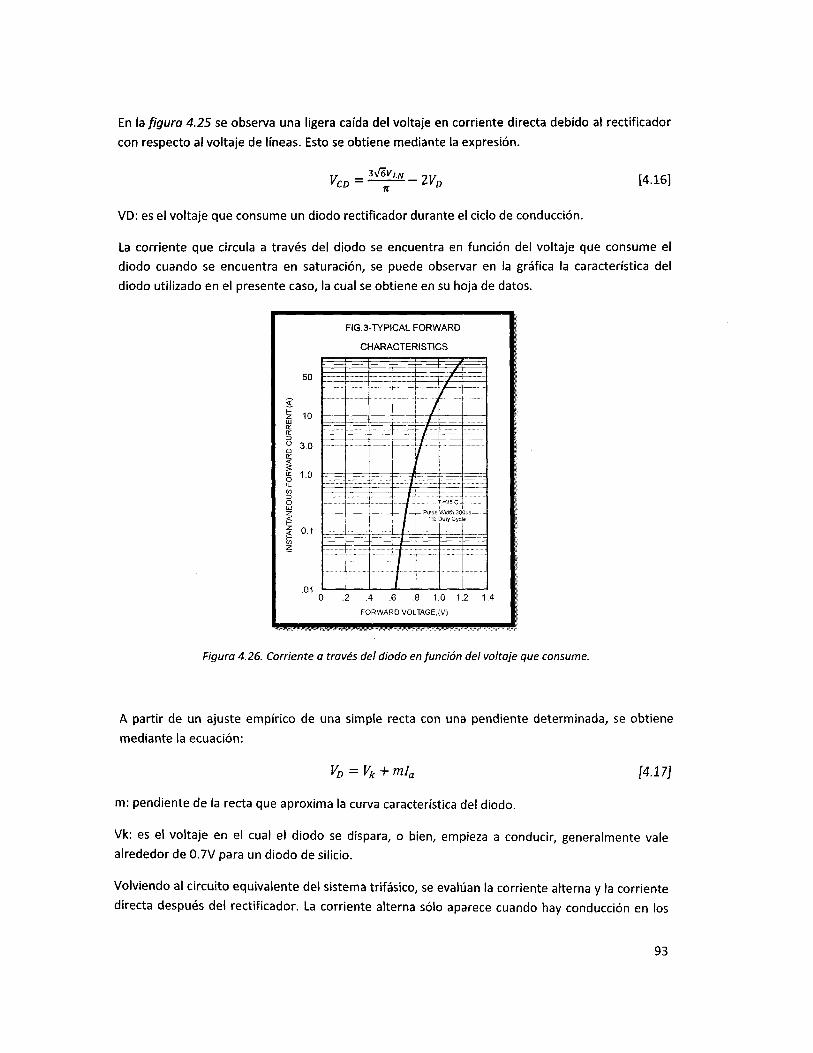
En ia figura 4.25 se observa una ligera caída del voltaje en corriente directa debido al rectificador
con respecto al voltaje de líneas. Esto se obtiene mediante la expresión.
[4.16]
VD: es el voltaje que consume un diodo rectificador durante el ciclo de conducción.
La corriente que circula a través del diodo se encuentra en función del voltaje que consume el
diodo cuando se encuentra en saturación, se puede observar en la gráfica la característica del
diodo utilizado en el presente caso, la cual se obtiene en su hoja de datos.
Figura 4.26. Corriente a través del diodo en función del voltaje que consume.
A partir de un ajuste empírico de una simple recta con una pendiente determinada, se obtiene
mediante la ecuación:
93
14.17]
m: pendiente de la recta que aproxima la curva característica del diodo.
Vk: es el voltaje en el cual el diodo se dispara, o bien, empieza a conducir, generalmente vale alrededor de 0.7V para un diodo de silicio.
Volviendo al circuito equivalente del sistema trifásico, se evalúan la corriente alterna y la corriente
directa después del rectificador. La corriente alterna sólo aparece cuando hay conducción en los

diodos. En la figura 4.27 se muestran la señal de corriente directa con rizado, el promedio de ésta
y la corriente de línea de una fase. Se observa que la corriente alterna no es sinusoidal, contiene
armónicas.
Figura 4.27. Señales de corriente alterna y corriente directa.
Para obtener el valor de la corriente RMS a partir de la corriente línea obtenida se utiliza la siguiente expresión [1]:
[4.18]
De esta manera se realiza una relación entre la corriente de alterna de línea y la corriente de
directa después del rectificador:
Modelo experimental.
Se realizaron las pruebas a diferente velocidad rotacional, aumentando de 25 en 25 hasta llegar a
250 rpm. Esta corrida se realiza para cuatro cargas resistivas distintas (120Q, 600., 40Q, 20Q) para
un total de 40 mediciones. Las muestras que se realizaron para el cálculo de la caída de voltaje en
el diodo (VD) son: voltaje de línea a neutro (VLN) y voltaje de corriente directa (VC D). Se obtiene
mediante la función:
94
[4.19]
K: es el factor de proporcionalidad entre las corrientes, en teoría este cuenta con un valor de
Realizando los pasos anteriores se toman los resultados prácticos del rectificador utilizado en el
módulo de pruebas, en este caso el modelo de éste es MB358.

[4.20]
Mediante los datos medidos de las variables de la corriente de línea (la) y el voltaje resultante en
cada corrida del diodo (VD), se obtiene la gráfica experimental de la caída de voltaje en el diodo a
partir de la corriente que pasa por éste.
Figura 4.28. Datos medidos de voltaje del diodo (VD¡ contra corriente de línea (la).
Utilizando una regresión lineal del paquete computacional Excel se obtiene una ecuación del
voltaje del diodo en función de la corriente de línea.
95
[4.21]
Por otro lado, para la obtención del factor de proporcionalidad (k) de la relación de corriente de
línea (la) y la corriente después del rectificador (ICD) mediante la siguiente fórmula:
[4.22]

En las corridas realizadas anteriormente se obtiene la relación de proporcionalidad de cada una de
las mediciones a diferente velocidad rotacional en cada una de las distintas cargas, se toman
dichos valores y se obtiene el promedio de ellos, obteniendo el siguiente valor:
Se toman las curvas del voltaje en el diodo a diferentes cargas variando la velocidad rotacional del
generador obteniendo la figura 4.29:
Se puede observar que el voltaje en el diodo es proporcional a la carga conectada al generador.
Modelo práctico.
Para comprobar lo realizado anteriormente se obtienen las relaciones de los resultados
experimentales de las mismas variables calculadas hasta el momento ( l C D , l a ; V C D , V l n ) realizando el
ajuste de las curvas de dichas relaciones mediante el paquete computacional Excel, obteniendo
una ecuación que acople las variables.
96
El cual es muy parecido al valor teórico de

Figura 4.30. Relación de corriente de línea la con corriente rectificada /CD
La ecuación obtenida a partir de las mediciones de corriente, tanto de la corriente de línea (la)
como la corriente de CD (lC D) es la siguiente:
Figura 4.31. Relación de voltaje de línea a neutro VLN y voltaje rectificado VCD
97
[4.23]
Ahora la siguiente gráfica muestra la relación del voltaje de línea a neutra (VLN) y el voltaje de CD
(VCD), y de la misma manera se obtiene la siguiente ecuación:
[4.24]

Se espera obtener una similitud entre los factores de corriente y voltaje de ambos modelos, se
puede observar que los valores de los factores se encuentran muy cercanos. Como conclusión se
expresan las relaciones del modelo teórico con el modelo práctico.
Modelo teórico:
Modelo práctico:
98
En el anexo C parte 2 se incluye el agregado del rectificador realizando el cálculo de la impedancia
equivalente Zeq. Para el cálculo de la corriente de línea del modelo anterior.

Capítulo V Pruebas y resultados
En el presente capítulo se realizan las pruebas del prototipo implementado del sistema de
regulación electrónica utilizando el módulo de pruebas instalado en el laboratorio del CITE. Se
realiza una comprobación de funcionamiento del módulo de pruebas con el modelo simplificado,
se agrega la regulación describiendo detalladamente las pruebas realizadas a éste y se despliegan
los resultados obtenidos de las corridas de pruebas realizadas. Finalmente se realiza un análisis de
los resultados alcanzados.
5.1 Módulo de pruebas.
Se realiza una comparación de los resultados de la simulación de un modelo simplificado que es
descrito en el capítulo anterior con los resultados obtenidos del módulo de pruebas para
comprobar su funcionamiento.
5.1.1 C o m p r o b a c i ó n de las variables eléctricas.
Se toman los valores de las diferentes variables eléctricas de importancia en el módulo de
pruebas, tomando diferentes puntos de la velocidad rotacional del generador eléctrico, los
resultados obtenidos de la medición de estas variables se comparan primeramente con un
instrumento de referencia confiable para la calibración de las mismas y finalmente compararlas
contra los resultados obtenidos de la simulación del modelo simplificado (sólo la parte eléctrica)
propuesto anteriormente.
La variable de torque electromecánico es de importancia en la emulación de viento en el módulo
de pruebas, ya que este se compara contra el torque aerodinámico calculado mediante su
respectivo algoritmo, es por ello que se ha calibrado exhaustivamente mediante una báscula, al
realizar la conversión del peso que marca la báscula en kg, se realiza la conversión a Newton metro
(Nm), se puede observar que el sensor de torque que se encuentra en el módulo es similar al
torque obtenido de la báscula, por lo tanto se puede decir que se encuentra correctamente
calibrado, al simular el torque mecánico en el modelo simplificado resulta una ligera discrepancia
de un 2.6% con respecto al torque calibrado.
99

Figura 5.1. Comparación del torque electromecánico medido con el modelo simplificado.
La corriente eléctrica de línea, de la misma manera que el torque, se calibra mediante un
instrumento de confianza, en este caso se utiliza un osciloscopio Fluke 123 utilizando una pinza de
corriente de efecto Hall, en la gráfica se muestra la corriente medida mediante este instrumento
contra el valor de la corriente medida utilizando un sensor de corriente implementado en el
módulo de pruebas y comparado de igual forma contra la corriente obtenida del modelo
simplificado, las tres corrientes se encuentran bastante parecidas.
Figura 5.2. Comparación de la corriente de línea medida con el modelo simplificado.
Este mismo procedimiento se realiza con la variable del voltaje de línea neutro, se utiliza el Fluke
123 para calibrar el sensor del módulo de pruebas, además se ha realizado la simulación mediante
el modelo simplificado para compararlos entre sí, obteniendo la siguiente gráfica:
100

Figura 5.3. Comparación del voltaje de línea neutro medido con el modelo simplificado.
El análisis de estos resultados establece que las variables eléctricas de importancia del módulo de
pruebas se encuentran calibradas correctamente y además han sido comprobadas mediante el
modelo matemático simplificado.
5.1.2 Pruebas en estado estable con aerodinámica.
Se realizan pruebas en estado estable del sistema para compararlos contra los resultados
obtenidos del modelo simplificado de Matlab agregando la parte aerodinámica. Se realiza un
barrido en diferentes zonas de operación de la turbina eólica, tomando en cuenta una carga
resistiva trifásica de 40 ohm, en este caso se toman diferentes velocidades de viento para obtener
los resultados medidos de las variables de interés, se comparan estos resultados con los obtenidos
mediante la simulación del modelo simplificado.
Las variables a comparar son: velocidad rotacional, torque electromecánico, y corriente de línea
en función de la velocidad de viento.
Se puede observar en las gráficas que la comparación de las variables medidas en el módulo de
pruebas concuerda correctamente con los resultados obtenidos de las simulaciones realizadas en
Matlab, lo cual quiere decir que tanto el modelo electromecánico como el modelo aerodinámico
funcionan bien.
101

Figura 5.4. Comparación de las variables: velocidad rotacional, torque electromecánico y corriente de línea
medido con el modelo simplificado agregando el algoritmo aerodinámico.
102

5.1.3 Evaluación de transitorios.
Para las mismas variables eléctricas, se analizan los transitorios al poner una entrada escalón en la
señal de velocidad de viento, empezando con una condición inicial de velocidad rotacional, en este
caso el valor del escalón es a una velocidad de viento de 6m/s constantes, se comparan estos
transitorios de las variables en el módulo de pruebas contra los resultados en la simulación.
Las variables medidas para comparar su transitorio con el modelo simplificado son velocidad
rotacional, torque mecánico y corriente eléctrica.
103

Figura 5.5. Comparación de las variables: velocidad rotacional, torque electromecánico y corriente de línea
medido con el modelo simplificado agregando el algoritmo aerodinámico en transitorios.
Los transitorios de las variables eléctricas comparadas con los transitorios obtenidos mediante la
simulación del modelo simplificado con aerodinámica concuerdan correctamente y de esta
manera se puede validar esta parte.
5.1.4 Velocidades de viento variables.
Las gráficas anteriores se realizan para una velocidad de viento constante, en esta ocasión las
pruebas son para velocidades de viento variables, para no obtener una aleatoriedad de los datos
obtenidos, se opta por Introducir una señal sinusoidal en la variable de velocidad de viento, con
esto se obtiene una periodicidad en el modelo y saber que esperar en los resultados, la variaciones
se hicieron en la frecuencia de las ondas sinusoidales introducidas como velocidad de viento.
Primeramente se introduce una señal sinusoidal de 90Hz como velocidad de viento, en la figura
5.6 se muestra esta señal comparada con la señal introducida en el modelo simplificado.
104

105

Figura 5.6. Comparación de las variables: velocidad de viento, velocidad rotacional, torque electromecánico y
corriente de línea medido con el modelo simplificado agregando el algoritmo aerodinámico en viento
variable (sinusoidal 90Hz.).
Se realiza el mismo procedimiento para una frecuencia de 45Hz para observar el comportamiento
en cambios más rápidos.
106

Figura 5.7. Comparación de las variables: velocidad de viento, velocidad rotacional, torque electromecánico y
corriente de línea medido con el modelo simplificado agregando el algoritmo aerodinámico en viento
variable (sinusoidal 45Hz.).
Se pueden observar discrepancias importantes en el inicio de cada una de las curvas, esto se debe
a que la señal de viento comienza antes de activarse la emulación de viento al iniciar el programa
en Labview de la interfaz con el usuario.
De esta manera podemos observar que el modelo simplificado propuesto para la simulación del
módulo de pruebas concuerda perfectamente con los resultados obtenidos experimentalmente
tanto en estado estable como en transitorios, además, funciona para una variación a la entrada de
velocidad de viento. Esto quiere decir que el algoritmo de emulación de viento y el algoritmo para
el cálculo del torque electro mecánico han sido validados.
5.2 Sistema de protección.
En este apartado se analizan los resultados obtenidos en pruebas de regulación de velocidad de la
turbina eólica, el prototipo descrito en el capítulo II se instala en el módulo de pruebas explicado
107
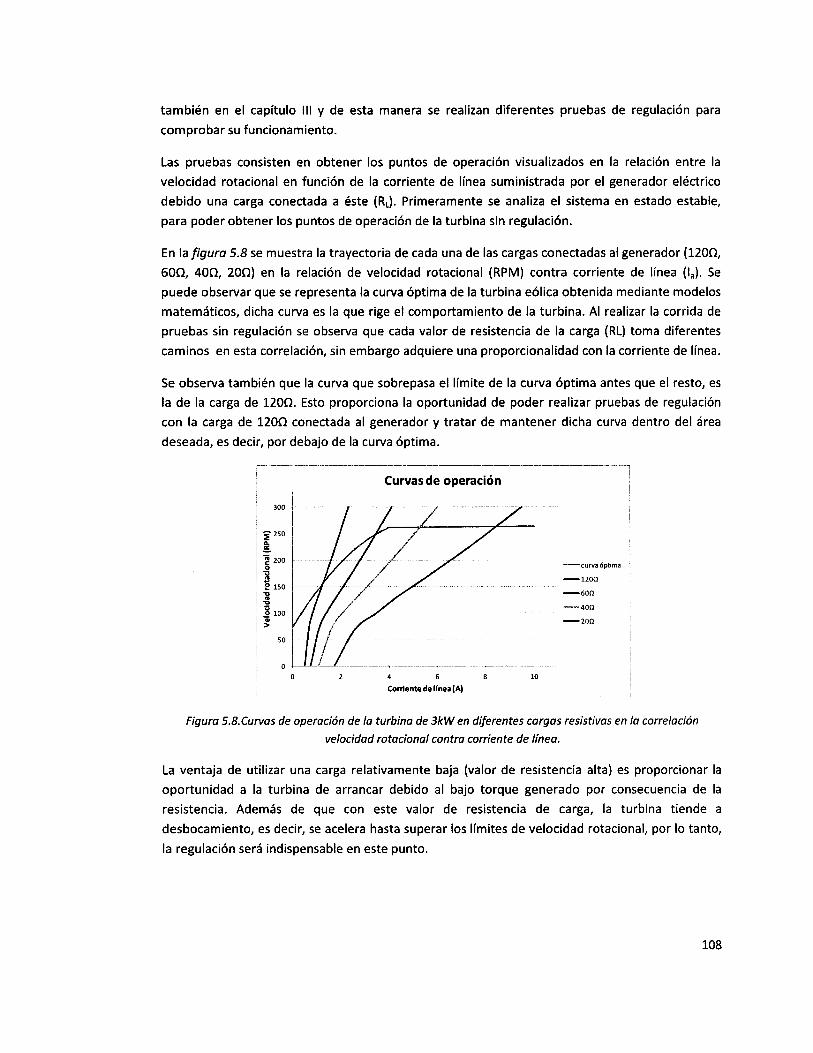
también en el capítulo III y de esta manera se realizan diferentes pruebas de regulación para
comprobar su funcionamiento.
Las pruebas consisten en obtener los puntos de operación visualizados en la relación entre la
velocidad rotacional en función de la corriente de línea suministrada por el generador eléctrico
debido una carga conectada a éste (RL). Primeramente se analiza el sistema en estado estable,
para poder obtener los puntos de operación de la turbina sin regulación.
En la figura 5.8 se muestra la trayectoria de cada una de las cargas conectadas al generador (120Q,
60Q, 40O, 20O) en la relación de velocidad rotacional (RPM) contra corriente de línea (la). Se
puede observar que se representa la curva óptima de la turbina eólica obtenida mediante modelos
matemáticos, dicha curva es la que rige el comportamiento de la turbina. Al realizar la corrida de
pruebas sin regulación se observa que cada valor de resistencia de la carga (RL) toma diferentes
caminos en esta correlación, sin embargo adquiere una proporcionalidad con la corriente de línea.
Se observa también que la curva que sobrepasa el límite de la curva óptima antes que el resto, es
la de la carga de 120Q. Esto proporciona la oportunidad de poder realizar pruebas de regulación
con la carga de 120Q conectada al generador y tratar de mantener dicha curva dentro del área
deseada, es decir, por debajo de la curva óptima.
Figura 5.8.Curvas de operación de la turbina de 3kW en diferentes cargas resistivas en la correlación
velocidad rotacional contra corriente de línea.
La ventaja de utilizar una carga relativamente baja (valor de resistencia alta) es proporcionar la
oportunidad a la turbina de arrancar debido al bajo torque generado por consecuencia de la
resistencia. Además de que con este valor de resistencia de carga, la turbina tiende a
desbocamiento, es decir, se acelera hasta superar los límites de velocidad rotacional, por lo tanto,
la regulación será indispensable en este punto.
108

5.2.1 Sintonización.
A pesar de que el sistema de control utilizado en el presente proyecto es a base de lógica difusa,
se han agregado los parámetros de un controlador clásico PID (proporcional, integral, derivativo).
Los efectos que realiza cada parámetro se muestran en la siguiente tabla.
Tabla 5.1. Efectos de los parámetros de control, ganancia proporcional (kp), ganancia integral (ki) y ganancia
derivativa (kd).
El primer paso es sintonizar los parámetros del controlador de la regulación, es decir, la
distribución de los triángulos de membrecía tanto de la ganancia proporcional como de su
derivada.
La ganancia de la parte integral se ajusta mediante un factor que establece el valor del error
sumado a la salida del controlador de lógica difusa como se menciona en el capítulo III. Finalmente
se ajusta la distribución de los triángulos de salida los cuales determinan la pendiente del
incremento o decremento del ciclo de trabajo para establecer la agresividad del sistema.
Se prueba entonces el sistema solamente mediante una entrada proporcional con una distribución
de triángulos de membrecía normalizada para observar sus efectos. En la gráfica siguiente se
muestra una corrida de regulación realizando cambios a la velocidad de viento a manera de
"escalones".
Se puede observar que las oscilaciones se presentan a lo largo de la curva hasta llegar a
establecerse, sin embargo, conforme aumentan las RPM las oscilaciones van aumentando y crecen
de manera considerable al pasar a la zona de operación nominal, lo cual indica que esta zona es
considerada inestable por lo que se explicaba en el capítulo III.
109

Figura 5.9.Comportamiento del sistema utilizando solamente una entrada proporcional.
En la gráfica de la velocidad rotacional en el tiempo, se pueden observar los sobretiros debidos al
cambio de velocidad de viento y se observa que el último escalón de cambio la oscilación es
mayor, Al realizar la prueba a vientos mayores, esta inestabilidad presentada en la zona de
operación nominal, disminuye.
El siguiente paso es agregar la entrada derivativa como se menciona en el capítulo III, al agregar
esta entrada se busca se disminuya el sobretiro y que el tiempo de estabilización sea menor. En la
gráfica siguiente se observa una drástica disminución en los sobretiros a los cambios de velocidad
de viento.
El ajuste de la distribución de los triángulos de membrecía para esta entrada comienza
normalizado, posteriormente se disminuye el factor que multiplica al eje x de los triángulos, lo cual
provoca que la derivada toma mayor peso en la decisiones de tal manera que finalmente el factor
de la distribución de los triángulos es de kd = 0.05.
110

Figura 5.10.Comportamiento del sistema utilizando una entrada proporcional y una entrada derivativa.
Al agregar una integral al sistema, se observa que la ganancia tiene que ser muy pequeña ya que
es un error acumulado sumado al final del lazo. En la gráfica siguiente se observa una oscilación
muy fuerte justo al entrar a la zona de operación nominal, conforme aumenta la velocidad de
viento, la oscilación es menor. El factor de ganancia del ¡ntegrador queda finalmente de 0.05.
Figura 5.11. Comportamiento del sistema utilizando solamente una entrada proporcional, derivativa e
integral.
111

Se ha graficado el cambio de velocidad de viento, la gráfica indica que llega a una velocidad de
l l m / s , sin embargo se ha visto que arriba de dicha velocidad de viento, las oscilaciones se reducen
considerablemente. Esto quiere decir que la zona inestable de operación del sistema es de 8m/s a
l l m / s .
Realizando las primeras pruebas se puede obtener como conclusión de la sintonización la
siguiente configuración de triángulos de membrecía o de entrada para el proporcional y el
derivativo. La ganancia de la parte integral es de Ki = 0.05.
Figura 5.12. Configuración de los triángulos de membresía de las entradas: error y derivada del error.
Una vez entendidos los efectos de cada uno de los parámetros del PID, nos encontramos con
ciertos desenlaces en el transcurso de las pruebas que se puntualizan a continuación:
• En la zona óptima de operación es mucho más sencillo regular que en la zona nominal de
la curva, esto se debe a que la regulación realiza un efecto perpendicular a la curva
óptima, mientras que en la nominal regula con cierta inclinación
• Cada vez que suben las RPM se observan oscilaciones más pronunciadas, más aún al
entrar a la zona nominal, agregar el parámetro derivativo reduce éstas oscilaciones
aumentando la corriente, sin embargo, la derivada del error es muy susceptible al ruido.
• La parte integral reduce considerablemente el error en estado estacionario, sin embargo
genera oscilaciones mayores, es por ello que el derivativo debe ser aún más agresivo.
• A la mitad de la zona nominal las oscilaciones se reducen considerablemente de tal
manera que la zona conflictiva es entre 8m/s y lOm/s.
112

Tomando una de las gráficas anteriores, se muestra la ubicación de cada uno de los puntos en
estado estable en las curvas C p y Kp, así como una correlación de la energía cinética del generador
con el valor de C p. En la figura 5.13 se enumeran los puntos mencionados y la tabla muestra los
valores de estos puntos.
Figura 5.13. Estados de operación en las curvas Kpy Cpy correlación de energía cinética contra Cp.
Tabla 5.2. Valores de cada una de las variables de los estados de operación.
En la gráfica RPM contra corriente, se puede observar que el punto 4 se le dificulta un poco más
estabilizarse, este punto de operación es paso a 9m/s. en la curva de C p se puede ver claramente
que los primeros tres puntos se encuentran en la cima de la curva lo cual indica que estos puntos
se encuentran en la curva óptima, conforme avanza la prueba los últimos tres puntos la obtención
de potencia cae, debido a que la velocidad de viento aumenta mientras que las RPM se mantienen
constantes, esta zona es la denominada nominal. El cambio de la zona óptima y la zona nominal
afecta el comportamiento del sistema como se muestra en el paso 4, esto es debido a que hay
mayor potencia disponible por encima de la zona nominal, lo cual si las RPM aumentan, la
regulación requiere alcanzarla aumentando la corriente para bajar las RPM. Se puede ver entonces
que debido a un sistema lento se hace mucho más difícil regularlo, es por ello que se propone
aumentar la frecuencia de muestreo.
113

5.2.2 Velocidad de respuesta.
Para eliminar dichas oscilaciones el sistema de regulación debe contar con una velocidad de
reacción bastante rápida. Hasta este momento se había trabajado con una velocidad de muestreo
de 200mS (5Hz). En la siguiente gráfica se muestra una entrada escalón de velocidad de viento de
6m/s a 12m/s. el resultado es el siguiente:
Figura 5.14. Respuesta al escalón de una variación de velocidad de viento de 6m/s a 12m/s a una frecuencia
de muestreo de 5Hz.
Debido a que el sistema es relativamente lento, se observa que la velocidad aumenta
considerablemente, así como la corriente. En ese momento se optó por apagar el sistema ya que
se encontraba en condiciones peligrosas para el generador debido a la corriente y velocidad altas.
Al observar las condiciones anteriores, en ese momento se propuso trabajar para disminuir el
tiempo de muestreo para mejorar la respuesta del control de regulación, de tal manera que se
optó por optimizar los códigos, tanto del sistema de emulación de viento, como el algoritmo de
regulación. Mediante esta propuesta la frecuencia de muestreo aumenta a 300Hz (33mS). De esta
manera mejora la respuesta del sistema.
Al realizar esto trajo consigo efectos que hubo que corregir como son los siguientes:
114

• El sistema de control se hace muy susceptible al ruido por lo que fue necesario colocar
filtros digitales a los sistemas de medición.
• El muestreo de datos se hace con ventanas mucho más pequeñas, es decir, se realiza el
cálculo de la corriente RMS con una ventana menor a la del período de la señal, por lo
tanto no es la información correcta. De esta manera fue necesario cambiar el método de
medición de la corriente de línea RMS, para la medición de la velocidad rotacional no hubo
efecto alguno, ya que la señal obtenida del sensor es en corriente directa.
Cálculo de la corriente de línea RMS.
La lógica utilizada para la utilización de un micro controlador para calcular una señal RMS es la
siguiente:
115
Se observaron las siguientes características en la señal de salida:
o Se observaron ligeras oscilaciones constantes en el valor RMS de la señal. Estas
oscilaciones se pueden reducir incrementando el valor del filtro pasa bajas, sin
embargo, esto provoca una medición más lenta,
o Incrementando la frecuencia de muestreo no necesariamente mejora los cálculos. Los
filtros pasa bajas deben seleccionarse de acuerdo con la frecuencia de muestreo
utilizada.
o Para una frecuencia de muestreo de 300Hz, Se observaron oscilaciones mínimas para:
a = 13 = 0.99
Al utilizar este algoritmo para el cálculo de la corriente RMS para la variable de entrada del
controlador ayuda obtener un buen sensado de la corriente utilizando una frecuencia de muestreo
alta. Un ligero inconveniente de este algoritmo es que la corriente actúa con un pequeño retardo
lo cual no genera efecto alguno para el regulador. El algoritmo utilizado para el cálculo de la señal
de corriente RMS a partir de la obtención de la corriente instantánea se encuentra en el anexo D.

Figura 5.15. Respuesta al escalón de una variación de velocidad de viento de 6m/s a 12m/s a una frecuencia de muestreo de 300Hz.
En la gráfica se muestra la respuesta al escalón de una velocidad de viento de 6m/s a 12m/s. la
frecuencia de muestreo en esta prueba es de 300Hz por lo cual la velocidad rotacional en esta
ocasión llegó a estabilizarse en un punto, de esta manera se puede ver que el aumento de la
frecuencia de muestreo mejora considerablemente el comportamiento de la regulación de la
turbina.
5.2.3 Distribución triángulos de salida.
Una vez lograda la estabilización del sistema a la respuesta escalón, se procede a realizar un ajuste
a la distribución de los triángulos de salida, esto provoca aumentar el incremento del ciclo de
trabajo para darle agresividad a la respuesta de regulación. Esta distribución se modifica mediante
un factor que multiplica al eje x de los triángulos normalizados. La siguiente gráfica muestra este
procedimiento.
116

Figura 5.16. Variación de la ganancia para la distribución de los triángulos de salida, incremento de ciclo de
trabajo.
Se puede observar que la realización de la sintonización del controlador ha mejorado bastante la
respuesta al sistema. En la siguiente gráfica se muestra la relación de los cambios realizados para
mejorar la respuesta. La curva número 1 representa a la prueba cuando se tenía una frecuencia de
muestreo de 5Hz y un incremento de ciclo de trabajo lento; la curva 2 es cuando se tenía la
frecuencia de muestreo a 5Hz, en esta ocasión se aumenta la ganancia al incremento; en la curva 3
es cuando se aumenta la frecuencia de muestreo a 300Hz dejando la ganancia del incremento a
lenta y finalmente la curva 4 es con frecuencia de muestreo rápida y el incremento alto dándole
mayor agresividad.
117

Figura 5.17. Comparación de la operación de la turbina al cambio de frecuencia de muestreo y el aumento de
ganancia a los triángulos de salida.
En la siguiente prueba se realiza un barrido de toda la curva óptima mediante cambios pequeños
de velocidad de viento, para observar estabilidad en cada uno de sus puntos y ver si existen
oscilaciones en estado estable.
118

Figura 5.18. Respuesta a la variación de velocidad de viento en escalones de lm/s.
En la gráfica anterior se puede observar que la velocidad de viento realiza cambios de intervalos
de lm/s a partir de 6m/s hasta llegar a 13m/s. la operación de la turbina se mantiene por encima
de la curva óptima sin observar oscilaciones o inestabilidad a lo largo de la curva. Se puede
observar en la gráfica de velocidad de viento contra corriente de línea que en la zona de operación
nominal o inestable el regulador requiere mayor corriente para mantener a la turbina en la zona
deseada. En cambio en la zona de por encima de los 12m/s se observa una mucho mayor
estabilidad en la cual se requiere menor corriente para emparejarse.
5.3 Series de viento.
Una vez definido el algoritmo de control con la adecuación de sus parámetros, se procede a
realizar las pruebas pertinentes realizando simulaciones de experiencias que puede vivir la turbina
eólica en un momento dado introduciendo series de viento. Las series de viento se crean a partir
del programa computacional Matlab mediante series aleatorias fijando la media y la desviación
estándar, de la misma manera se realizan series de viento con ráfagas para visualizar la regulación
en estos casos.
119

Figura 5.19. Respuesta del sistema a la introducción de una serie de viento de 7m/s.
En la gráfica anterior se puede observar a la izquierda la serie de viento introducida al sistema que
cuenta con un valor promedio de 7m/s, debajo de ésta es la respuesta del sistema, la velocidad
rotacional que anda alrededor de los 220rpm. Esta velocidad se encuentra sobre la curva óptima
de operación como se muestra en la gráfica de la derecha, la relación velocidad rotacional contra
corriente en la cual la operación regulada se encuentra sobre la curva.
Figura 5.20. Respuesta del sistema a la introducción de una serie de viento de 9m/s.
120

La gráfica anterior representa a una prueba en la cual se introduce una serie de viento con un
promedio de 9m/s, con el objetivo de probar la serie en la zona de operación inestable, la gráfica
de velocidad rotacional muestra que ésta se mantiene en la velocidad nominal de 264rpm
indicando que se encuentra regulando al sistema, en la gráfica de relación de velocidad rotacional
contra corriente de línea se puede observar que la operación se encuentra sobre la zona nominal
sin llegar a pasar por encima de ésta.
Figura 5.21. Respuesta del sistema a la introducción de una serie de viento de 19m/s.
En la gráfica anterior se realizan pruebas en condiciones máximas de velocidad de viento en la cual
el sistema de regulación trabaja 20m/s, arriba de este valor la turbina se protege mediante el pitch
como se menciona en el capítulo III. De la misma manera que las anteriores ocasiones la velocidad
rotacional de la turbina se mantiene a la velocidad nominal debido a la regulación de ésta. En la
relación velocidad rotacional contra corriente de línea se observa la trayectoria realizada debido a
que se ingresa la ráfaga con la turbina apagada y realiza un escalón a dicha velocidad de viento
hasta estabilizarse en el punto nominal. Se observa que la trayectoria la realiza justo a lo largo de
la curva óptima, resumiendo que la regulación se realiza correctamente.
121

Figura 5.22. Respuesta del sistema a la introducción de una ráfaga de viento a 15m/s.
En la gráfica se puede observar una ráfaga de viento que alcanza los 15m/s como entrada al
sistema. En la velocidad rotacional se observa un corte de la señal cuando se alcanza la velocidad
rotacional nominal de 264rpm. La corriente eléctrica aumenta conforme la regulación necesita
tener mayor agresividad debido a que el viento aumenta en la ráfaga, al aumentar la corriente se
aumenta el torque electromecánico para frenar a la turbina.
Figura 5.23. Respuesta del sistema a la introducción de una ráfaga de viento a 20m/s.
122

En esta prueba se realiza la ráfaga de viento hasta 20m/s, se observa que la velocidad rotacional se
mantiene a la velocidad nominal y la corriente de línea se queda más tiempo en su valor nominal
7.5 A, sin embargo, es tolerable. Este tipo de ráfaga también es regulable.
En la siguiente gráfica se observa una prueba utilizando una ráfaga negativa de velocidad de viento
de 15m/s a 6m/s, esto con el objetivo de observar el comportamiento a la inversa del sistema
mediante una ráfaga de este tipo. La velocidad rotacional en esta prueba se queda en el valor
nominal, la inercia de la turbina eliminó la ráfaga, la corriente sin embargo realizó la disminución
debido a la ráfaga para disminuir el ciclo de trabajo y en la curva velocidad rotacional contra
corriente, la operación no trabaja fuera de la zona deseada.
Figura 5.24. Respuesta del sistema a la introducción de una ráfaga invertida de viento a 6m/s.
123

Capítulo VI. Conclusiones y trabajos futuros.
6.1 Conclusiones generales.
El desarrollo descrito en los capítulos anteriores cumplió las metas establecidas durante el
planteamiento. Tras crear un modelo simplificado empírico del módulo de pruebas y haber
realizado un prototipo de un sistema de regulación electrónica para la protección de la turbina
mediante variación de carga utilizando como estrategia de control la lógica difusa.
El objetivo de realizar la simulación y la implementación del sistema propuesto para realizar la
regulación de la turbina en el módulo de pruebas implementado con emulación de viento para un
generador de 3kW, se cumple al relacionarlo con los resultados obtenidos.
El modelo aerodinámico propuesto para la obtención del torque aerodinámico cumple su
propósito tras realizar emulaciones de viento en el módulo de pruebas obteniendo resultados
favorables al introducir series de viento estocásticos y ráfagas de viento, lo cual genera una
herramienta importante para el desarrollo del presente proyecto de tesis.
La utilización de la herramienta computacional Labview es de gran importancia para la
implementación de la interfaz con el usuario para de esta manera monitorear el comportamiento
de la turbina eólica en el banco de pruebas, así como la introducción de la parte aerodinámica a
este sistema de pruebas.
El modelo electromecánico simplificado comprueba el funcionamiento del módulo de pruebas, lo
cual, establece una base fundamental para la implementación de futuras modelaciones
matemáticas. De esta manera es posible observar que el modelo simplificado propuesto para la
simulación del módulo de pruebas concuerda perfectamente con los resultados obtenidos
experimentalmente tanto en estado estable como en transitorios, además, funciona para una
variación a la entrada de velocidad de viento. Esto quiere decir que el algoritmo de emulación de
viento y el algoritmo para el cálculo del torque electro mecánico han sido validados.
Se ha comprobado que las variables eléctricas de importancia del módulo de pruebas (corriente de
línea, voltaje de fase y torque electromecánico) se encuentran calibradas correctamente y además
han sido demostradas mediante el modelo matemático simplificado. La implementación del
torquímetro digital genera resultados favorables para la medición del torque electromecánico en
la flecha del generador mediante la utilización de galgas extensiométricas.
La propuesta de la implementación de la regulación mediante cambio de carga utilizando una
resistencia variable en paralelo funciona de buena manera, la selección del valor de la resistencia
de disipación es importante, sin embargo no necesariamente tiene que ser muy exacta, el
124

controlador se encarga de aumentar o disminuir el ciclo de trabajo en caso de que la carga se
encuentre muy ligera o muy agresiva.
El sistema de regulación funciona ante cualquier tipo de carga conectada a la turbina eólica, por lo
tanto, se ha seleccionado una carga resistiva con un valor de 120Q, lo cual no es una carga común
en la realidad, sin embargo, ofrece la oportunidad a la turbina de acelerarse. El desbocamiento es
la principal preocupación de los diseñadores de turbinas para la protección de las mismas, el
sistema de regulación debe frenarla en ausencia de carga para evitar desbocamiento.
La utilización de la estrategia de regulación mediante la curva simplificada de RPM - corriente de
línea ocasiona que la regulación sea mucho más simple en un sistema tan complejo como es la
turbina eólica.
La lógica difusa utilizada como estrategia de control brinda un buen desempeño para controlar la
regulación de la turbina eólica, a pesar de ser vista como una herramienta imprecisa, los
resultados obtenidos demuestran que es muy robusta y es capaz de controlar sistemas no lineales,
complejos y poco conocidos. La utilización de parámetros tomados del control clásico como lo es
el PID, mejora la calidad de la respuesta del sistema.
6.2 Problemas presentados durante el desarrollo del proyecto.
La instrumentación y la electrónica de los sistemas (módulo de pruebas y regulación) son
vulnerables a fuentes de ruido EMI como lo son el variador de frecuencia y el generador eléctrico,
entre otras, es por ello que se implementaron métodos para la eliminación del ruido, el primero es
aterrizar correctamente los instrumentos (torque, RPM, corriente y voltaje), colocar filtros
capacitivos en las fuentes de alimentación de cada uno de los componentes electrónicos (micro
controlador, sensores en general y utilizar cable de instrumentación lo más corto posible para
realizar las conexiones entre ellos, aterrizando el blindaje de los cables solamente por un extremo.
Estos métodos ayudan a eliminar el ruido EMI propenso en este tipo de sistemas.
La utilización de la curva Cp - lambda en el modelo aerodinámico genera la posibilidad de obtener
información errónea debido a la concentración de datos en un pequeño espacio de la curva, por lo
que la curva Kp - 1/lambda soluciona este problema.
Es necesario considerar que la frecuencia de muestreo en la programación de la interfaz en
Labview es de vital importancia para la respuesta del sistema, este problema llega a ser muy
común en sistemas muy complejos en la programación del interfaz, lo cual afectó durante un
lapso de tiempo en el desarrollo del presente proyecto. Se soluciona con la correcta optimización
del programa para obtener una frecuencia de muestreo mucho más alta.
La resistencia de disipación paralela a la carga que se encarga de la regulación, cuenta con
inductancia parásita considerable lo cual afecta el comportamiento de los componentes
125

electrónicos debido a la conmutación periódica realizada, para eliminar la inductancia parásita la
cual afecta en el apagado del IGBT (se dañan debido al alto di/dt), se ha colocado un camino de
descarga mediante la utilización de un diodo de marcha libre en anti paralelo a dicha resistencia.
En simulaciones computacionales realizadas con el programa Pspice, se detecta un problema en el
caso de ausencia de carga, los resultados de la simulación muestran picos de voltaje de 1.3kV lo
cual es grave tanto para la turbina como la circuitería, esto se ha solucionado mediante la
colocación de un filtro capacitivo en paralelo al rectificador, se implementa en el módulo y se
observa que no hay efectos en el rendimiento del sistema, lo cual se ha colocado por seguridad.
La sintonización de los parámetros de control PID en la lógica difusa cuenta con la desventaja de
realizarse a prueba y error, el diseño del sistema experto ofrece un gran acercamiento a dichos
parámetros, la distribución de los triángulos se realizan en base a éste por lo tanto la sintonización
se facilita si se realiza un buen diseño de sistema experto, Además, la robustez de la lógica difusa
ofrece la bondad de que los parámetros no sean tan precisos y funcione de igual manera.
6.3 Aportaciones.
Se implementa un módulo de pruebas para generadores en conjunto con copartícipes del CITE, en
el caso del presente proyecto se utiliza para probar el sistema de regulación, el módulo es una
herramienta interesante para pruebas de cualquier tipo para turbinas eólicas. Es un sistema
interactivo que puede ser utilizado para fines académicos, se encuentra instalado en el laboratorio
del CITE en el tecnológico de Monterrey ITESM.
Se ha desarrollado un prototipo para la regulación electrónica de una turbina eólica, lo cual genera
las bases para la utilización de este tipo de control para turbinas eólicas pequeñas, por ejemplo el
aumento de la captura de energía. Si bien en otras turbinas comerciales ya se utilizan
controladores similares al propuesto, se trata de una tecnología muy nueva por lo que aún existen
grandes áreas de oportunidad para reducir el costo de este componente y hacerlo más eficiente.
Se realiza un modelo matemático aerodinámico eléctrico que ofrece las bases para la
implementación de modelos matemáticos para una turbina eólica, importante para el diseño de
las mismas.
6.4 Trabajos futuros.
El sistema de regulación debe contar con una respuesta rápida para controlar la turbina, es por
ello que la adquisición de datos de las variables de control (RPM y corriente de línea) y su
126

calibración debe medirse en un módulo diferente al del controlador, esto mejora la eficiencia de la
respuesta del sistema de control y la lectura de datos.
Realizar un modelo matemático del sistema de regulación en conjunto con el propuesto en este
trabajo.
El sistema de regulación propuesto debe ser sincronizado con el sistema de protección "pitch"
para evitar que trabajen juntos, es necesario colocar una instrucción en la programación que
indique el tiempo que sobrepasa la corriente nominal de 7.5 A, ya que si se encuentra mucho
tiempo por encima de este valor, significa que el ciclo de trabajo llegó al 100% y la turbina no
frena, esto nos indicará que no es posible regular en ese momento.
Para la comercialización de este sistema de regulación se deben realizar las siguientes mejoras:
1. Realizar un diseño térmico para el componente de conmutación IGBT, las pruebas
realizadas durante el desarrollo del proyecto tienen una duración de 3 minutos y medio
como máximo, en pruebas extremas la temperatura alcanzó los 90°C, es posible que si la
regulación es constante y se prolonga por mayor tiempo, el componente se desgaste
considerablemente y se dañe. Es necesario fabricar los disipadores en base al diseño
térmico.
2. El prototipo se realiza por etapas (instrumentación, electrónica de potencia, control), cada
etapa cuenta con su tarjeta impresa diseñada, es necesario realizar un módulo utilizando
una tarjeta impresa considerando cada una de ellas.
Realizar pruebas de campo para observar el comportamiento del sistema fuera del laboratorio,
colocando los diferentes tipos de cargas (baterías, inversor, bombas) para validarlo
completamente.
Realizar el escalamiento del sistema para una turbina de lOkW, para esto es necesario realizar las
siguientes modificaciones:
1. El valor de la resistencia de disipación es distinto para esta turbina, realizando el análisis
del mapeo se obtiene un valor de resistencia de 9Q en paralelo con una carga en el lado
de alterna, es necesario convertirla al lado de directa comparando la corriente
fundamental entre el lado de alterna y el de directa.
2. El IGBT seleccionado para la turbina de lOkW es el APT65GP60LDQ2G de la marca APT,
este componente es de 600V, 198 A. Es necesario realizar los cálculos térmicos para la
disipación de éste y el snubber de apagado para que opere dentro de la curva SOA de
acuerdo a los tiempos de subida y de bajada.
3. Configuración de la lógica difusa, es necesario realizar el cálculo del error en base a la
curva óptima del generador de lOkW, el resto de la programación es el mismo.
127

Bibliografía
[I] B. Wu, Y. Lang, N. Zargari y S. Kouro, Power Conversión and Control of Wind Energy Systems,
Canadá: John Wlley & Sons, 2011.
[2] O. Anaya, N. Jenkins y J. Ekanayake, Wind Energy Generation Modelling and Control, Unitef
Kingdom: John Wiley & Sons, 2009.
[3] N. Mohán, T. Undeland y W. Robbins, Electrónica de potencia convertidores aplicaciones y
diseño, México: McGraw-Hill, 2009.
[4] J. Yen y R. Langari, Fuzzy Logic Intelligence, Control and Information, United States of America:
Prentice-Hall, 1999.
[5] A. Ferreyra y F. R., Estudio comparativo entre control PID y difuso, UAM- Azcapotzalco, 1999.
[6] «Análisis de la viabilidad de conexión de parques eólicos a la red eléctrica,» [En línea]. Available:
http://upcommons.upc.edU/pfc/bitstream/2099.l/2682/l/36090-l.pdf.
[7] O. Monrroy, DISEÑO, MODELACIÓN Y VALIDACIÓN EXPERIMENTAL DE GENERADORES
TOROIDALES PARA APLICACIÓN EÓLICA, Monterrey, 2011.
[8] Microchip, «PIC18F2455/2550/4455/4550 datasheet,» 2009. [En línea].
[9] S. Kouro y R. Musalem, «Control mediante lógica difusa,» 2002.
[10] J. J., «Design of fuzzy controllers,» Technical University ofDenmark, 1998.
[II] J. Jantzen, «Tuning Of Fuzzy PID Controllers,» Technical University ofDenmark, Department of
Automation, 1998.
[12] T. Burton, S. David, N. Jenkins y E. Bossanyi, Wind Energy Handbook, Reino Unido: John Wiley,
2001.
[13] J. Martínez, Modelo aerodinámico y electromecánico con caracterización experimental para la
predicción de la curva de potencia del aerogenerador Bergey BWC XLI, Tesis maestría ITESM,
2004.
[14] J. F. GIERAS, R.-J. WANG y M. J. KAMPER, Axial Flux Permanent Magnet Brushless Machines,
Dordrecht, The Netherlands: Kluwer Academic Publishers, 2004.
[15] Z. Ivanovic*, B. Dokic*, B. Blanusa* and M . Knezic, Boost Converter Efficiency Optimization in Wind Turbine, Faculty of Electrical Engineering, Banja Luka, 2010.
128

[16] L. Wung, T. Yeh, A COMPARATIVE STUDY OF CAPTURED ENERGY OF WIND TURBINES, Department of Electrical Engineering, National Cheng Kung University, The 2004 IEEE Asla-Pacific Conference on Circuits and Systems, December 6-9,2004.
[17] I. A. Ruge, METODO BASICO PARA IMPLEMENTAR UN CONTROLADOR DIGITAL PID EN UN MICROCONTROLADOR PIC PARA DESARROLLO DE APLICACIONES A BAJO COSTO, Universidad de Cundinamarca, Colombia, 2007.
[18] L. Cruz, M. Escalona, V. M. Giménez, M. I. Fernández, H. Restrepo, EMULADOR EÓLICO PARA
AEROGENERADORES DE BAJA POTENCIA, Ciudad Guayana, Venezuela recibido el 2009.
[19] K. Ogata, Ingeniería de control moderna, University of Minnesota, Prentice Hall, 2003.
[20] [28] Z. Wang, L. Chang, PWM AC/DC BOOST CONVERTER SYSTEM FOR INDUCTION GENERATORIN
VARIABLE-SPEED WIND TURBINES Dept. of Electrical and Computer, University of New Brunswick,
2005.
[21] [27] W. Sudmee, B. Neammanee, Performance Comparison ofDC Link Voltage Controllers in Vector Controlled Boost Type PWM Converter for Wind Turbine System, Department of Electrical Engineering, King Mongkut's Institute of Technology North Bangkok, 2007.
[22] [26] C. Yang, H. Liang, J. Jiang, Modeling and Simulation of AC-DC-AC Converter System for MW-
Level Direct-Drive Wind Turbine grid Interface, Beijing Jiaotong University Department of
Electrical Engineering, 2005.
[23] 25] M. Arifujjaman, M. Iqbal, J. E. Quaicoe, MAXIMUM POWER EXTRACTION FROM A SMALL WIND TURBINE EMULATOR USING A DC - DC CONVERTER CONTROLLED BY A MICROCONTROLLER, Faculty of Engineering, Memorial University ofNewfoundland St. John's, Newfoundland, Canadá, 2006.
[24] [24] S. Jiao, G. Hunter, V. Ramsden and D. Patterson, Control System Design for a 20kw Wind Turbine Generator with a Boost Converter and Battery Bank Load, Faculty of Engineering, University of Technology, Sydney, 2001.
[25] [23] J. H. Laks, L. Y. Pao, A. D. Wright, Control of Wind Turbines: Past, Present, and Future, Hyatt Regency Riverfront, St. Louis, MO, USA, 2009.
[26] Hen, E. Walker, A first cou. Nguyrse in Fuzzy Logic, New México, CRC Press, 1997.
[27] K. Tanaka, An introduction to Fuzzy Logic for practical aplications, Japan, Rassel, 1991.
129

[28] S. Sivanandam, S. Sumathi, S. Deepa, Introduction to Fuzzy Logic using Matlab, India, Springer,
1999.
[29] [18] C. Leondes, Fuzzy Logic and Expert Systems Applications, University of California, Los
Ángeles, Academic Press, 1998.
[30] [18] Z. Lin, G. Qjngding, Adjustable-Pitch and Variable-Speed Control of Wind Turbines Using Nonllnear Algorithm, Shengyang University of Technology, China, IEEE Trans.
[31] [20] K. Ostergaard, Robust, Gain-Scheduled Control of Wind Turbines, Phd Thesis, Automation and Control Department of Electronic Systems Aalborg University, Denmark, 2008.
[32] R. Bharanikumar, M. Prabha, S. Palanichamy, Boost Chopper Circuit for Low Power Wind Turbine
Driven PM Synchronous Generator, Bannari Ammán Institute of Technology Anna University
Sathyamangalam, Tamil Nadu, India, 2007.
130

Anexo A Código para la configuración del módulo ADC utilizando el micro controlador PIC18Í4550
#pragma config FOSC = INTOSCIO_EC //Internal oscillator, port function on RA6, EC used by USB #pragma config WDT = OFF //Disable watchdog timer #include<pl8f4550.h> #include <adc.h> #include <math.h> #include<pwm.h> float V1,V2, S_P, S_I2, S_T; float S_l,l,SCon; float RPMs,P, T; float S_RPMs=0.0; int ¡=0.0; void ma¡n() {
ADCON1 = ObOOOOlOll; //VSS,VDD ref. y configurar ANO, AN1, AN2 y AN3 como entradas análogas ADCON0 = ObOOOOOOOO; //Leer de la entrada análoga ANO ADCON2 = ObOOOOlOOO; //ADCON2 setup: Left justified, Tacq=2Tad, Tad=2*Tosc (or Fosc/2)
while (1) //Ciclo infinito {
if (ADCONO == ObOOOOOOOO) //Lectura de RPMs ANO {
ADCONObits.ADON = 0x01; //Habilitar Módulo AD ADCON0bits.GO_DONE = 1; //Iniciar conversión A/D
while (ADCON0bits.GO_DONE != 0) //Esperar que termine la conversión AD {} ADCONO = ObOOOOOlOO; //Usar entrada AN1 en la siguiente conversión S_RPMs=S_RPMs+((ADRESH*5.0)/255.0);//Guardar lectura del ADRESH y acumularla i=i+1.0; //Inicia un contador
if (¡==1000.0) //Cuando haya mil muestras se saca un promedio { RPMs= ((S_RPMs+RPMs)/¡)* 105.33-59.259;//Calcula el promedio y las RPMs
S_RPMs=0.0; //Reinicia el contador de muestras }
}
if (ADCONO == ObOOOOOlOO) //Lectura de Corriente AN1 {
ADCONObits.ADON = 0x01; //Habilitar Módulo AD ADCON0bits.GO_DONE = 1; //Iniciar conversión A/D
while (ADCON0bits.GO_DONE != 0) //Esperar que termine la conversión AD {} ADCONO = ObOOOOlOOO; //Usar entrada AN2 en la siguiente conversión V1=ADRESH; //Guardar resultado de conversión V2= V2+(((Vl*5.0)/255.0)*((Vl*5.0)/255.0));//Acumula suma de cuadrados de VI S_l=(((Vl*5.0)/255.0)*((Vl*5.0)/255.0)); //Cuadrado de conversión AD, usado
para monitorear
if (¡==1000.0) { 1= sqrt(V2/i); //Se calcula la corriente RMS
i=0.0; //Inicializa variables i y V2 nuevamente en 0 V2=0.0;
} }
if (ADCONO == ObOOOOlOOO) //Lectura de Presión AN2 {
131

ADCONObits.ADON = 0x01; //Habilitar Módulo AD ADCON0bits.GO_DONE = 1; //Iniciar conversión A/D
while (ADCON0b¡ts.GO_DONE != 0) //Esperar que termine la conversión AD 0 ADCONO = ObOOOOllOO; //Usar entrada AN3 en la siguiente conversión S_P=ADRESH; //Guardar lectura del ADRESH P= ((((S_P*5.0)/255.0)/5.0)+0.095)/0.009; //Interpretar la señal leída
}
if (ADCONO == ObOOOOllOO) //Lectura de Temperatura AN3 {
ADCONObits.ADON = 0x01; //Habilitar Módulo AD ADCON0bits.GO_DONE = 1; //Iniciar conversión A/D
while (ADCON0bits.GO_DONE != 0) //Esperar que termine la conversión AD {} ADCONO = ObOOOOOOOO; //Usar entrada ANO en la siguiente conversión S_T=ADRESH; //Guardar lectura del ADRESH T= ((S_T*5.0)/255.0-2.78)/0.010+25.0; //Interpretar la señal leída
} } }
132

Anexo B Código de configuración del módulo PWM en el PIC18F4550.
#pragma config FOSC = HS// Establecemos que el Oscilador Primario viene de un cristal de alta velocidad HS #pragma config CPUDIV = OSCl_PLL2 //CPUDIV +1 #pragma config FCMEN = OFF //Deshabilitar "Fail Safe Clock Monitor" para forzar a usar sólo el ose ext. // #pragma config IESO = OFF // Switcheo entre Ose Interno/Externo OFF // #pragma config WDT = OFF //Disable watchdog timer #pragma config USBDIV = 1 //Clock source from OSC1/OSC2 = Crystal #include <pl8f4550.h> #include<adc.h> #include <math.h> #include <pwm.h>
int transí = ObllOOOOOO; void main() {
TRISD= 0x00; TRISC= 0x00; PORTD= 0x00; PORTC= 0x00; ADCON1 = 0b00001011;//VSS,VDD ref. AN0-AN3 ADCONO = 0b00000000;//clear ADCONO to select channel 0 (ANO) ADCON2 = 0b00001100;//ADCON2 setup: Left justified, Tacq=2Tad, Tad=2*Tosc (or Fosc/2) CCPlCON=0b00001111; // PWM Mode T2CON = ObOOOOOlOO; //Prescale=l, T2 "On" PR2 = OxfA; //PR2=250, TOSC=0.05us, TMR2=1; Periodo PWM= (PR2 +l)*4TOSC*(TMR2)=50us
while (1) {
{ADCONObits.ADON = 0x01; //Habilitar Módulo AD ADCON0bits.GO_DONE = 1; //Start A/D Conversión
• while (ADCON0bits.GO_DONE != 0) //Esperar que termine la conversión AD {} transí = ADRESL » 2; //Los bits del ADRESL se guardan en transí pero movidos 2 espacios a la
//derecha, con esto los 2 más significativos quedan en las posiciones 5 y 4 CCP1CON = (CCP1CON & Obl lOOl l l l ) + transí; //El AND que se le hace al CCP1CON es para //conservar el
valor que ya tengan todos sus bits excepto los 5 y 4, con el OR, sólo los bits 5 y 4 del CCP1CON //adquieren el valor de los bits 5 y 4 de transí, que son los 2 bits más significativos del ADRESL.
CCPR1L= ADRESH;//CCPR1L con 8 bits más significativos del Duty Cycle del PWM adquiere el valor //del ADRESH que son los 8 MSB del ADRES
//Con estas 2 últimas instrucciones logramos escribir los 10 bits del ADRES en los 10 bits destinados al ciclo //de trabajo de la señal PWM CCPR1L:CCP1C0N<5:4>
} } }
133

Anexo C Código Matlab del modelo simplificado para el cálculo del torque mecánico.
clear ali cióse all de
%Cond¡ciones iniciales dt=l; t=0:dt:180; F = 20; U=0.5*sin(2*pi*t/F)+6.5; nr(l)=14.4; Rt=40;
%Variables
r=2; ki=22; Ro=l.l;
%Constantes KE=0.S3; Ral=2.644;
for i=l:length(t) ns(i)=nr(i)*(30/p¡);
%Torque opuesto Tsf(¡)=(14.987*KE*ns(i))/((Ral+RL)); Tfr(i)=0.00933*ns(i)+1.22712; Tm(i)=Tsf(i)+Tfr(i);
la(i)=(ns(i)*KE)/((Ral+RL));
%Torque aerodinámico X(i) = U(i)/((nr(i)*r)); ifX(i)< 0.27196 % Si 1/lambda es menor a 0.27196
A l = -1250.027635; B l = 1336.147813; C l = -566.7889676; DI = 120.7049075; E l = -13.50226613; F l = 0.7700502769; G l = -0.01778949684;
Kp(i)=Al*X(i)A6+Bl*X(i)A5+Cl*X(i)A4+Dl*X(i)A3+El*X(i)A2+Fl*X(i)+Gl; else % Si 1/lambda es mayor a 0.27196
A2 = 2.86783267E-7; B2 = -2.710489778E-6; C2 = 6.55127905E-6; D2 = 2.095861085E-6; E2 = 0.0005688829266; F2 = -5.914217898E-5; G2 = 0.002372898677;
Kp(i)=A2*X(i)A6+B2*X(i)A5+C2*X(i)A4+D2*X(i)A3+E2*X(i)A2+F2*X(i)+G2;
134

end Ta(¡)=0.5*Ro*Kp(¡)*p¡*rA5*nr(i)A2;
%Comparación de Torques dn(i)=(l/(k¡))*((Ta(i)-Tm(i)))*dt; nr(i+l)=nr(i)+dn(i);
end
Modelo con rectificador
clear all ele cióse all
RL = 20; Ra¡ = 2.644; La¡ = 4.8e-3; n = 250; f = n*12/60; w = 2*pi*f;
Zai = Raí + i*w*Lai;
Zeq = 2*Zai + RL;
Zeqmag = norm(Zeq);
dt = 0.00001; t = 0:dt:0.1; Ke = 0.53; EMFrms = Ke*n;
EMFamp = EMFrms*sqrt(2); %VD = 6e-5*nA2-0.0025*n+0.5727;
V = EMFamp*(s¡n(w*t)-sin(w*t+2*pi/3));%-2*VD; I = (V-2*0.1826)/(2*Zai+RL+2*0.698);
%l = V/Zeq; Ireal = real(l); tmins = tflreal == max(lreal))-(l/(12*f)); tmaxs = t(lreal == max(lreal))+(l/(12*f)); tmin = tmins(l); tmax = tmaxs(l); Irismean = mean(lreal(t>=tmin & t<=tmax));
Irms = lrismean/1.2359
135

Anexo D Algoritmo en Matlab para el cálculo del valor RMS de una señal sinusoidal con armónicos.
clear all
wO = 2*pi*10; % [rad/sec] Normal frequency of the signal AO = 100*sqrt(2); % [V] Normal amplitude of the signal dt = le-3; % [s] Sampling period Tsim = 10; % [s] Duration of simulation
tr = 0:dt:Tsim; % [s] Time vector
N = length(tr)-!; % [-] Number of data points in the time vector
% PARAMETE RS Taff =1; % [s] Duration of amplitude and/or frequency change ka = 0.2; % [-] Factor by which the amplitude is affected kw = 1; % [-] Factor by which the frequency is affected
for j = l:length(tr)
if (j > lehgth(tr)/2)&&(j < (length(tr)/2 + Taff*N/Tsim))% Impose a reduction on the amplitude for a period from (Tsim/2) to (Tsim/2 + Tred)
A(j) = ka*A0; % Affected amplitude w(j) = kw*w0; % Affected frequency
else A(j) = AO; % Unaffected amplitude w(j) = wO; % Unaffected frequency
end
Vr(j) = A(j)*sin(w(j)*tr(j)); % The signal is the sinusoid constructed above end
Vdt = 0; % Intermedíate variable of the algorithm Vo = 0; % Intermedíate variable of the algorithm Vout(l) = 0; % Output variable. For visualizaron purposes it is a vector here, but it doesn't have to be a vector in the microcontroller alpha = 0.98; % Constant 1 for the first low pass filter. Make 0 to elimínate the first LPF beta = 0.98; % Constant 2 for the second low pass filter. Make 0 to elimínate the second LPF
for i = 2:length(Vr) V = abs(Vr(¡)); % Make a measurement. Notice that we measure the absolute valué Vdt = alpha*Vdt + (l-alpha)*(VA2); % Compute new valué of intermedíate variable using first LPF Vo = sqrt(Vdt); % Square root of intermedíate variable Vout(i) = beta*Vout(i-l) + (l-beta)*Vo; % Calcúlate output using second LPF
end
figure(l); hold; plot(tr,Vout,'b') % Plot in blue the calculated RMS valué plot(tr,A/sqrt(2),'r') % Plot in red the real RMS valué
136

Anexo £
Algoritmo en Labview (Formula Node) para la emulación de viento,
float T, Lambda, Ta, dw, wi, V, N;
To = -52.67*(Tv -Tref);
Ta = 0.5*rho*Kp*pi*pow(R,5)*pow(w,2);
dw = (Ta -To)*dt/K;
wi = w +dw;
V = wi*0.159;
if(V>=5){
V = 5; } if (V <= 0){ V = 0; }
N = wi*30/pi;
137