tercer taller señales
TRANSCRIPT

7/24/2019 Tercer Taller Señales
http://slidepdf.com/reader/full/tercer-taller-senales 1/26
Diseno de sistemas dinamicos y sistemas
discretos
Juan Camilo Ramırez, Alexander Aroca Poveda
29 de noviembre de 2015
1. Considere la funcion de transferencia del sismome-tro dada por:
H 1(s) = ms2
ms2 + f s + k =
s2
s2 + f −s + k− (1)
en que f − = f m
y k− = km
Use simulacion para encontrar el valor de f − en la ecuacion 1, de forma queel sistema actue como sismometro en el mayor rango operacional posible.concidere dos casos:
1) m = 20, k = 0.22) m = 20, k = 0.02
R/ Para resolver lo anterior, primero se tienen que reemplazar los valores de my de k dentro de la funcion de transferencia del sistema, se resolvera cada casopor aparte.1) Para este caso, se tiene una funcion de transferencia de la forma.
H 1(s) = s2
s2 + f −
20 s + 0,220
El sistema siempre va a ser estable para valores positivos de f y de k. Para quefuncione como un sismometro, la salida tiene que seguir a la entrada, expresadode forma matematica, la funcion de transferencia debe ser de la forma.
1

7/24/2019 Tercer Taller Señales
http://slidepdf.com/reader/full/tercer-taller-senales 2/26
H 1s(
s) =
s2
s2 = 1 (2)
Para que esto ocurra, en el dominio de la frecuencia se debe tener la siguientedesigualdad.
| jwf − + k−| << |( jw)2|
Se sabe que el valor de k− es de 0.01, entonces se debe hallar un valor de f 20
tal que el sistema funcione como un sismometro, con la ayuda de software desimulacion se realiza esta tarea, graficando para diferentes valores de f −, paraeste caso se utilizan los valores (0.04, 0.05, 0.14, 0.17) y el codigo utilizado enoctave se puede apreciar a continuacion.
w = 0 : 0,01 : 1,4; n = [1 0 0];d1 = [1 0,04 0,01]; H 1 = f reqs(n, d1, w);d2 = [1 0,05 0,01]; H 2 = f reqs(n, d2, w);d3 = [1 0,14 0,01]; H 3 = f reqs(n, d3, w);d4 = [1 0,17 0,01]; H 4 = f reqs(n, d4, w);
f = [1 0 0]; H 5 = freqs(n , f, w); plot(w, abs(H 1), ”g”,w,abs(H 2), ” − .k”,w,abs(H 3), ”b”,w,abs(H 4), ” −−r”);
En la figura 1 se puede apreciar el resultado de la simulacion.
Figura 1: resultado primera simulacion sismometro
2

7/24/2019 Tercer Taller Señales
http://slidepdf.com/reader/full/tercer-taller-senales 3/26
En esta imagen se puede observar que el valor de f − = 0.14 (linea de co-lor azul) es el que tiende mas rapidamente al valor 1, esto en una frecuencia
aproximada de 0.25 w. Por ende el sismometro funciona para frecuencias w ¿0.25. Es decir que para este caso el rango de frecuencias B es de [0.25, ∞], enotras palabras, es en este rango que se cumple la condici on de la funcion detransferencia H 1s(s).
2) Para este segundo caso, el valor de m no varia, este sigue siendo de 20,sin embargo el valor de k es de 0.02, por en de la funcion de transferencia quedade la forma.
H 1(s) = s2
s2 + f −
20 s + 0,0220
Se sabe que el valor de k− para esta ocasion es de 0.001, entonces se debehallar un valor de f
20 tal que el sistema funcione como un sismometro, con laayuda de software de simulacion se realiza esta tarea, graficando para diferentesvalores de f −,todo esto realizandose como en el apartado anterior. Se utilizanvalores de (0.014, 0.020, 0.045, 0.055), el codigo utilizado se puede apreciar aconitnuacion.
w = 0 : 0,01 : 1; n = [1 0 0];
d1 = [1 0,014 0,001]; H 1 = freqs(n, d1, w);d2 = [1 0,020 0,001]; H 2 = freqs(n, d2, w);d3 = [1 0,045 0,001]; H 3 = freqs(n, d3, w);d4 = [1 0,055 0,001]; H 4 = freqs(n, d4, w);
f = [1 0 0]; H 5 = freqs(n , f, w); plot(w, abs(H 1), ”g”,w,abs(H 2), ” − .k”,w,abs(H 3), ”b”,w,abs(H 4), ” −−r”);
En la figura 2 se puede apreciar el resultado de la simulacion.
3

7/24/2019 Tercer Taller Señales
http://slidepdf.com/reader/full/tercer-taller-senales 4/26
Figura 2: resultado segunda simulacion sismometro
En la imagen anterior se puede observar que el valor de f − = 0.045 (linea decolor azul) es el que tiende mas rapidamente al valor 1, esto en una frecuenciaaproximada de 0.10 w. Por ende el sismometro funciona para frecuencias w ¿0.10. Es decir que para este caso el rango de frecuencias B es de [0.10, ∞], enotras palabras, es en este rango que se cumple la condici on de la funcion detransferencia H 1s(s).
Compare la respuesta en frecuencia de los sismometros aproximados con
respecto a la respuesta en frecuencia ideal del sismometro
R/ Si se toma como sismometro ideal aquel en el cual la salida sigue a la entrada,
es decir donde la funcion de transferencia H(s) es igual a H 1(s) = s2
s2, entonces
se prueba lo anterior, para entradas que esten en el rango frecuencial de cadasismometro hallado con anterioridad, para esto se utiliza la funcion.
u(t) = e−0,3 ∗ sin(t) ∗ cos(20t)
como senal de entrada del sistema, cuyo rango frecuencial se puede apreciaren la figura 3 Para esto se utiliza la funci on fft, para hallar la transformadarapida de fourier.
4

7/24/2019 Tercer Taller Señales
http://slidepdf.com/reader/full/tercer-taller-senales 5/26
Figura 3: espectro de magnitud senal u(t)
Como se puede apreciar en la figura la amplitud de la frecuencia de la senalde entrada, esta dentro del rango frecuencial de los sismometros hallados conanterioridad. Para corroborar el funcionamiento de estos y como se comparanrespecto al sismometro ideal, se induce la entrada anterior a cada uno de lossismometros, cuyo resultado debe ser igual, es decir la salida del sistema y(t)debe ser igual a la entrada u(t). Para esto se utilizan dos codigos diferentes, unopara cada sismometro. Para el primer caso se tiene el siguiente codigo.
n = [100];d = [10,140,01];t = 0 : 0,1 : 10;
u = exp(−0,3 ∗ t). ∗ sin(t). ∗ cos(20 ∗ t);y = lsim(n,d,u,t);
subplot(2, 1, 1); plot(t, y);
subplot(2, 1, 2); plot(t, u);
(3)
Cuya respuesta y graficas se pueden apreciar en la figura 4.
5
7/24/2019 Tercer Taller Señales
http://slidepdf.com/reader/full/tercer-taller-senales 6/26
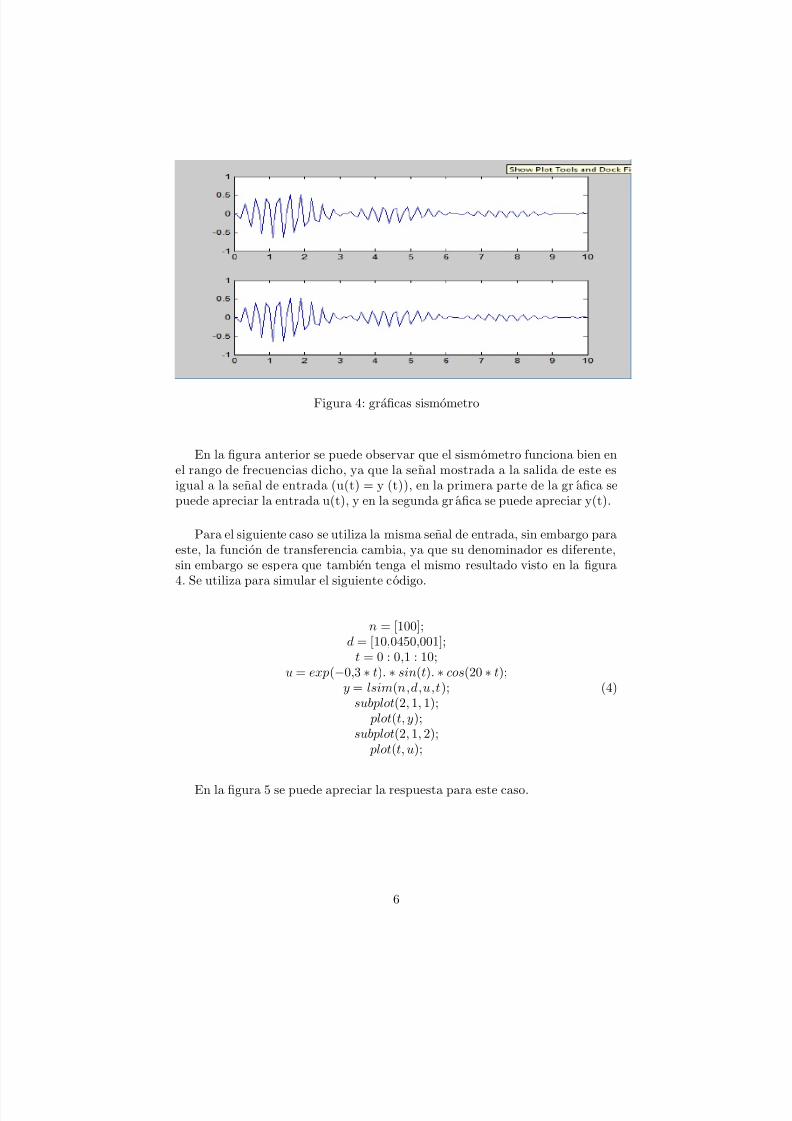
Figura 4: graficas sismometro
En la figura anterior se puede observar que el sismometro funciona bien enel rango de frecuencias dicho, ya que la senal mostrada a la salida de este esigual a la senal de entrada (u(t) = y (t)), en la primera parte de la gr afica sepuede apreciar la entrada u(t), y en la segunda grafica se puede apreciar y(t).
Para el siguiente caso se utiliza la misma senal de entrada, sin embargo paraeste, la funcion de transferencia cambia, ya que su denominador es diferente,sin embargo se espera que tambien tenga el mismo resultado visto en la figura4. Se utiliza para simular el siguiente codigo.
n = [100];d = [10,0450,001];
t = 0 : 0,1 : 10;u = exp(−0,3 ∗ t). ∗ sin(t). ∗ cos(20 ∗ t);
y = lsim(n,d,u,t);subplot(2, 1, 1);
plot(t, y);subplot(2, 1, 2);
plot(t, u);
(4)
En la figura 5 se puede apreciar la respuesta para este caso.
6
7/24/2019 Tercer Taller Señales
http://slidepdf.com/reader/full/tercer-taller-senales 7/26
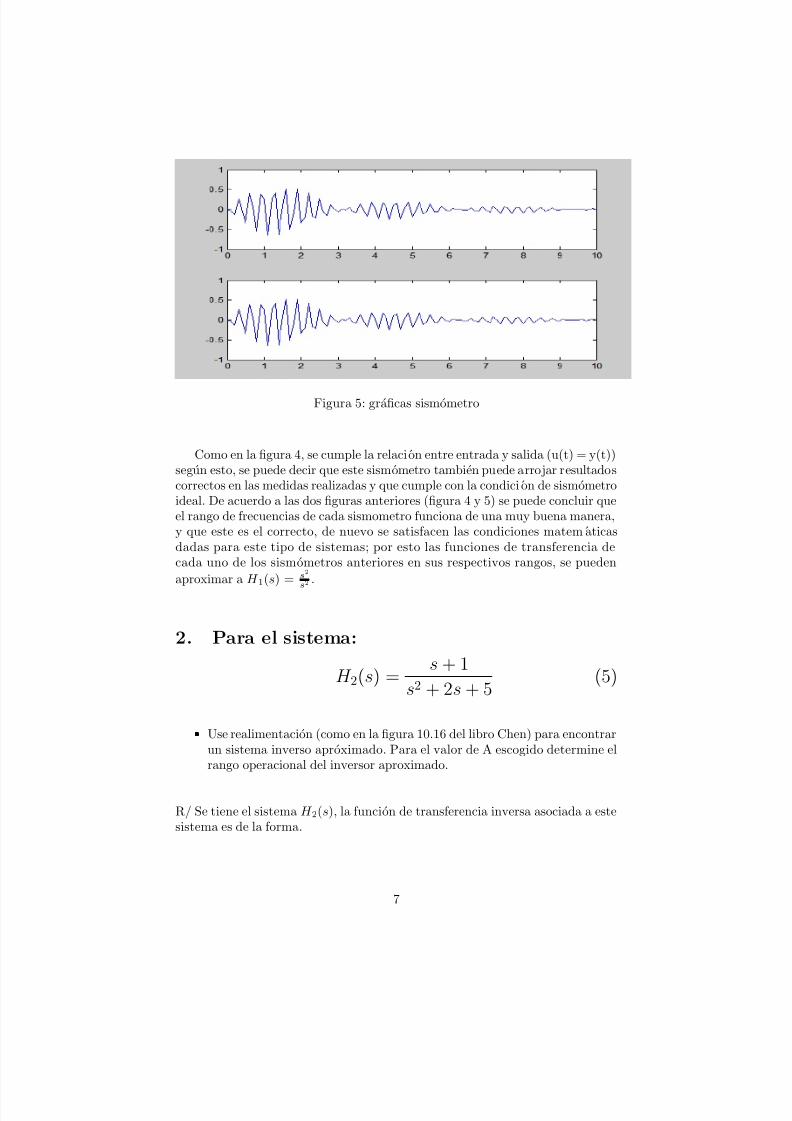
Figura 5: graficas sismometro
Como en la figura 4, se cumple la relacion entre entrada y salida (u(t) = y(t))segun esto, se puede decir que este sismometro tambien puede arrojar resultadoscorrectos en las medidas realizadas y que cumple con la condici on de sismometroideal. De acuerdo a las dos figuras anteriores (figura 4 y 5) se puede concluir queel rango de frecuencias de cada sismometro funciona de una muy buena manera,y que este es el correcto, de nuevo se satisfacen las condiciones matem aticasdadas para este tipo de sistemas; por esto las funciones de transferencia decada uno de los sismometros anteriores en sus respectivos rangos, se pueden
aproximar a H 1(s) = s2
s
2 .
2. Para el sistema:
H 2(s) = s + 1
s2 + 2s + 5 (5)
Use realimentacion (como en la figura 10.16 del libro Chen) para encontrarun sistema inverso aproximado. Para el valor de A escogido determine elrango operacional del inversor aproximado.
R/ Se tiene el sistema H 2(s), la funcion de transferencia inversa asociada a estesistema es de la forma.
7

7/24/2019 Tercer Taller Señales
http://slidepdf.com/reader/full/tercer-taller-senales 8/26
H 2(
s)
−1
=
s2 + 2s + 5
s + 1
La cual es una funcion de transferencia impropia y no se puede implementarsin el uso de derivadores, por ende por medio de la figura 6 se pretende encontrarun sistema inverso tal, que funcione para el sistema en un rango de frecuencias.
Figura 6: retroalimentacion para hallar el sistema inverso
Por la figura 6 se puede observar que el sistema realiza una funcion detransferencia de la forma
H 0(s) = A
1 + AH (s) =
A
AH (s) = H (s)−1
Para valores de A muy grandes que ocasionen |AH ( jw)| >> 1. Para estecaso se realizan las operaciones respectivas, lo que ocasiona que.
H 0(s) = A
1 + AH (s) =
A
1 +
A(s+1)
s2
+2s+5
Realizando las operaciones respectivas se tiene finalmente
8

7/24/2019 Tercer Taller Señales
http://slidepdf.com/reader/full/tercer-taller-senales 9/26
H o(
s) =
A(s2 + 2s + 5)
s2 + s(2 + A) + 5 + A
Lo cual para valores de A muy grandes
H 0(s) = A(s2 + 2s + 5)
As + A =
A(s2 + 2s + 5)
A(s + 1)
Cancelando A en la ecuacion anterior
H 0(s) =
s2 + 2s + 5
s + 1 = H (s)−1
Lo cual como se puede apreciar es igual a la funcion de transferencia inversa.por medio del test de routh se puede verificar para que valores de A la funci oninversa es estable.
s2|1s1|2 + An
s0|5 + A
Para verificar el criterio de estabilidad.
2 + A > 05 + A > 0
Por ello A debe ser mayor a -5 y a -2, para esto se toma el valor de A mayora -2, es decir A > -2. De forma contraria si A < -2 el sistema es inestable. Loanterior se cumple para el rango de frecuencias.
|( jw)2 + 2 jw + 5| << A| jw + 1|
Si se toma un valor de A igual a 100 se tiene entonces.
|( jw)2 + 2 jw + 5| << A| jw + 1| (5 − w2)2 + (2w)2 << 100
√ w2 + 1
9

7/24/2019 Tercer Taller Señales
http://slidepdf.com/reader/full/tercer-taller-senales 10/26
Despejando de la ecuacion anterior, se tiene la siguiente expresion para w.
w4 − 6w2 + 25 << 1002w2 + 1002
w4 − 6w2 + 25 − 1002w2 << 1002
w4 − 10006w2 − 9975 << 0
De acuerdo a esta ultima expresion se pueden hallar dos valores para w,porque la expresion como se puede apreciar tiene 4 raices, es decir dos raicesrepetidas dos veces, hallando las raices de la expresion anterior y despejando wse tiene finalmente.
(w2
−10006, 99)(w2 + 0,99) << 0
(w2 − 10006, 99) << 0)w2 << 10006, 9968025
w << + − 100, 04
Interesa solamente el rango de frecuencias positivo, es decir que solamente setoman los valores para los cuales w << 100.04. Para corroborar la desigualdaddada para la funcion de transferencia inversa, se toma un valor de A de 100 yuna entrada de la forma u(t) = (e−0,3tsen20t), es decir que posee una frecuenciade 20 hz. se realiza el analisis respectivo del denominador, lo cual ındica que.
(5
−202) + (2
∗20)2 << 100
√ 2020 + 12
397 << 2002, 50
Con el resultado anterior se puede apreciar que el sistema funciona parasenales con una precuencia muy baja, la desigualdad tiene sentido para el valorde A igual a 100.
Use una senal dentro del rango operacional de frecuencias para mostrar,mediante simulacion, que el inversor funciona.
R/ Para demostrar lo anterior, se escoge una A de 100. Una se nal de entrada confrecuencia de 5 hz. Esto para que se puede apreciar la respuesta completamente,sin embargo la frecuencia de la senal seno puede ser de hasta 100 hz. para quese cumpla la funcion de transferencia inversa. El codigo utilizado en este casose puede apreciar a continuacion.
10

7/24/2019 Tercer Taller Señales
http://slidepdf.com/reader/full/tercer-taller-senales 11/26
t = 0 : 0,1 : 10;
u = exp(−0,3 ∗ t). ∗ sin(5 ∗ t);subplot(3, 1, 1);
plot(t, u);
n = [11];d = [125];
H = tf (n, d);y = lsim(H,u,t);
subplot(3, 1, 2); plot(t, y);
A = 100;H 1 = f eedback(A, H );
k = lsim(H 1, y , t);subplot(3, 1, 3);
plot(t, k);
Figura 7: resultado simulacion senal de entrada, senal de salida, sistema inverso
En la figura 7 se puede apreciar la respuesta del sistema, en el primer recua-dro se observa la entrada u(t), en el segundo recuadro se observar la salida y(t)
esto debido a la funcion de transferencia H(s). Finalmente en el ultimo recua-dro se aprecia la salida debida a la funcion de transferencia inversa, como cabeesperar esta es igual a u(t) la entrada del sistema, esto cumple con la teoria dela funcion inversa de transferencia.
11

7/24/2019 Tercer Taller Señales
http://slidepdf.com/reader/full/tercer-taller-senales 12/26
Use una senal fuera del rango operacional del inversor para mostrar porsimulacion las limitaciones del inversor.
Para demostrar lo anterior, se utiliza una senal de entrada con una frecuenciade 3 Khz, esta es 30 veces mas grande que la maxima frecuencia permitida parael sistema, como se puede apreciar en la figura 8 Esto varia respecto a lo vistoen el item anterior. El codigo utilizado se puede apreciar a continuacion.
t = 0 : 0,1 : 10;u = exp(−0,3 ∗ t). ∗ sin(3000 ∗ t);
subplot(3, 1, 1); plot(t, u);
n = [11];d = [125];
H = tf (n, d);y = lsim(H,u,t);
subplot(3, 1, 2); plot(t, y);
A = 100;H 1 = f eedback(A, H );
k = lsim(H 1, y , t);subplot(3, 1, 3);
plot(t, k);
Figura 8: resultado simulacion senal de entrada, senal de salida, sistema inverso
12

7/24/2019 Tercer Taller Señales
http://slidepdf.com/reader/full/tercer-taller-senales 13/26
Como se ve en la figura anterior, para frecuencias muy grandes el sistemainverso no funciona completamente bien, por ende la salida de la funcion inversa
es diferente a la entrada inducida para este, se observa que esta posee una am-plitud y una forma de onda un tanto diferente, respecto a la respuesta esperada.Se concluye que el sistema funciona solamente para bajas frecuencias, con unaganancia A de 100.
3. Para el sistema
P (s) = 1
s(s− 2) (6)
Encuentre una funcion de transferencia C(s)de primer orden y un precompensador A queubique los polos del sistema realimentado en -3 y -1 +− j. Calcule A para que no exista errorpara rastrear r(t). Use los comandos feedbacky step para simular la respuesta del sistemarealimentado.
R/Se tiene P(s) para este caso, el sistema realimentado forma una funci on
de transferencia.
H f (s) = AC (s)P (s)
1 + C (s)P (s)
Se pide un C(s) es de primer orden, este es de la forma.
C (s) = N 1s + N 0
D1s + D0(7)
Se forma una funcion de transferencia con este C(s) de la forma
H f (s) =
A(N 1s+N 0)(D1s+D0)(s2−2s)
D1s3−2D1s2+D0s2−2D0s+N 1s+N 0(D1s+D0)(s2−2s)
13

7/24/2019 Tercer Taller Señales
http://slidepdf.com/reader/full/tercer-taller-senales 14/26
Se puede observar que dos de estos terminos se cancelan, y realizando elalgebra pertinente, se puede reducir la funcion de transferencia a una forma
mas simple. Se puede osbervar que en terminos de D1,D0,N 1,N 0 esta queda dela forma.
H f (s) = A(N 1s + N 0)
D1s3 + s2(D0 − 2D1) + s(N 1 − 2D0) + N 0(8)
Para esta funcion de transferencia se tiene un denominador de la forma
Df (s) = D1s3 + s2(D0 − 2D1) + s(N 1 − 2D0) + N 0
El cual debe cumplir la restriccion dada para las raices de H f (s), esta res-triccion se debe cumplir para los polos -3, (1 +
− j). Los cuales son las raices que
debe obtener el denominador, para esto se halla el polinomio caracteristico, quecumpli la condicion para las raices anteriores, este polinomio es de la forma.
s3 + 5s2 + 8s + 6
Por ende se puede despejar gracias a este polinomio y a las variables queposee Df (s) los valores de D1,D0,N 1,N 0 que cumplan la condicion. Para ello sedespejan como siguen
D1 = 1D0 − 2D1 = 5N 1 − 2D0 = 8
N 0 = 6
Despejando las diferentes variables, se obtienen los siguientes valores.
D1 = 1N 0 = 6
D0 = 7N 1 = 22
Reemplazando estos valores en la funcion C(s), se tiene que esta es de laforma
14

7/24/2019 Tercer Taller Señales
http://slidepdf.com/reader/full/tercer-taller-senales 15/26
C (s) = 22s + 6
s + 7
Ası que la funcion de transferencia finalmente es
H f (s) = A(22s + 6)
s3 + 5s2 + 8s + 6 (9)
Para hallar el valor de A si H f (s) es estable y se aplica un r(t) = a parat¿=0 entonces el valor de estado estcionario en este caso para t cuando tiende ainfinito debe ser el de aH f (0), por lo cual H f (0) debe tener el valor de 1. Paraque esto se cumpla A.
A6
6 = 1 A = 1
Lo cual certifica que H f (0) sea igual a 1. Una vez realizado lo anterior, pormedio de las funciones ”feedback” y ”step” se verifica la respuesta al paso delsistema, el comando o funcion ”feedback” realiza la operacion para hallar lafuncion de trasnferencia global del sistema retroalimentado, por medio de trescomandos se especifican, la funciones de transferencia que estan en los espaciosde H 1(s) y de H 2(s), y se indica si esta retroalimentacion es positiva o negativa.Para apreciar mejor esto, se observa por medio del codigo como se utiliza esta
funcion y la funcion step.
t = 0 : 0,01 : 10;n = [22 6];d = [1 7];
C = tf (n, d);n1 = [1];
d1 = [1 − 2 0];P = tf (n1, d1);
M = C ∗ P ;n2 = [1];d2 = [1];
G = tf (n2, d2);H = feedback(M, G);
step(H );
(10)
En la figura 9 se puede observar la salida del sistema.
15

7/24/2019 Tercer Taller Señales
http://slidepdf.com/reader/full/tercer-taller-senales 16/26
Figura 9: resultado simulacion feedback y step
claramente se aprecia que el sistema en estado estacionario tiende a 1, el cuales el valor de la amplitud del paso de la entrada, esto en un tiempo aproximadode 5τ , para este caso es de aproximadamente 5 seg. Para corroborar que lafuncion ”feedbackcumple con su cometido, se simula tambien la respuesta alpaso directamente para la funcion H f (s) dada en (7) con A = 1. Para esto seutiliza el siguiente codigo.
t=0:0.01:20;
n=[22 6];d=[1 5 8 6];H=tf(n,d);step(H);
(11)
El resultado se puede apreciar en la figura 9 el cual es el mismo visto en lagrafica 10.
16

7/24/2019 Tercer Taller Señales
http://slidepdf.com/reader/full/tercer-taller-senales 17/26
Figura 10: resultado simulacion step
4. Obtenga analıticamente y determine la res-puesta de estado estacionario del sistema:
H (z ) = z 2 + 2z + 1
(z + 0,6)3(z − 0,5)(z 2 + z + 0,61) (12)
Para los siguientes casos:
u[k] es un paso
R En el caso para el cual u[k] es un paso (de magnitud 1) se tiene entonces unasalida de la forma.
Y (z) = H (z)
U (z)
Teniendo en cuenta la transformada z del paso, y las raices del ultimo poli-
nomio de la funcion de transferencia, se tiene la transformada z de la salida.
Y (z) = z2 + 2z + 1
(z + 0,6)3(z − 0,5)(z + (0,5 + j0,6))(z + (0,5 − j0,6)) ∗ z
z − 1
17
7/24/2019 Tercer Taller Señales
http://slidepdf.com/reader/full/tercer-taller-senales 18/26
Relalizando expancion por fracciones parciales, se haya la transformandainversa de la funcion Y(z), sin embargo los coeficientes, no no sinteresan en
este caso ya que ellos no interfieren en la respuesta de estado estacionario delsistema, para este caso se tiene la salida y[n] de la forma.
y[n] = H (1)1n+k1(0,6)n+k2n(0,6)n+k3n2(0,6)n+k4(0,5)n+k50,78n∗sen(2, 26n+k6)
Como se dijo con anterioridad el valor de los coeficientes no intervienen enla respuesta de estado estacionario. Para hallar el coeficiente del paso, se realizaH(1), lo cual arroja.
H (1) = 0,74yss[n] = 0,74
(13)
esta respuesta es la respuesta de estado estacionario, esto se sabe ya quecuando se realiza el limite de y[n] cuando n tiende a infinito el unico terminoque resulta en la respuesta es el termino constante que equivale a la entrada delpaso o escalon. Para comprobar esto, se simula por medio de la funcion ”step”la respuesta al paso del sistema, por medio del siguiente codigo se puede realizaresto, en la figura 11 se observar la respuesta del sistema y como el valor final deeste (estado estacionario) corresponde a H(1).
n=[1 2 1];d=[1 2.3 2.09 0.649 -0.3222 -0.30564 -0.06588];H=tf(n,d,1);step(H,30);
18

7/24/2019 Tercer Taller Señales
http://slidepdf.com/reader/full/tercer-taller-senales 19/26
Figura 11: resultado simulacion step
u[k] es un impulso
R/ Con un impulso de magnitud 1, se tiene la salida del sistema de la forma
Y (z) = H (z)U (z)
Se realiza la transformada z de la entrada (impulso), sabiendo que esta tiene
un valor de 1, entonces se sabe que se cumple Y(z) = H(z). Por ende an ali-ticamente y por medio de los conceptos aprendidos se sabe que la respuestade estado estable es cero, esto se da por dos motivos importantes, primero elimpulso es aplicado solamente en el tiempo n = 0, por ende despues de ciertoperiodo, la respuesta debida a este impulso desaparece y el sistema tiende denuevo al reposo o a ser cero, segundo, si se lleva n a infinito en h[n] (respuesta alimpulso) se sabe que esta debe tender a cero, ya que el sistema es concentado,por ende es FIR y en la repsuesta finita al impulso h[n] debe converger a unvalor diferente de infinito en este caso, cero. Para comprobar esto se tiene lasalida como.
Y (z) = H (z) = z2 + 2z + 1(z + 0,6)3(z − 0,5)(z + (0,5 + j0,6))(z + (0,5 − j0,6))
Tranformando esto al diminio del tiempo (realizando la transformada inver-sa), se tiene una solucion de la forma.
19

7/24/2019 Tercer Taller Señales
http://slidepdf.com/reader/full/tercer-taller-senales 20/26
y[n] = +k1(0,6)n+k2n(0,6)n+ k3n2(0,6)n+ k4(0,5)n+ k50,78n ∗sen(2, 26n +k6)
Como se puede apreciar en la respuesta anterior, si n tiende a infinito, todoslos valores se desvanecen y finalmente resulta un cero. por ende se puede deducirque.
yss[n] = 0 (14)
Para corroborar lo anterior se utiliza la funcion ”impulse” para revisar lasolucion del sistema cuando a la entrada se le induce un impulso unitario, en
la figura 12 se puede apreciar la respuesta del sistema debido a esto, como sepuede apreciar se tiende a cero a medida que n tiende a infinito, y se muestrael codigo utilizado para realizar tal simulacion.
n = [121];d = [12,32,090,649 − 0,3222− 0,30564− 0,06588];
H = tf (n,d, 1);impulse(H, 30);
Figura 12: resultado simulacion impulse
u[k] = 2 + 0.5sen(n) + cos(3n)
20

7/24/2019 Tercer Taller Señales
http://slidepdf.com/reader/full/tercer-taller-senales 21/26
R/Para este caso se sabe que la respuesta se puede hallar por medio de simula-cion, sin embargo de forma analitica se puede aproximar esta respuesta. Se sabe
que en este caso la respuesta es de la forma
yss[n] = 2H (1) + 0,5|H (ej1)|sen(n+ < H (ej1) + |H (ej3)|cos(3n+ < H (ej3))
Esto se da gracias a la entrada de senales senosoidales, es valido para losvalores de frecuencia entre 0 y π. El valor de estado estacionario anterior, se hallaen el dominio de la frecuencia, para esto, se grafica la funci on de transferenciarespecto a la frecuencia (magnitud y fase); esto se hace con motivo de verificarque valores toma tanto la magnitud como la fase de la funcion de transferenciaen los valores de la entrada, los cuales para este caso son tanto de magnitud y defase 1 y 3. EL codigo utilizado para realizar esto se puede apreciar a continuaciony en la figura 13 se puede osbervar la grafica de magnitud y fase de la funcionde transferencia.
n = [121];d = [1 2,3 2,09 0,649 − 0,3222 − 0,30564 − 0,06588];
|H, w| = f reqz(n, d);subplot(2, 1, 1);
plot(w, abs(H ));subplot(2, 1, 2);
plot(w, angle(H ));
Figura 13: magnitud y fase H(z)
21

7/24/2019 Tercer Taller Señales
http://slidepdf.com/reader/full/tercer-taller-senales 22/26
Como se puede observar en la figura para H(ej1) = 0,69ej0,42, para H(ej3) =0,34ej−2,485 y se tiene finalmente para H(1) = 0.74. Con estos valores se puede
aproximar la respuesta y[n] del sistema al siguiente valor.
y[ss[n] = 1,48 + 0,345sen(n + 0,42) + 0,34cos(3n − 2,485) (15)
Lo cual concuerda con la teoria. Para corroborar lo anterior, por medio desimulacion se verifica la respuesta total del sistema, para esto se utiliza la funcion”lsim” del programa. EL codigo se puede apreciar a continuacion, junto con lafigura donde esta la respuesta del sistema.
n1 = [1 2 1];
d1 = [1 2,3 2,09 0,649 − 0,3222 − 0,30564 − 0,06588];n = 0 : 200;
t = 0,1;ut = 2 + (0,5. ∗ sin(n ∗ t)) + cos(3 ∗ n ∗ t);
H = tf (n1, d1, t);yt = lsim(H,ut);stairs(n ∗ t,yt);
Figura 14: respuesta de estado estacionario debido a entradas sen() y cos()
En el codigo se puede observar que se necesita tener una muestra para llevardel tiempo continuo al tiempo discreto, por esto en las lıneas 3 y 4 se apreciaque se toma n desde 0 hasta 200 muestras y estas se realizan cada una en untiempo de 0.1. por medio de la funcion ”stairs” se puede verificar en la figura
22
7/24/2019 Tercer Taller Señales
http://slidepdf.com/reader/full/tercer-taller-senales 23/26
14, el sistema en tiempo discreto. Como se esperaba con la teoria, la respuestaen estado estacionario debida a las entradas sen() y cos() posee comportamiento
ondulatorio, por ello se da este resultado grafico.
5. Para el sistema H(z) dado por:
H (z) = 0,0738z5 − 0,3689z4 + 0,7378z3 − 0,7378z2 + 0,3689z − 0,0738
z5 − 0,4375z4 + 0,7004z3 − 0,1528z2 + 0,0661z − 0,0041
a) encuentre una realizacion en variables de estado
R/ En este caso se tiene una funcion de transferencia bipropia, para hacerla realizacion de este sistema, se tiene que realizar divisi on directa entre lospolinomios del numerador y de denominador, con esto se elimina el termino dequinto grado del numerador. realizando esta division, se tiene que la funcion detransferencia resulta finalmente.
H (z) = −0,3366z4 + 0,6862z3 − 0,7266z2 + 0,36403z − 0,07078
z5 − 0,4375z4 + 0,7004z3 − 0,1528z2 + 0,0661z − 0,0041 + 0,0738
Con esta funcion de transferencia anterior, se realizan las respectivas matri-ces de ecuaciones de estado.
X 1|n + 1|X 2|n + 1|X 3|n + 1|X 4|n + 1|X 5|n + 1|
=
0,4375 −0,7004 0,1528 −0,0661 0,00411 0 0 0 00 1 0 0 00 0 1 0 00 0 0 1 0
X 1|n|X 2|n|X 3|n|X 4|n|X 5|n|
+
10000
u|n|
Y |n| = −0,3366 0,6862 −0,7266 0,36403 −0,07078
X 1|n|X 2|n|X 3|n|X 4|n|X 5|n|
+0,0738 u|n|
23

7/24/2019 Tercer Taller Señales
http://slidepdf.com/reader/full/tercer-taller-senales 24/26
b) Simule y obtenga analıticamente la respuesta de estado estacionarioante la entrada
u|n| = 1 + sin(0,2πn) + 0,6πsin(n) + 0,8πsin(n)
Determine, apartir de esta respuesta, si el sistema es pasaaltos o pasabajos
R/ para obtener de forma analitica la solucion del sistema, se tiene que teneren cuenta a que frecuencias estan las funciones de entrada del sistema, se puedeapreciar que una de estas esta a 0,2π, la segunda esta a 1, y finalmente la terceraesta a 1 tambien, por ende se puede apreciar que la respuesta general del sistemadebido a la entrada de estas senales es de la forma.
yss[n] = H (1) + |H (ej0,2π)|sin(n+ < H (ej0,2π))+0,6π|H (ej1)|sin(n+ < H (ej1)) + 0,8π|H (ej1)|sin(n+ < H (ej1))
Verificando los valores de magnitud y fase, en las graficas correspondientes,se tiene para H(ej0,2π) = 1.687ej−1,3 y para H(ej1) = 1.687ej−1,9. Finalmenteevaluando en H(1), se tiene el valor H(1) = 0, ya que los terminos del numeradorse hacen cero, se cancelan. Reemplazando lo anterior en la respuesta de estadoestacionario, se obtiene de forma analitica.
yss[n] = 1,687sin(0,2πn − 1,3) + 3,17sin(n − 1,9) + 4,23sin(n − 1,9) (16)
Lo cual indica la respuesta de estado estacionario del sistema, para apreciarmejor esto, se puede realizar la grafica de la respuesta del sistema y verificaresta que forma de onda tiene. En la figura 15 se tiene la respuesta del sistema.Esta se logra con el siguiente codigo.
n1 = [0,0738 − 0,3689 0,7378 − 0,7378 0,3689 − 0,0738];d1 = [1 − 0,4375 0,7004 − 0,1528 0,0661 − 0,0041];
n = 0 : 700;
t = 0,1;ut = 1 + sin(0,2 ∗ pi ∗ n ∗ t) + 0,6. ∗ pi. ∗ sin(n ∗ t) + 0,8. ∗ pi. ∗ sin(n ∗ t);
H = tf (n1, d1, t);yt = lsim(H,ut);stairs(n ∗ t,yt);
24
7/24/2019 Tercer Taller Señales
http://slidepdf.com/reader/full/tercer-taller-senales 25/26
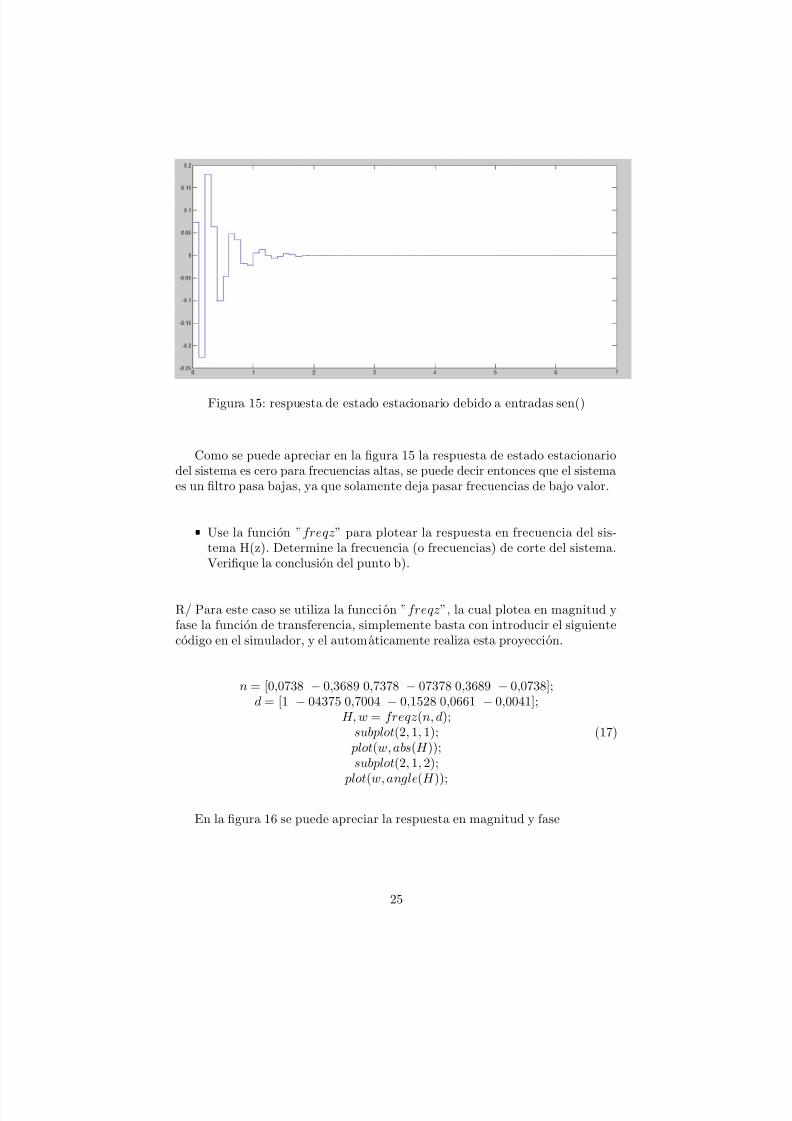
Figura 15: respuesta de estado estacionario debido a entradas sen()
Como se puede apreciar en la figura 15 la respuesta de estado estacionariodel sistema es cero para frecuencias altas, se puede decir entonces que el sistemaes un filtro pasa bajas, ya que solamente deja pasar frecuencias de bajo valor.
Use la funcion ”freqz” para plotear la respuesta en frecuencia del sis-tema H(z). Determine la frecuencia (o frecuencias) de corte del sistema.Verifique la conclusion del punto b).
R/ Para este caso se utiliza la funccion ”freqz”, la cual plotea en magnitud yfase la funcion de transferencia, simplemente basta con introducir el siguientecodigo en el simulador, y el automaticamente realiza esta proyeccion.
n = [0,0738 − 0,3689 0,7378 − 07378 0,3689 − 0,0738];d = [1 − 04375 0,7004 − 0,1528 0,0661 − 0,0041];
H, w = freqz(n, d);subplot(2, 1, 1);
plot(w, abs(H ));subplot(2, 1, 2);
plot(w, angle(H ));
(17)
En la figura 16 se puede apreciar la respuesta en magnitud y fase
25

7/24/2019 Tercer Taller Señales
http://slidepdf.com/reader/full/tercer-taller-senales 26/26
Figura 16: magnitud y fase H(z)
como se puede apreciar en la grafica de magnitud (la primera de las ante-riores), se tiene la forma de un filtro pasabajas lo cual concuerda con lo halla-do anteriormente, idealmente, este filtro permite pasar frecuencias bajas, y lasfrecuencias altas las atenua, lo cual se puede apreciar en la figura ya que enfrecuencias altas, la magnitud disminuye hasta hacerse cero. en la fase, se pue-de apreciar que al valor de 1.56 se tiene un corte abrupto en la amplitud, estepunto, puede ser un punto de corte, sin embargo la frecuencia de corte comotal del filtro se da cercana a los 3 hz, ya que es hasta este punto donde el filtropermite el paso de frecuencias bajas.
26