teorÍa lineal de la elasticidad para …mmc2.geofisica.unam.mx/cursos//mmst/... · estados de...
TRANSCRIPT

PARTE II
1
TEORÍA LINEAL DE LA ELASTICIDAD
PARA
MATERIALES ISOTRÓPICOS

2
G.
CLASIFICACIÓN DE LAS
DEFORMACIONES PURAS
3
Cuando en el desplazamiento la parte correspondiente a un movimiento rígido se anula, a la deformación se le llama
. La clasificación que sigue deformación pura
DEFORMACIÓN PURA
se refiere a exclusivamente. En tal caso,
deformaciones puras
H E
4
Cuando en el desplazamiento la parte correspondiente a un movimientorígido se anula, a la deformación se le llama
. La clasificacióndeformación diferencial
pura
DEFORMACIÓN PURA
que sigue se refiere a exclusivamente. En tal caso,
Donde 1=2
La trasa de es
tr =
pip jq iq jpij
q
pip iq
deformaciones puras
ij
ue
x
uE u
H E
E
e
qx

COMENTARIO INICIAL
Las matrices de deformacionesdiferenciales unitarias asociadas a lasdeformaciones puras son matricessimétricas. Un resultado fundamental delalgebra de matrices que subyace en lasdiscusiones que van a continuación es quetoda matriz simétrica es diagonal (esdecir, se diagonaliza) cuando se utilizanlas direcciones principales como ejes decoordenadas.
5

6
Se dice que corresponde a una cuando esdiagonal y todos los elementos de la diagonal son iguales. La magnitud de la dilatación (o simplemente
E dilatación pura DILATACIÓN PURA
1 1 2 2 3 3
la ) es 3 3 3En tal caso la matriz de deformaciones unitarias se puede escribircomo
1 0 0 3
1 0 0 3
1 0 0 3
dilataciónu u x u x u x
E
En el caso más general de deformaciones cualesquiera en que esarbitraria, la se define como
Cuando 0 se le llama
pip iq
q
Edilatación
uE u trE
xcontracción

7
Un esatdo de deformación es en un punto, cuando la se anula en ese punto. Es decir : 0
isocórico dilatación
u
DEFORMACIONES ISOCÓRICAS
Un esatdo de deformación es una en un punto cuando en ese punto se puede introducir un sistema Cartesiano (ortogonal) de coordenadas tal que
extensión simple EXTENSIÓN SIMPLE
en él 0 0
0 0 0 0 0 0
Un esatdo de deformación es una en un punto cuando en ese punto se pued
E
distorsión simple
DISTORSIÓN SIMPLE
e introducir un sistema Cartesiano (ortogonal) de coordenadas tal que en él
0 0 0 0
0 0 0E

8
RELACIONES ENTRE LAS CLASES DE
DEFORMACIONES PURAS

9
11
22
33
Suponga y diaginalícela : 0 0
0 0 0 0
donde
E isocóricae
E ee
TODA DEFORMACIÓN ISOCÓRICA ES LA SUPERPOSICIÓN DE DOS DEFORMACIONES SIMPLES
22 11 33
11 11
3322 11
3311
Luego
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
e e e
e eee e
ee

10
1 1 + 3 3
Porque: E I E I
TODO ESTADO DE DEFORMACIÓN PURA ES LA SUPERPOSICIÓN DE UNA DILATACIÓN SIMPLE Y UNA DEFORMACIÓN ISOCÓRICA

11
Esta afirmación es un corolario de los resultados anteriores
TODO ESTADO DE DEFORMACIÓN PURA ES LA SUPERPOSICIÓN DE UNA DILATACIÓN SIMPLE Y DOS DE DISTORSIÓN SIMPLE

12
H.
CLASIFICACIÓN DE LOS
ESFUERZOS

COMENTARIO INICIAL
Tanto las deformaciones unitarias puras como losestados de esfuerzo están caracterizados pormatrices simétricas. Debido a ello el análisis de unasy los otros son muy similares. Sin embargo, lasdiferencias principales radican en lasinterpretaciones físicas respectivas. Para facilitaréstas, las ilustraciones se harán para el caso deestados homogéneos de esfuerzo y usandocoordenadas en las direcciones principales.
13

EL TENSOR DE ESFUERZOS
14
11 12 13
21 22 23
31 32 33
LAS TRACCIONES
15
11
22
33
Dado que se ha diagonalizado : 0 0
0 0 0 0
Consecuentemente :
T n
La tracción en un punto de la frontera de un sólidoestá dada por
1 11 1
2 22 2
3 33 3
T nT nT n
ESTADO DE ESFUERZO ISOTRÓPICO
16
11 22 33
11
22
33
1 11 1
2
En este caso , por lo que
Dado que se ha diagonalizado : 0 0
0 0 0 0
Consecuentemente :
I
T nT
22 2
3 33 3
nT n

17
11
1 11 1
2
3
11
Este caso corresponde a 0 0
0 0 0 0 0 0
Consecuentemente :
00
En este caso
T nTT
TENSIÓN SIMPLE
ESFUERZO CORTANTE PURO
22 y : 0 0
0 0 0 0 0

TENSIÓN SIMPLE
18
19
La demostración es análoga
TODO ESTADO DE ESFUERZOS ES LA SUPERPOSICIÓN DE UN ESTADO ISOTRÓPICO Y DOS DE CORTANTE

20
I.
EL TENSOR ELÁSTICO
PARA
MATERIALES ISOTRÓPICOS

21
El número de constantes independientes queintervienen en el son cuando más 36, y 21 cuando la función de densidadde energía ( ; ver [20], p.60) existe . Ve
tensor elástico
strain -energy density functionremos a continuación
que cuando el material elástico es isotrópicoellas se reducen a 2 y se obtendrá la expresióngeneral de la relación esfuerzo deformación que gobierna esa clase de materiales. Dado que todoestado de deformación es la superposición deuna dilatación simple y dos distorsiones simples,bastará determinar el esfuerzo producido porestas dos clases de deformaciones : las dilataciones simples y las distorsiones simples.

22
Primero :
3
Segundo :
1 0 0 1 0 0 2 0 1 0 0 1 0
0 0 0 0 0 0
Aquí a y se les llama el mó
CI k I
C
k
DOS HECHOS BÁSICOS
dulos de y de , respectivamente.
compresibilidadcortante

23
3
Sea una , entonces:
Sea una , e
ECE k E
E
dilatación simple
distorisión simple
1. EL ESFUERZO PRODUCIDO POR UNA DILATACIÓN SIMPLE
2. EL ESFUERZO PRODUCIDO POR UNA DEFORMACIÓN ISOCÓRICA
2ntonces:
CE E

24
Se utlizará la identidad
3 3
Entonces 3 2 2 2
33Y pasando esta últma e
E I E I
k ECE k I I EE I
OBTENCIÓN DEL TENSOR ELÁSTICO
cuación a notación indicial :
+
Aquí se han utilizado las siguientes identidades :1= y =2
Los par
pip jq iq jpijpq ij pq ij
q
p pip jq iq jpij pq
q q
uC e
x
u ue u
x x
ámetros y son las constantes de Lamè. Note que 2 =3
k

25
En resumen, para materiales isotrópicos el tensor elástico está dado por
+ pq ip jq iq jpijpq ijC
EL TENSOR ELÁSTICO ISOTRÓPICO
26
2
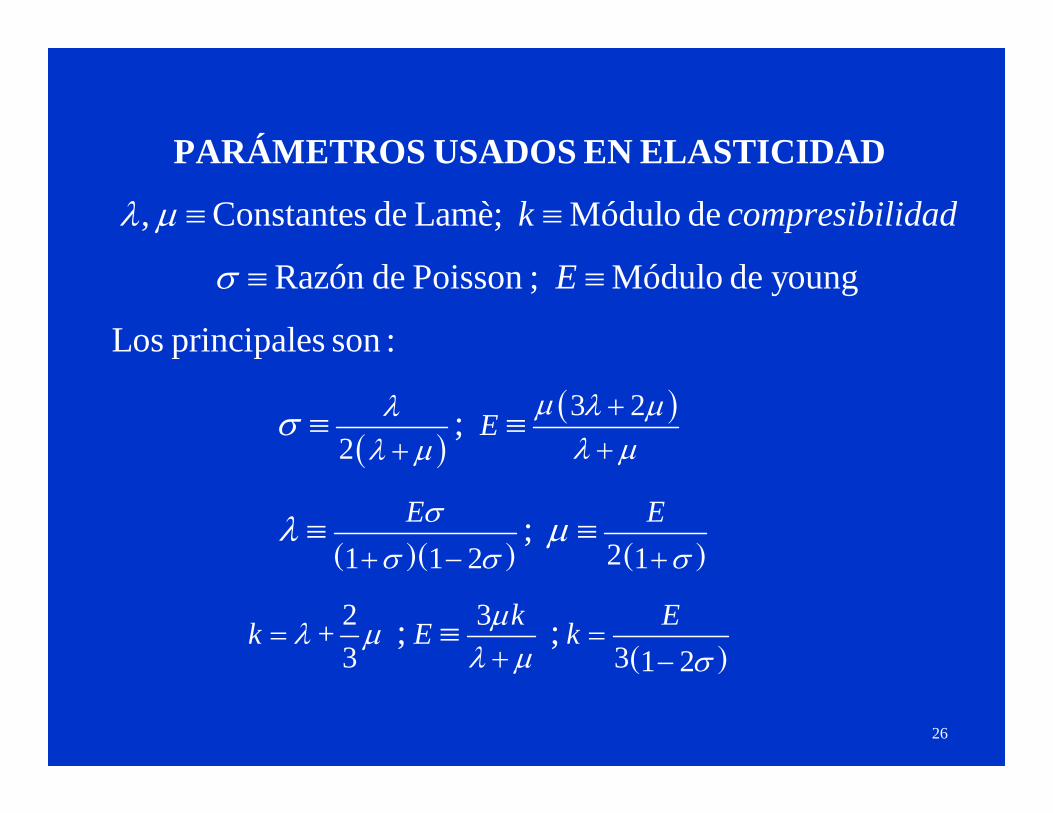
, Constantes de Lamè; Módulo de
Razón de Poisson ; Módulo de young
Los principales son :
; E
k compresibilidad
E
PARÁMETROS USADOS EN ELASTICIDAD
3 2
21 1 2 1
2 3 + 3 3 1 2
;
; ;
E E
k Ek E k

27
J.ECUACIONES GOBERNANTES
PARA
MATERIALES ISOTRÓPICOS
28
ECUACIONES DE LA
ELASTODINÁMICA
(ONDAS ELÁSTICAS)
29
2
2
2
2
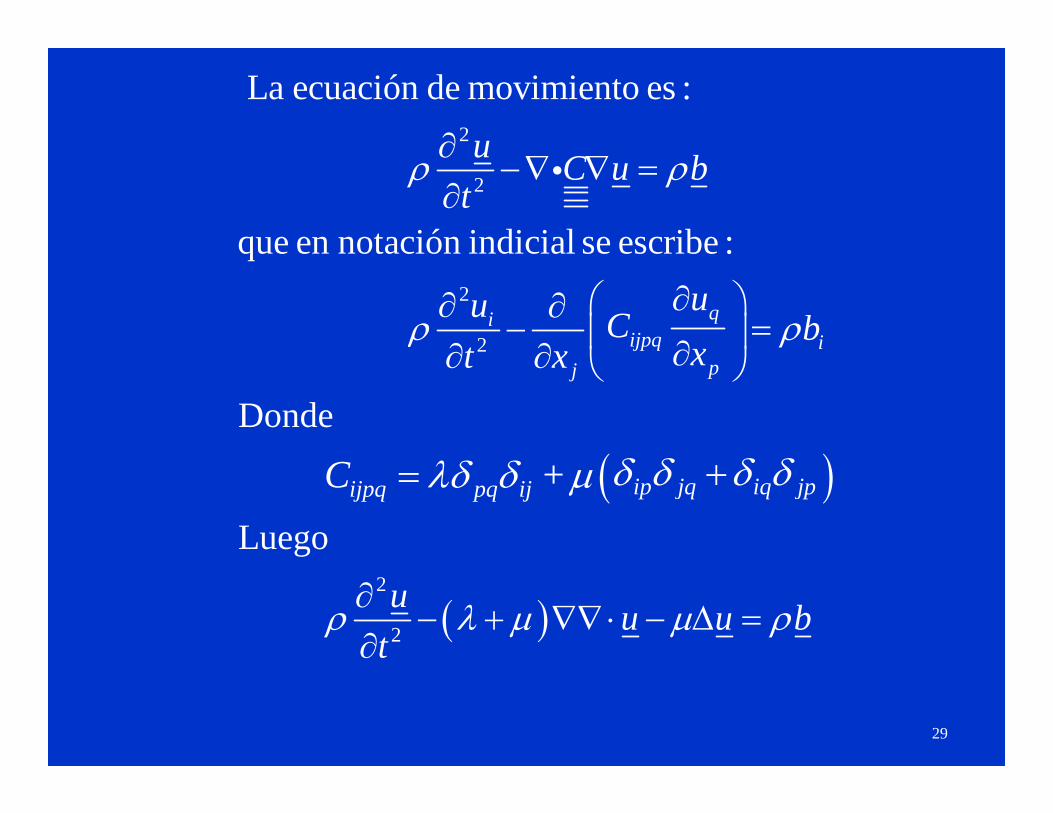
La ecuación de movimiento es :
que en notación indicial se escribe :
Donde
+
qiijpq i
pj
ip jq iq jpijpq pq ij
u C u bt
uu C bxt x
C
2
2
Luego
u u u bt

30
ECUACIONES DE LA
ELASTOSTÁTICA

31
La ecuación que gobierna el equilibrio de lossistemas elásticos es :
Cuando:
+ se tiene : El operador
ip jq iq jpijpq pq ij
C u b
u u b
C
es positivo definido.

32
En lo que sigue se van a utilizar los siguientes resultados
) = 0 y = 0 ) = 0 =
) = 0 0 =) Todo
T
a
b
c w w wwd
ALGUNOS RESULTADOS DEL CÁLCULO
v v
campo vectorial puede expresarse en la forma : =
donde es isocórico ( = 0) y es irrotacional = 0) Todo campo vectorial puede expresarse en la forma :
uu w
w
e u
v
v v
=
u

33
K.
REPRESENTACIÓN DE SOLUCIONES

34
2
2
Tomando = y sustituyendo en la ecuación
Donde, para simplificar, se suponondrá que 0 se obtie
u
u u u bt
b
USO DE POTENCIALES EN DINÁMICA
22
2 2
222 2
2 2
22
2
ne
2 0
Descomponemos esta ecuación en dos:
0 y 0
Las cuales se satisfacen cuando
y
t t
t t
t
1 12 2
22
2
Aquí:
2 and
t

35
L.
FORMULACIONES VARIACIONALES

36
APÉNDICE 1
CAPÍTULO IX

37
Se dice que corresponde a una cuando esdiagonal y todos los elementos de la diagonal son iguales. La magnitud de la dilatación (o simplemente
E dilatación pura DILATACIÓN PURA
la ) es
En tal caso la matriz de deformaciones unitarias se puede escribircomo
1 2
p iip jp
p j
iip jq iq jpij
j
dilataciónu uux x
uex

EJERCICIOS CAPÍTULO IX
38
39
1 1
2 2 2
3 3
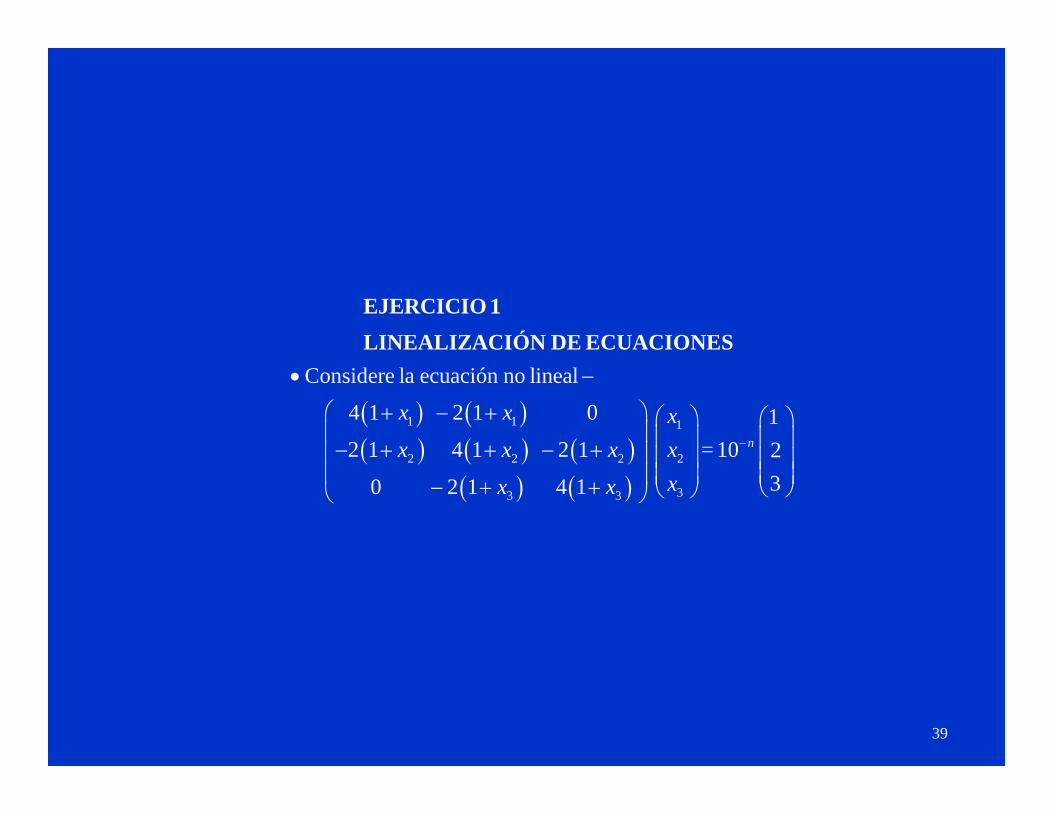
Considere la ecuación no lineal 4 2 0 1 1
2 4 2 1 1 1 0 2 1 4 1
x x
x x x
x x
EJERCICIO 1 LINEALIZACIÓN DE ECUACIONES
1
2
3
1 = 10 2
3
n
xxx
40
EJERCICIO 2 DEMUESTRE QUE EL NÚMERO DE CONSTANTES INDEPENDIENTES ES CUANDO MÁS DE 36