tema v. el mecanismo de los terremotos. - rua.ua.es 5.pdf · tema v. el mecanismo de los...
TRANSCRIPT

Tema V.
El Mecanismo de los terremotos.
I. Introducción.
II. Tensor momento sísmico y parámetros de la fractura.
III. Modelos cinemáticos.
�Doble par de fuerzas.
�Patrones de radiación de las ondas P y S.
IV. Fuentes extensivas: Modelos de Brune y Haskell.
V. Modelos dinámicos: Modelos de asperezas
y de barreras.
VI. Métodos de determinación de mecanismos focales.
Tema V.
El Mecanismo de los terremotos.
I. Introducción.
II. Tensor momento sísmico y parámetros de la fractura.
III. Modelos cinemáticos.
�Doble par de fuerzas.
�Patrones de radiación de las ondas P y S.
IV. Fuentes extensivas: Modelos de Brune y Haskell.
V. Modelos dinámicos: Modelos de asperezas
y de barreras.
VI. Métodos de determinación de mecanismos focales.

TEMA 5
EL MECANISMO DE LOS TERREMOTOS
� Mallet � Foco puntual del cual se propagan ondas sísmicas
(terremoto de Napoles de 1857)
� Oldham � Terremoto de Assan (India) en 1857
�Ambos establecen la relación entre terremotos y fracturas corticales
�Reid (1911).
Teoría del Rebote
Elástico
5.1 INTRODUCCIÓN

5.1 INTRODUCCIÓN
Parámetros de la falla
Línea AA’: Traza de la Falla
AA’BB’: Plano de Falla
L: Longitud de la Falla
∆u: Deslizamiento o dislocación (slip)
φ: Azimut de la traza (strike)
δ: Buzamiento del plano (dip)
λ: Angulo de deslizamiento (slip angle)

5.2 MODELOS CINEMÁTICOS: DOBLE PAR DE FUERZAS
� Estudio del mecanismo � Aproximación de foco puntual �
� plano de fractura = dislocación infinitesimal (solo se considera
el campo lejano)
Esto es válido para observaciones de onda cuya longitud de onda y
distancias sean >> que las dimensiones del foco.
� 1º: Cálculo del campo de desplazamientos elásticos ui (xj, t)
en un medio infinito y homogéneo, producido por una fuerza
unitaria impulsiva fi = δ(xi) δ(t) δin , actuando en el origen de
coordenadas en la dirección de n.
Solución: Función de Green para un medio de estas características
(Tensor de segundo que depende de la dirección de la fuerza)

� Si la fuerza está en la dirección n � ui (xj, t) = Gin (xj, t).
� Para una fuente sísmica puntual, Mij, el campo de desplazamiento
viene dado por la convolución de éste con la derivada de la función
de Green:u x t M x
G x t
xdk n ij n
ki n
j
( , ) ( , )( , )
=−
−∞
∞
∫ τ∂ τ
∂τ
� Para una fractura de cizalla sobre un plano S de normal ni y
desplazamiento ∆u en la dirección de li, el tensor Mij vale:
M M l n l nij o i j j i= +( )
� Para una fuente puntual, los desplazamientos son equivalentes a
los producidos por dos pares de fuerzas en las direcciones de ni y li,
sin momento resultante. El sistema es también equivalente a fuerzas
de presión P y tensión T, en el plano que contiene a ni y li y a 45º de
estas direcciones.
5.2 MODELOS CINEMÁTICOS: DOBLE PAR DE FUERZAS
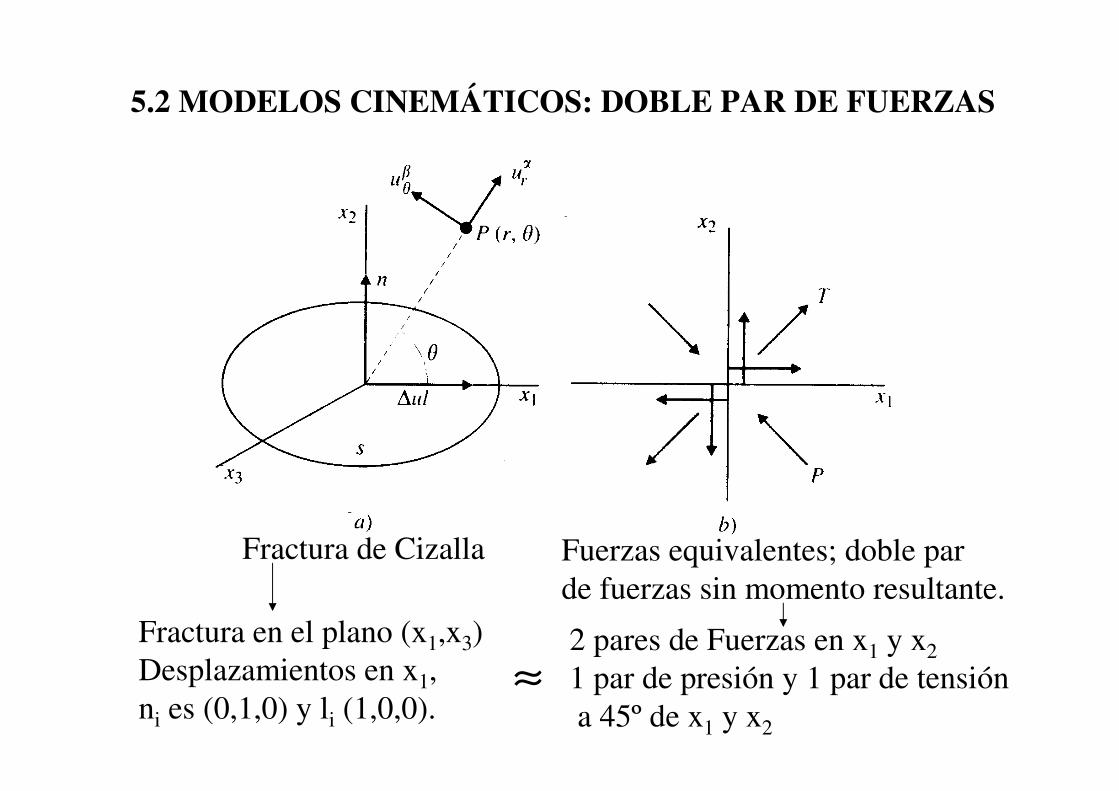
Fractura de Cizalla Fuerzas equivalentes; doble par
de fuerzas sin momento resultante.
Fractura en el plano (x1,x3)
Desplazamientos en x1,
ni es (0,1,0) y li (1,0,0).
2 pares de Fuerzas en x1 y x2
1 par de presión y 1 par de tensión
a 45º de x1 y x2
≈
5.2 MODELOS CINEMÁTICOS: DOBLE PAR DE FUERZAS

� En el plano (x1, x3), tomando coordenadas polares, los
desplazamientos de la onda P, en un punto P(r,θ), tienen sólo
componente radial y los de la S sólo transversal:
uM
rsenr
oα
πραθ=
423
uM
r
o
θβ
πρβθ=
423 cos
� Representando estos valores normalizados en función de θ�
Patrones de radiación de las ondas P y S
5.2 MODELOS CINEMÁTICOS: DOBLE PAR DE FUERZAS

Máxima amplitud para:
θ = π/4, 3π/4, 5π/4, 7π/4.
4 Cuadrantes alternantes
en dirección (dilataciones
y compresiones).
Máxima amplitud para:
θ = 0, π/2, π, 3π/2 .
En cada cuadrante, la
dirección de la onda S cambia
de sentido y converge hacia
el eje de tensión.
5.2 MODELOS CINEMÁTICOS: DOBLE PAR DE FUERZAS

5.3 TENSOR MOMENTO SÍSMICO.
� Introducido por F.Gilbert (1970), G. Backus y M. Mulcany (1976).
� Sea un volumen de material litosférico V, sujeto a esfuerzos τ ij
I
� En t =0, se produce dentro del volumen V una fractura de área S
y desplazamiento relativo ∆u (xi, t).
� Después de la fractura τ ij
II
Caída de esfuerzos:
Tij = τ ij
I τ ij
II-

5.3 TENSOR MOMENTO SÍSMICO.
� El tensor momento sísmico se denomina Mij
� El tensor momento sísmico por unidad de volumen se denomina
tensor densidad de momento mij y representa el esfuerzo
inelástico, relacionado con las deformaciones inelásticas:
m C eij ijkl kl
T=
� Luego Mij viene dado por:
M m dVij ijVo
= ∫ Vo: volumen región focal
� Es un tensor simétrico de 6 componentes distintos y puede
representar con gran generalidad los procesos del foco de un
terremoto.

5.3 TENSOR MOMENTO SÍSMICO.
� Los vectores propios del tensor νννν1, νννν2, νννν3, son ortogonales y
representan la dirección de los ejes principales de los esfuerzos.
� Los valores propios σ1, σ2, σ3, son la magnitud de los esfuerzos
principales, expresados de forma que σ1 >σ2 > σ3.
� σ1 corresponde a las presiones.
� σ 2 corresponde a las tensiones.
� Para una explosión σ1 = σ2 = σ3, y cualquier dirección corresponde
con los esfuerzos principales.

5.3 TENSOR MOMENTO SÍSMICO.
� Fractura de cizalla en el interior de
un medio elástico �
M u l n l n dsij i j j iS
= +∫µ ∆ ( )
ni : normal al plano de fractura
li : dirección en la que se produce el
desplazamiento o dislocación.
� Si ∆u, li y ni son constantes en toda la fractura S
M M l n l nij o i j j i= +( )
con Mo = µ S∆ u
∆σ = σI - σII σ σ σ= +1
2( )I II E S u= ησ ∆ ησ µ=
E
M
S
o

5.4 FUENTES EXTENSAS
� Una representación completa de la fuente sísmica debe incluir sus
dimensiones y considerar sus efectos en la radiación de ondas.
� Modelos de fuentes extensas:
.- Ben Menahem (1961,1962): FE como distribuciones de pares
de fuerzas que se propagan con una velocidad dada sobre una
superficie de área finita.
.- Berckhemer (1962): Efecto de una fractura circular de radio finito
que se propaga desde su centro.
.- Burridge yKnopoff (1964): Dislocaciones de cizalla que se propagan
sobre un área dada.
.- Haskell (1964, 1966): Modelo rectangular de fractura
.- Savage (1966): Falla elíptica.
.- Brune (1970): Modelo con esfuerzos de cizalla aplicados a una falla
circular.
.- Hartzell (1989): Fractura de cizalla que se propaga sobre fallas
finitas.

5.4 FUENTES EXTENSAS
� Modelo cinemático de fuentes extensas representado por una
superficie ∑ sobre la cual se propaga una dislocación de cizalla
∆u (ξi) con velocidad constante v en una dirección, desde el origen
(ξi =0) hasta un punto final a una distancia L. La velocidad de
fractura se supone constante y tal que v < β< α (v = 0.7 β)
u x tR n l
ru t
rdSi
P
j
k k k
i( , )( , , )
& ,= −
∑∫µ
πα ρ
γξ
α4 3 ∆
con r = | xi - ξi | distancia del punto de
observación x a un punto de la fuente
ξi donde el deslizamiento ∆u está
localizado para cada momento y R es
el patrón de radiación que depende de
la orientación de la fuente (l, n) y la
posición del punto de observación (γi).

5.4 FUENTES EXTENSAS
� Si estamos interesados en la forma de onda como función del
tiempo para una distancia ro desde el origen de ξi �
u t u tr
dSi( ) & ,= −
∑∫ ∆ ξα
� Desarrollando r en serie de Taylor y despreciando los términos
superiores al primer orden (desplazamientos de longitud de onda
λ, tal que, λ ro >> L2 ) �
u t u tr
dSi
o i i( ) & ,= −
−
∑∫ ∆ ξξ γ
αT. Fourier
U(ω) �
U e i U e dSi r
i
io i i( ) ( , )/ /ω ω ω ξω α ωγ ξ α= −∫ ∆Σ
Asumiendo: ∆u(t,ξi) = ∆u (ξi) H(t)
U e u e dSi r
i
io i i( ) ( )/ /ω ξω α ωγ ξ α= −∫ ∆Σ
U u dS uS Mi o( ) ( )0 ≈ ≈ ≈∫µ ξ µ∆ ∆Σ
Cte para un rango de ω y comienza a
decrecer a partir de una ω dada.
Para bajas frecuencias, las amplitudes
espectrales son proporcionales a Mo

5.4 FUENTES EXTENSAS
Modelo de Haskell
� Modelo cinemático de dimensiones finitas representado por una
falla rectangular de longitud L y ancho W, tal que el deslizamiento
∆u se propaga únicamente a lo largo de la dirección L con una
velocidad constante v. Las fractura que se propagan en un solo
sentido (de 0 a L) se llaman unilaterales y las que lo hacen en ambos
sentidos (de 0 a L/2 y 0 a –L/2) se llaman bilaterales.
La expresión para la transformada de los
desplazamientos elásticos de las ondas P es
para fracturas unilaterales:
U x WL UX
Xi
rXi
o( , ) ( )
sinexpω ω ω
ω
α
π= − − −
∆
2
con
XbL L
v= = − −
2 2
ω
α
αθcos

5.4 FUENTES EXTENSAS
Modelo de Haskell
Espectro de amplitudes de ondas sísmicas
para una falla extensa con dimensiones
finitas y tiempo de subida.
Parte PlanaLínea recta
pendiente -2
� Si θ=π/2 y ωc corresponde
a X= π/2 � ωc =2v/L, es
decir la frecuencia esquina
es proporcional a la inversa
de la longitud de la fuente.
� De la ecuación de los
desplazamientos se deduce que
si λ >>L � X→0 y sinX/X =1
para todo θ, luego las amplitudes
no son afectadas y el patrón de
radiación es de fuente puntual.
� Si λ ≈ L las amplitudes se ven afectadas de forma que son mayores
en la dirección de propagación de la fractura y menores en la dirección
opuesta.

5.4 FUENTES EXTENSAS
Modelo de Haskell
� Si la fractura es bilateral con velocidad de ruptura v=0.9 β y
∆∆
Uu
i i( )
( )ω
ωτ ω=
+1el modelo de Haskell tiene dos frecuencias
esquina y se puede definir una tercera como la intersección de la
parte plana y del decaimiento.
Para ondas P:
ω1=α/2L
ω2=2.4α/W
ω32=2.9 α2/LW
Para ondas S:
ω1=3.6β/L
ω2=4.1β /W
ω32=14.8 α β2/LW
Las frecuencias esquinas observadas
corresponden a ω3 normalmente y
las dimensiones de la fuentes son:
(LW)1/2 =1.7α/ωcP =3.8 β / ωc
S
5.4 FUENTES EXTENSAS
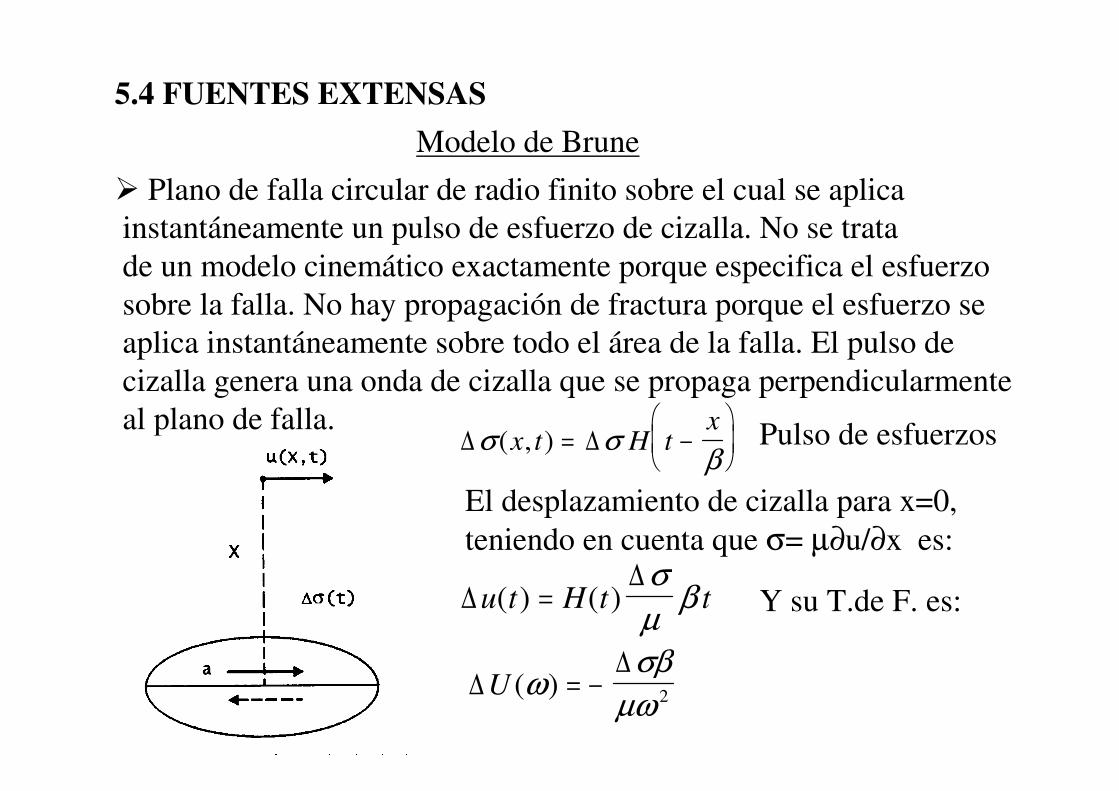
Modelo de Brune
� Plano de falla circular de radio finito sobre el cual se aplica
instantáneamente un pulso de esfuerzo de cizalla. No se trata
de un modelo cinemático exactamente porque especifica el esfuerzo
sobre la falla. No hay propagación de fractura porque el esfuerzo se
aplica instantáneamente sobre todo el área de la falla. El pulso de
cizalla genera una onda de cizalla que se propaga perpendicularmente
al plano de falla.∆ ∆σ σ
β( , )x t H t
x= −
Pulso de esfuerzos
El desplazamiento de cizalla para x=0,
teniendo en cuenta que σ= µ∂u/∂x es:
∆∆
u t H t t( ) ( )=σ
µβ Y su T.de F. es:
∆∆
U ( )ωσβ
µω= − 2

5.4 FUENTES EXTENSAS
Modelo de Brune
� Para caída total de esfuerzos, el desplazamiento de las ondas S
en el campo lejano para una distancia r, sin incluir el patrón de
radiación y la dependencia con la distancia es:
u t tr
b tr
( ) exp= −
− −
∆ σβ
µ β βSu espectro es:
Ub
con ba
( ).
ωσβ
µ ω
β=
+=
∆ 1 2 332 2
El espectro tiene una parte plana para bajas frecuencias y decrece
inversamente proporcional al cuadrado de la frecuencia para altas
frecuencias a partir de la frecuencias esquina = b. Si la caída de
esfuerzos no es total y para ε ≈0.01, el espectro decrece con la
inversa de la frecuencia. El radio de la falla se deduce de:
a = 2.33 β / ωc

5.4 FUENTES EXTENSAS
Modelo de Brune
� El modelo de Brune se usa normalmente para obtener las
dimensiones de la falla a partir del espectro de las ondas S de
terremotos de tamaño moderado a pequeño ( M <6), para los cuales
una falla circular es una buena aproximación.
� Los terremotos de mayor tamaño tienen mayores dimensiones y
puesto que sus anchuras están limitada a 20 km aprox., sus
longitudes deben ser mayores que sus anchuras (L > W). En estos
casos el modelo rectangular de Haskell da una aproximación
mejor.

� Los modelos dinámicos más sencillos son fracturas
homogéneas en las que el desplazamiento comienza en un punto
interior y se detiene en los bordes, siendo producido éste por
una caída de esfuerzos dada que supera la resistencia del material.
� Un modelo dinámico debe incluir todo el fenómeno, es decir,
su iniciación o nucleación, su propagación y su detención,
solamente en función de las condiciones de los esfuerzos y las
propiedades mecánicas del material.
� Desde el pto de vista dinámico una fractura se produce por una
caída en los esfuerzos y la energía producida es suma de la energía
sísmica debida al deslizamiento sobre la falla y la energía residual
perdida por fricción:
5.4 FUENTES EXTENSAS: MODELOS DINÁMICOS
E uS uSf= +1
2∆ ∆ ∆σ σ

5.4 FUENTES EXTENSAS: MODELOS DINÁMICOS
El problema estático
� Problema estático de una fractura libre de esfuerzos. Para una
falla circular de radio a, el esfuerzo de cizalla antes del fracturamiento
es σo y después, dentro de la falla (ρ < a) es cero. Teniendo en cuenta
las condiciones de desplazamiento y esfuerzo dentro y fuera de la falla,
la solución para el desplazamiento dentro de la falla es:
u a ao
( ) ( ) ;/ρσ
µρ ρ= − <2 2 1 2
De ella se deriva el esfuerzo fuera de la falla (σ(ρ) = µ∂u/∂ ρ )
σ ρσ ρ
ρρ( )
( );/=
−>
o
aa2 2 1 2
Estas ecuaciones describen la distribución estática de deslizamiento
dentro de la falla y fuera de ella.

5.4 FUENTES EXTENSAS: MODELOS DINÁMICOS
El problema estático
Modelo estático de fractura con caída total de esfuerzos.:
a) Desplazamiento y b) Esfuerzos.

5.4 FUENTES EXTENSAS: MODELOS DINÁMICOS
El problema dinámico
� Requiere la solución del problema de la fractura como una
función temporal. El frente de la fractura se propaga con una
velocidad dada, y conforme avanza, el material se fractura. Tras el
frente, los esfuerzos se hacen cero para una caída total en el esfuerzo
o tienen un valor residual que depende de la fricción.
� Sea un frente de ruptura plano ilimitado en la dirección x2 que
avanza en la dirección x1 con una velocidad constante v.
�La relación entre la dirección del desplazamiento en el plano de
fractura y su dirección de propagación define tres modos de
fractura.

5.4 FUENTES EXTENSAS: MODELOS DINÁMICOS
El problema dinámico
Modo I. Fractura
Tensional: Poca aplicación
porque se suponen debidos
a fracturas de cizalla.
Modo II. Fractura
de cizalla en el plano:
Se observan ondas P
y SV.
Modo III. Fractura
de cizalla antiplano:
Se observan sólo
ondas SH.

5.4 FUENTES EXTENSAS: MODELOS DINÁMICOS
El problema dinámico
La situación en el frente de ruptura (x =l(t)) para una fractura
dinámica: a) Desplazamiento; b) Velocidad del desplazamiento;
c) Esfuerzo.

� En la realidad las fractura no son homogéneas sino que el proceso
de ruptura es heterogéneo y complejo.Para explicar la complejidad
hay dos modelos: Barreras y Asperezas.
Das y Aki (1977): La ruptura tiene lugar bajo condiciones
uniformes de esfuerzos, pero en la superficie de la falla se dan
regiones de distinta resistencia. Las de mayor resistencia forman
barreras que impiden la propagación de la fractura. Entonces si
son débiles pueden romperse o permanecer intactas si son fuertes
y continuar la ruptura detrás de ellas. Terremoto grande está formado
por series de rupturas separados por barreras que no se rompen o
se rompen luego provocando réplicas.
5.4 FUENTES EXTENSAS: MODELOS DINÁMICOS

Kanamori y Stewart (1978). Parte de una distribución heterogénea
de esfuerzos sobre la superficie de una falla. Las zonas de esfuerzos
altos forman las asperezas. Las zonas de esfuerzos bajos se van
rompiendo dando lugar a pequeños terremotos y van concentrando los
esfuerzos en las asperezas que al romperse dan lugar a terremotos
grandes. Los terremotos grandes se deben a la ruptura de varias
asperezas, lo que explica su complejidad. Al final los esfuerzos
residuales sobre la falla son homogéneos y se explican los premo-
nitorios y las réplicas.
5.4 FUENTES EXTENSAS: MODELOS DINÁMICOS

� Orientación del mecanismo de un terremoto =
Orientación del plano de falla.
� Necesito datos de observación del sentido del primer impulso
de la onda P
(distribución de los desplazamiento en 4 cuadrantes de sentido
alternante y con los dos planos nodales ortogonales coincidiendo
con los dos posibles planos de falla).
� Método de Byerly (1926): Observar en muchos puntos de la
superficie terrestre la dirección del primer impulso de la onda P
(compresión o dilatación).
5.4 FUENTES EXTENSAS: METODOS PARA LA
DETERMINACIÓN DEL MECANISMO

� Esfera focal (Honda, Koning y Ritsema hacia 1940):
- Los ptos de observación se proyectan sobre la superficie de
una esfera focal de radio unidad con centro en el foco.
- Los ptos proyectados sobre la esfera tienen coordenadas φ,
acimut medido desde el Norte, e i, ángulo de salida del rayo
medido desde la vertical.
5.4 FUENTES EXTENSAS: METODOS PARA LA
DETERMINACIÓN DEL MECANISMO

� Los valores de i dependen de la distancia epicentral, de la
profundidad del foco y de la distribución de velocidad.
� Para distancias grandes (∆ > 10º), la curva (∆, i) se puede
deducir fácilmente de la curva domocrónica (t, ∆) de acuerdo
con la expresión:seni
v
r
dt
d
F
F
=∆
con vF y vF velocidad y radio terrestre correspondiente al foco.
� Para distancias cortas, el valor de i depende de la estructura
de la corteza en cada región y la profundidad del foco
5.4 FUENTES EXTENSAS: METODOS PARA LA
DETERMINACIÓN DEL MECANISMO

� Una vez determinados los valores de (φ, i) para cada
observación, estos se sitúan sobre la proyección de la esfera focal.
� Las más usadas son las esterográficas como la de Wulff y la de
Schmidt o de igual área. En ellas el acimut se conserva y el ángulo
i se representa por la distancia b desde el centro de la proyección.
b = tg i/2 :: Wulff
b = sen i/2 :: Schmidt
5.4 FUENTES EXTENSAS: METODOS PARA LA
DETERMINACIÓN DEL MECANISMO
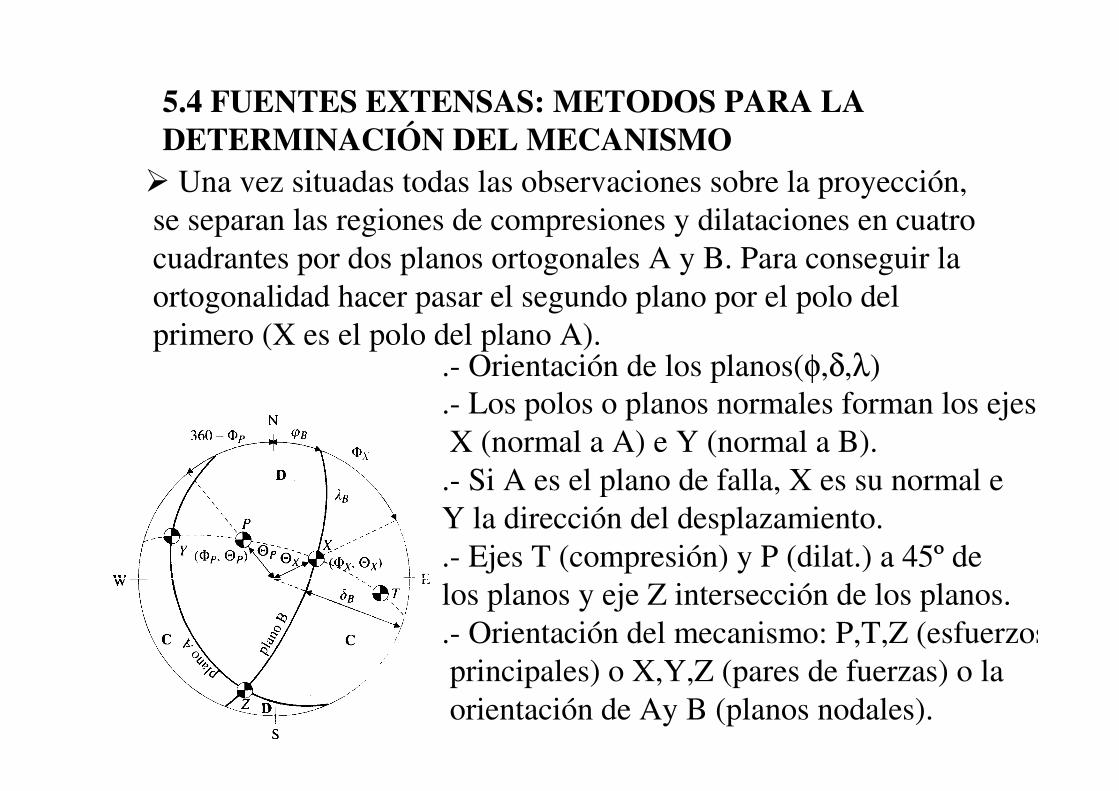
� Una vez situadas todas las observaciones sobre la proyección,
se separan las regiones de compresiones y dilataciones en cuatro
cuadrantes por dos planos ortogonales A y B. Para conseguir la
ortogonalidad hacer pasar el segundo plano por el polo del
primero (X es el polo del plano A)..- Orientación de los planos(φ,δ,λ)
.- Los polos o planos normales forman los ejes
X (normal a A) e Y (normal a B).
.- Si A es el plano de falla, X es su normal e
Y la dirección del desplazamiento.
.- Ejes T (compresión) y P (dilat.) a 45º de
los planos y eje Z intersección de los planos.
.- Orientación del mecanismo: P,T,Z (esfuerzos
principales) o X,Y,Z (pares de fuerzas) o la
orientación de Ay B (planos nodales).
5.4 FUENTES EXTENSAS: METODOS PARA LA
DETERMINACIÓN DEL MECANISMO

Pasos a seguir:
a) Observación de las direcciones (Comp. o Dilat.) del primer
impulso de la P en muchas estaciones alrededor del epicentro.
b) Cálculo de la distancia ∆ y acimut α del epicentro a cada estación,
y pasar de la distancia ∆ al ángulo i de salida del rayo en el foco.
c) Situar las compresiones y dilataciones para cada punto (α,i) sobre
la proyección estereográfica de la esfera focal. Generalmente sobre
el hemisferio inferior.
d) Separar las compresiones y dilataciones por dos planos ortogonales,
y determinar los ángulos (φ,δ,λ) de cada plano y los Φ y Θ de los
ejes XYZ y PTZ.
5.5 FUENTES EXTENSAS: METODOS PARA LA
DETERMINACIÓN DEL MECANISMO

Solución del mecanismo focal del terremoto de Alhucemas, Norte
de Africa del 26 de mayo de 1994 (círculos negros: compresiones;
triángulos blancos: dilataciones).
5.4 FUENTES EXTENSAS: METODOS PARA LA
DETERMINACIÓN DEL MECANISMO

5.4 FUENTES EXTENSAS: METODOS PARA LA
DETERMINACIÓN DEL MECANISMO