tema 4 - gobierno de canarias · los mecanismos permiten el movimiento de objetos y de personas,...
TRANSCRIPT
Departamento de Tecnología IES El Tablero I (Aguañac) 2018 - 2019
Tema 4
Mecanismos
2
Departamento de Tecnología IES El Tablero I (Aguañac) 2018 - 2019
TABLA DE CONTENIDOS
1. Los mecanismos .............................................................. ¡Error! Marcador no definido.3
2. Mecanismos de transmisión del movimiento .................. ¡Error! Marcador no definido.4
2.1 Mecanismos de transmisión de lineal .............................................................................. 4
2.1.1 Palancas ................................................................. ¡Error! Marcador no definido.4
2.1.1.1 Palancas de primer grado ................................ ¡Error! Marcador no definido.5
2.1.1.2 Palancas de segundo grado ............................. ¡Error! Marcador no definido.6
2.1.1.3 Palancas de tercer grado ................................. ¡Error! Marcador no definido.7
2.1.2 Poleas………………………………………………………………………………..8
2.1.3 Polipasto…………………………………………………………………………….8
2.2 Mecanismos de transmisión de circular .......................................................................... 9
2.2.1 Ruedas de fricción…………………………………………………………………..9
2.2.2 Polea con correa……………………………………………………………………10
2.2.3 Engranaje…………………………………………………………………………..10
2.2.4 Tornillo sin fin - corona……………………………………………………………11
3. Mecanismos de transformación del movimiento………………………………………....11
3.1 Conjunto manivela - torno ............................................................................................. 12
3.2 Piñon - cremallera.......................................................................................................... 12
3.3 Tornillo - tuerca ............................................................................................................. 12
3.4 Escentrica - leva ............................................................................................................ 13
3.5 Biela manivela ............................................................................................................... 13
3.6 Cigueñal ......................................................................................................................... 13
4. Ejercicios ………………………………………………………………………………...14
4.1 Palanca ………………………………………………………………………………...14
4.2 Poleas y polipastos …………………………………………………………………….17
4.3 Engranajes y correas …………………………………………………………………..20

3
Departamento de Tecnología IES El Tablero I (Aguañac) 2018 - 2019
1. Los mecanismos Los mecanismos son elementos que sirve para facilitar el trabajo humano. Son elementos destinados
a transmitir y transformar fuerzas y movimientos desde un elemento motriz o de entrada a un elemento
receptor o de salida.
Los mecanismos permiten el movimiento de objetos y de personas, ayudando al ser humano a realizar
determinados trabajos con mayor comodidad y menor esfuerzo.
En todo mecanismo resulta indispensable un elemento motriz que origine el movimiento (que puede
ser un muelle, una corriente de agua, nuestros músculos, un motor eléctrico…). El movimiento originado
por el motor se transforma y/o transmite a través de los mecanismos a los elementos receptores (ruedas,
brazos mecánicos...) realizando, así, el trabajo para el que fueron construidos. Según su función los
mecanismos se pueden clasificar en dos grandes grupos, según transmitan el movimiento producido por un
elemento motriz a otro punto (mecanismos de transmisión de movimiento), o cambien el tipo de
movimiento (mecanismos de transformación de movimientos).
Los movimientos los podemos clasificar en dos tipos; lineares y circulares.
Cuando un movimiento de un tipo lo convertimos en otro del mismo tipo (es decir, lineal en lineal o
circular en circular) hablamos de transmisión de movimiento.
Cuando, en cambio, lo convertimos en otro de otro tipo (es decir, lineal en circular o circular en lineal),
hablamos de transformación de movimientos.

4
Departamento de Tecnología IES El Tablero I (Aguañac) 2018 - 2019
Parte motriz Parte receptora
2. Mecanismos de transmisión del movimiento Estos mecanismos se encargan de transmitir el movimiento, la fuerza y la potencia producidos por un
elemento motriz (motor) a otro punto, sin transformarlo. Para su estudio distinguimos según transmitan un
movimiento lineal o circular:
2.1. Mecanismos de transmisión lineal
2.1.1. Palancas Las palancas son objetos rígidos que giran entorno un punto
de apoyo o fulcro. En un punto de la barra se aplica una fuerza (F)
con el fin de vencer una resistencia (R). Al realizar un movimiento
lineal de bajada en un extremo de la palanca, el otro extremo
experimenta un movimiento lineal de subida. Por tanto, la palanca
nos sirve para transmitir fuerza o movimiento lineal.
La palanca se encuentra en equilibrio cuando el producto de
la fuerza (F), por su distancia al punto de apoyo (d) es igual al producto de la resistencia (R) por su distancia
al punto de apoyo (r). Esta es la denominada ley de la palanca, que matemáticamente se expresa:
Donde:
- F: Fuerza o potencia. Se mide en Newton. Hay que recordar que para pasar de kg a Newton se aplica
la fórmula F= m · a, donde (m) es la masa en kg y (a) es la aceleración (en la Tierra), la cual vale 9,8
m/s2 y que en nuestros casos redondearemos a 10 m/s2.
Ejemplo pasar kg a Newton:
¿Cuántos Newton (N) son 2,5 Kg?
- d: Brazo de la fuerza, es la distancia desde el punto donde se ejerce la fuerza al punto de apoyo. Se
mide en metros.
- R: Resistencia, al igual que la fuerza, se mide en Newton.
- r: Brazo de la resistencia, es la distancia desde el punto donde se encuentra la resistencia a vencer al
punto de apoyo y al igual de (d) se mide en metros.
Hay tres tipos (géneros o grados) de palanca según se sitúen la fuerza, la resistencia y el punto de
apoyo:

5
Departamento de Tecnología IES El Tablero I (Aguañac) 2018 - 2019
2.1.1.1. Palancas de primer grado
Las letras F, d, r o R son genéricas en la fórmula, puedes encontrarte en varias fuentes de
información otras letras pero que significan exactamente lo mismo. ¡¡¡ No te confundas por que en
un ejercicio pongan unas letras y en otro ejercicio pongan otras, es exactamente lo mismo y se trata
de igual forma!!!
Ejemplo resuelto:
1. Calcula la fuerza motora necesaria para levantar un peso de 60 Kg,
usando una palanca de primer grado, con un brazo de fuerza de 1m y un
brazo resistente de 0,5m. Solución:
R=60Kg pasar de Kg a Newton 𝑅 = 60 𝐾𝑔 · 10 𝑚/𝑠2 = 600 𝑁
Ley de la palanca
Datos:
F = ¿?
R = 600N 𝐹 · 𝑑 = 𝑅 · 𝑟 𝐹 =𝑅·𝑟
𝑑=
600 ·0,5
1= 300 𝑁
d = 1m F=300N
r = 0,5m

6
Departamento de Tecnología IES El Tablero I (Aguañac) 2018 - 2019
2.1.1.2. Palancas de segundo grado
Ejemplo resuelto:
1. Calcula la longitud del brazo de fuerza necesario para levantar
con una palanca de segundo grado un peso de 180 Kg, usando
una fuerza motora de 60 Kg y un brazo resistente con una
longitud de 0,5m.
Solución:
*Nota: Aunque en este caso el resultado no se modifica si no
pasamos de Kg a Newton, puesto que las dos fuerzas se
encuentran en las mismas unidades, para mantener el acuerdo de
que las fuerzas se expresan en Newton, vamos a realizar la
conversión siempre.
R=180Kg pasar de Kg a Newton 𝑅 = 180 𝐾𝑔 ·
10 𝑚/𝑠2 = 1800 𝑁
F=60Kg pasar de Kg a Newton 𝐹 = 60 𝐾𝑔 · 10 𝑚/𝑠2 = 600 𝑁 Ley de la palanca
Datos:
F = 600N
R = 1800N 𝐹 · 𝑑 = 𝑅 · 𝑟 𝑑 =𝑅·𝑟
𝐹=
1800 · 0,5
600= 1,5 𝑚
d = ¿? d=1,5m
r = 0,5m
7
Departamento de Tecnología IES El Tablero I (Aguañac) 2018 - 2019
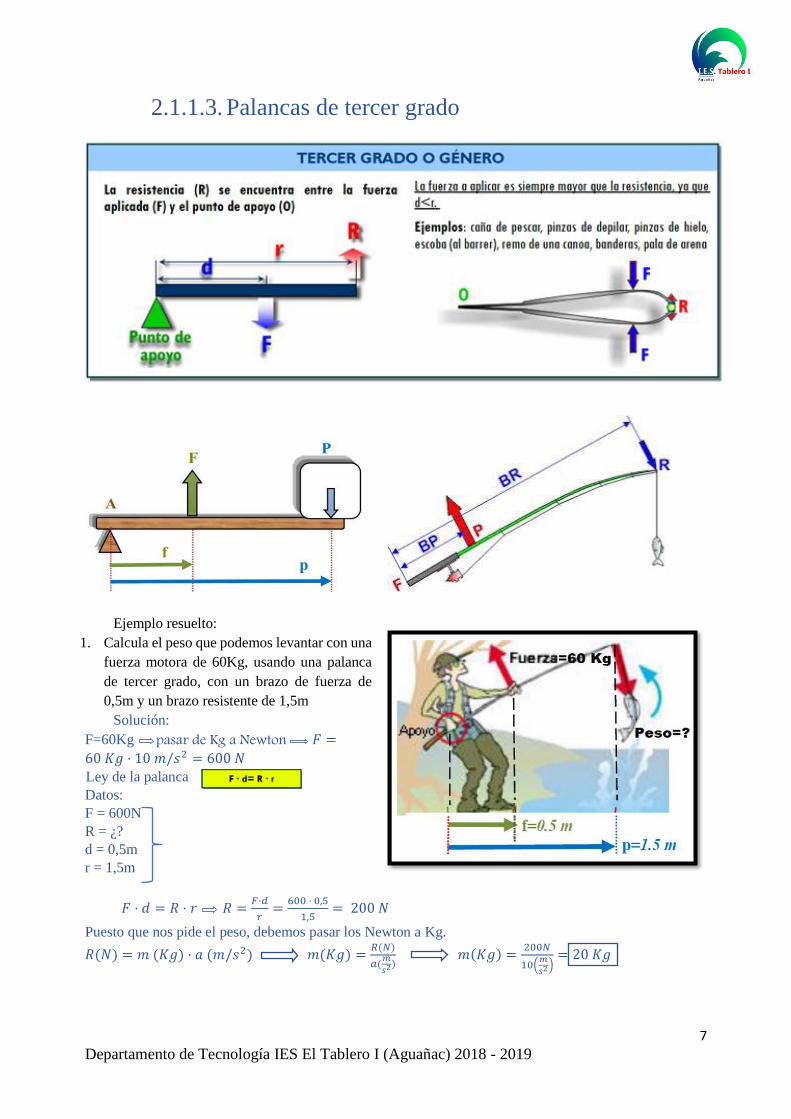
2.1.1.3. Palancas de tercer grado
Ejemplo resuelto:
1. Calcula el peso que podemos levantar con una
fuerza motora de 60Kg, usando una palanca
de tercer grado, con un brazo de fuerza de
0,5m y un brazo resistente de 1,5m
Solución:
F=60Kg pasar de Kg a Newton 𝐹 =
60 𝐾𝑔 · 10 𝑚/𝑠2 = 600 𝑁 Ley de la palanca
Datos:
F = 600N
R = ¿?
d = 0,5m
r = 1,5m
𝐹 · 𝑑 = 𝑅 · 𝑟 𝑅 =𝐹·𝑑
𝑟=
600 · 0,5
1,5= 200 𝑁
Puesto que nos pide el peso, debemos pasar los Newton a Kg.
𝑅(𝑁) = 𝑚 (𝐾𝑔) · 𝑎 (𝑚/𝑠2) 𝑚(𝐾𝑔) =𝑅(𝑁)
𝑎(𝑚
𝑠2) 𝑚(𝐾𝑔) =
200𝑁
10(𝑚
𝑠2)= 20 𝐾𝑔

8
Departamento de Tecnología IES El Tablero I (Aguañac) 2018 - 2019
2.1.2. Polea Una polea es una rueda ranurada que gira alrededor de un eje. Esta se encuentra sujeta a una superficie
fija. Por la ranura de la polea se hace pasar una cuerda o cable que permite vencer de forma cómoda una
resistencia (R) aplicando una fuerza (F).
Ejemplo resuelto:
1. Calcula la fuerza necesaria para levantar un peso de 80N desde una polea
fija.
F=R F= 80N
2. Calcula la fuerza necesaria para levantar un peso de 80N desde una polea
móvil.
𝐹 =𝑅
2 𝐹 =
80𝑁
2= 40𝑁
2.1.3. Polipasto El polipasto es una combinación de poleas fijas y móviles recorridas por una o varias cuerdas
permitiendo levantar grandes pesos con pequeños esfuerzos.
Un aparejo factorial consiste en montar varias poleas fijas
acopladas en una sola armadura que se conectan mediante una sola
cuerda con otras poleas móviles que se montan en otra armadura.
Si se quiere levantar un objeto con un peso de 240 N, con un
sistema de poleas como el
anterior, la fuerza
necesaria para lograrlo es:

9
Departamento de Tecnología IES El Tablero I (Aguañac) 2018 - 2019
Un aparejo potencial es otro tipo de polipastos que se presenta cuando cada polea móvil está sujeta
a un punto fijo a través de una cuerda. En este caso se trata de
Se quiere levantar un cuerpo cuyo peso es 320 N (Newton)
utilizando un polipasto como el de la figura anterior. La fuerza
necesaria para lograrlo es:
2.2. Mecanismos de transmisión circular El elemento de entrada y el de salida tiene movimiento circular. En estos casos debemos de tener en
cuenta las relaciones de transmisión de los sistemas.
Se define la relación de transmisión como el cociente entre la velocidad de giro de la rueda conducida
y la velocidad de giro de la rueda motriz. Dicha relación depende del tamaño relativo de las ruedas y se
expresa mediante la siguiente ecuación:
Donde:
D1 y D2 son diámetros de las ruedas 1 y 2
n1 y n2 son las velocidades de las ruedas motriz y
conducida, respectivamente; expresadas en revoluciones
por minuto (rpm).
Así podemos tener sistemas reductores (cuando la velocidad de la rueda conducida es menor que la de
la motriz), sistemas multiplicadores (cuando la velocidad de la rueda conducida es mayor que la de la
motriz), o sistemas en los que la velocidad no se modifica.
2.2.1. Ruedas de fricción Son sistemas de dos o más ruedas que se encuentran en contacto
directo. Una de las ruedas se denomina rueda motriz (o de entrada), púes
al moverse provoca el movimiento de la rueda conducida (o de salida)
que se ve arrastrada por la primera. El sentido de giro de la rueda
conducida es contrario a la de la rueda motriz.
Usos: para prensar o arrastrar papel, chapas metálicas, de madera,
en impresoras, videos (para mover la cinta).
Ejemplo resuelto:
1. Calcula la relación de transmisión en el sistema de ruedas de fricción de la figura, velocidad y qué
sentido girará la rueda conducida si la rueda motriz lo hace a 30 rpm.

10
Departamento de Tecnología IES El Tablero I (Aguañac) 2018 - 2019
Solución:
La rueda motriz es la rueda 1; por lo tanto, n1=30 rpm.
También tenemos el diámetro de la rueda motriz (D1=10) y de la
rueda conducida (D2=30).
- 𝑅𝑒𝑙𝑎𝑐𝑖ó𝑛 𝑑𝑒 𝑡𝑟𝑎𝑛𝑠𝑚𝑖𝑠𝑖ó𝑛 =𝐷1
𝐷2=
𝑛2
𝑛1→
10
30= 1/3
- N2=¿?
𝑅𝑒𝑙𝑎𝑐𝑖ó𝑛 𝑑𝑒 𝑡𝑟𝑎𝑛𝑠𝑚𝑖𝑠𝑖ó𝑛 =𝐷1
𝐷2=
𝑛2
𝑛1→ 𝐷1 · 𝑛1 = 𝐷2 · 𝑛2 → 𝑛2 =
𝐷1·𝑛1
𝐷2=
10·30
30=
300
30= 10 𝑟𝑝𝑚
La rueda pequeña siempre es la que gira más rápido. En este caso, cada tres vueltas de la rueda pequeña
(motriz), la rueda grande, conducida, da una vuelta, se trata de un sistema reductor el ejercicio.
2.2.2. Polea con correa Son conjuntos de poleas o ruedas situadas a cierta distancia que
giran al mismo tiempo por efecto de una correa. En este caso las dos
poleas giran en el mismo sentido o en el contrario, según esté colocada
la correa.
2.2.3. Engranajes Son sistemas de ruedas que poseen salientes denominados dientes
que encajan entre sí. De ese modo, unas ruedas arrastran a las otras. Por
tanto, los engranajes trasmiten el movimiento circular entre dos ejes
próximos (paralelos, perpendiculares u oblicuos).
Los engranajes adoptan distintas formas, pudiendo ser cilíndricos
(de dientes rectos o helicoidales), o cónicos. Todos los dientes de los
engranajes en contacto han de tener la misma forma y tamaño (para que
encajen).
Muchas veces los engranajes forman sistemas de dos o más engranajes, llamados trenes de engranajes;
o, formando sistemas de engranajes unidos por una cadena. Las aplicaciones de los engranajes son múltiples
y muy variadas, incluyendo relojes, bicicletas, coches, motocicletas, batidoras, juguetes….
La relación de transmisión entre las velocidades de giro depende en este caso del tamaño relativo de
los engranajes; y, por tanto, de la relación entre el número de dientes.
Donde:
Z1 y Z2 son los nº de dientes de la rueda 1 (motriz) y 2
(conducida o piñón), respectivamente.
n1 y n2 son las velocidades de los engranajes motriz y
conducido (piñón), respectivamente. Las velocidades se expresan en
revoluciones por minuto (rpm).
Al igual que ocurría en los casos de sistemas con ruedas, en los
sistemas de engranajes podremos tener sistemas reductores (cuando
la velocidad del piñón es menor que la de la motriz), sistemas
multiplicadores (cuando la velocidad del piñón es mayor que la de la
motriz), o sistemas en los que la velocidad no se modifica.

11
Departamento de Tecnología IES El Tablero I (Aguañac) 2018 - 2019
Ejercicio resuelto:
a) ¿Cuál será la velocidad de rotación del engranaje conducido en las siguientes parejas de
engranajes?
𝑍1 = 15 𝑑𝑖𝑒𝑛𝑡𝑒𝑠
𝑛1 = 10 𝑟𝑝𝑚
𝑍2 = 30 𝑑𝑖𝑒𝑛𝑡𝑒𝑠
𝑛2 =¿ ?
Despejamos 𝑛2 → 𝑛2 =𝑍1· 𝑛1
𝑍2=
15·10
30= 5 𝑟𝑝𝑚
b) ¿Cuál será la velocidad de rotación del engranaje motor en las siguientes parejas de engranajes?
𝑍1 = 25 𝑑𝑖𝑒𝑛𝑡𝑒𝑠
𝑛1 =¿ ?
𝑍2 = 18 𝑑𝑖𝑒𝑛𝑡𝑒𝑠
𝑛2 = 100𝑟𝑝𝑚
Despejamos:
𝑛𝟏 → 𝑛𝟏 =𝑍𝟐 · 𝑛𝟐
𝑍𝟏=
1𝟖 · 1𝟎0
𝟐𝟓= 𝟕𝟐 𝑟𝑝𝑚
2.2.4. Tornillo sinfín - corona El tornillo sinfín es un mecanismo de transmisión compuesto por 2
elementos: el tornillo (sinfín), que actúa como elemento motriz y la rueda
dentada, que actúa como elemento de salida y que algunos autores llaman
corona. La rosca del tornillo engrana con los dientes de la rueda de modo
que los ejes de transmisión de ambos son perpendiculares entre sí.
Se emplea en mecanismos que necesiten una gran reducción de
velocidad (por cada vuelta del tornillo, la rueda dentada avanza un
diente) y un aumento importante de la ganancia mecánica: clavijas de
guitarra, reductores de velocidad para motores eléctricos, manivelas para
andamios, cuentakilómetros....
3. Mecanismos de transformación del movimiento Los mecanismos de transformación de movimiento son aquellos que cambian el tipo de movimiento,
de lineal a circular (o a la inversa), o de alternativo a circular (o a la inversa). Vamos a ver algunos ejemplos.
𝑍1
𝑍2=
𝑛2
𝑛1→ 𝑍1 · 𝑛1 = 𝑍2 · 𝑛2
𝑍1
𝑍2=
𝑛2
𝑛1→ 𝑍1 · 𝑛1 = 𝑍2 · 𝑛2
12
Departamento de Tecnología IES El Tablero I (Aguañac) 2018 - 2019
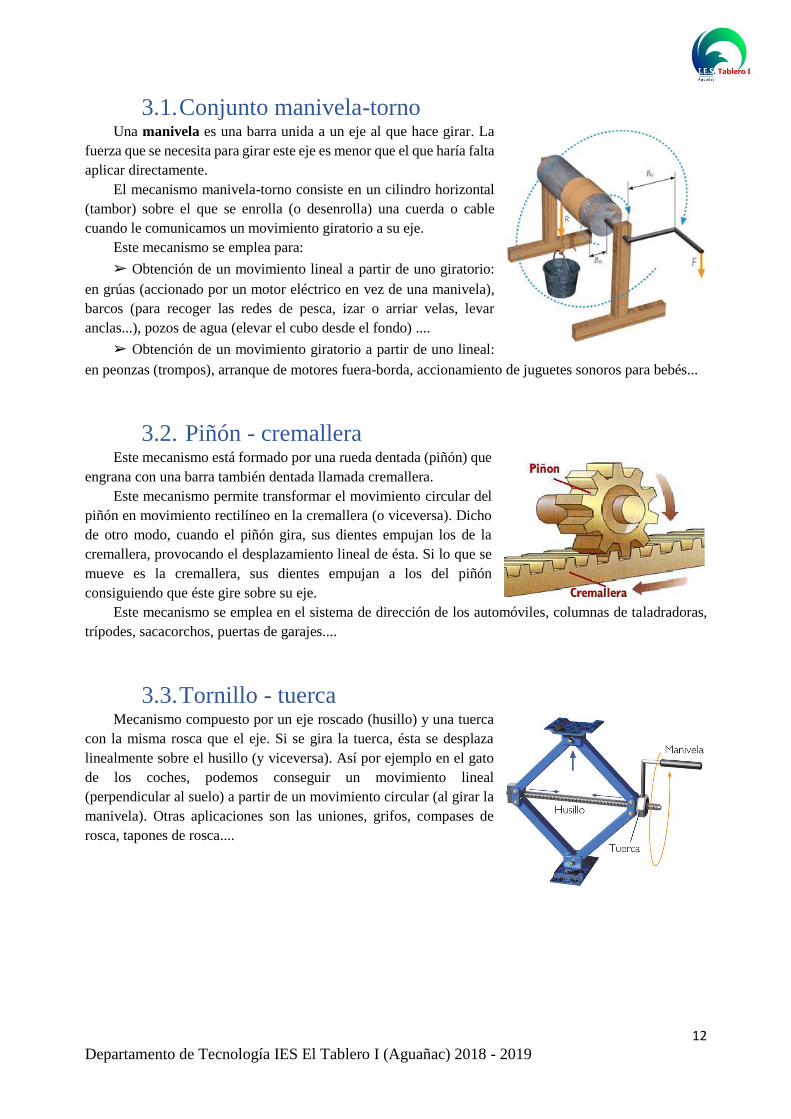
3.1. Conjunto manivela-torno Una manivela es una barra unida a un eje al que hace girar. La
fuerza que se necesita para girar este eje es menor que el que haría falta
aplicar directamente.
El mecanismo manivela-torno consiste en un cilindro horizontal
(tambor) sobre el que se enrolla (o desenrolla) una cuerda o cable
cuando le comunicamos un movimiento giratorio a su eje.
Este mecanismo se emplea para:
➢ Obtención de un movimiento lineal a partir de uno giratorio:
en grúas (accionado por un motor eléctrico en vez de una manivela),
barcos (para recoger las redes de pesca, izar o arriar velas, levar
anclas...), pozos de agua (elevar el cubo desde el fondo) ....
➢ Obtención de un movimiento giratorio a partir de uno lineal:
en peonzas (trompos), arranque de motores fuera-borda, accionamiento de juguetes sonoros para bebés...
3.2. Piñón - cremallera Este mecanismo está formado por una rueda dentada (piñón) que
engrana con una barra también dentada llamada cremallera.
Este mecanismo permite transformar el movimiento circular del
piñón en movimiento rectilíneo en la cremallera (o viceversa). Dicho
de otro modo, cuando el piñón gira, sus dientes empujan los de la
cremallera, provocando el desplazamiento lineal de ésta. Si lo que se
mueve es la cremallera, sus dientes empujan a los del piñón
consiguiendo que éste gire sobre su eje.
Este mecanismo se emplea en el sistema de dirección de los automóviles, columnas de taladradoras,
trípodes, sacacorchos, puertas de garajes....
3.3. Tornillo - tuerca Mecanismo compuesto por un eje roscado (husillo) y una tuerca
con la misma rosca que el eje. Si se gira la tuerca, ésta se desplaza
linealmente sobre el husillo (y viceversa). Así por ejemplo en el gato
de los coches, podemos conseguir un movimiento lineal
(perpendicular al suelo) a partir de un movimiento circular (al girar la
manivela). Otras aplicaciones son las uniones, grifos, compases de
rosca, tapones de rosca....

13
Departamento de Tecnología IES El Tablero I (Aguañac) 2018 - 2019
3.4. Excéntrica y leva Una rueda excéntrica es una rueda que gira sobre un eje que no
pasa por su centro. Estos sistemas se componen de una pieza de
contorno especial (leva) o de una rueda excéntrica que recibe el
movimiento rotativo a través del eje motriz y de un elemento
seguidor que está permanentemente en contacto con la leva por la
acción de un muelle.
Ambos son mecanismos que permiten convertir un movimiento
rotativo en un movimiento lineal (pero no viceversa). De este modo,
el giro del eje hace que el contorno de la leva o excéntrica mueva o
empuje al seguidor que realizará un recorrido ascendente y
descendente (movimiento lineal alternativo).
Este tipo de mecanismos se emplea en cerraduras, carretes de
pesca, cortapelos, depiladoras, motores de automóviles... etc.
3.5. Biela y manivela sEste mecanismo está formado por una manivela que tiene un
movimiento circular y una barra llamada biela. La biela está unida
con articulaciones por un extremo a la manivela, y por el otro a un
sistema de guiado (un pistón o émbolo encerrado en unas guías)
que describe un movimiento rectilíneo alternativo en ambos
sentidos.
Este mecanismo sirve para transformar un movimiento
circular en uno lineal o viceversa, ya que es reversible. Este
mecanismo se empleó en la locomotora de vapor, empleándose en
motores de combustión interna, herramientas mecánicas, máquinas
de coser, etc.
3.6. Cigüeñal En el caso de los motores se colocan una serie de bielas en un mismo
eje acodado, donde cada uno de los codos del eje hace las veces de
manivela. A este conjunto se le denomina cigüeñal. El cigüeñal transforma
el movimiento de las bielas en un movimiento de rotación en el eje.

14
Departamento de Tecnología IES El Tablero I (Aguañac) 2018 - 2019
4. Ejercicios
4.1. Palancas Ejercicio 1:
Selecciona la opción correcta:
1. ¿Qué es la palanca?
a. Es una barra larga y rígida que, con la ayuda de un punto de apoyo, se emplea para mover un cuerpo.
b. Es una barra larga y curva que, con la ayuda de un punto de apoyo, se emplea para mover un cuerpo.
c. Es una barra larga y rígida que, con la ayuda de un punto externo, se emplea para mover un cuerpo.
d. Es una barra corta y rígida que, con la ayuda de un punto externo, se emplea para mover un cuerpo.
2. ¿Qué es el brazo de potencia?
a. Es el punto donde se apoya la palanca.
b. Es la fuerza que se aplica al extremo de la palanca.
c. Es la distancia entre el punto de apoyo y el punto donde se aplica la resistencia.
d. Es la distancia entre el punto de apoyo y el punto donde se aplica la potencia
3. ¿Qué es el brazo de resistencia?
a. Es el punto donde se apoya la palanca.
b. Es la fuerza que se aplica al extremo de la palanca.
c. Es la distancia entre el punto de apoyo y el punto donde se aplica la resistencia
d. Es la distancia entre el punto de apoyo y el punto donde se aplica la potencia
4. El punto donde se apoya la palanca se llama punto de apoyo o …
a. Fulcro.
b. Pulcro.
c. Fieltro.
d. Piedra.
5. La palanca de tercer grado o género son:
a. Las que tienen el punto de apoyo entre la potencia y la resistencia.
b. Las que tienen la resistencia entre el punto de apoyo y la potencia.
c. Las que tienen la potencia entre el punto de apoyo y la resistencia.
d. Las que tienen el punto de apoyo después de la potencia y la resistencia.
6. La palanca de segundo grado o género son:
a. Las que tienen el punto de apoyo entre la potencia y la resistencia.
b. Las que tienen la resistencia entre el punto de apoyo y la potencia.
c. Las que tienen la potencia entre el punto de apoyo y la resistencia.
d. Las que tienen el punto de apoyo después de la potencia y la resistencia.
7. La palanca de primer grado o género son:
a. Las que tienen el punto de apoyo entre la potencia y la resistencia.
b. Las que tienen la resistencia entre el punto de apoyo y la potencia.
c. Las que tienen la potencia entre el punto de apoyo y la resistencia.
d. Las que tienen el punto de apoyo después de la potencia y la resistencia.

15
Departamento de Tecnología IES El Tablero I (Aguañac) 2018 - 2019
Ejercicio 2:
• ¿Qué es la ley de la palanca?
• ¿Qué tres tipos de palancas hay? Pon dos ejemplos de cada uno junto con su dibujo representando en cada
uno la resistencia, la fuerza y el punto de apoyo.
• Di si es verdadero o falso:
En una palanca de primer grado el efecto de la fuerza aplicada siempre se ve aumentado porque d > r.
En una palanca de tercer grado el efecto de la fuerza aplicada siempre se ve disminuido porque d < r.
En una palanca de segundo grado el efecto de la fuerza aplicada siempre se ve aumentado porque d > r
Ejercicio 3:
Indica el tipo de palanca en cada uno de los siguientes objetos tecnológicos: una carretilla
transportadora, una balanza, las pinzas de una cubitera, un cascanueces, unos alicates, una escoba al barrer.
Justifica tu respuesta indicando la posición de la fuerza, F, la resistencia, R, y el punto de apoyo.
Sol: Alicates y balanza (primer grado) / carretilla y cascanueces (segundo grado) / pinzas y escoba
(tercer grado).
Ejercicio 4:
Realiza un esquema relativo a los tres tipos de palanca, donde indique el tipo, dibujo de la palanca
donde se sitúe las fuerzas y el punto de apoyo y ejemplos de objetos cotidianos donde se aplique.
Ejercicio 5:
¿A qué distancia del punto de apoyo se tendrá que situar una niña de 10 kg de masa para que la barra
de un balancín esté en equilibrio, si se sabe que un niño de 15 kg está situado a 1,5 metros de dicho punto?
Sol: 2,25m
Ejercicio 6:
¿A qué distancia del eje de un balancín se tendrá que sentar un niño de 30 kg para que la barra esté en
equilibrio, si enfrente tiene a una niña de 20 kg situada a 2 m del punto de apoyo? ¿Y si la niña estuviera
situada a 4 m del punto de apoyo? ¿Qué conclusión puedes sacar?
Sol: 1,33m / 2,66m
Ejercicio 7:
Calcula el valor de la fuerza (F) que será
necesario aplicar para vencer la resistencia (R).
a. ¿Qué tipo de palanca es? ¿Primer, segundo
o tercer grado?
Solución: 1000N

16
Departamento de Tecnología IES El Tablero I (Aguañac) 2018 - 2019
Ejercicio 8:
Calcula el valor de la fuerza (F) que será necesario aplicar para
vencer la resistencia (R).
a. ¿Qué tipo de palanca es? ¿Primer, segundo o tercer grado?
Ayuda: “Ten en cuenta que el valor (d), brazo de fuerza, es
desde el punto de apoyo hasta la fuerza (F)”.
Solución: 1000N
Ejercicio 9:
Calcula el valor de la fuerza (F) que será necesario
aplicar para vencer la resistencia (R).
a. ¿Qué tipo de palanca es? ¿Primer, segundo o
tercer grado?
Ayuda: “Ten en cuenta que el valor (d), brazo
de fuerza, es desde el punto de apoyo hasta la
fuerza (F)”.
Solución: 4000N
Ejercicio 10:
El elefante del dibujo pesa 300 Kg y la
longitud del brazo donde se apoya es de 0,5 m.
La hormiga pesa 1g. ¿Qué longitud deberá
tener el brazo donde se apoya la hormiga para
poder levantar el elefante? Ayuda: ¡¡¡¡piensa
bien el cambio de unidades, suerte!!!!
Solución: 150 Km
Ejercicio 11:
En el mango de estas tijeras aplicamos una fuerza de 50N.
¿Qué fuerza resultará en las puntas?
¿Qué tipo de palanca es?
Solución: 33,3 N
Ejercicio 12:
La carretilla está cargada con 50 Kg. De arena.
¿Qué fuerza habrá que realizar para levantarla?
¿Qué tipo de palanca es?
Solución: 263,15N

17
Departamento de Tecnología IES El Tablero I (Aguañac) 2018 - 2019
Ejercicio 13:
El pez que estira de esta caña hace una fuerza de
30N
¿Qué fuerza será necesario aplicar para extraerlo
del agua?
¿Qué tipo de palanca es?
Solución: 150 N
Ejercicio 14:
El levantador de pesas puede generar una fuerza de
3000N. Si dispone de una palanca con un brazo de fuerza
de 2 m y uno de resistencia de 0,5 m.
¿Qué peso máximo podrá levantar?
Solución: 12000 N
4.2 . Poleas y polipastos
Ejercicio 15:
1. ¿Qué es un polipasto?
a. Es una combinación de poleas fijas y móviles que permite levantar grandes pesos con pequeños
esfuerzos.
b. Es una combinación de poleas fijas y móviles que permiten levantar grandes pesos con grandes
esfuerzos.
c. Es una combinación de poleas fijas y móviles que permiten levantar pequeños pesos con grandes
esfuerzos.
d. Es la combinación de poleas grandes y pequeñas que permiten levantar grandes pesos con pequeños
esfuerzos.
2. Se dice que un mecanismo es de transmisión circular cuando el elemento que transmite el
movimiento…..
a. …y el que lo recibe giran.
b. … y el que lo recibe se desplazan linealmente.
c. Gira y el que lo recibe se desplaza linealmente.
d. Se desplaza linealmente y el que lo recibe gira.
3. El mecanismo que consiste en un eje con varios codos, donde se acoplan bielas para transformar el
movimiento circular en movimiento rectilineo de vaiven se llama ….
a. Leva.
b. Torno elevador.
c. Rueda de fricción
d. Cigüeñal.
Ejercicio 16:
Representa los esquemas de una polea fija y de una polea móvil. ¿Para qué se utilizan estos
mecanismos? Nombra algunas aplicaciones.

18
Departamento de Tecnología IES El Tablero I (Aguañac) 2018 - 2019
Ejercicio 17:
Indica si las siguientes afirmaciones son verdaderas. En caso contrario, explica por qué:
a) Una polea fija se encuentra en equilibrio cuando la fuerza tiene el mismo valor que la carga o
resistencia.
b) Una polea móvil se encuentra en equilibrio cuando la fuerza aplicada es la mitad que el valor de la
carga o resistencia.
c) A medida que aumenta el número de poleas en un polipasto, el mecanismo se complica, pero la
fuerza necesaria para elevar la misma carga disminuye.
Ejercicio 18:
• ¿Para qué sirven los mecanismos? Pon algunos ejemplos de aplicaciones.
• ¿Qué es un mecanismo?
• Pon tres ejemplos de elementos motrices, tres ejemplos de elementos receptores y tres ejemplos de
mecanismos.
• ¿En qué dos grandes grupos se clasifican los mecanismos? Explica para qué sirven cada uno de estos
grupos.
• ¿Qué diferencia hay entre los mecanismos de transmisión lineal y los mecanismos de transmisión
circular?
• Especifica en cada caso si es un mecanismo de transmisión o de transformación del movimiento:
• ¿Qué es una polea?
• ¿Cuándo una polea fija está en equilibrio?
• ¿Para qué sirve una polea fija? Nombra algunas aplicaciones.
• ¿Qué es una polea móvil?
• ¿Cuándo una polea móvil está en equilibrio?
• ¿Qué ventaja presenta la polea móvil respecto a la polea fija?
• ¿Para qué sirve una polea móvil?
• ¿Qué es un polipasto?
• ¿Con cuál de estos tipos de poleas me permite aplicar menos esfuerzo para levantar la misma resistencia,
una polea móvil o un polipasto? ¿Por qué?
Ejercicio 19:
¿Qué fuerza es necesaria aplicar para levantar una carga de 50 kg con una polea fija? ¿Y si utilizamos
una polea móvil?
Sol: >500N / >250N
Ejercicio 20:
¿Qué fuerza hay que aplicar para levantar una carga de 10 kg con una polea fija? ¿Y con una polea
móvil? Sol: >100N / >50N
19
Departamento de Tecnología IES El Tablero I (Aguañac) 2018 - 2019
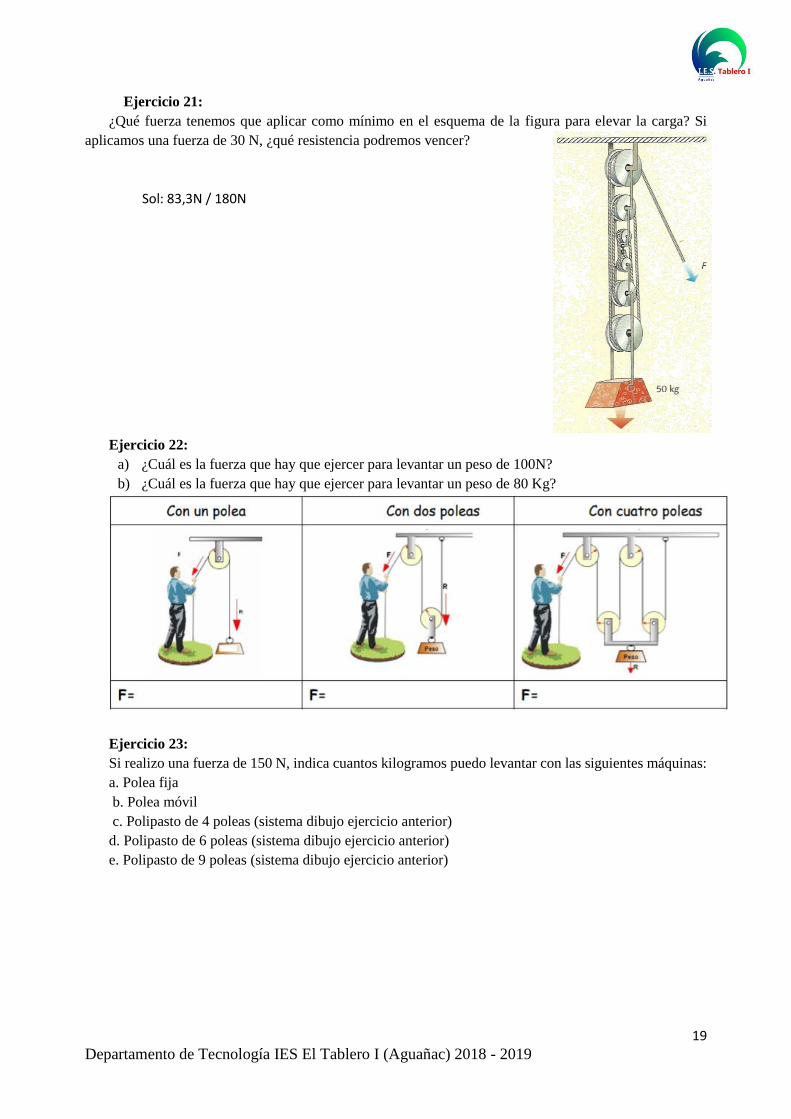
Ejercicio 21:
¿Qué fuerza tenemos que aplicar como mínimo en el esquema de la figura para elevar la carga? Si
aplicamos una fuerza de 30 N, ¿qué resistencia podremos vencer?
Sol: 83,3N / 180N
Ejercicio 22:
a) ¿Cuál es la fuerza que hay que ejercer para levantar un peso de 100N?
b) ¿Cuál es la fuerza que hay que ejercer para levantar un peso de 80 Kg?
Ejercicio 23:
Si realizo una fuerza de 150 N, indica cuantos kilogramos puedo levantar con las siguientes máquinas:
a. Polea fija
b. Polea móvil
c. Polipasto de 4 poleas (sistema dibujo ejercicio anterior)
d. Polipasto de 6 poleas (sistema dibujo ejercicio anterior)
e. Polipasto de 9 poleas (sistema dibujo ejercicio anterior)

20
Departamento de Tecnología IES El Tablero I (Aguañac) 2018 - 2019
4.3 Engranajes y correas
Ejercicio 24:
• ¿Qué son los engranajes?
Ejercicio 25:
• ¿Cuál será la velocidad de rotación del engranaje conducido en la siguiente pareja de engranaje?
𝑍1 = 15 𝑑𝑖𝑒𝑛𝑡𝑒𝑠
𝑛1 = 10 𝑟𝑝𝑚
𝑍2 = 60 𝑑𝑖𝑒𝑛𝑡𝑒𝑠
𝑛2 =¿ ?
Solución: 𝑛2 = 2,5 𝑟𝑝𝑚
Ejercicio 26:
• ¿Cuál será la velocidad de rotación del engranaje motor en la siguiente pareja de engranaje?
𝑍1 = 10 𝑑𝑖𝑒𝑛𝑡𝑒𝑠
𝑛1 =¿ ?
𝑍2 = 60 𝑑𝑖𝑒𝑛𝑡𝑒𝑠
𝑛2 = 1000𝑟𝑝𝑚
Solución: 𝑛𝟏 = 6000 𝑟𝑝𝑚
Ejercicio 27:
• La relación de transmisión de un par de engranajes es de 1/14. Si la rueda tiene
294 dientes. ¿Cuántos tiene el piñón? Solución: 21 dientes
Ejercicio 28:
• Calcula la relación de transmisión de un par de engranajes cuya rueda conductora tiene 50
dientes y la conducida 30. Explica por qué el eje conducido gira más deprisa o despacio que el
eje conductor Solución: 0,6
Ejercicio 29:
Determina la relación de transmisión entre dos árboles, la velocidad del segundo si están unidos
por una correa de transmisión. Los diámetros de las poleas son, respectivamente, d1= 60 cm y
d2= 30 cm, sabiendo que el primer árbol gira a 1500 rpm. Solución: 2 y 3000 rpm
Ejercicio 30:
• La relación de transmisión entre una polea de 120 mm de diámetro acoplada al árbol motor y
otra acoplada al árbol resistente es i = 1/5. Calcula el diámetro de esta última. Solución: 600 mm

21
Departamento de Tecnología IES El Tablero I (Aguañac) 2018 - 2019
Ejercicio 31:
• ¿La caja se abre o se cierra? Entiende y dibuja los sentidos de giro de todos los engranajes.