tema 3: representación de sistemas lineales. …fercas/documentos/fca2tema3.pdf · depto. ing....
TRANSCRIPT

Fundamentos de
Control Automático
2º G. Ing. Tecn. Industrial
Tema 3: Representación de sistemas lineales.
Transformada de Laplace

Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind.
Índice del tema
2
1. Transformada de Laplace. Propiedades
1. Definición de transformada de señales. Ejemplos
2. Definición de antitransformada. Ejemplos
3. Propiedades de la trasformada de Laplace
2. Transformada y antitransformada de señales3. Función de transferencia4. Interconexión de sistemas. Diagramas de
bloques.

Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind.
Introducción
0 5 10 15 20 25 30 35 400
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
0 5 10 15 20 25 30 35 400
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
0 5 10 15 20 25 30 35 400
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
↑ R
¿Cómo se puede estudiar el efecto de la resistencia en el comportamiento del sistema?
u
R
Cy
L
3
Transformadade
Laplace

Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind.
Transformada de Laplace
Transformación de una señalSea f(t) a derechas: f(t)=0, para todo t<0
Dominio del tiempo Dominio de Laplace
4

Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind.
Antitransformada de Laplace
Dominio del tiempo Dominio de Laplace
5

Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind.
Algunos ejemplos
6

Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind.
Transformadas de algunas señales
7
Señales f(t) tales que F(s) es una función racional

Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind.
Propiedades de la transformada Laplace
Linealidad
Transformación de la derivada
Transformación de la integral
8

Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind.
Propiedades de la transformada Laplace
Transformada de la señal modulada por una exponencial
Transformada de la señal retardada
Teorema del Valor Final
9
Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind.
Propiedades de la transformada Laplace
Teorema del Valor Inicial
Transformada de la convolución
10

Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind.
Índice del tema
11
Transformada de Laplace. PropiedadesTransformada y antitransformada de señales
Cálculo de antitransformadas.
Relación de la transformada y la señal. Efecto de ceros y
polos.
Función de transferenciaInterconexión de sistemas. Diagramas de bloques.

Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind.
Cálculo de antitransformadas
Objetivo:
Procedimiento: descomposición en factores simples
Ceros y polosCeros: valores que anulan F(s)
Polos: valores singulares de F(s)
12

Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind. 13
Ejemplo 1: polos reales
Denominador
Procedimiento
Cálculo de los residuos

Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind.
Ejemplo
14

Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind. 15
Denominador
Procedimiento
Ejemplo 2: polos complejos
Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind. 16
Cálculo de los residuos
Igualdad compleja=2 ecuaciones
• Parte real
• Parte imaginaria
2 incógnitas
Caso 2: polos complejos

Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind. 17
Ejemplo

Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind. 18
Denominador
Procedimiento
Caso 3: polos reales múltiples

Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind.
Ejemplo
19

Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind. 20
Efecto de los polos y ceros
Los polos de Y(s) determinan la forma de y(t)
Los ceros de Y(s) determinan el peso de cada sumando y(t)

Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind.
Índice del tema
21
Transformada de Laplace. PropiedadesTransformada y antitransformada de señalesFunción de transferencia
Caracterización de la respuesta de un sistema dinámico.Respuesta libre y forzada.Función de transferencia.
Interconexión de sistemas. Diagramas de bloques.

Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind. 22
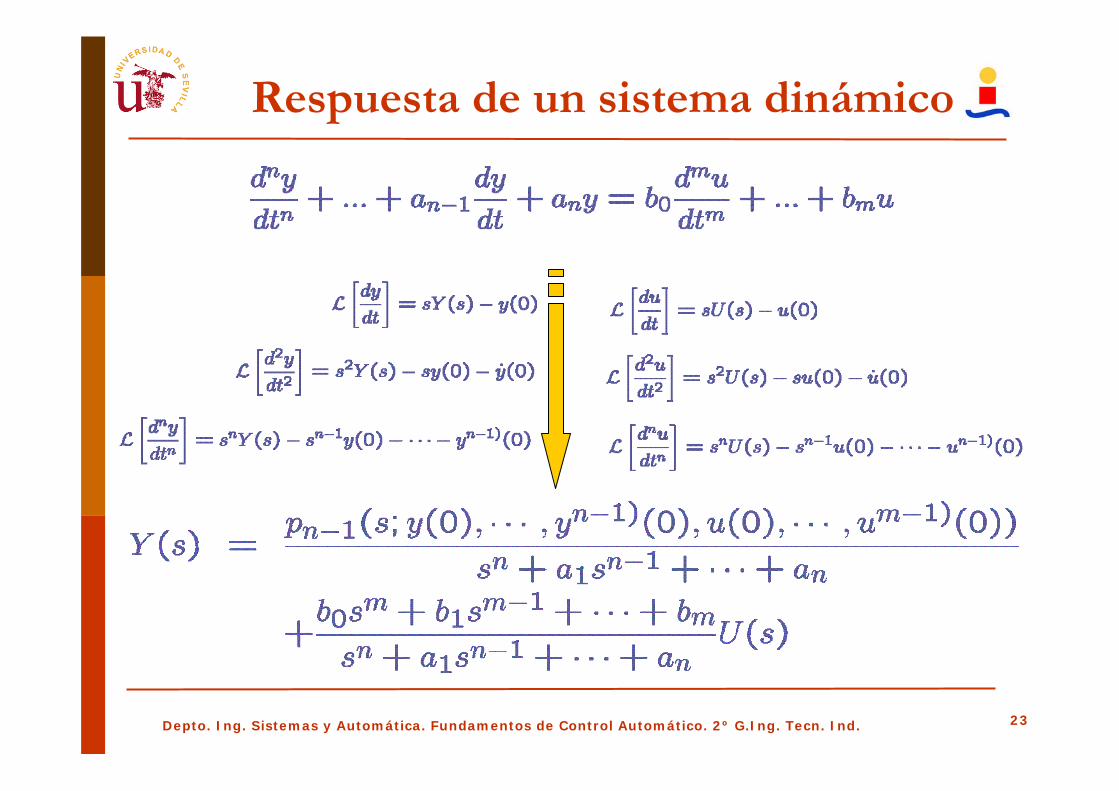
Respuesta de un sistema dinámico
Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind. 23
Respuesta de un sistema dinámico
Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind.
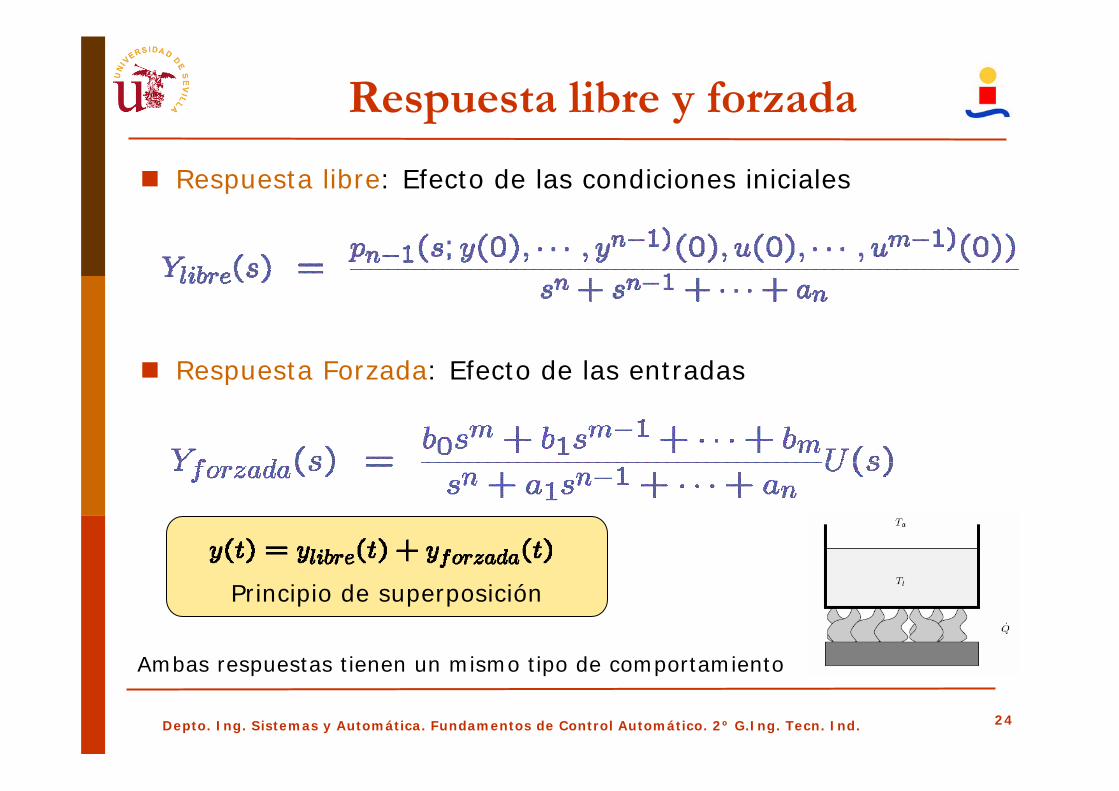
Respuesta libre y forzada
Respuesta libre: Efecto de las condiciones iniciales
Respuesta Forzada: Efecto de las entradas
24
Principio de superposición
Ambas respuestas tienen un mismo tipo de comportamiento

Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind. 25
Respuesta libre y forzada

Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind. 26
Función de transferencia
Caracteriza la respuesta forzadaCondiciones iniciales nulasDescribe el efecto de las entradas sobre las salidas.

Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind.
Ejemplo: sistema linealizado
27
Punto de Funcionamiento
Definiendo variables incrementales

Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind. 28
Ejemplo: calentador

Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind. 29
Sistemas multivariables

Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind. 30
Sistemas multivariables
Sistema···
···

Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind.
Índice del tema
31
Transformada de Laplace. PropiedadesTransformada y antitransformada de señalesFunción de transferencia Interconexión de sistemas. Diagramas de bloques.

Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind. 32
Álgebra de Bloques
Objetivo: Representar los sistemas como subsistemas interconectados
Cada subsistema se representa por un bloque funcionalLas señales se representan mediante arcos Interconexiones son uniones de bloques mediante arcos
Elementos:Sistema lineal
Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind. 33
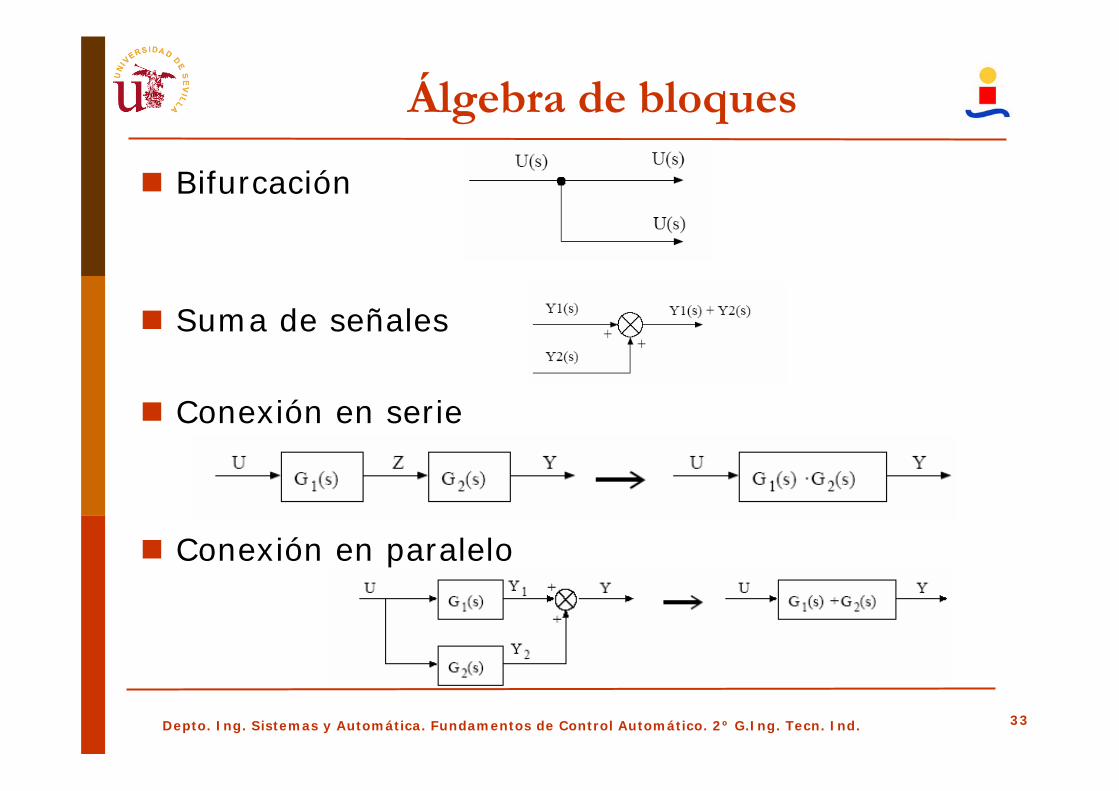
Álgebra de bloques
Bifurcación
Suma de señales
Conexión en serie
Conexión en paralelo

Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind. 34
Álgebra de Bloques
Realimentación
++_
Controlador
Variable Manipulable(entrada)
Variable a controlar(salida)
Actuador Sistema
Sensor
Señal de la medida
Actuador
Sensor
Controlador

Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind. 35
Álgebra de Bloques
Operaciones de bloques

Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind. 36
Álgebra de Bloques
Operaciones de bloques
Depto. Ing. Sistemas y Automática. Fundamentos de Control Automático. 2º G.Ing. Tecn. Ind. 37
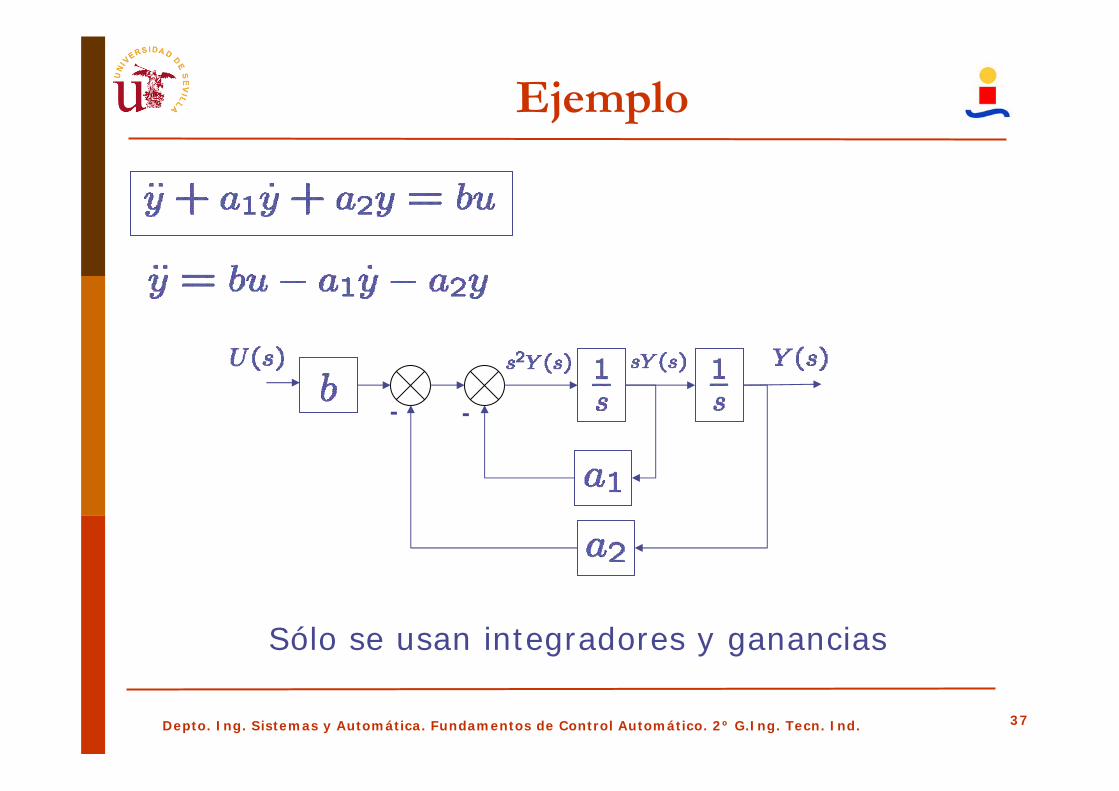
Ejemplo
Sólo se usan integradores y ganancias
- -