tema 1: descripción de las máquinas hidráulicas de las bombas hidráulicas rotodinámicas,...
TRANSCRIPT
Tema 1:
Descripción de las Máquinas Hidráulicas
1.1. CLASIFICACIÓN DE LAS MÁQUINAS DE FLUIDO
Antes de describir las máquinas hidráulicas se debe comenzar situándolas dentro del esquema general de las máquinas de fluido. Una máquina de fluido es un sistema mecánico que intercambia energía con un fluido que circula a través de él. En este apartado se proponen tres clasificaciones diferentes atendiendo a los siguientes criterios:
el sentido de transferencia de energía entre la máquina y el fluido,
el grado de compresibilidad del fluido utilizado, y
el principio de funcionamiento.
Existen otras clasificaciones, basadas en criterios menos generales, referentes a condiciones de funcionamiento, características constructivas, campos de aplicación, etc., que se irán viendo más adelante.
1.1.1. Sentido de transferencia de la energía Según el sentido de transferencia de la energía entre la máquina y el fluido que circula a través de ella, las máquinas se pueden clasificar en: generadoras, motoras, reversibles y transmisoras.
Las máquinas generadoras comunican energía al fluido, de forma que éste experimenta un incremento de energía específica entre las secciones de entrada y salida de la máquina. Ejemplos de máquinas generadoras son: las bombas, los ventiladores y los compresores. En ocasiones, el objetivo esencial de una máquina generadora no es realmente suministrar energía al fluido, sino producir una fuerza de empuje sobre un cuerpo que se mueve en el seno de aquel, por ejemplo, las hélices marinas y aéreas. La energía mecánica que consume una máquina generadora debe ser proporcionada por un motor.
Las máquinas motoras extraen energía del fluido, dando lugar a una reducción de la energía específica de éste a su paso por la máquina. Algunos ejemplos son: las turbinas hidráulicas, de vapor, de gas y las aeroturbinas. La energía mecánica obtenida por una máquina motora puede transmitirse a un generador eléctrico o, directamente, a un vehículo, a una máquina herramienta, etc.
2 Tema 1: Descripción de las Máquinas Hidráulicas
Las máquinas reversibles pueden funcionar indistintamente como generadoras o motoras. Un ejemplo son grupos turbina-bomba utilizados en centrales de acumulación por bombeo.
Las máquinas transmisoras permiten transmitir energía mediante un fluido, y están construidas por una combinación de máquinas motoras y generadoras. Ejemplos típicos son los acoplamientos, los convertidores de par, las transmisiones hidráulicas y neumáticas, etc.
1.1.2. Grado de compresibilidad del fluido En función de la compresibilidad del fluido que atraviesa la máquina, éstas se clasifican en máquinas hidráulicas y máquinas térmicas (de flujo compresible).
En las máquinas de flujo compresible, las variaciones de volumen específico sufridas por el fluido no son despreciables. El desacoplamiento mecánico y térmico de las ecuaciones no es posible, y se hace necesario establecer un balance de energía total, ya que la variación del volumen específico permite la transformación de energía interna en energía mecánica y viceversa.
En las máquinas hidráulicas, las variaciones de volumen específico que experimenta el fluido a través de la máquina son despreciables. Esto ocurre cuando el fluido es un líquido, o bien cuando es un gas que sufre variaciones de presión poco importantes, como en el caso de los ventiladores. En el caso de fluidos incompresibles de viscosidad constante existe un desacoplamiento entre los problemas mecánico y térmico, lo que supone una simplificación considerable al poder realizarse el balance de energía mecánica sin necesidad de recurrir a la ecuación de conservación de la energía total (mecánica + interna). La energía interna del fluido a la entrada de la máquina no puede transformarse en energía mecánica en el eje.
1.1.3. Principio de funcionamiento Según el principio de funcionamiento de las máquinas, se pueden clasificar en: máquinas dinámicas y de desplazamiento positivo.
Las máquinas dinámicas se basan en el intercambio de cantidad de movimiento entre la máquina y el fluido. Las más importantes son las denominadas máquinas rotodinámicas (turbomáquinas) cuyo elemento principal está dotado de un movimiento giratorio, que intercambia energía con el fluido través de una variación de momento cinético.
Las máquinas de desplazamiento positivo se basan fundamentalmente en principios fluidostáticos y mecánicos (aunque en ocasiones puede ser necesario considerar efectos fluidodinámicos). Existe una gran variedad de diseños atendiendo a la aplicación concreta en que se utiliza. La característica común a todas ellas es la circulación del fluido a través de la máquina de forma discontinua. En algunas máquinas, una determinada masa fluida es confinada en un compartimento (órgano de retención) que se desplaza desde la zona de alimentación de la máquina (baja presión en bombas) a la zona de descarga (alta presión en bombas). Otras tienen un compartimento de volumen variable llevándose a cabo los procesos de admisión y
Bloque I: Generalidades 3
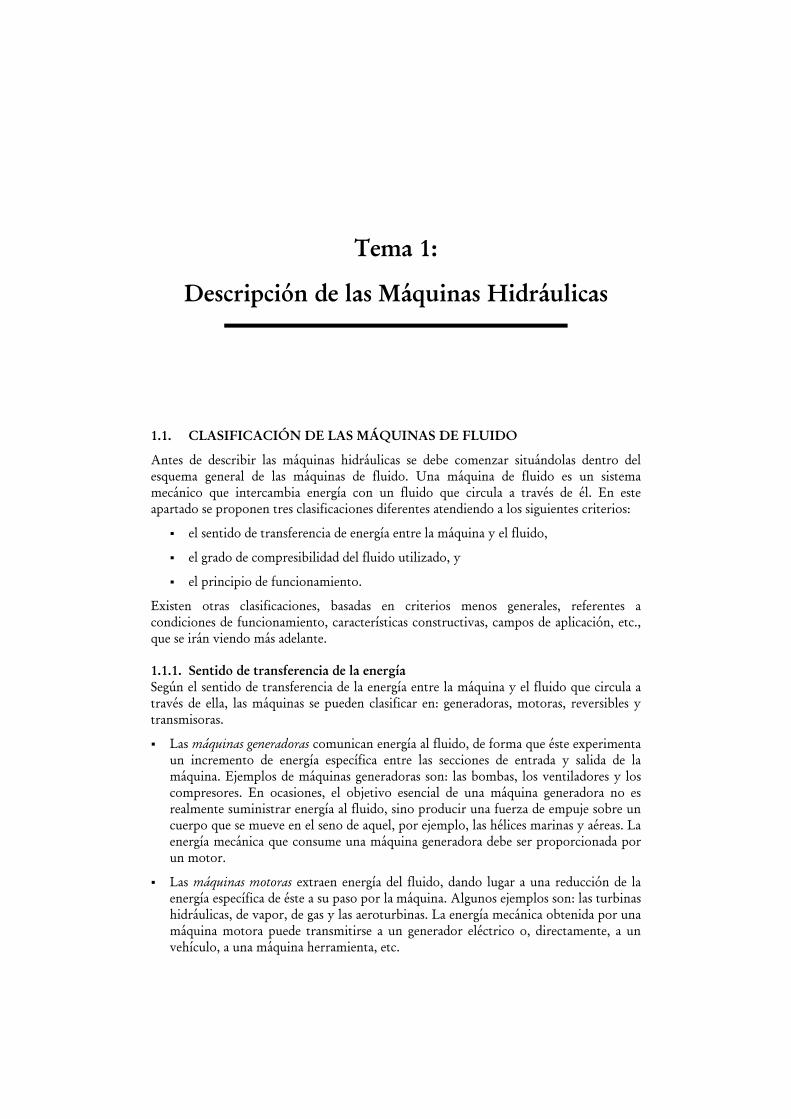
descarga mediante válvulas que se abren y cierran alternativamente. En la figura 1. 1 se presentan los esquemas de diversas máquinas de desplazamiento positivo. En los siguientes apartados de este capítulo se hará referencia solamente a las máquinas de tipo rotodinámico.
Fig. 1. 1. Algunos tipos de máquinas de desplazamiento positivo (MDP).
1.2. DESCRIPCIÓN DE LAS BOMBAS HIDRÁULICAS ROTODINÁMICAS
En este apartado se realiza una descripción general de las bombas hidráulicas rotodinámicas, dejando para más adelante la descripción de las turbinas. Las bombas hidráulicas rotodinámicas pertenecen al grupo de turbomáquinas hidráulicas, es decir son máquinas rotodinámicas de fluido incompresible. Como es obvio, por el momento no es posible justificar detalladamente las características de diseño de cada tipo de máquina, ni explicar de forma rigurosa las razones que hacen que un determinado tipo de máquina sea adecuado para un cierto rango de condiciones de funcionamiento.
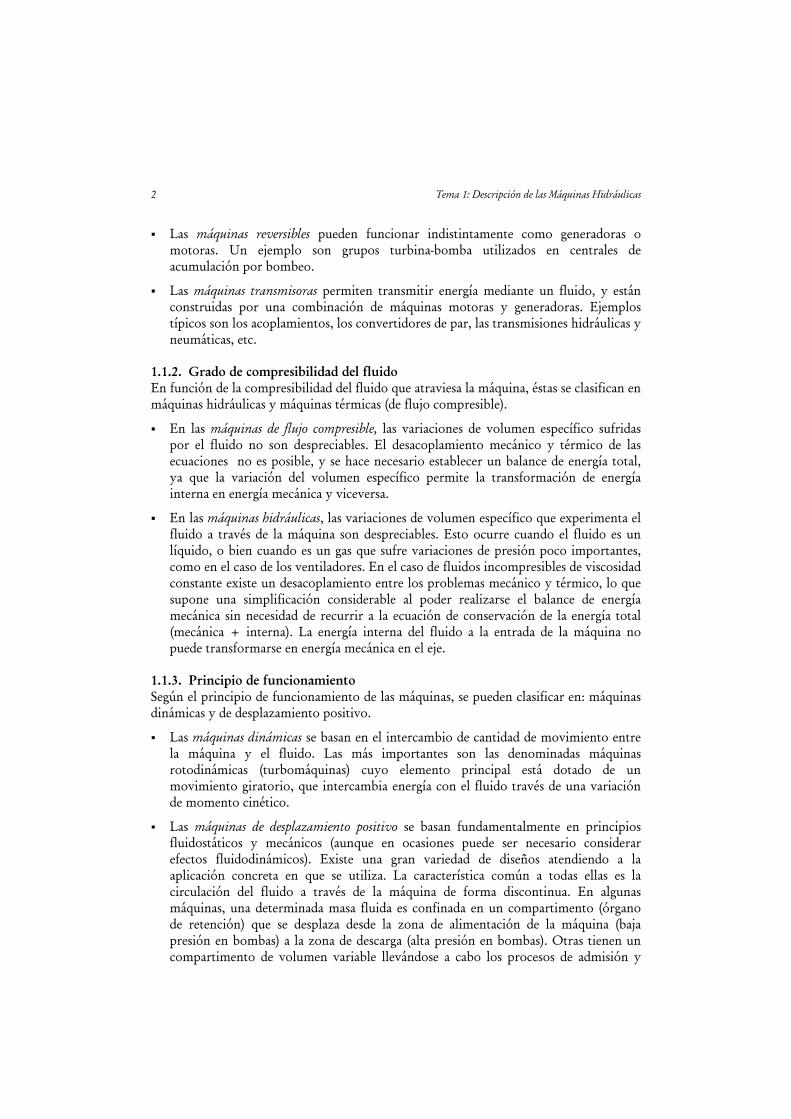
1.2.1. Elementos característicos de una bomba Una etapa (o célula) de una turbomáquina consta de un órgano fijo (estator), y un órgano móvil (rodete).
El rodete es una rueda provista de álabes que gira con el eje de la máquina. El estator lo constituyen la corona directriz, el difusor y la voluta o cámara espiral. En algunas
Fig. 1. 2. Elementos característicos de una bomba
4 Tema 1: Descripción de las Máquinas Hidráulicas
máquinas no existe alguno de estos tres elementos y, en ciertos casos como las hélices marinas, ninguno de los tres. En una etapa completa de una bomba, el fluido atraviesa sucesivamente, y en este orden, la corona directriz, el rodete, el difusor y la voluta (figura 1. 2.).
Corona directriz. Es un órgano fijo cuya función es conducir el fluido hasta la sección de entrada al rodete con una velocidad de magnitud y dirección adecuadas. En bombas monoetapa, la corona directriz suele consistir en una tubería simple, que puede ser recta o acodada y que puede tener o no unos álabes para conducir el fluido a la entrada del rodete. Frecuentemente es de sección convergente para garantizar una distribución de velocidad adecuada a la entrada del rodete. Aguas arriba de la corona directriz se encuentra la tubería de aspiración.
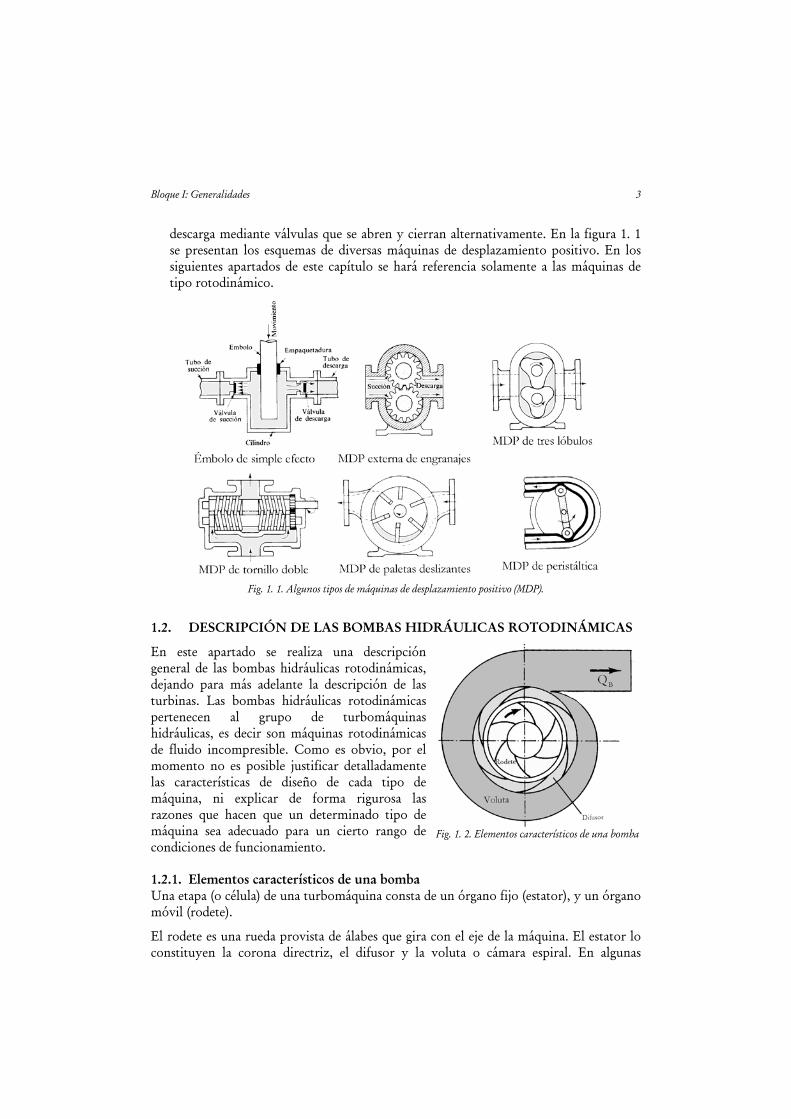
Rodete. Es el órgano esencial de la turbomáquina. Está provisto de unos álabes por medio de los cuales se produce el intercambio de energía con el fluido. Los rodetes se clasifican en función de la dirección del flujo de líquido en su interior (figura 1. 3).
En los rodetes radiales o centrífugos, las trayectorias que describen las partículas fluidas entre los álabes, están contenidas en planos perpendiculares al eje de rotación.
En los rodetes axiales, las trayectorias están contenidas en superficies cilíndricas, coaxiales con el eje de la máquina.
En los rodetes diagonales o helico-centrífugos, dichas trayectorias están contenidas en superficies cónicas coaxiales.
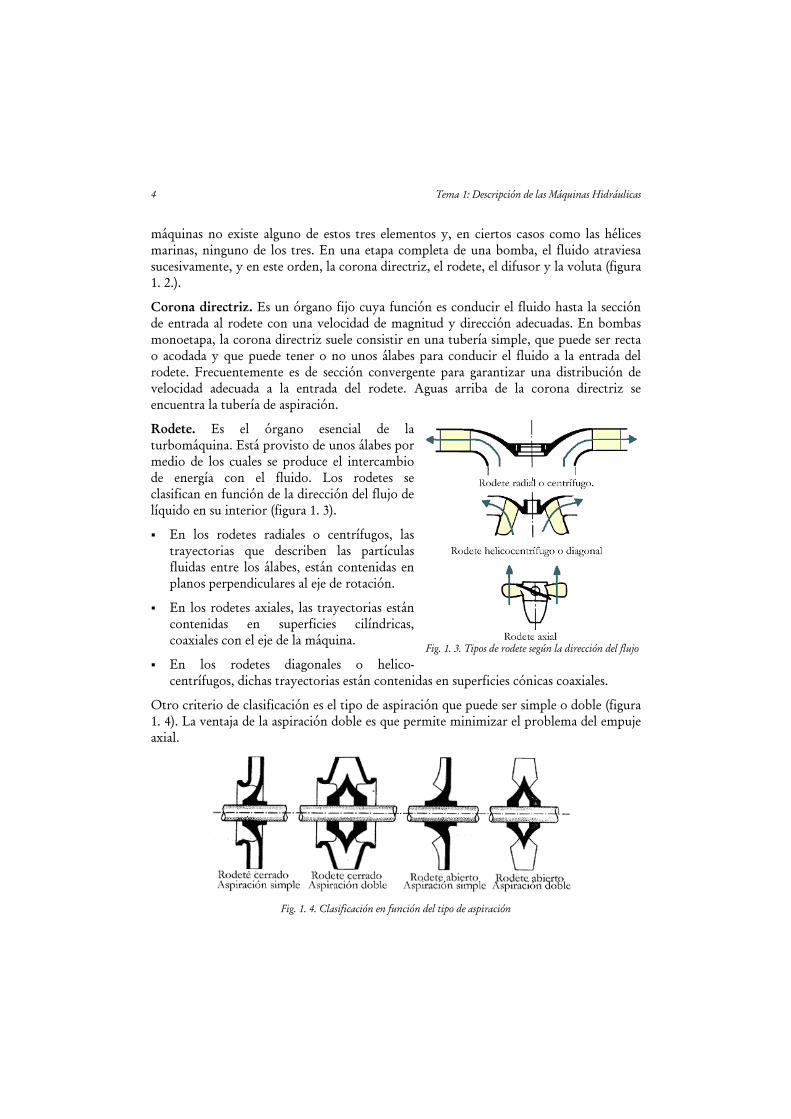
Otro criterio de clasificación es el tipo de aspiración que puede ser simple o doble (figura 1. 4). La ventaja de la aspiración doble es que permite minimizar el problema del empuje axial.
Fig. 1. 4. Clasificación en función del tipo de aspiración
Fig. 1. 3. Tipos de rodete según la dirección del flujo
Bloque I: Generalidades 5
Difusor. Está a la salida del rodete siendo su finalidad guiar el flujo de líquido hacia la voluta de forma hidráulicamente eficiente y recuperar parte de la energía cinética, transformándola en energía de presión.
Voluta. La voluta o cámara espiral recoge el flujo saliente del rodete o del difusor y lo conduce hacia la brida de la tubería de impulsión. Su finalidad es recuperar energía de presión a partir de la energía cinética del fluido.
1.2.2. Otros criterios de clasificación Las bombas hidráulicas rotodinámicas se pueden clasificar atendiendo a diferentes criterios, dependiendo de su disposición constructiva y sus condiciones de funcionamiento.
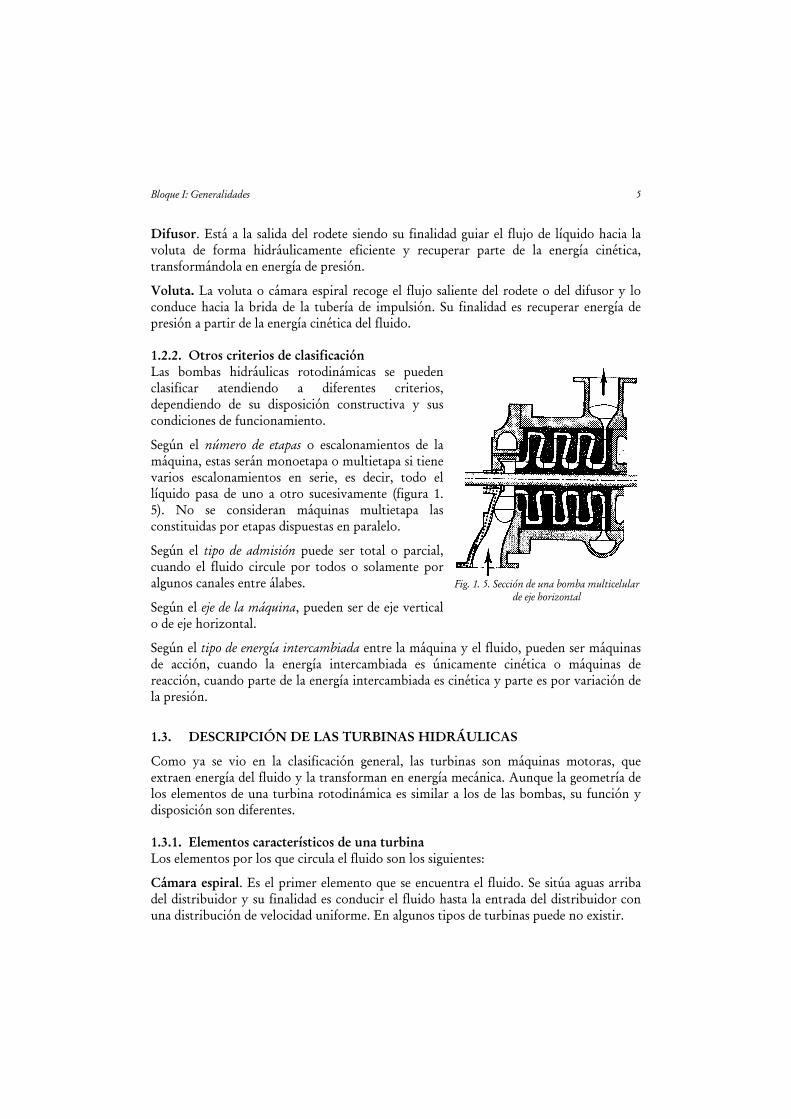
Según el número de etapas o escalonamientos de la máquina, estas serán monoetapa o multietapa si tiene varios escalonamientos en serie, es decir, todo el líquido pasa de uno a otro sucesivamente (figura 1. 5). No se consideran máquinas multietapa las constituidas por etapas dispuestas en paralelo.
Según el tipo de admisión puede ser total o parcial, cuando el fluido circule por todos o solamente por algunos canales entre álabes.
Según el eje de la máquina, pueden ser de eje vertical o de eje horizontal.
Según el tipo de energía intercambiada entre la máquina y el fluido, pueden ser máquinas de acción, cuando la energía intercambiada es únicamente cinética o máquinas de reacción, cuando parte de la energía intercambiada es cinética y parte es por variación de la presión.
1.3. DESCRIPCIÓN DE LAS TURBINAS HIDRÁULICAS
Como ya se vio en la clasificación general, las turbinas son máquinas motoras, que extraen energía del fluido y la transforman en energía mecánica. Aunque la geometría de los elementos de una turbina rotodinámica es similar a los de las bombas, su función y disposición son diferentes.
1.3.1. Elementos característicos de una turbina Los elementos por los que circula el fluido son los siguientes:
Cámara espiral. Es el primer elemento que se encuentra el fluido. Se sitúa aguas arriba del distribuidor y su finalidad es conducir el fluido hasta la entrada del distribuidor con una distribución de velocidad uniforme. En algunos tipos de turbinas puede no existir.
Fig. 1. 5. Sección de una bomba multicelular
de eje horizontal

6 Tema 1: Descripción de las Máquinas Hidráulicas
Distribuidor. Es un órgano muy importante, que distribuye el fluido por la periferia del rodete, imponiendo la dirección de la velocidad de entrada. Además puede realizar la función de regulación de caudal cuando dispone de álabes orientables.
Rodete. Igual que en las bombas, es el elemento principal, que debe existir siempre. Su clasificación es la misma que la de los rodetes de bombas, es decir: axiales, mixtos y radiales. La diferencia aparece en el sentido del flujo: en los rodetes radiales, por ejemplo, el flujo penetra en el rodete por la periferia del mismo y sale por el centro. Dependiendo del tipo de rodete, la turbina suele tomar un nombre diferente que la clasifica. La figura 1.6 muestra diferentes diseños de rodetes. En los apartados siguientes se describen brevemente los principales tipos de turbinas y sus campos de aplicación. En la figura 1.7 se indican los rangos de alturas y caudales en los que operan las turbinas.
Fig. 1. 7. Rango de aplicación de cada tipo de turbina
Difusor. Es un tubo de sección constante o ligeramente divergente, frecuentemente de forma acodada, que conduce el flujo desde el rodete hasta el canal de desagüe. Su segunda función es mejorar el rendimiento mediante el aprovechamiento de la energía potencial del fluido a la salida del rodete y la recuperación de parte de la energía cinética.
Fig. 1. 6. Diseño de rodetes
Bloque I: Generalidades 7
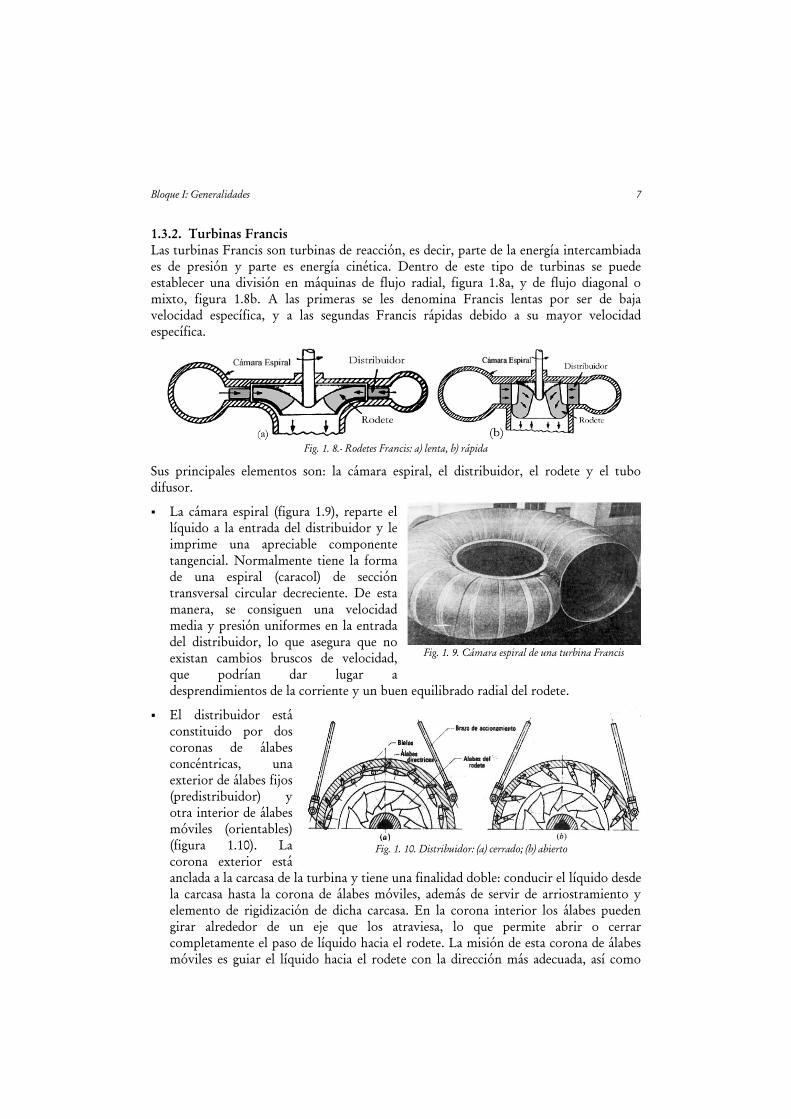
1.3.2. Turbinas Francis Las turbinas Francis son turbinas de reacción, es decir, parte de la energía intercambiada es de presión y parte es energía cinética. Dentro de este tipo de turbinas se puede establecer una división en máquinas de flujo radial, figura 1.8a, y de flujo diagonal o mixto, figura 1.8b. A las primeras se les denomina Francis lentas por ser de baja velocidad específica, y a las segundas Francis rápidas debido a su mayor velocidad específica.
Fig. 1. 8.- Rodetes Francis: a) lenta, b) rápida
Sus principales elementos son: la cámara espiral, el distribuidor, el rodete y el tubo difusor.
La cámara espiral (figura 1.9), reparte el líquido a la entrada del distribuidor y le imprime una apreciable componente tangencial. Normalmente tiene la forma de una espiral (caracol) de sección transversal circular decreciente. De esta manera, se consiguen una velocidad media y presión uniformes en la entrada del distribuidor, lo que asegura que no existan cambios bruscos de velocidad, que podrían dar lugar a desprendimientos de la corriente y un buen equilibrado radial del rodete.
El distribuidor está constituido por dos coronas de álabes concéntricas, una exterior de álabes fijos (predistribuidor) y otra interior de álabes móviles (orientables) (figura 1.10). La corona exterior está anclada a la carcasa de la turbina y tiene una finalidad doble: conducir el líquido desde la carcasa hasta la corona de álabes móviles, además de servir de arriostramiento y elemento de rigidización de dicha carcasa. En la corona interior los álabes pueden girar alrededor de un eje que los atraviesa, lo que permite abrir o cerrar completamente el paso de líquido hacia el rodete. La misión de esta corona de álabes móviles es guiar el líquido hacia el rodete con la dirección más adecuada, así como
Fig. 1. 9. Cámara espiral de una turbina Francis
Fig. 1. 10. Distribuidor: (a) cerrado; (b) abierto
8 Tema 1: Descripción de las Máquinas Hidráulicas
regular el caudal (desde cierre total hasta apertura total) de acuerdo con la potencia demandada. Estos álabes están dispuestos de manera que forman conductos convergentes lo que da lugar a que en la entrada del rodete el flujo sea más uniforme.
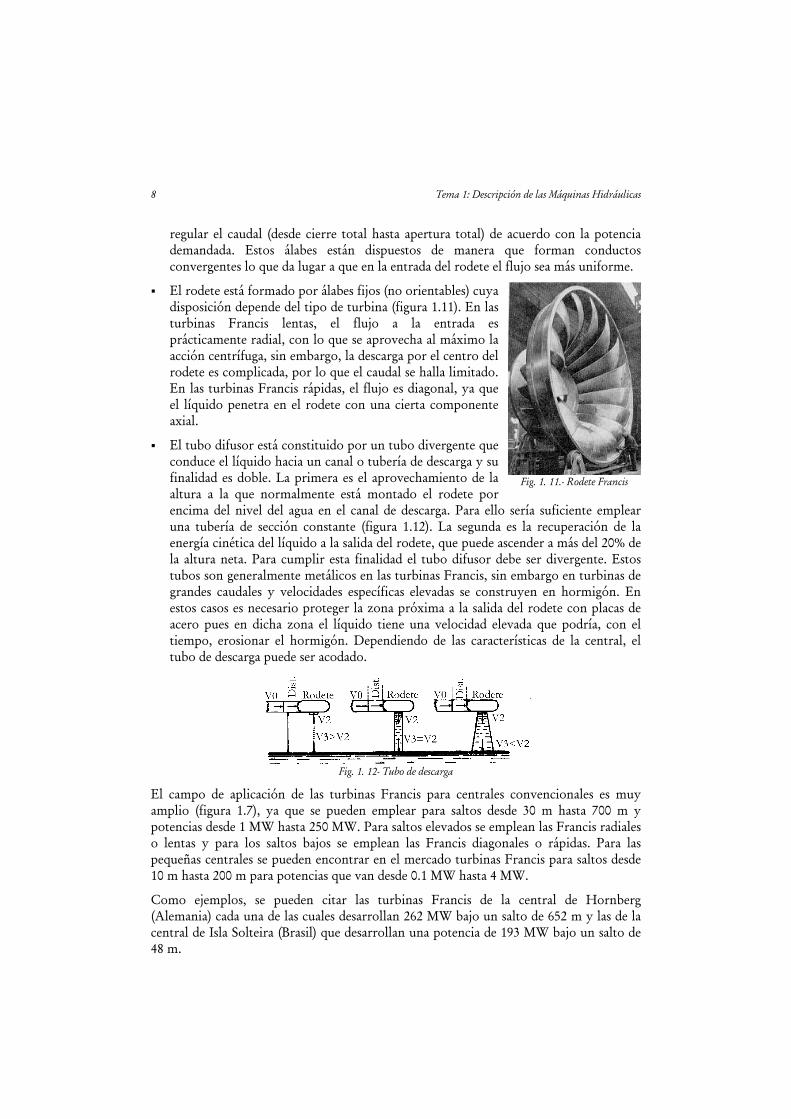
El rodete está formado por álabes fijos (no orientables) cuya disposición depende del tipo de turbina (figura 1.11). En las turbinas Francis lentas, el flujo a la entrada es prácticamente radial, con lo que se aprovecha al máximo la acción centrífuga, sin embargo, la descarga por el centro del rodete es complicada, por lo que el caudal se halla limitado. En las turbinas Francis rápidas, el flujo es diagonal, ya que el líquido penetra en el rodete con una cierta componente axial.
El tubo difusor está constituido por un tubo divergente que conduce el líquido hacia un canal o tubería de descarga y su finalidad es doble. La primera es el aprovechamiento de la altura a la que normalmente está montado el rodete por encima del nivel del agua en el canal de descarga. Para ello sería suficiente emplear una tubería de sección constante (figura 1.12). La segunda es la recuperación de la energía cinética del líquido a la salida del rodete, que puede ascender a más del 20% de la altura neta. Para cumplir esta finalidad el tubo difusor debe ser divergente. Estos tubos son generalmente metálicos en las turbinas Francis, sin embargo en turbinas de grandes caudales y velocidades específicas elevadas se construyen en hormigón. En estos casos es necesario proteger la zona próxima a la salida del rodete con placas de acero pues en dicha zona el líquido tiene una velocidad elevada que podría, con el tiempo, erosionar el hormigón. Dependiendo de las características de la central, el tubo de descarga puede ser acodado.
Fig. 1. 12- Tubo de descarga
El campo de aplicación de las turbinas Francis para centrales convencionales es muy amplio (figura 1.7), ya que se pueden emplear para saltos desde 30 m hasta 700 m y potencias desde 1 MW hasta 250 MW. Para saltos elevados se emplean las Francis radiales o lentas y para los saltos bajos se emplean las Francis diagonales o rápidas. Para las pequeñas centrales se pueden encontrar en el mercado turbinas Francis para saltos desde 10 m hasta 200 m para potencias que van desde 0.1 MW hasta 4 MW.
Como ejemplos, se pueden citar las turbinas Francis de la central de Hornberg (Alemania) cada una de las cuales desarrollan 262 MW bajo un salto de 652 m y las de la central de Isla Solteira (Brasil) que desarrollan una potencia de 193 MW bajo un salto de 48 m.
Fig. 1. 11.- Rodete Francis
Bloque I: Generalidades 9
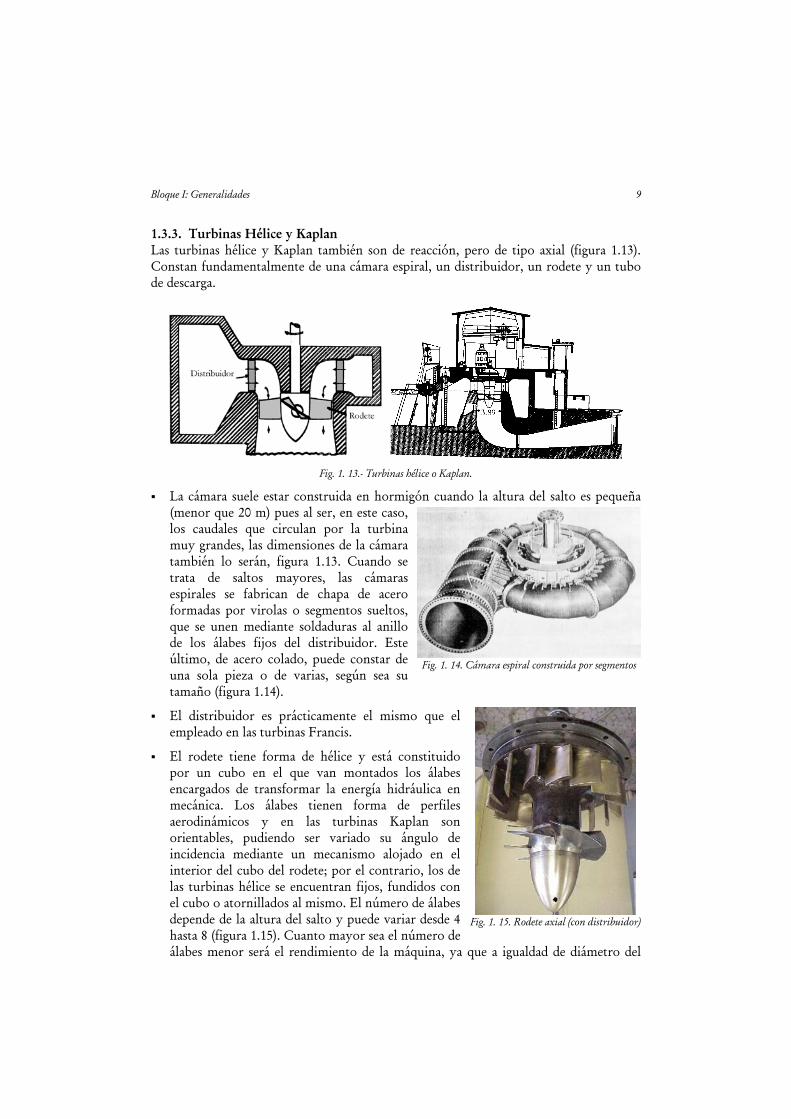
1.3.3. Turbinas Hélice y Kaplan Las turbinas hélice y Kaplan también son de reacción, pero de tipo axial (figura 1.13). Constan fundamentalmente de una cámara espiral, un distribuidor, un rodete y un tubo de descarga.
Fig. 1. 13.- Turbinas hélice o Kaplan.
La cámara suele estar construida en hormigón cuando la altura del salto es pequeña (menor que 20 m) pues al ser, en este caso, los caudales que circulan por la turbina muy grandes, las dimensiones de la cámara también lo serán, figura 1.13. Cuando se trata de saltos mayores, las cámaras espirales se fabrican de chapa de acero formadas por virolas o segmentos sueltos, que se unen mediante soldaduras al anillo de los álabes fijos del distribuidor. Este último, de acero colado, puede constar de una sola pieza o de varias, según sea su tamaño (figura 1.14).
El distribuidor es prácticamente el mismo que el empleado en las turbinas Francis.
El rodete tiene forma de hélice y está constituido por un cubo en el que van montados los álabes encargados de transformar la energía hidráulica en mecánica. Los álabes tienen forma de perfiles aerodinámicos y en las turbinas Kaplan son orientables, pudiendo ser variado su ángulo de incidencia mediante un mecanismo alojado en el interior del cubo del rodete; por el contrario, los de las turbinas hélice se encuentran fijos, fundidos con el cubo o atornillados al mismo. El número de álabes depende de la altura del salto y puede variar desde 4 hasta 8 (figura 1.15). Cuanto mayor sea el número de álabes menor será el rendimiento de la máquina, ya que a igualdad de diámetro del
Fig. 1. 14. Cámara espiral construida por segmentos
Fig. 1. 15. Rodete axial (con distribuidor)
10 Tema 1: Descripción de las Máquinas Hidráulicas
rodete al aumentar el número de álabes aumenta la superficie de fricción con el líquido.
El tubo de descarga se construye generalmente con hormigón. Cuando se trata de turbinas que desaguan grandes caudales, la velocidad del agua a la salida del rodete puede ser muy elevada de manera que, con el tiempo, existe el riesgo de que se erosione el hormigón de la parte del tubo de descarga inmediata al rodete, para evitarlo se suele revestir dicha parte con un blindaje de chapa de acero. En las turbinas pequeñas el tubo de descarga se construye en la mayoría de los casos con chapa de acero soldada.
Las turbinas Kaplan se emplean generalmente para caudales grandes y saltos pequeños (figura 1.7), más concretamente se utilizan para saltos de 6 m a 70 m y potencias de 20 MW a 100 MW, aunque estos límites pueden ser superados en algunos casos. Gracias a los álabes móviles, las turbinas Kaplan mantienen rendimientos elevados, aún en los casos de grandes variaciones de salto y de caudal. Cuando por el contrario, se disponga de un caudal suficientemente constante, las turbinas hélice resultan más ventajosas, por lo que a coste se refiere.
Comparando el campo de aplicación de las turbinas Kaplan con el de las turbinas Francis se puede concluir que ambos tipos de turbinas entran en competencia para saltos comprendidos entre 30 m y 70 m. Aunque la elección de la turbina adecuada depende de muchos factores, mediante un análisis simple se pueden hacer las siguientes consideraciones:
1. Las turbinas Kaplan se adaptan mejor a las variaciones de carga, debido a que su curva de rendimiento en función de la carga es muy plana.
2. Cuando las turbinas Francis funcionan con caudales inferiores al correspondiente a un 60% de la carga máxima, aparece en el tubo de descarga un fenómeno denominado antorcha que puede dar lugar a fuertes vibraciones (figura 1.16), mientras que las turbinas Kaplan funcionan con normalidad incluso a carga parcial de 40%÷50% de carga máxima.
3. Las turbinas Kaplan son más fáciles de transportar, pues el rodete es desmontable y el diámetro máximo del cubo del rodete es de 3.5 m.
4. Para saltos superiores a los 50 m, a igualdad de potencia, las turbinas Kaplan tienen diámetros de rodete mayores que las turbinas Francis. Sólo variaciones importantes en el salto o en la carga justificarían en este caso, el empleo de turbinas Kaplan.
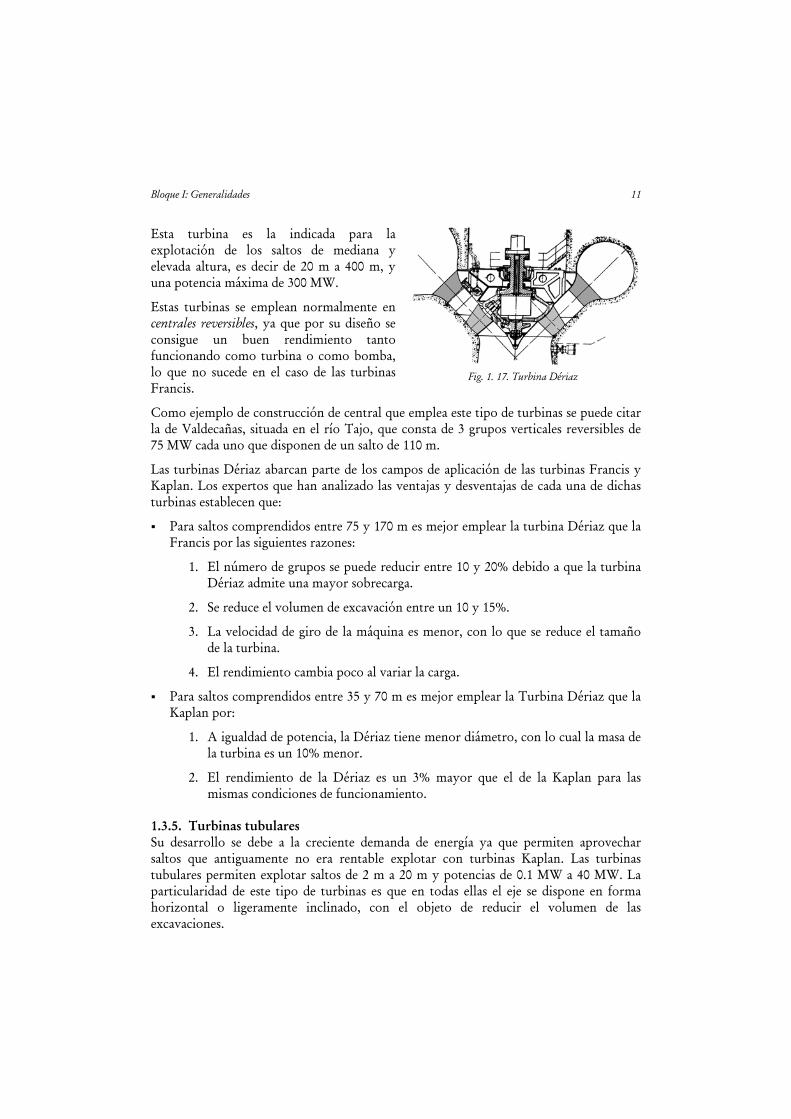
1.3.4. Turbinas Dériaz Esta turbina es relativamente moderna, ya que la primera turbina de este tipo fue puesta en servicio en 1957 en los saltos del Niágara. La turbina Dériaz es una variante de la turbina Kaplan que consiste en disponer el eje de giro en los álabes del rodete inclinado respecto del eje de giro del rotor (figura 1.17). Normalmente el distribuidor de estas turbinas es cónico, a fin de conducir mejor el flujo a través del rodete.
Fig. 1. 16. Efecto antorcha
Bloque I: Generalidades 11
Esta turbina es la indicada para la explotación de los saltos de mediana y elevada altura, es decir de 20 m a 400 m, y una potencia máxima de 300 MW.
Estas turbinas se emplean normalmente en centrales reversibles, ya que por su diseño se consigue un buen rendimiento tanto funcionando como turbina o como bomba, lo que no sucede en el caso de las turbinas Francis.
Como ejemplo de construcción de central que emplea este tipo de turbinas se puede citar la de Valdecañas, situada en el río Tajo, que consta de 3 grupos verticales reversibles de 75 MW cada uno que disponen de un salto de 110 m.
Las turbinas Dériaz abarcan parte de los campos de aplicación de las turbinas Francis y Kaplan. Los expertos que han analizado las ventajas y desventajas de cada una de dichas turbinas establecen que:
Para saltos comprendidos entre 75 y 170 m es mejor emplear la turbina Dériaz que la Francis por las siguientes razones:
1. El número de grupos se puede reducir entre 10 y 20% debido a que la turbina Dériaz admite una mayor sobrecarga.
2. Se reduce el volumen de excavación entre un 10 y 15%.
3. La velocidad de giro de la máquina es menor, con lo que se reduce el tamaño de la turbina.
4. El rendimiento cambia poco al variar la carga.
Para saltos comprendidos entre 35 y 70 m es mejor emplear la Turbina Dériaz que la Kaplan por:
1. A igualdad de potencia, la Dériaz tiene menor diámetro, con lo cual la masa de la turbina es un 10% menor.
2. El rendimiento de la Dériaz es un 3% mayor que el de la Kaplan para las mismas condiciones de funcionamiento.
1.3.5. Turbinas tubulares Su desarrollo se debe a la creciente demanda de energía ya que permiten aprovechar saltos que antiguamente no era rentable explotar con turbinas Kaplan. Las turbinas tubulares permiten explotar saltos de 2 m a 20 m y potencias de 0.1 MW a 40 MW. La particularidad de este tipo de turbinas es que en todas ellas el eje se dispone en forma horizontal o ligeramente inclinado, con el objeto de reducir el volumen de las excavaciones.
Fig. 1. 17. Turbina Dériaz
12 Tema 1: Descripción de las Máquinas Hidráulicas
Las turbinas tubulares no tienen cámara espiral y son alimentadas directamente desde el embalse por medio de una tubería rectilínea, generalmente muy corta, que lleva el agua al rodete a través de un distribuidor cónico de palas orientables o fijas. El rodete está constituido por una hélice con álabes orientables o fijos y su eje de giro coincide con el eje de la tubería de alimentación, lo que facilita el paso de grandes caudales. La descarga se realiza mediante una tubería divergente, en forma análoga a una turbina Kaplan.
A continuación se describen tres tipos de turbinas que pueden ser consideradas como turbinas tubulares.
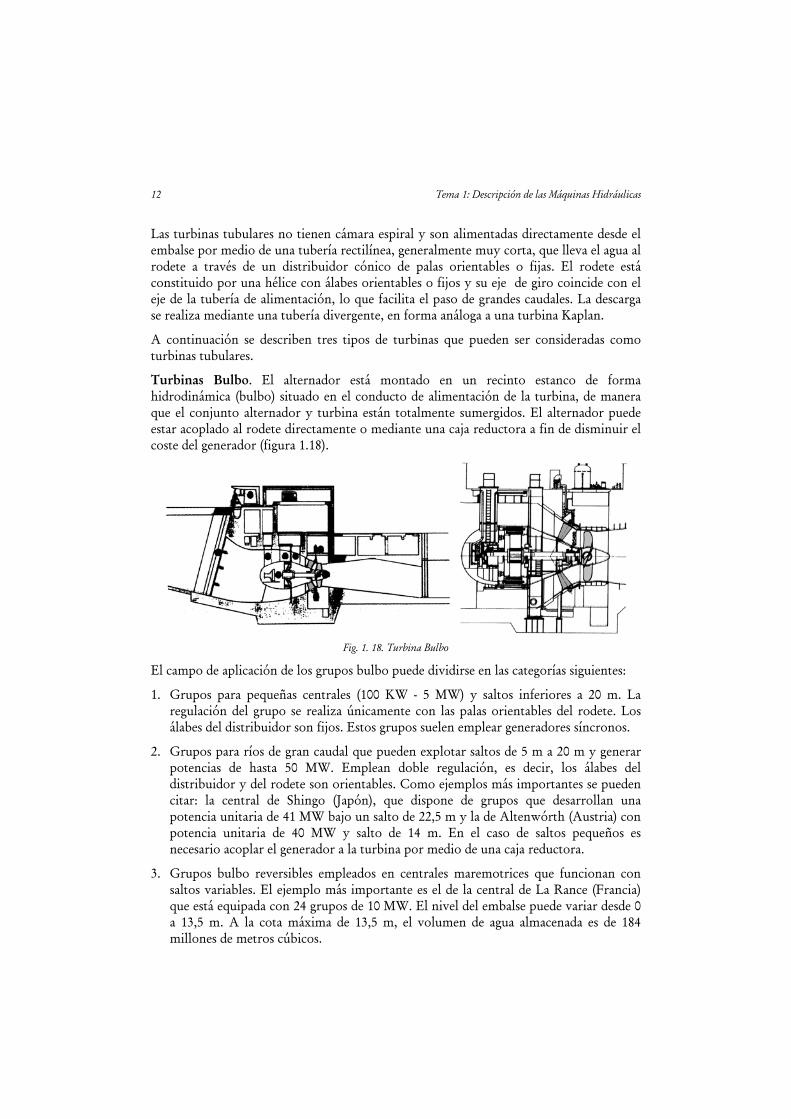
Turbinas Bulbo. El alternador está montado en un recinto estanco de forma hidrodinámica (bulbo) situado en el conducto de alimentación de la turbina, de manera que el conjunto alternador y turbina están totalmente sumergidos. El alternador puede estar acoplado al rodete directamente o mediante una caja reductora a fin de disminuir el coste del generador (figura 1.18).
Fig. 1. 18. Turbina Bulbo
El campo de aplicación de los grupos bulbo puede dividirse en las categorías siguientes:
1. Grupos para pequeñas centrales (100 KW - 5 MW) y saltos inferiores a 20 m. La regulación del grupo se realiza únicamente con las palas orientables del rodete. Los álabes del distribuidor son fijos. Estos grupos suelen emplear generadores síncronos.
2. Grupos para ríos de gran caudal que pueden explotar saltos de 5 m a 20 m y generar potencias de hasta 50 MW. Emplean doble regulación, es decir, los álabes del distribuidor y del rodete son orientables. Como ejemplos más importantes se pueden citar: la central de Shingo (Japón), que dispone de grupos que desarrollan una potencia unitaria de 41 MW bajo un salto de 22,5 m y la de Altenwórth (Austria) con potencia unitaria de 40 MW y salto de 14 m. En el caso de saltos pequeños es necesario acoplar el generador a la turbina por medio de una caja reductora.
3. Grupos bulbo reversibles empleados en centrales maremotrices que funcionan con saltos variables. El ejemplo más importante es el de la central de La Rance (Francia) que está equipada con 24 grupos de 10 MW. El nivel del embalse puede variar desde 0 a 13,5 m. A la cota máxima de 13,5 m, el volumen de agua almacenada es de 184 millones de metros cúbicos.
Bloque I: Generalidades 13
Las turbinas bulbo entran en competencia con las Kaplan de eje vertical para saltos inferiores a 20 m. A continuación se analizan las ventajas y desventajas de las turbinas bulbo frente a las Kaplan.
Ventajas de las turbinas bulbo con respecto a las turbinas Kaplan a igualdad de salto y caudal:
1. El flujo directo da lugar a menores pérdidas hidráulicas y por tanto a un rendimiento mayor, que puede ser superior en un 2% al de la turbina Kaplan.
2. Al ser las dimensiones transversales menores, se reduce la obra civil al mínimo. Este punto es indiscutible cuando el salto es inferior a 10 m.
3. La inversión es más rentable en cuanto a producción y funcionamiento.
4. Se comporta mejor frente a la cavitación y permite que la altura de montaje del rodete sea mucho más baja.
5. Estadísticamente entre 1970 y 1984 se han instalado 87 turbinas bulbo frente a 48 turbinas Kaplan, todas ellas de potencias superiores a los 5 MW.
Desventajas de las turbinas bulbo con respecto a las turbinas Kaplan a igualdad de salto y caudal:
1. El diseño del sistema de refrigeración del alternador es difícil.
2. El montaje y revisión del grupo es más difícil. Para acceder a los mecanismos encerrados en el bulbo es necesario detener la turbina.
3. Se deben emplear materiales de mejor calidad en la construcción de la turbina, a fin de reducir las revisiones por mantenimiento.
4. No se pueden acoplar a redes independientes con débil coeficiente de autorregulación, pues los tiempos de embalamiento son muy cortos, del orden de 1.5 a 2 segundos, por lo que la respuesta a un cambio en la demanda de potencia debe ser muy rápida.
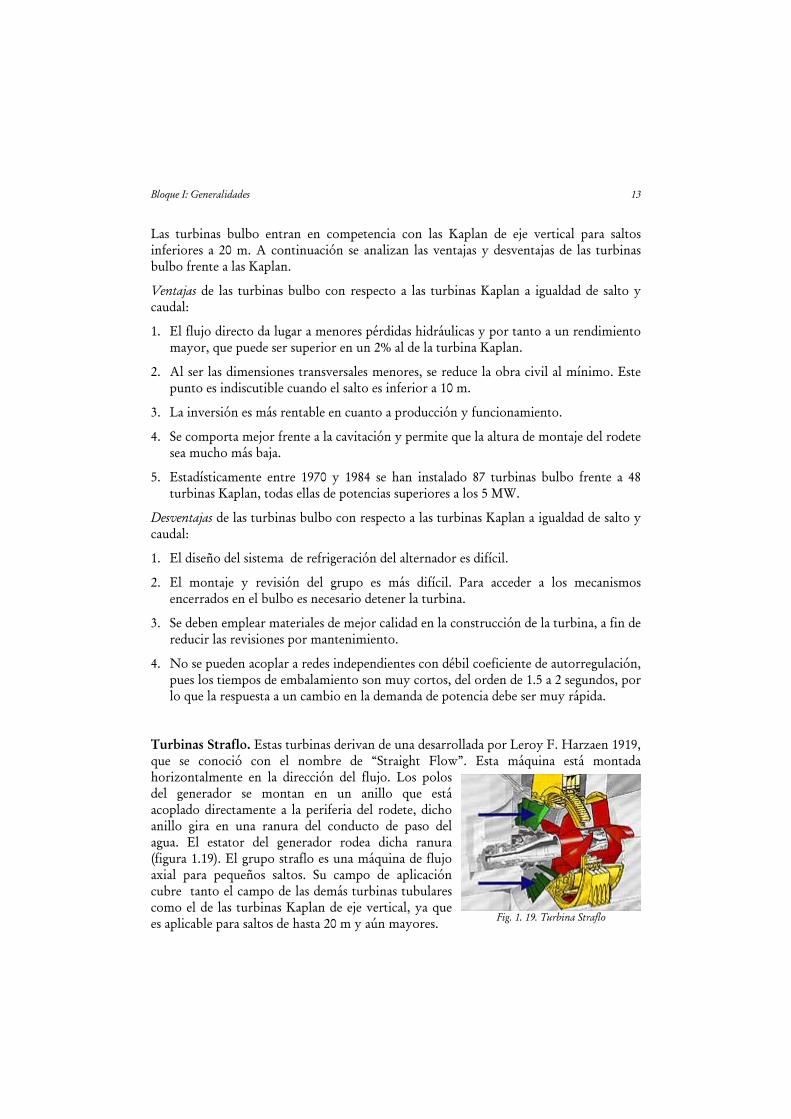
Turbinas Straflo. Estas turbinas derivan de una desarrollada por Leroy F. Harzaen 1919, que se conoció con el nombre de “Straight Flow”. Esta máquina está montada horizontalmente en la dirección del flujo. Los polos del generador se montan en un anillo que está acoplado directamente a la periferia del rodete, dicho anillo gira en una ranura del conducto de paso del agua. El estator del generador rodea dicha ranura (figura 1.19). El grupo straflo es una máquina de flujo axial para pequeños saltos. Su campo de aplicación cubre tanto el campo de las demás turbinas tubulares como el de las turbinas Kaplan de eje vertical, ya que es aplicable para saltos de hasta 20 m y aún mayores.
Fig. 1. 19. Turbina Straflo
14 Tema 1: Descripción de las Máquinas Hidráulicas
En Anápolis (U.S.A.) existe una planta piloto con grupos que desarrollan una potencia unitaria de 20 MW. La mayoría de estos grupos trabaja con regulación simple (rodete con palas orientables), aunque también se construyen con doble regulación para obtener elevados rendimientos en todo el rango posible de alturas y caudales. Estos grupos pueden ser empleados en grandes centrales y utilizados para estabilizar la frecuencia de la red, gracias a la elevada inercia del rotor.
Turbinas S. Estas turbinas disponen un rodete axial (tipo Kaplan), en una tubería en forma de S, acoplado al generador que queda fuera del conducto de paso del agua (figura 1.20). También se encuentran máquinas con engranaje cónico que no necesitan disponer de la tubería en forma de S. Estas máquinas pueden ser empleadas para saltos de 3 m a 20 m y potencias de 0.1 MW a 10 MW. Aunque hay centrales que disponen de este tipo de turbinas, que desarrollan una potencia unitaria de 50 MW bajo un salto de 9,8 m, las turbinas S son preferidas para las micro y minicentrales. Estas turbinas están normalizadas y existen varias empresas que las comercializan.
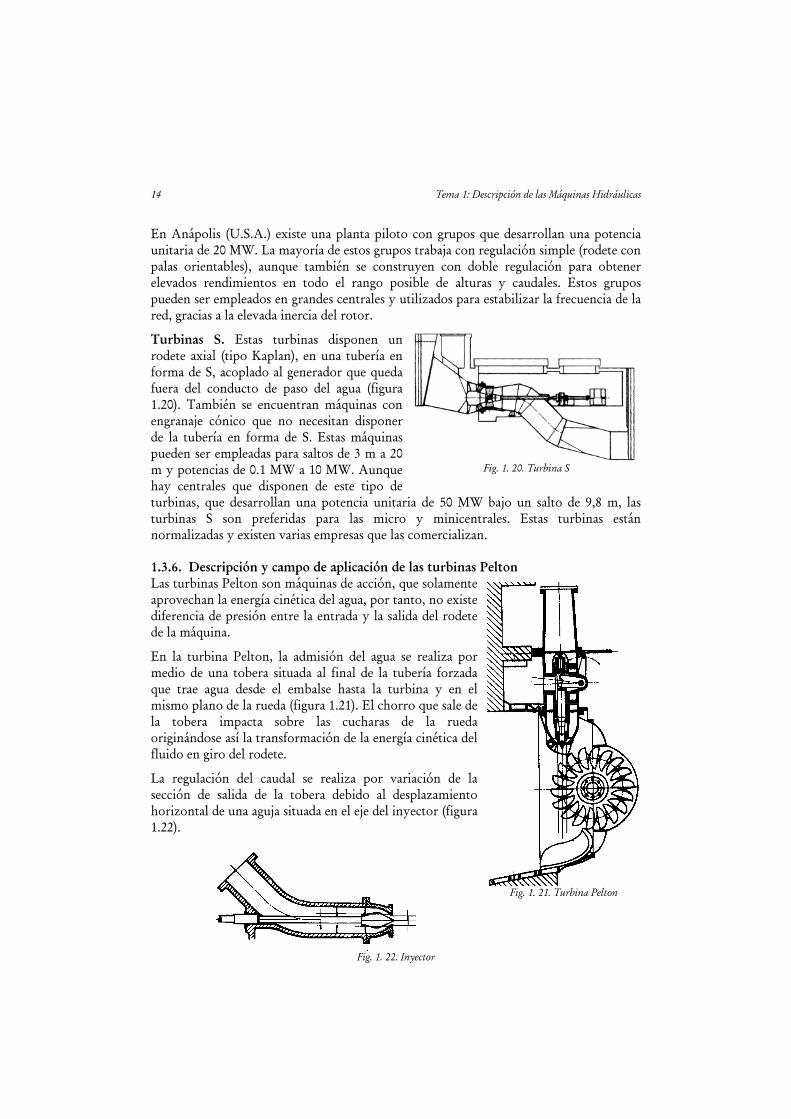
1.3.6. Descripción y campo de aplicación de las turbinas Pelton Las turbinas Pelton son máquinas de acción, que solamente aprovechan la energía cinética del agua, por tanto, no existe diferencia de presión entre la entrada y la salida del rodete de la máquina.
En la turbina Pelton, la admisión del agua se realiza por medio de una tobera situada al final de la tubería forzada que trae agua desde el embalse hasta la turbina y en el mismo plano de la rueda (figura 1.21). El chorro que sale de la tobera impacta sobre las cucharas de la rueda originándose así la transformación de la energía cinética del fluido en giro del rodete.
La regulación del caudal se realiza por variación de la sección de salida de la tobera debido al desplazamiento horizontal de una aguja situada en el eje del inyector (figura 1.22).
Fig. 1. 22. Inyector
Fig. 1. 20. Turbina S
Fig. 1. 21. Turbina Pelton
Bloque I: Generalidades 15
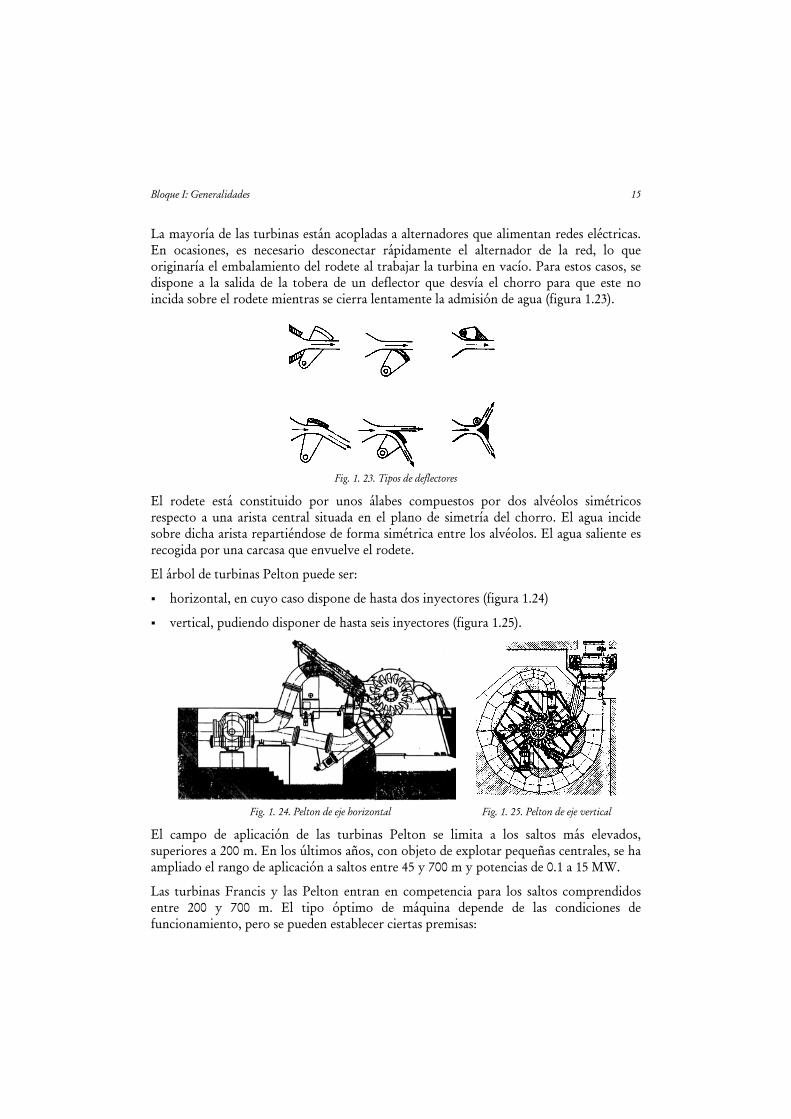
La mayoría de las turbinas están acopladas a alternadores que alimentan redes eléctricas. En ocasiones, es necesario desconectar rápidamente el alternador de la red, lo que originaría el embalamiento del rodete al trabajar la turbina en vacío. Para estos casos, se dispone a la salida de la tobera de un deflector que desvía el chorro para que este no incida sobre el rodete mientras se cierra lentamente la admisión de agua (figura 1.23).
Fig. 1. 23. Tipos de deflectores
El rodete está constituido por unos álabes compuestos por dos alvéolos simétricos respecto a una arista central situada en el plano de simetría del chorro. El agua incide sobre dicha arista repartiéndose de forma simétrica entre los alvéolos. El agua saliente es recogida por una carcasa que envuelve el rodete.
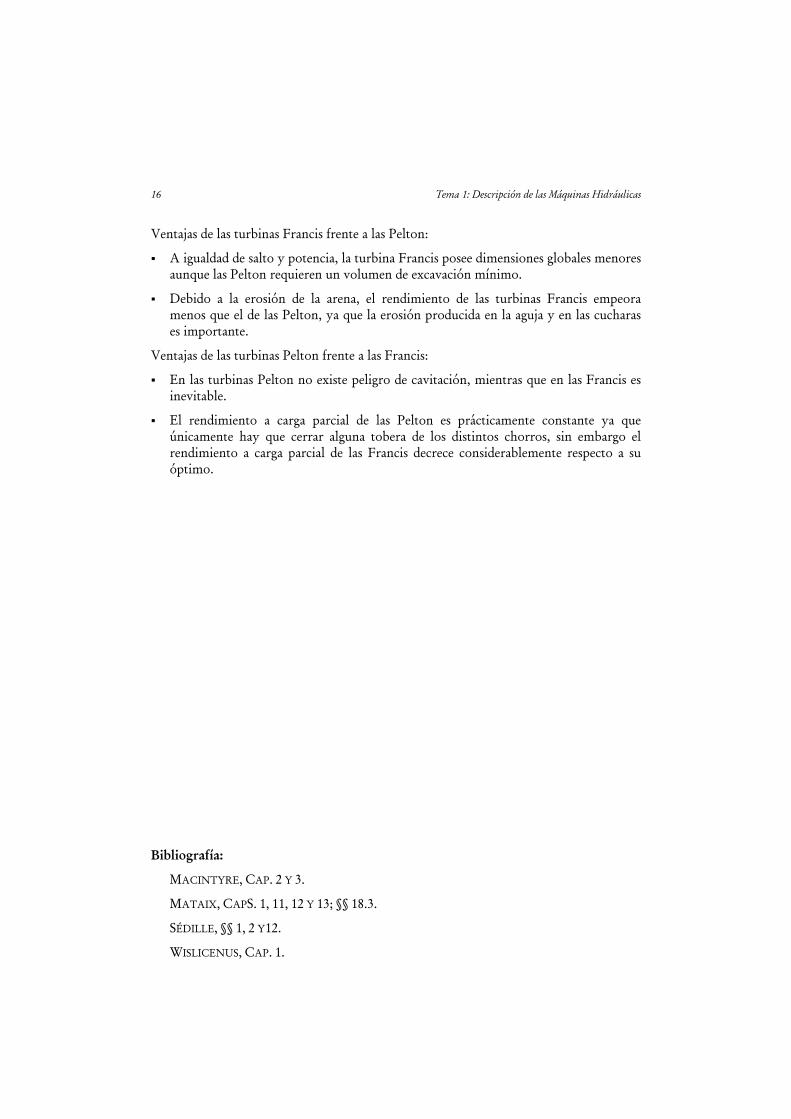
El árbol de turbinas Pelton puede ser:
horizontal, en cuyo caso dispone de hasta dos inyectores (figura 1.24)
vertical, pudiendo disponer de hasta seis inyectores (figura 1.25).
Fig. 1. 24. Pelton de eje horizontal Fig. 1. 25. Pelton de eje vertical
El campo de aplicación de las turbinas Pelton se limita a los saltos más elevados, superiores a 200 m. En los últimos años, con objeto de explotar pequeñas centrales, se ha ampliado el rango de aplicación a saltos entre 45 y 700 m y potencias de 0.1 a 15 MW.
Las turbinas Francis y las Pelton entran en competencia para los saltos comprendidos entre 200 y 700 m. El tipo óptimo de máquina depende de las condiciones de funcionamiento, pero se pueden establecer ciertas premisas:
16 Tema 1: Descripción de las Máquinas Hidráulicas
Ventajas de las turbinas Francis frente a las Pelton:
A igualdad de salto y potencia, la turbina Francis posee dimensiones globales menores aunque las Pelton requieren un volumen de excavación mínimo.
Debido a la erosión de la arena, el rendimiento de las turbinas Francis empeora menos que el de las Pelton, ya que la erosión producida en la aguja y en las cucharas es importante.
Ventajas de las turbinas Pelton frente a las Francis:
En las turbinas Pelton no existe peligro de cavitación, mientras que en las Francis es inevitable.
El rendimiento a carga parcial de las Pelton es prácticamente constante ya que únicamente hay que cerrar alguna tobera de los distintos chorros, sin embargo el rendimiento a carga parcial de las Francis decrece considerablemente respecto a su óptimo.
Bibliografía:
MACINTYRE, CAP. 2 Y 3.
MATAIX, CAPS. 1, 11, 12 Y 13; §§ 18.3.
SÉDILLE, §§ 1, 2 Y12.
WISLICENUS, CAP. 1.
Bloque I: Generalidades 17
1.1. CLASIFICACIÓN DE LAS MÁQUINAS DE FLUIDO ............................................. 1 1.1.1. Sentido de transferencia de la energía ............................................................... 1 1.1.2. Grado de compresibilidad del fluido ................................................................. 2 1.1.3. Principio de funcionamiento ............................................................................. 2
1.2. DESCRIPCIÓN DE LAS BOMBAS HIDRÁULICAS ROTODINÁMICAS ................... 3 1.2.1. Elementos característicos de una bomba ........................................................... 3 1.2.2. Otros criterios de clasificación ........................................................................... 5
1.3. DESCRIPCIÓN DE LAS TURBINAS HIDRÁULICAS.............................................. 5 1.3.1. Elementos característicos de una turbina .......................................................... 5 1.3.2. Turbinas Francis ................................................................................................ 7 1.3.3. Turbinas Hélice y Kaplan .................................................................................. 9 1.3.4. Turbinas Dériaz ............................................................................................... 10 1.3.5. Turbinas tubulares ........................................................................................... 11 1.3.6. Descripción y campo de aplicación de las turbinas Pelton .............................. 14

Tema 2:
Balance Energético en una Máquina Hidráulica
2.1 INTRODUCCIÓN
En esta lección se establece el balance integral de energía en una máquina hidráulica y se define su rendimiento. Dicha máquina hidráulica se considera como una caja negra de la que sólo se conoce la energía (térmica o mecánica) a la entrada, salida y la que se intercambia con el entorno.
2.2 BALANCE DE ENERGÍA TOTAL EN MÁQUINAS DE FLUIDOS
Como se ha visto en el tema anterior, las máquinas hidráulicas son máquinas de flujo incompresible por lo que existe un desacoplamiento entre las ecuaciones mecánicas y térmicas de las ecuaciones generales de la Mecánica de Fluidos. Si se integra la ecuación de la energía total entre la entrada y la salida de una máquina se obtiene un balance de energía total (mecánica + térmica). Si a este balance se le resta el balance de energía térmica, el resultado es un balance de energía mecánica, mucho más útil e interesante en máquinas hidráulicas.
La ecuación integral de la energía total se obtiene aplicando el Teorema de Transporte de Reynolds al primer principio de la Termodinámica y el resultado es:
( ) ( )444 3444 2143421
rr
43421
rr
4444 34444 21
rr
4444 34444 21)V(
VCqr
)IV(
SC
)III(
SC
)II(
SCr
2
)I(
VC
2
dVQQdSnqdSv)n(dSnv2vedV
2ve
dtd
∫∫∫∫∫∫∫∫∫∫∫∫ ++−τ=⎟⎟⎠
⎞⎜⎜⎝
⎛++ρ+⎟⎟
⎠
⎞⎜⎜⎝
⎛++ρ UU
(2. 1)
Se ha tomado como referencia para el criterio de signos el volumen de control, siendo positivo todo lo que se aporta y negativo lo que se extrae, es decir, la potencia calorífica por unidad de volumen (Q) es positiva si es aportada a dicho volumen de control. Además se ha supuesto que las fuerzas másicas derivan de un potencial, U, independiente del tiempo ( U∇ - = fm
r).
El significado de cada uno de los términos de la ecuación es el siguiente:
(I). Variación temporal de la energía total (interna + cinética + potencial) del fluido en el volumen de control por unidad de tiempo.

2 Tema 2: Balance Energético en una Máquina Hidráulica
(II). Flujo de energía total por unidad de tiempo a través de la superficie de control.
(III). Trabajo por unidad de tiempo realizado por las fuerzas de superficie.
(IV). Flujo de calor por unidad de tiempo transmitido por conducción a través de la superficie de control.
(V). Potencia calorífica intercambiada por radiación y reacción química.
Para establecer el balance energético en una máquina de fluido, se integra esta ecuación en un volumen de control que coincide con la caja negra que representa la máquina de fluido (figura 2.1). Dicho volumen de control, VC, está limitado por: una superficie de entrada (SE), una superficie de salida (SS), una superficie de contorno fija (SF) y una superficie móvil (SM).
AE pE TE vE
AS
pS TS vS
W
Q
SM
SF
VC Ss
SE
Fig. 2.1. Esquema de una máquina de fluido
Suponiendo condiciones uniformes a la entrada y a la salida, los términos tendrán la siguiente forma:
0dV)2ve(dtd 2
VC≈++ρ∫∫∫ U Rigurosamente este término es distinto de cero, pero
como el tiempo de integración es muy superior al tiempo característico de fluctuación, se puede suponer que la variación temporal es igual a cero, es decir, se consideran valores medios.
( )( )
( ) ( )
( ) ( )
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
==
==
+ρ++=
−ρ++=
=++ρ
∫∫∫∫∫∫∫∫
∫∫
0nv,0
0nv,0
Av2ve
Av2ve
dSnv2ve
rS
rS
SSSS2
SSS
EEEE2
EES
r2
SC
M
F
S
E
rr
rrrr
pared,la delidad impermeabila por
pared,la delidad impermeabila por
U
U
U

Bloque I: Generalidades 3
( )
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
=
==
=′⇒−=
=′⇒=
=τ
∫∫∫∫∫∫∫∫
∫∫
móvil superficiela enada intercambipotencia
S en 0v quea debido
0ijτuniforme esad la velocid si
0ijτuniforme esad la velocid si
F
,W
,0
,Avp
,Avp
dSvn
M
F
S
E
S
S
SSSS
EEES
SC rrr
( ) ( ) QdVQQdsnq qrVCSC
=++⋅− ∫∫∫∫∫rr
, potencia calorífica intercambiada
por tanto:
QAvpAvp2veAv
2veAv SSSEEE
E
2
EEES
2
SSS ++−=⎟⎟⎠
⎞⎜⎜⎝
⎛++ρ−⎟⎟
⎠
⎞⎜⎜⎝
⎛++ρ WUU
Utilizando la definición de entalpía ( ρ+= peh ) y utilizando la ecuación de continuidad (G =ρEvEAE = ρSvSAS), se obtiene el balance de energía total en una máquina de fluido con una entrada y una salida:
GQ
G2vh
2vh
E
2
S
2
+=⎟⎟⎠
⎞⎜⎜⎝
⎛++−⎟⎟
⎠
⎞⎜⎜⎝
⎛++
WUU
(2. 2)
donde W es el trabajo mecánico por unidad de tiempo intercambiado con la superficie móvil (que puede ser positivo o negativo). Esta ecuación expresa que la variación de entalpía, energía cinética y potencial por unidad de masa, entre la salida y la entrada de la máquina, es igual al trabajo más el calor por unidad de masa intercambiados con el fluido que circula por dicha máquina.
2.3 BALANCE DE ENERGÍA INTERNA EN MÁQUINAS HIDRÁULICAS
A continuación se deduce la expresión del balance de energía interna para las máquinas hidráulicas, que al ser restado del balance de energía total, proporciona el balance de energía mecánica para las máquinas hidráulicas. Para ello se parte de la ecuación integral de la energía interna para líquidos (ρ = cte):
)( ( )dVQQSdnqdVds)nv(edVedtd
VCqr
SCVCV
SCr
VC ∫∫∫∫∫∫∫∫∫∫∫∫∫ ++−+φ=ρ+ρrrr
Integrando esta ecuación en el volumen de control del apartado anterior (figura 2.1), se obtiene:
QvAevAe vEEESSS +∅=ρ−ρ (2. 3)
donde dVVC
Vv ∫∫∫ φ=∅ es el trabajo por unidad de tiempo realizado por los esfuerzos
viscosos, es decir, la potencia mecánica pérdida (energía mecánica por unidad de tiempo

4 Tema 2: Balance Energético en una Máquina Hidráulica
transformada en energía térmica) por disipación viscosa. Esta magnitud es esencialmente positiva y está extendida a todo el volumen fluido.
La ecuación (2. 3) dice que el líquido que pasa a través de la máquina se calienta por:
el calor recibido (que podría ser < 0 y enfriar el líquido), y
la disipación viscosa (fricción) (que siempre es > 0).
El calentamiento por disipación viscosa no se lleva a cabo totalmente en el interior de la máquina, y, aunque así fuera, el calentamiento del agua es inapreciable.
La ecuación (2.3) se puede poner de la forma:
cGQ
cGTT v
ES ⋅+
⋅∅
=− (2. 4)
donde c es el calor específico (cH2O = 4,18 103 J/kgK).
Con carácter general puede decirse que, si bien la disipación viscosa es importante desde un punto de vista mecánico, su efecto es despreciable desde un punto de vista termodinámico en Máquinas Hidráulicas. Por ejemplo, para una aplicación con un gasto de G = 0,41 kg/s, una Wu = 400 W y unas pérdidas del 15%, el aumento de temperatura sería aproximadamente ∆T = 0,035ºC.
2.4 BALANCE DE ENERGÍA MECÁNICA EN UNA MÁQUINA HIDRÁULICA
Si del balance de energía total (2.2) se resta el balance de energía interna (2.3), se obtiene el balance de energía mecánica a través de una máquina hidráulica:
GG2vp
2vp v
E
2
S
2 ∅−=⎟⎟
⎠
⎞⎜⎜⎝
⎛++
ρ−⎟⎟
⎠
⎞⎜⎜⎝
⎛++
ρWUU (2. 5)
El significado de los términos es el siguiente:
S2 2vp( U)++ρ : Energía mecánica específica que posee el fluido a la salida.
E2 2vp( U)++ρ : Energía mecánica específica que posee el fluido a la entrada.
GW : Energía mecánica intercambiada por unidad de masa que atraviesa la máquina.
GV∅ : Energía degradada por unidad de masa que atraviesa la máquina.
Esta ecuación es puramente mecánica ya que existe un desacoplamiento entre las ecuaciones mecánicas y térmicas por trabajar con fluidos incompresibles.
2.5 DEFINICIÓN DE ALTURAS EN UNA BOMBA HIDRÁULICA
Normalmente los términos de energía específica se expresan en función de una altura por la gravedad. Cuando la máquina hidráulica es una bomba se define la altura
Bloque I: Generalidades 5
manométrica (Hm) como la diferencia entre las energías mecánicas a la salida y a la entrada de la bomba, es decir:
mE
2
S
2
Hg2vp
2vp
=⎟⎟⎠
⎞⎜⎜⎝
⎛++
ρ−⎟⎟
⎠
⎞⎜⎜⎝
⎛++
ρUU (2. 6)
Con frecuencia en la práctica:
el término US - UE = g (zS - zE) y además, se suele considerar que zS - zE ≈ 0 (bombas de eje vertical o con pequeño desnivel geodésico entre los ejes de las bridas de conexión).
el diámetro de la tubería de aspiración es similar al de la tubería de impulsión, por lo que el término 02/)vv( 2
E2S ≈− (también a veces se considera despreciable frente a la
diferencia de presiones).
Por tanto, en la mayoría de los casos, la altura manométrica es aproximadamente igual a la diferencia de presiones entre la impulsión y la aspiración.
Se define la altura útil (Hu) como la energía aportada por el eje de la máquina. Es la energía que está a disposición para ser intercambiada en el rodete. Es toda la energía que podría transformarse en energía del fluido si no hubiera pérdidas.
GHg u
W=
La altura de pérdidas internas (Hp_int), cuantifica las pérdidas de energía mecánica que se producen en el interior de la máquina debido a la disipación viscosa.
GHg V
intp∅
=−
Según las anteriores definiciones se puede establecer la siguiente relación: Hm = Hu - Hp-int
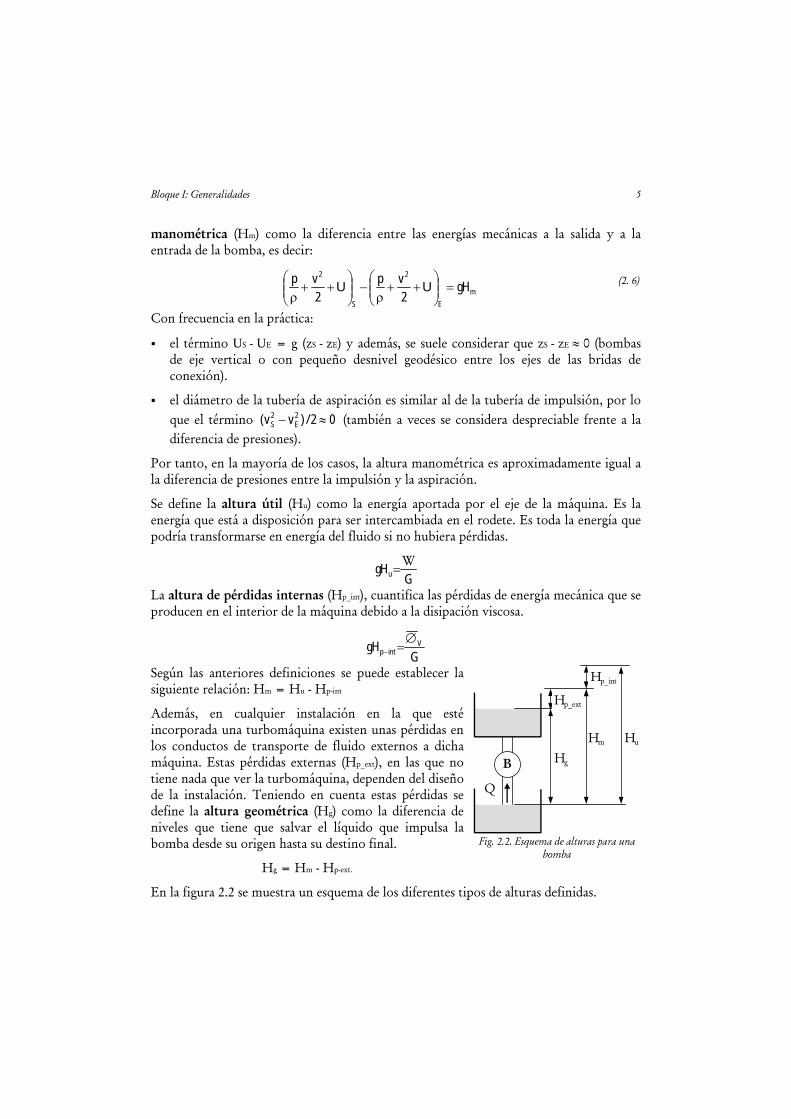
Además, en cualquier instalación en la que esté incorporada una turbomáquina existen unas pérdidas en los conductos de transporte de fluido externos a dicha máquina. Estas pérdidas externas (Hp_ext), en las que no tiene nada que ver la turbomáquina, dependen del diseño de la instalación. Teniendo en cuenta estas pérdidas se define la altura geométrica (Hg) como la diferencia de niveles que tiene que salvar el líquido que impulsa la bomba desde su origen hasta su destino final.
Hg = Hm - Hp-ext.
En la figura 2.2 se muestra un esquema de los diferentes tipos de alturas definidas.
B Hg
Hp_ext
Hm
Hp_int
Hu
Q
Fig. 2.2. Esquema de alturas para una
bomba
6 Tema 2: Balance Energético en una Máquina Hidráulica
2.6 DEFINICIÓN DE ALTURAS EN UNA TURBINA HIDRÁULICA
Cuando la máquina hidráulica es una turbina, en vez de hablar de alturas se suele utilizar la palabra salto. Al contrario que ocurre en las bombas, en este caso la energía del fluido a la entrada de la máquina es superior a la energía a la salida. Se define el salto neto (Hn), como la diferencia entre las energías mecánicas del fluido a la entrada y a la salida, es decir, la energía puesta a disposición de la turbina:
nS
2
E
2
Hg2vp
2vp
=⎟⎟⎠
⎞⎜⎜⎝
⎛++
ρ−⎟⎟
⎠
⎞⎜⎜⎝
⎛++
ρUU (2. 7)
Igual que en las bombas, se llama salto útil (Hu) a la energía que se extrae del fluido y está a disposición en el eje de la máquina.
GHg u
W-=
Las pérdidas mecánicas que se producen en el interior de la turbina por degradación de la energía mecánica se cuantifican dentro de la altura de pérdidas internas (Hp_int):
GHg V
intp∅
=−
Según las definiciones anteriores se puede establecer la siguiente relación: Hu = Hn - Hp-int
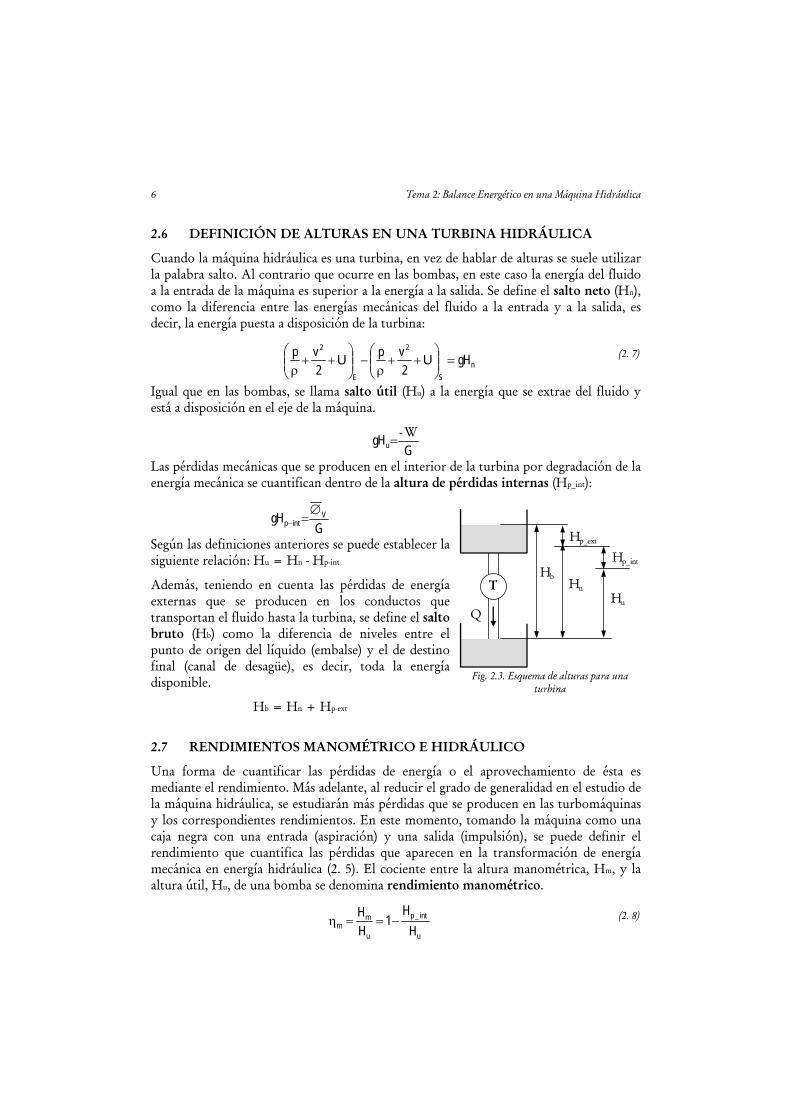
Además, teniendo en cuenta las pérdidas de energía externas que se producen en los conductos que transportan el fluido hasta la turbina, se define el salto bruto (Hb) como la diferencia de niveles entre el punto de origen del líquido (embalse) y el de destino final (canal de desagüe), es decir, toda la energía disponible.
Hb = Hn + Hp-ext
2.7 RENDIMIENTOS MANOMÉTRICO E HIDRÁULICO
Una forma de cuantificar las pérdidas de energía o el aprovechamiento de ésta es mediante el rendimiento. Más adelante, al reducir el grado de generalidad en el estudio de la máquina hidráulica, se estudiarán más pérdidas que se producen en las turbomáquinas y los correspondientes rendimientos. En este momento, tomando la máquina como una caja negra con una entrada (aspiración) y una salida (impulsión), se puede definir el rendimiento que cuantifica las pérdidas que aparecen en la transformación de energía mecánica en energía hidráulica (2. 5). El cociente entre la altura manométrica, Hm, y la altura útil, Hu, de una bomba se denomina rendimiento manométrico.
u
int_p
u
mm H
H1
HH
−==η (2. 8)
T Hn
Hp_ext
Hu
Hp_int Hb
Q
Fig. 2.3. Esquema de alturas para una
turbina
Bloque I: Generalidades 7
En el caso de las turbinas se define el rendimiento hidráulico como el cociente entre el salto útil, Hu, y el salto neto, Hn, y cuantifica el mismo tipo de pérdidas que en el caso anterior:
n
int_p
n
uh H
H1
HH
−==η (2. 9)
Estos dos rendimientos tienen en cuenta las pérdidas hidráulicas que tienen lugar en el fluido desde la entrada hasta la salida de la turbomáquina hidráulica.
2.8 LÍNEA DE CARGA Y PIEZOMÉTRICA EN BOMBAS
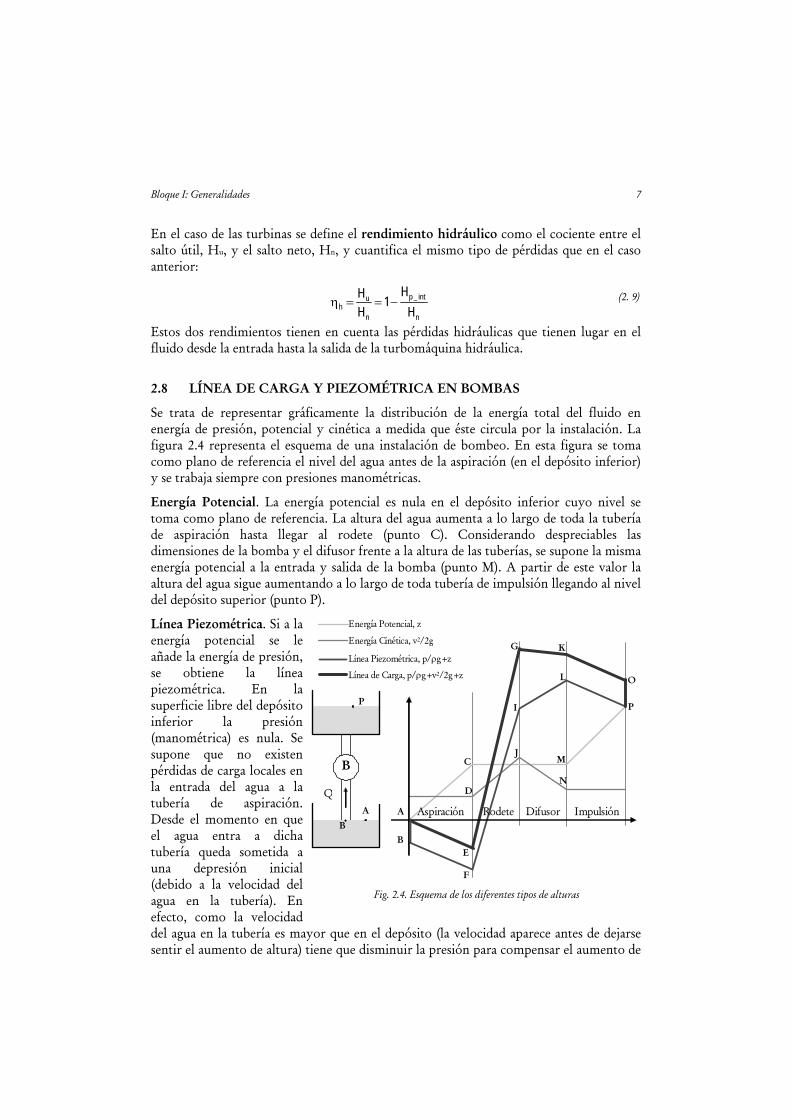
Se trata de representar gráficamente la distribución de la energía total del fluido en energía de presión, potencial y cinética a medida que éste circula por la instalación. La figura 2.4 representa el esquema de una instalación de bombeo. En esta figura se toma como plano de referencia el nivel del agua antes de la aspiración (en el depósito inferior) y se trabaja siempre con presiones manométricas.
Energía Potencial. La energía potencial es nula en el depósito inferior cuyo nivel se toma como plano de referencia. La altura del agua aumenta a lo largo de toda la tubería de aspiración hasta llegar al rodete (punto C). Considerando despreciables las dimensiones de la bomba y el difusor frente a la altura de las tuberías, se supone la misma energía potencial a la entrada y salida de la bomba (punto M). A partir de este valor la altura del agua sigue aumentando a lo largo de toda tubería de impulsión llegando al nivel del depósito superior (punto P).
Línea Piezométrica. Si a la energía potencial se le añade la energía de presión, se obtiene la línea piezométrica. En la superficie libre del depósito inferior la presión (manométrica) es nula. Se supone que no existen pérdidas de carga locales en la entrada del agua a la tubería de aspiración. Desde el momento en que el agua entra a dicha tubería queda sometida a una depresión inicial (debido a la velocidad del agua en la tubería). En efecto, como la velocidad del agua en la tubería es mayor que en el depósito (la velocidad aparece antes de dejarse sentir el aumento de altura) tiene que disminuir la presión para compensar el aumento de
B
Q
Rodete Difusor Impulsión Aspiración A
B
C
D
E
F
G
I
J
K
L
M
N
O
P
Energía Potencial, z
Energía Cinética, v2/2g
Línea Piezométrica, p/ρg+z
Línea de Carga, p/ρg+v2/2g+z
P
A
B
Fig. 2.4. Esquema de los diferentes tipos de alturas

8 Tema 2: Balance Energético en una Máquina Hidráulica
velocidad (punto B). Esta depresión aumenta (debido al aumento de altura) hasta la entrada del rodete (punto F). Aplicando la ecuación de la energía entre la superficie libre y un punto genérico de la tubería de aspiración se observa esto de manera clara:
i21i
2i
2i
iii
2i
i
2ii
0
200 Lctecte
DL
g2vf
g2vz
gp
DL
2vfgz
2vpgz
2vp
⋅−−=−−=+ρ
⇒+++ρ
=++ρ
Hasta la entrada del rodete no sólo no hay ningún elemento que comunique energía al fluido, sino que además éste pierde energía debido a las pérdidas de carga por fricción viscosa en la tubería.
En el rodete se produce el aumento de presión del agua hasta llegar al difusor (punto I). En el difusor, como se verá más adelante, se produce una transformación de energía de cinética en energía de presión (punto L). A lo largo de la tubería de impulsión, la suma de energía de presión y potencial del agua disminuye de nuevo por las mismas razones admitidas para la tubería de aspiración (pérdidas por fricción viscosa) y, como al llegar al depósito superior la presión se anula, la curva finaliza en el punto P.
Energía Cinética. La energía cinética es nula en la superficie libre del depósito de aspiración y toma un cierto valor, que depende del caudal, en la tubería de aspiración. Este valor se mantiene constante en toda la tubería hasta el rodete (punto D), supuesta la tubería de aspiración de sección uniforme. En los álabes del rodete la energía cinética aumenta (punto J). En el difusor se transforma parte de esta energía cinética en energía de presión hasta llegar al valor que toma en la tubería de impulsión (punto N) que se mantiene constante y depende, de nuevo, del caudal.
Línea de carga. Si a la línea piezométrica se le añade la energía cinética se obtiene la línea de carga, donde se observa:
El descenso equivalente a la pérdida de carga en el tubo de aspiración (altura entre A y E)
La energía que el agua recibe en el rodete sin tener en cuenta las pérdidas en el propio rodete (altura entre E y G).
El descenso equivalente a la pérdida de carga progresiva en el difusor (altura entre G y K)
El descenso equivalente a la pérdida de carga progresiva en el tubo de impulsión (altura entre K y O)
El descenso equivalente a la pérdida de energía cinética en la descarga al depósito superior (altura entre O y P)
La altura manométrica, Hm, (altura entre E y K)
La altura de aspiración, Ha, (altura entre A y C)
La altura de impulsión Hi, (altura entre M y P)
Bloque I: Generalidades 9
Bibliografía:
CRESPO, LECC. XIII
MACINTYRE, CAP. 2 Y 3
SÉDILLE, §§ 1, 2 Y12
MATAIX, §§ 4.3 A 4.8

10 Tema 2: Balance Energético en una Máquina Hidráulica
2.1 INTRODUCCIÓN ................................................................................................... 1 2.2 BALANCE DE ENERGÍA TOTAL EN MÁQUINAS DE FLUIDOS ............................... 1 2.3 BALANCE DE ENERGÍA INTERNA EN MÁQUINAS HIDRÁULICAS ........................ 3 2.4 BALANCE DE ENERGÍA MECÁNICA EN UNA MÁQUINA HIDRÁULICA ................ 4 2.5 DEFINICIÓN DE ALTURAS EN UNA BOMBA HIDRÁULICA ................................... 4 2.6 DEFINICIÓN DE ALTURAS EN UNA TURBINA HIDRÁULICA ................................ 6 2.7 RENDIMIENTOS MANOMÉTRICO E HIDRÁULICO ................................................ 6 2.8 LÍNEA DE CARGA Y PIEZOMÉTRICA EN BOMBAS ................................................. 7
Tema 3:
Teoría General de Máquinas Hidráulicas
3.1 SISTEMAS DE REFERENCIA. TRIÁNGULOS DE VELOCIDAD
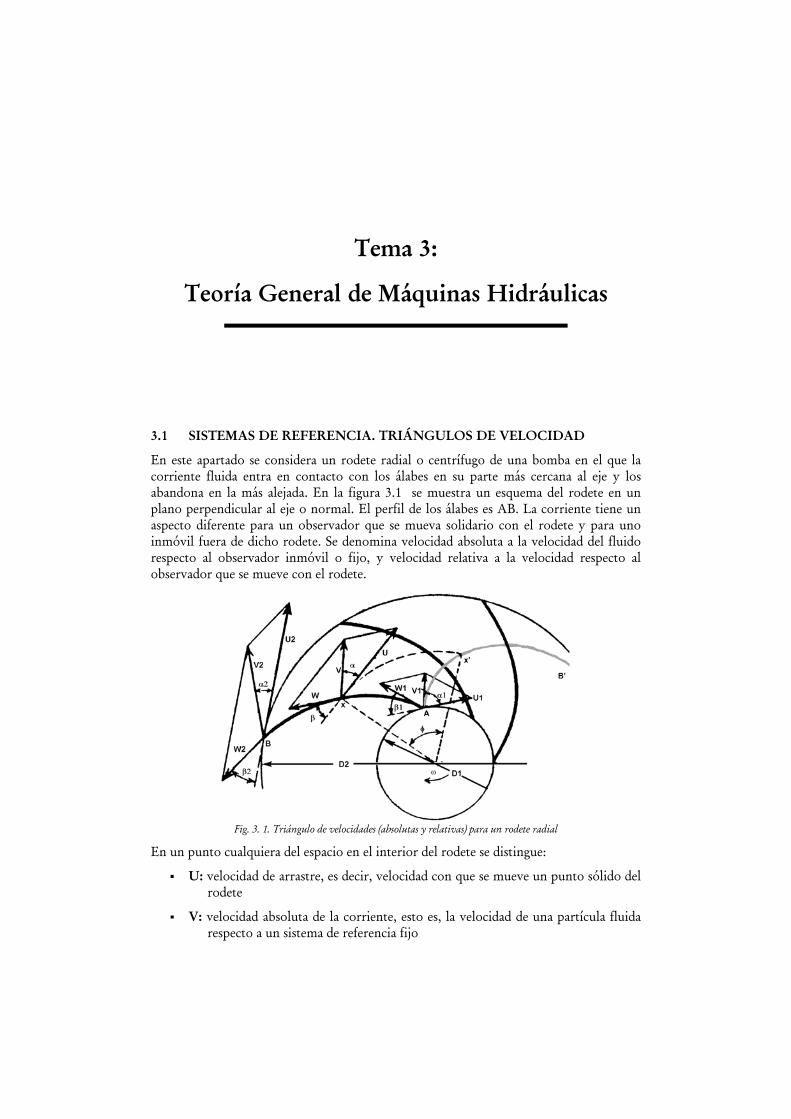
En este apartado se considera un rodete radial o centrífugo de una bomba en el que la corriente fluida entra en contacto con los álabes en su parte más cercana al eje y los abandona en la más alejada. En la figura 3.1 se muestra un esquema del rodete en un plano perpendicular al eje o normal. El perfil de los álabes es AB. La corriente tiene un aspecto diferente para un observador que se mueva solidario con el rodete y para uno inmóvil fuera de dicho rodete. Se denomina velocidad absoluta a la velocidad del fluido respecto al observador inmóvil o fijo, y velocidad relativa a la velocidad respecto al observador que se mueve con el rodete.
Fig. 3. 1. Triángulo de velocidades (absolutas y relativas) para un rodete radial
En un punto cualquiera del espacio en el interior del rodete se distingue:
U: velocidad de arrastre, es decir, velocidad con que se mueve un punto sólido del rodete
V: velocidad absoluta de la corriente, esto es, la velocidad de una partícula fluida respecto a un sistema de referencia fijo
2 Tema 3: Teoría General de Máquinas Hidráulicas
W: velocidad relativa de la corriente respecto del sistema que se mueve con el rodete
α: ángulo que forman uyvrr
β: el ángulo que forman uywrr
−
La velocidad absoluta, vr
, resulta de la suma vectorial de uywrr
. Estas tres velocidades forman también los tres lados de un triángulo. En la figura 3.1 también se han dibujado estos triángulos de velocidad en la entrada y salida de los álabes.
En principio se supone que la corriente relativa se comporta como si existiera un número infinito de álabes de paredes muy delgadas y la trayectoria relativa del fluido siguiera la forma del álabe, AB. La dirección de la velocidad relativa, w1 y w2, tanto a la entrada como a la salida, forman un ángulo β1 y β2 respectivamente con la dirección tangencial. La trayectoria que describe una partícula fluida para un observador inmóvil, es decir, la trayectoria absoluta AB', empieza en el borde del álabe en la dirección de la velocidad absoluta v1, formando un ángulo α1 con la dirección tangencial, y termina en la periferia del rodete, tangente a la dirección de la velocidad absoluta v2, con un ángulo α2. Por tanto, una partícula que en el sistema de referencia móvil esté en X, estará en realidad en el punto X’ respecto al sistema fijo. En consecuencia XX' será la trayectoria del punto X solidario al rodete en el mismo tiempo empleado por la partícula de fluido en viajar desde A hasta X’, de forma que el ángulo central φ, correspondiente al arco XX', es igual a ωt, para una velocidad angular ω = cte.
3.2 TEOREMA DE EULER
La teoría general de máquinas hidráulicas permite establecer relaciones entre los parámetros de funcionamiento de la máquina y las características del flujo, y a través de éstas con la geometría de los conductos fluidos. La más importante de estas relaciones es la propuesta por Leonhard Euler durante el siglo XVIII, que relaciona la altura transmitida por el rodete al fluido (o viceversa) con la variación de momento cinético que experimenta el fluido al atravesar el rodete. Esta relación se puede demostrar de forma general y particularizar después para los distintos tipos de rodete, o bien, como se va a hacer aquí, deducirla directamente primero para las máquinas radiales, mediante el teorema de conservación del momento cinético, y después, para las máquinas axiales mediante el teorema de conservación de la cantidad de movimiento.
En la deducción del teorema se sigue tratando la máquina como una caja negra de la que se desconoce lo que ocurre en su interior y sólo se conocen las condiciones, que se suponen uniformes, a la entrada y salida. La diferencia con el tema anterior es que como entrada se considera el borde de entrada de los álabes en vez de la entrada a la máquina y como salida se utiliza la del rodete en vez de la máquina.
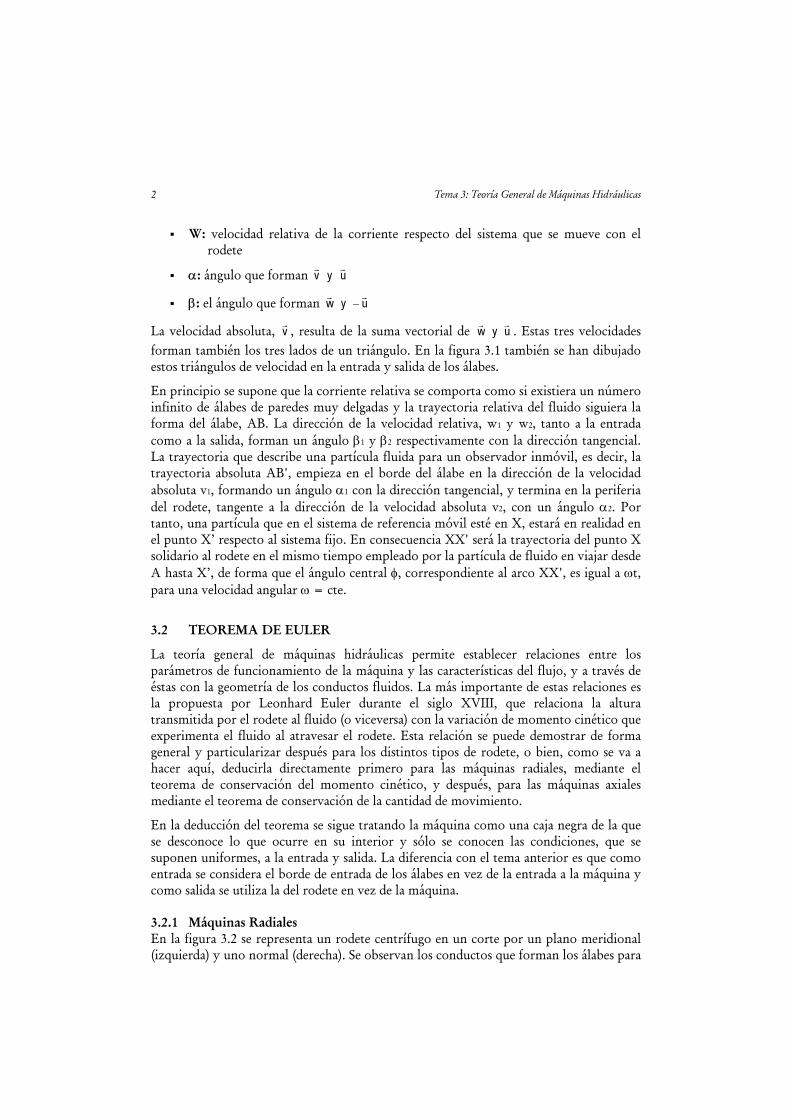
3.2.1 Máquinas Radiales En la figura 3.2 se representa un rodete centrífugo en un corte por un plano meridional (izquierda) y uno normal (derecha). Se observan los conductos que forman los álabes para
Bloque II. Teoría General de Turbomáquinas Hidráulicas 3
el paso del fluido, con flujo hacia fuera (bomba). La máquina gira con velocidad angular constante alrededor de su eje que pasa por O.
El volumen de control que se utiliza esta vez es móvil y está formado por los discos que limitan por delante y por detrás las paredes de los álabes y las secciones de entrada y salida de los álabes (cilindros de radios R1 y R2).
Fig 3. 2. Esquema de un rodete radial
Se suponen propiedades uniformes a la entrada ( 111 v,,pr
ρ ) y salida del rodete ( 222 v,,pr
ρ ). La velocidad v
r es la velocidad absoluta respecto a un sistema fijo, que se puede
descomponer en la velocidad relativa al rodete y la velocidad de arrastre: uwvrrr
+= (donde: θ⋅ω= eru
rr). Al ser u
r una velocidad tangencial, las componentes radiales de wyv
rr
tienen que ser iguales: vr = wr = v⋅senα = w⋅senβ.
Aunque en los conductos entre álabes las magnitudes fluidas puedan variar simultáneamente, no afecta al presente planteamiento ya que se utilizan las ecuaciones de conservación en forma integral, y por tanto, sólo interesa la entrada y la salida del volumen de control.
Para calcular el par, T, que el eje de la máquina ejerce sobre el fluido al atravesar el rodete, se aplica la ecuación de conservación del momento cinético en forma integral:
( ) ( )( ) [ ]( ) ( )∫∫∫∫∫∫∫∫∫∫ ∧ρ+τ∧=⋅∧ρ+∧ρVC
mSCSC
rVC
dVfrdSnrdSnvvrdVvrdtd rrrrrrrrrr
(3. 1)
Se podría elegir un sistema de referencia girando con velocidad angular ω constante, esto es, solidario al rodete, pero aparecerían fuerzas de Coriolis, por lo que se elige un sistema de referencia fijo a tierra, en el que, aunque el proceso no sea permanente, dado que toda la configuración fluida es axilsimétrica y gira alrededor del eje con velocidad angular ω constante, el primer sumando de la ecuación (3. 1) resulta nulo.
Se utiliza sólo la componente axial (z) de la ecuación que es la única que produce par, eligiendo como criterio de sentido positivo de momentos, el de la dirección axial de la

4 Tema 3: Teoría General de Máquinas Hidráulicas
máquina hacia dentro del papel, que corresponde a un giro en el sentido de las agujas del reloj.
El segundo sumando de la ecuación (3. 1) representa el flujo de momento cinético que sale menos el que entra en la máquina. No puede haber flujo a través de las paredes de los álabes, ni de los discos, sólo en las secciones de entrada y salida.
( ) ( ) ( ) ( ) 111111222222SC
rz Ssenw)2
(senvRSsenw)2
(senvRdSnvvr β−⋅⎟⎠⎞
⎜⎝⎛ α−
πρ+β⋅⎟
⎠⎞
⎜⎝⎛ α−
πρ=⋅∧ρ∫∫
rrrr
Las secciones S1 y S2 son las de entrada y salida: S1 = 2 π R1 b1 y S2 = 2 π R2 b2, donde b1 y b2 son las anchuras del álabe a la entrada y a la salida del rodete respectivamente.
El momento de las fuerzas de superficie se calcula descomponiendo la integral correspondiente en las contribuciones de los distintos elementos:
TdSn.r21 SScosdisálabesSC z=+=⎥⎦
⎤⎢⎣⎡ ⎟
⎠⎞⎜
⎝⎛ τ∧ ∫∫∫∫ ++
rr
La integral sobre los álabes y los discos es el par, T, que las paredes móviles de la máquina, ejercen sobre el fluido, igual y opuesto al que éste ejerce sobre la máquina. En las secciones S1 y S2 sólo actúan presiones, cuya línea de acción corta al eje de la máquina, por lo que no contribuyen al par.
Por último, las fuerzas gravitatorias, en el caso de que fuesen de importancia, darían una resultante que, debido a la simetría del problema, cortaría al eje de la máquina, sin generar momento respecto al mismo.
De la ecuación de continuidad se obtiene el gasto másico de fluido a través de la máquina, G, como: G = ρ w1 sen β1 S1 = ρ w2 sen β2 S2.
De forma que la ecuación (3. 1) daría en este caso:
( ) ( )u11u22111222 vRvRGcosvRcosvRGT −=α−α= (3. 2)
donde vu es la proyección del vector vr
sobre el vector ur
en cada caso. Esta proyección es positiva cuando tiene el mismo sentido que u
r y negativa cuando tiene sentido contrario.
En el ejemplo indicado en la figura 3.2, la máquina funciona como bomba. El par que ejerce el fluido sobre dicha máquina es opuesto al sentido de giro de la misma, debiendo vencerse la resistencia de dicho par por lo que la máquina consume energía.
La potencia mecánica desarrollada por el rodete (T ω en máquinas centrífugas), se puede igualar a la potencia hidráulica intercambiada con el fluido que pasa a través del rodete, llamada potencia útil: Wu = ρgQHu. Donde, Hu es la altura útil, que representa la máxima energía que se podría intercambiar entre el rodete y el fluido que lo atraviesa:
ρ Q g Hu = ω T = ω G (R2 v2u - R1 v1u) (3. 3)
Despejando la altura útil, se obtiene la ecuación de Euler o ecuación fundamental de las turbomáquinas:

Bloque II. Teoría General de Turbomáquinas Hidráulicas 5
gvuvu
gvRvR
H u11u22u11u22u
−=
−ω= (3. 4)
Excepto en los diseños en los que existen álabes en la corona directriz, la velocidad de entrada al rodete es radial, es decir v1u = 0 y se dice que el fluido entra sin prerrotación.
3.2.2 Máquinas Axiales Para el estudio de los rodetes axiales, en una primera aproximación, se supone que las superficies de corriente son cilindros concéntricos con el eje de la máquina. Si se desarrolla uno de estos cilindros de radio r sobre un plano, se obtiene lo que se denomina cascada de álabes (figura 3.3), muy utilizada para estudiar el flujo en dichos rodetes.
u=ω⋅r
FY
y x
u
w1
v1
β1
α1
u w2
v2
β2
α2 FX L
A
B
C
D
L
nr
nr
nr
nr
Fig. 3. 3. Cascada axial de álabes
La figura 3. 3 muestra el flujo a través de una de estas cascadas y el volumen de control que se utiliza. También muestra los triángulos de velocidad a la entrada y salida de la cascada. El problema se considera plano, consistente en una corriente uniforme que incide sobre una cascada o serie infinita de objetos alabeados, todos iguales y colocados periódicamente a una distancia L = 2πr/Z (siendo Z el número de álabes del rodete). Los álabes se mueven a una velocidad u = ω⋅r. La corriente es deflectada por la cascada y aguas abajo, suficientemente lejos, vuelve a ser uniforme. Se trata de calcular la fuerza FY ejercidas entre cada álabe y el fluido. Para ello se utiliza un sistema de referencia solidario a los álabes, que como se mueven linealmente con velocidad constante, será un sistema inercial. Se desprecian asimismo las fuerzas gravitatorias, por lo que no habrá fuerzas másicas.
Se utiliza el volumen de control móvil ABCD tal que AB = CD = L y BD y AC sean paralelas. AB y CD se consideran localizadas en regiones de corriente uniforme, suficientemente lejos de los álabes. El volumen de control está limitado interiormente por el álabe.
Ahora se integra la ecuación de conservación de la cantidad de movimiento en este volumen.
( ) ( ) ∫∫∫∫∫∫∫∫∫∫ ρ+⋅τ=⋅ρ+ρVC
mSCSC
relVC
dVfdSndSnvvdVvdtd rrrrrr
(3. 5)
Considerando la dirección Y, que es la de interés, el primer término es nulo por ser el proceso permanente. El segundo queda:

6 Tema 3: Teoría General de Máquinas Hidráulicas
( ) ( )4444 34444 214444 34444 21
rr
CD traves a2222
BA traves a1111
SCrely LsenwcoswL)senw)(cosw(dSnvvY ββ−ρ+β−β−ρ=ρ⇒ ∫∫
A través de la superficie del álabe no hay flujos. El flujo de cantidad de movimiento en las caras BD y AC cancela ya que, debido a su elección, el flujo que entra por una cara es exactamente igual al que sale por la otra porque las propiedades fluidas se repiten debido a la periodicidad del movimiento. Otra forma de elegir el volumen de control, sería tomar AC y BD como líneas de corriente, lo que supondría gasto másico nulo a través de ellas.
La integral de las fuerzas de superficie se descompone igualmente en:
∫∫
∫∫∫∫∫∫
∫∫∫∫∫∫∫∫
⎪⎪⎪⎪⎪
⎩
⎪⎪⎪⎪⎪
⎨
⎧
=
+=
+=
−=
−=
=τSC
Yálabe
2DC
1BA
BDAC
ACBD
y
F
iLp
iLpdS)n(
fluido el sobre álabe el ejerce quelongitud deunidad porfuerza
x dirección en ser porinteresa no
x dirección en ser porinteresa no
indicadaad periodicidla por
indicadaad periodicidla por
r
rr
De la ecuación de continuidad se obtiene el gasto másico por unidad de longitud entre dos álabes:
G = ρ w1 L⋅senβ1 = ρ w2 L⋅senβ2 (3. 6)
Agrupando todo lo anterior, la ecuación (3.3) en dirección Y queda:
FY = G⋅(w1cosβ1 - w2 cosβ2) = G⋅(v2u - v1u) (3. 7)
donde vu es la proyección del vector velocidad absoluta vr
sobre el vector ur
en cada caso. En cada triángulo (vu = v⋅cosα = u - w⋅cosβ). Esta proyección es positiva cuando tiene el mismo sentido que u
r y negativa cuando tiene sentido contrario.
Igual que con las máquinas centrífugas la potencia mecánica desarrollada por el rodete (FY U en máquinas axiales) se iguala a la potencia hidráulica intercambiada con el fluido que pasa a través del rodete, obteniéndose:
ρ Q g Hu = u FY = u G (v2u - v1u) (3. 8)
Y despejando la altura útil:
g)vv(u
H u1u2u
−= (3. 9)
Expresión muy similar a la obtenida para los rodetes centrífugos, que relaciona la altura útil con el incremento de velocidad del fluido en dirección tangencial.

Bloque II. Teoría General de Turbomáquinas Hidráulicas 7
3.3 HIPÓTESIS REALIZADAS
Como ya se ha comentado, en la deducción del teorema de Euler se considera el rodete de la máquina como una caja negra de la que sólo se conocen sus entradas y salidas, pero no lo que ocurre en su interior. Una de las hipótesis realizadas es que la velocidad absoluta, tanto en la entrada como en la salida del rodete, es permanente y presenta simetría de revolución alrededor del eje (velocidad de entrada uniforme). Por tanto, para un caudal y velocidad de giro constante, también el movimiento relativo es permanente y axilsimétrico.
Para que exista simetría en la velocidad de salida del rodete, es necesario que haya un guiado perfecto del fluido, lo que sólo es posible bajo la hipótesis de un número infinito de álabes de espesor nulo. Sin embargo, los rodetes reales poseen un número finito de álabes de cierto espesor distribuidos regularmente, lo que va a distorsionar la simetría del flujo. En el tema 4 se estudiará el sentido de esta distorsión y las correcciones necesarias cuando se esté estudiando un rodete con un número finito de álabes de cierto espesor.
3.4 DEDUCCIÓN ALTERNATIVA DEL TEOREMA DE EULER
Otra forma de deducir el teorema de Euler es mediante la utilización de la ecuación de la energía mecánica para máquinas hidráulicas.
GGW
2vp
2vp v
1211
2222 ∅
−=⎟⎟⎠
⎞⎜⎜⎝
⎛++
ρ−⎟
⎟⎠
⎞⎜⎜⎝
⎛++
ρUU (3. 10)
3.4.1 Máquinas Radiales Si se aplica la ecuación anterior a un rodete con la configuración de la figura 3.2 y con un sistema de referencia móvil, que gira con el rodete, los álabes resultan en reposo respecto del sistema de referencia y no producen trabajo. Sin embargo, aparecen las fuerzas de inercia, (centrífugas y de Coriolis). Las de Coriolis ( v2f
rrr∧ω= ) son perpendiculares a la
velocidad y, por tanto, no producen trabajo. Las centrífugas derivan del potencial:
2r 22ω
−=U .
Aplicando la ecuación (3. 10) al volumen de control formado por el rodete de la figura 3.2 y bajo la hipótesis de despreciar la gravedad, se obtiene:
edetro_pv gH
GRwpRwp
−=∅
−=⎟⎟⎠
⎞⎜⎜⎝
⎛ ω−+
ρ−⎟
⎟⎠
⎞⎜⎜⎝
⎛ ω−+
ρ0
2222
21
2211
22
2222 (3. 11)
Se puede aplicar la misma ecuación (3. 10) utilizando un sistema de referencia fijo a tierra, puesto que, aunque el rodete esté en movimiento, se puede suponer que el periodo de integración de la ecuación es muy superior al tiempo de fluctuación de las variables y, en valor medio, el término transitorio se anula, resultando un proceso estacionario.
edetro_pu gH
GWvpvp
−=⎟⎟⎠
⎞⎜⎜⎝
⎛+
ρ−⎟
⎟⎠
⎞⎜⎜⎝
⎛+
ρ 22
211
222 (3. 12)

8 Tema 3: Teoría General de Máquinas Hidráulicas
Restando la ec. (3.11) de la (3.12):
2Rwv
2Rwv
GW 2
122
121
22
222
22u ω+−
−ω+−
= (3. 13)
En los triángulos de velocidad de la figura 3.2, tanto en la entrada como en la salida, se cumple: w2 = v2 + ω2 r2 - 2 v ω r cos α. Con lo que la ecuación (3. 13) queda:
Wu = Gω(R2v2cosα2- R1v1cosα1) = G(u2v2u-u1v1u) (3. 14)
Si ahora se iguala la potencia mecánica a la hidráulica, como se hizo en la ecuación (3. 3), se obtiene de nuevo la expresión del teorema de Euler -ecuación (3. 4)-.
3.4.2 Máquinas Axiales En este punto se sigue el mismo procedimiento del punto anterior, pero aplicado a la cascada de álabes de la figura 3.3. Como la cascada de álabes se mueve con velocidad ju
r
constante, en un sistema de referencia móvil con la cascada, no habrá fuerzas másicas si en un sistema fijo a tierra tampoco las hay.
Igual que en el punto anterior, respecto del sistema de referencia que se mueve con los álabes, estos permanecen en reposo por lo que no se realiza trabajo y, aplicando la ecuación de la energía mecánica, se obtiene:
edetro_p211
222 Hg
2wp
2wp
−=⎟⎟⎠
⎞⎜⎜⎝
⎛+
ρ−⎟
⎟⎠
⎞⎜⎜⎝
⎛+
ρ (3. 15)
donde Hp_rodete es la altura de pérdidas viscosas que se produce en la cascada de álabes.
Respecto de un sistema de referencia fijo a tierra, los álabes se mueven y se produce un trabajo. Aplicando, de nuevo, la ecuación (3. 10):
edetro_pu
211
222 gH
GW
2vp
2vp
−=⎟⎟⎠
⎞⎜⎜⎝
⎛+
ρ−⎟
⎟⎠
⎞⎜⎜⎝
⎛+
ρ (3. 16)
Restando (3. 15) de (3. 16), se obtiene:
2wv
2wv
GW 2
121
22
22u −
−−
= (3. 17)
Viendo los triángulos de velocidad de la figura 3.3, se cumple que: w2 = v2 + u2 – 2uvcosα, y sustituyendo en la ecuación (3. 17): Wu = G⋅u⋅(v2cosα2 - v1cosα1) = G⋅u⋅(v2u - v1u).
Poniendo el trabajo mecánico en función de la altura útil, como se hizo en el punto 3.2.2, se obtiene de nuevo la expresión (3. 9).
No es de extrañar que los resultados de estos dos últimos apartados conduzcan a los mismos resultados de los puntos 3.2.1 y 3.2.2 ya que al tratarse de un flujo incompresible, se ha expresado la ecuación de la energía mecánica en la forma (3. 10) y la información contenida en dicha ecuación ya está incluida en la ecuación de conservación de cantidad de movimiento. El caso sería bastante más complejo para flujos compresibles.
Bloque II. Teoría General de Turbomáquinas Hidráulicas 9
3.5 CONSIDERACIONES SOBRE EL SENTIDO DEL FLUJO Y LA DISPOSICIÓN DE LOS ÁLABES EN BOMBAS Y TURBINAS
En el punto 3.4.1 sobre la deducción alternativa del teorema de EULER para máquinas hidráulicas centrífugas se llegó a la expresión:
2uwv
2uwv
GW 2
121
21
22
22
22u +−
−+−
=
Reordenando, se puede escribir:
( ) ( ) ( )21
22
22
21
21
22
u uu21ww
21vv
21
GW
−+−+−= (3. 18)
Para una bomba, la energía aportada al fluido por unidad de masa es positiva, por lo que el primer miembro de la igualdad lo es. Para que lo sea el segundo se puede conseguir de las siguiente formas:
haciendo que v2 > v1, es decir, logrando un aumento de la velocidad absoluta de salida respecto a la de entrada
haciendo que u2 > u1, es decir que R2 > R1, o lo que es igual, lograr que la sección de salida esté más alejada del eje que la de entrada
haciendo que w1 > w2, es decir, disminuyendo la velocidad relativa, lo que conduce a una disposición de los álabes que origine que los canales entre ellos sean divergentes.
Las bombas y ventiladores se basan en el segundo y tercer principio. El primero, incremento de la velocidad absoluta, resulta frecuentemente problemático, debido a que si la velocidad absoluta v2 es muy grande, sería necesario transformar mucha energía cinética de salida en energía de presión. Conviene señalar que para que una bomba funcione correctamente no es necesario que los tres sumandos sean positivos independientemente, sino que lo sea su suma.
Para el caso de turbinas, al ser la potencia intercambiada con el fluido negativa, las conclusiones son análogas pero opuestas.
3.6 GRADO DE REACCIÓN
Como ya se apuntó en el tema 1, las máquinas hidráulicas pueden dividirse en dos grandes grupos: máquinas de acción y máquinas de reacción. En las máquinas de acción, las presiones a la entrada y salida del rodete de la máquina son iguales, luego todo el intercambio de energía con el fluido se realiza a través de la energía cinética. En las máquinas de reacción, la presión a la salida es muy diferente de la de entrada, constituyendo la energía cinética sólo un cierto porcentaje de la energía útil intercambiada con el fluido.
Se define un parámetro denominado “grado de reacción del rodete” que cuantifica la proporción de la energía que se intercambia como energía piezométrica entre el rodete y el fluido. Se parte de la ecuación de las máquinas hidráulicas aplicada al rodete con un sistema de referencia fijo a tierra:

10 Tema 3: Teoría General de Máquinas Hidráulicas
edetro_puvu
1211
2222 gHgH
GGWgz
2vpgz
2vp
−=∅
−=⎟⎟⎠
⎞⎜⎜⎝
⎛++
ρ−⎟
⎟⎠
⎞⎜⎜⎝
⎛++
ρ (3. 19)
Se pueden agrupar los términos de altura piezométrica (estática) por un lado y los de altura dinámica por otro:
( )43421
43421444 3444 21 pérdidasaltura dinámicaaltura estáticaaltura
edetro_p
21
22
1212
u Hg2vvzz
gppH +⎟
⎟⎠
⎞⎜⎜⎝
⎛ −+−+⎟⎟
⎠
⎞⎜⎜⎝
⎛ρ−
=
Se define el grado de reacción, σ, como la relación entre la altura estática y la altura útil total:
( )u
21
22
u
edetro_p
u
1212
u
estáticaedetro Hg2
vvH
H1
H)zz(gpp
HH −
−−=−+ρ−
==σ (3. 20)
En las máquinas de acción (por ejemplo la turbina Pelton), el agua llega y sale del rodete con la misma presión (atmosférica) y por tanto todo el intercambio de energía se realiza a través de la energía cinética, por lo que su grado de reacción es σ = 0.
Generalmente la diferencia de cotas entre la entrada y salida del rodete, (z2-z1), es despreciable frente a la diferencia de presiones. Si se considera un comportamiento ideal del líquido, sin pérdidas, la expresión (3. 20) se simplifica, desapareciendo dicho término de pérdidas y se habla de grado de reacción teórico. El grado de reacción es un parámetro característico que cuantifica la calidad de la energía intercambiada (la energía de presión se considera de mayor calidad que la cinética, porque esta última requiere una transformación posterior en energía de presión, con las consiguientes pérdidas). El grado de reacción está relacionado con:
Las condiciones de funcionamiento de la máquina, que puede trabajar en admisión parcial o total. En condiciones de admisión parcial, el porcentaje de energía de presión intercambiado con el fluido es menor que en condiciones de admisión total, y por tanto, el grado de reacción también es menor.
La forma de los álabes. Los álabes curvados hacia delante, β > π/2, generan, a igualdad de caudal, mayores velocidades absolutas a la salida del rodete que los álabes curvados hacia atrás, β < π/2, teniendo, por tanto, menor grado de reacción.
El diseño del difusor. En un rodete de pequeño grado de reacción, la energía cinética constituye un elevado porcentaje de la energía útil total, por lo que se requiere una transformación mayor de energía cinética en energía de presión, mediante un cuidado diseño del difusor.
Aplicando la ecuación (3. 19) entre la entrada y la salida de una bomba, se obtendría el grado de reacción de dicha bomba. En este caso la expresión que se obtiene es:
u
2asp
2imp
mbomba Hg2vv −
−η=σ (3. 21)
donde ηm es el rendimiento manométrico, vimp es la velocidad de impulsión de la máquina y vasp, la de aspiración.
Bloque II. Teoría General de Turbomáquinas Hidráulicas 11
Como se puede ver, las bombas de elevado grado de reacción, van asociadas a elevados rendimientos manométricos. No se requiere recuperar mucha energía cinética en el difusor y cámara espiral, reduciéndose así las pérdidas hidráulicas en estos elementos, por lo que aumenta el rendimiento manométrico.
Bibliografía:
CRESPO, LECCS. X Y XIII
MACINTYRE, CAP. 4
PFLEIDERER, § 17 (a)
SÉDILLE, §§ 3 A 7
WISLICENUS, CAP. 6
12 Tema 3: Teoría General de Máquinas Hidráulicas
3.1 SISTEMAS DE REFERENCIA. TRIÁNGULOS DE VELOCIDAD................................. 1 3.2 TEOREMA DE EULER .......................................................................................... 2
3.2.1 Máquinas Radiales ............................................................................................. 2 3.2.2 Máquinas Axiales ............................................................................................... 5
3.3 HIPÓTESIS REALIZADAS ..................................................................................... 7 3.4 DEDUCCIÓN ALTERNATIVA DEL TEOREMA DE EULER ..................................... 7
3.4.1 Máquinas Radiales ............................................................................................. 7 3.4.2 Máquinas Axiales ............................................................................................... 8
3.5 CONSIDERACIONES SOBRE EL SENTIDO DEL FLUJO Y LA DISPOSICIÓN DE LOS ÁLABES EN BOMBAS Y TURBINAS ........................................................... 9
3.6 GRADO DE REACCIÓN ....................................................................................... 9
Tema 4:
Teoría Ideal Unidimensional de Turbomáquinas Hidráulicas
4.1 INTRODUCCIÓN
Como se vio en el tema anterior, la ecuación de Euler relaciona los parámetros de funcionamiento de la máquina (Hu) con los triángulos de velocidad del fluido a la entrada y salida del rodete. La teoría ideal unidimensional de las turbomáquinas hidráulicas describe la relación entre las velocidades medias del fluido en la entrada y salida de rodetes, distribuidores y difusores, con la geometría y tamaño de los conductos. Se entiende por velocidad media, el valor medio de la velocidad en una sección transversal de un conducto de la máquina. Asimismo, se supone que estas velocidades medias son estacionarias. Utilizando ambas teorías, se conseguirá relacionar los parámetros de funcionamiento con la geometría de la máquina.
4.2 APROXIMACIÓN UNIDIMENSIONAL
Igual que en Mecánica de Fluidos, también en la teoría de Turbomáquinas existe la división en aproximación unidimensional, bidimensional y tridimensional.
Se denomina unidimensional, al flujo que se desarrolla según la dirección de una senda predeterminada, con distribución uniforme de propiedades fluidas (velocidad, presión, temperatura, etc.) en las secciones transversales a dicha senda. Bajo estas condiciones, se justifica el uso del término unidimensional, pues las condiciones de flujo en un punto se pueden determinar perfectamente conociendo sólo la coordenada de ese punto según la senda. No importa que la geometría de la senda sea bi- o tridimensional (ya que dicha geometría se supone conocida), ni tampoco la situación del punto dentro del plano transversal, ya que las condiciones de flujo son las mismas para todos los puntos de la sección transversal. En las teorías bi- o tridimensionales, la geometría de la senda de las partículas fluidas y las distribuciones transversales de velocidad son incógnitas esenciales del problema. En tal caso, cada punto vendrá determinado por dos coordenadas en un plano o tres en el espacio, no siendo posible simplificación alguna.
Los problemas más habituales donde se utiliza la aproximación de la teoría unidimensional son aquellos en los que el flujo transcurre a través de conductos bien

2 Tema 4: Teoría Ideal Unidimensional de Turbomáquinas Hidráulicas
definidos (tuberías, canales, etc) que son habitualmente largos con respecto a la dimensión transversal y se puede considerar que el flujo está muy bien guiado, por lo que su dirección es conocida. Por otra parte, las hipótesis de unidimensionalidad fallan cuando se aplican al flujo alrededor de uno o más cuerpos aislados sumergidos en una corriente fluida infinita. En este caso, las diferencias entre el flujo próximo al cuerpo y el lejano, es decir, la influencia local del cuerpo sobre el flujo, son una parte importante del problema.
En la aproximación unidimiensional, el módulo de la velocidad de la corriente fluida se determina mediante: v = Q/A, donde v es la velocidad, Q es el caudal y A es el área transversal, por tanto, el problema se reducirá simplemente a calcular las fuerzas que actúan como consecuencia de un flujo de velocidad conocida. Para flujo no viscoso, el problema anterior tiene solución exacta, e incluso para flujo viscoso la solución se aproxima mucho a la exacta. Por lo anterior, la aproximación de flujo unidimensional se utiliza siempre que sea posible.
El problema de establecer si en un determinado flujo se puede aplicar con éxito una aproximación unidimensional, o si requiere suposiciones bi- o tridimensionales es de gran importancia. Por ejemplo, si se analiza el flujo a través de una tubería acodada, se ve que con la aproximación unidimensional, al suponer presión y velocidad uniformes en cada sección transversal, la energía mecánica no sería uniforme ya que el potencial de fuerzas másicas depende de r. Para conseguir una distribución transversal de energía uniforme es necesario utilizar una aproximación de flujo bidimensional.
En turbomaquinaria la mayoría de los problemas son límite, es decir, en primera aproximación permiten la suposición de unidimensionalidad, pero es necesario utilizar posteriormente una aproximación bidimensional para obtener una información más detallada de las características del flujo.
4.3 DESCRIPCIÓN DEL FLUJO DENTRO DE UNA TURBOMÁQUINA
En los rodetes centrífugos cerrados el espacio ocupado por el fluido está limitado por dos superficies de revolución: una interior, que constituye el cubo del rodete y otra exterior, conocida como zuncho. En los rodetes axiales, el cubo es la superficie cilíndrica más cercana al eje y el zuncho es la circunferencia descrita por la punta de los álabes. Además, los rodetes poseen álabes distribuidos uniformemente según la coordenada azimutal, por lo que el fluido discurre por un conducto limitado por el cubo, el zuncho y dos álabes consecutivos. Estos conductos, además están sometidos a rotación, figura 4.1.
El flujo se va a estudiar sobre dos planos: uno meridional, que contiene al eje de la máquina, y otro normal, perpendicular al plano meridional y tangente a la línea de
Fig. 4. 1. Plano meridional
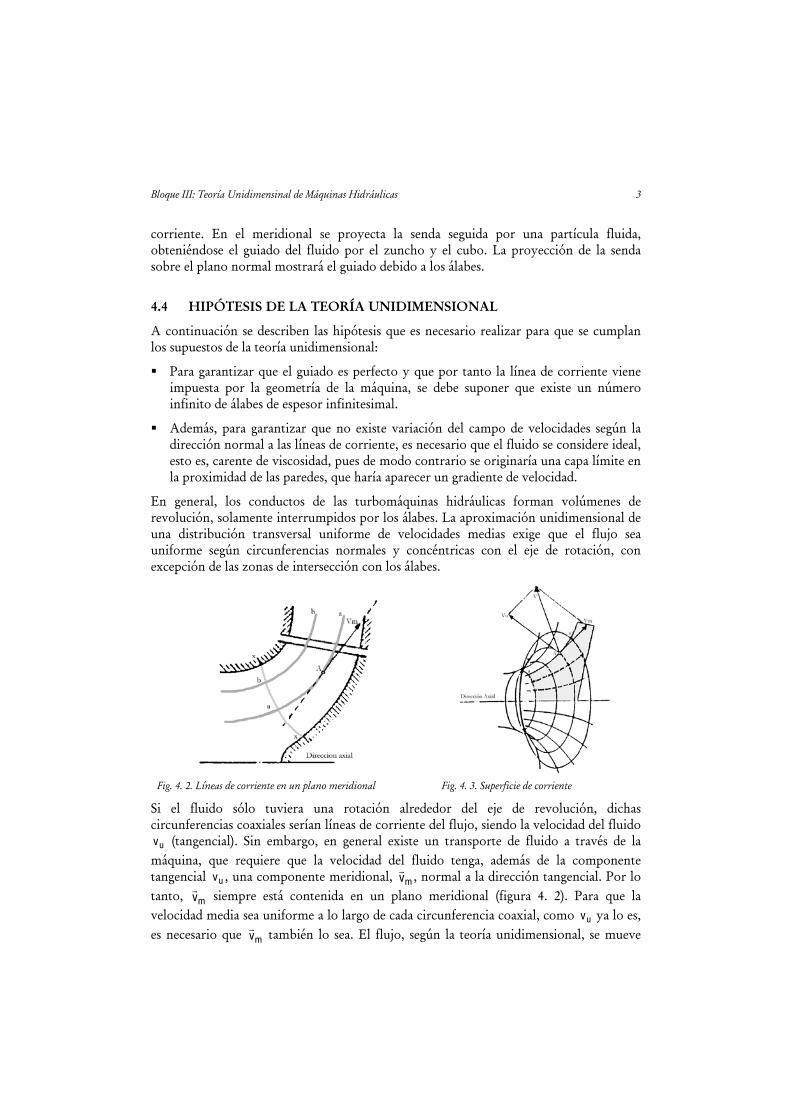
Bloque III: Teoría Unidimensinal de Máquinas Hidráulicas 3
corriente. En el meridional se proyecta la senda seguida por una partícula fluida, obteniéndose el guiado del fluido por el zuncho y el cubo. La proyección de la senda sobre el plano normal mostrará el guiado debido a los álabes.
4.4 HIPÓTESIS DE LA TEORÍA UNIDIMENSIONAL
A continuación se describen las hipótesis que es necesario realizar para que se cumplan los supuestos de la teoría unidimensional:
Para garantizar que el guiado es perfecto y que por tanto la línea de corriente viene impuesta por la geometría de la máquina, se debe suponer que existe un número infinito de álabes de espesor infinitesimal.
Además, para garantizar que no existe variación del campo de velocidades según la dirección normal a las líneas de corriente, es necesario que el fluido se considere ideal, esto es, carente de viscosidad, pues de modo contrario se originaría una capa límite en la proximidad de las paredes, que haría aparecer un gradiente de velocidad.
En general, los conductos de las turbomáquinas hidráulicas forman volúmenes de revolución, solamente interrumpidos por los álabes. La aproximación unidimensional de una distribución transversal uniforme de velocidades medias exige que el flujo sea uniforme según circunferencias normales y concéntricas con el eje de rotación, con excepción de las zonas de intersección con los álabes.
Fig. 4. 2. Líneas de corriente en un plano meridional Fig. 4. 3. Superficie de corriente
Si el fluido sólo tuviera una rotación alrededor del eje de revolución, dichas circunferencias coaxiales serían líneas de corriente del flujo, siendo la velocidad del fluido
uv (tangencial). Sin embargo, en general existe un transporte de fluido a través de la máquina, que requiere que la velocidad del fluido tenga, además de la componente tangencial uv , una componente meridional, mv
r , normal a la dirección tangencial. Por lo tanto, mv
r siempre está contenida en un plano meridional (figura 4. 2). Para que la velocidad media sea uniforme a lo largo de cada circunferencia coaxial, como uv ya lo es, es necesario que mv
r también lo sea. El flujo, según la teoría unidimensional, se mueve
4 Tema 4: Teoría Ideal Unidimensional de Turbomáquinas Hidráulicas
según superficies de revolución coaxiales aa ó bb (figura 4. 2). La superficie de corriente se muestra en perspectiva en la figura 4. 3.
Aunque este modelo idealizado de flujo es la única forma de flujo consistente con los principios de la teoría unidimensional, no implica que el flujo real en una turbomáquina tenga las características geométricas supuestas aquí. Está suficientemente comprobado, sobre todo para condiciones de trabajo lejanas a las de máximo rendimiento, que el flujo es diferente al mostrado en las figuras 4. 2 y 4. 3.
La relación entre las dos componentes de la velocidad (meridional y tangencial1) y los parámetros de funcionamiento se puede hacer de forma independiente.
La velocidad tangencial vu, se relaciona con el par o la altura útil de la máquina y la velocidad de giro. La relación viene dada por la ecuación de Euler que expresa el cambio de momento cinético del fluido cuando pasa a través del rodete, en términos de las condiciones de operación establecida:
u11u22u vrvrgH ω−ω= (4. 1)
La componente meridional se relaciona con el caudal y el área transversal a las líneas de corriente. Ya que la velocidad meridional está siempre contenida en planos meridionales, las correspondientes secciones transversales deberán ser normales a dichos planos, es decir, deberán ser superficies de revolución. Dentro de cada plano meridional deben, además, ser perpendiculares a la velocidad meridional, es decir, perpendiculares a las líneas de corriente de las figuras 4. 2 y 4. 3. Esto significa que, en un plano meridional, la sección transversal aparecerá como una línea xx, en todo punto perpendicular a las líneas de corriente aa y bb (figura 4. 2).
La ecuación que relaciona la componente tangencial ya ha sido discutida en lecciones anteriores. Queda por analizar la relación de la componente meridional con el caudal y la forma geométrica de la máquina, cuestión que es planteada en la siguiente sección.
4.5 ECUACIÓN DE CONTINUIDAD
Rodetes radiales. La ecuación de continuidad para el flujo estacionario en el interior de una turbomáquina viene dada por la expresión:
QQQ0dsnv 21sc
rel ==⇒=ρ∫rr
(4. 2)
Asumiendo que las secciones de entrada y salida son normales a la proyección de las líneas de corriente en el plano meridional y, por tanto, poseen propiedades uniformes de velocidad meridional, se puede conocer dicha velocidad meridional si se conoce el caudal: Q = v1m⋅S1 = v2m⋅S2.
El vector velocidad meridional puede obtenerse a partir de la función de corriente ψ. Como el fluido de trabajo es incompresible, la ecuación de continuidad en forma
1 Al ser vm tangente a las líneas de corriente meridionales la velocidad se pude descomponer sólo en dos vectores,
mu vvvrrr
+= , en vez de tres, xru vvvvrrrr
++= .

Bloque III: Teoría Unidimensinal de Máquinas Hidráulicas 5
diferencial viene representada por la divergencia nula del vector velocidad. En coordenadas cilíndricas adopta la expresión:
( ) 0x
vvr1
rrv
r1 xr =
∂∂
+θ∂
∂+
∂∂ θ (4. 3)
Como el flujo es axilsimétrico, la ecuación de continuidad se simplifica:
( ) 0x
vr
rvr1 xr =
∂∂
+∂
∂ (4. 4)
Las componentes radial y axial de la velocidad son las proyecciones de la velocidad meridional sobre dichos ejes: xmx evv
rr= y rmr evv
rr= .
La divergencia nula del vector velocidad en un movimiento plano garantiza la existencia de una función de corriente ψ, a partir de la cual se puede obtener el campo de velocidades:
xr1vr ∂
ψ∂=
rr1v x ∂
ψ∂−= (4. 5)
Usando la misma definición, si se deriva la función de corriente respecto de una coordenada l que sigue la sección transversal, se obtiene la velocidad meridional:
l∂ψ∂
=r1vm (4. 6)
Según indica la Mecánica de Fluidos, las líneas de corriente poseen un valor constante de la función de corriente y la diferencia entre dos valores de la función de corriente da información del caudal que circula entre las dos líneas de corriente asociadas a los dichos valores. Aplicando esta propiedad entre el zuncho y el cubo:
( )czieie ms rel 2d2rd2vdsnvQ Ψ−Ψπ=∂ψ∂
π=π== ∫∫∫ ll
lrr
(4. 7)
En general, cuando se representa un flujo mediante líneas de corriente, el espaciado entre las líneas se determina para garantizar que el caudal que circula entre cada dos líneas consecutivas sea el mismo, con independencia de las líneas elegidas. De acuerdo con la teoría unidimensional, la velocidad meridional debe ser uniforme sobre la sección transversal a la proyección de las líneas de corriente sobre el plano meridional, pero la sección de paso es diferente según se considere un elemento diferencial en las proximidades del cubo o del zuncho. Por tanto el espacio entre las líneas de corriente vendrá dado por la expresión:
( )m1i,i
1i,i vr21NQ⋅⋅π+
=∆+
+l (4. 8)
siendo N el número de líneas elegidas para la representación. En esta última expresión se observa que para los rodetes mixtos, las líneas de corriente estarán más separadas cerca del cubo del rodete y más próximas cerca del zuncho (figura 4. 4).
∆l
r
i i+1
Zuncho (z)
Cubo (c)
Fig. 4. 4. Distribución de líneas de corriente
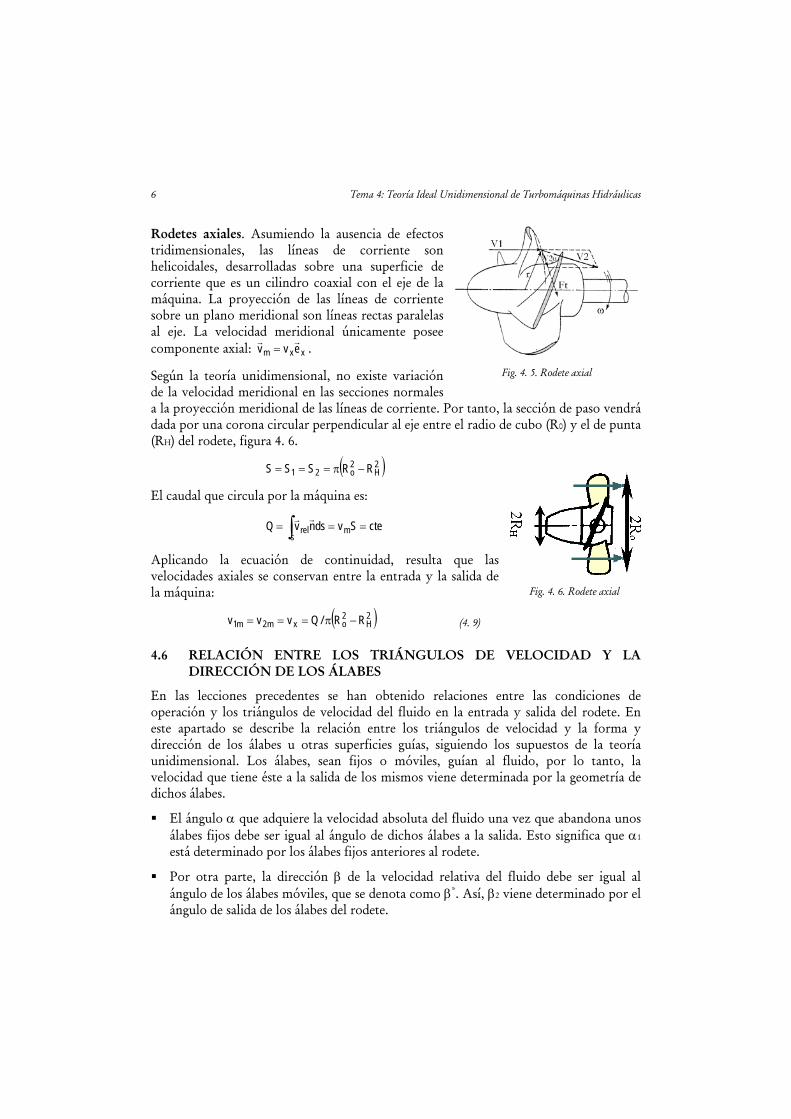
6 Tema 4: Teoría Ideal Unidimensional de Turbomáquinas Hidráulicas
Rodetes axiales. Asumiendo la ausencia de efectos tridimensionales, las líneas de corriente son helicoidales, desarrolladas sobre una superficie de corriente que es un cilindro coaxial con el eje de la máquina. La proyección de las líneas de corriente sobre un plano meridional son líneas rectas paralelas al eje. La velocidad meridional únicamente posee componente axial: xxm evv
rr= .
Según la teoría unidimensional, no existe variación de la velocidad meridional en las secciones normales a la proyección meridional de las líneas de corriente. Por tanto, la sección de paso vendrá dada por una corona circular perpendicular al eje entre el radio de cubo (R0) y el de punta (RH) del rodete, figura 4. 6.
( )2H
2o21 RRSSS −π===
El caudal que circula por la máquina es:
cteSvdsnvQ ms
rel === ∫rr
Aplicando la ecuación de continuidad, resulta que las velocidades axiales se conservan entre la entrada y la salida de la máquina:
( )2H
2oxm2m1 RR/Qvvv −π=== (4. 9)
4.6 RELACIÓN ENTRE LOS TRIÁNGULOS DE VELOCIDAD Y LA DIRECCIÓN DE LOS ÁLABES
En las lecciones precedentes se han obtenido relaciones entre las condiciones de operación y los triángulos de velocidad del fluido en la entrada y salida del rodete. En este apartado se describe la relación entre los triángulos de velocidad y la forma y dirección de los álabes u otras superficies guías, siguiendo los supuestos de la teoría unidimensional. Los álabes, sean fijos o móviles, guían al fluido, por lo tanto, la velocidad que tiene éste a la salida de los mismos viene determinada por la geometría de dichos álabes.
El ángulo α que adquiere la velocidad absoluta del fluido una vez que abandona unos álabes fijos debe ser igual al ángulo de dichos álabes a la salida. Esto significa que α1 está determinado por los álabes fijos anteriores al rodete.
Por otra parte, la dirección β de la velocidad relativa del fluido debe ser igual al ángulo de los álabes móviles, que se denota como β*. Así, β2 viene determinado por el ángulo de salida de los álabes del rodete.
Fig. 4. 5. Rodete axial
Fig. 4. 6. Rodete axial
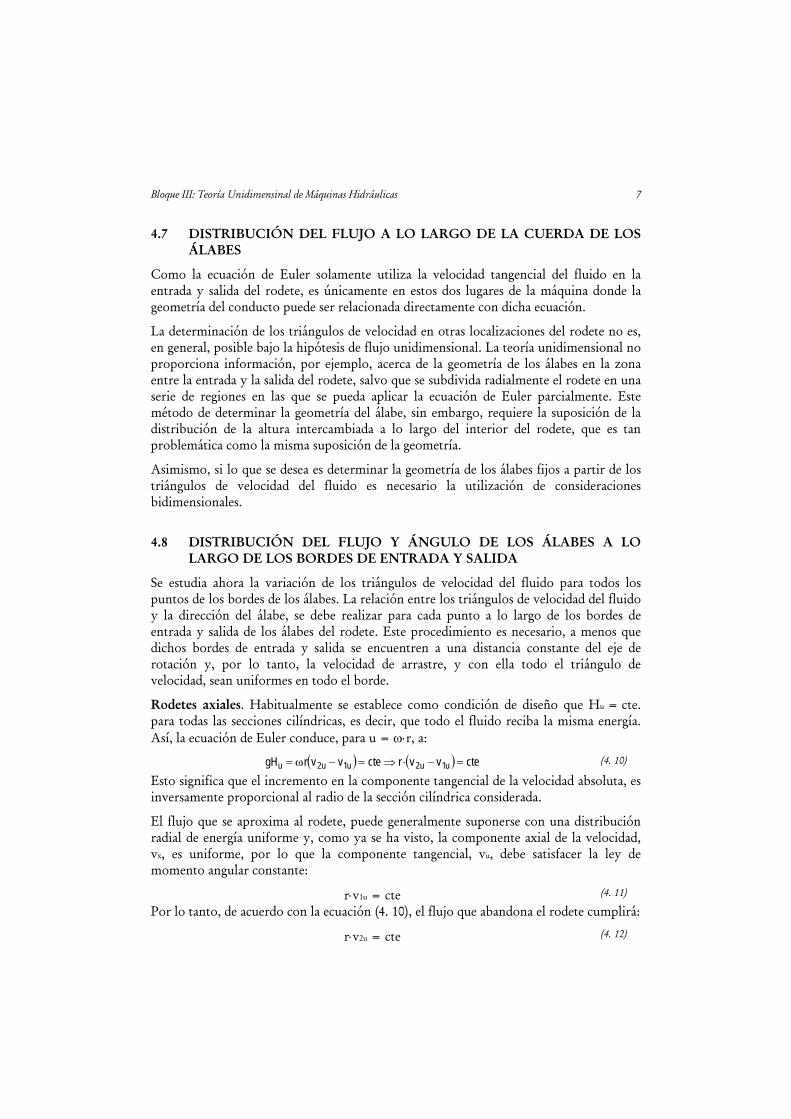
Bloque III: Teoría Unidimensinal de Máquinas Hidráulicas 7
4.7 DISTRIBUCIÓN DEL FLUJO A LO LARGO DE LA CUERDA DE LOS ÁLABES
Como la ecuación de Euler solamente utiliza la velocidad tangencial del fluido en la entrada y salida del rodete, es únicamente en estos dos lugares de la máquina donde la geometría del conducto puede ser relacionada directamente con dicha ecuación.
La determinación de los triángulos de velocidad en otras localizaciones del rodete no es, en general, posible bajo la hipótesis de flujo unidimensional. La teoría unidimensional no proporciona información, por ejemplo, acerca de la geometría de los álabes en la zona entre la entrada y la salida del rodete, salvo que se subdivida radialmente el rodete en una serie de regiones en las que se pueda aplicar la ecuación de Euler parcialmente. Este método de determinar la geometría del álabe, sin embargo, requiere la suposición de la distribución de la altura intercambiada a lo largo del interior del rodete, que es tan problemática como la misma suposición de la geometría.
Asimismo, si lo que se desea es determinar la geometría de los álabes fijos a partir de los triángulos de velocidad del fluido es necesario la utilización de consideraciones bidimensionales.
4.8 DISTRIBUCIÓN DEL FLUJO Y ÁNGULO DE LOS ÁLABES A LO LARGO DE LOS BORDES DE ENTRADA Y SALIDA
Se estudia ahora la variación de los triángulos de velocidad del fluido para todos los puntos de los bordes de los álabes. La relación entre los triángulos de velocidad del fluido y la dirección del álabe, se debe realizar para cada punto a lo largo de los bordes de entrada y salida de los álabes del rodete. Este procedimiento es necesario, a menos que dichos bordes de entrada y salida se encuentren a una distancia constante del eje de rotación y, por lo tanto, la velocidad de arrastre, y con ella todo el triángulo de velocidad, sean uniformes en todo el borde.
Rodetes axiales. Habitualmente se establece como condición de diseño que Hu = cte. para todas las secciones cilíndricas, es decir, que todo el fluido reciba la misma energía. Así, la ecuación de Euler conduce, para u = ω⋅r, a:
( ) ( ) ctevvrctevvrgH u1u2u1u2u =−⋅⇒=−ω= (4. 10)
Esto significa que el incremento en la componente tangencial de la velocidad absoluta, es inversamente proporcional al radio de la sección cilíndrica considerada.
El flujo que se aproxima al rodete, puede generalmente suponerse con una distribución radial de energía uniforme y, como ya se ha visto, la componente axial de la velocidad, vx, es uniforme, por lo que la componente tangencial, vu, debe satisfacer la ley de momento angular constante:
r⋅v1u = cte (4. 11)
Por lo tanto, de acuerdo con la ecuación (4. 10), el flujo que abandona el rodete cumplirá:
r⋅v2u = cte (4. 12)
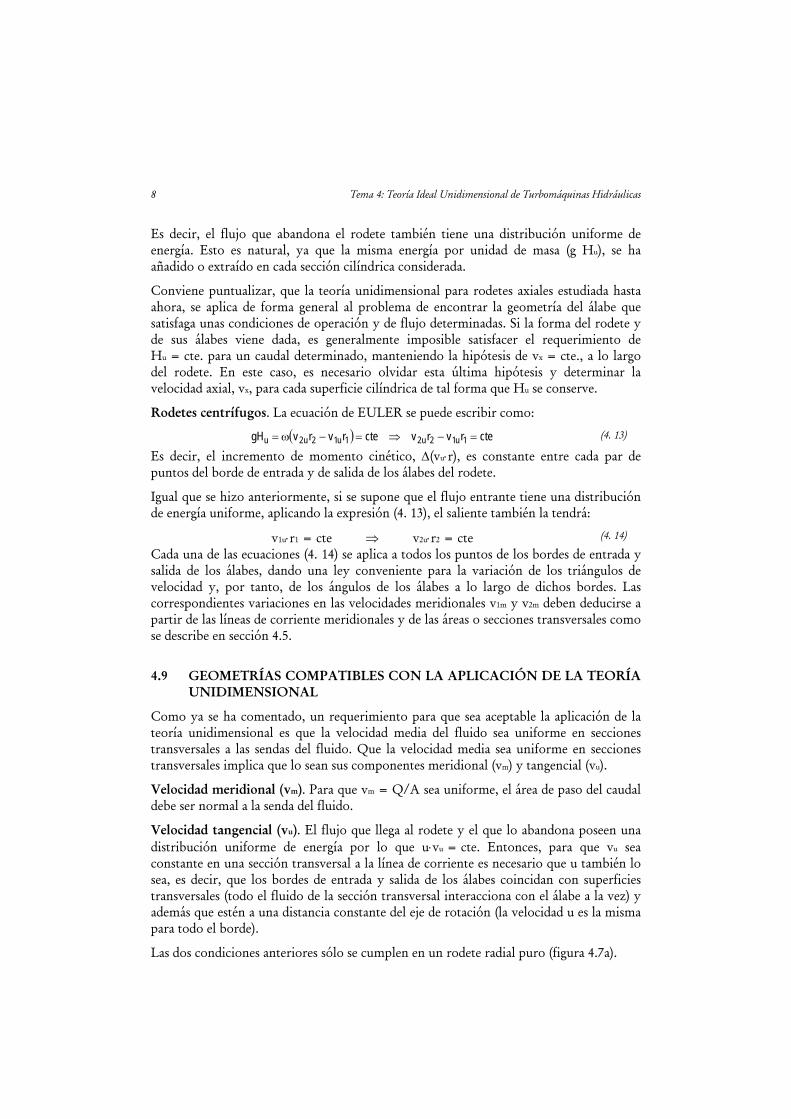
8 Tema 4: Teoría Ideal Unidimensional de Turbomáquinas Hidráulicas
Es decir, el flujo que abandona el rodete también tiene una distribución uniforme de energía. Esto es natural, ya que la misma energía por unidad de masa (g Hu), se ha añadido o extraído en cada sección cilíndrica considerada.
Conviene puntualizar, que la teoría unidimensional para rodetes axiales estudiada hasta ahora, se aplica de forma general al problema de encontrar la geometría del álabe que satisfaga unas condiciones de operación y de flujo determinadas. Si la forma del rodete y de sus álabes viene dada, es generalmente imposible satisfacer el requerimiento de Hu = cte. para un caudal determinado, manteniendo la hipótesis de vx = cte., a lo largo del rodete. En este caso, es necesario olvidar esta última hipótesis y determinar la velocidad axial, vx, para cada superficie cilíndrica de tal forma que Hu se conserve.
Rodetes centrífugos. La ecuación de EULER se puede escribir como:
( ) ctervrvctervrvgH 1u12u21u12u2u =−⇒=−ω= (4. 13)
Es decir, el incremento de momento cinético, ∆(vu⋅r), es constante entre cada par de puntos del borde de entrada y de salida de los álabes del rodete.
Igual que se hizo anteriormente, si se supone que el flujo entrante tiene una distribución de energía uniforme, aplicando la expresión (4. 13), el saliente también la tendrá:
v1u⋅r1 = cte ⇒ v2u⋅r2 = cte (4. 14)
Cada una de las ecuaciones (4. 14) se aplica a todos los puntos de los bordes de entrada y salida de los álabes, dando una ley conveniente para la variación de los triángulos de velocidad y, por tanto, de los ángulos de los álabes a lo largo de dichos bordes. Las correspondientes variaciones en las velocidades meridionales v1m y v2m deben deducirse a partir de las líneas de corriente meridionales y de las áreas o secciones transversales como se describe en sección 4.5.
4.9 GEOMETRÍAS COMPATIBLES CON LA APLICACIÓN DE LA TEORÍA UNIDIMENSIONAL
Como ya se ha comentado, un requerimiento para que sea aceptable la aplicación de la teoría unidimensional es que la velocidad media del fluido sea uniforme en secciones transversales a las sendas del fluido. Que la velocidad media sea uniforme en secciones transversales implica que lo sean sus componentes meridional (vm) y tangencial (vu).
Velocidad meridional (vm). Para que vm = Q/A sea uniforme, el área de paso del caudal debe ser normal a la senda del fluido.
Velocidad tangencial (vu). El flujo que llega al rodete y el que lo abandona poseen una distribución uniforme de energía por lo que u⋅vu = cte. Entonces, para que vu sea constante en una sección transversal a la línea de corriente es necesario que u también lo sea, es decir, que los bordes de entrada y salida de los álabes coincidan con superficies transversales (todo el fluido de la sección transversal interacciona con el álabe a la vez) y además que estén a una distancia constante del eje de rotación (la velocidad u es la misma para todo el borde).
Las dos condiciones anteriores sólo se cumplen en un rodete radial puro (figura 4.7a).
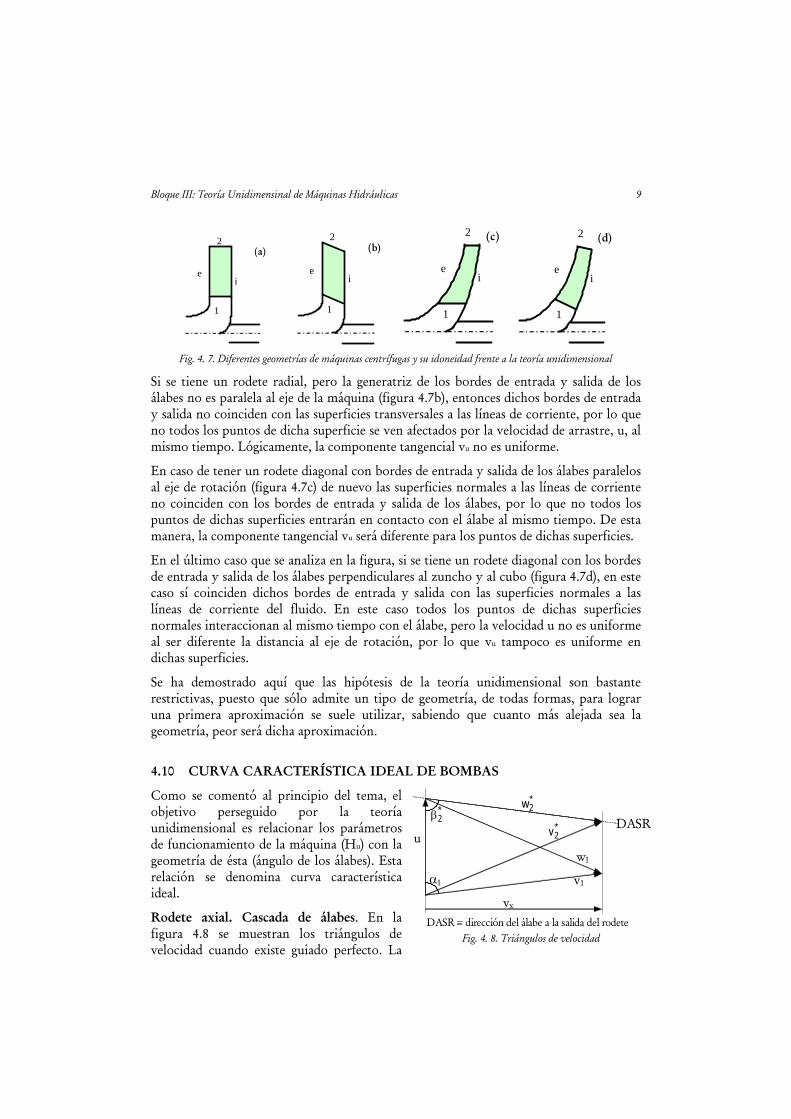
Bloque III: Teoría Unidimensinal de Máquinas Hidráulicas 9
i e
1
2 (a)
i e
1
2(b)
i e
1
2 (c)
i e
1
2 (d)
Fig. 4. 7. Diferentes geometrías de máquinas centrífugas y su idoneidad frente a la teoría unidimensional
Si se tiene un rodete radial, pero la generatriz de los bordes de entrada y salida de los álabes no es paralela al eje de la máquina (figura 4.7b), entonces dichos bordes de entrada y salida no coinciden con las superficies transversales a las líneas de corriente, por lo que no todos los puntos de dicha superficie se ven afectados por la velocidad de arrastre, u, al mismo tiempo. Lógicamente, la componente tangencial vu no es uniforme.
En caso de tener un rodete diagonal con bordes de entrada y salida de los álabes paralelos al eje de rotación (figura 4.7c) de nuevo las superficies normales a las líneas de corriente no coinciden con los bordes de entrada y salida de los álabes, por lo que no todos los puntos de dichas superficies entrarán en contacto con el álabe al mismo tiempo. De esta manera, la componente tangencial vu será diferente para los puntos de dichas superficies.
En el último caso que se analiza en la figura, si se tiene un rodete diagonal con los bordes de entrada y salida de los álabes perpendiculares al zuncho y al cubo (figura 4.7d), en este caso sí coinciden dichos bordes de entrada y salida con las superficies normales a las líneas de corriente del fluido. En este caso todos los puntos de dichas superficies normales interaccionan al mismo tiempo con el álabe, pero la velocidad u no es uniforme al ser diferente la distancia al eje de rotación, por lo que vu tampoco es uniforme en dichas superficies.
Se ha demostrado aquí que las hipótesis de la teoría unidimensional son bastante restrictivas, puesto que sólo admite un tipo de geometría, de todas formas, para lograr una primera aproximación se suele utilizar, sabiendo que cuanto más alejada sea la geometría, peor será dicha aproximación.
4.10 CURVA CARACTERÍSTICA IDEAL DE BOMBAS
Como se comentó al principio del tema, el objetivo perseguido por la teoría unidimensional es relacionar los parámetros de funcionamiento de la máquina (Hu) con la geometría de ésta (ángulo de los álabes). Esta relación se denomina curva característica ideal.
Rodete axial. Cascada de álabes. En la figura 4.8 se muestran los triángulos de velocidad cuando existe guiado perfecto. La
*2β DASR
w1
v1
u
α1
vx
*2v
*2w
DASR ≡ dirección del álabe a la salida del rodete Fig. 4. 8. Triángulos de velocidad
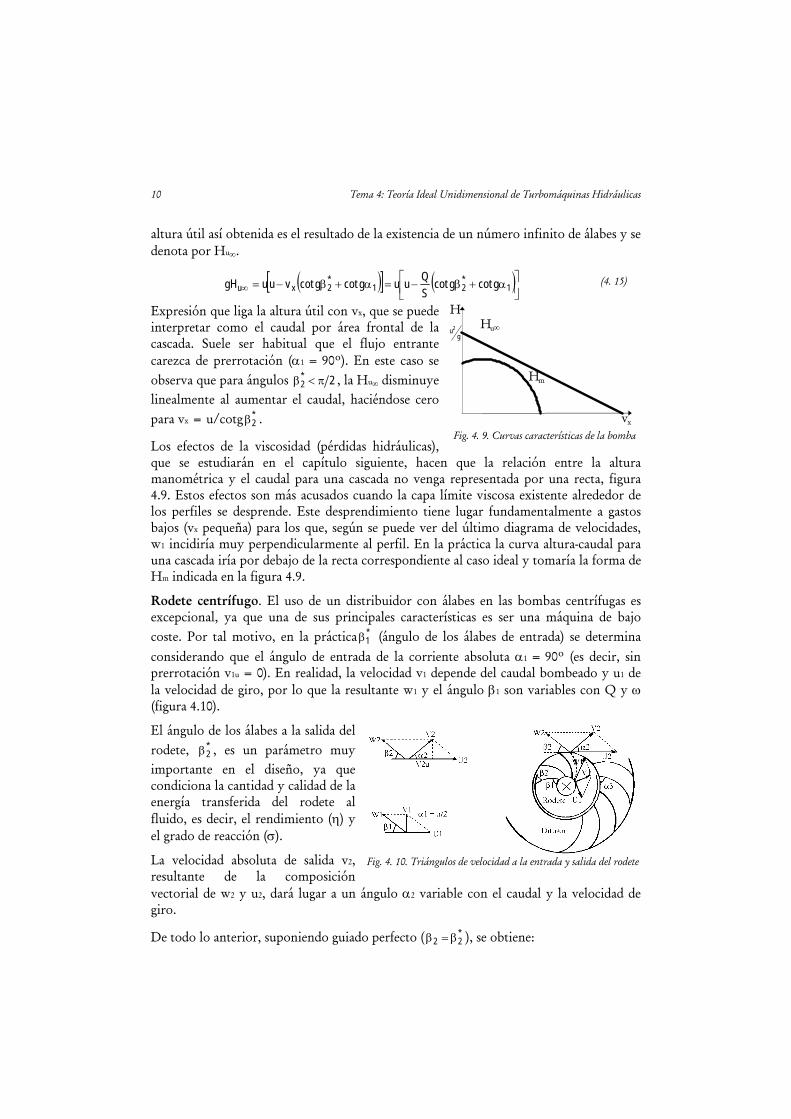
10 Tema 4: Teoría Ideal Unidimensional de Turbomáquinas Hidráulicas
altura útil así obtenida es el resultado de la existencia de un número infinito de álabes y se denota por Hu∞.
( )[ ] ( )⎥⎦⎤
⎢⎣⎡ α+β−=α+β−=∞ 1
*21
*2xu gcotgcot
SQuugcotgcotvuugH (4. 15)
Expresión que liga la altura útil con vx, que se puede interpretar como el caudal por área frontal de la cascada. Suele ser habitual que el flujo entrante carezca de prerrotación (α1 = 90º). En este caso se observa que para ángulos 2*
2 π<β , la Hu∞ disminuye linealmente al aumentar el caudal, haciéndose cero para vx = u/cotg *
2β .
Los efectos de la viscosidad (pérdidas hidráulicas), que se estudiarán en el capítulo siguiente, hacen que la relación entre la altura manométrica y el caudal para una cascada no venga representada por una recta, figura 4.9. Estos efectos son más acusados cuando la capa límite viscosa existente alrededor de los perfiles se desprende. Este desprendimiento tiene lugar fundamentalmente a gastos bajos (vx pequeña) para los que, según se puede ver del último diagrama de velocidades, w1 incidiría muy perpendicularmente al perfil. En la práctica la curva altura-caudal para una cascada iría por debajo de la recta correspondiente al caso ideal y tomaría la forma de Hm indicada en la figura 4.9.
Rodete centrífugo. El uso de un distribuidor con álabes en las bombas centrífugas es excepcional, ya que una de sus principales características es ser una máquina de bajo coste. Por tal motivo, en la práctica *
1β (ángulo de los álabes de entrada) se determina considerando que el ángulo de entrada de la corriente absoluta α1 = 90º (es decir, sin prerrotación v1u = 0). En realidad, la velocidad v1 depende del caudal bombeado y u1 de la velocidad de giro, por lo que la resultante w1 y el ángulo β1 son variables con Q y ω (figura 4.10).
El ángulo de los álabes a la salida del rodete, *
2β , es un parámetro muy importante en el diseño, ya que condiciona la cantidad y calidad de la energía transferida del rodete al fluido, es decir, el rendimiento (η) y el grado de reacción (σ).
La velocidad absoluta de salida v2, resultante de la composición vectorial de w2 y u2, dará lugar a un ángulo α2 variable con el caudal y la velocidad de giro.
De todo lo anterior, suponiendo guiado perfecto ( *22 β=β ), se obtiene:
H Hu∞
vx
Hm
gu2
Fig. 4. 9. Curvas características de la bomba
Fig. 4. 10. Triángulos de velocidad a la entrada y salida del rodete

Bloque III: Teoría Unidimensinal de Máquinas Hidráulicas 11
⎥⎦
⎤⎢⎣
⎡β−=
⋅=∞ )(gcot
AQu
gu
gvuH *
2s
22
*u22
u (4. 16)
donde u2 = ωD2/2 y Q = As⋅v2m, siendo As el área correspondiente a la salida.
Ecuación fundamental para una bomba centrífuga ideal, que permite conocer la curva característica ideal, Hu = ϕ (Q, ω), en ausencia de prerrotación (v1u = 0). En general, esta curva se puede expresar como: QBAH 2
u ω−ω= . Para régimen de giro constante, la curva de altura útil frente a caudal es una línea recta cuya pendiente viene dada por el régimen de giro y diferentes parámetros geométricos.
La inclinación de esta recta depende del valor del ángulo *2β . Los diferentes diseños de los
álabes y triángulos de velocidad se indican en la figura 4.11. El rodete más ventajoso (como ya se ha demostrado al hablar del grado de reacción), y por tanto el más empleado, es el de álabes curvados hacia atrás, 2/*
2 π<β , que da lugar a triángulos de velocidad a la salida de reducida energía cinética.
Fig. 4. 11. Triángulos a la salida del rodete en función del ángulo β2*
La pendiente de la curva característica ideal varía con el ángulo *
2β (figura 4.12), siendo negativa para
álabes curvados hacia atrás ( 2/*2 π<β ), nula para
álabes de salida radiales ( 2/*2 π=β ) y positiva para
álabes curvados hacia delante ( 2/*2 π>β ).
4.11 LIMITACIONES DE LA APROXIMACIÓN UNIDIMENSIONAL
Rodete centrífugo. Como ya se ha indicado, la teoría unidimensional asume la hipótesis de guiado perfecto. Esto supone que el rodete posee un infinito número de álabes de espesor infinitesimal. En realidad, el número de álabes del rodete suele oscilar entre seis y doce, lo que origina que la corriente relativa al rodete no esté perfectamente guiada y existan variaciones de presión y velocidad en la dirección de la coordenada tangencial (azimutal).
Fig. 4. 12. Altura útil en función del ángulo
β2*
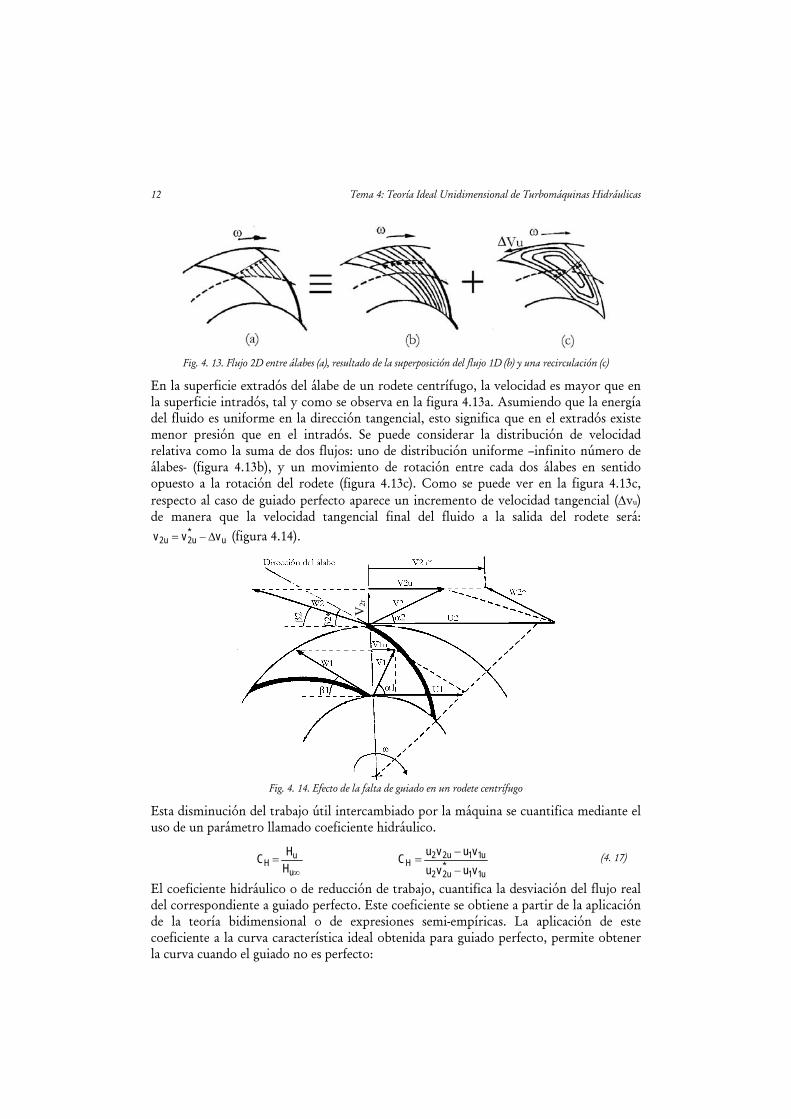
12 Tema 4: Teoría Ideal Unidimensional de Turbomáquinas Hidráulicas
Fig. 4. 13. Flujo 2D entre álabes (a), resultado de la superposición del flujo 1D (b) y una recirculación (c)
En la superficie extradós del álabe de un rodete centrífugo, la velocidad es mayor que en la superficie intradós, tal y como se observa en la figura 4.13a. Asumiendo que la energía del fluido es uniforme en la dirección tangencial, esto significa que en el extradós existe menor presión que en el intradós. Se puede considerar la distribución de velocidad relativa como la suma de dos flujos: uno de distribución uniforme –infinito número de álabes- (figura 4.13b), y un movimiento de rotación entre cada dos álabes en sentido opuesto a la rotación del rodete (figura 4.13c). Como se puede ver en la figura 4.13c, respecto al caso de guiado perfecto aparece un incremento de velocidad tangencial (∆vu) de manera que la velocidad tangencial final del fluido a la salida del rodete será:
u*u2u2 vvv ∆−= (figura 4.14).
V2r
Fig. 4. 14. Efecto de la falta de guiado en un rodete centrífugo
Esta disminución del trabajo útil intercambiado por la máquina se cuantifica mediante el uso de un parámetro llamado coeficiente hidráulico.
∞=
u
uH H
HC u11
*u22
u11u22H vuvu
vuvuC−
−= (4. 17)
El coeficiente hidráulico o de reducción de trabajo, cuantifica la desviación del flujo real del correspondiente a guiado perfecto. Este coeficiente se obtiene a partir de la aplicación de la teoría bidimensional o de expresiones semi-empíricas. La aplicación de este coeficiente a la curva característica ideal obtenida para guiado perfecto, permite obtener la curva cuando el guiado no es perfecto:

Bloque III: Teoría Unidimensinal de Máquinas Hidráulicas 13
⎥⎦
⎤⎢⎣
⎡β
π−== ∞ )(gcot
bDQu
guCHCH *
222
22
HuHu (4. 18)
Rodete axial. En este caso, el guiado del fluido será tanto mejor cuanto menor sea la relación entre la separación de los álabes y la cuerda de estos: L/c.
c
*2β
w1
v1
u
α1
vx
*2v
*2w
DASR ≡ dirección del álabe a la salida del rodete
DASR w2
v2
β2
Fig. 4. 15. Causa y efecto de la falta de guiado sobre una cascada axial de álabes
De forma más sencilla que en los rodetes centrífugos, utilizando hipótesis bidimensionales es posible calcular la separación del flujo real respecto al de guiado perfecto, para un flujo sin fricción. Estos estudios teóricos, dan unos resultados, que aparecen reflejados en la figura 4.16, en forma de factor de corrección CH, definido igual que para rodetes centrífugos: CH = HU/HU∞.
L/c
Fig. 4. 16. Coeficiente hidráulico para rodetes axiales
Se observa que cuando la relación L/c < 1, el factor CH es próximo a 1, es decir, el flujo relativo está muy cercano al guiado perfecto. Para valores L/c > 1, el factor CH decrece rápidamente, así que se hacen necesarias las consideraciones bidimensionales, bien a través de CH o mediante la teoría de perfiles aerodinámicos. Ambas teorías están basadas en los mismos principios y, consecuentemente proporcionan los mismos resultados.
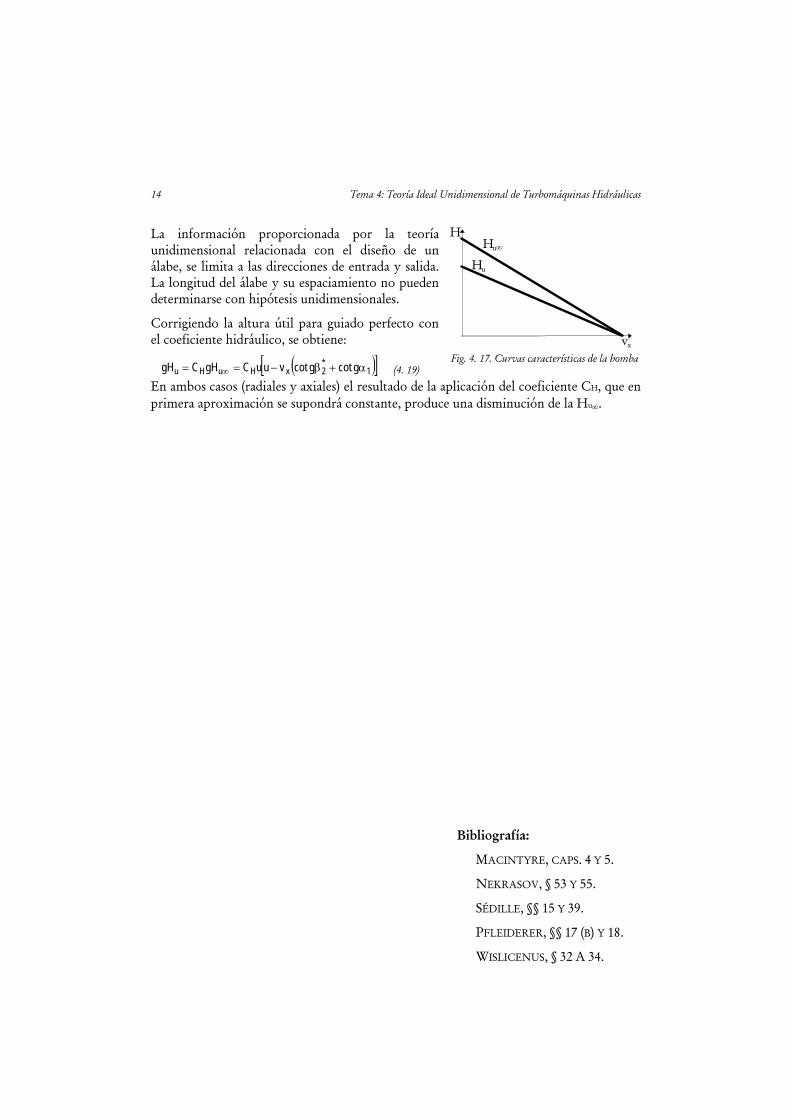
14 Tema 4: Teoría Ideal Unidimensional de Turbomáquinas Hidráulicas
La información proporcionada por la teoría unidimensional relacionada con el diseño de un álabe, se limita a las direcciones de entrada y salida. La longitud del álabe y su espaciamiento no pueden determinarse con hipótesis unidimensionales.
Corrigiendo la altura útil para guiado perfecto con el coeficiente hidráulico, se obtiene:
( )[ ]1*2xHuHu gcotgcotvuuCgHCgH α+β−== ∞ (4. 19)
En ambos casos (radiales y axiales) el resultado de la aplicación del coeficiente CH, que en primera aproximación se supondrá constante, produce una disminución de la Hu∞.
H Hu∞
vx
Hu
Fig. 4. 17. Curvas características de la bomba
Bibliografía:
MACINTYRE, CAPS. 4 Y 5.
NEKRASOV, § 53 Y 55.
SÉDILLE, §§ 15 Y 39.
PFLEIDERER, §§ 17 (B) Y 18.
WISLICENUS, § 32 A 34.
Bloque III: Teoría Unidimensinal de Máquinas Hidráulicas 15
4.1 INTRODUCCIÓN ................................................................................................. 1 4.2 APROXIMACIÓN UNIDIMENSIONAL ................................................................... 1 4.3 DESCRIPCIÓN DEL FLUJO DENTRO DE UNA TURBOMÁQUINA ........................... 2 4.4 HIPÓTESIS DE LA TEORÍA UNIDIMENSIONAL ...................................................... 3 4.5 ECUACIÓN DE CONTINUIDAD ........................................................................... 4 4.6 RELACIÓN ENTRE LOS TRIÁNGULOS DE VELOCIDAD Y LA DIRECCIÓN
DE LOS ÁLABES .................................................................................................... 6 4.7 DISTRIBUCIÓN DEL FLUJO A LO LARGO DE LA CUERDA DE LOS ÁLABES ............ 7 4.8 DISTRIBUCIÓN DEL FLUJO Y ÁNGULO DE LOS ÁLABES A LO LARGO DE
LOS BORDES DE ENTRADA Y SALIDA ................................................................... 7 4.9 GEOMETRÍAS COMPATIBLES CON LA APLICACIÓN DE LA TEORÍA
UNIDIMENSIONAL ............................................................................................... 8 4.10 CURVA CARACTERÍSTICA IDEAL DE BOMBAS ..................................................... 9 4.11 LIMITACIONES DE LA APROXIMACIÓN UNIDIMENSIONAL ............................... 11
Tema 5:
Pérdidas de Energía en Bombas
5.1 INTRODUCCIÓN
En temas previos se ha obtenido la altura útil de una turbomáquina para el caso de un rodete con infinito número de álabes (teoría unidimensional), y también se han considerado los efectos de no guiado que se cuantifican mediante el coeficiente hidráulico. En este tema se avanza un paso más, evaluando las pérdidas que sufre el fluido al atravesar la máquina, con objeto de obtener la altura manométrica teórica. Esto permite obtener las curvas características teóricas, es decir, la altura manométrica, la potencia y el rendimiento en función del caudal. Estas curvas son una aproximación a las curvas reales, obtenidas de forma experimental, que son suministradas por los fabricantes.
Los diferentes tipos de pérdidas que se producen se pueden agrupar en: hidráulicas, volumétricas y orgánicas.
5.2 PÉRDIDAS HIDRÁULICAS
Estas pérdidas comprenden las que se producen por fricción entre el fluido y los contornos sólidos por los que circula y las que surgen debido al desprendimiento de la capa límite en los álabes tanto del rodete como del difusor.
5.2.1 Pérdidas por rozamiento Este tipo de pérdidas aparece por la fricción entre el fluido y una pared sólida, por ejemplo en los canales entre los álabes existentes en el rodete, el distribuidor o el difusor. Para hacer una estimación de estas pérdidas, en primera aproximación, se pueden analizar dichos canales curvos de sección variable a través del análisis de un elemento diferencial de canal, d�, mediante las fórmulas habituales usadas para calcular la pérdida de carga en tuberías rectas de sección constante (fórmula de Darcy):
Dd
g2vfdH
2fr_p
l=
Integrando a lo largo de todo el canal se puede estimar la altura de pérdidas por fricción:
2 Pérdidas de energía en turbomáquinas
∫=L
0
2
Hfr_p d
g2v
D1fH l
(5. 1)
donde: v es el módulo de la velocidad relativa entre la pared y el fluido y DH es el diámetro hidráulico (DH = 4 ⋅Área/Perímetro).
Se observa una proporcionalidad entre la altura de pérdidas por fricción y el cuadrado de la velocidad (o del caudal), por lo que, en primera aproximación puede considerarse:
2frfr_p QKH = (5. 2)
donde Kfr es una constante de pérdidas por fricción que engloba la geometría de la máquina y las propiedades del líquido.
La limitación de este resultado es grande, puesto que las condiciones de utilización de la ecuación (5. 1) -flujo estacionario, desarrollado y conductos fijos, rectos, de sección constante, etc.- hacen prácticamente imposible que se pueda aplicar a las turbomáquinas, especialmente a los conductos del rodete, ya que se puede demostrar que las condiciones de flujo en un conducto en rotación, difieren radicalmente de aquellas en conductos fijos. Las tensiones cortantes, causantes de estas pérdidas, dependen, en general, de los gradientes de velocidad normales a la dirección del flujo, por lo que el problema no puede describirse mediante consideraciones unidimensionales, sin tener en cuenta las variaciones transversales de velocidad. Por tanto, el problema de la fricción es realmente bi- o tridimensional y para aplicaciones específicas que requieran mayor exactitud debe ser estudiado en profundidad.
5.2.2 Desprendimiento de capa límite Este tipo de pérdidas aparece cuando un flujo se aproxima a un álabe con una dirección diferente de aquella para la que éste ha sido diseñado. Se podría decir que tales pérdidas tienen lugar cuando es cinemáticamente imposible para el flujo seguir suavemente las paredes de los conductos fluidos, por lo que se producen perturbaciones que consumen energía. Al llevar la corriente una dirección muy diferente a la del álabe tiene que salvar el borde de ataque de dicho álabe, lo que genera una depresión importante y que el gradiente adverso de presiones origine el desprendimiento de la capa límite. Se produce así una disminución de la fuerza de sustentación entre la corriente y el perfil en la dirección perpendicular a dicha corriente y un aumento de la fuerza de arrastre en la dirección de la corriente.
Algunos autores, simplificando notablemente el fenómeno, describen dichas pérdidas utilizando una teoría unidimensional. Suponen que la velocidad media del fluido cambia bruscamente de la velocidad de aproximación al álabe a la velocidad indicada por el conducto, y relacionan las pérdidas con este cambio brusco de velocidad. Por este motivo, estas pérdidas se han denominado tradicionalmente pérdidas por choque.
En el presente capítulo se utiliza esta descripción como primera aproximación a la estimación de dichas pérdidas. Sin embargo, estudios más detallados apuntan que, en realidad, estas pérdidas se producen debido a las perturbaciones locales del flujo, que no se pueden describir mediante una aproximación unidimensional, que utiliza velocidades medias. Un estudio profundo de estas pérdidas (Wislicenus, cap. 12) revela que los
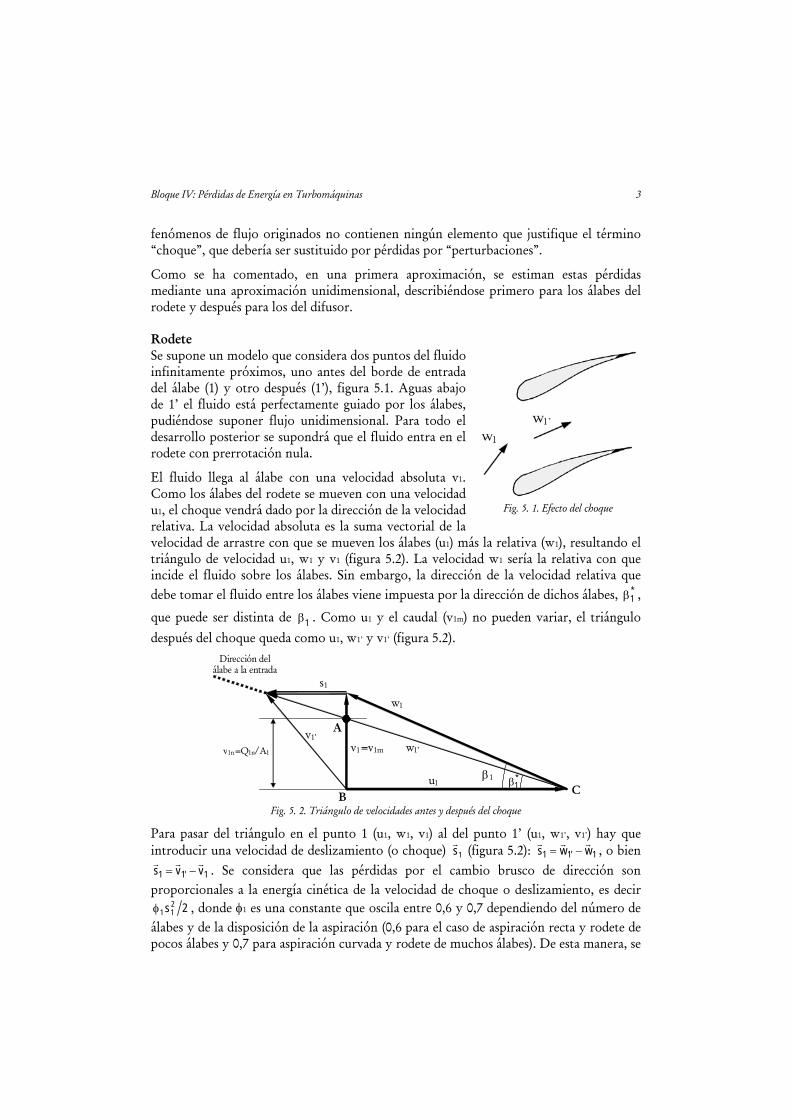
Bloque IV: Pérdidas de Energía en Turbomáquinas 3
fenómenos de flujo originados no contienen ningún elemento que justifique el término “choque”, que debería ser sustituido por pérdidas por “perturbaciones”.
Como se ha comentado, en una primera aproximación, se estiman estas pérdidas mediante una aproximación unidimensional, describiéndose primero para los álabes del rodete y después para los del difusor.
Rodete Se supone un modelo que considera dos puntos del fluido infinitamente próximos, uno antes del borde de entrada del álabe (1) y otro después (1’), figura 5.1. Aguas abajo de 1’ el fluido está perfectamente guiado por los álabes, pudiéndose suponer flujo unidimensional. Para todo el desarrollo posterior se supondrá que el fluido entra en el rodete con prerrotación nula.
El fluido llega al álabe con una velocidad absoluta v1. Como los álabes del rodete se mueven con una velocidad u1, el choque vendrá dado por la dirección de la velocidad relativa. La velocidad absoluta es la suma vectorial de la velocidad de arrastre con que se mueven los álabes (u1) más la relativa (w1), resultando el triángulo de velocidad u1, w1 y v1 (figura 5.2). La velocidad w1 sería la relativa con que incide el fluido sobre los álabes. Sin embargo, la dirección de la velocidad relativa que debe tomar el fluido entre los álabes viene impuesta por la dirección de dichos álabes, *
1β ,
que puede ser distinta de 1β . Como u1 y el caudal (v1m) no pueden variar, el triángulo después del choque queda como u1, w1’ y v1’ (figura 5.2).
w1
w1’ v1’
v1=v1m
s1
β1 *1β
B
A
C u1
Dirección del álabe a la entrada
v1n=Q1n/A1
Fig. 5. 2. Triángulo de velocidades antes y después del choque
Para pasar del triángulo en el punto 1 (u1, w1, v1) al del punto 1’ (u1, w1’, v1’) hay que introducir una velocidad de deslizamiento (o choque) 1s
r (figura 5.2): 1'11 wws
rrr−= , o bien
1'11 vvsrrr
−= . Se considera que las pérdidas por el cambio brusco de dirección son proporcionales a la energía cinética de la velocidad de choque o deslizamiento, es decir
2s211φ , donde φ1 es una constante que oscila entre 0,6 y 0,7 dependiendo del número de
álabes y de la disposición de la aspiración (0,6 para el caso de aspiración recta y rodete de pocos álabes y 0,7 para aspiración curvada y rodete de muchos álabes). De esta manera, se
Fig. 5. 1. Efecto del choque

4 Pérdidas de energía en turbomáquinas
puede expresar la altura de pérdidas como la energía cinética invertida en orientar el fluido en la dirección del álabe:
g2sH
21
1ch_p φ= (5. 3)
En el triángulo ABC no existiría componente de deslizamiento, puesto que la dirección de w1 coincidiría con la del álabe. La condición para que no exista choque a la entrada del rodete es que el ángulo de la velocidad relativa a la entrada
1β , debe coincidir con la orientación del álabe, *
1β . Es decir, para un rodete determinado y una velocidad de giro dada, variando el caudal de entrada (o v1m) se puede hacer desaparecer estas pérdidas. A este caudal para el que no existen pérdidas por choque se le llama Caudal Nominal del rodete: Q1n = A1⋅AB = A1⋅u1⋅tg( *
1β ) = A1⋅v1n, donde A1 es la sección de entrada que es la misma en 1 y 1’ por estar infinitamente próximos.
Teniendo en cuenta la semejanza de triángulos:
⎟⎟⎠
⎞⎜⎜⎝
⎛−=⎟⎟
⎠
⎞⎜⎜⎝
⎛ −=⇒=−
1QQu1
ABvus
ABu
ABvs
n11
m111
1
m1
1 (5. 4)
donde Q es el caudal que circula por el rodete en cada caso: Q = A1⋅v1m.
Por tanto, las pérdidas se pueden expresar como:
g2u1
QQH
21
2
n11ch_p ⎟⎟
⎠
⎞⎜⎜⎝
⎛−φ=
(5. 5)
La expresión (5. 4) muestra la variación lineal de la velocidad de deslizamiento con el caudal (figura 5.3). Para caudales inferiores al nominal, s1 es negativa, haciéndose nula para el caudal nominal. En la figura 5.4 se observa la variación de Hp_ch con el caudal que circula por el rodete. La curva presenta una forma parabólica que se hace cero cuando por el rodete circula el caudal nominal. Para caudal nulo, las pérdidas presentan un valor de g2u 2
11φ . Estas pérdidas se deben a la existencia de una velocidad relativa w1 = -u1, para Q = 0.
Difusor con álabes Dado que los álabes del difusor son fijos, la existencia de choque vendrá dada por la dirección de la velocidad absoluta del fluido y no por la de la velocidad relativa como en el caso del rodete. En el apartado anterior se ha utilizado el subíndice 1 para la entrada a los álabes del rodete. Se deja el subíndice 2 para la salida del rodete y se utiliza, en este apartado, el subíndice 3 para la entrada a los álabes del difusor. Análogamente al apartado
v1m = Q/A1
Q1n/A1 = v1n
Dirección del álabe a la entrada
s U1
s1
s1
s1
w1
w1
*1β
Fig. 5. 3. Variación de la velocidad de
deslizamiento con el caudal
Q Q1n
Hp_ch
g2u21
1 ⋅φ
Fig. 5. 4. Variación de las pérdidas por choque con el caudal

Bloque IV: Pérdidas de Energía en Turbomáquinas 5
anterior, se suponen los puntos 3 y 3’ (antes y después del choque con el álabe respectivamente). Suponiendo que entre el rodete y el difusor se conserva la misma anchura (b2 = b3), la separación radial entre ellos es nula y pasa el mismo caudal, las características del flujo de salida del rodete (2) serían iguales que las de aproximación al difusor (3).
Las pérdidas por desprendimiento de la capa límite se producen cuando la dirección de v3 (velocidad de llegada al difusor) no es tangente a la dirección de los álabes del difusor. Los triángulos de velocidad resultantes son los de la figura 5.5. Para pasar de la velocidad
3vr
a la '3vr
hay que sumar una velocidad de deslizamiento 3s
r. Las pérdidas son proporcionales a la energía cinética de
dicha velocidad: g2
sH23
3ch_p φ= , donde φ3 es una constante similar a la del apartado
anterior.
Como se observa en la figura 5.5, variando el caudal (o v3m) se puede hacer desaparecer la velocidad de deslizamiento. Esto ocurre en el punto A, donde se cortan la dirección de la velocidad relativa de salida del rodete (w2) y la dirección del álabe del difusor (αd). Si la sección de paso es A3, se define el Caudal Nominal del difusor como: Q3n = A3⋅v3n. Por tanto, cuando por el difusor circule dicho caudal estas pérdidas serán nulas. Este caudal depende del ángulo de los álabes del difusor, de la velocidad de giro y de la geometría de salida del rodete.
Teniendo en cuenta la semejanza de triángulos:
⎟⎟⎠
⎞⎜⎜⎝
⎛−=⎟⎟
⎠
⎞⎜⎜⎝
⎛−=⇒=
−1
QQu1
vvus
Vu
vvs
n32
n3
m323
n3
2
n3m3
3 (5. 6)
Sustituyendo en la expresión de las pérdidas por choque, se obtiene:
g2u1
QQH
22
2
n33ch_p ⎟⎟
⎠
⎞⎜⎜⎝
⎛−φ=
(5. 7)
Expresión análoga a la obtenida para el rodete, ecuación (5. 5). En la expresión (5. 6) se observa la variación lineal de la velocidad de deslizamiento 3s
r con el caudal, y en la (5. 7)
la variación de la altura de pérdidas con el cuadrado del caudal, por lo que se puede obtener una gráfica similar a la de la figura 5.3.
Para que no haya choque ni a la entrada del rodete, ni a la entrada de los álabes del difusor, los caudales nominales deben coincidir: Qn = Q1n = Q3n, por tanto, se suele diseñar el rodete y el difusor para el mismo caudal nominal.
w2 v3’v2=v3
s3
β2 B
A
C u2
3
n3n3 A
Qv =
v3m
α3 αd
Dirección del álabe a la entrada
Fig. 5. 5. Triángulos de velocidad antes y después del choque en el difusor

6 Pérdidas de energía en turbomáquinas
En resumen, la altura total de pérdidas por desprendimiento de la capa límite se puede estimar, en primera aproximación, como la suma de las pérdidas originadas en el rodete más las del difusor, por lo que se pueden expresar de la siguiente forma:
( )2nch
2
n
22
3
2
n
21
1ch_p QQK1QQ
g2u1
g2uH −=⎟⎟
⎠
⎞⎜⎜⎝
⎛−φ+⎟⎟
⎠
⎞⎜⎜⎝
⎛−φ=
donde Kch es una constante de pérdidas por choque y Qn es el caudal nominal tanto del rodete como del difusor.
5.2.3 Curvas características teóricas de una bomba Una vez que se han estimado todas las pérdidas hidráulicas se puede recuperar el balance de energía mecánica para una bomba hidráulica del tema 2, donde se establecía que la altura manométrica era igual a la altura útil menos la altura de pérdidas internas (hidráulicas) y llegar a la expresión de la curva característica teórica para una bomba:
2nch
2fr
2nch
2fru11u22
Hch_pfr_pum )QQ(KQKBQA)QQ(KQK)vuvu(
gCHHHH −−−−=−−−−=−−= ∗
Como ya se definió también en el tema 2, el rendimiento manométrico cuantifica las pérdidas hidráulicas:
u
2nch
2fr
u
mm H
)QQ(KQK1
HH −+
−==η
En la figura 5.6 se representa la altura útil, las pérdidas asociadas a la fricción y al desprendimiento de la capa límite, la altura manométrica y el rendimiento manométrico.
5.3 PÉRDIDAS VOLUMÉTRICAS
En cualquier máquina en la que hay unos elementos móviles (por ejemplo, el rodete en una turbomáquina) y otros fijos (por ejemplo, la carcasa) existen inevitablemente pequeñas holguras. Las pérdidas volumétricas o fugas de caudal se producen debido a la existencia de estas pequeñas holguras que conectan regiones de fluido con presiones diferentes. Dependiendo del tipo de bomba, estas fugas pueden producirse en los siguientes lugares:
a) entre la carcasa y el rodete en la entrada del rodete
b) entre dos etapas consecutivas en bombas multicelulares
c) a través de la empaquetadura
d) a través de los dispositivos para equilibrar el empuje axial
e) a través del extremo del álabe en rodetes abiertos
Q
H
0
0,2
0,4
0,6
0,8
1η
Hu
Hm Hp_ch
Hp_fr
ηm
Qn Q
0,75
0,60
0,45
0,30
0,15
Fig. 5. 6. Curvas características de una bomba

Bloque IV: Pérdidas de Energía en Turbomáquinas 7
Otra fuente de pérdidas volumétricas es la pequeña parte de caudal sangrado que se utiliza, en ocasiones, para refrigerar o lubricar.
En una bomba, la holgura inevitable entre el rodete y la carcasa provoca un retorno del líquido desde la impulsión (alta presión) hacia la aspiración (baja presión). Este caudal de fuga interno, Qfi (figura 5.7i), circula por el rodete, por lo que consume una energía, pero no sale al exterior, no circula por la instalación. Es necesario minimizarlo mediante juntas de estanqueidad.
Qfi
Fig. 5. 7. Pérdidas volumétricas en una bomba (i) y en una turbina (d)
Además, en bombas centrífugas de aspiración simple, habitualmente, se taladra el rodete para evitar el empuje axial, de tal forma que dicho empuje se equilibre hidráulicamente. A través de estos orificios se producen también fugas internas.
Para minimizar las fugas externas (Qfe) que se producen en la holgura entre el eje y la carcasa es necesario situar otra junta de estanqueidad (empaquetadura). Estas juntas producen una elevada pérdida de carga, para que el caudal fugado sea mínimo.
El caudal al que se entrega energía en una bomba es el que circula por el rodete: Qrodete = Q + Qfi + Qfe, donde Q es el caudal suministrado por la bomba, Qfi es el caudal de fugas interno y Qfe el caudal de fugas externo. Se define el rendimiento volumétrico de una bomba de la siguiente forma:
4434421321vevi
fefi
fi
fivevi
Fv QQQ
QQQQ
QQQ
Q
ηη
+++
+=ηη=
+=η (5. 8)
Habitualmente el rendimiento volumétrico se refiere sólo al apartado de fugas internas, despreciando las externas. En general, todos los cálculos se refieren siempre al caudal que circula por la instalación, que es el que se puede medir, por lo que en las expresiones en las que aparezca el caudal que circula por el rodete se debe utilizar: Q/ηv.
En una turbina, la situación es la que se muestra en la figura 5.7d. Ahora el rendimiento volumétrico se define como el cociente entre el caudal que produce trabajo (Q-QF) y el
caudal total turbinado (Q): QQQ F
v−
=η .

8 Pérdidas de energía en turbomáquinas
5.4 PÉRDIDAS ORGÁNICAS
Las pérdidas orgánicas comprenden: la fricción que se produce entre el líquido y las superficies exteriores del rodete y las pérdidas de energía mecánica que se producen por la fricción entre el eje del rodete y los elementos fijos de guía y soporte de dicho eje.
5.4.1 Pérdidas por rozamiento de disco y ventilación La holgura existente entre las caras exteriores del rodete y la carcasa está llena de líquido. Como el rodete está girando, estas caras exteriores sufren esfuerzos de rozamiento con dicho líquido, que se traducen en un consumo extra de energía, originando pérdidas de cierta importancia. El trabajo de rozamiento correspondiente se puede estimar, en primera aproximación, estableciendo una similitud con el rozamiento que sufre un disco cilíndrico macizo girando dentro de una carcasa como muestra la figura 5.8. Cada una de las dos caras planas del disco representa una de las caras exteriores del rodete y el ancho de la superficie cilíndrica (e) representa la suma de los espesores de ambas caras del rodete. Para calcular el esfuerzo cortante se toma, en una de las caras, un anillo de anchura dr a una distancia r del eje, resultando:
( )2rC
2uC
2
f
2
fω
ρ=ρ=τ
donde ρ es la densidad del líquido, ω la velocidad de giro y Cf un coeficiente de fricción función del número de Reynolds. Es conveniente, y ello no hace variar el resultado final, considerar Cf como constante, y tener en cuenta la influencia del número de Reynolds al final, para el conjunto de todo el disco.
La fuerza de fricción es el esfuerzo cortante por la superficie (2 caras × 2πr⋅dr):
( ) drr42rCdSdF
2
f1 πω
ρ=⋅τ=
El momento de esta fuerza respecto al eje de rotación es: drrCrdFdM f42
11 2 ωπρ=⋅=
Integrando la expresión anterior para las dos caras laterales: ( )∫ ωπρ==
2D
0
522
f112
52DC2dMM
Por otra parte, también existe fricción en la superficie cilíndrica periférica (πD2e):
( ) ( ) e2DCeD2
2DCF 32
2'f2
22'
f2 ωρπ=πω
ρ=
a b
a+b=e
r
dr
Fig. 5. 8. Pérdidas por rozamiento de disco

Bloque IV: Pérdidas de Energía en Turbomáquinas 9
que origina un momento suplementario: e2
DC2
DFM4
22'f
222 ⎟⎟
⎠
⎞⎜⎜⎝
⎛ωπρ==
suponiendo C´f = Cf, el momento total por rozamiento será:
⎟⎟⎠
⎞⎜⎜⎝
⎛+⎟⎟
⎠
⎞⎜⎜⎝
⎛ωρπ=+= e
5D
2DCMMM 2
422
f21f
Se puede calcular ahora la potencia mecánica absorbida (perdida) por rozamiento:
⎟⎠
⎞⎜⎝
⎛ +⎟⎠
⎞⎜⎝
⎛ωρπ=ω= e5
D2
DCMW 24
23ffroz
&
El coeficiente Cf es función de ⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎠
⎞⎜⎝
⎛ωµρ
=2
22
DB,rugosidad,
2DRe .
Las partículas fluidas entre el disco y la carcasa adquieren una determinada velocidad de rotación como consecuencia de la fuerza centrífuga. Las partículas cercanas a la superficie del disco se mueven alejándose del eje, creándose un movimiento secundario o circulación (figura 5.8). Cuando el volumen de líquido es pequeño, las partículas mantendrán parte de su rotación y consumirán menos energía del disco, siendo así menor el coeficiente Cf (figura 5.9).
↓⇒↓ roz_p2
HDB
Fig. 5. 9. Coeficiente de fricción frente al número de Reynolds
5.4.2 Pérdidas mecánicas Estas pérdidas son debidas a los rozamientos que existen entre los elementos sólidos en movimiento (eje) y los que están inmóviles (soportes, etc…). Se producen en los rodamientos y los prensaestopas y, aunque su naturaleza es bien conocida, existen pocos datos sobre su valor debido a que son pequeñas y difíciles de medir en las instalaciones habituales. Además, no influyen directamente en el proceso de mejora del diseño

10 Pérdidas de energía en turbomáquinas
hidráulico de una bomba, por lo que se les presta menor atención. Tanto el diseño de un cojinete como el de un prensaestopas está dirigido por requerimientos mecánicos, siendo secundario el tema de las pérdidas mecánicas por fricción que producen.
Las pérdidas por fricción en los prensaestopas dependen de un gran número de factores tales como: el tamaño y la profundidad de la caja, la velocidad de giro de la bomba, la presión, la forma de la empaquetadura y la lubricación, por lo que cualquier valor será representativo sólo de un modelo de empaquetadura.
Aunque los rodamientos están normalizados, la fricción para el mismo tamaño y carga varía con el fabricante, además de afectarle notablemente el tipo de lubricación.
Visto lo anterior, se suelen estimar las pérdidas como un porcentaje de la potencia útil que se está utilizando. Para bombas de potencia útil superior a 100 KW se estiman del orden del 1% de la potencia útil, y para bombas pequeñas se estiman entre el 2% y el 3%.
mecW
uv
u HQgWη
ρ= >105 W uW01,0 ⋅
<105 W uW)03,002,0( ⋅÷
5.4.3 Rendimiento orgánico Se define el rendimiento orgánico, que cuantifica las pérdidas orgánicas, como el cociente entre la potencia útil que le llega al rodete y la potencia exterior que hay que aportar (de accionamiento):
Bombas: ( )ext
uvo
HgQWηρ
=η
Donde la potencia exterior (de accionamiento) se calcula como suma de la potencia útil más las pérdidas orgánicas: mecrozuext WWWW ++= .
Para las turbinas la definición es análoga. Es el cociente entre la potencia que se extrae del rodete y la que le llega al rodete para transformar:
Turbinas: uv
exto HgQηρ
=ηW
5.5 RENDIMIENTO TOTAL
Se define el rendimiento total de una turbomáquina como el producto del rendimiento manométrico por el volumétrico y por el orgánico:
Bomba: ext
m
ext
uf
fu
movmT W
gQHW
H)QQ(gQQ
QHH ρ
=+ρ
⋅+
⋅=η⋅η⋅η=η
El rendimiento cuantifica todas las pérdidas que existen en la turbomáquina, siendo, para una bomba, el cociente entre la ganancia real de energía del fluido y la energía que es necesario aportar en el eje. A diferencia del rendimiento manométrico, para un caudal nulo Q = 0, el rendimiento total sí es nulo. Se define el caudal óptimo o de diseño como aquel para el cual el rendimiento de la máquina es máximo. Este caudal, en principio, es diferente del caudal nominal definido en la pregunta 5.2.2.
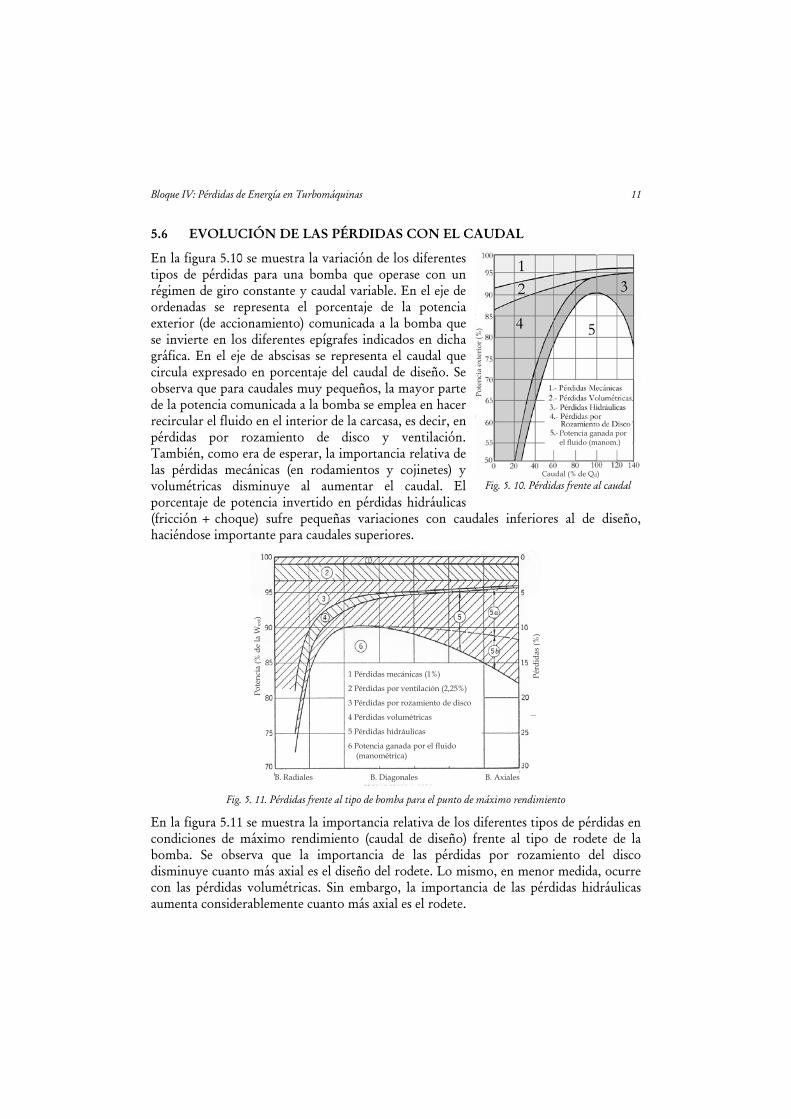
Bloque IV: Pérdidas de Energía en Turbomáquinas 11
5.6 EVOLUCIÓN DE LAS PÉRDIDAS CON EL CAUDAL
En la figura 5.10 se muestra la variación de los diferentes tipos de pérdidas para una bomba que operase con un régimen de giro constante y caudal variable. En el eje de ordenadas se representa el porcentaje de la potencia exterior (de accionamiento) comunicada a la bomba que se invierte en los diferentes epígrafes indicados en dicha gráfica. En el eje de abscisas se representa el caudal que circula expresado en porcentaje del caudal de diseño. Se observa que para caudales muy pequeños, la mayor parte de la potencia comunicada a la bomba se emplea en hacer recircular el fluido en el interior de la carcasa, es decir, en pérdidas por rozamiento de disco y ventilación. También, como era de esperar, la importancia relativa de las pérdidas mecánicas (en rodamientos y cojinetes) y volumétricas disminuye al aumentar el caudal. El porcentaje de potencia invertido en pérdidas hidráulicas (fricción + choque) sufre pequeñas variaciones con caudales inferiores al de diseño, haciéndose importante para caudales superiores.
1 Pérdidas mecánicas (1%)
2 Pérdidas por ventilación (2,25%)
3 Pérdidas por rozamiento de disco
4 Pérdidas volumétricas
5 Pérdidas hidráulicas
6 Potencia ganada por el fluido (manométrica)
B. Radiales B. Diagonales B. Axiales
Pote
ncia
(% d
e la
Wex
t)
Pérd
idas
(%)
Fig. 5. 11. Pérdidas frente al tipo de bomba para el punto de máximo rendimiento
En la figura 5.11 se muestra la importancia relativa de los diferentes tipos de pérdidas en condiciones de máximo rendimiento (caudal de diseño) frente al tipo de rodete de la bomba. Se observa que la importancia de las pérdidas por rozamiento del disco disminuye cuanto más axial es el diseño del rodete. Lo mismo, en menor medida, ocurre con las pérdidas volumétricas. Sin embargo, la importancia de las pérdidas hidráulicas aumenta considerablemente cuanto más axial es el rodete.
Potencia ganada por el fluido (manom.)
Pote
ncia
ext
erio
r (%
) Caudal (% de Qd)
Fig. 5. 10. Pérdidas frente al caudal
12 Pérdidas de energía en turbomáquinas
Bibliografía:
BETZ, § 20. HORLOCK, § 3.3.
KOVÁTS Y DESMUR, CAPS. 3 Y 6 A-D. NEKRASOV, § 57.
PFLEIDERER, §§ 15 Y 15 A. SCHLICHTING, CAP. 21 B).
SÉDILLE, §§ 17 A 19, 40, 46 Y 87. STEPANOFF, CAPS. 9 Y 10.
WISLICENUS, CAP. 12.
Bloque IV: Pérdidas de Energía en Turbomáquinas 13
5.1 INTRODUCCIÓN .............................................................................................. 1 5.2 PÉRDIDAS HIDRÁULICAS ................................................................................. 1
5.2.1 Pérdidas por rozamiento .................................................................................... 1 5.2.2 Desprendimiento de capa límite ........................................................................ 2 5.2.3 Curvas características teóricas de una bomba ................................................... 6
5.3 PÉRDIDAS VOLUMÉTRICAS .............................................................................. 6 5.4 PÉRDIDAS ORGÁNICAS .................................................................................... 8
5.4.1 Pérdidas por rozamiento de disco y ventilación ................................................ 8 5.4.2 Pérdidas mecánicas ............................................................................................. 9 5.4.3 Rendimiento orgánico ..................................................................................... 10
5.5 RENDIMIENTO TOTAL .................................................................................. 10 5.6 EVOLUCIÓN DE LAS PÉRDIDAS CON EL CAUDAL .......................................... 11
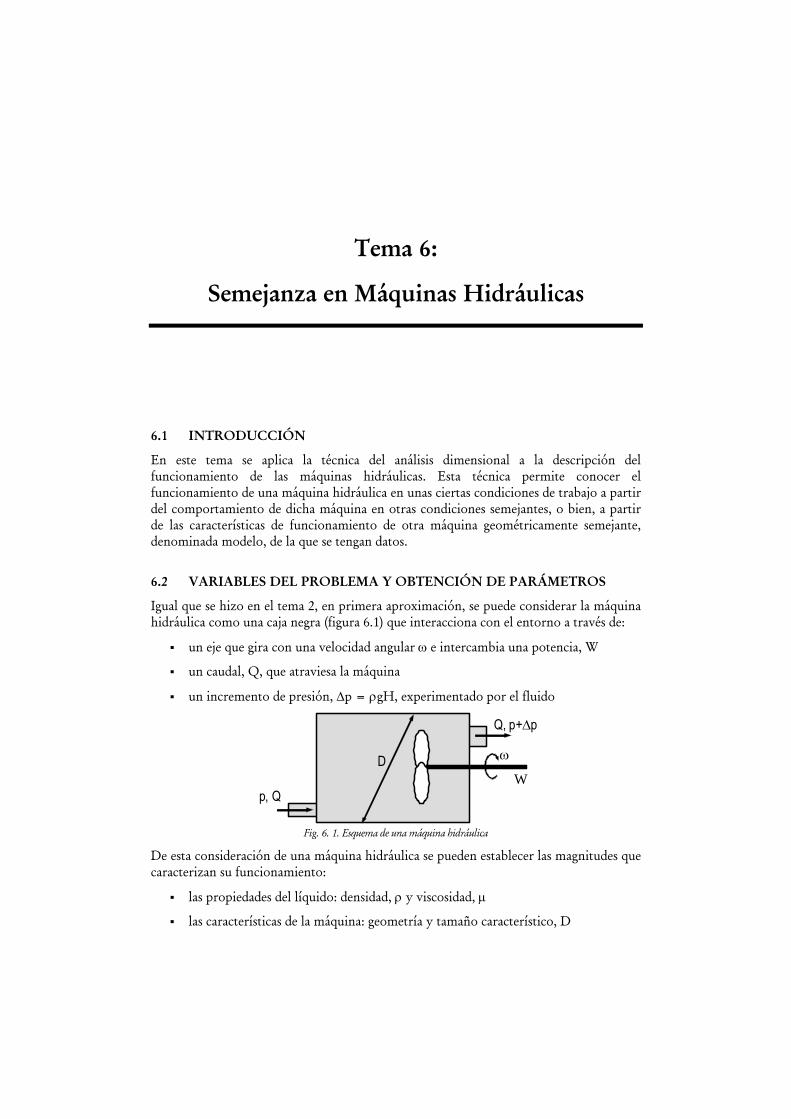
Tema 6:
Semejanza en Máquinas Hidráulicas
6.1 INTRODUCCIÓN
En este tema se aplica la técnica del análisis dimensional a la descripción del funcionamiento de las máquinas hidráulicas. Esta técnica permite conocer el funcionamiento de una máquina hidráulica en unas ciertas condiciones de trabajo a partir del comportamiento de dicha máquina en otras condiciones semejantes, o bien, a partir de las características de funcionamiento de otra máquina geométricamente semejante, denominada modelo, de la que se tengan datos.
6.2 VARIABLES DEL PROBLEMA Y OBTENCIÓN DE PARÁMETROS
Igual que se hizo en el tema 2, en primera aproximación, se puede considerar la máquina hidráulica como una caja negra (figura 6.1) que interacciona con el entorno a través de:
un eje que gira con una velocidad angular ω e intercambia una potencia, W
un caudal, Q, que atraviesa la máquina
un incremento de presión, ∆p = ρgH, experimentado por el fluido
p, Q
Q, p+∆p
W
ωD
Fig. 6. 1. Esquema de una máquina hidráulica
De esta consideración de una máquina hidráulica se pueden establecer las magnitudes que caracterizan su funcionamiento:
las propiedades del líquido: densidad, ρ y viscosidad, µ
las características de la máquina: geometría y tamaño característico, D
2 Semejanza en Máquinas Hidráulicas
las condiciones operativas: la velocidad angular del eje, ω, el caudal de fluido que atraviesa la máquina, Q y el incremento de presión que experimenta el fluido: ∆p
la potencia mecánica intercambiada a través del eje: W
el rendimiento: η
Si se toman como magnitudes dependientes las tres últimas: ∆p, W y η y como independientes todas las demás, se pueden establecer las siguientes relaciones de dependencia, para máquinas geométricamente semejantes:
),D,Q,,(fηω),D,Q,,(fW
),D,Q,,(fp
3
2
1
ωµρ=µρ=
ωµρ=∆
(6. 1)
Utilizando la técnica del análisis dimensional, estas relaciones se transforman en:
)D
Q,D
Q(=
)D
Q,D
Q(=D
W
)D
Q,D
Q(=D
p
33
3253
3122
µρ
ωφη
µρ
ωφ
ωρ
µρ
ωφ
ωρ∆
(6. 2)
La elección de magnitudes no es fija, aunque las relaciones anteriores son las comúnmente aceptadas. Se pueden intercambiar unas con otras, siempre y cuando se mantenga fijo el número de magnitudes de partida. A continuación se realizan algunas consideraciones sobre los parámetros adimensionales anteriores.
6.3 PARÁMETROS ADIMENSIONALES MÁS SIGNIFICATIVOS. INTERPRETACIÓN FÍSICA
6.3.1 Coeficiente de caudal Todas las dimensiones de la máquina son proporcionales a D, por tanto, las áreas serán proporcionales a D2. La relación Q/D2, se puede considerar como una velocidad del fluido en el interior de la máquina. Cualquier velocidad del fluido en la máquina, absoluta o relativa, será proporcional a ella. Por otra parte, la velocidad en la periferia del rodete, es decir, la velocidad del álabe, es proporcional a D⋅ω. El coeficiente de caudal se podría interpretar, entonces, como una relación de velocidades:
álabe velocidadfluido velocidad
≈ω
=ω D
DQDQ 2
3
Además representa el caudal específico, es decir, el caudal bombeado por una máquina de tamaño 1 m que gira a 1 rad/s. Proporciona una idea de qué tipo de geometría, a igualdad de régimen de giro y tamaño, proporciona más caudal.
Si el coeficiente de caudal es el mismo para dos máquinas geométricamente semejantes, la relación de velocidades es idéntica, lo que asegura la semejanza de los triángulos de
Bloque V: Semejanza en Máquinas Hidráulicas. 3
velocidad. En otras palabras, dos máquinas geométricamente semejantes tienen un funcionamiento cinemáticamente semejante si tienen el mismo coeficiente de caudal.
6.3.2 Número de Reynolds El parámetro:
µ
⋅⋅ρ=
µρ DD
Q
DQ 2
representa el número de Reynolds (Re), es decir, la relación entre las fuerzas de inercia y las viscosas.
Se desconoce bastante sobre la influencia del número de Reynolds en los flujos a través de canales curvilíneos, convergentes o divergentes, con movimiento giratorio y donde además se está extrayendo o aportando energía al fluido. No se puede emplear el criterio del número de Reynolds para establecer el tipo de flujo, como se hace en tuberías. Además, el valor del número de Reynolds puede variar notablemente dependiendo del punto de la máquina elegido. Sin embargo, dado que en las condiciones habituales de funcionamiento de las máquinas hidráulicas el flujo es altamente turbulento, se puede despreciar la influencia del número de Reynolds.
6.3.3 Coeficiente de presión El coeficiente de presión que aparece en las relaciones (6. 2) representa el cociente entre las fuerzas de presión y las de inercia, y habitualmente se expresa en función de la altura:
DH g
Dp
2222 ω=
ρω∆
donde H es la altura suministrada por la máquina, y gH la energía por unidad de masa que se intercambia con el fluido. Se puede considerar que H es tanto la altura manométrica como la altura útil, siempre que al comparar el mismo parámetro para dos situaciones diferentes se utilice la misma consideración. Haciendo uso del teorema de Euler se puede expresar como una relación entre la velocidad tangencial del fluido y la velocidad de los álabes:
uv
DH g u
22 ≈ω
6.4 INFLUENCIA DE LA VARIACIÓN DEL RÉGIMEN DE GIRO EN LAS CURVAS CARACTERÍSTICAS
Se analiza aquí el efecto que produce la variación de la velocidad de giro de una bomba hidráulica en sus condiciones de funcionamiento. Se dispone de las curvas características de la bomba para un determinado régimen de giro ω1. En un punto determinado, 1, el caudal es Q1, la altura H1, la potencia W y el rendimiento η1. Se trata de hallar el punto de funcionamiento semejante al punto 1 cuando la bomba gira a una velocidad ω2.

4 Semejanza en Máquinas Hidráulicas
En dos puntos de funcionamiento semejante, los parámetros adimensionales son iguales. Dado que se trata de la misma máquina D1 = D2. Haciendo uso de las relaciones adimensionales (6. 2), y suponiendo despreciable la influencia del número de Reynolds, se puede establecer que, para que exista semejanza, se tiene que cumplir:
2
1
2
1
ωω
= ωω
22
21
2
1 =HH
ωω
32
31
2
1 =WW η1 = η2
(6. 3)
Se puede ver que la condición de semejanza cinemática exige que a una variación de la velocidad de giro le corresponda una variación proporcional del caudal, una variación cuadrática de la altura y una variación cúbica de la potencia. Aplicando las relaciones (6. 3) a cada punto de las curvas características de la bomba para la velocidad ω1, se obtienen las curvas características de la máquina a otra velocidad de giro ω2 (figura 6.2).
Por otra parte, las relaciones (6. 3) también indican que los puntos correspondientes a condiciones de funcionamiento semejantes a las del punto 1, para distintas velocidades de giro, están situados sobre la parábola:
221
222
1
12 QcteQ
QH=H ⋅=
Como todos los puntos de la parábola presentan condiciones de funcionamiento semejantes, su rendimiento es el mismo, por lo que es una curva de iso-rendimiento.
Una vez que se hayan obtenido las curvas de funcionamiento para diferentes velocidades de giro, es posible establecer el comportamiento de la máquina hidráulica ante variaciones que no verifiquen las relaciones de semejanza. Por ejemplo, si se quiere determinar qué ocurre cuando la máquina pasa de ω1 a ω2 manteniendo el caudal constante, hay que pasar de una curva a otra mediante una paralela al eje de ordenadas, AA’ (figura 6.2). En este caso las condiciones finales de funcionamiento no son semejantes a las de partida y no se pueden calcular aplicando directamente las relaciones (6. 3). Estas relaciones, como se ha visto, no describen de forma completa el comportamiento de la máquina con la variación de la velocidad de giro. Por ejemplo, no aparece en dichas relaciones el efecto de la variación de la velocidad de giro a caudal o altura constante, ya que tal variación no satisface las relaciones de semejanza.
6.5 INFLUENCIA DE LA VARIACIÓN DEL TAMAÑO DE LA MÁQUINA EN LAS CURVAS CARACTERÍSTICAS
En este apartado se analiza el efecto de variar el tamaño de la máquina, D, manteniendo una estricta semejanza geométrica (holguras y rugosidad). La velocidad de giro se mantiene constante. Se parte de las condiciones de funcionamiento de una máquina hidráulica de tamaño D1 en un punto 1, que serán: Q1, H1, W y η1 y se trata de hallar el
Fig. 6. 2. Curvas características de una bomba a dos
velocidades de giro
Bloque V: Semejanza en Máquinas Hidráulicas. 5
punto de funcionamiento semejante de otra máquina de tamaño D2, que será: Q2, H2, 2W& y η2. Utilizando las relaciones de semejanza (6. 2) y despreciando, como ya se ha dicho, la influencia del número de Reynolds, se tiene:
DD=
32
31
2
1 DD=
HH
22
21
2
1
DD=
WW
52
51
2
1 η1 = η2
(6. 4)
Como en el ejemplo anterior, si estas relaciones se aplican a cada punto de las curvas características de una máquina hidráulica, se obtienen las curvas características para otra máquina geométricamente semejantes de tamaño diferente (figura 6.3).
6.6 CURVAS CARACTERÍSTICAS ADIMENSIONALES
En los casos anteriores se han descrito por separado los efectos de las variaciones de ω y D. En el caso general en que estas variaciones se presenten simultáneamente, las relaciones adimensionales (6. 2) permiten hallar las condiciones de funcionamiento semejantes a las originales. Las expresiones (6. 2), una vez simplificadas despreciando la influencia del número de Reynolds, permiten representar todos los estados de funcionamiento de una familia de máquinas geométricamente semejantes, mediante una sola curva por parámetro adimensional dependiente. Estas son las curvas características adimensionales (figura 6.4), que generalmente hay que obtener a partir de las curvas características experimentales de una máquina hidráulica. En estas curvas, todas las condiciones de funcionamiento semejantes a una dada coinciden en el mismo punto de la curva. A partir de estas curvas adimensionales, conociendo la velocidad de giro y el tamaño de la máquina, se pueden obtener de nuevo las curvas dimensionales.
6.7 CONCEPTO DE VELOCIDAD ESPECÍFICA
De los planteamientos anteriores se puede decir que una máquina hidráulica de un determinado diseño cubre un cierto rango de condiciones de funcionamiento (simplemente variando su velocidad de giro, o su tamaño, o ambos). Por tanto, es
Fig. 6. 3. Curvas características de bombas geométricamente
semejantes pero de tamaño diferente
Fig. 6. 4. Curvas características adimensionales de una
bomba
6 Semejanza en Máquinas Hidráulicas
necesario disponer de distintas geometrías de máquinas para cubrir todas las posibles condiciones de trabajo. El problema que se plantea habitualmente a la hora de seleccionar una máquina hidráulica es determinar cuál de las geometrías posibles se adapta mejor a las condiciones de trabajo presentadas. Esta es la finalidad de la velocidad específica.
En los primeros estudios sobre bombas era habitual clasificarlas de acuerdo con relaciones hidráulicas, tales como: los cocientes entre la anchura y el diámetro del rodete, o entre el diámetro de la tubería de aspiración y el diámetro del rodete. Kramerer introdujo un parámetro para clasificar las turbinas hidráulicas, que posteriormente se aplicó a las bombas. Este parámetro, denominado velocidad específica, no dependía del tamaño y tenía la siguiente expresión:
HQ=n 43s ω
donde ω se expresa en r.p.m., Q en m3/s y H en m. Se podría interpretar como las revoluciones por minuto a las que tendría que girar la máquina para elevar un caudal de 1 m3/s a 1 m de altura.
El parámetro anterior tiene el inconveniente de que no es adimensional. Para encontrar un parámetro análogo que sea adimensional, se parte de los parámetros adimensionales de presión y caudal y se elimina el tamaño de la máquina, obteniendo la velocidad especifica adimensional, ωs.
( ) 4343s4
3
22
21
3
gHQ
pQ=
Dp
DQ
ω=
⎟⎟⎠
⎞⎜⎜⎝
⎛ρ∆
ωω⇒
⎟⎟⎠
⎞⎜⎜⎝
⎛
ρω∆
⎟⎠⎞
⎜⎝⎛ω
(6. 5)
Esta expresión se utiliza para las bombas hidráulicas y se define para las condiciones de rendimiento máximo. De la obtención de la expresión (6. 5) se deduce que un valor de la velocidad específica representa aquellas posibles condiciones de funcionamiento (Q, H, ω) que pueden ser satisfechas por una familia de máquinas geométricamente semejantes, trabajando con rendimiento máximo. Es decir, la velocidad específica tiene una gran importancia como parámetro indicativo del diseño de la máquina. Dos máquinas geométricamente semejantes tienen la misma velocidad específica, sin embargo, el recíproco no tiene por qué ser cierto.
Obviamente se pueden obtener expresiones análogas relacionando otras variables de funcionamiento. Así, si se utilizan los coeficientes de presión y potencia se obtiene:
(gH)W
=45oρ
ωω (6. 6)
Esta expresión se utiliza habitualmente en el campo de las turbinas hidráulicas.
La ecuación (6. 5) indica que, para la misma velocidad de giro y altura de impulsión, cuanto mayor sea la velocidad específica de la máquina, mayor será el caudal impulsado.
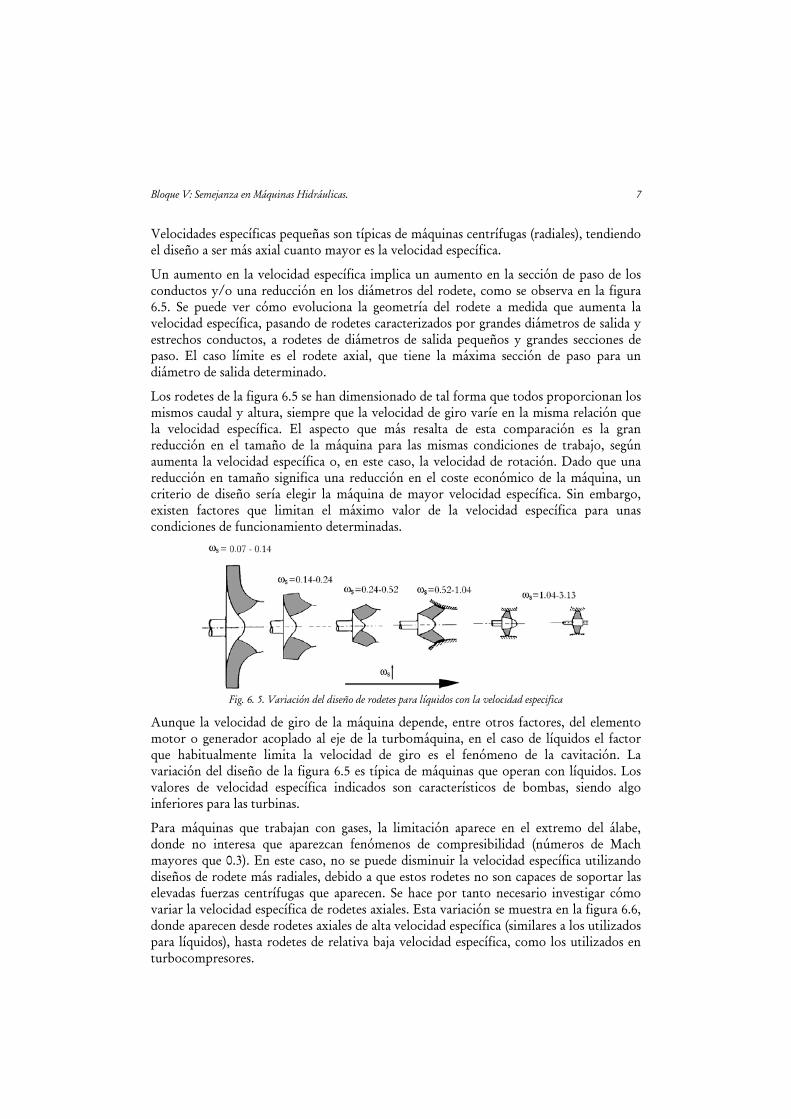
Bloque V: Semejanza en Máquinas Hidráulicas. 7
Velocidades específicas pequeñas son típicas de máquinas centrífugas (radiales), tendiendo el diseño a ser más axial cuanto mayor es la velocidad específica.
Un aumento en la velocidad específica implica un aumento en la sección de paso de los conductos y/o una reducción en los diámetros del rodete, como se observa en la figura 6.5. Se puede ver cómo evoluciona la geometría del rodete a medida que aumenta la velocidad específica, pasando de rodetes caracterizados por grandes diámetros de salida y estrechos conductos, a rodetes de diámetros de salida pequeños y grandes secciones de paso. El caso límite es el rodete axial, que tiene la máxima sección de paso para un diámetro de salida determinado.
Los rodetes de la figura 6.5 se han dimensionado de tal forma que todos proporcionan los mismos caudal y altura, siempre que la velocidad de giro varíe en la misma relación que la velocidad específica. El aspecto que más resalta de esta comparación es la gran reducción en el tamaño de la máquina para las mismas condiciones de trabajo, según aumenta la velocidad específica o, en este caso, la velocidad de rotación. Dado que una reducción en tamaño significa una reducción en el coste económico de la máquina, un criterio de diseño sería elegir la máquina de mayor velocidad específica. Sin embargo, existen factores que limitan el máximo valor de la velocidad específica para unas condiciones de funcionamiento determinadas.
Fig. 6. 5. Variación del diseño de rodetes para líquidos con la velocidad especifica
Aunque la velocidad de giro de la máquina depende, entre otros factores, del elemento motor o generador acoplado al eje de la turbomáquina, en el caso de líquidos el factor que habitualmente limita la velocidad de giro es el fenómeno de la cavitación. La variación del diseño de la figura 6.5 es típica de máquinas que operan con líquidos. Los valores de velocidad específica indicados son característicos de bombas, siendo algo inferiores para las turbinas.
Para máquinas que trabajan con gases, la limitación aparece en el extremo del álabe, donde no interesa que aparezcan fenómenos de compresibilidad (números de Mach mayores que 0.3). En este caso, no se puede disminuir la velocidad específica utilizando diseños de rodete más radiales, debido a que estos rodetes no son capaces de soportar las elevadas fuerzas centrífugas que aparecen. Se hace por tanto necesario investigar cómo variar la velocidad específica de rodetes axiales. Esta variación se muestra en la figura 6.6, donde aparecen desde rodetes axiales de alta velocidad específica (similares a los utilizados para líquidos), hasta rodetes de relativa baja velocidad específica, como los utilizados en turbocompresores.
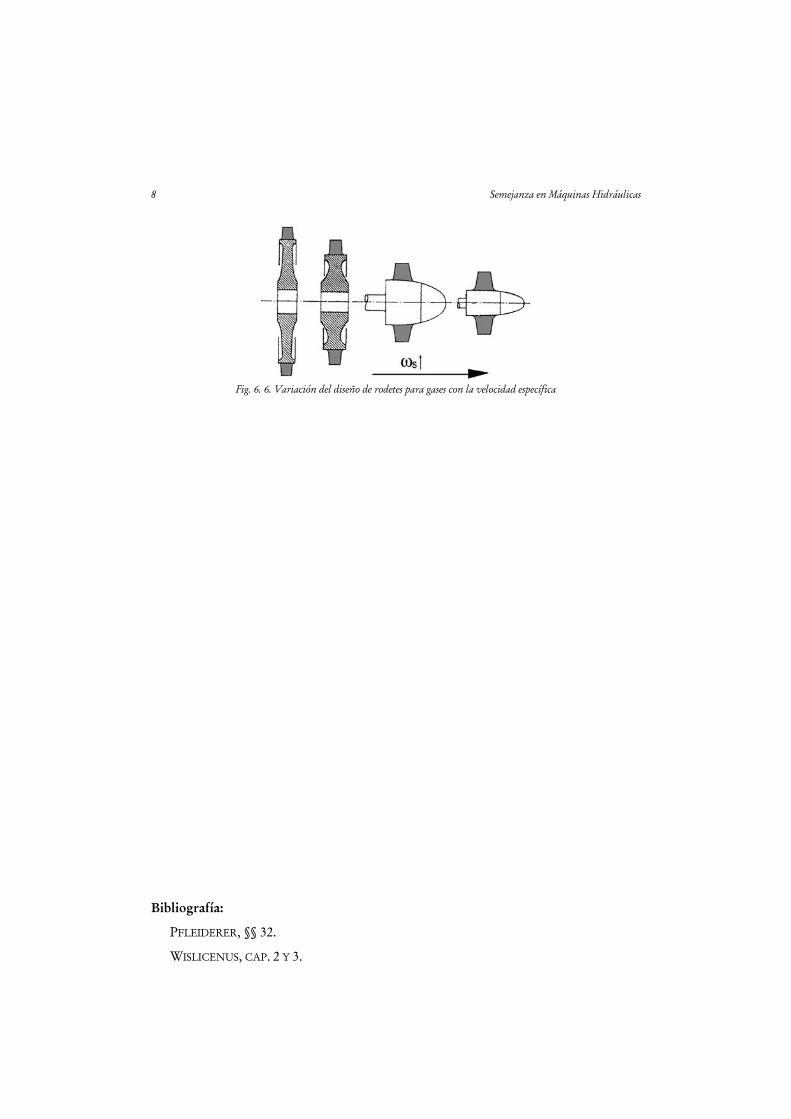
8 Semejanza en Máquinas Hidráulicas
Fig. 6. 6. Variación del diseño de rodetes para gases con la velocidad específica
Bibliografía:
PFLEIDERER, §§ 32.
WISLICENUS, CAP. 2 Y 3.
Bloque V: Semejanza en Máquinas Hidráulicas. 9
6.1 INTRODUCCIÓN .............................................................................................. 1 6.2 VARIABLES DEL PROBLEMA Y OBTENCIÓN DE PARÁMETROS .......................... 1 6.3 PARÁMETROS ADIMENSIONALES MÁS SIGNIFICATIVOS.
INTERPRETACIÓN FÍSICA ................................................................................. 2 6.3.1 Coeficiente de caudal .......................................................................................... 2 6.3.2 Número de Reynolds .......................................................................................... 3 6.3.3 Coeficiente de presión ......................................................................................... 3
6.4 INFLUENCIA DE LA VARIACIÓN DEL RÉGIMEN DE GIRO EN LAS CURVAS CARACTERÍSTICAS ............................................................................. 3
6.5 INFLUENCIA DE LA VARIACIÓN DEL TAMAÑO DE LA MÁQUINA EN LAS CURVAS CARACTERÍSTICAS ............................................................................. 4
6.6 CURVAS CARACTERÍSTICAS ADIMENSIONALES ................................................ 5 6.7 CONCEPTO DE VELOCIDAD ESPECÍFICA .......................................................... 5
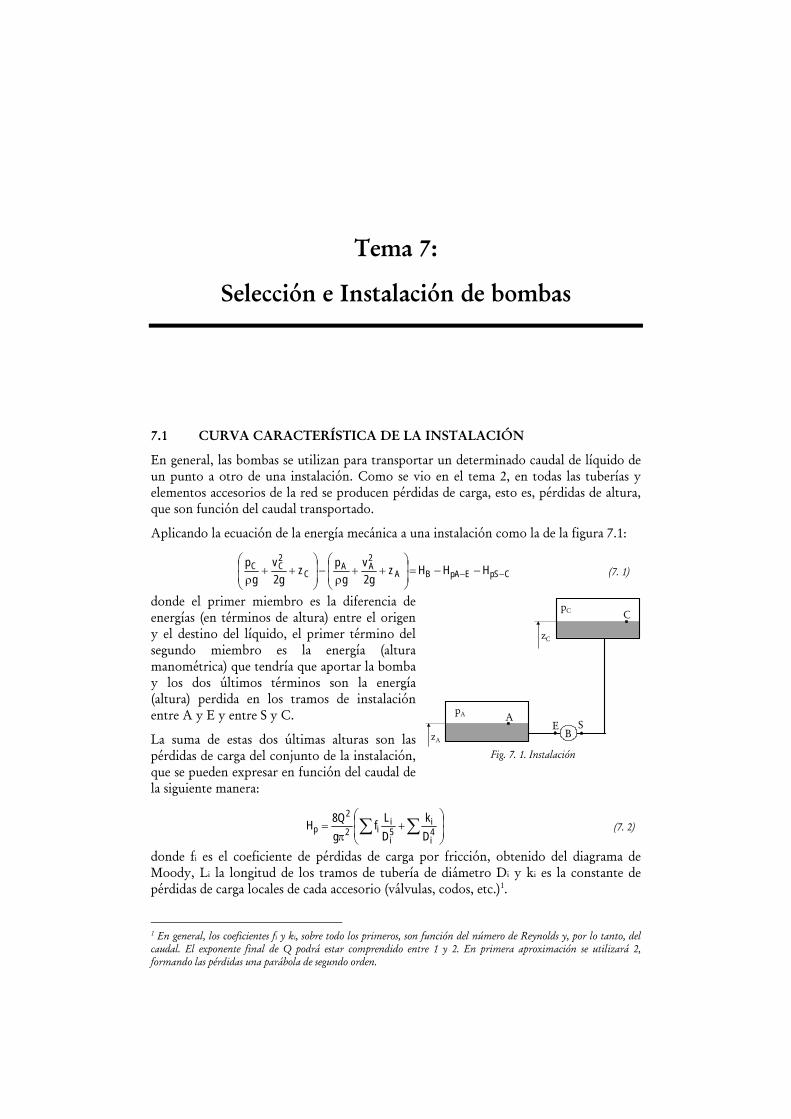
Tema 7:
Selección e Instalación de bombas
7.1 CURVA CARACTERÍSTICA DE LA INSTALACIÓN
En general, las bombas se utilizan para transportar un determinado caudal de líquido de un punto a otro de una instalación. Como se vio en el tema 2, en todas las tuberías y elementos accesorios de la red se producen pérdidas de carga, esto es, pérdidas de altura, que son función del caudal transportado.
Aplicando la ecuación de la energía mecánica a una instalación como la de la figura 7.1:
CpSEpABA2AA
C
2CC HHHz
g2v
gpz
g2v
gp
−− −−=⎟⎟⎠
⎞⎜⎜⎝
⎛++
ρ−⎟
⎟⎠
⎞⎜⎜⎝
⎛++
ρ
(7. 1)
donde el primer miembro es la diferencia de energías (en términos de altura) entre el origen y el destino del líquido, el primer término del segundo miembro es la energía (altura manométrica) que tendría que aportar la bomba y los dos últimos términos son la energía (altura) perdida en los tramos de instalación entre A y E y entre S y C.
La suma de estas dos últimas alturas son las pérdidas de carga del conjunto de la instalación, que se pueden expresar en función del caudal de la siguiente manera:
⎟⎟⎠
⎞⎜⎜⎝
⎛+
π= ∑ ∑ 4
i
i5i
ii2
2p D
kDLf
gQ8H
(7. 2)
donde fi es el coeficiente de pérdidas de carga por fricción, obtenido del diagrama de Moody, Li la longitud de los tramos de tubería de diámetro Di y ki es la constante de pérdidas de carga locales de cada accesorio (válvulas, codos, etc.)1.
1 En general, los coeficientes fi y ki, sobre todo los primeros, son función del número de Reynolds y, por lo tanto, del caudal. El exponente final de Q podrá estar comprendido entre 1 y 2. En primera aproximación se utilizará 2, formando las pérdidas una parábola de segundo orden.
pA
pC
zA
zC
B
C
A E S
Fig. 7. 1. Instalación
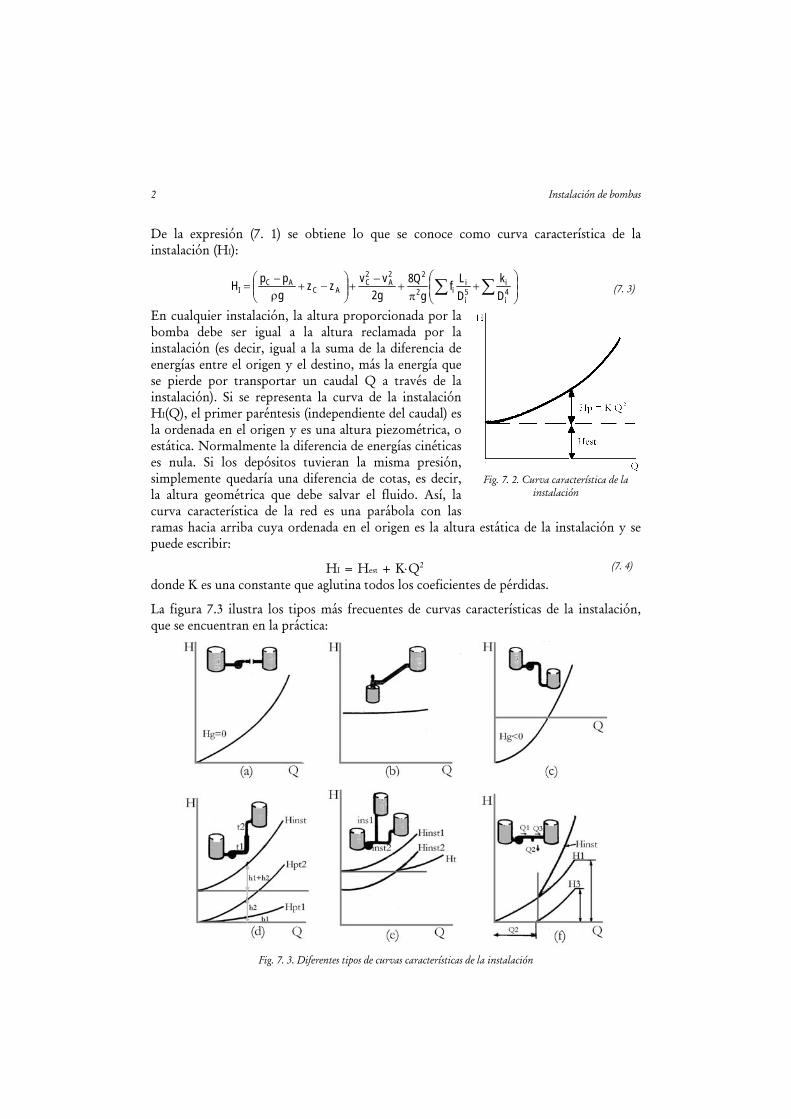
2 Instalación de bombas
De la expresión (7. 1) se obtiene lo que se conoce como curva característica de la instalación (HI):
⎟⎟⎠
⎞⎜⎜⎝
⎛+
π+
−+⎟⎟⎠
⎞⎜⎜⎝
⎛−+
ρ−
= ∑∑ 4i
i5i
ii2
22A
2C
ACAC
I Dk
DLf
gQ8
g2vvzz
gppH
(7. 3)
En cualquier instalación, la altura proporcionada por la bomba debe ser igual a la altura reclamada por la instalación (es decir, igual a la suma de la diferencia de energías entre el origen y el destino, más la energía que se pierde por transportar un caudal Q a través de la instalación). Si se representa la curva de la instalación HI(Q), el primer paréntesis (independiente del caudal) es la ordenada en el origen y es una altura piezométrica, o estática. Normalmente la diferencia de energías cinéticas es nula. Si los depósitos tuvieran la misma presión, simplemente quedaría una diferencia de cotas, es decir, la altura geométrica que debe salvar el fluido. Así, la curva característica de la red es una parábola con las ramas hacia arriba cuya ordenada en el origen es la altura estática de la instalación y se puede escribir:
HI = Hest + K⋅Q2 (7. 4)
donde K es una constante que aglutina todos los coeficientes de pérdidas.
La figura 7.3 ilustra los tipos más frecuentes de curvas características de la instalación, que se encuentran en la práctica:
Fig. 7. 3. Diferentes tipos de curvas características de la instalación
Fig. 7. 2. Curva característica de la
instalación
Bloque VII: Elección, Instalación y Regulación de bombas 3
Fig. 7. 3.a. Si el origen y el destino se encuentran a la misma altura y misma presión, la altura estática es nula, es decir pasa por el origen de coordenadas. Si las pérdidas son elevadas tendrá gran pendiente. Es la curva típica de instalaciones de ventilación.
Fig. 7. 3.b. Si los diámetros de las tuberías son grandes, las pérdidas son pequeñas y la altura de la instalación es muy similar a la estática. El resultado es una curva casi horizontal.
Fig. 7. 3.c. Si la bomba está instalada en carga, la altura estática es negativa. El caudal que fluye en ausencia de la bomba es el correspondiente a H = 0. La función de la bomba es incrementar dicho caudal.
Fig. 7. 3.d. Curva característica de una instalación con tuberías de diferentes diámetros en serie. Se han trazado las curvas de pérdidas para cada tramo de tubería de diámetro constante en función del caudal. La curva característica total se obtiene añadiendo a la altura estática de la instalación, las ordenadas de cada curva de pérdidas para cada caudal.
Fig. 7. 3.e. Curva característica de una instalación con dos ramificaciones de diferente altura estática. Se trazan las curvas características asociadas a cada ramificación. La curva característica total se obtiene sumando los caudales de cada ramal para la misma altura. Esta instalación se verá más adelante como un posible método de regulación.
Fig. 7. 3.f. Se extrae un caudal constante Q2 de la rama principal. Se muestra la curva característica de la línea 1. La curva característica del conducto 3 no comienza hasta que no se supera el caudal Q2 (pues este caudal circula por 1 y 2 pero no por 3). La característica total se obtiene por adición para cada caudal, de las alturas de pérdidas de 1 y 3.
7.2 PUNTO DE FUNCIONAMIENTO Y DE DISEÑO
Como ya se ha visto en temas anteriores, en las bombas rotodinámicas el caudal depende de la altura (a diferencia de las bombas de desplazamiento positivo en las que teóricamente el caudal es independiente de la altura). Por tanto, el caudal que suministrará una bomba rotodinámica colocada en una instalación sólo puede conocerse por la superposición de la curva H-Q de la bomba con la curva característica de la instalación. La intersección de ambas curvas se denomina punto de funcionamiento. Este punto se debe encontrar en la curva característica de la bomba, porque, para una determinada velocidad de giro, la bomba no puede funcionar fuera de esa curva, y se debe encontrar también en la curva característica de la red, que determina la altura necesaria para cada caudal que circula por la instalación. Luego el punto de funcionamiento es el punto de intersección de las curvas características de la bomba y de la red.
Este punto no tiene nada que ver con el punto de diseño de la bomba, que es aquel punto de la curva H-Q de la bomba cuyo rendimiento total es máximo. Lo lógico, a la hora de seleccionar una bomba, es que una vez situada en la instalación, el punto de funcionamiento esté lo más próximo posible al de diseño de la bomba. Una vez proyectada la instalación, se debe trazar cuidadosamente la curva característica H-Q de dicha instalación y determinar en ella el punto correspondiente al caudal requerido.

4 Instalación de bombas
Luego, se deberá seleccionar aquella bomba cuyo punto de diseño sea lo más próximo posible al punto de funcionamiento deseado.
Si el cálculo de la curva característica de la red está equivocado y, por tanto, el punto de funcionamiento no es el requerido realmente por la instalación, se presentarán anomalías en el funcionamiento.
En la figura 7.4a se muestra la superposición de la curva característica estimada de una red de ventilación (Hinst) con la curva característica de un ventilador a una velocidad de giro determinada (HB). El punto de funcionamiento de la instalación es el punto A. Se muestra también la curva de potencia absorbida por el ventilador (Wacc). Las siguientes figuras muestran lo que sucede si el cliente ha infraestimado (7.4b) o sobrestimado (7.4c) las pérdidas de la instalación. En el primer caso, figura 7.4b, el ventilador suministrará menos caudal, absorbiendo también menos potencia. Para corregir esta anomalía y obtener el caudal deseado habrá que disminuir las pérdidas en la conducción (por ejemplo, utilizando un codo de mayor radio de curvatura o con álabes directrices en su interior, etc.). En el segundo caso, figura 7.4c, el ventilador suministra más caudal, absorbiendo más potencia. La reducción del caudal hasta el valor requerido en este caso se consigue fácilmente estrangulando la conducción a la salida (aumentar las pérdidas de la instalación).
(a)
(b) (c)
Fig. 7. 4. Curvas características de la red y de un ventilador. Punto de funcionamiento
Hinst, calculada Hinst, real
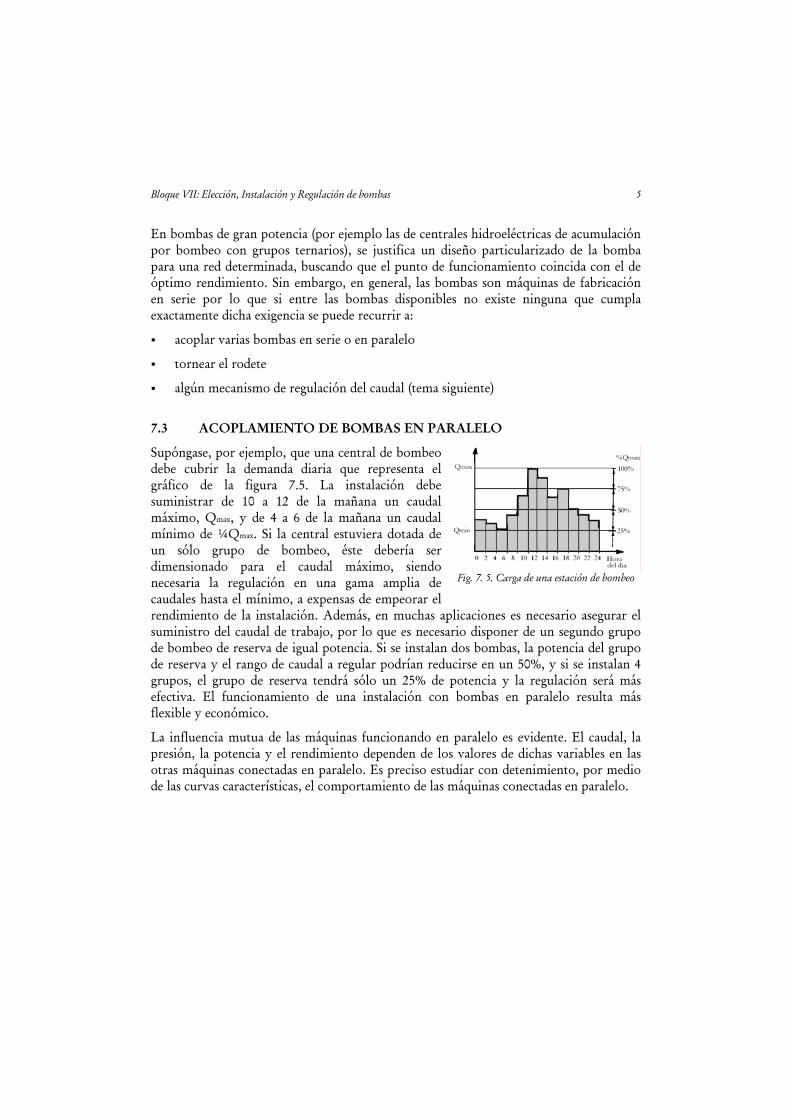
Bloque VII: Elección, Instalación y Regulación de bombas 5
En bombas de gran potencia (por ejemplo las de centrales hidroeléctricas de acumulación por bombeo con grupos ternarios), se justifica un diseño particularizado de la bomba para una red determinada, buscando que el punto de funcionamiento coincida con el de óptimo rendimiento. Sin embargo, en general, las bombas son máquinas de fabricación en serie por lo que si entre las bombas disponibles no existe ninguna que cumpla exactamente dicha exigencia se puede recurrir a:
acoplar varias bombas en serie o en paralelo
tornear el rodete
algún mecanismo de regulación del caudal (tema siguiente)
7.3 ACOPLAMIENTO DE BOMBAS EN PARALELO
Supóngase, por ejemplo, que una central de bombeo debe cubrir la demanda diaria que representa el gráfico de la figura 7.5. La instalación debe suministrar de 10 a 12 de la mañana un caudal máximo, Qmax, y de 4 a 6 de la mañana un caudal mínimo de ¼Qmax. Si la central estuviera dotada de un sólo grupo de bombeo, éste debería ser dimensionado para el caudal máximo, siendo necesaria la regulación en una gama amplia de caudales hasta el mínimo, a expensas de empeorar el rendimiento de la instalación. Además, en muchas aplicaciones es necesario asegurar el suministro del caudal de trabajo, por lo que es necesario disponer de un segundo grupo de bombeo de reserva de igual potencia. Si se instalan dos bombas, la potencia del grupo de reserva y el rango de caudal a regular podrían reducirse en un 50%, y si se instalan 4 grupos, el grupo de reserva tendrá sólo un 25% de potencia y la regulación será más efectiva. El funcionamiento de una instalación con bombas en paralelo resulta más flexible y económico.
La influencia mutua de las máquinas funcionando en paralelo es evidente. El caudal, la presión, la potencia y el rendimiento dependen de los valores de dichas variables en las otras máquinas conectadas en paralelo. Es preciso estudiar con detenimiento, por medio de las curvas características, el comportamiento de las máquinas conectadas en paralelo.
Fig. 7. 5. Carga de una estación de bombeo
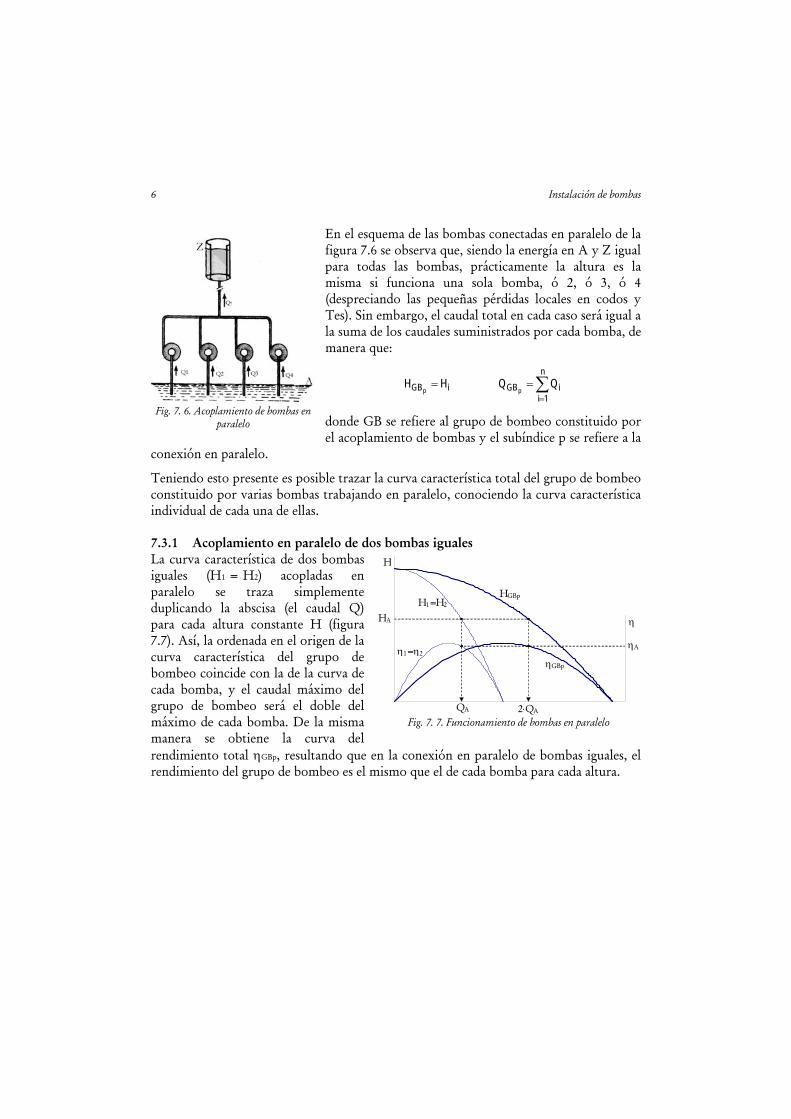
6 Instalación de bombas
En el esquema de las bombas conectadas en paralelo de la figura 7.6 se observa que, siendo la energía en A y Z igual para todas las bombas, prácticamente la altura es la misma si funciona una sola bomba, ó 2, ó 3, ó 4 (despreciando las pequeñas pérdidas locales en codos y Tes). Sin embargo, el caudal total en cada caso será igual a la suma de los caudales suministrados por cada bomba, de manera que:
iGB HHp= ∑
==
n
1iiGB QQ
p
donde GB se refiere al grupo de bombeo constituido por el acoplamiento de bombas y el subíndice p se refiere a la
conexión en paralelo.
Teniendo esto presente es posible trazar la curva característica total del grupo de bombeo constituido por varias bombas trabajando en paralelo, conociendo la curva característica individual de cada una de ellas.
7.3.1 Acoplamiento en paralelo de dos bombas iguales La curva característica de dos bombas iguales (H1 = H2) acopladas en paralelo se traza simplemente duplicando la abscisa (el caudal Q) para cada altura constante H (figura 7.7). Así, la ordenada en el origen de la curva característica del grupo de bombeo coincide con la de la curva de cada bomba, y el caudal máximo del grupo de bombeo será el doble del máximo de cada bomba. De la misma manera se obtiene la curva del rendimiento total ηGBp, resultando que en la conexión en paralelo de bombas iguales, el rendimiento del grupo de bombeo es el mismo que el de cada bomba para cada altura.
Fig. 7. 6. Acoplamiento de bombas en
paralelo
H1=H2 HGBp
2⋅QA QA
H
HA
η1=η2 ηGBp
η
ηA
Fig. 7. 7. Funcionamiento de bombas en paralelo

Bloque VII: Elección, Instalación y Regulación de bombas 7
En la figura 7.8 se estudia el comportamiento de dos ventiladores iguales en paralelo. Se muestran las curvas de presión estática (p1 = p2) (altura) y potencia (Wacc1) en función del caudal para un ventilador, y la curva de dos iguales funcionando en paralelo (p1+2). Se ha superpuesto también la curva característica de la red (pinst). El punto de funcionamiento de ambos ventiladores en paralelo es el punto A (11 m3/s). Cada ventilador funciona en el punto B (5,5 m3/s) absorbiendo una potencia dada por el punto C (26 kW). La potencia total absorbida por los dos será el doble (52 kW).
En el funcionamiento en paralelo se deben tener en cuenta las tres consideraciones siguientes:
a) Si se necesita menos caudal y se desconecta un ventilador, el otro funcionaría en el punto D (7,5 m3/s), absorbiendo una potencia dada por el punto E (37 kW), mayor que la de un ventilador individual con los dos en paralelo. De esta manera, el funcionamiento de la instalación es más flexible, pero hay que prever un motor que pueda dar más potencia, puesto que con un sólo ventilador WaccE > WaccC.
b) Al conectar el segundo ventilador a la red, el caudal obtenido es siempre menor que el doble del proporcionado por un sólo ventilador (Q1+2 < 2⋅Q1). En general:
in
1iGB QnQQ
p⋅<=∑
(7. 5)
La explicación de este hecho importante es obvia dada la forma de la curva característica de la instalación. También es obvio que cuanto mayor sea la pendiente de esta curva, es decir, cuanto mayores sean las pérdidas en la red, tanto menor será el incremento de caudal obtenido con dos o más bombas acopladas en paralelo con respecto al caudal que proporciona una sola.
c) A veces no es conveniente trabajar con una sola máquina, aún cuando ella sola pueda proporcionar el Q necesario. Trabajando una sola bomba el punto de funcionamiento puede caer fuera de la zona de rendimientos razonables, lo cual puede no suceder al conectar varias en paralelo.
Para calcular de forma analítica la curva característica de un grupo de bombeo constituido por un acoplamiento en paralelo de N bombas iguales se parte de las curvas de las bombas individuales: CQBQAH B
2BB +⋅+⋅−= . La curva del grupo de bombeo se
expresa en términos del caudal de la instalación, Q y resulta: ( ) ( ) CNQBN
QAH2
GBp+⋅+⋅−= ,
ya que Q/N representa el caudal que circula por cada bomba, QB.
Fig. 7. 8. Funcionamiento de dos ventiladores en paralelo

8 Instalación de bombas
7.3.2 Acoplamiento en paralelo de dos bombas diferentes Sean H1 y H2 las curvas características de dos bombas diferentes (figura 7.9). La curva característica de ambas conectadas en paralelo HGBp, está constituida por dos tramos. Por debajo de H10 las dos bombas trabajan en paralelo. Para obtener cada punto de la curva característica del acoplamiento hay que sumar los caudales que circulan por cada bomba, para cada altura constante. Por encima de H10 la bomba 1 no puede funcionar, porque se origina el fenómeno de bombeo, es decir, a través de la bomba 1 el fluido comenzaría a circular en sentido contrario, lo que se evita parando la bomba y utilizando válvulas antirretorno para evitar dicha recirculación del fluido. En este caso, la curva del grupo de bombeo coincide con la de H2. El trabajo en paralelo de ambas bombas es imposible con la curva característica de la red H’inst, mientras que es posible con la curva de la red Hinst.
El rendimiento del grupo de bombeo ηGBp para cada altura se obtiene ponderando el rendimiento en función del caudal que atraviesa cada una de las bombas, es decir:
∑∑ ηρ=
ηρ
=η
ρ=i i
i
i i
i
GB
GBaccGB
QgHHgQQgHW
p
pp
& ⇒ ( )∑∑
η=η
ii
iGB Q
Qp
(7. 6)
La curva característica de un acoplamiento en paralelo de dos bombas se puede calcular de forma analítica, partiendo de las curvas características individuales: H1 = -A1Q2 + B1Q + C1 y H2 = -A2Q2 + B2Q + C2 siendo la ordenada en el origen de la bomba 2 mayor que la de la bomba 1 (H20 > H10). La curva característica del grupo de bombeo está formada por tramos de parábolas de la forma:
⎪⎩
⎪⎨⎧
=>=<=
102GBGB2
GB
102222
22GB HH a ientecorrespond Q QsiC + QB + Q A-
HH a ientecorrespond Q QsiC + QB + Q A-= H Hp
(7. 7)
donde las constantes AGB, BGB y CGB, pueden ser obtenidas haciendo pasar la curva del acoplamiento por tres puntos cualesquiera, por ejemplo: (H = 0; Qmax = Q1max + Q2max), (H = HA; Q = QA = Q1+Q2), etc.
De todo lo dicho se deduce que para trabajar en paralelo se deben escoger bombas cuyas alturas en los puntos de diseño sean aproximadamente iguales (aunque los caudales de diseño sean diferentes).
H1 H2 HGBp
Q1max+Q2max Q1 Q2 QA=Q1+Q2
H20
H10
HA A Hinst
H’inst
Fig. 7. 9. Funcionamiento de bombas en paralelo
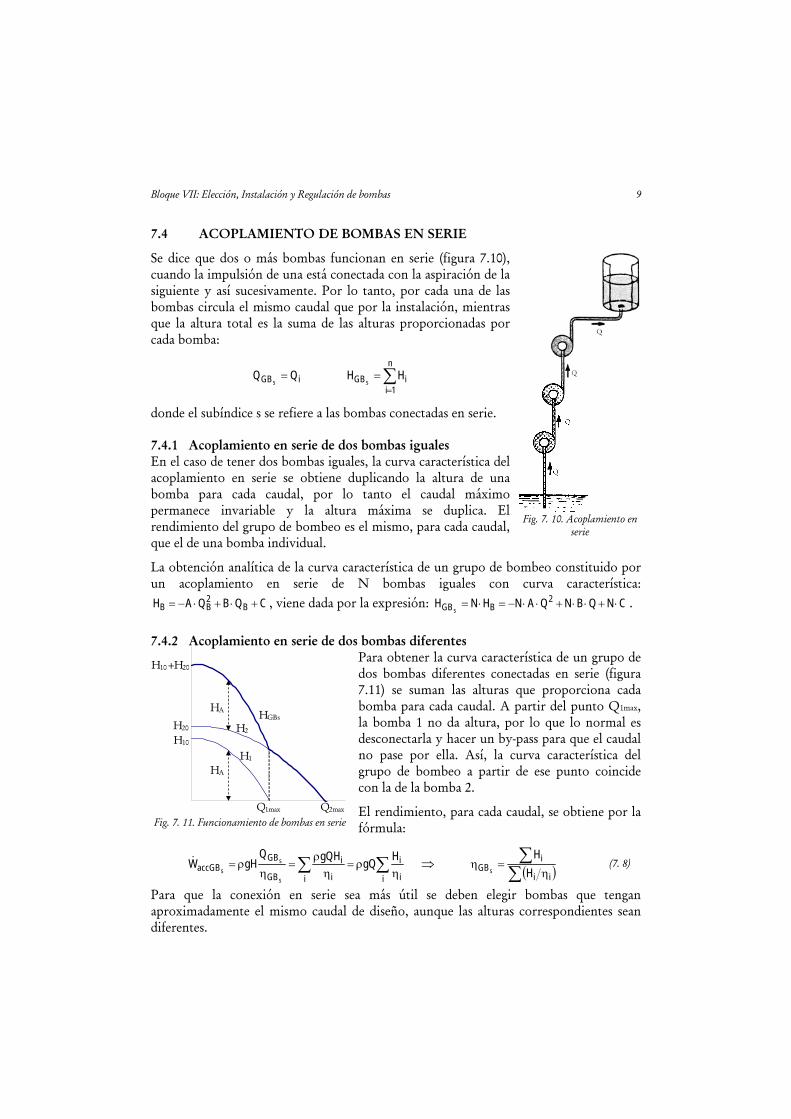
Bloque VII: Elección, Instalación y Regulación de bombas 9
7.4 ACOPLAMIENTO DE BOMBAS EN SERIE
Se dice que dos o más bombas funcionan en serie (figura 7.10), cuando la impulsión de una está conectada con la aspiración de la siguiente y así sucesivamente. Por lo tanto, por cada una de las bombas circula el mismo caudal que por la instalación, mientras que la altura total es la suma de las alturas proporcionadas por cada bomba:
iGB QQs= ∑
==
n
1iiGB HH
s
donde el subíndice s se refiere a las bombas conectadas en serie.
7.4.1 Acoplamiento en serie de dos bombas iguales En el caso de tener dos bombas iguales, la curva característica del acoplamiento en serie se obtiene duplicando la altura de una bomba para cada caudal, por lo tanto el caudal máximo permanece invariable y la altura máxima se duplica. El rendimiento del grupo de bombeo es el mismo, para cada caudal, que el de una bomba individual.
La obtención analítica de la curva característica de un grupo de bombeo constituido por un acoplamiento en serie de N bombas iguales con curva característica:
CQBQAH B2BB +⋅+⋅−= , viene dada por la expresión: CNQBNQANHNH 2
BGBs⋅+⋅⋅+⋅⋅−=⋅= .
7.4.2 Acoplamiento en serie de dos bombas diferentes Para obtener la curva característica de un grupo de dos bombas diferentes conectadas en serie (figura 7.11) se suman las alturas que proporciona cada bomba para cada caudal. A partir del punto Q1max, la bomba 1 no da altura, por lo que lo normal es desconectarla y hacer un by-pass para que el caudal no pase por ella. Así, la curva característica del grupo de bombeo a partir de ese punto coincide con la de la bomba 2.
El rendimiento, para cada caudal, se obtiene por la fórmula:
∑∑ ηρ=
ηρ
=η
ρ=i i
i
i i
i
GB
GBaccGB
HgQgQHQgHW
s
ss
& ⇒ ( )∑∑
η=η
ii
iGB H
Hs
(7. 8)
Para que la conexión en serie sea más útil se deben elegir bombas que tengan aproximadamente el mismo caudal de diseño, aunque las alturas correspondientes sean diferentes.
Fig. 7. 10. Acoplamiento en
serie
H1
H2 HGBs
Q2max Q1max
H20
H10+H20
HA
H10
HA
Fig. 7. 11. Funcionamiento de bombas en serie
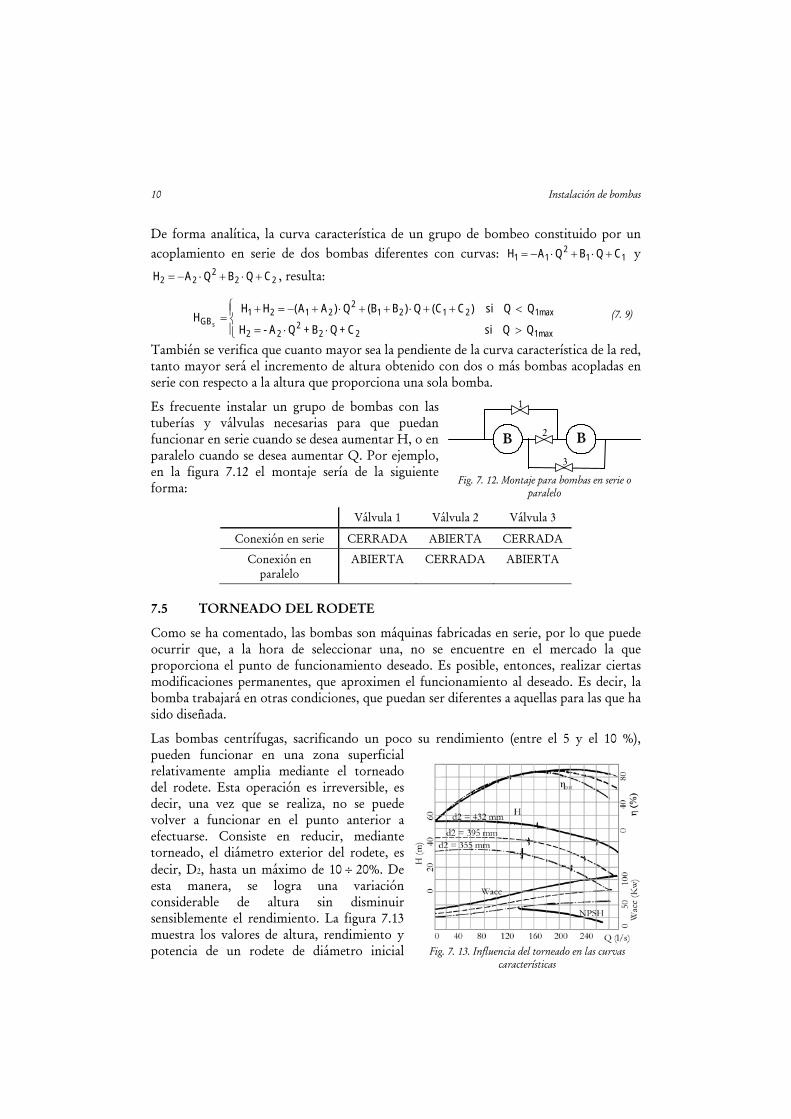
10 Instalación de bombas
De forma analítica, la curva característica de un grupo de bombeo constituido por un acoplamiento en serie de dos bombas diferentes con curvas: 11
211 CQBQAH +⋅+⋅−= y
222
22 CQBQAH +⋅+⋅−= , resulta:
⎪⎩
⎪⎨⎧
>⋅⋅=
<++⋅++⋅+−=+=
1max222
22
1max21212
2121GB
Q QsiC + QB + Q A-H
Q Qsi)CC(Q)BB(Q)AA(HH H
s
(7. 9)
También se verifica que cuanto mayor sea la pendiente de la curva característica de la red, tanto mayor será el incremento de altura obtenido con dos o más bombas acopladas en serie con respecto a la altura que proporciona una sola bomba.
Es frecuente instalar un grupo de bombas con las tuberías y válvulas necesarias para que puedan funcionar en serie cuando se desea aumentar H, o en paralelo cuando se desea aumentar Q. Por ejemplo, en la figura 7.12 el montaje sería de la siguiente forma:
Válvula 1 Válvula 2 Válvula 3
Conexión en serie CERRADA ABIERTA CERRADA
Conexión en paralelo
ABIERTA CERRADA ABIERTA
7.5 TORNEADO DEL RODETE
Como se ha comentado, las bombas son máquinas fabricadas en serie, por lo que puede ocurrir que, a la hora de seleccionar una, no se encuentre en el mercado la que proporciona el punto de funcionamiento deseado. Es posible, entonces, realizar ciertas modificaciones permanentes, que aproximen el funcionamiento al deseado. Es decir, la bomba trabajará en otras condiciones, que puedan ser diferentes a aquellas para las que ha sido diseñada.
Las bombas centrífugas, sacrificando un poco su rendimiento (entre el 5 y el 10 %), pueden funcionar en una zona superficial relativamente amplia mediante el torneado del rodete. Esta operación es irreversible, es decir, una vez que se realiza, no se puede volver a funcionar en el punto anterior a efectuarse. Consiste en reducir, mediante torneado, el diámetro exterior del rodete, es decir, D2, hasta un máximo de 10 ÷ 20%. De esta manera, se logra una variación considerable de altura sin disminuir sensiblemente el rendimiento. La figura 7.13 muestra los valores de altura, rendimiento y potencia de un rodete de diámetro inicial
B B
1
2
3 Fig. 7. 12. Montaje para bombas en serie o
paralelo
Fig. 7. 13. Influencia del torneado en las curvas
características

Bloque VII: Elección, Instalación y Regulación de bombas 11
D2 = 432 mm torneado primero a D2 = 395 mm y después a D2 = 355 mm. En las curvas se observa como la altura y la potencia varían considerablemente con el D2, pero no el rendimiento.
Supóngase un rodete de diámetro de salida D2, con un triángulo de velocidades a la salida del rodete
∆ABC (figura 7.14a). Si se tornea el rodete hasta un diámetro D2t, disminuye la
velocidad tangencial hasta u2t. Se supone que no varía el coeficiente hidráulico, y por tanto el ángulo β2 de salida del fluido, w2t conserva su dirección. El caudal nominal no varía con el torneado, ya que viene condicionado por la geometría a la entrada del rodete y el régimen de giro. Sin embargo, al disminuir la sección de salida del rodete S2t, se produce un ligero aumento de la componente meridional de la velocidad. El resultado de la composición de velocidades u2t y w2t suministra el nuevo triángulo de velocidades
∆
ttCAB . Se observa que la dirección del flujo a la entrada del difusor varía desde el ángulo α2 hasta el ángulo α2t.
Trasladando el efecto del torneado a la curva característica ideal (figura 7.14b realizada bajo la hipótesis de flujo con prerrotación nula en la entrada del rodete) se pone de manifiesto que la curva conserva su pendiente2 aunque suministra menores alturas y caudales.
u2 u2t
v2 w2
w2t
v2t
A
B
CCt
Bt
β2 β2 α2 α2t
gu2
t2
Q
H
Hu
Hut
gu2
2
u2t⋅tagβ2⋅S2t u2⋅tagβ2⋅S2 Fig. 7. 14. a) Variación del triángulo de velocidades b) Variación de la altura característica ideal
Las leyes de semejanza no son aplicables a este método porque, al tornear las superficies exteriores del rodete, junto con la parte correspondiente de los alabes, no se disminuye el ancho en la misma proporción, rompiéndose entonces la semejanza geométrica.
Experimentalmente se han verificado las siguientes relaciones entre el caudal y la altura antes y después del torneado del rodete:
2
2
t2tDD
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛∝ y
2
2
t2tDD
HH
⎟⎟⎠
⎞⎜⎜⎝
⎛∝
(7. 10)
2 Al obtener la curva característica ideal, se observa que el diámetro desaparece del término del caudal:
22
22
2
222
2u tangb2
Qg4D
tanSQu
guH
βπω
−ω
=⎟⎟⎠
⎞⎜⎜⎝
⎛
β−=
22
2t2
2ut2t2
ut tangb2Q
g4D
gvu
Hβπ
ω−
ω==
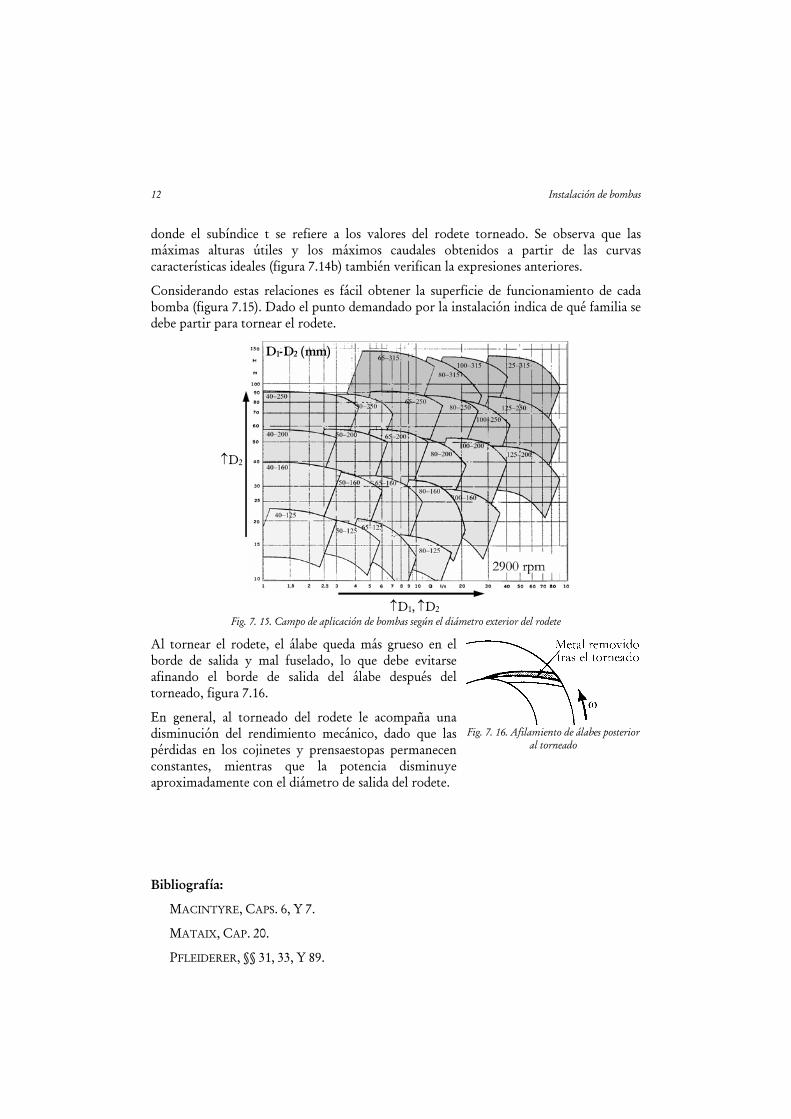
12 Instalación de bombas
donde el subíndice t se refiere a los valores del rodete torneado. Se observa que las máximas alturas útiles y los máximos caudales obtenidos a partir de las curvas características ideales (figura 7.14b) también verifican la expresiones anteriores.
Considerando estas relaciones es fácil obtener la superficie de funcionamiento de cada bomba (figura 7.15). Dado el punto demandado por la instalación indica de qué familia se debe partir para tornear el rodete.
↑D2
↑D1, ↑D2
D1-D2 (mm)
Fig. 7. 15. Campo de aplicación de bombas según el diámetro exterior del rodete
Al tornear el rodete, el álabe queda más grueso en el borde de salida y mal fuselado, lo que debe evitarse afinando el borde de salida del álabe después del torneado, figura 7.16.
En general, al torneado del rodete le acompaña una disminución del rendimiento mecánico, dado que las pérdidas en los cojinetes y prensaestopas permanecen constantes, mientras que la potencia disminuye aproximadamente con el diámetro de salida del rodete.
Fig. 7. 16. Afilamiento de álabes posterior
al torneado
Bibliografía:
MACINTYRE, CAPS. 6, Y 7.
MATAIX, CAP. 20.
PFLEIDERER, §§ 31, 33, Y 89.
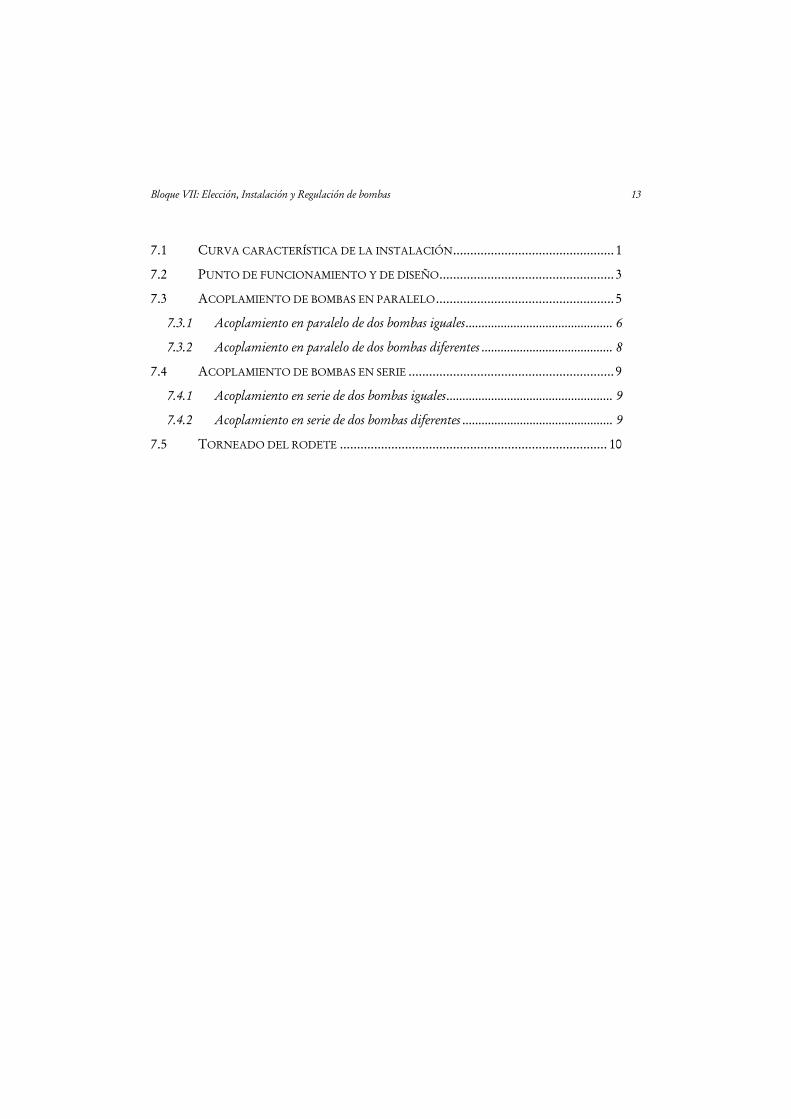
Bloque VII: Elección, Instalación y Regulación de bombas 13
7.1 CURVA CARACTERÍSTICA DE LA INSTALACIÓN ............................................... 1 7.2 PUNTO DE FUNCIONAMIENTO Y DE DISEÑO ................................................... 3 7.3 ACOPLAMIENTO DE BOMBAS EN PARALELO .................................................... 5
7.3.1 Acoplamiento en paralelo de dos bombas iguales .............................................. 6 7.3.2 Acoplamiento en paralelo de dos bombas diferentes ......................................... 8
7.4 ACOPLAMIENTO DE BOMBAS EN SERIE ............................................................ 9 7.4.1 Acoplamiento en serie de dos bombas iguales .................................................... 9 7.4.2 Acoplamiento en serie de dos bombas diferentes ............................................... 9
7.5 TORNEADO DEL RODETE .............................................................................. 10
Tema 8:
Regulación de bombas hidráulicas
8.1 INTRODUCCIÓN
Con mucha frecuencia, las exigencias de servicio de una bomba hidráulica varían, es decir, el punto de funcionamiento puede apartarse del punto de diseño, con la consiguiente disminución del rendimiento. La mayoría de las veces, el problema de la regulación de una bomba se refiere a la variación de su caudal. Para hacerlo de forma óptima, hay que tratar de adaptar el caudal a las nuevas condiciones con la mayor efectividad posible.
Dado que el punto de funcionamiento de una bomba viene dado por la intersección de las curvas características de la bomba y de la instalación, los métodos para variar el caudal se pueden agrupar en tres: los que modifican sólo la curva característica de la instalación, los que varían sólo la curva característica de la bomba y los que modifican ambas a la vez.
Regulación
Curva característica de la instalación
Curva característica de la bomba
Ambas curvas características
Válvula estranguladora Apertura salida secundaria Introducción de aire en aspiración Cierre o apertura de ramales en paralelo o serie
Variación velocidad de giro del rodete Orientación corona directriz a la entrada Orientación de álabes móviles del rodete
En el tema anterior se vio la disposición de bombas en serie y paralelo, que puede ser una forma de variar el caudal que transporta una instalación. El torneado del rodete es una manera, irreversible, de modificar la curva característica de la bomba. En el presente tema se revisan algunos métodos que permiten variar el caudal de manera reversible.
La evaluación de un sistema de regulación ha de considerar, entre otros factores:
el coste de instalación el coste de funcionamiento la gama de control requerida la velocidad de respuesta
la simplicidad de funcionamiento la seguridad de marcha la durabilidad y mantenimiento
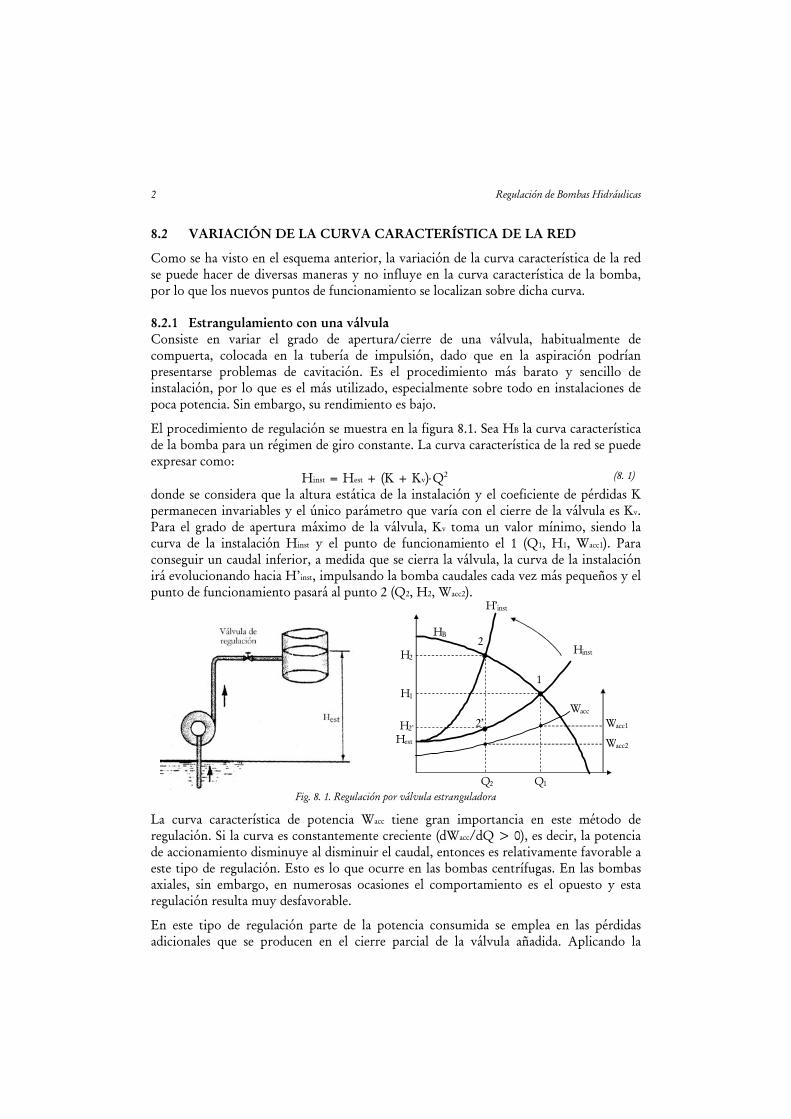
2 Regulación de Bombas Hidráulicas
8.2 VARIACIÓN DE LA CURVA CARACTERÍSTICA DE LA RED
Como se ha visto en el esquema anterior, la variación de la curva característica de la red se puede hacer de diversas maneras y no influye en la curva característica de la bomba, por lo que los nuevos puntos de funcionamiento se localizan sobre dicha curva.
8.2.1 Estrangulamiento con una válvula Consiste en variar el grado de apertura/cierre de una válvula, habitualmente de compuerta, colocada en la tubería de impulsión, dado que en la aspiración podrían presentarse problemas de cavitación. Es el procedimiento más barato y sencillo de instalación, por lo que es el más utilizado, especialmente sobre todo en instalaciones de poca potencia. Sin embargo, su rendimiento es bajo.
El procedimiento de regulación se muestra en la figura 8.1. Sea HB la curva característica de la bomba para un régimen de giro constante. La curva característica de la red se puede expresar como:
Hinst = Hest + (K + Kv)⋅Q2 (8. 1)
donde se considera que la altura estática de la instalación y el coeficiente de pérdidas K permanecen invariables y el único parámetro que varía con el cierre de la válvula es Kv. Para el grado de apertura máximo de la válvula, Kv toma un valor mínimo, siendo la curva de la instalación Hinst y el punto de funcionamiento el 1 (Q1, H1, Wacc1). Para conseguir un caudal inferior, a medida que se cierra la válvula, la curva de la instalación irá evolucionando hacia H’inst, impulsando la bomba caudales cada vez más pequeños y el punto de funcionamiento pasará al punto 2 (Q2, H2, Wacc2).
1
HB Hinst
H’inst
2
Q1 Q2
H1
H2
Hest
Wacc Wacc1
Wacc2
2’ H2’
Fig. 8. 1. Regulación por válvula estranguladora
La curva característica de potencia Wacc tiene gran importancia en este método de regulación. Si la curva es constantemente creciente (dWacc/dQ > 0), es decir, la potencia de accionamiento disminuye al disminuir el caudal, entonces es relativamente favorable a este tipo de regulación. Esto es lo que ocurre en las bombas centrífugas. En las bombas axiales, sin embargo, en numerosas ocasiones el comportamiento es el opuesto y esta regulación resulta muy desfavorable.
En este tipo de regulación parte de la potencia consumida se emplea en las pérdidas adicionales que se producen en el cierre parcial de la válvula añadida. Aplicando la

Bloque VII: Elección Instalación y Regulación de Bombas 3
ecuación de la energía mecánica a la válvula se pueden calcular las pérdidas producidas debido a la disipación viscosa, resultando: )HH(gQ '222v −ρ=φ .
Como cambia el punto de funcionamiento, varía también el rendimiento de la bomba, resultando antes y después de regular:
1acc
111B W
HgQρ=η
2acc
222B W
HgQρ=η
(8. 2)
El rendimiento de la instalación, una vez que se ha regulado, se define como el cociente entre la potencia mínima necesaria en caso ideal para elevar un caudal Q2 hasta una altura Hest y la potencia real de accionamiento empleada:
2
est2B
2B22
est2
2acc
est2i H
HHgQ
HgQW
HgQη=
ηρρ
=ρ
=η
(8. 3)
En general, las pérdidas debidas a este tipo de regulación son tanto mayor cuanto más intensa es la regulación.
8.2.2 Apertura de una salida secundaria de descarga Este método se utiliza principalmente para evitar fenómenos de funcionamiento inestable y cuando se exigen, durante mucho tiempo, caudales muy pequeños o incluso la marcha en vacío (bombas de alimentación de condensadores o de calderas). Es especialmente adecuada en las bombas que tienen la curva de potencia de accionamiento que disminuye al aumentar el caudal, por ejemplo bombas hélice.
En la figura 8.2 aparece reflejado este mecanismo de regulación. El punto de funcionamiento inicial es el 1. La salida secundaria de descarga al mismo nivel del depósito de aspiración tiene una curva característica sin altura estática1 (Haux). Al abrir la salida secundaria ambas instalaciones comienzan a trabajar en paralelo y la curva característica total de la instalación es Htotal, por lo que el nuevo punto de funcionamiento es el 2. El caudal total, que circula por la bomba, es Q2 (Q2 = Qaux + Qinst) y es la suma del caudal que va a la instalación principal, Qinst y el que recircula por la auxiliar, Qaux. Al abrir la salida secundaria se ha provocado la disminución del caudal que circula por la instalación principal de Q1 a Qinst.
1 La curva característica de la instalación auxiliar es del tipo: Haux = K⋅Q2
aux. Para calcular la constante de pérdidas de dicha instalación (K), a partir del caudal que se desea impulsar por la instalación principal (Qinst), se obtiene la altura H2. Con esta altura se calcula el caudal que circula por la bomba (Q2) y el caudal auxiliar (Qaux = Q2 – Qinst). Dividiendo la altura H2 entre dicho Q2
aux, se obtiene K.
1
HB Hinst
Haux
Q2 Qinst
H2
Hest Wacc
Wacc2
Htotal
Qaux
2
Q1
Wacc1
H1
Fig. 8. 2. Regulación por salida secundaria
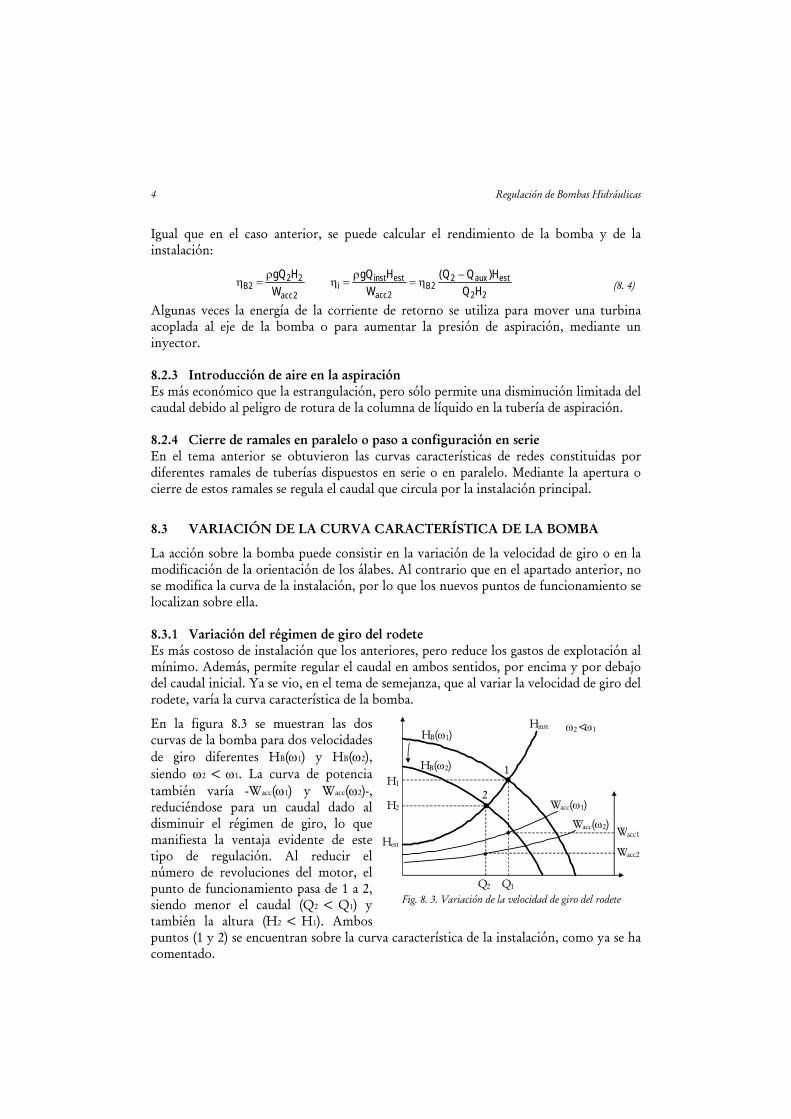
4 Regulación de Bombas Hidráulicas
Igual que en el caso anterior, se puede calcular el rendimiento de la bomba y de la instalación:
2acc
222B W
HgQρ=η
22
estaux22B
2acc
estinsti HQ
H)QQ(W
HgQ −η=
ρ=η
(8. 4)
Algunas veces la energía de la corriente de retorno se utiliza para mover una turbina acoplada al eje de la bomba o para aumentar la presión de aspiración, mediante un inyector.
8.2.3 Introducción de aire en la aspiración Es más económico que la estrangulación, pero sólo permite una disminución limitada del caudal debido al peligro de rotura de la columna de líquido en la tubería de aspiración.
8.2.4 Cierre de ramales en paralelo o paso a configuración en serie En el tema anterior se obtuvieron las curvas características de redes constituidas por diferentes ramales de tuberías dispuestos en serie o en paralelo. Mediante la apertura o cierre de estos ramales se regula el caudal que circula por la instalación principal.
8.3 VARIACIÓN DE LA CURVA CARACTERÍSTICA DE LA BOMBA
La acción sobre la bomba puede consistir en la variación de la velocidad de giro o en la modificación de la orientación de los álabes. Al contrario que en el apartado anterior, no se modifica la curva de la instalación, por lo que los nuevos puntos de funcionamiento se localizan sobre ella.
8.3.1 Variación del régimen de giro del rodete Es más costoso de instalación que los anteriores, pero reduce los gastos de explotación al mínimo. Además, permite regular el caudal en ambos sentidos, por encima y por debajo del caudal inicial. Ya se vio, en el tema de semejanza, que al variar la velocidad de giro del rodete, varía la curva característica de la bomba.
En la figura 8.3 se muestran las dos curvas de la bomba para dos velocidades de giro diferentes HB(ω1) y HB(ω2), siendo ω2 < ω1. La curva de potencia también varía -Wacc(ω1) y Wacc(ω2)-, reduciéndose para un caudal dado al disminuir el régimen de giro, lo que manifiesta la ventaja evidente de este tipo de regulación. Al reducir el número de revoluciones del motor, el punto de funcionamiento pasa de 1 a 2, siendo menor el caudal (Q2 < Q1) y también la altura (H2 < H1). Ambos puntos (1 y 2) se encuentran sobre la curva característica de la instalación, como ya se ha comentado.
1
HB(ω1) Hinst
2
Q1 Q2
H1
H2
Hest
Wacc(ω1)
Wacc1
Wacc2
HB(ω2)
ω2<ω1
Wacc(ω2)
Fig. 8. 3. Variación de la velocidad de giro del rodete
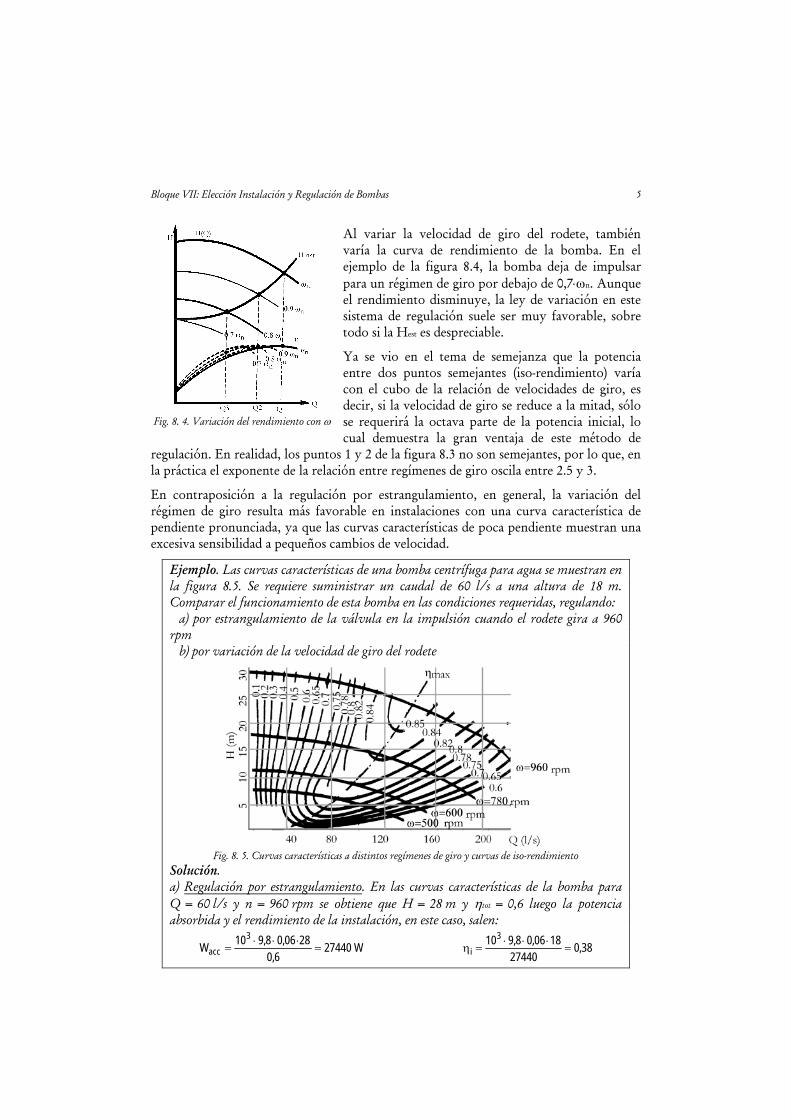
Bloque VII: Elección Instalación y Regulación de Bombas 5
Al variar la velocidad de giro del rodete, también varía la curva de rendimiento de la bomba. En el ejemplo de la figura 8.4, la bomba deja de impulsar para un régimen de giro por debajo de 0,7⋅ωn. Aunque el rendimiento disminuye, la ley de variación en este sistema de regulación suele ser muy favorable, sobre todo si la Hest es despreciable.
Ya se vio en el tema de semejanza que la potencia entre dos puntos semejantes (iso-rendimiento) varía con el cubo de la relación de velocidades de giro, es decir, si la velocidad de giro se reduce a la mitad, sólo se requerirá la octava parte de la potencia inicial, lo cual demuestra la gran ventaja de este método de
regulación. En realidad, los puntos 1 y 2 de la figura 8.3 no son semejantes, por lo que, en la práctica el exponente de la relación entre regímenes de giro oscila entre 2.5 y 3.
En contraposición a la regulación por estrangulamiento, en general, la variación del régimen de giro resulta más favorable en instalaciones con una curva característica de pendiente pronunciada, ya que las curvas características de poca pendiente muestran una excesiva sensibilidad a pequeños cambios de velocidad.
Ejemplo. Las curvas características de una bomba centrífuga para agua se muestran en la figura 8.5. Se requiere suministrar un caudal de 60 l/s a una altura de 18 m. Comparar el funcionamiento de esta bomba en las condiciones requeridas, regulando: a) por estrangulamiento de la válvula en la impulsión cuando el rodete gira a 960 rpm b) por variación de la velocidad de giro del rodete
Fig. 8. 5. Curvas características a distintos regímenes de giro y curvas de iso-rendimiento
Solución. a) Regulación por estrangulamiento. En las curvas características de la bomba para Q = 60 l/s y n = 960 rpm se obtiene que H = 28 m y ηtot = 0,6 luego la potencia absorbida y el rendimiento de la instalación, en este caso, salen:
W274406,0
2806,08,910W3
acc =⋅⋅⋅
= 38,027440
1806,08,9103i =
⋅⋅⋅=η
Fig. 8. 4. Variación del rendimiento con ω

6 Regulación de Bombas Hidráulicas
b) Regulación por variación de velocidad. Según las curvas características de la bomba, para Q = 60 l/s y H = 18 m se podrá reducir la velocidad hasta 795 rpm, obteniéndose un rendimiento de ηtot = 0,67. La potencia de accionamiento y el rendimiento de la instalación salen:
W1579767,0
1806,08,910W3
acc =⋅⋅⋅
= 67,015797
1806,08,9103i =
⋅⋅⋅=η
En este caso no sólo la potencia que necesita la bomba es mucho menor (27440-15797 = 11634 W), sino también mejora el ηtot.
8.3.2 Orientación de una corona directriz a la entrada del rodete Este método de regulación se utiliza bastante en los ventiladores y poco en las bombas. Consiste en imprimir una rotación o contrarrotación a la corriente a la entrada del rodete por medio de una corona directriz de álabes orientables instalada antes del rodete. El fundamento del método queda patente con el estudio de los triángulos de velocidad de la figura 8.6. Suponiendo que inicialmente el fluido entra sin prerrotación (α1 = 90°), se puede variar el ángulo de entrada de la corriente absoluta para que sea α′1 < 90º, o bien α′′1 > 90º. Se supone que la velocidad relativa mantiene siempre la misma dirección de entrada, β1.
En el primer caso v'1m < v1m, con lo que el caudal disminuye. Además v'1u > 0 y la energía específica comunicada por el rodete según la ecuación de Euler también disminuye (g Hu = u2v2u - u1v1u). En el segundo caso v''1m > v1m, aumentando el caudal. Además como v''1u < 0, la energía específica comunicada al fluido también aumenta. Sólo en el primer caso (disminución del caudal) esta regulación es aceptable, porque en el segundo la potencia de accionamiento puede incluso aumentar, lo cual evidentemente es desfavorable.
La realización práctica de este método de regulación se efectúa, básicamente, de dos maneras:
u1
v1
β1 1α1α′
u1v′
1w′
u1v ′′1α′′
1w ′′
1w
Fig. 8. 6.Triángulos de velocidad en regulación por corona directriz
Q
H
)(H 1u α ′′
)(H 1u α
)(H 1u α′
Fig. 8. 7.Variación de la altura útil
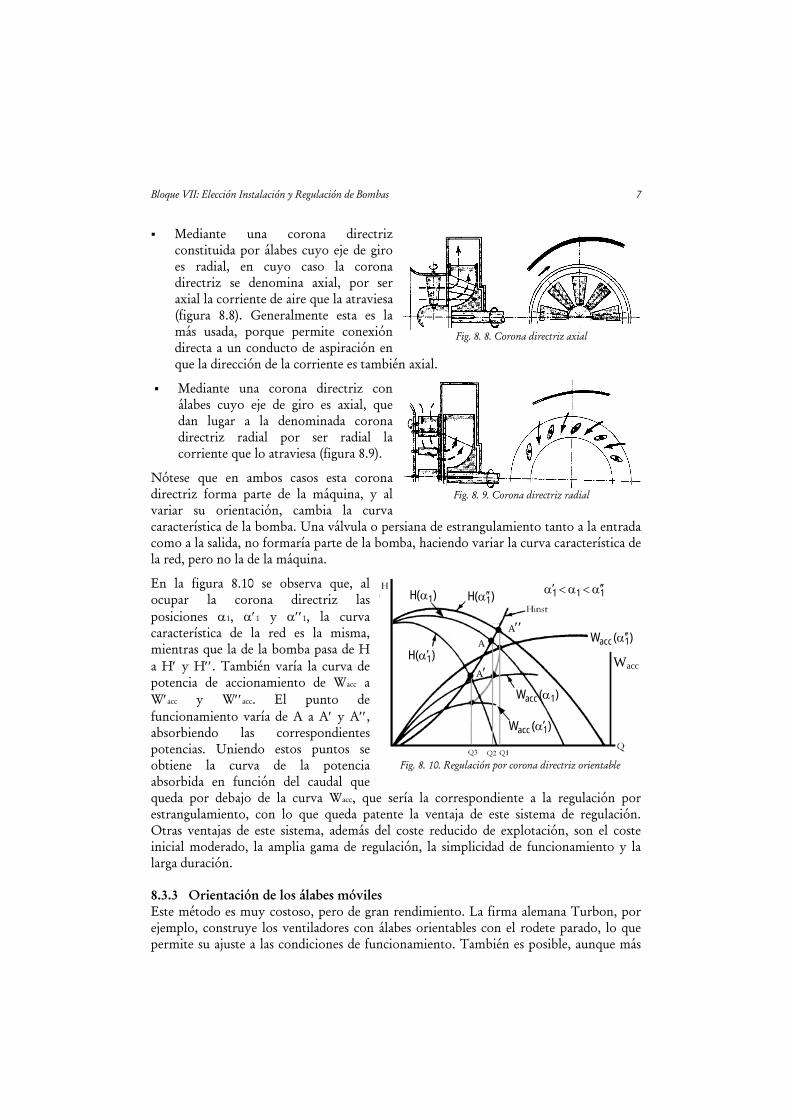
Bloque VII: Elección Instalación y Regulación de Bombas 7
Mediante una corona directriz constituida por álabes cuyo eje de giro es radial, en cuyo caso la corona directriz se denomina axial, por ser axial la corriente de aire que la atraviesa (figura 8.8). Generalmente esta es la más usada, porque permite conexión directa a un conducto de aspiración en que la dirección de la corriente es también axial.
Mediante una corona directriz con álabes cuyo eje de giro es axial, que dan lugar a la denominada corona directriz radial por ser radial la corriente que lo atraviesa (figura 8.9).
Nótese que en ambos casos esta corona directriz forma parte de la máquina, y al variar su orientación, cambia la curva característica de la bomba. Una válvula o persiana de estrangulamiento tanto a la entrada como a la salida, no formaría parte de la bomba, haciendo variar la curva característica de la red, pero no la de la máquina.
En la figura 8.10 se observa que, al ocupar la corona directriz las posiciones α1, α′1 y α′′1, la curva característica de la red es la misma, mientras que la de la bomba pasa de H a H′ y H′′. También varía la curva de potencia de accionamiento de Wacc a W′acc y W′′acc. El punto de funcionamiento varía de A a A′ y A′′, absorbiendo las correspondientes potencias. Uniendo estos puntos se obtiene la curva de la potencia absorbida en función del caudal que queda por debajo de la curva Wacc, que sería la correspondiente a la regulación por estrangulamiento, con lo que queda patente la ventaja de este sistema de regulación. Otras ventajas de este sistema, además del coste reducido de explotación, son el coste inicial moderado, la amplia gama de regulación, la simplicidad de funcionamiento y la larga duración.
8.3.3 Orientación de los álabes móviles Este método es muy costoso, pero de gran rendimiento. La firma alemana Turbon, por ejemplo, construye los ventiladores con álabes orientables con el rodete parado, lo que permite su ajuste a las condiciones de funcionamiento. También es posible, aunque más
Fig. 8. 8. Corona directriz axial
Fig. 8. 9. Corona directriz radial
111 α′′<α<α′
)(W 1acc α′′ )(H 1α′
)(H 1α )(H 1α′′
)(W 1acc α
)(W 1acc α′
Wacc
A′′
A′
A
Fig. 8. 10. Regulación por corona directriz orientable
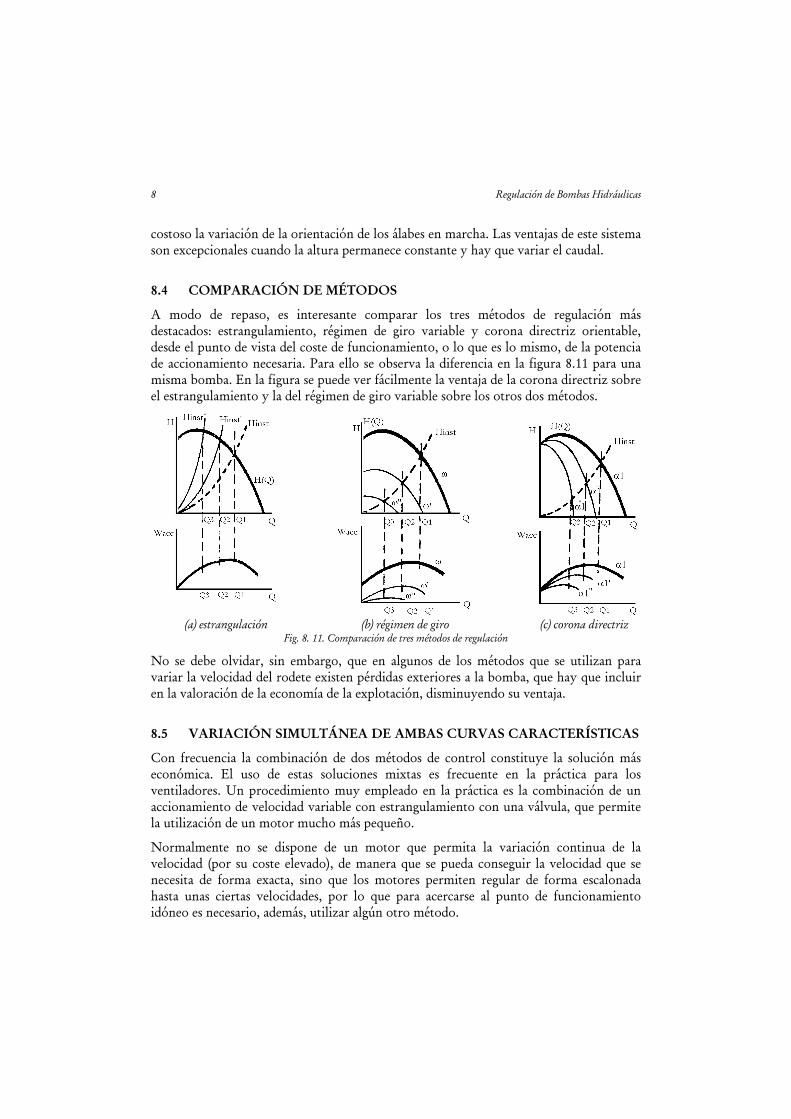
8 Regulación de Bombas Hidráulicas
costoso la variación de la orientación de los álabes en marcha. Las ventajas de este sistema son excepcionales cuando la altura permanece constante y hay que variar el caudal.
8.4 COMPARACIÓN DE MÉTODOS
A modo de repaso, es interesante comparar los tres métodos de regulación más destacados: estrangulamiento, régimen de giro variable y corona directriz orientable, desde el punto de vista del coste de funcionamiento, o lo que es lo mismo, de la potencia de accionamiento necesaria. Para ello se observa la diferencia en la figura 8.11 para una misma bomba. En la figura se puede ver fácilmente la ventaja de la corona directriz sobre el estrangulamiento y la del régimen de giro variable sobre los otros dos métodos.
(a) estrangulación (b) régimen de giro (c) corona directriz
Fig. 8. 11. Comparación de tres métodos de regulación
No se debe olvidar, sin embargo, que en algunos de los métodos que se utilizan para variar la velocidad del rodete existen pérdidas exteriores a la bomba, que hay que incluir en la valoración de la economía de la explotación, disminuyendo su ventaja.
8.5 VARIACIÓN SIMULTÁNEA DE AMBAS CURVAS CARACTERÍSTICAS
Con frecuencia la combinación de dos métodos de control constituye la solución más económica. El uso de estas soluciones mixtas es frecuente en la práctica para los ventiladores. Un procedimiento muy empleado en la práctica es la combinación de un accionamiento de velocidad variable con estrangulamiento con una válvula, que permite la utilización de un motor mucho más pequeño.
Normalmente no se dispone de un motor que permita la variación continua de la velocidad (por su coste elevado), de manera que se pueda conseguir la velocidad que se necesita de forma exacta, sino que los motores permiten regular de forma escalonada hasta unas ciertas velocidades, por lo que para acercarse al punto de funcionamiento idóneo es necesario, además, utilizar algún otro método.
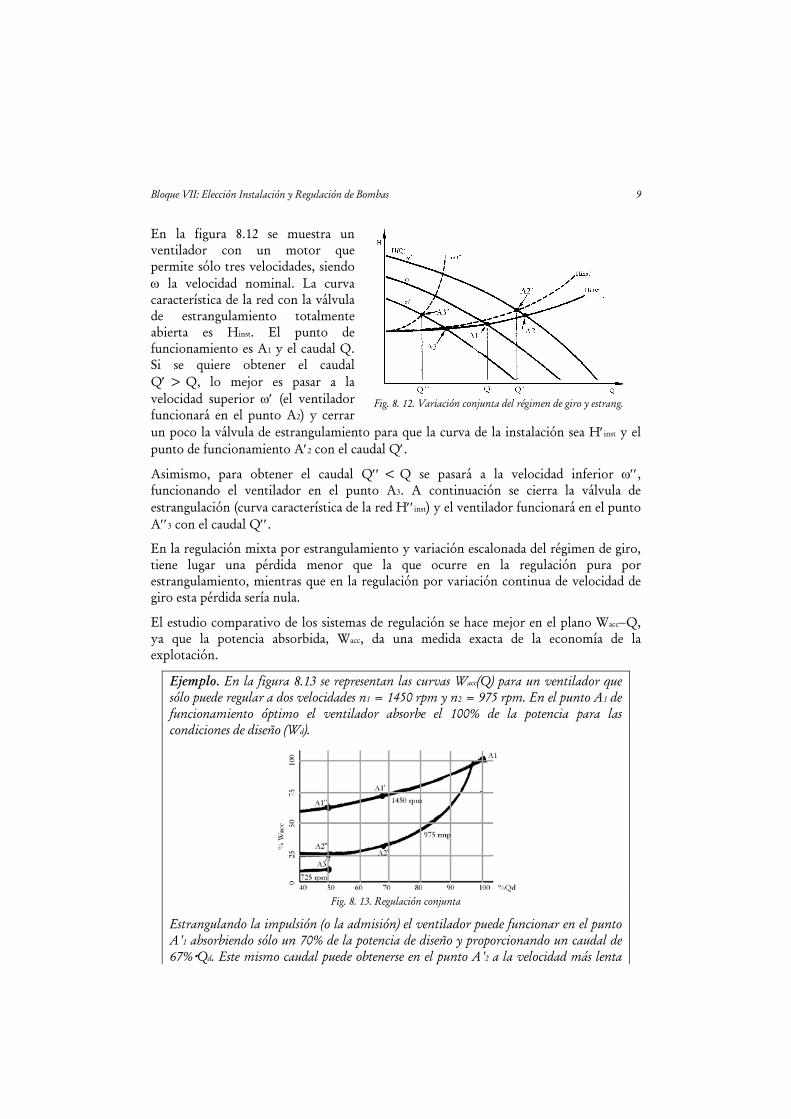
Bloque VII: Elección Instalación y Regulación de Bombas 9
En la figura 8.12 se muestra un ventilador con un motor que permite sólo tres velocidades, siendo ω la velocidad nominal. La curva característica de la red con la válvula de estrangulamiento totalmente abierta es Hinst. El punto de funcionamiento es A1 y el caudal Q. Si se quiere obtener el caudal Q′ > Q, lo mejor es pasar a la velocidad superior ω′ (el ventilador funcionará en el punto A2) y cerrar un poco la válvula de estrangulamiento para que la curva de la instalación sea H′inst y el punto de funcionamiento A′2 con el caudal Q′.
Asimismo, para obtener el caudal Q′′ < Q se pasará a la velocidad inferior ω′′, funcionando el ventilador en el punto A3. A continuación se cierra la válvula de estrangulación (curva característica de la red H′′inst) y el ventilador funcionará en el punto A′′3 con el caudal Q′′.
En la regulación mixta por estrangulamiento y variación escalonada del régimen de giro, tiene lugar una pérdida menor que la que ocurre en la regulación pura por estrangulamiento, mientras que en la regulación por variación continua de velocidad de giro esta pérdida sería nula.
El estudio comparativo de los sistemas de regulación se hace mejor en el plano Wacc−Q, ya que la potencia absorbida, Wacc, da una medida exacta de la economía de la explotación.
Ejemplo. En la figura 8.13 se representan las curvas Wacc(Q) para un ventilador que sólo puede regular a dos velocidades n1 = 1450 rpm y n2 = 975 rpm. En el punto A1 de funcionamiento óptimo el ventilador absorbe el 100% de la potencia para las condiciones de diseño (Wd).
Fig. 8. 13. Regulación conjunta
Estrangulando la impulsión (o la admisión) el ventilador puede funcionar en el punto A'1 absorbiendo sólo un 70% de la potencia de diseño y proporcionando un caudal de 67% Qd. Este mismo caudal puede obtenerse en el punto A'2 a la velocidad más lenta
Fig. 8. 12. Variación conjunta del régimen de giro y estrang.

10 Regulación de Bombas Hidráulicas
n2 = 975 rpm, absorbiendo sólo el 30% Wd. Si el ventilador tuviera otra velocidad más lenta a 725 rpm, un caudal 50%Qd podría conseguirse de tres modos:
con un simple estrangulamiento (punto A''1), absorbiendo el 60% Wd
con un cambio de velocidad y un estrangulamiento (punto A''2), absorbiendo el 25% Wd y ahorrando un 58% respecto al primer caso (60-25/60 100)
con un mero cambio de velocidad sin estrangulamiento (punto A''3), absorbiendo un 12,5% Wd y ahorrando un 79% respecto al primer caso( 60-12,5/60 100) y un 50% respecto al segundo (25-12,5/25 100).
Bibliografía:
MATAIX, CAP. 21.
PFLEIDERER, CAP. K.
Bloque VII: Elección Instalación y Regulación de Bombas 11
8.1 INTRODUCCIÓN .............................................................................................. 1 8.2 VARIACIÓN DE LA CURVA CARACTERÍSTICA DE LA RED ................................. 2
8.2.1 Estrangulamiento con una válvula ................................................................... 2 8.2.2 Apertura de una salida secundaria de descarga ................................................. 3 8.2.3 Introducción de aire en la aspiración ................................................................ 4 8.2.4 Cierre de escalones en paralelo o paso a configuración en serie ........................ 4
8.3 VARIACIÓN DE LA CURVA CARACTERÍSTICA DE LA BOMBA ............................ 4 8.3.1 Variación del régimen de giro del rodete .......................................................... 4 8.3.2 Orientación de una corona directriz a la entrada del rodete ........................... 6 8.3.3 Orientación de los álabes móviles ...................................................................... 7
8.4 COMPARACIÓN DE MÉTODOS ......................................................................... 8 8.5 VARIACIÓN SIMULTÁNEA DE AMBAS CURVAS CARACTERÍSTICAS ................... 8
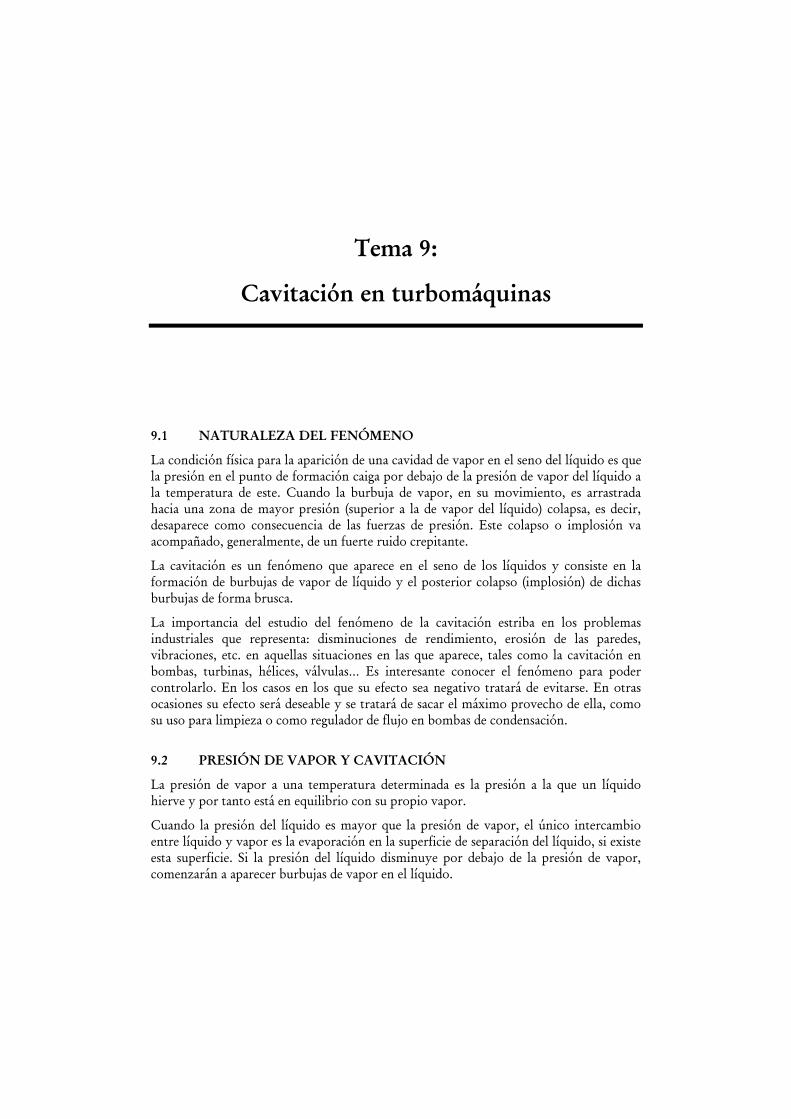
Tema 9:
Cavitación en turbomáquinas
9.1 NATURALEZA DEL FENÓMENO
La condición física para la aparición de una cavidad de vapor en el seno del líquido es que la presión en el punto de formación caiga por debajo de la presión de vapor del líquido a la temperatura de este. Cuando la burbuja de vapor, en su movimiento, es arrastrada hacia una zona de mayor presión (superior a la de vapor del líquido) colapsa, es decir, desaparece como consecuencia de las fuerzas de presión. Este colapso o implosión va acompañado, generalmente, de un fuerte ruido crepitante.
La cavitación es un fenómeno que aparece en el seno de los líquidos y consiste en la formación de burbujas de vapor de líquido y el posterior colapso (implosión) de dichas burbujas de forma brusca.
La importancia del estudio del fenómeno de la cavitación estriba en los problemas industriales que representa: disminuciones de rendimiento, erosión de las paredes, vibraciones, etc. en aquellas situaciones en las que aparece, tales como la cavitación en bombas, turbinas, hélices, válvulas… Es interesante conocer el fenómeno para poder controlarlo. En los casos en los que su efecto sea negativo tratará de evitarse. En otras ocasiones su efecto será deseable y se tratará de sacar el máximo provecho de ella, como su uso para limpieza o como regulador de flujo en bombas de condensación.
9.2 PRESIÓN DE VAPOR Y CAVITACIÓN
La presión de vapor a una temperatura determinada es la presión a la que un líquido hierve y por tanto está en equilibrio con su propio vapor.
Cuando la presión del líquido es mayor que la presión de vapor, el único intercambio entre líquido y vapor es la evaporación en la superficie de separación del líquido, si existe esta superficie. Si la presión del líquido disminuye por debajo de la presión de vapor, comenzarán a aparecer burbujas de vapor en el líquido.
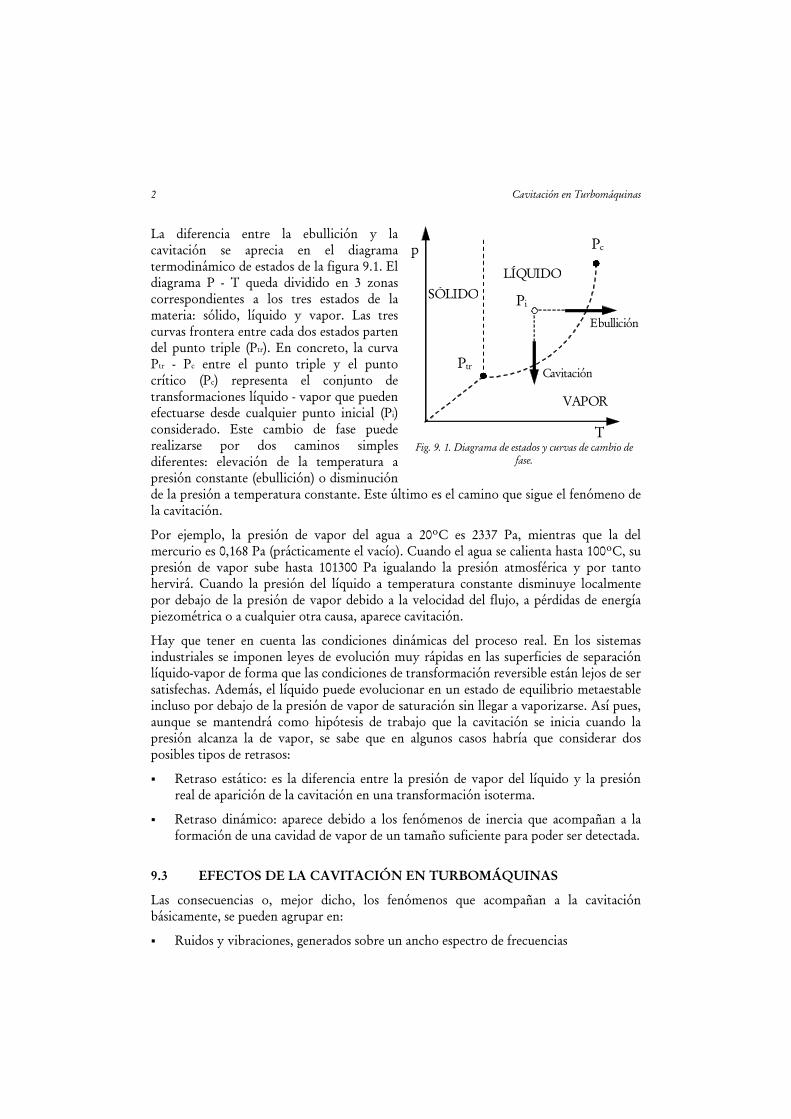
2 Cavitación en Turbomáquinas
La diferencia entre la ebullición y la cavitación se aprecia en el diagrama termodinámico de estados de la figura 9.1. El diagrama P - T queda dividido en 3 zonas correspondientes a los tres estados de la materia: sólido, líquido y vapor. Las tres curvas frontera entre cada dos estados parten del punto triple (Ptr). En concreto, la curva Ptr - Pc entre el punto triple y el punto crítico (Pc) representa el conjunto de transformaciones líquido - vapor que pueden efectuarse desde cualquier punto inicial (Pi) considerado. Este cambio de fase puede realizarse por dos caminos simples diferentes: elevación de la temperatura a presión constante (ebullición) o disminución de la presión a temperatura constante. Este último es el camino que sigue el fenómeno de la cavitación.
Por ejemplo, la presión de vapor del agua a 20ºC es 2337 Pa, mientras que la del mercurio es 0,168 Pa (prácticamente el vacío). Cuando el agua se calienta hasta 100ºC, su presión de vapor sube hasta 101300 Pa igualando la presión atmosférica y por tanto hervirá. Cuando la presión del líquido a temperatura constante disminuye localmente por debajo de la presión de vapor debido a la velocidad del flujo, a pérdidas de energía piezométrica o a cualquier otra causa, aparece cavitación.
Hay que tener en cuenta las condiciones dinámicas del proceso real. En los sistemas industriales se imponen leyes de evolución muy rápidas en las superficies de separación líquido-vapor de forma que las condiciones de transformación reversible están lejos de ser satisfechas. Además, el líquido puede evolucionar en un estado de equilibrio metaestable incluso por debajo de la presión de vapor de saturación sin llegar a vaporizarse. Así pues, aunque se mantendrá como hipótesis de trabajo que la cavitación se inicia cuando la presión alcanza la de vapor, se sabe que en algunos casos habría que considerar dos posibles tipos de retrasos:
Retraso estático: es la diferencia entre la presión de vapor del líquido y la presión real de aparición de la cavitación en una transformación isoterma.
Retraso dinámico: aparece debido a los fenómenos de inercia que acompañan a la formación de una cavidad de vapor de un tamaño suficiente para poder ser detectada.
9.3 EFECTOS DE LA CAVITACIÓN EN TURBOMÁQUINAS
Las consecuencias o, mejor dicho, los fenómenos que acompañan a la cavitación básicamente, se pueden agrupar en:
Ruidos y vibraciones, generados sobre un ancho espectro de frecuencias
p
T
VAPOR
LÍQUIDO SÓLIDO
Ptr
Pc
Ebullición
Cavitación
Pi
Fig. 9. 1. Diagrama de estados y curvas de cambio de
fase.
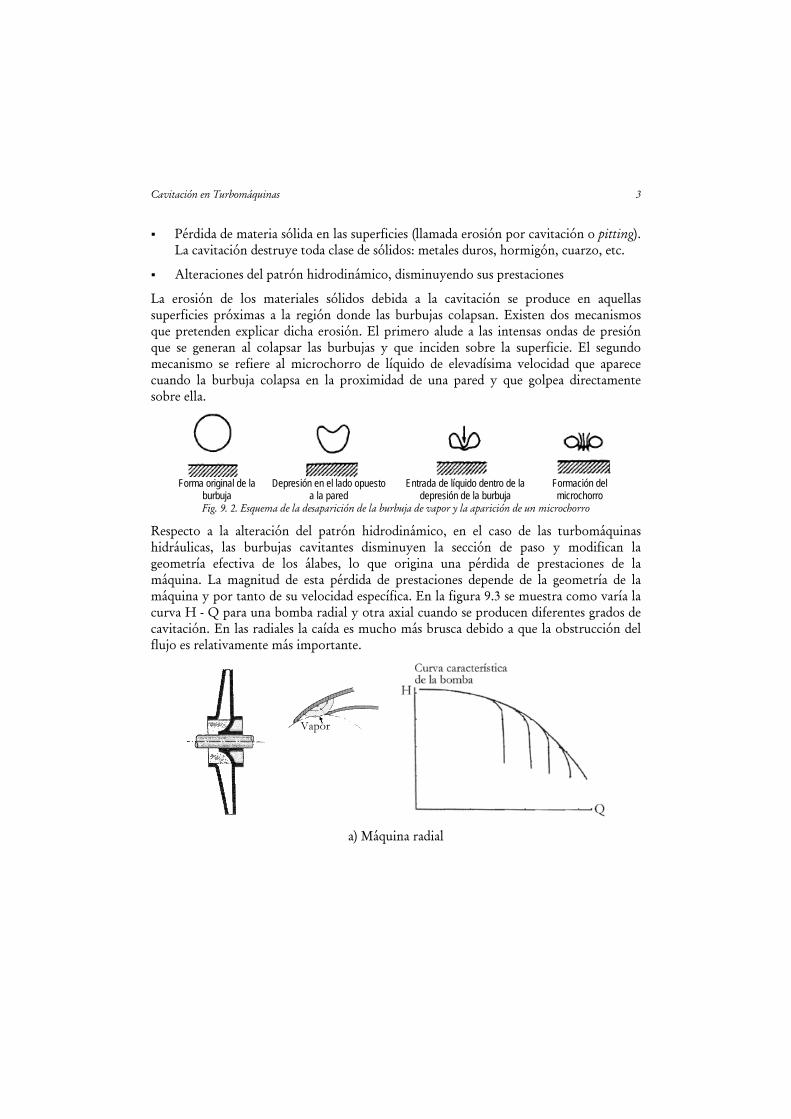
Cavitación en Turbomáquinas 3
Pérdida de materia sólida en las superficies (llamada erosión por cavitación o pitting). La cavitación destruye toda clase de sólidos: metales duros, hormigón, cuarzo, etc.
Alteraciones del patrón hidrodinámico, disminuyendo sus prestaciones
La erosión de los materiales sólidos debida a la cavitación se produce en aquellas superficies próximas a la región donde las burbujas colapsan. Existen dos mecanismos que pretenden explicar dicha erosión. El primero alude a las intensas ondas de presión que se generan al colapsar las burbujas y que inciden sobre la superficie. El segundo mecanismo se refiere al microchorro de líquido de elevadísima velocidad que aparece cuando la burbuja colapsa en la proximidad de una pared y que golpea directamente sobre ella.
Forma original de la
burbuja Depresión en el lado opuesto
a la pared Entrada de líquido dentro de la
depresión de la burbuja Formación del microchorro
Fig. 9. 2. Esquema de la desaparición de la burbuja de vapor y la aparición de un microchorro
Respecto a la alteración del patrón hidrodinámico, en el caso de las turbomáquinas hidráulicas, las burbujas cavitantes disminuyen la sección de paso y modifican la geometría efectiva de los álabes, lo que origina una pérdida de prestaciones de la máquina. La magnitud de esta pérdida de prestaciones depende de la geometría de la máquina y por tanto de su velocidad específica. En la figura 9.3 se muestra como varía la curva H - Q para una bomba radial y otra axial cuando se producen diferentes grados de cavitación. En las radiales la caída es mucho más brusca debido a que la obstrucción del flujo es relativamente más importante.
a) Máquina radial
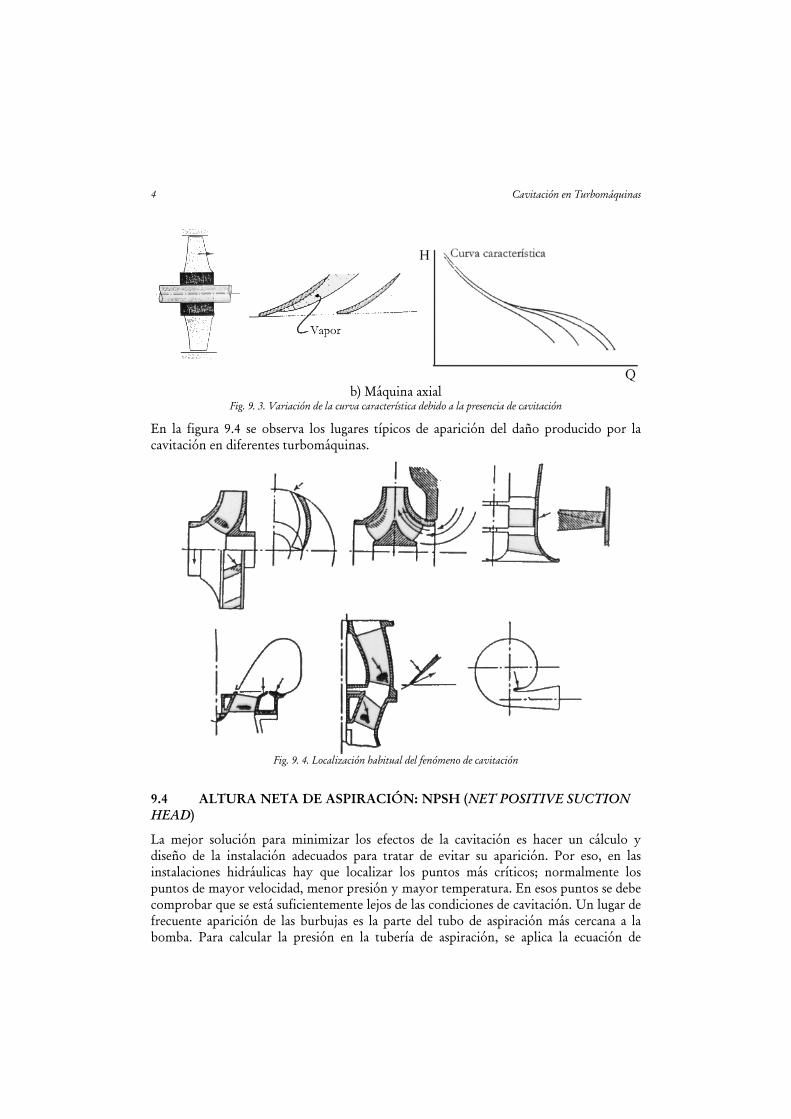
4 Cavitación en Turbomáquinas
b) Máquina axial
Fig. 9. 3. Variación de la curva característica debido a la presencia de cavitación
En la figura 9.4 se observa los lugares típicos de aparición del daño producido por la cavitación en diferentes turbomáquinas.
Fig. 9. 4. Localización habitual del fenómeno de cavitación
9.4 ALTURA NETA DE ASPIRACIÓN: NPSH (NET POSITIVE SUCTION HEAD)
La mejor solución para minimizar los efectos de la cavitación es hacer un cálculo y diseño de la instalación adecuados para tratar de evitar su aparición. Por eso, en las instalaciones hidráulicas hay que localizar los puntos más críticos; normalmente los puntos de mayor velocidad, menor presión y mayor temperatura. En esos puntos se debe comprobar que se está suficientemente lejos de las condiciones de cavitación. Un lugar de frecuente aparición de las burbujas es la parte del tubo de aspiración más cercana a la bomba. Para calcular la presión en la tubería de aspiración, se aplica la ecuación de

Cavitación en Turbomáquinas 5
conservación de la energía mecánica entre la superficie libre del líquido que se aspira (D) y la entrada de la bomba (A) (figura 9.5):
pD
2
A
2Hg
2vp
2vp
⋅−=⎟⎟⎠
⎞⎜⎜⎝
⎛++
ρ−⎟
⎟⎠
⎞⎜⎜⎝
⎛++
ρUU
(9. 1)
donde Hp es la altura de pérdidas de carga en la tubería de aspiración.
Restando pv/ρ (donde pv es la presión de vapor del líquido) a los dos miembros de la ecuación (9. 1) y reorganizando:
ρ−
=⋅−−+−
+ρ− vA
pAD
2A
2DvD ppHg
2vvpp UU
Para que no exista cavitación debe verificarse que pA > pv. Si además se cumple que en el punto D la velocidad es despreciable, y que las únicas fuerzas másicas son las gravitatorias, se obtiene la siguiente inecuación que debe cumplirse para evitar la cavitación en la tubería de aspiración:
0Hgzg2
vppp
2AvD ≥⋅−∆⋅−−
ρ−
(9. 2)
Además, hay que tener en cuenta que una vez en el interior de la bomba y antes de alcanzar los álabes del rodete, el fluido sufre pérdidas adicionales, por lo que hay que considerar la nueva disminución de presión que se
produce. Para ello, se introduce en la ecuación (9. 2) un nuevo término: 2
w2A⋅λ , donde
wA es la velocidad del flujo relativo en la aspiración y λ es un parámetro característico de la geometría de la bomba. Por tanto, la inecuación (9. 2) se convierte en:
0Hg2
wzg2
vppp
2A
2AvD ≥⋅−⋅λ−∆⋅−−
ρ−
(9. 3)
Despejando de aquí ∆z (la diferencia de nivel entre los puntos A y D) se obtiene la expresión de la máxima altura de aspiración:
g2wH
g2v
gppz
2A
p2AvD
⋅⋅λ−−
⋅−
⋅ρ−
≤∆
(9. 4)
En concreto, para bombas, puede decirse que la máxima altura posible de aspiración disminuye cuando se aumenta cualquiera de estos parámetros:
El caudal (porque aumentan las pérdidas en la tubería de aspiración, vA y wA).
La pérdida de carga en la aspiración (porque aumenta Hp).
Fig. 9. 5. Esquema de la bomba y la tubería de
aspiración.

6 Cavitación en Turbomáquinas
La velocidad de rotación de la bomba (porque en el triángulo de velocidad de entrada, al aumentar uA, manteniendo el caudal, aumenta wA).
Con unas pequeñas hipótesis para el caso límite más favorable se puede obtener un orden de magnitud aproximado:
Si la presión en el punto D es la atmosférica (pD ≈ 105 Pa)
El líquido utilizado es agua (ρ ≈ 1000 kg/m3)
Asumiendo, en el caso más favorable, una presión de vapor prácticamente nula (pv ≈ 0 Pa)
Admitiendo un caso muy favorable en que la velocidad en la entrada de la bomba llegase a ser despreciable (vA ≈ 0 m/s)
Considerando flujo ideal en el tubo de aspiración (Hp ≈ 0 m)
Considerando igualmente que las pérdidas a la entrada fueran nulas ( 02
w2A ≈⋅λ ).
En este caso límite ideal, se obtiene una máxima altura de aspiración de ∆zMAX ≈ 10 m.
En la realidad, para depósitos no presurizados y condiciones no ideales, la máxima altura de aspiración de una bomba no suele sobrepasar los 6 m.
Algunos de los parámetros que intervienen en la inecuación (9. 3) pueden modificarse en la instalación y, sin embargo, otros vienen dados por el diseño de la bomba. Por eso, agrupando los términos, se puede definir la altura neta de aspiración disponible, que es un parámetro que representa las características de la instalación:
zHgppNPSH p
vDdisponible ∆−−
ρ−
=
(9. 5)
Por otro lado, la altura neta de aspiración requerida representa las características de la bomba:
g2w
g2vNPSH
2A
2A
requerido ⋅λ+=
(9. 6)
Por tanto, para que no exista cavitación en la aspiración, ha de cumplirse: NPSHd ≥ NPSHr, donde NPSHd es la altura neta disponible en la instalación y NPSHr es la altura neta requerida de la bomba.
9.5 DETERMINACIÓN DEL NPSHREQUERIDO
El parámetro NPSH caracteriza el comportamiento de una bomba ante el fenómeno de la cavitación. Su determinación se realiza de forma experimental mediante un ensayo semejante al descrito a continuación.

Cavitación en Turbomáquinas 7
El ensayo tiene lugar en una instalación semejante a la de la figura 9.6, equipada con un depósito con cámara de aire de presión regulable. El procedimiento a seguir será el siguiente:
Eliminar la mayor cantidad de aire disuelto en el líquido del túnel, incluso mediante calentamiento.
Poner en funcionamiento la bomba y, mediante la válvula V2, ajustar un determinado caudal.
Disminuir la presión en la cámara de aire del depósito hasta que se detecta la aparición de cavitación. Aplicando la ecuación de la energía entre la superficie libre del líquido en el depósito y la entrada de la bomba se obtiene:
pa
2aa
dd Hz
g2v
gpz
gp
+++ρ
=+ρ
(9. 7)
Por otra parte la presión mínima en el rodete será:
g2wH
g2vzz
gp
g2w
gp
gp 2
ap
2a
add
2aamin λ−−−−+
ρ=λ−
ρ=
ρ
(9. 8)
En el momento que aparece cavitación pmin = pv y se obtiene:
padvd
disponiblerequerido HzzgppNPSHNPSH −−+
ρ−
==
(9. 9)
Repitiendo el procedimiento para diferentes caudales se obtiene la curva NPSHreq – Q.
Los fabricantes, convencionalmente, definen la aparición de cavitación, para un caudal determinado, cuando se produce una disminución igual al 3% de la altura desarrollada por la bomba en ausencia de cavitación.
9.6 FACTORES QUE INFLUYEN EN EL NPSHREQUERIDO
En esta pregunta se comentan de manera somera algunos factores que influyen en el valor del NPSHrequerido y la manera de minimizarlo.
Fig. 9. 6. Esquema de la instalación de ensayo

8 Cavitación en Turbomáquinas
Influencia del caudal. De lo estudiado en este tema se puede decir que el caudal para el cual 2w2
a⋅λ es mínimo es el caudal nominal.
En la figura 9.7 se representa el valor de g2v2a
(proporcional a Q2) y de g2w2a⋅λ frente al
caudal y la suma de ambos, que es el NPSHrequerido.
En bombas radiales (velocidad específica baja) y para grandes caudales, se puede considerar que
2a
2a wv λ>> y entonces g2vNPSH 2
areq ≈ . Por tanto, para evitar la cavitación, se debe intentar fabricar bombas con velocidad de aspiración baja y uniforme. Esto supone mayor tamaño, coste de fabricación y peso, lo que puede ser perjudicial en algunas aplicaciones.
Si se trabaja con caudales diferentes al nominal, existen desprendimientos de la corriente y formación de zonas de recirculación, donde localmente se alcanzan velocidades mayores que la de aspiración.
Influencia del diseño del rodete. La región de entrada al rodete es la geometría que tiene más importancia sobre la cavitación. Cuando se definió el NPSHreq, la influencia del rodete se cuantificó a través del término 2w2
aλ . Este término aumenta su valor, entre otras razones, por el espesor finito de los álabes, que provoca que la velocidad de entrada sea superior que la de la sección inmediatamente anterior donde no hay álabes. Por otra parte, el coeficiente λ depende de la geometría de entrada al rodete, del ángulo de entrada o de ataque de los álabes y de la rugosidad y forma de los canales entre álabes.
El número de álabes del rodete es un aspecto que tiene mayor importancia en máquinas axiales, ya que la mayor parte de la energía se transfiere por efectos aerodinámicos. En éstas, se puede suponer que g2wNPSH 2
areq λ≈ . Cuanto mayor sea el número de álabes,
estarán más descargados y el coeficiente λ será menor.
Resumiendo, para minimizar el NPSHrequerido se debe optar por una máquina que tenga:
el mayor tamaño posible, aunque por otra parte origine mayores pérdidas por fugas y tenga mayor coste y peso.
el mayor número de álabes de la mayor superficie posible, para minimizar la carga de cada álabe, aunque esto produzca mayores pérdidas por fricción y menor rendimiento.
los canales entre álabes lo más hidrodinámicos posible, es decir, variaciones de geometría graduales y con pequeño ángulo de curvatura.
Fig. 9. 7. Influencia del caudal
Cavitación en Turbomáquinas 9
9.1 NATURALEZA DEL FENÓMENO ....................................................................... 1 9.2 PRESIÓN DE VAPOR Y CAVITACIÓN ................................................................. 1 9.3 EFECTOS DE LA CAVITACIÓN EN TURBOMÁQUINAS ....................................... 2 9.4 ALTURA NETA DE ASPIRACIÓN: NPSH (NET POSITIVE SUCTION HEAD) ........... 4 9.5 DETERMINACIÓN DEL NPSHREQUERIDO ............................................................. 6 9.6 FACTORES QUE INFLUYEN EN EL NPSHREQUERIDO ............................................ 7