solución de ecuaciones simbólica alfonso cubillos v · pdf filesolución...
TRANSCRIPT
Solución deecuacionesSimbólica
Alfonso Cubillos V
Introducción
Maxima - UnaIntroducción
Trabajo y EnergíaMétodo Variacional
Tracción Pura
Flexión
2.1
Capitulo 2Solución de ecuaciones SimbólicaAplicación a la Mecánica de Materiales
Aplicaciones computacionales de la Mecánica de Materiales
Alfonso Cubillos VPrograma de Ing. Mecánica
Universidad de Ibagué
Solución deecuacionesSimbólica
Alfonso Cubillos V
Introducción
Maxima - UnaIntroducción
Trabajo y EnergíaMétodo Variacional
Tracción Pura
Flexión
2.2
Herramientas de Calculo simbólico
Qué se puede hacer con una herramienta de calculo simbólico?
• Manipulación de expresiones simbólicas y numéricas• Diferenciación• Integración• Expansión en series de Taylor• Transformadas de Laplace• Ecuaciones diferenciales ordinarias• Sistemas de ecuaciones lineales• Vectores, matrices y tensores.
Y todo esto de forma simbólica !!!
Cuál es el software más conocido para realizar cálculossimbólicos?
• Maple• Mathematica• Maxima

Solución deecuacionesSimbólica
Alfonso Cubillos V
Introducción
Maxima - UnaIntroducción
Trabajo y EnergíaMétodo Variacional
Tracción Pura
Flexión
2.2
Herramientas de Calculo simbólico
Qué se puede hacer con una herramienta de calculo simbólico?
• Manipulación de expresiones simbólicas y numéricas
• Diferenciación• Integración• Expansión en series de Taylor• Transformadas de Laplace• Ecuaciones diferenciales ordinarias• Sistemas de ecuaciones lineales• Vectores, matrices y tensores.
Y todo esto de forma simbólica !!!
Cuál es el software más conocido para realizar cálculossimbólicos?
• Maple• Mathematica• Maxima
Solución deecuacionesSimbólica
Alfonso Cubillos V
Introducción
Maxima - UnaIntroducción
Trabajo y EnergíaMétodo Variacional
Tracción Pura
Flexión
2.2
Herramientas de Calculo simbólico
Qué se puede hacer con una herramienta de calculo simbólico?
• Manipulación de expresiones simbólicas y numéricas• Diferenciación
• Integración• Expansión en series de Taylor• Transformadas de Laplace• Ecuaciones diferenciales ordinarias• Sistemas de ecuaciones lineales• Vectores, matrices y tensores.
Y todo esto de forma simbólica !!!
Cuál es el software más conocido para realizar cálculossimbólicos?
• Maple• Mathematica• Maxima

Solución deecuacionesSimbólica
Alfonso Cubillos V
Introducción
Maxima - UnaIntroducción
Trabajo y EnergíaMétodo Variacional
Tracción Pura
Flexión
2.2
Herramientas de Calculo simbólico
Qué se puede hacer con una herramienta de calculo simbólico?
• Manipulación de expresiones simbólicas y numéricas• Diferenciación• Integración
• Expansión en series de Taylor• Transformadas de Laplace• Ecuaciones diferenciales ordinarias• Sistemas de ecuaciones lineales• Vectores, matrices y tensores.
Y todo esto de forma simbólica !!!
Cuál es el software más conocido para realizar cálculossimbólicos?
• Maple• Mathematica• Maxima
Solución deecuacionesSimbólica
Alfonso Cubillos V
Introducción
Maxima - UnaIntroducción
Trabajo y EnergíaMétodo Variacional
Tracción Pura
Flexión
2.2
Herramientas de Calculo simbólico
Qué se puede hacer con una herramienta de calculo simbólico?
• Manipulación de expresiones simbólicas y numéricas• Diferenciación• Integración• Expansión en series de Taylor
• Transformadas de Laplace• Ecuaciones diferenciales ordinarias• Sistemas de ecuaciones lineales• Vectores, matrices y tensores.
Y todo esto de forma simbólica !!!
Cuál es el software más conocido para realizar cálculossimbólicos?
• Maple• Mathematica• Maxima
Solución deecuacionesSimbólica
Alfonso Cubillos V
Introducción
Maxima - UnaIntroducción
Trabajo y EnergíaMétodo Variacional
Tracción Pura
Flexión
2.2
Herramientas de Calculo simbólico
Qué se puede hacer con una herramienta de calculo simbólico?
• Manipulación de expresiones simbólicas y numéricas• Diferenciación• Integración• Expansión en series de Taylor• Transformadas de Laplace
• Ecuaciones diferenciales ordinarias• Sistemas de ecuaciones lineales• Vectores, matrices y tensores.
Y todo esto de forma simbólica !!!
Cuál es el software más conocido para realizar cálculossimbólicos?
• Maple• Mathematica• Maxima

Solución deecuacionesSimbólica
Alfonso Cubillos V
Introducción
Maxima - UnaIntroducción
Trabajo y EnergíaMétodo Variacional
Tracción Pura
Flexión
2.2
Herramientas de Calculo simbólico
Qué se puede hacer con una herramienta de calculo simbólico?
• Manipulación de expresiones simbólicas y numéricas• Diferenciación• Integración• Expansión en series de Taylor• Transformadas de Laplace• Ecuaciones diferenciales ordinarias
• Sistemas de ecuaciones lineales• Vectores, matrices y tensores.
Y todo esto de forma simbólica !!!
Cuál es el software más conocido para realizar cálculossimbólicos?
• Maple• Mathematica• Maxima
Solución deecuacionesSimbólica
Alfonso Cubillos V
Introducción
Maxima - UnaIntroducción
Trabajo y EnergíaMétodo Variacional
Tracción Pura
Flexión
2.2
Herramientas de Calculo simbólico
Qué se puede hacer con una herramienta de calculo simbólico?
• Manipulación de expresiones simbólicas y numéricas• Diferenciación• Integración• Expansión en series de Taylor• Transformadas de Laplace• Ecuaciones diferenciales ordinarias• Sistemas de ecuaciones lineales
• Vectores, matrices y tensores.
Y todo esto de forma simbólica !!!
Cuál es el software más conocido para realizar cálculossimbólicos?
• Maple• Mathematica• Maxima
Solución deecuacionesSimbólica
Alfonso Cubillos V
Introducción
Maxima - UnaIntroducción
Trabajo y EnergíaMétodo Variacional
Tracción Pura
Flexión
2.2
Herramientas de Calculo simbólico
Qué se puede hacer con una herramienta de calculo simbólico?
• Manipulación de expresiones simbólicas y numéricas• Diferenciación• Integración• Expansión en series de Taylor• Transformadas de Laplace• Ecuaciones diferenciales ordinarias• Sistemas de ecuaciones lineales• Vectores, matrices y tensores.
Y todo esto de forma simbólica !!!
Cuál es el software más conocido para realizar cálculossimbólicos?
• Maple• Mathematica• Maxima
Solución deecuacionesSimbólica
Alfonso Cubillos V
Introducción
Maxima - UnaIntroducción
Trabajo y EnergíaMétodo Variacional
Tracción Pura
Flexión
2.2
Herramientas de Calculo simbólico
Qué se puede hacer con una herramienta de calculo simbólico?
• Manipulación de expresiones simbólicas y numéricas• Diferenciación• Integración• Expansión en series de Taylor• Transformadas de Laplace• Ecuaciones diferenciales ordinarias• Sistemas de ecuaciones lineales• Vectores, matrices y tensores.
Y todo esto de forma simbólica !!!
Cuál es el software más conocido para realizar cálculossimbólicos?
• Maple• Mathematica• Maxima

Solución deecuacionesSimbólica
Alfonso Cubillos V
Introducción
Maxima - UnaIntroducción
Trabajo y EnergíaMétodo Variacional
Tracción Pura
Flexión
2.2
Herramientas de Calculo simbólico
Qué se puede hacer con una herramienta de calculo simbólico?
• Manipulación de expresiones simbólicas y numéricas• Diferenciación• Integración• Expansión en series de Taylor• Transformadas de Laplace• Ecuaciones diferenciales ordinarias• Sistemas de ecuaciones lineales• Vectores, matrices y tensores.
Y todo esto de forma simbólica !!!
Cuál es el software más conocido para realizar cálculossimbólicos?
• Maple
• Mathematica• Maxima

Solución deecuacionesSimbólica
Alfonso Cubillos V
Introducción
Maxima - UnaIntroducción
Trabajo y EnergíaMétodo Variacional
Tracción Pura
Flexión
2.2
Herramientas de Calculo simbólico
Qué se puede hacer con una herramienta de calculo simbólico?
• Manipulación de expresiones simbólicas y numéricas• Diferenciación• Integración• Expansión en series de Taylor• Transformadas de Laplace• Ecuaciones diferenciales ordinarias• Sistemas de ecuaciones lineales• Vectores, matrices y tensores.
Y todo esto de forma simbólica !!!
Cuál es el software más conocido para realizar cálculossimbólicos?
• Maple• Mathematica
• Maxima

Solución deecuacionesSimbólica
Alfonso Cubillos V
Introducción
Maxima - UnaIntroducción
Trabajo y EnergíaMétodo Variacional
Tracción Pura
Flexión
2.2
Herramientas de Calculo simbólico
Qué se puede hacer con una herramienta de calculo simbólico?
• Manipulación de expresiones simbólicas y numéricas• Diferenciación• Integración• Expansión en series de Taylor• Transformadas de Laplace• Ecuaciones diferenciales ordinarias• Sistemas de ecuaciones lineales• Vectores, matrices y tensores.
Y todo esto de forma simbólica !!!
Cuál es el software más conocido para realizar cálculossimbólicos?
• Maple• Mathematica• Maxima
Solución deecuacionesSimbólica
Alfonso Cubillos V
Introducción
Maxima - UnaIntroducción
Trabajo y EnergíaMétodo Variacional
Tracción Pura
Flexión
2.3
¿De dónde viene Maxima?
• Maxima desciende del sistema Macsyma, desarrollado enel MIT (Massachusetts Institute of Technology) entre losaños 1968 y 1982 como parte del proyecto MAC.
• El MIT pasó una copia del código fuente al DOE(Department of Energy) en 1982, en una versión conocidacomo DOE-Macsyma.
• Una de estas copias fue mantenida por el Profesor WilliamF. Schelter de la Universidad de Texas desde el año 1982hasta su fallecimiento en 2001.
• En 1998 Schelter había obtenido del Departamento deEnergía permiso para distribuir el código fuente deDOE-Macsyma bajo licencia GNU-GPL, iniciando en elaño 2000 el proyecto Maxima en SourceForge con el finde mantener y seguir desarrollando DOE-Macsyma, ahoracon el nombre de Maxima.

Solución deecuacionesSimbólica
Alfonso Cubillos V
Introducción
Maxima - UnaIntroducción
Trabajo y EnergíaMétodo Variacional
Tracción Pura
Flexión
2.3
¿De dónde viene Maxima?
• Maxima desciende del sistema Macsyma, desarrollado enel MIT (Massachusetts Institute of Technology) entre losaños 1968 y 1982 como parte del proyecto MAC.
• El MIT pasó una copia del código fuente al DOE(Department of Energy) en 1982, en una versión conocidacomo DOE-Macsyma.
• Una de estas copias fue mantenida por el Profesor WilliamF. Schelter de la Universidad de Texas desde el año 1982hasta su fallecimiento en 2001.
• En 1998 Schelter había obtenido del Departamento deEnergía permiso para distribuir el código fuente deDOE-Macsyma bajo licencia GNU-GPL, iniciando en elaño 2000 el proyecto Maxima en SourceForge con el finde mantener y seguir desarrollando DOE-Macsyma, ahoracon el nombre de Maxima.

Solución deecuacionesSimbólica
Alfonso Cubillos V
Introducción
Maxima - UnaIntroducción
Trabajo y EnergíaMétodo Variacional
Tracción Pura
Flexión
2.3
¿De dónde viene Maxima?
• Maxima desciende del sistema Macsyma, desarrollado enel MIT (Massachusetts Institute of Technology) entre losaños 1968 y 1982 como parte del proyecto MAC.
• El MIT pasó una copia del código fuente al DOE(Department of Energy) en 1982, en una versión conocidacomo DOE-Macsyma.
• Una de estas copias fue mantenida por el Profesor WilliamF. Schelter de la Universidad de Texas desde el año 1982hasta su fallecimiento en 2001.
• En 1998 Schelter había obtenido del Departamento deEnergía permiso para distribuir el código fuente deDOE-Macsyma bajo licencia GNU-GPL, iniciando en elaño 2000 el proyecto Maxima en SourceForge con el finde mantener y seguir desarrollando DOE-Macsyma, ahoracon el nombre de Maxima.
Solución deecuacionesSimbólica
Alfonso Cubillos V
Introducción
Maxima - UnaIntroducción
Trabajo y EnergíaMétodo Variacional
Tracción Pura
Flexión
2.3
¿De dónde viene Maxima?
• Maxima desciende del sistema Macsyma, desarrollado enel MIT (Massachusetts Institute of Technology) entre losaños 1968 y 1982 como parte del proyecto MAC.
• El MIT pasó una copia del código fuente al DOE(Department of Energy) en 1982, en una versión conocidacomo DOE-Macsyma.
• Una de estas copias fue mantenida por el Profesor WilliamF. Schelter de la Universidad de Texas desde el año 1982hasta su fallecimiento en 2001.
• En 1998 Schelter había obtenido del Departamento deEnergía permiso para distribuir el código fuente deDOE-Macsyma bajo licencia GNU-GPL, iniciando en elaño 2000 el proyecto Maxima en SourceForge con el finde mantener y seguir desarrollando DOE-Macsyma, ahoracon el nombre de Maxima.
Solución deecuacionesSimbólica
Alfonso Cubillos V
Introducción
Maxima - UnaIntroducción
Trabajo y EnergíaMétodo Variacional
Tracción Pura
Flexión
2.4
La primera impresión
Cuando se abre el programa lo primero que se encuentra es
wxMaxima 0.7.2 http://wxmaxima.sourceforge.netMaxima 5.12.0 http://maxima.sourceforge.netUsing Lisp GNU Common Lisp (GCL) GCL 2.6.8 (aka GCL)Distributed under the GNU Public License. See the file COPYING.Dedicated to the memory of William Schelter.This is a development version of Maxima. The function bug_report()provides bug reporting information.
(%i1)
El indicador (%i1) señala que el program esta esperando laprimera entrada
(%i1) 3 + 4;
a lo que el programa responde
(%o1) 7
La letra i significa input (entrada) y la o significa output (salida)

Solución deecuacionesSimbólica
Alfonso Cubillos V
Introducción
Maxima - UnaIntroducción
Trabajo y EnergíaMétodo Variacional
Tracción Pura
Flexión
2.5
Algunos cálculos iniciales
Tips iniciales
• La asignación de variables se realiza por medio del operador dospuntos (:)
• Puede usar la etiqueta (%i*) o (%o*) para referirse a eseelemento
• Puede utilizar el operador (%) para referirse a la última salida
• Al final de cada orden debe ir el operador punto y coma (;)
• Si no desea ver la salida utilice al final ($)
(%i2) u: expand ((x + y)^6);
(%i3) diff (u, x);
(%i4) factor (%o3);
Solución deecuacionesSimbólica
Alfonso Cubillos V
Introducción
Maxima - UnaIntroducción
Trabajo y EnergíaMétodo Variacional
Tracción Pura
Flexión
2.6
Algunos cálculos inicialesPuede resolver sistemas de ecuaciones lineales y cúbicas
linsolve ([3*x + 4*y = 7, 2*x + a*y = 13], [x, y]);
solve (x^3 - 3*x^2 + 5*x = 15, x);
Así como generar gráficas
plot2d (sin(x)/x, [x, -20, 20]);
plot2d ([atan(x), erf(x), tanh(x)], [x, -5, 5]);
plot3d (sin(sqrt(x^2 + y^2))/sqrt(x^2 + y^2), [x, -12, 12],[y, -12, 12]);
Manipulación algebraica
eq1 : expand((a-2)*(b+1)^2*(a+b)^5);
factor(eq1);
eq1,a=2,b=2*c;
eq2 : 1/(x+y)-(y+x)/z+(x+y)^2;
subst(k,x+y,eq2);
Solución deecuacionesSimbólica
Alfonso Cubillos V
Introducción
Maxima - UnaIntroducción
Trabajo y EnergíaMétodo Variacional
Tracción Pura
Flexión
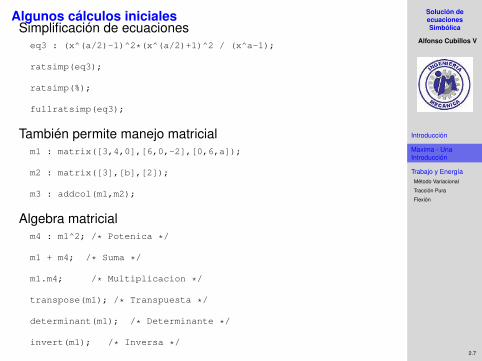
2.7
Algunos cálculos inicialesSimplificación de ecuacioneseq3 : (x^(a/2)-1)^2*(x^(a/2)+1)^2 / (x^a-1);
ratsimp(eq3);
ratsimp(%);
fullratsimp(eq3);
También permite manejo matricialm1 : matrix([3,4,0],[6,0,-2],[0,6,a]);
m2 : matrix([3],[b],[2]);
m3 : addcol(m1,m2);
Algebra matricialm4 : m1^2; /* Potenica */
m1 + m4; /* Suma */
m1.m4; /* Multiplicacion */
transpose(m1); /* Transpuesta */
determinant(m1); /* Determinante */
invert(m1); /* Inversa */
Solución deecuacionesSimbólica
Alfonso Cubillos V
Introducción
Maxima - UnaIntroducción
Trabajo y EnergíaMétodo Variacional
Tracción Pura
Flexión
2.8
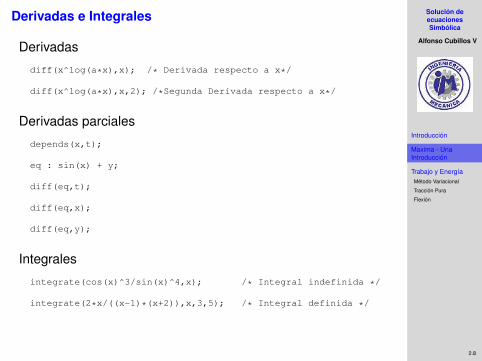
Derivadas e Integrales
Derivadas
diff(x^log(a*x),x); /* Derivada respecto a x*/
diff(x^log(a*x),x,2); /*Segunda Derivada respecto a x*/
Derivadas parciales
depends(x,t);
eq : sin(x) + y;
diff(eq,t);
diff(eq,x);
diff(eq,y);
Integrales
integrate(cos(x)^3/sin(x)^4,x); /* Integral indefinida */
integrate(2*x/((x-1)*(x+2)),x,3,5); /* Integral definida */
Solución deecuacionesSimbólica
Alfonso Cubillos V
Introducción
Maxima - UnaIntroducción
Trabajo y EnergíaMétodo Variacional
Tracción Pura
Flexión
2.9
Trabajo y Energía
Concepto Fundamental
Energía Total de un sistema es la suma de su energíaPotencial + Cinética
ET = EP + EK
Para sistemas estáticos
Se toma la EK = 0, y por lo tanto
EP = U + WP
U es la energía de deformación, y WP es el potencial detrabajo de las fuerzas externas

Solución deecuacionesSimbólica
Alfonso Cubillos V
Introducción
Maxima - UnaIntroducción
Trabajo y EnergíaMétodo Variacional
Tracción Pura
Flexión
2.9
Trabajo y Energía
Concepto Fundamental
Energía Total de un sistema es la suma de su energíaPotencial + Cinética
ET = EP + EK
Para sistemas estáticos
Se toma la EK = 0, y por lo tanto
EP = U + WP
U es la energía de deformación, y WP es el potencial detrabajo de las fuerzas externas
Solución deecuacionesSimbólica
Alfonso Cubillos V
Introducción
Maxima - UnaIntroducción
Trabajo y EnergíaMétodo Variacional
Tracción Pura
Flexión
2.10
Trabajo y Energía
Energía de Deformación Paramateriales elásticos lineales
U =12
∫V
−→σ · −→ε dV
donde −→σ es el vector de esfuerzos,y −→ε es el vector de deformaciones,y por lo tanto
−→σ = [ σx σy σz τx τy τz ]T
−→ε = [ εx εy εz γx γy γz ]T
Potencial de Trabajo
WP = −∫
V
−→u ·−→f dV −
∫S
−→u ·−→T dS −
∑i
−→ui ·−→Pi

Solución deecuacionesSimbólica
Alfonso Cubillos V
Introducción
Maxima - UnaIntroducción
Trabajo y EnergíaMétodo Variacional
Tracción Pura
Flexión
2.10
Trabajo y Energía
Energía de Deformación Paramateriales elásticos lineales
U =12
∫V
−→σ · −→ε dV
donde −→σ es el vector de esfuerzos,y −→ε es el vector de deformaciones,y por lo tanto
−→σ = [ σx σy σz τx τy τz ]T
−→ε = [ εx εy εz γx γy γz ]T
Potencial de Trabajo
WP = −∫
V
−→u ·−→f dV −
∫S
−→u ·−→T dS −
∑i
−→ui ·−→Pi
Solución deecuacionesSimbólica
Alfonso Cubillos V
Introducción
Maxima - UnaIntroducción
Trabajo y EnergíaMétodo Variacional
Tracción Pura
Flexión
2.10
Trabajo y Energía
Energía de Deformación Paramateriales elásticos lineales
U =12
∫V
−→σ · −→ε dV
donde −→σ es el vector de esfuerzos,y −→ε es el vector de deformaciones,y por lo tanto
−→σ = [ σx σy σz τx τy τz ]T
−→ε = [ εx εy εz γx γy γz ]T
Potencial de Trabajo
WP = −∫
V
−→u ·−→f dV −
∫S
−→u ·−→T dS −
∑i
−→ui ·−→Pi

Solución deecuacionesSimbólica
Alfonso Cubillos V
Introducción
Maxima - UnaIntroducción
Trabajo y EnergíaMétodo Variacional
Tracción Pura
Flexión
2.10
Trabajo y Energía
Energía de Deformación Paramateriales elásticos lineales
U =12
∫V
−→σ · −→ε dV
donde −→σ es el vector de esfuerzos,y −→ε es el vector de deformaciones,y por lo tanto
−→σ = [ σx σy σz τx τy τz ]T
−→ε = [ εx εy εz γx γy γz ]T
Potencial de Trabajo
WP = −∫
V
−→u ·−→f dV −
∫S
−→u ·−→T dS −
∑i
−→ui ·−→Pi

Solución deecuacionesSimbólica
Alfonso Cubillos V
Introducción
Maxima - UnaIntroducción
Trabajo y EnergíaMétodo Variacional
Tracción Pura
Flexión
2.10
Trabajo y Energía
Energía de Deformación Paramateriales elásticos lineales
U =12
∫V
−→σ · −→ε dV
donde −→σ es el vector de esfuerzos,y −→ε es el vector de deformaciones,y por lo tanto
−→σ = [ σx σy σz τx τy τz ]T
−→ε = [ εx εy εz γx γy γz ]T
Potencial de Trabajo
WP = −∫
V
−→u ·−→f dV −
∫S
−→u ·−→T dS −
∑i
−→ui ·−→Pi

Solución deecuacionesSimbólica
Alfonso Cubillos V
Introducción
Maxima - UnaIntroducción
Trabajo y EnergíaMétodo Variacional
Tracción Pura
Flexión
2.11
Método de Rayleigh-Ritz
Energía Total
Para medios continuos
Π =12
∫V
−→σ · −→ε dV −∫
V
−→u ·−→f dV −
∫S
−→u ·−→T dS −
∑i
−→ui ·−→Pi
El método
Consiste en la construcción de un campo de desplazamientosupuesto, como
u =∑
aiφi(x , y , z) i = 1 a lv =
∑ajφj(x , y , z) j = l + 1 a m
w =∑
akφk (x , y , z) k = m + 1 a n
Donde las funciones φi usualmente son polinomios.

Solución deecuacionesSimbólica
Alfonso Cubillos V
Introducción
Maxima - UnaIntroducción
Trabajo y EnergíaMétodo Variacional
Tracción Pura
Flexión
2.11
Método de Rayleigh-Ritz
Energía Total
Para medios continuos
Π =12
∫V
−→σ · −→ε dV −∫
V
−→u ·−→f dV −
∫S
−→u ·−→T dS −
∑i
−→ui ·−→Pi
El método
Consiste en la construcción de un campo de desplazamientosupuesto, como
u =∑
aiφi(x , y , z) i = 1 a lv =
∑ajφj(x , y , z) j = l + 1 a m
w =∑
akφk (x , y , z) k = m + 1 a n
Donde las funciones φi usualmente son polinomios.

Solución deecuacionesSimbólica
Alfonso Cubillos V
Introducción
Maxima - UnaIntroducción
Trabajo y EnergíaMétodo Variacional
Tracción Pura
Flexión
2.12
Método de Rayleigh-Ritz
Y cómo se solucionan?
Los desplazamientos u, v y w deben ser cinemáticamenteadmisibles. Es decir:
• u, v y w deben satisfacer las condiciones de frontera• Se debe satisfacer el conjunto de r ecuaciones
δΠ
δai= 0
para i = 1, 2, 3, . . . r
Carga Axial
U =12
∫E
A(
dudx
)2
dx

Solución deecuacionesSimbólica
Alfonso Cubillos V
Introducción
Maxima - UnaIntroducción
Trabajo y EnergíaMétodo Variacional
Tracción Pura
Flexión
2.12
Método de Rayleigh-Ritz
Y cómo se solucionan?
Los desplazamientos u, v y w deben ser cinemáticamenteadmisibles. Es decir:
• u, v y w deben satisfacer las condiciones de frontera
• Se debe satisfacer el conjunto de r ecuaciones
δΠ
δai= 0
para i = 1, 2, 3, . . . r
Carga Axial
U =12
∫E
A(
dudx
)2
dx
Solución deecuacionesSimbólica
Alfonso Cubillos V
Introducción
Maxima - UnaIntroducción
Trabajo y EnergíaMétodo Variacional
Tracción Pura
Flexión
2.12
Método de Rayleigh-Ritz
Y cómo se solucionan?
Los desplazamientos u, v y w deben ser cinemáticamenteadmisibles. Es decir:
• u, v y w deben satisfacer las condiciones de frontera• Se debe satisfacer el conjunto de r ecuaciones
δΠ
δai= 0
para i = 1, 2, 3, . . . r
Carga Axial
U =12
∫E
A(
dudx
)2
dx

Solución deecuacionesSimbólica
Alfonso Cubillos V
Introducción
Maxima - UnaIntroducción
Trabajo y EnergíaMétodo Variacional
Tracción Pura
Flexión
2.12
Método de Rayleigh-Ritz
Y cómo se solucionan?
Los desplazamientos u, v y w deben ser cinemáticamenteadmisibles. Es decir:
• u, v y w deben satisfacer las condiciones de frontera• Se debe satisfacer el conjunto de r ecuaciones
δΠ
δai= 0
para i = 1, 2, 3, . . . r
Carga Axial
U =12
∫E
A(
dudx
)2
dx
Solución deecuacionesSimbólica
Alfonso Cubillos V
Introducción
Maxima - UnaIntroducción
Trabajo y EnergíaMétodo Variacional
Tracción Pura
Flexión
2.13
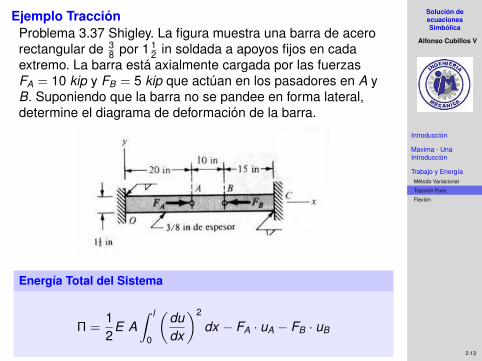
Ejemplo TracciónProblema 3.37 Shigley. La figura muestra una barra de acerorectangular de 3
8 por 1 12 in soldada a apoyos fijos en cada
extremo. La barra está axialmente cargada por las fuerzasFA = 10 kip y FB = 5 kip que actúan en los pasadores en A yB. Suponiendo que la barra no se pandee en forma lateral,determine el diagrama de deformación de la barra.
Energía Total del Sistema
Π =12
E A∫ l
0
(dudx
)2
dx − FA · uA − FB · uB

Solución deecuacionesSimbólica
Alfonso Cubillos V
Introducción
Maxima - UnaIntroducción
Trabajo y EnergíaMétodo Variacional
Tracción Pura
Flexión
2.14
Ejemplo Tracción
Campo de deformaciones supuesto. Polinomio de segundoOrden
u = a0 + a1 x + a2 x2
Definir las condiciones de frontera
u(x=0) = 0u(x=l) = 0
Aplicar las condiciones de Frontera
u(x=0) = a0 = 0u(x=l) = a1 · l + a2 · l2 = 0
a1 = −a2 · l

Solución deecuacionesSimbólica
Alfonso Cubillos V
Introducción
Maxima - UnaIntroducción
Trabajo y EnergíaMétodo Variacional
Tracción Pura
Flexión
2.14
Ejemplo Tracción
Campo de deformaciones supuesto. Polinomio de segundoOrden
u = a0 + a1 x + a2 x2
Definir las condiciones de frontera
u(x=0) = 0u(x=l) = 0
Aplicar las condiciones de Frontera
u(x=0) = a0 = 0u(x=l) = a1 · l + a2 · l2 = 0
a1 = −a2 · l

Solución deecuacionesSimbólica
Alfonso Cubillos V
Introducción
Maxima - UnaIntroducción
Trabajo y EnergíaMétodo Variacional
Tracción Pura
Flexión
2.14
Ejemplo Tracción
Campo de deformaciones supuesto. Polinomio de segundoOrden
u = a0 + a1 x + a2 x2
Definir las condiciones de frontera
u(x=0) = 0u(x=l) = 0
Aplicar las condiciones de Frontera
u(x=0) = a0 = 0u(x=l) = a1 · l + a2 · l2 = 0
a1 = −a2 · l

Solución deecuacionesSimbólica
Alfonso Cubillos V
Introducción
Maxima - UnaIntroducción
Trabajo y EnergíaMétodo Variacional
Tracción Pura
Flexión
2.15
Ejemplo Tracción
El campo de deformaciones con las condiciones de frontera
U = a2 x2 − a2 l x
Cálculos necesarios
dUdx
= 2 a2 x − a2 l
Ua = a2 la2 − a2 l la
Ub = a2 lb2 − a2 l lb
La energía del sistema
Π =12
a22 l3 A E
3+
(a2 l lb − a2 lb2
)Pb −
(a2 la2 − a2 l la
)Pa

Solución deecuacionesSimbólica
Alfonso Cubillos V
Introducción
Maxima - UnaIntroducción
Trabajo y EnergíaMétodo Variacional
Tracción Pura
Flexión
2.15
Ejemplo Tracción
El campo de deformaciones con las condiciones de frontera
U = a2 x2 − a2 l x
Cálculos necesarios
dUdx
= 2 a2 x − a2 l
Ua = a2 la2 − a2 l la
Ub = a2 lb2 − a2 l lb
La energía del sistema
Π =12
a22 l3 A E
3+
(a2 l lb − a2 lb2
)Pb −
(a2 la2 − a2 l la
)Pa
Solución deecuacionesSimbólica
Alfonso Cubillos V
Introducción
Maxima - UnaIntroducción
Trabajo y EnergíaMétodo Variacional
Tracción Pura
Flexión
2.15
Ejemplo Tracción
El campo de deformaciones con las condiciones de frontera
U = a2 x2 − a2 l x
Cálculos necesarios
dUdx
= 2 a2 x − a2 l
Ua = a2 la2 − a2 l la
Ub = a2 lb2 − a2 l lb
La energía del sistema
Π =12
a22 l3 A E
3+
(a2 l lb − a2 lb2
)Pb −
(a2 la2 − a2 l la
)Pa
Solución deecuacionesSimbólica
Alfonso Cubillos V
Introducción
Maxima - UnaIntroducción
Trabajo y EnergíaMétodo Variacional
Tracción Pura
Flexión
2.16
Ejemplo Tracción
Extremizar la energía
dΠ
da2=
a2 l3 A E3
+(
l lb − lb2)
Pb −(
la2 − l la)
Pa = 0
Despejar a2 y a1
a2 =
(3 lb2 − 3 l lb
)Pb +
(3 la2 − 3 l la
)Pa
l3 A E
a1 = −
(3 lb2 − 3 l lb
)Pb +
(3 la2 − 3 l la
)Pa
l2 A E
La función Aproximada
U = 2,49 · 10−4 x − 5,55 · 10−6 x2

Solución deecuacionesSimbólica
Alfonso Cubillos V
Introducción
Maxima - UnaIntroducción
Trabajo y EnergíaMétodo Variacional
Tracción Pura
Flexión
2.16
Ejemplo Tracción
Extremizar la energía
dΠ
da2=
a2 l3 A E3
+(
l lb − lb2)
Pb −(
la2 − l la)
Pa = 0
Despejar a2 y a1
a2 =
(3 lb2 − 3 l lb
)Pb +
(3 la2 − 3 l la
)Pa
l3 A E
a1 = −
(3 lb2 − 3 l lb
)Pb +
(3 la2 − 3 l la
)Pa
l2 A E
La función Aproximada
U = 2,49 · 10−4 x − 5,55 · 10−6 x2

Solución deecuacionesSimbólica
Alfonso Cubillos V
Introducción
Maxima - UnaIntroducción
Trabajo y EnergíaMétodo Variacional
Tracción Pura
Flexión
2.16
Ejemplo Tracción
Extremizar la energía
dΠ
da2=
a2 l3 A E3
+(
l lb − lb2)
Pb −(
la2 − l la)
Pa = 0
Despejar a2 y a1
a2 =
(3 lb2 − 3 l lb
)Pb +
(3 la2 − 3 l la
)Pa
l3 A E
a1 = −
(3 lb2 − 3 l lb
)Pb +
(3 la2 − 3 l la
)Pa
l2 A E
La función Aproximada
U = 2,49 · 10−4 x − 5,55 · 10−6 x2

Solución deecuacionesSimbólica
Alfonso Cubillos V
Introducción
Maxima - UnaIntroducción
Trabajo y EnergíaMétodo Variacional
Tracción Pura
Flexión
2.17
Ejemplo Tracción
Solución deecuacionesSimbólica
Alfonso Cubillos V
Introducción
Maxima - UnaIntroducción
Trabajo y EnergíaMétodo Variacional
Tracción Pura
Flexión
2.18
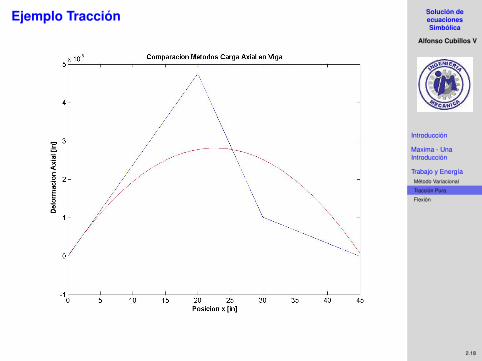
Ejemplo Tracción

Solución deecuacionesSimbólica
Alfonso Cubillos V
Introducción
Maxima - UnaIntroducción
Trabajo y EnergíaMétodo Variacional
Tracción Pura
Flexión
2.19
Ejemplo Tracción

Solución deecuacionesSimbólica
Alfonso Cubillos V
Introducción
Maxima - UnaIntroducción
Trabajo y EnergíaMétodo Variacional
Tracción Pura
Flexión
2.20
Ejemplo Tracción

Solución deecuacionesSimbólica
Alfonso Cubillos V
Introducción
Maxima - UnaIntroducción
Trabajo y EnergíaMétodo Variacional
Tracción Pura
Flexión
2.21
Ejercicio Tracción
Dibuje el diagrama de deformación aproximado. Calcule losesfuerzos y las fuerzas en los apoyos.
Solución deecuacionesSimbólica
Alfonso Cubillos V
Introducción
Maxima - UnaIntroducción
Trabajo y EnergíaMétodo Variacional
Tracción Pura
Flexión
2.22
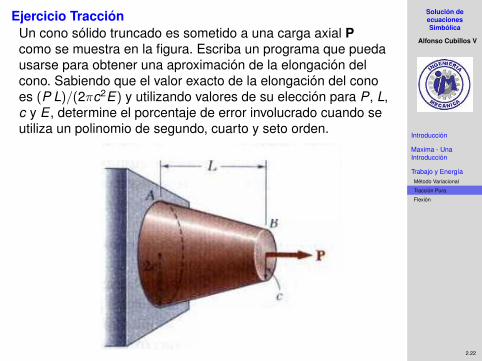
Ejercicio TracciónUn cono sólido truncado es sometido a una carga axial Pcomo se muestra en la figura. Escriba un programa que puedausarse para obtener una aproximación de la elongación delcono. Sabiendo que el valor exacto de la elongación del conoes (P L)/(2πc2E) y utilizando valores de su elección para P, L,c y E , determine el porcentaje de error involucrado cuando seutiliza un polinomio de segundo, cuarto y seto orden.

Solución deecuacionesSimbólica
Alfonso Cubillos V
Introducción
Maxima - UnaIntroducción
Trabajo y EnergíaMétodo Variacional
Tracción Pura
Flexión
2.23
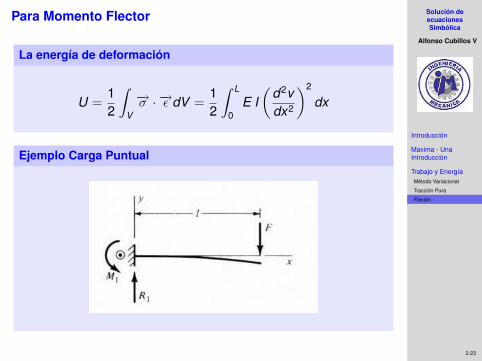
Para Momento Flector
La energía de deformación
U =12
∫V
−→σ · −→ε dV =12
∫ L
0E I
(d2vdx2
)2
dx
Ejemplo Carga Puntual
Solución deecuacionesSimbólica
Alfonso Cubillos V
Introducción
Maxima - UnaIntroducción
Trabajo y EnergíaMétodo Variacional
Tracción Pura
Flexión
2.23
Para Momento Flector
La energía de deformación
U =12
∫V
−→σ · −→ε dV =12
∫ L
0E I
(d2vdx2
)2
dx
Ejemplo Carga Puntual

Solución deecuacionesSimbólica
Alfonso Cubillos V
Introducción
Maxima - UnaIntroducción
Trabajo y EnergíaMétodo Variacional
Tracción Pura
Flexión
2.24
Ejemplo Flexión
Campo de deformaciones supuesto. Polinomio de segundoOrden
v = a0 + a1 x + a2 x2
Definir las condiciones de frontera
v(x=0) = 0dvdx (x=0)
= 0
Aplicar las condiciones de Frontera
v(x=0) = a0 = 0devdx (x=0)
= a1 = 0
Solución deecuacionesSimbólica
Alfonso Cubillos V
Introducción
Maxima - UnaIntroducción
Trabajo y EnergíaMétodo Variacional
Tracción Pura
Flexión
2.24
Ejemplo Flexión
Campo de deformaciones supuesto. Polinomio de segundoOrden
v = a0 + a1 x + a2 x2
Definir las condiciones de frontera
v(x=0) = 0dvdx (x=0)
= 0
Aplicar las condiciones de Frontera
v(x=0) = a0 = 0devdx (x=0)
= a1 = 0

Solución deecuacionesSimbólica
Alfonso Cubillos V
Introducción
Maxima - UnaIntroducción
Trabajo y EnergíaMétodo Variacional
Tracción Pura
Flexión
2.24
Ejemplo Flexión
Campo de deformaciones supuesto. Polinomio de segundoOrden
v = a0 + a1 x + a2 x2
Definir las condiciones de frontera
v(x=0) = 0dvdx (x=0)
= 0
Aplicar las condiciones de Frontera
v(x=0) = a0 = 0devdx (x=0)
= a1 = 0

Solución deecuacionesSimbólica
Alfonso Cubillos V
Introducción
Maxima - UnaIntroducción
Trabajo y EnergíaMétodo Variacional
Tracción Pura
Flexión
2.25
Ejercicio Flexión