sociedad colombiana de ingenieros comisión de...
TRANSCRIPT
SOCIEDAD COLOMBIANA DE INGENIEROS Comisión de Transporte y Movilidad
- UNIVERSIDAD NACIONAL -
Encuentro Nacional de Secretarios y Autoridades de Tránsito
“Dinámica vehicular”
Autor, expositor : Hernando Augusto Silva García
Ingeniero Civil
Bogotá D.C. abril 2012

“Se pronostica que en el 2030 los accidentes de carretera serán la quinta causa de muerte a nivel
global, mientras en 2004 ocupaban el décimo lugar.”
Antecedente:
Accidentalidad Vial
La ocurrencia de múltiples accidentes de tránsito vehicular, con muchas
pérdidas de vidas humanas y graves daños en bienes materiales, nos
comprometen a ocuparnos del análisis de los movimientos vehiculares,
para prevenirnos de tales accidentes.
Objetivos del tema: 1. Analizar el comportamiento dinámico en
vehículos automotores terrestres,
2. Identificar las fuerzas físicas resultantes en el movimiento vehicular,
3. Controlar el riesgo y evitar accidentes.
Existen normas que habilitan a las personas para suministrar, poseer y conducir vehículos. El Estado construye, conserva y ofrece vías públicas. También se fijan normas de obligatorio cumplimiento para el comportamiento ciudadano. Si las normas no se acatan y además se causan daños, estos desacatos no deben considerarse como sucesos imprevistos, es decir, no deben considerarse como accidentales, sino como infracciones de responsabilidad personal.
No son accidentes.
Compromiso Social
Efectos del Daño
Las estadísticas indican los efectos dañinos del transporte, y muestran que la tecnología del automóvil ingresó a la vida cotidiana sin los estudios previos para analizar sus impactos sociales y los efectos de una tecnología que genera acciones destructivas. En general, los accidentes de tránsito se aceptan como de normal ocurrencia, y la misma legislación suele considerarlos como eventos generalmente involuntarios.

Causas físicas del Daño
El daño es causado por la acción de La Fuerza. Las causas de muertes, heridas y destrozos, son esas múltiples fuerzas sin control generadas en los accidentes de tránsito. Fuerza es la magnitud física que caracteriza la acción mutua entre dos cuerpos. Fuerza es la acción que tiene capacidad para modificar el estado de movimiento o de reposos de un cuerpo, o para trasladarlo de un lugar a otro. Fuerza es la acción que tiene capacidad de alterar las dimensiones o la forma de un cuerpo, o de romperlo
Elementos en la conducción
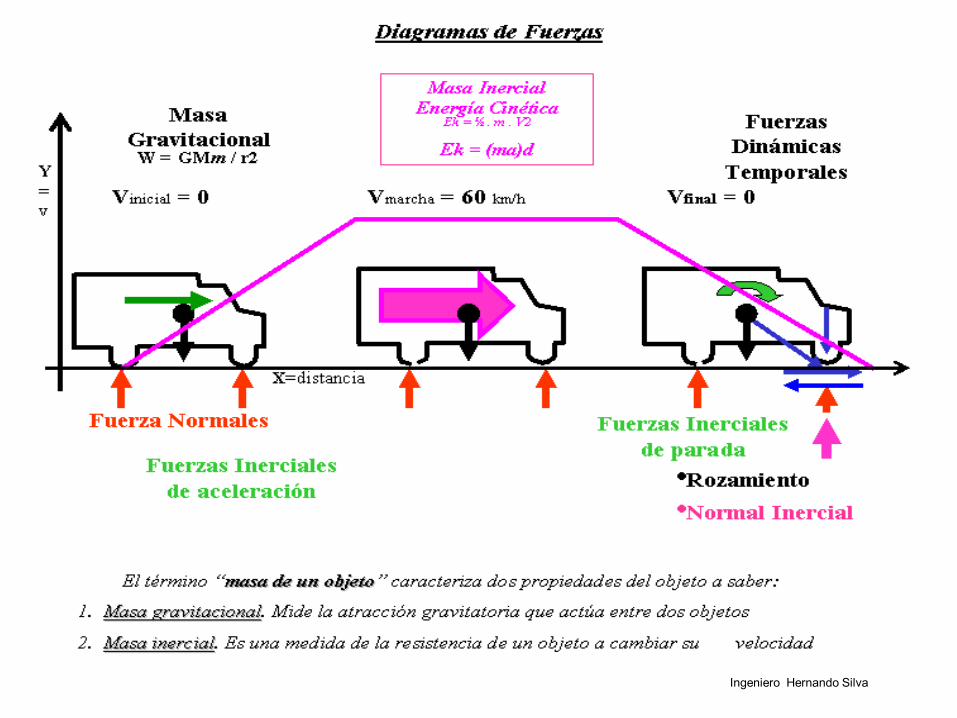
A) EL VEHÍCULO. MASA física, portador de materia. Conjunto de automotor, personas y carga.
B) OPERACIÓN DE CONDUCCIÓN. Intervienen:
1. El conductor. Operaciones de control, conducción, navegación y manejo de la energía cinética.
2. El vehículo. Constituye la masa; adquiere velocidad y es el cuerpo físico que ejerce la acción de Fuerza, y
3. La carretera o Via, que cumple dos funciones: a. Componente espacial que da conectividad entre
puntos geográficos, y b. Componente dinámico; transfiere la energía
cinética necesaria entre carretera y vehículo.
1. Acción: Conductor => Vehículo
2. Las ruedas de tracción generan fuerza y desplazamiento, ejecutan trabajo mecánico, y el conjunto masa gana Energía Cinética:
( Fuerza x Distancia )
Esta energía varía en el recorrido de acuerdo con la velocidad ganada.
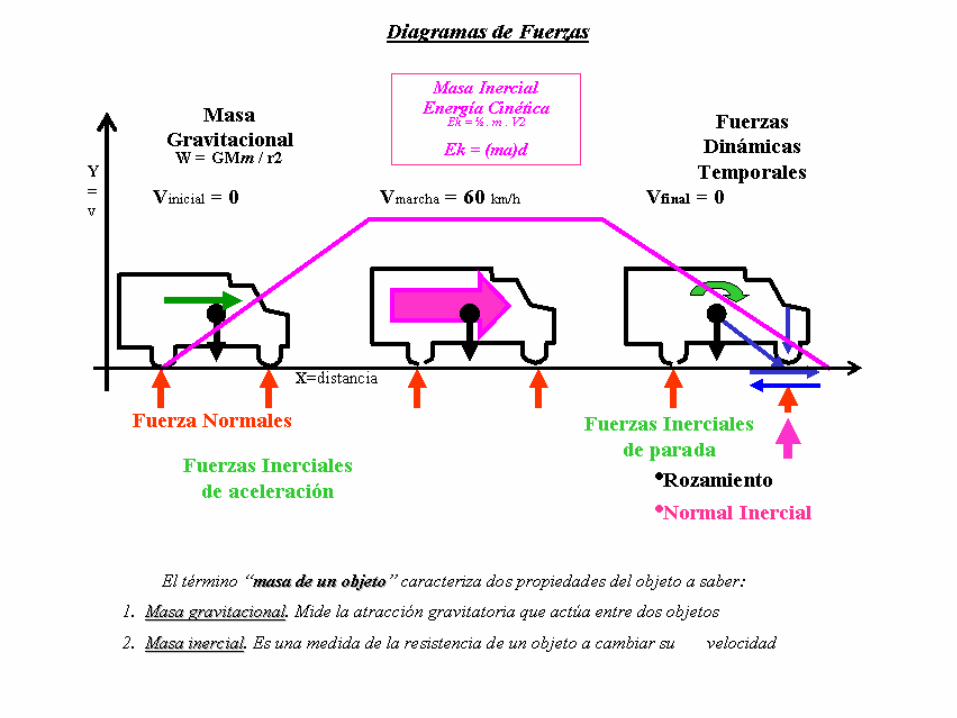
Generación de Fuerza Dinámica:
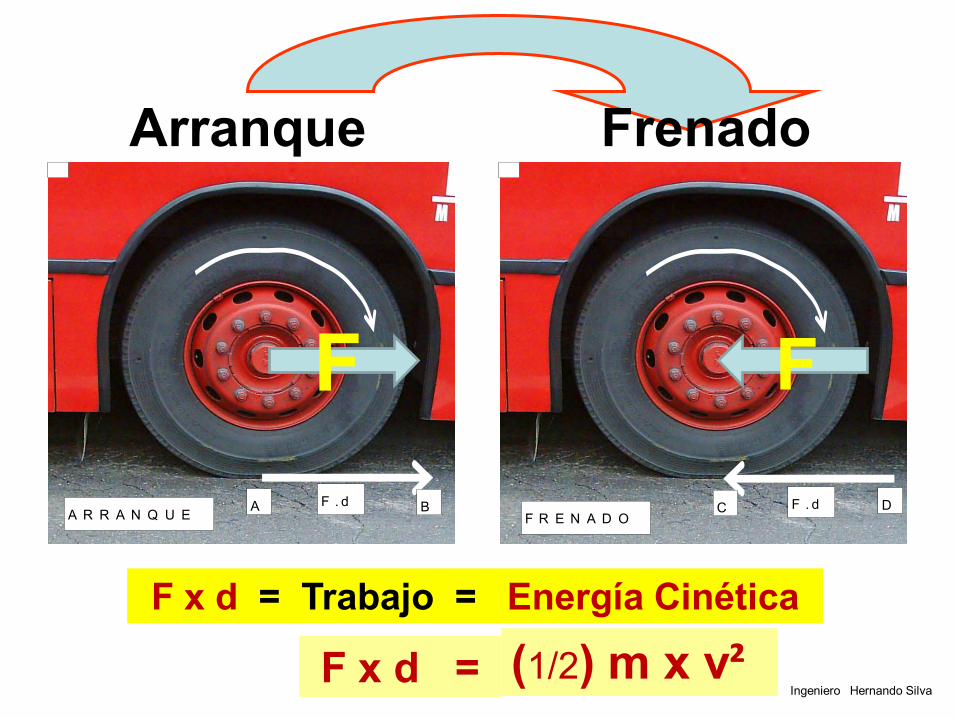
F . d F . dBA C DA R R A N Q U E F R E N A D O
Ingeniero Hernando Silva
F
F x d = Trabajo = Energía Cinética
F x d = (1/2) m x v²
F
Arranque Frenado
Energía Cinética (Ek) Dos características:
Primera: Se expresa en: Ek = Fuerza x Distancia
Segunda: La energía cinética varía en proporción al cuadrado de la velocidad, Importante conocerlo por su nivel de variación
Ejemplo en conducción: * El conductor aumenta la velocidad al doble (x2).
**La energía cinética aumenta cuatro veces, [y por consiguiente su fuerza (F)].
Consecuencia: el riesgo aumenta 4 veces. Si existe Fuerza, existe riesgo de causar daño.
Ek = (1/2) m x v²
Energia Cinetica masa Velocidad al
cuadrado
Ek = V̂2 Variable
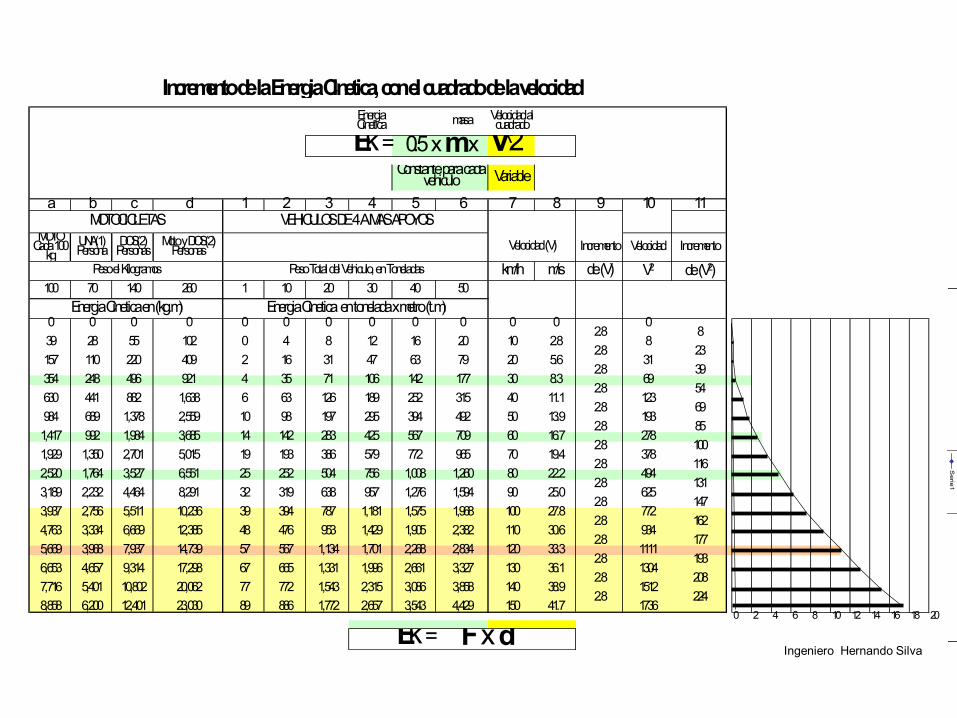
a b c d 1 2 3 4 5 6 7 8 9 10 11
MOTO Cada 100
kgUNA(1) Persona
DOS(2) Personas
Moto y DOS(2) Personas Incremento Velocidad Incremento
km/h m/s de (V) V2 de (V2)100 70 140 260 1 10 20 30 40 50
0 0 0 0 0 0 0 0 0 0 0 0 02.8 8
39 28 55 102 0 4 8 12 16 20 10 2.8 82.8 23
157 110 220 409 2 16 31 47 63 79 20 5.6 312.8 39
354 248 496 921 4 35 71 106 142 177 30 8.3 692.8 54
630 441 882 1,638 6 63 126 189 252 315 40 11.1 1232.8 69
984 689 1,378 2,559 10 98 197 295 394 492 50 13.9 1932.8 85
1,417 992 1,984 3,685 14 142 283 425 567 709 60 16.7 2782.8 100
1,929 1,350 2,701 5,015 19 193 386 579 772 965 70 19.4 3782.8 116
2,520 1,764 3,527 6,551 25 252 504 756 1,008 1,260 80 22.2 4942.8 131
3,189 2,232 4,464 8,291 32 319 638 957 1,276 1,594 90 25.0 6252.8 147
3,937 2,756 5,511 10,236 39 394 787 1,181 1,575 1,968 100 27.8 7722.8 162
4,763 3,334 6,669 12,385 48 476 953 1,429 1,905 2,382 110 30.6 9342.8 177
5,669 3,968 7,937 14,739 57 567 1,134 1,701 2,268 2,834 120 33.3 11112.8 193
6,653 4,657 9,314 17,298 67 665 1,331 1,996 2,661 3,327 130 36.1 13042.8 208
7,716 5,401 10,802 20,062 77 772 1,543 2,315 3,086 3,858 140 38.9 15122.8 224
8,858 6,200 12,401 23,030 89 886 1,772 2,657 3,543 4,429 150 41.7 17360 2 4 6 8 10 12 14 16 18 20
Ek =
Incremento de la Energia Cinetica, con el cuadrado de la velocidad
MOTOCICLETAS VEHICULOS DE 4 A MAS APOYOS
F x d
Peso el Kilogramos
Energia Cinetica en tonelada x metro (t.m)Energia Cinetica en (kg.m)
0.5 x m x Constante para cada
vehiculo
Velocidad (V)
Peso Total del Vehiculo, en Toneladas
Riesg
o d
e rotu
ras en accid
entes d
e transito
039
157354
630984
1,4171,929
2,5203,189
3,937
4,763
5,669
6,653
7,716
8,858
-2,000 0
2,000
4,000
6,000
8,000
10,000
020
4060
80100
120140
160
Ve
locid
ad
en
kilom
etro
s po
r ho
ra
Energia cinetica en Kilogramos por metro (Kg.m)
Serie1
Ingeniero Hernando Silva
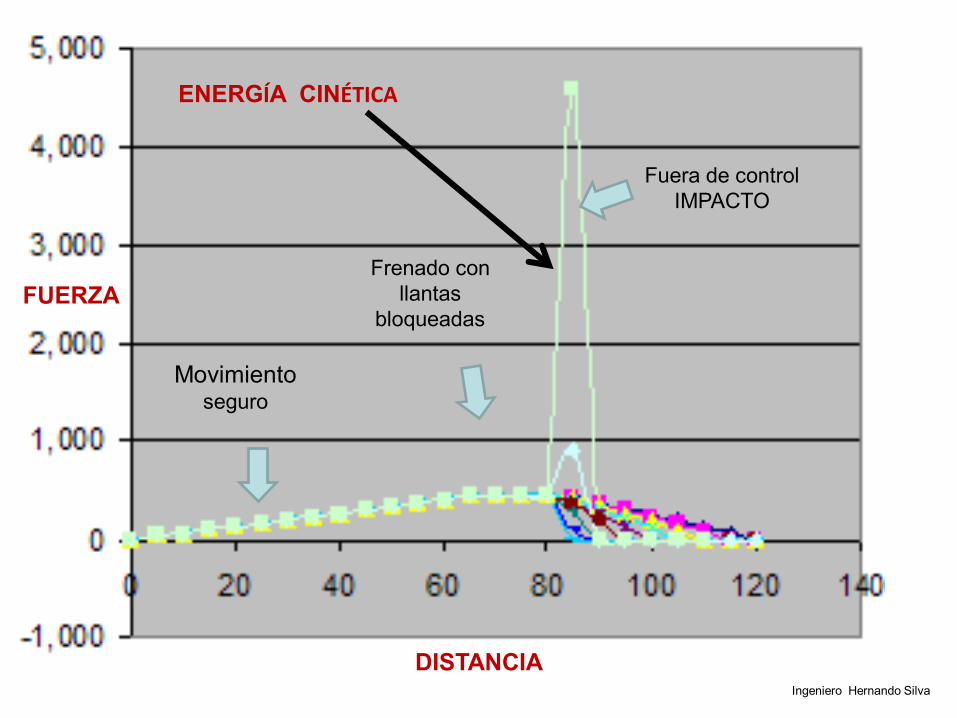
Control del Riesgo El conductor debe controlar el riesgo atendiendo a los dos factores (Fxd): 1) La Fuerza (F). Este factor, cuando se genera, no se puede modificar
porque la energía cinética depende de la MASA y ésta es inmodificable cuando el vehículo está en movimiento, y
2) La Distancia (d). Esta es la distancia de la cual dispone el conductor para el frenado hasta obtener velocidad cero. Se puede seleccionar como:
a) Distancia suficiente sin impacto, b) Distancia corta de alto riesgo y c) Distancia insuficiente numérica en acción de impacto.
1. Distancia suficiente => fuerza controlable. Operación es exitosa. 2. Distancia de alto riesgo => Llantas bloqueadas y puede causar
daños; y , 3. La distancia corta => No logra velocidad “cero”, fuerza alta en
exceso, distancia corta y se produce impacto con destrucción física.
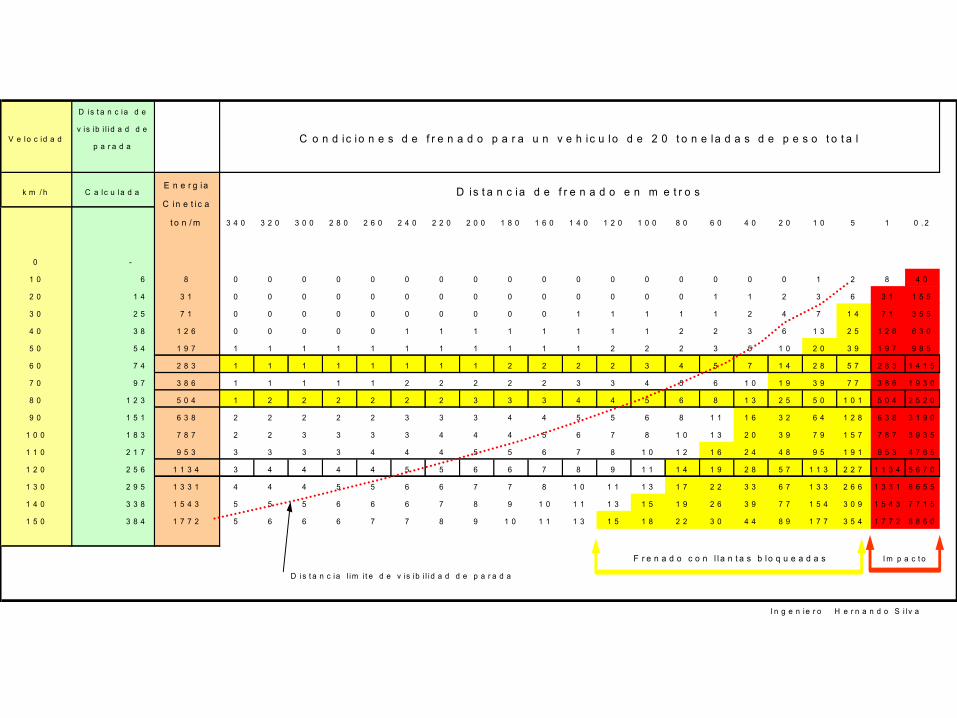
V e lo c id a d
D is t a n c ia d e
v i s ib i l i d a d d e
p a r a d a
k m / h C a lc u la d a
3 4 0 3 2 0 3 0 0 2 8 0 2 6 0 2 4 0 2 2 0 2 0 0 1 8 0 1 6 0 1 4 0 1 2 0 1 0 0 8 0 6 0 4 0 2 0 1 0 5 1 0 . 2
0 -
1 0 6 8 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 2 8 4 0
2 0 1 4 3 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 1 2 3 6 3 1 1 5 5
3 0 2 5 7 1 0 0 0 0 0 0 0 0 0 0 1 1 1 1 1 2 4 7 1 4 7 1 3 5 5
4 0 3 8 1 2 6 0 0 0 0 0 1 1 1 1 1 1 1 1 2 2 3 6 1 3 2 5 1 2 6 6 3 0
5 0 5 4 1 9 7 1 1 1 1 1 1 1 1 1 1 1 2 2 2 3 5 1 0 2 0 3 9 1 9 7 9 8 5
6 0 7 4 2 8 3 1 1 1 1 1 1 1 1 2 2 2 2 3 4 5 7 1 4 2 8 5 7 2 8 3 1 4 1 5
7 0 9 7 3 8 6 1 1 1 1 1 2 2 2 2 2 3 3 4 5 6 1 0 1 9 3 9 7 7 3 8 6 1 9 3 0
8 0 1 2 3 5 0 4 1 2 2 2 2 2 2 3 3 3 4 4 5 6 8 1 3 2 5 5 0 1 0 1 5 0 4 2 5 2 0
9 0 1 5 1 6 3 8 2 2 2 2 2 3 3 3 4 4 5 5 6 8 1 1 1 6 3 2 6 4 1 2 8 6 3 8 3 1 9 0
1 0 0 1 8 3 7 8 7 2 2 3 3 3 3 4 4 4 5 6 7 8 1 0 1 3 2 0 3 9 7 9 1 5 7 7 8 7 3 9 3 5
1 1 0 2 1 7 9 5 3 3 3 3 3 4 4 4 5 5 6 7 8 1 0 1 2 1 6 2 4 4 8 9 5 1 9 1 9 5 3 4 7 6 5
1 2 0 2 5 6 1 1 3 4 3 4 4 4 4 5 5 6 6 7 8 9 1 1 1 4 1 9 2 8 5 7 1 1 3 2 2 7 1 1 3 4 5 6 7 0
1 3 0 2 9 5 1 3 3 1 4 4 4 5 5 6 6 7 7 8 1 0 1 1 1 3 1 7 2 2 3 3 6 7 1 3 3 2 6 6 1 3 3 1 6 6 5 5
1 4 0 3 3 8 1 5 4 3 5 5 5 6 6 6 7 8 9 1 0 1 1 1 3 1 5 1 9 2 6 3 9 7 7 1 5 4 3 0 9 1 5 4 3 7 7 1 5
1 5 0 3 8 4 1 7 7 2 5 6 6 6 7 7 8 9 1 0 1 1 1 3 1 5 1 8 2 2 3 0 4 4 8 9 1 7 7 3 5 4 1 7 7 2 8 8 6 0
F r e n a d o c o n l l a n t a s b l o q u e a d a s
D is t a n c ia l im i t e d e v i s ib i l i d a d d e p a r a d a
I n g e n ie r o H e r n a n d o S i l v a
E n e r g i a
C i n e t i c a
t o n / m
D is t a n c ia d e f r e n a d o e n m e t r o s
I m p a c t o
C o n d ic i o n e s d e f r e n a d o p a r a u n v e h i c u lo d e 2 0 t o n e la d a s d e p e s o t o t a l
Ingeniero Hernando Silva
Movimiento seguro
Frenado con llantas
bloqueadas
Fuera de control IMPACTO
FUERZA
DISTANCIA
ENERGÍA CINÉTICA
Ingeniero Hernando Silva
El Exceso de Velocidad es una situación relativa,
No consiste únicamente en superar la
velocidad indicada en las señales de tránsito; estas son las velocidades de diseño.
El exceso de velocidad real consiste a las limitaciones de operación ó control mecánico que puedan darse en el vehículo, el conductor o la carretera.

CONTROL DEL EXCESO REAL El exceso de velocidad no se puede controlar, porque en realidad, tal exceso consiste en un estado de velocidad, superior a la posibilidad de control. El control del riesgo consiste en evitar que ocurra exceso de velocidad, para las condiciones reales del vehículo y del ambiente en el que se está conduciendo.
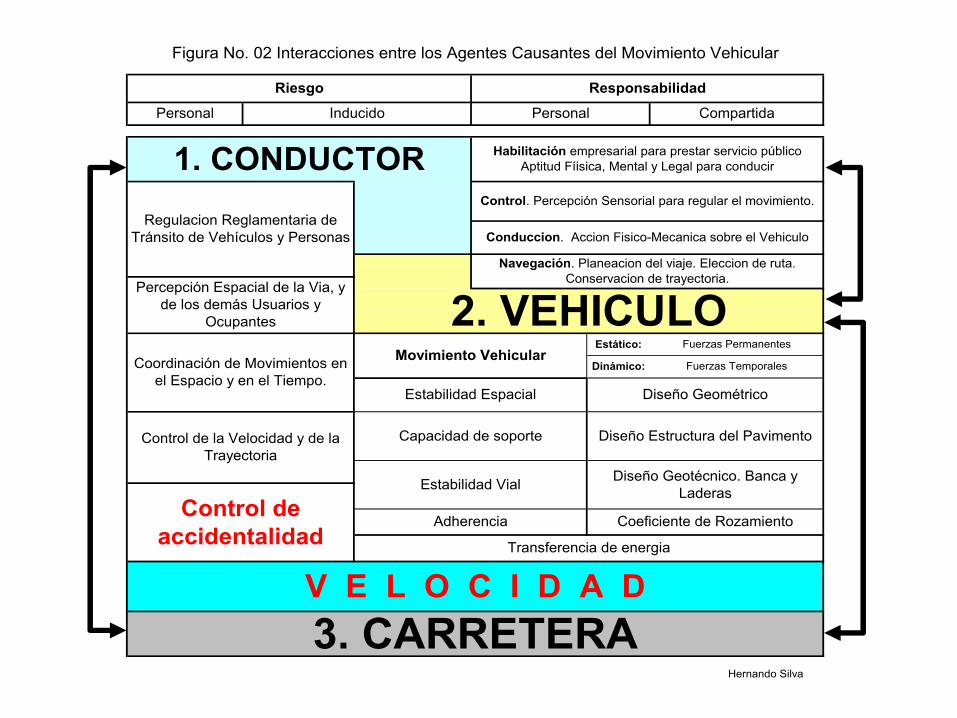
Dinámico:
Estático: Fuerzas Permanentes
Fuerzas TemporalesCoordinación de Movimientos en el Espacio y en el Tiempo.
Percepción Espacial de la Via, y de los demás Usuarios y
Ocupantes
Transferencia de energia
Diseño Geométrico
Diseño Estructura del Pavimento
Diseño Geotécnico. Banca y Laderas
Coeficiente de Rozamiento
Capacidad de soporte
Navegación. Planeacion del viaje. Eleccion de ruta. Conservacion de trayectoria.
2. VEHICULO
Control de accidentalidad
V E L O C I D A D
Movimiento Vehicular
Estabilidad Espacial
Estabilidad Vial
Adherencia
3. CARRETERAHernando Silva
Control de la Velocidad y de la Trayectoria
1. CONDUCTOR Habilitación empresarial para prestar servicio público Aptitud Fíisica, Mental y Legal para conducir
Control. Percepción Sensorial para regular el movimiento.
Conduccion. Accion Fisico-Mecanica sobre el VehiculoRegulacion Reglamentaria de
Tránsito de Vehículos y Personas
Responsabilidad
Personal Inducido Personal Compartida
Riesgo
Figura No. 02 Interacciones entre los Agentes Causantes del Movimiento Vehicular
Kilometros / hora 0 10 20 30 40 50 60 70 80 90 100 110 120Metros / segundo 0 3 6 8 11 14 17 19 22 25 28 31 33
Agente Funcion Factor Variable de riesgoDiseño Geometria de la via
PavimentadoPavimento con huecos
LisaDestapado
SecoLluvia
Dia Noche
Niebla, nieveHumo
EstabilidadPlano
OnduladoEscarpado
PeatonesDeportistas
SemovientesConstruccion
Alto traficoExtra grande
ArticuladoCamion - Volqueta
BusAutomovil
MotocicletaMotor. Impulsion
Luces externas e internasLlantas, y soporte
Frenos. Marcha y parqueoEn movimiento Comportamiento dinamico
Experto en el manejoSabe las normas de transito
Comportamiento dinamicoResponsabilidad al conducir
Sentido de la VistaSentidos O-O-T
Cerebro. Sistema nerviosoExtremidades
Grado de concentracionCarretera
Carretera urbanaUrbana
RestriccionEmpresarial Recorrido
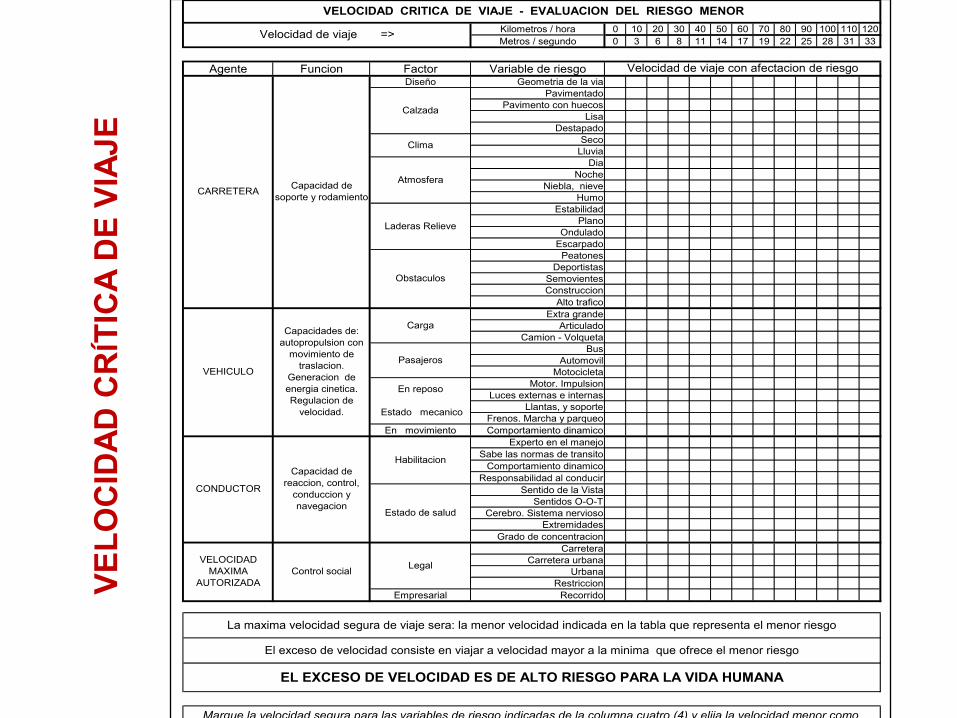
El exceso de velocidad consiste en viajar a velocidad mayor a la minima que ofrece el menor riesgo
EL EXCESO DE VELOCIDAD ES DE ALTO RIESGO PARA LA VIDA HUMANA
Marque la velocidad segura para las variables de riesgo indicadas de la columna cuatro (4) y elija la velocidad menor como velocidad critica de riesgo controlable durante el viaje. El riesgo crece en proporcion al cuadrado de la velocidad. A mayor
velocidad, mayor riesgo de accidente.Ingeniero Hernando A. Silva Garcia
VELOCIDAD MAXIMA
AUTORIZADAControl social Legal
La maxima velocidad segura de viaje sera: la menor velocidad indicada en la tabla que representa el menor riesgo
CONDUCTOR
Capacidad de reaccion, control,
conduccion y navegacion
Habilitacion
Estado de salud
VEHICULO
Capacidades de: autopropulsion con
movimiento de traslacion.
Generacion de energia cinetica. Regulacion de
velocidad.
Carga
Pasajeros
En reposo
Estado mecanico
VELOCIDAD CRITICA DE VIAJE - EVALUACION DEL RIESGO MENOR
Velocidad de viaje =>
Velocidad de viaje con afectacion de riesgo
CARRETERA Capacidad de soporte y rodamiento
Calzada
Clima
Atmosfera
Laderas Relieve
Obstaculos
VELO
CID
AD C
RÍT
ICA
DE
VIAJ
E

En los Manuales de Diseño Geométrico de Carreteras no se han establecido espacios para circulación de motocicletas, por lo cual, tales vehículos automotores se ven en la necesidad de ocupar las franjas laterales de seguridad de los vehículos mayores, con los riesgos de accidentes de los dos tipos de vehículos.

FIN


1
2
3

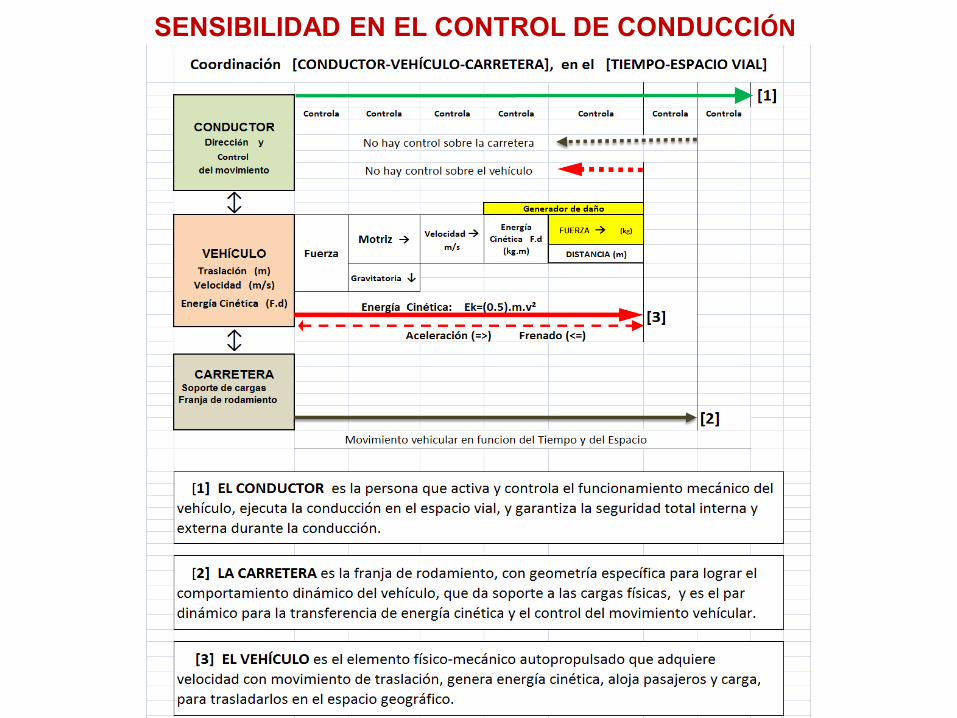
SENSIBILIDAD EN EL CONTROL DE CONDUCCIÓN

Hernando Augusto Silva García
Ingeniero Civil
Especialista en: 1. Infraestructura Vial y de Transporte 2. Sistemas de Información Geográfica 3. Administración de obras civiles 4. Topógrafo
Sociedad Colombiana de Ingenieros. Socio de número
Autor de los libros:
1. “CARRETERAS. INGENIERÍA DE ESPACIO Y MOVIMIENTO” 2. “EXCESO DE VELOCIDAD EN VEHÍCULOS AUTOMOTORES” 3. “SIMÓN BOLÍVAR. EL LIBERTADOR EN EL ESPACIO Y EN EL TIEMPO”
Dirección: [email protected]
1
Movimiento vehicular El fenomeno fisico







Que regrese sin novedad!
Que le vaya bien!
Que regrese pronto!
Que Dios lo lleve con bien !
Son clamores y deseos de siempre en una despedida !
Es la sabiduría popular !
Es presentimiento de algo !


REFERENCIA:
Título: © “CARRETERAS. INGENIERÍA DE ESPACIO Y MOVIMIENTO”
Autor: © Hernando Augusto Silva García
• Ingeniero Civil • Especialista en Sistemas de Información Geográfica SIG • Especialista en Infraestructura Vial y de Transporte • Topógrafo
Socio de la Sociedad Colombiana de Ingenieros SCI
Teléfono: 4318880, 3106735133
•las operaciones de arranque, aceleración y frenado. Cuando las coordenadas espaciales del vehículo varían en función del tiempo, surge el fenómeno físico de la velocidad, o relación entre el espacio y el tiempo.