sesioni.3
TRANSCRIPT
Controladores Predictivos.
Fundamentos y Actualidad
Universidad de Oriente
Facultad de Ingeniería Eléctrica
Departamento de Control Automático
Ania Lussón Cervantes
DISA- UPV Mayo 2013
Control Predictivo ©Ania Lussón. Mayo - 2013 2
Control Predictivo basado en Modelos No Lineales
Introducción
Esencia – NMPC
Ventajas – NMPC
Fundamento teórico – NMPC
Modelos de predicción
Problemática – NMPC
Resolución del problema-
Productos comerciales
Necesidades futuras
Alternativa del NMPC
Conferencia 3
Control Predictivo ©Ania Lussón. Mayo - 2013 3
Control Predictivo basado en Modelos
(MPC)
Tiene su origen en los desarrollos de la teoría del control óptimo en la
última parte de la década del 50 década del 70.
Conjunto de algoritmos computacionales que controlan la respuesta
futura de un proceso mediante el uso explícito de un modelo del mismo.
Múltiples aplicaciones: refinerías de petróleo, plantas de potencias, torres
de secado, brazos de robot, columnas de destilación, generadores de
vapor, servomotores, etc.
Introducción
Control Predictivo ©Ania Lussón. Mayo - 2013 4
Control Predictivo basado en Modelos
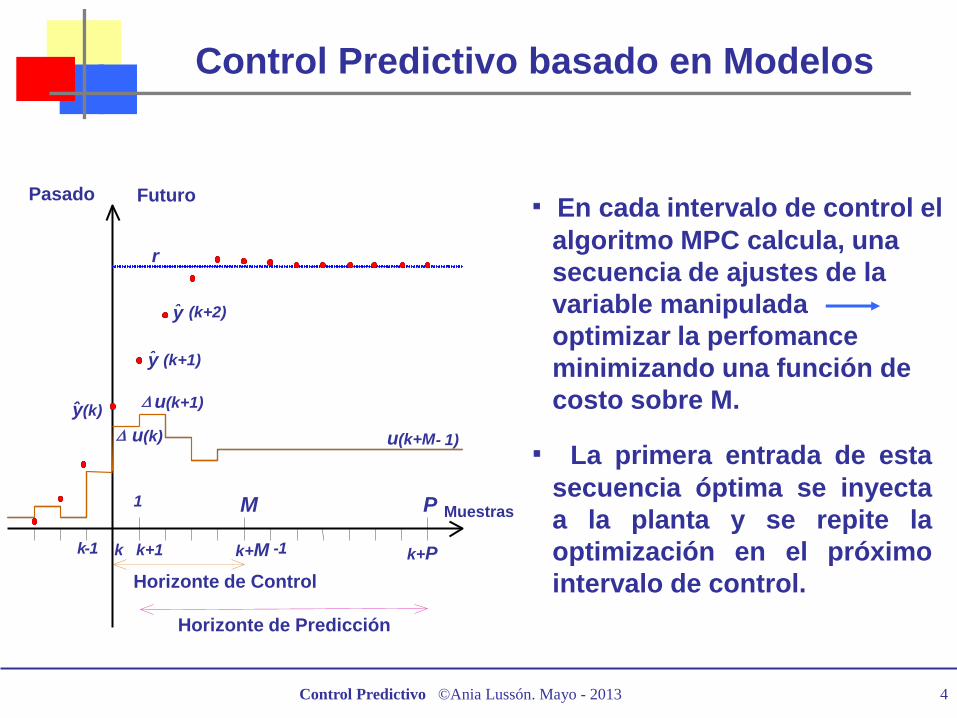
En cada intervalo de control el
algoritmo MPC calcula, una
secuencia de ajustes de la
variable manipulada
optimizar la perfomance
minimizando una función de
costo sobre M.
P
Horizonte de Control
Horizonte de Predicción
Muestras M
Futuro
k+1
1
r
Pasado
- u(k+M 1)
k - 1 k+P k k+M - 1
D u(k)
D u(k+1) y(k) ˆ
y (k+1) ˆ
y (k+2) ˆ
La primera entrada de esta
secuencia óptima se inyecta
a la planta y se repite la
optimización en el próximo
intervalo de control.
Control Predictivo ©Ania Lussón. Mayo - 2013 5
Control Predictivo basado en Modelos
Aunque los procesos industriales son no lineales, la mayoría de las aplicaciones
de MPC hasta la fecha son basadas en modelos dinámicos lineales, siendo las
estructuras más comunes las de respuesta al escalón o al impulso.
Es relativamente fácil identificar modelos lineales a partir de datos del
proceso.
Los modelos lineales dan buen resultado cuando el proceso opera en las
cercanías del punto de trabajo nominal. En el sector petroquímico, donde
tiene lugar la mayoría de las aplicaciones de MPC, el objetivo es
mantener el proceso en torno al estado estacionario (problema
del regulador) más que realizar frecuentes cambios de un punto
de operación a otro (problema del servo) y por tanto un modelo
lineal preciso es suficiente.
Control Predictivo ©Ania Lussón. Mayo - 2013 6
Control Predictivo basado en Modelos
Usando un modelo lineal y una función objetivo cuadrática, el algoritmo MPC
nominal toma la forma de un problema de Programación Cuadrática (QP) que
tiene propiedades de convexidad muy deseables.
Esto es sumamente importante pues, en general, para la mayoría de las
aplicaciones reales debemos obtener la convergencia del problema a un óptimo
en pocos décimos de segundo.
Control Predictivo ©Ania Lussón. Mayo - 2013 7
Existen casos donde el efecto de las no linealidades es suficientemente
importante como para justificar el uso de NMPC.
Dos grandes categorías de aplicación:
Problemas de regulación: el proceso es altamente no lineal y está sujeto a
perturbaciones grandes y frecuentes (control del pH).
Problemas de seguimiento: el punto de operación cambia frecuentemente y
abarca un amplio rango de la dinámica del proceso no lineal (fabricación de
polímeros).
Control Predictivo basado
en Modelos No Lineales (NMPC)
Control Predictivo ©Ania Lussón. Mayo - 2013 8
•Altas especificaciones de calidad en los productos
•Necesidad de incrementar la productividad
•Regulaciones medioambientales
requieren la operación del sistema en un rango dinámico más amplio, o
cercano a los límites de las regiones de operación admisibles.
En tales situaciones, los modelos lineales también resultan generalmente
inadecuados, y se deben utilizar modelos no lineales para describir la
dinámica del proceso.
Control Predictivo basado
en Modelos No Lineales (NMPC)
Control Predictivo ©Ania Lussón. Mayo - 2013 9
Esencia del NMPC
El agregado de un modelo no lineal dentro del algoritmo de control.
La complejidad del esquema de control se incrementa significativamente y
desde el punto de vista computacional, el problema de optimización que debe
resolverse en cada instante de muestreo puede llegar a ser muy intensivo, por
lo que las aplicaciones en tiempo real se hacen prácticamente imposibles.
Control Predictivo basado
en Modelos No Lineales (NMPC)
Control Predictivo ©Ania Lussón. Mayo - 2013 10
Se han realizado varias modificaciones a la estructura básica del MPC para
extender la técnica a sistemas no lineales. Las tres aproximaciones
fundamentales son:
Linealización tabulada: El modelo no lineal es linealizado alrededor de varios
estados estacionarios de operación, y luego es usado dentro de la estructura
del MPC lineal a medida que el proceso se mueve de una condición de
operación a otra (Garcia, 84).
MPC lineal extendido (extensión del DMC): La estructura de MPC lineal
básica es extendida para expresar las verdaderas no linealidades capturadas
por un modelo no lineal explícito. La solución al problema del DMC extendido
se alcanza agregando una perturbación alrededor de la solución del DMC
lineal estándar (Hernandez&Arkun, 91).
NMPC
Control Predictivo ©Ania Lussón. Mayo - 2013 11
NMPC
MPC no lineal explícito: El problema fundamental de MPC se plantea como
un problema no lineal a escala completa, y el controlador no lineal es
obtenido explícitamente por medios analíticos o implícitamente como la
solución de un problema de programación no lineal (NLP) incluyendo el
modelo no lineal completo y las restricciones (Biegler&Rawlings,91).
Control Predictivo ©Ania Lussón. Mayo - 2013 12
Otras alternativas para la incorporación de
no linealidades en el MPC
El uso de herramientas de inteligencia artificial, con el fin de obtener modelos
compactos y con buen grado de precisión.
Artículos tutoriales de Bequette y Henson (Bequette91); (Henson98).
Modelos empíricos, como las redes neuronales (Su&McAvoy,97) y la lógica
Fuzzy (Alvarez&diSciascio&Carelli,00).
Técnicas basadas en modelos Hammerstein (Zhu&Seborg94); modelos
Wiener (Lussón&Figueroa&Agamennoni03); y de Volterra
(Genceli&Nikolaou95).
NMPC
Control Predictivo ©Ania Lussón. Mayo - 2013 13
La extensión de los conceptos básicos de MPC a procesos no lineales es en
principio sencilla, pero no es un asunto trivial y aún hay muchos temas
abiertos:
La disponibilidad de modelos no lineales debido a la dificultad de técnicas de
identificación para procesos no lineales.
La complejidad de los cálculos necesarios para resolver el problema del
control predictivo de procesos no lineales.
La escasez de resultados de estabilidad y robustez.
NMPC
Control Predictivo ©Ania Lussón. Mayo - 2013 14
Ventajas del NMPC
Presenta la posibilidad de abordar dinámicas no lineales.
A medida que aparecen nuevas herramientas que hacen posible la obtención
y representación de modelos no lineales, bien a partir de primeros principios
(leyes de conservación) o bien a partir de datos experimentales (modelos de
Volterra o redes neuronales), el interés por su utilización en NMPC se va
acrecentando.
NMPC
Control Predictivo ©Ania Lussón. Mayo - 2013 15
Dificultades derivadas del empleo de
modelos no lineales en MPC
La obtención de un modelo no lineal a partir de datos experimentales es un
problema abierto. La utilización de redes neuronales o series de Volterra no
parecen solucionar el problema de forma general y la obtención de modelos a
partir de primeros principios no es siempre viable.
El problema de optimización es no convexo, aparecen problemas relativos
a la obtención del óptimo global, por tanto trae consigo muchas dificultades
en cuanto a, convergencia, factibilidad, estabilidad y optimalidad del proceso
en cuestión.
NMPC
Control Predictivo ©Ania Lussón. Mayo - 2013 16
La dificultad del problema de optimización se traduce en un aumento
considerable del tiempo de cálculo, hecho que puede dar lugar a que la
aplicación de esta técnica quede restringida a un conjunto de sistemas con
dinámica lenta.
El estudio de temas fundamentales como estabilidad o robustez se complica
enormemente. Este tema constituye un campo abierto de gran interés para los
investigadores.
NMPC
Control Predictivo ©Ania Lussón. Mayo - 2013 17
Fundamento teórico del
NMPC
Se puede definir un algoritmo genérico NMPC que englobe a todas las
técnicas que comparten las mismas ideas.
El proceso (multivariable) se puede describir por un modelo en el espacio de
estados de la forma:
donde:
x es el vector de estados de dimensión n, u es el vector de mu entradas, d son
las perturbaciones medibles, w son las no medibles. El vector de salidas es y
de dimensión my, la misma que la del vector de ruidos de medida e.
)2()())(()(
)1())(),(),(),(()1(
ttt
ttttt
exgy
wduxfx
NMPC
Control Predictivo ©Ania Lussón. Mayo - 2013 18
El problema que hay que resolver es el cálculo de la secuencia de
señales de control u que llevan al proceso desde su estado actual al estado
deseado xs.
El punto de trabajo deseado (ys, xs, us) viene determinado por una
optimización estática basada en criterios económicos. Este punto debe ser
recalculado periódicamente ya que las perturbaciones pueden hacer
cambiar el punto óptimo de operación.
NMPC
Control Predictivo ©Ania Lussón. Mayo - 2013 19
Las perturbaciones medibles se pueden eliminar incluyendo su efecto en la
función f, mientras que el resto se rechaza con la realimentación,
considerando que la perturbación permanecerá constante a lo largo del
horizonte.
Esto se formaliza añadiendo un término constante (bias) e igual al error
entre la salida medida y la calculada a toda la predicción:
)()()(),())(()( ttttjtjt m yybbxgy
NMPC
Control Predictivo ©Ania Lussón. Mayo - 2013 20
El problema de control es calcular u que minimice la función objetivo:
donde:
M es el horizonte de control, P es el horizonte de predicción,
Q, R, S, T son matrices de ponderación.
)()()()(1
1
1
11
JjtjtjtJM
j
s
M
j
P
j
s T
RSQ
Suuuyy D
NMPC
Control Predictivo ©Ania Lussón. Mayo - 2013 21
La minimización estará sujeta a la restricción del modelo del sistema (ec.
(1), (2)) y al resto de restricciones en entradas y salidas que se quieran
considerar:
1,,1)(
1,,1)(
,,1)(
maxmin
maxmin
maxmin
DDD
Mjjt
Mjjt
Pjjt
uuu
uuu
syysy
Obsérvese que se ha considerado la violación de las restricciones en la
salida con el término s, que entra en juego en la minimización
apareciendo en la función de costo con una penalización dada por la
matriz T. (**)
NMPC
Control Predictivo ©Ania Lussón. Mayo - 2013 22
Modelos de Predicción
Modelo de la Respuesta al Impulso Truncada
Modelo de la Respuesta al Escalón
Modelo de Función Transferencia
Modelo de Espacio de Estados
Modelos lineales: Expresan relaciones lineales entre sus variables, por lo que
permiten una solución matemática sencilla al problema de MPC. Es válido el
principio de superposición de efectos.
Modelos no lineales: Expresan relaciones no lineales entre sus variables,
transformado el problema del MPC en uno no lineal, cuya solución numérica es
mucho más compleja. No es válido el principio de superposición de efectos.
NMPC
Control Predictivo ©Ania Lussón. Mayo - 2013 23
Modelos específicos que reflejen la dinámica no lineal:
Modelos no lineales
Modelos de Wiener
Modelos Hammerstein
Modelos basados en redes neuronales
Modelos de Volterra
Modelos NARX
Modelos borrosos, etc.
NMPC
Control Predictivo ©Ania Lussón. Mayo - 2013 24
Modelos usados en la industria
Modelos en el espacio de estados
Modelos de Entrada/Salida
Modelos basados en primeros principios
NMPC
Control Predictivo ©Ania Lussón. Mayo - 2013 25
Modelos en el espacio de estados
Se puede usar un modelo formado por la combinación de una ecuación de
estado lineal con una relación no lineal de salida:
))(()()()()()1( tttttt xgyDdBuAxx
))(()())(( tNNtt xCxxg
La no linealidad de la salida se puede modelar con la superposición de una
relación lineal y una red neuronal no lineal:
Al no estar el vector de estados limitado necesariamente a variables físicas,
este modelo es muy genérico y permite englobar más efectos no lineales
que los exclusivos de las medidas.
NMPC
Control Predictivo ©Ania Lussón. Mayo - 2013 26
NMPC
Se identifica el sistema como lineal y los residuos de las salidas se ajustan
a los estados con la red neuronal.
Se puede usar un índice de confianza de modo que la predicción se basa
más o menos en la red neuronal según este índice, apagándose en caso de
que su aportación no sea fiable.
También puede añadir un filtro de Kalman extendido (EKF) para corregir los
errores de modelado y las perturbaciones no medibles, reemplazando de este
modo el error constante en la realimentación que se emplea normalmente en
el MPC.
Control Predictivo ©Ania Lussón. Mayo - 2013 27
Modelos de Entrada/Salida
Una idea adoptada por algunos fabricantes de controladores predictivos
es usar un modelo no lineal estático junto con un modelo dinámico no
lineal.
NMPC
Control Predictivo ©Ania Lussón. Mayo - 2013 28
NMPC
Modelos basados en primeros principios
Es difícil obtener modelos empíricos fiables a partir de datos experimentales.
En la práctica existe la posibilidad de usar modelos dados directamente de
las ecuaciones de balance: modelos de primeros principios.
Estas ecuaciones pueden ser ecuaciones estáticas de balance o funciones no
lineales de variables físicas que generan otra variable.
En este caso el cálculo de la predicción se realiza mediante una simulación
de las ecuaciones no lineales (integración) que describen el proceso.
Control Predictivo ©Ania Lussón. Mayo - 2013 29
NMPC
Problemática asociada al NMPC
La metodología de cálculo de
la señal de control.
El comportamiento dinámico del
lazo cerrado.
Estabilidad de la solución Resolución
Robustez
Control Predictivo ©Ania Lussón. Mayo - 2013 30
NMPC
Resolución
La introducción de un modelo no lineal en el algoritmo de optimización
conduce a la pérdida de convexidad, no pudiendo ser resuelto por los
algoritmos de programación cuadrática (QP), para los cuales existen
soluciones fiables y suficientemente estudiadas.
Esta pérdida de convexidad hace que sea mucho más difícil encontrar
una solución y que, una vez encontrada, no se pueda garantizar que sea
un óptimo global.
Control Predictivo ©Ania Lussón. Mayo - 2013 31
NMPC
En estas circunstancias el tiempo de cálculo aumenta considerablemente
debido a dos motivos:
1) Para la obtención de la secuencia de acciones de control
óptima, el paquete de programación no lineal debe evaluar
repetidamente la función objetivo y en cada evaluación se
debe resolver el sistema de ecuaciones no lineales que
componen el modelo de predicción, lo cual conlleva mucho
tiempo de cálculo.
2) A partir de los datos obtenidos a través de la evaluación de la
función objetivo, el programa de optimización debe calcular el
gradiente de la función y los próximos puntos de búsqueda,
además de comprobar la violación o no de las restricciones y
los criterios de finalización del algoritmo. Estas tareas
consumen más tiempo de cálculo que en el caso lineal.
Control Predictivo ©Ania Lussón. Mayo - 2013 32
NMPC
Estabilidad de la solución
Este problema ha sido abordado desde distintos puntos de vista,
existiendo en la actualidad diferentes propuestas:
Horizonte infinito
Restricción terminal
Control dual
Horizonte casi-infinito
Contracción del estado
Control Predictivo ©Ania Lussón. Mayo - 2013 33
Horizonte infinito
Propuesta por Meadows et al. (1995).
Ampliar los horizontes de control y de predicción hasta el infinito:
En este caso la función objetivo también sirve como función de Lyapunov,
dando lugar a la estabilidad nominal.
En el artículo citado se demuestra que si existe solución inicial factible
entonces existe solución en cada periodo de muestreo posterior.
MP,
NMPC
Control Predictivo ©Ania Lussón. Mayo - 2013 34
La idea básica es que si el problema de minimización es factible en el
instante t entonces la función de costo es finita y
Por tanto la función de costo es monótona decreciente y se puede interpretar
como una función de Lyapunov, garantizando la estabilidad asintótica.
Es un concepto con un interés teórico, no es viable una implementación
práctica con horizonte infinito.
)()()()(1 tututxtxJJ tt
tt SR
NMPC
Control Predictivo ©Ania Lussón. Mayo - 2013 35
Restricción terminal
Propuesta por Keerthi y Gilbert (1988) (restricción terminal de igualdad).
Consiste en añadir una restricción terminal al estado en el algoritmo
NMPC de la forma:
Con la imposición de (1), la función objetivo se convierte en una función
de Lyapunov para el sistema a lazo cerrado, conduciendo a la estabilidad
nominal.
)1(0)( Ptx
NMPC
Control Predictivo ©Ania Lussón. Mayo - 2013 36
Con (1) el estado al final del horizonte finito es cero y por tanto lo será la
señal de control, con lo que el sistema (sin perturbaciones) se queda para
siempre en el origen. De esta forma es como si el horizonte de predicción
fuera infinito.
En la práctica la introducción de (1) añade un costo computacional
considerable (la satisfacción exacta de esta tipo de restricción requiere un
número infinito de iteraciones) y da lugar a una región de operación muy
restrictiva.
NMPC
Control Predictivo ©Ania Lussón. Mayo - 2013 37
Control dual
Michalska y Mayne (1993) buscan una restricción menos estricta que la
restricción terminal (restricción de desigualdad).
La ventaja: satisfacción exacta de esta tipo de restricción requiere un
número finito de iteraciones del algoritmo.
La idea es definir un entorno W alrededor del estado final deseado xs dentro
del cual el sistema pueda ser llevado a dicho estado por medio de un
controlador lineal por realimentación del vector de estados.
NMPC
Control Predictivo ©Ania Lussón. Mayo - 2013 38
La restricción que se añade a la formulación es:
Si el estado actual se encuentra fuera de esta región se usa el algoritmo
NMPC con la restricción terminal.
Una vez que el estado se encuentra en W, el control conmuta a una
estrategia lineal determinada previamente (estrategia del tipo dual-mode
controller).
Este método conlleva a la conmutación entre los dos controladores, la
determinación de la región W y de la matriz de ganancia de la realimentación
del vector de estados.
WPt s xx )(
NMPC
Control Predictivo ©Ania Lussón. Mayo - 2013 39
Horizonte casi-infinito
Chen y Allgower (1996) extendieron el concepto anterior, proponiendo un
esquema de control con horizonte casi-infinito.
Se hace uso de la idea de región terminal y controlador estabilizante, pero
sólo para el cálculo del costo terminal.
La señal de control se determina resolviendo el problema de optimización en
línea (con horizonte finito) sin conmutar al controlador lineal incluso dentro de
la región terminal.
NMPC
Control Predictivo ©Ania Lussón. Mayo - 2013 40
Se añade el término a la función de costo, cuyo objetivo es
extender P hasta el infinito y por tanto evitar la conmutación del
controlador.
Se interpreta como si el P se expandiera casi hasta el infinito (es como si
se minimizara un costo de horizonte infinito resolviendo un problema de
horizonte finito).
2
)(PpTtx
NMPC
Control Predictivo ©Ania Lussón. Mayo - 2013 41
Contracción del estado
Método introducido por Yan and Polak (1993), donde sugieren el uso de una
restricción de estabilidad que impone una contracción previamente
establecida en el vector de estado.
De Oliveira (1996), presenta una reformulación del problema de
optimización considerando la restricción adicional de contracción:
Esta restricción fuerza a la magnitud del vector de estado a contraerse
según el factor elegido cada vez que se calcula la señal de control.
Garantiza estabilidad exponencial del lazo cerrado al origen, asumiendo
que el origen es un punto de equilibrio.
)1,0()()(22
txNtx
NMPC
Control Predictivo ©Ania Lussón. Mayo - 2013 42
La estabilidad queda garantizada siempre que el problema sea factible, lo
que no viene impuesto necesariamente porque sea factible en k = 0, ya que
las restricciones que se le imponen al estado son muy estrictas y pueden
hacer perder factibilidad.
Esto se puede mejorar con valores grandes de , pero la disminución de
la magnitud del estado es menor.
En muchas situaciones reales la condición es muy restrictiva y la no-
factibilidad aparece con facilidad.
NMPC
Control Predictivo ©Ania Lussón. Mayo - 2013 43
Robustez
Incluir la realimentación en el NMPC es para tener en cuenta las diferencias
existentes entre el modelo y el proceso (a causa de ruidos del proceso,
errores de modelado, errores del observador, entre otras).
Un algoritmo de MPC proporciona una buena performance para un modelo
particular, minimizando una función objetivo, pero en el caso de existir
diferencias entre el modelo y el proceso, puede tener una pobre performance
cuando se implementa en la planta real.
Limitación principal del MPC es su poca habilidad para tratar con modelos
que presentan incertidumbres.
NMPC
Control Predictivo ©Ania Lussón. Mayo - 2013 44
Los resultados en los que se considera robustez en MPC presentan dos
categorías:
1. Análisis de robustez: Determinar la estabilidad y desempeño del lazo
cerrado para un controlador en presencia de incertidumbres.
2. Síntesis robusta: Se incorpora, en la formulación del problema, la
descripción explícita de las incertidumbres y se utiliza para la síntesis de
controladores predictivos robustos.
NMPC
Control Predictivo ©Ania Lussón. Mayo - 2013 45
Resultados de robustez del NMPC con restricciones
Michalska y Mayne (1993) añaden robustez al NMPC con modo dual e híbrido,
imponiendo una restricción de desigualdad.
Mayne (1995) sugirió una formulación con realimentación del método min-
max que evita situaciones no realistas en la elección del control, y discutió la
estrategia del NMPC min-max con horizonte variable.
Piñon (2001) propone un método de diseño para el NMPC robusto aplicando
las técnicas basadas en LMI.
Lussón, et al. (2003) propone un modelo de incertidumbres utilizando
funciones lineales a tramos, el cual es empleado en el NMPC robusto.
NMPC
Control Predictivo ©Ania Lussón. Mayo - 2013 46
NMPC
Resolución del problema. Productos comerciales
Los controladores comerciales dividen el algoritmo de control en:
Optimización local estática Optimización dinámica
Calcula los valores de entrada
y salida a los que es necesario
llegar.
Calcula la secuencia de
control adecuada.
Control Predictivo ©Ania Lussón. Mayo - 2013 47
NMPC
La optimización dinámica se lleva a cabo minimizando la función objetivo
genérica (J) con las restricciones correspondientes.
Los distintos esquemas comerciales hacen simplificaciones respecto a la
formulación general.
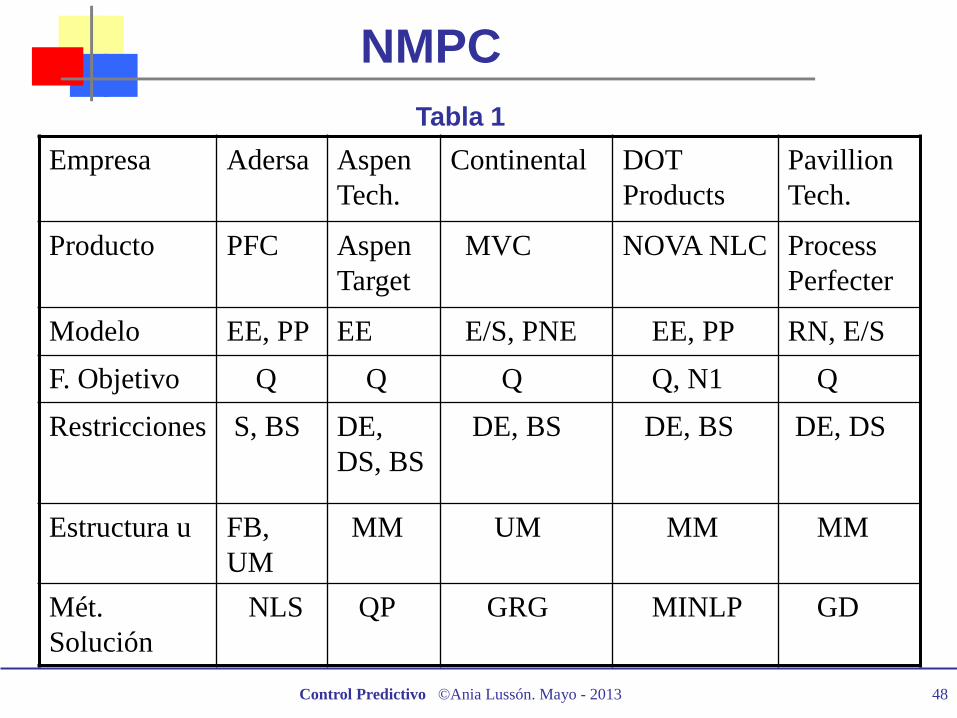
Tabla 1
EE: espacio de estados no lineal. PP: primeros principios. E/S: entrada/salida. PNE: polinomio no lineal estático. RN: red neuronal. N1: norma 1. S: saturación. BS: blandas (mínimo y máximo) en la salida. DS: duras en las salidas. DE: duras en las entradas. FB: funciones base. UM: único movimiento. MM: múltiples movimientos. NLS: mínimos cuadrados no lineales.
GRG: Generalized Reduced Gradient. MINLP: Mixed Integer Nonlinear Programming. GD: Gradient descent.
Control Predictivo ©Ania Lussón. Mayo - 2013 48
NMPC
Empresa Adersa Aspen
Tech.
Continental DOT
Products
Pavillion
Tech.
Producto PFC Aspen
Target
MVC NOVA NLC Process
Perfecter
Modelo EE, PP EE E/S, PNE EE, PP RN, E/S
F. Objetivo Q Q Q Q, N1 Q
Restricciones S, BS DE,
DS, BS
DE, BS DE, BS DE, DS
Estructura u FB,
UM
MM UM MM MM
Mét.
Solución
NLS QP GRG MINLP GD
Tabla 1
Control Predictivo ©Ania Lussón. Mayo - 2013 49
NMPC
Función Objetivo
La mayoría de los productos sólo permiten matrices de peso constantes en
todo el horizonte y sólo el NOVA-NLC trabaja con norma 1.
El Process Perfecter minimiza sólo la salida pero con una matriz de peso que
se incrementa gradualmente con el horizonte, dando más importancia a los
errores más lejanos y en consecuencia una acción de control más suave.
Control Predictivo ©Ania Lussón. Mayo - 2013 50
NMPC
Restricciones en la entrada: DURAS, que nunca deben ser violadas.
El PFC: restricciones de saturación, muy útiles para aplicaciones de
servomecanismos.
Este método no trata estas restricciones de forma óptima, sino que resuelve
el problema de optimización sin restricciones y luego satura a los límites,
produciendo una solución no óptima.
Restricciones
Restricciones en la salida: BLANDAS, debido a que una perturbación puede
producir fácilmente una pérdida de factibilidad.
En Process Perfecter: una restricción dura en forma de embudo, de manera
que se da más libertad a la salida al comienzo del horizonte que al final.
Control Predictivo ©Ania Lussón. Mayo - 2013 51
NMPC Estructuración de la señal de control
Se encuentra desde Horizonte de control igual a 1 (UM), horizonte variable
(MM) o funciones base (FB).
Las FB (PFC), parametriza la señal de control usando un conjunto de
funciones polinomiales, permitiendo un perfil de entrada complejo para un
horizonte de control grande, empleando un número de incógnitas pequeño
(ventaja en el caso de sistemas no lineales).
La elección de FB establece muchas de las características del perfil de la
entrada, pudiendo asegurar con una correcta elección una señal de control
suave.
Si se eligen FB polinómicas, se puede seleccionar el orden para seguir un
setpoint polinómico sin retraso (aplicaciones de servosistemas mecánicos).
Control Predictivo ©Ania Lussón. Mayo - 2013 52
NMPC Método de Solución
La solución del problema no es tarea fácil debido a la no convexidad del
problema genérico.
Diversos métodos: NLS, QP, GRG, MINLP, GD.
El PFC: una solución sencilla resolviendo el problema sin restricciones usando
un algoritmo de mínimos cuadrados no lineal (NLS) y saturando las entradas a
sus límites, si éstos se violan; no se asegura una solución óptima, pero se gana
en velocidad, permitiendo que este controlador se use en aplicaciones con
períodos de muestreo pequeños (seguimiento de misiles).
Para cualquier método, el esfuerzo computacional es superior al caso lineal,
siendo ésta una de las principales razones para la escasa implantación de estas
técnicas en la industria.
Control Predictivo ©Ania Lussón. Mayo - 2013 53
NMPC
Una idea introducida en el PFC y adoptada por Aspen Target es el uso de
puntos de coincidencia, en los cuales deben coincidir la salida y la
trayectoria de referencia.
Esta idea puede ser útil cuando las salidas responden con distinta
velocidad y se pueden definir distintos puntos de coincidencia para cada una
de ellas.
Control Predictivo ©Ania Lussón. Mayo - 2013 54
NMPC
Necesidades futuras
Temas que pueden considerarse abiertos en esta técnica:
Modelado
Los modelos no lineales son más complejos que los lineales, el proceso
de identificación es mucho más difícil.
Se necesita una gran batería de ensayos para capturar las no linealidades
del proceso, resultando en un período de pruebas considerable.
La forma de disponer de una representación correcta de la dinámica del
proceso es un problema que no está completamente resuelto.
Control Predictivo ©Ania Lussón. Mayo - 2013 55
NMPC
Resolución del problema
La inclusión del modelo no lineal en la optimización da lugar a que ésta no
sea convexa.
Grandes esfuerzos deben hacerse todavía para encontrar algoritmos de
optimización fiables que permitan la resolución dentro del tiempo asignado.
Control Predictivo ©Ania Lussón. Mayo - 2013 56
NMPC
Justificación del esfuerzo
Vistas las dificultades que aparecen en la aplicación de NMPC, debe
poder justificarse el beneficio que este tipo de técnica aporta.
Algunos fabricantes ofrecen un MPC de respaldo, de manera que en el
caso de que no se necesite ese esfuerzo adicional o el controlador no lineal
sea realmente complicado de poner en marcha, se aplicaría la estrategia
lineal.
Control Predictivo ©Ania Lussón. Mayo - 2013 57
NMPC
Otros temas
Temas que son aplicables al Control Predictivo en general, funciones
objetivos multicriterio, sintonización de parámetros, mal condicionamiento
o tolerancia a fallos.
Ninguno de los productos comerciales incluye restricción terminal ni
horizonte infinito, situaciones requeridas en teoría para garantizar la
estabilidad nominal.
En lugar de eso, se confía en que con un horizonte de predicción lo
suficientemente grande se consiga el mismo comportamiento que con
horizonte infinito.

Control Predictivo ©Ania Lussón. Mayo - 2013 58
Alternativa de MPC no
Lineal
Control Predictivo ©Ania Lussón. Mayo - 2013 59
MPC con estructura Wiener-LAT
Objetivo
Control Predictivo ©Ania Lussón. Mayo - 2013 60
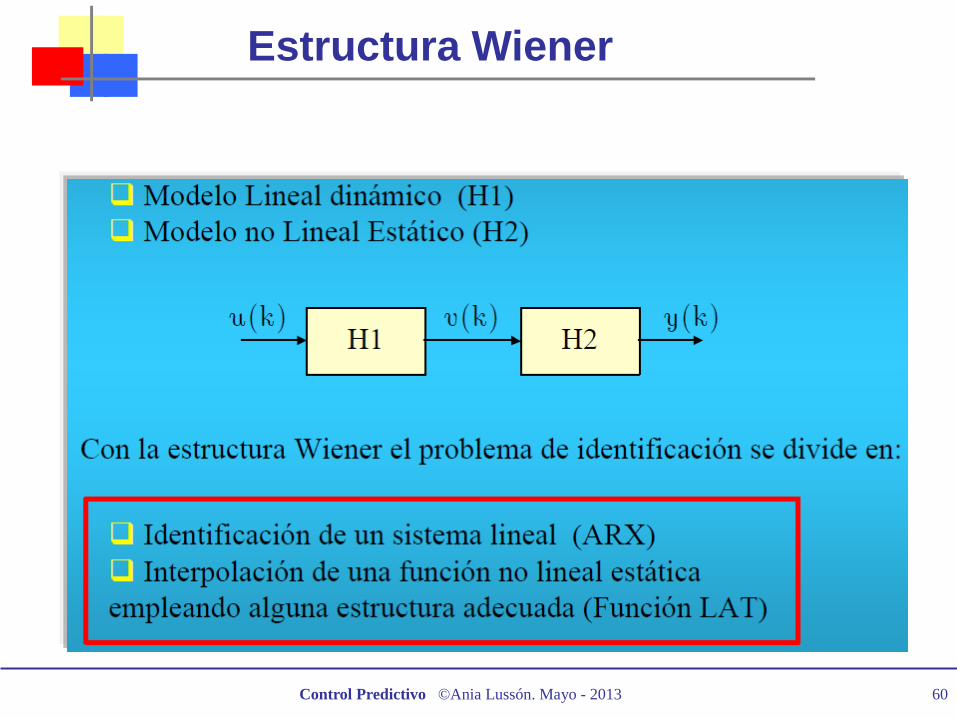
Estructura Wiener
Control Predictivo ©Ania Lussón. Mayo - 2013 61
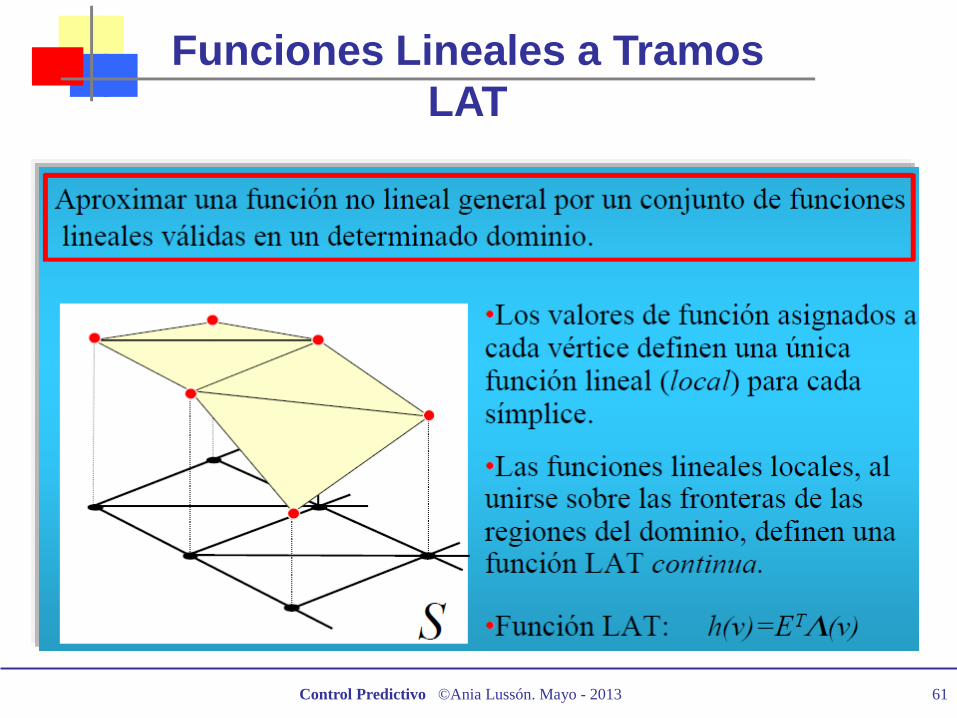
Funciones Lineales a Tramos
LAT
Control Predictivo ©Ania Lussón. Mayo - 2013 62
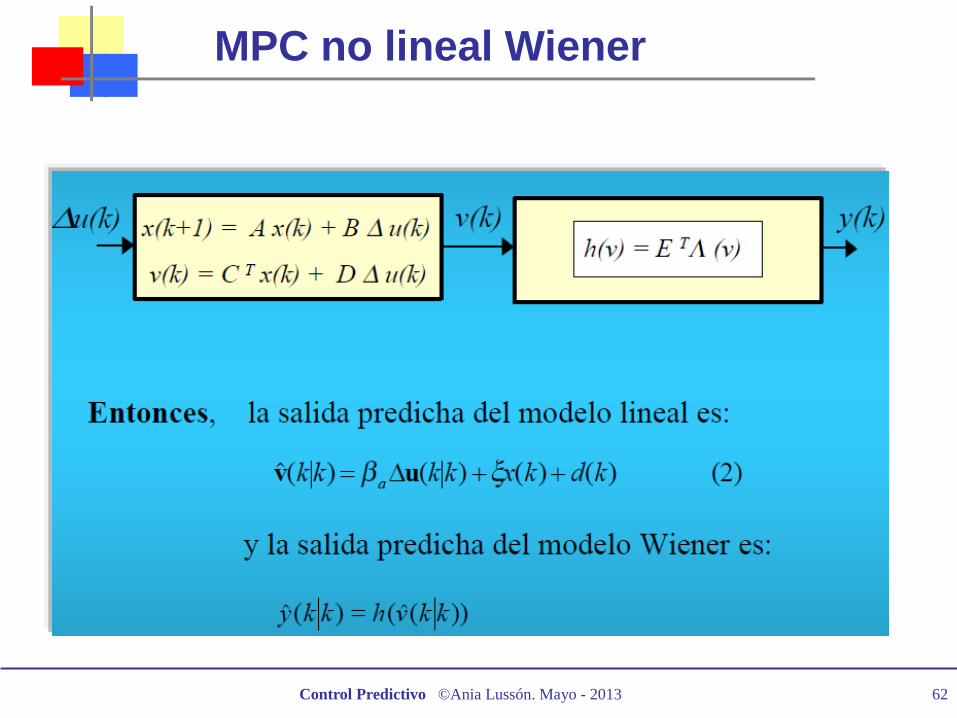
MPC no lineal Wiener
Control Predictivo ©Ania Lussón. Mayo - 2013 63
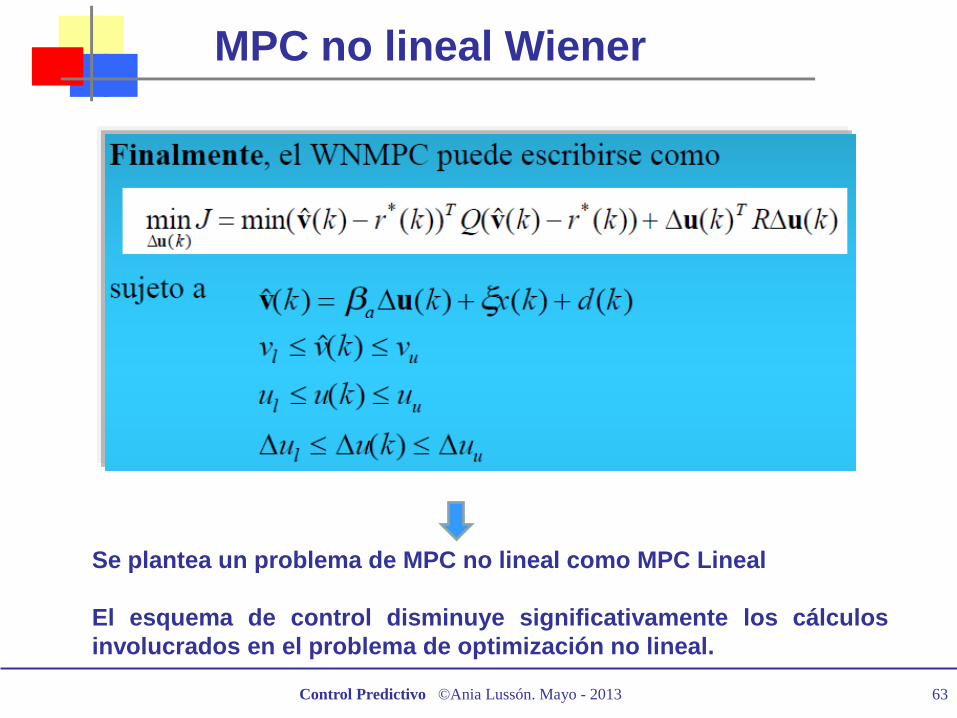
MPC no lineal Wiener
Se plantea un problema de MPC no lineal como MPC Lineal
El esquema de control disminuye significativamente los cálculos
involucrados en el problema de optimización no lineal.
Control Predictivo ©Ania Lussón. Mayo - 2013 64
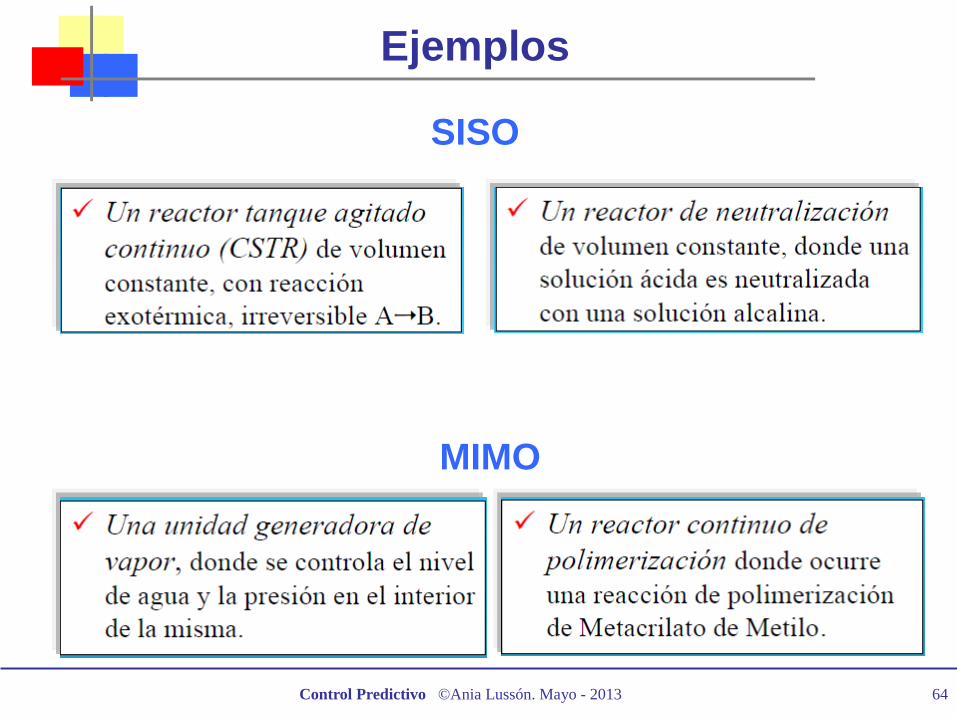
Ejemplos
SISO
MIMO
Control Predictivo ©Ania Lussón. Mayo - 2013 65
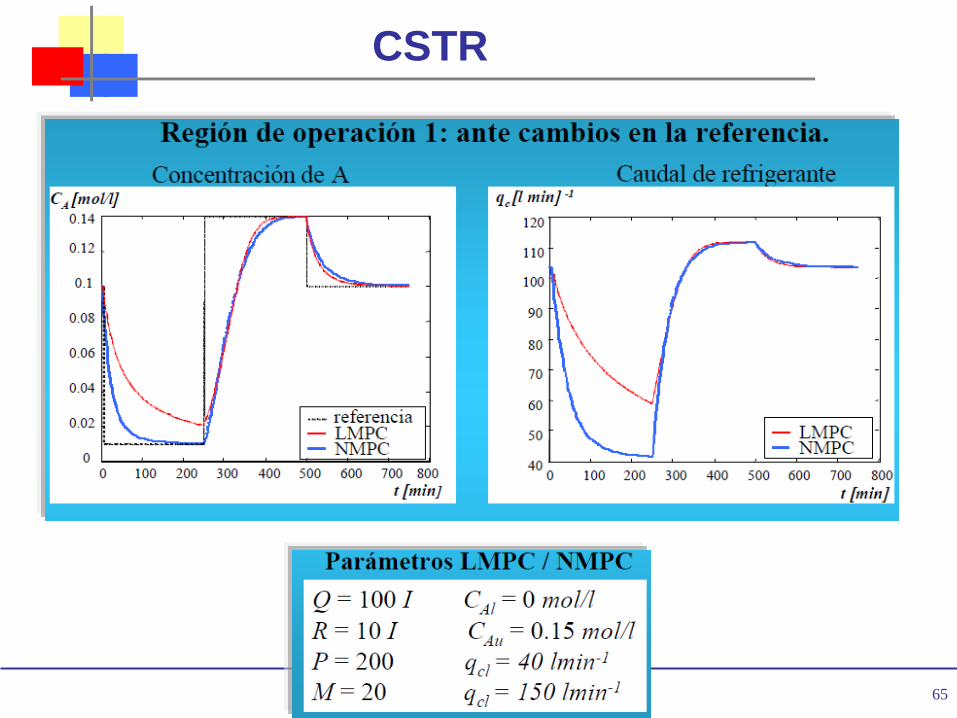
CSTR
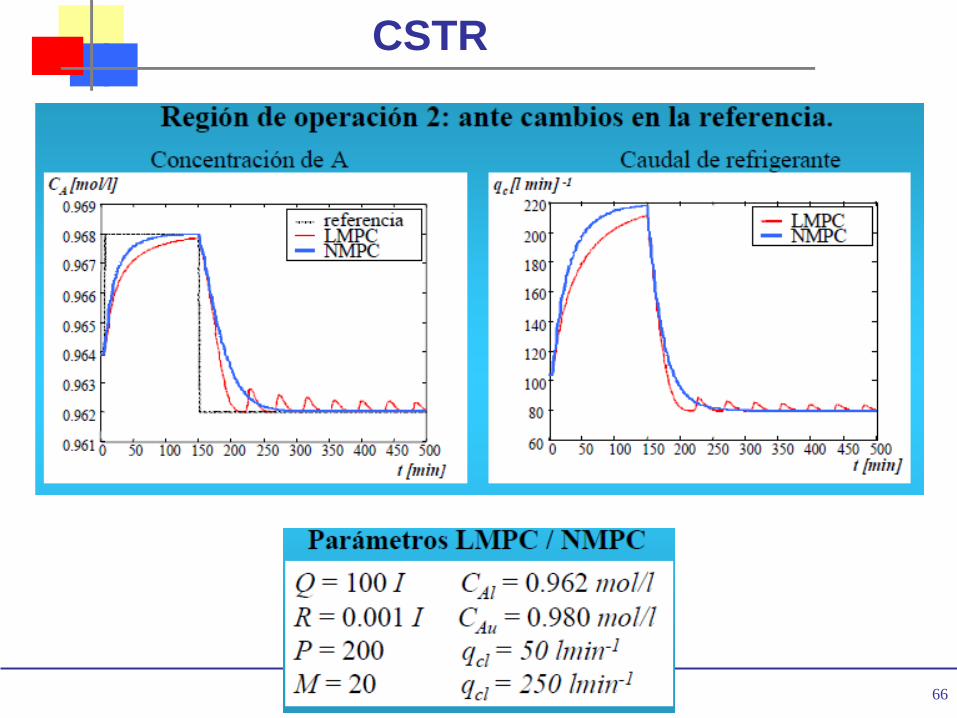
Control Predictivo ©Ania Lussón. Mayo - 2013 66
CSTR
Control Predictivo ©Ania Lussón. Mayo - 2013 67
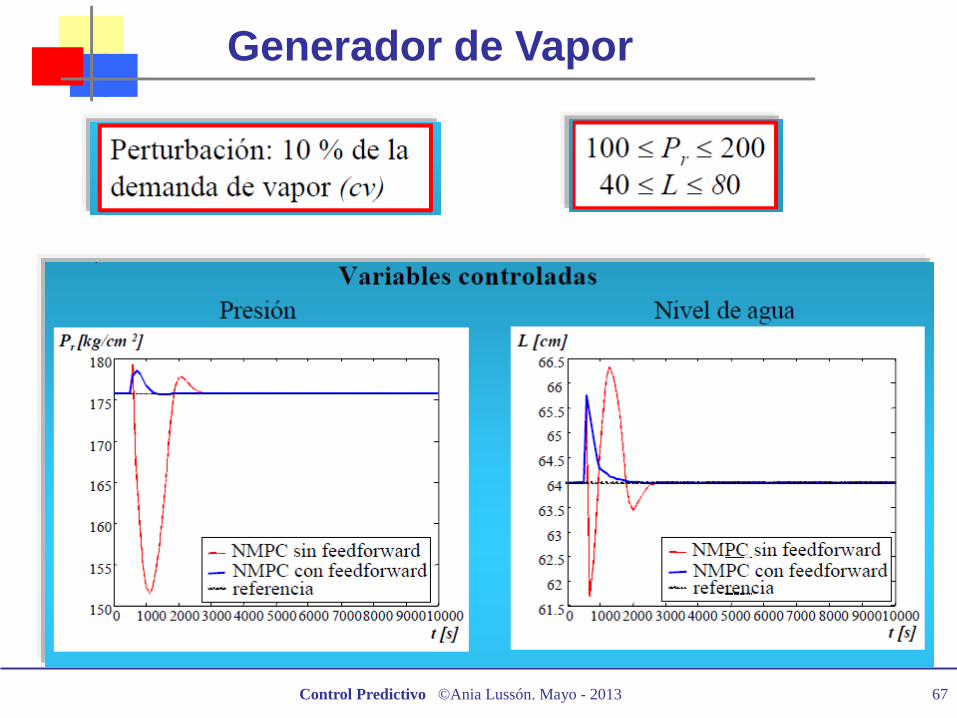
Generador de Vapor
Control Predictivo ©Ania Lussón. Mayo - 2013 68
CONCLUSIONES
Se mostró la esencia del NMPC basado en sus fundamentos
teóricos, ventajas, problemática asociada y productos comerciales.
Se mostró una Alternativa del NMPC: estructura Wiener –LAT.
Control Predictivo ©Ania Lussón. Mayo - 2013 69
NMPC Bibliografía
1. Garcia, C. E. (1984). Quadratic Dynamic Matrix Control (QDMC) of
Nonlinear Process. An application to a batch reaction process. Proc.
AIChe Annual Meeting, San Francisco, California.
2. Hernandez, E., Arkun Y. (1991). A nonlinear DMC controller: Some
Modeling an robustness considerations. Proc. American Control
Conference. pp. 2355 .Boston, USA
3. Biegler L., Rawlings J. (1991). Optimization approaches to nonlinear
model predictive control. Proc. Conference of Chemical Process Control (CPC-
IV). pp. 543-571. CACHF-AIChE. South Padre Island, TX.
4. Bequette, B. W. (1991). Nonlinear Control of Chemical Processes: A
Review. Industrial Engineering Chemical Research. 30:1391-1413.
5. Henson, M. A. (1998). Nonlinear Model Predictive Control: current
status and future directions. Computers and Chemical Engineering. 23:187-202.
6. Su, H. T., McAvoy, T. J. (1997). Artificial Neural Networks for nonlinear
process identification and control. Nonlinear Process Control, Chapter 7.
Editor: "Henson and Seborg“. Englewood Cliffs, NJ, Prentice-Hall. pp. 371-428.
Control Predictivo ©Ania Lussón. Mayo - 2013 70
7. Alvarez , H. diSciascio, F. Carelli, R. (2000). A Contractive Fuzzy Model
Predictive Controller with a PI feedback for a wastewater pH Neutralization
Benchmark. Anales del IX Congreso Latinoamericano de Control Automático (CLCA'00). Cali,
Colombia. pp.19-27.
8. Zhu, X., Seborg, D. E. (1994). Nonlinear Model Predictive Control Based on
Hammerstein Models. Proc. International Symposium on Process System Engineerin. Seul,
Korea. pp. 995-1000.
9. Lussón C. A., Figueroa J. L., Agamennoni O. (2003) A Nonlinear Model
Predictive Control System based on Wiener Piecewise Linear Models. Journal
of Process Control. 13:655-666.
10. Genceli, H. Nikolaou, M. (1995). Design of Robust Constrained Model-
Predictive Controllers with Volterra Series. AIChe Journal. 41: 2098-2107.
11. Meadows, E., Henson M., Eaton, J., Rawlings J (1995). Receding horizon
control and discontinuous state feedback stabilization. International Journal
Control. 62:1217-1229.
12. Keerthi, S.S. y Gilbert, E.G. (1988). Optimal infinite-horizon feedback laws for
a general class of constrained discrete-time systems: Stability and moving-
horizon appro-ximations. J. Optim. Theory Appl. 57(2):265–293.
NMPC
Control Predictivo ©Ania Lussón. Mayo - 2013 71
NMPC
13. Michalska, H., Mayne, D. (1993). Robust receding horizon control of
constrained nonlinear systems. IEEE Transaction on Automatic Control. 38 (11):1623-
1633.
14. Chen, H., Allgower, F. (1996). A quasi-infinite horizon predictive control
scheme for constrained nonlinear systems. Proc. 16th Chinese Control Conference.
Qindao, China. pp. 309-316.
15. Yang, T. H., Polak, E. (1993). Moving horizon control of nolinear systems
with input saturation, disturbances and plant uncertainty. International Journal
Control. 58:875-903.
16. De Oliveira, S. L., Morari, M. (1996). Contractive Model Predictive Control
with Local Linearization for Nonlinear Systems. Nonlinear Model Based Process
Control. editor R. Berber, C. Kravaris. Proc. of the NATO Advanced Study Institute. pp.403-431.
17. Mayne, D. Q. (1995). Optimization in model based control. In Rawling, J., editor,
4th IFAC Symposium on Dynamics and Control Chemical Reactors, Desdtillation Columns, and
Batch Processes (DYCORD+95), Danish Automation Society. pp. 229-242.
18. Piñon, S. (2001). Control Predictivo basado en Modelos para cultivos
protegidos. Tesis doctoral en Ingeniería, Universidad Nacional de San Juan, Argentina.