servomotores síncronos serie dbl/dbk · especialmente la brida y el eje corren peligro ......
TRANSCRIPT

Servomotores síncronos
Serie DBL/DBK
Descripción técnica, montaje, puesta en funcionamiento
Edición 02/2002
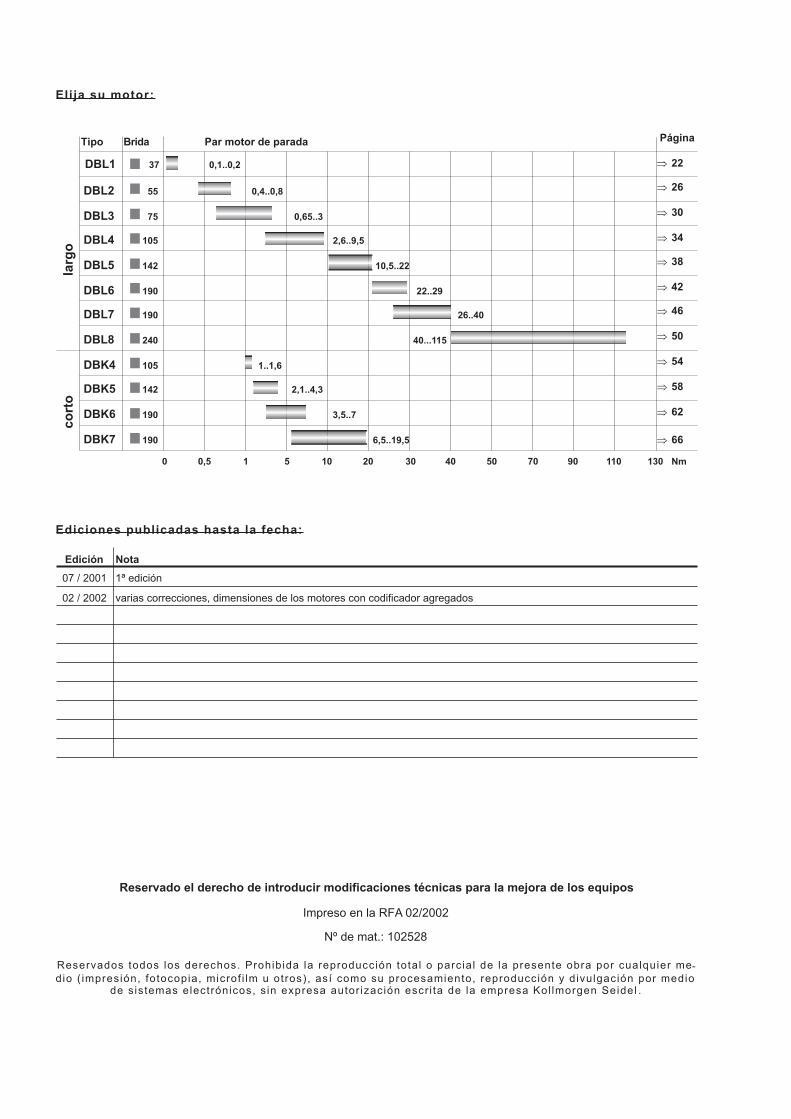
Elija su motor:
Ediciones publicadas hasta la fecha:
Edición Nota
07 / 2001 1ª edición
02 / 2002 varias correcciones, dimensiones de los motores con codificador agregados
Reservado el derecho de introducir modificaciones técnicas para la mejora de los equipos
Impreso en la RFA 02/2002
Nº de mat.: 102528
Reservados todos los derechos. Prohibida la reproducción total o parcia l de la presente obra por cualquier me-dio ( impresión, fotocopia, microf i lm u otros), así como su procesamiento, reproducción y divulgación por medio
de sistemas electrónicos, s in expresa autor ización escr i ta de la empresa Kol lmorgen Seidel .
0,5
DBL1 37 0,1..0,2
DBL2 55 0,4..0,8
DBL3 75 0,65..3
DBL4 105 2,6..9,5
DBL5 142 10,5..22
DBL6 190 22..29
DBL7 190 26..40
DBL8 240 40...115
DBK4 105 1..1,6
DBK5 142 2,1..4,3
DBK6 190 3,5..7
DBK7 190 6,5..19,5
0 10 5020 701 30 90 1305 40 110 Nm
Tipo Brida Par motor de parada Página
larg
oco
rto
� 22
� 26
� 30
� 34
� 38
� 42
� 46
� 50
� 54
� 58
� 62
� 66
Contenido Página
Contenido . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
Instrucciones de seguridad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
Instrucciones importantes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
Declaración del fabricante . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
Servomotores síncronos DBL/DBK 3
Seidel 02/2002 Contenido
I Generalidades
I.1 Sobre este manual . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7I.2 Utilización conforme a lo prescrito . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7I.3 Estructura de los motores . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8I.4 Datos técnicos generales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8I.5 Modelo estándar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
I.5.1 Forma de diseño . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9I.5.2 Extremo del eje, lado de accionamiento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9I.5.3 Brida . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9I.5.4 Tipo de protección . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9I.5.5 Protección . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9I.5.6 Clase de material aislante. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10I.5.7 Calidad vibracional . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10I.5.8 Técnica de conexión . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10I.5.9 Unidad de retorno . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10I.5.10 Freno de detención . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
I.6 Opciones. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11I.7 Criterios de selección . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
I.7.1 Código de modelo. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12I.7.2 Placa de identificación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
I I Montaje/Puesta en funcionamiento
II.1 Instrucciones importantes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13II.2 Montaje / Cableado. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
II.2.1 Conexión de los motores . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16II.2.1.1 Conexión de motores con resolver . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17II.2.1.2 Conexión de motores con codificador . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
II.3 Puesta en funcionamiento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
I I I Datos técnicos
III.1 Definiciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21III.2 DBL1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22III.3 DBL2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26III.4 DBL3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30III.5 DBL4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34III.6 DBL5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38III.7 DBL6 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42III.8 DBL7 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46III.9 DBL8 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50III.10 DBK4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54III.11 DBK5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58III.12 DBK6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62III.13 DBK7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
IV Apéndice
IV.1 Volumen de suministro, transporte, almacenamiento, mantenimiento, eliminación . . . . . . . . . . . . . . . . . . . . . 69IV.2 Eliminación de perturbaciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70IV.3 Índice . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
Instrucciones de seguridad
� Las operaciones de transporte, instalación, puesta en funcionamiento y mantenimiento sólo
podrán ser realizadas por personal cualificado. Por personal cualificado se entiende las
personas que están familiarizadas con el transporte, la instalación, el montaje, la puesta en
funcionamiento y el manejo del producto y que disponen de las correspondientes
calificaciones profesionales. El personal especializado deberá conocer y observar las
siguientes normas y directrices:
IEC 364 y CENELEC HD 384 o DIN VDE 0100
IEC-Report 664 o DIN VDE 0110
Normativa nacional de prevención de accidentes o BGV A2
� Antes del montaje y de la puesta en funcionamiento, lea detenidamente la presente
documentación. La incorrecta manipulación del motor puede producir daños personales y
materiales. La observación de los datos técnicos y las indicaciones de conexión (placa de
identificación y documentación) son de obligado cumplimiento.
� Asegúrese de la adecuada puesta a tierra del bloque del motor con la barra colectora del
armario de distribución como potencial de referencia. Careciendo de una toma de tierra de
baja resistencia no se puede garantizar la seguridad personal.
� No extraiga ningún enchufe con el equipo en marcha. Existe peligro de muerte, de riesgos
graves para la salud y de daños materiales.
� Las conexiones pueden llevar tensión, incluso con el motor parado. No suelte nunca las
conexiones eléctricas estando bajo tensión. En circunstancias desfavorables se pueden
producir chispazos que dañen a las personas y a los contactos.
� Al desconectar el servoamplificador de la corriente de alimentación, espere por lo menos
cinco minutos antes de soltar piezas conductoras de corriente (por ejemplo, contactos,
pernos, etc.). Los condensadores en el servoamplificador conducen tensiones peligrosas
hasta unos cinco minutos después de cortar la alimentación de corriente. Para mayor
seguridad, mida la corriente en el circuito intermedio y espere a que la corriente se sitúe por
debajo de 40V.
� Durante el funcionamiento, los motores pueden tener superficies calientes según la clase de
protección. La temperatura de las superficies puede alcanzar 100°C. Mida la temperatura y,
antes de tocar el motor, espere hasta que se haya enfriado a 40 °C.
� Si el motor gira libremente, quite/fije el muelle de ajuste que pueda existir, para evitar que
salga despedido con el consiguiente peligro de accidente.
Símbolos uti l izados en este manual
Peligro para las personas porelectricidad y sus efectos
Precauciones generalesInstrucciones generalesRiesgos para la maquinaria
� Véase capítulo (Referencia cruzada) � Destacar
4 Servomotores síncronos DBL/DBK
Instrucciones de seguridad 02/2002 Seidel
Instrucciones importantes
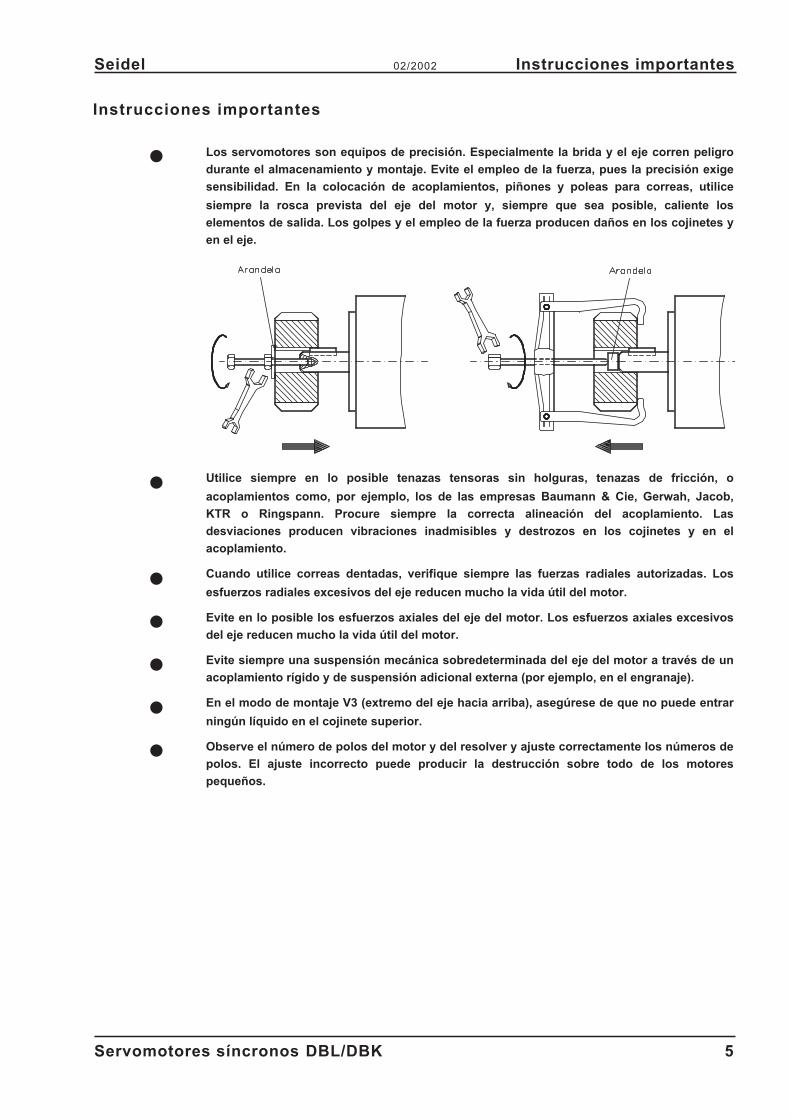
� Los servomotores son equipos de precisión. Especialmente la brida y el eje corren peligro
durante el almacenamiento y montaje. Evite el empleo de la fuerza, pues la precisión exige
sensibilidad. En la colocación de acoplamientos, piñones y poleas para correas, utilice
siempre la rosca prevista del eje del motor y, siempre que sea posible, caliente los
elementos de salida. Los golpes y el empleo de la fuerza producen daños en los cojinetes y
en el eje.
� Utilice siempre en lo posible tenazas tensoras sin holguras, tenazas de fricción, o
acoplamientos como, por ejemplo, los de las empresas Baumann & Cie, Gerwah, Jacob,
KTR o Ringspann. Procure siempre la correcta alineación del acoplamiento. Las
desviaciones producen vibraciones inadmisibles y destrozos en los cojinetes y en el
acoplamiento.
� Cuando utilice correas dentadas, verifique siempre las fuerzas radiales autorizadas. Los
esfuerzos radiales excesivos del eje reducen mucho la vida útil del motor.
� Evite en lo posible los esfuerzos axiales del eje del motor. Los esfuerzos axiales excesivos
del eje reducen mucho la vida útil del motor.
� Evite siempre una suspensión mecánica sobredeterminada del eje del motor a través de un
acoplamiento rígido y de suspensión adicional externa (por ejemplo, en el engranaje).
� En el modo de montaje V3 (extremo del eje hacia arriba), asegúrese de que no puede entrar
ningún líquido en el cojinete superior.
� Observe el número de polos del motor y del resolver y ajuste correctamente los números de
polos. El ajuste incorrecto puede producir la destrucción sobre todo de los motores
pequeños.
Servomotores síncronos DBL/DBK 5
Seidel 02/2002 Instrucciones importantes
6 Servomotores síncronos DBL/DBK
Declaración del fabricante 02/2002 Seidel
Declaración del fabricante
a efectos de la Directiva sobre máquinas 98/37/CE, Anexo II B
Por la presente, la empresa declara
Kollmorgen Seidel GmbH & Co. KG
Wacholderstrasse 40-42
40489 Düsseldorf
que los servomotores de la
gama DBL/DBK
(modelos DBL1, DBL2, DBL3, DBL4, DBL5, DBL6, DBL7, DBL8, DBK4, DBK5, DBK6, DBK7)
en su ejecución de serie están destinados exclusivamente para su montaje en otras máquinas y su puesta en
funcionamiento queda prohibida hasta que se verifique que la máquina, en la que este producto será
incorporado, cumple los requisitos de la Directiva 98/37/CE.
Declaramos la conformidad de los productos descritos con las normas relacionadas a continuación:
73/23/CEE Directiva referente a material eléctrico destinado a utilizarse con
determinados límites de tensión
VDE 0530 / DIN 57530 Normas para máquinas rotativas
DIN 42950 Forma de construcción
DIN 748 Extremos cilíndricos de ejes
DIN 42955 Equilibrado, coaxialidad, excentricidad axial
DIN ISO 2373 Factor de calidad vibracional
Emisor: Gerencia
Michael Schulte
La presente declaración no constituye garantía de propiedad. Se cumplirán siempre las instrucciones de
seguridad y de protección contenidas en la documentación.
I Generalidades
I.1 Sobre este manual
El presente manual describe los servomotores síncronos de la Serie DBL/DBK
(modelo estándar). Entre otras, encontrará información sobre:
� Instrucciones generales, modelo estándar de los motores Capítulo I
� Montaje, puesta en funcionamiento, planos de conexiones Capítulo II
� Datos técnicos, dimensiones y curvas características Capítulo III
� Transporte, almacenamiento, mantenimiento, eliminación Capítulo IV
El presente manual va dirigido a profesionales con conocimientos en electrotecnia y mecá-
nica.
Los motores son utilizados en el sistema de accionamiento junto con los servoamplificadores
SERVOSTAR™ 600. Por este motivo, tenga presente la totalidad de la documentación del sistema,
compuesta por:
— Instrucciones de instalación y de puesta en funcionamiento del servoamplificador
— Instrucciones de instalación y de puesta en funcionamiento de una tarjeta de ampliación
— eventualmente existente
— Manual del usuario de software de operadores del servoamplificador— Descripción técnica de la serie de motores DBL/DBK
I.2 Utilización conforme a lo prescrito
Los servomotores sincrónicos de la Serie DBL/DBK están diseñados especialmente para el accio-namiento de equipos de manipulación, maquinaria textil, máquinas-herramientas, maquinaria de
embalaje y similares con elevados requerimientos dinámicos.
Están solamente autorizados a operar en motores cumpliendo las condiciones del entorno defini-
das en la presente documentación.
Los motores de la Serie DBL/DBK está exclusivamente destinados a ser activados mediante ser-
voamplificadores digitales SERVOSTAR™ 600 regulados por velocidad y/o por par motor.
Los motores se montan como componentes de instalaciones eléctricas o maquinaria y solamente
pueden ser puestos en servicio como componentes integrados.
Nunca se podrán conectar los motores directamente a la red.
El contacto de termoprotección incorporado en el arrollamiento del motor será evaluado y compro-bado.
Garantizamos la conformidad del servosistema con los términos de la declaración del fabricante de
la página 6, solamente cuando se utilicen los componentes entregados por nosotros (servoamplifi-cador, motor, cables, etc.).
Servomotores síncronos DBL/DBK 7
Seidel 02/2002 Generalidades
I.3 Estructura de los motores
Los servomotores sincrónicos de las Series DBL/DBK son motores sin escobillas de corriente
alterna para servoaplicaciones de altas prestaciones. Conjuntamente con nuestros servoamplifica-
dores digitales son especialmente adecuados para las funciones de posicionamiento de robotsindustriales, máquinas-herramientas, líneas de transferencia, etc., con elevados requerimientos
dinámicos y de duración.
Los servomotores poseen imanes permanentes en el rotor. El material magnético Neodym permite
que estos motores puedan funcionar en condiciones dinámicas muy elevadas. En el estátor seencuentra un arrollamiento trifásico alimentado por el servoamplificador. El motor carece de esco-billas, la conmutación tiene lugar electrónicamente en el servoamplificador.
La temperatura del arrollamiento es controlada por sensores térmicos en los arrollamientos del
estátor y transmitida a través de un contacto sin potencial (contacto de reposo, DBL1: PTC/3k�).
Los motores incorporan de serie como unidad de retorno un resolver. Los servoamplificadores de
la Serie SERVOSTAR™ 600 evalúan la posición resolver del rotor y alimentan los motores con
corrientes sinusoidales.
Los motores se entregan con o sin freno de detención montado. No es posible el montaje ulterior
del freno.
Los motores están pintados de color negro mate (RAL 9005), no siendo resistente a disolventes
(Tri, diluyentes, etc.).
I.4 Datos técnicos generales
Clase de clima 3K3 según EN 50178
Temperatura ambiente 5...+40°C con altura de emplazamiento hasta 1000 m sobre el nivel del
mar
(con datos nominales) Con temperaturas ambiente superiores a 40°C
y con montaje encapsulado de los motores, tome contacto siemprecon nuestro Departamento de Aplicaciones.
Humedad autorizada 85% humedad relativa, sin formación de rocío
(con datos nominales)
Reducción de potencia 1%/K en el rango 40°C...50°C hasta 1000 m sobre el nivel del mar
(Corrientes y momentos) con alturas de emplazamiento superiores a 1000 m sobre el nivel del
mar y 40°C
6% a 2000 m sobre el nivel del mar17% a 3000 m sobre el nivel del mar
30% a 4000 m sobre el nivel del mar
55% a 5000 m sobre el nivel del mar
Sin reducción de potencia a alturas de emplazamiento superiores
a 1000 m sobre el nivel del mar y reducción de temperatura en10K / 1000m Reducción de potencia 1%/K en el rango 40°C...50°C
hasta 1000 m sobre el nivel del mar
Temperatura máxima
autorizada de la brida 65°C aprovechando los datos nominales
Vida útil de cojinetes � 20.000 horas de servicio
Datos técnicos � III
Datos de almacenamiento � IV.1
8 Servomotores síncronos DBL/DBK
Generalidades 02/2002 Seidel
I.5 Modelo estándar
I.5.1 Forma de diseño
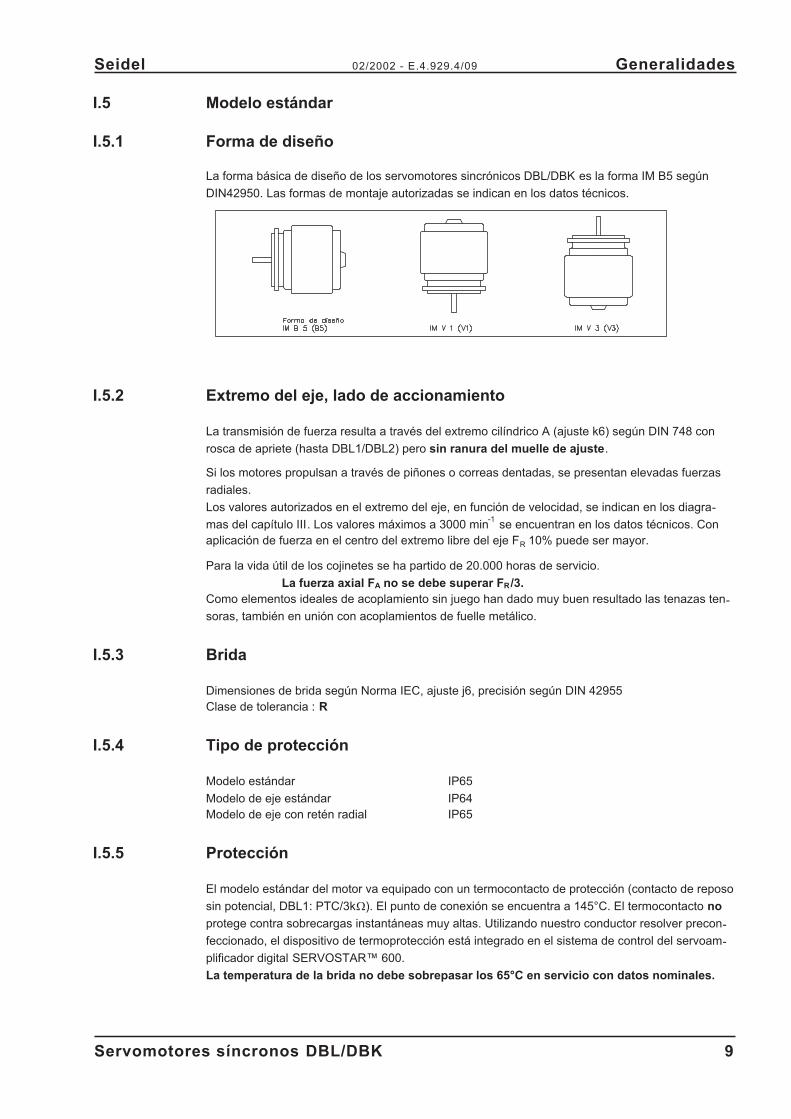
La forma básica de diseño de los servomotores sincrónicos DBL/DBK es la forma IM B5 según
DIN42950. Las formas de montaje autorizadas se indican en los datos técnicos.
I.5.2 Extremo del eje, lado de accionamiento
La transmisión de fuerza resulta a través del extremo cilíndrico A (ajuste k6) según DIN 748 con
rosca de apriete (hasta DBL1/DBL2) pero sin ranura del muelle de ajuste.
Si los motores propulsan a través de piñones o correas dentadas, se presentan elevadas fuerzas
radiales.
Los valores autorizados en el extremo del eje, en función de velocidad, se indican en los diagra-
mas del capítulo III. Los valores máximos a 3000 min-1
se encuentran en los datos técnicos. Conaplicación de fuerza en el centro del extremo libre del eje FR 10% puede ser mayor.
Para la vida útil de los cojinetes se ha partido de 20.000 horas de servicio.
La fuerza axial FA no se debe superar FR/3.Como elementos ideales de acoplamiento sin juego han dado muy buen resultado las tenazas ten-soras, también en unión con acoplamientos de fuelle metálico.
I.5.3 Brida
Dimensiones de brida según Norma IEC, ajuste j6, precisión según DIN 42955Clase de tolerancia : R
I.5.4 Tipo de protección
Modelo estándar IP65
Modelo de eje estándar IP64Modelo de eje con retén radial IP65
I.5.5 Protección
El modelo estándar del motor va equipado con un termocontacto de protección (contacto de reposo
sin potencial, DBL1: PTC/3k�). El punto de conexión se encuentra a 145°C. El termocontacto no
protege contra sobrecargas instantáneas muy altas. Utilizando nuestro conductor resolver precon-feccionado, el dispositivo de termoprotección está integrado en el sistema de control del servoam-plificador digital SERVOSTAR™ 600.
La temperatura de la brida no debe sobrepasar los 65°C en servicio con datos nominales.
Servomotores síncronos DBL/DBK 9
Seidel 02/2002 - E.4.929.4/09 Generalidades
I.5.6 Clase de material aislante
Los motores cumplen con la clase F de materiales aislantes según DIN 57530.
I.5.7 Calidad vibracional
Los motores se fabrican con el factor N de calidad vibracional según DIN ISO 2373.
I.5.8 Técnica de conexión
Serie de motor Resolver Potencia
DBL1 Cable CableDBL2..DBL6, DBK Enchufe Enchufe
DBL7, DBL8 Enchufe Cajetín del terminal
Los contraenchufes no están incluidos en el volumen de entrega. Ofrecemos conductores resolvery conductores de potencia confeccionados listos para su montaje. En el capítulo II.2.1 se encuen-tran indicaciones sobre los materiales de conductores.
I.5.9 Unidad de retorno
Los motores están equipados en su versión estándar con resolver bipolares de eje hueco. Opcio-nalmente, los motores (menos el DBL1) se pueden suministrar también con codificador EnDat sin-gle (ECN 1313) o multiturn (EQN 1325) integrado. (DBL2: ECN 1113 / EQN 1125)
La longitud del motor varía con el codificador montado. No es posible el montaje ulterior.
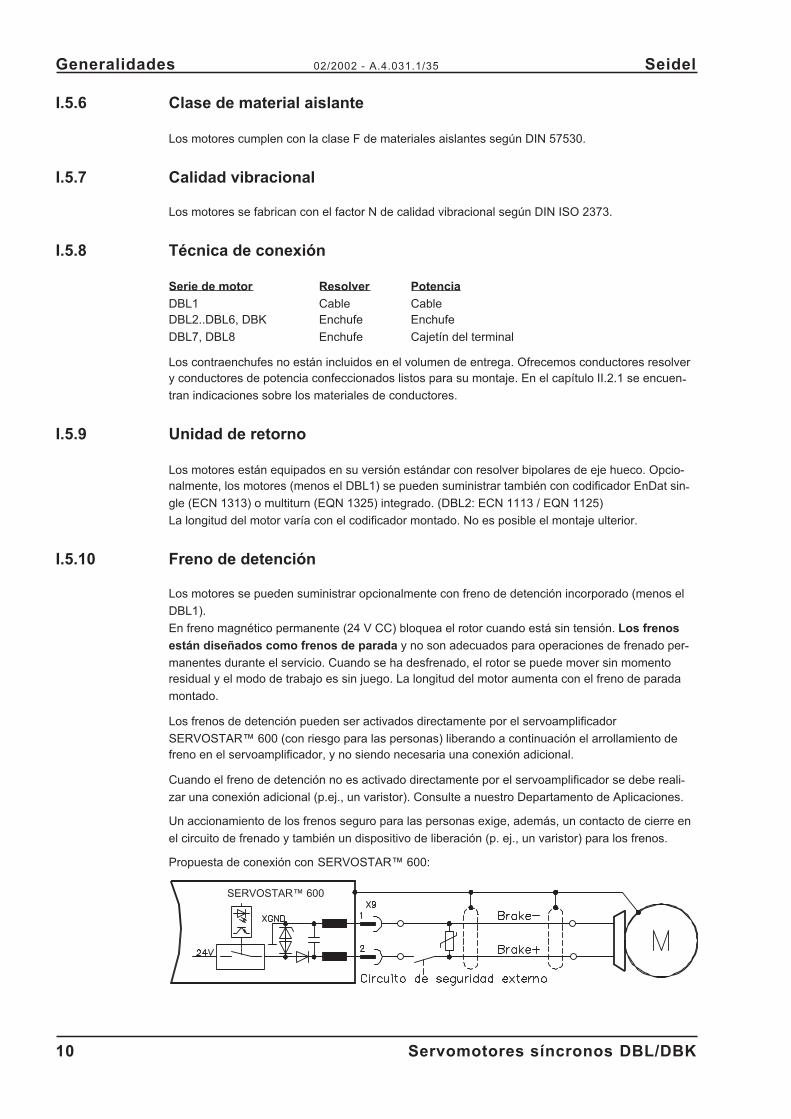
I.5.10 Freno de detención
Los motores se pueden suministrar opcionalmente con freno de detención incorporado (menos el
DBL1).
En freno magnético permanente (24 V CC) bloquea el rotor cuando está sin tensión. Los frenos
están diseñados como frenos de parada y no son adecuados para operaciones de frenado per-
manentes durante el servicio. Cuando se ha desfrenado, el rotor se puede mover sin momentoresidual y el modo de trabajo es sin juego. La longitud del motor aumenta con el freno de parada
montado.
Los frenos de detención pueden ser activados directamente por el servoamplificador
SERVOSTAR™ 600 (con riesgo para las personas) liberando a continuación el arrollamiento defreno en el servoamplificador, y no siendo necesaria una conexión adicional.
Cuando el freno de detención no es activado directamente por el servoamplificador se debe reali-
zar una conexión adicional (p.ej., un varistor). Consulte a nuestro Departamento de Aplicaciones.
Un accionamiento de los frenos seguro para las personas exige, además, un contacto de cierre en
el circuito de frenado y también un dispositivo de liberación (p. ej., un varistor) para los frenos.
Propuesta de conexión con SERVOSTAR™ 600:
10 Servomotores síncronos DBL/DBK
Generalidades 02/2002 - A.4.031.1/35 Seidel
SERVOSTAR™ 600
I.6 Opciones
— Freno de detención
Freno de detención integrado en el motor (� I.5.10).
Por el freno de detención aumenta la longitud del motor.
— Retén radial
Retén radial contra vapor de aceite y salpicaduras de aceite.
La clase de protección del eje se incrementa así a IP65.
El retén no es adecuado para marcha en seco.Con el freno de detención montado, la longitud del motor aumenta por el retén en unos
10 mm.
— Casquillos verticales de montaje
Los motores pueden ser suministrados también con casquillos verticales de montaje,siempre que de serie estén equipados con casquillos de montaje en ángulo para
conexiones de potencia /resolver.
— Muelles de ajusteLos motores se pueden entregar con ranuras y muelles de ajuste montados según DIN 748.
El equilibrado del rotor se realiza con medio muelle de ajuste.
— EnDat
Se encuentra montado un codificador EnDat de alta resolución en lugar del resolver
(�I.5.9).
La longitud del motor aumenta con el codificador montado
— 2. TermocontactoEn el arrollamiento del motor se puede montar un termocontacto protección adicional.
La conexión se realiza a través del enchufe del motor o del cajetín del terminal.
— Ventilación forzada
Para algunos motores se pueden suministrar campanas de ventilador, con las cuales losmotores son sometidos a ventilación forzada eléctrica. La conexión del ventilador se realiza
mediante un enchufe angular de 6 polos. Debido a la ventilación, se modifican los datos
nominales y las dimensiones del motor.
Consulte a nuestro Departamento de Aplicaciones.
No todas las opciones se pueden montar ulteriormente.
I.7 Criterios de selección
Los servomotores de corriente alterna están dimensionados para el servicio en los servoamplifica-
dores de la Serie SERVOSTAR™ 600. Ambas unidades forman conjuntamente un circuito cerradode regulación de momentos o de velocidad.
Los principales criterios de selección son:
— Momento de parada M0 [Nm]
— Velocidad nominal con tensión nominal nn [min-1]
— Momentos de inercia de motor y carga J [kgcm²]
— Momento efectivo (calculado) Mrms [Nm]
En el cálculo de los motores y servoamplificadores necesarios, tenga presente la carga estática y
la carga dinámica (aceleración/frenado). Nuestro Departamento de Aplicaciones proporcionará las
fórmulas y ejemplos de cálculo correspondientes.
Servomotores síncronos DBL/DBK 11
Seidel 02/2002 Generalidades
I.7.1 Código de modelo
El código de modelos se describe sólo en términos generales. Como información para pedidos es
suficiente la denominación del motor de 10 números (AAA....), siempre que se describa en el texto
el equipo que difiere del modelo estándar.
Ejemplo: Texto del pedido: DBL4H00260
con freno de detención y codificador Multiturn Endat
El fabricante generará entonces el correcto código de modelo completo:
DBL4H00260 - 01 3M 00 00 00 00 0 - 00285E
Descripción de cada una de las posiciones del código de modelo:
AAAAAAAAA - BB CC DD EE FF GG H - KKKKKK
Abreviaturas Nº de cifras Denominación Contenido
AAAAAAAAAA 10 Denominación del motorDenominación del motor estándar sin tener encuenta las opciones
- 1 -BB 2 Freno 00 para standardCC 2 Feedback 02 para standardDD 2 Conexión Feedback/Potencia 00 para standardEE 2 Forma del eje 00 para standardFF 2 Termoprotección 00 para standardGG 2 Tipo de protección 00 para standardH 1 Ventilación 00 para standard- 1 -
KKKKKK 6 Nº de motorNº con el que el motor está guardado en la basede datos de motores del variable TIPO.
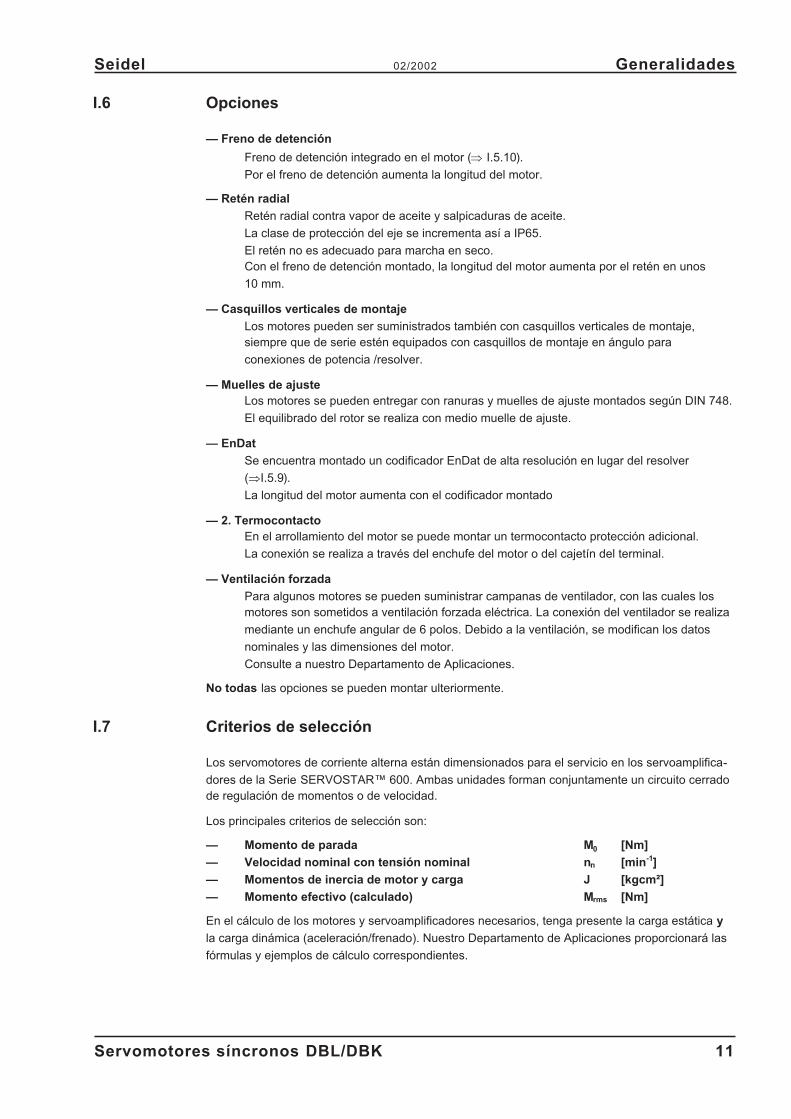
I.7.2 Placa de identificación
12 Servomotores síncronos DBL/DBK
Generalidades 02/2002 - A.4.028.6/44 Seidel
Danaher Motion
www.danaher-motion.com
Typ
Mo Isol.Kl. IPNm
Io Pn U/min V@A kW
Número de serieModelo de servomotor
Corriente de parada
Clase de aislamientoTipo de
protecciónPar motor de parada
Potencia nominalVelocidad
nominal
Tensión nominal
de la red
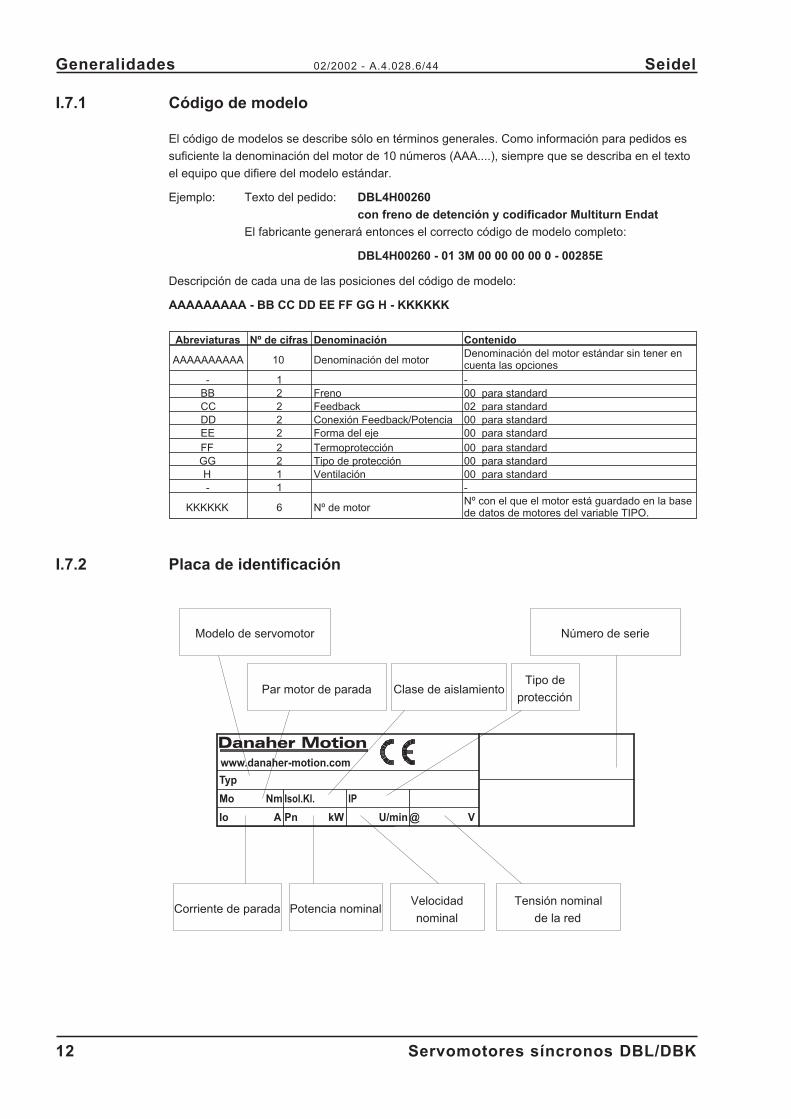
II Montaje/Puesta en funcionamiento
II.1 Instrucciones importantes
� Compruebe la correspondencia entre el servoamplificador y el motor. Compare la tensión
nominal y la corriente nominal de los aparatos. Realice el cableado conforme al cuadro de
conexiones de las Instrucciones de instalación y de puesta en funcionamiento del servoam-
plificador. Las conexiones del motor se encuentran en la páginas 17f. En la página 16 en-
contrará observaciones sobre las técnicas de conexión.
� Asegúrese de que la toma de tierra del servoamplificador y del motor esté perfectamente
instalada.
� Tienda los cables de potencia y de control suficientemente espaciados (distancia > 20 cm).
Así mejorará la compatibilidad electromagnética del sistema. Utilizando un cale de potencia
del motor con conductores de mando de freno integrados, estos deberán estar apantalla-
dos. La pantalla estará dispuesta por ambos lados (véase manual de instalación del ser-
voamplificador).
� Realice el tendido de todos las conducciones de alta tensión con sección suficiente según
EN 60204. En los datos técnicos se incluyen las secciones recomendadas.
¡Atención!
Si utiliza un servoamplificador SERVOSTAR™ 601 ..620 y el cable del motor tiene más
de 25 m de largo, deberá conectar una caja de estrangulación del motor (tipo 3YL-xx,
marca Kollmorgen Seidel) al cable del motor, utilizando un cable del motor con las si-
guientes secciones:
ServoamplificadorCaja de estran-gulación
Sección máxima del cable del motor
SERVOSTAR™ 601...606 3YL-20 4 x 1mm²SERVOSTAR™ 610 3YL-20 4 x 1,5mm²SERVOSTAR™ 620 3YL-20 4 x 2,5 mm²
� Realice apantallamientos de gran superficie (baja resistencia) a través de cajas de enchufe
metalizadas, o bien, de uniones de cable roscadas compatibles electromagnéticamente.
� Controle las cargas radiales y axiales autorizadas FR y FA. Utilizando un accionamiento por
correa dentada, el diámetro mínimo autorizado del piñón se obtiene según la ecuación si-
guiente: dM
FRmin � 0 2.
� Procure la suficiente evacuación del calor en el entorno y en la brida del motor para no su-perar la temperatura máxima autorizada de 65 °C en la brida del motor.
Precaución
No manipule nunca las conexiones eléctricas de los motores cuando se encuentren
bajo tensión.
Las cargas residuales en los condensadores del servoamplificador pueden presentar
valores peligrosos incluso hasta 5 minutos después de desconectar de la red.
Mida la tensión en el circuito intermedio y espere hasta que haya descendido por de-
bajo de 40 V.
Las conexiones de control y de potencia pueden provocar tensión, incluso aunque el
motor no esté girando.
Servomotores síncronos DBL/DBK 13
Seidel 02/2002 Montaje/Puesta en funcionamiento
II.2 Montaje / Cableado
Solamente los profesionales con conocimientos de mecánica están autorizados a montar el
motor.
Solamente los profesionales con conocimientos de electrotecnia están autorizados a
cablear el motor.
El procedimiento se describe a título de ejemplo. Dependiendo del tipo de puesta en servicio de losaparatos puede ser adecuado o necesario un procedimiento u otro.
¡Atención!
Proteja los motores contra esfuerzos excesivos.
Especialmente durante el transporte y la manipulación, no se deberán doblar componentes,
ni modificar las distancias de aislamiento.
El montaje y cableado de los motores se realizará siempre sin tensión, es decir, ninguna de
las tensiones de servicio del aparato a conectar deberá estar activada.
Asegúrese de que la desconexión del armario de distribución sea segura (bloqueo, rótulos
de advertencia, etc.). Las diferentes tensiones se conectarán en la primera puesta en funcio-
namiento.
¡Nota!
El símbolo de masa�, que se encuentra en todos los planos de conexión, indica que
debe asegurarse de realizar una conexión en el armario de distribución con la mayor super-
ficie posible conductora de electricidad, entre el aparato que lleva la indicación y la placa de
montaje. Esta conexión hará posible la derivación de interferencias de alta frecuencia y no
debe confundirse con la marca PE (medida de protección según EN 60204).
Respete también las indicaciones en los planos de conexión de las Instrucciones de instala-
ción y de puesta en funcionamiento del servoamplificador utilizado.
14 Servomotores síncronos DBL/DBK
Montaje/Puesta en funcionamiento 02/2002 Seidel
Las indicaciones siguientes facilitarán la secuencia lógica de las operaciones de montaje y cableado, evi-
tando omitir operaciones importantes.
El lugar de instalación se encontrará libre de materiales conductores y agresi-
vos.
Durante el montaje del V3 (extremo del eje hacia arriba), ponga atención a
que no penetren líquidos en los cojinetes. Antes de realizar el montaje encap-
sulado, consulte a nuestro Departamento de Aplicaciones.
Asegúrese de la ventilación sin obstáculos de los motores, respetando la tem-
peratura ambiente y la temperatura de la brida. Con temperaturas superiores
a 40 °C, consulte previamente con nuestro Departamento de Aplicaciones.
Durante el montaje cuide de que el motor no quede fijado con excesivos es-
fuerzos mecánicos.
Selecciones los cables conforme a EN 60204.
Con longitud de cable > 25 m, consulte la tabla en el capítulo II.1.
Véanse la adecuada protección de compatibilidad electromagnética y de
puesta a tierra en las Instrucciones de instalación del servoamplificador utili-zado. Ponga a tierra la placa de montaje y el bloque del motor.
Las indicaciones sobre las técnicas de conexión se encuentran en el capítulo
II.2.1.
— Tienda los cables de potencia y de control bien separados
— Conecte el resolver y el codificador
— Conecte los cables del motor cerca del servoamplificador,
— apantallamientos a ambos lados en bornes de protección o en el enchufe
— de compatibilidad electromagnética
— Conecta el freno de detención, si está montado.
— Coloque el apantallamiento a ambos lados
Compruebe finalmente el cableado realizado conforme a los planos de cone-
xión utilizados
Servomotores síncronos DBL/DBK 15
Seidel 02/2002 Montaje/Puesta en funcionamiento
Lugar de instalación
Ventilación
Montaje
Toma de tierraProtección
Selección delconductor
Comprobación
Cableado
II.2.1 Conexión de los motores
� Realice el cableado cumpliendo los reglamentos y normas vigentes.
� Para las conexiones de potencia y de retorno, utilice exclusivamente nuestras conduccionespreconfeccionadas y protegidas.
� Coloque los apantallamientos en la forma indicada en las figuras de las Instrucciones de
instalación de los servoamplificadores.
� Los apantallamientos mal colocados producen siempre a interferencias electromagnéticas.
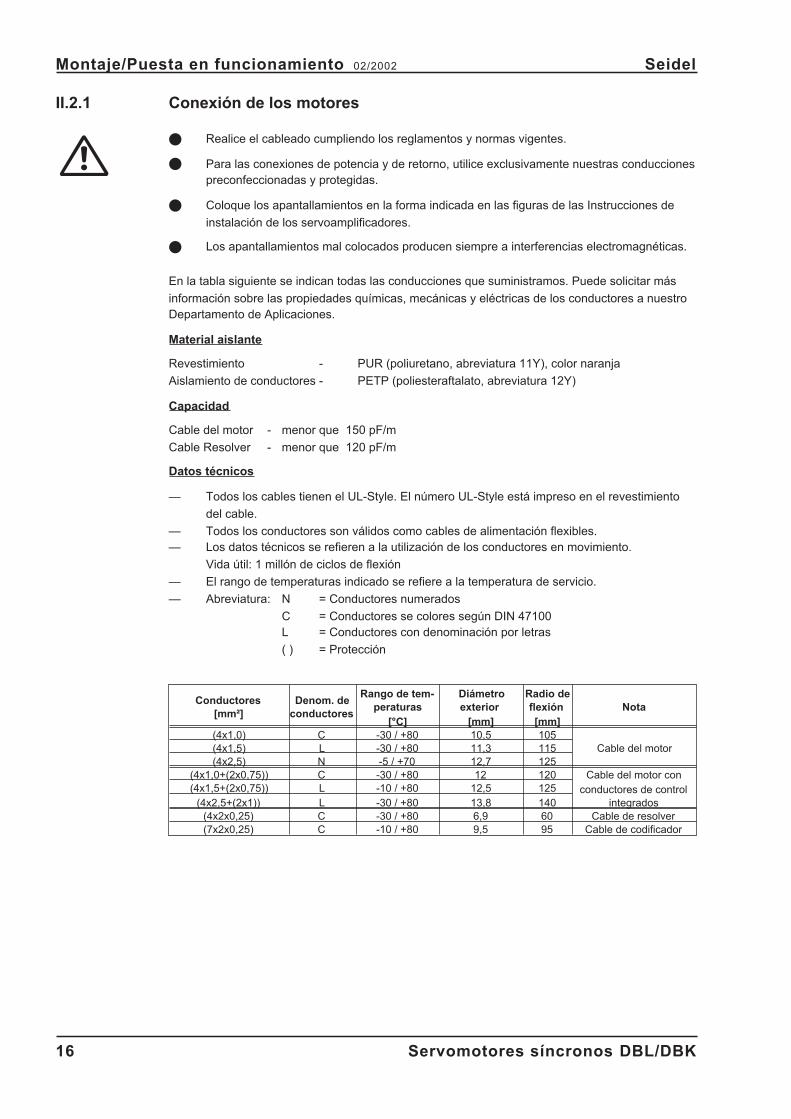
En la tabla siguiente se indican todas las conducciones que suministramos. Puede solicitar más
información sobre las propiedades químicas, mecánicas y eléctricas de los conductores a nuestroDepartamento de Aplicaciones.
Material aislante
Revestimiento - PUR (poliuretano, abreviatura 11Y), color naranja
Aislamiento de conductores - PETP (poliesteraftalato, abreviatura 12Y)
Capacidad
Cable del motor - menor que 150 pF/m
Cable Resolver - menor que 120 pF/m
Datos técnicos
— Todos los cables tienen el UL-Style. El número UL-Style está impreso en el revestimiento
del cable.
— Todos los conductores son válidos como cables de alimentación flexibles.— Los datos técnicos se refieren a la utilización de los conductores en movimiento.
Vida útil: 1 millón de ciclos de flexión
— El rango de temperaturas indicado se refiere a la temperatura de servicio.
— Abreviatura: N = Conductores numerados
C = Conductores se colores según DIN 47100L = Conductores con denominación por letras
( ) = Protección
Conductores[mm²]
Denom. deconductores
Rango de tem-peraturas
[°C]
Diámetroexterior
[mm]
Radio deflexión[mm]
Nota
(4x1,0) C -30 / +80 10,5 105Cable del motor(4x1,5) L -30 / +80 11,3 115
(4x2,5) N -5 / +70 12,7 125(4x1,0+(2x0,75)) C -30 / +80 12 120 Cable del motor con
conductores de controlintegrados
(4x1,5+(2x0,75)) L -10 / +80 12,5 125(4x2,5+(2x1)) L -30 / +80 13,8 140
(4x2x0,25) C -30 / +80 6,9 60 Cable de resolver(7x2x0,25) C -10 / +80 9,5 95 Cable de codificador
16 Servomotores síncronos DBL/DBK
Montaje/Puesta en funcionamiento 02/2002 Seidel

II.2.1.1 Conexión de motores con resolver
Servomotores síncronos DBL/DBK 17
Seidel 02/2002 - A.4.043.1/01Montaje/Puesta en funcionamiento
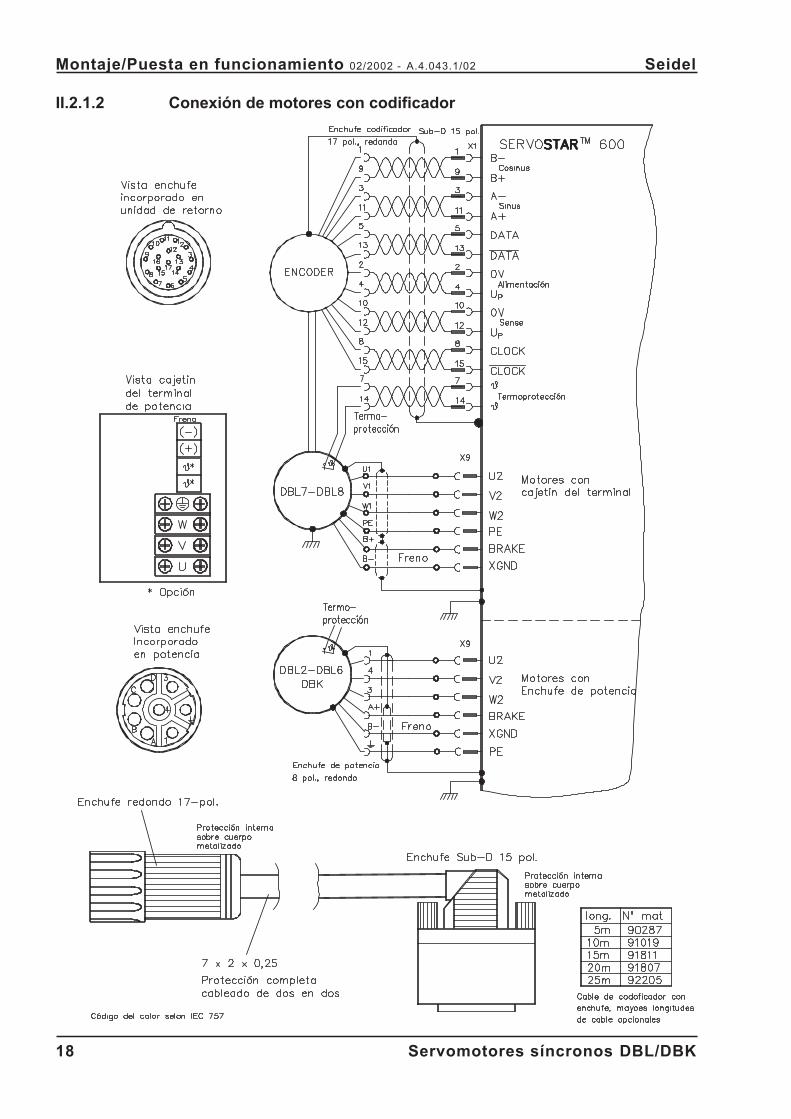
II.2.1.2 Conexión de motores con codificador
18 Servomotores síncronos DBL/DBK
Montaje/Puesta en funcionamiento 02/2002 - A.4.043.1/02 Seidel
II.3 Puesta en funcionamiento
A continuación se describe el procedimiento de puesta en funcionamiento, a título de ejemplo.
Según el modo de operación de los equipos, también podría ser preciso otro procedimiento.
Solamente los profesionales con amplios conocimientos de electrotecnia y de técnicas de acciona-miento están autorizados a la puesta en funcionamiento del conjunto servoamplificador-motor.
¡Atención!
Compruebe que todas las piezas de conexión que conducen tensión estén protegidas con-
tra cualquier posible contacto. Se producen tensiones peligrosas de hasta 900V.
No manipule nunca las conexiones eléctricas de los motores cuando se encuentren bajo
tensión. Las cargas residuales en los condensadores del servoamplificador pueden presen-
tar valores peligrosos incluso hasta 5 minutos después de desconectar de la red.
La temperatura de la superficie del motor puede alcanzar 100 °C durante el servicio. Com-
pruebe (mida) la temperatura del motor. Espere a que la temperatura haya descendido a 40
°C antes de tocar el motor con las manos.
Asegúrese de que, incluso con movimientos involuntarios del motor, no puedan existir peli-
gros para las personas y para la máquina.
� Compruebe el montaje y la alineación del motor.
� Compruebe el firme asiento de los elementos de salida de fuerza (acoplamiento, engranaje,
polea de la correa) así como el ajuste correcto (respetar las fuerzas radiales y axiales auto-
rizadas).
� Compruebe el cableado y las conexiones del motor y del servoamplificador. Compruebe la
correcta puesta a tierra.
� Compruebe el funcionamiento del freno de detención, si está montado. (conectar 24V, el
freno se debe soltar).
� Compruebe si el rotor del motor gira libremente (soltar primero el freno, si está montado).Compruebe si se escuchan ruidos de fricción.
� Compruebe si se han tomado todas las medidas de protección contra contactos para las
piezas móviles y las conductoras de tensión.
� Realice todas las comprobaciones específicas y necesarias para su equipo.
� Conforme a las Instrucciones de puesta en funcionamiento del servoamplificador, pongaahora en marcha el accionamiento.
� En sistemas de varios ejes, ponga en marcha, una a una, cada una de las unidades de ac-
cionamiento servoamplificador-motor.
Servomotores síncronos DBL/DBK 19
Seidel 02/2002 Montaje/Puesta en funcionamiento

Esta página se ha dejado en blanco intencionadamente.
20 Servomotores síncronos DBL/DBK
Montaje/Puesta en funcionamiento 02/2002 Seidel
III Datos técnicos
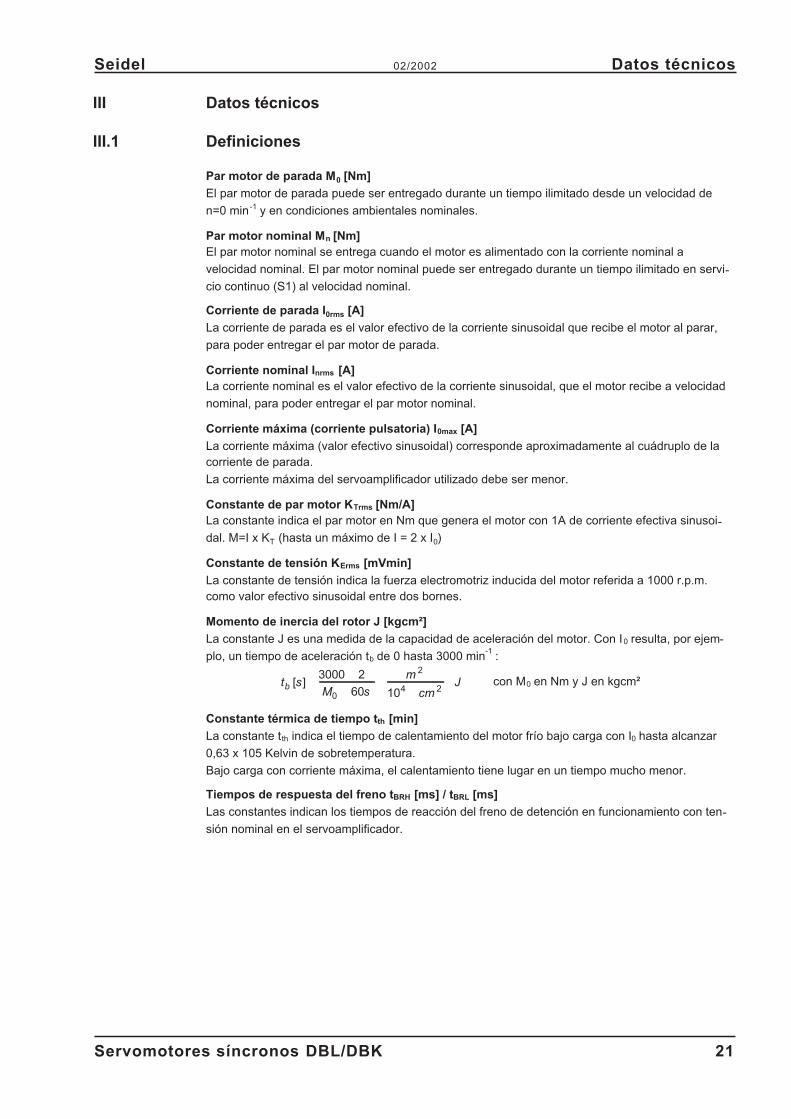
III.1 Definiciones
Par motor de parada M0 [Nm]
El par motor de parada puede ser entregado durante un tiempo ilimitado desde un velocidad de
n=0 min-1 y en condiciones ambientales nominales.
Par motor nominal Mn [Nm]El par motor nominal se entrega cuando el motor es alimentado con la corriente nominal a
velocidad nominal. El par motor nominal puede ser entregado durante un tiempo ilimitado en servi-cio continuo (S1) al velocidad nominal.
Corriente de parada I0rms [A]
La corriente de parada es el valor efectivo de la corriente sinusoidal que recibe el motor al parar,
para poder entregar el par motor de parada.
Corriente nominal Inrms [A]La corriente nominal es el valor efectivo de la corriente sinusoidal, que el motor recibe a velocidad
nominal, para poder entregar el par motor nominal.
Corriente máxima (corriente pulsatoria) I0max [A]
La corriente máxima (valor efectivo sinusoidal) corresponde aproximadamente al cuádruplo de lacorriente de parada.
La corriente máxima del servoamplificador utilizado debe ser menor.
Constante de par motor KTrms [Nm/A]La constante indica el par motor en Nm que genera el motor con 1A de corriente efectiva sinusoi-dal. M=I x KT (hasta un máximo de I = 2 x I0)
Constante de tensión KErms [mVmin]
La constante de tensión indica la fuerza electromotriz inducida del motor referida a 1000 r.p.m.como valor efectivo sinusoidal entre dos bornes.
Momento de inercia del rotor J [kgcm²]
La constante J es una medida de la capacidad de aceleración del motor. Con I0 resulta, por ejem-
plo, un tiempo de aceleración tb de 0 hasta 3000 min-1
:
t sM s
m
cmJb [ ]
3000 2
60 100
2
4 2con M0 en Nm y J en kgcm²
Constante térmica de tiempo tth [min]
La constante tth indica el tiempo de calentamiento del motor frío bajo carga con I0 hasta alcanzar
0,63 x 105 Kelvin de sobretemperatura.
Bajo carga con corriente máxima, el calentamiento tiene lugar en un tiempo mucho menor.
Tiempos de respuesta del freno tBRH [ms] / tBRL [ms]
Las constantes indican los tiempos de reacción del freno de detención en funcionamiento con ten-
sión nominal en el servoamplificador.
Servomotores síncronos DBL/DBK 21
Seidel 02/2002 Datos técnicos
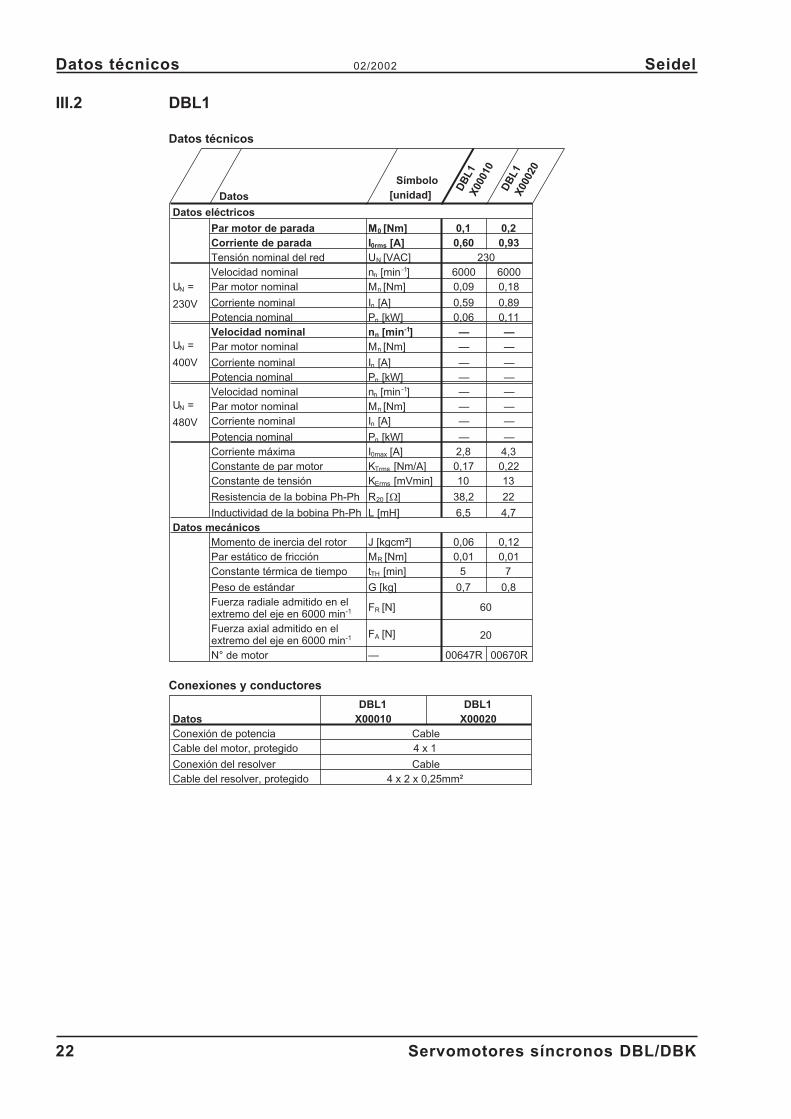
III.2 DBL1
Datos técnicos
Datos
Símbolo[unidad]
DB
L1X
0001
0
DB
L1X
0002
0
Datos eléctricos
Par motor de parada M0 [Nm] 0,1 0,2Corriente de parada I0rms [A] 0,60 0,93Tensión nominal del red UN [VAC] 230
UN =
230V
Velocidad nominal nn [min-1] 6000 6000Par motor nominal Mn [Nm] 0,09 0,18
Corriente nominal In [A] 0,59 0,89Potencia nominal Pn [kW] 0,06 0,11
UN =
400V
Velocidad nominal nn [min-1] — —Par motor nominal Mn [Nm] — —
Corriente nominal In [A] — —Potencia nominal Pn [kW] — —
UN =
480V
Velocidad nominal nn [min-1] — —Par motor nominal Mn [Nm] — —Corriente nominal In [A] — —
Potencia nominal Pn [kW] — —Corriente máxima I0max [A] 2,8 4,3Constante de par motor KTrms [Nm/A] 0,17 0,22Constante de tensión KErms [mVmin] 10 13
Resistencia de la bobina Ph-Ph R20 [�] 38,2 22
Inductividad de la bobina Ph-Ph L [mH] 6,5 4,7Datos mecánicos
Momento de inercia del rotor J [kgcm²] 0,06 0,12Par estático de fricción MR [Nm] 0,01 0,01Constante térmica de tiempo tTH [min] 5 7
Peso de estándar G [kg] 0,7 0,8Fuerza radiale admitido en elextremo del eje en 6000 min-1 FR [N] 60
Fuerza axial admitido en elextremo del eje en 6000 min-1 FA [N] 20
N° de motor — 00647R 00670R
Conexiones y conductores
DatosDBL1
X00010DBL1
X00020Conexión de potencia CableCable del motor, protegido 4 x 1
Conexión del resolver CableCable del resolver, protegido 4 x 2 x 0,25mm²
22 Servomotores síncronos DBL/DBK
Datos técnicos 02/2002 Seidel
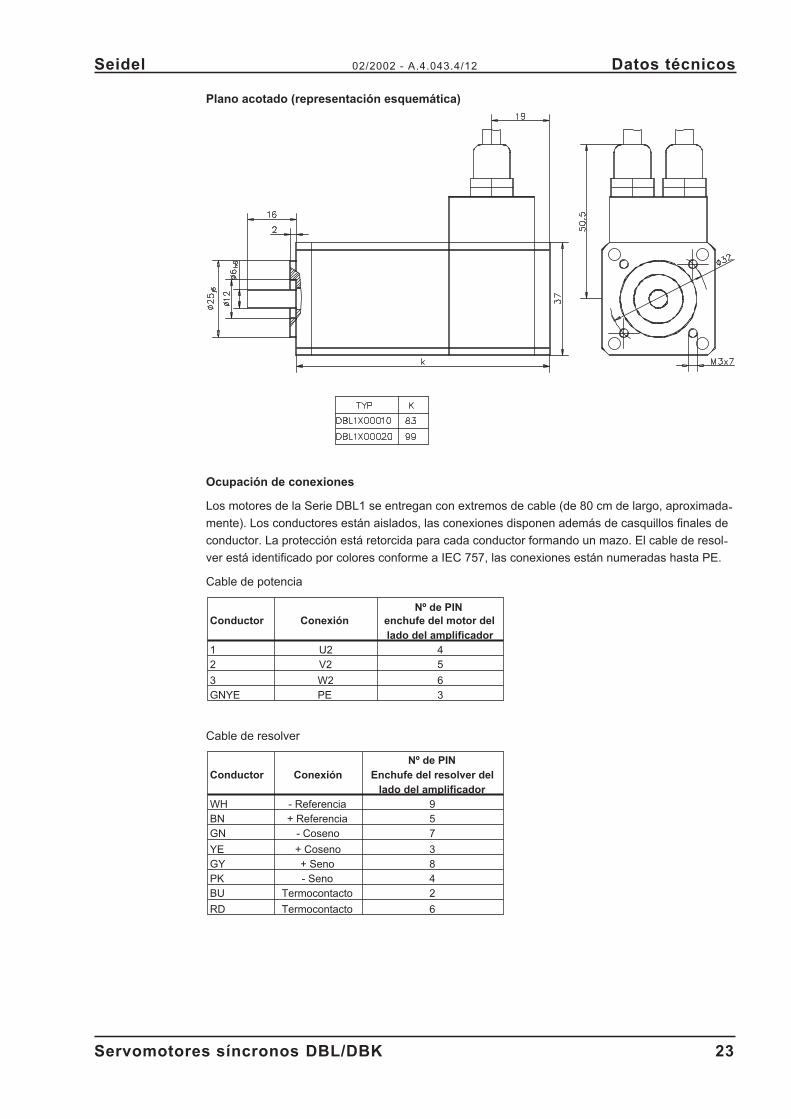
Plano acotado (representación esquemática)
Ocupación de conexiones
Los motores de la Serie DBL1 se entregan con extremos de cable (de 80 cm de largo, aproximada-mente). Los conductores están aislados, las conexiones disponen además de casquillos finales de
conductor. La protección está retorcida para cada conductor formando un mazo. El cable de resol-ver está identificado por colores conforme a IEC 757, las conexiones están numeradas hasta PE.
Cable de potencia
Conductor ConexiónNº de PIN
enchufe del motor dellado del amplificador
1 U2 42 V2 5
3 W2 6GNYE PE 3
Cable de resolver
Conductor ConexiónNº de PIN
Enchufe del resolver dellado del amplificador
WH - Referencia 9BN + Referencia 5GN - Coseno 7
YE + Coseno 3GY + Seno 8PK - Seno 4BU Termocontacto 2
RD Termocontacto 6
Servomotores síncronos DBL/DBK 23
Seidel 02/2002 - A.4.043.4/12 Datos técnicos
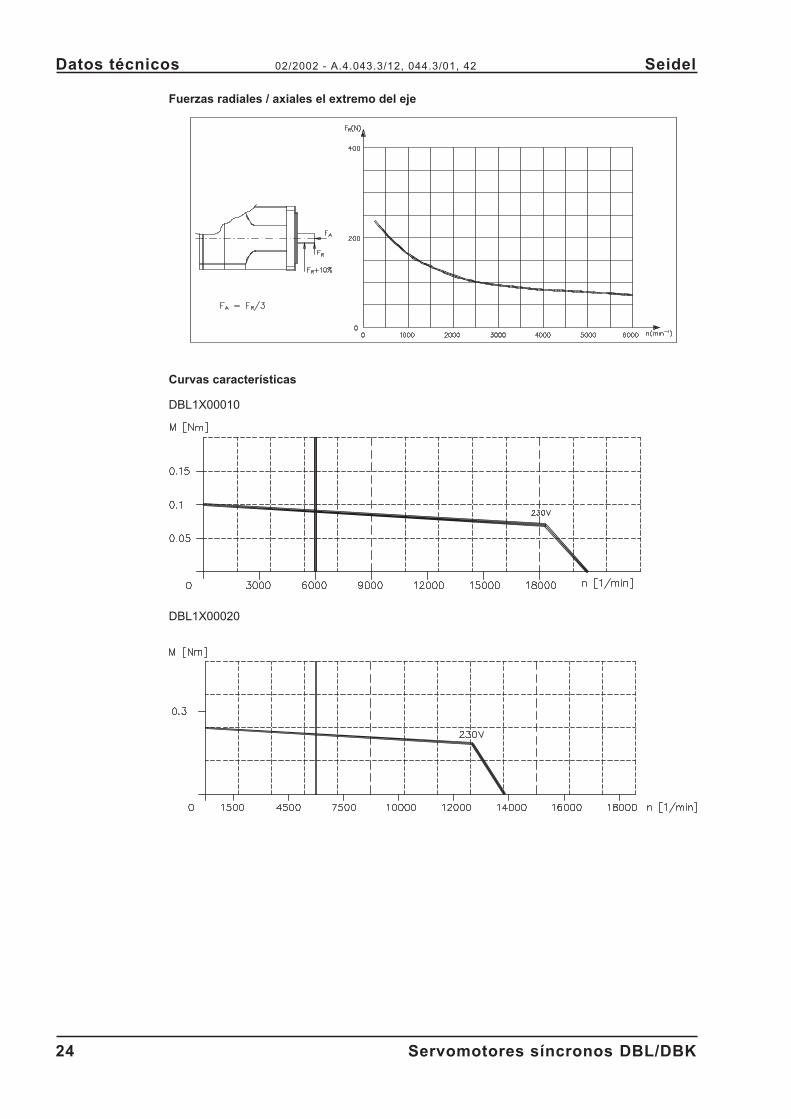
Fuerzas radiales / axiales el extremo del eje
Curvas características
DBL1X00010
DBL1X00020
24 Servomotores síncronos DBL/DBK
Datos técnicos 02/2002 - A.4.043.3/12, 044.3/01, 42 Seidel

Esta página se ha dejado en blanco intencionadamente.
Servomotores síncronos DBL/DBK 25
Seidel 02/2002 Datos técnicos
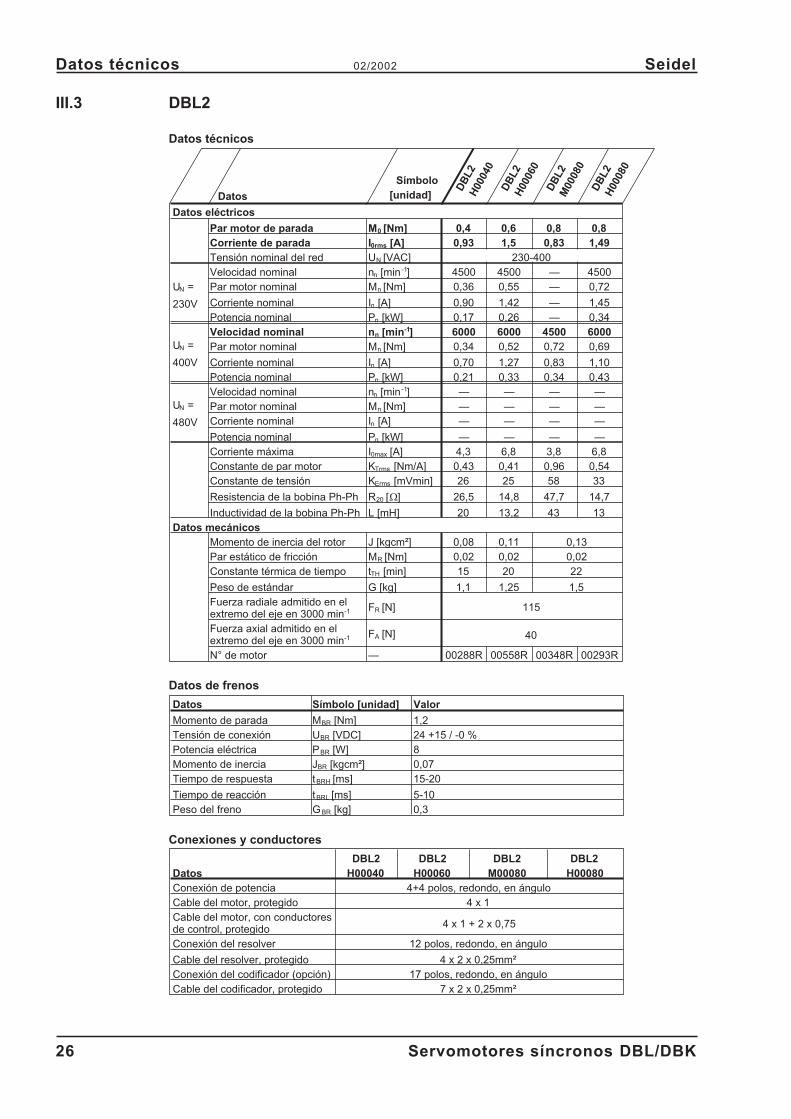
III.3 DBL2
Datos técnicos
Datos
Símbolo[unidad]
DB
L2H
0004
0
DB
L2H
0006
0
DB
L2M
0008
0
DB
L2H
0008
0
Datos eléctricos
Par motor de parada M0 [Nm] 0,4 0,6 0,8 0,8Corriente de parada I0rms [A] 0,93 1,5 0,83 1,49Tensión nominal del red UN [VAC] 230-400
UN =
230V
Velocidad nominal nn [min-1] 4500 4500 — 4500Par motor nominal Mn [Nm] 0,36 0,55 — 0,72
Corriente nominal In [A] 0,90 1,42 — 1,45Potencia nominal Pn [kW] 0,17 0,26 — 0,34
UN =
400V
Velocidad nominal nn [min-1] 6000 6000 4500 6000Par motor nominal Mn [Nm] 0,34 0,52 0,72 0,69
Corriente nominal In [A] 0,70 1,27 0,83 1,10Potencia nominal Pn [kW] 0,21 0,33 0,34 0,43
UN =
480V
Velocidad nominal nn [min-1] — — — —Par motor nominal Mn [Nm] — — — —Corriente nominal In [A] — — — —
Potencia nominal Pn [kW] — — — —Corriente máxima I0max [A] 4,3 6,8 3,8 6,8Constante de par motor KTrms [Nm/A] 0,43 0,41 0,96 0,54Constante de tensión KErms [mVmin] 26 25 58 33
Resistencia de la bobina Ph-Ph R20 [�] 26,5 14,8 47,7 14,7
Inductividad de la bobina Ph-Ph L [mH] 20 13,2 43 13Datos mecánicos
Momento de inercia del rotor J [kgcm²] 0,08 0,11 0,13Par estático de fricción MR [Nm] 0,02 0,02 0,02Constante térmica de tiempo tTH [min] 15 20 22
Peso de estándar G [kg] 1,1 1,25 1,5Fuerza radiale admitido en elextremo del eje en 3000 min-1 FR [N] 115
Fuerza axial admitido en elextremo del eje en 3000 min-1 FA [N] 40
N° de motor — 00288R 00558R 00348R 00293R
Datos de frenos
Datos Símbolo [unidad] Valor
Momento de parada MBR [Nm] 1,2Tensión de conexión UBR [VDC] 24 +15 / -0 %Potencia eléctrica PBR [W] 8Momento de inercia JBR [kgcm²] 0,07Tiempo de respuesta tBRH [ms] 15-20
Tiempo de reacción tBRL [ms] 5-10Peso del freno GBR [kg] 0,3
Conexiones y conductores
DatosDBL2
H00040DBL2
H00060DBL2
M00080DBL2
H00080Conexión de potencia 4+4 polos, redondo, en ánguloCable del motor, protegido 4 x 1Cable del motor, con conductoresde control, protegido 4 x 1 + 2 x 0,75
Conexión del resolver 12 polos, redondo, en ángulo
Cable del resolver, protegido 4 x 2 x 0,25mm²Conexión del codificador (opción) 17 polos, redondo, en ánguloCable del codificador, protegido 7 x 2 x 0,25mm²
26 Servomotores síncronos DBL/DBK
Datos técnicos 02/2002 Seidel
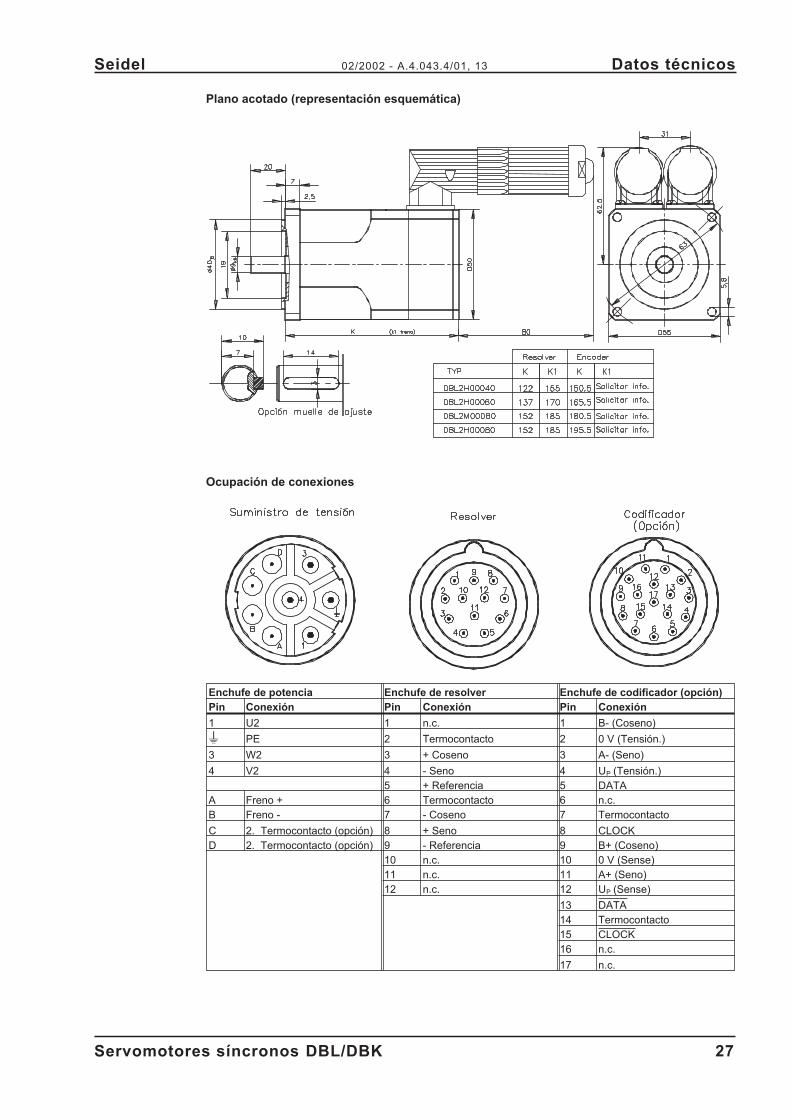
Plano acotado (representación esquemática)
Ocupación de conexiones
Enchufe de potencia Enchufe de resolver Enchufe de codificador (opción)Pin Conexión Pin Conexión Pin Conexión
1 U2 1 n.c. 1 B- (Coseno)
� PE 2 Termocontacto 2 0 V (Tensión.)
3 W2 3 + Coseno 3 A- (Seno)
4 V2 4 - Seno 4 UP (Tensión.)5 + Referencia 5 DATA
A Freno + 6 Termocontacto 6 n.c.B Freno - 7 - Coseno 7 Termocontacto
C 2. Termocontacto (opción) 8 + Seno 8 CLOCKD 2. Termocontacto (opción) 9 - Referencia 9 B+ (Coseno)
10 n.c. 10 0 V (Sense)11 n.c. 11 A+ (Seno)12 n.c. 12 UP (Sense)
13 DATA14 Termocontacto15 CLOCK16 n.c.
17 n.c.
Servomotores síncronos DBL/DBK 27
Seidel 02/2002 - A.4.043.4/01, 13 Datos técnicos
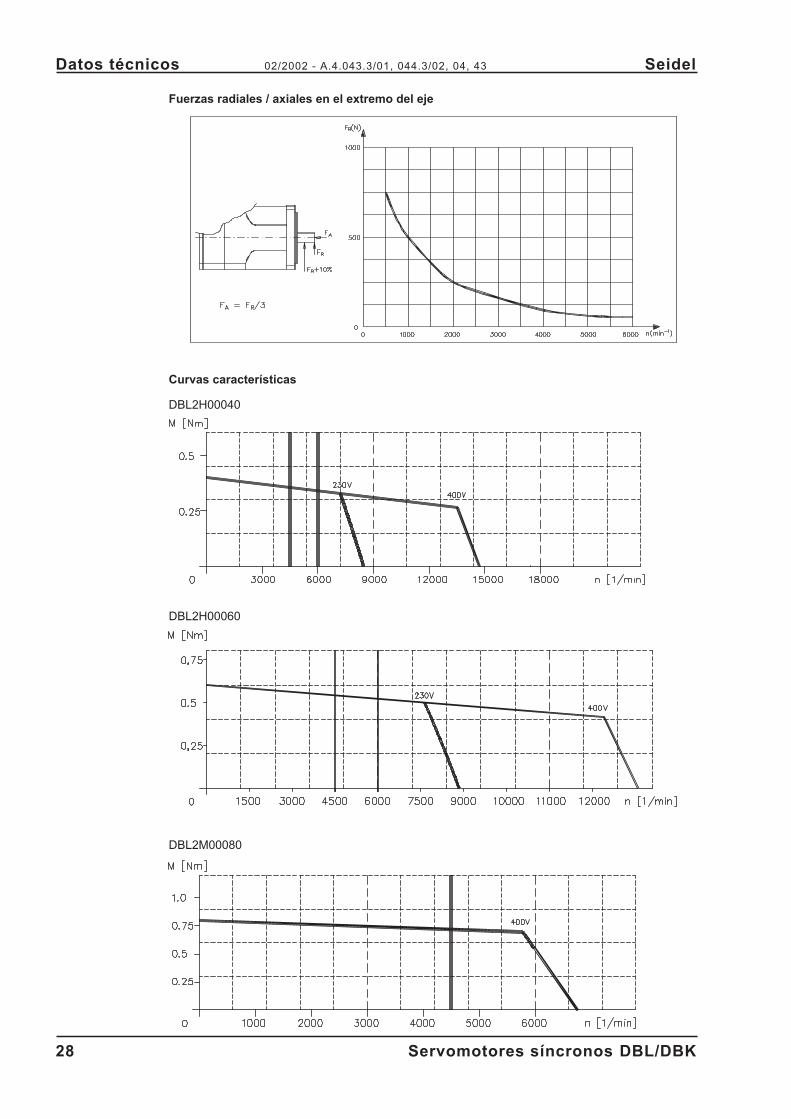
Fuerzas radiales / axiales en el extremo del eje
Curvas características
DBL2H00040
DBL2H00060
DBL2M00080
28 Servomotores síncronos DBL/DBK
Datos técnicos 02/2002 - A.4.043.3/01, 044.3/02, 04, 43 Seidel
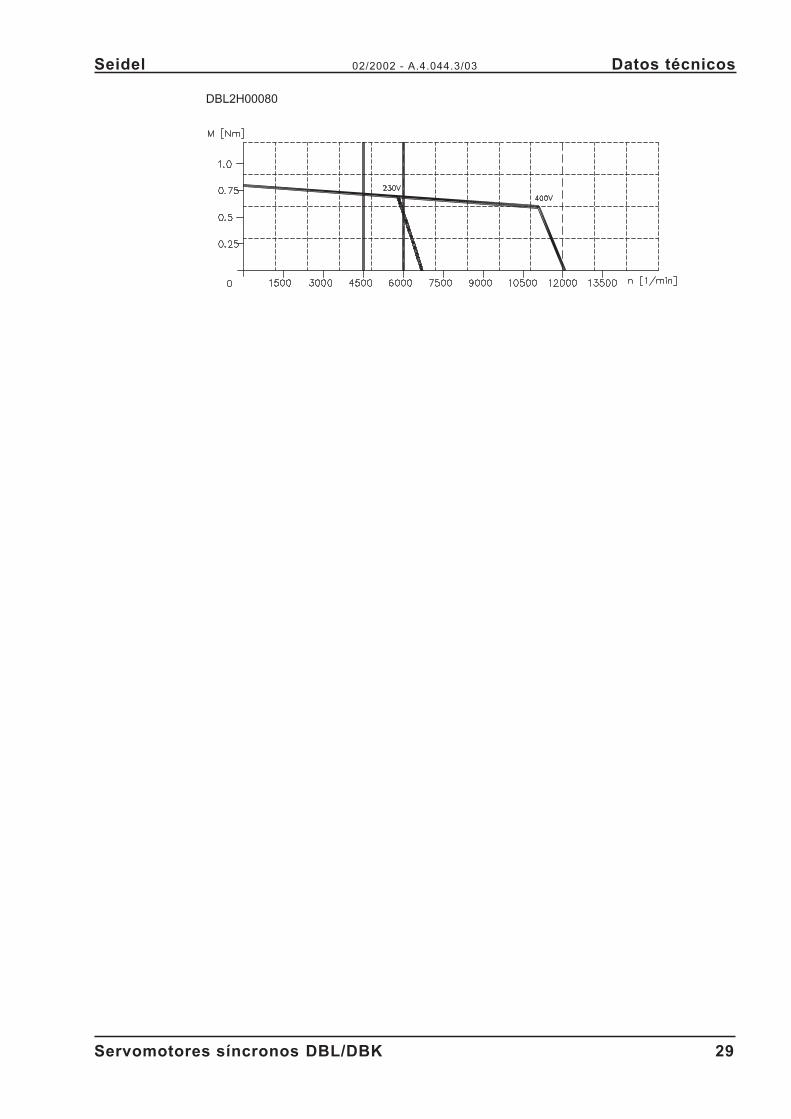
DBL2H00080
Servomotores síncronos DBL/DBK 29
Seidel 02/2002 - A.4.044.3/03 Datos técnicos
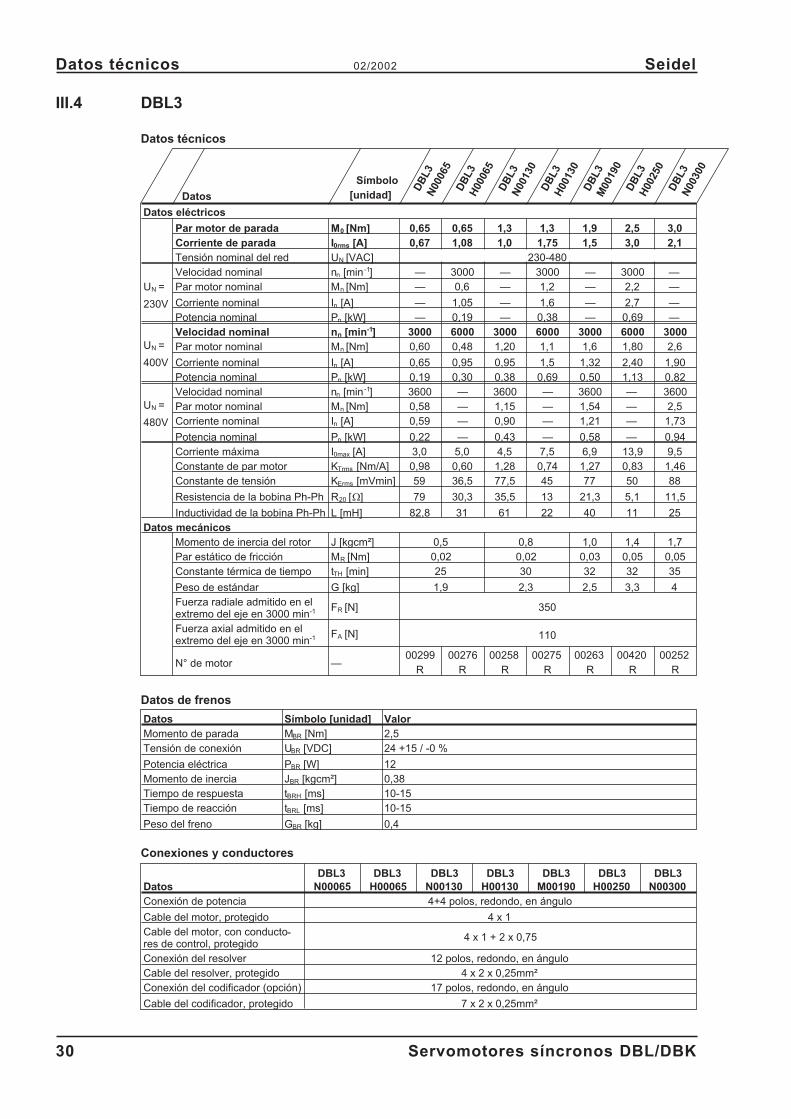
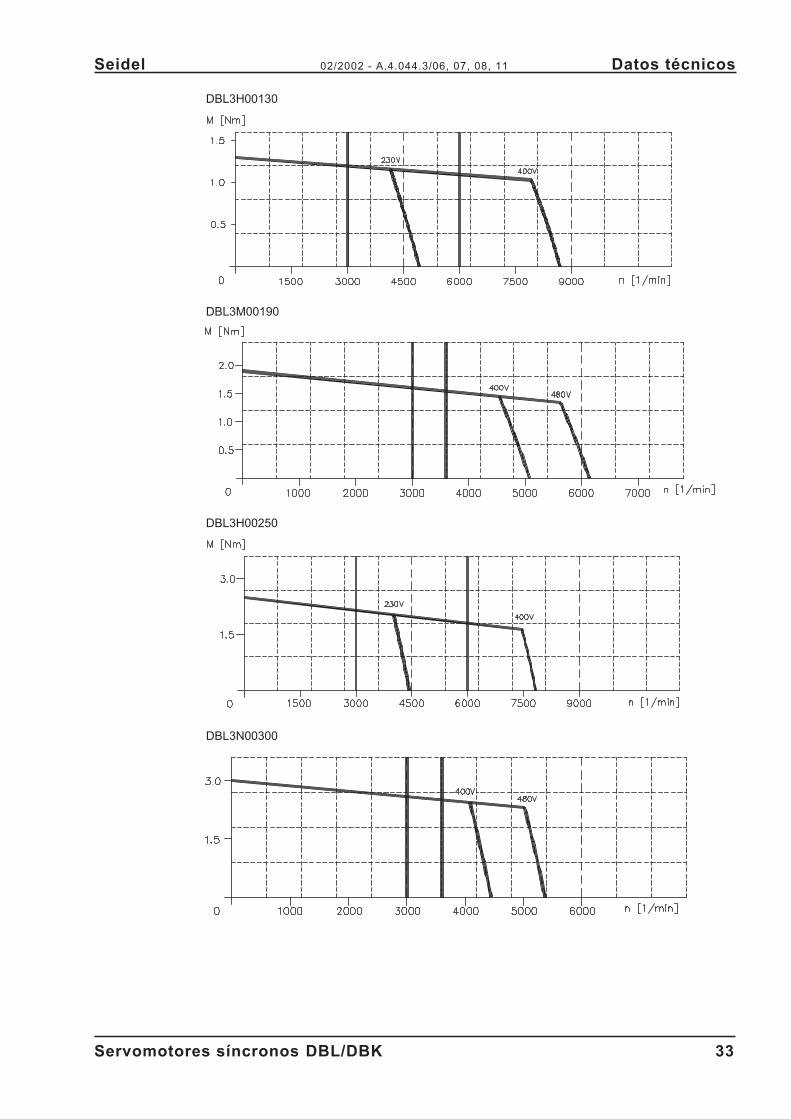
III.4 DBL3
Datos técnicos
Datos
Símbolo[unidad]
DB
L3N
0006
5D
BL3
H00
065
DB
L3N
0013
0D
BL3
H00
130
DB
L3M
0019
0D
BL3
H00
250
DB
L3N
0030
0
Datos eléctricos
Par motor de parada M0 [Nm] 0,65 0,65 1,3 1,3 1,9 2,5 3,0Corriente de parada I0rms [A] 0,67 1,08 1,0 1,75 1,5 3,0 2,1Tensión nominal del red UN [VAC] 230-480
UN =
230V
Velocidad nominal nn [min-1] — 3000 — 3000 — 3000 —Par motor nominal Mn [Nm] — 0,6 — 1,2 — 2,2 —
Corriente nominal In [A] — 1,05 — 1,6 — 2,7 —Potencia nominal Pn [kW] — 0,19 — 0,38 — 0,69 —
UN =
400V
Velocidad nominal nn [min-1] 3000 6000 3000 6000 3000 6000 3000Par motor nominal Mn [Nm] 0,60 0,48 1,20 1,1 1,6 1,80 2,6
Corriente nominal In [A] 0,65 0,95 0,95 1,5 1,32 2,40 1,90Potencia nominal Pn [kW] 0,19 0,30 0,38 0,69 0,50 1,13 0,82
UN =
480V
Velocidad nominal nn [min-1] 3600 — 3600 — 3600 — 3600Par motor nominal Mn [Nm] 0,58 — 1,15 — 1,54 — 2,5Corriente nominal In [A] 0,59 — 0,90 — 1,21 — 1,73
Potencia nominal Pn [kW] 0,22 — 0,43 — 0,58 — 0,94Corriente máxima I0max [A] 3,0 5,0 4,5 7,5 6,9 13,9 9,5Constante de par motor KTrms [Nm/A] 0,98 0,60 1,28 0,74 1,27 0,83 1,46Constante de tensión KErms [mVmin] 59 36,5 77,5 45 77 50 88
Resistencia de la bobina Ph-Ph R20 [�] 79 30,3 35,5 13 21,3 5,1 11,5
Inductividad de la bobina Ph-Ph L [mH] 82,8 31 61 22 40 11 25Datos mecánicos
Momento de inercia del rotor J [kgcm²] 0,5 0,8 1,0 1,4 1,7Par estático de fricción MR [Nm] 0,02 0,02 0,03 0,05 0,05Constante térmica de tiempo tTH [min] 25 30 32 32 35
Peso de estándar G [kg] 1,9 2,3 2,5 3,3 4Fuerza radiale admitido en elextremo del eje en 3000 min-1 FR [N] 350
Fuerza axial admitido en elextremo del eje en 3000 min-1 FA [N] 110
N° de motor —00299
R00276
R00258
R00275
R00263
R00420
R00252
R
Datos de frenos
Datos Símbolo [unidad] ValorMomento de parada MBR [Nm] 2,5Tensión de conexión UBR [VDC] 24 +15 / -0 %
Potencia eléctrica PBR [W] 12Momento de inercia JBR [kgcm²] 0,38Tiempo de respuesta tBRH [ms] 10-15Tiempo de reacción tBRL [ms] 10-15
Peso del freno GBR [kg] 0,4
Conexiones y conductores
DatosDBL3
N00065DBL3
H00065DBL3
N00130DBL3
H00130DBL3
M00190DBL3
H00250DBL3
N00300Conexión de potencia 4+4 polos, redondo, en ángulo
Cable del motor, protegido 4 x 1Cable del motor, con conducto-res de control, protegido
4 x 1 + 2 x 0,75
Conexión del resolver 12 polos, redondo, en ánguloCable del resolver, protegido 4 x 2 x 0,25mm²Conexión del codificador (opción) 17 polos, redondo, en ángulo
Cable del codificador, protegido 7 x 2 x 0,25mm²
30 Servomotores síncronos DBL/DBK
Datos técnicos 02/2002 Seidel
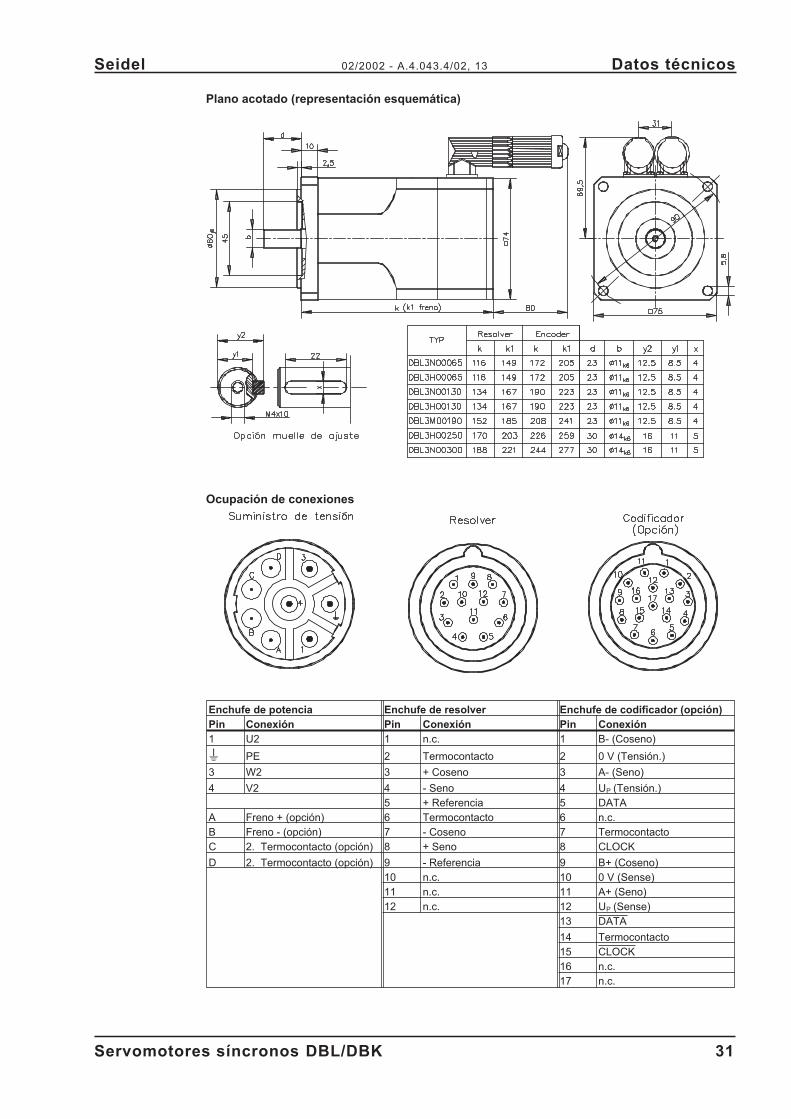
Plano acotado (representación esquemática)
Ocupación de conexiones
Enchufe de potencia Enchufe de resolver Enchufe de codificador (opción)
Pin Conexión Pin Conexión Pin Conexión
1 U2 1 n.c. 1 B- (Coseno)
� PE 2 Termocontacto 2 0 V (Tensión.)
3 W2 3 + Coseno 3 A- (Seno)
4 V2 4 - Seno 4 UP (Tensión.)
5 + Referencia 5 DATA
A Freno + (opción) 6 Termocontacto 6 n.c.
B Freno - (opción) 7 - Coseno 7 Termocontacto
C 2. Termocontacto (opción) 8 + Seno 8 CLOCK
D 2. Termocontacto (opción) 9 - Referencia 9 B+ (Coseno)
10 n.c. 10 0 V (Sense)
11 n.c. 11 A+ (Seno)
12 n.c. 12 UP (Sense)
13 DATA
14 Termocontacto
15 CLOCK
16 n.c.
17 n.c.
Servomotores síncronos DBL/DBK 31
Seidel 02/2002 - A.4.043.4/02, 13 Datos técnicos
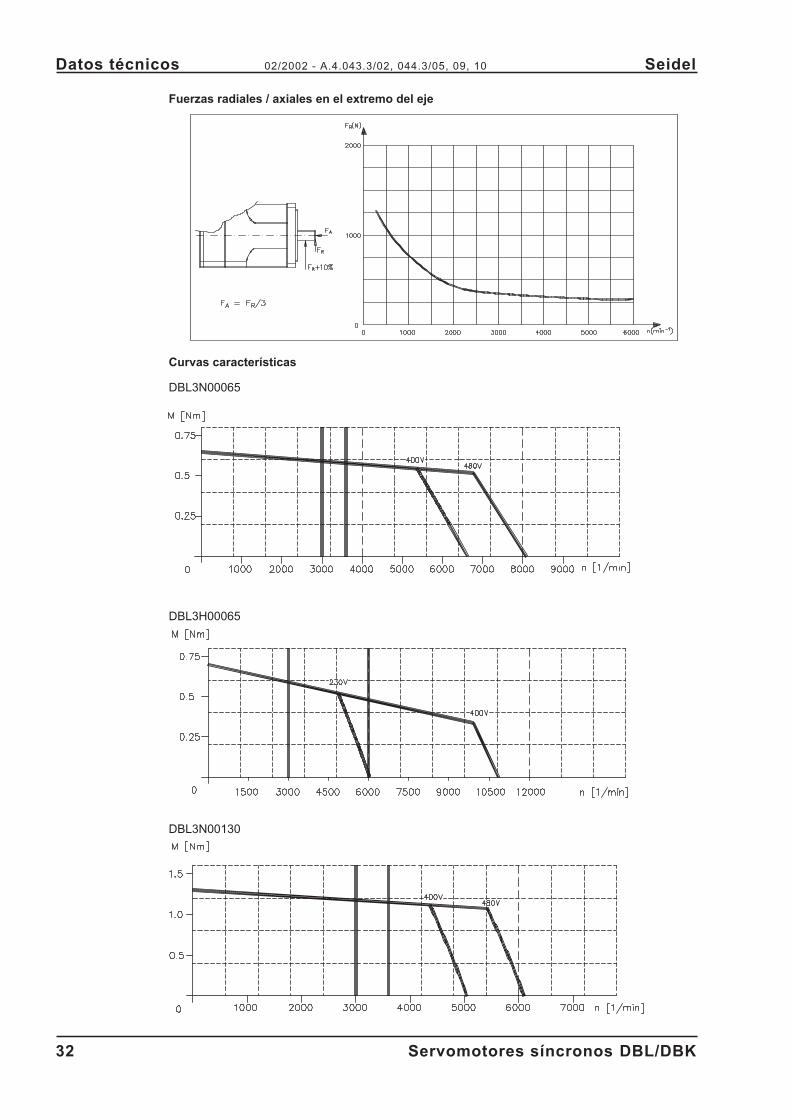
Fuerzas radiales / axiales en el extremo del eje
Curvas características
DBL3N00065
DBL3H00065
DBL3N00130
32 Servomotores síncronos DBL/DBK
Datos técnicos 02/2002 - A.4.043.3/02, 044.3/05, 09, 10 Seidel
DBL3H00130
DBL3M00190
DBL3H00250
DBL3N00300
Servomotores síncronos DBL/DBK 33
Seidel 02/2002 - A.4.044.3/06, 07, 08, 11 Datos técnicos
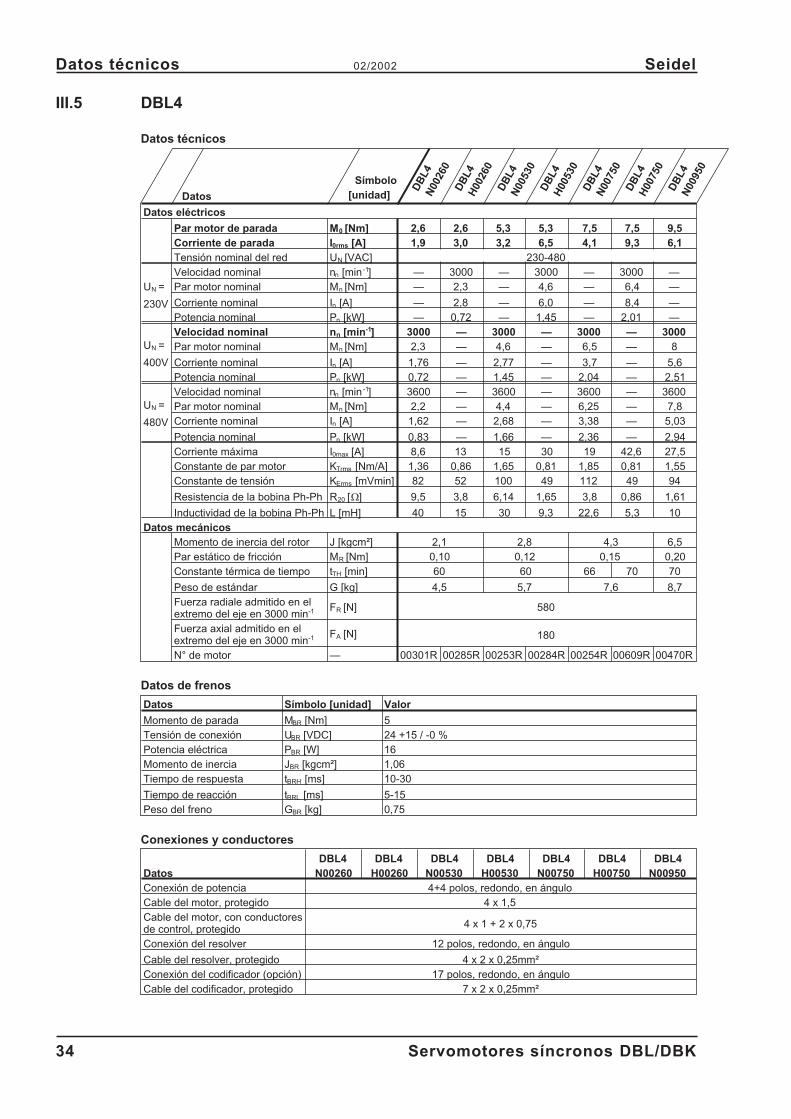
III.5 DBL4
Datos técnicos
Datos
Símbolo[unidad]
DB
L4N
0026
0D
BL4
H00
260
DB
L4N
0053
0D
BL4
H00
530
DB
L4N
0075
0D
BL4
H00
750
DB
L4N
0095
0
Datos eléctricos
Par motor de parada M0 [Nm] 2,6 2,6 5,3 5,3 7,5 7,5 9,5Corriente de parada I0rms [A] 1,9 3,0 3,2 6,5 4,1 9,3 6,1Tensión nominal del red UN [VAC] 230-480
UN =
230V
Velocidad nominal nn [min-1] — 3000 — 3000 — 3000 —Par motor nominal Mn [Nm] — 2,3 — 4,6 — 6,4 —
Corriente nominal In [A] — 2,8 — 6,0 — 8,4 —Potencia nominal Pn [kW] — 0,72 — 1,45 — 2,01 —
UN =
400V
Velocidad nominal nn [min-1] 3000 — 3000 — 3000 — 3000Par motor nominal Mn [Nm] 2,3 — 4,6 — 6,5 — 8
Corriente nominal In [A] 1,76 — 2,77 — 3,7 — 5,6Potencia nominal Pn [kW] 0,72 — 1,45 — 2,04 — 2,51
UN =
480V
Velocidad nominal nn [min-1] 3600 — 3600 — 3600 — 3600Par motor nominal Mn [Nm] 2,2 — 4,4 — 6,25 — 7,8Corriente nominal In [A] 1,62 — 2,68 — 3,38 — 5,03
Potencia nominal Pn [kW] 0,83 — 1,66 — 2,36 — 2,94Corriente máxima I0max [A] 8,6 13 15 30 19 42,6 27,5Constante de par motor KTrms [Nm/A] 1,36 0,86 1,65 0,81 1,85 0,81 1,55Constante de tensión KErms [mVmin] 82 52 100 49 112 49 94
Resistencia de la bobina Ph-Ph R20 [�] 9,5 3,8 6,14 1,65 3,8 0,86 1,61
Inductividad de la bobina Ph-Ph L [mH] 40 15 30 9,3 22,6 5,3 10Datos mecánicos
Momento de inercia del rotor J [kgcm²] 2,1 2,8 4,3 6,5Par estático de fricción MR [Nm] 0,10 0,12 0,15 0,20Constante térmica de tiempo tTH [min] 60 60 66 70 70
Peso de estándar G [kg] 4,5 5,7 7,6 8,7Fuerza radiale admitido en elextremo del eje en 3000 min-1 FR [N] 580
Fuerza axial admitido en elextremo del eje en 3000 min-1 FA [N] 180
N° de motor — 00301R 00285R 00253R 00284R 00254R 00609R 00470R
Datos de frenos
Datos Símbolo [unidad] Valor
Momento de parada MBR [Nm] 5Tensión de conexión UBR [VDC] 24 +15 / -0 %Potencia eléctrica PBR [W] 16Momento de inercia JBR [kgcm²] 1,06Tiempo de respuesta tBRH [ms] 10-30
Tiempo de reacción tBRL [ms] 5-15Peso del freno GBR [kg] 0,75
Conexiones y conductores
DatosDBL4
N00260DBL4
H00260DBL4
N00530DBL4
H00530DBL4
N00750DBL4
H00750DBL4
N00950Conexión de potencia 4+4 polos, redondo, en ánguloCable del motor, protegido 4 x 1,5Cable del motor, con conductoresde control, protegido 4 x 1 + 2 x 0,75
Conexión del resolver 12 polos, redondo, en ángulo
Cable del resolver, protegido 4 x 2 x 0,25mm²Conexión del codificador (opción) 17 polos, redondo, en ánguloCable del codificador, protegido 7 x 2 x 0,25mm²
34 Servomotores síncronos DBL/DBK
Datos técnicos 02/2002 Seidel
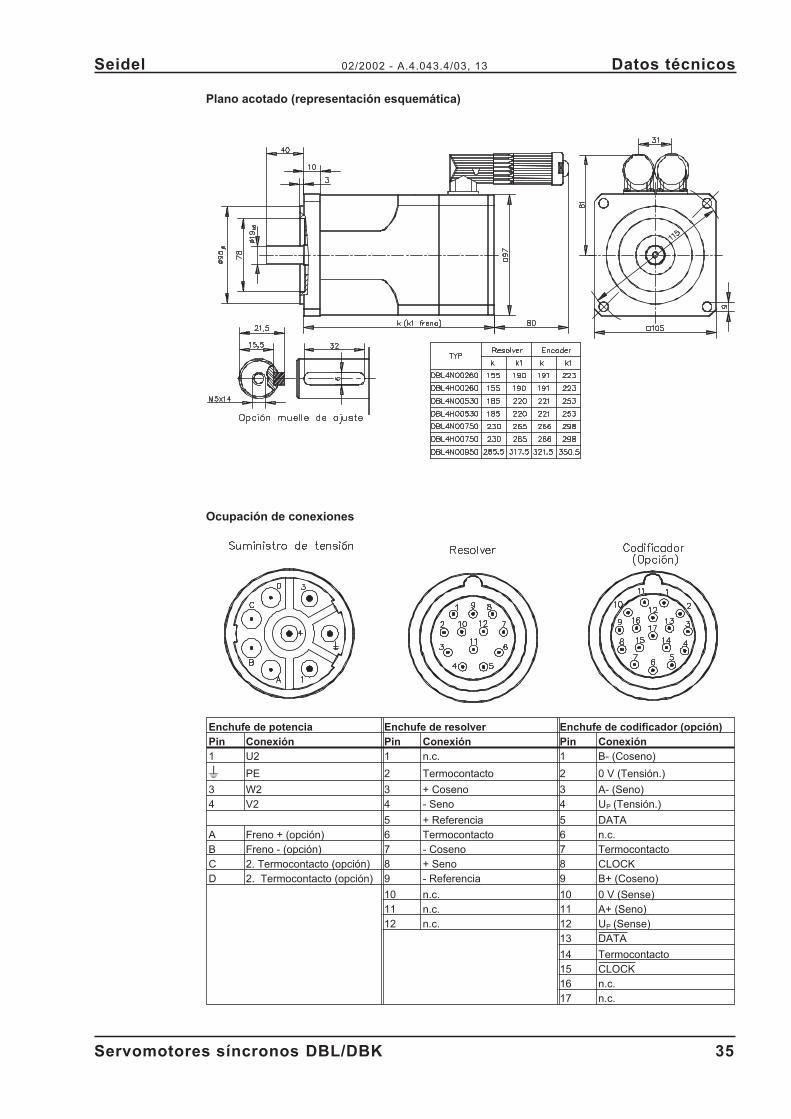
Plano acotado (representación esquemática)
Ocupación de conexiones
Enchufe de potencia Enchufe de resolver Enchufe de codificador (opción)Pin Conexión Pin Conexión Pin Conexión1 U2 1 n.c. 1 B- (Coseno)
� PE 2 Termocontacto 2 0 V (Tensión.)
3 W2 3 + Coseno 3 A- (Seno)4 V2 4 - Seno 4 UP (Tensión.)
5 + Referencia 5 DATAA Freno + (opción) 6 Termocontacto 6 n.c.B Freno - (opción) 7 - Coseno 7 TermocontactoC 2. Termocontacto (opción) 8 + Seno 8 CLOCKD 2. Termocontacto (opción) 9 - Referencia 9 B+ (Coseno)
10 n.c. 10 0 V (Sense)11 n.c. 11 A+ (Seno)12 n.c. 12 UP (Sense)
13 DATA
14 Termocontacto15 CLOCK16 n.c.17 n.c.
Servomotores síncronos DBL/DBK 35
Seidel 02/2002 - A.4.043.4/03, 13 Datos técnicos
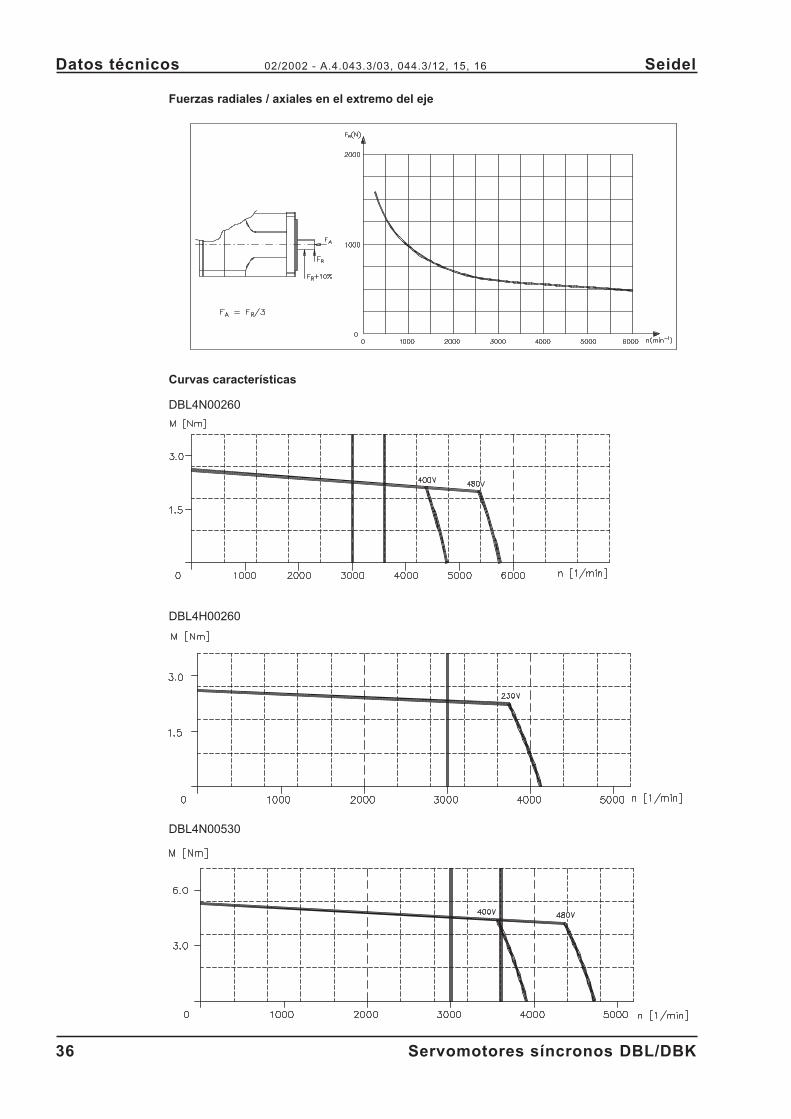
Fuerzas radiales / axiales en el extremo del eje
Curvas características
DBL4N00260
DBL4H00260
DBL4N00530
36 Servomotores síncronos DBL/DBK
Datos técnicos 02/2002 - A.4.043.3/03, 044.3/12, 15, 16 Seidel
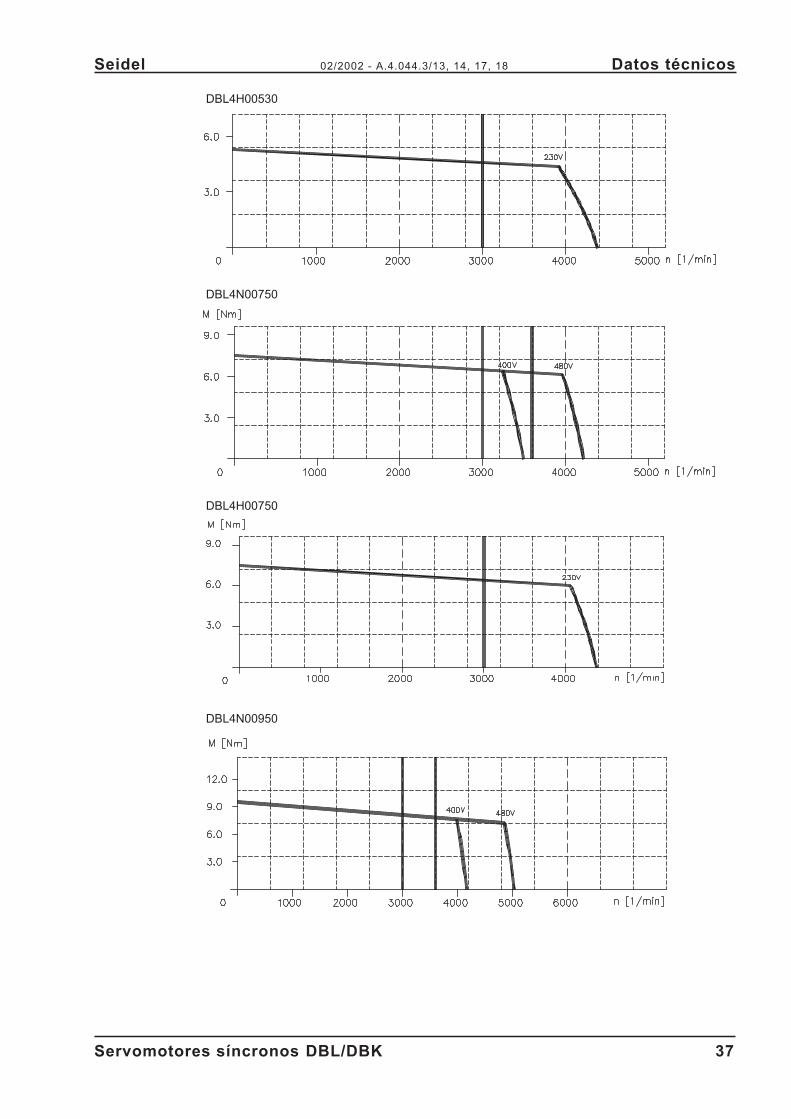
DBL4H00530
DBL4N00750
DBL4H00750
DBL4N00950
Servomotores síncronos DBL/DBK 37
Seidel 02/2002 - A.4.044.3/13, 14, 17, 18 Datos técnicos
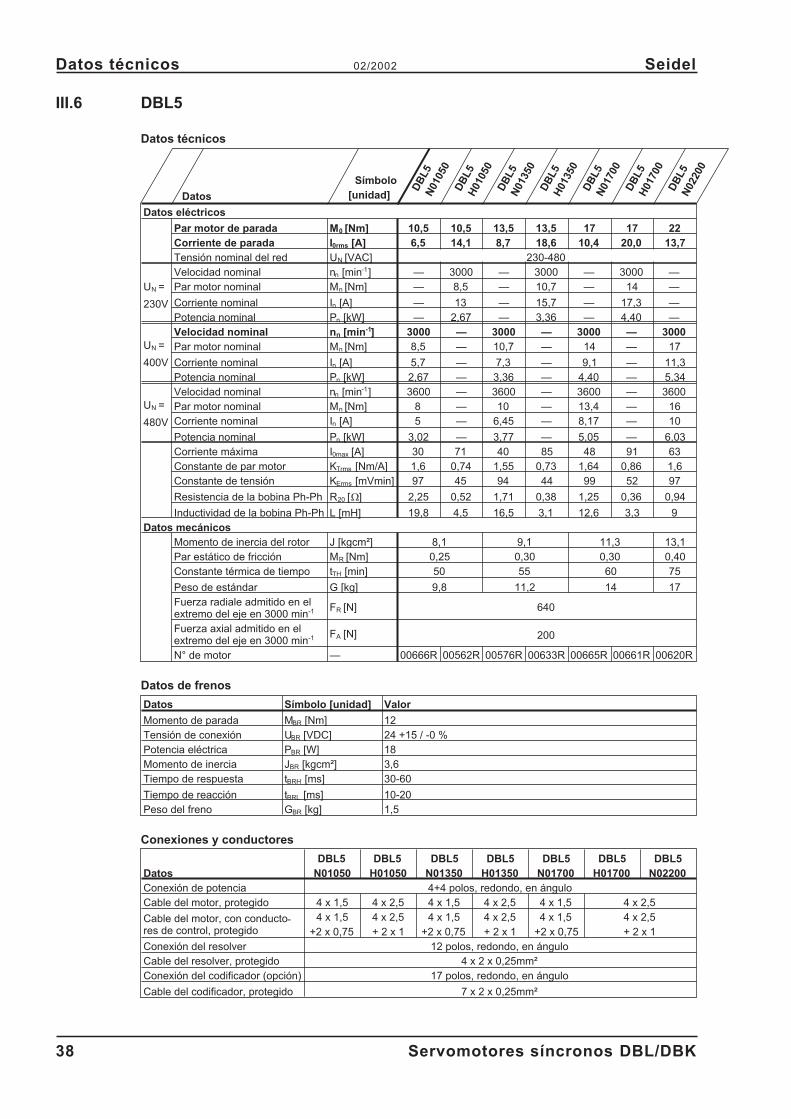
III.6 DBL5
Datos técnicos
Datos
Símbolo[unidad]
DB
L5N
0105
0D
BL5
H01
050
DB
L5N
0135
0D
BL5
H01
350
DB
L5N
0170
0D
BL5
H01
700
DB
L5N
0220
0
Datos eléctricos
Par motor de parada M0 [Nm] 10,5 10,5 13,5 13,5 17 17 22Corriente de parada I0rms [A] 6,5 14,1 8,7 18,6 10,4 20,0 13,7Tensión nominal del red UN [VAC] 230-480
UN =
230V
Velocidad nominal nn [min-1] — 3000 — 3000 — 3000 —Par motor nominal Mn [Nm] — 8,5 — 10,7 — 14 —
Corriente nominal In [A] — 13 — 15,7 — 17,3 —Potencia nominal Pn [kW] — 2,67 — 3,36 — 4,40 —
UN =
400V
Velocidad nominal nn [min-1] 3000 — 3000 — 3000 — 3000Par motor nominal Mn [Nm] 8,5 — 10,7 — 14 — 17
Corriente nominal In [A] 5,7 — 7,3 — 9,1 — 11,3Potencia nominal Pn [kW] 2,67 — 3,36 — 4,40 — 5,34
UN =
480V
Velocidad nominal nn [min-1] 3600 — 3600 — 3600 — 3600Par motor nominal Mn [Nm] 8 — 10 — 13,4 — 16Corriente nominal In [A] 5 — 6,45 — 8,17 — 10
Potencia nominal Pn [kW] 3,02 — 3,77 — 5,05 — 6,03Corriente máxima I0max [A] 30 71 40 85 48 91 63Constante de par motor KTrms [Nm/A] 1,6 0,74 1,55 0,73 1,64 0,86 1,6Constante de tensión KErms [mVmin] 97 45 94 44 99 52 97
Resistencia de la bobina Ph-Ph R20 [�] 2,25 0,52 1,71 0,38 1,25 0,36 0,94
Inductividad de la bobina Ph-Ph L [mH] 19,8 4,5 16,5 3,1 12,6 3,3 9Datos mecánicos
Momento de inercia del rotor J [kgcm²] 8,1 9,1 11,3 13,1Par estático de fricción MR [Nm] 0,25 0,30 0,30 0,40Constante térmica de tiempo tTH [min] 50 55 60 75
Peso de estándar G [kg] 9,8 11,2 14 17Fuerza radiale admitido en elextremo del eje en 3000 min-1 FR [N] 640
Fuerza axial admitido en elextremo del eje en 3000 min-1 FA [N] 200
N° de motor — 00666R 00562R 00576R 00633R 00665R 00661R 00620R
Datos de frenos
Datos Símbolo [unidad] Valor
Momento de parada MBR [Nm] 12Tensión de conexión UBR [VDC] 24 +15 / -0 %Potencia eléctrica PBR [W] 18Momento de inercia JBR [kgcm²] 3,6Tiempo de respuesta tBRH [ms] 30-60
Tiempo de reacción tBRL [ms] 10-20Peso del freno GBR [kg] 1,5
Conexiones y conductores
DatosDBL5
N01050DBL5
H01050DBL5
N01350DBL5
H01350DBL5
N01700DBL5
H01700DBL5
N02200Conexión de potencia 4+4 polos, redondo, en ánguloCable del motor, protegido 4 x 1,5 4 x 2,5 4 x 1,5 4 x 2,5 4 x 1,5 4 x 2,5
Cable del motor, con conducto-res de control, protegido
4 x 1,5+2 x 0,75
4 x 2,5+ 2 x 1
4 x 1,5+2 x 0,75
4 x 2,5+ 2 x 1
4 x 1,5+2 x 0,75
4 x 2,5+ 2 x 1
Conexión del resolver 12 polos, redondo, en ánguloCable del resolver, protegido 4 x 2 x 0,25mm²Conexión del codificador (opción) 17 polos, redondo, en ángulo
Cable del codificador, protegido 7 x 2 x 0,25mm²
38 Servomotores síncronos DBL/DBK
Datos técnicos 02/2002 Seidel
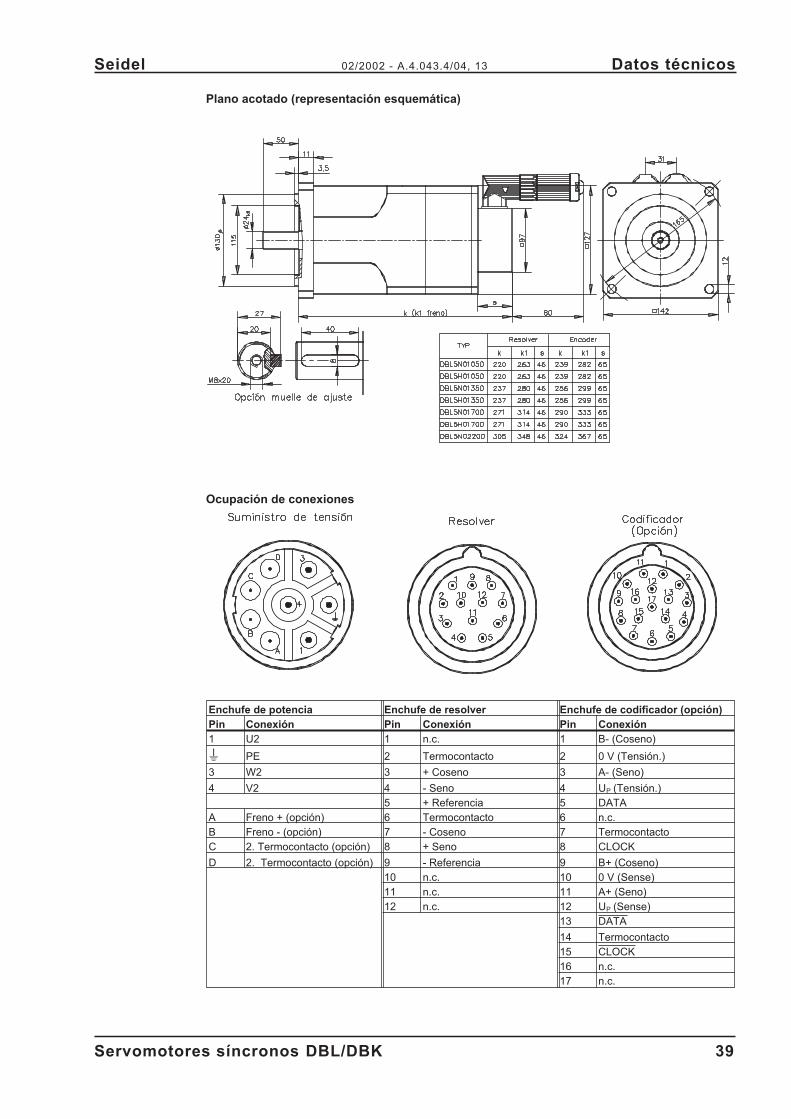
Plano acotado (representación esquemática)
Ocupación de conexiones
Enchufe de potencia Enchufe de resolver Enchufe de codificador (opción)
Pin Conexión Pin Conexión Pin Conexión
1 U2 1 n.c. 1 B- (Coseno)
� PE 2 Termocontacto 2 0 V (Tensión.)
3 W2 3 + Coseno 3 A- (Seno)
4 V2 4 - Seno 4 UP (Tensión.)
5 + Referencia 5 DATA
A Freno + (opción) 6 Termocontacto 6 n.c.
B Freno - (opción) 7 - Coseno 7 Termocontacto
C 2. Termocontacto (opción) 8 + Seno 8 CLOCK
D 2. Termocontacto (opción) 9 - Referencia 9 B+ (Coseno)
10 n.c. 10 0 V (Sense)
11 n.c. 11 A+ (Seno)
12 n.c. 12 UP (Sense)
13 DATA
14 Termocontacto
15 CLOCK
16 n.c.
17 n.c.
Servomotores síncronos DBL/DBK 39
Seidel 02/2002 - A.4.043.4/04, 13 Datos técnicos
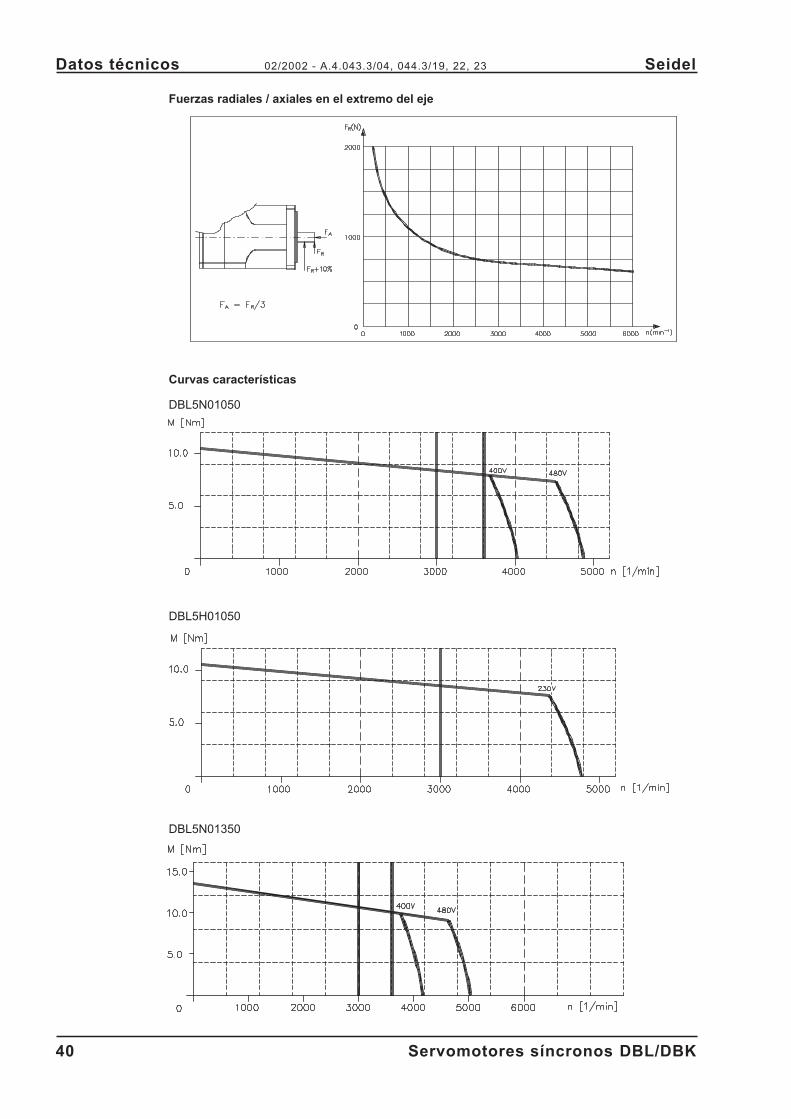
Fuerzas radiales / axiales en el extremo del eje
Curvas características
DBL5N01050
DBL5H01050
DBL5N01350
40 Servomotores síncronos DBL/DBK
Datos técnicos 02/2002 - A.4.043.3/04, 044.3/19, 22, 23 Seidel

DBL5H01350
DBL5N01700
DBL5H01700
DBL5N02200
Servomotores síncronos DBL/DBK 41
Seidel 02/2002 - A.4.044.3/20, 21, 24, 25 Datos técnicos
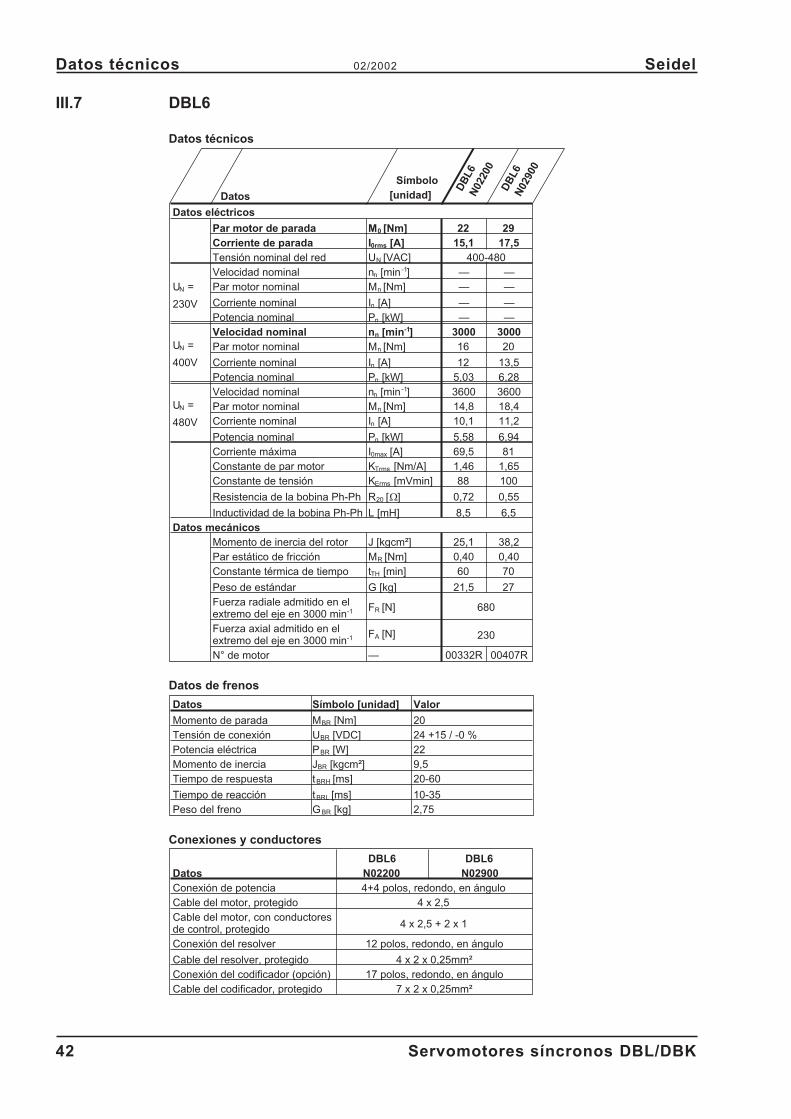
III.7 DBL6
Datos técnicos
Datos
Símbolo[unidad]
DB
L6N
0220
0
DB
L6N
0290
0
Datos eléctricos
Par motor de parada M0 [Nm] 22 29Corriente de parada I0rms [A] 15,1 17,5Tensión nominal del red UN [VAC] 400-480
UN =
230V
Velocidad nominal nn [min-1] — —Par motor nominal Mn [Nm] — —
Corriente nominal In [A] — —Potencia nominal Pn [kW] — —
UN =
400V
Velocidad nominal nn [min-1] 3000 3000Par motor nominal Mn [Nm] 16 20
Corriente nominal In [A] 12 13,5Potencia nominal Pn [kW] 5,03 6,28
UN =
480V
Velocidad nominal nn [min-1] 3600 3600Par motor nominal Mn [Nm] 14,8 18,4Corriente nominal In [A] 10,1 11,2
Potencia nominal Pn [kW] 5,58 6,94Corriente máxima I0max [A] 69,5 81Constante de par motor KTrms [Nm/A] 1,46 1,65Constante de tensión KErms [mVmin] 88 100
Resistencia de la bobina Ph-Ph R20 [�] 0,72 0,55
Inductividad de la bobina Ph-Ph L [mH] 8,5 6,5Datos mecánicos
Momento de inercia del rotor J [kgcm²] 25,1 38,2Par estático de fricción MR [Nm] 0,40 0,40Constante térmica de tiempo tTH [min] 60 70
Peso de estándar G [kg] 21,5 27Fuerza radiale admitido en elextremo del eje en 3000 min-1 FR [N] 680
Fuerza axial admitido en elextremo del eje en 3000 min-1 FA [N] 230
N° de motor — 00332R 00407R
Datos de frenos
Datos Símbolo [unidad] Valor
Momento de parada MBR [Nm] 20Tensión de conexión UBR [VDC] 24 +15 / -0 %Potencia eléctrica PBR [W] 22Momento de inercia JBR [kgcm²] 9,5Tiempo de respuesta tBRH [ms] 20-60
Tiempo de reacción tBRL [ms] 10-35Peso del freno GBR [kg] 2,75
Conexiones y conductores
DatosDBL6
N02200DBL6
N02900Conexión de potencia 4+4 polos, redondo, en ánguloCable del motor, protegido 4 x 2,5Cable del motor, con conductoresde control, protegido 4 x 2,5 + 2 x 1
Conexión del resolver 12 polos, redondo, en ángulo
Cable del resolver, protegido 4 x 2 x 0,25mm²Conexión del codificador (opción) 17 polos, redondo, en ánguloCable del codificador, protegido 7 x 2 x 0,25mm²
42 Servomotores síncronos DBL/DBK
Datos técnicos 02/2002 Seidel
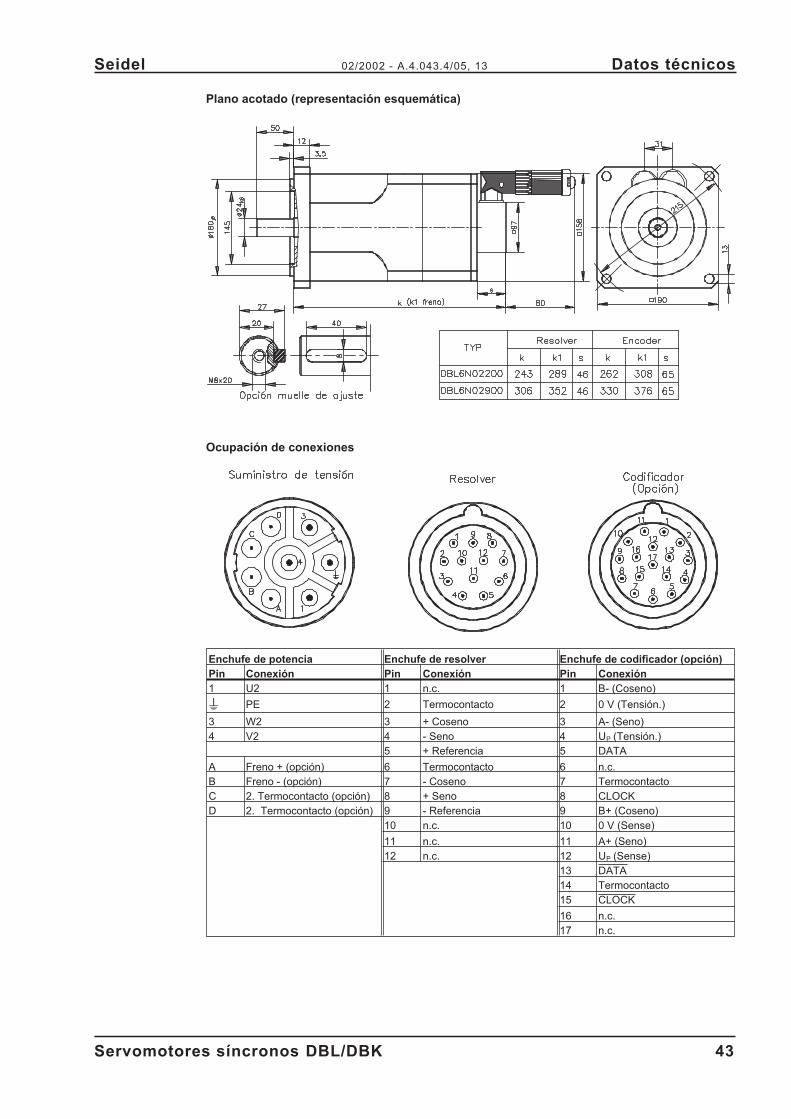
Plano acotado (representación esquemática)
Ocupación de conexiones
Enchufe de potencia Enchufe de resolver Enchufe de codificador (opción)Pin Conexión Pin Conexión Pin Conexión1 U2 1 n.c. 1 B- (Coseno)
� PE 2 Termocontacto 2 0 V (Tensión.)
3 W2 3 + Coseno 3 A- (Seno)4 V2 4 - Seno 4 UP (Tensión.)
5 + Referencia 5 DATA
A Freno + (opción) 6 Termocontacto 6 n.c.B Freno - (opción) 7 - Coseno 7 TermocontactoC 2. Termocontacto (opción) 8 + Seno 8 CLOCKD 2. Termocontacto (opción) 9 - Referencia 9 B+ (Coseno)
10 n.c. 10 0 V (Sense)
11 n.c. 11 A+ (Seno)12 n.c. 12 UP (Sense)
13 DATA14 Termocontacto15 CLOCK
16 n.c.17 n.c.
Servomotores síncronos DBL/DBK 43
Seidel 02/2002 - A.4.043.4/05, 13 Datos técnicos
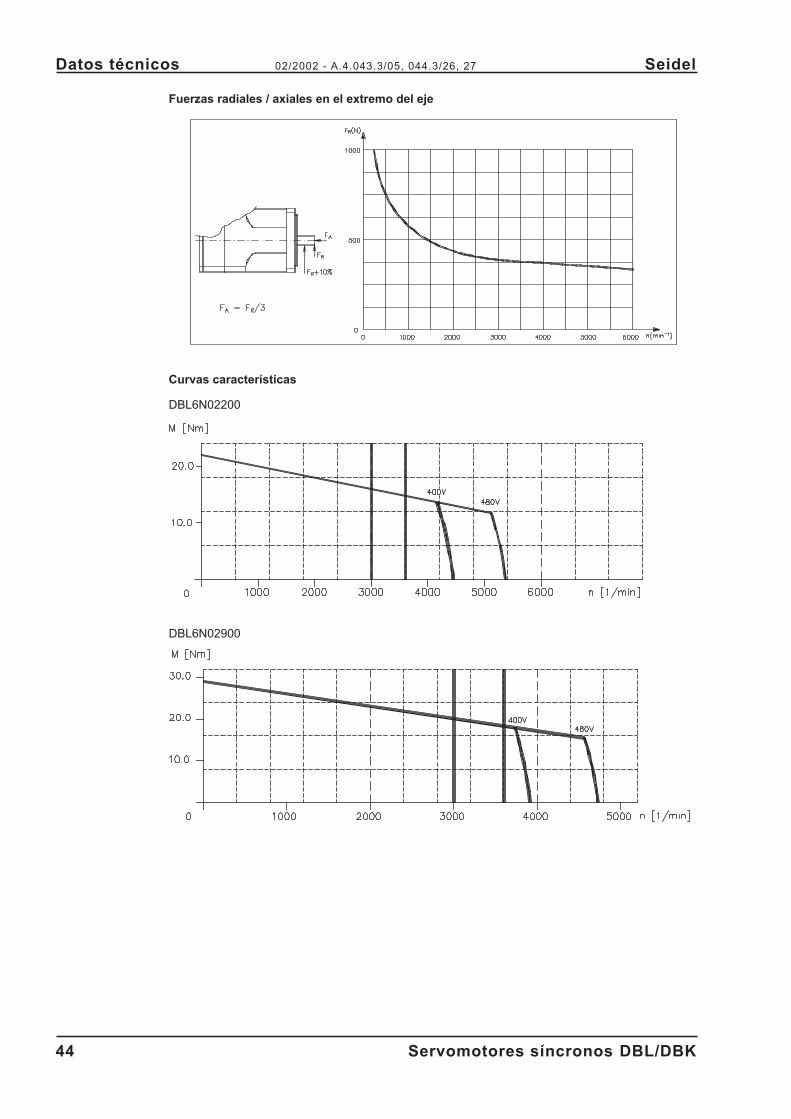
Fuerzas radiales / axiales en el extremo del eje
Curvas características
DBL6N02200
DBL6N02900
44 Servomotores síncronos DBL/DBK
Datos técnicos 02/2002 - A.4.043.3/05, 044.3/26, 27 Seidel

Esta página se ha dejado en blanco intencionadamente.
Servomotores síncronos DBL/DBK 45
Seidel 02/2002 Datos técnicos
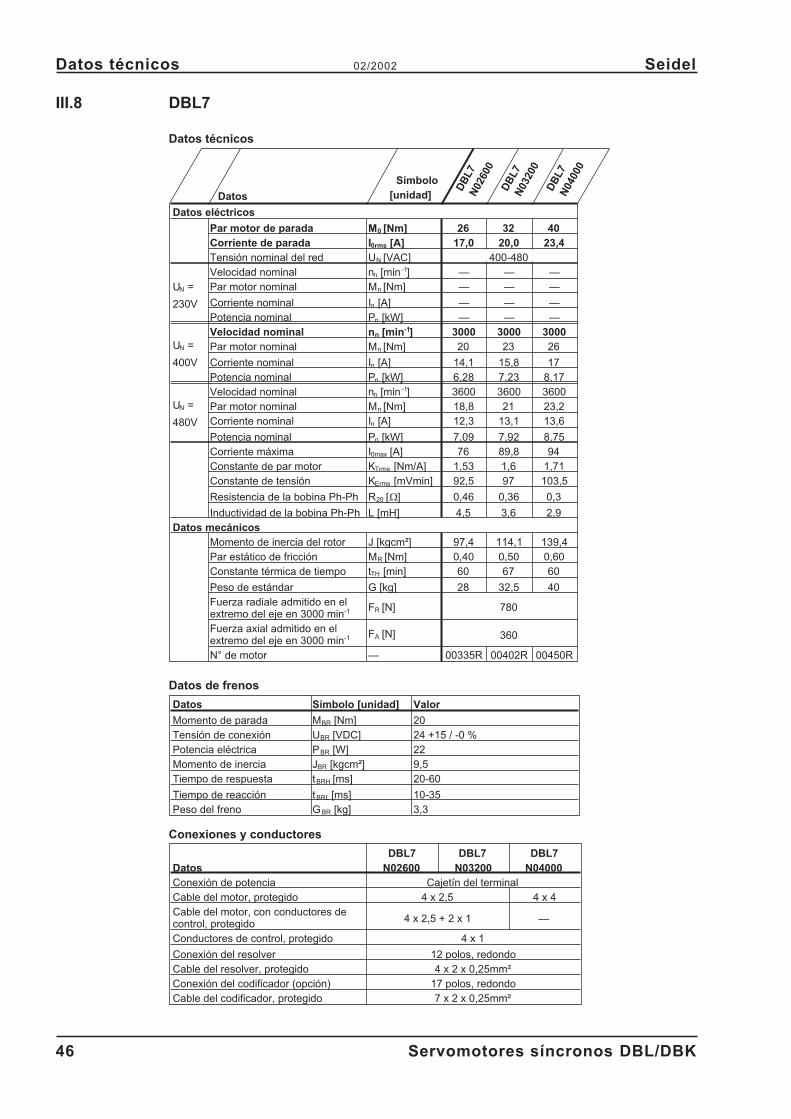
III.8 DBL7
Datos técnicos
Datos
Símbolo[unidad]
DB
L7N
0260
0
DB
L7N
0320
0
DB
L7N
0400
0
Datos eléctricos
Par motor de parada M0 [Nm] 26 32 40Corriente de parada I0rms [A] 17,0 20,0 23,4Tensión nominal del red UN [VAC] 400-480
UN =
230V
Velocidad nominal nn [min-1] — — —Par motor nominal Mn [Nm] — — —
Corriente nominal In [A] — — —Potencia nominal Pn [kW] — — —
UN =
400V
Velocidad nominal nn [min-1] 3000 3000 3000Par motor nominal Mn [Nm] 20 23 26
Corriente nominal In [A] 14,1 15,8 17Potencia nominal Pn [kW] 6,28 7,23 8,17
UN =
480V
Velocidad nominal nn [min-1] 3600 3600 3600Par motor nominal Mn [Nm] 18,8 21 23,2Corriente nominal In [A] 12,3 13,1 13,6
Potencia nominal Pn [kW] 7,09 7,92 8,75Corriente máxima I0max [A] 76 89,8 94Constante de par motor KTrms [Nm/A] 1,53 1,6 1,71Constante de tensión KErms [mVmin] 92,5 97 103,5
Resistencia de la bobina Ph-Ph R20 [�] 0,46 0,36 0,3
Inductividad de la bobina Ph-Ph L [mH] 4,5 3,6 2,9Datos mecánicos
Momento de inercia del rotor J [kgcm²] 97,4 114,1 139,4Par estático de fricción MR [Nm] 0,40 0,50 0,60Constante térmica de tiempo tTH [min] 60 67 60
Peso de estándar G [kg] 28 32,5 40Fuerza radiale admitido en elextremo del eje en 3000 min-1 FR [N] 780
Fuerza axial admitido en elextremo del eje en 3000 min-1 FA [N] 360
N° de motor — 00335R 00402R 00450R
Datos de frenos
Datos Símbolo [unidad] Valor
Momento de parada MBR [Nm] 20Tensión de conexión UBR [VDC] 24 +15 / -0 %Potencia eléctrica PBR [W] 22Momento de inercia JBR [kgcm²] 9,5Tiempo de respuesta tBRH [ms] 20-60
Tiempo de reacción tBRL [ms] 10-35Peso del freno GBR [kg] 3,3
Conexiones y conductores
DatosDBL7
N02600DBL7
N03200DBL7
N04000Conexión de potencia Cajetín del terminalCable del motor, protegido 4 x 2,5 4 x 4Cable del motor, con conductores decontrol, protegido 4 x 2,5 + 2 x 1 —
Conductores de control, protegido 4 x 1
Conexión del resolver 12 polos, redondoCable del resolver, protegido 4 x 2 x 0,25mm²Conexión del codificador (opción) 17 polos, redondoCable del codificador, protegido 7 x 2 x 0,25mm²
46 Servomotores síncronos DBL/DBK
Datos técnicos 02/2002 Seidel

Plano acotado (representación esquemática)
Ocupación de conexiones
Cajetín del terminal Enchufe de resolver Enchufe de codificador (opción)Kl. Conexión Pin Conexión Pin Conexión
U U2 1 n.c. 1 B- (Coseno)
� PE 2 Termocontacto 2 0 V (Tensión.)
V V2 3 + Coseno 3 A- (Seno)W W2 4 - Seno 4 UP (Tensión.)
5 + Referencia 5 DATA(+) Freno + (opción) 6 Termocontacto 6 n.c.(-) Freno - (opción) 7 - Coseno 7 Termocontacto
� 2. Termocontacto (opción) 8 + Seno 8 CLOCK
� 2. Termocontacto (opción) 9 - Referencia 9 B+ (Coseno)
10 n.c. 10 0 V (Sense)11 n.c. 11 A+ (Seno)12 n.c. 12 UP (Sense)
13 DATA
14 Termocontacto15 CLOCK16 n.c.17 n.c.
Servomotores síncronos DBL/DBK 47
Seidel 02/2002 - A.4.043.4/10, 14 Datos técnicos
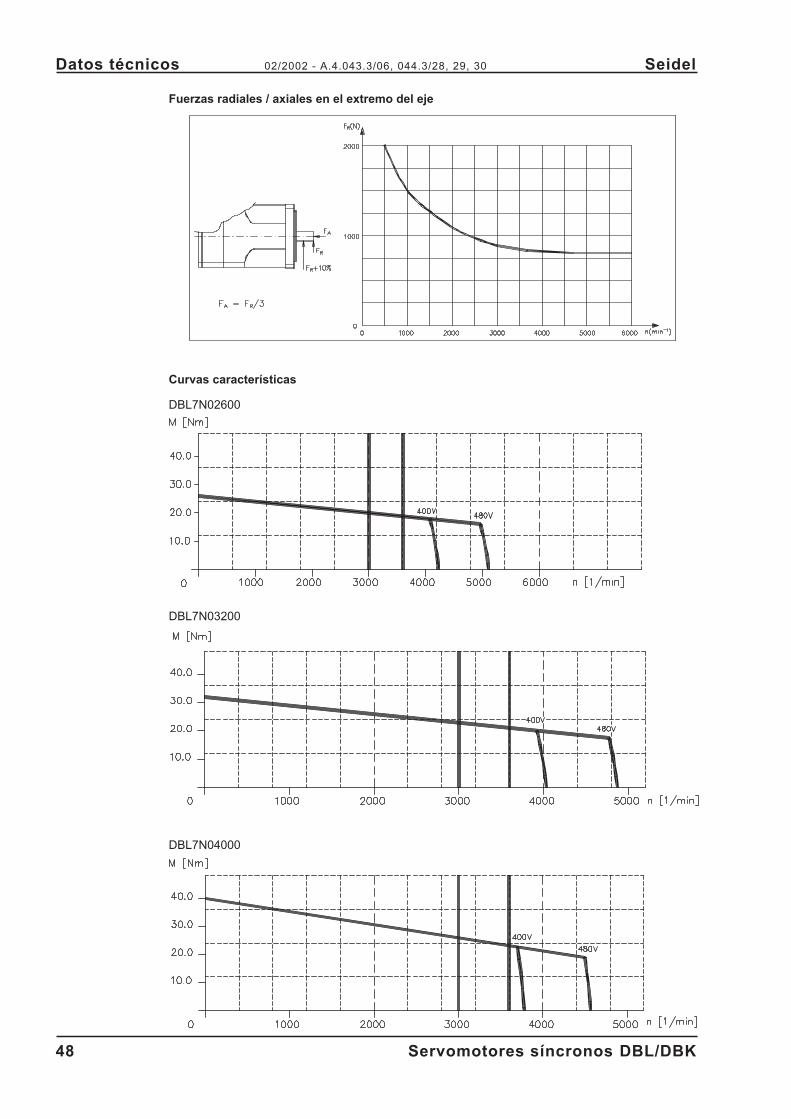
Fuerzas radiales / axiales en el extremo del eje
Curvas características
DBL7N02600
DBL7N03200
DBL7N04000
48 Servomotores síncronos DBL/DBK
Datos técnicos 02/2002 - A.4.043.3/06, 044.3/28, 29, 30 Seidel

Esta página se ha dejado en blanco intencionadamente.
Servomotores síncronos DBL/DBK 49
Seidel 02/2002 Datos técnicos
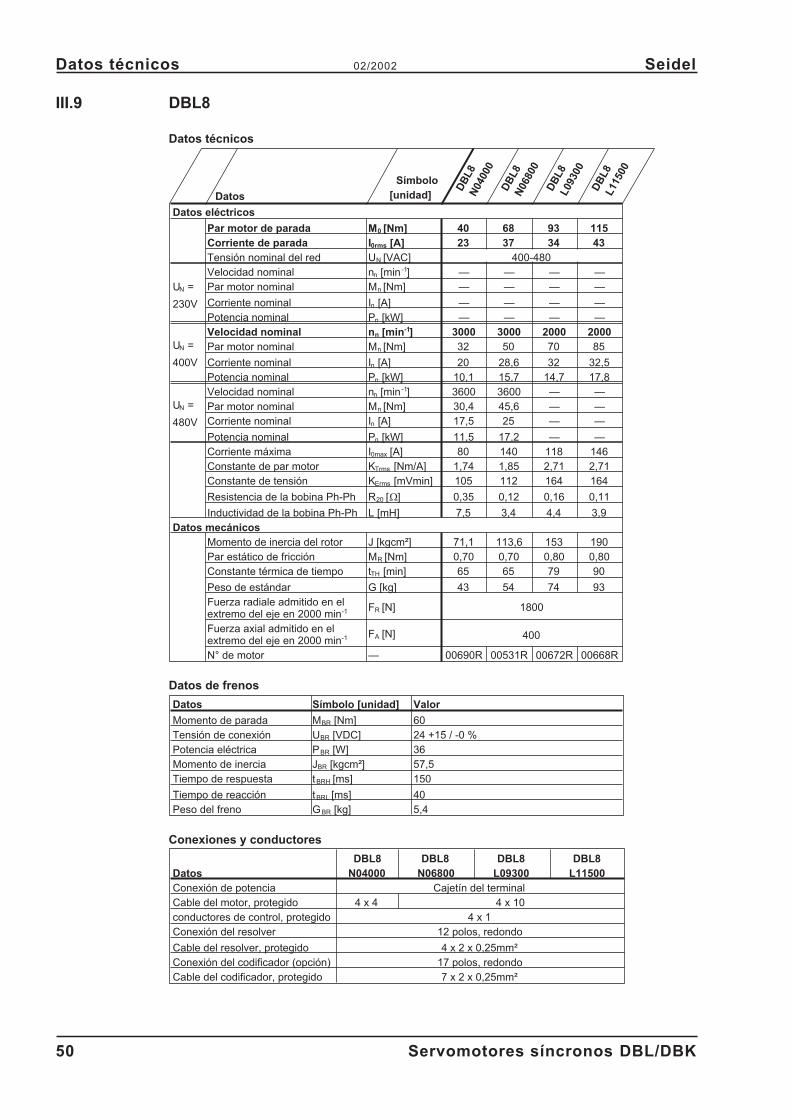
III.9 DBL8
Datos técnicos
Datos
Símbolo[unidad]
DB
L8N
0400
0
DB
L8N
0680
0
DB
L8L0
9300
DB
L8L1
1500
Datos eléctricos
Par motor de parada M0 [Nm] 40 68 93 115Corriente de parada I0rms [A] 23 37 34 43Tensión nominal del red UN [VAC] 400-480
UN =
230V
Velocidad nominal nn [min-1] — — — —Par motor nominal Mn [Nm] — — — —
Corriente nominal In [A] — — — —Potencia nominal Pn [kW] — — — —
UN =
400V
Velocidad nominal nn [min-1] 3000 3000 2000 2000Par motor nominal Mn [Nm] 32 50 70 85
Corriente nominal In [A] 20 28,6 32 32,5Potencia nominal Pn [kW] 10,1 15,7 14,7 17,8
UN =
480V
Velocidad nominal nn [min-1] 3600 3600 — —Par motor nominal Mn [Nm] 30,4 45,6 — —Corriente nominal In [A] 17,5 25 — —
Potencia nominal Pn [kW] 11,5 17,2 — —Corriente máxima I0max [A] 80 140 118 146Constante de par motor KTrms [Nm/A] 1,74 1,85 2,71 2,71Constante de tensión KErms [mVmin] 105 112 164 164
Resistencia de la bobina Ph-Ph R20 [�] 0,35 0,12 0,16 0,11
Inductividad de la bobina Ph-Ph L [mH] 7,5 3,4 4,4 3,9Datos mecánicos
Momento de inercia del rotor J [kgcm²] 71,1 113,6 153 190Par estático de fricción MR [Nm] 0,70 0,70 0,80 0,80Constante térmica de tiempo tTH [min] 65 65 79 90
Peso de estándar G [kg] 43 54 74 93Fuerza radiale admitido en elextremo del eje en 2000 min-1 FR [N] 1800
Fuerza axial admitido en elextremo del eje en 2000 min-1 FA [N] 400
N° de motor — 00690R 00531R 00672R 00668R
Datos de frenos
Datos Símbolo [unidad] Valor
Momento de parada MBR [Nm] 60Tensión de conexión UBR [VDC] 24 +15 / -0 %Potencia eléctrica PBR [W] 36Momento de inercia JBR [kgcm²] 57,5Tiempo de respuesta tBRH [ms] 150
Tiempo de reacción tBRL [ms] 40Peso del freno GBR [kg] 5,4
Conexiones y conductores
DatosDBL8
N04000DBL8
N06800DBL8
L09300DBL8
L11500Conexión de potencia Cajetín del terminalCable del motor, protegido 4 x 4 4 x 10conductores de control, protegido 4 x 1Conexión del resolver 12 polos, redondo
Cable del resolver, protegido 4 x 2 x 0,25mm²Conexión del codificador (opción) 17 polos, redondoCable del codificador, protegido 7 x 2 x 0,25mm²
50 Servomotores síncronos DBL/DBK
Datos técnicos 02/2002 Seidel

Plano acotado (representación esquemática)
Ocupación de conexiones
Cajetín del terminal Enchufe de resolver Enchufe de codificador (opción)Kl. Conexión Pin Conexión Pin Conexión
U U2 1 n.c. 1 B- (Coseno)
� PE 2 Termocontacto 2 0 V (Tensión.)
V V2 3 + Coseno 3 A- (Seno)W W2 4 - Seno 4 UP (Tensión.)
5 + Referencia 5 DATA(+) Freno + (opción) 6 Termocontacto 6 n.c.(-) Freno - (opción) 7 - Coseno 7 Termocontacto
� 2. Termocontacto (opción) 8 + Seno 8 CLOCK
� 2. Termocontacto (opción) 9 - Referencia 9 B+ (Coseno)
10 n.c. 10 0 V (Sense)11 n.c. 11 A+ (Seno)12 n.c. 12 UP (Sense)
13 DATA
14 Termocontacto15 CLOCK16 n.c.17 n.c.
Servomotores síncronos DBL/DBK 51
Seidel 02/2002 - A.4.043.4/11, 14 Datos técnicos
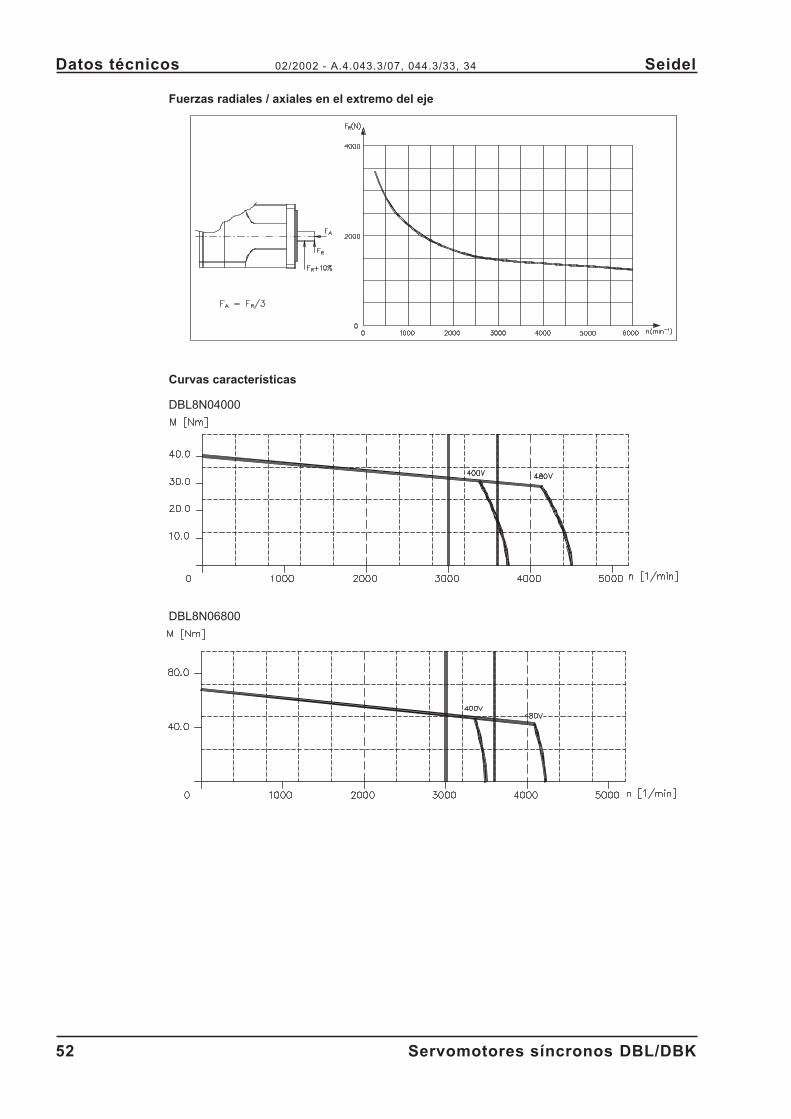
Fuerzas radiales / axiales en el extremo del eje
Curvas características
DBL8N04000
DBL8N06800
52 Servomotores síncronos DBL/DBK
Datos técnicos 02/2002 - A.4.043.3/07, 044.3/33, 34 Seidel
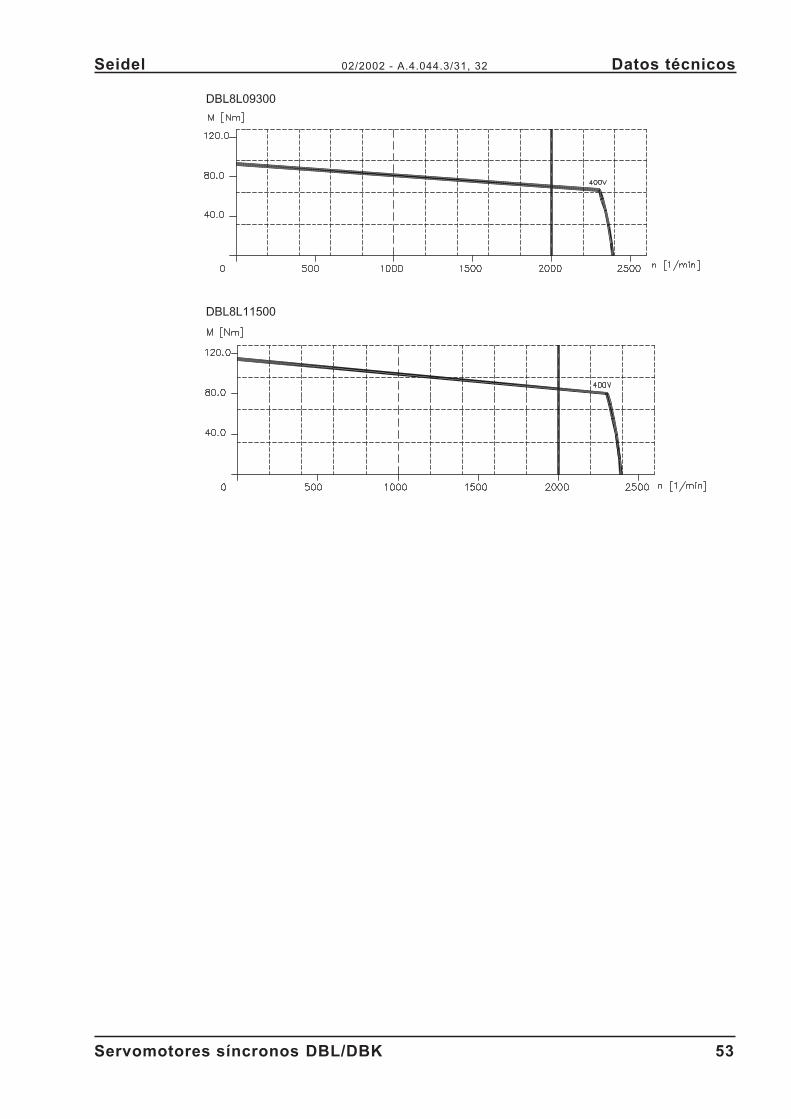
DBL8L09300
DBL8L11500
Servomotores síncronos DBL/DBK 53
Seidel 02/2002 - A.4.044.3/31, 32 Datos técnicos
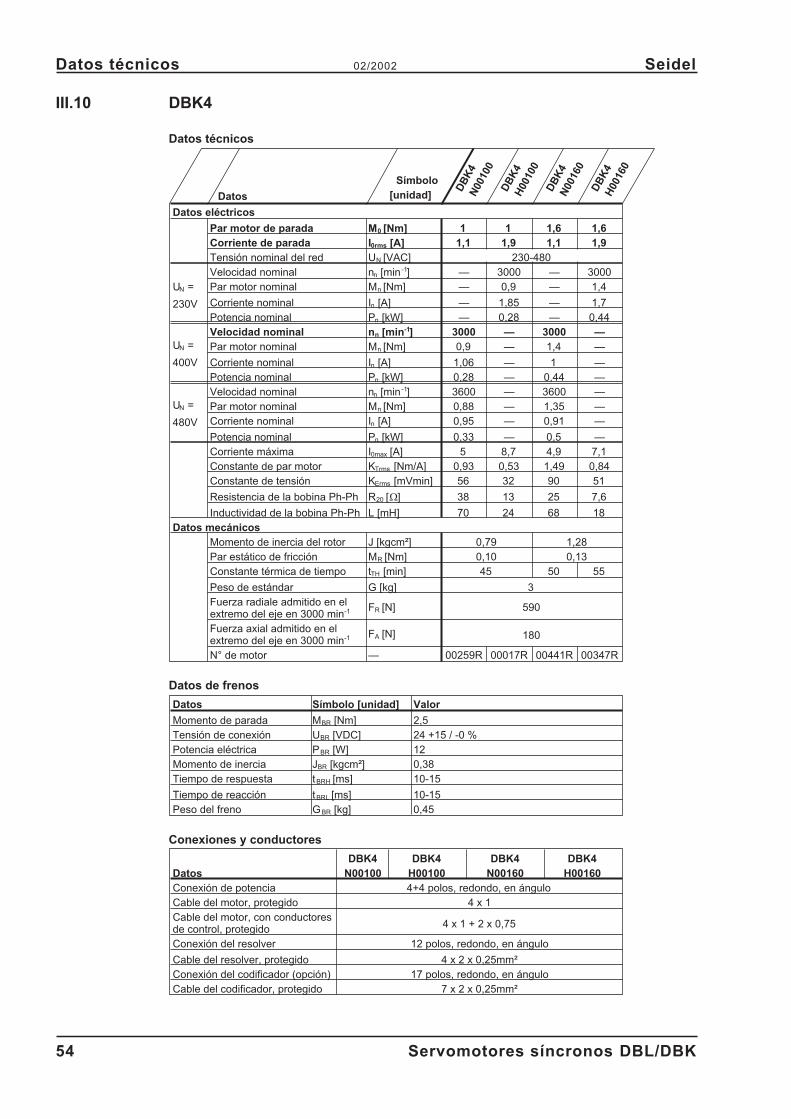
III.10 DBK4
Datos técnicos
Datos
Símbolo[unidad]
DB
K4
N00
100
DB
K4
H00
100
DB
K4
N00
160
DB
K4
H00
160
Datos eléctricos
Par motor de parada M0 [Nm] 1 1 1,6 1,6Corriente de parada I0rms [A] 1,1 1,9 1,1 1,9Tensión nominal del red UN [VAC] 230-480
UN =
230V
Velocidad nominal nn [min-1] — 3000 — 3000Par motor nominal Mn [Nm] — 0,9 — 1,4
Corriente nominal In [A] — 1,85 — 1,7Potencia nominal Pn [kW] — 0,28 — 0,44
UN =
400V
Velocidad nominal nn [min-1] 3000 — 3000 —Par motor nominal Mn [Nm] 0,9 — 1,4 —
Corriente nominal In [A] 1,06 — 1 —Potencia nominal Pn [kW] 0,28 — 0,44 —
UN =
480V
Velocidad nominal nn [min-1] 3600 — 3600 —Par motor nominal Mn [Nm] 0,88 — 1,35 —Corriente nominal In [A] 0,95 — 0,91 —
Potencia nominal Pn [kW] 0,33 — 0,5 —Corriente máxima I0max [A] 5 8,7 4,9 7,1Constante de par motor KTrms [Nm/A] 0,93 0,53 1,49 0,84Constante de tensión KErms [mVmin] 56 32 90 51
Resistencia de la bobina Ph-Ph R20 [�] 38 13 25 7,6
Inductividad de la bobina Ph-Ph L [mH] 70 24 68 18Datos mecánicos
Momento de inercia del rotor J [kgcm²] 0,79 1,28Par estático de fricción MR [Nm] 0,10 0,13Constante térmica de tiempo tTH [min] 45 50 55
Peso de estándar G [kg] 3Fuerza radiale admitido en elextremo del eje en 3000 min-1 FR [N] 590
Fuerza axial admitido en elextremo del eje en 3000 min-1 FA [N] 180
N° de motor — 00259R 00017R 00441R 00347R
Datos de frenos
Datos Símbolo [unidad] Valor
Momento de parada MBR [Nm] 2,5Tensión de conexión UBR [VDC] 24 +15 / -0 %Potencia eléctrica PBR [W] 12Momento de inercia JBR [kgcm²] 0,38Tiempo de respuesta tBRH [ms] 10-15
Tiempo de reacción tBRL [ms] 10-15Peso del freno GBR [kg] 0,45
Conexiones y conductores
DatosDBK4
N00100DBK4
H00100DBK4
N00160DBK4
H00160Conexión de potencia 4+4 polos, redondo, en ánguloCable del motor, protegido 4 x 1Cable del motor, con conductoresde control, protegido 4 x 1 + 2 x 0,75
Conexión del resolver 12 polos, redondo, en ángulo
Cable del resolver, protegido 4 x 2 x 0,25mm²Conexión del codificador (opción) 17 polos, redondo, en ánguloCable del codificador, protegido 7 x 2 x 0,25mm²
54 Servomotores síncronos DBL/DBK
Datos técnicos 02/2002 Seidel
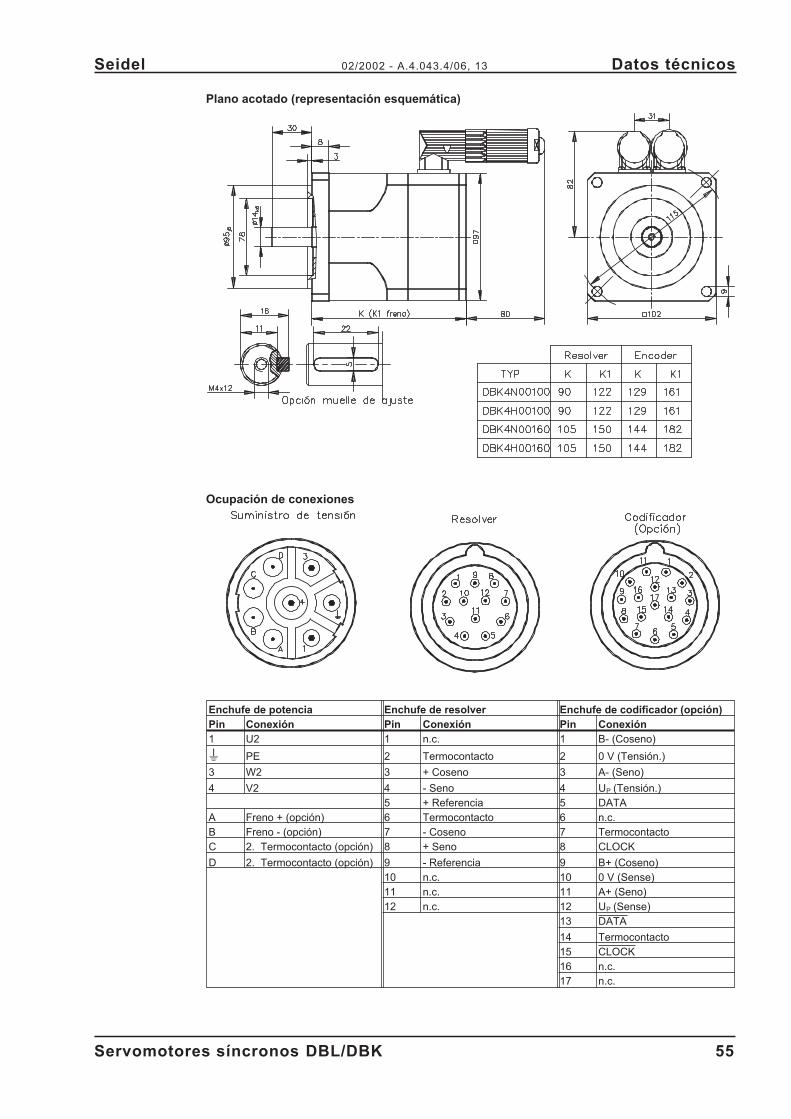
Plano acotado (representación esquemática)
Ocupación de conexiones
Enchufe de potencia Enchufe de resolver Enchufe de codificador (opción)Pin Conexión Pin Conexión Pin Conexión1 U2 1 n.c. 1 B- (Coseno)
� PE 2 Termocontacto 2 0 V (Tensión.)
3 W2 3 + Coseno 3 A- (Seno)
4 V2 4 - Seno 4 UP (Tensión.)5 + Referencia 5 DATA
A Freno + (opción) 6 Termocontacto 6 n.c.B Freno - (opción) 7 - Coseno 7 TermocontactoC 2. Termocontacto (opción) 8 + Seno 8 CLOCK
D 2. Termocontacto (opción) 9 - Referencia 9 B+ (Coseno)10 n.c. 10 0 V (Sense)11 n.c. 11 A+ (Seno)12 n.c. 12 UP (Sense)
13 DATA
14 Termocontacto15 CLOCK16 n.c.17 n.c.
Servomotores síncronos DBL/DBK 55
Seidel 02/2002 - A.4.043.4/06, 13 Datos técnicos
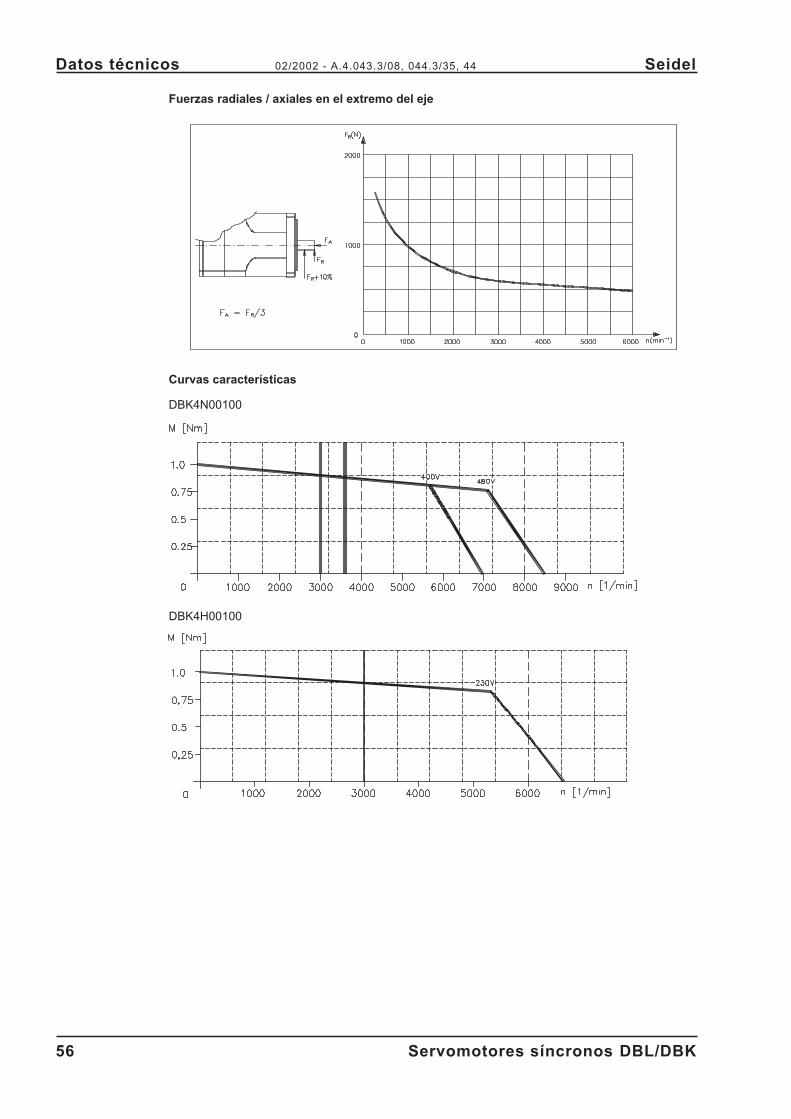
Fuerzas radiales / axiales en el extremo del eje
Curvas características
DBK4N00100
DBK4H00100
56 Servomotores síncronos DBL/DBK
Datos técnicos 02/2002 - A.4.043.3/08, 044.3/35, 44 Seidel
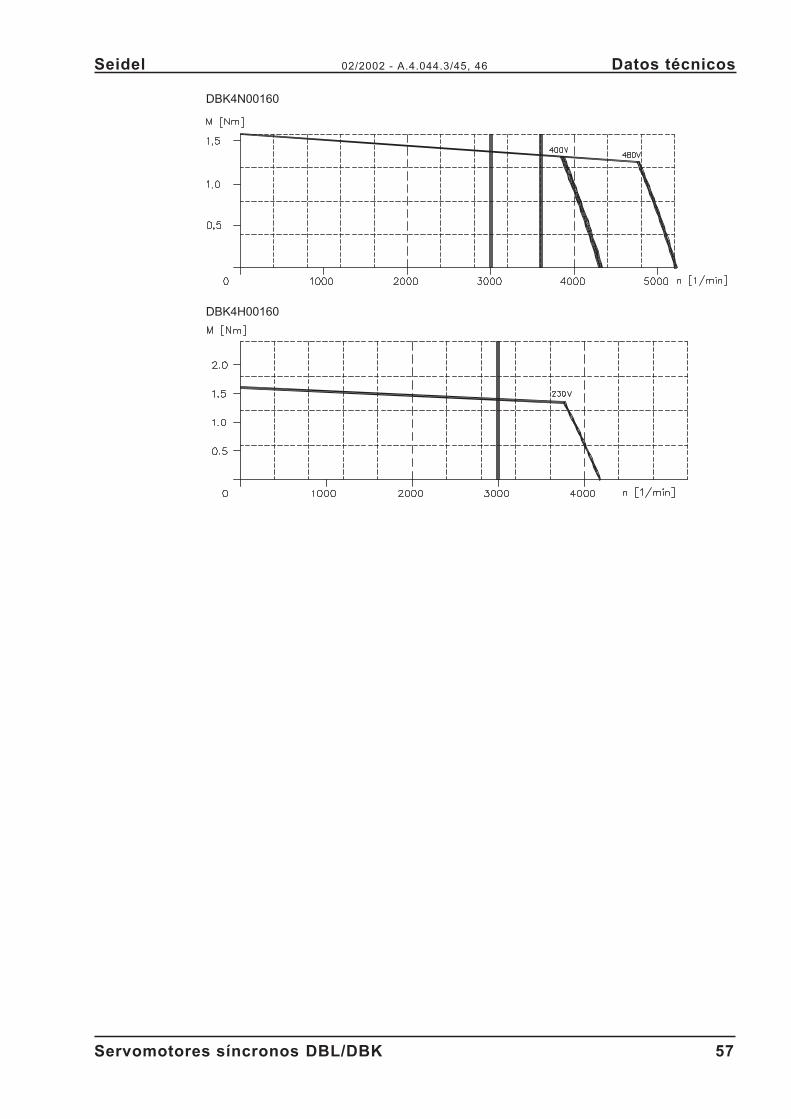
DBK4N00160
DBK4H00160
Servomotores síncronos DBL/DBK 57
Seidel 02/2002 - A.4.044.3/45, 46 Datos técnicos
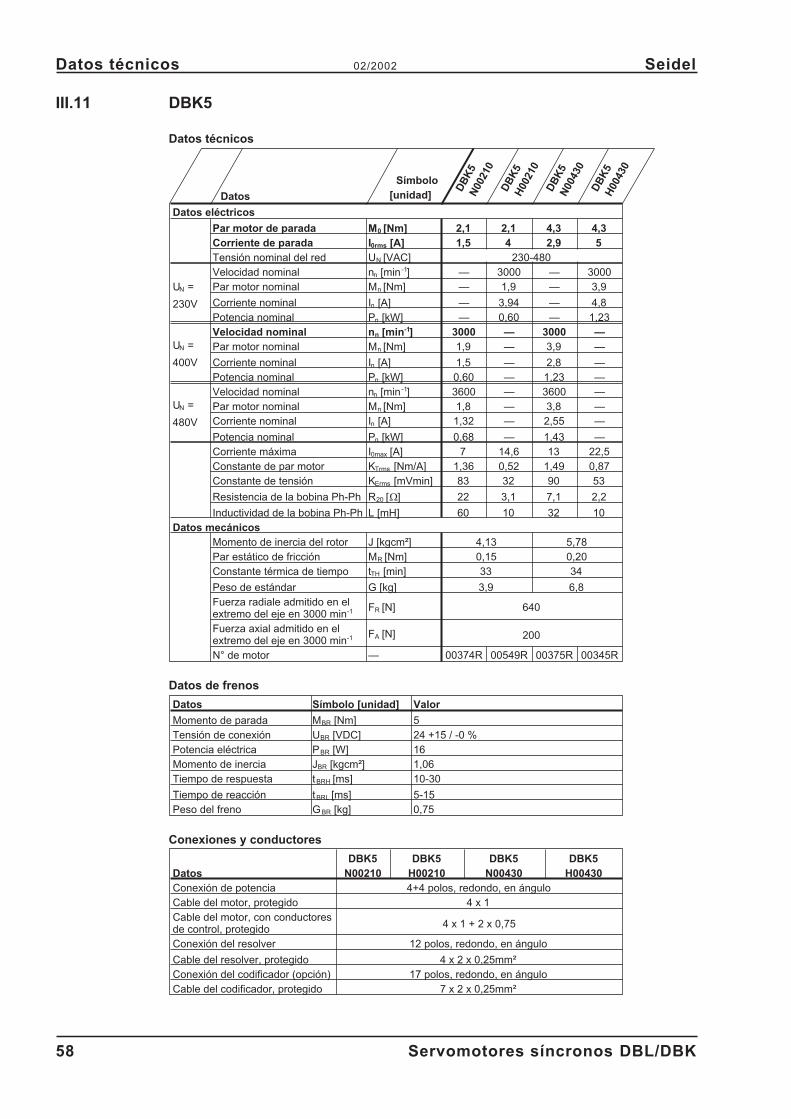
III.11 DBK5
Datos técnicos
Datos
Símbolo[unidad]
DB
K5
N00
210
DB
K5
H00
210
DB
K5
N00
430
DB
K5
H00
430
Datos eléctricos
Par motor de parada M0 [Nm] 2,1 2,1 4,3 4,3Corriente de parada I0rms [A] 1,5 4 2,9 5Tensión nominal del red UN [VAC] 230-480
UN =
230V
Velocidad nominal nn [min-1] — 3000 — 3000Par motor nominal Mn [Nm] — 1,9 — 3,9
Corriente nominal In [A] — 3,94 — 4,8Potencia nominal Pn [kW] — 0,60 — 1,23
UN =
400V
Velocidad nominal nn [min-1] 3000 — 3000 —Par motor nominal Mn [Nm] 1,9 — 3,9 —
Corriente nominal In [A] 1,5 — 2,8 —Potencia nominal Pn [kW] 0,60 — 1,23 —
UN =
480V
Velocidad nominal nn [min-1] 3600 — 3600 —Par motor nominal Mn [Nm] 1,8 — 3,8 —Corriente nominal In [A] 1,32 — 2,55 —
Potencia nominal Pn [kW] 0,68 — 1,43 —Corriente máxima I0max [A] 7 14,6 13 22,5Constante de par motor KTrms [Nm/A] 1,36 0,52 1,49 0,87Constante de tensión KErms [mVmin] 83 32 90 53
Resistencia de la bobina Ph-Ph R20 [�] 22 3,1 7,1 2,2
Inductividad de la bobina Ph-Ph L [mH] 60 10 32 10Datos mecánicos
Momento de inercia del rotor J [kgcm²] 4,13 5,78Par estático de fricción MR [Nm] 0,15 0,20Constante térmica de tiempo tTH [min] 33 34
Peso de estándar G [kg] 3,9 6,8Fuerza radiale admitido en elextremo del eje en 3000 min-1 FR [N] 640
Fuerza axial admitido en elextremo del eje en 3000 min-1 FA [N] 200
N° de motor — 00374R 00549R 00375R 00345R
Datos de frenos
Datos Símbolo [unidad] Valor
Momento de parada MBR [Nm] 5Tensión de conexión UBR [VDC] 24 +15 / -0 %Potencia eléctrica PBR [W] 16Momento de inercia JBR [kgcm²] 1,06Tiempo de respuesta tBRH [ms] 10-30
Tiempo de reacción tBRL [ms] 5-15Peso del freno GBR [kg] 0,75
Conexiones y conductores
DatosDBK5
N00210DBK5
H00210DBK5
N00430DBK5
H00430Conexión de potencia 4+4 polos, redondo, en ánguloCable del motor, protegido 4 x 1Cable del motor, con conductoresde control, protegido 4 x 1 + 2 x 0,75
Conexión del resolver 12 polos, redondo, en ángulo
Cable del resolver, protegido 4 x 2 x 0,25mm²Conexión del codificador (opción) 17 polos, redondo, en ánguloCable del codificador, protegido 7 x 2 x 0,25mm²
58 Servomotores síncronos DBL/DBK
Datos técnicos 02/2002 Seidel
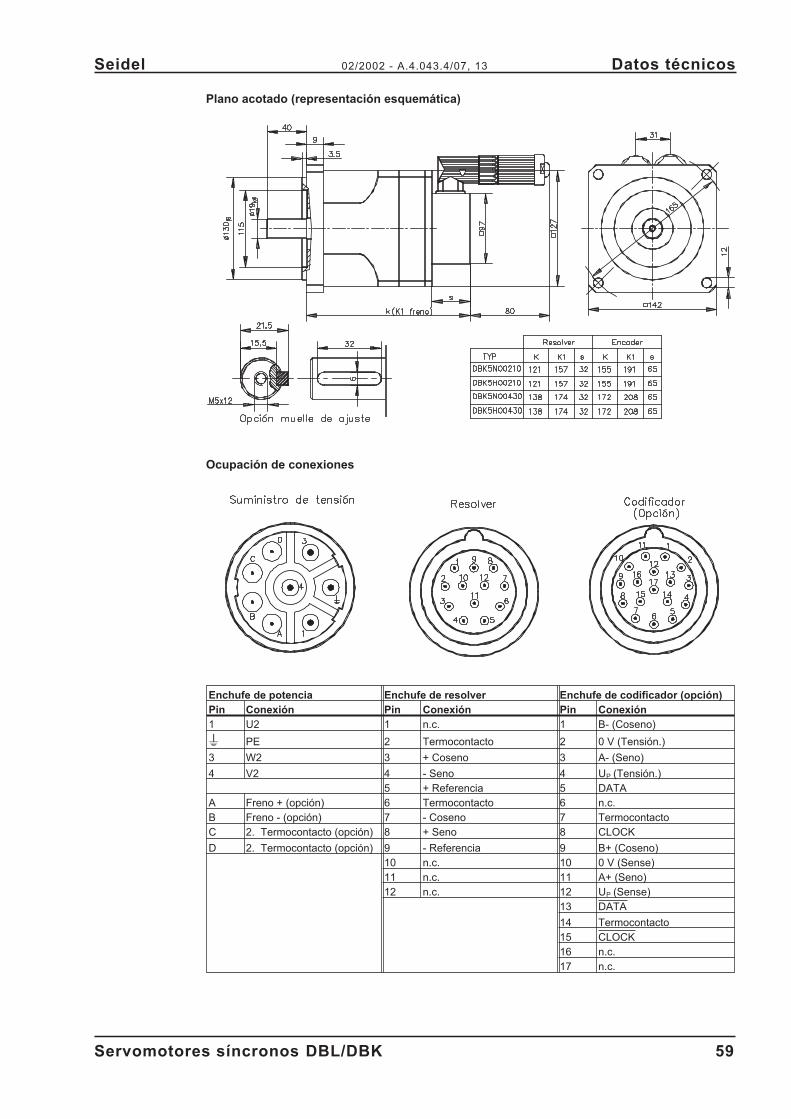
Plano acotado (representación esquemática)
Ocupación de conexiones
Enchufe de potencia Enchufe de resolver Enchufe de codificador (opción)Pin Conexión Pin Conexión Pin Conexión1 U2 1 n.c. 1 B- (Coseno)
� PE 2 Termocontacto 2 0 V (Tensión.)
3 W2 3 + Coseno 3 A- (Seno)
4 V2 4 - Seno 4 UP (Tensión.)5 + Referencia 5 DATA
A Freno + (opción) 6 Termocontacto 6 n.c.B Freno - (opción) 7 - Coseno 7 TermocontactoC 2. Termocontacto (opción) 8 + Seno 8 CLOCK
D 2. Termocontacto (opción) 9 - Referencia 9 B+ (Coseno)10 n.c. 10 0 V (Sense)11 n.c. 11 A+ (Seno)12 n.c. 12 UP (Sense)
13 DATA
14 Termocontacto15 CLOCK16 n.c.17 n.c.
Servomotores síncronos DBL/DBK 59
Seidel 02/2002 - A.4.043.4/07, 13 Datos técnicos
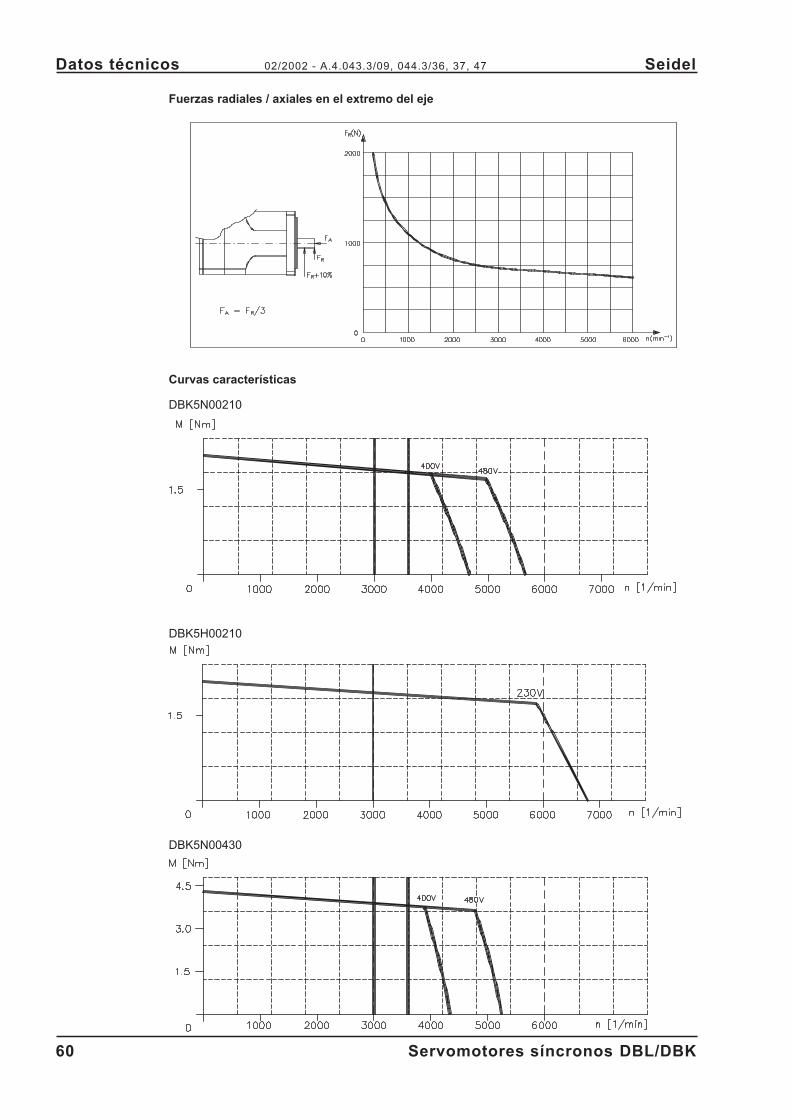
Fuerzas radiales / axiales en el extremo del eje
Curvas características
DBK5N00210
DBK5H00210
DBK5N00430
60 Servomotores síncronos DBL/DBK
Datos técnicos 02/2002 - A.4.043.3/09, 044.3/36, 37, 47 Seidel
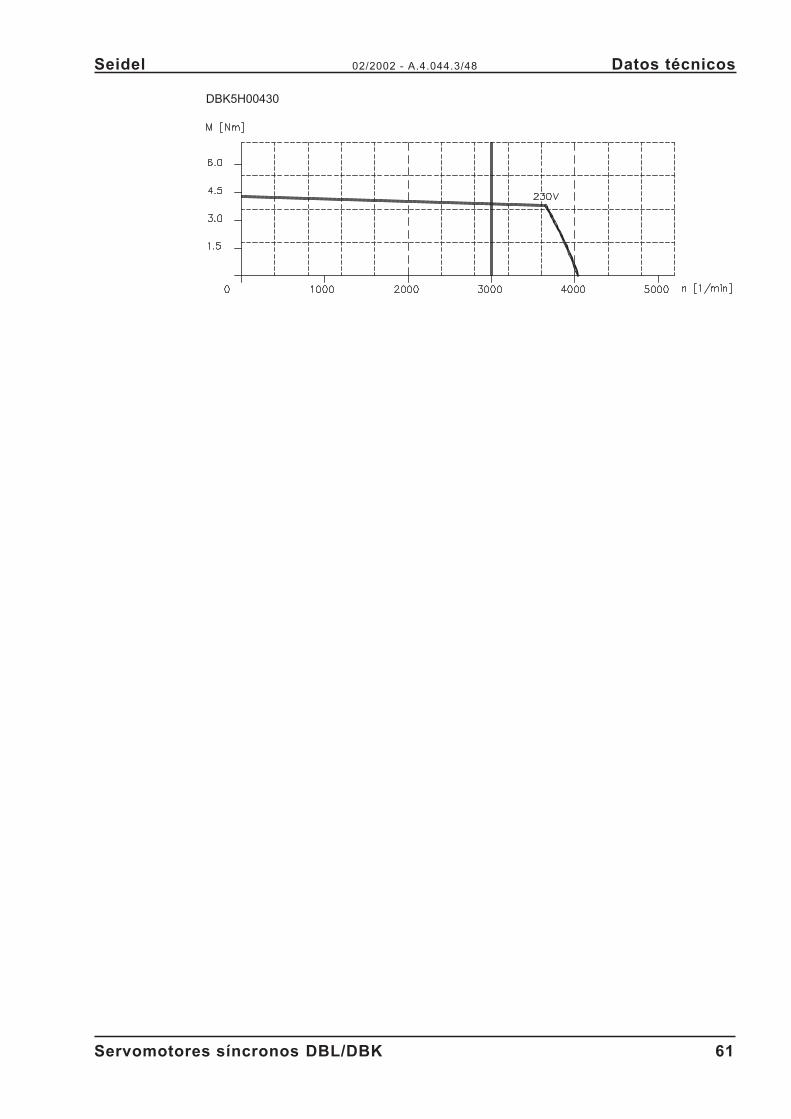
DBK5H00430
Servomotores síncronos DBL/DBK 61
Seidel 02/2002 - A.4.044.3/48 Datos técnicos
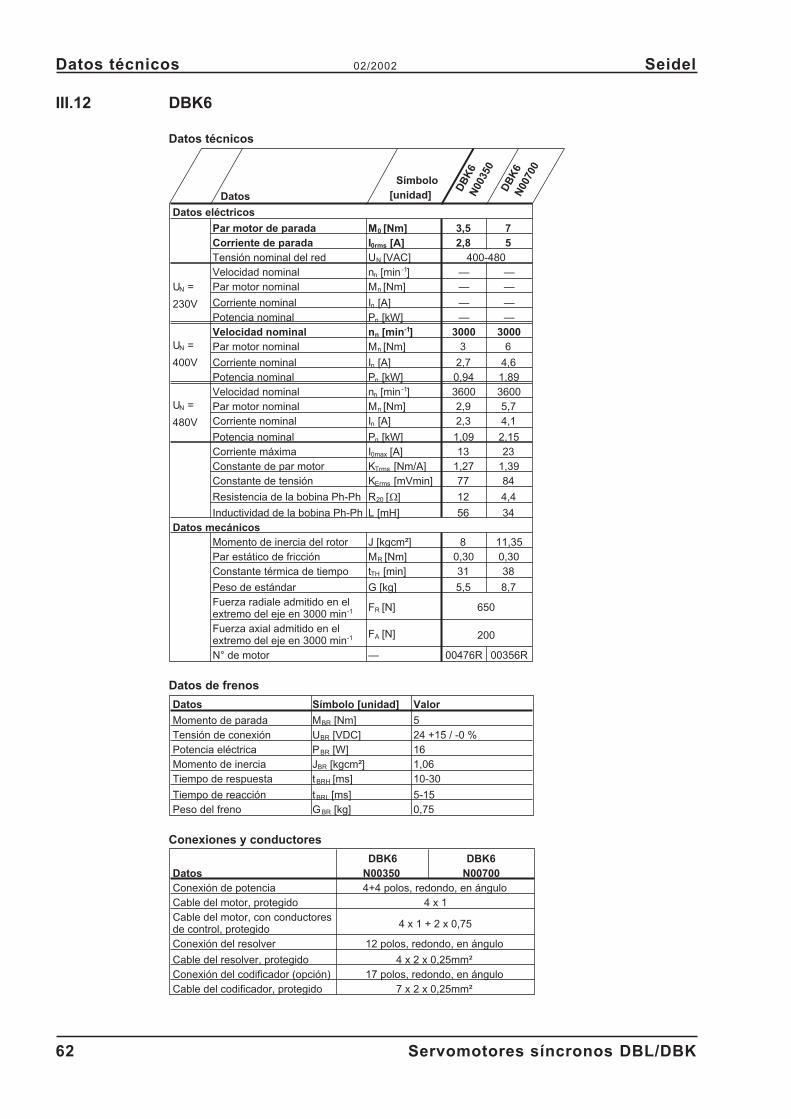
III.12 DBK6
Datos técnicos
Datos
Símbolo[unidad]
DB
K6
N00
350
DB
K6
N00
700
Datos eléctricos
Par motor de parada M0 [Nm] 3,5 7Corriente de parada I0rms [A] 2,8 5Tensión nominal del red UN [VAC] 400-480
UN =
230V
Velocidad nominal nn [min-1] — —Par motor nominal Mn [Nm] — —
Corriente nominal In [A] — —Potencia nominal Pn [kW] — —
UN =
400V
Velocidad nominal nn [min-1] 3000 3000Par motor nominal Mn [Nm] 3 6
Corriente nominal In [A] 2,7 4,6Potencia nominal Pn [kW] 0,94 1,89
UN =
480V
Velocidad nominal nn [min-1] 3600 3600Par motor nominal Mn [Nm] 2,9 5,7Corriente nominal In [A] 2,3 4,1
Potencia nominal Pn [kW] 1,09 2,15Corriente máxima I0max [A] 13 23Constante de par motor KTrms [Nm/A] 1,27 1,39Constante de tensión KErms [mVmin] 77 84
Resistencia de la bobina Ph-Ph R20 [�] 12 4,4
Inductividad de la bobina Ph-Ph L [mH] 56 34Datos mecánicos
Momento de inercia del rotor J [kgcm²] 8 11,35Par estático de fricción MR [Nm] 0,30 0,30Constante térmica de tiempo tTH [min] 31 38
Peso de estándar G [kg] 5,5 8,7Fuerza radiale admitido en elextremo del eje en 3000 min-1 FR [N] 650
Fuerza axial admitido en elextremo del eje en 3000 min-1 FA [N] 200
N° de motor — 00476R 00356R
Datos de frenos
Datos Símbolo [unidad] Valor
Momento de parada MBR [Nm] 5Tensión de conexión UBR [VDC] 24 +15 / -0 %Potencia eléctrica PBR [W] 16Momento de inercia JBR [kgcm²] 1,06Tiempo de respuesta tBRH [ms] 10-30
Tiempo de reacción tBRL [ms] 5-15Peso del freno GBR [kg] 0,75
Conexiones y conductores
DatosDBK6
N00350DBK6
N00700Conexión de potencia 4+4 polos, redondo, en ánguloCable del motor, protegido 4 x 1Cable del motor, con conductoresde control, protegido 4 x 1 + 2 x 0,75
Conexión del resolver 12 polos, redondo, en ángulo
Cable del resolver, protegido 4 x 2 x 0,25mm²Conexión del codificador (opción) 17 polos, redondo, en ánguloCable del codificador, protegido 7 x 2 x 0,25mm²
62 Servomotores síncronos DBL/DBK
Datos técnicos 02/2002 Seidel
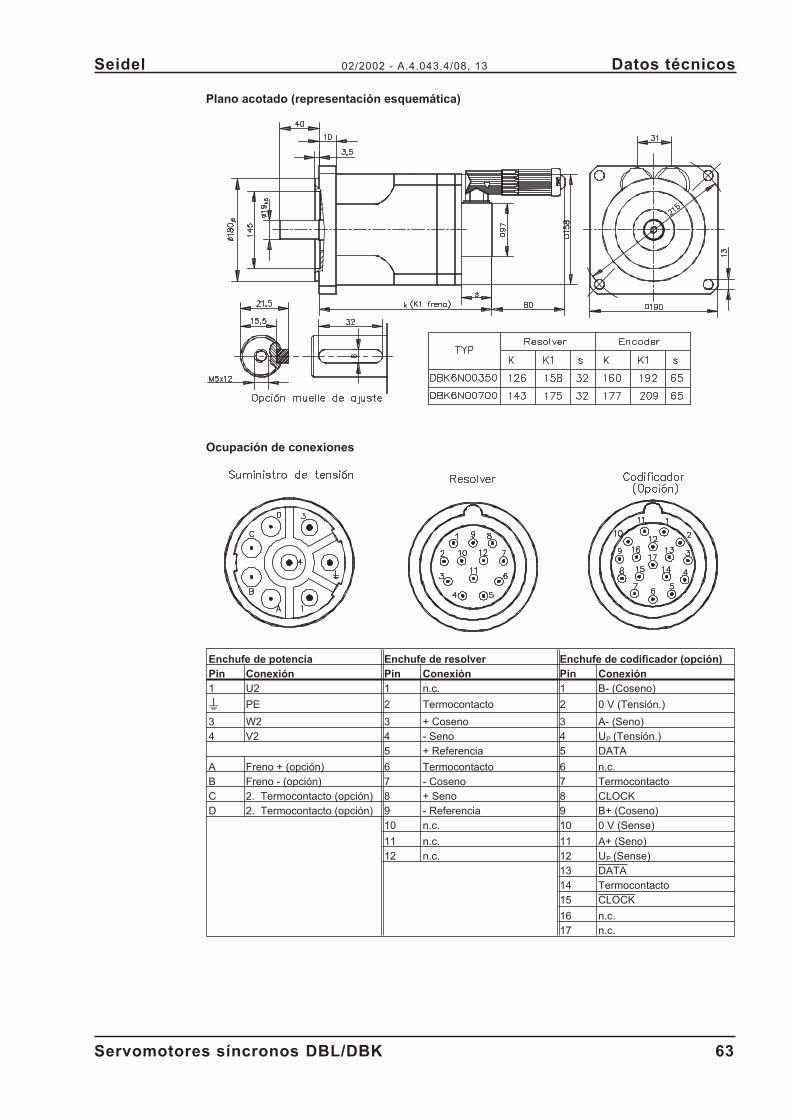
Plano acotado (representación esquemática)
Ocupación de conexiones
Enchufe de potencia Enchufe de resolver Enchufe de codificador (opción)Pin Conexión Pin Conexión Pin Conexión1 U2 1 n.c. 1 B- (Coseno)
� PE 2 Termocontacto 2 0 V (Tensión.)
3 W2 3 + Coseno 3 A- (Seno)4 V2 4 - Seno 4 UP (Tensión.)
5 + Referencia 5 DATA
A Freno + (opción) 6 Termocontacto 6 n.c.B Freno - (opción) 7 - Coseno 7 TermocontactoC 2. Termocontacto (opción) 8 + Seno 8 CLOCKD 2. Termocontacto (opción) 9 - Referencia 9 B+ (Coseno)
10 n.c. 10 0 V (Sense)
11 n.c. 11 A+ (Seno)12 n.c. 12 UP (Sense)
13 DATA14 Termocontacto15 CLOCK
16 n.c.17 n.c.
Servomotores síncronos DBL/DBK 63
Seidel 02/2002 - A.4.043.4/08, 13 Datos técnicos
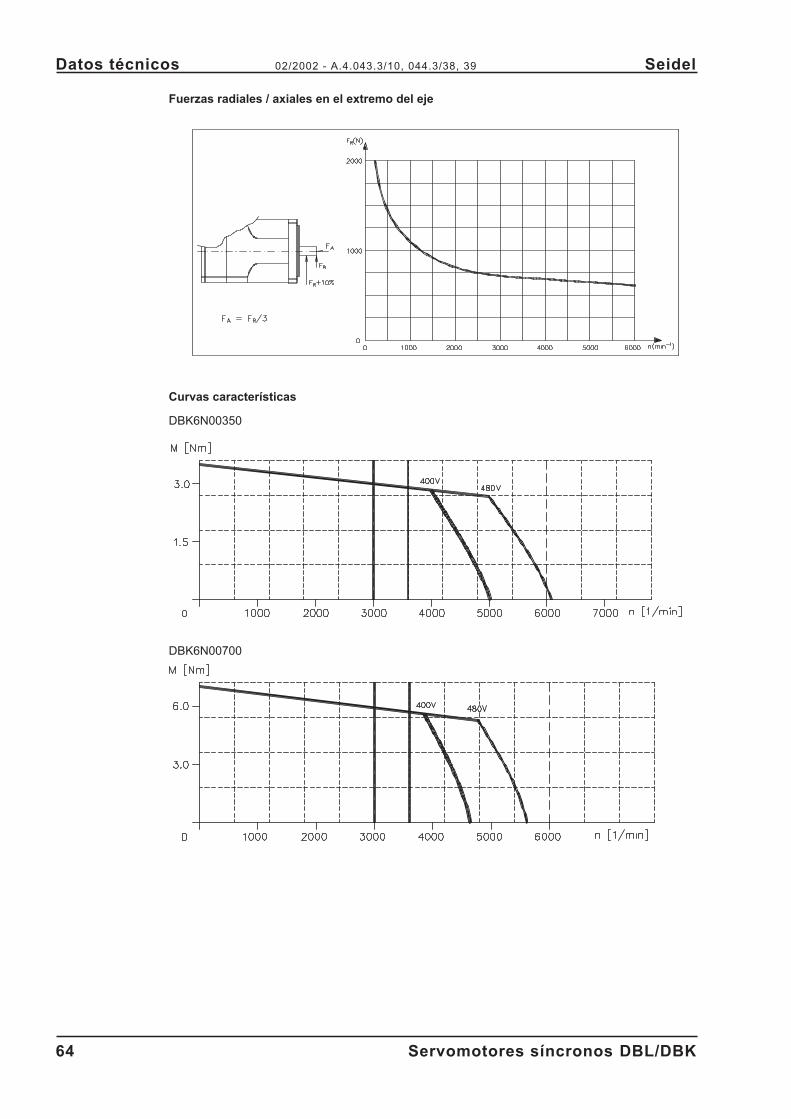
Fuerzas radiales / axiales en el extremo del eje
Curvas características
DBK6N00350
DBK6N00700
64 Servomotores síncronos DBL/DBK
Datos técnicos 02/2002 - A.4.043.3/10, 044.3/38, 39 Seidel

Esta página se ha dejado en blanco intencionadamente.
Servomotores síncronos DBL/DBK 65
Seidel 02/2002 Datos técnicos
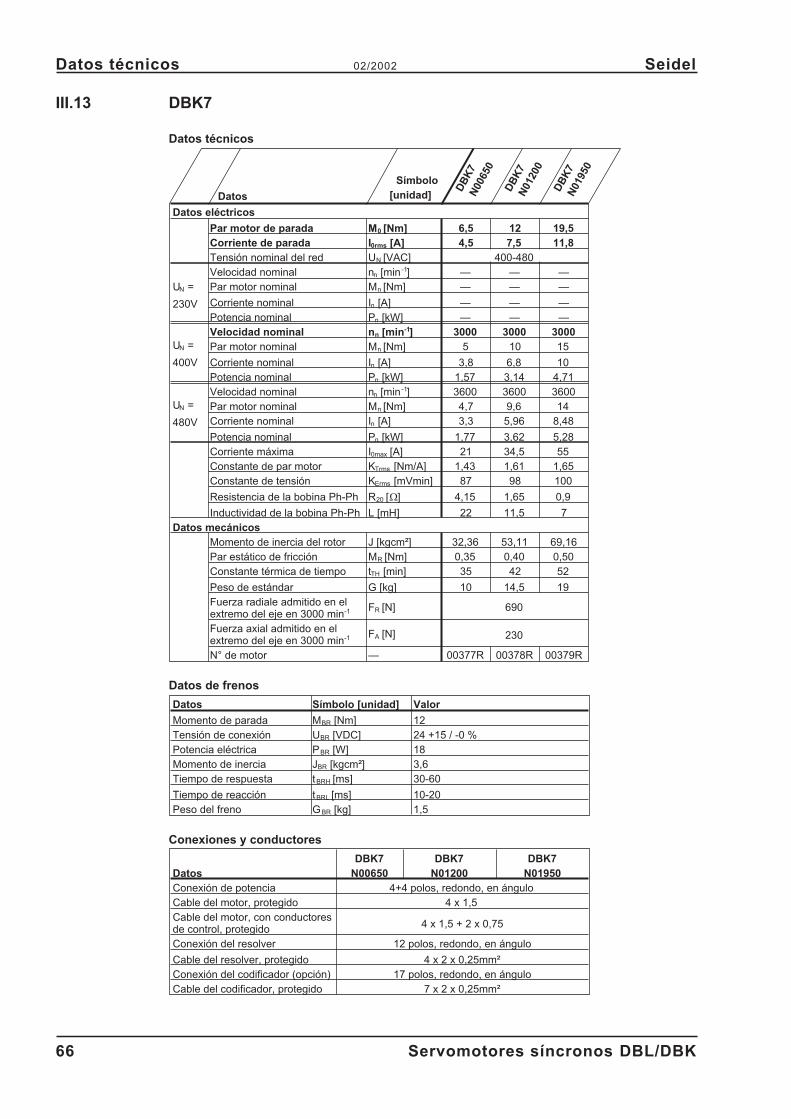
III.13 DBK7
Datos técnicos
Datos
Símbolo[unidad]
DB
K7
N00
650
DB
K7
N01
200
DB
K7
N01
950
Datos eléctricos
Par motor de parada M0 [Nm] 6,5 12 19,5Corriente de parada I0rms [A] 4,5 7,5 11,8Tensión nominal del red UN [VAC] 400-480
UN =
230V
Velocidad nominal nn [min-1] — — —Par motor nominal Mn [Nm] — — —
Corriente nominal In [A] — — —Potencia nominal Pn [kW] — — —
UN =
400V
Velocidad nominal nn [min-1] 3000 3000 3000Par motor nominal Mn [Nm] 5 10 15
Corriente nominal In [A] 3,8 6,8 10Potencia nominal Pn [kW] 1,57 3,14 4,71
UN =
480V
Velocidad nominal nn [min-1] 3600 3600 3600Par motor nominal Mn [Nm] 4,7 9,6 14Corriente nominal In [A] 3,3 5,96 8,48
Potencia nominal Pn [kW] 1,77 3,62 5,28Corriente máxima I0max [A] 21 34,5 55Constante de par motor KTrms [Nm/A] 1,43 1,61 1,65Constante de tensión KErms [mVmin] 87 98 100
Resistencia de la bobina Ph-Ph R20 [�] 4,15 1,65 0,9
Inductividad de la bobina Ph-Ph L [mH] 22 11,5 7Datos mecánicos
Momento de inercia del rotor J [kgcm²] 32,36 53,11 69,16Par estático de fricción MR [Nm] 0,35 0,40 0,50Constante térmica de tiempo tTH [min] 35 42 52
Peso de estándar G [kg] 10 14,5 19Fuerza radiale admitido en elextremo del eje en 3000 min-1 FR [N] 690
Fuerza axial admitido en elextremo del eje en 3000 min-1 FA [N] 230
N° de motor — 00377R 00378R 00379R
Datos de frenos
Datos Símbolo [unidad] Valor
Momento de parada MBR [Nm] 12Tensión de conexión UBR [VDC] 24 +15 / -0 %Potencia eléctrica PBR [W] 18Momento de inercia JBR [kgcm²] 3,6Tiempo de respuesta tBRH [ms] 30-60
Tiempo de reacción tBRL [ms] 10-20Peso del freno GBR [kg] 1,5
Conexiones y conductores
DatosDBK7
N00650DBK7
N01200DBK7
N01950Conexión de potencia 4+4 polos, redondo, en ánguloCable del motor, protegido 4 x 1,5Cable del motor, con conductoresde control, protegido 4 x 1,5 + 2 x 0,75
Conexión del resolver 12 polos, redondo, en ángulo
Cable del resolver, protegido 4 x 2 x 0,25mm²Conexión del codificador (opción) 17 polos, redondo, en ánguloCable del codificador, protegido 7 x 2 x 0,25mm²
66 Servomotores síncronos DBL/DBK
Datos técnicos 02/2002 Seidel
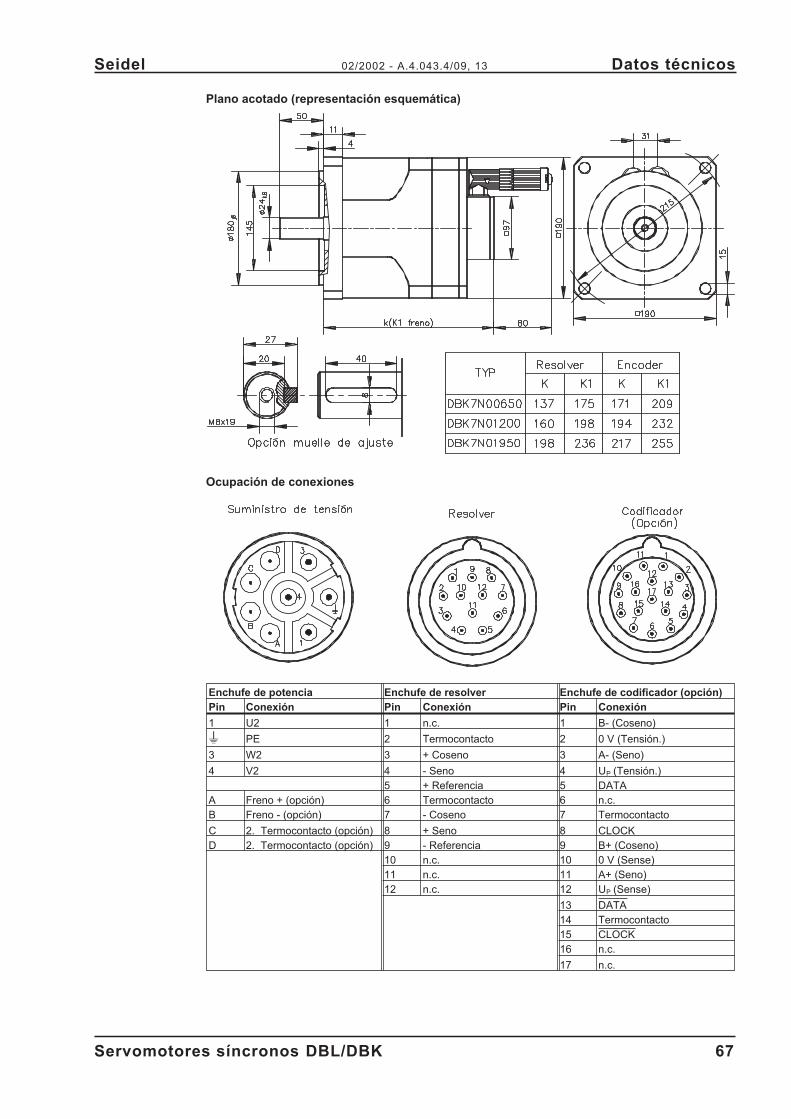
Plano acotado (representación esquemática)
Ocupación de conexiones
Enchufe de potencia Enchufe de resolver Enchufe de codificador (opción)Pin Conexión Pin Conexión Pin Conexión
1 U2 1 n.c. 1 B- (Coseno)
� PE 2 Termocontacto 2 0 V (Tensión.)
3 W2 3 + Coseno 3 A- (Seno)
4 V2 4 - Seno 4 UP (Tensión.)5 + Referencia 5 DATA
A Freno + (opción) 6 Termocontacto 6 n.c.B Freno - (opción) 7 - Coseno 7 Termocontacto
C 2. Termocontacto (opción) 8 + Seno 8 CLOCKD 2. Termocontacto (opción) 9 - Referencia 9 B+ (Coseno)
10 n.c. 10 0 V (Sense)11 n.c. 11 A+ (Seno)12 n.c. 12 UP (Sense)
13 DATA14 Termocontacto15 CLOCK16 n.c.
17 n.c.
Servomotores síncronos DBL/DBK 67
Seidel 02/2002 - A.4.043.4/09, 13 Datos técnicos
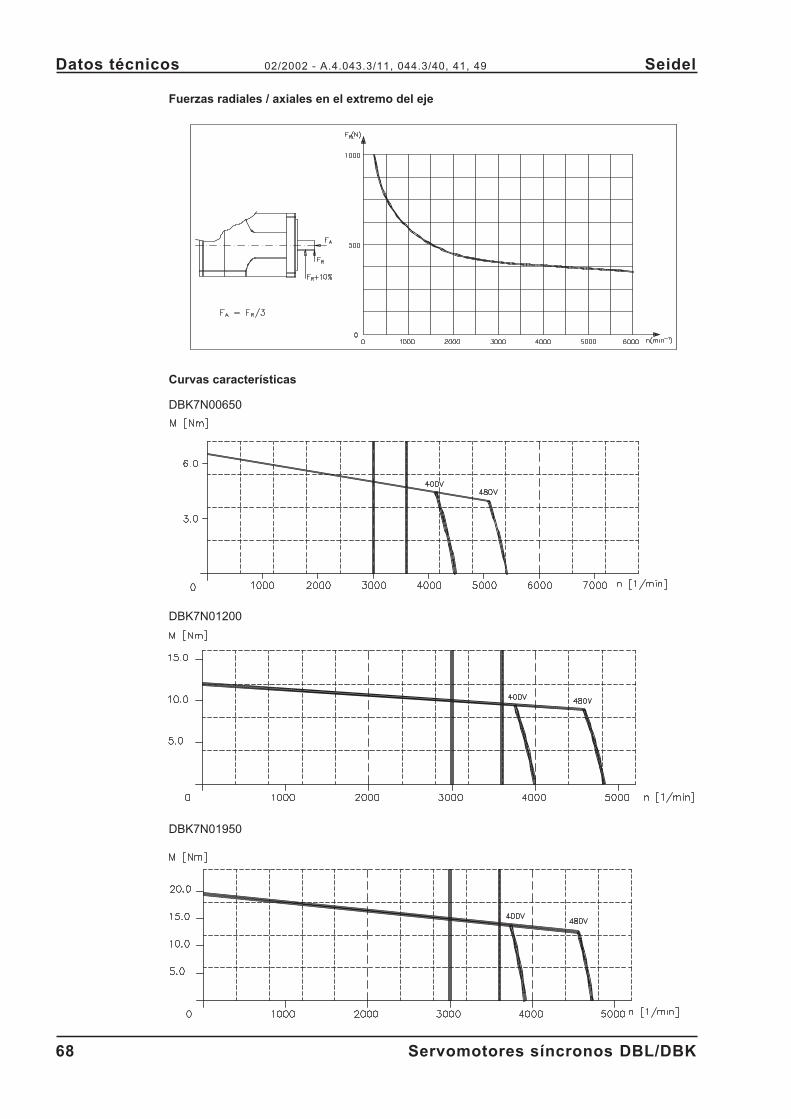
Fuerzas radiales / axiales en el extremo del eje
Curvas características
DBK7N00650
DBK7N01200
DBK7N01950
68 Servomotores síncronos DBL/DBK
Datos técnicos 02/2002 - A.4.043.3/11, 044.3/40, 41, 49 Seidel
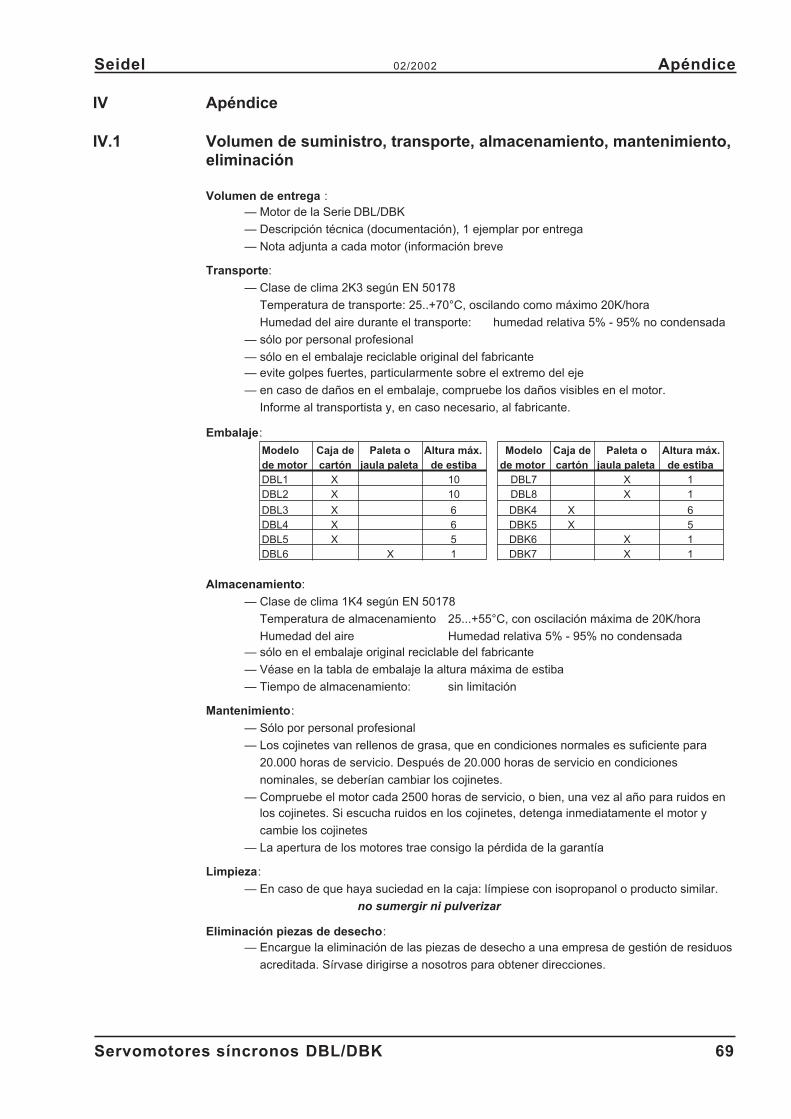
IV Apéndice
IV.1 Volumen de suministro, transporte, almacenamiento, mantenimiento,eliminación
Volumen de entrega :— Motor de la Serie DBL/DBK
— Descripción técnica (documentación), 1 ejemplar por entrega
— Nota adjunta a cada motor (información breve
Transporte:
— Clase de clima 2K3 según EN 50178
— Temperatura de transporte: 25..+70°C, oscilando como máximo 20K/hora
— Humedad del aire durante el transporte: humedad relativa 5% - 95% no condensada
— sólo por personal profesional
— sólo en el embalaje reciclable original del fabricante— evite golpes fuertes, particularmente sobre el extremo del eje
— en caso de daños en el embalaje, compruebe los daños visibles en el motor.
— Informe al transportista y, en caso necesario, al fabricante.
Embalaje:
Modelode motor
Caja decartón
Paleta ojaula paleta
Altura máx.de estiba
Modelode motor
Caja decartón
Paleta ojaula paleta
Altura máx.de estiba
DBL1 X 10 DBL7 X 1DBL2 X 10 DBL8 X 1
DBL3 X 6 DBK4 X 6DBL4 X 6 DBK5 X 5DBL5 X 5 DBK6 X 1DBL6 X 1 DBK7 X 1
Almacenamiento:
— Clase de clima 1K4 según EN 50178
— Temperatura de almacenamiento 25...+55°C, con oscilación máxima de 20K/hora
— Humedad del aire Humedad relativa 5% - 95% no condensada— sólo en el embalaje original reciclable del fabricante
— Véase en la tabla de embalaje la altura máxima de estiba
— Tiempo de almacenamiento: sin limitación
Mantenimiento:
— Sólo por personal profesional
— Los cojinetes van rellenos de grasa, que en condiciones normales es suficiente para
— 20.000 horas de servicio. Después de 20.000 horas de servicio en condiciones
— nominales, se deberían cambiar los cojinetes.
— Compruebe el motor cada 2500 horas de servicio, o bien, una vez al año para ruidos en— los cojinetes. Si escucha ruidos en los cojinetes, detenga inmediatamente el motor y
— cambie los cojinetes
— La apertura de los motores trae consigo la pérdida de la garantía
Limpieza:
— En caso de que haya suciedad en la caja: límpiese con isopropanol o producto similar.
no sumergir ni pulverizar
Eliminación piezas de desecho:— Encargue la eliminación de las piezas de desecho a una empresa de gestión de residuos
— acreditada. Sírvase dirigirse a nosotros para obtener direcciones.
Servomotores síncronos DBL/DBK 69
Seidel 02/2002 Apéndice
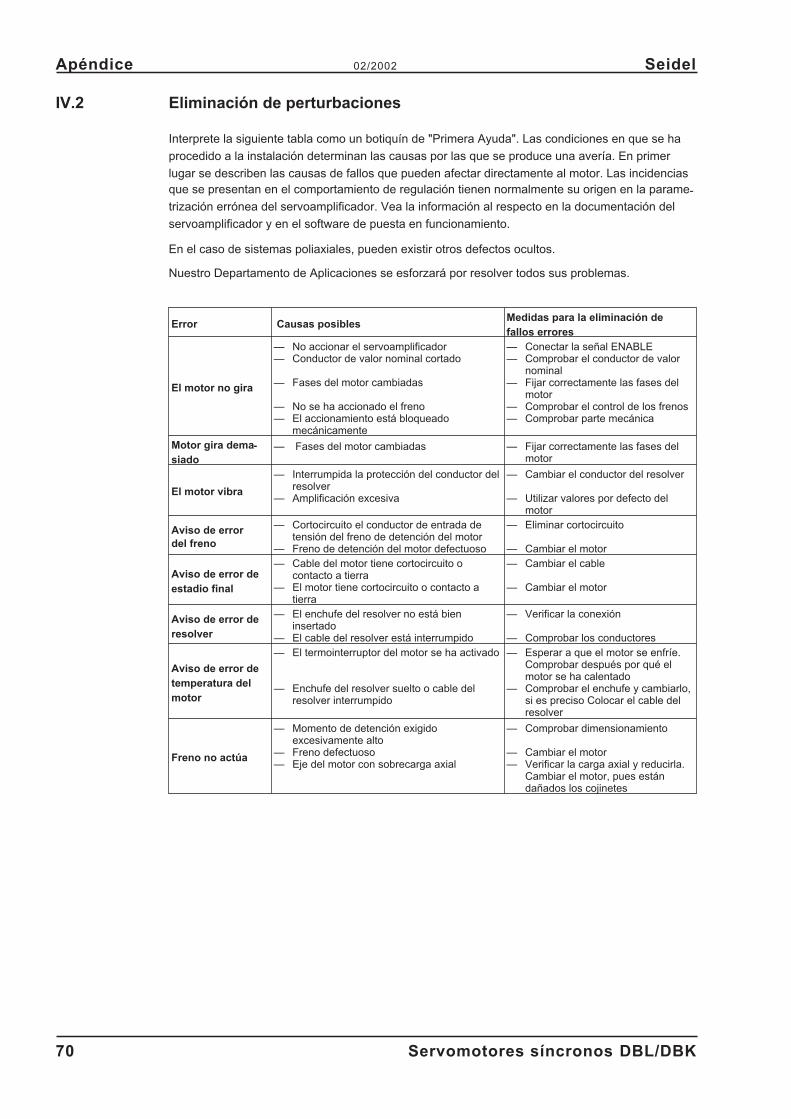
IV.2 Eliminación de perturbaciones
Interprete la siguiente tabla como un botiquín de "Primera Ayuda". Las condiciones en que se ha
procedido a la instalación determinan las causas por las que se produce una avería. En primer
lugar se describen las causas de fallos que pueden afectar directamente al motor. Las incidenciasque se presentan en el comportamiento de regulación tienen normalmente su origen en la parame-trización errónea del servoamplificador. Vea la información al respecto en la documentación del
servoamplificador y en el software de puesta en funcionamiento.
En el caso de sistemas poliaxiales, pueden existir otros defectos ocultos.
Nuestro Departamento de Aplicaciones se esforzará por resolver todos sus problemas.
Error Causas posiblesMedidas para la eliminación defallos errores
El motor no gira
— No accionar el servoamplificador— Conductor de valor nominal cortado
— Fases del motor cambiadas
— No se ha accionado el freno— El accionamiento está bloqueado
mecánicamente
— Conectar la señal ENABLE— Comprobar el conductor de valor
nominal— Fijar correctamente las fases del
motor— Comprobar el control de los frenos— Comprobar parte mecánica
Motor gira dema-siado
— Fases del motor cambiadas — Fijar correctamente las fases delmotor
El motor vibra
— Interrumpida la protección del conductor delresolver
— Amplificación excesiva
— Cambiar el conductor del resolver
— Utilizar valores por defecto delmotor
Aviso de errordel freno
— Cortocircuito el conductor de entrada detensión del freno de detención del motor
— Freno de detención del motor defectuoso
— Eliminar cortocircuito
— Cambiar el motor
Aviso de error deestadio final
— Cable del motor tiene cortocircuito ocontacto a tierra
— El motor tiene cortocircuito o contacto atierra
— Cambiar el cable
— Cambiar el motor
Aviso de error deresolver
— El enchufe del resolver no está bieninsertado
— El cable del resolver está interrumpido
— Verificar la conexión
— Comprobar los conductores
Aviso de error detemperatura delmotor
— El termointerruptor del motor se ha activado
— Enchufe del resolver suelto o cable delresolver interrumpido
— Esperar a que el motor se enfríe.Comprobar después por qué elmotor se ha calentado
— Comprobar el enchufe y cambiarlo,si es preciso Colocar el cable delresolver
Freno no actúa
— Momento de detención exigidoexcesivamente alto
— Freno defectuoso— Eje del motor con sobrecarga axial
— Comprobar dimensionamiento
— Cambiar el motor— Verificar la carga axial y reducirla.
Cambiar el motor, pues estándañados los cojinetes
70 Servomotores síncronos DBL/DBK
Apéndice 02/2002 Seidel
IV.3 Índice
Servomotores síncronos DBL/DBK 71
Seidel 02/2002 Apéndice
Texto Página Texto Página
A Acoplamiento . . . . . . . . . . . . . . . 9Almacenamiento . . . . . . . . . . . . . 69
C Cable del motor . . . . . . . . . . . . . 16Cable del resolver . . . . . . . . . . . . 16Cableado . . . . . . . . . . . . . . . . . 15Calidad vibracional . . . . . . . . . . . . 10Clase de material aislante . . . . . . . . 10Codificador . . . . . . . . . . . . . . . . 10Código de modelo . . . . . . . . . . . . 12Constante de par motor . . . . . . . . . 21Constante de tensión. . . . . . . . . . . 21Constante térmica de tiempo. . . . . . . 21Contacto de protección térmica . . . . . . 9Contenido . . . . . . . . . . . . . . . . . 3Corriente de parada . . . . . . . . . . . 21Corriente máxima . . . . . . . . . . . . 21Corriente nominal . . . . . . . . . . . . 21
D DBK4 . . . . . . . . . . . . . . . . . . . 54DBK5 . . . . . . . . . . . . . . . . . . . 58DBK6 . . . . . . . . . . . . . . . . . . . 62DBK7 . . . . . . . . . . . . . . . . . . . 66DBL1 . . . . . . . . . . . . . . . . . . . 22DBL2 . . . . . . . . . . . . . . . . . . . 26DBL3 . . . . . . . . . . . . . . . . . . . 30DBL4 . . . . . . . . . . . . . . . . . . . 34DBL5 . . . . . . . . . . . . . . . . . . . 38DBL6 . . . . . . . . . . . . . . . . . . . 42DBL7 . . . . . . . . . . . . . . . . . . . 46DBL8 . . . . . . . . . . . . . . . . . . . 50Declaración del fabricante . . . . . . . . . 6
E Eliminación . . . . . . . . . . . . . . . . 69F Forma de diseño. . . . . . . . . . . . . . 9
Freno de detención. . . . . . . . . . . . 10Fuerza axial . . . . . . . . . . . . . . . . 9Fuerza radial. . . . . . . . . . . . . . . . 9
H Humedad de almacenamiento . . . . . . 69
I Instrucciones de seguridad . . . . . . . . 4L Lugar de instalación . . . . . . . . . . . 15M Mantenimiento . . . . . . . . . . . . . . 69
Momento de inercia del rotor . . . . . . . 21Montaje. . . . . . . . . . . . . . . . . . 15
O Opciones . . . . . . . . . . . . . . . . . 11P Par motor de parada . . . . . . . . . . . 21
Par motor nominal . . . . . . . . . . . . 21Placa de identificación . . . . . . . . . . 12Protección . . . . . . . . . . . . . . . . 15Puesta en funcionamiento . . . . . . . . 19
R Reducción de potencia . . . . . . . . . . 8Resolver . . . . . . . . . . . . . . . . . 10
S Servoamplificador . . . . . . . . . . . . . 8Signo de masa . . . . . . . . . . . . . . 14
T Técnica de conexión . . . . . . . . . . . 10Temperatura ambiental . . . . . . . . . . 8Temperatura de almacenamiento . . . . 69Temperatura de brida . . . . . . . . . . . 8Tiempo de almacenamiento . . . . . . . 69Tiempos de reacción de freno . . . . . . 21Tipo de protección . . . . . . . . . . . . . 9Toma de tierra . . . . . . . . . . . . . . 15Transporte . . . . . . . . . . . . . . . . 69
U Unidad de retorno . . . . . . . . . . . . 10V Ventilación . . . . . . . . . . . . . . . . 15
Volumen de suministro . . . . . . . . . . 69
Vertrieb und Service / Sales and Service / Agence et Services
Bundesrepubl ik Deutschland /Germany / Al lemagne
KOLLMORGEN SEIDEL GmbH & Co. KGVerkaufsniederlassung NordWacholderstr. 40-4240489 DüsseldorfTel.: +49(0)203 - 99 79 214Fax: +49(0)203 - 99 79 182
KOLLMORGEN SEIDEL GmbH & Co. KGVerkaufsniederlassung WestLilienstraße 342719 SolingenTel.: +49(0)212 - 2 30 77 99Fax: +49(0)212 - 2 30 77 97
KOLLMORGEN SEIDEL GmbH & Co. KGVerkaufsniederlassung MitteBussardweg 3861118 Bad VilbelTel.: +49(0)6101 - 55 866 00Fax: +49(0)6101 - 55 866 06
KOLLMORGEN SEIDEL GmbH & Co. KGVerkaufsniederlassung Süd-WestLessingstr. 4175015 BrettenTel.: +49(0)7252 - 97 39 040Fax: +49(0)7252 - 97 39 055
KOLLMORGEN SEIDEL GmbH & Co. KGVerkaufsniederlassung Süd-OstLandsbergerstr. 1786947 WeilTel.: +49(0)8195 - 99 92-50Fax: +49(0)8195 - 99 92-33
SERVO-DYNTechnik GmbHKaditzer Str. 1301139 DresdenTel.: +49(0)351 - 49 05 793Fax: +49(0)351 - 49 05 794
Dänemark / Denmark / Danemark
DIGIMATIC ApSMunkehatten1c5220 Odense SØTel.: +45 - 70 20 16 70Fax: +45 - 70 20 16 71
Finnland / Finland / Finlande
DRIVEMATIC OYHevosenkenkä 428430 PoriTel.: +358 - 20 11 23 - 111Fax: +358 - 20 11 23 - 358
Frankreich / France / France
KOLLMORGEN SEIDEL GmbH & Co. KGParc technologique St.Jacques2 rue Pierre et Marie Curie54320 MaxévilleTel.: +33(0)3 83 95 44 80Fax: +33(0)3 83 95 44 81
KOLLMORGEN SEIDEL GmbH & Co. KG1 Rue du 19 mars 196238560 JarrieTel.: +33(0)4 76 72 03 55Fax: +33(0)4 76 72 03 56
KOLLMORGEN SEIDEL GmbH & Co. KG13 Rue des Pins72230 RuaudinTel.: +33(0)2 43 78 32 50Fax: +33(0)2 43 78 32 51
Großbri tannien /Great Br i ta in / Royaume-Uni
INMOTION TECHNOLOGIESBridge MillsHolmfirthHuddersfield HD9 3TWTel : +44 (0) 14 84 68 83 25Fax: +44 (0) 14 84 68 83 26
HEASON TECHNOLOGIES GROUPClaremont LodgeFontwell AvenueEastergate Chichester PO20 6RYTel.: +44(0)12 43 - 54 54 00Fax: +44(0)12 43 - 54 45 90
Ital ien / I ta ly / I ta l ie
DANAHER MOTION s.r.l.Via Brughetti ZI20030 Bovisio Masciago (MI)Tel. +39 (0) 0362 594260Fax +39 (0) 0362 594263
Nieder lande /Nether lands / Pays-Bas
DYNAMIC DRIVESWattstraat 26f2723 RC ZoetermeerTel.: +31(0)79 - 59 39 214Fax: +31(0)79 - 59 39 840
Schweden / Sweden / Suéde
S D T AB25467 HelsingborgTel.: +46(0)42 - 380 800Fax: +46(0)42 - 380 813Stockholm12030 StockholmTel.: +46(0)8 - 640 77 30Fax: +46(0)8 - 641 09 15Göteborg42671 Västra FrölundaTel.: +46(0)31 - 69 62 60Fax: +46(0)31 - 69 62 69
Schweiz / Switzer land / Suisse
KOLLMORGEN SEIDEL GmbH & Co. KGEggbühlstr. 14Postfach8052 ZürichTel.: +41(0)43 - 299 60 50Fax: +41(0)43 - 299 60 51
Spanien / Spain / Espagne
BROTOMATIC S.L.C/San Miguel de Acha, 2 Pab.301010 Vitoria (ALAVA)Tel.: +34 945 - 24 94 11Fax: +34 945 - 22 78 32
KOLLMORGEN SEIDEL GmbH & Co. KG Internet : www.danaher-motion.de
E-Mail: [email protected]
Hausanschrift Postanschrift
Wacholderstr. 40-42 Postfach 34 01 61 Tel.: +49(0)203 - 99 79 - 0D - 40489 Düsseldorf D-40440 Düsseldorf Fax: +49(0)203 - 99 79 - 155
Bundesrepubl ik Deutschland /Germany / Al lemagne
WERNER P. HERMESIngenieurbüroTurmstr. 2340750 LangenfeldTel.: +49(0)212 - 65 10 55Fax :+49(0)212 - 65 10 57
EAT GmbHElektronische AntriebstechnikHanferstraße 2379108 FreiburgTel: +49(0)761 - 13 03 50Fax:+49(0)761 - 13 03 555
IBK Ingenieurbüro Keßler GmbHDachtmisser Str. 1021394 KirchgellersenTel: +49(0)4135 - 12 88Fax:+49(0)4135 - 14 33
MACCON GmbHKühlbachstr. 981543 MünchenTel: +49(0)89 - 65 12 20-0Fax:+49(0)89 - 65 52 17
Großbri tannien /Great Br i ta in / Royaume-Uni
MOTOR TECHNOLOGY Ltd.Unit 1Chadkirk Industrial EstateOtterspool RoadRomiley, StockportCheshire SK6 3LETel.: +44(0)161 - 42 73 641Fax : +44(0)161 - 42 71 306Nieder lande /Nether lands / Pays-Bas
KIWIETIngenieurbüroHelenaveenseweg 355985 NK Panningen (Grashoek)Tel.: +31(0)77 - 30 76 661Fax: +31(0)77 - 30 76 646
Schweiz / Switzer land / Suisse
BOBRY SERVO ELECTRONIC AGZentralstr. 66030 EbikonTel.: +41(0)41- 440 - 77 22Fax : +41(0)41 - 440 - 69 43
Ungarn / Hungary / Hongr ie
Q-TECH Mérnöki Szolgáltató Kft.1161 BudapestBatthyány u. 8.Tel.: +36 (1) 405 - 33 38Fax: +36 (1) 405 - 91 34
Tschechien / Czech Rep. / Tchéquie
TG DRIVES s.r.oJeneweinova 3761700 BrnoTel : 05 - 45 23 49 35Fax: 05 - 45 23 47 35
Türkei / Turkey / Turquie
Robotek Otomasyon Teknolojileri Ltd.IMES Sanayi Sitesi A Blok 107.Sk. No. 25 Dudullu81260 IstanbulTel: +90 216 527 15 42Fax:+90 216 499 76 13
Griechenland / Greece / Grèce
ALPHA MOTION5 - 7 Alkamenoys Str.104.39 AthensTel.: +30 10 82 27 470Fax: +30 10 82 53 787
Austral ien / Austral ia / Austral ie
MOTION TECHNOLOGIES PTY. Ltd.1/65 Alexander AvenueTaren Point NSW 2229SydneyTel.: +61 (0)295 24 47 82Fax: +61 (0)295 25 38 78
Systempartner / System partners / Partenaires du systéme