sensores tactiles
TRANSCRIPT

INSTITUTO TECNOLÓGICO DE SALTILLO
AUTOMATIZACIÓN INDUSTRIAL
SENSORES TÁCTILES
CATEDRATICO: MC ANA CRISTINA MOTA GUTIERREZ
ALUMNO: ALEJANDRO RUIZ GALLEGOS
Saltillo, Coah. A 10 de Febrero del 2011

SENSORES TACTILES
Los sensores táctiles son dispositivos que indican el contacto de algún objeto sólido con ellos mismos. Suelen ser empleados en los extremos de los brazos de robot (pinzas) para controlar la manipulación de objetos. A su vez se pueden dividir en dos tipos: de contacto y de fuerza. Pasamos a continuación a hablar de cada uno de los dos tipos.
SENSORES DE CONTACTO
Los sensores de contacto nos indican simplemente si ha habido contacto o no con algún objeto, sin considerar la magnitud de la fuerza de contacto. Suelen ser dispositivos sencillos cuyo uso es muy variado. Se pueden situar en las pinzas de los brazos de robot para determinar cuándo se ha cogido un objeto, pueden formar parte de sondas de inspección para determinar dimensiones de objetos, o incluso pueden situarse en el exterior de las pinzas para ir tanteando un entorno.
Estos sensores suelen ser interruptores de límite o micro interruptores, que son sencillos dispositivos eléctricos que cuando se contacta con ellos cambian de estado.
Dentro de los componentes electrónicos, se encuentra el final de carrera o sensor de contacto (también conocido como "interruptor de límite") o limit switch, son dispositivos eléctricos, neumáticos o mecánicos situados al final del recorrido de un elemento móvil, como por ejemplo una cinta transportadora, con el objetivo de enviar señales que puedan modificar el estado de un circuito. Internamente pueden contener interruptores normalmente abiertos (NA o NO en inglés), cerrados (NC) o conmutadores dependiendo de la operación que cumplan al ser accionados, de ahí la gran variedad de finales de carrera que existen en mercado.
Generalmente estos sensores están compuestos por dos partes: un cuerpo donde se encuentran los contactos y una cabeza que detecta el movimiento. Su uso es muy diverso, empleándose, en general, en todas las máquinas que tengan un movimiento rectilíneo de ida y vuelta o sigan una trayectoria fija, es decir, aquellas que realicen una carrera o recorrido fijo, como por ejemplo ascensores, montacargas, robots, etc.
Los finales de carrera están fabricados en diferentes materiales tales como metal, plástico o fibra de vidrio.
ALEJANDRO RUIZ GALLEGOS

COMPONENTES:
ACCIONADOR: es la parte del interruptor que entra en contacto con el objeto que se está detectando.
CABEZA: en él se encuentra el mecanismo que transforma el movimiento del accionador en movimiento de contacto.
BLOQUE DE CONTACTOS: se encuentran en este los elementos eléctricos de contacto del interruptor. Generalmente hay 2 o 4 pares de contactos.
CUERPO DEL INTERRUPTOR: en un interruptor enchufable, el cuerpo del interruptor aloja el bloque de terminales. En un interruptor no enchufable se encontrara el bloque de terminales del interruptor.
BLOQUE DE TERMINALES: se encuentran las terminales atornillables, aquí se realiza la conexión eléctrica entre el interruptor y el circuito de control.
BASE: en un interruptor enchufable la base aloja la bloque de terminales. Los interruptores no enchufables no cuentan con una base adicional.
TIPO DE ACCIONADORES:
Lateral rotatorio Pulsación lateral o superior Vástago oscilante o bigote de gato
VENTAJAS MECANICAS:
Facilidad de uso Operación sencilla y visible Carcasa durable Cierres herméticos para una operación confiable Elevada resistencia a las condiciones ambientales Alta repetibilidad
VENTAJAS ELECTRICAS:
Capacidad de conmutar cargas eléctricas más elevadas Inmunidad a la interferencia de ruido eléctrico Inmunidad a la interferencia de frecuencias de radio Ausencia de corrientes de fuga Perdidas de voltaje mínimas Operación sencilla basada en Normalmente Abierta y/o Cerrada
DESVENTAJAS:
Vida de los contactos más breves que las de estado sólido Los componentes mecánicos se desgastan No todas las aplicaciones pueden utilizar detección por contacto
APLICACIONES:
ALEJANDRO RUIZ GALLEGOS
Cintas transportadoras Tornos de torreta automática Maquinas de Transferencia Fresadoras y taladros Brocas radiales Equipos de producción de alta velocidad
SENSORES DE FUERZA
Los sensores de fuerza determinan, además de si ha habido contacto con un objeto como los anteriores, la magnitud de la fuerza con la que se ha producido dicho contacto. Esta capacidad es muy útil ya que permitirá al robot poder manipular objetos de diferentes tamaños e incluso colocarlos en lugares muy precisos.
Para detectar la fuerza con la que se ha contactado con un objeto existen diversas técnicas; a continuación pasamos a describir brevemente tres de las más importantes:
Muñeca detectora de fuerza.
Consta de una célula de carga que se sitúa entre la muñeca y las pinzas del brazo. Su objetivo es proporcionar información sobre las tres componentes de la fuerza (Fx, Fy, Fz) y sobre sus tres momentos en el extremo del brazo. En la figura se puede observar una posible configuración de un dispositivo de detección utilizando muñecas detectoras.
Este sistema para medir fuerzas tiene una serie de inconvenientes. Por un lado, los cálculos necesarios para procesar la información que proviene de las muñecas son bastante complejos y requieren un tiempo considerable. Además, cuando la velocidad con la que se mueve el brazo es considerable, resulta difícil poder controlar sus movimientos lo suficientemente rápido como para que no provoque ninguna catástrofe (como el aplastamiento de algún objeto).
Los sensores de muñeca son pequeños, sensibles, de poco peso (aproximadamente 12 onzas) y de un diseño relativamente compacto, del orden de 10 cm de diámetro total y de 3cm de espesor.Para poder reducir la histéresis y aumentar la exactitud en la medida, el hardware se suele construir a partir de una pieza mecánica maciza, que suele ser de aluminio. Por ejemplo, el sensor mostrado en la figura utiliza ocho pares de galgas de deformaciones de semiconductores ALEJANDRO RUIZ GALLEGOS

montadas en cuatro barras de deflexión (una galga a cada lado de una barra de deflexión).Las galgas en los extremos abiertos opuestos de las barras de deflexión están cableadas, de manera diferencial, a un circuito potencio métrico, cuya tensión de salida es proporcional a la componente de la fuerza normal al plano de la galga de deformación.
La conexión diferencial de las galgas de deformación proporciona una compensación automática de las variaciones en la temperatura.
Sin embargo, se trata solamente de una compensación de primer orden aproximado. Puesto que los ocho pares de galgas de deformación están orientados en sentido normal a los ejes x, y, z del sistema de referencia, las tres componentes del momento M pueden determinarse sumando y restando adecuadamente las tensiones de salida, respectivamente.
La mayoría de los sensores de fuerza de muñeca funcionan como transductores para transformar las fuerzas y los momentos ejercidos en la mano en desviaciones o desplazamientos medibles en la muñeca generados por el sensor de fuerza no afecten a la exactitud del posicionamiento del manipulador.
Por consiguiente, las especificaciones del rendimiento pueden resumirse como siguen:
Alta rigidez. La frecuencia natural de un dispositivo mecánico está relaciona con su rigidez; así, la alta rigidez asegura que las fuerzas perturbadoras se amortigüen rápidamente para permitir lecturas exactas durante cortos intervalos de tiempo. Además, reduce la magnitud de las desviaciones de una fuerza / momento aplicado, lo que puede añadirse al error de posicionamiento de la mano.
Diseño compacto. Este diseño asegura que el dispositivo no restrinja el movimiento del manipulador en un área de trabajo con poco espacio libre. Con el sensor de fuerza compacto, es
importante colocar el sensor lo más próximo posible a la herramienta para reducir el error de posicionamiento como consecuencia del giro de la mano en pequeños ángulos.
ALEJANDRO RUIZ GALLEGOS

Además, es deseable medir una fuerza / momento de la mano lo más grande posible; así, al hacer mínima la distancia entre la mano y el sensor, se reduce el brazo de la palanca para las fuerzas aplicadas en la mano.
Linealidad. Una buena linealidad entre la respuesta de los elementos detectores de la fuerza y las fuerzas / momentos aplicados permite resolver la fuerza y los momentos mediante simples operaciones matriciales.
Baja histéresis y rozamiento interno. El rozamiento interno reduce la sensibilidad de los elementos detectores de la fuerza porque las fuerzas tienen que superar este rozamiento, o fricción, antes de que pueda obtenerse una desviación medible.Produce también efectos de histéresis que no restablecen los dispositivos de medida de la posición a sus lecturas originales.
Detección de articulaciones.
Esta técnica se basa en la medida del par de torsión de la articulación. La medida de este par puede resultar sencilla, ya que es proporcional a la corriente que circula por el motor que provoca dicha torsión.
A pesar de que está técnica pueda parecer sencilla y fiable, tiene un problema importante. La medida del par de torsión se realiza sobre las articulaciones del brazo y no sobre el efector final (la pinza) como sería deseable, por lo que dicha torsión no solo refleja la fuerza que se ejercerá en la pinza, sino también la fuerza utilizada para mover la articulación.
Sensores de arreglo táctil.
Es un tipo especial de sensores de fuerza ya que en realidad está constituido por una matriz de pequeños sensores de fuerza. Debido a esta característica, permiten además reconocer formas en los objetos que se está manipulando. Este tipo de dispositivos suelen montarse en las pinzas de los brazos de robot.
Cada uno de los sensores de fuerza que componen la matriz suele ser una almohadilla elastomérica, que cuando se comprime cambia su resistencia eléctrica de manera proporcional a la fuerza aplicada. Midiendo esa resistencia es cuando podemos obtener la información acerca de la fuerza. La resolución de este tipo de sensores vendrá dada lógicamente por las dimensiones de la matriz de sensores.
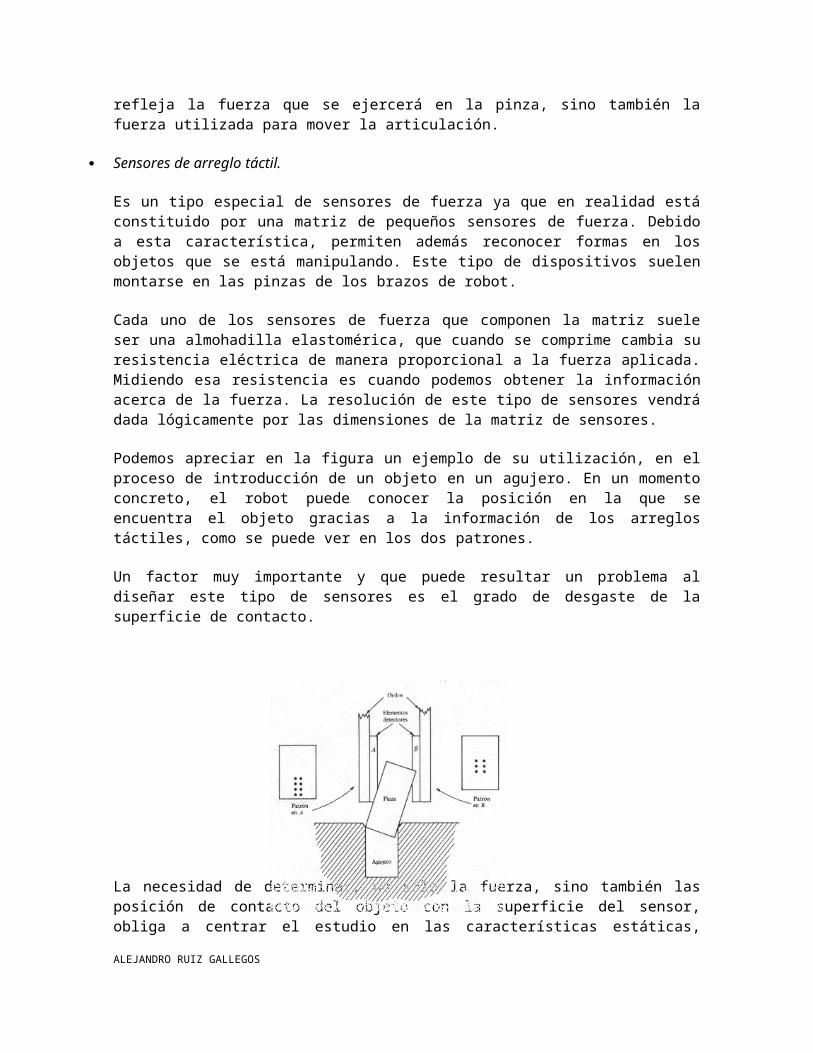
Podemos apreciar en la figura un ejemplo de su utilización, en el proceso de introducción de un objeto en un agujero. En un momento concreto, el robot puede conocer la posición en la que se encuentra el objeto gracias a la información de los arreglos táctiles, como se puede ver en los dos patrones.
Un factor muy importante y que puede resultar un problema al diseñar este tipo de sensores es el grado de desgaste de la superficie de contacto.
ALEJANDRO RUIZ GALLEGOS

La necesidad de determinar, no sólo la fuerza, sino también las posición de contacto del objeto con la superficie del sensor, obliga a centrar el estudio en las características estáticas, dinámicas y de dimensionamiento de un Array de sensores, i.e, un dispositivo sensorial formado por un número, elevado de celdas de forma que los contactos de salida del mismo permitan obtener la posición de los contactos y sus intensidades de presión.
Los sensores, se puede definir en cuanto a sus características estáticas (describen la actuación del sensor en régimen permanente o con cambios lentos del estímulo) y dinámicas (en régimen transitorio).
Otro tipo de arreglo de sensores táctiles muy usado es:
Sensor Táctil Resistivo
Un sensor táctil resistivo está formado por varias capas. Las más importantes son dos finas capas de material conductor entre las cuales hay una pequeña separación. Cuando algún objeto toca la superficie de la capa exterior, las dos capas conductoras entran en contacto en un punto concreto. De esta forma se produce un cambio en la corriente eléctrica que permite a un controlador calcular la posición del punto en el que se ha tocado el sensor midiendo la resistencia. Algunos sensores pueden medir, aparte de las coordenadas del contacto, la presión que se ha ejercido sobre la misma.
Un inconveniente que tienen es que pueden ser dañadas por objetos afilados. Por el contrario no se ven afectadas por elementos externos como polvo o agua, razón por la que son el tipo de sensor más usado para pantallas táctiles en la actualidad.
Sensor Táctil Capacitivo
ALEJANDRO RUIZ GALLEGOS
Un sensor táctil capacitivo está cubierto con un material, habitualmente óxido de indio y estaño que conduce una corriente eléctrica continua a través del sensor. El sensor por tanto muestra un campo de electrones controlado con precisión tanto en el eje vertical como en el horizontal, es decir, adquiere capacitancia. El cuerpo humano también se puede considerar un dispositivo eléctrico en cuyo interior hay electrones, por lo que también dispone de capacitancia. Cuando el campo de capacitancia normal del sensor (su estado de referencia) es alterado por otro campo de capacitancia, como puede ser el dedo de una persona, los circuitos electrónicos miden la 'distorsión' resultante en la onda senoidal característica del campo de referencia y envía la información acerca de este evento al controlador para su procesamiento matemático. Los sensores capacitivos deben ser tocados con un dispositivo conductivo en contacto directo con la mano o con un dedo, al contrario que los sensores resistivos o de onda superficial en las que se puede utilizar cualquier objeto. Los sensores táctiles capacitivos no se ven afectadas por elementos externos y tienen una alta claridad, pero su complejo procesado de la señal hace que su coste sea elevado. La mayor ventaja que presentan sobre los sensores resistivos es su alta sensibilidad y calidad.
ALEJANDRO RUIZ GALLEGOS