relaciones físicas
TRANSCRIPT

5/10/2018 Relaciones físicas - slidepdf.com
http://slidepdf.com/reader/full/relaciones-fisicas 1/8
Relaciones físicas
En la Física la ley de Hooke indica la relación entre las magnitudes que intervienen en elFenómeno físico mediante un análisis cualitativo y cuantitativo. La Ley de Hooke establece queel límite de la tensión elástica de un cuerpo es directamente proporcional a la fuerza. Mediante
un análisis e interpretación de la Ley de Hooke se estudia aspectos relacionados con la ley defuerzas, trabajo, fuerzas conservativas y energía de Resortes.
Hooke estableció la ley fundamental que relaciona la fuerza aplicada y la deformaciónproducida. Para una deformación unidimensional, la Ley de Hooke se puede expresarmatemáticamente de la siguiente forma:
= -K
Donde:
K es la constante de proporcionalidad o de elasticidad.
es la deformación, esto es, lo que se ha comprimido o estirado a partir del estado queno tiene deformación. Se conoce también como el alargamiento de su posición de equilibrio.
es la fuerza resistente del sólido. El signo ( - ) en la ecuación se debe a la fuerza restauradora que tiene sentido contrarioal desplazamiento. La fuerza se opone o se resiste a la deformación.
La ley de fuerza para el resorte es la Ley de Hooke se da Conforme el resorte está estirado (ocomprimido) cada vez más, la fuerza de restauración del resorte se hace más grande y es
necesario aplicar una fuerza mayor. Se encuentra que la fuerza aplicada F es directamente
proporcional al desplazamiento o al cambio de longitud del resorte. Esto se puede expresar enforma de una ecuación.
O con X 0 = 0 , F = kX
Como se puede ver la fuerza varía con X. Esto se expresa diciendo que la fuerza es unafunción de la posición. La k en esta ecuación es una constante de proporcionalidad ycomúnmente se llama la constante del resorte o de la fuerza restauradora . Mientrasmayor sea el valor de k, más rígido o fuerte será el resorte .
La anterior relación se mantiene sólo para los resortes ideales . Los resortes verdaderos seaproximan a esta relación lineal entre fuerza y desplazamiento, dentro de ciertos límites.Por ejemplo, si un resorte se estira más allá de un cierto punto, llamado el límite deelasticidad , se puede deformar y F = kX no se aplica más.
Un resorte ejerce una fuerza ( Fs ) igual y opuesta

5/10/2018 Relaciones físicas - slidepdf.com
http://slidepdf.com/reader/full/relaciones-fisicas 2/8
Fs = - k XFs = -k (X - X 0 )
El signo menos indica que la fuerza del resorte está en la dirección opuesta al desplazamientosi el resorte se estira o se comprime. Esta ecuación es una forma de lo que se conoce como Leyde Hooke .
La magnitud de la fuerza ejercida por un resorte que se ha estirado desde su posición dereposo (X 0 ) a una posición X. La posición de referencia X 0 para el cambio en la longitud deun resorte es arbitraria. La magnitud importante es la diferencia del desplazamiento o el
cambio neto en la longitud del resorte.También dado que el desplazamiento tiene posición vertical, las X con frecuencia sereemplazan por Y. Los resortes dan lugar al Movimiento Armónico Simple (M.A.S.).
Relaciones geométricas
Si se usa un sistema de coordenadas en que el eje baricéntrico de la barra coincide con el ejeX y los ejes Y y Z con las direcciones principales de inercia de la sección, la energía dedeformación por unidad de volumen de una barra recta (viga o pilar) sometida a extensión,
torsión, flexión y cortante, viene dada por:
Donde son las energías debidas únicamente a la extensión, la flexión
impura y la torsión tomadas aisladamente. El término aparece sólo en piezasasimétricas donde el centro de cortante no coincide con el centro de gravedad. Lasexpresiones de estos términos de la energía de deformación cuando existen simultáneamente
flexión y torsión son:
Donde:
es el vector de desplazamientos de los puntos del eje dela pieza.
son los giros de los puntos de eje de la pieza, alrededor de los
5/10/2018 Relaciones físicas - slidepdf.com
http://slidepdf.com/reader/full/relaciones-fisicas 3/8
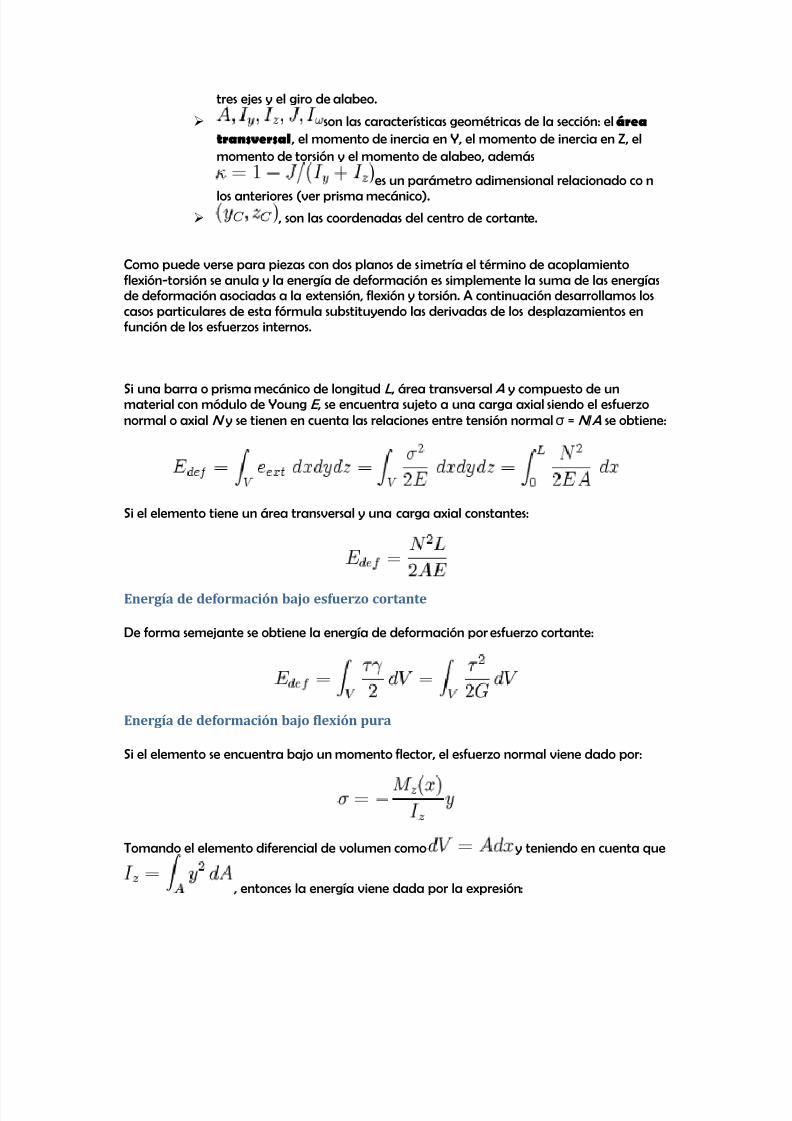
tres ejes y el giro de alabeo.
son las características geométricas de la sección: el área
transversal , el momento de inercia en Y, el momento de inercia en Z, el
momento de torsión y el momento de alabeo, además
es un parámetro adimensional relacionado co n
los anteriores (ver prisma mecánico).
, son las coordenadas del centro de cortante.
Como puede verse para piezas con dos planos de simetría el término de acoplamiento
flexión-torsión se anula y la energía de deformación es simplemente la suma de las energíasde deformación asociadas a la extensión, flexión y torsión. A continuación desarrollamos los
casos particulares de esta fórmula substituyendo las derivadas de los desplazamientos enfunción de los esfuerzos internos.
Si una barra o prisma mecánico de longitud L , área transversal A y compuesto de unmaterial con módulo de Young E , se encuentra sujeto a una carga axial siendo el esfuerzo
normal o axial N y se tienen en cuenta las relaciones entre tensión normal σ = N /A se obtiene:
Si el elemento tiene un área transversal y una carga axial constantes:
Energía de deformación bajo esfuerzo cortante
De forma semejante se obtiene la energía de deformación por esfuerzo cortante:
Energía de deformación bajo flexión pura
Si el elemento se encuentra bajo un momento flector, el esfuerzo normal viene dado por:
Tomando el elemento diferencial de volumen como y teniendo en cuenta que
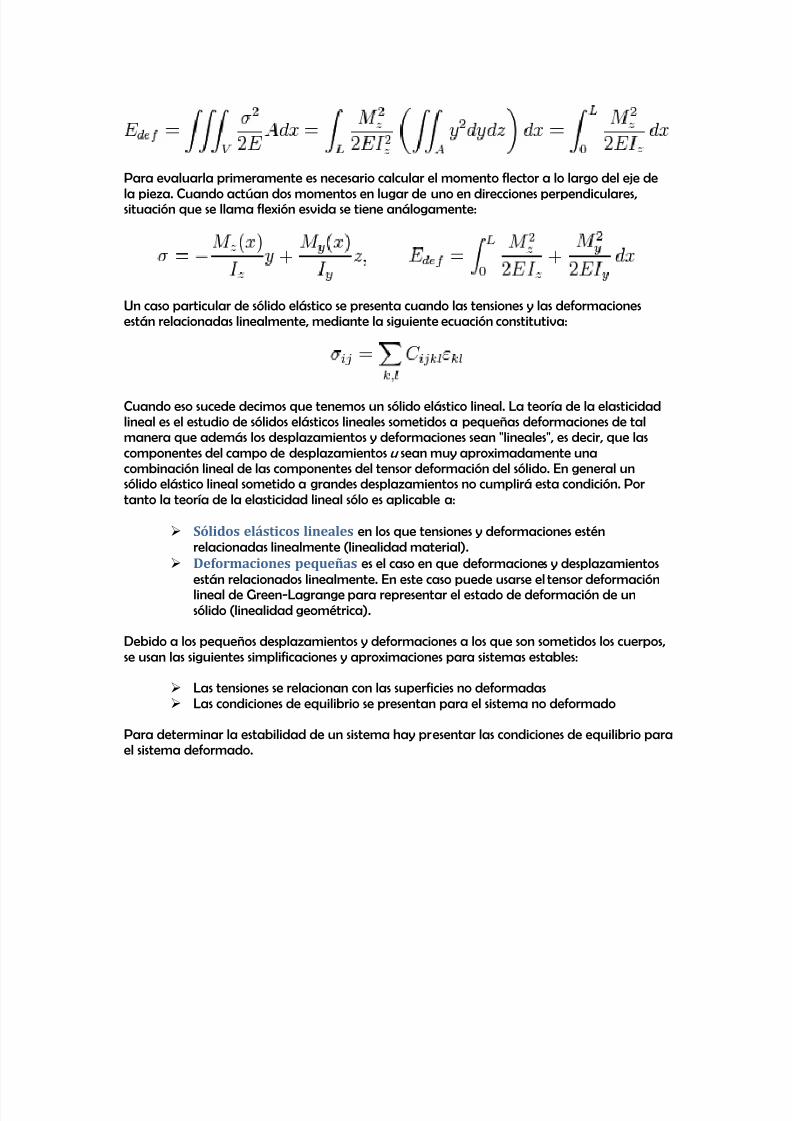
, entonces la energía viene dada por la expresión:
5/10/2018 Relaciones físicas - slidepdf.com
http://slidepdf.com/reader/full/relaciones-fisicas 4/8
Para evaluarla primeramente es necesario calcular el momento flector a lo largo del eje de
la pieza. Cuando actúan dos momentos en lugar de uno en direcciones perpendiculares,situación que se llama flexión esvida se tiene análogamente:
Un caso particular de sólido elástico se presenta cuando las tensiones y las deformacionesestán relacionadas linealmente, mediante la siguiente ecuación constitutiva:
Cuando eso sucede decimos que tenemos un sólido elástico lineal. La teoría de la elasticidadlineal es el estudio de sólidos elásticos lineales sometidos a pequeñas deformaciones de talmanera que además los desplazamientos y deformaciones sean "lineales", es decir, que las
componentes del campo de desplazamientos u sean muy aproximadamente unacombinación lineal de las componentes del tensor deformación del sólido. En general unsólido elástico lineal sometido a grandes desplazamientos no cumplirá esta condición. Por
tanto la teoría de la elasticidad lineal sólo es aplicable a:
Sólidos elásticos lineales en los que tensiones y deformaciones estén
relacionadas linealmente (linealidad material).
Deformaciones pequeñas es el caso en que deformaciones y desplazamientos
están relacionados linealmente. En este caso puede usarse el tensor deformaciónlineal de Green-Lagrange para representar el estado de deformación de un
sólido (linealidad geométrica).
Debido a los pequeños desplazamientos y deformaciones a los que son sometidos los cuerpos,
se usan las siguientes simplificaciones y aproximaciones para sistemas estables:
Las tensiones se relacionan con las superficies no deformadas Las condiciones de equilibrio se presentan para el sistema no deformado
Para determinar la estabilidad de un sistema hay presentar las condiciones de equilibrio parael sistema deformado.

5/10/2018 Relaciones físicas - slidepdf.com
http://slidepdf.com/reader/full/relaciones-fisicas 5/8
Componentes del tensor tensión en un punto P de un sólido deformable.
La tensión en un punto se define como el límite de la fuerza aplicada sobre una pequeñaregión sobre un plano π que contenga al punto dividida del área de la región, es decir, la
tensión es la fuerza aplicada por unidad de superficie y depende del punto elegido, delestado tensional de sólido y de la orientación del plano escogido para calcular el límite.
Puede probarse que la normal al plano escogido n π y la tensión t π en un punto estánrelacionadas por:
Donde T es el llamado tensor tensión, también llamado tensor de tensiones, que fijada una
base vectorial ortogonal viene representado por una matriz simétrica 3x3:
Donde la primera matriz es la forma común de escribir el tensor tensión en física y la segundaforma usa las convenciones comunes en ingeniería. Dada una región en forma de ortoedrocon caras paralelas a los ejes coordenados situado en el interior un sólido elástico tensionado
las componentes σxx , σyy y σzz dan cuenta de cambios de longitud en las tres direcciones, pero
que no distorsinan los ángulos del ortoedro, mientras que las componentes σxy , σyz y σzx están
relacionadas con la distorsión angular que convertiría el ortoedro en un paralelepípedo.
En teoría lineal de la elasticidad dada la pequeñez de las deformaciones es una condiciónnecesaria para poder asegurar que existe una relación lineal entre los desplazamientos y la
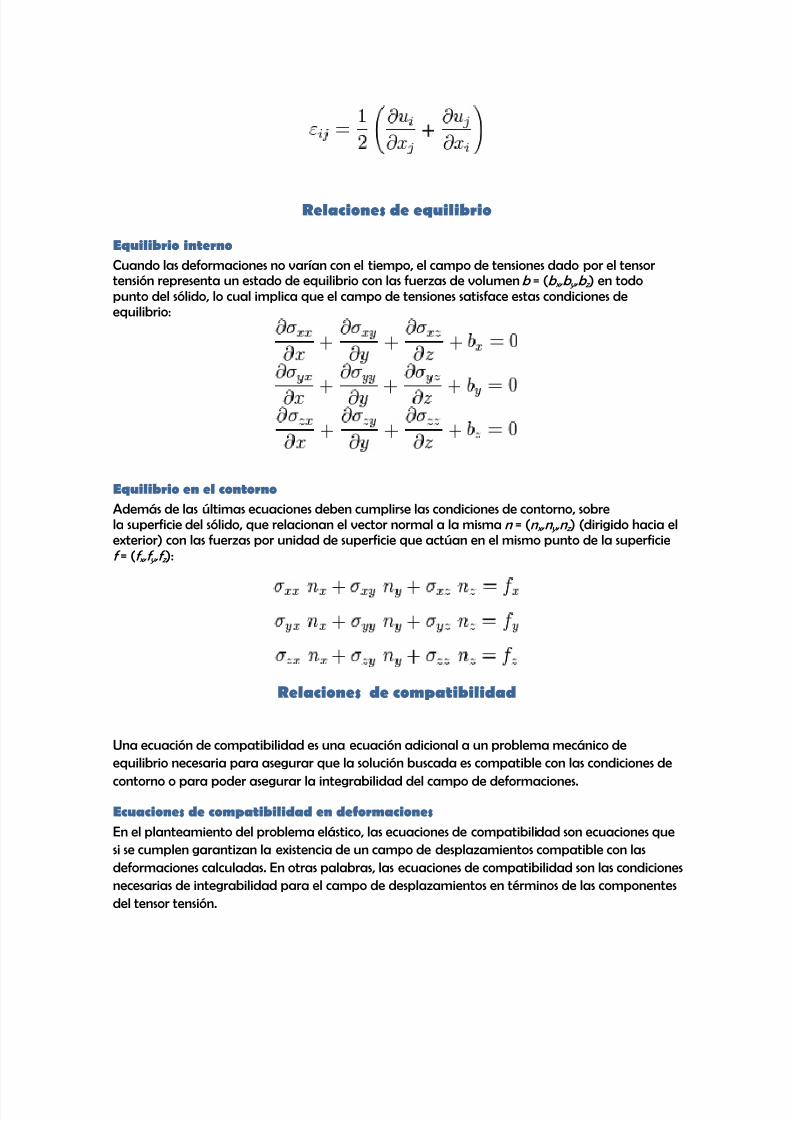
deformación. Bajo esas condiciones la deformación puede representarse adecuadamentemediante el tensor deformación infinitesimal que viene dada por:
Los componentes de la diagonal principal contienen los alargamientos (dilataciones),mientras que el resto de los componentes del tensor son los medios desplazamientos. Lascomponentes están linealmente relacionadas con los desplazmientos mediante esta relación:
5/10/2018 Relaciones físicas - slidepdf.com
http://slidepdf.com/reader/full/relaciones-fisicas 6/8
Relaciones de equilibrio
Equilibrio interno
Cuando las deformaciones no varían con el tiempo, el campo de tensiones dado por el tensortensión representa un estado de equilibrio con las fuerzas de volumen b = (b x ,b y ,b z ) en todo
punto del sólido, lo cual implica que el campo de tensiones satisface estas condiciones deequilibrio:
Equilibrio en el contorno
Además de las últimas ecuaciones deben cumplirse las condiciones de contorno, sobrela superficie del sólido, que relacionan el vector normal a la misma n = (n x ,n y ,n z ) (dirigido hacia elexterior) con las fuerzas por unidad de superficie que actúan en el mismo punto de la superficie
f = (f x ,f y ,f z ):
Relaciones de compatibilidad
Una ecuación de compatibilidad es una ecuación adicional a un problema mecánico de
equilibrio necesaria para asegurar que la solución buscada es compatible con las condiciones de
contorno o para poder asegurar la integrabilidad del campo de deformaciones.
Ecuaciones de compatibilidad en deformaciones
En el planteamiento del problema elástico, las ecuaciones de compatibilidad son ecuaciones que
si se cumplen garantizan la existencia de un campo de desplazamientos compatible con las
deformaciones calculadas. En otras palabras, las ecuaciones de compatibilidad son las condiciones
necesarias de integrabilidad para el campo de desplazamientos en términos de las componentes
del tensor tensión.

5/10/2018 Relaciones físicas - slidepdf.com
http://slidepdf.com/reader/full/relaciones-fisicas 7/8
Elasticidad lineal
En elasticidad lineal una deformación será físicamente posible si es compatible con un
determinado campo de desplazamientos es decir si se cumplen las siguientes relaciones para
las componentes del tensor deformación:
Normalmente las componentes del campo de desplazamiento son desconocidas por lo que
necesitamos una relación expresable sólo en términos de las componentes del tensor deformación.
La expresión buscada es precisamente:
Estas últimas relaciones son precisamente las que se conocen como ecuaciones de
compatibilidad de la elasticidad lineal.
Elasticidad no-lineal
En teoría de la elasticidad no lineal la relación entre el vector de desplazamientos y las
componentes del tensor tensión son no lineales y substancialmente más complicadas:
Por lo que las ecuaciones de compatibilidad en elasticidad no lineal también son no-lineales:
Donde los símbolos de Christoffel vienen dados por:
Esta ecuación se puede reinterpretar en términos de geometría diferencial, si consideramos que el
sólido se deforma sobre un espacio euclídeo una vez deformado las coordenadas materiales
dejarán de ser cartesianas y la medición de distancias requerirá el uso de un tensor métrico de la
forma:

5/10/2018 Relaciones físicas - slidepdf.com
http://slidepdf.com/reader/full/relaciones-fisicas 8/8
Y en ese caso la condición no expresa más que el tensor de Riemann del espacio euclídeo
expresado en esta métrica debe ser nulo
Ecuaciones de compatibilidad en desplazamientos
Con frecuencia, en problemas mecánicos o de resistencia de materiales hiperestáticos el cálculo de
alguna fuerza u otra magnitud resulta insuficiente a partir de las condiciones de equilibrio. En ese
caso, las ecuaciones de equilibrio forman un sistema compatible indeterminado. Puesto que la
situación física real sí presenta una solución unívoca, es decir, las piezas mecánicas toman valores
de tensión concretos y las reacciones reales tienen valores totalmente determinados, concluimos
que las ecuaciones de equilibrio deben ser complementadas con algún otro tipo de información
adicional que haga que el problema sea determinado.
De hecho, muchos problemas se vuelven completamente determinados si tenemos en cuenta que
los desplazamientos observados en la realidad tienen valores determinados. Así si introducimos
ecuaciones que expresen ciertos desplazamientos en función del resto de variables, podemos
llegar a construir un sistema de ecuaciones compatible determinado. Dicho sistema estaría
formado por la ecuaciones de equilibrio, y varias ecuaciones adicionales llamadas ecuaciones de
compatibilidad.
En este caso P es una fuerza conocida. Para poder determinar las reaciones observamos que la
parte izquierda (entre R A y P ) estátraccionada y por tanto se estirará, mientras que la partederecha (entre P y R B ) está comprimida y por tanto se encogerá. Puesto que la pieza es un
único sólido deformable el estiramiento de parte izquierda compensará exactamente el
estiramiento de la parte derecha, de lo contrario la pieza se rompería. Por tanto estiramiento y
acortamiento deben ser compatibles, ésa es precisamente la condición de compatibilidad
adicional que resuelve el problema:
Las ecuaciones adicionales pueden obtenerse por diversos métodos, por ejemplo usando
el teoremas de Castigliano o usando la ecuación de la curva elástica. Si el problema es
suficientemente sencillo, como en el ejemplo anterior, puede encontrarse la ecuación de
compatibilidad directamente.