realizado por el alumno huerta prof. agustin suarez …
TRANSCRIPT
. *"
I Z T A P A L A P A
/ D I V I S I O N DE C I E N C I A S B A S I C A S
E I N G E N I E R I A
PROYECTO T E R M I N A L
REALIZADO POR EL ALUMNO
HUERTA
PROF. AGUSTIN SUAREZ FERNANDEZ
o ~ u r R ~ D w @ c o w
El termino radar es la expresihn papular para designar eqcfipo5 de
microondas que son utilizados para "ver" electrdnicamente mediante
transmision de ondas radiales. Aunque los LISOS ppictjcos, Y las
implementaciones de los sistemas de radar pueden ser complicados y
sofisticados, 10s principios b.LLsicm de la teoría del radar son simples
y estan basados en las reglas elementales de la física basica. Una CaraCteriStiCd muy importante del radar es su capacidad de medicith
de la distancia al objeto,sirndo nedida la misma d m d e el sitio del
transmisor del radar, hasta el objeto. La radiacih electromagnetica
generada por la unidad transmisora es transmitida al espacio por media d e fa antena transmisora. La energid transmitida que choca contra los
objetos se refleja en todas las direcciones, y una parte de esta energla
reflejada retorna a la antena receptora que tambien puede ser la misma antena utilizada como transmisora. La energid recibida es enviada a la
unidad receptora, donde, luego de ser procesados los datos
correspondientes, se provee informacion respecto a la ubicacicm del
objeto (el blanco u objetivo) en el espacio, su direccitm y velocidad. €1 pr-incipio de la madicirjn de la distancia al objetivo se basa ert el
hecho de que la energid electronagnetica se propaga la velocidad de la
luz. La distancia al objetivo se calcula midiendo el intervalo de tiempo entre la emisidn y la recepcidn de la energla electromagn+tica, mientras
su localitacidn en el espacio es indicado por LOP anqulos de elevacim y
acimut de los ejes de la antcpna. las antenas de radar son muy
direccionales y transmiten haces muy angostos, por lo cual la direcciesn del objetivo es indicada con un alto grado de exactitud. la velocidad del objetivo puede ser determinada de dos manevas:
calculando la velocidad de cambio de posicion en funcion del tiempo
A.R/AT, o determinando el desplazamiento d e la frecuencia entre la
enerqla transmitida y la energla recibida (efecto Doppler) ,determinando
asi la velocidad radial da1 objetivo. Para un objetivo fijo, la
velocidad determinada por el radar es cero. Considerando que la energía electromagnbtica viaja a la velocidad d e la
luz y que la distancia total recorrida es el doble de la distancia del
objetivo, la distancia R esta dada por la ecuacim:
tienen las ondas electromagnbticas de esta frecuencia de propagarse mas
allA del horizonte y de tener un alcance muy grande. Adembs, la perdida
de energía en el espacio, en funcibn del alcance, es baja. Pero las
desventajas son importantes: se necesitan antenas muy grandes para
obtener directividad de la energid electromagnetica, se captan ecos na
deseados desde objetos terrestres y hay incapacidad de modular pulsos de
banda ancha a tan bajas frecuencias.
A l t a frecuencia ( 3 a 30 HHz) Cas desventajas de la banda LF son tambien las de la banda de alta
frecuencia (HF), por consiguiente los sistemas de radar para usos comunes generalmente no operan en esta bandas de frecuencia. Ademhs, la
banda HF es tambi&n perturbada por reflexiones ionosfericas, que
interrumpen las operaciones del radar para ciertos Angulos de elevacidn
de la antena. Por otro lado, estas reflexiones ionosfericas pueden ser
utilizadas para la deteccibn de objetivos muy distantes, mAs all& del
alcance visual.
MUY alta fercuencia (30 a 300 MHz)
La banda de muy alta frecuencia (VHF) esta caracterizada por niveles de
ruido mris bajos que los de las bandas LF o HF. Pueden alcanzarse lar-qas distancias usando antenas grandes y transmisores de alta potencia. Un
sistema de radar de VHF es relativamente barato y simple de construir y
aunque el alcance angular del radar de VHF es pobre, el Brea de
cobertura es buena.
Los radares de VHF son apropiados como indicadoras de objetivo m9vil (MTI = Moving Target Indicators), los que requieren transmisores y
receptores estables. Estos son mas faciles de lograr a las frecuencias
m6s bajas. Los radares VHF no son afectados por ecos producidos por
condiciones climAticas o por atenuacihn.
Ultra alta frecuencia (300 a 1000 MHz)
La banda de ultra alta frecuencia (UHF) tiene características similares a las de la banda VHF. Facilita la obtencidn de haces estrechos de
antena y reduce el ruido externo. La UHF QI apropiada para las
operaciones a largas distancias de vigilancia con radar y est&
relativamente libre de la influencia der las condiciones atmosf4ricas. El uso de esta banda esta limitado por las trasnmisiones de TV.
3

1 4 4 1 9 0
Banda S (2000 a 4000 HHz)
La banda S brinda muy buena resolucidn angular y requiere antenas de
dimensiones relativamente pequeRas. La indicacidn de objetivo mdvil es
peor en las frecuencias de la banda S de 10 que es a frecuencias
menores, y los ecos causados por las condiciones clim&ticas y terrestres
provocan una disminucibn del desempeKo del radar. El radar de banda S
puede ser considerado como una relacibn de compromiso entre los radares
de baja y alta frecuencia. Puede ser usado tanto como radar de
seguimiento como de deteccidn.
Banda C (4000 a 8000 HHz)
La banda C es usada en aplicaciones de vigilancia de alcance moderado
donde se requiere presician, como pot- ejemplo para un radar de
naveqacibn marina. Lor radares en la banda C son usados en telemetria y para la naveqacidn precisa de misiles.
Banda X ( 8 a 12.5 GHz) La banda X es ampliamente usada en sistemas de control de fuego y en
aplicaciones comerciales. La unidad de radar es pequeKa, liviana y
fgcilmente transportable. Los radares de banda X son usados para reunir informacidn y vigilancia a poca distancia. La informacidn en banda ancha
y pulsos puede ser transmitidos fdcilmente y pueden ser obtenidos haces
estrechos de antena. Un ancho de haz de 1 grado puede ser obtenido con
una antena de aproximadamente 6 pies de ancho.
Bandas Ku; K y Ka (12.5 a 40 GHz)
Los primeros radares de banda KU fuerCin diseKadlos con una frecuencia de
aproximadamente 24 GHz (1.25 cm). A esta frecuencia la absorcihn de
energía electromaqn&tica era alta, mientras que su lonquitud de onda era
cercana a la lonquitud de onda de resonancia del agua (22.2 GHz). La
banda K fu& entonces dividida en dos regiones: la regibn m A s baja tCu que
4

En el CIAAC (Centro Internacional de Adiestramineto de
se prepara a los tecnicos que se encargan de realizar
al equipo electronico con que cuentan los aviones, por
dicho anteriormente,
funcionamiento die un
pretende lograr esto
es indispensable pat-a ellos el sistema de radar, por lo que el
mediante un sistema sencillo y
5
Aviacihn Civi 1 )
el mantenimiento
lo que, por 10
conocimiento del
presente trabajo
barato asi como
didactico, basado en un microprocesador de alto nivel de integt-aciam.
DISE??O DEL SISTEHA
Uno de los principales objetivos del proyecto era lograr un sistema de
facil implementacibn y bajo costa, por lo que se eligio utilizar un
microprocesador de alto nivel de integracibn como lo es el circuito
integrado 80188, el cual nos permite reducir de gran manera el tamaRio
del circuito y la cantidad de perifericos adicionales que se tendrlan
que agregar al sistema.
Este circuito integrado cuenta con una unidad central de procesamiento
8088 y ademas contiene los siguientes perifericos:
1.-Generador de reloj a una frecuencia de 8 MHz.
2.-D05 canales independientes de acceso directo a memoria (DM&). 3.-Un controlador do interrupciones programable.
4.-Tres temporizadores programables de 16 bits.
5.-Lbgica programable para reflales de habilitacian tanto para el area de
memoria como para el espacio da entrada/salida.
Ademas nos permite tener de manera simultanea las seHales de control
para los modos de operaci6n en modo maximo 6 minimo.
Este circuito esta disponible en varias presentaciones y tiene un costo
aproximado de 60 a 70 nuevos pesos, en nuestro sistema se utiliza la
PLCC (Plastic Lead Chip Carrier) el cual tiene 1 7 terminales por lado y
se monta en una base.
Los perifericos integrados del 80188 se controlan mediante registros
localizados en un bloque de control interno el cual se encuentra mapeado
en las ultimas 256 localidades del espacio de entrada/salida,es posible
reubicar este bloque tanto en el espacio de entrada/salida como en el de
memoria. NO se requiere de niguna instruccibn especial para tener acceso
a los registros del bloque de control y estos pueden ser accesados en
cualquier momento.
&demas del microprocesador parr la construccidn del sistema se emplearbn
los siguientes componentes:
1.-Memoria ROM de 8 K bytes 2764 (1).
í!.-Memoria SRAM de 8k bytes &264 ( 1 ) . 3.-Interfase perifkrica programable 8255 (1).
4.-Controlador de teclado y despliegue 8279 (1).
S.-Heceptor transmisor asincrono universal programable 8250 ( 1 )
6.-despliegue de 8 digitos
7.-Teclado de 24 teclas
8.-Cristal de 16 MHz
9.-Latch 74373 (2)
10.-Transceptor octal para bus 74245 ( 2 )
144190
11.-Buffer inversor 7414 (2)
12.-Interfaz electrica puerto serial MC1.689 ( 1 ) y MC 1488 ( 1 ) .
13. -Conectar macho DB-25.
SISTEMA DE EVALUACION Y CONTROL
El sistema direKado nos permite lograr el control de la r-otacian de la antena de radar por medio de una etapa de potencia a cuya entrada se
aplica la salida de uno de los puertos paralelos, de igual forma se
controla la generacibn del pulso de RF por medio de otra interfaz que
controla al generador de RF y la recepcibn de un pulso de retorno por
medio del generador de interrupciones del microprocesador, la forma en que se logra el control de estas mismas se detallara posteriormente
cuando se describa cada uno de estos circuitos. La forma en que el
sistema opera es la siguiente:
CI)-El sistema envia a la PC por medio del puerto serie la posiribn de
la antena y en caso de haberlo la posician del objeto detectado, y si es necesario mueve la antena a una nueva posicim.
B)-Genera un pulso de RF y arranca el timer para tiempo maximo de espera
de la sef'íal de retorno.
C)-Si una seflal de retorno es detectada antes de que termine el tiempo
maximo de espera se genera una interrupcibn la cual activa una rutina
que se encarga de detener el timer y lee el valor de tiempo
transcurrido y en base a este calcula la distancia del o b j e t o
detectado y escribe este valor a una localidad de memoria. En caso de
no ser recibida d detectada ninguna seKal de retorno, al llegar el
timer al valor maximo de conteo, genera una interrupci1.m que la reseteara y dejara listo para iniciar otra secuencia de conteo.
Ademas de esta secuencia el sistema a1 ser encendido realiza un chequeo
de memoria para asegurar la confiabilidad del sistema despues de lo cual
inicia esta secuencia y continua asi hasta que &S desenergizado.
7
SISTEHA DE CONTROL DEL RADAR
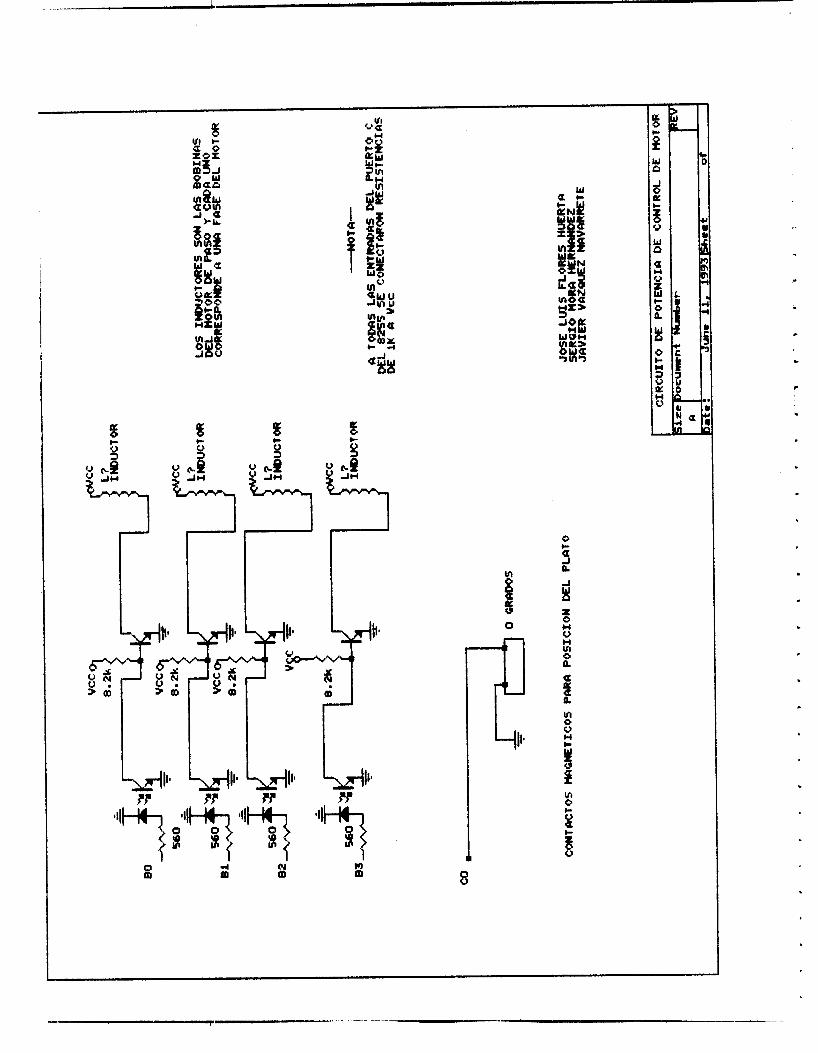
INTERFAZ DE POTENCIA El sistema se encarga d e realizar la movilizacion d e la antena de radar
oor medio de un circuito que se encarga de controlar un motor de pasos el cual tiene 4 pasos cada uno d e estos de aproximadamente 5 orados. Esta interfaz esta hecha en base a un circuito optoscoplador que es el TIL-111 y el transistor BD-135,ademas de algunas resistencias necesarias para su operacidn,El uso de los optoacopladores nos permite asegurar que el controlador de puertos no sufrira dafio alguno en caso de producirse
una falla en el circu.ito de polarizacibn del motor, ya que este opera
con 12 Volts-Se utiliza el puerto B del 8255 como la salida que se
aplica a al entrada de la interfrz de potencia utilizando los primeros
cuatro bits menos significativos del mismo, aplicando la secuencia
correcta se logra que el motor gire a la derecha .S a la izquierda.
Para el control del paso activo del motor tenemos que el bit de control
aplicado a este debe de ser un cero, pues si este es un uno el paso se
encuentra desactivado, de esta manera la secuencia de control que debe
aplicarse a la entrada d e d e la interfaz de potencia para que el motor
g i r e a la derecha es: 07H,OBH,ODH,OEH, y para la izquierda es
OEH,ODH,OBH,07H, para nuestro sistema unicamemte utilizamos la secuencia
de giro a la derecha, ya que es en este sentido que se realiza el
rastreo c5 busqueda d e objetivo. Para lograr tener un control sobre la
posici6n de la antena ademas se utiliza un contacto magnetic0 para que
al iniciar el sistema se coloque la antena en la posicitm de referencia
o d e cero grados, para esto se utiliza el contacto magnetic0 pat-a poner
un uno rS un cero en la entrada Co del puerto C del 8255 que es utilizado como entrada en este caso, asi d o esta forma cuando el valor leido es un cero sabemos que la antena esta en' la posicibn de cero grados. &demas se
utilizan dos engranes unidos por medio de una banda dentada lo cual nos
permite una resoluci6n entre cada paso de rastreo de, 3 grados.
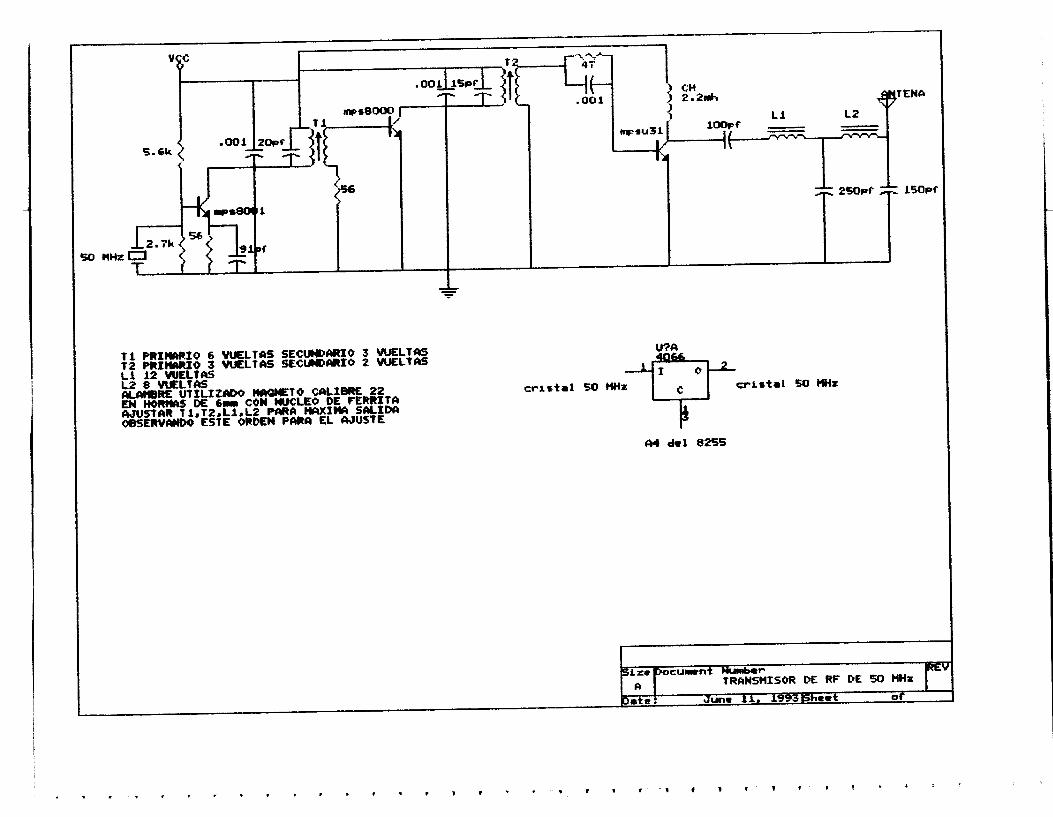
AMPLIFICADOR DE RF; Para la generacidn del pulso de RF que servira como la sehal a mviar se
utilize?, un generador amplificador de RF el cual es controlado por
cristal, garantizando de esta forma que la frecuencia d e operacifin
sea estable. La frecuencia elegida fue d e 50 MHz ya que este presentaba
las mejores; ventajas para el diseRo como son menor costo dcn los
8
componentes y un tamafio de antena no demasiado Qrande.
El amplificador consta de tres etapas, la osciladora, la exitadora y
acopladora, y la de potencia la cual es un amplificador de clase D, por
lo cual cuenta a su salida con un filtro tipo doble Pi para la supresibn de los armonicos generados en un amplificador de este tipo. el
acoplamiento entre la etapa osciladora y la exitadora asi como el de
est& con la d e potencia es por medio de transformadores los cuales se
deben ajustar, el primero para lograr- que el 0sc.i ladot- trabaje, y el
segundo para lograr maxima ganancia de la seKal. Las bobinas del filtro
doble Pi se ajustan para obtener maxima seKal y un minimo de distorsibn de la misma, de esta forma se logra obtener una sePial cuyo nivel de
potencia es de entre 3 y S Watts.
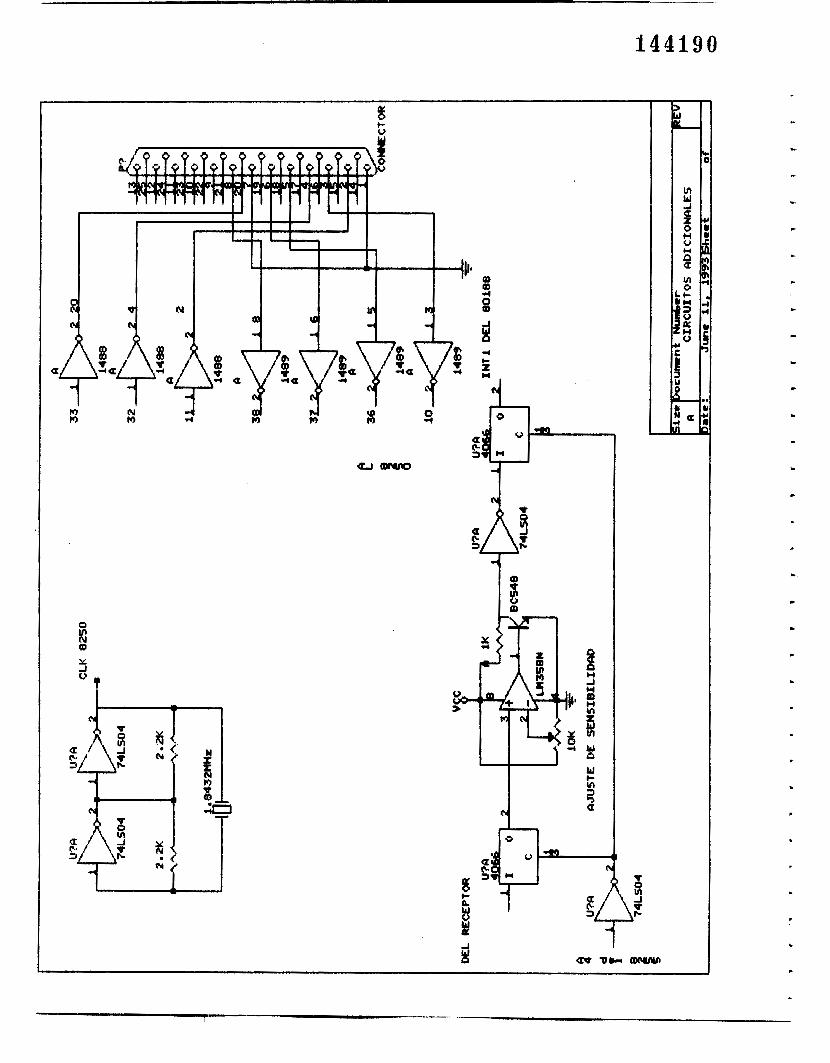
INTERFAZ SISTEHA DE EVALUACION Y RADAR
Para lograr que el sistema controlara la transmisi&-t del pulso y la
recepcidn del mismo en e1 retorno se utilizo el circuito integrado 4066
el cual esta formado por cuatro switchs analogicos,uno de los cuales 58
utilizo para cortocircuitar el cristal en el transmisor con lo cual se
inhibe la transmisidn de un pulso de RF y dos de ellos para permitir el
paso de la seRa1 al receptor de HF y conectar la salida del comparador
a la entrada I N T l del controlador de interrupciones del 80188. &si para
generar la sefíal de RF por medio de la salida A4 del 8255 se activa o
desactiva este switch y controlar asi el funcionamiento del oscilador,
con esta misma salida pero por medio de un inversor se controlan los
otros dos switchs para permitir conectar el receptor a la antena y el
comparador a la entrada INTl del controlador de interrupciones del
80188.La salida del receptor de RF es aplicada a un circuito comparador mediante el cual se puede ajustar el nivel de saFRal a,partir del cual se tomar-a como sena1 de retorno valida para el sistema y ademas genera esta sebl de reconocimiento a un nivel de T J L que se puede aplicar
directamente a la entrada INTl del microporcssador, esto se loqra
mediante el circuito amplificador operacional LM358 el cual mediante el
potenciometro en su entrada inversora permite ajustar el nivel en su
entrada no inversora con el cual su salida se it-a a uno, lo cual
ocurrira cuando el voltaje en la entrada no inversora sea ma5 positivo
que el de la entrada inversora.
El circuito receptor esta hecho en base al circuito integrado NE602 el
cual es un amplificador de RF de bajo ruido con control autornatico de
9

1 4 4 1 9 0 . ganancia integrado, a la entrada de este se conecta la antena pot- medio
d e uno de 1os.switchs del 4066 y su salida se envia al comparador el
cual se encaqa de generar la interrupcibn.
Cuando una seRal de retorno es detectada, se genera una interrupcidn la cual llama a una subrutina que se encarga de calcular la distancia del
objetivo en base al tiempo transcurrido entre el envio de la seKal y el
tiempo que tardo esta en retornar.
INTERFAZ SISTEHA DE EVALUACION-PC El sistema realiza la trasnmisidn d e datos a la PC por medio de el
puerto serie de la misma, para lo cual el sistema cuenta con uno propia,
la velocidad a la que se realiza la comunicaci4n es a 2400 baudios 8
bits no bit d e paridad, la forma en que realiza el enlace es la
siguiente:
1.-El sistema envia un FFH a la PC con lo cual el progr.ama queda
enterado que los datos siguientes son informacidn.
Z.-Los' dos siguientes bytes recibidos son sumados para ani obtener el
angulo que determina la posicibn del cursor en la pantalla.
3.-El ultimo byte es la posicidn del objeto detectado sobre el cursor
que esta en pantalla, este valor es multiplicado por 75 y asi es
mostrado en pantalla como la distancia em metros del objetivo detectado.
De esta forma el sistema se encarga de mover antena y enviar los datos
d e la posieidn d e la misma y el objetivo detectado.
PROGRAHACION El programa para el sistema de evalucibn se realizb en ensamblador, el
cual se estructuro d e la siguiente manera
-A1 inicio se realiza la proqramacibn de1 registro d e control para la
parte alta d e la memoria y se hace un brinco a la direccion FEOOH que es
la direccibn OOOOH de la memoria ROM.
-El programa continua con la programrcibn de los demas registros d r
control del microprocesador asi como de 10s perifericos proqramables
externos (8250,8255,8279).
-Se realiza un checksum para prueba de RUM y se prueba la memoria SRAM
escribiendo 55H en toda esta y leyendola desipues,en caso de un error
para cualquiera de las dos pruebas e1 error se reporta y se detiene al
sistema.
. * , , 1
-Si la prueba de memoria fue un exita se escribe en la memoria SRaM 105
vectores de interrupcion corre~pondientes para la atencibn de las
interrupciones programadas.
-Se coloca la antena en posicibn de cero Grados.
-Inicia la rutina que se encarga de la transmisian de los datos y el
movimiento de la antena,en esta rutina se programa el timet- 1 para que
realize el conteo del tiempo entre l a seRal enviada y la de retot-no y al
terminar este conteo se genera su interrupcian la cual se encarga de
actualizar los valores de posicibn de sntena.Al iniciarse el conteo se
escribe un valor a una posici4n de memoria,el cual es leido por la
rutina y activa el paso correspondiente a ese valor,mientras este sea el
mismo la antena no se movera y no se transmitira a la PC un nuevo valor de posici6n de antena y objetivo-Si este valor es diferente se transmite la posicibn de la antena y el valor del objetivo detectado, si este es cero siqnifica que no se detecto ningun objeto, una vez que este valot-
es transmitido se resetea a cero nuevamente.
Si se genera una intecrupcidn por una sePía1 de retorno se llama a una
subrutina que se encarga de calcular la' distancia y esct-ibe este valor a
memoria para que sea transmitido por la rutina principal.
PROGRAHCION PC El programa de interfase para la PC y el sistema de control se hizo en
lenquaje C, utilizando los servicios de la interrupcibn 14H para
realizar el enlace por el puerto serial, y la presentaciin en -pantalla
por- medio de las rutinas d e graficos.
CONCLUSIONES
Mediante un microprocesador de alto nivel de integracibn y el auxilio de
algunos componetes externos es posible la realizacihn de un sistema de
radar economico y facil de construir, lo cual permite su uso para fines
didacticos, con una exactitud bastante buena para estos prooositos,
permitiendo ademas vincular un sistema de control digital con un sistema
de comunicacibn tradicionalmen.te analogico, reduciendo su costo tanto de construccibn como de operacidn.
1 1
. 1
BIBLIOGRAFIA
-Curso RTS principios y aplicaciones del radar DEGEM SYSTEM 1982
-Electronics Teoria de Circuitos Robert Boylestad,Louis Nashelsky
Frentice Hall cuarta edicion 1989
-Electronics manual practico de refewmcias Edward Pasahow McGraw Hi 11
-Turbo C Bible Nabajyoti Barkakati
Howard W. Sams & Company 1989.
-Fundamentos de fisica
Halliday,Resnick
C. E. C. S. A 1986
-Electromagnetismo
Edward C. Jordan, Keith 6. balmain
1989
12
1

I
1 4 4 1 9 0
o: t- o v
C c
O m N W X J * m
OD QD
I
oculnnt Number TRANSHISOR DE RF DE 50 MHz
JUM 11, 1993Sheet OC
f t ++ 95
L
d m P m- m
O
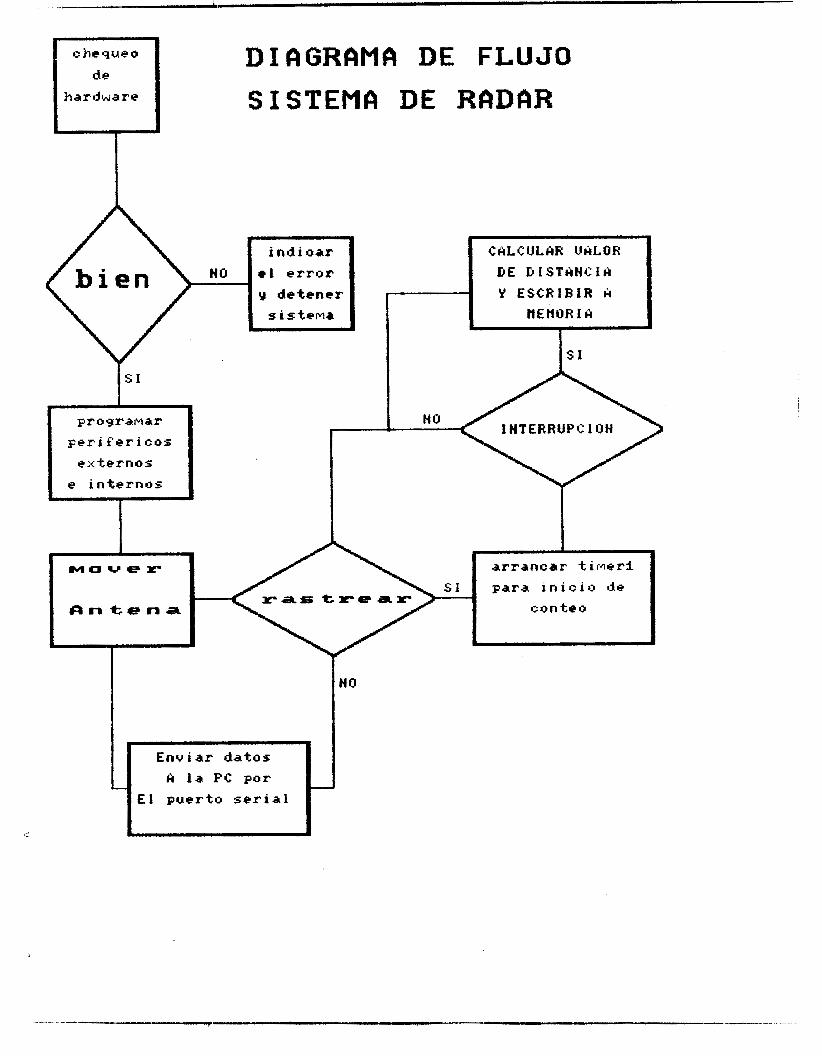
DIAGRAMA DE FLUJO
SISTEMA DE RADCIR
indicar ' CALCULUR UdLOR HO + I error DE DISTAHCId
y detener Y ESCRIEIR A
sistema flEHORIA
I
prograrvar perifericos
externos
e internos
arrancar timer1 S I para inicio de
an.t;ena conteo
NO
Enviar datos A id PC por
I I "EI puerto serial L