proyecto ducha
TRANSCRIPT
ESCUELA SUPERIOR POLITÉCNICA DE CHIMBORAZO
FACULTAD DE MECÁNICA
ESC. ING. MECÁNICA
CONTROL AUTOMÁTICO
PROF.: Ing. Jorge Lema
PROYECTO: DISEÑO DE UN SISTEMA DE CONTROL PID DE TEMPERATURA PARA
UNA DUCHA ELÉCTRICA DOMESTICA.
ALUMNOS: Franklin Cunalata Nelson Naranjo
Byron Sisa
FECHA: 2012 - 12 – 04
TEMA: DISEÑO DE UN SISTEMA DE CONTROL PID DE TEMPERATURA PARA UNA DUCHA
ELÉCTRICA DOMESTICA.
Objetivos: Diseñar un sistema de control de temperatura para obtener una temperatura
adecuada y estable en una ducha.
Investigar sobre el control PID y su aplicación. Realizar los diagramas pertinentes de la propuesta de diseño para el control de
la temperatura.
Marco Teórico:
CONTROL PIDIntroducciónEl controlador PID (Proporcional, Integral y Derivativo) es un controlador realimentado cuyo propósito es hacer que el error en estado estacionario, entre la señal de referencia y la señal de salida de la planta sea lo menor posible, lo que se logra mediante el uso de la acción integral. Además el controlador tiene la capacidad de anticipar el futuro a través de la acción derivativa que tiene un efecto predictivo sobre la salida del proceso.
Los controladores PID son suficientes para resolver el problema de control de muchas aplicaciones en la industria, particularmente cuando la dinámica del proceso lo permite (en general procesos que pueden ser descritos por dinámicas de primer y segundo orden), y los requerimientos de desempeño son modestos (generalmente limitados a especificaciones del comportamiento del error en estado estacionario y una rápida respuesta a cambios en la señal de referencia). Los controladores PID son generalmente usados en el nivel de control más bajo, por debajo de algunos dispositivos de mediano nivel como PLCs, y sistemas de monitoreo. Sin embargo, su importancia es tal que se convierte en el “pan de cada día” del ingeniero.
El microprocesador ha tenido una influencia dramática sobre el desarrollo del controlador PID; ha permitido brindar nuevas oportunidades para implementar funciones adicionales como el ajuste automático de parámetros y los cambios de modos de control. Para los efectos de estos apuntes, se considera la frase “ajuste automático” en el sentido de que los parámetros del controlador se ajustan automáticamente en base a la demanda de un operador o de una señal externa, desactivando para ello el controlador.
Es así que quedan por hacer varias mejoras sustanciales con respecto al desempeño de los procesos industriales; por su parte, la industria, a medida que la demanda de productos requiere una mejor calidad, está obligada a mejorar sus lazos de control, lo que a su vez requiere un mayor conocimiento acerca de los procesos y de sus mecanismos de regulación.
El Controlador PID
Es la extensión natural del controlador on-off. Es suficiente para muchos problemas de control. Más del 95% de los lazos de control utilizan el control PID. Ha sobrevivido a los cambios tecnológicos
o Aparición del microprocesadoro Planificación de ganancia
Utiliza la realimentación para rechazar las perturbaciones. Elimina el error estacionario con la acción integral. Puede anticipar el futuro con la acción derivativa. No es trivial ajustarlo para conseguir los mayores beneficios sobre el proceso
o Tres parámetros de control
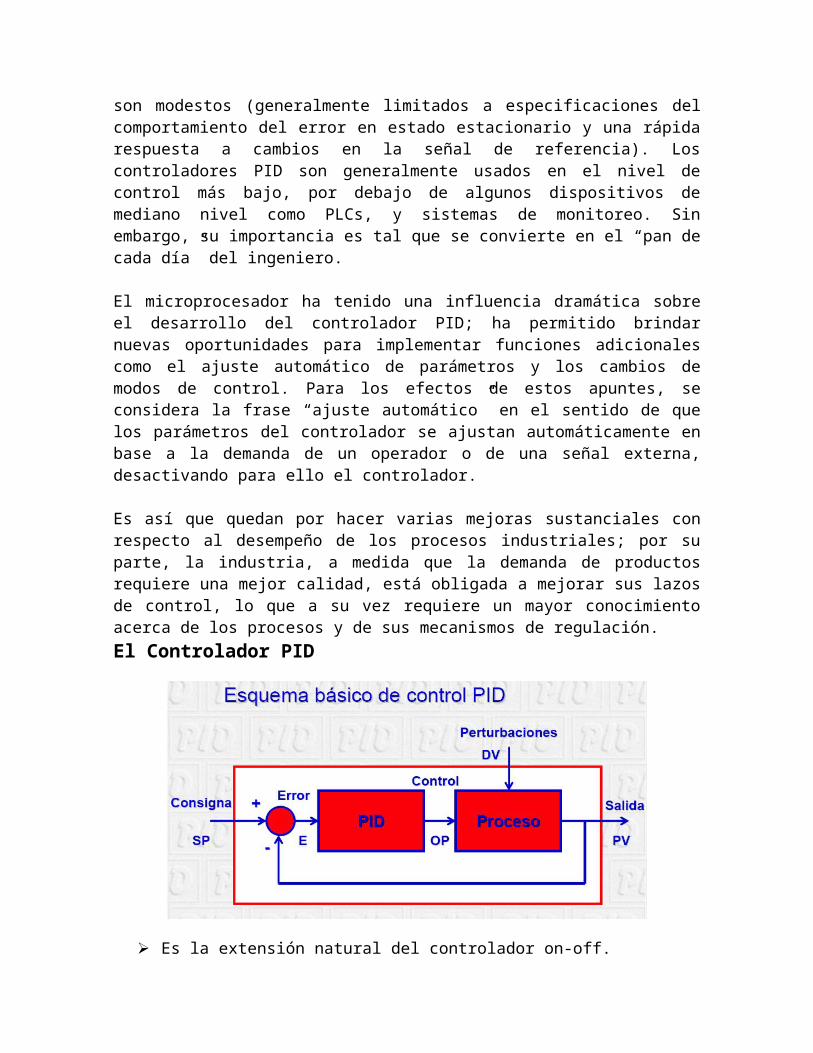
El control PID combina las tres acciones:Proporcional (P)Integral (I)Derivativa (D)
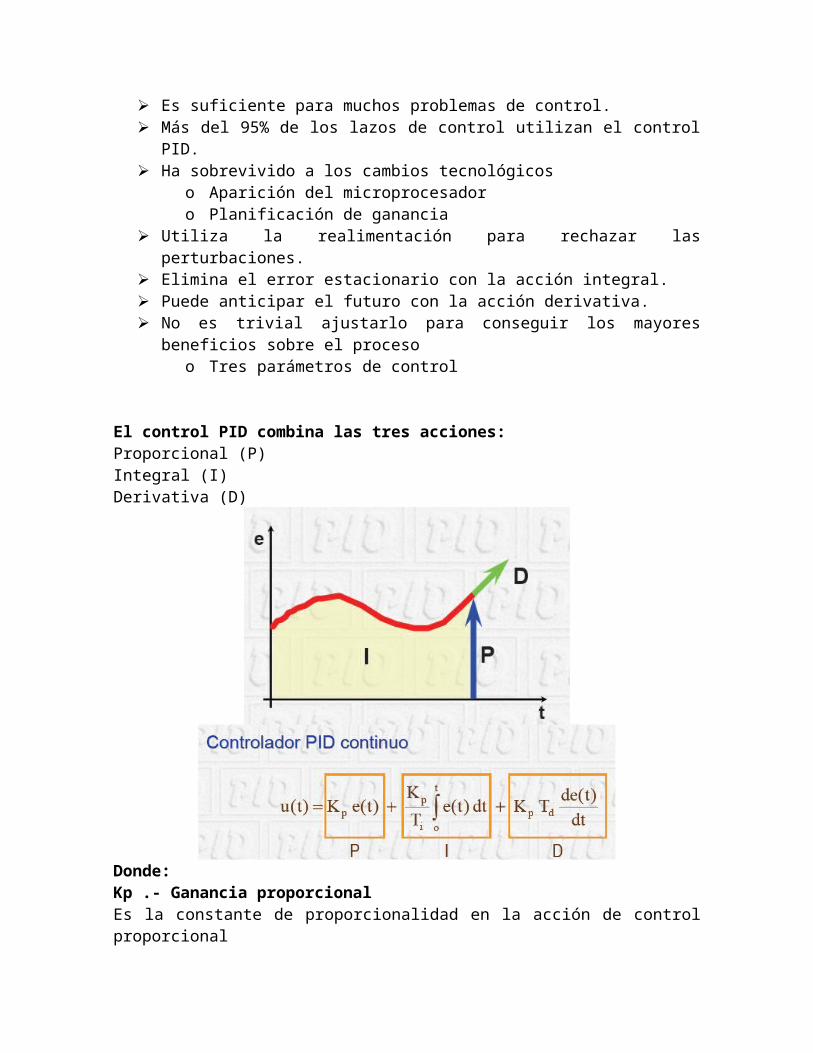
Donde:Kp .- Ganancia proporcionalEs la constante de proporcionalidad en la acción de control proporcional Kp pequeña , la acción proporcional es pequeña Kp grande, la acción proporcional es grandeAcción Proporcional.- Produce una señal de control proporcional a la señal de error.
Ti.- Constante de tiempo integral El tiempo requerido para que la acción integral contribuya a la salida del controlador en una cantidad igual a la acción proporcional.Ti pequeño…. Acción integral grande Ti grande……..acción integral pequeñaAcción Integral.-Proporciona una corrección para compensar las perturbaciones y mantener la variable controlada en el punto de consigna.
Td .- Constante de tiempo derivativa El tiempo requerido para que la acción proporcional contribuya a la salida del controlador en una cantidad igual a la acción derivativa.Td pequeño…….. acción derivativa pequeñaTd grande………...acción derivativa grandeAcción Derivativa.- Anticipa el efecto de la acción proporcional para estabilizar más rápidamente la variable controlada después de cualquier perturbación.
Selección del controlador (recomendado):
Lazos de caudal o de presión (dinámicas rápidas, sin retardos y perturbaciones de alta frecuencia): PI.
Lazos de nivel (combinación de varias dinámicas, sin retardo y perturbaciones de media frecuencia): PI o PID.
Lazos de temperatura (dinámicas lentas, con o sin retardo y perturbaciones de baja frecuencia) : PI o PID.
Lazos de composición (predomina el retardo debido al analizador): PI, aunque se aconsejan otros tipos de controladores (predictor de Smith).
Procesos integradores (procesos térmicos o ciertos lazos de nivel): PD o PID. Control en cascada: PI o PID en el lazo primario, P o PD en el secundario.
LAS DUCHAS ELÉCTRICAS
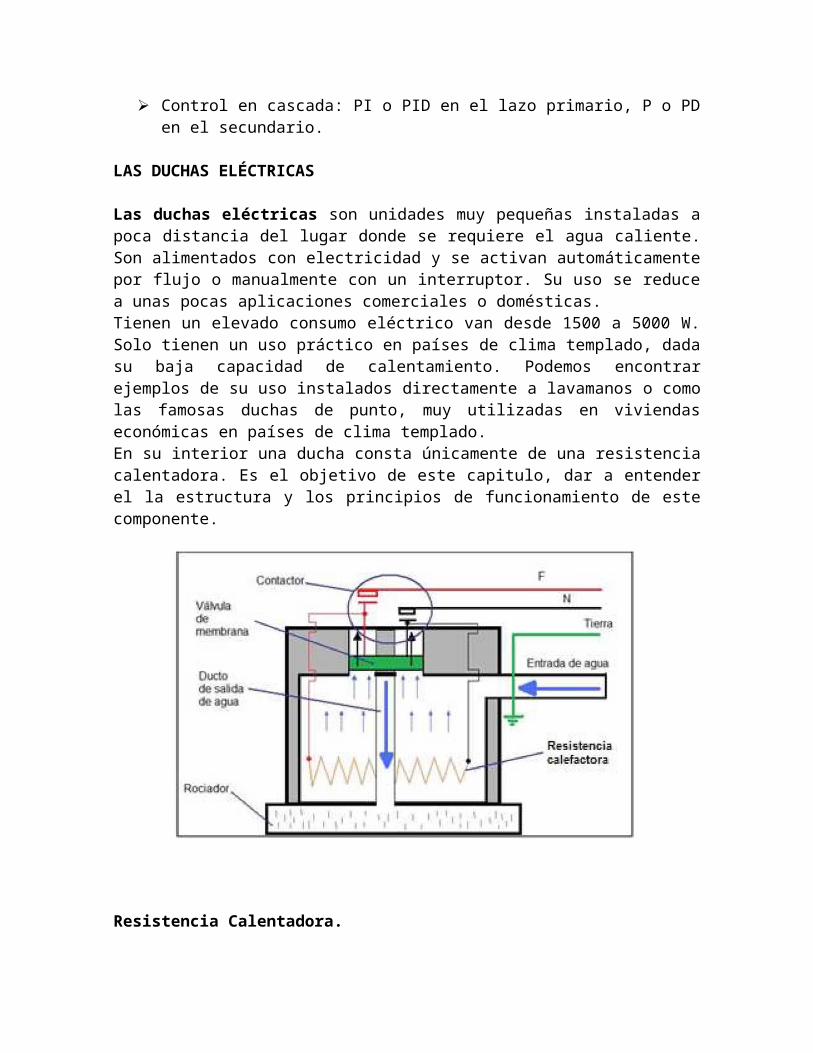
Las duchas eléctricas son unidades muy pequeñas instaladas a poca distancia del lugar donde se requiere el agua caliente. Son alimentados con electricidad y se activan automáticamente por flujo o manualmente con un interruptor. Su uso se reduce a unas pocas aplicaciones comerciales o domésticas.Tienen un elevado consumo eléctrico van desde 1500 a 5000 W. Solo tienen un uso práctico en países de clima templado, dada su baja capacidad de calentamiento. Podemos encontrar ejemplos de su uso instalados directamente a lavamanos o como las famosas duchas de punto, muy utilizadas en viviendas económicas en países de clima templado.En su interior una ducha consta únicamente de una resistencia calentadora. Es el objetivo de este capitulo, dar a entender el la estructura y los principios de funcionamiento de este componente.
Resistencia Calentadora.Las resistencias calentadoras convierten energía eléctrica en calor. Procedimiento descubierto por James Prescott Joule cuando en 1841 al hacer circular corriente eléctrica a través de un conductor se liberó calor por encontrar resistencia.En la actualidad las resistencias calentadores se utilizan para infinidad de aplicaciones. La gran mayoría de ellas son fabricadas con un alambre de una aleación de níquel (80%) y cromo (20%). Esta aleación soporta temperaturas muy altas (1000º C), es resistivo (condición necesaria para generar calor), es muy resistente a los impactos y es inoxidable.
MICROCONTROLADORES PIC
El PIC es un circuito altamente integrado que contiene todos los elementos de un computador aunque delimitadas prestaciones que esta contenida en un microchip gracias a su reducido tamaño suele incorporarse en el propio dispositivo de control.
Definición de PIC: Peripheral Interface Control, comúnmente llamado Microcontrolador.
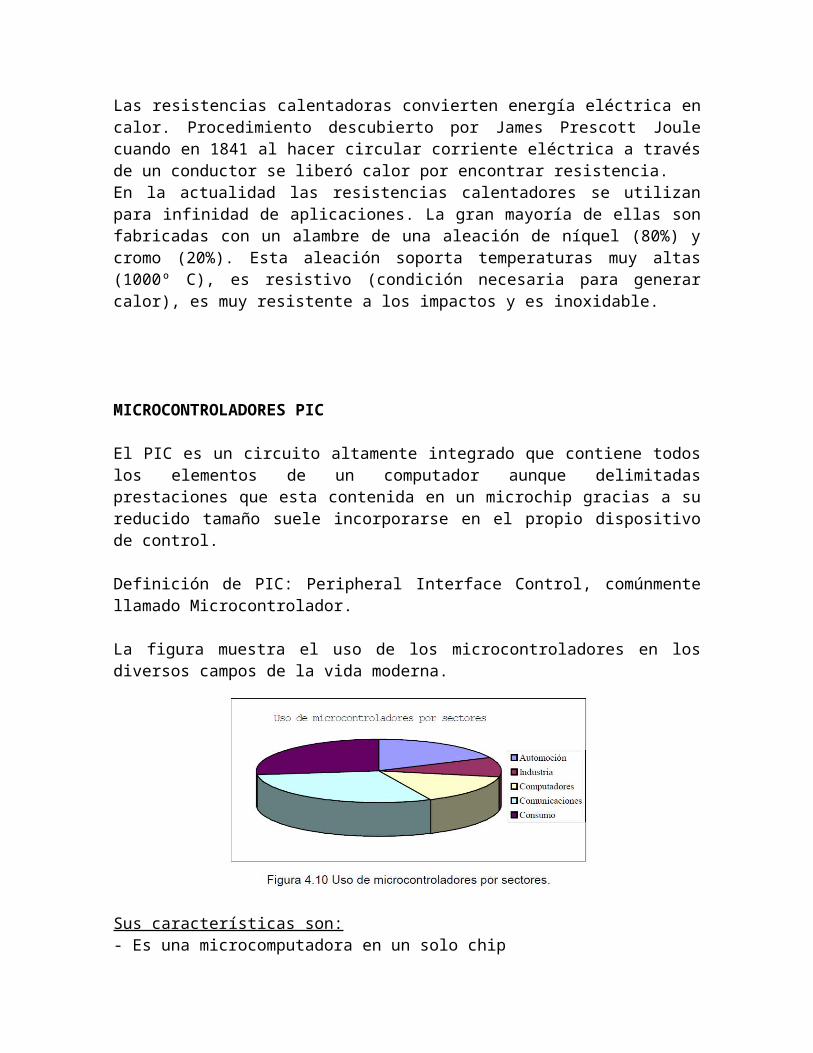
La figura muestra el uso de los microcontroladores en los diversos campos de la vida moderna.
Sus características son:- Es una microcomputadora en un solo chip
El PIC integra CPU, RAM, ROM y dispositivos de I/O.- Puede leer variables analógicas (ciertos modelos)
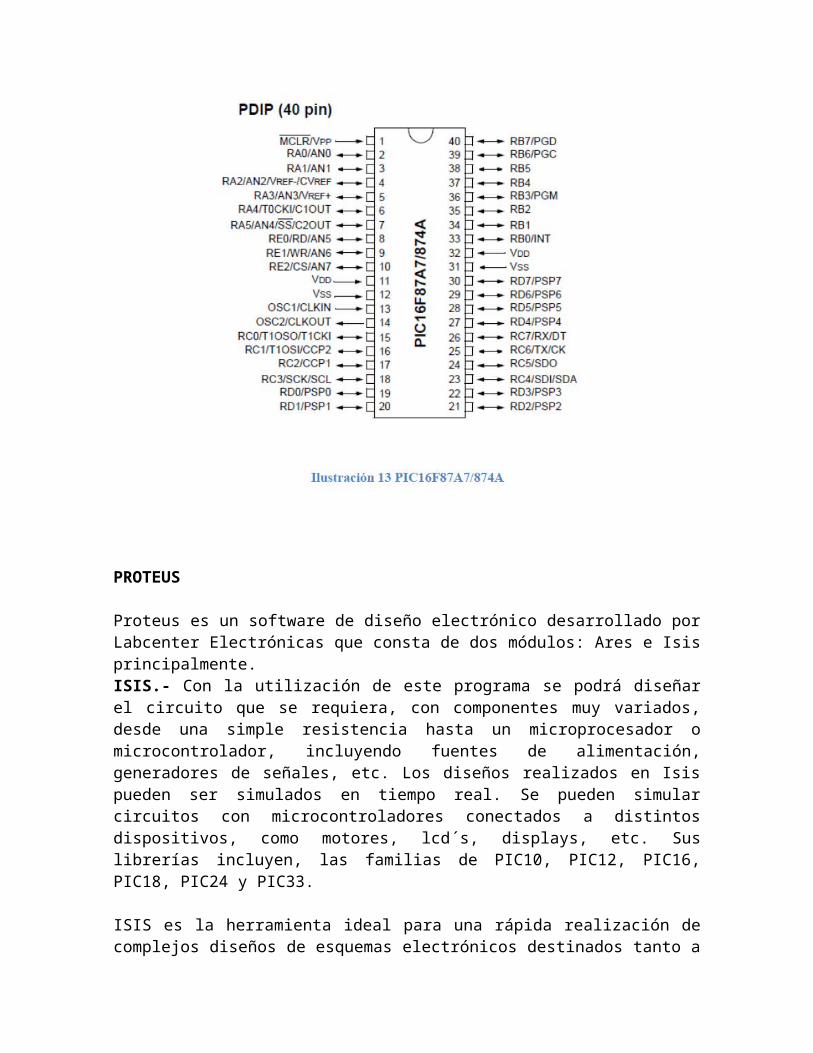
El PIC 16F874A maneja 8 canales de entrada analógica.- RISC (Reduced Instruction Set Computer)
Solo 35 instrucciones pueden ser decodificadas.- Encapsulado pequeño (DIP 8 - 40 pines)
Se puede conectar en equipos pequeños.- Tecnología de bajo consumo de potencia (0.8W) y alta velocidad
Se puede usar con batería y a una frecuencia máxima de 20MHz.- Alta corriente I/O(20 - 25mA)
Se pueden manejar LEDs directamente.- Bajo costo
Un PIC tiene costos totalmente accesibles y economicos.
Su Forma de uso:-Se escribe el programa en un archivo de texto con extensión .asm-Se compila por medio de la aplicación MPLAB-Se carga por medio de un circuito especial, el programa ya compilado en unarchivo con extensión .hex-Se prueba el programa en breadboard o en un entrenador especial
PROTEUS
Proteus es un software de diseño electrónico desarrollado por Labcenter Electrónicas que consta de dos módulos: Ares e Isis principalmente.ISIS.- Con la utilización de este programa se podrá diseñar el circuito que se requiera, con componentes muy variados, desde una simple resistencia hasta un microprocesador o microcontrolador, incluyendo fuentes de alimentación, generadores de señales, etc. Los diseños realizados en Isis pueden ser simulados en tiempo real. Se pueden simular circuitos con microcontroladores conectados a distintos dispositivos, como motores, lcd´s, displays, etc. Sus librerías incluyen, las familias de PIC10, PIC12, PIC16, PIC18, PIC24 y PIC33.
ISIS es la herramienta ideal para una rápida realización de complejos diseños de esquemas electrónicos destinados tanto a la construcción de equipos electrónicos como a la realización de tareas de simulación y prueba.
DESARROLLO DEL DISEÑO Y SELECCIÓN DE COMPONENTES DEL CONTROLADOR DE TEMPERATURA
Análisis y determinación de los requerimientos. Mediante investigaciones realizadas sobre las características del proceso que se desea trabajar, se conocen algunos parámetros con los cuales debe contar el sistema automatizado. Los cuales se detallan a continuación.
La temperatura. *La temperatura a la salida del agua en los hogares de la ciudad, se encuentra entre 22°C y 26°C aproximadamente, dependiendo de la estación del año en que se encuentre, siendo esta menor durante las noches de invierno y mayor durante los días de verano.
*Las temperaturas disponibles en las duchas en el mercado se encuentran entre 38°C y 90°C aproximadamente, pero un rango de temperatura para darse un baño es de 40°C a 48°C ya que temperaturas mayores pueden ocasionar quemaduras en la piel de las personas. Para el presente diseño se considerará una temperatura máxima de 48°C.
*El cuerpo humano puede percibir variaciones de temperatura entre 0.2°C y 5°C, dependiendo de la velocidad a la que cambie la temperatura del agua, siendo esta velocidad entre 0.1°C/s y 0.5°C/min, mientras más lento se realice el cambio mayor debe ser la diferencia de temperatura para ser percibida por la piel humana, para nuestro caso las variación de temperatura es cercana a 0.5°C/min. , por las pérdidas de calor en todo el sistema, consideraremos 4°C de variación aceptable e imperceptible para los usuarios.
El flujo. * El flujo constante promedio en las duchas convencionales es de 9 l/min. Dicho flujo varía dependiendo del lugar, conexión a una bomba de agua o a un tanque elevado, la antigüedad de las tuberías, entre otros. *La cantidad de agua promedio usada por una persona al ducharse es de 135 litros (15min).
Las tuberías. Se despreciarán las pérdidas de calor en las tuberías. *El ancho de las tuberías en las viviendas de nuestro país son por norma de 1/2” según el reglamento nacional de edificaciones. *Los calentadores de agua pueden ser conectados a tuberías no metálicas por lo cual requeriremos tuberías de PVC para minimizar las pérdidas de calor.
. Requerimientos del micro controlador. Se requieren las siguientes características: El controlador deberá tener una cantidad adecuada de puertos de E/S igual o mayor al necesario.
Para esta aplicación se requiere de 9 puertos de entrada: -Se considerarán cuatro usuarios por ser la cantidad de miembros promedio por vivienda a nivel nacional. -Botones para aumentar y disminuir la temperatura (2). -Un pulsador para guardar la temperatura deseada. -Sensores de temperatura para la salida de agua caliente y la salida de agua fría.
Para esta aplicación se requiere de 19 puertos de salida: -Actuadores para las válvulas del agua fría y del agua caliente, se utilizarán solo 4 bits de un DAC para cada actuador, ya que brindan 16 opciones de control por cada actuador, mayor al necesario. - Pantalla LCD, la cual requiere 3 bits de control y 8 bits de datos.
*Capacidad de almacenamiento de memoria no volátil para guardar la configuración de los usuarios y poder acceder a ella cada vez que se encienda el equipo sin tener que configurar la temperatura deseada nuevamente.
Dados los requerimientos antes descritos se optará por usar el micro controlador 16F877A, por contar con líneas programables de entrada/salida mayor a las 28 necesarias y un conversor analógico-digital integrado el cual se usará para la señal analógica de los sensores de temperatura, otras razones importantes son su bajo costo y la experiencia en trabajos previos con micro controladores de esa familia.
Requerimientos del sensor de temperatura. Para los sensores de temperatura de agua fría y caliente se requieren las siguientes características: *Rango de temperatura: 10-90°C *Precisión igual o mayor a ±1°C.
Por satisfacer las características mencionadas se usará el sensor de temperatura LM35, usando el aislamiento necesario para esta aplicación, en este caso se usará el aislamiento
FP-301 de la marca 3M. El sensor cuenta con una precisión de 0.5°C, rango de temperatura de temperatura de 2°C a 150°C y bajo costo.
SENSOR LM35Es un sensor de temperatura con una precisión calibrada de 1ºC y un rango de -55º hasta +150ºC. Se presenta en diferentes encapsulados pero el más común es el to-92 igual que un típico transistor con 3 patas, dos para alimentarlo y la tercera entrega un valor de tensión proporcional a la temperatura medida por el dispositivo. El nombre de sus pines es: VCC - Vout – GND y su forma de conexión se observa en la fig. :
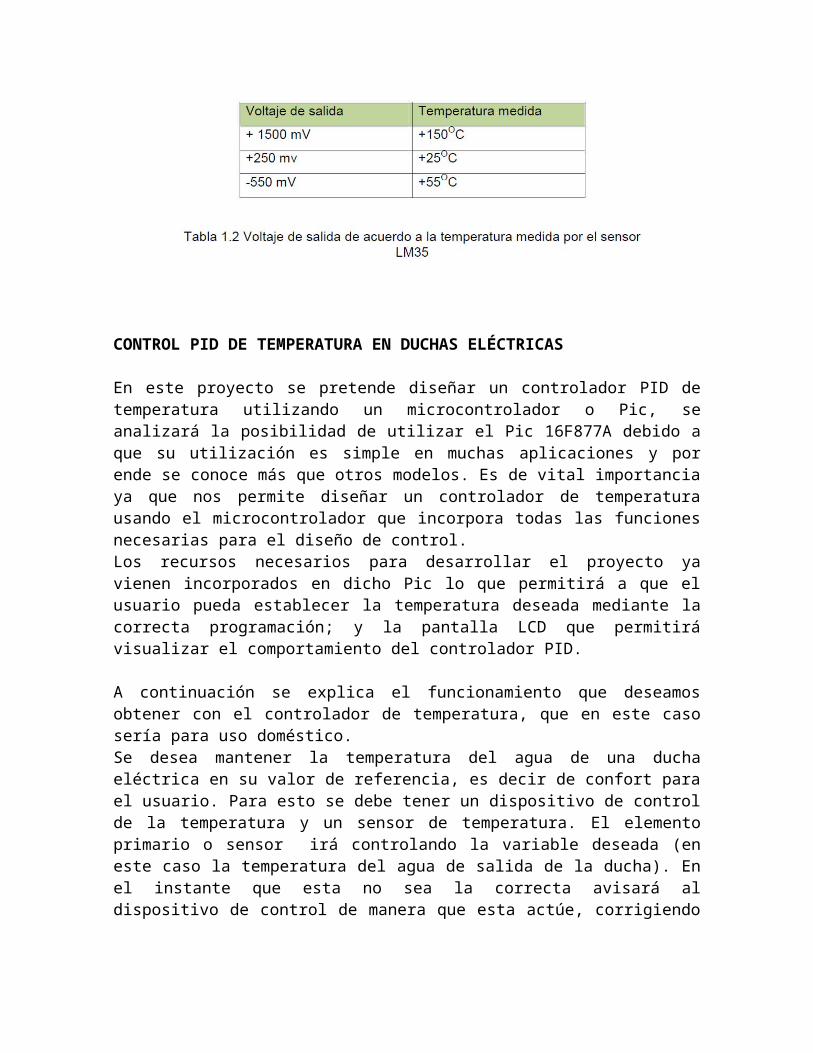
La característica principal, es que, es un sensor de temperatura cuya tensión de salida es linealmente proporcional con la temperatura en la escala Celsius(centígrada). Posee una precisión aceptable para la aplicación requerida· Factor de escala : 10mV/ºC ( garantizado entre 9,8 y 10,2mV/ºC)· Rango de utilización : -55ºC < T < 150ºC· Precisión de : ~1,5ºC (peor caso)· No linealidad : ~0,5ºC (peor caso)El sensor de temperatura puede usarse para compensar un dispositivo de medida sensible a la temperatura ambiente, refrigerar partes delicadas de un dispositivo o bien para sensar temperaturas en el transcurso de un trayecto de exploración.
CONTROL PID DE TEMPERATURA EN DUCHAS ELÉCTRICAS
En este proyecto se pretende diseñar un controlador PID de temperatura utilizando un microcontrolador o Pic, se analizará la posibilidad de utilizar el Pic 16F877A debido a que su utilización es simple en muchas aplicaciones y por ende se conoce más que otros modelos. Es de vital importancia ya que nos permite diseñar un controlador de temperatura usando el microcontrolador que incorpora todas las funciones necesarias para el diseño de control.Los recursos necesarios para desarrollar el proyecto ya vienen incorporados en dicho Pic lo que permitirá a que el usuario pueda establecer la temperatura deseada mediante la correcta programación; y la pantalla LCD que permitirá visualizar el comportamiento del controlador PID.
A continuación se explica el funcionamiento que deseamos obtener con el controlador de temperatura, que en este caso sería para uso doméstico.Se desea mantener la temperatura del agua de una ducha eléctrica en su valor de referencia, es decir de confort para el usuario. Para esto se debe tener un dispositivo de control de la temperatura y un sensor de temperatura. El elemento primario o sensor irá controlando la variable deseada (en este caso la temperatura del agua de salida de la ducha). En el instante que esta no sea la correcta avisará al dispositivo de control de manera que esta actúe, corrigiendo el error. Según lo consultado lo más correcto es utilizar un controlador PID.
Se usará un sensor de temperatura tipo LM35 que como ya se explico es un sensor de temperatura con una precisión calibrada de 1ºC y un rango de -55º hasta +150ºC. Se presenta en diferentes encapsulados para evitar que sufra daños. Son dispositivos muy lineales en un gran rango de temperaturas.
Justificación de los Componentes Empleados.
Para la realización del proyecto se hizo uso de ciertos componentes, como por ejemplo, la termocupla tipo J, el microcontrolador PIC 16F877A, el circuito integrado AD594, los cuales fueron elegidos por ciertas razones de conveniencia, las cuales se procede a numerar a continuación:
El Microcontrolador PIC 16F877A, fue de los primeros componentes en adquirirse, y posee características que lo hacen preferirse de entre otros modelos, por ejemplo:• Comunicación serie síncrona y asíncrona• Suficiente memoria de programa para la aplicación• 8 canales de conversión análogo a digital de 10 bits• Disponible en el país• Documentación, programas y dispositivo programador accesibles
• Bajo costo• Suficientes puertos de entrada/salida digitales
Relé de estado sólido, fue necesario utilizar este dispositivo debido a que se tienen que conmutar 110V ó 220V y es necesario sincronizarse con la línea de corriente alterna para tal efecto y sin producir el ruido que involucra un relé común magnético, él ya internamente posee los circuitos de potencia necesarios para hacer la sincronía con la línea y la conmutación.
Pantallas LCDUna pantalla de cristal líquido o LCD (acrónimo del inglés Liquid Crystal Display) es una pantalla delgada y plana formada por un número de píxeles en color o monocromos colocados delante de una fuente de luz o reflectora. A menudo se utiliza en dispositivos electrónicos de pilas, ya que utiliza cantidades muy pequeñas de energía eléctrica.Cada píxel de un LCD típicamente consiste de una capa de moléculas alineadas entre dos electrodos transparentes, y dos filtros de polarización, los ejes de transmisión de cada uno que están (en la mayoría de los casos) perpendiculares entre sí. Sin cristal líquido entre el filtro polarizante, la luz que pasa por el primer filtro sería bloqueada por el segundo polarizador. Conexión de un LCD:
ESQUEMAS Y REPRESENTACIONES DE SISTEMA DE CONTROL PID
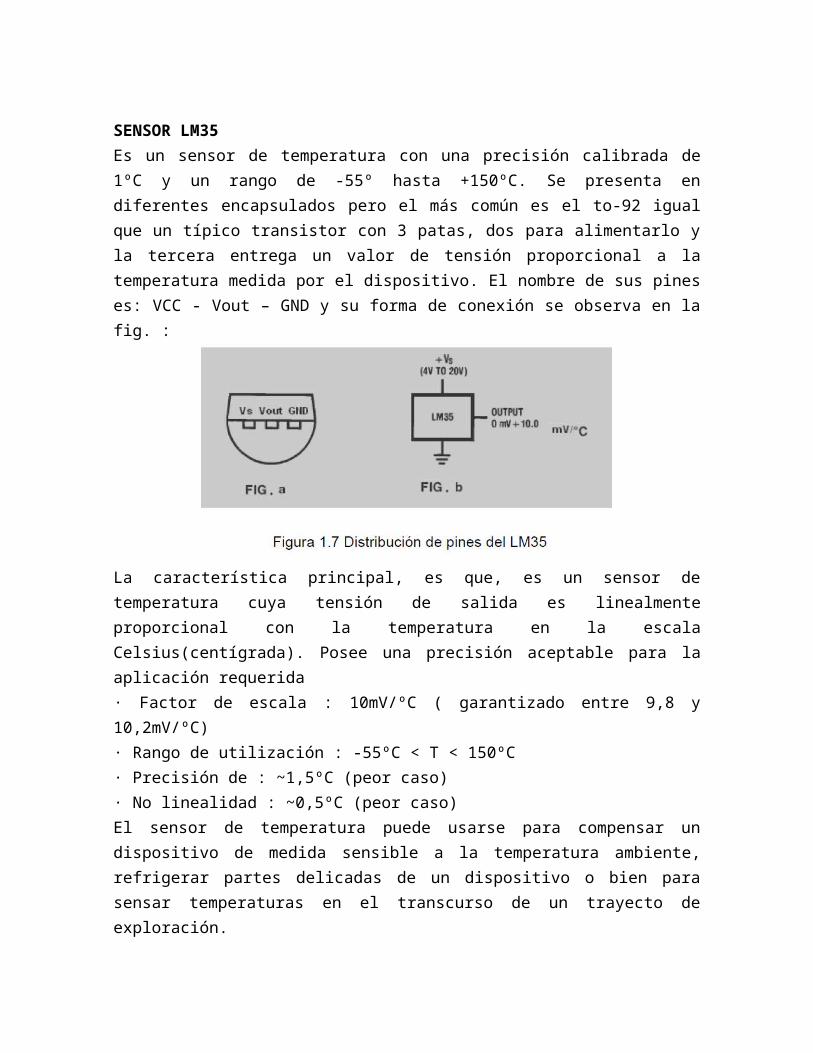
Diagrama P&ID
Diagramas eléctricos en Proteus
Bibliografia:
file:///F:/control/calent/Calentadores%20el%C3%A9ctricos%20semiinstant%C3%A1neos%20-%20CSA%20Sistemas.htm