practicas maq. elec
TRANSCRIPT
Practicas
MC. Nicolás González Morales
Jueves m5
Angel Yoan Bonilla Barenca 1540774
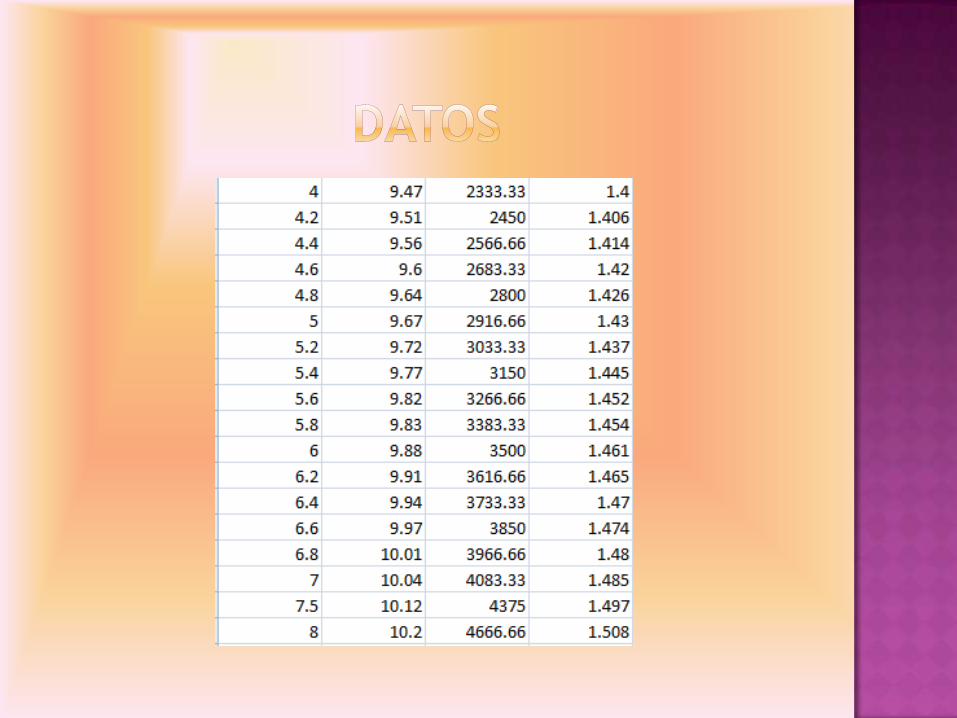
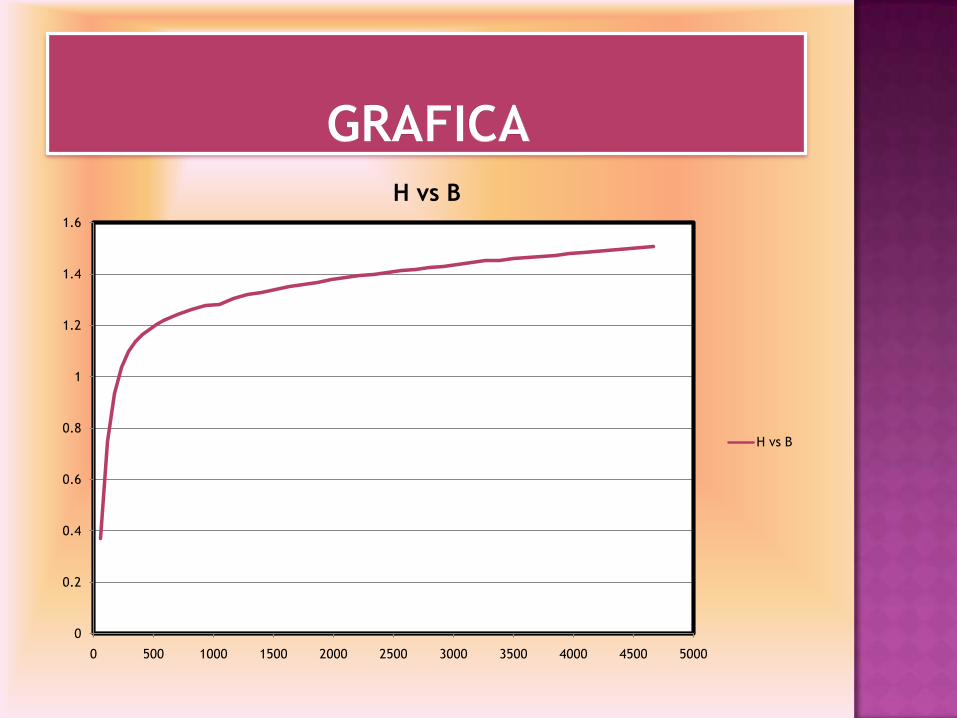
Obtención de la curva de imanación
dinámica por el método amperímetro-
voltímetro
Obtener, para un material ferromagnetico
dado, su curva de imanación dinámica
utilizando amperímetro y voltímetro.
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
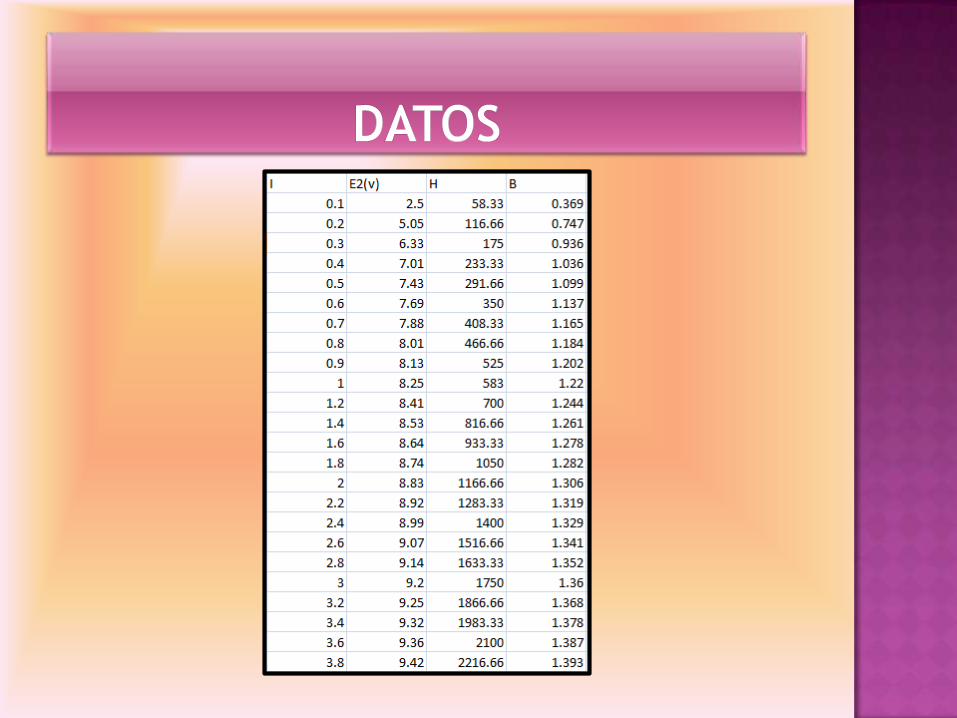
0 500 1000 1500 2000 2500 3000 3500 4000 4500 5000
H vs B
H vs B
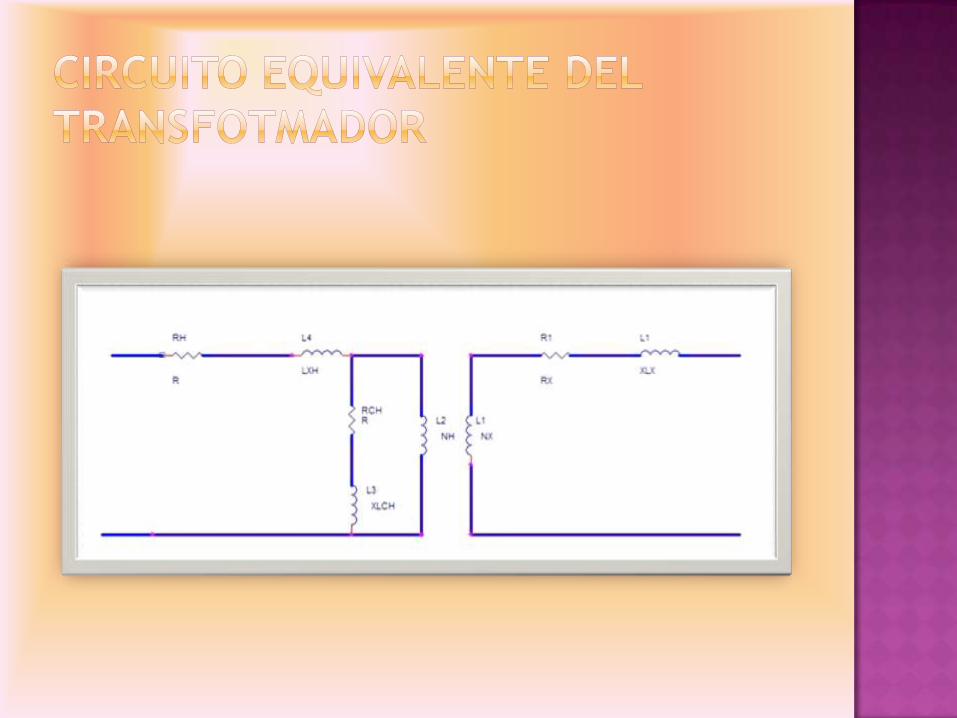
Cálculos de parámetros del
transformador monofásico
Objetivo:
Determinar los parámetros del transformador
monofásico mediante las pruebas de vacio y
corto circuito, obtener también la eficiencia
del transformador así como la regulación.
Datos del transformador
3kva
220v/110v
P=(V)(I) IH=P/V=3000VA/220V=13.63amp
IX=p/I=3000VA/110v=27.27amp
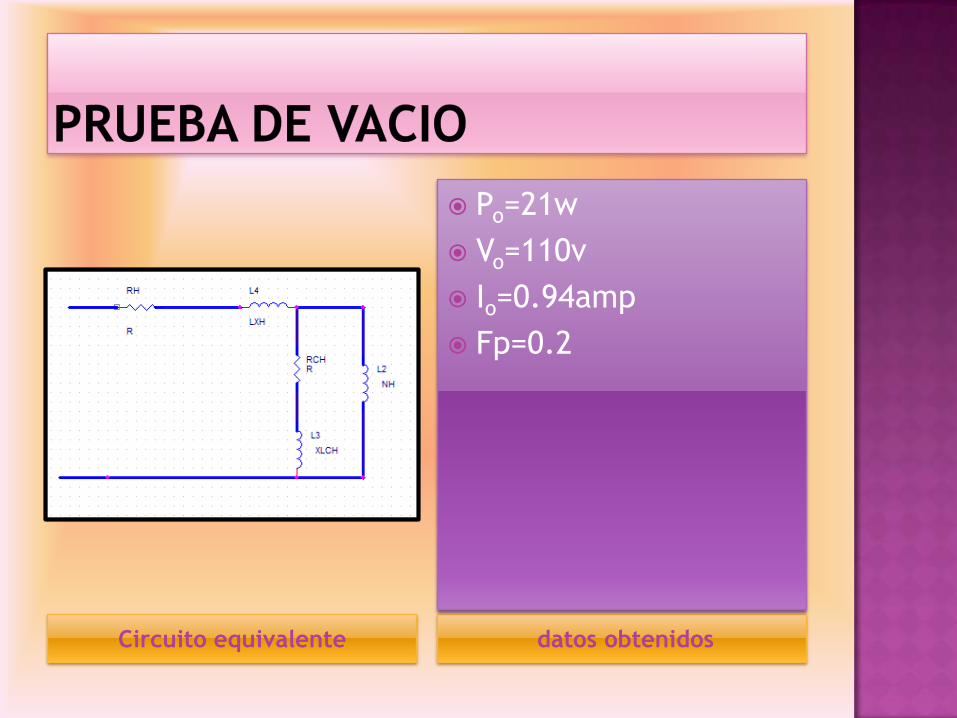
Circuito equivalente datos obtenidos
Po=21w
Vo=110v
Io=0.94amp
Fp=0.2
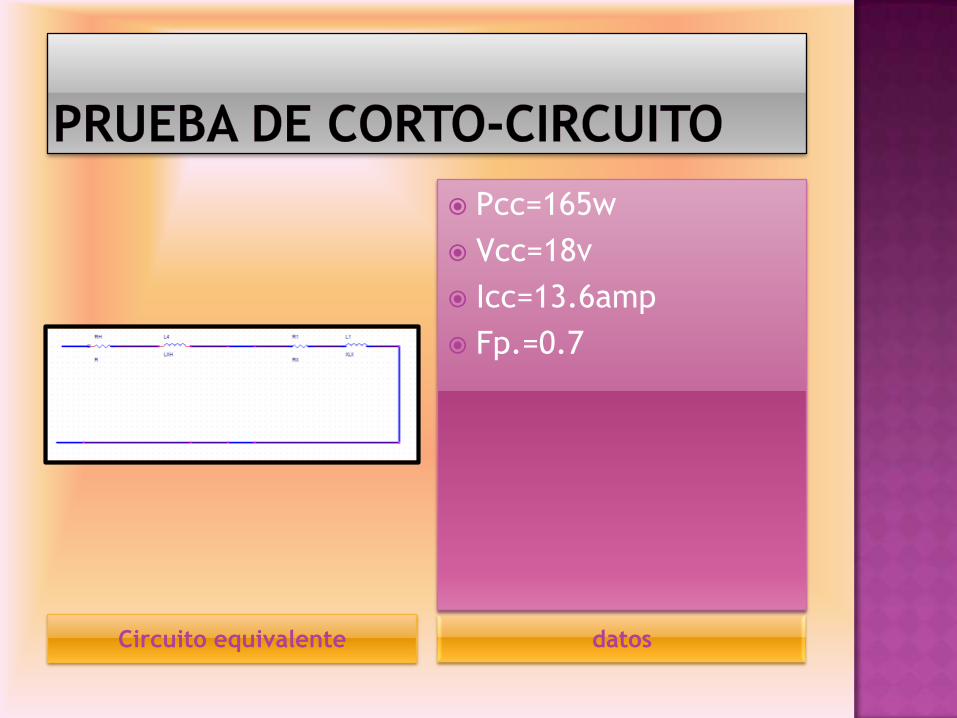
Circuito equivalente datos
Pcc=165w
Vcc=18v
Icc=13.6amp
Fp.=0.7
Objetivo: analizar el comportamiento
de un transformador con carga
resistiva, inductiva y capacitiva.

foco A1 V1 W1 FP a A2 V2 w2 FP2 %n %Rg
1 2 110 200 .93 .55 .89 220 190 .99 .95 145
2 3.6 110 385 .96 .52 1.75 210 370 .99 .96 138
3 5.4 110 560 .98 .52 2.6 210 547 .99 .97 138

foco A1 V1 W1 FP1 a A2 V2 W2 FP2 %n %R
1 1.9 110 45 .2 .5 .7 220 39 .4 .86 165
2 1.8 110 40 .2 .51 .7 215 38 .42 .95 159
3 2.5 110 45 .18 .51 1.1 213 43 .28 .955 156
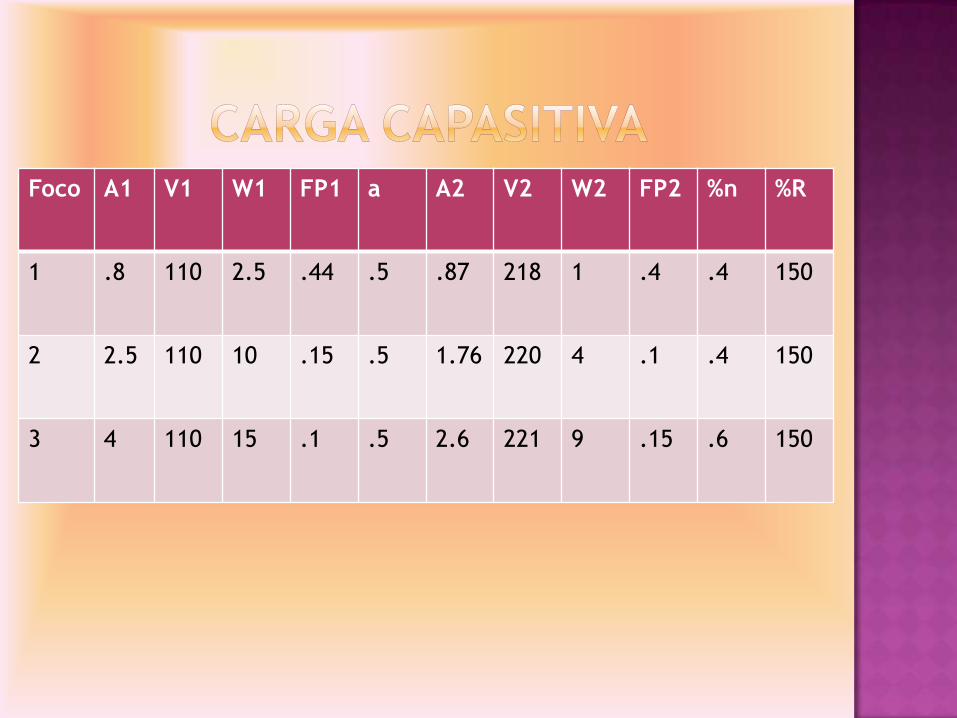
Foco A1 V1 W1 FP1 a A2 V2 W2 FP2 %n %R
1 .8 110 2.5 .44 .5 .87 218 1 .4 .4 150
2 2.5 110 10 .15 .5 1.76 220 4 .1 .4 150
3 4 110 15 .1 .5 2.6 221 9 .15 .6 150

Se obcervo que con la carga resistiva la
potencia es mayor que en las otras cargas de
la misma manera el factor de potencia es
mejor con carga positiva que con carga
inductiva
Corrientes trifasicas
Analizar el comportamiento de las corrientes
trifásicas Y-Y , ∆-∆, Y-∆, ∆-Y en
transformadores.
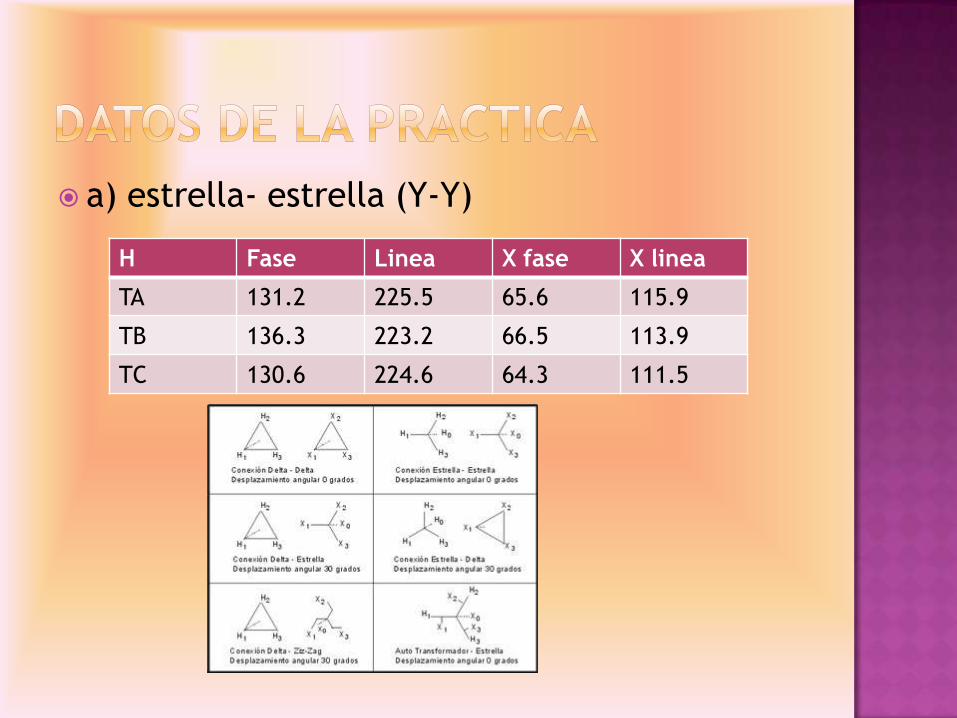
a) estrella- estrella (Y-Y)
H Fase Linea X fase X linea
TA 131.2 225.5 65.6 115.9
TB 136.3 223.2 66.5 113.9
TC 130.6 224.6 64.3 111.5
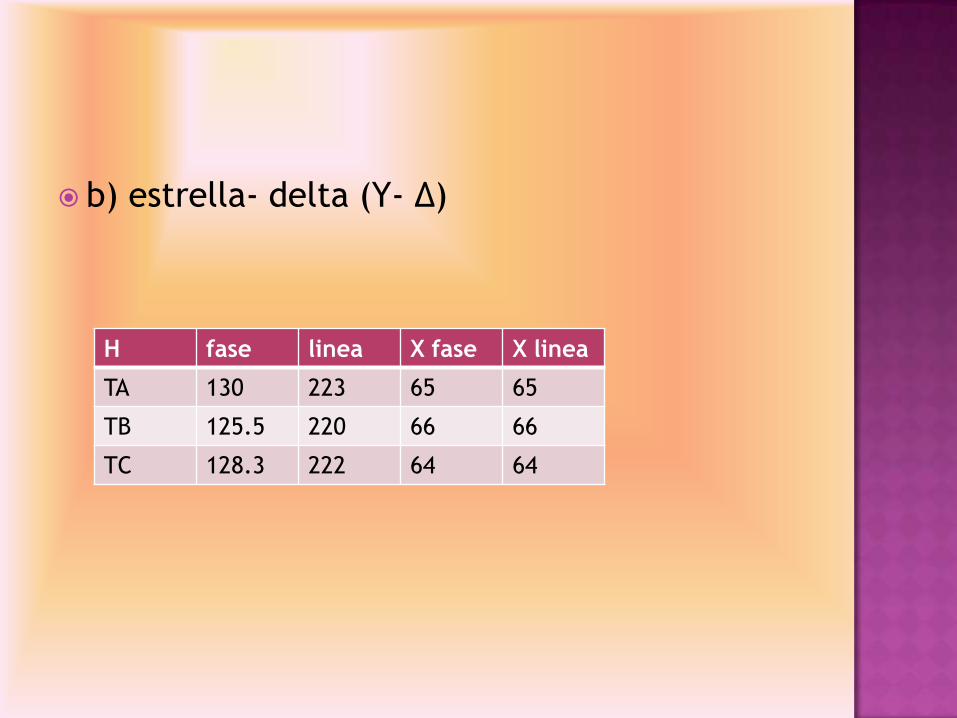
b) estrella- delta (Y- ∆)
H fase linea X fase X linea
TA 130 223 65 65
TB 125.5 220 66 66
TC 128.3 222 64 64
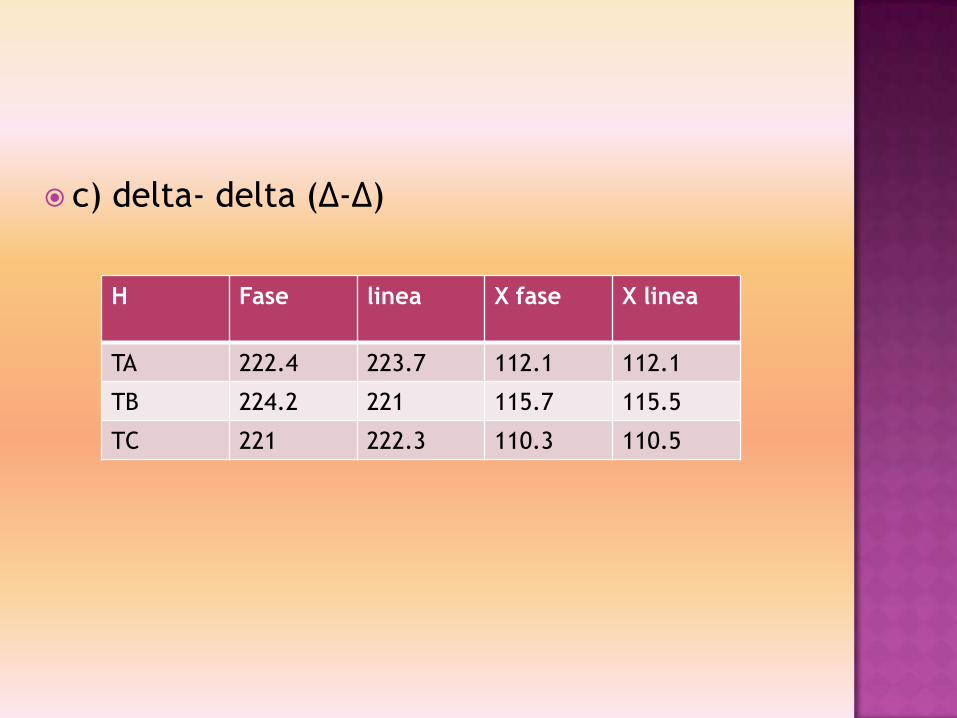
c) delta- delta (∆-∆)
H Fase linea X fase X linea
TA 222.4 223.7 112.1 112.1
TB 224.2 221 115.7 115.5
TC 221 222.3 110.3 110.5
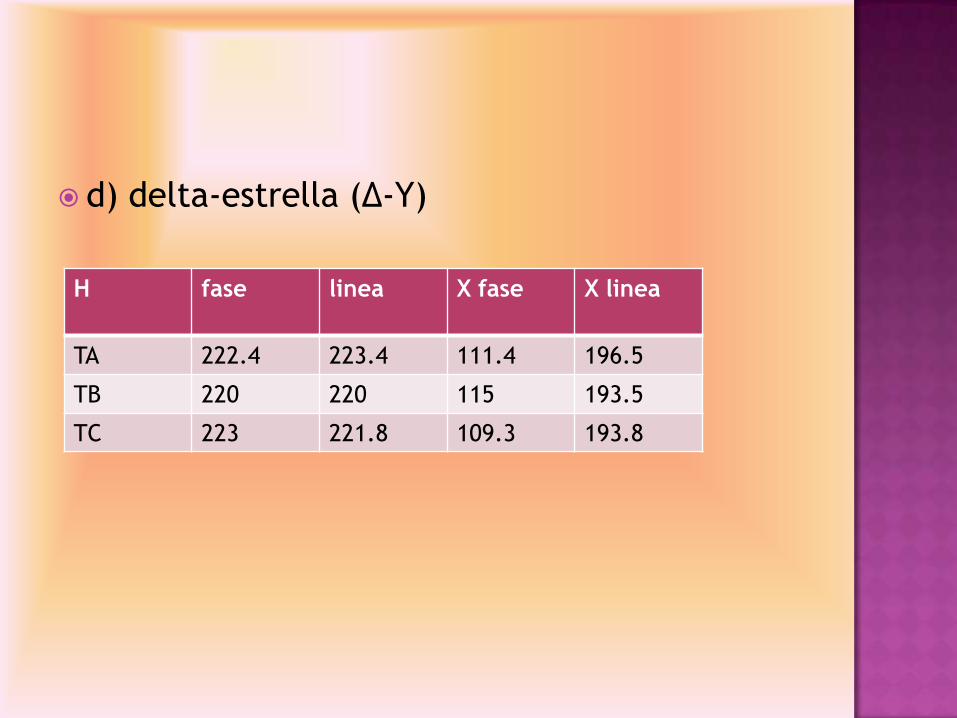
d) delta-estrella (∆-Y)
H fase linea X fase X linea
TA 222.4 223.4 111.4 196.5
TB 220 220 115 193.5
TC 223 221.8 109.3 193.8
Grupos de Conexión
Las conexiones utilizadas en la práctica están normalizadas en grupos de conexión. El grupo de conexión caracteriza las conexiones de los dos arrollamientos y el desfase entre las fuerzas electromotrices correspondientes a ambos arrollamientos. Cada grupo se identifica con una cifra o índice de conexión que multiplicada por 30º, da como resultado el desfase en retraso, que existe entre las tensiones del mismo genero (simples o compuestas) del secundario respecto al primario del transformador en cuestión.
Estudio de la transformación trifásica en conexión estrella-estrella (Yy) con arrollamiento terciario
La conexión estrella – estrella tiene la gran ventaja de disminuir la tensión por fase del transformador, pero presenta inconvenientes cuando las cargas no están equilibradas. Para eliminar estos inconvenientes se dispone de un arrollamiento terciario el cual esta conectado en triángulo y cerrado en cortocircuito sobre sí mismo. Las fuerzas magnetomotrices, primaria y secundaria, debidas a esta sobrecarga, se compensan en cada columna, con lo que desaparecen los flujos adicionales y, con ellos, los inconvenientes que resultaban de las cargas desequilibradas.
El devanado terciario puede utilizarse para suministrar cargas locales con la tensión más conveniente. Puede alimentar los circuitos de control y las instalaciones auxiliares en las estaciones transformadoras.
Ventajas.
Conexión más económica para transfor-madores de alta tensión que de pequeña potencia.
Pueden conectarse neutros a los dos bobinados, tanto con la tierra, como para una distribución equilibrada con cuatro cables. Una de las conexiones más sencillas para poner "en fase", en el funcionamiento en paralelo.
Debido al tamaño relativamente grande de los conductores, la capacidad electrostática entre las espiras es elevada, de manera que los esfuerzos debidos a las ondas producidas por sobretensiones momentáneas que afectan a los enrollamientos, se disminuyen considerablemente.
Si una fase en cualquier bobinado funciona defectuosa, las dos fases restantes pueden funcionar resultando una transformación monofásica. La carga que podría suministrar seria del 58 por ciento de la potencia normal trifásica.
Inconvenientes.
Los neutros negativos son muy inestables, a menos que sean sólidamente conectados a una toma de tierra.
Las unidades trifásicas o baterías de polaridad opuesta no pueden funcionar en paralelo, a no ser que la conexión de las fases del primario o del secundario de un transformador o batería se invierta.
Una avería en una fase hace que una unidad trifásica no pueda trabajar en una distribución de tres fases hasta que se repare. La construcción de los enrollamientos es más dificultosa y su coste, más elevado. Especialmente cuando es para corrientes altas.
Los transformadores conectados d e estrella-estrella encuentran su mayor aplicación como unidades de núcleo trifásico para suministrar una potencia relativamente pequeña. En la práctica, es generalmente difícil conseguir que una carga de iluminación por distribución trifásica de cuatro hilos resulte siempre equilibrada y, por esta razón esta conexión no es apropiada para tales cargas. Para la distribución de fuerza; esta conexión es completamente apropiada desde el punto de vista de su funcionamiento, con tal que se empleen transformadores de núcleo trifásico, pues los transfor-madores tipo de concha y monofásicos en tándem a menudo producen perturbaciones debidas a los armónicos.
La aplicación principal de esta conexión tiene efecto en transformado-res reductores de tensión para alimentar convertidores sincrónicos trifásicos y, al mismo tiempo, proporcionar en el lado de la estrella interconectada, un neutro para la distribución de corriente continua. A causa de la interconexión en él secundario, se puede tener una corriente continua muy desequilibrada sin que produzca efectos nocivos en la característica magnética del transformador.
Esta conexión solamente resulta aconsejable tratándose de transformadores trifásicos del tipo de acorazado o de baterías de tres transformadores monofásicos. La interconexión en el secundario no es necesaria en los transformadores trifásicos del tipo de núcleo usual, pues, al emplear un enrollamien-to simple en estrella, se produce un flujo magnético que circula siguiendo el circuito magnético en la misma dirección, en los tres brazos, y como el flujo continuo correspondiente debe encontrar un camino de retorno a través del aire o a través del depósito del transformador y del aceite, resulta que sus efectos magnéticos son despreciables.
Ventajas.
Se eliminan las tensiones del tercer armónico por la circulación de la corriente de este tercer armónico en el secundario en triangulo.
El neutro del primario se puede conectar con la tierra.
El neutro del primario se mantiene estable por el secundario en triangulo.
Es la conexión más conveniente para los transformadores reductores de tensión, debido a las características inherentes de los enrollamientos en estrella para altas tensiones y de los enrollamientos en triangulo para las bajas tensiones.
Inconvenientes.
No se puede disponer de un neutro en el secundario para conectar con la tierra o para una distribución de cuatro cables, a menos que se disponga un aparato auxiliar.
Un defecto en una fase hace que no pueda funcionar la batería o unidad trifásica hasta que se la repare.
El enrollamiento en triangulo puede resultar débil mecánicamente en el caso de un transformador elevador con una tensión en el secundario muy alta, o con una tensión secundaria medianamente alta y potencia pequeña.
La aplicación principal de esta conexión
tiene efecto en los transformadores
reductores para alimentar una carga
equilibrada trifásica, por ejemplo, motores.
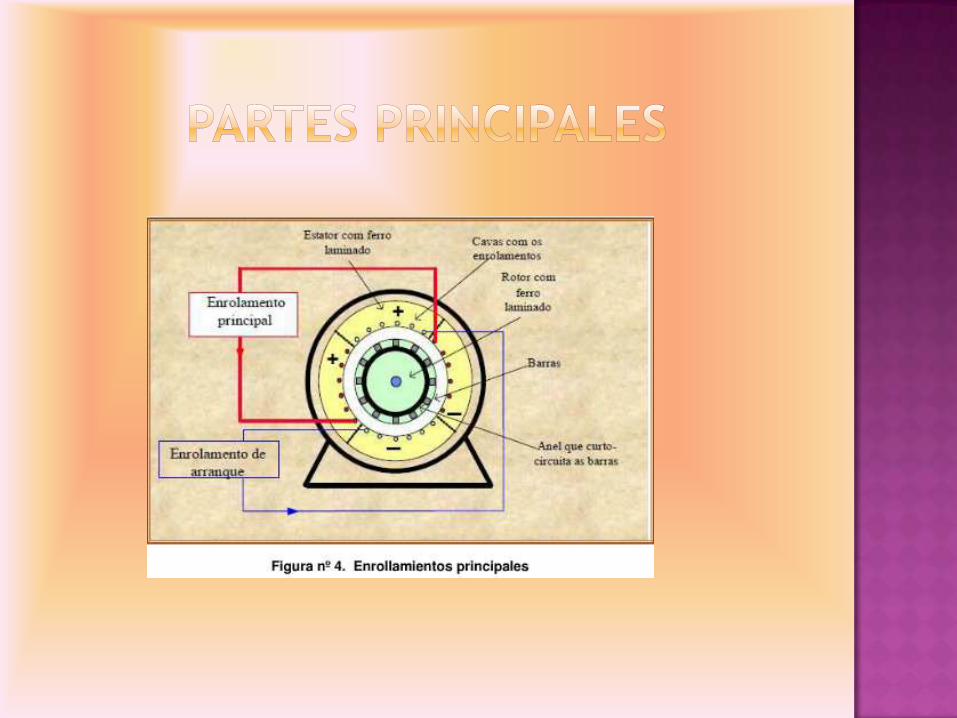
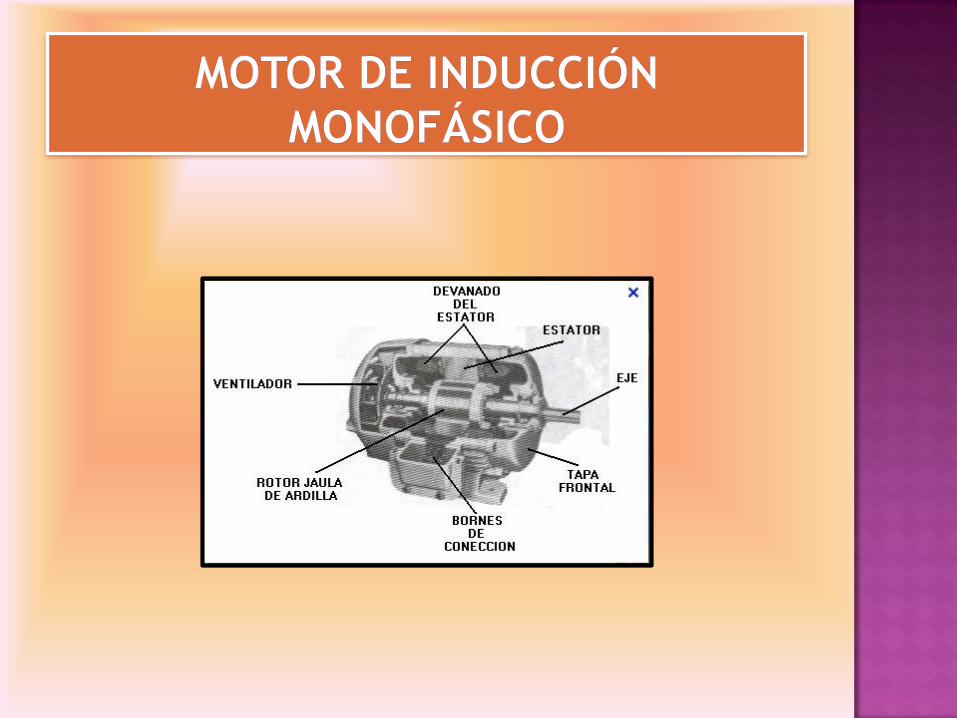
Conocimiento de las partes de un motor
de inducción
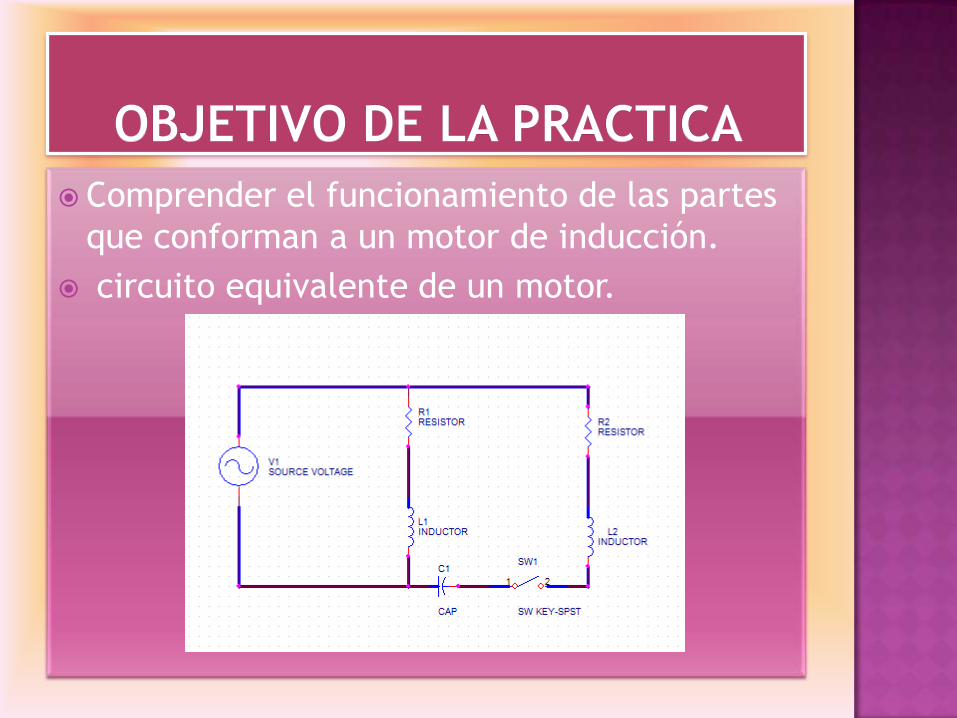
Comprender el funcionamiento de las partes
que conforman a un motor de inducción.
circuito equivalente de un motor.
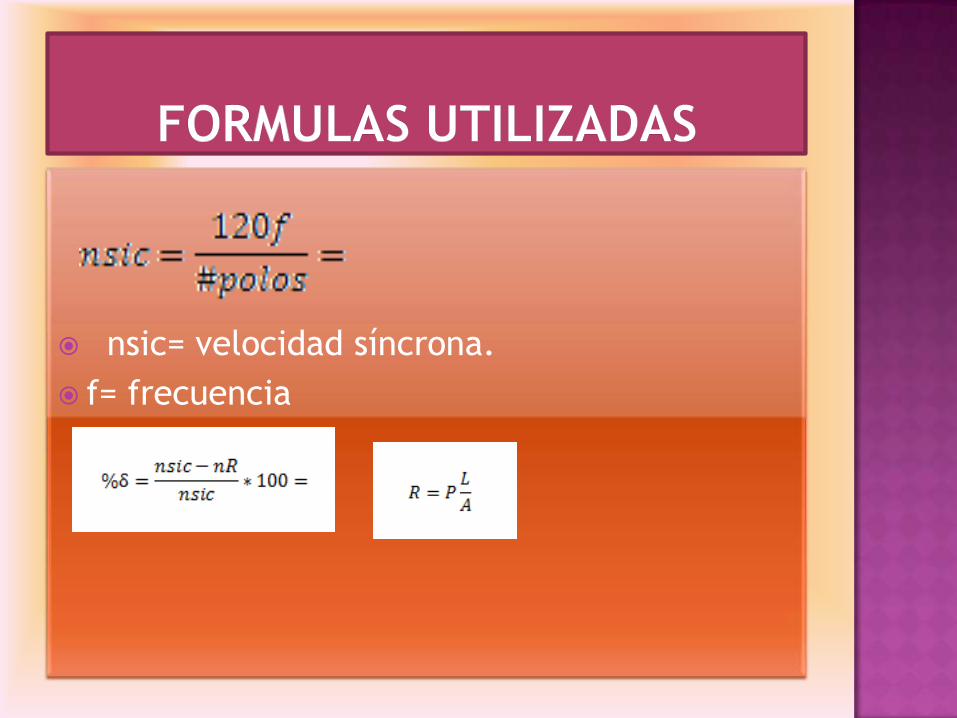
nsic= velocidad síncrona.
f= frecuencia
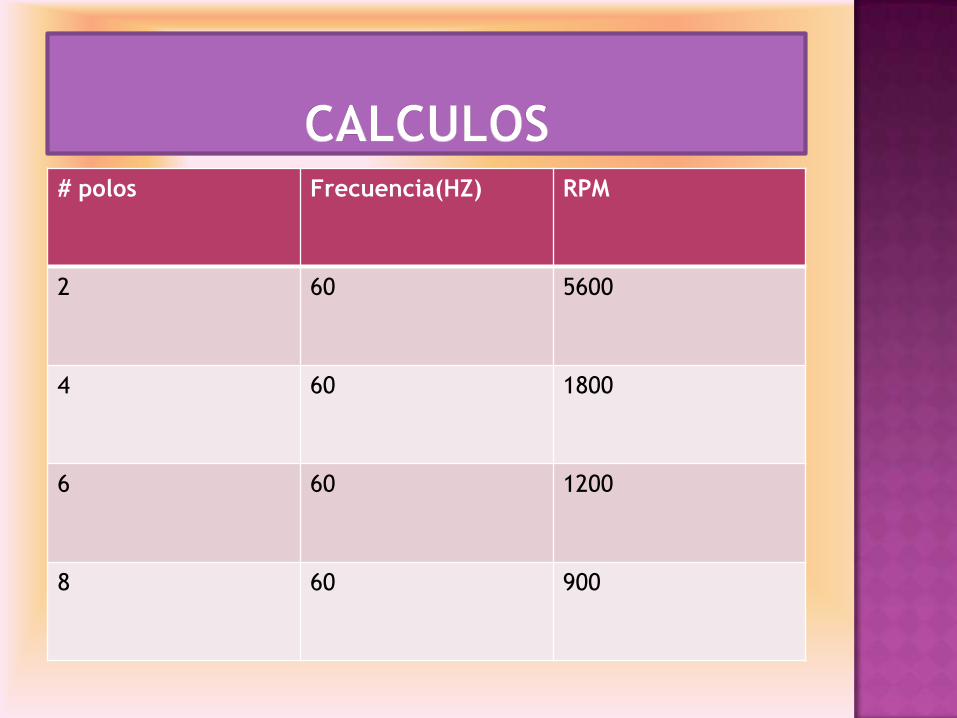
# polos Frecuencia(HZ) RPM
2 60 5600
4 60 1800
6 60 1200
8 60 900
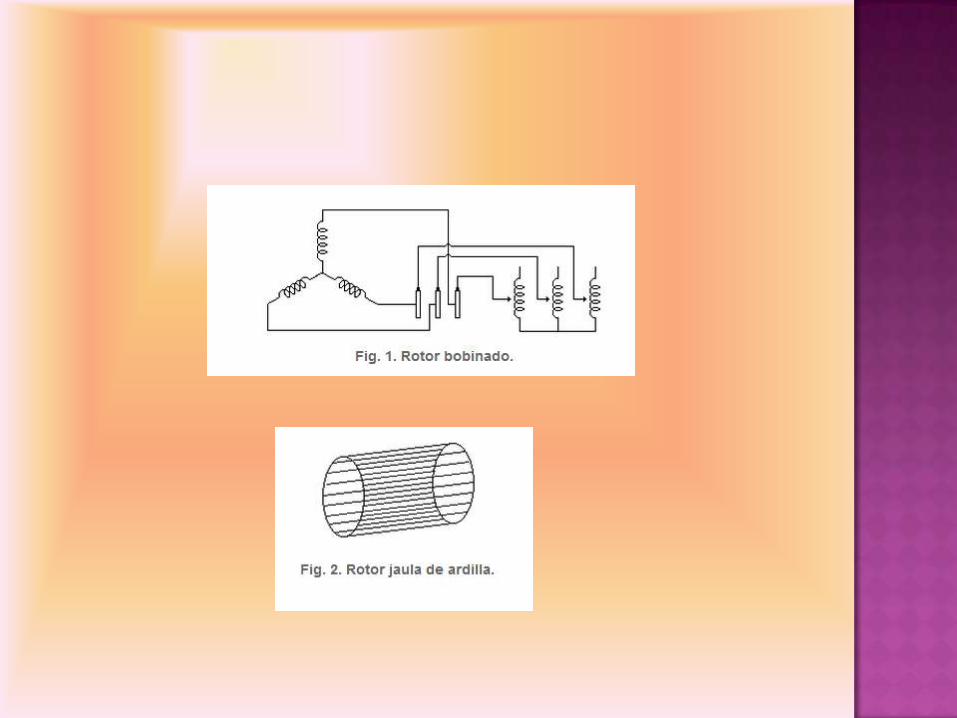
a) Rotor Bobinado.
El rotor bobinado está compuesto de un devanado polifásico similar al del estator y con el mismo número de polos que él. Los terminales del devanado del rotor se conectan a anillos rozantesaislados, montados sobre el eje, en los que se apoyan escobillas de carbón, de manera que dichos terminales resultan accesibles desde el exterior, según se aprecia en la Figura 1.
b) Rotor Jaula de Ardilla.
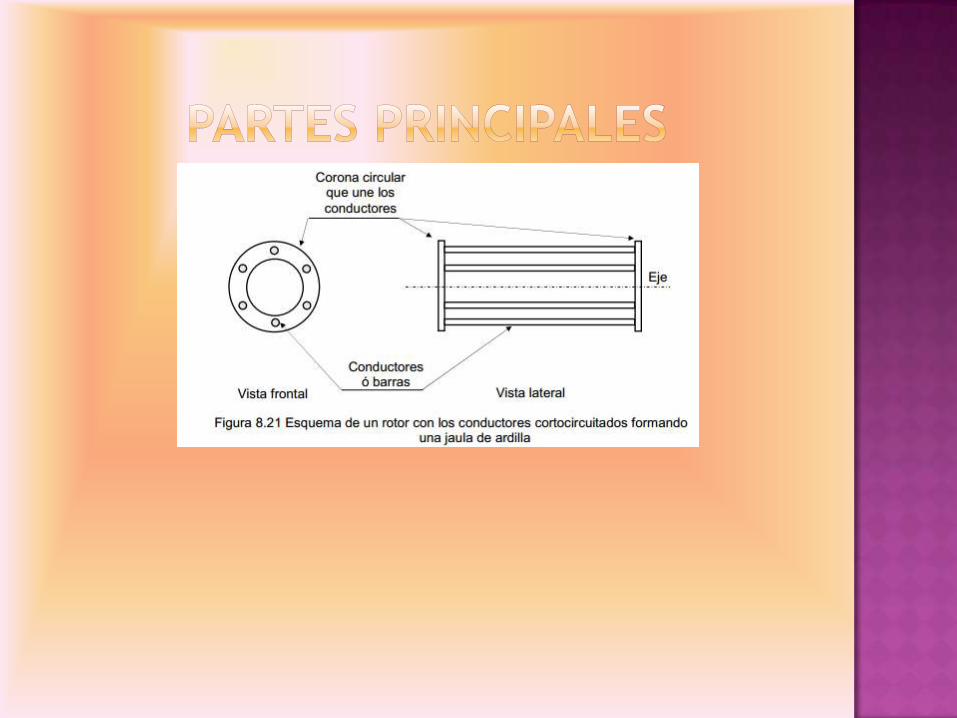
El rotor jaula de ardilla está formado por varillas conductoras alojadas en ranuras que existen en el hierro del propio rotor y cortocircuitadas en ambos extremos mediante dos anillos planos conductores dispuestos en cada lado del rotor, según se puede apreciar en la Figura 2.
El motor monofásico de inducción con rotor tipo jaula está diseñado para poder ser empleado en la gran mayoría de aplicaciones donde se requiera motores de un rendimientoEntre las principales características de esta línea están:
Rango de potencias desde 0,25 HP hasta 12.5 HP2,4 y 6 polosTotalmente cerrados con ventilación exterior ó abiertos ODPFactor de Servicio 1.15Armazón de lámina roladaOperación ContinuaAislamiento clase FDimensiones NEMAIncremento de temperatura clase BVentilador de plástico anti-flama (Auto extinguible)Tensiones normalizadas: 115/208-230 VFrecuencia normalizada : 60 HzGrado de protección interna IP55 para motores cerrados e IP 21 para motores abiertosVariantes: Motores con base resilente, doble salida de flecha, para compresores, para bombas centrífugas, para uso agrícola, a prueba de explosión.
Aplicaciones comunes
Los motores de la línea monofásica pueden ser clasificados como “Motores de Uso General”; sin embargo pueden ser empleados , sin ningún problema, en aplicaciones específicas como :
Aplicaciones en ambientes polvososBombas centrífugasCompresoresVentiladoresBombas de combustibleA prueba de explosiónLavadoras y electrodomésticos en general
Rotor bobinado
Los motores no cuentan con una sola espira, sino que se forman bobinas para lograr más conductores que aporten cupla. Un tipo de motor es el que tiene 3 bobinas con sus ejes magnéticos desplazados, a los efectos de formar un conjunto trifásico. Dichas bobinas están unidas en un punto común, formando una conexión del tipo “estrella”, mientras que los otros terminales de las bobinas se conectan al exterior de la máquina mediante unos anillos rozantes, tal como se muestra esquemáticamente en la figura 8.19. Estos anillos están aislados eléctricamente entre si y también del eje del rotor, y cada uno de ellos conectado a cada terminal de las bobinas. La conexión al exterior se efectúa, mediante escobillas o carbones que se deslizan sobre los anillos, efectuando la continuidad eléctrica entre una parte móvil y una parte fija. Mediante estas escobillas se pueden conectar en serie con cada bobina una resistencia o bien cortocircuitar los tres extremos.
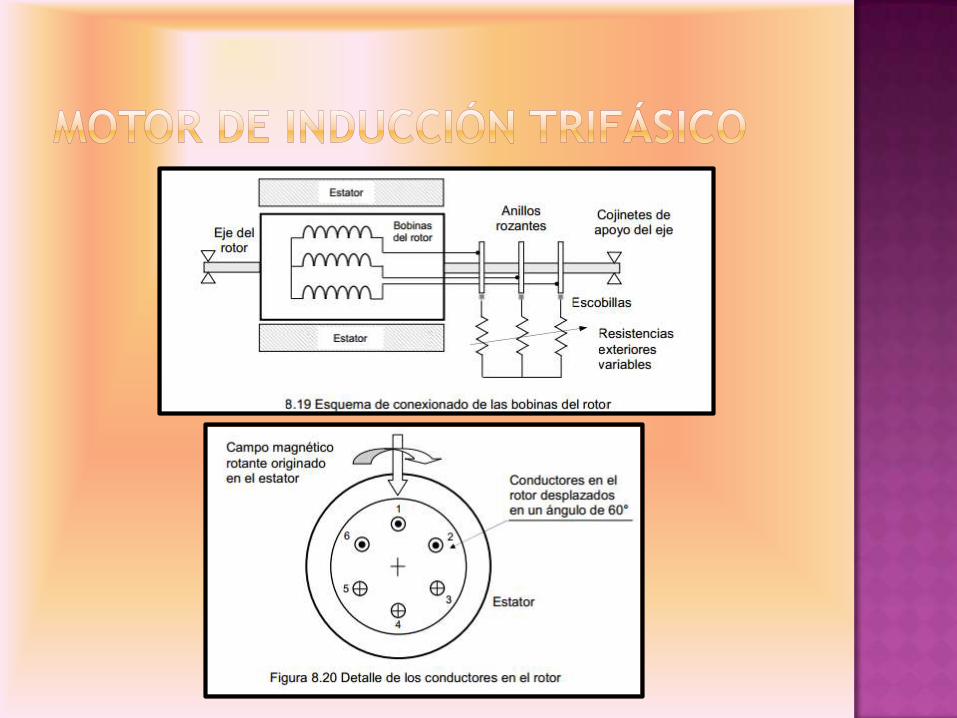
Rotor en cortocircuito o jaula de ardilla
Si colocamos en el rotor de la máquina una serie de conductores paralelos a su eje, tal como se muestra en la figura 8.20, en los mismos vamos a tener fuerzas electromotrices inducidas, cuyo valor depende de la magnitud la inducción magnética, de la longitud de los conductores y de la velocidad con que el campo magnético pasa frente al conductor analizado. En el esquema se han tomado seis conductores desplazados 60° entre ellos, lo cual nos lleva a que las fuerza electromotrices inducidas en los mismos son de igual módulo pero desfasados en 60°, entre sí. Esto se puede representar fasorialmente, mediante un valor eficaz "E", igual para todos los conductores pero con un desfasaje de 60°. De acuerdo a la posición que se dibujó del campo magnético, en ese instante, las fem son salientes en los conductores superiores y entrantes en los inferiores, lo cual surge de aplicar la regla ya estudiada. En esta situación no hay circulación de corriente ya que no se presenta un circuito cerrado. Si los extremos anteriores y posteriores de los conductores, los unimos mediante una corona, tal como se muestra en la figura 8.21, circulará corriente por los mismos, valor que depende de la impedancia que presente dicho conductor.


Control de un motor monofásico y
trifásico
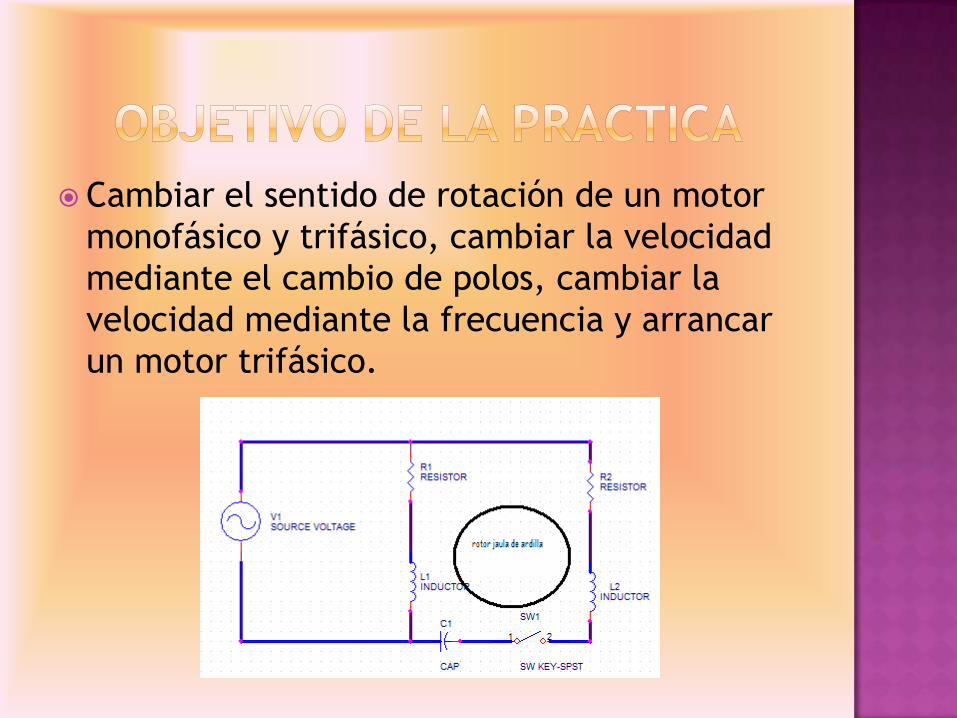
Cambiar el sentido de rotación de un motor
monofásico y trifásico, cambiar la velocidad
mediante el cambio de polos, cambiar la
velocidad mediante la frecuencia y arrancar
un motor trifásico.
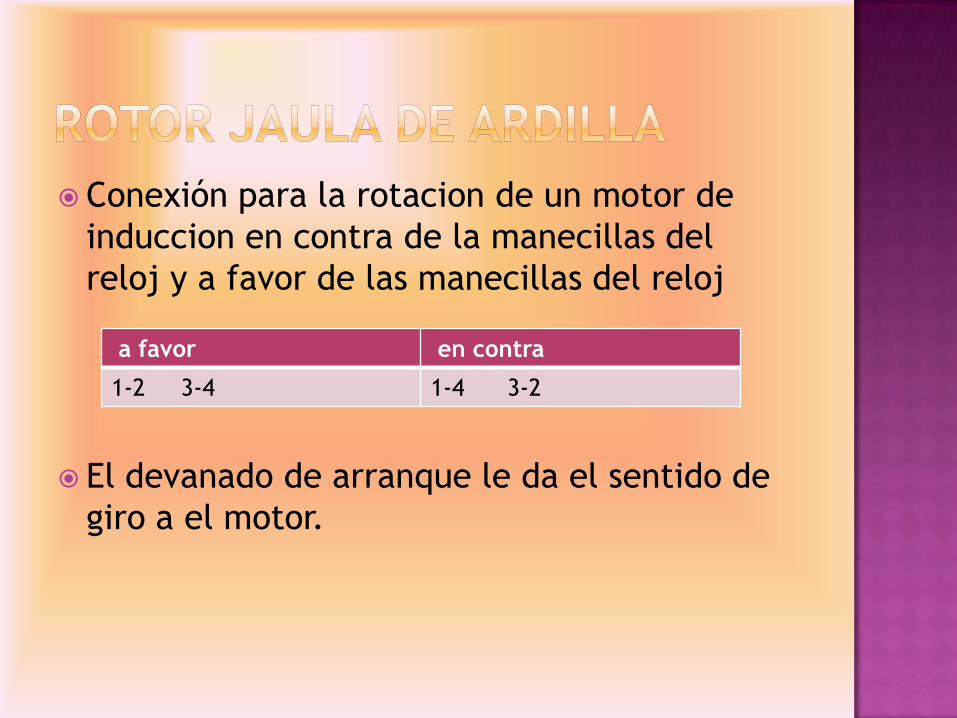
Conexión para la rotacion de un motor de
induccion en contra de la manecillas del
reloj y a favor de las manecillas del reloj
El devanado de arranque le da el sentido de
giro a el motor.
a favor en contra
1-2 3-4 1-4 3-2
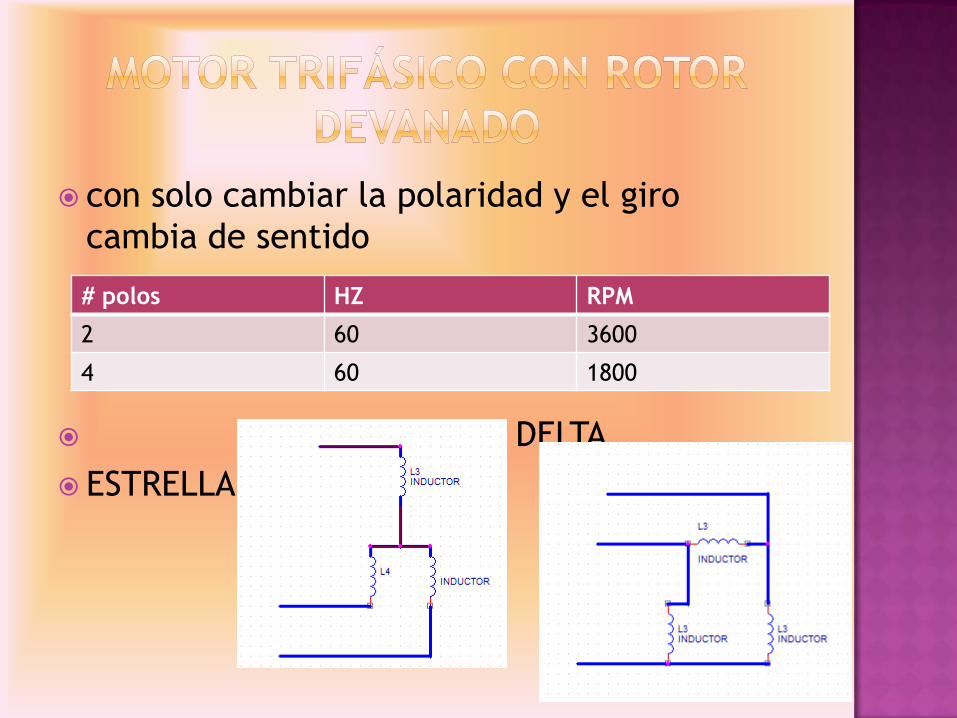
con solo cambiar la polaridad y el giro
cambia de sentido
DELTA
ESTRELLA
# polos HZ RPM
2 60 3600
4 60 1800
EN EL LABORATORIO ARRANCAMOS ALGUNOS
MOTORES MONOFASICOS Y TRIFASICOS CON
CONEXIONES DELTA Y ESTRELLA, Y UNO
CAMBIO DE POLOS PARA PARA VARIAR SU
VELOCIDAD SE OBCERVO QUE AL CAMBIAR LA
POLARIDAD SE CAMBIA EL SENTIDO DE GIRO
DE LOS MOTORES, SE LE REALISO LAS DOS
CONEXIONES EN DELTA Y LUEGO EN ESTRELLA
UNA PRACTICA INTERESANTE PARA APRENDER
A UTILIZAR UN MOTOR DE ROTOR DEVANO O
DE JAULA DE ARDILLA.

EFICIENCIA DE UN MOTOR TRIFASICO.
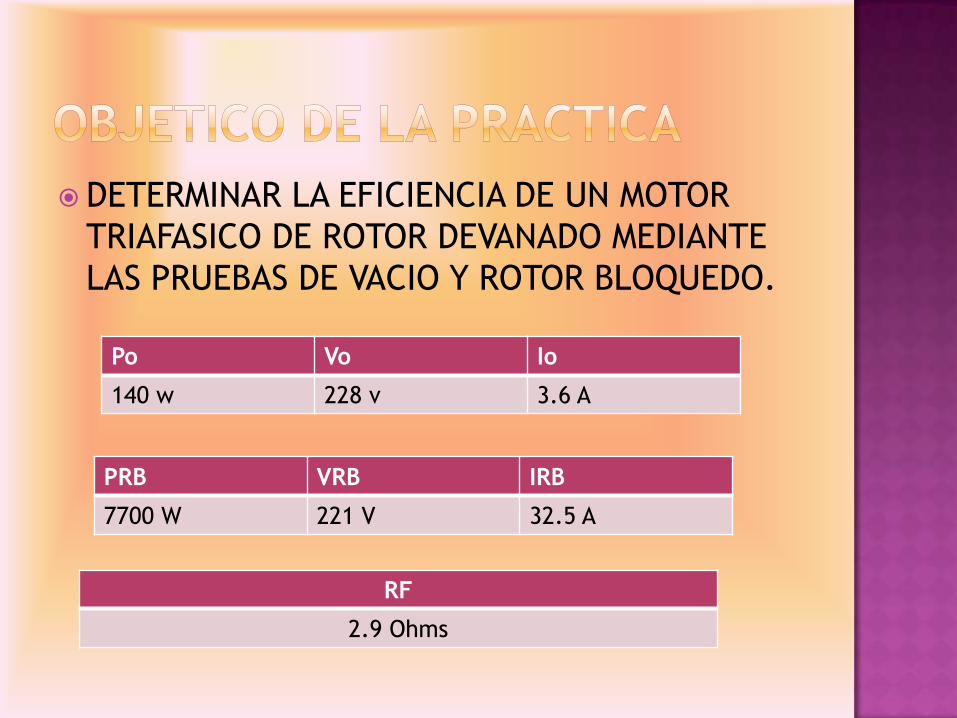
DETERMINAR LA EFICIENCIA DE UN MOTOR
TRIAFASICO DE ROTOR DEVANADO MEDIANTE
LAS PRUEBAS DE VACIO Y ROTOR BLOQUEDO.
Po Vo Io
140 w 228 v 3.6 A
PRB VRB IRB
7700 W 221 V 32.5 A
RF
2.9 Ohms
Motor trifásico con carga
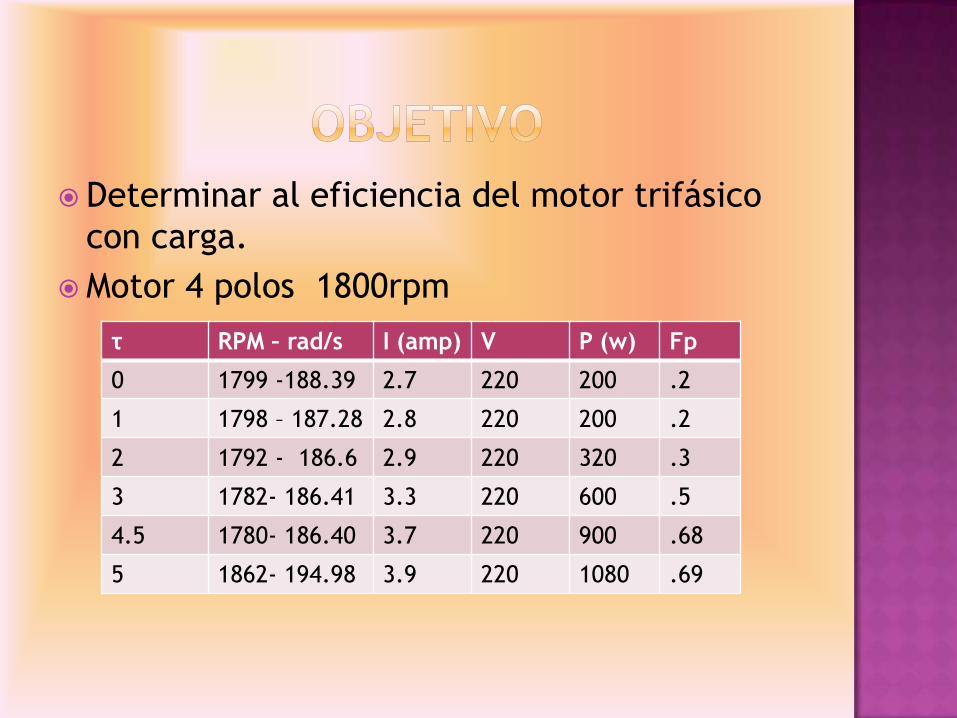
Determinar al eficiencia del motor trifásico
con carga.
Motor 4 polos 1800rpm
τ RPM – rad/s I (amp) V P (w) Fp
0 1799 -188.39 2.7 220 200 .2
1 1798 – 187.28 2.8 220 200 .2
2 1792 - 186.6 2.9 220 320 .3
3 1782- 186.41 3.3 220 600 .5
4.5 1780- 186.40 3.7 220 900 .68
5 1862- 194.98 3.9 220 1080 .69
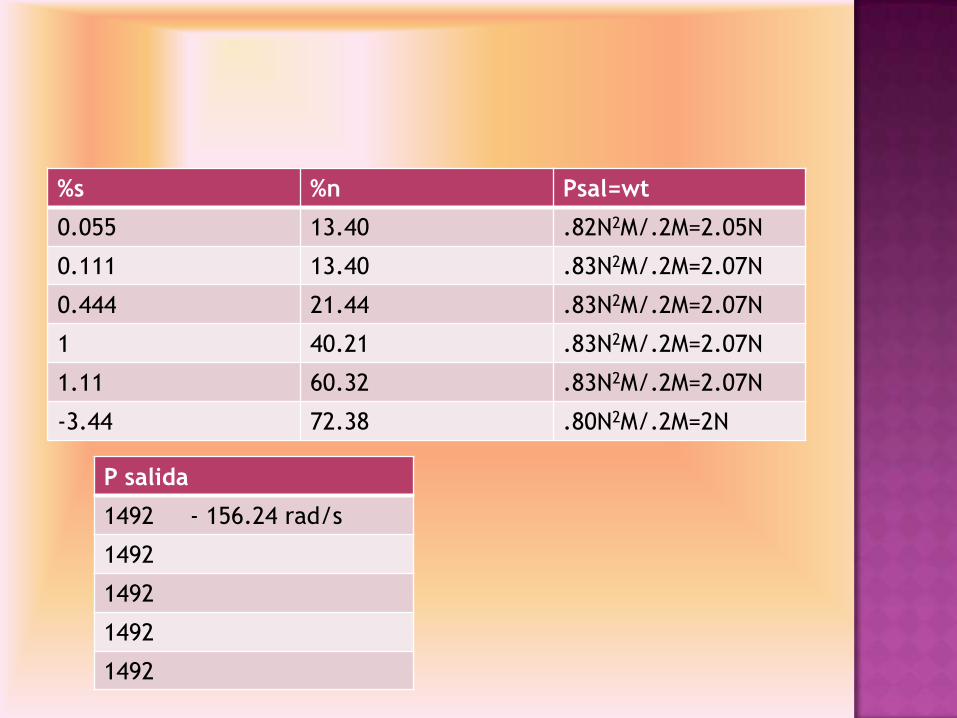
%s %n Psal=wt
0.055 13.40 .82N2M/.2M=2.05N
0.111 13.40 .83N2M/.2M=2.07N
0.444 21.44 .83N2M/.2M=2.07N
1 40.21 .83N2M/.2M=2.07N
1.11 60.32 .83N2M/.2M=2.07N
-3.44 72.38 .80N2M/.2M=2N
P salida
1492 - 156.24 rad/s
1492
1492
1492
1492
0
10
20
30
40
50
60
70
80
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8
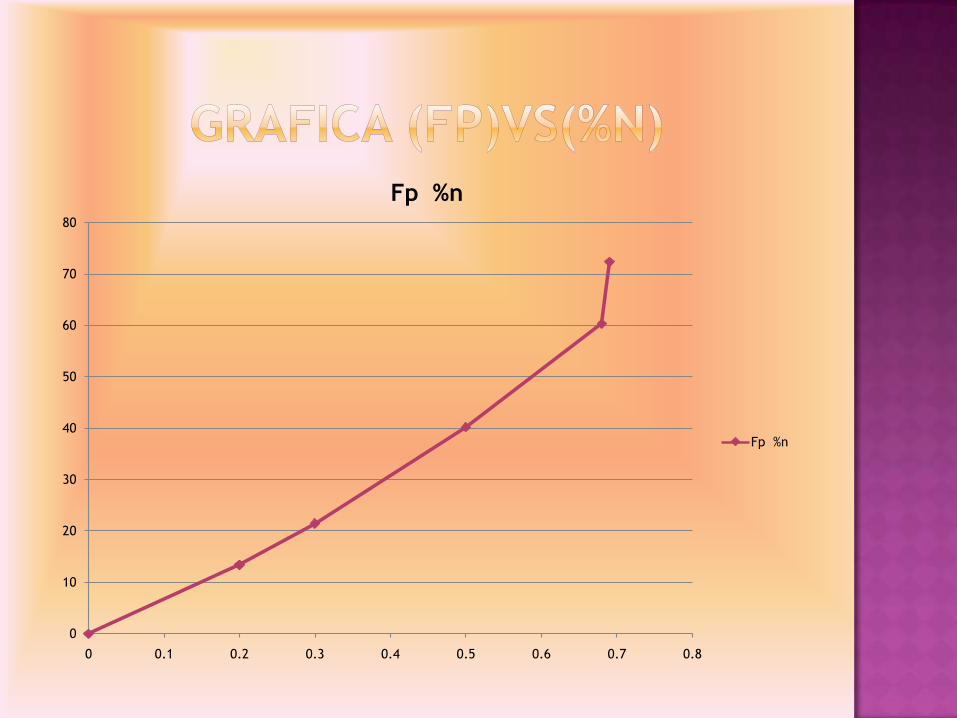
Fp %n
Fp %n
CREO Q ES IMPORTANTE GRAFICAS EL FACTOR
DE POTENCIA DEL MOTOR VS EL LA EFICIENCIA
DEL MISMO PARA OBSERVAR COMO ES QUE EL
FACTOR DE PONTENCIA INFLUYE MUCHO EN
EL MOTOR Y EN SU RENDIMIENTO ; ASÍ
PODEMOS OBSERVAR EN LA GRAFICA QUE
ENTRE MEJOR FACTOR DE POTENCIA EXISTA EL
MOTOR TENDRA UNA MEJOR EFICIENCIA ALA
HORA DE OPERAR.
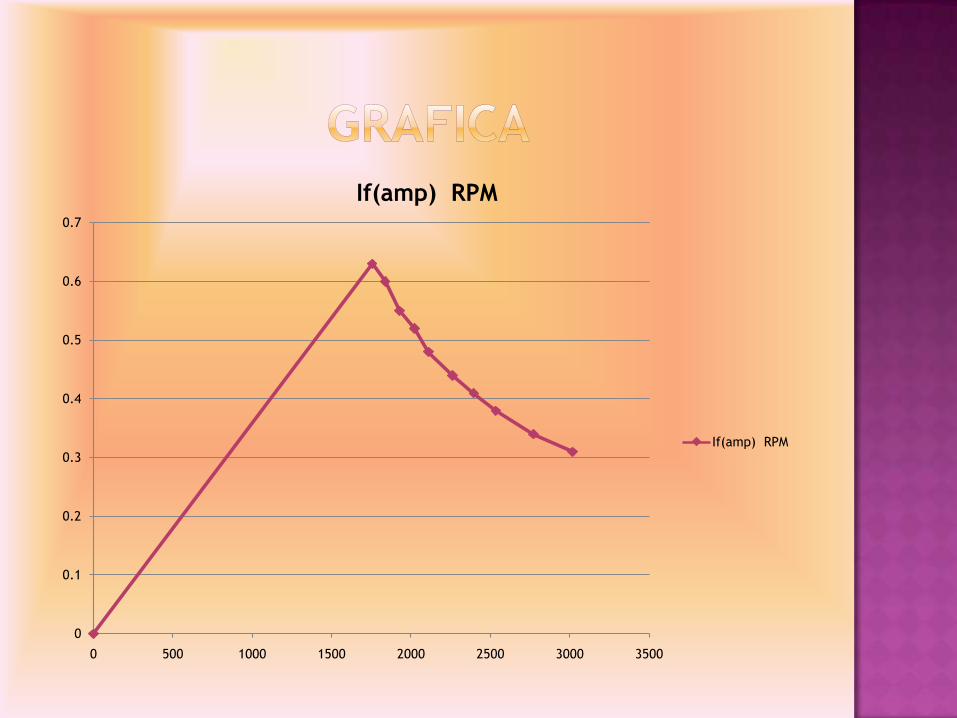
Motores de corriente directa
Analizar el funcionamiento de un motor de
corriente directa paralelo.
Rmin ifmax θmax RPMmin
Rmax ifmin θmin RPMmax
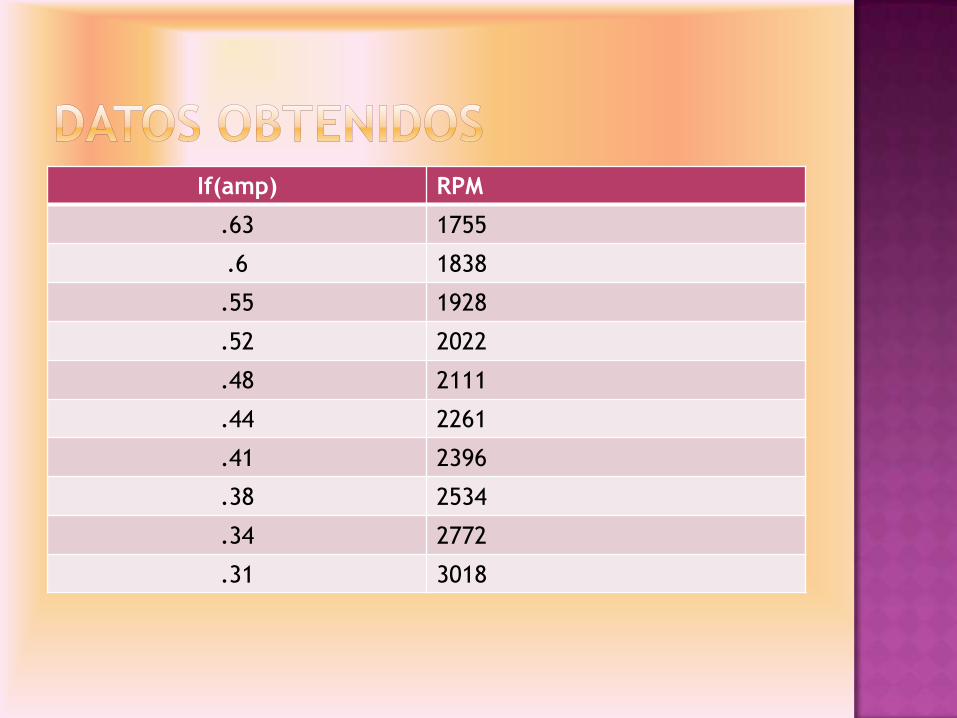
If(amp) RPM
.63 1755
.6 1838
.55 1928
.52 2022
.48 2111
.44 2261
.41 2396
.38 2534
.34 2772
.31 3018
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0 500 1000 1500 2000 2500 3000 3500
If(amp) RPM
If(amp) RPM

Observamos el funcionamiento de un motor
de corriente directa y con un reóstato de
campo manipulamos su velocidad entre mas
resistencia mas RPM´s se presentaban en lo
personal no había visto un motor de
corriente directa ni sabia como arrancarlo en
esta practica me enseño a como se debe
conectar un motor de DC y como funciona en
lo basico