practica pwm
DESCRIPTION
En la mayor parte de los casos en la industria se manejan los motores en forma directa, desde las líneas de suministro de ca o de cd esto es, las terminales de los devanados del motor se conectan en forma directa con las líneas que suministran la corriente eléctrica. En esos casos, el comportamiento del motor en funcionamiento se determina por la naturaleza de la carga mecánica conectada al eje del motor.TRANSCRIPT
INFORME # 4
CONTROL DE VELOCIDAD DE
MOTORES CD
MODULACIÓN DE ANCHO DE PULSO
CONTENIDO
1. OBJETIVOS
2. FUNDAMENTO TEÓRICO
1.1 MOTORES DE CD — FUNCIONAMIENTO Y CARACTERÍSTICAS
1.2 CONTROL MEDIANTE MODULACIÓN DE ANCHO DE PULSO (PWM)
3. CIRCUITO EXPERIMENTAL
4. CÁLCULOS
5. SIMULACIÓN
6. BIBLIOGRAFÍA
2
CONTROL DE VELOCIDAD DE MOTORES CD
MODULACIÓN DE ANCHO DE PULSO
1. OBJETIVOS
Estudiar las formas de control de velocidad de motores de corriente continua.
Analizar el uso de la modulación de ancho de pulso para el control de velocidad de motores DC.
Realizar un circuito experimental que realice la modulación de ancho de pulso.
2. FUNDAMENTO TEÓRICO
En la mayor parte de los casos en la industria se manejan los motores en forma directa, desde las líneas de suministro de ca o de cd esto es, las terminales de los devanados del motor se conectan en forma directa con las líneas que suministran la corriente eléctrica. En esos casos, el comportamiento del motor en funcionamiento se determina por la naturaleza de la carga mecánica conectada al eje del motor.
En términos sencillos, si la carga es fácil de impulsar, el motor tenderá a entregar relativamente poco par de giro y trabajará a alta velocidad. Si la carga es difícil de mover, el motor tenderá a entregar mucho par y trabajará a una velocidad menor. La base es que el comportamiento del motor en operación está establecido por su carga (para determinado voltaje fijo de línea de suministro), y el operador no tiene control sobre ese comportamiento. En casos de la industria moderna hay muchas aplicaciones que requieren que el operador pueda intervenir para controlar la velocidad del motor. Ese control se suele hacer mediante tiristores. La combinación del motor, el o los tiristores de control y los componentes electrónicos asociados se llama sistema de control de velocidad, sistema de accionamiento o sistema de excitación de motor.
2.1 MOTORES DE CD — FUNCIONAMIENTO Y CARACTERÍSTICAS
Los motores de cd son importantes en el control industrial, porque son más adaptables que los motores de ca, de campo rotatorio, a sistemas de velocidad ajustable. La figura 1 muestra los símbolos eléctricos de un motor en derivación de cd. El devanado de campo del motor se indica como una bobina. Físicamente, el devanado de campo está formado por muchas vueltas
3
de alambre delgado (de alta resistencia) devanadas en torno a los polos de campo. Los polos de campo son núcleos de metal ferromagnético, fijos al estator de la máquina. La alta resistencia del devanado de campo limita la corriente de campo a un valor bastante pequeño y permite que el devanado de campo se conecte en forma directa entre las líneas de suministro de cd. Sin embargo, la corriente de campo (IF) relativamente pequeña se compensa con la gran cantidad de vueltas en el devanado, que le permiten producir un campo magnético intenso.
El devanado de campo no se afecta al cambiar las condiciones en la armadura. Esto es, cuando varía la corriente en la armadura para adaptarse a las condiciones variables de la carga, la corriente en el devanado de campo permanece constante, en esencia, y la intensidad del campo magnético que resulta permanece constante. La corriente del campo se puede calcular con facilidad, de acuerdo con la ley de Ohm:
donde VS es el voltaje de la fuente aplicado al devanado de campo [figura 1(a)] y RF es la re- sistencia de cd del devanado. El devanado de armadura se ve en la figura 1(a) como un círculo en contacto con dos cuadrados pequeños.
4
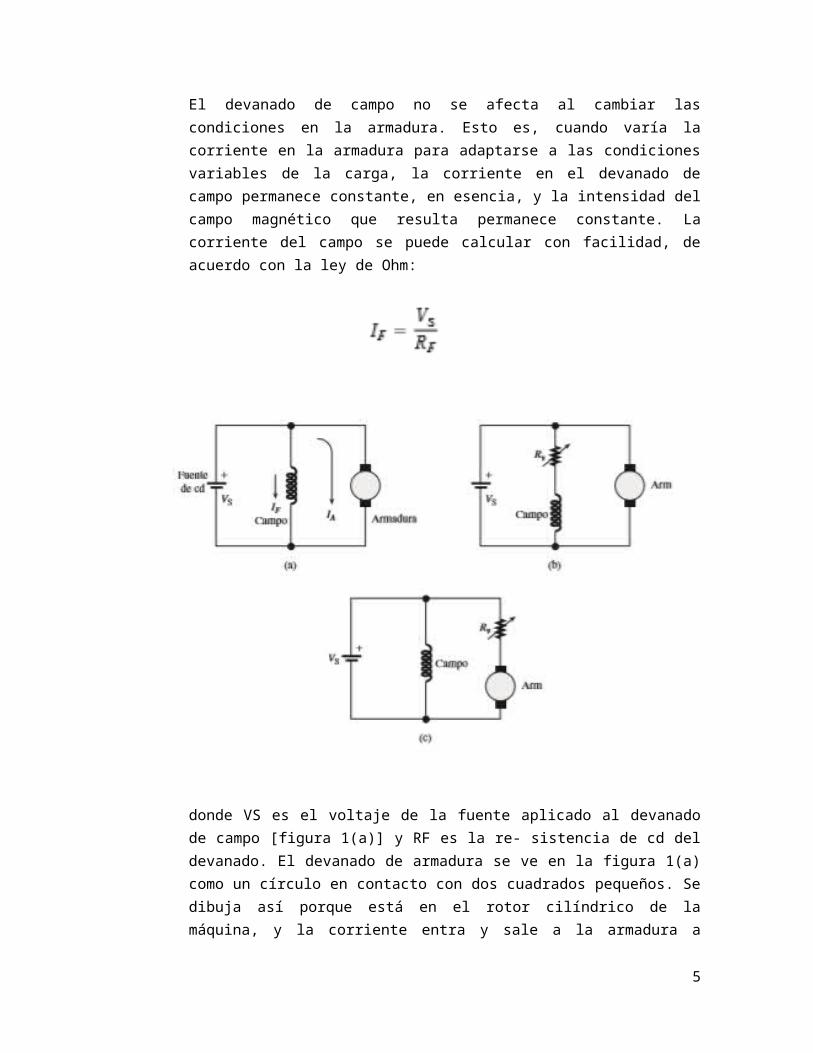
Se dibuja así porque está en el rotor cilíndrico de la máquina, y la corriente entra y sale a la armadura a través de las escobillas de carbón que tocan a las delgas (los segmentos) del conmutador. El devanado de armadura de un motor de cd está formado por relativamente pocas vuel- tas de alambre más grueso, para tener baja resistencia a la cd. La resistencia de la armadura de un motor de cd de mediano a grande suele ser menor que 1 ohm.
Cuando se aplica la corriente por primera vez al devanado de armadura, sólo se dispone de la resistencia óhmica del devanado para limitar la corriente, por lo que el golpe inicial de corriente es bastante grande. Sin embargo, a medida que acelera el motor, comienza a inducir (a generar) una fuerza contraelectromotirz por la acción normal de generador. Esa FCEM se opone al voltaje de suministro aplicado, y limita la corriente de la armadura a un valor razonable.
Cuando un motor de cd ha llegado a la velocidad normal de funcionamiento, su FCEM es aproximadamente el 90% del voltaje aplicado en la armadura [VS, en la figura 1(a)]. La caída de voltaje IR a través de la resistencia del devanado de la armadura constituye el otro 10% del voltaje aplicado, sin tener en cuenta la caída de voltaje a través de las escobillas de carbón. El tamaño exacto de la fuerza contralectromotriz generada en el devanado de armadura depende de dos cosas:
1. La intensidad del campo magnético. Mientras más intenso sea el campo, la fuerza contrae- lectromotriz tiende a ser mayor.
2. La velocidad de rotación. Mientras mayor sea la velocidad, la FCEM tiende a ser mayor
2.2 CONTROL MEDIANTE MODULACIÓN DE ANCHO DE PULSO (PWM)
Los motores grandes de cd se controlan mejor con tiristores de gran potencia, pero los motores de cd de imán permanente, de pequeños a medianos, y algunos motores de cd sin escobillas, se controlan bien mediante transistores de conmutación conectados en serie, y operados con el sistema de modulación por ancho de pulso, o duración de impulsos. Primero examinaremos la idea general del control de potencia con modulación por ancho de pulso.
Después podremos describir las técnicas específicas de este método en el control de motores de cd.
5
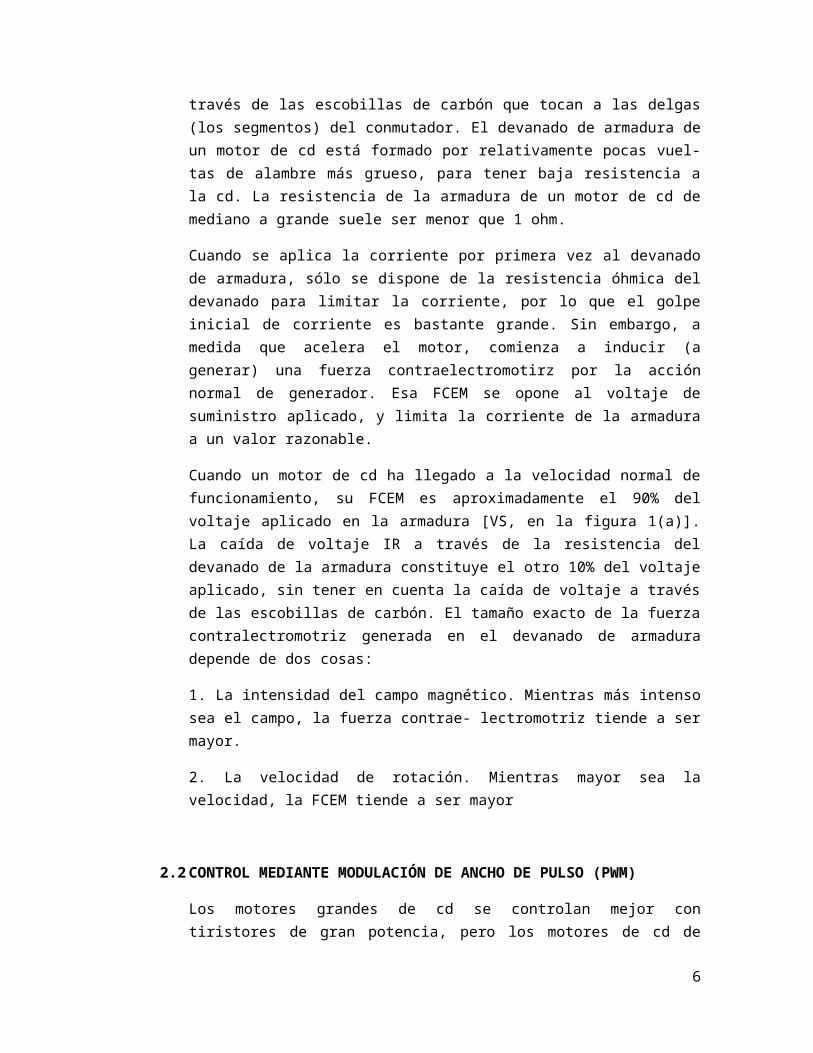
Hay tres partes esenciales en cualquier modulación por ancho de pulso, que se ven en la figura.
1. Un generador de ondas en rampa, que en general funciona a frecuencia constante.
2. Un comparador, para detectar cuándo el voltaje de rampa ha rebasado el voltaje de la señal de control.
3. Un dispositivo electrónico que conecta la corriente a la carga, en el momento en que el comparador detecta el punto crítico en la onda en rampa.
6
En la figura, el comparador se implementa con un amplificador operacional y el interruptor electrónico es un transistor bipolar que funciona en configuración de emisor común. La forma en que trabaja es la siguiente; vea las formas de onda en la figura.
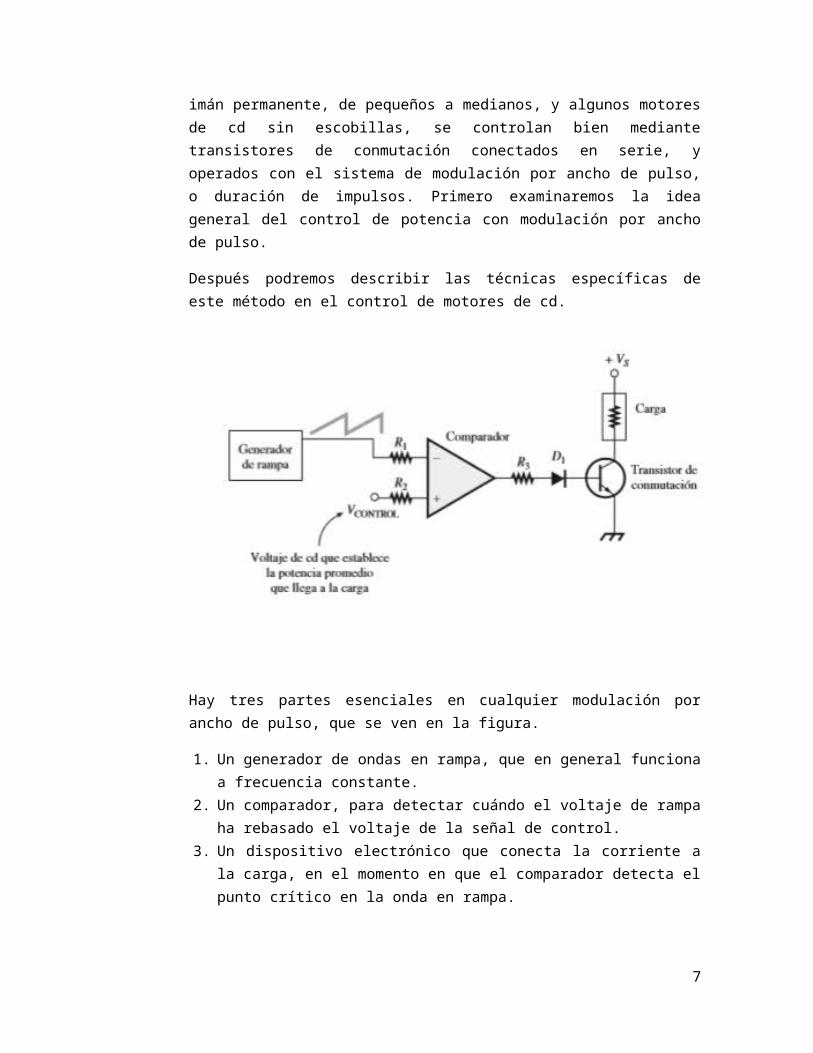
En el momento en que la rampa comienza a subir, el voltaje positivo de control es mayor que vrampa. Por consiguiente, el amplificador operacional comparador produce saturación positiva, que satura al transistor, cerrando el interruptor de corriente.
Todo el voltaje de suministro, VS, aparece a través de la carga. Esta situación se ve con claridad en la figura 16-10(a). El voltaje vrampa aumenta hacia su valor máximo de 10 V. En el momento en que vrampa es mayor que vcontrol, el amplificador operacional comparador cambia a saturación negativa. En la figura eso sucede a 3 V.
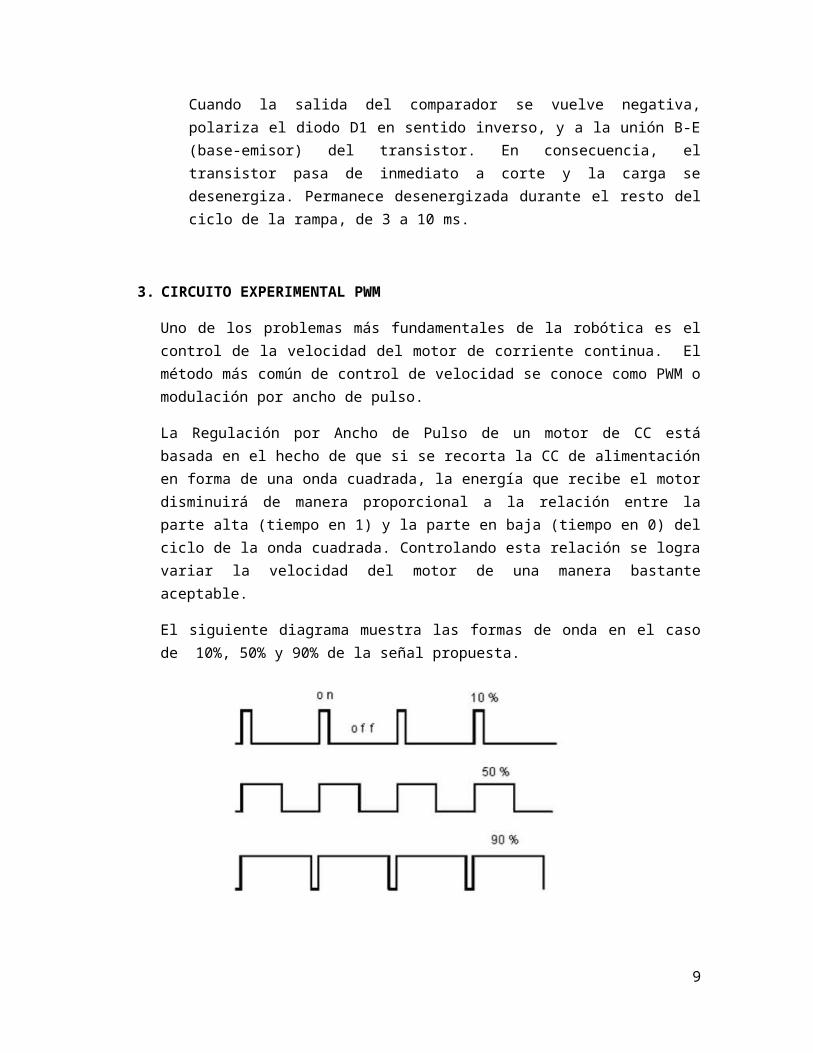
Cuando la salida del comparador se vuelve negativa, polariza el diodo D1 en sentido inverso, y a la unión B-E (base-emisor) del transistor. En consecuencia, el transistor pasa de inmediato a corte y la carga se desenergiza. Permanece desenergizada durante el resto del ciclo de la rampa, de 3 a 10 ms.
3. CIRCUITO EXPERIMENTAL PWM
Uno de los problemas más fundamentales de la robótica es el control de la velocidad del motor de corriente continua. El método más común de control de velocidad se conoce como PWM o modulación por ancho de pulso.
La Regulación por Ancho de Pulso de un motor de CC está basada en el hecho de que si se recorta la CC de alimentación en forma de una onda cuadrada, la energía que recibe el motor disminuirá de manera proporcional a la relación entre la parte alta (tiempo en 1) y la parte en baja (tiempo en 0) del ciclo de la onda cuadrada. Controlando esta relación se logra variar la velocidad del motor de una manera bastante aceptable.
El siguiente diagrama muestra las formas de onda en el caso de 10%, 50% y 90% de la señal propuesta.
7
La siguiente figura muestra como sería esto en término de la energía entregada al motor y la velocidad del mismo:
Estas señales se envían al motor a una determinada frecuencia. El resultado final del proceso de PWM es que la potencia total enviada al motor se puede ajustar desde x % ciclo de trabajo a casi 100% del ciclo de trabajo) con un buen rendimiento y un control estable.
Mientras que muchos diseñadores utilizan un microcontrolador para generar las señales necesarias PWM, el circuito con un 555 que se explica es muy útil para muchas aplicaciones y para comprender el concepto. El temporizador 555 en el
8
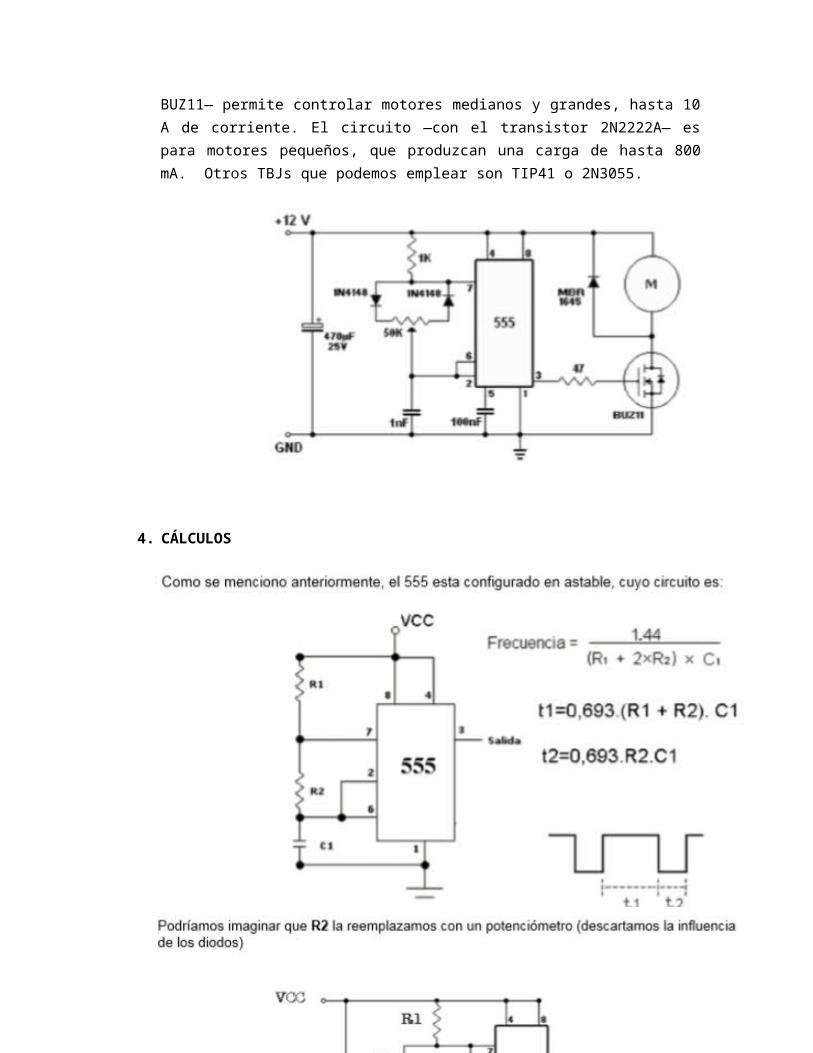
circuito de PWM está configurado como un oscilador astable Debe quedar claro que siempre deberemos usar alguna interfaz entre en circuito del 555 y el motor que deseamos manejar, la razón principal es la corriente requerida por el motor, sobre todo con carga mecánica en su eje. También podemos necesitar adaptar tensiones. El circuito —con el MOSFET de potencia BUZ11— permite controlar motores medianos y grandes, hasta 10 A de corriente. El circuito —con el transistor 2N2222A— es para motores pequeños, que produzcan una carga de hasta 800 mA. Otros TBJs que podemos emplear son TIP41 o 2N3055.
4. CÁLCULOS
9

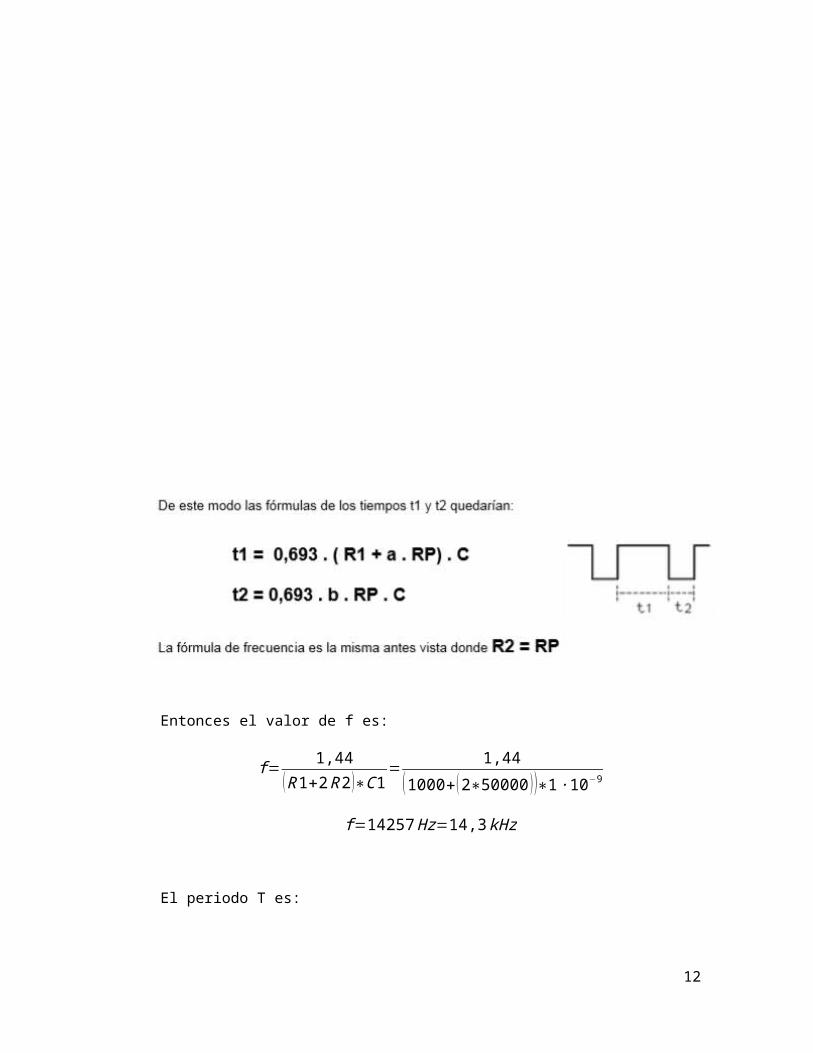
Entonces el valor de f es:
f= 1,44(R1+2R2 )∗C 1
= 1,44
(1000+ (2∗50000 ) )∗1 ∙10−9
f=14257Hz=14,3kHz
El periodo T es:
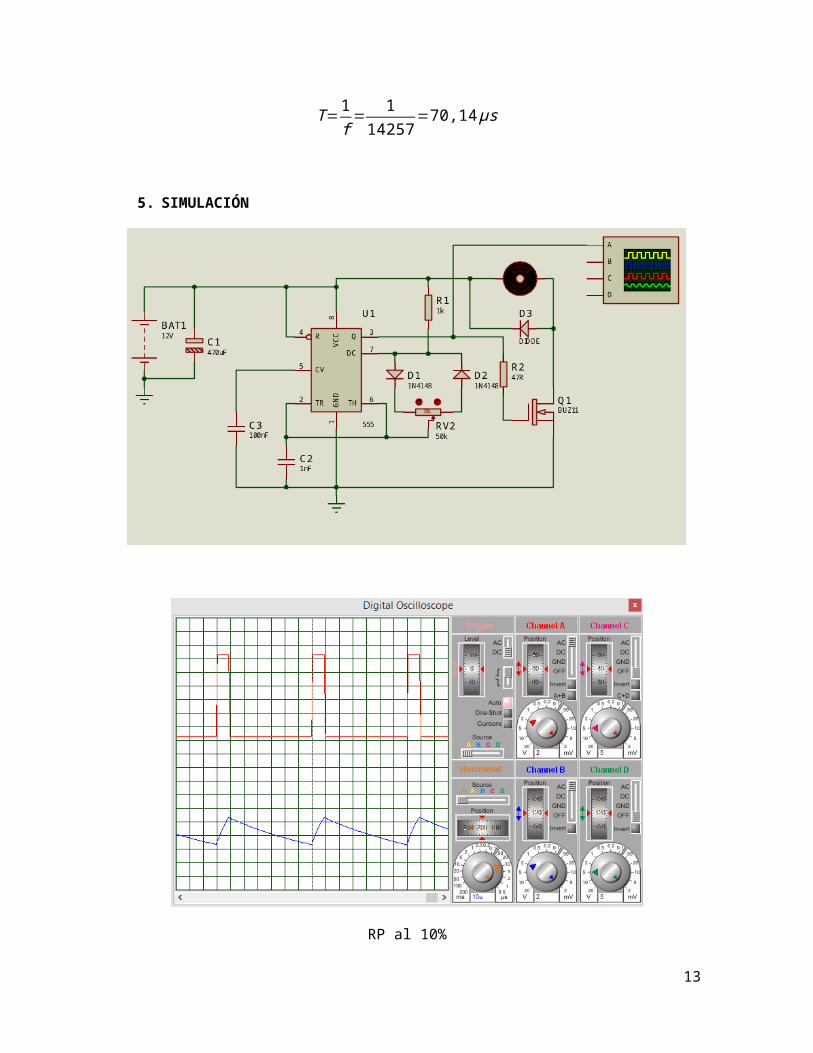
T=1f= 114257
=70,14 μs
10
5. SIMULACIÓN
RP al 10%
11
RP al 50%
RP al 90%
12
6. BIBLIOGRAFÍA
Maloney Timothy. (1983).Electrónica Industrial, Dispositivos y Sistemas. Prentice-Hall. Cap. 13.
Maloney Timothy. (2006).Electrónica Industrial Moderna. 5º edición. Prentice-Hall. Cap. 16. Pág. 740.
http://electronica-electronics.com/Circuitos/Variador_de_velocidad.html
http://www.unicrom.com/cir_control-motor-dc-555.asp
13