practica nº 2 introduccion a simulink · pdf fileejercicios a realizar 1.- considere el...
TRANSCRIPT

UNIVERSIDAD NACIONAL EXPERIMENTAL “FRANCISCO DE MIRANDA”
COMPLEJO ACADÉMICO EL SABINO PROGRAMA DE INGENIERÍA QUÍMICA
DPTO DE MECÁNICA Y TECNOLOGÍA DE LA PRODUCCIÓN DINÁMICA Y CONTROL DE PROCESOS
PRÁCTICA Nº 2 INTRODUCCIÓN A SIMULINK DE MATLAB
PROFESOR:
PROF. Ing. Esp. Carlos A. Pérez
PUNTO FIJO; febrero de 2016

Introducción a Simulink de Matlab
PROF. Ing. Esp. Carlos A. Pérez
INTRODUCCIÓN
Simulink es un entorno de diagrama de bloques para la simulación multidominio y diseño
basado en modelos. Es compatible con la simulación, generación automática de código y prueba
continua y verificación de sistemas embebidos.
Ofrece un editor gráfico, bibliotecas de bloques personalizables y solucionadores de modelado y
simulación de sistemas dinámicos. Está integrado con MATLAB ®, lo que le permite incorporar
algoritmos de MATLAB en modelos y exportar los resultados de simulación de MATLAB para el
análisis.
Simulink está especialmente pensado para el análisis y diseño de sistemas de control, aunque
es totalmente útil en el estudio de cualquier tipo de sistema dinámico: lineal, no lineal, continuo,
discreto o híbrido. El análisis del sistema, mediante simulación, se puede efectuar desde el menú
de simulación asociado a todo modelo en Simulink, desde la línea de comandos en Matlab o desde
cualquier programa en Matlab.
Durante la simulación no es posible modificar los parámetros generales, pero si es posible
efectuar cambio en los parámetros específicos de cada bloque, dotando así a Simulink de un
entorno interactivo muy útil para la realización de pruebas.
Adicionalmente a la simulación es posible: obtener un modelo lineal del sistema frente a
determinadas perturbaciones, obtener las condiciones de equilibrio del sistema a partir de distintas
condiciones iniciales y utilizar toda la potencia de Matlab para el análisis de datos o para el análisis
y diseño del modelo lineal.

Introducción a Simulink de Matlab
PROF. Ing. Esp. Carlos A. Pérez
Objetivo General:
� Desarrollar sistemas dinámicos mediante el uso del programa Simulink de Matlab.
Objetivos específicos:
� Conocer el programa y sus múltiples utilidades en el área de la ingeniería de control de
procesos.
� Obtener respuestas graficas de los procesos mediante las diferentes perturbaciones en los
mismos.
� Analizar el comportamiento grafico de un proceso a lazo abierto o cerrado.
BASES TEÓRICAS: - Diagramas de Bloques:
Un diagrama de bloques es un modelo grafico que representa el modelo matemático de un
determinado sistema dinámico. Simulink es una librera (toolbox) de Matlab que permite representar
el diagrama de bloques de un sistema y a continuación proceder a su simulación.
- Interfaz gráfica:
El programa se inicia escribiendo simulink en la pantalla de comandos de Matlab o también
pulsando con el ratón en el icono coloreado de Simulink que aparece en la ventana de comandos.

Introducción a Simulink de Matlab
PROF. Ing. Esp. Carlos A. Pérez
- Librería de Simulink:
La librería “Simulink” contiene los bloques necesarios para simular un sistema mediante
técnicas convencionales, las demás librerías son herramientas adicionales que se utilizan para
aplicaciones específicas de control avanzado. En la Figura 2 se muestra el contenido de la librería
Simulink.
En la figura 3, se pueden observar los bloques mas utilizados en la simulación de procesos.
Estos se encuentran en hacer clic en el signo (+) de cada librería. Pueden ser utilizados al hacer
clic sobre ellos y arrastrándolos sobre la hoja de trabajo
Introducción a Simulink de Matlab
PROF. Ing. Esp. Carlos A. Pérez
NOTAS SOBRE EL USO DE MATLAB.
� Los bloques pueden ser movidos al arrastrase con el botón izquierdo del mouse y pueden
ser copiados al hacer clic sobre ellos con el botón izquierdo del mouse y arrastrando la
copia creada.
� Los bloques se deben unir mediante flechas. Esto se logra haciendo clic en la flecha de
salida del bloque deseado y conectándola (sin soltar el botón), a la flecha del bloque que
se desea unir.
� Para que las modificaciones en el programa hagan efecto este deberá ser grabado
después de realizar los cambios.
� Al hacer clic con el botón derecho sobre una señal, se podrá obtener una “línea” de esta
señal para llevarla o conectarla a un bloque deseado.
� Al barrer el mouse sobre un grupo de bloques se podrán mover estos a la vez y copiarlos
en grupo.
� El “save format” de los “workspace” debe ser colocado en “array” para poder “graficar” las
variables deseadas posteriormente.
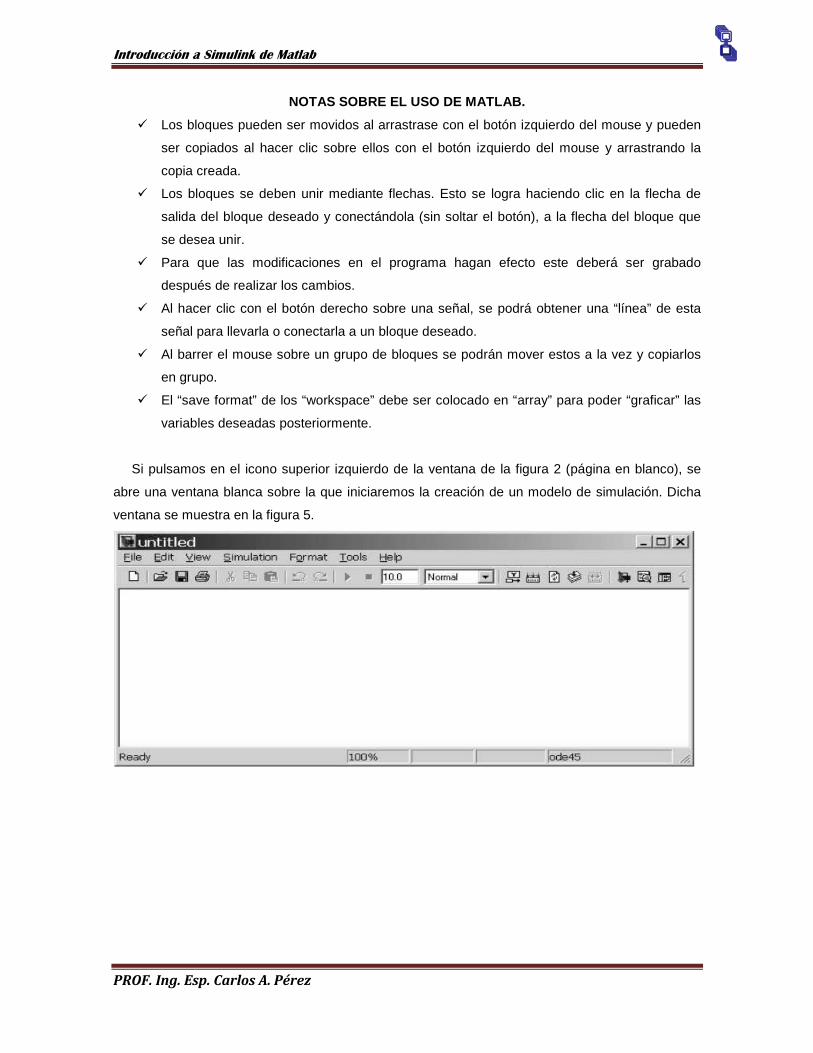
Si pulsamos en el icono superior izquierdo de la ventana de la figura 2 (página en blanco), se
abre una ventana blanca sobre la que iniciaremos la creación de un modelo de simulación. Dicha
ventana se muestra en la figura 5.

Introducción a Simulink de Matlab
PROF. Ing. Esp. Carlos A. Pérez
EJERCICIOS A REALIZAR
1.- Considere el sistema realimentado del siguiente esquema. Dicho sistema está formado por tres
bloques independientes: G1(s), que representa el controlador, G2(s), que corresponde a la planta a
controlar, y G3(s), la función de transferencia del sensor con el que se mide la salida del sistema.
Los valores de las tres funciones son:
a.- Elabore el diagrama de bloques suponiendo que hay una perturbación tipo escalón unitario.
b.- Obtenga la respuesta gráfica del proceso. ¿Cómo es el comportamiento del mismo?

Introducción a Simulink de Matlab
PROF. Ing. Esp. Carlos A. Pérez
2.- Simular la siguiente ecuación diferencial y encontrar su respuesta ante una entrada escalón.
Donde, X0 = 0 en T=500
Tenga en cuenta los siguientes parámetros:
a.- Obtenga la respuesta grafica del proceso.
b.- ¿Qué pasa si usted cambia la perturbación?
3.- Ecuaciones Diferenciales Acopladas
Simular el siguiente sistema de ecuaciones diferenciales.
Donde Fo, To1 y To son posibles perturbaciones cuyos valores son:
Fo = 0,01 m3/min, To1 = 280 K, To2 = 350 K.

Introducción a Simulink de Matlab
PROF. Ing. Esp. Carlos A. Pérez
Los parámetros iniciales de los bloques y simulació n serán:
a.- Obtenga la gráfica del proceso.
4.- Dada la siguiente función de trasferencia obtenga la respuesta del sistema a lazo abierto ante
una entrada escalón.
Los parámetros iniciales de los bloques y simulación serán:
a.- Obtenga la respuesta grafica del proceso a lazo abierto.
b.- obtenga la respuesta a lazo cerrado.
c.- Suponga que ahora aumenta 5 veces su ganancia del proceso obtenga la respuesta gráfica.
d.- ahora suponga que se cambia la ganancia por un controlador PID donde sus parámetros son:
Kp = 1; Ti = 0.5, obtenga la respuesta del proceso.
e.- muestre los resultados en una sola gráfica y analice su respuesta.

Introducción a Simulink de Matlab
PROF. Ing. Esp. Carlos A. Pérez
HOJA DE RESULTADO:
Apellido y Nombre:_________________________C.I.____ _____________
• Experiencia Práctica Nº 1.
De acuerdo a la respuesta obtenida ¿cómo considera usted la respuesta del proceso?
_______________________________________________________________________________
_______________________________________________________________________________
______________________________________________________________________________
• Experiencia Práctica Nº 2.
¿Qué ocurrió al cambia el proceso a la perturbación indicada cn el proceso? ¿Incide en el mismo?
_______________________________________________________________________________
_______________________________________________________________________________
______________________________________________________________________________
• Experiencia Práctica Nº 3.
Explique brevemente lo observado en la gráfica:
_______________________________________________________________________________
_______________________________________________________________________________
______________________________________________________________________________
• Experiencia Práctica Nº 4.
Analice cada una de las peticiones del ejercicio.
_______________________________________________________________________________
_______________________________________________________________________________
______________________________________________________________________________
_______________________________________________________________________________
_______________________________________________________________________________
______________________________________________________________________________