motor electrico
DESCRIPTION
dsTRANSCRIPT

MOTOR ELECTRICO – TIPOS Y FUNDAMENTOS
34 Votes

Hay muchos tipos de motores
Motor eléctricoExisten varios tipos de motores y continuará proliferando nuevos tipos de motores según
avance la tecnología. Pero antes de adentrarnos en la clasificación, vamos a definir los
elementos que componen a los motores.
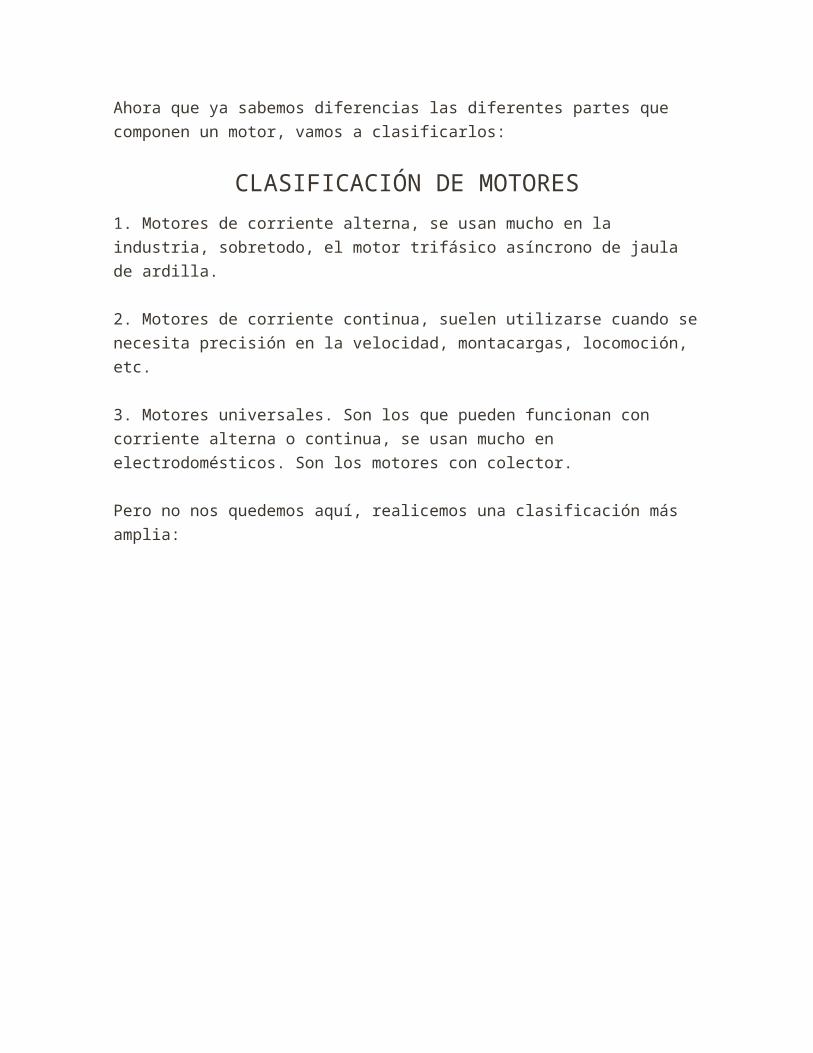
1. La carcasa o caja que envuelve las partes eléctricas del motor, es la parte externa.
2. El inductor, llamado estator cuando se trata de motores de corriente alterna, consta de un
apilado de chapas magnéticas y sobre ellas está enrollado el bobinado estatórico, que es una
parte fija y unida a la carcasa.
3. El inducido, llamado rotor cuando se trata de motores de corriente alterna, consta de un
apilado de chapas magnéticas y sobre ellas está enrollado el bobinado rotórico, que
constituye la parte móvil del motor y resulta ser la salida o eje del motor.
Ahora que ya sabemos diferencias las diferentes partes que componen un motor, vamos a
clasificarlos:
CLASIFICACIÓN DE MOTORES
1. Motores de corriente alterna, se usan mucho en la industria, sobretodo, el motor trifásico
asíncrono de jaula de ardilla.
2. Motores de corriente continua, suelen utilizarse cuando se necesita precisión en la
velocidad, montacargas, locomoción, etc.
3. Motores universales. Son los que pueden funcionan con corriente alterna o continua, se
usan mucho en electrodomésticos. Son los motores con colector.
Pero no nos quedemos aquí, realicemos una clasificación más amplia:
Motor de corriente alterna.
Podemos clasificarlos de varias maneras, por su velocidad de giro, por el tipo de rotor y por
el número de fases de alimentación. Vamos a ello:
1. Por su velocidad de giro.
1.1 Asíncronos. Un motor se considera asíncrono cuando la velocidad del campo
magnético generado por el estárter supera a la velocidad de giro del rotor.
1.2 Síncronos. Un motor se considera síncrono cuando la velocidad del campo magnético
del esta tor es igual a la velocidad de giro del rotor. Recordar que el rotor es la parte
móvil del motor. Dentro de los motores síncronos, nos encontramos con una
subclasificación:
-1.2.1Motores síncronos trifásicos.
-1.2.2 Motores asíncronos sincronizados.
– 1.2.3Motores con un rotor de imán permanente.
2. Por el tipo de rotor.
– 2.1Motores de anillos rozantes.
– 2.2Motores con colector.
– 2.3Motores de jaula de ardilla.
3. Por su número de fases de alimentación.
– 3.1 Motores monofásicos.
– 3.2 Motores bifásicos.
– 3.3 Motores trifásicos.
– 3.4 Motores con arranque auxiliar bobinado.
– 3.5 Motores con arranque auxiliar bobinado y con condensador.

Motor de corriente continua.
La clasificación de este tipo de motores se realiza en función de los bobinados del inductor
y del inducido:
– Motores de excitación en serie.
– Motores de excitación en paralelo.
– Motores de excitación compuesta.
Tipos de rotores
Existen varios tipos de estos elementos, pero aquí solamente vamos a tratar los que son más
usados en la industria; es decir, los rotores para motores asíncronos de corriente alterna.
Rotor de jaula de ardilla simple.
Jaula de Ardilla Simple
En el dibujo se puede observar unos círculos negros, éstos representan las ranuras del rotor
donde va introducido el bobinado. Existen varios tipos de ranuras, de ahí que existan varios
tipos de rotores.
El rotor representado es de jaula de ardilla simple.
Este tipo de rotor es el usado para motores pequeños, en cuyo arranque la intensidad
nominal supera 6 ó 8 veces a la intensidad nominal del motor. Soporta mal los picos de
cargas. Esta siendo sustituido por los rotores de jaula de ardilla doble en motores de
potencia media. Su par de arranque no supera el 140 % del normal.

Rotor de jaula de ardilla doble.
Rotor de jaula de ardilla doble
En este otro dibujo, observáis que la ranura es doble, por este motivo tiene el nombre de
jaula de ardilla doble. Las dos ranuras están separadas físicamente, aunque en el dibujo no
se observe.
Este tipo de rotor tiene una intensidad de arranque de 3 ó 5 veces la intensidad nominal, y
su par de arranque puede ser de 230 % la normal. Éstas características hacen que este tipo
de rotor sea muy interesante frente al rotor de jaula de ardilla simple. Es el más empleado
en la actualidad, soporta bien las sobrecargas sin necesidad de disminuir la velocidad, lo
cual le otorga mejor estabilidad.
Rotor con ranura profunda.
Rotor con ranura profunda
El tipo de rotor que se ve en el dibujo es una variante del rotor de jaula de ardilla simple,
pero se le denomina rotor de ranura profunda. Sus características vienen a ser iguales a la
del rotor de jaula simple. Es usado para motores de baja potencia que necesitan realizan
continuos arranques y paradas.

Rotor de anillos rozantes.
Se denominan rotores de anillos rozantes porque cada extremo del bobinado está conectado
con un anillo situado en el eje del rotor. Las fases del bobinado salen al exterior por medio
de unas escobillas que rozan en los anillos. Conectando unas resistencias externas a las
escobillas se consigue aumentar la resistencia rotórica, de esta forma, se logra variar el par
de arranque, que puede ser, dependiendo de dichas resistencias externas, del 150 % y el 250
% del par normal. La intensidad nominal no supera las 2 veces la intensidad nominal del
motor.
Motor eléctrico C.C.
Motor eléctrico C.C.
Los motores de corriente continua tienen varias particularidades que los hacen muy
diferentes a los de corriente alterna. Una de las particularidades principales es que pueden
funcionar a la inversa, es decir, no solamente pueden ser usados para transformar la energía
eléctrica en energía mecánica, sino que también pueden funcionar como generadores de
energía eléctrica. Esto sucede porque tienen la misma constitución física, de este modo,
tenemos que un motor eléctrico de corriente continua puede funcionar como un generador y
como un motor.
Los motores de corriente continua tienen un par de arranque alto, en comparación con los
de corriente alterna, también se puede controlar con mucha facilidad la velocidad. Por estos
motivos, son ideales para funciones que requieran un control de velocidad. Son usados para
tranvías, trenes, coches eléctricos, ascensores, cadenas productivas, y todas aquellas
actividades donde el control de las funcionalidades del motor se hace esencial.
Constitución del motor.
Los motores de corriente continua están formados principalmente por:

1. Estator. El estator lleva el bobinado inductor. Soporta la culata, que no es otra cosa que
un aro acero laminado, donde están situados los núcleos de los polos principales, aquí es
donde se sitúa el bobinado encargado de producir el campo magnético de excitación.
2. Rotor. Esta construido con chapas superpuestas y magnéticas. Dichas chapas, tienen
unas ranuras en donde se alojan los bobinados.
3. Colector. Es donde se conectan los diferentes bobinados del inducido.
4. Escobillas. Las escobillas son las que recogen la electricidad. Es la principal causa de
avería en esta clase de motores, solo hay que cambiarlas con el mantenimiento habitual.
5. Truco. Este es un truco de electricista viejo, cuando el motor deja de funcionar, las
entradas de tensión son las correctas, entonces nos queda este truco: quitamos la tensión,
desmontamos la tapa del ventilador del motor, la tapa esta unida con tornillos a la carcasa
del motor y movemos el ventilador dándole unos giros, el sentido del giro es indiferente,
volvemos a tapar el ventilador y conectamos el motor, ¡Ah! Sorpresa, funciona. Sucede que
las escobillas llevan unos muelles para la fricción con los aros rozantes y puede ser que
penetre suciedad en los muelles o que se queden atascados. Por supuesto, en cuanto
dispongamos de tiempo se cambiarán las escobillas y los muelles.
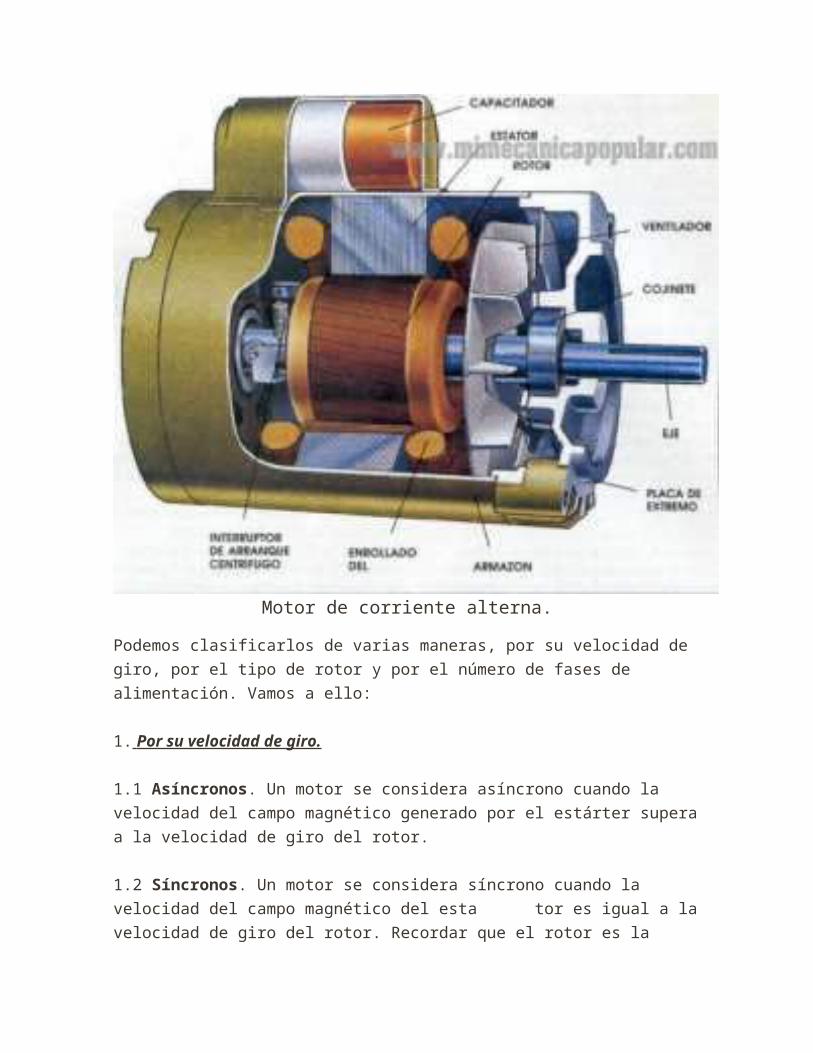
Motor de excitación en serie.
Motor de excitación en serie.
La conexión del devanado de excitación se realiza en serie con el devanado del inducido,
como se puede observar en el dibujo. El devanado de excitación llevará pocas espiras y
serán de una gran sección. La corriente de excitación es igual a la corriente del inducido.
Los motores de excitación en serie se usan para situaciones en los que se necesita un gran
par de arranque como es el caso de tranvías, trenes, etc.
La velocidad es regulada con un reostato regulable en paralelo con el devanado de
excitación. La velocidad disminuye cuando aumenta la intensidad.

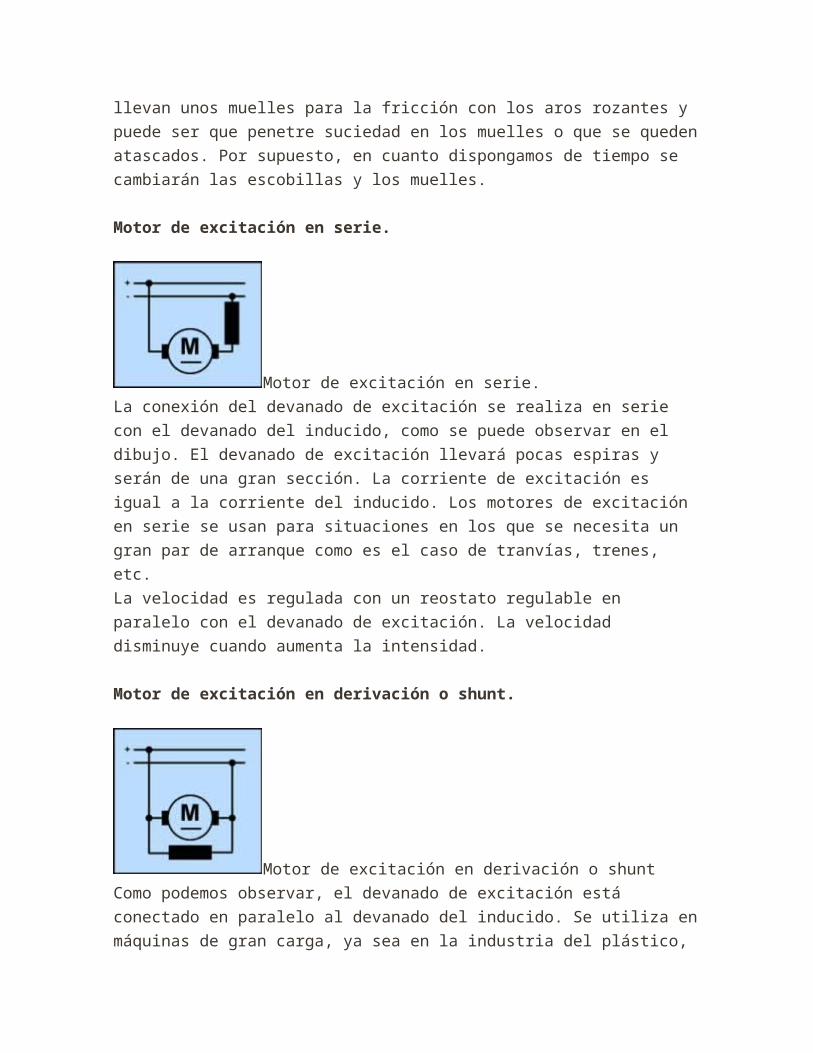
Motor de excitación en derivación o shunt.
Motor de excitación en derivación o shunt
Como podemos observar, el devanado de excitación está conectado en paralelo al devanado
del inducido. Se utiliza en máquinas de gran carga, ya sea en la industria del plástico, metal,
etc. Las intensidades son constantes y la regulación de velocidad se consigue con un
reostato regulable en serie con el devanado de excitación.
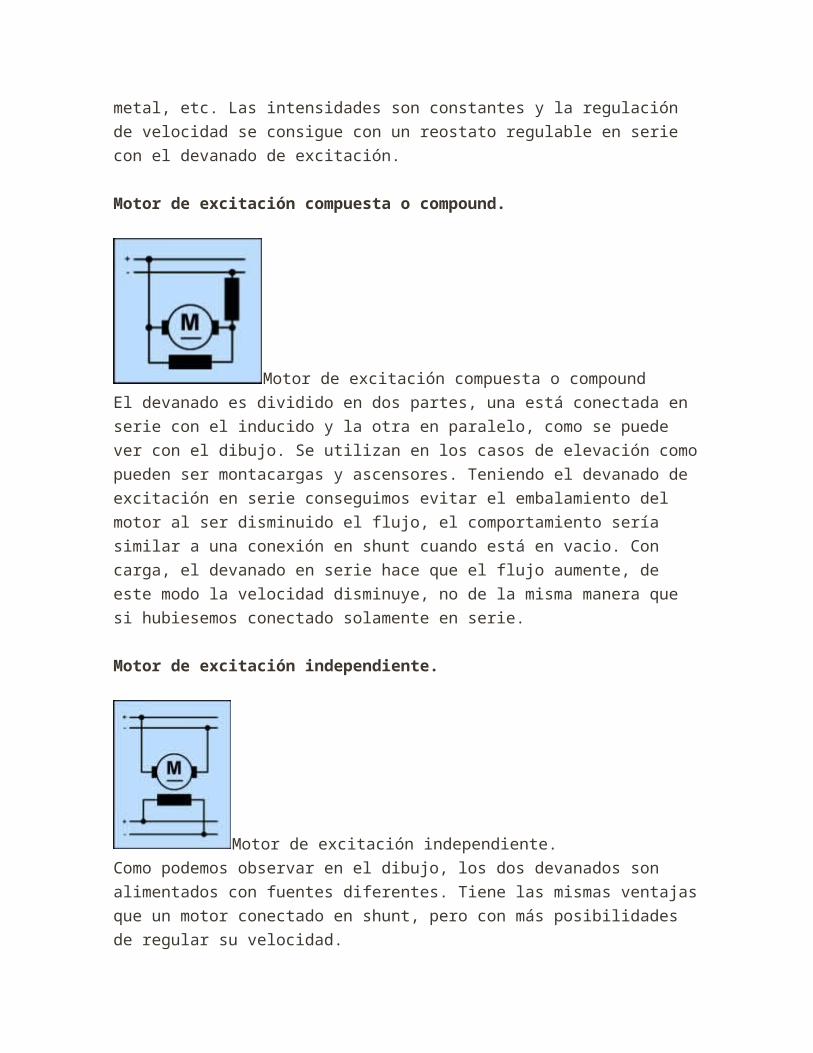
Motor de excitación compuesta o compound.
Motor de excitación compuesta o compound
El devanado es dividido en dos partes, una está conectada en serie con el inducido y la otra
en paralelo, como se puede ver con el dibujo. Se utilizan en los casos de elevación como
pueden ser montacargas y ascensores. Teniendo el devanado de excitación en serie
conseguimos evitar el embalamiento del motor al ser disminuido el flujo, el
comportamiento sería similar a una conexión en shunt cuando está en vacio. Con carga, el
devanado en serie hace que el flujo aumente, de este modo la velocidad disminuye, no de la
misma manera que si hubiesemos conectado solamente en serie.
Motor de excitación independiente.
Motor de excitación independiente.
Como podemos observar en el dibujo, los dos devanados son alimentados con fuentes
diferentes. Tiene las mismas ventajas que un motor conectado en shunt, pero con más
posibilidades de regular su velocidad.
Conexión de bornes.
En la caja de bornes del motor disponemos de unas bornas numeradas alfabéticamente, que
corresponden con los diferentes conexionados que podemos hacer en el motor.
Para el inducido serán la A-B.
Para el devanado de excitación en shunt o derivación serán C-D.
Para el devanado de excitación en serie serán E-F.
Para el devanado de excitación independiente serán J-K.
Para el devanado de compensación y de conmutación serán G-H.
Motor trifásico.
Dentro de los motores de corriente alterna, nos encontramos la clasificación de los motores
trifásicos, asíncronos y sincronos.
No hay que olvidar que los motores bifásicos y monofásicos, también son de corriente
alterna.
Los motores trifásicos tienen ciertas características comunes:
En relación con su tensión, éstos motores cuando su utilidad es industrial suelen ser de
230 V y 400 V, para máquinas de pequeña y mediana potencia, siendo considerados de baja
tensión. No sobrepasan los 600 KW a 1500 r.p.m.
Los motores de mayor tensión, de 500, 3000, 5000, 10000 y 15000 V son dedicados para
grandes potencias y los consideramos como motores de alta tensión.
Los motores que admiten las conexiones estrella y triángulo, son alimentados por dos
tensiones diferentes, 230 V y 400 V, siendo especificado en su placa de características.
Respecto a su frecuencia tenemos que decir que en europa se utilizan los 50 Hz, mientras
que en américa se utilizan los 60 Hz.
Aunque la frecuencia de red tenga fructuaciones, siempre que no superen el 1%, el motor
rendirá perfectamente. Mayores fructuaciones afectará directamente sobre el rendimiento
de su potencia. De hecho, para variar la velocidad de esta clase de motores se manipula la
frecuencia.
Con respecto a la velocidad los motores trifásico son construidos para velocidades
determinadas que corresponden directamente con las polaridades del bobinado y la
frecuencia de la red.
Respecto a la intensidad, el motor trifásico absorbe de la red la intensidad que necesita,
dependiendo siempre de la fase en que se encuentre. Por ésta razón existen diferentes
modos de arranques, para ahorrar energía y preservar el motor.
En sobrecarga pueden asumir un incremento de la intensidad de hasta 1.5 la intensidad
nominal sin sufrir ningún daño durante dos minutos.
También se tienen que tener en cuenta las pérdidas que tienen los motores trifásicos, sus
causas son varias. El rendimiento de los motores de calculan en sus valores nominales, que
son los indicados en las placas de características. Presentan pérdidas de entrehierro, por
rozamiento, por temperatura y en el circuito magnético.
Los rotores de jaula de ardilla (con rotor en cortocircuito) son los más usados por su precio
y su arranque. En cambio, los motores de rotor bobinado o también llamados de anillos
rozantes necesitan ser arrancados con resistencias rotóricas, lo que incrementa su precio y
su complejidad.
Los motores de rotor cortocircuitado no llevan escobillas, pero si las llevan los que son de
colector y de rotor bobinado.
Motor trifásico asíncrono.
Dentro de la clasificación de los motores trifásicos asíncronos, podemos hacer otra
subclasificación, los motores asíncronos de rotor en cortocircuito (rotor de jaula de ardilla y
sus derivados) y los motores asíncronos con rotor bobinado (anillos rozantes).
Los motores asíncronos generan un campo magnético giratorio y se les llaman asíncronos
porque la parte giratoria, el rotor, y el campo magnético provocado por la parte fija, el
estartor, tienen velocidad desigual. Ha esta desigualdad de velocidad se
denomina deslizamiento.

El rotor está unido sobre un eje giratorio. Dicho eje, está atravesado por barras de cobre o
aluminio unidas en sus extremos. El estator encapsula al rotor y genera el campo
magnético. Como hemos mencionado, es la parte fija. Provoca con su campo magnético
fuerzas electromotrices en el rotor que a su vez provocan corrientes eléctricas. Estas dos
circunstancias, la fuerza electromotriz y las corrientes eléctricas, provocan una fuerza
magnetomotriz, lo cual hace que el rotor gire. La velocidad del rotor siempre será menor
que la velocidad de giro del campo magnético. Así tenemos que la velocidad de un motor
asíncrono será igual a la velocidad del campo magnético menos el deslizamiento del motor.
La fuerza magnetomotriz que aparece en el rotor deriva en un par de fuerzas, a las que
denominados par del motor, siendo las causantes del giro del rotor. El par motor depende
directamente de las corrientes del rotor, y tenemos que saber que en el momento del
arranque son muy elevadas, disminuyendo a medida que se aumenta la velocidad. De esta
forma distinguimos dos tipos de par: el par de arranque y el par normal. Esto sucede porque
al ir aumentando la velocidad del rotor se cortan menos líneas de fuerzas en el estartor y,
claro está, también las fuerzas electromotrices del rotor disminuyen, de este modo
obtenemos que las corrientes del rotor disminuyen junto con el par de motor. Lo importante
de toda esta explicación, es que con los motores asíncronos podemos manejar cargas
difíciles porque tenemos un par de arranque elevado (hasta tres veces el par normal).
Motor trifásico síncrono.
Funcionan de forma muy similar a un alternador. Dentro de la familia de los motores
síncronos debemos distinguir:
1. Los motores síncronos.
2. Los motores asíncronos sincronizados.
3. Los motores de imán permanente.
Los motores síncronos son llamados así, porque la velocidad del rotor y la velocidad del
campo magnético del estartor son iguales.
Los motores síncronos se usan en máquinas grandes que tienen una carga variable y
necesitan una velocidad constante.
Arranque de un motor trifásico síncrono.
Existen cuatro tipos de arranques diferentes para este tipo de motor:

1. Como un motor asíncrono.
2. Como un motor asíncrono, pero sincronizado.
3. Utilizando un motor secundario o auxiliar para el arranque.
4. Como un motor asíncrono, usando un tipo de arrollamiento diferente: llevará unos
anillos rozantes que conectarán la rueda polar del motor con el arrancador.
Frenado de un motor trifásico síncrono.
Por regla general, la velocidad deseada de este tipo de motor se realiza por medio de un
reostato.
El motor síncrono cuando alcance el par crítico se detendrá, no siendo esta la forma más
ortodoxa de hacerlo. El par crítico se alcanza cuando la carga asignada al motor supera al
par del motor. Como comento, no es la forma apropiada para detener el motor, se estropea
si abusamos de ello, porque se recalienta.
La mejor forma de hacerlo, es ir variando la carga hasta que la intensidad absorvida de la
red sea la menor posible, entonces desconectaremos el motor.
Otra forma de hacerlo, y la más habitual, es regulando el reostato, con ello variamos la
intensidad y podemos desconectar el motor sin ningún riesgo.
Motor monofásico.
Este tipo de motor es muy utilizado en electrodomésticos porque pueden funcionar con
redes monofásicas algo que ocurre con nuestras viviendas.
En los motores monofásicos no resulta sencillo iniciar el campo giratorio, por lo cual, se
tiene que usar algún elemento auxiliar. Dependiendo del método empleado en el arranque,
podemos distinguir dos grandes grupos de motores monofásicos:
Motor monofásico de inducción.
Su funcionamiento es el mismo que el de los motores asíncronos de inducción. Dentro de
este primer grupo disponemos de los siguientes motores:
1. De polos auxiliares o también llamados de fase partida.
2. Con condensador.
3. Con espira en cortocircuito o también llamados de polos partidos.

Motor monofásico de colector.
Son similares a los motores de corriente continua respecto a su funcionamiento. Existen dos
clases de estos motores:
1. Universales.
2. De repulsión.
Motor monofásico de fase partida.
Este tipo de motor tiene dos devanados bien diferenciados, un devanado principal y otro
devanado auxiliar. El devanado auxiliar es el que provoca el arranque del motor, gracias a
que desfasa un flujo magnético respecto al flujo del devanado principal, de esta manera,
logra tener dos fases en el momento del arranque.
Al tener el devanado auxiliar la corriente desfasada respecto a la corriente principal, se
genera un campo magnético que facilita el giro del rotor. Cuando la velocidad del giro del
rotor acelera el par de motor aumenta. Cuando dicha velocidad está próxima al
sincronismo, se logran alcanzar un par de motor tan elevado como en un motor trifásico, o
casi. Cuando la velocidad alcanza un 75 % de sincronismo, el devanado auxiliar se
desconecta gracias a un interruptor centrífugo que llevan incorporados estos motores de
serie, lo cual hace que el motor solo funcione con el devanado principal.
Este tipo de motor dispone de un rotor de jaula de ardilla como los utilizados en los
motores trifásicos.
El par de motor de éstos motores oscila entre 1500 y 3000 r.p.m., dependiendo si el motor
es de 2 ó 4 polos, teniendo unas tensiones de 125 y 220 V. La velocidad es prácticamente
constante. Para invertir el giro del motor se intercambian los cables de uno solo de los
devanados (principal o auxiliar), algo que se puede realizar facilmente en la caja de
conexiones o bornes que viene de serie con el motor.
Motores monofásicos 2.
Motor monofásico de condensador.
Son tecnicamente mejores que los motores de fase partida. También disponen de dos
devanados, uno auxiliar y otro principal. Sobre el devanado auxiliar se coloca un
condensador en serie, que tiene como función el de aumentar el par de arranque, entre 2 y 4

veces el par normal. Como se sabe, el condensador desfasa la fase afectada en 90°, lo cual
quiere decir, que el campo magnético generado por el devanado auxiliar se adelanta 90°
respecto al campo magnético generado por el devanado principal. Gracias a esto, el factor
de potencia en el momento del arranque, está proximo al 100%, pues la reactancia
capacitiva del condensador (XC) anula la reactancia inductiva del bobinado (xL).
Por lo demás, se consideran igual que los motores de fase partida, en cuanto a cambio de
giro, etc. Lo único importante que debemos saber, es que con un condensador en serie se
mejora el arranque.
Motor monofásico con espira en cortocircuito.
Dentro del grupo que habiamos realizado en otra página, el motor monofásico con espira en
cortocircuito es el último que vamos a tratar. Son también llamados motores monofásicos
de polos partidos.
Este tipo de motor no lleva devanado auxiliar, en su lugar se coloca una espira (vamos a
llamarle minibobina) alrededor de una de las masas polares, al menos, en un tercio de la
masa.
¿Qué entendemos por masa polar? La masa polar es el conjunto de espiras de un polo.
Imaginar por un momento una pelota pequeña a la cual le sobresalen dos cables, pues bien,
la minibobina está enrollada en la pelota sin tocar los cables, la masa polar sería el cuerpo
de la pelota, y la pelota con los cables vendría a ser el polo.
Con lo expuesto anteriormente, se consigue que al alimentar el motor en las espiras que se
encuentran en cortocircuito se genere un flujo diferente respecto a las demás espiras que no
están en cortocircuito. La diferencia no llega a alcanzar los 90°, pero es suficiente para
lograr arrancar el motor.
La velocidad dependerá del número de polos que tenga el motor. El par de arranque es muy
inferior respecto a un motor de fase partida, alrededor del 60%. Si queremos cambiar el
sentido del giro, debemos desmontar el motor e invertir el eje. Se fabrican para bajas
potencias, de 1 a 20 Cv. Se utiliza poco este tipo de motor.
Motor universal.
El motor universal es un tipo de motor que puede ser alimentado con corriente alterna o con
corriente continua, es indistinto. Sus características principales no varían

significativamente, sean alimentados de una forma u otra. Por regla general, se utilizan con
corriente alterna. También los encontraréis con el sobrenombre de motor monofásico en
serie.
Este tipo de motor se puede encontrar tanto para una máquina de afeitar como para una
locomotora, esto da una idea del margen de potencia en que pueden llegar a ser construidos.
Las partes principales de este motor son:
1. Estartor.
2. Rotor con colector.
Los bobinados del estartor y del rotor están conectados en serie a través de unas escobillas.
El par de arranque se sitúa en 2 ó 3 veces el par normal.
La velocidad cambia según la carga. Cuando aumenta el par motor disminuye la velocidad.
Se suelen construir para velocidades de 3000 a 8000 r.p.m., aunque los podemos encontrar
para 12000 r.p.m. Para poder variar la velocidad necesitamos variar la tensión de
alimentación, normalmente se hace con un reostato o resistencia variable.
El cambio de giro es controlable, solo tenemos que intercambiar una fase en el estartor o en
el rotor, nunca en los dos, lo cual es facilmente realizable en la caja de conexiones o bornes
que viene incorporado con el motor.
Cuando el motor es alimentado, se produce que las corrientes circulan en el mismo sentido,
tanto el estartor como en el rotor, pero en el cambio de ciclo cambia el sentido en los dos,
provocando el arranque del motor.
Motor paso a paso.
Este tipo de motor de motor es empleado cuando se hace imprescindible controlar
exactamente las revoluciones o las partes de vueltas.
Son utilizados, principalmente, en máquinas pequeñas de oficina, como pueden ser
impresoras, fotocopiadoras, faxes, etc. También se pueden encontrar en instrumentos
médicos y científicos.
Hay tres tipos de éstos motores, a saber:
1. De excitación unipolar.
2. De excitación bipolar.
3. Híbridos.

La posición en que se encuentran instalados resulta vital para su correcto funcionamiento,
pues la gracia que tienen estos motores es precisamente el absoluto control del movimiento.
Las partes que integran este tipo de motor son:
1. Un estartor, que tiene integrado una serie de bobinas alimentadas por impulsos de c.c.
2. El rotor, tiene uno o más imanes permanentes.
Ayuda para que siempre encuentres lo que buscas!
Acerca de estos anunciosComaparti:
Twitter 3
Facebook 14
Tumblr
Más
Relacionado
Selenoide (Actuador electromagnetico) En "AYUDA USUARIO"
Efectos de la Electricidad en el cuerpoEn "Dudas del Millon"
Razones porque no dejar comentarioEn "opinion"
FEBRERO 28, 2012 · PUBLICADO EN AYUDA USUARIO, CIENCIAS, DUDAS DEL
MILLON, UNIVERSIDAD ·ETIQUETADO COMO ESCOBILLAS, ETC, IDUSTRIA, INDUCTOR, INDUSTRIA
MOTORES, LOCOMOCIÓN,MONTACARGAS, MOTOR, MOTOR ELECTRICO, MOTOR TRIFÁSICO
ASÍNCRONO DE JAULA DE ARDILLA, MOTORES ASÍNCRONOS SINCRONIZADOS, MOTORES
BIFÁSICOS, MOTORES CON ARRANQUE AUXILIAR BOBINADO, MOTORES CON ARRANQUE AUXILIAR
BOBINADO Y CON CONDENSADOR, MOTORES CON COLECTOR, MOTORES CON UN ROTOR DE IMÁN
PERMANENTE, MOTORES DE ANILLOS ROZANTES, MOTORES DE CORRIENTE ALTERNA, MOTORES
DE CORRIENTE CONTINUA, MOTORES DE JAULA DE ARDILLA, MOTORES INDUSTRIALES, MOTORES

MONOFÁSICOS,MOTORES SÍNCRONOS TRIFÁSICOS, MOTORES TRIFÁSICOS, MOTORES
UNIVERSALES, ROTOR, STATOR
22 comentarios en “MOTOR ELECTRICO – TIPOS Y FUNDAMENTOS”
1. ignacio
FEBRERO 29, 2012 A LAS 10:37 PM
y no os habeis dado cuenta de que la electricidad se recoge no se crea. si un generador de
un vehiculo, consume aproximadamente unos 2 amperios y produce unos 50 amperios, lo
unico que aportamos es que recorra el campo magnetico creado por la induccion, podemos
mover el campo magnetico simplemente, cambiando la polaridad del inducido. o con un
pequeño motor que haga girar un plato con las delgas y acoplandolo al inducido.
las patentes solo benefician a los mismos nunca benefician al pueblo.
YA ES HORA DE QUE VEAMOS LA REALIDAD, Y DIVULGARLA
perdon y gracias.
Disculpa por este email, he estado viendo el generador eléctrico sencillo hecho con cartón.
Si en vez de darle vueltas a los imanes, haces un electroimán con unos clavos y lo colocas
en medio de la bobina, cambiando la polaridad de la corriente de una pila de 1,5v,
obtendrás corriente en la bobina. La prueba te saldrá muy barata….
Cansado de ver como le sacan el dinero a la gente con inventos inútiles.
La energía no se crea ni se destruye (jamás y nunca se transforma) solo cambia de posición.
La luz, calor, electricidad, etc. Son manifestaciones de la energía. Cuando en un sistema se
le añade energía, esta arrastra la que esta en su entorno o afín a ella
1º La electricidad se produce solo cambiando la polaridad del campo, se induce cd
(corriente continua o directa) en el inducido de un generador, cambiando la polaridad de la
misma, dejando un hueco entre los pulsos como lo hace la pipa del delco, +o-o+-o+o-
recogiéndose en el colector la electricidad para la que este hecho el generador, sin
movimiento del rotor, de esa electricidad se toma una ínfima parte se pasa a cd para
realimentarlo. Y no hay más…… según Nikolas Tesla 1880 + o -, Clemente Figuera 1902-
1909.
2º Otra cosa para los curiosos…. Coged Mirra (resina de Commiphora myrrha) la calientas
en una lata hasta que se carbonice totalmente, lavas el carbón que queda y veras unos
cristalitos, estos cristalitos son diamantes. Puedes hacerlos del tamaño que quieras. Los
gases de la mirra e incienso creo que son tóxicos hazlo en lugar muy ventilado. Según lo
hayas calentado también podrás ver carbón sin cristalizarse completamente.
Lo de los diamantes tiene que ver mucho con la energía y dará más posibilidades a la
electrónica. Tienen una respuesta en nanosegundos, mientras el cuarzo tiene respuesta en
microsegundos.
3ª Otra cosa que demuestra que no nos queremos dar cuenta de nada. Desaladora o energía
producida por las mareas y olas. Imagínense un inflador de gomas de bicicletas, de unos 20
o 30 metros de diámetro, se fija a unos 60 u 80 metros en el fondo del mar (los japoneses
son expertos en esto), el embolo se acopla a un flotador (buque) de unas 100 o 200
toneladas de desplazamiento, las mareas y las olas hacen el resto, el chorro de agua se
puede regular así como la presión del mismo, se puede subir el agua a la altura que se desee
o se puede provocar vació, etc. (en la isla del hierro están construyendo algo de esto pero
con turbinas cólicas, ganas de gastar nuestro dinero en proyectos absurdos). las medidas
son por poner un ejemplo, aunque parezcan grandes son en realidad muy reducidas para la
cosas que se hacen en el mar.
La verdad no se puede cambiar nos guste o no nos guste, la palabrería y los escritos si.
Lo segundo pueden se algún millón…. lo primero se escribe con B de burro y con S de plural, la
sociedad actual esta basada completamente en ello, y en tergiversar la verdad
MOTORES ELECTRICOSExisten varios tipos de motores y continuará proliferando nuevos tipos de motores según avance la tecnología. Pero antes de adentrarnos en la clasificación, vamos a definir los elementos que componen a los motores.
1. La carcasa o caja que envuelve las partes eléctricas del motor, es la parte externa.2. El inductor, llamado estartor cuando se trata de motores de corriente alterna, consta de un apilado de chapas magnéticas y sobre ellas está enrollado el bobinado estatórico, que es una parte fija y unida a la carcasa.3. El inducido, llamado rotor cuando se trata de motores de corriente alterna, consta de un apilado de chapas magnéticas y sobre ellas está enrollado el bobinado rotórico, que constituye la parte móvil del motor y resulta ser la salida o eje del motor.
Ahora que ya sabemos diferencias las diferentes partes que componen un motor, vamos a clasificarlos:
1. Motores de corriente alterna, se usan mucho en la industria, sobretodo, el motor trifásico asíncrono de jaula de ardilla.2. Motores de corriente continua, suelen utilizarse cuando se necesita precisión en la velocidad, montacargas, locomoción, etc.3. Motores universales. Son los que pueden funcionan con corriente alterna o continua, se usan mucho en electrodomésticos. Son los motores con colector.

Pero no nos quedemos aquí, realicemos una clasificación más amplia:Motor de corriente alterna.
Podemos clasificarlos de varias maneras, por su velocidad de giro, por el tipo de rotor y por el número de fases de alimentación. Vamos a ello:
1. Por su velocidad de giro.
1. Asíncronos. Un motor se considera asíncrono cuando la velocidad del campo magnético generado por el estártor supera a la velocidad de giro del rotor.2. Síncronos. Un motor se considera síncrono cuando la velocidad del campo magnético del estártor es igual a la velocidad de giro del rotor. Recordar que el rotor es la parte móvil del motor. Dentro de los motores síncronos, nos encontramos con una subclasificación:
- Motores síncronos trifásicos.- Motores asíncronos sincronizados.- Motores con un rotor de imán permanente.
2. Por el tipo de rotor.
- Motores de anillos rozantes.- Motores con colector.- Motores de jaula de ardilla.
3. Por su número de fases de alimentación.
- Motores monofásicos.- Motores bifásicos.- Motores trifásicos.- Motores con arranque auxiliar bobinado.- Motores con arranque auxiliar bobinado y con condensador.
Motor de corriente continua.
La clasificación de este tipo de motores se realiza en función de los bobinados del inductor y del inducido:
- Motores de excitación en serie.- Motores de excitación en paralelo.- Motores de excitación compuesta.En este caso estaremos tratando sobre los motores de jaula de ardilla.
Estos motores provienen de los motores polifásicos de inducción. Suponiendo que un motor de inducción comercial de jaula de ardilla se haga arrancar con el voltaje nominal de las terminales de línea de su estator desarrollará un par de arranque que hará que aumente la velocidad. Al aumentar la velocidad a partir del reposo (100% de deslizamiento) disminuye su deslizamiento y su par disminuye hasta que se desarrolla un par máximo. Esto hace que la velocidad aumente todavía más, reduciéndose en forma simultánea el deslizamiento y el par que desarrolla el motor de inducción.
Los pares desarrollados al arranque y al valor de desplazamiento que produce el par máximo, en ambos exceden el par de la carga, por lo tanto la velocidad del motor aumentará hasta que el valor de desplazamiento sea tan pequeño que el par que se desarrolla se reduzca a un valor igual al aplicado por la carga. El motor continuará trabajando a esa velocidad y el valor de equilibrio del desplazamiento, hasta que aumente o disminuya el par aplicado.
La característica esencial que distingue a una máquina de inducción de los demás motores eléctricos es que las corrientes secundarias son creadas

únicamente por inducción.
Cuando se desarrolló por primera vez el rotor de doble jaula de ardilla se creo tal variedad y adaptabilidad en el diseño de rotores para motores de inducción que ha llevado a diversas características de curva deslizamiento - par. Al dar la proporción correcta al devanado de doble jaula de ardilla, los fabricantes han desarrollado numerosas variaciones del diseño del rotor de vaciado o normal único. Estas variaciones tienen por consecuencia pares de arranque mayores o menores que el diseño normal y también menores corrientes de arranque
MOTORES DE INDUCCION DE JAULA DE ARDILLA CLASE A
El motor clase A es un motor de jaula de ardilla normal o estándar fabricado para uso a velocidad constante. Tiene grandes áreas de ranuras para una muy buena disipación de calor, y barras con ranuras ondas en el motor. Durante el periodo de arranque, la densidad de corriente es alta cerca de la
superficie del rotor; durante el periodo de la marcha, la densidad se distribuye con uniformidad. Esta diferencia origina algo de alta resistencia y baja reactancia de arranque, con lo cuál se tiene un par de arranque entre 1.5 y 1.75 veces el nominal ( a plena carga). El par de arranque es relativamente
alto y la baja resistencia del rotor producen una aceleración bastante rápida hacia la velocidad nominal. Tiene la mejor regulación de velocidad pero su corriente de arranque varía entre 5 y 7 veces la corriente nominal normal, haciéndolo menos deseable para arranque con línea, en especial en los
tamaños grandes de corriente que sean indeseables.
Motores de inducción de jaula de ardilla clase B
A los motores de clase B a veces se les llama motores de propósito general; es muy parecido al de la clase A debido al comportamiento de su deslizamiento-par. Las ranuras de su motor están embebidas algo más profundamente que el los motores de clase A y esta mayor profundidad tiende a
aumentar la reactancia de arranque y la marcha del rotor. Este aumento reduce un poco el par y la corriente de arranque.
Las corrientes de arranque varían entre 4 y 5 veces la corriente nominal en los tamaños mayores de 5 HP se sigue usando arranque a voltaje reducido. los motores de clase B se prefieren sobre los de la clase A para tamaños mayores.
Las aplicaciones típicas comprenden las bombas centrífugas de impulsión, las máquinasherramientas y los sopladores.
MOTORES DE INDUCCION DE JAULA DE ARDILLA CLASE C
Estos motores tienen un rotor de doble jaula de ardilla, el cual desarrolla un alto par de arranque y una menor corriente de arranque.
Debido a su alto par de arranque, acelera rápidamente, sin embargo cuando se emplea en grandes cargas, se limita la disipación térmica del motor por que la mayor parte de la corriente se concentra en el devanado superior.
En condiciones de arranque frecuente, el rotor tiene tendencia a sobre calentarse se adecua mejor a grandes cargas repentinas pero de tipo de baja inercia.
Las aplicaciones de os motores de clase C se limitan a condiciones en las que es difícil el arranque como en bombas y compresores de pistón
MOTORES DEINDUCCION DE JAULA DE ARDILLA CLASE D
Los motores comerciales de inducción de jaula de ardilla clase D se conocen también como de alto par y alta resistencia.
Las barras del rotor se fabrican en aleación de alta resistencia y se colocan en ranuras cercanas a la superficie o están embebidas en ranuras de pequeño diámetro. La relación de resistencia a reactancia del rotor de arranque es mayor que en lo motores de las clases anteriores.
El motor está diseñado para servicio pesado de arranque, encuentra su mayor aplicación con cargas como cizallas o troqueles, que necesitan el alto par

con aplicación a carga repentina la regulación de velocidad en esta clase de motores es la peor.
MOTORES DE INDUCCIÓN DE JAULA DE ARDILLA DE CLASE F
También conocidos como motores de doble jaula y bajo par. Están diseñados principalmente como motores de baja corriente, porque necesita la menor corriente de arranque de todas las clases. Tiene una alta resistencia del rotor tanto en su devanado de arranque como en el de marcha y tiende a
aumentar la impedancia de arranque y de marcha, y a reducir la corriente de marcha y de arranque.
El rotor de clase F se diseño para remplazar al motor de clase B. El motor de clase F produce pares de arranque aproximadamente 1.25 veces el par nominal y bajas corrientes de arranque de 2 a 4 veces la nominal. Los motores de esta clase se fabrican de la capacidad de 25 hp para servicio directo de
la línea. Debido a la resistencia del rotor relativamente alta de arranque y de marcha, estos motores tienen menos regulación de voltaje de los de clase B, bajan capacidad de sobrecarga y en general de baja eficiencia de funcionamiento. Sin embargo , cuando se arrancan con grandes cargas, las bajas de
corrientes de arranque eliminan la necesidad de equipo para voltaje reducido, aún en los tamaños grandes.
CLASIFICACIÓN DE LOS MOTORES DE INDUCCIÓN DE JAULA DE ARDILLA DE ACUERDO CON EL ENFRIAMIENTO Y EL AMBIENTE DE TRABAJO.
Los motores comerciales de inducción de jaula de ardilla, y en general todos lo motores eléctricos , se pueden clasificar también de acuerdo con el ambiente en que funcionan, sí también como en los métodos de enfriamiento.
La temperatura ambiente juega un papel importante en la capacidad y selección del tamaño de armazón para una dínamo, parte importante del motivo es que la temperatura ambiente influye en la elevación permisible de temperatura por sobre los 40º C normales. Por ejemplo una dínamo que trabaje a
una temperatura ambiente de 75º C empleando aislamiento clase B tiene un aumento permisible de temperatura de tan solo 55º C. Si trabajara a su temperatura ambiente normal de 40 º C se podría permitir un aumento de temperatura de 90º C, sin dañar su aislamiento.
También se hizo notar que la hermeticidad de la máquina afecta a su capacidad. Una máquina con una armazón totalmente abierta con un ventilador interno en su eje, permite un fácil paso de aire succionado y arrojado. Esta caja origina una temperatura final de trabajo en los devanados, menor en
comparación que la de una máquina totalmente cerrada que evita el intercambio de aire con el exterior.
Esto da como resultado que existe una clasificación de los motores por el tipo de carcazaTIPOS DE ENVOLVENTES O CARCAZAS.
La NEMA reconoce los siguientes:
1. carcaza a prueba de agua. Envolvente totalmente cerrada para impedir que entre agua aplicada en forma de un chorro o manguera, al recipiente de aceite y con medios de drenar agua al interior. El medio para esto último puede ser una válvula de retención o un agujero machuelado en la parte más inferior del armazón, para conectar un tipo de drenado.
2. carcaza a prueba de ignición de polvos. Envolvente totalmente cerrada diseñada y fabricada para evitar que entren cantidades de polvo que puedan encender o afectar desempeño o capacidad.
3. carcaza a prueba de explosión. Envolvente totalmente cerrada diseñada y construida para resistir una explosión de un determinado gas o vapor que pueda estar dentro de un motor, y también para evitar la ignición de determinado gas o vapor que lo rodee, debido a chispas o llamaradas en su interior.
4. carcaza totalmente cerrada envolvente que evita el intercambio de aire entre el interior y el exterior de ella pero que no es lo suficiente mente cerrada para poderla considerar hermética al aire.
5. carcaza protegida al temporal. Envolvente abierta cuyos conductos de ventilación están diseñados para reducir al mínimo la entrada de lluvia o nieve y partículas suspendidas en el aire, y el acceso de estas en las partes eléctricas.

6. carcaza protegida. Envolvente abierta en la cual todas las aberturas conducen directamente a partes vivas o giratorias, exceptuando los ejes lisos del motor, tienen tamaño limitado mediante el diseño de partes estructurales o parrillas coladeras o metal desplegado etc. Par< evitar el contacto accidental con las parte vivas
7. Carcaza a prueba de salpicaduras. Envolvente abierta en la que las aberturas de ventilación están fabricadas de tal modo que si caen partículas de sólidos o gotas de líquidos a cualquier ángulo no mayor de 100º con la vertical no puedan entrar en forma directa o por choque de flujo por una superficie horizontal o inclinada hacia adentro.
8. Carcaza a prueba de goteo envolvente abierta en que las aberturas de ventilación se construye de tal modo que si caen partículas sólidas o gotas de líquido a cualquier ángulo no mayor de 15º con la vertical no pueda entrar ya sea en forma directa o por choque y flujo por una superficie horizontal o inclinada hacia adentro.
9. Carcaza abierta envolvente que tiene agujeros de ventilación que permiten el flujo de aire externo de enfriamiento sobre y alrededor de los devanados de la máquina.
El costo y el tamaño de los motores totalmente cerrados es mayor que el de los motores abiertos, de la misma potencia y ciclo de trabajo y elevación sobre la temperatura ambienteEFECTO DE LA VARIACIÓN DE VOLTAJE SOBRE LA VELOCIDAD DE UN MOTOR DE INDUCIDO DE JAULA DE ARDILLA O DE ROTOR DEVANADO.
Si solo hacemos variar el voltaje del estator no se produce una variación correspondiente en el deslizamiento y la velocidad. Entonces si los demás factores permanecen constantes, el par del motor es directamente proporcional al cuadrado del voltaje. Esto significa que si se aumenta el voltaje en el estator , se produce un aumento mucho mayor en el par y, correspondientemente, una reducción en el desplazamiento, es decir el deslizamiento varía inversamente con el cuadrado del voltaje o en proporción al inverso del par.
Para fines de cálculo, podemos resumir la relación entre par y voltaje de estator como sigue:
En el cual el subíndice "n" representa el nuevo valor
El subíndice "o" representa el valor original.
El cálculo del deslizamiento con un cambio en el voltaje del estator (y del rotor) es un tanto más complejo, porque el deslizamiento varía también con la resistencia del rotor, el voltaje del estator y/o el par. La relación se puede resumir de la siguiente forma: para la cual se ha definido previamente los símbolos y subíndices.
A la siguiente figura se muestra el efecto de una reducción en el voltaje del estator sobre la curva característica par- deslizante
De un motor de inducción de jaula de ardilla de propósito general. Al voltaje nominal del estator Vs, el motor entrega el par niminal a un desplazamiento aproximado de 5 %, lo cual se ve en el punto a de la figura a una reducción del 80 % del voltaje del estator, suponiendo una carga convencional cuyo par varíe con la velocidad, disminuyen tanto el par como la velocidad,, con lo cual se tiene un aumento en el deslizamiento , como se muestra en el punto b. Una reducción semejante de voltaje produce tanto la reducción en el par como aumento en el desplazameinmto en el punto c. La extrapolación de los puntos a, b, y c produce la línea de carga que aparece punteada para mayores reducciones en el voltaje del estator.
Por tanto si se tiene mayor calentamiento a la menor velocidad, así como una eficiencia reducida, lo cuál causa un rápido deterioro en el aislamiento del motor. Por tanto se acostumbra limitar la variación de voltaje sobre el par, el deslizamiento y la velocidad, empleando las ecuaciones 1 y 2
El siguiente ejemplo muestra que tanto resiste la velocidad de un motor comercial de inducción de jaula de ardilla a un cambio de voltaje en el estator. Como se muestra en la parte (d) de ese ejemplo, cuando se reduce 10 % el voltaje del estator, tan solo produce ¡una disminución de 1.23% en la velocidad!

Ejemplo 1
Un motor de jaula de ardilla trifásico , 10hp, cuatro polos, 220 V, produce un par de 30 lb pie a la velocidad nominal de 1710 r.p.m. calcular.
a. el desplazamiento y velocidad nuevos a un voltaje impreso en el estator igual a 242 Vb. repetir parte (a) a 198 V
c. el cambio porcentual en el deslizamiento y velocidad debido a un cambio de voltaje en la parte (a)
d. el cambio porcentual en el deslizamiento y velocidad debido a un cambio de voltaje en la parte (b)MOTOR SINCRONO DE INDUCCIÓN
Este motor se creó debido a la demanda de un motor síncrono polifásico con arranque propio en tamaños menores, de menos de 50 HP. Que no necesitarán excitación del campo con CD y que poseen las características de velocidad constante el motor. El rotor consiste de un devanado de jaula de ardilla, embobinado o vaciado, distribuido uniformemente en las ranuras que se muestran en la figura 1.
Cuando una corriente alterna polifásica se aplica a la armadura normal de un estator polifásico, el motor arranca como motor de inducción. Debido al rotor de polo saliente, que se muestra en la figura 2, el motor llega muy fácil a su sincronía y desarrolla con rapidez el par máximo del motor síncrono de la máquina de polos salientes.
Así el motor síncrono de inducción desarrolla el par de reluctancia, proporcional a sen de2a y al cuál se le llama a veces motor polifásico de reluctancia. Pero este es un nombre equivocado porque el motor síncrono de inducción trabaja con las características combinadas de par del motor síncrono y de inducción, como se ve en la figura 2. Cuando está diseñado con devanados de rotor de alta resistencia, se pueden desarrollar pares de arranque bastante altos, hasta del 400 % del par a plena carga. Por otro lado, el empleo de devanados del rotor con alta resistencia ocasiona desplazamiento mayor, menor eficiencia y menor posibilidades entrada en sincronismo con carga mediante el par de reluctancia.
Como motor síncrono, trabaja a velocidad constante hasta un poco más del 200% de la plena carga. Si la carga aplicada es mayor que el 200% del par a plena carga se baja a su característica de inducción, en donde puede seguir trabajando como motor de inducción hasta casi el 700% del par a plena carga.
Debido a que el par crítico del motor síncrono es aproximadamente la tercera parte del correspondiente del de inducción, el armazón del estator de un motor síncrono de inducción es de tamaño tres veces mayor que un motor ordinario de inducción de la misma potencia. Además, puesto que trabaja desde sin carga hasta plena carga como motor síncrono sin excitación un mayor ángulo de par compensa la falta de excitación y el motor toma una alta corriente de retraso a bajo factor de potencia. Esto también ocasiona baja eficiencia y necesita de mayor tamaño de armazón para disipar el calor.
En motores de potencia relativamente baja, como el motor síncrono de inducción, los problemas creados por su mayor tamaño y peso, baja eficiencia y corriente en retraso no tienen importancia en comparación con las ventajas de velocidad constante, robustez, falta de excitación de CD, alto par de arranque , de marcha y de mantenimiento mínimo que caracterizan a estos motores.
Características de funcionamiento del motor de inducción.
Suponiendo que el motor de inducción comercial de jaula de ardilla se haga arrancar con voltaje nominal en las terminales de línea de su estator (arranque a través de la línea) desarrollará un par de arranque de acuerdo a la ecuación 1 que hará que aumente su velocidad. Al aumentar su velocidad a partir del reposo (100% de deslizamiento), disminuye su deslizamiento y su par disminuye hasta el valor en que se desarrolle el par máximo (sXIr ) de acuerdo con la ecuación 2 . Esto hace que la velocidad aumente todavía más reduciéndose en forma simultánea el deslizamiento y el par que desarrolle el par de inducción.
Los pares desarrollados al arranque y al valor de deslizamiento que produce el par máximo ambos exceden al par aplicado a la carga. Por lo tanto la velocidad del motor aumentará, hasta que el valor del deslizamiento sea tan pequeño que el par que se desarrolla se reduzca a un valor igual al par

aplicado por la carga. Mientras tanto el motor continuará trabajando a esta velocidad y valor de equilibrio del deslizamiento hasta que aumente o disminuya el par aplicado de acuerdo con la ecuación 1.
La siguiente gráfica resume el funcionamiento de un motor polifásico de inducción.
Muestra la relación entre los pares de arranque, máximo y nominal a plena carga que desarrolla un motor de inducción, como función de la velocidad de este y del desplazamiento. Esta figura es representación gráfica de la corriente y el par desarrollados en el rotor del motor como funciones de deslizamiento desde el instante de arranque (punto a ) hasta la condición de funcionamiento en estado estable (en general entre marcha en vacío y marcha a plena carga puntos c y d ) cuando los pares desarrollados y aplicado son iguales.
Nótese que a desplazamiento cero, el par desarrollado y la corriente del rotor, que se indica como línea de puntos, son ambos cero porque no, se efectúa acción del motor de inducción a la velocidad síncrona. Aún sin carga, es necesario que el motor de inducción tenga un pequeño deslizamiento, que en general es del 1%, para poder desarrollar el pequeño par que necesita para superar las fricciones mecánica y con el aire, y otras pérdidas internas.
El motor de inducción es de velocidad constante entre el funcionamiento sin carga y a plena carga (puntos d y c en la figura) y tiene una curva característica de velocidad que se asemeja a la del motor derivación.
Los motores asíncronos o de inducción, por ser robustos y baratos, son los más extensamente empleados en la industria. En estos motores el campo gira a velocidad síncrona, como en las máquinas síncronas: ns = f / p.
Teóricamente , para el motor girando en vacío y sin pérdidas, el rotor también tendría la velocidad síncrona . no obstante al ser aplicado un par externo al motor, su rotor disminuirá su velocidad justamente en la proporción necesaria para que la corriente inducida por la diferencia de velocidad entre el campo giratorio (síncrono) y el rotor, pase a producir un par electromagnético igual y opuesto al par aplicado exteriormente. El par electromagnético es proporcional al flujo producido por el campo giratorio y a la corriente y al factor de potencia del rotor.
El par del motor electromagnético puede ser expresado por la relación:
C = Pg / w s
Donde Pg es la potencia del campo que gira a una velocidad angular síncrona w s radianes por segundo. Por otro lado, si P es la potencia mecánica proporcionada a través del eje que gira a una velocidad angular w radianes por segundo C = P / w s
Por lo tanto:
P = Pg * w /w s = (1 - s ) * Pg
O sea la potencia cedida por el eje es igual a la potencia disponible en el entre hierro de la máquina Pg (potencia de campo giratorio), menos al parte correspondiente a las pérdidas en el rotor s * Pg.
En la siguiente figura se muestra el diagrama vectorial de los componentes de corrientes del motor asíncrono. Para un núcleo de hierro ideal, con una permeabilidad infinitamente grande y con pérdidas nulas, la corriente absorbida en vacío por el motor sería nula . en otras condiciones, para un motor en carga, los arrollamientos del primario (estator) y secundario (rotor), tendrían exactamente la misma f.m.m., o sea, el motor absorbería de la red una corriente equivalente a su corriente rotórica (determinada por el par solicitado), referida al arrollamiento del estator, I'2.
Para el caso de núcleos ferromagnéticos reales, la permeabilidad finita implicará una cierta corriente de magnetización Im , y las pérdidas en el hierro (transformadas en calor en el proceso) exigirán una componente activa de corriente Ip.
La composición de estas corrientes produce la corriente I0 que el motor absorbe en vacío.
Ahora para una situación de carga I'2, la corriente absorbida de la línea es la suma vectorial. I1 = I2 + I0.
Aquí están representadas las ff.ee.mm. E1 (f.e.m inducida en el estator ) y E'2 (f.e.m. inducida en el rotor referida al estator). Ellas sirven de referncia para el diagrama de corrientes, una vez que su vector debe estar adelantado 90º eléctricos con relación al vector de la corriente de magnetización.
Alterándose la carga aplicada al motor, la componente de corriente del rotor I'2 varía, pues es proporcional al par. I0 permanece constante, pues está vinculada a la magnetización del motor. El lugar geométrico de la punta del vector que representa I1, corriente absorbida por el primario, es una circunferencia, tal como se ve en la figura de abajo:
En la medida que el motor es cargado por un par aplicado a su eje, el punto P se mueve sobre la circunferencia. En cada punto el desplazamiento es mayor, aproximadamente al valor s= 1, que corresponde a la condición del rotor bloqueado (punto Pb). En este punto la corriente absorbida por el estator es O'Pb y la correspondiente corriente del rotor es Opb. La semirecta Opb es por regla general, denominada "recta de las potencias". El segmento PG, igual a I1 cos f es proporcional a la potencia por fase UI1 cos f absorbida de la línea. El segmento DG, igual a I0 cos f es proporcional a las pérdidas en vacío del motor. El segmento ED representa las pérdidas de joule; consecuentemente PE, el segmento comprendido entre la circunferencia y la recta de potencias, es proporcional a la potencia transmitida al eje, la potencia mecánica.
El punto Pb, toda potencia absorbida por el motor, con excepción de pérdida en el hierro, esta siendo convertida en calor a través de las pérdidas de joule en los circuitos del estator y del rotor, segmentos PbC. Dividiendose este segmento en el punto M , de forma que MC es proporcional a las pérdidas de Joule en el estator, mientras que PbM será proporcional a las perdidas en el rotor.
Al trazar una recta tangente a la circunferencia, paralela a la recta de las potencias, se determina el segmento JK proporcional a la máxima potencia que el motor puede proporcionar. De manera semejante, el segmento LN representa el máximo par que el eje puede aplicar a la carga. Estos dos máximos ocurren a diferentes velocidades.
La gráfica anterior y la siguiente son una ayuda para la comprensión de cómo varían las características del motor. Tambien se muestra el comportamiento de la corriente del facttor de potencia del par y de la potencia excedida al eje en función de la velocidad del motor, deducudas a partir del diagrama del circuito.
Características de funcionamiento normal del motor de inducción en marcha ( desde vacío hasta plena carga).
Las características de funcionamiento normal del motor se tiene en la gráfica en los puntos d a c . enseguida vemos el comportamiento del rotor de un motor de inducción de jaula de ardilla a una velocidad sin carga, ligeramente menor que la velocidad síncrona cuando se aplica una carga que va en aumento.
Caso sin carga y vacío:
Sin carga, el deslizamiento es muy pequeño y la frecuencia, reactancia del rotor, y la FEM inducida en éste son muy pequeñas. Por lo tanto la corriente en el rotor es muy pequeña y solo la suficiente para producir el par sin carga y por lo tanto la corriente en el estator es la suma fasorial de su corriente de excitación Ie y un componente de carga primario Io inducido en el rotor por acción del transformador.
La figura 3 muestra la suma fasorial de esas corrientes sin carga , en la que la corriente de excitación en el primario del estator a circuito abierto es Ie, es decir la suma fasorial de un componente Ih de histéresis o de potencia, y un componente Im, de magnetización necesario para producir el flujo rotatorio en el estator. Los componentes de potencia Ih e Io están en fase con Egp. El factor de potencia sin cargar se representa mediante q , el ángulo entre Isc y Egp. Así, Isc cosq es la suma de Io e Ih, des decir, la pequeña corriente del estator Ioproducida por la corriente del rotor y por un componente primario de pérdida de Iha, debido a la histéresis y corrientes parásitas en el hierro del estator y del rotor. Se nota que si q es grande, el factor de potencia es extremadamente pequeña y está en retraso

Aspectos físicos. El rotor
Es la parte giratoria y el inducido en los motores de inducción. Está formado por:
Circuito magnético: formado de chapas de Fe aleado al Si, asiladas entre sí con Carlite, para reducir las pérdidas por corrientes parásitas.
Circuito eléctrico: formado por un devanado trifásico. En función de la forma constructiva de este devanado, distinguimos entrejaula de ardilla y rotor bobinado.
Rotor de jaula de ardilla
La forma contractiva del devanado es realmente peculiar. Los conductores del rotor son barras de aluminio fundido, cortocircuitadas en sus extremos mediante anillos, que también son de aluminio. El conjunto forma una estructura que recuerda a una "jaula de ardilla", de ahí su nombre. La jaula a su vez se encuentra embebida en la masa ferromagnética del rotor, que dispone de ranuras para alojar los conductores.
Observa que el rotor de jaula de ardilla, no presenta conexiones eléctricas con el exterior, entonces ¿cómo es posible que circule intensidad por las barras rotóricas, sin conectarlas a ninguna toma de tensión? La respuesta la encontrarás más adelante.
Se comprobó experimentalmente que el motor presenta menos vibraciones y más estabilidad si las barras rotóricas se inclinan respecto al eje de la jaula . Existen además otras disposiciones constructivas, como los rotores de doble jaula o de ranuras profundas, para mejorar el par electromagnético suministrado por el motor en el arranque .
Para que te hagas una idea más exacta del ensamblaje entre la carcasa del motor, el estator con sus ranuras y devanados y el rotor de jaula, puedes ver la siguiente figura.

Rotor bobinado o devanado
Ante todo debes saber que este tipo de rotores está actualmente extinguiéndose y que el 95 % de los motores de inducción son actualmente de jaula de ardilla. No obstante no está de más que te "suene" por si acaso te encuentras con alguno (improbable).
La principal diferencia es que los conductores provienen de un devanado trifásico de hilo esmaltado, similar a los devanados estatóricos. Un extremo de cada devanado se conecta en estrella y el otro se conecta con el exterior mediante tres anillos que rozan con tres escobillas. En el exterior hay que
conectar en estrella mediante cables, para cerrar el circuito rotórico. En vista de estas conexiones y del rozamiento anillos-escobillas, estos motores necesitan un mantenimiento del que carecen los de jaula.
En motores de rotor bobinado de gran potencia, se conectan durante el arranque resistencias al rotor, para aumentar el par de arranque, que posteriormente se cortocircuitan. Este sistema de arranque al igual que los motores de rotor bobinado, está actualmente obsoleto.
http://apuntescientificos.org/maquinas-motores.html