monografía pdh y sdh
TRANSCRIPT

MONOGRAFÍA
Jerarquías Digitales PDH y SDH
Autor: Ing. Senia Abad Rodríguez.
Facultad de Eléctrica.
ISPJAE.

Introducción.
Independientemente de que prácticamente todas las centrales o nodos de conmutación trabajan con flujos primarios E1 a la entrada, es muy frecuente que la transmisión para la comunicación entre centrales que unir ciudades, regiones y naciones, se realice a velocidades mayores que la proporciona este flujo E1 de 2 Mbps.
Están definidas entonces las diferentes Jerarquías Digitales que establecen las distintas velocidades de transmisión digitale que son preferidas o permitidas. Se define una Jerarquía Digital como un flujo digital que contiene multiplexado en su interior otros flujos digitales de una tasa inferior.
1.- Jerarquía Digital Plesiócrona (PDH).
En la década del 60 se populariza la primera de las técnicas de Transmisión Digital para altas velocidades , la Jerarquía Digital Plesiócrona , en inglés Plesiochronus Digital Hierarchy (PDH).
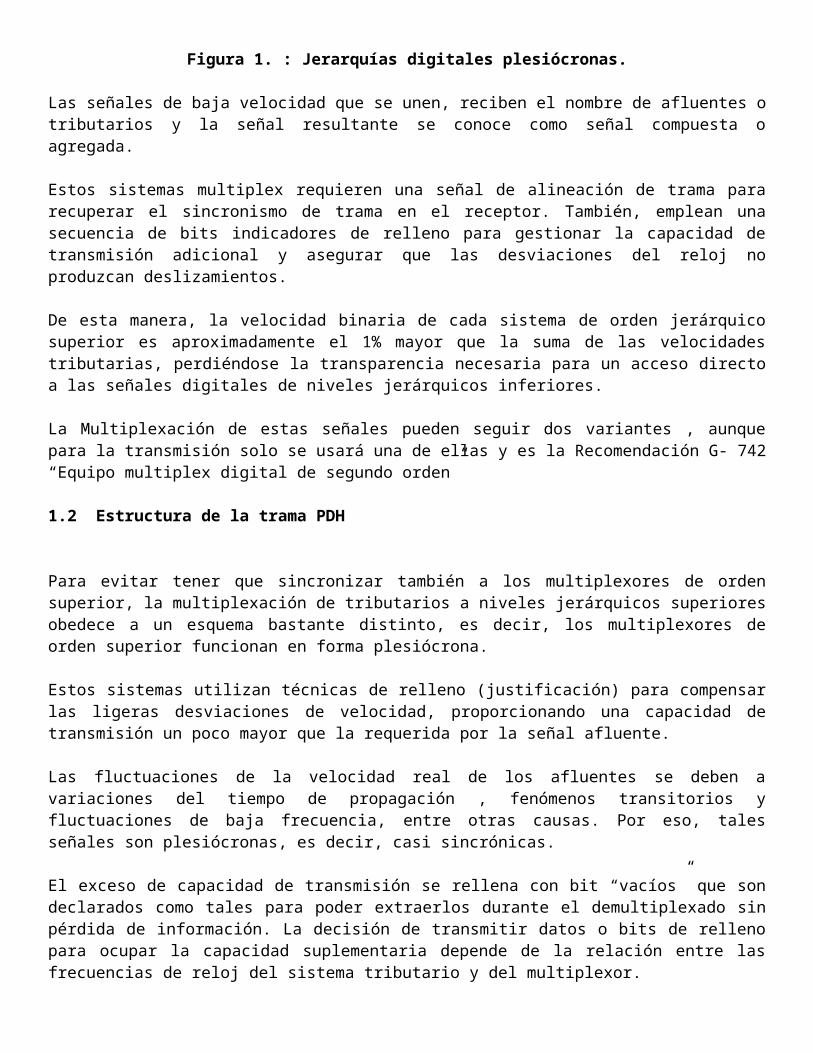
El siguiente esquema muestra las diferentes jerarquías o velocidades PDH utilizadas en diferentes regiones.
Figura 1. : Jerarquías digitales plesiócronas.
Las señales de baja velocidad que se unen, reciben el nombre de afluentes o tributarios y la señal resultante se conoce como señal compuesta o agregada.
Estos sistemas multiplex requieren una señal de alineación de trama para recuperar el sincronismo de trama en el receptor. También, emplean una secuencia de bits indicadores de relleno para gestionar la capacidad de transmisión adicional y asegurar que las desviaciones del reloj no produzcan deslizamientos.

De esta manera, la velocidad binaria de cada sistema de orden jerárquico superior es aproximadamente el 1% mayor que la suma de las velocidades tributarias, perdiéndose la transparencia necesaria para un acceso directo a las señales digitales de niveles jerárquicos inferiores.
La Multiplexación de estas señales pueden seguir dos variantes , aunque para la transmisión solo se usará una de ellas y es la Recomendación G- 742 “Equipo multiplex digital de segundo orden”
1.2 Estructura de la trama PDH
Para evitar tener que sincronizar también a los multiplexores de orden superior, la multiplexación de tributarios a niveles jerárquicos superiores obedece a un esquema bastante distinto, es decir, los multiplexores de orden superior funcionan en forma plesiócrona.
Estos sistemas utilizan técnicas de relleno (justificación) para compensar las ligeras desviaciones de velocidad, proporcionando una capacidad de transmisión un poco mayor que la requerida por la señal afluente.
Las fluctuaciones de la velocidad real de los afluentes se deben a variaciones del tiempo de propagación , fenómenos transitorios y fluctuaciones de baja frecuencia, entre otras causas. Por eso, tales señales son plesiócronas, es decir, casi sincrónicas. El exceso de capacidad de transmisión se rellena con bit “vacíos” que son declarados como tales para poder extraerlos durante el demultiplexado sin pérdida de información. La decisión de transmitir datos o bits de relleno para ocupar la capacidad suplementaria depende de la relación entre las frecuencias de reloj del sistema tributario y del multiplexor.
La Recomendación G.742 del CCITT regula la formación del multiplex de segundo orden para el sistema G.732 ( jerarquía europea ).
La siguiente figura muestra la estructura de trama a 8 448 kbit/s con relleno positivo, donde se multiplexan 4 tributarios primarios a 2 048 kbit/s.
Cn : bits de control de relleno del tributario n.
Sn : bits de oportunidad de relleno del tributario n.
Figura 3 : Estructura de trama PDH a 8 448 kbit/s
La trama se divide en cuatro segmentos iguales de 212 bit. El primero comienza con la señal de alineación de trama FAS (bit 1 a 10) . El bit 11 (A) puede emplearse para transmisión de alarmas, mientras que el 12 (N) se reserva para uso nacional. Los 200 bits restantes del primer segmento son bits tributarios y se entrelazan cíclicamente .
Cada uno de los tres segmentos siguientes de la trama comienza con cuatro bits de control de relleno (C1, C2, C3 y C4) . Uno de ellos en cada segmento se asigna a un sistema tributario e indica si se emiten datos o bits de relleno inmediatamente tras los bits de control de relleno del ultimo segmento de trama.
Cuando el bit Sn contiene información, los bits Cn correspondientes toman el valor “0” y cuando el bit Sn es relleno, los bit Cn toman el valor “1”, indicando al demultiplexor que ese bit debe ser saltado al recuperar los bits del tributario.
Los bits de control de relleno C se protegen contra errores repitiéndose tres veces en la trama (decisión por mayoría), ya que dejar de reconocer un relleno implicaría un slip de un bit en el tributario demultiplexado, con la consiguiente pérdida de sincronismo en el equipo demultiplexor de primer orden .
Dentro de esta línea jerárquica, la Recomendación G.751 especifica los multiplex de orden superior. Todos ellos adoptan métodos de relleno positivo y de multiplexado con entrelazado binario cíclico en una estructura de trama similar al multiplex digital de segundo orden mencionado anteriormente. Las siguientes figuras ilustran las estructuras de tramas de 39 Mbit/s y 140 Mbit/s :
Figura 4 : Estructura de trama PDH a 34 Mbit/s

Figura 5 : Estructura de trama PDH a 140 Mbit/s
El siguiente cuadro establece una comparación entre los niveles superiores de la jerarquía plesiócrona:
NIVEL JERÁRQUICO 2° 3° 4°Velocidad binaria de línea (kbit/s) 8 448 34 368 139 264Tolerancia de la velocidad (ppm) 30 20 15Longitud de la trama (bit/trama) 848 1 536 2 928Bits de la FAS, alarmas y reservados por trama 12 12 16Cantidad de bits C por trama 12 12 20Cantidad de bits S por trama 4 4 4Bits de información por trama 820 + 4S 1 508+4S 2 882+4SBits de información por trama por afluente 205 a 206 377 a 378 722 a 723Duración de la trama (µseg) 100,378.. 44,6927 21,0248Código de transmisión empleado HDB3 HDB3 CMI
Figura 6 : Principales características de los niveles superiores de la jerarquía PDH
En general, las características de la jerarquía digital plesiócrona PDH pueden resumirse de la siguiente manera :
Existen dos jerarquías : una, basada en la velocidad de 1 544 kbit/s empleada en EUA y Japón, y la otra, basada en 2 048 kibit/s usada en Europa y en el resto del mundo. También están normalizadas las interacciones entre ellas.
En caso de ser insuficiente la capacidad de línea de los sistemas básicos, es necesario pasar a niveles más altos en la jerarquía. En el estándar europeo las velocidades jerárquicas de niveles superiores se obtienen por la multiplexación plesiócrona de grupos de cuatro tributarios provenientes del nivel jerárquico inferior. La técnica de multiplexación se conoce como “pulse stuffing” o pulso de relleno.
En el primer nivel la multiplexación es orientada a octetos, los espacios de carga están intercalados byte a byte, mientras que en los niveles superiores segundo, tercero y cuarto, la multiplexación es orientada a bit, es decir, los tributarios están intercalados bit a bit.

Cada nivel jerárquico tiene una señal de alineación de trama específica, para obtener el sincronismo de trama.
La duración de las tramas es diferente en cada nivel jerárquico.
La creciente evolución hacia sistemas más flexibles, la aparición de los “cross-connect” y la necesidad de una gestión de red más eficiente, entre otras cosas, ponen de manifiesto las limitaciones de los sistemas plesiócronos, que se mencionan a continuación :
1. Proceso de multiplexación/demultiplexación muy complejo: Las señales de alto nivel jerárquico deben formarse a partir de cuatro tributarios de nivel inferior, por lo que para formar la trama de cuarto nivel, deben estructurarse previamente las tramas del segundo y tercer nivel. Después de la primera justificación se pierde la posibilidad de recobrar facilmente un canal individual a 64 kbit/s pues hay que demultiplexar la señal a través de todos los niveles intermedios. Si a lo largo de una ruta se necesita acceder a un tributario, hay que realizar la demultiplexación completa del mismo. Todo esto representa un mayor costo en los equipos necesarios correspondientes a estas funciones.
2. Dificultad en la gestión de red : La capacidad auxiliar de bits de servicio es mínima, los canales de servicio solo alcanzan para un limitado transporte de alarmas, impidiendo la existencia de un estándar que permita su uso generalizado.
3. Ausencia de estándares para los equipos de línea : Como no hay estándares para los equipos de línea, estos son diseñados específicamente por cada fabricante.
4. Capacidad limitada de transporte : A la velocidad máxima definida por el CCITT para la jerarquía PDH europea (139 264 kbit/s) se pueden transportar hasta 1920 canales útiles de 64 kbit/s, lo cual no satisface las demandas actuales de los sistemas de comunicaciones.
2.- INTRODUCCION A LOS SISTEMAS SDH
Existen múltiples razones que impulsan la introducción de una nueva jerarquía digital síncrona. Por ejemplo, se necesitan sistemas de transmisión con alta capacidad de canales para satisfacer la demanda siempre creciente de las comunicaciones. También, los costos de la conversión entre las distintas jerarquías plesiócronas son muy elevados. Todo esto unido a las demás limitaciones conocidas de los sistemas plesiócronos en general, ha llevado al estudio e introducción de una nueva jerarquía digital: la jerarquía digital síncrona.
La técnica de multiplexación sincrónica fue normalizada en EUA en el año 1985, en respuesta a la demanda de interfaces estandarizadas y para facilitar el acceso a las señales dentro de las tramas. Esta técnica se denominó SONET (Synchronous Optical NETwork) y estaba orientada en principio a satisfacer las necesidades de los sistemas de transmisión de los EUA .
Posteriormente, basándose en dichas normas estadounidenses sobre una red óptica sincrónica SONET, el CCITT definió las Recomendaciones G.707, G.708 y G.709 en Noviembre de 1988, en las cuales se introduce una norma mundial sobre la jerarquía digital síncrona. Estas Recomendaciones establecen una norma unitaria que tiene en cuenta tanto la jerarquía plesiócrona europea con una velocidad binaria básica de 2 048 kbit/s como la jerarquía plesiócrona norteamericana con velocidad básica de 1 544 kbit/s.
La nueva norma definida en dichas Recomendaciones se denomina Synchronous Digital Hierarchy (SDH) o Jerarquía Digital Síncrona (JDS) y es una forma novedosa de multiplexar las señales digitales aprovechando los avances de la microelectrónica de los últimos años.

La jerarquía SDH se caracteriza por tener una estuctura de trama organizada en octetos, es decir, los espacios de carga de los tributarios están intercalados byte a byte. La duración de la trama es uniforme (125 µseg), repitiéndose 8000 veces por segundo, por lo que cada byte del espacio de carga tiene capacidad para transportar un canal a 64 kbit/s (8 kHz X 8 bit). Además, la SDH incluye un proceso de justificación para lograr adaptación de velocidad mediante la utilización de punteros que señalan el inicio de las tramas de las señales tributarias dentro del área de carga útil, manejando así eventuales diferencias de velocidad entre la señal tributaria (contenedor virtual) y el espacio de carga (unidad tributaria o unidad administrativa).
Otra característica de la SDH es poseer una tara (overhead) muy grande que permite la designación de varios canales de gran capacidad para funciones de supervisión, operación, mantenimiento y gestión de los elementos de la red.
También es muy importante la relación de la jerarquía síncrona con las actuales redes plesiócronas para lograr un desarrollo progresivo de los sistemas de transmisión digital existentes. En comparación con la jerarquía PDH, la SDH ofrece las siguientes ventajas:
Normas de alcance mundial : Las velocidades de la SDH permiten la transmisión de señales a través de las fronteras internacionales sin cambiar de norma. Las señales tributarias se adaptan a las velocidades síncronas mediante un procedimiento de entramado que permite utilizar sistemas y vías de comunicación estandarizados. De esta forma, la SDH complementa a las dos jerarquías plesiócronas existentes, brindando la posibilidad de transportar y mezclar señales de diferentes jerarquías PDH.
Técnicas de multiplexación/demultiplexación simplificadas : El proceso de multiplexación es mucho más directo gracias a la utilización de punteros que permiten la localización fácil y directa de las señales tributarias dentro de la señal de línea, posibilitando el acceso directo a los afluentes de menor velocidad, sin necesidad de multiplexar/demultiplexar la señal completa de alta velocidad. Los multiplexores poseen funciones de inserción y extracción para tributarios plesiócronos de todos los niveles.
Interfaces normalizadas : La interfaz óptica de línea está estandarizada para todos los niveles SDH, mientras que la interfaz eléctrica solo está especificada para el primer nivel (STM-1), por lo que hay equipos que ni siquiera poseen interfaz eléctrica. La normalización a escala internacional de la interfaz para la SDH elimina la proliferación de interfaces digitales, logrando una compatibilidad eléctrica y óptica entre los equipos de los distintos proveedores.
De esta manera, los fabricantes podrán ofrecer los componentes de los sistemas a precios más bajos gracias a la unificación del mercado mundial, la estandarización de los procesos y la integración de funciones que conducen a la reducción del costo de los equipos de transmisión. Mayor rentabilidad : La transmisión de señales a través de fibras ópticas monomodo en la gama de 1300 a
1550 nm permite alcanzar distancias de hasta 100 Km sin regenerar la señal. Una sola fibra óptica a 2,5 Gbit/s posee una capacidad de 30 240 canales de usuario a 64 kbit/s.
Servicios de banda ancha : La capacidad de transmisión que ofrece la trama de la jerarquía SDH, permite la transmisión de señales de banda ancha.
Las redes de banda ancha pueden transportar señales de televisión de alta definición (HDTV), videoconferencias y otras aplicaciones digitales de alta velocidad y pueden conectarse a redes de área local (LAN), redes de área metropolitana (MAN) y a la Red Digital de Servicios Integrados de banda ancha (B-ISDN). También, la SDH está preparada para servir de base al Modo de Transferencia Asincrónico (ATM).

Capacidades mejoradas de operación, administración, mantenimiento (OAM) y de gestión de red : El empleo de canales auxiliares y bits de control normalizados permite la supervisión y mando a distancia de los elementos de red (NE :Network Element), localización de averías, etc, así como una gestión automática y centralizada de toda la red de transmisión.
Redes más flexibles : La utilización de equipos como los multiplexores de inserción/extracción (Add & Drop Multiplexers: ADM) y transconectores digitales (Digital Cross-Connect: DXC) posibilita la realización de redes mucho mas flexibles.
Por otro lado, debido a que la jerarquía SDH debe establecerse a partir de la red plesiócrona existente, hay que tener en cuenta ciertas dificultades que se presentan, sobre todo durante el período de instalación y de transición de PDH a SDH:
En primer lugar, existen ciertas incompatibilidades con las redes actuales. Los cross-connect o transconectores de las actuales redes PDH no son directamente compatibles con la SDH.
En segundo lugar, la planificación de una red flexible SDH es totalmente diferente a la planificación de una red PDH. Por ejemplo, los enlaces SDH son de alta velocidad, lo cual implica tener consideraciones especiales en cuanto al medio de transmisión para asegurar un determinado nivel de protección.
También, es necesario disponer de una estrategia adecuada de transición de PDH a SDH.
Durante el período de transición se produce un aumento en los costos de la administración de la red causado por la mezcla de equipos sincrónicos y plesiócronos.
Otro aspecto importante es la necesidad de una gestión de red eficiente (TMN: Telecommunications Managment Network) para sacarle el máximo provecho a la nueva jerarquía. La flexibilidad de los trayectos en las redes SDH solo puede aprovecharse correctamente con un buen sistema de gestión computarizado.
Finalmente, la tara de sección es excesivamente grande por criterios de compatibilidad que influyeron en que no se buscara ahorrar ancho de banda digital al definir las tramas, por lo que las tramas de SDH poseen un "overhead" muy grande. Esto no constituye ningún problema para la transmisión por fibra óptica, pero en la transmisión por radio impuso ciertas limitaciones que fueron solucionadas con los modems actuales.
La Recomendación G.707 del CCITT define las velocidades binarias de la SDH. En la siguiente tabla se muestran los niveles jerárquicos del estándar SDH y su homólogo norteamericano SONET.
El primer nivel de la jerarquía recomendada por el CCITT se denomina STM-1 (Synchronous Transport Module - first order) y posee una velocidad de 155,52 Mbit/s.
Las velocidades binarias de los niveles superiores de la jerarquía digital síncrona son múltiplos enteros de la velocidad binaria del primer nivel y dichos niveles superiores se denominan por el correspondiente factor de multiplicación de la velocidad del primer nivel (a diferencia de la jerarquía plesiócrona, donde la velocidad binaria de cada nivel es igual a la suma de la velocidad de los tributarios más la velocidad adicional requerida para información de trama y relleno).
También fue necesario adoptar una velocidad menor para los sistemas de transmisión basados en tecnologías radioeléctricas y de satélite que no están diseñados para transmitir señales STM-1.
En estos casos se adoptó la velocidad de 51 840 kbit/s equivalente al primer nivel de SONET (STS-1: Synchronous Transport Signal), aunque esta velocidad no representa ningún nivel de la SDH. Ya en la

actualidad los sistemas de transmisión por radio que emplean microonda digital pueden transmitir fácilmente la trama básica STM-1 de SDH.
STM-N (TRAMA SDH)
VELOCIDAD(KBIT/S)
STS-N (TRAMA SONET)
Transmisión por radio y satélite
51 840 STS-1
STM-1
155 520 STS-3
---------
466 560
STS-9
STM-4
622 080 STS-12
---------
933 120 STS-18
---------
1 244 160 STS-24
---------
1 866 240 STS-36
STM-16
2 488 320 STS-48
STM-64
9 953 280 STS-192
Figura 7 : Niveles jerárquicos de SDH y SONET
Actualmente los fabricantes ya están desarrollando equipos para operar a las mayores velocidades STM-64 y STS-192 .
2 . 1 Estructura de la trama SDH
El CCITT, en su Recomendación G.708, especifica los principios generales y la estructura de trama en la interfaz de nodo de red (NNI :Network Node Interface) para la jerarquía digital síncrona, describiendo las características lógicas de la interfaz mediante la estructura y el significado del flujo binario en la NNI, eliminando de esta forma los problemas de incompatibilidad entre redes.
Las características físicas, eléctricas y ópticas de la NNI están contenidas en las Recomendaciones G.703 y G.957. La trama SDH en su conjunto se denomina Módulo de Transporte Síncrono de orden N (MTS-N) o Synchronous Transport Module of N order (STM-N), donde N puede tomar los valores 1, 4 y 16 según el nivel jerárquico.
La estructura de trama STM-N se muestra en la siguiente figura. Nótese que el elemento más pequeño es el octeto:

Figura 8 : Estructura de trama STM-N
La figura rectangular es solamente un medio de representar la trama STM-N de manera compacta y ordenada. El dibujo en forma de matriz puede crear la idea errónea de que las líneas son transmitidas en paralelo.
En realidad, los bytes se transmiten secuencialmente en serie uno tras otro, de izquierda a derecha y de arriba hacia abajo, desde el primer byte de la primera fila hasta el último byte de la última fila.
Por ejemplo, en el caso de la trama STM-1 se transmiten 9 bytes de la tara de sección, luego otros 261 bytes de la carga útil y así sucesivamente. En cada octeto el bit más significativo (bit 1) está a la izquierda, y es el que se transmite primero.
En el presente capítulo se explica la trama primaria básica STM-1 por su relativa sencillez y representatividad frente a las tramas de orden superior STM-4 y STM-16.
La trama primaria STM-1 consta de 2430 octetos (270 columnas X 9 filas), tiene una duración de 125 µseg y se divide en tres sectores principales: -La tara de sección.
-El puntero de unidad administrativa.
-La carga útil o área de datos del usuario.
2.1.1 Tara de sección
Las filas 1 a 3 y 5 a 9 de las columnas 1 a 9 están dedicadas a la Tara de Sección (TS), en inglés Section OverHead (SOH). La tara de sección (SOH) incluye octetos con información de sincronismo de trama, gestión, identificación, etc.
Las filas 1 a 3 de la SOH (parte superior) se denominan Tara de Sección de Regeneración (TSR) o Regenerator Section OverHead (RSOH). Su contenido puede ser examinado y modificado por las estaciones terminales de una sección multiplex y por los regeneradores de línea.
Las filas 5 a 9 de la SOH (parte inferior) se denominan Tara de Sección de Multiplexación (TSM) o Mutiplexor Section OverHead (MSOH). Su información pasa de forma transparente a través de los regeneradores, y solo puede ser accedida en los nodos de red o terminales de sección multiplex.

En la figura se muestra la estructura y el contenido de la tara de sección (SOH) de una trama STM-1, según la Recomendación G.708:
Figura 9 : Estructura y contenido de la tara de sección
La existencia de tantos bytes "en blanco" se debe a la compatibilidad con el estándar SONET norteamericano. La trama básica de SONET es exactamente la tercera parte de la trama básica STM-1 de SDH, o sea, la trama STM-1 es compatible con la segunda jerarquía de la red SONET: STS-3.
Los octetos de la SOH tienen el siguiente significado:
-A1 (11110110) y A2 (00101000) : Octetos de alineación de trama. Cada elemento de red localiza la trama STM-1 a través de una secuencia repetitiva en la trama, que es la señal de alineación de trama, cuyo contenido es fijo. Las palabras de alineación de trama A1 y A2 se repiten tres veces por compatibilidad con SONET.
-C1 : Identificador de STM-1 en STM-N. Este byte designa individualmente cada una de las N tramas básicas STM-1 multiplexadas en una señal de línea STM-N. Como cada señal STM-N se obtiene por multiplexación síncrona de N tramas STM-1 por intercalado de bytes, en cada trama STM-N hay N bytes C1.
-B1: Octeto de paridad (BIP-8). Esta función es un código de paridad con entrelazado de bits 8 (PEB-8), o bit interleaved parity-8 (BIP-8). Se utiliza para la supervisión de errores en la sección de regenerador. Este byte contiene el resultado del cálculo de paridad vertical (longitudinal) efectuado sobre todos los bits de la trama STM-N anterior.
Todos los bytes de la trama STM-N anterior pasan por un registro que al final calcula una palabra de 8 bits, de forma tal que el número de bits “1” total en cada posición de la 1 a la 8 sea par. El cálculo se realiza después de la aleatorización de la trama anterior, y el octeto B1 se coloca antes de la aleatorización de la trama actual. El byte B1 es recalculado y analizado por todos los elementos de red, incluido los regeneradores, los cuales informan la detección de errores a los nodos en los extremos de la sección, a través del canal de usuario F1.
-E1, E2 : Canales de servicio. Estos octetos proporcionan canales de servicio para comunicaciones de voz y datos. El octeto E1 pertenece a la RSOH y puede ser accesado desde los regeneradores. El octeto E2 es parte de la MSOH y se puede tener acceso al mismo en los terminales de la sección multiplex. -F1 : Canal de usuario. El octeto F1 está reservado para ser utilizado por usuarios como los operadores de red.
-D1...D12 : Canales de comunicación de datos (CCD) para fines de gestión de red. Los canales de servicio digitales D1, D2 y D3 (en la RSOH) conforman un único canal de 192 kbit/s definido como un CCD de sección

de regenerador al cual se tiene acceso mediante una interfaz V.11 o G.703 desde todos los elementos de red. Los canales de servicio D4 a D12 (en la MSOH) conforman un único canal de 576 kbit/s definido como un CCD de sección de multiplexor, el cual puede ser accesado a través de una interfaz V.11 o G.703 desde los multiplexores.
-B2 : Octetos de paridad (PEB-Nx24). Los octetos B2 contienen un código de paridad con entrelazado de bits Nx24 (BIP-Nx24) similar al octeto B1 de paridad vertical par, y se utiliza para la supervisión de errores en la sección de multiplexor. La paridad BIP-Nx24 se calcula para todos los bits de la trama STM-N anterior, excepto las tres primeras filas de la SOH (RSOH) pues el contenido de estas filas puede ser alterado por los regeneradores intermedios y B2 solo es analizado en los extremos multiplexores.
El cálculo de paridad B2 es diferente al cálculo de paridad B1 ya que el octeto B1 es un solo byte para cualquier señal STM-N, mientras que los octetos B2 son tres bytes por cada señal STM-1. Para calcular B2, se hace una columna de grupos de tres bytes para cada trama STM-1, exceptuando la RSOH, y se calcula una palabra de paridad par similar al cálculo de B1, pero en este caso el resultado es una palabra de 24 bits (3 bytes) para cada trama STM-1. Este resultado se coloca en los octetos B2 antes de la aleatorización, y es compatible con el calculado por separado sobre tres señales STS-1 de SONET.
-K1, K2 : Canales de conmutación de protección automática (CPA) o Automatic Protection Switching (APS). Estos octetos se asignan para señalización y mando del sistema de protección que controla los equipos de reserva.
Específicamente, el octeto K2 transporta dos tipos de señales de mantenimiento de sección de multiplexación : la señal de indicación de alarma (AIS : Alarm Indication Signal) y la señal de fallo de recepción en el extremo distante (FERF : Far End Receive Failure).
La señal de indicación de alarma (AIS) es una señal que se envía hacia el destino para indicar que se ha detectado un fallo hacia el origen y se ha enviado la alarma. La AIS de sección de multiplexación se activa poniendo tres unos “111” en los bits 6, 7 y 8 del octeto K2 después de la desaleatorización.
El fallo de recepción en el extremo distante (FERF) de sección de multiplexación se utiliza para devolver una indicación al extremo transmisor de que el extremo receptor ha detectado un fallo de sección entrante o está recibiendo una AIS de sección. El FERF se indica con el código “110” también en las posiciones 6, 7 y 8 del octeto K2 después de la desaleatorización.
-Z1, Z2 : Canales de reserva. Estos octetos pueden tener distintas funciones según el fabricante.
-X : Octetos no aleatorizados, su contenido debe tratarse con precaución.
-N : Octetos reservados para uso nacional.
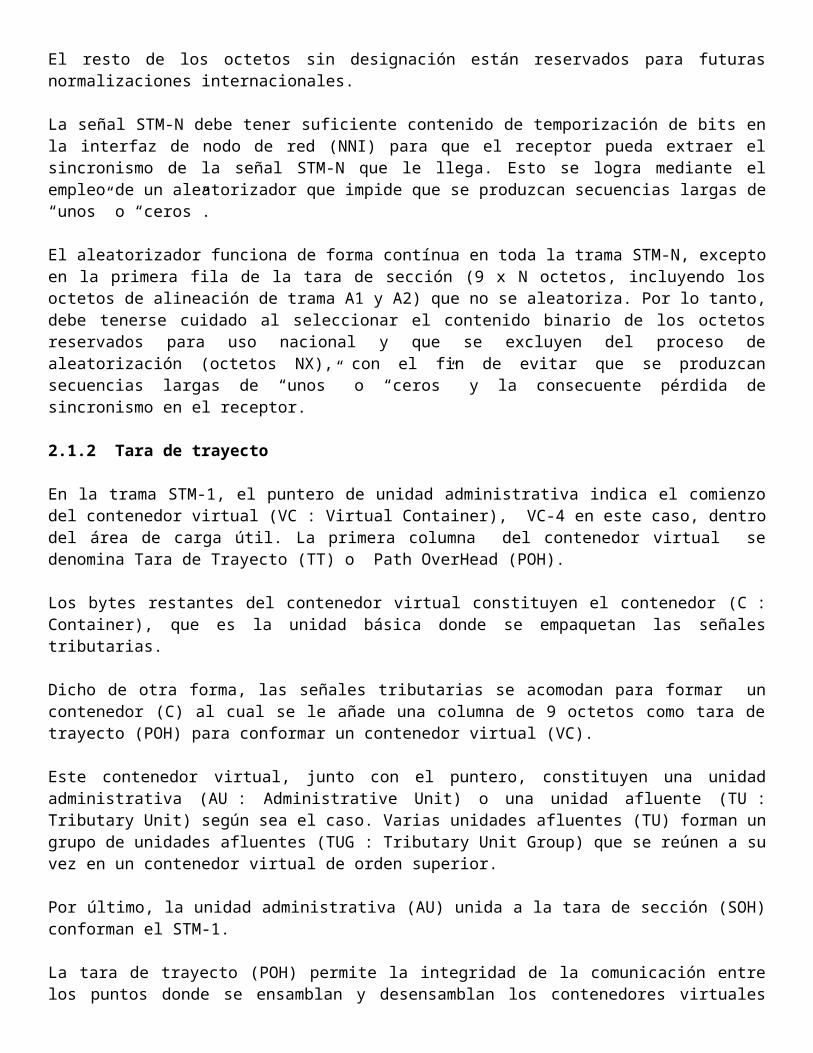
El resto de los octetos sin designación están reservados para futuras normalizaciones internacionales.
La señal STM-N debe tener suficiente contenido de temporización de bits en la interfaz de nodo de red (NNI) para que el receptor pueda extraer el sincronismo de la señal STM-N que le llega. Esto se logra mediante el empleo de un aleatorizador que impide que se produzcan secuencias largas de “unos” o “ceros”.
El aleatorizador funciona de forma contínua en toda la trama STM-N, excepto en la primera fila de la tara de sección (9 x N octetos, incluyendo los octetos de alineación de trama A1 y A2) que no se aleatoriza. Por lo tanto, debe tenerse cuidado al seleccionar el contenido binario de los octetos reservados para uso nacional y que

se excluyen del proceso de aleatorización (octetos NX), con el fin de evitar que se produzcan secuencias largas de “unos” o “ceros” y la consecuente pérdida de sincronismo en el receptor.
2.1.2 Tara de trayecto
En la trama STM-1, el puntero de unidad administrativa indica el comienzo del contenedor virtual (VC : Virtual Container), VC-4 en este caso, dentro del área de carga útil. La primera columna del contenedor virtual se denomina Tara de Trayecto (TT) o Path OverHead (POH).
Los bytes restantes del contenedor virtual constituyen el contenedor (C : Container), que es la unidad básica donde se empaquetan las señales tributarias.
Dicho de otra forma, las señales tributarias se acomodan para formar un contenedor (C) al cual se le añade una columna de 9 octetos como tara de trayecto (POH) para conformar un contenedor virtual (VC). Este contenedor virtual, junto con el puntero, constituyen una unidad administrativa (AU : Administrative Unit) o una unidad afluente (TU : Tributary Unit) según sea el caso. Varias unidades afluentes (TU) forman un grupo de unidades afluentes (TUG : Tributary Unit Group) que se reúnen a su vez en un contenedor virtual de orden superior.
Por último, la unidad administrativa (AU) unida a la tara de sección (SOH) conforman el STM-1.
La tara de trayecto (POH) permite la integridad de la comunicación entre los puntos donde se ensamblan y desensamblan los contenedores virtuales (VC). A lo largo de todo el trayecto, la tara de trayecto (POH) está unida a la información de usuario.
Existen dos tipos de tara de trayecto: -Tara de trayecto de orden superior (en los VC-3 y VC-4). -Tara de trayecto de orden inferior (en los VC-1 y VC-2).
La estructura de la tara de trayecto (POH) de orden superior (en los VC-3 y VC-4) se muestra a continuación:
Figura 10 : Estructura de la tara de trayecto de orden superior
Los nueve bytes de la tara de trayecto (POH) de orden superior cumplen varias funciones, según la Recomendación G.709:

-J1 : Traza de trayecto de VC-3 y VC-4. Este es el primer octeto del contenedor virtual (VC) y su ubicación se indica mediante el puntero. Este byte se utiliza para transmitir de forma repetitiva un identificador de trayecto de orden superior consistente en una secuencia que puede ser de 64 octetos o, conforme a la Recomendación E.164, de 16 octetos.
En las fronteras internacionales solo se emplea el formato de la Recomendación E.164 de 16 octetos, en el cual se incluye el resultado de un cálculo de CRC-7 sobre la trama anterior, entre otras cosas. El identificador de trayecto J1 le permite al terminal que recibe un trayecto verificar la continuidad de su conexión con el transmisor deseado.
-B3 : Octeto de paridad (PEB-8). Este octeto se asigna para la detección de errores de trayecto, y consiste en un código de paridad vertical par con entrelazado de bits 8 (BIP-8) similar al octeto B1 de la RSOH. El cálculo del BIP-8 de trayecto se efectúa antes de la aleatorización sobre todos los bits del VC-3 o VC-4 anterior, y se coloca en el octeto B3 del contenedor virtual (VC) en rigor también antes de la aleatorización.
-C2 : Etiqueta de señal o Identificador de carga del contenedor virtual (VC). Indica la composición de la carga útil del contenedor virtual (VC). Según el código hexadecimal que aparezca en este octeto, será el tipo de carga: no ocupado (sin equipar), ocupado con un tributario plesiócrono (34.368 kbit/s, 139.264 kbit/s, etc), ocupado con células ATM, etc.
-G1 : Estado del trayecto. Se utiliza para intercambio de informaciones tales como alarmas y errores remotos entre los extremos del trayecto de VC-4. Este octeto permite controlar el estado y funcionamiento del trayecto dúplex completo en cualquier punto del mismo, incluyendo los extremos.
Dentro del octeto G1 se transmiten dos señales de mantenimiento de trayecto : el error de bloque en el extremo distante (FEBE : Far End Block Error) y el fallo de recepción en el extremo distante (FERF) de trayecto.
Los bits 1 a 4 constituyen la señal de error de bloque en el extremo distante (FEBE), la cual indica la cantidad de bloques de paridad detectados con errores utilizando el código BIP-8 de trayecto (B3). Esta señal tiene nueve valores válidos (de 0 a 8) que indican la cantidad de bloques erróneos, los siete restantes valores se interpretan como cero errores.
El bit 5 transporta la señal de fallo de recepción en el extremo distante (FERF) de trayecto. Este bit se activa en “1” cuando se detecta una AIS de trayecto, un fallo de la señal o alguna otra discrepancia en el extremo receptor distante. La AIS de trayecto (de TU y AU) se especifica poniendo UNOS en toda la TU o AU, incluído el puntero correspondiente.
Los bits 6, 7 y 8 del octeto G1 no se utilizan. -F2: Canal de usuario del trayecto. Se asigna para fines de comunicación de usuario entre elementos de trayecto, para monitorización extremo a extremo.
-H4: Indicador de posición de multitrama. Este octeto se relaciona con el nivel más bajo de la estructura de multiplexación. Identifica la fase de trama del siguiente contenido útil de VC-3 y VC-4 cuando contienen unidades afluentes bajas que se repiten cada 500 µseg (cada 4 tramas STM-1). Su acción se ejemplifica en la figura 2.18 del epígrafe 2.2 de estructura de multiplexación.
-Z3: Canal de usuario de trayecto.
-Z4: Octeto de reserva sin definir.

-Z5: Octeto de operador de red. Este octeto está asignado para fines de gestión de red.
La tara de trayecto (POH) de los contenedores virtuales de orden inferior (VC-1 y VC-2) se denomina tara de trayecto (POH) de orden inferior y está constituida por un solo byte: V5.
El octeto V5 es el primero de la multitrama y su posición se indica en el puntero correspondiente. Este octeto comprende funciones de comprobación de errores, identificación de carga y estado de trayecto para los VC-1 y VC-2, de forma análoga a las funciones de la tara de trayecto de orden superior .
La asignación de bits del octeto V5 (POH de orden inferior) se ilustra en la figura :
Figura 11 : Estructura de la tara de trayecto de orden inferior
Los bits 1 y 2 se utilizan para el control de errores, mediante un código de paridad par BIP-2. El bit 1 completa la paridad par en todos los bits de posición impar dentro del VC-1 o VC-2 anterior, mientras que el bit 2 lo hace con los de posición par.
El bit 3 constituye la indicación de error en el extremo distante (FEBE) de trayecto de VC-1 / VC-2 que se activa en “1” y se envía hacia el transmisor si se detecta al menos un error mediante el BIP-2.
El bit 4 no se utiliza.
Los bits 5 a 7 transportan la etiqueta de señal de VC-1 / VC-2, cuyo valor indica la composición de la carga útil de los mismos (similar al octeto C2 de la POH de orden superior).
El bit 8 es una indicación de fallo de recepción en el extremo distante (FERF) de trayecto de VC-1 / VC-2. Este bit se activa en “1” si se está recibiendo una AIS de trayecto o una condición de fallo de señal.
2.1.3 Puntero
La cuarta línea de la trama STM-1 contiene el puntero de la unidad administrativa de cuarto orden (AU-4). Este puntero permite la alineación flexible y dinámica del contenedor virtual (VC) dentro del área de unidad administrativa (AU), para que el contenedor virtual (VC) pueda "flotar" dentro de la unidad administrativa (AU) absorbiendo las diferencias de fase entre ambos.
El puntero de AU-4 esta compuesto por octetos H1, H2 y H3, como muestra la figura:
1* : octetos todos UNOS Y : 1001SS11 (bits S sin especificar)

Figura 12 : Puntero de AU-4
La codificación del puntero se ilustra en la siguiente figura :
Figura 2.7 : Codificación del puntero de AU-4
El valor del puntero está contenido en los octetos H1 y H2, los cuales forman una palabra de 16 bits. Los últimos 10 bits (bit 7 a 16) forman un número binario que constituye el valor del puntero, el cual indica la posición del inicio del VC-4 (posición del octeto J1) dentro del área de carga AU-4, siendo esta posición la diferencia en incrementos de tres octetos entre las posiciones del último octeto del puntero y el primer octeto del VC-4.
De esta manera, la posición 0 es el primer byte que le sigue al puntero (fila 4, columna 10), la posición 1 es el cuarto byte después del puntero (fila 4, columna 13), y así sucesivamente. Luego, como el área de carga tiene 261 x 9 = 2349 bytes, existen 2349 / 3 = 783 posiciones, o lo que es lo mismo, el puntero toma valores binarios entre 0 y 782.
Los tres octetos H3 constituyen un área de carga extra que se utiliza como oportunidad de justificación negativa. La oportunidad de justificación positiva corresponde a la posición 0, es decir, a los tres bytes siguientes a los bytes H3.
La alineación del puntero puede ser necesaria en caso de variaciones de fase entre la red local y el tráfico internacional (entre los VC y la trama superior). Estos defasajes pueden ser producidos por variaciones del tiempo de propagación en el medio de transmisión, o por ramales de la red no sincronizados con el reloj.
Si la velocidad de trama del VC-4 es más lenta que la de la AU-4 generada localmente donde debe ser copiado, la alineación del VC-4 debe retroceder, incrementándose en uno el valor del puntero. Esta operación se realiza cuando el defasaje acumulado alcanza 24 bits (3 octetos).
El incremento del puntero se indica mediante la inversión de los cinco bits I de la palabra del puntero para permitir una votación de mayoría de cinco bits en el receptor, avisándole que aparecerán tres octetos de justificación positiva (que no contienen información) inmediatamente después del ultimo octeto H3 de la trama que contiene los bits I invertidos. Los punteros de las próximas tramas tendrán el nuevo valor resultado del incremento en uno, correspondiente a la nueva posición del inicio de los VC-4.
El proceso de incremento de punteros (justificación positiva) se muestra en la figura :

Figura 13 : Proceso de incremento de punteros
Si por el contrario, la velocidad de trama del VC-4 es mayor que la de la AU-4, la alineación del VC-4 debe avanzar, decrementándose el valor del puntero. Esta operación también se realiza cuando el desfasaje acumulado alcanza 24 bits (3 octetos).
El decremento del puntero se indica mediante la inversión de los cinco bits D de la palabra del puntero para permitir una votación de mayoría de cinco bits en el receptor, avisándole que aparecerán tres octetos de justificación negativa (que contienen información del VC-4) en el área de los bytes H3 de la trama que contiene los bits D invertidos.
Los punteros de las próximas tramas tendrán el nuevo valor resultado del decremento en uno, correspondiente a la nueva posición del inicio de los VC-4.
El proceso de decremento de los punteros se muestra en la próxima figura.
En ambos casos (incremento y decremento), el puntero solo puede ser modificado tras previo aviso cada cuatro tramas, y en las tres tramas intermedias el valor del puntero debe permanecer constante, lo cual significa que se permiten como máximo 2 000 acciones de puntero por segundo.Los cuatro primeros bits (1 a 4) de la palabra del puntero constituyen la Bandera de Nuevos Datos (BND) o New Data Flag (NDF). Esta bandera permite un cambio arbitrario del valor del puntero debido a un cambio del contenido útil.
La operación normal de la NDF se indica mediante el código “0110” , y se activa invirtiendo sus bits a “1001” para indicar un proceso de nueva sincronización que concluye cuando el extremo receptor reconoce el valor del puntero durante cuatro tramas. La NDF solo aparece activada en la primera trama que contiene los nuevos valores.
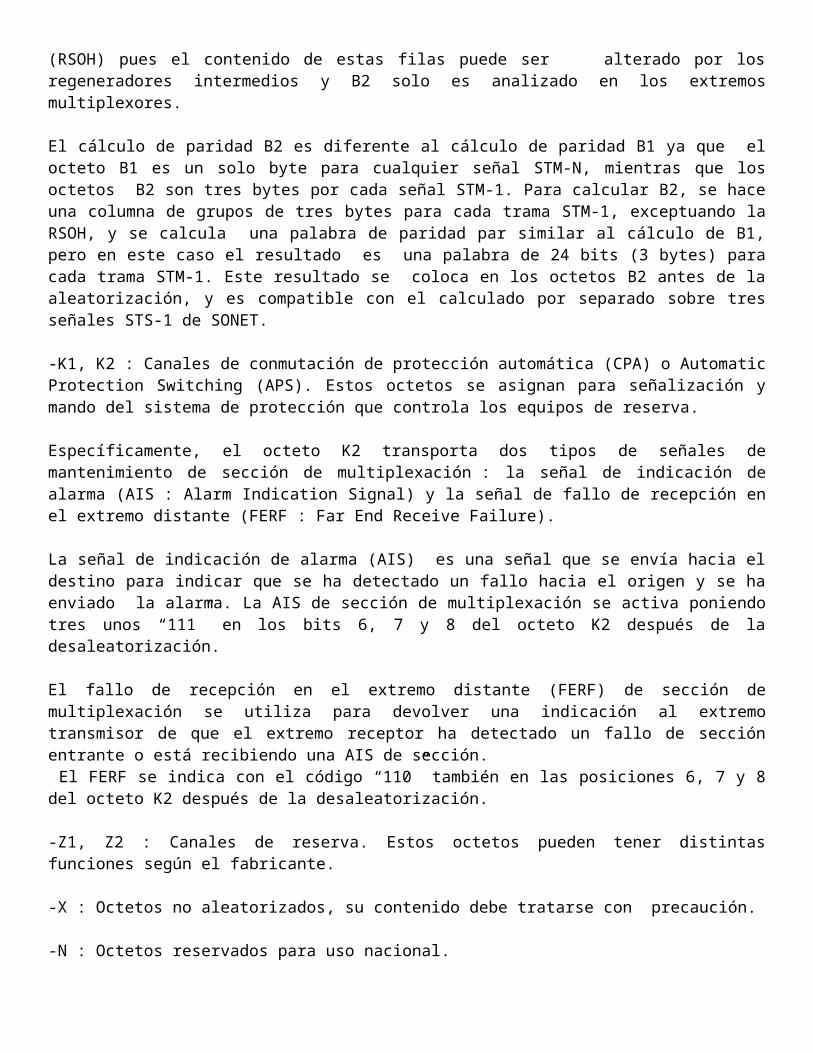
Figura 14 : Proceso de decremento de punteros
Los bits S asumen el valor fijo “10” excepto en la indicación de concatenación y de puntero nulo, donde toman valores no especificados (Para más información ver Recomendación G.709 del CCITT).
También puede emplearse una estructura encadenada de punteros : el puntero de AU-4 indica el comienzo del VC-4, y dentro del VC-4 hay otros punteros en lugares fijos marcando el comienzo de los tributarios de menor orden.
De esta manera es posible insertar libremente canales de datos en la trama STM-1, pues la técnica de puntero permite localizar y accesar directamente a cada canal de datos en todas las tramas STM-1 sin necesidad de multiplexar / demultiplexar hasta los niveles inferiores.
El puntero de las unidades afluentes (TU) es similar al de la AU-4 y está compuesto por los octetos V1, V2, V3 y V4.
Los octetos V1 y V2 se definen de forma análoga a los octetos H1 y H2, formando una palabra de puntero de 16 bits. De la misma forma, el octeto V3 y el adyacente a este constituyen la oportunidad de justificación negativa y positiva respectivamente, pero en este caso es un solo byte de justificación en vez de tres.
La principal diferencia entre ambos punteros radica en que los bytes V1, V2, V3 y V4 (este último de uso reservado) que conforman el puntero de las TU se repiten cada 500 µseg (al igual que la trama TU-12), y por consiguiente, dicho puntero tarda cuatro tramas VC-4 en completarse, de tal manera que en cada trama VC-4 solo se coloca un octeto Vn.
También, el puntero de las TU contienen un número que indica donde se encuentra el inicio de la trama del VC-12 (byte V5) dentro del campo de carga útil.
2.2 Estructura de multiplexación síncrona de la jerarquía SDH
La Recomendación G.709 del CCITT define la estructura de multiplexación síncrona a partir de los afluentes plesiócronos descritos en la Recomendación G.702. Estos afluentes aparecen asociados a los contenedores C-x
correspondientes tal y como se muestra en la siguiente figura (también pueden incluirse otras señales, como por ejemplo ATM):
Figura 15 : Estructura de multiplexación síncrona según el CCITT (SDH y SONET)
Este esquema abarca la estructura de multiplexación del ETSI (European Telecommunications Standard Institute) consistente en el SDH basado en la jerarquía PDH europea de velocidad primaria 2048 kbit/s, y la estructura de multiplexación SONET basada en la jerarquía PDH norteamericana de velocidad primaria 1 544 kbit/s.
La estructura de multiplexación del CCITT en su conjunto, evidencia la interrelación existente entre el estándar SDH europeo y el SONET norteamericano, y es una muestra del esfuerzo realizado por establecer una norma única donde coexistan ambas jerarquías síncronas : SDH y SONET.
Nosotros haremos mayor énfasis en la norma del ETSI, pues la jerarquía PDH más proliferada en el mundo es la europea (2 048 kbit/s), además de ser más general y mejor pensada. La estructura de multipleaxación síncrona según el ETSI es la siguiente :
Figura 16 : Estructura de multiplexación síncrona según el ETSI (SDH)
En esta metodología, la trama STM-1 está compuesta por una unidad administrativa de cuarto orden (AU-4) más la tara de sección (SOH).
Como ya se conoce, dicha unidad administrativa (AU-4) se divide en un puntero de AU-4 y en un contenedor virtual de cuarto orden (VC-4), el cual puede transportar una señal tributaria PDH de 140 Mbit/s, o puede estar

subdividida en tres áreas iguales de carga intercaladas byte a byte, llamados grupos de unidades tributarias de tercer orden (TUG-3).
Cada TUG-3 puede contener una unidad tributaria de tercer orden (TU-3) o seguir subdividiéndose en siete grupos de unidades tributarias de segundo orden (TUG-2), las cuales a su vez se subdividen en tres unidades tributarias de primer orden / segunda velocidad (TU-12).
De esta forma, el TUG-3 se subdivide en 21 TU-12 intercalados byte a byte, cada una de las cuales tiene un puntero individual (formado por los octetos V1, V2, V3 y V4) que indica la posición del comienzo (octeto V5) del contenedor virtual de primer orden / segunda velocidad (VC-12) dentro de su respectivo espacio de carga.
El VC-12, por su parte, está compuesto por la tara de trayecto (POH) de orden inferior (octeto V5) y el contenedor de primer orden / segunda velocidad (C-12) que puede transportar una señal tributaria PDH de 2048 kbit/s o incluso, canales individuales de N x 64 kbit/s.
En caso que el grupo de unidades tributarias de tercer orden (TUG-3) contenga una unidad tributaria de tercer orden (TU-3), la primera columna del TUG-3 estaría ocupada por un puntero (H1, H2 y H3) que indicaría el comienzo del contenedor virtual de tercer orden (VC-3) dentro del área de carga del TUG-3. El VC-3 y la TU-3 tienen el mismo tamaño y el primero está contenido dentro del segundo, por lo que la TU-3 se considera como un espacio de carga sólido.
El VC-3 está compuesto por una tara de trayecto (POH) de orden superior y un contenedor de tercer orden (C-3) capaz de transportar una señal PDH de 34 Mbit/s o una de 45 Mbit/s correspondiente a la jerarquía norteamericana.
En la estructura de multiplexación SONET, el área de carga de la trama básica STM-1 está subdividida en tres áreas de carga intercaladas byte a byte, llamadas unidades administrativas de tercer orden (AU-3). En este caso existen tres punteros, cada uno asociado a un área de carga.
La AU-3 consta de un contenedor virtual de tercer orden (VC-3) formado por un área de carga y una tara de trayecto (POH) de orden superior, de manera similar al VC-4. Dicha área de carga puede estar formada a su vez por un contenedor de tercer orden (C-3) similar al de la norma ETSI, o subdividirse en siete grupos de unidades tributarias de segundo orden (TUG-2) compuestas cada una por una unidad tributaria de segundo orden (TU-2).
Cada TU-2 contiene un puntero y un contenedor virtual de segundo orden (VC-2) que porta un contenedor de segundo orden (C-2) capaz de transportar señales PDH de 6 Mbit/s.
Los TUG-2 también pueden subdividirse en cuatro unidades tributarias de primer orden / primera velocidad (TU-11) con sus respectivos punteros. Las TU-11, además de los punteros, constan de un contenedor virtual de primer orden / primera velocidad (VC-11), formado por una tara de trayecto (POH) de orden inferior y un contenedor de primer orden / primera velocidad (C-11) con capacidad para transportar una señal PDH de 1 544 kbit/s.
Para formar los niveles superiores STM-N, los grupos de unidades administrativas (AUG) se multiplexan mediante un simple entrelazado de octetos.
2.2.1 Ajuste de un tributario PDH de 140 Mbit/s dentro de una trama VC-4
Para acomodar un tributario PDH de 140 Mbit/s dentro de una trama VC-4, cada línea del VC-4 se divide en 20 bloques de 13 octetos cada uno, de los cuales 12 octetos son de información en cada bloque, y el octeto restante puede ser del tipo W, X, Y o Z como muestra la figura (la figura abarca una sola fila del VC-4) :

Figura 17 : Ajuste de un tributario de 140 Mbit/s dentro de un VC-4
Los 5 bits de control C (uno en cada octeto X) indican si se transmite información o justificación en la posición S del byte Z. En cada línea del C-4 hay 8 bits I del byte W + 20 bloques de 96 bits I (12 octetos x 8 bits) + 6 bits I del byte Z + 1 bit S del byte Z, es decir, de 1 934 a 1 935 bits de información por línea, lo cual brinda una capacidad de 139 248 kbit/s a 139 320 kbit/s. Cada bit S ocupado con información representa un incremento de 8 kbit/s en la velocidad del tributario. Si el tributario PDH tiene exactamente 139 264 kbit/s (16 kbit/s por encima de la capacidad mínima), se ocuparán 2 de las 9 oportunidades (pues recuerde que solo hemos representado una fila del VC-4).
Este proceso de justificación es muy parecido al empleado en tramas PDH. La sucesión irregular de los bits de relleno provoca un cierto jitter de tiempo de espera con una envolvente de baja frecuencia. En el caso de la SDH, ese jitter se llama jitter de mapeo o jitter de justificación.
2.2.2 Multiplexación de tres TUG-3 en un VC-4
El C-4 tiene una estructura de 260 columnas x 9 filas, y el área de carga (260 columnas) no es divisible entre tres, por lo que las dos primeras columnas del área de carga son de relleno fijo. Las restantes 258 columnas se dividen en tres TUG-3 intercalados byte a byte, cada uno con 86 columnas x 9 filas, como se muestra en la figura :
Figura 18 : Multiplexación de tres TUG-3 en un VC-4

2.2.3 Multiplexación de siete TUG-2 en un TUG-3
Las dos primeras columnas del TUG-3 son de relleno, y los tres primeros bytes de la primera columna (que serían ocupados por el puntero : H1, H2 y H3) están ocupados por una indicación de ausencia de puntero (NPI : Null Pointer Indication), pasando a llamarse con las letras mayúsculas griegas : ípsilon, omega y lambda. Esta NPI puede servir para distinguir los TUG-3 que contienen TUG-2 de los que contienen TU-3.
En las restantes 84 columnas del TUG-3 se intercalan byte a byte los siete TUG-2 de 12 columnas x 9 filas cada uno (84 / 7 = 12). La estructura de multiplexación correspondiente se muestra en la figura :
Figura 19 : Multiplexación de siete TUG-2 en un TUG-3
2.2.4 Multiplexación de tres TU-12 en un TUG-2
Las 12 columnas del TUG-2 son exactamente divisibles entre tres, por lo que cada TU- 12 ocupa 4 de las 12 columnas del TUG-2. El tamaño de una TU-12 es de 4 columnas x 9 filas, es decir, 36 bytes por trama de VC-4.
El primer byte de cada TU-12 está ocupado por uno de los cuatro octetos V1, V2, V3 o V4 del puntero de las TU-12, de manera que cada trama VC-4 de 125 µseg solo transporta uno de los bytes Vn del puntero, completándose un puntero cada cuatro tramas (500 µseg). Este puntero indica el inicio del VC-12.
En la siguiente figura se ilustra la multiplexación de tres TU-12 :

Figura 20 : Multiplexación de tres TU-12 en un TUG-2
2.2.5 Formación del TUG-3 a partir del TU-3
La TUG-3 de 86 columnas formada a partir de un TU-3 tiene la primera columna ocupada con relleno fijo, excepto los tres primeros octetos, donde se encuentran los bytes H1, H2 y H3 del puntero de la TU-3, a diferencia de cuando se forma partiendo de siete TUG-2, en cuyo caso existiría una indicación de NPI.
El VC-3 (85 columnas x 9 filas) tiene el mismo tamaño que la TU-3. La primera columna del VC-3 está constituída por la tara de trayecto (POH) de orden superior de VC-3, y en las 84 columnas restantes (C-3) se acomoda un tributario de 45 o 34 Mbit/s mediante un proceso de justificación similar al empleado en el VC-4 para acomodar señales de 140 Mbit/s.
La palabra del puntero contenida en los octetos H1 y H2 indica el comienzo del VC-3 (dado por la posición del octeto J1 de la POH respecto al octeto H3) dentro del área de carga útil del TUG-3.
La formación del TUG-3 a partir de un TU-3 se muestra a continuación :
Figura 21 : Formación del TUG-3 a partir del TU-3

2.2.6 Multiplexación de 63 TU-12 en un VC-4
Debido a la subdivisión de un VC-4 en 3 TUG-3, de cada TUG-3 en 7 TUG-2 y de cada TUG-2 en 3 TU-12, se obtiene como resultado que dentro del VC-4 pueden multiplexarse hasta 63 señales TU-12.
Luego, el VC-4 puede estar formado por TUG-3 subdivididas en TUG-2 (para transportar VC-12) o por TUG-3 configuradas como TU-3 (para transportar VC-3).
Es importante señalar que una trama TU-12 se completa cada cuatro tramas VC-4, es decir, cada 500 µseg.
En la siguiente figura se ilustra la multiplexación de 63 TU-12 en un VC-4 :
Figura 22 : Multiplexación de 63 TU-12 en un VC-4
Las dos primeras columnas del C-4 son de relleno fijo (ver figura 2.13). Las seis columnas siguientes son de relleno de los TUG-3, siendo dos de cada TUG-3, incluyendo las indicaciones de ausencia de puntero NPI . En el resto del área de carga se entrelazan cíclicamente cuatro columnas de cada uno de las 63 TU-12.
2.2.7 Estructura del TU-12
Como se explicó anteriormente, la trama TU-12 se completa cada cuatro tramas VC-4 (2000 veces por segundo), al igual que el puntero correspondiente. El número del puntero (V1, V2, V3 y V4) indica la posición del octeto V5 (POH del VC-12) dentro del área de carga respecto al octeto V2.
La TU-12 tiene 4 columnas x 9 filas = 36 bytes por trama VC-4, y en total : 36 bytes por trama x 4 tramas = 144 bytes, de los cuales cuatro pertenecen al puntero (V1, V2, V3 y V4) y los restantes 140 constituyen el VC-12 o espacio de carga, por lo que el puntero puede tomar valores entre 0 y 139. La posición 0 es la que sigue al octeto V2. Este puntero se utiliza para justificación de frecuencia de la misma forma que los punteros vistos anteriormente.
En la figura se muestra la estructura de una trama completa TU-12 :

Figura 23 : Estructura de una trama completa TU-12
2.2.8 Ajuste asíncrono y síncrono de bits de un tributario PDH de 2048 Kbit/s en un VC-12
El TU-12 se compone de un puntero (V1, V2, V3 y V4) y de un VC-12 cuya longitud es igual a la del área de carga de la TU-12. El VC-12 tiene 140 bytes cada 500 µseg y 35 bytes cada 125 µseg (8 000 veces por segundo).
La señal tributaria PDH de 2 048 kbit/s tiene 32 bytes por trama de 125 µseg, quedando tres bytes sobrantes por trama cada 125 µseg. La figura 24 muestra los dos tipos de correspondencia que existen en este caso.
En el mapeo plesiócrono (correspondencia asíncrona), la última trama contiene 31 bytes más 7 bits de información y dos bits S (S1 para relleno negativo y S2 para relleno positivo).
En el mapeo síncrono bit a bit (correspondencia síncrona), las señales PDH de 2 048 kbit/s están sincronizadas con los VC-12 (a través del mismo reloj maestro), por lo que no se necesita justificación. Sin embargo, para lograr compatibilidad con elementos que no entiendan el mapeo síncrono, las posiciones de los bits de control de justificación negativa C1 se fijan en “1” indicando que la posición antes ocupada por S1 es relleno, y los de control de justificación positiva C2 se fijan en “0” para indicar que la posición antes ocupada por S2 contiene información.

I : bit de información S : bit de oportunidad de justificación O : bit de tara. (S1 :negativa, S2 :positiva). C : bit de control de justificación R : bit de relleno fijo. (C1 :negativa, C2 :positiva).
Figura 24 : Ajuste asíncrono y síncrono de bits de un tributario de 2 048 kbit/s en un VC-12
2.2.9 Ajuste síncrono de octetos de un tributario PDH de 2 048 Kbit/s en un VC-12
Los elementos de red (NE) como los multiplexores de inserción / extracción (ADM) y los transconectores digitales (DXC) ofrecen un nuevo tipo de mapeo : el mapeo síncrono byte a byte, con modalidad de VC-12 flotante o fija, tal como se ilustra en la figura 2.20.
En modo flotante el VC-12 puede comenzar en cualquier posición, la cual se indica con el puntero.
En modo fijo el puntero siempre indica la posición 0, que es donde comienza el VC-12. Este modo se utiliza en trayectos donde todas las señales primarias permanecerían juntas dentro del VC-4 hasta el final, sin derivaciones, excepto los canales de N x 64 kbit/s.
En ambos modos (flotante y fijo) el elemento de red (NE) no necesita buscar la señal de alineación de trama (FAS) para tener acceso a los canales de 64 kbit/s, pues la posición de los mismos es fija respecto al inicio del VC-12. También se prevé una posición (R*) que puede recibir la señal correspondiente al intervalo de tiempo 0 (FAS) para lograr compatibilidad con los NE que necesitan esta señal. De la misma forma, hay un byte entre los canales 15 y 16 que puede recibir la señal del intervalo de tiempo 16 (señalización asociada a canal) para los equipos que la necesiten.

Figura 25 : Ajuste síncrono de octetos de un tributario de 2 048 kbit/s (30 canales con señalización asociada a canal) en un VC-12.
3.- EQUIPOS UTILIZADOS EN LAS REDES SDH
Las ventajas introducidas por la jerarquía digital síncrona SDH permiten la evolución de las redes de transmisión hacia estructuras más flexibles, con capacidad de reconfiguración dinámica y funciones de monitoreo y control gobernadas por un sistema eficiente de gestión.
El temprano reconocimiento de la importancia de las normas SONET y SDH ha impulsado la fabricación de toda una familia de sistemas de acceso, transporte y gestión de redes, los cuales constituyen los elementos básicos de la venidera infraestructura de telecomunicaciones de banda ancha.
Según las distintas aplicaciones, se definen varios tipos de equipos : los transconectores digitales (Digital Cross-Connect Systems : DXC), los multiplexores terminales, los multiplexores de inserción / extracción (Add / Drop Multiplexers : ADM) y los regeneradores intermedios. También existen equipos de monitoreo y supervisión para controlar el estado de la red.
3.1 Sistemas transconectores digitales
Los transconectores digitales (Digital Cross-Conect : DXC) son conmutadores de canales con conexiones semi-permanentes caracterizados por una conmutación totalmente transparente.
La flexibilidad de los sistemas DXC lo convierten en uno de los principales equipos a emplear en las redes SDH, pues contribuyen a lograr una operación más eficiente de las redes de telecomunicaciones y brindan una gran capacidad de conmutación para la configuración y restauración de la red.
Los DXC pueden conmutar señales de las jerarquías plesiócronas y síncronas, sirviendo en una primera fase como interconexión entre ambos tipos de redes, y posteriormente, como nodos inteligentes.
Los sistemas transconectores digitales poseen las siguientes propiedades básicas de las redes de conmutación :
1. Independencia de señal :La red de conmutación puede transconectar señales de cualquier jerarquía, considerándose solamente la capacidad límite que admite el conmutador.

2. Ausencia de bloqueo : Siempre es posible conectar cualquier entrada con cualquier salida, independientemente del ancho de banda de la señal. Incluso una entrada puede conectarse simultáneamente a varias salidas, como por ejemplo, en el caso de distribución de televisión.
3. Ciclicidad : Todos los tributarios se repiten periódicamente en las posiciones fijadas en cada trama de 125 µseg. Por ejemplo, una determinada señal de 2 Mbit/s transportada en otra señal STM-1 de 155 Mbit/s se encuentra en posiciones fijas específicas en cada trama STM-1.
4. Sincronismo : Todas las señales paralelas tienen exactamente la misma frecuencia. La combinación de sincronismo y ciclicidad brinda la posibilidad de localizar cualquier canal a través de la red, permitiendo la manipulación de señales de todas las jerarquías y el intercambio fácil de la información de diferentes señales paralelas.
El DXC, aunque es un conmutador, se diferencia del conmutador telefónico ordinario en varios aspectos :
El DXC es controlado por comandos de un sistema operativo o de un operador y no por información de control transportada en las señales transmitidas.
Las conexiones de los DXC pueden mantenerse durante días y semanas, mientras que el conmutador telefónico solo las mantiene minutos.
El ancho de banda de las señales conmutadas en el DXC está en el orden de 1,5 - 155 Mbit/s, (capacidad STM-1), mientras en el telefónico es de 64 kbit/s.
El DXC debe preservar la temporización de las señales que pasan por el sistema (transparencia). La información de temporización de cada canal debe transportarse a través de todo el sistema y se recupera a la salida del mismo.
En la figura se muestra la estructura general de un transconector digital :
Figura 26 : Estructura general de un transconector digital
El transconector posee una matriz de conmutación sin bloqueo y una memoria para almacenar una determinada cantidad de configuraciones de transconexiones. El cambio de una configuración a otra es instantáneo al recibirse la instrucción adecuada, lo cual permite que se establezcan o reserven nuevos circuitos de forma inmediata.

Un solo circuito se puede compartir entre varios clientes de manera programada, para hacer un uso óptimo de la capacidad de enlace. Así mismo, es posible agrupar varios circuitos en una subred más pequeña y fácil de controlar.
La capacidad del transconector para encaminar circuitos, simplemente tecleando la información adecuada en el teclado del sistema de gestión de red, permite la optimización frecuente del flujo de tráfico. Esto puede hacerse de acuerdo con las variaciones de tráfico en enlaces específicos según el período del día o del año (los períodos vacacionales, por ejemplo, generan a menudo un flujo de tráfico totalmente diferente), o a causa de una posible avería en la red.
La transición hacia la red totalmente síncrona se puede implementar progresivamente gracias a la capacidad del transconector de poder trabajar con cualquier tipo de señal, ya sea síncrona STM-1 o plesiócrona de 2, 34 y 140 Mbit/s entre sus puertos. Actualmente se incluyen terminales ópticos en los transconectores para operar a los niveles STM-4 y STM-16.
La flexibilidad de estos sistemas proporciona a los operadores un modo más económico de explotación de la red de interconexión. Los transconectores forman parte de los sistemas de protección automáticos que continúan funcionando en caso de un fallo en la red, minimizando la pérdida de servicio y su impacto económico. 3.2 Sistemas multiplexores terminales
Los multiplexores terminales son equipos que pueden entramar señales afluentes de la jerarquía plesiócrona en una señal STM-N, o también pueden multiplexar un cierto número de señales STM-1 en una señal STM-N.
En el primer caso, se trata de un multiplexor de frontera entre la jerarquía PDH y la SDH. Este multiplexor mapea las señales PDH dentro de los contenedores virtuales según corresponda (VC-12, VC-3 o VC-4), los cuales a su vez son transportados en la trama STM-N empleando la estructura de multiplexación establecida.
La asignación de las señales PDH hacia cierta área de carga de la señal STM-N puede realizarse de forma libre y programable, lo cual permite el uso inteligente de este tipo de multiplexores para realizar el enrutamiento dinámico de los tributarios PDH dentro de la red de transporte SDH.
Como se mencionó anteriormente, los multiplexores terminales también pueden combinar una determinada cantidad de señales STM-1 para formar una señal STM-N de orden superior. La trama STM-N se genera a partir de varias tramas locales STM-1 síncronas y en fase.
La figura 27 representa la estructura de un multiplexor terminal.
Hasta ahora, por fibra óptica solo se considera la transmisión simplex, por lo que se requiere de un mínimo de dos fibras para la transmisión bidireccional entre dos puntos.
El conversor de código (CMI / NRZ) convierte las señales plesiócronas CMI en señales NRZ (este bloque solo se utiliza si se está trabajando con señales PDH). Las señales obtenidas se multiplexan y aleatorizan (la parte receptora del multiplexor terminal realiza las mismas funciones, pero inversamente).

Figura 27 : Estructura de un multiplexor terminal
El proceso de multiplexación consiste en intercalar los bytes de los procesos STM-1 agregando el byte B1 (el cual es calculado una única vez para toda la trama STM-N) y los respectivos bytes C1, además de designar solamente los canales de servicio correspondientes al primer STM-1 del STM-N.
También, en este proceso de multiplexación puede programarse la posición de cada una de las señales tributarias síncronas o plesiócronas dentro de la trama STM-N. Es importante señalar que en todas las operaciones de los multiplexores terminales se consideran los punteros.
La señal eléctrica STM-N se convierte en señal óptica mediante un diodo láser de realimentación distribuída. La señal de línea óptica NRZ aleatorizada formada por los multiplexores terminales se transmite, modernamente, a través de fibra óptica monomodo con una longitud de onda de 1310 nm o 1550 nm.
Estos sistemas pueden combinarse con equipos conmutadores de protección automática, los cuales, en caso de fallo del sistema activo, conmutan automáticamente las señales de línea hacia otro sistema de transmisión de reserva.
3.3 Sistemas multiplexores de inserción / extracción
Los multiplexores de inserción / extracción (Add / Drop Multiplexers : ADM) como su nombre lo indica, pueden insertar y extraer señales tributarias individuales de un flujo binario determinado y configurarlas de forma flexible a la velocidad requerida.
La estructura de un multiplexor ADM se ilustra a continuación :

Figura 28 : Estructura de un multiplexor de inserción / extracción ADM
Los multiplexores ADM poseen dos interfaces bidireccionales STM-N que les permiten operar hacia ambos lados de un anillo SDH, así como una puerta baja también bidireccional, para inserción y extracción de señales tributarias, equipada con interfaces para señales plesiócronas (1.5 - 2 Mbit/s, 34 Mbit/s y/o 140 Mbit/s) o síncronas STM-1 a 155 Mbit/s.
Se pueden configurar varios ADM como una red en anillo o punto a punto. Debido a que la señal STM-N se sincroniza a lo largo de toda la red, la extracción e inserción de señales se simplifica mucho. Las señales destinadas a un terminal específico pueden ser añadidas y extraídas a un STM-N sin demultiplexar toda la señal, lo cual aumenta la calidad de la señal y la fiabilidad de la red.
Las características de autodiagnóstico del ADM permiten que varios se puedan configurar en forma de anillo autorreparable dinámicamente. Si alguno de los enlaces se perdiera, el equipo detecta instantáneamente el fallo y reencamina de nuevo el tráfico en la red por medio de un circuito de reserva, asegurando un servicio ininterrumpido.
En los multiplexores ADM también se puede programar la asignación de las señales tributarias al área de carga de un contenedor virtual (VC) localizado en cierta unidad tributaria (TU) o administrativa (AU) de una de las dos interfaces STM-N. Igualmente, es posible programar el seguimiento de los VC que no son accedidos en ese nodo del anillo.
Por lo tanto, en la configuración del nodo de red, el operador de red debe programar la conexión bidireccional transparente de ciertos VC entre los puertos STM-N a la izquierda y a la derecha, y la inserción / extracción de los que son conducidos a la puerta baja de derivación. También, los sistemas multiplexores ADM procesan los punteros, corrigiéndolos si es necesario.
3.4 Sistemas regeneradores intermedios
Los regeneradores son equipos bidireccionales que reproducen las señales que llegan atenuadas y distorsionadas por la dispersión en amplitud y fase.
Sus funciones transmisoras son realizadas por bloques similares a los de los multiplexores terminales : la señal óptica de línea recibida se convierte en una señal eléctrica y se demultiplexa en señales STM-1, las cuales son

regeneradas. Las señales regeneradas se vuelven a multiplexar para formar una señal eléctrica que es convertida nuevamente en la señal óptica de línea.
Estos equipos derivan la señal de reloj de las señales recibidas, y se sincronizan mediante el procesamiento de los octetos A1, A2 y C1 de la tara de sección de regenerador (RSOH).
Además, para recibir información, los regeneradores extraen de la RSOH los canales de servicio E1 y F1, así como el canal de comunicación de datos a 192 kbit/s formado por los octetos D1, D2 y D3, con la posibilidad de volver a transmitir información en todos ellos. De forma similar, los regeneradores también extraen el octeto de paridad B1, lo verifican, y lo vuelven a generar, lo cual permite la supervisión de fallos como la ausencia de señal o la pérdida de sincronismo. Incluso en el caso de que ocurran alguno de estos fallos, los propios regeneradores síncronos generan una trama ordinaria STM-N para mantener en funcionamiento el sistema. En los regeneradores no se procesan los punteros ni el resto de los datos aleatorizados.
En principio, todos los trayectos de transmisión son idénticos en cualquier nivel jerárquico, aunque en la red local los regeneradores no son normalmente necesarios en transmisiones por fibra óptica, al igual que en la red interurbana hasta distancias de 100 km aproximadamente.