modelo - nautical de seguridad ... 5.1 unidad de presentación/procesador panel: n3.0 newtone nº 5...
TRANSCRIPT
COMPAS SATELITARIO THD
MODELO SC-50
MANUAL OPERADOR

Su Agente/Vendedor Local
C/ Francisco remiro 2-B28028 Madrid, España
Teléfono : + 34 91 725 90 88Fax + 34 91 725 98 97::
PRIMERA EDICION : FEB. 2004Imprimido en JapónA3 :: JUL. 21, 2004
PUB.No. OMS-72510
(( J. M )) SC-50
FURUNO ESPAÑA S.A
Todos los derechos reservados
!!!!!
!!!!! !!!!!
i
MEDIDAS DE SEGURIDAD
ADVERTENCIAADVERTENCIAEfectuar la instalación con la alimenta-
ción desconectada.
Riesgo de incendio o descarga eléctrica.
Instalar el equipo a salvo de salpicaduras
de agua y de la lluvia.
Riesgo de incendio o descarga eléctrica.
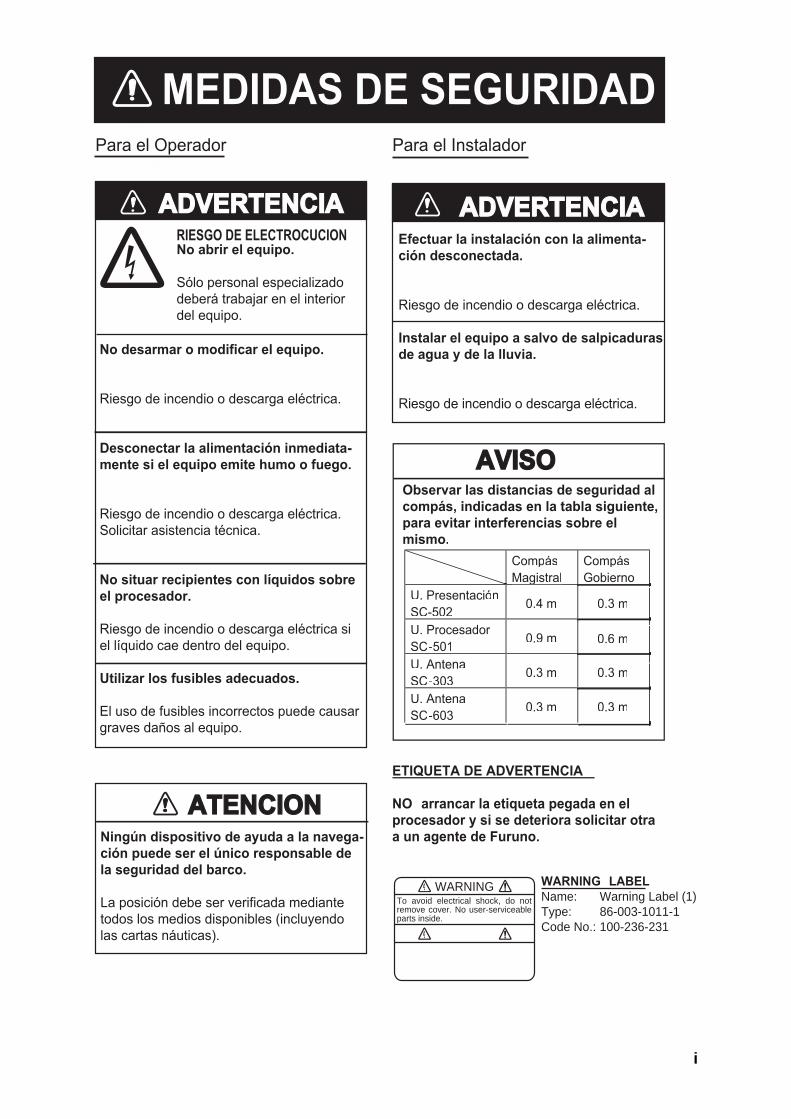
AVISOAVISOObservar las distancias de seguridad al
compás, indicadas en la tabla siguiente,
para evitar interferencias sobre el
mismo.
Para el Operador Para el Instalador
Compás
Magistral
Compás
Gobierno
U. Presentación
SC-5020.4 m 0.3 m
gg
U. Procesador
SC-5010.9 m 0.6 m
U. Antena
SC-3030.3 m 0.3 m
U. Antena
SC-6030.3 m 0.3 m
WARNINGTo avoid electrical shock, do not remove cover. No user-serviceable parts inside.
ETIQUETA DE ADVERTENCIA
NO arrancar la etiqueta pegada en el procesador y si se deteriora solicitar otra
a un agente de Furuno.
WARNING LABEL
Name: Warning Label (1)Type: 86-003-1011-1Code No.: 100-236-231
ADVERTENCIAADVERTENCIA
No desarmar o modificar el equipo.
Riesgo de incendio o descarga eléctrica.
Desconectar la alimentación inmediata-
mente si el equipo emite humo o fuego.
Riesgo de incendio o descarga eléctrica.
Solicitar asistencia técnica.
No situar recipientes con líquidos sobre
el procesador.
Riesgo de incendio o descarga eléctrica si
el líquido cae dentro del equipo.
Utilizar los fusibles adecuados.
El uso de fusibles incorrectos puede causar
graves daños al equipo.
ATENCIONATENCIONNingún dispositivo de ayuda a la navega-
ción puede ser el único responsable de
la seguridad del barco.
La posición debe ser verificada mediante
todos los medios disponibles (incluyendo
las cartas náuticas).
RIESGO DE ELECTROCUCIONNo abrir el equipo.
Sólo personal especializado
deberá trabajar en el interior
del equipo.
INDICE
INTRODUCCION ................................................................................................................ ivCONFIGURACION DEL SISTEMA .................................................................................. vALCANCE DEL SUMINISTRO ........................................................................................ viESPECIFICACIONES ................................................................................................... SP-1
1. INSTALACION ........................................................................................................... 1-11.1 Consideraciones Generales ............................................................................ 1-1
1.1.1 Antena ..................................................................................................... 1-11.1.2 Unidad de presentación, procesador .................................................. 1-3
1.2 Instalación de la Antena .................................................................................... 1-41.2.1 Antena SC-303 ...................................................................................... 1-41.2.2 Antena SC-603 ...................................................................................... 1-7
1.3 Instalación del Procesador ..............................................................................1-121.3.1 Montaje en mamparo ........................................................................... 1-121.3.2 Montaje sobre mesa ............................................................................ 1-131.3.3 Montaje bajo mesa ............................................................................... 1-14
1.4 Instalación de la Unidad de Presentación .................................................... 1-151.4.1 Montaje sobre mesa, en techo ........................................................... 1-151.4.2 Montaje empotrada .............................................................................. 1-15
1.5 Cableado .......................................................................................................... 1-171.6 Configuración Inicial ........................................................................................ 1-20
1.6.1 Confirmación de satélites ................................................................... 1-201.6.2 Posición de montaje ............................................................................ 1-21
1.7 Conexión de Equipos Externos ..................................................................... 1-221.7.1 Cableado general ................................................................................ 1-221.7.2 Preparación de cables ........................................................................ 1-23
2. OPERACION .............................................................................................................. 2-12.1 Controles ........................................................................................................... 2-12.2 Encendido/Apagado ........................................................................................ 2-22.3 Iluminación del Panel, Contraste de la Presentación ................................... 2-22.4 Selección de la Presentación ......................................................................... 2-3
2.4.1 Descripción de las presentaciones .................................................... 2-32.5 Alarmas .............................................................................................................. 2-62.6 Verificación del Estado de Satélites ............................................................... 2-72.7 Configuración GPS ........................................................................................... 2-8
2.7.1 Presentación del menú de configuración GPS .................................. 2-82.7.2 Descripción del menú GPS SETUP ................................................... 2-8
2.8 Datos de Salida ................................................................................................ 2-92.8.1 Rumbo .................................................................................................... 2-92.8.2 Pulsos de corredera ............................................................................ 2-13
2.9 Configuración del Sistema ............................................................................. 2-142.9.1 Datos geodésicos ............................................................................... 2-14
ii
2.9.2 Unidades de medida .......................................................................... 2-152.9.3 Hora local ............................................................................................. 2-152.9.4 Formato de la hora .............................................................................. 2-152.9.5 Modo de demostración ....................................................................... 2-16
2.10 Configuración WAAS/DGPS ......................................................................... 2-172.11 Menú OTHERS ............................................................................................... 2-202.12 Menú TRIP ....................................................................................................... 2-212.13 Distancia Recorrida ....................................................................................... 2-222.14 Fuente de Información de Rumbo de Reserva ............................................ 2-22
3. MANTENIMIENTO, INCIDENCIAS ........................................................................ 3-13.1 Mantenimiento Preventivo ................................................................................ 3-13.2 Incidencias ......................................................................................................... 3-23.3 Diagnosis ........................................................................................................... 3-33.4 Versión del Programa ....................................................................................... 3-73.5 Borrado de Datos .............................................................................................. 3-73.6 Sustitución de la Pila ......................................................................................... 3-83.7 Sustitución del Fusible ...................................................................................... 3-93.8 Mensajes de Error ............................................................................................. 3-9
APENDICE ...................................................................................................................... AP-11. Arbol de Menús .................................................................................................. AP-12. Interfaz Digital ..................................................................................................... AP-23. Puertos Entrada/Salida ..................................................................................... AP-84. Lista y Localización de Partes ....................................................................... AP-105. Cartas Geodésicas ......................................................................................... AP-126. Principio del Compás Satelitario .................................................................. AP-137. ¿Qué es el WAAS? ......................................................................................... AP-14
LISTAS DE ENVIODIBUJOS DE DIMENSIONESDIAGRAMA DE INTERCONEXION
Declaración de Conformidad
iii
INDICE
INTRODUCCION
FURUNO Electric Company desea hacer constar su agradecimiento por la con-sideración prestada a su Compás Satelitario SC-50, en la seguridad de que muypronto el usuario descubrirá por qué el nombre de FURUNO se ha convertido ensinónimo de calidad y fiabilidad.
Dedicada durante más de 50 años al diseño y fabricación de electrónica marina,FURUNO Electric Company goza de una envidiable reputación como líder delsector, resultado de su excelente técnica y de su eficiente red mundial de distri-bución y servicio.
A los Usuarios del SC-50
El equipo ha sido diseñado y fabricado para soportar el riguroso ambiente mari-no; sin embargo, es esencial su adecuada conservación y manejo, por lo que seruega leer y seguir la información de seguridad y los procedimientos de opera-ción y mantenimiento descritos en este manual; así, el equipo resultará suma-mente útil y fiable.
CaracterísticasEl SC-50 es un nuevo compás satelitario diseñado con la avanzada tecnologíaGPS de FURUNO. Encuentra un amplio campo de aplicaciones en cualquier ti-po de barco o en móviles terrestres.
Sus características principales son:
• Perfecto como sensor de rumbo para Radar/ARPA, AIS, ECDIS y Sonar.
• No contiene partes mecánicas móviles; así está prácticamente libre de man-tenimiento.
• Su funcionamiento no resulta afectado por el geomagnetismo.
• Al contrario que las giroscópicas, no necesita corrección por velocidad.
iv
• Mínimo tiempo de respuesta: 3 minutos.
• Satisface los requisitos de: IMO MSC, 116(73), ISO/FDIS 22090-3, IMOA.694(17), IEC 60945 (2002-08), IEC 61162 (2000).
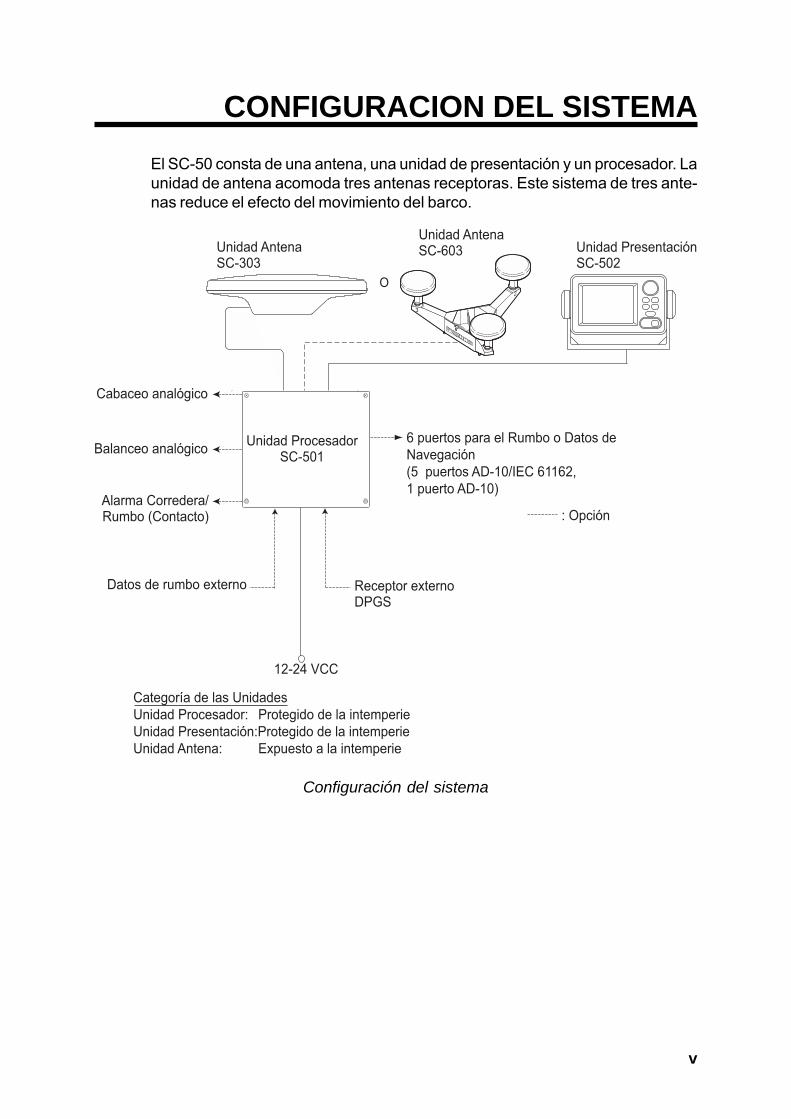
CONFIGURACION DEL SISTEMAEl SC-50 consta de una antena, una unidad de presentación y un procesador. Launidad de antena acomoda tres antenas receptoras. Este sistema de tres ante-nas reduce el efecto del movimiento del barco.
Configuración del sistema
v
Unidad Antena SC-303
3
2
O
Unidad Antena SC-603 Unidad Presentación
SC-502
: Opción
12-24 VCC
Datos de rumbo externo
6 puertos para el Rumbo o Datos de
Navegación
(5 puertos AD-10/IEC 61162,
1 puerto AD-10)
Receptor externoDPGS
Unidad ProcesadorSC-501
Balanceo analógico
Cabaceo analógico
Alarma Corredera/Rumbo (Contacto)
Categoría de las Unidades
Unidad Procesador: Protegido de la intemperie
Unidad Presentación:Protegido de la intemperie
Unidad Antena: Expuesto a la intemperie
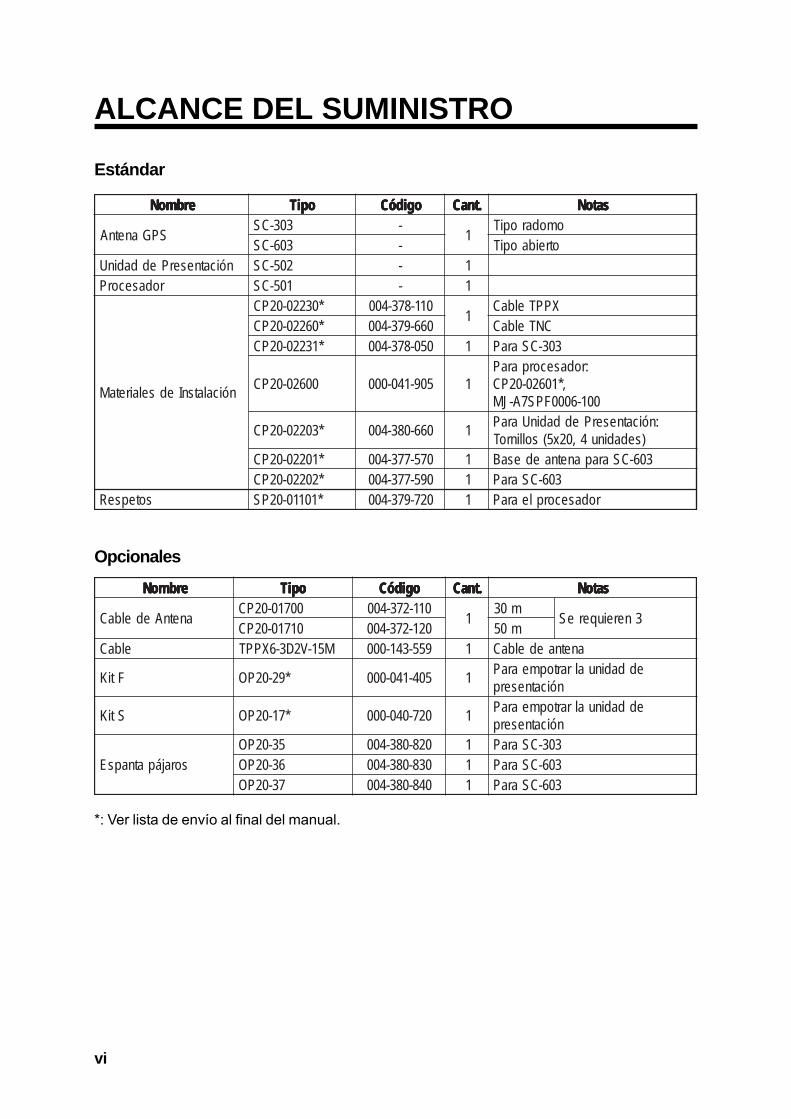
ALCANCE DEL SUMINISTRO
Estándar
Opcionales
vi
erbmoN erbmoN erbmoN erbmoN erbmoN opiT opiT opiT opiT opiT ogidóC ogidóC ogidóC ogidóC ogidóC .tnaC .tnaC .tnaC .tnaC .tnaC satoN satoN satoN satoN satoN
SPGanetnA 303-CS - 1 omodaropiT306-CS - otreibaopiT
nóicatneserPeddadinU 205-CS - 1rodasecorP 105-CS - 1
nóicalatsnIedselairetaM
*03220-02PC 011-873-400 1 XPPTelbaC*06220-02PC 066-973-400 CNTelbaC*13220-02PC 050-873-400 1 303-CSaraP
00620-02PC 509-140-000 1:rodasecorparaP
,*10620-02PC001-6000FPS7A-JM
*30220-02PC 066-083-400 1 :nóicatneserPeddadinUaraP)sedadinu4,02x5(sollinroT
*10220-02PC 075-773-400 1 306-CSarapanetnaedesaB*20220-02PC 095-773-400 1 306-CSaraP
sotepseR *10110-02PS 027-973-400 1 rodasecorplearaP
erbmoN erbmoN erbmoN erbmoN erbmoN opiT opiT opiT opiT opiT ogidóC ogidóC ogidóC ogidóC ogidóC .tnaC .tnaC .tnaC .tnaC .tnaC satoN satoN satoN satoN satoN
anetnAedelbaC 00710-02PC 011-273-400 1 m03 3nereiuqereS01710-02PC 021-273-400 m05elbaC M51-V2D3-6XPPT 955-341-000 1 anetnaedelbaC
FtiK *92-02PO 504-140-000 1 eddadinualrartopmearaPnóicatneserp
StiK *71-02PO 027-040-000 1 eddadinualrartopmearaPnóicatneserp
sorajápatnapsE53-02PO 028-083-400 1 303-CSaraP63-02PO 038-083-400 1 306-CSaraP73-02PO 048-083-400 1 306-CSaraP
*: Ver lista de envío al final del manual.

ESPECIFICACIONES DEL COMPAS SATELITARIOSC-50
1 GENERALES1.1 Precisión de rumbo ±1,0º (95%)1.2 Resolución 0,1º1.3 Seguimiento Relación de giro de 45º/s1.4 Tiempo de respuesta 3 minutos1.5 Precisión de posición 10 m ó 5 m (DGPS), 95 % del tiempo
1.10 Entrada rumbo externo 1 puerto AD-10 o IEC 61162 (reconocimiento auto)AD-10: rumbo de reservaIEC 61162: entrada de velocidad con relación alagua (sentencias: HDT, HDG, HDM, VBW, VHW,VLW)
2 UNIDAD DE PRESENTACION
2.1 Pantalla LCD monocroma de 4,5’’; 120 x 64 puntos2.2 Area efectiva 60 mm (H) x 95 mm (V)
2.4 Modo de presentación Rumbo, Datos de Navegación, Operación, Rosade Compás
SP-1 E7251S01B
1.6 Salida de rumbo/datos de navegaciónFormato AD-10: 1 puerto (puerto especial)5 puertos formato AD-10 ó 10 puertos formato IEC61162 (seleccionable en menú)El formato IEC 61162 es nivel RS-485Sentencias: HDT, HDM, ROT, ATT, VDR, VTG, GGA,GNS, GLL, VHW, VBW, HVE, ZDA
1.7 Salida señal corredera 1 puerto (señal de pulsos)1.8 Salida alarma rumbo 1 puerto (señal de contacto)1.9 Salida señal movimiento 1 puerto balanceo, 1 puerto cabeceo
1.11 Entrada diferencial 1 puerto, formato RTCM SC-104 (nivel RS-232)
2.3 Contraste 64 pasos
3 ALIMENTACION
12-24 V CC; 1,2-0,5 A

4 CONDICIONES AMBIENTALES Y EMC
E7251S01B SP-2
4.1 Temperatura ambienteUnidad de presentación: -15 ºC a +55 ºC (en área protegida)Procesador: -15 ºC a +55 ºC (en área protegida)Unidad de antena: -25 ºC a +70 ºC (en área expuesta)
4.2 Humedad relativa 93% ±3%, a 40 ºC
4.3 EstanqueidadUnidad de antena: IPX6Unidad de presentación: IPX5Procesador: IPX0
5.4 Vibración IEC 60945
5 COLORES5.1 Unidad de Presentación/Procesador
Panel: N3.0 Newtone Nº 5 (gris oscuro)Chasis: 2.5GY5/1.5 (gris claro)
5.2 Unidad de antena N9.5 (blanco)
ESPECIFICACIONES
1. INSTALACION
1.1 Consideraciones Generales
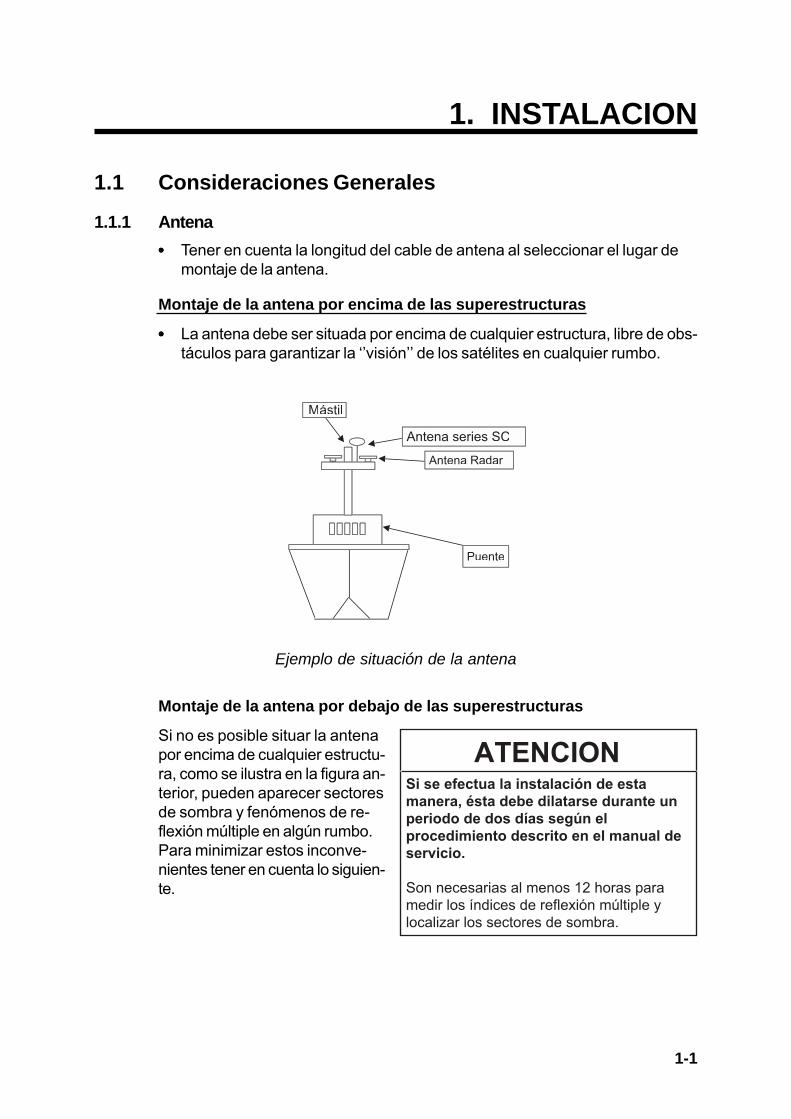
1.1.1 Antena••••• Tener en cuenta la longitud del cable de antena al seleccionar el lugar de
montaje de la antena.
Montaje de la antena por encima de las superestructuras
••••• La antena debe ser situada por encima de cualquier estructura, libre de obs-táculos para garantizar la ‘’visión’’ de los satélites en cualquier rumbo.
Ejemplo de situación de la antena
Montaje de la antena por debajo de las superestructuras
Si no es posible situar la antenapor encima de cualquier estructu-ra, como se ilustra en la figura an-terior, pueden aparecer sectoresde sombra y fenómenos de re-flexión múltiple en algún rumbo.Para minimizar estos inconve-nientes tener en cuenta lo siguien-te.
1-1
Mástil
Antena Radar
Puente
Antena series SC
ATENCIONSi se efectua la instalación de esta
manera, ésta debe dilatarse durante un
periodo de dos días según el
procedimiento descrito en el manual de
servicio.
Son necesarias al menos 12 horas para
medir los índices de reflexión múltiple y
localizar los sectores de sombra.
1. INSTALACION
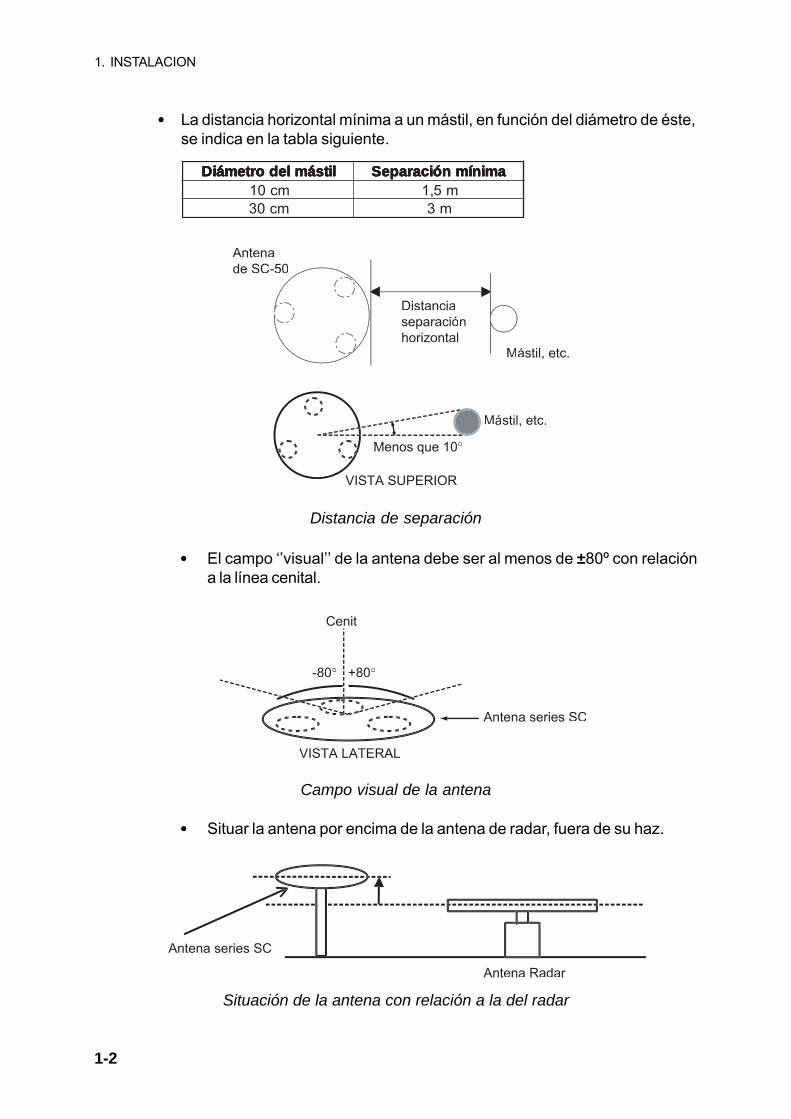
••••• La distancia horizontal mínima a un mástil, en función del diámetro de éste,se indica en la tabla siguiente.
litsámledortemáiD litsámledortemáiD litsámledortemáiD litsámledortemáiD litsámledortemáiD aminímnóicarapeS aminímnóicarapeS aminímnóicarapeS aminímnóicarapeS aminímnóicarapeSmc01 m5,1mc03 m3
Distancia de separación
••••• El campo ‘’visual’’ de la antena debe ser al menos de ±80º con relacióna la línea cenital.
Campo visual de la antena
••••• Situar la antena por encima de la antena de radar, fuera de su haz.
Situación de la antena con relación a la del radar
1-2
Mástil, etc.
Antena
de SC-50
Distancia
separación
horizontal
Menos que 10°
Mástil, etc.
VISTA SUPERIOR
Cenit
-80° +80°
Antena series SC
VISTA LATERAL
Antena series SC
Antena Radar
1.1.2 Unidad de presentación, procesador••••• Elegir situaciones con vibración mínima.
••••• Instalar las unidades a salvo de salpicaduras de agua, de la lluvia y de la luzsolar directa.
••••• No situarlas enfrente de salidas de aire acondicionado.••••• Para la unidad de presentación, elegir un lugar en el que pueda ser obser-
vada y manejada cómodamente.
••••• Pensar en el espacio para acceso para mantenimiento. Ver en los dibujosde dimensiones los espacios recomendados.
1-3
1. INSTALACION
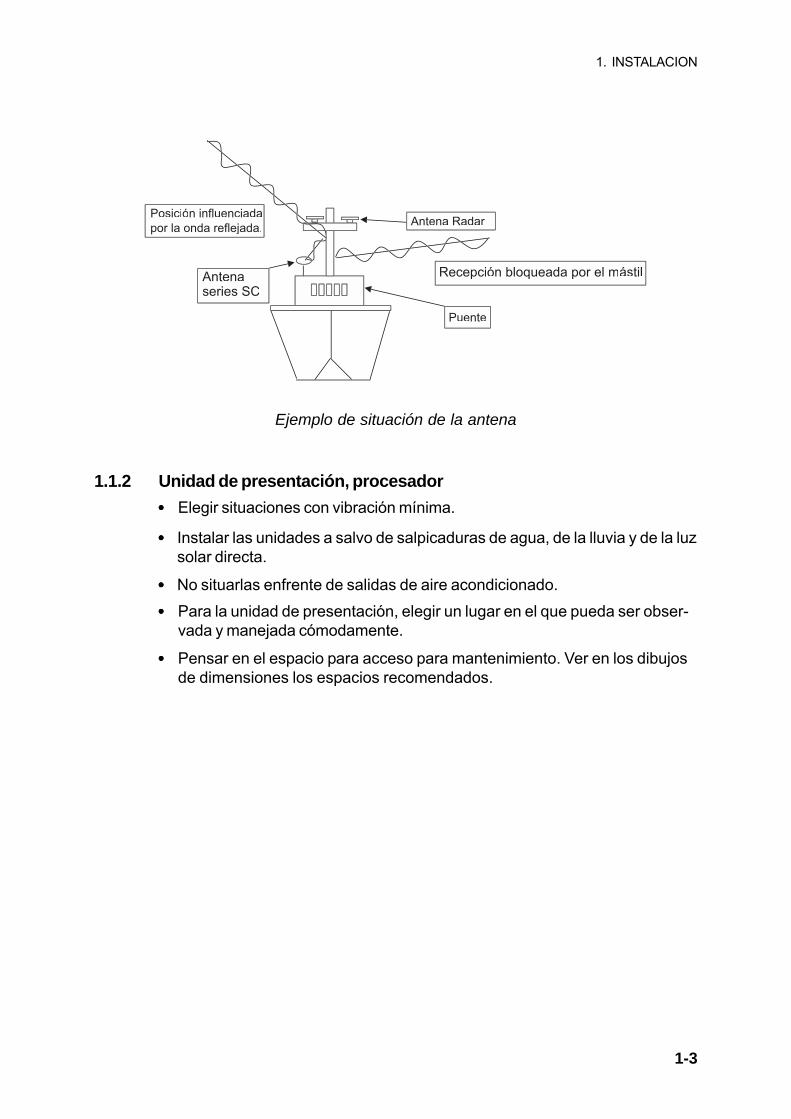
Ejemplo de situación de la antena
Antena Radar
Antenaseries SC
Puente
Recepción bloqueada por el mástil
Posición influenciada
por la onda reflejada.

1. INSTALACION
1.2 Instalación de la Antena1.2.1 Antena SC-303
1. Preparar una base soporte (de madera, acero o aluminio) de las dimensio-nes indicadas en la figura siguiente.
2. Fijar la antena a la base, orientando la marca hacia proa dentro de ±2,5º,mediante tornillos M10 con arandelas planas y de presión; el par de aprietede los tornillos debe ser de aproximadamente 20 Nm.
Nota: Al taladrar, en la base, los orificios para sujeción de la antena, ali-nearlos en la dirección proa-popa.
Montaje de la antena
1-4
3. Cubrir la cabeza de los tornillos y las arandelas con sellante de silicona.
Nota: Los dispositivos ‘’espanta pájaros’’ (suministrados) pueden ser incorpo-rados a la antena, según se describe en el paso 9 de este procedimien-to, antes de instalarla.
ATENCIONATENCION
Conviene conectar el cable de antena
antes de fijarla en su lugar.
F
UR
U
N
160
240
160240
Orificio de fijación (φ11 mm)
PROA
Tornillo hexagonal
Arandela elástica
Arandela plana
AVISOAVISONo abrir la antena.
Esta instalación no necesita retirar la
cubierta de la antena.
5-10 mm

Protección de los tornillos
1. INSTALACION
4. Conectar los tres cables coaxiales procedentes de la antena a los corres-pondientes del cable de antena.
5. Cubrir los tres puntos de conexión con cinta vulcanizada para hacerlos es-tancos.
Protección de los conectores de antena
6. Acomodar los tres conectores en la cavidad de la base de la antena.
7. Fijar el cable de antena como se ilustra en la figura siguiente.
Fijación del cable de antena
1-5
anetnaaledelbaC anetnaaledelbaC anetnaaledelbaC anetnaaledelbaC anetnaaledelbaC)elbacleneodacramºN(
anetnaedelbaC anetnaedelbaC anetnaedelbaC anetnaedelbaC anetnaedelbaCM51-V2D3-6XPTT
1TNA rolocniS2TNA olliramA3TNA ojoR
El cable TNC-PS-3D-15 está etiquetado 1, 2 y 3.
Base delradomo
Cubrir con silicona selladora.
Plataforma
Atadura del Cable
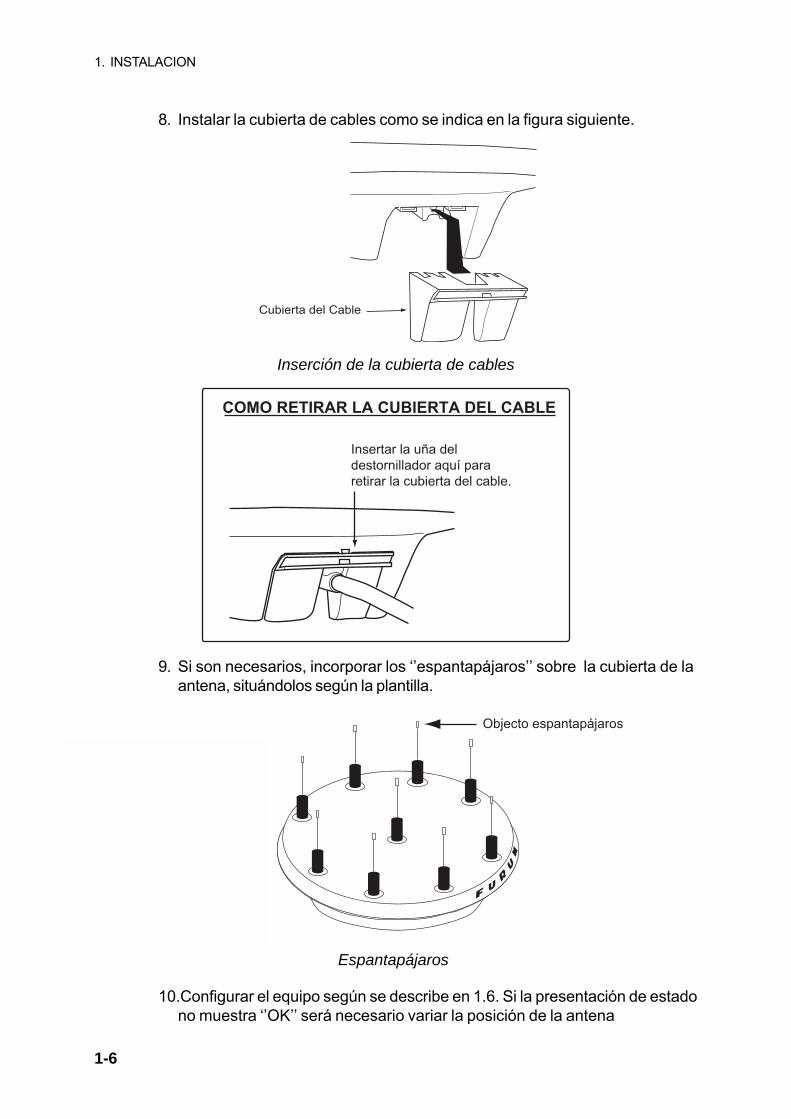
8. Instalar la cubierta de cables como se indica en la figura siguiente.
1. INSTALACION
Inserción de la cubierta de cables
1-6
9. Si son necesarios, incorporar los ‘’espantapájaros’’ sobre la cubierta de laantena, situándolos según la plantilla.
Espantapájaros
10.Configurar el equipo según se describe en 1.6. Si la presentación de estadono muestra ‘’OK’’ será necesario variar la posición de la antena
Cubierta del Cable
Insertar la uña del
destornillador aquí para
retirar la cubierta del cable.
COMO RETIRAR LA CUBIERTA DEL CABLE
F
UR
U
N
Objecto espantapájaros
Plantilla de papel

1. INSTALACION
1-7
1.2.2 Antena SC-603Nota: Los dispositivos ‘’espanta pájaros’’ (suministrados) pueden ser incorpo-
rados a las antenas antes de fijar la unidad de antena.
Montaje
1. Montar los tres elementos de antena en los extremos de los tres brazos de labase de la unidad. Retirar las cubiertas de los brazos y la cubierta central dela base.
2. Pasar el cable coaxial de cada uno de los elementos de antena por el interiorde su respectivo brazo y por el orificio central de la base de la unidad.
Unidad de antena CS-603
3. Orientar cada elemento de antena de manera que la protuberancia de subase quede mirando hacia proa.
Orientación de los elementos de antena
Elemento
Antena
Cubierta Antena
Base Antena
Cubierta del Brazo
2
1
3
PROA
Orienta los tres elementos
antena con el saliente de
cada uno mirando a la proa.Tuerca
Cubierta del Brazo

1. INSTALACION
1-8
4. Orientado correctamente cada elemento de antena, fijarlo con su tuerca. Mar-car cada uno de los coaxiales de los elementos de antena con el númerode la posición del elemento de antena correspondiente.
5. Fijar el pedestal en el lugar elegido provisionalmente hasta que se com-pruebe que está correctamente orientado. (Ver las ilustraciones de las pági-nas siguientes.)
Fijación provisional del pedestal
6. Fijar la unidad de antena en el pedestal.
Fijación de la unidad de antena en su pedestal
)1(ozarB 1
)2(ozarB 2
)3(ozarB 3
PEDESTAL
Placa Soporte
Abrazadera
Mástil Antena (suministro local (φ50 mm o más)
PROA
Arandela PlanaArandela Elástica
Tuerca
Identificación del Cable Coaxial
Brazo [1]: 1
Brazo [2]: 2
Brazo [3]: 3
1
3
2

1. INSTALACION
7. Orientar la unidad de antena como se ilustra en la figura siguiente.
1-9
La antena debe ser orientada den-tro de ±2,5º con relación a la proa.
Orientación de la unidad de antena
ATENCION
8. Montar la cubierta de la unidad de antena con tres tornillos.
Cubierta de antena
9. Efectuada la comprobación descrita en 2.6, si el estado de seguimiento desatélites es ‘’OK’’ la unidad de antena puede ser fijada definitivamente, comose describe a continuación.
BABOR
ElementoAntena
1
ElementoAntena
2
ElementoAntena
3
Un número está
marcado en cada brazo
de antena. Es el número
del elemento antena.
PROA
La marca de proa está entre
el elemento antena [1] y [2].
La marca se encara hacia
la proa
1
3
Cubierta Antena
2
1. INSTALACION
1-10
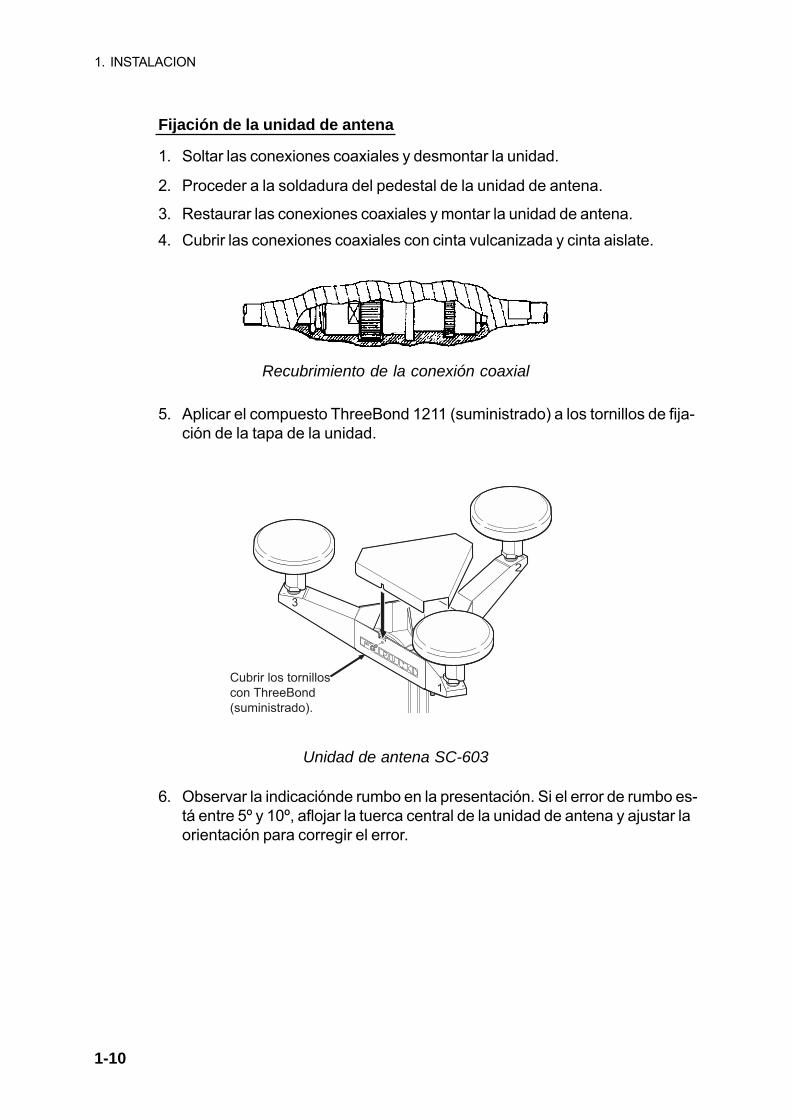
Fijación de la unidad de antena
1. Soltar las conexiones coaxiales y desmontar la unidad.
2. Proceder a la soldadura del pedestal de la unidad de antena.
3. Restaurar las conexiones coaxiales y montar la unidad de antena.4. Cubrir las conexiones coaxiales con cinta vulcanizada y cinta aislate.
5. Aplicar el compuesto ThreeBond 1211 (suministrado) a los tornillos de fija-ción de la tapa de la unidad.
Recubrimiento de la conexión coaxial
Unidad de antena SC-603
6. Observar la indicaciónde rumbo en la presentación. Si el error de rumbo es-tá entre 5º y 10º, aflojar la tuerca central de la unidad de antena y ajustar laorientación para corregir el error.
Cubrir los tornillos
con ThreeBond
(suministrado).
2
1
3
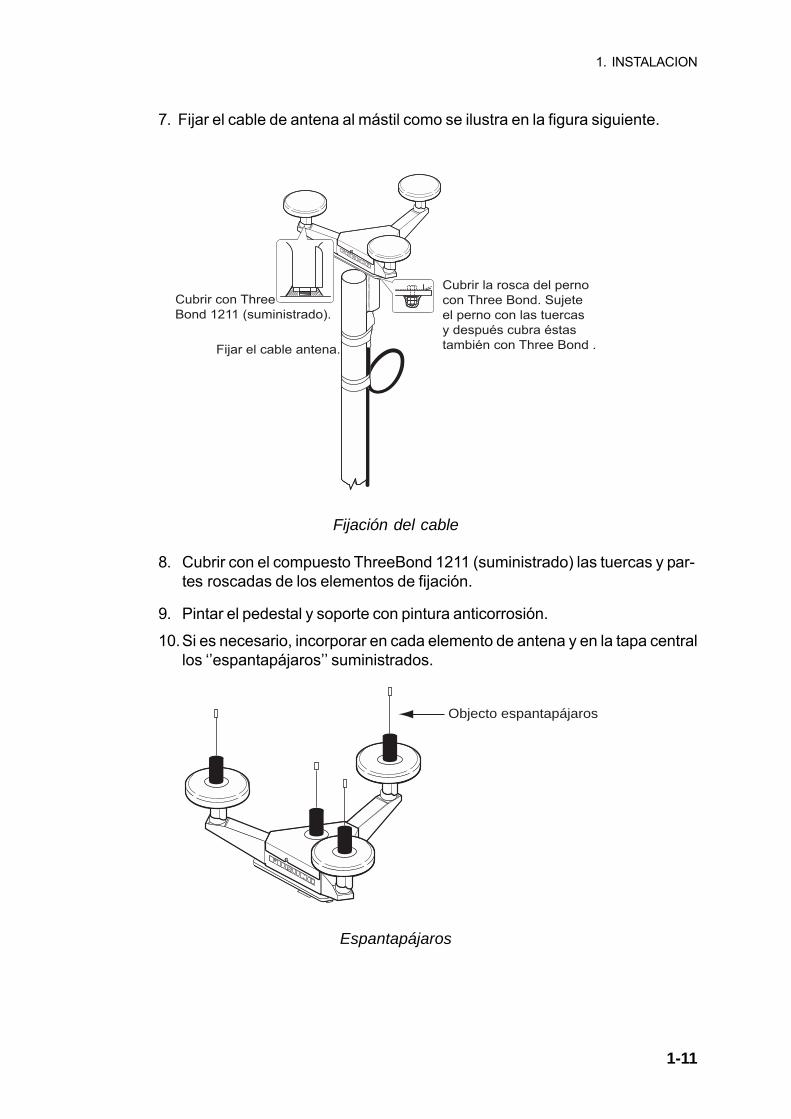
7. Fijar el cable de antena al mástil como se ilustra en la figura siguiente.
1. INSTALACION
1-11
Fijación del cable
8. Cubrir con el compuesto ThreeBond 1211 (suministrado) las tuercas y par-tes roscadas de los elementos de fijación.
9. Pintar el pedestal y soporte con pintura anticorrosión.10.Si es necesario, incorporar en cada elemento de antena y en la tapa central
los ‘’espantapájaros’’ suministrados.
Espantapájaros
Cubrir la rosca del perno
con Three Bond. Sujete
el perno con las tuercas
y después cubra éstas
también con Three Bond .
Cubrir con Three
Bond 1211 (suministrado).
Fijar el cable antena.
Objecto espantapájaros
1-12
1. INSTALACION
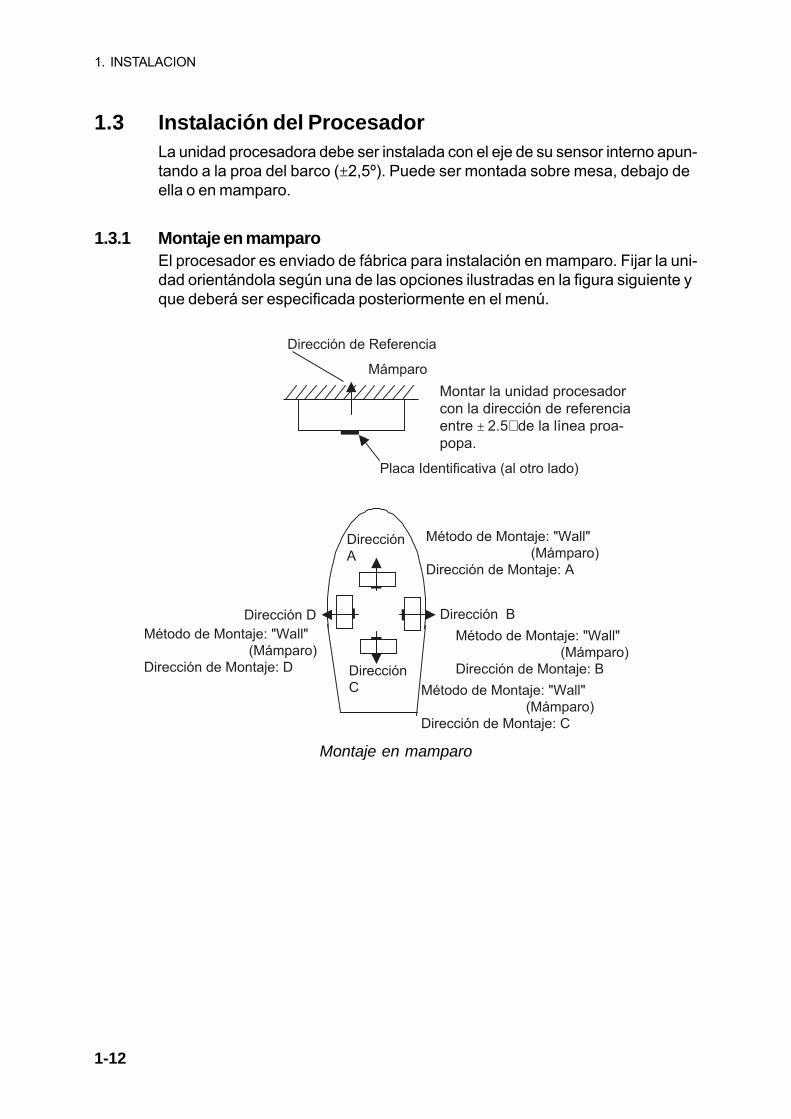
1.3 Instalación del ProcesadorLa unidad procesadora debe ser instalada con el eje de su sensor interno apun-tando a la proa del barco (±2,5º). Puede ser montada sobre mesa, debajo deella o en mamparo.
1.3.1 Montaje en mamparoEl procesador es enviado de fábrica para instalación en mamparo. Fijar la uni-dad orientándola según una de las opciones ilustradas en la figura siguiente yque deberá ser especificada posteriormente en el menú.
Montaje en mamparo
Placa Identificativa (al otro lado)
Dirección de Referencia
Dirección
A
Dirección BDirección D
Dirección
C
Método de Montaje: "Wall"
(Mámparo)
Dirección de Montaje: A
Método de Montaje: "Wall"
(Mámparo)
Dirección de Montaje: B
Método de Montaje: "Wall"
(Mámparo)
Dirección de Montaje: D
Método de Montaje: "Wall"
(Mámparo)
Dirección de Montaje: C
Montar la unidad procesador
con la dirección de referencia
entre ± 2.5˚ de la línea proa-
popa.
Mámparo

1. INSTALACION
1.3.2 Montaje sobre mesaFijar la unidad a la mesa mediante cuatro tornillos autoroscantes de 5 x 20,orientándola según una de las direcciones que se ilustran en la figura siguientey que debe ser especificada posteriormente en el menú.
Orientación de la Unidad Procesador, montaje sobre mesa
1-13
Proa
Popa Popa
PopaPopa
Babor Estribor
Método de Montaje: "Floor"
(Sobre mesa)
Dirección de Montaje: A
Método de Montaje: "Floor"
(Sobre mesa)
Dirección de Montaje: B
Método de Montaje: "Floor"
(Sobre mesa)
Dirección de Montaje: C
Método de Montaje: "Floor"
(Sobre mesa)
Dirección de Montaje: D
Proa
Babor Estribor
Proa
Babor Estribor
Proa
Babor Estribor
Placa Identificativa
Conectores
Dirección de Referencia
Conmutador POWER
(power lamp)
Unidad Procesador, vista superior
Montar la unidad
procesador con la
dirección de
referencia entre
± 2.5˚ de la línea
proa-popa.
DIRECCION "A" DIRECCION "B"
DIRECCION "C" DIRECCION "D"
1. INSTALACION
1-14
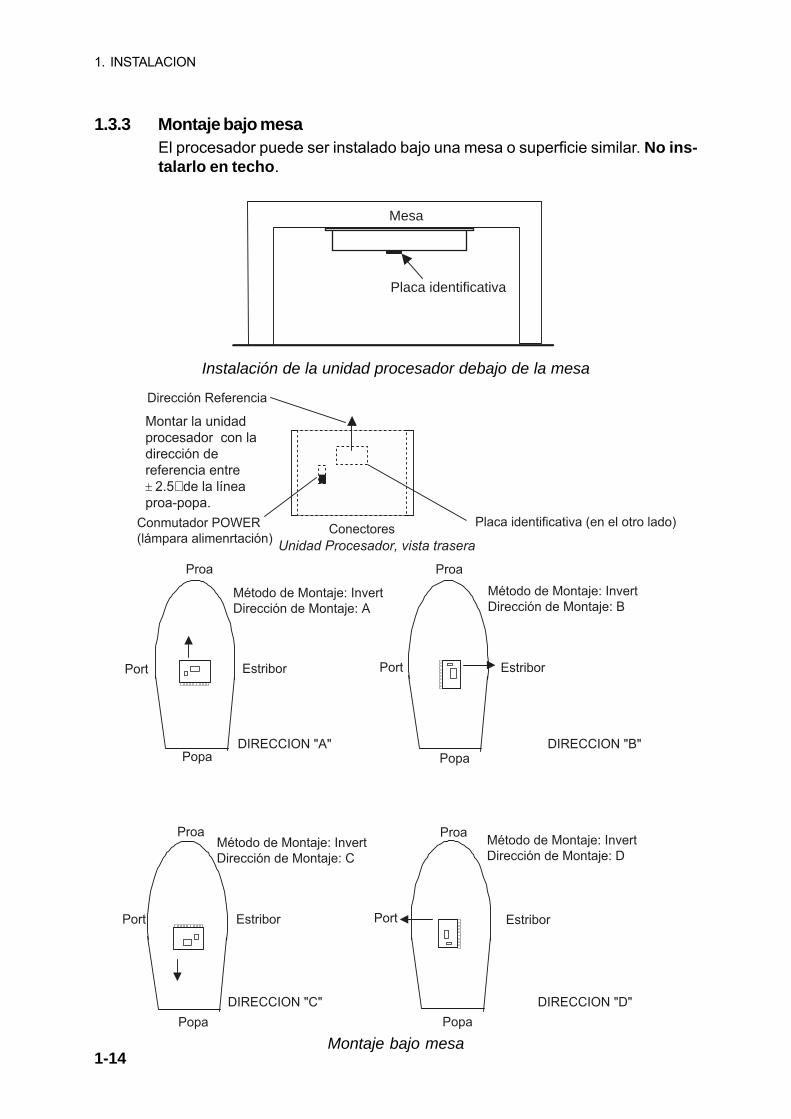
El procesador puede ser instalado bajo una mesa o superficie similar. No ins-talarlo en techo.
1.3.3 Montaje bajo mesa
Montaje bajo mesa
Instalación de la unidad procesador debajo de la mesa
Placa identificativa
Mesa
Proa
Popa Popa
PopaPopa
Port Estribor
Método de Montaje: Invert
Dirección de Montaje: A
Método de Montaje: Invert
Dirección de Montaje: B
Método de Montaje: Invert
Dirección de Montaje: C
Método de Montaje: Invert
Dirección de Montaje: D
Proa
Port Estribor
Proa
Port Estribor
Proa
Port Estribor
Placa identificativa (en el otro lado)Conectores
Dirección Referencia
Conmutador POWER
(lámpara alimenrtación) Unidad Procesador, vista trasera
Montar la unidad
procesador con la
dirección de
referencia entre
± 2.5˚ de la línea
proa-popa.
DIRECCION "A" DIRECCION "B"
DIRECCION "C" DIRECCION "D"
1-15
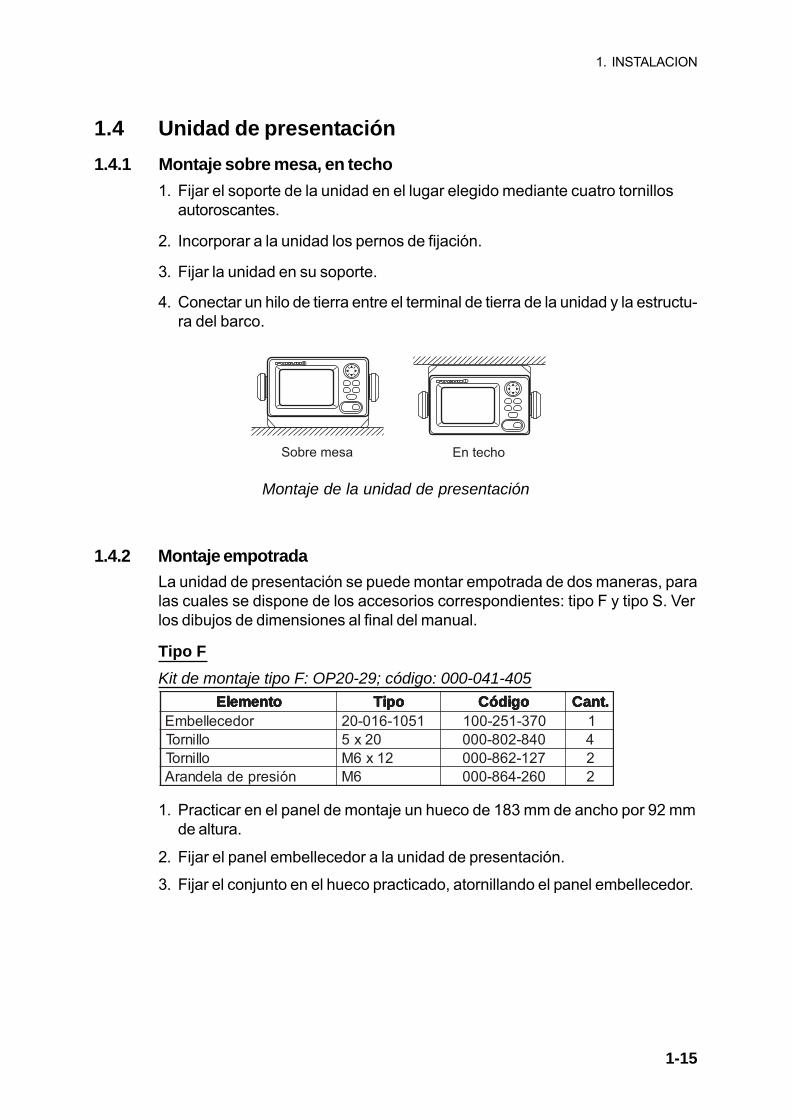
1.4 Unidad de presentación1.4.1 Montaje sobre mesa, en techo
1. Fijar el soporte de la unidad en el lugar elegido mediante cuatro tornillosautoroscantes.
2. Incorporar a la unidad los pernos de fijación.
3. Fijar la unidad en su soporte.
4. Conectar un hilo de tierra entre el terminal de tierra de la unidad y la estructu-ra del barco.
Montaje de la unidad de presentación
1. INSTALACION
1.4.2 Montaje empotradaLa unidad de presentación se puede montar empotrada de dos maneras, paralas cuales se dispone de los accesorios correspondientes: tipo F y tipo S. Verlos dibujos de dimensiones al final del manual.
Tipo FKit de montaje tipo F: OP20-29; código: 000-041-405
otnemelE otnemelE otnemelE otnemelE otnemelE opiT opiT opiT opiT opiT ogidóC ogidóC ogidóC ogidóC ogidóC .tnaC .tnaC .tnaC .tnaC .tnaCrodecellebmE 1501-610-02 073-152-001 1
ollinroT 02x5 048-208-000 4ollinroT 21x6M 721-268-000 2
nóiserpedalednarA 6M 062-468-000 2
1. Practicar en el panel de montaje un hueco de 183 mm de ancho por 92 mmde altura.
2. Fijar el panel embellecedor a la unidad de presentación.
3. Fijar el conjunto en el hueco practicado, atornillando el panel embellecedor.
Sobre mesa En techo

1. INSTALACION
1-16
Tipo S
Kit de montaje tipo S: OP20-17; código: 000-040-720
1. Practicar en el panel de montaje un hueco de 167 mm de ancho por 92 mmde altura.
2. Situar la unidad de presentación en el hueco practicado.
3. Atornillar a la unidad los dos ángulos de fijación.
otnemelE otnemelE otnemelE otnemelE otnemelE opiT opiT opiT opiT opiT ogidóC ogidóC ogidóC ogidóC ogidóC .tnaC .tnaC .tnaC .tnaC .tnaCnóicajifedolugnA 1042-700-02 091-381-001 2
asopiramedollinroT 03x4M 997-408-000 4asopiramedacreuT 4M 603-368-000 4
ollinroT 21x6M 721-268-000 2nóiserpedalednarA 6M 062-468-000 2
4. Roscar en los tornillos de mariposa las tuercas de mariposa.5. Fijar la unidad apretando los tornillos de mariposa y bloquearlos con las tuercas
de mariposa.
Montaje tipo «S»

1. INSTALACION
1.5 CableadoSe describe a continuación el cableado general del equipo. Ver también el diagra-ma de interconexión al final del manual.
Cableado general
1-17
UNIDAD PRESENTACION
SC-502
UNIDAD PROCESADOR
SC-501
*
12-24 VCC
UNIDAD ANTENA
SC-303
MJ-A7SPF0006-100,
10m
TPPX6-3D2V-15M, 15m
o
TNC-PS-3D-15 (3 piezas.)
DPYC 1.5
O
3
2
UNIDAD ANTENA
SC-603
DISPLAY
32
GPS ANT
1
Terminal de MasaConectar el hilo demasa IV-2.0 sq a la superestructura del barco.
Cable de la unidad presentaciónTerminales ANTENA GPS ANT1: No color GPS ANT2: Línea amarilla GPS ANT3: Línea roja(usa el cable TPPX6-3D2V-15M)

1. INSTALACION
Nota 1: Utilizar cable DPYC-1.5 (o equivalente) para la alimentación.
Cable DPYC-1.5 en sección
Nota 2: El conjunto opcional de cables de extensión (OP20-01700 ó OP20-01710) permite alargar la longitud de la conexión de antena con elprocesador hasta 30 ó 50 m. Ver en la página siguiente como semontan los conectores.
Cables de extensión
1-18
1 m 1 m30 or 50 m
Acoplar el conector
N-P-8DFB en el montaje.
Cubrir cada
conexión con
cinta.
Envolver los cables coaxial con cinta de vinilo .
(O Antena
tipo Abierto)
a la unidad
procesador
1. INSTALACION
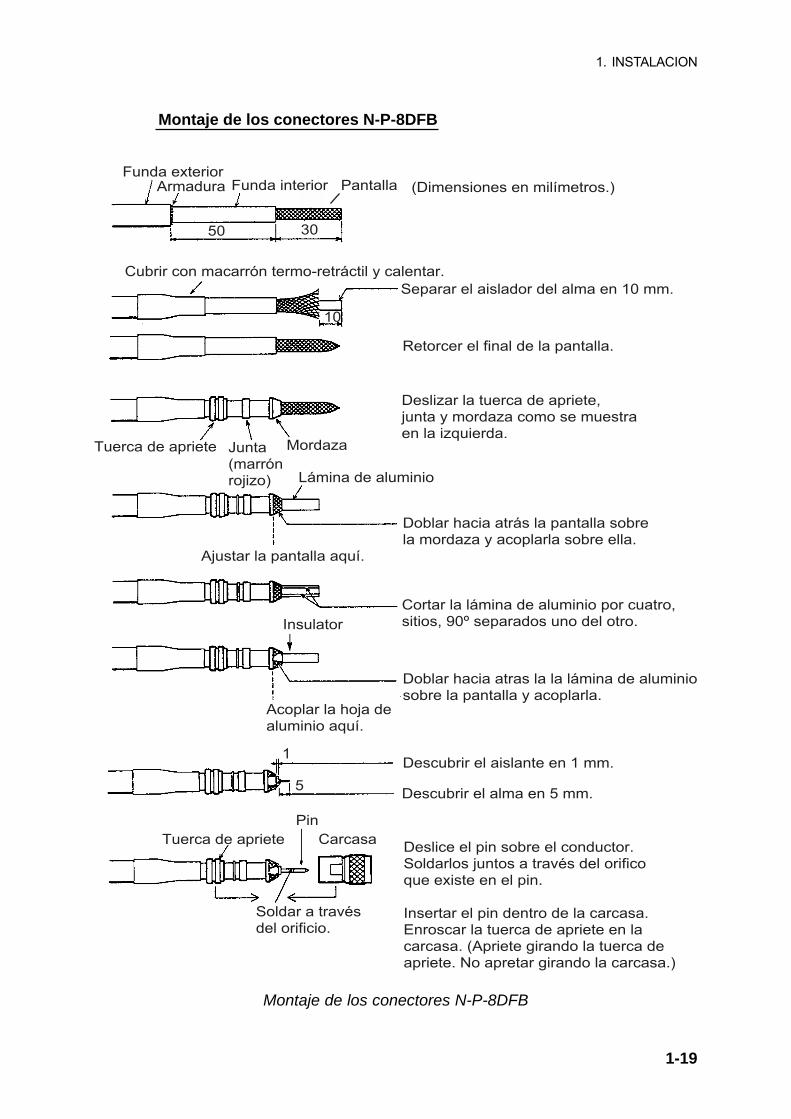
Montaje de los conectores N-P-8DFB
Montaje de los conectores N-P-8DFB
1-19
Funda exterior
50 30
1
5
10
Armadura Funda interior Pantalla
Cubrir con macarrón termo-retráctil y calentar.
Separar el aislador del alma en 10 mm.
Retorcer el final de la pantalla.
Deslizar la tuerca de apriete, junta y mordaza como se muestraen la izquierda.
Tuerca de apriete Junta(marrónrojizo)
Mordaza
Lámina de aluminio
Ajustar la pantalla aquí.
Doblar hacia atrás la pantalla sobrela mordaza y acoplarla sobre ella.
Cortar la lámina de aluminio por cuatro,sitios, 90º separados uno del otro.
Doblar hacia atras la la lámina de aluminiosobre la pantalla y acoplarla.
Acoplar la hoja dealuminio aquí.
Insulator
Descubrir el aislante en 1 mm.
Descubrir el alma en 5 mm.
Tuerca de apriete
Pin
Soldar a travésdel orificio.
Deslice el pin sobre el conductor.Soldarlos juntos a través del orificoque existe en el pin.
Insertar el pin dentro de la carcasa.Enroscar la tuerca de apriete en la carcasa. (Apriete girando la tuerca deapriete. No apretar girando la carcasa.)
Carcasa
(Dimensiones en milímetros.)
1. INSTALACION
1.6 Configuración Inicial
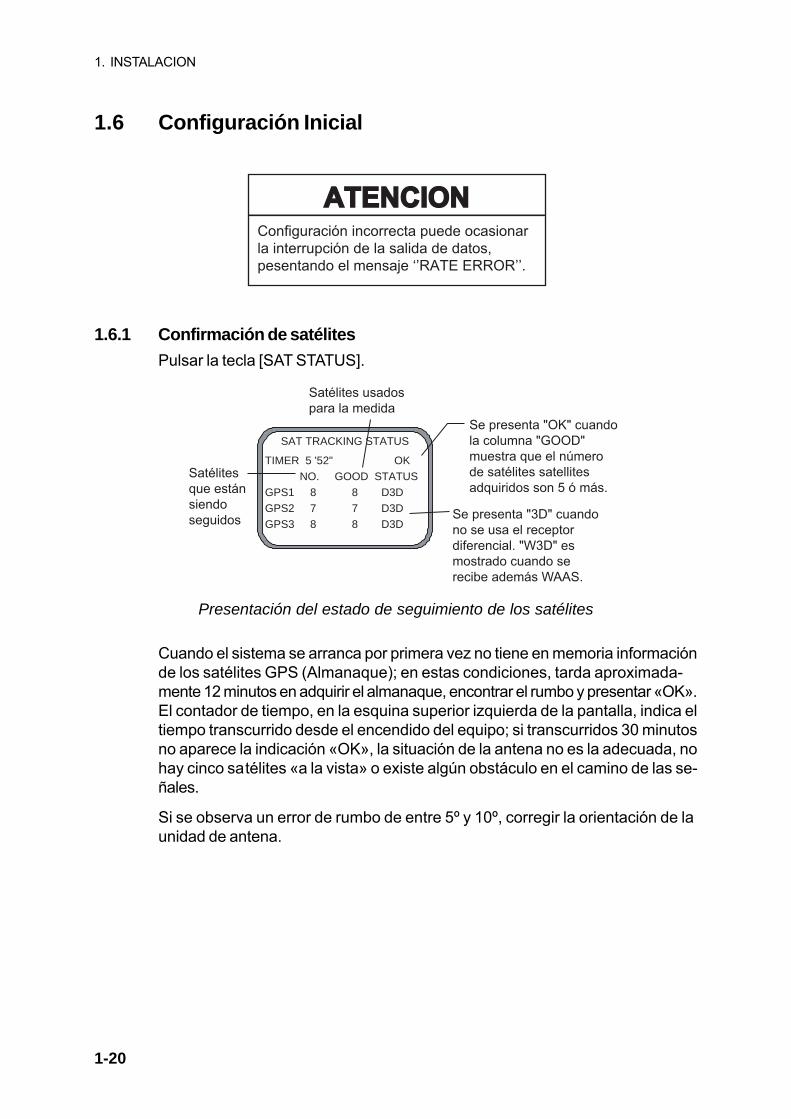
1.6.1 Confirmación de satélitesPulsar la tecla [SAT STATUS].
Presentación del estado de seguimiento de los satélites
Cuando el sistema se arranca por primera vez no tiene en memoria informaciónde los satélites GPS (Almanaque); en estas condiciones, tarda aproximada-mente 12 minutos en adquirir el almanaque, encontrar el rumbo y presentar «OK».El contador de tiempo, en la esquina superior izquierda de la pantalla, indica eltiempo transcurrido desde el encendido del equipo; si transcurridos 30 minutosno aparece la indicación «OK», la situación de la antena no es la adecuada, nohay cinco satélites «a la vista» o existe algún obstáculo en el camino de las se-ñales.
Si se observa un error de rumbo de entre 5º y 10º, corregir la orientación de launidad de antena.
1-20
ATENCIONATENCION
Configuración incorrecta puede ocasionar
la interrupción de la salida de datos,
pesentando el mensaje ‘’RATE ERROR’’.
SAT TRACKING STATUS
TIMER 5 '52" OK NO. GOOD STATUSGPS1 8 8 D3DGPS2 7 7 D3DGPS3 8 8 D3D
Satélites
que están
siendo
seguidos
Satélites usados
para la medida
Se presenta "3D" cuando
no se usa el receptor
diferencial. "W3D" es
mostrado cuando se
recibe además WAAS.
Se presenta "OK" cuando
la columna "GOOD"
muestra que el número
de satélites satellites
adquiridos son 5 ó más.
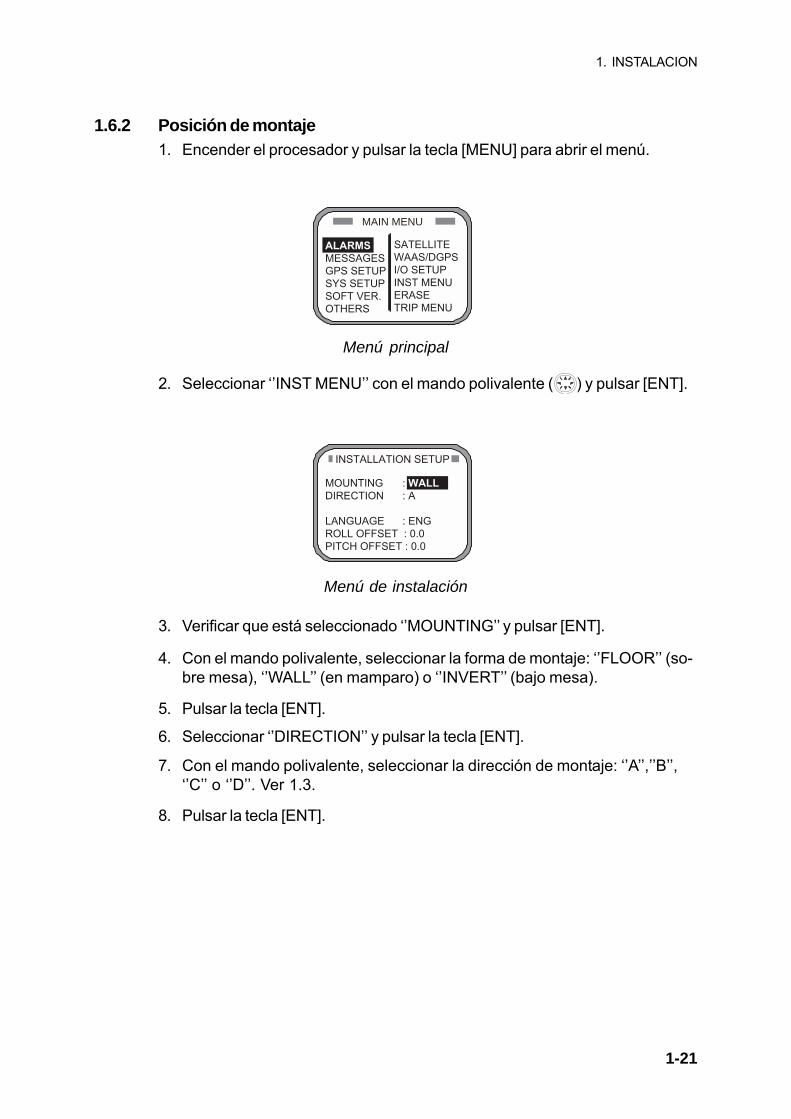
1.6.2 Posición de montaje
1. INSTALACION
1. Encender el procesador y pulsar la tecla [MENU] para abrir el menú.
Menú principal
2. Seleccionar ‘’INST MENU’’ con el mando polivalente ( ) y pulsar [ENT].
Menú de instalación
3. Verificar que está seleccionado ‘’MOUNTING’’ y pulsar [ENT].
4. Con el mando polivalente, seleccionar la forma de montaje: ‘’FLOOR’’ (so-bre mesa), ‘’WALL’’ (en mamparo) o ‘’INVERT’’ (bajo mesa).
5. Pulsar la tecla [ENT].
6. Seleccionar ‘’DIRECTION’’ y pulsar la tecla [ENT].
7. Con el mando polivalente, seleccionar la dirección de montaje: ‘’A’’,’’B’’,‘’C’’ o ‘’D’’. Ver 1.3.
8. Pulsar la tecla [ENT].
1-21
MAIN MENU
SATELLITE
WAAS/DGPS
I/O SETUP
INST MENU
ERASE
TRIP MENU
ALARMS
MESSAGES
GPS SETUP
SYS SETUP
SOFT VER.
OTHERS
INSTALLATION SETUP
MOUNTING : WALL
DIRECTION : A
LANGUAGE : ENG
ROLL OFFSET : 0.0
PITCH OFFSET : 0.0
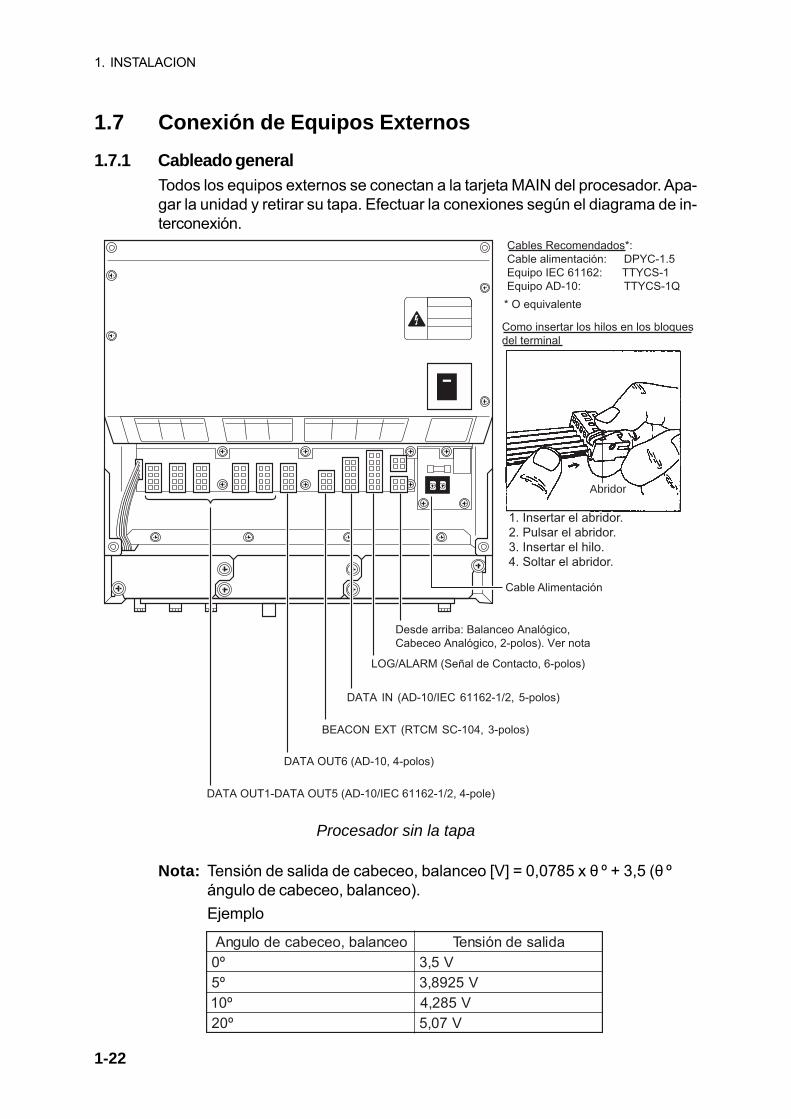
Desde arriba: Balanceo Analógico,
Cabeceo Analógico, 2-polos). Ver nota
LOG/ALARM (Señal de Contacto, 6-polos)
Cables Recomendados*:
Cable alimentación: DPYC-1.5
Equipo IEC 61162: TTYCS-1
Equipo AD-10: TTYCS-1Q
1. Insertar el abridor.
2. Pulsar el abridor.
3. Insertar el hilo.
4. Soltar el abridor.
Abridor
Como insertar los hilos en los bloques
del terminal
DATA IN (AD-10/IEC 61162-1/2, 5-polos)
BEACON EXT (RTCM SC-104, 3-polos)
DATA OUT6 (AD-10, 4-polos)
DATA OUT1-DATA OUT5 (AD-10/IEC 61162-1/2, 4-pole)
Cable Alimentación
* O equivalente
1. INSTALACION
1.7 Conexión de Equipos Externos
Todos los equipos externos se conectan a la tarjeta MAIN del procesador. Apa-gar la unidad y retirar su tapa. Efectuar la conexiones según el diagrama de in-terconexión.
1.7.1 Cableado general
Procesador sin la tapa
Nota: Tensión de salida de cabeceo, balanceo [V] = 0,0785 x θ º + 3,5 (θ ºángulo de cabeceo, balanceo).Ejemplo
1-22
oecnalab,oecebacedolugnA adilasednóisneTº0 V5,3º5 V5298,3º01 V582,4º02 V70,5
1. INSTALACION
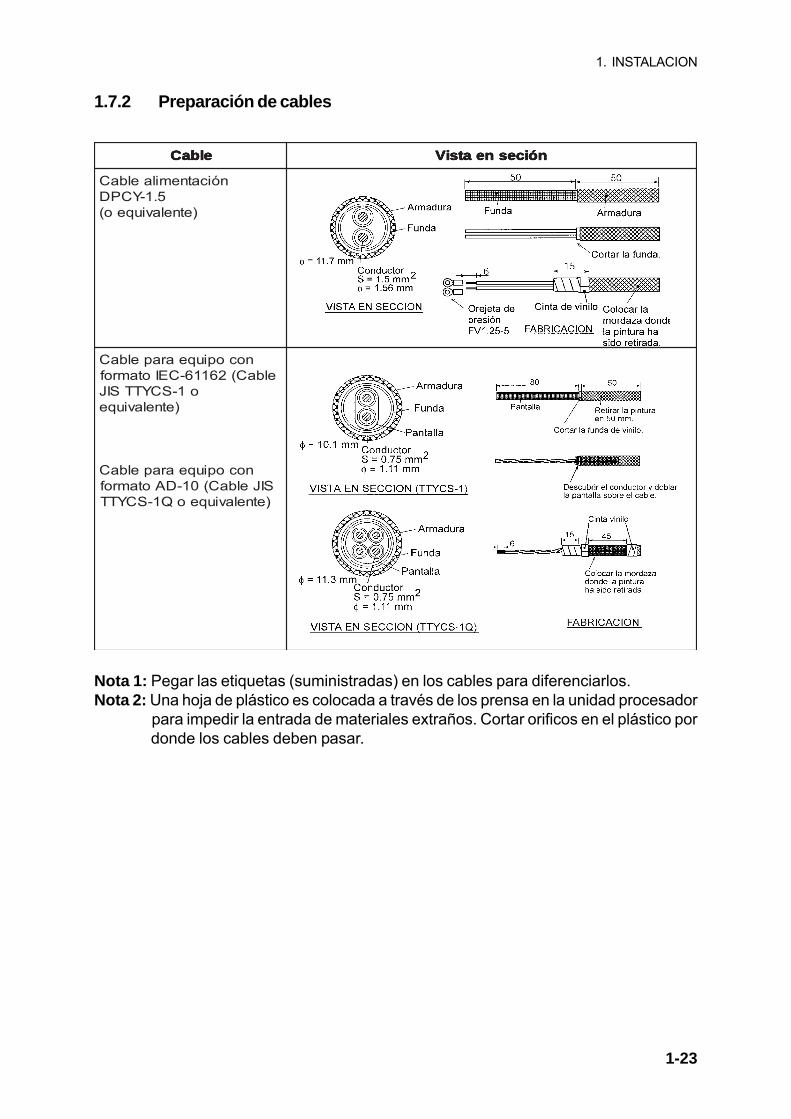
1.7.2 Preparación de cables
1-23
elbaC elbaC elbaC elbaC elbaC nóicesneatsiV nóicesneatsiV nóicesneatsiV nóicesneatsiV nóicesneatsiV
nóicatnemilaelbaC5.1-YCPD
)etnelaviuqeo(
nocopiuqearapelbaCelbaC(26116-CEIotamrof
o1-SCYTTSIJ)etnelaviuqe
nocopiuqearapelbaCSIJelbaC(01-DAotamrof)etnelaviuqeoQ1-SCYTT
Nota 1: Pegar las etiquetas (suministradas) en los cables para diferenciarlos.Nota 2: Una hoja de plástico es colocada a través de los prensa en la unidad procesador
para impedir la entrada de materiales extraños. Cortar orificos en el plástico por donde los cables deben pasar.

1. INSTALACION
Página en blanco
1-24

2. OPERACION
2.1 Controles
Unidad de Presentación
2-1
ATENCIONATENCIONLa precisión puede resultar degradada
en el caso de geometría satelitaria
desfavorable.
La posición debe ser verificada mediante
todos los medios disponibles.
MENU ENT
DISP DIM
HDG
SETUP
SAT
STATUS
SATELLITE
COMPASS
Tecla omnidireccional: Selecciona los elementos del
menú; desplaza el cursor.
Tecla MENU: Abre/cierra el menú.
Tecla ENT: Finaliza la entrada del teclado.
Tecla DISP: Selecciona la
presentación.
Tecla DIM: Ajusta la iluminación del panel,
contraste de la presentación.
Tecla HDG SETUP: Configura al equipo.
Tecla SAT STATUS: Muestra la presentación de estado
Vea la ilustración en pag. 2-7 para su descripción.
Pulsar aquí y tirar hacia uno
para quitar la cubierta.
COMO QUITAR LA CUBIERTA

2. OPERACION
2.2 Encendido/ApagadoEl sistema se enciende o apaga con el interruptor POWER, situado en el pro-cesador.
Procesador
El equipo arranca en la presentación en uso cuando se apagó.
2-2
Nota: La presentación parapadea cuando presenta información de rumboprocedente de la fuente de de rumbo de reserva.
2.3 Iluminación del Panel, Contraste de la Presentación1. Pulsar la tecla [DIM].
Ventana de ajuste
2. Ajustar la iluminación del panel pulsando ! o " en el mando polivalente.
3. Ajustar el contraste de la presentación pulsando # o $.
4. Pulsar la tecla [ENT].
Conmutador
POWER
DIMMER (1-8)
CONTRAST (0-63)
EXIT: [ENT]
4
45
2. OPERACION
2.4 Selección de la PresentaciónLa presentación se selecciona con la tecla [DISP].
2-3
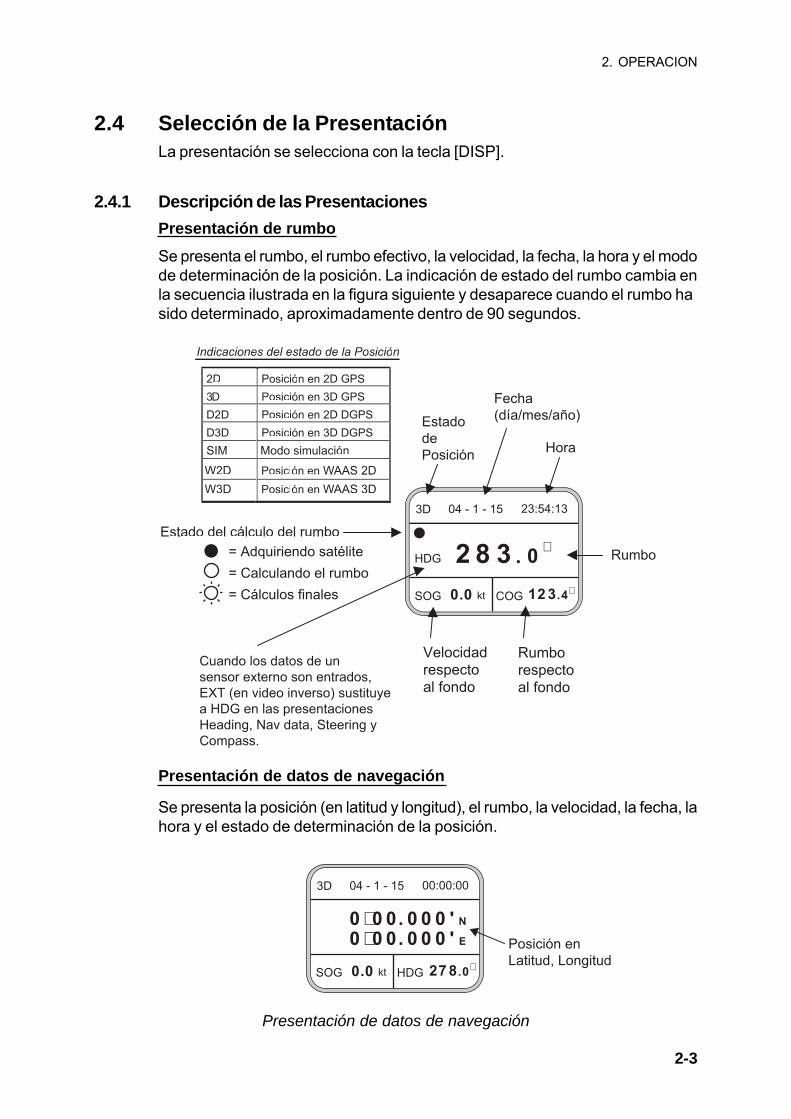
2.4.1 Descripción de las PresentacionesPresentación de rumbo
Se presenta el rumbo, el rumbo efectivo, la velocidad, la fecha, la hora y el modode determinación de la posición. La indicación de estado del rumbo cambia enla secuencia ilustrada en la figura siguiente y desaparece cuando el rumbo hasido determinado, aproximadamente dentro de 90 segundos.
Presentación de datos de navegación
Se presenta la posición (en latitud y longitud), el rumbo, la velocidad, la fecha, lahora y el estado de determinación de la posición.
Presentación de datos de navegación
Velocidad
respecto
al fondo
Estado
de
Posición
3D
˚0.8 32
SOG COG 21 3.4kt.00
04 - 1 - 15 23:54:13
HDG
˚
Fecha
(día/mes/año)
Hora
Rumbo
respecto
al fondo
Rumbo
Estado del cálculo del rumbo
= Adquiriendo satélite
= Calculando el rumbo
= Cálculos finales
2D Posición en 2D GPS
Posici
Posici
Posici
ón
Indicaciones del estado de la Posición
Cuando los datos de un
sensor externo son entrados,
EXT (en video inverso) sustituye
a HDG en las presentaciones
Heading, Nav data, Steering y
Compass.
W2D Posición en
W3D Posición en WAAS 3D
3D
0 0 0 0 E'0.˚00 0 0 0 N'0.˚0
SOG HDG 72 8.0kt.00
04 - 1 - 15 00:00:00
˚
Posición en
Latitud, Longitud

2. OPERACION
Presentación de gobierno
Se presenta el rumbo en forma numérica y analógica. También se indican SOG(velocidad con relación al fondo) y COG (rumbo con relación al fondo). Nóteseque la precisión de la indicación COG es baja cuando la velocidad del barco esbaja.
Presentación de compásSe presenta el rumbo como dirección del compás; éste gira según el rumbo. Seindican también el balanceo y el cabeceo.
2-4
Presentación de gobierno
Presentación compás
Presentación ROT (relación de giro)Se presenta la relación de giro en forma numérica y analógica.
Presentación ROT
3D
˚0.7 82
SOG COG 21 3.4kt.00
07:54
HDG
˚
260250 270 280 290 300
Marca referenciaEscala
demora
3D
0
23:24:01
PIT˚
0. 0HDG˚
0ROL˚+
+
W
NW
NESW
ES
SE
N
Símbolo de nuestro
barcoCabeceo
Balanceo
3D
˚ /min.2 21ROT
STBD
2030 10 0 10 20 30
PORT
Escala
ROT
ROT
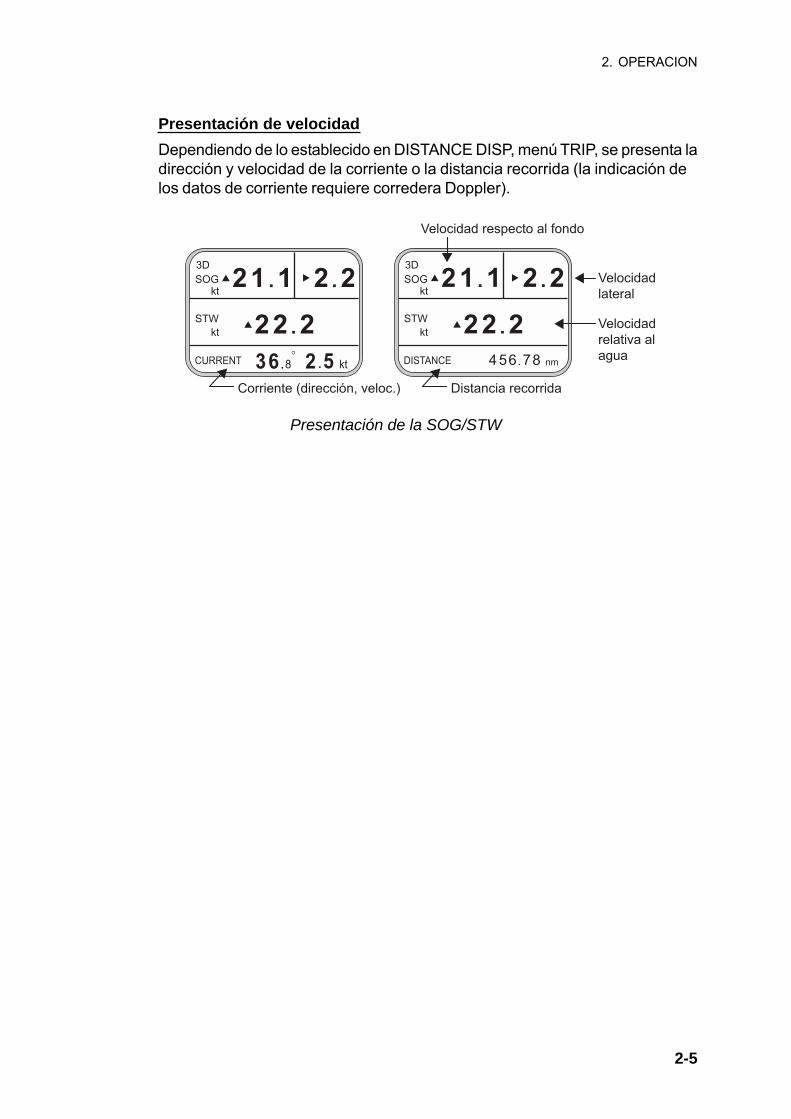
Presentación de velocidadDependiendo de lo establecido en DISTANCE DISP, menú TRIP, se presenta ladirección y velocidad de la corriente o la distancia recorrida (la indicación delos datos de corriente requiere corredera Doppler).
2. OPERACION
Presentación de la SOG/STW
2-5
3D
. 2SOG
DISTANCE 54 76 8.
kt
STW
nm
2
kt .2 22
.2 113D
. 2SOG
CURRENT
kt
STW
2
kt .2 22
.2 11
8°
.36 5 kt.2Corriente (dirección, veloc.)
Velocidad
relativa al
agua
Distancia recorrida
Velocidad respecto al fondo
Velocidad
lateral
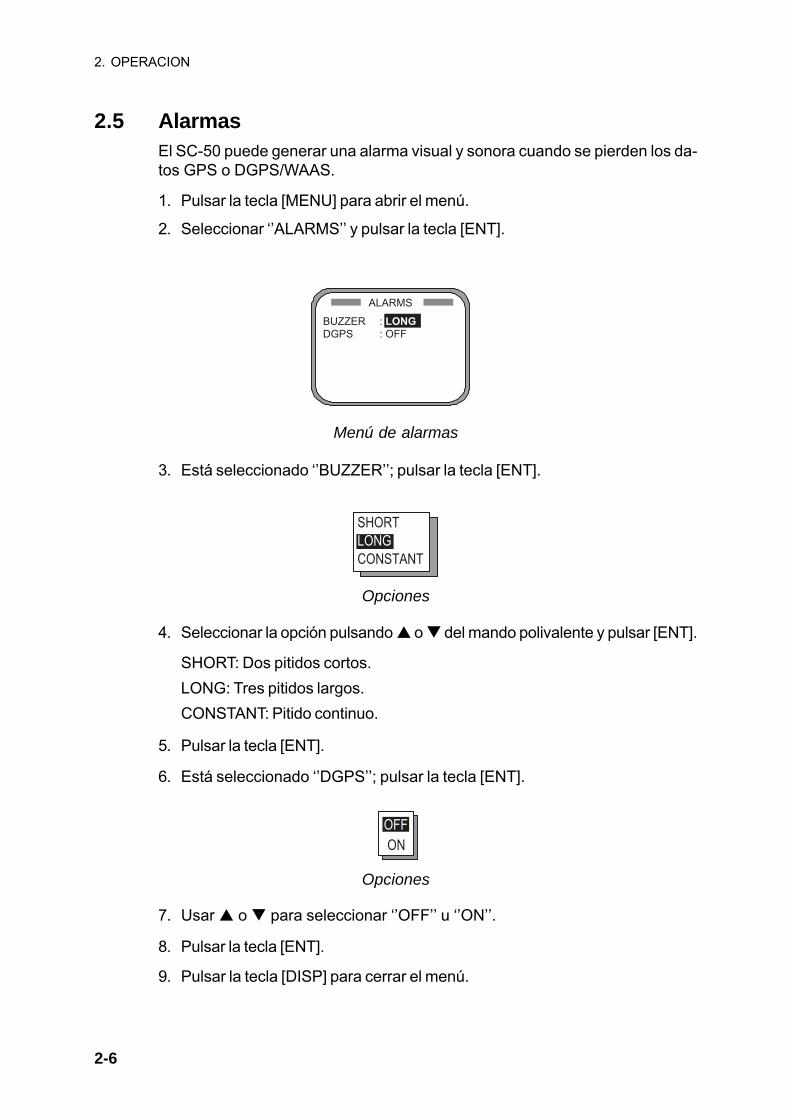
2.5 AlarmasEl SC-50 puede generar una alarma visual y sonora cuando se pierden los da-tos GPS o DGPS/WAAS.
1. Pulsar la tecla [MENU] para abrir el menú.
Menú de alarmas
Opciones
2. OPERACION
2. Seleccionar ‘’ALARMS’’ y pulsar la tecla [ENT].
3. Está seleccionado ‘’BUZZER’’; pulsar la tecla [ENT].
4. Seleccionar la opción pulsando ! o " del mando polivalente y pulsar [ENT].
SHORT: Dos pitidos cortos.LONG: Tres pitidos largos.CONSTANT: Pitido continuo.
5. Pulsar la tecla [ENT].
6. Está seleccionado ‘’DGPS’’; pulsar la tecla [ENT].
Opciones
7. Usar ! o " para seleccionar ‘’OFF’’ u ‘’ON’’.
8. Pulsar la tecla [ENT].
9. Pulsar la tecla [DISP] para cerrar el menú.
2-6
ALARMS
BUZZER : LONG
DGPS : OFF
SHORT
LONG
CONSTANT
ON
OFF
2. OPERACION
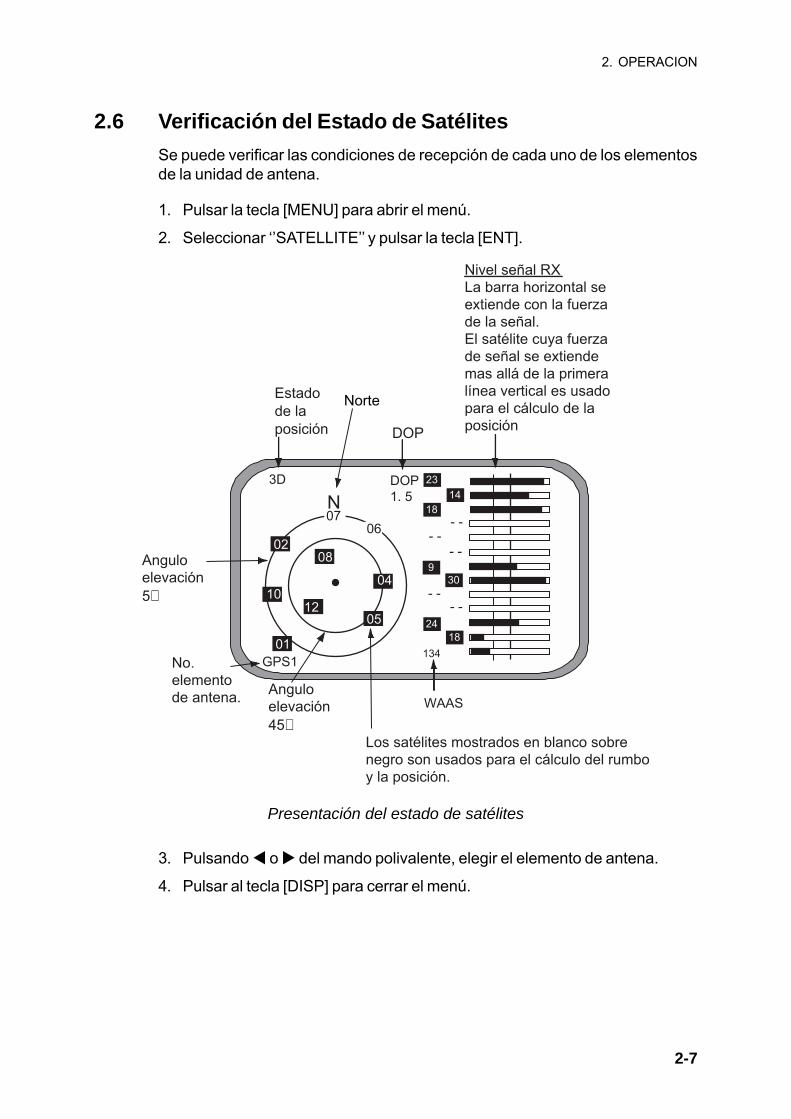
2.6 Verificación del Estado de SatélitesSe puede verificar las condiciones de recepción de cada uno de los elementosde la unidad de antena.
1. Pulsar la tecla [MENU] para abrir el menú.
2. Seleccionar ‘’SATELLITE’’ y pulsar la tecla [ENT].
Presentación del estado de satélites
3. Pulsando ! o " del mando polivalente, elegir el elemento de antena.
4. Pulsar al tecla [DISP] para cerrar el menú.
2-7
GPS1
N
DOP
1. 5
3D
DOP
06
04
05
01
1012
08
NorteEstadode la
posición
No.
elemento
de antena.Angulo
elevación
45
Angulo
elevación
5 ˚
23
- -07
02
Nivel señal RX
La barra horizontal se
extiende con la fuerza
de la señal.
El satélite cuya fuerza
de señal se extiende
mas allá de la primera
línea vertical es usado
para el cálculo de la
posición
Los satélites mostrados en blanco sobre
negro son usados para el cálculo del rumbo
y la posición.
14
18
- -- -
9
30
- -- -
24
18
134
WAAS

2. OPERACION
2.7.1 Presentación del menú de configuración GPS
El menú GPS SETUP permite establecer el amortiguamiento de posición y rum-bo, el promedio de velocidad, aplicar correcciones de posición y excluir satéli-tes anormales.
2.7 Configuración GPS
1. Pulsar la tecla [MENU] para abrir el menú.
2. Seleccionar ‘’GPS SETUP’’ y pulsar la tecla [ENT].
Menú GPS SETUP
2.7.2 Descripción del menú GPS SETUPSMOOTH POS (amortiguamiento de posición)
Cuando la DOP o las condiciones de recepción son desfavorables, la posiciónGPS puede variar significativamente aun cuando el barco permanezca estacio-nario. Estos cambios pueden ser reducidos filtrando las señales GPS recibi-das. A valores más altos corresponde mayor amortiguamiento de los datos re-cibidos, haciéndose más lento el cambio en Latitud y longitud; el margen deajuste es de 0 a 999 segundos. El valor ‘’0’’ es el normal, que debe ser incre-mentado según las necesidades del caso.
SMOOTH S/C (amortiguamiento de velocidad/rumbo)
Durante la determinación de la posición, la velocidad y rumbo del barco se cal-culan directamente de las señales GPS recibidas. Los datos de velocidad pue-den variar aleatoriamente dependiendo de las condiciones de recepción y otrosfactores. Se pueden reducir estas variaciones incrementando el amortiguamien-to, teniendo en cuenta que esto ocasiona que la respuesta a los cambios develocidad y rumbo sea más lenta. El margen de ajuste es de 0 a 999 segundos.
En algunos casos la posición aparece desplazada de la posición correcta, enlatitud o longitud, en algunos minutos. Entrar el valor de corrección.
LAT/LON OFFSET (corrección de posición)
2-8
GPS SETUP
SMOOTH POS : 0SEC
SMOOTH S/C : 5SEC
LAT OFFSET : 0.000'N
LON OFFSET : 0.000'E
DISABLE SV :
2. OPERACION
Cada satélite GPS difunde información (el almanaque) de los satélites del siste-ma. Esta información incluye a los satélites anormales para que el receptor noconsidere los datos de los mismos. Pero, a veces, el almanaque no contieneesta información; si el usuario la conoce por otro medio, puede manualmenteexcluir un satélite anormal escribiendo el número (dos dígitos) del mismo y pul-sando la tecla [ENT]. Para restaurarlo, escribir ‘’00’’.
DIABLE SV (exclusión de satélite)
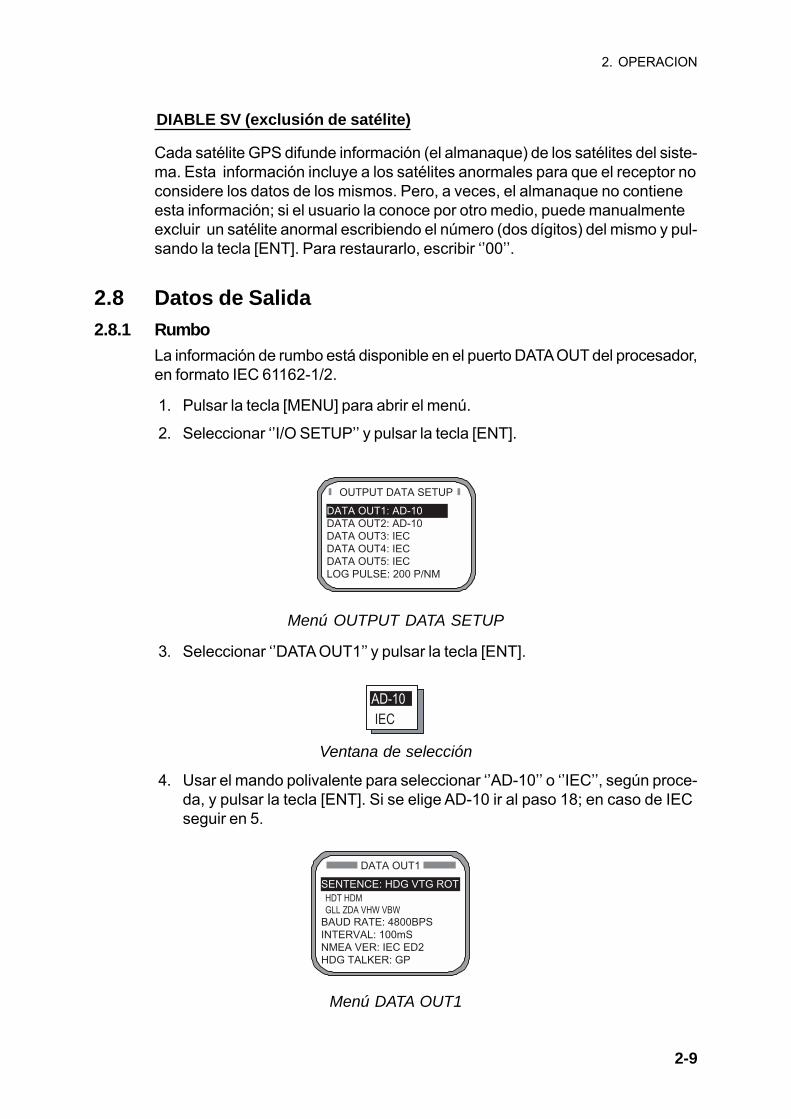
2.8 Datos de Salida
La información de rumbo está disponible en el puerto DATA OUT del procesador,en formato IEC 61162-1/2.
1. Pulsar la tecla [MENU] para abrir el menú.
2. Seleccionar ‘’I/O SETUP’’ y pulsar la tecla [ENT].
Menú OUTPUT DATA SETUP
3. Seleccionar ‘’DATA OUT1’’ y pulsar la tecla [ENT].
Ventana de selección
4. Usar el mando polivalente para seleccionar ‘’AD-10’’ o ‘’IEC’’, según proce-da, y pulsar la tecla [ENT]. Si se elige AD-10 ir al paso 18; en caso de IECseguir en 5.
2-9
2.8.1 Rumbo
Menú DATA OUT1
OUTPUT DATA SETUP
DATA OUT1: AD-10
DATA OUT2: AD-10
DATA OUT3: IEC
DATA OUT4: IEC
DATA OUT5: IEC
LOG PULSE: 200 P/NM
IEC
AD-10
DATA OUT1
SENTENCE: HDG VTG ROT
BAUD RATE: 4800BPS
INTERVAL: 100mS
NMEA VER: IEC ED2
HDG TALKER: GP
HDT HDM
GLL ZDA VHW VBW

2. OPERACION
5. Seleccionar ‘’SENTENCE’’ y pulsar la tecla [ENT].
Menú DATA OUT1, sentencias
HDT: Rumbo verdadero (requerido para radar, AIS, ECDIS, etc.)HDM: Rumbo magnético (obtenido de HDT más la variación magnética).ROT: Datos de la relación de virada.ATT: Rumbo verdadero, cabeceo, balanceo (sentencia exclusiva de Furuno)VDR: Dirección y velocidad de la corrienteVTG: Rumbo y velocidad sobre el fondoGGA: Datos de posición del sistema de posicionamiento global (GPS)GNS: Datos GNSSGLL: Posición en latitud y longitudVHW: Velocidad con relación al agua y rumboVBW: Velocidad con relación al agua/con relación al fondoHVE: Amplitud arriba-abajo del movimiento de la antena GPSZDA: Hora y fecha
7. Usar el mando polivalente para seleccionar ‘’OFF’’ u ‘’ON’’, según proceda,y después pulsar la tecla [ENT]. Las sentencias seleccionadas aparecenmarcadas con un asterisco.
2-10
6. Usar el mando polivalente para seleccionar una sentencia y pulsar la tecla[ENT].
8. Repetir los pasos 6 y 7 para otras sentencias; todas no pueden ser selec-cionadas. Agotada la capacidad de selección aparece el mensaje‘’SENTENCE OVERLOAD’’. Más información en la página 2-12.
9. Pulsar la tecla [MENU] para volver al menú DATA OUT1.10. Seleccionar ‘’BAUD RATE’’ y pulsar la tecla [ENT].
Ventana de opciones
DATA OUT1
HDT VTG VHW
HDM GGA VBW
ROT GNS HVE
ATT GLL ZDA
VDR
ON
OFF
4800BPS
9600BPS
19200BPS
38400BPS

2. OPERACION
Opciones de intervalo Tx
13. Usar el mando polivalente para seleccionar el intrevalo de salida y pulsar latecla [ENT].
2-11
11. Usar el mando polivalente para seleccionar la velocidad del equipo conec-tado y pulsar la tecla [ENT].
12. Está seleccionado ‘’INTERVAL’’; pulsar la tecla [ENT].
14. Seleccionar ‘’IEC VERSION’’ y pulsar la tecla [ENT].
Opciones de intervalo Tx
15. Seleccionar la versión IEC (o NMEA) apropiada y pulsar la tecla [ENT].
16. Seleccionar ‘’HDG TALKER’’ y pulsar la tecla [ENT].
Opciones transmisor de rumbo
17. Seleccionar la opción apropiada y pulsar la tecla [ENT].GP: Navegador GPSHE: Giroscópica orientada al norteHN: Giroscópica no orientada al norteHC: Compás magnético
18. Pulsar la tecla [DISP] para cerrar el menú o pulsar la tecla [MENU] paravolver al menú I/O SETUP.
25ms
100ms
200ms
1S
2S
IEC ED1
IEC ED2
NMEA 1.5
GP
HE
HN
HC
2. OPERACION
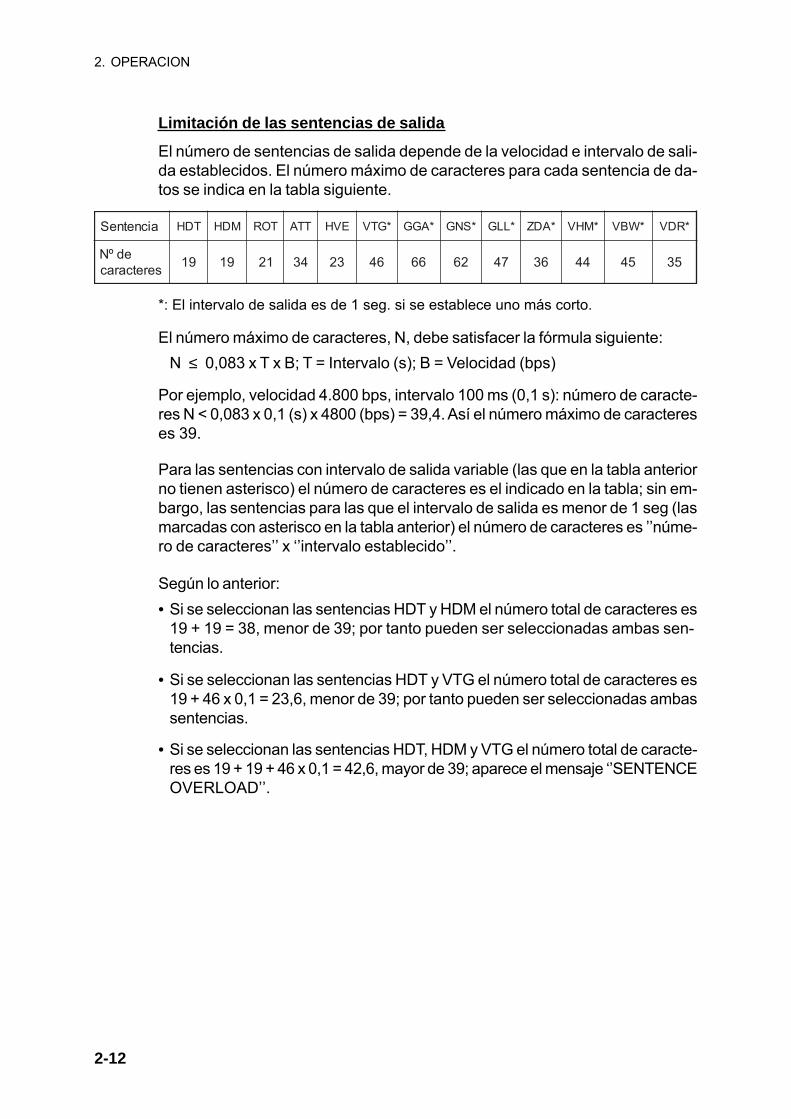
Limitación de las sentencias de salida
2-12
El número de sentencias de salida depende de la velocidad e intervalo de sali-da establecidos. El número máximo de caracteres para cada sentencia de da-tos se indica en la tabla siguiente.
aicnetneS TDH MDH TOR TTA EVH *GTV *AGG *SNG *LLG *ADZ *MHV *WBV *RDV
edºNseretcarac 91 91 12 43 32 64 66 26 74 63 44 54 53
*: El intervalo de salida es de 1 seg. si se establece uno más corto.
El número máximo de caracteres, N, debe satisfacer la fórmula siguiente:N ≤ 0,083 x T x B; T = Intervalo (s); B = Velocidad (bps)
Por ejemplo, velocidad 4.800 bps, intervalo 100 ms (0,1 s): número de caracte-res N < 0,083 x 0,1 (s) x 4800 (bps) = 39,4. Así el número máximo de caractereses 39.
Para las sentencias con intervalo de salida variable (las que en la tabla anteriorno tienen asterisco) el número de caracteres es el indicado en la tabla; sin em-bargo, las sentencias para las que el intervalo de salida es menor de 1 seg (lasmarcadas con asterisco en la tabla anterior) el número de caracteres es ’’núme-ro de caracteres’’ x ‘’intervalo establecido’’.
Según lo anterior:• Si se seleccionan las sentencias HDT y HDM el número total de caracteres es
19 + 19 = 38, menor de 39; por tanto pueden ser seleccionadas ambas sen-tencias.
• Si se seleccionan las sentencias HDT y VTG el número total de caracteres es19 + 46 x 0,1 = 23,6, menor de 39; por tanto pueden ser seleccionadas ambassentencias.
• Si se seleccionan las sentencias HDT, HDM y VTG el número total de caracte-res es 19 + 19 + 46 x 0,1 = 42,6, mayor de 39; aparece el mensaje ‘’SENTENCEOVERLOAD’’.

2. OPERACION
2.8.2 Pulsos de CorrederaEl equipo proporciona el valor de la velocidad con relación al fondo (SOG) enforma de señal de pulsos: 200 pulsos/milla ó 400 pulsos/milla.
1. Pulsar la tecla [MENU].
2. Seleccionar ‘’I/O SETUP’’ y pulsar la tecla [ENT].
3. Seleccionar ‘’LOG PULSE’’ y pulsar la tecla [ENT].
Ventana de selección
4. Seleccionar ‘’200p/nm’’ o ‘’400p/nm’’ y pulsar la tecla [ENT].
5. Pulsar la tecla [DISP] para cerrar el menú.
2-13
200p/nm
400p/nm
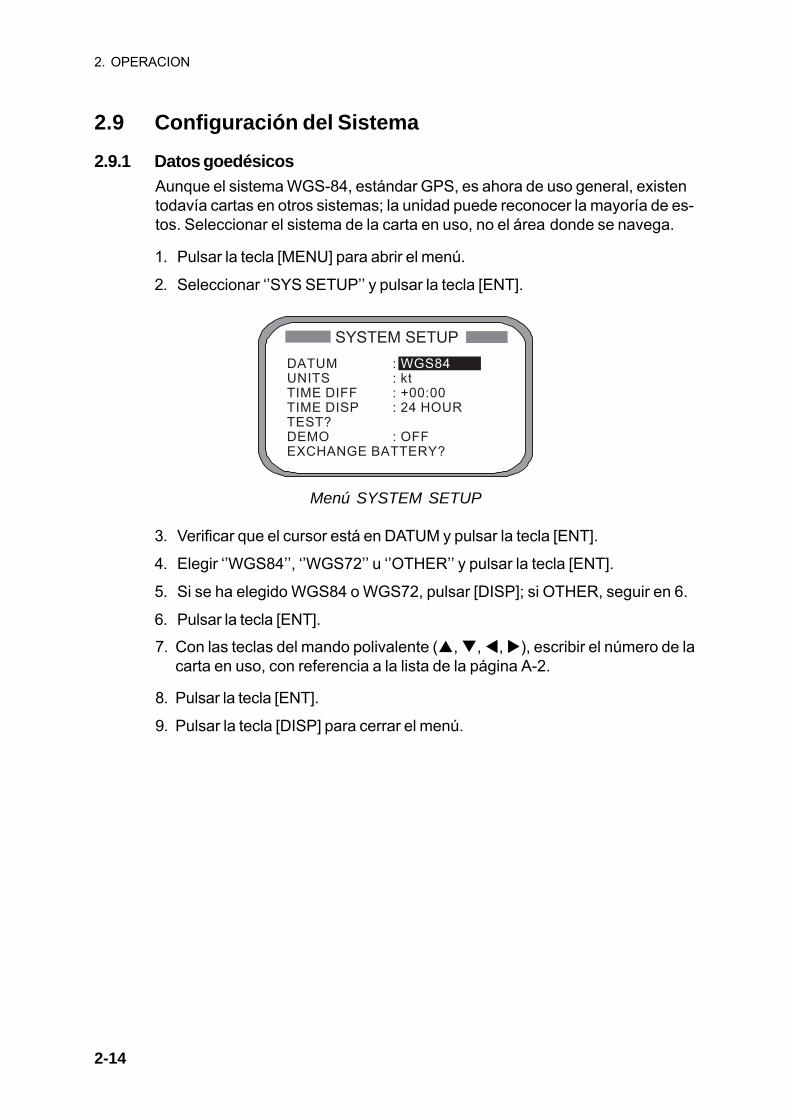
2.9.1 Datos goedésicosAunque el sistema WGS-84, estándar GPS, es ahora de uso general, existentodavía cartas en otros sistemas; la unidad puede reconocer la mayoría de es-tos. Seleccionar el sistema de la carta en uso, no el área donde se navega.
1. Pulsar la tecla [MENU] para abrir el menú.
2. Seleccionar ‘’SYS SETUP’’ y pulsar la tecla [ENT].
3. Verificar que el cursor está en DATUM y pulsar la tecla [ENT].
4. Elegir ‘’WGS84’’, ‘’WGS72’’ u ‘’OTHER’’ y pulsar la tecla [ENT].
5. Si se ha elegido WGS84 o WGS72, pulsar [DISP]; si OTHER, seguir en 6.
6. Pulsar la tecla [ENT].
Menú SYSTEM SETUP
7. Con las teclas del mando polivalente (!, ", #, $), escribir el número de lacarta en uso, con referencia a la lista de la página A-2.
8. Pulsar la tecla [ENT].
9. Pulsar la tecla [DISP] para cerrar el menú.
2.9 Configuración del Sistema
2. OPERACION
2-14
SYSTEM SETUP
DATUM : WGS84UNITS : ktTIME DIFF : +00:00 TIME DISP : 24 HOURTEST? DEMO : OFF EXCHANGE BATTERY?
2. OPERACION
2.9.2 Unidades de medidaLa distancia/velocidad puede ser presentada en millas náuticas/nudos, kilóme-tros/kilómetros por hora o millas/millas por hora.
1. Pulsar la tecla [MENU] para abrir el menú.
2. Seleccionar ‘’SYS SETUP’’ y pulsar la tecla [ENT].
3. Seleccionar ‘’UNITS’’.
4. Pulsar la tecla [ENT].
5. Seleccionar la combinación deseada: nm/kt, km/h, mi/h.
6. Pulsar la tecla [ENT].
7. Pulsar la tecla [DISP] para cerrar el menú.
2.9.3 Hora LocalEl sistema GPS utiliza la hora UTC; si se quiere utilizar el horario local, entrar ladiferencia (margen de -13:30 a +13:30) entre éste y el UTC.
1. Pulsar la tecla [MENU] para abrir el menú.
2. Seleccionar ‘’SYS SETUP’’ y pulsar la tecla [ENT].
3. Seleccionar ‘’TIME DIFF’’ y pulsar [ENT].
4. Pulsar ! o " para presentar + o -.
6. Pulsar la tecla [ENT].
7. Pulsar la tecla [DISP] para cerrar el menú.
5. Con las teclas del mando polivalente (!, ", #, $), escribir la diferencia ho-raria.
2.9.4 Formato de la horaLa hora puede ser presentada en formato de 12 ó 24 horas.
1. Pulsar la tecla [MENU] para abrir el menú.
2. Seleccionar ‘’SYS SETUP’’ y pulsar la tecla [ENT].
3. Seleccionar ‘’TIME DISP’’ y pulsar [ENT].
4. Seleccionar ‘’12HOUR’’ o ‘’24 HOUR’’ y pulsar [ENT].
5. Pulsar la tecla [DISP] para cerrar el menú.
2-15
2. OPERACION
2.9.5 Modo de demostraciónEl modo de demostración simula la operación del equipo.
1. Pulsar la tecla [MENU] para abrir el menú.
2. Seleccionar ‘’SYS SETUP’’ y pulsar la tecla [ENT].
3. Seleccionar ‘’DEMO’’ y pulsar la tecla [ENT].
4. Seleccionar ‘’OFF’’ u ‘’ON’’, según proceda, y pulsar la tecla [ENT].
5. Pulsar la tecla [DISP] para cerrar el menú.
Con el modo de demostración activo aparece la indicción ‘’SIM’’ en la parte su-perior de la pantalla. Cuando se activa el modo de demostración por primeravez aparece ‘’SIMULATION MODE’’ cuando se enciende el equipo; esto se borrapulsando cualquier tecla.
2-16
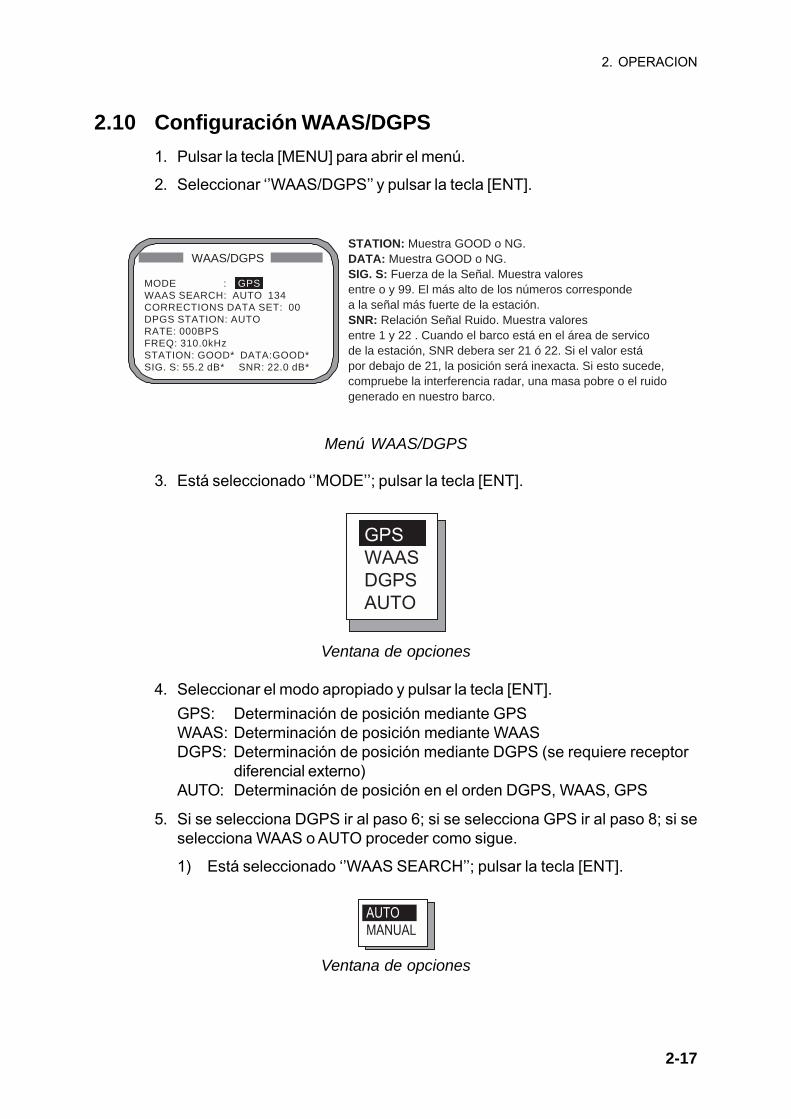
1. Pulsar la tecla [MENU] para abrir el menú.
2. Seleccionar ‘’WAAS/DGPS’’ y pulsar la tecla [ENT].
2.10 Configuración WAAS/DGPS
2. OPERACION
Menú WAAS/DGPS
3. Está seleccionado ‘’MODE’’; pulsar la tecla [ENT].
Ventana de opciones
4. Seleccionar el modo apropiado y pulsar la tecla [ENT].GPS: Determinación de posición mediante GPSWAAS: Determinación de posición mediante WAASDGPS: Determinación de posición mediante DGPS (se requiere receptor
diferencial externo)AUTO: Determinación de posición en el orden DGPS, WAAS, GPS
5. Si se selecciona DGPS ir al paso 6; si se selecciona GPS ir al paso 8; si seselecciona WAAS o AUTO proceder como sigue.
Ventana de opciones
1) Está seleccionado ‘’WAAS SEARCH’’; pulsar la tecla [ENT].
2-17
WAAS/DGPS
MODE : GPS WAAS SEARCH: AUTO 134CORRECTIONS DATA SET: 00DPGS STATION: AUTO RATE: 000BPS FREQ: 310.0kHzSTATION: GOOD* DATA:GOOD*SIG. S: 55.2 dB* SNR: 22.0 dB*
STATION: Muestra GOOD o NG.DATA: Muestra GOOD o NG.SIG. S: Fuerza de la Señal. Muestra valores entre o y 99. El más alto de los números correspondea la señal más fuerte de la estación.SNR: Relación Señal Ruido. Muestra valoresentre 1 y 22 . Cuando el barco está en el área de servicode la estación, SNR debera ser 21 ó 22. Si el valor estápor debajo de 21, la posición será inexacta. Si esto sucede,compruebe la interferencia radar, una masa pobre o el ruidogenerado en nuestro barco.
GPS
WAAS
DGPS
AUTO
AUTO
MANUAL

2. OPERACION
2) Usando el mando polivalente, seleccionar el método de búsqueda delsatélite WAAS. En el caso de MANUAL, pulsar la tecla [ENT], entrar elsatélite WAAS adecuado y pulsar la tecla [ENT].
rodeevorP rodeevorP rodeevorP rodeevorP rodeevorP OEGetilétaS OEGetilétaS OEGetilétaS OEGetilétaS OEGetilétaS dutignoL dutignoL dutignoL dutignoL dutignoL
SAAW)431(ROP Eº871
)221(W-ROA Wº45
SONGE)021(E-ROA Wº5,51
)131(ROI Eº5,46
Satélite GEO y área de cobertura
3) Está seleccionado ‘’CORRECTIONS DATA SET’’; pulsar la tecla [ENT].Se establece el modo de uso de la señal WAAS; utilizar la opción pordefecto ‘’00’’.
6. Seleccionar ‘’DGPS STATION’’ y pulsar la tecla [ENT].
Ventana de opciones
2-18
122
AOR-W
54°W
120
AOR-E
15.5°W
131
IOR
64.5°W
134
POR
178°E
118°W 34.75°W 24.5°E 121.25°E2° 2° 2° 2°
élite
° °
° °
°
23.5 E a 122.25
Nivel umbral de un grado
AUTO
MANUAL

2. OPERACION
2-19
7. Seleccionar ‘’MANUAL’’ o ‘’AUTO’’, según proceda, y pulsar la tecla [ENT].En el caso AUTO ir al paso 8. En el caso MANUAL proceder como sigue.
1) Está seleccionado RATE; pulsar la tecla [ENT].
Ventana de opciones
2) Seleccionar la velocidad y pulsar la tecla [ENT].
3) Está seleccionado FREQ; pulsar la tecla [ENT].
4) Establecer la frecuencia usando ! o " y ! o ".
8. Pulsar la tecla [DISP] para cerrar el menú.
50BPS
100BPS
200BPS

2. OPERACION
2.11 Menú OTHERSEn el menú OTHERS contiene los elementos siguientes:
1. Pulsar la tecla [MENU] para abrir el menú.
3. Está seleccionado ‘’HOLD HDG DATA’’; pulsar la tecla [ENT].
Menú OTHERS
4. Seleccionar ‘’ON’’ u ‘’OFF’’, según proceda; pulsar la tecla [ENT]5. Está seleccionado ‘’HDG RESTORATION’’; pulsar la tecla [ENT].
6. Utilizar el mando polivalente para seleccionar ‘’MAN’’ o ‘’AUTO’’ y pulsar latecla [ENT].
7. Está seleccionado ‘’HDG BACKUP’’; pulsar la tecla [ENT].
9. Pulsar la tecla [ENT] y después la [DISP] para cerrar el menú.
2-20
HOLD HDG DATA: Se establece si utilizar o no los últimos datos de rumbo alencender el equipo. Puesto que esta información no es fiable, la indicación derumbo parpadea.
HDG RESTORATION: Se establece como restaurar la señal GPS, automáticao manualmente, si ésta se ha perdido. Manualmente debe ser pulsada una teclapara reiniciar la salida de rumbo; esto obedece a razones de seguridad, porejemplo si se utiliza un autopiloto.
HDG BACKUP: Se establece cuanto tiempo presentar la información de re-serva cuando se pierde la señal GPS (estos datos son también transferidos alos equipos externos).
2. Seleccionar ‘’OTHERS’’ y pulsar la tecla [ENT].
8. Seleccionar ‘’1’’, ‘’2’’, ‘’3’’, ‘’4’’ o ‘’5’’ minutos, según proceda.
OTHERS
HOLD HDG DATA: OFF
HDG RESTORATION : MAN
HDG BACKUP : 5MIN
ON
OFF
Opciones HDG RESTORATION
AUTO
MAN
2. OPERACION
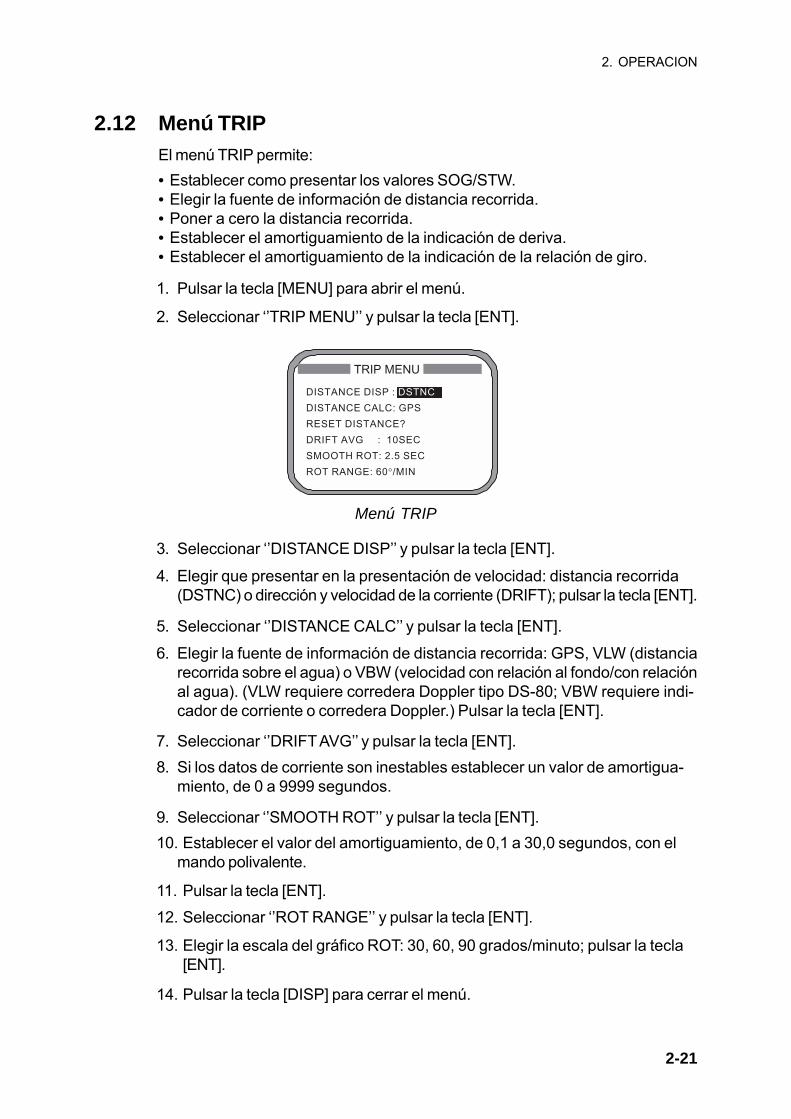
2.12 Menú TRIPEl menú TRIP permite:
1. Pulsar la tecla [MENU] para abrir el menú.
2. Seleccionar ‘’TRIP MENU’’ y pulsar la tecla [ENT].
• Establecer como presentar los valores SOG/STW.• Elegir la fuente de información de distancia recorrida.• Poner a cero la distancia recorrida.• Establecer el amortiguamiento de la indicación de deriva.• Establecer el amortiguamiento de la indicación de la relación de giro.
Menú TRIP
3. Seleccionar ‘’DISTANCE DISP’’ y pulsar la tecla [ENT].
4. Elegir que presentar en la presentación de velocidad: distancia recorrida(DSTNC) o dirección y velocidad de la corriente (DRIFT); pulsar la tecla [ENT].
5. Seleccionar ‘’DISTANCE CALC’’ y pulsar la tecla [ENT].6. Elegir la fuente de información de distancia recorrida: GPS, VLW (distancia
recorrida sobre el agua) o VBW (velocidad con relación al fondo/con relaciónal agua). (VLW requiere corredera Doppler tipo DS-80; VBW requiere indi-cador de corriente o corredera Doppler.) Pulsar la tecla [ENT].
7. Seleccionar ‘’DRIFT AVG’’ y pulsar la tecla [ENT].8. Si los datos de corriente son inestables establecer un valor de amortigua-
miento, de 0 a 9999 segundos.
9. Seleccionar ‘’SMOOTH ROT’’ y pulsar la tecla [ENT].10. Establecer el valor del amortiguamiento, de 0,1 a 30,0 segundos, con el
mando polivalente.
11. Pulsar la tecla [ENT].12. Seleccionar ‘’ROT RANGE’’ y pulsar la tecla [ENT].
13. Elegir la escala del gráfico ROT: 30, 60, 90 grados/minuto; pulsar la tecla[ENT].
14. Pulsar la tecla [DISP] para cerrar el menú.
2-21
TRIP MENU
DISTANCE DISP : DSTNC
DISTANCE CALC: GPS
RESET DISTANCE?
DRIFT AVG : 10SEC
SMOOTH ROT: 2.5 SEC
ROT RANGE: 60°/MIN
2. OPERACION
2.13 Distancia RecorridaLa indicación de la distancia recorrida puede ser puesta a cero cuando la fuen-te de información es GPS o VBW.
1. Pulsar la tecla [MENU] para abrir el menú.
2. Seleccionar ‘’TRIP MENU’’ y pulsar la tecla [ENT].
3. Seleccionar ‘’RESET DISTANCE’’ y pulsar la tecla [ENT].
Puesta a cero de la distancia
4. Seleccionar ‘’YES’’ y pulsar la tecla [ENT].
5. Pulsar la tecla [DISP] para cerrar el menú.
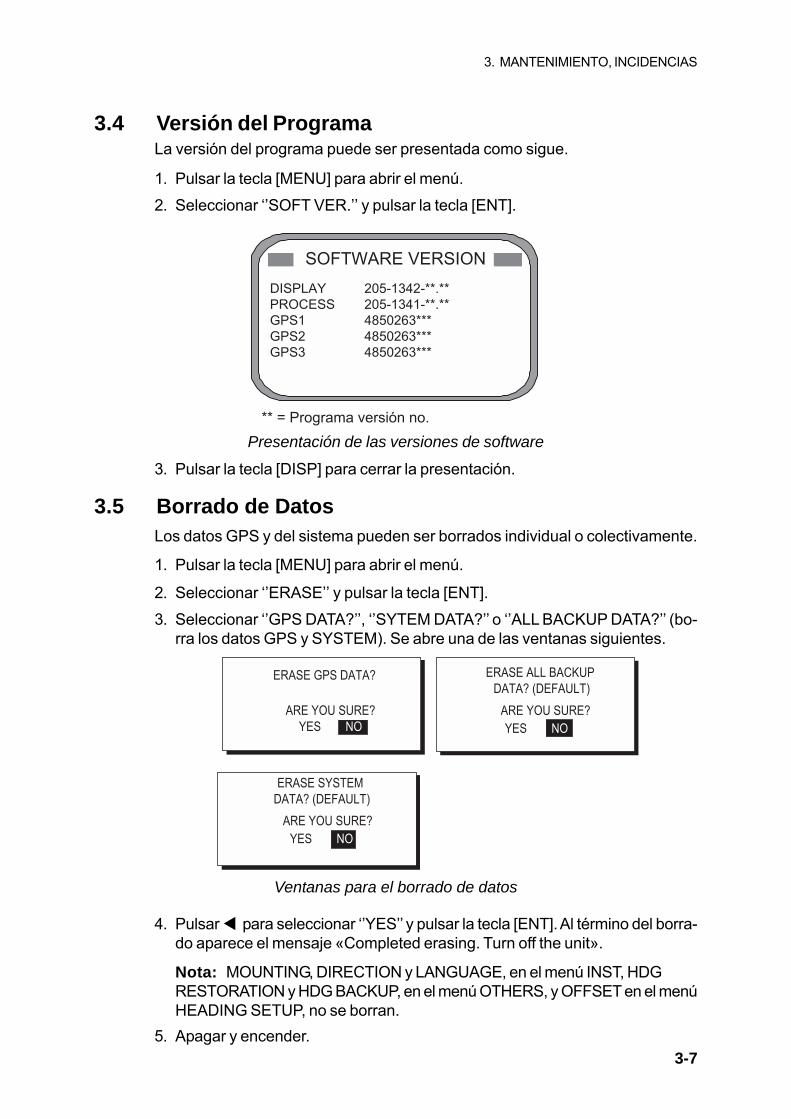
2.14 Fuente de Información de Rumbo de Reserva
1. Pulsar la tecla [HDG SETUP] para abrir el menú.
2. Está seleccionado ‘’HEADING’’; pulsar la tecla [ENT].
Menú HEADING SETUP
3. Seleccionar ‘’INT’’ o ‘’EXT’’ (normalmente INT). Si el sensor GPS interno nofunciona adecuadamente y se dispone de una fuente de rumbo externa, se-leccionar ‘’EXT’’.
4. Pulsar la tecla [ENT].5. Pulsar la tecla [DISP] para cerrar el menú.
2-22
RESET DISTANCE?
ARE YOU SURE?
YES NO
ATENCIONATENCIONNo cambiar la fuente de información de
rumbo con el autopiloto en modo auto.
Cambiar a modo manual antes del
cambio.
OFFSET : Compensa la salida del rumbo.
HEADING : Selecciona la fuente del rumbo. Elija INT para
un uso normal. Si un girocompás está
conectada como principal, dejar este equipo
como respaldo, elija EXT.
INT HDG : Rumbo
EXT HDG : Rumbo entrado desde un equipo externo.
HEADING SETUP
OFFSET : +000.0°
HEADING : INT
INT HDG - - - . -°
EXT HDG - - - . -°

3. MANTENIMIENTO, INCIDENCIAS
!
3.1 Mantenimiento PreventivoEl mantenimiento regular del equipo es esencial para mantenerlo en el mejor es-tado de funcionamiento durante mucho tiempo. El programa de mantenimientoa establecer debe incluir los siguientes puntos.
• Comprobación del apriete de los conectores del procesador y de la unidadde presentación.
• Comprobación del apriete y limpieza de los terminales de tierra.
• Comprobación del estado del cable de antena.
La limpieza del equipo debe efectuarse con un paño suave y seco; no utilizaragentes químicos que pueden afectar a la pintura y al rotulado. Limpiar la panta-lla LCD cuidadosamente para evitar arañazos; usar un pañuelo de papel y unlimpiador de LCD para disolver la suciedad; cambiar de papel frecuentementepara evitar arañazos en la pantalla.
3-1
WARNINGRIESGO DE DESCARGA ELECTRICA
No abrir el equipo.
Sólo personal especializado.

3. MANTENIMIENTO, INCIDENCIAS
3.2 IncidenciasEn la tabla siguiente se relacionan los problemas más comunes y la solución alos mismos.
3-2
amotníS amotníS amotníS amotníS amotníS asuaC asuaC asuaC asuaC asuaC nóiculoS nóiculoS nóiculoS nóiculoS nóiculoS
edneicneonopiuqelE edrotcenoCotleusnóicatnemila
leetnematcerrocrajiFrotcenoc
nóicatnemilaaledollaF nóicatnemilaalraruatseRodidnufelbisuF acincétaicnetsisaraticiloS
obmurednóicacidniaLnocetnemairotaelaaibmac
onoodarramaocrableesocrableodnaucaibmac
eveum
rosnesledollaF edabeurpalratucejE2ocitsóngaid
onobmurednóicacidniaLsopiuqesolaagell
sonretxe
senoixenocsalneollaFsonretxesopiuqea senoixenocracifireV
rosnesledollaF edabeurpalratucejE1ocitsóngaid
Si se observa un gran error de rumbo o la indicación de éste se interrumpe confrecuencia, solicitar asistencia técnica.

3.3 Diagnosis
La prueba de diagnosis 1 verifica el funcionamiento del equipo.
Nota: Durante la ejecución de esta prueba no hay salida de datos de rumbo;además, aparece un mensaje de error en la presentación de los equipos exter-nos . Terminada la prueba, apagar y encender para actualizar los datos.
1. Pulsar la tecla [MENU] para abrir el menú.
2. Seleccionar ‘’SYS SETUP’’ y pulsar la tecla [ENT].
3. Seleccionar ‘’TEST?’’ y pulsar la tecla [ENT].
Opciones del menú TEST
4. Verificar que está seleccionado ‘’TEST1’’ y pulsar la tecla [ENT].
Ventana de confirmación
5. Pulsar ! para seleccionar ‘’YES’’ y pulsar la tecla [ENT]. Se inicia la secuen-cia de comprobación ilustrada en la página siguiente.
3. MANTENIMIENTO, INCIDENCIAS
Prueba de diagnosis 1
3-3
Nota: La prueba del puerto de salida está destinada al servicio técnico y requie-re un conector de prueba; si TEST 1 se ejecuta sin este conector, desconectarDATA IN del procesador.
TEST1
TEST2
TEST3
TEST START?(STOP: PWR OFF)
ARE YOU SURE?
YES NO

3. MANTENIMIENTO, INCIDENCIAS
Secuencia de la prueba de diagnosis
6. Apagar el procesador para salir de la prueba.
3-4
AD-10 IEC
OUT1 - - - -OUT2 - - - -OUT3 - - - -OUT4 - - - -OUT5 - - - -OUT6 - -
SOFTWARE VERSION
DISPLAY 205-1342-**.**
PROCESS 205-1341-**.**
GPS1 4850263***
GPS2 4850263***
GPS3 4850263***
CNT= (STOP: PWR OFF)
Después de 3 seg.
Después de 5 seg.
<LCD CHECK>
ALL ON 2 SEC.
ALL OFF 3 SEC.
Todos los segmentos LCD se encienden 2 seg.,
Todos los segmentos LCD se apagan 3 seg.
La comprobación ROM, RAM, KEY
aparece después de 3 seg.
ROM RAM
GPS1 OK OK PUSH KEY
GPS2 OK OK
GPS3 OK OK
CAL OK OK OK
DISP OK OK
CNT= (STOP: PWR OFF)
Número de veces que eltest se ha ejecutado
Receptor GPS
Unidad procesador
Unidad presentación
TEST TECLADO
Pulse cada tecla una a
a una. El nombre de la
tecla pulsada aparece
aquí si la tecla funciona
adecuadamente.
Para parar el test apague la alimentación.
TEST SALIDA (para técnicos)
TEST ROM, RAM, KEY
TEST PRESENTACION
PRESENTACIONNUMERO DELPROGRAMA
OK mostrado para normal;
NG (No Good) mostrado para error
B-EXT - - DISP OK
** Programa
Versión No.
(Para los técnicos)

Si la indicación de rumbo cambia aleatoriamente cuando el barco está amarra-do o cambia cuando el barco se mueve, ejecutar la prueba de diagnóstico 2con el barco amarrado.
Nota: Durante la ejecución de esta prueba no hay salida de datos de rumbo;además, aparece un mensaje de error en la presentación de los equipos exter-nos. Terminada la prueba, apagar y encender para actualizar los datos.
1. Pulsar la tecla [MENU] para abrir el menú.
2. Seleccionar ‘’SYS SETUP’’ y pulsar la tecla [ENT].
3. Seleccionar ‘’TEST?’’ y pulsar la tecla [ENT].
Opciones del menú TEST4. Verificar que está seleccionado ‘’TEST2’’ y pulsar la tecla [ENT].
Ventana de confirmación
5. Pulsar ! para seleccionar ‘’YES’’ y pulsar la tecla [ENT].
3. MANTENIMIENTO, INCIDENCIAS
Prueba de diagnosis 2
6. Pulsar la tecla [ENT] dos veces. Los valores ‘’RATE’’ y ‘’ANGLE’’ son 0.0º; siestos valores, con el barco amarrado, se modifican significativamente pro-bablemente no funciona correctamente el sensor de relación; en este casosolicitar asistencia técnica.
Presentación TEST 2
7. Apagar el procesador para salir de la prueba.
3-5
TEST1
TEST2
TEST3
TEST START?(STOP: PWR OFF)
ARE YOU SURE?
YES NO
TEST2
RATE
ANGLE
YAW ROL PIT
0.0° 0.0° 0.0°0.0° 0.0° 0.0°
<STOP: PWR OFF>

Esta prueba verifica la señal/contacto de alarma.
1. Pulsar la tecla [MENU] para abrir el menú.
2. Seleccionar ‘’SYS SETUP’’ y pulsar la tecla [ENT].
3. Seleccionar ‘’TEST?’’ y pulsar la tecla [ENT].
Opciones del menú TEST
4. Verificar que está seleccionado ‘’TEST3’’ y pulsar la tecla [ENT].
Ventana de confirmación
5. Pulsar ! para seleccionar ‘’YES’’ y pulsar la tecla [ENT].
3. MANTENIMIENTO, INCIDENCIAS
Prueba de diagnosis 3
Menú TEST 3
7. Seleccionar ‘’OFF’’ (no suena la alarma; alarma de contacto cerrado) u ‘’ON’’(suena la alarma; alarma de contacto abierto).
3-6
6. Pulsar la tecla [ENT].
Ventana de opciones
8. Apagar el procesador para salir de la prueba.
TEST1
TEST2
TEST3
TEST START?(STOP: PWR OFF)
ARE YOU SURE?
YES NO
TEST3
ALARM: OFF
ON
OFF
3. MANTENIMIENTO, INCIDENCIAS
3.4 Versión del ProgramaLa versión del programa puede ser presentada como sigue.
1. Pulsar la tecla [MENU] para abrir el menú.2. Seleccionar ‘’SOFT VER.’’ y pulsar la tecla [ENT].
3. Pulsar la tecla [DISP] para cerrar la presentación.
Presentación de las versiones de software
3.5 Borrado de DatosLos datos GPS y del sistema pueden ser borrados individual o colectivamente.
1. Pulsar la tecla [MENU] para abrir el menú.
2. Seleccionar ‘’ERASE’’ y pulsar la tecla [ENT].
Ventanas para el borrado de datos
4. Pulsar ! para seleccionar ‘’YES’’ y pulsar la tecla [ENT]. Al término del borra-do aparece el mensaje «Completed erasing. Turn off the unit».
Nota: MOUNTING, DIRECTION y LANGUAGE, en el menú INST, HDGRESTORATION y HDG BACKUP, en el menú OTHERS, y OFFSET en el menúHEADING SETUP, no se borran.
5. Apagar y encender.3-7
3. Seleccionar ‘’GPS DATA?’’, ‘’SYTEM DATA?’’ o ‘’ALL BACKUP DATA?’’ (bo-rra los datos GPS y SYSTEM). Se abre una de las ventanas siguientes.
SOFTWARE VERSION
DISPLAY 205-1342-**.**
PROCESS 205-1341-**.**
GPS1 4850263***
GPS2 4850263***
GPS3 4850263***
** = Programa versión no.
ERASE GPS DATA?
ARE YOU SURE?
YES NO
ARE YOU SURE?
ARE YOU SURE?
ERASE SYSTEM
DATA? (DEFAULT)
ERASE ALL BACKUP
DATA? (DEFAULT)
YES NO
YES NO

3. MANTENIMIENTO, INCIDENCIAS
3.6 Sustitución de la PilaEl procesador dispone de una pila que conserva la memoria cuando se apagael equipo. La duración estimada de esta pila es de 3 a 5 años. Cuando se agotaaparece en pantalla el aviso ‘’BATTERY!’’. Solicitar asistencia técnica para cam-biarla.
1. Pulsar la tecla [MENU] para abrir el menú.
2. Seleccionar ‘’SYS SETUP’’ y pulsar la tecla [ENT].
3. Seleccionar ‘’EXCHANGE BATTERY?’’ y pulsar la tecla [ENT].
Ventana de confirmación
4. Pulsar ! para seleccionar ‘’YES’’ y pulsar la tecla [ENT]. El contenido de laRAM se transfiere temporalmente a la memoria ‘’flash’’.
Instrucción de apagar el equipo
5. Apagar el equipo.
3-8
aliPalednóicautiS aliPalednóicautiS aliPalednóicautiS aliPalednóicautiS aliPalednóicautiS opiT opiT opiT opiT opiT ogidóC ogidóC ogidóC ogidóC ogidóCrodasecorP L2TS2F-0542RC 149-441-000
6. Proceder al cambio de la pila (personal técnico).
Nota: Si se ha previsto no usar el equipo durante un largo periodo de tiempoconviene salvar los datos mediante el procedimiento anterior; así se evitará supérdida aunque la pila se agote.
EXCHANGE BATT?
ARE YOU SURE?
YES NO
READY FOR
BATTERY CHANGE.
TURN OFF THE
UNIT.
3. MANTENIMIENTO, INCIDENCIAS
3.7 Sustitución del FusibleEl fusible de 3 A incorporado en la tarjeta POWER del procesador protege alequipo contra fallos del mismo, sobretensión e inversión de la polaridad de laalimentación. Si el fusible se funde, solicitar asistencia técnica para comproba-ción del equipo y sustitución del fusible.
3.8 Mensajes de ErrorEncaso de fallo, suena la alarma y en pantalla aparece intermitente el símbolo
; la alarma se silencia pulsando cualquier tecla; el símbolo permanece en lapresentación hasta que cesa la causa de la alarma. Para averiguar cual es estacausa, proceder como sigue.
!
1. Pulsar la tecla [MENU] para abrir el menú.
2. Seleccionar ‘’MESSAGES’’ y pulsar la tecla [ENT].
Presentación de mensajes
3. Pulsar la tecla [DISP] para cerrar el menú.
Mensajes de error
ejasneM ejasneM ejasneM ejasneM ejasneM odacifingiS odacifingiS odacifingiS odacifingiS odacifingiS nóiculoS nóiculoS nóiculoS nóiculoS nóiculoS
!GNITROBA.otunimnuetnarudobmuredrorrE
lenenóiccurtsbo,olpmejeroP.SPGlañesaledonimac
.nóicurtsboalranimilE
!CLACGNITROBA etnarudadipmurretniSPGlañeS.otunimnu
arapalcetreiuqlaucrasluP.lamronnóicarepoalraruatser
)PSID(!RORREPUKCABalnenóicarugifnocedsotaD
nóicatneserpeddadinu.sodaroireted
aletnemacitámotuaaruatsereS.otcefedropnóicarugifnoc
(Continua en la página siguiente)
3-9
ATENCIONUtilizar los fusibles adecuados.
El uso de fusibles incorrectos puede causar
graves daños al equipo o un incendio.
MESSAGES
GPS DATA ERROR!
3. MANTENIMIENTO, INCIDENCIAS
Mensajes de error (continuación)
3-10
ejasneM ejasneM ejasneM ejasneM ejasneM odacifingiS odacifingiS odacifingiS odacifingiS odacifingiS nóiculoS nóiculoS nóiculoS nóiculoS nóiculoS
)RSSCRP(!RORREPUKCB lenenóicarugifnocedsotaD.sodaroiretedrodasecorp
etnemacitámotuaaruatsereS.otcefedropnóicarugifnocal
!MLAYRETTAB .ajabátserodasecorpledalipaL acincétaicnetsisaraticiloS.alraibmacarap
!RREATAD
ledSPGrotpecerled(SPGsotaDnuetnarudsodidrep)rodasecorpedadilasaladipmurretnI.otunim
lednóicacidnial;obmuredsotad."---"omocecarapaomsim
.SPGrotpecerleraborpmoC
!RORRESPGDSPGDrotpecerled(SPGDsotaD
nuetnarudsodidrep)onretxe.otunim
ledareufratseedeupocrablE.SPGDarutrebocedaerá
!RORREATADSPG
ledSPGrotpecerled(SPGsotaDnuetnarudsodidrep)rodasecorpedadilasaladipmurretnI.otunim
lednóicacidnial;obmuredsotad."---"omocecarapaomsim
edabeurpalratucejEisraborpmocy1sisongaid
solarapGNecerapay2SPG,1SPGserotpecer
.3SPG!XIFONSPG .SPGsotadyahoN .anetnaedelbacraborpmoC
!RORREGDH .obmuredrorrE .acincétaicnetsisaraticiloS
!TUPTUOGNIDAEHON
etnarudounitnocobmuredrorrEalepmurretnieS.sotunim*ocnic
al;obmuredsotadedadilasecarapaomsimlednóicacidni
."---"omocotcefedrop=*
arapalcetreiuqlaucrasluPnóicarepoalraruatserratnetni
.lamron
!RORREMAR .MARalneamelborP .acincétaicnetsisaraticiloS
!)WAY(RORREETAR .sotadedadilasalednóicpurretnI .acincétaicnetsisaraticiloS
!)LLOR(RORREETAR .sotadedadilasalednóicpurretnI .acincétaicnetsisaraticiloS
!)HCTIP(RORREETAR .sotadedadilasalednóicpurretnI .acincétaicnetsisaraticiloS
!RRENOITACINUMMOCnóicacinumocalednóicpurretnI
ynóicatneserpeddadinualertne.rodasecorple
.acincétaicnetsisaraticiloS
!RORRESAAW 1etnarudsodidrepSAAWsotaD.otunim .acincétaicnetsisaraticiloS
!RORREMOR .MORalneamelborP .acincétaicnetsisaraticiloS

APENDICE1. Arbol de Menús
AP-1
SATELLITE
MESSAGES
MENU ALARMS BUZZER (SHORT, LONG, CONSTANT) DGPS (OFF, ON)
GPS SETUP SMOOTH POS (0 SEC) SMOOTH S/C (5 SEC)LAT OFFSET (0.000'N)LON OFFSET (0.000'E)DISABLE SV
Ajustes por defecto en itálica negrilla
INST MENU
ERASE
MOUNTING (FLOOR, WALL, INVERT)DIRECTION (A, B, C, D)LANGUAGE (ENG, JPN)ROLL OFFSET (-90.0 to +90.0, 0)PITCH OFFSET (-90.0 to +90.0, 0)
GPS DATA?SYSTEM DATA?ALL BACKUP DATA?
SOFT VER.
SYS SETUP DATUM (WGS84, WGS72, OTHER 001 (WGS84))UNITS (kt, km/h, mi/h)TIME DIFF (+00:00)TIME DISP (12 HOUR, 24 HOUR)TEST? (TEST1, TEST2, TEST3)DEMO (OFF, ON)EXCHANGE BATTERY?
I/O SETUP DATA OUT1 AD-10, IEC DATA OUT2 DATA OUT3 DATA OUT4 DATA OUT5LOG PULSE (200, 400 (p/nm))
DISTANCE DISP (DSTNC, DRIFT)DISTANCE CALC (GPS, VLW, VBW ) RESET DISTANCE? DRIFT AVG. (0-9999SEC, 10)SMOOTH ROT (0.1 - 30.0, 2.5 (sec)) ROT RANGE (30, 60, 90 (°/min))
OTHERS HOLD HDG DATA (OFF, ON) HDG RESTORATION (MAN, AUTO)HDG BACKUP (1-5 (MIN))
MODE (GPS, WAAS, DGPS, AUTO)WAAS SEARCH (AUTO, MANUAL)CORRECTIONS DATA SET (00-99, 00)DGPS STATION (AUTO, MANUAL)RATE* (50BPS, 100BPS, 200BPS) *000BPS ajuste por defecto. FREQ (310.0kHz)
WAAS/ DGPS
SENTENCE (HDT, HDM, ROT ATT, VDR, VTG, GGA, GNS, GLL, VHW, VBW, HVE, ZDA)BAUD RATE (4800, 9600, 19200, 38400) INTERVAL (25ms, 100ms, 200ms, 1S, 2S) NMEA VER (IEC ED1, IEC ED2, NMEA1.5) TALKER (GP, HE, HN, HC)
TRIP MENU

APENDICE
2. Interfaz Digital
AP-2
Sentencias de Salida del canal 1DATA OUT1-5: HDT, HDM, ROT, Patt, Phve, VTG, GGA, GLL, GNS, ZDA, VHW, VBW,VDRDATA OUT 6:AD-10
Intervalo de TransmisiónHDT, HDM, ROT, Patt, Phve: 100 msVTG, GGA, GLL, GNS, ZDA, VHW, VBW, VDR: 1 s
Transmisión de DatosEn formato serie asíncrona de acuerdo con 2.1 del estándar IEC 61162-1.
Ver detalles en página 2-12.
Requisitos de carga como receptorAislamiento: OptoacopladorImpedancia de Entrada: 220 ΩTensión Máxima: ±15 VUmbral: 4 mA
Se utilizan los parámetros siguientes:Velocidad: 4.800Bits de datos: 8 (D7 = 0), paridad: ningunaBit de parada: 1.
D0 D1 D2 D3 D4 D5 D6 D7
Bit dearranque
Bit deparadaBits de datos
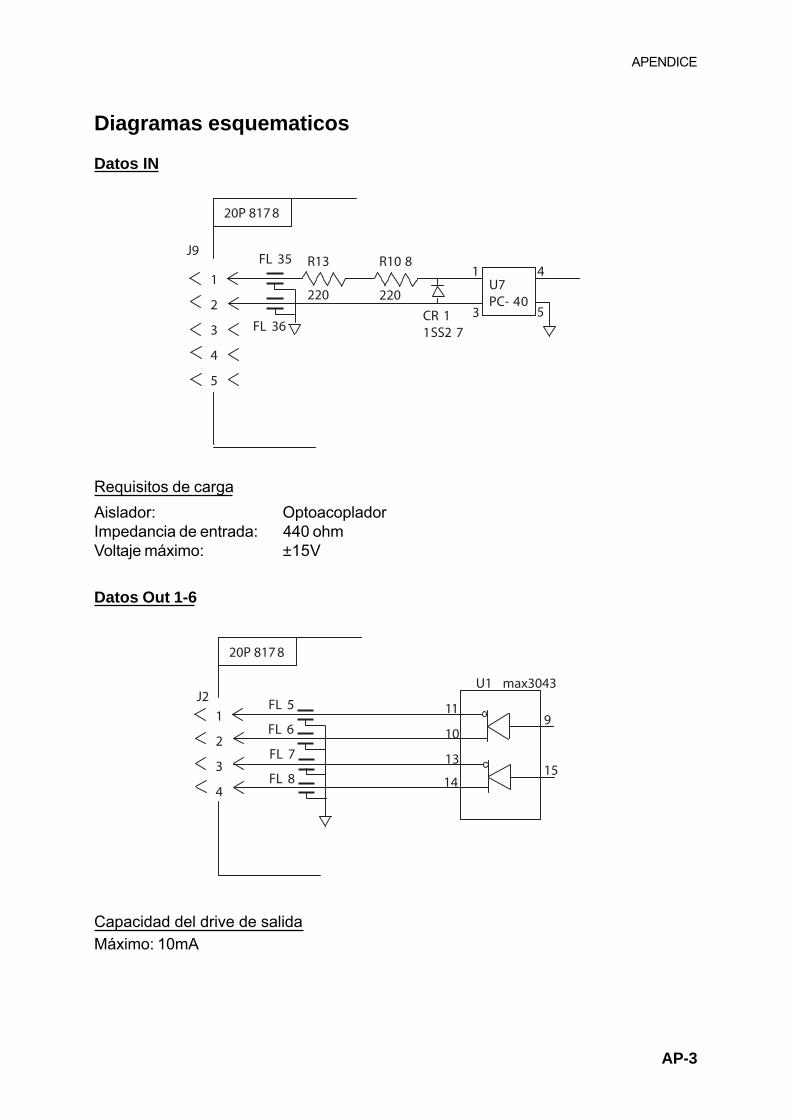
APENDICE
Diagramas esquematicos
AP-3
Datos IN
FL 36
20P 817 8
1
2
3
4
5
FL 35 R13 220
R10 8 220
CR 11SS2 7
U7 PC- 40
1
3 5
4
J9
Requisitos de cargaAislador: OptoacopladorImpedancia de entrada: 440 ohmVoltaje máximo: ±15V
Datos Out 1-6
20P 817 8
1
2
3
4
FL 6
FL 5
FL 8
FL 7
11
10
13
14
9
15
U1 max3043 J2
Capacidad del drive de salidaMáximo: 10mA
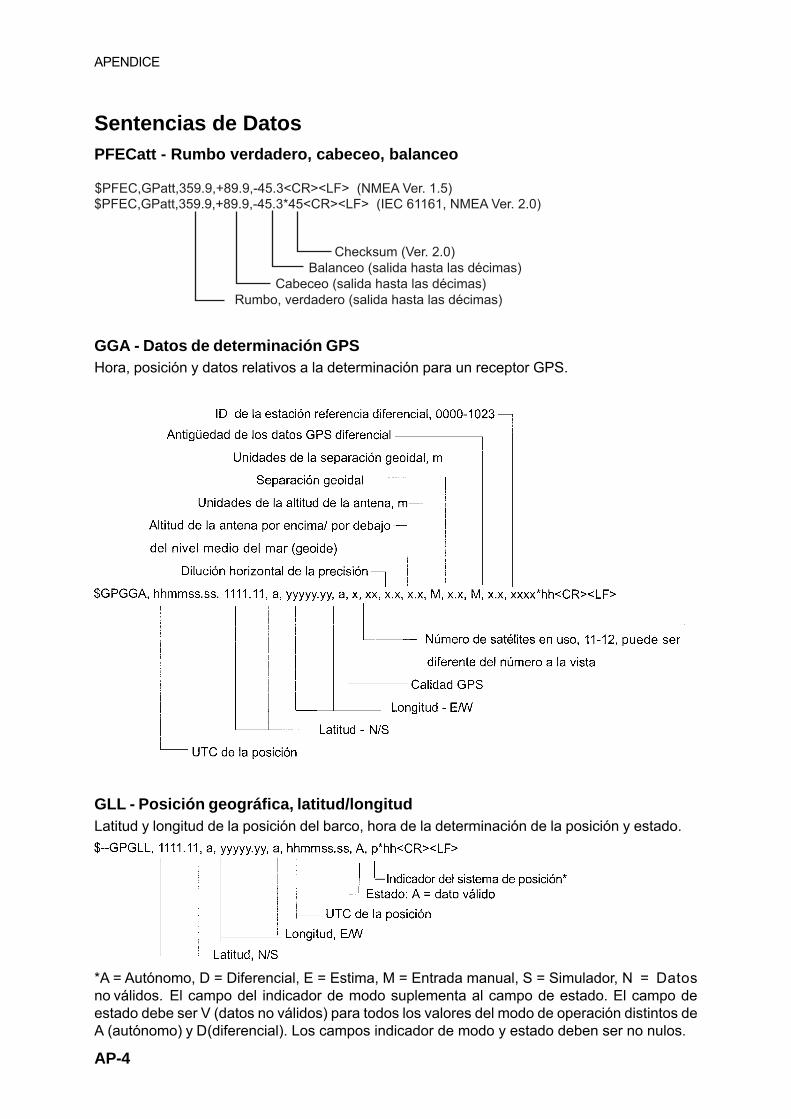
$PFEC,GPatt,359.9,+89.9,-45.3*45<CR><LF> (IEC 61161, NMEA Ver. 2.0)
Checksum (Ver. 2.0) Balanceo (salida hasta las décimas) Cabeceo (salida hasta las décimas) Rumbo, verdadero (salida hasta las décimas)
$PFEC,GPatt,359.9,+89.9,-45.3<CR><LF> (NMEA Ver. 1.5)
APENDICE
Sentencias de Datos
AP-4
PFECatt - Rumbo verdadero, cabeceo, balanceo
GGA - Datos de determinación GPS
GLL - Posición geográfica, latitud/longitud
Hora, posición y datos relativos a la determinación para un receptor GPS.
Latitud y longitud de la posición del barco, hora de la determinación de la posición y estado.
*A = Autónomo, D = Diferencial, E = Estima, M = Entrada manual, S = Simulador, N = Datosno válidos. El campo del indicador de modo suplementa al campo de estado. El campo deestado debe ser V (datos no válidos) para todos los valores del modo de operación distintos deA (autónomo) y D(diferencial). Los campos indicador de modo y estado deben ser no nulos.
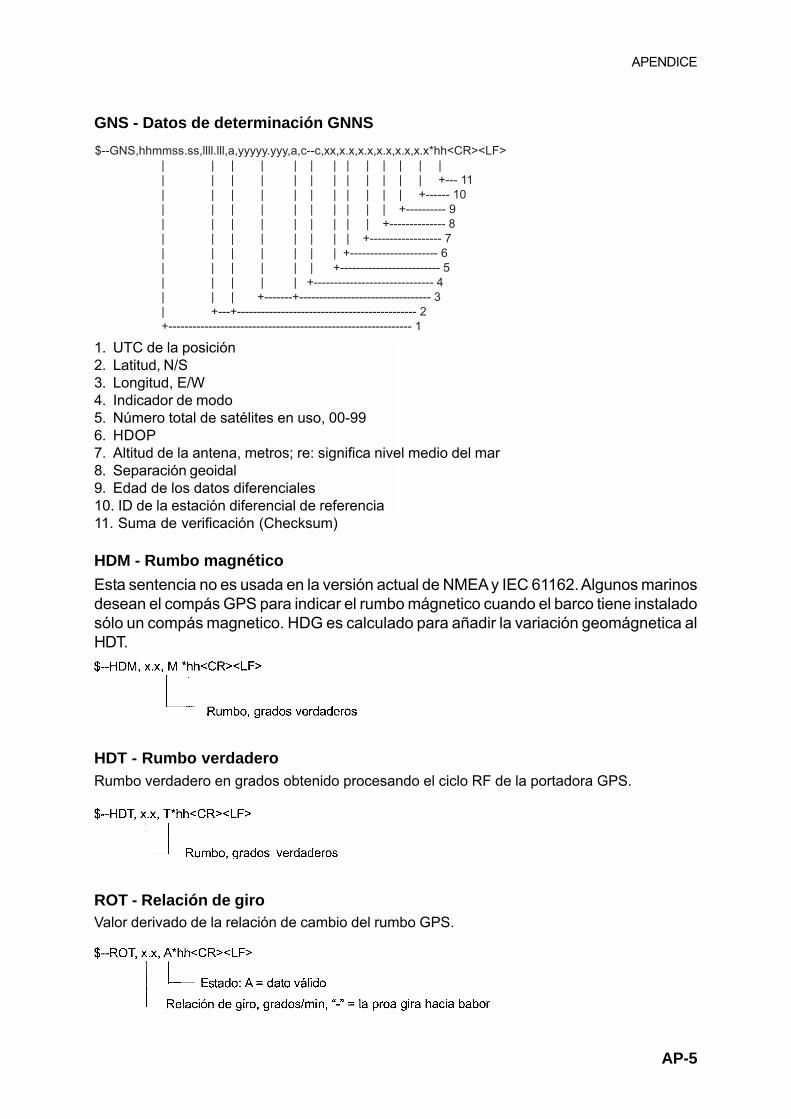
$--GNS,hhmmss.ss,llll.lll,a,yyyyy.yyy,a,c--c,xx,x.x,x.x,x.x,x.x,x.x*hh<CR><LF> | | | | | | | | | | | | | | | | | | | | | | | | | +--- 11 | | | | | | | | | | | +------ 10 | | | | | | | | | | +---------- 9 | | | | | | | | | +-------------- 8 | | | | | | | | +------------------ 7 | | | | | | | +---------------------- 6 | | | | | | +------------------------- 5 | | | | | +------------------------------ 4 | | | +-------+--------------------------------- 3 | +---+--------------------------------------------- 2 +------------------------------------------------------------- 1
1. UTC of position 2. Latitude, N/S 3. Longitude, E/W 4. Mode indicator 5. Total number of satllite in use,00-99 6. HDOP 7. Antenna altitude, metres, re:mean-sea-level(geoid) 8. Geoidal separation 9. Age of differential data 10. Differential reference station ID 11. Checksum
APENDICE
AP-5
GNS - Datos de determinación GNNS
1. UTC de la posición2. Latitud, N/S3. Longitud, E/W4. Indicador de modo5. Número total de satélites en uso, 00-996. HDOP7. Altitud de la antena, metros; re: significa nivel medio del mar8. Separación geoidal9. Edad de los datos diferenciales10. ID de la estación diferencial de referencia11. Suma de verificación (Checksum)
HDT - Rumbo verdadero
HDM - Rumbo magnético
Rumbo verdadero en grados obtenido procesando el ciclo RF de la portadora GPS.
ROT - Relación de giroValor derivado de la relación de cambio del rumbo GPS.
Esta sentencia no es usada en la versión actual de NMEA y IEC 61162. Algunos marinosdesean el compás GPS para indicar el rumbo mágnetico cuando el barco tiene instaladosólo un compás magnetico. HDG es calculado para añadir la variación geomágnetica alHDT.

APENDICE
VBW - Velocidad dual
1. Velocidad longitudinal con relación al agua, nudos2. Velocidad transversal con relación al agua, nudos3. Estado: velocidad con relación al agua, A= datos válidos; V= datos no válidos4. Velocidad longitudinal con relación al fondo, nudos5. Velocidad transversal con relación al fondo, nudos6. Estado: velocidad con relación al fondo, A= datos válidos; V= datos no válidos7. Velocidad transversal atrás con relación al agua, nudos8. Estado: velocidad atrás con relación al agua, A= datos válidos; V= datos no válidos9. Velocidad transversal atrás con relación al fondo, nudos10. Estado: velocidad atrás con relación al fondo, A= datos válidos; V= datos no válidos11. Suma de verificación (Checksum)
VDR - Corriente, velocidad y dirección
1. Dirección, verdadera2. Dirección, magnética3. Velocidad, nudos4. Suma de verificación (Checksum)
VHW - Velocidad con relación al agua y rumbo
1. Rumbo verdadero, grados2. Rumbo magnético, grados3. Velocidad, nudos4. Velocidad, km/h5. Suma de verificación (Checksum)
AP-6

APENDICE
VLW - Distancia recorrida sobre el agua
1. Distancia total acumulada, millas2. Distancia parcial, millas3. Suma de verificación (Checksum)
VTG - Rumbo efectivo y velocidad sobre el fondoLos valores COG y SOG son obtenidos mediante proceso de las señales GPS.
*A = Autónomo, D = Diferencial, E = Estima, M = Entrada manual, S = Simulador, N = Datosno válidos. El campo del indicador de modo suplementa al campo de estado. El campo deestado debe ser V (datos no válidos) para todos los valores del modo de operación distintos deA (autónomo) y D(diferencial). Los campos indicador de modo y estado deben ser no nulos.
ZDA - Hora y fecha
NOTA: La descripción de zona es el número de horas a añadir a la hora local para obtener GMT;valor negativo para longitudes Este.
Hora UTC, día, mes, año y zona horaria local.
AP-7

APENDICE
3. Puertos Entrada/Salida
AP-8
ateuqitEotreuPled
lederbmoNlanimreT O/I lañeS satoN
ATAD1TUO
OGAW-00-620/403-132
0O
,obmuR-adicoleVobmuR,d
,ovitcefeynóicisoP
aroH
01-DAo)3810AEMN(26116CEIotamroF)erawtfos(
0.2,5.1.reV)3810AEMN(1-26116CEI2-26116CEI
-anoicceles(CH,NH,EH,PG:rosimsnarTolóssaicnetnessarto;TOR,MDH,TDHselb
)PGspb00483,00291,0069,0084:dadicoleV
,TOR,TDH,MDH:26116CEIsaicnetneS,WBV,WHV,SNG,LLG,AGG,ADZ,GTV
)únemneffo/no(RDVadilasedolavretnI:)3810AEMN(26116CEI52:TOR,TDH,MDHsaicnetnessaled;elbanoicceles,s2,s1,sm002,sm001,sm,WBV,WHV,ADZ,SNG,LLG,AGG,GTV
elbanoicceles,s2,s1:RDVTTAaicnetneS
onuruFaicnetnesoavisulcxeaicnetneS,sm52adilasolavretni:PaicnetnesolóS
elbanoicceles,s2,s1,sm002,sm001
,oecebac,oredadrevobmuR:TTAaicnetneSoecnalab
>FL<>RC<x.xx+,x.xx+,x.xxx,ttaPG,CEFP$)5.1.reV)3810AEMN(1-26116CEI(
>RC<hh*x.xx+,x.xx+,x.xxx,ttaPG,CEFP$>FL<
,0.2.reV)3810AEMN(1-26116CEI()2-26116CEI
EVHaicnetneSonuruFaicnetnesoavisulcxeaicnetneS
,sm52adilasolavretni:PaicnetnesolóS7elbanoicceles,s2,s1,sm002,sm001
oenuc:EVHaicnetneS>FL<>RC<A,xxx.xx,evhPG,CEFP$)5.1.reV)3810AEMN(1-26116CEI(
>FL<>RC<hh*A,xxx.xx,evhPG,CEFP$,0.2.reV)3810AEMN(1-26116CEI(
)2-26116CEI
sm52:01-DAadilasedolavretnI26116CEI:lañesedleviN
sodaniccelesobmuredsotadsoledadilaS.únemlene
ATAD2TUO
OGAW-00-620/403-132
0O
ATAD3TUO
OGAW-00-620/403-132
0O
ATAD4TUO
OGAW-00-620/403-132
0O
ATAD5TUO
OGAW-00-620/403-132
0O
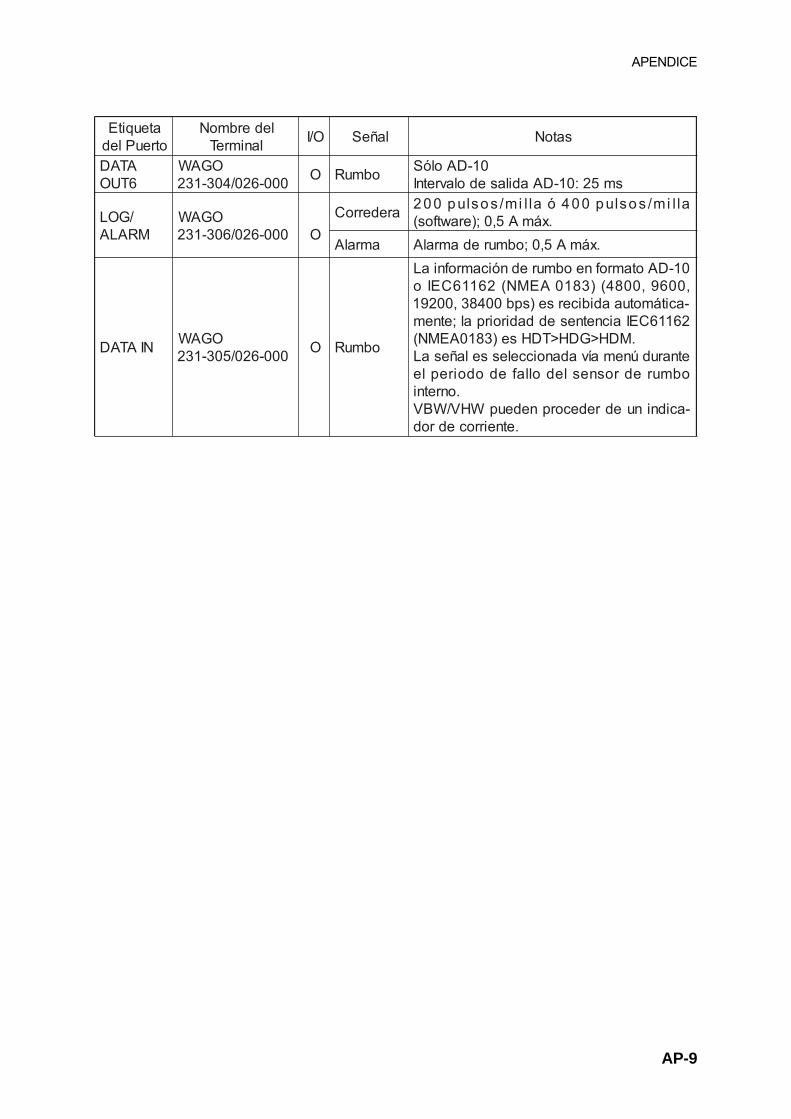
AP-9
APENDICE
ateuqitEotreuPled
lederbmoNlanimreT O/I lañeS satoN
ATAD6TUO
OGAW000-620/403-132 O obmuR 01-DAolóS
sm52:01-DAadilasedolavretnI
/GOLMRALA
OGAW000-620/603-132 O
arederroC allim/soslup004óallim/soslup002.xámA5,0;)erawtfos(
amralA .xámA5,0;obmuredamralA
NIATAD OGAW000-620/503-132 O obmuR
01-DAotamrofneobmurednóicamrofniaL,0069,0084()3810AEMN(26116CEIo-acitámotuaadibicerse)spb00483,0029126116CEIaicnetneseddadiroirpal;etnem
.MDH>GDH>TDHse)3810AEMN(etnarudúnemaívadanoiccelesselañesaLobmuredrosnesledollafedodoireple
.onretni-acidninuedredecorpnedeupWHV/WBV
.etneirrocedrod
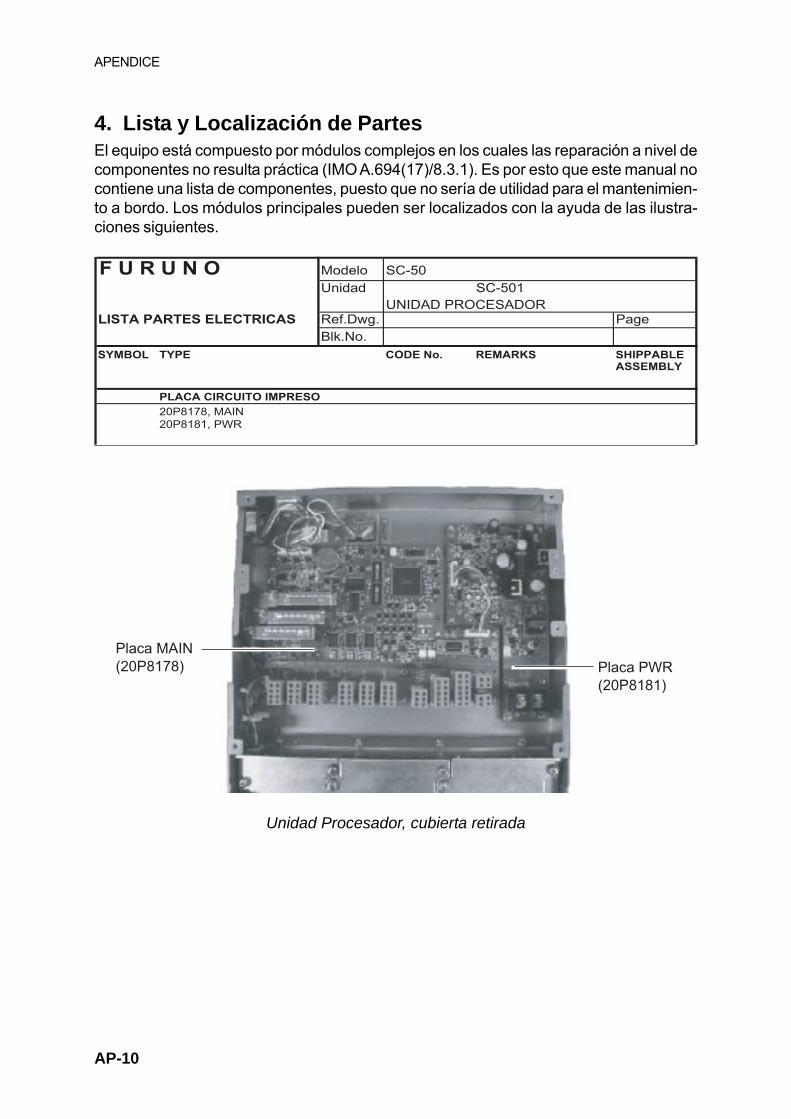
El equipo está compuesto por módulos complejos en los cuales las reparación a nivel decomponentes no resulta práctica (IMO A.694(17)/8.3.1). Es por esto que este manual nocontiene una lista de componentes, puesto que no sería de utilidad para el mantenimien-to a bordo. Los módulos principales pueden ser localizados con la ayuda de las ilustra-ciones siguientes.
AP-10
APENDICE
4. Lista y Localización de Partes
F U R U N O Modelo SC-50
Unidad SC-501
UNIDAD PROCESADORLISTA PARTES ELECTRICAS Ref.Dwg. Page
Blk.No.
SYMBOL TYPE CODE No. REMARKS SHIPPABLE
ASSEMBLY
PLACA CIRCUITO IMPRESO
20P8178, MAIN
20P8181, PWR
Placa MAIN
(20P8178) Placa PWR
(20P8181)
Unidad Procesador, cubierta retirada

APENDICE
AP-11
F U R U N O Modelo SC-50/110
Unidad SC-502
UNIDAD PRESENTACIONLISTA PARTES ELECTRICAS Ref.Dwg. Page
Blk.No.
SYMBOL TYPE CODE No. REMARKS SHIPPABLE
ASSEMBLY
PLACA CIRCUITO IMPRESO
20P8189, CPU
Placa CPU
(20P8189)
Unidad de presentación, cubierta retirada
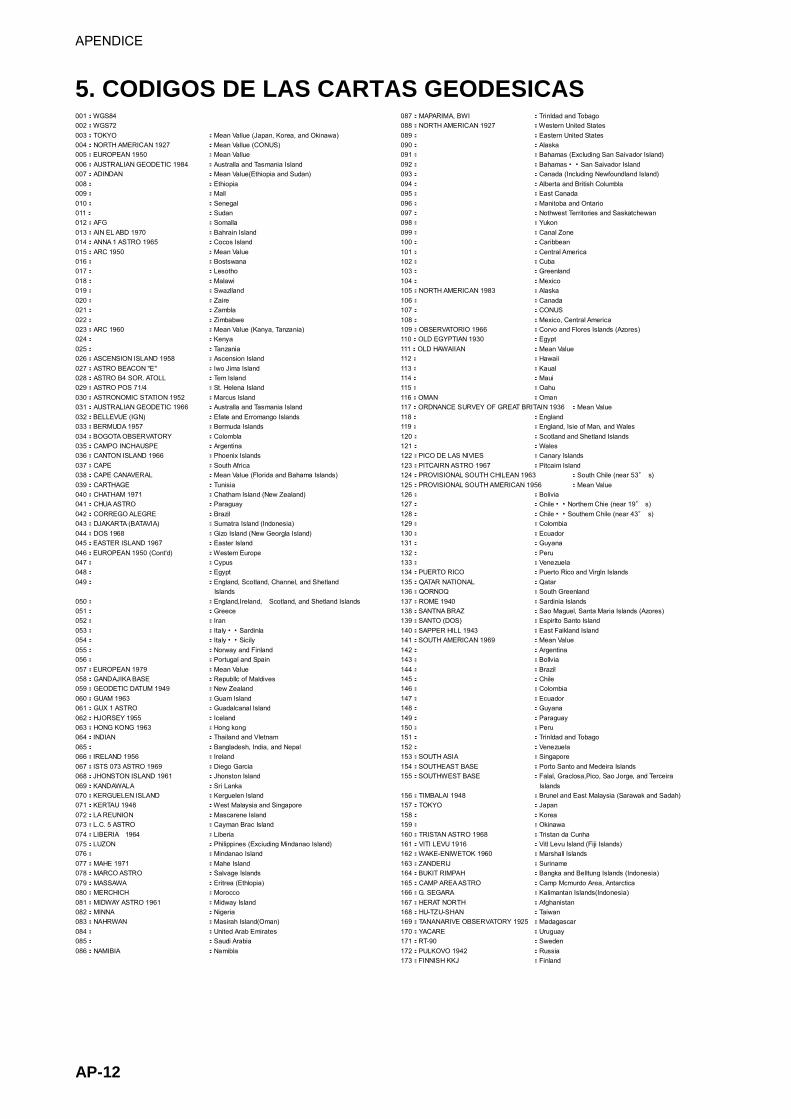
APENDICE
AP-12
5. CODIGOS DE LAS CARTAS GEODESICAS001:WGS84 002:WGS72 003:TOKYO :Mean Vallue (Japan, Korea, and Okinawa) 004:NORTH AMERICAN 1927 :Mean Vallue (CONUS) 005:EUROPEAN 1950 :Mean Vallue 006:AUSTRALIAN GEODETIC 1984 :Australla and Tasmania Island 007:ADINDAN :Mean Value(Ethiopia and Sudan) 008: :Ethiopia 009: :Mall 010: :Senegal 011: :Sudan 012:AFG :Somalla 013:AIN EL ABD 1970 :Bahrain Island 014:ANNA 1 ASTRO 1965 :Cocos Island 015:ARC 1950 :Mean Value 016: :Bostswana 017: :Lesotho 018: :Malawi 019: :Swazlland 020: :Zaire 021: :Zambla 022: :Zimbabwe 023:ARC 1960 :Mean Value (Kanya, Tanzania) 024: :Kenya 025: :Tanzania 026:ASCENSION ISLAND 1958 :Ascension Island 027:ASTRO BEACON "E" :Iwo Jima Island 028:ASTRO B4 SOR. ATOLL :Tem Island 029:ASTRO POS 71/4 :St. Helena Island 030:ASTRONOMIC STATION 1952 :Marcus Island 031:AUSTRALIAN GEODETIC 1966 :Australla and Tasmania Island 032:BELLEVUE (IGN) :Efate and Erromango Islands 033:BERMUDA 1957 :Bermuda Islands 034:BOGOTA OBSERVATORY :Colombla 035:CAMPO INCHAUSPE :Argentina 036:CANTON ISLAND 1966 :Phoenix Islands 037:CAPE :South Africa 038:CAPE CANAVERAL :Mean Value (Florida and Bahama Islands) 039:CARTHAGE :Tunisia 040:CHATHAM 1971 :Chatham Island (New Zealand) 041:CHUA ASTRO :Paraguay 042:CORREGO ALEGRE :Brazil 043:DJAKARTA (BATAVIA) :Sumatra Island (Indonesia) 044:DOS 1968 :Gizo Island (New Georgla Island) 045:EASTER ISLAND 1967 :Easter Island 046:EUROPEAN 1950 (Cont'd) :Westem Europe 047: :Cypus 048: :Egypt 049: :England, Scotland, Channel, and Shetland Islands 050: :England,Ireland, Scotland, and Shetland Islands 051: :Greece 052: :Iran 053: :Italy・・Sardinla 054: :Italy・・Sicily 055: :Norway and Finland 056: :Portugal and Spain 057:EUROPEAN 1979 :Mean Value 058:GANDAJIKA BASE :Republlc of Maldives 059:GEODETIC DATUM 1949 :New Zealand 060:GUAM 1963 :Guam Island 061:GUX 1 ASTRO :Guadalcanal Island 062:HJORSEY 1955 :Iceland 063:HONG KONG 1963 :Hong kong 064:INDIAN :Thailand and Vletnam 065: :Bangladesh, India, and Nepal 066:IRELAND 1956 :Ireland 067:ISTS 073 ASTRO 1969 :Diego Garcia 068:JHONSTON ISLAND 1961 :Jhonston Island 069:KANDAWALA :Sri Lanka 070:KERGUELEN ISLAND :Kerguelen Island 071:KERTAU 1948 :West Malaysia and Singapore 072:LA REUNION :Mascarene Island 073:L.C. 5 ASTRO :Cayman Brac Island 074:LIBERIA 1964 :Liberia 075:LUZON :Philippines (Exciuding Mindanao Island) 076: :Mindanao Island 077:MAHE 1971 :Mahe Island 078:MARCO ASTRO :Salvage Islands 079:MASSAWA :Eritrea (Ethlopia) 080:MERCHICH :Morocco 081:MIDWAY ASTRO 1961 :Midway Island 082:MINNA :Nigeria 083:NAHRWAN :Masirah Island(Oman) 084: :United Arab Emirates 085: :Saudi Arabia 086:NAMIBIA :Namibla
087:MAPARIMA, BWI :Trinldad and Tobago 088:NORTH AMERICAN 1927 :Western United States 089: :Eastern United States 090: :Alaska 091: :Bahamas (Excluding San Saivador Island) 092: :Bahamas・・San Saivador Island 093: :Canada (Including Newfoundland Island) 094: :Alberta and British Columbla 095: :East Canada 096: :Manitoba and Ontario 097: :Nothwest Territories and Saskatchewan 098: :Yukon 099: :Canal Zone 100: :Caribbean 101: :Central America 102: :Cuba 103: :Greenland 104: :Mexico 105:NORTH AMERICAN 1983 :Alaska 106: :Canada 107: :CONUS 108: :Mexico, Central America 109:OBSERVATORIO 1966 :Corvo and Flores Islands (Azores) 110:OLD EGYPTIAN 1930 :Egypt 111:OLD HAWAIIAN :Mean Value 112: :Hawaii 113: :Kaual 114: :Maui 115: :Oahu 116:OMAN :Oman 117:ORDNANCE SURVEY OF GREAT BRITAIN 1936 :Mean Value 118: :England 119: :England, Isie of Man, and Wales 120: :Scotland and Shetland Islands 121: :Wales 122:PICO DE LAS NIVIES :Canary Islands 123:PITCAIRN ASTRO 1967 :Pitcaim Island 124:PROVISIONAL SOUTH CHILEAN 1963 :South Chile (near 53 s) 125:PROVISIONAL SOUTH AMERICAN 1956 :Mean Value 126: :Bolivia 127: :Chile・・Northem Chie (near 19 s) 128: :Chile・・Southem Chile (near 43 s) 129: :Colombia 130: :Ecuador 131: :Guyana 132: :Peru 133: :Venezuela 134:PUERTO RICO :Puerto Rico and Virgln Islands 135:QATAR NATIONAL :Qatar 136:QORNOQ :South Greenland 137:ROME 1940 :Sardinia Islands 138:SANTNA BRAZ :Sao Maguel, Santa Maria Islands (Azores) 139:SANTO (DOS) :Espirlto Santo Island 140:SAPPER HILL 1943 :East Faikland Island 141:SOUTH AMERICAN 1969 :Mean Value 142: :Argentina 143: :Bollvia 144: :Brazil 145: :Chile 146: :Colombia 147: :Ecuador 148: :Guyana 149: :Paraguay 150: :Peru 151: :Trinldad and Tobago 152: :Venezuela 153:SOUTH ASIA :Singapore 154:SOUTHEAST BASE :Porto Santo and Medeira Islands 155:SOUTHWEST BASE :Falal, Graclosa,Pico, Sao Jorge, and Terceira Islands 156:TIMBALAI 1948 :Brunel and East Malaysia (Sarawak and Sadah) 157:TOKYO :Japan 158: :Korea 159: :Okinawa 160:TRISTAN ASTRO 1968 :Tristan da Cunha 161:VITI LEVU 1916 :Vitl Levu Island (Fiji Islands) 162:WAKE-ENIWETOK 1960 :Marshall Islands 163:ZANDERIJ :Suriname 164:BUKIT RIMPAH :Bangka and Belltung Islands (Indonesia) 165:CAMP AREA ASTRO :Camp Mcmurdo Area, Antarctica 166:G. SEGARA :Kalimantan Islands(Indonesia) 167:HERAT NORTH :Afghanistan 168:HU-TZU-SHAN :Taiwan 169:TANANARIVE OBSERVATORY 1925 :Madagascar 170:YACARE :Uruguay 171:RT-90 :Sweden 172:PULKOVO 1942 :Russia 173:FINNISH KKJ :Finland
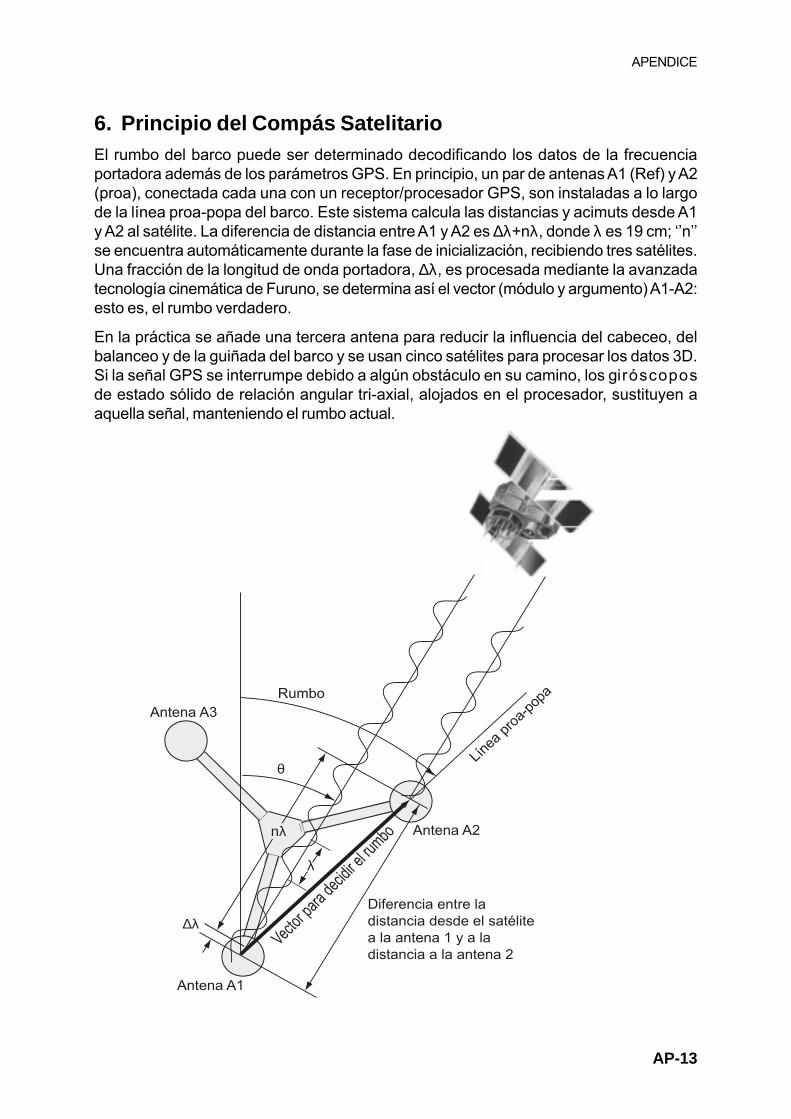
Rumbo
q
Antena A1
Antena A2
Antena A3
Diferencia entre la
distancia desde el satélite
a la antena 1 y a la
distancia a la antena 2
nl
Dl
l
Líne
apr
oa-p
opa
Vector
para
decid
ir elru
mbo
AP-13
APENDICE
6. Principio del Compás SatelitarioEl rumbo del barco puede ser determinado decodificando los datos de la frecuenciaportadora además de los parámetros GPS. En principio, un par de antenas A1 (Ref) y A2(proa), conectada cada una con un receptor/procesador GPS, son instaladas a lo largode la línea proa-popa del barco. Este sistema calcula las distancias y acimuts desde A1y A2 al satélite. La diferencia de distancia entre A1 y A2 es ∆λ+nλ, donde λ es 19 cm; ‘’n’’se encuentra automáticamente durante la fase de inicialización, recibiendo tres satélites.Una fracción de la longitud de onda portadora, ∆λ, es procesada mediante la avanzadatecnología cinemática de Furuno, se determina así el vector (módulo y argumento) A1-A2:esto es, el rumbo verdadero.
En la práctica se añade una tercera antena para reducir la influencia del cabeceo, delbalanceo y de la guiñada del barco y se usan cinco satélites para procesar los datos 3D.Si la señal GPS se interrumpe debido a algún obstáculo en su camino, los giróscoposde estado sólido de relación angular tri-axial, alojados en el procesador, sustituyen aaquella señal, manteniendo el rumbo actual.
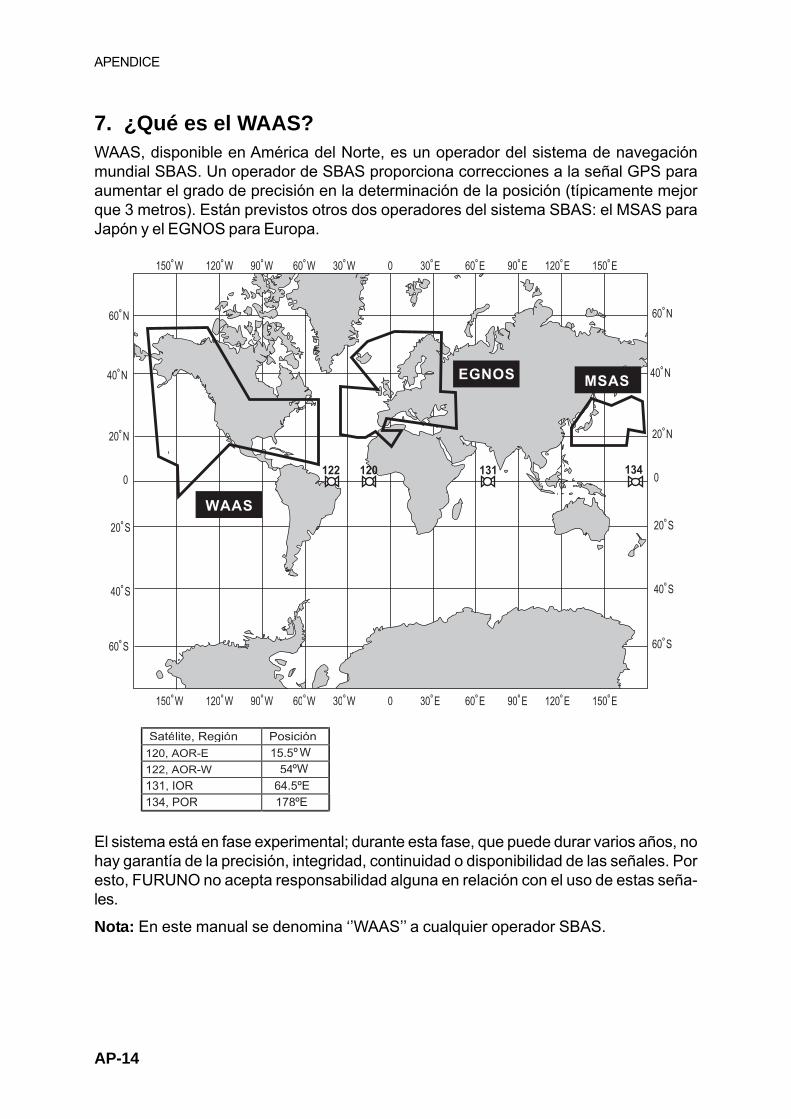
APENDICE
7. ¿Qué es el WAAS?WAAS, disponible en América del Norte, es un operador del sistema de navegaciónmundial SBAS. Un operador de SBAS proporciona correcciones a la señal GPS paraaumentar el grado de precisión en la determinación de la posición (típicamente mejorque 3 metros). Están previstos otros dos operadores del sistema SBAS: el MSAS paraJapón y el EGNOS para Europa.
El sistema está en fase experimental; durante esta fase, que puede durar varios años, nohay garantía de la precisión, integridad, continuidad o disponibilidad de las señales. Poresto, FURUNO no acepta responsabilidad alguna en relación con el uso de estas seña-les.
Nota: En este manual se denomina ‘’WAAS’’ a cualquier operador SBAS.
AP-14
150˚W 120˚W 90˚W 60˚W 30˚W 0 30˚E 60˚E 90˚E 120˚E 150˚E
150˚W 120˚W 90˚W 60˚W 30˚W 0 30˚E 60˚E 90˚E 120˚E 150˚E
0
20˚S
40˚S
60˚S
20˚N
40˚N
60˚N
0
20˚S
40˚S
60˚S
20˚N
40˚N
60˚N
WAAS
EGNOSMSAS
Satélite, Regió ón
54
131, IOR 64.5
134, POR 178
131 134122 120
º WºWºEºE
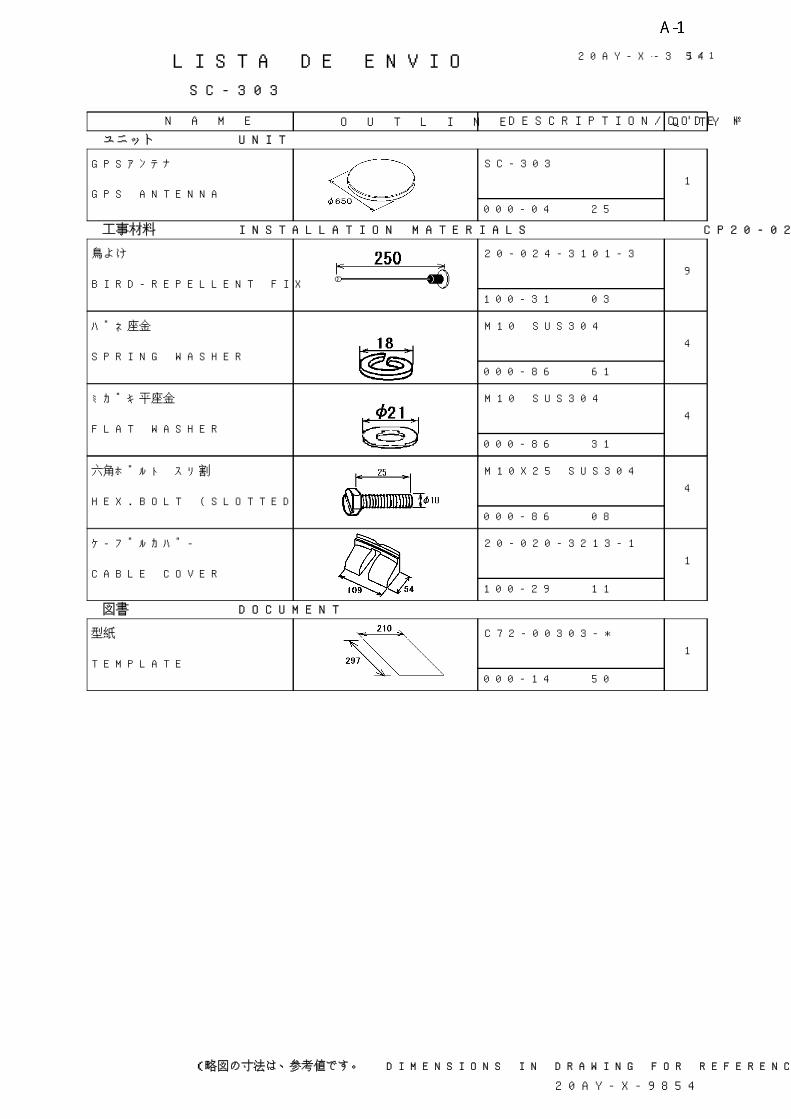
LISTA DE ENVIO 20AY-X-9854 -3
SC-303
N A M E O U T L I N E DESCRIPTION/CODE Q'TY
1/1
ユニット UNIT
GPSアンテナ
GPS ANTENNA
SC-303
000-041-925
1
工事材料 INSTALLATION MATERIALS CP20-02231
鳥よけ
BIRD-REPELLENT FIXTURE
20-024-3101-3
100-315-303
9
バネ座金
SPRING WASHER
M10 SUS304
000-864-261
4
ミガキ平座金
FLAT WASHER
M10 SUS304
000-864-131
4
六角ボルト スリ割
HEX.BOLT (SLOTTED HEAD)
M10X25 SUS304
000-862-308
4
ケーブルカバー
CABLE COVER
20-020-3213-1
100-291-511
1
図書 DOCUMENT
型紙
TEMPLATE
C72-00303-*
000-149-150
1
(略図の寸法は、参考値です。 DIMENSIONS IN DRAWING FOR REFERENCE ONLY.)
20AY-X-9854
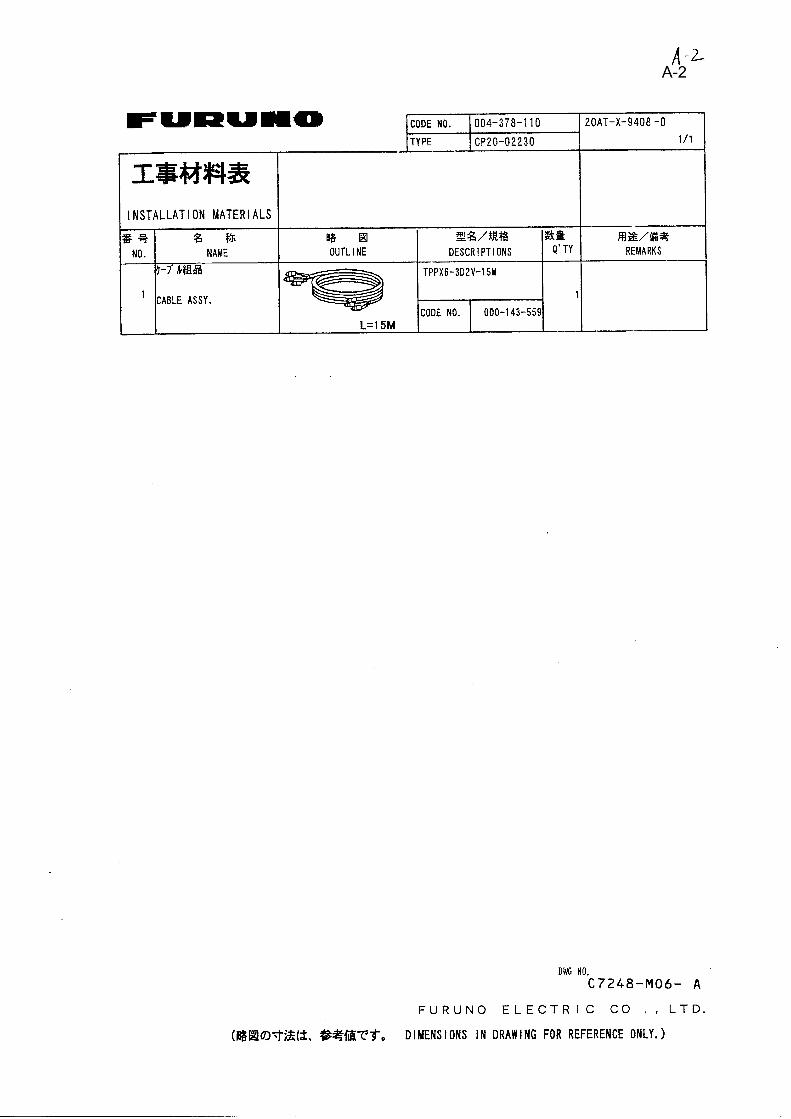
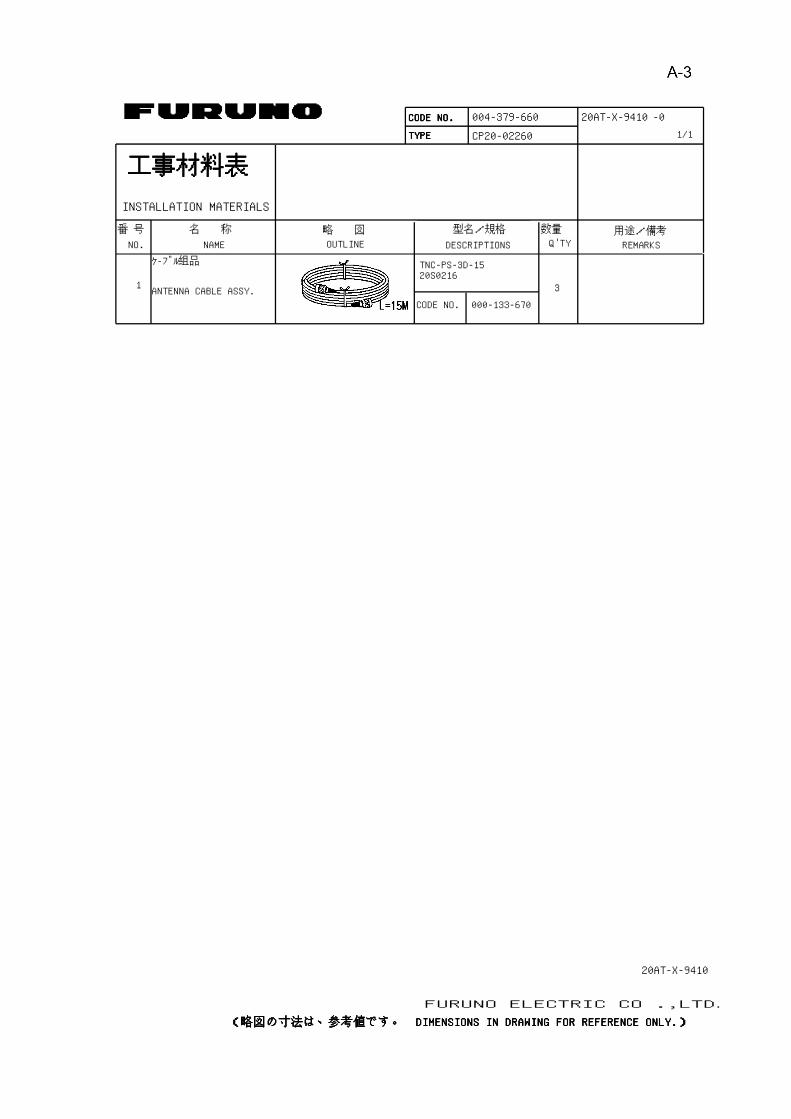
CODE NO.CODE NO.CODE NO.CODE NO. 004-379-660TYPETYPETYPETYPE CP20-02260
略 図OUTLINE
名 称 NAME
数量Q'TY
用途/備考REMARKS
番 号 NO.
型名/規格DESCRIPTIONS
1/1
-0
INSTALLATION MATERIALS
工事材料表工事材料表工事材料表工事材料表
20AT-X-9410
ケーブル組品
ANTENNA CABLE ASSY.
TNC-PS-3D-15 20S0216
3
000-133-670
1
CODE NO.
(略図の寸法は、参考値です。 DIMENSIONS IN DRAWING FOR REFERENCE ONLY.)(略図の寸法は、参考値です。 DIMENSIONS IN DRAWING FOR REFERENCE ONLY.)(略図の寸法は、参考値です。 DIMENSIONS IN DRAWING FOR REFERENCE ONLY.)(略図の寸法は、参考値です。 DIMENSIONS IN DRAWING FOR REFERENCE ONLY.)FURUNO ELECTRIC CO .,LTD.
20AT-X-9410
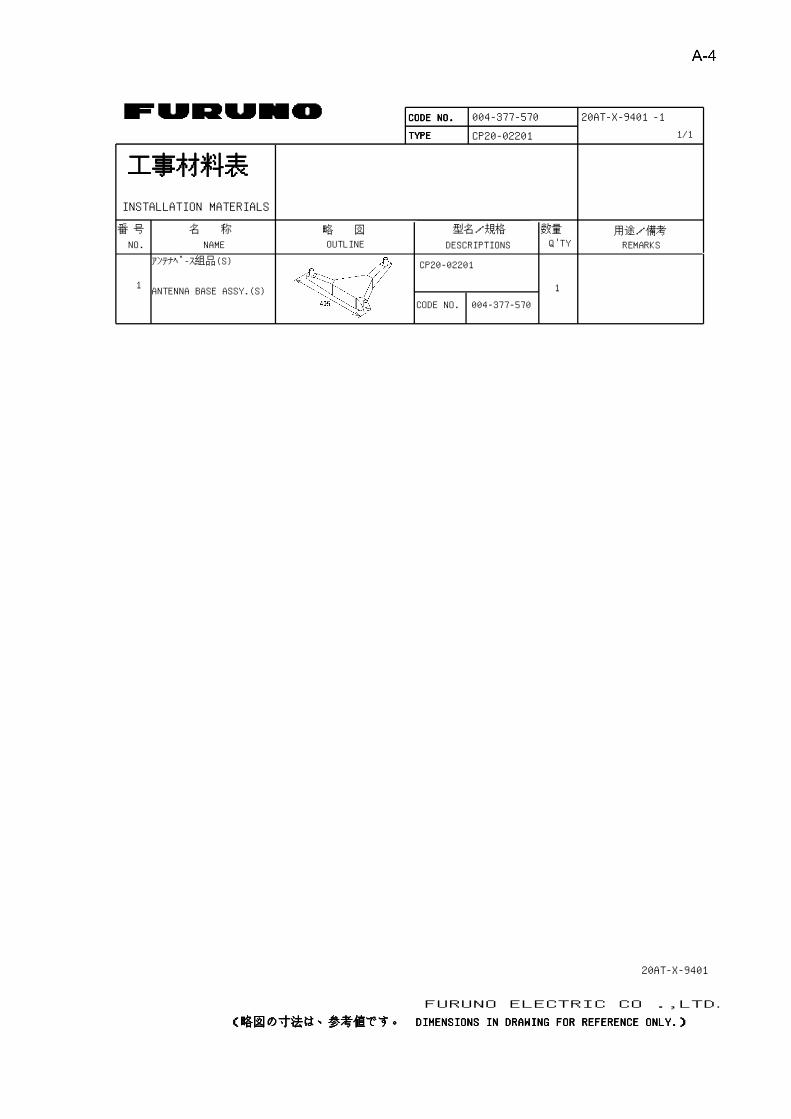
CODE NO.CODE NO.CODE NO.CODE NO. 004-377-570TYPETYPETYPETYPE CP20-02201
略 図OUTLINE
名 称 NAME
数量Q'TY
用途/備考REMARKS
番 号 NO.
型名/規格DESCRIPTIONS
1/1
-1
INSTALLATION MATERIALS
工事材料表工事材料表工事材料表工事材料表
20AT-X-9401
アンテナベース組品(S)
ANTENNA BASE ASSY.(S)
CP20-02201
1
004-377-570
1
CODE NO.
(略図の寸法は、参考値です。 DIMENSIONS IN DRAWING FOR REFERENCE ONLY.)(略図の寸法は、参考値です。 DIMENSIONS IN DRAWING FOR REFERENCE ONLY.)(略図の寸法は、参考値です。 DIMENSIONS IN DRAWING FOR REFERENCE ONLY.)(略図の寸法は、参考値です。 DIMENSIONS IN DRAWING FOR REFERENCE ONLY.)FURUNO ELECTRIC CO .,LTD.
20AT-X-9401

CODE NO. 004-377-590
TYPE CP20-02202
略 図
OUTLINE
名 称
NAME
数量
Q'TY用途/備考
REMARKS
番 号
NO.
型名/規格
DESCRIPTIONS
1/1
-4
INSTALLATION MATERIALS
工事材料表
20AT-X-9404
スリーボンド
SEALANT
1211 50G
1
000-854-118
1
CODE NO.
固定用金具S
MOUNTING BASE
20-019-3351-2
1
100-284-842
2
CODE NO.
補助金具
ATTACHMENT PLATE
20-019-3352-1
1
100-284-851
3
CODE NO.
鳥よけ
BIRD-REPELLENT FIXTURE
20-024-3101-3
4
100-315-303
4
CODE NO.
バネ座金
SPRING WASHER
M8 SUS304
3
000-864-262
5
CODE NO.
ミガキ平座金
FLAT WASHER
M8 SUS304
3
000-864-130
6
CODE NO.
六角ナット 1種
HEX.NUT
M8 SUS304
6
000-863-110
7
CODE NO.
(略図の寸法は、参考値です。 DIMENSIONS IN DRAWING FOR REFERENCE ONLY.)
FURUNO ELECTRIC CO .,LTD.
20AT-X-9404
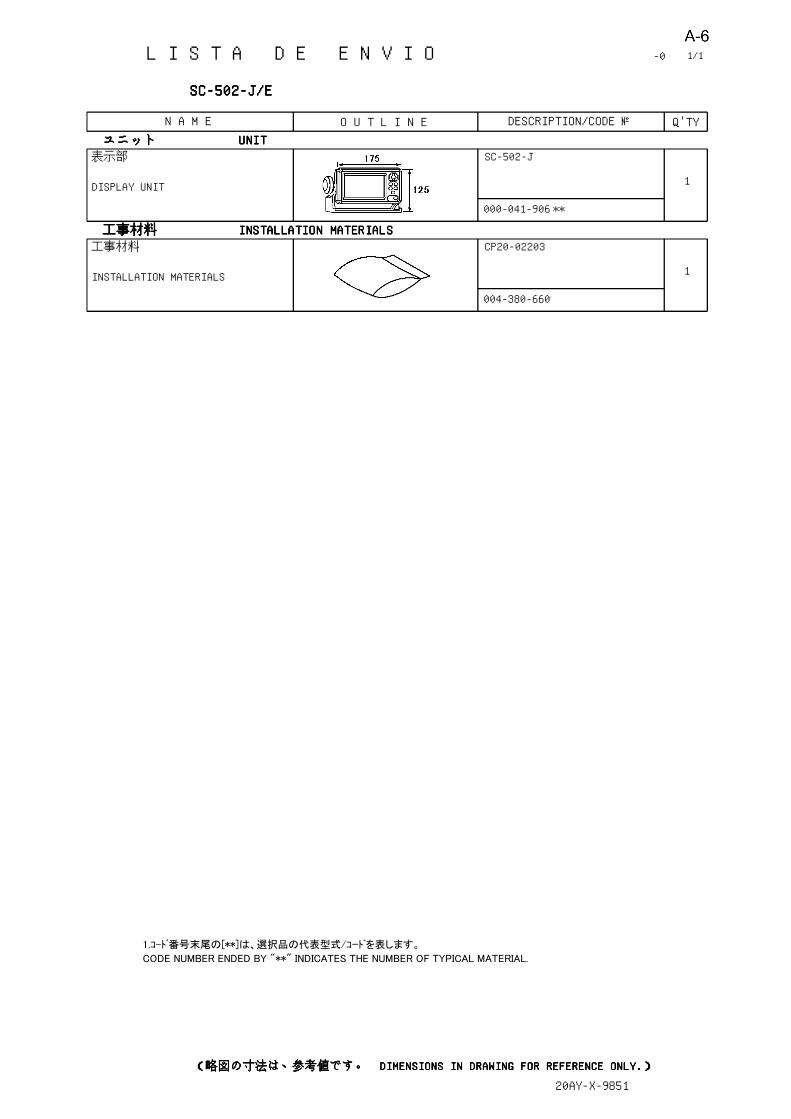
LISTA DE ENVIO 20AY-X-9852 -0
SC-502-J/ESC-502-J/ESC-502-J/ESC-502-J/E
N A M E O U T L I N E DESCRIPTION/CODE Q'TY
1/1
ユニットユニットユニットユニット UNITUNITUNITUNIT表示部
DISPLAY UNIT
SC-502-J
000-041-906
1
**
工事材料工事材料工事材料工事材料 INSTALLATION MATERIALSINSTALLATION MATERIALSINSTALLATION MATERIALSINSTALLATION MATERIALS工事材料
INSTALLATION MATERIALS
CP20-02203
004-380-660
1
1.コ-ド番号末尾の[**]は、選択品の代表型式/コードを表します。
CODE NUMBER ENDED BY "**" INDICATES THE NUMBER OF TYPICAL MATERIAL.
(略図の寸法は、参考値です。 DIMENSIONS IN DRAWING FOR REFERENCE ONLY.)(略図の寸法は、参考値です。 DIMENSIONS IN DRAWING FOR REFERENCE ONLY.)(略図の寸法は、参考値です。 DIMENSIONS IN DRAWING FOR REFERENCE ONLY.)(略図の寸法は、参考値です。 DIMENSIONS IN DRAWING FOR REFERENCE ONLY.)
20AY-X-9851
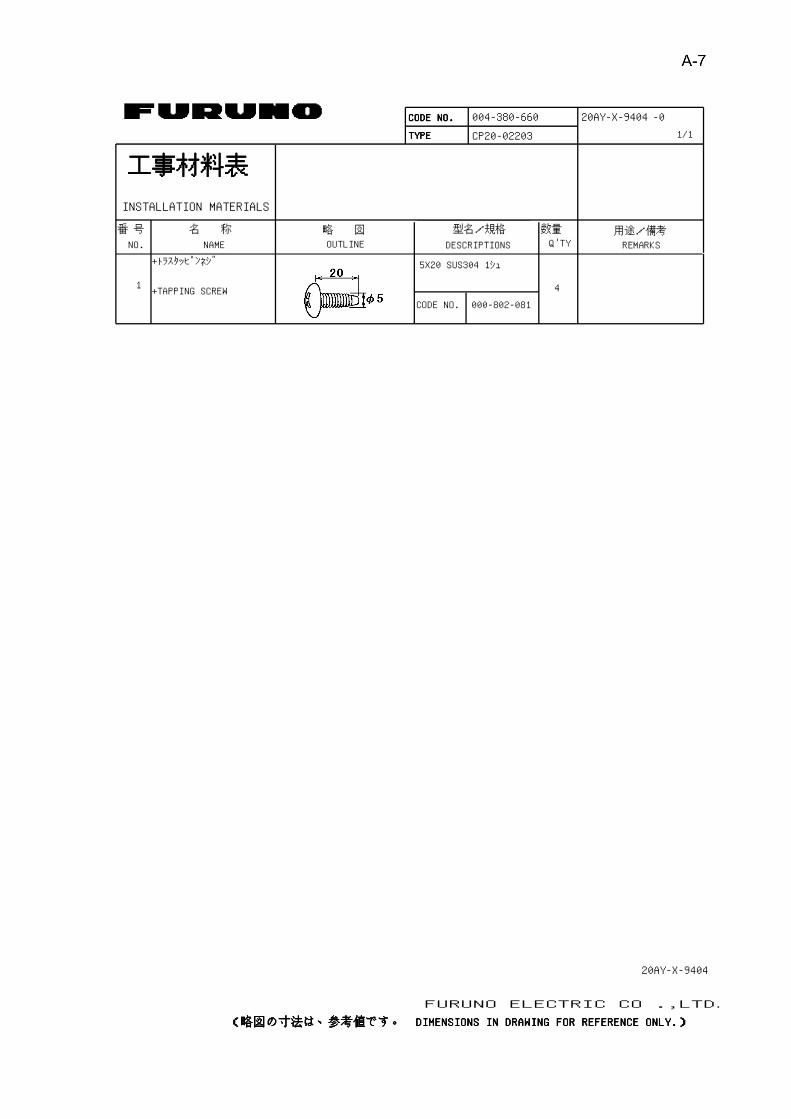
CODE NO.CODE NO.CODE NO.CODE NO. 004-380-660TYPETYPETYPETYPE CP20-02203
略 図OUTLINE
名 称 NAME
数量Q'TY
用途/備考REMARKS
番 号 NO.
型名/規格DESCRIPTIONS
1/1
-0
INSTALLATION MATERIALS
工事材料表工事材料表工事材料表工事材料表
20AY-X-9404
+トラスタッピンネジ
+TAPPING SCREW
5X20 SUS304 1シュ
4
000-802-081
1
CODE NO.
(略図の寸法は、参考値です。 DIMENSIONS IN DRAWING FOR REFERENCE ONLY.)(略図の寸法は、参考値です。 DIMENSIONS IN DRAWING FOR REFERENCE ONLY.)(略図の寸法は、参考値です。 DIMENSIONS IN DRAWING FOR REFERENCE ONLY.)(略図の寸法は、参考値です。 DIMENSIONS IN DRAWING FOR REFERENCE ONLY.)FURUNO ELECTRIC CO .,LTD.
20AY-X-9404
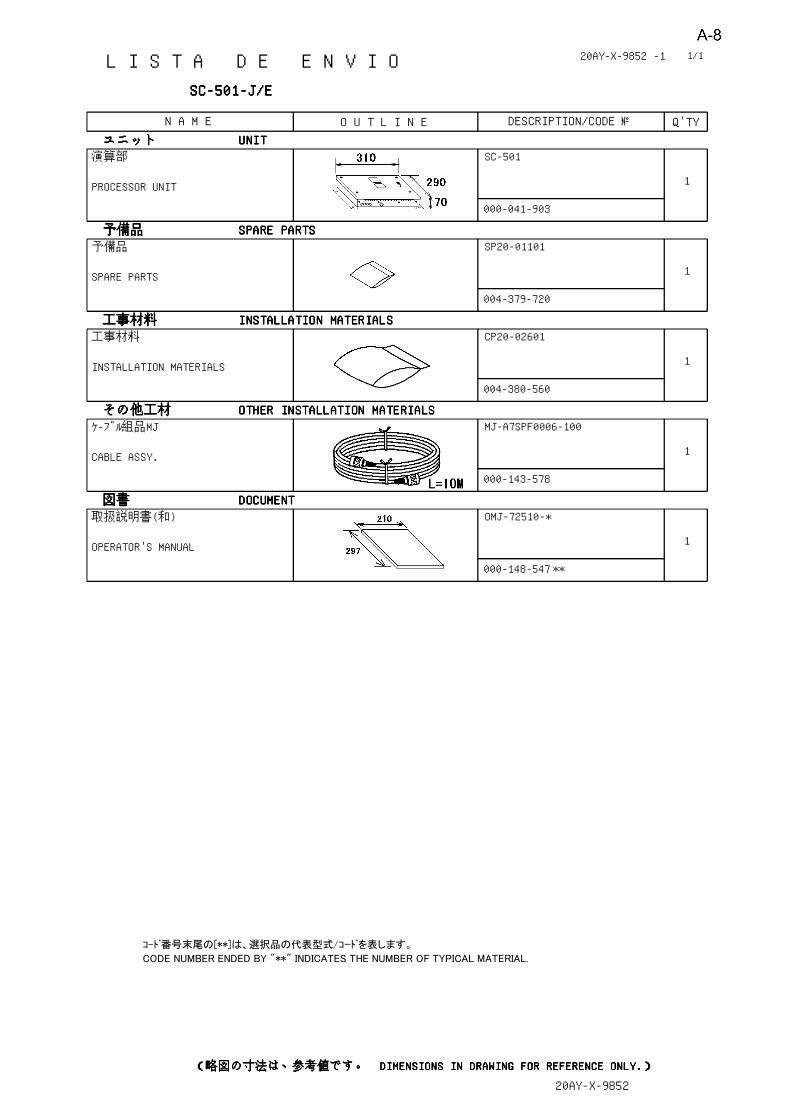
LISTA DE ENVIO 20AY-X-9852 -1
SC-501-J/ESC-501-J/ESC-501-J/ESC-501-J/E
N A M E O U T L I N E DESCRIPTION/CODE Q'TY
1/1
ユニットユニットユニットユニット UNITUNITUNITUNIT演算部
PROCESSOR UNIT
SC-501
000-041-903
1
予備品予備品予備品予備品 SPARE PARTSSPARE PARTSSPARE PARTSSPARE PARTS予備品
SPARE PARTS
SP20-01101
004-379-720
1
工事材料工事材料工事材料工事材料 INSTALLATION MATERIALSINSTALLATION MATERIALSINSTALLATION MATERIALSINSTALLATION MATERIALS工事材料
INSTALLATION MATERIALS
CP20-02601
004-380-560
1
その他工材その他工材その他工材その他工材 OTHER INSTALLATION MATERIALSOTHER INSTALLATION MATERIALSOTHER INSTALLATION MATERIALSOTHER INSTALLATION MATERIALSケーブル組品MJ
CABLE ASSY.
MJ-A7SPF0006-100
000-143-578
1
図書図書図書図書 DOCUMENTDOCUMENTDOCUMENTDOCUMENT取扱説明書(和)
OPERATOR'S MANUAL
OMJ-72510-*
000-148-547
1
**
コ-ド番号末尾の[**]は、選択品の代表型式/コードを表します。
CODE NUMBER ENDED BY "**" INDICATES THE NUMBER OF TYPICAL MATERIAL.
(略図の寸法は、参考値です。 DIMENSIONS IN DRAWING FOR REFERENCE ONLY.)(略図の寸法は、参考値です。 DIMENSIONS IN DRAWING FOR REFERENCE ONLY.)(略図の寸法は、参考値です。 DIMENSIONS IN DRAWING FOR REFERENCE ONLY.)(略図の寸法は、参考値です。 DIMENSIONS IN DRAWING FOR REFERENCE ONLY.)
20AY-X-9852
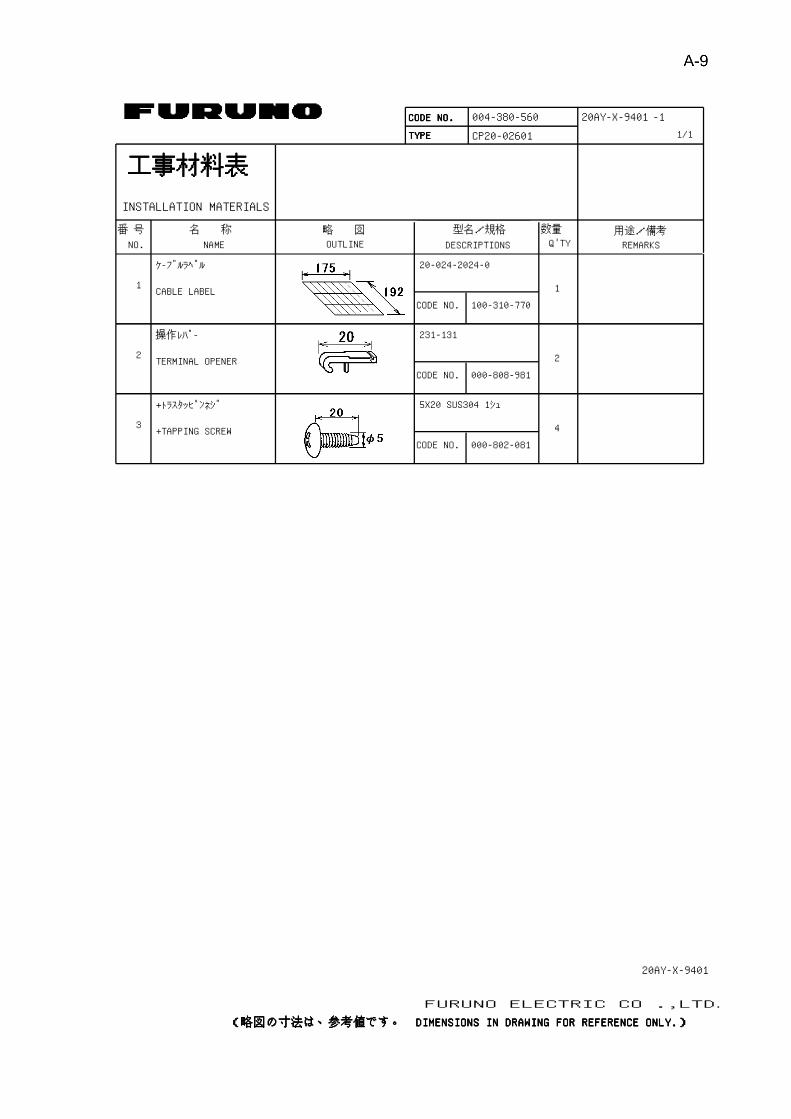
CODE NO.CODE NO.CODE NO.CODE NO. 004-380-560TYPETYPETYPETYPE CP20-02601
略 図OUTLINE
名 称 NAME
数量Q'TY
用途/備考REMARKS
番 号 NO.
型名/規格DESCRIPTIONS
1/1
-1
INSTALLATION MATERIALS
工事材料表工事材料表工事材料表工事材料表
20AY-X-9401
ケーブルラベル
CABLE LABEL
20-024-2024-0
1
100-310-770
1
CODE NO.
操作レバー
TERMINAL OPENER
231-131
2
000-808-981
2
CODE NO.
+トラスタッピンネジ
+TAPPING SCREW
5X20 SUS304 1シュ
4
000-802-081
3
CODE NO.
(略図の寸法は、参考値です。 DIMENSIONS IN DRAWING FOR REFERENCE ONLY.)(略図の寸法は、参考値です。 DIMENSIONS IN DRAWING FOR REFERENCE ONLY.)(略図の寸法は、参考値です。 DIMENSIONS IN DRAWING FOR REFERENCE ONLY.)(略図の寸法は、参考値です。 DIMENSIONS IN DRAWING FOR REFERENCE ONLY.)
FURUNO ELECTRIC CO .,LTD.
20AY-X-9401

CODE NO.CODE NO.CODE NO.CODE NO. 004-379-720
TYPETYPETYPETYPE SP20-01101
ITEM ITEM ITEM ITEM NO.NO.NO.NO.
NAME OF NAME OF NAME OF NAME OF PARTPARTPARTPART OUTLINEOUTLINEOUTLINEOUTLINE
DWG. NO. DWG. NO. DWG. NO. DWG. NO. OR OR OR OR
PERPERPERPERSETSETSETSET
PERPERPERPERVESVESVESVES
SPARESPARESPARESPARE
WORKINGWORKINGWORKINGWORKING
QUANTITYQUANTITYQUANTITYQUANTITY REMARKS/CODE NO.REMARKS/CODE NO.REMARKS/CODE NO.REMARKS/CODE NO.
BOX NO. P BOX NO. P BOX NO. P BOX NO. P
SHIP NO.SHIP NO.SHIP NO.SHIP NO. SPARE PARTS LIST FOR SPARE PARTS LIST FOR SPARE PARTS LIST FOR SPARE PARTS LIST FOR U S EU S EU S EU S ESETS PER SETS PER SETS PER SETS PER VESSELVESSELVESSELVESSEL
-0
TYPE NO.TYPE NO.TYPE NO.TYPE NO.
20AY-X-9301 1/1
ヒューズ FGMB 3A 125V
3FUSE
000-104-909
1
1/1MFR'S NAMEMFR'S NAMEMFR'S NAMEMFR'S NAME FURUNO ELECTRIC CO.,LTD.FURUNO ELECTRIC CO.,LTD.FURUNO ELECTRIC CO.,LTD.FURUNO ELECTRIC CO.,LTD. DWG NO.DWG NO.DWG NO.DWG NO.
(略図の寸法は、参考値です。 DIMENSIONS IN DRAWING FOR REFERENCE ONLY.)(略図の寸法は、参考値です。 DIMENSIONS IN DRAWING FOR REFERENCE ONLY.)(略図の寸法は、参考値です。 DIMENSIONS IN DRAWING FOR REFERENCE ONLY.)(略図の寸法は、参考値です。 DIMENSIONS IN DRAWING FOR REFERENCE ONLY.)
20AY-X-9301
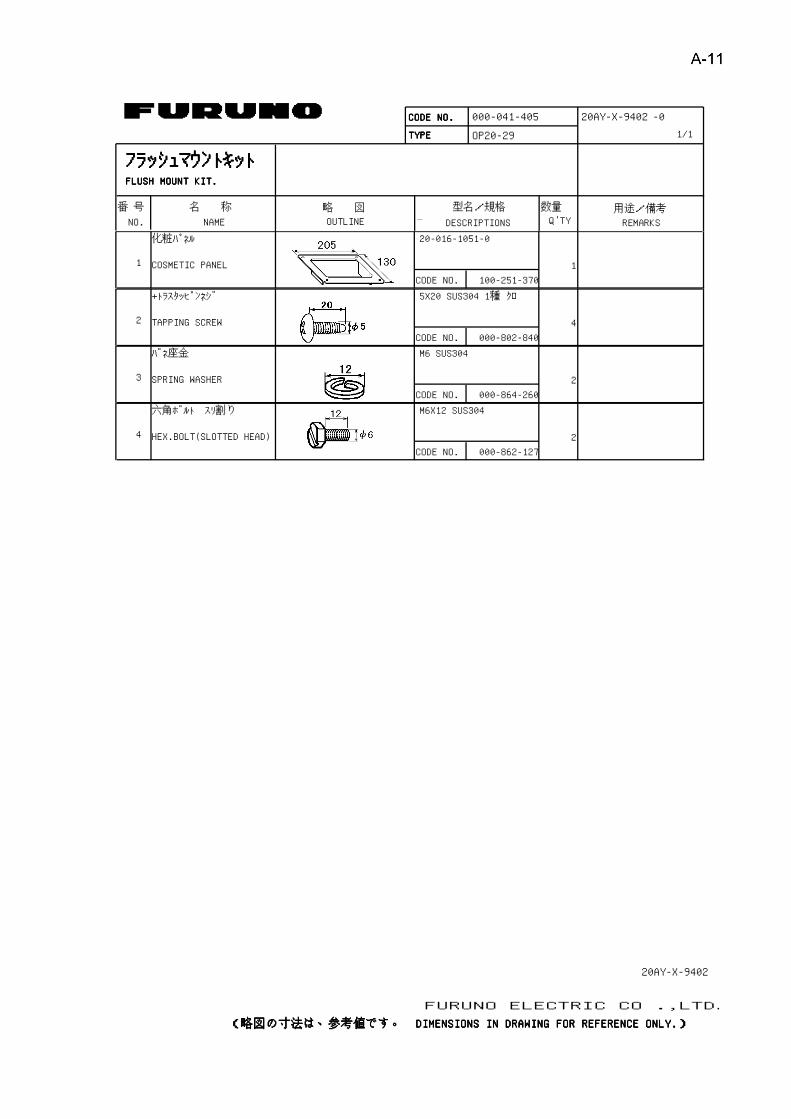
CODE NO.CODE NO.CODE NO.CODE NO. 000-041-405TYPETYPETYPETYPE OP20-29
略 図OUTLINE
名 称 NAME
数量Q'TY
用途/備考REMARKS
番 号 NO.
型名/規格DESCRIPTIONS
1/1
-0 20AY-X-9402
フラッシュマウントキットフラッシュマウントキットフラッシュマウントキットフラッシュマウントキットFLUSH MOUNT KIT.FLUSH MOUNT KIT.FLUSH MOUNT KIT.FLUSH MOUNT KIT.
化粧パネル
COSMETIC PANEL
20-016-1051-0
1100-251-370
1
CODE NO.+トラスタッピンネジ
TAPPING SCREW
5X20 SUS304 1種 クロ
4000-802-840
2
CODE NO.バネ座金
SPRING WASHER
M6 SUS304
2000-864-260
3
CODE NO.六角ボルト スリ割り
HEX.BOLT(SLOTTED HEAD)
M6X12 SUS304
2000-862-127
4
CODE NO.
(略図の寸法は、参考値です。 DIMENSIONS IN DRAWING FOR REFERENCE ONLY.)(略図の寸法は、参考値です。 DIMENSIONS IN DRAWING FOR REFERENCE ONLY.)(略図の寸法は、参考値です。 DIMENSIONS IN DRAWING FOR REFERENCE ONLY.)(略図の寸法は、参考値です。 DIMENSIONS IN DRAWING FOR REFERENCE ONLY.)FURUNO ELECTRIC CO .,LTD.
20AY-X-9402
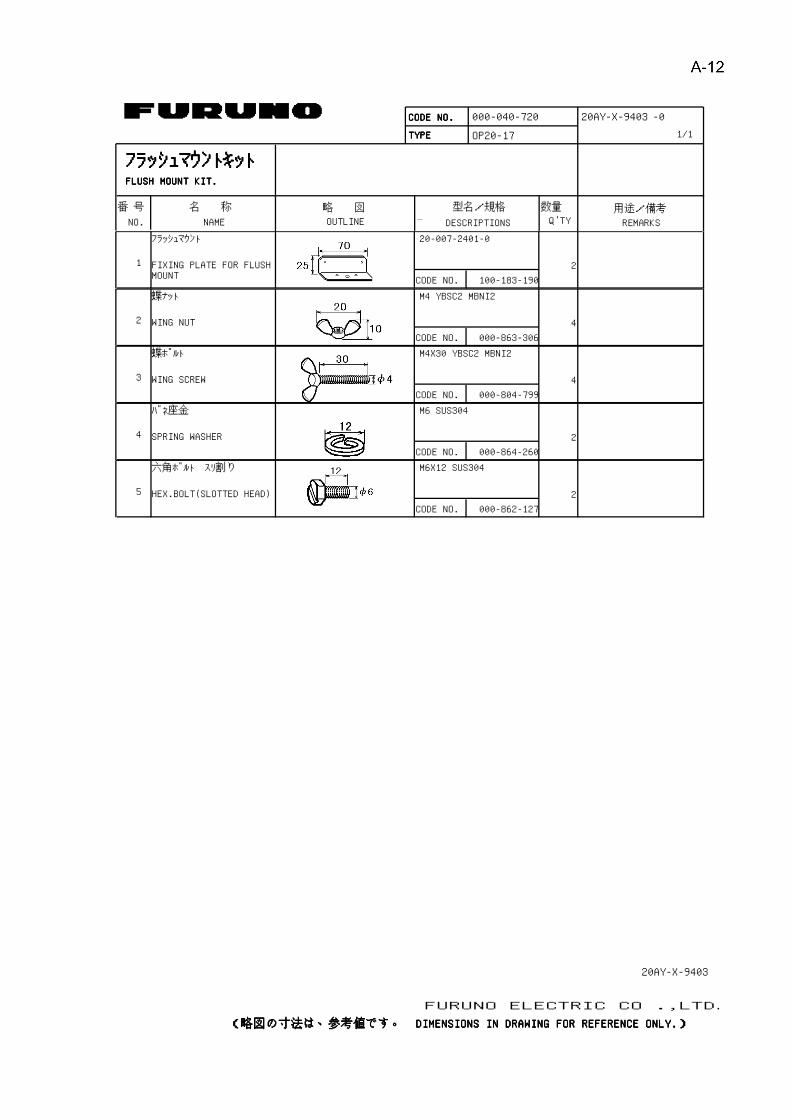
CODE NO.CODE NO.CODE NO.CODE NO. 000-040-720TYPETYPETYPETYPE OP20-17
略 図OUTLINE
名 称 NAME
数量Q'TY
用途/備考REMARKS
番 号 NO.
型名/規格DESCRIPTIONS
1/1
-0 20AY-X-9403
フラッシュマウントキットフラッシュマウントキットフラッシュマウントキットフラッシュマウントキットFLUSH MOUNT KIT.FLUSH MOUNT KIT.FLUSH MOUNT KIT.FLUSH MOUNT KIT.
フラッシュマウント
FIXING PLATE FOR FLUSH MOUNT
20-007-2401-0
2100-183-190
1
CODE NO.蝶ナット
WING NUT
M4 YBSC2 MBNI2
4000-863-306
2
CODE NO.蝶ボルト
WING SCREW
M4X30 YBSC2 MBNI2
4000-804-799
3
CODE NO.バネ座金
SPRING WASHER
M6 SUS304
2000-864-260
4
CODE NO.六角ボルト スリ割り
HEX.BOLT(SLOTTED HEAD)
M6X12 SUS304
2000-862-127
5
CODE NO.
(略図の寸法は、参考値です。 DIMENSIONS IN DRAWING FOR REFERENCE ONLY.)(略図の寸法は、参考値です。 DIMENSIONS IN DRAWING FOR REFERENCE ONLY.)(略図の寸法は、参考値です。 DIMENSIONS IN DRAWING FOR REFERENCE ONLY.)(略図の寸法は、参考値です。 DIMENSIONS IN DRAWING FOR REFERENCE ONLY.)FURUNO ELECTRIC CO .,LTD.
20AY-X-9403



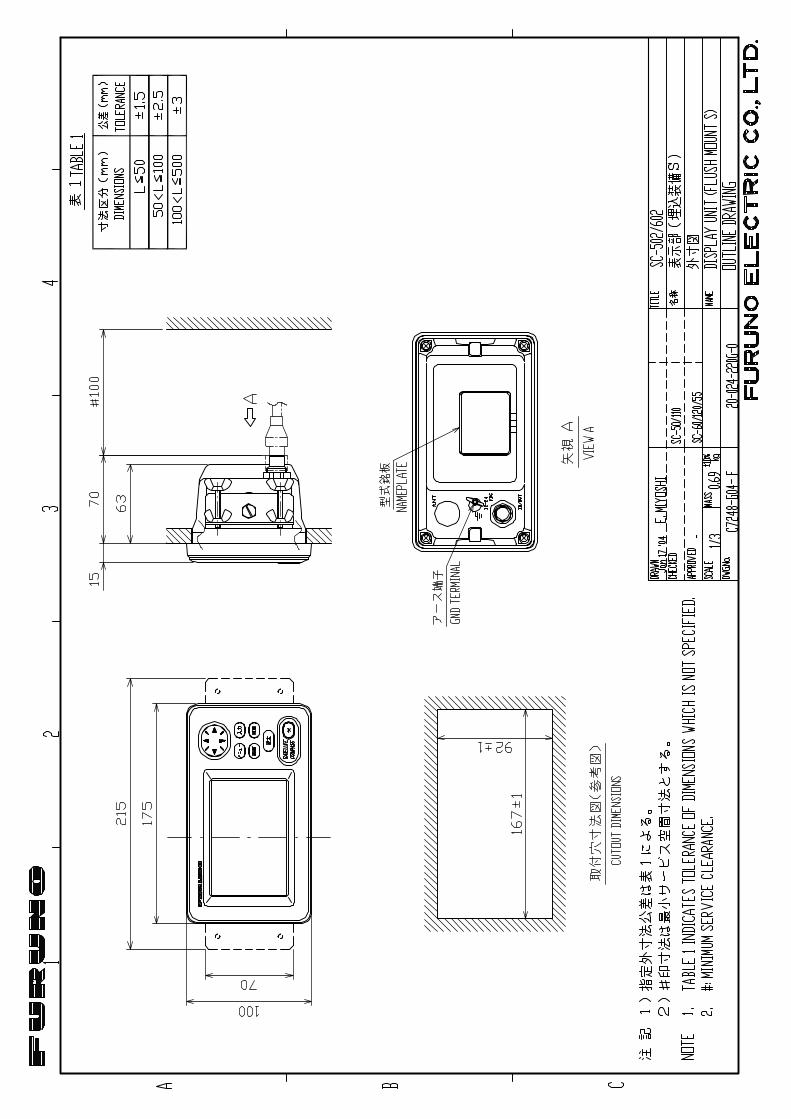
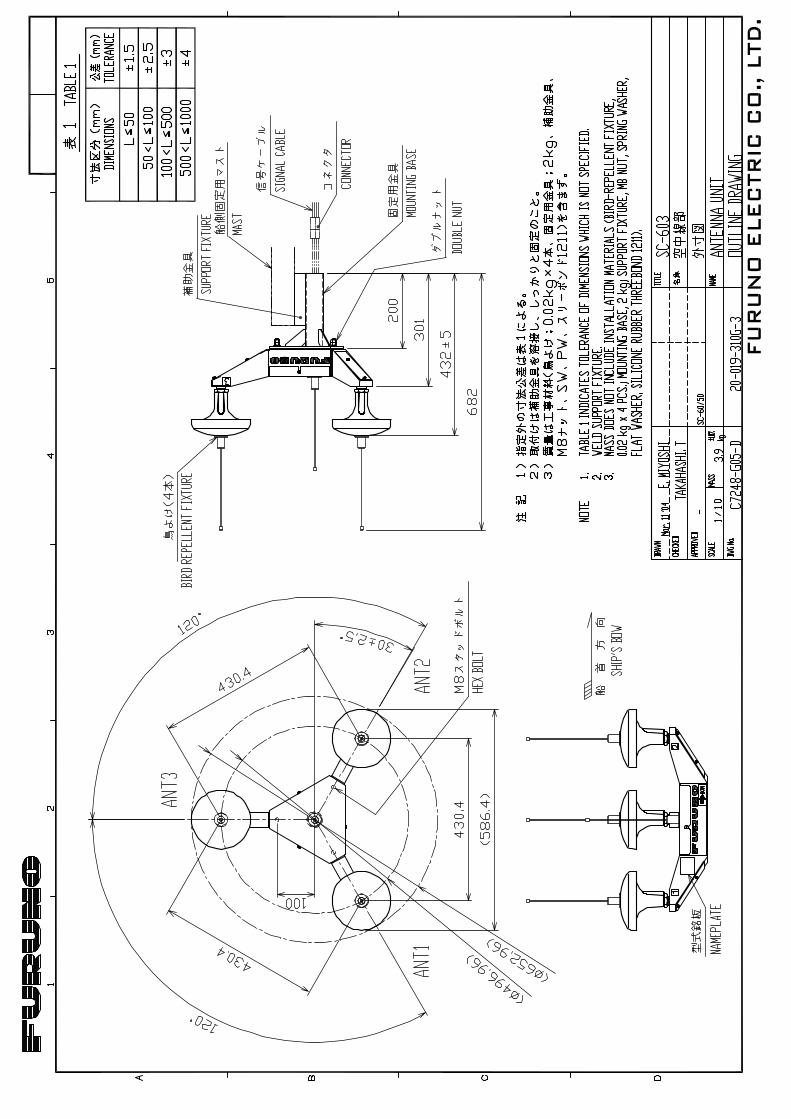
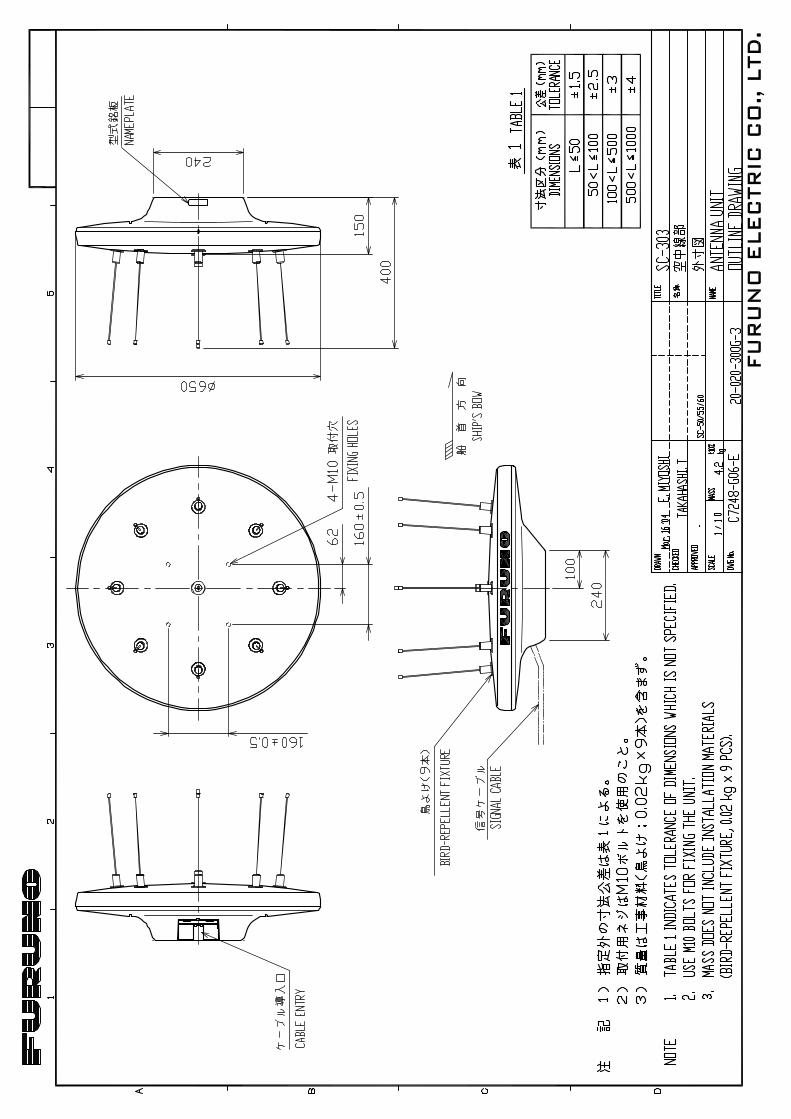

相互結線図
INTERCONNECTION DIAGRAM
D
C
B
A
654321
FURUNO ELECTRIC CO., LTD.
kg
DRAWN
CHECKED
APPROVED
SCALE MASS
DWG No.
TITLE
NAME
名称 サテライトコンパス
GND
1
2
3
4
5
6
7
+15V
SHIELD
DISPLAYMJ-A7SPFD
GND
1
2
3
4
5
6
7
+15V
SHIELD
J7(B3) MJ-A7SPFD
NC
演算部表示部
DISPLAY UNIT
*3 *3
*1
IV-2SQ.*1
PROCESSOR UNIT
SATELLITE COMPASS
MJ-A7SPF0006,10m,φ6.0
GPS ANT 1
GPS ANT 2
GPS ANT 3
*5
1
2
3
4
AD-10/NMEA0183RS-422 LEVEL
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
BEACON EXT
1
2
3SG
1
2
(+)(-)
12-24 VDC
EXT. BEACON RECEIVER外部ビーコンレシーバ
TTYCS-1
TNC-P-3*3
TPPx6-3D2V-15M,15m TNC-P-3*3 *3
TNC-J-3
TNC-P-3*3
CABLE W/ YEL-LINE黄線入ケーブル
TNC-P-3*3 *3
TNC-J-3
TNC-P-3*3 赤線入ケーブル
CABLE W/ RED-LINE TNC-P-3*3 *3
TNC-J-3
GPS ANT 1
GPS ANT 2
GPS ANT 3
ANTENNA UNIT空中線部
SELECT選択
*3*3TNC-P-3x3 TNC-J-3x3
*4
30/50m
8D-FB-CV*2
*2
NJTP-3DXV-1
1m
1m
TNC-J-3TNC-P-3*3
*4
*3 *4
N-P-8DFB
N-J-3
*3*4
*3*4 *2
NJTP-3DXV-1
*3
N-J-3
N-P-8DFB
SC-603
ANT 1
ANT 2
ANT 3
SC-50
SC-501SC-502
SGNC
TXRX
RXTX
SG
DATA OUT 4
DATA OUT 5
J2
J3
J4
J5
J6
J7
TB1
DATA OUT 6
DATA OUT 3
DATA OUT 2
DATA OUT 1
IV-2SQ.
K.MIYAZAWA
C7251-C01- B
カラーマーク無NO COLOR MARK
SC-303
J8
RS-232C
1
2
3
4
5
GYROCOMPASS, CURRENT INDICATOR, ETC.ジャイロコンパス、潮流計など
(HDG/VBW/VHW/VLW etc.)(HDG, 対地・対水船速, 航程など)
TTYCS-1Q
1
2
3
4
5
6
FGLOG-HLOG-C
ALARM-HALARM-C
FG
LOG/ALARM
J10
レーダー、潮流計などRADAR, CURRENT INDICATOR, ETC.
AD-10 only
DATA INJ9
1
2
1
2
ROLLSG
J11
ROLL
PITCH
J12
SGPITCH
レーダーオートパイロットソナー潮流計
RADARAUTOPILOTSONARCURRENT INDICATOR
HDG OUT
方位信号出力
TTYCS-1
TTYCS-1SHIFT5-C/TD10-BSHIFT5-H/TD10-ADATA5-C/TD9-BDATA5-H/TD9-A
DATA1-C/TD1-BDATA1-H/TD1-A
SHIFT1-H/TD2-A
SHIFT1-C/TD2-B
DATA2-H/TD3-ADATA2-C/TD3-BSHIFT2-H/TD4-ASHIFT2-C/TD4-B
DATA3-H/TD5-ADATA3-C/TD5-BSHIFT3-H/TD6-A
SHIFT3-C/TD6-B
DATA4-H/TD7-ADATA4-C/TD7-BSHIFT4-H/TD8-ASHIFT4-C/TD8-B
HDG-IN-C/RD-CHDG-IN-H/RD-H
SHIFT-IN-CSHIFT-IN-H
FG
NMEA0183
AD-10/IECRS-422 LEVEL
RD-H
RD-C
TD-B
TD-A
DATA-HDATA-CSHIFT-HSHIFT-C
TTYCS-1
OR
TTYCS-1Q
TTYCS-1
OR
TTYCS-1Q
TTYCS-1
OR
TTYCS-1Q
TTYCS-1
OR
TTYCS-1Q
TTYCS-1
OR
TTYCS-1Q
OR TNC-PS-3D-15,15m
OR TNC-PS-3D-15,15m
OR TNC-PS-3D-15,15m
TTYCS-1Q
RXTX
IEC61162フォーマット接続CONNECTION FOR IEC61162
アラームシステムMAX 1A
PPIソナーPPI SONAR
TTYCS-1Q
注記
*1)現地手配。
*2)オプション。
*3)工場にて取付済み
*4)防水のためテープで処理すること。
*5)内部設定切替。
NOTE
*1. LOCAL SUPPLY.
*2. OPTION.
*3. FITTED AT FACTORY.
*4. TAPE FOR WATERPLOOFING.
*5. CHANGE INTERNAL SETTING.
*6)方位出力が停止したとき、接点回路がオープンになる。
*6. IF THE HEADING OUTPUT STOPS, THE CONTACT CIRCUIT OPENS.
DPYC-1.5
*1
12-24 VDC
Jan. 28 '04
*6
PULSE SIGNAL
200/400 ppm
ALARM SYSTEM
