modelación y control de máquinas eléctricas -...
TRANSCRIPT

Modelación y Control de Máquinas EléctricasEscuela Superior Politécnica de Chimborazo
(ESPOCH)
Prof. José Manuel Aller Castro
Riobamba, Mayo 2015
Resumen
El presente curso es una introducción a la modelación y control de máquinas eléctricas utili-zando técnicas vectoriales y matriciales. Se desarrollan los principios básicos de conversiónque permiten determinar las ecuaciones internas de las máquinas eléctricas. Utilizando lassimetrías de la máquina se obtienen las transformaciones de coordenadas que simplifican elanálisis matemático del convertidor tanto en vectores espaciales como mediante el uso de ma-trices. Se obtienen los modelos de la máquina de inducción y sincrónica en régimen dinámicoy estático utilizando estas transformaciones. Se desarrollan algoritmos en Matlab que permi-ten analizar el comportamiento de estas máquinas en diferentes regímenes de operación.

Índice general
1. Conversión de energía eléctrica 5
1.1. Conceptos básicos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.2. Convertidor electromecánico elemental . . . . . . . . . . . . . . . . . . . . 12
1.3. Curvas características . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
1.4. Balance energético . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
2. Conceptos de Energía y Trabajos Virtuales 24
2.1. Energía y coenergía en el campo . . . . . . . . . . . . . . . . . . . . . . . . 24
2.2. Ecuaciones internas del convertidor . . . . . . . . . . . . . . . . . . . . . . 32
2.3. Ecuaciones de potencia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
2.4. Generalización de las ecuaciones . . . . . . . . . . . . . . . . . . . . . . . 38
3. Ecuaciones generales de las máquinas eléctricas rotativas 43
3.1. Cálculo del par eléctrico . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
3.2. Par eléctrico y fuerzas magnetomotrices . . . . . . . . . . . . . . . . . . . . 52
3.3. El campo magnético rotatorio . . . . . . . . . . . . . . . . . . . . . . . . . . 55
3.4. La máquina trifásica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
3.5. Transformación de coordenadas . . . . . . . . . . . . . . . . . . . . . . . . 60
3.6. Transformación de coordenadas αβ −dq . . . . . . . . . . . . . . . . . . . 63
3.7. Ecuaciones generales en coordenadas αβdq . . . . . . . . . . . . . . . . . . 66
4. Máquinas de Corriente Continua 68
4.1. Principio de operación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
4.2. Ecuaciones de las máquinas de conmutador . . . . . . . . . . . . . . . . . . 81
2

ÍNDICE GENERAL 3
4.3. Características de operación de las diferentes conexiones . . . . . . . . . . . 83
4.4. Control de velocidad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
4.5. Accionamiento de las Máquinas de Corriente Continua . . . . . . . . . . . . 92
5. La Máquina de Inducción 97
5.1. Transformación de Coordenadas . . . . . . . . . . . . . . . . . . . . . . . . 100
5.1.1. Componentes simétricas . . . . . . . . . . . . . . . . . . . . . . . . 100
5.1.2. Transformación a vectores espaciales . . . . . . . . . . . . . . . . . 102
5.2. Modelo de Régimen Permanente . . . . . . . . . . . . . . . . . . . . . . . . 112
5.3. Accionamientos de la Máquina de Inducción . . . . . . . . . . . . . . . . . . 117
5.3.1. Control Escalar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 118
5.3.1.1. Arranca Suaves . . . . . . . . . . . . . . . . . . . . . . . 118
5.3.1.2. Tensión - Frecuencia Constante . . . . . . . . . . . . . . . 119
5.3.1.3. Accionamiento a Deslizamiento Constante . . . . . . . . . 128
5.3.2. Control Vectorial por Campo Orientado . . . . . . . . . . . . . . . . 128
5.3.3. Control Directo de Par y Flujo . . . . . . . . . . . . . . . . . . . . . 137
5.3.3.1. Expresión vectorial de par eléctrico y del enlace de flujoen el estator . . . . . . . . . . . . . . . . . . . . . . . . . 137
5.3.3.2. Estrategia de control directo de par . . . . . . . . . . . . . 138
6. Modelo de la Máquina Sincrónica 146
6.1. Descripción de la máquina sincrónica . . . . . . . . . . . . . . . . . . . . . 146
6.2. Ecuaciones en coordenadas primitivas . . . . . . . . . . . . . . . . . . . . . 149
6.3. Transformación a vectores espaciales . . . . . . . . . . . . . . . . . . . . . . 154
6.4. Transformación a coordenadas rotóricas . . . . . . . . . . . . . . . . . . . . 156
6.5. Transformación de Park . . . . . . . . . . . . . . . . . . . . . . . . . . . . 158
6.6. Régimen permanente . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 165
6.7. Diagrama fasorial . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 166
6.8. Potencia y par eléctrico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 170

4 ÍNDICE GENERAL
7. Evaluación Numérica de Modelos 175
7.1. Máquina de inducción - Coordenadas primitivas . . . . . . . . . . . . . . . . 175
7.2. Máquina de inducción - Coordenadas vectoriales . . . . . . . . . . . . . . . 180
7.3. Máquina Sincrónica - Coordenadas d-q . . . . . . . . . . . . . . . . . . . . 180

Capítulo 1
Conversión de energía eléctrica
En la historia del desarrollo de la humanidad se han buscado muchas fuentes de energíapara movilizarse, construir viviendas, arar, segar, procesar los alimentos e iluminar. Hom-bres y bestias fueron las primeras fuentes de energía, incluso la esclavitud fue ampliamentejustificada durante milenios con esta finalidad. La leña y el carbón desempeñaron un papelprotagónico durante la revolución industrial, con la invención de la máquina de vapor. Eldesarrollo de la electricidad a finales del siglo XIX permitió el desarrollo de la industria mo-derna y requirió la conversión de diversas fuentes de energía en energía eléctrica y viceversa.En la actualidad el desarrollo de la electrónica y en especial de la electrónica de potencia,permite el control efectivo y eficiente de los procesos de conversión de energía eléctrica.
En este capítulo analizaremos los conceptos fundamentales involucrados en la conversión deenergía, los principios básicos que permiten la conversión electromecánica de energía y lastécnicas matemáticas para analizar el comportamiento de los convertidores electromecánicosde energía.
1.1. Conceptos básicos
La energía es uno de los conceptos más importantes en el estudio de las máquinas eléctricas.La energía es la capacidad de realizar un trabajo. La energía se presenta en la naturaleza endiferentes formas. El objetivo de las máquinas eléctricas consiste en convertir la energía deuna forma en otra.
En la tabla 1.1 se presenta un resumen de las densidades de energía que pueden ser almace-nadas en diversos procesos físicos.
5

6 CAPÍTULO 1. CONVERSIÓN DE ENERGÍA ELÉCTRICA
1. Gravitación (100m) 0,0098 MJ/kg2. Energía Cinética (5.000rpm) 0,053 MJ/kg3. Campo Magnético (2Wb/m) 0,0016 MJ/litro4. Campo Eléctrico (6,5MV/m) 0,006 MJ/litro5. Batería de plomo ácido Pb+2O→ PbO2 0,16 MJ/kg6. Calor de reacción del combustible fósil 44 MJ/kg7. Calor de combinación H +H→ H2 216 MJ/kg8. Energía de Ionización 990 MJ/kmol9. Fisión U235 83.000 MJ/kg
10. Fusión Deuterio+Tritio→ He+17,6MeV 340.000 MJ/kg
Tabla 1.1: Densidades de energía que pueden ser almacenadas en diversos procesos físicos
Se puede observar que los sistemas eléctricos y magnéticos no son buenos acumuladores deenergía porque las máximas densidades de energía que se pueden obtener con los materialesexistentes en la actualidad, son relativamente pequeñas al compararse con la energía porunidad de peso que puede ser almacenada en una batería o en los combustibles fósiles. Poresta razón es necesario realizar la conversión electromecánica de la energía para obtenerenergía eléctrica en grandes cantidades. La conversión electromecánica de energía permitetransmitir, consumir, modificar o transformar la energía electromagnética de una forma enotra, pero no es posible almacenarla en grandes cantidades1.
El segundo concepto físico importante en los fenómenos de conversión de energía es la fuer-
za. La fuerza se manifiesta en un sistema físico mediante la presencia de interacciones entrela materia. Aun cuando parece que las fuerzas pueden ser de muy diferentes formas y tipos,se conocen en la actualidad sólo cuatro fuerzas:
1. Interacciones gravitacionales entre masas (gravitones)2. Interacciones eléctricas entre las cargas (electrón-protón-fotón)3. Interacciones nucleares débiles (bosones intermedios)4. Interacciones nucleares fuertes (protón-neutrón-pión)
Si se asocia a las fuerzas nucleares fuertes de cohesión protón-protón por intercambio depiones entre protones y neutrones el valor unitario, las interacciones nucleares débiles de laspartículas nucleares con rareza se encuentran en el orden de 10−14. Las fuerzas gravitacio-nales se encuentran, en la misma base de comparación, en el orden de 10−37. Las fuerzas
1Existen algunas excepciones como pueden ser los voltímetros electrostáticos y ciertos sensores de posiciónque utilizan el campo eléctrico en el proceso de conversión de energía.

1.1. CONCEPTOS BÁSICOS 7
de atracción y repulsión de cargas eléctricas por intercambio de fotones están en el rango de10−2.
El tercer concepto básico es el de campo. La palabra campo posee la interpretación geomé-trica de extensión, superficie o espacio. Sin embargo, en física el concepto de campo consisteen la descripción del espacio donde se produce algún tipo de fuerza. El campo gravitatorio esla zona del espacio donde una masa ejerce su influencia atrayendo a otras masas. El campo
eléctrico se define exactamente igual, pero considerando las interacciones entre las cargas
eléctricas. El campo magnético se define a través de las fuerzas entre dipolos magnéticos. Lamedición de un campo se realiza colocando en un punto del espacio una partícula de prueba(masa, carga o dipolo magnético) y se mide la fuerza ejercida sobre ella. El cociente entre lafuerza en dicho punto y la magnitud de interés de la partícula es la intensidad del campo enel punto. Por ejemplo, si en un punto en la superficie de la tierra se mide la fuerza de atrac-ción gravitatoria sobre la masa de prueba m, el dinamómetro indicará F = mg, donde g es laaceleración de gravedad en el punto donde se realiza la medida, y su dirección apunta haciael centro de la tierra. El campo gravitatorio es el cociente entre la fuerza y la masa. En otraspalabras la aceleración de gravedad en cada punto determina el valor de la intensidad delcampo gravitatorio. De igual forma, el campo eléctrico es el cociente entre la fuerza eléctricasobre una partícula cargada, y el valor de la carga de esa partícula E = F
q .
Para el fenómeno eléctrico se plantea una ecuación de equilibrio de fuerzas en función delcampo eléctrico E y el campo magnético B de un sistema dado. Esta ecuación de equilibriose conoce como relación de Lorenz:
F = q(E+v×B) (1.1)
Donde:
F es el vector de la fuerza resultante sobre la partícula cargada
q es la carga eléctrica de la partícula
E es el vector intensidad del campo eléctrico
v es el vector velocidad
B es el vector densidad de campo magnético
En la ecuación 1.1 todas las cantidades vectoriales deben estar referidas a un sistema dereferencia único. Además, el campo eléctrico E y el campo magnético B deben ser producidos

8 CAPÍTULO 1. CONVERSIÓN DE ENERGÍA ELÉCTRICA
Figura 1.1: Carga eléctrica en un campo eléctrico
externamente a la carga q. Para que ocurra una interacción electromagnética sobre la cargaq es necesaria la existencia de otras cargas. La figura 1.1 ilustra esta idea. En el punto queocupa la carga q, el campo eléctrico E1 se debe a las otras cargas presentes en el sistema y noa sí misma. En estas condiciones existe una interacción eléctrica entre la carga puntual q y elcampo eléctrico E1 producido por las cargas distribuidas en las dos placas.
En un convertidor electromagnético de energía es necesario analizar el mecanismo de crea-ción de campo eléctrico E y magnético B. Para este fin se recurre a las ecuaciones de Maxwell
y a las condiciones de contorno impuestas por el equipo.
Para determinar la solución del campo electromagnético, se parte de las siguientes premisas:
1. Las partículas eléctricas q se desplazan en campos eléctricos E y magnéticos B.
2. Estos campos son producidos externamente a las cargas, por otras partículas cargadas.
Con las premisas anteriores, las leyes de Maxwell expresadas en su forma diferencial para unpunto cualquiera del espacio son:
∇×E =−∂B∂ t
(1.2)
∇×H = J+∂D∂ t
(1.3)
∇ ·E = ρ (1.4)
∇ ·B = 0 (1.5)

1.1. CONCEPTOS BÁSICOS 9
Y las relaciones constitutivas debidas al medio material:
B = µH (1.6)
D = εE (1.7)
J = σE (1.8)
Donde µ , ε y σ pueden ser tensores que dependen del tipo de material y orientación, peroque en los casos más simples son cantidades escalares.
Las ecuaciones 1.2 a 1.5 se pueden escribir en forma integral:
˛L
E ·dl =− ∂
∂ t
ˆS
B ·dS (1.9)
˛L
H ·dl =ˆ
SJ ·dS+
∂
∂ t
ˆS
D ·dS (1.10)
˛S
D ·dS =
ˆV
ρv ·dv (1.11)
˛S
B ·dS = 0 (1.12)
En general, cuando se analizan casos prácticos de los convertidores electromecánicos de ener-gía, la variación de la densidad del campo eléctrico B con respecto al tiempo es despreciablecomparada con la densidad de corriente J. Este término representa las corrientes capacitivasdebidas a las variaciones del campo eléctrico y se conoce como corrientes de desplazamiento.Las corrientes de desplazamiento son importantes cuando el campo eléctrico es muy inten-so2 o cuando su variación es muy rápida3. Ninguna de estas condiciones es frecuente en lasmáquinas eléctricas convencionales en condiciones normales de operación.
Para resolver las ecuaciones de Maxwell en un problema concreto, se define a las corrientescomo las variables independientes. A partir de ellas se calcula el campo magnético B con lasecuaciones 1.3 y 1.5, el campo eléctrico E de la ecuación 1.2 y las fuerzas electromotrices
2Alta tensión.3Alta frecuencia.

10 CAPÍTULO 1. CONVERSIÓN DE ENERGÍA ELÉCTRICA
por integración lineal del campo eléctrico en la trayectoria de interés. Las condiciones decontorno del sistema físico relacionan las fuerzas electromotrices con las corrientes que hansido previamente consideradas como variables independientes. Este proceso de cálculo seutilizará en el próximo capítulo para obtener el modelo de un sistema electromecánico simple,pero es totalmente general. La ecuación 1.4 no se utiliza en este análisis ya que se suponeque en el medio no se encuentran disponibles cargas libres, es decir la densidad de carga ρ escero.
Figura 1.2: Efecto del cambio del sistema de referencia sobre el campo eléctrico
En la figura 1.2 se ilustra un par de conductores idénticos. El primero se desplaza a unavelocidad v diferente de cero, en la presencia de los campos E1 y B1. En el segundo conductorel observador se mueve a la misma velocidad v y considera por esta razón que el conductorestá en reposo. En esta condición el observador detecta el campo E2.
Si se introduce una partícula en cada uno de los conductores anteriores cuya carga es q1, enel primer sistema la fuerza sobre la partícula, de acuerdo con la relación de Lorenz 1.1, es:
F1 = q1 (E1 +v×B1) (1.13)
Si la velocidad es constante, las fuerza F1 es nula y de la ecuación 1.13 se deduce:
E1 =−v×B1 (1.14)
En el sistema II, como la velocidad relativa es cero, el observador sólo puede atribuir la fuerzaactuante sobre la partícula q1 al campo eléctrico E2:

1.1. CONCEPTOS BÁSICOS 11
Figura 1.3: Conductor en movimiento en presencia de campos eléctricos y magnéticos
E2 =F2
q1(1.15)
Como los conductores son idénticos en los dos sistemas, a excepción de su sistema de refe-rencia, se puede establecer la transformación de Lorenz mediante las expresiones 1.13 y 1.15,debido a que F1 = F2:
E2 = E1 +v×B1 (1.16)
La ecuación 1.16 permite calcular el campo eléctrico equivalente de un sistema de referencia
solidario a los conductores del convertidor electromecánico de energía, conociendo vectorial-mente el campo eléctrico y el campo magnético, del sistema fijo y externo al conductor.
En la figura 1.3 se ha esquematizado un segmento conductor al cual se le aplica entre susextremos el campo eléctrico E. El circuito se encuentra inmerso en un campo magnéticouniforme B. La densidad de corriente J que circula por el conductor depende de la superposi-ción de los campos eléctricos aplicados sobre él y de la conductividad σ del material, segúnla relación constitutiva 1.8, también conocida como ley de Ohm:
J = σE = σ(Eaplicada−Einducida
)(1.17)
El campo eléctrico producido por el movimiento del conductor a la velocidad v en un campomagnético B se calcula según la ecuación 1.14, y por lo tanto la expresión 1.17 queda:
J = σE = σ(Eaplicada−v×B
)(1.18)

12 CAPÍTULO 1. CONVERSIÓN DE ENERGÍA ELÉCTRICA
Figura 1.4: Convertidor electromagnético elemental
La expresión anterior determina la densidad de corriente J por el conductor. Una vez cono-cida la densidad de corriente se puede evaluar el campo eléctrico o magnético en cualquierpunto del espacio utilizando las ecuaciones de Maxwell 1.2 a 1.5. Conocidos los campos sepueden evaluar las fuerzas sobre cualquier partícula eléctrica cargada o sobre cualquier dipo-lo magnético. De esta forma queda resuelto el problema de la conversión electromecánica dela energía.
1.2. Convertidor electromecánico elemental
En general las máquinas eléctricas tienen por finalidad transformar la energía mecánica enenergía eléctrica y viceversa. Cuando la conversión es de energía mecánica en energía eléc-trica se dice que la máquina está funcionando como generador y en el caso contrario operacomo motor. Tal vez la máquina eléctrica más simple es la que se representa en la figura 1.4.Este dispositivo es un convertidor electromagnético elemental y está constituido solamentepor un conductor rectilíneo, moviéndose ortogonalmente a un campo magnético uniforme.
En la figura 1.4, el conductor longitudinal se mueve en el interior de un campo magnético B:
E es el vector intensidad de campo eléctricoe es la fuerza electromotrizB es el vector densidad de campo magnéticov es el vector velocidad del conductor lineal
Las variables anteriores se relacionan a partir de la ecuación 1.13, considerando que no existecampo eléctrico externo:

1.2. CONVERTIDOR ELECTROMECÁNICO ELEMENTAL 13
Figura 1.5: Corriente circulando por un conductor
E = v×B (1.19)
Si en la ecuación 1.19, se supone que el campo magnético B es uniforme en todos los puntosdel conductor y la velocidad v es constante, la fuerza electromotriz e de todo el conductor es:
e =ˆ l
0E ·dl (1.20)
Si al conductor anterior se le conecta una resistencia entre sus extremos, circularán cargaspor el conductor y se producirá una corriente de valor:
i =eR
(1.21)
En el conductor de la figura 1.5 se produce una fuerza Fe, que se opone al movimiento. Estafuerza puede calcularse a partir de la relación de Lorenz 1.1, expresada como función de lacorriente i por el conductor:
Fe = l · i×B (1.22)
La fuerza calculada en la expresión anterior muestra que el sistema se opone a la extracciónde energía. Para obtener la energía, es necesario forzar el movimiento del conductor. Si noactúa ninguna otra fuerza que mantenga el movimiento, y si la velocidad es diferente de cero,el sistema tendrá un movimiento retardado de aceleración negativa. El conductor convertirá

14 CAPÍTULO 1. CONVERSIÓN DE ENERGÍA ELÉCTRICA
la energía que estaba inicialmente almacenada en su masa, en pérdidas en la resistencia R delcircuito externo. En estas condiciones, la velocidad decae exponencialmente a cero.
Para mantener una velocidad constante en el conductor de la figura 1.5, es necesario aplicaruna fuerza externa al conductor que se oponga a Fe. Esta fuerza es de origen mecánico y sedenomina Fm. En la figura 1.5 se observa el equilibrio de fuerzas necesario para mantenerconstante la velocidad v del conductor.
El sistema mecánico entrega potencia al sistema eléctrico para mantener la velocidad v, la po-tencia mecánica instantánea entregada por el sistema externo se calcula mediante la relaciónsiguiente:
Pm = Fm ·v (1.23)
y la potencia eléctrica instantánea en el conductor es:
Pe = e · i (1.24)
Si se realiza un balance de potencia, considerando que las cantidades vectoriales son ortogo-nales entre sí, se obtiene el siguiente resultado:
Pm = Fm ·v = Fe ·v = i ·B · v · l = i ·E · l = i · e = Pe (1.25)
La ecuación 1.25 demuestra que la conversión de energía mecánica en energía eléctrica ha si-do completa. En el proceso no hay pérdidas debido a que la potencia disipada en la resistenciadel circuito es externa a la máquina.
Añadiendo una fuente de tensión al conductor anterior con el conductor inicialmente en re-poso, tal como se ilustra en la figura 1.6, la fuente de tensión V hace circular una corriente i
por el circuito. Esta corriente produce, según la ecuación 1.22 una fuerza eléctrica Fe. Si noactúa ninguna otra fuerza sobre el conductor, este comienza a moverse con aceleración.
Cuando el conductor se mueve en un campo magnético, se origina a su vez un campo eléctricoE. Como se puede apreciar en la figura 1.6, la fuente de tensión produce una corriente quese opone al campo eléctrico E inducido por el movimiento. La corriente se puede calcularcomo:
i =V − e
R(1.26)

1.2. CONVERTIDOR ELECTROMECÁNICO ELEMENTAL 15
Figura 1.6: Conductor alimentado por una fuente de tensión V
De esta forma, en la medida que aumenta la fuerza electromotriz e inducida por el movimien-to del conductor, disminuye la corriente en el circuito. Al decrecer la corriente, se reduce lafuerza eléctrica sobre el conductor. El proceso continúa hasta que la fuerza eléctrica Fe sehace cero. En esta condición la tensión aplicada por la batería V es igual a la fuerza electro-motriz e, inducida por el movimiento del conductor en el campo magnético y la corriente i seanula.
La velocidad del conductor en que la fuerza eléctrica es cero, debido al equilibrio entre la ten-sión aplicada y la fuerza electromotriz inducida por el movimiento, se define como velocidadsincrónica del conductor. En esta situación:
e =V = l · vs ·B (1.27)
Donde vs es la velocidad sincrónica y se calcula de la expresión anterior como:
vs =V
l ·B(1.28)
Una vez que el conductor alcanza la velocidad sincrónica (V = e ; i = 0), si se aplica unafuerza resistente al conductor, el sistema comienza a retardarse y la fuerza electromotrizinducida e disminuye, aumenta la corriente en el conductor debido a que la tensión V dela batería supera a la fuerza electromotriz e. La aceleración o retardo del sistema se puedecalcular aplicando convenientemente la segunda ley de Newton:

16 CAPÍTULO 1. CONVERSIÓN DE ENERGÍA ELÉCTRICA
a =dvdt
=1M ∑F =
Fe +Fm
M(1.29)
Donde:
∑F es la sumatoria de fuerzas aplicadas
Fe es la fuerza eléctrica sobre el conductor
Fm es la fuerza mecánica resistente
M es la masa del conductor
Cuando la fuerza mecánica Fm equilibra a la fuerza eléctrica Fe, la aceleración es cero y enese instante se cumple que:
Fm = Fe = l ·B · i = l ·B ·(
V −B · l · v0
R
)(1.30)
De la ecuación 1.30 se obtiene la velocidad de operación v0 en función de la fuerza mecánicaresistente:
v0 =V − Fm·R
B·lB · l
(1.31)
La velocidad v0 corresponde a la operación de la máquina cuando las fuerzas eléctricas ymecánicas sobre el conductor están en equilibrio. Si en este momento se elimina la fuerzaresistente Fm, el conductor se acelera en la dirección de la fuerza eléctrica Fe hasta alcanzarnuevamente la velocidad sincrónica.
La exposición anterior permite resumir en seis ecuaciones los principios que rigen la conver-sión electromecánica de energía:
E = v×B (1.32)
f = i×B (1.33)
e =ˆ l
oE ·dl = E · l = v ·B · l (1.34)

1.3. CURVAS CARACTERÍSTICAS 17
F =
ˆ l
of ·dl = f · l = i ·B · l (1.35)
i =V − e
R(1.36)
dvdt
=1M
Fa =Fe +Fm
M(1.37)
En el sistema de ecuaciones representado por las expresiones 1.32 a 1.37 se destacan lossiguientes puntos:
1. La ecuación 1.34 calcula una variable eléctrica (e) en función de una variable mecánica(v) y el campo (B).
2. La ecuación 1.35 determina una variable mecánica (F) en función de una variableeléctrica (i) y el campo (B).
3. Las expresiones 1.34 y 1.35 dependen del conductor y del campo en el cual está inmer-so, por esta razón se denominan las ecuaciones internas del convertidor electromecá-nico.
4. Las ecuaciones 1.36 y 1.37 representan las relaciones entre el conductor –máquina
eléctrica– y el resto del universo. Estas ecuaciones se denominan ecuaciones de liga-
zón, ecuaciones de borde, ecuaciones de contorno o ecuaciones de frontera.
1.3. Curvas características
Para representar la curva característica de la fuerza eléctrica sobre el conductor en funciónde la velocidad, se puede utilizar la ecuación 1.30:
Fe = i ·B · l =(
V − eR
)·B · l = V ·B · l
R− (B · l)2
Rv (1.38)
La ecuación 1.38 representa la fuerza eléctrica Fe como una recta en función de la velocidad v
del conductor. Cuando el conductor se encuentra en reposo (v= 0), la fuerza eléctrica es igualal término independiente en velocidad. Si la fuerza eléctrica es cero, la velocidad corresponde

18 CAPÍTULO 1. CONVERSIÓN DE ENERGÍA ELÉCTRICA
Figura 1.7: Curva característica de la máquina
a la velocidad sincrónica de la máquina. Si se opone una fuerza constante de valor conocido,como se observa en la figura 1.7, se determina un punto de equilibrio v0 en la intersección delas características eléctrica y mecánica. En este caso v0 corresponde a la velocidad en la cualla fuerza eléctrica Fe equilibra a la fuerza mecánica Fm, y constituye un punto de operaciónestable debido a que cualquier perturbación en la velocidad mecánica del sistema tenderáa ser restituida a las condiciones previas por las fuerzas actuantes sobre el conductor. Estaintersección es un punto de operación de régimen permanente para la máquina.
En la figura 1.7 se han marcado dos zonas (1) y (2). En la zona (1), si la máquina arrancaen contra de una fuerza mecánica resistente constante, se acelera hasta alcanzar el puntode operación permanente o punto de equilibrio v0 –intersección de las características. Estoocurre debido a que esta zona de operación, la fuerza eléctrica Fe, siempre es superior a lafuerza mecánica Fm.
Si el sistema se encuentra originalmente en vacío, es decir, operando a velocidad sincrónica,sin carga mecánica y repentinamente se añade una fuerza mecánica resistente, la fuerza eléc-trica es inferior a la mecánica y ocurre un proceso de retardo en la zona (2) de la figura 1.7.La velocidad disminuye desde la sincrónica hasta la velocidad de operación v0 en el puntode equilibrio.
La fuerza mecánica Fm depende en general, para un accionamiento físico, de la velocidad delconductor. En la figura 1.8 se muestra la curva característica de la máquina eléctrica anterior,pero sometida a una fuerza mecánica dependiente de la velocidad.
1.3. CURVAS CARACTERÍSTICAS 19
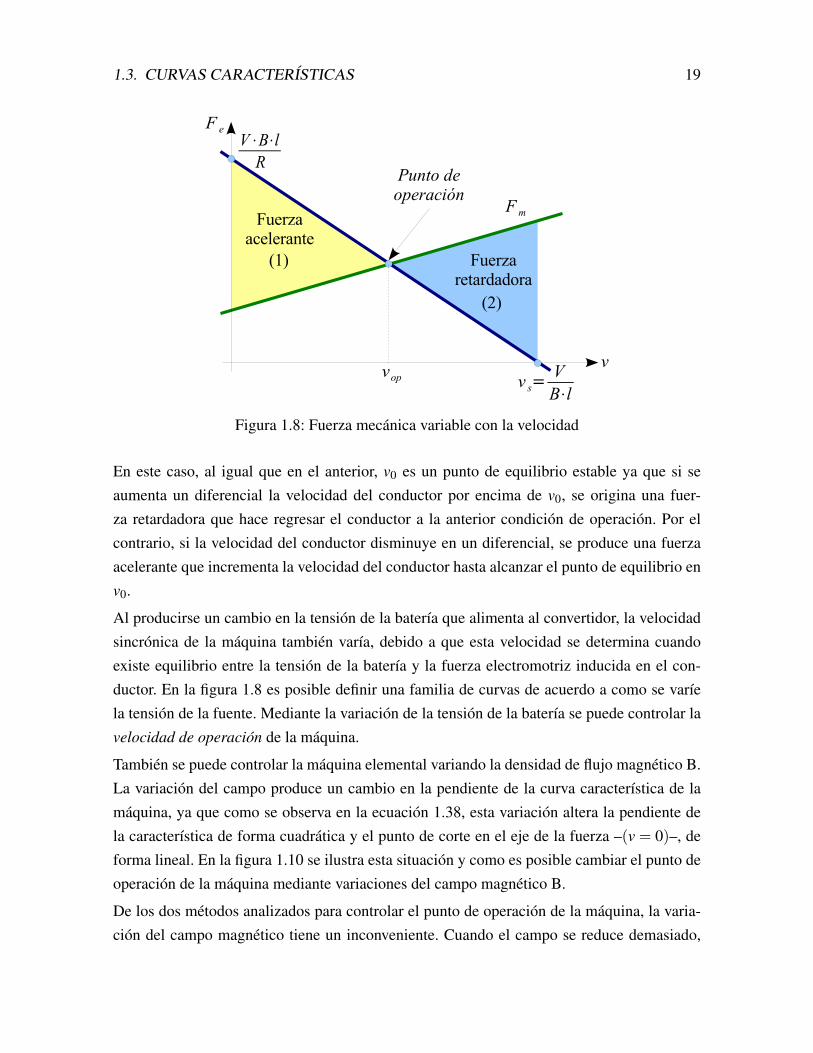
Figura 1.8: Fuerza mecánica variable con la velocidad
En este caso, al igual que en el anterior, v0 es un punto de equilibrio estable ya que si seaumenta un diferencial la velocidad del conductor por encima de v0, se origina una fuer-za retardadora que hace regresar el conductor a la anterior condición de operación. Por elcontrario, si la velocidad del conductor disminuye en un diferencial, se produce una fuerzaacelerante que incrementa la velocidad del conductor hasta alcanzar el punto de equilibrio env0.
Al producirse un cambio en la tensión de la batería que alimenta al convertidor, la velocidadsincrónica de la máquina también varía, debido a que esta velocidad se determina cuandoexiste equilibrio entre la tensión de la batería y la fuerza electromotriz inducida en el con-ductor. En la figura 1.8 es posible definir una familia de curvas de acuerdo a como se varíela tensión de la fuente. Mediante la variación de la tensión de la batería se puede controlar lavelocidad de operación de la máquina.
También se puede controlar la máquina elemental variando la densidad de flujo magnético B.La variación del campo produce un cambio en la pendiente de la curva característica de lamáquina, ya que como se observa en la ecuación 1.38, esta variación altera la pendiente dela característica de forma cuadrática y el punto de corte en el eje de la fuerza –(v = 0)–, deforma lineal. En la figura 1.10 se ilustra esta situación y como es posible cambiar el punto deoperación de la máquina mediante variaciones del campo magnético B.
De los dos métodos analizados para controlar el punto de operación de la máquina, la varia-ción del campo magnético tiene un inconveniente. Cuando el campo se reduce demasiado,

20 CAPÍTULO 1. CONVERSIÓN DE ENERGÍA ELÉCTRICA
Figura 1.9: Efecto de la variación de la tensión de alimentación
Figura 1.10: Efecto de la variación del campo B del convertidor

1.4. BALANCE ENERGÉTICO 21
la velocidad sincrónica aumenta considerablemente y se puede producir un fenómeno deno-minado embalamiento. El embalamiento es una aceleración súbita debida a la pérdida delcampo en una máquina eléctrica sin carga. Si la velocidad sube a niveles peligrosos, puedeocurrir deterioro de la máquina por fallas eléctricas y mecánicas. En las máquinas eléctricasrotativas este problema es muy grave como se observa del siguiente ejemplo:
Una máquina de 3.600 rpm con un radio de 50 cm gira a una velocidad angular
de:
ω = 2πnf= 377
rads
La aceleración centrípeta que aparece sobre los conductores de la periferia del
rotor de la máquina se calcula como:
ac = ω2r = 71.061
ms2
Esta aceleración es aproximadamente 7.252default veces superior a la de gra-
vedad, por lo tanto sobre cada gramo de material en la periferia aparece una
fuerza de 7kg tratando de mover el material conductor de sus ranuras. Como
la aceleración varía con el cuadrado de la velocidad angular, si se duplica la
velocidad angular, la aceleración aumenta 4 veces.
1.4. Balance energético
En el balance de potencias desarrollado en la ecuación 1.25 se llegó a la conclusión de quetodo el proceso es conservativo sobre la base de que la potencia eléctrica desarrollada por lamáquina es igual a la potencia mecánica entregada por el sistema externo.
En general, todas las máquinas eléctricas son reversibles y su funcionamiento depende delsentido en que se transmite la potencia. Si la energía fluye del sistema eléctrico al mecánico,la máquina funciona como motor. Si el flujo de energía es del sistema mecánico al eléctrico,el convertidor es un generador. Cuando el sistema eléctrico y mecánico inyectan energía ala máquina, y esta energía se consume totalmente como pérdidas internas, esta condición
22 CAPÍTULO 1. CONVERSIÓN DE ENERGÍA ELÉCTRICA
Figura 1.11: Modos de operación del convertidor
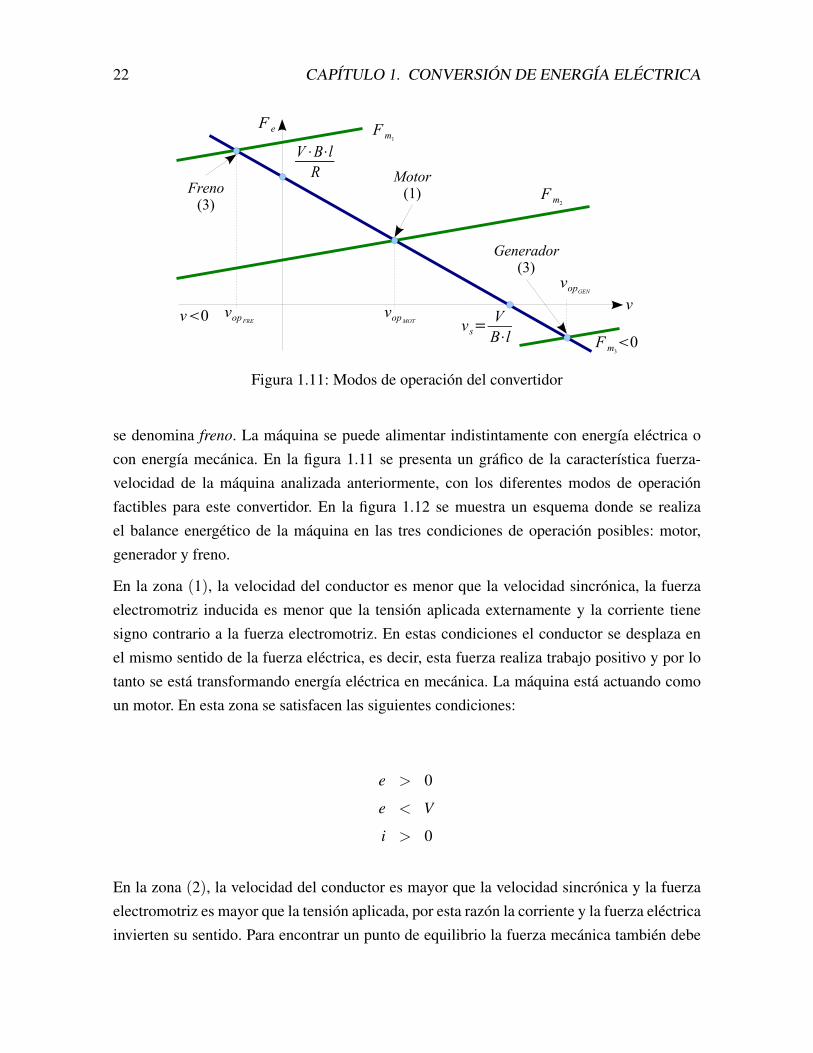
se denomina freno. La máquina se puede alimentar indistintamente con energía eléctrica ocon energía mecánica. En la figura 1.11 se presenta un gráfico de la característica fuerza-velocidad de la máquina analizada anteriormente, con los diferentes modos de operaciónfactibles para este convertidor. En la figura 1.12 se muestra un esquema donde se realizael balance energético de la máquina en las tres condiciones de operación posibles: motor,generador y freno.
En la zona (1), la velocidad del conductor es menor que la velocidad sincrónica, la fuerzaelectromotriz inducida es menor que la tensión aplicada externamente y la corriente tienesigno contrario a la fuerza electromotriz. En estas condiciones el conductor se desplaza enel mismo sentido de la fuerza eléctrica, es decir, esta fuerza realiza trabajo positivo y por lotanto se está transformando energía eléctrica en mecánica. La máquina está actuando comoun motor. En esta zona se satisfacen las siguientes condiciones:
e > 0
e < V
i > 0
En la zona (2), la velocidad del conductor es mayor que la velocidad sincrónica y la fuerzaelectromotriz es mayor que la tensión aplicada, por esta razón la corriente y la fuerza eléctricainvierten su sentido. Para encontrar un punto de equilibrio la fuerza mecánica también debe

1.4. BALANCE ENERGÉTICO 23
Motor
Pm
Pe
Pm
Pe
Generador
Pm
Pe
Freno pérdidas
pérdidas pérdidas(1) (2) (3)
Figura 1.12: Balance de potencia en los diversos modos de operación
invertir su sentido original. La fuerza mecánica ahora está entregando energía y el sistema secomporta como un generador. Las condiciones que imperan en esta zona de trabajo son:
e > 0
e > V
i < 0
En la zona (3), tanto la velocidad, como la fuerza electromotriz son negativas. La fuerzamecánica está aplicada en el mismo sentido de la velocidad –negativa en este caso–, porlo tanto el sistema mecánico entrega energía a la máquina. Simultáneamente, la fuente detensión entrega potencia eléctrica a la carga. En esta condición toda la potencia entregadapor el sistema mecánico y por el sistema eléctrico se consume en la resistencia interna delconductor y se produce un gran calentamiento de la máquina. Este estado se conoce con elnombre de frenado eléctrico y se caracteriza por las siguientes condiciones de operación:
e < 0
e < V
i > 0

Capítulo 2
Conceptos de Energía y TrabajosVirtuales
2.1. Energía y coenergía en el campo
Un convertidor electromecánico de energía es una máquina eléctrica. En general una máquinaeléctrica posee varios ejes o puertos por los cuales fluye la energía. Estos ejes pueden ser dedos tipos: eléctricos o mecánicos. Esquemáticamente se representan en la figura 2.1.
En los ejes eléctricos de la máquina, las interacciones se analizan conociendo las corrientesy tensiones. En los ejes mecánicos las variables que determinan la condición de operación dela máquina son las velocidades y fuerzas, si el movimiento es lineal, o el par1 y la velocidadangular, si el movimiento es rotativo.
La máquina eléctrica más simple requeriría al menos un eje eléctrico y un eje mecánico. Elesquema básico de esta máquina se ilustra en la figura 2.2: dWe es el diferencial de energíaeléctrica que entra en el convertidor por el eje eléctrico, dWm es el diferencial de energíamecánica que sale por el eje mecánico y dWc es el diferencial de energía que se almacena enlos campos eléctrico y magnético de la máquina.
En las máquinas eléctricas, no toda la energía introducida en los ejes eléctricos se entregaen los ejes mecánicos o viceversa. Es necesario que parte de la energía eléctrica se almaceneen los campos electromagnéticos del convertidor. En un balance de la energía en la máquinaeléctrica es necesario tener en cuenta la parte de la energía que fluye hacia y desde los camposeléctricos y magnéticos. En la figura 2.2 esta energía se representa por dWc.
1En algunos textos se utiliza la palabra torque, pero este vocablo no se ha incorporado aún al idioma español.
24

2.1. ENERGÍA Y COENERGÍA EN EL CAMPO 25
Figura 2.1: Máquina eléctrica y algunos de sus posibles ejes
Figura 2.2: Máquina eléctrica con un eje eléctrico y un eje mecánico
26 CAPÍTULO 2. CONCEPTOS DE ENERGÍA Y TRABAJOS VIRTUALES
Del principio de conservación de la energía se determina:
dWe = dWc +dWm (2.1)
La energía acumulada en el campo no puede ser medida, pero es posible calcularla por ladiferencia entre la energía eléctrica y la mecánica:
dWc = dWe−dWm (2.2)
La energía eléctrica se determina a partir de la integral de la potencia eléctrica en el tiempo.Esta energía puede ser calculada directamente en el eje eléctrico de la máquina a partir de lasmedidas de tensión y corriente instantánea:
∆We =
ˆ t
0Pe(τ)dτ =
ˆ t
0v(τ) · i(τ)dτ =
ˆ t
0v(τ) · i(τ)dτ (2.3)
Transformando las variables de la expresión anterior se puede reescribir esta ecuación en unaforma más conveniente. Considerando que el sistema es conservativo, es decir, no existen pér-didas en elementos resistivos, la tensión v(t) aplicada a la máquina y la fuerza electromotrizinducida son iguales, y por lo tanto:
v(t) = e(t) =dλ
dt(2.4)
En este caso, a partir de 2.3 y 2.4 se determina que:
∆We =
ˆ t
0v(τ) · i(τ)dτ =
ˆ t
0
dλ
dt· i(τ)dτ =
ˆλ (t)
λ (0)i(x,λ )dλ =
ˆλ (t)
λ (0)dWe (2.5)
De la expresión 2.5 se determina que el diferencial de energía eléctrica es dWe = idλ .
La ecuación 2.5 indica que para obtener la energía eléctrica que fluye por la máquina esnecesario conocer solamente la dependencia de la corriente i(x,λ ) con respecto al flujo λ ya la posición x del convertidor.
Para determinar la variación de la energía mecánica es necesario conocer la velocidad y lafuerza en función del tiempo:
∆Wm =
ˆ t
0Pm(τ)dτ =
ˆ t
0F(τ) · x(τ)dτ (2.6)

2.1. ENERGÍA Y COENERGÍA EN EL CAMPO 27
Figura 2.3: Diagrama λ − i de un electro-imán elemental
Realizando cambio de variables sobre la ecuación 2.6, se obtiene:
∆Wm =
ˆ t
0F(τ) · dx
dτdτ =
ˆ x(t)
x(0)F(x,λ )dx =
ˆ x(t)
x(0)dWm (2.7)
Para analizar las relaciones anteriores se puede utilizar como ejemplo el electro-imán que seilustra en la figura 2.3. Allí se ha representado un gráfico de la relación existente entre losenlaces de flujo λ y la corriente i, para dos condiciones extremas de la posición relativa delyugo del electro-imán. Para la misma corriente i, al disminuir la distancia x, disminuye lareluctancia y se incrementan los enlaces de flujo λ .
En el gráfico λ− i, la región sombreada representa la integral de la corriente i(λ ) con respectoa λ para una posición x fija. Como se ha determinado en la ecuación 2.5, esta región represen-ta la variación de la energía eléctrica en un circuito magnético que se energiza manteniendoconstante la posición del yugo (x).
En un sistema conservativo, la energía es una función de estado. Esto quiere decir que enestos sistemas el incremento de energía acumulada no depende de la trayectoria utilizadapara alcanzar un determinado estado, sino del valor de las variables en los estados iniciales yfinales del proceso.
Para determinar la energía acumulada en el campo, es necesario calcular la diferencia entrelas energías eléctrica y mecánica del sistema después del proceso. Si el sistema mecánicoestá detenido, no existe variación en la energía mecánica del convertidor y por lo tanto todala energía eléctrica que entra en la máquina se convierte en energía acumulada en el campo,

28 CAPÍTULO 2. CONCEPTOS DE ENERGÍA Y TRABAJOS VIRTUALES
Figura 2.4: Energía y coenergía en el campo
entonces:
∆We =
ˆλ (t)
λ (0)i(x,λ )dλ = ∆Wc, si x = cte (2.8)
La ecuación 2.8 se puede integrar por partes y se obtiene:
∆Wc = i(x,λ ) ·λ |λ (t)λ (0)−
ˆ i(t)
i(0)λ (x, i)di (2.9)
En la ecuación 2.9, el término integral de define como coenergía en el campo y se expresacomo ∆W
′c . En la figura 2.4 se observa que la coenergía es el área bajo la característica λ − i.
En la figura 2.4 se observa que un sistema electromecánico donde la posición x es constantecumple la siguiente relación:
λ · i = ∆Wc +∆W′c (2.10)
De las definiciones anteriores de energía y coenergía en el campo magnético se destacan lassiguientes observaciones:
1. Para la energía, el enlace de flujo λ es la variable independiente, y la corriente i es lavariable dependiente.
2. Para la coenergía, la corriente i es la variable independiente y el enlace de flujo λ es lavariable dependiente.
Para calcular la fuerza Fe, se reducen los incrementos de energía mecánica y de energía enel campo a valores diferenciales. Recordando que la energía acumulada en el campo de la

2.1. ENERGÍA Y COENERGÍA EN EL CAMPO 29
máquina depende de los enlaces de flujo y de la posición de la pieza móvil:
Wc =Wc(x,λ ) (2.11)
El trabajo mecánico se define en su forma diferencial como:
dWm = Fe ·dx (2.12)
A partir de las ecuaciones 3.27 y 3.29 se obtiene:
dWm = Fe ·dx =−dWc(x,λ ) , si λ = cte. (2.13)
El diferencial total de la energía en el campo es:
dWc(x,λ ) =∂Wc
∂xdx+
∂Wc
∂λdλ (2.14)
Como el enlace se considera constante, el segundo término de la sumatoria de la ecuación2.14 es nulo y por lo tanto se deduce de 2.13 y de 2.14 que:
Fe ·dx =∂Wc(x,λ )
∂xdx , si λ = cte. (2.15)
Por identificación de términos en la ecuación 2.15 se puede calcular la fuerza sobre la piezamóvil en un proceso a enlace de flujo constante como:
Fe =−∂Wc(x,λ )
∂x, si λ = cte. (2.16)
La ecuación anterior, también denominada principio de los trabajos virtuales, indica que paracalcular la fuerza Fe sobre la pieza móvil, es necesario conocer la variación de la energía delcampo en función del desplazamiento, cuando se mantiene constante el enlace de flujo λ .Cuando en el convertidor, la energía acumulada en el campo es independiente de la posición,la fuerza eléctrica es cero.
Si el convertidor electromecánico analizado anteriormente, mantiene una característica linealentre el enlace de flujo y la corriente, la energía en el campo se puede evaluar mediante lasiguiente expresión:
Wc =12
λ · i = 12
L(x) · i2 = 12
λ 2
L(x)(2.17)

30 CAPÍTULO 2. CONCEPTOS DE ENERGÍA Y TRABAJOS VIRTUALES
En la ecuación anterior, L(x) representa la inductancia en función de la posición de la piezamóvil. La inductancia de una bobina se determina a partir del número de vueltas N y de lapermeanza del circuito magnético ℘ como:
L(x) = N2 ·℘(x) (2.18)
Para el electro-imán en análisis, la permeanza del circuito magnético es:
℘(x) =µo ·A
2(x+d)(2.19)
Donde:
µ0 es la permeabilidad del vacío 4π×10−7 Hm
A es el área efectiva del magneto
x es la separación del yugo
d es la distancia entre el yugo y el circuito electro-imán
Sustituyendo la expresión 2.19 en 2.18 y este resultado en 2.17 se obtiene:
Wc(x) =12
2(x+d)µ0A ·N2 λ
2 (2.20)
y aplicando 2.16 a 2.20:
Fe =−∂Wc(x,λ )
∂x=− λ 2
µ0A ·N2 (2.21)
El mismo electro-imán permite analizar lo que sucede si el movimiento se realiza muy len-tamente. Si el yugo se desplaza a una velocidad prácticamente cero, la corriente se mantieneconstante porque no se induce fuerza electromotriz debido a que los enlaces de flujo cambianmuy lentamente y su derivada con respecto al tiempo es prácticamente nula. En la figura 2.5se muestra la situación anterior. En este caso, la energía mecánica se puede evaluar mediantelas diferencias de la coenergía en el campo entre la posición x1 y la posición x2. En la figura2.5 se observa que para la condición descrita:
∆Wm = ∆W′c , si i = cte. (2.22)

2.1. ENERGÍA Y COENERGÍA EN EL CAMPO 31
Figura 2.5: Cálculo de la energía con desplazamientos muy lentos del yugo
La coenergía en el campo se calcula de la siguiente forma:
W′c =
ˆ i(t)
i(0)λ (x, i)di (2.23)
La coenergía en el campo depende de la posición de la pieza móvil y de la corriente, por lotanto:
dWm = Fe ·dx = dW′c =
∂W′c(x, i)∂x
dx+∂W
′c(x, i)∂ i
di (2.24)
Durante el proceso, la corriente i no varía y por esta razón se puede determinar a partir de2.24 que:
Fe =∂W
′c(x, i)∂x
si i = cte. (2.25)
La fuerza eléctrica originada en el convertidor electromagnético depende de la variación de laenergía en el campo en función del desplazamiento cuando el movimiento se realiza mante-niendo constantes los enlaces de flujo. Si el movimiento se realiza manteniendo constante lacorriente, la fuerza eléctrica depende de la variación de la coenergía en función de la posición.
Para calcular o medir una fuerza se utiliza el principio de los trabajos virtuales. Este métodoconsiste en evaluar las variaciones de la energía o coenergía en el campo ante un desplaza-miento diferencial. Cualquiera de los dos métodos analizados anteriormente, permite calcularlas fuerzas que aparecen sobre el sistema. Sin embargo, dependiendo de la forma como sepresenten los datos del convertidor, es más fácil para determinar la fuerza utilizar los con-ceptos de energía o de coenergía. En los sistemas lineales el cálculo puede ser realizado conigual facilidad por ambos métodos. Cuando el sistema no es lineal, la facilidad o dificultad

32 CAPÍTULO 2. CONCEPTOS DE ENERGÍA Y TRABAJOS VIRTUALES
Figura 2.6: Electro-imán sometido a fuerzas internas y externas
del cálculo de fuerzas por uno u otro método depende de cuáles sean las variables indepen-dientes y cuáles las dependientes. Si se conoce el enlace de flujo en función de las corrientes,el cálculo por medio de la coenergía simplifica el problema. Si la corriente se expresa comofunción de los enlaces, la energía es el mejor método para determinar la fuerza que apareceen la máquina.
2.2. Ecuaciones internas del convertidor
En la figura 2.6 se representa una máquina eléctrica constituida por un electro-imán alimen-tado por una bobina y una pieza móvil sobre la que actúan dos fuerzas, la fuerza eléctricaFe producida por la interacción electromagnética del dispositivo y una fuerza externa Fm denaturaleza mecánica.
En general la fuerza eléctrica no tiene por qué ser igual a la fuerza mecánica. En el sistemamecánico ilustrado en la figura 2.7, las tensiones de las cuerdas no están necesariamenteequilibradas.
En el ejemplo de la figura 2.7, la fuerza F1 es diferente a la fuerza F2, ya que:
F1 = (m+M) ·a (2.26)
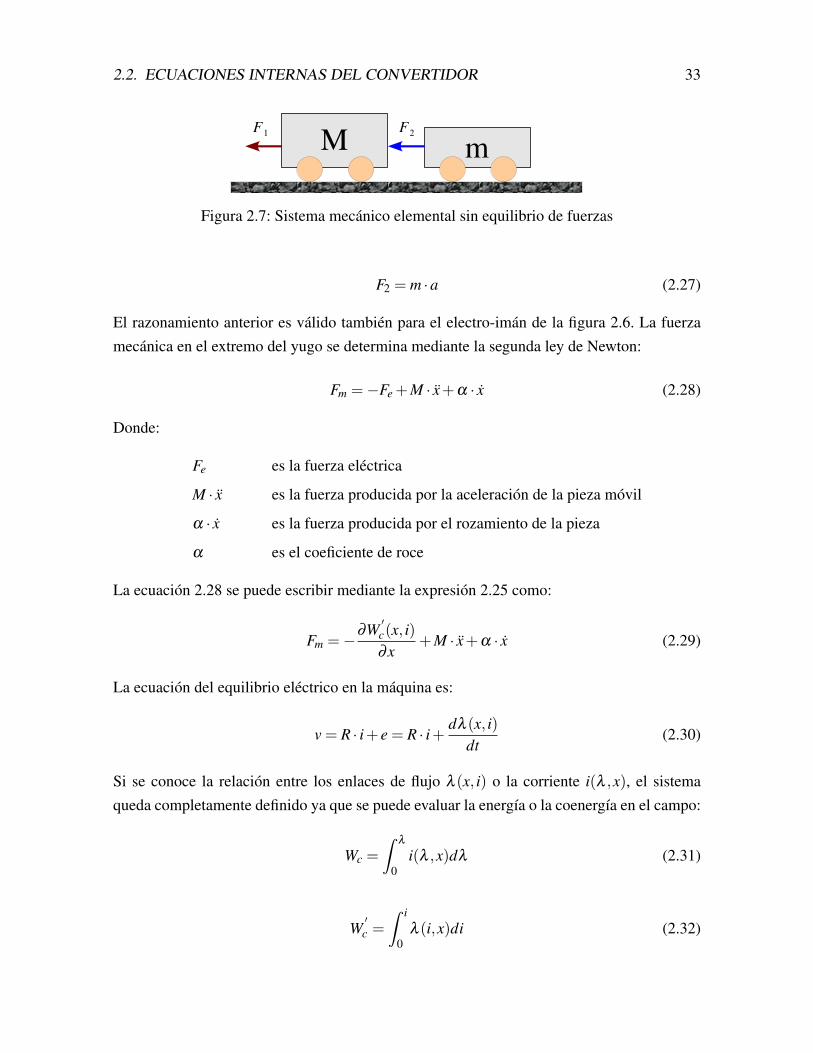
2.2. ECUACIONES INTERNAS DEL CONVERTIDOR 33
Figura 2.7: Sistema mecánico elemental sin equilibrio de fuerzas
F2 = m ·a (2.27)
El razonamiento anterior es válido también para el electro-imán de la figura 2.6. La fuerzamecánica en el extremo del yugo se determina mediante la segunda ley de Newton:
Fm =−Fe +M · x+α · x (2.28)
Donde:
Fe es la fuerza eléctrica
M · x es la fuerza producida por la aceleración de la pieza móvil
α · x es la fuerza producida por el rozamiento de la pieza
α es el coeficiente de roce
La ecuación 2.28 se puede escribir mediante la expresión 2.25 como:
Fm =−∂W′c(x, i)∂x
+M · x+α · x (2.29)
La ecuación del equilibrio eléctrico en la máquina es:
v = R · i+ e = R · i+ dλ (x, i)dt
(2.30)
Si se conoce la relación entre los enlaces de flujo λ (x, i) o la corriente i(λ ,x), el sistemaqueda completamente definido ya que se puede evaluar la energía o la coenergía en el campo:
Wc =
ˆλ
0i(λ ,x)dλ (2.31)
W′c =
ˆ i
0λ (i,x)di (2.32)

34 CAPÍTULO 2. CONCEPTOS DE ENERGÍA Y TRABAJOS VIRTUALES
La expresión 2.29 determina el comportamiento dinámico del sistema ilustrado en la figura2.6 si se conoce la fuerza mecánica Fm.
Si el sistema es lineal, la relación entre los enlaces de flujo y la corriente viene expresada me-diante la ecuación λ (i,x) = L(x) i. En esa ecuación, la inductancia L depende de la posicióndel yugo, es decir L = L(x). Por esta razón:
i = i(λ ,x) =1
L(x)·λ (i,x) = Γ(x) ·λ (i,x) (2.33)
Donde:
Γ(x) es la inductancia inversa L−1.
Mediante la ecuación 2.33, la dinámica del electro-imán queda completamente determinada.Como el sistema es lineal:
W′c =
ˆ i
0λ (i,x)di =
ˆ i
0L(x) · i ·di =
12
L(x) · i2 (2.34)
Sustituyendo la ecuación 2.34 en la ecuación 2.29 se obtiene:
Fm =−∂W′c
∂x+Mx+α x =−1
2dL(x)
dx· i2 +Mx+α x (2.35)
La ecuación 2.35 representa el equilibrio de fuerzas sobre la pieza móvil. La ecuación querepresenta el circuito eléctrico del sistema es:
v = R · i+ ddt
(L(x) · i) = R · i+ dL(x)dt· dx
dt· i+L(x) · di
dt(2.36)
Definiendo τ(x) como:
τ(x)≡ dL(x)dt
(2.37)
la ecuación eléctrica de la máquina, a partir de 2.36 y 2.37, es:
v = R · i+ τ(x) · x · i+L(x) · didt
(2.38)
En la expresión anterior, el primer sumando representa la caída de tensión en la resistenciade la bobina, el segundo representa la fuerza electromotriz inducida en la bobina por el movi-miento del yugo y el tercer sumando representa la fuerza electromotriz inducida por variación

2.2. ECUACIONES INTERNAS DEL CONVERTIDOR 35
de la corriente en la bobina. De forma compacta, la ecuación 2.38 se puede escribir como:
v = R · i+ eG + eT (2.39)
Donde:
e es la fuerza electromotriz total compuesta por eG y eT
eG es el término que depende de la velocidad de la pieza móvil de lamáquina, denominado término de generación
eT es el término que depende de la variación de la corriente en la má-quina, denominado término de transformación
Cuando la corriente es cero, puede existir fuerza electromotriz de transformación, pero no degeneración como se observa en la ecuación 2.38.
En conclusión, las ecuaciones internas de la máquina se pueden escribir, en función de lacoenergía:
Fm =−12
τ(x) · i2 +M · x+α · x (2.40)
o, en función de la energía:
Fm =12
dΓ(x)dx·λ 2 +M · x+α · x (2.41)
y la ecuación eléctrica 2.38.
Las variables que definen el estado del sistema en las ecuaciones 2.40, 2.41 y 2.38 son lacorriente i, la posición x y la velocidad x. Realizando el cambio de variables ˙x = u, las ecua-ciones anteriores se pueden expresar de la siguiente forma:
Fm =−12τ(x) · i2 +M · u+α ·u
v = R · i+ τ(x) · ˙u · i+L(x) · didt
x = u
(2.42)
Representando el sistema de ecuaciones diferenciales 2.42 en la forma canónica x=A(x)x+Bu,se obtiene:
didt =−
1L(x) [R · i+ τ(x) · i ·u]+ 1
L(x)v(t)
u = 1M
[12τ(x) · i2−α ·u
]+ 1
M Fm(t)
x = u
(2.43)

36 CAPÍTULO 2. CONCEPTOS DE ENERGÍA Y TRABAJOS VIRTUALES
Para determinar la solución de este sistema de ecuaciones diferenciales no lineales, es nece-sario conocer:
1. Las condiciones iniciales de las variables de estado i(0), u(0) y x(0).
2. Las condiciones de borde o ligazones externas. En el presente caso definidas por lasexcitaciones en el tiempo de la fuerza mecánica Fm(t) aplicada al yugo y la tensión v(t)
aplicada a la bobina del electro-imán.
2.3. Ecuaciones de potencia
La potencia utilizada por el convertidor electromecánico en el eje mecánico de la máquina dela figura 2.6 se puede calcular a partir de la fuerza mecánica y de la velocidad del yugo:
Pm = Fm · x =−12
τ(x) · i2 · x+M · x · x+α · x2 (2.44)
La potencia absorbida por el eje eléctrico es:
Pe = v · i = R · i2 + τ(x) · x · i+L(x) · didt· i = R · i2 + eG · i+ eT · i (2.45)
Para que la máquina anterior pueda trabajar en un régimen continuo, con corriente y velocidadconstante, despreciando las pérdidas de fricción (α = 0), y las pérdidas por efecto Joule enlos conductores (R = 0), mediante las ecuaciones 2.44 y 2.45 se observa que:
Pm =12
eG · i (2.46)
Pe = eG · i (2.47)
Las expresiones 2.44 y 2.45 indican que en las condiciones anteriores, la máquina absorbepermanentemente por el eje eléctrico el doble de la potencia mecánica que está utilizando. Ladiferencia entre estas dos potencias sólo puede ser almacenada en el campo. En la figura 2.8se representa esta situación. De toda la potencia que es inyectada en el eje eléctrico, el 50%se convierte en energía mecánica y el otro 50% se almacena en el campo. Como la corrientees constante, el término de transformación (eT · i) es cero y el campo no puede devolver alsistema la energía que le ha sido entregada en el proceso de conversión.

2.3. ECUACIONES DE POTENCIA 37
Figura 2.8: Balance energético de una máquina eléctrica en régimen continuo
Si una máquina eléctrica se mantiene todo el tiempo operando en esta situación, acumula deforma indefinida energía en el campo. Esto no es factible para un sistema físico real. La solu-ción del problema planteado consiste en permitir la variación de la corriente. Con la variaciónde la corriente aparece el término de transformación (eT · i) que compensa el término de ge-neración (1
2eG · i). Por esta razón no es posible construir un máquina que funcione sólo concorriente continua. En todas las máquinas eléctricas es necesaria la variación de las corrientespara permitir una operación en régimen permanente.
La argumentación anterior se puede cuestionar debido a que son muy frecuentes en la in-dustria las «Máquinas de corriente continua». Sin embargo en este caso el término corrientecontinua se aplica a la fuente utilizada para alimentar el convertidor. Las máquinas de corrien-te continua requieren de un dispositivo inversor electromecánico –las escobillas y el colector–que permite la variación de las corrientes en los devanados de la máquina.
También parecen contradecir esta argumentación los principios de funcionamiento de lasmáquinas homopolares y los convertidores magneto-hidrodinámicos2. En ambos casos, estasmáquinas funcionan con corriente continua, pero la corriente no siempre circula por el mis-mo material. Si un observador se mueve solidario con el medio conductor, el disco en el casohomopolar y el fluido en la máquina magnetohidrodinámica, puede medir la variación de lascorrientes al aproximarse y alejarse del punto de inyección. En otras palabras, estas máquinasson equivalentes a las de corriente continua, pero si en ellas el proceso de variación de lascorrientes se realiza de forma discreta mediante el colector y las escobillas, en las homopo-lares y magnetohidrodinámicas el proceso de variación de las corrientes se lleva a cabo deforma continua mediante un proceso de acercamiento y alejamiento del punto de inyecciónde la corriente.
Por lo tanto en ningún caso conocido, la experiencia contradice la necesidad teórica de va-
2Ver figura 2.9.

38 CAPÍTULO 2. CONCEPTOS DE ENERGÍA Y TRABAJOS VIRTUALES
(a) Convertidor homopolar (b) Bomba magnetohidrodinámica
Figura 2.9: Máquinas de corriente continua
riación de la corriente para el funcionamiento en régimen permanente de los convertidoreselectromecánicos de energía.
2.4. Generalización de las ecuaciones
En una máquina con dos ejes eléctricos y un eje mecánico, como la ilustrada en la figura2.10, se satisface la siguiente relación para la evaluación de la fuerza eléctrica sobre la piezamóvil:
Fe =−∂Wc(x,λ1,λ2)
∂x(2.48)
Para demostrar la validez de la ecuación 2.48 se debe recordar que en un sistema mecánico deeste tipo, si se varía la posición x, el intercambio energético se produce entre los ejes eléctricosy el eje mecánico. Si la posición permanece fija, el intercambio energético se realiza entre losejes eléctricos únicamente. La ecuación 2.48 mantiene la validez en el cálculo de la fuerza enun sistema con dos ejes eléctricos, ya que la ecuación 2.17 se demostró para el caso en el quelos enlaces de flujo se mantienen constantes. Si el enlace de flujo es constante, las fuerzaselectromotrices son cero y no puede entrar energía hacia el campo desde ninguno de los ejeseléctricos. Por esta razón se cumplen las mismas condiciones en la expresión 2.48 que en la2.17. De todo esto se concluye que es completamente general su aplicación.
Cualquiera que sea el número de ejes eléctricos o mecánicos de un convertidor electrome-cánico, para calcular la fuerza eléctrica se puede utilizar una expresión similar a la ecuación2.48, siempre y cuando el movimiento se realice sólo en uno de los ejes mecánicos y se man-tengan constantes todos los enlaces de flujo en los ejes eléctricos. La expresión generalizada

2.4. GENERALIZACIÓN DE LAS ECUACIONES 39
Figura 2.10: Máquina con dos ejes eléctricos y un eje mecánico
para el cálculo de la fuerza eléctrica es:
Fer =−∂Wc(x1,x2, ...,xr, ...,xn,λ1,λ2, ...,λm)
∂xr(2.49)
La ecuación 2.49 determina la fuerza eléctrica que aparece sobre el eje mecánico r. Para estefin, se calcula la derivada parcial de la energía en el campo con respecto a la posición del ejer, manteniendo constantes las posiciones de los otros ejes mecánicos y los enlaces de flujo detodos los ejes eléctricos.
En el sistema de la figura 2.10, si la posición x se mantiene constante, la energía acumuladaen el campo es igual a la energía eléctrica:
dWc = dWe , si x = cte. (2.50)
La energía eléctrica se puede calcular como:
dWc = dWe = i1dλ1 + i2dλ2 , si x = cte. (2.51)
Si se conoce cómo varían las corrientes con los enlaces de flujo y con la posición, el problemaqueda resuelto, es decir:
i1 = f1(x,λ1,λ2)
i2 = f2(x,λ1,λ2)(2.52)
En los casos lineales se puede establecer:λ1 = L11i1 +L12i2λ2 = L21i1 +L22i2
(2.53)

40 CAPÍTULO 2. CONCEPTOS DE ENERGÍA Y TRABAJOS VIRTUALES
Matricialmente la expresión 2.51 se puede escribir como:
[λ ] = [L] [i] (2.54)
Donde:
[λ ] =
[λ1
λ2
]; [i] =
[i1i2
]; [L] =
[L11 L12
L21 L22
]
Empleando álgebra matricial, se puede determinar la corriente [i] en función de los enlaces[λ ]:
[i] = [L]−1 [λ ] = [Γ] [λ ] (2.55)
La expresión 2.55 en forma explícita es:[i1i2
]=
[Γ11(x) Γ12(x)
Γ21(x) Γ22(x)
][λ1
λ2
](2.56)
Para calcular la energía en el campo, es necesario variar cada uno de los parámetros en formasucesiva, desde su valor inicial a su valor final, mientras todas las otras variables de estado semantienen constantes. Para evaluar la energía acumulada en el campo, se realiza el siguienteprocedimiento:
∆Wc =
ˆ (x,λ1,λ2)
(0,0,0)dWc =
ˆ (x,0,0)
(0,0,0)dWc +
ˆ (x,λ1,0)
(x,0,0)dWc +
ˆ (x,λ1,λ2)
(x,λ1,0)dWc (2.57)
La primera integral de la sumatoria de la ecuación 2.57 es cero, debido a que los enlaces deflujo son cero mientras se mueve el yugo de la máquina. Como no existe variación de los en-laces, no existen fuerzas electromotrices y por lo tanto no se inyecta potencia eléctrica desdelos ejes eléctricos hacia el campo. Al no existir enlaces de flujo, para realizar el desplaza-miento mecánico x no es necesario consumir ni suministrar energía. Para la evaluación de losdos términos restantes de la ecuación 2.57, se sustituyen las ecuaciones 2.51 y 2.56:
∆Wc =
ˆ (x,λ1,0)
(x,0,0)(Γ11λ1 +Γ12λ2)dλ1 +(Γ21λ1 +Γ22λ2)dλ2 +
+
ˆ (x,λ1,λ2)
(x,λ1,0)(Γ11λ1 +Γ12λ2)dλ1 +(Γ21λ1 +Γ22λ2)dλ2 =
=12
Γ11λ21 +Γ21λ1λ2 +
12
Γ22λ22 (2.58)

2.4. GENERALIZACIÓN DE LAS ECUACIONES 41
En el cálculo de las integrales de la ecuación 2.58 se asume que Γ12 es igual a Γ21, condiciónde simetría siempre válida para los sistemas físicos.
Generalizando el cálculo anterior mediante el álgebra de matrices, se tiene:
dWc = dWe = [i]t [dλ ] , si x = cte. (2.59)
De la ecuación 2.56 y recordando la propiedad sobre la traspuesta de un producto de matrices:
[i]t = [λ ]t [Γ]t (2.60)
Se obtiene la energía acumulada en el campo como:
∆Wc =
ˆ (x,λ1,λ2)
(0,0,0)[λ ]t [Γ(x)]t [dλ ] =
12[λ ]t [Γ(x)]t [λ ] (2.61)
Si se deriva parcialmente la ecuación 2.61 con respecto a la posición x, se encuentra la fuerzaeléctrica Fe que actúa sobre la pieza móvil:
Fe =−∂Wc(x, [λ ])
∂x=−1
2[λ ]t
ddx
([Γ(x)]t
)[λ ] (2.62)
Por un razonamiento semejante, pero aplicado a la coenergía, se puede deducir que:
∆W′c =
12[i]t [L(x)]t [i] (2.63)
La fuerza eléctrica sobre la pieza se puede calcular como:
Fe =∂W
′c(x, [i])∂x
=12[i]t
ddx
([L(x)]t
)[i] =
12[i]t [τ(x)]t [i] (2.64)
Las ecuaciones 2.62 y 2.64 son válidas para un número cualquiera de ejes eléctricos, peropara un eje mecánico solamente. La mayoría de las máquinas eléctricas poseen un solo ejemecánico, pero si existen más, es necesario calcular las derivadas parciales de la energía ode la coenergía, según sea el caso, con respecto a cada una de las variables que definen laposición de cada eje mecánico (x1,x2,x3, ...,xn).
Si el eje mecánico es rotativo o giratorio, como se representa en la figura 2.11, la matriz deinductancia se define en función del ángulo θ y no se calculan fuerzas sino pares eléctricos ymecánicos.

42 CAPÍTULO 2. CONCEPTOS DE ENERGÍA Y TRABAJOS VIRTUALES
Figura 2.11: Electro-imán con yugo rotativo
Las ecuaciones del convertidor en este caso son:
Te =12[i]t [τ(θ)]t [i] (2.65)
Donde:[τ(θ)] =
ddθ
[L(θ)]
Las ecuaciones de equilibrio eléctrico y mecánico de un convertidor electromecánico linealcon múltiples ejes eléctricos y un eje mecánico son:
[i] = [R] [i]+ [e] =
= [R] [i]+ddt
[λ ] =
= [R] [i]+ddx
[L(x)] x [i]+ [L(x)]d [i]dt
=
= [R] [i]+ [τ(x)] x [i]+ [L(x)]d [i]dt
(2.66)
Fm =−12[i]t [τ(x)]t [i]+Mx+α x (2.67)
En las ecuaciones 2.66 y 2.67 se observa que la información que determina la dinámica yel comportamiento de la máquina eléctrica está contenida en la matriz [L(x)]. A partir deesta matriz, se obtiene la matriz [τ(x)], y con estas dos matrices y los elementos de ligazóncon los sistemas eléctricos y mecánicos externos, se formulan las ecuaciones completas delconvertidor.

Capítulo 3
Ecuaciones generales de las máquinaseléctricas rotativas
Las máquinas eléctricas rotativas poseen características comunes entre sí y en general seasemejan al modelo representado en la figura 3.1. En algunas ocasiones el elemento interiorde la máquina es fijo y el exterior, móvil. Incluso pueden ser móviles los dos elementos; perolo más característico de las máquinas eléctricas rotativas es la existencia de dos superficiescilíndricas con movimiento relativo entre una y otra.
El flujo puede ser descompuesto en dos componentes ortogonales α y β . Para representar elflujo producido en el rotor se inyectan corrientes en las bobinas αr y βr, fijas en el rotor. Elflujo del estator se obtiene inyectando corrientes en las bobinas αe y βe fijas en el estator. Es-tos devanados no tienen necesariamente existencia física, pero pueden reproducir los camposen el interior de la máquina. La posición relativa entre el rotor y el estator queda determinada
Figura 3.1: Partes de una máquina eléctrica rotativa
43

44CAPÍTULO 3. ECUACIONES GENERALES DE LAS MÁQUINAS ELÉCTRICAS ROTATIVAS
Figura 3.2: Esquema de la máquina generalizada
mediante el ángulo θ , medido entre los ejes magnéticos αe y αr respectivamente.
La máquina eléctrica generalizada posee cuatro ejes eléctricos αe, αr, βe y βr por los cualesse inyectan las corrientes y un eje mecánico o eje de giro. El flujo en el entrehierro de lamáquina cambia su distribución cuando varían las corrientes iαr, iβ r, iαe e iβe. En la figura3.2 se representa el esquema de las bobinas ortogonales de la máquina generalizada.
Definiendo a Tm como el par mecánico en el eje de la máquina, las ecuaciones de la máquinaen forma matricial compacta son:
[v] = [R] [i]+ θ [τ(θ)] [i]+ [L(θ)]ddt
[i]
Tm = −12[i]t [τ(θ)] [i]+ J θ +ρ θ (3.1)
En el sistema de ecuaciones 3.1, ρ es el coeficiente de fricción y J es la inercia del eje derotación. Las variables de estado de este sistema de ecuaciones diferenciales son las corrientes[i], el ángulo θ y la velocidad angular dθ
dt , denominada también ωm.
Para poder plantear el sistema 3.1, es necesario determinar las matrices de resistencias [R],inductancias en función del ángulo [L(θ)], así como la derivada con respecto al ángulo θ dela matriz de inductancias, también denominada matriz de par [τ(θ)].

45
La matriz de resistencias
La matriz de resistencias de la máquina eléctrica generalizada es diagonal porque todas lasresistencias son propias de cada bobina y no existen resistencias mutuas debido a que losdevanados están aislados galvánicamente:
[R] =
Reα 0 0 0
0 Reβ 0 00 0 Rrα 00 0 0 Rrβ
(3.2)
La matriz de inductancias
Si la máquina posee un rotor cilíndrico y homogéneo, al girar no se modifica la permeanza delcamino magnético, por esta razón la inductancia propia del estator no depende de la posicióndel rotor. La inductancia propia del estator es constante e independiente del ángulo θ . Estainductancia se puede calcular como:
Le = N2e ·Pe (3.3)
Si el estator es cilíndrico, la inductancia propia del rotor es constante por el mismo razona-miento anterior. Si todos los devanados del estator poseen el mismo número de vueltas y lomismo ocurre con las bobinas del rotor, los términos de la diagonal de la matriz de inductan-cia son:
[L] =
Le ? ? ?? Le ? ?? ? Lr ?? ? ? Lr
(3.4)
Las inductancias mutuas entre los devanados α y β del estator son cero porque estas bobinasson ortogonales y el flujo que se produce en una de ellas no puede enlazar a la otra. La mismasituación sucede con los devanados del rotor:

46CAPÍTULO 3. ECUACIONES GENERALES DE LAS MÁQUINAS ELÉCTRICAS ROTATIVAS
[L] =
Le 0 ? ?0 Le ? ?? ? Lr 0? ? 0 Lr
(3.5)
La inductancia mutua entre la bobina α del estator y α del rotor es máxima cuando ambosdevanados se encuentran alineados, es decir con θ = 0. Para representar este valor de lainductancia mutua se debe utilizar un término en cosθ .
Una situación semejante se presenta entre el eje β del estator y el eje β del rotor. La induc-tancia mutua entre las bobinas α del rotor y β del estator es máxima cuando θ = π
2 ; estose representa mediante un término en senθ . La inductancia mutua entre el devanado β delrotor y α del estator es máxima cuando θ = −π
2 ; por esta razón esta inductancia se puederepresentar mediante un término −senθ .
De esta forma y recordando que la matriz de inductancias es simétrica, se obtiene:
[L] =
Le 0 Lercosθ −Lersenθ
0 Le Lersenθ Lercosθ
Lercosθ Lersenθ Lr 0−Lersenθ Lercosθ 0 Lr
(3.6)
Matriz de par
La matriz de par [τ(θ)] se calcula derivando la matriz de inductancias de la máquina conrespecto al ángulo θ :
[τ(θ)] =d
dθ[L] (3.7)
De esta forma se obtiene:
[τ(θ)] =
0 0 −Lersenθ −Lercosθ
0 0 Lercosθ −Lersenθ
−Lersenθ Lercosθ 0 0−Lercosθ −Lersenθ 0 0r
(3.8)

3.1. CÁLCULO DEL PAR ELÉCTRICO 47
3.1. Cálculo del par eléctrico
A partir de las matrices 3.6 y 3.8 se puede calcular el par eléctrico de la máquina:
Te =12
ieα
ieβ
irα
irβ
t
Le 0 Lercosθ −Lersenθ
0 Le Lersenθ Lercosθ
Lercosθ Lersenθ Lr 0−Lersenθ Lercosθ 0 Lr
ieα
ieβ
irα
irβ
(3.9)
Efectuando los productos matriciales en la ecuación 3.9 se obtiene:
Te = Ler
senθ(−ieα · irα − ieβ · irβ
)+ cosθ
(−ieα · irβ + ieβ · irα
)(3.10)
Si las corrientes del estator o del rotor son cero, todos los términos del par eléctrico en laecuación 3.10 se anulan y no se produce par. Si se inyectan corrientes constantes en todas lasbobinas del rotor y del estator, el par eléctrico que se obtiene es de la forma:
Te = Ler A · senθ +B · cosθ (3.11)
En la ecuación 3.11 se observa que para cada valor de la posición del rotor θ existe un pareléctrico, pero el promedio de ese par en un giro completo de la máquina es cero. Ésta esuna razón que refuerza el concepto de la imposibilidad de que una máquina eléctrica puedafuncionar en régimen permanente con corriente continua en todos sus devanados.
Calculando el par eléctrico promedio de la máquina bifásica en un período se obtiene:
〈Te〉=Ler
T
ˆ T
0
senθ
(−ieα · irα − ieβ · irβ
)+ cosθ
(−ieα · irβ + ieβ · irα
)dθ (3.12)
El ángulo θ en la expresión 3.12, considerando que el rotor gira a velocidad angular constanteωm, se puede expresar como:
θ = ωmt +θ0 (3.13)
Sustituyendo la expresión 3.13 en 3.12 se obtiene:

48CAPÍTULO 3. ECUACIONES GENERALES DE LAS MÁQUINAS ELÉCTRICAS ROTATIVAS
〈Te〉 =Ler
T
ˆ T
0
sen(ωmt +θ0)
(−ieα · irα − ieβ · irβ
)+
+cos(ωmt +θ0)(−ieα · irβ + ieβ · irα
)dωmt (3.14)
Si se expresan las corrientes en forma de cosenos:
ieα =√
2Ieαcos(ωeαt +θeα)
ieβ =√
2Ieβ cos(ωeβ t +θeβ
)irα =
√2Irαcos(ωrαt +θrα)
irβ =√
2Irβ cos(ωrβ t +θrβ
)(3.15)
Recordando que:1T
ˆ T
0senθ · cosθdθ = 0 (3.16)
Los únicos términos que pueden producir par promedio diferente de cero son los productosde cosenos, por lo tanto:
〈Te〉=Ler
T
ˆ T
0
cos(ωmt +θ0) ·
(−ieα · irβ + ieβ · irα
)dθ (3.17)
Si las corrientes estatóricas y rotóricas son periódicas, es posible expresarlas mediante seriesde Fourier. Utilizando expansión de las funciones en series de cosenos:
ie =∞
∑k=1
Ikecos(kωet− γe) (3.18)
ir =∞
∑j=1
I jrcos( jωrt− γr) (3.19)
Los términos del par son de la forma:
cos(ωmt +θ0) ·∞
∑k=1
Ikecos(kωet− γe) ·∞
∑j=1
I jrcos( jωrt− γr) (3.20)

3.1. CÁLCULO DEL PAR ELÉCTRICO 49
Recordando la propiedad trigonométrica:
cosα · cosβ · cosγ ≡ 14[cos(α +β + γ)+ cos(α +β − γ)+ · · ·
· · ·+ cos(α−β + γ)+ cos(−α +β + γ)] (3.21)
Se puede aplicar esta propiedad al término genérico del par eléctrico 3.20. El término gené-rico queda entonces así:
cos(ωmt +θ0± kωet± jωrt± γe± γr) (3.22)
Para que un término igual al 3.22 tenga un promedio diferente de cero en un período, esnecesario que se anule la dependencia del tiempo en el argumento de la función coseno:
ωm± kωe± jωr = 0 (3.23)
La ecuación 3.33 es fundamental en el análisis de las máquinas eléctricas rotativas y se co-noce como condición necesaria para par promedio. En la ecuación 3.33, ωm es la velocidadmecánica del sistema, ωe representa la frecuencia angular de las corrientes inyectadas en lasbobinas del estator y ωr es la frecuencia angular de las corrientes inyectadas en el rotor.
Los tipos más comunes de máquinas eléctricas convencionales se diferencian por el meca-nismo que utilizan para dar cumplimiento a la ecuación 3.33. Las máquinas sincrónicas,de inducción y de corriente continua utilizan diferentes mecanismos de excitación de susbobinas rotóricas y estatóricas, pero siempre deben satisfacer la condición necesaria de parpromedio para permitir la conversión de energía.
La máquina sincrónica
A las máquinas sincrónicas se les inyecta corriente continua en las bobinas rotóricas, por estarazón:
ωr = 0 (3.24)
Aplicando la condición necesaria de par promedio 3.33 con la restricción 3.34 para las má-quinas sincrónicas se obtiene:
ωm± kωe = 0 (3.25)

50CAPÍTULO 3. ECUACIONES GENERALES DE LAS MÁQUINAS ELÉCTRICAS ROTATIVAS
La ecuación 3.35 justifica el nombre de estas máquinas, ya que las máquinas sincrónicas sólopueden producir par promedio diferente de cero cuando la velocidad mecánica coincide conla velocidad angular de las corrientes inyectadas en el estator. En otras palabras, la máquinadebe girar en sincronismo con las corrientes estatóricas.
Las máquinas de corriente continua son un caso particular de máquina sincrónica, donde laigualdad de frecuencias entre las corrientes –rotóricas en este caso– y la velocidad mecánicase obtiene mediante un inversor mecánico constituido por un colector y un juego de carbonesque conmuta las corrientes en las bobinas del rotor, con una frecuencia igual a la velocidadmecánica de giro.
La máquina de inducción
En la máquina de inducción se permite un grado de libertad adicional. En esta máquina sepuede obtener par promedio diferente de cero en un amplio rango de velocidades mecánicas.Las corrientes que circulan por el rotor se ajustan –por el fenómeno de inducción electro-
magnética– y cumplen la condición 3.33. En la máquina de inducción se fija la frecuenciade las corrientes en el estator ωe, se produce un campo electromagnético en el entrehierro dela máquina que gira mecánicamente con la frecuencia angular de estas corrientes. Como elrotor gira a la velocidad mecánica ωm, los conductores del rotor cortan el campo magnéticoproducido en el estator con una velocidad que es la diferencia entre ωe y ωm. La diferenciaporcentual entre estas dos velocidades se conoce como deslizamiento de la máquina:
s =ωe−ωm
ωe×100 (3.26)
La velocidad angular ωe se conoce como velocidad sincrónica de la máquina de inducción.
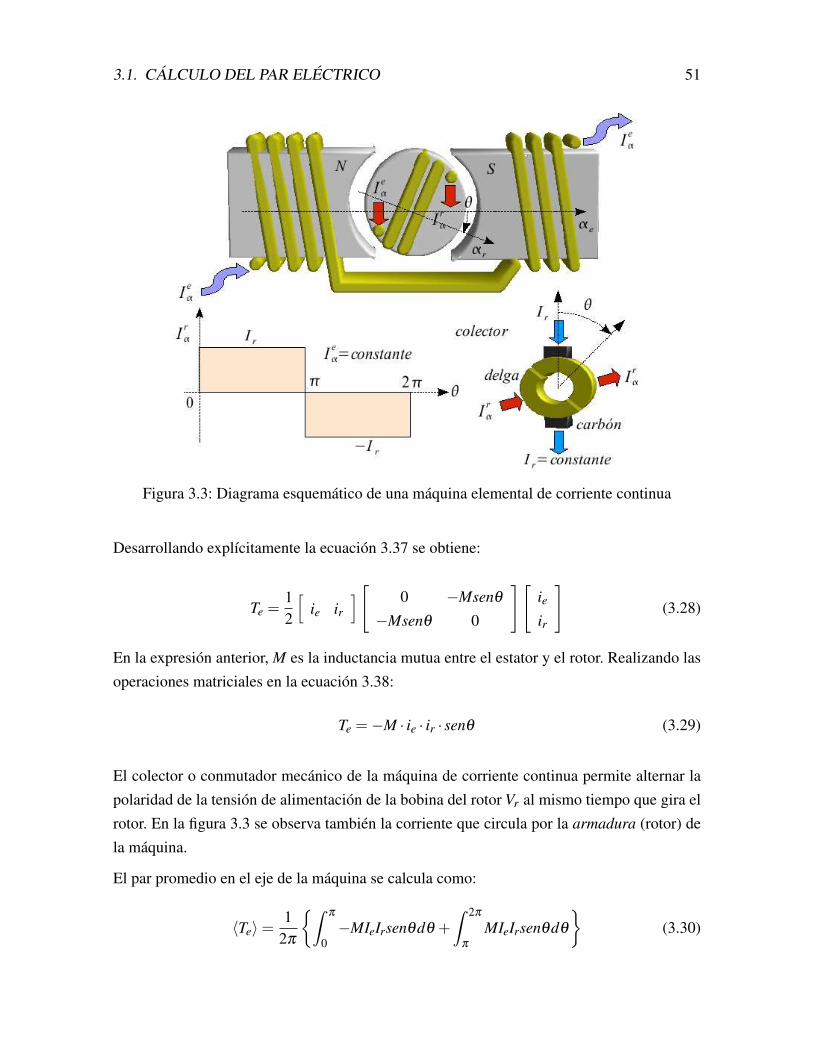
La máquina de corriente continua
En la figura 3.3 se muestra una máquina de corriente continua simplificada. Esta máquinaposee un devanado estatórico por el cual se inyecta corriente continua y una armadura enel rotor alimentada mediante una fuente de corriente continua y un colector que permite lainversión de las corrientes en la armadura. Para calcular el par eléctrico que produce estamáquina se utiliza la expresión deducida en el capítulo 2 para los sistemas lineales:
Te =12[i]t [τ(θ)] [i] (3.27)
3.1. CÁLCULO DEL PAR ELÉCTRICO 51
Figura 3.3: Diagrama esquemático de una máquina elemental de corriente continua
Desarrollando explícitamente la ecuación 3.37 se obtiene:
Te =12
[ie ir
][ 0 −Msenθ
−Msenθ 0
][ieir
](3.28)
En la expresión anterior, M es la inductancia mutua entre el estator y el rotor. Realizando lasoperaciones matriciales en la ecuación 3.38:
Te =−M · ie · ir · senθ (3.29)
El colector o conmutador mecánico de la máquina de corriente continua permite alternar lapolaridad de la tensión de alimentación de la bobina del rotor Vr al mismo tiempo que gira elrotor. En la figura 3.3 se observa también la corriente que circula por la armadura (rotor) dela máquina.
El par promedio en el eje de la máquina se calcula como:
〈Te〉=1
2π
ˆπ
0−MIeIrsenθdθ +
ˆ 2π
π
MIeIrsenθdθ
(3.30)
52CAPÍTULO 3. ECUACIONES GENERALES DE LAS MÁQUINAS ELÉCTRICAS ROTATIVAS
Figura 3.4: Par eléctrico a partir de las fuerzas magnetomotrices
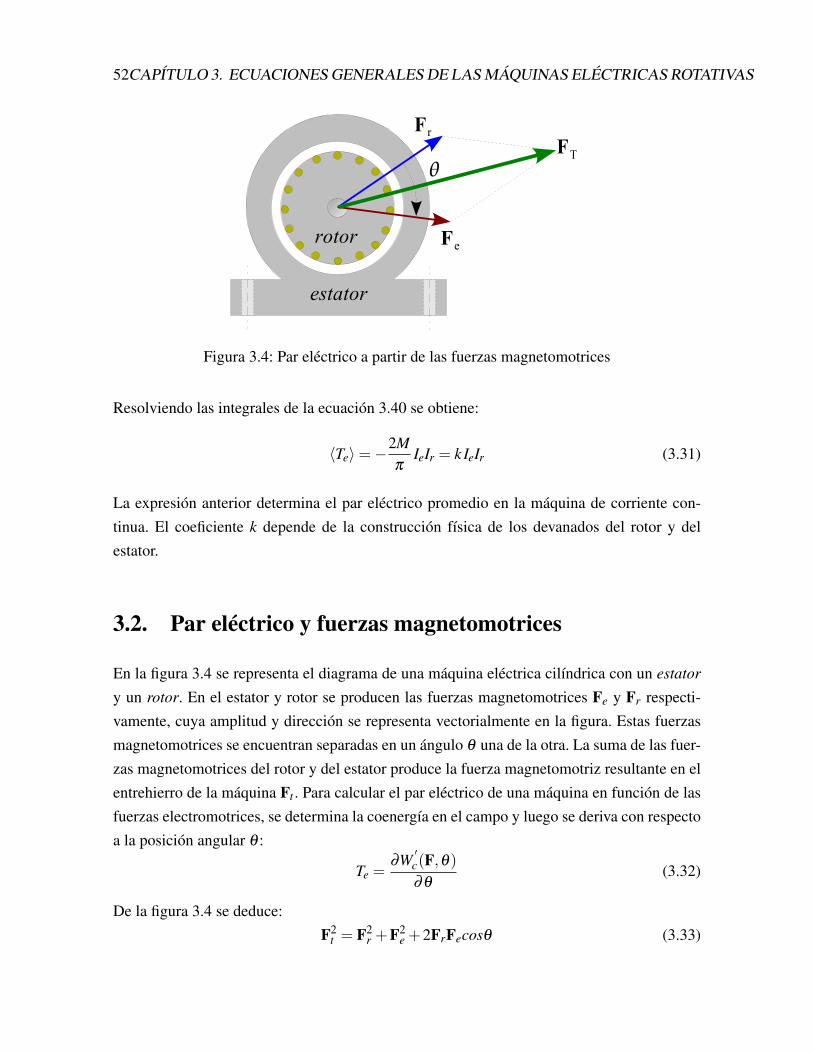
Resolviendo las integrales de la ecuación 3.40 se obtiene:
〈Te〉=−2Mπ
IeIr = k IeIr (3.31)
La expresión anterior determina el par eléctrico promedio en la máquina de corriente con-tinua. El coeficiente k depende de la construcción física de los devanados del rotor y delestator.
3.2. Par eléctrico y fuerzas magnetomotrices
En la figura 3.4 se representa el diagrama de una máquina eléctrica cilíndrica con un estator
y un rotor. En el estator y rotor se producen las fuerzas magnetomotrices Fe y Fr respecti-vamente, cuya amplitud y dirección se representa vectorialmente en la figura. Estas fuerzasmagnetomotrices se encuentran separadas en un ángulo θ una de la otra. La suma de las fuer-zas magnetomotrices del rotor y del estator produce la fuerza magnetomotriz resultante en elentrehierro de la máquina Ft . Para calcular el par eléctrico de una máquina en función de lasfuerzas electromotrices, se determina la coenergía en el campo y luego se deriva con respectoa la posición angular θ :
Te =∂W
′c(F,θ)∂θ
(3.32)
De la figura 3.4 se deduce:F2
t = F2r +F2
e +2FrFecosθ (3.33)

3.2. PAR ELÉCTRICO Y FUERZAS MAGNETOMOTRICES 53
Si la permeabilidad del material magnético es muy grande, es decir µr tiende a infinito, todala energía está concentrada en el entrehierro y la coenergía se puede calcular de la siguienteforma:
W′c =Wc = volumen×〈wc〉 (3.34)
En la ecuación 3.34, 〈wc〉 representa la energía promedio en el campo por unidad de volumen.De esta forma:
W′c = 2πrδ l
⟨12
H ·B⟩
(3.35)
Donde:
r es el radio medio del entrehierro [m].
δ es el espesor del entrehierro [m].
l es la longitud activa de la máquina [m].
Como la densidad de campo magnético B en el entrehierro es igual a µ0H:
W′c = 2πrδ l
⟨12
µ0H2⟩
(3.36)
La primera armónica de la intensidad de campo magnético H es sinusoidal y su valor prome-dio es: ⟨
H2⟩= 12π
ˆ 2π
0(Hmaxsenθ)2 dθ =
12
H2max (3.37)
Sustituyendo 3.37 en 3.36:
W′c = 2πrδ l
12
H2max (3.38)
En la ecuación 3.38 es necesario expresar la amplitud de la intensidad de campo magnético deprimera armónica en función de las fuerzas magnetomotrices. En la figura 3.5 se representauna máquina con un devanado en el estator. Como la permeabilidad del hierro es infinita, todala fuerza magnetomotriz se utiliza para que el flujo cruce el entrehierro. Aplicando la ley deAmpère a esta máquina, se tiene:
F = NI =˛
H ·dl =ˆ
Haire ·dlaire +
ˆHhierro ·dlhierro (3.39)

54CAPÍTULO 3. ECUACIONES GENERALES DE LAS MÁQUINAS ELÉCTRICAS ROTATIVAS
Figura 3.5: Fuerzas magnetomotrices e intensidades de campo magnético
El segundo término integral es cero, ya que:
Hhierro =B
µ0µhierro= 0 (3.40)
Sustituyendo 3.40 en 3.39:
F = NI =˛
H ·dl =ˆ
Haire ·dlaire (3.41)
En la figura 3.5 también se representa la distribución de la intensidad del campo magnéticoen función de la posición θ de la trayectoria de Ampère. De esta forma se obtiene:
F = NI =˛
H ·dl =ˆ
Haire ·dlaire = 2δ ·Haire (3.42)
Despejando de la ecuación 3.42 la intensidad de campo magnético en función de la fuerzaelectromotriz:
H =F
2δ(3.43)
Sustituyendo la ecuación 3.43 en la ecuación 3.38 se obtiene:
W′c =
πrlµ0
8δF2 (3.44)

3.3. EL CAMPO MAGNÉTICO ROTATORIO 55
Reemplazando la ecuación 3.33 en la ecuación 3.44:
W′c =
πrlµ0
8δ
(F2
r +F2e +2FrFecosθ
)(3.45)
Para calcular el par eléctrico se utiliza la ecuación 3.22:
Te =∂W
′c(F,θ)∂θ
=−πrlµ0
4δFrFesenθ (3.46)
Mediante la ecuación 3.46 se puede calcular el par eléctrico en función de las fuerzas magne-tomotrices de la máquina. La fuerza magnetomotriz depende de las corrientes y del númerode vueltas de las bobinas. Si se conocen las dimensiones de la máquina, las corrientes y elnúmero de conductores de cada bobina, es posible utilizar la ecuación 3.46 para determinarel par.
Si la distribución de las corrientes en la máquina no es puntual, se puede utilizar la mismatécnica para calcular la intensidad de campo magnético H pero se tiene en cuenta que:
˛H ·dl =
ˆ ˆJ ·ds (3.47)
En la figura 3.6 se muestran dos distribuciones diferentes de los conductores en la superficiede una máquina, así como su respectiva distribución de intensidades de campo magnéticoH. Cuando el entrehierro es constante, la densidad de campo magnético B posee la mismadistribución que la intensidad de campo magnético H.
3.3. El campo magnético rotatorio
Cuando se analizaron las bases de la máquina eléctrica generalizada, se utilizaron dos gradosde libertad para la representación del campo magnético, uno dado por la bobina α y el otropor la bobina β . Mediante este esquema se puede determinar el campo en cualquier punto delplano.
En la figura 3.7 se muestran dos corrientes iα e iβ que pueden ser inyectadas en las bobinasα y β de la máquina.
En el instante inicial –t = 0– la corriente iαvale cero e iβ es −I, por lo tanto el camporesultante apunta en la dirección negativa del eje β . Cuando el tiempo se incrementa y llegaal instante π
2ω, la corriente iβ se anula, mientras que la corriente iα es +I, el campo en estas

56CAPÍTULO 3. ECUACIONES GENERALES DE LAS MÁQUINAS ELÉCTRICAS ROTATIVAS
(a) Distribuci\’on trapezoidal
(b) Diferentes distribuciones de conductores y campos en las máqui-nas
Figura 3.6: Diferentes distribuciones de conductores y campos en las máquinas

3.4. LA MÁQUINA TRIFÁSICA 57
Figura 3.7: Corrientes inyectadas en la máquina generalizada
condiciones apunta en la dirección positiva del eje α . En el instante π
ωel flujo se orientará
según la dirección positiva del eje β , ya que la corriente iβ tiene como valor +I y la corrienteiα es cero. Para el instante de tiempo 2π
ω, la corriente iα es cero, la corriente iβ vale −I y el
vector del campo apunta nuevamente en la dirección negativa del eje β , repitiéndose de estaforma las condiciones iniciales. En la figura 3.8 se representa la situación anterior.
El análisis anterior señala que las corrientes que varían en el tiempo, producen un campomagnético que gira en el espacio. Aun cuando los campos de cada eje tienen igual amplitud, eldesfasaje en el tiempo y en el espacio origina un campo magnético rotatorio. La frecuencia degiro del campo magnético en el espacio es igual a la frecuencia de variación de las corrientesen el tiempo.
Si la bobina α no es idéntica a la bobina β , o las corrientes inyectadas a la máquina en cadaeje difieren en amplitud, el campo no es circular sino elíptico. Los campos elípticos tambiénson considerados campos magnéticos rotatorios o rotantes. Las máquinas trifásicas tambiénfuncionan mediante el principio del campo magnético rotatorio.
3.4. La máquina trifásica
La máquina trifásica dispone de tres devanados repartidos simétricamente en la periferia delcilindro. En la figura 3.9 se representa la configuración esquemática de este tipo de máquinasasí como las tres corrientes que se han inyectado en las bobinas a, b, y c. En la figura se

58CAPÍTULO 3. ECUACIONES GENERALES DE LAS MÁQUINAS ELÉCTRICAS ROTATIVAS
Figura 3.8: Campo magnético rotatorio
representan las corrientes a, b, c y las fuerzas magnetomotrices que estas corrientes producenen el tiempo inicial (t = 0) como fasores. En el instante inicial las corrientes que circulan porlas tres bobinas son:
ia(0) = Imax
ib(0) = −12
Imax
ic(0) = −12
Imax (3.48)
Para demostrar que el campo magnético originado por las corrientes de la figura 3.9 es rota-torio, se expresan estas corrientes como:
ia(t) = I cos(ωt−α)
ib(t) = I cos(ωt−α− 2π
3) (3.49)
ic(t) = I cos(ωt−α− 4π
3)
Si θ es la dirección de un punto cualquiera en el entrehierro medido a partir del eje magnético

3.4. LA MÁQUINA TRIFÁSICA 59
Figura 3.9: Corrientes y fuerzas magnetomotrices de la máquina trifásica
de la bobina a, se obtiene:
F(θ , t) = N iacosθ +N ibcos(θ +4π
3)+N iccos(θ +
2π
3) (3.50)
Sustituyendo las expresiones 3.49 en la ecuación 3.50 se obtiene:
F(θ , t) = N I cos(ωt−α) · cosθ + · · ·
· · ·+ cos(ωt−α− 2π
3) · cos(θ +
4π
3)+ · · ·
· · ·+ cos(ωt−α− 4π
3) · cos(θ +
2π
3) (3.51)
Aplicando las propiedades trigonométricas para el producto de cosenos se obtiene:
F(θ , t) =N I2cos(ωt−α +θ)+ cos(ωt−α−θ)+ · · ·
· · ·+ cos(ωt−α +θ +2π
3)+ cos(ωt−α−θ)+ · · ·
· · ·+ cos(ωt−+θ − 2π
3)+ cos(ωt−α−θ (3.52)
En la ecuación anterior los términos primero, tercero y quinto de la sumatoria de cosenos
suman cero porque el desfasaje entre ellos es de 2π
3 . Con esta consideración se obtiene:
F(θ , t) =32
N Icos(ωt−α−θ) (3.53)
60CAPÍTULO 3. ECUACIONES GENERALES DE LAS MÁQUINAS ELÉCTRICAS ROTATIVAS
Esta expresión permite obtener la fuerza magnetomotriz en el espacio y en el tiempo. Si sefija la posición, es decir, el ángulo θ es constante, la ecuación 3.53 indica que en esa posiciónla fuerza magnetomotriz varía sinusoidalmente en el tiempo. Si se congela el tiempo en uninstante específico, la expresión 3.53 determina una distribución sinusoidal de la fuerza mag-netomotriz en el espacio. La ecuación 3.53 demuestra que en una máquina eléctrica trifásica,alimentada por tres corrientes balanceadas y desfasadas 2π
3 en el tiempo, produce un campomagnético rotatorio similar al producido por dos devanados ortogonales a los cuales se lesinyecten corrientes sinusoidales desfasadas π
2 .
3.5. Transformación de coordenadas
El sistema de ecuaciones diferenciales 3.1, que modela el comportamiento de la máquinaeléctrica, no es lineal. La dependencia en θ de este modelo dificulta notablemente la soluciónde cualquier problema. La transformación de las ecuaciones diferenciales a nuevos sistemasde coordenadas simplifica en muchos casos este modelo.
Un nuevo sistema de coordenadas se puede definir mediante una matriz de transformaciónaplicada a las variables en coordenadas primitivas α y β . Las tensiones y corrientes en elnuevo sistema transformado son:
[vαeβe,αrβ r
]= [Awxyz] [vwxyz] (3.54)
[iαeβe,αrβ r
]= [Awxyz] [iwxyz] (3.55)
Donde:
Awxyz es la matriz de transformación
vαeβe,αrβ r son las tensiones en coordenadas primitivas
vwxyz son las tensiones en las nuevas coordenadas
iαeβe,αrβ r son las corrientes en coordenadas primitivas
iwxyz son las corrientes en las nuevas coordenadas
La potencia en coordenadas primitivas se puede calcular mediante la expresión:
p =[iαeβe,αrβ r
]∗t · [vαeβe,αrβ r]
(3.56)

3.5. TRANSFORMACIÓN DE COORDENADAS 61
En la expresión 3.56, el asterisco (∗) indica que el vector de corrientes se debe conjugar encaso de ser complejo y el superíndice t representa una trasposición del vector de corrientespara que el producto matricial con el vector de tensiones sea conformable. Sustituyendo enla ecuación 3.56 las definiciones 3.54 y 3.55, se obtiene:
p = [iwxyz]∗t · [Awxyz]
∗t · [Awxyz] [vwxyz] (3.57)
Para que la transformación utilizada [Awxyz] sea invariante en potencia es necesario que:
[Awxyz]∗t · [Awxyz] = [I] (3.58)
En la ecuación 3.58, [I] es la matriz identidad. De esta expresión se obtiene:
[Awxyz]∗t = [Awxyz]
−1 (3.59)
Una matriz que satisface la condición 3.59 se denomina hermitiana o hermítica. La ecuación3.59 indica que si en la matriz de transformación de coordenadas, su conjugada traspuestaes idéntica a la matriz inversa, dicha transformación es conservativa en potencia. En otraspalabras, una transformación hermitiana permite calcular las potencias en las variables trans-formadas sin necesidad de regresar a las coordenadas primitivas.
Las ecuaciones de los ejes eléctricos de la máquina se pueden escribir como:
[vαβ ,αβ
]=[[
Rαβ ,αβ
]+[Lαβ ,αβ
]p+ θ
[ταβ ,αβ
]][iαβ ,αβ
](3.60)
Transformando las coordenadas en la ecuación 3.60 se obtiene:
[Awxyz] [vwxyz] =[[
Rαβ ,αβ
]+[Lαβ ,αβ
]p+ θ
[ταβ ,αβ
]][Awxyz] [iwxyz] (3.61)
Despejando de 3.61 el vector de tensiones se obtiene:
[vwxyz] =[Awxyz]
−1 [Rαβ ,αβ
][Awxyz]+ · · ·
· · ·+[Awxyz]−1 [Lαβ ,αβ
][Awxyz] p+ · · ·
· · ·+[Awxyz]−1 [Lαβ ,αβ
] ddt
[Awxyz]+ · · ·
· · ·+ θ [Awxyz]−1 [
ταβ ,αβ
][Awxyz]
[iwxyz] (3.62)

62CAPÍTULO 3. ECUACIONES GENERALES DE LAS MÁQUINAS ELÉCTRICAS ROTATIVAS
La ecuación 3.62 se puede escribir utilizando las siguientes definiciones:
[Rwxyz]≡ [Awxyz]−1 [Rαβ ,αβ
][Awxyz] (3.63)
[Lwxyz]≡ [Awxyz]−1 [Lαβ ,αβ
][Awxyz] (3.64)
[τwxyz]≡ [Awxyz]−1 [
ταβ ,αβ
][Awxyz] (3.65)
Como la matriz de transformación puede depender en general de la posición angular θ , seobtiene:
ddt
[Awxyz] =d
dθ[Awxyz] ·
dθ
dt(3.66)
y definiendo:
[Hwxyz]≡ [Awxyz]−1 [Lαβ ,αβ
] ddθ
[Awxyz] (3.67)
Se puede escribir la ecuación 3.62 como:
[vwxyz] =[[Rwxyz]+ [Lwxyz] p+ θ [[τwxyz]+ [Hwxyz]]
][iwxyz] (3.68)
En la ecuación 3.68, el segundo término de la sumatoria, corresponde a las fuerzas electro-motrices de transformación y el término tercero a las fuerzas electromotrices de generación.Este último término se descompone en dos partes, por un lado la matriz de par [τwxyz] y porotro la matriz [Hwxyz] que reproduce los términos de generación originados por el movimientorelativo de los ejes transformados con respecto a los ejes reales. La matriz [Hwxyz] determinalos términos no-holonómicos debidos a la transformación de coordenadas.
La ecuación dinámica de la máquina se expresa como:
Tm =−12[iαβ ,αβ
]∗t [ταβ ,αβ
][iαβ ,αβ
]+ Jθ +ρθ (3.69)
Transformando la ecuación 3.69 a las nuevas coordenadas:
Tm =−12[iwxyz]
∗t [Awxyz]∗t [
ταβ ,αβ
][Awxyz] [iwxyz]+ Jθ +ρθ (3.70)

3.6. TRANSFORMACIÓN DE COORDENADAS αβ −DQ 63
Figura 3.10: Transformación de coordenadas αβ de del rotor a dq del rotor
y sustituyendo la ecuación 3.65 en 3.70:
Tm =−12[iwxyz]
∗t [τwxyz] [iwxyz]+ Jθ +ρθ (3.71)
Las ecuaciones 3.68 y 3.71 representan a la máquina eléctrica en un nuevo sistema de coor-denadas. Mediante una selección apropiada de la matriz de transformación [Awxyz], es posibleencontrar una solución más simple al sistema de ecuaciones diferenciales que definen el com-portamiento de la máquina.
3.6. Transformación de coordenadas αβ −dq
Una transformación útil en el análisis de las máquinas eléctricas rotativas consiste en pro-yectar las coordenadas del rotor en ejes colineales con los ejes del estator. Estos nuevos ejesse denominan directo dr y cuadratura qr; esta transformación permite anular el movimien-to de las bobinas del rotor y las inductancias entre el estator y el rotor son constantes en elsistema de coordenadas transformadas. En la figura 3.10 se ha representado un diagrama conla transformación propuesta. En esta transformación, las tensiones y corrientes correspon-dientes a las coordenadas primitivas del rotor son referidas a nuevas tensiones y corrientesinyectadas en bobinas fijas en el espacio. Los ejes del estator permanecen inalterados en lasnuevas coordenadas. La matriz de transformación de coordenadas se puede particionar de la

64CAPÍTULO 3. ECUACIONES GENERALES DE LAS MÁQUINAS ELÉCTRICAS ROTATIVAS
siguiente forma: [Aαβdq
]=
[[Aee] [0][0] [Arr]
](3.72)
Las coordenadas del estator no cambian en la transformación, por esta razón la submatriz[Aee] debe ser unitaria:
[Aee] =
[1 00 1
](3.73)
Para determinar [Arr] se debe recordar que:
[iαrβr
]= [Arr]
[idrqr
](3.74)
La matriz [Arr] corresponde a la proyección de los ejes αr y βr sobre los ejes dr y qr solidarioscon el estator. Esta transformación es una rotación inversa que anula la rotación del rotor dela máquina. De la figura 3.10 se deduce que la transformación de coordenadas es:
[Arr] =
[cosθ senθ
−senθ cosθ
](3.75)
La matriz obtenida en la ecuación 3.75 es hermitiana y su traspuesta conjugada es igual a suinversa:
[Arr]−1 =
[cosθ senθ
−senθ cosθ
]−1
=1
cos2θ + sen2θ
[cosθ −senθ
senθ cosθ
]= [Arr]
∗t (3.76)
Definida la transformación de coordenadas[Arr], es posible determinar las matrices transfor-madas
[Rαβdq
],[Lαβdq
],[ταβdq
]y[Hαβdq
].
Matriz de resistencias en coordenadas αβ −dq
La matriz de resistencia[Rαβdq
]en las nuevas coordenadas es:
[Rαβdq
]=
[Aαβdq
]−1 [Rαβ ,αβ
][Aαβdq
]=
=
[[I] [0][0] [Arr]
t
]−1[Re [I] [0][0] Rr [I]
][[I] [0][0] [Arr]
](3.77)

3.6. TRANSFORMACIÓN DE COORDENADAS αβ −DQ 65
Efectuando el triple producto matricial de la ecuación 3.77 se obtiene:
[Rαβdq
]=
[Re [I] [0][0] Rr [I]
](3.78)
Como se observa en la ecuación 3.78, la transformación aplicada no modifica la matriz ori-ginal de resistencias. Esto es de esperar, debido a que las resistencias no dependen de laposición del rotor y no existe acoplamiento galvánico entre las bobinas.
Matriz de inductancias en coordenadas αβdq
Si se aplica la transformación a la matriz de inductancia[Lαβ ,αβ
]se obtiene:
[Lαβ ,dq
]=
[Aαβ ,dq
]−1 [Lαβ ,αβ
][Aαβ ,dq
]=
=
[Le [I] Ler [I]
Ler [I] Lr [I]
]=
Le 0 Ler 00 Le 0 Ler
Ler 0 Lr 00 Ler 0 Lr
(3.79)
En la ecuación 3.79 se observa que la matriz de inductancias transformadas es independientede la posición angular del rotor. Esto es debido a la rotación en sentido inverso de la transfor-mación, que con los ejes del rotor convierte las inductancias solidarias en inductancias quegiran en contra de la posición angular del rotor y por tanto mantienen una posición constantecon respecto a los ejes α y β del estator.
Matrices de generación en coordenadas αβdq
Aplicando el mismo procedimiento a la matriz de par[ταβ ,αβ
]se obtiene:
[ταβ ,dq
]=[Aαβ ,dq
]−1 [ταβ ,αβ
][Aαβ ,dq
]=
0 0 0 −Ler
0 0 Ler 00 Ler 0 0−Ler 0 0 0
(3.80)
Igual que con la matriz de inductancia[Lαβ ,dq
], la matriz de par
[ταβ ,dq
]es independiente del
ángulo θ . La matriz de términos de generación no-holonómicos[Hαβ ,dq
]se puede calcular

66CAPÍTULO 3. ECUACIONES GENERALES DE LAS MÁQUINAS ELÉCTRICAS ROTATIVAS
como:
[Hαβ ,dq
]=[Aαβ ,dq
]−1 [Lαβ ,αβ
] ddθ
[Aαβ ,dq
]=
0 0 0 Ler
0 0 −Ler 00 0 0 Lr
0 0 Lr 0
(3.81)
La matriz de generación[Gαβ ,dq
]se define de la siguiente forma:
[Gαβ ,dq
]=[ταβ ,dq
]+[Hαβ ,dq
]=
0 0 0 00 0 0 00 Ler 0 Lr
−Ler 0 −Lr 0
(3.82)
3.7. Ecuaciones generales en coordenadas αβdq
Las ecuaciones de tensión para la máquina en coordenadas transformadasαβdq son:
vαe
vβe
vdr
vqr
=
Re +Le p 0 Ler p 0
0 Re +Le p 0 Ler p
Ler p θLer Rr +Lr p θLr
−θLer Ler p −θLr Rr +Lr p
iαe
iβe
idr
iqr
(3.83)
La ecuación 3.83 representa a la máquina eléctrica en coordenadas αβdq. La construcciónde una máquina como ésta es posible físicamente mediante la incorporación de un par deconmutadores como los que se ilustran en la figura 3.11. El colector permite que las induc-tancias propias y mutuas vistas desde el estator sean independientes de la posición del rotor.Las escobillas o carbones que recolectan la corriente, neutralizan el efecto del giro de formaanáloga a lo que realiza la transformación
[Aαβ ,dq
].
Los términos de la ecuación 3.83 se pueden identificar fácilmente en el modelo de la figura3.11. Es necesario destacar que los signos negativos tienen su origen en el sentido de girode la máquina, las convenciones de polaridad y la posición relativa de los ejes α, β , d yq.Para completar las ecuaciones que definen el comportamiento de la máquina eléctrica en las

3.7. ECUACIONES GENERALES EN COORDENADAS αβDQ 67
Figura 3.11: Modelo esquemático de la máquina generalizada
coordenadas αβdq, es necesario calcular el par eléctrico:
Te =12
iαe
iβe
idr
iqr
−1
0 0 0 −Ler
0 0 Ler 00 Ler 0 0−Ler 0 0 0
iαe
iβe
idr
iqr
= Ler(iβeidr − iαeiqr
)(3.84)
La ecuación de balance del par mecánico es:
Tm = Ler(iβeidr − iαeiqr
)+ Jθ +ρθ (3.85)
La condición necesaria para la existencia del par eléctrico requiere que existan al menos doscorrientes, una en el estator y otra en el rotor, y que esas corrientes se encuentren en ejesortogonales del modelo de la máquina generalizada.

Capítulo 4
Máquinas de Corriente Continua
4.1. Principio de operación
Una máquina de conmutador está constituida básicamente por un estator, un rotor y un colec-
tor acoplado sólidamente al rotor. El colector permite conectar galvánicamente los conduc-tores del circuito rotórico o armadura a la fuente de tensión continua, mediante un juego decarbones1 o escobillas2 solidarios con el estator de la máquina. En la figura 4.1 se presenta eldiagrama esquemático de la máquina de corriente continua y un modelo constructivo simplepara fines demostrativos.
El principio de operación de las máquinas de corriente continua se fundamenta en la in-yección de corriente continua, tanto en el circuito rotórico como estatórico. Estas corrientesproducen las fuerzas magnetomotrices Fr en el rotor y Fe en el estator, que intentan alinearse.Cuando se alcanza el alineamiento, cesa el par eléctrico. Si en ese preciso instante se invierteel sentido de la corriente inyectada en el circuito rotórico, la fuerza magnetomotriz del rotorcambia de sentido 180º y aparece un nuevo par de alineamiento. En la figura 4.2 se representaesta situación.
Analizando los diagramas de la figura 4.2 se pueden indicar las siguientes observaciones:
1. Las fuerzas magnetomotrices en el semiplano positivo, producen par positivo en el1Esta denominación se debe al hecho de estar fabricados con carbón. Este material, además de ser conductor
eléctrico, proporciona una superficie suave que lubrica el contacto con las delgas de cobre, evitando de estaforma que se desgaste rápidamente.
2Otro método para obtener un contacto eléctrico deslizante es mediante una escobilla fabricada con hilosde cobre; este dispositivo se utiliza frecuentemente cuando es necesario hacer circular corrientes constantes poruna bobina rotórica. En el caso de las máquinas de colector es más beneficioso el empleo de carbones, queproducen un desgaste menor de las delgas.
68
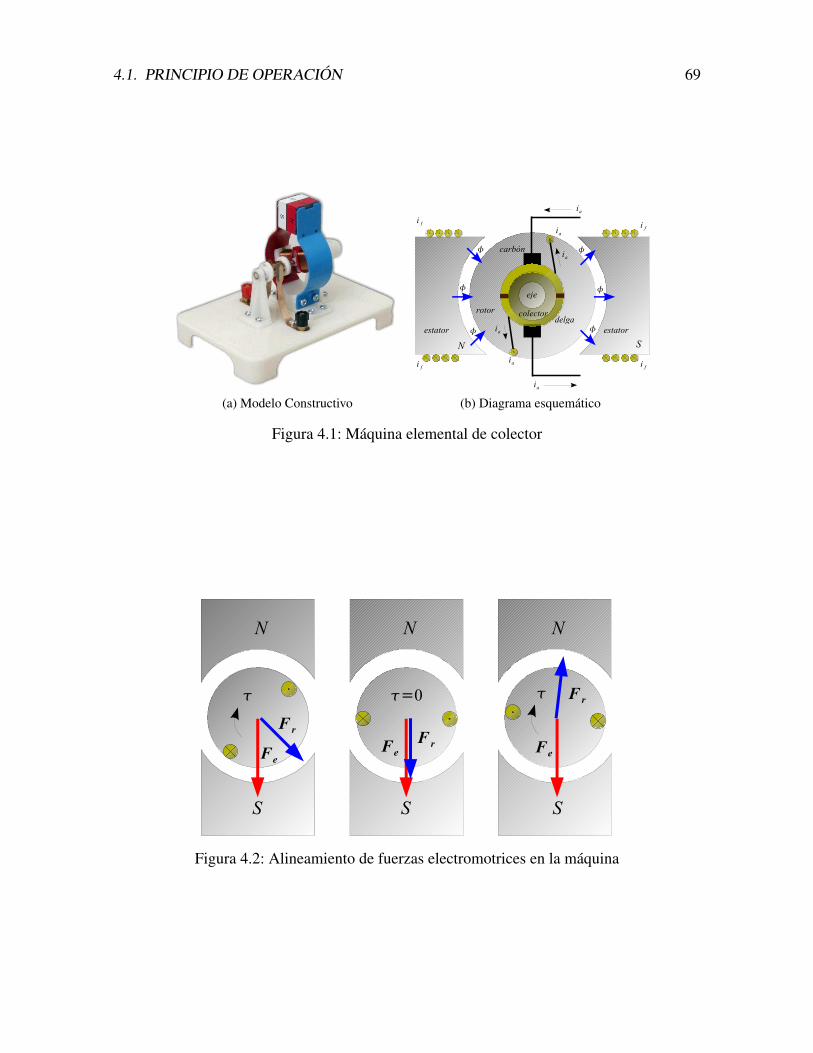
4.1. PRINCIPIO DE OPERACIÓN 69
(a) Modelo Constructivo (b) Diagrama esquemático
Figura 4.1: Máquina elemental de colector
Figura 4.2: Alineamiento de fuerzas electromotrices en la máquina

70 CAPÍTULO 4. MÁQUINAS DE CORRIENTE CONTINUA
Figura 4.3: Conmutador y forma de la corriente del rotor en un período de revolución
sentido de las agujas del reloj.
2. Las corrientes que circulan por el rotor deben producir la fuerza magnetomotriz en elplano positivo, para que el par siempre resulte positivo.
Para invertir el sentido de la fuerza magnetomotriz del rotor se utiliza el conmutador. En lafigura 4.3 se observa que la corriente tiene como período de repetición una revolución delrotor de la máquina de corriente continua. Al girar el rotor, la escobilla (1), se conecta conla delga (4) y la escobilla (2) se conecta con la delga (3). El procedimiento anterior permi-te la inversión del sentido de circulación de la corriente por el rotor mediante el dispositivomecánico descrito. La corriente interna en el circuito rotórico es alterna. La corriente inyec-tada por la fuente es continua. En la práctica, es necesario un conmutador por cada bobinadel rotor, pero por simplicidad en el análisis se ha supuesto que la máquina posee una solabobina.
Con la distribución de la corriente de armadura que se representa en la figura 4.4, la fuer-za magnetomotriz producida en el rotor se encuentra en el semiplano positivo y se produce

4.1. PRINCIPIO DE OPERACIÓN 71
Figura 4.4: Alineamiento de las corrientes por los conductores del rotor para producir parpositivo
un par positivo que intenta alinear esta fuerza magnetomotriz con la fuerza magnetomotrizproducida por el enrollado de campo de la máquina. En esta situación, los conductores contri-buyen al par en la dirección positiva del movimiento, debido a que los conductores ubicadosa la derecha de la figura producen fuerza tangencial hacia abajo, mientras que los de la iz-quierda producen fuerzas tangenciales hacia arriba.
En un alineamiento conductivo semejante al ilustrado en la figura 4.5, existe equilibrio defuerzas sobre el mismo brazo y el par resultante es nulo. Este análisis elemental explica laconveniencia de utilizar la distribución de las corrientes de armadura presentada en la figura4.4, con la finalidad de obtener par eléctrico significativo en la máquina de corriente continua.
En las máquinas de conmutador, el plano que contiene el eje mecánico y corta diametralmenteal rotor se denomina línea neutra de la máquina. La línea neutra divide los puntos del rotoren los que entra el flujo de aquellos en los cuales el flujo sale.
Para lograr la inversión en el sentido de la corriente, es necesario un dispositivo conmutadorpor cada bobina. Esta solución es muy primitiva, el conmutador puede ser mejorado median-te una distribución conveniente de los conductores que permita obtener el resultado deseado.En la figura 4.6 se representa un abatimiento lineal de la superficie del estator y de los con-ductores del rotor. Es conveniente realizar una conexión de los conductores del rotor, de talforma que sólo se necesite un par de escobillas y no una por cada espira. Esta situación sepuede obtener conectando las bobinas en serie. La otra condición que debe cumplirse es queal cambiar de posición la espira, en ella debe cambiar el sentido de la corriente, pero no enlas otras espiras. En la figura 4.7 se muestra una forma posible de realizar las conexiones de

72 CAPÍTULO 4. MÁQUINAS DE CORRIENTE CONTINUA
Figura 4.5: Alineamiento de las corrientes de armadura que no produce par efectivo en el eje
Figura 4.6: Abatimiento lineal de una máquina rotativa de corriente continua

4.1. PRINCIPIO DE OPERACIÓN 73
Figura 4.7: Conexión de los conductores del rotor
los conductores del circuito de armadura.
Los conductores conectados a los terminales (1) y (2) de la figura 4.7 se encuentran en unasituación diferente al resto de los conductores del circuito rotórico porque son los extremosde la bobina. Para resolver este inconveniente se conecta un segundo devanado similar alanterior en las mismas ranuras del rotor y conectados en paralelo.
En la figura 4.8 se observa el abatimiento lineal de estas dos bobinas. Con esta distribución delos conductores del devanado de armadura, es suficiente inyectar corriente entre dos delgasseparadas 180º eléctricos para que la corriente circule en una dirección en una mitad de laperiferia del rotor y en sentido contrario en la otra. Disponiendo de esta forma las bobinas,toda la superficie del rotor puede ser aprovechada para la producción de par. Si las escobillasse colocan alineadas convenientemente, se obtendrá siempre corriente en un sentido en elpolo norte de la máquina y en sentido contrario en el polo sur. Cuando un conductor atraviesala línea neutra, se invierte el sentido de su corriente y por esta razón el par producido sobreél mantiene la misma dirección.
En la práctica se utilizan dos esquemas básicos para bobinar el circuito de armadura de lasmáquinas de corriente continua, el devanado imbricado y el devanado ondulado. En la figu-

74 CAPÍTULO 4. MÁQUINAS DE CORRIENTE CONTINUA
Figura 4.8: Armadura de la máquina
ra 4.9 se muestran dos ejemplos de estos bobinados. En el enrollado imbricado, la bobina sedevana regresando por ranuras adyacentes o muy cercanas los retornos. En el devanado ondu-lado el conductor de retorno de bobina adelanta poco más o menos un paso polar. El análisisde los diferentes tipos de devanados es muy complejo y excede los alcances de este texto,pero se puede destacar que en los rotores ondulados se puede utilizar un par de carbones paraconectar todos los pares de polos de la armadura, mientras que los rotores imbricados requie-ren un par de carbones por cada par de polos. En máquinas pequeñas con múltiples pares depolos el empleo de bobinas onduladas puede representar un ahorro importante en el procesode fabricación, porque además se utiliza menor cantidad de cobre en las cabezas de bobina.
En la figura 4.10 se muestran dos etapas del proceso de fabricación de la armadura de unamáquina de corriente continua. En primer lugar la conexión de los mazos de conductores conlas delgas y en la siguiente se muestra el maquinado final de las delgas realizado en el torno.
En la figura 4.11 se representa la armadura de la máquina de corriente continua mediantecapas de corriente. La capa de corriente puede girar mediante la rotación de las escobillasque alimentan a las bobinas. La frontera producida por la inversión de las corrientes en laarmadura que contiene a las escobillas de la máquina se conoce como separatriz de la ar-
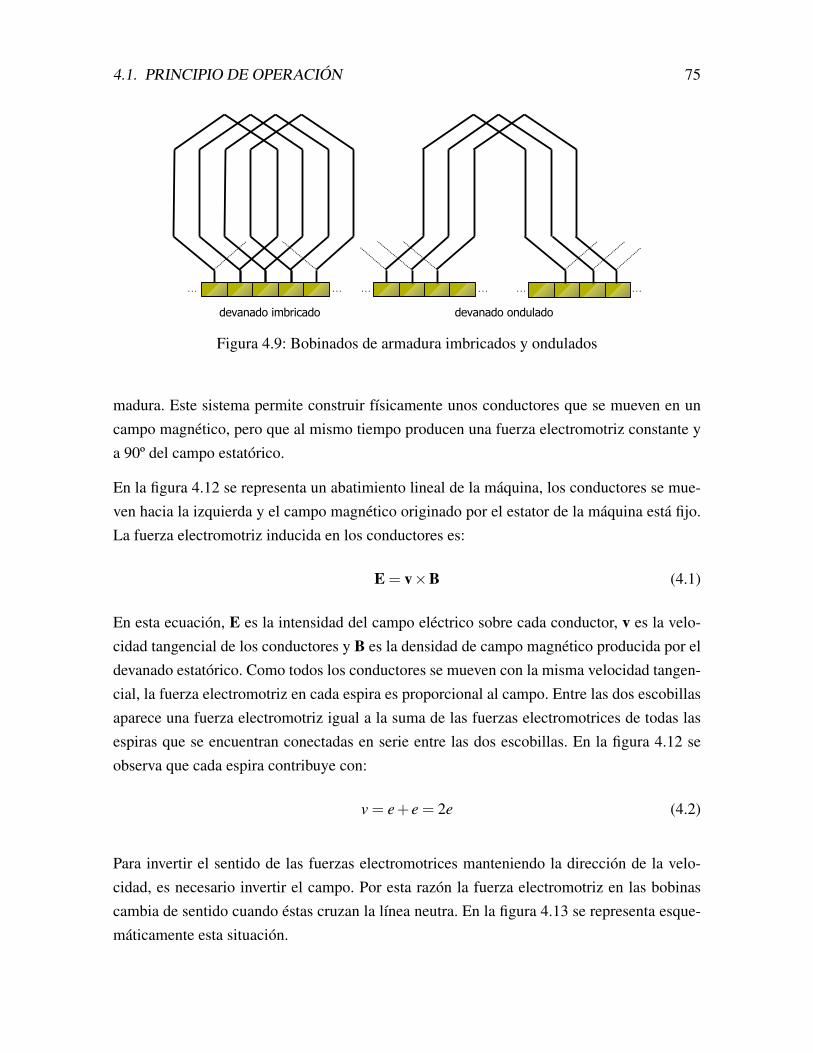
4.1. PRINCIPIO DE OPERACIÓN 75
Figura 4.9: Bobinados de armadura imbricados y ondulados
madura. Este sistema permite construir físicamente unos conductores que se mueven en uncampo magnético, pero que al mismo tiempo producen una fuerza electromotriz constante ya 90º del campo estatórico.
En la figura 4.12 se representa un abatimiento lineal de la máquina, los conductores se mue-ven hacia la izquierda y el campo magnético originado por el estator de la máquina está fijo.La fuerza electromotriz inducida en los conductores es:
E = v×B (4.1)
En esta ecuación, E es la intensidad del campo eléctrico sobre cada conductor, v es la velo-cidad tangencial de los conductores y B es la densidad de campo magnético producida por eldevanado estatórico. Como todos los conductores se mueven con la misma velocidad tangen-cial, la fuerza electromotriz en cada espira es proporcional al campo. Entre las dos escobillasaparece una fuerza electromotriz igual a la suma de las fuerzas electromotrices de todas lasespiras que se encuentran conectadas en serie entre las dos escobillas. En la figura 4.12 seobserva que cada espira contribuye con:
v = e+ e = 2e (4.2)
Para invertir el sentido de las fuerzas electromotrices manteniendo la dirección de la velo-cidad, es necesario invertir el campo. Por esta razón la fuerza electromotriz en las bobinascambia de sentido cuando éstas cruzan la línea neutra. En la figura 4.13 se representa esque-máticamente esta situación.

76 CAPÍTULO 4. MÁQUINAS DE CORRIENTE CONTINUA
(a) Unión de los conductores a las delgas
(b) Proceso de fabricación de una armadura de corriente continua
Figura 4.10: Proceso de fabricación de una armadura de corriente continua

4.1. PRINCIPIO DE OPERACIÓN 77
Figura 4.11: Separatriz de la armadura
Figura 4.12: Campo eléctrico en la superficie de los conductores

78 CAPÍTULO 4. MÁQUINAS DE CORRIENTE CONTINUA
Figura 4.13: Fuerzas electromotrices inducidas sobre las bobinas
En la figura 4.13 se definen:
E1 es la fuerza electromotriz resultante en el polo norte
E2 es la fuerza electromotriz resultante en el polo sur
La densidad de campo en el polo norte es prácticamente igual a la del polo sur, por esta razónlas fuerzas electromotrices del rotor E1 y E2 son iguales en magnitud pero contrarias ensentido. Cuando las fuerzas electromotrices E1 y E2 son diferentes, se produce una corrientecirculatoria en la armadura que puede ocasionar un calentamiento excesivo de la máquina.
Si las escobillas se alinean exactamente con la línea neutra, la fuerza electromotriz induci-da sobre las bobinas del rotor es máxima. Cuando la línea neutra y la separatriz no estánalineadas, ocurre una situación semejante a la que se muestra en la figura 4.14.
En este caso, la máquina se encuentra girando a la velocidad angular ω . El par producido en elsentido del movimiento se denomina motriz. Si el par tiene sentido contrario a la referenciade posición o velocidad, se denomina generatriz. En las regiones (2) y (4) de la figura, lamáquina de corriente continua posee par motriz y por lo tanto estas regiones de la máquinatrabajan como motor inventando accionar la carga mecánica en el sentido de las agujas delreloj. En las regiones (1) y (3) la fuerza es contraria al sentido del movimiento, por lo tanto enestas zonas la máquina actúa como un generador. Las regiones (2) y (4) son más extensas quelas zonas marcadas con (1) y (3), el par promedio está dirigido en el sentido del movimientoy el comportamiento neto de la máquina es como motor. Del análisis anterior se explica quecuando la separatriz y la línea neutra no coinciden, el par resultante se reduce.
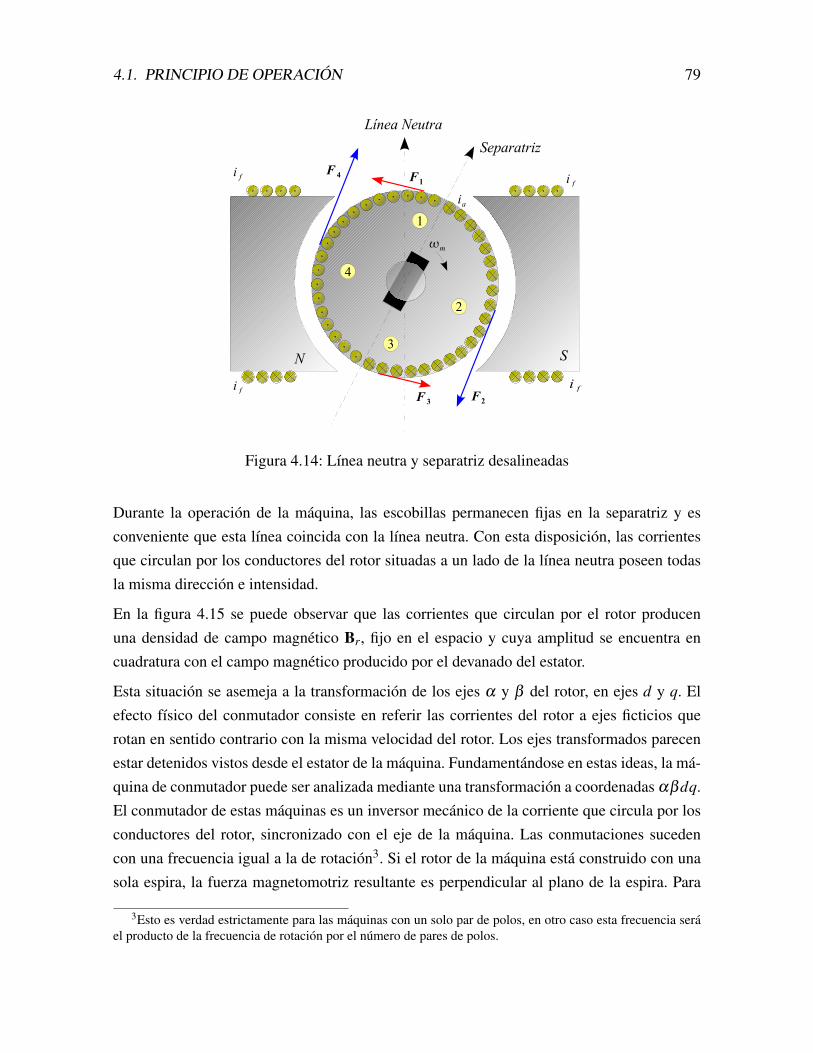
4.1. PRINCIPIO DE OPERACIÓN 79
Figura 4.14: Línea neutra y separatriz desalineadas
Durante la operación de la máquina, las escobillas permanecen fijas en la separatriz y esconveniente que esta línea coincida con la línea neutra. Con esta disposición, las corrientesque circulan por los conductores del rotor situadas a un lado de la línea neutra poseen todasla misma dirección e intensidad.
En la figura 4.15 se puede observar que las corrientes que circulan por el rotor producenuna densidad de campo magnético Br, fijo en el espacio y cuya amplitud se encuentra encuadratura con el campo magnético producido por el devanado del estator.
Esta situación se asemeja a la transformación de los ejes α y β del rotor, en ejes d y q. Elefecto físico del conmutador consiste en referir las corrientes del rotor a ejes ficticios querotan en sentido contrario con la misma velocidad del rotor. Los ejes transformados parecenestar detenidos vistos desde el estator de la máquina. Fundamentándose en estas ideas, la má-quina de conmutador puede ser analizada mediante una transformación a coordenadas αβdq.El conmutador de estas máquinas es un inversor mecánico de la corriente que circula por losconductores del rotor, sincronizado con el eje de la máquina. Las conmutaciones sucedencon una frecuencia igual a la de rotación3. Si el rotor de la máquina está construido con unasola espira, la fuerza magnetomotriz resultante es perpendicular al plano de la espira. Para
3Esto es verdad estrictamente para las máquinas con un solo par de polos, en otro caso esta frecuencia seráel producto de la frecuencia de rotación por el número de pares de polos.

80 CAPÍTULO 4. MÁQUINAS DE CORRIENTE CONTINUA
Figura 4.15: Flujo magnético producido por las corrientes de la armadura
Figura 4.16: Resultante de la fuerza magnetomotriz del rotor
un conjunto de conductores como los ilustrados en la figura 4.16, la fuerza magnetomotriz seencuentra en la dirección de la separatriz de la máquina.
Para que el par eléctrico sea máximo, la fuerza magnetomotriz del rotor debe ser perpendicu-lar a la fuerza magnetomotriz del estator. Por esta razón, las escobillas se colocan colinealescon la línea neutra para permitir que la fuerza magnetomotriz del rotor se encuentre en cua-dratura con la fuerza magnetomotriz del estator, tal como se demostró en la ecuación 3.46.
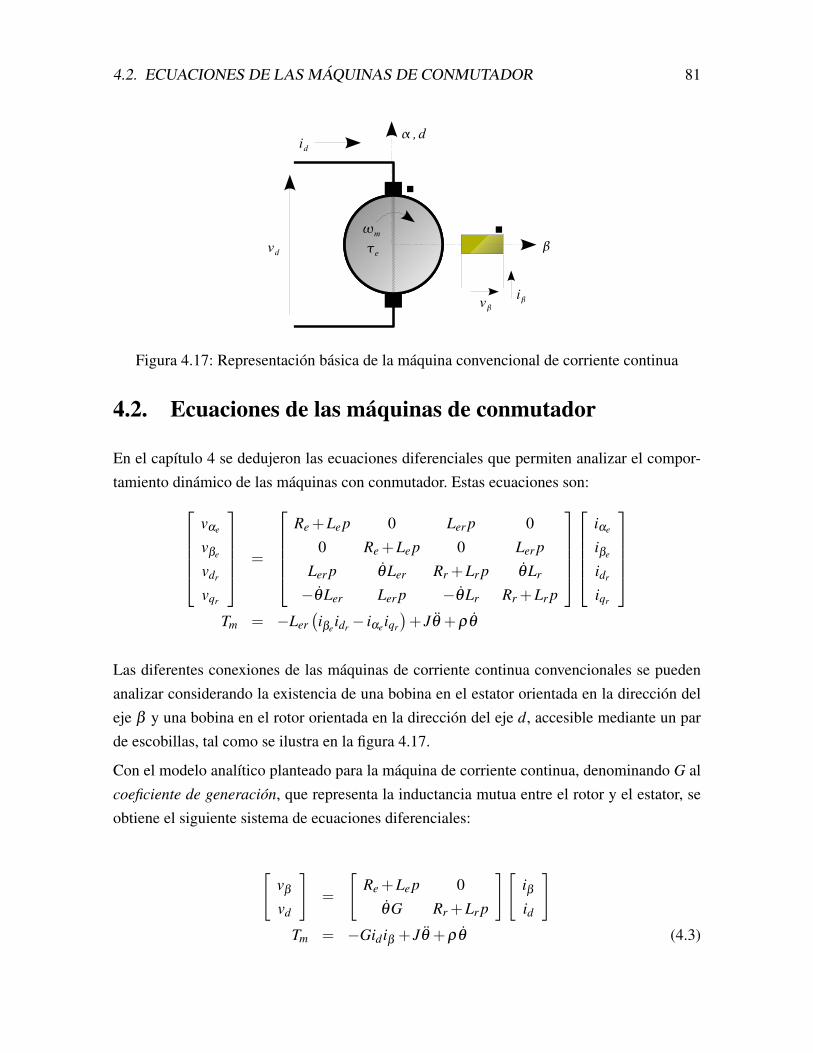
4.2. ECUACIONES DE LAS MÁQUINAS DE CONMUTADOR 81
Figura 4.17: Representación básica de la máquina convencional de corriente continua
4.2. Ecuaciones de las máquinas de conmutador
En el capítulo 4 se dedujeron las ecuaciones diferenciales que permiten analizar el compor-tamiento dinámico de las máquinas con conmutador. Estas ecuaciones son:
vαe
vβe
vdr
vqr
=
Re +Le p 0 Ler p 0
0 Re +Le p 0 Ler p
Ler p θLer Rr +Lr p θLr
−θLer Ler p −θLr Rr +Lr p
iαe
iβe
idr
iqr
Tm = −Ler
(iβeidr − iαeiqr
)+ Jθ +ρθ
Las diferentes conexiones de las máquinas de corriente continua convencionales se puedenanalizar considerando la existencia de una bobina en el estator orientada en la dirección deleje β y una bobina en el rotor orientada en la dirección del eje d, accesible mediante un parde escobillas, tal como se ilustra en la figura 4.17.
Con el modelo analítico planteado para la máquina de corriente continua, denominando G alcoeficiente de generación, que representa la inductancia mutua entre el rotor y el estator, seobtiene el siguiente sistema de ecuaciones diferenciales:
[vβ
vd
]=
[Re +Le p 0
θG Rr +Lr p
][iβid
]Tm = −Gidiβ + Jθ +ρθ (4.3)

82 CAPÍTULO 4. MÁQUINAS DE CORRIENTE CONTINUA
Figura 4.18: Conexiones de la máquina de conmutador
Las máquinas de corriente continua se clasifican normalmente según la conexión del enro-llado de excitación o campo. El devanado de excitación produce un campo magnético máso menos uniforme en el cual gira el rotor. Generalmente el devanado de excitación de lasmáquinas de conmutador se encuentra ubicado en el estator4. Si la corriente de excitación seobtiene a partir de la fuente de tensión que alimenta la armadura, la máquina se encuentra enconexión paralelo o derivación. Si el campo y la armadura se conectan mediante dos fuentesdiferentes, la máquina se encuentra en conexión independiente. Cuando la corriente de la ar-madura circula por el devanado de campo, la conexión se denomina serie. Si la máquina tienedividido el campo en dos partes, una conectada en serie con la armadura y otra en paralelo,la conexión se conoce como compuesta. En la figura 4.18 se muestra un diagrama con todasestas conexiones.
4El rotor tiene asociado el colector para permitir la sincronización de la inversión de sus corrientes con laposición de esta pieza.

4.3. CARACTERÍSTICAS DE OPERACIÓN DE LAS DIFERENTES CONEXIONES 83
4.3. Características de operación de las diferentes conexio-nes
Si a la armadura de la máquina se le aplica tensión constante de valor Va y al devanado decampo una tensión constante de magnitud Vf ,5 en régimen permanente las corrientes Ia eI f también son constantes y en el sistema de ecuaciones 4.3 desaparecen los términos detransformación:
Vf = R f · I f (4.4)
Va = GωmI f +RaIa (4.5)
Tm =−GIaI f +ρωm (4.6)
Despejando de la ecuación 4.5 la corriente I f , de la ecuación 4.6 la corriente Ia y reempla-zándolas en la expresión 4.7, se obtiene la ecuación de equilibrio mecánico de la máquina decorriente continua en función de las fuentes forzantes:6
Tm =−G
Va−(
GωmV fR f
)Ra
Vf
R f+ρωm (4.7)
En la figura 4.19 se representa en un gráfico el par eléctrico de la máquina en función de lavelocidad.
En el gráfico de la figura 4.19, la velocidad ωs se define como la velocidad del rotor donde latensión aplicada es igual a la fuerza electromotriz inducida en la armadura de la máquina y sedenomina velocidad de sincronismo o velocidad sincrónica. La característica del par eléctricode la máquina de corriente continua en función de la velocidad angular mecánica es igual a lacaracterística de la fuerza eléctrica en función de la velocidad tangencial sobre un conductorelemental que se desplaza en la presencia de un campo magnético uniforme analizado en elcapítulo 1. Esta semejanza en las características no es coincidencial, los conductores de laarmadura se encuentran en una disposición geométrica similar a la del conductor solitario.
La curva de par eléctrico-velocidad puede variar con la tensión aplicada a la armadura o a la
5El subíndice f se utiliza habitualmente y proviene de los textos en idioma inglés por la inicial de la palabrafield= campo. Utilizar la letra c puede confundir debido a que se identifica con la carga.
6Tensión de armadura Va y tensión del campo Vf .
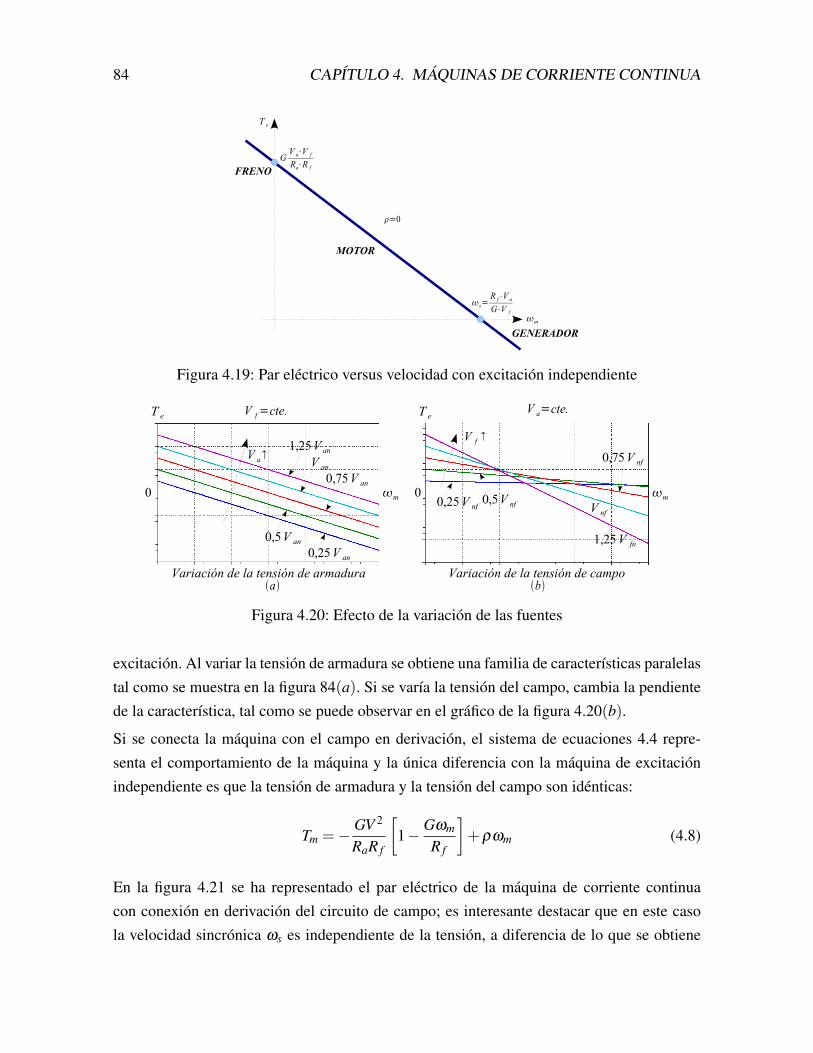
84 CAPÍTULO 4. MÁQUINAS DE CORRIENTE CONTINUA
Figura 4.19: Par eléctrico versus velocidad con excitación independiente
Figura 4.20: Efecto de la variación de las fuentes
excitación. Al variar la tensión de armadura se obtiene una familia de características paralelastal como se muestra en la figura 84(a). Si se varía la tensión del campo, cambia la pendientede la característica, tal como se puede observar en el gráfico de la figura 4.20(b).
Si se conecta la máquina con el campo en derivación, el sistema de ecuaciones 4.4 repre-senta el comportamiento de la máquina y la única diferencia con la máquina de excitaciónindependiente es que la tensión de armadura y la tensión del campo son idénticas:
Tm =− GV 2
RaR f
[1− Gωm
R f
]+ρωm (4.8)
En la figura 4.21 se ha representado el par eléctrico de la máquina de corriente continuacon conexión en derivación del circuito de campo; es interesante destacar que en este casola velocidad sincrónica ωs es independiente de la tensión, a diferencia de lo que se obtiene

4.3. CARACTERÍSTICAS DE OPERACIÓN DE LAS DIFERENTES CONEXIONES 85
Figura 4.21: Par eléctrico versus velocidad de la máquina en derivación
para la máquina de excitación independiente. La ecuación de tensión para la armadura de lamáquina es:
Va = Rria +GωmI f (4.9)
En la ecuación 4.9, el término GωmI f es la fuerza electromotriz de generación producida porel campo. En la figura 4.22 se representa el modelo circuital equivalente de la máquina decorriente continua en derivación.
Si la fuerza electromotriz generada es mayor que la tensión aplicada, la máquina entregapotencia a la fuente y el par eléctrico es negativo. En estas condiciones es necesario parmecánico de accionamiento.
La velocidad sincrónica depende del coeficiente de generación G y de la resistencia del campoR f . Esta velocidad corresponde a la condición de vacío7 de la máquina. Para controlar lavelocidad de vacío se pueden intercalar resistencias en el campo.
Los motores de corriente continua se utilizan ampliamente para el control de velocidad opara la tracción de vehículos eléctricos y trenes laminadores8. Las características de par-
7Esta condición se alcanza cuando sobre el rotor no existe carga mecánica ni de pérdidas. En el laboratoriose requiere de un motor que accione la máquina exactamente a la velocidad sincrónica para poder suplir laspérdidas y lograr la condición de vacío, donde no circula corriente por la armadura.
8Sin embargo, existe una fuerte tendencia para su reemplazo por los motores de corriente continua sinescobillas, DC Brushless. Éstos en realidad son máquinas sincrónicas de imán permanente en el rotor, quese alimentan por el estator con un inversor electrónico sincronizado con la posición θ del rotor mediante undecodificador óptico.
Algunas limitaciones a su uso se deben a la posibilidad de desmagnetización de los imanes permanentesdurante cortocircuitos en el estator y a los costos de inversión y mantenimiento especializado del controladorde potencia asociado con este equipo. Por otra parte en plantas donde se utilizan materiales inflamables o

86 CAPÍTULO 4. MÁQUINAS DE CORRIENTE CONTINUA
Figura 4.22: Modelo circuital de la máquina de corriente continua en derivación
Figura 4.23: Punto de operación del generador autoexcitado con remanencia
velocidad de estas máquinas permiten su utilización en un gran número de aplicaciones.Antiguamente se utilizaban resistencias para limitar la corriente en la armadura durante elproceso de arranque. Las máquinas se diseñan para permitir entre 1,5 y 2 veces la corrientenominal por la armadura durante el arranque. En la actualidad el arranque y accionamiento delos motores de corriente continua se realiza mediante fuentes de corriente continua regulablesen tensión, con lo cual las pérdidas en los reóstatos se eliminan. Esto es de gran importanciaen sistemas con paradas y arranques frecuentes, como ocurre en el caso de un sistema urbanode transporte público.
corrosivos, estas máquinas son una necesidad debido a que no producen arcos eléctricos durante su operación.

4.3. CARACTERÍSTICAS DE OPERACIÓN DE LAS DIFERENTES CONEXIONES 87
Figura 4.24: Conexión serie de la máquina de corriente continua
La conexión serie del devanado de campo es una de las más utilizadas en los sistemas detracción eléctrica. En este caso, la tensión aplicada se reparte entre la armadura y el campo,y la corriente de armadura también circula por el campo. En la figura 4.24 se muestra elesquema de esta conexión.
Las ecuaciones dinámicas de la conexión serie son:
v = va + v f =(Ra +R f
)i+(La +L f
)pi+Gωmi = (RT +Gωm) i+LT pi (4.10)
Tm =−Gi2 + Jωm +ρωm (4.11)
En régimen permanente se tiene:
V = (RT +Gωm) I (4.12)
Te = GI2 (4.13)
Sustituyendo la corriente I de la ecuación 4.12, en la expresión 4.13 se obtiene:
Te =GV 2
(RT +Gωm)2 (4.14)
En la figura 4.25 se representa la característica de par eléctrico para una máquina de corrientecontinua con excitación serie.

88 CAPÍTULO 4. MÁQUINAS DE CORRIENTE CONTINUA
Figura 4.25: Característica par-velocidad de una máquina de conmutador serie
La característica par-velocidad tiene la forma de una hipérbola cuadrática, como se deduce dela ecuación 4.14. Esta característica permite variar ampliamente el par resistente manteniendola potencia mecánica prácticamente constante9. El motor serie se utiliza frecuentemente entracción eléctrica porque permite obtener un elevado par de arranque. Al igual que en el motorderivación, es necesario limitar la corriente de arranque.
La máquina de conmutador con excitación compuesta posee características combinadas delas máquinas derivación y serie. La característica de estas máquinas se parecen más a uno uotro tipo, dependiendo del grado de intensidad que proporcione el campo serie y el campoderivación.
9Muchas pequeñas máquinas utilizadas en el hogar tales como taladros, licuadoras y aspiradoras, entreotras, utilizan esta conexión. Aun cuando la mayoría de ellas se accionan mediante corriente alterna, como laarmadura y el campo serie conducen la misma corriente el par es proporcional al cuadrado de la corriente. Lasreactancias de las bobinas tienen el efecto de limitar la circulación de corrientes alternas sin producir pérdidas.Una licuadora tiene una alta carga cuando comienza a triturar los alimentos y su velocidad es baja en estacondición; en la medida que la carga se procesa, la velocidad aumenta y el par disminuye, tal como sucede enlas máquinas de excitación en serie. Argumentos similares se pueden utilizar en las otras aplicaciones.

4.4. CONTROL DE VELOCIDAD 89
Figura 4.26: Diagrama de bloques de la máquina de corriente continua
4.4. Control de velocidad
Después de analizar el comportamiento en régimen permanente de las máquinas de corrientecontinua, es posible estudiar el comportamiento transitorio mediante su función de transfe-rencia. La máquina de corriente continua satisface el sistema de ecuaciones diferenciales 4.4en régimen transitorio. De la ecuación de tensión para el eje β se puede obtener la función detransferencia operacional de la corriente iβ :
iβ =vβ
Rβ
(1+
Lβ
Rbetap) =
1Rbeta
vβ
1+ τβ p(4.15)
La ecuación del eje d en 4.4 permite obtener la corriente id:
id =vd−Gωmiβ
Rd
(1+ Ld
Rdp) =
1Rd
(vd−Gωmiβ
)1+ τd p
(4.16)
A partir de la ecuación diferencial correspondiente al eje mecánico se obtiene:
ωm =Te +Tm (ωm)
ρ + Jp=
1ρ
(Giβ id +Tm (ωm)
)1+ τM p
(4.17)
En la figura 4.26 se han representado las funciones de transferencia 4.15, 4.16 y 4.17 endiagrama de bloques, con sus respectivas realimentaciones e interconexiones. Este diagramacontiene multiplicadores, debido a las no linealidades implícitas entre las variables de estado

90 CAPÍTULO 4. MÁQUINAS DE CORRIENTE CONTINUA
Figura 4.27: Diagrama de bloques de la máquina con corriente de campo constante
del modelo. Por esta razón no es posible reducir este diagrama a una función de transferencia.Asumiendo que la tensión vβ es constante, la corriente iβ se estabiliza en un valor continuodespués de varias constantes de tiempo. En estas condiciones se puede representar el modelodinámico de la máquina de corriente continua mediante un solo bloque. Con la corriente iβconstante, se puede definir como constante k al producto de esta corriente por el coeficientede generación G de la máquina. En la figura 4.27 se observa el diagrama de bloques de lamáquina de corriente continua excitada con una corriente constante en el campo.
Este último diagrama de bloques se puede reducir a una función de transferencia cuando elpar mecánico es nulo o constante. Un par mecánico constante no altera la respuesta transitoriadel sistema sino los valores en régimen permanente. Definiendo la función de transferenciaT′(p) como el producto de las funciones de transferencia de la figura 4.27:
T′(p) =
kRdρ· 1
1+ τd p· 1
1+ τM p(4.18)
La función de transferencia entre la velocidad mecánica de la máquina y la tensión aplicadaen el circuito de armadura es:
ωm(p)vd(p)
=T′(p)
1+ kT ′(p)=
kRdρ (1+ τd p)(1+ τM p)+ k2 (4.19)
Transformando al dominio de Laplace la función de transferencia 4.19 se obtiene:
Ωm(s)Vd(s)
=k
RdρτdτMs2 +Rdρ (τd + τM)s+Rdρ + k2 (4.20)
Como todos los términos del denominador de la función de transferencia 4.20 son positivos,los polos del polinomio tienen parte real negativa. Por esta razón, la respuesta del siste-ma siempre es estable. Para reducir los tiempos de respuesta se puede ajustar el valor de laconstante k variando la corriente de campo iβ . La constante de tiempo de la armadura de lamáquina τd es generalmente mucho menor que la constante de tiempo del sistema mecánico

4.4. CONTROL DE VELOCIDAD 91
Figura 4.28: Máquina de corriente continua sin fricción
τM y puede ser despreciada en la ecuación 4.20:
Ωm(s)Vd(s)
=k
RdρτMs+Rdρ + k2 (4.21)
El polo de la función de transferencia 4.21 es:
s =Rdρ + k2
RdρτM(4.22)
Al aumentar el valor de la constante k,10 el valor del polo se hace más negativo y la respuestade la máquina es más rápida. Al aumentar la corriente de campo en una máquina de corrientecontinua se incrementa considerablemente la velocidad de respuesta.
Otra aproximación habitual cuando se analiza la dinámica de la máquina de corriente con-tinua, consiste en despreciar la fricción. En estas condiciones el coeficiente de fricción ρ
es cero. En la figura 4.28 se ilustra el diagrama de bloques correspondiente al sistema sinpérdidas mecánicas.
Repitiendo el análisis realizado anteriormente se obtiene la función de transferencia:
Ωm(s)Vd(s)
=k
RdJ(
k2
RdJ + s) (4.23)
Cuando se desprecia la fricción es evidente que para mover el polo del sistema a la izquierdaes necesario incrementar el valor de la constante k y por lo tanto la corriente de campo.Mientras más corriente de campo circula por la máquina, los procesos dinámicos o respuestastransitorias son más rápidos.
La variable de control en este sistema es la tensión de armadura vd , debido a que la constantede tiempo de este circuito τd es mucho menor que la constante de tiempo mecánica τM,fuertemente dependiente de la inercia J. Para que la respuesta de una máquina sea rápida es
10Es conveniente recordar que incrementar la constante k es igual a incrementar la corriente de campo iβ .

92 CAPÍTULO 4. MÁQUINAS DE CORRIENTE CONTINUA
necesario que la inercia sea pequeña. Las máquinas de corriente continua son muy rápidasy se utilizan ampliamente para el control par-velocidad en los procesos industriales y en lossistemas de tracción eléctrica.
4.5. Accionamiento de las Máquinas de Corriente Continua
Los accionamientos de la máquina de corriente continua deben presentar la característica depar, flujo y fuerza electromotriz en función de la velocidad, mostrada en la figura 4.29 paracada uno de los cuadrantes de operación del convertidor electromecánico. En esta caracterís-tica de accionamiento el par se mantiene constante mientras la tensión de armadura alcanzasu valor régimen, este proceso se realiza limitando el valor de la corriente de armadura alnominal, mediante el control de la tensión.
Figura 4.29: Característica de accionamiento de la máquina de corriente continua
En la figura 4.30, se presenta el esquema de accionamiento de una máquina de corrientecontinua en lazo cerrado con realimentación en corriente.

4.5. ACCIONAMIENTO DE LAS MÁQUINAS DE CORRIENTE CONTINUA 93
Figura 4.30: Accionamiento de la máquina de corriente continua.
La fuente de alimentación puede ser en corriente alterna o continua, el controlador de velo-cidad combina las funciones de un controlador PI con limitación. Este accionamiento limitala corriente en el circuito de armadura de la máquina a 1,5 veces la corriente nominal deldevanado.
En las figuras 4.31 y 4.32 se presenta la respuesta de la maquina de corriente continua con-trolada con el esquema de la figura 4.30 ante una consigna de velocidad constante y tomade carga para una máquina de corriente continua de 5 HP , con un rectificador monofásicocontrolado como convertidor, desde un sistema de 220V a frecuencia industrial de 60Hz.

94 CAPÍTULO 4. MÁQUINAS DE CORRIENTE CONTINUA
Figura 4.31: Corriente de armadura y velocidad mecánica
Figura 4.32: Tensión de armadura y ángulo de disparo del rectificador
En las figuras 4.33 y 4.34 se presenta la respuesta de la maquina de corriente continua con-trolada con el esquema de la figura 4.30 ante una variación de velocidad para una máquinade corriente continua de 5 HP , con un chopper tipo “ A” como convertidor desde un sistemade corriente continua de 280V .

4.5. ACCIONAMIENTO DE LAS MÁQUINAS DE CORRIENTE CONTINUA 95
Figura 4.33: Corriente de armadura y velocidad mecánica
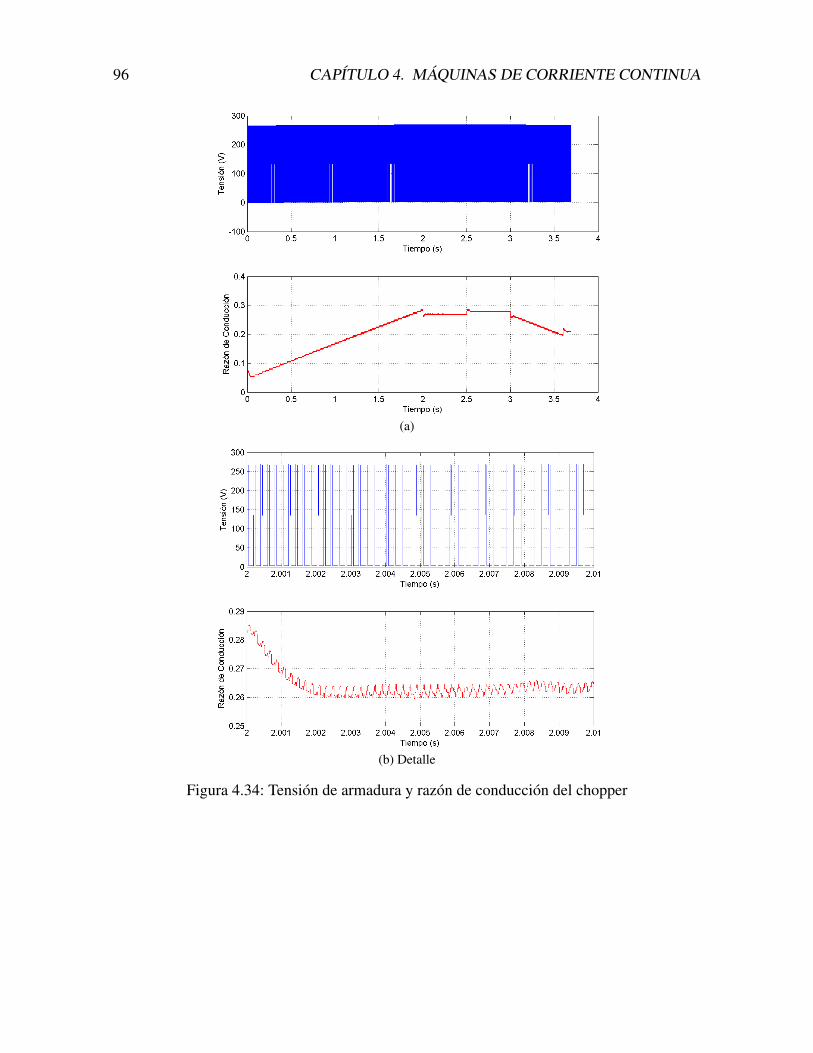
96 CAPÍTULO 4. MÁQUINAS DE CORRIENTE CONTINUA
(a)
(b) Detalle
Figura 4.34: Tensión de armadura y razón de conducción del chopper

Capítulo 5
La Máquina de Inducción
En la figura 5.1 se presenta el esquema básico de las bobinas de una máquina de induccióncuyo rotor y estator son trifásicos. En general el modelo se puede establecer para un númerogeneral de fases en el estator y otro en el rotor. Como la mayoría de los motores de inducciónde uso industrial son trifásicos en el estator, se realizará el modelo para un caso particulardonde el rotor y el estator son trifásicos1. Normalmente las bobinas rotóricas se encuentranen cortocircuito y en el estator se aplica un sistema trifásico y balanceado de tensiones si-nusoidales. En los modelos convencionales de la máquina de inducción se desprecian losefectos que produce el ranurado, la distribución de los devanados, las excentricidades estáti-cas y dinámicas y en ciertos casos las pérdidas en el hierro y las pérdidas mecánicas.
Las ecuaciones diferenciales que rigen el comportamiento de la máquina de inducción en elsistema de coordenadas indicado en la figura 5.1 son:
[v] = [R] [i]+ p [λ ] = [R] [i]+ [L(θ)] p [i]+ θ [τ(θ)] [i] (5.1)
Te−Tm =12[i]t [τ] [i]−Tm = Jθ +ρθ (5.2)
Donde:
[v] =
[[ve]
[vr]
]=
[ vea ve
b vec
]t[vr
a vrb vr
c
]t
; [i] =
[[ie][ir]
]=
[ iea ieb iec]t[
ira irb irc]t
;
1El caso general puede ser analizado mediante la misma técnica.
97

98 CAPÍTULO 5. LA MÁQUINA DE INDUCCIÓN
Figura 5.1: Diagrama esquemático de las bobinas de una máquina de inducción trifásica enel rotor y estator

99
[λ ] =
[[λe]
[λr]
]=
[ λ ea λ e
b λ ec
]t[λ r
a λ rb λ r
c
]t
[R] =
[[Ree] [Rer]
[Rre] [Rrr]
]=
[Re [I] [0][0] Rr [I]
]
[L(θ)] =
[[Lee] [Ler(θ)]
[Lre(θ)] [Lrr]
]=
[Lσe [I]+Lme [S] Ler [C(θ)]
Ler [C(θ)]t Lσr [I]+Lmr [S]
]
[τ(θ)] =
[d
dθ[Lee]
ddθ
[Ler(θ)]d
dθ[Lre(θ)]
ddθ
[Lrr]
]=
[[0] Ler
ddθ
[C(θ)]
Lerd
dθ[C(θ)]t [0]
]
[I] =
1 0 00 1 00 0 1
; [S] =
1 −12 −1
2
−12 1 −1
2
−12 −1
2 1
; [0] =
0 0 00 0 00 0 0
[C(θ)] =
cosθ cos(θ + 2π
3 ) cos(θ + 4π
3 )
cos(θ + 4π
3 ) cosθ cos(θ + 2π
3 )
cos(θ + 2π
3 ) cos(θ + 4π
3 ) cosθ
ddθ
[C(θ)] =
−senθ −sen(θ + 2π
3 ) −sen(θ + 4π
3 )
−sen(θ + 4π
3 ) −senθ −sen(θ + 2π
3 )
−sen(θ + 2π
3 ) −sen(θ + 4π
3 ) −senθ
Los parámetros que definen el comportamiento del modelo de la máquina de inducción en elsistema de coordenadas primitivas son:
100 CAPÍTULO 5. LA MÁQUINA DE INDUCCIÓN
Re es la resistencia de cada una de las bobinas del estatorRr es la resistencia de cada una de las bobinas del rotorLσe es la inductancia de dispersión del estatorLσr es la inductancia de dispersión del rotorLme es la inductancia de magnetización del estatorLmr es la inductancia de magnetización del rotorLer es la inductancia mutua de acoplamiento estator-rotor
La matriz [S] representa los acoplamientos simétricos entre bobinas del estator o rotor, lostérminos 1 en la diagonal corresponden a las magnetizaciones de la bobina propia2 y el tér-mino −1
2 representa las mutuas entre fases que se encuentran separadas espacialmente 2π
3 o4π
3 ,3 cuyo acoplamiento depende entonces del cos 2π
3 = cos 4π
3 =−12 .
La matriz [C(θ)] determina el comportamiento cíclico de los acoplamientos mutuos entrebobinas del rotor y del estator, por esta razón aparece el ángulo θ como argumento de lafunción coseno. El acoplamiento entre la fase ae del estator y la fase ar del rotor dependedirectamente del cosθ ; el acoplamiento entre la fase ae del estator y la br del rotor, ademásde estar separada en el ángulo θ entre las referencias de ambos sistemas, tiene una faseadicional de 2π
3 que corresponde a la separación espacial entre fases y explica de esta forma laaparición del término cos(θ + 2π
3 ). De igual forma se puede explicar el término cos(θ + 4π
3 ),correspondiente al acoplamiento entre la fase ae del estator y la cr del rotor.
El sistema conformado por las seis ecuaciones de tensión planteadas en 5.1 y el balance depar expresado en la ecuación 5.2, representan el comportamiento dinámico de la máquina deinducción4, pero la dependencia de la posición angular θ complica notablemente la soluciónpráctica de este modelo y la técnica de transformación de coordenadas es conveniente.
5.1. Transformación de Coordenadas
5.1.1. Componentes simétricas
Un análisis de los acoplamientos observados en el modelo de la máquina de inducción encoordenadas primitivas permite destacar que éstos están definidos por matrices simétricas [S]
2Las fases a con a, b con b y c con c del sistema rotórico o estatórico respectivamente.3Lo cual incluye los acoplamientos mutuos entre a y b, a y c, así como b con c.4Dentro del rango de las hipótesis simplificadoras supuestas inicialmente.

5.1. TRANSFORMACIÓN DE COORDENADAS 101
o cíclicas [C(θ)]. Estas matrices pueden ser diagonalizadas utilizando el método de autovalo-
res y autovectores. Con esta técnica se puede demostrar que la transformación de componen-
tes simétricas5 es capaz de realizar el desacoplamiento de ambas matrices. La transformaciónde componentes simétricas hermitiana6 se define como: x0
x+x−
=1√3
1 1 1
1 e j 2π
3 e j 4π
3
1 e j 4π
3 e j 2π
3
xa
xb
xc
=1√3
1 1 11 α α2
1 α2 α
xa
xb
xc
(5.3)
xa
xb
xc
=1√3
1 1 1
1 e j 4π
3 e j 2π
3
1 e j 2π
3 e j 4π
3
xa
xb
xc
=1√3
1 1 11 α2 α
1 α α2
xa
xb
xc
(5.4)
Al aplicar la transformación 5.4 a un sistema cíclico se obtiene el siguiente resultado: ya
yb
yc
=
a b c
c a b
b c a
xa
xb
xc
⇒
1√3
1 1 11 α2 α
1 α α2
y0
y+y−
=
a b c
c a b
b c a
1√3
1 1 11 α2 α
1 α α2
x0
x+x−
⇒
y0
y+y−
=1√3
1 1 11 α α2
1 α2 α
a b c
c a b
b c a
1√3
1 1 11 α2 α
1 α α2
x0
x+x−
⇒ y0
y+y−
=
a+b+ c 0 00 a+bα + cα2 00 0 a+bα2 + cα
x0
x+x−
(5.5)
El desacoplamiento de las matrices simétricas se obtiene como caso particular de las matrices
5Propuesta por Fortescue y ampliamente utilizada para el análisis de fallas en sistemas desequilibrados.6Conservativa en potencia.

102 CAPÍTULO 5. LA MÁQUINA DE INDUCCIÓN
cíclicas donde b = c: ya
yb
yc
=
a b b
b a b
b b a
xa
xb
xc
⇒ y0
y+y−
=
a+2b 0 00 a−b 00 0 a−b
x0
x+x−
(5.6)
5.1.2. Transformación a vectores espaciales
Esta propiedad característica de transformación de componentes simétricas permite convertirun sistema acoplado en tres sistemas independientes. El sistema de secuencia cero solamentese puede excitar cuando la sumatoria instantánea de las tensiones o de las corrientes es dife-rente de cero7. El sistema de secuencia negativa y de secuencia positiva son similares y unoes el conjugado del otro. Por estos motivos es posible representar el modelo de la máquinautilizando solamente la transformación de secuencia positiva8 y se denominó transformacióna vectores espaciales. Para conservar la potencia activa en la transformación se debe definirla siguiente transformación:
x(t)=√
23
[1 e j 2π
3 e j 4π
3
]·
xa(t)
xb(t)
xc(t)
=
√23
[1 α α2
]·
xa(t)
xb(t)
xc(t)
(5.7)
La transformación a vectores espaciales permite representar un sistema de tensiones, corrien-tes o flujos trifásicos mediante un vector en el espacio, cuya posición y magnitud dependendel tiempo. En la figura 5.2 se muestra una representación gráfica con la interpretación geo-métrica de la transformación a vectores espaciales para un instante de tiempo dado.
Transformando las ecuaciones 5.1 y 5.2 al dominio de los vectores espaciales se obtiene el
7En los sistemas trifásicos, esto requiere la presencia de un cuarto hilo por donde pueda circular esta com-ponente. En las máquinas eléctricas industriales es poco habitual la conexión del neutro.
8Es equivalente utilizar la componente de secuencia negativa. La componente de secuencia cero tiene escasautilidad en el análisis de las máquinas debido a que no puede producir par. Sin embargo, algunos desequilibriosdependen notoriamente de esta componente.

5.1. TRANSFORMACIÓN DE COORDENADAS 103
Figura 5.2: Representación gráfica del vector espacial de un sistema trifásico
siguiente resultado:[ve
vr
]=
[Re 00 Rr
][ieir
]+ p
[[Le Mere jθ
Mere− jθ Lr
][ieir
]](5.8)
Donde:
ve =
√23
[1 α α2
]·[
vea ve
b vec
]t
vr =
√23
[1 α α2
]·[
vra vr
b vrc
]t
ie =
√23
[1 α α2
]·[
iea ieb iec]t
ir =
√23
[1 α α2
]·[
ira irb irc]t
Le = Lσe +32
Lme ; Lr = Lσr +32
Lmr , Mer =32
Ler

104 CAPÍTULO 5. LA MÁQUINA DE INDUCCIÓN
Los términos que aparecen en la expresión 5.8 se pueden obtener realizando la transformacióna vectores espaciales de la matrices que representan el modelo de la máquina en coordenadasprimitivas, tales como:
1. La transformación de vectores espaciales aplicada a la matriz identidad [I]:
√23
[1 α α2
] ya
yb
yc
=
√23
[1 α α2
] 1 0 00 1 00 0 1
xa
xb
xc
y =
√23
[1 α α2
] xa
xb
xc
= x (5.9)
2. La transformación aplicada a la matriz simétrica [S]:
√23
[1 α α2
] ya
yb
yc
=
√23
[1 α α2
] 1 −12 −1
2
−12 1 −1
2
−12 −1
2 1
xa
xb
xc
y =
√23
[1 α α2
]32xa32xb32xc
=32
x (5.10)
3. La misma transformación aplicada a la matriz cíclica [C(θ)], recordando que cosθ =e jθ+e− jθ
2 :
y =
√23
[1 α α2
] cosθ cos(θ + 2π
3 ) cos(θ + 4π
3 )
cos(θ + 4π
3 ) cosθ cos(θ + 2π
3 )
cos(θ + 2π
3 ) cos(θ + 4π
3 ) cosθ
xa
xb
xc
=
=
√23
[1 α α2
]e jθ
2
1 α α2
α2 1 α
α α2 1
+ e− jθ
2
1 α2 α
α 1 α2
α2 α 1
xa
xb
xc

5.1. TRANSFORMACIÓN DE COORDENADAS 105
y =
√23
12
e jθ[
3 3α 3α2]+ e− jθ
[0 0 0
] xa
xb
xc
=32
e jθ x (5.11)
La transformación a vectores espaciales de la expresión del par eléctrico expresado en elbalance de la ecuación 5.2 queda:
Te =12[i]t [τ] [i] =
12
[[ie][ir]
][[0] Ler
ddθ
[C(θ)]
Lerd
dθ[C(θ)]t [0]
]t [[ie][ir]
]=
= Ler [ie]td
dθ[C(θ)] [ir] =
= Ler [ie]t
e− jθ
2 j
1 α2 α
α 1 α2
α2 α 1
− e jθ
2 j
1 α α2
α2 1 α
α α2 1
[ir] =
=
√32
Ler
e− jθ
2 jie[
1 α2 α
]− e jθ
2 ji∗e[
1 α α2]
[ir] =
=32
Ler
e− jθ
2 jiei∗r −
e jθ
2 ji∗e ir= Merℑm
iei∗r e− jθ
= Merℑm
ie(
ire jθ)∗
(5.12)
El sistema de ecuaciones diferenciales que definen el comportamiento de la máquina de in-ducción en el sistema de coordenadas correspondiente a los vectores espaciales es:
[ve
vr
]=
[Re 00 Rr
][ieir
]+ p
[[Le Mere jθ
Mere− jθ Lr
][ieir
]]
Merℑm
ie(
ire jθ)∗−Tm(θ) = Jθ +ρθ (5.13)
El modelo 5.13 simplifica notablemente las expresiones 5.1 y 5.2, al representar las magni-

106 CAPÍTULO 5. LA MÁQUINA DE INDUCCIÓN
tudes trifásicas mediante vectores espaciales. Por una parte el sistema se ha reducido de lassiete ecuaciones diferenciales iniciales a tres9 y la dependencia en la posición angular θ seha simplificado a su aparición en matrices cuya dimensión es 2×2.10 Sin embargo, la depen-dencia en la posición angular θ puede ser eliminada, si las variables del rotor se refieren alestator utilizando la siguiente transformación11:
xer ≡ xr · e jθ (5.14)
Para aplicar la transformación 5.14 al modelo de la máquina en vectores espaciales 5.13, serequiere desarrollar la derivada correspondiente de esta transformación:
pxer = pxr · e jθ + jθxr · e jθ = pxr · e jθ + jθxe
r ⇒
pxr · e jθ = pxer− jθxe
r (5.15)
Utilizando las expresiones 5.14 y 5.15 en el modelo 5.13, se obtiene el siguiente modelo dela máquina de inducción en vectores espaciales referidos al estator:
[ve
ver
]=
[Re 00 Rr
][ieier
]+
[Le Mer
Mer Lr
]p
[ieier
]− jθ
[0 0
Mer Lr
][ieier
]
Merℑm
ie (ier)∗−Tm(θ) = Jθ +ρθ (5.16)
El modelo 5.16 es independiente de la posición angular θ , que es variable en el tiempo aun enel caso particular de la operación en régimen permanente y esta dependencia es reemplazadapor la velocidad angular θ cuyo comportamiento temporal varía más lentamente12. Este mo-delo puede ser representado mediante el circuito equivalente que se muestra en la figura 5.3.
9Esta apariencia más simple no debe hacer olvidar el hecho de que las nuevas variables son vectores espa-ciales variables en el tiempo y no simples variables instantáneas, como era en el caso del modelo de la máquinade inducción en coordenadas primitivas.
10Y que pueden ser invertidas analíticamente con relativa sencillez.11Recordemos que el sistema de referencia del estator es independiente del sistema de referencia del estator,
pero ambas referencias se encuentran separadas en el ángulo θ , por esta razón cuando se multiplica una vectorespacial en el sistema de referencia rotórico por e jθ , el nuevo vector resultante posee la misma magnitud y sufase ahora se mide desde el sistema de referencia estatórico.
12En efecto, en régimen permanente la velocidad angular es una constante, mientras que el ángulo cambiaconstantemente.

5.1. TRANSFORMACIÓN DE COORDENADAS 107
Figura 5.3: Circuito equivalente de la máquina de inducción en vectores espaciales referidosal sistema de referencia estatórico
Este circuito reproduce el comportamiento eléctrico de la máquina en régimen transitorio yes capaz de calcular el par eléctrico evaluando la potencia activa transferida a la fuente de-pendiente de corriente del circuito rotórico, tema que será analizado con mayor profundidaden el capítulo 7.
En la sección 5.1.2 se obtuvo el modelo dinámico de la máquina de inducción expresado enel sistema de coordenadas de los vectores espaciales referidos al sistema de referencia del es-tator13. Esta representación tiene las ventajas de ser independiente de la posición angular θ 14
y reducir la dimensión del sistema de ecuaciones diferenciales. Por otra parte, las variablesde estado en este modelo están acopladas.
Un nivel de simplificación y desacoplamiento mayor se obtiene en el modelo al proyectar losdiversos fasores espaciales con respecto a una referencia determinada. Estas proyecciones sonequivalentes a realizar una rotación de los vectores espaciales a las coordenadas dq analizadaen el capítulo 4. En la transformación clásica a coordenadas dq el ángulo de rotación se defineentre la referencia del estator15 y la posición del rotor. En general, se pueden seleccionarinfinitas referencias de rotación completamente arbitrarias tales como la posición del fasorespacial de la corriente del estator, la corriente del rotor o la corriente de magnetización yla selección de cualquiera de estos patrones depende del análisis o la aplicación que se estárealizando:
1. El vector espacial de la corriente del estator puede ser medido directamente.
2. El vector espacial de la corriente de magnetización está asociado directamente con el
13Sistema de ecuaciones 5.25 y figura 5.3.14Aun cuando se mantiene la dependencia con la velocidad angular ωr.15Generalmente el eje magnético de la fase a.

108 CAPÍTULO 5. LA MÁQUINA DE INDUCCIÓN
flujo resultante en el entrehierro y con la producción del par eléctrico.
3. El vector espacial de la corriente del rotor tiene incidencia sobre el rendimiento de lamáquina y la transferencia de potencia al eje mecánico.
4. Posición arbitraria δ , permite acelerar la integración numérica de las variables de es-tado del modelo cuando se sintoniza esta referencia con las fluctuaciones de las fuenteso de la velocidad de rotación.
5. El vector espacial de la corriente de magnetización modificada puede desacoplar lasderivadas de los vectores espaciales de las corrientes del estator y rotor proporcionandoun modelo de la máquina de inducción donde se puede independizar la generación delflujo y la producción del par.16 Es una de las referencias más utilizada en la literaturay se conoce como modelo de campo orientado.
La corriente de magnetización modificada que determina la referencia del modelo de campoorientado se define como:
im ≡ ie +Lr
Merier = im(t) · e jδ (t) (5.17)
El término LrMer
refiere al sistema de referencia del estator todo el campo magnético producidopor las corrientes del rotor que atraviesa el entrehierro de la máquina. En la figura 5.4 se pre-senta un diagrama de los vectores espaciales correspondientes a las corrientes de la máquina.El vector espacial de la corriente del estator se puede representar mediante dos componentesortogonales, una paralela al fasor espacial de la corriente de magnetización im y la otra encuadratura, denominadas ide e iqe respectivamente. De acuerdo con la figura 5.4 se tiene:
ide(t)+ jiqe(t) = iee− jδ (t) = (iαe + jiβe) · (cosδ − j senδ )⇒ (5.18)
[ide
iqe
]=
[cosδ −senδ
senδ cosδ
][iαe
iβe
](5.19)
[iαe
iβe
]=
[cosδ senδ
−senδ cosδ
][ide
iqe
](5.20)
16La difusión de este modelo se debe a la posibilidad de utilizar los esquemas de control de las máquinas decorriente continua para regular la velocidad de las máquinas de inducción.

5.1. TRANSFORMACIÓN DE COORDENADAS 109
Figura 5.4: Vectores espaciales de las corrientes del modelo de la máquina de inducción
Donde:
ie = iαe + jiβe =
√23(iae + e j 2π
3 ibe + e j 4π
3 ice)⇒ (5.21)
[iαe
iβe
]=
√32 0
1√2
2√2
[ iae
ibe
](5.22)
[iae
ibe
]=
√23 0
− 1√6
1√2
[ iαe
iβe
](5.23)
iae =
√23
ℜe(ie) ; ibe =
√23
ℜe(iee− j 2π
3 ) ; ice =
√23
ℜe(iee− j 4π
3 ) (5.24)
Reemplazando la corriente ier de la definición 5.17 de la corriente de magnetización modifi-cada im en el modelo de la máquina de inducción en coordenadas vectoriales referidas a lascorrientes del estator 5.25, se obtiene:
[ve
ver
]=
[Re 00 Rr
][ie
MerLr
(im− ie)
]+
[Le Mer
Mer Lr
]p
[ie
MerLr
(im− ie)
]+
= · · ·− jθ
[0 0
Mer Lr
][ie
MerLr
(im− ie)
]

110 CAPÍTULO 5. LA MÁQUINA DE INDUCCIÓN
Merℑm
ie(
Mer
Lr(im− ie)
)∗−Tm(θ) = Jθ +ρθ (5.25)
Reagrupando las variables de estado del sistema 5.25 se obtiene el modelo de la máquina deinducción expresado en coordenadas de campo orientado:
[ve
1Mer
ver
]=
[Re 0− 1
Tr1Tr
][ieim
]+
[Le− M2
erLr
M2er
Lr
0 1
]p
[ieim
]+ · · ·
· · ·− jθ
[0 00 1
][ieim
]
M2er
Lrℑmie · i∗m−Tm(θ) = Jθ +ρθ (5.26)
Donde:Tr =
Lr
Rr(5.27)
La expresión del par eléctrico en el modelo de la máquina de inducción en coordenadas decampo orientado se simplifica si se incluye la definición de la corriente de magnetización5.17 y la transformación de la corriente del estator a coordenadas dq 5.18:
Te =M2
erLr
ℑmie · i∗m=M2
erLr
ℑm
ie · ime− jδ=
M2er
Lrim · iqe (5.28)
La ecuación de la tensión del rotor referida al sistema de referencia del estator en el modelode campo orientado es independiente de la derivada de las corrientes del estator. Por otraparte, es frecuente que la tensión del rotor es cero ve
r = 0. Multiplicando por e− jδ la ecuaciónde tensión del rotor y separando esta expresión en parte real e imaginaria se obtienen las dosecuaciones diferenciales escalares siguientes:
Tr pim + im = ide (5.29)
Tr im(δ − θ) = iqe (5.30)
Las expresiones 5.28, 5.29 y 5.30 tienen un paralelismo con el modelo dinámico de la má-

5.1. TRANSFORMACIÓN DE COORDENADAS 111
quina de corriente continua. La ecuación 5.29 determina el comportamiento del campo17 dela máquina de inducción y se puede controlar ajustando la componente directa de la corrientedel estator ide. La componente cuadratura iqe por otra parte determina mediante la expresión5.30 el deslizamiento (δ − θ) existente entre la velocidad angular del campo y la velocidadangular del rotor18. El par eléctrico 5.28 queda determinado por el producto de la magnitudde la corriente de campo im y la componente cuadratura de la corriente del estator19. Una delas ventajas más importantes de este modelo reside en la posibilidad de regular el par y la ve-locidad de la máquina mediante el control de las corrientes del estator. Con el uso de fuentesde corriente controladas, es posible accionar la máquina a velocidad variable sin utilizar laecuación de las tensiones del estator.
El modelo escalar completo en coordenadas de campo orientado es:
pide = (Le− M2er
Lr)−1
vde− (Re +RrM2
erL2
r)ide
+ωmiqe +
i2qeTrim
+RrM2
erL2
rim
piqe =−ωmide−ideiqeTrim− (Le− M2
erLr
)−1(Re +Rr
M2er
L2r)iqe− M2
erLr
ωmim− vqe
pim = ide−im
Tr
pδ = ωm +iqe
Trim
pωm = 1J
M2
erLr
im · iqe−Tm(ωm)
(5.31)
El modelo de campo orientado 5.31, requiere que la corriente de magnetización sea diferentede cero im 6= 0. Si este requisito no se cumple, se pierde la referencia δ , debido a que pδ →∞.En algunos casos es posible asumir que en las condiciones iniciales la corriente im tiene unvalor de remanencia que permita iniciar la integración numérica, pero aun así si durante elproceso en algún instante esta corriente se anula, el sistema de ecuaciones diferenciales pierdela referencia y debe encontrarse algún modelo alterno que permita continuar la integración.El sistema de coordenadas referidas a una posición angular arbitraria δ permite resolver esteproblema y plantea una generalización del modelo que en muchos casos acelera el cálculo delas variables de estado.
En el modelo de referencia arbitraria se refieren todos los vectores espaciales del sistema5.32 a una posición angular δ , que gira a la velocidad δ . Para esto, se multiplican todos los
17Esta ecuación es similar a la ecuación del campo de una máquina de corriente continua L f pi f +R f i f = v f .18Esta ecuación es comparable directamente con el modelo de la armadura de la máquina de corriente conti-
nua Va−Gωmi f = Raia.19En la máquina de corriente continua el par queda determinado por el producto de la corriente de campo y
la corriente de armadura Te = Gi f ia.

112 CAPÍTULO 5. LA MÁQUINA DE INDUCCIÓN
vectores espaciales por e− jδ obteniéndose el siguiente resultado:
[vδ
e
vδr
]=
[Re 00 Rr
][iδeiδr
]+
[Le Mer
Mer Lr
]p
[iδeiδr
]+ · · ·
· · ·+ j
[δLe δMer
(δ − θ)Mer (δ − θ)Lr
][iδeiδr
]
Merℑm
iδe(
iδr)∗−Tm(θ) = Jθ +ρθ (5.32)
El par eléctrico calculado a partir de la integración de las ecuaciones diferenciales, que mo-delan el comportamiento de la máquina, presenta fuertes oscilaciones durante el arranqueporque la fuente debe incrementar el flujo en el entrehierro para producir el par. Estas os-cilaciones son semejantes al fenómeno de energización de un transformador. La velocidadtambién es afectada por las fuertes perturbaciones del par eléctrico, pero en menor medidadebido al retardo que introduce la inercia.
5.2. Modelo de Régimen Permanente
Se puede obtener un modelo de la máquina de inducción operando en condiciones de régimenpermanente a partir del modelo transitorio, particularizando las variables correspondientesen este estado. En régimen permanente equilibrado, las bobinas del estator de la máquinade inducción se alimentan con un sistema balanceado de tensiones trifásicas de secuenciapositiva y las bobinas del rotor se encuentran en cortocircuito:
vae(t) =√
2Ve cosωet
vbe(t) =√
2Ve cos(
ωet−2π
3
)vce(t) =
√2Ve cos
(ωet−
4π
3
)(5.33)
var(t) = vbr(t) = vcr(t) = 0 (5.34)

5.2. MODELO DE RÉGIMEN PERMANENTE 113
Las tensiones 5.33 y 5.34 expresadas como vectores espaciales son:
ve =
√23
[1 α α2
]·
√
2Ve cosωet√2Ve cos
(ωet− 2π
3
)√
2Ve cos(ωet− 4π
3
)⇒
ve =√
2
√23
Ve
[1 α α2
] 12
e jωet + e− jωet
α2e jωet +αe− jωet
αe jωet +α2e− jωet
=√
3Vee jωet (5.35)
vr =
√23
[1 α α2
]·
000
= 0 = ver (5.36)
Al excitar las bobinas con tensiones trifásicas balanceadas, las corrientes del estator y lasdel rotor referidas al estator también resultarán balanceadas y los correspondientes vectoresespaciales serán:
ie =√
3Iee j(ωet+φe) (5.37)
ier =√
3Ire j(ωet+φr) (5.38)
Por otra parte, la velocidad del rotor en régimen permanente será constante θ =ωm = cte. Re-emplazando las condiciones 5.35, 5.36, 5.37 y 5.38 en el modelo de la máquina de induccióndescrito en vectores espaciales se obtiene:[ √
3Vee jωet
0
]=
[Re 00 Rr
][ √3Iee j(ωet+φe)
√3Ire j(ωet+φr)
]+ · · ·
· · ·+
[Le Mer
Mer Lr
]jωe
[ √3Iee j(ωet+φe)
√3Ire j(ωet+φr)
]+ · · ·
· · ·− jωm
[0 0
Mer Lr
][ √3Iee j(ωet+φe)
√3Ire j(ωet+φr)
]
[Ve
0
]=
[[Re 00 Rr
]+ jωe
[Le Mer
Mer Lr
]− jωm
[0 0
Mer Lr
]][Iee jφe
Ire jφr
]⇒
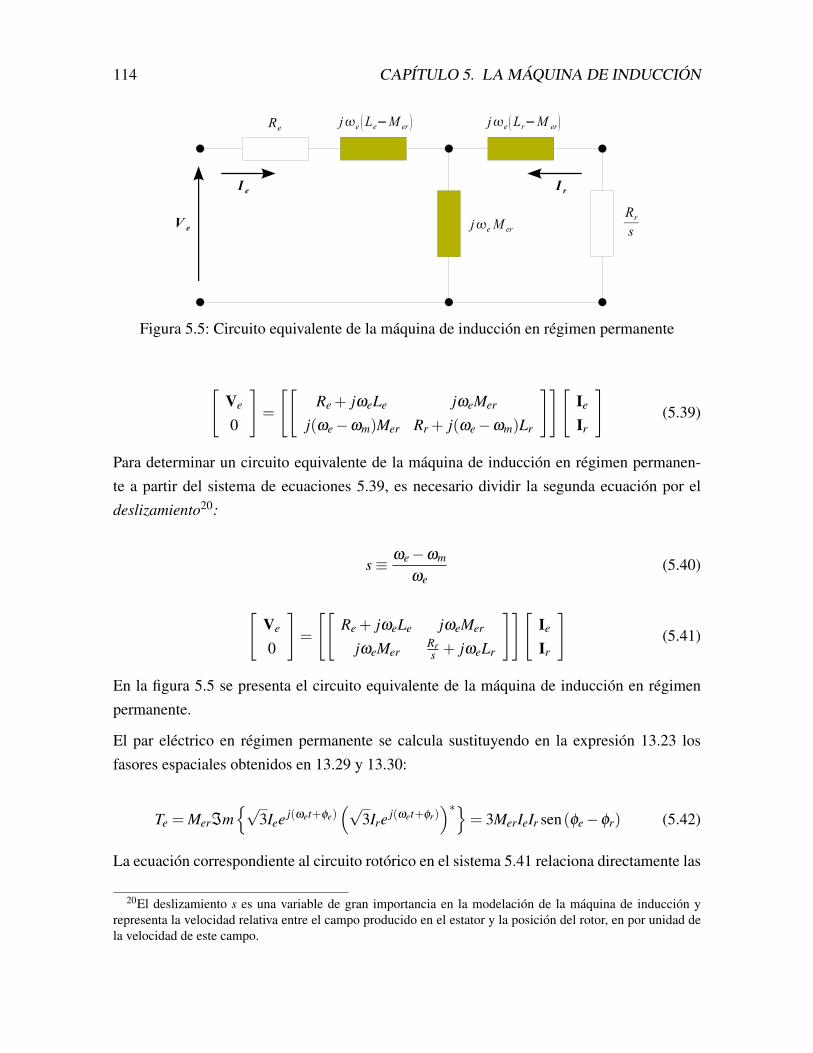
114 CAPÍTULO 5. LA MÁQUINA DE INDUCCIÓN
Figura 5.5: Circuito equivalente de la máquina de inducción en régimen permanente
[Ve
0
]=
[[Re + jωeLe jωeMer
j(ωe−ωm)Mer Rr + j(ωe−ωm)Lr
]][Ie
Ir
](5.39)
Para determinar un circuito equivalente de la máquina de inducción en régimen permanen-te a partir del sistema de ecuaciones 5.39, es necesario dividir la segunda ecuación por eldeslizamiento20:
s≡ ωe−ωm
ωe(5.40)
[Ve
0
]=
[[Re + jωeLe jωeMer
jωeMerRrs + jωeLr
]][Ie
Ir
](5.41)
En la figura 5.5 se presenta el circuito equivalente de la máquina de inducción en régimenpermanente.
El par eléctrico en régimen permanente se calcula sustituyendo en la expresión 13.23 losfasores espaciales obtenidos en 13.29 y 13.30:
Te = Merℑm√
3Iee j(ωet+φe)(√
3Ire j(ωet+φr))∗
= 3MerIeIr sen(φe−φr) (5.42)
La ecuación correspondiente al circuito rotórico en el sistema 5.41 relaciona directamente las
20El deslizamiento s es una variable de gran importancia en la modelación de la máquina de inducción yrepresenta la velocidad relativa entre el campo producido en el estator y la posición del rotor, en por unidad dela velocidad de este campo.

5.2. MODELO DE RÉGIMEN PERMANENTE 115
corrientes del estator y del rotor:
0 = jωeMerIe +
(Rr
s+ jωeLr
)Ir⇒
Ie = j
(Rrs + jωeLr
)ωeMer
Ir⇒ Iee jφe = j
(Rrs + jωeLr
)ωeMer
Ire jφr
Iee j(φe−φr) = j
(Rrs + jωeLr
)ωeMer
Ir ⇒ Ie sen(φe−φr) =Rr
sωeMerIr (5.43)
Al sustituir la expresión 5.43 en la ecuación del par eléctrico 5.42, se obtiene el par eléctricoen función de la corriente del rotor Ir, el deslizamiento s, la resistencia del rotor Rr y lavelocidad sincrónica ωs:
Te = 3Rr
ωesI2r (5.44)
La expresión 5.44 se puede obtener directamente del circuito equivalente de la figura 5.5,cuando se calcula tres veces21 la potencia entregada a la resistencia Rr
s y se divide por lavelocidad sincrónica ωe.
Dentro de las hipótesis del modelo se han despreciado la pérdidas en el hierro de la máqui-na. Es posible considerar estas pérdidas colocando una resistencia en paralelo con la fuerzaelectromotriz producida por el flujo de magnetización. También se puede recordar que lasinductancias Le y Lr están compuestas de dos partes, dispersión y magnetización. Por estarazón, haciendo uso de sus respectivas definiciones planteadas en el modelo 5.8, se puedeestablecer lo siguiente:
Le−Mer = Lσe +32
Ler−32
Ler = Lσe
Lr−Mer = Lσr +32
Ler−32
Ler = Lσr (5.45)
Al definir Xσe ≡ ωeLσe, Xσr ≡ ωeLσr y Xm = ωeMer, incluir la resistencia de magnetizaciónen paralelo con la reactancia de magnetización y separar la resistencia Rr
s en dos componentes,una Rr que representa las pérdidas óhmicas del circuito rotórico y 1−s
s Rr que representa la
21Por estar representando un modelo unifilar de la máquina aparece el coeficiente 3 en los cálculos de potenciay par.
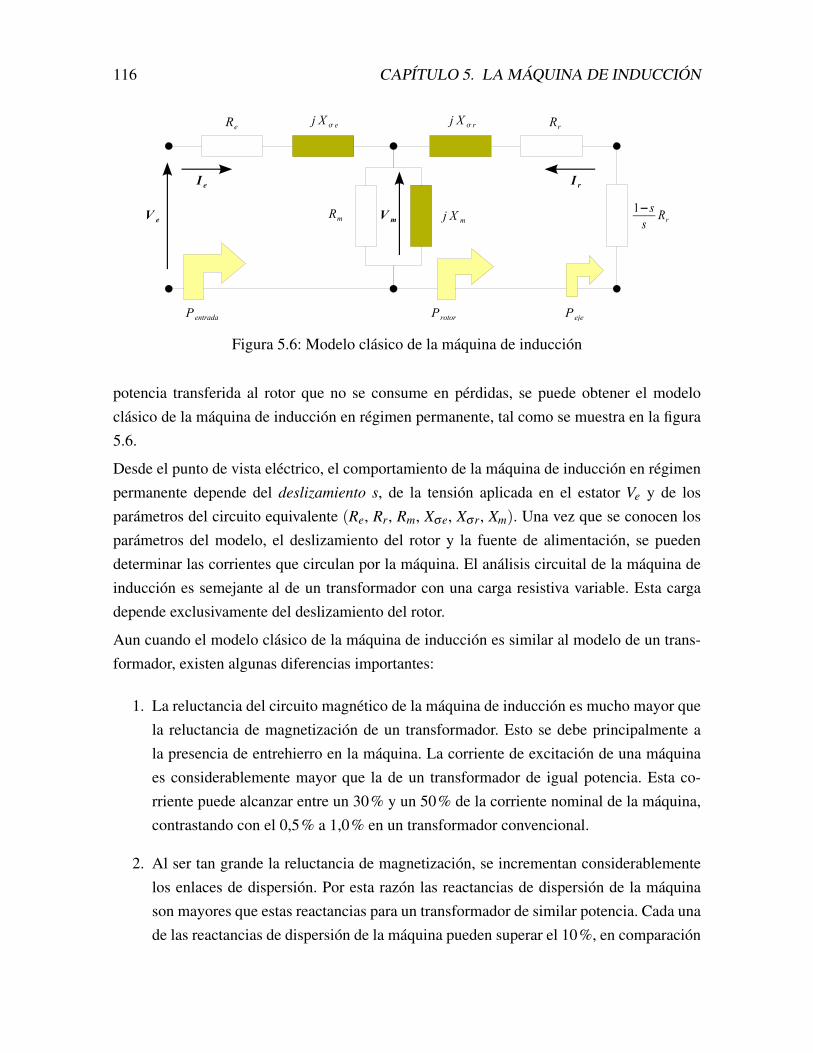
116 CAPÍTULO 5. LA MÁQUINA DE INDUCCIÓN
Figura 5.6: Modelo clásico de la máquina de inducción
potencia transferida al rotor que no se consume en pérdidas, se puede obtener el modeloclásico de la máquina de inducción en régimen permanente, tal como se muestra en la figura5.6.
Desde el punto de vista eléctrico, el comportamiento de la máquina de inducción en régimenpermanente depende del deslizamiento s, de la tensión aplicada en el estator Ve y de losparámetros del circuito equivalente (Re, Rr, Rm, Xσe, Xσr, Xm). Una vez que se conocen losparámetros del modelo, el deslizamiento del rotor y la fuente de alimentación, se puedendeterminar las corrientes que circulan por la máquina. El análisis circuital de la máquina deinducción es semejante al de un transformador con una carga resistiva variable. Esta cargadepende exclusivamente del deslizamiento del rotor.
Aun cuando el modelo clásico de la máquina de inducción es similar al modelo de un trans-formador, existen algunas diferencias importantes:
1. La reluctancia del circuito magnético de la máquina de inducción es mucho mayor quela reluctancia de magnetización de un transformador. Esto se debe principalmente ala presencia de entrehierro en la máquina. La corriente de excitación de una máquinaes considerablemente mayor que la de un transformador de igual potencia. Esta co-rriente puede alcanzar entre un 30% y un 50% de la corriente nominal de la máquina,contrastando con el 0,5% a 1,0% en un transformador convencional.
2. Al ser tan grande la reluctancia de magnetización, se incrementan considerablementelos enlaces de dispersión. Por esta razón las reactancias de dispersión de la máquinason mayores que estas reactancias para un transformador de similar potencia. Cada unade las reactancias de dispersión de la máquina pueden superar el 10%, en comparación

5.3. ACCIONAMIENTOS DE LA MÁQUINA DE INDUCCIÓN 117
con un transformador donde se encuentran entre el 1% y el 6% aproximadamente.
5.3. Accionamientos de la Máquina de Inducción
Algunos accionamientos mecánicos regulados con máquina de inducción requieren poseeruna respuesta dinámica ante variaciones de la señal de consigna. Al mismo tiempo es ne-cesario reducir el efecto de las perturbaciones, como variaciones del par mecánico, sobre elfuncionamiento del accionamiento. En general sistemas de baja inercia presentan este tipode requerimiento. Un ejemplo claro de la necesidad de una buena respuesta dinámica, asícomo de un control que refleje fielmente el comportamiento dinámico del sistema, es el deun servomecanismo. Con el modelo en régimen permanente de la máquina de inducción, es-tos objetivos no se pueden alcanzar debido a que las estrategias de control que consideraneste modelo, no se tiene en cuenta la respuesta dinámica de la máquina. Para mejorar estosesquemas de control es necesario considerar modelos dinámicos de la máquina de inducciónpara realizar las acciones de control sobre las variables eléctricas instantáneas que definen elpar eléctrico, con el fin de mejorar las respuestas dinámicas del accionamiento. En la figura5.7, se presenta la característica de tracción y frenado que debe suministrar el accionamientode un motor de inducción. En esta curva se mantiene el par constante hasta que la máquinaalcanza una determinada velocidad (ωbase) y posteriormente se controla a potencia constante,durante estas dos etapas se limita la corriente en los devanados del estator a un valor constan-te. Finalmente la máquina se lleva a su punto de operación a deslizamiento constante.
Figura 5.7: Característica de tracción y frenado de un motor de inducción

118 CAPÍTULO 5. LA MÁQUINA DE INDUCCIÓN
5.3.1. Control Escalar
5.3.1.1. Arranca Suaves
El arranca suave es el más simple y económico método de control de velocidad de la máquinade inducción, en la figura 5.8, se presenta el esquema del puente convertidor.
Figura 5.8: Esquema del arranca suave
En la figura 5.9, se presenta el diagrama de control de un arranca suaves para motores deinducción. Este accionamiento consiste en regular la tensión efectiva a frecuencia fundamen-tal del estator mediante el uso de un controlador AC - AC. Durante el arranque se limita lacorriente en el estator controlado la tensión efectiva sobre los devanados de la máquina. Esteaccionamiento estima la tensión efectiva de referencia del puente convertidor utilizando unacurva de par vs. corriente a frecuencia industrial. Las máquinas que más se utilizan con estetipo de arrancador son la NEMA tipo D.
Figura 5.9: Esquema de control de un arranca suave
En la figura 5.10, se presenta en esquema de regulación de par y corriente al variar la tensiónde alimentación de la máquina de inducción con el arranca suave, la intersección de estas

5.3. ACCIONAMIENTOS DE LA MÁQUINA DE INDUCCIÓN 119
características de par con el par resistencia de la carga determina el punto de operación delconvertidor electromecánico.
(a) Par (b) Corriente
Figura 5.10: Característica de par y corriente para una máquina de inducción accionada conuna arranca suave
5.3.1.2. Tensión - Frecuencia Constante
El primer controlador de velocidad de las máquinas de inducción y tal vez el más utilizado enla práctica hasta el presente, consiste básicamente en regular la fuente de alimentación, va-riando la frecuencia de las tensiones aplicadas a las bobinas del estator. En la figura 5.11, sepresenta el esquema constructivo de un controlador v/ f = cte. La variación de la frecuenciaafecta proporcionalmente las reactancias de magnetización y dispersión en el circuito equi-valente, pero las resistencias se mantienen aproximadamente constantes si el efecto pelicularno es muy pronunciado. Para que la densidad de flujo magnético sea prácticamente constante,dentro de los límites de diseño de la máquina, es necesario variar la amplitud de la tensiónde alimentación en la misma proporción que se varía la frecuencia. Con esta estrategia lamagnitud del par eléctrico obtenido en cada velocidad puede ser cercano, o incluso superioral par nominal.

120 CAPÍTULO 5. LA MÁQUINA DE INDUCCIÓN
Figura 5.11: Esquema de un cicloconvertidor
En la figura 5.12, se presentan las características par eléctrico-velocidad angular del rotorpara una máquina de inducción alimentada mediante cuatro frecuencias diferentes, mante-niendo constante la relación entre la amplitud de la tensión de alimentación y la frecuencia.Incrementando paulatinamente la frecuencia, es posible acelerar una carga mecánica a travésde los puntos 1, 2, 3, hasta alcanzar el punto 4. Si la variación de la frecuencia es lenta encomparación con la inercia del conjunto máquina carga mecánica, la corriente de la máquinaen esta condición se reduce en comparación con un arranque directo a plena tensión.
Figura 5.12: Característica par eléctrico velocidad para una máquina de inducción con controlde tensión - frecuencia constante
El control tensión-frecuencia constante, permite mantener cualquier punto de operación inter-medio, aumentar o reducir la velocidad mecánica de la máquina. Operando a bajas frecuen-cias, se incrementa el par eléctrico de arranque, pero el par eléctrico máximo de la máquina

5.3. ACCIONAMIENTOS DE LA MÁQUINA DE INDUCCIÓN 121
es prácticamente constante, siempre y cuando las reactancias del circuito equivalente de lamáquina en régimen permanente sean mucho mayores que las respectivas resistencias.
Este controlador de velocidad requiere una fuente de alimentación alterna regulable en ten-sión y frecuencia. Para esta función, en el pasado se empleaban máquinas sincrónicas regu-ladas en velocidad y corriente de campo. Esta solución trasladaba el problema de regulaciónal eje mecánico del generador sincrónico. Mediante los interruptores electrónicos de alta ve-locidad es posible diseñar y construir fuentes de alimentación alternas reguladas en tensióny frecuencia. Los convertidores electrónicos de inversión fueron desarrollados durante la dé-cada de los treinta utilizando diversos dispositivos tales como: las válvulas de alto vacío concátodos incandescentes, tiratrones o ignitrones. Esta tecnología evoluciona considerablemen-te durante las décadas de los setenta y ochenta con el auge de la electrónica de potencia y laaparición de los tiristores y transistores de alta potencia.
En la figura 5.13 se muestra el diagrama de un controlador de velocidad para un motor deinducción que utiliza el método de tensión - frecuencia constante. El sistema realimenta lavelocidad o la posición del eje mecánico. Esta velocidad se compara con una referencia de-terminada por el usuario o por la aplicación. El error obtenido de la comparación entre lasmedidas y las referencias se utiliza para definir la frecuencia de operación del inversor y conla técnica de modulación definida para el convertidor se determinan las señales de encendidoy apagado de las componentes semiconductores del puente. Algunos puentes convertidoresregulan la tensión de la barra de continua a fin de no modular la tensión sobre la máquinacon el inversor, esto simplifica el control del inversor a expensas de utilizar un rectificadorcontrolado o un chopper en la barra de corriente continua.
Figura 5.13: Variador de velocidad por control de tensión - frecuencia constante.
En la figura 5.14, 5.15 y 5.16 se presenta la respuesta del esquema de la figura 5.13 al seguir

122 CAPÍTULO 5. LA MÁQUINA DE INDUCCIÓN
una consigna de velocidad, para una máquina de inducción de 3HP alimentada con un puenteinversor de un pulso por semiciclo, desde un sistema trifásico de 220V a frecuencia industrialde 60Hz. La conversión AC - DC se realiza con un rectificador no controlado trifásico.
Figura 5.14: Velocidad mecánica, par y tensión de la barra de continua para el accionamientode tensión frecuencia constante

5.3. ACCIONAMIENTOS DE LA MÁQUINA DE INDUCCIÓN 123
(a)
(b) Detalle
Figura 5.15: Tensión y corriente en la fase “a” del motor de inducción para el accionamientode tensión frecuencia constante
En la figura 5.17, 5.18 y 5.19 se presenta la respuesta del esquema de la figura 5.13 al seguiruna consigna de velocidad, para una máquina de inducción de 3HP alimentada con un puente

124 CAPÍTULO 5. LA MÁQUINA DE INDUCCIÓN
(a)
(b) Detalle
Figura 5.16: Tensión y corriente en la fase “a” de la fuente alterna para el accionamiento detensión frecuencia constante

5.3. ACCIONAMIENTOS DE LA MÁQUINA DE INDUCCIÓN 125
inversor con control por SPWM, desde un sistema trifásico de 220V a frecuencia industrialde 60Hz. La conversión AC - DC se realiza con un rectificador no controlado trifásico.
Figura 5.17: Velocidad mecánica, par y tensión de la barra de continua para el accionamientode tensión frecuencia constante con SPWM

126 CAPÍTULO 5. LA MÁQUINA DE INDUCCIÓN
(a)
(b) Detalle
Figura 5.18: Tensión y corriente en la fase “a” del motor de inducción para el accionamientode tensión frecuencia constante con SPWM

5.3. ACCIONAMIENTOS DE LA MÁQUINA DE INDUCCIÓN 127
(a)
(b) Detalle
Figura 5.19: Tensión y corriente en la fase “a” de la fuente alterna para el accionamiento detensión frecuencia constante con SPWM

128 CAPÍTULO 5. LA MÁQUINA DE INDUCCIÓN
5.3.1.3. Accionamiento a Deslizamiento Constante
El proceso de aceleración y frenado de la máquina de inducción se puede realizar controlandoel par eléctrico mediante la frecuencia de deslizamiento. Esto permite acelerar el convertidorcon par constante o variable, controlando la frecuencia de deslizamiento.
Para controlar el par de aceleración de la máquina es necesario mantener la relación ten-sión - frecuencia constante, esto con la finalidad de obtener una densidad de flujo magnéticoaproximadamente constante.
La frecuencia de deslizamiento debe estar limitada a un valor máximo que asegure el fun-cionamiento de la máquina de inducción en un punto estable de la característica par eléctricovelocidad mecánica y además permita limitar las corrientes durante el proceso de aceleracióna un consumo igual a la capacidad de sobrecarga del equipo de potencia. En la figura 5.20, sepresenta el esquema de un accionamiento que mantiene el deslizamiento constante. En esteesquema la frecuencia de operación del inversor se determina a partir de la velocidad mecá-nica del rotor y del deslizamiento de referencia, mientras la tensión de referencia se calculadel error de velocidad. El control de la tensión se puede realizar con el inversor a través detécnicas de modulación o con un rectificador controlado o un chopper conectado en la barrade corriente continua.
Figura 5.20: Variador de velocidad a deslizamiento constante
5.3.2. Control Vectorial por Campo Orientado
Aplicando la teoría de auto valores y auto vectores a la matriz de inductancia obtenida delmodelo de la máquina de inducción en vectores espaciales (??), se pueden encontrar dos

5.3. ACCIONAMIENTOS DE LA MÁQUINA DE INDUCCIÓN 129
transformaciones de variables genéricas. Una transformación que refiere las variables delrotor al estator y la otra refiere las variables del estator al rotor.
Utilizando la transformación que refiere las variables del rotor al estator y escogiendo loscoeficientes adecuados para anular la influencia de la derivada de las corrientes del estator enla ecuación del rotor, se obtiene la transformación a Vectores de Campo Orientado.
~im =~ie +Lr
Ler~ire jθ (5.46)
Proyectando las ecuaciones de la máquina de inducción del sistema (??) en un sistema de dosejes coordenados ortogonales, uno solidario con la dirección de la variable transformada ~im yel otro en cuadratura a esta dirección, se obtiene el modelo en campo orientado de la máquinade inducción.
vde = Reide + Le(
pide +δ iqs)+
L2er
Lrpim (5.47)
vqe = Reiqe + Le(
piqe +δ ids)+
L2er
Lrpδ im (5.48)
pim =1
Tm(ide− im) (5.49)
p(δ −θ) =1
Tm
iqe
im(5.50)
Donde:
Le = Le−Ler
Lr
Tr =Lr
Rr
En el modelo por campo orientado, el par eléctrico depende del producto de la corriente demagnetización y de la componente en cuadratura de la corriente del estator. Los sistemas decontrol por campo orientado se fundamentan en la posibilidad de ajustar el valor de estas dosvariables.

130 CAPÍTULO 5. LA MÁQUINA DE INDUCCIÓN
Te =L2
erLr
iqeim (5.51)
Tal como sucede en las máquinas de corriente continua, en las máquinas de inducción elcircuito de campo tiene una constante de tiempo relativamente lenta. Por esta razón resultaventajoso mantener la corriente de magnetización en el valor máximo posible, para incremen-tar la velocidad de respuesta del sistema. La corriente de magnetización se controla medianteel ajuste de la componente directa de la corriente del estator. En régimen permanente estasdos corrientes tienen el mismo valor.
El principal problema de los controladores por campo orientado consiste en adecuar el va-lor de las corrientes o tensiones de alimentación a sus valores en variables transformadas. Latransformación directa e inversa entre las coordenadas primitivas y las coordenadas de campoorientado dependen de la posición instantánea del vector espacial de la corriente de magne-tización ~im. Esto presenta un problema importante al diseñar este tipo de controlador, debidoa que no resulta simple medir o estimar este ángulo. La medición requiere incluir sensoresespeciales en la máquina. Estimar esta posición requiere la integración en tiempo real delsistema de ecuaciones diferenciales que modelan la máquina de inducción. La primera so-lución es costosa y difícil de implementar en la practica. La segunda alternativa depende dela velocidad del estimador, de la exactitud del modelo y de la variabilidad de los parámetrosdurante la operación. Por esta razón es conveniente la utilización de estimadores rápidos yprecisos de las variables no medibles, entre los cuales encontramos las redes neurales y esti-madores de estado. También es indispensable la estimación de los parámetros de la máquinade inducción en tiempo real. Estas dos técnicas permiten una solución rápida y eficiente parala estimación de la posición de la corriente de magnetización.
En la figura 5.21 se muestra el esquema de un controlador de velocidad de una máquina deinducción en coordenadas de campo orientado donde se utiliza un inversor controlado porcorriente por modulación delta.
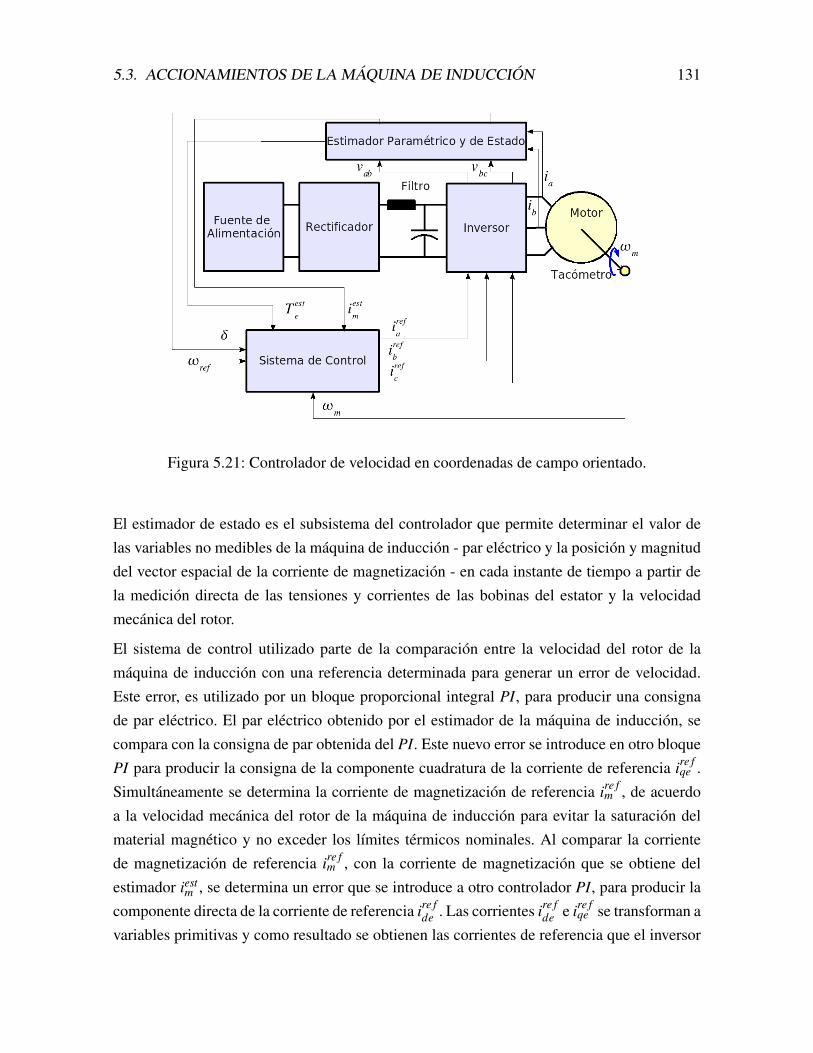
5.3. ACCIONAMIENTOS DE LA MÁQUINA DE INDUCCIÓN 131
Figura 5.21: Controlador de velocidad en coordenadas de campo orientado.
El estimador de estado es el subsistema del controlador que permite determinar el valor delas variables no medibles de la máquina de inducción - par eléctrico y la posición y magnituddel vector espacial de la corriente de magnetización - en cada instante de tiempo a partir dela medición directa de las tensiones y corrientes de las bobinas del estator y la velocidadmecánica del rotor.
El sistema de control utilizado parte de la comparación entre la velocidad del rotor de lamáquina de inducción con una referencia determinada para generar un error de velocidad.Este error, es utilizado por un bloque proporcional integral PI, para producir una consignade par eléctrico. El par eléctrico obtenido por el estimador de la máquina de inducción, secompara con la consigna de par obtenida del PI. Este nuevo error se introduce en otro bloquePI para producir la consigna de la componente cuadratura de la corriente de referencia ire f
qe .Simultáneamente se determina la corriente de magnetización de referencia ire f
m , de acuerdoa la velocidad mecánica del rotor de la máquina de inducción para evitar la saturación delmaterial magnético y no exceder los límites térmicos nominales. Al comparar la corrientede magnetización de referencia ire f
m , con la corriente de magnetización que se obtiene delestimador iest
m , se determina un error que se introduce a otro controlador PI, para producir lacomponente directa de la corriente de referencia ire f
de . Las corrientes ire fde e ire f
qe se transforman avariables primitivas y como resultado se obtienen las corrientes de referencia que el inversor
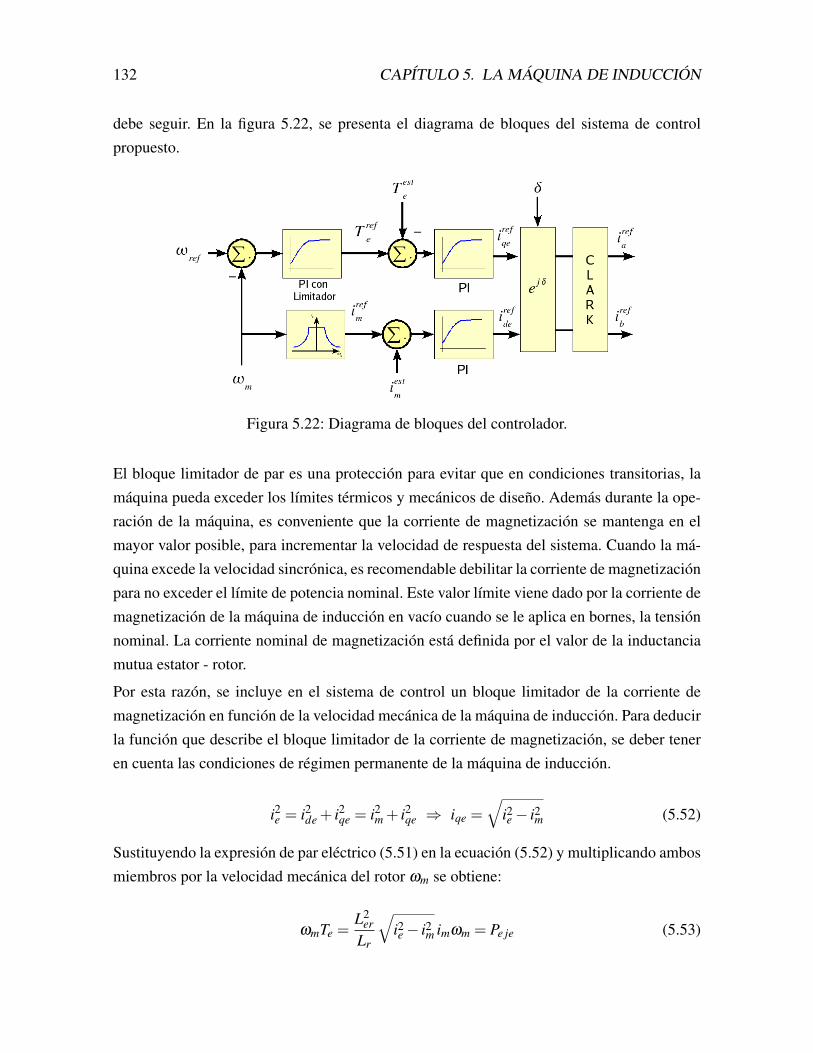
132 CAPÍTULO 5. LA MÁQUINA DE INDUCCIÓN
debe seguir. En la figura 5.22, se presenta el diagrama de bloques del sistema de controlpropuesto.
Figura 5.22: Diagrama de bloques del controlador.
El bloque limitador de par es una protección para evitar que en condiciones transitorias, lamáquina pueda exceder los límites térmicos y mecánicos de diseño. Además durante la ope-ración de la máquina, es conveniente que la corriente de magnetización se mantenga en elmayor valor posible, para incrementar la velocidad de respuesta del sistema. Cuando la má-quina excede la velocidad sincrónica, es recomendable debilitar la corriente de magnetizaciónpara no exceder el límite de potencia nominal. Este valor límite viene dado por la corriente demagnetización de la máquina de inducción en vacío cuando se le aplica en bornes, la tensiónnominal. La corriente nominal de magnetización está definida por el valor de la inductanciamutua estator - rotor.
Por esta razón, se incluye en el sistema de control un bloque limitador de la corriente demagnetización en función de la velocidad mecánica de la máquina de inducción. Para deducirla función que describe el bloque limitador de la corriente de magnetización, se deber teneren cuenta las condiciones de régimen permanente de la máquina de inducción.
i2e = i2de + i2qe = i2m + i2qe ⇒ iqe =√
i2e− i2m (5.52)
Sustituyendo la expresión de par eléctrico (5.51) en la ecuación (5.52) y multiplicando ambosmiembros por la velocidad mecánica del rotor ωm se obtiene:
ωmTe =L2
erLr
√i2e− i2m imωm = Pe je (5.53)

5.3. ACCIONAMIENTOS DE LA MÁQUINA DE INDUCCIÓN 133
Evaluando la expresión (5.53) en los valores nominales de la máquina de inducción, se puedeencontrar el valor de la velocidad a partir de la cual es conveniente debilitar la corriente demagnetización.
ωcritico =Pe jeLr
L2er imn
√i2e− i2m
=Pe jen
Ten
= ωmn (5.54)
A partir de ésta velocidad, se desea debilitar la corriente de magnetización para mantener lapotencia constante. Reescribiendo la expresión (5.53) se obtiene:
ωmim√
i2e− i2m =Pe jenLr
L2er
= cte. (5.55)
Desarrollando la expresión (5.55) se obtiene la corriente de magnetización en función de lavelocidad.
ire fm =
√2
2
√√√√i2en−
√i4en−
4P2e jen
L2r
L4erω
2m
(5.56)
La función que determina la referencia de la corriente de magnetización en función de lavelocidad se ilustra en la figura 5.23.
Figura 5.23: Corriente de magnetización de referencia en función de la velocidad mecánicadel rotor.
El principal problema del estimador de estado de las variables internas de la máquina es lavariabilidad de los parámetros con la temperatura, la frecuencia y la saturación magnética.En particular el estimador por campo orientado, es muy sensible a variaciones de la constante
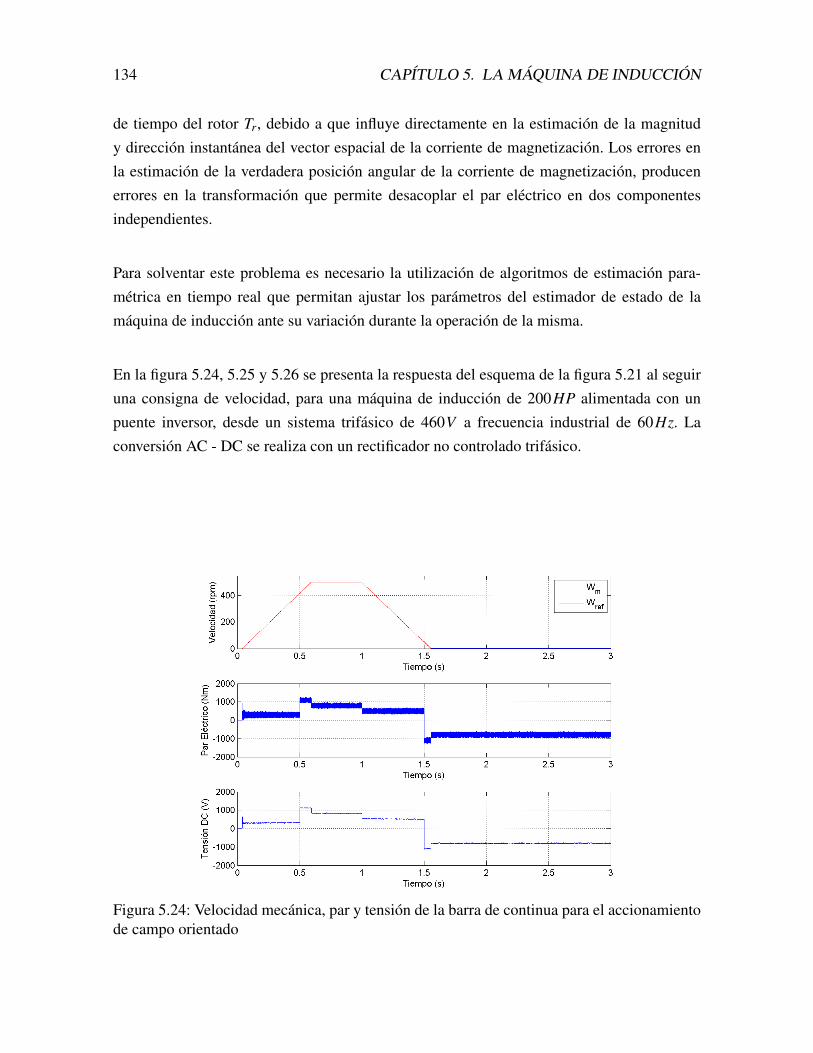
134 CAPÍTULO 5. LA MÁQUINA DE INDUCCIÓN
de tiempo del rotor Tr, debido a que influye directamente en la estimación de la magnitudy dirección instantánea del vector espacial de la corriente de magnetización. Los errores enla estimación de la verdadera posición angular de la corriente de magnetización, producenerrores en la transformación que permite desacoplar el par eléctrico en dos componentesindependientes.
Para solventar este problema es necesario la utilización de algoritmos de estimación para-métrica en tiempo real que permitan ajustar los parámetros del estimador de estado de lamáquina de inducción ante su variación durante la operación de la misma.
En la figura 5.24, 5.25 y 5.26 se presenta la respuesta del esquema de la figura 5.21 al seguiruna consigna de velocidad, para una máquina de inducción de 200HP alimentada con unpuente inversor, desde un sistema trifásico de 460V a frecuencia industrial de 60Hz. Laconversión AC - DC se realiza con un rectificador no controlado trifásico.
Figura 5.24: Velocidad mecánica, par y tensión de la barra de continua para el accionamientode campo orientado

5.3. ACCIONAMIENTOS DE LA MÁQUINA DE INDUCCIÓN 135
(a)
(b) Detalle
Figura 5.25: Tensión y corriente en la fase “a” del motor de inducción para el accionamientode campo orientado

136 CAPÍTULO 5. LA MÁQUINA DE INDUCCIÓN
(a)
(b) Detalle
Figura 5.26: Tensión y corriente en la fase “a” de la fuente alterna para el accionamiento decampo orientado

5.3. ACCIONAMIENTOS DE LA MÁQUINA DE INDUCCIÓN 137
5.3.3. Control Directo de Par y Flujo
Durante la década de los ochenta, Takahashi introduce una técnica avanzada de control es-calar denominada control directo de par y flujo (DTC) o direct self-control (DSC), la cualsuministra la consigna de disparo para las componentes de un inversor en tensión. Esta téc-nica permite obtener una característica dinámica del accionamiento comparable con la deotros accionamientos por control vectorial. Recientemente, este esquema de control ha sidointroducido comercialmente en diferentes convertidores de distintas industrias despertandoun alto interés a nivel industrial. Este esquema, como su nombre lo indica, se basa en el con-trol del par eléctrico de la máquina y del flujo en el estator, a través de la selección del vectorespacial de tensión más apropiado de una tabla, para seguir la referencia de estas señales. Lainformación de disparo de las componentes del inversor para cada vector espacial de tensiónestá contenida en la tabla de control.
5.3.3.1. Expresión vectorial de par eléctrico y del enlace de flujo en el estator
La expresión (??) puede ser representada de forma más sencilla, a través del producto vecto-rial de la corriente del rotor y del estator como:
Te = Ler(iqeidr− ideiqr
)= Ler
(−→ier ×−→ie)
(5.57)
El enlace de flujo del estator se puede obtener, a partir de la integración directa de la fuerzaelectromotriz en los devanados del estator.
~λe =
ˆ (~ve−Re~ie
)dt = Le~ie +Ler~ier (5.58)
donde:
−→xe =√
23
[1 e j 2π
3 e j 4π
3
][xae(t) xbe(t) xce(t)
]t
∀x ∈ v, i,λ(5.59)
−→xe =√
23 e− j π
6
[1 e j 2π
3 e j 4π
3
][xabe(t) xbce(t) xcae(t)
]t
∀x ∈ v(5.60)
Para calcular el enlace de flujo del estator a partir de la integral de la expresión (5.58) esnecesario realizar la medición directa de la tensión y corriente en los terminales del estator.

138 CAPÍTULO 5. LA MÁQUINA DE INDUCCIÓN
Despejando el vector especial de la corriente del rotor de la expresión (5.58) y sustituyendoel resultado en la expresión (5.57), se obtiene el par eléctrico de la máquina de inducción enfunción del vector espacial del flujo y la corriente del estator.
Te =−→λe×
−→ie (5.61)
El único parámetro del modelo de la máquina de inducción involucrado en la estimación delpar eléctrico instantáneo y del enlace de flujo del estator, es la resistencia del estator (Re). Elerror introducido en la estimación por la variación de este parámetro con la temperatura esdespreciable y puede ser reducido utilizando métodos de estimación paramétrica en tiemporeal.
El puente inversor trifásico genera ocho diferentes salidas de tensión, dependiendo la ten-sión en la barra de corriente continua y la conectividad de los seis interruptores estáticosque conforman. Utilizando la expresión (5.60) para cada una de estas posibles salidas, sepuede encontrar el vector espacial de tensión aplicado sobre los terminales del convertidorelectromecánico.
−→ve =√
23
[1 e j 2π
3 e j 4π
3
]SwVDC (5.62)
Donde, Sw es un vector que representa el estado de los interruptores del puente de dimen-sión 3x1. En este vector, el elemento "1" corresponde al encendido del interruptor superior,mientras que "0" indica el encendido del interruptor inferior de la misma rama. Seis de losvectores espaciales de tensión poseen magnitud uniforme y se encuentran desfasados entreellos. Los otros dos estados están asociados al vector espacial nulo.
5.3.3.2. Estrategia de control directo de par
En la figura 5.27, se presenta el diagrama en bloques del controlador directo de par. La mag-nitud del enlace de flujo y el par eléctrico de referencia son comparados con los estimadosde la máquina de inducción, que se calculan a partir, de la corriente del estator, el vector deinterrupciones del inversor y la tensión de la barra de continua. Los errores de par y flujo sonprocesados en dos comparadores de histéresis de tres y dos niveles respectivamente, a partirde estos resultados y de la posición angular del enlace de flujo del estator se determina el vec-tor de interrupciones del inversor. El algoritmo del controlador directo de par se fundamentaen escoger el vector espacial de tensión que maximice el cambio necesario en el enlace de
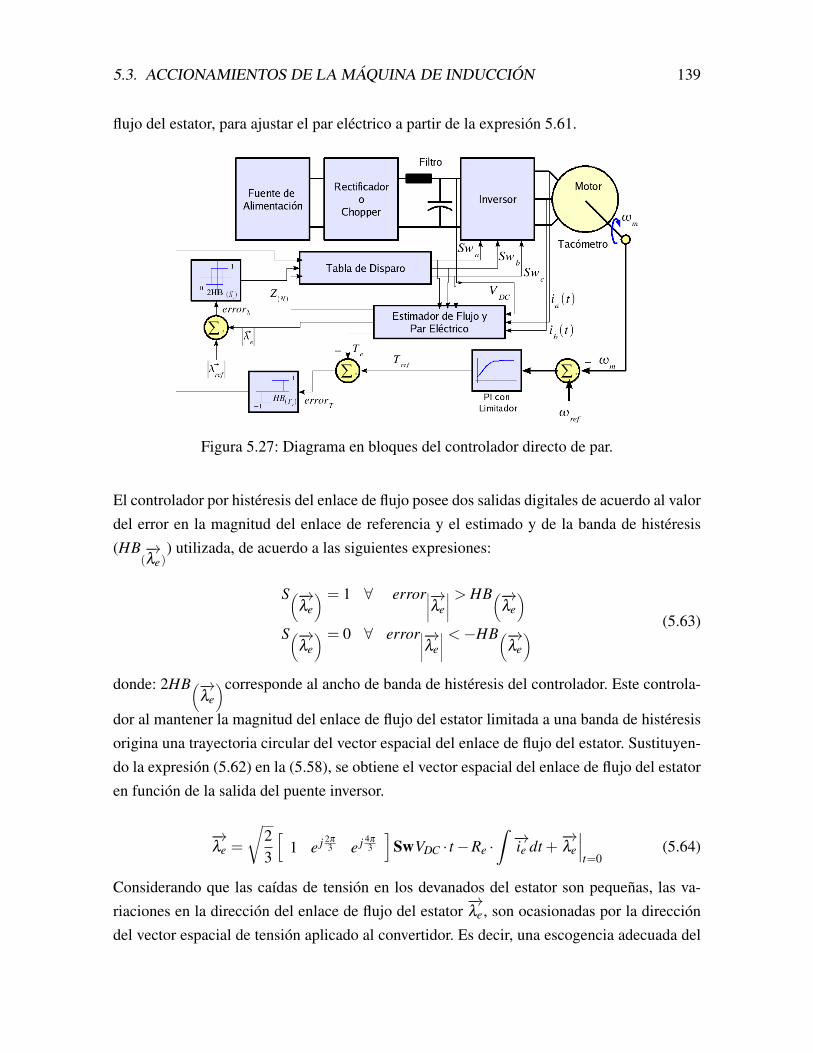
5.3. ACCIONAMIENTOS DE LA MÁQUINA DE INDUCCIÓN 139
flujo del estator, para ajustar el par eléctrico a partir de la expresión 5.61.
Figura 5.27: Diagrama en bloques del controlador directo de par.
El controlador por histéresis del enlace de flujo posee dos salidas digitales de acuerdo al valordel error en la magnitud del enlace de referencia y el estimado y de la banda de histéresis(HB
(−→λe)
) utilizada, de acuerdo a las siguientes expresiones:
S(−→λe
) = 1 ∀ error∣∣∣∣−→λe
∣∣∣∣ > HB(−→λe
)S(−→
λe
) = 0 ∀ error∣∣∣∣−→λe
∣∣∣∣ <−HB(−→λe
) (5.63)
donde: 2HB(−→λe
)corresponde al ancho de banda de histéresis del controlador. Este controla-
dor al mantener la magnitud del enlace de flujo del estator limitada a una banda de histéresisorigina una trayectoria circular del vector espacial del enlace de flujo del estator. Sustituyen-do la expresión (5.62) en la (5.58), se obtiene el vector espacial del enlace de flujo del estatoren función de la salida del puente inversor.
−→λe =
√23
[1 e j 2π
3 e j 4π
3
]SwVDC · t−Re ·
ˆ−→ie dt +
−→λe
∣∣∣t=0
(5.64)
Considerando que las caídas de tensión en los devanados del estator son pequeñas, las va-riaciones en la dirección del enlace de flujo del estator
−→λe , son ocasionadas por la dirección
del vector espacial de tensión aplicado al convertidor. Es decir, una escogencia adecuada del

140 CAPÍTULO 5. LA MÁQUINA DE INDUCCIÓN
vector espacial de tensión aplicado a la máquina de inducción, determina un control sobre lamagnitud y trayectoria del enlace de flujo del estator. En la figura 5.28 se puede observar latrayectoria del vector espacial del enlace de flujo del estator y la variación en el enlace deflujo del estator correspondiente a cada uno de los vectores espaciales de tensión del inversorpara un instante de tiempo ∆t.
(a) (b)
Figura 5.28: (a) Trayectoria del vector especial del enlace de flujo del estator, (b) variacióndel enlace de flujo en función del vector espacial de tensión del inversor.
El controlador por histéresis del par eléctrico posee tres salidas digitales de acuerdo al valordel error en la magnitud del par de referencia y el estimado y de la banda de histéresis (HB(Te))utilizada, de acuerdo a las siguientes expresiones:
S(Te) = 1 ∀ errorTe > HB(Te)
S(Te) =−1 ∀ errorTe < HB(Te)
S(Te) = 0 ∀ −HB(Te) < errorTe < HB(Te)
(5.65)
La estrategia del controlador directo de par, se fundamenta en ajustar el par eléctrico al dereferencia, mediante el control de la magnitud y sentido de rotación del vector espacial delenlace de flujo del estator. Esta posibilidad de ajuste, define seis zonas de operación depen-diendo de la posición del vector espacial del enlace de flujo del estator. Estas zonas de controlcoinciden con la localización de los vectores espaciales de tensión del inversor. Cada uno de

5.3. ACCIONAMIENTOS DE LA MÁQUINA DE INDUCCIÓN 141
estas seis zonas de control tiene un ancho de π/3 radianes y vienen dados por la expresión(5.66). En la figura 5.28 (a) se puede observar las seis zonas de operación .
(2N−3) · π6≤ Z(n) ≤ (2N−1) · π
6(5.66)
En cada zona de operación, una escogencia adecuada del vector espacial de tensión permiteincrementar o decrementar la magnitud del enlace de flujo del estator y alterar su sentido derotación. Manteniendo las magnitudes de corriente y el enlace de flujo constante, se puedecontrolar el par eléctrico resultante, modificando el ángulo relativo entre el enlace de flujo yla corriente del estator. Este ángulo relativo se puede variar controlando el sentido de rotacióndel vector espacial del enlace de flujo en el estator.
Por ejemplo, si el vector espacial del enlace de flujo se encuentra en la primera zona de opera-ción Z(1), y se desea aumentar la magnitud del enlace, se debe aplicar sobre los terminales dela máquina el vector espacial de tensión −→v2 si el par de referencia es menor que la referenciao el vector espacial −→v6 si el par eléctrico es mayor que la referencia.
En la tabla 5.1 se presenta la secuencia de disparo del inversor para la estrategia de controldirecto de par, a partir de la posición del enlace de flujo del estator, y la salida de los com-paradores de histéresis del flujo y par eléctrico. Con la finalidad de incrementar la velocidadde cambio del par eléctrico y magnitud del enlace de flujo, no se utiliza el vector espacialde tensión que se encuentra dentro de la zona de localización del enlace de flujo, así comotampoco el localizado en la zona opuesta.
Tabla 5.1: Secuencia de disparo del inversor para el controlador directo de par.
S(−→λe)
S(Te) Z(1) Z(2) Z(3) Z(4) Z(5) Z(6)
1 1 −→v1−→v5
−→v4−→v6
−→v2−→v3
1 0 −→v7−→v0
−→v7−→v0
−→v7−→v0
1 −1 −→v5−→v4
−→v6−→v2
−→v3−→v1
0 1 −→v2−→v3
−→v1−→v5
−→v4−→v6
0 0 −→v0−→v7
−→v0−→v7
−→v0−→v7
0 −1 −→v6−→v2
−→v3−→v1
−→v5−→v4
El estimador de par y flujo de la figura estimador de la figura 5.27, se basa en la utilizaciónde las expresiones (5.61), (5.62) y (5.66) para el cálculo de las variables par, flujo y zona deoperación.

142 CAPÍTULO 5. LA MÁQUINA DE INDUCCIÓN
Consideramos el ejemplo de la figura 5.28 (b), el enlace de flujo estimado se encuentra enla zona de operación Z(2) punto "A" y es mayor que la referencia (HB
(−→λe)
= 0) y adicional-
mente, el par eléctrico es mayor a la referencia (HB(Te) = −1), para corregir esta situaciónes necesario, como se observa en la tabla 5.1, aplicar el vector espacial de tensión −→v6 paradesplazar el enlace de flujo al punto "B". Este procedimiento es el utilizado por el controldirecto de par, para el ajuste del enlace de flujo del estator y del par eléctrico a los valores dereferencia.
Las respuestas dinámicas de los accionamientos de la máquina de inducción que utilizan con-trol directo de par, son comparables a los obtenidos con otros esquemas de control vectorial.La estimación del enlace de flujo de estator y del par eléctrico instantáneo sólo depende de laresistencia del estator (Re), a diferencia de otros controladores vectoriales como el de cam-po orientado en los que los estimadores, dependen de un conjunto mayor de parámetros delmodelo de la máquina de inducción. Entre estos parámetros encontramos: las inductanciasdel estator, rotor y mutua del estator-rotor, la constante de tiempo del rotor, estos parámetrosson fuertemente afectados durante la operación del convertidor electromecánico, por las va-riaciones del grado de saturación magnética y la temperatura. El efecto por variaciones de latemperatura sobre la resistencia del estator es despreciable y puede ser corregida en línea conmétodos de estimación paramétrica.
Entre las características del control directo de par tenemos:
No utiliza realimentación en corriente.
No utiliza el esquema tradicional de control por ancho de pulso.
Los controladores por histéresis del enlace de flujo del estator y del par eléctrico gene-ran un rizado sobre estas variables.
La frecuencia de conmutación del puente inversor no es constante y depende de labanda de histéresis de los controladores de par eléctrico y del enlace de flujo.
En la figura 5.29, 5.30 y 5.31 se presenta la respuesta del esquema de la figura 5.27 al seguiruna consigna de velocidad, para una máquina de inducción de 200HP alimentada con unpuente inversor, desde un sistema trifásico de 460V a frecuencia industrial de 60Hz. Laconversión AC - DC se realiza con un rectificador no controlado trifásico.

5.3. ACCIONAMIENTOS DE LA MÁQUINA DE INDUCCIÓN 143
Figura 5.29: Velocidad mecánica, par y tensión de la barra de continua para el accionamientode DTC

144 CAPÍTULO 5. LA MÁQUINA DE INDUCCIÓN
(a)
(b) Detalle
Figura 5.30: Tensión y corriente en la fase “a” del motor de inducción para el accionamientode DTC
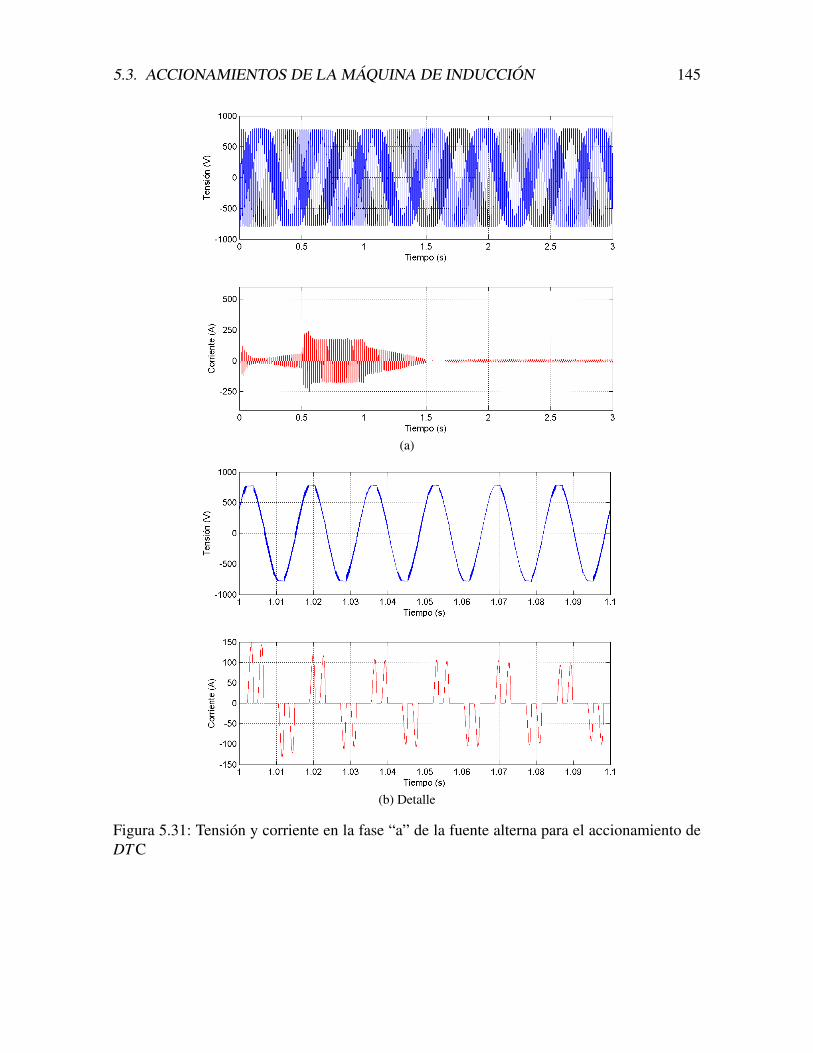
5.3. ACCIONAMIENTOS DE LA MÁQUINA DE INDUCCIÓN 145
(a)
(b) Detalle
Figura 5.31: Tensión y corriente en la fase “a” de la fuente alterna para el accionamiento deDT C

Capítulo 6
Modelo de la Máquina Sincrónica
6.1. Descripción de la máquina sincrónica
La máquina sincrónica es un convertidor electromecánico de energía con una pieza giratoriadenominada rotor o campo, cuya bobina se excita mediante la inyección de una corrientecontinua, y una pieza fija denominada estator o armadura, por cuyas bobinas circula corrientealterna. Las corrientes alternas que circulan por los enrollados del estator producen un campomagnético rotatorio que gira en el entrehierro de la máquina con la frecuencia angular delas corrientes de armadura. El rotor debe girar a la misma velocidad del campo magnéticorotatorio producido en el estator para que el par eléctrico medio pueda ser diferente de cero. Silas velocidades angulares del campo magnético rotatorio y del rotor de la máquina sincrónicason diferentes, el par eléctrico medio es nulo. Por esta razón a esta máquina se la denominasincrónica; el rotor gira mecánicamente a la misma frecuencia del campo magnético rotatoriodel estator durante la operación en régimen permanente. En la figura 6.1 (a) y (b), se observael estator y rotor de una máquina sincrónica de polos salientes.
Durante la operación de la máquina sincrónica en régimen permanente, la velocidad mecáni-ca del rotor es igual a la velocidad angular del campo magnético rotatorio producido por elestator. En estas condiciones, sobre los conductores o bobinas del campo no se induce fuerzaelectromotriz. Para producir fuerza magnetomotriz en el rotor es necesario inyectar corrienteen esta bobina mediante una fuente externa. De esta forma se obtienen dos campo magné-ticos rotatorios que giran a la misma velocidad, uno producido por el estator y otro por elrotor. Estos campos interactúan produciendo par eléctrico medio y se realiza el proceso deconversión electromecánica de energía. La condición necesaria, pero no suficiente, para que
146

6.1. DESCRIPCIÓN DE LA MÁQUINA SINCRÓNICA 147
(a) Estator de la máquina sincrónica (b) Rotor de polos salientes
Figura 6.1: Partes de las máquinas sincrónicas
el par medio de la máquina sea diferente de cero es:
ωe = p ·ωm (6.1)
Donde:
p es el número de pares de polos de la máquina sincrónica.
La bobina del rotor o campo de la máquina sincrónica se alimenta mediante la inyección decorriente continua, como se mencionó anteriormente, con la finalidad de producir un campomagnético de magnitud constante, semejante al de un imán permanente, pero de una inten-sidad mucho mayor. Debido a que el rotor de la máquina gira en régimen permanente a lavelocidad sincrónica, el campo magnético constante producido en este sistema se comporta,desde el punto de vista del estator, como un campo magnético rotatorio. En la figura 6.2 seha representado el esquema básico de una máquina sincrónica trifásica de polos salientes.
Para evaluar la magnitud del par en una máquina sincrónica se puede recordar la expresión:
Te = k ·FrFe sinδ (6.2)
Donde:
k es una constante de proporcionalidad que depende de la geometríade la máquina y de la disposición física de las bobinas

148 CAPÍTULO 6. MODELO DE LA MÁQUINA SINCRÓNICA
(a) Modelo elemental demostrativo
(b) Esquema básico
Figura 6.2: Esquema básico de una máquina sincrónica trifásica de polos salientes

6.2. ECUACIONES EN COORDENADAS PRIMITIVAS 149
Fe es la amplitud de la distribución sinusoidal de la fuerza magnetomo-triz del estator
Fr es la amplitud de la distribución sinusoidal de la fuerza magnetomo-triz del rotor
δ es el ángulo entre las amplitudes de las dos fuerzas magnetomotri-ces, conocido generalmente como ángulo de carga
Las fuerzas magnetomotrices del estator Fe y del rotor Fr tienen una amplitud constantey para que en la expresión 6.2 el par medio resulte constante, es necesario que el ánguloδ entre las dos fuerzas magnetomotrices sea constante en el tiempo durante la operaciónen régimen permanente. Para lograr esto, las dos fuerzas magnetomotrices deben girar a lamisma velocidad angular.
Cuando la máquina sincrónica se encuentra desequilibrada, el campo magnético rotatorioproducido por las bobinas del estator es elíptico. Este campo se puede descomponer a suvez en dos campos magnéticos rotatorios circulares de sentidos contrarrotativos. Para quesea posible la producción de par eléctrico medio en estas condiciones, es necesario que lavelocidad del rotor esté sincronizada con uno de los dos campos magnéticos contrarrotativos.El campo que está fuera de sincronismo y gira en el sentido contrario del rotor, produce pareléctrico transitorio, pero su valor medio es cero.
Si se cortocircuita la bobina de campo en el rotor de la máquina sincrónica, es posible enciertos casos acelerar el rotor como si fuera un motor de inducción con rotor devanado. En elcampo se inducen fuerzas electromotrices con la frecuencia del deslizamiento cuando el cam-po magnético rotatorio del estator corta a los conductores del campo. La fuerza electromotrizinducida en el rotor fuerza la circulación de corrientes por este devanado. Aun cuando el pareléctrico puede ser muy reducido, en algunas ocasiones este método puede ser utilizado paraarrancar en la máquina sincrónica sin cargas mecánicas acopladas.
6.2. Ecuaciones en coordenadas primitivas
Analizando el comportamiento de los ejes eléctricos de la máquina sincrónica en el sistemade coordenadas correspondiente a las bobinas reales o físicas, se satisface el siguiente sistemade ecuaciones: [
vabc, f]=[Rabc, f
][iabc, f
]+
ddt
[λabc, f
](6.3)

150 CAPÍTULO 6. MODELO DE LA MÁQUINA SINCRÓNICA
En los sistemas lineales, la relación entre las corrientes que circulan por las bobinas y losenlaces de flujo que las enlazan vienen dados por la relación:
[λabc, f (θ , i)
]=[Labc, f (θ)
][iabc, f
](6.4)
Sustituyendo esta relación en la expresión 6.3 se obtiene el resultado siguiente:
[vabc, f
]=
[Rabc, f
][iabc, f
]+[Labc, f
] ddt
[iabc, f
]+
dθ
dtddt
[Labc, f
][iabc, f
]=
=[Rabc, f
][iabc, f
]+[Labc, f
]p[iabc, f
]+ θ ·
[τabc, f
][iabc, f
](6.5)
El sistema de ecuaciones diferenciales 6.5 representa el comportamiento dinámico de lasbobinas de la máquina sincrónica en coordenadas primitivas. Este sistema se expresa en formacanónica como:
p[iabc, f
]=[Labc, f
]−1[vabc, f]−[[
Rabc, f]+ θ ·
[τabc, f
]][iabc, f
](6.6)
La matriz de inductancia[Labc, f
]depende de la posición relativa θ del rotor con respecto
al estator, por esta razón la matriz de transición de estado también depende de la posiciónangular del rotor. Si la velocidad de la máquina es constante, la posición angular del rotor es:
θ = θ0 +ωmt (6.7)
La solución del sistema 6.6 puede obtenerse mediante métodos numéricos de integración, uti-lizando algoritmos tales como Euler, Runge-Kutta o Adams, entre muchos otros. El principalinconveniente que se presenta es la necesidad de evaluar e invertir la matriz de inductanciasde la máquina en cada paso de integración, debido a la dependencia de esta matriz con la po-sición angular del rotor. Los computadores personales actuales son capaces de resolver esteproblema, aun cuando en el pasado estos cálculos representaban grandes dificultades. Por estemotivo durante varias décadas se desarrollaron transformaciones de coordenadas que simpli-fican el problema, aceleran notablemente los cálculos y permiten interpretar más fácilmenteel comportamiento dinámico y estático de la máquina sincrónica.
Durante los períodos transitorios, la velocidad angular de la máquina cambia y la posiciónangular del rotor es una nueva variable de estado que debe ser evaluada para determinar sudependencia temporal. En este caso es necesario incorporar una ecuación adicional al sistema

6.2. ECUACIONES EN COORDENADAS PRIMITIVAS 151
6.6 para representar el comportamiento dinámico del eje mecánico de la máquina:
12[iabc, f
]t [τabc, f
][iabc, f
]−Tm = J θ +αθ (6.8)
La ecuación 6.8 representa el balance del par eléctrico y mecánico en el eje del rotor. Elpar acelerante es igual al par eléctrico del convertidor, menos el par resistente opuesto porla carga y por las pérdidas mecánicas. La ecuación diferencial de segundo orden 6.8 puedeexpresarse mediante dos ecuaciones diferenciales de primer orden:
ωm = 1J
(12
[iabc, f
]t [τabc, f
][iabc, f
]−Tm−αθ
)θ = ωm
(6.9)
Donde:
J es el momento de inercia del rotor
Tm es el par mecánico resistente
α es el coeficiente de fricción dinámica
El sistema de seis ecuaciones diferenciales formado por las cuatro ecuaciones del sistema 6.6y las dos ecuaciones mecánicas representadas por la expresión 6.9, definen el comportamientodinámico y transitorio completo de la máquina sincrónica de la figura 6.2. Este sistema deecuaciones diferenciales es no lineal y los coeficientes son variables en el tiempo, por estemotivo hay que recurrir a técnicas numéricas para evaluar el comportamiento de la máquinao simplificar el problema mediante la técnica de transformación de coordenadas.
En la matriz de inductancia de la máquina sincrónica, se encuentra toda la información nece-saria para determinar su comportamiento. En la matriz de inductancias se resume la informa-ción sobre la disposición geométrica de las bobinas, sus acoplamientos, número de vueltasy reluctancias de los diferentes caminos magnéticos. Una vez conocida la matriz de induc-tancias, se puede evaluar la matriz de par calculando la derivada parcial de esta matriz conrespecto a la posición angular del rotor. La matriz de inductancias de la máquina sincrónicaesquematizada en la figura 6.2 posee la siguiente estructura:
[Labc, f (θ)
]=
[[Lee(θ)] [Ler(θ)]
[Lre(θ)] L f
](6.10)

152 CAPÍTULO 6. MODELO DE LA MÁQUINA SINCRÓNICA
[Lee(θ)] =
Laa(θ) Mab(θ) Mac(θ)
Mba(θ) Lbb(θ) Mbc(θ)
Mca(θ) Mcb(θ) Mcc(θ)
;[Le f (θ)
]=[L f e(θ)
]t=
Ma f (θ)
Mb f (θ)
Mc f (θ)
Donde:
e es el subíndice referido a las bobinas del estator
f es el subíndice referido a las bobinas del campo
a,b,c son los subíndices de las tres bobinas físicas del estator
Cada una de las inductancias de la máquina sincrónica se puede representar como una fun-ción del ángulo θ , que es periódica porque se repite nuevamente cada vez que el rotor realizaun giro completo. Esta propiedad permite representar estas funciones mediante expansionesen series de Fourier, con el ángulo θ como variable. Si la pieza polar se diseña conveniente-mente1, es posible representar las inductancias de la máquina con un número reducido de lostérminos de la serie. La expresión de la matriz de inductancias más simple consiste en consi-derar términos dependientes hasta en 2θ , para las inductancias estator-estator, y términos enθ para las inductancias estator-rotor.
La inductancia del rotor L f es independiente de la posición θ del rotor, debido a que el estatorde la máquina es aproximadamente liso2. El resto de las inductancias propias y mutuas depen-de de la posición angular θ , si el rotor de la máquina es de polos salientes. Las permeanzasde los caminos magnéticos de las bobinas del estator y de los acoplamientos estator-rotor sondependientes de la posición angular θ . Cuando la pieza polar del rotor se encuentra alineadacon una de las bobinas del estator, el camino magnético posee la máxima permeanza. Si lapieza polar se encuentra en cuadratura con la bobina, el entrehierro es muy grande y dismi-nuye la permeanza. La variación de la permeanza depende del ángulo 2θ porque una bobinaalineada con el polo norte del rotor tiene el mismo camino magnético cuando el alineamientoocurre con el polo sur. Estas inductancias se pueden representar aproximadamente mediantelas siguientes funciones:
Laa(θ) = L1e +M2e cos2θ + · · · (6.11)
Lbb(θ) = L1e +M2e cos2(θ − 2π
3)+ · · · (6.12)
1Variando el entrehierro para producir una densidad de campo magnético distribuido sinusoidalmente.2Para esta consideración es necesario despreciar el efecto de las ranuras del estator.

6.2. ECUACIONES EN COORDENADAS PRIMITIVAS 153
Lcc(θ) = L1e +M2e cos2(θ − 4π
3)+ · · · (6.13)
Mab(θ) = Mba(θ) =−M1e−M2e cos2(θ +π
6)+ · · · (6.14)
Mac(θ) = Mca(θ) =−M1e−M2e cos2(θ − π
6)+ · · · (6.15)
Mbc(θ) = Mcb(θ) =−M1e−M2e cos2(θ − π
2)+ · · · (6.16)
Donde3:
Ld ≡32(L1e +M2e) ; Lq ≡
32(L1e−M2e) ; Ld f ≡
√32
Me f (6.17)
L1e =Ld +Lq
3; M2e =
Ld−Lq
3(6.18)
M1e 'L1e
2(6.19)
En lo que se refiere a los acoplamientos mutuos estator-rotor, la funcionalidad de las induc-tancias es diferente porque al girar el rotor 180, la bobina del campo invierte su polaridad.Las inductancias del estator varían entre un valor máximo y un mínimo, siempre positivorespecto a la posición angular del rotor. Sin embargo, los acoplamientos mutuos estator-rotorvarían entre un valor máximo positivo hasta un valor máximo negativo, que en valor absolu-to son idénticos cuando el rotor de la máquina gira 180. Las inductancias mutuas entre elestator y el rotor pueden ser aproximadas mediante las siguientes funciones:
Ma f (θ) = M f a(θ) = Me f cosθ + · · · (6.20)
Mb f (θ) = M f b(θ) = Me f cos(θ − 2π
3)+ · · · (6.21)
3En este caso la aproximación se debe a que la dispersión de la bobina no está siendo considerada. Ladispersión puede ser considerada en el modelo como si estuviese conectada externamente a los bornes de lamáquina.

154 CAPÍTULO 6. MODELO DE LA MÁQUINA SINCRÓNICA
Mc f (θ) = M f c(θ) = Me f cos(θ − 4π
3)+ · · · (6.22)
Si el rotor de la máquina sincrónica es liso, todas las inductancias del estator son indepen-dientes de la posición del rotor. En esta situación la matriz de inductancias
[Labc, f (θ)
]se
expresa de la siguiente forma:
[Labc, f (θ)
]=
L1e M1e M1e Me f cosθ
M1e L1e M1e Me f cos(θ − 2π
3 )
M1e M1e L1e Me f cos(θ − 4π
3 )
Me f cosθ Me f cos(θ − 2π
3 ) Me f cos(θ − 4π
3 ) L f
(6.23)
Aún para el caso de una máquina sincrónica de rotor liso, la solución del sistema de ecuacio-nes diferenciales que determina el comportamiento de la máquina sincrónica requiere el usode métodos numéricos, debido a la dependencia de las inductancias mutuas entre el estator yel campo, con la posición θ del rotor. El modelo de la máquina sincrónica de rotor liso o depolos salientes se puede obtener mediante transformaciones del sistema de coordenadas. Latransformación a vectores espaciales y a coordenadas dq0, permiten simplificar notablementeestos modelos.
6.3. Transformación a vectores espaciales
Para aplicar la transformación de vectores espaciales a las ecuaciones 6.5 y 6.8 que represen-tan el comportamiento de la máquina sincrónica en coordenadas primitivas, es convenienteexpresar por separado las ecuaciones del estator y del rotor:
[ve] = [Re] [ie]+ p[Lee] [ie]+
[Le f]
i f
(6.24)
v f = R f i f + p[
L f e][ie]+L f i f
(6.25)
Aplicando esta transformación de vectores espaciales a la expresión 6.24, se obtienen el si-guiente resultado:
ve = Reie + p
(L1e +M1e) ie +
32
M2ee j2θ i∗e +√
32
Me f e jθ i f
(6.26)

6.3. TRANSFORMACIÓN A VECTORES ESPACIALES 155
Donde:
ve =
√23(va +αvb +α
2vc)
(6.27)
√23
[1 α α2
][Re] [ie] = Reie (6.28)
√23
[1 α α2
][Lee] [ie] =
=
√23
[1 α α2
]· · · ·
· · · ·
L1e −M1e −M1e
−M1e L1e −M1e
−M1e −M1e L1e
+M2e
cos2θ −cos2(θ + π
6 ) −cos2(θ − π
6 )
−cos2(θ + π
6 ) cos2(θ − 2π
3 ) −cos2(θ − π
2 )
−cos2(θ − π
6 ) −cos2(θ − π
2 ) cos2(θ − 4π
3 )
[ie] =
(L1e +M1e) ie +32
M2ee j2θ i∗e =
=12(Ld +Lq) ie +
12(Ld−Lq)e j2θ i∗e (6.29)
√23
[1 α α2
][Le f]
i f =
√32
Me f e jθ i f = Ld f e jθ i f (6.30)
Reemplazando las definiciones de los vectores espaciales en la ecuación 6.25 se obtiene:
v f = R f i f + p
Ld f
[e jθ i∗e + e− jθ ie
2
]+L f i f
(6.31)
El par eléctrico es:
Te =12[iabc, f
]t [τabc, f
][iabc, f
]=
12[ie]
t [τee] [ie]+ [ie]t [
τe f]
i f =

156 CAPÍTULO 6. MODELO DE LA MÁQUINA SINCRÓNICA
= jM2e
2[ie]
t
e j2θ
−1 e− j π
3 e j π
3
e− j π
3 −e− j 4π
3 e− jπ
e j π
3 e− jπ −e− j 8π
3
− e− j2θ
−1 e j π
3 e− j π
3
e j π
3 −e j 4π
3 e jπ
e− j π
3 e jπ −e j 8π
3
[ie]+· · ·
· · ·+ jMe f
2[ie]
t
e jθ
1
e− j 2π
3
e− j 4π
3
− e− jθ
1
e j 2π
3
e j 4π
3
i f =
=34 j
M2e
(e− jθ ie)2− (e jθ i∗e)
2+ j
Me f
2
√32
e jθ i∗e− e− jθ ie
i f =
=12(Ld−Lq)ℑm
(e− jθ ie)2
+Ld f ℑm
e− jθ ie
i f (6.32)
Las expresiones 6.26, 6.31 y 6.32 modelan la máquina sincrónica utilizando vectores espacia-les. La principal ventaja de esta transformación consiste en la reducción de las tres ecuacionesdel estator a una sola en variable compleja. Por otra parte, aun cuando la dependencia angularen θ se mantiene en este sistema de coordenadas, las correspondientes expresiones han sidosimplificadas convenientemente al utilizar los términos e± jθ . En la expresión 6.32 corres-pondiente al par eléctrico pueden observarse dos componentes: el par de reluctancia y el parproducido entre las fuerzas magnetomotrices del estator y del campo.
6.4. Transformación a coordenadas rotóricas
Para eliminar la dependencia en θ existente en el modelo de la máquina sincrónica en vec-tores espaciales, es posible referir las variables del estator al sistema de referencia del rotor,el cual se encuentra exactamente en la posición θ con respecto al sistema solidario con elestator. Por esta razón es posible multiplicar la ecuación del estator por e− jθ para referir estasecuaciones a un sistema de coordenadas sincronizado con el eje del campo. Este nuevo siste-ma de coordenadas es conocido como ejes d y q. El eje directo d apunta en la misma direcciónque el eje del campo f . El eje cuadratura q se encuentra a 90 de adelanto con respecto al eje

6.4. TRANSFORMACIÓN A COORDENADAS ROTÓRICAS 157
d. De esta forma se pueden introducir las siguientes definiciones:
vdqe = vd + jvq = vee− jθ (6.33)
idqe = id + jiq = iee− jθ (6.34)
Derivando la expresión 6.34 se obtiene la relación siguiente:
e− jθ pie = pid + jpiq + jθ idqe (6.35)
Al multiplicar la ecuación 6.26 por el término de rotación e− jθ se obtiene:
e− jθ ve = Reiee− jθ + e− jθ p
12(Ld +Lq) ie +
12(Ld−Lq)e j2θ i∗e +Ld f e jθ i f
⇒
vdqe = Reidq
e +12(Ld +Lq)
(pidq
e + jθ idqe
)+
12(Ld−Lq)
(pidq∗
e + jθ idq∗e
)+Ld f
(pi f + jθ i f
)(6.36)
Descomponiendo la expresión 6.36 en parte real y parte imaginaria resulta:
vd = Reid + p(Ldid +Ld f i f
)− θLqiq = Reid + pλd− θλq (6.37)
vq = Reiq + p(Lqiq
)+ θ
(Ldid +Ld f i f
)= Reiq + pλq + θλd (6.38)
Realizando transformaciones semejantes en la ecuación 6.31 se obtiene el resultado siguiente:
v f = R f i f + p
Ld f
2
[idqe +
(idqe
)∗]+L f i f
=
v f = R f i f + p(L f i f +Ld f id
)= R f i f + pλ f (6.39)
Finalmente, transformando las variables espaciales de la expresión 6.32 correspondiente alpar eléctrico, se obtiene:
Te =12(Ld−Lq)ℑm
(idq
e )2+Ld f ℑm
e− jθ ie
i f =

158 CAPÍTULO 6. MODELO DE LA MÁQUINA SINCRÓNICA
=(Ld−Lq
)idiq +Ld f iqi f = λdiq−λqid = λ
dqe × idq
e (6.40)
El sistema de ecuaciones diferenciales que determina el comportamiento dinámico de la má-quina sincrónica se puede expresar de la siguiente forma:
vd = Reid + pλd−ωλq
vq = Reiq + pλq +ωλd
v f = R f i f + pλ f
J ω = λdqe × idq
e −Tm(ω)
(6.41)
Donde:
λd = Ldid +Ld f i f
λq = Lqiq
λ f = L f i f +Ld f id
λdqe = λd + jλq
6.5. Transformación de Park
En la máquina sincrónica, el campo magnético rotatorio producido por las fuerzas magneto-motrices de los devanados estatóricos, gira a la velocidad sincrónica ωe. El rotor de la máqui-na también gira a la velocidad sincrónica ωr = ωe. Por esta razón es conveniente referir lasecuaciones diferenciales que definen el comportamiento de la máquina a un sistema de coor-denadas solidario con el rotor. De acuerdo con estos lineamientos se definen los siguientesejes magnéticos:
Eje d : Gira con respecto al estator a la velocidad del rotor y en todo momento se en-cuentra colineal con el eje magnético del campo.
Eje q : Rota con respecto al estator a la velocidad del rotor y en todo momento se en-cuentra en cuadratura con el eje magnético del campo.
Eje 0 : Fijo en el estator y se encuentra desacoplado magnéticamente del resto de losejes de la máquina.

6.5. TRANSFORMACIÓN DE PARK 159
Eje f : Solidario con el sistema rotórico y colineal con el eje magnético de la bobina decampo.
Aun cuando los ejes d y q giran a igual velocidad que el rotor, ambos representan variablesdel estator. El eje 0 es necesario para permitir que la transformación de coordenadas sea bidi-reccional, es decir, se pueda transformar de variables primitivas a variables dq0 y viceversa.El eje 0 tiene una estrecha relación con las variables de secuencia cero de la transformaciónde componentes simétricas. En la práctica el eje 0 permite representar flujos de dispersión queno están acoplados con otras bobina de la máquina. En la figura 6.3(b) se ha representado elsistema de coordenadas dq0− f .
La matriz de transformación de coordenadas dq0− f a coordenadas primitivas se definemediante la relación: [
iabc, f]= [A]
[idq0, f
](6.42)
Si la transformación anterior se escoge de tal forma que la matriz [A] sea hermitiana4, latransformación es conservativa en potencia. Cuando la matriz es hermitiana y real, se obtiene:
[idq0, f
]= [A]−1 [iabc, f
]= [A]t
[iabc, f
](6.43)
La matriz de transformación [A] se puede obtener multiplicando la transformación de coor-denadas primitivas a coordenadas ortogonales αβ0,5 por la transformación de coordenadasαβ0 a coordenadas dq0:6
iaibic
=
√23
1 0 1√
2
−12
√3
21√2
−12 −
√3
21√2
iα
iβi0
(6.44)
iαiβi0
=
cosθ −sinθ 0sinθ cosθ 0
0 0 1
id
iqi0
(6.45)
4Inversa de la matriz de transformación [A] igual a su traspuesta conjugada.5Transformación de Clark.6Rotación en θ introducida en el capítulo 4.

160 CAPÍTULO 6. MODELO DE LA MÁQUINA SINCRÓNICA
iaibic
=
√23
cosθ −sinθ
1√2
cos(θ − 2π
3
)−sin
(θ − 2π
3
) 1√2
cos(θ − 4π
3
)−sin
(θ − 4π
3
) 1√2
id
iqi0
(6.46)
La matriz de la expresión 6.46 se conoce como transformación de Park. La transformaciónde coordenadas primitivas abc, f a coordenadas dq0, f es:
idiqi0i f
=
√23
cosθ cos
(θ − 2π
3
)cos(θ − 4π
3
)0
−sinθ −sin(θ − 2π
3
)−sin
(θ − 4π
3
)0
1√2
1√2
1√2
0
0 0 0√
32
iaibici f
(6.47)
La transformación de Park utilizada es hermitiana y por tanto es invariante en potencia:
p(t) =[vabc, f
]t [iabc, f]=[[A][vdq0, f
]]t [[A][idq0, f
]]=
=[vdq0, f
]t[A]t [A]
[idq0, f
]=[vdq0, f
]t [idq0, f]= p(t) (6.48)
Aplicando la transformación 6.47 al sistema de ecuaciones 6.5 se obtiene:
[vdq0, f
]=[Rdq0, f
][idq0, f
]+[Ldq0, f
]p[idq0, f
]+ θ ·
[Gdq0, f
][idq0, f
](6.49)
Donde: [Rdq0, f
]= [A]t
[Rabc, f
][A] (6.50)
[Ldq0, f
]= [A]t
[Labc, f
][A] (6.51)
[Gdq0, f
]=[τdq0, f
]+[Hdq0, f
]= [A]t
[τabc, f
][A]+ [A]t
[Rabc, f
] ddθ
[A] (6.52)
Por otra parte, la ecuación dinámica del movimiento se puede expresar de la siguiente forma:
Jθ +ρθ =12[idq0, f
]t [τdq0, f
][idq0, f
]−Tm (6.53)

6.5. TRANSFORMACIÓN DE PARK 161
Evaluando explícitamente las expresiones 6.50 a 6.52 y sustituyendo el resultado en las ecua-ciones diferenciales 6.49 y 6.53 se obtiene:
vd
vq
v0
v f
=
Re +Ld p −ωLq 0 Ld f p
ωLd Re +Lq p 0 ωLd f
0 0 R0 +L0 p 0Ld f p 0 0 R f +L f p
idiqi0i f
Jpω =
(Ld−Lq
)idiq +Ld f iqi f −ρω−Tm (6.54)
El modelo de la máquina sincrónica obtenido a partir de la transformación de vectores es-paciales referidos a las coordenadas del rotor 6.41 coincide con el modelo 6.54, obtenidoaplicando la transformación de Park 6.51. La transformación a vectores espaciales 6.27 y latransformación de Clark 6.44 están íntimamente relacionadas. Lo mismo sucede entre la ro-tación 6.45 y referir las variables espaciales del estator al sistema de coordenadas del rotormultiplicándolas por el término e− jθ .
En un sistema trifásico sin neutro no circula corriente de secuencia cero, pero cuando las trescorrientes de fase encuentran un camino de retorno, es necesario considerar esta componente.La componente de secuencia cero representa la circulación de corrientes iguales y en fasepor las bobinas de la máquina. Estas corrientes no producen magnetización debido a que lasuma de las fuerzas magnetomotrices de las tres bobinas es cero. Sin embargo, los flujos dedispersión sí poseen componente de secuencia cero. En el modelo de la máquina no existeacoplamiento magnético de esta secuencia con el resto de las bobinas. Esta componente nopuede producir par eléctrico, pero influye en las pérdidas de la máquina y en las fuerzaselectromotrices sobre las bobinas. En la expresión 6.54 no aparecen fuerzas electromotricesde generación sobre la bobina de campo. Esto se debe a que el sistema de coordenadas dq0es solidario al eje f del campo. Los flujos de las bobinas d y q no cruzan tangencialmente alos conductores del campo. Sin embargo, en este eje pueden aparecer fuerzas electromotricespor transformación, debido a que el flujo de la bobina del eje directo atraviesa el devanadode campo. Por el contrario, el eje cuadratura no puede producir ningún efecto sobre el campodebido a que se encuentra permanentemente en una posición ortogonal.
La máquina sincrónica puede ser representada mediante un modelo físico en coordenadasdq0− f , similar al obtenido en el capítulo 4 para la máquina generalizada. En la figura sepresenta el modelo en coordenadas dq0− f que satisface las ecuaciones 6.54. En la máqui-na real, las corrientes id e iq no circulan por ningún devanado físico, para determinar lascorrientes reales es necesario aplicar la transformación inversa de coordenadas dq0− f a

162 CAPÍTULO 6. MODELO DE LA MÁQUINA SINCRÓNICA
Figura 6.3: Modelo en coordenadas dq0− f de la máquina sincrónica
coordenadas primitivas.
Cada pareja de escobillas separa las capas de corriente de las bobinas equivalentes. La fuerzaelectromotriz de todos los conductores que forman cada una de las bobina se obtiene en bor-nes de las escobillas. Cuando por un par de escobillas se inyecta una corriente, ésta circulaentrando a los conductores a la derecha del eje que define la posición de estas escobillas ysaliendo en los conductores a la izquierda. Esta configuración produce una fuerza magneto-motriz orientada en el eje de las escobillas, tal como se muestra en la figura 6.4.
Las fuerzas electromotrices de generación que aparecen sobre los conductores se recolectanen los circuitos que se encuentran en cuadratura con el flujo que las produce. El campo yla bobina del eje d producen generación sobre la bobina del eje q, y la bobina del eje q
produce generación sobre el eje d, pero sobre la bobina de campo no se produce generaciónporque este devanado no es cortado por el flujo de los demás ejes. En el sistema de referenciautilizado, las fuerzas electromotrices de generación aparecen adelantadas 90º con respecto alos flujos que las producen. Si en las bobinas primitivas se inyecta un sistema balanceado decorrientes trifásicas, se obtienen las siguientes corrientes en el sistema de coordenadas dq0:

6.5. TRANSFORMACIÓN DE PARK 163
idiqi0
=
√23
cosθ cos
(θ − 2π
3
)cos(θ − 4π
3
)−sinθ −sin
(θ − 2π
3
)−sin
(θ − 4π
3
)1√2
1√2
1√2
√2Ie
cos(ωt +α)
cos(ωt +α− 2π
3 )
cos(ωt +α− 4π
3 )
=
idiqi0
=√
3Ie
cos(θ −ωt−α)
−sin(θ −ωt−α)
0
(6.55)
Si la posición angular θ del rotor se sincroniza7 con la variación angular de las corrientes enla expresión 6.55, las corrientes en las coordenadas dq0 son independientes del tiempo. Enesta condición, los términos que dependen de las derivadas de las corrientes se anulan. En estesistema de coordenadas, corrientes constantes en el tiempo producen fuerzas magnetomotri-ces constantes en las bobinas dq0 transformadas. Como la transformación está sincronizadacon la velocidad angular de las corrientes durante el régimen permanente, el campo magnéti-co producido por las bobinas d y q gira con la misma velocidad y como resultado se obtieneel mismo campo magnético rotatorio de la máquina sincrónica en coordenadas primitivas,excitada mediante un sistema trifásico balanceado de corrientes.
El par electromagnético de la máquina está determinado por la interacción entre fuerzas mag-netomotrices no alineadas. Por una parte la fuerza magnetomotriz del campo produce par alinteractuar con el flujo de la bobina que representa al eje q. La fuerza magnetomotriz deleje d produce par en su interacción con la fuerza magnetomotriz del enrollado cuadratura.Exactamente igual pero con sentido contrario, la fuerza magnetomotriz del eje q produce parcon la fuerza magnetomotriz del eje d. Si la reluctancia de los caminos magnéticos d y q soniguales, estos dos pares se neutralizan. Cuando la reluctancia del eje d es menor que la deleje q, el par que produce la fuerza magnetomotriz del eje d sobre el eje q es mayor que en ladirección contraria y se produce un par neto resultante debido a la variación de reluctanciaentre los dos ejes. Desde otro punto de vista se puede interpretar que la pieza polar intentaalinearse con la fuerza electromotriz resultante en la máquina. Si la máquina posee un rotorcilíndrico, este par es nulo. En la ecuación 6.40, el par eléctrico se divide en dos componen-tes: la primera es proporcional al producto de la corriente de campo i f por la corriente de labobina cuadratura iq y la segunda depende del producto de las corrientes id e iq. Esta últimacomponente se anula si la inductancia Ld es igual a la inductancia Lq. La inductancia Ld está
7θ(t) = ωt +θ0.

164 CAPÍTULO 6. MODELO DE LA MÁQUINA SINCRÓNICA
definida por la permeanza del eje directo, mientras que Lq se define por la permeanza del ejecuadratura.
En la figura 6.3 se han representado las fuerzas magnetomotrices en coordenadas dq0. Seobserva que sobre la pieza polar aparecerá un par eléctrico que intentará alinear el rotor conla fuerza magnetomotriz total. Cuando se analizan las fuerzas electromotrices de generaciónen el sistema de ecuaciones 6.54 se observan dos términos similares: el primero depende dela inductancia Lq, que es proporcional a la permeanza del camino cuadratura y determinala generación sobre el eje directo; el segundo término depende de Ld , es proporcional a lapermeanza del camino directo y determina parte de la generación sobre el eje cuadratura.
Incluyendo el efecto de los devanados amortiguadores el sistema de ecuaciones diferencialesse puede expresar como:
vd
vq
vad
vaq
v f
=
Re +Ld p −ωLq Ldad p −ωLdaq Ld f p
ωLd Re +Lq p ωLqad Lqaq p ωLd f
Ldad p 0 Ra +Lad p 0 Lad f p
0 Lqaq p 0 Ra +Laq p 0Ld f p 0 Lad f p 0 R f +L f p
idiqiad
iaq
i f
(6.56)
2HωB pω =(Ld−Lq
)idiq +Ld f iqi f +Ldadiadiq−Lqaqiaqid−Tm (6.57)
También se puede expresar estas ecuaciones con enlaces de flujo como variable de estado:
vd = Reid + pλd−ωλq
vq = Reiq + pλq +ωλd
vad = Raiad + pλad
vaq = Raiaq + pλaq
v f = R f i f + pλ f
J ω = λdqe × idq
e −Tm(ω)
(6.58)
donde:

6.6. RÉGIMEN PERMANENTE 165
λd = Ldid +Ld f i f +Lad−diad
λq = Lqiq +Laq−qiaq
λad = Ladiad +Lad− f i f +Lad−didλaq = Laqiaq +Laq−qiqλ f = L f i f +Ld f idλ
dqe = λd + jλq
(6.59)
6.6. Régimen permanente
Para analizar el comportamiento de la máquina sincrónica en régimen permanente es nece-sario excitar los circuitos de armadura con un sistema equilibrado y simétrico de corrientes.Además, en estas condiciones el rotor de la máquina debe girar a la velocidad sincrónica. Laposición relativa del rotor con respecto al sistema de referencia solidario al estator es:
θ = ωt +θ0 (6.60)
Sustituyendo la expresión 6.60, en la transformación a coordenadas dq0 definida mediante larelación 6.55, se obtiene el siguiente resultado:
id =√
3Ie cos(θ0−α) ; iq =−√
3Ie sin(θ0−α) ; id = 0 (6.61)
Las corrientes de régimen permanente en coordenadas primitivas, transformadas al sistemade coordenadas dq0, son independientes del tiempo. El argumento de las funciones trigo-nométricas (θ0−α) proyecta la fuerza magnetomotriz producida por el sistema balanceadode corrientes primitivas, según las direcciones de los nuevos ejes coordenados. En la figura6.3 se representa el efecto de la transformación para un sistema en régimen permanente yequilibrado. Como las corrientes id , iq e i0 son independientes del tiempo, los términos detransformación son nulos en el nuevo sistema de coordenadas y en estas condiciones, lasecuaciones del modelo 6.54 se reducen a:
vd = Reid−ωLqiq = Reid−Xqiq (6.62)
vq = Reiq +ωLdid +ωLd f i f = Reiq +Xdid + e f (6.63)

166 CAPÍTULO 6. MODELO DE LA MÁQUINA SINCRÓNICA
v f = R f i f (6.64)
Te = (Ld−Lq)idiq +Ld f iqi f (6.65)
6.7. Diagrama fasorial
Mediante la transformación inversa de Park 6.46 se puede obtener la tensión de la fase a:
va(t) =
√23(vd cosθ − vq sinθ +
1√2
v0) (6.66)
La tensión v0 es nula debido a que no existe corriente de secuencia cero en el sistema trifásicobalanceado8. Por otra parte, la transformación de coordenadas gira a velocidad sincrónicasegún se describe en la expresión 6.60. En estas condiciones se determina la tensión en bornesde la fase a de la máquina como:
va(t) =
√23
vd[cos(ωt +θ0)− vq sin(ωt +θ0)
]=
√23
ℜe[(
vd + jvq)
e j(ωt+θ0)]=
= ℜe[√
2(Vd + jVq
)e j(ωt+θ0)
]= ℜe
[√2Vee j(ωt+θ0)
](6.67)
De acuerdo con esta expresión, el fasor que representa el valor efectivo de la tensión en lafase a del estator de la máquina sincrónica en régimen permanente es:
Ve = Vd +Vq =Vd + jVq =vd√
3+ j
vq√3
(6.68)
Con un razonamiento similar para las corrientes en régimen permanente se obtiene la siguien-te expresión:
Ie = Id + Iq = Id + jIq =id√
3+ j
iq√3
(6.69)
Reemplazando las expresiones 6.68 y 6.69 en las ecuaciones 6.62 y 6.63, se obtienen lassiguientes relaciones fasorales:
Vd = ReId + jXqIq (6.70)
8En el sistema trifásico balanceado se tiene: v0 = va + vb + vc = 0.

6.7. DIAGRAMA FASORIAL 167
Vq = ReIq + jXdId + j1√3
e f = ReIq + jXdId +E f (6.71)
Ve = Vd +Vq = Re(Id + Iq
)+ jXdId + jXqIq +E f ⇒
Ve = ReIe + jXdId + jXqIq +E f (6.72)
En las expresiones 6.70 a 6.72, los fasores con subíndice d están orientados según la direc-ción del eje directo, y los fasores con subíndice q apuntan en la dirección del eje cuadratura.El fasor E f se orienta en la dirección del eje q debido a que representa la fuerza electromo-triz producida por la corriente del campo i f sobre el eje q. En la ecuación 6.71 se observaque el fasor E f se obtiene multiplicando por j9 la fuerza electromotriz e f producida por elcampo y dividiendo este resultado por el factor 1√
3. Todas las magnitudes de los fasores de
las expresiones anteriores se han definido en términos de valores efectivos, por esta razón noaparece en la definición de cada uno de los términos el coeficiente
√2. En la ecuación faso-
rial 6.72 aparecen los términos jXdId y jXqIq, los cuales aun cuando aparentan ser caídas detensión reactivas, en realidad representan fuerzas electromotrices de generación. Es necesariorecordar que el operador imaginario j produce una rotación de 90. Como el fasor XdId estádirigido según el eje directo, el fasor jXdId se orienta según la dirección del eje cuadratura.En otras palabras, el flujo producido por la bobina del eje directo de la máquina, corta a losconductores fijos del estator e induce fuerza electromotriz de generación en el eje cuadratura.De forma semejante el término XqIq representa un fasor con dirección cuadratura, jXqIq rota90º y el fasor resultante apunta en la dirección negativa del eje directo. En la figura 6.4 serepresenta el diagrama fasorial de la máquina sincrónica en régimen permanente.
Si el rotor de la máquina sincrónica es liso, las reactancias directa y cuadratura son iguales, eneste caso se define una sola reactancia denominada reactancia sincrónica Xs. Para la máquinasincrónica de rotor liso la ecuación fasorial 6.72 se simplifica cuando se agrupan los términosde generación:
Ve = (Re + jXs)Ie +E f (6.73)
Las relaciones anteriores están escritas en la convención motor. En otras palabras, las corrien-tes que circulan por las bobinas de la máquina entran por su punto de polaridad relativa. En
9Dirección del eje cuadratura.

168 CAPÍTULO 6. MODELO DE LA MÁQUINA SINCRÓNICA
Figura 6.4: Diagrama fasorial de la máquina sincrónica de polos salientes en convenciónmotor
la convención motor una potencia positiva indica que la máquina consume potencia eléctrica.Si la potencia es negativa, la máquina genera potencia eléctrica. Las máquinas sincrónicasson empleadas con mucha frecuencia como generadores y es ventajoso en estos casos utilizarla convención generador en lugar de la convención motor para describir su comportamiento.En la convención generador las corrientes de armadura salen por el punto de polaridad decada bobina. En ambas convenciones, la dirección de referencia de la corriente de campo sedefine entrando por el punto de polaridad relativa, porque este eje eléctrico es pasivo y engeneral consume potencia eléctrica. El cambio de convención se realiza invirtiendo el sentidode circulación de las corrientes de los ejes directo y cuadratura; para este fin se cambia elsigno de las corrientes Ie, Id e Iq, en las ecuaciones 6.70, 6.71 y 6.72. La fuerza electromotrizque produce el campo no cambia de signo en la nueva convención, debido a que la corrientede campo i f mantiene la misma referencia en las dos convenciones. De esta forma, la ecua-ción de la máquina sincrónica de polos salientes en régimen permanente y en convencióngenerador se puede expresar como:
E f = Ve +ReIe + jXdId + jXqIq (6.74)
En la figura 6.5 el triángulo4ABC es semejante al triángulo4DEF , por esta razón se puede

6.7. DIAGRAMA FASORIAL 169
Figura 6.5: Diagrama fasorial de la máquina sincrónica de polos salientes en la convencióngenerador
establecer la siguiente relación:
EFAC
=DFAB⇒ Vz
Ie=
jXqIq
Iq⇒ Vz = jXqIe (6.75)
La tensión Vz, aun cuando no posee una interpretación física concreta, es una herramientamuy útil en la construcción del diagrama fasorial de la máquina sincrónica de polos salientes.Cuando se suma fasorialmente la tensión de armadura en bornes de la máquina Ve, la caídaresistiva ReIe en el circuito de armadura y el fasor Vz, el fasor resultante está orientado en ladirección del eje cuadratura tal como se observa en la figura 6.5. Conociendo la posición deleje cuadratura de la máquina, es posible proyectar la corriente Ie en sus dos componentes,Id e Iq. Conocido el fasor Id se determina la fuerza electromotriz producida por el campo,sumando el término j(Xd −Xq)Id al extremo del fasor que representa la tensión Vz en eldiagrama fasorial. Expresando matemáticamente el planteamiento anterior, se tiene:
AE = D∠δ = Ve +ReIe + jXqIe (6.76)
δ = arctan[
XqIe cosφe−ReIe sinφe
Ve +ReIe cosφe +XqIe sinφe
](6.77)
D =√
(Ve +ReIe cosφe +XqIe sinφe)2 +(XqIe cosφe−ReIe sinφe)2 (6.78)
|Id|= Id = |Ie|sin(φe +δ ) (6.79)

170 CAPÍTULO 6. MODELO DE LA MÁQUINA SINCRÓNICA
E f = AE + j(Xd−Xq)Id = D∠δ + j(Xd−Xq)Id (6.80)
E f = D+(Xd−Xq)Ie sin(φe +δ ) (6.81)
Mediante las expresiones anteriores se determina el diagrama fasorial de la máquina sincró-nica de polos salientes, conocida la resistencia del estator Re, las reactancias directa Xd ycuadratura Xq, la tensión de armadura Ve, la corriente de armadura Ie y el ángulo del factor depotencia en el punto de operación φe.
6.8. Potencia y par eléctrico
Para calcular del par eléctrico se pueden utilizar las expresiones 6.40 o 6.65. Sin embargo,las variables independientes de esta ecuación son ficticias y por esta razón es convenienteexpresar el par y la potencia eléctrica mediante variables asociadas con el diagrama fasorial.Las máquinas sincrónicas tienen rendimientos muy altos, particularmente cuando son de granpotencia. En una máquina sincrónica típica, la potencia mecánica en el eje es prácticamenteigual a la potencia eléctrica en bornes de la máquina. Empleando esta aproximación es posibledesarrollar expresiones del par y de la potencia eléctrica dependientes de variables mesurablesen la práctica. Con estas condiciones se tiene:
Pm = Tm ·ωm ≈ Pe = Te ·ωe (6.82)
La potencia eléctrica se determina de la siguiente forma:
Pe(t) = vaia + vbib + vcic = vdid + vqiq + v0i0 (6.83)
En régimen permanente equilibrado, las corrientes y las tensiones en coordenadas transfor-madas son independientes del tiempo. La corriente y la tensión de secuencia cero son nulas.La potencia eléctrica se calcula como:
Pe(t) = vdid + vqiq =√
3Vd√
3Id +√
3Vq√
3Iq = 3(VdId +VqIq) (6.84)

6.8. POTENCIA Y PAR ELÉCTRICO 171
Despreciando la caída de tensión en la resistencia Re en el diagrama fasorial representado enla figura 6.5, se deducen las siguientes relaciones:
Ve cosδ +XdId = E f ⇒ Id =E f −Ve cosδ
Xd(6.85)
Ve sinδ = XqIq ⇒ Iq =Ve sinδ
Xq(6.86)
Vd =Ve sinδ (6.87)
Vq =Ve cosδ (6.88)
Reemplazando las ecuaciones 6.85 a 6.88 en la expresión 6.84 se obtiene el siguiente resul-tado:
Pe = 3E fVe
Xdsinδ +3
Xd−Xq
2XdXqV 2
e sin2δ (6.89)
El segundo término de la expresión anterior depende de la diferencia entre las reactanciasdel eje directo y cuadratura. En otras palabras, depende de la variación de reluctancia delcircuito magnético. El primer término depende de la fuerza electromotriz E f producida porla corriente de campo. En una máquina de rotor liso, éste es el único término de la potenciaeléctrica que interviene en el proceso de conversión de energía. El par eléctrico se calculadividiendo la expresión 6.89 por la velocidad angular sincrónica mecánica ωm = ωe
p , dondep es el número de pares de polos de la máquina. El ángulo δ se denomina ángulo de cargade la máquina y representa la diferencia de fase entre la fuerza electromotriz producida porel flujo del campo y la tensión de armadura. El ángulo de carga define el estado o punto deoperación de la máquina, es análogo a la variable deslizamiento en el caso de la máquina deinducción. En la figura 6.6(a) se presenta el gráfico potencia eléctrica con respecto al ángulode carga para una máquina sincrónica típica, indicando las dos componentes de la potenciaeléctrica y la potencia eléctrica total.
La potencia aparente en el estator de la máquina sincrónica se calcula de la siguiente forma:
Se = 3Ve · I∗e = 3(Vd + jVq)(Id− jIq) =
= 3[(VdId +VqIq)+ j(VqId−VdIq)
]= Pe + jQe (6.90)

172 CAPÍTULO 6. MODELO DE LA MÁQUINA SINCRÓNICA
(a) Potencia activa (b) Potencia reactiva
Figura 6.6: Potencia eléctrica de la máquina sincrónica de polos salientes
La ecuación anterior determina la potencia activa y reactiva de la máquina sincrónica. Lapotencia reactiva expresada en función de las variables del diagrama fasorial se obtiene re-emplazando en la expresión 6.89, las relaciones 6.85 a 6.88:
Qe = 3(VqId−VdIq) = 3E fVe
Xdcosδ −3
V 2e
XdXq(Xq cos2
δ +Xd sin2δ ) (6.91)
En la figura 6.6(b) se representa la potencia reactiva en función del ángulo de carga para unamáquina sincrónica típica de polos salientes.
El punto de operación de la máquina sincrónica queda definido al conocer el valor del ángulode carga δ . En la figura 6.7 se observa que a medida que aumenta la potencia entregada porla máquina al sistema eléctrico, se incrementa el valor del ángulo de carga. Sin embargo, lacaracterística potencia eléctrica en función del ángulo de carga tiene un valor de potenciamáxima que puede entregar la máquina. Si por el sistema mecánico se entrega una potenciamayor, no es posible realizar la conversión de toda la potencia y el exceso o diferencia acele-rará el rotor. Si el rotor de la máquina se acelera, el ángulo de carga aumentará continuamentey la máquina perderá el sincronismo con el sistema eléctrico de potencia. Cuando ocurre estefenómeno es necesario desconectar la máquina sincrónica de la red para evitar las fuertesoscilaciones de potencia y la aceleración de la máquina, que es capaz de alcanzar el nivel deembalamiento del rotor.
Para determinar el ángulo de carga correspondiente a la máxima potencia que puede entregarla máquina, se deriva la expresión 6.89 con respecto a este ángulo. En el valor δmax la derivada

6.8. POTENCIA Y PAR ELÉCTRICO 173
Figura 6.7: Variación de la potencia eléctrica con el ángulo de carga y punto de máximapotencia
de la potencia con respecto al ángulo de carga es nula:
∂Pe
∂δ=
E fVe
Xdcosδ +
Xd−Xq
XdXqV 2
e cos2δ (6.92)
∂Pe
∂δ(δmax) =
E fVe
Xdcosδmax +
Xd−Xq
XdXqV 2
e cos2δmax = 0 (6.93)
Recordando la identidad trigonométrica cos2α ≡ 2cos2 α−1, se puede expresar la ecuación6.93 como una ecuación cuadrática:
2Xd−Xq
XdXqV 2
e cos2δmax +
E fVe
Xdcosδmax−
Xd−Xq
XdXqV 2
e = 0 (6.94)
Simplificando la expresión anterior se puede obtener:
cos2δmax +
12
Xq
Xd−Xq
E f
Vecosδmax−
12= 0 (6.95)

174 CAPÍTULO 6. MODELO DE LA MÁQUINA SINCRÓNICA
Cuya solución es:
δmax = arccos
√ X2q E2
f
16(Xd−Xq)2V 2e+
12−
XqE f
4(Xd−Xq)Ve
(6.96)
Para las máquinas sincrónicas de rotor liso, las reactancias directa y cuadratura son iguales,y en este caso se obtiene a partir de la expresión 6.93:
δmax = arccos(0) =π
2⇒ Pemax =
E fVe
Xs(6.97)

Capítulo 7
Evaluación Numérica de Modelos
7.1. Máquina de inducción - Coordenadas primitivas
En este ejemplo de presenta el modelo en Matlab de una máquina de inducción trifásica encoordenadas primitivas. Los datos de la máquina en el sistema adimensional de unidades, sonlos siguientes:
Re Rr Lσe Lσr Lme Lmr Ler 2HωB
0,02 0,02 0,1 0,1 2,0 2,0 2,0 800
Las tensiones de alimentación son el siguiente sistema equilibrado:
vae(t) =√
2sen(t)vbe(t) =
√2sen
(t− 2π
3
)vce(t) =
√2sen
(t− 4π
3
)ó el siguiente sistema desequilibrado:
vae(t) =√
2sen(t)vbe(t) =
√2sen
(t− π
2
)vce(t) =
√2(−sen(t)− sen
(t− π
2
))
175

176 CAPÍTULO 7. EVALUACIÓN NUMÉRICA DE MODELOS
Algoritmo 7.1 Modelo de la máquina de inducción en coordenadas primitivas - ProgramaPrincipal (Matlab)
% Modelo de l a Máquina de I n d u c c i ó n en coordenadas p r i m i t i v a s% Programa p r i n c i p a lg l o b a l Re Rr Loe Lor Lme Lmr Ler J t b wb Idem Sim Cero Lee L r r Cose Sen L e r tg l o b a l Rt Lt DerLt Ve Vae Vbe Vce Var Vbr Vcr Tm t f k Vent% Párametros y v a r i a b l e s de e n t r a d aRe = 0 . 0 2 ; Rr = 0 . 0 2 ; Loe = 0 . 1 ; Lor = 0 . 1 ; Lme = 2 . 0 ; Lmr = 2 . 0 ; Ler = 2 . 0 ; J =800; wb=377;Tm=0; t b =1/wb ;
t f =5 ;% V a r i a b l e para d e f i n i r l a s t e n s i o n e s de e n t r a d aVent =1;%c o n d i c i o n e s i n i c i a l e s de l a s v a r i a b l e syo =[0 0 0 0 0 0 0 0 ] ;% D e f i n i c i o n de M a t r i c e sIdem = [ 1 , 0 , 0 ; 0 , 1 , 0 ; 0 , 0 , 1 ] ;Sim =[1 , −0 .5 , −0 .5 ; −0 .5 ,1 , −0 .5 ; −0 .5 , −0 .5 ,1 ] ;Cero = [ 0 , 0 , 0 ; 0 , 0 , 0 ; 0 , 0 , 0 ] ;Rt =[ Re*Idem , Cero ; Cero , Rr*Idem ] ;Lee=Loe*Idem+Lme*Sim ;L r r =Lor *Idem+Lmr*Sim ;Ta =0: t f / t b ; % Tiempo de i n t e g r a c i ó n% I n t e g r a c i o n de l a s v a r i a b l e s de e s t a d o por Runge−K u t t a con pasos v a r i a b l e s[ T , x ]= ode23 ( ’ i n d u c c i o n ’ , Ta , yo ) ;% C á l c u l o d e l par e l é c t r i c o como s a l i d am=max ( s i z e ( x ( : , 1 ) ) ) ;f o r k =1:m;
I t =[ x ( k , 3 ) ; x ( k , 4 ) ; x ( k , 5 ) ; x ( k , 6 ) ; x ( k , 7 ) ; x ( k , 8 ) ] ;t h e t a =x ( k , 1 ) ;
Seno =[ s i n ( t h e t a ) , s i n ( t h e t a +2* pi / 3 ) , s i n ( t h e t a +4* pi / 3 ) ; s i n ( t h e t a +4* pi / 3 ) , s i n ( t h e t a ) , s i n ( t h e t a+2* pi / 3 ) ; s i n ( t h e t a +2* pi / 3 ) , s i n ( t h e t a +4* pi / 3 ) , s i n ( t h e t a ) ] ;
DLt =[ Cero ,−Ler * Seno ;−Ler *Seno ’ , Cero ] ;Te ( k ) =0 .5* I t ’* DLt* I t ;
end% G r á f i c o de l a s v a r i a b l e s de e s t a d of i g u r es u b p l o t ( 2 , 1 , 1 )p l o t ( T* tb , x ( : , 1 ) , ’ b ’ ) , x l a b e l ( ’ Tiempo ( s ) ’ , ’ Fontname ’ , ’ t i m e s ’ ) , y l a b e l ( ’ D e s p l a z a m i e n t o ( r a d )
) ’ )gr ids u b p l o t ( 2 , 1 , 2 )p l o t ( T* tb , x ( : , 2 ) , ’ b ’ ) , x l a b e l ( ’ Tiempo ( s ) ’ , ’ Fontname ’ , ’ t i m e s ’ ) , y l a b e l ( ’ V e l o c i d a d a n g u l a r ( p
. u . ) ’ )gr idf i g u r es u b p l o t ( 2 , 1 , 1 )p l o t ( T* tb , x ( : , 3 ) , ’ b ’ ) , x l a b e l ( ’ Tiempo ( s ) ’ , ’ Fontname ’ , ’ t i m e s ’ ) , y l a b e l ( ’ C o r r i e n t e en e l
e s t a t o r −f a s e a ( p . u . ) ’ )gr ids u b p l o t ( 2 , 1 , 2 )p l o t ( T* tb , x ( : , 6 ) , ’ b ’ ) , x l a b e l ( ’ Tiempo ( s ) ’ , ’ Fontname ’ , ’ t i m e s ’ ) , y l a b e l ( ’ C o r r i e n t e en e l
r o t o r−f a s e a ( p . u . ) ’ )gr id% G r á f i c o s d e l par e l é c t r i c of i g u r es u b p l o t ( 2 , 1 , 1 )p l o t ( T* tb , Te , ’ b ’ ) , x l a b e l ( ’ Tiempo ( s ) ’ , ’ Fontname ’ , ’ t i m e s ’ ) , y l a b e l ( ’ Pa r e l é c t r i c o ( p . u . ) ’ )gr ids u b p l o t ( 2 , 1 , 2 )p l o t ( x ( : , 2 ) , Te , ’ b ’ ) , x l a b e l ( ’ V e l o c i d a d a n g u l a r ( p . u ) ’ , ’ Fontname ’ , ’ t i m e s ’ ) , y l a b e l ( ’ Pa r
e l é c t r i c o ( p . u . ) ’ )gr id

7.1. MÁQUINA DE INDUCCIÓN - COORDENADAS PRIMITIVAS 177
Algoritmo 7.2 Modelo de la máquina de inducción en coordenadas primitivas - Cálculo dederivadas (Matlab)
f u n c t i o n dx= i n d u c c i o n ( t , x )% Traspaso de v a r i a b l e s a l a f u n c i o n i n d u c c i o ng l o b a l Re Rr Loe Lor Lme Lmr Ler J t b wb Idem Sim Cero Lee L r r Cose Sen L e r tg l o b a l Rt Lt DerLt Ve Vae Vbe Vce Var Vbr Vcr Tm Te Vent% C o n v e r s i o n de l a s v a r i a b l e s de e s t a d o a d e f i n i c i o n e s n e m o t é c n i c a st h e t a =x ( 1 ) ; w=x ( 2 ) ; i a e =x ( 3 ) ; i b e =x ( 4 ) ; i c e =x ( 5 ) ; i a r =x ( 6 ) ; i b r =x ( 7 ) ; i c r =x ( 8 ) ;% T e n s i o n e s de e n t r a d ai f Vent ==0;
Vae =(2^ ( −0 .5 ) ) * s i n ( t ) ;Vbe =(2^ ( −0 .5 ) ) * s i n ( t−2* pi / 3 ) ;Vce =(2^ ( −0 .5 ) ) * s i n ( t−4* pi / 3 ) ;
endi f Vent ==1;
Vae =(2^ ( −0 .5 ) ) * s i n ( t ) ;Vbe =(2^ ( −0 .5 ) ) * s i n ( t−pi / 2 ) ;Vce =−(2^(−0.5) ) * ( s i n ( t ) + s i n ( t−pi / 2 ) ) ;Var =0; Vbr =0; Vcr =0;
endVt =[ Vae ; Vbe ; Vce ; 0 ; 0 ; 0 ] ;i t =[ i a e ; i b e ; i c e ; i a r ; i b r ; i c r ] ;% D e f i n i c i ó n de m a t r i c e sCose =[ cos ( t h e t a ) , cos ( t h e t a +2* pi / 3 ) , cos ( t h e t a +4* pi / 3 ) ; cos ( t h e t a +4* pi / 3 ) , cos ( t h e t a ) , cos ( t h e t a
+2* pi / 3 ) ; cos ( t h e t a +2* pi / 3 ) , cos ( t h e t a +4* pi / 3 ) , cos ( t h e t a ) ] ;Sen =[ s i n ( t h e t a ) , s i n ( t h e t a +2* pi / 3 ) , s i n ( t h e t a +4* pi / 3 ) ; s i n ( t h e t a +4* pi / 3 ) , s i n ( t h e t a ) , s i n ( t h e t a
+2* pi / 3 ) ; s i n ( t h e t a +2* pi / 3 ) , s i n ( t h e t a +4* pi / 3 ) , s i n ( t h e t a ) ] ;L e r t =Ler * Cose ;Lt =[ Lee , L e r t ; Le r t ’ , L r r ] ;DerLt =[ Cero ,−Ler *Sen;−Ler *Sen ’ , Cero ] ;% C á l c u l o de l a s d e r i v a d a s de l a s v a r i a b l e s de e s t a d od i t = inv ( Lt ) * ( Vt−Rt * i t −w* DerLt * i t ) ;dw = ( 0 . 5 * i t ’* DerLt * i t −Tm) / J ;d t h e t a =w;% A s i g n a c i ó n de l a s v a r i a b l e s de e s t a d o a l v e c t o r de s a l i d a de l a f u n c i ó ndx =[ d t h e t a ; dw ; d i t ] ;

178 CAPÍTULO 7. EVALUACIÓN NUMÉRICA DE MODELOS
(a) Velocidad y posición angular (b) Corrientes estatórica y rotórica
(c) Par eléctrico
Figura 7.1: Gráficos del modelo de la máquina de inducción en coordenadas primitivas -Sistema Equilibrado

7.1. MÁQUINA DE INDUCCIÓN - COORDENADAS PRIMITIVAS 179
(a) Velocidad y posición angular (b) Corrientes estatórica y rotórica
(c) Par eléctrico
Figura 7.2: Gráficos del modelo de la máquina de inducción en coordenadas primitivas -Sistema Desequilibrado

180 CAPÍTULO 7. EVALUACIÓN NUMÉRICA DE MODELOS
7.2. Máquina de inducción - Coordenadas vectoriales
En la figura 7.3 se muestra la posición angular, la velocidad angular, las corrientes tanto delestator como del rotor y el par eléctrico, la velocidad angular producida por una máquinade inducción excitada mediante un sistema de tensiones trifásicas balanceadas utilizando elmodelo 5.25 definido en el sistema de coordenadas de las corrientes del estator. El códigofuente 7.3 y 7.4 desarrolla el modelo numérico de la máquina de inducción en este sistemade coordenadas.
7.3. Máquina Sincrónica - Coordenadas d-q
Los datos y parámetros de un motor síncrono que alimenta a una bomba son los siguientes:
VB SB IB f nB ZB
13,2kV 18MVA 0,439 1,54 1,4
ZBF ZB−BF VBF IBF TB
1,3864 1,3864 1,2464 1,3864 2,3151s
Re Ra R f Ld Lq Lad Laq
0,0211 0,01∼ 0,03 0,439 1,54 1,4 1,54 1,4
Ld f Ldad Lqaq Lad f H ωB
1,3864 1,3864 1,2464 1,3864 2,3151s 377rad
La característica par-velocidad de la bomba suministrada por el fabricante se puede obser-var en la figura 7.4. El polinomio de sexto orden que reproduce el comportamiento de estacaracterística es el siguiente:
Tm = 6,01x10−12n6r −1,706x10−8n5
r +1,953x10−5n4r −1,147x10−2n3
r +3,808n2r −569,26x10−12nr +33758 [Nm]
En la figura 7.5 se muestra el modelo de la carga mecánica obtenido a partir de la digita-lización de los datos del fabricante, el par eléctrico y mecánico con respecto al tiempo, lascorrientes en la armadura id e iq, las corrientes en los devanados amortiguadores, la velocidady posición angular y la corriente de rotor, utilizando el modelo desarrollado en las ecuaciones6.56 y 6.57. El código fuente 7.5, 7.6 y 7.7 desarrolla el modelo numérico de la máquina deinducción en este sistema de coordenadas.

7.3. MÁQUINA SINCRÓNICA - COORDENADAS D-Q 181
(a) Velocidad y posición angular (b) Corrientes estatórica y rotórica
(c) Par eléctrico
Figura 7.3: Gráficos del modelo de la máquina de inducción en coordenadas primitivas -Sistema Equilibrado
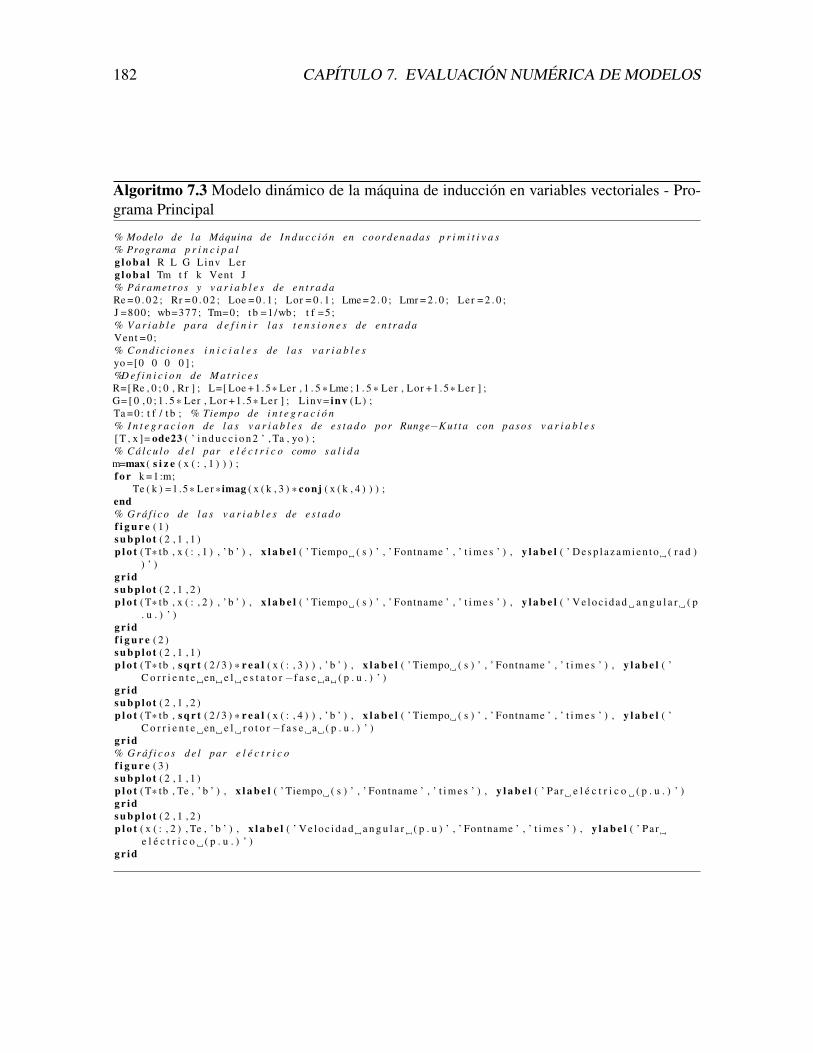
182 CAPÍTULO 7. EVALUACIÓN NUMÉRICA DE MODELOS
Algoritmo 7.3 Modelo dinámico de la máquina de inducción en variables vectoriales - Pro-grama Principal
% Modelo de l a Máquina de I n d u c c i ó n en coordenadas p r i m i t i v a s% Programa p r i n c i p a lg l o b a l R L G Linv Lerg l o b a l Tm t f k Vent J% Párametros y v a r i a b l e s de e n t r a d aRe = 0 . 0 2 ; Rr = 0 . 0 2 ; Loe = 0 . 1 ; Lor = 0 . 1 ; Lme = 2 . 0 ; Lmr = 2 . 0 ; Ler = 2 . 0 ;J =800; wb=377; Tm=0; t b =1/wb ; t f =5 ;% V a r i a b l e para d e f i n i r l a s t e n s i o n e s de e n t r a d aVent =0;% C o n d i c i o n e s i n i c i a l e s de l a s v a r i a b l e syo =[0 0 0 0 ] ;%D e f i n i c i o n de M a t r i c e sR=[Re , 0 ; 0 , Rr ] ; L=[ Loe +1 .5* Ler , 1 . 5 * Lme ; 1 . 5 * Ler , Lor +1 .5* Ler ] ;G= [ 0 , 0 ; 1 . 5 * Ler , Lor +1 .5* Ler ] ; Linv= inv ( L ) ;Ta =0: t f / t b ; % Tiempo de i n t e g r a c i ó n% I n t e g r a c i o n de l a s v a r i a b l e s de e s t a d o por Runge−K u t t a con pasos v a r i a b l e s[ T , x ]= ode23 ( ’ i n d u c c i o n 2 ’ , Ta , yo ) ;% C á l c u l o d e l par e l é c t r i c o como s a l i d am=max ( s i z e ( x ( : , 1 ) ) ) ;f o r k =1:m;
Te ( k ) =1 .5* Ler * imag ( x ( k , 3 ) * conj ( x ( k , 4 ) ) ) ;end% G r á f i c o de l a s v a r i a b l e s de e s t a d of i g u r e ( 1 )s u b p l o t ( 2 , 1 , 1 )p l o t ( T* tb , x ( : , 1 ) , ’ b ’ ) , x l a b e l ( ’ Tiempo ( s ) ’ , ’ Fontname ’ , ’ t i m e s ’ ) , y l a b e l ( ’ D e s p l a z a m i e n t o ( r a d )
) ’ )gr ids u b p l o t ( 2 , 1 , 2 )p l o t ( T* tb , x ( : , 2 ) , ’ b ’ ) , x l a b e l ( ’ Tiempo ( s ) ’ , ’ Fontname ’ , ’ t i m e s ’ ) , y l a b e l ( ’ V e l o c i d a d a n g u l a r ( p
. u . ) ’ )gr idf i g u r e ( 2 )s u b p l o t ( 2 , 1 , 1 )p l o t ( T* tb , s q r t ( 2 / 3 ) * r e a l ( x ( : , 3 ) ) , ’ b ’ ) , x l a b e l ( ’ Tiempo ( s ) ’ , ’ Fontname ’ , ’ t i m e s ’ ) , y l a b e l ( ’
C o r r i e n t e en e l e s t a t o r −f a s e a ( p . u . ) ’ )gr ids u b p l o t ( 2 , 1 , 2 )p l o t ( T* tb , s q r t ( 2 / 3 ) * r e a l ( x ( : , 4 ) ) , ’ b ’ ) , x l a b e l ( ’ Tiempo ( s ) ’ , ’ Fontname ’ , ’ t i m e s ’ ) , y l a b e l ( ’
C o r r i e n t e en e l r o t o r−f a s e a ( p . u . ) ’ )gr id% G r á f i c o s d e l par e l é c t r i c of i g u r e ( 3 )s u b p l o t ( 2 , 1 , 1 )p l o t ( T* tb , Te , ’ b ’ ) , x l a b e l ( ’ Tiempo ( s ) ’ , ’ Fontname ’ , ’ t i m e s ’ ) , y l a b e l ( ’ Pa r e l é c t r i c o ( p . u . ) ’ )gr ids u b p l o t ( 2 , 1 , 2 )p l o t ( x ( : , 2 ) , Te , ’ b ’ ) , x l a b e l ( ’ V e l o c i d a d a n g u l a r ( p . u ) ’ , ’ Fontname ’ , ’ t i m e s ’ ) , y l a b e l ( ’ Pa r
e l é c t r i c o ( p . u . ) ’ )gr id
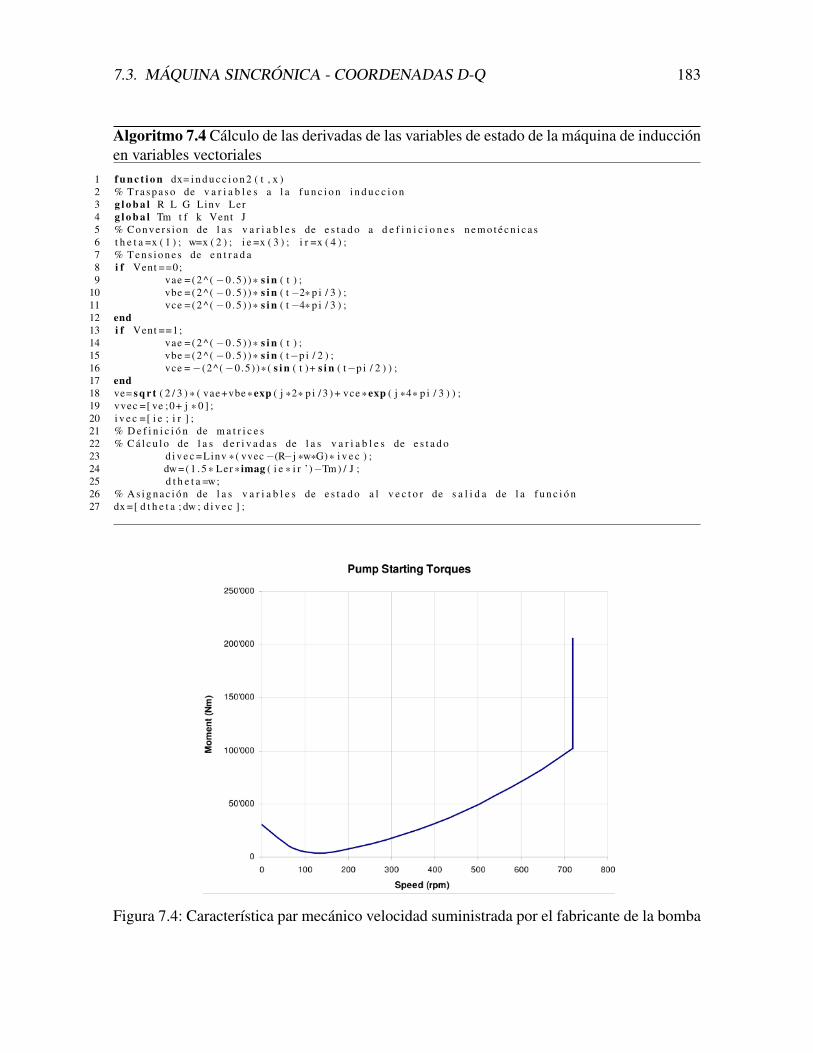
7.3. MÁQUINA SINCRÓNICA - COORDENADAS D-Q 183
Algoritmo 7.4 Cálculo de las derivadas de las variables de estado de la máquina de inducciónen variables vectoriales
1 f u n c t i o n dx= i n d u c c i o n 2 ( t , x )2 % T r a s p a s o de v a r i a b l e s a l a f u n c i o n i n d u c c i o n3 g l o b a l R L G Linv Ler4 g l o b a l Tm t f k Vent J5 % C o n v e r s i o n de l a s v a r i a b l e s de e s t a d o a d e f i n i c i o n e s n e m o t é c n i c a s6 t h e t a =x ( 1 ) ; w=x ( 2 ) ; i e =x ( 3 ) ; i r =x ( 4 ) ;7 % T e n s i o n e s de e n t r a d a8 i f Vent ==0;9 vae = ( 2 ^ ( −0 . 5 ) ) * s i n ( t ) ;
10 vbe = ( 2 ^ ( −0 . 5 ) ) * s i n ( t−2* p i / 3 ) ;11 vce = ( 2 ^ ( −0 . 5 ) ) * s i n ( t−4* p i / 3 ) ;12 end13 i f Vent ==1;14 vae = ( 2 ^ ( −0 . 5 ) ) * s i n ( t ) ;15 vbe = ( 2 ^ ( −0 . 5 ) ) * s i n ( t−p i / 2 ) ;16 vce =− (2^(−0.5) )*( s i n ( t )+ s i n ( t−p i / 2 ) ) ;17 end18 ve= s q r t ( 2 / 3 ) * ( vae+vbe *exp ( j *2* p i / 3 ) + vce *exp ( j *4* p i / 3 ) ) ;19 vvec =[ ve ;0+ j * 0 ] ;20 i v e c =[ i e ; i r ] ;21 % D e f i n i c i ó n de m a t r i c e s22 % C á l c u l o de l a s d e r i v a d a s de l a s v a r i a b l e s de e s t a d o23 d i v e c =Linv *( vvec−(R−j *w*G)* i v e c ) ;24 dw = ( 1 . 5 * Ler * imag ( i e * i r ’)−Tm ) / J ;25 d t h e t a =w;26 % A s i g n a c i ó n de l a s v a r i a b l e s de e s t a d o a l v e c t o r de s a l i d a de l a f u n c i ó n27 dx =[ d t h e t a ; dw ; d i v e c ] ;
Figura 7.4: Característica par mecánico velocidad suministrada por el fabricante de la bomba

184 CAPÍTULO 7. EVALUACIÓN NUMÉRICA DE MODELOS
(a) Par mecánico y modelo polinómico (b) Par mecánico y modelo polinómico
(c) Corrientes id e iq (d) Corrientes amortiguadoras iad e iaq
(e) Velocidad y posición angular (f) Corriente de campo
Figura 7.5: Gráficos del modelo de la máquina sincrónica en variables d-q

7.3. MÁQUINA SINCRÓNICA - COORDENADAS D-Q 185
Algoritmo 7.5 Modelo dinámico de la máquina sincrónica - Programa Principal
g l o b a l Lsd Lsf Lsad Lsq Lsaq Lmd Ldf Ldad Lfad Lmq Lqaq Re Rad Raq Rf1 Ld Lq Lf Lad LaqH R L L_1 G p
t = [ 0 : . 1 : 3 5 * 3 7 7 ] ; % Tiempo de s i m u l a c i ó n% Datos
Sn =18.5 e6 / 0 . 9 8 ; Vn=13 .2 e3 ; In =919; I f n = 1 9 9 . 6 ; J =6150;% Parametros
x d l = 1 . 5 4 ; xq = 1 . 4 ; xd2p = . 2 4 5 ; xq2p = 0 . 2 6 5 ;% Bases
wn=720*2* pi / 6 0 ; Zbase=Vn ^ 2 / Sn ; pp =3 60 0 /7 20 ; I b a s e =Sn / ( s q r t ( 3 ) *Vn ) ; Lbase=Zbase / ( pp*wn ) ;Tm_base=Sn / wn ;
% C a l c u l o Xoxo = . 1 1 1 / . 1 7 7 * xd2p % Valor t i p i c oH= 2 . 5 * 0 . 5 * J *wn ^ 2 / Sn ; % C á l c u l o d e l H en segundosLmf=xdl−xo ; Lf=Lmf + . 2 ; % Bases C o h e r e n t e s x un idadRa = 0 . 0 2 1 1 ; Rf =0.439 % R e s i s t e n c i a s En u n i d a d e s F i s i c a s O h n a 20 ºLd= x d l * Lbase ; Lmd=( xdl−xo ) * Lbase ; Ldf= s q r t ( 1 ) *Vn / ( wn*pp ) ; Lmf=Ldf ^ 2 /Lmd ; % I n d u c t a n c i a sI f b = I b a s e * s q r t (Lmd / Lmf ) ; Vfb=Sn / ( 3 * I f b ) ; % BasesZ ba se f =Vfb / I f b ; Zbased f =Vn / ( s q r t ( 3 ) * I f b ) ; Zbase fd =Vfb / I b a s e ; Lbase fd = Zbase fd / 3 7 7 ; %
Parámetros en por un idadLsd=xo ; Lsf =Lf−Lmf ; Lsad=Lsd ; Lsq=Lsd ; Lsaq=Lsd ; Lmd=Lmd / Lbase ;Ldf=Ldf / Lbase fd ; Ldad=Lmd ; Lfad=Lmd ; Lmq=xq−xo ; Lqaq=Lmq ;Re=Ra / Zbase ; Rad = 0 . 0 1 ; Raq=Rad ; Rf1=Rf / Z ba s e f ;
% Curva de Par Mecánicoa= load ( ’ par_bomba . t x t ’ ) ;x=a ( 1 : 2 7 9 0 , 1 ) / 7 2 0 ; y=a ( 1 : 2 7 9 0 , 2 ) / Tm_base ; n =6; % i n p u t ( ’ orden d e l p o l i n o m i o ’ ) ;p= p o l y f i t ( x , y , n ) ; % A j u s t e d e l p o l i n o m i o de l a carga mecánicaf i g u r e ( 1 0 )y1= p o l y v a l ( p , x ) ;p l o t ( x , y , x , y1 , ’ r ’ ) ; gr idx l a b e l ( ’ v e l o c i d a d ( r a d / s ) ’ ) ; y l a b e l ( ’ Pa r mecánico ( r a d / s ) ’ ) ;Ld=Lsd+Lmd ; Lq=Lsq+Lmq ; Lf= Lsf +Ldf ; Lad=Lsad+Ldad ; Laq=Lsaq+Lqaq ;R= diag ( [ Re , Re , Rf1 , Rad , Raq ] ) ;L = ( [ Ld , 0 , Ldf , Ldad , 0 ; 0 , Lq , 0 , 0 , Lqaq ; Ldf , 0 , Lf , Lfad , 0 ; Ldad , 0 , Lfad , Lad , 0 ; 0 , Lqaq , 0 , 0 , Laq ] ) ;L_1= inv ( L ) ; G=[0 ,−Lq ,0 ,0 ,−Lqaq ; Ld , 0 , Ldf , Ldad , 0 ; 0 , 0 , 0 , 0 , 0 ; 0 , 0 , 0 , 0 , 0 ; 0 , 0 , 0 , 0 , 0 ] ;
% C o n d i c i o n e s I n i c i a l e syo = [ 0 ; 0 ; 0 ; 0 ; 0 ; 0 ; 0 ] ;[ Ti ,X]= ode45 ( ’ s i n c r o ’ , t , yo ) ; % I n t e g r a c i ó n de l a s v a r i a b l e s de e s t a d o
% Punto de Operac ióni d =X ( : , 1 ) ; i q =X ( : , 2 ) ; i f 1 =X( : , 3 ) ; i a d =X( : , 4 ) ; i a q =X( : , 5 ) ; w=X( : , 6 ) ; Te tha =X( : , 7 ) ; t =Ti ;a=exp ( j *2* pi / 3 ) ; Ve= s q r t ( 2 / 3 ) * s q r t ( 2 ) * ( s i n ( t ) +a * s i n ( t−2* pi / 3 ) +a ^2* s i n ( t−4* pi / 3 ) ) ;i d q = i d + j * i q ; i e = i d q . * exp ( j * ( Te tha ) ) ;Tm= p o l y v a l ( p ,w) ; % Par mecánico
% C á l c u l o d e l par e l é c t r i c of o r k =1: l e n g t h ( i d )
Te ( k ) =(Ld−Lq ) * i d ( k ) * i q ( k ) +Ldf * i q ( k ) * i f 1 ( k ) +( Ldad* i a d ( k ) * i q ( k )−Lqaq* i a q ( k ) * i d ( k ) ) ;end

186 CAPÍTULO 7. EVALUACIÓN NUMÉRICA DE MODELOS
Algoritmo 7.6 Salida gráfica de las variables de la máquina sincrónica
Ti=Ti / 3 7 7 ; % Tiempo en segundosf i g u r e ( 1 )
s u b p l o t ( 2 , 1 , 1 )p l o t ( Ti , Te )gr idt i t l e ( ’ Pa r e l é c t r i c o ’ )x l a b e l ( ’ Tiempo ’ )s u b p l o t ( 2 , 1 , 2 )p l o t ( Ti ,Tm)t i t l e ( ’ Pa r mecánico ’ )x l a b e l ( ’ Tiempo ’ )gr id
f i g u r e ( 2 )s u b p l o t ( 2 , 1 , 1 )p l o t ( Ti ,X ( : , 6 ) )t i t l e ( ’ V e l o c i d a d a n g u l a r ( en pu ) ’ )x l a b e l ( ’ Tiempo ’ )gr ids u b p l o t ( 2 , 1 , 2 )p l o t ( Ti ,X ( : , 7 ) )t i t l e ( ’ p o s i c i ó n ’ )x l a b e l ( ’ Tiempo ’ )gr id
f i g u r e ( 3 )p l o t ( Ti ,X ( : , 1 ) , Ti ,X( : , 2 ) , ’ r ’ )t i t l e ( ’ C o r r i e n t e s de e j e s d y q ’ )x l a b e l ( ’ Tiempo ’ )gr id
f i g u r e ( 4 )p l o t ( Ti ,X ( : , 4 ) , Ti ,X( : , 5 ) , ’ r ’ )t i t l e ( ’ C o r r i e n t e s de a m o r t i g u a d o r e s ’ )x l a b e l ( ’ Tiempo ’ )gr id
f i g u r e ( 5 )p l o t ( Ti ,X ( : , 3 ) * I f b )t i t l e ( ’ C o r r i e n t e de campo ’ )x l a b e l ( ’ Tiempo ’ )gr id
Algoritmo 7.7 Cálculo de las derivadas de las variables de estado de la máquina sincrónica
f u n c t i o n dX= s i n c r o ( t , yo )g l o b a l Lsd Lsf Lsad Lsq Lsaq Lmd Ldf Ldad Lfad Lmq Lqaq Re Rad Raq Rf1 Ld Lq Lf Lad
Laq H R L L_1 G pi d =yo ( 1 ) ; i q =yo ( 2 ) ; i f 1 =yo ( 3 ) ; i a d =yo ( 4 ) ; i a q =yo ( 5 ) ; % C o r r i e n t e sw=yo ( 6 ) ; Te tha =yo ( 7 ) ; %v e l o c i d a d y p o s i c i ó ni o p =[ i d i q i f 1 i a d i a q ] ’ ; % V e c t o r de C o r r i e n t e sVa=[ s q r t ( 2 ) * s i n ( t ) ; s q r t ( 2 ) * s i n ( t−2* pi / 3 ) ; s q r t ( 2 ) * ( s i n ( t−4* pi / 3 ) ) ] ; %T e n s i ó n r e a la=exp ( j *2* pi / 3 ) ; Ve= s q r t ( 2 / 3 ) * [1 a a ^2]* Va ; %T e n s i ó n en v e c t o r e s e s p a c i a l e sVdq=Ve*exp(− j * Te tha ) ; Vd= r e a l ( Vdq ) ; Vq=imag ( Vdq ) ; %T e n s i ó n en coordenadas r o t ó r i c a sVf= 0 . 0 1 * (w> = 0 . 9 ) ; Vf =0; % T e n s i ó n en e l CampoV=[Vd Vq Vf 0 0 ] ’ ; % T e n s i o n e sTe =(Ld−Lq ) * i d * i q +Ldf * i q * i f 1 +( Ldad* i a d * iq−Lqaq* i a q * i d ) ; %C á l c u l o d e l par e l é c t r i c o
% Modelo de l a máquina en coordenadas dqf−ad−aqL = ( [ Ld , 0 , Ldf , Ldf , 0 ; 0 , Lq , 0 , 0 , Lqaq ; Ldf , 0 , Lf , Ldf , 0 ; Ldf , 0 , Ldf , Lad , 0 ; 0 , Lqaq , 0 , 0 , Laq ] ) ;L_1= inv ( L ) ; G=[0 ,−Lq ,0 ,0 ,−Lqaq ; Ld , 0 , Ldf , Ldf , 0 ; 0 , 0 , 0 , 0 , 0 ; 0 , 0 , 0 , 0 , 0 ; 0 , 0 , 0 , 0 , 0 ] ;Tm= p o l y v a l ( p ,w) ;
% E c u a c i o n e s d i f e r e n c i a l e sdw = 1 / (H*377) * ( Te−Tm) ; d i = L^−1 * (V−(R+w*G) * i o p ) ; dTe tha = w;dX=[ d i ; dw ; dTe tha ] ;

Índice alfabético
ángulo de carga, 171, 172
Adams, 150armadura, 51, 68, 146autovalores, 101autovectores, 101
balance de potencia, 14, 21balance del par, 151bobinas reales, 149
campo, 7, 146campo eléctrico, 7campo elíptico, 149campo magnético, 7campo magnético rotatorio, 55, 57carbones, 68cargas eléctricas, 7coeficiente de fricción, 151coeficiente de generación, 81coenergía en el campo, 33colector, 51, 68componentes simétricas, 101conexión compuesta, 82conexión derivación, 82conexión independiente, 82conexión paralelo, 82conexión serie, 82conmutador mecánico, 51conservativa en potencia, 61
conservativo, 26
control par-velocidad, 92
convención generador, 168
convención motor, 167
conversión, 6
convertidor electromagnético elemental, 12
convertidores magnetohidrodinámicos, 37
coordenadas primitivas, 150
corriente alterna, 146
corriente circulatoria, 78
corriente continua, 37
corriente de magnetización modificada, 108
corrientes de desplazamiento, 9
curva característica, 17
delga, 70
densidad de corriente, 9
densidades de energía, 5
deslizamiento, 114, 116
devanado imbricado, 73
devanado ondulado, 73
diagrama de bloques, 89
diagrama fasorial, 166
dipolos magnéticos, 7
ecuaciones de borde, 17
ecuaciones de contorno, 17
ecuaciones de frontera, 17
ecuaciones de ligazón, 17
187

188 ÍNDICE ALFABÉTICO
ecuaciones de Maxwell, 8ecuaciones internas, 17eje 0, 158eje d, 158eje f, 159eje mecánico, 44eje q, 158ejes, 24ejes eléctricos, 24ejes mecánicos, 24embalamiento, 21energía, 5equilibrio de fuerzas, 14escobilla, 70escobillas, 68, 162Euler, 150
flujos de dispersión, 161freno, 22fuerza, 6función de estado, 27
generador, 12, 21, 78
hermítica, 61hermitiana, 61, 64
identidad, 104inductancia del rotor, 152interacción, 163interacciones, 6inversor mecánico, 79
línea neutra, 71, 73leyes de Maxwell, 8
máquina de corriente continua, 50máquina de inducción, 50
máquina eléctrica, 24máquina generalizada, 161máquina sincrónica, 49máquina trifásica, 57máquinas homopolares, 37matriz cíclica, 104matriz de inductancias, 44, 151matriz de par, 44, 151matriz de resistencias, 44matriz hermitiana, 159matriz simétrica, 104momento de inercia, 151motor, 12, 21, 78
neutro, 161no-holonómicos, 62
par, 24par acelerante, 151par generatriz, 78par motriz, 78par resistente, 151par-velocidad, 86parámetros, 99permeanza, 164potencia, 60potencia reactiva, 172principio de conservación de la energía, 26principio de los trabajos virtuales, 29, 31puertos, 24
régimen continuo, 36régimen permanente, 165relación de Lorenz, 7, 13relaciones constitutivas, 9reluctancia, 27, 163

ÍNDICE ALFABÉTICO 189
rendimientos, 170rotor cilíndrico, 163Runge-Kutta, 150
secuencia cero, 102, 161secuencia negativa, 102secuencia positiva, 102segunda ley de Newton, 15, 33separatriz, 74sistema de coordenadas dq0-f, 159sistema de referencia, 11sistema equilibrado, 165
término de generación, 35término de transformación, 35transformación de Clark, 159transformación de Park, 158
variables dq0, 159variables primitivas, 159vectores espaciales, 102, 154velocidad de operación, 18, 19velocidad de sincronismo, 83velocidad sincrónica, 18, 83
yugo, 27