mecanismos de transmisión y transformación de...
TRANSCRIPT
Mecanismos de transmisión y transformación de movimiento. 1/22
Primera edición Febrero 2000Primera revisión Febrero 2001Segunda revisión Mayo 2002
Mecanismos de transmisióny transformación de
movimiento.
1. Introducción.
Un mecanismo transforma un movimiento y una fuerza de entrada en un movimiento y una fuerza desalida. La misión del mecanismo es transmitir el movimiento, transformarlo o ambas cosas a untiempo.
Los movimientos pueden ser:
Lineal: Movimiento en línea recta. Ejemplo: el desplazamiento de un coche en línea recta.
Lineal alternativo: Es un movimiento de avance y retroceso en línea recta. Durante un tiempodeterminado el movimiento lleva una dirección y durante otro tiempo la dirección opuesta. Ejemplo: Elpistón del motor de un coche.
Rotativo o giratorio: Es un movimiento en círculo en un sentido determinado. Ejemplo, las ruedas deun coche.
Oscilante: Es un movimiento de avance y retroceso describiendo un arco. Ejemplo un columpio o elpéndulo de un reloj.
Un mecanismo está formado por una serie de órganos móviles, destinados a la transmisión ytransformación del movimiento y de una serie de apoyos fijos que forman la estructura delmecanismo.
Las principales transformaciones de movimiento son:
• Circular continuo en circular continuo: Poleas unidas por correas, Engranajes,Ruedas de fricción.
• Circular continuo en rectilíneo continuo: Husillos, Piñón - Cremallera.
© Leoncio Venteo http://roble.cnice.mecd.es/~lventeo Febrero 2000
Ela
bora
do c
on O
penO
ffice
baj
o LI
NU
X
2/22 Tecnología
• Circular continuo en rectilíneo alternativo: Biela - Manivela, Excéntrica,balancín.
• Rectilíneo continuo en rectilíneo continuo: Poleas.
En la transformación de movimiento intervienen varios elementos como: árboles o ejes, poleas,ruedas, piñones, engranajes, correas, cadenas, bielas, etc.
2. Palancas.
Una palanca está formada por una barra rígida, una fuerza de entrada o esfuerzo, una fuerza desalida o carga y un punto de apoyo o fulcro. Las palancas son mecanismos que se utilizan paratransformar esfuerzos. Ejemplos de palancas son: tijeras, alicates, abridor de botellas, caña depescar, etc.
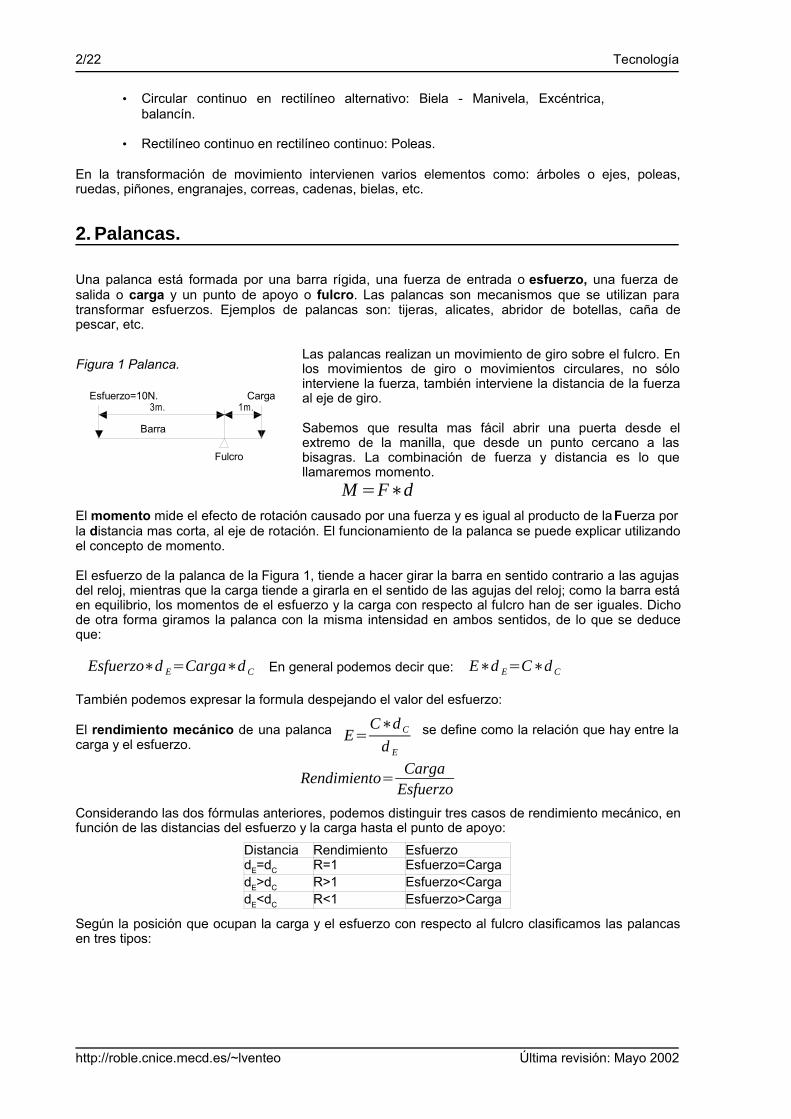
Las palancas realizan un movimiento de giro sobre el fulcro. Enlos movimientos de giro o movimientos circulares, no sólointerviene la fuerza, también interviene la distancia de la fuerzaal eje de giro.
Sabemos que resulta mas fácil abrir una puerta desde elextremo de la manilla, que desde un punto cercano a lasbisagras. La combinación de fuerza y distancia es lo quellamaremos momento.
El momento mide el efecto de rotación causado por una fuerza y es igual al producto de la Fuerza porla distancia mas corta, al eje de rotación. El funcionamiento de la palanca se puede explicar utilizandoel concepto de momento.
El esfuerzo de la palanca de la Figura 1, tiende a hacer girar la barra en sentido contrario a las agujasdel reloj, mientras que la carga tiende a girarla en el sentido de las agujas del reloj; como la barra estáen equilibrio, los momentos de el esfuerzo y la carga con respecto al fulcro han de ser iguales. Dichode otra forma giramos la palanca con la misma intensidad en ambos sentidos, de lo que se deduceque:
Esfuerzo∗d E=Carga∗d C En general podemos decir que: E∗d E=C∗d C
También podemos expresar la formula despejando el valor del esfuerzo:
El rendimiento mecánico de una palanca se define como la relación que hay entre lacarga y el esfuerzo.
Considerando las dos fórmulas anteriores, podemos distinguir tres casos de rendimiento mecánico, enfunción de las distancias del esfuerzo y la carga hasta el punto de apoyo:
Distancia Rendimiento EsfuerzodE=dC R=1 Esfuerzo=CargadE>dC R>1 Esfuerzo<CargadE<dC R<1 Esfuerzo>Carga
Según la posición que ocupan la carga y el esfuerzo con respecto al fulcro clasificamos las palancasen tres tipos:
http://roble.cnice.mecd.es/~lventeo Última revisión: Mayo 2002
M =F∗d
Rendimiento= CargaEsfuerzo
E=C∗d C
d E
Figura 1 Palanca.
Fulcro
Barra
Esfuerzo=10N. Carga3m. 1m.
Mecanismos de transmisión y transformación de movimiento. 3/22
2.1.Palancas de primer orden.
En las palancas de primer orden, el fulcro se encuentra entre el esfuerzo y la carga y pueden darse lostres casos de la tabla anterior: R=1, R>1 y R1, dependiendo de la posición del punto de apoyo.Ejemplo un columpio.
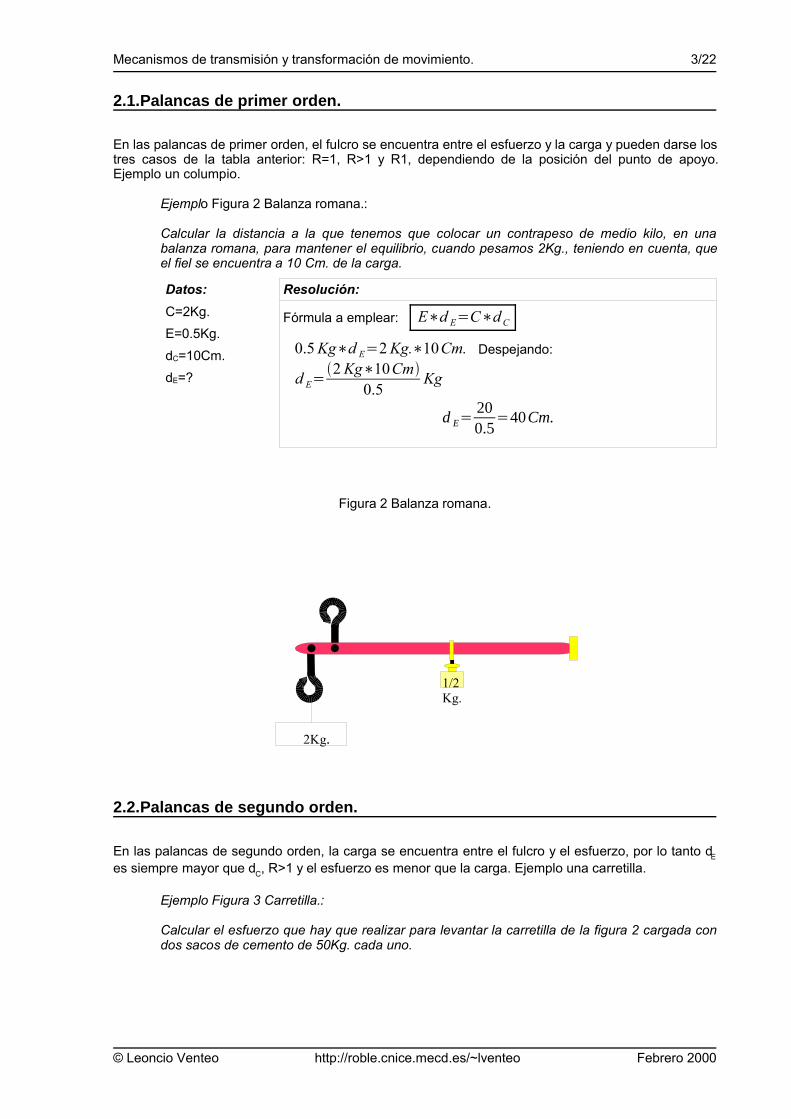
Ejemplo Figura 2 Balanza romana.:
Calcular la distancia a la que tenemos que colocar un contrapeso de medio kilo, en unabalanza romana, para mantener el equilibrio, cuando pesamos 2Kg., teniendo en cuenta, queel fiel se encuentra a 10 Cm. de la carga.
Datos: Resolución:C=2Kg.E=0.5Kg.dC=10Cm.dE=?
Fórmula a emplear: E∗d E=C∗dC
0.5Kg∗d E=2Kg.∗10Cm. Despejando:
d E=2Kg∗10Cm
0.5Kg
2.2.Palancas de segundo orden.
En las palancas de segundo orden, la carga se encuentra entre el fulcro y el esfuerzo, por lo tanto dE
es siempre mayor que dC, R>1 y el esfuerzo es menor que la carga. Ejemplo una carretilla.
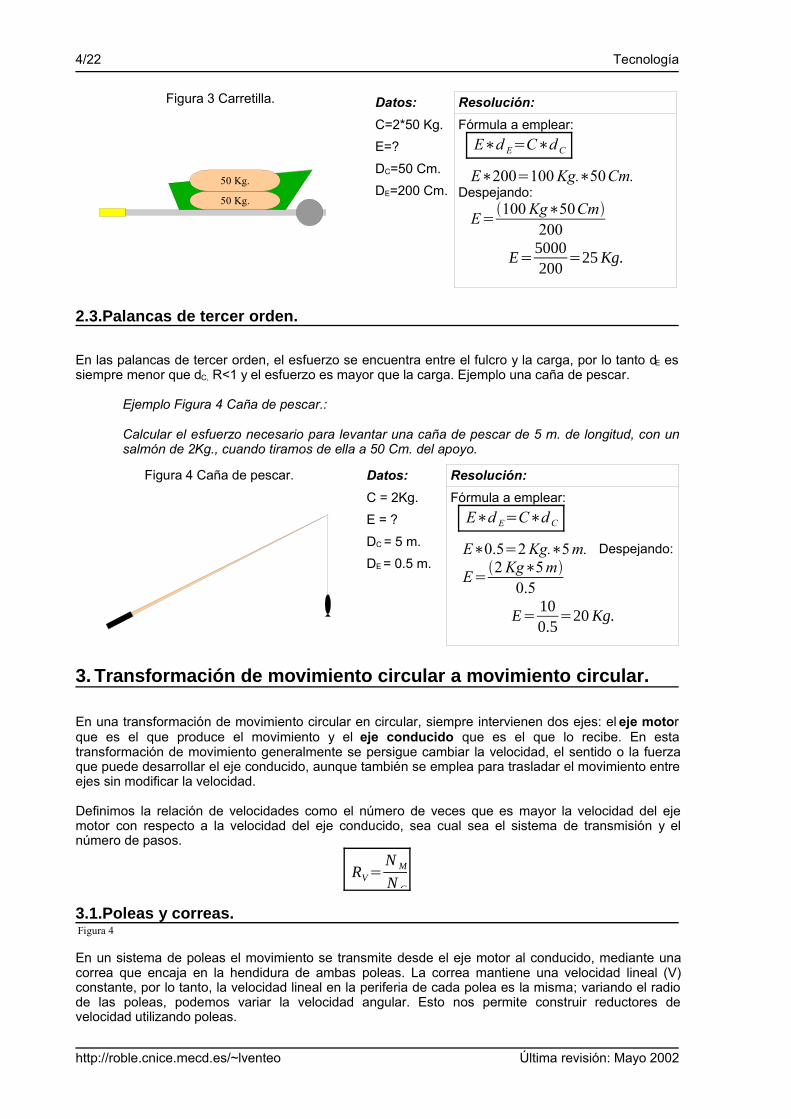
Ejemplo Figura 3 Carretilla.:
Calcular el esfuerzo que hay que realizar para levantar la carretilla de la figura 2 cargada condos sacos de cemento de 50Kg. cada uno.
© Leoncio Venteo http://roble.cnice.mecd.es/~lventeo Febrero 2000
d E=200.5
=40Cm.
Figura 2 Balanza romana.
2Kg.
1/2Kg.
4/22 Tecnología
Datos: Resolución:C=2*50 Kg.E=?DC=50 Cm.DE=200 Cm.
Fórmula a emplear:E∗d E=C∗dC
E∗200=100Kg.∗50Cm.Despejando:
E=100Kg∗50Cm200
2.3.Palancas de tercer orden.
En las palancas de tercer orden, el esfuerzo se encuentra entre el fulcro y la carga, por lo tanto dE essiempre menor que dC, R<1 y el esfuerzo es mayor que la carga. Ejemplo una caña de pescar.
Ejemplo Figura 4 Caña de pescar.:
Calcular el esfuerzo necesario para levantar una caña de pescar de 5 m. de longitud, con unsalmón de 2Kg., cuando tiramos de ella a 50 Cm. del apoyo.
Figura 4 Caña de pescar. Datos: Resolución:C = 2Kg.E = ?DC = 5 m.DE = 0.5 m.
Fórmula a emplear:E∗d E=C∗d C
E∗0.5=2Kg.∗5m. Despejando:
E=2Kg∗5m0.5
3. Transformación de movimiento circular a movimiento circular.
En una transformación de movimiento circular en circular, siempre intervienen dos ejes: el eje motorque es el que produce el movimiento y el eje conducido que es el que lo recibe. En estatransformación de movimiento generalmente se persigue cambiar la velocidad, el sentido o la fuerzaque puede desarrollar el eje conducido, aunque también se emplea para trasladar el movimiento entreejes sin modificar la velocidad.
Definimos la relación de velocidades como el número de veces que es mayor la velocidad del ejemotor con respecto a la velocidad del eje conducido, sea cual sea el sistema de transmisión y elnúmero de pasos.
3.1.Poleas y correas.
En un sistema de poleas el movimiento se transmite desde el eje motor al conducido, mediante unacorrea que encaja en la hendidura de ambas poleas. La correa mantiene una velocidad lineal (V)constante, por lo tanto, la velocidad lineal en la periferia de cada polea es la misma; variando el radiode las poleas, podemos variar la velocidad angular. Esto nos permite construir reductores develocidad utilizando poleas.
http://roble.cnice.mecd.es/~lventeo Última revisión: Mayo 2002
E= 100.5
=20 Kg.
Figura 3 Carretilla.
50 Kg.
50 Kg.
E=5000200
=25 Kg.
RV=N M
N C
Figura 4
Mecanismos de transmisión y transformación de movimiento. 5/22
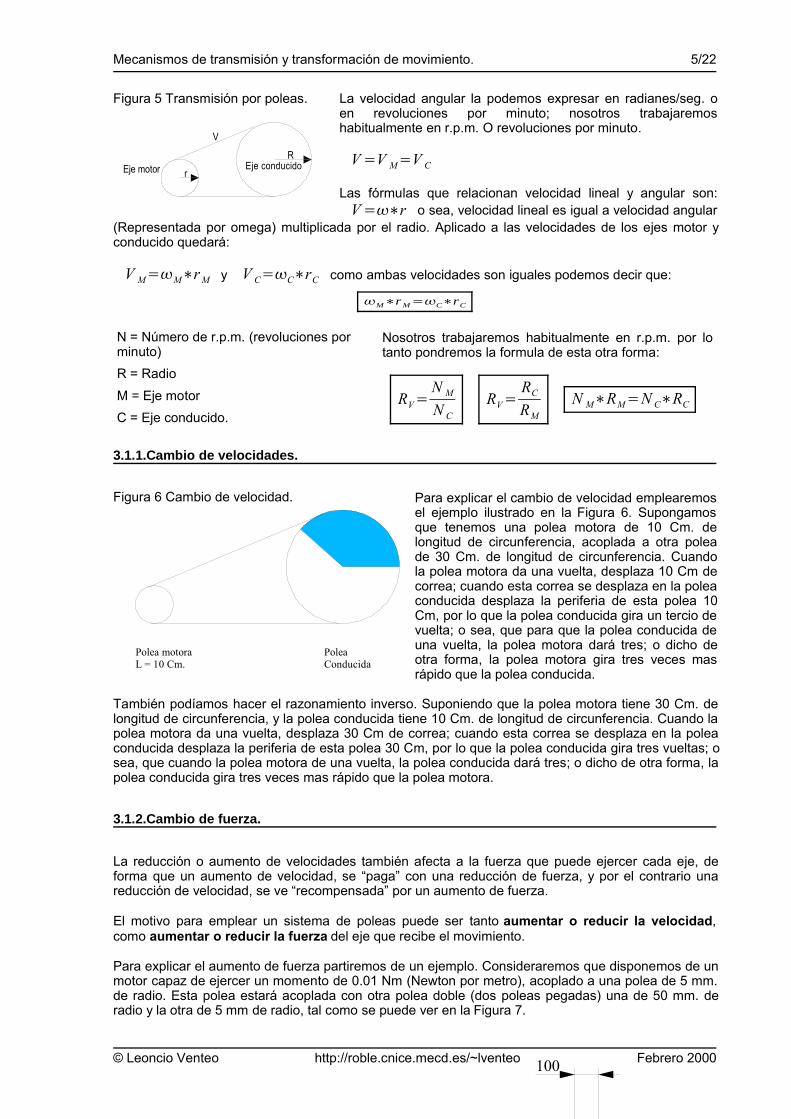
La velocidad angular la podemos expresar en radianes/seg. oen revoluciones por minuto; nosotros trabajaremoshabitualmente en r.p.m. O revoluciones por minuto.
V=V M=V C
Las fórmulas que relacionan velocidad lineal y angular son:V=∗r o sea, velocidad lineal es igual a velocidad angular
(Representada por omega) multiplicada por el radio. Aplicado a las velocidades de los ejes motor yconducido quedará:
V M=M∗rM y V C=C∗rC como ambas velocidades son iguales podemos decir que:
N = Número de r.p.m. (revoluciones porminuto)R = RadioM = Eje motorC = Eje conducido.
Nosotros trabajaremos habitualmente en r.p.m. por lotanto pondremos la formula de esta otra forma:
RV=N M
N CRV=
RC
RMN M∗RM=N C∗RC
3.1.1.Cambio de velocidades.
Para explicar el cambio de velocidad emplearemosel ejemplo ilustrado en la Figura 6. Supongamosque tenemos una polea motora de 10 Cm. delongitud de circunferencia, acoplada a otra poleade 30 Cm. de longitud de circunferencia. Cuandola polea motora da una vuelta, desplaza 10 Cm decorrea; cuando esta correa se desplaza en la poleaconducida desplaza la periferia de esta polea 10Cm, por lo que la polea conducida gira un tercio devuelta; o sea, que para que la polea conducida deuna vuelta, la polea motora dará tres; o dicho deotra forma, la polea motora gira tres veces masrápido que la polea conducida.
También podíamos hacer el razonamiento inverso. Suponiendo que la polea motora tiene 30 Cm. delongitud de circunferencia, y la polea conducida tiene 10 Cm. de longitud de circunferencia. Cuando lapolea motora da una vuelta, desplaza 30 Cm de correa; cuando esta correa se desplaza en la poleaconducida desplaza la periferia de esta polea 30 Cm, por lo que la polea conducida gira tres vueltas; osea, que cuando la polea motora de una vuelta, la polea conducida dará tres; o dicho de otra forma, lapolea conducida gira tres veces mas rápido que la polea motora.
3.1.2.Cambio de fuerza.
La reducción o aumento de velocidades también afecta a la fuerza que puede ejercer cada eje, deforma que un aumento de velocidad, se “paga” con una reducción de fuerza, y por el contrario unareducción de velocidad, se ve “recompensada” por un aumento de fuerza.
El motivo para emplear un sistema de poleas puede ser tanto aumentar o reducir la velocidad,como aumentar o reducir la fuerza del eje que recibe el movimiento.
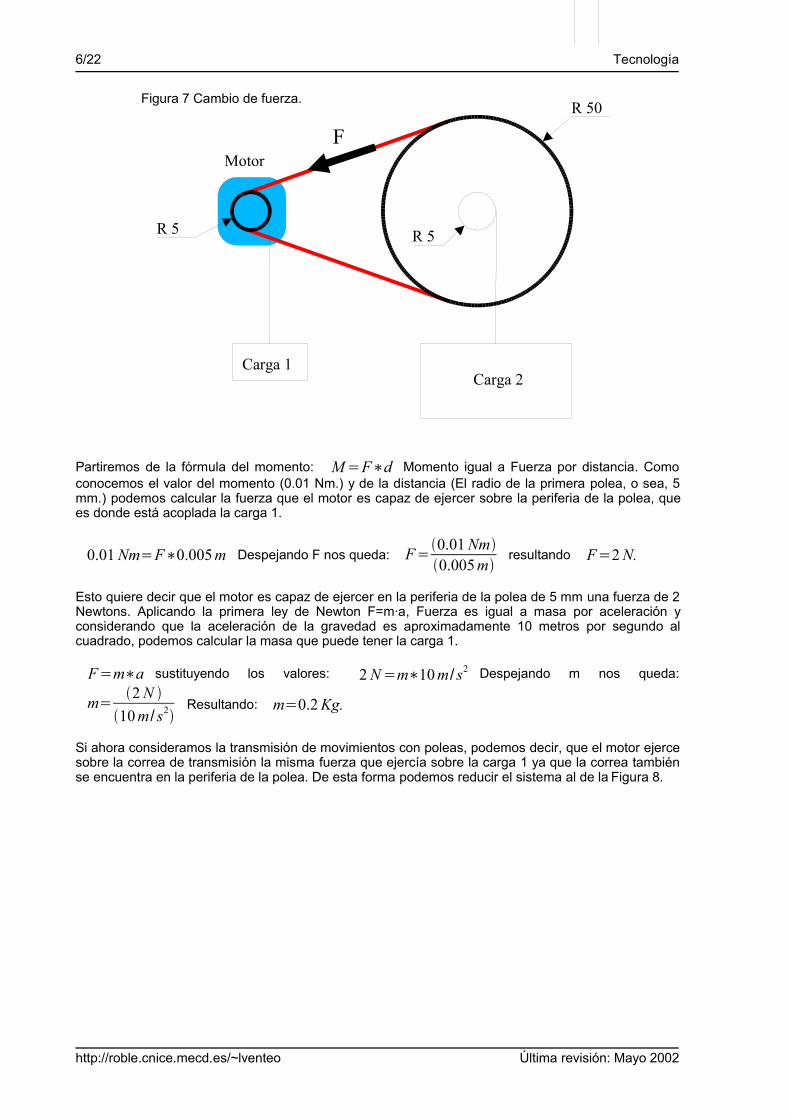
Para explicar el aumento de fuerza partiremos de un ejemplo. Consideraremos que disponemos de unmotor capaz de ejercer un momento de 0.01 Nm (Newton por metro), acoplado a una polea de 5 mm.de radio. Esta polea estará acoplada con otra polea doble (dos poleas pegadas) una de 50 mm. deradio y la otra de 5 mm de radio, tal como se puede ver en la Figura 7.
© Leoncio Venteo http://roble.cnice.mecd.es/~lventeo Febrero 2000
Figura 6 Cambio de velocidad.
M∗rM=C∗rC
Polea motoraL = 10 Cm.
Polea Conducida
100
Figura 5 Transmisión por poleas.
Eje motor Eje conducidoR
r
V
6/22 Tecnología
Partiremos de la fórmula del momento: M=F∗d Momento igual a Fuerza por distancia. Comoconocemos el valor del momento (0.01 Nm.) y de la distancia (El radio de la primera polea, o sea, 5mm.) podemos calcular la fuerza que el motor es capaz de ejercer sobre la periferia de la polea, quees donde está acoplada la carga 1.
0.01Nm=F∗0.005m Despejando F nos queda: F=0.01Nm0.005m
resultando F=2N.
Esto quiere decir que el motor es capaz de ejercer en la periferia de la polea de 5 mm una fuerza de 2Newtons. Aplicando la primera ley de Newton F=m·a, Fuerza es igual a masa por aceleración yconsiderando que la aceleración de la gravedad es aproximadamente 10 metros por segundo alcuadrado, podemos calcular la masa que puede tener la carga 1.
F=m∗a sustituyendo los valores: 2N=m∗10m/ s2 Despejando m nos queda:
m= 2N 10m/ s2
Resultando: m=0.2Kg.
Si ahora consideramos la transmisión de movimientos con poleas, podemos decir, que el motor ejercesobre la correa de transmisión la misma fuerza que ejercía sobre la carga 1 ya que la correa tambiénse encuentra en la periferia de la polea. De esta forma podemos reducir el sistema al de la Figura 8.
http://roble.cnice.mecd.es/~lventeo Última revisión: Mayo 2002
Figura 7 Cambio de fuerza.
Carga 2Carga 1
R 5 R 5
R 50
MotorF
100
Mecanismos de transmisión y transformación de movimiento. 7/22
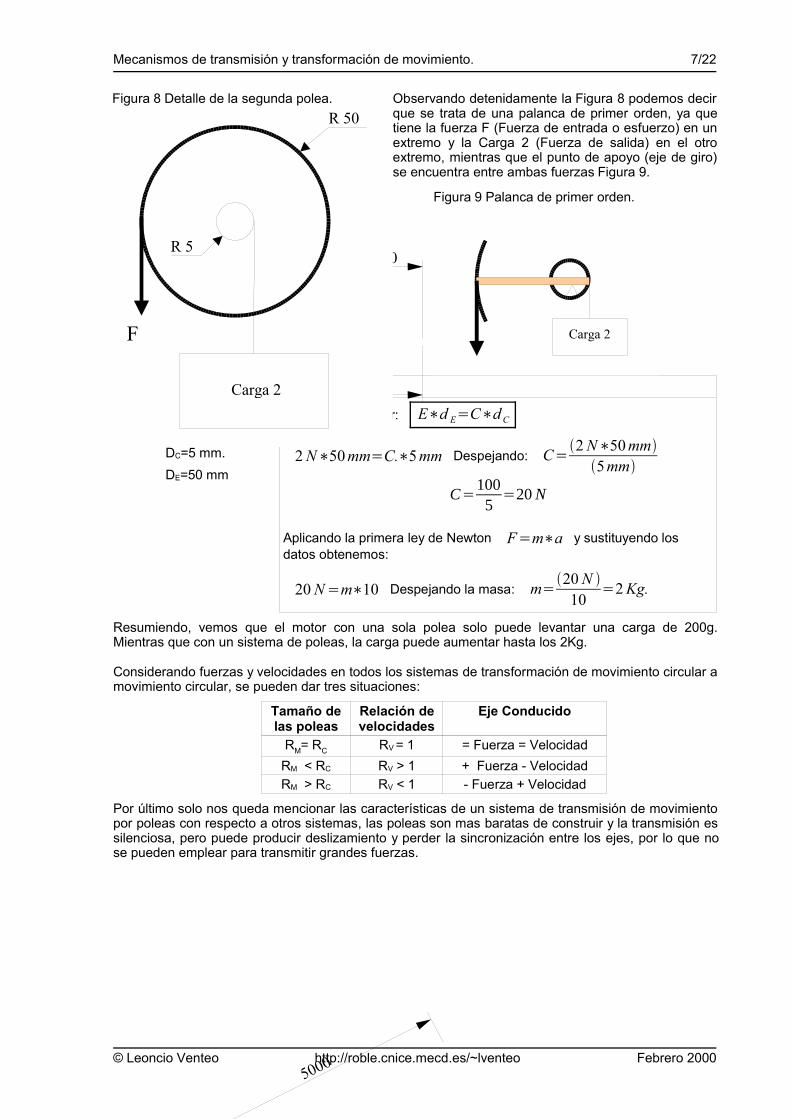
Observando detenidamente la Figura 8 podemos decirque se trata de una palanca de primer orden, ya quetiene la fuerza F (Fuerza de entrada o esfuerzo) en unextremo y la Carga 2 (Fuerza de salida) en el otroextremo, mientras que el punto de apoyo (eje de giro)se encuentra entre ambas fuerzas Figura 9.
Datos: Resolución:C=?E=2N.DC=5 mm.DE=50 mm
Fórmula a emplear: E∗d E=C∗dC
2N∗50mm=C.∗5mm Despejando: C=2N∗50mm5mm
Aplicando la primera ley de Newton F=m∗a y sustituyendo losdatos obtenemos:
20 N=m∗10 Despejando la masa: m=20 N 10
=2Kg.
Resumiendo, vemos que el motor con una sola polea solo puede levantar una carga de 200g.Mientras que con un sistema de poleas, la carga puede aumentar hasta los 2Kg.
Considerando fuerzas y velocidades en todos los sistemas de transformación de movimiento circular amovimiento circular, se pueden dar tres situaciones:
Tamaño delas poleas
Relación develocidades
Eje Conducido
RM= RC RV = 1 = Fuerza = VelocidadRM < RC RV > 1 + Fuerza - VelocidadRM > RC RV < 1 - Fuerza + Velocidad
Por último solo nos queda mencionar las características de un sistema de transmisión de movimientopor poleas con respecto a otros sistemas, las poleas son mas baratas de construir y la transmisión essilenciosa, pero puede producir deslizamiento y perder la sincronización entre los ejes, por lo que nose pueden emplear para transmitir grandes fuerzas.
© Leoncio Venteo http://roble.cnice.mecd.es/~lventeo Febrero 20005000
500
2000
Figura 8 Detalle de la segunda polea.
Carga 2
R 5
R 50
F
Figura 9 Palanca de primer orden.
Carga 2
C=1005
=20 N

8/22 Tecnología
Ejercicio:
Disponemos de un motor con una polea de 1 Cm de diámetro, que gira a 300 r.p.m.(revoluciones por minuto). Con este motor queremos hacer girar un expositor de mercancías,de forma que de una vuelta cada 6 segundos. Calcular el radio de la polea que debe iracoplada al expositor:
Datos: Resolución:RM = 5 mm.RC = ?NM = 300 r.p.m.Nc = 10 r.p.m.
Fórmula a emplear: N M∗RM=N C∗RC
300 r.p.m.∗5mm=10 r.p.m.∗RC Despejando:
RC=300 r.p.m.∗5mm
10 r.p.m.Resultado: RC=
150010
=150mm.
3.2.Piñones y cadenas.
Los piñones son ruedas dentadas, engranadas en cadenas, que son los órganos de transmisión.Existen varios tipos de cadenas, dependiendo de la fuerza a transmitir, de la durabilidad, la lubricacióny el ambiente de trabajo. La ventaja principal de este sistema de transmisión, frente al de poleas, es laausencia de deslizamiento, característica fundamental en maquinaria donde la posición relativa de laspartes en movimiento no debe cambiar.
Al igual que ocurre con las poleas, los sentidos de giro de los ejes motor y conducido son iguales; peroel sistema resulta algo mas caro y menos silencioso que el formado por poleas y correa.
El funcionamiento de esta transmisión es similar al de las poleas, pero en este caso el órgano detransmisión es la cadena. Para explicar el aumento y reducción de velocidades que se producepodemos emplear un esquema similar empleado en las poleas.
Supongamos que tenemos un piñón motor de 10dientes, acoplado a otro piñón de 30 dientes.Cuando el piñón motor da una vuelta, desplaza 10dientes de la cadena; cuando esta cadena sedesplaza en el piñón conducido desplaza 10dientes, por lo que el piñón conducido gira untercio de vuelta; o sea, que para que el piñónconducido de una vuelta, el piñón motor dará tres;o dicho de otra forma, el piñón motor gira tresveces mas rápido que el piñón conducido.
También podíamos hacer el razonamiento inverso.Suponiendo que tenemos un piñón motor de 50
dientes, acoplado a otro piñón de 25 dientes. Cuando el piñón motor da una vuelta, desplaza 50dientes de la cadena; cuando esta cadena se desplaza en el piñón conducido desplaza 50 dientes, porlo que el piñón conducido gira dos vueltas; o sea, que cuando el piñón motor da una vuelta, el piñónconducido dará dos; o dicho de otra forma, el conducido gira dos veces mas rápido que el piñónmotor.
Para que el sistema engrane, es necesario que el tamaño del diente sea igual en el piñón motor y enel conducido, por lo tanto, el número de dientes de cada piñón será directamente proporcional al radio.En el caso de los piñones resulta mas fácil contar el número de dientes, que medir los radios odiámetros, por lo que la formula que relaciona las velocidades las estableceremos en función deestos.
http://roble.cnice.mecd.es/~lventeo Última revisión: Mayo 2002
5000
500
Figura 10 Transmisión con cadenas.
Piñón motorZ = 10
Piñón Conducido

Mecanismos de transmisión y transformación de movimiento. 9/22
N = Número de r.p.m. (revoluciones porminuto)Z = Número de dientesM = Eje motorC = Eje conducido.
RV=N M
N CRV=
ZC
ZMN M∗ZM=N C∗ZC
Ejercicio:
Disponemos de una bicicleta con un plato de 44 dientes, y un piñón de 11 dientes. El ciclistapedalea a un ritmo de una vuelta cada dos segundos. Calcular la velocidad de la rueda enr.p.m. Si el radio de la rueda es de 35 Cm, calcular la velocidad a la que se desplaza labicicleta en Km/h. Recuerda las fórmulas de la velocidad y de la longitud de la circunferencia:
V= et
L=2∗∗r
Datos: Resolución:ZM = 44 dientesZC = 11 dientesNM = 30 r.p.m.Nc = ?
Fórmula a emplear: N M∗ZM=N C∗ZC
30 r.p.m.∗44=N C∗11 Despejando: N C=30 r.p.m.∗44
11
Resultado: RC=132011
=120 rpm
El espacio recorrido por la bicicleta en un minuto es el numero de vueltas que da en un minutomultiplicado por el espacio que recorre en cada vuelta. El espacio recorrido en una vuelta es lalongitud de la circunferencia.
L=2∗∗35Cm=219.9Cm≈220Cm
V= et
V=220Cm∗120 rev.
1min. V=26400Cm./min.
Para pasar a Km./h. Pasamos los Cm a Kilómetros dividiendo por 10.000 y los minutos ahoras dividiendo por 60.
V=0.26400Km
160
h=60∗0.264Km./h.=15.84 Km./h.
3.3.Ruedas de fricción.
Las ruedas de fricción son mecanismos que transmiten el movimiento circular entre dos ejes,mediante contacto directo de las superficies periféricas. En la transmisión de movimiento se invierte elsentido de giro. Para que las superficies puedan transmitir movimiento sin patinar, es necesario queexista una fuerza de rozamiento entre ellas. La fuerza de rozamiento depende de los materialesempleados y de la fuerza Q, normal al punto de contacto.
Para aumentar la fuerza de contacto se utilizan materiales flexibles o resortes que presionan los ejes,o ambos métodos a la vez. Este mecanismo de transmisión es también barato y silencioso, pero nopuede emplearse para grandes fuerzas, ya que puede producir deslizamiento. Existen varios tipos deruedas de fricción, dependiendo de la aplicación en la que se van a emplear.
© Leoncio Venteo http://roble.cnice.mecd.es/~lventeo Febrero 2000
10 Cm

10/22 Tecnología
N = Número de r.p.m. (revoluciones porminuto)R = RadioM = Eje motorC = Eje conducido.
Nosotros trabajaremos habitualmente en r.p.m. por lotanto pondremos la formula de esta otra forma:
RV=N M
N CRV=
RC
RMN M∗RM=N C∗RC
3.4.Engranajes.
Los engranajes cumplen la misma misión que las ruedas de fricción, pero evitan el deslizamiento ypermiten transmitir mayores potencias. Los entrantes y salientes de las ruedas dentadas, además deevitar el deslizamiento, reducen la presión que se ejerce sobre los ejes en la transmisión con ruedasde fricción. Como las ruedas de fricción, los engranajes invierten el sentido de giro, pero la inversiónse puede evitar insertando entre los dos engranajes motor y conducido, un engranaje loco que noafecta a las relaciones de transmisión. También se evita la inversión cuando uno de los engranajestiene los dientes por la parte exterior de la circunferencia y el otro los tiene por el interior. El principalinconveniente de los engranajes es su alto coste.
Para que dos ruedas puedan engranar es necesario que tengan el mismo tamaño de diente, estoimplica que el número de dientes (Z) de un engranaje es proporcional al diámetro de la circunferencia,luego podemos sustituir en la fórmula el valor del radio por el número de dientes sin que el resultadovaríe:
N = Número de r.p.m. (revoluciones porminuto)Z = Número de dientesM = Eje motorC = Eje conducido.
RV=N M
N CRV=
Z C
ZMN M∗ZM=N C∗ZC
Si partimos de un tren de engranajes simple (dos engranajes: un engranaje motor un engranajeconducido) con un engranaje motor de 12 dientes y un engranaje conducido de 36 dientes; cuando elengranaje motor da una vuelta desplaza 12 dientes, el engranaje conducido también se mueve 12dientes por lo que gira un tercio de vuelta. Dicho de otra forma, para que el engranaje conducido gireuna vuelta el engranaje motor girará tres, o el engranaje conducido gira tres veces más lento que elengranaje motor. Para explicar el aumento de velocidad podemos hacer un análisis similar.
Ejercicio:
Disponemos de un tren de engranajes simple, con un engranaje motor de 18 dientes. Cuandoel eje motor gira 25 vueltas, el eje conducido gira solo 5. Calcular:
a) La relación de velocidades.b) El número de dientes del engranaje conducido.c) Si el eje motor gira a 60 rpm. Calcular la velocidad del eje conducido.d) Si el eje motor gira en el sentido de las agujas del reloj. ¿En que sentido gira el eje
conducido.Datos: Resolución. Apartado a)ZM = 18 dientesZC = ?NM = 25 rev.Nc = 5 rev.
Fórmula a emplear: RV=N M
N C
Resultado: RV=255=5 veces
http://roble.cnice.mecd.es/~lventeo Última revisión: Mayo 2002
10 Cm

Mecanismos de transmisión y transformación de movimiento. 11/22
Datos: Resolución. Apartado b) (método 1)ZM = 18 dientesZC = ? dientesNM = 25 rev.Nc = 5 rev.RV = 5 veces
Fórmula a emplear: N M∗ZM=N C∗ZC
25 r.p.m.∗18=5 r.p.m.∗ZC Despejando: ZC=25 r.p.m.∗18
5
Resultado: ZC=4505
=90dientes
Datos: Resolución. Apartado b) (método 2)ZM = 18 dientesZC = ? dientesNM = 25 rev.Nc = 5 rev.RV = 5 veces
Fórmula a emplear: RV=ZC
ZM
5=ZC
18Despejando: ZC=5∗18 Resultado: ZC=90dientes
Datos: Resolución. Apartado c) (método 1)ZM = 18 dientesZC = 90 dientesNM = 60 rpm.Nc = ? rpm.RV = 5 veces
Fórmula a emplear: N M∗ZM=N C∗ZC
60 r.p.m.∗18=N C∗90 Despejando: N C=60 r.p.m.∗18
90
Resultado: N C=1080
90=12 rpm.
Datos: Resolución. Apartado c) (método 2)ZM = 18 dientesZC = 90 dientesNM = 60 rpm.Nc = ? rpm.RV = 5 veces
Fórmula a emplear: RV=N M
N C
5= 60N C
Despejando: N C=605
Resultado: N C=12 rpm
Si el eje motor gira en el sentido de las agujas del reloj, el engranaje conducido girará ensentido contrario, ya que los sistemas de transmisión a base de engranajes invierten el giro deun eje al siguiente.
3.4.1.Tren de engranajes compuesto.
Un tren de engranajes compuestos esta formado por varios ejes y varios engranajes, de manera queuna pareja de engranes transmiten el movimiento desde un eje al siguiente. En los ejes intermedios secolocan engranajes dobles (dos engranajes solidarios) donde uno de los engranajes recibe elmovimiento del eje anterior y el otro engranaje lo transmite al eje siguiente.
Cuando el tren de engranajes tiene dos ejes (tren simple) sólo hay una transmisión de movimiento;cuando el tren de engranajes tiene tres ejes hay dos transmisiones de movimiento, con cuatro ejestres transmisiones y así sucesivamente.
En el caso de tren de engranajes compuesto la relación de velocidades se refiere a las veces que esmayor el número de revoluciones del eje motor con respecto al número de revoluciones del último de
© Leoncio Venteo http://roble.cnice.mecd.es/~lventeo Febrero 2000
12/22 Tecnología
los ejes.
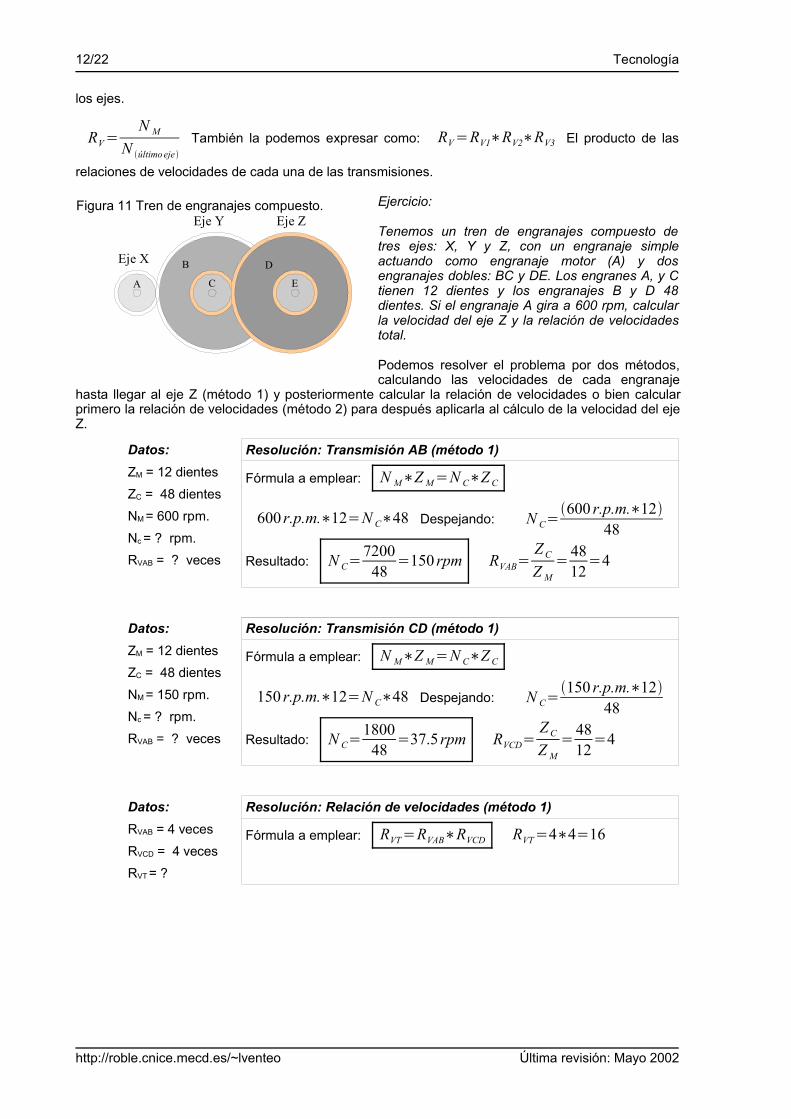
RV=N M
N últimoeje También la podemos expresar como: RV=RV1∗RV2∗RV3 El producto de las
relaciones de velocidades de cada una de las transmisiones.
Ejercicio:
Tenemos un tren de engranajes compuesto detres ejes: X, Y y Z, con un engranaje simpleactuando como engranaje motor (A) y dosengranajes dobles: BC y DE. Los engranes A, y Ctienen 12 dientes y los engranajes B y D 48dientes. Si el engranaje A gira a 600 rpm, calcularla velocidad del eje Z y la relación de velocidadestotal.
Podemos resolver el problema por dos métodos,calculando las velocidades de cada engranaje
hasta llegar al eje Z (método 1) y posteriormente calcular la relación de velocidades o bien calcularprimero la relación de velocidades (método 2) para después aplicarla al cálculo de la velocidad del ejeZ.
Datos: Resolución: Transmisión AB (método 1)ZM = 12 dientesZC = 48 dientesNM = 600 rpm.Nc = ? rpm.RVAB = ? veces
Fórmula a emplear: N M∗ZM=N C∗ZC
600 r.p.m.∗12=N C∗48 Despejando: N C=600 r.p.m.∗12
48
Resultado: N C=7200
48=150 rpm RVAB=
ZC
ZM= 48
12=4
Datos: Resolución: Transmisión CD (método 1)ZM = 12 dientesZC = 48 dientesNM = 150 rpm.Nc = ? rpm.RVAB = ? veces
Fórmula a emplear: N M∗ZM=N C∗ZC
150 r.p.m.∗12=N C∗48 Despejando: N C=150 r.p.m.∗12
48
Resultado: N C=1800
48=37.5 rpm RVCD=
ZC
ZM= 48
12=4
Datos: Resolución: Relación de velocidades (método 1)RVAB = 4 vecesRVCD = 4 vecesRVT = ?
Fórmula a emplear: RVT=RVAB∗RVCD RVT=4∗4=16
http://roble.cnice.mecd.es/~lventeo Última revisión: Mayo 2002
Figura 11 Tren de engranajes compuesto.
Eje X
Eje Y Eje Z
A
B
C
D
E
Mecanismos de transmisión y transformación de movimiento. 13/22
Datos: Resolución: Relación de velocidades (método 2)ZMAB = ZMCD=12 ZCAB = ZCCD =48 RVAB=?RVCD=?RVT = ? veces
Fórmula a emplear: RVT=RVAB∗RVCD
RVAB=ZC
ZM= 48
12=4 RVCD=
ZC
Z M= 48
12=4 RVT=4∗4=16
Datos: Resolución: Velocidad final (método 2)RVT=16NM=600NC = ?
Fórmula a emplear: RVT=N M
N C
16=600N C
Despejando:
16N C=600 Resultado: N C=60016
=37.5 rpm
3.4.2.Engranaje loco.
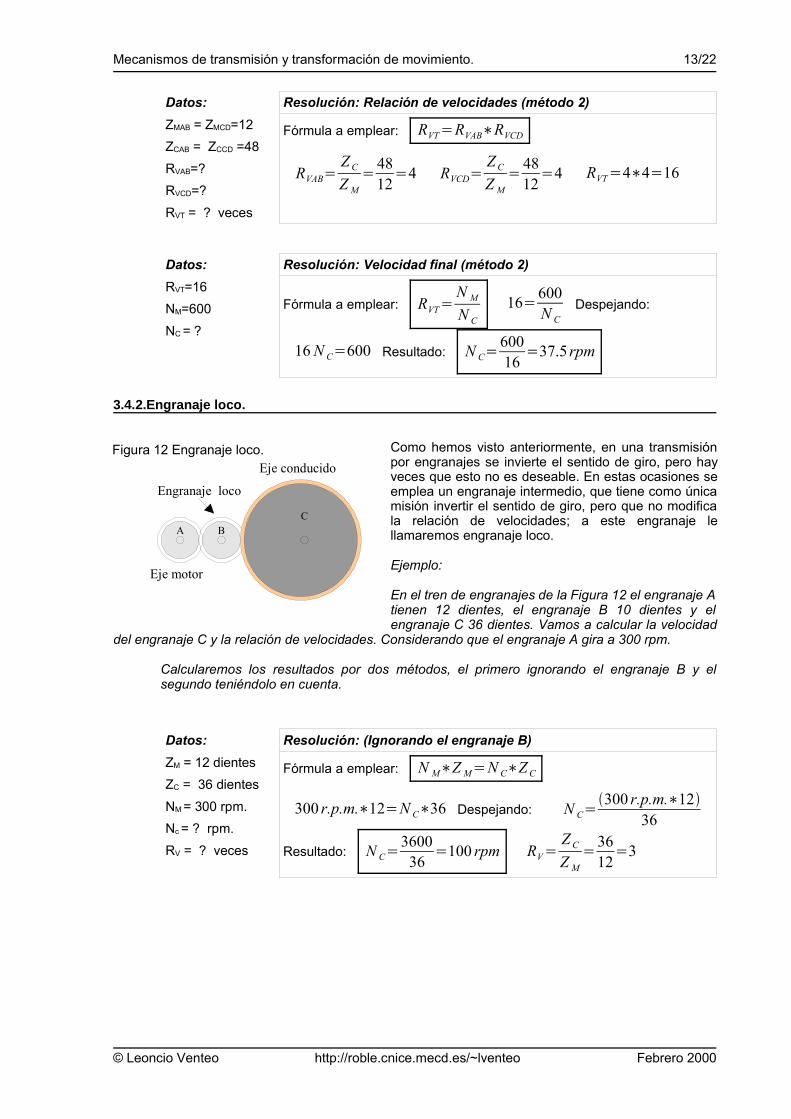
Como hemos visto anteriormente, en una transmisiónpor engranajes se invierte el sentido de giro, pero hayveces que esto no es deseable. En estas ocasiones seemplea un engranaje intermedio, que tiene como únicamisión invertir el sentido de giro, pero que no modificala relación de velocidades; a este engranaje lellamaremos engranaje loco.
Ejemplo:
En el tren de engranajes de la Figura 12 el engranaje Atienen 12 dientes, el engranaje B 10 dientes y elengranaje C 36 dientes. Vamos a calcular la velocidad
del engranaje C y la relación de velocidades. Considerando que el engranaje A gira a 300 rpm.
Calcularemos los resultados por dos métodos, el primero ignorando el engranaje B y elsegundo teniéndolo en cuenta.
Datos: Resolución: (Ignorando el engranaje B)ZM = 12 dientesZC = 36 dientesNM = 300 rpm.Nc = ? rpm.RV = ? veces
Fórmula a emplear: N M∗ZM=N C∗ZC
300 r.p.m.∗12=N C∗36 Despejando: N C=300 r.p.m.∗12
36
Resultado: N C=3600
36=100 rpm RV=
Z C
ZM=36
12=3
© Leoncio Venteo http://roble.cnice.mecd.es/~lventeo Febrero 2000
Figura 12 Engranaje loco.
A BC
Eje motor
Engranaje loco
Eje conducido

14/22 Tecnología
Datos: Resolución: Transmisión AB (método 2 considerando el engranajeB)
ZM = 12 dientesZC = 10 dientesNM = 300 rpm.Nc = ? rpm.RVAB = ? veces
Fórmula a emplear: N M∗ZM=N C∗ZC
300 r.p.m.∗12=N C∗10 Despejando: N C=300 r.p.m.∗12
10
Resultado: N C=3600
10=360 rpm RVAB=
ZC
Z M=10
12=5
6
Datos: Resolución: Transmisión BC (método 2 considerando el engranajeB)
ZM = 10 dientesZC = 36 dientesNM = 360 rpm.Nc = ? rpm.RVBC = ? veces
Fórmula a emplear: N M∗ZM=N C∗ZC
360 r.p.m.∗10=N C∗36 Despejando: N C=360 r.p.m.∗10
36
Resultado: N C=3600
36=100 rpm RVBC=
ZC
ZM=36
10
Datos: Resolución: Relación de velocidades (método 2 considerando elengranaje B)
RVAB=10/12RVBC=36/10RVT = ? veces
Fórmula a emplear: RVT=RVAB∗RVBC RVT=1012
∗ 3610
=3
Podemos ver que con ambos planteamientos el resultado es el mismo. Podéis probar que con otrosvalores para el número de dientes del engranaje B los resultados no cambian.
Un fallo habitual en los cálculos es confundir un tren de engranajes compuesto con un tren deengranaje loco.
3.5.Tornillo sinfín corona helicoidal.
Este sistema transmite el movimiento circular entre ejesperpendiculares, de forma silenciosa. Está formado porun tornillo sinfín, que actúa como eje motor, acoplado conuna rueda dentada, que actúa como eje conducido. Losdientes de la rueda helicoidal, están ligeramenteinclinados para que se adapten a la rosca del tornillo (poreso se llama corona helicoidal). Cada vuelta del tornillohace que la rueda gire el ángulo equivalente a un diente;de esta forma se consiguen grandes reducciones develocidad con poco espacio. Al ser un sistema deengranajes su precio es alto al igual que su precisión enla transmisión de movimiento.
Una de las características de este sistema de transmisión es que no es reversible, esto es unmovimiento en el eje motor provoca un movimiento en el eje conducido, pero el eje conducido nopuede mover al eje motor. Al ser un mecanismo dentado, también evita el deslizamiento entre ejes.
http://roble.cnice.mecd.es/~lventeo Última revisión: Mayo 2002
Figura 13 Tornillo sinfín - corona helicoidal.
A A'
Tornillo sinfín
Corona helicoidal

Mecanismos de transmisión y transformación de movimiento. 15/22
Para que un tornillo engrane en una corona helicoidal, la distancia entre dos filetes (paso de rosca)debe ser igual que la distancia entre dos engranajes de la corona helicoidal y la inclinación del dienteen la corona debe ser igual que la inclinación del filete en el tornillo.
Cuando el tornillo sinfín gira media vuelta, como se indica en la Figura 13, la corona helicoidal gira ensentido contrario a las agujas del reloj, ya que el punto A del tornillo sinfín pasará a la posición A'empujando hacia abajo el borde izquierdo de la corona helicoidal.
Las formulas a emplear son las mismas que las empleadas en la transmisión por engranajes, pero eneste caso, el número de dientes del engranaje motor será el numero de filetes del tornillo sinfín. Elnúmero de dientes del engranaje conducido será el número de dientes de la corona helicoidal.
Ejemplo:
Calcular la relación de velocidades de un sistema de transmisión de movimiento circularformado por un tornillo sinfín de tres filetes acoplado a una corona helicoidal de 36 dientes.Calcular la velocidad del eje motor si sabemos que el eje conducido gira a 120 rpm. Sisustituimos este sistema por un tren de engranajes simple con un engranaje motor de 10dientes. Calcular el número de dientes del engranaje conducido para conseguir la mismarelación de velocidades.
Datos: Resolución: Tornillo sinfín.ZM = 3 filetesZC = 36 dientesNM = ? rpm.Nc = 120 rpm.RV = ? veces
Fórmulas a emplear: N M∗ZM=N C∗ZC
N M∗3=120 rpm∗36 Despejando: N M=120 r.p.m.∗36
3
Resultado: N M=4320
3=1440 rpm RV=
ZC
Z M=36
3=12
Datos: Resolución: EngranajesZM = 10 filetesZC = ? dientesRV = 12 veces
Fórmulas a emplear: RV=ZC
ZMSustituyendo: 12=
ZC
10Despejando: ZC=12∗10=120dientes
4. Transformación de movimiento circular a movimiento lineal.
Los motores son máquinas que transforman energía en movimiento. Casi todos los motores generanmovimiento circular, pero hay muchas situaciones en las que necesitamos movimiento lineal. Porejemplo una grúa se mueve con motores y no hace girar su carga, si no que la desplaza horizontal yverticalmente. El pistón del motor de un coche se desplaza de forma lineal y sin embargo las ruedasdel coche giran.
Para calcular la relación de movimientos debemos tener en cuenta algunas fórmulas, como la de lavelocidad, que relaciona espacio recorrido y tiempo, la de la circunferencia que relaciona el radio deuna circunferencia con la longitud de su perímetro y la formula que relaciona velocidad angular convelocidad lineal.
Leyenda: Fórmulas:l= longitud de circunferencia R= Radiov= velocidad e= espacio recorrido.t= tiempo
l=2∗∗R v= et
© Leoncio Venteo http://roble.cnice.mecd.es/~lventeo Febrero 2000

16/22 Tecnología
4.1.Tornillo o husillo.
Un tornillo está formado por una base cilíndrica sobre la que se talla uno o varios surcos helicoidales,quedando un relieve también helicoidal que llamaremos filete o filetes.
El mecanismo está formado por un tornillo fijo, que al girar mueve una tuerca bloqueada de forma queno gire, de esta manera, el giro del husillo se transforma en un desplazamiento lineal de la tuerca. Porcada vuelta del tornillo o husillo, la tuerca se desplaza una longitud igual al paso de la rosca. Lasroscas de los husillos están normalizadas y se diseñan para que puedan transmitir grandes fuerzas.Las características mas importantes de este sistema de transmisión son: desplazamiento uniforme ypreciso, funcionamiento silencioso, capacidad para transmitir grandes fuerzas y grandes relaciones dereducción en poco espacio.
Para disminuir las pérdidas por rozamiento se suelen utilizar cuerpos de rodaje en las tuercas,además del aumento de rendimiento se reduce el desgaste aumentando la precisión.
Ejemplo:
Calcular el tiempo que tarda en desplazarse 100 mm la tuerca de un tornillo sinfín con un pasode rosca de 0.5 mm. cuando el tornillo gira a 240 rpm.
Datos: Resolución:Paso = 0.5 mm.e= 100 mmNM = 240 rpm.v= ?t= ?
La velocidad a la que se mueve la tuerca es: v= et
El espacio que
recorre en un minuto es igual al producto del número de revolucionespor el paso del tornillo.
e=240 rpm∗0.5mm t=60 s.
v=240 rpm∗0.5mm60
s.=2mm/ s. esta es la velocidad a la que se
mueve la tuerca. Ahora calcularemos el tiempo que tarda en recorrer
100 a esa velocidad: 2mm / s.=100 mm.t
despejando:
2 t=100mm. Resultado: t=100 mm.2mm / s.
=50 s.
4.2.Piñón cremallera.
Este sistema de transmisión está formado por un engranaje que engrana con una cremallera dentadacon la misma separación entre sus dientes que la que tiene el piñón. Este sistema es reversible, estoes, desplazando linealmente la cremallera podemos hacer girar el piñón. y viceversa, al girar el piñóndesplazamos la cremallera.
La relación entre la velocidad del piñón y la cremallera depende del número de dientes del piñón, desu velocidad de giro y del número de dientes por unidad de longitud de la cremallera.
Ejemplo:
Tenemos una cremallera 3 dientes por centímetro engranada a un piñón de 15 dientes quegira a una velocidad de 30 rpm. Calcular la velocidad a la que se mueve la cremallera. Si elpiñón gira durante 2.5 minutos, ¿Cuanto espacio se desplaza la cremallera?.
http://roble.cnice.mecd.es/~lventeo Última revisión: Mayo 2002
10 dientes
Mecanismos de transmisión y transformación de movimiento. 17/22
Datos: Resolución: Velocidad.Cremallera = 3dientes/Cm.ZM = 15 dientes.NM = 30 rpm.v= ?
Cada vuelta del piñón desplaza 15 dientes. Como gira a 30 rpm,cada minuto desplazar un número de dientes igual al producto delnúmero de dientes del piñón por el número de revoluciones.
dientes desplazados=30 rpm∗15dientes=450dientesEl espacio recorrido es:
espacio= 450dientes3dientes /Cm.
=150Cm.
El tiempo que hemos tardado en mover este espacio es un minuto:t=60 s.
v= et
v=150Cm60
s.=2.5Cm / s.
Datos: Resolución: Espacio.t= 2.5 m. = 150s.v= 2.5 Cm./s.e= ?
Formula a emplear: v= et
2.5Cm/ s.= e150
s. Despejando:
e=2.5Cm/ s.∗150 s.=375Cm.
4.3.Tornos y cabrestantes
Están formados por un tambor en el que se fija una cuerda y sobre el que esta se enrolla, en el otroextremo de la cuerda se encuentra suspendida una carga. El tambor está solidariamente unido a unamanivela. El sistema se comporta como una palanca de primer orden donde el fulcro es el eje de giro,la carga es el peso que tira de la cuerda y el esfuerzo lo realizamos en la manivela. La distancia de lacarga al fulcro es el radio del tambor y la distancia del esfuerzo al fulcro es el radio de la manivela. Laecuación de equilibrio será:
Los cabrestantes son versiones mas sofisticadas de los tornos, con motores, mecanismos dereducción retención, etc.
Ejemplo:
Tenemos un torno con un tambor de 30 Cm de radio. Calcular el tiempo que tardaremos enelevar una carga que se encuentra a 57 metros, si damos una vuelta cada 4 segundos.
© Leoncio Venteo http://roble.cnice.mecd.es/~lventeo Febrero 2000
E⋅d E=C⋅d C

18/22 Tecnología
Datos: Resolución: Velocidad.R = 30 Cm.e= 57 m.NM = 15 rpm.t= ?
Formula a emplear: v= et
tenemos como datos el espacio a
recorrer (57 m) y tenemos que calcular el tiempo. Para ello nos faltacalcular la velocidad de la cuerda; para ello volvemos a emplear lamisma fórmula de velocidad. En este caso el tiempo es un minuto yel espacio el correspondiente a 15 vueltas, que son las que eltambor da en un minuto.
Cada vuelta del torno movemos una cantidad de cuerda igual a lalongitud de circunferencia del torno.
l=2∗∗R=2∗3.14∗30=188.5Cm.En 15 vueltas:e=188Cm./vuelta∗15vueltas=2827.4Cm=28.274m.
El tiempo es como habíamos dicho un minuto o 60s: t=60 s.La velocidad de la cuerda será:
v= et=28.2 m
60s.=0,47m/ s.
Ahora disponemos de la velocidad de la cuerda y del espacio arecorrer ahora sustituimos los valores en la fórmula:
0.47m / s.=57 m.t
Despejando: 0.47∗t=57
t=57 m.0.47m/ s.
=120 s.=2min.
4.4.Biela - manivela.
El mecanismo de biela manivela, como el de la Figura14, transforma un movimiento circular en un movimientorectilíneo alternativo o viceversa. La aplicación masdifundida es la de transformar el movimiento lineal de lospistones de un motor de explosión en un movimiento degiro. El mecanismo está formado por un émbolo (pistón)que se mueve en unas guías (cilindro); el émbolo estáunido por un eje a la biela y esta a la manivela; por últimola manivela se une solidariamente al eje de giro. Paraque el sistema funcione la biela ha de ser entre 4 y 6veces el tamaño de la manivela.
Como puede apreciarse en la Figura 15, de la página 19, un motor de explosión tiene entre otroscomponentes un cigüeñal, una biela, un pistón y un cilindro. Para explicar el movimiento delmecanismo biela manivela partiremos de la Figura 15 (a); en esta posición la unión entre cigüeñal ybiela se encuentra en el punto A y el pistón, en el Punto Muerto Inferior; cuando el pistón se dirigehacia el Punto Muerto Superior, la biela tira del cigüeñal, hacia arriba, y le hace girar hacia el punto B.Como se puede ver en la Figura 15 (b), hasta llegar el pistón al Punto Muerto Superior Figura 15 ( c).Cuando el pistón comienza su carrera descendente hacia el Punto Muerto Inferior, la unión cigüeñalbiela se encuentra en la posición B Figura 15 (c); al iniciar la bajada, el pistón empuja a la biela haciaabajo y esta hace girar el cigüeñal desde B hacia A, como se puede ver en la Figura 15 (d).
http://roble.cnice.mecd.es/~lventeo Última revisión: Mayo 2002
Figura 14 Biela - manivela.

Mecanismos de transmisión y transformación de movimiento. 19/22
Al observar el funcionamiento del mecanismo biela manivela, podemos sacar varias conclusiones:
a) La distancia entre el Punto Muerto Superior (PMS) y el Punto Muerto Inferior (PMI) es eldoble del radio de la manivela.
b) Por cada vuelta del cigüeñal, el pistón realiza dos carreras: una carrera de subida y otra debajada.
c) Para que el sistema funcione, la longitud de la biela ha de ser entre 4 y 6 veces la longitudde la manivela.
Ejemplo:
Calcular el número de dientes que ha de tener el engranaje conducido de un mecanismo deprensa, en el que el eje motor tiene 10 dientes y gira a 180 rpm. Y el engranaje conducidoacciona una prensa que debe dar un golpe cada dos segundos. Si la distancia entre laposición alta y baja de la prensa es de 4 Cm. Calcular la distancia entre el eje del engranajeconducido y el enganche de la biela. ¿Que longitud tendrá la biela?. ¿Cuantos Cm recorre lamaza de la prensa por cada vuelta del eje conducido?.
Datos: Resolución: Engranaje.NM = 180 rpm.ZM = 10 dientesN c = 30 rpm.Zc = ?
Cada vuelta de la manivela, la prensa golpea un vez, si la prensa hade golpear una vez cada dos segundos, girará 30 veces en unminuto o lo que es igual girará a 30 rpm.
Formula a emplear: N M∗ZM=N C∗ZC Sustituyendo:
180∗10=30∗ZC Despejando:
ZC=180∗10
30=60dientes
Datos: Resolución: Manivela
D= 4 Cm.R = ?
Formula a emplear: recorrido=2∗R Sustituyendo:
4Cm.=2∗R Despejando: R=4 Cm.2
=2Cm.
Datos: Resolución: Biela.Manivela= 2 Cm.Biela = ?
Formula a emplear: biela=4∗manivela Sustituyendo:
Biela=4∗2=8Cm.
© Leoncio Venteo http://roble.cnice.mecd.es/~lventeo Febrero 2000
Figura 15 Esquema del motor de explosión.
PMI
PMS
A
B
PMI
PMS
A
B
PMI
PMS
A
B
PMI
PMS
A
B
(a) (b) (c) (d)
20/22 Tecnología
Datos: Resolución: Recorrido de la mazaD = 4 Cm.Recorrido = ?
Por cada vuelta de la manivela la maza hace un recorrido de subiday otro de bajada.
longidud=recorrido∗2=4∗2=8Cm.
4.5.Levas y excéntricas.
4.5.1.Excéntrica.
Una excéntrica es un rueda o disco, que gira por un punto separado, un determinada distancia, de sucentro. Este desplazamiento del centro provoca un vaivén en el movimiento del disco que se puedetransformar en un movimiento lineal alternativo mediante un palpador en contacto con el.
4.5.2.Levas.
La leva es un mecanismo similar a la excéntrica, pero en el que se puede establecer una ley periódicaque relaciona el movimiento de giro con el movimiento lineal. Se emplean en automóviles y enmáquinas herramientas. Dependiendo de la forma podemos clasificarlas en tres grupos:
4.5.3.Levas de disco.
Se llaman así, porque para su construcción se parte de un disco al que se le quita una parte. La formade la parte eliminada determina el movimiento que genera. Las mas habituales son: de corazón, deroldana y de movimiento variado. El movimiento se produce en el mismo plano en el que se encuentrala circunferencia del disco.
4.5.4.Levas frontales.
Las levas frontales producen el movimiento en un plano perpendicular al plano de la circunferencia. Eneste caso se parte de un cilindro o un cono, al que no se le modifica la circunferencia, sino la parteplana.
4.5.5.Levas de tambor.
Las levas de tambor parten de un cilindro sobre el que se talla un canal en el que se introduce unpivote que hace que se mueva el elemento mandado.
5. Transformación de movimiento rectilíneo en movimientorectilíneo.
En la transformación de movimiento rectilíneo en movimiento rectilíneo, se persigue cambiar ladirección, el sentido del movimiento o el esfuerzo necesario para realizarlo.
http://roble.cnice.mecd.es/~lventeo Última revisión: Mayo 2002

Mecanismos de transmisión y transformación de movimiento. 21/22
5.1.Polea fija.
Una polea fija está formada por una rueda o polea que gira libremente sobre un eje fijo, o sea, que nose desplaza. La polea fija sólo cambia el sentido del movimiento sin alterar la velocidad, ni la fuerza.
5.2.Polea móvil.
Una polea móvil está formada por una rueda o polea que gira libremente sobre un eje, en el que secoloca la carga. La polea además de girar se desplaza. La polea móvil no cambia el sentido delmovimiento, pero si altera la velocidad, y la fuerza.
5.3.Aparejos de poleas.
Los aparejos de poleas son mecanismos que se utilizan para transformar un movimiento rectilíneo enotro de igual tipo. Generalmente se pretende reducir la fuerza necesaria para trasladar un objetoreduciendo la velocidad de este.
La polea fija sólo cambia el sentido del movimiento sin alterar la velocidad. La polea móvil, la poleadiferencial, la trócola y los polipastos además del sentido de movimiento modifican la velocidad.Algunas de estas poleas llevan un mecanismo de trinquete para evitar que la carga descienda, alsoltar la cuerda.
5.3.1.Aparejo potencial.
El aparejo de potencial está formado por una o mas poleas móviles y una poleafija dispuestas como se indican en la figura. Esta configuración permite reducir lafuerza necesaria para elevar el peso a consta de reducir también la velocidad deelevación.
Si aplicamos las ecuaciones de equilibrio a las poleas de la figura comenzandopor la polea A obtenemos:
P=2∗t1 t1=P2
t1=2∗t 2 t2=t1
2
t2=2∗t3 t3=t2
2
t3=FF=t 2
2F=
t1
22 F= P23
En general:
F= P2n
Donde: n=número de poleas móviles,P=Peso a elevar y F=Fuerza necesaria.
5.3.2.Trócolas y polipastos.
Las trócolas y polipastos están formadas por un grupo de poleas fijas (A) y un grupo de poleasmóviles (B) cada uno de ellos montado en un armadura, con la disposición que se indica en la figura.
© Leoncio Venteo http://roble.cnice.mecd.es/~lventeo Febrero 2000
P
A
B
C
D
t1
t2
t3t3
t2
t1
t3
22/22 Tecnología
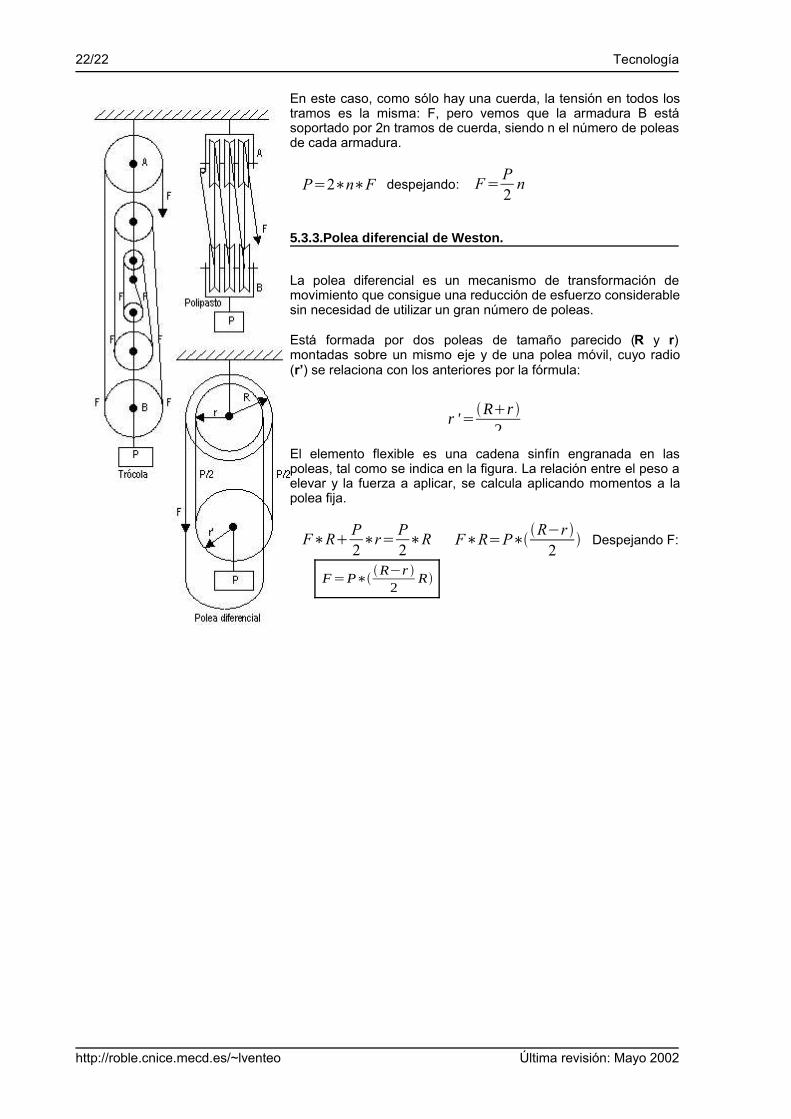
En este caso, como sólo hay una cuerda, la tensión en todos lostramos es la misma: F, pero vemos que la armadura B estásoportado por 2n tramos de cuerda, siendo n el número de poleasde cada armadura.
P=2∗n∗F despejando: F= P2n
5.3.3.Polea diferencial de Weston.
La polea diferencial es un mecanismo de transformación demovimiento que consigue una reducción de esfuerzo considerablesin necesidad de utilizar un gran número de poleas.
Está formada por dos poleas de tamaño parecido (R y r)montadas sobre un mismo eje y de una polea móvil, cuyo radio(r’) se relaciona con los anteriores por la fórmula:
r '=Rr 2
El elemento flexible es una cadena sinfín engranada en laspoleas, tal como se indica en la figura. La relación entre el peso aelevar y la fuerza a aplicar, se calcula aplicando momentos a lapolea fija.
F∗R P2∗r= P
2∗R F∗R=P∗R−r
2 Despejando F:
http://roble.cnice.mecd.es/~lventeo Última revisión: Mayo 2002
F=P∗ R−r 2
R