mecanica mit
TRANSCRIPT
7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 1/123
Estructura e Interpretación de la Mecánica Clásica
Estructura e Interpretación de la Mecánica Clásica (SICM) es una mecánica clásica libro de textoescrito por Gerald Jay Sussman y Sabiduría Jack con Meinard E! Mayer ! "ue publicado por MI#$ress en %&&'! El libro ( IS &*%+%*',-..*- ) se utili/a en el Instituto de #ecnolo0ía deMassacusetts (MI#) para ense1ar una clase en la mecánica clásica a2an/adas3 a partir de las
ecuaciones de 4a0ran0e y procediendo a tra25s canónica teoría de perturbaciones !SICM explica al0unos 6enómenos 6ísicos3 mostrando los pro0ramas in6ormáticos para la simulaciónde ellos! Estos pro0ramas están escritos en el len0ua7e de pro0ramación Sceme 3 así como lospro0ramas de antes de Sussman in6ormática libro de texto3 Estructura e Interpretación de $ro0ramasde 8rdenador !
Sussman escribió:4a mecánica clásica es en0a1osamente simple! Es sorprendentemente 6ácil de obtener la respuestacorrecta con el 6ala/ ra/onamiento o sin la 2erdadera comprensión! $ara acer 6rente a esteproblema Jack 9isdom y yo3 con la ayuda de :ardy Mayer3 an escrito un libro con el título de esta
carla (Estructura e Interpretación de la Mecánica Clásica) y están dando una clase en el MI# ;ueutili/a t5cnicas de computación para comunicar una comprensión más pro6unda de 4a mecánicaclásica! <tili/amos al0oritmos de cálculo para expresar los m5todos utili/ados para anali/ar los6enómenos dinámicos! Expresando los m5todos en un len0ua7e in6ormático obli0a a ;ue seanine;uí2ocas y computacionalmente e6ica/! 4a 6ormulación de un m5todo como un pro0ramae7ecutable por ordenador y la depuración de ese pro0rama es un e7ercicio de 0ran alcance en elproceso de aprendi/a7e! =demás3 una 2e/ 6ormali/ada de procedimiento3 una idea matemática secon2ierte en una erramienta ;ue se puede utili/ar directamente para calcular los resultados!
El texto completo está disponible 0ratuitamente en línea en el sitio >eb de la editorial!
Enlaces externos
$á0ina Editor en MI# $ress#exto completo en :#M4 en el lu0ar de co*autor Gerald SussmanSICM texto completo en 6ormato $?"Carla sobre SICMMI# curso +!,-+3 @la mecánica clásicaA un en6o;ue computacional@8C9 MI# 8penCourse9are materiales de clase para el curso +!,-+3 "all %&&B!e2isión en =merican Scientiste2ise en "undamentos de "ísica por $iet :ut3 Instituto de Estudios =2an/ados
SD=?83 =I4 &'3 %&&+
Ense1an/a mediante la pro0ramaciónGerald Jay Sussman dio una con6erencia in2itada en 88$S4=&. titulada9y pro0rammin0 is a 0ood medium 6or expressin0 poorly understood andsloppily 6ormulated ideas! :ay una transcripción de la con6erencia! Elresumen de la con6erencia diceA
4le2amos .& a1os pro0ramando ordenadores! 4a pro0ramación nosproporciona nue2as erramientas para expresarnos! =ora tenemoserramientas intelectuales para describir @cómo@3 así como @;u5 es@! Estorepresenta una trans6ormación pro6undaA es una re2olución de la 6orma comoexpresamos lo ;ue pensamos! $or e7emplo3 a menudo se puede oir a
estudiantes y pro6esores ;ue7arse de ;ue el estudiante conoce la @teoría de
7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 2/123
al0una materia3 pero no puede resol2er problemas de manera e6ica/! o deberíamos sorprendernosAel estudiante no tiene un procedimiento 6ormal para aprender la t5cnica! Esperamos ;ue elestudiante aprenda a resol2er problemas mediante un proceso ine6icienteA el estudiante obser2a alpro6esor resol2iendo al0unos problemas3 y esperamos ;ue lue0o abstrai0a los procedimientos apartir del comportamiento ;ue el pro6esor a tenido en al0unos e7emplos! unca se le dan alestudiante instrucciones sobre cómo abstraer a partir de los e7emplos3 ni se le da al estudiante un
len0ua7e para expresar los ;ue a aprendido! Es di6ícil aprender lo ;ue uno no puede expresar! F$eroaora podemos expresarlo! El expresar una metodolo0ía en un len0ua7e de pro0ramación 6uer/a a;ue la metodolo0ía no sea ambi0ua y e6ecti2a computacionalmente! 4a tarea de 6ormular un m5todocomo un pro0rama de ordenador e7ecutable3 y depurar el pro0rama3 es un e7ercicio poderoso en elproceso de aprendi/a7e! El pro0ramador puede expresar así de manera precisa sus ideassomeramente comprendidas3 o 6ormuladas de manera descuidada! =demás3 una 2e/ ;ue una ideamatemática a sido 6ormali/ada procedimentalmente3 se con2ierte en una erramienta ;ue puede serutili/ada directamente para computar resultados!Sussman a aplicado sus resultados a la docencia de in0eniería el5ctrica y más recientemente a la deuna asignatura sobre mecánica! :ace unos a1os publicó el libro Structure and Interpretation ofClassical Mechanics3 en cuyo prólo0o explica cómo mediante la pro0ramación se puede aprender3
en este caso3 mecánica! En el MI#3 donde ense1a Sussman3 se an propuesto desde ace d5cadasideas similares por 0ente como $apert (4o0o) o Minsky! =lan Hay tambi5n lle2a d5cadas traba7andoalrededor de estas ideas!
http://indoecencias.blogspot.com.es/200/0!/ensean"a#mediante#la#programacin.htmlhttps://mitpress.mit.edu/sicp/full#te$t/boo%/boo%.html
7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 3/123
Estructura e Interpretación de la Mecánica Clásica&erald 'a( Sussman ( Sabidur)a 'ac% con Meinhard E. Ma(er
*he MI* +ress Cambridge, Massachusetts -ondres, Inglaterra
%&&' El Instituto de #ecnolo0ía de Massacusetts
eser2ados todos los derecos! in0una parte de este libro puede ser reproducida en cual;uier6orma o por cual;uier medio electrónico o mecánico (incluyendo el 6otocopiado3 0rabación oalmacenamiento y recuperación de in6ormación) sin el permiso por escrito del editor!Este libro 6ue creado por los autores a partir de la 4 = # E sistema de composición y 6ue impresoy encuadernado en los Estados <nidos de =m5rica!
iblioteca del Con0reso de datos Catalo0ación en la 6uente Sussman3 Gerald Jay!Estructura e interpretación de la mecánica clásica Gerald Jay Sussman y Sabiduría Jack con
Meinard E! Mayer! p! cm!
Incluye re6erencias biblio0rá6icas e índice!
IS &*%+%*&',-..*- (c!A! =lk papel)
'! Mecánica! I! Sabiduría3 Jack! II! Mayer3 E! Meinard(Meinard Ed>in)3 ',%, * III! #ítulo!KC'%.!%! SB,. %&&'.L' * ?C%' & &*.','
Este libro está dedicado3 en el respeto y la admiración3 aEl principio de mínima acción
NN El autor no a escatimado en sí mismo no ay dolores en su es6uer/o para presentar las principales ideasde la 6orma más simple y comprensible3 y en 0eneral3 en la secuencia y la conexión en la ;ue en realidad se
ori0inó! En aras de la claridad3 me pareció ine2itable ;ue debo repetirme con 6recuencia3 sin prestar la menoratención a la ele0ancia de la presentación! Me respetado escrupulosamente el precepto de ;ue el 6ísicoteórico brillante 4! olt/mann3 se0On el cual los asuntos de la ele0ancia deberían de7arse a la medida y parael /apatero!
=lbert Einstein3 en la relati2idad3 la teoría especial y 0eneral 3 (',+')3 p! 2
Contenido $re6acio =0radecimientos ' Mecánica de 4a0ran0e '!' El principio de acción estacionaria
Experiencia de mo2imientosenderos reali/ables
'!% Espacios de con6i0uración'!L Coordenadas 0enerali/adas
4a0ran0ianos en coordenadas 0enerali/adas'3- acciones In6ormática
2ías de acción mínimaEncontrar trayectorias ;ue minimi/an la acción
'!. 4a Euler*4a0ran0e ecuacionesde 4a0ran0e ecuaciones
'!.!' ?eri2ación de las ecuaciones de 4a0ran0e
Pariando un camino
7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 4/123
Pariando la accióndel oscilador armónicomo2imiento orbital
'!.!% Ecuaciones de 4a0ran0e Computin04a partícula libreEl oscilador armónico
'!+ Cómo encontrar 4a0ran0ianos
principio de :amiltonconstante aceleracióncampo de 6uer/a central
'!+!' #rans6ormaciones de coordenadas'!+!% Sistemas con restricciones rí0idas
4a0ran0ianos para sistemas limitados rí0idamente<n p5ndulo impulsado en el pi2ote$or ;u5 6uncionamás 0eneral
'!+!L 4imitaciones como de coordenadas'!+!- El la0ran0iano no es Onica
deri2adas temporales totales=dición deri2adas temporales totales a 4a0ran0ianosIdenti6icación de los deri2ados de tiempo total de
'! E2olución de ?ynamical Estadoum5rica inte0ración
'!B Cantidades Conser2adas'!B!' Conser2ada Momenta
E7emplos de cantidades de mo2imiento se conser2a'!B!% Ener0ía Conser2ación
de Ener0ía en t5rminos de ener0ía cin5tica y potencial'!B!L 6uer/as centrales en #res ?imensiones'!B!- #eorema de oeter
IlustraciónA mo2imiento en un centro potencial de'!, =bstracción de Sendero "uncionesecuaciones de 4a0ran0e en un momento
'!'& Mo2imiento restrin0ida'!'&!' Coordinar estricciones
=ora mira esto=lternati2amenteEl p5ndulo mediante restriccionessistemas de construcción de pie/as
'!'&!% 4imitaciones deri2adasde Goldstein aro
'!'&!L Sistemas olonómica
'!'' esumen'!'% $royectos
% cuerpos rí0idos %!' Ener0ía cin5tica de rotación
%!% Cinemática de otación%!L Momentos de inercia%!- Inercia #ensor%!. Momentos principales de inercia%!+ epresentación de la 2elocidad an0ular Pector
Implementación de 6unciones de 2elocidad an0ular%! Dn0ulos Euler%3B Pector =n0ular Momentum
%!, Mo2imiento de un cuerpo rí0ido libre
7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 5/123
conser2adas cantidades%!,!' Cálculo del Mo2imiento de cuerpos rí0idos 0ratis%!,!% Características cualitati2as de libre Mo2imiento de cuerpos rí0idos
%!'& axisim5trico #ops%3'' Spin*8rbit acoplamiento
%!''!' ?esarrollo del $otencial de la Ener0ía%!''!% otación de la 4una y :yperion
%!'% Ecuaciones de EulerEuler ecuaciones para cuerpos rí0idos 6or/ados
%!'L sin0ular Generali/ado Coordenadas<na cuestión prácticaComposición de rotaciones
%!'- esumen%!'. $royectos
L Mecánica amiltoniana L!' Ecuaciones de :amilton
Ilustraciónestado amiltonianoecuaciones de :amilton Computin0
L!'!' 4os 4e0endre de trans6ormación delas trans6ormaciones de 4e0endre con ar0umentos pasi2osecuaciones de :amilton a partir de la trans6ormación de 4e0endre4e0endre trans6orma de 6unciones cuadráticasIn6ormática amiltonianos
L!'!% Ecuaciones de :amilton desde el principio de la acciónL!'!L <n cableado ?ia0rama
L!% $oisson Soportes$ropiedades del soporte de $oisson$oisson soportes de cantidades conser2adas
L!L un 0rado de libertad
L!- "ase de educción de Espaciode mo2imiento en un potencial centro dela parte superior axisim5trico
L!-!' educción de 4a0ran0eL!. "ase Espacio E2olution
L!.!' "ase*Space ?escripción no es aplicable sóloL3+ 4as super6icies de la Sección
L!+!' Sistemas $eriódicamente a conducidoL!+!% In6ormática Stroboscopic Super6icies de la SecciónL!+!L Sistemas =utónomos
:5non*:eiles 6ondoEl sistema de :5non y :eiles
InterpretaciónL!+!- In6ormática :5non*:eiles Super6icies de la SecciónL!+!. no axisim5trico #op
L! exponencial ?i2er0enciaL!B #eorema de 4iou2ille
El 6lu7o de 6ase para el p5ndulo?emostración del teorema de 4iou2illepreser2ación Drea de super6icies estroboscópicas de sección de$oincar5 recurrenciaEl 0as en la es;uina de la abitaciónInexistencia de atractores de sistemas amiltonianoConser2ación de 2olumen de 6ase en un disipati2as sistema de
6unciones de distribución
7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 6/123
L!, Estándar MapL!'& esumenL!'' $royectos
Estructura del Espacio - "ase -!' emer0encia del espacio de 6ase di2idida
?ri2en secciones de p5ndulo con cero accionamiento?ri2en secciones de p5ndulo para la pe;ue1a unidad de
-3% 4ineal Estabilidad-!%!' E;uilibrios de Ecuaciones ?i6erenciales-!%!% puntos 6i7os de Maps-!%!L elaciones Entre los exponentes
amiltoniano especiali/aciónlineales y estabilidad no lineal
-!L Enredo omoclínicas-!L!' Cálculo de estable e inestable Colectores
-!- Sistemas inte0rablestipos de órbita en sistemas inte0rablessuper6icies de sección para los sistemas inte0rables
-!. $oincar5*irko66 #eorema-!.!' Cálculo de las $oincar5*irko66 Construcción
-!+ Cur2as In2ariantes-!+!' Encontrar In2ariant Cur2as-!+!% ?isolución de cur2as in2ariantes
-! esumen-!B $royectos
. canónicas #rans6ormaciones .!' $unto #rans6ormaciones
punto de aplicación #rans6ormaciones.!% #rans6ormaciones canónicas 0enerales
.!%!' #iempo*Independiente Canónica #rans6ormaciones
=rmónica oscilador.!%!% simpl5ctica #rans6ormaciones.!%!L #rans6ormaciones dependientes del tiempo
otación coordenadas.!%!- 4os Simpl5ctica Condición
.!L In2ariantes de Canónica #rans6ormacionesnonin2ariance de p 2
in2ariancia de $oisson Soportespreser2ación Polumen<na 6orma bilineal preser2ado por trans6ormaciones simpl5cticos$oincar5 in2ariantes inte0rales
.!- Extended "ase Espacio
restrin0ido problema de tres cuerpos.!-!' $oincar5*Cartan inte0rales in2ariantes
.!. educción de espacio de 6aseQrbitas en un campo central
"unciones .!+ Generación de4a $olar* trans6ormación canónica
.!+!' " ' Genera canónicas #rans6ormaciones"unciones .!+!% Generación e in2ariantes inte0rales
Generación de 6unciones de tipo " ' 6unciones 0eneradoras de tipo " % elación entre la " ' y " % .!+!L #ipos de 6unciones Generación
Generación de 6unciones en el espacio 6ase extendida
7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 7/123
.!+!- $unto de #rans6ormacionespolar y rectan0ular coordenadas0iratorio coordinaproblema de dos cuerposde mo2imiento epicicloidal
.!+!. Clásica NN Gau0e #rans6ormaciones.! #iempo de e2olución es canónica
teorema de 4iou2ille3 otra 2e/8tra trans6ormación e2olución temporal
.!!' 8tra 2ista de la e2olución en el tiempode área preser2ación de las super6icies de la sección
.!!% Sin embar0o3 otra 2isión del tiempo E2olution.!B de :amilton*Jacobi Ecuación
.!B!' 8scilador =rmónico
.!B!% $roblema de Hepler
.!B!L " % y la 6unción de 4a0ran0e
.!B!- 4a acción 0enera tiempo de e2olución.3, 4ie #rans6orma
4ie trans6orma de las 6unciones de4ie simple trans6ormaE7emplo
.!'& 4ie Serie?inámicaComputin0 serie 4ie
.3'' exponencial Identidades
.!'% esumen
.!'L $royectos + Canónica $erturbación #eoría +!' #eoría de la perturbación con 4ie Series
+!% $5ndulo como un perturbado otor
+!%!' 8rden Superior+!%!% Eliminando t5rminos seculares+3L Cuántos 0rados de libertad
+!L!' $endulum Impulsado como un perturbado otor+3- resonancia no lineal
+!-!' $5ndulo =proximación?ri2en p5ndulo resonancias
+!-!% 4eyendo el amiltoniano+!-!L esonancia*82erlap Criterio+!-!- 8rden Superior*#eoría de la perturbación+!-!. Estabilidad del e;uilibrio 2ertical in2ertido
+!. esumen
+!+ $royectos =p5ndiceA Es;uema de $rocedimiento llama
4ambda expresiones?e6inicionesCondicionalesprocedimientos recursi2osombres localesde datos compuesto * 4istas y 2ectoresSímbolos
B =p5ndiceA otación uestros "unciones
2alores simbólicos
7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 8/123
tuplas?eri2ados?eri2ados de 6unciones de 2arios ar0umentosestructurados resultados
iblio0ra6ía 4ista de E7ercicios Rndice
+refacio
NN En casi todos los libros de texto3 incluso el me7or3 este principio se presenta de modo ;ue esimposible de entender! (H! Jacobi3 Con6erencias sobre la ?inámica 3 'B-%*'B-L)! o e decididoromper con la tradición!
PI =rnold3 M5todos matemáticos de la Mecánica Clásica . T3 nota3 p! %-+
Se a producido un notable resur0imiento del inter5s por la mecánica clásica en los Oltimos a1os!=ora sabemos ;ue ay muco más a la mecánica clásica ;ue se sospecaba! El comportamiento delos sistemas clásicos es sorprendentemente ricaU deri2ación de las ecuaciones de mo2imiento3 elen6o;ue de las presentaciones tradicionales de la mecánica3 es sólo el comien/o! 4os sistemasclásicos muestran una comple7a serie de 6enómenos tales como resonancias no lineales3comportamiento caótico3 y las transiciones acia el caos!
4os tratamientos tradicionales de la mecánica se concentran la mayor parte de su es6uer/o en la muype;ue1a clase de sistemas dinámicos simbólicamente mane7ables! os concentramos en eldesarrollo de m5todos 0enerales para el estudio del comportamiento de los sistemas3 ya sea ;ue
ten0an o no una solución simbólica! 4os sistemas típicos exiben un comportamiento ;ue escualitati2amente di6erente de los sistemas ;ue tienen solución y sorprendentemente complicado!os centramos en los 6enómenos del mo2imiento3 y acemos un uso extensi2o de la simulación porordenador para explorar esta moción!
Incluso cuando un sistema no es tratable simbólicamente3 las erramientas de la dinámica modernospermiten una para extraer una comprensión cualitati2a! En 2e/ de concentrarse en descripcionessimbólicas3 nos concentramos en las características 0eom5tricas del con7unto de posiblestrayectorias! Estas erramientas proporcionan una base para el análisis sistemático de datosnum5ricos o experimentales!
4a mecánica clásica es en0a1osamente simple! Es sorprendentemente 6ácil de obtener la respuestacorrecta con un ra/onamiento 6ala/ o sin una comprensión real! otación matemática tradicionalcontribuye a este problema! 4os símbolos tienen si0ni6icados ambi0uos ;ue dependen del contexto3e incluso a menudo cambian dentro de un contexto dado! ' $or e7emplo3 un resultado 6undamentalde la mecánica es las ecuaciones de 4a0ran0e! En la notación tradicional las ecuaciones de4a0ran0e se escriben
4a 6unción de 4a0ran0e 4 debe ser interpretado como una 6unción de los componentes de posicióny 2elocidad ; i y i 3 de modo ;ue las deri2adas parciales tienen sentido3 pero a continuación3 para
;ue el tiempo de deri2ada d d t para acer 2ías de solución sentido deben aber sido insertado en
7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 9/123
las deri2adas parciales de la 6unción de 4a0ran0e para acer 6unciones del tiempo! El usotradicional de la notación ambi0ua es con2eniente en situaciones simples3 pero en situaciones máscomplicadas3 puede ser un serio obstáculo para el ra/onamiento claro! Con el 6in de ;ue elra/onamiento sea clara e ine;uí2oca3 emos adoptado una notación matemática más precisa!uestra notación es6uncional y si0ue la de las representaciones matemáticas modernas! % <naintroducción a la notación 6uncional es en un ap5ndice!
Computación tambi5n entra en la presentación de las ideas matemáticas mecánica subyacente!e;uerimos ;ue nuestros notaciones matemáticas sean explícitos y lo su6icientemente precisos ;uepueden ser interpretados de 6orma automática3 como por una computadora! Como consecuencia deeste re;uisito las 6órmulas y ecuaciones ;ue aparecen en el texto de pie por su cuenta! #ienen unsi0ni6icado claro3 independiente del contexto in6ormal! $or e7emplo3 escribimos las ecuaciones de4a0ran0e en notación 6uncional como si0ueA L
El 4a0ran0iano 4 es una 6unción real de tiempo t 3 las coordenadas x 3 y 2elocidades 2 U el 2alor es4 ( t 3 x 3 2 )! 4as deri2adas parciales se indican como deri2ados de 6unciones con respecto a
posiciones particulares de ar0umentoU % 4 indica la 6unción obtenida tomando la deri2ada parcial dela 6unción de 4a0ran0e 4 con respecto a la posición ar0umento 2elocidad! 4a notación deri2adaparcial tradicional3 ;ue emplea un deri2ado con respecto a una 2ariable de NN3 depende del contextoy puede dar lu0ar a la ambi0Vedad! - 4as deri2adas parciales de la 6unción de 4a0ran0e se e2alOande 6orma explícita a lo lar0o de una 6unción de trayectoria ; ! 4a deri2ada temporal es tomada y lasecuaciones de 4a0ran0e 6ormó! Cada paso es explícitoU no ay sustituciones implícitas!
4os al0oritmos de cálculo se utili/an para comunicar con precisión al0unos de los m5todosutili/ados en el análisis de 6enómenos dinámicos! Expresando los m5todos de la mecánica2ariacionales en un len0ua7e in6ormático obli0a a ;ue sean ine;uí2ocas y computacionalmentee6ica/! Computación nos obli0a a ser más precisos acerca de la representación de las nocionesmecánicas y 0eom5tricas como ob7etos computacionales y nos permite representar explícitamentelos al0oritmos para la manipulación de estos ob7etos! =demás3 una 2e/ 6ormali/ada como unprocedimiento3 una idea matemática se con2ierte en una erramienta ;ue se puede utili/ardirectamente para calcular los resultados!
4a exploración acti2a por parte del alumno es una parte esencial de la experiencia de aprendi/a7e!uestra atención se centra en la comprensión del mo2imiento de los sistemasU para aprender sobreel mo2imiento del estudiante debe explorar acti2amente el mo2imiento de los sistemas a tra25s dela simulación y la experimentación! 4os e7ercicios y proyectos son una parte inte0ral de lapresentación!
Kue la matemática es lo su6icientemente precisa para ser interpretado de 6orma automática permitela exploración acti2a se extienda a la misma! El re;uisito de ;ue el e;uipo sea capa/ de interpretarcual;uier expresión proporciona retroalimentación inmediata y estricta en cuanto a si la expresiónestá 6ormulado correctamente! 4a experiencia demuestra ;ue la interacción con el e;uipo de estamanera descubre y corri0e mucas de6iciencias en la comprensión!
En este libro nos expresamos m5todos computacionales en Sceme3 un dialecto de la 6amilia 4ispde len0ua7es de pro0ramación ;ue tambi5n utili/amos en nuestro in6ormática introductoria tema enel MI#! :ay mucas buenas exposiciones de Sceme! 86recemos una bre2e introducción alEs;uema en un ap5ndice!
7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 10/123
Incluso en la clase de ciencias de la computación introductoria nunca ense1ar 6ormalmente a lalen0ua3 ya ;ue no tenemos ;ue acerlo! os limitamos a usar3 y los estudiantes reco0erlo en unosdías! Esta es una 0ran 2enta7a de idiomas 4isp comoA #ienen muy pocas maneras de 6ormarexpresiones compuestas3 y casi nin0una estructura sintáctica! #odas las propiedades 6ormales sepueden cubrir en una ora3 al i0ual ;ue las re0las del a7edre/! ?espu5s de un bre2e periodo detiempo nos ol2idamos de los detalles sintácticos de la len0ua (por;ue no ay nin0uno) y se0uir
adelante con los problemas reales * a2eri0uar lo ;ue ;ueremos calcular!
4a 2enta7a del Es;uema 6rente a otros idiomas para la exposición de la mecánica clásica es ;ue lamanipulación de los procedimientos ;ue implementan 6unciones matemáticas es más 6ácil y másnatural en el es;uema ;ue en otros len0ua7es de pro0ramación! ?e eco3 mucos teoremas de lamecánica son directamente representable como pro0ramas de Sceme!
4a 2ersión del es;uema ;ue utili/amos en este libro es el MI# Sceme3 aumentada con una 0ranbiblioteca de so6t>are llamado Scmutils ;ue se extiende a los operadores es;uema sea 0en5ricosobre una 2ariedad de ob7etos matemáticos3 incluyendo expresiones simbólicas! 4a bibliotecaScmutils tambi5n proporciona soporte para los m5todos num5ricos ;ue utili/amos en este libro3
como la cuadratura3 la inte0ración de sistemas de ecuaciones di6erenciales3 y la minimi/aciónmulti2ariante!
El sistema de Sceme3 aumentada con la biblioteca Scmutils3 es so6t>are libre! $roporcionamos estesistema3 con la documentación y el códi0o 6uente3 en una 6orma ;ue se puede utili/ar con el sistemaoperati2o G< 4inux3 en Internet3 enttpA>>>*mitpress!mit!edusicm !
Este libro presenta la mecánica clásica desde una perspecti2a poco abitual! Se centra en lacomprensión de mo2imiento en lu0ar de deri2ar ecuaciones de mo2imiento! #e7e descubrimientosrecientes en la dinámica no lineal en toda la presentación3 en lu0ar de presentarlos como unaocurrencia tardía! <tili/a la notación matemática 6uncional ;ue permite la comprensión precisa delas propiedades 6undamentales de la mecánica clásica! <tili/a cómputo para limitar la notación3para capturar y 6ormali/ar m5todos3 para la simulación3 y para el análisis simbólico!
Este libro es el resultado de la ense1an/a de la mecánica clásica en el MI# durante los Oltimos seisa1os! El contenido de nuestra clase empe/ó con ideas de una clase sobre la dinámica no lineal ydinámica del sistema solar por la sabiduría y las ideas acerca de cómo la computación puede serutili/ado para 6ormular la metodolo0ía desarrollada en una clase de ciencias de la computación deintroducción por =belson y Sussman! Cuando empe/amos esperábamos ;ue el uso de este m5todopara 6ormular la mecánica sería 6ácil! =prendimos rápidamente ;ue mucas cosas ;ue pensamos
;ue entendimos ;ue no3 de eco3 entendemos! uestra exi0encia de ;ue nuestras notacionesmatemáticas sean explícitos y lo su6icientemente precisos ;ue pueden ser interpretados de 6ormaautomática3 como por un ordenador3 es muy e6ica/ en el descubrimiento de los 7ue0os de palabras ylas 6allas en el ra/onamiento! 4a luca ;ue resulta de acer la matemática precisa3 sin embar0o3clara y e6ica/ computacionalmente3 duró muco más tiempo de lo ;ue esperábamos! =prendimosmuco sobre los dos mecánicos y el cómputo de este proceso! Esperamos ;ue otros3 sobre todo denuestros competidores3 adopten esos m5todos3 ;ue me7oran la comprensión y aminorar lain2esti0ación!
' En su libro sobre la peda0o0ía matemática ' T3 :ans "reudental ar0umenta ;ue la dependenciade las con2enciones de notación ambi0uos3 no declaradas en expresiones tales como 6 ( x ) y d 6
( x ) d x ace ;ue las matemáticas y el cálculo en especial de introducción3 muy con6uso para los
7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 11/123
estudiantes principiantesU y 5l ordena educadores matemáticos de utili/ar la notación moderna más6ormal!
% En su ermoso libro de Cálculo en 2ariedades -& T3 Micael Spi2ak utili/a la notación 6uncional!En p! -- abla sobre al0unos de los problemas con la notación clásica! os Extracto un pasa7eparticularmente 7u0osaA
4a mera declaración de la re0la de la cadenaT en notación clásica re;uiere la introducción de letrasirrele2antes! 4a e2aluación abitual para ? ' ( 6 8 ( 0 3 )) se e7ecuta como si0ueASi 6 ( u 3 2 ) es una 6unción y u W 0 ( x 3 y ) y 2 W ( x 3 X ) a continuación
El símbolo < x si0ni6ica x 0 ( x 3 y )3 y u 6 ( u 3 2 ) si0ni6ica ? ' " ( u 3 2 ) W ? ' 6 ( 0 ( x 3 y )3 ( x 3 y ))!T Esta ecuación se escribe a menudo simplemente
#en0a en cuenta ;ue 6 si0ni6ica al0o di6erente en los dos lados de la ecuación
L Esta se presenta a;uí sin explicación3 para dar el sabor de la notación! El texto da una explicacióncompleta!
- NN Es necesario el uso de los aparatos de las deri2adas parciales3 en la ;ue incluso la anotación esambi0ua! PI =rnold3 M5todos matemáticos de la Mecánica Clásica . T3 la Sección -3 p! %.B!P5ase tambi5n la nota al pie de esa pá0ina!
gradecimientos
os 0ustaría dar las 0racias a las mucas personas ;ue nos an ayudado a desarrollar este libro y elplan de estudios está dise1ado para apoyar! :emos tenido ayuda sustancial de los mara2illososestudiantes ;ue an estudiado con nosotros en nuestra clase de la mecánica clásica! Ellos nos anobli0ado a ser claroU ;ue an encontrado errores ;ue emos tenido ;ue solucionar en el so6t>are3 enla presentación3 y en nuestro pensamiento!
:emos tenido una considerable ayuda t5cnica para la elaboración y presentación de la materiaob7eto de :arold =belson! =belson es uno de los desarrolladores del sistema de so6t>are Scmutils!$uso poderoso es6uer/o en al0unas secciones del códi0o! #ambi5n le consultamos cuando
estábamos tratando desesperadamente de comprender la ló0ica de la mecánica! = menudo se puedeproponer una dirección para lle2ar a cabo de un laberinto intelectual!
Mateo :al6ant nos inicia en el desarrollo del sistema Scmutils! =lentó a nosotros para entrar en lacomputación cientí6ica3 utili/ando Es;uema y estilo 6uncional como una 6orma acti2a de explicarlas ideas3 sin las distracciones de los len0ua7es imperati2os como C! En la d5cada de ',B& ;ueescribió al0unos de los procedimientos del Es;uema temprana para el cálculo num5rico ;ue aOnutili/ar!
?an Yuras nos ayudó con la in2ención de la or0ani/ación Onica del sistema Scmutils! Es debido a su2isión de ;ue el sistema se or0ani/a en torno a una extensión 0en5rica de la re0la de la cadena para
la toma de deri2ados! #ambi5n ayudó en el traba7o pesado ;ue se re;uiere para acer un muy buen
7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 12/123
al0oritmo GC? polinomio3 en base a las ideas ;ue emos aprendido de icard Yippel!
Este libro3 y una 0ran cantidad de otros traba7os de nuestro laboratorio3 no se podrían aber ecosin el excelente traba7o de Cris :anson! Cris desarrollado y mantenido el sistema Es;uema ;uesubyace a este traba7o! =demás3 nos lle2ó a tra25s de un paso de la reor0ani/ación del sistemaScmutils ;ue obli0ó al esclarecimiento de mucas de las ideas de los tipos y de las operaciones
0en5ricas ;ue acen ;ue nuestro sistema es tan bueno como lo ;ue es!
Guillermo Juan o/as3 co*desarrollador del sistema de Sceme3 i/o importantes contribuciones alcompilador de es;uema3 e implementó una serie de otros mecanismos arcanos ;ue acen ;uenuestro sistema lo su6icientemente e6iciente para apoyar nuestro traba7o!
=demás de contribuir a al0unos de los m5todos para la solución de ecuaciones lineales en el sistemaScmutils3 Jacob Hat/enelson a proporcionado 2aliosa retroalimentación ;ue la me7ora de lapresentación del material!
Julie Sussman3 $$=3 a condición de una lectura cuidadosa y crítica seria ;ue nos obli0ó a
reor0ani/ar y 2ol2er a escribir las partes principales del texto! Ella tambi5n desarrolló y mantieneGerald Jay Sussman durante todos estos a1os!
Sabiduría Cecile3 santo3 es un recordatorio constante3 por su 6e y su e7emplo3 de lo ;ue es realmenteimportante! Este proyecto no abría sido posible sin el apoyo y el aliento de amor incondicional ;uea dado a Jack 9isdom! Sus i7os3 9illiam3 Ed>ard3 #omas3 Jon y Eli/abet sabiduría ycotidianas enri;uecer su 2ida con la de ellos!
Meinard (:ardy) Mayer ;uiere dar las 0racias a ita Mayer para el apoyo moral del paciente3sobre todo durante sus 6recuentes 2isitas a MI# durante los Oltimos '% a1os3 iels Mayer parapresentarle al mundo mara2illoso del Es;uema (sembrando así las semillas de esta colaboración)3como así como Elma y el resto de la 6amilia por su amor!
Mucos an contribuido a nuestra comprensión de la dinámica de los Oltimos a1os! oris Ciriko23Micel :5non3 $eter Goldreic3 y Stan $eale an tenido una in6luencia particular! #ambi5nreconocemos la in6luencia de la tarde es! Jost!
Mucos otros an contribuido a esta labor3 ya sea en el desarrollo de so6t>are o en el desarrollo delos contenidos3 incluyendo a ill Siebert3 $anayotis Skordos3 Hleantes Honiaris3 He2in 4in3 JamesMcride3 ebecca "rankel3 #omas "! Hni0t3 $a>an Humar3 Eli/abet radley3 =lice Seckel3Jiad #ouma3 y Hennet Xip! :emos tenido una respuesta muy Otil desde y discusiones con $iet
:ut3 Jon ?oyle3 ?a2id "inkelstein3 $eter "iser3 Guy 4e>is Steele Jr! y obert :ermann!=0radecemos al 4aboratorio de Inteli0encia =rti6icial del MI# por su ospitalidad y apoyolo0ístico! econocemos la Matsusita Corporación para el apoyo de Gerald Jay Sussman a tra25s deuna cátedra! =0radecemos reene M! Herr para apoyo de Jack Sabiduría a tra25s de una cátedra!=0radecemos a las Matemáticas del MI# y departamentos EECS apoyo sabático para MeinardMayer!
#ambi5n ;ueremos dar las 0racias a Hatrina =2ery3 nuestro editor3 por su ayuda en la preparación deeste libro! X3 por Oltimo3 damos las 0racias a ebecca isbee por su ayuda durante los mucos a1os;ue emos estado in2olucrados en este proyecto!
7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 13/123
Cap)tulo
Mecánica de -agrange
El propósito de la mecánica es describir cómo los cuerpos cambian su posición en el espacio con NNel tiempo! ?ebo car0ar mi conciencia con 0ra2es pecados contra el espíritu sa0rado de la lucide/ Situ2iera ;ue 6ormular los ob7eti2os de la mecánica de esta manera3 sin una re6lexión seria yexplicaciones detalladas! Pamos a proceder a re2elar estos pecados!
=lbert Einstein3 la relati2idad3 la teoría especial y 0eneral '+ T3 p! ,
El tema de este libro es el mo2imiento y las erramientas matemáticas utili/adas para describirlo!
Si0los de cuidadosas obser2aciones de los mo2imientos de los planetas re2elan re0ularidades enesos mo2imientos3 permitiendo predicciones exactas de 6enómenos como los eclipses y
con7unciones! El es6uer/o por 6ormular estas re0ularidades y en Oltima instancia para entender loslle2ó al desarrollo de las matemáticas y para el descubrimiento de ;ue las matemáticas pueden serutili/ados con e6icacia para describir aspectos del mundo 6ísico! Kue las matemáticas se puedeutili/ar para describir los 6enómenos naturales es un eco notable!
<n pasador arro7ada por un 7u0lar toma un camino bastante predecible y rota de una manerabastante predecible! ?e eco3 la abilidad de acer 7ue0os malabares depende de manera crucial deesta pre2isibilidad! #ambi5n es un descubrimiento notable ;ue las mismas erramientasmatemáticas utili/adas para describir los mo2imientos de los planetas se pueden utili/ar paradescribir el mo2imiento del pasador de malabarismo!
4a mecánica clásica describe el mo2imiento de un sistema de partículas3 con su7eción a las 6uer/as;ue describen sus interacciones! 8b7etos 6ísicos comple7os3 como los pins de malabares3 se puedenmodelar como partículas con innumerables relaciones espaciales 6i7os mantenidos por las 6uer/asrí0idas de interacción!
:ay mucas maneras concebibles sistema podría mo2er eso nunca ocurrió! $odemos ima0inar ;ueel pasador de malabarismo podría acer una pausa en medio del aire o ir catorce 2eces alrededor dela cabe/a del malabarista antes de ser capturado3 pero estos mo2imientos no ocurren! ZCómopodemos distin0uir los mo2imientos de un sistema ;ue en realidad puede ocurrir por otrosmo2imientos ima0inables[ #al 2e/ podamos in2entar al0una matemática6unción ;ue nos permite
distin0uir mo2imientos de reali/ación de entre todos los mo2imientos ima0inables!El mo2imiento de un sistema se puede describir por dando la posición de cada pie/a del sistema encada momento! #al descripción del mo2imiento del sistema se denominaruta de con6i0uración U laruta de acceso de con6i0uración especi6ica la con6i0uración como una 6unción del tiempo! Elpasador de malabarismo 0ira3 ya ;ue 2uela por el aireU la con6i0uración de la cla2i7a de malabares seespeci6ica dando la posición y orientación de la cla2i7a! El mo2imiento de la cla2i7a de malabares seespeci6ica dando la posición y orientación del pasador como una 6unción del tiempo!
4a 6unción ;ue buscamos toma una ruta de con6i0uración como entrada y produce una salida!Kueremos ;ue esta 6unción tiene un comportamiento característico cuando la entrada es un camino
de reali/ación! $or e7emplo3 la salida podría ser un nOmero3 y ;ue se podía tratar de or0ani/ar ;ue
7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 14/123
este nOmero sea cero sólo en las trayectorias de reali/ación! Ecuaciones de mo2imiento de e>tonson de esta 6ormaU en cada momento3 las ecuaciones di6erenciales de e>ton se deben cumplir!
Sin embar0o3 existe una estrate0ia alternati2a ;ue proporciona una 2isión más clara y poderApodemos buscar una 6unción de trayectoria distinti2a ;ue tiene un mínimo en los caminos dereali/ación * por caminos cercano irreali/ables el 2alor de la 6unción es más alta de lo ;ue es en la
reali/ación camino! Este es elestrate0ia 2ariacional A! para cada sistema 6ísico ;ue in2entar una6unción de la ruta distinti2o ;ue distin0ue a los mo2imientos reali/ables del sistema por tener unpunto estacionario para cada camino de reali/ación ' $ara una 0ran 2ariedad de sistemas demo2imientos de reali/ación del sistema se puede 6ormular en t5rminos de una principio 2ariacional!%
Mecánica3 como in2entado por e>ton y otros de su 5poca3 describe el mo2imiento de un sistemaen 6unción de las posiciones3 2elocidades y aceleraciones de cada una de las partículas en elsistema! En contraste con la"ormulación de la mecánica de e>ton3 la 6ormulación 2ariacional dela mecánica describe el mo2imiento de un sistema en t5rminos de cantidades a0re0adas ;ue estánasociados con el mo2imiento del sistema en su con7unto!
En la 6ormulación ne>toniana las 6uer/as a menudo se pueden escribir como deri2ados de la ener0íapotencial del sistema! El mo2imiento del sistema se determina considerando cómo las partículascomponentes indi2iduales responden a estas 6uer/as! 4a 6ormulación ne>toniana de las ecuacionesde mo2imiento es intrínsecamente una descripción de partícula por partícula!
En la 6ormulación 2ariacional las ecuaciones de mo2imiento se 6ormulan en t5rminos de ladi6erencia de la ener0ía cin5tica y la ener0ía potencial! 4a ener0ía potencial es un nOmero ;ue escaracterístico de la disposición de las partículas en el sistemaU la ener0ía cin5tica es un nOmero ;ueestá determinado por las 2elocidades de las partículas en el sistema! i la ener0ía potencial ni laener0ía cin5tica depende de cómo se especi6ican las posiciones y 2elocidades! 4a di6erencia es
característico del sistema como un todo y no depende de los detalles de cómo se especi6ica elsistema! =sí ;ue tenemos la libertad de ele0ir 6ormas de describir el sistema ;ue son 6áciles detraba7arU nos liberamos de la descripción de partícula por partícula inerente a la 6ormulaciónne>toniana!
4a 6ormulación 2ariacional tiene numerosas 2enta7as sobre la 6ormulación ne>toniana! 4asecuaciones de mo2imiento para los parámetros ;ue describen el estado del sistema se deri2an de lamisma manera independientemente de la elección de los parámetrosA el m5todo de 6ormulación nodepende de la elección de lossistema de coordenadas! Si ay restricciones posicionales entre laspartículas de un sistema de la 6ormulación de e>ton re;uiere ;ue consideremos las 6uer/as demantenimiento de estas restricciones3 mientras ;ue en la 6ormulación 2ariacional de las limitacionesse pueden incorporar a las coordenadas! 4a 6ormulación 2ariacional re2ela la asociación de las leyesde conser2ación con las simetrías! 4a 6ormulación 2ariacional proporciona un marco para lacolocación de cual;uier mo2imiento particular de un sistema en el contexto de todos los posiblesmo2imientos del sistema! $erse0uimos la 6ormulación 2ariacional debido a estas 2enta7as!
' <n punto estacionario de una 6unción es un punto donde la 2alor de la 6unción no 2aría como laentrada es muy 2ariada! Máximos o mínimos locales son puntos estacionarios!
% 4a 6ormulación 2ariacional describe con 5xito todos los mecánica ne>toniana de partículas ycuerpos rí0idos! 4a 6ormulación 2ariacional tambi5n se a aplicado de 6orma Otil en la descripción
de mucos otros sistemas tales como la electrodinámica clásica3 la dinámica de 6luidos no 2iscosos3
7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 15/123
y el dise1o de mecanismos tales como enlaces de cuatro barras! =demás3 las 6ormulacionesmodernas de la mecánica cuántica y la teoría cuántica de campos se basan en mucos de los mismosconceptos! Sin embar0o3 parece ;ue no todos los sistemas dinámicos tienen una 6ormulación2ariacional! $or e7emplo3 no ay receta simple de aplicar el aparato 2ariacional a los sistemas condisipación3 aun;ue en casos especiales m5todos 2ariacionales toda2ía se pueden utili/ar!
. El principio de acción estacionaria
Supon0amos ;ue para cada sistema 6ísico ay una ruta de distin0uir la 6unción ;ue está parado enlos caminos de reali/ación! Pamos a tratar de deducir al0unas de sus propiedades!
-a e$periencia del moimiento
uestra experiencia cotidiana su0iere ;ue 6ísica mo2imiento puede ser descrito por caminos decon6i0uración ;ue son continuas y lisas! L o 2emos el salto pin malabares de un lu0ar a otro!#ampoco 2emos el pasador malabares repente cambiar la 6orma en ;ue se está mo2iendo!
uestra experiencia cotidiana su0iere ;ue el mo2imiento de los sistemas 6ísicos no depende de todala istoria del sistema! Si entramos en la abitación despu5s de ;ue el pasador de malabarismo asido lan/ado en el aire ;ue no podemos decir cuando salió de la mano del malabarista! Elmalabarista podría aber arro7ado el pin de una 2ariedad de lu0ares en una 2ariedad de 2eces con elmismo resultado aparente a medida ;ue caminamos por la puerta! - =sí ;ue el mo2imiento delpasador no depende de los detalles de la istoria!
uestra experiencia ordinaria su0iere ;ue el mo2imiento de los sistemas 6ísicos es determinista! ?eeco3 un pe;ue1o nOmero de parámetros resumir los aspectos importantes de la istoria delsistema y determinar su e2olución 6utura! $or e7emplo3 en cual;uier momento la posición3 la2elocidad3 la orientación y la 2elocidad de cambio de la orientación de la cla2i7a de malabares sonsu6icientes para determinar completamente el mo2imiento 6uturo de la cla2i7a!
Caminos reali"ables
?esde nuestra experiencia de mo2imiento desarrollamos ciertas expectati2as sobre tipos decon6i0uración reali/ables! Si una ruta es reali/able3 entonces cual;uier se0mento de la ruta es unse0mento de tra/ado de reali/ación! = la in2ersa3 un camino es reali/able si cada se0mento de laruta es un se0mento de tra/ado de reali/ación! 4a reali/abilidad de un se0mento de la ruta dependede todos los puntos de la ruta en el se0mento! 4a reali/abilidad de un se0mento de la ruta dependede cada punto del se0mento de tra/ado de la misma maneraU in0una parte de la ruta de acceso es
especial! 4a reali/abilidad de un se0mento de tra/ado sólo depende de los puntos de la ruta dentrodel se0mentoU la reali/abilidad de un se0mento de tra/ado es una propiedad local!
?e modo ;ue la 6unción de trayectoria*distin0uiendo a0re0a una propiedad local del sistema demedida en cada momento a lo lar0o del se0mento de tra/ado! Cada momento a lo lar0o de la ruta deacceso debe ser tratado de la misma manera! 4as contribuciones de cada momento a lo lar0o delse0mento de tra/ado deben ser combinados de manera ;ue se manten0a la independencia de lascontribuciones de los subse0mentos dis7untos! <no de los m5todos de combinación ;ue satis6aceestos re;uisitos es sumar las contribuciones3 lo ;ue ace la 6unción de ruta de distin0uir una inte0ralsobre el se0mento de tra/ado de al0una propiedad local de la ruta! .
=sí ;ue trataremos de coordinar ;ue la 6unción de trayectoria*distin0uiendo3 construido como una

7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 16/123
inte0ral de una propiedad local a lo lar0o del camino3 asume un 2alor extremo para cual;uiercamino de reali/ación! #al 6unción de la ruta ;ue distin0ue tradicionalmente se denomina acciónpara el sistema! <samos la palabra NN acción para ser coerente con el uso comOn! #al 2e/ sería másclaro para continuar llamarla NN 6unción de trayectoria*distinti2o3 pero entonces sería más di6ícilpara ;ue otros sepan lo ;ue estábamos ablando! +
Con el 6in de continuar la a0enda de la mecánica 2ariacionales3 debemos in2entar 6unciones deacción ;ue son estacionarias en las trayectorias de reali/ación de los sistemas ;ue estamosestudiando! #endremos en cuenta las acciones ;ue son inte0rales de al0una propiedad local de laruta de con6i0uración en cada momento! ?e7arser la 6unción de la ruta de con6i0uraciónU ( t ) es lacon6i0uración en el momento t ! 4aacción del se0mento de la trayectoria en el inter2alo de tiempodesde t ' a # % es ⁷
donde "(y) es una 6unción del tiempo ;ue mide al0una propiedad local de la ruta de acceso! Estopuede depender del 2alor de la 6unción en ese momento y el 2alor de cual;uier deri2ado de en ese
momento! B
4a ruta de con6i0uración puede ser descrito de 6orma local en un momento en t5rminos de lacon6i0uración3 la 2elocidad de cambio de la con6i0uración3 y todas las deri2adas de orden superiorde la con6i0uración en el momento dado! ?ada esta in6ormación3 el camino puede ser reconstruidoen un inter2alo ;ue contiene ese momento! , propiedades locales de caminos pueden depender nomás de la descripción local de la ruta!
4a 6unción (")mide al0una propiedad local de la ruta de con6i0uración(y) ! $odemos descomponer"yT en dos partesA una parte ;ue mide al0una propiedad de una descripción local y una parte ;ueextrae una descripción local de la ruta de acceso de la 6unción de trayectoria! 4a 6unción ;ue midela propiedad local del sistema depende del sistema 6ísico en particularU el m5todo de construcciónde una descripción local de una ruta de acceso de una ruta de acceso es el mismo para cual;uiersistema! $odemos escribir "yT como una composición de estas dos 6uncionesA '&
4a 6unción # toma el camino y produce una 6unción de tiempo cuyo 2alor es una tupla ordenada;ue contiene la ora3 la con6i0uración en ese momento3 la 2elocidad de cambio de la con6i0uraciónen ese momento3 y los 2alores más altos de los deri2ados de la trayectoria e2aluada en ese tiempo!$ara el trayecto y el tiempo t A ''
os re6erimos a esta tupla3 ;ue incluye el mayor nOmero de deri2ados como son es necesario3 comola tupla locales !
4a 6unción 4 depende de los detalles especí6icos del sistema 6ísico ;ue se in2esti0a3 pero nodepende de cual;uier ruta de con6i0uración particular! 4a 6unción 4 calcula un 2alor real de lapropiedad local de la ruta! os daremos cuenta de ;ue 4 sólo tiene un nOmero 6inito decomponentes de la tupla local para calcular esta propiedadA 4a ruta de acceso puede ser reconstruidoa ni2el local de la descripción completa localesU ;ue 4 depende de un nOmero 6inito de componentesde las 0arantías tupla locales ;ue mide una propiedad local! '%
4a 2enta7a de esta descomposición es ;ue la descripción local de la ruta se calcula por un proceso
7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 17/123
uni6orme de la ruta de con6i0uración3 independiente del sistema ;ue está siendo considerado! #odala in6ormación especí6ica del sistema se captura en la 6unción 4!4a 6unción l se llama una 6unción de 4a0ran0e 'L para el sistema3 y la acción resultante3
;ue se llama la acción de 4a0ran0e ! 4a0ran0ianos se pueden encontrar una 0ran 2ariedad desistemas! Peremos ;ue para mucos sistemas de la4a0ran0e puede ser tomado como la di6erenciaentre la ener0ía cin5tica y potencial! #ales 4a0ran0ianos sólo dependen de la ora3 la con6i0uración3y la tasa de cambio de la con6i0uración! os centraremos en esta clase de sistemas3 pero tambi5n2amos a considerar los sistemas más 0enerales de 2e/ en cuando!
<n camino de reali/ación del sistema a de distin0uirse de los demás por tener acción estacionariocon respecto a un con7unto de caminos irreali/ables cercanas! =ora al0unos caminos cerca de lossenderos de reali/ación tambi5n será reali/ableA para cual;uier mo2imiento del pasador malabaresay otro ;ue es un poco di6erente! =sí ;ue la ora de abordar la cuestión de si la medida esestacionario con respecto a2ariaciones de la trayectoria ;ue deben restrin0ir de al0una manera el
con7unto de caminos ;ue estamos considerando para contener sólo un camino de reali/ación!esultará ;ue por 4a0ran0ianos ;ue dependen sólo de la con6i0uración y la 2elocidad de cambio decon6i0uración es su6iciente para restrin0ir el con7unto de caminos para los ;ue tienen la mismacon6i0uración en los puntos 6inales del se0mento de tra/ado!
El principio de acción estacionaria '- a6irma ;ue para cada sistema dinámico podemos cocinar una6unción de 4a0ran0e de tal manera ;ue un camino de reali/ación la conexión de las con6i0uracionesen dos momentos t ' y t % se distin0ue de todos los caminos concebibles por el eco de ;ue laacción T ( t ' 3 t % ) es estacionaria con respecto a las 2ariaciones de la ruta de acceso! $ara4a0ran0ianos ;ue dependen sólo de la con6i0uración y la 2elocidad de cambio de la con6i0uración3las 2ariaciones se limitan a a;uellos ;ue conser2an las con6i0uraciones en t ' y t % ! '.
E1ercicio .. óptica ermat"ermat obser2ó ;ue las leyes de la re6lexión y la re6racción se podrían explicar por los si0uientesecosA 4a lu/ 2ia7a en línea recta en un medio en particular3 con una 2elocidad ;ue depende delmedio! El camino tomado por un rayo desde un ori0en a un destino a tra25s de cual;uier secuenciade los medios de comunicación es una 2ía de menor tiempo total3 en comparación con los caminos2ecinos! ?emostrar ;ue estos ecos implican las leyes de la re6lexión y la re6racción! '+
L 4a experiencia con los sistemas a escala atómica su0iere ;ue en estos sistemas de escala no 2ia7anpor caminos bien de6inidos de con6i0uración! ?escribir la e2olución de los sistemas a escala
atómica empleamos la mecánica cuántica! =;uí3 restrin0imos la atención a los sistemas para los ;ueel mo2imiento está bien descrita por una ruta de con6i0uración lisa!
- 4a extrapolación de la órbita de la 4una acia atrás en el tiempo no puede determinar el punto enel ;ue 6ue colocado en esta trayectoria! $ara determinar el ori0en de la 4una3 debemoscomplementar la e2idencia dinámico con otras e2idencias 6ísicas tales como composiciones;uímicas!
. #enemos la sospeca de ;ue este ar0umento puede ser promo2ido a una restricción precisa sobrelas posibles 6ormas de acer este tipo de trayectoria*distin0uir!
+ :istóricamente3 :uy0ens 6ue el primero en utili/ar el t5rmino NN =cción en la mecánica3 en
7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 18/123
re6erencia a NN el e6ecto de un mo2imiento! Esto es una idea ;ue sur0ió de los 0rie0os! En sumanuscrito NN ?ynamica ('+,&) 4eibni/ enunció una NN $rincipio mínima acción utili/ando el NNacción ino6ensi2a3 ;ue era el producto de la masa3 la 2elocidad y la distancia de la moción! 4eibni/tambi5n abló de un NN acción 2iolenta en el caso de ;ue las cosas cocaron!
<na inte0ral de6inida de una 6unción real 6 de una 2erdadera ar0umento se escribe un b 6 ! Esto
tambi5n se puede escribir una b 6 ( x ) d x ! 4a primera anotación ace incapi5 en ;ue una 6unciónse está inte0rando!
B #radicionalmente3 los corcetes se colocan alrededor 6uncional ar0umentos! En este caso3 loscorcetes nos recuerdan ;ue el 2alor de puede depender de la 6unción de maneras complicadas3como por e7emplo a tra25s de sus deri2ados!
, En el caso de una 6unción de 2alor real3 el 2alor de la 6unción y sus deri2ados en un cierto puntose puede utili/ar para construir una serie de potencias! $ara su6icientemente a0radables 6unciones(analíticos real)3 la serie de potencia construido de esta manera con2er0e en un inter2alo ;uecontiene el punto! o todas las 6unciones pueden ser representados localmente de esta manera! $or
e7emplo3 la 6unción 6 ( x ) W exp ( * ' x % )3 con 6 (&) W &3 es cero y todos los deri2ados a cero en xW &3 pero este nOmero in6inito de deri2ados es insu6iciente para determinar la 2alor de la 6unción encual;uier otro punto!
'& =;uí o denota composición de 6uncionesA ( 6 o 0 ) ( t ) W 6 ( 0 ( t ))! En nuestra notación de laaplicación de una 6unción dependiente de la trayectoria a su trayectoria es de mayor prioridad ;ue lacomposición3 por lo ;ue o T W o ( T)! 4#y 4#y
'' El deri2ado de una ruta de con6i0uración se puede de6inir en t5rminos de deri2adas ordinariasespeci6icando la 6orma en ;ue actOa en 6unciones de 2alores reales su6icientemente sua2es 6 decon6i0uraciones! 4a de6inición exacta no es importante en esta etapa! Si usted es curioso3 25ase lanota %L ! ?yy
'% Pamos a tarde descubrimos ;ue un se0mento inicial de la tupla local es su6iciente paradeterminar la e2olución 6utura del sistema! Kue una con6i0uración y un nOmero 6inito de deri2adosde determinar el 6uturo si0ni6ica ;ue ay una manera de determinar todo el resto de los deri2ados dela ruta desde el se0mento inicial!
'L 4a clásica 4a0ran0iano 7ue0a un papel 6undamental en la 6ormulación*inte0ral de camino de lamecánica cuántica (debido a ?irac y "eynman)3 donde el comple7o exponencial de la acción clásicaproduce la amplitud de probabilidad relati2a para un camino! El 4a0ran0iano es el punto de partida
para la 6ormulación amiltoniana de la mecánica (discutido en el capítulo L )3 ;ue tambi5n esesencial en las 6ormulaciones de la mecánica cuántica de Scr\din0er y :eisenber0 y en el en6o;uede olt/mann*Gibbs a la mecánica estadística!
'- El principio a menudo se llama el NN principio de mínima acción por;ue sus 6ormulacionesiniciales ablaban en t5rminos de la acción ;ue se está minimi/ado y no el caso más 0eneral decontratación de un 2alor 6i7o! El t5rmino NN principio de mínima acción tambi5n se utili/acomOnmente para re6erirse a un resultado3 debido a Maupertuis3 Euler y 4a0ran0e3 ;ue dice ;ue laspartículas libres se mue2en a lo lar0o de los caminos para ;ue se minimice la inte0ral de la ener0íacin5tica entre todos los caminos con los puntos 6inales indicados! Correspondientemente3 el t5rminoNN acción se utili/a a 2eces para re6erirse especí6icamente a la inte0ral de la ener0ía cin5tica! (En
realidad3 Euler y 4a0ran0e utili/an la 2is 2i2a 3 o el doble de la ener0ía cin5tica!)
7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 19/123
'. 8tras 6ormas de indicando el principio de acción estacionaria acer ;ue suene teleoló0ica ymisterioso! $or e7emplo3 uno podría ima0inar ;ue el sistema considera todas las posibles rutas desdesu con6i0uración inicial a su con6i0uración 6inal y3 a continuación eli0e el uno con la acción máspe;ue1a! ?e eco3 la 2isión subyacente de un uni2erso con propósito3 económica y racional 7u0óun importante papel en las consideraciones 6ilosó6icas ;ue acompa1aron el desarrollo inicial de lamecánica! El principio de acción más temprano ;ue si0ue 6ormando parte de la 6ísica moderna es el
principio de "ermat3 ;ue establece ;ue el camino recorrido por un rayo de lu/ entre dos puntos es lasenda ;ue lle2a a la menor cantidad de tiempo! "ermat 6ormuló este principio en torno a '++& y lautili/ó para deri2ar las leyes de la re6lexión y la re6racción! Moti2ado por esto3 el matemático yastrónomo 6ranc5s $ierre*4ouis Moreau de Maupertuis enunció el principio de mínima acción comoun 0ran principio uni6icador de la 6ísica! En su Essai de cosmolo0ie ('.&) Maupertuis apeló a esteprincipio de NN economía en la naturale/a como prueba de la existencia de ?ios3 a6irmando ;ue NNdemuestra la intención de ?ios para re0ular los 6enómenos 6ísicos por un principio 0eneral de lamás alta per6ección! $ara una perspecti2a istórica de Maupertuis3 Euler de3 y roles de 4a0ran0een la 6ormulación del principio de mínima acción3 2er %B T!
'+ $ara la re6lexión del án0ulo de incidencia es i0ual al án0ulo de re6lexión! 4a re6racción se
describe por la ley de SnellA cuando la lu/ pasa de un medio a otro3 la relación de los senos de losán0ulos 6ormados a la normal a la inter6a/ es la in2ersa de la relación de los índices de re6racción delos medios de comunicación! El índice de re6racción es la relación de la 2elocidad de la lu/ en el2acío a la 2elocidad de la lu/ en el medio!
.2 Espacios de configuración
Pamos a considerar los sistemas mecánicos ;ue pueden ser considerados como compuesto porpartículas puntuales constituti2os3 con masa y posición3 pero sin estructura interna! ' cuerposextendidos pueden ser considerados como compuesto por un 0ran nOmero de estas partículasconstituyentes con las relaciones espaciales especí6icas entre ellos! Cuerpos extendidos mantienensu 6orma a causa delimitaciones espaciales entre las partículas constituyentes! Especi6icación de laposición de todas las partículas constituyentes de un sistema especi6ica el con6i0uración del sistema!4a existencia de limitaciones entre las partes del sistema3 tales como los ;ue determinan la 6orma deun cuerpo extendido3 si0ni6ica ;ue las partículas constituyentes no pueden asumir todas lasposiciones posibles! El con7unto de todas las con6i0uraciones del sistema ;ue se pueden asumir sellama el espacio de con6i0uración del sistema! 4a dimensión del espacio de con6i0uración es el máspe;ue1o nOmero de parámetros ;ue tienen ;ue ser determinado para especi6icar una con6i0uracióncompletamente! 4a dimensión del espacio de con6i0uración tambi5n se llama el nOmero de 0radosde libertad del sistema! 'B
$ara una sola partícula sin restricciones ;ue se necesita tres parámetros para especi6icar lacon6i0uración! <na partícula de punto tiene un espacio de con6i0uración tridimensional! Si se tratade un sistema con más de un punto de partículas3 el espacio de con6i0uración es más complicado! Siay k partículas separadas necesitamos L k parámetros para describir las con6i0uraciones posibles!Si ay limitaciones entre las partes de un sistema de la con6i0uración se restrin0e a un espaciodimensional in6erior! $or e7emplo3 un sistema 6ormado por dos partículas puntuales obli0ado amo2erse en tres dimensiones de manera ;ue la distancia entre las partículas permanece 6i7o tiene unespacio de con6i0uración de cinco dimensionesA por lo tanto con tres nOmeros podemos 6i7ar laposición de una partícula3 y con los otros dos podemos dar la posición de la otra partícula conrespecto a la primera!
7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 20/123
Considere la posibilidad de un al6iler malabares! Se especi6ica la con6i0uración de la cla2i7a si ledamos las posiciones de los átomos ;ue componen el pin! Sin embar0o3 existen descripciones máseconómicos de la con6i0uración! En la ideali/ación ;ue el pasador de malabares es realmente rí0ida3las distancias entre todos los átomos de la cla2i7a permanecen constantes! =sí ;ue podemosespeci6icar la con6i0uración de la cla2i7a al dar la posición de un solo átomo y la orientación del pin!<so de las limitaciones3 las posiciones de todos los otros constituyentes de la $I se puede
determinar a partir de esta in6ormación! 4a dimensión del espacio de con6i0uración de la cla2i7a demalabares es de seisA el nOmero mínimo de parámetros ;ue especi6ican la posición en el espacio esde tres3 y el nOmero mínimo de parámetros ;ue especi6ican una orientación tambi5n es tres!
Como sistema e2oluciona con el tiempo3 las partículas constituyentes se mue2en con su7eción a lasrestricciones! El mo2imiento de cada partícula constituyente se especi6ica mediante la descripciónde la con6i0uración cambiante! $or lo tanto3 el mo2imiento del sistema puede ser descrito como lae2olución a lo lar0o de un camino en el espacio de con6i0uración! 4a ruta de con6i0uración puedeser especi6icado por una 6unción3 la6unción*ruta de con6i0uración3 lo ;ue da la con6i0uración delsistema en cual;uier momento!
E1ercicio .2. &rados de libertad$ara cada uno de los sistemas mecánicos se describen a continuación3 dar el nOmero de 0rados delibertad del espacio de con6i0uración!
una ! #res cla2i7as de malabares!
b ! 4ap5ndulo es65rica3 ;ue consta de una masa ;ue cuel0a punto de una barra sin masa rí0ido unidoa un punto de soporte 6i7o! El p5ndulo puede mo2erse en cual;uier dirección con su7eción a larestricción impuesta por la 2arilla rí0ida! El punto de masa está su7eto a la 6uer/a uni6orme de la0ra2edad!
c ! 4ap5ndulo doble es65rica3 ;ue consta de un punto de masa ;ue cuel0a de una barra sin masarí0ido unido a un se0undo punto de masa ;ue cuel0a de una se0unda 2arilla sin masa unida a unpunto de soporte 6i7o! El punto de masa está su7eto a la 6uer/a uni6orme de la 0ra2edad!
d ! <n punto de masa desli/ante sin 6ricción en un alambre cur2ado rí0ido!
e ! <na parte superior ;ue consta de un cuerpo de re2olución rí0ido con un punto en el e7e desimetría del cuerpo unido a un soporte 6i7o3 su7eto a una 6uer/a 0ra2itacional uni6orme!
6 ! 4a misma como correo 3 pero no de re2olución!
' = menudo se re6ieren a una partícula puntual con masa3 pero no interno estructura como unamasa puntual !
'B En sentido estricto3 la dimensión de la con6i0uración el espacio y el nOmero de 0rados de libertadno son la misma! El nOmero de 0rados de libertad es la dimensión del espacio de con6i0uraciones;ue se NN localmente accesible! $ara sistemas con limitaciones inte0rables los dos son lo mismo!$ara sistemas con restricciones de no*inte0rables la dimensión de con6i0uración puede ser mayor;ue el nOmero de 0rados de libertad! $ara una explicación más detallada 25ase el análisis desistemas con restricciones no inte0rables en la sección '!'&!L ! =parte de esa discusión3 todos lossistemas ;ue considere tener restricciones inte0rables (son NN olonómico)! Es por ello ;ue emos
decidido borrar la distinción entre el nOmero de 0rados de libertad y la dimensión del espacio de
7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 21/123
con6i0uración!
.3 Coordenadas generali"adas
Con el 6in de ser capa/ de ablar acerca de las con6i0uraciones especí6icas ;ue necesitamos tener uncon7unto de parámetros ;ue eti;uetan las con6i0uraciones! 4os parámetros ;ue se utili/an para
especi6icar la con6i0uración del sistema se denominan coordenadas 0enerali/adas ! Considere unapartícula libre sin restricciones! 4a con6i0uración de la partícula se especi6ica dando su posición!Esto re;uiere tres parámetros! 4a partícula sin restricciones tiene tres 0rados de libertad! <na 6ormade especi6icar la posición de una partícula es especi6icar su coordenadas rectan0ulares con relacióna al0unos ele0idos e7es de coordenadas! 4as componentes rectan0ulares de la posición se0enerali/an las coordenadas de una partícula sin restricciones! 8 considere un idealplana p5ndulodobleA un punto de masa restrin0ida a ser una distancia dada de un punto 6i7o por una 2arilla rí0ida3con una se0unda masa restrin0ida a estar en una distancia dada de la primera masa por otra 2arillarí0ida3 todo con6inado a un plano 2ertical! Se especi6ica la con6i0uración si se da la orientación delas dos 2arillas! Esto re;uiere al menos dos parámetrosU el p5ndulo doble plana tiene dos 0rados delibertad! <na 6orma de especi6icar la orientación de cada 2arilla es para especi6icar el án0ulo ;ue
6orma con la 2ertical! Estos dos puntos de 2ista son 0enerali/adas las coordenadas para el p5ndulodoble plana!
El nOmero de coordenadas no tienen por ;u5 ser la misma ;ue la dimensión del espacio decon6i0uración3 aun;ue debe aber por lo menos tantos! $odemos optar por traba7ar con másparámetros ;ue es necesario3 pero entonces los parámetros a ser ob7eto de restricciones ;ue limitanel sistema a las con6i0uraciones posibles3 es decir3 a los elementos del espacio de con6i0uración!
$ara el p5ndulo doble plana se a descrito anteriormente3 las dos coordenadas an0ulares sonsu6icientes para especi6icar la con6i0uración! #ambi5n podríamos tomar como coordenadas0enerali/adas las coordenadas rectan0ulares de cada una de las masas en el plano3 en relación conal0unos e7es de coordenadas ele0ido! Estos tambi5n son coordenadas 6inas3 pero ;ue tendríamos ;uemantener explícitamente en cuenta las restricciones ;ue limitan las posibles con6i0uraciones a la0eometría real del sistema! 4os con7untos de coordenadas con la misma dimensión ;ue el espacio decon6i0uración es más 6ácil de traba7ar por;ue no tenemos ;ue lidiar con las limitaciones explícitasentre las coordenadas! $or lo tanto3 por el momento 2amos a considerar sólo 6ormulaciones en las;ue el nOmero de con6i0uración de coordenadas es i0ual al nOmero de 0rados de libertadU másadelante 2amos a aprender cómo mane7ar los sistemas de coordenadas redundantes y limitacionesexplícitas!
En 0eneral3 las con6i0uraciones 6orman un espacio M de al0una dimensión n ! El n espacio de
con6i0uración tridimensional se puede para metri/ar por la elección de un6unción de coordinar ;ue mapea los elementos del espacio de con6i0uración de n *tuplas de nOmeros reales! Si ay másde una dimensión3 la 6unción es una tupla de n coordinar 6unciones independientes ', ] 3 i W &3 !!! 3 * '3 donde cada i es una 6unción de 2alor real se de6ine en al0una re0ión del espacio decon6i0uración ! %& $ara una con6i0uración dada m en el espacio de con6i0uración M los 2alores i( m ) de las 6unciones de coordenadas son las coordenadas 0enerali/adas de la con6i0uración! Estascoordenadas 0enerali/adas nos permiten identi6icar los puntos de la n el espacio de con6i0uraciónunidimensional con n *tuplas de nOmeros reales! %' $ara cual;uier espacio de con6i0uración dado3ay una 0ran 2ariedad de 6ormas de ele0ir coordenadas 0enerali/adas! Incluso para un solo punto enmo2imiento sin restricciones3 podemos ele0ir las coordenadas rectan0ulares3 coordenadas polares3 ocual;uier otro sistema de coordenadas ;ue a6ecta a nuestra 6antasía!
7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 22/123
El mo2imiento del sistema puede ser descrito por una ruta de con6i0uración de tiempo deasi0nación de puntos de con6i0uración en el espacio! Correspondiente a la trayectoria decon6i0uración es uncoordinar camino ; W o tiempo de mapeo para tuplas de coordenadas0enerali/adas! Si ay más de un 0rado de libertad el camino de coordenadas es un ob7etoestructuradoA K es una tupla de componente de coordenadas ruta 6unciones ; i W i 8 ! En cadainstante de tiempo t 3 los 2alores de ; ( t ) W ( ; & ( t )3 !!! 3 ; n * ' ( t )) son las coordenadas
0enerali/adas de una con6i0uración! yy
El deri2ado ? ; de la trayectoria de coordenadas ; es una 6unción %% ;ue da la tasa de cambio de lacon6i0uración de las coordenadas en un momento dadoA ? ; ( t ) W ( ? ; & ( t )3 !!! 3 ? ; n * ' ( t ))!4a tasa de cambio de una coordenada 0enerali/ada se denomina2elocidad 0enerali/ada !
$odemos acer coordinar representaciones para mayores deri2ados de la ruta tambi5n! Se introducela 6unción ($ronunciado NN carta) ;ue se extiende a una representación de coordenadas para latupla localA %L
donde ; W 8 ! 4a 6unción toma la coordenada libre tupla locales ( t 3 ( t )3 ( t )3 !!! ) y da unarepresentación de coordenadas como una tupla de las 2eces3 el 2alor de la 6unción de trayectoriacoordinar en ese momento3 y los 2alores de como ya ;ue se necesitan mucos deri2ados de la6unción de trayectoria de coordenadas! y^y?y
?ado un camino de coordenadas ; W 8 3 el resto de la tupla local se puede calcular a partir de ella!Introducimos una 6unción y# ;ue ace estoA
4a 6unción ; T depende sólo de la trayectoria de coordenadas ; y sus deri2adosU la 6unción ; T nodepende de o el eco de ;ue K se ace mediante la composición con ! ?e las relaciones ( '!. ) y( '!+ )3 encontramos
E7ercicio '!L! Generali/ado coordenadas$ara cada uno de los sistemas en el e7ercicio '!% 3 especi6icar un sistema de coordenadas0enerali/adas ;ue se pueden utili/ar para describir el comportamiento del sistema!
-agrangianos en coordenadas generali"adas
4a acción es una propiedad de un se0mento de tra/ado de con6i0uración de un la0ran0iano en
particular ! 4aacción no depende del sistema de coordenadas ;ue se utili/a para eti;uetar lascon6i0uraciones! $odemos utili/ar esta propiedad para encontrar una representación de coordenadas4 para la 6unción de 4a0ran0e !4
4a acción es
4a 6unción de 4a0ran0e - es una 6unción de la tupla local de # yT ( t ) W ( t 3y ( t )3 ( t )3 !!! )! 4atupla local tiene la representación de coordenadas ; T W o T3 donde ; W o ! =sí ;ue si ele0imos %- ?y#^x#yy
7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 23/123
a continuación3 %.
= la i/;uierda tenemos la composición de 6unciones ;ue utili/an el intermediario de unarepresentación de coordenadasU a la dereca tenemos la composición de dos 6unciones ;ue noimpli;uen coordenadas! ?e6inimos elcoordinar la representación de la acción a ser
4a 6unción Sx toma un camino de coordenadasU la 6unción S toma un camino de con6i0uración!?esde los inte0randos son la misma por la ecuación ( '!'& )3 las inte0rales tienen el mismo 2alorA
=sí ;ue tenemos una manera de construir coordinar representaciones de un la0ran0iano ;ue da lamisma acción para un camino en cual;uier sistema de coordenadas!
$ara 4a0ran0ianos ;ue dependen sólo de las posiciones y 2elocidades de la acción tambi5n se puedeescribir
El sistema de coordenadas utili/ado en la de6inición de una 6unción de 4a0ran0e o una acción espor lo 0eneral sin ambi0Vedades3 de manera ;ue el subíndice normalmente serán descartados!
', <na tupla de 6unciones ;ue todos tienen el mismo dominio es en sí un 6unciona en ese dominioA?ado un punto en el dominio3 el 2alor de la tupla de 6unciones es una tupla de los 2alores de las6unciones de los componentes en ese punto!
%& El uso de superíndices para indexar la coordenada componentes es tradicional3 a pesar de ;ueexiste la posibilidad de con6usión3 por e7emplo3 con exponentes! <tili/amos indi/ación de base cero!
%' ?e manera más precisa3 las coordenadas 0enerali/adas identi6ican abierta subcon7untos delespacio de con6i0uración con subcon7untos abiertos de n ! Se puede re;uerir más de un con7untode coordenadas 0enerali/adas para cubrir todo el espacio de con6i0uración! $or e7emplo3 si elespacio de con6i0uración es una es6era de dos dimensiones3 podríamos tener un con7unto decoordenadas ;ue se asi0na (un poco más de) el emis6erio norte en un disco3 y otro 0rupo ;ue seasi0na (un poco más de) el emis6erio sur en un disco3 con una 6ran7a cerca del ecuador comOn aambos sistemas de coordenadas! <n espacio ;ue se puede parametri/ar a ni2el local por sua2es
coordinar las 6unciones se llama una 2ariedad di6erenciable ! 4a teoría de las 2ariedadesdi6erenciables se puede utili/ar para 6ormular un tratamiento coordinar libre de la mecánica2ariacionales! <na introducción a la mecánica desde esta perspecti2a se puede encontrar en % T o . T!
%% El deri2ado de una 6unción 6 es una 6unción3 denotado ? 6 ! uestra con2ención de notación es;ue ? es un operador de alta prioridad! $or lo tanto ? opera en la 6unción adyacente antes de ;ueocurra cual;uier otra aplicaciónA ? 6 ( x ) es el mismo ;ue ( ? 6 ) ( x )!
%L 4a de6inición 6ormal de es importancia a la discusión3 pero si realmente ;uieres saber a;uí esuna manera de acerloA En primer lu0ar3 se de6ine la deri2ada de una ruta de con6i0uración en
t5rminos de deri2adas ordinarias especi6icando la 6orma en ;ue actOa sobre 6unciones reales

7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 24/123
su6icientemente sua2es 6 de con6i0uraciones A ( n ) ( # ) ( 6 ) W ? n ( 6 8 ) ( t )! 4ue0o de6inimos ( un3 b 3 c 3 d 3 !!! ) W ( un 3 ( b )3 c ( )3 d ( )3 !!! )! Con esta de6iniciónA ?yy?yy^x
4a 6unción de coordenadas es localmente in2ertible3 y así es ^ !
%. 4 o # yT W o * _ o o T W 4 o o T W 4 o ; T! 4^ ^#y#y#
cciones .! Informática
$ara ilustrar las ideas anteriores3 y para presentar a su 6ormulación como los pro0ramas deordenador3 consideramos ;ue el sistema mecánico más simple * una libre de partículas enmo2imiento en tres dimensiones! Euler y 4a0ran0e descubrieron ;ue para una partícula libre de la
inte0ral de tiempo de la ener0ía cin5tica sobre la trayectoria real de la partícula es menor ;ue lamisma inte0ral a lo lar0o de cual;uier camino alternati2o entre los mismos puntosA una partícula semue2e libre de acuerdo con el principio de acción estacionaria3 proporcionado tomar la 4a0ran0ianoser la ener0ía cin5tica! 4a ener0ía cin5tica de una partícula de masa m y la 2elocidad 2 es ('%) m⁻
P`3 donde P es la ma0nitud de 2 ! En este caso podemos ele0ir las coordenadas 0enerali/adas ;ue⁻
las coordenadas rectan0ulares ordinarios!
?espu5s de Euler y 4a0ran0e3 el la0ran0iano para la partícula libre es %+
donde el parámetro 6ormal x nombra a una tupla de componentes de la posición con respecto a unsistema de coordenadas rectan0ular dado3 y el parámetro 6ormal 2 nombres de una tupla decomponentes de la 2elocidad! %
$odemos expresar esta 6órmula como un procedimientoA
(?e6ine ((masa*4 libre de partículas) local)(let ((2 (2elocidad local)))( '% masa (22 punto*producto))))
4a de6inición indica ;ue *4 libre de partículas es un procedimiento ;ue toma masi2a como
ar0umento y de2uel2e un procedimiento ;ue toma una tupla locales locales 3 %B extractos de la2elocidad 0enerali/ada con el procedimiento de la 2elocidad 3 y utili/a la 2elocidad para calcular el2alor de la 6unción de 4a0ran0e !
Supon0amos ;ue 2amos ; denota una 6unción de trayectoria coordinar ;ue se asi0na tiempo paracomponentes de posiciónA %,
$odemos acer esta de6inición L&
(?e6ine ;
(asta (literal*6unción x)
7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 25/123
(literal*6unción y)(literal*6unción /)))
donde literal*6unción ace ;ue un procedimiento ;ue representa una 6unción de un ar0umento ;ueno tiene propiedades conocidas ;ue no sea el nombre simbólico dado! El símbolo ; aora danombre a un procedimiento de un Onico ar0umento real (tiempo) ;ue produce una tupla de tres
componentes ;ue representan las coordenadas en ese momento! $or e7emplo3 podemos e2aluar esteprocedimiento durante un tiempo simbólico t como si0ueA
(Impresión*expresión (; t)) (asta (x t) (y t) (/ t))
El procedimiento de impresión*expresión produce una 6orma de impresión de la expresión3ysimpli6ica las expresiones antes de imprimirlos!
El deri2ado de la coordenada ruta ? ; es la 6unción ;ue asi0na tiempo para componentes de la2elocidadA
$odemos 6abricar y utili/ar la deri2ada de una 6unción! L' $or e7emplo3 se puede escribirA
(Impresión*expresión ((; ?) t)) (asta ((? x) t) ((? y) t) ((? /) t))
4a 6unción toma un camino de coordenadas y de2uel2e una 6unción de tiempo ;ue da la tuplalocales ( t 3 ; ( t )3 ? ; ( t )3 !!! )! Implementamos este con el procedimientoGamma ! Esto es lo ;ueGamma aceA
(Impresión*expresión ((Gamma ;) t)) (asta t (asta (xt) (yt) (/t)) (asta ((? x) t) ((? y) t) ((/?) t )))
=sí la composición 4 o es una 6unción del tiempo ;ue de2uel2e el 2alor de la 6unción de 4a0ran0epara este punto de la trayectoriaA L%
(Impresión*expresión((componer (4*partcula libre m) (Gamma ;)) t)) ( ( '% m (expt ((? x) t) %)) ( '% m (expt
((? y) t) %)) ( '% m (expt ((? /) t) %)))
El procedimiento de so>*expresión es como impresión*expresión excepto ;ue pone la expresiónsimpli6icada en 6orma in6i7a tradicional y muestra el resultado! LL <tili/amos este m5todo depantalla para ;ue las expresiones en ca7a en este libro! El procedimiento de so>*expresión tambi5n
produce la 6orma de pre6i7o de2uelto por print*expresión 3 pero por lo 0eneral no muestran esto! L-
(So>*expresión((componer (4*libre*partícula m) (Gamma ;)) t))
?e acuerdo con la ecuación ('!'') podemos calcular la acción de 4a0ran0e de tiempo t ' a tiempot % comoA
(?e6ine (4a0ran0e*action 4 ; t' t%)
(de6inida*inte0ral (componer 4 (Gamma ;)) t% t'))
7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 26/123
4a0ran0e*acción toma como ar0umentos un procedimiento de 4 ;ue calcula la 6unción de 4a0ran0e3un procedimiento ; ;ue calcula una ruta de coordinar y empe/ando y terminando tiempos t' y t% !4ade6initeinte0ral utili/ado a;uí toma como ar0umentos una 6unción y los dos límites t' y t% 3 ycalcula la inte0ral de6inida de la 6unción en el inter2alo de t' a t% ! L. #en0a en cuenta ;ue lade6inición de 4a0ran0e*acción no depende de nin0On sistema particular de coordenadas o incluso ladimensión del espacio de con6i0uración! El m5todo de cálculo de lala acción de la representación de
coordenadas de una 6unción de 4a0ran0e y un camino de coordenadas no depende del sistema decoordenadas!
=ora podemos calcular la acción para la partícula libre a lo lar0o de un camino! $or e7emplo3consideremos una partícula ;ue se mue2e a una 2elocidad uni6orme a lo lar0o de una línea recta t(- t 3 L t .3 % t ')! L+ epresentamos el camino como un procedimiento
(?e6ine (*pat prueba t)(acia arriba ( ( - t) )
( ( L t) .)( ( % t) ')))
$ara una partícula de masa L3 obtenemos la acción entre t W & y t W '& como L
(4a0ran0e*acción (*4 libre de partículas L!&) prueba de ruta del &3& '&!&) -L.!
E1ercicio .!. acciones de -agrangepara una partícula libre de un la0ran0iano apropiado es LB
Supon0amos ;ue x es la 2elocidad constante trayectoria en línea recta de una partícula libre3 de
manera ;ue xa W x ( ta ) y xb W x ( tb )! ?emostrar ;ue la acción en el camino de la solución es
Caminos de la m)nima acción
Xa sabemos ;ue el camino real de una partícula libre es un mo2imiento uni6orme en línea recta! ?eacuerdo con Euler y 4a0ran0e3 la acción es menor a lo lar0o de un camino de prueba de línea recta alo lar0o de los caminos cercanos! ?e7e ; sea un camino de prueba de línea recta con la acción S ; T( t ' 3 t % )! ?e7e ; sea una pista de atletismo3 ;ue se obtiene a partir de ; a1adiendo un 2ariaciónruta escalado por el parámetro 2erdadero ! L, 4a acción en la 2ariada trayectoria es S ; T ( t ' 3 t
% )! Euler y 4a0ran0e encontraron ;ue S ; T ( t ' 3 t % ) S ; T ( t ' 3 t % ) para cual;uier ;ue escero en los puntos 6inales y para cual;uier pe;ue1o distinto de cero !
Pamos a 2er esto num5ricamente mediante la 2ariación de la trayectoria de prueba3 a1adiendo unacierta cantidad de una 6unción de prueba ;ue es cero en los puntos 6inales t W t ' y t W t % ! $araacer una 6unción ;ue es cero en los puntos 6inales3 dada una 6unción su6icientemente bieneducado 3 podemos utili/ar ( t ) W ( t * t ' ) ( t * t % ) ( t )! Esto se puede implementarA
(?e6ine ((make*eta t% t' nu) t)( (* t t') (* t t%) (nu t)))
$odemos usar esto para calcular la acción de una partícula libre sobre un tra/ado 2ariado de la ruta
7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 27/123
dada3 en 6unción de A -&
(?e6ine ((2ariada libre de partículas de la acción de masas ; nu t' t%) 5psilon)(let ((eta (make*eta t' t% nu)))(4a0ran0e*acción (masa*4 libre de partículas)
( ; ( eta 5psilon))t't%)))
4a acción de la 2ariada trayectoria3 con ( t ) W (sen t 3 cos t 3 t % ) y W &3&&'3 es decir3 como seesperaba3 más 0rande ;ue la ruta de acceso de pruebaA
((*Pariado partcula libre*acción L!& prueba de ruta(el pecado cos cuadrado)&3& '&3&)
&!&&') -L+3%,'%'-%B.''.L$odemos calcular num5ricamente el 2alor de para el ;ue se minimi/a la acción! uscamos entre3por e7emplo3 * % y 'A -'
(Minimi/ar(2ariada partcula libre*acción L!& prueba de ruta
(el pecado cos cuadrado)&3& '&3&)
*%3& '3&) (*'!.,B%''..-+&%%.-e*'- -L.!&&&&&&&&&&%L .)
Encontramos exactamente lo ;ue se espera * ;ue la me7or relación calidad* es cero3 -% y el 2alormínimo de la acción es la acción a lo lar0o del camino recto!
Encontrar tra(ectorias 4ue minimi"an la acción
:emos utili/ado el principio de 2ariación para determinar si una trayectoria dada es reali/able!#ambi5n podemos utili/ar el principio 2ariacional para encontrar trayectorias! ?ado un con7unto detrayectorias ;ue se especi6ican por un nOmero 6inito de parámetros3 podemos buscar en el espaciode parámetros en busca de la trayectoria en el con7unto ;ue me7or se aproxima a la trayectoria realpor encontrar uno ;ue minimi/a la acción! =l ele0ir un buen con7unto de 6unciones de aproximación;ue podemos conse0uir arbitrariamente cerca de la trayectoria real! -L
<na manera de acer una ruta param5trico ;ue se a 6i7ado puntos 6inales es utili/ar un polinomio;ue pasa a tra25s de los puntos 6inales3 así como un nOmero de puntos intermedios! Pariación de lasposiciones de los puntos intermedios 2aría el caminoU los parámetros de la 2ariada ruta son lascoordenadas de las posiciones intermedias! El procedimientoacer*pat construye ese caminousando un! 4a0ran0e interpolación polinómica -- El procedimiento de ma;uilla7e ruta se llama concinco ar0umentosA (make*pat ;s ;' ;& t' t&) 3 donde ;& y ;' son los puntos 6inales3 t& y t' son lostiempos correspondientes3 y ;s es una lista de intermedia puntos!
?espu5s de aber especi6icado una ruta param5trico3 podemos construir un param5trico acción ;uees sólo la acción calculado a lo lar0o de la ruta param5tricoA
(?e6ine ((*ruta param5trico acción t& 4a0ran0e ;& ;' t') ;s)(let ((;s ruta (make*pat t' t& ;& ;')))(t' 4a0ran0e*action camino de 4a0ran0e t&)))

7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 28/123
$odemos encontrar 2ías de solución aproximada mediante la bOs;ueda de los parámetros ;ueminimi/an la acción! Esto lo acemos con la minimi/ación de un procedimiento de minimi/aciónmultidimensional en lataA -.
(?e6ine (encontrar*pat t& 4a0ran0e ;& ;' t' n)(let ((iniciales*KS (lineales*interpolantes ;& ;' n)))
(let ((*cs minimi/ando(multidimensional*minimi/ar(ruta param5trico acción t& 4a0ran0e ;& ;' t')inicial*;s)))
(make*pat t' t& ;& ;' minimi/ando*;s))))
El procedimiento multidimensional*a minimi/ar reali/a un procedimiento (en este caso el 2alor dela llamada a parametricpataction ) ;ue calcula la 6unción a ser minimi/ada (en este caso la acción)y una aproximación inicial para los parámetros! =;uí ele0imos la estimación inicial para ser puntose;uidistantes sobre una línea recta entre los dos puntos 6inales3 calculadas con lineales*interpolantes
$ara ilustrar el uso de esta estrate0ia3 nos encontraremos con trayectorias del oscilador armónico3con 4a0ran0iana -+
para la masa m y constante del resorte k ! Este 4a0ran0e es implementado por
(?e6ine ((*4 armónica mk) local)(let ((; (coordenadas locales))
(2 ())) 2elocidad local(* ( '% m (2 cuadrada)) ( '% k (pla/a ;)))))
$odemos encontrar una trayectoria aproximada tomada por el oscilador armónico para m W ' y k W' entre K (&) W ' y K ( %) W & como si0ueA -
(?e6ine ; (Encontrar*pat (*4 armónica '3& '3&) & 'A!!! $i % & L))
Sabemos ;ue las trayectorias de este oscilador armónico3 para m W ' y k W '3 son
donde la amplitud = y la 6ase se determinan por las condiciones iniciales! $ara las condiciones depunto 6inal ele0ido la solución es ; ( t ) W cos ( t )! 4a trayectoria aproximada debe ser unaaproximación a coseno en el ran0o de & a %! 4a 6i0ura '!' muestra el error en la aproximación
polinómica producido por este proceso! El error máximo en la aproximación con tres puntosintermedios es in6erior a '3 '& * - ! os encontramos3 como se esperaba3 ;ue el error en laaproximación disminuye a medida ;ue se incrementa el nOmero de puntos intermedios! $ara cuatropuntos intermedios se trata de un 6actor de '. me7or!
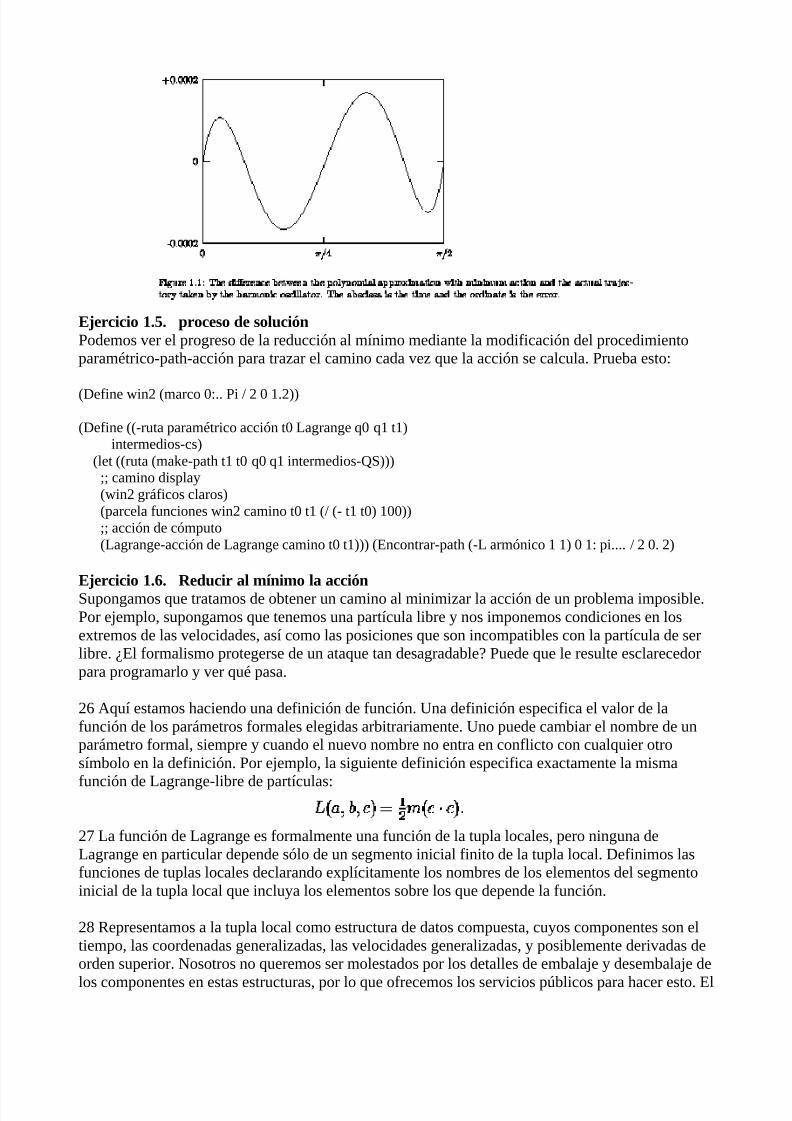
7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 29/123
E1ercicio .5. proceso de solución$odemos 2er el pro0reso de la reducción al mínimo mediante la modi6icación del procedimientoparam5trico*pat*acción para tra/ar el camino cada 2e/ ;ue la acción se calcula! $rueba estoA
(?e6ine >in% (marco &A!! $i % & '!%))
(?e6ine ((*ruta param5trico acción t& 4a0ran0e ;& ;' t')intermedios*cs)
(let ((ruta (make*pat t' t& ;& ;' intermedios*KS)))UU camino display(>in% 0rá6icos claros)(parcela 6unciones >in% camino t& t' ( (* t' t&) '&&))UU acción de cómputo(4a0ran0e*acción de 4a0ran0e camino t& t'))) (Encontrar*pat (*4 armónico ' ') & 'A pi!!!! % &! %)
E1ercicio .. 6educir al m)nimo la acciónSupon0amos ;ue tratamos de obtener un camino al minimi/ar la acción de un problema imposible!$or e7emplo3 supon0amos ;ue tenemos una partícula libre y nos imponemos condiciones en losextremos de las 2elocidades3 así como las posiciones ;ue son incompatibles con la partícula de serlibre! ZEl 6ormalismo prote0erse de un ata;ue tan desa0radable[ $uede ;ue le resulte esclarecedorpara pro0ramarlo y 2er ;u5 pasa!
%+ =;uí estamos aciendo una de6inición de 6unción! <na de6inición especi6ica el 2alor de la6unción de los parámetros 6ormales ele0idas arbitrariamente! <no puede cambiar el nombre de unparámetro 6ormal3 siempre y cuando el nue2o nombre no entra en con6licto con cual;uier otrosímbolo en la de6inición! $or e7emplo3 la si0uiente de6inición especi6ica exactamente la misma
6unción de 4a0ran0e*libre de partículasA
% 4a 6unción de 4a0ran0e es 6ormalmente una 6unción de la tupla locales3 pero nin0una de4a0ran0e en particular depende sólo de un se0mento inicial 6inito de la tupla local! ?e6inimos las6unciones de tuplas locales declarando explícitamente los nombres de los elementos del se0mentoinicial de la tupla local ;ue incluya los elementos sobre los ;ue depende la 6unción!
%B epresentamos a la tupla local como estructura de datos compuesta3 cuyos componentes son eltiempo3 las coordenadas 0enerali/adas3 las 2elocidades 0enerali/adas3 y posiblemente deri2adas deorden superior! osotros no ;ueremos ser molestados por los detalles de embala7e y desembala7e de
los componentes en estas estructuras3 por lo ;ue o6recemos los ser2icios pOblicos para acer esto! El
7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 30/123
constructor * locales se toma el tiempo3 las coordenadas y las 2elocidades y de2uel2e unaestructura de datos ;ue representa una tupla local! El selectores de tiempo 3 coordinar 3 y la2elocidad se extraen las porciones apropiadas de la estructura local! El procedimiento de tiempo esel mismo ;ue el procedimiento (componente &) 3 y de manera similar de coordenadas es(componente ') y la 2elocidad es (componente %) !
%, #en cuidado! 4a x en la de6inición de ; no es el misma ;ue la x ;ue se utili/ó como parámetro6ormal en la de6inición de la 6unción de 4a0ran0e*libre de partículas anteriormente! Sólo ay tantasletras en el al6abeto3 por lo ;ue se 2en obli0ados a 2ol2er a utili/arlos! Pamos a tener cuidado deindicar ;ue los símbolos se dan nue2os si0ni6icados!
L& <na tupla de coordenadas o componentes de 2elocidad se ace con el procedimiento de arriba !Componente i de la tupla ; es (;i re6) ! #oda la indexación es cero basado! 4a palabra para arriba espara recordarnos ;ue en notación matemática estos componentes son indexados por lossuperíndices! #ambi5n ay aba7o tuplas de componentes ;ue están indexadas en subíndices! P5aseel ap5ndice sobre notación!
L' ?eri2ados de 6unciones de rendimiento 6unciones! $or e7emplo3 ((Cubo ?) %) W '% y ((cubo ?)a) W (L (expt un %)) !
L% En nuestro sistema3 los operadores aritm5ticos son 0en5ricos sobre las expresiones simbólicas3así como 2alores num5ricosU procedimientos aritm5ticos pueden traba7ar de manera uni6orme conlos nOmeros o expresiones! $or e7emplo3 dado el procedimiento (de6ine (cubo x) ( )) se puedeobtener su 2alor para un nOmero (cubo %) W B o para un símbolo literal (cubo a) W ( ===) !
33 -a pantalla se genera con * E 7.
L- $ara expresiones muy complicadas la notación de pre6i7o de es;uema a menudo es me7or3 pero lasimpli6icación es casi siempre Otil! $odemos separar las 6unciones de la simpli6icación y la pantallain6i7o! Pamos a 2er e7emplos de esto más tarde!
L. Scmutils incluye una 2ariedad de inte0ración num5rica procedimientos! 4os e7emplos de estasección se calcularon racional*6unción extrapolación de las 6órmulas de Euler*Maclaurin con unatolerancia de error relati2o de '& * '& !
L+ $ara una situación 6ísica real3 tendríamos ;ue especi6icar unidades para estas cantidades3 pero eneste e7emplo ;ue les de7e sin especi6icar!
L =;uí usamos los nOmeros con puntos decimales para especi6icar los parámetros! Este obli0a a lasrepresentaciones estar 6lotando punto3 ;ue es e6iciente para el cálculo num5rico! Si el ál0ebrasimbólica ;ue se debe acer es esencial ;ue los nOmeros de ser enteros o 6racciones exactasracionales3 de modo ;ue las expresiones se pueden reducir de 6orma 6iable a los t5rminos más! #alesnOmeros se especi6ican sin coma decimal!
LB 4a ma0nitud al cuadrado de la 2elocidad es f 3 el punto producto 2ectorial de la 2elocidad con lamisma! 4a cuadrado de una estructura de componentes se de6ine como la suma de los cuadrados delos componentes indi2iduales3 por lo ;ue escribir simplemente 2` W 2 f 2 !⁻ ⁻
L, #en0a en cuenta ;ue estamos aciendo operaciones aritm5ticas con 6unciones! Extendemos la
operaciones aritm5ticas de modo ;ue la combinación de dos 6unciones del mismo tipo (mismos
7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 31/123
dominios y ran0os) es la 6unción en el mismo dominio ;ue combina los 2alores de las 6unciones delos ar0umentos en el ran0o! $or e7emplo3 si 6 y 0 son 6unciones de t 3 entonces 6 0 es la 6unción t 6 (t ) 0 ( t )! <n mOltiplo constante de una 6unción es la 6unción cuyo 2alor es la constante multiplicadapor el 2alor de la 6unción para cada ar0umentoA C 6 es la 6unción t c 6 ( t )!
-& #en0a en cuenta ;ue estamos a0re0ando procedimientos! $aralelamente a nuestra extensión de
operaciones aritm5ticas a 6unciones3 operaciones aritm5ticas se extienden a procedimientoscompatibles!
-' 4os ar0umentos para minimi/ar son un procedimiento la implementación de la 6unciónuni2ariante en cuestión3 y los límites in6erior y superior de la re0ión a buscar! Scmutils incluye unaselección de m5todos de minimi/ación num5ricaU el ;ue se utili/a a;uí es el al0oritmo de rent3 conuna tolerancia de error de '& * . ! El 2alor de2uelto por minimi/ar es una lista de tres nOmerosA elprimero es el ar0umento en ;ue se produ7o el mínimo3 el se0undo es el mínimo obtenido3 y eltercero es el nOmero de iteraciones del al0oritmo de minimi/ación se re;uiere para obtener elmínimo!
-% Sí3 *'!.,B%''..-+&%%.-e*'- es cero para el tolerancia re;uerida del minimi/er! X el-L.!&&&&&&&&&&%L es posiblemente el mismo ;ue -L. obtenido antes!
-L :ay un montón de buenas maneras de acer tal con7unto param5trico de las trayectorias deaproximación! Se podría utili/ar splines o de orden superior polinomios de interpolaciónU se podríautili/ar polinomios de Cebyse2U se podría utili/ar componentes de "ourier! 4a elección dependede los tipos de trayectorias se ;uieren aproximar!
-- :e a;uí una manera de implementar *pat marca A
(?e6ine (;s ;' ma;uilla7e ruta ;& t& t')(let (( (;s lon0itud)))
(let ((ts (t' lineales*interpolantes t& n)))(4a0ran0e*interpolación de 6unciones(append (lista ;&) ;s (lista ;'))(se a1ade a la lista (t&) ts (lista t'))))))
4os procedimientos lineales*interpolantes produce una lista de elementos ;ue interpolanlinealmente los dos primeros ar0umentos! <tili/amos este procedimiento para especi6icar ts 3 el nuni6ormemente espaciados tiempos intermedios entre t& y t' en la ;ue se especi6ica la ruta deacceso! 4os parámetros ;ue se a7ustan3 ;s 3 son las posiciones en estos tiempos intermedios! Elprocedimiento de 4a0ran0e*interpolación*6unción toma una lista de 2alores y una lista de oras yproduce un procedimiento ;ue calcula el polinomio de interpolación de 4a0ran0e ;ue pasa a tra25s
de estos puntos!
-. El minimi/er usada a;uí es la simple ba7ada elder*Mead m5todo! Como es abitual en losprocedimientos num5ricos3 la inter6a/ con el elder*Mead procedimiento es comple7o3 con unmontón de parámetros opcionales para ;ue los errores de control de usuario con e6icacia! $ara estapresentación nos emos especiali/ado elder*Mead en2ol2i5ndolo en el más apeteciblemultidimensional*minimi/ar ! ?esa6ortunadamente3 usted tendrá ;ue aprender a 2i2ir conprocedimientos num5ricos complicados al0On día!
-+ o se preocupe! Sabemos ;ue usted toda2ía no sabe por ;u5 este es el 4a0ran0iano dereca!Pamos a lle0ar a esto en la sección '!+ !
7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 32/123
- $or con2ención3 llamada constantes tienen nombres ;ue comien/an con dos puntos! 4asconstantes con nombre A pi y A*pi son lo ;ue se espera de sus nombres!
.5 -as ecuaciones de Euler#-agrange
El principio de acción estacionaria caracteri/a a los caminos de reali/ación de los sistemas en el
espacio de con6i0uración como a;uellos para los ;ue la acción tiene un 2alor estacionario! Encálculo elemental3 nos enteramos de ;ue los puntos críticos de una 6unción son los puntos donde laderi2ada se anula! ?e una manera análo0a3 lacaminos por los ;ue la acción no es estacionaria sonsoluciones de un sistema de ecuaciones di6erenciales! Este sistema3 llamado las ecuaciones deEuler*4a0ran0e o sólo las ecuaciones de 4a0ran0e 3 es el 2ínculo ;ue nos permite utili/ar elprincipio de acción estacionaria para calcular los mo2imientos de los sistemas mecánicos3 y pararelacionar el 2ariacional y 6ormulaciones de la mecánica ne>toniana! -B
Ecuaciones de -agrange
osotros encontramos ;ue si 4 es una 6unción de 4a0ran0e para un sistema ;ue depende del
tiempo3 las coordenadas3 y 2elocidades3 y si ; es un camino de coordenadas para ;ue la acción S ; T ( t ' 3 t % ) es estacionario (con respecto a cual;uier 2ariación en la ruta de acceso ;ue mantienelos puntos 6inales de la trayectoria 6i7a)3 lue0o
=;uí 4 es una 6unción real de una tupla localU ' 4 y % 4 denotan la deri2adas parciales de 4 conrespecto a su posición 0enerali/ada y los ar0umentos de 2elocidad 0enerali/adas! -, 4a 6unción de% 4 mapas una tupla local a una estructura cuyos componentes son los deri2ados de 4 con respecto acada componente de la 2elocidad 0enerali/ada! 4a 6unción ; T asi0na tiempo para la tupla localA ; T ( t ) W ( t 3 ; ( t )3 ? ; ( t )3 !!! )! =sí3 las composiciones ' 4 o ; T y % 4 o ; T son 6unciones deun solo ar0umento3 el tiempo! 4as ecuaciones de 4a0ran0e a6irman ;ue el deri2ado de % 4 de 8 ; Tes i0ual a ' 4 de 8 ; T3 en cual;uier momento! ?ada una 6unción de 4a0ran0e3 las ecuaciones de4a0ran0e 6orman un sistema de ecuaciones di6erenciales ordinarias ;ue debe ser satis6eca por loscaminos de reali/ación! .&
.5. 8eriación de las ecuaciones de -agrange
Pamos a demostrar ;ue el principio de acción estacionaria implica ;ue las rutas reali/ablessatis6acen un con7unto de ecuaciones di6erenciales ordinarias! En primer lu0ar 2amos a desarrollarerramientas para la in2esti0ación de cómo las 6unciones dependientes de la trayectoria 2aríancomo los caminos son 2ariados! = continuación3 aplicaremos estas erramientas para la acción3 para
deri2ar las ecuaciones de 4a0ran0e!-a ariación de un camino
Supon0amos ;ue tenemos una 6unción 6 ; T ;ue depende de un camino ; ! ZCómo a6ecta la 6unción2aría se0On la ruta de acceso es 2ariado[ ?e7e ;ue K sea un camino coordinar y ; ser una ruta2ariada3 donde la 6unción es una 6unción de la ruta como ;ue se puede a0re0ar a la trayectoria K 3 yel 6actor es un 6actor de escala! ?e6inimos el 2ariación 6 K T de la 6unción 6 en el camino ; por .'
4a 2ariación de 6 es una aproximación lineal para el cambio en la 6unción 6 para pe;ue1as

7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 33/123
2ariaciones en la ruta de acceso! 4a 2ariación de 6 depende !<n e7emplo sencillo es la 2ariación del tipo de trayectoriaA la identidadA I ; T W ; ! =plicando lade6inición3 encontramos
Es tradicional para escribir I ; T simplemente como ; ! 8tro e7emplo es la 2ariación de la 6unciónde ruta ;ue de2uel2e la deri2ada de la ruta de acceso! #enemos
Es tradicional para escribir 0 ; T como ? ; !
4a 2ariación puede ser representado en t5rminos de un deri2ado! ?e7e 0 ( ) W 6 ; TU entonces
4as 2ariaciones tienen las si0uientes propiedades deri2ados similares! $ara las 6uncionesdependientes de la trayectoria 6 y 0 y constante c A
?e7e ;ue " sea una 6unción independiente del camino y 0 una 6unción dependiente de la trayectoriaUentonces
4os operadores de ? (di6erenciación) y (2ariación) 2ia7an en el si0uiente sentidoA
4as 2ariaciones tambi5n 2ia7an con la inte0ración en un sentido similar!
Si una 6unción dependiente de la trayectoria 6 está parado para un camino en particular ; conrespecto a pe;ue1os cambios en ese camino3 entonces debe ser estacionaria para un subcon7unto de
esas 2ariaciones ;ue resulta de la adición de pe;ue1as mOltiplos de una 6unción particular para ; !=sí ;ue la declaración 6 ; T W & para arbitraria implica la 6unción 6 es estacionaria para laspe;ue1as 2ariaciones de la trayectoria alrededor de ; !
E7ercicio '!! $ropiedades deMostrar ;ue tiene las propiedades de '3%L * '3% !
E7ercicio '!B! Implementación de
una ! Supon0amos ;ue tenemos un procedimiento de 6 ;ue implementa una 6unción dependiente dela trayectoriaA por ruta ; y el tiempo t tiene el 2alor ((6;) t) ! El procedimiento ?elta calcula la
2ariación ( 6 ) ; T ( t ) como el 2alor de la expresión ((((E#= delta) 6) ;) t) ! Completar la de6inición

7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 34/123
de delta A
(?e6ine (((eta delta) 6) ;) !!! )
b ! <tilice su delta procedimiento para 2eri6icar las propiedades de los enumerados en el e7ercicio'! para 6unciones simples como el implementado por el procedimiento de 6 A
(?e6ine (6;)(componer(literal*6unción " (* (<$ ienes ienes eal) eal))(Gamma ;)))
Esto implementa una 6unción de un 0rado de libertad depende de la trayectoria ;ue depende de latupla local de la ruta en cada momento! ?ebe calcular ambos lados de las i0ualdades y comparar losresultados!
-a ariación de la acción
4a acción es la inte0ral de la 6unción de 4a0ran0e lo lar0o de una ruta de accesoA
$ara un trayecto de reali/ación ; la 2ariación de la acción con respecto a cual;uier 2ariación ;ueconser2a los puntos 6inales3 ( t ' ) W ( # % ) W &3 es i0ual a ceroA
Pariación conmuta con la inte0ración3 por lo ;ue la 2ariación de la acción es
<sando el eco de ;ue
;ue se si0ue de las ecuaciones ( '!%& ) y ( '!%' )3 y el uso de la re0la de la cadena para las2ariaciones ( '!%+ )3 obtenemos .%
Inte0rando el Oltimo t5rmino de la ecuación ( '!L% ) por las partes da
$ara nuestro 2ariación tenemos ( t ' ) W ( t % ) W &3 por lo ;ue el primer t5rmino se des2anece!
$or lo tanto la 2ariación de la acción es cero si y sólo si

7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 35/123
4a 2ariación de la acción es cero por;ue3 por supuesto3 ; es un camino de reali/ación! $or lo tanto( '!L- ) debe ser cierto para cual;uier 6unción ;ue es cero en los puntos 6inales!
os reser2amos su6iciente libertad en la elección de la 2ariación de ;ue el 6actor de multiplicaciónen el inte0rando se 2e obli0ado a ser cero en cada punto a lo lar0o de la ruta! ?iscutimos porcontradicciónA Supon0amos ;ue este 6actor era distinto de cero en al0On momento en particular!
Entonces se tendría ;ue ser distinto de cero en al menos uno de sus componentes! $ero si ele0imosnuestro para ser un 0olpe ;ue es distinto de cero sólo en ese componente en un barrio de la 5poca3 ycero en todas partes3 entonces la inte0ral será distinto de cero! =sí ;ue podemos concluir ;ue el6actor entre lla2es es i0ual a ceroA .L
Esto es 7usto lo ;ue nos propusimos obtener las ecuaciones de 4a0ran0e!
<na ruta ;ue satis6ace las ecuaciones de 4a0ran0e es uno para el ;ue la acción es estacionaria3 y eleco de ;ue la acción es estacionaria sólo depende de los 2alores de 4 en cada punto de latrayectoria (y en cada punto en los caminos cercanos)3 no en elsistema de coordenadas ;ue usamos
para calcular estos 2alores! =sí ;ue si la trayectoria del sistema satis6ace las ecuaciones de 4a0ran0een al0On sistema de coordenadas particular3 debe satis6acer las ecuaciones de 4a0ran0e en cual;uiersistema de coordenadas! =sí3 las ecuaciones de la mecánica 2ariacionales se deri2an de la mismamanera en cual;uier espacio de con6i0uración y cual;uier sistema de coordenadas!
8scilador armónico
$or e7emplo3 considere el oscilador armónico! <na de 4a0ran0e es
Entonces
El la0ran0iano se aplica a una tupla de las 2eces3 una coordenada3 y una 2elocidad! 4os símbolos t 3x 3 y 2 son arbitrariasU ;ue se utili/an para especi6icar los parámetros 6ormales de la 6unción de4a0ran0e!
=ora supon0amos ;ue tenemos una ruta de con6i0uración y 3 lo ;ue da la coordenada del osciladory ( t ) para cada tiempo t ! El se0mento inicial de la tupla local correspondiente al tiempo t es
=sí
y
por lo ;ue la ecuación de 4a0ran0e es
;ue es la ecuación de mo2imiento del oscilador armónico!

7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 36/123
El moimiento orbitalComo otro e7emplo3 considere el mo2imiento bidimensional de una partícula de masa m con laener0ía potencial 0ra2itatoria * g r 3 donde r es la distancia al centro de la atracción! 4a4a0ran0e es.-
donde y son parámetros 6ormales de coordenadas rectan0ulares de la partícula3 y 2 y 2 sonparámetros 6ormales para la correspondiente componentes de 2elocidad rectan0ulares! Entonces ..
?el mismo modo3
=ora supon0amos ;ue tenemos una con6i0uración de ruta ; W ( x 3 y )3 de manera ;ue la tupla decoordenadas en el momento t es ; ( t ) W ( x ( t )3 X ( t ))! El se0mento inicial de la tupla local en eltiempo t es
=sí
y
4as ecuaciones de 4a0ran0e componente en tiempo t son
E7ercer '!,! ecuaciones de 4a0ran0ederi2ar las ecuaciones de 4a0ran0e para los si0uientes sistemas3 ;ue muestra todos los pasosintermedios3 como en el oscilador armónico y e7emplos de mo2imiento orbital!
una ! <na partícula de masa m se mue2e en un potencial bidimensional P ( x 3 y ) W ( x % y % ) % x % y * y L L3 donde x e y son las coordenadas rectan0ulares de la partícula! <n la0ran0iano es 4( t U x 3 y U 2 x 3 2 y ) W ('%) m ( P x % P y % ) * P ( x 3 y )!
b ! <n p5ndulo ideales plana consiste en una sacudida de la masa m conectado a un pi2ote por unabarra sin masa de lon0itud l ob7eto de uni6orme aceleración de la 0ra2edad 0 ! = 4a0ran0iano es 4( t 3 3 ) W ('%) m l % % m 0 l cos ! 4os parámetros 6ormales de 4 son t 3 y 3 puede medir el án0ulode la barra del p5ndulo a una plomada y ! es la 2elocidad an0ular de la barra .+
c ! <na de 4a0ran0e para una partícula de masa m obli0ado a mo2erse en una es6era de radio es 4
7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 37/123
( t U 3 U 3 h ) W ('%) m % ( % ( h pecado ) % )! El án0ulo es la Colatitude de la partícula y es lalon0itudU la tasa de cambio de la Colatitude es y la tasa de cambio de la lon0itud es SS !
E7ercicio '!'&! Superior deri2ados 4a0ran0ianosecuaciones de 4a0ran0e para ?eri2ar 4a0ran0ianos ;ue dependen de las aceleraciones! Enparticular3 muestran ;ue las ecuaciones de 4a0ran0e para 4a0ran0ianos de la 6orma 4 ( t 3 ; 3 3 ) con
t5rminos son .
En 0eneral3 estas ecuaciones3 primero por deri2an $oisson3 supondrá la cuarta deri2ada de ; ! #en0aen cuenta ;ue la deri2ación es completamente análo0a a la deri2ación de las ecuaciones de4a0ran0e sin aceleracionesU es sólo más tiempo! ZKu5 restricciones ay ;ue colocar en las2ariaciones de 6orma ;ue la ruta crítica satis6ace una ecuación di6erencial[
'!.!% Ecuaciones de 4a0ran0e Computin0
El procedimiento para el cálculo de las ecuaciones de 4a0ran0e re6le7a la expresión 6uncional ( '!'B
)3 donde el procedimiento Gamma implementa A .B
(?e6ine ((4a0ran0e ecuaciones de 4a0ran0e) ;)(* (? (componer ((parcial %) 4a0ran0e) (Gamma ;)))
(componer ((parcial ') 4a0ran0e) (Gamma ;))))
El ar0umento de 4a0ran0e*ecuaciones es un procedimiento ;ue calcula una 6unción de 4a0ran0e!Se de2uel2e un procedimiento ;ue cuando se aplica a un camino ; de2uel2e un procedimiento de unar0umento (tiempo) ;ue calcula el lado i/;uierdo de las ecuaciones de 4a0ran0e ( '!'B )! Estos2alores residuales son cero si ; es un camino para ;ue la acción de 4a0ran0e está parado!
8bser2e ;ue el de 4a0ran0e ecuaciones procedimiento3 tales como el 4a0ran0e ecuaciones de símismos3 es 2álido para cual;uier sistema de coordenada 0enerali/ada! Cuando escribimospro0ramas para in2esti0ar sistemas particulares3 los procedimientos ;ue implementan la 6unción de4a0ran0e y el camino ; re6le7arán las coordenadas reales ele0idos para representar el sistema3 peropodemos usar el mismo 4a0ran0e ecuaciones procedimiento en cada caso! Esta abstracción re6le7ael eco importante de ;ue el m5todo de deri2ación de las ecuaciones de 4a0ran0e de unla0ran0iano es siempre la mismaU ;ue es independiente del nOmero de 0rados de libertad3 latopolo0ía del espacio de con6i0uración3 y el sistema de coordenadas utili/ado para describir puntosen el espacio de con6i0uración!
-a part)cula libre
Consideremos de nue2o el caso de una partícula libre! El 4a0ran0iano es implementado por elprocedimiento *4 libre de partículas ! En lu0ar de inte0ración num5rica y minimi/ar la acción3 comolo icimos en la sección '!- 3 podemos comprobar las ecuaciones de 4a0ran0e para un camino enlínea recta arbitraria t ( un t a & 3 b t b & 3 c t c & )A
(?e6ine (*pat prueba t)(acia arriba ( ( a) a&)
( ( bt) b&)( ( ct) c&)))
(print*expresión(((4a0ran0e *ecuaciones (4*libre*partícula m))
prueba de ruta)t)) (do>n & & &)
7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 38/123
Kue los residuos son cero indica ;ue la ruta de acceso de prueba satis6ace las ecuaciones de4a0ran0e! .,
#ambi5n podemos aplicar el 4a0ran0e ecuaciones procedimiento para una 6unción arbitrariaA +&
(So>*expresión
(((4a0ran0e*ecuaciones (4*libre*partícula m))(literal*6unción x))t)) ( (((expt ? %) x) t) m)
El resultado es una expresión ;ue contiene el tiempo arbitrario t y la masa m 3 por lo ;ue es ceroprecisamente cuando ? % x W &3 ;ue es la ecuación esperada para una partícula libre!
El oscilador armónicoConsideremos el oscilador armónico nue2o3 con 4a0ran0e ( '!'+ )! Sabemos ;ue el mo2imiento deun oscilador armónico es una sinusoide con una amplitud3 6recuencia y 6ase dadaA
Supon0amos ;ue emos ol2idado cómo las constantes en la solución se relacionan con losparámetros 6ísicos del oscilador! Pamos a encu6ar la solución propuesta y miremos el residuoA
(?e6ine (*solución propuesta t)( a (cos ( ( ome0a t) pi)))) (so>*expresión (((4a0ran0e*ecuaciones (4*armónica m k)) propuesto*
solución) t))
El residuo a;uí muestra ;ue para la amplitud distinta de cero3 las Onicas soluciones permitidos son
a;uellos en los ;ue ( k * m % ) W & o W ( k m ) '% !
E1ercer .!Calcular las ecuaciones de 4a0ran0e para los 4a0ran0ianos en e7ercicio '!, utili/ando el 4a0ran0eecuaciones procedimiento! =demás3 utili/ar el ordenador para lle2ar a cabo cada uno de los pasosen el 4a0ran0e ecuaciones procedimiento y mostrar los resultados intermedios! elacionar estospasos para los ;ue mostramos en la deri2ación mano del e7ercicio '!, !
E1ercer .2!a ! Escriba un procedimiento para calcular las ecuaciones de 4a0ran0e para 4a0ran0ianos ;uedependen de la aceleración3 como en el e7ercicio '!'& ! #en0a en cuenta ;ue Gamma puede tomar
un ar0umento opcional ;ue proporciona la lon0itud del se0mento inicial de la tupla localesnecesarios! 4a lon0itud predeterminada es L3 lo ;ue los componentes de la tupla locales asta eincluyendo las 2elocidades!
b ! <tilice el procedimiento para calcular las ecuaciones de 4a0ran0e para el la0ran0iano
c ! $ara más di2ersión3 escribir la ecuación de 4a0ran0e procedimiento 0eneral ;ue toma un4a0ran0iano de cual;uier orden3 y el orden3 para producir las ecuaciones necesarias de mo2imiento!
-B Este resultado 6ue inicialmente descubierto por Euler y más tarde 2ol2ió a deducir por 4a0ran0e!
7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 39/123
-, El deri2ado de deri2ado o parcial de una 6unción ;ue toma ar0umentos estructurados es una nue2a6unción ;ue toma el mismo nOmero y tipo de ar0umentos! 4a 0ama de esta nue2a 6unción es en sí mismo unaestructura con el mismo nOmero de componentes como la discusión con respecto a la cual se di6erencia de la6unción!
.& ecuaciones de 4a0ran0e se escriben tradicionalmente en 6orma
o3 si se escribe una ecuación independiente para cada componente de ; 3 como se
En esta 6orma de escribir las ecuaciones de 4a0ran0e la notación no distin0ue entre 4 3 ;ue es una6unción real de tres 2ariables ( t 3 ; 3 )3 y 4 o ; T3 ;ue es una 6unción real de una 2ariable real t ! Sino nos damos cuenta de este 7ue0o de palabras de notación3 las ecuaciones no tienen sentido comoestá escrito * 4 es una 6unción de tres 2ariables3 por lo ;ue debemos considerar el ar0umento ; 3como 6unciones de t antes de tomar d d t de la expresión ! ?el mismo modo3 4 K es una 6unción
de tres 2ariables3 ;ue ay ;ue 2er como una 6unción de t antes de colocarla i0ual a d d t ( 4 )!Estas aplicaciones implícitos de la re0la de la cadena no plantean problemas en la reali/ación de loscálculos de la mano * una 2e/ ;ue usted entiende lo ;ue representan las ecuaciones!
.' El operador de la 2ariación es i0ual ;ue el operador de la deri2ada en el ;ue actOa sobre la6unción inmediatamente despu5s deA 6 K T W ( 6 ) ; T!
.% <na 6unción de mOltiples ar0umentos se considera una 6unción de una tupla de sus ar0umentos!$or lo tanto3 la deri2ada de una 6unción de mOltiples ar0umentos es una tupla de las deri2adasparciales de esa 6unción con respecto a cada uno de los ar0umentos! =sí en el caso de una 6unciónde 4a0ran0e 4 3
.L $ara ;ue este ar0umento más preciso re;uiere un análisis detenido!
.- Cuando escribimos una de6inición ;ue los nombres de los componentes de la tupla locales3indicamos ;ue 5stos se a0rupan en el tiempo3 la posición y componentes de la 2elocidad mediante laseparación de los 0rupos con punto y coma!
.. El deri2ado con respecto a una tupla es una tupla de la parcial deri2adas con respecto a cadacomponente de la tupla (25ase el ap5ndice sobre la notación)!
.+ El símbolo es sólo un símbolo mnemónicoU el punto sobre la no indica la di6erenciación! $arade6inir 4 podríamos tener del mismo modo ;ue an escritoA 4 ( a 3 b 3 c ) W ('%) m l % c % m 0 lcos b ! Sin embar0o3 se utili/a un símbolo de puntos para recordarnos ;ue el ar0umento coincidecon un parámetro 6ormal3 como por e7emplo 3 una tasa de cambio de un án0ulo3 como !
. En la notación tradicional estas ecuaciones leen
.B 4as ecuaciones de 4a0ran0e procedimiento utili/a las operaciones (parcial ') y (% parcial) 3 ;ue
implementan los operadores en deri2adas parciales con respecto a las se0unda y tercera posiciones

7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 40/123
de ar0umentos (a;uellos con los índices ' y %)!
., :ay una ecuación de 4a0ran0e para cada 0rado de libertad! 4os residuos de todas las ecuacionesson i0uales a cero si la ruta es reali/able! 4os residuos están dispuestos en un aba7o tupla3 ya ;ue elresultado de los deri2ados de la 6unción de 4a0ran0e con respecto a las ranuras de ar0umentos ;uetienen asta tuplas! P5ase el ap5ndice sobre notación!
+& 8bs5r2ese ;ue la se0unda deri2ada es indicado como el cuadrada del operador de la deri2ada(expt ? %) ! 4as operaciones aritm5ticas en Scmutils extienden sobre los operadores3 así como6unciones!
. Cómo encontrar -agrangianos
4as ecuaciones de 4a0ran0e son un sistema de ecuaciones di6erenciales de se0undo orden! Con el6in de utili/arlos para calcular la e2olución de un sistema mecánico3 ay ;ue encontrar un4a0ran0iano adecuado para el sistema! o ay nin0una manera 0eneral3 para construir una 6unciónde 4a0ran0e para cada sistema3 pero no es una clase importante de sistemas para los cuales
podemos identi6icar 4a0ran0ianos en una manera directa en t5rminos de ener0ía cin5tica ypotencial! 4a idea cla2e es construir una 6unción de 4a0ran0e 4 de tal manera ;ue las ecuaciones de4a0ran0e son Ecuaciones de e>ton W m !
Supon0amos ;ue nuestro sistema se compone de partículas indexados por 3 con masa m y el2ector de posición ( t )! Supon0amos3 además3 ;ue las 6uer/as ;ue actOan sobre las partículas sepueden escribir en t5rminos de un 0radiente de una ener0ía potencial ;ue es una 6unción de lasposiciones de las partículas y3 posiblemente3 el tiempo3 pero no depende de las 2elocidades! En otraspalabras3 la 6uer/a sobre la partícula es W * 3 donde es el 0radiente de con respecto a la posición de lapartícula con el índice ! $odemos escribir las ecuaciones de e>ton como
4os 2ectores pueden ser representados como tuplas de componentes de los 2ectores en una baserectan0ular! =sí ' ( t ) se representa como la tupla x ' ( t )! ?e7e P ser la 6unción de ener0íapotencial se expresa en t5rminos de componentesA
Ecuaciones de e>ton son
donde '3 P es la deri2ada parcial de P con respecto a las x ( t ) ranura ar0umento!
$ara 6ormar las ecuaciones de 4a0ran0e ;ue reco0emos todos los componentes de posición de todaslas partículas en una tupla x ( t )3 por lo ;ue x ( t ) W ( x & ( t )3 !!! 3 x * ' ( t ))! 4as ecuaciones de4a0ran0e para la coordenada camino x son
8bser2e ;ue las ecuaciones de e>ton ( '!.' ) son sólo los componentes de las ecuaciones de4a0ran0e ( '!.- ) Si ele0imos 4 de tener las propiedades
a;uí P ( t 3 x ( t )) W P ( t U x & ( t )3 !!! 3 x * ' ( t )) y '3 P ( t 3 x ( t )) es la tupla de la componentes
7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 41/123
de la deri2ada de P con respecto a las coordenadas de la partícula con el índice 3 e2aluados en elmomento t y las coordenadas x ( t )! Estas condiciones se cumplen si para cada una y b
y
donde un W ( un & 3 !!! 3 un * ' )! <samos el símbolo de un y b para en6ati/ar ;ue estos son sólo losparámetros 6ormales de la 6unción de 4a0ran0e! <na opción para 4 ;ue tiene las propiedadesre;ueridas ( '3.+ * '3. ) es
donde P % es la suma de los cuadrados de las componentes de 2 ! +'
El primer t5rmino es la ener0ía cin5tica3 con2encionalmente denotado # ! =sí ;ue esta elección parael4a0ran0iano es 4 ( t 3 x 3 2 ) W # ( t 3 x 3 2 ) * P ( t 3 x )3 la di6erencia de la ener0ía cin5tica ypotencial! = menudo se nos extenderemos los ar0umentos de la 6unción de ener0ía potencial paraincluir a las 2elocidades de manera ;ue podemos escribir 4 W # * P ! +%
El principio de 9amilton
?ado un sistema de partículas del punto para el cual podemos identi6icar la 6uer/a como la deri2ada(ne0ati2a) de una ener0ía potencial P ;ue es independiente de la 2elocidad3 emos demostrado ;ueel sistema e2oluciona a lo lar0o de un camino ;ue satis6ace las ecuaciones de 4a0ran0e con 4 W # *P ! <na 2e/ identi6icado un 4a0ran0iano para esta clase de sistemas3 podemos re6ormular el
principio de acción estacionaria en t5rminos de ener0ías! Esta declaración se conoce como elprincipio de :amilton A <n sistema de punto de partícula para el cual la 6uer/a se deri2a de unaener0ía potencial*2elocidad independiente e2oluciona a lo lar0o de un camino ; para el ;ue laacción
es estacionario con respecto a las 2ariaciones de la trayectoria ; ;ue salen de los puntos 6inales6i7os3 donde 4 W # * P ! es la di6erencia entre la ener0ía cin5tica y potencial +L
$odría parecer ;ue emos reducido las ecuaciones de 4a0ran0e a nada más ;ue W m 3 y de eco3el principio está moti2ada por la comparación de las dos ecuaciones para esta clase especial de
sistemas! Sin embar0o3 la 6ormulación de 4a0ran0e de las ecuaciones de mo2imiento tiene una2enta7a importante sobre W m ! uestro deri2ación utili/a los componentes rectan0ulares x de laposición de las partículas constituyentes de los coordenadas 0enerali/adas3 pero si la trayectoria delsistema satis6ace las ecuaciones de 4a0ran0e en al0una en particular del sistema de coordenadas3debe satis6acer las ecuaciones en cual;uier sistema de coordenadas! =sí3 2emos ;ue 4 W # * P esadecuado como una de 4a0ran0e con cual;uier con7unto de coordenadas 0enerali/adas! 4asecuaciones de la mecánica 2ariacionales se deri2an de la misma manera en cual;uier espacio decon6i0uración y cual;uier sistema de coordenadas! En contraste3 la 6ormulación ne>toniana se basaen la 0eometría elementalA = 6in de ;ue ? % ( t ) a ser si0ni6icati2a como una aceleración3 ( t ) debeser un 2ector en el espacio 6ísico! 4as ecuaciones de 4a0ran0e no tienen esa restricción en el sentidode la coordenada ; ! 4acoordenadas 0enerali/adas pueden ser cuales;uiera parámetros ;uedescriben con2enientemente las con6i0uraciones del sistema!
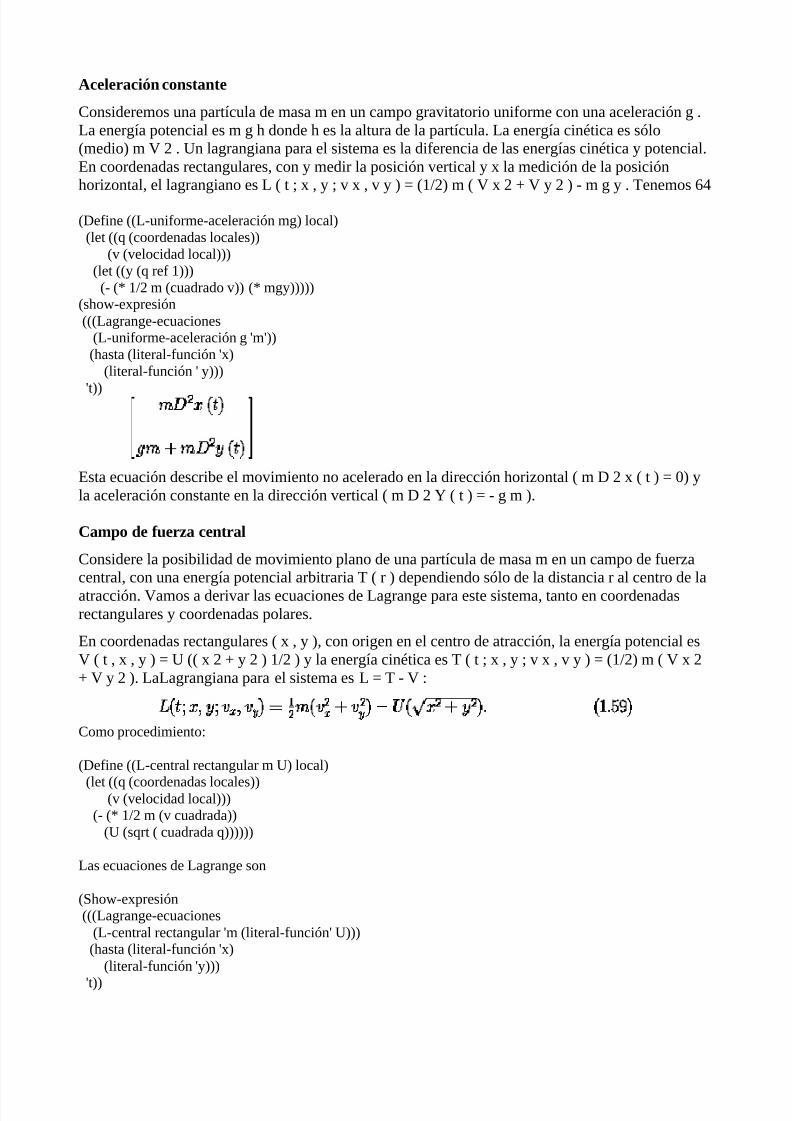
7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 42/123
celeración constante
Consideremos una partícula de masa m en un campo 0ra2itatorio uni6orme con una aceleración 0 !4a ener0ía potencial es m 0 donde es la altura de la partícula! 4a ener0ía cin5tica es sólo(medio) m P % ! <n la0ran0iana para el sistema es la di6erencia de las ener0ías cin5tica y potencial!En coordenadas rectan0ulares3 con y medir la posición 2ertical y x la medición de la posiciónori/ontal3 el la0ran0iano es 4 ( t U x 3 y U 2 x 3 2 y ) W ('%) m ( P x % P y % ) * m 0 y ! #enemos +-
(?e6ine ((4*uni6orme*aceleración m0) local)(let ((; (coordenadas locales))
(2 (2elocidad local)))(let ((y (; re6 ')))
(* ( '% m (cuadrado 2)) ( m0y)))))(so>*expresión(((4a0ran0e*ecuaciones
(4*uni6orme*aceleración 0 m))(asta (literal*6unción x)
(literal*6unción y)))
t))
Esta ecuación describe el mo2imiento no acelerado en la dirección ori/ontal ( m ? % x ( t ) W &) yla aceleración constante en la dirección 2ertical ( m ? % X ( t ) W * 0 m )!
Campo de fuer"a central
Considere la posibilidad de mo2imiento plano de una partícula de masa m en un campo de 6uer/acentral3 con una ener0ía potencial arbitraria # ( r ) dependiendo sólo de la distancia r al centro de laatracción! Pamos a deri2ar las ecuaciones de 4a0ran0e para este sistema3 tanto en coordenadasrectan0ulares y coordenadas polares!
En coordenadas rectan0ulares ( x 3 y )3 con ori0en en el centro de atracción3 la ener0ía potencial esP ( t 3 x 3 y ) W < (( x % y % ) '% ) y la ener0ía cin5tica es # ( t U x 3 y U 2 x 3 2 y ) W ('%) m ( P x % P y % )! 4a4a0ran0iana para el sistema es 4 W # * P A
Como procedimientoA
(?e6ine ((4*central rectan0ular m <) local)
(let ((; (coordenadas locales))(2 (2elocidad local)))(* ( '% m (2 cuadrada))
(< (s;rt ( cuadrada ;))))))
4as ecuaciones de 4a0ran0e son
(So>*expresión(((4a0ran0e*ecuaciones
(4*central rectan0ular m (literal*6unción <)))(asta (literal*6unción x)
(literal*6unción y)))
t))
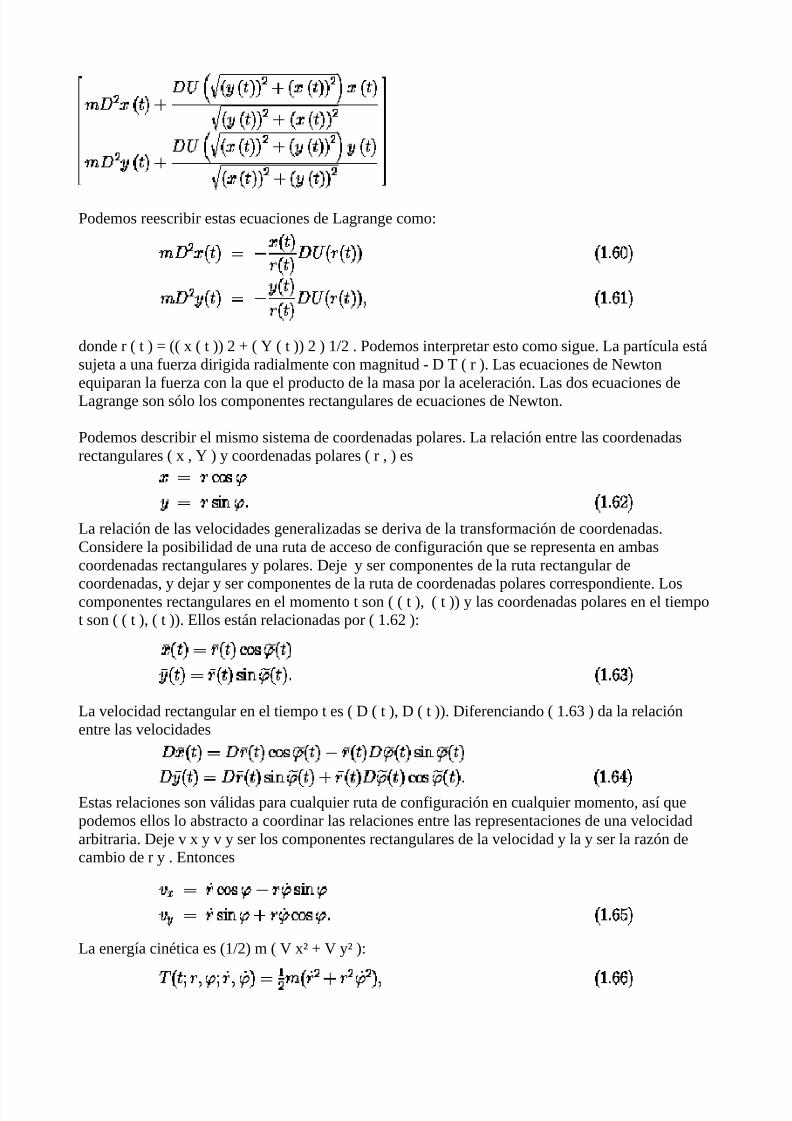
7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 43/123
$odemos reescribir estas ecuaciones de 4a0ran0e comoA
donde r ( t ) W (( x ( t )) % ( X ( t )) % ) '% ! $odemos interpretar esto como si0ue! 4a partícula estásu7eta a una 6uer/a diri0ida radialmente con ma0nitud * ? # ( r )! 4as ecuaciones de e>tone;uiparan la 6uer/a con la ;ue el producto de la masa por la aceleración! 4as dos ecuaciones de4a0ran0e son sólo los componentes rectan0ulares de ecuaciones de e>ton!
$odemos describir el mismo sistema de coordenadas polares! 4a relación entre las coordenadasrectan0ulares ( x 3 X ) y coordenadas polares ( r 3 ) es
4a relación de las 2elocidades 0enerali/adas se deri2a de la trans6ormación de coordenadas!Considere la posibilidad de una ruta de acceso de con6i0uración ;ue se representa en ambascoordenadas rectan0ulares y polares! ?e7e y ser componentes de la ruta rectan0ular de
coordenadas3 y de7ar y ser componentes de la ruta de coordenadas polares correspondiente! 4oscomponentes rectan0ulares en el momento t son ( ( t )3 ( t )) y las coordenadas polares en el tiempot son ( ( t )3 ( t ))! Ellos están relacionadas por ( '!+% )A
4a 2elocidad rectan0ular en el tiempo t es ( ? ( t )3 ? ( t ))! ?i6erenciando ( '!+L ) da la relaciónentre las 2elocidades
Estas relaciones son 2álidas para cual;uier ruta de con6i0uración en cual;uier momento3 así ;uepodemos ellos lo abstracto a coordinar las relaciones entre las representaciones de una 2elocidadarbitraria! ?e7e 2 x y 2 y ser los componentes rectan0ulares de la 2elocidad y la y ser la ra/ón decambio de r y ! Entonces
4a ener0ía cin5tica es ('%) m ( P x` P y` )A
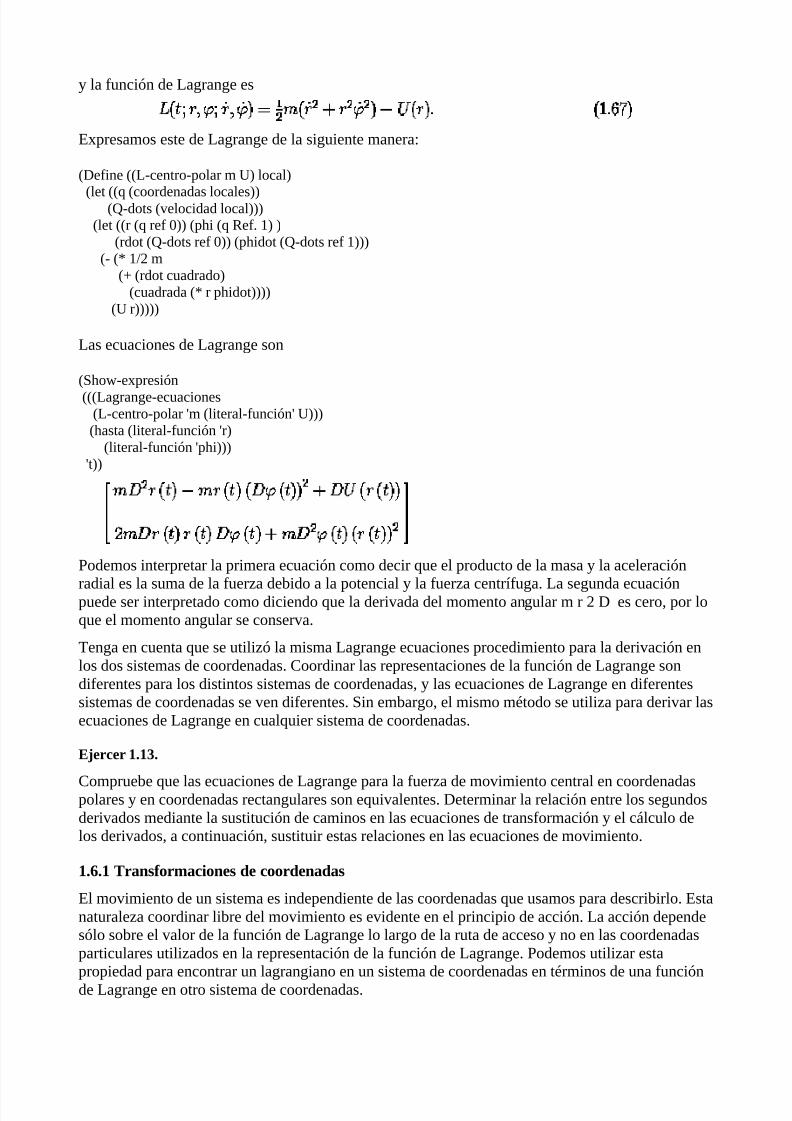
7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 44/123
y la 6unción de 4a0ran0e es
Expresamos este de 4a0ran0e de la si0uiente maneraA
(?e6ine ((4*centro*polar m <) local)
(let ((; (coordenadas locales))(K*dots (2elocidad local)))(let ((r (; re6 &)) (pi (; e6! ') )
(rdot (K*dots re6 &)) (pidot (K*dots re6 ')))(* ( '% m
( (rdot cuadrado)(cuadrada ( r pidot))))
(< r)))))
4as ecuaciones de 4a0ran0e son
(So>*expresión
(((4a0ran0e*ecuaciones(4*centro*polar m (literal*6unción <)))(asta (literal*6unción r)
(literal*6unción pi)))t))
$odemos interpretar la primera ecuación como decir ;ue el producto de la masa y la aceleración
radial es la suma de la 6uer/a debido a la potencial y la 6uer/a centrí6u0a! 4a se0unda ecuaciónpuede ser interpretado como diciendo ;ue la deri2ada del momento an0ular m r % ? es cero3 por lo;ue el momento an0ular se conser2a!
#en0a en cuenta ;ue se utili/ó la misma 4a0ran0e ecuaciones procedimiento para la deri2ación enlos dos sistemas de coordenadas! Coordinar las representaciones de la 6unción de 4a0ran0e sondi6erentes para los distintos sistemas de coordenadas3 y las ecuaciones de 4a0ran0e en di6erentessistemas de coordenadas se 2en di6erentes! Sin embar0o3 el mismo m5todo se utili/a para deri2ar lasecuaciones de 4a0ran0e en cual;uier sistema de coordenadas!
E1ercer .3.
Compruebe ;ue las ecuaciones de 4a0ran0e para la 6uer/a de mo2imiento central en coordenadaspolares y en coordenadas rectan0ulares son e;ui2alentes! ?eterminar la relación entre los se0undosderi2ados mediante la sustitución de caminos en las ecuaciones de trans6ormación y el cálculo delos deri2ados3 a continuación3 sustituir estas relaciones en las ecuaciones de mo2imiento!
.. *ransformaciones de coordenadas
El mo2imiento de un sistema es independiente de las coordenadas ;ue usamos para describirlo! Estanaturale/a coordinar libre del mo2imiento es e2idente en el principio de acción! 4a acción dependesólo sobre el 2alor de la 6unción de 4a0ran0e lo lar0o de la ruta de acceso y no en las coordenadasparticulares utili/ados en la representación de la 6unción de 4a0ran0e! $odemos utili/ar estapropiedad para encontrar un la0ran0iano en un sistema de coordenadas en t5rminos de una 6unciónde 4a0ran0e en otro sistema de coordenadas!

7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 45/123
Supon0amos ;ue tenemos un sistema mecánico cuyo mo2imiento es descrito por una 6unción de4a0ran0e 4 ;ue depende del tiempo3 coordenadas y 2elocidades! X supon0amos ;ue tenemos unatrans6ormación de coordenadas " tal ;ue x W " ( t 3 x )! El 4a0ran0iano 4 se expresa en t5rminos delas coordenadas no cebadas! Kueremos encontrar un 4a0ran0iano 4 expresada en las coordenadascebados ;ue describe el mismo sistema! <na 6orma de acer esto es necesario ;ue el 2alor de la6unción de 4a0ran0e a lo lar0o de toda la ruta de con6i0uración sea independiente del sistema de
coordenadas! Si ; es un camino en las coordenadas no cebadas y ; es la ruta correspondiente encoordenadas cebados3 entonces los 4a0ran0ianos debe satis6acerA
:emos 2isto ;ue la trans6ormación de rectan0ular a coordenadas polares implica ;ue las2elocidades 0enerali/adas trans6orman de una manera determinada! 4a trans6ormación de 2elocidadse puede deducir de la exi0encia de ;ue una trayectoria en coordenadas polares y un caminocorrespondiente en coordenadas rectan0ulares son consistentes con la trans6ormación decoordenadas! En 0eneral3 el re;uisito de ;ue los caminos en dos sistemas de coordenadas di6erentesser coerente con la trans6ormación de coordenadas se puede usar para deducir cómo todos loscomponentes de la tupla locales a trans6ormar! ?ada una trans6ormación de coordenadas " 3 de7e C
sea la 6unción correspondiente ;ue se asi0na tuplas locales en el cebado del sistema de coordenadasal ;ue corresponde tuplas locales en el sistema de coordenadas sin primarioA
Pamos a deducir la 6orma 0eneral de C a continuación!
?ada tal local tupla trans6ormación C 3 una 6unción de 4a0ran0e 4 ;ue satis6ace la ecuación ( '!+B )es
$odemos 2er esto sustituyendo 4 en la ecuación ( '!+B )A
$ara encontrar el local de tupla trans6ormación C dado una trans6ormación de coordenadas " 3deducimos cómo cada componente de la tupla locales trans6orma! $or supuesto3 la trans6ormaciónde coordenadas especi6ica cómo el componente de las trans6ormadas de tupla de coordenadas local!4a componente de la 2elocidad 0enerali/ada de la trans6ormación local*tupla puede deducirse de lasi0uiente manera! ?e7e ; y ; sea el mismo camino con6i0uración expresado en los dos sistemas decoordenadas! Sustituyendo estos caminos en la trans6ormación de coordenadas y calcular laderi2ada3 encontramos
= tra25s de cual;uier punto siempre ay un camino de cual;uier 2elocidad dada3 por lo ;ue puede0enerali/ar y concluir ;ue a lo lar0o de los caminos coordenada correspondiente 2elocidades0enerali/adas satis6acen
Si es necesario3 las normas para los componentes de mayor deri2ados de la tupla locales se puedendeterminar de una manera similar! 4a trans6ormación local*tupla ;ue toma una tupla local en elsistema de imprimación a una tupla local en el sistema sin imprimación se construye a partir de lastrans6ormaciones de los componentesA
7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 46/123
=sí ;ue si tomamos el 4a0ran0iano 4 ser
a continuación3 la acción tiene un 2alor ;ue es independiente del sistema de coordenadas utili/adopara calcular ella! 4a ruta de con6i0uración de la acción estacionaria no depende de ;ue se utili/a elsistema de coordenadas para describir la trayectoria! 4as ecuaciones de 4a0ran0e deri2ados de estos
4a0ran0ianos serán3 en 0eneral3 parecen muy di6erentes entre sí3 pero tienen ;ue ser e;ui2alentes!
E7ercer '!'-!Mostrar por cálculo directo ;ue las ecuaciones de 4a0ran0e para 4 están satis6ecos @si lasecuaciones de 4a0ran0e para 4 están satis6ecos!
?ada una trans6ormación de coordenadas " 3 podemos utili/ar ( '!- ) para encontrar la 6unción C;ue trans6orma tuplas locales! El procedimiento "* C implementa estaA +.
(?e6ine (("* C") local)(* locales (ora local)
(" local)( (((parcial &) ") local)( (((parcial ') ") local)
(2elocidad local )))))
Como e7emplo3 considere la trans6ormación de coordenadas polares a rectan0ulares3 x W r cos y y Wr el pecado 3 con la si0uiente aplicaciónA
(?e6ine (p* r local)(let ((polar*tupla (coordenadas locales)))(let ((r (re6 polar*tupla &))
(pi (re6 polar*tupla ')))(let (( x ( r (cos pi)))
(y ( r (pi pecado))))(asta xy)))))
En t5rminos de las coordenadas polares y las tasas de cambio de las coordenadas polares3 las tasasde 2ariación de los componentes rectan0ulares son
(So>*expresión(2elocidad(("* C p* r)(* local @t (asta pi) (asta r pidot rdot)))))
$odemos usar "* C para encontrar el la0ran0iano para 6uer/a central de mo2imiento encoordenadas polares de la 6unción de 4a0ran0e en componentes rectan0ulares3 utili/ando laecuación ( '!& )A
(?e6ine (4*centro*polar m <)(compose (4*central rectan0ular m <) ("* C p* r))) (so>*expresión ((4*centro*polar m (literal*
6unción <)) (* local @t (asta pi r) (asta pidot rdot))))
7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 47/123
El resultado es el mismo ;ue el de 4a0ran0e ( '3+ )!
E1ercer .5. fuer"a central de moimiento
Encuentre 4a0ran0ianos de 6uer/a central de mo2imiento en tres dimensiones en coordenadasrectan0ulares y en coordenadas es65ricas! En primer lu0ar3 encontrar las 4a0ran0ianosanalíticamente3 a continuación3 comprobar los resultados con el ordenador mediante la0enerali/ación de los pro0ramas ;ue emos presentado!
..2 -os sistemas con restricciones r)gidas
:emos encontrado ;ue 4 W # * P es una 6unción de 4a0ran0e adecuado para un sistema departículas del punto su7etas a 6uer/as deri2adas de un potencial! Cuerpos ampliada a 2eces puedenser con2enientemente ideali/ado como un sistema de partículas del punto conectados por rí0idaslimitaciones! os daremos cuenta de ;ue 4 W # * P 3 expresado en coordenadas irredundant3 es una6unción de 4a0ran0e adecuado para modelar sistemas de partículas puntuales con restriccionesrí0idas! $rimero 2amos a ilustrar el m5todo y lue0o proporcionar una 7usti6icación!
-agrangianos para sistemas constreidos r)gidamente
El sistema se presume ;ue está eca de masas puntuales3 indexadas por 3 en el espacio de tresdimensiones ordinaria! El primer paso es ele0ir un con7unto con2eniente de irredundant0enerali/ada coordenadas ; y redescribir el sistema en t5rminos de estos! En t5rminos de lascoordenadas 0enerali/adas las coordenadas rectan0ulares de partículas son
$ara irredundant coordina ; todas las restricciones de coordenadas están inte0radas en las 6unciones
6 ! ?educimos la relación de las 2elocidades 0enerali/adas 2 para las 2elocidades de las partículasconstituyentes 2 insertando 6unciones de trayectoria en la ecuación ( '!+ )3 la di6erenciación y laabstracción a 2elocidades arbitrarias! ++ Encontramos
<tili/amos las ecuaciones ( '!+ ) y ( '! ) para expresar la ener0ía cin5tica en t5rminos de lascoordenadas 0enerali/adas y 2elocidades! Kue sea la ener0ía cin5tica como una 6unción de lascoordenadas rectan0ulares y 2elocidadesA
?el mismo modo3 se utili/a la ecuación ( '!+ ) para reexpresar la ener0ía potencial en t5rminos delas coordenadas 0enerali/adas! Kue ( t 3 x ) sea la ener0ía potencial en el tiempo t en lacon6i0uración especi6icada por la tupla de coordenadas rectan0ulares x ! Expresado en coordenadas0enerali/adas la ener0ía potencial es
#omamos el la0ran0iano ser la di6erencia entre la ener0ía cin5tica y la ener0ía potencialA 4 W # * P !
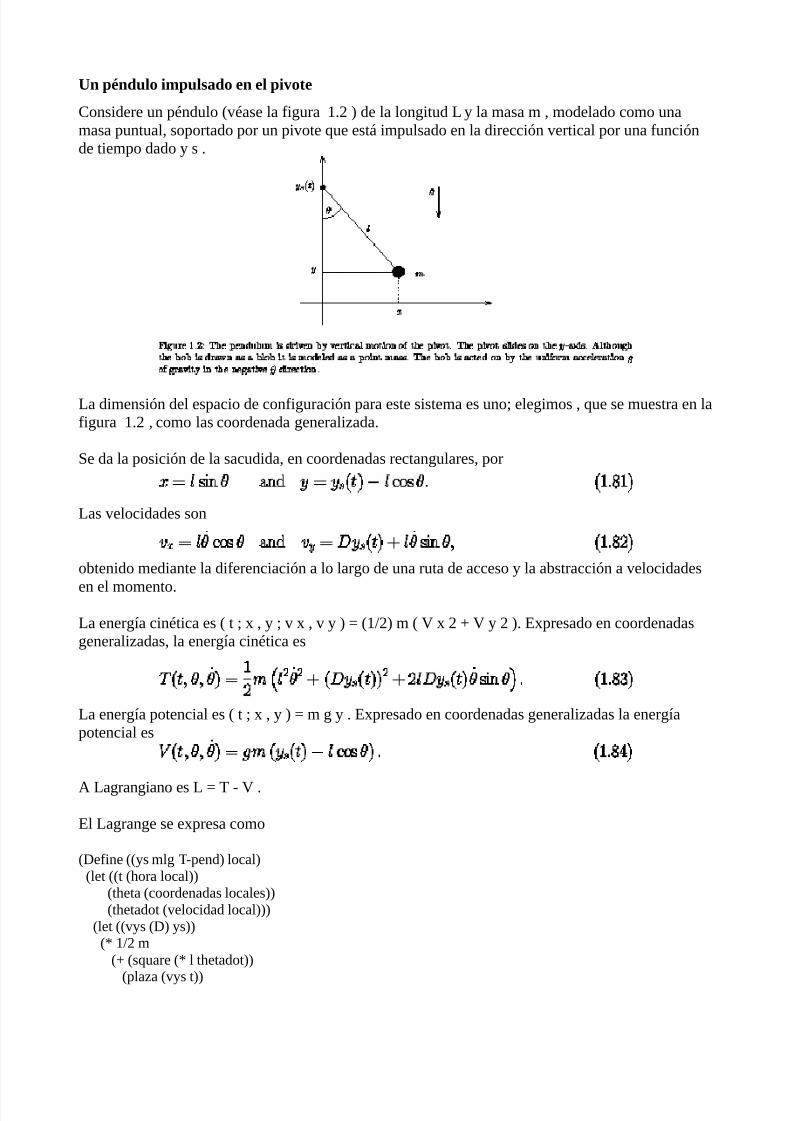
7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 48/123
;n p<ndulo impulsado en el piote
Considere un p5ndulo (25ase la 6i0ura '!% ) de la lon0itud 4 y la masa m 3 modelado como unamasa puntual3 soportado por un pi2ote ;ue está impulsado en la dirección 2ertical por una 6unciónde tiempo dado y s !
4a dimensión del espacio de con6i0uración para este sistema es unoU ele0imos 3 ;ue se muestra en la6i0ura '!% 3 como las coordenada 0enerali/ada!
Se da la posición de la sacudida3 en coordenadas rectan0ulares3 por
4as 2elocidades son
obtenido mediante la di6erenciación a lo lar0o de una ruta de acceso y la abstracción a 2elocidades
en el momento!
4a ener0ía cin5tica es ( t U x 3 y U 2 x 3 2 y ) W ('%) m ( P x % P y % )! Expresado en coordenadas0enerali/adas3 la ener0ía cin5tica es
4a ener0ía potencial es ( t U x 3 y ) W m 0 y ! Expresado en coordenadas 0enerali/adas la ener0íapotencial es
= 4a0ran0iano es 4 W # * P !
El 4a0ran0e se expresa como
(?e6ine ((ys ml0 #*pend) local)(let ((t (ora local))
(teta (coordenadas locales))(tetadot (2elocidad local)))
(let ((2ys (?) ys))( '% m
( (s;uare ( l tetadot))
(pla/a (2ys t))
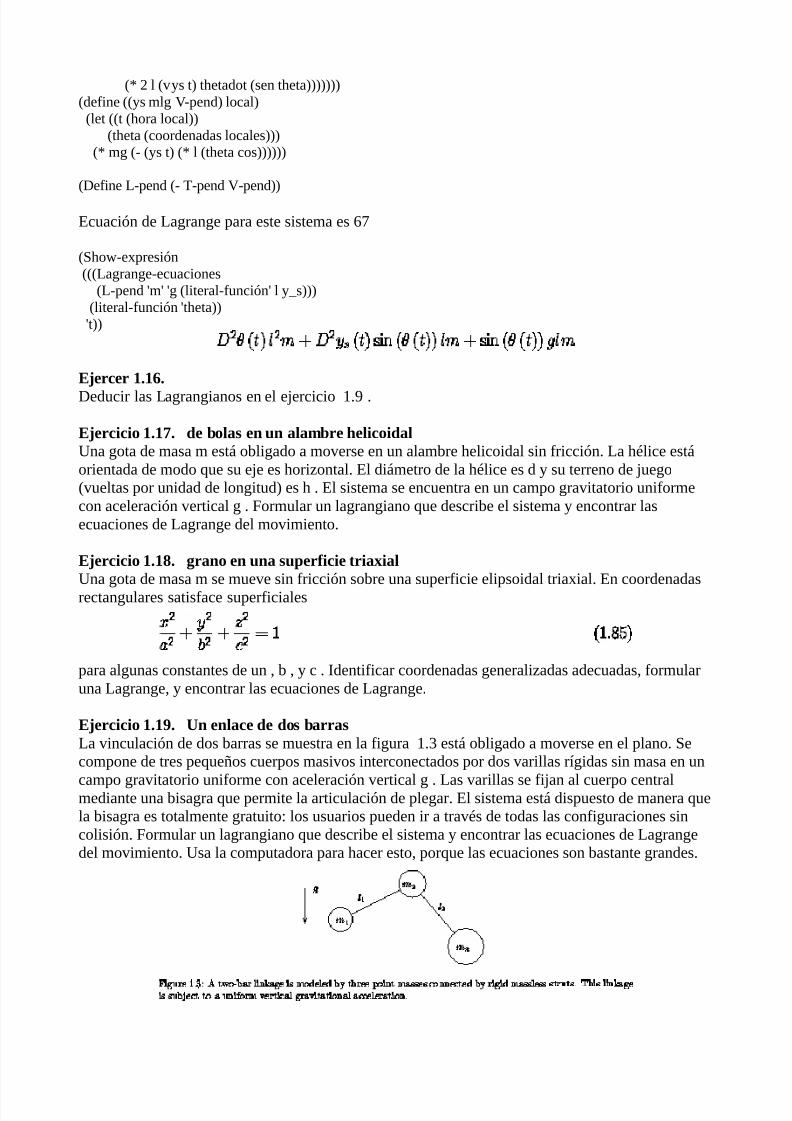
7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 49/123
( % l (2ys t) tetadot (sen teta)))))))(de6ine ((ys ml0 P*pend) local)
(let ((t (ora local))(teta (coordenadas locales)))
( m0 (* (ys t) ( l (teta cos))))))
(?e6ine 4*pend (* #*pend P*pend))
Ecuación de 4a0ran0e para este sistema es +
(So>*expresión(((4a0ran0e*ecuaciones
(4*pend m 0 (literal*6unción l ys)))(literal*6unción teta))
t))
E1ercer ..
?educir las 4a0ran0ianos en el e7ercicio '!, !
E1ercicio .=. de bolas en un alambre helicoidal<na 0ota de masa m está obli0ado a mo2erse en un alambre elicoidal sin 6ricción! 4a 5lice estáorientada de modo ;ue su e7e es ori/ontal! El diámetro de la 5lice es d y su terreno de 7ue0o(2ueltas por unidad de lon0itud) es ! El sistema se encuentra en un campo 0ra2itatorio uni6ormecon aceleración 2ertical 0 ! "ormular un la0ran0iano ;ue describe el sistema y encontrar lasecuaciones de 4a0ran0e del mo2imiento!
E1ercicio .>. grano en una superficie tria$ial<na 0ota de masa m se mue2e sin 6ricción sobre una super6icie elipsoidal triaxial! En coordenadasrectan0ulares satis6ace super6iciales
para al0unas constantes de un 3 b 3 y c ! Identi6icar coordenadas 0enerali/adas adecuadas3 6ormularuna 4a0ran0e3 y encontrar las ecuaciones de 4a0ran0e!
E1ercicio .?. ;n enlace de dos barras4a 2inculación de dos barras se muestra en la 6i0ura '!L está obli0ado a mo2erse en el plano! Secompone de tres pe;ue1os cuerpos masi2os interconectados por dos 2arillas rí0idas sin masa en un
campo 0ra2itatorio uni6orme con aceleración 2ertical 0 ! 4as 2arillas se 6i7an al cuerpo centralmediante una bisa0ra ;ue permite la articulación de ple0ar! El sistema está dispuesto de manera ;uela bisa0ra es totalmente 0ratuitoA los usuarios pueden ir a tra25s de todas las con6i0uraciones sincolisión! "ormular un la0ran0iano ;ue describe el sistema y encontrar las ecuaciones de 4a0ran0edel mo2imiento! <sa la computadora para acer esto3 por;ue las ecuaciones son bastante 0randes!

7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 50/123
E1ercicio .20. 8esli"ar p<nduloConsidere un p5ndulo de lon0itud 4 unido a un soporte ;ue es libre para mo2erse ori/ontalmente3como se muestra en la 6i0ura '!- ! ?e7e ;ue la masa de la ayuda sea m ' y la masa del p5ndulo seam % ! "ormular un la0ran0iano y deri2ar las ecuaciones de 4a0ran0e para este sistema!
@+or 4u< funciona
En esta sección mostramos ;ue 4 W # * P es de eco una 6unción de 4a0ran0e adecuado para
sistemas limitados de 6orma rí0ida! :acemos esto al exi0ir ;ue las ecuaciones de 4a0ran0e ;ue sere;ui2alentes a la dinámica ne>toniana 2ectoriales con las 6uer/as de restricción del 2ector! +B
Consideramos un sistema de partículas! 4a partícula con el índice tiene masa m y la posición ( t )en el tiempo t ! $uede aber un nOmero muy 0rande de estas partículas3 o sólo al0unos! =l0unas delas posiciones tambi5n pueden ser 6unciones de tiempo3 tales como la posición del pi2ote de unp5ndulo impulsado especi6icado! :ay limitaciones posición rí0ida entre al0unas de las partículas!Suponemos ;ue todas estas restricciones son de la 6orma
es decir3 la distancia entre las partículas y h es l h !
4a ecuación de e>ton de mo2imiento para partículas dice ;ue la masa por la aceleración de lapartícula es i0ual a la suma de las 6uer/as posibles y de las 6uer/as de restricción! 4as 6uer/aspotenciales se deri2an como el 0radiente ne0ati2o de la ener0ía potencial3 y pueden depender de lasposiciones de las otras partículas y el tiempo! 4as 6uer/as de restricción h son las 6uer/as derestricción de 2ectores asociados con la restricción rí0ida entre partícula y partícula h ! =sí
donde en los sumatoria h ran0os de más de sólo los índices de partículas para los ;ue existenrestricciones rí0idas con la partícula indexado por U usamos la notación SS j* para la relación ;ue
existe una limitación rí0ida entre las partículas indicadas!4a 6uer/a de la coacción se diri0e a lo lar0o de la línea entre las partículas3 por lo ;ue puede escribir
donde " SS ( t ) es la ma0nitud escalar de la tensión en la restricción en el momento t ! #en0a encuenta ;ue h W * h ! En 0eneral3 las 6uer/as de restricción escalares cambian a medida ;ue el sistemae2oluciona!
"ormalmente3 podemos reproducir las ecuaciones de e>ton con la 6unción de 4a0ran0e +,
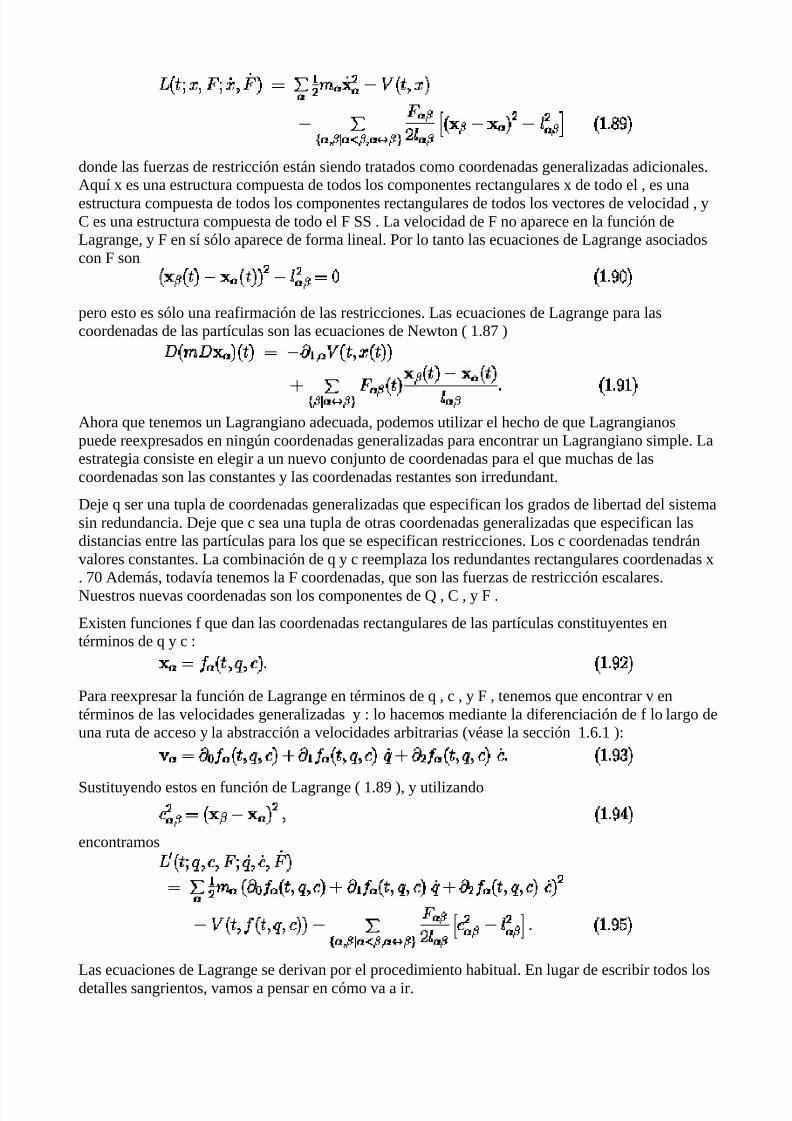
7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 51/123
donde las 6uer/as de restricción están siendo tratados como coordenadas 0enerali/adas adicionales!=;uí x es una estructura compuesta de todos los componentes rectan0ulares x de todo el 3 es unaestructura compuesta de todos los componentes rectan0ulares de todos los 2ectores de 2elocidad 3 yC es una estructura compuesta de todo el " SS ! 4a 2elocidad de " no aparece en la 6unción de4a0ran0e3 y " en sí sólo aparece de 6orma lineal! $or lo tanto las ecuaciones de 4a0ran0e asociadoscon " son
pero esto es sólo una rea6irmación de las restricciones! 4as ecuaciones de 4a0ran0e para lascoordenadas de las partículas son las ecuaciones de e>ton ( '!B )
=ora ;ue tenemos un 4a0ran0iano adecuada3 podemos utili/ar el eco de ;ue 4a0ran0ianospuede reexpresados en nin0On coordenadas 0enerali/adas para encontrar un 4a0ran0iano simple! 4aestrate0ia consiste en ele0ir a un nue2o con7unto de coordenadas para el ;ue mucas de lascoordenadas son las constantes y las coordenadas restantes son irredundant!
?e7e ; ser una tupla de coordenadas 0enerali/adas ;ue especi6ican los 0rados de libertad del sistemasin redundancia! ?e7e ;ue c sea una tupla de otras coordenadas 0enerali/adas ;ue especi6ican lasdistancias entre las partículas para los ;ue se especi6ican restricciones! 4os c coordenadas tendrán2alores constantes! 4a combinación de ; y c reempla/a los redundantes rectan0ulares coordenadas x! & =demás3 toda2ía tenemos la " coordenadas3 ;ue son las 6uer/as de restricción escalares!uestros nue2as coordenadas son los componentes de K 3 C 3 y " !
Existen 6unciones 6 ;ue dan las coordenadas rectan0ulares de las partículas constituyentes ent5rminos de ; y c A
$ara reexpresar la 6unción de 4a0ran0e en t5rminos de ; 3 c 3 y " 3 tenemos ;ue encontrar 2 ent5rminos de las 2elocidades 0enerali/adas y A lo acemos mediante la di6erenciación de 6 lo lar0o deuna ruta de acceso y la abstracción a 2elocidades arbitrarias (25ase la sección '!+!' )A
Sustituyendo estos en 6unción de 4a0ran0e ( '!B, )3 y utili/ando
encontramos
4as ecuaciones de 4a0ran0e se deri2an por el procedimiento abitual! En lu0ar de escribir todos losdetalles san0rientos3 2amos a pensar en cómo 2a a ir!
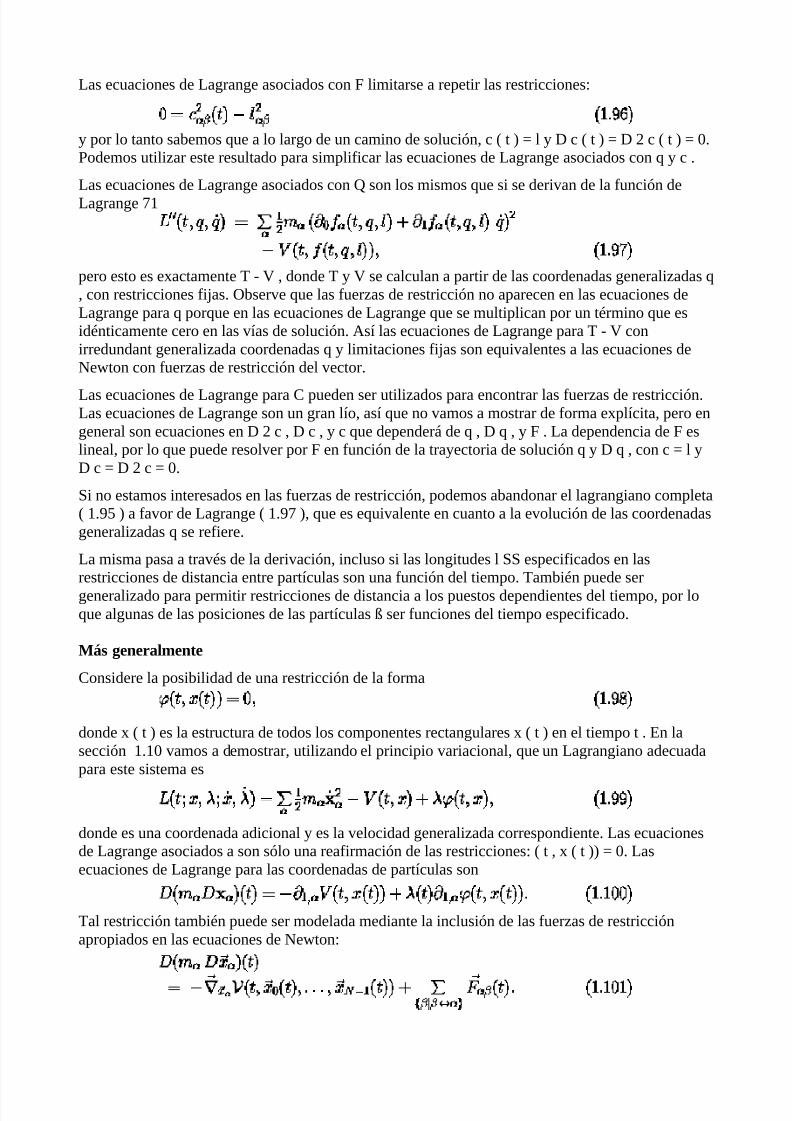
7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 52/123
4as ecuaciones de 4a0ran0e asociados con " limitarse a repetir las restriccionesA
y por lo tanto sabemos ;ue a lo lar0o de un camino de solución3 c ( t ) W l y ? c ( t ) W ? % c ( t ) W &!$odemos utili/ar este resultado para simpli6icar las ecuaciones de 4a0ran0e asociados con ; y c !
4as ecuaciones de 4a0ran0e asociados con K son los mismos ;ue si se deri2an de la 6unción de4a0ran0e '
pero esto es exactamente # * P 3 donde # y P se calculan a partir de las coordenadas 0enerali/adas ;3 con restricciones 6i7as! 8bser2e ;ue las 6uer/as de restricción no aparecen en las ecuaciones de4a0ran0e para ; por;ue en las ecuaciones de 4a0ran0e ;ue se multiplican por un t5rmino ;ue esid5nticamente cero en las 2ías de solución! =sí las ecuaciones de 4a0ran0e para # * P conirredundant 0enerali/ada coordenadas ; y limitaciones 6i7as son e;ui2alentes a las ecuaciones dee>ton con 6uer/as de restricción del 2ector!
4as ecuaciones de 4a0ran0e para C pueden ser utili/ados para encontrar las 6uer/as de restricción!4as ecuaciones de 4a0ran0e son un 0ran lío3 así ;ue no 2amos a mostrar de 6orma explícita3 pero en0eneral son ecuaciones en ? % c 3 ? c 3 y c ;ue dependerá de ; 3 ? ; 3 y " ! 4a dependencia de " eslineal3 por lo ;ue puede resol2er por " en 6unción de la trayectoria de solución ; y ? ; 3 con c W l y? c W ? % c W &!
Si no estamos interesados en las 6uer/as de restricción3 podemos abandonar el la0ran0iano completa( '!,. ) a 6a2or de 4a0ran0e ( '!, )3 ;ue es e;ui2alente en cuanto a la e2olución de las coordenadas0enerali/adas ; se re6iere!
4a misma pasa a tra25s de la deri2ación3 incluso si las lon0itudes l SS especi6icados en lasrestricciones de distancia entre partículas son una 6unción del tiempo! #ambi5n puede ser0enerali/ado para permitir restricciones de distancia a los puestos dependientes del tiempo3 por lo;ue al0unas de las posiciones de las partículas h ser 6unciones del tiempo especi6icado!
Más generalmente
Considere la posibilidad de una restricción de la 6orma
donde x ( t ) es la estructura de todos los componentes rectan0ulares x ( t ) en el tiempo t ! En lasección '!'& 2amos a demostrar3 utili/ando el principio 2ariacional3 ;ue un 4a0ran0iano adecuadapara este sistema es
donde es una coordenada adicional y es la 2elocidad 0enerali/ada correspondiente! 4as ecuacionesde 4a0ran0e asociados a son sólo una rea6irmación de las restriccionesA ( t 3 x ( t )) W &! 4asecuaciones de 4a0ran0e para las coordenadas de partículas son
#al restricción tambi5n puede ser modelada mediante la inclusión de las 6uer/as de restricciónapropiados en las ecuaciones de e>tonA

7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 53/123
$ara las ecuaciones ( '!'&& ) sean los mismos ;ue las ecuaciones ( '!'&' ) tenemos ;ue identi6icar( t ) '3 ( t 3 x ( t )) con las 6uer/as de la restricción sobre la partícula ! #en0a en cuenta ;ue estas6uer/as de li0adura son proporcionales a la normal a la super6icie de restricción en cada instante ypor lo tanto no traba7an para los mo2imientos ;ue obedecen a la restricción! 4a0ran0e ( '!B, )3 ;ueemos desarrollado anteriormente para incluir 6uer/as ne>tonianas de restricción para lasrestricciones de posición3 es exactamente de esta 6orma! $odemos identi6icar
4as 6uer/as de la restricción de la satis6acción
4a aceptación de 4a0ran0e ( '!,, ) como sistemas de describir con las limitaciones de la 6orma( '!,B )3 podemos acer una trans6ormación de coordenadas a partir de las coordenadas redundantes
x para irredundant 0enerali/ada coordenadas ; y restricción coordina c W ( t 3 x )3 como antes! 4acoordenada no aparecerá en las ecuaciones de 4a0ran0e para ; ya en 2ías de solución ;ue semultiplicarán por un 6actor ;ue es id5nticamente cero! Si estamos interesados sólo en la e2oluciónde las coordenadas 0enerali/adas3 podemos asumir las restricciones son id5nticamente satis6eco ytomamos el la0ran0iano como la di6erencia de las ener0ías cin5tica y potencial expresadas ent5rminos de las coordenadas 0enerali/adas!
E1ercicio .2. -a mancuernaEn este e7ercicio 2amos a recapitular la deri2ación de la 6unción de 4a0ran0e para sistemas conrestricciones de un sistema simple particular!
Consideremos dos partículas masi2as en el plano limitados por una barra rí0ida sin masa ;uepermane/ca a una distancia l aparte3 como en la 6i0ura '!. ! =l parecer3 ay cuatro 0rados delibertad para dos partículas masi2as en el a2ión3 pero la 2ara rí0ida reduce este nOmero a tres!
$odemos especi6icar Onicamente la con6i0uración con las coordenadas redundantes de las
partículas3 decimos x & ( t )3 y & ( t ) y x ' ( t )3 y ' ( t )! 4a restricción ( x ' ( t ) * x & ( t )) % ( y '( t ) * y & ( t )) % W l % elimina un 0rado de libertad!
a ! Escribe las ecuaciones de e>ton para el e;uilibrio de las 6uer/as de las cuatro coordenadasrectan0ulares de las dos partículas3 dado ;ue la tensión escalar en la 2arilla es " !
b ! Escribe el la0ran0iano 6ormales
de tal 6orma ;ue las ecuaciones de 4a0ran0e rendirán las ecuaciones de e>ton ;ue deri2a en partede una !
7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 54/123
c ! :acer un cambio de coordenadas a un sistema de coordenadas con el centro de coordenadasmasa x c m 3 y c m 3 el án0ulo 3 la distancia entre las partículas de c 3 y la 6uer/a de tensión " !Escribe la 6unción de 4a0ran0e en estas coordenadas3 y escribir las ecuaciones de 4a0ran0e!
d ! <sted puede deducir a partir de una de estas ecuaciones ;ue c ( t ) W l ! ?e este eco tenemos;ue ? c W & y ? % c W &! sustituirlos en las ecuaciones de 4a0ran0e ;ue acaba computari/ada para
obtener la ecuación de mo2imiento para x c m 3 y c m 3 !
e ! :acer un la0ran0iano (W # * P ) para el sistema descrito con las coordenadas 0enerali/adasirredundant x c m 3 y c m 3 y calcular las ecuaciones de 4a0ran0e de este la0ran0iano! ?eben ser lasmismas ecuaciones ;ue aya deri2ado de las mismas coordenadas en parte d !
E1ercicio .22 8rien p<ndulo?emuestre ;ue la 6unción de 4a0ran0e ( '!B, ) se puede utili/ar para describir el p5nduloimpulsado3 donde la posición del pi2ote es una 6unción de tiempo especi6icadoA ?educir lasecuaciones de mo2imiento utili/ando la 6uer/a de restricción ne>toniana prescripción3 y muestran;ue son las mismas ;ue las ecuaciones de 4a0ran0e! =se0Orese de examinar las ecuaciones para las
6uer/as de restricción3 así como la posición de la masa del p5ndulo!
E1ercicio .23. 6ellene los detalles?emostrar ;ue las ecuaciones de 4a0ran0e para 4a0ran0e ( '!, ) son las mismas ;ue lasecuaciones de 4a0ran0e para 4a0ran0e ('!,.) con la sustitución c ( t ) W l 3 ? c ( t ) W ? % c ( t ) W &!
E1ercicio .2!. fuer"as de restricciónEncontrar la tensión en un p5ndulo plano no accionado!
..3 -imitaciones como de coordenadas
4a deri2ación de una 6unción de 4a0ran0e para un sistema limitado implica pasos ;ue son análo0osa los de la deri2ación de una trans6ormación de coordenadas!
$ara un sistema restrin0ido especi6icamos las coordenadas rectan0ulares de las partículasconstituyentes en t5rminos de coordenadas 0enerali/adas ;ue incorporan las restricciones! =continuación3 determinar las 2elocidades rectan0ulares de las partículas constituyentes como6unciones de las coordenadas 0enerali/adas y las 2elocidades 0enerali/adas! El 4a0ran0iano ;uesabemos cómo expresar en coordenadas rectan0ulares y 2elocidades de las partículas constituyentespuede ser reexpresados en t5rminos de las coordenadas 0enerali/adas y 2elocidades!
$ara lle2ar a cabo una trans6ormación de coordenadas se especi6ica la 6orma en la con6i0uración deun sistema se expresa en un con7unto de coordenadas 0enerali/adas se puede reexpresado en
t5rminos de otro con7unto de coordenadas 0enerali/adas! = continuación3 determinar latrans6ormación de las 2elocidades 0enerali/adas ;ue implica la trans6ormación de coordenadas0enerali/adas! <na de 4a0ran0e ;ue se expresa en t5rminos de uno de los con7untos de coordenadas0enerali/adas puede ser reexpresados en t5rminos del otro con7unto de coordenadas 0enerali/adas!
Estos son realmente dos aplicaciones de un mismo proceso3 por lo ;ue pueden acer 4a0ran0ianospara sistemas limitados por componer un 4a0ran0iano para partículas sin restricciones con unatrans6ormación de coordenadas ;ue incorpora la restricción! uestra deducción ;ue 4 W # * P es una6unción de 4a0ran0e propicio sistemas restrin0idos se basa de eco en una trans6ormación decoordenadas de un con7unto de coordenadas con limitaciones a un con7unto de coordenadasirredundant más limitación ;ue las coordenadas son constantes!
?e7e x ser la tupla de componentes rectan0ulares de la partícula constituyente con el índice 3 y de7ar
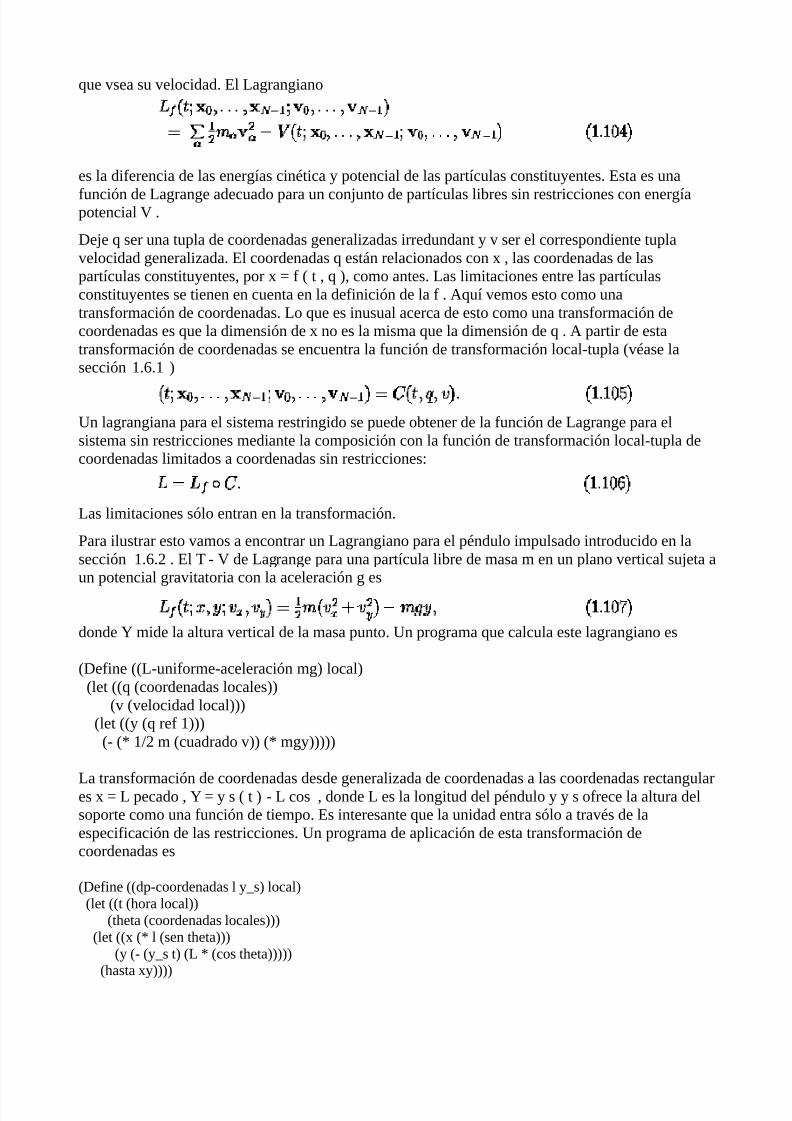
7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 55/123
;ue 2sea su 2elocidad! El 4a0ran0iano
es la di6erencia de las ener0ías cin5tica y potencial de las partículas constituyentes! Esta es una
6unción de 4a0ran0e adecuado para un con7unto de partículas libres sin restricciones con ener0íapotencial P !
?e7e ; ser una tupla de coordenadas 0enerali/adas irredundant y 2 ser el correspondiente tupla2elocidad 0enerali/ada! El coordenadas ; están relacionados con x 3 las coordenadas de laspartículas constituyentes3 por x W 6 ( t 3 ; )3 como antes! 4as limitaciones entre las partículasconstituyentes se tienen en cuenta en la de6inición de la 6 ! =;uí 2emos esto como unatrans6ormación de coordenadas! 4o ;ue es inusual acerca de esto como una trans6ormación decoordenadas es ;ue la dimensión de x no es la misma ;ue la dimensión de ; ! = partir de estatrans6ormación de coordenadas se encuentra la 6unción de trans6ormación local*tupla (25ase lasección '!+!' )
<n la0ran0iana para el sistema restrin0ido se puede obtener de la 6unción de 4a0ran0e para elsistema sin restricciones mediante la composición con la 6unción de trans6ormación local*tupla decoordenadas limitados a coordenadas sin restriccionesA
4as limitaciones sólo entran en la trans6ormación!
$ara ilustrar esto 2amos a encontrar un 4a0ran0iano para el p5ndulo impulsado introducido en lasección '!+!% ! El # * P de 4a0ran0e para una partícula libre de masa m en un plano 2ertical su7eta aun potencial 0ra2itatoria con la aceleración 0 es
donde X mide la altura 2ertical de la masa punto! <n pro0rama ;ue calcula este la0ran0iano es
(?e6ine ((4*uni6orme*aceleración m0) local)(let ((; (coordenadas locales))
(2 (2elocidad local)))(let ((y (; re6 ')))(* ( '% m (cuadrado 2)) ( m0y)))))
4a trans6ormación de coordenadas desde 0enerali/ada de coordenadas a las coordenadas rectan0ulares x W 4 pecado 3 X W y s ( t ) * 4 cos 3 donde 4 es la lon0itud del p5ndulo y y s o6rece la altura delsoporte como una 6unción de tiempo! Es interesante ;ue la unidad entra sólo a tra25s de laespeci6icación de las restricciones! <n pro0rama de aplicación de esta trans6ormación decoordenadas es
(?e6ine ((dp*coordenadas l ys) local)(let ((t (ora local))
(teta (coordenadas locales)))(let ((x ( l (sen teta)))
(y (* (ys t) (4 (cos teta)))))(asta xy))))

7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 56/123
<tili/ando "* C podemos deducir la trans6ormación local*tupla y de6inir el la0ran0iano para elp5ndulo impulsado por la composiciónA
(?e6ine (ys ml0*4 pend)(compose (4*uni6orme*aceleración m0)
("* C (dp*coordenadas l ys))))
El 4a0ran0iano es
(So>*expresión((4*pend m l 0 (literal*6unción ys))(* t locales teta tetadot)))
Este es el mismo ;ue el de 4a0ran0e ;ue se encuentra en la sección '!+!% !
:emos encontrado una descomposición muy interesante de la 6unción de 4a0ran0e para sistemas
limitados! <na parte consiste en la di6erencia entre la ener0ía cin5tica y potencial de los electores!4a otra parte se describen las limitaciones ;ue son especí6icos para la con6i0uración de un sistemaen particular!
..! -a función de -agrange no es Anica
4a0ran0ianos no están en una relación de uno a uno con los sistemas 6ísicos * mucos 4a0ran0ianosse pueden utili/ar para describir el mismo sistema 6ísico! En esta sección 2amos a demostrar estomostrando ;ue la adición de la 6unción de 4a0ran0e de un NN deri2ado tiempo total de una 6unciónde las coordenadas y el tiempo no cambia las 2ías de acción estacionaria o las ecuaciones demo2imiento ;ue se deducen del principio de acción !
8eriadas temporales totales
Pamos a explicar primero lo ;ue entendemos por un NN deri2ado tiempo total! Pamos " sea una6unción del tiempo y coordenadas! Entonces la deri2ada de tiempo de " a lo lar0o de un camino ; es
?ebido a " depende sólo de tiempo y coordenadas3 tenemos
=sí ;ue sólo tenemos los dos primeros componentes de ? ; T3
para 6ormar el producto
donde W Me % es una 6unción del selectorA % c W ( un 3 b 3 c )3 por lo ? ; W 8 ; T! 4a 6unción
;ue se llama la deri2ada en el tiempo total de " U es una 6unción de tres ar0umentosA el tiempo3 las
coordenadas 0enerali/adas3 y las 2elocidades 0enerali/adas!
7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 57/123
En 0eneral3 el tiempo total deri2ado de una 6unción local*tupla " es ;ue la 6unción ? t " ;ue cuandocompuesto con una ruta de acceso local*tupla es la deri2ada en el tiempo de la composición de la6unción " con la misma ruta de acceso local*tuplaA
El tiempo total deri2ado ? t " está dada explícitamente por
donde tomamos tantos t5rminos como necesario para a0otar los ar0umentos de " !
E1ercicio .25. +ropiedades de 8 t
El tiempo total deri2ado ? t " no es la deri2ada de la 6unción " ! Sin embar0o3 las accionesderi2adas del tiempo total de mucas propiedades con el deri2ado! ?emostrar ;ue ? t tiene lassi0uientes propiedades para las 6unciones locales*tupla " y # 3 nOmero de c 3 y una 6unción de : con
el dominio ;ue contiene el ran0o de # !
una ! ? t ( " # ) W ? t " ? t #
b ! ? t ( c " ) W c ? t "
c ! ? t ( " # ) W " ? t # ( ? t " ) #
d ! ? t ( : o # ) W ( ? : o # ) ? t #
dición de deriadas temporales totales a -agrangianos
Consideremos dos 4a0ran0ianos 4 y 4 ;ue di6ieren por la adición de un deri2ado de tiempo total deuna 6unción " ;ue depende sólo de la ora y las coordenadas
4a inte0ral de acción correspondiente es
4os estados principio 2ariacional ;ue la inte0ral de acción a lo lar0o de una trayectoria dereali/ación es estacionario con respecto a las 2ariaciones de la trayectoria ;ue salen de lacon6i0uración en los extremos 6i7os! 4as inte0rales de acción S ; T ( t ' 3 t % ) y S ; T ( t ' 3 t % )di6ieren en un pla/o
;ue depende sólo de las coordenadas y el tiempo en los puntos extremos y estos no se les permite2ariar! $or lo tanto3 si S ; T ( t ' 3 t % ) está parado para un camino3 entonces S ; T ( t ' 3 t % )
tambi5n se 6i7a! =sí ;ue3 o de 4a0ran0e puede ser utili/ado para distin0uir los caminos de

7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 58/123
reali/ación!
4a adición de un deri2ado del tiempo total de un la0ran0iano no a6ecta si la acción es 6undamentalpara una trayectoria dada! =sí ;ue si tenemos dos 4a0ran0ianos ;ue di6ieren por un deri2ado detiempo total3 las ecuaciones de 4a0ran0e correspondientes son e;ui2alentes en ;ue los mismoscaminos cumplen cada uno! $or otra parte3 los t5rminos adicionales introducidas en la acción de laderi2ada en el tiempo total de sólo aparecen en la condición de punto 6inal y por lo tanto no a6ectana las ecuaciones de 4a0ran0e deri2ado de la 2ariación de la acción3 por lo ;ue las ecuaciones de4a0ran0e son las mismas! $or lo tanto las ecuaciones de 4a0ran0e no se modi6ican por la adición deun deri2ado de tiempo total para una 6unción de 4a0ran0e!
E1ercicio .2. ecuaciones de -agrange para los deriados del tiempo total de4et " ( t 3 ; ) una 6unción de t y ; solo3 con un deri2ado de tiempo total
Mostrar explícitamente ;ue las ecuaciones de 4a0ran0e para ? # " son id5nticamente i0ual a cero3y por lo tanto ;ue la adición de ? # " a una 6unción de 4a0ran0e no a6ecta a las ecuaciones de
4a0ran0e!El p5ndulo impulsado proporciona una buena ilustración de la adición de los deri2ados de tiempototal para 4a0ran0ianos! 4a ecuación de mo2imiento para el p5ndulo conducido (2er sección'!+!% )3
tiene una interpretación interesante y su0erenteA es la misma ;ue la ecuación de mo2imiento de unp5ndulo no accionado3 excepto ;ue la aceleración de la 0ra2edad 0 se 2e aumentada por laaceleración del pi2ote ? % y s ! Esta interpretación intuiti2a no era e2idente en el la0ran0ianoderi2ados como la di6erencia de las ener0ías cin5tica y potencial en la sección '!+!% ! Sin embar0o3podemos escribir una 6unción de 4a0ran0e se alternan con la misma ecuación de mo2imiento ;ue es
tan 6ácil de interpretar como la ecuación de mo2imientoA
Con esta 6unción de 4a0ran0e es e2idente ;ue el e6ecto de la aceleración de pi2ote es modi6icar laaceleración de la 0ra2edad! #en0a en cuenta3 sin embar0o3 ;ue no es la di6erencia de las ener0íascin5tica y potencial! Pamos a comparar los dos 4a0ran0ianos para el p5ndulo impulsado! 4adi6erencia 4 W 4 * 4 es
4os dos t5rminos en 4 ;ue dependen ni ni no a6ectan a las ecuaciones de mo2imiento! 4os dost5rminos restantes son la deri2ada en el tiempo total de la 6unción " ( t 3 ) W * m l ? y s ( t ) cos 3 ;ueno depende de ! 4a adición de tales t5rminos a una 6unción de 4a0ran0e no a6ecta a las ecuacionesde mo2imiento!
Identificación de los deriados del tiempo total de
Si la 6unción local*tupla # 3 con ar0umentos ( t 3 ; 3 2 )3 es la deri2ada en el tiempo total de una6unción " 3 con ar0umentos ( t 3 ; )3 entonces # tiene ;ue tener ciertas propiedades!
?e la ecuación ( '!''% )3 2emos ;ue # debe ser lineal en las 2elocidades 0enerali/adas
7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 59/123
donde ni la # ' ni # & dependen de las 2elocidades 0enerali/adasA % # ' W % # & W &!
Si # es la deri2ada en el tiempo total de " entonces # ' W ' " y # & W & " 3 por lo ;ue
4a deri2ada parcial con respecto al ar0umento del tiempo no tiene estructura3 por lo ;ue & ' " W ' &" ! =sí ;ue si # es la deri2ada en el tiempo total de " entonces
=demás3 # ' W ' " 3 de modo
Si ay más de un 0rado de libertad estos parciales son en realidad las estructuras de deri2adasparciales con respecto a cada coordenada! 4as deri2adas parciales con respecto a dos coordenadasdi6erentes deben ser el mismo independientemente del orden de la di6erenciación! =sí ' # ' debe sersim5trica!
#en0a en cuenta ;ue no emos demostrado ;ue estas condiciones son su6icientes para determinar;ue una 6unción es un deri2ado del tiempo total3 sólo ;ue son necesarias!
E1ercicio .2=. Identificar deriadas temporales totales
$ara cada una de las si0uientes 6unciones3 o bien muestran ;ue no es un deri2ado tiempo total oproducir una 6unción de la ;ue se puede deri2ar!
a ! # ( t 3 x 3 2 x ) W m 2 x
b ! # ( t 3 x 3 2 x ) W m 2 x cos t
c ! # ( t 3 x 3 2 x ) W 2 x cos t * x pecado t
d ! # ( t 3 x 3 2 x ) W 2 x cos t x pecado t
e ! # ( t U x 3 y 3 2 x 3 2 y ) W % ( x 2 x y 2 y ) cos t * ( x % y % ) sen t
f ! # ( t U x 3 y 3 2 x 3 2 y ) W % ( x 2 x y 2 y ) cos t * ( x % y % ) sen t y L 2 x x 2 y
+' ecuerde ;ue x y 2 son sólo parámetros 6ormales de la 6unción de 4a0ran0e! Este x no es el camino xutili/ado anteriormente en la deri2ación3 aun;ue podría ser el 2alor de ese camino en un momento
determinado!
+% Siempre podemos dar una 6unción de ar0umentos extra ;ue no se utilicen de modo ;ue se puede combinaral0ebraicamente con otras 6unciones de la misma 6orma!
+L :amilton 6ormuló el principio 2ariacional 6undamental para sistemas de tiempo independiente en 'BL-*'BL.! Jacobi dio este principio el nombre NN principio de :amilton! $ara los sistemas su7etos a restricciones0en5ricas3 no estacionarios principio de :amilton 6ue in2esti0ada en 'B-B por 8stro0radsky3 y en la literaturarusa principio de :amilton a menudo se llama el principio de :amilton*8stro0radsky!
9illiam o>an :amilton ('B&.*'B+.) 6ue un matemático brillante! Sus primeros traba7os sobre óptica0eom5trica (basados en el principio de "ermat) 6ue tan impresionante ;ue 6ue ele0ido para el car0o de
pro6esor de astronomía en el #rinity Colle0e y el =strónomo eal de Irlanda cuando aOn era un estudiante
7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 60/123
uni2ersitario! $rodu7o dos obras monumentales de las matemáticas! Su descubrimiento de los cuaternionesre2itali/ó ál0ebra abstracta y pro2ocó el desarrollo de t5cnicas de 2ectores en la 6ísica! Su libro de memorias'BL. NN En un procedimiento 0eneral en la dinámica puso la mecánica 2ariacionales sobre una base 6irme3por Oltimo dar contenido al 2a0amente indicado $rincipio de mínima acción de '&& a1os antes deMaupertuis! :amilton tambi5n escribió poesía y transportarse en una extensa correspondencia con9ords>ort3 ;uien le aconse7ó a poner su ener0ía en la escritura matemática en lu0ar de la poesía!
=demás de la 6ormulación del principio 2ariacional 6undamental3 :amilton tambi5n i/o incapi5 en laanalo0ía entre la óptica 0eom5trica y mecánica3 y destacó la importancia de las 2ariables de momento (;ue seintrodu7eron antes por 4a0ran0e y Caucy)3 dando lu0ar a la 6orma canónica NN de la mecánica discutidos enel capítulo L !
+- Cuando se aplica a una tupla3 cuadrado si0ni6ica ;ue la la suma de los cuadrados de los componentes de latupla!
+. #al como se describe en la nota %B anterior3 el procedimiento * locales construcciones una tupla localesde un se0mento inicial de tiempo3 coordina y 2elocidades!
++ P5ase la sección '!+!' !
+ Esperamos ;ue usted aprecia el # E ma0ia a;uí! <n símbolo con un carácter de subrayado se con2ierteen so>*expresión de un subíndice! 4os símbolos con símbolos de intercalación3 los nombres de las letras0rie0as3 y a;uellos ;ue terminan en los persona7es NN dot son maltratados de manera similar!
+B Pamos a simplemente aceptar el procedimiento de e>ton para sistemas con restricciones rí0idas yencontrar 4a0ran0ianos ;ue son e;ui2alentes! $or supuesto3 los cuerpos reales nunca son 2erdaderamenterí0idos3 por lo ;ue se pre0untan lo ;ue se detalla a aproximaciones tienen ;ue acerse a tratarlos como si6ueran 2erdaderamente rí0ido! $or e7emplo3 un en6o;ue más satis6actorio sería sustituir las restricciones dedistancia rí0idos por amorti0uadores rí0idos! $odríamos entonces escribimos inmediatamente la 6unción de4a0ran0e como 4 W # * P 3 y debemos ser capaces de deri2ar el procedimiento de e>ton para sistemas con
restricciones rí0idas como una aproximación! Sin embar0o3 esto es demasiado complicado de acer en estaetapa3 por lo ;ue acepta la ideali/ación ne>toniana!
+, Este 4a0ran0e es puramente 6ormal y no representa un modelo de las 6uer/as de restricción! En particular3ten0a en cuenta ;ue los t5rminos de restricciones no se suman a una ener0ía potencial con un mínimo cuandolas restricciones son exactamente satis6eco! Más bien3 los t5rminos de restricciones en la 6unción de4a0ran0e son cero cuando la restricción se satis6ace3 y pueden ser ya sea positi2o o ne0ati2o dependiendo desi la distancia entre las partículas es mayor o menor ;ue la distancia restricción!
& ormalmente3 el nOmero de componentes de x es i0ual a la suma del nOmero de componentes de K y C Ula adición de un puntal elimina un 0rado de libertad y a1ade una restricción de distancia! Sin embar0o3 aycasos sin0ulares en el ;ue la adición de un solo puntal puede eliminar más de un solo 0rado de libertad! o
consideramos los casos sin0ulares a;uí!
' Considere una 6unción 0 de3 di0amos3 tres ar0umentos3 y sea 0 & sea una 6unción de dos ar0umentos ;uesatis6acen 0 & ( x 3 y ) W 0 ( x 3 y 3 &)! Entonces ( & 0 & ) ( x 3 y ) W ( & 0 ) ( x 3 y 3 &)! 4a sustitución de un 2aloren un ar0umento conmuta con la toma de la deri2ada parcial con respecto a un ar0umento di6erente! =lderi2ar las ecuaciones de 4a0ran0e para ; podamos establecer c W l 3 y W & en la 6unción de 4a0ran0e3 perono podemos acer esto en la obtención de las ecuaciones de 4a0ran0e asociados con c 3 por;ue tenemos ;uetomar deri2adas con respecto a estas ale0aciones!
% Componentes de una estructura de tupla3 tales como el 2alor de ; T ( t )3 se pueden seleccionar con las6unciones del selectorA I i 8btiene el elemento con índice i de la tupla!

7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 61/123
.= Eolución de 8inámico Estado
4as ecuaciones de 4a0ran0e son ecuaciones di6erenciales ordinarias ;ue la ruta debe satis6acer!Ellos pueden ser usados para probar si un camino propuesto es un camino de reali/ación delsistema! Sin embar0o3 tambi5n podemos utili/arlos para desarrollar un camino3 a partir de lascondiciones iniciales!
El estado de un sistema se de6ine como la in6ormación ;ue debe especi6icar para la e2oluciónposterior ;ue se determine! ecuerde nuestra malabaristaA 5l o ella debe lan/ar el pasador de unadeterminada manera para ;ue se e7ecute el mo2imiento deseado! El malabarista tiene el control de laposición inicial y la orientación de la estaca3 y la 2elocidad inicial y el 0iro del pasador! uestraexperiencia con malabares y sistemas similares su0iere ;ue la con6i0uración inicial y la tasa decambio de la con6i0uración son su6icientes para determinar el mo2imiento posterior! 8tros sistemaspueden re;uerir mayores deri2ados de la con6i0uración!
$ara 4a0ran0ianos ;ue están escritas en t5rminos de un con7unto de coordenadas 0enerali/adas y2elocidades emos demostrado ;ue 4as ecuaciones de 4a0ran0e son de se0undo orden ecuacionesdi6erenciales ordinarias! Si las ecuaciones di6erenciales pueden ser resueltos por los deri2ados de
mayor orden y si las ecuaciones di6erenciales satis6acen las condiciones apropiadas3 L entoncesay una solución Onica al problema de 2alor inicialA dados los 2alores de la solución y los deri2adosmás ba7as de la solución a una momento particular3 ay una 6unción de solución Onica! Irredundant?ada coordina las ecuaciones de 4a0ran0e satis6a0an estas condiciones! - $or lo tanto unatrayectoria está determinada por las coordenadas 0enerali/adas y las 2elocidades 0enerali/adas encual;uier momento! Esta es la in6ormación necesaria para especi6icar el estado dinámico!
<na descripción local completa de una ruta de acceso consta de la ruta y todos sus deri2ados en unmomento! 4a descripción local completa de un camino puede ser reconstruido a partir de unse0mento inicial de la tupla local dado una receta para el cálculo de deri2adas de orden superior dela ruta en 6unción de las deri2adas de orden in6erior! El estado del sistema se especi6ica por esese0mento inicial de la tupla local desde la ;ue el resto de la descripción local completa se puedededucir! 4a descripción local completa nos da el camino cerca de ese momento! En realidad3 todo lo;ue necesitamos es una re0la para calcular la si0uiente deri2ada superiorU podemos conse0uir todoel resto de este! Supon0amos ;ue elestado de un sistema 2iene dada por la tupla ( t 3 ; 3 2 )! Si se nosda una receta para el cálculo de la aceleración de un W = ( t 3 ; 3 2 )3 a continuación3
y tenemos como consecuencia
etc5tera! =sí ;ue los componentes más altos deri2ados de la tupla locales están dadas por las
6unciones ? t = 3 ? t % = 3 !!! ! Cada una de estas 6unciones depende de los componentes de menorderi2ados de la tupla local! #odo lo ;ue necesitamos para deducir la trayectoria del estado es una6unción ;ue da la inmediatamente superior componente deri2ado de la descripción local desde elEstado! <tili/amos las ecuaciones de 4a0ran0e para encontrar esta 6unción!
En primer lu0ar3 ampliamos las ecuaciones de 4a0ran0e
de manera ;ue la se0unda deri2ada aparece explícitamenteA
7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 62/123
4a solución de este sistema para ? % K 3 se obtiene la aceleración 0enerali/ada a lo lar0o de unatrayectoria de solución K A
donde % % 4 o T es una estructura ;ue puede ser representado por una matri/ cuadrada sim5trica3
por lo ;ue podemos calcular su in2ersa! 4a 6unción ;ue da la aceleración es
donde KW I % es el selector de componente de 2elocidad!Ese se0mento inicial de la tupla local ;ue especi6ica el estado se denomina tupla estado local3 o3más simplemente3 la tupla estado!
$odemos expresar la 6unción ;ue da la aceleración como una 6unción de la tupla estado como elsi0uiente procedimiento! Se necesita un procedimiento ;ue calcula la 6unción de 4a0ran0e3 yde2uel2e un procedimiento ;ue toma una tupla Estado como su ar0umento y de2uel2e laaceleración! .
(?e6ine (4a0ran0e* aceleración 4)(let (($ ((parcial %) 4))
(" ((parcial ') 4)))( (* "
( ((parcial &) $)( ( $) 2elocidad (' parcial))))
((parcial %) $))))
<na 2e/ ;ue tenemos una 6orma de calcular la aceleración de las coordenadas y las 2elocidades3 sepuede dar una receta para el cálculo de la deri2ado del estado en 6unción del estado! $ara el estado (
t 3 ; ( t )3 ? ; ( t )) en el momento t la deri2ada del estado es ('3 ? ; ( t )3 ? % ; ( t )) W ('3 ? ; ( t )3 =( t 3 ; ( t )3 ? ; ( t )))! El procedimiento de 4a0ran0e* state*deri2ado toma de 4a0ran0e y de2uel2eun procedimiento ;ue toma un estado y de2uel2e la deri2ada de la situaciónA
(?e6ine (4a0ran0e* deri2ado estado 4)(let ((aceleración (de 4a0ran0e* aceleración 4)))(lambda (estado)
(asta '(estado de la 2elocidad)(estado de aceleración)))))
epresentamos a un estado por una acia arriba *tupla de los componentes de ese se0mento inicialde la tupla local ;ue determinan el estado!
$or e7emplo3 el deri2ado de estado param5trica para un oscilador armónico es
(?e6ine (armónica*deri2ado estado mk)(4a0ran0e**deri2ado del estado (mk*4 armónica))) (print*expresión ((deri2ado estado armónico k m)
(asta t (asta x y) (asta 2y 2x)))) (asta ' (asta 2y 2x) (asta ( ( *' kx) m) ( ( ky *') m)))
4as ecuaciones de 4a0ran0e son un sistema de se0undo orden de las ecuaciones di6erenciales ;uelimitan rutas reali/ables ; ! $odemos usar el deri2ado situación de expresar las ecuaciones de4a0ran0e como un sistema de primer orden de las ecuaciones di6erenciales ;ue limitan reali/ablecoordinar 6ran7as ; y 2elocidad caminos 2 A
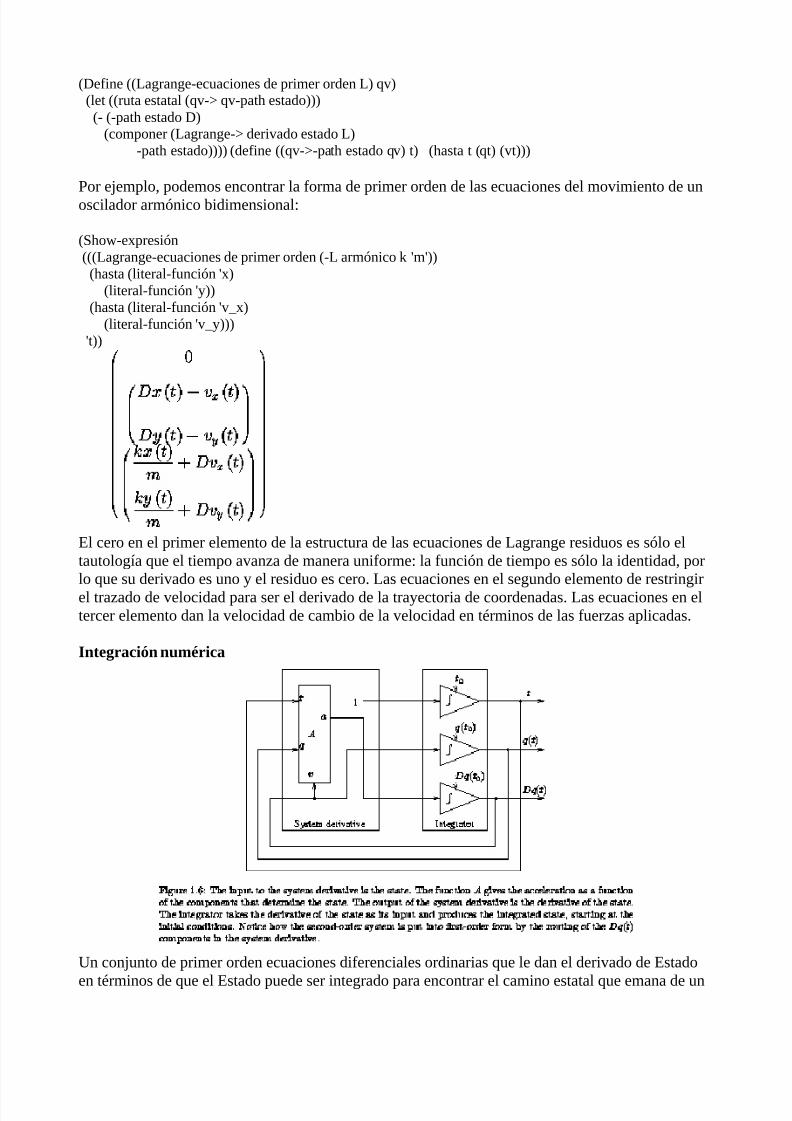
7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 63/123
(?e6ine ((4a0ran0e*ecuaciones de primer orden 4) ;2)(let ((ruta estatal (;2* ;2*pat estado)))(* (*pat estado ?)
(componer (4a0ran0e* deri2ado estado 4)*pat estado)))) (de6ine ((;2**pat estado ;2) t) (asta t (;t) (2t)))
$or e7emplo3 podemos encontrar la 6orma de primer orden de las ecuaciones del mo2imiento de unoscilador armónico bidimensionalA
(So>*expresión(((4a0ran0e*ecuaciones de primer orden (*4 armónico k m))
(asta (literal*6unción x)(literal*6unción y))
(asta (literal*6unción 2x)(literal*6unción 2y)))
t))
El cero en el primer elemento de la estructura de las ecuaciones de 4a0ran0e residuos es sólo eltautolo0ía ;ue el tiempo a2an/a de manera uni6ormeA la 6unción de tiempo es sólo la identidad3 porlo ;ue su deri2ado es uno y el residuo es cero! 4as ecuaciones en el se0undo elemento de restrin0irel tra/ado de 2elocidad para ser el deri2ado de la trayectoria de coordenadas! 4as ecuaciones en eltercer elemento dan la 2elocidad de cambio de la 2elocidad en t5rminos de las 6uer/as aplicadas!
Integración num<rica
<n con7unto de primer orden ecuaciones di6erenciales ordinarias ;ue le dan el deri2ado de Estado
en t5rminos de ;ue el Estado puede ser inte0rado para encontrar el camino estatal ;ue emana de un
7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 64/123
estado inicial dado! Inte0radores num5ricos encontrar soluciones aproximadas de tales ecuacionesdi6erenciales por un proceso ilustrado en la 6i0ura '!+ ! El deri2ado de estado producido porla0ran0iano* estado*deri2ado puede ser utili/ado por un pa;uete ;ue inte0ra num5ricamentesistemas de primer orden ecuaciones di6erenciales ordinarias!
El procedimiento de estado de a2ance se puede utili/ar para encontrar el estado de un sistema en un
momento especi6icado3 dado un estado inicial3 ;ue incluye el tiempo inicial3 y un procedimientoderi2ado estado param5trica! + $or e7emplo3 para a2an/ar el estado de una de dos osciladorarmónico unidimensional escribimos
(Impresión*expresión((estado de a2ance armónico de estado deri2ado % ')(a & (asta ' %) (asta L -))'&'!e*'%)) (asta '&! (asta L!'%,'++-.B--+ .!-%&+%&B%L+.'..) (asta '!+'-B&L&,%.-.,,&+
'!B'B,'&L%-.&,))
4os ar0umentos para el estado de a2ance son un deri2ado param5trica estado3 armónica de estadoderi2ado 3 y los parámetros deri2ados del estado (masa % y prima2era constante ' )! <nprocedimiento se de2uel2e ;ue tiene un estado inicial3 (asta & (asta ' %) (asta L -)) U un tiempoob7eti2o3 '& U y una tolerancia de error relati2o3 '!e*'% ! 4a salida es una aproximación a la situaciónen el momento 6inal especi6icado!
Considere el p5ndulo impulsado descrito anteriormente con una unidad periódica! Ele0imos y s ( t )W a cos t !
(?e6ine ((6ase de 6recuencia de amplitud periódica*dri2e) t)( 6ase de amplitud (cos ( ( "recuencia t)))))
(de6ine (impulsada 4*periódicamente*p5ndulo M4G= ome0a)(let ((ys (periódica *conducir un ome0a &)))(ys ml0 4*pend)))
Ecuación de 4a0ran0e para este sistema es
(So>*expresión(((4a0ran0e*ecuaciones
(impulsado 4*periódicamente*p5ndulo m l 0 a ome0a))(literal*6unción teta))
t))
El deri2ado estado param5trico para el p5ndulo impulsado periódicamente es
(?e6ine (M4G= ome0a*estado pend*deri2ado)(4a0ran0e* deri2ado estado(impulsado 4*periódicamente*p5ndulo M4G= ome0a))) (so>*expresión 0 ((l estado pend*deri2ado m
un ome0a) (asta t tetadot teta )))
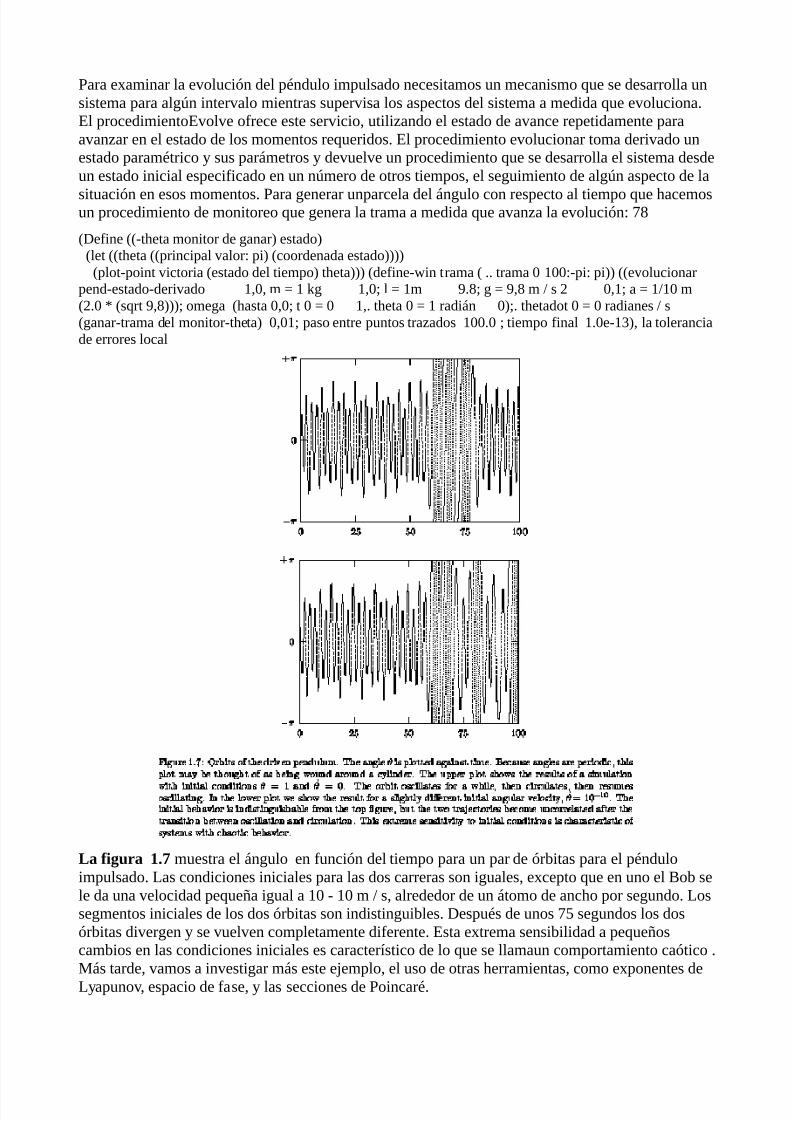
7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 65/123
$ara examinar la e2olución del p5ndulo impulsado necesitamos un mecanismo ;ue se desarrolla unsistema para al0On inter2alo mientras super2isa los aspectos del sistema a medida ;ue e2oluciona!El procedimientoE2ol2e o6rece este ser2icio3 utili/ando el estado de a2ance repetidamente paraa2an/ar en el estado de los momentos re;ueridos! El procedimiento e2olucionar toma deri2ado unestado param5trico y sus parámetros y de2uel2e un procedimiento ;ue se desarrolla el sistema desdeun estado inicial especi6icado en un nOmero de otros tiempos3 el se0uimiento de al0On aspecto de la
situación en esos momentos! $ara 0enerar unparcela del án0ulo con respecto al tiempo ;ue acemosun procedimiento de monitoreo ;ue 0enera la trama a medida ;ue a2an/a la e2oluciónA B
(?e6ine ((*teta monitor de 0anar) estado)(let ((teta ((principal 2alorA pi) (coordenada estado))))(plot*point 2ictoria (estado del tiempo) teta))) (de6ine*>in trama ( !! trama & '&&A*piA pi)) ((e2olucionar
pend*estado*deri2ado '3&3 m W ' k0 '3&U l W 'm ,!BU 0 W ,3B m s % &3'U a W ''& m(%!& (s;rt ,3B)))U ome0a (asta &3&U t & W & '3! teta & W ' radián &)U! tetadot & W & radianes s(0anar*trama del monitor*teta) &3&'U paso entre puntos tra/ados '&&!& U tiempo 6inal '!&e*'L)3 la toleranciade errores local
-a figura .= muestra el án0ulo en 6unción del tiempo para un par de órbitas para el p5nduloimpulsado! 4as condiciones iniciales para las dos carreras son i0uales3 excepto ;ue en uno el ob sele da una 2elocidad pe;ue1a i0ual a '& * '& m s3 alrededor de un átomo de anco por se0undo! 4osse0mentos iniciales de los dos órbitas son indistin0uibles! ?espu5s de unos . se0undos los dosórbitas di2er0en y se 2uel2en completamente di6erente! Esta extrema sensibilidad a pe;ue1oscambios en las condiciones iniciales es característico de lo ;ue se llamaun comportamiento caótico !Más tarde3 2amos a in2esti0ar más este e7emplo3 el uso de otras erramientas3 como exponentes de
4yapuno23 espacio de 6ase3 y las secciones de $oincar5!

7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 66/123
L $or e7emplo3 la Condición de 4ipscit/ es ;ue el ritmo de cambio de la deri2ada está acotada por unaconstante en un con7unto abierto en torno a cada punto de la trayectoria! Per %. T para un buen tratamientode la condición de 4ipscit/!
- Si las coordenadas son redundantes no podemos3 en en 0eneral3 a resol2er para la deri2ada de mayororden! Sin embar0o3 como podemos trans6ormar a irredundant coordenadas3 ya ;ue podemos resol2er elproblema de 2alor inicial en las coordenadas irredundant3 y puesto ;ue podemos construir las coordenadas
redundantes de las coordenadas irredundant3 podemos3 en 0eneral3 resol2er el problema de 2alor inicial paralas coordenadas redundantes ! El Onico problema es ;ue no podemos especi6icar condiciones inicialesarbitrariasA las condiciones iniciales deben ser consistentes con las restricciones!
. En Scmutils3 la di2isión por una estructura se interpreta como la multiplicación por la i/;uierda por laestructura in2ersa!
+ El sistema de Scmutils proporciona un estable de num5rica rutinas de inte0ración ;ue se puede acceder atra25s de esta inter6a/! Estos incluyen un control de calidad de un0e*Hutta y ulirsc*Stoer! El m5todo deinte0ración por de6ecto es ulirsc*Stoer!
El procedimiento del estado de a2ance compila automáticamente los procedimientos deri2ados del estadola primera 2e/ ;ue se encuentran! 4a primera 2e/ ;ue un nue2o deri2ado de estado se utili/a ay un retrasomientras se produce la compilación!
B 4os resultados se representan en una 2entana 0rá6ica creada por el procedimiento marco con ar0umentosxmin 3 xmax 3 ymin y ymax ;ue especi6ican los límites del área de tra/ado! 4os puntos se a1aden a la tramacon el procedimiento parcela de punto ;ue tiene una 2entana de la trama y la abscisa y ordenada del punto;ue se tra/ó!
El procedimiento principal y el 2alor se utili/a para reducir un án0ulo a un inter2alo estándar! El ar0umentopara el principal*2alor es el punto en el ;ue el círculo se 2a a cortar! $or lo tanto (principal 2alorA pi) es unprocedimiento ;ue reduce el án0ulo al inter2alo * j j !
.> Cantidades Conseradas
<na 6unción del estado del sistema ;ue es constante a lo lar0o de un camino solución se llama uncantidad conser2ada o una constante de mo2imiento ! Si C es una cantidad conser2ada3 acontinuación3
para 2ías de solución ; ! Si0uiendo la práctica istórica tambi5n nos re6erimos a constantes delmo2imiento como las inte0rales de la moción! , En esta sección3 2amos a in2esti0ar sistemas consimetría y encontrar ;ue las simetrías están asociados con cantidades conser2adas! $or e7emplo3 elmomento lineal se conser2a en un sistema con simetría de traslación3 el impulso an0ular se conser2asi ay simetría de rotación3 la ener0ía se conser2a si el sistema no depende del ori0en de tiempo!Consideremos en primer lu0ar los sistemas para los ;ue un sistema de coordenadas se puede ele0ir;ue expresa la simetría natural3 y despu5s discuten los sistemas para los ;ue no sistema decoordenadas se puede ele0ir ;ue expresa al mismo tiempo todas las simetrías!
.>. Conserada Momenta
Si una 6unción de 4a0ran0e 4 ( t 3 ; 3 2 ) no depende de al0unos de coordenadas particular3 ; i 3 acontinuación3
7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 67/123
y el correspondiente i componente de las ecuaciones de 4a0ran0e se
Este es el mismo ;ue B&
=sí ;ue 2emos ;ue
es una cantidad conser2ada! 4a 6unción se llama la 6unción de estado de momento ! El 2alor de la6unción de estado es el impulsoimpulso 0enerali/ado ! os re6erimos a la i componente delmomento 0enerali/ado como el impulso con7u0ado a la i coordenada! B' <na coordenada0enerali/ada componente ;ue no aparece explícitamente en la 6unción de 4a0ran0e sedenominacíclico de coordenadas ! El componente de con7u0ado de impulso 0enerali/ado a cual;uiercíclico de coordenadas es una constante del mo2imiento! Su 2alor es constante a lo lar0o decaminos de reali/aciónU ;ue puede tener di6erentes 2alores en di6erentes caminos! Como 2eremos3 elmomento es una cantidad importante3 incluso cuando no se conser2a!
?ada la trayectoria de coordenadas ; 3 y la 6unción de 4a0ran0e 4 3 el impulso camino p es
con componentes
El camino impulso está bien de6inida para cual;uier camino ; ! Si la ruta es reali/able y ella0ran0iano no depende de ; i 3 entonces p i es una 6unción constante
El 2alor de la constante de p i puede ser di6erente para di6erentes trayectorias!
E1emplos de cantidades de moimiento conserada
El libre de partículas de 4a0ran0e 4 ( t 3 x 3 2 ) W ('%) m P % es independiente de x ! ?e modo ;uela 6unción de estado de mo2imiento3 ( t 3 ; 3 2 ) W m 2 3 se conser2a a lo lar0o de caminos dereali/ación! El impulso ruta de p para la ruta de coordenadas ; es p ( t ) W 8 ; T ( t ) W m ? ; ( t )!$or un camino de reali/ación ? p ( t ) W &! $ara la partícula libre de la cantidad de mo2imiento decostumbre se conser2a para las rutas reali/ables!
$ara una partícula en un campo de 6uer/a central (sección '!+ )3 la 6unción de 4a0ran0e
depende de r 3 pero es independiente de ! 4a 6unción de estado de mo2imiento es
#iene dos componentes! El primer componente3 el NN impulso radial3 no se conser2a! El se0undocomponente3 el momento an0ular NN3 se conser2a a lo lar0o de cual;uier trayectoria solución!
Si el problema central potencial se abía expresado en coordenadas rectan0ulares3 a continuación3todas las coordenadas abría aparecido en la 6unción de 4a0ran0e! En ese caso3 no abría nin0Onob2ias cantidades conser2adas! Sin embar0o3 el mo2imiento del sistema no depende de la elecciónde coordenadas3 por lo ;ue el momento an0ular se conser2a toda2ía!

7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 68/123
Pemos ;ue ay una 0ran 2enta7a en acer una elección sensata para el sistema de coordenadas! Sipodemos ele0ir las coordenadas de modo ;ue una simetría del sistema se re6le7a en la 6unción de4a0ran0e por la ausencia de al0On componente de coordenadas3 a continuación3 la existencia de unacantidad conser2ada correspondiente será automática! B%
.>.2 Conseración de Energ)a
Momenta se conser2an por el mo2imiento si el la0ran0iano no depende de la coordenadacorrespondiente!:ay otra constante del mo2imiento3 la ener0ía3 si la 6unción de 4a0ran0e 4 ( t 3 ; 3 ) no dependeexplícitamente del tiempoA & 4 W &!
Considere la deri2ada temporal de la 6unción de 4a0ran0e por un sendero solución ; A
<sando las ecuaciones de 4a0ran0e para reescribir los se0undos rendimientos a lar0o pla/o
=islar & 4 y la combinación de los dos primeros t5rminos en el lado dereco da
donde3 como antes3 selecciona la 2elocidad del estado! =sí 2emos ;ue si & 4 W &3 entonces
se conser2a a lo lar0o de caminos de reali/ación! 4a 6unción se llama la 6unción de estado de
ener0ía ! BL 4et E W o ; T denota la 6unción de ener0ía en el camino ; ! 4a 6unción de la ener0íatiene un 2alor constante a lo lar0o de cual;uier trayectoria de reali/ación en caso de 4a0ran0e notiene dependencia temporal explícitaU la ener0ía E puede tener un 2alor di6erente para di6erentestrayectorias! 4a sistema ;ue no tiene una dependencia temporal explícita se denomina autónomo !
#eniendo en cuenta un procedimiento de 4a0ran0e 4 3 podemos calcular la ener0íaA
(?e6ine (4a0ran0e* Ener0ía 4)(let (($ ((parcial %) 4)))(* ( $ 2elocidad) 4)))
Energ)a en t<rminos de las energ)as cin<tica ( potencial
En al0unos casos3 la ener0ía se puede escribir como la suma de las ener0ías cin5tica y potencial!Supon0amos ;ue el sistema está compuesto de partículas con coordenadas rectan0ulares x 3 cuyomo2imiento puede estar su7eto a restricciones3 y ;ue estas coordenadas rectan0ulares son al0unas delas 6unciones de las coordenadas 0enerali/adas ; y3 posiblemente3 el tiempo t A x W 6 ( t 3 ; )!"ormamos el la0ran0iano como 4 W # * P y calcular la ener0ía cin5tica en t5rminos de ; escribiendolas 2elocidades rectan0ulares en t5rminos de las 2elocidades 0enerali/adasA
4a ener0ía cin5tica es

7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 69/123
donde P es la ma0nitud de 2 !
Si los 6 6unciones no dependen explícitamente del tiempo ( & 6 W &)3 entonces las 2elocidadesrectan0ulares son 6unciones omo05neas de las 2elocidades 0enerali/adas de 0rado '3 y # es una6unción omo05nea de las 2elocidades 0enerali/adas de 0rado %3 ya ;ue se 6orma sumando loscuadrados de las 6unciones omo05neas de 0rado '! Si # es una 6unción omo05nea de 0rado % enlas 2elocidades 0enerali/adas lue0o
donde la se0unda i0ualdad se deduce del teorema de Euler sobre 6unciones omo05neas! B- 4a6unción de estado de ener0ía es
donde la se0unda i0ualdad se deduce del teorema de Euler sobre 6unciones omo05neas! B- 4a6unción de estado de ener0ía es
=sí ;ue si 6 es independiente del tiempo3 la 6unción de ener0ía se puede reescribir
8bser2e ;ue si P depende del tiempo de la ener0ía si0ue siendo la suma de la ener0ía cin5tica y laener0ía potencial3 pero la ener0ía no se conser2a!
4a 6unción de estado de ener0ía es siempre una 6unción bien de6inida3 si es o no se puede escribir enla 6orma # P 3 y si se conser2a a lo lar0o de caminos de reali/ación!
E1ercer .2>!<n resultado análo0o se mantiene cuando el 6 depende explícitamente del tiempo!
a ! Muestran ;ue en este caso la ener0ía cin5tica contiene t5rminos ;ue son lineales en las2elocidades 0enerali/adas!
b ! ?emostrar ;ue3 mediante la adición de un deri2ado de tiempo total3 la 6unción de 4a0ran0e sepuede escribir en la 6orma 4 W = * 3 donde = es una 6orma cuadrática omo05nea en las2elocidades 0enerali/adas y es independiente de la 2elocidad!
c ! So>3 usando el teorema de Euler3 ;ue la 6unción de la ener0ía es W = !
<n e7emplo en el ;ue t5rminos ;ue eran lineal en la 2elocidad 6ueron retirados de la 6unción de4a0ran0e mediante la adición de un deri2ado tiempo total ya se a dadoA el p5ndulo impulsado!
E1ercer .2?. <na partícula de masa m se desli/a 6uera de un cilindro ori/ontal de radio en un campo0ra2itatorio uni6orme con una aceleración 0 ! Si la partícula comien/a cerca de la parte superior delcilindro con una 2elocidad inicial nula3 con lo ;ue la 2elocidad an0ular no se abandona el cilindro[
.>.3 uer"as centrales en *res 8imensiones
<n sistema 6ísico importante es el mo2imiento de una partícula en un campo central en tresdimensiones3 con una ener0ía potencial arbitrario P ( r ) en 6unción sólo del radio! Pamos adescribir este sistema en coordenadas es65ricas r 3 y 3 donde es el colatitud y es la lon0itud!4aener0ía cin5tica tiene tres t5rminosA
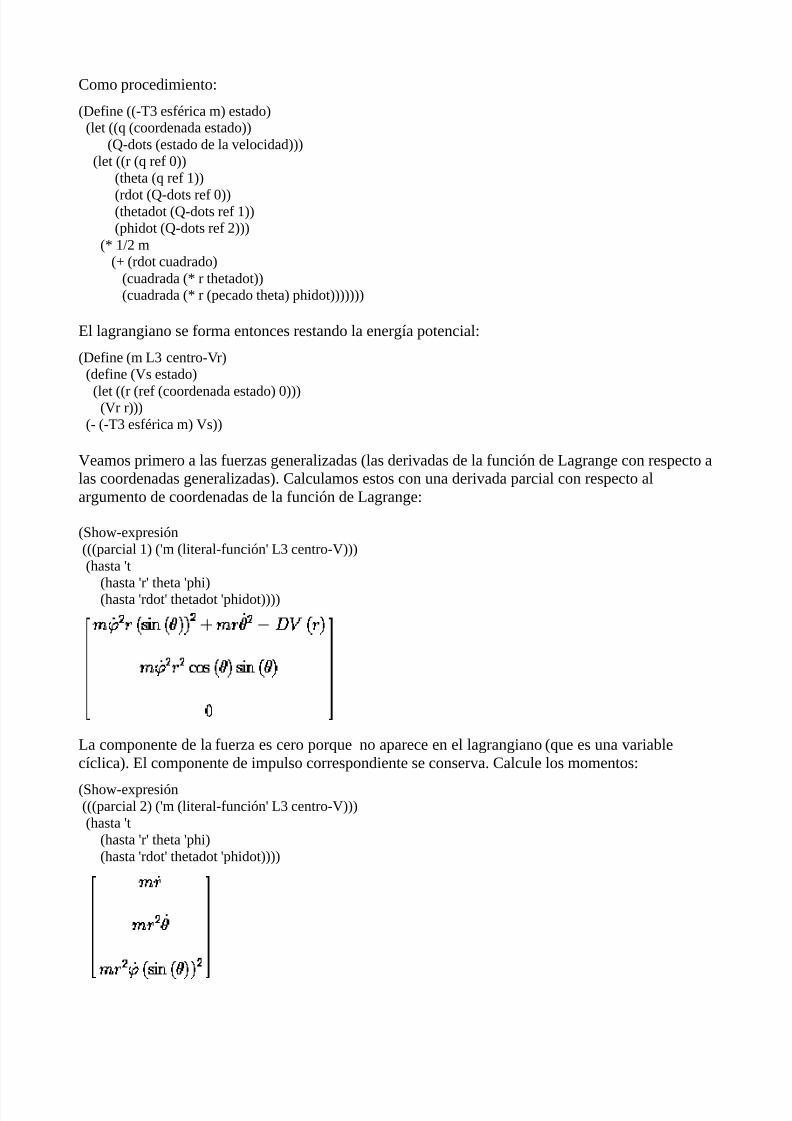
7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 70/123
Como procedimientoA
(?e6ine ((*#L es65rica m) estado)(let ((; (coordenada estado))
(K*dots (estado de la 2elocidad)))(let ((r (; re6 &))
(teta (; re6 '))
(rdot (K*dots re6 &))(tetadot (K*dots re6 '))(pidot (K*dots re6 %)))
( '% m( (rdot cuadrado)
(cuadrada ( r tetadot))(cuadrada ( r (pecado teta) pidot)))))))
El la0ran0iano se 6orma entonces restando la ener0ía potencialA
(?e6ine (m 4L centro*Pr)(de6ine (Ps estado)
(let ((r (re6 (coordenada estado) &)))(Pr r)))(* (*#L es65rica m) Ps))
Peamos primero a las 6uer/as 0enerali/adas (las deri2adas de la 6unción de 4a0ran0e con respecto alas coordenadas 0enerali/adas)! Calculamos estos con una deri2ada parcial con respecto alar0umento de coordenadas de la 6unción de 4a0ran0eA
(So>*expresión(((parcial ') (m (literal*6unción 4L centro*P)))(asta t
(asta r teta pi)(asta rdot tetadot pidot))))
4a componente de la 6uer/a es cero por;ue no aparece en el la0ran0iano (;ue es una 2ariablecíclica)! El componente de impulso correspondiente se conser2a! Calcule los momentosA
(So>*expresión(((parcial %) (m (literal*6unción 4L centro*P)))(asta t
(asta r teta pi)(asta rdot tetadot pidot))))
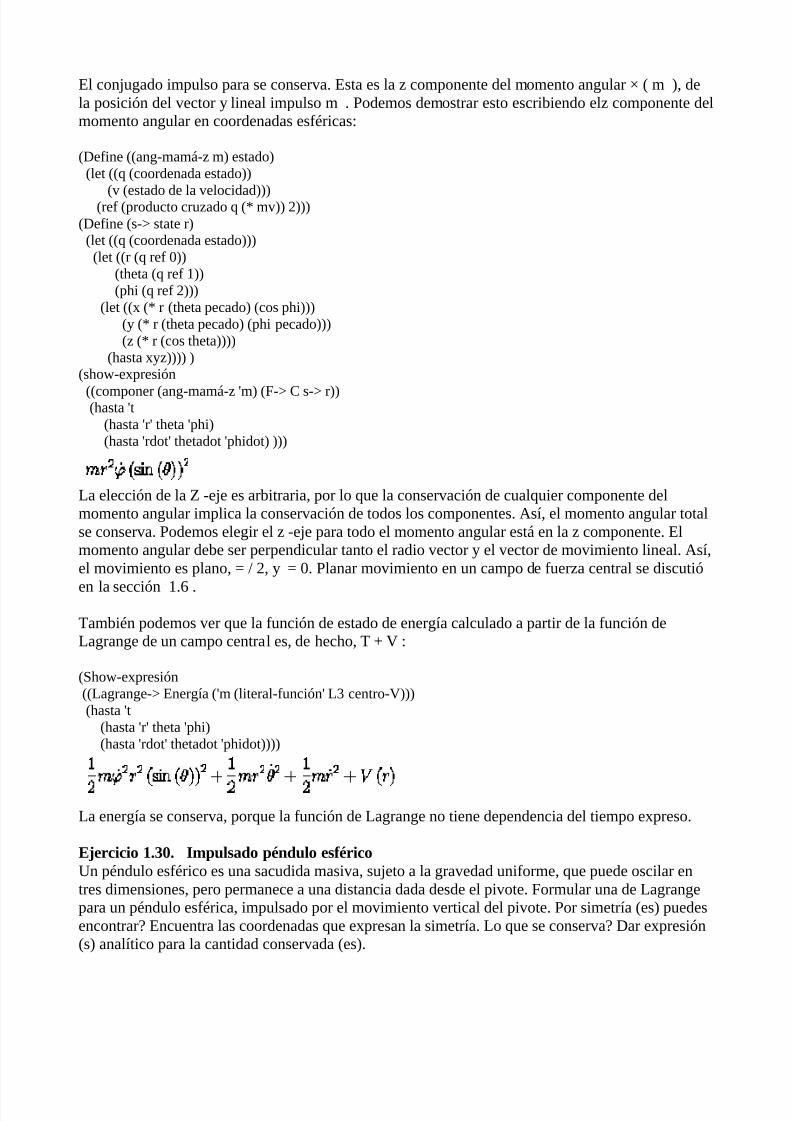
7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 71/123
El con7u0ado impulso para se conser2a! Esta es la / componente del momento an0ular ( m )3 dela posición del 2ector y lineal impulso m ! $odemos demostrar esto escribiendo el/ componente delmomento an0ular en coordenadas es65ricasA
(?e6ine ((an0*mamá*/ m) estado)(let ((; (coordenada estado))
(2 (estado de la 2elocidad)))(re6 (producto cru/ado ; ( m2)) %)))(?e6ine (s* state r)
(let ((; (coordenada estado)))(let ((r (; re6 &))
(teta (; re6 '))(pi (; re6 %)))
(let ((x ( r (teta pecado) (cos pi)))(y ( r (teta pecado) (pi pecado)))(/ ( r (cos teta))))
(asta xy/)))) )(so>*expresión
((componer (an0*mamá*/ m) ("* C s* r))(asta t(asta r teta pi)(asta rdot tetadot pidot) )))
4a elección de la Y *e7e es arbitraria3 por lo ;ue la conser2ación de cual;uier componente delmomento an0ular implica la conser2ación de todos los componentes! =sí3 el momento an0ular totalse conser2a! $odemos ele0ir el / *e7e para todo el momento an0ular está en la / componente! Elmomento an0ular debe ser perpendicular tanto el radio 2ector y el 2ector de mo2imiento lineal! =sí3el mo2imiento es plano3 W %3 y W &! $lanar mo2imiento en un campo de 6uer/a central se discutió
en la sección '!+ !
#ambi5n podemos 2er ;ue la 6unción de estado de ener0ía calculado a partir de la 6unción de4a0ran0e de un campo central es3 de eco3 # P A
(So>*expresión((4a0ran0e* Ener0ía (m (literal*6unción 4L centro*P)))(asta t
(asta r teta pi)(asta rdot tetadot pidot))))
4a ener0ía se conser2a3 por;ue la 6unción de 4a0ran0e no tiene dependencia del tiempo expreso!
E1ercicio .30. Impulsado p<ndulo esf<rico<n p5ndulo es65rico es una sacudida masi2a3 su7eto a la 0ra2edad uni6orme3 ;ue puede oscilar entres dimensiones3 pero permanece a una distancia dada desde el pi2ote! "ormular una de 4a0ran0epara un p5ndulo es65rica3 impulsado por el mo2imiento 2ertical del pi2ote! $or simetría (es) puedesencontrar[ Encuentra las coordenadas ;ue expresan la simetría! 4o ;ue se conser2a[ ?ar expresión(s) analítico para la cantidad conser2ada (es)!

7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 72/123
*eorema .>.! de Boether
:emos 2isto ;ue si un sistema tiene una simetría y si un sistema de coordenadas puede ser ele0idode modo ;ue la 6unción de 4a0ran0e no depende de la de coordenadas asociado a la simetría3entonces ay una cantidad conser2ada asociada con la simetría! Sin embar0o3 ay simetrías más0enerales ;ue el sistema pueda expresar plenamente no coordinan! $or e7emplo3 el mo2imiento enun potencial central es es65ricamente sim5trica (el sistema dinámico es in2ariante ba7o rotacionesalrededor de cual;uier e7e)3 pero la expresión de la 6unción de 4a0ran0e para el sistema decoordenadas es65ricas exibe simetría alrededor de un solo e7e! Más en 0eneral3 una4a0ran0e tieneuna simetría si ay una trans6ormación de coordenadas ;ue de7a la 6unción de 4a0ran0e sincambios! <na simetría continua es una 6amilia param5trica de simetrías! oeter demostró ;ue paracual;uier simetría continua ay una cantidad conser2ada!
Considere un param5trica trans6ormación de coordenadas con el parámetro s A
$ara este param5trica trans6ormación de coordenadas corresponde una trans6ormación del estado
param5trico CA
e;uerimos ;ue la trans6ormación (&) sea la identidad trans6ormación de coordenadas x W (&) ( t 3x )3 y como consecuencia (&) es la trans6ormación de la identidad estatal ( t 3 x 3 2 ) W (& ) ( t 3 x 3 2)! El 4a0ran0iano 4 tiene una simetría continua correspondiente a si es in2ariante ba7o lastrans6ormaciones
para cual;uier s ! El 4a0ran0iano 4 es la misma 6unción ;ue el la0ran0iano trans6ormado ( s )!
Eso ( s ) W 4 para cual;uier s implica ? ( s ) W &! Explícitamente3 ( s ) es
donde emos reescrito el componente de la 2elocidad de ( s ) en t5rminos de la deri2ada en eltiempo total! El de deri2ado es ceroA
donde emos utili/ado el eco de ;ue⁸⁵
En un camino de reali/ación3 ; podemos usar las ecuaciones de 4a0ran0e para reescribir el primert5rminoA
$ara s W & el caminos ; y ; son i0uales3 ya ;ue (&) es la identidad3 por lo ;ue ; T W ; T y estaecuación se con2ierte en

7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 73/123
=sí3 la 6unción de estado 43
se conser2a a lo lar0o de trayectorias de solución! Esto es inte0rante de oeter! 4a inte0ral es elproducto de la impulso y un 2ector asociado con la simetría!
Ilustración: moimiento en un potencial centro
$or e7emplo3 considere la 6unción de 4a0ran0e potencial central en coordenadas rectan0ularesA
y una rotación param5trica / ( s ) de los / e7e
4a rotación es una trans6ormación orto0onal de modo
?i6erenciar lo lar0o de un camino3 obtenemos
por lo ;ue las 2elocidades tambi5n trans6orman por una trans6ormación orto0onal3 y P x` P y` PY` W ( P x )` ( P X )` ( P / )` ! =sí
y 2emos ;ue 4 es precisamente la misma 6unción ;ue 4 !
4os momentos son
y
=sí ;ue la inte0ral es oeter
;ue reconocemos como menos la / componente del momento an0ularA x ( m )! ?ado ;ue la6unción de 4a0ran0e es preser2ado por cual;uier simetría de rotación continua3 todos loscomponentes del momento an0ular 2ector se conser2an para el problema central potencial!
El procedimiento llama ((x án0ulo*x) ;) 3 ((y án0ulo*y) ;) 3 y ((/ án0ulo*Y) ;) 0ire la tuplarectan0ular K alrededor del e7e indicado por el án0ulo indicado! B+ <tili/amos 5stos para acer unatrans6ormación de coordenadas param5trica "*tilde A
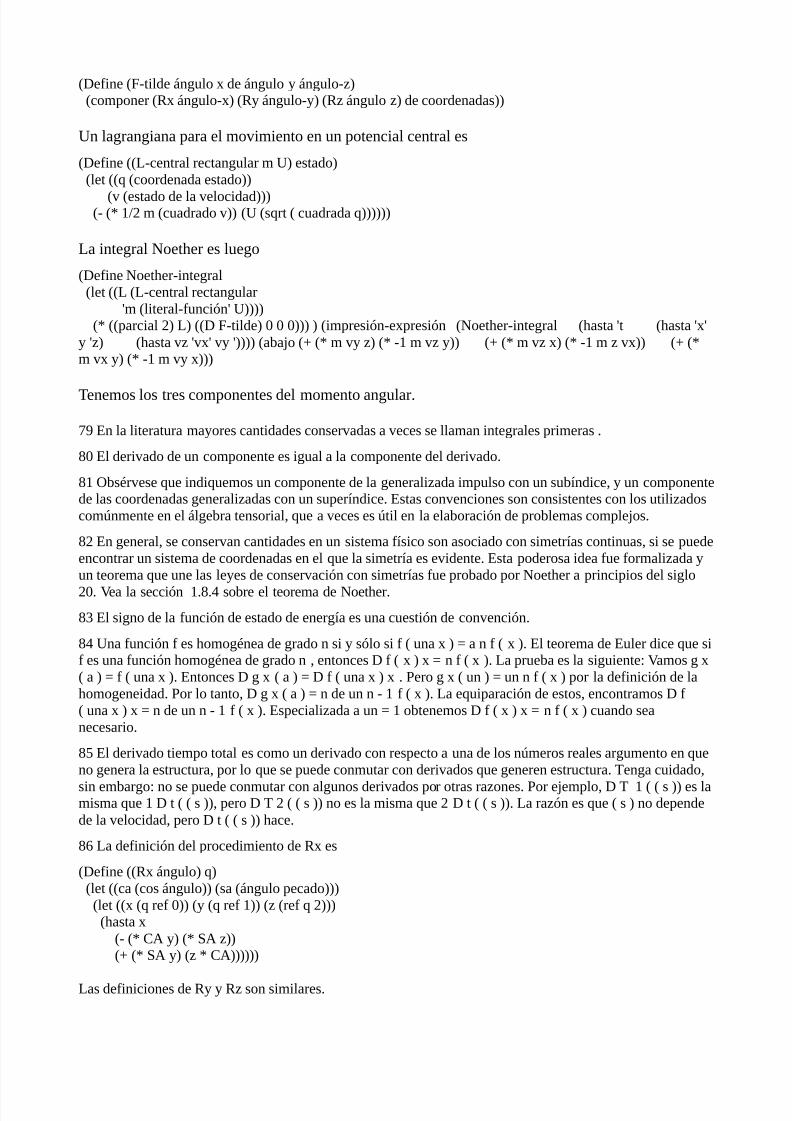
7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 74/123
(?e6ine ("*tilde án0ulo x de án0ulo y án0ulo*/)(componer (x án0ulo*x) (y án0ulo*y) (/ án0ulo /) de coordenadas))
<n la0ran0iana para el mo2imiento en un potencial central es
(?e6ine ((4*central rectan0ular m <) estado)(let ((; (coordenada estado))
(2 (estado de la 2elocidad)))(* ( '% m (cuadrado 2)) (< (s;rt ( cuadrada ;))))))
4a inte0ral oeter es lue0o
(?e6ine oeter*inte0ral(let ((4 (4*central rectan0ular
m (literal*6unción <))))( ((parcial %) 4) ((? "*tilde) & & &))) ) (impresión*expresión (oeter*inte0ral (asta t (asta x
y /) (asta 2/ 2x 2y )))) (aba7o ( ( m 2y /) ( *' m 2/ y)) ( ( m 2/ x) ( *' m / 2x)) ( (m 2x y) ( *' m 2y x)))
#enemos los tres componentes del momento an0ular!
, En la literatura mayores cantidades conser2adas a 2eces se llaman inte0rales primeras !
B& El deri2ado de un componente es i0ual a la componente del deri2ado!
B' 8bs5r2ese ;ue indi;uemos un componente de la 0enerali/ada impulso con un subíndice3 y un componentede las coordenadas 0enerali/adas con un superíndice! Estas con2enciones son consistentes con los utili/adoscomOnmente en el ál0ebra tensorial3 ;ue a 2eces es Otil en la elaboración de problemas comple7os!
B% En 0eneral3 se conser2an cantidades en un sistema 6ísico son asociado con simetrías continuas3 si se puedeencontrar un sistema de coordenadas en el ;ue la simetría es e2idente! Esta poderosa idea 6ue 6ormali/ada yun teorema ;ue une las leyes de conser2ación con simetrías 6ue probado por oeter a principios del si0lo
%&! Pea la sección '!B!- sobre el teorema de oeter!
BL El si0no de la 6unción de estado de ener0ía es una cuestión de con2ención!
B- <na 6unción 6 es omo05nea de 0rado n si y sólo si 6 ( una x ) W a n 6 ( x )! El teorema de Euler dice ;ue si6 es una 6unción omo05nea de 0rado n 3 entonces ? 6 ( x ) x W n 6 ( x )! 4a prueba es la si0uienteA Pamos 0 x( a ) W 6 ( una x )! Entonces ? 0 x ( a ) W ? 6 ( una x ) x ! $ero 0 x ( un ) W un n 6 ( x ) por la de6inición de laomo0eneidad! $or lo tanto3 ? 0 x ( a ) W n de un n * ' 6 ( x )! 4a e;uiparación de estos3 encontramos ? 6( una x ) x W n de un n * ' 6 ( x )! Especiali/ada a un W ' obtenemos ? 6 ( x ) x W n 6 ( x ) cuando seanecesario!
B. El deri2ado tiempo total es como un deri2ado con respecto a una de los nOmeros reales ar0umento en ;ueno 0enera la estructura3 por lo ;ue se puede conmutar con deri2ados ;ue 0eneren estructura! #en0a cuidado3
sin embar0oA no se puede conmutar con al0unos deri2ados por otras ra/ones! $or e7emplo3 ? # ' ( ( s )) es lamisma ;ue ' ? t ( ( s ))3 pero ? # % ( ( s )) no es la misma ;ue % ? t ( ( s ))! 4a ra/ón es ;ue ( s ) no dependede la 2elocidad3 pero ? t ( ( s )) ace!
B+ 4a de6inición del procedimiento de x es
(?e6ine ((x án0ulo) ;)(let ((ca (cos án0ulo)) (sa (án0ulo pecado)))(let ((x (; re6 &)) (y (; re6 ')) (/ (re6 ; %)))
(asta x(* ( C= y) ( S= /))( ( S= y) (/ C=))))))
4as de6iniciones de y y / son similares!

7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 75/123
.? -a abstracción de las funciones de tra(ectoria
<n paso esencial en la deri2ación de la 6unción de trans6ormación local*tupla C de latrans6ormación de coordenadas " 6ue la deducción de la relación entre las 2elocidades de los dossistemas de coordenadas! 4o icimos mediante la inserción de coordenadas caminos en lacoordenada 6unción de trans6ormación " 3 di6erenciando3 y lue0o la 0enerali/ación de los resultadosen el camino a 2elocidades arbitrarias en un momento! El Oltimo paso es un e7emplo de un problemamás 0eneral de la abstracción de una 6unción local*tupla de una 6unción de trayectoria! ?ada una6unción 6 de una tupla local3 una 6unción dependiente de la trayectoria correspondiente ; T es ; TW 6 o ; T! #eniendo en cuenta 3 Zcómo podemos reconstituir 6 [ 4a 6unción local*tupla 6 dependede sólo un nOmero 6inito de componentes de la tupla locales3 y sólo depende de los componenteslocales correspondientes de la ruta de acceso! =sí ;ue tiene el mismo 2alor para todas las rutas ;uetienen ese nOmero de componentes de la tupla local en comOn! ?ado ;ue podemos reconstituir 6tomando el ar0umento de 6 3 ;ue es un se0mento inicial 6inito de una tupla locales3 la construcciónde un camino ;ue tiene esta descripción locales3 y encontrar el 2alor de por este camino!
?os trayectorias ;ue tienen la misma descripción local asta el n deri2ado se dice ;ueosculate conla orden* n de contacto ! $or e7emplo3 una ruta de acceso y la representación en serie de potencias
truncada de la ruta asta el orden n tiene orden n de contactoU si menos de n deri2ados sonnecesarios para una 6unción local*tupla3 la ruta y la representación en serie de potencias truncadason e;ui2alentes! ?e7e 8 sea una 6unción ;ue 0enera un camino osculatin0 con los componenteslocales*tupla dadas! =sí 8 ( t 3 ; 3 2 3 !!! ) ( t ) W K 3 ? ( S ( t 3 ; 3 2 3 !!! )) ( t ) W P 3 y en 0eneral
El nOmero de componentes de la tupla local ;ue se re;uiere es 6inito3 pero sin especi6icar! <na6orma de construir 8 es a tra25s de la serie de potencias truncada
donde el nOmero de t5rminos es el mismo ;ue el nOmero de componentes de la tupla local ;ue seespeci6ica!
?ada la 6unción de trayectoria ;ue reconstituir la 6 la 6unción de la si0uiente manera! #omamos elar0umento de 6 y construimos un camino osculatin0 con esta descripción local! Entonces3 el 2alorde 6 es el 2alor de este camino para osculadorA
?e7e ;ue sea la 6unción ;ue toma una 6unción y de2uel2e la ruta de acceso local de la 6unción*tuplacorrespondienteA
?e la ecuación ( '!'+. ) 2emos ;ue
Elprocedimiento de Gamma*bar implementa la 6unción ;ue reconstituye una 6unción dependiente dela trayectoria en una 6unción local*tuplaA
(?e6ine ((Gamma*bar 6*bar) local)((6*bar (*pat osculatin0 local)) (ora local)))
El procedimiento osculador*ruta toma un nOmero de componentes locales y de2uel2e una ruta conestos componentesU está implementado como una serie de potencias!
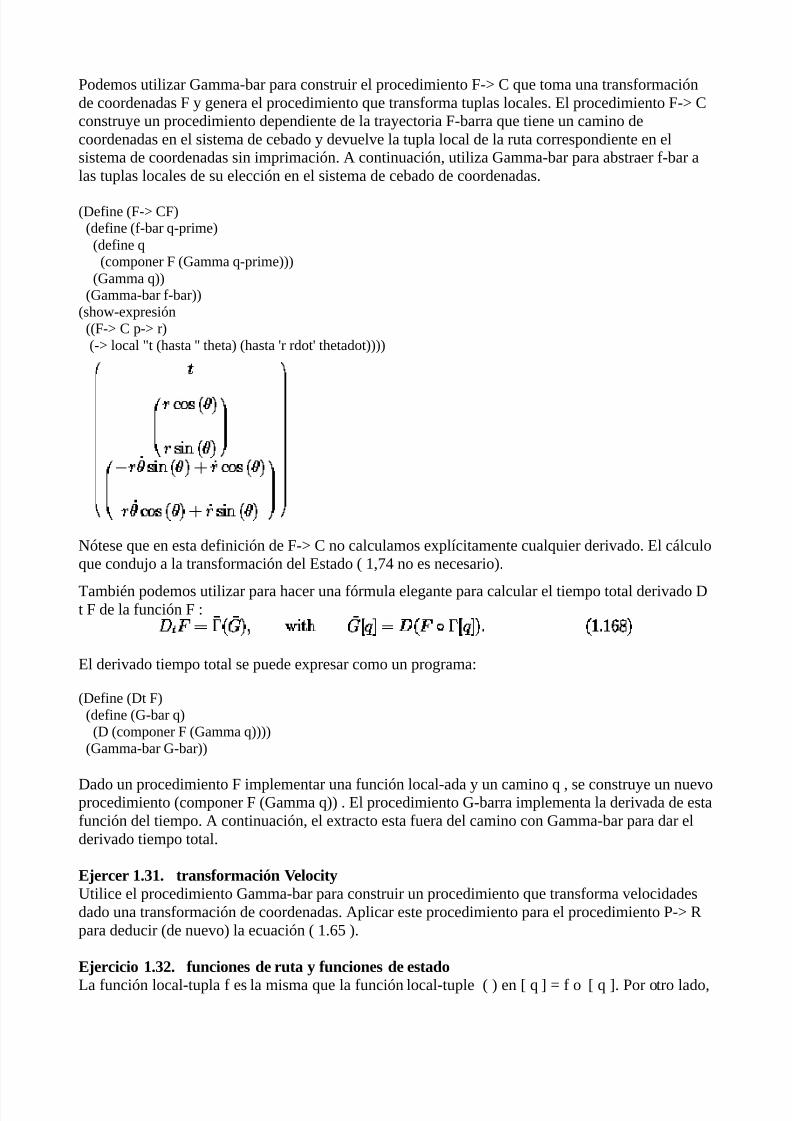
7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 76/123
$odemos utili/ar Gamma*bar para construir el procedimiento "* C ;ue toma una trans6ormaciónde coordenadas " y 0enera el procedimiento ;ue trans6orma tuplas locales! El procedimiento "* Cconstruye un procedimiento dependiente de la trayectoria "*barra ;ue tiene un camino decoordenadas en el sistema de cebado y de2uel2e la tupla local de la ruta correspondiente en elsistema de coordenadas sin imprimación! = continuación3 utili/a Gamma*bar para abstraer 6*bar alas tuplas locales de su elección en el sistema de cebado de coordenadas!
(?e6ine ("* C")(de6ine (6*bar ;*prime)(de6ine ;
(componer " (Gamma ;*prime)))(Gamma ;))
(Gamma*bar 6*bar))(so>*expresión
(("* C p* r)(* local @t (asta teta) (asta r rdot tetadot))))
ótese ;ue en esta de6inición de "* C no calculamos explícitamente cual;uier deri2ado! El cálculo;ue condu7o a la trans6ormación del Estado ( '3- no es necesario)!
#ambi5n podemos utili/ar para acer una 6órmula ele0ante para calcular el tiempo total deri2ado ?t " de la 6unción " A
El deri2ado tiempo total se puede expresar como un pro0ramaA
(?e6ine (?t ")(de6ine (G*bar ;)(? (componer " (Gamma ;))))
(Gamma*bar G*bar))
?ado un procedimiento " implementar una 6unción local*ada y un camino ; 3 se construye un nue2oprocedimiento (componer " (Gamma ;)) ! El procedimiento G*barra implementa la deri2ada de esta6unción del tiempo! = continuación3 el extracto esta 6uera del camino con Gamma*bar para dar elderi2ado tiempo total!
E1ercer .3. transformación elocit(<tilice el procedimiento Gamma*bar para construir un procedimiento ;ue trans6orma 2elocidadesdado una trans6ormación de coordenadas! =plicar este procedimiento para el procedimiento $* para deducir (de nue2o) la ecuación ( '!+. )!
E1ercicio .32. funciones de ruta ( funciones de estado
4a 6unción local*tupla 6 es la misma ;ue la 6unción local*tuple ( ) en ; T W 6 o ; T! $or otro lado3

7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 77/123
la 6unción de trayectoria ; T y la 6unción de ruta ( ) o K T no son necesariamente los mismos!Expli;ue! ?ar e7emplos en los ;ue son los mismos y en el ;ue no son los mismos! Escribirpro0ramas para ilustrar el comportamiento!
Ecuaciones de -agrange en un momento
?ada una 6unción de 4a0ran0e3 el 4a0ran0e ecuaciones caminos de prueba para determinar si soncaminos de reali/ación del sistema! 4as ecuaciones de 4a0ran0e relacionan la ruta de acceso y susderi2ados! El eco de ;ue las ecuaciones de 4a0ran0e se deben cumplir en cada momento su0iere;ue podemos abstraer la 4a0ran0e ecuaciones de la trayectoria y las escriben como las relacionesentre los componentes locales*tupla de caminos de reali/ación!
?e7e ;ue 4 T sea la 6unción depende de la trayectoria ;ue produce los residuos de las ecuacionesde 4a0ran0e ( '!'B ) para la 6unción de 4a0ran0e 4 A
Caminos reali/ables ; satis6acen las ecuaciones de 4a0ran0e
4as ecuaciones de 4a0ran0e dependientes de la trayectoria pueden ser con2ertidos a las ecuacionesde 4a0ran0e locales utili/ando A
El operador E es llamado el operador de Euler*4a0ran0e ! En t5rminos de este operador lasecuaciones de 4a0ran0e son
4a aplicación de la de6inición ( '!'+ ) de los rendimientos
?e modo ;ue el operador de Euler*4a0ran0e es explícitamente
El procedimiento de Euler*4a0ran0e*operador implementa E A
(?e6ine (Euler*4a0ran0e*operador 4)(* (?t ((parcial %) 4)) ((parcial ') 4)))!
$or e7emplo3 se aplica a la 6unción de 4a0ran0e para el oscilador armónico3 tenemos
(Impresión*expresión((Euler*4a0ran0e*operador
(4*armónico k m))(* local de t x 2 a))) ( ( am) ( kx))
8bser2e ;ue se especi6ican indi2idualmente los componentes de la tupla local! <tili/ando laecuación ( '!'% )3 las ecuaciones de 4a0ran0e para el oscilador armónico son B
7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 78/123
(Impresión*expresión((componer
(Euler*4a0ran0e*operador (k m 4*armónico))(Gamma (literal*6unción x) -))
t)) ( ( k (xt)) ( m (((expt ? %) x) t)))
E1ercicio .33. +ropiedades de E4et " y # sea dos 6unciones de 4a0ran0e*como de una tupla local C sea una 6unción detrans6ormación local de tupla3 y c una constante! ?emostrar las si0uientes propiedadesA
a ! E " # T W E " T E # T
b ! E c " T W c E " T
c ! E " # T W E " T # " E # T ( ? t " ) % # % " ( ? t # )
d ! E " o C T W ? t ( ? " o C ) % C ? " o C E C T
B #en0a en cuenta ;ue Gamma tiene un ar0umento más de lo ;ue normalmente tiene! Este ar0umento da lalon0itud del se0mento inicial de la tupla locales necesarios! 4a lon0itud predeterminada es L3 lo ;ue loscomponentes de la tupla locales asta e incluyendo las 2elocidades!
.0 restringida de moimiento
<na 2enta7a del en6o;ue de 4a0ran0e es ;ue coordenadas a menudo se pueden ele0ir ;ue describenexactamente la libertad del sistema3 incorporando de 6orma automática todas las restricciones!#ambi5n podemos utili/ar las coordenadas ;ue tienen más libertad ;ue el sistema tiene en realidad yconsiderar las limitaciones explícitas entre las coordenadas! $or e7emplo3 el p5ndulo plana tiene unespacio de con6i0uración de una sola dimensión! :emos 6ormulado este problema utili/ando elán0ulo desde la 2ertical3 como la con6i0uración de coordenadas! =lternati2amente3 podemos optarpor representar el p5ndulo como un cuerpo ;ue se mue2e en el plano3 obli0ado a estar en el círculo
de la radio correcto alrededor del pi2ote! os 0ustaría tener descripciones 2álidas para ambasopciones y demostrar ;ue son e;ui2alentes! En esta sección desarrollamos erramientas paramane7ar los problemas con restricciones explícitas! 4as limitaciones ;ue a;uí se consideran son más0enerales ;ue los utili/ados en la demostración de ;ue la 6unción de 4a0ran0e para sistemas conrestricciones rí0idas se puede escribir como la di6erencia de las ener0ías cin5tica y potencial (25asela sección '!+!% )!
Supon0amos ;ue la con6i0uración de un sistema con n 0rados de libertad se especi6ica por n 'coordenadas y ;ue las rutas de con6i0uración ; se 2en obli0ados a satis6acer al0una relación de la6orma
ZCómo nos 6ormulamos las ecuaciones de mo2imiento[ <n en6o;ue podría ser el uso de la ecuaciónde restricción para eliminar una de las coordenadas en 6a2or de los demásU a continuación3 lae2olución de la reducida con7unto de coordenadas 0enerali/adas sería descrito por las ecuacionesabituales de 4a0ran0e! 4as ecuaciones ;ue ri0en la e2olución de las coordenadas ;ue no sontotalmente independientes deben ser e;ui2alentes!
$odemos abordar el problema de 6ormular ecuaciones de mo2imiento para sistemas concoordenadas redundantes 2ol2iendo al principio de acción! Caminos reali/ables se distin0uen de losotros caminos por los ;ue e7er/an una acción estacionaria! Estacionario se re6iere al eco de ;ue laacción no cambia con ciertas pe;ue1as 2ariaciones de la ruta de acceso! ZKu5 2ariaciones se debenconsiderar[ :emos 2isto ;ue las restricciones rí0idas*2elocidad independiente se puede utili/ar para
eliminar las coordenadas redundantes! En el irredundant coordenadas del distin0uimos rutasreali/ables utili/ando 2ariaciones ;ue por la construcción de satis6acer las restricciones! =sí3 en el
7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 79/123
caso de ;ue las restricciones se pueden usar para eliminar las coordenadas redundantes podemosrestrin0ir las 2ariaciones en el camino a los ;ue están en consonancia con las restricciones!
Entonces3 Zcómo la restricción de las posibles 2ariaciones a6ectan el ar0umento ;ue dio lu0ar a lasecuaciones de 4a0ran0e (consulte la sección '!. )[ En realidad la mayoría de los cálculos no se 2ea6ectada! 4a condición de ;ue la acción está parado toda2ía se reduce a la condición ( '!L- )A
En este punto3 emos ar0umentado ;ue debido a ;ue las 2ariaciones son arbitrarias (a excepción delas condiciones en los extremos)3 la Onica manera para ;ue la inte0ral es cero es para el inte0rando aser cero! $or otra parte3 la libertad en la elección de nos permitió deducir ;ue el 6actor demultiplicación en el inte0rando debe ser i0ual a cero3 deri2ando con ello las ecuaciones de4a0ran0e!
=ora3 la elección de no es completamente libre! #oda2ía podemos deducir de la arbitrariedad de;ue el inte0rando debe ser cero3 BB 3 pero ya no podemos deducir ;ue el 6actor de multiplicación esi0ual a cero (sólo ;ue la proyección de este 6actor en las 2ariaciones aceptables es cero)! =sí ;ue
tenemos
con su7eción a las restricciones!
<n camino ; satis6ace la restricción si ; T W o ; T W & 4a restricción debe ser satis6eca3 inclusopara la 2ariada trayectoria3 por lo ;ue permitir ;ue sólo 2ariaciones! para el ;ue la 2ariación de larestricción es ceroA
$odemos decir ;ue la 2ariación debe ser NN tan0ente a la super6icie de limitación! 4a expansión deesta con la re0la de la cadena3 una 2ariación es tan0ente a la super6icie de restricción si
#en0a en cuenta ;ue estos son 6unciones del tiempoU la 2ariación en un momento dado es tan0ente ala restricción en ese momento!
.0. -imitaciones de coordenadas
Considere la posibilidad de restricciones ;ue no dependen de las 2elocidadesA
En este caso3 la 2ariación es tan0ente a la super6icie de restricción si
En con7unto3 las ecuaciones ( '!' ) y ( '!'B& ) deberían determinar el mo2imiento3 pero Zcómopodemos eliminar [ El residual de las ecuaciones de 4a0ran0e es orto0onal B, a cual;uier ;ue esorto0onal a la normal a la super6icie de restricción! <n 2ector ;ue es orto0onal a todos los 2ectoresorto0onales a un 2ector dado es paralelo al 2ector dado! $or lo tanto3 el residual de las ecuacionesde 4a0ran0e es paralela a la normal a la super6icie de restricciónU los dos deben ser proporcionalesA
hora mira esto
Supon0amos ;ue 6ormamos una la0ran0iana aumentada tratar como una de las coordenadasA

7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 80/123
4as ecuaciones de 4a0ran0e asociados con las coordenadas ; son sólo las ecuaciones de 4a0ran0emodi6icados ( '!'B' )3 y la ecuación de 4a0ran0e asociado con es simplemente la ecuación derestricción! (#en0a en cuenta ;ue no aparece en la la0ran0iana aumentada!) =sí las ecuaciones de4a0ran0e para esta aumentada de 4a0ran0e encapsular completamente la modi6icación de lasecuaciones de 4a0ran0e ;ue se impone por la adición de una restricción explícita de coordenadas3 aexpensas de introducir 0rados adicionales de libertad! 8bser2e ;ue esta 6unción de 4a0ran0e es de
la misma 6orma ;ue el de 4a0ran0e (ecuación '!B, ) ;ue usamos en la deri2ación de 4 W # * P parasistemas rí0idos (sección '!+!% )!
lternatiamente
ZCómo sabemos ;ue no tenemos su6iciente in6ormación para eliminar la 6unción desconocida de lasecuaciones ( '!'B' )3 o ;ue el 0rado de libertad adicional introducida en 4a0ran0e ( '!'B% ) espuramente 6ormal[
Si puede ser escrito como una 6unción de la trayectoria de estado de solución3 entonces sería claro;ue se determina por el estado y por lo tanto puede ser eliminado! Supon0amos ;ue se puedeescribir como una composición de una 6unción dependiente del estado con la rutaA W o ; T!
Consideremos el la0ran0iano
Esta nue2a 6unción de 4a0ran0e no tiene 0rados adicionales de libertad! 4as ecuaciones de4a0ran0e para 4 son las ecuaciones de 4a0ran0e para 4 con t5rminos adicionales deri2ados delproducto de ! =plicando el operador de Euler*4a0ran0e E (2er sección '!, ) a esta 4a0ran0e da ,&
Composición de E 4 T con ; T da las ecuaciones de 4a0ran0e para el camino ; ! <sando el ecode ;ue la restricción se satis6ace en el camino o K T W & y3 por consi0uiente ? t o K T W &3tenemos
donde emos utili/ado W o ; T! Si aora usamos el eco de ;ue se trata sólo de coordinar laslimitaciones3 % W &3 entonces
4as ecuaciones de 4a0ran0e son los mismos ;ue los deri2ados de la aumentada de 4a0ran0e 4 ! 4adi6erencia es ;ue aora 2emos ;ue W o ; T está determinado por el estado no aumentada! Esto es
lo mismo ;ue decir ;ue se puede eliminar!Considerando solamente la 2alide/ 6ormal de las ecuaciones de 4a0ran0e para el la0ran0ianoaumentado3 no podríamos deducir ;ue se podría escribir como la composición de una 6uncióndependiente del estado con ; T! 4as ecuaciones de 4a0ran0e explícitos deri2ados de la la0ran0ianaaumentada dependen del aceleraciones ? % ; 3 así como 3 por lo ;ue no se puede deducir ;ue3 obien por separado es la composición de una 6unción dependiente del estado y ; T! Sin embar0o3aora 2emos ;ue es una composición de este tipo! Esto nos permite deducir ;ue ? % ; es tambi5nuna 6unción dependiente del estado compuesto por la ruta! 4a e2olución del sistema se determina apartir del estado dinámico!

7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 81/123
El p<ndulo mediante restricciones
El p5ndulo se puede 6ormular como el mo2imiento de una partícula masi2a en un plano 2erticalsu7eto a la restricción de ;ue la distancia al pi2ote es constante (25ase la 6i0ura '!B )!
En esta 6ormulación3 las ener0ías cin5tica y potencial en la 6unción de 4a0ran0e son las de unapartícula sin restricciones en una aceleración 0ra2itacional uni6orme! <na de 4a0ran0e para la
partícula sin restricciones es
4a restricción de ;ue el p5ndulo se mue2e en un círculo de radio 4 alrededor del pi2ote es ,'
El 4a0ran0iano aumentado es
4as ecuaciones de 4a0ran0e para el la0ran0iano aumentado son
Estas ecuaciones son su6icientes para resol2er para el mo2imiento del p5ndulo!
o debería sorprender ;ue estas ecuaciones simpli6ican si cambiamos a NN coordenadas polares
Sustituyendo esto en la ecuación de restricción3 determinamos ;ue r W l 3 una constante! 4a6ormación de los deri2ados y sustituyendo en las otras dos ecuaciones3 encontramos
Multiplicando la primera por cos y la se0unda por el pecado y la adición3 encontramos
;ue reconocemos como la ecuación correcta para el p5ndulo! Esta es la misma ;ue la ecuación de4a0ran0e para el p5ndulo usando los 0enerali/ada sin restricciones de coordenadas ! $ara completar3podemos encontrar en cuanto a las otras 2ariablesA
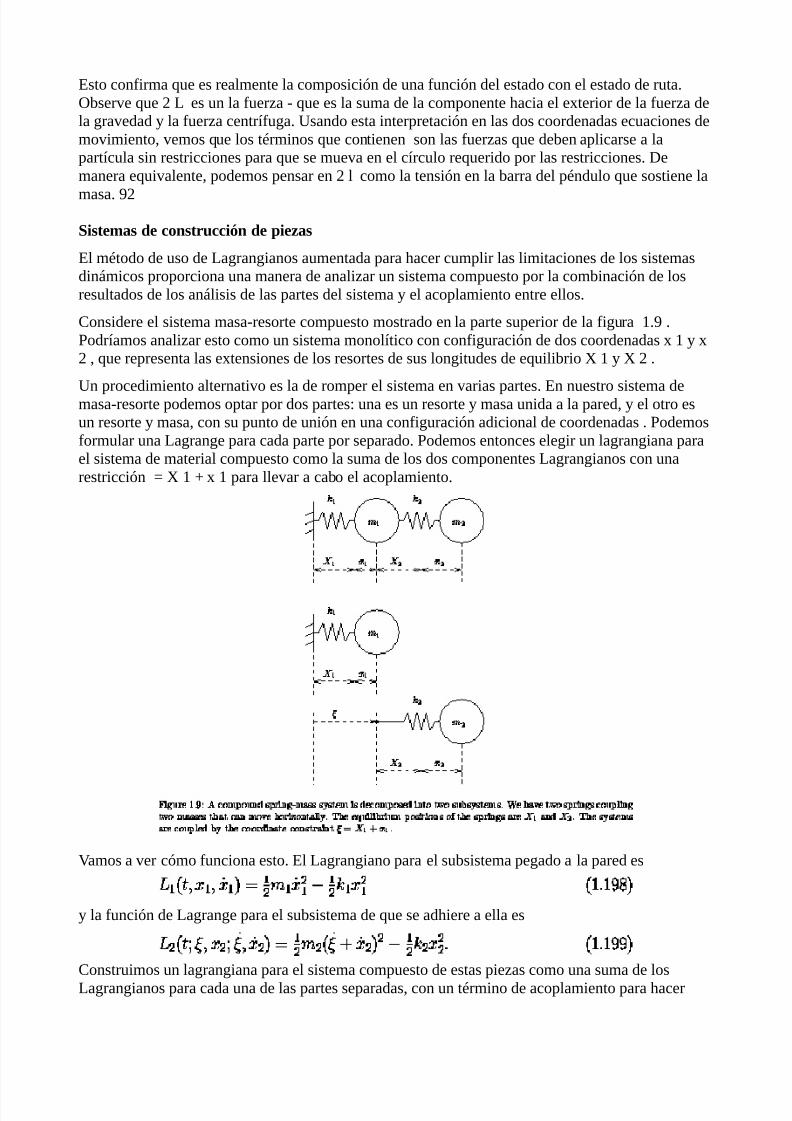
7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 82/123
Esto con6irma ;ue es realmente la composición de una 6unción del estado con el estado de ruta!8bser2e ;ue % 4 es un la 6uer/a * ;ue es la suma de la componente acia el exterior de la 6uer/a dela 0ra2edad y la 6uer/a centrí6u0a! <sando esta interpretación en las dos coordenadas ecuaciones demo2imiento3 2emos ;ue los t5rminos ;ue contienen son las 6uer/as ;ue deben aplicarse a lapartícula sin restricciones para ;ue se mue2a en el círculo re;uerido por las restricciones! ?emanera e;ui2alente3 podemos pensar en % l como la tensión en la barra del p5ndulo ;ue sostiene la
masa! ,%
Sistemas de construcción de pie"as
El m5todo de uso de 4a0ran0ianos aumentada para acer cumplir las limitaciones de los sistemasdinámicos proporciona una manera de anali/ar un sistema compuesto por la combinación de losresultados de los análisis de las partes del sistema y el acoplamiento entre ellos!
Considere el sistema masa*resorte compuesto mostrado en la parte superior de la 6i0ura '!, !$odríamos anali/ar esto como un sistema monolítico con con6i0uración de dos coordenadas x ' y x% 3 ;ue representa las extensiones de los resortes de sus lon0itudes de e;uilibrio ' y % !
<n procedimiento alternati2o es la de romper el sistema en 2arias partes! En nuestro sistema demasa*resorte podemos optar por dos partesA una es un resorte y masa unida a la pared3 y el otro esun resorte y masa3 con su punto de unión en una con6i0uración adicional de coordenadas ! $odemos6ormular una 4a0ran0e para cada parte por separado! $odemos entonces ele0ir un la0ran0iana parael sistema de material compuesto como la suma de los dos componentes 4a0ran0ianos con unarestricción W ' x ' para lle2ar a cabo el acoplamiento!
Pamos a 2er cómo 6unciona esto! El 4a0ran0iano para el subsistema pe0ado a la pared es
y la 6unción de 4a0ran0e para el subsistema de ;ue se adiere a ella es
Construimos un la0ran0iana para el sistema compuesto de estas pie/as como una suma de los4a0ran0ianos para cada una de las partes separadas3 con un t5rmino de acoplamiento para acer

7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 83/123
cumplir la restricciónA
$or lo tanto3 podemos escribir las ecuaciones de 4a0ran0e para los cuatro coordenadas decon6i0uración3 en orden3 de la si0uiente maneraA
8bser2e ;ue en este sistema es la 6uer/a de restricción ;ue sostiene el sistema en con7unto! =orapodemos eliminar el pe0amento NN coordenadas y obtener las ecuaciones de mo2imiento en lascoordenadas x ' y x % A
Esta estrate0ia se puede 0enerali/ar! $odemos acer una biblioteca de componentes primiti2os!Cada componente se puede caracteri/ar por un la0ran0iano con 0rados de libertad adicionales paralos terminales donde ese componente puede estar unido a los demás! $odemos entonces construir4a0ran0ianos compuestos combinando componentes3 mediante restricciones para pe0ar 7untos losterminales!
E1ercicio .3!. Combinando -agrangianos
a ! :acer otro componente primiti2o3 compatible con las estructuras de masa*muelle ;ue sedescriben en esta sección! $or e7emplo3 acer un p5ndulo ;ue se adiera al sistema de resorte*masa!Construir una combinación y deri2ar las ecuaciones de mo2imiento! #en cuidado3 el ál0ebra esorrible si eli0e mal las coordenadas!
b ! $or un poco de buen proyecto3 la construcción de una 6amilia de pie/as mecánicas compatibles3;ue se caracteri/an por 4a0ran0ianos apropiado3 ;ue se pueden combinar en una 2ariedad demaneras de acer ;ue los mecanismos interesantes! ecuerde ;ue en un buen len0ua7e el resultadode la combinación de pie/as debe ser un peda/o de la misma clase ;ue se puede combinar ademáscon otras pie/as!
E1ercicio .35. grano en una superficie tria$ialConsideremos de nue2o el mo2imiento de un cordón obli0ados a despla/arse por una super6icietriaxial (e7ercicio '!'B )! e6ormular esta usando coordenadas rectan0ulares como las coordenadas0enerali/adas con una limitación explícita de ;ue la estancia del 0rano en la super6icie! Encuentraun 4a0ran0iano y demostrar ;ue las ecuaciones de 4a0ran0e son e;ui2alentes a los encontrados enel e7ercicio '!'B !
E1ercicio .3. moimiento de una pelota de golf pe4ueoConsidere el mo2imiento de una pelota de 0ol6 ideali/ado como un punto de masa limitada a unasuper6icie lisa sin 6ricción de la 2ariación de la altura ( x 3 y ) en un campo 0ra2itatorio uni6ormecon la aceleración 0 !

7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 84/123
a ! Encontrar una aumentada de 4a0ran0e para este sistema3 y deri2ar las ecuaciones ;ue ri0en elmo2imiento de la masa puntual en x y y !
b ! ZEn ;u5 condiciones está presente aproximada por una 6unción potencial P ( x 3 y ) W m 0 ( x 3y )[
c ! Supon0a ;ue ( x 3 y ) es sim5trica al e7e sobre x W y W &! Z$uedes encontrar un e7emplo ;ue
produce mo2imientos con órbitas cerradas[
.0.2 -imitaciones deriados
=;uí in2esti0amos limitaciones dependientes de la 2elocidad ;ue son NN deri2adas temporales entotal de las limitaciones de 2elocidad independiente! 4os m5todos presentados asta el momentono se aplican por;ue la restricción es dependiente de la 2elocidad!
Considere la posibilidad de una 2elocidad dependiente de restricción W &! Eso es un deri2adotiempo total si0ni6ica ;ue existe una 6unción de 2elocidad independiente de tal 6orma ;ue
Eso es*independiente de la 2elocidad mediante % W &! Como las 6unciones del Estado de la relaciónentre y es
?ada una podemos encontrar mediante la resolución de esta ecuación di6erencial parcial lineal! 4asolución se determina a una constante3 por lo ;ue W & implica W H para al0una constante H ! $orotro lado3 si supi5ramos W H entonces W & si0ue! =sí3 el dependiente de la 2elocidad restricción W& es e;ui2alente a la 2elocidad independiente restricción W H 3 y sabemos cómo encontrar lasecuaciones de 4a0ran0e para tales sistemas!
Si 4 es una 6unción de 4a0ran0e para el problema sin restricciones3 las ecuaciones de 4a0ran0e conla restricción W H son
donde es una 6unción del tiempo ;ue se elimina durante el proceso de solución! 4a constante H noa6ecta a las ecuaciones de 4a0ran0e! 4a 6unción es independiente de la 2elocidad3 % W &3 por lo ;uelas ecuaciones de 4a0ran0e con2ertirse
?e la ecuación ( '!%&B ) 2emos ;ue
por lo ;ue las ecuaciones de 4a0ran0e con la restricción W & son
4a característica importante es ;ue podemos escribir las ecuaciones de 4a0ran0e directamente ent5rminos de sin tener ;ue presentar la inte0ral ! $ero la 2alide/ de estas ecuaciones de 4a0ran0edepende de la existencia de la inte0ral !
esulta ;ue el truco aumentada de 4a0ran0e tambi5n traba7a a;uí! Estas ecuaciones de 4a0ran0e sedan si aumentamos la 6unción de 4a0ran0e con la restricción multiplicado por una 6unción detiempo A

7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 85/123
4as ecuaciones de 4a0ran0e para 4 resultan ser
;ue3 con la identi6icación W * ? 3 son las mismas ;ue las ecuaciones de 4a0ran0e ( '!%'% )!
= 2eces un problema se puede 6ormular de manera natural en t5rminos de restricciones de2elocidad*dependiente! El 6ormalismo ;ue emos desarrollado se encar0ará de cual;uier restriccióndependiente de la 2elocidad ;ue se puede escribir en t5rminos de la deri2ada de una restricción decoordenadas! #al limitación se denominarestricción inte0rable ! Cual;uier sistema para el ;ue laslimitaciones se pueden poner en la 6orma de una restricción de coordenadas3 o ;ue ya están en esa6orma3 se llama un sistema de olonómico !
E1ercer .3=!?emostrar ;ue la 6unción de 4a0ran0e aumentada ( '!%'L ) da lu0ar a las ecuaciones de 4a0ran0e( '!%'- )3 teniendo en cuenta el eco de ;ue es un deri2ado del tiempo total de !
ro de &oldstein
=;uí consideramos un problema para el cual la restricción puede ser representada como unaderi2ada en el tiempo de una restricción de coordenadasA un aro de masa M de rodadura3 sindesli/amiento3 por un (unidimensional) plano inclinado (25ase la 6i0ura '!'& !) ,L
Pamos a 6ormular este problema en t5rminos de las dos coordenadas 3 la rotación de un puntoarbitrario en el aro de una dirección de re6erencia arbitrario3 y x 3 el pro0reso lineal acia aba7o delplano inclinado! 4a restricción es ;ue el aro no se resbale! =sí3 un cambio en la se re6le7aexactamente en un cambio en x U la 6unción de restricción es
Esta restricción se 6ormula como una relación entre las 2elocidades 0enerali/adas3 pero podríainte0rarse para obtener x W c ! $odemos 6ormar nuestra aumentada de 4a0ran0e3 ya sea con la
restricción inte0rado o su deri2ado!4a ener0ía cin5tica tiene dos partes3 la ener0ía de rotación del aro y la ener0ía del mo2imiento de sucentro de masa! ,- 4a ener0ía potencial del aro disminuye a medida ;ue la altura disminuye! $or lotanto3 podemos escribir la 6unción de 4a0ran0e aumentadaA
4as ecuaciones de 4a0ran0e son

7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 86/123
X por di6erenciación de la tercera ecuación de 4a0ran0e obtenemos
Combinando estas ecuaciones podemos resol2er para las cantidades dinámicas de inter5s! $ara estecaso de un aro de rodadura la aceleración lineal
es sólo la mitad de lo ;ue abría sido si la masa abía desli/ado por un a2ión sin 6ricción y sinrotación! #en0a en cuenta ;ue para este aro ? % x es independiente tanto de M y ! Pemos en lasecuaciones de 4a0ran0e ;ue ? puede ser interpretado como la 6uer/a de 6ricción ;ue participan enla aplicación de la restricción! 4a 6uer/a de 6ricción de la restricción es
y la aceleración an0ular es
.0.3 Sistemas holonómica
4os sistemas con restricciones ;ue no son inte0rables se denominan sistemas olonómicos ! <narestricción no es inte0rable si no se puede escribir en t5rminos de una coordenada restriccióne;ui2alente! <n e7emplo de un sistema no olonómica es una pelota ;ue rueda sin resbalar en unta/ón! = medida ;ue la bola rueda ;ue debe 0irar de modo ;ue su super6icie no se mue2e enrelación con el recipiente en el punto de contacto! Esto se 2e como si 6uera a establecer una relaciónentre la posición de la bola en la ta/a y la orientación de la pelota3 pero no es así! El balón puede2ol2er al mismo lu0ar en el recipiente con di6erentes orientaciones en 6unción de la trayectoria de lainter2ención ;ue aya adoptado! Como consecuencia de ello3 las limitaciones no se pueden utili/arpara eliminar cual;uier coordenadas!
ZCuáles son las ecuaciones de mo2imiento ;ue ri0en los sistemas olonómicos[ $ara el con7untorestrin0ido de sistemas con limitaciones no olonómicos ;ue son lineales en las 2elocidades3 esampliamente in6ormó ,. ;ue las ecuaciones de mo2imiento son los si0uientes! Kue tiene la 6orma
una 6unción de estado ;ue es lineal en las 2elocidades! Suponemos ;ue no es un deri2ado deltiempo total! Si 4 es una 6unción de 4a0ran0e para el sistema sin restricciones3 a continuación3 lasecuaciones de mo2imiento se a6irman ser
Con la restricción W &3 el sistema se cierra y la e2olución del sistema se determina! #en0a en cuenta;ue estas ecuaciones son id5nticas a las ecuaciones de 4a0ran0e ( '!%'% ) para el caso de ;ue es underi2ado de tiempo total3 pero a;uí la deri2ación de las ecuaciones ya no es 2álida!
<n paso esencial en la deri2ación de las ecuaciones de 4a0ran0e para coordinar las restricciones W& con % W & se lle0ó a se1alar ;ue dos condiciones deben cumplirseA
y
?ebido a ;ue E 4 T o ; T es orto0onal y se 2e obli0ado a ser orto0onal a ' o ; T3 los dos debenser paralelos en cada momentoA

7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 87/123
4as ecuaciones de 4a0ran0e para las restricciones deri2adas se obtu2ieron a partir de esto!
Esta deri2ación no pasa por si la 6unción de limitación depende de la 2elocidad! En este caso3 parauna 2ariación para ser coerente con la 6unción de limitación dependiente de la 2elocidad ;ue debesatis6acer (25ase la ecuación '!', )
Es posible ;ue ya no eliminamos por el mismo ar0umento3 por;ue ya no es orto0onal a ' o ; T3 yno podemos reescribir la restricción como restricción coordinar por;ue es3 por supuesto3 nointe0rable!
4a si0uiente es la deri2ación de las ecuaciones no olonómicos de =rnold et al! + T3 traducido anuestra notación! ?e6inir una 2elocidad NN 2irtual ;ue cual;uier 2elocidad ;ue satis6ace
El NN principio de d=lembert*4a0ran0e3 se0On =rnold3 se1ala ;ue
para cual;uier 2elocidad 2irtual ! ?ebido a ;ue es arbitrario3 excepto ;ue se re;uiere ;ue seaorto0onal a % o ; T y cual;uiera de estos es orto0onal a E 4 T o ; T y lue0o % o ; T debe serparalela a E 4 T o ; T ! =sí
;ue son las ecuaciones no olonómicos!
$ara con2ertir las ecuaciones de acción estacionarias a las ecuaciones de =rnold debemos acer losi0uiente! $ara lle0ar desde la ecuación ( '!%%+ ) a la ecuación ( '!%L' )3 debemos sustituir por ! Sinembar0o3 para obtener de la ecuación ( '!%%, ) a la ecuación ( '!%L& )3 debemos establecer W & ysustituya ? por ! #odas las deri2aciones NN de las ecuaciones no olonómicos tienen
identi6icaciones similares! #odo se reduce a estoA las ecuaciones no olonómicos no si0uen desde elprincipio de la acción! Son al0o más! Si son correctas o no depende de si son o no están de acuerdocon los experimentos!
$ara los sistemas de coordenadas3 ya sea con restricciones o limitaciones deri2ados3 emosencontrado ;ue las ecuaciones de 4a0ran0e se pueden deri2ar de una 6unción de 4a0ran0e ;ue se 2eaumentada con la restricción! Sin embar0o3 si las restricciones no son inte0rables las ecuaciones de4a0ran0e para la 6unción de 4a0ran0e aumentada no son los mismos ;ue el sistema no olonómica(ecuaciones '!%%. )! ,+ 4et 4 ser un aumentada de 4a0ran0e con restricción de no*inte0rable A
a continuación3 las ecuaciones de 4a0ran0e asociados con las coordenadas son
4a ecuación de 4a0ran0e asociado con es sólo la ecuación de restricción
<na característica interesante de estas ecuaciones es ;ue implican tanto y ? ! =sí3 las 2ariables deestado abituales ; y ? ; 3 con la restricción3 no son su6icientes para determinar un con7unto decondiciones iniciales para las ecuaciones de 4a0ran0e deri2adosU tenemos ;ue especi6icar un 2alorinicial para tambi5n!
En 0eneral3 para cual;uier sistema 6ísico en particular3 las ecuaciones ( '!%%. ) y ( '!%L- ) no son los
7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 88/123
mismos3 y3 de eco3 tienen di6erentes soluciones! o es e2idente ;ue3 o bien un con7unto deecuaciones con precisión los modelos del sistema 6ísico! 4a primera aproximación a los sistemas noolonómicos no es 7usti6icado por la extensión de los ar0umentos para el caso olonómico y el otrono está totalmente determinado! Kui/ás esto indica ;ue los modelos no son adecuados3 ;ue másdetalles de cómo se mantienen las restricciones deben especi6icarse!
BB #eniendo en cuenta cual;uier 2ariación aceptable3 podemos acer otra 2ariación aceptable multiplicando
la dada por una 6unción de 0olpe ;ue ace incapi5 en cual;uier inter2alo de tiempo particular!
B, #omamos dos 6unciones de tupla con 2alores de tiempo para ser orto0onales Si en cada instante elproducto escalar de las tuplas es cero! ?el mismo modo3 las 6unciones de tupla con 2alores se consideranparalelas si en cada momento uno de los tuplas es un mOltiplo escalar de la otra! El multiplicador escalar esen 0eneral una 6unción del tiempo!
,& ecordemos ;ue el de Euler*4a0ran0e operador E tiene la propiedad
,' Esta restricción tiene la misma 6orma ;ue los utili/ados en la demostración de ;ue 4 W # * P se puedeutili/ar para sistemas rí0idos! =;uí se trata de un e7emplo particular de un con7unto más 0eneral de
limitaciones!,% En e6ecto3 si ubi5ramos escalado las ecuaciones de restricción como lo icimos en la discusión de las6uer/as de restricción de e>ton3 podríamos aber identi6icado con el de la ma0nitud de la 6uer/a derestricción de " ! Sin embar0o3 aun;ue será en 0eneral relacionada con las 6uer/as de restricción no será unode ellos! ?ecidimos de7ar la escala3 ya ;ue3 naturalmente3 apareció en lu0ar de acer ;ue las cosas resultenarti6icialmente bonita!
,L Este e7emplo aparece en %& T3 pp -,*.'3
,- Peremos en el capítulo % cómo calcular la ener0ía cin5tica de rotación3 pero por aora la respuesta es('%) M % % !
,. $ara al0unos tratamientos de los sistemas no olonómicos 2er3 por e7emplo3 9ittaker -+ T3 Goldstein
%& T3 Gantmaker ', T3 o =rnold et al! + T!
,+ =rnold et al! + T llamar la mecánica 2ariacionales con las limitaciones ;ue a1aden a las de 4a0ran0emecánica Pakonomic !
. 6esumen
$ara el análisis de un sistema mecánico ;ue construimos una 6unción de la acción ;ue nos da unamanera de distin0uir los mo2imientos de reali/ación de otros mo2imientos concebibles del sistema!4a 6unción de acción se construye de manera ;ue sea estacionaria sólo en las trayectorias ;uedescriben mo2imientos de reali/ación3 con respecto a las 2ariaciones de la ruta de acceso! Esto seconoce como el principio de acción estacionaria! El principio de acción estacionaria es una
especi6icación de coordenadas independiente de las trayectorias reali/ables! $ara sistemas con o sinlimitaciones podemos ele0ir cual;uier sistema de coordenadas ;ue determina de 6orma Onica lacon6i0uración del sistema!
$ara una 0ran 2ariedad de sistemas mecánicos acciones son inte0rales de una 6unción3 llamada la6unción de 4a0ran0e3 a lo lar0o del camino! $ara mucos sistemas de un la0ran0iano apropiada es ladi6erencia de la ener0ía cin5tica y la ener0ía potencial del sistema! 4a elección de una 6unción de4a0ran0e para un sistema no es Onica!
$ara cual;uier sistema para el cual contamos con una acción de 4a0ran0e podemos 6ormular unsistema de ecuaciones di6erenciales ordinarias3 las ecuaciones de 4a0ran0e3 ;ue se satis6ace concual;uier camino de reali/ación! El m5todo de deri2ar las ecuaciones de 4a0ran0e de la 6unción de4a0ran0e es independiente del sistema de coordenadas utili/ado para 6ormular la 6unción de
7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 89/123
4a0ran0e! <na libertad ;ue tenemos en la 6ormulación es ;ue la adición de un deri2ado total detiempo para una 6unción de 4a0ran0e para un sistema produce otra de 4a0ran0e ;ue tiene lasmismas ecuaciones de 4a0ran0e!
4as ecuaciones de 4a0ran0e son un con7unto de ecuaciones di6erenciales ordinariasA ay un estado6inito ;ue resume la istoria del sistema y es su6iciente para determinar el 6uturo! o es unprocedimiento e6ica/ para la e2olución del mo2imiento del sistema de un estado en un instante! $aramucos sistemas del estado se determina por las coordenadas y la 2elocidad de cambio de lascoordenadas en un instante!
Si ay simetrías continuas en un sistema 6ísico ay cantidades conser2adas asociadas con ellos! Si elsistema se puede 6ormular de tal manera ;ue las simetrías se mani6iestan en coordenadas en la6unción de 4a0ran0e ;ue 6alta3 entonces no se conser2an con7u0ado momentos a esas coordenadas!Si la 6unción de 4a0ran0e es independiente del tiempo3 entonces ay una ener0ía conser2ada!
.2 +ro(ectos
E1ercicio .3>. ;na inestigación num<rica
Considere un p5nduloA una masa m apoyado en una barra sin masa de lon0itud l en un campo0ra2itatorio uni6orme! <na de 4a0ran0e para el p5ndulo es
$ara el p5ndulo3 el período del mo2imiento depende de la amplitud! ?eseamos encontrartrayectorias del p5ndulo con una 6recuencia dada! #res m5todos para acer esto se presentanA (') lasolución por el principio de mínima acción3 (%) la inte0ración num5rica de la ecuación de 4a0ran0e3y (L) de la solución analítica (;ue re;uiere un poco de exposición a las 6unciones elípticas)! Pamos alle2ar a cabo los tres y comparar las trayectorias de solución!
#en0a en cuenta los parámetros m W ' k03 l W ' m3 0 W ,!B ms * % ! 4a 6recuencia de las oscilaciones
de pe;ue1a amplitud es & W ( 0 l ) '% ! Pamos a encontrar la solución no tri2ial ;ue tiene la6recuencia ' W (-.) & !
a ! El án0ulo es periódica en el tiempo3 por lo ;ue una representación en serie de "ourier esapropiado! $odemos ele0ir el ori0en de tiempo para ;ue un cruce por cero del án0ulo es en elmomento cero! ?ado ;ue el potencial es incluso en el án0ulo3 el án0ulo es una 6unción impar detiempo! $or lo tanto sólo necesitamos una serie de senos! $uesto ;ue el án0ulo 2uel2e a cerodespu5s de período de un medio3 el án0ulo es una 6unción impar de tiempo sobre el punto medio!#5rminos tanto3 sólo impares de la serie están presentesA
4a amplitud de la trayectoria es = W max W suma n W ' in6ty ( * ') n ' <n n !
Encontrar aproximaciones a los primeros coe6icientes = n minimi/ando la acción! <sted tendrá ;ueescribir un pro0rama parecido al de la ruta alla/0o procedimiento en la sección '!- ! CuidadoA aymás de una trayectoria ;ue minimi/a la acción!
b ! Escriba un pro0rama para inte0rar num5ricamente las ecuaciones de 4a0ran0e para lastrayectorias del p5ndulo! El problema con el uso de la inte0ración num5rica para resol2er esteproblema es ;ue no sabemos cómo la 6recuencia del mo2imiento depende de las condicionesiniciales! =sí ;ue tenemos ;ue adi2inar3 y lue0o poco a poco me7orar nuestra suposición! ?e6iniruna 6unción de ( ) ;ue calcula num5ricamente la 6recuencia del mo2imiento como una 6unción de la2elocidad an0ular inicial (con W &)! Encontrar la trayectoria mediante la resolución de ( ) W para la2elocidad an0ular inicial de la trayectoria deseada! 4os m5todos para la solución de esta ecuación
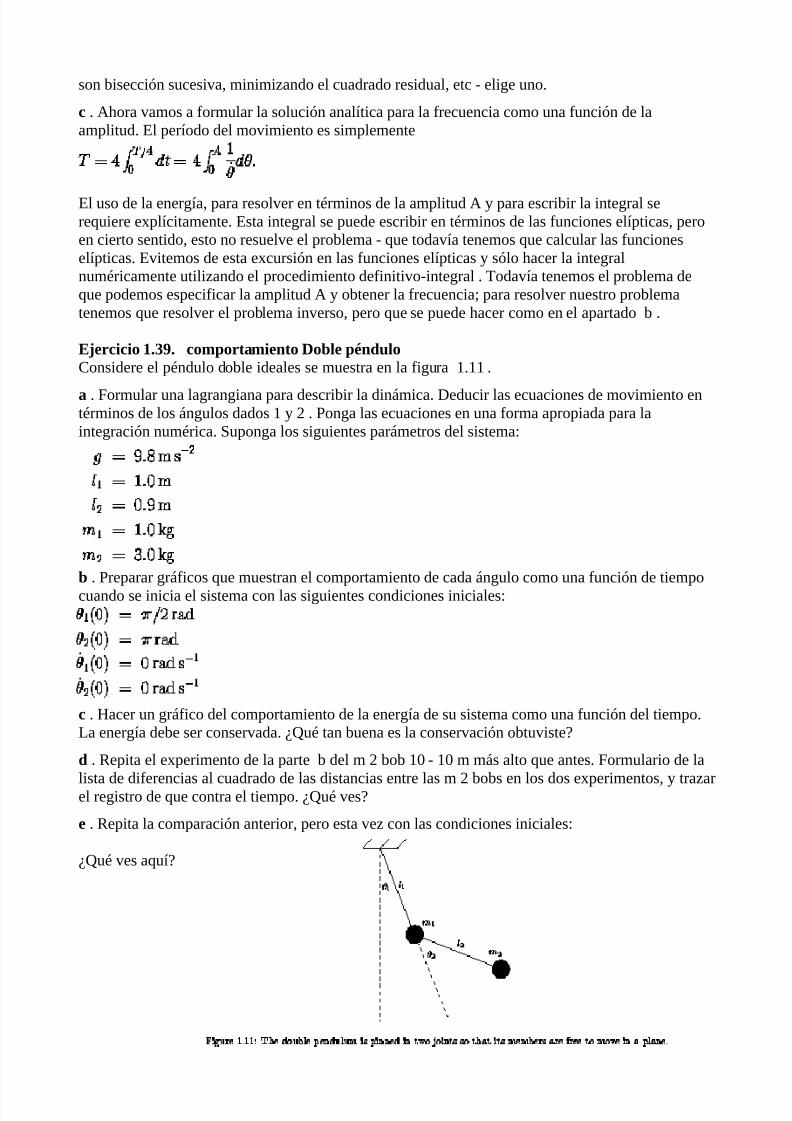
7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 90/123
son bisección sucesi2a3 minimi/ando el cuadrado residual3 etc * eli0e uno!
c ! =ora 2amos a 6ormular la solución analítica para la 6recuencia como una 6unción de laamplitud! El período del mo2imiento es simplemente
El uso de la ener0ía3 para resol2er en t5rminos de la amplitud = y para escribir la inte0ral sere;uiere explícitamente! Esta inte0ral se puede escribir en t5rminos de las 6unciones elípticas3 peroen cierto sentido3 esto no resuel2e el problema * ;ue toda2ía tenemos ;ue calcular las 6uncioneselípticas! E2itemos de esta excursión en las 6unciones elípticas y sólo acer la inte0ralnum5ricamente utili/ando el procedimiento de6initi2o*inte0ral ! #oda2ía tenemos el problema de;ue podemos especi6icar la amplitud = y obtener la 6recuenciaU para resol2er nuestro problematenemos ;ue resol2er el problema in2erso3 pero ;ue se puede acer como en el apartado b !
E1ercicio .3?. comportamiento 8oble p<nduloConsidere el p5ndulo doble ideales se muestra en la 6i0ura '!'' !
a ! "ormular una la0ran0iana para describir la dinámica! ?educir las ecuaciones de mo2imiento ent5rminos de los án0ulos dados ' y % ! $on0a las ecuaciones en una 6orma apropiada para lainte0ración num5rica! Supon0a los si0uientes parámetros del sistemaA
b ! $reparar 0rá6icos ;ue muestran el comportamiento de cada án0ulo como una 6unción de tiempocuando se inicia el sistema con las si0uientes condiciones inicialesA
c ! :acer un 0rá6ico del comportamiento de la ener0ía de su sistema como una 6unción del tiempo!4a ener0ía debe ser conser2ada! ZKu5 tan buena es la conser2ación obtu2iste[
d ! epita el experimento de la parte b del m % bob '& * '& m más alto ;ue antes! "ormulario de la
lista de di6erencias al cuadrado de las distancias entre las m % bobs en los dos experimentos3 y tra/arel re0istro de ;ue contra el tiempo! ZKu5 2es[
e ! epita la comparación anterior3 pero esta 2e/ con las condiciones inicialesA
ZKu5 2es a;uí[
7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 91/123
Cap)tulo 2
Cuerpos 6)gidos
El polode rueda sin desli/arse en el erpolode situada en el plano in2ariable!
:erbert Goldstein3 Mecánica Clásica %& T3 nota3 p! %&!
El mo2imiento de los cuerpos rí0idos presenta mucos 6enómenos sorprendentes!
Consideremos el mo2imiento de una peon/a! <n top se lo suele considerar como un cuerpo dere2olución3 su7eto a la 0ra2edad3 con un punto en el e7e de simetría ;ue se 6i7a en el espacio! 4aparte superior se ace 0irar y en 0eneral reali/a al0On mo2imiento complicado! 8bser2amos ;ue laparte superior por lo 0eneral se establece en un mo2imiento inusual en el ;ue el e7e de la partesuperior lentamentemo2imiento de precesión alrededor de la 2ertical3 aparentemente en mo2imientoperpendicular a la dirección en la ;ue la 0ra2edad está tratando de acelerarlo!
Consideremos el mo2imiento de un libro lan/ado al aire! ' 4os libros tienen tres e7es principales! Siideali/amos un libro como un ladrillo con caras rectan0ulares3 los tres e7es son las líneas a tra25s de
los centros de las caras opuestas! $ruebe a 0irar el libro sobre cada e7e! El mo2imiento del libroeco 0irar alrededor del e7e más lar0o y el más corto es de una rotación re0ular simple3 tal 2e/ conun poco de oscilación en 6unción de cómo se tira cuidadosamente! El mo2imiento del libro eco0irar alrededor del e7e intermedio es cualitati2amente di6erenteA sin embar0o cuidadosamente ellibro se i/o 0irar alrededor del e7e intermedio3 ;ue cae!
4a rotación de la 4una tiene la peculiaridad de ;ue la 4una presenta siempre la misma cara a la#ierra3 lo ;ue indica ;ue el período de rotación y el período de la órbita son los mismos! #eniendoen cuenta ;ue la órbita de la 4una está en constante cambio debido a las interacciones con el Sol yotros planetas3 y por lo tanto su periodo orbital es constantemente sometido a pe;ue1as 2ariaciones3se podría esperar ;ue la cara de la 4una ;ue 2emos cambiaría lentamente3 pero lo ace no! ZKu5 ay
de especial en la cara ;ue se nos presenta[<n cuerpo rí0ido puede ser considerado como un 0ran nOmero de partículas constituyentes conlimitaciones rí0idas entre ellos! =sí3 los principios dinámicos ;ue ri0en el mo2imiento de loscuerpos rí0idos son las mismas ;ue las ;ue ri0en el mo2imiento de cual;uier otro sistema departículas con rí0idas limitaciones! 4o ;ue es nue2o a;uí es ;ue el nOmero de partículasconstituyentes es muy 0rande y tenemos ;ue desarrollar nue2as erramientas para mane7ar demanera e6ecti2a!
:emos encontrado ;ue una de 4a0ran0e para un sistema con limitaciones rí0idas se puede escribircomo la di6erencia de las ener0ías cin5tica y potencial! 4as ener0ías cin5tica y potencial se expresannaturalmente en t5rminos de las posiciones y 2elocidades de las partículas constituyentes! $ara
escribir la 6unción de 4a0ran0e en t5rminos de las coordenadas 0enerali/adas y 2elocidadesdebemos especi6icar las 6unciones ;ue se relacionan las coordenadas 0enerali/adas a las posicionesde las partículas constituyentes! En los sistemas con limitaciones rí0idas considerados asta aora aestas 6unciones se les dio de 6orma explícita para cada una de las partículas constituyentes y de6orma indi2idual incluyen en la deri2ación de la 6unción de 4a0ran0e! $ara un cuerpo rí0ido3 sinembar0o3 ay demasiadas partículas consituent para mane7ar cada uno de ellos de esta manera!#enemos ;ue encontrar la 6orma de expresar las ener0ías cin5tica y potencial de los cuerpos rí0idosen t5rminos de las coordenadas 0enerali/adas y 2elocidades3 sin pasar por los detalles de partículapor partícula!
4a estrate0ia es 2ol2er a escribir primero las ener0ías cin5tica y potencial en t5rminos de cantidades
;ue caracteri/an a los aspectos esenciales de la distribución de la masa en el cuerpo y el estado de
7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 92/123
mo2imiento del cuerpo! Sólo más tarde Cómo introducir coordenadas 0enerali/adas! $ara la ener0íacin5tica3 resulta ;ue un pe;ue1o nOmero de parámetros especi6ican completamente el estado demo2imiento y los aspectos rele2antes de la distribución de la masa en el cuerpo! $ara la ener0íapotencial3 encontramos ;ue para al0unos problemas especí6icos de la ener0ía potencial se puederepresentar con un pe;ue1o nOmero de parámetros3 pero en 0eneral tenemos ;ue aceraproximaciones para obtener una representación con un nOmero mane7able de parámetros!
2. Energ)a cin<tica de rotación
Consideramos un cuerpo rí0ido ;ue se compone de un 0ran nOmero de partículas constituyentes conmasa m 3 la posición y las 2elocidades 3 con las restricciones posicionales rí0idas entre ellos! 4aener0ía cin5tica es
esulta ;ue la ener0ía cin5tica de un cuerpo rí0ido se puede separar en dos pie/asA una ener0íacin5tica de traslación y una ener0ía cin5tica de rotación! Pamos a 2er como se produce esto!
4a con6i0uración de un cuerpo rí0ido está totalmente especi6icado en 6unción de la ubicación de
cual;uier punto en el cuerpo y la orientación del cuerpo! Esto su0iere ;ue sería Otil paradescomponer los 2ectores de posición de las partículas constituyentes como la suma del 2ector encierta posición de re6erencia en el cuerpo y el 2ector de la posición de re6erencia para el elementoconstituyente particular3 con el índice A
= lo lar0o de los caminos3 las 2elocidades están relacionadas por
=sí ;ue en t5rminos de y la ener0ía cin5tica es
Si seleccionamos la posición de re6erencia en el cuerpo para ser su centro de masa 3
donde M W suma m es la masa total del cuerpo3 a continuación3
=sí ;ue a lo lar0o de los caminos de las 2elocidades relati2as satis6acen
4a ener0ía cin5tica es lue0o
4a ener0ía cin5tica es la suma de la ener0ía cin5tica del mo2imiento de la masa total en el centro demasa
y la ener0ía cin5tica de rotación alrededor del centro de masa
7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 93/123
Escrito en t5rminos de coordenadas 0enerali/adas apropiadas3 la ener0ía cin5tica es una 6unción de4a0ran0e para un cuerpo rí0ido de 6orma 0ratuita! Si ele0imos coordenadas 0enerali/adas de modo;ue la posición del centro de masa se especi6ica en su totalidad por al0unos de ellos y la orientaciónse especi6ica en su totalidad por los demás3 entonces las ecuaciones de 4a0ran0e para un cuerporí0ido libre se disociar en dos 0rupos de ecuaciones3 una cuestión con el mo2imiento del centro demasa y uno de ;ue se trate con la orientación!
#al separación puede ocurrir en otros problemas3 tales como un cuerpo rí0ido ;ue se mue2e en uncampo 0ra2itatorio uni6orme3 pero en 0eneral3 las ener0ías potenciales no pueden ser separadoscomo la ener0ía cin5tica separa! =sí el mo2imiento del centro de masa y el mo2imiento de rotaciónestán acoplados por lo 0eneral a tra25s de la potencial! Incluso en estos casos3 por lo 0eneral es una2enta7a para ele0ir coordenadas 0enerali/adas ;ue por separado especi6icar la posición del centro demasa y la orientación!
2.2 Cinemática de 6otación
El mo2imiento de un cuerpo rí0ido alrededor de un centro de rotación3 una posición de re6erencia;ue se 6i7a con respecto al cuerpo3 se caracteri/a en cada momento por un e7e de rotación y una
2elocidad de rotación! Pamos a elaborar!$odemos obtener de cual;uier orientación de un cuerpo a cual;uier otra orientación del cuerpo poruna rotación del cuerpo! Kue esto es así se llama ! #eorema de Euler en rotaciones alrededor de unpunto % Sabemos ;ue las rotaciones tienen la propiedad de ;ue no conmutanA la composición derotaciones sucesi2as en 0eneral depende de la orden de la operación! otación de un libro sobre ele7e y lue0o sobre el e7e pone el libro en una orientación di6erente a la ;ue 0ira el libro sobre el e7e ylue0o sobre el e7e! Sin embar0o3 el teorema de Euler establece ;ue sin embar0o mucas rotacionesan sido compuestas para lle0ar a una orientación dada3 la orientación podría aber sido alcan/adocon una sola rotación! $ru5belo os tomamos un libro3 rotamos de esta manera3 entonces eso3 ylue0o de otra manera * a continuación3 bus;ue la rotación ;ue ace el traba7o en un solo paso! =sí
;ue una rotación puede ser especi6icado por un e7e de rotación y la cantidad an0ular de la rotación!Si la orientación de un cuerpo e2oluciona a lo lar0o de cierto inter2alo de tiempo3 entonces laorientación en el principio y el 6inal del inter2alo se pueden conectar por una sola rotación! En ellímite de ;ue la duración del inter2alo 2a a cero el e7e de rotación se acerca a un e7e de rotacióninstantánea Onica! X en este límite de la relación entre el án0ulo de rotación y la duración delinter2alo se aproxima a la tasa instantánea de rotación! epresentamos a este mo2imiento derotación instantánea de la2ector de 2elocidad an0ular 3 ;ue apunta en la dirección del e7e derotación (con la re0la de la mano dereca dando la dirección de rotación alrededor del e7e) y tieneuna ma0nitud i0ual a la tasa de rotación!
Si el 2ector de 2elocidad an0ular de un cuerpo es entonces las 2elocidades de las partículas
constituyentes son perpendiculares a los 2ectores a las partículas constituyentes y proporcional a la2elocidad de rotación del cuerpo y la distancia de la partícula constituyente del e7e de rotacióninstantáneaA
Zo es interesante ;ue emos encontrado una 6orma concisa de cómo especi6icar la orientación delcuerpo está cambiando3 a pesar de ;ue aOn no emos descrito una manera de especi6icar la mismaorientación[
% $ara una demostración 0eom5trica elemental 2er 9ittaker -+ T3 p! %!

7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 94/123
2.3 Momentos de inercia
4a ener0ía cin5tica de rotación es la suma de la ener0ía cin5tica de cada uno de los constituyentesdel cuerpo rí0ido! $odemos reescribir la ener0ía cin5tica de rotación en t5rminos del 2ector de2elocidad an0ular y ciertas cantidades a0re0adas determinada por la distribución de la masa en elcuerpo rí0ido!
Sustituyendo nuestra representación de los 2ectores de 2elocidad relati2a en la ener0ía cin5tica derotación3 se obtiene
Introducimos una rectan0ular arbitraria sistema de coordenadas con ori0en en el centro de rotacióny con 2ectores de la base & 3 ' y % 3 con la característica ;ue & ' W % ! 4os componentes de estesistema de coordenadas son & 3 ' y % ! eescritura en t5rminos de sus componentes3 la ener0íacin5tica de rotación se con2ierte en
con
El cantidades ;ue i 7 son los componentes de la tensor de inercia con respecto al sistema decoordenadas ele0ido!
#en0a en cuenta lo ;ue es una 6orma notable la ener0ía cin5tica a tomado! #odo lo ;ue emoseco es intercambiar el orden de las sumatorias3 pero aora la ener0ía cin5tica se escribe como unasuma de productos de componentes del 2ector 2elocidad an0ular3 ;ue especi6ican por completo la
6orma en la orientación del cuerpo está cambiando3 y la cantidad I i 7 3 ;ue depende Onicamente dela distribución de la masa en el cuerpo con respecto al sistema de coordenadas ele0ido!
Pamos a deducir una serie de propiedades del tensor de inercia! En primer lu0ar3 nos encontramoscon una expresión al0o más sencillo para 5l! 4os componentes del 2ector son ( 3 3 )! L Si 2ol2emos aescribir como una suma sobre sus componentes y simpli6icar los productos 2ectoriales elementalesde 2ectores de la base3 se pueden obtener las componentes del tensor de inercia! $odemos or0ani/arlos componentes del tensor de inercia para 6ormar el matri/ de inercia I 3 ;ue se 2e asíA
El tensor de inercia tiene componentes reales y es sim5tricaA I 7 k W I k 7 !
Se de6ine el momento de inercia I alrededor de una línea de
donde es la distancia perpendicular desde la línea a la constituyente con el índice ! 4oscomponentes dia0onales del tensor de inercia I i i son reconocidos como los momentos de inercia entorno a las líneas ;ue coinciden con los e7es de coordenadas i ! 4os componentes no dia0onales deltensor de inercia se llamanproductos de inercia !
4a ener0ía cin5tica de rotación de un cuerpo depende de la distribución de la masa del cuerpo
7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 95/123
Onicamente a tra25s del tensor de inercia! Sorprendentemente3 el tensor de inercia implica sólo dese0undo orden momentos de la distribución de la masa con respecto al centro de la masa!$odríamos aber esperado ;ue la ener0ía cin5tica a depender de una manera complicada en todoslos momentos de la distribución de la masa3 entrela/adas de al0una manera complicada con loscomponentes del 2ector de 2elocidad an0ular3 pero esto no es el caso! Este eco tiene unaconsecuencia notableA por el mo2imiento de un cuerpo rí0ido libre de la 6orma detallada del cuerpo
no importa! Si un libro y un plátano tienen el mismo tensor de inercia3 es decir3 los mismosmomentos de masas de se0undo orden3 a continuación3 si se tiran en la misma 6orma en ;ue elmo2imiento posterior será el mismo3 sin embar0o complicado ;ue el mo2imiento es! El eco de;ue el libro tiene es;uinas y el plátano tiene un tallo no a6ectan el mo2imiento3 excepto por sucontribución al tensor de inercia! En 0eneral3 la ener0ía potencial de un cuerpo extendido no es tansimple y de eco depende de todos los momentos de la distribución de la masa3 pero para laener0ía cin5tica de los se0undos momentos son todo lo ;ue importa
E1ercicio 2.. rotacional energ)a cin<tica?emuestre ;ue la ener0ía cin5tica de rotación tambi5n se puede escribir
donde I es el momento de inercia de la recta ;ue pasa por el centro de la masa con la dirección 3 y esla tasa de rotación instantáneo!
E1ercicio 2.2. teorema de Steiner4et Me ser el momento de inercia de un cuerpo con respecto a al0una línea dada a tra25s del centrode masa! ?emostrar ;ue el momento de inercia I con respecto a una se0unda línea paralela a laprimera es
donde M es la masa total del cuerpo y es la distancia entre las líneas!
. E1ercicio 2.3 lgunos momentos Atiles de inercia?emostrar ;ue los momentos de inercia de los si0uientes ob7etos es el ;ue apareceA
a ! El momento de inercia de una es6era de densidad uni6orme con la masa M y el radio sobrecual;uier línea a tra25s del centro es (%.) M % !
b ! El momento de inercia de una cáscara es65rica con masa M y radio sobre cual;uier línea atra25s del centro es (%L) M % !
c ! El momento de inercia de un cilindro de densidad uni6orme con la masa M y el radio alrededordel e7e del cilindro es ('%) M % !
d ! El momento de inercia de una 2arilla del0ada de densidad uni6orme por unidad de lon0itud conuna masa M y lon0itud 4 de alrededor de un e7e perpendicular a la 2arilla a tra25s del centro demasas es (''%) M 4 % !
E1ercicio 2.!. 'Apiter
a ! 4a densidad de un planeta aumenta acia el centro! $roporcionar un ar0umento de ;ue elmomento de inercia de un planeta es menor ;ue la de una es6era de densidad uni6orme de la mismamasa y el radio!
b ! 4a densidad como una 6unción del radio interior JOpiter está bien aproximada por
7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 96/123
donde M es la masa y es el radio de JOpiter! :alle el momento de inercia de JOpiter en t5rminosde M y !
L =;uí e2itamos la notación más consistente ( & 3 ' 3 % ) para los componentes del debido expresiones conpotencias de los componentes son torpes en este 6ormulario!
2.! Inercia *ensor
4a representación de la ener0ía cin5tica de rotación en t5rminos de la tensor de inercia se obtienecon la ayuda de un sistema de coordenadas rectan0ular con 2ectores de la base i ! o abía nadaespecial sobre esta base rectan0ular particular! $or lo tanto3 la ener0ía cin5tica debe tener la misma6orma en cual;uier sistema de coordenadas rectan0ular! $odemos utili/ar este eco para deducircómo el tensor de inercia cambia si el cuerpo o en el sistema de coordenadas se 0ira!
Pamos a ablar un poco sobre acti2os y pasi2os de las rotaciones! 4a rotación del 2ector por larotación produce un nue2o 2ector W ! $odemos escribir en t5rminos de sus componentes conrespecto a al0unos rectan0ular arbitraria sistema de coordenadas con 2ectores de la base ortonormali A W x & & x ' ' x % % ! ?e7e x indica la matri/ de la columna de componentes x & 3 x ' 3 y x %de 3 y sea la representación matricial de con respecto a la misma base! En estos t5rminos larotación se puede escribir x W x ! 4a matri/ de rotación es una matri/ orto0onal real! - <narotación ;ue lle2a 2ectores a nue2os 2ectores se llama una acti2a rotación!
=lternati2amente3 se puede 0irar el sistema de coordenadas mediante la rotación de los 2ectores dela base3 pero de7e otros 2ectores ;ue pueden estar representados en t5rminos de ellos sin cambios! Siun 2ector es sin cambios3 pero los 2ectores de la base se acen 0irar3 a continuación3 loscomponentes del 2ector en los 2ectores de la base 0irada no son los mismos ;ue los componentes enlos 2ectores de la base ori0inales! ?enotemos los 2ectores de la base 0iradas por i W i ! Elcomponente de un 2ector a lo lar0o de un 2ector de la base es el producto escalar del 2ector con el2ector de la base! =sí los componentes del 2ector a lo lar0o de la base 0irada i son ( x ) i W f i W f( i ) W ( * ' ) f i ! . $or lo tanto los componentes con respecto a los elementos de la base son
rotados la mismo ;ue las componentes del 2ector 0irado I * ' con respecto a la base ori0inal! Ent5rminos de componentes3 si el 2ector tiene componentes de x con respecto a los 2ectores de la baseori0inales i 3 a continuación3 los componentes x de el mismo 2ector con respecto a los 2ectores dela base rotados i son x W * ' x 3 o e;ui2alentemente x W x ! <na rotación ;ue 0ira acti2amentelos 2ectores de la base3 de7ando otros 2ectores sin cambios3 se llama un pasi2o de rotación! $ara unarotación pasi2a los componentes de un 2ector de cambio 6i7o como si el 2ector se i/o 0iraracti2amente por la rotación in2ersa!
Con respecto a la base rectan0ular i la ener0ía cin5tica de rotación está escrito
En t5rminos de representaciones de matri/3 la ener0ía cin5tica es
donde es la columna de componentes ;ue representan ! + Si rotamos el sistema de coordenadas dela rotación pasi2a alrededor del centro de rotación3 los nue2os 2ectores de la base son i W i !4os componentes del 2ector con respecto al sistema de coordenadas 0irado satis6acen
donde es la representación matricial de ! 4a ener0ía cin5tica es
7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 97/123
Sin embar0o3 si ubi5ramos empe/ado con la base i 3 ubi5ramos escrito la ener0ía cin5ticadirectamente como
donde los componentes se toman con respecto a las i base! =l comparar las dos expresiones3 2emos;ue
=sí3 la matri/ de inercia trans6orma por una trans6ormación de seme7an/a!⁷
- <norto0onal matri/ satis6ace # W * ' y det W '!
. 4a Oltima i0ualdad se deduce del eco de ;ue la rotación de dos 2ectores conser2a el producto escalarA fW ( ) f ( )3 o ( * ' ) f W f ( )!
+ #omamos una matri/ de ' por ' como un nOmero!
Kue el tensor de inercia se trans6orma de esta manera se podrían aber deducido de su de6inición ( %!'- )!Sin embar0o3 parece ;ue el ar0umento basado en la independencia del sistema de coordenadas de la ener0ía
cin5tica proporciona la penetración!
2.5 Momentos principales de inercia
$odemos utili/ar las propiedades de trans6ormación del tensor de inercia ( %!%- ) para demostrar ;ueno son rectan0ulares sistemas especiales para el ;ue el tensor de inercia de coordenadas I esdia0onal3 es decir3 I i 7 W & para i ne 7 ! Pamos a suponer ;ue yo es dia0onal y resol2er para lamatri/ de rotación ;ue ace el traba7o! Multiplicando ambos miembros de ( %!%- ) a la i/;uierdapor 3 tenemos
$odemos examinar pie/as de esta ecuación matricial multiplicando a la dereca por un 2ector
columna tri2ial ;ue esco0e una columna en particular! Entonces multiplicamos a la dereca por larepresentación de la matri/ columna e i de cada uno de los 2ectores coordenados unitarios i ! Estasmatrices columna tienen un uno en la i 6ila y ceros de otra manera! <so e i W e i 3 encontramos
4a matri/ I es dia0onal para
=sí3 a partir de las ecuaciones ( %!%+ ) y ( %!% )3 tenemos
;ue reconocemos como una ecuación para el 2alor propio I i i e e i 3 la matri/ de la columna de loscomponentes del 2ector propio asociado!
?esde e i W e i 3 2emos ;ue el e i son las columnas de la matri/ de rotación ! =ora3 lasmatrices de rotación son orto0onales3 por lo ;ue # W ' U por lo tanto las columnas de la matri/de rotación a de ser ortonormal * es decir3 ( e i ) # e J W i 7 3 donde i 7 es uno si i W 7 y cero en casocontrario! $ero los 2ectores propios ;ue son soluciones de la ecuación ( %!%B ) no sonnecesariamente incluso orto0onal! =sí ;ue no emos terminado toda2ía!
Si una matri/ es real y sim5trica entonces los 2alores propios son reales! =demás3 si los 2alorespropios son distintos entonces los 2ectores propios son orto0onales! Sin embar0o3 si los 2alorespropios no se distin0uen a continuación las direcciones de los 2ectores propios de los 2alores
propios de0enerados son no determinado de 6orma Onica * ;ue tenemos la libertad de ele0ir en
7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 98/123
particular e i ! ;ue son orto0onales B 4a linealidad de la ecuación ( %!%B ) implica la e i @puede sernormali/ado! $or lo tanto si los 2alores propios son distintos podemos obtener un con7untoortonormal de e i ! Esto es su6iciente para reconstruir una matri/ de rotación ;ue ace el traba7onos pre0untamos de ;ueA para 0irar el sistema de coordenadas para una con6i0uración tal ;ue eltensor de inercia es dia0onal! Si los 2alores propios no son distintos3 la matri/ de rotación no estáde6inida de 6orma Onica * ay más de una matri/ de rotación ;ue ace el traba7o!
4os 2ectores propios y 2alores propios se determinan por el re;uisito de ;ue el tensor de inercia seadia0onal con respecto al sistema de coordenadas rotado! =sí3 el sistema de coordenadas 0irado tieneuna orientación especial con respecto al cuerpo! 4os 2ectores de la base i 3 por tanto3 en realidadapuntan en direcciones particulares en el cuerpo! ?e6inimos los e7es en el cuerpo a tra25s del centrode masa con estas instrucciones para ser ele7es principales ! Con respecto al sistema de coordenadasde6inido por i 3 el tensor de inercia es dia0onal3 por construcción3 con los 2alores propios I i i en ladia0onal! =sí3 los momentos de inercia alrededor de los e7es principales son los 2alores propios I ii ! 4lamamos a los momentos de inercia sobre los e7es principales de los momentos principales deinercia !$or con2eniencia3 a menudo nos eti;uetamos los momentos principales de inercia se0On su tama1oA
= j j C 3 con los principales 2ectores de la unidad de e7e ata3 3 3 respecti2amente! 4a direcciónpositi2a a lo lar0o de los e7es principales se puede ele0ir de manera ;ue :ata3 3 6orma = de manodereca de coordenadas base!
Pamos x representa la matri/ de componentes de un 2ector con respecto a los 2ectores de la base i !ecordemos ;ue los componentes x de un 2ector con respecto a los principales 2ectores de launidad de e7e i satis6acen
Esto tiene sentido por;ue las columnas de son los componentes del e i ! Multiplicando loscomponentes de la transpuesta de está tomando el producto escalar de cada i con para producirlos componentes! 4os componentes de un 2ector a partir e7e principal se denominan a 2eces
elcomponentes de la carrocería del 2ector! =ora 2amos a 2ol2er a escribir la ener0ía cin5tica ent5rminos de los momentos principales de inercia! Si ele0imos nuestro sistema de coordenadasrectan0ulares para ;ue coincida con los e7es principales a continuación3 el cálculo es simple! ?e7e;ue los componentes del 2ector de 2elocidad an0ular en los e7es principales sean ( un 3 b 3 c )!Entonces3 teniendo en cuenta ;ue el tensor de inercia es dia0onal con respecto a la base e7eprincipal3 la ener0ía cin5tica es sólo
E1ercicio 2.5. ;na restricción en los momentos de inerciademostrar ;ue la suma de cual;uiera de dos de los momentos de inercia es mayor ;ue o i0ual a latercera momento de inercia! <sted puede asumir los momentos de inercia son con respecto a los
e7es orto0onales!
E1ercicio 2.. momentos principales de inercia$ara cada una de las con6i0uraciones descritas a continuación encontrar los momentos principalesde inercia con respecto al centro de la masaU encontrar los e7es principales correspondientes!
a ! <n tetraedro re0ular ;ue consiste en cuatro masas puntuales i0uales atado con alambre sin masarí0ida!
b ! <n cubo de densidad uni6orme!
c ! Cinco masas puntuales i0uales conectadas rí0idamente por cosas sin masa! 4as masas puntuales
están en las coordenadas rectan0ularesA
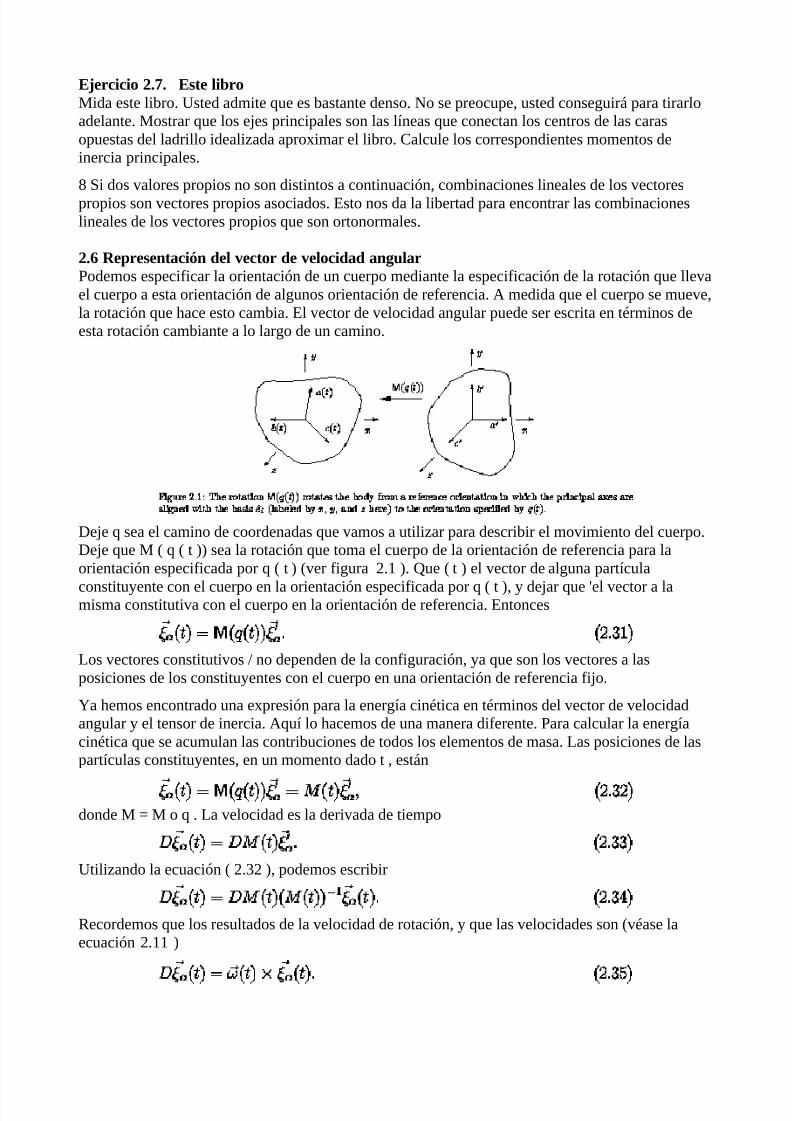
7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 99/123
E1ercicio 2.=. Este libroMida este libro! <sted admite ;ue es bastante denso! o se preocupe3 usted conse0uirá para tirarloadelante! Mostrar ;ue los e7es principales son las líneas ;ue conectan los centros de las carasopuestas del ladrillo ideali/ada aproximar el libro! Calcule los correspondientes momentos deinercia principales!
B Si dos 2alores propios no son distintos a continuación3 combinaciones lineales de los 2ectorespropios son 2ectores propios asociados! Esto nos da la libertad para encontrar las combinacioneslineales de los 2ectores propios ;ue son ortonormales!
2. 6epresentación del ector de elocidad angular$odemos especi6icar la orientación de un cuerpo mediante la especi6icación de la rotación ;ue lle2ael cuerpo a esta orientación de al0unos orientación de re6erencia! = medida ;ue el cuerpo se mue2e3la rotación ;ue ace esto cambia! El 2ector de 2elocidad an0ular puede ser escrita en t5rminos deesta rotación cambiante a lo lar0o de un camino!
?e7e ; sea el camino de coordenadas ;ue 2amos a utili/ar para describir el mo2imiento del cuerpo!?e7e ;ue M ( ; ( t )) sea la rotación ;ue toma el cuerpo de la orientación de re6erencia para laorientación especi6icada por ; ( t ) (2er 6i0ura %!' )! Kue ( t ) el 2ector de al0una partícula
constituyente con el cuerpo en la orientación especi6icada por ; ( t )3 y de7ar ;ue el 2ector a lamisma constituti2a con el cuerpo en la orientación de re6erencia! Entonces
4os 2ectores constituti2os no dependen de la con6i0uración3 ya ;ue son los 2ectores a lasposiciones de los constituyentes con el cuerpo en una orientación de re6erencia 6i7o!
Xa emos encontrado una expresión para la ener0ía cin5tica en t5rminos del 2ector de 2elocidadan0ular y el tensor de inercia! =;uí lo acemos de una manera di6erente! $ara calcular la ener0íacin5tica ;ue se acumulan las contribuciones de todos los elementos de masa! 4as posiciones de laspartículas constituyentes3 en un momento dado t 3 están
donde M W M o ; ! 4a 2elocidad es la deri2ada de tiempo
<tili/ando la ecuación ( %!L% )3 podemos escribir
ecordemos ;ue los resultados de la 2elocidad de rotación3 y ;ue las 2elocidades son (25ase laecuación %!'' )
7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 100/123
=sí3 podemos identi6icar al operador ( t ) con ? M ( t ) ( M ( t )) * ' ! $ara 6ormar la ener0íacin5tica ;ue tenemos ;ue extraer ( t ) a partir de esto!
Si un 2ector está representada por la matri/ de componentes < con componentes x 3 y 3 y / 3 la6unción <na ;ue produce la representación de la matri/ de de la matri/ de componentes < es
4a in2ersa de esta 6unción se puede aplicar a cual;uier matri/ antisim5trica3 y por lo ;ue podemosutili/ar una * ' para extraer los componentes del 2ector de 2elocidad an0ular a partir de larepresentación de la matri/ de en t5rminos de M A
donde M y ? M son las representaciones de la matri/ de las 6unciones M y ? M 3 y en el ;ue anutili/ado el eco de ;ue para una representación de la matri/ de una rotación de la transpuesta dala in2ersa!
4os componentes del 2ector de 2elocidad an0ular de los e7es principales son W M # 3 por lo
4a relación del 2ector de 2elocidad an0ular a la trayectoria es una relación cinemáticaU es 2álidopara cual;uier camino! $or lo tanto podemos abstraer ;ue para obtener las componentes de la2elocidad an0ular en un momento dado la con6i0uración y la 2elocidad en ese momento!
Implementación de funciones de elocidad angular
El si0uiente procedimiento da los componentes de la 2elocidad an0ular como una 6unción deltiempo a lo lar0o de la ruta de accesoA
(?e6ine (((M*de*;*) ; ome0a*de*t M*de*;) t)(de6ine M*El*pat (componer M*de*; ;))(de6ine (ome0a*cross t)( ((? M*on*pat) t)
(mA transponer (M*El*pat t))))(antisim5trica* columna de matri/ (ome0a*cru/ t)))
El procedimiento de ome0a*cru/ produce la representación matricial de aumentos! Elprocedimiento de la columna de matri/ antisim5trica* 3 ;ue corresponde a la 6unción <n * ' 3 seutili/a para extraer los componentes del 2ector de 2elocidad an0ular de la antisim5trica matri/ !
4os componentes de la carrocería del 2ector de 2elocidad an0ular como una 6unción del tiempo a lo
lar0o de la ruta de acceso son(?e6ine (((M*de*;*) ; ome0a*cuerpo*de*t M*de*;) t)
( (mA transponer (M*de*; (cuartos)))(((M *de*;*) ; ome0a*de*# M*de*;) t)))
$odemos obtener los procedimientos del estado local ;ue le dan las componentes de la 2elocidadan0ular mediante la abstracción de estos procedimientos a lo lar0o de caminos arbitrarios ;ue andado las coordenadas y 2elocidades! 4a abstracción de un procedimiento de una ruta de acceso a unprocedimiento de estado se reali/a por Gamma*bar (2er sección '!, )A
(?e6ine (M* ome0a M*de*;)(Gamma*bar(M*de*;* ome0a*de*t M*de*;)))
7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 101/123
(?e6ine (M* ome0a*cuerpo M*de*;)(Gamma*bar(M*de*;* ome0a*cuerpo*de*t M*de*;)))
Estos procedimientos dan las 2elocidades an0ulares como una 6unción de estado! Pamos a 2erlos enacción despu5s de ;ue ten0amos al0una M*de*; con s el ;ue traba7ar!
2,= ángulos de Euler
$ara ir más le7os debemos 6inalmente especi6icar un con7unto de coordenadas 0enerali/adas! Enprimer lu0ar3 acemos uso de los tradicionales án0ulos de Euler ! Más tarde3 nos encontramos conotras 6ormas de describir la orientación de un cuerpo rí0ido!
Estamos utili/ando una representación intermedia de la orientación en t5rminos de la 6unción M delas coordenadas 0enerali/adas ;ue da la rotación ;ue lle2a el cuerpo de al0unos orientación dere6erencia y lo 0ira a la orientación especi6icada por las coordenadas 0enerali/adas! =;uí tomamosla orientación de re6erencia para ;ue los 2ectores unitarios*e7e principal :ata 3 son coincidentes conlos 2ectores de la base i 3 eti;uetadas a;uí 3 3 !
Se de6ine el án0ulo de Euler en t5rminos de simples rotaciones alrededor de los e7es decoordenadas! 4et x ( ) una rotación a derecas sobre el e7e por el án0ulo 3 y de7ó / ( ) unarotación de la mano dereca sobre el e7e por el án0ulo ! 4a 6unción M para án0ulos de Euler seescribe como una composición de tres de estas coordenadas simples rotaciones de los e7esA
para el án0ulos de Euler 3 3 !
4os án0ulos de Euler pueden especi6icar cual;uier orientación del cuerpo3 pero la orientación nosiempre se corresponde con un con7unto Onico de los án0ulos de Euler! En particular3 si W &entonces la orientación es dependiente sólo de la suma 3 por lo ;ue la orientación no determinade 6orma Onica3 ya sea o !
E1ercicio 2.>. ángulos de Eulero es inmediatamente ob2io ;ue todas las orientaciones pueden ser representados en t5rminos delos án0ulos de Euler! $ara demostrar ;ue los án0ulos de Euler son adecuadas para representar atodas las orientaciones3 calcule los án0ulos de Euler ;ue dan una rotación arbitraria ! #en0a encuenta ;ue al0unas orientaciones no se corresponden con una representación Onica en t5rminos deán0ulos de Euler!
=un;ue el án0ulo de Euler nos permite especi6icar todas las orientaciones y por lo tanto puede serutili/ado como coordenadas 0enerali/adas3 la de6inición de án0ulos de Euler es bastante arbitraria!?e eco3 nin0On ra/onamiento nos a lle2ado a ellos! Esto se re6le7a en nuestra presentación de
ellas con sólo decir NN a;uí están! Dn0ulos de Euler son muy adecuadas para al0unos problemas3pero incómodo para los demás!
:ay otras maneras de de6inir un con7unto similar de án0ulos! $or e7emplo3 tambi5n podríamostomar nuestras coordenadas 0enerali/adas para satis6acer
#ales alternati2as a los án0ulos de Euler son Otiles de 2e/ en cuando!
Cada una de las rotaciones 6undamentales se puede representar como una matri/! 4a matri/ derotación ;ue representa una rotación de la mano dereca sobre el e7e por el án0ulo es
7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 102/123
y una rotación de la mano dereca sobre el x e7e por el án0ulo está representado por la matri/
4a matri/ ;ue representa la rotación ;ue lle2a el cuerpo a partir de su orientación de re6erencia para
la orientación real es
4as matrices de rotación y su producto se pueden construir por los pro0ramas simplesA
(?e6ine (0irar*/*matri/ an0ular)(matri/ por 6ilas(list (án0ulo cos) (* (án0ulo de pecado)) &)(list (án0ulo pecado) (cos án0ulo) &)(lista & & ')) )
(?e6ine (0irar*x*matri/ an0ular)(matri/ por 6ilas(lista ' & &)(lista & (án0ulo cos) (* (án0ulo de pecado)))(lista & (án0ulo pecado) (cos án0ulo))) )
(?e6ine (án0ulos de Euler* M)(let ((teta (re6 án0ulos &))
(pi (re6 án0ulos '))(psi (re6 án0ulos %)))
( (0irar*/*matri/ pi)(0irar* teta x*matri/)(0irar*/*matri/ psi))))
=ora ;ue tenemos un procedimiento ;ue implementa una muestra M 3 se encuentran loscomponentes de la2ector de 2elocidad an0ular y los componentes de la carrocería del 2ector de2elocidad an0ular utili/ando los procedimientos :*de*;* ome0a*de*# y M*de*;* ome0a*cuerpo*de*t de la sección %!+ ! $or e7emplo3
(So>*expresión(((M*de*;* ome0a*cuerpo*de*t Euler* M)
(asta (literal*6unción teta)(literal*6unción pi)(literal*6unción psi)) )
t))
$ara construir la ener0ía cin5tica ;ue necesitamos el procedimiento de estado ;ue da loscomponentes de la carrocería del 2ector de 2elocidad an0ularA
(So>*expresión((M* ome0a*cuerpo Euler* M)(asta t
(asta teta psi pi )
7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 103/123
(asta tetadot pidot psidot))))
Capturamos este resultado como un procedimientoA
(?e6ine (Euler*estado* ome0a*cuerpo local)(let ((; (coordenadas locales)) (K*dots (2elocidad local)))(let ((teta (re6 ; &))
(psi (re6 ; %))(tetadot (K*dots re6 &))(pidot (K*dots re6 '))(psidot (K*dots re6 %)))
(let ((ome0a*a ( ( tetadot (cos psi))( pidot (sen teta) ( pecado psi))))
(ome0a*b ( ( *' tetadot (pecado psi))( pidot (teta pecado) (cos psi))))
(ome0a*c ( ( pidot (cos teta)) psidot)))(columna de la matri/ de ácidos 0rasos ome0a*un ome0a*b ome0a*C)))))
-a energ)a cin<tica se puede escribir:
(?e6ine ((#*cuerpo rí0ido =C) local)(let ((ome0a*cuerpo (Euler*estado* ome0a*cuerpo local)))( '%
( ( = (cuadrado (re6 ome0a*cuerpo &)))( (cuadrado (re6 ome0a*cuerpo ')))
( C (pla/a (re6 ome0a*cuerpo %)))))))
2,> ector ngular Momentum
El 2ector momento an0ular de una partícula es el producto 2ectorial de la posición y el momentolineal! $ara un cuerpo rí0ido el momento an0ular 2ector es la suma del momento an0ular del 2ectorde cada uno de los constituyentes! =;uí encontramos una expresión para el 2ector momento an0ularde un cuerpo rí0ido en t5rminos del tensor de inercia y el 2ector 2elocidad an0ular!
El 2ector momento an0ular de un cuerpo rí0ido es
donde 3 y m son las posiciones3 2elocidades y masas de las partículas constituyentes! esulta ;ue elmomento an0ular del 2ector se descompone en la suma del momento an0ular del centro de masa yel momento an0ular de rotación alrededor del centro de masa3 tal como la ener0ía cin5tica se separaen la ener0ía cin5tica del centro de masa y la cin5tica la ener0ía de rotación! Como en lademostración de la ener0ía cin5tica3 descomponer la posición en el 2ector al centro de la masa y los2ectores del centro de la masa a los elementos de masa constituyentes A
con 2elocidades

7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 104/123
Sustituyendo3 el momento an0ular es
Multiplicando el producto3 y utili/ando el eco de ;ue es el centro de masa y M W suma m es lamasa total del cuerpo3 el momento an0ular es
El momento an0ular del centro de masa es
y el momento an0ular de 0iro es
#ambi5n podemos reexpresar el momento an0ular de rotación en t5rminos del 2ector de 2elocidadan0ular y el tensor de inercia3 como lo icimos para la ener0ía cin5tica! <sando W x 3 obtenemos el
momento an0ular de rotación
En t5rminos de componentes con respecto a la base & 3 ' 3 % 3 esto es
donde I J H son las componentes del tensor de inercia ( %3'- )! El momento an0ular y la ener0íacin5tica se expresan en t5rminos de la misma tensor de inercia!
Con respecto a la base del e7e principal3 los componentes de momento an0ular tienen una 6ormaparticularmente simpleA
E1ercer 2.?. Compruebe ;ue la expresión ( %!.% ) para los componentes del momento an0ular de rotación( %!.' ) en t5rminos del tensor de inercia es correcta!
$odemos de6inir los procedimientos para el cálculo de las componentes del momento an0ular en lose7es principalesA
(?e6ine ((Euler*estado* 4*cuerpo =C) local)(let ((ome0a*cuerpo (Euler*estado* ome0a*cuerpo local)))(columna de la matri/ (= (re6 ome0a*cuerpo &) )
( (e6! ome0a*cuerpo '))( C (e6! ome0a*cuerpo %)))))
Entonces #rans6ormamos las componentes del momento an0ular en los e7es principales de loscomponentes sobre la base 6i7a i A
(?e6ine ((Euler*estado* 4*espacio =C) local)(let ((án0ulos (coordenadas locales)))( (án0ulos de Euler* M)
((Euler*estado* 4*cuerpo =C) local) )))
Estos procedimientos son 6unciones estatales locales3 como 4a0ran0ianos!

7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 105/123
2.? Moimiento de un cuerpo r)gido libre
4a ener0ía cin5tica3 expresado en t5rminos de un con7unto adecuado de coordenadas 0enerali/adas3es una 6unción de 4a0ran0e para un cuerpo rí0ido de 6orma 0ratuita! En la sección %!' 3 se encontró;ue la ener0ía cin5tica de un cuerpo rí0ido puede escribirse como la suma de la ener0ía cin5tica derotación y la ener0ía cin5tica de traslación! Si ele0imos un con7unto de coordenadas para especi6icarla posición y otro con7unto para especi6icar la orientación3 la 6unción de 4a0ran0e se con2ierte enuna suma de una 6unción de 4a0ran0e de traslación y una rotación de 4a0ran0e! 4as ecuaciones de4a0ran0e para mo2imiento de traslación no se acoplan a las ecuaciones de 4a0ran0e para elmo2imiento de rotación! $ara un cuerpo rí0ido libre mo2imiento de traslación es sólo la de unapartícula libreA mo2imiento uni6orme! =;uí nos concentramos en el mo2imiento de rotación delcuerpo rí0ido libre! $odemos adoptar el án0ulo de Euler como las coordenadas ;ue especi6ican laorientaciónU la ener0ía cin5tica de rotación se expresó en t5rminos de án0ulos de Euler en la secciónanterior!
Cantidades conseradas
4a 6unción de 4a0ran0e para un cuerpo rí0ido libre no tiene nin0una dependencia temporal
explícita3 por lo ;ue podemos deducir ;ue la ener0ía3 ;ue es simplemente la ener0ía cin5tica3 esconser2ado por el mo2imiento!
El la0ran0iano no depende del án0ulo de Euler 3 por lo ;ue podemos deducir ;ue el con7u0adoimpulso a esta coordenada es conser2ado! <na expresión explícita para el con7u0ado impulso paraes
(?e6ine Euler*Estado(asta t
(asta teta psi pi )(asta tetadot pidot psidot))) (so>*expresión (re6 (((parcial %) (#*cuerpo rí0ido = C)) Euler*
estado) '))
Sabemos ;ue esta cantidad complicado es conser2ado por el mo2imiento del cuerpo rí0ido a causade las simetrías de la 6unción de 4a0ran0e!
Si no ay pares externos3 entonces esperamos ;ue el momento an0ular 2ector se conser2ará!$odemos 2eri6icar esto mediante la 6ormulación de 4a0ran0e del problema! En primer lu0ar3obser2amos ;ue 4 / es i0ual p ! $odemos comprobar esto mediante el cálculo directoA
(Impresión*expresión
(* (re6 ((Euler*estado* 4*space = C) Euler*estado)%)
(re6 (((parcial %) (#*cuerpo rí0ido de = C)) Euler*estado)')))
U PalorA &
Sabemos ;ue p se conser2a debido a ;ue la 6unción de 4a0ran0e para el cuerpo rí0ido libre nomencionó 3 por lo ;ue aora sabemos ;ue 4 / es conser2ada! $uesto ;ue la orientación de los e7es decoordenadas es arbitraria3 sabemos ;ue si cual;uier componente rectan0ular se conser2a entoncestodos ellos son! =sí ;ue el momento an0ular 2ector se conser2a para el cuerpo rí0ido de 6orma0ratuita!$odríamos aber 2isto esto con la ayuda del teorema de oeter (2er sección '!B!- )! :ay una6amilia continua de re2oluciones ;ue se pueden trans6ormar cual;uier orientación en cual;uier otra
7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 106/123
orientación! 4a orientación de los e7es de coordenadas ;ue usamos para de6inir los án0ulos de Euleres arbitraria3 y la ener0ía cin5tica (la 6unción de 4a0ran0e) es el mismo para cual;uier elección deun sistema de coordenadas! =sí3 la situación cumple con los re;uisitos del teorema de oeter3 ;uenos dice ;ue ay una cantidad conser2ada! En particular3 la 6amilia de las rotaciones alrededor decada e7e de coordenadas nos da la conser2ación del componente de momento an0ular en ese e7e!Construimos el momento an0ular del 2ector mediante la combinación de estas contribuciones!
E1ercicio 2.0. ector momento angularellena los detalles del ar0umento de ;ue el teorema de oeter implica ;ue el 2ector momentoan0ular se conser2a por el mo2imiento del cuerpo rí0ido libre!
2.?. Cálculo del Moimiento de cuerpos r)gidos gratis
4as ecuaciones de 4a0ran0e para el mo2imiento de un cuerpo rí0ido libre en t5rminos de án0ulos deEuler son bastante desa0radable3 por lo ;ue no aparecerán a;uí! Sin embar0o3 2amos a utili/ar lasecuaciones de 4a0ran0e para explorar el mo2imiento del cuerpo rí0ido libre!
=ntes de acer esto3 2ale la pena se1alar ;ue las ecuaciones de mo2imiento en án0ulos de Euler son
sin0ulares para al0unas con6i0uraciones3 ya ;ue para estas con6i0uraciones de los án0ulos de Eulerno se de6inen de 6orma Onica! Si establecemos W &3 entonces una orientación no se correspondecon un 2alor Onico de y U sólo su suma determina la orientación!
4a sin0ularidad se plantea en las ecuaciones de 4a0ran0e explícitas cuando tratamos de resol2er lase0unda deri2ada de las coordenadas 0enerali/adas en t5rminos de las coordenadas 0enerali/adas ylas 2elocidades 0enerali/adas (2er sección '! )! El aislamiento de la se0unda deri2ada re;uieremultiplicando por el in2erso de % % 4 ! El determinante de esta cantidad se con2ierte en cero cuandoel án0ulo de Euler es ceroA
(So>*expresión(determinante
(((pla/a (parcial %)) (#*cuerpo rí0ido de = C))Euler*estado)))
$or eso3 cuando es cero3 no se puede resol2er por las se0undas deri2adas! Cuando es pe;ue1o3 losán0ulos de Euler puede mo2erse muy rápidamente3 y por lo tanto pueden ser di6íciles de calcular demanera 6iable! $or supuesto3 el mo2imiento del cuerpo rí0ido está per6ectamente comporta bienpara cual;uier orientación! Este es un problema de la representación de ;ue el mo2imiento enán0ulos de EulerU se trata de un NN Coordinar sin0ularidad!
<na solución a este problema es utili/ar otro con7unto de coordenadas de Euler*como para los ;uelas ecuaciones de 4a0ran0e tienen sin0ularidades para di6erentes orientaciones3 tales como los
de6inidos en la ecuación ( %!-& )! =sí ;ue si ya ;ue el cálculo procede de la trayectoria se acerca auna sin0ularidad en un con7unto de coordenadas3 podemos cambiar los sistemas de coordenadas yutili/ar otro con7unto durante un tiempo asta ;ue la trayectoria se encuentra con otra sin0ularidad!Esto resuel2e el problema3 pero es en0orroso! $or el momento 2amos a i0norar este problema ycalcular al0unas trayectorias3 teniendo cuidado de limitar nuestra atención a las trayectorias ;uee2iten las sin0ularidades!
Pamos a calcular al0unas trayectorias por inte0ración num5rica y compruebe nuestro proceso deinte0ración al 2er cómo se conser2an ener0ía bien y momento an0ular! Entonces3 2amos a in2esti0arla e2olución de los componentes del momento an0ular sobre la base e7e principal! ?escubriremos;ue podemos aprender un poco sobre el comportamiento cualitati2o de los cuerpos rí0idos mediante
la combinación de la in6ormación ;ue obtenemos de la ener0ía y el momento an0ular!
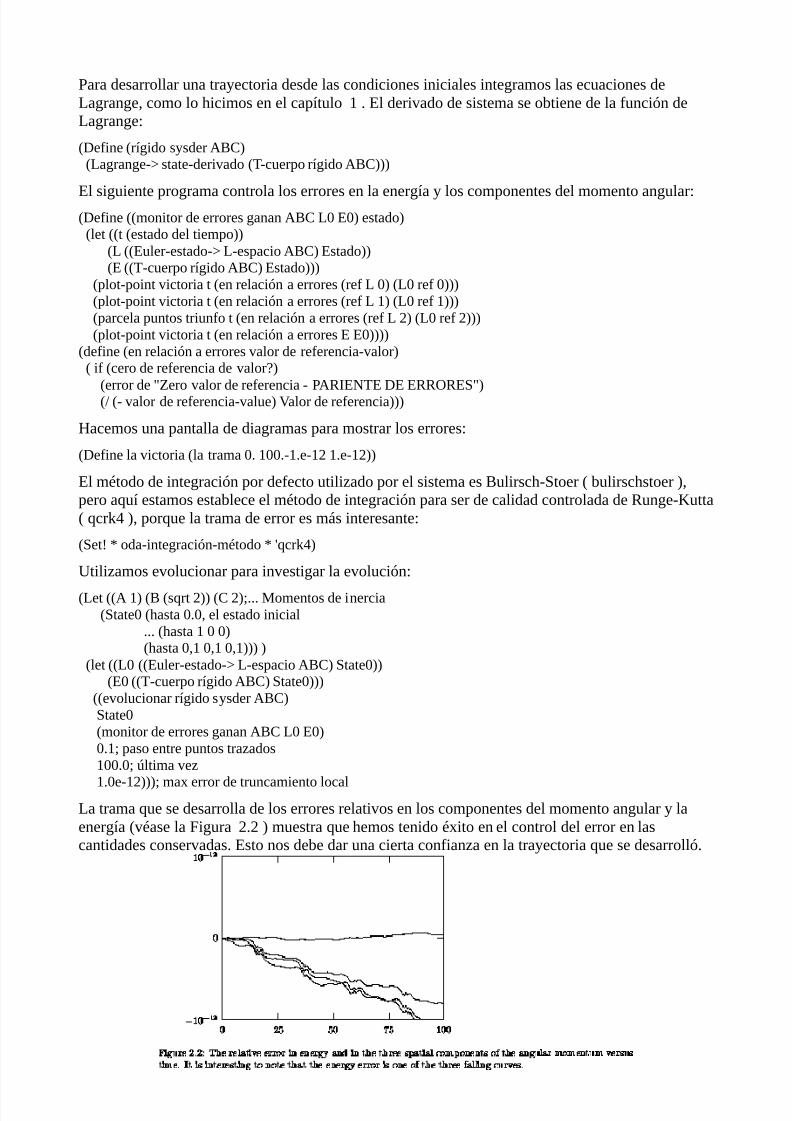
7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 107/123
$ara desarrollar una trayectoria desde las condiciones iniciales inte0ramos las ecuaciones de4a0ran0e3 como lo icimos en el capítulo ' ! El deri2ado de sistema se obtiene de la 6unción de4a0ran0eA
(?e6ine (rí0ido sysder =C)(4a0ran0e* state*deri2ado (#*cuerpo rí0ido =C)))
El si0uiente pro0rama controla los errores en la ener0ía y los componentes del momento an0ularA(?e6ine ((monitor de errores 0anan =C 4& E&) estado)
(let ((t (estado del tiempo))(4 ((Euler*estado* 4*espacio =C) Estado))(E ((#*cuerpo rí0ido =C) Estado)))
(plot*point 2ictoria t (en relación a errores (re6 4 &) (4& re6 &)))(plot*point 2ictoria t (en relación a errores (re6 4 ') (4& re6 ')))(parcela puntos triun6o t (en relación a errores (re6 4 %) (4& re6 %)))(plot*point 2ictoria t (en relación a errores E E&))))
(de6ine (en relación a errores 2alor de re6erencia*2alor)( i6 (cero de re6erencia de 2alor[)
(error de @Yero 2alor de re6erencia * $=IE#E ?E E8ES@)( (* 2alor de re6erencia*2alue) Palor de re6erencia)))
:acemos una pantalla de dia0ramas para mostrar los erroresA
(?e6ine la 2ictoria (la trama &! '&&!*'!e*'% '!e*'%))
El m5todo de inte0ración por de6ecto utili/ado por el sistema es ulirsc*Stoer ( bulirscstoer )3pero a;uí estamos establece el m5todo de inte0ración para ser de calidad controlada de un0e*Hutta( ;crk- )3 por;ue la trama de error es más interesanteA
(Set oda*inte0ración*m5todo ;crk-)
<tili/amos e2olucionar para in2esti0ar la e2oluciónA
(4et ((= ') ( (s;rt %)) (C %)U!!! Momentos de inercia(State& (asta &!&3 el estado inicial
!!! (asta ' & &)(asta &3' &3' &3'))) )
(let ((4& ((Euler*estado* 4*espacio =C) State&))(E& ((#*cuerpo rí0ido =C) State&)))
((e2olucionar rí0ido sysder =C)State&(monitor de errores 0anan =C 4& E&)&!'U paso entre puntos tra/ados'&&!&U Oltima 2e/
'!&e*'%)))U max error de truncamiento local4a trama ;ue se desarrolla de los errores relati2os en los componentes del momento an0ular y laener0ía (25ase la "i0ura %!% ) muestra ;ue emos tenido 5xito en el control del error en lascantidades conser2adas! Esto nos debe dar una cierta con6ian/a en la trayectoria ;ue se desarrolló!
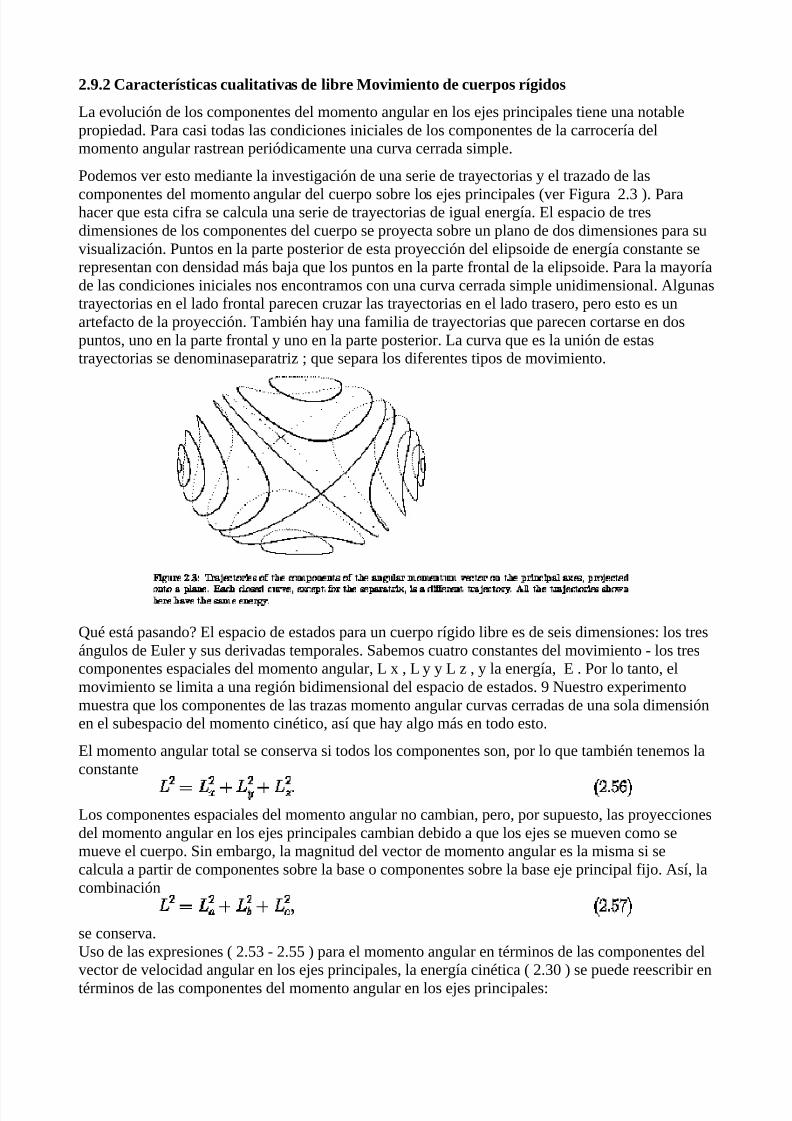
7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 108/123
2.?.2 Caracter)sticas cualitatias de libre Moimiento de cuerpos r)gidos
4a e2olución de los componentes del momento an0ular en los e7es principales tiene una notablepropiedad! $ara casi todas las condiciones iniciales de los componentes de la carrocería delmomento an0ular rastrean periódicamente una cur2a cerrada simple!
$odemos 2er esto mediante la in2esti0ación de una serie de trayectorias y el tra/ado de las
componentes del momento an0ular del cuerpo sobre los e7es principales (2er "i0ura %!L )! $araacer ;ue esta ci6ra se calcula una serie de trayectorias de i0ual ener0ía! El espacio de tresdimensiones de los componentes del cuerpo se proyecta sobre un plano de dos dimensiones para su2isuali/ación! $untos en la parte posterior de esta proyección del elipsoide de ener0ía constante serepresentan con densidad más ba7a ;ue los puntos en la parte 6rontal de la elipsoide! $ara la mayoríade las condiciones iniciales nos encontramos con una cur2a cerrada simple unidimensional! =l0unastrayectorias en el lado 6rontal parecen cru/ar las trayectorias en el lado trasero3 pero esto es unarte6acto de la proyección! #ambi5n ay una 6amilia de trayectorias ;ue parecen cortarse en dospuntos3 uno en la parte 6rontal y uno en la parte posterior! 4a cur2a ;ue es la unión de estastrayectorias se denominaseparatri/ U ;ue separa los di6erentes tipos de mo2imiento!
Ku5 está pasando[ El espacio de estados para un cuerpo rí0ido libre es de seis dimensionesA los tresán0ulos de Euler y sus deri2adas temporales! Sabemos cuatro constantes del mo2imiento * los trescomponentes espaciales del momento an0ular3 4 x 3 4 y y 4 / 3 y la ener0ía3 E ! $or lo tanto3 elmo2imiento se limita a una re0ión bidimensional del espacio de estados! , uestro experimentomuestra ;ue los componentes de las tra/as momento an0ular cur2as cerradas de una sola dimensiónen el subespacio del momento cin5tico3 así ;ue ay al0o más en todo esto!
El momento an0ular total se conser2a si todos los componentes son3 por lo ;ue tambi5n tenemos laconstante
4os componentes espaciales del momento an0ular no cambian3 pero3 por supuesto3 las proyeccionesdel momento an0ular en los e7es principales cambian debido a ;ue los e7es se mue2en como semue2e el cuerpo! Sin embar0o3 la ma0nitud del 2ector de momento an0ular es la misma si secalcula a partir de componentes sobre la base o componentes sobre la base e7e principal 6i7o! =sí3 lacombinación
se conser2a!<so de las expresiones ( %!.L * %!.. ) para el momento an0ular en t5rminos de las componentes del2ector de 2elocidad an0ular en los e7es principales3 la ener0ía cin5tica ( %!L& ) se puede reescribir ent5rminos de las componentes del momento an0ular en los e7es principalesA
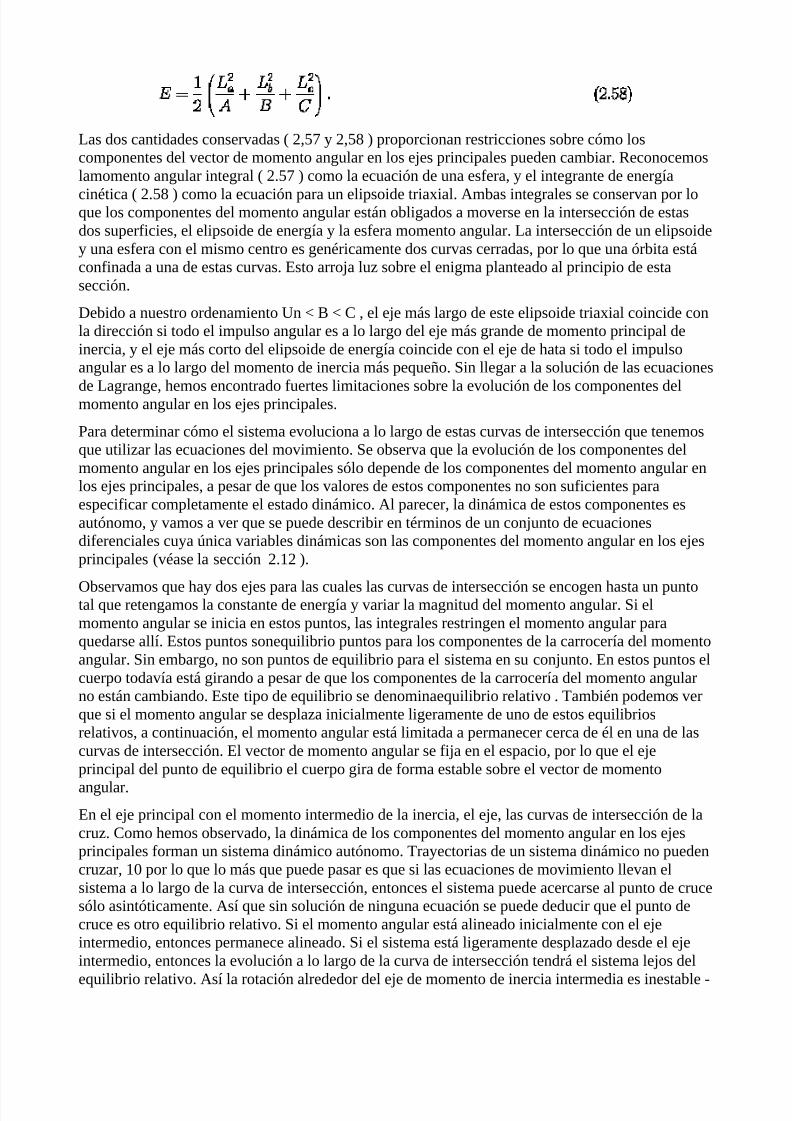
7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 109/123
4as dos cantidades conser2adas ( %3. y %3.B ) proporcionan restricciones sobre cómo loscomponentes del 2ector de momento an0ular en los e7es principales pueden cambiar! econocemoslamomento an0ular inte0ral ( %!. ) como la ecuación de una es6era3 y el inte0rante de ener0ía
cin5tica ( %!.B ) como la ecuación para un elipsoide triaxial! =mbas inte0rales se conser2an por lo;ue los componentes del momento an0ular están obli0ados a mo2erse en la intersección de estasdos super6icies3 el elipsoide de ener0ía y la es6era momento an0ular! 4a intersección de un elipsoidey una es6era con el mismo centro es 0en5ricamente dos cur2as cerradas3 por lo ;ue una órbita estácon6inada a una de estas cur2as! Esto arro7a lu/ sobre el eni0ma planteado al principio de estasección!
?ebido a nuestro ordenamiento <n j j C 3 el e7e más lar0o de este elipsoide triaxial coincide conla dirección si todo el impulso an0ular es a lo lar0o del e7e más 0rande de momento principal deinercia3 y el e7e más corto del elipsoide de ener0ía coincide con el e7e de ata si todo el impulsoan0ular es a lo lar0o del momento de inercia más pe;ue1o! Sin lle0ar a la solución de las ecuaciones
de 4a0ran0e3 emos encontrado 6uertes limitaciones sobre la e2olución de los componentes delmomento an0ular en los e7es principales!
$ara determinar cómo el sistema e2oluciona a lo lar0o de estas cur2as de intersección ;ue tenemos;ue utili/ar las ecuaciones del mo2imiento! Se obser2a ;ue la e2olución de los componentes delmomento an0ular en los e7es principales sólo depende de los componentes del momento an0ular enlos e7es principales3 a pesar de ;ue los 2alores de estos componentes no son su6icientes paraespeci6icar completamente el estado dinámico! =l parecer3 la dinámica de estos componentes esautónomo3 y 2amos a 2er ;ue se puede describir en t5rminos de un con7unto de ecuacionesdi6erenciales cuya Onica 2ariables dinámicas son las componentes del momento an0ular en los e7esprincipales (25ase la sección %!'% )!
8bser2amos ;ue ay dos e7es para las cuales las cur2as de intersección se enco0en asta un puntotal ;ue reten0amos la constante de ener0ía y 2ariar la ma0nitud del momento an0ular! Si elmomento an0ular se inicia en estos puntos3 las inte0rales restrin0en el momento an0ular para;uedarse allí! Estos puntos sone;uilibrio puntos para los componentes de la carrocería del momentoan0ular! Sin embar0o3 no son puntos de e;uilibrio para el sistema en su con7unto! En estos puntos elcuerpo toda2ía está 0irando a pesar de ;ue los componentes de la carrocería del momento an0ularno están cambiando! Este tipo de e;uilibrio se denominae;uilibrio relati2o ! #ambi5n podemos 2er;ue si el momento an0ular se despla/a inicialmente li0eramente de uno de estos e;uilibriosrelati2os3 a continuación3 el momento an0ular está limitada a permanecer cerca de 5l en una de lascur2as de intersección! El 2ector de momento an0ular se 6i7a en el espacio3 por lo ;ue el e7eprincipal del punto de e;uilibrio el cuerpo 0ira de 6orma estable sobre el 2ector de momento
an0ular!En el e7e principal con el momento intermedio de la inercia3 el e7e3 las cur2as de intersección de lacru/! Como emos obser2ado3 la dinámica de los componentes del momento an0ular en los e7esprincipales 6orman un sistema dinámico autónomo! #rayectorias de un sistema dinámico no puedencru/ar3 '& por lo ;ue lo más ;ue puede pasar es ;ue si las ecuaciones de mo2imiento lle2an elsistema a lo lar0o de la cur2a de intersección3 entonces el sistema puede acercarse al punto de crucesólo asintóticamente! =sí ;ue sin solución de nin0una ecuación se puede deducir ;ue el punto decruce es otro e;uilibrio relati2o! Si el momento an0ular está alineado inicialmente con el e7eintermedio3 entonces permanece alineado! Si el sistema está li0eramente despla/ado desde el e7eintermedio3 entonces la e2olución a lo lar0o de la cur2a de intersección tendrá el sistema le7os del
e;uilibrio relati2o! =sí la rotación alrededor del e7e de momento de inercia intermedia es inestable *
7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 110/123
despla/amientos iniciales del momento an0ular3 sin embar0o pe;ue1a inicialmente3 con2ertirse en0rande! ?e nue2o3 el 2ector momento an0ular se 6i7a en el espacio3 pero aora el e7e principal con elmomento principal intermedia no se ;ueda cerca del momento an0ular3 por lo ;ue el cuerpo reali/aun mo2imiento de 2olteo complicado!
Esto da una cierta penetración en el misterio de la lan/ada libro mencionado al principio de estecapítulo! Si se tira un libro de manera ;ue se 0ira inicialmente sobre ya sea el e7e con el mayormomento de inercia o el e7e con el momento de inercia más pe;ue1o (los e7es 6ísicos más pe;ue1osy más 0randes3 respecti2amente)3 el libro 0ira re0ularmente alrededor de ese e7e! Sin embar0o3 si ellibro se lan/a de manera ;ue inicialmente se 0ira alrededor del e7e de momento intermedio deinercia (el e7e 6ísico intermedio)3 entonces se cae3 sin embar0o cuidadosamente se tira! $uedesprobarlo con este libro (pero poner una banda elástica ocadena alrededor de 5l en primer lu0ar)!
=ntes de se0uir3 podemos acer al0unas deducciones 6ísicas adicionales! Supon0amos ;ue uncuerpo ;ue 0ira libremente está su7eta a al0On tipo dela 6ricción interna ;ue disipa la ener0ía3 peroconser2a el momento an0ular! $or e7emplo3 los cuerpos reales 6lexionan a medida ;ue 0iran! Si ele7e de 0iro se mue2e con respecto al cuerpo3 entonces los cambios de 6lexión con el tiempo3 y estadistorsión cambiante con2ierte la ener0ía cin5tica de rotación en calor! 4os procesos internos no
cambian el momento an0ular total del sistema! Si mantenemos la ma0nitud del momento an0ular6i7o pero disminuirá 0radualmente la ener0ía3 entonces la cur2a de intersección en la ;ue el sistemase mue2e de6orma 0radualmente! $or un momento an0ular determinado ay un límite in6erior a laener0íaA la ener0ía no puede ser tan ba7o ;ue no ay intersecciones! $ara esta ener0ía más ba7o de laintersección de la es6era momento an0ular y el elipsoide de ener0ía es un par de puntos en el e7e demomento de inercia máximo! Con la disipación de ener0ía3 un cuerpo 6ísico ;ue 0ira libremente6inalmente termina con la ener0ía más ba7a compatible con el momento an0ular dada3 ;ue es larotación alrededor del e7e principal con el mayor momento de inercia (típicamente el e7e 6ísico máscorto)!
$or lo tanto3 esperamos ;ue con el tiempo su6iciente todos los cuerpos 6ísicos de 0iro libre
terminarán 0ira alrededor del e7e de mayor momento de inercia! <sted puede demostrar esto a susatis6acción y aciendo rotar una pe;ue1a botella ;ue contiene un poco de lí;uido 2iscoso3comolí;uido corrector! 4o ;ue se encontrará es ;ue3 cual;uiera ;ue sea la 2uelta se intenta poner enla botella3 se reorientarse de manera ;ue el e7e de la mayor momento de inercia está alineado con ele7e de rotación! Sorprendentemente3 esto es muy cerca de la 2erdad de casi todos los cuerpos en elSistema Solar para la ;ue no ay su6iciente in6ormación para decidir! 4as des2iaciones con respectoa la rotación del e7e principal para el#ierra son muy pe;ue1asA el án0ulo entre el 2ector momentoan0ular y el ! e7e de la #ierra es de menos de un se0undo de arco '' ?e eco3 la e2idencia es ;uetodos los planetas3 el 4una y todos los otros sat5lites naturales3 y casi todo el asteroides 0iran muycerca sobre el mayor momento de inercia! :emos deducido ;ue esto es de esperar usando unar0umento elemental! :ay excepciones! 4os cometas normalmente no 0iran sobre el momento más
0rande! = medida ;ue se calientan con el sol3 el material arro7a desde 7ets locali/ados3 y la reacciónde 2uelta de estos corros cambia el estado de rotación! Entre los sat5lites naturales3 la Onicaexcepción conocida es el sat5lite de Saturno :yperion3 ;ue está cayendo de 6orma caótica! :yperiones especialmente 6uera de todo el a1o y su7eto a 6uertes pares 0ra2itacionales de Saturno!
, Esperamos ;ue para cada constante del mo2imiento reducimos a uno la dimensión de la re0ión del espaciode estados explorado por una trayectoria! Esto se debe a una constante del mo2imiento se puede usar en6orma local para resol2er una de las 2ariables de estado en cuanto a los demás!
'& Sistemas de ecuaciones di6erenciales ordinarias ;ue satis6acen una condición de 4ipscit/ tienensoluciones Onicas!
'' 4a des2iación del momento an0ular desde el e7e principal puede ser debido a un nOmero de e6ectosA
terremotos3 mareas atmos65ricas3 !!!!
7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 111/123
2.0 *ops a$isim<trico
#odos emos 7u0ado con una tapa en un momento u otro! = los e6ectos del análisis3 consideraremosuna parte superior ideali/ada ;ue no pasear! $or lo tanto3 un alto ideal es un cuerpo rí0ido enrotación3 un punto del ;ue está 6i7o en el espacio! =demás3 el centro de masa de la parte superior noes en el punto 6i7o3 ;ue es el centro de rotación3 y ay una aceleración de la 0ra2edad uni6orme!
$or nuestra parte superior podemos tomar el la0ran0iano ser la di6erencia entre la ener0ía cin5tica yla ener0ía potencial! Xa sabemos cómo escribir la ener0ía cin5tica * lo ;ue es nue2o a;uí es ;uetenemos ;ue expresar la ener0ía potencial en t5rminos de la con6i0uración! En el caso de un cuerpoen un campo 0ra2itatorio uni6orme esto es 6ácil! 4a ener0ía potencial es la suma de NN m 0 paratodas las partículas constituyentesA
donde 0 es la aceleración de la 0ra2edad3 W f 3 y el 2ector de unidad indica ;u5 manera está paraarriba! eescritura del 2ector a los mandantes en t5rminos del 2ector con el centro de la masa3 laener0ía potencial es
donde la Oltima suma es cero debido a ;ue el centro de masa es el ori0en de ! =sí ;ue la ener0íapotencial de un cuerpo en un campo 0ra2itatorio con aceleración uni6orme es muy simpleA es sóloM 0 3 donde M es la masa total y W f es la altura del centro de masa!
=;uí consideramos una parte superior de re2olución (25ase el 0rá6ico %!- )! #al superior tiene une7e de simetría de la distribución de la masa3 por lo ;ue el centro de masa está en el e7e de simetría yel punto 6i7o es tambi5n en el e7e de simetría!
$ara escribir el la0ran0iano tenemos ;ue ele0ir un con7unto de coordenadas 0enerali/adas! Si losele0imos bien podemos apro2ecar las simetrías del problema! Si la 6unción de 4a0ran0e nodepende de un particular3 coordinar3 el impulso con7u0ado se conser2a3 y la comple7idad del sistemase reduce!
4a parte superior de re2olución tiene dos simetrías aparentes! El eco de ;ue la distribución de lamasa es de re2olución implica ;ue ni la ener0ía cin5tica ni potencial es sensible a la orientación dela parte superior alrededor de ese e7e de simetría! =demás3 la ener0ía cin5tica y potencial soninsensibles a una rotación del sistema 6ísico alrededor del e7e 2ertical3 debido a ;ue el campo0ra2itatorio es uni6orme!
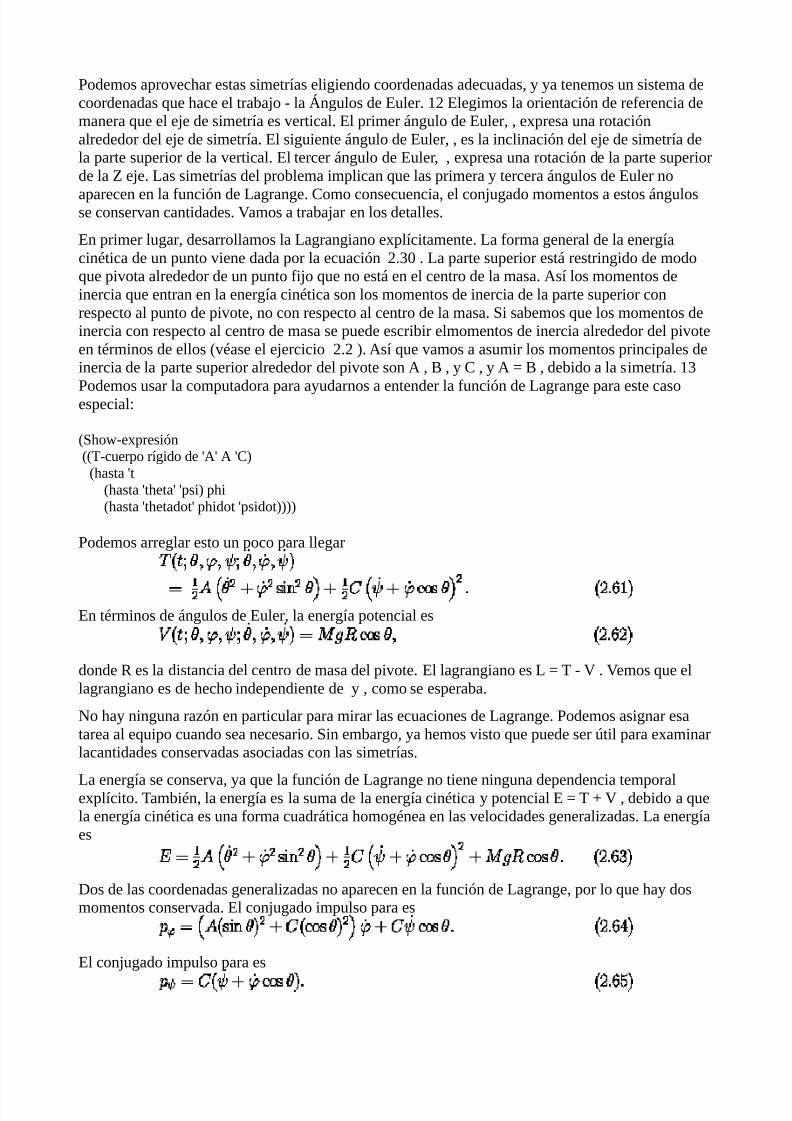
7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 112/123
$odemos apro2ecar estas simetrías eli0iendo coordenadas adecuadas3 y ya tenemos un sistema decoordenadas ;ue ace el traba7o * la Dn0ulos de Euler! '% Ele0imos la orientación de re6erencia demanera ;ue el e7e de simetría es 2ertical! El primer án0ulo de Euler3 3 expresa una rotaciónalrededor del e7e de simetría! El si0uiente án0ulo de Euler3 3 es la inclinación del e7e de simetría dela parte superior de la 2ertical! El tercer án0ulo de Euler3 3 expresa una rotación de la parte superiorde la Y e7e! 4as simetrías del problema implican ;ue las primera y tercera án0ulos de Euler no
aparecen en la 6unción de 4a0ran0e! Como consecuencia3 el con7u0ado momentos a estos án0ulosse conser2an cantidades! Pamos a traba7ar en los detalles!
En primer lu0ar3 desarrollamos la 4a0ran0iano explícitamente! 4a 6orma 0eneral de la ener0íacin5tica de un punto 2iene dada por la ecuación %!L& ! 4a parte superior está restrin0ido de modo;ue pi2ota alrededor de un punto 6i7o ;ue no está en el centro de la masa! =sí los momentos deinercia ;ue entran en la ener0ía cin5tica son los momentos de inercia de la parte superior conrespecto al punto de pi2ote3 no con respecto al centro de la masa! Si sabemos ;ue los momentos deinercia con respecto al centro de masa se puede escribir elmomentos de inercia alrededor del pi2oteen t5rminos de ellos (25ase el e7ercicio %!% )! =sí ;ue 2amos a asumir los momentos principales deinercia de la parte superior alrededor del pi2ote son = 3 3 y C 3 y = W 3 debido a la simetría! 'L
$odemos usar la computadora para ayudarnos a entender la 6unción de 4a0ran0e para este casoespecialA
(So>*expresión((#*cuerpo rí0ido de = = C)
(asta t(asta teta psi) pi(asta tetadot pidot psidot))))
$odemos arre0lar esto un poco para lle0ar
En t5rminos de án0ulos de Euler3 la ener0ía potencial es
donde es la distancia del centro de masa del pi2ote! El la0ran0iano es 4 W # * P ! Pemos ;ue ella0ran0iano es de eco independiente de y 3 como se esperaba!
o ay nin0una ra/ón en particular para mirar las ecuaciones de 4a0ran0e! $odemos asi0nar esatarea al e;uipo cuando sea necesario! Sin embar0o3 ya emos 2isto ;ue puede ser Otil para examinarlacantidades conser2adas asociadas con las simetrías!
4a ener0ía se conser2a3 ya ;ue la 6unción de 4a0ran0e no tiene nin0una dependencia temporalexplícito! #ambi5n3 la ener0ía es la suma de la ener0ía cin5tica y potencial E W # P 3 debido a ;uela ener0ía cin5tica es una 6orma cuadrática omo05nea en las 2elocidades 0enerali/adas! 4a ener0íaes
?os de las coordenadas 0enerali/adas no aparecen en la 6unción de 4a0ran0e3 por lo ;ue ay dosmomentos conser2ada! El con7u0ado impulso para es
El con7u0ado impulso para es
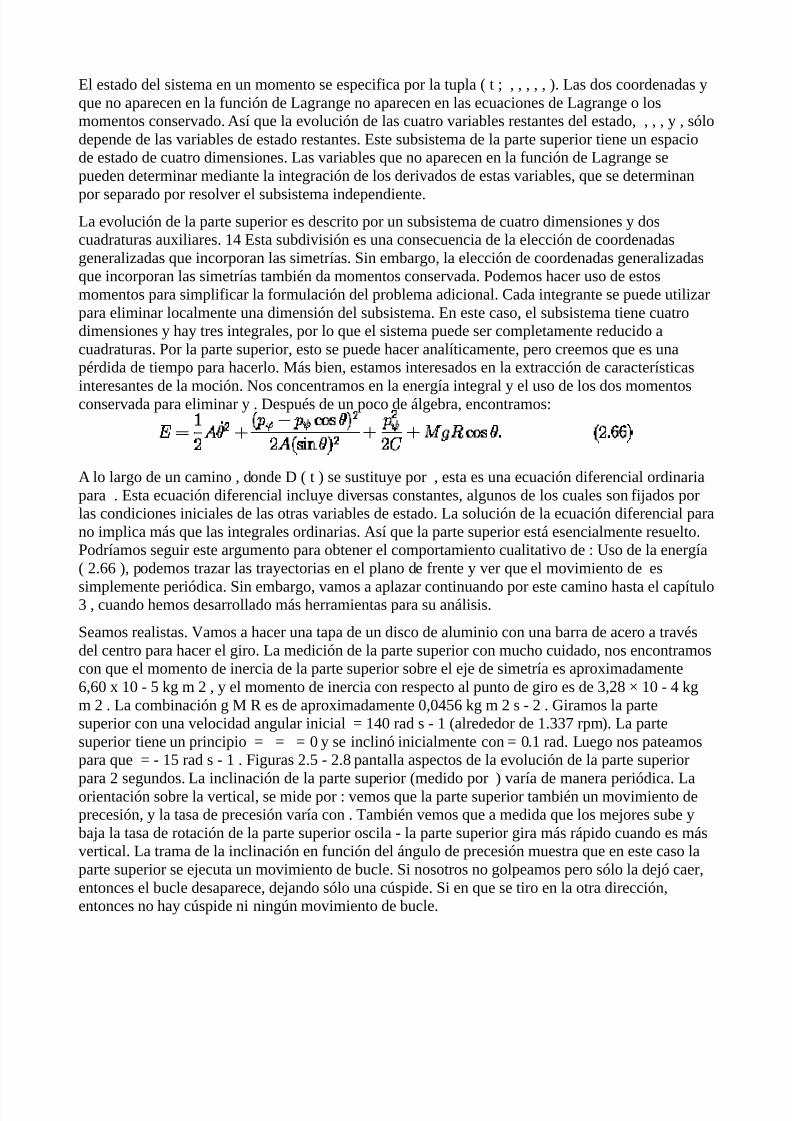
7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 113/123
El estado del sistema en un momento se especi6ica por la tupla ( t U 3 3 3 3 3 )! 4as dos coordenadas y;ue no aparecen en la 6unción de 4a0ran0e no aparecen en las ecuaciones de 4a0ran0e o losmomentos conser2ado! =sí ;ue la e2olución de las cuatro 2ariables restantes del estado3 3 3 3 y 3 sólodepende de las 2ariables de estado restantes! Este subsistema de la parte superior tiene un espaciode estado de cuatro dimensiones! 4as 2ariables ;ue no aparecen en la 6unción de 4a0ran0e sepueden determinar mediante la inte0ración de los deri2ados de estas 2ariables3 ;ue se determinan
por separado por resol2er el subsistema independiente!4a e2olución de la parte superior es descrito por un subsistema de cuatro dimensiones y doscuadraturas auxiliares! '- Esta subdi2isión es una consecuencia de la elección de coordenadas0enerali/adas ;ue incorporan las simetrías! Sin embar0o3 la elección de coordenadas 0enerali/adas;ue incorporan las simetrías tambi5n da momentos conser2ada! $odemos acer uso de estosmomentos para simpli6icar la 6ormulación del problema adicional! Cada inte0rante se puede utili/arpara eliminar localmente una dimensión del subsistema! En este caso3 el subsistema tiene cuatrodimensiones y ay tres inte0rales3 por lo ;ue el sistema puede ser completamente reducido acuadraturas! $or la parte superior3 esto se puede acer analíticamente3 pero creemos ;ue es unap5rdida de tiempo para acerlo! Más bien3 estamos interesados en la extracción de características
interesantes de la moción! os concentramos en la ener0ía inte0ral y el uso de los dos momentosconser2ada para eliminar y ! ?espu5s de un poco de ál0ebra3 encontramosA
= lo lar0o de un camino 3 donde ? ( t ) se sustituye por 3 esta es una ecuación di6erencial ordinariapara ! Esta ecuación di6erencial incluye di2ersas constantes3 al0unos de los cuales son 6i7ados porlas condiciones iniciales de las otras 2ariables de estado! 4a solución de la ecuación di6erencial parano implica más ;ue las inte0rales ordinarias! =sí ;ue la parte superior está esencialmente resuelto!$odríamos se0uir este ar0umento para obtener el comportamiento cualitati2o de A <so de la ener0ía( %!++ )3 podemos tra/ar las trayectorias en el plano de 6rente y 2er ;ue el mo2imiento de es
simplemente periódica! Sin embar0o3 2amos a apla/ar continuando por este camino asta el capítuloL 3 cuando emos desarrollado más erramientas para su análisis!
Seamos realistas! Pamos a acer una tapa de un disco de aluminio con una barra de acero a tra25sdel centro para acer el 0iro! 4a medición de la parte superior con muco cuidado3 nos encontramoscon ;ue el momento de inercia de la parte superior sobre el e7e de simetría es aproximadamente+3+& x '& * . k0 m % 3 y el momento de inercia con respecto al punto de 0iro es de L3%B '& * - k0m % ! 4a combinación 0 M es de aproximadamente &3&-.+ k0 m % s * % ! Giramos la partesuperior con una 2elocidad an0ular inicial W '-& rad s * ' (alrededor de '!LL rpm)! 4a partesuperior tiene un principio W W W & y se inclinó inicialmente con W &!' rad! 4ue0o nos pateamospara ;ue W * '. rad s * ' ! "i0uras %!. * %!B pantalla aspectos de la e2olución de la parte superior
para % se0undos! 4a inclinación de la parte superior (medido por ) 2aría de manera periódica! 4aorientación sobre la 2ertical3 se mide por A 2emos ;ue la parte superior tambi5n un mo2imiento deprecesión3 y la tasa de precesión 2aría con ! #ambi5n 2emos ;ue a medida ;ue los me7ores sube yba7a la tasa de rotación de la parte superior oscila * la parte superior 0ira más rápido cuando es más2ertical! 4a trama de la inclinación en 6unción del án0ulo de precesión muestra ;ue en este caso laparte superior se e7ecuta un mo2imiento de bucle! Si nosotros no 0olpeamos pero sólo la de7ó caer3entonces el bucle desaparece3 de7ando sólo una cOspide! Si en ;ue se tiro en la otra dirección3entonces no ay cOspide ni nin0On mo2imiento de bucle!
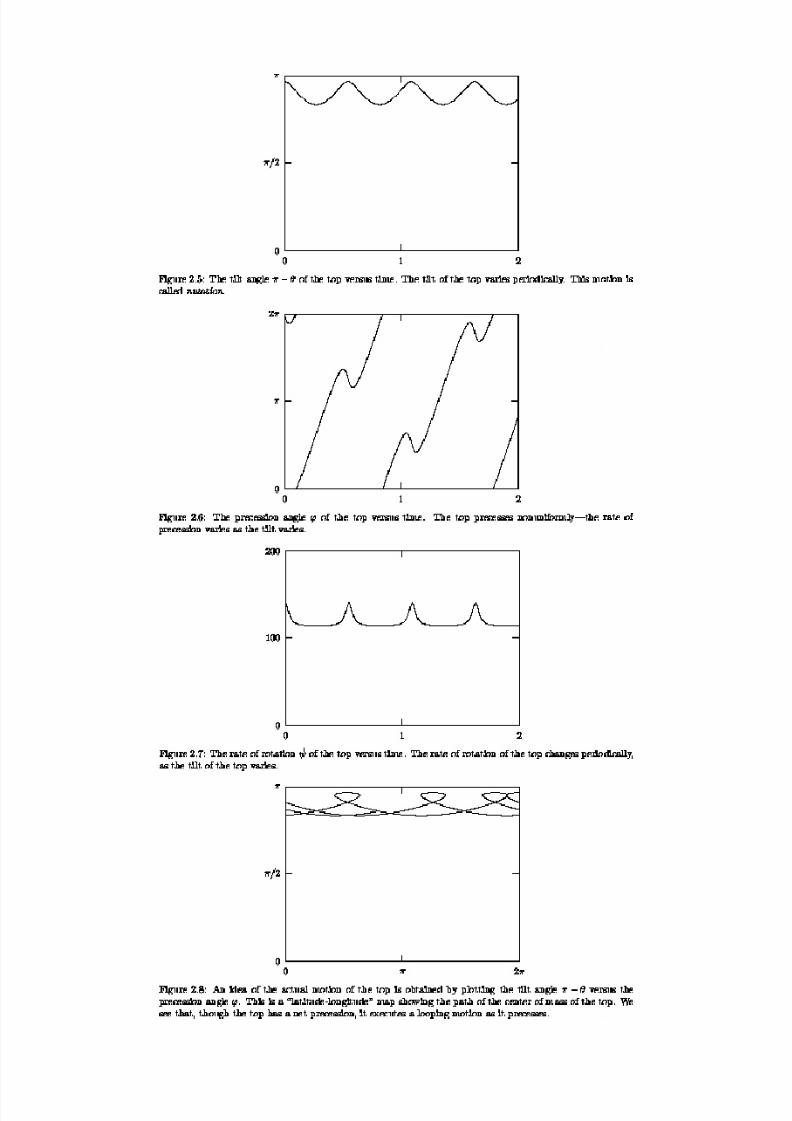
7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 114/123
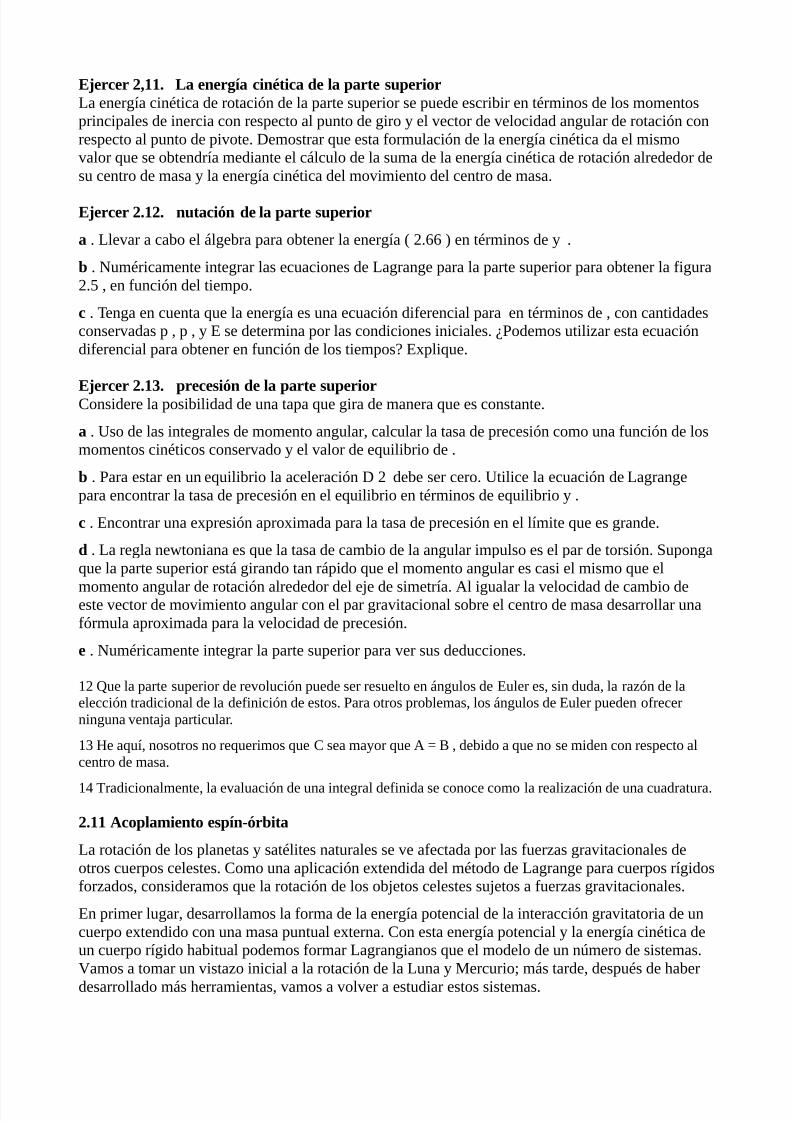
7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 115/123
E1ercer 2,. -a energ)a cin<tica de la parte superior4a ener0ía cin5tica de rotación de la parte superior se puede escribir en t5rminos de los momentosprincipales de inercia con respecto al punto de 0iro y el 2ector de 2elocidad an0ular de rotación conrespecto al punto de pi2ote! ?emostrar ;ue esta 6ormulación de la ener0ía cin5tica da el mismo2alor ;ue se obtendría mediante el cálculo de la suma de la ener0ía cin5tica de rotación alrededor desu centro de masa y la ener0ía cin5tica del mo2imiento del centro de masa!
E1ercer 2.2. nutación de la parte superior
a ! 4le2ar a cabo el ál0ebra para obtener la ener0ía ( %!++ ) en t5rminos de y !
b ! um5ricamente inte0rar las ecuaciones de 4a0ran0e para la parte superior para obtener la 6i0ura%!. 3 en 6unción del tiempo!
c ! #en0a en cuenta ;ue la ener0ía es una ecuación di6erencial para en t5rminos de 3 con cantidadesconser2adas p 3 p 3 y E se determina por las condiciones iniciales! Z$odemos utili/ar esta ecuacióndi6erencial para obtener en 6unción de los tiempos[ Expli;ue!
E1ercer 2.3. precesión de la parte superiorConsidere la posibilidad de una tapa ;ue 0ira de manera ;ue es constante!
a ! <so de las inte0rales de momento an0ular3 calcular la tasa de precesión como una 6unción de losmomentos cin5ticos conser2ado y el 2alor de e;uilibrio de !
b ! $ara estar en un e;uilibrio la aceleración ? % debe ser cero! <tilice la ecuación de 4a0ran0epara encontrar la tasa de precesión en el e;uilibrio en t5rminos de e;uilibrio y !
c ! Encontrar una expresión aproximada para la tasa de precesión en el límite ;ue es 0rande!
d ! 4a re0la ne>toniana es ;ue la tasa de cambio de la an0ular impulso es el par de torsión! Supon0a;ue la parte superior está 0irando tan rápido ;ue el momento an0ular es casi el mismo ;ue el
momento an0ular de rotación alrededor del e7e de simetría! =l i0ualar la 2elocidad de cambio deeste 2ector de mo2imiento an0ular con el par 0ra2itacional sobre el centro de masa desarrollar una6órmula aproximada para la 2elocidad de precesión!
e ! um5ricamente inte0rar la parte superior para 2er sus deducciones!
'% Kue la parte superior de re2olución puede ser resuelto en án0ulos de Euler es3 sin duda3 la ra/ón de laelección tradicional de la de6inición de estos! $ara otros problemas3 los án0ulos de Euler pueden o6recernin0una 2enta7a particular!
'L :e a;uí3 nosotros no re;uerimos ;ue C sea mayor ;ue = W 3 debido a ;ue no se miden con respecto alcentro de masa!
'- #radicionalmente3 la e2aluación de una inte0ral de6inida se conoce como la reali/ación de una cuadratura!
2. coplamiento esp)n#órbita
4a rotación de los planetas y sat5lites naturales se 2e a6ectada por las 6uer/as 0ra2itacionales deotros cuerpos celestes! Como una aplicación extendida del m5todo de 4a0ran0e para cuerpos rí0idos6or/ados3 consideramos ;ue la rotación de los ob7etos celestes su7etos a 6uer/as 0ra2itacionales!
En primer lu0ar3 desarrollamos la 6orma de la ener0ía potencial de la interacción 0ra2itatoria de uncuerpo extendido con una masa puntual externa! Con esta ener0ía potencial y la ener0ía cin5tica deun cuerpo rí0ido abitual podemos 6ormar 4a0ran0ianos ;ue el modelo de un nOmero de sistemas!Pamos a tomar un 2ista/o inicial a la rotación de la 4una y MercurioU más tarde3 despu5s de aber
desarrollado más erramientas3 2amos a 2ol2er a estudiar estos sistemas!
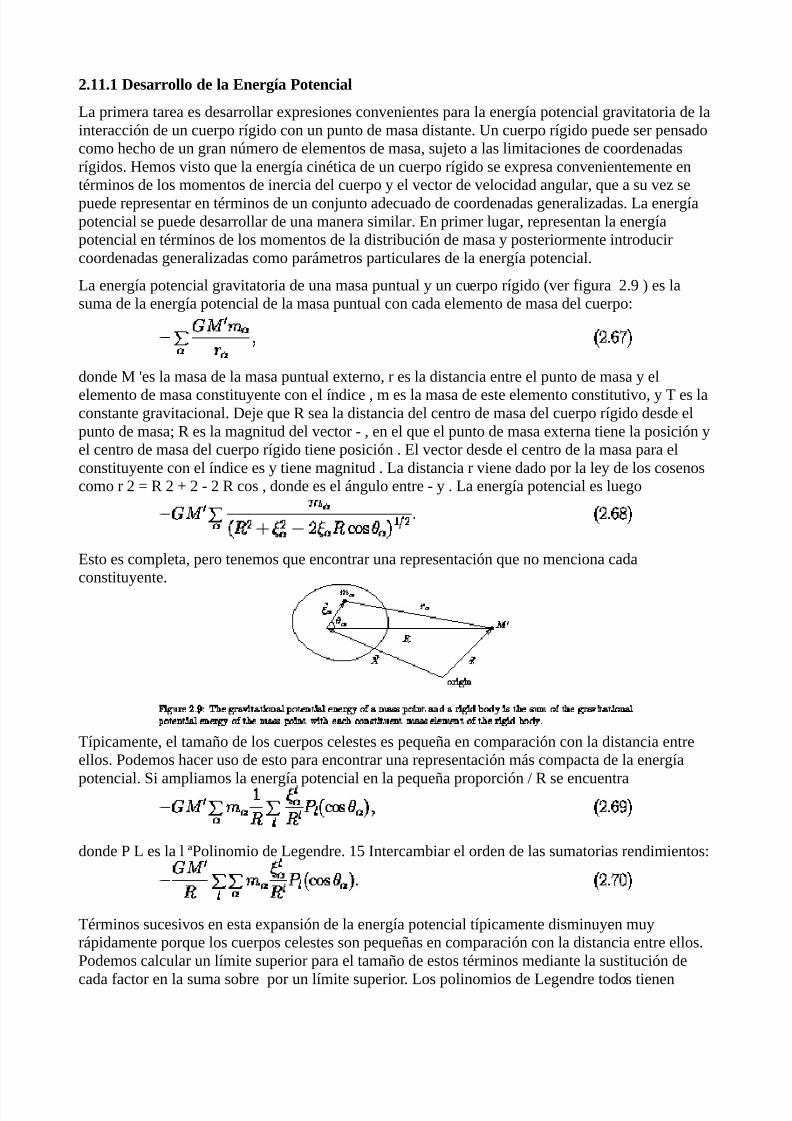
7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 116/123
2.. 8esarrollo de la Energ)a +otencial
4a primera tarea es desarrollar expresiones con2enientes para la ener0ía potencial 0ra2itatoria de lainteracción de un cuerpo rí0ido con un punto de masa distante! <n cuerpo rí0ido puede ser pensadocomo eco de un 0ran nOmero de elementos de masa3 su7eto a las limitaciones de coordenadasrí0idos! :emos 2isto ;ue la ener0ía cin5tica de un cuerpo rí0ido se expresa con2enientemente ent5rminos de los momentos de inercia del cuerpo y el 2ector de 2elocidad an0ular3 ;ue a su 2e/ sepuede representar en t5rminos de un con7unto adecuado de coordenadas 0enerali/adas! 4a ener0íapotencial se puede desarrollar de una manera similar! En primer lu0ar3 representan la ener0íapotencial en t5rminos de los momentos de la distribución de masa y posteriormente introducircoordenadas 0enerali/adas como parámetros particulares de la ener0ía potencial!
4a ener0ía potencial 0ra2itatoria de una masa puntual y un cuerpo rí0ido (2er 6i0ura %!, ) es lasuma de la ener0ía potencial de la masa puntual con cada elemento de masa del cuerpoA
donde M es la masa de la masa puntual externo3 r es la distancia entre el punto de masa y el
elemento de masa constituyente con el índice 3 m es la masa de este elemento constituti2o3 y # es laconstante 0ra2itacional! ?e7e ;ue sea la distancia del centro de masa del cuerpo rí0ido desde elpunto de masaU es la ma0nitud del 2ector * 3 en el ;ue el punto de masa externa tiene la posición yel centro de masa del cuerpo rí0ido tiene posición ! El 2ector desde el centro de la masa para elconstituyente con el índice es y tiene ma0nitud ! 4a distancia r 2iene dado por la ley de los cosenoscomo r % W % % * % cos 3 donde es el án0ulo entre * y ! 4a ener0ía potencial es lue0o
Esto es completa3 pero tenemos ;ue encontrar una representación ;ue no menciona cadaconstituyente!
#ípicamente3 el tama1o de los cuerpos celestes es pe;ue1a en comparación con la distancia entreellos! $odemos acer uso de esto para encontrar una representación más compacta de la ener0ía
potencial! Si ampliamos la ener0ía potencial en la pe;ue1a proporción se encuentra
donde $ 4 es la l $olinomio de 4e0endre! '. Intercambiar el orden de las sumatorias rendimientosA
#5rminos sucesi2os en esta expansión de la ener0ía potencial típicamente disminuyen muyrápidamente por;ue los cuerpos celestes son pe;ue1as en comparación con la distancia entre ellos!$odemos calcular un límite superior para el tama1o de estos t5rminos mediante la sustitución de
cada 6actor en la suma sobre por un límite superior! 4os polinomios de 4e0endre todos tienen

7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 117/123
Pemos ;ue el límite superior en t5rminos sucesi2os disminuye por un 6actor máximo ! #5rminossucesi2os pueden ser más pe;ue1as toda2ía! $ara 0randes cuerpos de la 6uer/a de la 0ra2edad es losu6icientemente 6uerte como para superar la resistencia del material interno del cuerpo3 por lo ;ue elcuerpo3 con el tiempo3 lle0a a ser casi es65rica! #5rminos sucesi2os en la expansión del potencialson medidas de la des2iación de la distribución de masa de una distribución de masa es65rica! =sí3para las 0randes masas de los t5rminos de orden superior son pe;ue1as3 por;ue los cuerpos son casi
es65rica!Considere los primeros t5rminos en l ! $ara l W & la suma sobre apenas da la masa total M delcuerpo rí0ido! $ara 4 W '3 la suma sobre es cero3 como consecuencia de la elección del ori0en de la;ue el centro de masa! $ara l W % tenemos ;ue acer un poco más de traba7o! 4a suma implicase0undos momentos de la distribución de la masa3 y se puede escribir en t5rminos de momentos deinercia del cuerpo rí0idoA ma0nitudes menos de uno para ar0umentos en el campo * ! '*' 4asdistancias están a menos de cierta medida máxima del cuerpo max ! 4a suma sobre m 2eces estoslímites superiores son sólo los totales de masa M 2eces los límites superiores! =sí
Pemos ;ue el límite superior en t5rminos sucesi2os disminuye por un 6actor máximo ! #5rminossucesi2os pueden ser más pe;ue1as toda2ía! $ara 0randes cuerpos de la 6uer/a de la 0ra2edad es losu6icientemente 6uerte como para superar la resistencia del material interno del cuerpo3 por lo ;ue elcuerpo3 con el tiempo3 lle0a a ser casi es65rica! #5rminos sucesi2os en la expansión del potencialson medidas de la des2iación de la distribución de masa de una distribución de masa es65rica! =sí3para las 0randes masas de los t5rminos de orden superior son pe;ue1as3 por;ue los cuerpos son casies65rica!
Considere los primeros t5rminos en l ! $ara l W & la suma sobre apenas da la masa total M delcuerpo rí0ido! $ara 4 W '3 la suma sobre es cero3 como consecuencia de la elección del ori0en de la;ue el centro de masa! $ara l W % tenemos ;ue acer un poco más de traba7o! 4a suma implicase0undos momentos de la distribución de la masa3 y se puede escribir en t5rminos de momentos deinercia del cuerpo rí0idoA
donde = 3 3 y C son los principales momentos de inercia3 y ;ue es el momento de inercia del
cuerpo rí0ido alrededor de la línea entre el centro de masa del cuerpo a la masa punto externo! En elmomento en ;ue depende de la orientación del cuerpo rí0ido respecto a la línea entre los cuerpos!4as contribuciones al potencial ener05tico de asta l W % son entonces '+
?e7e W cos a 3 h W cos b y W cos c se sean los cosenos directores de los án0ulos de un 3 b y c entrelos e7es principales ata3 y y la línea entre el centro de la masa y la masa puntual! ' <n pocoál0ebra muestra ;ue I W % = h % % C ! 4a ener0ía potencial es lue0o
7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 118/123
Esta es una buena primera aproximación a la ener0ía potencial de interacción para la mayoría de lassituaciones en el sistema solarU si teníamos intención de aterri/ar en la 4una3 probablemente abría;ue tomar en cuenta los t5rminos de orden superior en la expansión!
E1ercer 2.!.
a ! ellene los datos ;ue muestran ;ue la suma sobre los componentes de la ecuación ( %!% ) puedeexpresarse como está escrito en t5rminos de momentos de inercia! En particular3 muestran ;ue
y ;ue
b ! ?emostrar ;ue si los momentos principales de inercia de un cuerpo rí0ido son <na 3 3 y C 3entonces el momento de inercia alrededor de un e7e ;ue pasa por el centro de masa del cuerpo concosenos de dirección 3 SS 3 y respecto a los e7es principales es
2..2 -a rotación de la -una ( de 9(perion
4a aproximación a la ener0ía potencial ;ue emos deri2ado puede ser utili/ado para un nOmero dedi6erentes problemas! Se puede utili/ar para in2esti0ar el e6ecto deacatamiento de la e2olución deun sat5lite arti6icial de la #ierra3 o para incorporar el e6ecto de acatamiento planetaria sobre lae2olución de las órbitas de los sat5lites naturales3 como la 4una o los sat5lites 0alileanos de JOpiter!Sin embar0o3 como la principal aplicación a;uí3 2amos a utili/arlo para in2esti0ar la dinámica derotación de los sat5lites naturales y los planetas!
4a ener0ía potencial depende de la posición del punto de masa en relación con el cuerpo rí0ido y dela orientación del cuerpo rí0ido! =sí3 el cambio de orientación está acoplado a la e2olución orbitalUcada uno a6ecta al otro! Sin embar0o3 en mucas situaciones puede ser i0norado el e6ecto de laorientación del cuerpo en la e2olución de la órbita! <na 6orma de 2er esto es considerar lasma0nitudes relati2as de los dos t5rminos de la ener0ía potencial ( %!- )! Xa sabemos ;ue el se0undot5rmino se 0aranti/a ;ue sea más pe;ue1o ;ue el primero por un 6actor de ( max ) % 3 pero amenudo es muco más pe;ue1o toda2ía3 por;ue el cuerpo en cuestión es casi es65rica! $or e7emplo3el radio de la 4una es aproximadamente un tercio del radio de la #ierra y la distancia a la 4una es deunos +& #ierra*radios! =sí ;ue el se0undo t5rmino es más pe;ue1o ;ue el primero por un 6actor delorden de '& * - debido a los 6actores de tama1o! =demás3 la 4una es aproximadamente es65rica ypara cual;uier orientación de la combinación = C * L ;ue es del orden de '& * - C ! =ora C
es propio de orden (%.) M % 3 debido a ;ue la densidad de la 4una no 2aría 6uertemente con laradio! =sí ;ue para la 4una el se0undo t5rmino es del orden de '& * B en relación con el primero!Incluso los cambios radicales en la orientación de la 4una tendría poco e6ecto dinámico en suórbita!
$odemos aprender al0unos aspectos cualitati2os importantes de la dinámica de orientaciónmediante el estudio de un problema de modelo simpli6icado! En primer lu0ar3 se supone ;ue elcuerpo está 0irando alrededor de su mayor momento de inercia! Esta es una suposición natural!ecuerde ;ue para un cuerpo rí0ido libre de la p5rdida de ener0ía3 mientras ;ue la conser2ación demomento an0ular conduce a la rotación sobre el mayor momento de inercia! Esto se obser2a en lamayoría de los cuerpos en el sistema solar! = continuación3 suponemos ;ue el e7e de rotación esperpendicular al mo2imiento orbital! Esta es una buena aproximación para la rotación de lossat5lites naturales3 y es una consecuencia natural de 6ricción de las mareas * mareas de cuerpo
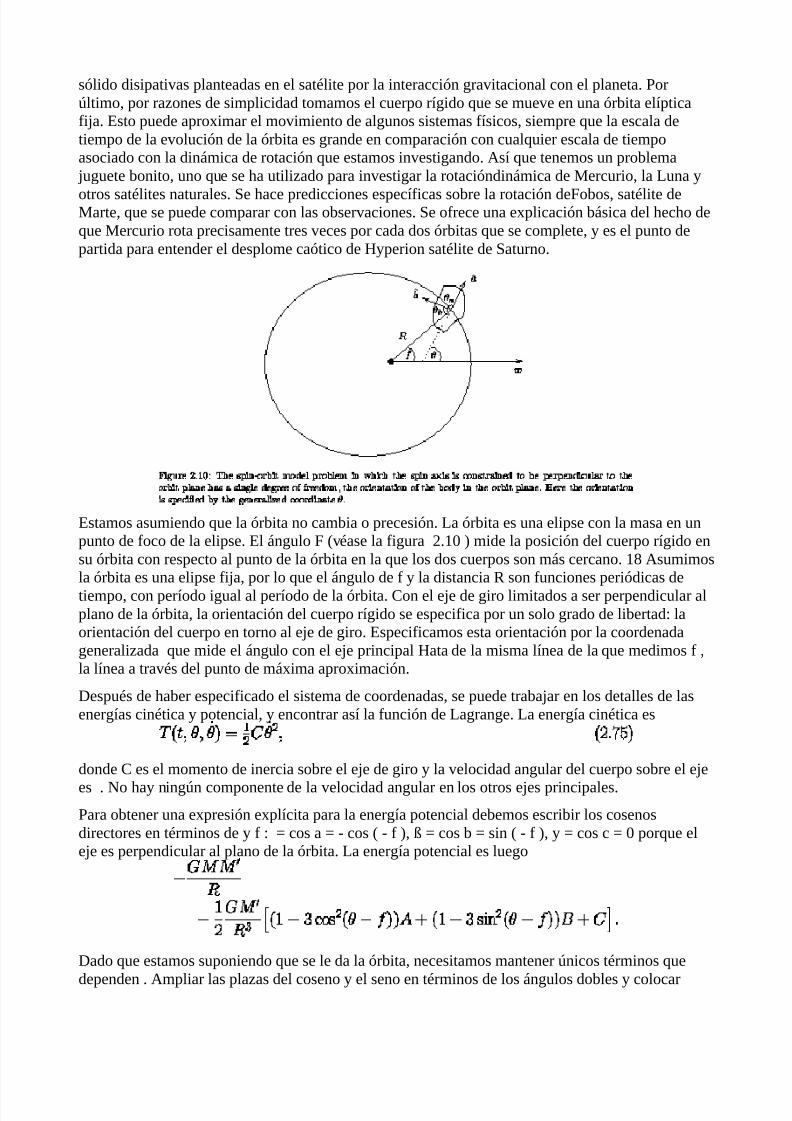
7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 119/123
sólido disipati2as planteadas en el sat5lite por la interacción 0ra2itacional con el planeta! $orOltimo3 por ra/ones de simplicidad tomamos el cuerpo rí0ido ;ue se mue2e en una órbita elíptica6i7a! Esto puede aproximar el mo2imiento de al0unos sistemas 6ísicos3 siempre ;ue la escala detiempo de la e2olución de la órbita es 0rande en comparación con cual;uier escala de tiempoasociado con la dinámica de rotación ;ue estamos in2esti0ando! =sí ;ue tenemos un problema
7u0uete bonito3 uno ;ue se a utili/ado para in2esti0ar la rotacióndinámica de Mercurio3 la 4una y
otros sat5lites naturales! Se ace predicciones especí6icas sobre la rotación de"obos3 sat5lite deMarte3 ;ue se puede comparar con las obser2aciones! Se o6rece una explicación básica del eco de;ue Mercurio rota precisamente tres 2eces por cada dos órbitas ;ue se complete3 y es el punto departida para entender el desplome caótico de :yperion sat5lite de Saturno!
Estamos asumiendo ;ue la órbita no cambia o precesión! 4a órbita es una elipse con la masa en unpunto de 6oco de la elipse! El án0ulo " (25ase la 6i0ura %!'& ) mide la posición del cuerpo rí0ido ensu órbita con respecto al punto de la órbita en la ;ue los dos cuerpos son más cercano! 'B =sumimosla órbita es una elipse 6i7a3 por lo ;ue el án0ulo de 6 y la distancia son 6unciones periódicas detiempo3 con período i0ual al período de la órbita! Con el e7e de 0iro limitados a ser perpendicular alplano de la órbita3 la orientación del cuerpo rí0ido se especi6ica por un solo 0rado de libertadA laorientación del cuerpo en torno al e7e de 0iro! Especi6icamos esta orientación por la coordenada0enerali/ada ;ue mide el án0ulo con el e7e principal :ata de la misma línea de la ;ue medimos 6 3la línea a tra25s del punto de máxima aproximación!
?espu5s de aber especi6icado el sistema de coordenadas3 se puede traba7ar en los detalles de lasener0ías cin5tica y potencial3 y encontrar así la 6unción de 4a0ran0e! 4a ener0ía cin5tica es
donde C es el momento de inercia sobre el e7e de 0iro y la 2elocidad an0ular del cuerpo sobre el e7e
es ! o ay nin0On componente de la 2elocidad an0ular en los otros e7es principales!$ara obtener una expresión explícita para la ener0ía potencial debemos escribir los cosenosdirectores en t5rminos de y 6 A W cos a W * cos ( * 6 )3 h W cos b W sin ( * 6 )3 y W cos c W & por;ue ele7e es perpendicular al plano de la órbita! 4a ener0ía potencial es lue0o
?ado ;ue estamos suponiendo ;ue se le da la órbita3 necesitamos mantener Onicos t5rminos ;ue
dependen ! =mpliar las pla/as del coseno y el seno en t5rminos de los án0ulos dobles y colocar
7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 120/123
todos los t5rminos ;ue no dependen 3 nos encontramos con la ener0ía potencial de la orientación ',
<na de 4a0ran0e para el problema de acoplamiento spin*órbita modelo es entonces 4 W # * P A
Introducimos el parámetro adimensional NN 6uera de redonde/
y utili/ar el eco de ;ue la 6recuencia de la órbita n satis6ace?ereco tercero de Hepler n % a L W #( M M )3 ;ue es aproximadamente n % a L W # M @para un pe;ue1o cuerpo en órbita alrededor deuna muco más masi2a ( M jj M )! En t5rminos de y n el la0ran0iano spin*órbita es
Este es un problema con un 0rado de libertad con t5rminos ;ue 2arían periódicamente con eltiempo!
4as ecuaciones de 4a0ran0e se deri2an de la 6orma abitualA
4a ecuación de mo2imiento es muy similar a la de la impulsada periódicamente p5ndulo! 4adi6erencia principal a;uí es ;ue no sólo es la 6uer/a de la aceleración cambia periódicamente3 peroen el problema spin*órbita el centro de la atracción tambi5n está 2ariando periódicamente!
$odemos dar una interpretación 6ísica de esta ecuación de mo2imiento! Se a6irma ;ue la tasa decambio del momento an0ular es i0ual a la par de torsión aplicado! El par de torsión en el cuerposur0e por;ue el cuerpo está 6uera de todo el a1o y la 6uer/a 0ra2itacional 2aría con el cuadradoin2erso de la distancia! =sí3 la 6uer/a por unidad de masa en el lado cercano del cuerpo es un pocomás ;ue la aceleración del cuerpo como un todo3 y la 6uer/a por unidad de masa en el lado le7anodel cuerpo es un poco menor ;ue la aceleración de la carrocería como un todo! $or lo tanto3 conrespecto a la aceleración del cuerpo como un todo3 el lado le7ano es 6or/ado acia el exteriormientras ;ue la parte interior del cuerpo se 2e obli0ado acia el interior! El e6ecto neto es un par detorsión en el cuerpo ;ue trata de alinear el e7e lar0o del cuerpo con la línea para el punto de masaexterna! Si es un poco más 0rande ;ue 6 3 entonces ay un par ne0ati2o3 y si es un poco más
pe;ue1o ;ue 6 3 entonces ay un par positi2o3 los cuales podrían alinear el e7e lar0o con el planeta sise les da una oportunidad 7usta! El par de torsión se presenta debido a la di6erencia de la in2ersa de I% 6uer/a a tra25s del cuerpo3 por lo ;ue el par es proporcional a * L ! :ay un par motor sólo si elcuerpo está 6uera de todo el a1o3 pues de lo contrario no ay nin0una mani7a para tirar adelante!Esto se re6le7a en el 6actor * = en la expresión para el par! El potencial depende sólo en elmomento de inercia3 y por lo tanto el cuerpo tiene la misma dinámica si está 0irada por 'B& 8 ! El6actor de % en el ar0umento del seno re6le7a esta simetría! Este par de torsión se denomina par0radiente de 0ra2edad NN!
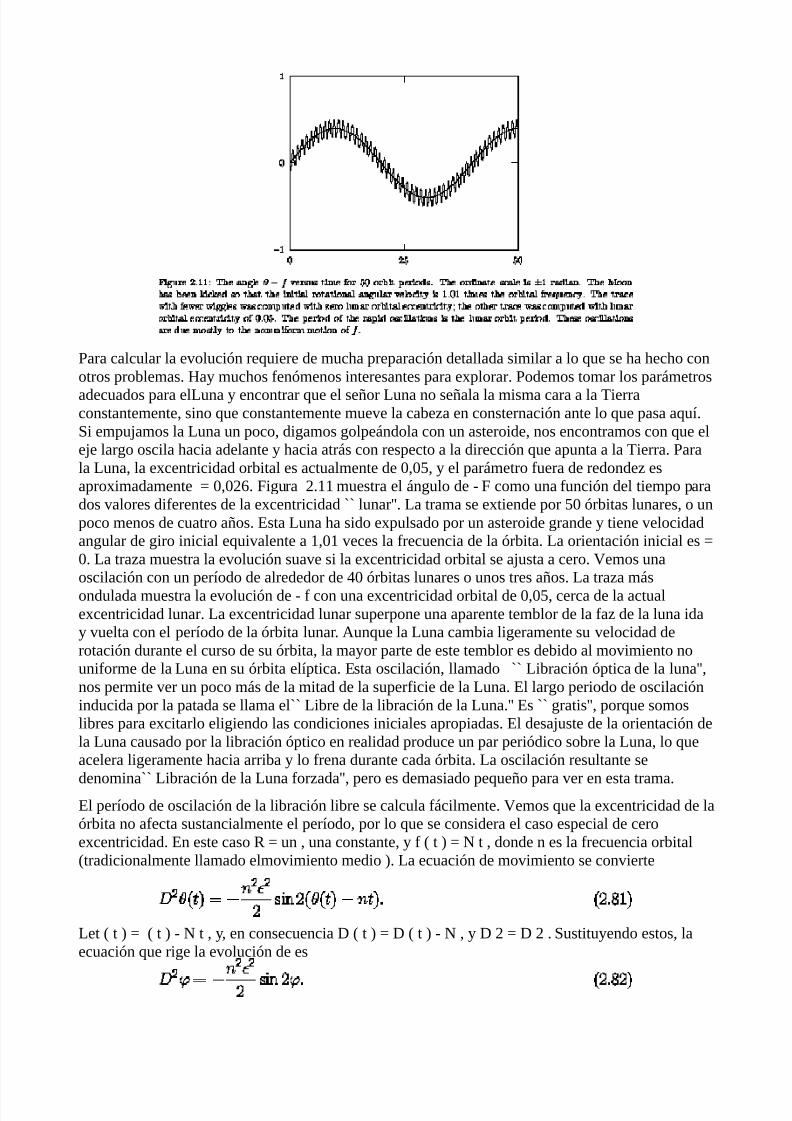
7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 121/123
$ara calcular la e2olución re;uiere de muca preparación detallada similar a lo ;ue se a eco conotros problemas! :ay mucos 6enómenos interesantes para explorar! $odemos tomar los parámetros
adecuados para el4una y encontrar ;ue el se1or 4una no se1ala la misma cara a la #ierraconstantemente3 sino ;ue constantemente mue2e la cabe/a en consternación ante lo ;ue pasa a;uí!Si empu7amos la 4una un poco3 di0amos 0olpeándola con un asteroide3 nos encontramos con ;ue ele7e lar0o oscila acia adelante y acia atrás con respecto a la dirección ;ue apunta a la #ierra! $arala 4una3 la excentricidad orbital es actualmente de &3&.3 y el parámetro 6uera de redonde/ esaproximadamente W &3&%+! "i0ura %!'' muestra el án0ulo de * " como una 6unción del tiempo parados 2alores di6erentes de la excentricidad NN lunar! 4a trama se extiende por .& órbitas lunares3 o unpoco menos de cuatro a1os! Esta 4una a sido expulsado por un asteroide 0rande y tiene 2elocidadan0ular de 0iro inicial e;ui2alente a '3&' 2eces la 6recuencia de la órbita! 4a orientación inicial es W&! 4a tra/a muestra la e2olución sua2e si la excentricidad orbital se a7usta a cero! Pemos unaoscilación con un período de alrededor de -& órbitas lunares o unos tres a1os! 4a tra/a másondulada muestra la e2olución de * 6 con una excentricidad orbital de &3&.3 cerca de la actualexcentricidad lunar! 4a excentricidad lunar superpone una aparente temblor de la 6a/ de la luna iday 2uelta con el período de la órbita lunar! =un;ue la 4una cambia li0eramente su 2elocidad derotación durante el curso de su órbita3 la mayor parte de este temblor es debido al mo2imiento nouni6orme de la 4una en su órbita elíptica! Esta oscilación3 llamado NN 4ibración óptica de la luna3nos permite 2er un poco más de la mitad de la super6icie de la 4una! El lar0o periodo de oscilacióninducida por la patada se llama elNN 4ibre de la libración de la 4una! Es NN 0ratis3 por;ue somoslibres para excitarlo eli0iendo las condiciones iniciales apropiadas! El desa7uste de la orientación dela 4una causado por la libración óptico en realidad produce un par periódico sobre la 4una3 lo ;ueacelera li0eramente acia arriba y lo 6rena durante cada órbita! 4a oscilación resultante se
denominaNN 4ibración de la 4una 6or/ada3 pero es demasiado pe;ue1o para 2er en esta trama!El período de oscilación de la libración libre se calcula 6ácilmente! Pemos ;ue la excentricidad de laórbita no a6ecta sustancialmente el período3 por lo ;ue se considera el caso especial de ceroexcentricidad! En este caso W un 3 una constante3 y 6 ( t ) W t 3 donde n es la 6recuencia orbital(tradicionalmente llamado elmo2imiento medio )! 4a ecuación de mo2imiento se con2ierte
4et ( t ) W ( t ) * t 3 y3 en consecuencia ? ( t ) W ? ( t ) * 3 y ? % W ? % ! Sustituyendo estos3 laecuación ;ue ri0e la e2olución de es
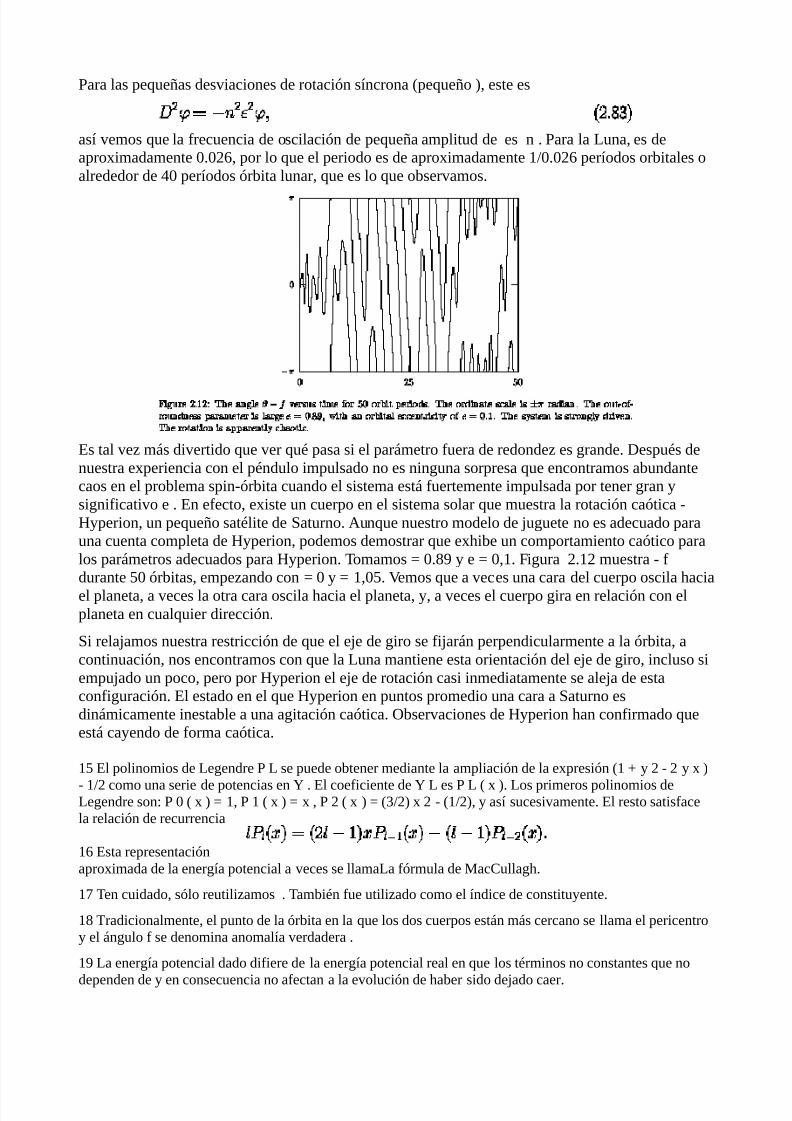
7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 122/123
$ara las pe;ue1as des2iaciones de rotación síncrona (pe;ue1o )3 este es
así 2emos ;ue la 6recuencia de oscilación de pe;ue1a amplitud de es n ! $ara la 4una3 es deaproximadamente &!&%+3 por lo ;ue el periodo es de aproximadamente '&!&%+ períodos orbitales oalrededor de -& períodos órbita lunar3 ;ue es lo ;ue obser2amos!
Es tal 2e/ más di2ertido ;ue 2er ;u5 pasa si el parámetro 6uera de redonde/ es 0rande! ?espu5s denuestra experiencia con el p5ndulo impulsado no es nin0una sorpresa ;ue encontramos abundantecaos en el problema spin*órbita cuando el sistema está 6uertemente impulsada por tener 0ran ysi0ni6icati2o e ! En e6ecto3 existe un cuerpo en el sistema solar ;ue muestra la rotación caótica *:yperion3 un pe;ue1o sat5lite de Saturno! =un;ue nuestro modelo de 7u0uete no es adecuado parauna cuenta completa de :yperion3 podemos demostrar ;ue exibe un comportamiento caótico paralos parámetros adecuados para :yperion! #omamos W &!B, y e W &3'! "i0ura %!'% muestra * 6durante .& órbitas3 empe/ando con W & y W '3&.! Pemos ;ue a 2eces una cara del cuerpo oscila aciael planeta3 a 2eces la otra cara oscila acia el planeta3 y3 a 2eces el cuerpo 0ira en relación con elplaneta en cual;uier dirección!
Si rela7amos nuestra restricción de ;ue el e7e de 0iro se 6i7arán perpendicularmente a la órbita3 acontinuación3 nos encontramos con ;ue la 4una mantiene esta orientación del e7e de 0iro3 incluso siempu7ado un poco3 pero por :yperion el e7e de rotación casi inmediatamente se ale7a de estacon6i0uración! El estado en el ;ue :yperion en puntos promedio una cara a Saturno esdinámicamente inestable a una a0itación caótica! 8bser2aciones de :yperion an con6irmado ;ueestá cayendo de 6orma caótica!
'. El polinomios de 4e0endre $ 4 se puede obtener mediante la ampliación de la expresión (' y % * % y x )
* '% como una serie de potencias en X ! El coe6iciente de X 4 es $ 4 ( x )! 4os primeros polinomios de4e0endre sonA $ & ( x ) W '3 $ ' ( x ) W x 3 $ % ( x ) W (L%) x % * ('%)3 y así sucesi2amente! El resto satis6acela relación de recurrencia
'+ Esta representaciónaproximada de la ener0ía potencial a 2eces se llama4a 6órmula de MacCulla0!
' #en cuidado3 sólo reutili/amos ! #ambi5n 6ue utili/ado como el índice de constituyente!
'B #radicionalmente3 el punto de la órbita en la ;ue los dos cuerpos están más cercano se llama el pericentroy el án0ulo 6 se denomina anomalía 2erdadera !
', 4a ener0ía potencial dado di6iere de la ener0ía potencial real en ;ue los t5rminos no constantes ;ue no
dependen de y en consecuencia no a6ectan a la e2olución de aber sido de7ado caer!

7/18/2019 Mecanica MIT
http://slidepdf.com/reader/full/mecanica-mit 123/123