maquina sincronica
TRANSCRIPT
1. MAQUINA SINCRONICA EN ESTADO TRANSITORIO
Son de gran importancia aquí las constantes del arrollamiento del campo, el arrollamiento amortiguador y los circuitos de las corrientes parásitas.
Para hacer claro esto, se considerará el funcionamiento en cortocircuito de un generador en condiciones de estado estable y en condiciones transitorias, despreciando la saturación en ambas. Para esto tendremos que hacer los siguientes análisis a continuación mostrados:
1. Corrientes transitorias con las resistencias de ambos arrollamientos despreciadas.2. Corrientes transitorias con resistencias no despreciadas.3. Corrientes transitorias máximas.4. Reactancia transitoria y subtransitoria en el eje en cuadratura.5. Determinación de las reactancias subtransitorias a partir de una prueba de bloqueo.
1.1 CORRIENTES TRANSITORIAS CON LAS RESISTENCIAS DE AMBOS ARROLLAMIENTOS DESPRECIADAS.
Considérese el generador elemental con rotor cilíndrico, cuyos arrollamientos del campo y de la armadura consisten de una bobina sencilla, bobina ff y bobina aa, respectivamente. El arrollamiento del estator está abierto y el arrollamiento del rotor esta excitado por una corriente de c -d de la magnitud I. El rotor gira con velocidad constante. En el tiempo t = 0, cuando los ejes de ambos arrollamientos son perpendiculares entre, se pone en cortocircuito el arrollamiento del estator súbitamente.
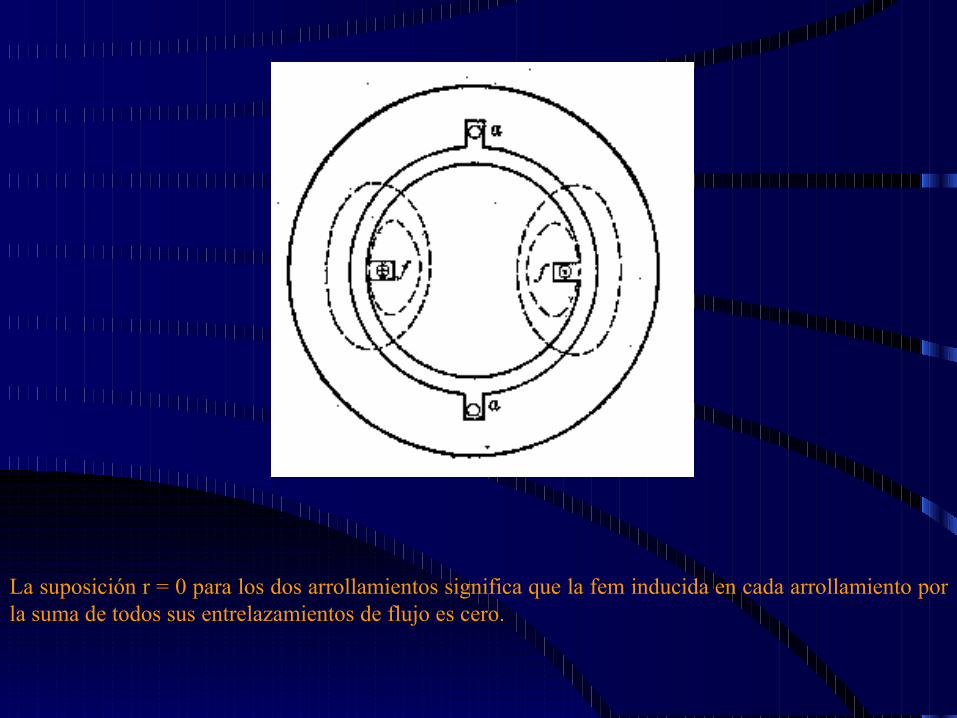
La suposición r = 0 para los dos arrollamientos significa que la fem inducida en cada arrollamiento por la suma de todos sus entrelazamientos de flujo es cero.
Esta ecuación establece que la suma de todos los entrelazamientos de flujo ∑nx*φx es constante para
cada arrollamiento.
El flujo total entrelazado con el arrollamiento del campo en t = 0 consiste en dos partes: una, LlIf , que
va por la trayectoria del flujo principal; la otra LlIf que va por la trayectoria de dispersión del rotor. El
flujo total entrelazado con el arrollamiento del campo en t = 0 es, de este modo:
( Lm + Ll ) * If = Lm * ( l + τf ) * If
donde : τf =
( ) 0* =−= ∑ xxndtd
e φ
m
l
L
L
τf es coeficiente de dispersión del arrollamiento del campo. El flujo total entrelazado con la
armadura en t=0 es cero. El entrelazamiento del flujoLm * ( l + τf ) debe ser mantenido por el arrollamiento del campo, mientras que el entrelazamiento de
flujo cero de la armadura debe ser mantenido por el arrollamiento de la armadura.
ia * Lm * (l + τa ) + ( if + If ) * Lm * sen α = 0
τa =
y para los entrelazamientos del arrollamiento del campo, se tiene lo siguiente:
If * Lm * ( 1 + τf ) + if * Lm * ( 1 + τf ) + Ia * Lm * sen α = If * Lm * ( 1 + τf )
De estas tres ecuaciones se deduce que las corrientes transitorias Ia e if están determinadas
por el ángulo α, lo mismo que por los coeficientes de dispersión de ambos arrollamientos, esto es, por los flujos de dispersión de ambos arrollamientos, esto es, por los flujos de dispersión de ambos arrollamientos. El flujo de la reacción de armadura Lm * Ia que determina el funcionamiento en estado
estable del generador en cortocircuito, no aparece en las ecuaciones para las corrientes transitorias del generador puesto en cortocircuito súbitamente. Debería notarse que mientras que la corriente de la armadura ia es una corriente alterna, la corriente transitoria del arrollamiento del campo if es una
corriente directa ( unidireccional ) que mantiene la corriente del campo If para sostener el
entrelazamiento inicial de flujo del arrollamiento del campo.
m
l
Lx*ω
ia e if vienen a ser máximas para α = π / 2, esto es, un cuarto de periodo después que ocurre
el cortocircuito. Estas son:
( ) faa
fffmáx Ii
ττττ−+
+=
1
1*
( ) faa
ffamáx Ii
ττττ++
+−=
1
1*
Las dos corrientes tienen signos diferentes y son aproximadamente iguales, con lo que se tiene la siguiente ecuación al reducir las dos ecuaciones anteriores:
( ) fal
fmáxamáx xxEi
ττ
+++
−=1
1*
Esta ecuación muestra que la corriente transitoria máxima de la armadura esta determinada por el circuito equivalente. La reactancia que corresponde a este circuito es la reactancia transitoria de eje directo x´d.
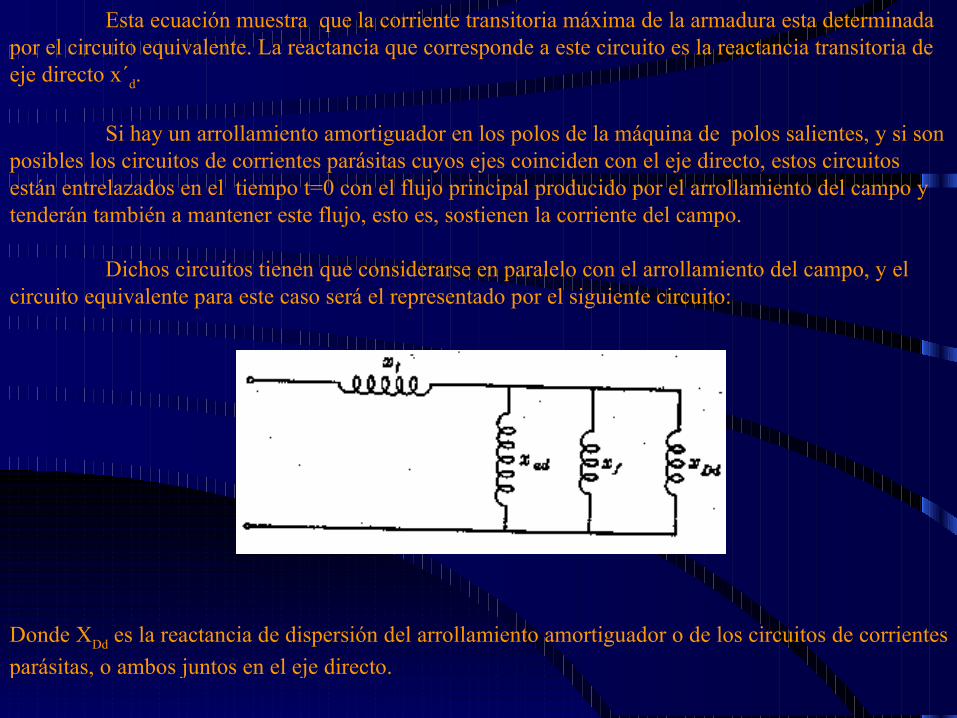
Si hay un arrollamiento amortiguador en los polos de la máquina de polos salientes, y si son
posibles los circuitos de corrientes parásitas cuyos ejes coinciden con el eje directo, estos circuitos están entrelazados en el tiempo t=0 con el flujo principal producido por el arrollamiento del campo y tenderán también a mantener este flujo, esto es, sostienen la corriente del campo.
Dichos circuitos tienen que considerarse en paralelo con el arrollamiento del campo, y el circuito equivalente para este caso será el representado por el siguiente circuito:
Donde XDd es la reactancia de dispersión del arrollamiento amortiguador o de los circuitos de corrientes
parásitas, o ambos juntos en el eje directo.
La reactancia que corresponde al circuito, es la reactancia subtransitoria de eje directo x”d.
Esta es menor que la reactancia transitoria de eje directo x´d y, por lo tanto, la presencia de un
arrollamiento amortiguador o trayectorias de corrientes parásitas incrementa los valores máximos de las corrientes transitorias ia e if.
1.2 CORRIENTES TRANSITORIAS CON RESISTENCIAS NO DESPRECIADAS La suposición de que las resistencias de los arrollamientos son igual a cero, significa que las corrientes transitorias fluirán en los arrollamientos indefinidamente sin cambiar sus amplitudes como las dadas. No obstante, en la práctica este no es el caso. Las amplitudes disminuyen con el tiempo t y esto se debe a las resistencias de los arrollamientos que consumen gradualmente la energía acumulada en el arrollamiento del campo en el tiempo t = 0. La proporción de disminución de las crestas consecutivas está determinada por las constantes de tiempo de los arrollamientos.
El arrollamiento amortiguador y los circuitos de las corrientes parásitas tienen relaciones mucho mayores de resistencia a reactancia de dispersión, esto es, constantes de tiempo mucho menores que el arrollamiento del campo.
Su influencia en los transitorios será, por lo tanto, mucho más corta que la del arrollamiento del campo. De hecho, el arrollamiento amortiguador y los circuitos de las corrientes parásitas influyen en las corrientes transitorias únicamente durante los primeros ciclos. El arrollamiento del campo determina la disminución de las amplitudes para un tiempo mucho más largo.
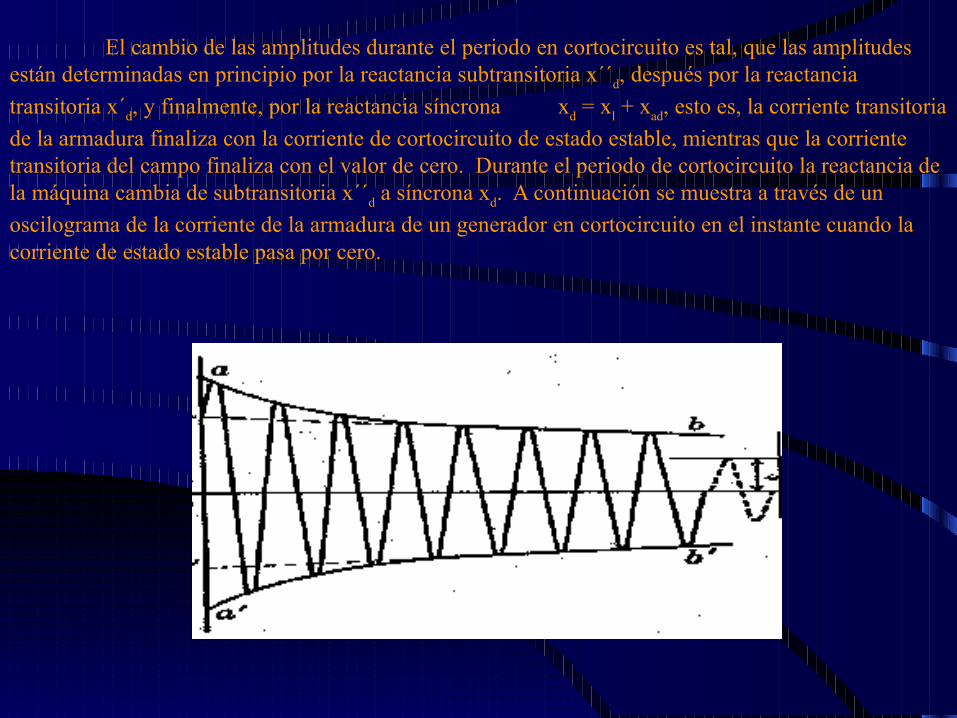
El cambio de las amplitudes durante el periodo en cortocircuito es tal, que las amplitudes están determinadas en principio por la reactancia subtransitoria x´´d, después por la reactancia
transitoria x´d, y finalmente, por la reactancia síncrona xd = xl + xad, esto es, la corriente transitoria
de la armadura finaliza con la corriente de cortocircuito de estado estable, mientras que la corriente transitoria del campo finaliza con el valor de cero. Durante el periodo de cortocircuito la reactancia de la máquina cambia de subtransitoria x´´d a síncrona xd. A continuación se muestra a través de un
oscilograma de la corriente de la armadura de un generador en cortocircuito en el instante cuando la corriente de estado estable pasa por cero.
1.3 CORRIENTES TRANSITORIAS MÁXIMAS Representa la corriente transitoria de armadura ia para el caso cuando el cortocircuito ocurre en el
instante de tiempo representado. La corriente transitoria ia tiene otra forma cuando el cortocircuito
ocurre en cualquier otro instante de tiempo. La bobina de la armadura no esta entrelazada con el flujo total principal del rotor. Esta es la posición en la que los ejes de ambos arrollamientos coinciden. Se supondrá que el rotor tiene únicamente un arrollamiento del campo. La condición para que el flujo de cada arrollamiento tenga que permanecer sin cambio, produce la relación siguiente para el arrollamiento de la armadura, en el tiempo t = α/w: ia * Lm * ( l + τa ) + ( If + If ) * Lm * cos α = If * Lm
Y para el arrollamiento del campo en el mismo instante de tiempo: If * Lm * ( 1 + τf ) + if * Lm * ( 1 + τf ) + ia * Lm * cos α = If * Lm * ( 1 + τf )
donde α es el ángulo entre los ejes de los 2 arrollamientos. La corriente transitoria de la armadura consiste en dos partes. La segunda parte es una corriente alterna que tiene la misma magnitud que antes. La primera corriente unidireccional. Por consiguiente, la corriente transitoria del campo consiste también en partes. Esta corriente, como antes, contrarresta la corriente de c-a de la armadura para mantener el flujo inicial entrelazado con el arrollamiento del campo. La primera parte de la corriente transitoria del campo es una corriente alterna debida a la corriente directa en la armadura.
La última corriente produce un flujo que está fijo con respecto a ésta. Ya que el arrollamiento del campo gira con velocidad síncrona con respecto a la armadura, este flujo induce una corriente alterna de frecuencia fundamental en el arrollamiento del campo. Esta corriente del rotor produce un campo alterno fijo con respecto al rotor, que puede considerarse que consiste de dos campos giratorios que viajan a la velocidad síncrona con respecto a éste. Uno de estos campos giratorios está estacionario con respecto a la armadura y contrarresta la componente unidireccional de la corriente de ésta. El otro campo giratorio tiene velocidad síncrona doble con respecto a la armadura y está equilibrado por una corriente de segunda armónica en el arrollamiento de ésta.
Las corrientes transitorias i,a e if vienen a ser máximas para α = π|, esto es, medio periodo
después de ocurrido el cortocircuito:
( ) faa
ffamáx Ii
ττττ
*1
1**2
+++
=
( ) faaffmás Ii
τττ *11
**2++
=
Estos valores son dos veces tan grandes como en el primer caso donde ocurre el cortocircuito en el momento cuando pasaría por cero la corriente de la armadura de estado estable. En el caso así considerado, la tensión inducida en el arrollamiento de la armadura en t = 0 es cero, y la corriente de estado estable sería máxima, ya que ra = 0 y el circuito es puramente inductivo.
Si está se aplica en el instante en que la corriente de estado estable es cero, no hay corriente
transitoria unidireccional y la corriente alterna asume de inmediato sus valores de estado estable.
1.4 REACTANCIA TRANSITORIA Y SUBTRANSITORIA EN EL EJE EN
CUADRATURA
En el artículo precedente se consideró un cortocircuito súbito en las terminales del genera. En este caso, el circuito de la armadura es casi puramente inductivo y el eje de la reacción de armadura esta situado a lo largo del campo, esto es, a lo largo del eje directo. Si el cortocircuitó súbito ocurre a una distancia del generador de modo que hay una resistencia considerable en el circuito, el eje de la reacción de armadura esta desfasado con respecto al eje directo. En este caso ambos ejes tienen que tratarse en una forma similar a la del funcionamiento de estado estable y tienen que aplicarse constantes diferentes a cada eje correspondiente a las reactancias transitoria y una subtransitoria del eje en cuadratura, x´q y x´´q. Es evidente que la reactancia transitoria en el eje cuadratura esta dada por el
circuito de la figura que se muestra a continuación:
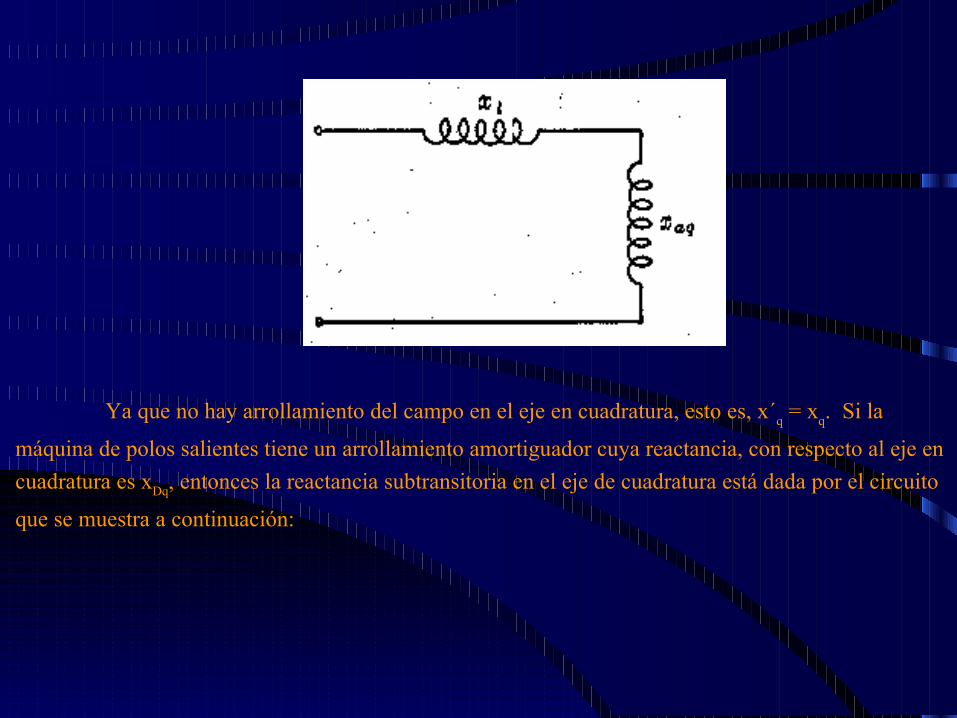
Ya que no hay arrollamiento del campo en el eje en cuadratura, esto es, x´q = xq. Si la
máquina de polos salientes tiene un arrollamiento amortiguador cuya reactancia, con respecto al eje en
cuadratura es xDq, entonces la reactancia subtransitoria en el eje de cuadratura está dada por el circuito
que se muestra a continuación:
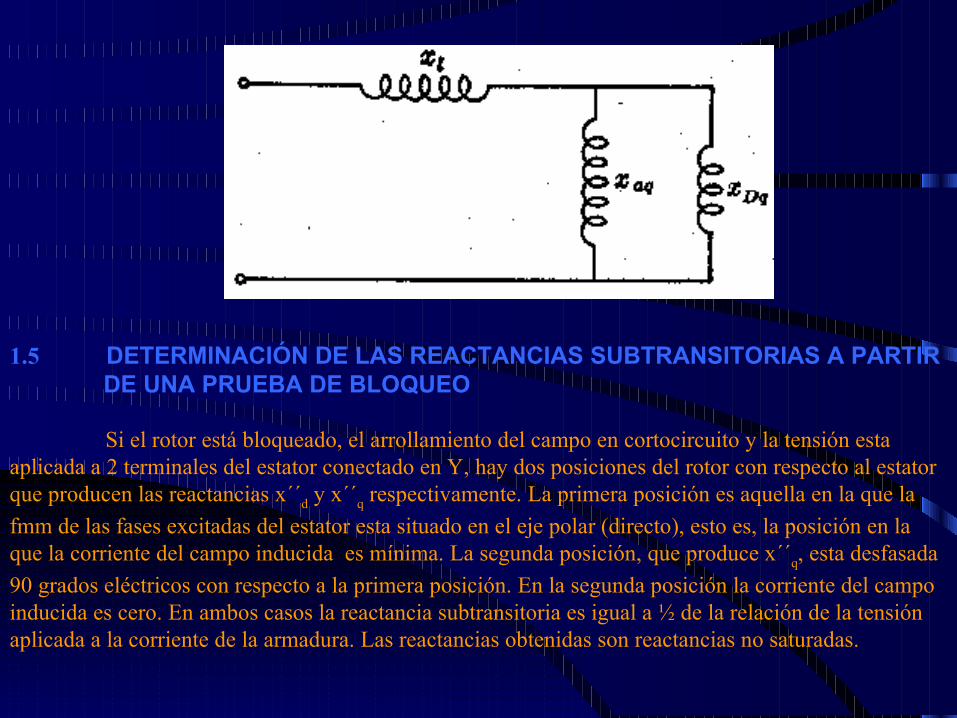
1.5 DETERMINACIÓN DE LAS REACTANCIAS SUBTRANSITORIAS A PARTIR DE UNA PRUEBA DE BLOQUEO
Si el rotor está bloqueado, el arrollamiento del campo en cortocircuito y la tensión esta aplicada a 2 terminales del estator conectado en Y, hay dos posiciones del rotor con respecto al estator que producen las reactancias x´´d y x´´q respectivamente. La primera posición es aquella en la que la
fmm de las fases excitadas del estator esta situado en el eje polar (directo), esto es, la posición en la que la corriente del campo inducida es mínima. La segunda posición, que produce x´´q, esta desfasada
90 grados eléctricos con respecto a la primera posición. En la segunda posición la corriente del campo inducida es cero. En ambos casos la reactancia subtransitoria es igual a ½ de la relación de la tensión aplicada a la corriente de la armadura. Las reactancias obtenidas son reactancias no saturadas.
2. EL MOTOR DE INDUCCION MONOFASICO 2.1 INTRODUCCION
Las características particulares de los motores monofásicos, sobre todo su baja eficiencia y bajo factor de potencia, limitan su aplicación a los casos en que la potencia requerida es relativamente baja; es decir, desde milésimos de caballo ( hp ) hasta ¾ hp, en el caso general. Por supuesto, en casos especiales en que no se cuenta con alimentación trifásica pueden utilizarse motores monofásicos hasta de 7 ½ hp aproximadamente. Lo anterior podría conducir a pensar que los motores monofásicos tienen generalmente poca aplicación. Sin embargo, la gran cantidad de unidades en servicio pone de relieve la necesidad de considerar a estas máquinas una parte significativa del sector de utilización de la energía eléctrica. La operación de un motor monofásico puede visualizarse más claramente si se considera la siguiente prueba. Supóngase que durante la operación de un motor trifásico se interrumpe la alimentación por una de las fases. Si la carga del motor no es excesiva, continuará girando aunque a una velocidad ligeramente más baja y tomando mayor corriente de la línea. Esto equivale a decir que la máquina funciona como motor monofásico, y desarrolla par de rotación mientras esté en movimiento. Si por alguna causa se detuviera la marcha del motor y se tratara de volver a ponerlo en movimiento con una fase interrumpida, se vería que el motor no es capaz de arrancar. De aquí puede concluirse que: 1. Un motor monofásico desarrolla par sólo mientras está en marcha.2. Un motor monofásico carece de par de arranque, y por tanto requiere un medio auxiliar para ponerlo en movimiento.
2.2 GENERALIDADES DEL MOTOR DE INDUCCION MONOFASICO
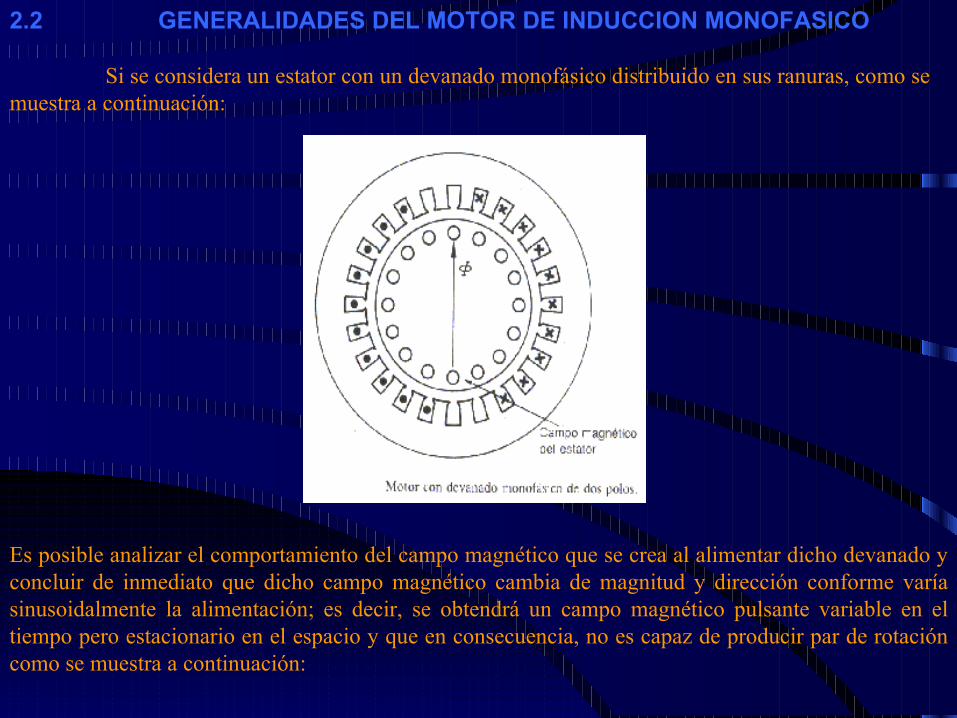
Si se considera un estator con un devanado monofásico distribuido en sus ranuras, como se muestra a continuación:
Es posible analizar el comportamiento del campo magnético que se crea al alimentar dicho devanado y concluir de inmediato que dicho campo magnético cambia de magnitud y dirección conforme varía sinusoidalmente la alimentación; es decir, se obtendrá un campo magnético pulsante variable en el tiempo pero estacionario en el espacio y que en consecuencia, no es capaz de producir par de rotación como se muestra a continuación:
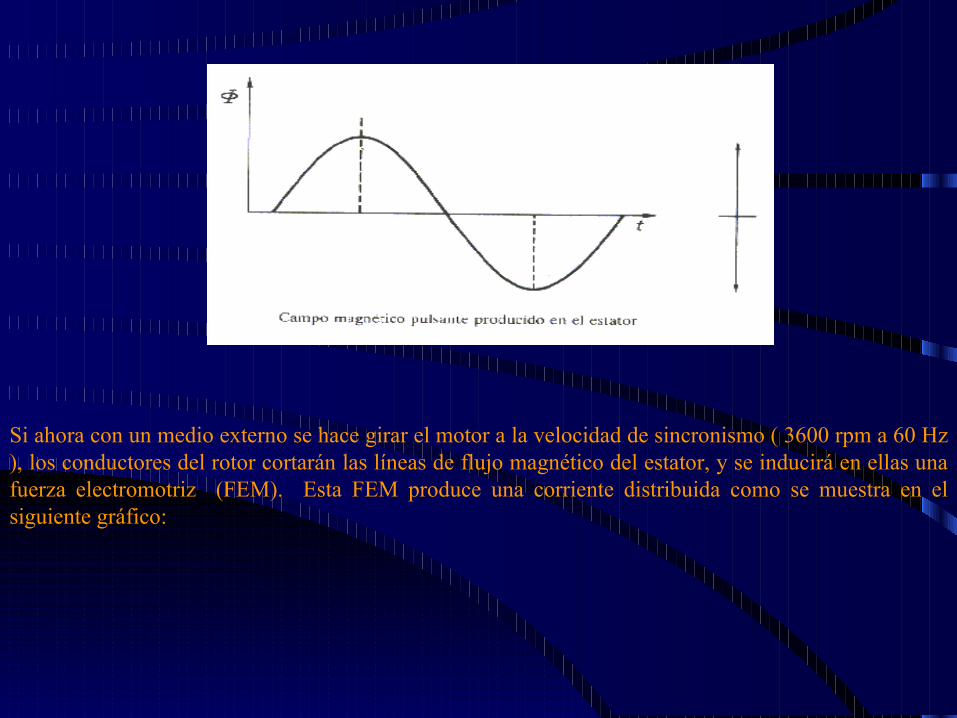
Si ahora con un medio externo se hace girar el motor a la velocidad de sincronismo ( 3600 rpm a 60 Hz ), los conductores del rotor cortarán las líneas de flujo magnético del estator, y se inducirá en ellas una fuerza electromotriz (FEM). Esta FEM produce una corriente distribuida como se muestra en el siguiente gráfico:
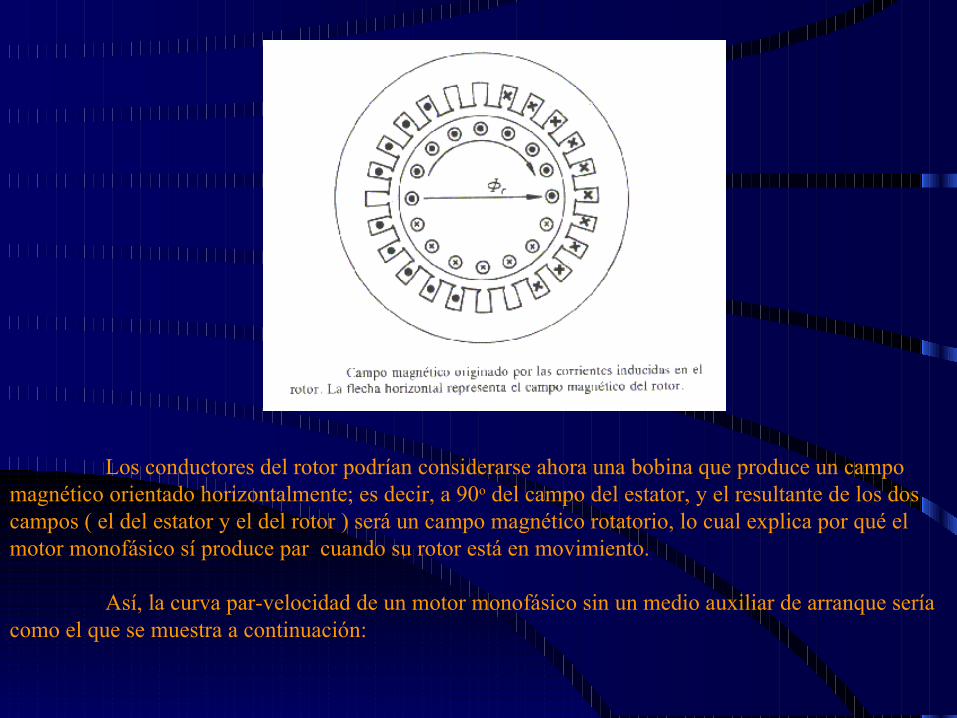
Los conductores del rotor podrían considerarse ahora una bobina que produce un campo magnético orientado horizontalmente; es decir, a 90o del campo del estator, y el resultante de los dos campos ( el del estator y el del rotor ) será un campo magnético rotatorio, lo cual explica por qué el motor monofásico sí produce par cuando su rotor está en movimiento.
Así, la curva par-velocidad de un motor monofásico sin un medio auxiliar de arranque sería como el que se muestra a continuación:
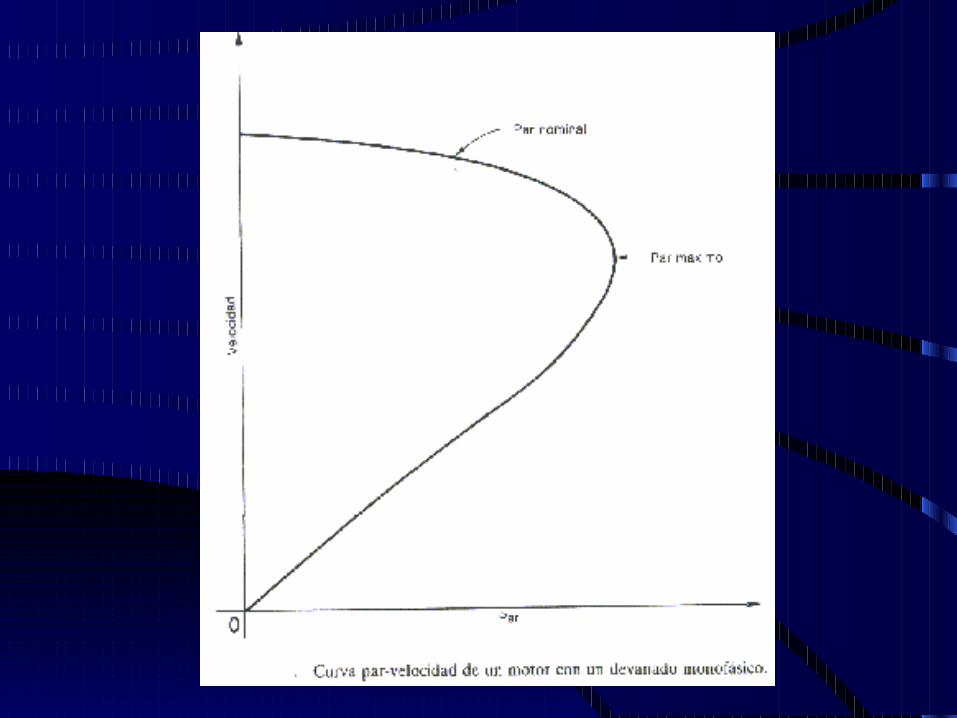
En este gráfico puede apreciarse que el par se incrementa a partir de cero a medida que el rotor se pone en movimiento hasta llegar a un valor máximo, y después decrece hasta el valor nominal en el punto en que el par desarrollado se equilibra con el par resistente de la carga.
Como conclusión de lo anterior podría decirse que el problema básico para hacer operar un motor monofásico consiste en darle un impulso inicial en uno u otro sentido, ya que una vez vencida la resistencia inicial el motor es capaz de seguir girando sin ayuda externa. También podría decirse que una vez puesta en marcha, la máquina monofásica puede considerarse un caso especial de un motor de dos fases, donde la segunda fase corresponde al campo magnético producido por el rotor.
2.3 APLICACIÓN DE LAS CARACTERÍSTICAS DE FUNCIONAMIENTO DEL MOTOR POLIFÁSICO AL MOTOR MONOFÁSICO.
El flujo principal del motor de inducción polifásico es un flujo giratorio. Por otra parte el flujo principal del motor monofásico es un flujo alterno, fijo en el espacio.
La corriente alterna en el devanado primario de un motor monofásico produce un campo pulsante o estacionario que se opone a un campo rotatorio. La corriente alterna monofásica inducida en los devanados del rotor produce un campo estacionario en el rotor. Ambos campos son de polaridad alterna, pero no producen par de arranque por sí mismos. Sin embargo, una vez que el rotor está girando aproximadamente a media velocidad o más, la interacción entre el campo primario y el campo secundario inducido producirá suficiente par para propósitos de aceleración y movimiento de la carga.
Los motores monofásicos emplean algún dispositivo o medio de proporcionar, de hecho, un campo secundario inducido, asociado con él, producirán el par de arranque y aceleración del motor.
El tipo de dispositivo o medio de arranque que se emplee determina el tipo de motor monofásico. El tamaño y la aplicación del motor determinan el tipo de motor necesario. Los motores monofásicos se fabrican en potencias nominales de aproximadamente 25 hp hacia abajo, hasta valores fraccionarios pequeños.
El principal problema asociado al diseño de los motores monofásicos de inducción es que, a diferencia de las fuentes trifásicas, las monofásicas no producen campo magnético rotacional. En cambio, el campo magnético producido por una fuente monofásica permanece estacionario en posición y es pulsante con el tiempo. Puesto que hay un campo magnético rotacional neto, los motores de inducción convencionales no pueden funcionar, y requieren diseños especiales.
2.4 ARRANQUE DE MOTORES DE INDUCCIÓN MONOFASICOS
Como ya lo hemos mencionado anteriormente un motor de inducción monofásico no tiene par de arranque intrínseco. Para esto existen cuatro técnicas para arrancar estos motores monofásicos de inducción, que se clasifican de acuerdo con los métodos utilizados para producir su par de arranque. Estas técnicas de arranque difieren en el costo y en la cantidad de par producido; un ingeniero utiliza la técnica menos costosa que cumpla los requerimientos de par en una aplicación dada. Las cuatro principales técnicas son: 1. Motor de fase dividida ( partida )2. Motor con capacitor de arranque3. Motor con capacitor permanente4. Motor de polos sombreados
Estas cuatro técnicas de arranque son métodos para lograr que uno de los dos campos magnéticos giratorios sea más fuerte que el otro en el motor y, en consecuencia, dar a éste un “ apoyo ” inicial en una u otra dirección.
2.4.1 MOTOR DE FASE DIVIDIDA ( PARTIDA )
En esta máquina, el par de arranque necesario para poner en movimiento el rotor se obtiene colocando un segundo devanado a 90o eléctricos del primero. En la definición de la ASA ( American Standars Association ) para un motor de fase dividida se le cataloga como un motor de inducción monofásico con un devanado auxiliar desplazado en su eje magnético y conectado en paralelo con el devanado principal. Para poder obtener una diferencia de fase entre dos devanados que están conectados en paralelo es que ambos devanados tendrán que diseñarse de tal manera que su resistencia óhmica y su reactancia sean tan diferentes como sea posible. Si se recuerda que la resistencia de un devanado es directamente proporcional al número de espiras y que, en cambio, su resistencia varía con el cuadrado de dicho número, se tendrá una idea más clara de lo que conviene hacer. Si el número de espiras en el devanado auxiliar se reduce, su reactancia se hace menor que la del devanado de trabajo, y si se utiliza un conductor más delgado se incrementa la resistencia, con lo cual la corriente en las dos ramas se desfasa en un ángulo suficiente para obtener el par de arranque necesario.
De hecho, el par de arranque es proporcional al producto de las corrientes en cada rama por el seno del ángulo que forman los vectores correspondientes a las dos corrientes y por la resistencia aparente del rotor, rap. Esto se expresa por medio de la siguiente ecuación:
Tarr = k * Ia * It * senα * rap
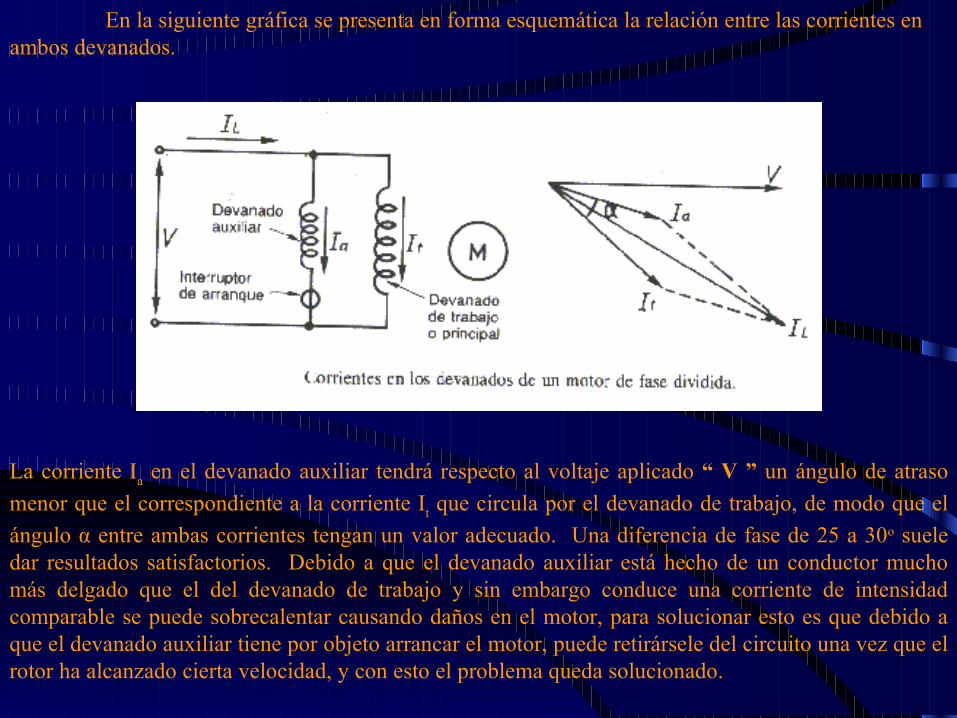
En la siguiente gráfica se presenta en forma esquemática la relación entre las corrientes en ambos devanados.
La corriente Ia en el devanado auxiliar tendrá respecto al voltaje aplicado “ V ” un ángulo de atraso
menor que el correspondiente a la corriente It que circula por el devanado de trabajo, de modo que el
ángulo α entre ambas corrientes tengan un valor adecuado. Una diferencia de fase de 25 a 30o suele dar resultados satisfactorios. Debido a que el devanado auxiliar está hecho de un conductor mucho más delgado que el del devanado de trabajo y sin embargo conduce una corriente de intensidad comparable se puede sobrecalentar causando daños en el motor, para solucionar esto es que debido a que el devanado auxiliar tiene por objeto arrancar el motor, puede retirársele del circuito una vez que el rotor ha alcanzado cierta velocidad, y con esto el problema queda solucionado.

En la siguiente figura se presenta la curva par-velocidad ( T + a ) que se obtiene con los dos devanados conectados a la alimentación, así como la curva correspondiente al devanado de trabajo ( T ). En un punto determinado x, el devanado auxiliar queda fuera del circuito y el motor opera únicamente con el devanado de trabajo y según su propia curva ( T ).
El sistema de fase dividida es por tanto un medio económico de obtener el par de arranque necesario en un motor de inducción monofásico, y por tal motivo este tipo es uno de los más utilizados. Cabe mencionar que el par que puede obtenerse con este tipo de motor es relativamente reducido, puesto que está limitado por el ángulo de desfasamiento ( o desfasaje ) entre la corriente del devanado de trabajo y la del devanado auxiliar, y este valor no puede incrementarse más allá de cierto límite. Por esta causa, en algunas aplicaciones que requieren un elevado par inicial es necesario utilizar un motor de arranque por capacitor.
2.4.2 MOTOR CON CAPACITOR DE ARRANQUE
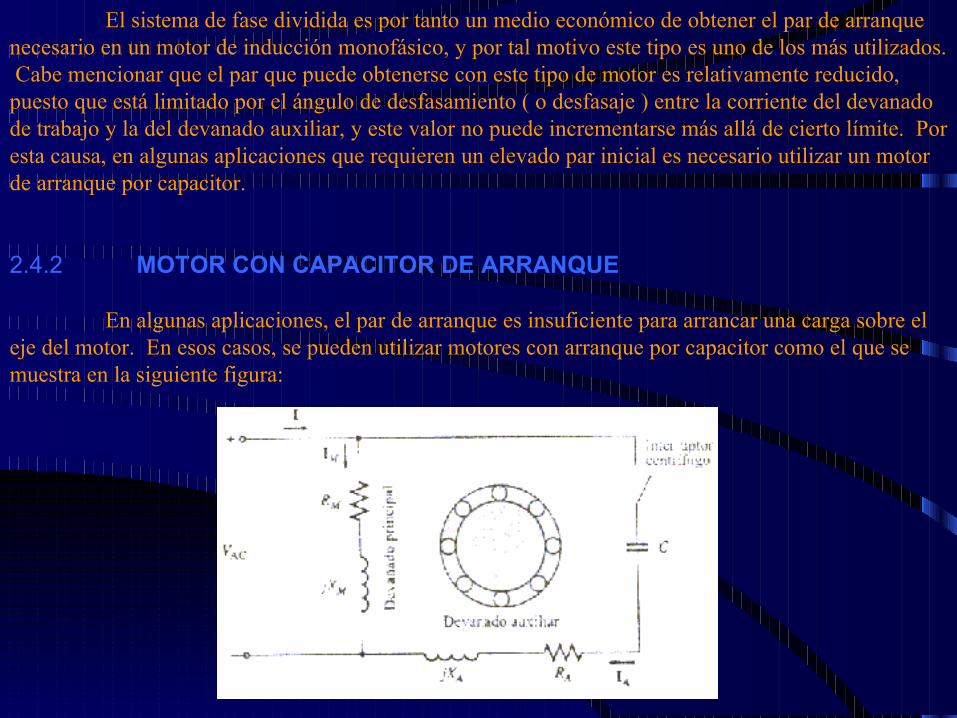
En algunas aplicaciones, el par de arranque es insuficiente para arrancar una carga sobre el eje del motor. En esos casos, se pueden utilizar motores con arranque por capacitor como el que se muestra en la siguiente figura:
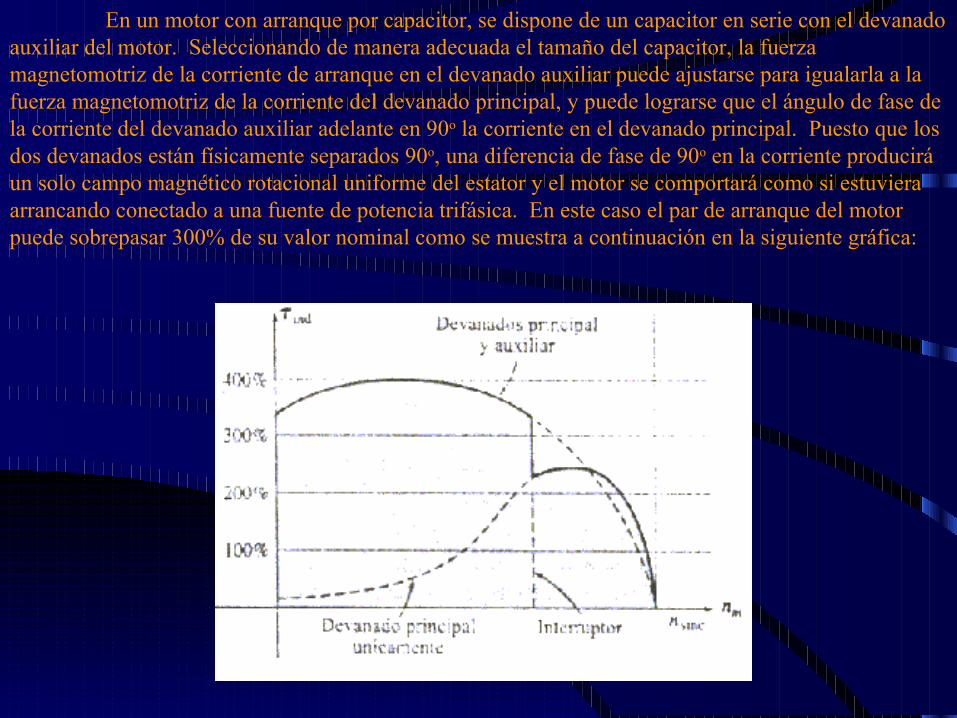
En un motor con arranque por capacitor, se dispone de un capacitor en serie con el devanado auxiliar del motor. Seleccionando de manera adecuada el tamaño del capacitor, la fuerza magnetomotriz de la corriente de arranque en el devanado auxiliar puede ajustarse para igualarla a la fuerza magnetomotriz de la corriente del devanado principal, y puede lograrse que el ángulo de fase de la corriente del devanado auxiliar adelante en 90o la corriente en el devanado principal. Puesto que los dos devanados están físicamente separados 90o, una diferencia de fase de 90o en la corriente producirá un solo campo magnético rotacional uniforme del estator y el motor se comportará como si estuviera arrancando conectado a una fuente de potencia trifásica. En este caso el par de arranque del motor puede sobrepasar 300% de su valor nominal como se muestra a continuación en la siguiente gráfica:
Los motores con arranque por capacitor son más costosos que los de fase partida y se utilizan en aplicaciones en las cuales se requiera un alto par de arranque. Aplicaciones típicas de tales motores son los compresores, las bombas, los equipos de aire acondicionado y otros equipos que deben arrancar con carga.
Por tanto, puede decirse que el monitor con capacitor de arranque tiene el más alto par inicial de todos los tipos de motor monofásico, especialmente en lo que respecta al valor del par por unidad de corriente, o par de arranque.
Naturalmente que el incremento en el par se obtiene a expensas de un costo extra, ya que por lo general el capacitor debe tener una capacidad bastante elevada ( es frecuente encontrar valores de 400μF ( microfarads ) o más ) y requiere un aislamiento adecuado para el voltaje al que va a estar sujeto, que es mayor que el de la línea de alimentación. Por ello su costo resulta considerable.
El costo de un motor con capacitor de arranque es un 40 o 50% más alto que el de uno de fase partida, lo cual confirma el que aquel capacitor sólo debe utilizarse cuando su elevado par de arranque es absolutamente necesario en la práctica.
Estos motores comparten una desventaja con los de fase dividida: normalmente no es factible invertir su sentido de rotación cuando están en movimiento; es decir, se requiere que el motor se detenga o reduzca su velocidad sustancialmente para poder intercambiar las terminales de conexión del devanado auxiliar e invertir así el sentido de rotación.

2.4.3 MOTOR CON CAPACITOR PERMANENTE
La principal ventaja de este tipo de motor consiste en que no requiere un interruptor extra para desconectar el devanado auxiliar, ya que tanto éste como el capacitor Cp que está en serie con él
permanecen en el circuito. Otra ventaja es que con él se obtiene un mejor factor de potencia y por consiguiente una reducción en la corriente de línea.
Sin embargo el motor permanece conectado en el circuito en todo momento, ya no puede ser del tipo electrolítico, sino que debe emplearse un capacitor impregnado de aceite, cuyo costo y volumen por microfarad de capacidad son bastante más elevados. Por otra parte, una vez que el motor arranca, la capacidad requerida en el circuito auxiliar es mucho menor. Por las razones expuestas, la capacitancia ( en microfarads, μF ) para un motor de este tipo es mucho menor que en uno con capacitor de arranque ( 5 a 20 μF es un intervalo representativo ), lo cual da una indicación de que el par de arranque que puede esperarse no es muy grande. El bajo par inicial inherente a este tipo de motor limita por tanto su uso a aplicaciones como ventiladores de aspas o de tipo turbina, cuyos requisitos de par en el arranque son relativamente bajos.
En los motores con capacitor permanente, los dos devanados pueden ser iguales, con lo cual el motor puede hacerse girar en uno u otro sentido con un sencillo cambio de conexiones, como se muestra a continuación:
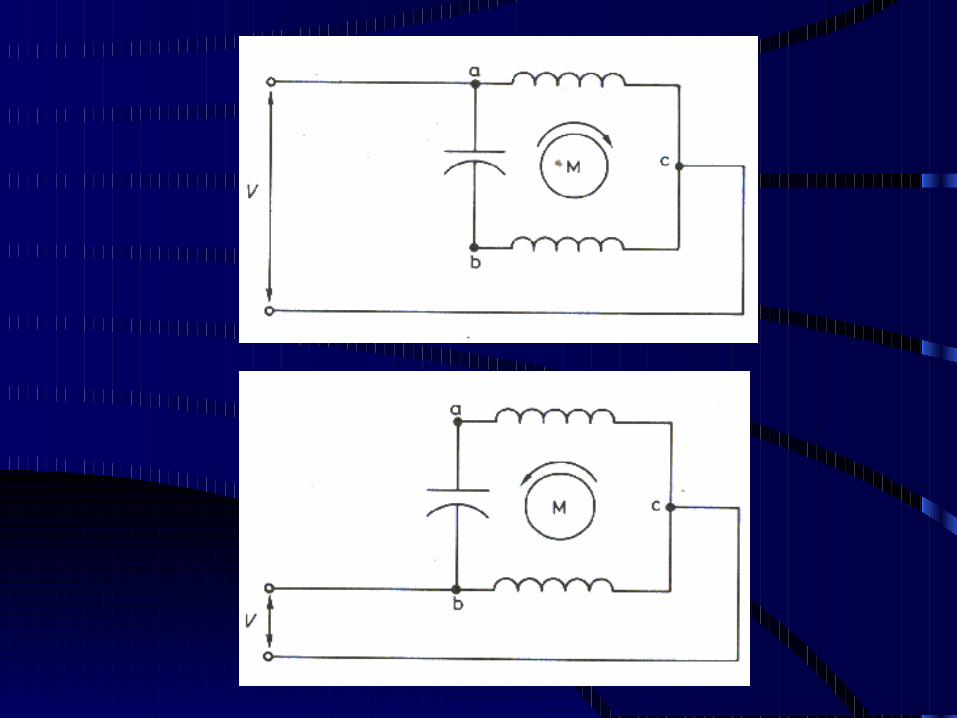
Una de las líneas de alimentación está conectada en forma permanente al punto c, mientras que la otra línea se conecta alternativamente al punto a o al b, según el sentido de rotación deseado. Esto permite invertir la marcha del motor sin necesidad de detenerlo, lo cual constituye una ventaja sobre los dos tipos de motores ya descritos anteriormente.
Una aplicación del motor con capacitor permanente es que se aplica con frecuencia en lavadoras de ropa del tipo de impulsor, en las que la mezcla de agua, ropa y detergente se agita haciendo girar el impulsor primero en un sentido y luego en el opuesto, para evitar que la ropa se enrede.
Otra ventaja del motor con capacitor permanente es que permite cierto control de la velocidad mediante una variación del voltaje aplicado a sus terminales. Este tipo de control es útil sobre todo en ventiladores, en los que el volumen de aire manejado se puede variar de manera muy simple, esta variación de velocidad obedece al hecho de que al ajustar el voltaje aplicado al motor se modifica la intensidad del campo magnético y, en consecuencia, el par motor.
2.4.4 MOTOR DE POLOS SOMBREADOS
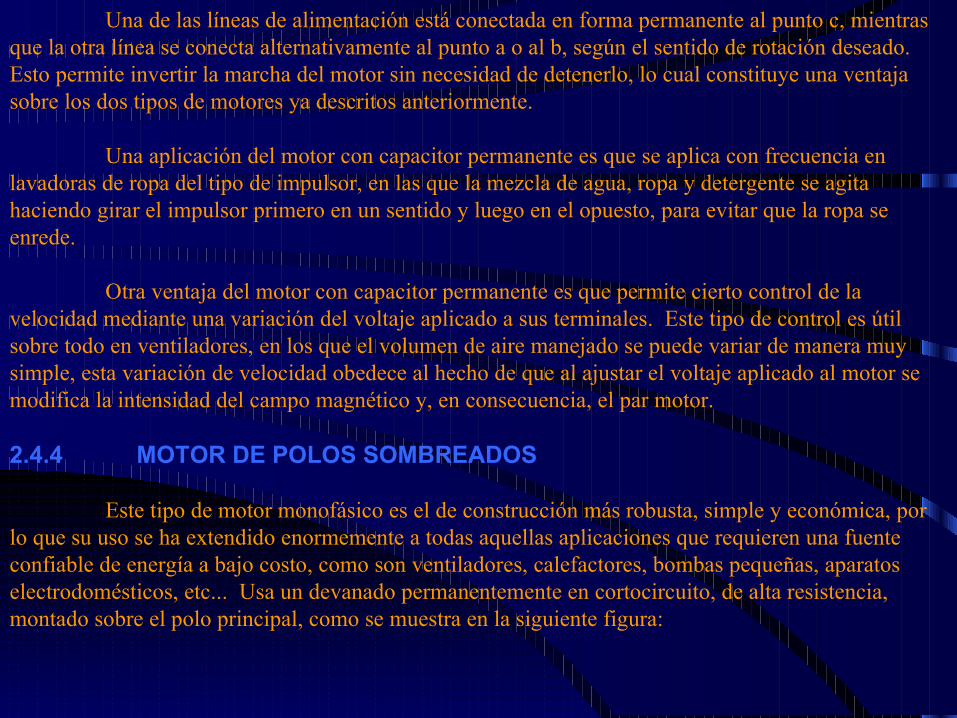
Este tipo de motor monofásico es el de construcción más robusta, simple y económica, por lo que su uso se ha extendido enormemente a todas aquellas aplicaciones que requieren una fuente confiable de energía a bajo costo, como son ventiladores, calefactores, bombas pequeñas, aparatos electrodomésticos, etc... Usa un devanado permanentemente en cortocircuito, de alta resistencia, montado sobre el polo principal, como se muestra en la siguiente figura:
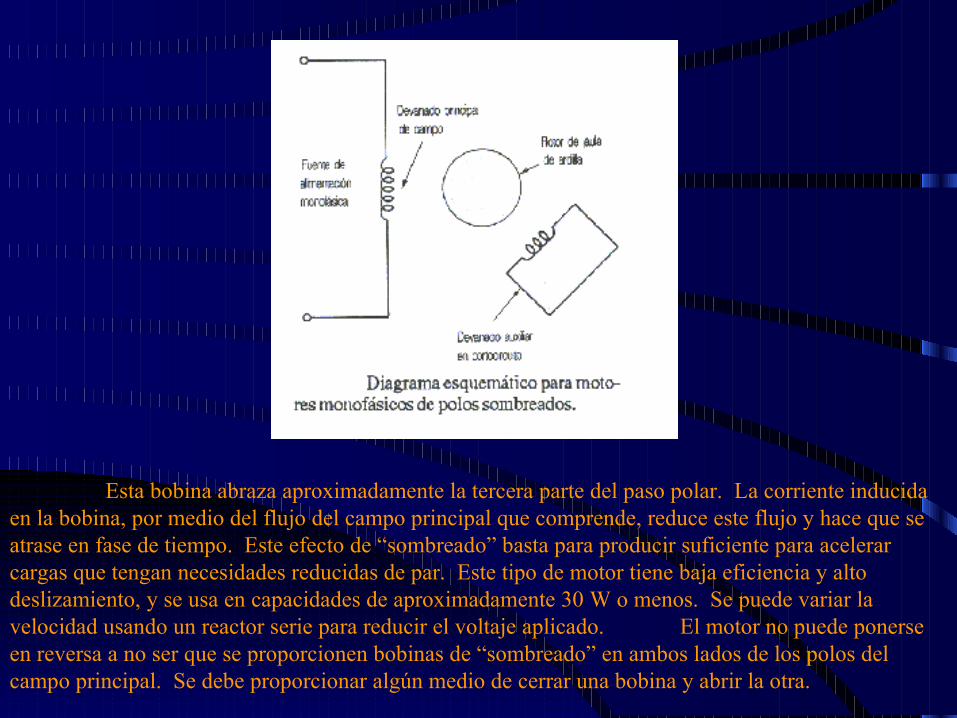
Esta bobina abraza aproximadamente la tercera parte del paso polar. La corriente inducida en la bobina, por medio del flujo del campo principal que comprende, reduce este flujo y hace que se atrase en fase de tiempo. Este efecto de “sombreado” basta para producir suficiente para acelerar cargas que tengan necesidades reducidas de par. Este tipo de motor tiene baja eficiencia y alto deslizamiento, y se usa en capacidades de aproximadamente 30 W o menos. Se puede variar la velocidad usando un reactor serie para reducir el voltaje aplicado. El motor no puede ponerse en reversa a no ser que se proporcionen bobinas de “sombreado” en ambos lados de los polos del campo principal. Se debe proporcionar algún medio de cerrar una bobina y abrir la otra.

El principio en que se basa la operación del motor de polos sombreados es muy simple, y se ilustra a continuación:

Esta figura representa un tipo de construcción denominada de esqueleto, pero el principio es
aplicable a todos los motores de polos sombreados.
Al aplicarse una tensión alterna a la bobina B, la corriente que circula por sus espiras produce un flujo magnético Φ que circula por la estructura laminar del estator y cruza el entrehierro para completar su trayectoria a través del rotor. En cada polo del motor hay por lo menos una “ bobina ” S que abarca una parte del arco del polo y que consta de una anilla o espira única de cobre cerrada sobre sí misma; es decir, en cortocircuito. Dado que una parte del flujo magnético ( como la denotada por L1 en la figura anterior ) se enlaza con la espira S, en esta espira se induce una tensión, y por ella circula entonces una corriente. Esta última ocasionará a su vez que el flujo magnético correspondiente a la parte del polo abarcada por la “bobina” S se atrase ( o desfase en atraso ) con respecto al flujo que pasa por el resto del polo. Esto equivale a la formación de un campo magnético rotatorio que gira hacia la parte “sombreada” del polo y pone en movimiento al rotor. Tal efecto se denomina “sombreo”.
De la descripción anterior puede inferirse que el par de arranque de un motor de polos sombreados no es muy alto, pero en muchas aplicaciones prácticas su magnitud es suficiente. Por otra parte, como no se tiene un dispositivo de desconexión ni un capacitor extra, la operación de este tipo de motores sumamente confiable. En cambio, el hecho de que las bobinas de sombra permanezcan en el circuito después de haber cumplido su misión de producir el par de arranque necesario, significa que la corriente que circula por ellas originará una pérdida extra en el motor. La eficiencia de un motor de polos sombreados es muy baja; en un motor del tipo esqueleto no es rara una eficiencia de apenas un 10%, pero cuando la potencia requerida es del orden de 1 W, en realidad no es relevante el concepto de eficiencia.
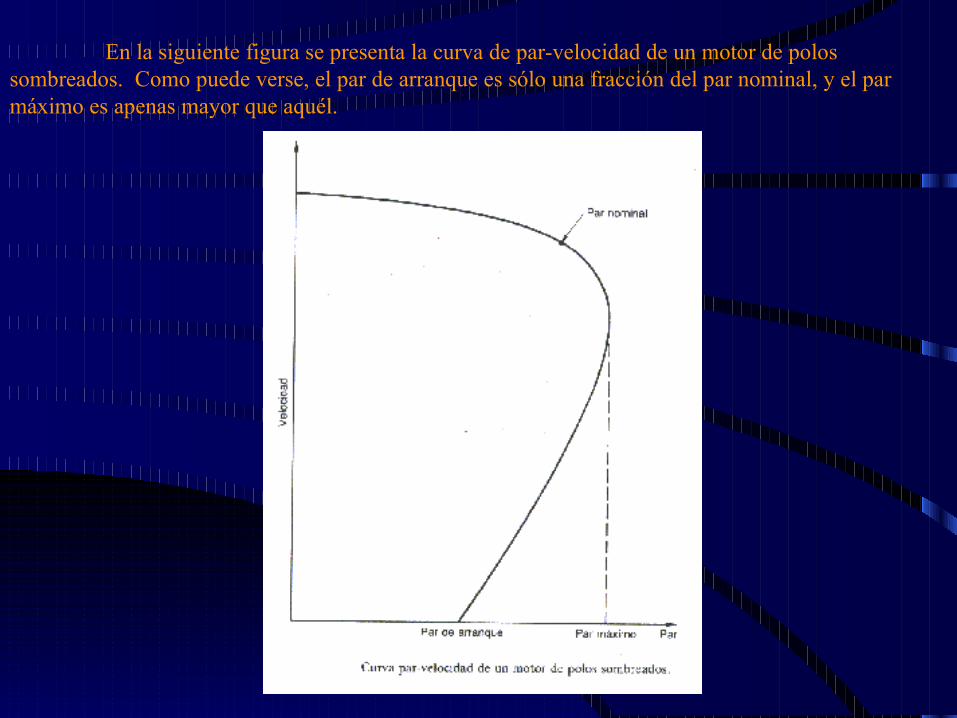
En la siguiente figura se presenta la curva de par-velocidad de un motor de polos sombreados. Como puede verse, el par de arranque es sólo una fracción del par nominal, y el par máximo es apenas mayor que aquél.

Es tan baja la corriente que toma un motor de polos sombreados, que algunos de estos motores pueden permanecer con su rotor bloqueado durante semanas enteras sin quemarse. Sin embargo, una desventaja importante es la dificultad de hacer reversible esta máquina.
3. DETERMINACION DE LOS PARAMETROS DE LA MAQUINA SINCRONICA 3.1 ENSAYO DE EXCITACIÓN NEGATIVA
El ensayo de excitación negativa se efectúa con la máquina funcionando en vacío en paralelo con la red. La intensidad de excitación se reduce progresivamente hasta cero, se invierte su polaridad y se aumenta hasta que la máquina desliza un paso polar. Se miden durante el ensayo, hasta el momento en que la máquina comienza a deslizar, los valores de la tensión, de la intensidad del inducido y de la intensidad de excitación.
3.2 DETERMINACION DE Xq A PARTIR DEL ENSAYO DE EXCITACIÓN
NEGATIVA
Xq se determina por medio del ensayo de excitación negativa utilizando la siguiente fórmula:
eUU
XXr
rdq +
= *

donde: ( e ).- Es la fem en vacío correspondiente a la intensidad de excitación ia con la cual la máquina desliza
un paso polar. Se determina por medio de la recta que une el punto origen con el punto de la característica de saturación en vacío correspondiente a la tensión en el momento de pérdida de sincronismo. ( Ur ).- Es la tensión en el momento en que la máquina desliza un paso polar.
( Xd ).- Es la reactancia síncrona longitudinal determinada por medio de la misma recta ( característica
de saturación en vacío rectificada ).
Si se mide durante el ensayo la intensidad del inducido ( Ir ) en el momento en que la
máquina desliza un paso polar, Xq se determina por medio de la siguiente fórmula:
r
rq I
UX
*3=
r
rq IU
X =
El valor de Xq obtenido a partir de este ensayo puede, según el valor de Ur, incluir el efecto
de la saturación. Para obtener un valor no saturado de Xq, la tensión aplicada debe ser normalmente
inferior o igual a 0,6 veces la tensión asignada.
3.3 ENSAYO CON DESLIZAMIENTO REDUCIDO
Durante el ensayo con deslizamiento reducido se aplica una tensión trifásica simétrica inferior a la normal ( 0,01 Un a0,2 Un ) a los bornes del inducido de la máquina ensayada. La tensión
debe ser suficientemente baja para que la máquina no llegue a sincronizarse. El devanado de excitación debe estar en circuito abierto y el rotor debe ser accionado por un motor de forma que gire con un deslizamiento inferior al 1% y en el caso de una máquina con rotor macizo, con un deslizamiento aún más reducido de tal forma que las intensidades inducidas en los circuitos amortiguadores durante la marcha asíncrona, tengan una influencia despreciable sobre las mediciones. El devanado de excitación debe ser puesto en cortocircuito directamente o sobre una resistencia de descarga durante la conexión y desconexión de la red de alimentación, para evitar que se deteriore. Se miden por medio de aparatos indicadores o se registran en un oscilógrafo, la intensidad y la tensión del inducido y la tensión de los anillos colectores así como el deslizamiento. Si la tensión remanente medida antes del ensayo es superior al 30% de la tensión de alimentación utilizada para el ensayo, el rotor debe ser desmagnetizado. Esta desmagnetización se puede efectuar, por ejemplo, alimentando el devanado inductor con una fuente de muy baja frecuencia con una intensidad de aproximadamente la mitad de la intensidad de excitación correspondiente a la tensión asignada en vacío y haciendo decrecer gradualmente la intensidad y la frecuencia ( esta última si es posible ).
3.4 DETERMINACION DE Xq A PARTIR DEL ENSAYO CON DESLIZAMIENTO
REDUCIDO
Para determinar Xq por medio del ensayo con deslizamiento reducido, se miden la tensión y
la intensidad del inducido en el momento en que la tensión en los bornes del devanado de excitación ( Ulo ) es máxima, Xq se calcula por medio de la siguiente fórmula:
máx
mínq I
UX
*3=
Los resultados de la medida de Xq por el método del ensayo con deslizamiento reducido no se pueden
considerar como correctos, salvo si el valor de Xd obtenido en el mismo ensayo coincide prácticamente
con el obtenido conforme a las indicaciones manifestadas anteriormente. Si no es así, el ensayo debe repetirse con valores cada vez más reducidos del deslizamiento, y los valores sucesivos de Xq son
extrapolados hasta un deslizamiento nulo. El valor de la reactancia síncrona transversal obtenida por medio de este ensayo corresponde prácticamente al valor no saturado.
3.5 ENSAYO EN CARGA CON MEDICION DEL ANGULO DE CARGA δ
El ensayo se realiza con la máquina funcionando en paralelo con la red y a una carga como mínimo igual a “ δ ” la mitad de la potencia asignada con el factor de potencia asignado.
En el ensayo se miden la intensidad del inducido ( l ), la tensión en los bornes del inducido ( U ), el ángulo entre la tensión φ y la intensidad ( por el método de los dos vatímetros ) y el ángulo δ ( ángulo interno entre la tensión en los bornes y la fem ). El ángulo de carga se puede medir utilizando el método estroboscópico o cualquier otro método de precisión. 3.6 DETERMINACION DE Xq A PARTIR DEL ENSAYO EN CARGA CON
MEDICION DEL ANGULO DE CARGA
La determinación de Xq por el método de la medición del ángulo de carga, se efectúa
utilizando la siguiente fórmula:
( )δϕϕδ
tan*cos**3
tan*
senI
UX q −
=

3.7 ENSAYO DE ROTACIÓN INVERSA
Se efectúa el ensayo aplicando una tensión simétrica reducida ( 0,02 a 0,2) UN suministrada
por una fuente exterior de secuencia inversa, con la máquina girando a su velocidad asignada, es decir, que la máquina funciona como un freno electromagnético con un deslizamiento igual a 2.
El devanado de excitación debe ponerse en cortocircuito. Si la tensión residual de la máquina ensayada sobrepasa el 30% de la tensión de alimentación, el rotor debe desmagnetizarse antes de empezar el ensayo. Deben medirse durante el ensayo la tensión y la intensidad de las tres fases y la potencia suministrada. 3.8 DETERMINACION DE LAS MAGNITUDES A PARTIR DEL ENSAYO DE
ROTACIÓN INVERSA
La reactancia y la resistencia inversa X2 y R2 se determinan a partir del ensayo de rotación
inversa, por medio de las siguientes fórmulas:
22
22
2 RZX −= I
UZ
*32 =22 *3 I
PR =
donde: P es la potencia suministrada. I es la intensidad media medida. U es el valor medio medido de la tensión aplicada. La reactancia y la resistencia inversas X2 y R2 se determinan para cada uno de los valores medidos de
la tensión de alimentación X2 y R2 se representan en un diagrama en función de la intensidad.
BIBLIOGRAFÍA • Autor: Robert W. Smeaton. Motores Eléctricos, Selección, Mantenimiento y Reparación, Tomo I, Segunda Edición.• Autor: R.J.Lawrie Biblioteca Práctica de Motores Eléctricos, Océano/Centrum, Tomo I.• Autor: J. Maloney Electricidad Industrial, Segunda Edición.• Autor: Universidad Salesiana Folleto del Funcionamiento del Motor de Inducción Monofásico.