licenciatura en ingeniería electrónica148.206.53.84/tesiuami/uami16699.pdf · informe de proyecto...
TRANSCRIPT

División de Ciencias Básicas e Ingeniería
Departamento de Ingeniería Eléctrica
Licenciatura en Ingeniería Electrónica
Informe de Proyecto Terminal en Telecomunicaciones
“Implementación de una Red de Monitoreo Meteorológico con sensores Waspmote”
Alumno:
Carlos Raúl García Cruz
Matricula:
206216300
Asesor:
Dr. Michael Pascoe Chalke
Enero 2015
2015
1

2
Gracias a mi familia por su apoyo incondicional a lo largo de este camino.
Por el cual se logró la terminación de esta carrera.
Mil Gracias.
Carlos Raúl García Cruz

3
INDICE Página
INDICE GENERAL ................................................................................................................................................................. 3
RESUMEN ............................................................................................................................................................................... 4
Capítulo 1 Introducción ......................................................................................................................................................... 6
1.1 Antecedentes Meteorológicos ........................................................................................................................................ 6
1.2 Las redes de sensores .................................................................................................................................................. 8
1.2.1 Redes Cableadas de Sensores ............................................................................................................................. 10
1.2.2 Redes Inalámbricas de Sensores ......................................................................................................................... 11
1.2.3 Características de las redes de sensores inalámbricas ........................................................................................ 14
Capítulo 2 Estaciones meteorológicas .............................................................................................................................. 16
2.1. Características generales ........................................................................................................................................... 16
2.2. Clasificación de estaciones meteorológicas ............................................................................................................... 17
2.2.1 Estaciones Climatologicas .................................................................................................................................... 14
2.2.2 Estaciones Agricolas ............................................................................................................................................ 14
2.2.3 Estaciones Maritimas ............................................................................................................................................ 14
2.2.4 Estaciones Aeronauticas ...................................................................................................................................... 14
2.2.5 Estaciones Satelitales ........................................................................................................................................... 14
2.3. Métodos de adquisición de las variables meteorológicas ........................................................................................... 20
2.4. Métodos de transmisión de las variables .................................................................................................................... 20
Capítulo 3 Waspmote ......................................................................................................................................................... 21
3.1 Dispositivos Waspmote ............................................................................................................................................... 21
3.2 Hardware ..................................................................................................................................................................... 23
3.2.1 Arquitectura Waspmote ........................................................................................................................................ 27
3.2.2 Indicadores LED ................................................................................................................................................... 28
3.2.3 Interruptores (jumpers) ......................................................................................................................................... 29
3.3 Tarjetas de Eventos ..................................................................................................................................................... 28
3.3.1 Tarjeta de Sensor de Gases ................................................................................................................................. 30
3.3.2 Tarjeta Smart Parking ........................................................................................................................................... 30
3.3.3 Tarjeta de Agricultura............................................................................................................................................ 31
3.3.4 Radiación .............................................................................................................................................................. 31
3.4 Gateway ...................................................................................................................................................................... 32
4
3.4.1 Pulsadores ............................................................................................................................................................ 34
3.5 Interfaz I/O ................................................................................................................................................................... 35
3.5.1 Terminales analógicas y digitales ......................................................................................................................... 35
3.6 Módulos XBee ............................................................................................................................................................. 37
Capítulo 4 Instalación y Manejo de Programas ................................................................................................................. 39
4.1 Instalación del IDE de Waspmote ................................................................................................................................ 39
4.2 Instalación del X-CTU .................................................................................................................................................. 41
4.3 Analizando la tarjeta de eventos .................................................................................................................................. 44
4.3.1 Conectores 1, 2, 3, 6 ............................................................................................................................................ 44
4.3.2 Conector 4 ............................................................................................................................................................ 45
4.3.3 Conector 5 ........................................................................................................................................................... 46
4.3.4 Conector 7 ........................................................................................................................................................... 46
4.3.5 Conector 8 ........................................................................................................................................................... 47
4.4 Configuración de la Placa de Eventos ...................................................................................................................... 48
Capítulo 5 Programación de dispositivos. ....................................................................................................................... 50
5.1 Configurando los dispositivos XBee ............................................................................................................................ 50
5.2 Programando la Tarjeta Waspmote ............................................................................................................................. 59
5.2.1 IDE- Waspmote .................................................................................................................................................... 60
5.2.2 Programa Principal ................................................................................................................................................ 65
5.2.3 Resultados del Programa Principal ....................................................................................................................... 68
5.3 Incorporando la Tarjeta de Eventos ........................................................................................................................... 69
5.3.1 Resultados obtenidos de la tarjeta de eventos ..................................................................................................... 75
Capítulo 6 Proyectos Futuros ........................................................................................................................................... 78
6.1 Waspmote Plug & Sense! - Encapsulado Línea ......................................................................................................... 78
6.2 Programación de los nodos ......................................................................................................................................... 79
6.3 Programa en minutos .................................................................................................................................................. 80
6.4 Modelos ....................................................................................................................................................................... 80
6.5 Medio Ambiente Inteligente ......................................................................................................................................... 81
Conclusiones ....................................................................................................................................................................... 83
Referencias .......................................................................................................................................................................... 84

5
RESUMEN
¿Qué es una Estación Meteorológica?
Es un conjunto de dispositivos eléctricos y mecánicos que realizan mediciones de las variables meteorológicas de forma
automática (sobre todo en forma numérica).
Una Estación Meteorológica Automática, está conformada por un grupo de sensores que registran y transmiten
información meteorológica de forma automática de los sitios donde están estratégicamente colocadas. Su función
principal es la recopilación y monitoreo de algunas Variables Meteorológicas para generar archivos del promedio de cada
una de las variables medidas en un periodo de tiempo determinado.
En el siguiente proyecto se presenta la implementación de un prototipo de una estación meteorológica con ayuda de las
tarjetas Waspmote de la compañía Libelium, en la cual también se utiliza una tarjeta de eventos del mismo fabricante, en
este informe se explica, paso por paso, el procedimiento que se llevó para configurar cada una de éstas, desde la
búsqueda de información hasta la programación de las tarjetas, así como los programas que se necesitan.
El equipo utilizado en el proyecto fue diseñado por Libelium. Dicha empresa nació en la Universidad de Zaragoza que
comenzó como un proyecto destinado al desarrollo de redes de sensores y su uso con fines educativos y de investigación.
Sin embargo, rápidamente encontró un nicho en la industria y aplicaciones medioambientales debido a su flexibilidad y
software de código abierto.
En el informe se muestra como se programan las funciones de lectura de temperatura, la activación del acelerómetro, la
carga de batería, la dirección MAC de cada tarjeta y el sensor de luminosidad con su respectiva tarjeta de eventos.
Además de las herramientas que se utilizan para la programación de la tarjeta Waspmote y el Gateway así como la tarjeta
de eventos que se utilizó.
El equipo con que se trabajó fue Waspmote Libelium versión 1.1, esto se debe remarcar ya que hay una nueva versión,
que es la 1.2, y todo archivo migró hacia esa versión. Lo más importante es que estas dos versiones no son compatibles
entre sí, por lo cual hay que tener cuidado con la versión que se maneje.
Los resultados obtenidos al finalizar este proyecto terminal fueron la activación del acelerómetro, el sensor de temperatura,
verificar la carga de batería, lectura de la dirección MAC y hacer trabajar la tarjeta de eventos para hacer funcionar el
sensor de luminosidad en su debido socket. Todo esto se transmitió inalámbricamente enviando tramas de información
hacia la puerta de enlace en conjunto con la placa Waspmote y la tarjeta de eventos.
Los componentes Waspmote son multifuncionales como se podrá observar en este proyecto, dependiendo del uso que le
asignemos. Nuestros objetivos se lograron los cuales fueron transmitir tramas de datos inalámbricamente usando la tarjeta
Waspmote, también logramos transmitir datos usando un sensor de luminosidad utilizando su respectiva tarjeta de eventos.

6
Capítulo 1 Introducción
El conocimiento de las variaciones climáticas ha sido siempre de suma importancia para el desarrollo de la agricultura, la
navegación, las operaciones militares y la vida en general. El pronóstico del tiempo es uno de los factores más importantes
en nuestra vida diaria, ya que permite realizar ciertas tareas sabiendo que no serán impedidas, arruinadas o complicadas
por el tiempo, pudiendo tomar precauciones para evitar sus consecuencias o suspenderlas hasta un momento más
propicio. Una ayuda muy importante para la medición de estas variables es la electrónica, mediante la cual se pueden
diseñar sistemas que proporcionen las mediciones con gran de precisión.
En este proyecto, se presenta la implementación de un sistema de sensores electrónicos vía Waspmote para la captura,
transmisión y despliegue de datos a distancia de un prototipo de estación meteorológica. Dicho sistema estará inicialmente
instalado dentro de la Unidad Iztapalapa de la Universidad Autónoma Metropolitana; sin embargo, el mismo podrá ser
implementado en cualquier torre de monitoreo climático lo que permitirá tener información útil para el desarrollo e
instalación de sistemas de, medición de temperatura y luminosidad en cualquier parte del Distrito Federal.
1.1. Antecedentes Meteorológicos
Desde la antigüedad se tiene constancia de la observación de los cambios en el clima, asociando el movimiento de los
astros con las estaciones del año y con los fenómenos atmosféricos. Los antiguos egipcios asociaban los ciclos de
crecimiento del Nilo con los movimientos de las estrellas explicados por la influencia de los dioses, mientras que los
babilonios predecían el tiempo guiándose por el aspecto del cielo. Galileo construyó el primer termómetro en 1607, seguido
de la invención del barómetro por parte de Evangelista Torricelli en 1643, el cual constaba de un recipiente y un tubo lleno
de mercurio (Hg) cerrado en uno de sus extremos, al invertir el tubo dentro del recipiente se formaba vacío en la parte
superior del tubo como se muestra en la figura 1.
Figura 1 Barómetro construido por Torricelli en 1643.
[21]

7
El primer descubrimiento de la dependencia de la presión atmosférica en relación a la altitud fue realizado por Blaise
Pascal y René Descartes; la idea fue profundizada luego por Edmund Halley. El anemómetro, que mide la velocidad del
viento, fue construido en 1667 por Robert Hooke, mientras Horace de Saussure contribuyó en el desarrollo de los
instrumentos meteorológicos más importantes en 1780 con el higrómetro, que mide la humedad del aire.
Otros progresos tecnológicos, que son conocidos principalmente como parte del progreso de la física, fueron la
investigación de la dependencia del volumen del gas sobre la presión, que conduce a la termodinámica, y el experimento
de Benjamín Franklin con el volantín y el rayo. El problema de clasificar ciertas características climáticas como las nubes y
los vientos fue resuelto cuando Luke Howard y Francis Beaufort introdujeron un sistema de clasificación de las nubes en
1802 y de la fuerza del viento en 1806, respectivamente. El verdadero punto de cambio fue la invención del telégrafo en
1843 que permitía intercambiar información sobre el clima a velocidades inigualables como se muestra en la figura 1.2.
Figura 2 Receptor telegráfico de Morse.
A inicios del siglo XX, los progresos en la comprensión de la dinámica atmosférica llevaron a la creación de la moderna
previsión del tiempo calculada con bases matemáticas. En los años 50, los experimentos de cálculo numérico con
computadora mostraron ser factibles. La primera previsión del tiempo realizada con este método usaba modelos de
baroscopios, y podía prever con éxito los movimientos a gran escala de las zonas de alta a baja presión. En los años 60, la
naturaleza caótica de la atmósfera fue comprendida por Edward Lorenz, fundador del campo de la teoría del caos. Los
avances matemáticos obtenidos en este campo fueron retomados por la meteorología y contribuyeron a estabilizar el límite
de predictibilidad del modelo atmosférico. Esto es conocido como efecto mariposa: la evolución de los disturbios del tiempo
en una region significa un efecto en otra zona. En 1960, el lanzamiento del TIROS-1, primer satélite meteorológico en
funcionar, significó el inicio de una era de difusión global de las informaciones climáticas.
[21]

8
La meteorología incluye el estudio (descripción, análisis y predicción) de las variaciones diarias de las condiciones
atmosféricas a gran escala o Meteorología sinóptica, el estudio de los movimientos en la atmósfera involucrados en la
dinámica atmosférica y su evolución temporal basada en los principios de la mecánica de fluidos (Meteorología dinámica,
muy relacionada actualmente con la meteorología sinóptica), del estudio de la estructura y composición de la atmósfera,
así como las propiedades eléctricas, ópticas, termodinámicas, radiactivas y otras (Meteorología física), la variación de los
elementos meteorológicos cerca del suelo en un área pequeña (Micro meteorología), el estudio específico de los
fenómenos meteorológicos de la zona intertropical (Meteorología tropical) y otros muchos fenómenos. El estudio de las
capas más altas de la atmósfera (superiores a los 20 o 25 km) implica, el uso de técnicas y disciplinas especiales, y recibe
el nombre de aeronomía. El término aerología se aplica al estudio de las condiciones atmosféricas a cualquier altura.
La meteorología aplicada tiene por objeto acopiar constantemente un máximo de datos sobre el estado de la atmósfera y, a
la luz de los conocimientos y leyes de la meteorología teórica, analizarlos, interpretarlos y obtener deducciones prácticas,
especialmente para prever el tiempo con la máxima antelación. Como la atmósfera es una inmensa masa gaseosa sujeta a
variaciones constantes, que la mayoría de las veces se producen en el ámbito regional, su estado en un momento dado
sólo puede ser conocido si se dispone de una red suficientemente densa de puestos de observación o estaciones
meteorológicas, distribuidas por todas las regiones del globo, que a horas fijas efectúan las mismas mediciones
(temperatura, presión, humedad, viento, precipitaciones, radiación solar, nubosidad, etc.) y transmiten los resultados a los
centros encargados de utilizarlos.
En la actualidad, la tecnología está cada vez más cerca de los diferentes sectores sociales, brindando soluciones prácticas,
rápidas y eficaces a sus problemas. Hoy en día se puede establecer comunicación o controlar el comportamiento de una
gran variedad de dispositivos a grandes distancias, en un tiempo casi instantáneo.
En general, cada ciencia tiene su propio equipamiento e instrumental de laboratorio. Sin embargo, la meteorología es una
disciplina corta en equipos de laboratorio y amplia en los equipos de observación en campo. En algunos aspectos esto
puede parecer bueno, pero en realidad puede hacer que simples observaciones se desvíen hacia una afirmación errónea.

9
1.2 Las redes de sensores
Una red de sensores (del inglés sensor network) es una red de [Computadora | ordenadores]] pequeñísimos («nodos»),
equipados con sensores, que colaboran en una tarea común.
Las redes de sensores es un concepto relativamente nuevo en adquisición y tratamiento de datos con múltiples
aplicaciones en distintos campos tales como entornos industriales, domótica, entornos militares, detección ambiental.
Esta clase de redes se caracterizan por su facilidad de despliegue y por ser autoconfigurables, pudiendo convertirse en
todo momento en emisor, receptor, ofrecer servicios de encaminamiento entre nodos sin visión directa, así como registrar
datos referentes a los sensores locales de cada nodo. Otra de sus características es su gestión eficiente de la energía, que
les permite obtener una alta tasa de autonomía que las hace plenamente operativas.
Pasando de largo las aplicaciones militares, éstas tienen usos civiles interesantes como vemos a continuación:
Eficiencia energética: Red de sensores se utilizan para controlar el uso eficaz de la electricidad, en los casos de Japón y
España.
Entornos de alta seguridad: Existen lugares que requieren altos niveles de seguridad para evitar ataques terroristas, tales
como centrales nucleares, aeropuertos, edificios del gobierno de paso restringido.
Sensores ambientales: El control ambiental de vastas áreas de bosque o de océano, sería imposible sin las redes de
sensores. El control de múltiples variables, como temperatura, humedad, fuego, actividad sísmica así como otras. También
ayudan a expertos a diagnosticar o prevenir un problema o urgencia y además minimiza el impacto ambiental del presencia
humana.
Sensores industriales: Dentro de fábricas existen complejos sistemas de control de calidad, el tamaño de estos sensores
les permite estar allí donde se requiera.
Automoción: Las redes de sensores son el complemento ideal a las cámaras de tráfico, ya que pueden informar de la
situación del tráfico en ángulos muertos que no cubren las cámaras y también pueden informar a conductores de la
situación, en caso de atasco o accidente, con lo que estos tienen capacidad de reacción para tomar rutas alternativas.
Medicina: Es otro campo bastante prometedor. Con la reducción de tamaño que están sufriendo los nodos sensores, la
calidad de vida de pacientes que tengan que tener controlada sus constantes vitales (pulsaciones, presión, nivel de azúcar
en sangre, etc.), podrá mejorar sustancialmente.
Existen dos tipos de redes de sensores, la redes cableadas de sensores y las redes inalámbricas de sensores las cuales de describen a continuación.
[22]
10
1.2.1 Redes cableadas de sensores (alambradas)
Las redes de sensores cableadas o alambradas no son nuevas y sus funciones incluyen medir niveles de temperatura,
líquido, humedad etc. Muchos sensores instalados ya sea en fábricas o automóviles, por ejemplo, tienen su propia red que
se conecta con una computadora o una caja de controles a través de un cable y, al detectar una anomalía, envían un aviso
a la caja de controles. La diferencia entre los sensores que todos conocemos y la nueva generación de redes de sensores
sin cable (inalámbricas), es que estas últimas son capaces de poner en marcha una acción de acuerdo a la información
que vayan acumulando y no están limitadas por un cable fijo.
La comunicación de las redes alambradas es a través de cables de datos, generalmente en Ethernet o cables con hilos
conductores (CAT5), los cuales conectan computadoras y otros dispositivos para formar redes. Las redes alambradas son
mejores cuando se necesita mover grandes cantidades de datos a altas velocidades.
Ventajas de una red cableada
Dentro de las ventajas al implantar redes cableadas de sensores se encuentran las siguientes:
* Los costos son relativamente bajos en comparación con el de las redes inalámbricas.
* Ofrecen el máximo rendimiento posible.
* Brindan mayor velocidad debido a que utilizan cable de Ethernet estándar (hasta 100 Mbps).
Desventajas de una red cableada
Entre las desventajas que presentan las redes alambradas están las siguientes:
* El costo de instalación es un problema muy común en este tipo de tecnología, el estudio de instalación, las canaletas,
conectores, cables y otros factores no mencionados suman costos muy elevados en algunas ocasiones.
* El acceso físico es uno de los problemas más comunes dentro de las redes alambradas. Por ejemplo, para llegar a ciertos
lugares dentro de una empresa, es muy complicado el paso de los cables a través de las paredes de concreto u otros
obstáculos.
* Dificultad y expectativas de expansión es otro de los problemas más comunes, ya que cuando pensamos tener un
numero definido de nodos en una oficina, la mayoría del tiempo hay necesidades de instalación de un nuevo nodo y ya no
se tiene espacio en los conmutadores instalados.

11
1.2.2 Redes Inalámbricas de sensores
Como se mencionó anteriormente, las redes alambradas de sensores ofrecen muchas ventajas, pero requieren de cables
para interconectar dispositivos. Estos conducen a altos costos de instalación y mantenimiento, por ejemplo, la alta tasa de
fallos en los conectores. Por esta razón, las tecnologías inalámbricas han logrado un éxito enorme en la industria en los
últimos años. Además, a nivel sensor ofrecen ventajas como la alta resolución, medición en muchos lugares al mismo
tiempo, apoyo a la movilidad de equipos, añaden redundancia y se aprovecha la tecnología de sistemas Micro-Electro-
Mecánicos MEMS (Micro-Electro-Mechanical Systems)
Las redes inalámbricas de sensores están formadas por un grupo de dispositivos electrónicos con ciertas capacidades
sensitivas y de comunicación por radio frecuencia los cuales permiten formar redes ad hoc sin infraestructura física
preestablecida ni administración central.
Las redes de sensores tienen una serie de características propias y otras adaptadas de las redes Ad-Hoc:
Topología Dinámica: En una red de sensores, la topología siempre es cambiante y éstos tienen que adaptarse para poder
comunicar nuevos datos adquiridos esto aplica principalmente a las redes inalámbricas pero también en cableadas podría
suceder.
Variabilidad del canal: El medio inalámbrico es un canal muy variable en el que existen una serie de fenómenos como
pueden ser la atenuación, desvanecimientos rápidos, desvanecimientos lentos e interferencias que puede producir errores
en los datos.
No se utiliza infraestructura de red: Una red sensora no tiene necesidad alguna de infraestructura para poder operar, ya
que sus nodos pueden actuar de emisores, receptores o enrutadores de la información. Sin embargo, hay que destacar en
el concepto de red sensora la figura del nodo recolector (también denominados sink node), que es el nodo que recolecta la
información y por el cual se recoge la información generada normalmente en tiempo discreto. Esta información
generalmente es adquirida por un ordenador conectado a este nodo y es sobre el ordenador que recae la posibilidad de
transmitir los datos por tecnologías inalámbricas o cableadas según sea el caso.
Tolerancia a errores: Un dispositivo sensor dentro de una red sensora tiene que ser capaz de seguir funcionando a pesar
de tener errores en el sistema propio.
Comunicaciones multisalto o broadcast: En aplicaciones sensoras siempre es característico el uso de algún protocolo que
permita comunicaciones multi-hop, léase AODV, DSDV, EWMA u otras, aunque también es muy común utilizar mensajería
basada en broadcast.
Consumo energético: Es uno de los factores más sensibles debido a que tienen que conjugar autonomía con capacidad de
proceso, ya que actualmente cuentan con una unidad de energía limitada. Un nodo sensor tiene que contar con un
procesador de consumo ultra bajo así como de un transceptor radio con la misma característica, a esto hay que agregar un
software que también conjugue esta característica haciendo el consumo aún más restrictivo.
Limitaciones hardware: Para poder conseguir un consumo ajustado, se hace indispensable que el hardware sea lo más
sencillo posible, así como su transceptor radio, esto nos deja una capacidad de proceso limitada.
12
Costes de producción: Dada que la naturaleza de una red de sensores tiene que ser en número muy elevada, para poder
obtener datos con fiabilidad, los nodos sensores una vez definida su aplicación, son económicos de hacer si son fabricados
en grandes cantidades.
Una red inalámbrica de sensores inalámbricos (WSN Wireless Sensor Networks por sus siglas en inglés) es una red
inalámbrica que consiste en dispositivos distribuidos en el espacio a cubrir utilizando sensores autónomos para monitorizar
condiciones físicas o ambientales. Un sistema WSN incorpora un Gateway que provee conectividad inalámbrica de regreso
al mundo de cables y nodos distribuidos. Las redes de sensores inalámbricos es uno de los campos con más investigación,
en la actualidad. La comunicación inalámbrica es fundamental en el área de la electrónica.
Las redes inalámbricas ofrecen las siguientes ventajas:
El bajo costo de instalación así como de mantenimiento
En cuanto a la infraestructura podemos darnos cuenta de que se reducen los costos de cables también como
requerimientos de espacio, a diferencia de las redes cableadas.
Otro factor importante es el bajo consumo de energía en los pequeños módulos inalámbricos y el alcance de
cobertura de grandes espacios ya sea que estemos hablando de metros o hasta kilómetros.
Las redes de sensores inalámbricas por su flexibilidad en espacio y posible movilidad suponen más aplicaciones
que las redes de sensores cableadas.
Hoy en día se utilizan las redes de sensores inalámbricas en algunas áreas como lo son la industria, la agricultura,
la ciudad, los bosques etc.
Podemos mencionar también la aplicación de redes de sensores en estructuras inteligentes y la automatización de
las mismas.
El uso de redes WSN no sólo es para hacer más cómoda la vida de las personas, sino también para crear entornos
seguros y predecir siniestros o catástrofes naturales monitorizando el medio ambiente o condiciones de algún ecosistema
en particular.
Desventajas de las redes inalámbricas
Evidentemente, como todo en la vida, no todo son ventajas, las redes inalámbricas también tiene unos puntos negativos en
su comparativa con las redes de cable.
Los principales inconvenientes de las redes inalámbricas son los siguientes:
Menor ancho de banda. Las redes de cable actuales trabajan a 100 Mbps, mientras que las redes inalámbricas Wi-Fi lo
hacen a 11 Mbps. Es cierto que existen estándares que alcanzan los 54 Mbps y soluciones propietarias que llegan a 100
Mbps, pero estos estándares están en los comienzos de su comercialización y tiene un precio superior al de los actuales
equipos Wi-Fi.
Mayor inversión inicial. Para la mayoría de las configuraciones de la red local, el coste de los equipos de red inalámbricos
es superior al de los equipos de red cableada.
Seguridad. Las redes inalámbricas tienen la particularidad de no necesitar un medio físico para funcionar. Esto
fundamentalmente es una ventaja, pero se convierte en una desventaja cuando se piensa que cualquier persona con una
computadora portátil solo necesita estar dentro del área de cobertura de la red para poder intentar acceder a ella.
13
Como el área de cobertura no está definida por paredes o por ningún otro medio físico, a los posibles intrusos no les hace
falta estar dentro de un edificio o estar conectado a un cable. Además, el sistema de seguridad que incorporan las redes
Wi-Fi no es de lo más fiables. A pesar de esto también es cierto que ofrece una seguridad válida para la inmensa mayoría
de las aplicaciones y que ya hay disponible un nuevo sistema de seguridad (WPA) que hace a Wi-Fi mucho más confiable.
Interferencias. Las redes inalámbricas funcionan utilizando el medio radio electrónico en la banda de 2,4 GAZ. Esta banda
de frecuencias no requiere de licencia administrativa para ser utilizada por lo que muchos equipos del mercado, como
teléfonos inalámbricos, microondas, etc., utilizan esta misma banda de frecuencias. Además, todas las redes Wi-Fi
funcionan en la misma banda de frecuencias incluida la de los vecinos.
Este hecho hace que no se tenga la garantía de nuestro entorno radioeléctrico esté completamente libre para que nuestra
red inalámbrica funcione a su más alto rendimiento. Cuantos mayores sean las interferencias producidas por otros equipos,
menor será el rendimiento de nuestra red. No obstante, el hecho de tener probabilidades de sufrir interferencias no quiere
decir que se tengan. La mayoría de las redes inalámbricas funcionan perfectamente sin mayores problemas en este
sentido.
Incertidumbre tecnológica. La tecnología que actualmente se está instalando y que ha adquirido una mayor popularidad es
la conocida como Wi-Fi (IEEE 802.11B). Sin embargo, ya existen tecnologías que ofrecen una mayor velocidad de
transmisión y unos mayores niveles de seguridad, es posible que, cuando se popularice esta nueva tecnología, se deje de
comenzar la actual o, simplemente se deje de prestar tanto apoyo a la actual.
Lo cierto es que las leyes del mercado vienen también marcadas por las necesidades del cliente y, aunque existe una
incógnita, los fabricantes no querrán perder el tirón que ha supuesto Wi-Fi y harán todo lo posible para que los nuevos
dispositivos sean compatibles con los actuales. La historia nos ha dado muchos ejemplos similares.
XBEE
Es una familia de módulos Zigbee listos para usar que soportan Zigbee 2006 y Zigbee Pro (red con balizas, fragmentación,
frequency agility, entre otros) de la empresa Digi International. La familia ofrece cuatro posibilidades de antena: chip, whip,
UFL y RPSMA. Además viene en dos versiones: Xbee y Xbee Pro. La segunda con un mayor rango de alcance y consumo
eléctrico. Los módulos tienen una interfaz de comunicación RS-232, algunos pines de entrada y salida digitales, otros de
entrada analógica y de PWM. Son de montaje through hole, utilizan pines con una separación de 2 mm, más pequeño al
estándar de 2.54 mm, lo que hace que se necesite un adaptador para utilizarlo en protoboards.
Los módulos pueden ser operados con comandos AT o con un API de más alto nivel. A pesar de incluir un
microcontrolador, éste ya tiene un firmware programado, por lo que, aunque es teóricamente posible, no es recomendable
cambiarlo para utilizarlo en aplicaciones propias. Básicamente el firmware del dispositivo, permite sin necesidad de un
microcontrolador externo, la lectura y escritura remota de pines de entrada y salida y la transmisión de datos; por lo tanto,
una posible configuración de la red, es la utilización de terminales brutas con entradas y salidas, controladas por módulos
centrales inteligentes. Las especificaciones Zigbee, y Wi-Fi, tienen diferencias marcadas en características como la
velocidad de transmisión, consumo eléctrico, rango de alcance, tamaño del protocolo, técnica de modulación, tiempo de
activación, entre otras. Aunque XBee tiene tasas de transmisión menores que WiFi, la ventaja de XBee es que los
dispositivos son de menor consumo eléctrico lo cual prolonga el tiempo de operación de la red inalámbrica.
14
1.2.3 Características de las redes de sensores inalámbricas
Para que las WSN sean totalmente confiables y seguras, se deben cumplir con ciertas características capaces de superar
una serie de retos y obstáculos. Existen desafíos y limitaciones en las redes de sensores que deben ser resueltos y
tomados en cuenta, esto para obtener un óptimo funcionamiento de la red, algunas características para lograr este
funcionamiento óptimo son las mencionadas en las secciones siguientes.
Restricciones de hardware.
Un sensor puede ser insertado en un módulo del orden centímetros. Están compuestos principalmente por tres unidades:
* Una unidad de potencia (baterías o celdas solares).
* Una unidad de detección (sensores y convertidores analógico-digitales).
* Una unidad transceptora (conexión del nodo a la red).
Además, existen componentes opcionales los cuales incluyen un sistema para determinar la localización, un generador de
energía, un control de actuador y otros elementos dependientes de la aplicación.
Consumo de energía
El tiempo de vida de un nodo sensor, depende mucho de la batería. En muchos casos, el nodo sensor inalámbrico tiene
una fuente de poder limitado (1.2V, 500mAh), mientras que la carga de la batería podría ser limitada o imposible de ser
cargada por completo. Comúnmente, los nodos sensores utilizan como fuente de poder dos pilas alcalinas “doble A” o bien
una batería de Litio “Li-AA”.
Así, con una fuente de poder como las mencionadas anteriormente, si un nodo sensor detecta un evento local, éste
realizará el procesamiento de datos y los transmitirá en bruto o procesados y el consumo de energía será distribuido en
tres dominios: Detección, comunicación y procesamiento de datos.
En el área de comunicaciones, en una red multipunto, un nodo puede desempeñar una doble función de recopilación de
datos, procesamiento y retransmisión de los mismos, pero esto requerirá de un consumo de energía adicional.
Costo de un nodo
Como se había mencionado antes, una red de sensores se compone de un amplio conjunto de nodos de sensores. Por ello
se toma en cuenta el costo de un nodo de manera individual, así como también el costo por mayoreo, buscando mantener
costos bajos y buena calidad.

15
Medio ambiente
Se espera que el uso de las redes de sensores se aplique para funcionar en un medio ambiente abierto, dispersadas de
manera geográfica en puntos estratégicos, entornos donde muy difícilmente un ser humano pueda estar tomando medidas,
ya sea por niveles tóxicos altos o altas temperaturas.
Canales de transmisión
Las redes de sensores operan en un ancho de banda y rendimiento limitados, de igual manera en un medio de
comunicación inalámbrico multipunto. En estos enlaces de comunicación inalámbrica operan algunos equipos con
tecnologías infrarroja óptica. Algunos dispositivos de baja potencia utilizan un canal único de radio frecuencia funcionando
cerca de los 916MHz, otros sistemas utilizan un sensor compatible con un receptor Bluetooth a 2.4GHz, y otros más
utilizan tecnología IEEE 802.11b a 2.4 GHz.
En nuestro caso particular usamos la banda 802.15.4, como el mostrado en la figura 3.
Figura 3. Sensor con tecnología 802.15

16
Capítulo 2 Estaciones meteorológicas
2.1 Características generales
Una estación meteorológica es una instalación destinada a medir y registrar regularmente diversas variables
meteorológicas. Algunos de los parámetros meteorológicos más importantes a medir son: temperatura, humedad, presión
atmosférica, precipitación pluvial, velocidad y dirección del viento.
Las estaciones meteorológicas se pueden dividir en dos tipos:
· Convencionales
· Automáticas
Estación Meteorológica Convencional: Esta estación típicamente cuenta con instrumentos convencionales de lectura
directa o con registro en papel, pero la complejidad y delicadeza en su uso hacen dudar su efectividad.
Estación Meteorológica Automática (E.M.A.): En esta estación las lecturas son acondicionadas para luego ser procesadas
mediante microcontroladores o microprocesadores y transmitidas a través de un sistema de comunicación alámbrico o
inalámbrico (radio, satélites, teléfono, etc.) en forma automática. La estación automática funciona de manera autónoma las
24 horas del día a lo largo de todo el año, utilizando un sistema de alimentación autónomo basado en baterías recargables
y paneles solares.
Nota: La hora que se utiliza para registrar los datos es el horario TUC ó UTC (Tiempo Universal Coordinado) por esta
razón deberá tener en consideración este factor para la correcta interpretación de los datos desplegados en esta página.
El área representativa de las estaciones es de 5 km de radio aproximadamente, en terreno plano, excepto en terreno
montañoso.
(Referencia OMM número 100 y 168)
Sensores que integran la Estación:
- Velocidad del viento
- Dirección del viento
- Presión atmosférica
- Temperatura y Humedad relativa
- Radiación solar
- Precipitación

17
2.2 Clasificación de estaciones meteorológicas
Las estaciones meteorológicas se pueden subdividir en varios tipos según sean los objetivos y los parámetros que se
deseen medir, entre las principales podemos citar las siguientes:
· Climatológicas
· Agrícolas
· Especiales
· Aeronáuticas
· Satelitales
2.2.1 Estaciones Climatológicas
Una estación climatológica es un área destinada a la obtención y medición de los datos generados por instrumentos que
registran los distintos fenómenos meteorológicos que se producen en la atmósfera. Esta estación comparte los datos
meteorológicos para predecir el clima en un lugar o el comportamiento estadístico de los mismos durante los años.
Las observaciones que se efectúan se realizan en forma horaria remitiéndolas inmediatamente a un centro recolector de
datos, mediante mensajes codificados, por la vía de comunicación más rápida disponible. Estas observaciones se utilizan
para una multitud de fines meteorológicos, en general en tiempo real y especialmente para la elaboración de mapas
meteorológicos.
Entre los usos de estas estaciones podemos enlistar los siguientes:
· Instalación en hogares, casas de campo y ranchos.
· Escuelas de educación básica, media y media superior donde se imparten asignaturas relacionadas al medio ambiente y
para el uso de datos reales que permitan determinar el clima en un lugar y el comportamiento del estado del tiempo a
través de los años.
· Centros de investigación para llevar registros del clima.
· Empresas cuyos procesos se vean afectados o beneficiados por las condiciones meteorológicas (aserraderos,
invernaderos, etc.).
· Dependencias gubernamentales para registrar los fenómenos naturales y prever posibles situaciones de riesgo de la
población.

18
2.2.2 Estaciones Agrícolas
Una estación agroclimática tiene el propósito de proporcionar un conocimiento de las condiciones del clima en relación con
el desarrollo y crecimiento de los cultivos y su manejo.
El desarrollo tecnológico ha permitido demostrar que la variación del clima afecta la mayoría de los procesos físicos y
biológicos que determinan la calidad y cantidad de la producción agrícola. Conocer el clima oportunamente o con
anticipación suficiente es necesario para mejorar la producción o reducir efectos adversos para el cultivo.
Utilizar de manera oportuna y apropiada los registros climatológicos permitiendo, entre otros posibles, los siguientes
beneficios agrícolas:
a) Realizar un riego eficiente.
b) Mejorar el control de plagas.
c) Mejorar la fertilización durante el desarrollo de la planta.
d) Pronosticar heladas.
Estos beneficios representan para el agricultor mayor producción, menor costo de cultivo, mayor superficie cultivable,
producto de mayor calidad, todo lo cual significa en términos finales, mayor ganancia, menores gastos o menos problemas
para el productor agrícola y la población en general.
Asimismo, estos beneficios son de gran importancia en términos ecológicos por las implicaciones que tienen sobre el uso
racional de los recursos naturales como el agua y la reducción de la contaminación del suelo y del agua por agroquímicos.
2.2.3 Estaciones Marítimas
Este tipo de estaciones se usan entre otras aplicaciones para la medida de variables en mares y océanos. En estas
estaciones especiales se utilizan sistemas dispuestos en boyas meteorológicas.
Otras instalaciones meteorológicas menos comunes disponen de instrumental de sondeo remoto como radar meteorológico
para medir la turbulencia atmosférica y la actividad de tormentas, perfiladores de viento y sistemas acústicos de sondeo de
la estructura vertical de temperaturas.
Alternativamente, estas y otras variables pueden obtenerse mediante el uso de globos sonda.

19
2.2.4 Estaciones Aeronáuticas
Las estaciones aeronáuticas son observaciones especiales que se efectúan generalmente en aeropuertos y aeródromos
civiles o militares, aunque se hacen también observaciones que se efectúan en varias horas del día enviándolas
inmediatamente a un centro recolector de datos. Estas observaciones se transmiten a otros aeródromos y con frecuencia a
los aviones en vuelo, con la finalidad de contribuir y proveer un normal desarrollo de la navegación aérea segura, regular y
eficiente así como para las actividades en tiempo real de la industria de la aviación, por medio de la transmisión de
informaciones destinadas a preparar el vuelo y otorgar seguridad a las aeronaves y en caso de desastre, proveen la
información indispensable que permita tomar medidas necesarias para una rápida búsqueda y salvamento de los posibles
sobrevivientes.
Uno de los objetivos principales de las estaciones aeronáuticas es permitir a los operadores de las líneas aéreas utilizar
directamente los pronósticos meteorológicos para el plan de vuelo y las advertencias exactas del tiempo adverso
incluyendo tempestades, formación de hielo, turbulencias y otras durante las diferentes fases de vuelos.
La disponibilidad de información meteorológica fiable es un factor decisivo para las operaciones de vuelo y en particular
para la elección de la ruta y nivel de vuelo. Esta información permite reducir la carga de combustible, reducir el tiempo de
duración del vuelo, elegir las componentes favorables del viento, así de esta manera disminuyen los costos operativos
logrando muy importantes ahorros gracias a estas predicciones concretas.
Los sensores con los que suelen contar las estaciones meteorológicas aeronáuticas son de: temperatura del aire y del
punto de rocío, dirección y fuerza del viento, presión barométrica, precipitación, alcance visual en la pista y sensor para
medir la altitud de las nubes.
2.2.5 Estaciones Satelitales
Un satélite meteorológico es un tipo de satélite artificial que se utiliza principalmente para supervisar el tiempo atmosférico
y el clima de la Tierra.
Los satélites meteorológicos se han convertido en una de las herramientas más prácticas que ha producido la tecnología
espacial para la predicción del tiempo desde que empezaron a lanzarse en abril de 1960. El primer satélite meteorológico
puesto en órbita fue el TIROS-1, el cual constató la enorme capacidad informativa aportada para el estudio de la atmósfera,
así como la importancia de observar la Tierra desde el espacio.
La configuración básica de un satélite meteorológico, consiste en una cámara con la función de fotografiar
electrónicamente los sistemas nubosos. La información recibida es enviada rápidamente a la Tierra, debido a que las
condiciones meteorológicas pueden variar en poco tiempo. La transmisión de estas imágenes, permiten la suficiente
resolución para el trabajo meteorológico.

20
Existen dos tipos básicos de satélites meteorológicos, dependiendo de su órbita: los geoestacionarios y los polares.
Los satélites meteorológicos geoestacionarios orbitan alrededor de la Tierra sobre el ecuador a unas altitudes de 35.880
km. Debido a su órbita, permanecen estáticos respecto al movimiento de rotación terrestre y por tanto pueden grabar o
transmitir imágenes del hemisferio que tienen debajo continuamente con sus sensores de luz visible e infrarrojos.
Los satélites de órbita polar rodean la Tierra a una altitud típica de 850 km de norte a sur o viceversa, pasando sobre los
polos en su vuelo. Los satélites polares están en órbitas helio síncronas, lo que significa que pueden observar cualquier
lugar de la Tierra y ver dos veces al día un lugar con las mismas condiciones generales de luz debido al tiempo solar casi
constante. Además, los satélites de órbita polar ofrecen mayor resolución que sus homólogos geoestacionarios debido a su
cercanía con la Tierra.
2.3. Métodos de adquisición de las variables meteorológicas
En los principales sistemas de adquisición se implementan diferentes dispositivos para llevar a cabo la captura de las
señales provenientes de los sensores para su posterior procesamiento y almacenamiento. Entre los más utilizados
podemos encontrar los dataloggers, microprocesadores, microcontroladores y circuitos lógicos programables (PLC).
Algunos de los factores que intervienen en la elección de los sistemas a utilizar son el costo del equipo, la capacidad de
almacenamiento y el procesamiento de los datos.
2.4. Métodos de transmisión de las variables
En la actualidad los principales sistemas de transmisión remota son:
· RF (Radio Frecuencia).
· Satélite (Microondas)
· GSM (Global System for Mobile)/GPRS (General Packet Radio Service).
· Red Inalámbrica (WiFi, WiMax, XBee).
Las especificaciones Zigbee, WiMax y Wi-Fi, tienen diferencias marcadas en características como la velocidad de
transmisión, consumo eléctrico, rango de alcance, tamaño del protocolo, técnica de modulación, tiempo de activación, entre
otras. En términos prácticos, uno de los aspectos más importantes para seleccionar una u otra tecnología es el ancho de
banda de datos que permite transmitir. Sin embargo, a la hora de utilizar dichas tecnologías en aplicaciones de control y de
envío de pequeñas cantidades datos, este aspecto se vuelve menos relevante y otros como el rango, el consumo y el
precio del dispositivo cobran gran importancia.
A pesar de que el rango de alcance y el consumo eléctrico está directamente ligados a la tecnología, si revisamos los
dispositivos del mercado, vemos que estas diferencias no son tan marcadas y que la mayoría de módulos que hay
disponibles pueden satisfacer nuestras necesidades, haciendo que la decisión de que componente seleccionar se base en
su precio, facilidad de implementación y uso y la confiabilidad de la marca.

21
Consumo de energía
El tiempo de vida de un nodo sensor, depende mucho de la batería. En muchos casos, el nodo sensor inalámbrico tiene
una fuente de poder limitado (1.2V, 500mAh), mientras que la carga de la batería podría ser limitada o imposible de ser
cargada por completo. Comúnmente, los nodos sensores utilizan como fuente de poder dos pilas alcalinas “doble A” o bien
una batería de Litio “Li-AA”.
Dos aspectos prácticos, que limitan a menudo la elección del sistema de transmisión son el alcance de la transmisión y el
costo de la instrumentación instalada. Teniendo en cuenta estas consideraciones, algunas ventajas y desventajas de los
principales sistemas de transmisión se describen a continuación:
La radiofrecuencia tiene la posibilidad de mandar y recibir mucha información con un reducido costo de la transmisión.
La ventaja fundamental de los satélites es su gran cobertura espacial y temporal. Su inconveniente radica
fundamentalmente en el elevado costo de la instalación, operación y mantenimiento del sistema. Respecto a las redes WiFi
(Wireless Fidelity) destaca su elevada velocidad de transmisión, pero una de las desventajas es su limitado rango de
cobertura, siendo éste del orden 200 metros.
La ventaja fundamental de la tecnología WiMax (Worldwide Interoperability for Microwave Access) sobre WiFi radica en el
hecho de su mayor cobertura, siendo del orden de 50 km. El inconveniente fundamental del WiMax es el alto costo de la
instalación.
Algunas de las ventajas de la tecnología GSM/GPRS es el costo de comunicación muy reducido, la tecnología GPRS
permite estar siempre conectado y facilidad de llevar a cabo la instalación. Por otro lado, una de las desventajas es que su
cobertura depende de la disponibilidad de una conexión telefónica movil.
22
Capítulo 3 Waspmote
3.1 Dispositivos Waspmote
Waspmote es la línea original en el que los desarrolladores tienen un control total sobre el dispositivo de hardware. Puede acceder físicamente a la tableta y conectar nuevos sensores o incluso incrustar en sus propios productos como un dispositivo sensor electrónico. Ahora puede implementar redes de sensores inalámbricos en una manera fácil y escalable para garantizar unos costos de mantenimiento mínimos. Las redes de sensores inalámbricas están formadas por una serie de nodos que son capaces de medir parámetros de relevancia, esto mediante sensores que trabajan en conjunto para enviar la información. Los dispositivos Waspmote, son equipos de comunicación que han sido diseñados para implementarse en redes de sensores basados en un microprocesador de bajo consumo, a este mismo se le pueden incorporar módulos a través de sus entradas analógicas y digitales. Las redes de sensores inalámbricas permiten monitorear cualquier entorno por más inaccesible que parezca. Todo esto se logra mediante la distribución de los nodos de sensores en el terreno que se desee monitorear. Estos dispositivos, se comunican mediante tecnología XBee, la cual se puede controlar y recibir información de otros nodos de sensores. El dispositivo Waspmote, son fabricados y distribuidos por la empresa española Libelium. Esta empresa diseña y fabrica
tecnología de hardware para la implementación de redes de sensores inalámbricas y está especialmente orientado para
desarrolladores.
Waspmote permite realizar tres aplicaciones principales:
1º- Conecte cualquier sensor a un bus industrial existente
Waspmote se puede configurar para funcionar como un nodo en la red, la inserción de datos de los sensores en el bus
industrial ya presente. Waspmote se puede obtener información de más de 70 sensores actualmente integrados en la
plataforma mediante el uso de placas de sensores específicos (por ejemplo: CO, CO2, temperatura, humedad, aceleración,
pH, IR, luminosidad, vibraciones, etc.). De esta manera, la información del sensor se puede leer desde cualquier dispositivo
industrial conectado al bus.

23
2º- Añadir conectividad inalámbrica a los buses con cable
Waspmote puede ser configurado para leer la información procedente del bus y enviar de forma inalámbrica utilizando
cualquiera de los módulos inalámbricos disponibles en la plataforma a una estación base o a otro nodo conectado a otro
bus. Las tecnologías inalámbricas disponibles son: WiFi, 3G, GPRS, 802.15.4, ZigBee, Bluetooth, Bluetooth Low Energy,
RF-868MHz, 900MHz RF.
3º- Conecta a los dispositivos industriales a la nube
El almacenamiento en la nube (del inglés cloud storage), es un modelo de almacenamiento de datos basado en redes,
ideado en los años 1960, donde los datos están alojados en espacios de almacenamiento virtualizados, por lo general
aportados por terceros.
Waspmote se puede configurar para leer la información que viene del bús y enviar de forma inalámbrica directamente a la
nube utilizando Wi-Fi, 3G y GPRS interfaces de radio.
Trabaja con diferentes protocolos de bajo consumo (ZigBee, 802.15.4, Bluetooth, GPS, Wifi) y frecuencias (2.4GHz,
868MHz, 900MHz) con la capacidad de establecer enlaces de hasta 12 km.
Cuenta con un modo de hibernación con consumo de 0.7μA lo que permite ahorrar batería cuando no está transmitiendo
información.
Este dispositivo dispone de más de 50 sensores entre los que se pueden mencionar: Temperatura, humedad, luminosidad
o radiación etc., y también cuenta con un entorno de desarrollo (IDE) de código abierto (librerías + compilador), lo que
facilita trabajar con la plataforma.
El propósito principal de este dispositivo consiste en facilitar la configuración de redes de sensores, para su uso en
diferentes escenarios, como una red de sensores para cultivos, o una red de sensores para monitoreo de un edificio o lugar
público. Se puede apreciar en la figura 4.
Figura 4 Dispositivo Waspmote.
24
3.2 Hardware
Waspmote se basa en una arquitectura modular. La idea es integrar únicamente los módulos que necesitemos en cada
dispositivo y ser capaces de cambiarlos y ampliarlos según las necesidades.
Los módulos disponibles para integrar en Waspmote se clasifican en:
- Módulos ZigBee /802.15.4 (2.4GHz, 868MHz, 900MHz). Baja y alta potencia.
- Módulo GSM - GPRS/3G (Quadband: 850MHz/900MHz/1800MHz/1900MHz).
- Módulo GPS.
- Módulos Sensoriales (Placas de Sensores).
- Módulo de almacenamiento: SD Memory Card.
Especificaciones de los Dispositivos Waspmote
El dispositivo Waspmote cuenta con las siguientes características:
* Microcontrolador: ATmega 1281
* Frecuencia: 8 MHz
* SRAM: 8 KB
* EEPROM: 4KB
* FLASH: 128 KB
* SD CARD: 2 GB
* Peso: 20 gr.
* Dimensiones: 73.5 x 51 x 13 mm
* Intervalo de temperatura: [-20°C, +65°C]
* Reloj: RTC (32 kHz)
* Consumo:
ON: 15 mA
Sleep: 55 μADeep Sleep: 55 μA
25
Hibernate: 0.7 μA
* Funcionamiento sin recarga: 1 año
* Entradas/Salidas:
7 Analógicas (I), 8 Digitales (I/O), 1PWM
2 UART, 1 I2C, 1 USB
* Características Eléctricas:
Valores de funcionamiento:
--Tensión de batería mínima de funcionamiento 3.3 V
--Tensión de batería máxima de funcionamiento 4.2V
--Tensión de carga USB 5 V
--Tensión de carga placa solar 6 - 12 V
--Corriente de carga de batería por USB 100 mA (max)
--Corriente de carga de batería por placa solar 280 mA (max)
--Tensión de pila de botón 3V
Valores máximos absolutos:
--Tensión en cualquier pin [-0.5 V, +3.8 V]
--Corriente máxima por cualquier pin I/O digital 40 mA
--Tensión de alimentación USB 7V
--Tensión de alimentación placa solar 18V
--Tensión de batería cargada 4.2 V
26
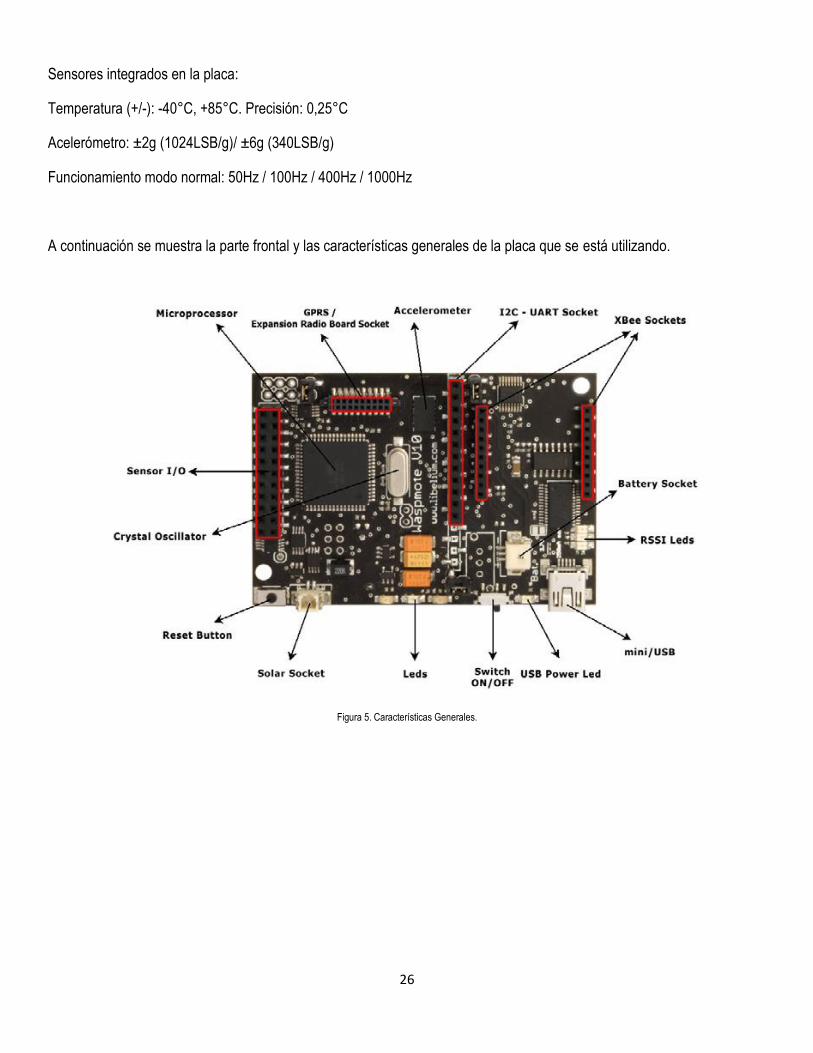
Sensores integrados en la placa:
Temperatura (+/-): -40°C, +85°C. Precisión: 0,25°C
Acelerómetro: ±2g (1024LSB/g)/ ±6g (340LSB/g)
Funcionamiento modo normal: 50Hz / 100Hz / 400Hz / 1000Hz
A continuación se muestra la parte frontal y las características generales de la placa que se está utilizando.
Figura 5. Características Generales.

27
En esta imagen se puede observar la parte posterior de la placa también podemos observar la batería auxiliar, los sockets
del GPS el RTC (Real Time Clock) y la entrada a la tarjeta SD.
Figura 6. Lado Posterior de la tarjeta y sus Características Generales.
3.2.1 Arquitectura Waspmote
La arquitectura de Waspmote se basa en el microcontrolador ATMEGA 1281 de Atmel. Esta unidad de procesado arranca
ejecutando el binario denominado “bootloader” que se encarga de cargar en memoria parte de los programas y librerías
compiladas y almacenadas previamente en la memoria FLASH, con la finalidad de que el programa principal que se ha
creado pueda finalmente comenzar su ejecución.
Cuando se conecta Waspmote y se inicia el bootloader, existe un tiempo de espera (62.5ms) antes de comenzar con la
primera instrucción, tiempo que es utilizado para iniciar la actualización de los programas que se encuentran cargados en
el caso de que estuviéramos cargando nuevos programas compilados. Si en ese tiempo se recibe un nuevo programa a
través del USB, se procederá a cargarlo en la memoria FLASH (128KB) sustituyendo los programas que existieran. Por el
contrario, si no se recibe un nuevo programa, se iniciará el último programa almacenado en memoria.
Una vez que tenemos un programa cargado en el microcontrolador, el funcionamiento de Waspmote se basa en el código
que se ha cargado. La estructura de los códigos se divide en 2 partes fundamentales: un parte denominada setup y una
parte llamada loop. Ambas partes del código tienen un comportamiento secuencial, ejecutándose las instrucciones en el
orden establecido.
La parte llamada setup es la primera parte del código que se ejecuta, haciéndolo sólo una vez al iniciar el código. En esta
parte es recomendable incluir la inicialización de los módulos que se vayan a utilizar, así como parte del código que sólo
interesa que se ejecute al iniciarse Waspmote.
La parte denominada loop es un bucle que se ejecuta continuamente, formando un bucle infinito. Debido al comportamiento
de esta parte del código es recomendable la utilización de las interrupciones para realizar acciones con Waspmote.

28
3.2.2 Indicadores LED
Figura 7. Ubicación de cada LED
A continuación se describe la función de cada led en la tarjeta Waspmote de izquierda a derecha:
Led indicador de carga de batería.
El Led de color rojo indica que en el Waspmote hay conectada una batería que está siendo cargada, la carga se puede
hacer mediante un cable mini USB o bien mediante una placa solar conectada al Waspmote. Una vez que la batería está
totalmente cargada el LED se apaga automáticamente.
Led 1 (Led programable)
Led indicador rojo conectado al microcontrolador totalmente programable por el usuario desde el código del programa.
Led 0 (LED programable)
Led indicador verde conectado al microcontrolador totalmente programable por el usuario desde el código del programa.
Además el LED 0 indica cuando Waspmote se reestablece, emitiendo un parpadeo cada vez que se lleva a cabo un
restablecimiento en la placa.
Led indicador USB Power
Led verde que indica cuando el Waspmote está conectado a un puerto USB compatible ya sea para carga de batería o bien
para programación. Cuando el LED está encendido indica que el cable USB está conectado correctamente, al quitar el
cable USB el LED se apagará automáticamente.
Indicadores LED de RSSI
Se incluyen 3 indicadores LED para conocer visualmente el valor del RSSI (Received Strength Signal Indicator) de las
tramas ZigBee/802.15.4. Estos LED indican la intensidad de la señal del último paquete recibido.
29
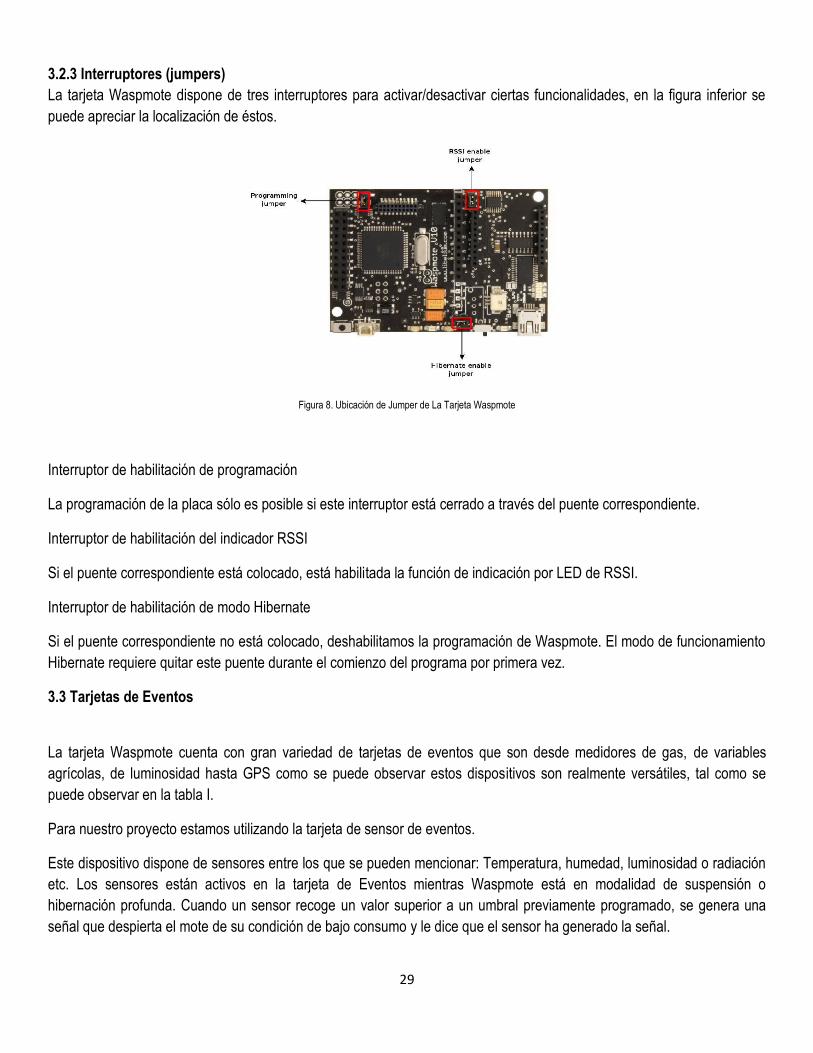
3.2.3 Interruptores (jumpers)
La tarjeta Waspmote dispone de tres interruptores para activar/desactivar ciertas funcionalidades, en la figura inferior se
puede apreciar la localización de éstos.
Figura 8. Ubicación de Jumper de La Tarjeta Waspmote
Interruptor de habilitación de programación
La programación de la placa sólo es posible si este interruptor está cerrado a través del puente correspondiente.
Interruptor de habilitación del indicador RSSI
Si el puente correspondiente está colocado, está habilitada la función de indicación por LED de RSSI.
Interruptor de habilitación de modo Hibernate
Si el puente correspondiente no está colocado, deshabilitamos la programación de Waspmote. El modo de funcionamiento
Hibernate requiere quitar este puente durante el comienzo del programa por primera vez.
3.3 Tarjetas de Eventos
La tarjeta Waspmote cuenta con gran variedad de tarjetas de eventos que son desde medidores de gas, de variables
agrícolas, de luminosidad hasta GPS como se puede observar estos dispositivos son realmente versátiles, tal como se
puede observar en la tabla I.
Para nuestro proyecto estamos utilizando la tarjeta de sensor de eventos.
Este dispositivo dispone de sensores entre los que se pueden mencionar: Temperatura, humedad, luminosidad o radiación
etc. Los sensores están activos en la tarjeta de Eventos mientras Waspmote está en modalidad de suspensión o
hibernación profunda. Cuando un sensor recoge un valor superior a un umbral previamente programado, se genera una
señal que despierta el mote de su condición de bajo consumo y le dice que el sensor ha generado la señal.
30
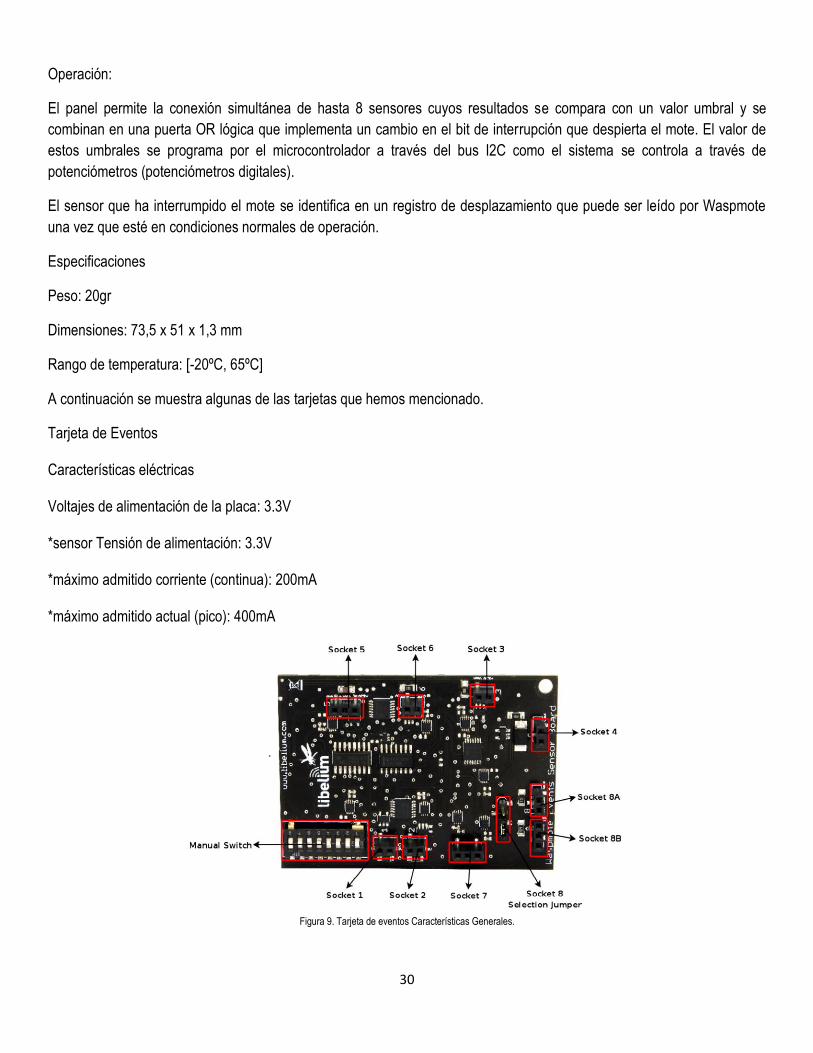
Operación:
El panel permite la conexión simultánea de hasta 8 sensores cuyos resultados se compara con un valor umbral y se
combinan en una puerta OR lógica que implementa un cambio en el bit de interrupción que despierta el mote. El valor de
estos umbrales se programa por el microcontrolador a través del bus I2C como el sistema se controla a través de
potenciómetros (potenciómetros digitales).
El sensor que ha interrumpido el mote se identifica en un registro de desplazamiento que puede ser leído por Waspmote
una vez que esté en condiciones normales de operación.
Especificaciones
Peso: 20gr
Dimensiones: 73,5 x 51 x 1,3 mm
Rango de temperatura: [-20ºC, 65ºC]
A continuación se muestra algunas de las tarjetas que hemos mencionado.
Tarjeta de Eventos Características eléctricas Voltajes de alimentación de la placa: 3.3V *sensor Tensión de alimentación: 3.3V *máximo admitido corriente (continua): 200mA *máximo admitido actual (pico): 400mA
Figura 9. Tarjeta de eventos Características Generales.

31
TABLA I
Tarjeta de Sensor de Gases
arjeta Sensor de Eventos

32
Tarjeta de Agricultura
Tarjeta de Radiación
Tarjeta de Smart Parking

33
Como se puede observar hay varios tipos de sensores que se pueden usar estos 5 son solo una prueba de la versatilidad
de la tarjeta Waspmote. En mi caso solo puse estos cinco debido a que para mí son los más interesantes claro las
opiniones pueden variar dependiendo de cada asunto al que vaya dirigido.
3.4 Gateway
En esta sección se presenta la puerta de enlace, la cual también necesitamos para la programación de los XBee es sumamente importante ya que sin esta no se pueden programar. Más adelante se explicarán los programas que se usan para la programación, los canales y la tasa transmisión que usa en baudios que, el fabricante nos recomienda sea a 38400 bauds. Interfaz USB-PC Modelo: Waspmote Gateway Comunicación: 802.15.4 / ZigBee - PC USB Botones programables y leds •• IDE-Waspmote (de código abierto) •• Idioma: C ++ •• Las versiones de Windows, Linux y Mac OS-
Figura 10. Puerta de enlace (Gateway).
Indicadores LED de la puerta de enlace En el Gateway se incluyen cuatro indicadores LED:
34
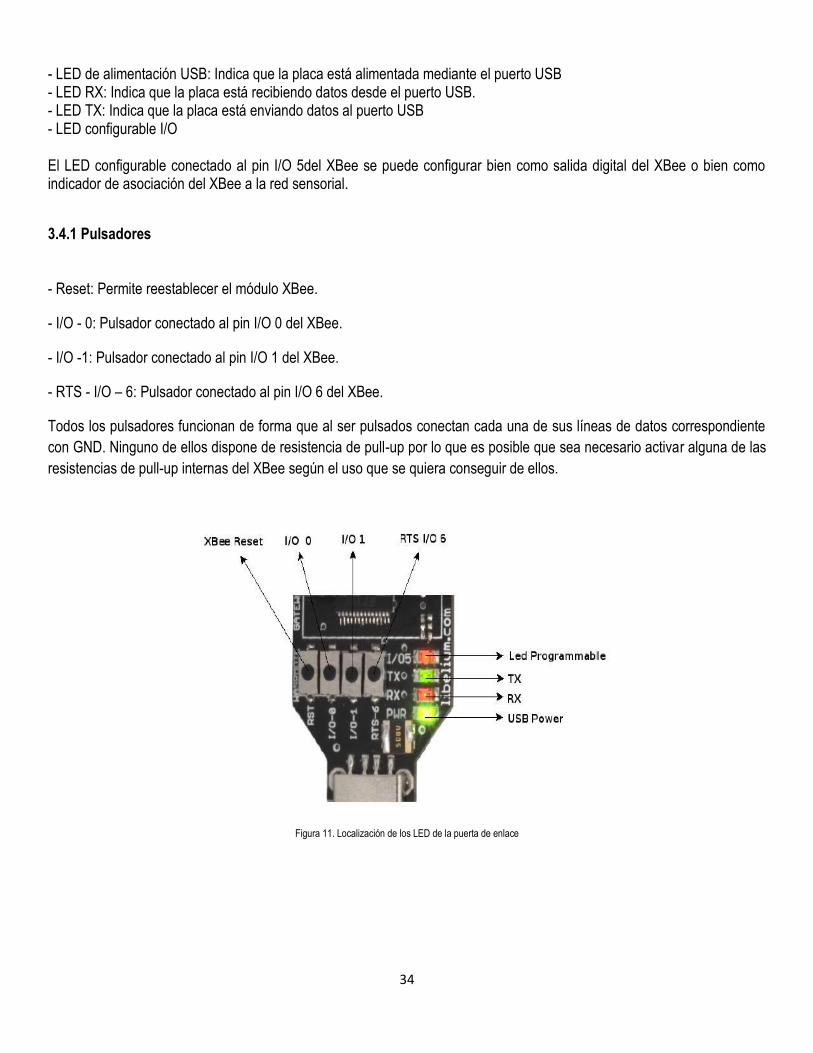
- LED de alimentación USB: Indica que la placa está alimentada mediante el puerto USB - LED RX: Indica que la placa está recibiendo datos desde el puerto USB. - LED TX: Indica que la placa está enviando datos al puerto USB - LED configurable I/O El LED configurable conectado al pin I/O 5del XBee se puede configurar bien como salida digital del XBee o bien como indicador de asociación del XBee a la red sensorial.
3.4.1 Pulsadores
- Reset: Permite reestablecer el módulo XBee.
- I/O - 0: Pulsador conectado al pin I/O 0 del XBee.
- I/O -1: Pulsador conectado al pin I/O 1 del XBee.
- RTS - I/O – 6: Pulsador conectado al pin I/O 6 del XBee.
Todos los pulsadores funcionan de forma que al ser pulsados conectan cada una de sus líneas de datos correspondiente
con GND. Ninguno de ellos dispone de resistencia de pull-up por lo que es posible que sea necesario activar alguna de las
resistencias de pull-up internas del XBee según el uso que se quiera conseguir de ellos.
Figura 11. Localización de los LED de la puerta de enlace
35
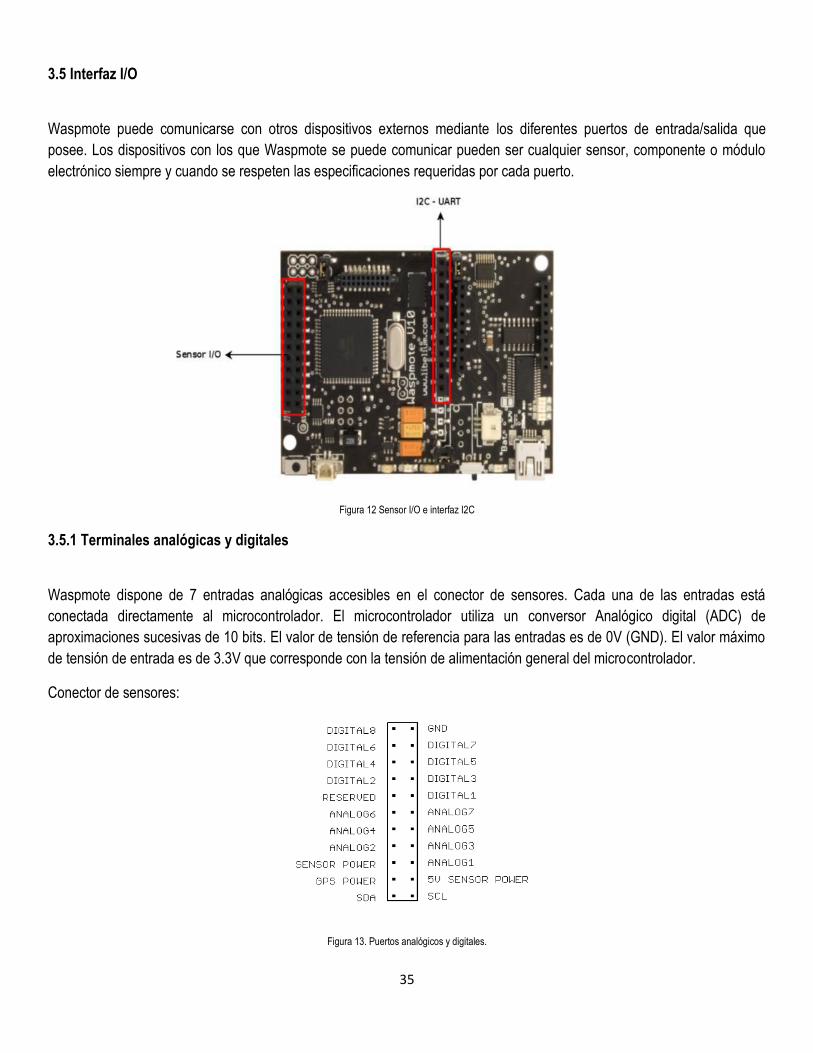
3.5 Interfaz I/O
Waspmote puede comunicarse con otros dispositivos externos mediante los diferentes puertos de entrada/salida que
posee. Los dispositivos con los que Waspmote se puede comunicar pueden ser cualquier sensor, componente o módulo
electrónico siempre y cuando se respeten las especificaciones requeridas por cada puerto.
Figura 12 Sensor I/O e interfaz I2C
3.5.1 Terminales analógicas y digitales
Waspmote dispone de 7 entradas analógicas accesibles en el conector de sensores. Cada una de las entradas está
conectada directamente al microcontrolador. El microcontrolador utiliza un conversor Analógico digital (ADC) de
aproximaciones sucesivas de 10 bits. El valor de tensión de referencia para las entradas es de 0V (GND). El valor máximo
de tensión de entrada es de 3.3V que corresponde con la tensión de alimentación general del microcontrolador.
Conector de sensores:
Figura 13. Puertos analógicos y digitales.

36
Conector I2C – UART conectores
Figura 14. Conexión transmisión I2C y UART
Terminales analógicas
Para obtener el valor de las entradas se utiliza la función “analogRead (entrada analógica)” el parámetro de entrada de la
función será el nombre de la entrada que queremos leer “ANALOG1, ANALOG2...”. El valor obtenido de esta función será
un número entero entre 0 y 1023, 0 corresponde con 0 V y 1023 con 3.3 V.
Los pines de entrada analógicos pueden utilizarse también como pines de entrada / salida digitales. Si queremos usar
estos pines como digitales tenemos que tener en cuenta la siguiente lista de correspondencias en el nombre de los pines:
Figura 15 Configuración de pines
Waspmote posee 8 pines digitales que pueden ser configuradas como entrada o salida en función de las necesidades de la
aplicación. Los valores de tensión correspondientes a los diferentes valores digitales serían:
--0V para el 0 lógico.
--3.3V para el 1 lógico.
37
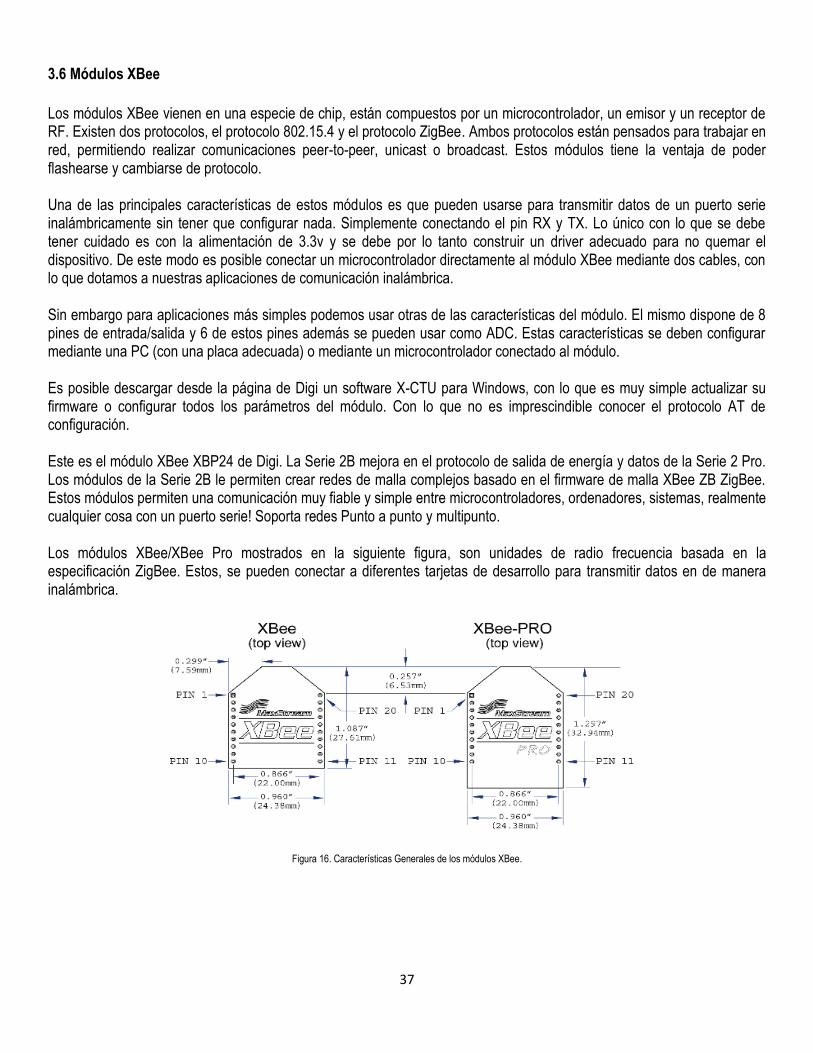
3.6 Módulos XBee
Los módulos XBee vienen en una especie de chip, están compuestos por un microcontrolador, un emisor y un receptor de RF. Existen dos protocolos, el protocolo 802.15.4 y el protocolo ZigBee. Ambos protocolos están pensados para trabajar en red, permitiendo realizar comunicaciones peer-to-peer, unicast o broadcast. Estos módulos tiene la ventaja de poder flashearse y cambiarse de protocolo. Una de las principales características de estos módulos es que pueden usarse para transmitir datos de un puerto serie inalámbricamente sin tener que configurar nada. Simplemente conectando el pin RX y TX. Lo único con lo que se debe tener cuidado es con la alimentación de 3.3v y se debe por lo tanto construir un driver adecuado para no quemar el dispositivo. De este modo es posible conectar un microcontrolador directamente al módulo XBee mediante dos cables, con lo que dotamos a nuestras aplicaciones de comunicación inalámbrica. Sin embargo para aplicaciones más simples podemos usar otras de las características del módulo. El mismo dispone de 8 pines de entrada/salida y 6 de estos pines además se pueden usar como ADC. Estas características se deben configurar mediante una PC (con una placa adecuada) o mediante un microcontrolador conectado al módulo. Es posible descargar desde la página de Digi un software X-CTU para Windows, con lo que es muy simple actualizar su firmware o configurar todos los parámetros del módulo. Con lo que no es imprescindible conocer el protocolo AT de configuración. Este es el módulo XBee XBP24 de Digi. La Serie 2B mejora en el protocolo de salida de energía y datos de la Serie 2 Pro. Los módulos de la Serie 2B le permiten crear redes de malla complejos basado en el firmware de malla XBee ZB ZigBee. Estos módulos permiten una comunicación muy fiable y simple entre microcontroladores, ordenadores, sistemas, realmente cualquier cosa con un puerto serie! Soporta redes Punto a punto y multipunto. Los módulos XBee/XBee Pro mostrados en la siguiente figura, son unidades de radio frecuencia basada en la especificación ZigBee. Estos, se pueden conectar a diferentes tarjetas de desarrollo para transmitir datos en de manera inalámbrica.
Figura 16. Características Generales de los módulos XBee.
38
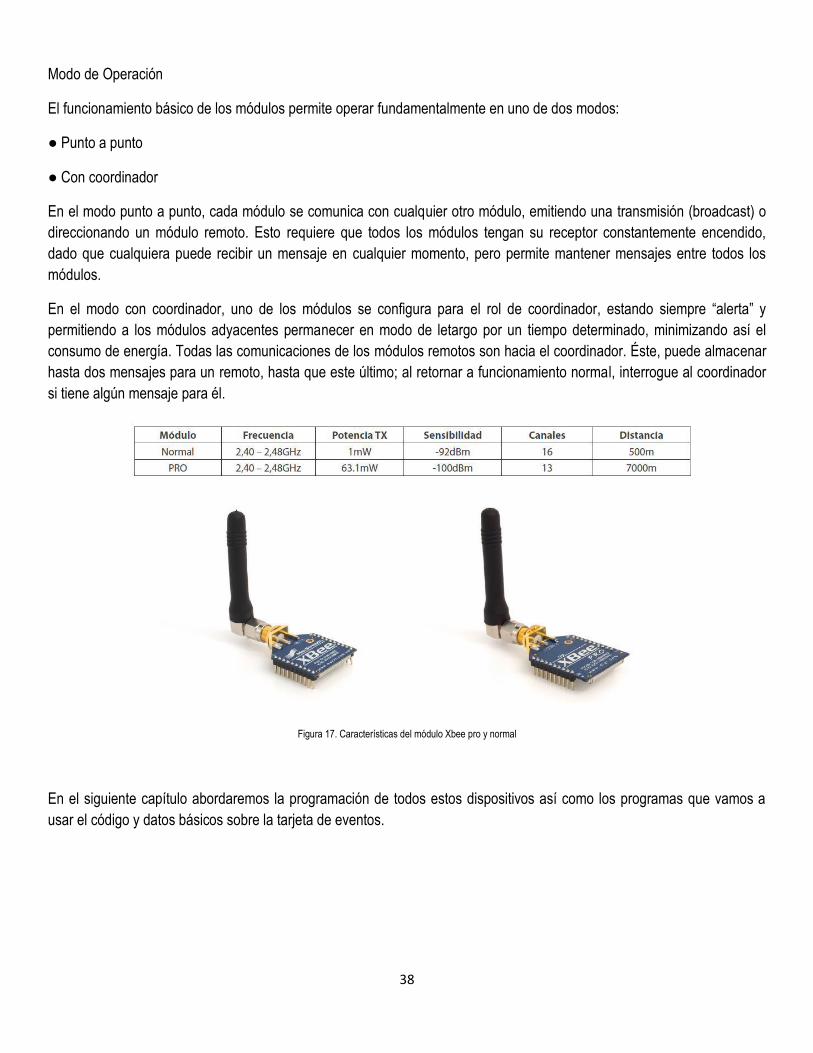
Modo de Operación
El funcionamiento básico de los módulos permite operar fundamentalmente en uno de dos modos:
● Punto a punto
● Con coordinador
En el modo punto a punto, cada módulo se comunica con cualquier otro módulo, emitiendo una transmisión (broadcast) o
direccionando un módulo remoto. Esto requiere que todos los módulos tengan su receptor constantemente encendido,
dado que cualquiera puede recibir un mensaje en cualquier momento, pero permite mantener mensajes entre todos los
módulos.
En el modo con coordinador, uno de los módulos se configura para el rol de coordinador, estando siempre “alerta” y
permitiendo a los módulos adyacentes permanecer en modo de letargo por un tiempo determinado, minimizando así el
consumo de energía. Todas las comunicaciones de los módulos remotos son hacia el coordinador. Éste, puede almacenar
hasta dos mensajes para un remoto, hasta que este último; al retornar a funcionamiento normal, interrogue al coordinador
si tiene algún mensaje para él.
Figura 17. Características del módulo Xbee pro y normal
En el siguiente capítulo abordaremos la programación de todos estos dispositivos así como los programas que vamos a
usar el código y datos básicos sobre la tarjeta de eventos.

39
Capítulo 4 Instalación y Manejo de Programas
En este capítulo abordaremos la cuestión de programación de la tarjeta Waspmote, el Gateway que programa y sincroniza
el dispositivo XBee y también la tarjeta de eventos de este proyecto.
4.1 Instalación del IDE de Waspmote
IDE PARA WASPMOTE
El primer paso es instalar el IDE (Integrated Development Environment) utilizado para programar los Waspmote. Este IDE
se puede encontrar en la página http://www.libelium.com/development/waspmote
El IDE que se va a utilizar es el compilador de la plataforma Arduino, siguiendo el mismo estilo de librerías y
funcionamiento. Es importante usar la versión que se encuentra en la web de Waspmote y no otras versiones del IDE de
Arduino. La razón es que la versión disponible en la web de Libelium es la que ha sido debidamente probada con la cual se
asegura un funcionamiento óptimo.
El IDE-Waspmote incluye todas las librerías del API necesarias para compilar los programas.
El archivo que contiene el compilador y las librerías se llama “Waspmote-environment-Vxx.zip” (xx corresponde al nombre
de la versión). Este archivo contiene una carpeta con el compilador Waspmote, que debe extraerse en la ruta deseada. Las
librerías de Waspmote están integradas en esta carpeta, estando disponibles al ejecutar el compilador.
El IDE o ambiente integrado de desarrollo, servirá para programar los nodos Waspmote de una manera sencilla e intuitiva
como se muestra en la figura 18 Éste puede ser instalado en los diferentes sistemas operativos, a continuación listados.
* Windows
* Linux
* Mac‐Os
En nuestro caso usaremos el IDE correspondiente a Windows
Windows
1.- Descargando Waspmote
El primer paso es descargar el archivo que contiene el entorno y las librerías. Este archivo se puede encontrar en:
http://www.libelium.com/development/waspmote
2.- Instalando Waspmote
El siguiente paso es descomprimir el archivo descargado en la carpeta elegida. En esta carpeta se encuentran los drivers
que serán necesarios en el siguiente paso para instalar el USB y el conversor FTDI.

40
3.- Conectando una placa Waspmote
Al conectar una placa Waspmote mediante el conector mini-USB, aparecerá un mensaje de „Nuevo dispositivo encontrado‟.
Se abrirá una ventana para la instalación de dicho dispositivo.
A continuación debemos seleccionar la ruta donde se encuentran los controladores para el conversor FTDI. Estos
controladores se encuentran en la carpeta donde hemos descomprimido Waspmote.
Se procederá a la instalación de los controladores del conversor FTDI, mostrando el siguiente mensaje cuando se haya
finalizado la misma.
Una vez finalizada esta instalación, aparecerá un mensaje de un „Nuevo dispositivo encontrado‟ referente al USB. Se debe
seguir el mismo proceso que hemos llevado a cabo para el conversor FTDI, seleccionando las mismas opciones en todas
las ventanas. La ruta para los drivers es la misma que la especificada anteriormente.
Una vez finalizada esta instalación, aparecerá un mensaje indicando la correcta instalación del USB.
Una vez instalados correctamente ambos dispositivos, aparecerá en el „Administrador de dispositivos‟ el puerto en el que
se ha conectado la placa Waspmote.
Al finalizar estos pasos y al haber instalado correctamente el IDE de Waspmote podemos proceder abrir el programa si lo
hemos hecho correctamente se mostrara la imagen siguiente de la figura 18.
Figura 18 Muestra el IDE del Waspmote.

41
Podemos ver el programa que es realmente básico consta las siguientes funcionalidades:
* Ambiente de desarrollo basado en C/C++
* Monitor de puerto serial para observar los datos enviados por los nodos
* Manejo de funcionalidades como interrupciones u otros estados de energía
* Múltiples ejemplos de código para las diferentes características de equipo
A continuación se muestra la función que tiene cada botón del programa y se incluye un programa de prueba el cual hace
que enciendan los leds cada 1000 ms (milisegundos)
Figura 19. Muestra el IDE del Waspmote con la función de cada botón.
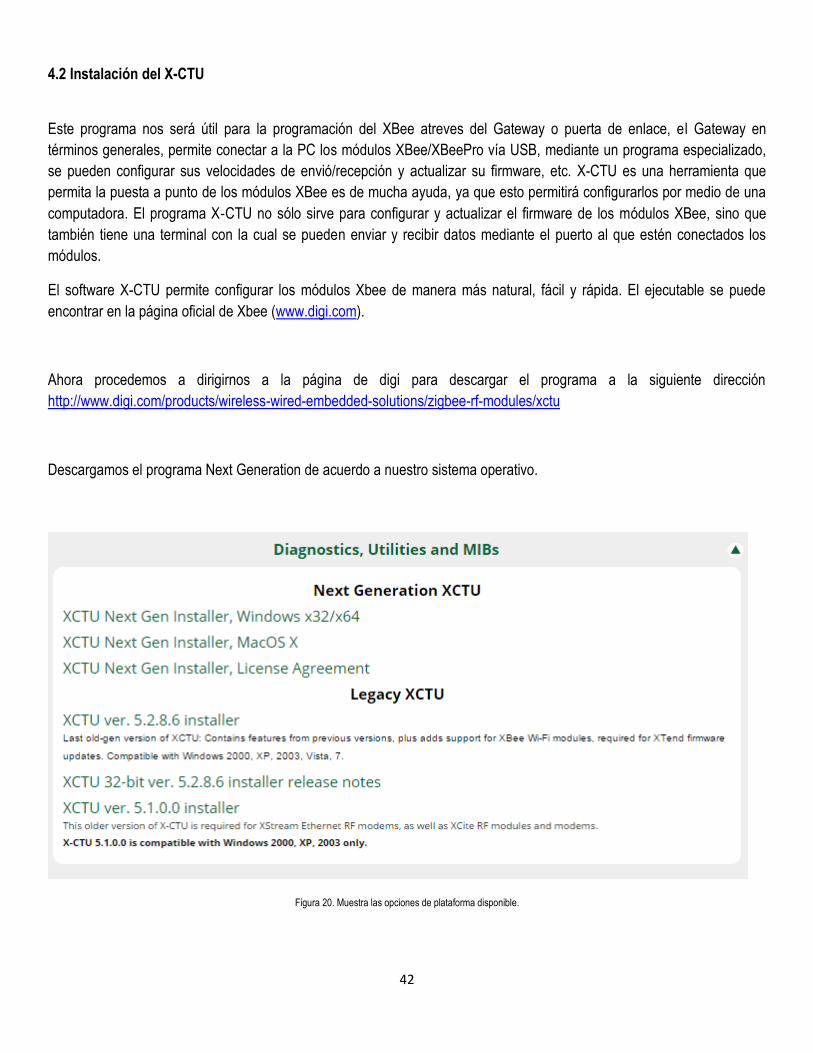
42
4.2 Instalación del X-CTU
Este programa nos será útil para la programación del XBee atreves del Gateway o puerta de enlace, el Gateway en
términos generales, permite conectar a la PC los módulos XBee/XBeePro vía USB, mediante un programa especializado,
se pueden configurar sus velocidades de envió/recepción y actualizar su firmware, etc. X-CTU es una herramienta que
permita la puesta a punto de los módulos XBee es de mucha ayuda, ya que esto permitirá configurarlos por medio de una
computadora. El programa X‐CTU no sólo sirve para configurar y actualizar el firmware de los módulos XBee, sino que
también tiene una terminal con la cual se pueden enviar y recibir datos mediante el puerto al que estén conectados los
módulos.
El software X-CTU permite configurar los módulos Xbee de manera más natural, fácil y rápida. El ejecutable se puede
encontrar en la página oficial de Xbee (www.digi.com).
Ahora procedemos a dirigirnos a la página de digi para descargar el programa a la siguiente dirección
http://www.digi.com/products/wireless-wired-embedded-solutions/zigbee-rf-modules/xctu
Descargamos el programa Next Generation de acuerdo a nuestro sistema operativo.
Figura 20. Muestra las opciones de plataforma disponible.

43
Nos descargara un archivo con la siguiente extensión 40003026_A. Lo abrimos y lo ejecutamos después procedemos a la
instalación del mismo realmente este no tiene ninguna complicación, además de elegir donde deseamos guardar el
programa que comúnmente la computadora lo hace por default.
Al finalizar la instalación y al abrir el programa nos aparecerá la siguiente ventana que nos muestra la inicialización del
programa.
Figura 21. Muestra la inicialización del Programa.
Al cargar el programa completamente nos aparecerá la siguiente imagen.
Figura 22. Muestra el Programa abierto.
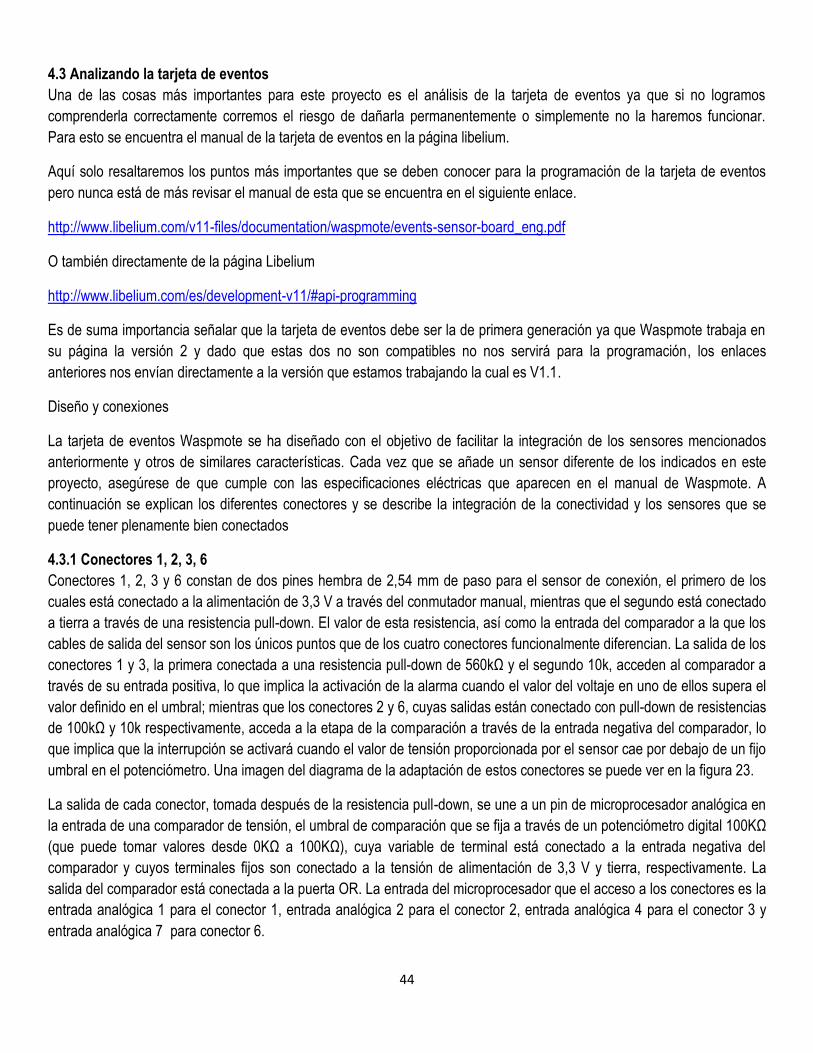
44
4.3 Analizando la tarjeta de eventos
Una de las cosas más importantes para este proyecto es el análisis de la tarjeta de eventos ya que si no logramos
comprenderla correctamente corremos el riesgo de dañarla permanentemente o simplemente no la haremos funcionar.
Para esto se encuentra el manual de la tarjeta de eventos en la página libelium.
Aquí solo resaltaremos los puntos más importantes que se deben conocer para la programación de la tarjeta de eventos
pero nunca está de más revisar el manual de esta que se encuentra en el siguiente enlace.
http://www.libelium.com/v11-files/documentation/waspmote/events-sensor-board_eng.pdf
O también directamente de la página Libelium
http://www.libelium.com/es/development-v11/#api-programming
Es de suma importancia señalar que la tarjeta de eventos debe ser la de primera generación ya que Waspmote trabaja en
su página la versión 2 y dado que estas dos no son compatibles no nos servirá para la programación, los enlaces
anteriores nos envían directamente a la versión que estamos trabajando la cual es V1.1.
Diseño y conexiones
La tarjeta de eventos Waspmote se ha diseñado con el objetivo de facilitar la integración de los sensores mencionados
anteriormente y otros de similares características. Cada vez que se añade un sensor diferente de los indicados en este
proyecto, asegúrese de que cumple con las especificaciones eléctricas que aparecen en el manual de Waspmote. A
continuación se explican los diferentes conectores y se describe la integración de la conectividad y los sensores que se
puede tener plenamente bien conectados
4.3.1 Conectores 1, 2, 3, 6
Conectores 1, 2, 3 y 6 constan de dos pines hembra de 2,54 mm de paso para el sensor de conexión, el primero de los
cuales está conectado a la alimentación de 3,3 V a través del conmutador manual, mientras que el segundo está conectado
a tierra a través de una resistencia pull-down. El valor de esta resistencia, así como la entrada del comparador a la que los
cables de salida del sensor son los únicos puntos que de los cuatro conectores funcionalmente diferencian. La salida de los
conectores 1 y 3, la primera conectada a una resistencia pull-down de 560kΩ y el segundo 10k, acceden al comparador a
través de su entrada positiva, lo que implica la activación de la alarma cuando el valor del voltaje en uno de ellos supera el
valor definido en el umbral; mientras que los conectores 2 y 6, cuyas salidas están conectado con pull-down de resistencias
de 100kΩ y 10k respectivamente, acceda a la etapa de la comparación a través de la entrada negativa del comparador, lo
que implica que la interrupción se activará cuando el valor de tensión proporcionada por el sensor cae por debajo de un fijo
umbral en el potenciómetro. Una imagen del diagrama de la adaptación de estos conectores se puede ver en la figura 23.
La salida de cada conector, tomada después de la resistencia pull-down, se une a un pin de microprocesador analógica en
la entrada de una comparador de tensión, el umbral de comparación que se fija a través de un potenciómetro digital 100KΩ
(que puede tomar valores desde 0KΩ a 100KΩ), cuya variable de terminal está conectado a la entrada negativa del
comparador y cuyos terminales fijos son conectado a la tensión de alimentación de 3,3 V y tierra, respectivamente. La
salida del comparador está conectada a la puerta OR. La entrada del microprocesador que el acceso a los conectores es la
entrada analógica 1 para el conector 1, entrada analógica 2 para el conector 2, entrada analógica 4 para el conector 3 y
entrada analógica 7 para conector 6.

45
Estos conectores se han instalado para integrar ambos sensores resistivos (como el FlexiForce PS-02, el FLX-01-H, la
STRX-04 y de la LDR), así como sensores de conmutación (tales como la ASLS-2, la AG2401-1, la AG3011-1, la
PTFA3415, la PTFA0100, la PTFA1103 y la PLA41201), a condición de que son normalmente abierto si está conectado a
los conectores de 1 o 3 y cerrado si conectado a los conectores de 2 o 6.
Figura 23. Diagrama de conectores 1, 2, 3 y 6.
4.3.2 Conector 4
El conector 4 consiste en una tira de dos patillas hembra 2,54 mm de paso. El primer pasador está conectado a la tierra del
tablero, mientras que el segundo está conectado a la salida del sensor por una resistencia en serie de 10k, tanto conectado
a través de un diodo. El diagrama de conexión de los pines se puede ver en la figura 24. La salida del sensor se compara
con un umbral fijado por el usuario a través de un DigiPot de 100KΩ utilizando un comparador, que está conectado al
sensor a través de su entrada positiva y los datos de salida en la puerta OR. De la misma manera, la salida del conector se
inserta en el microprocesador a través de su análogo de entrada 3.
Figura 24. Diagrama de conector 4

46
4.3.3 Conector 5
Conector 5 está formado por una tira de 2,54 mm de paso de tres patillas hembra que son conectadas directamente a la
alimentación de 3,3 V (a través del conmutador manual), a tierra y a la salida del conector. Esta salida es llevada
directamente al análogo 6 de entrada del comparador de umbral y cuya salida se activa la puerta OR. Los pines de
alimentación y de tierra del conector están desacoplados por un condensador de 100nF. Un diagrama del conector se
puede ver en la figura 25.
Este conector permite la conexión de sensores analógicos a la tabla de eventos (como el MCP9700A), que proporciona
una tensión salida y sólo requiere de alimentación y tierra.
Figura 25. Diagrama de conector 5
4.3.4 Conector 7
Conector 7 consiste en una tira de tres pines hembra de 2,54 mm de paso conectada a tierra, fuente de alimentación (a
través de interruptor manual 7) y la puerta OR y entradas del microprocesador. El diagrama se puede ver en la figura 26.
La salida del conector está conectada directamente a Digital5 entrada digital del microprocesador.
Este conector se ha instalado para la integración de sensores digitales y sólo requiere conexión a tierra y el suministro de
3,3 V y cuya salida puede ser leído por un pin digital en el microprocesador.
Figura 26. Diagrama de conector 7

47
4.3.5 Conector 8
Conector 8 está formado por dos tiras de dos y tres pines hembra de 2,54 mm de paso, la primera de las cuales permite
conexiones a tierra, el suministro de 3.3V del interruptor manual y la salida del sensor, conectados al poder a través de una
resistencia pull-up de 100KΩ. Las patillas de la segunda tira se conectan a tierra y la salida del sensor, conectado a tierra a
través de una resistencia pull-down. La salida del conector que va a acceder a la puerta OR y el pin analógico 5 se
selecciona de los dos anteriores a través de un puente. Un diagrama se puede ver en la figura 27.
Este conector permite la conexión de sensores de conmutación. Las dos salidas disponibles, conectados a tierra y poder a
través del pull-down y las resistencias pull-up respectivamente, permiten el uso de sensores que son normalmente tanto
cerrado y abierto. También se pueden utilizar para la integración de sensores digitales.
Figura 27. Diagrama de conector 8

48
4.4 Configuración de la Placa de Eventos
Configuración de hardware
Los diferentes sensores deben estar conectados en las tiras de pines del conector. La función del pin se imprime en la
placa donde la fuente de alimentación es de + 3,3 V y la tierra del circuito (GND) o señal de salida del conector (Vout).
Aunque la salida de muchos de los sensores puede estar conectado de manera indiscriminada a los pines de entrada,
tanto para sensores resistivos y de conmutación, el usuario debe mantener la precaución para evitar cortocircuitos y
conexiones erróneas que pueden dañar tanto el sensor y la placa, siguiendo las instrucciones de este trabajo y hoja de
datos del sensor, y tras consultar al distribuidor con cualquier pregunta.
Figura 28. Muestra un ejemplo de cómo usar la tabla de sensores.
Además de las conexiones del sensor, la tarjeta de eventos Waspmote también incluye dos componentes que deben ser
manualmente configurados por el usuario: un interruptor manual para controlar la potencia de cada sensor y un puente
para la elección de la salida de uno de los conectores. Un interruptor manual ha sido elegido debido a que la inserción de
elementos más digitales limitaría en gran medida el número máximo de sensores que se pueden conectar a la placa.

49
En primer lugar, el poder de cada sensor debe activarse o desactivarse manualmente. Una de tres posiciones del DIP (por
sus siglas en ingles Dual In line Package) de 8 interruptores que se ha instalado para este fin, de la que cada uno de los
conectores es controlado. Como se ve en la imagen 29, colocando el interruptor frente al número de identificación permite
la alimentación de todos los componentes de ese conector y cualquier unido a él, mientras que en cualquiera de las otras
dos posiciones de la entrada de alimentación de los diferentes dispositivos están desconectados.
Figura 29. Imagen de tres interruptores, en la posición de encendido (interruptor 8) y desactivación (interruptores 7 y 6)
Como se puede ver se debe conocer bien la placa de eventos para tener el correcto funcionamiento de esta ya que si no la
podemos dañar o simplemente no la haremos funcionar.
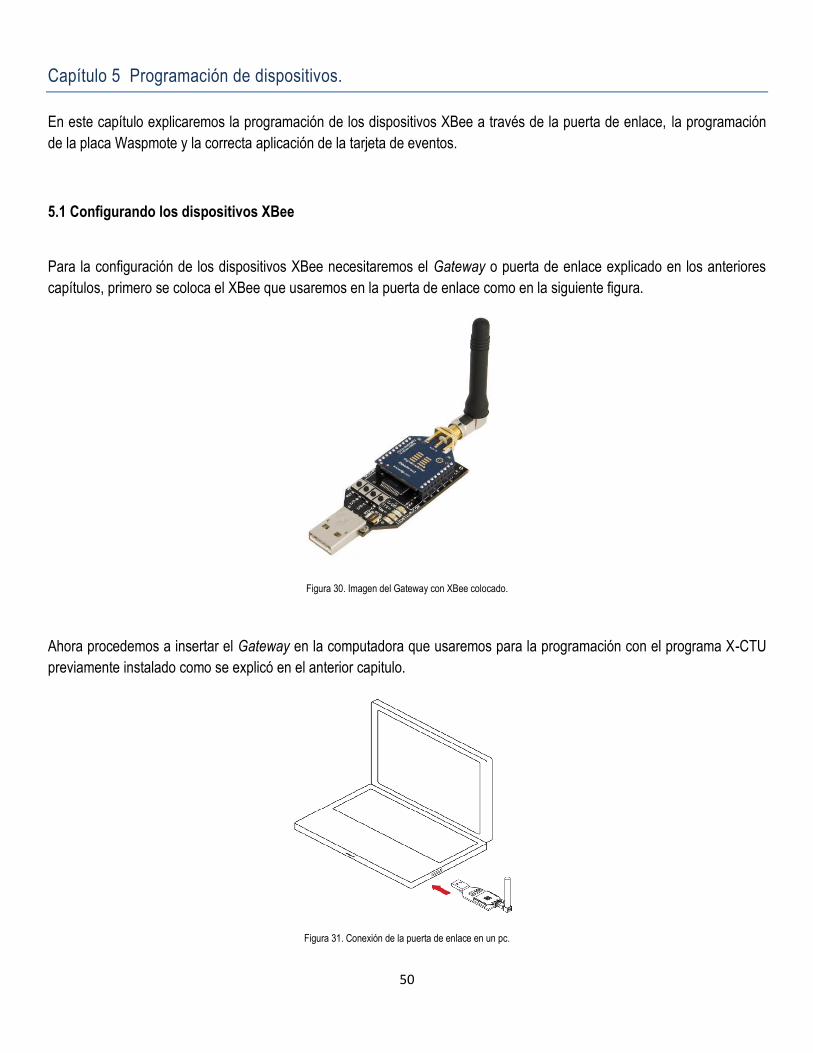
50
Capítulo 5 Programación de dispositivos.
En este capítulo explicaremos la programación de los dispositivos XBee a través de la puerta de enlace, la programación
de la placa Waspmote y la correcta aplicación de la tarjeta de eventos.
5.1 Configurando los dispositivos XBee
Para la configuración de los dispositivos XBee necesitaremos el Gateway o puerta de enlace explicado en los anteriores
capítulos, primero se coloca el XBee que usaremos en la puerta de enlace como en la siguiente figura.
Figura 30. Imagen del Gateway con XBee colocado.
Ahora procedemos a insertar el Gateway en la computadora que usaremos para la programación con el programa X-CTU
previamente instalado como se explicó en el anterior capitulo.
Figura 31. Conexión de la puerta de enlace en un pc.

51
Ahora procedemos a abrir nuestro programa X-CTU en nuestro ordenador.
Figura 32. Programa X-CTU.
Ejecutar la aplicación X-CTU, pulse el botón "Descubra módulos de radio conectados" (Es la figura de la lupa en su
imagen), seleccione el puerto de comunicación apropiado y configurarlo como se muestra a continuación (si no está
seguro, puede seleccionar todos) Y oprima Next.
Figura 33. Buscando dispositivos conectados.

52
Esto es muy importante si es la primera vez a programar el dispositivo XBee para el uso de la placa Waspmote elija los
valores que se le indican en el manual de usuario o en este proyecto los cuales son los siguientes.
Pc Settings
- Set port parameters
Baud Rate [ 38400 ] // Si no elegimos este valor de 38400 en el IDE en la pestaña de monitor serial este nos arrojara solo basura, dado que este es el valor
Configurado por las tarjetas Waspmote de fábrica. Data bits [ 8 ]
Parity [ None ]
Stop bits [ 1 ]
Flow Control [ None ]
Y oprimimos la instrucción Next.
Figura 34. Primera configuración.
NOTA: Si es que ya habíamos configurado los datos anteriores y queremos volver a revisar el XBee por medio del X-CTU
debemos darle los mismos parámetros ya que de lo contrario nos será imposible leer el dispositivo dado que este ya fue
configurado anteriormente.
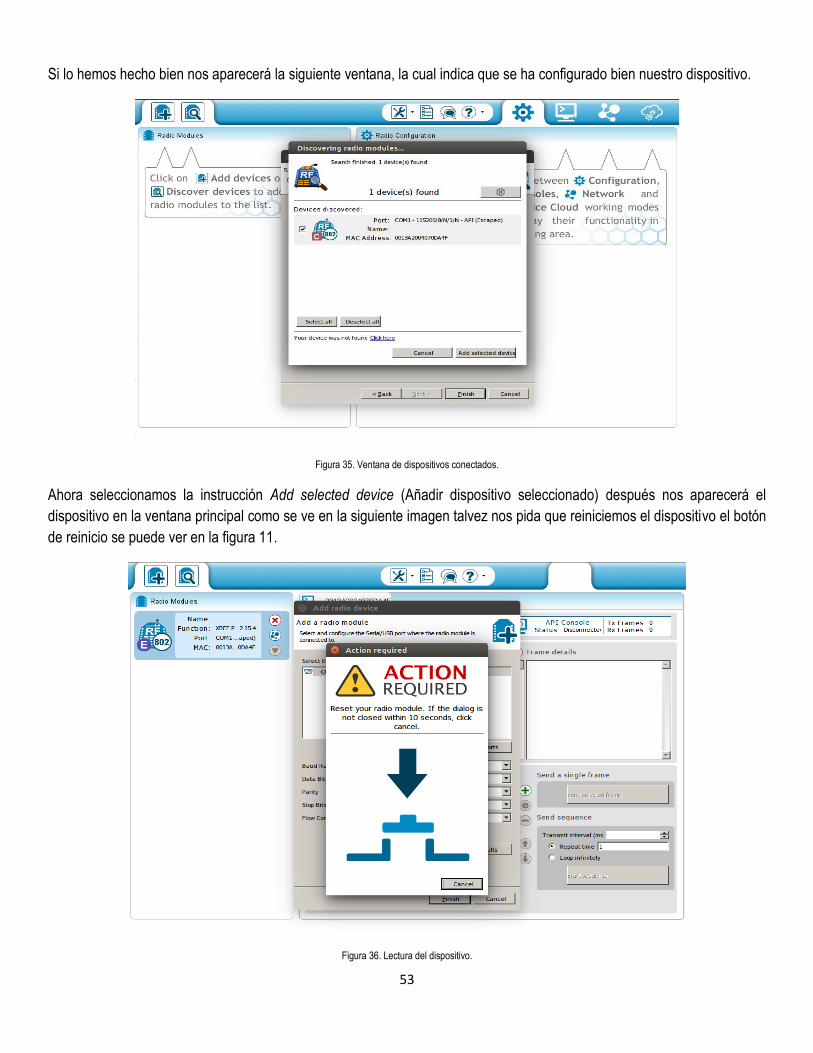
53
Si lo hemos hecho bien nos aparecerá la siguiente ventana, la cual indica que se ha configurado bien nuestro dispositivo.
Figura 35. Ventana de dispositivos conectados.
Ahora seleccionamos la instrucción Add selected device (Añadir dispositivo seleccionado) después nos aparecerá el
dispositivo en la ventana principal como se ve en la siguiente imagen talvez nos pida que reiniciemos el dispositivo el botón
de reinicio se puede ver en la figura 11.
Figura 36. Lectura del dispositivo.

54
A continuación, vaya al modo de configuración de trabajo (Es la figura del engrane) y haga clic para seleccionar el
dispositivo. Tenemos que comprobar cada parámetro primero.
Figura 37. Datos del dispositivo.
Tanto como el dispositivo XBee que va conectado a la placa Waspmote como el que va conectado a la puerta de enlace
deberán tener los mismos datos para que estos se puedan comunicar, como se muestra a continuación.
Los canales deben ser los mismos.
Figura 38. Se elige el canal C.

55
El PAN ID también debe ser el mismo para ambos dispositivos, estos valores vienen programados de fábrica pero es
necesario revisarlos para evitar futuras fallas.
Figura 39. Se elige el valor 3332.
El destination address consta de dos direcciones una que es la alta (High Address) y la otra es la baja (Low Address) estas
se pueden encontrar al reverso del XBee. Estas configuración solo se cambia si se requiere usar un coordinador para los
demás dispositivos en nuestro caso no lo haremos porque no es necesario.
Figura 40. El dispositivo en su parte posterior.

56
Para nuestro proyecto solamente se deja el espacio en blanco como en la siguiente figura.
Figura 41.High y Low Address.
El siguiente parámetro sólo se llena si se necesita una llave encriptada para nuestro caso lo dejamos en blanco. Esto lo
indico ya que el programa nos lo remarca con color y uno piensa que se debe llenar forzosamente.
Figura 42.Encriptacion de llave.

57
La velocidad de transmisión de interfaz esto lo hablamos anteriormente la cual debería ser de 38400 bauds si en ese paso
lo hicimos correcto la velocidad ya estará marcada, en el caso que hayamos tenido algún error aquí es el momento de
corregirlo y darle la velocidad deseada. Esta velocidad debe ser debido a que es la velocidad en que trabaja nuestra placa
Waspmote.
Figura 43.Velocidad de transmisión.
Para finalizar la programación del dispositivo para nuestra tarjeta solo debemos elegir las opciones del API la cual deben
ser las mismas para el gateway como para nuestra placa Waspmote. Para este proyecto usamos la tercera opción w/PPP (2)
Figura 44.Opciones de API.

58
Bueno para finalizar con la programación ahora vamos a la sección de Write radio Settings (Es la imagen del Lápiz) la cual
grabara las configuraciones que hemos programado en nuestro dispositivo y listo nuestro dispositivo estará correctamente
programado. Para revisar si la programación es correcta lo que debemos hacer es lo siguiente pulsar la tecla de Read radio
Settings (Son la flechas) y solo verificamos que la información que nos aparece es la que nosotros programamos.
Figura 45.Grabar el dispositivo.
NOTA: Es muy importante que se haga el mismo procedimiento con el dispositivo XBee que va en la tarjeta de Waspmote,
solo se tiene que retirar de la tarjeta e introducirla en la puerta de enlace y hacer todo lo anterior nuevamente.
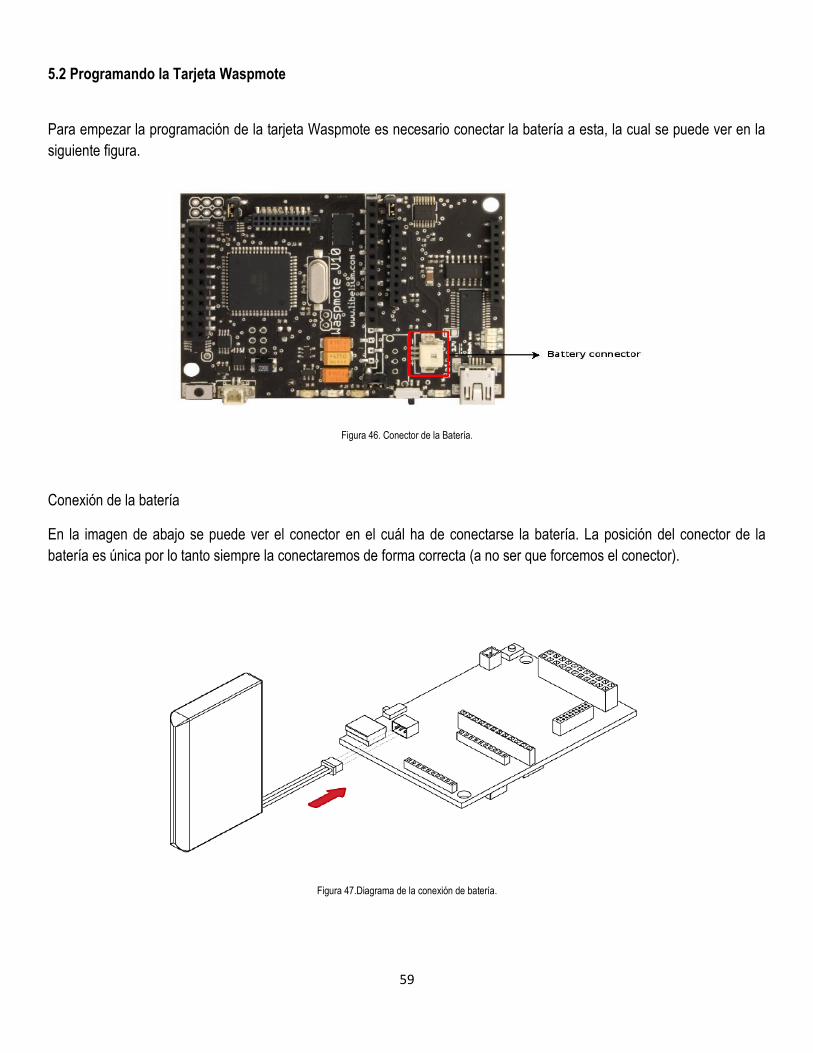
59
5.2 Programando la Tarjeta Waspmote
Para empezar la programación de la tarjeta Waspmote es necesario conectar la batería a esta, la cual se puede ver en la
siguiente figura.
Figura 46. Conector de la Batería.
Conexión de la batería
En la imagen de abajo se puede ver el conector en el cuál ha de conectarse la batería. La posición del conector de la
batería es única por lo tanto siempre la conectaremos de forma correcta (a no ser que forcemos el conector).
Figura 47.Diagrama de la conexión de batería.
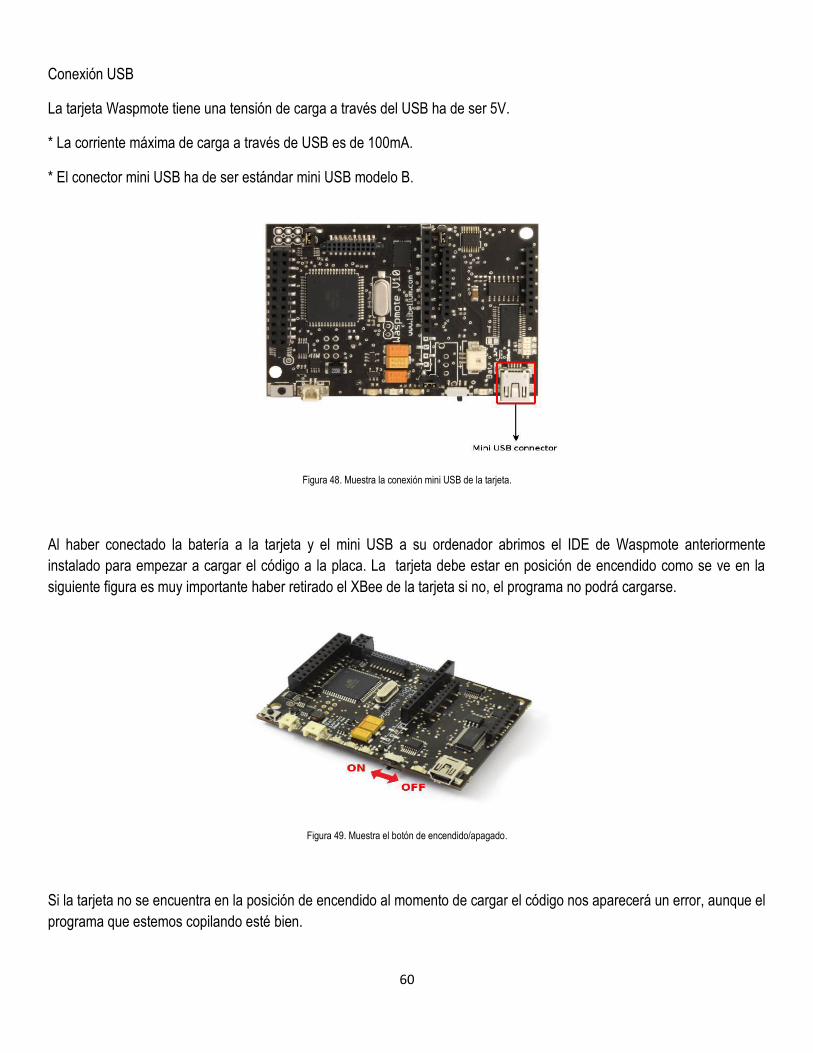
60
Conexión USB
La tarjeta Waspmote tiene una tensión de carga a través del USB ha de ser 5V.
* La corriente máxima de carga a través de USB es de 100mA.
* El conector mini USB ha de ser estándar mini USB modelo B.
Figura 48. Muestra la conexión mini USB de la tarjeta.
Al haber conectado la batería a la tarjeta y el mini USB a su ordenador abrimos el IDE de Waspmote anteriormente
instalado para empezar a cargar el código a la placa. La tarjeta debe estar en posición de encendido como se ve en la
siguiente figura es muy importante haber retirado el XBee de la tarjeta si no, el programa no podrá cargarse.
Figura 49. Muestra el botón de encendido/apagado.
Si la tarjeta no se encuentra en la posición de encendido al momento de cargar el código nos aparecerá un error, aunque el
programa que estemos copilando esté bien.
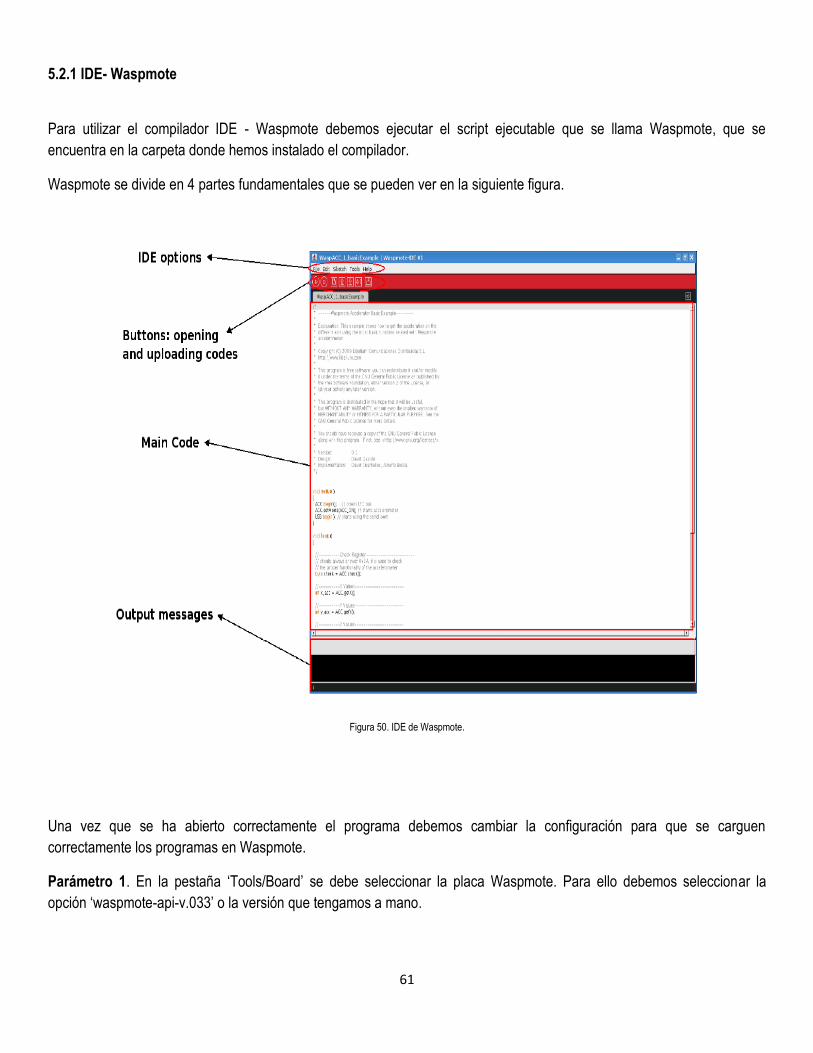
61
5.2.1 IDE- Waspmote
Para utilizar el compilador IDE - Waspmote debemos ejecutar el script ejecutable que se llama Waspmote, que se
encuentra en la carpeta donde hemos instalado el compilador.
Waspmote se divide en 4 partes fundamentales que se pueden ver en la siguiente figura.
Figura 50. IDE de Waspmote.
Una vez que se ha abierto correctamente el programa debemos cambiar la configuración para que se carguen
correctamente los programas en Waspmote.
Parámetro 1. En la pestaña „Tools/Board‟ se debe seleccionar la placa Waspmote. Para ello debemos seleccionar la
opción „waspmote-api-v.033‟ o la versión que tengamos a mano.

62
Parámetro 2. En la pestaña „Tools/Serial Port‟ se debe seleccionar el USB en el que se ha conectado Waspmote a la
computadora. Este paso es muy importante debido a que si no se elige el puerto serial el programa no podrá cargarse en la
tarjeta Waspmote.
Figura 51. Se elige el puerto serial.
Una vez que tenemos configurados estos 2 parámetros podemos cargar un programa en Waspmote.
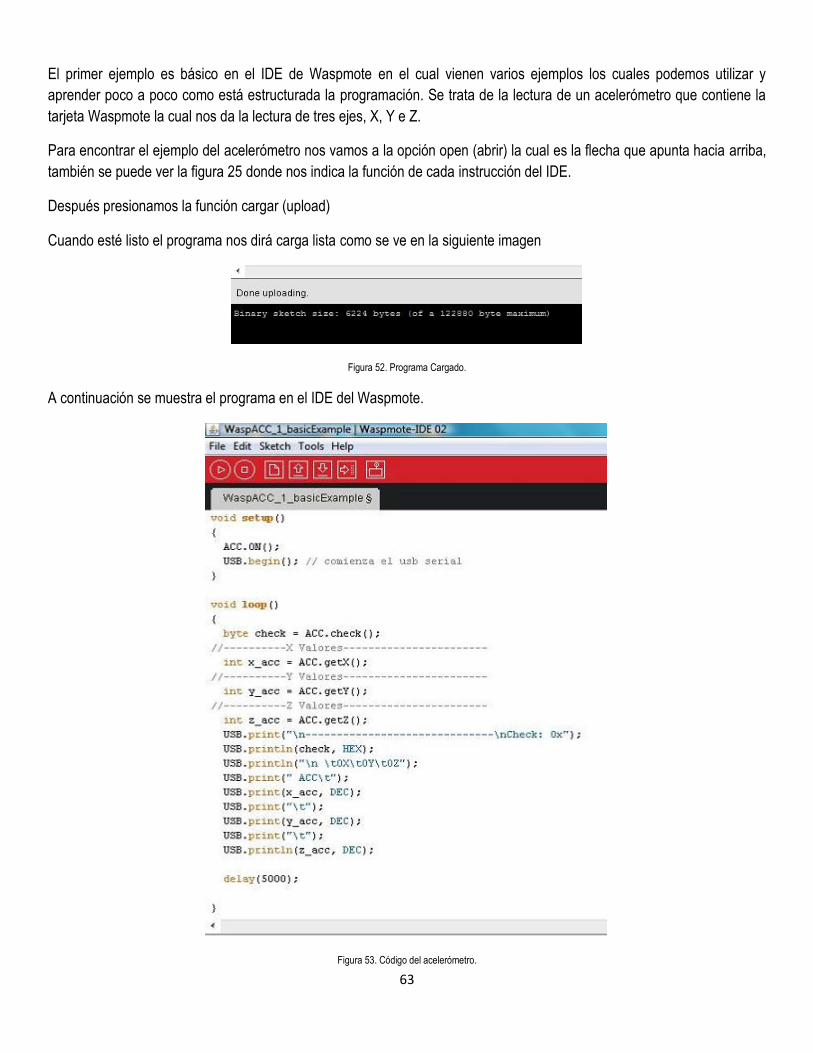
63
El primer ejemplo es básico en el IDE de Waspmote en el cual vienen varios ejemplos los cuales podemos utilizar y
aprender poco a poco como está estructurada la programación. Se trata de la lectura de un acelerómetro que contiene la
tarjeta Waspmote la cual nos da la lectura de tres ejes, X, Y e Z.
Para encontrar el ejemplo del acelerómetro nos vamos a la opción open (abrir) la cual es la flecha que apunta hacia arriba,
también se puede ver la figura 25 donde nos indica la función de cada instrucción del IDE.
Después presionamos la función cargar (upload)
Cuando esté listo el programa nos dirá carga lista como se ve en la siguiente imagen
Figura 52. Programa Cargado.
A continuación se muestra el programa en el IDE del Waspmote.
Figura 53. Código del acelerómetro.

64
Este código nos muestra una salida en el monitor serial con los ejes X, Y e Z como se puede ver en la siguiente imagen.
Figura 54. Salida del programa.
Este es un ejemplo básico y como estos hay muchos en el IDE del Waspmote, se ofrece éste como ejemplo para empezar
a practicar y comenzar a entender un poco el sistema de programación Waspmote. Es importante remarcar que el IDE
debe corresponder con la versión de la placa ya que sin esto no se podrá coordinar la tarjeta y el programador.
También es importante decir que este programa sólo funciona para la tarjeta Waspmote. Si queremos enviar paquetes para
que los reciba nuestro Gateway deberemos inicializar la librería del XBee con las siguientes instrucciones.
packetXBee* paq_sent;
int8_t state=0;
long previous=0;
char aux[200];
char* macHigh=" ";
char* macLow=" ";

65
5.2.2 Programa Principal
El siguiente programa corresponde enteramente a nuestro proyecto en el cual se inicializa el XBee para que pueda enviar
un paquete de tramas y el Gateway los pueda interpretar y leer en el monitor serial. El programa Principal es el siguiente.
// Comenzamos inicializando la librería del XBee para enviar y recibir datos
packetXBee* paq_sent;
int8_t state=0;
long previous=0;
char aux[200];
char* macHigh=" ";
char* macLow=" ";
#define key_access "LIBELIUM"
uint8_t direccion[8]={0x00,0x00,0x00,0x00,0x00,0x00,0xFF,0xFF};
void setup(){
// Definimos los ciclos a usar
for(int i=0;i<8;i++){
Utils.writeEEPROM(i+107,key_access[i]);
}
Encendemos el reloj del circuito junto con el acelerómetro, los tiempo de retardo
RTC.ON();
ACC.ON();
XBee.setMode(XBEE_ON);
XBee.begin(9600);
delay(1000);
XBee.print("+++");
delay(2000);
XBee.println("ATBD5,AP2,WR,CN");
66
delay(150);
XBee.setMode(XBEE_OFF);
XBee.close();
// Utilizamos los leds y definimos su tiempo de intermitencia
Utils.setLED(LED0, LED_ON);
Utils.setLED(LED1, LED_ON);
delay(5000);
Utils.setLED(LED0, LED_OFF);
Utils.setLED(LED1, LED_OFF);
for (int i=0;i<24;i++){
Utils.blinkLEDs(125);
}
// Inicia la libreria XBee
xbee802.init(XBEE_802_15_4,FREQ2_4G,NORMAL);
// Activamos Xbee
xbee802.ON();
// Obtenemos el valor de la MAC del Xbee
delay(500);
int counter = 0;
while(xbee802.getOwnMac()==1&&counter<4){
xbee802.getOwnMac();
counter++;
}
Utils.hex2str(xbee802.sourceMacHigh,macHigh,4); // Convierte el valor hexadecimal a una cadena (macHigh) de 4
digitos
Utils.hex2str(xbee802.sourceMacLow,macLow,4); // Convierte el valor hexadecimal a una cadena (macHigh) de 4
digitos
}
67
void loop()
{
RTC.ON();
float temperature = RTC.getTemperature();
char temp[6];
Utils.float2String(temperature, temp, 2);
sprintf(aux,"-mac:%s%s -x:%d,y:%d,z:%d -temp:%s -bat: %d%c%c% ",macHigh,macLow,ACC.getX(),ACC.getY(),ACC.getZ(),temp,PWR.getBatteryLevel(),'%','\n \n');
paq_sent=(packetXBee*) calloc(1,sizeof(packetXBee));
paq_sent->mode=BROADCAST;
paq_sent->MY_known=0;
paq_sent->packetID=0x52;
paq_sent->opt=0;
xbee802.hops=0;
xbee802.setOriginParams(paq_sent,MAC_TYPE);
xbee802.setDestinationParams(paq_sent, direccion, aux, MAC_TYPE, DATA_ABSOLUTE);
xbee802.sendXBee(paq_sent);
free(paq_sent);
paq_sent = NULL;
delay(1000);
}

68
5.2.3 Resultados del Programa Principal
El siguiente programa nos muestra en el monitor serial los siguientes datos. En la primera columna se muestra el
identificador asociado a cada tarjeta, esto con el fin de poder distinguir los datos enviados desde cada tarjeta al gateway.
En este caso debido a que la tarjeta está un poco dañada solo podemos apreciar el número que se asocia con la tarjeta
Waspmote
En la segunda columna se muestra la dirección mac de cada tarjeta Xbee montada en las tarjetas Waspmote, la dirección
mac es una forma más de poder identificar de que tarjeta estamos obteniendo los datos deseados.
En la tercera columna se muestra los datos relacionados al acelerómetro, donde se tiene los ejes X, Y y Z.
En la cuarta columna está contenido el valor relacionado a la temperatura del medio en que se encuentra ubicada la tarjeta,
es importante mencionar que independiente a la tarjeta de eventos que es montado al Waspmote para poder colocar y
medir temperatura, la propia tarjeta Waspmote trae un sensor de temperatura incorporado.
En la quinta columna se muestra el valor de carga de la batería en cada tarjeta, este valor está en dado en por ciento (%)
no en volts.
Figura 55. Salida del Monitor Serial.
Para cada tarjeta Waspmote se desplegara una línea de datos como la que se muestra en la imagen anterior, en la
ventana del serial monitor se mostraran de manera ordenada estos datos.

69
5.3 Incorporando la Tarjeta de Eventos
En esta parte del proyecto incorporaremos la tarjeta de eventos a nuestra placa Waspmote, realmente este paso no es
complicado solo hay una forma de incorporar la tarjeta a nuestra placa Waspmote. Como se puede ver a continuación solo
se debe sobreponer arriba la tarjeta de eventos a la placa Waspmote y esta se acoplara simplemente, claro antes ya
debimos haber configurado el XBee y programado la placa con el programa de la tarjeta de eventos.
Figura 56. Tarjeta de Eventos y Placa Waspmote.
En el programa anterior enteramente usamos la tarjeta Waspmote, pero ahora incorporaremos la tarjeta de eventos la cual
ya hemos explicado su correcto funcionamiento en capítulos anteriores. Esta tarjeta nos permite medir la temperatura, la
presión, la luminosidad etc. Pero siempre y cuando esté debidamente usada de lo contrario podríamos dañar la tarjeta con
el circuito Waspmote.
En nuestro caso usaremos un sensor LDR (por sus siglas en inglés "light-dependent resistor") para nuestro proyecto se
definió en el socket 6 del programa para la tarjeta de eventos.
Sensor fotoeléctrico
Un sensor fotoeléctrico o fotocélula es un dispositivo electrónico que responde al cambio en la intensidad de la luz. Estos
sensores requieren de un componente emisor que genera la luz, y un componente receptor que percibe la luz generada por
el emisor. Todos los diferentes modos de censado se basan en este principio de funcionamiento. Están diseñados
especialmente para la detección, clasificación y posicionado de objetos; la detección de formas, colores y diferencias de
superficie, incluso bajo condiciones ambientales extremas.
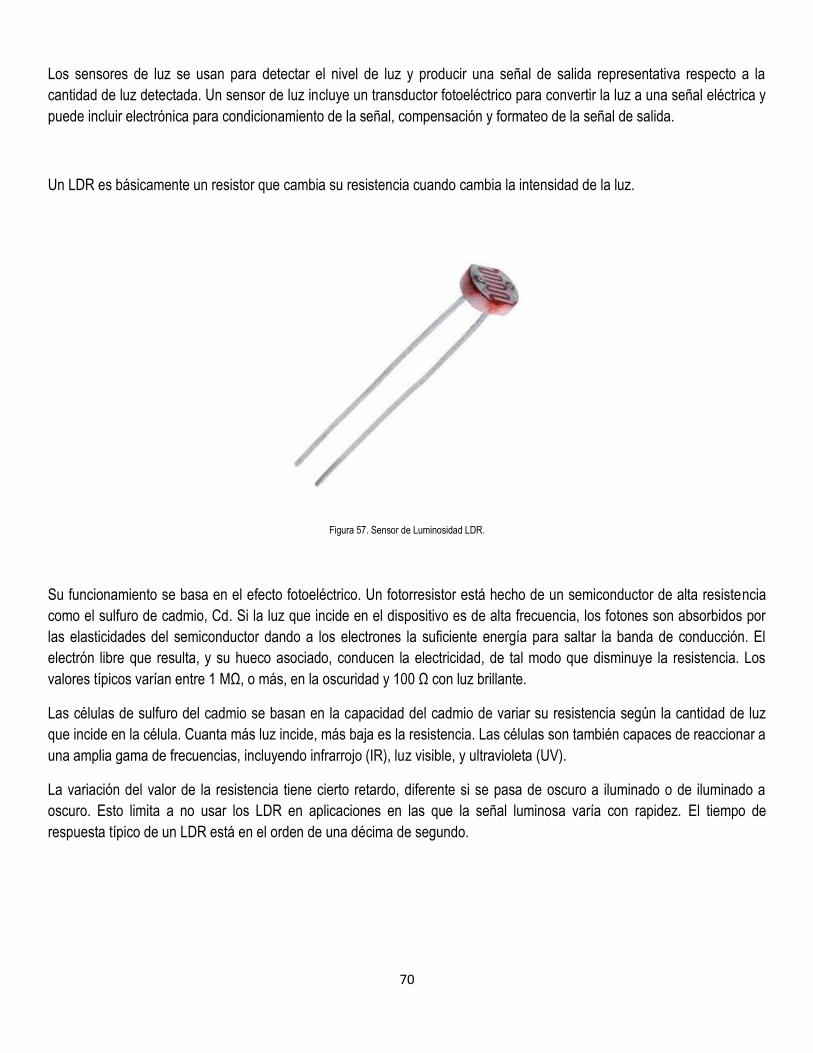
70
Los sensores de luz se usan para detectar el nivel de luz y producir una señal de salida representativa respecto a la
cantidad de luz detectada. Un sensor de luz incluye un transductor fotoeléctrico para convertir la luz a una señal eléctrica y
puede incluir electrónica para condicionamiento de la señal, compensación y formateo de la señal de salida.
Un LDR es básicamente un resistor que cambia su resistencia cuando cambia la intensidad de la luz.
Figura 57. Sensor de Luminosidad LDR.
Su funcionamiento se basa en el efecto fotoeléctrico. Un fotorresistor está hecho de un semiconductor de alta resistencia
como el sulfuro de cadmio, Cd. Si la luz que incide en el dispositivo es de alta frecuencia, los fotones son absorbidos por
las elasticidades del semiconductor dando a los electrones la suficiente energía para saltar la banda de conducción. El
electrón libre que resulta, y su hueco asociado, conducen la electricidad, de tal modo que disminuye la resistencia. Los
valores típicos varían entre 1 MΩ, o más, en la oscuridad y 100 Ω con luz brillante.
Las células de sulfuro del cadmio se basan en la capacidad del cadmio de variar su resistencia según la cantidad de luz
que incide en la célula. Cuanta más luz incide, más baja es la resistencia. Las células son también capaces de reaccionar a
una amplia gama de frecuencias, incluyendo infrarrojo (IR), luz visible, y ultravioleta (UV).
La variación del valor de la resistencia tiene cierto retardo, diferente si se pasa de oscuro a iluminado o de iluminado a
oscuro. Esto limita a no usar los LDR en aplicaciones en las que la señal luminosa varía con rapidez. El tiempo de
respuesta típico de un LDR está en el orden de una décima de segundo.
71
Ahora presentamos el programa para usar la tarjeta con sus librerías.
// Comenzamos definiendo los caracteres y su tamaño los cuales usaremos en este programa
long previous=0;
char S[10];
char T[10];
char U[10];
char V[10];
// El envio de paquetes con la libreria XBee
packetXBee* paq_sent;
char data[30];
uint8_t state=2;
float value=0;
int flag=0;
uint8_t counter=0;
uint8_t direccion[8]={0x00,0x00,0x00,0x00,0x00,0x00,0xFF,0xFF};
#define NORMAL_OPTION 0
#define SENS_OPTION 1
// Definimos la función de cada socket en nuestro proyecto sería el socket 6
#define SENS_LIQUID SENS_SOCKET8
#define SENS_LDR SENS_SOCKET6
#define SENS_PRESS SENS_SOCKET1
#define SENS_PIR SENS_SOCKET7
#define SENS_HALL SENS_SOCKET2
#define SENS_BEND SENS_SOCKET3
72
#define LIQ_INT 2
void setup()
{
// Establecer Tabla de Eventos en Modo ON (Encendido) y configurarlo
setBoard();
xbee802.init(XBEE_802_15_4,FREQ2_4G,NORMAL); //inicializar el 'xbee802'
xbee802.ON(); // Abrir los puertos UART y encender el XBee
previous=millis();
}
void loop()
{
if( intFlag & SENS_INT )
{
intFlag &= ~(SENS_INT);
sendData();
}
else if( (millis()-previous) > 1000 )
{
sendData();
previous=millis();
}

73
}
// Enviar Mensaje
void sendData()
{
paq_sent=(packetXBee*) calloc(1,sizeof(packetXBee));
paq_sent->mode=UNICAST;
paq_sent->MY_known=0;
paq_sent->packetID=0x52;
paq_sent->opt=0;
xbee802.hops=0;
xbee802.setOriginParams(paq_sent, "EVE", NI_TYPE);
flag=SensorEvent.loadInt();
XBee.println(flag,DEC);
XBee.println(SensorEvent.intFlag,BIN);
Utils.long2array(flag,S);
value=SensorEvent.readValue(SENS_LDR);
value*=10;
Utils.long2array(value,T);
value=SensorEvent.readValue(SENS_BEND);
value*=10;
Utils.long2array(value,U);
value=SensorEvent.readValue(SENS_PRESS);

74
value*=10;
Utils.long2array(value,V);
sprintf(data, "***%s,%s,%s,%s,$", S, T, U, V);
xbee802.setDestinationParams(paq_sent, direccion, data, MAC_TYPE, DATA_ABSOLUTE);
while( counter<3 ) {
state=xbee802.sendXBee(paq_sent);
counter++;
}
counter=0;
if(!state)
{
XBee.println("OK");
}
free(paq_sent);
paq_sent=NULL;
SensorEvent.intFlag=0;
enableInterrupts(SENS_INT);
}
void setBoard()
{
SensorEvent.setBoardMode(SENS_ON); //Encendemos la table de Eventos
// umbrales fijados
SensorEvent.setThreshold(SENS_LDR,0.1);
SensorEvent.setThreshold(SENS_PRESS,1.5);

75
SensorEvent.setThreshold(SENS_BEND,2.2);
// permitir interrupciones en el panel de sensores
enableInterrupts(SENS_INT);
}
5.3.1 Resultados obtenidos de la tarjeta de eventos
En el Sol
Ahora para analizar los resultados se tomaron muestras de cómo funciona nuestra tarjeta de eventos con su sensor de
luminosidad en el sol y en la sombra.
Figura 58. Sensor de Luminosidad en el Sol.

76
En la siguiente imagen se puede ver algo de basura seguido de la palabra EVE esto no debería ser así ya que se programó
la tarjeta para que apareciera la placa Waspmote que se está utilizando seguido de la leyenda Tarjeta de Eventos pero
debido a fallas en el programa o en las tarjetas nos da el siguiente resultado.
En la primera columna nos tendría que aparecer que tarjeta Waspmote estamos usando y la frase Eventos, pero como
mencione anteriormente solo nos muestra basura.
En la segunda columna se pueden apreciar cuatro cifras.
La primera nos da la lectura del sensor de Líquido, esta muestra cero debido a que no hay ningún sensor en su posición.
La segunda se puede apreciar el numero 32 lux esa es la cifra de nuestro sensor al recibir el sol directamente sobre el
LDR, lo cual nos muestra que el sensor está trabajando correctamente con la tarjeta Waspmote y la placa de eventos.
La tercera opción mide la presión pero debido a falta de sensor solo se puede apreciar el cero que aparece.
Finalmente la última y para mí una de las más interesantes es el sensor PIR o sensor de infrarrojo este puede detectar los
objetos situados en su campo de visión.
Figura 59. Datos del Sensor de Luminosidad en el Sol.

77
En la Sombra
Ahora pasamos nuestra tarjeta a la sombra para así poder obtener otra muestra pero esta vez con poca luz como se puede
apreciar en la siguiente imagen.
Figura 60. Sensor de Luminosidad en la Sombra.
Los datos que se tomaron fueron los siguientes:
Figura 61.Sensor de Luminosidad en el Sol.
Como se puede apreciar ahora nos da 17 lux donde anteriormente eran 32 lux, esto nos dice que el sensor está trabajando
correctamente. Para finalizar se pudieron haber tomado más muestras pero no la creí necesarias ya que lo que se debía
probar se consiguió el funcionamiento de la tarjeta de eventos.

78
Capítulo 6 Proyectos Futuros
Una novedosa herramienta que posee la tarjeta Waspmote es el Waspmote Plug & Sense! - Encapsulado Línea el cual
serviría enteramente para un proyecto futuro más completo. Seria simplemente hacer una estación meteorológica
completa, este proyecto sería muy interesante y seguiría la línea Waspmote a continuación presentaremos el encapsulado
que estamos describiendo.
6.1 Waspmote Plug & Sense! - Encapsulado Línea
También para este proyecto nos interesa saber cómo proteger nuestra tarjeta ya que como anteriormente se mencionó se trata de una red de sensores para una estación meteorológica. Para esto podemos usar un encapsulado como es el siguiente. Sondas sensores Las sondas sensores se pueden conectar fácilmente con sólo atornillarlos en las tomas de fondo. Esto le permite añadir nuevos sensores capacidades a las redes existentes sólo en cuestión de minutos. De la misma manera, las sondas de sensores pueden ser reemplazados fácilmente con el fin de asegurar la bajo coste de mantenimiento de la red de sensores.
Figura 62. Sonda de Sensores Encapsulamiento.

79
6.2 Programación de los nodos
Waspmote Plug & Sense! puede ser reprogramado en dos formas: La programación básica se realiza desde el puerto USB. Sólo tiene que conectar el USB a la toma externa específica y luego a la computadora para cargar el nuevo firmware.
Figura 63. Programación de la sonda de sensores.
Durante la programación al aire también es posible una vez que el nodo ha sido instalado. Con esta técnica se puede reprogramar de forma inalámbrica uno o más nodos de sensores de Waspmote, al mismo tiempo mediante el uso de un ordenador portátil y la gateway Waspmote.
Figura 64. Segundo tipo de programación (programación al aire).
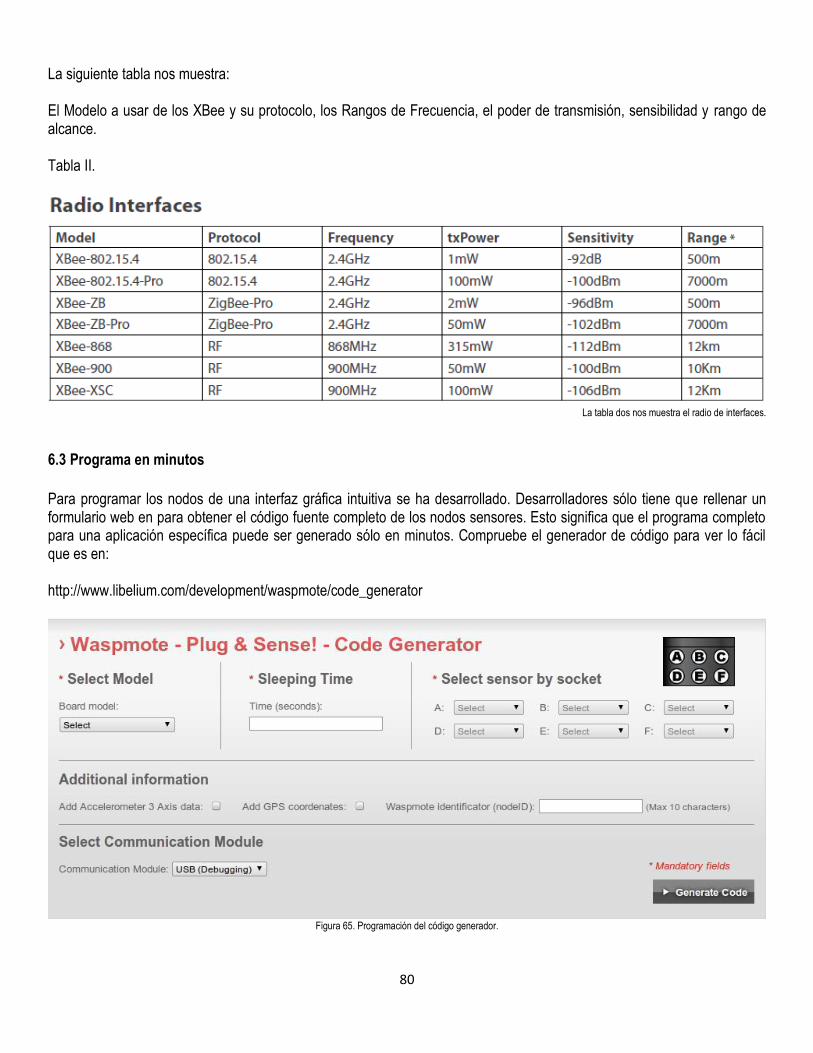
80
La siguiente tabla nos muestra: El Modelo a usar de los XBee y su protocolo, los Rangos de Frecuencia, el poder de transmisión, sensibilidad y rango de alcance. Tabla II.
La tabla dos nos muestra el radio de interfaces.
6.3 Programa en minutos
Para programar los nodos de una interfaz gráfica intuitiva se ha desarrollado. Desarrolladores sólo tiene que rellenar un formulario web en para obtener el código fuente completo de los nodos sensores. Esto significa que el programa completo para una aplicación específica puede ser generado sólo en minutos. Compruebe el generador de código para ver lo fácil que es en: http://www.libelium.com/development/waspmote/code_generator
Figura 65. Programación del código generador.

81
6.4 Modelos
Hay algunas configuraciones definidas de Waspmote Plug & Sense! dependiendo de qué sensores se van a utilizar. Waspmote Plug & Sense! configuraciones permite la conexión de hasta seis sondas de sensor al mismo tiempo. Cada modelo tiene un circuito de acondicionamiento diferente para permitir la integración del sensor. Por esta razón cada modelo permite conectar sólo sus sensores específicos. Esta sección describe cada configuración del modelo en detalle, mostrando los sensores que pueden ser utilizados en cada caso y cómo conectarlos a Waspmote. En muchos casos, las tomas de sensores aceptar la conexión de más de una sonda sensor. Vea la tabla de compatibilidad para cada configuración de modelo para elegir la mejor combinación de la sonda para la aplicación. Es muy importante resaltar que cada conector está diseñado sólo para un sensor específico, por lo que no son intercambiables. Asegúrese siempre de que las sondas conectadas en el zócalo de la derecha, de lo contrario se pueden dañar.
Figura 66. Distribución de los sensores

82
6.5 Medio Ambiente Inteligente
En nuestro caso particular para este proyecto se podría usar este encapsulado o sonda de sensores dado que nuestro trabajo está dirigido hacia esto. Medio Ambiente modelo inteligente está diseñado para controlar los parámetros ambientales tales como la temperatura, la humedad, presión atmosférica y algunos tipos de gases. Las principales aplicaciones de este Waspmote Plug son la configuración de la contaminación en la ciudad, medición de emisiones en las granjas y criaderos, control de químicos y procesos industriales, incendios forestales, etc.
Figura 67. Encapsulado Ambiente Inteligente.

83
Como se comentó en la sección anterior hay que tener mucho cuidado en donde se conecta cada sensor ya que cada entrada esta predefinida y no podemos usarlas como más nos convenga. En la siguiente tabla muestra cómo se debe usar cada entrada de nuestro encapsulado de sensores. Tabla III.
Tabla 3. Muestra cómo debe ir cada sensor.

84
Conclusiones
En este proyecto se implementó un prototipo de red de sensores para el uso meteorológico con la ayuda de las tarjetas Waspmote, en realidad estas tarjetas son muy versátiles gracias a sus placas de eventos la cual nosotros podemos acoplarlas según sea el proyecto en el que decidamos trabajar. Una de las mayores ventajas de las tarjetas que hemos utilizado en este proyecto es el gran alcance que puede llegar a tener en cuanto a aplicaciones en la vida diaria y en diferentes ámbitos, además de que estamos hablando de tecnología que nos ahorra mucho trabajo de infraestructura y consumo de energía, estas tarjetas son capaces de estar trabajando hasta un año completo sin necesidad de estar recargando la batería. Realmente el uso que se le den a estas tarjetas depende de cada proyecto que uno considere llevar a cabo, la estrategia de implementación de estas redes depende de diversos factores, ya sea los costos o los recursos disponibles, si se cuenta con una infraestructura, si se trata de un campo de difícil acceso. No existe una metodología específica para cubrir cada necesidad. Pero se debe de tener una visión generalizada de las opciones disponibles, los protocolos y estándares existentes para así poder implementar un sistema que se ajuste mejor a las necesidades que se presenten.
En nuestro proyecto lo realmente complicado es que la empresa Libelium nos ofrece una amplia variedad de herramientas
para el desarrollo de aplicaciones según nuestras propias necesidades, pero toda esta información va dirigida hacia su
nuevo producto el cual es la versión 1.2 que se trata de la más nueva de sus placas y no es compatible con la versión
anterior que es la que se utilizó para este proyecto si bien no es tan sencillo comenzar a envolverse en el ambiente de
programación, una vez que se comprende el entorno es más sencillo comenzar a desarrollar aplicaciones en las tarjetas.
Los problemas como en todo trabajo se presentan y depende de nosotros saber cómo enfrentarlos, ya sea usando los
manuales que nos ofrecen la página Libelium o entrar a los foros de la misma, pero yo he aprendido que la mejor forma de
enfrentarlos es a lo largo del proceso de implementación a base de prueba y error encontrar realmente cual es el origen
del problema y enfocarse en eso. Nuestro primer obstáculo en este trabajo fue la transmisión de tramas de datos por la
puerta de enlace esto se debió a una librería que no estaba declarada en los programas del comienzo pero buscando este
problema en los foros de programación apareció el resultado. El segundo y más grande problema yo creo fue la tarjeta de
eventos dado que la información sobre esta es demasiado reducida debido a que toda la información esta para su nueva
tarjeta de eventos de la versión 1.2, por esto fue complicado pero con la guías técnicas que nos ofrece la página se fueron
despejando poco a poco las dudas hasta lograr el resultado esperado.
Este trabajo es una muy buena introducción si se desea hacer algo más grande como se mencionó en la sección de
proyectos futuros, que sería implementar una red más grande de sensores y con mejores materiales.
Al final de este proyecto el objetivo se cumplió el cual fue:
Se deseaba poder comunicar las tarjetas XBee en primera instancia para poder tener la certeza de que funcionaban y
existía envió y recepción de datos como era la dirección mac, la temperatura, el estado de la batería y el acelerómetro.
Se deseaba hacer funcionar la tarjeta de eventos y colocarle un sensor de luminosidad el cual este transmitiera
inalámbricamente hasta la puerta de enlace y se pudiera leer la señal en el monitor serial.
85
Referencias
[1]. Libelium, ”Waspmote Datasheet,” Junio 2013.[Online] . Disponible:
http://www.libelium.com/development/waspmote/documentation/
[2]. Scribd, http://es.scribd.com/doc/111028643/6/Ventajas-y-Desventajas-en-WSN
[3].EsLaRed,http://www.eslared.net/walcs/walc2010/material/track1/Introduccion%20a%20WSN.pdf
[4]. redescontent, http://redescontent.blogspot.mx/2012/07/redes-de-sensores-inalambricos-wsn.html
[5]. National instruments, http://www.ni.com/white-paper/7142/es/
[6]. Libelium,“Waspmote Quickstar Guide” .[Online] Disponible:
http://www.libelium.com/development/waspmote/documentation/
[7] "Analogue Signals for Process Control Systems ‐ Part 1 Specification for direct current signals", IEC381/1, 1984,
International Electrotechnical Commission.
[8] Attwood, M. J., Wheable. D., Bond, D. F. , "An Intelligent Digital Transmitter for Analogue Transducers", Proceedings
Transducer Tempcon, London, 1983.
[9] Chee‐Yee Chong and Srikanta P.Kumar. Sensor Networks: Evolution, Opportunities and Challenges. Proceeding of the
IEEE, 91(8):1247‐1256, Aug. 2003.
[10] SOSUS: The "Secret Weapon" of Undersea Surveillance", Undersea Warfare, Winter, 2005, Vol. 7, No. 2, article by
Edward C. Whitman
[11] C. E. Nishimura and D. M. Conlon, “IUSS dual use: Monitoring whales and earthquakes using SOSUS,” Mar. Technol.
Soc. J. , vol. 27, 1994
[12]. Libelium,“Waspmote Quickstar Guide” .[Online] Disponible:
http://www.libelium.com/development/waspmote/documentation/
[13]. Libelium,“Zigbee Networking Guide” .[Online] Disponible:
http://www.libelium.com/development/waspmote/documentation/
[14]. Libelium,“Zigbee Tutoorial” .[Online] Disponible: http://www.libelium.com/development/waspmote/documentation/
[15]. Libelium,“Programming Guide” .[Online] Disponible: http://www.libelium.com/development/waspmote/documentation/
[16]. Libelium,“IDE Use Guide” .[Online] Disponible: http://www.libelium.com/development/waspmote/documentation/

86
[17]. Libelium,“Accelerometer Programming Guide” .[Online] Disponible:
http://www.libelium.com/development/waspmote/documentation/
[18]. Libelium,“RTC Programming Guide” .[Online] Disponible:
http://www.libelium.com/development/waspmote/documentation/
[19]. http://www.libelium.com/es/development/waspmote/documentation/x-ctu-tutorial/
[20]. http://smn.cna.gob.mx/emas/
[21] Wallace, J. M. and P. V. Hobbs, 2006: Atmospheric science: an introduction survey. 2nd ed. Libro. Amsterdam: Elsevier
Academic Press. 483 pp.
[22]. Anonimo, . (2001). «Largest Tiny Network Yet - Large-Scale Demonstration of Self-Organizing Wireless Sensor
Networks»
[23]. http://es.wikipedia.org/wiki/Sensor_fotoel%C3%A9ctrico