sensoresjdedios/asignaturas/sensores.pdf · 3 sensores para estimación de distancia i 5/17 ciclo...
TRANSCRIPT

1
Sensores para estimación de distancia I 1/17
Sensores
Escuela Superior de IngenierosUniversidad de Sevilla
J. Ramiro Martínez de Dios
Despacho: L1-P2-E13email: [email protected] http://www.esi.us.es/~jdedios
Sensores para estimación de distancia I 2/17
• Un sensor es un transductor que convierte algún fenómeno físico en señales eléctricas– Sensores externos– Sensores internos
Introducción
• Parámetros:– Precisión: Diferencia entre el valor real y el medido
– Resolución: Incremento mínimo observable en la entrada
– Sensibilidad: Es una medida del grado de variación de la señal conforme el fenómeno medido ha cambiado
– Repetibilidad: Diferencia entre sucesivas medidas de la misma entrada
2
Sensores para estimación de distancia I 3/17
• Estimación de distancia con cámaras
• Sensores de ultrasonidos
Sensores para estimación de distancia I
Sensores para estimación de distancia I 4/17
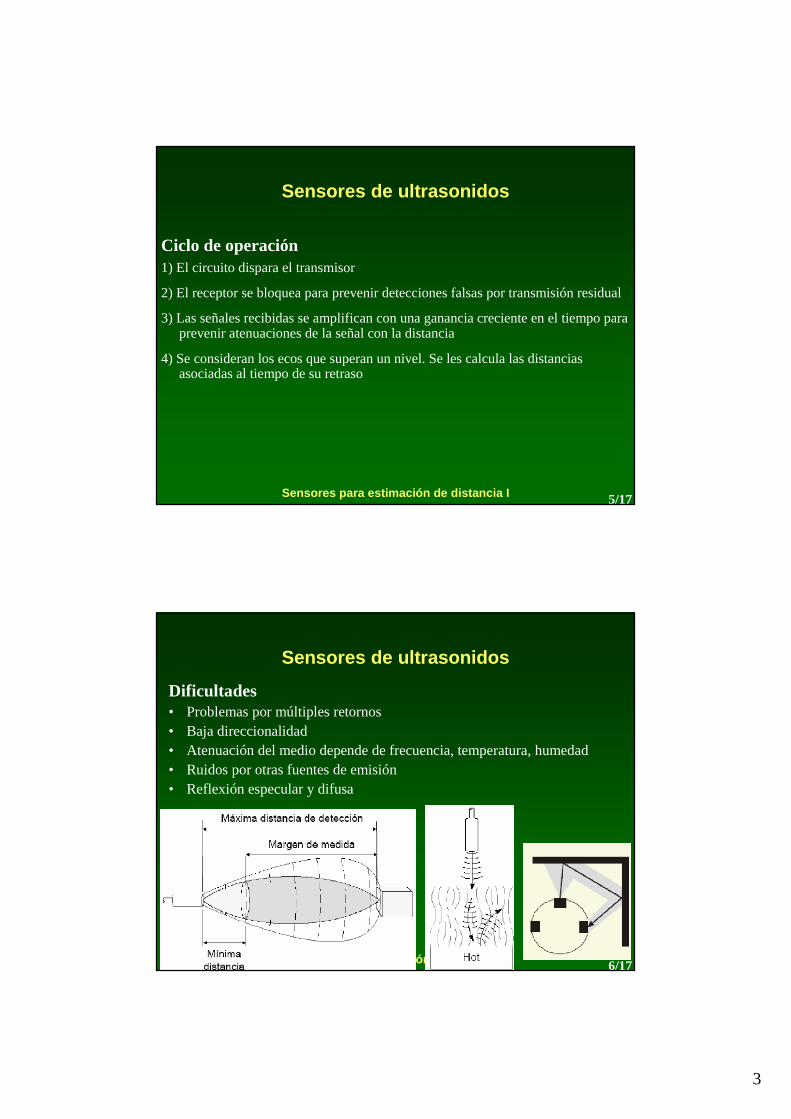
• Hoja muy delgada que al recibir energía eléctrica vibra generando sonidos en frecuencias de 50 kHz
• Cuando recibe vibraciones genera energía eléctrica
Sensores de ultrasonidos
Parámetros:
- Rango de medida- Ángulo: 5-30º
3
Sensores para estimación de distancia I 5/17
Ciclo de operación1) El circuito dispara el transmisor
2) El receptor se bloquea para prevenir detecciones falsas por transmisión residual
3) Las señales recibidas se amplifican con una ganancia creciente en el tiempo para prevenir atenuaciones de la señal con la distancia
4) Se consideran los ecos que superan un nivel. Se les calcula las distancias asociadas al tiempo de su retraso
Sensores de ultrasonidos
Sensores para estimación de distancia I 6/17
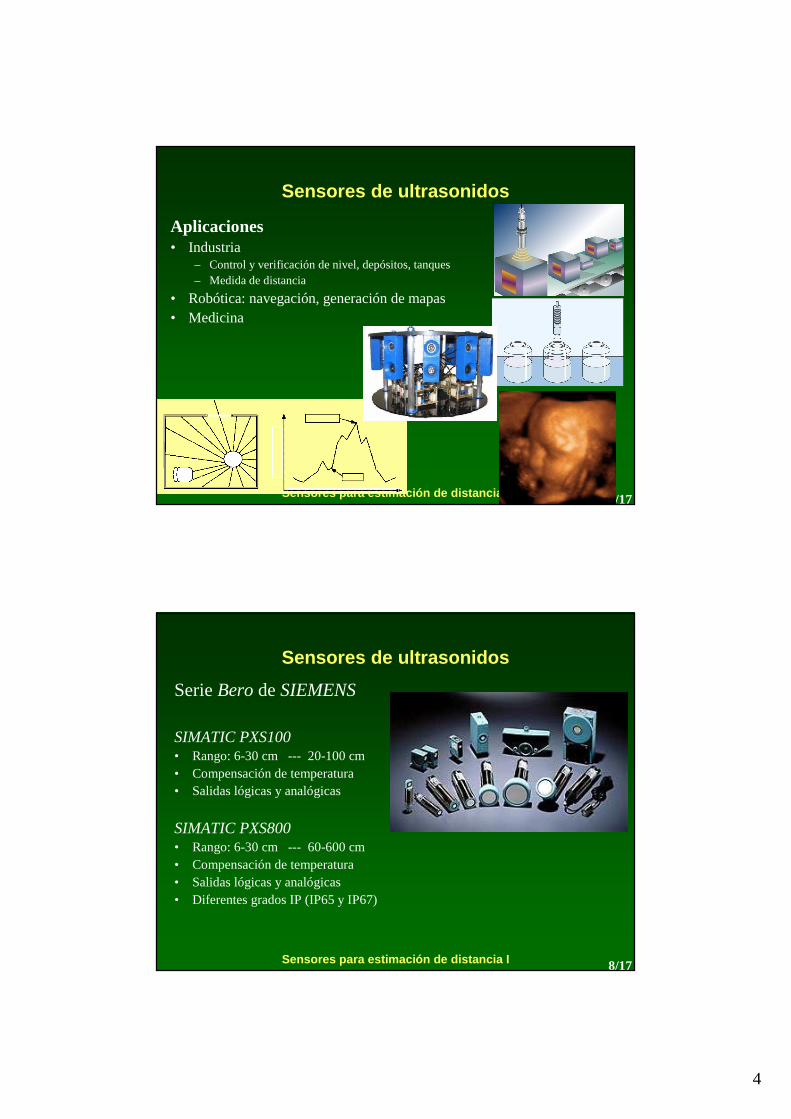
Dificultades• Problemas por múltiples retornos• Baja direccionalidad• Atenuación del medio depende de frecuencia, temperatura, humedad• Ruidos por otras fuentes de emisión• Reflexión especular y difusa
Sensores de ultrasonidos
4
Sensores para estimación de distancia I 7/17
Aplicaciones• Industria
– Control y verificación de nivel, depósitos, tanques – Medida de distancia
• Robótica: navegación, generación de mapas• Medicina
Sensores de ultrasonidos
Sensores para estimación de distancia I 8/17
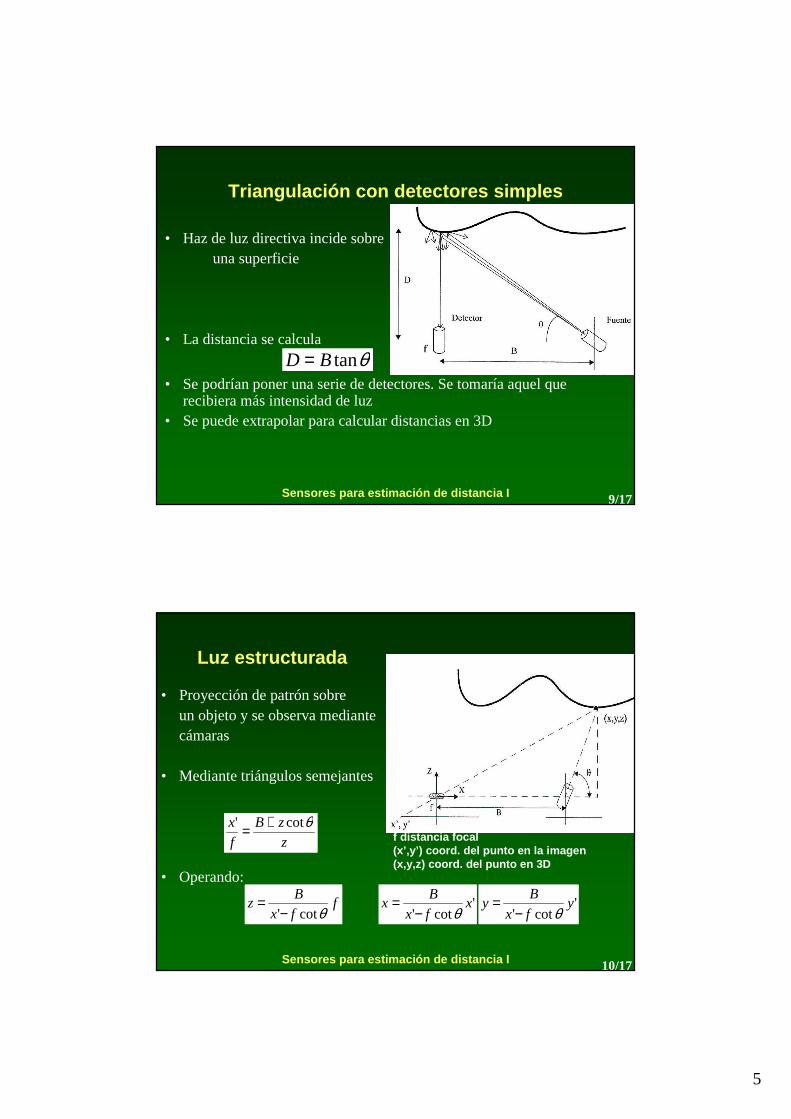
Serie Bero de SIEMENS
SIMATIC PXS100• Rango: 6-30 cm --- 20-100 cm• Compensación de temperatura• Salidas lógicas y analógicas
SIMATIC PXS800• Rango: 6-30 cm --- 60-600 cm• Compensación de temperatura• Salidas lógicas y analógicas• Diferentes grados IP (IP65 y IP67)
Sensores de ultrasonidos
5
Sensores para estimación de distancia I 9/17
Triangulación con detectores simples
• Haz de luz directiva incide sobre una superficie
• La distancia se calcula
• Se podrían poner una serie de detectores. Se tomaría aquel que recibiera más intensidad de luz
• Se puede extrapolar para calcular distancias en 3D
θtanBD =
Sensores para estimación de distancia I 10/17
• Proyección de patrón sobre un objeto y se observa mediante cámaras
• Mediante triángulos semejantes
• Operando:
z
zB
f
x θcot' +=
ffx
Bz
θcot'−=
f distancia focal(x’,y’) coord. del punto en la imagen(x,y,z) coord. del punto en 3D
'cot'
xfx
Bx
θ−= '
cot'y
fx
By
θ−=
Luz estructurada
6
Sensores para estimación de distancia I 11/17
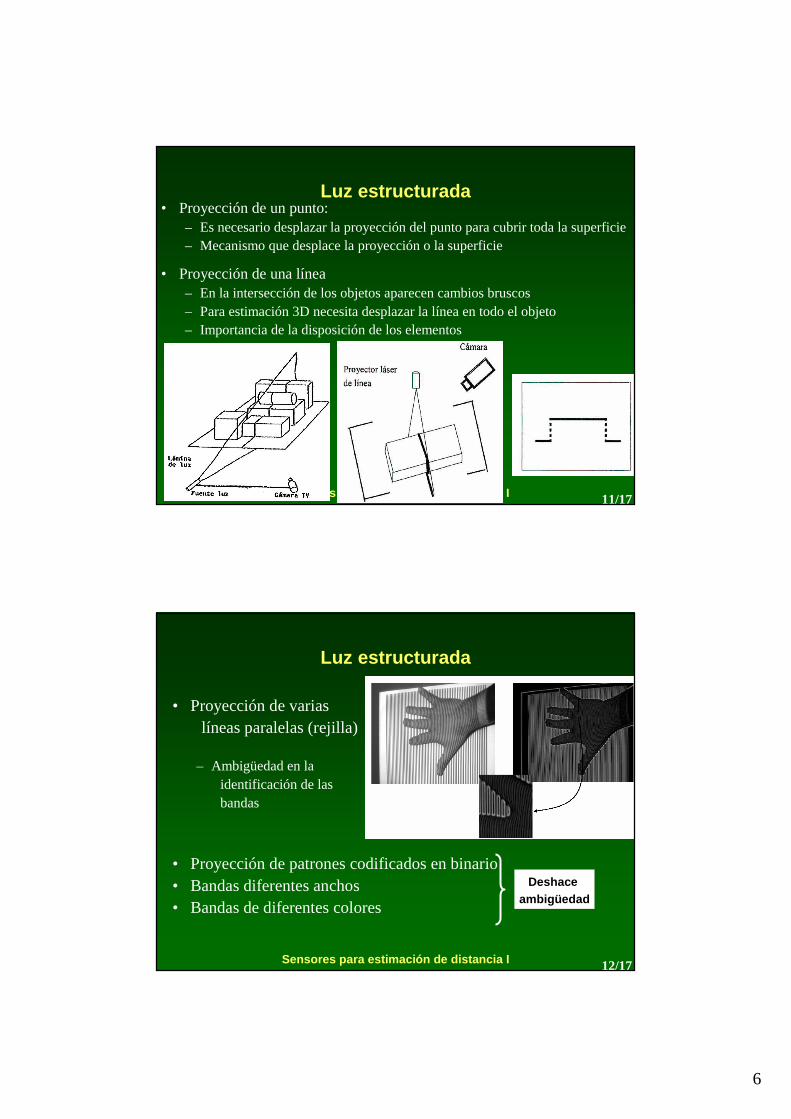
• Proyección de un punto:– Es necesario desplazar la proyección del punto para cubrir toda la superficie– Mecanismo que desplace la proyección o la superficie
• Proyección de una línea– En la intersección de los objetos aparecen cambios bruscos– Para estimación 3D necesita desplazar la línea en todo el objeto– Importancia de la disposición de los elementos
Luz estructurada
Sensores para estimación de distancia I 12/17
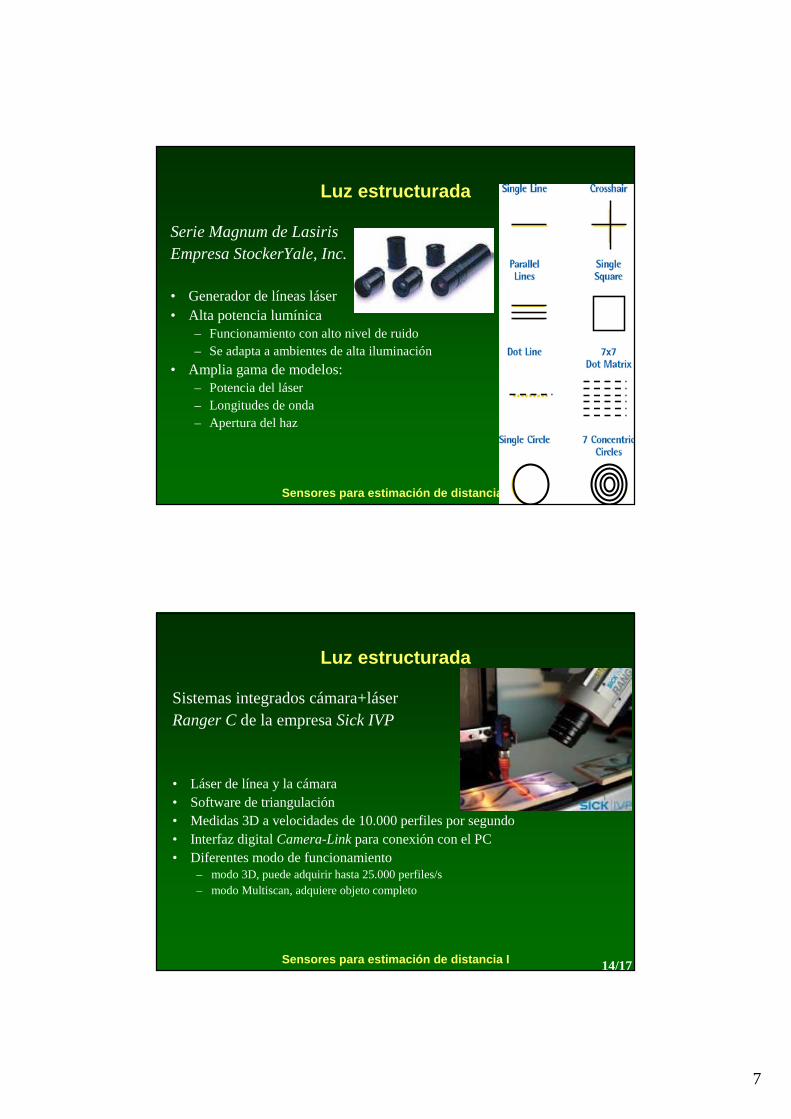
• Proyección de varias líneas paralelas (rejilla)
– Ambigüedad en laidentificación de las bandas
• Proyección de patrones codificados en binario• Bandas diferentes anchos• Bandas de diferentes colores
Luz estructurada
Deshace ambigüedad
7
Sensores para estimación de distancia I 13/17
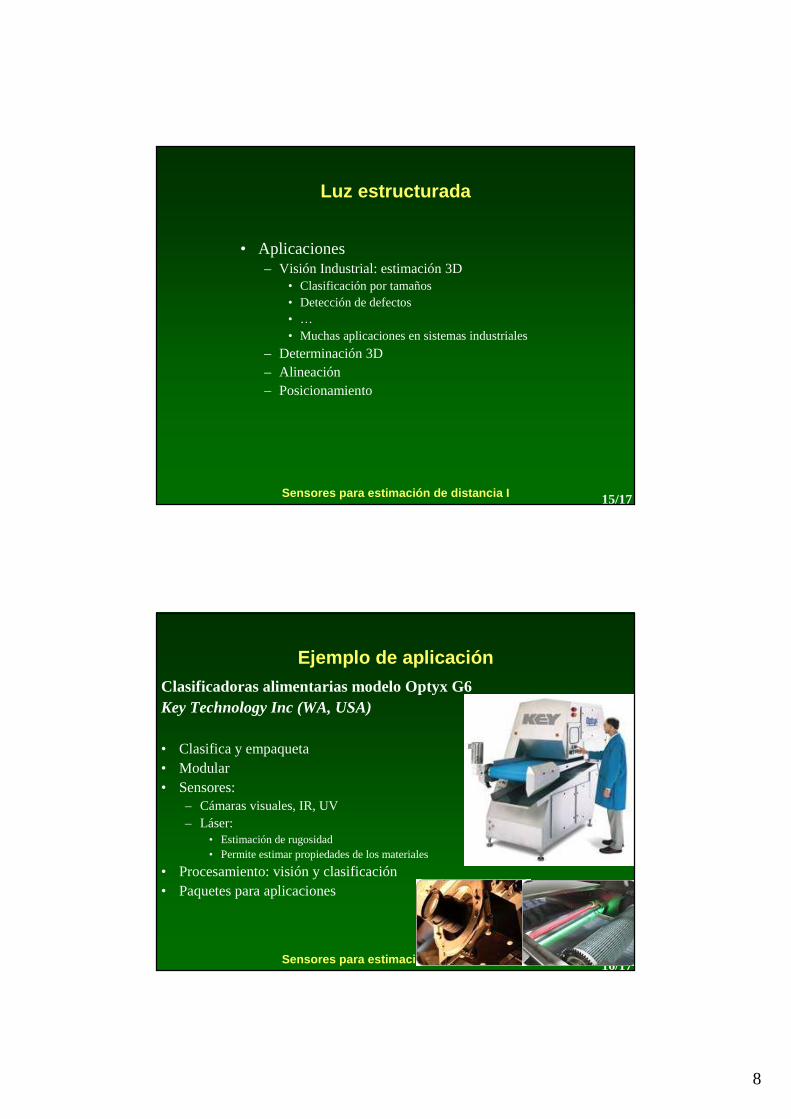
Serie Magnum de LasirisEmpresa StockerYale, Inc.
• Generador de líneas láser• Alta potencia lumínica
– Funcionamiento con alto nivel de ruido– Se adapta a ambientes de alta iluminación
• Amplia gama de modelos:– Potencia del láser– Longitudes de onda– Apertura del haz
Luz estructurada
Sensores para estimación de distancia I 14/17
Sistemas integrados cámara+láserRanger C de la empresaSick IVP
• Láser de línea y la cámara• Software de triangulación• Medidas 3D a velocidades de 10.000 perfiles por segundo• Interfaz digital Camera-Link para conexión con el PC• Diferentes modo de funcionamiento
– modo 3D, puede adquirir hasta 25.000 perfiles/s – modo Multiscan, adquiere objeto completo
Luz estructurada
8
Sensores para estimación de distancia I 15/17
• Aplicaciones– Visión Industrial: estimación 3D
• Clasificación por tamaños• Detección de defectos• …• Muchas aplicaciones en sistemas industriales
– Determinación 3D– Alineación– Posicionamiento
Luz estructurada
Sensores para estimación de distancia I 16/17
Clasificadoras alimentarias modelo Optyx G6Key Technology Inc (WA, USA)
• Clasifica y empaqueta• Modular• Sensores:
– Cámaras visuales, IR, UV– Láser:
• Estimación de rugosidad• Permite estimar propiedades de los materiales
• Procesamiento: visión y clasificación• Paquetes para aplicaciones
Ejemplo de aplicación

9
Sensores para estimación de distancia I 17/17
Conclusiones• Triangulación con detectores simples• Iluminación estructurada � muchas aplicaciones industriales• Sensores de ultrasonidos• Sensores láser, medida de desfase, Doppler, sensores de presencia ����
próxima lección
Bibliografía adicional• Ollero A., (2000), “Apuntes del tema”.• González Jiménez, J. (1999), “Visión por Computador”, Paraninfo• Russ, J.C, (2002), “The Image Processing Handbook”, CRC Press• Sitio web de fabricantes (Sick, Siemens, …)
1
1/21
Cámaras como sensores
Escuela Superior de IngenierosUniversidad de Sevilla
J. Ramiro Martínez de Dios
Despacho: L1-P2-E13email: [email protected] http://www.esi.us.es/~jdedios
2/21
• Conceptos básicos• El problema de la percepción• Componentes de un sistema de percepción• Etapas del proceso de percepción• Campos de aplicación
Introducción
Introducción
2
3/21
• Sistema:Entidad formada por un conjunto de elementos que guardan entre sí una relación de influencia
• Percepción: Adquisición de información mediante los sentidos
• Sistema de percepción :conjunto de elementos para la adquisición de información del entorno mediante sensores que emulan los sentidos
• Objetivo: Automatización de procesos, robótica
Conceptos básicos
Introducción
4/21
• Sensores:Dispositivos capaces de medir una magnitud física
– Sensores para percepción: tratan de emular los sentidos humanos• Vista: cámaras � Sistemas de visión por computador
• Oído: micrófonos � Sistemas de reconocimiento de habla
• Tacto:
– Sensores de contacto, de corte de haz– Sensores de Proximidad (láser, ultrasonidos, visión estéreo)– Sensores hápticos
• Olfato: sensores olfativos � Detección de sustancias, explosivos, etc…
Conceptos básicos
Introducción
3
5/21
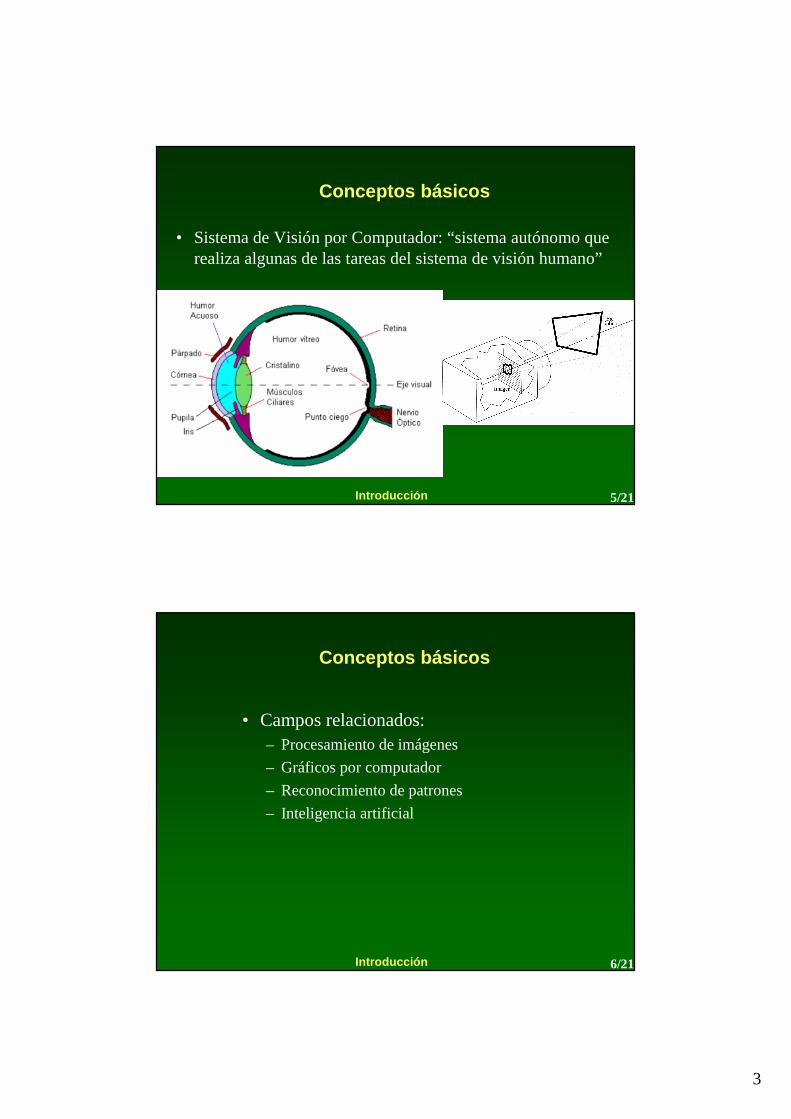
• Sistema de Visión por Computador: “sistema autónomo que realiza algunas de las tareas del sistema de visión humano”
Conceptos básicos
Introducción
6/21
• Campos relacionados:– Procesamiento de imágenes
– Gráficos por computador
– Reconocimiento de patrones
– Inteligencia artificial
Conceptos básicos
Introducción
4
7/21
– La realidad de multidimensional y muy compleja
– Los sensores sólo captan imágenesde dimensión muy inferior de dicha realidad, por ejemplo imágenes 2D de realidad 3D
– La percepción artificial mediante sensores y métodos objetivos es muy compleja. Requieren técnicas muy potentes
– Sin embargo parecen triviales o muy sencillas a nuestro cerebro
El problema de la percepción
Introducción
8/21
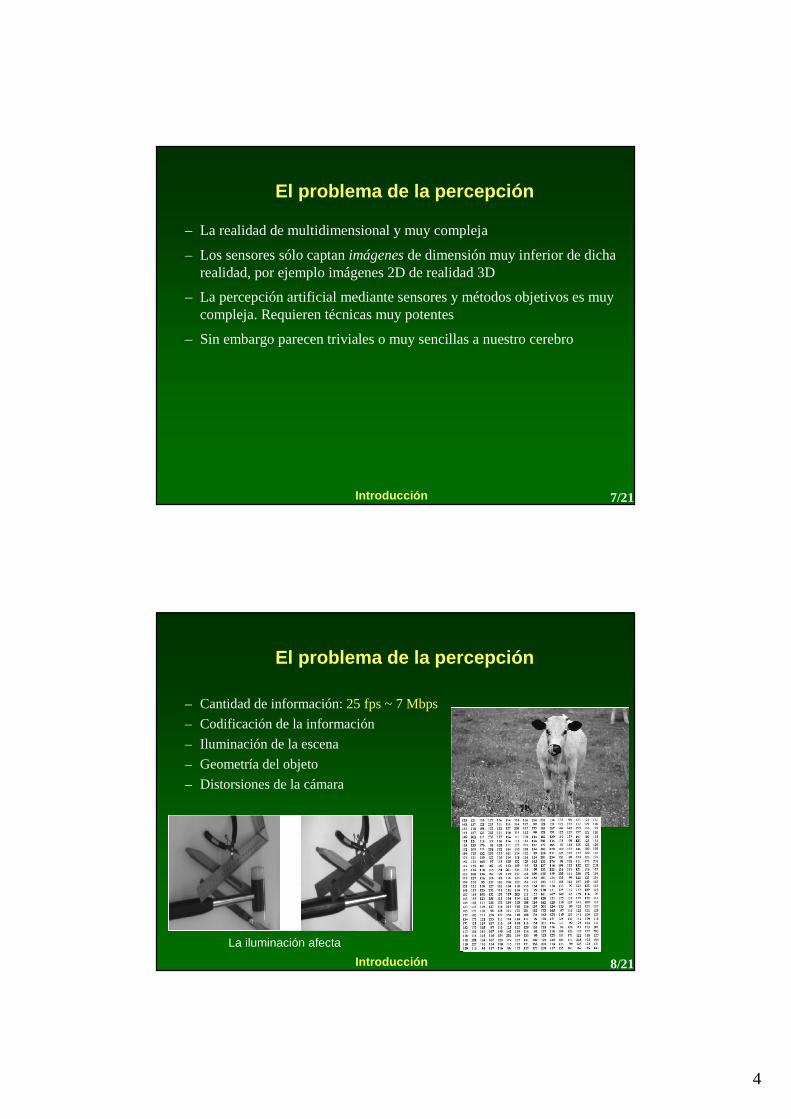
– Cantidad de información: 25 fps ~ 7 Mbps
– Codificación de la información
– Iluminación de la escena
– Geometría del objeto
– Distorsiones de la cámara
El problema de la percepción
La iluminación afecta
Introducción
5
9/21
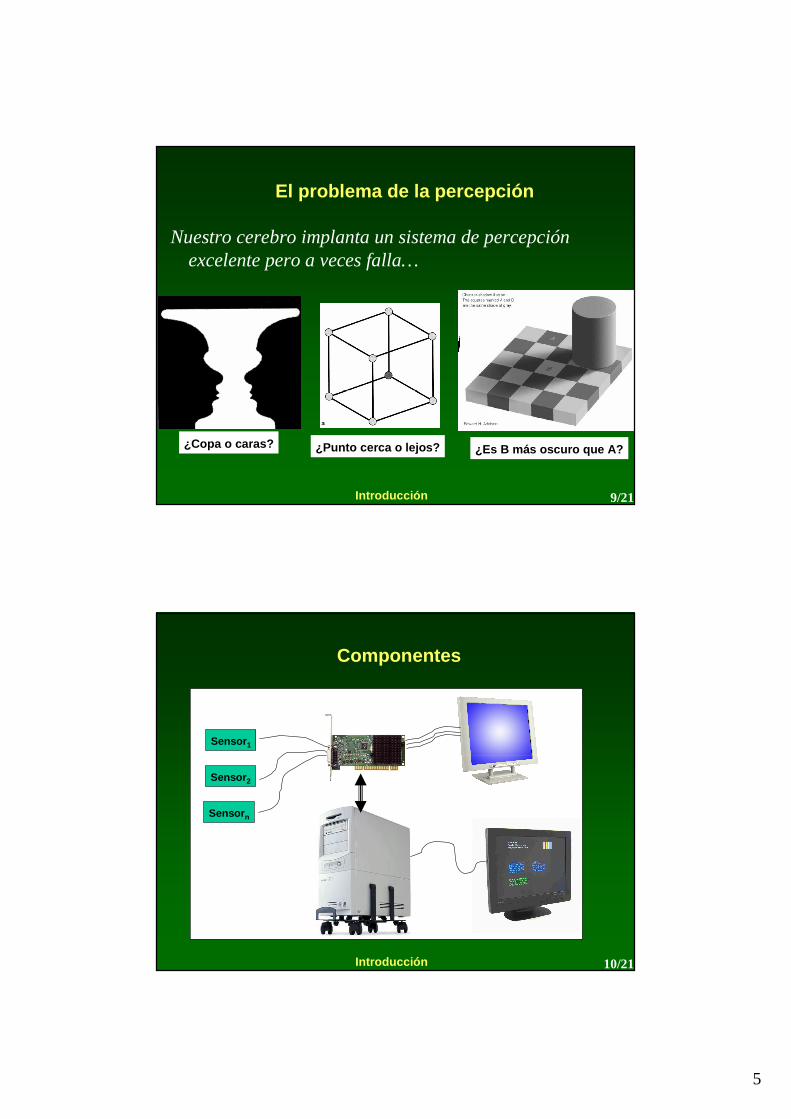
Nuestro cerebro implanta un sistema de percepción excelente pero a veces falla…
¿Copa o caras? ¿Punto cerca o lejos? ¿Es B más oscuro que A?
El problema de la percepción
Introducción
10/21
Componentes
Sensor 1
Sensor 2
Sensor n
Introducción

6
11/21
Componentes
Introducción
12/21
Etapas del proceso de percepción
Introducción
7
13/21
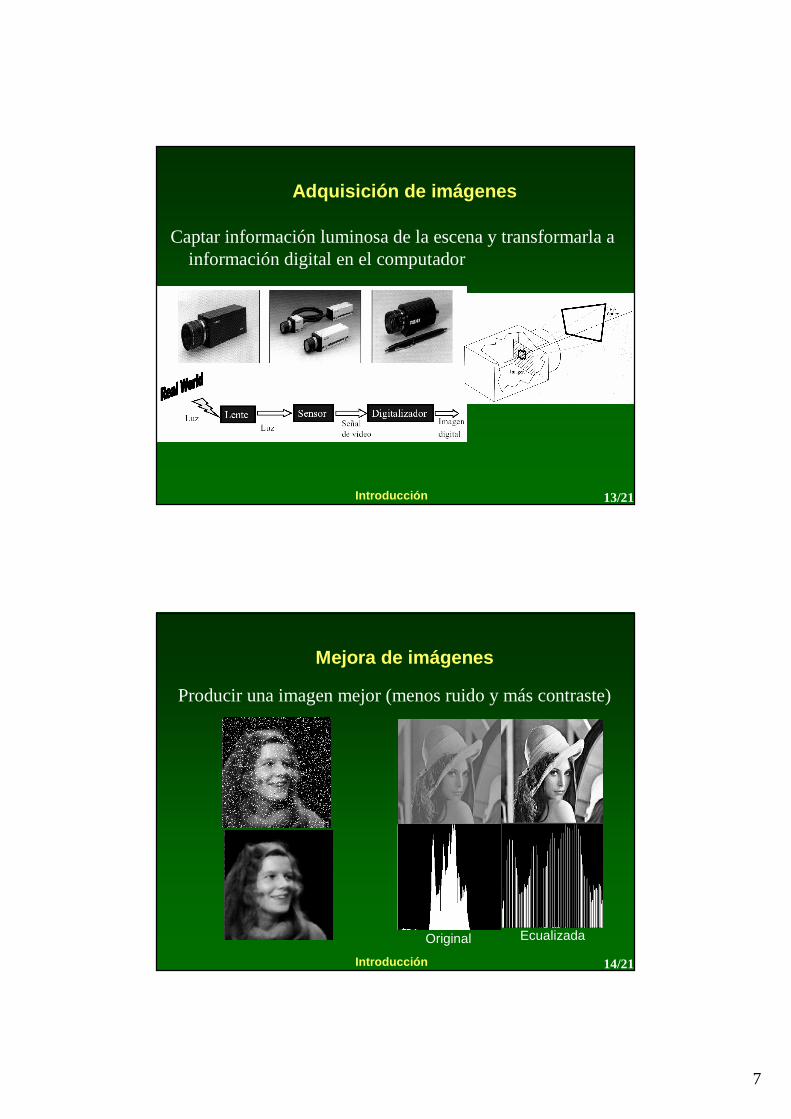
Adquisición de imágenes
Captar información luminosa de la escena y transformarla a información digital en el computador
Introducción
14/21
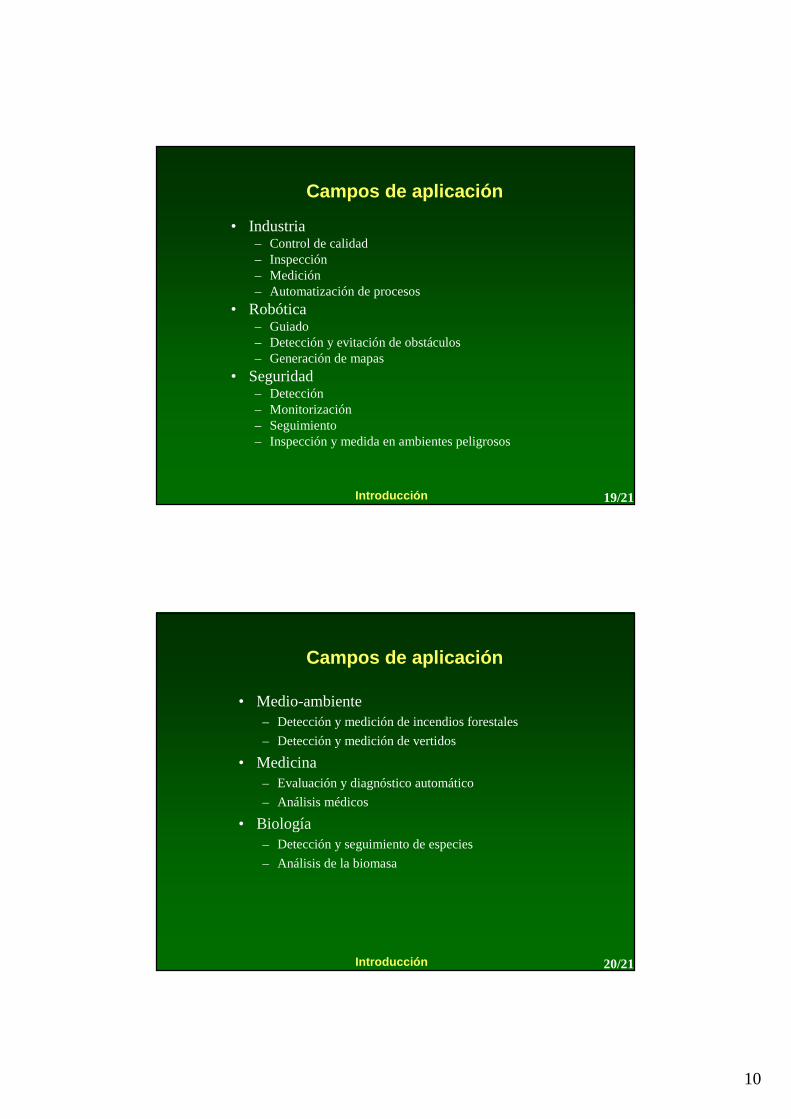
Mejora de imágenes
Producir una imagen mejor (menos ruido y más contraste)
Original Ecualizada
Introducción

8
15/21
Segmentación
Identificar objetos y separarlos del fondo
Negra roja verde
Introducción
16/21
Extracción de características
Obtener descripción matemática de los objetos encontrados
Relación de aspecto
Campo de color verde
Introducción

9
17/21
Reconocimiento de patrones
Identificar un objeto como una clase según sus características
x1
x2
MAX
xd(x)=x∈Clase1
Introducción
18/21
Interpretación de la escenaMuy complejo. Requiere:
– inteligencia
– experiencia
Introducción
10
19/21
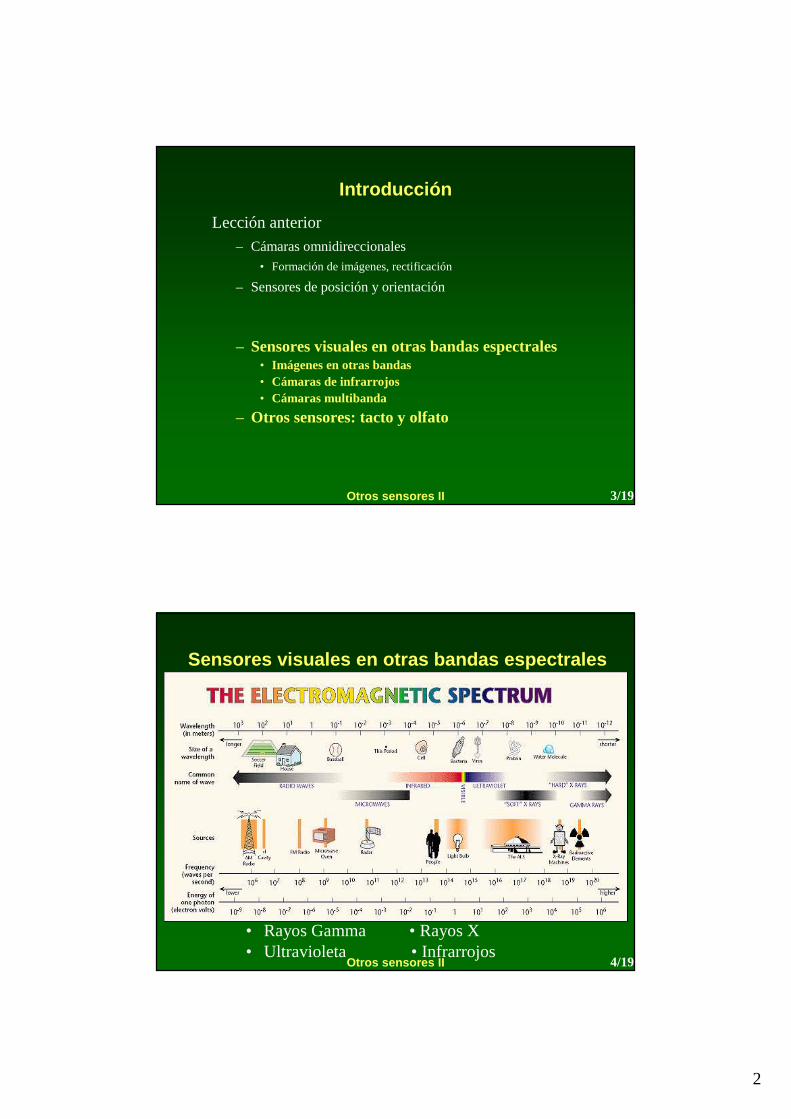
• Industria– Control de calidad– Inspección– Medición– Automatización de procesos
• Robótica– Guiado– Detección y evitación de obstáculos– Generación de mapas
• Seguridad– Detección– Monitorización – Seguimiento– Inspección y medida en ambientes peligrosos
Campos de aplicación
Introducción
20/21
• Medio-ambiente– Detección y medición de incendios forestales
– Detección y medición de vertidos
• Medicina– Evaluación y diagnóstico automático
– Análisis médicos
• Biología– Detección y seguimiento de especies
– Análisis de la biomasa
Campos de aplicación
Introducción

11
21/21
Conclusiones• Reproducir las capacidades del ser humano
• El problema de la percepción
• Necesidad de procesamiento de las señales
• Aplicaciones
Bibliografía adicional• González Jiménez, J. (1999), “Visión por Computador”, Paraninfo
• Gonzalez, R.C. y Woods R.E. (2002), “Digital Image Processing”, Addison-Wesley
• Russ, J.C, (2002), “The Image Processing Handbook”, CRC Press
• Maravall Gomez-Allende D., (1993), “Reconocimiento de Formas y Visión Artificial”, RA-MA
Introducción

1
Otros sensores II 1/19
Otros sensores II
Escuela Superior de IngenierosUniversidad de Sevilla
J. Ramiro Martínez de Dios
Despacho: L1-P2-E13email: [email protected] http://www.esi.us.es/~jdedios
Otros sensores II 2/19
• Un sensor es un transductor que convierte algún fenómeno físico en señales eléctricas– Sensores externos– Sensores internos
• Sensores analizados:– Sensores visuales en espectro visible– Sensores láser– Sensores de ultrasonidos– Sensores de presencia– Cámaras omnidireccionales– Sensores de posición y orientación
Introducción
En este tema analizamos otros sensores para percepci ón
2
Otros sensores II 3/19
Introducción
– Sensores visuales en otras bandas espectrales• Imágenes en otras bandas• Cámaras de infrarrojos• Cámaras multibanda
– Otros sensores: tacto y olfato
Lección anterior– Cámaras omnidireccionales
• Formación de imágenes, rectificación
– Sensores de posición y orientación
Otros sensores II 4/19
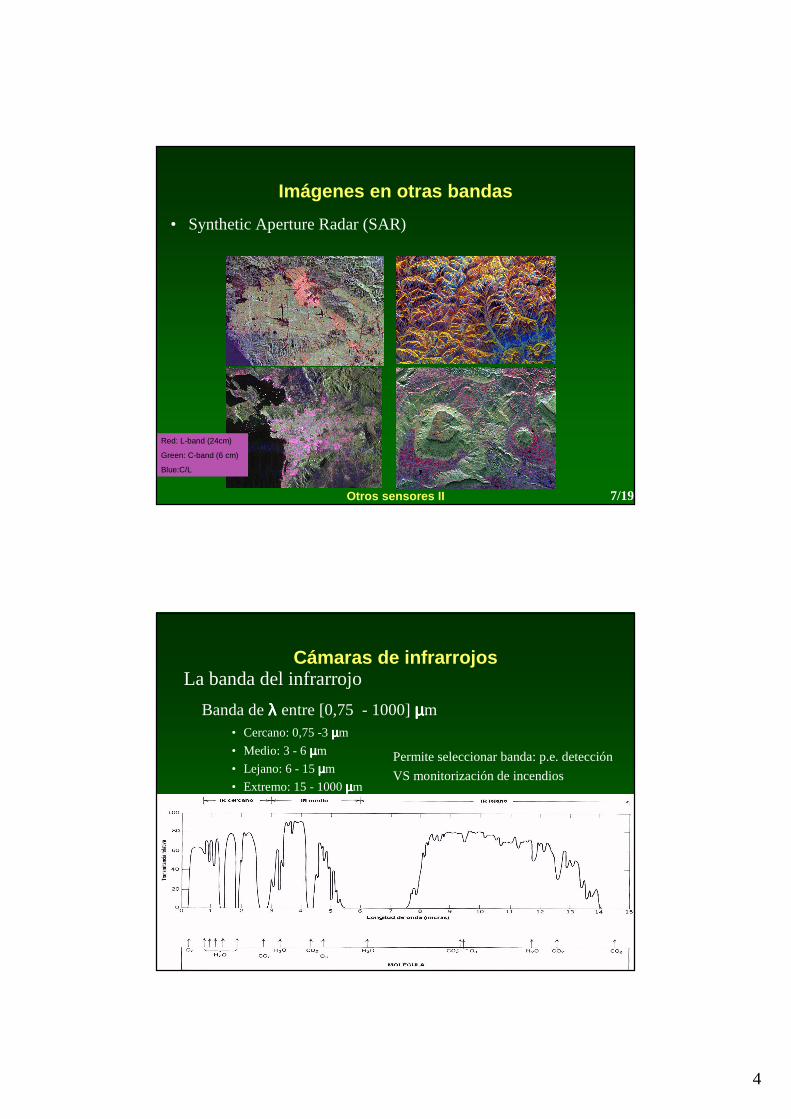
• Rayos Gamma • Rayos X• Ultravioleta • Infrarrojos
Sensores visuales en otras bandas espectrales

3
Otros sensores II 5/19
Rayos Gamma
Frecuencias mayores a 1019 Hz
Pueden penetrar casi todos los materiales
Imágenes en otras bandas
Otros sensores II 6/19
Rayos XImágenes en otras bandas
4
Otros sensores II 7/19
• Synthetic Aperture Radar (SAR)
Red: L-band (24cm)
Green: C-band (6 cm)
Blue:C/L
Imágenes en otras bandas
Otros sensores II 8/19
La banda del infrarrojo
Banda de λλλλ entre [0,75 - 1000] µµµµm• Cercano: 0,75 -3 µµµµm
• Medio: 3 - 6 µµµµm
• Lejano: 6 - 15 µµµµm
• Extremo: 15 - 1000 µµµµm
Permite seleccionar banda: p.e. detección
VS monitorización de incendios
Cámaras de infrarrojos
5
Otros sensores II 9/19
• No es válida la aproximación de la óptica geométrica
• Se basa en la física de los cuerpos negros– Ley de Wien, Ley de Stefan-Boltzmann
• Emisividad: ε(λ)=α(λ)
• Materiales muy caros, ópticas• Sensores necesitan control de temperatura del sensor:
– Sistemas criogénicos - Peltiers
Cámaras de infrarrojos
Otros sensores II 10/19
Detectores de infrarrojos
– Detectores térmicos:• La radiación se transforma en calor por absorción del material sensible
– Detectores cuánticos: • Señal depende del nivel de excitación de partículas del material sensible
Cámaras de infrarrojos
Sensores de infrarrojos– Puntuales: pirómetros
– Scanners de línea
– Matriciales: cámaras de infrarrojos

6
Otros sensores II 11/19
Tipos de cámaras de infrarrojos:– Térmicas: dan medida cualitativa
– Termográficas: dan medida cuantitativa de Tª• calibración térmica
Cámaras de infrarrojos
Otros sensores II 12/19
[-20, 1500] ºC
[-40, 1500] ºC
[0, 200] ºC
Not Thermal
Not Thermal
Rango de Tª
10º, 20º
12º, 24º, 45º
30º
30º
30º
Lentes
0.1º @ 30ºC
0.1º @ 30ºC
2º @ 30ºC
Not Thermal
Not Thermal
Sensibilidad
CCIR, JPG in Flash
Card
CCIR, JPG in Flash
Card
CCIR, Firewire
CCIR
CCIR
Interfaz
1.5 kg
7,5-13 µm
FLIR ThermaCam P20
120 gr.
7-13 µm
Indigo Omega
2 kg3.5-5 µm
FLIR 550 Elite
120 gr.
7-14 µm
Raytheon 2000AS
8 kg.3-5 µm
Mitsubishi IRM300
PesoBanda
Cámaras de infrarrojos
7
Otros sensores II 13/19
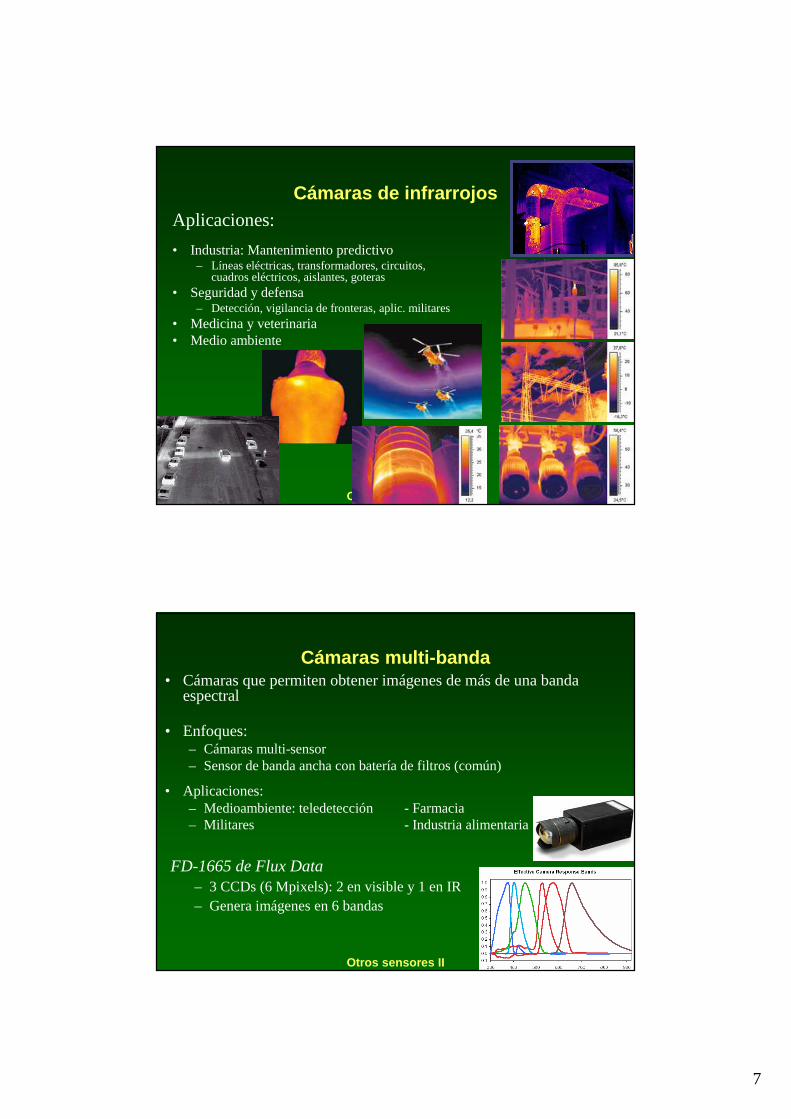
Aplicaciones:
• Industria: Mantenimiento predictivo– Líneas eléctricas, transformadores, circuitos,
cuadros eléctricos, aislantes, goteras• Seguridad y defensa
– Detección, vigilancia de fronteras, aplic. militares• Medicina y veterinaria• Medio ambiente
Cámaras de infrarrojos
Otros sensores II 14/19
• Cámaras que permiten obtener imágenes de más de una banda espectral
• Enfoques:– Cámaras multi-sensor– Sensor de banda ancha con batería de filtros (común)
• Aplicaciones:– Medioambiente: teledetección - Farmacia– Militares - Industria alimentaria
Cámaras multi-banda
FD-1665 de Flux Data– 3 CCDs (6 Mpixels): 2 en visible y 1 en IR– Genera imágenes en 6 bandas
8
Otros sensores II 15/19
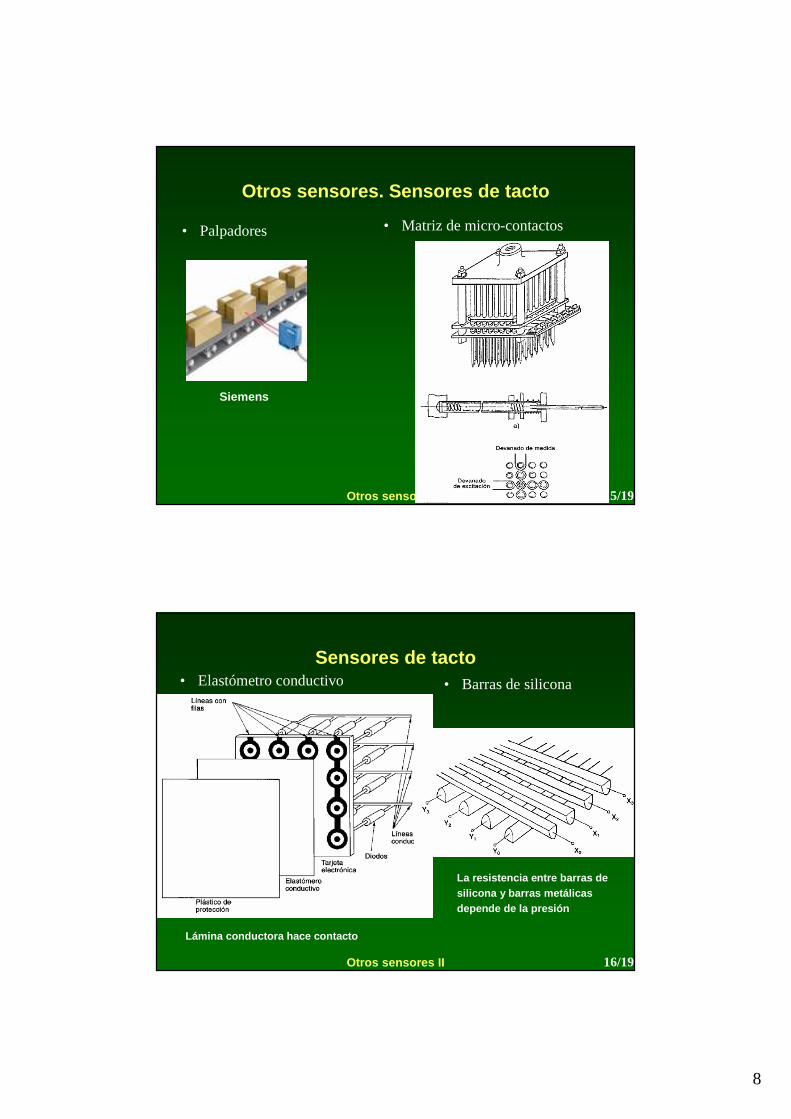
• Palpadores
Otros sensores. Sensores de tacto
• Matriz de micro-contactos
Siemens
Otros sensores II 16/19
• Elastómetro conductivo • Barras de silicona
Lámina conductora hace contacto
La resistencia entre barras de silicona y barras metálicas depende de la presión
Sensores de tacto
9
Otros sensores II 17/19
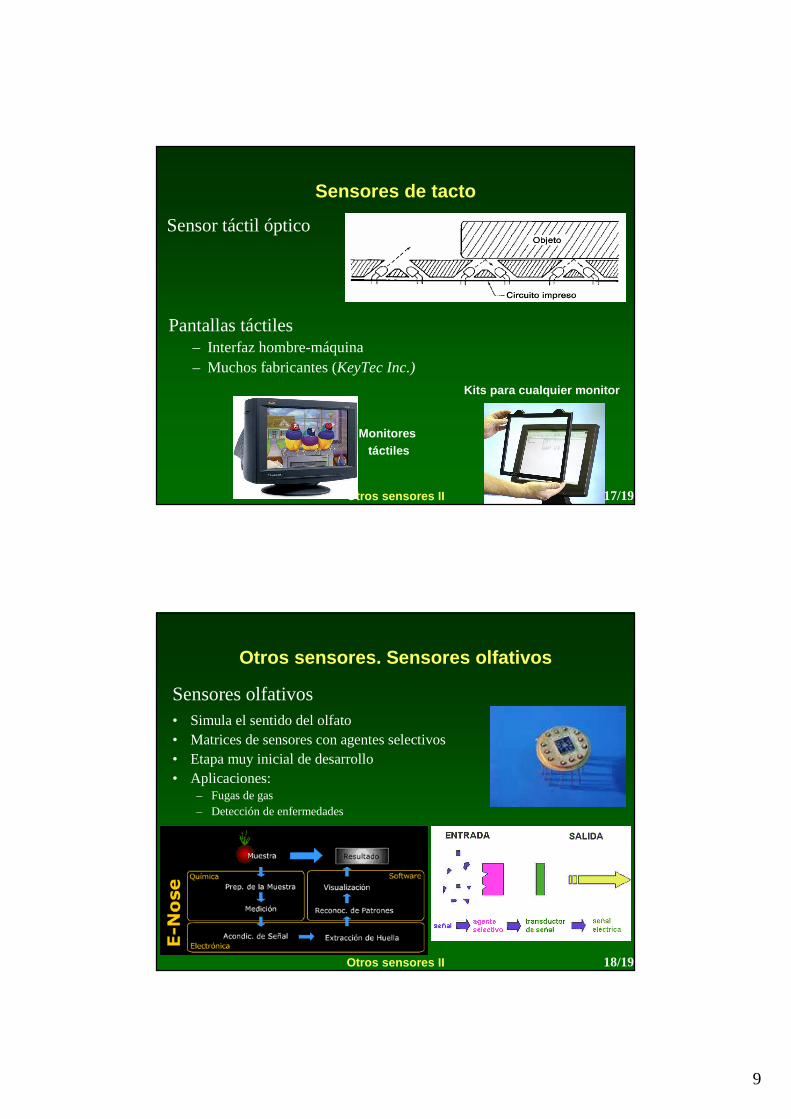
Sensores de tacto
Pantallas táctiles– Interfaz hombre-máquina– Muchos fabricantes (KeyTec Inc.)
Monitores táctiles
Kits para cualquier monitor
Sensor táctil óptico
Otros sensores II 18/19
Sensores olfativos• Simula el sentido del olfato• Matrices de sensores con agentes selectivos• Etapa muy inicial de desarrollo• Aplicaciones:
– Fugas de gas– Detección de enfermedades
Otros sensores. Sensores olfativos

10
Otros sensores II 19/19
Conclusiones• Imágenes en otras bandas espectrales
– Cámaras de infrarrojos– Cámaras multibanda
• Sensores táctiles y olfativos• Empleo de sinergias entre sensores ���� integración sensorial
Bibliografía adicional• Russ, J.C, (2002), “The Image Processing Handbook”, CRC Press• Kaplan H. (1999) “Practical applications of infrared thermal sensing and
imaging equipment”, SPIE Optical Engineering Press• http://www.magictouch.com/sp/index.html• http://www.e-nose.com.ar/paginas/portada.htm

1
Introducción a las redes de sensores 1/20
Introducción a las redes de sensores
Escuela Superior de IngenierosUniversidad de Sevilla
J. Ramiro Martínez de Dios
Despacho: L1-P2-E13email: [email protected] http://www.esi.us.es/~jdedios
Introducción a las redes de sensores 2/20
• Información se encuentra distribuida espacialmente
• Un sólo sensor es insuficiente
• Técnicas para:– Relacionar la información del mismo objeto desde sensores distribuidos
• Sistemas de referencia (espaciales y temporales)
– Fusionar la información del mismo objeto ���� Tema anterior
• Áreas tecnológicas:– Redes de cámaras���� Lección anterior
– Redes distribuidas de sensores
Introducción

2
Introducción a las redes de sensores 3/20
Percepción distribuida
Introducción a las redes de sensores 4/20
• Redes de sensores
• Sistemas RFID
Introducción a las redes de sensores
3
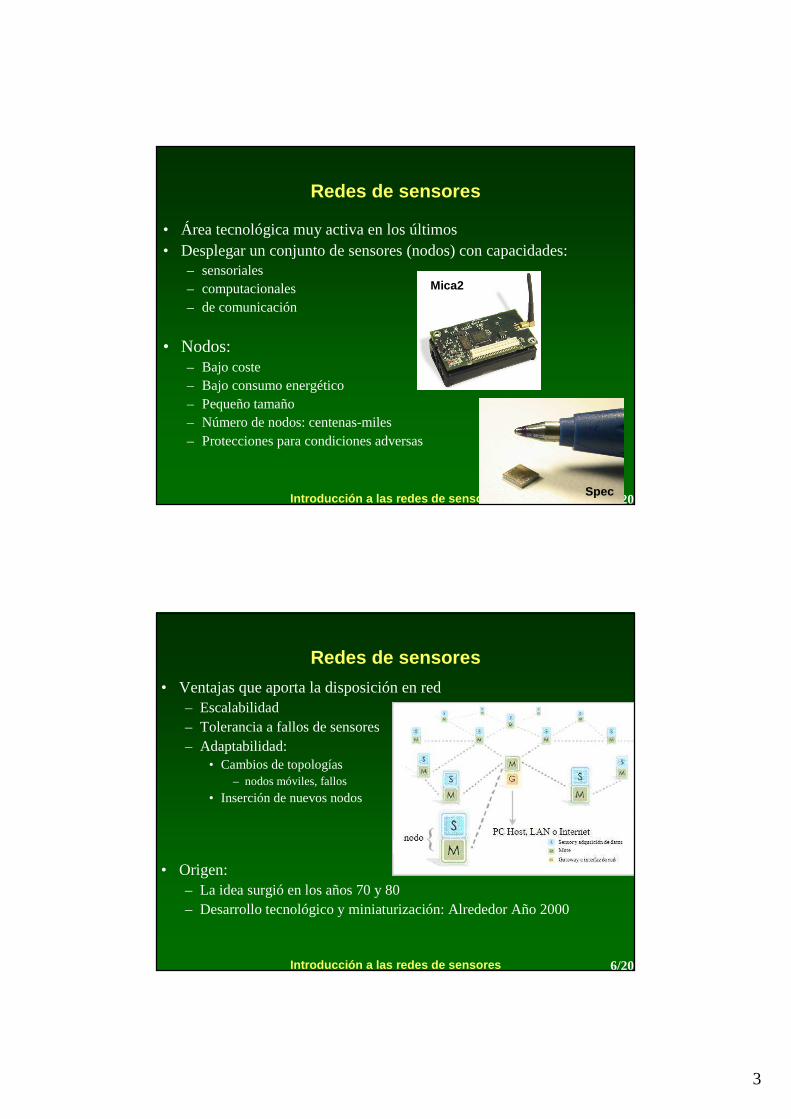
Introducción a las redes de sensores 5/20
• Área tecnológica muy activa en los últimos• Desplegar un conjunto de sensores (nodos) con capacidades:
– sensoriales– computacionales– de comunicación
• Nodos: – Bajo coste– Bajo consumo energético– Pequeño tamaño– Número de nodos: centenas-miles– Protecciones para condiciones adversas
Redes de sensores
Mica2
Spec
Introducción a las redes de sensores 6/20
• Ventajas que aporta la disposición en red– Escalabilidad– Tolerancia a fallos de sensores– Adaptabilidad:
• Cambios de topologías – nodos móviles, fallos
• Inserción de nuevos nodos
• Origen:– La idea surgió en los años 70 y 80– Desarrollo tecnológico y miniaturización: Alrededor Año 2000
Redes de sensores

4
Introducción a las redes de sensores 7/20
• Cada nodo actúa:– Como sensor
– Como elemento que retransmite datos
• Se establecen rutas de datos dinámicas para el transporte de datos
• Interfaz externo: la red se comporta como un todo
Redes de sensores
Introducción a las redes de sensores 8/20
• Limitaciones:– Del nodo:
• Potencia computacional limitada (procesam. medidas sensores)• Rango de comunicaciones � antenas inteligentes• Tasa alta de errores de transmisión � Pérdida de paquetes• Retrasos de comunicaciones (multisalto)• Memoria limitada• Movilidad y tamaño � mm3, sensores móviles• Capacidad de baterias
– De los sensores• Rango de medida (medidas locales)• Errores de percepción:
– Bajas probabilidades de detección – Altas probabilidades de falsa alarma
• Solución: – Desplegar muchos nodos– Emplear técnicas de fusión sensorial (tema anterior)
Redes de sensores
5
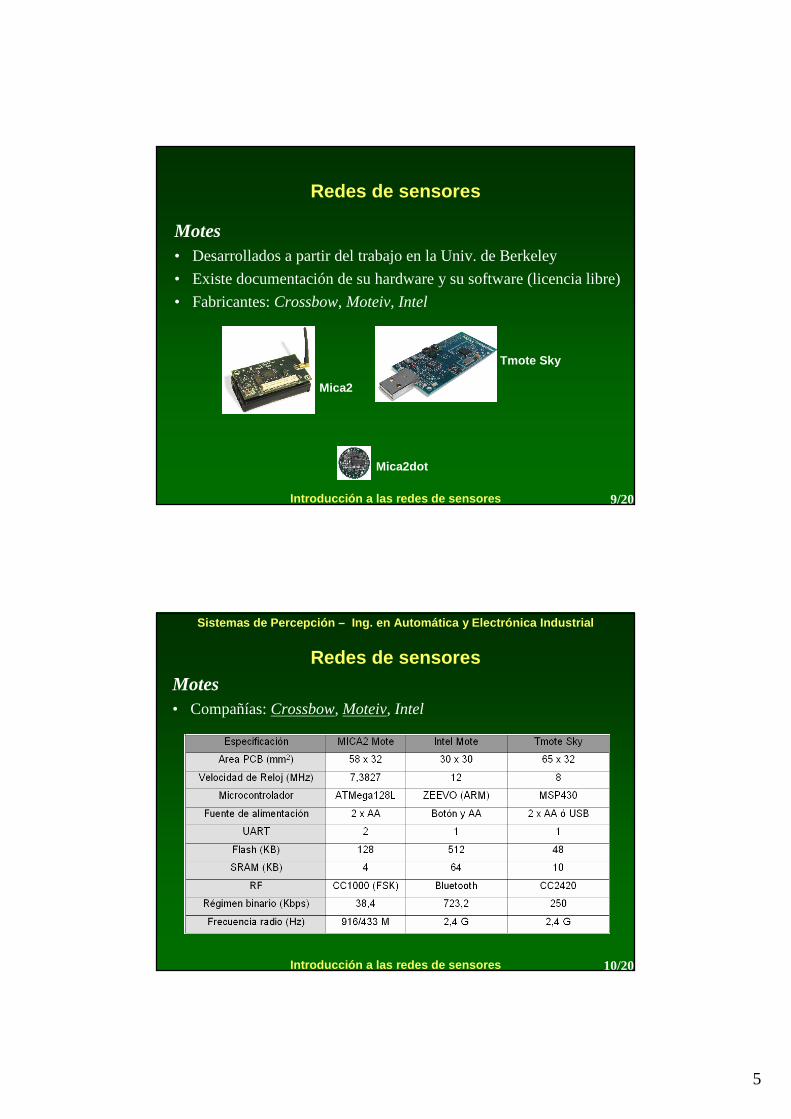
Introducción a las redes de sensores 9/20
Motes• Desarrollados a partir del trabajo en la Univ. de Berkeley
• Existe documentación de su hardware y su software (licencia libre)
• Fabricantes: Crossbow, Moteiv, Intel
Redes de sensores
Mica2dot
Mica2
Tmote Sky
Introducción a las redes de sensores 10/20
Motes• Compañías: Crossbow, Moteiv, Intel
Redes de sensores
Sistemas de Percepción – Ing. en Automática y Electróni ca Industrial
6
Introducción a las redes de sensores 11/20
Hardware• Tamaño: cm3 • Peso: gr.• Autonomía: meses ó años con 2 pilas AA• Comunicaciones: 900 MHz – 2.4 GHz• Sensores: humedad, temperatura, gases, placas de expansión, e.g. cámaras
Software• TinyOS: Código libre, ocupa muy poca memoria
– La posibilidad de estar “dormidos” durante un alto porcentaje del tiempo, permitiendo ahorro de energía
Zigbee• Sencillez hardware y software• Ser capaz de funcionar, sobre todo, en una configuración en malla
Redes de sensores
Sistemas de Percepción – Ing. en Automática y Electróni ca Industrial
Introducción a las redes de sensores 12/20
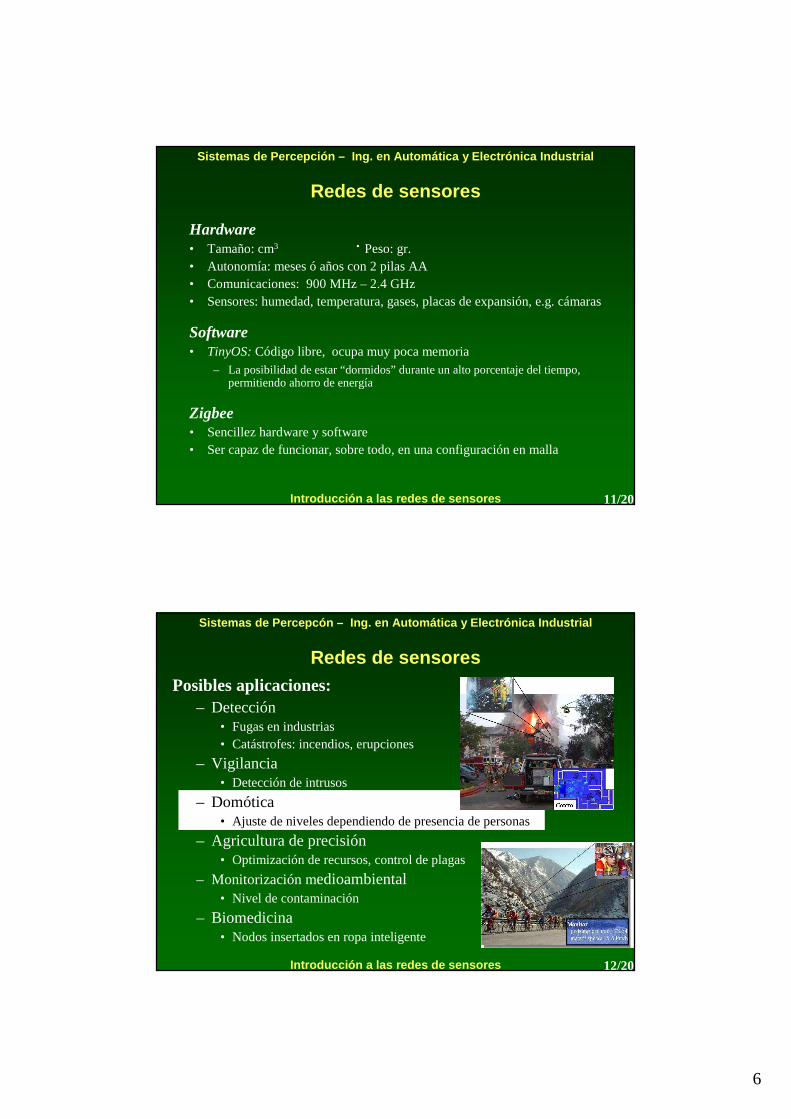
Posibles aplicaciones:– Detección
• Fugas en industrias• Catástrofes: incendios, erupciones
– Vigilancia• Detección de intrusos
– Domótica• Ajuste de niveles dependiendo de presencia de personas
– Agricultura de precisión• Optimización de recursos, control de plagas
– Monitorización medioambiental• Nivel de contaminación
– Biomedicina• Nodos insertados en ropa inteligente
Redes de sensores
Sistemas de Percepcón – Ing. en Automática y Electrónica Industrial

7
Introducción a las redes de sensores 13/20
• RFID: Radio Frequency Identification
• Área tecnológica en expansión
• Sistema de almacenamiento y recuperación de datos remoto
• Utiliza etiquetas, transpondedores o tags RFID
• Transmitir la identidad de un objeto mediante radio
• No requiere visión directa entre emisor y receptor
• Etiqueta RFID:
Sistemas RFID
– Dispositivo pequeño
– Contiene antenas para permitirles recibir y responder a peticiones por radiofrecuencia desde un emisor-receptor RFID
Introducción a las redes de sensores 14/20
• Origen: Años 60
• Actualidad: Extensión por el ahorro de costes
• Componentes del sistema:
– Etiqueta RFID: • Antena, transductor radio y pequeño chip
• Chip transmite la información de identificación cuando encuentra solicitud
Sistemas RFID
– Lector de RFID:• Antena, transceptor y decodificador
• El lector envía periódicamente señales de solicitud. Cuando capta una señal de una etiqueta, extrae la información
8
Introducción a las redes de sensores 15/20
• Etiquetas pasivas– No tienen fuente de alimentación propia
– La corriente eléctrica inducida en la antena por la señal de escaneo proporciona energía para la respuesta
– La respuesta de una etiqueta pasiva es muy breve y débil
– Rango de lectura: 10 mm. - 3 m.
– Tamaño muy pequeño: 0.05 mm. × 0.05 mm.
– Baratas
• Etiquetas semipasivas– Incorporan una pequeña batería
– Elimina la necesidad de diseñar una antena para recoger potencia de señal entrante
– Permiten rangos mayores
Sistemas RFID
Introducción a las redes de sensores 16/20
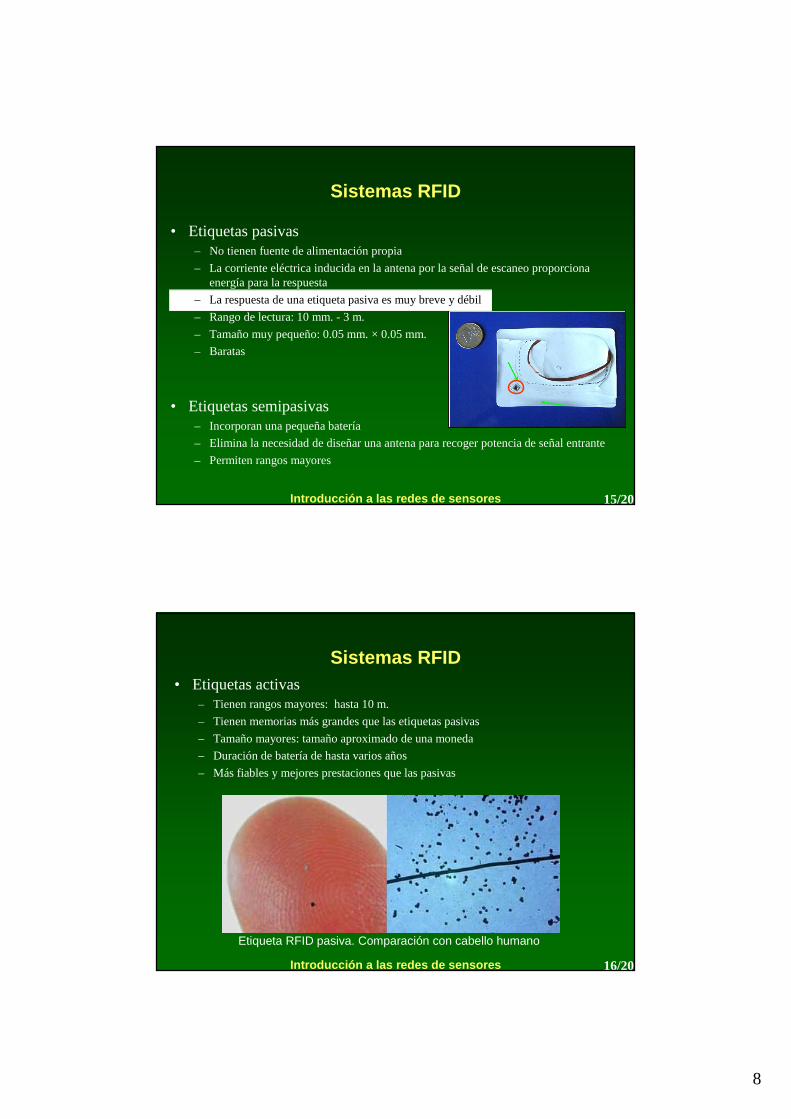
• Etiquetas activas– Tienen rangos mayores: hasta 10 m.
– Tienen memorias más grandes que las etiquetas pasivas
– Tamaño mayores: tamaño aproximado de una moneda
– Duración de batería de hasta varios años
– Más fiables y mejores prestaciones que las pasivas
Sistemas RFID
Etiqueta RFID pasiva. Comparación con cabello humano
9
Introducción a las redes de sensores 17/20
• Clasificación:– Sólo lectura: el código de identificación es único y es personalizado en fábrica
– De lectura y escritura: la información de identificación puede ser modificada
– Anticolisión: Etiquetas especiales que permiten que un lector identifique varias al mismo tiempo (habitualmente las etiquetas deben entrar una a una en la zona de cobertura del lector)
• Frecuencias:– Frecuencia baja (entre 125 ó 134,2 KHz)
– Alta frecuencia (13,56 MHz)
– UHF o de frecuencia ultraelevada (868 a 956 MHz)
– Microondas (2,45 GHz)
Sistemas RFID
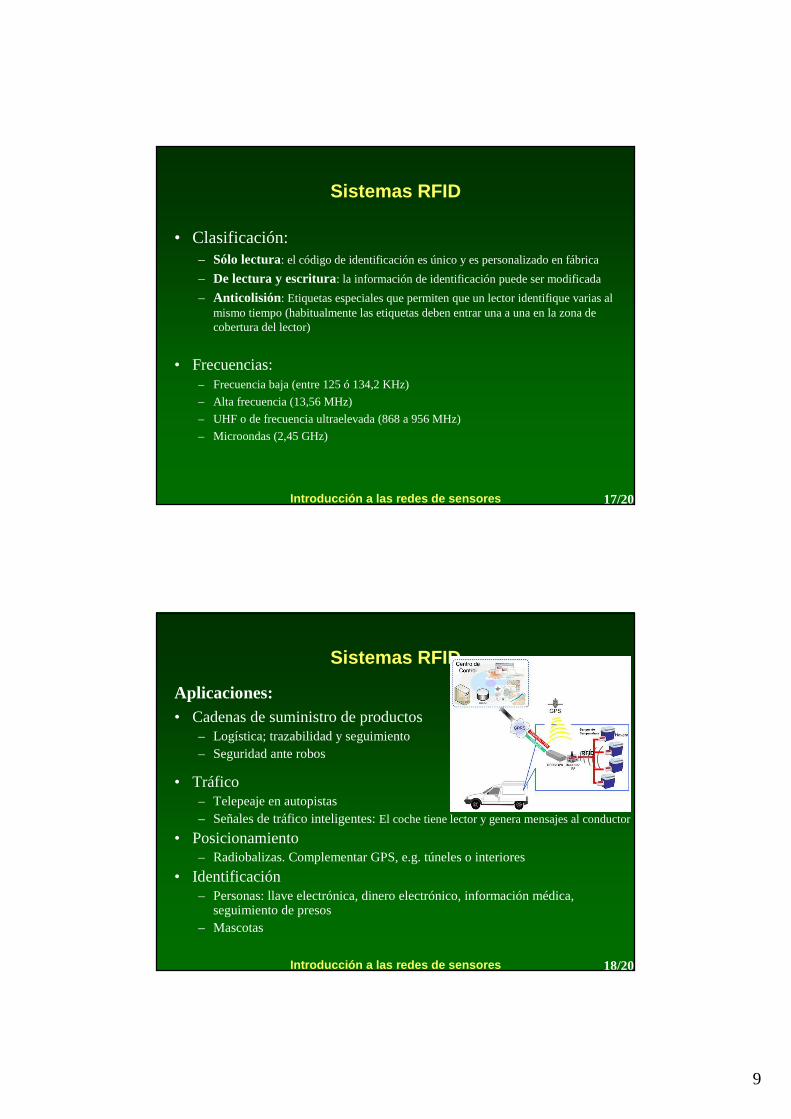
Introducción a las redes de sensores 18/20
Aplicaciones:• Cadenas de suministro de productos
– Logística; trazabilidad y seguimiento– Seguridad ante robos
• Tráfico– Telepeaje en autopistas– Señales de tráfico inteligentes: El coche tiene lector y genera mensajes al conductor
• Posicionamiento– Radiobalizas. Complementar GPS, e.g. túneles o interiores
• Identificación– Personas: llave electrónica, dinero electrónico, información médica,
seguimiento de presos– Mascotas
Sistemas RFID

10
Introducción a las redes de sensores 19/20
Fabricantes:• Texas Instruments
• Philips
• Randall Jackson
Sistemas RFID
Chips de RFID• Atmel
Introducción a las redes de sensores 20/20
Conclusiones• Redes de sensores• Sistemas RFID• Áreas tecnológicas en expansión
– Altas posibilidades de aplicación (aún no muy empleadas)– Grandes avances tecnológicos
Bibliografía adicional• Mitchell, H.B., (2007),“Multi-Sensor Data Fusion: An Introduction”, Springer
• Olariu S. (2007), “Wireless Sensor Networks and Applications”, John Wiley & Sons
• Finkenzeller K., (2003), “RFID Handbook: Fundamentals and Applications in Contactless Smart Cards and Identification”, Wiley