introduccion sig.pdf
TRANSCRIPT
1
Sistemas de Información Geográfica

2
3
INDICE
1.- Los Sistemas de Información Geográfica: Descripción, funciones y aplicaciones 4
1.1.- Definiciones de Sistemas de Información Geográfica: 4
1.2.- Funcionamiento de un SIG 6
1.3.- Usos de los Sistemas de Información Geográfica 7
1.4 Aplicaciones de los SIG 10
1.5.- Análisis en los SIG 13
2.- Información georreferenciada. Sistemas de coordenadas y de proyección 14
2.1.- Escala 14
2.2.- Proyección 18
3.- Modelos de datos: vectoriales y raster. Ventajas e inconvenientes, diferentes
aplicaciones. 25
3.1.- Modelo de datos Raster 26
3.1.1.- Clasificaciones de los datos raster: 28
3.1.2.- Fuentes de origen de datos Raster. 30
3.2.- Modelo de datos Vectorial 32
3.2.1.- Las fuentes de información vectorial pueden ser: 36
3.3.- Ventajas y desventajas del modelo raster respecto al vectorial 37
3.4.- Cambio formato raster-vector 38
3.5.- Análisis vectorial 39
3.6.- Funciones de análisis raster 44
4.- Los modelos digitales del terreno 47
4.1.- Cálculo de variables topográficas: información derivada del MDE
mediante análisis focal 49
5.- Principales SIG: comerciales: (arcgis, idrisi, ermapper) y libres (GRASS,
SAGA, gvsig) 53
4
1.- Los Sistemas de Información Geográfica: Descripción, funciones y aplicaciones
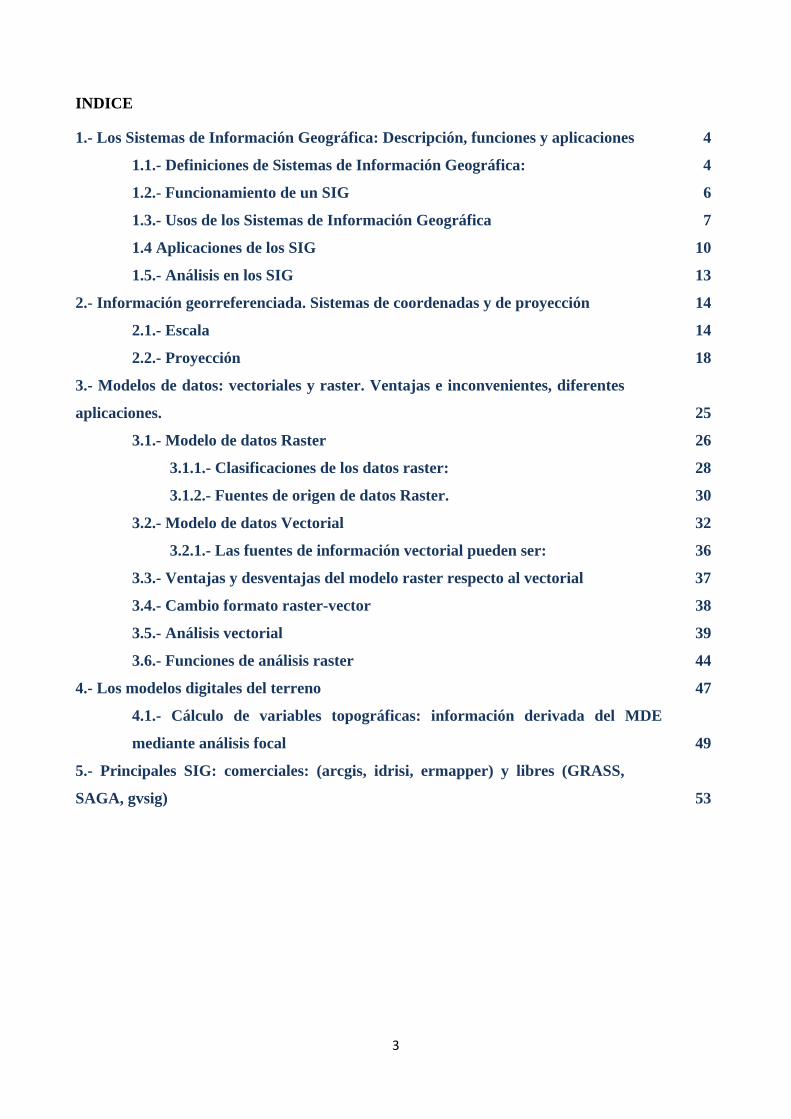
Un SIG se basa en una serie de capas de información espacial en formato digital que representan diversas variables, o bien capas que representan entidades a los que corresponden varias entradas en una base de datos enlazada (figura 1.1). Estas capas corresponden, al menos en parte, a la misma zona, de manera que pueden analizarse en conjunto. De este modo puede combinarse, en un mismo sistema, información espacial y temática, con orígenes y formatos muy diversos.
Figura 1.1.- Organización por capas temáticas de la información espacial en un SIG
La razón fundamental para utilizar un SIG es la gestión de información espacial. El sistema permite separar la información en diferentes capas temáticas y las almacena independientemente, permitiendo trabajar con ellas de manera rápida y sencilla, y facilitando la posibilidad de relacionar la información existente con el fin de generar otra nueva a partir de operaciones de análisis y modelización
1.1.- Definiciones de Sistemas de Información Geográfica:
Un Sistema de Información Geográfica (SIG o GIS, en su acrónimo inglés (Geographic Information System)) es una integración organizada de hardware, software y datos geográficos diseñado para capturar, almacenar, manipular, analizar y desplegar en todas sus formas la información geográficamente referenciada con el fin de resolver problemas complejos de planificación y gestión.
También puede definirse como un modelo de una parte de la realidad referido a un sistema de coordenadas terrestre y construido para satisfacer unas necesidades concretas de información. En el sentido más estricto, es cualquier sistema de información capaz de integrar, almacenar, editar, analizar, compartir y mostrar la información geográficamente referenciada. En un sentido más genérico, los SIG son herramientas que permiten a los usuarios crear consultas interactivas, analizar la información espacial, editar datos, mapas y presentar los resultados de todas estas operaciones.
Existen otras muchas definiciones de SIG, algunas de ellas acentúan su componente de base de datos, otras sus funcionalidades y otras enfatizan el hecho de ser una herramienta de apoyo en la toma de decisiones, pero todas coinciden en referirse a un SIG como un sistema integrado para trabajar con información espacial, herramienta esencial para el análisis y toma de decisiones en muchas áreas de gestión e investigación.
5
Desde el punto de vista de las herramientas, los Sistemas de Información Geográfica se han desarrollado a partir de la unión de diversos tipos de aplicaciones informáticas: la cartogafía automática tradicional, los sistemas de gestión de bases de datos, las herramientas de análisis digital de imágenes, los sistemas de ayuda a la toma de decisiones y las técnicas de modelización física. Por ello tienden a veces a ser considerados un software complejo para ser usados por informáticos, sin embargo la fuerte carga teórica de los SIG exige al usuario conocimientos adecuados acerca de la ciencia espacial con la que está trabajando para escoger, en cada caso, las herramientas adecuadas a cada análisis en particular. Por otro lado, para un especialista en ciencias de la tierra y ambientales que desee introducirse en el manejo de los SIG, resulta imprescindible una formación informática sólida. Por tanto utilizar una determinada herramienta SIG para resolver un problema implica la aceptación, al menos implícita, de una teoría, una hipótesis, acerca de los datos que se manejan. Este problema está en el centro de los debates acerca de si los SIG deben considerarse tan sólo como una herramienta neutra o como una disciplina científica. Por otro lado, el desarrollo de los SIG no ha supuesto sin embargo un cambio real en los modos de analizar la información. Gran parte de los algoritmos utilizados se conocían desde antes de la aparición de los ordenadores y simplemente eran demasiado lentos para ser utilizados. La utilización de grandes ordenadores y herramientas sofisticadas no garantiza tampoco la calidad de los resultados. Sólo con buenos datos de partida, un modelo de datos adecuado a los mismos y técnicas de análisis también adecuadas podrán obtenerse buenos resultados. Estos programas es lo que normalmente se conoce como SIG (IDRISI, ArcGis, GRASS, etc.), pero que realmente constituyen tan sólo un componente de lo que es realmente un SIG. Podríamos considerar, en sentido amplio que un SIG está constituido por: 1. Bases de datos espaciales en las que la realidad se codifica mediante unos modelos de datos específicos.
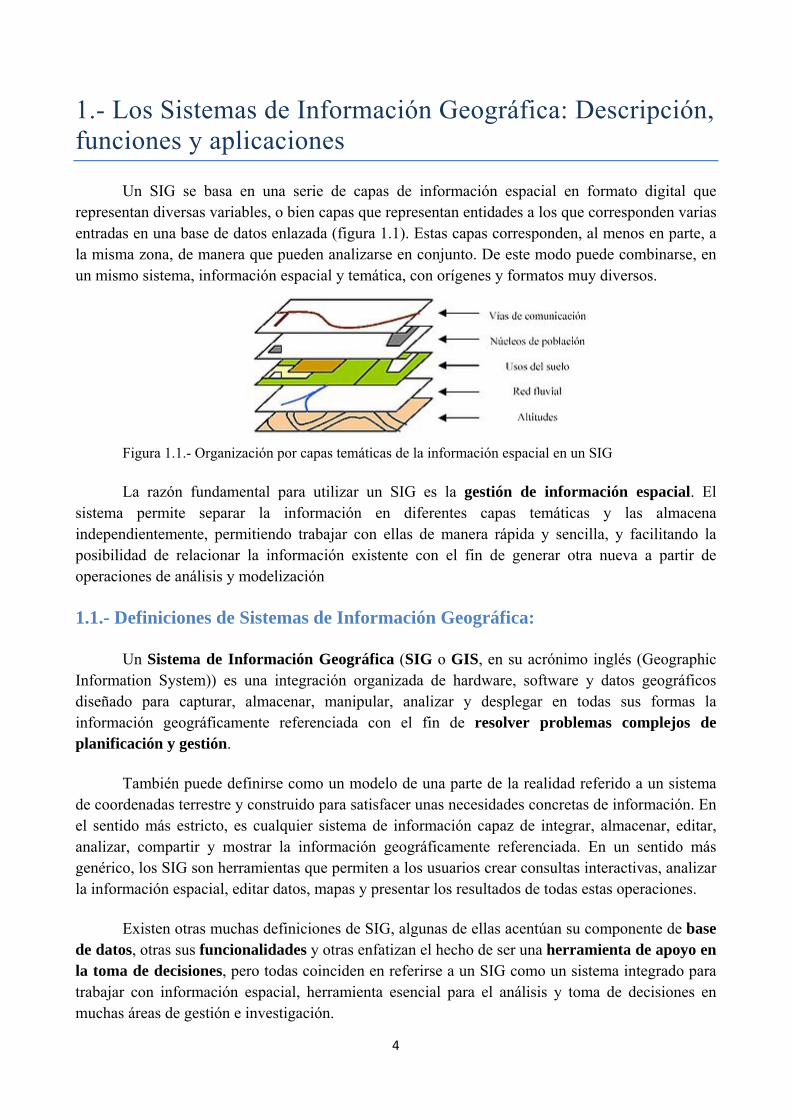
2. Bases de datos temáticas cuya vinculación con la base de datos cartográfica permite asignar a cada punto, linea o área del territorio unos valores temáticos (figura 1.2).
Figura 1.2.- Elemento geográfico y tabla de atributos asociada
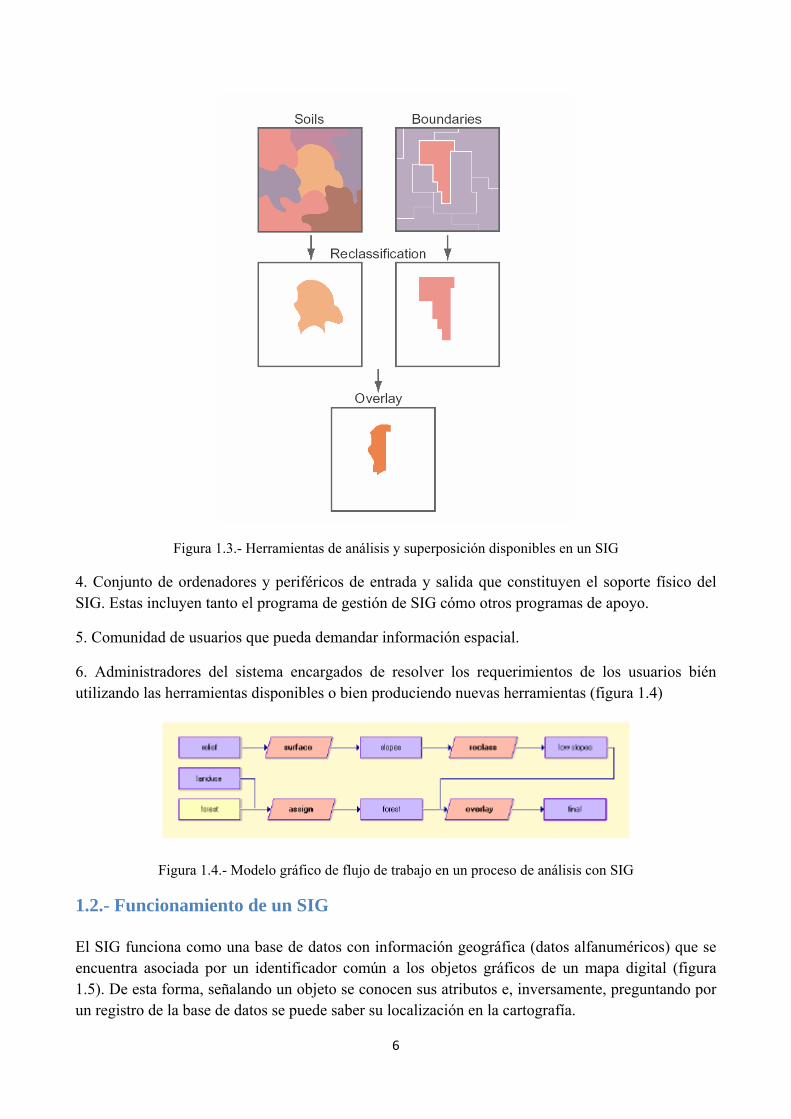
3. Conjunto de herramientas que permiten manejar estas bases de datos de forma útil para diversos propósitos de investigación, docencia o gestión (figura 1.3).
6
Figura 1.3.- Herramientas de análisis y superposición disponibles en un SIG
4. Conjunto de ordenadores y periféricos de entrada y salida que constituyen el soporte físico del SIG. Estas incluyen tanto el programa de gestión de SIG cómo otros programas de apoyo.
5. Comunidad de usuarios que pueda demandar información espacial.
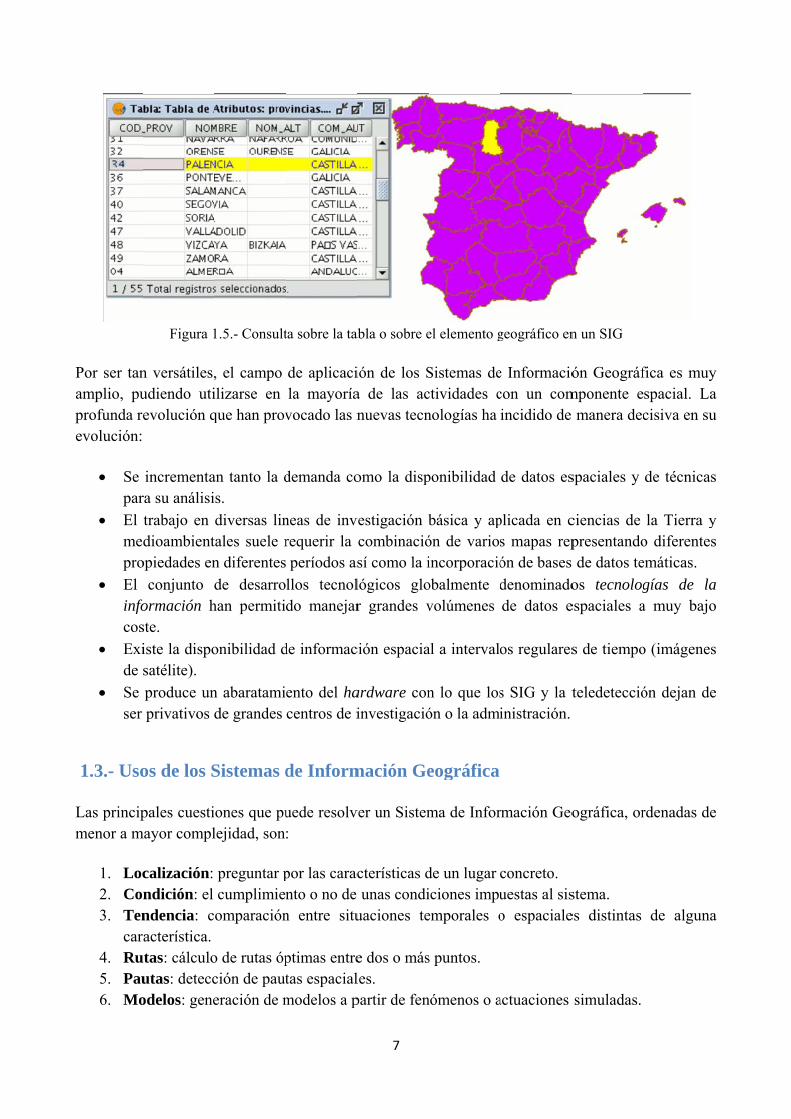
6. Administradores del sistema encargados de resolver los requerimientos de los usuarios bién utilizando las herramientas disponibles o bien produciendo nuevas herramientas (figura 1.4)
Figura 1.4.- Modelo gráfico de flujo de trabajo en un proceso de análisis con SIG
1.2.- Funcionamiento de un SIG
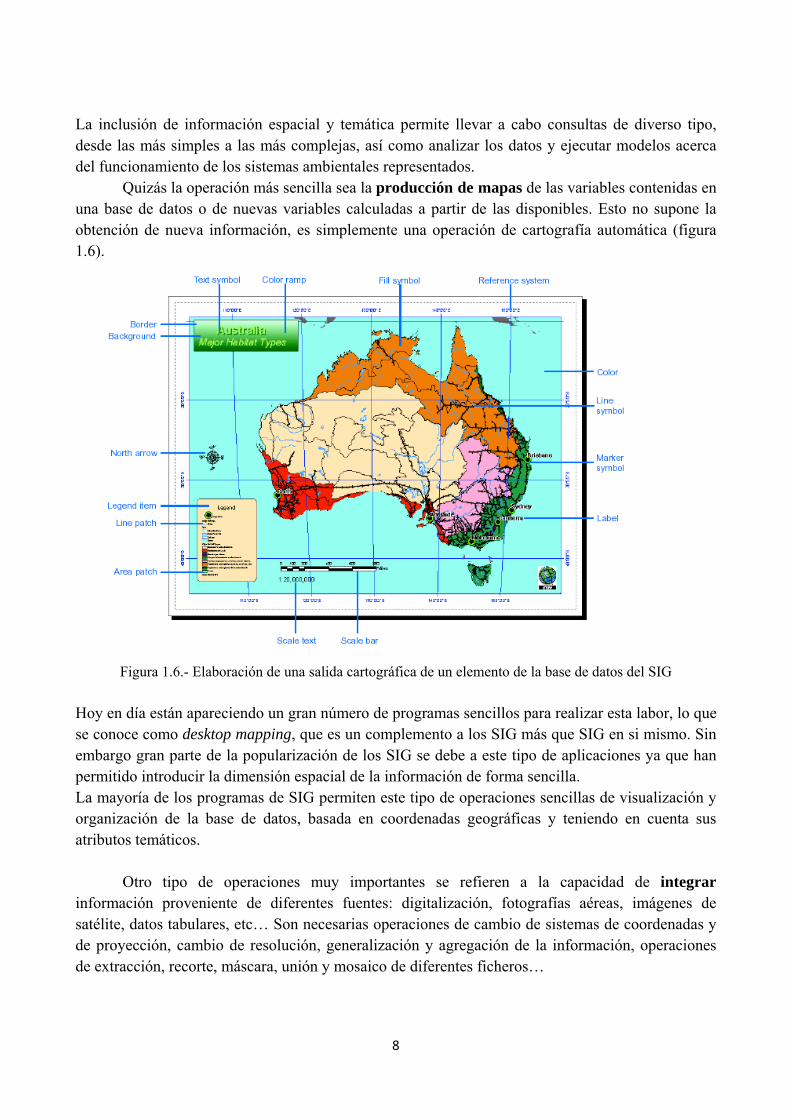
El SIG funciona como una base de datos con información geográfica (datos alfanuméricos) que se encuentra asociada por un identificador común a los objetos gráficos de un mapa digital (figura 1.5). De esta forma, señalando un objeto se conocen sus atributos e, inversamente, preguntando por un registro de la base de datos se puede saber su localización en la cartografía.
Por ser tanamplio, puprofunda reevolución:
Se par
El mepro
El infocos
Exide
Se ser
1.3.- Uso
Las principmenor a m
1. Loc2. Co3. Ten
car4. Ru5. Pau6. Mo
Figura 1
n versátiles,udiendo utievolución q
incrementara su análisi
trabajo en dioambient
opiedades en
conjunto dformación hste.
iste la disposatélite).
produce unprivativos d
os de los S
pales cuestimayor compl
calización: ndición: el ndencia: cacterística.
utas: cálculoutas: deteccodelos: gene
1.5.- Consult
, el campo ilizarse en que han prov
an tanto la ds.
diversas lintales suele rn diferentes
de desarrohan permiti
onibilidad d
n abaratamide grandes
Sistemas d
ones que pulejidad, son
preguntar pcumplimienomparación
o de rutas ópción de pauteración de m
ta sobre la tab
de aplicacila mayoríavocado las n
demanda co
neas de invrequerir la períodos as
llos tecnoldo manejar
de informac
ento del hacentros de i
de Inform
uede resolv:
por las caracnto o no de n entre situ
ptimas entretas espacialmodelos a p
7
abla o sobre e
ión de los Sa de las acnuevas tecn
omo la disp
vestigación bcombinaciósí como la i
lógicos glor grandes v
ción espacia
ardware coninvestigació
mación Ge
ver un Sistem
cterísticas dunas condi
uaciones te
e dos o másles. partir de fen
el elemento g
Sistemas dectividades cnologías ha
ponibilidad
básica y apón de variosincorporació
obalmente dvolúmenes
al a intervalo
n lo que losón o la admi
eográfica
ma de Infor
de un lugar iciones impuemporales o
s puntos.
nómenos o a
geográfico en
e Informaciócon un comincidido de
de datos es
plicada en cs mapas repón de bases
denominadode datos e
os regulares
s SIG y la tinistración.
rmación Geo
concreto. uestas al siso espaciale
actuaciones
n un SIG
ón Geográfmponente e manera dec
spaciales y
ciencias de presentando
s de datos te
os tecnologespaciales a
s de tiempo
teledetecció
ográfica, or
stema. es distintas
simuladas.
fica es muyspacial. Lacisiva en su
de técnicas
la Tierra yo diferentesemáticas.
gías de laa muy bajo
o (imágenes
ón dejan de
rdenadas de
de alguna
y a u
s
y s
a o
s
e
e
a
8
La inclusión de información espacial y temática permite llevar a cabo consultas de diverso tipo, desde las más simples a las más complejas, así como analizar los datos y ejecutar modelos acerca del funcionamiento de los sistemas ambientales representados.
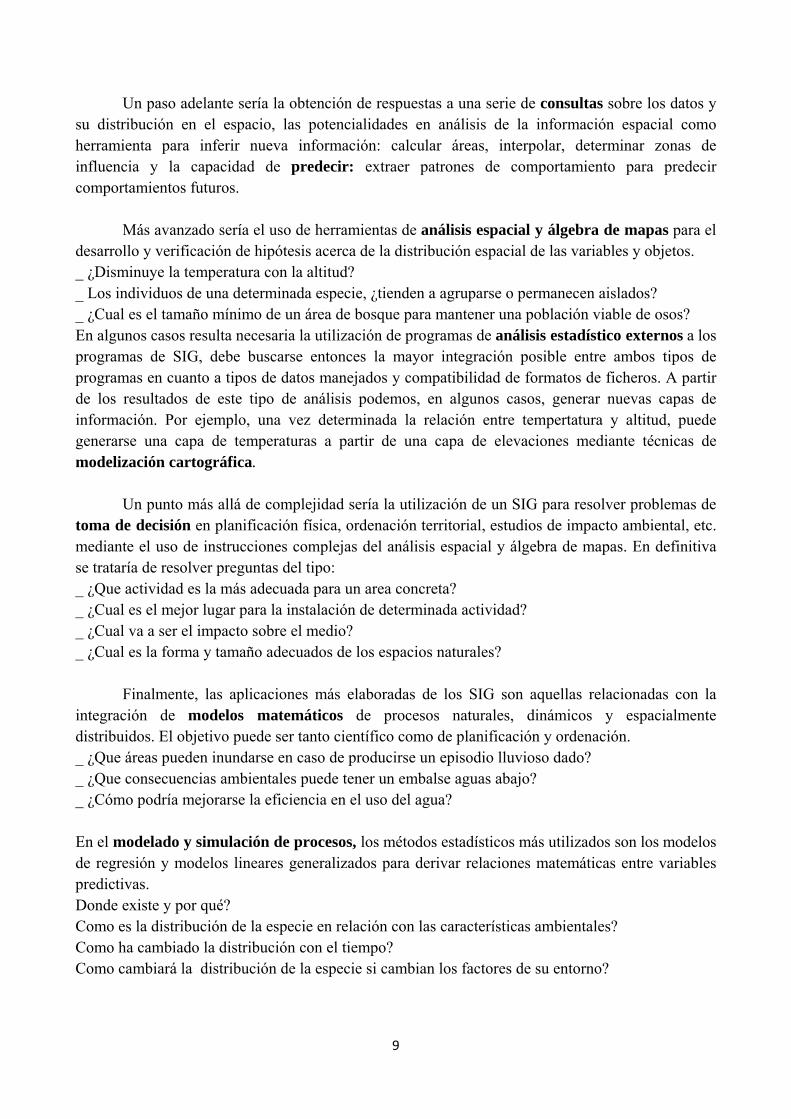
Quizás la operación más sencilla sea la producción de mapas de las variables contenidas en una base de datos o de nuevas variables calculadas a partir de las disponibles. Esto no supone la obtención de nueva información, es simplemente una operación de cartografía automática (figura 1.6).
Figura 1.6.- Elaboración de una salida cartográfica de un elemento de la base de datos del SIG
Hoy en día están apareciendo un gran número de programas sencillos para realizar esta labor, lo que se conoce como desktop mapping, que es un complemento a los SIG más que SIG en si mismo. Sin embargo gran parte de la popularización de los SIG se debe a este tipo de aplicaciones ya que han permitido introducir la dimensión espacial de la información de forma sencilla. La mayoría de los programas de SIG permiten este tipo de operaciones sencillas de visualización y organización de la base de datos, basada en coordenadas geográficas y teniendo en cuenta sus atributos temáticos.
Otro tipo de operaciones muy importantes se refieren a la capacidad de integrar información proveniente de diferentes fuentes: digitalización, fotografías aéreas, imágenes de satélite, datos tabulares, etc… Son necesarias operaciones de cambio de sistemas de coordenadas y de proyección, cambio de resolución, generalización y agregación de la información, operaciones de extracción, recorte, máscara, unión y mosaico de diferentes ficheros…
9
Un paso adelante sería la obtención de respuestas a una serie de consultas sobre los datos y su distribución en el espacio, las potencialidades en análisis de la información espacial como herramienta para inferir nueva información: calcular áreas, interpolar, determinar zonas de influencia y la capacidad de predecir: extraer patrones de comportamiento para predecir comportamientos futuros.
Más avanzado sería el uso de herramientas de análisis espacial y álgebra de mapas para el desarrollo y verificación de hipótesis acerca de la distribución espacial de las variables y objetos. _ ¿Disminuye la temperatura con la altitud? _ Los individuos de una determinada especie, ¿tienden a agruparse o permanecen aislados? _ ¿Cual es el tamaño mínimo de un área de bosque para mantener una población viable de osos? En algunos casos resulta necesaria la utilización de programas de análisis estadístico externos a los programas de SIG, debe buscarse entonces la mayor integración posible entre ambos tipos de programas en cuanto a tipos de datos manejados y compatibilidad de formatos de ficheros. A partir de los resultados de este tipo de análisis podemos, en algunos casos, generar nuevas capas de información. Por ejemplo, una vez determinada la relación entre tempertatura y altitud, puede generarse una capa de temperaturas a partir de una capa de elevaciones mediante técnicas de modelización cartográfica.
Un punto más allá de complejidad sería la utilización de un SIG para resolver problemas de toma de decisión en planificación física, ordenación territorial, estudios de impacto ambiental, etc. mediante el uso de instrucciones complejas del análisis espacial y álgebra de mapas. En definitiva se trataría de resolver preguntas del tipo: _ ¿Que actividad es la más adecuada para un area concreta? _ ¿Cual es el mejor lugar para la instalación de determinada actividad? _ ¿Cual va a ser el impacto sobre el medio? _ ¿Cual es la forma y tamaño adecuados de los espacios naturales?
Finalmente, las aplicaciones más elaboradas de los SIG son aquellas relacionadas con la integración de modelos matemáticos de procesos naturales, dinámicos y espacialmente distribuidos. El objetivo puede ser tanto científico como de planificación y ordenación. _ ¿Que áreas pueden inundarse en caso de producirse un episodio lluvioso dado? _ ¿Que consecuencias ambientales puede tener un embalse aguas abajo? _ ¿Cómo podría mejorarse la eficiencia en el uso del agua? En el modelado y simulación de procesos, los métodos estadísticos más utilizados son los modelos de regresión y modelos lineares generalizados para derivar relaciones matemáticas entre variables predictivas. Donde existe y por qué? Como es la distribución de la especie en relación con las características ambientales? Como ha cambiado la distribución con el tiempo? Como cambiará la distribución de la especie si cambian los factores de su entorno?
10
El futuro desarrollo de los SIG se dirige hacia la “estadística geográfica”. Actualmente, todavía es necesario extraer la información a un formato manejable por programas de estadística tradicional (spss, sas, statistica, systat, R), en los que se genera el modelo y se vuelven a incluir los resultados en el SIG En estos casos los programas se utilizan tanto para introducir las capas de información inicial como para ver y analizar los resultados del modelo en su distribución espacial.
1.4 Aplicaciones de los SIG Un Sistema de Información Geográfica es una herramienta que permite la integración de bases de datos espaciales y la implementación de diversas técnicas de análisis de datos. Por tanto cualquier actividad relacionada con el espacio, puede beneficiarse del trabajo con SIG. Entre las aplicaciones más usuales destacan: _ Científicas – Ciencias medioambientales y relacionadas con el espacio – Desarrollo de modelos empíricos – Modelización cartográfica – Modelos dinámicos – Teledetección _ Gestión – Cartografía automática – Información pública, catastro – Planificación física – Ordenación territorial – Planificación urbana – Estudios de impacto ambiental – Evaluación de recursos – Seguimiento de actuaciones _ Empresarial – Marketing – Estrategias de distribución – Planificación de transportes – Localización óptima
Cartografía automatizada
Las entidades públicas han implementado este componente de los SIG en la construcción y mantenimiento de planos digitales de cartografía. Dichos planos son luego puestos a disposición de las empresas a las que puedan resultar de utilidad estos productos. Las propias entidades se encargan posteriormente de proveer versiones actualizadas periódicamente.
11
En infraestructuras
Algunos de los primeros sistemas SIG fueron utilizados por las empresas encargadas del desarrollo, mantenimiento y gestión de redes de electricidad, gas, agua, teléfonos, alcantarillados, etc., en estas los sistemas SIG almacenan información alfanumérica de servicios, que se encuentra relacionada a las distintas representaciones gráficas de los mismos. Estos sistemas almacenan información relativa a la conectividad de los elementos representados gráficamente, con el fin de permitir realizar análisis de redes.
La elaboración de mapas, así como la posibilidad de elaborar otro diferente tipo de consulta, ya sea gráfica o alfanumérica, son las funciones más comunes para estos sistemas, también son utilizados en trabajos de ingeniería, inventarios, planificación de redes, gestión de mantenimiento, etc.
Gestión territorial
Son aplicaciones SIG dirigidas a la gestión de entidades territoriales. Estas aplicaciones permiten un rápido acceso a la información gráfica y alfanumérica, y suministran herramientas para el análisis espacial de la información. Facilitan labores de mantenimiento de infraestructuras, mobiliario urbano, etc., y permiten realizar una optimización en los trabajos de mantenimiento de empresas de servicios. Tienen la facilidad de generar, documentos con información gráfica y alfanumérica.
Medio ambiente
Son aplicaciones implementadas por instituciones de medioambiente, que facilitan la evaluación del impacto medioambiental en la ejecución de proyectos. Integrados con sistemas de adquisición de datos permiten el análisis en tiempo real de la concentración de contaminantes, a fin de tomar las precauciones y medidas del caso. Facilitan una ayuda fundamental en trabajos tales como repoblaciones forestales, planificación de explotaciones agrícolas, estudios de representatividad caracterización de ecosistemas, estudios de fragmentación, estudios de especies, etc.
Equipamiento social
Son implementación de aplicaciones SIG dirigidas a la gestión de servicios de impacto social, tales como servicios sanitarios, centros escolares, hospitales, etc., suministran información sobre los centros ya existentes en una determinada zona y ayudan en la planificación en cuanto a la localización de nuevos centros. Un buen diseño y una buena implementación de estos SIG aumentan la productividad al optimizar recursos, ya que permiten asignar de forma adecuada y precisa los centros a los usuarios y cubrir de forma eficiente la totalidad de la zona de influencia.
Recursos mineros
El diseño de estos SIG facilitan el manejo de un gran volumen de información generado de varios años de explotación intensiva, suministrando funciones para la realización de análisis de elementos puntuales (sondeos o puntos topográficos), lineales (perfiles, tendido de electricidad), superficies
12
(áreas de explotación) y volúmenes (capas geológicas). Facilitan herramientas de modelización de las capas o formaciones geológicas.
Tráfico
SIG utilizados para modelizar la conducta del tráfico determinando modelos de circulación por una vía en función de las condiciones de tráfico y longitud. Asignando un coste a los nodos (o puntos) en los que puede existir un semáforo, se puede obtener información muy útil relacionada con análisis de redes.
Demografía
Se evidencian en este tipo de SIG un conjunto diverso de aplicaciones cuyo vínculo es la utilización de las variadas características demográficas, y en concreto su distribución espacial, para la toma de decisiones. Algunas de estas aplicaciones pueden ser: el análisis para la implantación de negocios o servicios públicos, zonificación electoral, etc.
El origen de los datos suele ser los censos poblacionales elaborados por algún entidad, este grupo de aplicaciones no obligan a una elevada precisión, y en general, manejan escalas pequeñas.
En el ámbito privado deberían tener más incidencia los SIG, aunque aún no es de este modo, ya que por el coste o la falta de información no es posible tener acceso a estas herramientas. Los SIG pueden y deberían ser empleados en:
GeoMarketing:
La base de datos empalmada a la información geográfica resulta indispensable para planificar una adecuada campaña de marketing o el envío de correo promocional, se podrían diseñar rutas óptimas a seguir por comerciales, etc.
Banca:
Los bancos y cajas son unos buenos usuarios de SIG, en el momento requieren ubicar a sus clientes y planificar tanto sus campañas como la apertura de nuevas oficinas, incluyendo información sobre las sucursales de la competencia.
Servidores Cartográficos
Existen servidores cartográficos o de IDE’s (Infraestructura de Datos Espaciales) donde a través de navegadores es posible consultar la información espacial georreferenciada, incluyendo herramientas de búsqueda y consulta sencillas. Los más importantes:
-Instituto Geográfico Nacional (IGN): http://www.ign.es/ign/es/IGN/home.jsp:
-Centro Nacional de Información Geográfica (CNIG): http://www.cnig.es/
13
-Infraestructura de Datos Espaciales de España (IDEE): http://www.idee.es/show.do?to=pideep_pidee.ES
- Servidores cartográficos autonómicos: http://sitar.aragon.es
- Ministerios: MARM: http://www.mapa.es/es/sig/sig1.htm#, http://www.mma.es/portal/secciones/biodiversidad/banco_datos/
1.5.- Análisis en los SIG
Las funciones de análisis tratan conjuntamente los datos cartográficos y sus atributos temáticos. Se identifican cuatro grupos de funciones:
Recuperación Superposición Vecindad Conectividad
Recuperación
Recuperación filtrada Consulta e interrogación de la base de datos Reclasificación Mediciones Estadística espacial
Superposición
Superposición geométrica Superposición lógica de atributos Superposición aritmética de atributos
Vecindad
Contenido en…….. Filtrado Poligonación o polígonos Thiessen Generación de isolíneas Interpolación Modelos Digitales de Terreno
14
Conectividad
Contigüidad Proximidad Difusión espacial Análisis de redes
o Ruta óptima o Análisis de accesibilidad o Modelo de accesibilidad o Geocodificación de direcciones postales
2.- Información georreferenciada. Sistemas de coordenadas y de proyección
Los Sistemas de Información Geográfica gestionan y analizan información espacial georreferenciada: conocemos la posición de un objeto en un sistema de referencia. Puede ser un sistema de coordenadas geográficas o un sistema proyectado de coordenadas. Una primera información derivada es la medición de superficies y distancias.
Todas las capas (“layers”) de informacion geográfica de una base de datos en un SIG deben estar en el mismo sistema de referencia.
“el mismo sistema de referencia” = tipo de proyección + Datum.
A la hora de representar la superficie terrestre hay que tener en cuenta varios factores:
Las dimensiones de la zona a representar son muy extensas o Solución: ESCALA
La superficie que queremos representar no es plana o Solución: PROYECCION
2.1.- Escala La relación existente entre las distancias medidas en un plano o mapa y las correspondientes en la realidad se denomina ESCALA. Por tanto, la escala es una proporción entre dos magnitudes lineales, independientemente del sistema de unidades de longitud que se utilice (figura 2.1). La escala puede expresarse de tres formas distintas: numérica, gráfica y textual o literal. Cualquiera de estas formas (o su combinación) es suficiente para conocer inequívocamente la relación entre las dimensiones reales y las medidas en el plano o mapa.
15
Es la razón de semejanza entre la superficie real y la representación cartográfica. N: Denominador de la Escala Dr: Distancia Real Dm: Distancia en el mapa Una escala 1:50.000 nos indica que 1 centímetro medido en el mapa equivale a 50.000 cm de distancia real (500 metros)
Figura 2.1.- Reducción de escala en un mapa
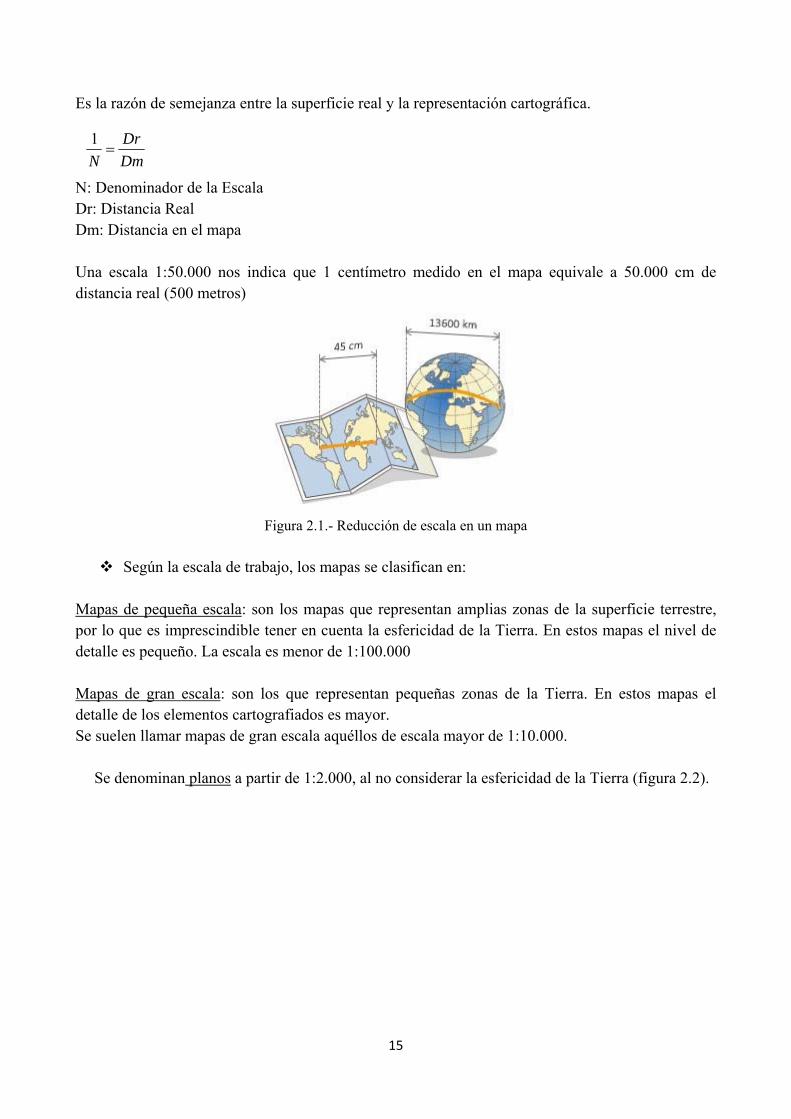
Según la escala de trabajo, los mapas se clasifican en:
Mapas de pequeña escala: son los mapas que representan amplias zonas de la superficie terrestre, por lo que es imprescindible tener en cuenta la esfericidad de la Tierra. En estos mapas el nivel de detalle es pequeño. La escala es menor de 1:100.000 Mapas de gran escala: son los que representan pequeñas zonas de la Tierra. En estos mapas el detalle de los elementos cartografiados es mayor. Se suelen llamar mapas de gran escala aquéllos de escala mayor de 1:10.000.
Se denominan planos a partir de 1:2.000, al no considerar la esfericidad de la Tierra (figura 2.2).
Dm
Dr
N
1
16
Figura 2.2.- Mapas de pequeña escala (poco detalle, grandes áreas con influencia de la esfericidad terrestre) y de gran escala (gran detalle, áreas pequeñas sin influencia de la esfericidad)
Las herramientas de zoom de cualquier SIG permiten un cambio en la escala de
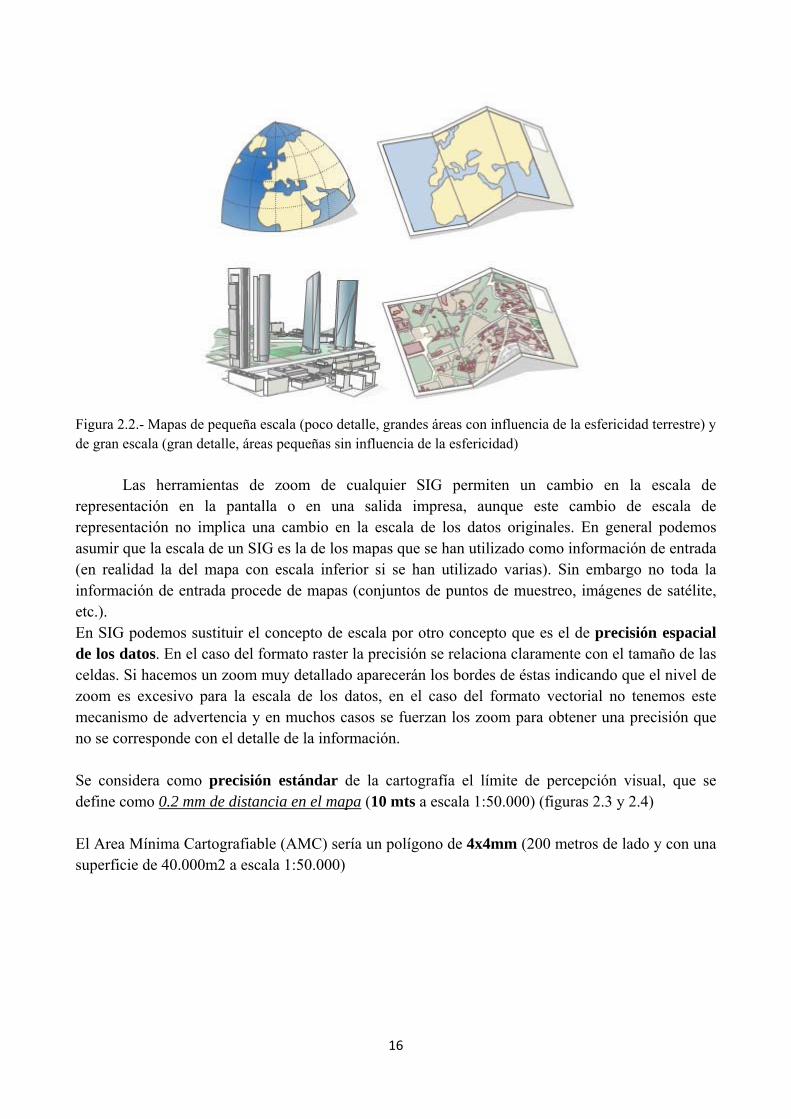
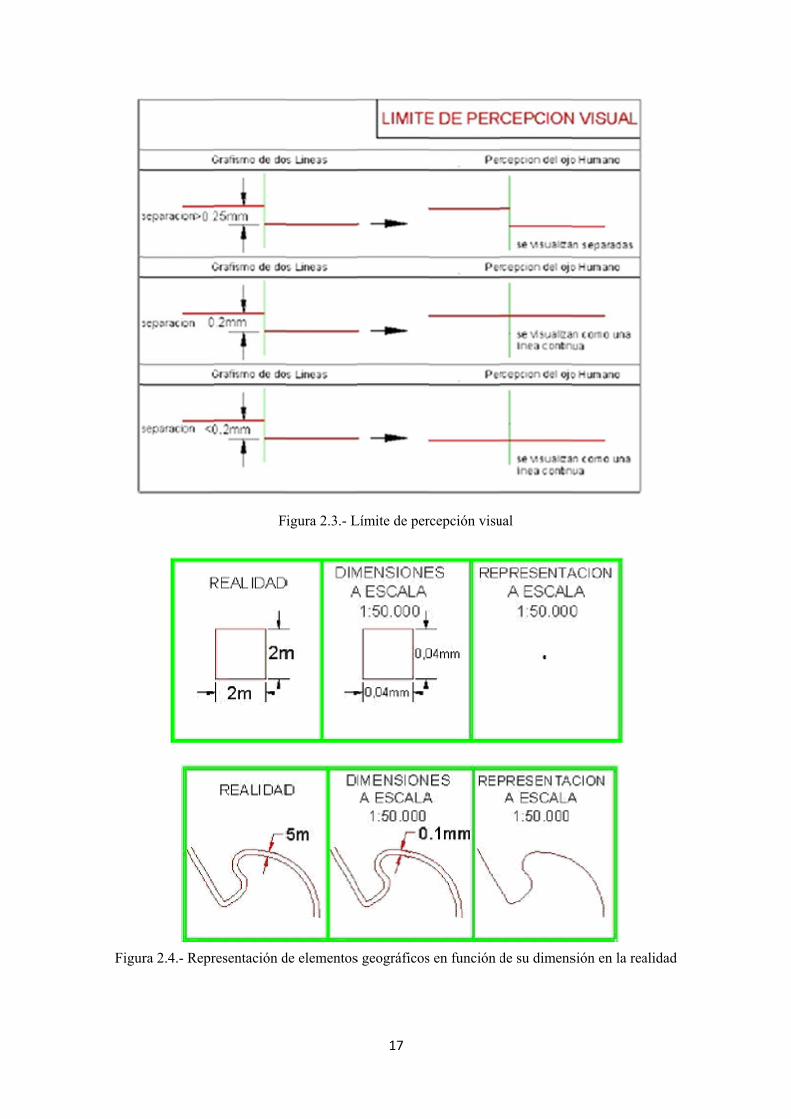
representación en la pantalla o en una salida impresa, aunque este cambio de escala de representación no implica una cambio en la escala de los datos originales. En general podemos asumir que la escala de un SIG es la de los mapas que se han utilizado como información de entrada (en realidad la del mapa con escala inferior si se han utilizado varias). Sin embargo no toda la información de entrada procede de mapas (conjuntos de puntos de muestreo, imágenes de satélite, etc.). En SIG podemos sustituir el concepto de escala por otro concepto que es el de precisión espacial de los datos. En el caso del formato raster la precisión se relaciona claramente con el tamaño de las celdas. Si hacemos un zoom muy detallado aparecerán los bordes de éstas indicando que el nivel de zoom es excesivo para la escala de los datos, en el caso del formato vectorial no tenemos este mecanismo de advertencia y en muchos casos se fuerzan los zoom para obtener una precisión que no se corresponde con el detalle de la información. Se considera como precisión estándar de la cartografía el límite de percepción visual, que se define como 0.2 mm de distancia en el mapa (10 mts a escala 1:50.000) (figuras 2.3 y 2.4) El Area Mínima Cartografiable (AMC) sería un polígono de 4x4mm (200 metros de lado y con una superficie de 40.000m2 a escala 1:50.000)
Figur
ra 2.4.- Repr
F
resentación d
igura 2.3.- L
de elementos
17
Límite de per
s geográficos
rcepción visu
s en función d
ual
de su dimens
sión en la rea
alidad
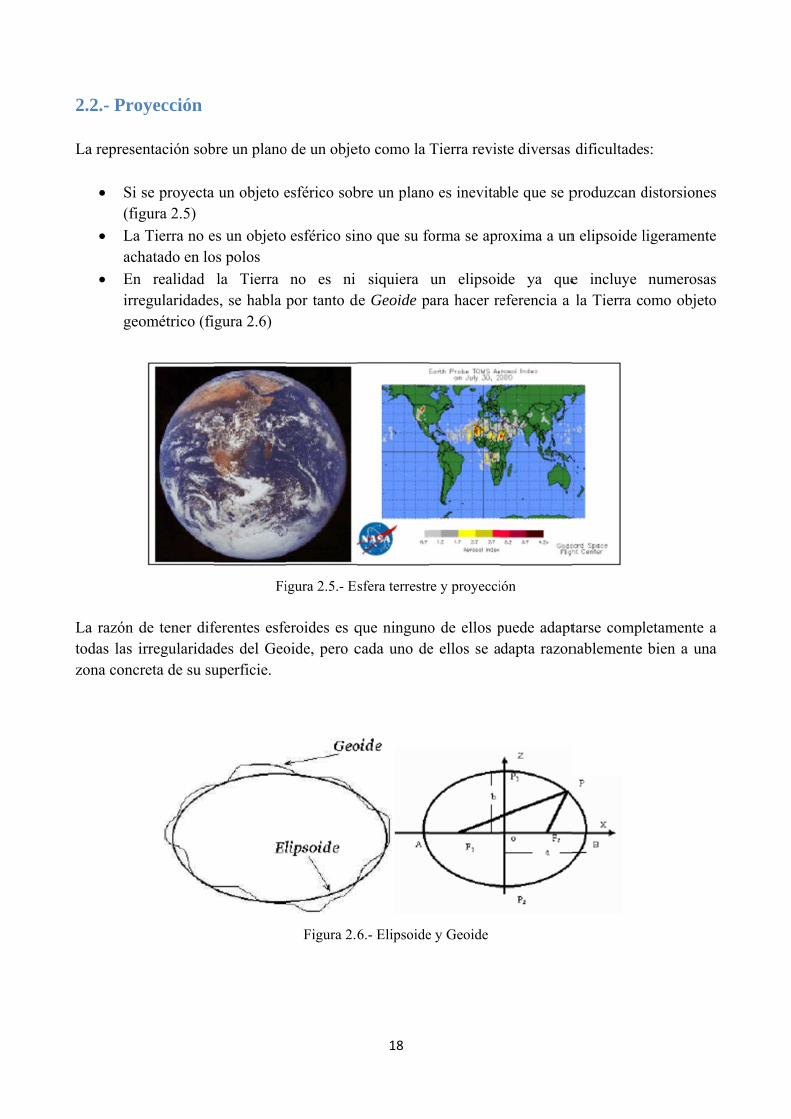
2.2.- Pro La represen
Si s(fig
La ach
En irregeo
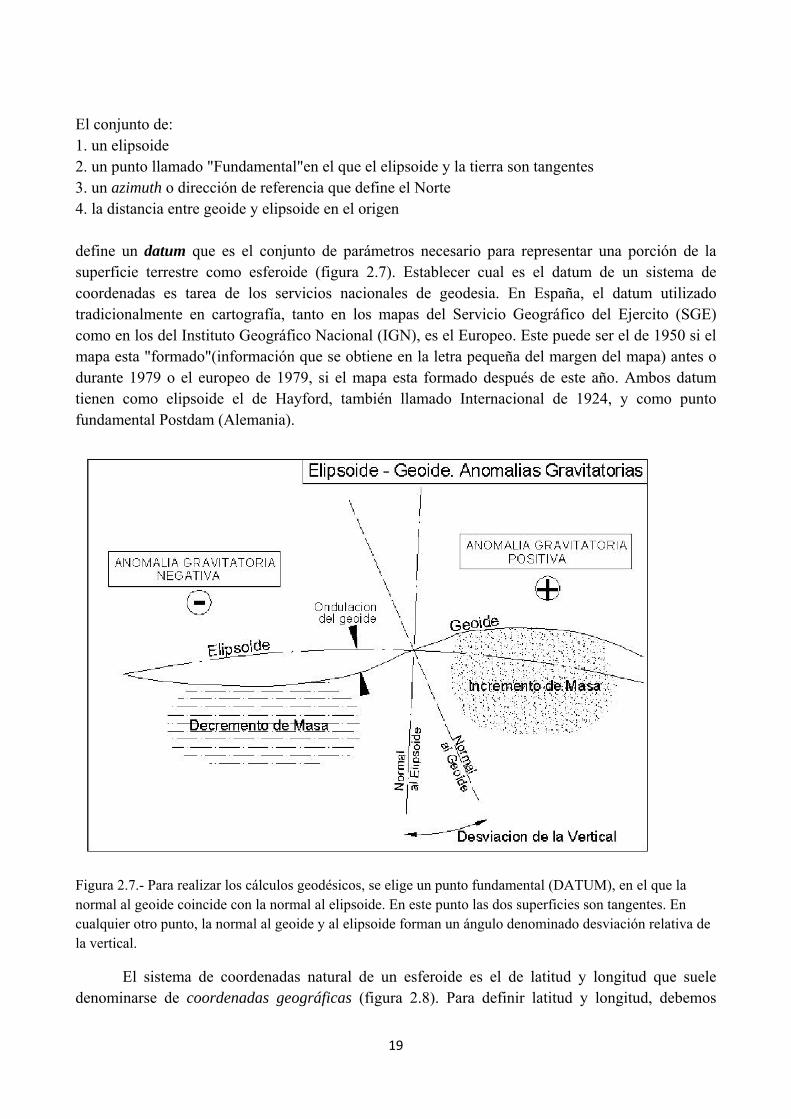
La razón dtodas las irzona concr
yección
ntación sob
se proyecta gura 2.5)
Tierra no ehatado en lo
realidad egularidadesométrico (fi
de tener difrregularidadreta de su su
bre un plano
un objeto e
es un objetoos polos
la Tierra s, se habla gura 2.6)
Fi
ferentes esfedes del Geouperficie.
o de un obje
esférico sob
esférico sin
no es ni por tanto d
igura 2.5.- Es
eroides es qoide, pero c
Figura 2.6
18
eto como la
bre un plano
no que su fo
siquiera de Geoide p
sfera terrestr
que ningunocada uno de
6.- Elipsoide
Tierra revis
o es inevitab
forma se apr
un elipsoipara hacer re
re y proyecci
o de ellos pe ellos se a
e y Geoide
ste diversas
ble que se p
roxima a un
de ya queeferencia a
ión
puede adaptdapta razon
dificultade
produzcan d
n elipsoide l
e incluye la Tierra c
tarse complnablemente
s:
distorsiones
ligeramente
numerosasomo objeto
letamente abien a una
s
e
s o
a a
19
El conjunto de: 1. un elipsoide 2. un punto llamado "Fundamental"en el que el elipsoide y la tierra son tangentes 3. un azimuth o dirección de referencia que define el Norte 4. la distancia entre geoide y elipsoide en el origen define un datum que es el conjunto de parámetros necesario para representar una porción de la superficie terrestre como esferoide (figura 2.7). Establecer cual es el datum de un sistema de coordenadas es tarea de los servicios nacionales de geodesia. En España, el datum utilizado tradicionalmente en cartografía, tanto en los mapas del Servicio Geográfico del Ejercito (SGE) como en los del Instituto Geográfico Nacional (IGN), es el Europeo. Este puede ser el de 1950 si el mapa esta "formado"(información que se obtiene en la letra pequeña del margen del mapa) antes o durante 1979 o el europeo de 1979, si el mapa esta formado después de este año. Ambos datum tienen como elipsoide el de Hayford, también llamado Internacional de 1924, y como punto fundamental Postdam (Alemania).
Figura 2.7.- Para realizar los cálculos geodésicos, se elige un punto fundamental (DATUM), en el que la normal al geoide coincide con la normal al elipsoide. En este punto las dos superficies son tangentes. En cualquier otro punto, la normal al geoide y al elipsoide forman un ángulo denominado desviación relativa de la vertical.
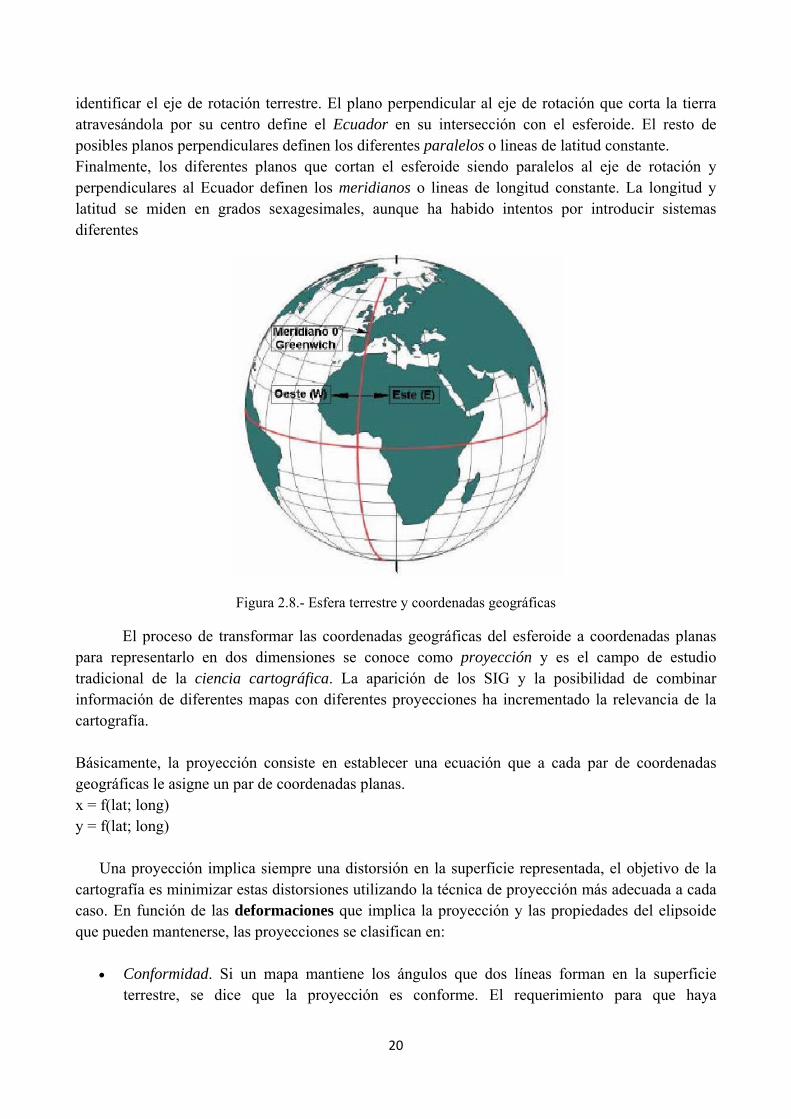
El sistema de coordenadas natural de un esferoide es el de latitud y longitud que suele denominarse de coordenadas geográficas (figura 2.8). Para definir latitud y longitud, debemos
20
identificar el eje de rotación terrestre. El plano perpendicular al eje de rotación que corta la tierra atravesándola por su centro define el Ecuador en su intersección con el esferoide. El resto de posibles planos perpendiculares definen los diferentes paralelos o lineas de latitud constante. Finalmente, los diferentes planos que cortan el esferoide siendo paralelos al eje de rotación y perpendiculares al Ecuador definen los meridianos o lineas de longitud constante. La longitud y latitud se miden en grados sexagesimales, aunque ha habido intentos por introducir sistemas diferentes
Figura 2.8.- Esfera terrestre y coordenadas geográficas
El proceso de transformar las coordenadas geográficas del esferoide a coordenadas planas para representarlo en dos dimensiones se conoce como proyección y es el campo de estudio tradicional de la ciencia cartográfica. La aparición de los SIG y la posibilidad de combinar información de diferentes mapas con diferentes proyecciones ha incrementado la relevancia de la cartografía. Básicamente, la proyección consiste en establecer una ecuación que a cada par de coordenadas geográficas le asigne un par de coordenadas planas. x = f(lat; long) y = f(lat; long)
Una proyección implica siempre una distorsión en la superficie representada, el objetivo de la cartografía es minimizar estas distorsiones utilizando la técnica de proyección más adecuada a cada caso. En función de las deformaciones que implica la proyección y las propiedades del elipsoide que pueden mantenerse, las proyecciones se clasifican en:
Conformidad. Si un mapa mantiene los ángulos que dos líneas forman en la superficie terrestre, se dice que la proyección es conforme. El requerimiento para que haya
21
conformidad es que en el mapa los meridianos y los paralelos se corten en ángulo recto y que la escala sea la misma en todas las direcciones alrededor de un punto, sea el punto que sea.
Equivalencia, es la condición por la cual una superficie en el plano de proyección tiene la misma superficie que en la esfera. La equivalencia no es posible sin deformar considerablemente los ángulos originales. Por lo tanto, ninguna proyección puede ser equivalente y conforme a la vez.
Equidistancia, cuando una proyección mantiene las distancias reales entre dos puntos situados sobre la superficie del Globo (representada por el arco de Círculo Máximo que las une).
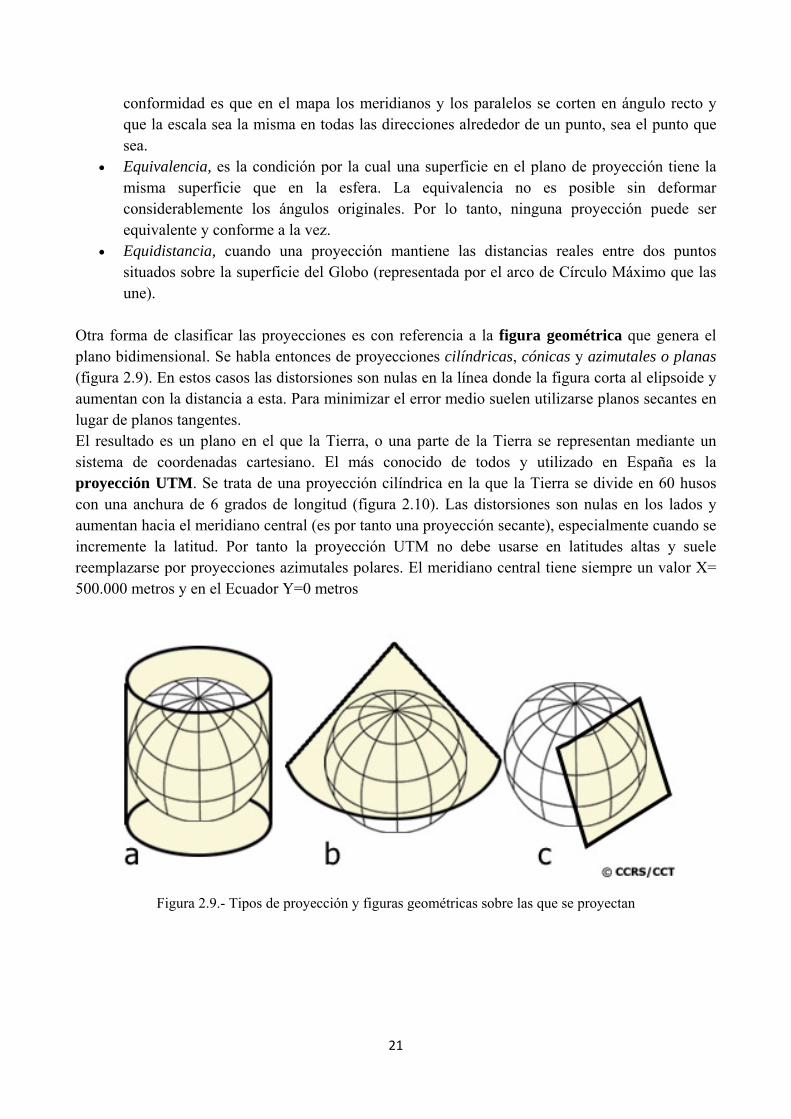
Otra forma de clasificar las proyecciones es con referencia a la figura geométrica que genera el plano bidimensional. Se habla entonces de proyecciones cilíndricas, cónicas y azimutales o planas (figura 2.9). En estos casos las distorsiones son nulas en la línea donde la figura corta al elipsoide y aumentan con la distancia a esta. Para minimizar el error medio suelen utilizarse planos secantes en lugar de planos tangentes. El resultado es un plano en el que la Tierra, o una parte de la Tierra se representan mediante un sistema de coordenadas cartesiano. El más conocido de todos y utilizado en España es la proyección UTM. Se trata de una proyección cilíndrica en la que la Tierra se divide en 60 husos con una anchura de 6 grados de longitud (figura 2.10). Las distorsiones son nulas en los lados y aumentan hacia el meridiano central (es por tanto una proyección secante), especialmente cuando se incremente la latitud. Por tanto la proyección UTM no debe usarse en latitudes altas y suele reemplazarse por proyecciones azimutales polares. El meridiano central tiene siempre un valor X= 500.000 metros y en el Ecuador Y=0 metros
Figura 2.9.- Tipos de proyección y figuras geométricas sobre las que se proyectan
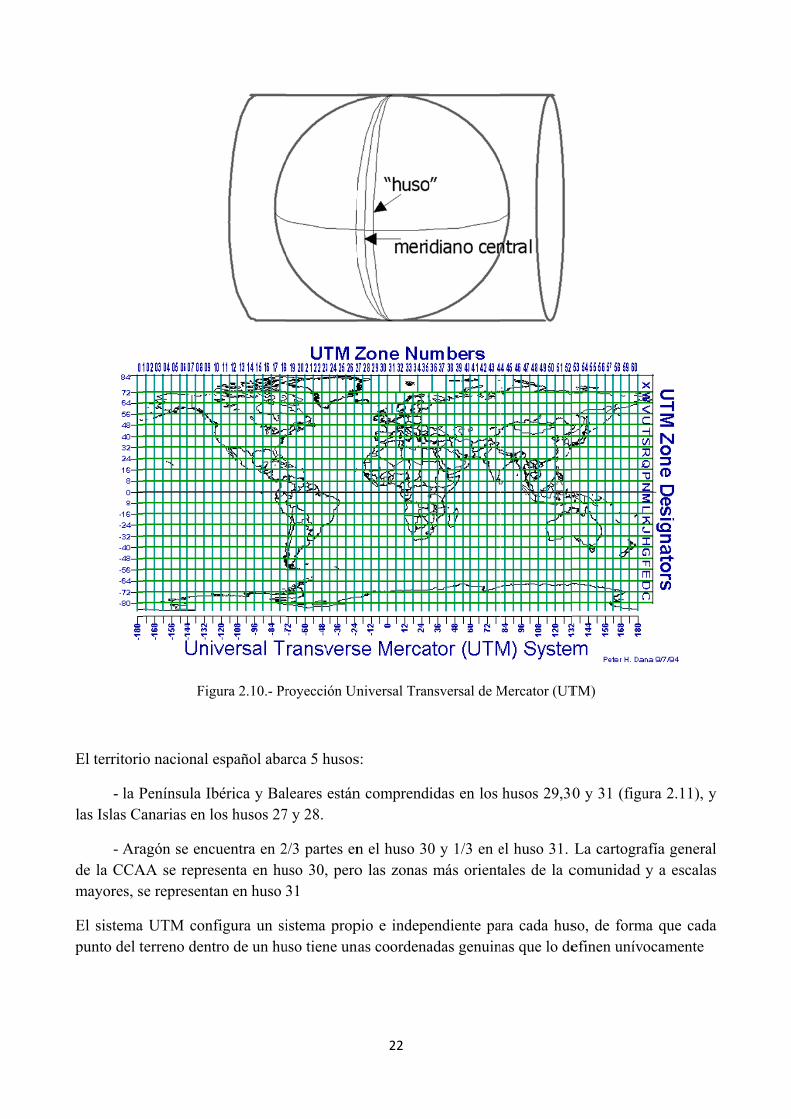
El territorio
- la Plas Islas Ca
- Arade la CCAmayores, s
El sistema punto del t
Fig
o nacional e
Península Ibanarias en lo
agón se encAA se represe representa
a UTM confterreno dent
gura 2.10.- Pr
español aba
bérica y Balos husos 27
cuentra en 2senta en huan en huso
figura un sitro de un hu
royección Un
arca 5 husos
leares están7 y 28.
2/3 partes enuso 30, pero31
istema propuso tiene un
22
niversal Tran
s:
n comprend
n el huso 30o las zonas
pio e indepenas coordena
nsversal de M
idas en los
0 y 1/3 en emás orient
endiente paadas genuin
Mercator (UT
husos 29,30
el huso 31. tales de la c
ara cada husnas que lo de
TM)
0 y 31 (figu
La cartogracomunidad
so, de formefinen unív
ura 2.11), y
afía generaly a escalas
ma que cadaocamente
y
l s
a
23
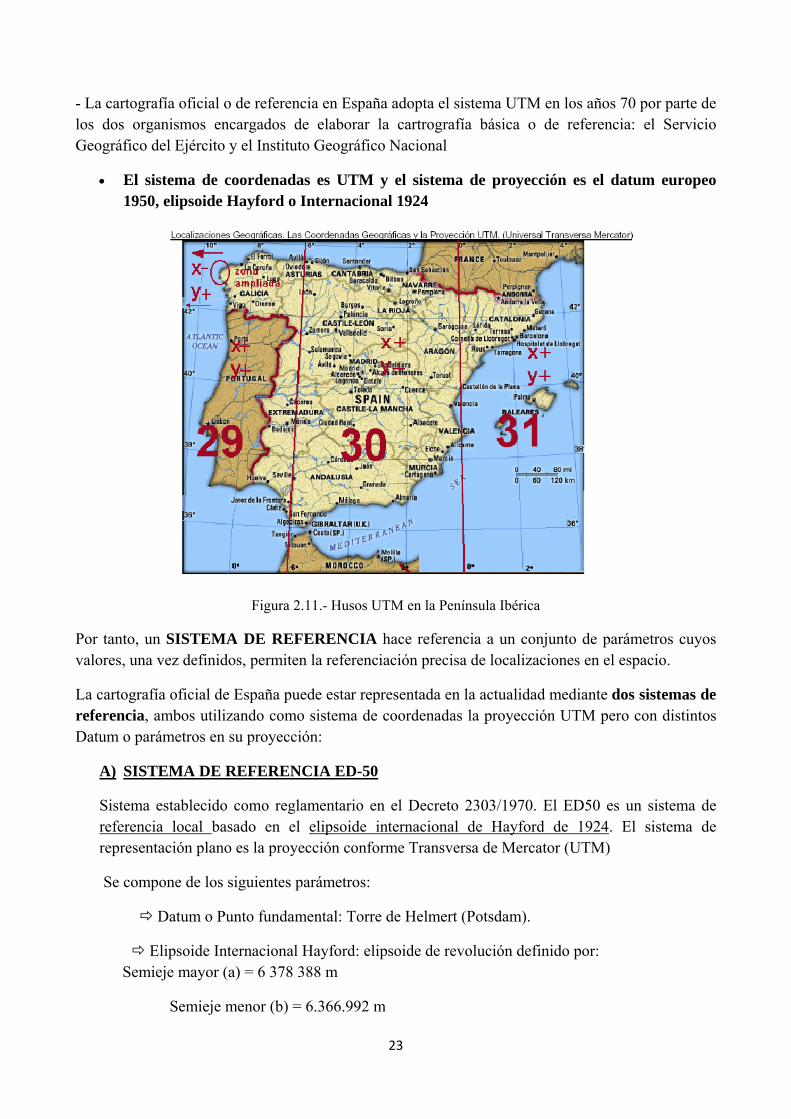
- La cartografía oficial o de referencia en España adopta el sistema UTM en los años 70 por parte de los dos organismos encargados de elaborar la cartrografía básica o de referencia: el Servicio Geográfico del Ejército y el Instituto Geográfico Nacional
El sistema de coordenadas es UTM y el sistema de proyección es el datum europeo 1950, elipsoide Hayford o Internacional 1924
Figura 2.11.- Husos UTM en la Península Ibérica
Por tanto, un SISTEMA DE REFERENCIA hace referencia a un conjunto de parámetros cuyos valores, una vez definidos, permiten la referenciación precisa de localizaciones en el espacio.
La cartografía oficial de España puede estar representada en la actualidad mediante dos sistemas de referencia, ambos utilizando como sistema de coordenadas la proyección UTM pero con distintos Datum o parámetros en su proyección:
A) SISTEMA DE REFERENCIA ED-50
Sistema establecido como reglamentario en el Decreto 2303/1970. El ED50 es un sistema de referencia local basado en el elipsoide internacional de Hayford de 1924. El sistema de representación plano es la proyección conforme Transversa de Mercator (UTM)
Se compone de los siguientes parámetros:
Datum o Punto fundamental: Torre de Helmert (Potsdam).
Elipsoide Internacional Hayford: elipsoide de revolución definido por: Semieje mayor (a) = 6 378 388 m
Semieje menor (b) = 6.366.992 m

longituAlicantGreenw
B) ET
El ReaEspaña
Es el SEuropedatum (Europ
El sisteestamoEspaña
El desplos 250
Así, lasistemadatum calidadcientos
Figura 2.12
Las ud al este dete. El origenwich para la
TRS-89 EUR
al Decreto a, sustituyen
Sistema de rean Referenutilizado p
pean Terrest
ema ETRS-os en un pra. A partir d
plazamiento0 metros (fig
as coordenaa de referencon el que
d, pero si es de metros
.- Localizaci
coordenadael meridianon de coordeas longitude
ROPEAN T
1071/2007ndo al sistem
referencia gence Frame (or defecto trial Referen
-89 será obroceso de trdel año 201
o que se progura 2.12)
das tomadancia, puedee fueron tomel usuario e
ión de un vér
as son poso de Greenwenadas se sites.
TERREST
, regula lama geodésic
eodésico eu(EUREF). Epor el sistence Frame).
bligatorio paransición d5, el único
oduce entre
as con GPSn diferir cimadas. Pueequivoca el
rtice geodési
24
sitivas en lawich. Las cotúa en el Ec
TRIAL REF
a adopción co de refere
uropeo. FueEl elipsoideema GPS). E.
ara toda la de sistema dsistema de r
mapas con
S (referidas entos de m
ede que losl datum de
ico en funció
atitud al nootas están recuador para
FERENCE
del sistemencia region
propuesto pe es el mismEl marco d
cartografía de referencreferencia u
distinto sis
al datum Wmetros de sus valores de
referencia,
ón del sistem
orte desde eferidas al nlas latitude
SYSTEM
ma geodésical ED50, of
por la IAG mo que parade referencia
en 2015, ecia oficial putilizado ser
stema de ref
WGS84) o u posición re las coorde el error co
a de proyecc
el Ecuadornivel medioes y en el m
co global Eficial hasta
Subcommia el datum Wa es el llam
es decir, acpara la cartrá el ETRS8
ferencia pue
consideradareal si equivenadas seanometido pu
ción utilizado
r y para lao del mar en
meridiano de
ETRS89 enentonces.
sion for theWGS84 (el
mado ETRF
ctualmentetografía en89
ede llegar a
as con otrovocamos eln de buenauede ser de
o
a n e
n
e l
F
e n
a
o l a e
25
Teniendo en cuenta que todas las capas de nuestra base de datos espacial deben estar en el mismo sistema de proyección, será necesario en muchos casos efectuar un cambio del sistema de referencia ed-50 <–> etrs89, para lo cual es necesario saber todos los parámetros de la proyección:
SISTEMA DE REFERENCIA ED-50:
• DATUM EUROPEO 1950
• ELIPSOIDE HAYFORD O INTERNACIONAL 1924
SISTEMA DE REFERENCIA ETRS89
• DATUM ETRS89
• ELIPSOIDE: GRS80 ≈ WGS84
SISTEMA DE REFERENCIA WGS84 (coordenadas tomadas por defecto por GPS)
• DATUM WGS84
• ELIPSOIDE: GRS80 ≈ ETRS89
• El elipsoide es el mismo que para el datum WGS84.
Esta operación de “reproyectar” nuestros mapas será también necesaria si están en el mismo sistema de referencia pero en husos distintos (los SIG no pueden superponer mapas en husos UTM distintos)
3.- Modelos de datos: vectoriales y raster. Ventajas e inconvenientes, diferentes aplicaciones.
La representación de los datos Los datos espaciales y georreferenciados representan variables del mundo real (carreteras, el uso del suelo, altitudes) utilizando una escala de reducción y un sistema de referencia. Los objetos del mundo real se pueden dividir en dos abstracciones: objetos discretos (localización de una casa, representación de una masa forestal) y continuos (cantidad de lluvia caída, mapa de elevaciones). Existen dos formas de almacenar los datos en un SIG: raster y vectorial. Los SIG que se centran en el manejo de datos en formato vectorial son más populares en el mercado. No obstante, los SIG raster son muy utilizados en estudios que requieran la generación de capas continuas, necesarias en fenómenos no discretos; también en estudios medioambientales donde no se requiere una excesiva precisión espacial (contaminación atmosférica, distribución de temperaturas, localización de especies marinas, análisis geológicos, etc.).
26
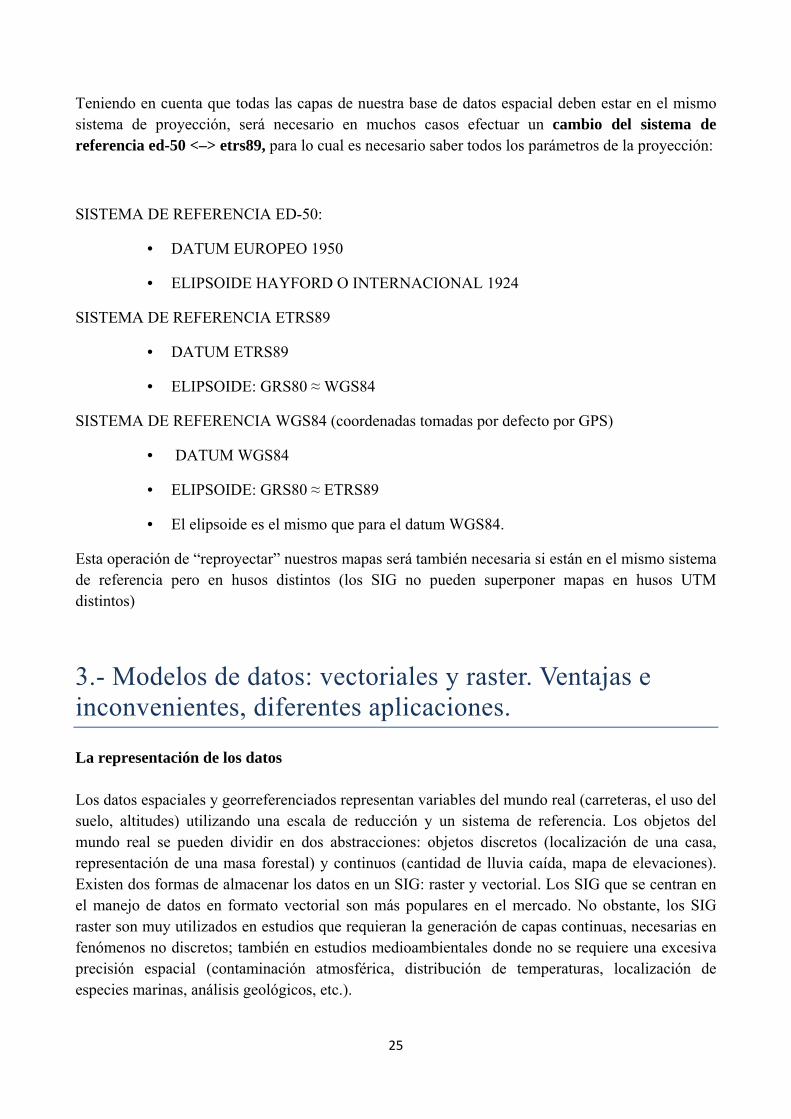
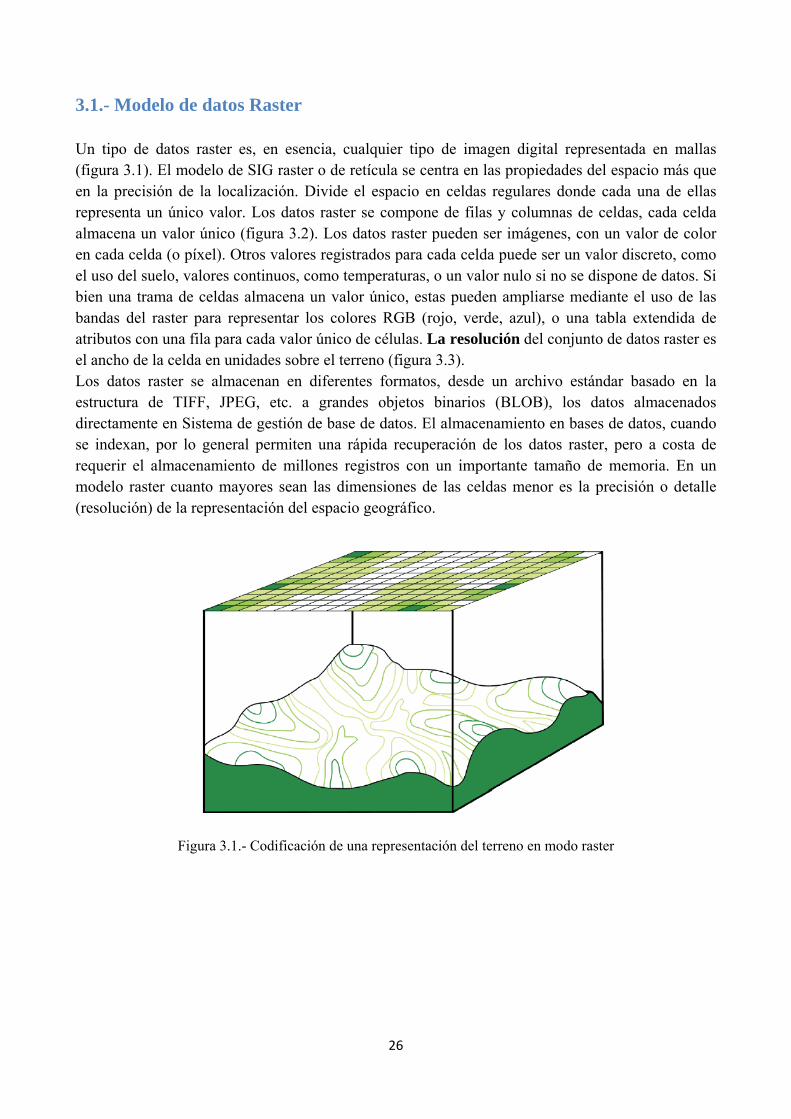
3.1.- Modelo de datos Raster Un tipo de datos raster es, en esencia, cualquier tipo de imagen digital representada en mallas (figura 3.1). El modelo de SIG raster o de retícula se centra en las propiedades del espacio más que en la precisión de la localización. Divide el espacio en celdas regulares donde cada una de ellas representa un único valor. Los datos raster se compone de filas y columnas de celdas, cada celda almacena un valor único (figura 3.2). Los datos raster pueden ser imágenes, con un valor de color en cada celda (o píxel). Otros valores registrados para cada celda puede ser un valor discreto, como el uso del suelo, valores continuos, como temperaturas, o un valor nulo si no se dispone de datos. Si bien una trama de celdas almacena un valor único, estas pueden ampliarse mediante el uso de las bandas del raster para representar los colores RGB (rojo, verde, azul), o una tabla extendida de atributos con una fila para cada valor único de células. La resolución del conjunto de datos raster es el ancho de la celda en unidades sobre el terreno (figura 3.3). Los datos raster se almacenan en diferentes formatos, desde un archivo estándar basado en la estructura de TIFF, JPEG, etc. a grandes objetos binarios (BLOB), los datos almacenados directamente en Sistema de gestión de base de datos. El almacenamiento en bases de datos, cuando se indexan, por lo general permiten una rápida recuperación de los datos raster, pero a costa de requerir el almacenamiento de millones registros con un importante tamaño de memoria. En un modelo raster cuanto mayores sean las dimensiones de las celdas menor es la precisión o detalle (resolución) de la representación del espacio geográfico.
Figura 3.1.- Codificación de una representación del terreno en modo raster

27
Figura 3.2.- Matriz ráster para representar una variable cualitativa
Las imágenes de satélite y los modelos digitales de terreno son estructuras de datos de este tipo, aunque cualquier tipo de información puede ser expresada de esta forma. * Las celdas de los datos raster están uniformemente espaciadas. La posición geográfica de cada celda está implícita en su ubicación dentro de la matriz. La posición está especificada por el origen de la matriz y el número de la filas y de la columnas de la celda. * Las celdas de los datos raster se denominan también pixeles (picture elements). Es un formato que permite una gran facilidad de análisis, preferible para variables de tipo contínuo (climáticas y topográficas) * En general, el formato raster se considera más adecuado para la representación de variables contínuas y el formato vectorial para representar variables discretas, con límites bien definidos entre las clases
Figura 3.3.- Diferente resolución (tamaño de celda) en un raster
3.1.1.- Exi A) Según e
Connomprede d
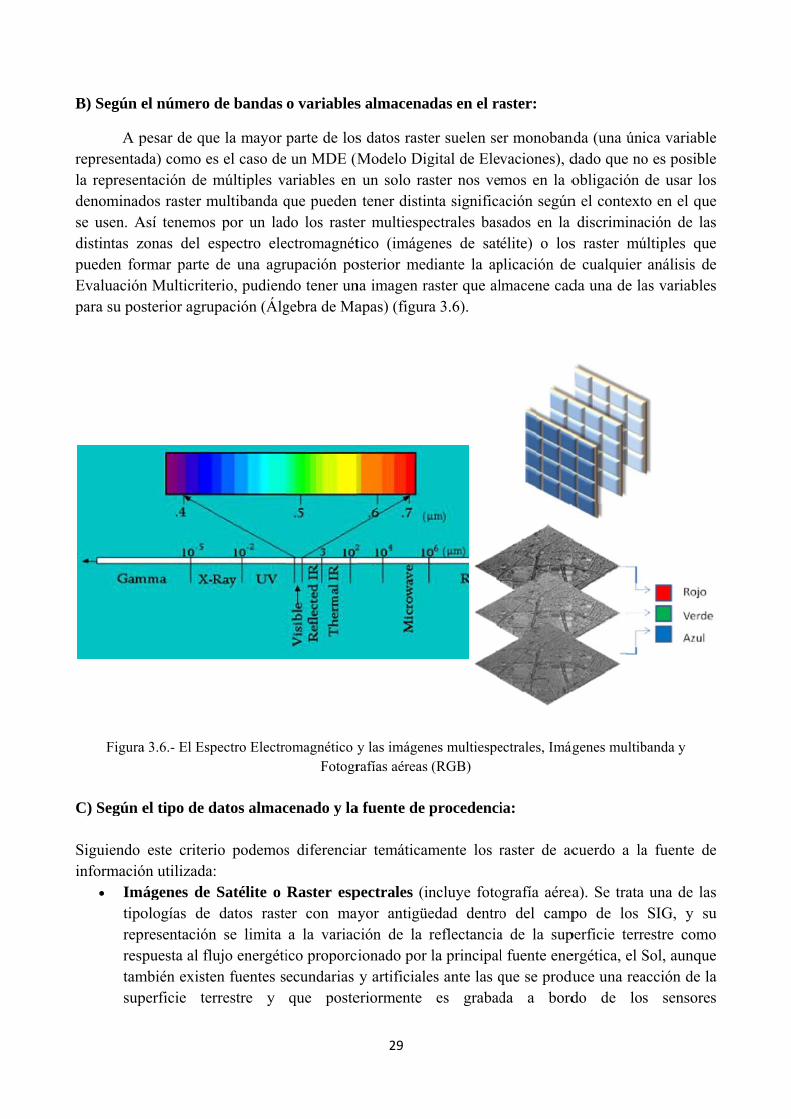
Dis
esqde es ediscel rpíxRE
isten diversa
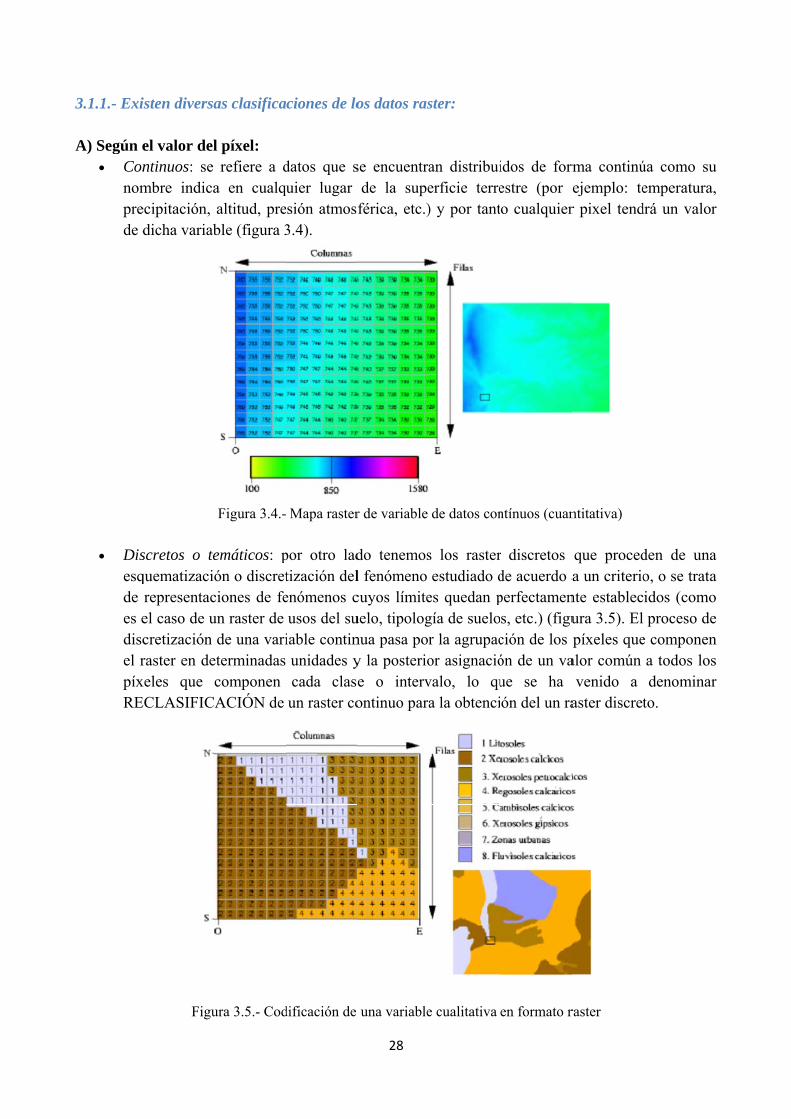
el valor delntinuos: se mbre indicaecipitación, dicha variab
scretos o tequematizaciórepresentacel caso de ucretización raster en de
xeles que ECLASIFIC
Figu
as clasifica
l píxel: refiere a d
a en cualqaltitud, preble (figura 3
Figura 3.4.-
emáticos: pón o discret
ciones de feun raster de de una vari
eterminadas componen ACIÓN de
ura 3.5.- Cod
ciones de lo
datos que suier lugar
esión atmosf3.4).
Mapa raster
por otro ladtización delenómenos cusos del su
iable continunidades ycada claseun raster co
dificación de
28
os datos ras
se encuentrade la supeférica, etc.)
r de variable
do tenemosl fenómeno cuyos límiteuelo, tipolognua pasa pory la posterioe o intervontinuo para
una variable
ster:
an distribuierficie terre) y por tant
de datos con
s los rasterestudiado d
es quedan pgía de suelor la agrupacor asignacióvalo, lo qua la obtenci
e cualitativa
idos de formestre (por eo cualquier
ntínuos (cuan
r discretos de acuerdo aperfectamens, etc.) (figución de los pón de un vaue se ha ón del un ra
en formato r
rma continúejemplo: ter pixel tend
ntitativa)
que proceda un criterio
nte establecura 3.5). Elpíxeles que
alor común venido a
aster discret
raster
úa como suemperatura,
drá un valor
den de unao, o se trataidos (comoproceso de
e componena todos losdenominar
to.
u , r
a a o e n s r
B) Según e
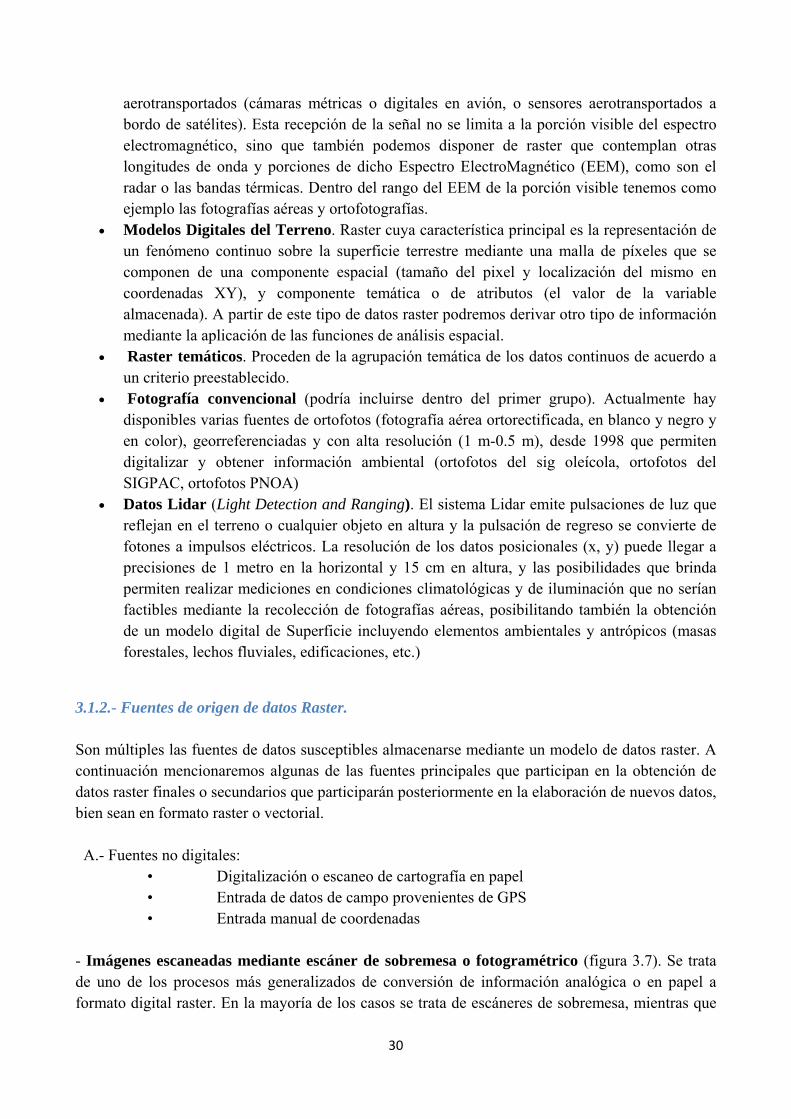
A prepresentadla represendenominadse usen. Adistintas zpueden forEvaluaciónpara su pos
Figura
C) Según e Siguiendo informació
Imtiporepresptamsup
el número d
pesar de queda) como esntación de mdos raster m
Así tenemoszonas del ermar parte n Multicritesterior agrup
a 3.6.- El Esp
el tipo de d
este criterión utilizada:ágenes de ologías de
presentaciónpuesta al flu
mbién existeperficie ter
de bandas
e la mayor s el caso demúltiples v
multibanda qs por un ladespectro elede una agr
erio, pudienpación (Álg
pectro Electro
datos almac
io podemos: Satélite o datos raste
n se limita ujo energétien fuentes srrestre y
o variables
parte de lose un MDE (Mariables en que pueden do los rasteectromagnétrupación podo tener ungebra de Ma
omagnético yFotogr
cenado y la
s diferencia
Raster esper con maya la variac
ico proporcecundarias que poste
29
s almacena
s datos rasteModelo Digun solo ratener distin
er multiespetico (imágeosterior medna imagen raapas) (figur
y las imágenrafías aéreas
a fuente de
ar temáticam
pectrales (inyor antigüeción de la ionado por y artificiale
eriormente
adas en el ra
er suelen segital de Elevster nos venta significaectrales basenes de satdiante la apaster que ala 3.6).
nes multiespe(RGB)
procedenci
mente los r
ncluye fotoedad dentroreflectanciala principal
es ante las qes grabad
aster:
er monobanvaciones), dmos en la oación segúnsados en la élite) o los
plicación delmacene cad
ectrales, Imág
ia:
raster de ac
ografía aéreao del campa de la supl fuente eneque se produda a bord
nda (una únidado que noobligación n el context
discriminas raster múe cualquier da una de la
ágenes multib
cuerdo a la
a). Se tratapo de los
perficie terrergética, el Sduce una reado de los
ica variableo es posiblede usar los
to en el queación de lasúltiples que
análisis deas variables
banda y
a fuente de
a una de lasSIG, y su
restre comoSol, aunqueacción de las sensores
e e s e s e e s
e
s u o e a s
30
aerotransportados (cámaras métricas o digitales en avión, o sensores aerotransportados a bordo de satélites). Esta recepción de la señal no se limita a la porción visible del espectro electromagnético, sino que también podemos disponer de raster que contemplan otras longitudes de onda y porciones de dicho Espectro ElectroMagnético (EEM), como son el radar o las bandas térmicas. Dentro del rango del EEM de la porción visible tenemos como ejemplo las fotografías aéreas y ortofotografías.
Modelos Digitales del Terreno. Raster cuya característica principal es la representación de un fenómeno continuo sobre la superficie terrestre mediante una malla de píxeles que se componen de una componente espacial (tamaño del pixel y localización del mismo en coordenadas XY), y componente temática o de atributos (el valor de la variable almacenada). A partir de este tipo de datos raster podremos derivar otro tipo de información mediante la aplicación de las funciones de análisis espacial.
Raster temáticos. Proceden de la agrupación temática de los datos continuos de acuerdo a un criterio preestablecido.
Fotografía convencional (podría incluirse dentro del primer grupo). Actualmente hay disponibles varias fuentes de ortofotos (fotografía aérea ortorectificada, en blanco y negro y en color), georreferenciadas y con alta resolución (1 m-0.5 m), desde 1998 que permiten digitalizar y obtener información ambiental (ortofotos del sig oleícola, ortofotos del SIGPAC, ortofotos PNOA)
Datos Lidar (Light Detection and Ranging). El sistema Lidar emite pulsaciones de luz que reflejan en el terreno o cualquier objeto en altura y la pulsación de regreso se convierte de fotones a impulsos eléctricos. La resolución de los datos posicionales (x, y) puede llegar a precisiones de 1 metro en la horizontal y 15 cm en altura, y las posibilidades que brinda permiten realizar mediciones en condiciones climatológicas y de iluminación que no serían factibles mediante la recolección de fotografías aéreas, posibilitando también la obtención de un modelo digital de Superficie incluyendo elementos ambientales y antrópicos (masas forestales, lechos fluviales, edificaciones, etc.)
3.1.2.- Fuentes de origen de datos Raster. Son múltiples las fuentes de datos susceptibles almacenarse mediante un modelo de datos raster. A continuación mencionaremos algunas de las fuentes principales que participan en la obtención de datos raster finales o secundarios que participarán posteriormente en la elaboración de nuevos datos, bien sean en formato raster o vectorial. A.- Fuentes no digitales:
• Digitalización o escaneo de cartografía en papel • Entrada de datos de campo provenientes de GPS • Entrada manual de coordenadas
- Imágenes escaneadas mediante escáner de sobremesa o fotogramétrico (figura 3.7). Se trata de uno de los procesos más generalizados de conversión de información analógica o en papel a formato digital raster. En la mayoría de los casos se trata de escáneres de sobremesa, mientras que
los escánefotogramétcualquier pmediante dfotogramasElevacione
B.- Fuent
- Imágeneobtención detecta y genviarlas aproceso co
Fue Atm El o El s
Como resuque lleva ainformaciómultiespecanalizadas etc.) o digreconocim
eres fotogratrico obteniproceso reladigitalizaciós. Entre loes y Ortofot
tes digitales• • •
es de Satélde informacgraba la ena centros deonlleva la inente de Enemósfera. objeto que isensor (que
ultado de dia éstos (moón detectadactrales o h
para extragital (análiiento de pat
amétricos siendo así laacionado coón, entre oos datos obtografías Aé
Fig. 3.7
s TeledeteccImportacióGeneradas
lite o fotogción acerca
nergía emitie tratamientontegración drgía.
interactúa c puede ser e
icha interacodificada ena y la almachiperespectrer informacisis de comtrones, etc.)
se usan paas imágeneon los GIS (tros), o se btenidos méreas.
7.-. Escáner F
ión (fotogran desde otropor el prop
grafía aérede la super
ida o reflejao específico
de varios ele
on dicha raelemento ac
ción entre cn gran medicenará pararales, segúnción derivadmponentes )
31
ara escaneaes digitales(entrada deaerotriangu
mediante es
Fotogramétr
afía aérea, imos sistemas
pio SIG
a (cámararficie terrestada en sensos para su uementos ent
adiación. ctivo o pasiv
cualquier obda por la co
a su posterion el sensoda mediantprincipales
ar los fotoque poster datos, análularán y ge
sta técnica
rico y de sobr
magen de s
s métricastre sin estarsores aerotr
uso final denre los que d
vo).
bjeto de la omponente or tratamienor utilizadote análisis vs, índices d
gramas obtriormente selisis, y extraeorreferencitenemos M
remesa.
atélite, rada
o digitaler en contactoransportadontro de las a
destacan:
superficie tatmosférica
nto y difusióo. Dichas visual (análde vegetaci
tenidos trae podrán u
racción de iniarán respeModelos D
ar)
es). La teledo con ella. P
os para postaplicacione
terrestre y la) el sensorón mediantimágenes plisis de textión, clasifi
as el vueloutilizar paranformacióncto a otros
Digitales de
detección uPara ello seteriormentes SIG. Este
la radiaciónr grabará late imágenespodrán sertura, tonos,icaciones o
o a n s e
u e e e
n a s r ,
o

3.2.- Mod * El mod“fronteras”son represerectos que
• Losdel
• Larep
• Los3.9
La capturadigitalizacide formatoglobal (GP
delo de da
delo vectori” (límite o pentadas melas forman s objetos puobjeto.
as líneas mpresentan mes polígonos) a de informión en panto raster a fPS), entrada
Figur
atos Vect
ial represenperímetro quediante las c
(figura 3.8)untuales se
mediante el ediante las cs se codific
mación en etalla sobre uformato vecde datos al
ra 3.8.- Repr
orial
nta los objue separa elcoordenadas). representan
trazado decoordenadaan mediant
el formato un documenctorial (vecfanumérica
resentación ra
32
jetos espacl objeto dels de los pu
n mediante
e segmentoas X e Y de te segmento
vectorial sento raster gtorizadores
a, entre otros
aster y vecto
ciales codifl entorno). L
untos o vérti
un par de c
os lineales esos vértice
os lineales q
e hace por georreferenc
automáticos.
orial de los ob
ficando, deLas líneas qices que de
coordenadas
que se crues. que se corta
medio de ciado (figuros), sistema
bjetos geográ
e modo expque actúan delimitan los
s X e Y de
uzan en vé
tan en vérti
mesas digira 3.10), coas de posic
áficos
plícito, susde fronteras segmentos
la posición
értices y se
ces. (figura
talizadoras,onvertidorescionamiento
s s s
n
e
a
, s o
33
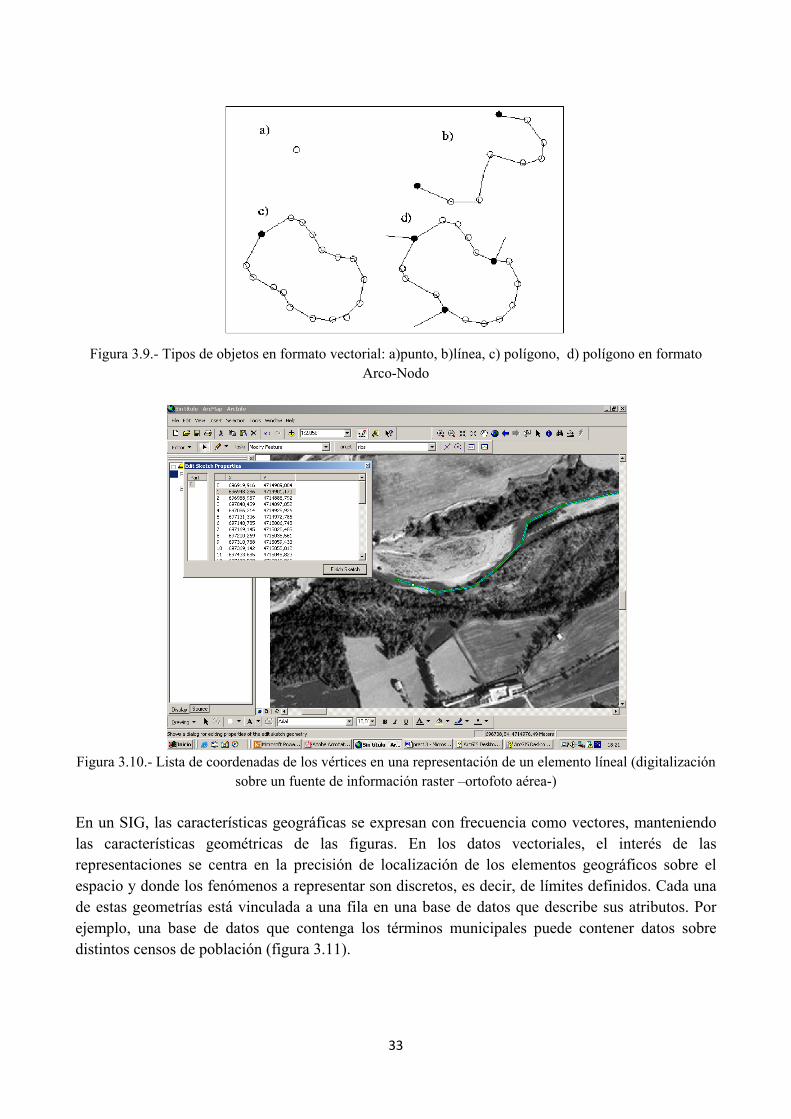
Figura 3.9.- Tipos de objetos en formato vectorial: a)punto, b)línea, c) polígono, d) polígono en formato
Arco-Nodo
Figura 3.10.- Lista de coordenadas de los vértices en una representación de un elemento líneal (digitalización
sobre un fuente de información raster –ortofoto aérea-)
En un SIG, las características geográficas se expresan con frecuencia como vectores, manteniendo las características geométricas de las figuras. En los datos vectoriales, el interés de las representaciones se centra en la precisión de localización de los elementos geográficos sobre el espacio y donde los fenómenos a representar son discretos, es decir, de límites definidos. Cada una de estas geometrías está vinculada a una fila en una base de datos que describe sus atributos. Por ejemplo, una base de datos que contenga los términos municipales puede contener datos sobre distintos censos de población (figura 3.11).
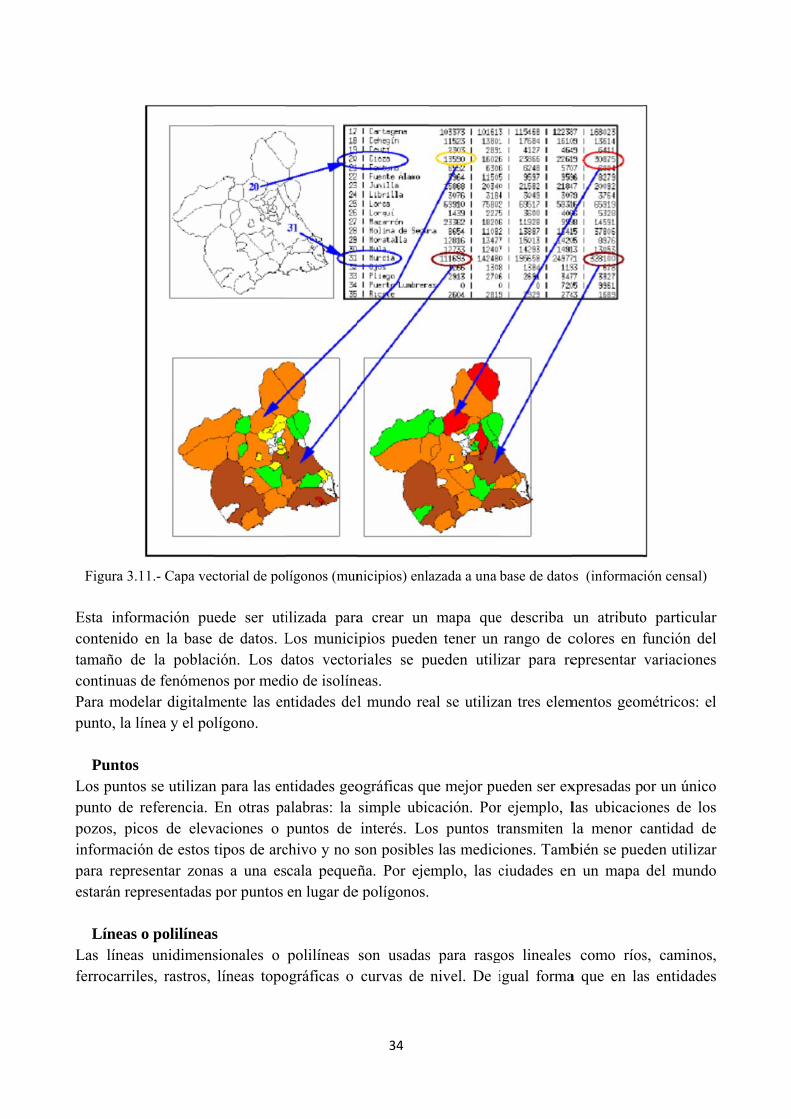
Figura 3.1
Esta informcontenido tamaño decontinuas dPara modepunto, la lí � Puntos Los puntospunto de rpozos, picinformaciópara repreestarán rep � Líneas oLas líneasferrocarrile
11.- Capa vec
mación puen la base
e la poblacde fenómenelar digitalmínea y el pol
s se utilizanreferencia. cos de elevón de estos tsentar zona
presentadas
o polilíneass unidimenses, rastros,
ctorial de pol
ede ser utide datos. L
ción. Los dnos por medmente las enlígono.
n para las enEn otras pa
vaciones o tipos de arcas a una espor puntos
s sionales o líneas topo
lígonos (mun
ilizada paraLos municidatos vectordio de isolínntidades del
ntidades geoalabras: la puntos de
chivo y no scala pequeñen lugar de
polilíneas ográficas o
34
nicipios) enl
a crear un ipios puederiales se p
neas. l mundo re
ográficas qusimple ubicinterés. Lo
son posiblesña. Por eje
e polígonos.
son usadascurvas de
azada a una b
mapa queen tener un ueden utili
al se utiliza
ue mejor pucación. Poros puntos ts las medici
emplo, las c
s para rasgnivel. De i
base de dato
e describa rango de czar para re
an tres elem
ueden ser exr ejemplo, lransmiten liones. Tambciudades en
os lineales igual forma
os (informac
un atributocolores en fepresentar
mentos geom
xpresadas plas ubicaciola menor cbién se puen un mapa
como ríosa que en la
ión censal)
o particularfunción delvariaciones
métricos: el
or un únicoones de loscantidad deden utilizardel mundo
s, caminos,s entidades
r l s
l
o s e r o
, s
puntuales, lineales pu � PolígonLos polígoárea particparques nala mayor cperímetro yA parte dcoordenadaalmacenan
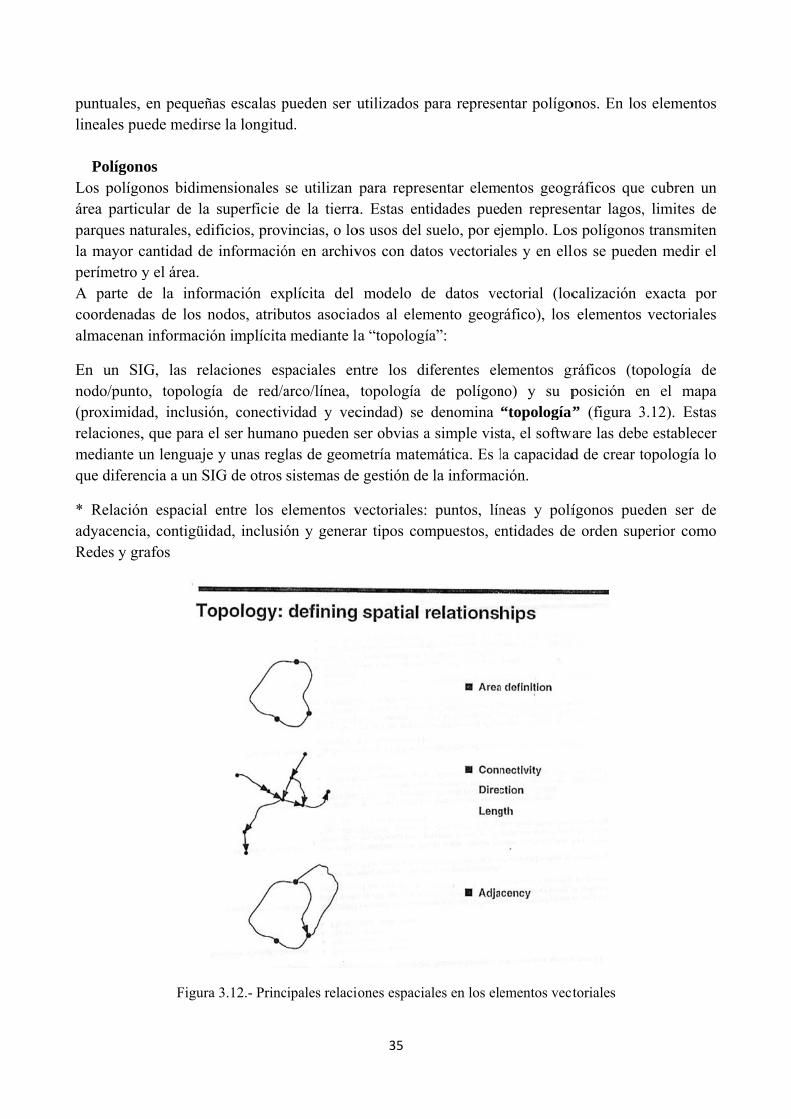
En un SInodo/punto(proximidarelaciones,mediante uque diferen
* RelaciónadyacenciaRedes y gr
en pequeñauede medirse
os onos bidimecular de la aturales, edicantidad de y el área. de la informas de los n
n informació
IG, las relao, topologíad, inclusió, que para eun lenguaje ncia a un SI
n espacial a, contigüidrafos
Figura
as escalas pe la longitu
ensionales ssuperficie
ificios, provinformació
mación expnodos, atribuón implícita
aciones espía de red/aón, conectivel ser human
y unas reglIG de otros
entre los edad, inclusió
a 3.12.- Princ
pueden ser ud.
se utilizan de la tierra
vincias, o loón en archiv
plícita del utos asocia
a mediante l
paciales enarco/línea, vidad y vecno pueden slas de geomsistemas de
elementos vón y genera
cipales relaci
35
utilizados p
para represa. Estas entos usos del svos con dat
modelo dados al elema “topologí
ntre los ditopología
cindad) se ser obvias ametría mateme gestión de
vectoriales: ar tipos com
ones espacia
para represe
sentar elemtidades puesuelo, por ejtos vectoria
e datos vemento geogra”:
ferentes elde polígondenomina
a simple vismática. Es lla informac
puntos, línmpuestos, e
ales en los ele
entar polígo
entos geogrden represejemplo. Losles y en ell
ectorial (locráfico), los
ementos grno) y su p“topología”ta, el softwala capacidadción.
neas y políntidades de
ementos vect
onos. En los
ráficos queentar lagos,s polígonoslos se puede
calización elementos
gráficos (toposición en” (figura 3
ware las debed de crear t
ígonos puee orden sup
ctoriales
s elementos
e cubren un, limites des transmitenen medir el
exacta porvectoriales
pología den el mapa3.12). Estase establecertopología lo
eden ser deperior como
s
n e n l
r s
e a s r o
e o
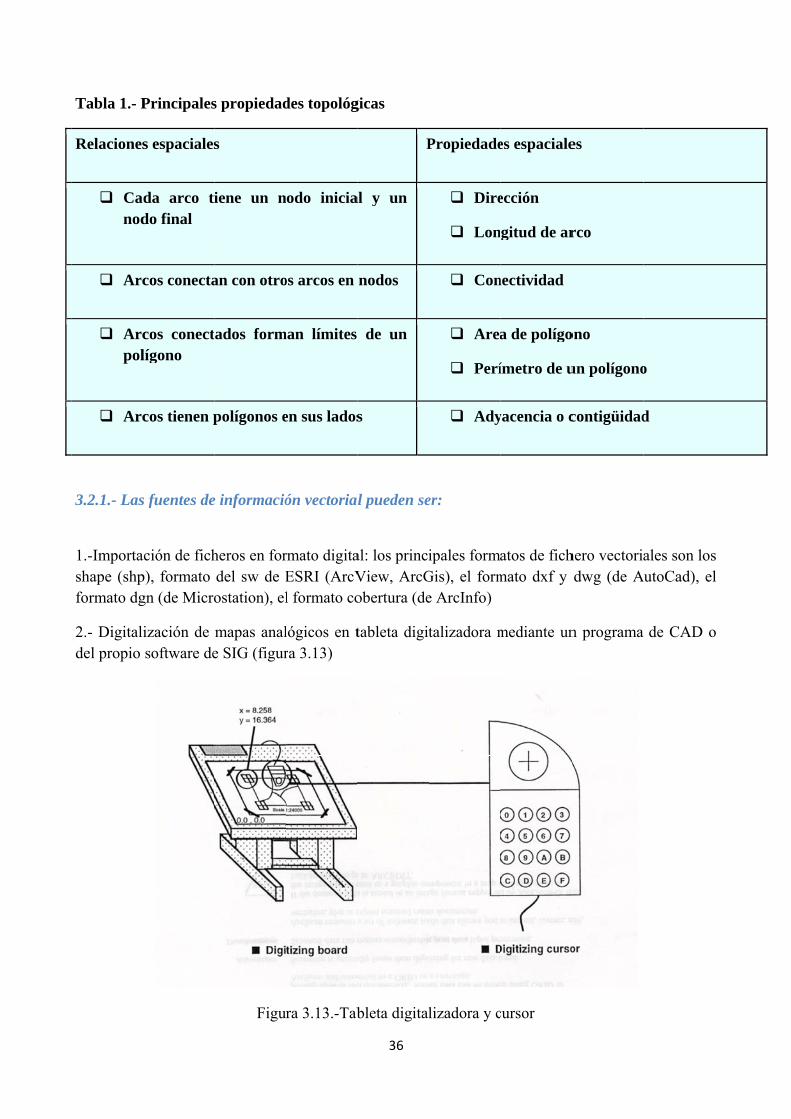
Tabla 1.- P
Relaciones
Canod
Arc
Arcpol
Arc
3.2.1.- Las
1.-Importashape (shpformato dg
2.- Digitalidel propio
Principales
s espaciales
da arco tido final
cos conecta
cos conectlígono
cos tienen p
s fuentes de
ación de fichp), formato gn (de Micro
ización de software de
s propiedad
s
iene un n
an con otro
ados form
polígonos e
e informació
heros en fordel sw de Eostation), el
mapas anale SIG (figur
Figu
des topológ
odo inicia
os arcos en
man límites
en sus lados
ón vectorial
rmato digitaESRI (ArcVl formato co
lógicos en tra 3.13)
ra 3.13.-Tab
36
gicas
P
al y un
nodos
de un
s
l pueden se
al: los princiView, ArcGobertura (de
tableta digit
bleta digital
Propiedade
Dire
Lon
Con
Area
Perí
Ady
er:
ipales formGis), el forme ArcInfo)
talizadora m
lizadora y c
es espaciale
ección
gitud de ar
nectividad
a de polígo
ímetro de u
yacencia o c
atos de fichmato dxf y
mediante un
cursor
es
rco
ono
un polígono
contigüidad
hero vectoridwg (de A
n programa
o
d
ales son losAutoCad), el
de CAD o
s l
o
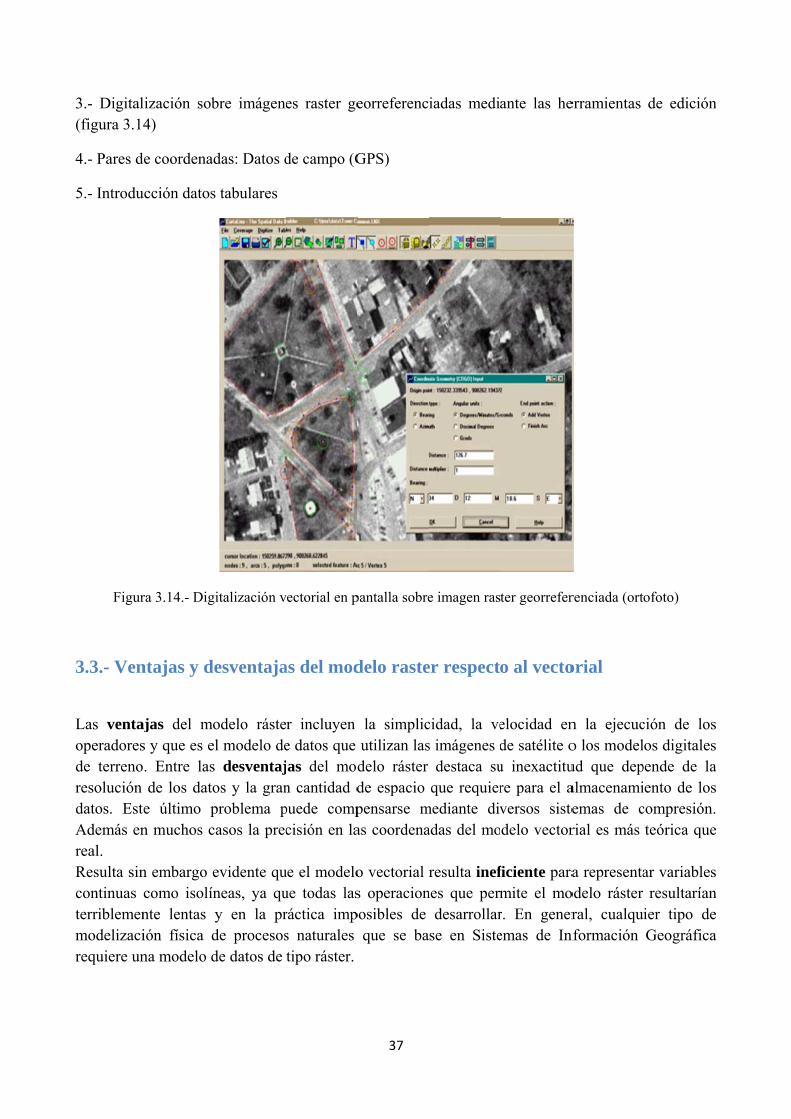
3.- Digital(figura 3.1
4.- Pares d
5.- Introdu
Figur
3.3.- Ven
Las ventaoperadoresde terrenoresolución datos. EstAdemás enreal. Resulta sincontinuas terriblemenmodelizacirequiere un
lización sob4)
de coordenad
ucción datos
ra 3.14.- Dig
ntajas y de
ajas del mos y que es eo. Entre las
de los datoe último pn muchos c
n embargo ecomo isolínnte lentas ión física dna modelo d
bre imágene
das: Datos d
s tabulares
gitalización v
esventaja
odelo rástel modelo de
s desventajos y la granproblema pcasos la prec
evidente quneas, ya quy en la prde procesosde datos de
es raster ge
de campo (G
vectorial en p
as del mod
r incluyen e datos que as del mod
n cantidad dpuede compcisión en la
ue el modeloue todas lasráctica imps naturales tipo ráster.
37
eorreferenc
GPS)
pantalla sobre
delo raste
la simplicutilizan lasdelo ráster de espacio pensarse mas coordena
o vectorial s operacion
posibles de que se ba
iadas medi
e imagen ras
er respect
cidad, la ves imágenes d
destaca suque requier
mediante divadas del mo
resulta inefnes que perm
desarrollarse en Siste
ante las he
ter georrefer
o al vecto
elocidad ende satélite ou inexactiture para el aversos sistedelo vector
ficiente paramite el mor. En generemas de In
erramientas
renciada (ort
orial
n la ejecuco los modelud que depalmacenamiemas de crial es más
a representaodelo ráster ral, cualqu
nformación
de edición
ofoto)
ción de losos digitales
pende de laiento de loscompresión.teórica que
ar variablesresultarían
ier tipo deGeográfica
n
s s a s . e
s n e a
38
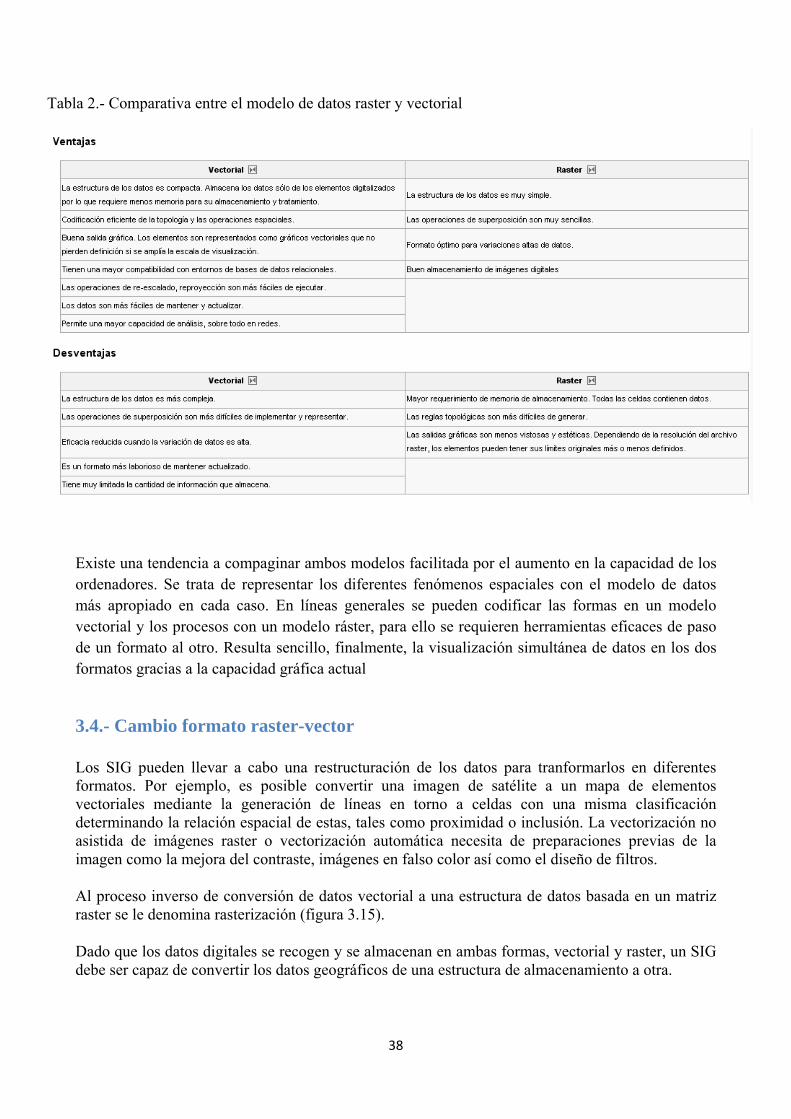
Tabla 2.- Comparativa entre el modelo de datos raster y vectorial
Existe una tendencia a compaginar ambos modelos facilitada por el aumento en la capacidad de los ordenadores. Se trata de representar los diferentes fenómenos espaciales con el modelo de datos más apropiado en cada caso. En líneas generales se pueden codificar las formas en un modelo vectorial y los procesos con un modelo ráster, para ello se requieren herramientas eficaces de paso de un formato al otro. Resulta sencillo, finalmente, la visualización simultánea de datos en los dos formatos gracias a la capacidad gráfica actual
3.4.- Cambio formato raster-vector
Los SIG pueden llevar a cabo una restructuración de los datos para tranformarlos en diferentes formatos. Por ejemplo, es posible convertir una imagen de satélite a un mapa de elementos vectoriales mediante la generación de líneas en torno a celdas con una misma clasificación determinando la relación espacial de estas, tales como proximidad o inclusión. La vectorización no asistida de imágenes raster o vectorización automática necesita de preparaciones previas de la imagen como la mejora del contraste, imágenes en falso color así como el diseño de filtros.
Al proceso inverso de conversión de datos vectorial a una estructura de datos basada en un matriz raster se le denomina rasterización (figura 3.15).
Dado que los datos digitales se recogen y se almacenan en ambas formas, vectorial y raster, un SIG debe ser capaz de convertir los datos geográficos de una estructura de almacenamiento a otra.
39
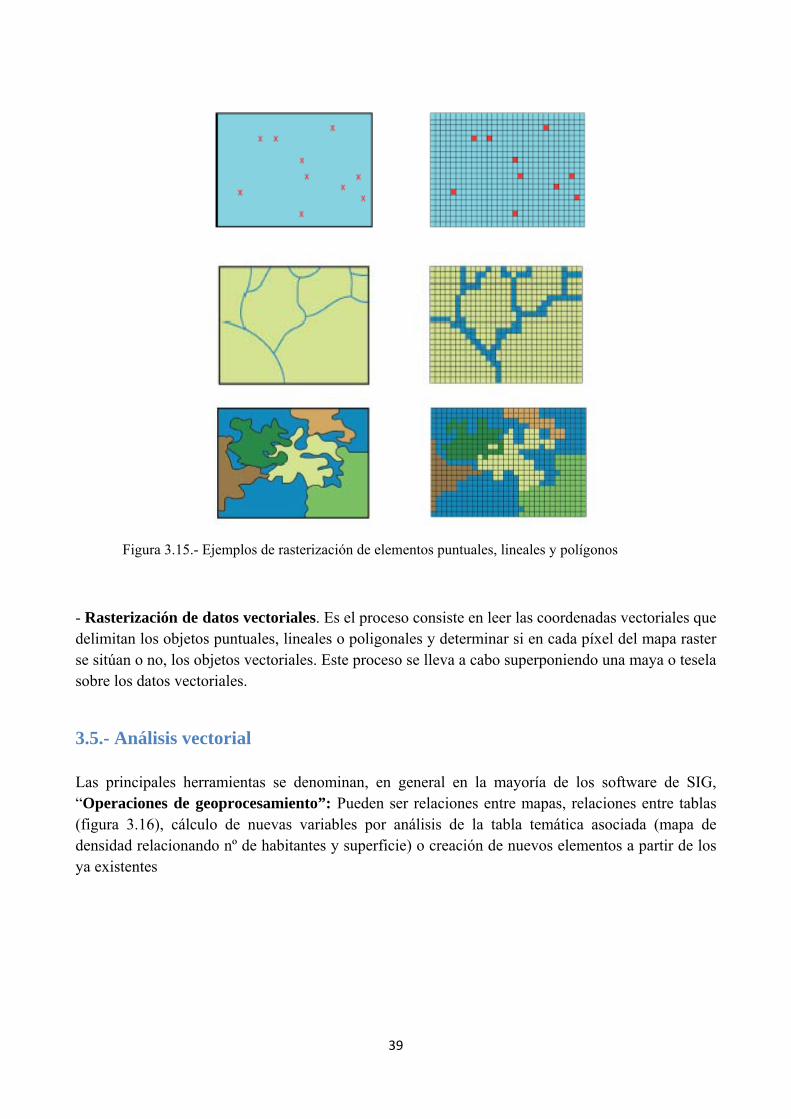
Figura 3.15.- Ejemplos de rasterización de elementos puntuales, lineales y polígonos
- Rasterización de datos vectoriales. Es el proceso consiste en leer las coordenadas vectoriales que delimitan los objetos puntuales, lineales o poligonales y determinar si en cada píxel del mapa raster se sitúan o no, los objetos vectoriales. Este proceso se lleva a cabo superponiendo una maya o tesela sobre los datos vectoriales.
3.5.- Análisis vectorial Las principales herramientas se denominan, en general en la mayoría de los software de SIG, “Operaciones de geoprocesamiento”: Pueden ser relaciones entre mapas, relaciones entre tablas (figura 3.16), cálculo de nuevas variables por análisis de la tabla temática asociada (mapa de densidad relacionando nº de habitantes y superficie) o creación de nuevos elementos a partir de los ya existentes
40
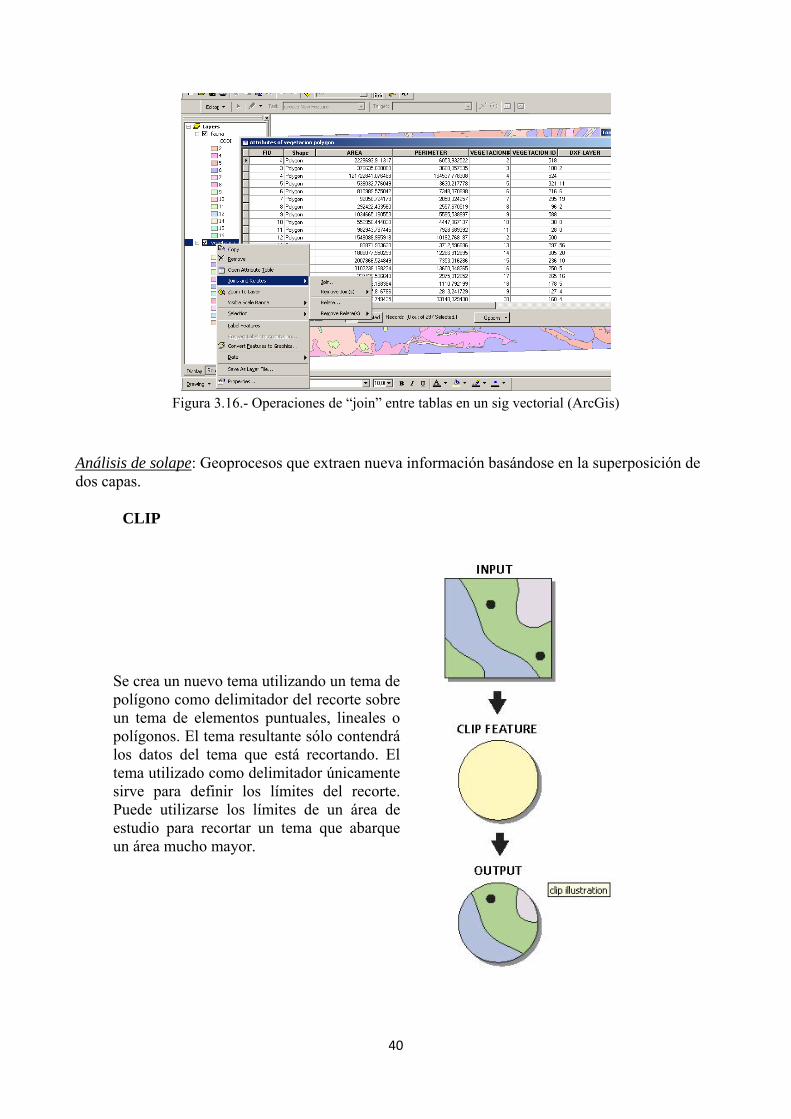
Figura 3.16.- Operaciones de “join” entre tablas en un sig vectorial (ArcGis)
Análisis de solape: Geoprocesos que extraen nueva información basándose en la superposición de dos capas.
CLIP
Se crea un nuevo tema utilizando un tema de polígono como delimitador del recorte sobre un tema de elementos puntuales, lineales o polígonos. El tema resultante sólo contendrá los datos del tema que está recortando. El tema utilizado como delimitador únicamente sirve para definir los límites del recorte. Puede utilizarse los límites de un área de estudio para recortar un tema que abarque un área mucho mayor.
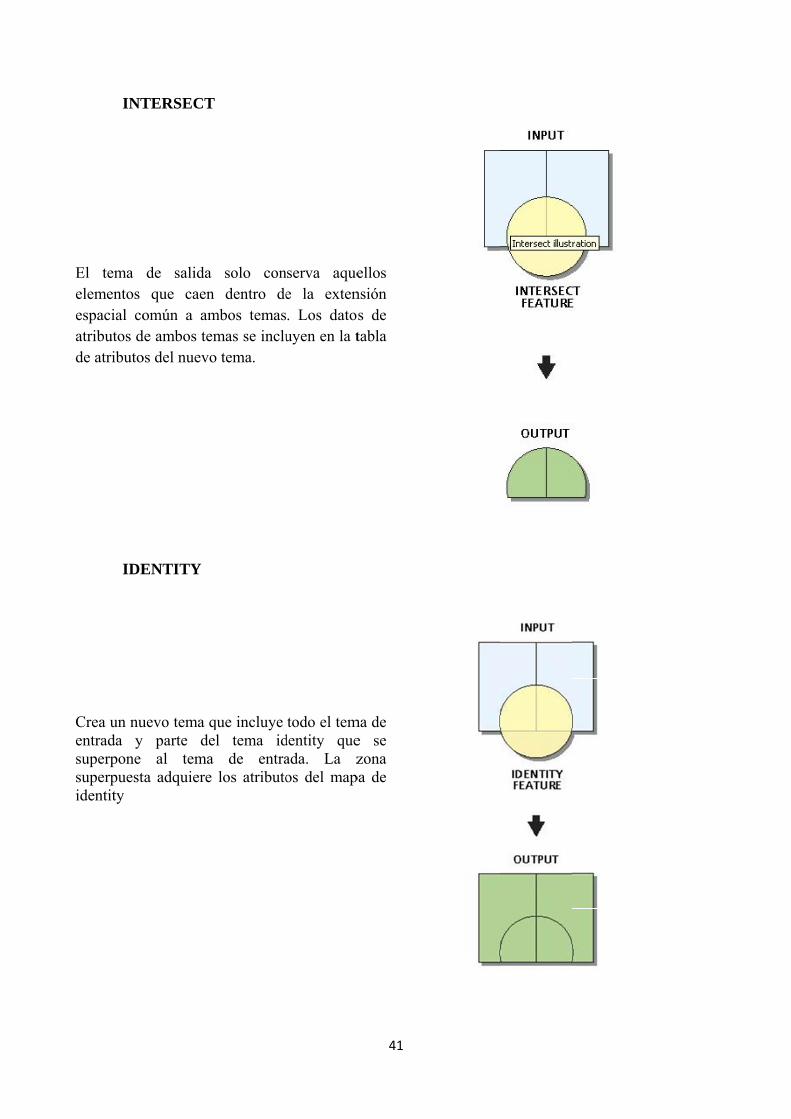
INT El tema elementos espacial coatributos dde atributo
IDE
Crea un nuentrada y superpone superpuestidentity
TERSECT
de salida que caen
omún a amde ambos temos del nuevo
ENTITY
uevo tema q parte de
al tema ta adquiere
solo condentro de
mbos temasmas se incluo tema.
que incluye el tema id
de entralos atributo
nserva aquee la exten. Los datouyen en la t
todo el temdentity queada. La zos del map
41
ellos nsión s de tabla
ma de e se zona
pa de
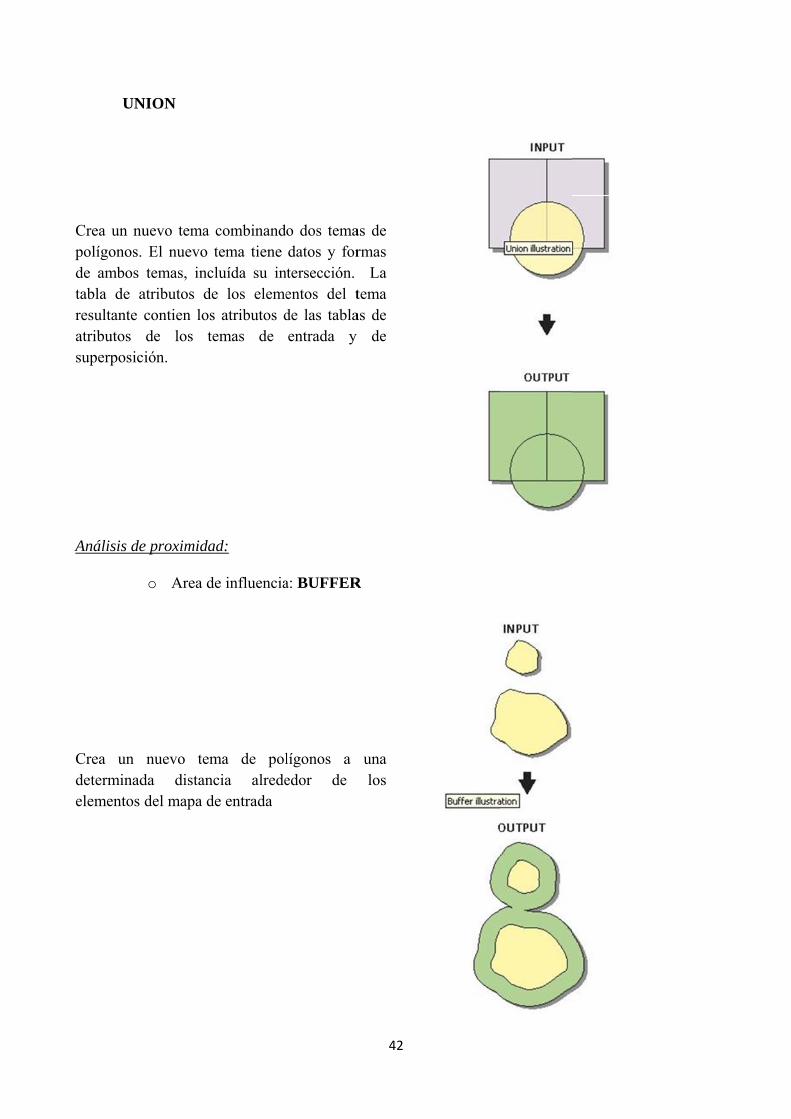
UN Crea un nupolígonos. de ambos tabla de aresultante atributos superposic
Análisis de
Crea un determinadelementos
NION
uevo tema El nuevo ttemas, incl
atributos decontien losde los te
ción.
e proximida
o Area d
nuevo temda distancdel mapa d
combinandtema tiene luída su ine los elemes atributos demas de
ad:
e influencia
ma de polcia alredee entrada
o dos temadatos y for
ntersección. entos del tde las tablaentrada y
a: BUFFER
lígonos a edor de
42
as de rmas La
tema as de
de
R
una los
43
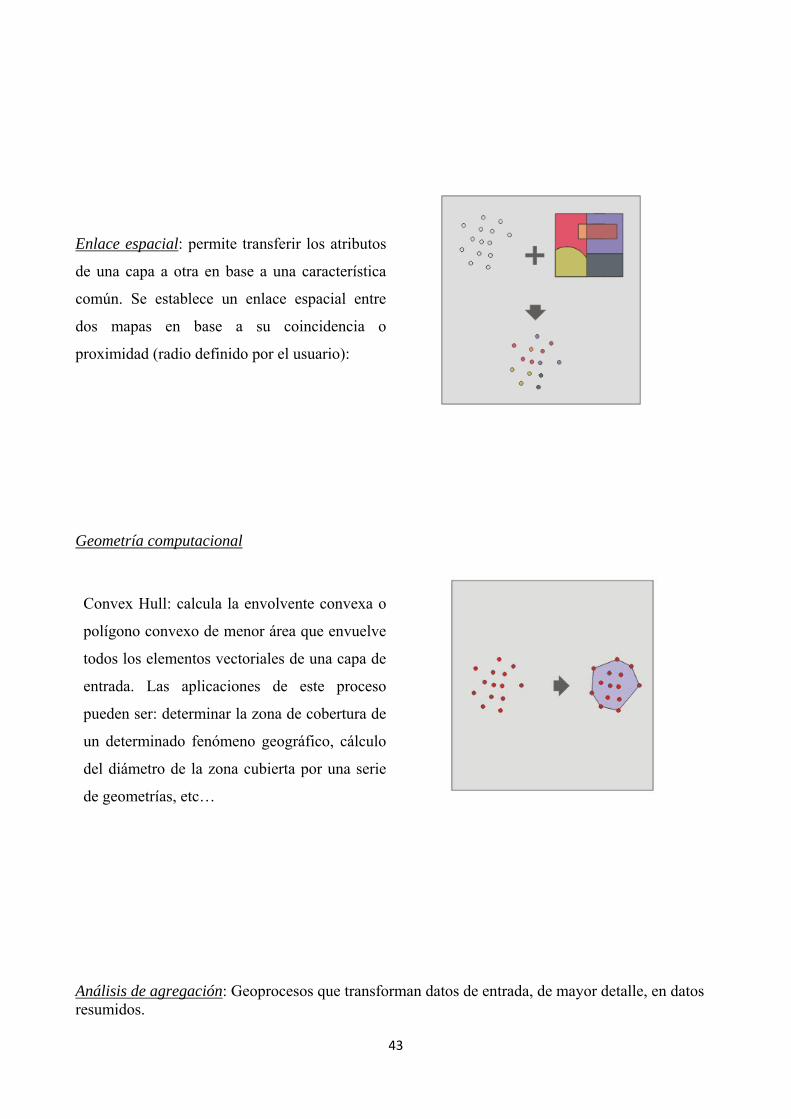
Enlace espacial: permite transferir los atributos
de una capa a otra en base a una característica
común. Se establece un enlace espacial entre
dos mapas en base a su coincidencia o
proximidad (radio definido por el usuario):
Geometría computacional
Convex Hull: calcula la envolvente convexa o
polígono convexo de menor área que envuelve
todos los elementos vectoriales de una capa de
entrada. Las aplicaciones de este proceso
pueden ser: determinar la zona de cobertura de
un determinado fenómeno geográfico, cálculo
del diámetro de la zona cubierta por una serie
de geometrías, etc…
Análisis de agregación: Geoprocesos que transforman datos de entrada, de mayor detalle, en datos resumidos.

Disolver: l
debe ser
adyacentes
solo polígo
3.6.- Fun Los SIG nteselación Funcionespixel a pixcuenta unatenemos laenmáscara
Funcionesvalor en fumismo. Paestar comp
la geometr
de polígon
s que tengan
ono
nciones de
nos permitey ordenació
s u Operadxel, obteniena o varias as operaciondo, etc. (Ál
s u Operadfunción de ara este tipopuesta por l
ía de la ca
nos: fusion
n un mismo
e análisis
en abordar ón de los píxdores Localndo el resulcapas o banes aritmétgebra de M
Figura 3.
dores Focallos valores
o de análisios píxeles m
apa de ent
nará polígo
o atributo en
raster
múltiples xeles de losles: en este ltado en funandas (figurticas entre r
Mapas).
17.- Tipolog
es: o de vecs almacenadis usamos lmás próxim
44
trada
onos
n un
funciones ds mismos. S tipo de fun
nción del vaura 3.17). Eraster, oper
gía de Análsi
cindad, ya qdos en dicho que se de
mos (operad
de análisis e pueden dinciones la malor de dichEntre las opraciones de
s y Funcione
que con ellahos píxelesenomina un
dores de vec
sobre datoistinguir: manipulacióha localizaciperaciones
reclasifica
es Locales
as obtendremy en los v
na matriz dcindad inme
os raster en
ón del rasteión, pudienque podem
ación, super
mos para cavecinos o a
de recorridoediata), o m
n base a la
er se realizando tener enmos realizarrposiciones,
ada pixel unaledaños al que puede
más alejados
a
a n r ,
n l e s
al pixel anadeterminarComo ejemvecinos, apcálculo de de las opecontiguos c
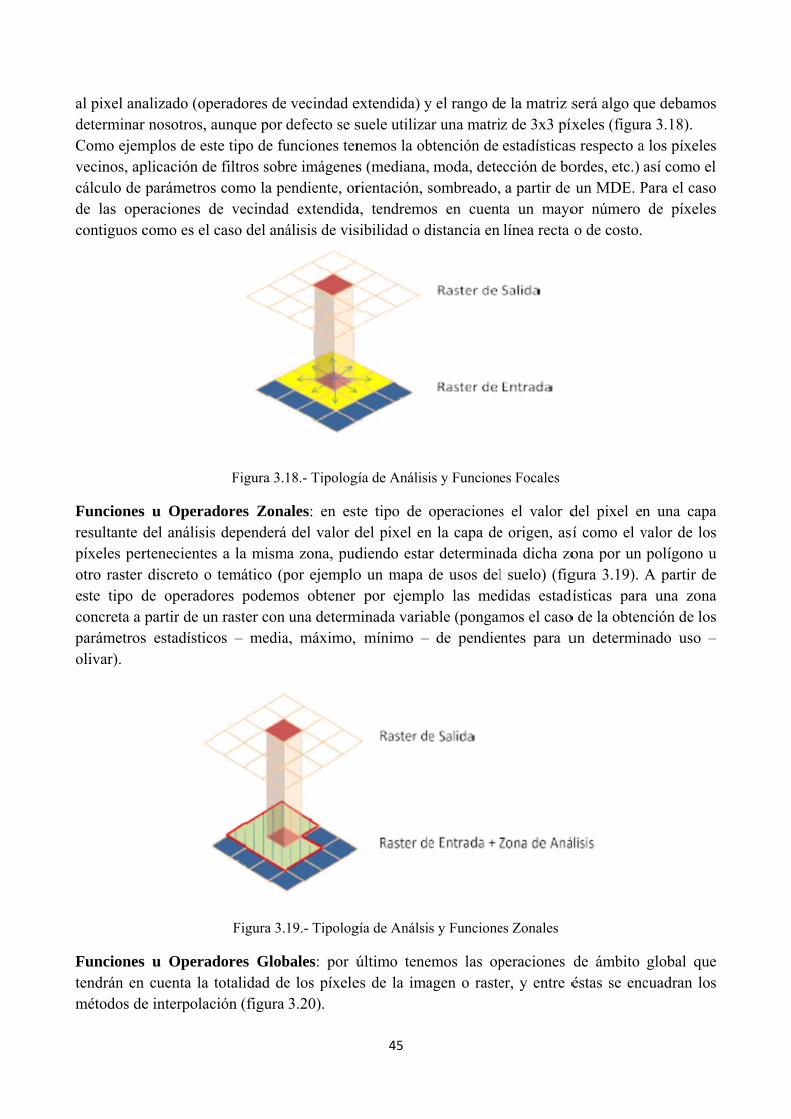
Funcionesresultante píxeles perotro raster este tipo dconcreta a parámetrosolivar).
Funcionestendrán enmétodos de
alizado (oper nosotros, amplos de estplicación deparámetros
eraciones dcomo es el c
s u Operaddel análisisrtenecientesdiscreto o
de operadopartir de un
s estadístico
s u Operadn cuenta la te interpolac
eradores deaunque por te tipo de fue filtros sobrs como la pede vecindadcaso del aná
Figura 3.
dores Zonas dependerás a la mismtemático (p
ores podemon raster con os – media
Figura 3.
dores Globtotalidad de
ción (figura
e vecindad edefecto se sunciones tenre imágenesendiente, ord extendidaálisis de vis
18.- Tipolog
ales: en está del valor d
ma zona, pudpor ejemploos obtener una determ
a, máximo,
19.- Tipolog
bales: por úe los píxele3.20).
45
extendida) ysuele utilizanemos la obs (mediana,rientación, sa, tendremosibilidad o d
gía de Análisi
te tipo de del pixel endiendo estaro un mapa
por ejempminada varia
mínimo –
gía de Análsi
último tenees de la ima
y el rango dear una matribtención de moda, detesombreado,os en cuentdistancia en
is y Funcione
operacionesn la capa der determinade usos del
plo las medable (pongam
de pendie
s y Funcione
emos las opagen o raste
e la matriz sz de 3x3 píxestadísticas
ección de boa partir de
ta un mayolínea recta
es Focales
s el valor de origen, asíada dicha zol suelo) (figdidas estadímos el casontes para u
es Zonales
peraciones er, y entre é
será algo quxeles (figurs respecto aordes, etc.) un MDE. P
or número o de costo.
del pixel ení como el vona por un gura 3.19). dísticas parao de la obtenun determin
de ámbito éstas se enc
ue debamosra 3.18). a los píxelesasí como elPara el caso
de píxeles
n una capavalor de lospolígono uA partir de
a una zonanción de losnado uso –
global quecuadran los
s
s l o s
a s u e a s –
e s
Otras oper
- Medicion- Obtenció- Interpolageoestadíst- Extracció- Operacio- Análisis H
La calculafuncionalidoperadoresrango de fude celdas, eDicha herroperacionedentro de l
Losprocesos, lprogramacorganiza el
raciones de
nes de distann de mapasación a rasticos.
ón de parámnes de reclaHidrológico
adora rasterdad que vs más avanzunciones pretc.) ramienta eses algebraicla capa raste
s SIG actualo que algunción o por ul flujo de tra
Figura
e análisis ra
ncia tanto e de densidaster a parti
metros morfoasificación yos y otros an
r se trata dva desde ozados comoredefinidas
stá basada cas que se rer sino tamb
almente disnos programun entorno abajo del pr
a 3.20.- Tipo
aster
n línea rectaad, a partir dir de mues
ométricos a y conversionálisis aplic
de una potoperadores o son operad(análisis de
en las operealizan sobbién a los pí
sponibles inmas llaman gráfico se
royecto: dia
46
ología de Aná
a (euclidiande datos punstras, utiliz
partir de unones entre Rcados.
tente herramy funcionedores boole
e distancia, m
eraciones dbre capas díxeles vecin
ncorporan h“MODEL establece u
agrama de G
álisis y Func
na) como pontuales o linzando méto
n Modelo DRaster y Vec
mienta de es básicos eanos o logamosaicos, c
de álgebra e tipo raste
nos o a todo
herramientaBUILDER
un diagramGantt (figura
iones Global
onderada poneales. odos tanto
Digital del Tctorial en am
análisis qu(operadore
arítmicos, pcambios de r
de mapaser aplicables
el conjunto
as para mo” (ArcGis):a de geoproa 3.21)
les
or el coste.
determiníst
Terreno. mbos sentid
ue nos proves aritmétipasando porresolución,
s, definidass no solo ao de píxeles
delizar y a: mediante lrocesamient
ticos como
os.
vee de unacos), hastar un ampliosustitución
s como lasa cada pixels.
automatizarlenguaje deto donde se
o
a a o n
s l
r e e
47
Figura 3.21.- Diagrama de Model Builder o editor de Modelos
4.- Los modelos digitales del terreno
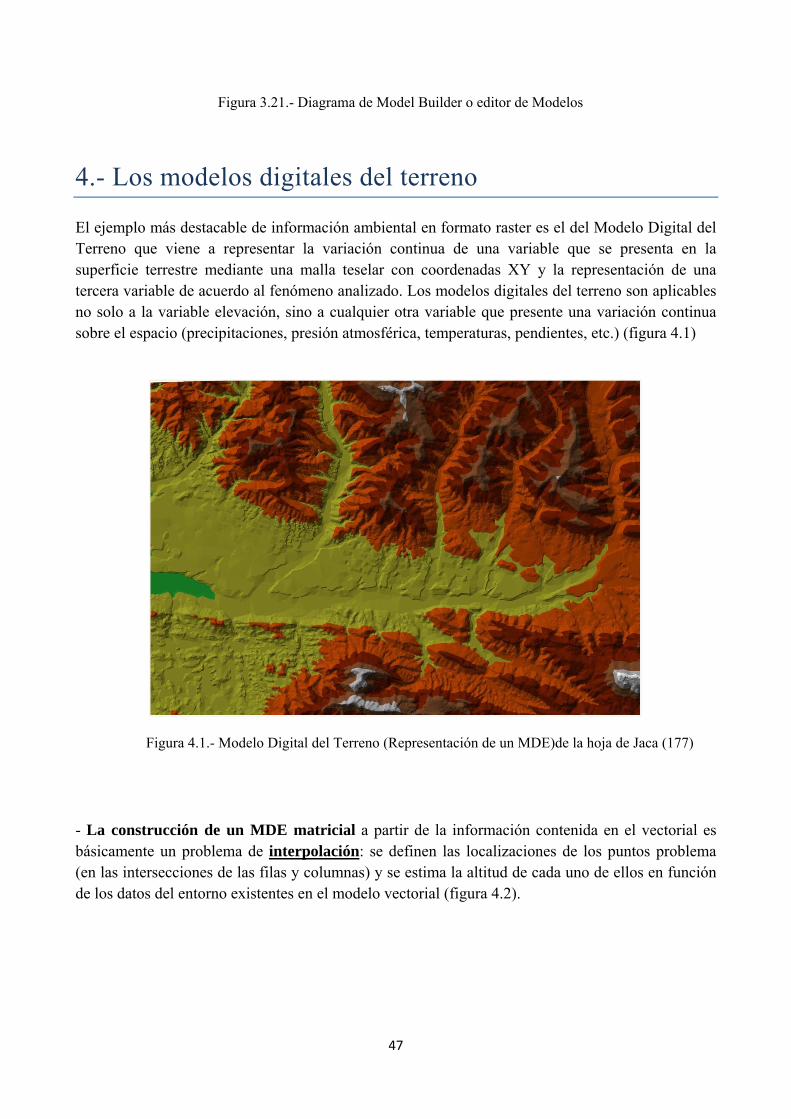
El ejemplo más destacable de información ambiental en formato raster es el del Modelo Digital del Terreno que viene a representar la variación continua de una variable que se presenta en la superficie terrestre mediante una malla teselar con coordenadas XY y la representación de una tercera variable de acuerdo al fenómeno analizado. Los modelos digitales del terreno son aplicables no solo a la variable elevación, sino a cualquier otra variable que presente una variación continua sobre el espacio (precipitaciones, presión atmosférica, temperaturas, pendientes, etc.) (figura 4.1)
Figura 4.1.- Modelo Digital del Terreno (Representación de un MDE)de la hoja de Jaca (177)
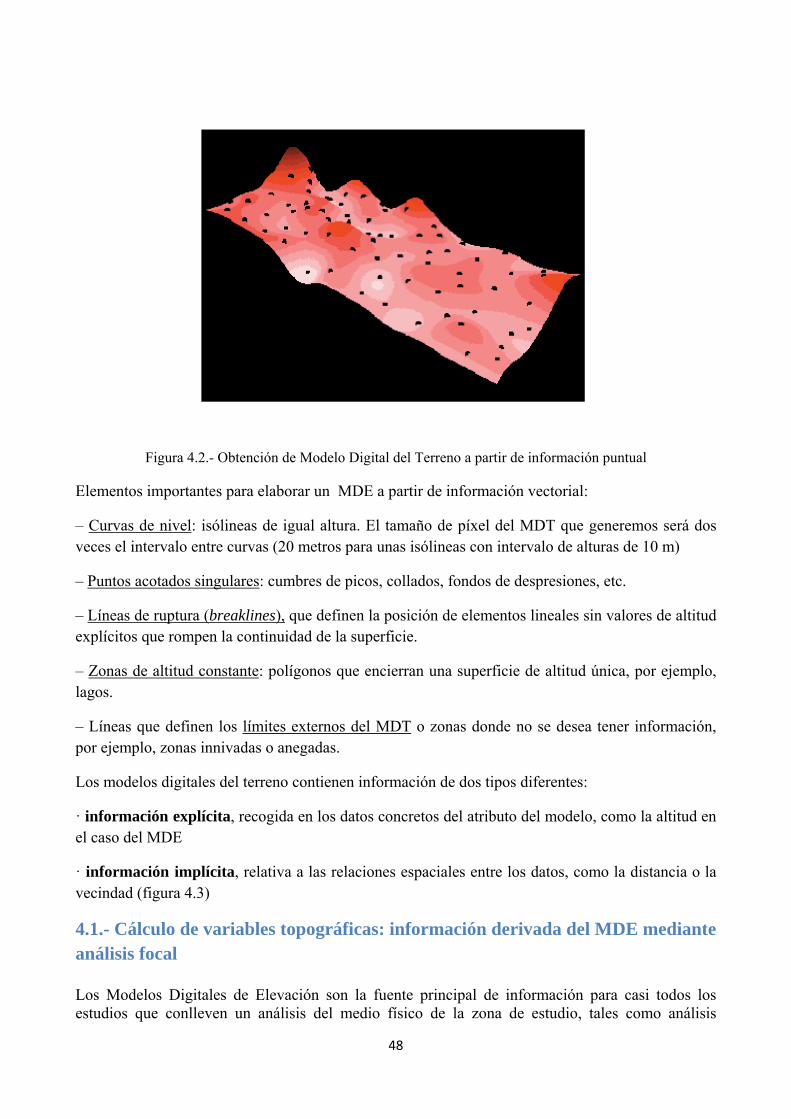
- La construcción de un MDE matricial a partir de la información contenida en el vectorial es básicamente un problema de interpolación: se definen las localizaciones de los puntos problema (en las intersecciones de las filas y columnas) y se estima la altitud de cada uno de ellos en función de los datos del entorno existentes en el modelo vectorial (figura 4.2).
48
Figura 4.2.- Obtención de Modelo Digital del Terreno a partir de información puntual
Elementos importantes para elaborar un MDE a partir de información vectorial:
– Curvas de nivel: isólineas de igual altura. El tamaño de píxel del MDT que generemos será dos veces el intervalo entre curvas (20 metros para unas isólineas con intervalo de alturas de 10 m)
– Puntos acotados singulares: cumbres de picos, collados, fondos de despresiones, etc.
– Líneas de ruptura (breaklines), que definen la posición de elementos lineales sin valores de altitud explícitos que rompen la continuidad de la superficie.
– Zonas de altitud constante: polígonos que encierran una superficie de altitud única, por ejemplo, lagos.
– Líneas que definen los límites externos del MDT o zonas donde no se desea tener información, por ejemplo, zonas innivadas o anegadas.
Los modelos digitales del terreno contienen información de dos tipos diferentes:
· información explícita, recogida en los datos concretos del atributo del modelo, como la altitud en el caso del MDE
· información implícita, relativa a las relaciones espaciales entre los datos, como la distancia o la vecindad (figura 4.3)
4.1.- Cálculo de variables topográficas: información derivada del MDE mediante análisis focal Los Modelos Digitales de Elevación son la fuente principal de información para casi todos los estudios que conlleven un análisis del medio físico de la zona de estudio, tales como análisis
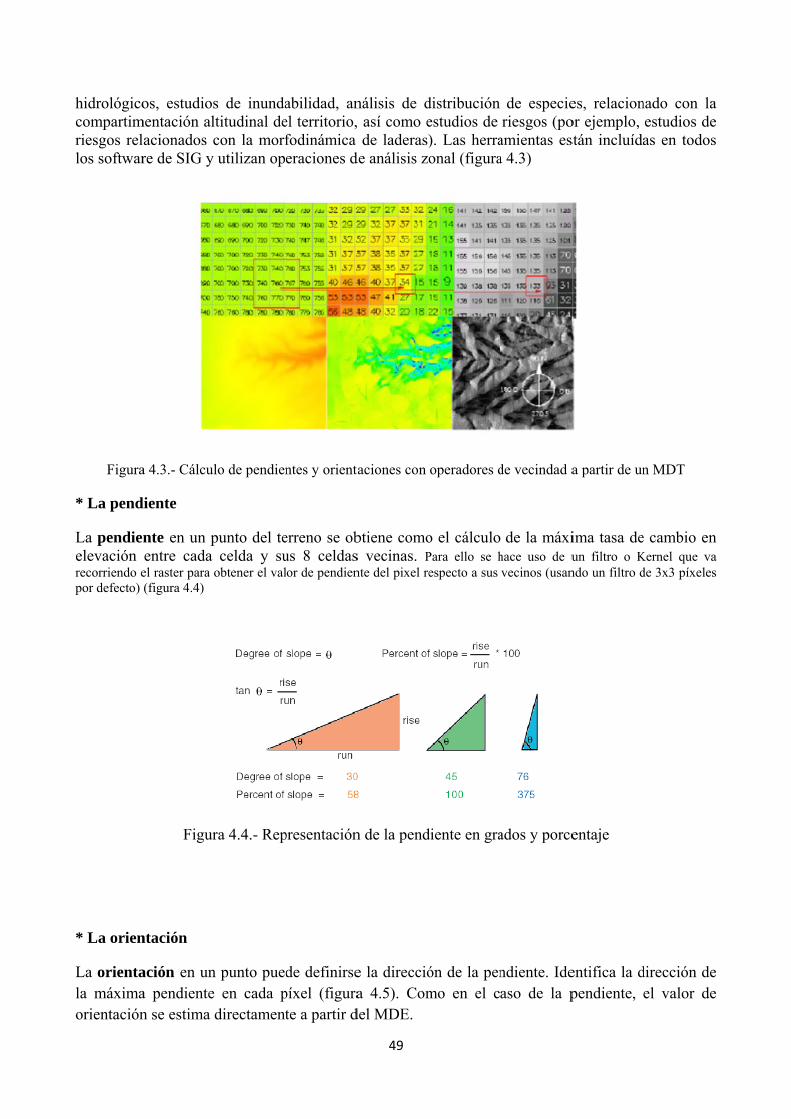
hidrológicocompartimriesgos rellos softwar
Figura
* La pend
La pendieelevación recorriendo epor defecto)
* La orien
La orientala máximaorientación
os, estudiosmentación al
acionados cre de SIG y
a 4.3.- Cálcul
diente
nte en un pentre cada
el raster para o(figura 4.4)
Figur
ntación
ación en una pendienten se estima
s de inundaltitudinal decon la morfutilizan op
lo de pendien
punto del tecelda y su
obtener el val
ra 4.4.- Rep
n punto pued en cada pdirectament
abilidad, anel territorio,fodinámica eraciones d
ntes y orienta
erreno se obus 8 celdaslor de pendien
presentación
de definirsepíxel (figurate a partir d
49
nálisis de d así como ede laderas)
de análisis zo
aciones con
btiene comos vecinas. Pnte del pixel re
n de la pend
e la direccióa 4.5). Com
del MDE.
distribución estudios de ). Las herraonal (figura
operadores d
o el cálculoPara ello se hespecto a sus
diente en gra
ón de la penmo en el c
de especieriesgos (po
amientas esa 4.3)
de vecindad a
de la máxihace uso de uvecinos (usan
ados y porce
ndiente. Ideaso de la p
es, relacionor ejemplo, stán incluída
a partir de un
ima tasa deun filtro o Kndo un filtro d
entaje
entifica la dpendiente,
nado con laestudios deas en todos
n MDT
e cambio enKernel que vade 3x3 píxeles
dirección deel valor de
a e s
n a s
e e
50
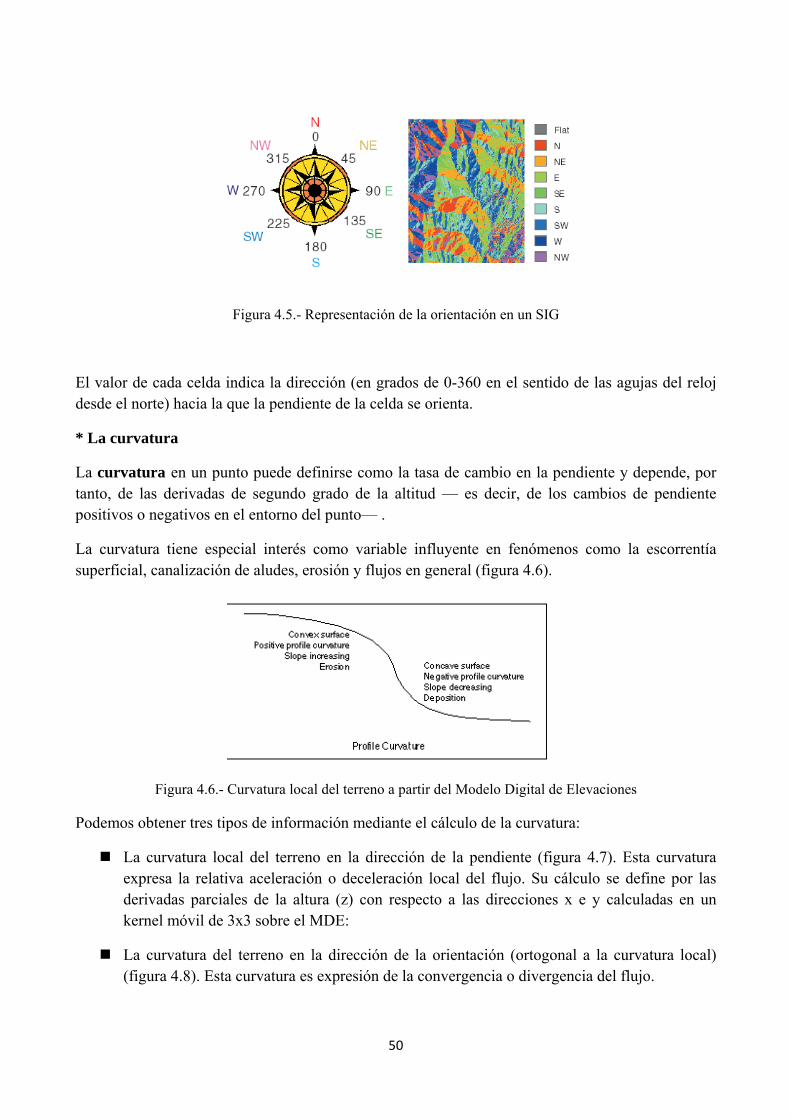
Figura 4.5.- Representación de la orientación en un SIG
El valor de cada celda indica la dirección (en grados de 0-360 en el sentido de las agujas del reloj desde el norte) hacia la que la pendiente de la celda se orienta.
* La curvatura
La curvatura en un punto puede definirse como la tasa de cambio en la pendiente y depende, por tanto, de las derivadas de segundo grado de la altitud — es decir, de los cambios de pendiente positivos o negativos en el entorno del punto— .
La curvatura tiene especial interés como variable influyente en fenómenos como la escorrentía superficial, canalización de aludes, erosión y flujos en general (figura 4.6).
Figura 4.6.- Curvatura local del terreno a partir del Modelo Digital de Elevaciones
Podemos obtener tres tipos de información mediante el cálculo de la curvatura:
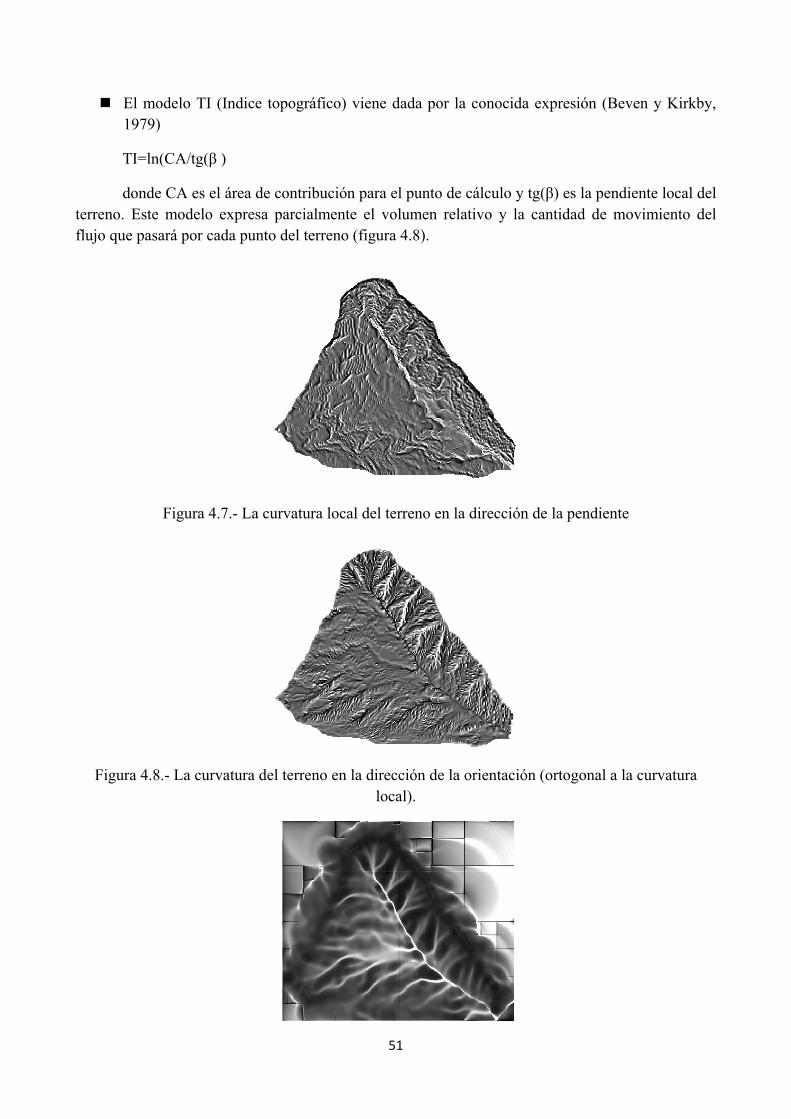
La curvatura local del terreno en la dirección de la pendiente (figura 4.7). Esta curvatura expresa la relativa aceleración o deceleración local del flujo. Su cálculo se define por las derivadas parciales de la altura (z) con respecto a las direcciones x e y calculadas en un kernel móvil de 3x3 sobre el MDE:
La curvatura del terreno en la dirección de la orientación (ortogonal a la curvatura local) (figura 4.8). Esta curvatura es expresión de la convergencia o divergencia del flujo.
51
El modelo TI (Indice topográfico) viene dada por la conocida expresión (Beven y Kirkby, 1979)
TI=ln(CA/tg(β )
donde CA es el área de contribución para el punto de cálculo y tg(β) es la pendiente local del terreno. Este modelo expresa parcialmente el volumen relativo y la cantidad de movimiento del flujo que pasará por cada punto del terreno (figura 4.8).
Figura 4.7.- La curvatura local del terreno en la dirección de la pendiente
Figura 4.8.- La curvatura del terreno en la dirección de la orientación (ortogonal a la curvatura local).
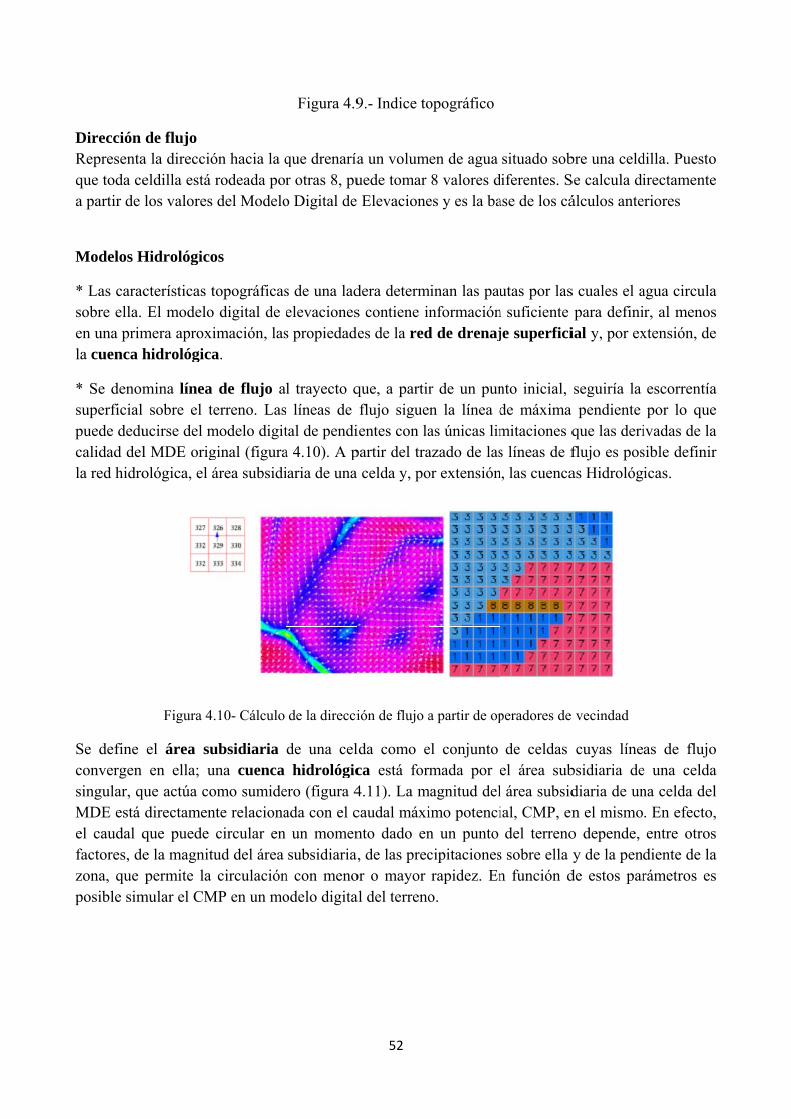
Dirección Representaque toda cea partir de
Modelos H
* Las caracsobre ella. en una primla cuenca h
* Se denomsuperficial puede deducalidad della red hidro
Se define convergen singular, qMDE está el caudal qfactores, dezona, que posible sim
de flujo a la direccióeldilla está los valores
Hidrológico
cterísticas tEl modelo
mera aproxihidrológica
mina línea sobre el te
ucirse del ml MDE origológica, el á
Figura 4.
el área suen ella; u
que actúa codirectamenque puede e la magnitupermite la
mular el CM
ón hacia la qrodeada pordel Modelo
os
topográficasdigital de e
imación, lasa.
de flujo aerreno. Las
modelo digitginal (figuraárea subsidi
.10- Cálculo
ubsidiaria una cuenca omo sumidente relaciona
circular en ud del área circulación
MP en un mo
Figura 4.9
que drenaríar otras 8, puo Digital de
s de una ladelevacioness propiedade
l trayecto qs líneas de tal de pendia 4.10). A piaria de una
de la direcci
de una celhidrológic
ero (figura 4ada con el c
un momensubsidiaria,
n con menoodelo digita
52
9.- Indice to
a un volumuede tomar Elevacione
dera determs contiene ines de la red
que, a partirflujo sigue
ientes con lapartir del traa celda y, po
ión de flujo a
lda como eca está for4.11). La mcaudal máxinto dado en, de las prec
or o mayor al del terreno
opográfico
en de agua 8 valores d
es y es la ba
minan las paunformación
d de drenaj
r de un punn la línea das únicas limazado de lasor extensión
a partir de op
el conjunto mada por e
magnitud delimo potencin un punto cipitacionesrapidez. En
o.
situado sobdiferentes. Sase de los cá
utas por lasn suficiente je superfici
nto inicial, de máxima mitaciones qs líneas de f
n, las cuenca
peradores de
de celdas el área subl área subsidial, CMP, endel terreno
s sobre ella n función d
bre una celdSe calcula diálculos ante
s cuales el apara defini
ial y, por ex
seguiría la a pendiente que las deriflujo es posas Hidrológ
vecindad
cuyas línebsidiaria dediaria de unn el mismoo depende, y de la pend
de estos par
dilla. Puestoirectamente
eriores
agua circulair, al menosxtensión, de
escorrentíapor lo que
ivadas de lasible definiricas.
as de flujoe una celdana celda del. En efecto,entre otrosdiente de larámetros es
o e
a s e
a e a r
o a l , s a s
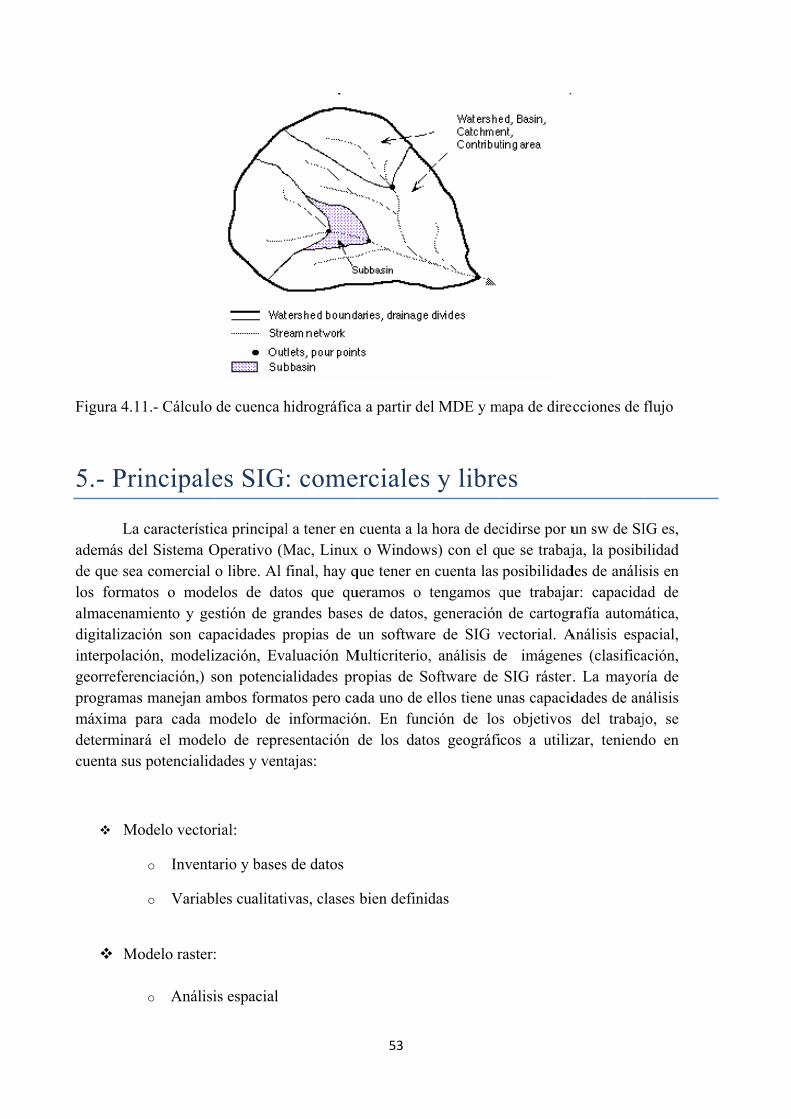
Figura 4.11
5.- Pri
La además dede que sea los formatalmacenamdigitalizaciinterpolacigeorreferenprogramas máxima pdeterminarcuenta sus
Mo
Mo
1.- Cálculo
incipale
característicl Sistema O
a comercial tos o mode
miento y geión son capión, modelinciación,) smanejan amara cada m
rá el modelpotencialid
odelo vector
o Inventa
o Variab
odelo raster:
o Análisi
de cuenca h
es SIG
ca principalOperativo (Mo libre. Al elos de datstión de grpacidades pzación, Eva
son potencimbos formamodelo de lo de repre
dades y vent
rial:
ario y bases
les cualitati
:
is espacial
hidrográfica
: come
l a tener en Mac, Linuxfinal, hay qtos que quandes basespropias de aluación Malidades pratos pero cainformació
esentación tajas:
s de datos
ivas, clases
53
a a partir de
erciales
cuenta a la x o Windowque tener enueramos o s de datos, un softwar
Multicriterio,ropias de Soada uno de eón. En funcde los dato
bien definid
el MDE y m
s y libre
hora de decws) con el qn cuenta las tengamos qgeneración
e de SIG v, análisis doftware de ellos tiene ución de losos geográfi
das
mapa de dire
es
cidirse por uue se trabajposibilidad
que trabajan de cartogrvectorial. Ae imágeneSIG ráster
unas capacids objetivos cos a utiliz
ecciones de
un sw de SIja, la posibi
des de análisar: capacidarafía autom
Análisis espes (clasificar. La mayordades de an del trabajzar, teniend
flujo
IG es, ilidad sis en ad de
mática, pacial, ación, ría de nálisis jo, se do en

54
o Representación de variables contínuas

55
Tabla 3.- Comparativa de los principales Sistemas de Información Geográfica (actualizado a junio 2009). El color azul indica enlace a una entrada en Wikipedia. El color rojo indica que no hay entrada para ese software en Wikipedia
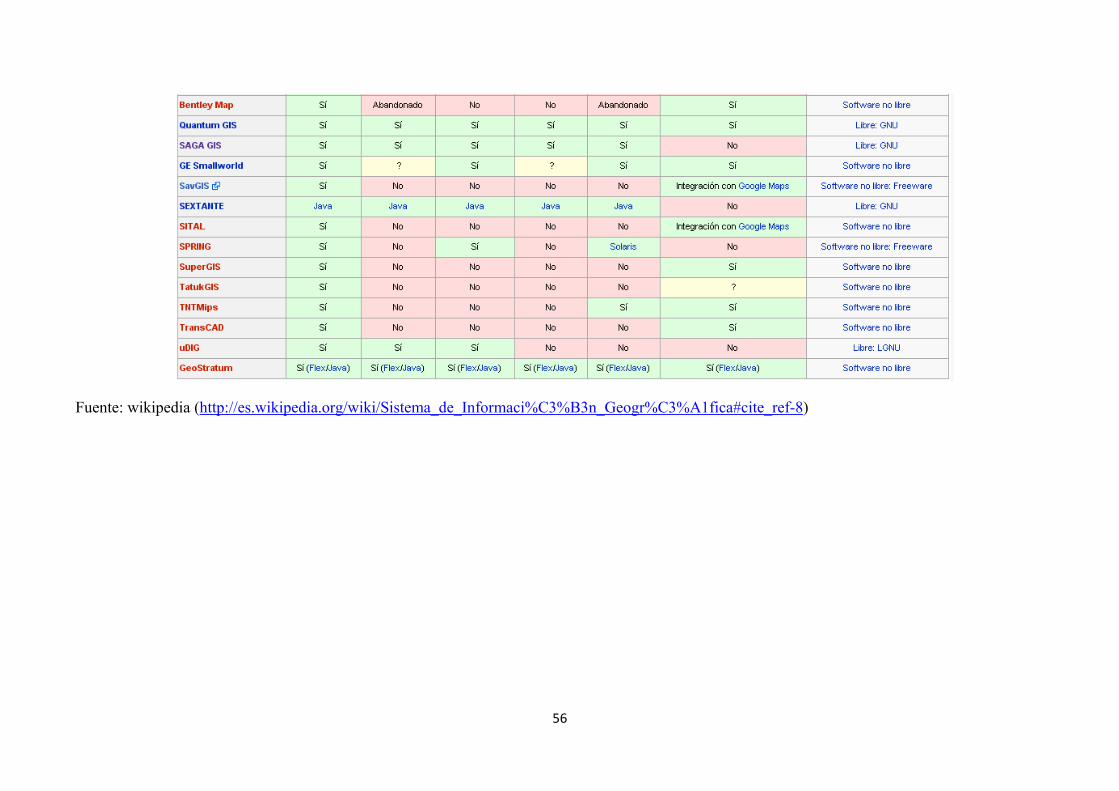
56
Fuente: wikipedia (http://es.wikipedia.org/wiki/Sistema_de_Informaci%C3%B3n_Geogr%C3%A1fica#cite_ref-8)
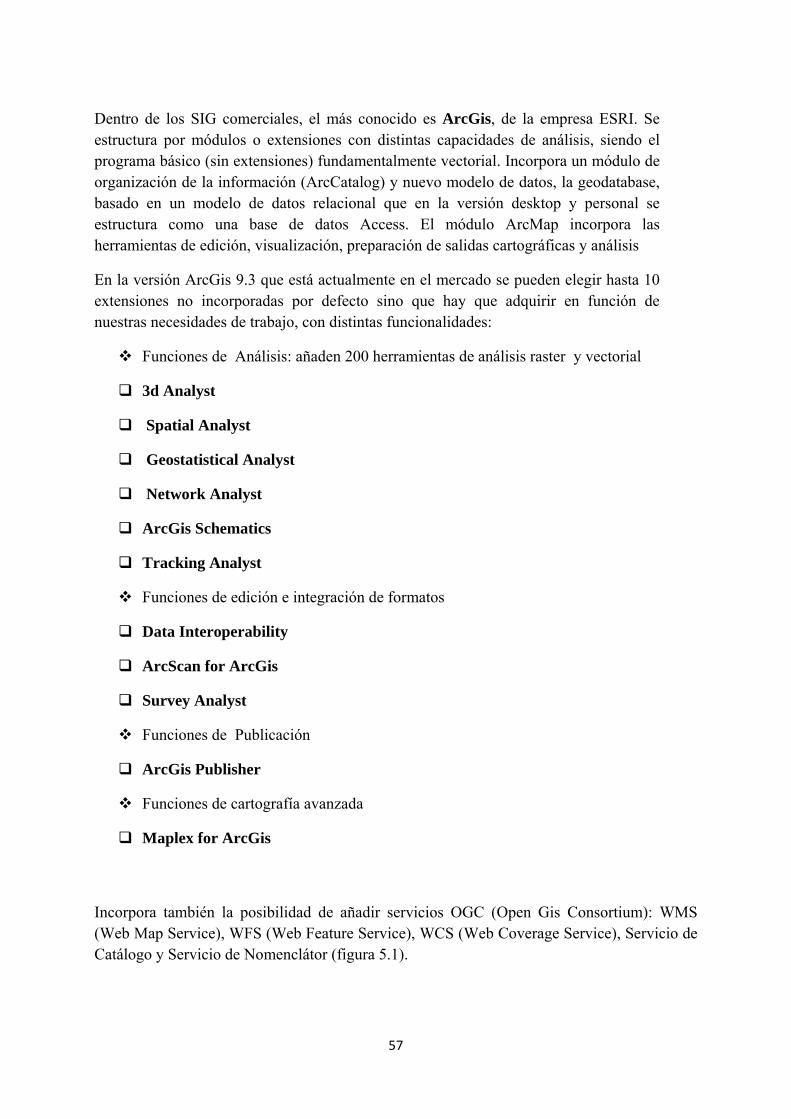
57
Dentro de los SIG comerciales, el más conocido es ArcGis, de la empresa ESRI. Se estructura por módulos o extensiones con distintas capacidades de análisis, siendo el programa básico (sin extensiones) fundamentalmente vectorial. Incorpora un módulo de organización de la información (ArcCatalog) y nuevo modelo de datos, la geodatabase, basado en un modelo de datos relacional que en la versión desktop y personal se estructura como una base de datos Access. El módulo ArcMap incorpora las herramientas de edición, visualización, preparación de salidas cartográficas y análisis
En la versión ArcGis 9.3 que está actualmente en el mercado se pueden elegir hasta 10 extensiones no incorporadas por defecto sino que hay que adquirir en función de nuestras necesidades de trabajo, con distintas funcionalidades:
Funciones de Análisis: añaden 200 herramientas de análisis raster y vectorial
3d Analyst
Spatial Analyst
Geostatistical Analyst
Network Analyst
ArcGis Schematics
Tracking Analyst
Funciones de edición e integración de formatos
Data Interoperability
ArcScan for ArcGis
Survey Analyst
Funciones de Publicación
ArcGis Publisher
Funciones de cartografía avanzada
Maplex for ArcGis
Incorpora también la posibilidad de añadir servicios OGC (Open Gis Consortium): WMS (Web Map Service), WFS (Web Feature Service), WCS (Web Coverage Service), Servicio de Catálogo y Servicio de Nomenclátor (figura 5.1).
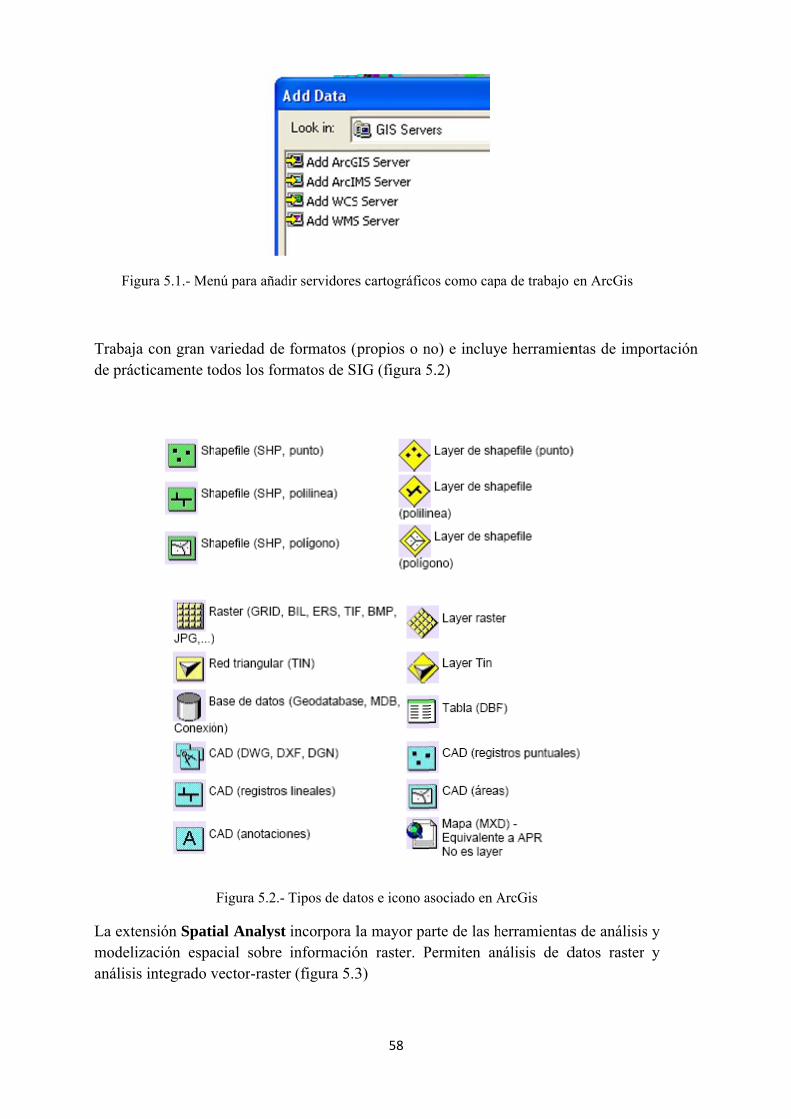
Figu
Trabajade práct
La extenmodelizanálisis
ura 5.1.- Men
a con gran vticamente to
nsión Spatización espaintegrado v
nú para añad
variedad de odos los for
Figura 5.2.-
ial Analyst acial sobre vector-raste
dir servidores
formatos (prmatos de SI
Tipos de dat
incorpora linformaciór (figura 5.3
58
s cartográfico
propios o nIG (figura 5
tos e icono a
la mayor paón raster. P3)
os como cap
no) e incluy5.2)
asociado en A
arte de las hPermiten an
a de trabajo
e herramien
ArcGis
herramientasnálisis de d
en ArcGis
ntas de imp
s de análisisdatos raster
portación
s y r y
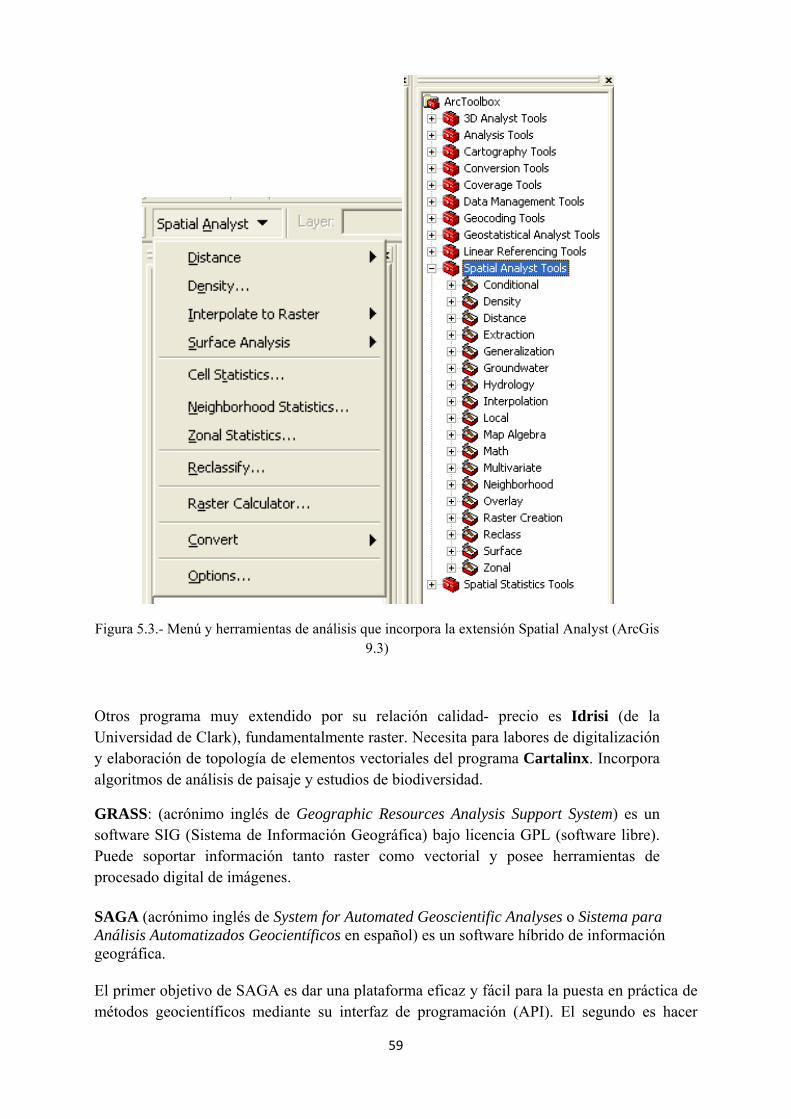
59
Figura 5.3.- Menú y herramientas de análisis que incorpora la extensión Spatial Analyst (ArcGis 9.3)
Otros programa muy extendido por su relación calidad- precio es Idrisi (de la Universidad de Clark), fundamentalmente raster. Necesita para labores de digitalización y elaboración de topología de elementos vectoriales del programa Cartalinx. Incorpora algoritmos de análisis de paisaje y estudios de biodiversidad.
GRASS: (acrónimo inglés de Geographic Resources Analysis Support System) es un software SIG (Sistema de Información Geográfica) bajo licencia GPL (software libre). Puede soportar información tanto raster como vectorial y posee herramientas de procesado digital de imágenes.
SAGA (acrónimo inglés de System for Automated Geoscientific Analyses o Sistema para Análisis Automatizados Geocientíficos en español) es un software híbrido de información geográfica.
El primer objetivo de SAGA es dar una plataforma eficaz y fácil para la puesta en práctica de métodos geocientíficos mediante su interfaz de programación (API). El segundo es hacer
60
estos métodos accesibles de una manera fácil. Esto se consigue principalmente mediante su interfaz gráfica de usuario (GUI). Juntos, API Y GUI son el verdadero potencial de SAGA: un sistema cada vez mayor y rápido de métodos geocientíficos con gran importancia de análisis hidrológico y topográfico.
El Sistema EXTremeño de ANálisis TErritorial (SEXTANTE) es una biblioteca de algoritmos de análisis espacial de código libre disponible para varios softwares de Sistemas de Información Geográfica. Su objetivo principal es crear una plataforma que facilite tanto el uso como la implementación de estos algoritmos.
Actualmente SEXTANTE contiene más de 240 herramientas de análisis geográfico.
En un principio SEXTANTE estaba basado en el SIG SAGA, para posteriormente pasarse a gvSIG. Inicialmente se centraba principalmente en el modelado y análisis de la información mediante imágenes ráster aunque en la actualidad son más de 240 extensiones tanto raster como vectorial.
Tras el desarrollo de una gran colección de algoritmos de análisis geoespacial desarrollados para gvSIG, los desarrolladores entendieron que muchos otros proyectos requerían de análisis geoespacial, pero no existía una biblioteca que pudiera proporcionarles los algoritmos correspondientes. Ante este hecho, en el año 2008 tomaron la decisión de independizar SEXTANTE de cualquier software SIG, creando una biblioteca de tal manera que otros programas diferentes de procesamiento de información geográfica pudieran hacer uso de sus algoritmos de forma igual de sencilla que se venía haciendo hasta ahora.
SEXTANTE está programado en Java desarrollado por la Universidad de Extremadura (UNEX) y financiado por la Junta de Extremadura que se distribuye bajo la licencia GPL cumpliendo con los cuatro principios necesario para clasificarlo como software libre.
Algunas de sus utilidades son:
Análisis de patrones. Análisis hidrológico básico. Costes, distancias y rutas. Estadísticas de celda para múltiples capas raster. Estadísticas por vecindad para una capa raster. Geoestadística. Geomorfometría y análisis del relieve. Herramientas básicas para capas raster. Herramientas de análisis para capas raster. Herramientas de cálculo para capas raster. Herramientas para capas de líneas. Herramientas para capas de puntos. Herramientas para capas de polígonos. Herramientas para capas raster categóricas. Herramientas para capas discretas e información categórica. Herramientas para capas vectoriales. Herramientas para crear nuevas capas raster.
61
Herramientas para tablas. Iluminación y visibilidad. Localización óptima de elementos. Lógica difusa. Métodos estadísticos. Perfiles. Rasterización e interpolación. Tratamiento y análisis de imágenes. Vectorización. Zonas de influencia (buffers). Índices de vegetación. Índices y otros parámetros hidrológicos.
SEXTANTE además cuenta con una línea de comandos, un gestor de procesado por lotes, un generador de modelos y un historial de comandos realizados por el usuario con el fin de facilitar la reiteración de procesos.
Actualmente existen adaptaciones de la biblioteca para Geotools, gvSIG y OpenJUMP, y están en desarrollo las versiones para Kosmo
gvSIG es un programa informático para el manejo de información geográfica con precisión cartográfica que se distribuye bajo licencia GNU GPL. Permite acceder a información vectorial y raster así como a servidores de mapas que cumplan la especificaciones del OGC. Esta es una de las principales características de gvSIG respecto a otros Sistema de Información Geográfica, la importante implementación de servicios OGC: WMS (Web Map Service), WFS (Web Feature Service), WCS (Web Coverage Service), Servicio de Catálogo y Servicio de Nomenclátor.
Está desarrollado en lenguaje de programación Java, funcionando con los sistemas operativos Microsoft Windows, Linux y Mac OS X, y utiliza librerías estándar de GIS reconocidas, como Java Topology Suite (JTS). Asimismo, gvSIG posee un lenguaje de scripting basado en Jython y también se pueden crear extensiones en Java utilizando las clases de gvSIG.
Entre los formatos gráficos de fichero más habituales cuenta entre otros con acceso a formatos vectoriales GML, SHP, DXF, DWG, DGN, KML y formatos de imagen raster como MrSID GeoTIFF, ENVI o ECW.
Iniciado en el año 2003, es un proyecto de desarrollo informático cofinanciado por la Consejería de Infraestructuras y Transporte de la Generalidad Valenciana y la Unión Europea mediante el Fondo Europeo de Desarrollo Regional (FEDER) y codesarrollado por la empresa IVER y Prodevelop.